2009 : M DCG 3 4 3
|
|
|
- あやか はぎにわ
- 5 years ago
- Views:
Transcription
1 2009 M
2 2009 : M DCG 3 4 3
3 I
4 1 1.1 (CG) [1] [2] Mech [3] WEBER [4] 3 3 [5][6][7]3DCG Maya Paint Effects


5 図 1.2: ツル植物 図 1.1: 直立した植物 ツル植物は 自立せず他の植物や支柱に絡みつきながら光を得るために上へ伸 びて生長し 自体では直立できず 他の植物や環境に影響され形状が変化する植 物である ガーデニングにおいては 壁やフェンスに絡ませることによって景観 の硬い印象を柔らかくし 華やかな印象を与えるなど重要な要素を担っている [8] また 手入れをしていない雑木林に絡まる植物などの風景に良く見る事ができる このような風景の表現を行う際 他の物体に絡みつくツル植物の 3 次元形状モ デルを生成するためには 周辺物体の形状を生長過程に判断し その結果を考慮 する必要がある このため ツル植物の 3 次元形状モデルをより写実的に表現す るためには 生長過程を考慮しながら手作業で生成する必要があった そのため 生長過程を考慮したツル植物の 3 次元形状モデルの生成には多大な労力が必要で ある 古屋ら [9] による手法では支柱を用意し その支柱に沿った形でツル植物の 3 次 元モデルの生成をしている 用意する支柱には大きな制約があり 1 本の折れ線に 沿った支柱でなければならない しかし ツル植物は T 字や格子状の柵などにも 巻きつくため T 字や格子状の柵を支柱と設定してもツル植物を生成できるよう にする必要がある ツル植物が生長している過程に周囲の物体の形状を判断し枝 分かれや巻きつきを行うが 古屋らの研究では枝分かれを考慮していない また 古屋らの手法を用いて生成したツル植物の巻きつく茎の 3 次元モデルは滑らかで 2


6 : 1.4: Luft[10] 1 An Ivy Generator 3 Zhou [11]
7 3DCG
8 2 2.1 [12] 2 [13] [14] 3 1 [15]


9 2.1: 2.2:


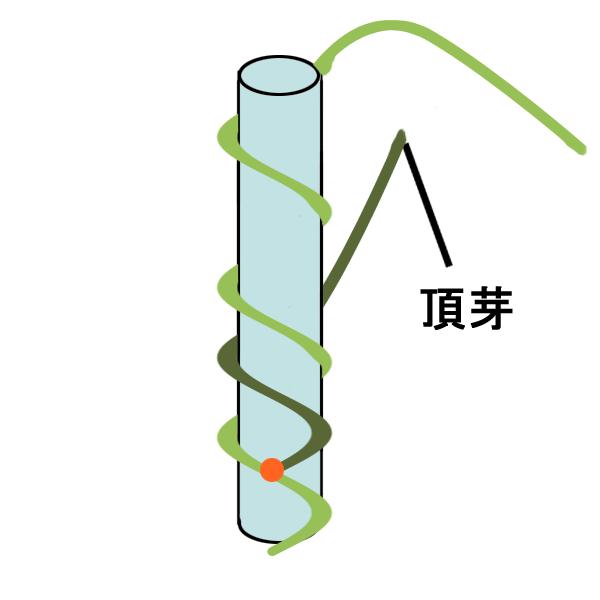
10 2.2.1 巻きつき型 巻きつき型は 主軸となる茎が巻きついて伸びていく 図 2.3 は巻きつき型のツ ル植物の様子である 図 2.3: 巻きつき型 巻きひげ型 巻きひげ型は 主軸となる茎は巻きつかずに巻きひげという茎や葉が変化した ものを出して周囲に絡みつけて茎を支える 図 2.4 は 巻きひげ型のツル植物の様 子である 図 2.4: 巻きひげ型 7



11 2.2.3 よじ登り型 よじ登り型は ツルから付着根という根や吸盤を出して壁などに張り付いてい く 以下の図 2.5 は付着根を持つよじ登り型のツル植物を示している また 図 2.6 は吸盤を持つよじ登り型のツル植物の様子である 図 2.5: よじ登り 付着根 型 図 2.6: よじ登り 吸盤 型 寄りかかり型 寄りかかり型は 茎に生えたとげを引っ掛けながら伸びていく 図 2.7 は 寄り かかり型のツル植物の様子である 茎全体に生えている毛のようなとげを見る事 ができる 図 2.7: 寄りかかり型 8
![2.3 4 [16] [15] 2.8 2.9 2.](/docs-images/90/101764748/images/12-0.jpg "8: 2.9: 2.3.")
12 2.3 4 [16] [15] : 2.9: [17] [18] 2 9
13 : [17]

14 2.11: 2.12: 11
15 [19] y +y
16 3.1: 3 l r t θ p U y 3 γ L i P i N i i 0 f d l r U t L i f 1 +y l d L f L f L f 1 t 13
17 L i i 0 d 3.1 L i 3.1: i = 0 P i P i 1 (3.1) P i = P i 1 + l d N i 1 (3.1) i = Ud i k N k N k N f N k y y y θ p y f k r P k+1 P f 14
18 P i i k N k : 2 L n n = (U + 1)d U n d P n L i
19 L i 2. L i 3. L i 4. L i 23 L i 5. L i , N i y N i 1 y 45 i C 3 [20] P i N i y (3.2) α L i i C d 2 C + d 2 H α y H α y d d d 1 16
20 H α = (1 β)h C d + βh 2 C+ d 2 β = α (C d) 2 d (3.2) 3 [21] P i 1 2 P i (3.3) U j P i i 0 (U + 1)d J 2d J P i P j P i se 0(U + 1)d J 2dJ d J i 1 2 P i P s+d P e d P e l 5l d 5l x, z d P j = (1 β) 3 P s + 3(1 β) 2 βp s+d + 3(1 β)β 2 P e d + β 3 P e β = { j 2d j 3d ( 1 ) ( 2 ) (3.3) L i L i P i r a 1 17
21 [19] x y z x y z x y z x R x i (θ x ) z R z i (θ z ) θ x θ z x z x y z L i x y z L i P i 1 L i xz a 1 0 M i L i 0 I r θ θ = 360 M 3.3 y S a,i (3.4) S a,i S a,i (3.5) : y 1 18
22 S a,i = (r cos(aθ), 0, r sin(aθ)) a = 0, 1, 2, 3,..., M i = 0, 1, 2, 3,..., I (3.4) 3.4: S a,i = P i + R z i (θ z ) R x i (θ x ) S a,i a = 0, 1, 2, 3,..., M i = 0, 1, 2, 3,..., I (3.5) 19
23 L i L i xz 1 (3.6) : 1 F g,h = (γ cos(gθ) + γ + r, 0, γ sin(gθ)) g = 0, 1, 2, 3 h = 0, 1, 2, 3,..., Q (3.6) γ r F g,h T h P i θ θ =
24 g h 0 Q F g,h F g,h L h Rz h (θ z)r x h (θ x) (3.7) θ x θ z xz F g,h = T h + R z h(θ z ) R x h(θ x ) F g,h g = 0, 1, 2, 3 h = 0, 1, 2, 3,..., Q (3.7) 2 (3.8) : 2 21
25 F g,h = (γ cos(gθ + w), 0, γ sin(gθ + w) + b) g = 0, 1, 2, 3, 4, 5, 6, 7 h = 0, 1, 2, 3,..., Q (3.8) γrf g,h T h θh (3.6) 4 g g 0 3 w = 90 b = γ + r g 4 7 w = 90 b = γ r g F g,h F g,h L h Rz h (θ z)r x h (θ x) (3.9) θ x θ z xz F g,h = T h + R z h(θ z ) R x h(θ x ) F g,h g = 0, 1, 2, 3, 4, 5, 6, 7 h = 0, 1, 2, 3,..., Q (3.9) 22

