<4D F736F F F696E74202D F82C282C882AA82E98D488FEA95AA89C889EF E B E9197BF>
|
|
|
- ときな むらかわ
- 5 years ago
- Views:
Transcription
1 ロボットミドルウエア標準 RT ミドルウェア 安藤慶昭 経済産業省製造産業局産業機械課情報化推進係長 ( 独 ) 産業技術総合研究所知能システム研究部門主任研究員
2 概要 ロボットミドルウエアとは? RTミドルウエア:OpenRTM-aist 様々なミドルウエア / プラットフォーム 標準化 終わりに 2
3 ロボットミドルウエアとは? ロボットシステム構築を効率化するための共通機能を提供するソフトウエア インターフェース プロトコルの共通化 標準化 例として モジュール化 コンポーネント化フレームワークを提供 モジュール化されたソフトウエアやサーバ クライアント間の通信をサポート パラメータの設定 配置 起動 モジュールの複合化 ( 結合 ) 機能を提供 抽象化により OS や言語間連携 相互運用を実現 2000 年ごろから開発が活発化 世界各国で様々なミドルウエアが開発 公開されている 3
4 ミドルウエア コンポーネント etc ミドルウエア OS とアプリケーション層の中間に位置し 特定の用途に対して利便性 抽象化向上のために種々の機能を提供するソフトウエア 例 :RDBMS ORB 等 定義は結構曖昧 分散オブジェクト ( ミドルウエア ) 分散環境において リモートのオブジェクトに対して透過的アクセスを提供する仕組み 例 :CORBA Ice Java RMI DCOM 等 コンポーネント 再利用可能なソフトウエアの断片 ( 例えばモジュール ) であり 内部の詳細機能にアクセスするための ( シンタクス セマンティクスともにきちんと定義された ) インターフェースセットをもち 外部に対してはそのインターフェースを介してある種の機能を提供するモジュール CBSD(Component Based Software Development) ソフトウエア システムを構築する際の基本構成要素をコンポーネントとして構成するソフトウエア開発手法 4
5 アナリシスからシンセシスへ scientific principals human being robot animal insect RT based system nature analysis synthesis integration artifact 5
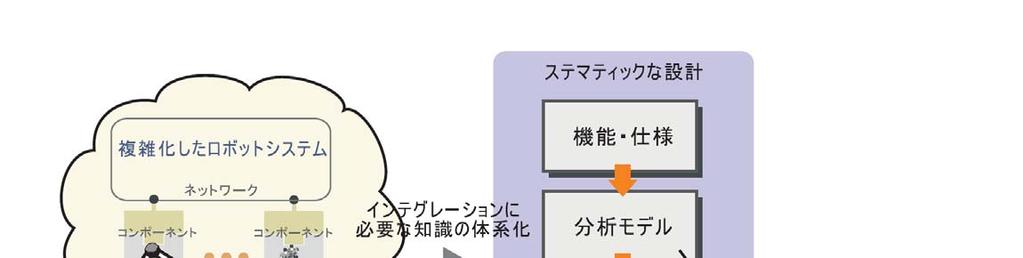
6 体系的システム開発 開発者の経験やノウハウに依存したロボットシステム開発 体系的システムデザイン : 分析 設計 実装の一連の流れ 6
7 様々なミドルウエア / プラットフォーム OpenRTM-aist ROS OROCOS OPRoS ORCA Microsoft Robotic Studio Player/Stage/Gazebo ORiN RSNP UNR Platform OPEN-R Open Robot Controller architecture 7
8 様々なミドルウエア / プラットフォーム OpenRTM-aist ROS OROCOS OPRoS ORCA Microsoft Robotic Studio Player/Stage/Gazebo ORiN RSNP UNR Platform OPEN-R Open Robot Controller architecture 8
9 ROS(Robot Operating System) 9
 Scott Hassan が出資 google の初期エンジンの作者の一人 Brian Gerkey")