26 D FK System[22] : 23
 3 (a) (b)3 4.")
27 (a) 4.2(b) 3 (a) (b)3 4.2:

")
 4 4.")
 5 25")
28 4.3: 4.4: (a) (a) 4.5(b) (c) 4 4.5(d) 4.5(e) 5 25
29 4.5(f) (g) 2 4.1: 4.5(a)
 (d)")
 4.")
30 (a) (b) (c) (d) (e) (f) (g) 4.5: 27
31 (a) (a) 4.6(b) (c) (d) 2 4.6(e) 2 4.6(f) : 4.6(a)
 4.6: 3 4.")
32 (a) (b) (c) (d) (e) (f) 4.6:

33 :
34
35
36 33
37 [1],,,, 3,, D-II, Vol.J78-DII, No.7, pp , [2],,,, CG,, D-II, Vol.J76-DII, No8, pp , [3] R.Mech and P.Prusinkiewicz, Visual Models of Plants Interacting with Their Environment, SIGGRAPH96, pp , [4] J.WEBER, and J.PENN, Creation and rendering of realistic trees, SIG- GRAPH 95 Computer Graphics Proceedings, pp , [5],,,,, D-II, vol.j82-d-ii, no.9, pp , [6],,,, CAD, No.112-8, pp.41-46, [7],,,, 3,, Vol.25, No.1, pp.45-53,
38 [8],,, 1000,, [9], 3DCG,,2005. [10] Thomas Luft, An Ivy Generator, [11] Kun Zhou, Xin Huang, Xi Wang, Yiying Tong, Mathieu Desbrun, Baining Guo, Heung-Yeung Shum, Mesh Quilting For Geometric Texture Synthesis, In Proceedings of SIGGRAPH 2006, pp , [12],, gln/14/1401.htm. [13],, hada/index.html. [14],, [15],,,, [16],,,, [17],, [18] C.,, --,, [19] Fletcber Dunn, Ian Parberry,, 3D,,
39 [20] I.J. Shoenberg, Contributions to the problem of approximation of equidistance data by analytic functions, Quartely of the Applied Mathematics, 4:45-99, [21] P. Bezir, Numerical Control: Mathematics and Applications, John Wiley & Sons, London, [22], Fine Kernel Tool Kit System, 36
2010 : M CG 3DCG 3 3
 2010 M0107432 2010 : M0107432 3 3 CG 3DCG 3 3 1 1 1.1............................ 1 1.2.............................. 2 2 3 2.1................................. 3 2.2 3........................ 4 2.3.................................
2010 M0107432 2010 : M0107432 3 3 CG 3DCG 3 3 1 1 1.1............................ 1 1.2.............................. 2 2 3 2.1................................. 3 2.2 3........................ 4 2.3.................................
2010 : M
 2010 M0107288 2010 : M0107288 1 1 1.1............................ 1 1.2............................... 3 2 4 2.1................ 4 2.2....................... 6 3 9 3.1......................... 9 3.1.1..............................
2010 M0107288 2010 : M0107288 1 1 1.1............................ 1 1.2............................... 3 2 4 2.1................ 4 2.2....................... 6 3 9 3.1......................... 9 3.1.1..............................



2009 : M (CG)
") 2009 M0106262 2009 : M0106262 (CG) 2 2 2 2 2 2 1 1 1.1............................. 1 1.2.............................. 3 2 4 2.1............................... 4 2.2............................... 6 2.3.............................
2009 M0106262 2009 : M0106262 (CG) 2 2 2 2 2 2 1 1 1.1............................. 1 1.2.............................. 3 2 4 2.1............................... 4 2.2............................... 6 2.3.............................

")

2006 3D M
 2006 3D M0103190 2006 3D : M0103190 3DCG 3DCG 3DCG 3D 3 3D SKETCH 3D Teddy 1 1 2 3DModelingTool Dice 5 2.1................................... 5 2.2.............................. 6 2.2.1.............. 6
2006 3D M0103190 2006 3D : M0103190 3DCG 3DCG 3DCG 3D 3 3D SKETCH 3D Teddy 1 1 2 3DModelingTool Dice 5 2.1................................... 5 2.2.............................. 6 2.2.1.............. 6
O1-1 O1-2 O1-3 O1-4 O1-5 O1-6
 O1-1 O1-2 O1-3 O1-4 O1-5 O1-6 O1-7 O1-8 O1-9 O1-10 O1-11 O1-12 O1-13 O1-14 O1-15 O1-16 O1-17 O1-18 O1-19 O1-20 O1-21 O1-22 O1-23 O1-24 O1-25 O1-26 O1-27 O1-28 O1-29 O1-30 O1-31 O1-32 O1-33 O1-34 O1-35
O1-1 O1-2 O1-3 O1-4 O1-5 O1-6 O1-7 O1-8 O1-9 O1-10 O1-11 O1-12 O1-13 O1-14 O1-15 O1-16 O1-17 O1-18 O1-19 O1-20 O1-21 O1-22 O1-23 O1-24 O1-25 O1-26 O1-27 O1-28 O1-29 O1-30 O1-31 O1-32 O1-33 O1-34 O1-35
/HOHS‐05(基礎二次)")
2009 3DCG : M0106423 3DCG,,,, 3DCG 2D 3DCG 2D 3DCG 3DCG
 2009 3DCG M0106423 2009 3DCG : M0106423 3DCG,,,, 3DCG 2D 3DCG 2D 3DCG 3DCG 1 1 1.1................................. 1 1.2................................. 1 1.3............................... 3 1.4.................................
2009 3DCG M0106423 2009 3DCG : M0106423 3DCG,,,, 3DCG 2D 3DCG 2D 3DCG 3DCG 1 1 1.1................................. 1 1.2................................. 1 1.3............................... 3 1.4.................................

 1 911 9001030 9:00 A B C D E F G H I J K L M 1A0900 1B0900 1C0900 1D0900 1E0900 1F0900 1G0900 1H0900 1I0900 1J0900 1K0900 1L0900 1M0900 9:15 1A0915 1B0915 1C0915 1D0915 1E0915 1F0915 1G0915 1H0915 1I0915
1 911 9001030 9:00 A B C D E F G H I J K L M 1A0900 1B0900 1C0900 1D0900 1E0900 1F0900 1G0900 1H0900 1I0900 1J0900 1K0900 1L0900 1M0900 9:15 1A0915 1B0915 1C0915 1D0915 1E0915 1F0915 1G0915 1H0915 1I0915
IPSJ SIG Technical Report Vol.2012-CG-148 No /8/29 3DCG 1,a) On rigid body animation taking into account the 3D computer graphics came
 On rigid body animation taking into account the 3D computer graphics came") 3DCG 1,a) 2 2 2 2 3 On rigid body animation taking into account the 3D computer graphics camera viewpoint Abstract: In using computer graphics for making games or motion pictures, physics simulation is
3DCG 1,a) 2 2 2 2 3 On rigid body animation taking into account the 3D computer graphics camera viewpoint Abstract: In using computer graphics for making games or motion pictures, physics simulation is


 24 21 21115025 i 1 1 2 5 2.1.................................. 6 2.1.1........................... 6 2.1.2........................... 7 2.2...................................... 8 2.3............................
24 21 21115025 i 1 1 2 5 2.1.................................. 6 2.1.1........................... 6 2.1.2........................... 7 2.2...................................... 8 2.3............................
2010 : M0107189 3DCG 3 (3DCG) 3DCG 3DCG 3DCG S
 3DCG 3DCG 3DCG S") 2010 M0107189 2010 : M0107189 3DCG 3 (3DCG) 3DCG 3DCG 3DCG S 1 1 1.1............................ 1 1.2.............................. 4 2 5 2.1............................ 5 2.2.............................
2010 M0107189 2010 : M0107189 3DCG 3 (3DCG) 3DCG 3DCG 3DCG S 1 1 1.1............................ 1 1.2.............................. 4 2 5 2.1............................ 5 2.2.............................

済/P6‐16 クリニカル 柿木 5")
[2] 2. [3 5] 3D [6 8] Morishima [9] N n 24 24FPS k k = 1, 2,..., N i i = 1, 2,..., n Algorithm 1 N io user-specified number of inbetween omis
![[2] 2. [3 5] 3D [6 8] Morishima [9] N n 24 24FPS k k = 1, 2,..., N i i = 1, 2,..., n Algorithm 1 N io user-specified number of inbetween omis](/thumbs/76/74386791.jpg "[2] 2. [3 5] 3D [6 8] Morishima [9] N n 24 24FPS k k = 1, 2,..., N i i = 1, 2,..., n Algorithm 1 N io user-specified number of inbetween omis") 1,a) 2 2 2 1 2 3 24 Motion Frame Omission for Cartoon-like Effects Abstract: Limited animation is a hand-drawn animation style that holds each drawing for two or three successive frames to make up 24 frames
1,a) 2 2 2 1 2 3 24 Motion Frame Omission for Cartoon-like Effects Abstract: Limited animation is a hand-drawn animation style that holds each drawing for two or three successive frames to make up 24 frames
2018 M
 2018 M0115001 2018 9 2018 : M0115001 1 3D 3D 1 3D 3D 1 1 1.1......................................... 1 1.2......................................... 3 2 4 2.1...................................... 4 2.2................................
2018 M0115001 2018 9 2018 : M0115001 1 3D 3D 1 3D 3D 1 1 1.1......................................... 1 1.2......................................... 3 2 4 2.1...................................... 4 2.2................................

V")
授業研究第1日目
 1 1 1 0. (sextant) ( ) 2 1. IB I AB I AI E H H E B GHE CIHE ( ) 2 2 I H A (0 ) ( ) 3 2 2 θ = α + γ β + γ = θ + α β + γ = ( α + γ ) + α β = 2 α + γ γ C H CIG ( ) 4 2. John Hadley 1731 5 ( (octant)) Captain
1 1 1 0. (sextant) ( ) 2 1. IB I AB I AI E H H E B GHE CIHE ( ) 2 2 I H A (0 ) ( ) 3 2 2 θ = α + γ β + γ = θ + α β + γ = ( α + γ ) + α β = 2 α + γ γ C H CIG ( ) 4 2. John Hadley 1731 5 ( (octant)) Captain
研修コーナー
 l l l l l l l l l l l α α β l µ l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l
l l l l l l l l l l l α α β l µ l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l