10 Willow Garage Willow Garage 2007 年設立のロボットベンチャー ( 米 Menlo Park) Scott Hassan が出資 google の初期エンジンの作者の一人 Brian Gerkey がソフトウエア部分の PL Player の作者の一人 ビジネスモデル ソフト :ROS( 無償 )+ハード:PR2 を販売 その他は不明 資金がたくさんあるので急いで利益を上げる必要はないとのこと まずPR2を10 台無償で大学などに配布予定 10
11 ROS(Robot Operating System) 目的 : ロボット研究を効率的にする OS ではない Robot Operating System, Robot Open Source UNIX 哲学 UNIX 的なコンパクトなツール ライブラリ群による効率的なインテグレーション環境を提供する モジュール性 柔軟性 再利用性 言語 OS 非依存 オープンソース プラットフォームアーキテクチャ 独自ミドルウエア ( 独自 IDL からコード生成 ) メッセージベース pub/sub モデル RPC モデル 11


12 ROS(2) ライブラリ ツール群が充実 シミュレータ :Gazebo ベース ナビゲーション :Player 等 座標変換 キャリブレーション プランニング :TREX マニピュレーション :OpenRAVE ビジョン :OpenCV 音声 :ManyEars 外部のオープンソースライブラリを取り込みライブラリ群として整備 12
13 Willow Garage および ROS 周辺の動き gazebo OSRF ROS ROS/gazebo を携えてスピンアウト スピンオフ Willow Garage ROS よりビジネスよりの会社として再スタート Scott Hassan が資金提供をやめた? $ WG はポリシーとして DARPA などから資金提供を受けない DARPA から資金提供を受けるために OSRF として独立? DARPA OSRFJ? JSK,AIST, 有志 SwRI ROS-i 産ロボ向け ROS パッケージ開発を目指すコンソーシアム ROS industrial を立ち上げ 連携? HiDOF Industrial Perception Inc. OpenCV Open Perception Foundation 8 つのベンチャー NPO(OSRF 含む ) Fraunhofer Suitable Technologi es ROS-i の欧州拠点 ドイツの大中小企業が多数参加か? トヨタも? Redwood Robotics

14 ROS Industrial 14
15 ROS Industrial
16 ROS の産業応用 ROS industrial (ROS-i):ROSを産業用途に利用することを目的とし ROSおよびStackを再パッケージ化 検証 インターフェースの統一などを進めることを目的としたコンソーシアム 2012 年に米国の独立研究所 South West Research Institute が立ち上げ 欧州では Fraunhofer IPAが積極的に推進 16
17 ROS-i の目的 様々なマニピュレータ, エンドエフェクタ, 認識システム センサ, 移動プラットフォーム, その他周辺機器機間の相互運用性向上 オープンかつモジュール化された先進的なライブラリの配布 利用促進 オープンソースライブラリに対して一定の品質保証を提供する 学会等で発表される最新技術をいち早く実用化するためのチャネルを提供する 17

18 ROS-i Conference これまでに米国で1 回, ドイツで2 回開催 コンソーシアムメンバーの募集とコンソーシアムメンバー内での情報共有を目的とする 2014 年 7 月 6 日にFraunhofer IPA, シュツットガルトで開催 Industrie4.0に関する取り組みなども紹介される 18

19 OROCOS 19
20 OROCOS EU プロジェクトで開発 ( ) K.U.Leuven( ベルギー ) LAAS Toulouse( フランス ) ORCA へ KTH Stockholm( スウェーデン ) ハードリアルタイムのソフトウエアフレームワーク ロボットの制御に必要なライブラリ集 ( 運動学 リアルタイム制御 etc ) 最近はコンポーネントベース開発のフレームワークも提供 ツールによるモデルベース開発 20


21 OROCOS コンポーネントモデル データフローポート 種々のサービスインターフェース コンフィギュレーション機能 コールバックベースのロジック実行フレームワーク ほぼ RTC を同じ ( マネ?) 21
22 OPRoS (The Open Platform for Robotic Services) 22
23 OPRoS 韓国の国プロジェクトで開発されたロボット用プラットフォーム ETRI(Electronics and Telecommunication Research Institute) KIST, Kanwong Univ., etc OMG RTC( ほぼ ) 準拠 通信ミドルウエアは独自 (URC(Ubiquitous Robot Companion PJ) で開発したもの ) ツールチェーンなども提供 23

24 OPRoS ETRI, OMG Infra. WG, OPRoS Component Tools 24


25 OPRoS コンポーネント開発 Component Editor システム構築 Component Composer OpenRTM-aist によく似たツールチェーン ETRI, OMG Infra. WG, OPRoS Component Tools 25