10 4 2
 1 10 4 2 92 11 3 8 20 10 2 10 20 10 28 3 B 78 111 104 1021 95 10 2 4 10 8 95 18 10 30 11 13 104 20 105 105 105 105 107 5 1 11 26 13301500 6 GH 1 GH 34 7 11 27 9301030 8 4 9 GH 1 23 10 20 60 --------------------------------------------------------------------------------------------------------------------------
1 10 4 2 92 11 3 8 20 10 2 10 20 10 28 3 B 78 111 104 1021 95 10 2 4 10 8 95 18 10 30 11 13 104 20 105 105 105 105 107 5 1 11 26 13301500 6 GH 1 GH 34 7 11 27 9301030 8 4 9 GH 1 23 10 20 60 --------------------------------------------------------------------------------------------------------------------------
_0212_68<5A66><4EBA><79D1>_<6821><4E86><FF08><30C8><30F3><30DC><306A><3057><FF09>.pdf


untitled
 18 1 2,000,000 2,000,000 2007 2 2 2008 3 31 (1) 6 JCOSSAR 2007pp.57-642007.6. LCC (1) (2) 2 10mm 1020 14 12 10 8 6 4 40,50,60 2 0 1998 27.5 1995 1960 40 1) 2) 3) LCC LCC LCC 1 1) Vol.42No.5pp.29-322004.5.
18 1 2,000,000 2,000,000 2007 2 2 2008 3 31 (1) 6 JCOSSAR 2007pp.57-642007.6. LCC (1) (2) 2 10mm 1020 14 12 10 8 6 4 40,50,60 2 0 1998 27.5 1995 1960 40 1) 2) 3) LCC LCC LCC 1 1) Vol.42No.5pp.29-322004.5.
2003 : 00P249,,, CG
 2003 Web3D 00P249 2003 : 00P249,,, CG 1 1 1.1................................. 1 1.2................................. 3 1.3.............................. 3 2 4 2.1............................... 4 2.2.....................
2003 Web3D 00P249 2003 : 00P249,,, CG 1 1 1.1................................. 1 1.2................................. 3 1.3.............................. 3 2 4 2.1............................... 4 2.2.....................
第86回日本感染症学会総会学術集会後抄録(I)
") κ κ κ κ κ κ μ μ β β β γ α α β β γ α β α α α γ α β β γ μ β β μ μ α ββ β β β β β β β β β β β β β β β β β β γ β μ μ μ μμ μ μ μ μ β β μ μ μ μ μ μ μ μ μ μ μ μ μ μ β
κ κ κ κ κ κ μ μ β β β γ α α β β γ α β α α α γ α β β γ μ β β μ μ α ββ β β β β β β β β β β β β β β β β β β γ β μ μ μ μμ μ μ μ μ β β μ μ μ μ μ μ μ μ μ μ μ μ μ μ β
IPSJ SIG Technical Report Vol.2014-CG-155 No /6/28 1,a) 1,2,3 1 3,4 CG An Interpolation Method of Different Flow Fields using Polar Inter
 1,2,3 1 3,4 CG An Interpolation Method of Different Flow Fields using Polar Inter") ,a),2,3 3,4 CG 2 2 2 An Interpolation Method of Different Flow Fields using Polar Interpolation Syuhei Sato,a) Yoshinori Dobashi,2,3 Tsuyoshi Yamamoto Tomoyuki Nishita 3,4 Abstract: Recently, realistic
,a),2,3 3,4 CG 2 2 2 An Interpolation Method of Different Flow Fields using Polar Interpolation Syuhei Sato,a) Yoshinori Dobashi,2,3 Tsuyoshi Yamamoto Tomoyuki Nishita 3,4 Abstract: Recently, realistic
2013 M
 2013 M0110213 2013 : M0110213 3DCG 3DCG 3DCG 2D 3DCG 2D 1 1 3DCG 3D 1 1 1.1............................ 1 1.2............................... 10 2 11 2.1......................... 11 3 16 3.1..........................
2013 M0110213 2013 : M0110213 3DCG 3DCG 3DCG 2D 3DCG 2D 1 1 3DCG 3D 1 1 1.1............................ 1 1.2............................... 10 2 11 2.1......................... 11 3 16 3.1..........................
3D VR CAD 3D CAD CAD [1] CAD 3DCG [2] [3] CAD 3D NC CG [4] Ccurve XY C curve α C curve [5], [6], [7], [8], [9] 2 [10] 1 [11], [12] 2.2 [13] Tcu
![3D VR CAD 3D CAD CAD [1] CAD 3DCG [2] [3] CAD 3D NC CG [4] Ccurve XY C curve α C curve [5], [6], [7], [8], [9] 2 [10] 1 [11], [12] 2.2 [13] Tcu](/thumbs/92/109954609.jpg "3D VR CAD 3D CAD CAD [1] CAD 3DCG [2] [3] CAD 3D NC CG [4] Ccurve XY C curve α C curve [5], [6], [7], [8], [9] 2 [10] 1 [11], [12] 2.2 [13] Tcu") 1,a) 2 2 2011 10 21, 2012 5 12 A Study of Simulating Log-aesthetic Curved Surfaces under Various Light Source Environments with Augmented Reality Ryo Hirano 1,a) Toshinobu Harada 2 Kohe Tokoi 2 Received:
1,a) 2 2 2011 10 21, 2012 5 12 A Study of Simulating Log-aesthetic Curved Surfaces under Various Light Source Environments with Augmented Reality Ryo Hirano 1,a) Toshinobu Harada 2 Kohe Tokoi 2 Received:

第5章 偏微分方程式の境界値問題
 October 5, 2018 1 / 113 4 ( ) 2 / 113 Poisson 5.1 Poisson ( A.7.1) Poisson Poisson 1 (A.6 ) Γ p p N u D Γ D b 5.1.1: = Γ D Γ N 3 / 113 Poisson 5.1.1 d {2, 3} Lipschitz (A.5 ) Γ D Γ N = \ Γ D Γ p Γ N Γ
October 5, 2018 1 / 113 4 ( ) 2 / 113 Poisson 5.1 Poisson ( A.7.1) Poisson Poisson 1 (A.6 ) Γ p p N u D Γ D b 5.1.1: = Γ D Γ N 3 / 113 Poisson 5.1.1 d {2, 3} Lipschitz (A.5 ) Γ D Γ N = \ Γ D Γ p Γ N Γ
t θ, τ, α, β S(, 0 P sin(θ P θ S x cos(θ SP = θ P (cos(θ, sin(θ sin(θ P t tan(θ θ 0 cos(θ tan(θ = sin(θ cos(θ ( 0t tan(θ
 4 5 ( 5 3 9 4 0 5 ( 4 6 7 7 ( 0 8 3 9 ( 8 t θ, τ, α, β S(, 0 P sin(θ P θ S x cos(θ SP = θ P (cos(θ, sin(θ sin(θ P t tan(θ θ 0 cos(θ tan(θ = sin(θ cos(θ ( 0t tan(θ S θ > 0 θ < 0 ( P S(, 0 θ > 0 ( 60 θ
4 5 ( 5 3 9 4 0 5 ( 4 6 7 7 ( 0 8 3 9 ( 8 t θ, τ, α, β S(, 0 P sin(θ P θ S x cos(θ SP = θ P (cos(θ, sin(θ sin(θ P t tan(θ θ 0 cos(θ tan(θ = sin(θ cos(θ ( 0t tan(θ S θ > 0 θ < 0 ( P S(, 0 θ > 0 ( 60 θ
, 3, STUDY ON IMPORTANCE OF OPTIMIZED GRID STRUCTURE IN GENERAL COORDINATE SYSTEM 1 2 Hiroyasu YASUDA and Tsuyoshi HOSHINO
 , 3, 2012 9 STUDY ON IMPORTANCE OF OPTIMIZED GRID STRUCTURE IN GENERAL COORDINATE SYSTEM 1 2 Hiroyasu YASUDA and Tsuyoshi HOSHINO 1 950-2181 2 8050 2 950-2181 2 8050 Numerical computation of river flows
, 3, 2012 9 STUDY ON IMPORTANCE OF OPTIMIZED GRID STRUCTURE IN GENERAL COORDINATE SYSTEM 1 2 Hiroyasu YASUDA and Tsuyoshi HOSHINO 1 950-2181 2 8050 2 950-2181 2 8050 Numerical computation of river flows
JKR Point loading of an elastic half-space 2 3 Pressure applied to a circular region Boussinesq, n =
 JKR 17 9 15 1 Point loading of an elastic half-space Pressure applied to a circular region 4.1 Boussinesq, n = 1.............................. 4. Hertz, n = 1.................................. 6 4 Hertz
JKR 17 9 15 1 Point loading of an elastic half-space Pressure applied to a circular region 4.1 Boussinesq, n = 1.............................. 4. Hertz, n = 1.................................. 6 4 Hertz


 H24.12.23")
Microsoft Word doc
 . 正規線形モデルのベイズ推定翠川 大竹距離減衰式 (PGA(Midorikawa, S., and Ohtake, Y. (, Attenuation relationships of peak ground acceleration and velocity considering attenuation characteristics for shallow and deeper earthquakes,
. 正規線形モデルのベイズ推定翠川 大竹距離減衰式 (PGA(Midorikawa, S., and Ohtake, Y. (, Attenuation relationships of peak ground acceleration and velocity considering attenuation characteristics for shallow and deeper earthquakes,
2007 3DCG : M DCG 3DCG 3DCG 3D (huristic method) C++
 C++") 2007 3DCG M0104402 2007 3DCG : M0104402 3DCG 3DCG 3DCG 3D (huristic method) C++ 1 1 1.1............................ 1 1.2.............................. 3 2 4 2.1......................... 4 2.2....................
2007 3DCG M0104402 2007 3DCG : M0104402 3DCG 3DCG 3DCG 3D (huristic method) C++ 1 1 1.1............................ 1 1.2.............................. 3 2 4 2.1......................... 4 2.2....................
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _
 1000101_ 1000102_ 1000103_ 1000301_ 1000302_ 1000303_ 1000401_ 1000402_ 1000403_ 1000701_ 1000702_ 1000703_ 1000801_ 1000802_ 1000803_ 1000901_ 1000902_ 1000903_ 1001001_ 1001002_ 1001003_ 1001101_ 1001102_
1000101_ 1000102_ 1000103_ 1000301_ 1000302_ 1000303_ 1000401_ 1000402_ 1000403_ 1000701_ 1000702_ 1000703_ 1000801_ 1000802_ 1000803_ 1000901_ 1000902_ 1000903_ 1001001_ 1001002_ 1001003_ 1001101_ 1001102_

平成20年5月 協会創立50年の歩み 海の安全と環境保全を目指して 友國八郎 海上保安庁 長官 岩崎貞二 日本船主協会 会長 前川弘幸 JF全国漁業協同組合連合会 代表理事会長 服部郁弘 日本船長協会 会長 森本靖之 日本船舶機関士協会 会長 大内博文 航海訓練所 練習船船長 竹本孝弘 第二管区海上保安本部長 梅田宜弘


![Œ{Ł¶/1ŒÊ −ªfiª„¾ [ 1…y†[…W ]](/thumbs/50/26134150.jpg "Œ{Ł¶/1ŒÊ −ªfiª„¾ [ 1…y†[…W ]")






( )
") NAIST-IS-MT9951117 2001 2 9 ( ) 3 CG, VR.,,,.,,,,,.,, 2, 3 3,.,, 2, 3.,,,,,.,,,.,,.,,, 3, NAIST-IS- MT9951117, 2001 2 9. i Intaractive terrain generation within Immersive Modeling System 3 Ryutarou Morimoto
NAIST-IS-MT9951117 2001 2 9 ( ) 3 CG, VR.,,,.,,,,,.,, 2, 3 3,.,, 2, 3.,,,,,.,,,.,,.,,, 3, NAIST-IS- MT9951117, 2001 2 9. i Intaractive terrain generation within Immersive Modeling System 3 Ryutarou Morimoto
情報処理学会研究報告 IPSJ SIG Technical Report Vol.2015-CVIM-195 No /1/22 AR マーカ除去のための実時間背景画像変形 *1 1 1 Abstract 本稿では, 拡張現実感で用いられる AR マーカの違和感のない視覚的除去を実現するた
 AR マーカ除去のための実時間背景画像変形 *1 1 1 Abstract 本稿では, 拡張現実感で用いられる AR マーカの違和感のない視覚的除去を実現するための, 背景画像の実時間変形手法を提案する. 従来,AR マーカの実時間除去は, マーカが平面上に存在するという仮定のもと, カメラ位置姿勢に基づく単一の射影変換行列を用いて, 背景画像を変形し, マーカ上に重畳することで実現していた. しかし,
AR マーカ除去のための実時間背景画像変形 *1 1 1 Abstract 本稿では, 拡張現実感で用いられる AR マーカの違和感のない視覚的除去を実現するための, 背景画像の実時間変形手法を提案する. 従来,AR マーカの実時間除去は, マーカが平面上に存在するという仮定のもと, カメラ位置姿勢に基づく単一の射影変換行列を用いて, 背景画像を変形し, マーカ上に重畳することで実現していた. しかし,
")
Optical Flow t t + δt 1 Motion Field 3 3 1) 2) 3) Lucas-Kanade 4) 1 t (x, y) I(x, y, t)
 2) 3) Lucas-Kanade 4) 1 t (x, y) I(x, y, t)") http://wwwieice-hbkborg/ 2 2 4 2 -- 2 4 2010 9 3 3 4-1 Lucas-Kanade 4-2 Mean Shift 3 4-3 2 c 2013 1/(18) http://wwwieice-hbkborg/ 2 2 4 2 -- 2 -- 4 4--1 2010 9 4--1--1 Optical Flow t t + δt 1 Motion Field
http://wwwieice-hbkborg/ 2 2 4 2 -- 2 4 2010 9 3 3 4-1 Lucas-Kanade 4-2 Mean Shift 3 4-3 2 c 2013 1/(18) http://wwwieice-hbkborg/ 2 2 4 2 -- 2 -- 4 4--1 2010 9 4--1--1 Optical Flow t t + δt 1 Motion Field