26 YARP 26
")

27 YARP (Yet Another Robot Platform) IIT (Istituto Italiano di Tecnologia) で開発された icub のためのソフトウエアプラットフォーム icub: EUプロジェクト RobotCub, 53DOFの赤ちゃんの様なヒューマノイド YARP 27
28 YARP コンポーネントフレームワークは無し Main から書き始める 原則 1 プロセス 1 モジュール 多様な伝送方式のデータポートを提供 TCP, UDP, multicast Carrier: 様々なマーシャリング プロトコルを利用可能 簡単な RPC もある 独自のマーシャリング方式 ノード間の利用にはネームサービスを利用 CUI ツール : yarp 接続制御 モジュール制御 28
29 ORiN 29
 http://www.orin.")
30 ORiN (Open Robot Interface for the Network) 日本の FA ロボット標準 FA ロボットコントローラを抽象化 マルチベンダロボットシステムを容易に実現可能 メンバー : ORiN consortium (FANUC, YASUKAWA, Kawasaki, MITSUBISHI, DENSO, KOBELCO) ORiN 30
31 ORiN 設計ポリシ 緩やかな標準化 様々なタイプのロボット仕様を包含可能 拡張性 ベンダ特有のオプションを定義可能 ネットワークプロトコルのモジュール化 既存のロボットに適用可能 実装と仕様の分離 OOP 実装ポリシ デファクト標準 PC&Windows Distributed object model (DCOM) ネットワーク透過 言語非依存 XML ベンダ独自の仕様を記述するための標準フレームワーク インターネット技術 HTTP, XML, SOAP 31
 ロボットプロファイルデータ RAP (Robot Access Protocol) インターネットを介したアクセシビリティを提供")
32 ORiN アーキテクチャ RAO (Robot Access Object) ロボットコントローラに対する統一されたデータアクセシビリティを提供 RRD (Robot Resource Definition) ロボットプロファイルデータ RAP (Robot Access Protocol) インターネットを介したアクセシビリティを提供 32

33 RSNP (Robot Service Network Protocol)
 が主導となって定めるロボット用インターネットサービスのプロトコル RSi:2004")

34 RSi (Robot Service Initiative) RSi (Robot Service Initiative) が主導となって定めるロボット用インターネットサービスのプロトコル RSi:2004 年発足 富士通 三菱重工 東芝 安川電機 日本気象協会等が加盟 ロボットをプラットフォームとしたインターネットと連携した新たなビジネス創出を目指す 成田雅彦, 産業技術大学院大学 ROBOMEC2013 RTM 講習会資料より 34


35 RSNP RSiサーバ等で提供するサービスを各地のロボットを介して提供 天気予報 見守り ロボットマップ 各種ロボット制御 SOAPを利用 疑似 Push 機能を利用し Firewall 越し通信を実現 主としてロボットとインターネット ( クラウド ) との連携に利用 cf. RTC RSNP RTC/RTM 成田雅彦, 産業技術大学院大学 ROBOMEC2013 RTM 講習会資料より 35
36 UNR Platform (Ubiquitous Network Robot Platform) 36


37 UNR Platform 商業施設 病院 家などのさまざまな場所における人々の活動を支援 ロボット スマートフォンアプリ 環境センサがネットワークを介して連携し 多地点で人々にサービスを提供することを目指す ART により開発 配布 亀井剛次 ATR, CNR 研究会
")

38 UNR Platform 一部はOMG RoIS (Robot Interaction Service) 標準に準拠 個々のロボット仕様を気にせずアプリケーションを記述可能 アプリと下位コンポーネントのデータのやり取りを仲介 共通化 標準化 38