「スウェーデン企業におけるワーク・ライフ・バランス調査 」報告書
 1 2004 12 2005 4 5 100 25 3 1 76 2 Demoskop 2 2004 11 24 30 7 2 10 1 2005 1 31 2 4 5 2 3-1-1 3-1-1 Micromediabanken 2005 1 507 1000 55.0 2 77 50 50 /CEO 36.3 37.4 18.1 3-2-1 43.0 34.4 / 17.6 3-2-2 78 79.4
1 2004 12 2005 4 5 100 25 3 1 76 2 Demoskop 2 2004 11 24 30 7 2 10 1 2005 1 31 2 4 5 2 3-1-1 3-1-1 Micromediabanken 2005 1 507 1000 55.0 2 77 50 50 /CEO 36.3 37.4 18.1 3-2-1 43.0 34.4 / 17.6 3-2-2 78 79.4


RF_1
 RF_1 10/04/16 10:32 http://rftechno.web.infoseek.co.jp/rf_1.html 1/12 RF_1 10/04/16 10:32 http://rftechno.web.infoseek.co.jp/rf_1.html 2/12 RF_1 10/04/16 10:32 http://rftechno.web.infoseek.co.jp/rf_1.html
RF_1 10/04/16 10:32 http://rftechno.web.infoseek.co.jp/rf_1.html 1/12 RF_1 10/04/16 10:32 http://rftechno.web.infoseek.co.jp/rf_1.html 2/12 RF_1 10/04/16 10:32 http://rftechno.web.infoseek.co.jp/rf_1.html
IPSJ SIG Technical Report Vol.2012-CG-149 No.13 Vol.2012-CVIM-184 No /12/4 3 1,a) ( ) DB 3D DB 2D,,,, PnP(Perspective n-point), Ransa
 ( ) DB 3D DB 2D,,,, PnP(Perspective n-point), Ransa") 3,a) 3 3 ( ) DB 3D DB 2D,,,, PnP(Perspective n-point), Ransac. DB [] [2] 3 DB Web Web DB Web NTT NTT Media Intelligence Laboratories, - Hikarinooka Yokosuka-Shi, Kanagawa 239-0847 Japan a) yabushita.hiroko@lab.ntt.co.jp
3,a) 3 3 ( ) DB 3D DB 2D,,,, PnP(Perspective n-point), Ransac. DB [] [2] 3 DB Web Web DB Web NTT NTT Media Intelligence Laboratories, - Hikarinooka Yokosuka-Shi, Kanagawa 239-0847 Japan a) yabushita.hiroko@lab.ntt.co.jp
 27 24 24115059 i 1 1 2 4 2.1...................... 4 2.1.1.............................. 5 2.1.2...................... 7 2.2............................ 9 2.2.1.................................. 10 2.2.2...............................
27 24 24115059 i 1 1 2 4 2.1...................... 4 2.1.1.............................. 5 2.1.2...................... 7 2.2............................ 9 2.2.1.................................. 10 2.2.2...............................
I II III IV V
 I II III IV V N/m 2 640 980 50 200 290 440 2m 50 4m 100 100 150 200 290 390 590 150 340 4m 6m 8m 100 170 250 µ = E FRVβ β N/mm 2 N/mm 2 1.1 F c t.1 3 1 1.1 1.1 2 2 2 2 F F b F s F c F t F b F s 3 3 3
I II III IV V N/m 2 640 980 50 200 290 440 2m 50 4m 100 100 150 200 290 390 590 150 340 4m 6m 8m 100 170 250 µ = E FRVβ β N/mm 2 N/mm 2 1.1 F c t.1 3 1 1.1 1.1 2 2 2 2 F F b F s F c F t F b F s 3 3 3
Microsoft Word - GrCadSymp1999.doc
 u u Ê É Îf ÈÉ uõòñõçí uõòñõëêi oy * ÎÏ Ó ÏÕ( ) **Ï ÓÐ ÕÖ *** ÎÏ Ó ÏÕ( ) APÑÖÕ ÑÕ { itot, inoue, furuhata} @trl.ibm.co.jp shimada@cmu.edu Automated Conversion of Triangular Mesh to Quadrilateral Mesh with
u u Ê É Îf ÈÉ uõòñõçí uõòñõëêi oy * ÎÏ Ó ÏÕ( ) **Ï ÓÐ ÕÖ *** ÎÏ Ó ÏÕ( ) APÑÖÕ ÑÕ { itot, inoue, furuhata} @trl.ibm.co.jp shimada@cmu.edu Automated Conversion of Triangular Mesh to Quadrilateral Mesh with
2 2 3 4 5 5 2 7 3 4 6 1 3 4 7 4 2 2 2 4 2 3 3 4 5 1932 A p. 40. 1893 A p. 224, p. 226. 1893 B pp. 1 2. p. 3.
 1 73 72 1 1844 11 9 1844 12 18 5 1916 1 11 72 1 73 2 1862 3 1870 2 1862 6 1873 1 3 4 3 4 7 2 3 4 5 3 5 4 2007 p. 117. 2 2 3 4 5 5 2 7 3 4 6 1 3 4 7 4 2 2 2 4 2 3 3 4 5 1932 A p. 40. 1893 A p. 224, p. 226.
1 73 72 1 1844 11 9 1844 12 18 5 1916 1 11 72 1 73 2 1862 3 1870 2 1862 6 1873 1 3 4 3 4 7 2 3 4 5 3 5 4 2007 p. 117. 2 2 3 4 5 5 2 7 3 4 6 1 3 4 7 4 2 2 2 4 2 3 3 4 5 1932 A p. 40. 1893 A p. 224, p. 226.

日経テレコン料金表(2016年4月)
") 1 2 3 4 8,000 15,000 22,000 29,000 5 6 7 8 36,000 42,000 48,000 54,000 9 10 20 30 60,000 66,000 126,000 166,000 50 100 246,000 396,000 1 25 8,000 7,000 620 2150 6,000 4,000 51100 101200 3,000 1,000 201
1 2 3 4 8,000 15,000 22,000 29,000 5 6 7 8 36,000 42,000 48,000 54,000 9 10 20 30 60,000 66,000 126,000 166,000 50 100 246,000 396,000 1 25 8,000 7,000 620 2150 6,000 4,000 51100 101200 3,000 1,000 201




122011pp.139174 18501933
 122011pp.139174 18501933 122011 1850 3 187912 3 1850 8 1933 84 4 1871 12 1879 5 2 1 9 15 1 1 5 3 3 3 6 19 9 9 6 28 7 7 4 1140 9 4 3 5750 58 4 3 1 57 2 122011 3 4 134,500,000 4,020,000 11,600,000 5 2 678.00m
122011pp.139174 18501933 122011 1850 3 187912 3 1850 8 1933 84 4 1871 12 1879 5 2 1 9 15 1 1 5 3 3 3 6 19 9 9 6 28 7 7 4 1140 9 4 3 5750 58 4 3 1 57 2 122011 3 4 134,500,000 4,020,000 11,600,000 5 2 678.00m
29 2011 3 4 1 19 5 2 21 6 21 2 21 7 2 23 21 8 21 1 20 21 1 22 20 p.61 21 1 21 21 1 23
 29 2011 3 pp.55 86 19 1886 2 13 1 1 21 1888 1 13 2 3,500 3 5 5 50 4 1959 6 p.241 21 1 13 2 p.14 1988 p.2 21 1 15 29 2011 3 4 1 19 5 2 21 6 21 2 21 7 2 23 21 8 21 1 20 21 1 22 20 p.61 21 1 21 21 1 23 1
29 2011 3 pp.55 86 19 1886 2 13 1 1 21 1888 1 13 2 3,500 3 5 5 50 4 1959 6 p.241 21 1 13 2 p.14 1988 p.2 21 1 15 29 2011 3 4 1 19 5 2 21 6 21 2 21 7 2 23 21 8 21 1 20 21 1 22 20 p.61 21 1 21 21 1 23 1
Microsoft Word - 映画『東京裁判』を観て.doc
 1 2 3 4 5 6 7 1 2008. 2 2010, 3 2010. p.1 4 2008 p.202 5 2008. p.228 6 2011. 7 / 2008. pp.3-4 1 8 1 9 10 11 8 2008, p.7 9 2011. p.41 10.51 11 2009. p. 2 12 13 14 12 2008. p.4 13 2008, p.7-8 14 2008. p.126
1 2 3 4 5 6 7 1 2008. 2 2010, 3 2010. p.1 4 2008 p.202 5 2008. p.228 6 2011. 7 / 2008. pp.3-4 1 8 1 9 10 11 8 2008, p.7 9 2011. p.41 10.51 11 2009. p. 2 12 13 14 12 2008. p.4 13 2008, p.7-8 14 2008. p.126

戦後の補欠選挙
 1 2 11 3 4, 1968, p.429., pp.140-141. 76 2005.12 20 14 5 2110 25 6 22 7 25 8 4919 9 22 10 11 12 13 58154 14 15 1447 79 2042 21 79 2243 25100 113 2211 71 113 113 29 p.85 2005.12 77 16 29 12 10 10 17 18
1 2 11 3 4, 1968, p.429., pp.140-141. 76 2005.12 20 14 5 2110 25 6 22 7 25 8 4919 9 22 10 11 12 13 58154 14 15 1447 79 2042 21 79 2243 25100 113 2211 71 113 113 29 p.85 2005.12 77 16 29 12 10 10 17 18
73 p.1 22 16 2004p.152
 1987 p.80 72 73 p.1 22 16 2004p.152 281895 1930 1931 12 28 1930 10 27 12 134 74 75 10 27 47.6 1910 1925 10 10 76 10 11 12 139 p.287 p.10 11 pp.3-4 1917 p.284 77 78 10 13 10 p.6 1936 79 15 15 30 80 pp.499-501
1987 p.80 72 73 p.1 22 16 2004p.152 281895 1930 1931 12 28 1930 10 27 12 134 74 75 10 27 47.6 1910 1925 10 10 76 10 11 12 139 p.287 p.10 11 pp.3-4 1917 p.284 77 78 10 13 10 p.6 1936 79 15 15 30 80 pp.499-501

() L () 20 1
 L () 20 1") () 25 1 10 1 0 0 0 1 2 3 4 5 6 2 3 4 9308510 4432193 L () 20 1 PP 200,000 P13P14 3 0123456 12345 1234561 2 4 5 6 25 1 10 7 1 8 10 / L 10 9 10 11 () ( ) TEL 23 12 7 38 13 14 15 16 17 18 L 19 20 1000123456
() 25 1 10 1 0 0 0 1 2 3 4 5 6 2 3 4 9308510 4432193 L () 20 1 PP 200,000 P13P14 3 0123456 12345 1234561 2 4 5 6 25 1 10 7 1 8 10 / L 10 9 10 11 () ( ) TEL 23 12 7 38 13 14 15 16 17 18 L 19 20 1000123456
308 ( ) p.121
 p.121") 307 1944 1 1920 1995 2 3 4 5 308 ( ) p.121 309 10 12 310 6 7 ( ) ( ) ( ) 50 311 p.120 p.142 ( ) ( ) p.117 p.124 p.118 312 8 p.125 313 p.121 p.122 p.126 p.128 p.156 p.119 p.122 314 p.153 9 315 p.142 p.153
307 1944 1 1920 1995 2 3 4 5 308 ( ) p.121 309 10 12 310 6 7 ( ) ( ) ( ) 50 311 p.120 p.142 ( ) ( ) p.117 p.124 p.118 312 8 p.125 313 p.121 p.122 p.126 p.128 p.156 p.119 p.122 314 p.153 9 315 p.142 p.153


1 (1) ( i ) 60 (ii) 75 (iii) 315 (2) π ( i ) (ii) π (iii) 7 12 π ( (3) r, AOB = θ 0 < θ < π ) OAB A 2 OB P ( AB ) < ( AP ) (4) 0 < θ < π 2 sin θ
 ( i ) 60 (ii) 75 (iii) 315 (2) π ( i ) (ii) π (iii) 7 12 π ( (3) r, AOB = θ 0 < θ < π ) OAB A 2 OB P ( AB ) < ( AP ) (4) 0 < θ < π 2 sin θ") 1 (1) ( i ) 60 (ii) 75 (iii) 15 () ( i ) (ii) 4 (iii) 7 1 ( () r, AOB = θ 0 < θ < ) OAB A OB P ( AB ) < ( AP ) (4) 0 < θ < sin θ < θ < tan θ 0 x, 0 y (1) sin x = sin y (x, y) () cos x cos y (x, y) 1 c
1 (1) ( i ) 60 (ii) 75 (iii) 15 () ( i ) (ii) 4 (iii) 7 1 ( () r, AOB = θ 0 < θ < ) OAB A OB P ( AB ) < ( AP ) (4) 0 < θ < sin θ < θ < tan θ 0 x, 0 y (1) sin x = sin y (x, y) () cos x cos y (x, y) 1 c
14 2 5
 14 2 5 i ii Surface Reconstruction from Point Cloud of Human Body in Arbitrary Postures Isao MORO Abstract We propose a method for surface reconstruction from point cloud of human body in arbitrary postures.
14 2 5 i ii Surface Reconstruction from Point Cloud of Human Body in Arbitrary Postures Isao MORO Abstract We propose a method for surface reconstruction from point cloud of human body in arbitrary postures.
JFE.dvi
 ,, Department of Civil Engineering, Chuo University Kasuga 1-13-27, Bunkyo-ku, Tokyo 112 8551, JAPAN E-mail : atsu1005@kc.chuo-u.ac.jp E-mail : kawa@civil.chuo-u.ac.jp SATO KOGYO CO., LTD. 12-20, Nihonbashi-Honcho
,, Department of Civil Engineering, Chuo University Kasuga 1-13-27, Bunkyo-ku, Tokyo 112 8551, JAPAN E-mail : atsu1005@kc.chuo-u.ac.jp E-mail : kawa@civil.chuo-u.ac.jp SATO KOGYO CO., LTD. 12-20, Nihonbashi-Honcho
変 位 変位とは 物体中のある点が変形後に 別の点に異動したときの位置の変化で あり ベクトル量である 変位には 物体の変形の他に剛体運動 剛体変位 が含まれている 剛体変位 P(x, y, z) 平行移動と回転 P! (x + u, y + v, z + w) Q(x + d x, y + dy,
 平行移動と回転 P! (x + u, y + v, z + w) Q(x + d x, y + dy,") 変 位 変位とは 物体中のある点が変形後に 別の点に異動したときの位置の変化で あり ベクトル量である 変位には 物体の変形の他に剛体運動 剛体変位 が含まれている 剛体変位 P(x, y, z) 平行移動と回転 P! (x + u, y + v, z + w) Q(x + d x, y + dy, z + dz) Q! (x + d x + u + du, y + dy + v + dv, z +
変 位 変位とは 物体中のある点が変形後に 別の点に異動したときの位置の変化で あり ベクトル量である 変位には 物体の変形の他に剛体運動 剛体変位 が含まれている 剛体変位 P(x, y, z) 平行移動と回転 P! (x + u, y + v, z + w) Q(x + d x, y + dy, z + dz) Q! (x + d x + u + du, y + dy + v + dv, z +
- (20 ) 400 () 3DCG No.51 No.61 No.62 No.11 P 2 16
 400 () 3DCG No.51 No.61 No.62 No.11 P 2 16") - (20 ) 226-8503 1974 6 10 29 4259 Tel:045-924-5050 Fax:045-924-5016 E-mail:hase@hi.pi.titech.ac.jp Tel: Fax: E-mail: Tel:03-3786-5650 Tel:090-6036-8520 P 1 16 - (20 ) 400 () 3DCG No.51 No.61 No.62 No.11
- (20 ) 226-8503 1974 6 10 29 4259 Tel:045-924-5050 Fax:045-924-5016 E-mail:hase@hi.pi.titech.ac.jp Tel: Fax: E-mail: Tel:03-3786-5650 Tel:090-6036-8520 P 1 16 - (20 ) 400 () 3DCG No.51 No.61 No.62 No.11

21(2009) I ( ) 21(2009) / 42
 I ( ) 21(2009) / 42") 21(2009) 10 24 21(2009) 10 24 1 / 21(2009) 10 24 1. 2. 3.... 4. 5. 6. 7.... 8.... 2009 8 1 1 (1.1) z = x + iy x, y i R C i 2 = 1, i 2 + 1 = 0. 21(2009) 10 24 3 / 1 B.C. (N) 1, 2, 3,...; +,, (Z) 0, ±1,
21(2009) 10 24 21(2009) 10 24 1 / 21(2009) 10 24 1. 2. 3.... 4. 5. 6. 7.... 8.... 2009 8 1 1 (1.1) z = x + iy x, y i R C i 2 = 1, i 2 + 1 = 0. 21(2009) 10 24 3 / 1 B.C. (N) 1, 2, 3,...; +,, (Z) 0, ±1,
ii 3.,. 4. F. ( ), ,,. 8.,. 1. (75% ) (25% ) =7 24, =7 25, =7 26 (. ). 1.,, ( ). 3.,...,.,.,.,.,. ( ) (1 2 )., ( ), 0., 1., 0,.
, ,,. 8.,. 1. (75% ) (25% ) =7 24, =7 25, =7 26 (. ). 1.,, ( ). 3.,...,.,.,.,.,. ( ) (1 2 )., ( ), 0., 1., 0,.") (1 C205) 4 10 (2 C206) 4 11 (2 B202) 4 12 25(2013) http://www.math.is.tohoku.ac.jp/~obata,.,,,..,,. 1. 2. 3. 4. 5. 6. 7. 8. 1., 2007 ( ).,. 2. P. G., 1995. 3. J. C., 1988. 1... 2.,,. ii 3.,. 4. F. ( ),..
(1 C205) 4 10 (2 C206) 4 11 (2 B202) 4 12 25(2013) http://www.math.is.tohoku.ac.jp/~obata,.,,,..,,. 1. 2. 3. 4. 5. 6. 7. 8. 1., 2007 ( ).,. 2. P. G., 1995. 3. J. C., 1988. 1... 2.,,. ii 3.,. 4. F. ( ),..