39 RoIS: ロボット対話サービスに必要な機能を標準化 UNRプラットフォームは各種 RoISサービスをクライアントの要求に応じて仲介 ロボット側はRTMや ROSなど何を利用してもよい UNR Platform RoIS 機能コンポーネント群 39
40 RT-Middleware OpenRTM-aist 40
41 RT とは? RT = Robot Technology cf. IT Real-time 単体のロボットだけでなく さまざまなロボット技術に基づく機能要素をも含む ( センサ アクチュエータ, 制御スキーム アルゴリズム etc.) 産総研版 RT ミドルウエア OpenRTM-aist RT-Middleware (RTM) RT 要素のインテグレーションのためのミドルウエア RT-Component (RTC) RT-Middleware におけるソフトウエアの基本単位 RT-Middleware 41
42 RT ミドルウエアプロジェクト NEDO 21 世紀ロボットチャレンジプログラム ( 年度 ) ロボット機能発現のために必要な要素技術開発 RT 分野のアプリケーション全体に広く共通的に使われる機能および RT 要素の部品化 ( モジュール化 ) の研究開発 分散オブジェクト指向システムのミドルウェアである CORBA をベースとして行う RT 要素の分類を行い モジュール化の形態 必要な機能 課題 インタフェース仕様などを明確にする 14 年度成果報告書より 42
43 従来のシステムでは Joystick software Joystick Robot Arm Control software 互換性のあるインターフェース同士は接続可能 Robot Arm 43
44 従来のシステムでは Humanoid s Arm Control software Humanoid s Arm Joystick software Joystick ロボットによって インターフェースは色々互換性が無ければつながらない Robot Arm Control software Robot Arm 44

45 RT ミドルウエアでは RT ミドルウエアは別々に作られたソフトウエアモジュール同士を繋ぐための共通インターフェースを提供する Arm A Control software compatible arm interfaces Humanoid s Arm Joystick software Joystick ソフトウエアの再利用性の向上 RT システム構築が容易になる Arm B Control software Robot Arm 45
46 モジュール化のメリット 再利用性の向上 同じコンポーネントをいろいろなシステムに使いまわせる 選択肢の多様化 同じ機能を持つ複数のモジュールを試すことができる 柔軟性の向上 モジュール接続構成かえるだけで様々なシステムを構築できる 信頼性の向上 モジュール単位でテスト可能なため信頼性が向上する 堅牢性の向上 システムがモジュールで分割されているので 一つの問題が全体に波及しにくい
47 RT コンポーネント化のメリット モジュール化のメリットに加えて ソフトウエアパターンを提供 ロボットに特有のソフトウエアパターンを提供することで 体系的なシステム構築が可能 フレームワークの提供 フレームワークが提供されているので コアのロジックに集中できる 分散ミドルウエア ロボット体内 LAN やネットワークロボットなど 分散システムを容易に構築可能
48 RT ミドルウエアの目的 モジュール化による問題解決 仕様の明確化 最新技術を容易に利用可能 誰でもロボットが作れる コストの問題技術の問題ニーズの問題 A 社製移動ベース B 社製アーム C 社製センサ 最新の理論 アルゴリズム 多様なユーザ!!!! RT コンポーネント化 仕様 モジュール化 再利用 ロボットの低コスト化 システム開発者 最新技術を利用可能 カスタマイズが容易に 多様なニーズに対応 ロボットシステムインテグレーションによるイノベーション 48
49 分散オブジェクトとは? システムの機能分割と分散配置 ネットワーク透過なオブジェクト コンポーネント化と再利用 オブジェクト指向 + ネットワーク 分散オブジェクト プロキシオブジェクト アプリ A アプリ B アプリ C ミドルウエア 代表例 CORBA (Common Object Request Broker Architecture) CCM (CORBA Component Model) JavaRMI (Java Remote Method Invocation) EJB (Enterprise Java Beans) DCOM, HORB etc 計算機 A OS A 計算機 B OS B 計算機 C OS C 計算機 D OS D 49
50 CORBA の例 <<IDL 定義 >> interface MobileRobot { void gotopos(in position pos); } << サーバ実装 >> class MobileRobot_Impl : public virtual POA_MobileRobot, public virtual PortableServer::RefCountServant Base { void gotopos(position pos) { MobileRobot::gotoPos の実装 } } << クライアント >> 本題にたどり着くまでが面倒 RTミドルウエアがサーバ MobileRobot_var robot; robot = { 何らかの方法でオブジェクト参照を取得 } // robot = プロキシオブジェクト robot->gotopos(pos); サーバスケルトン 全部面倒みます object!! IDL メソッド gotopos() 呼び出し クライアントスタブ クライアント proxy object call 50
51 RTM RTC とは? ソフトウエアアーキテクチャの違い RTC アプリ アプリケーション RTC RTC アプリケーション オブジェクト オブジェクト RTM ライブラリ ライブラリ ミドルウエア (CORBA) ミドルウエア (CORBA) OS OS OS 従来ソフトウエアから分散オブジェクトへ オブジェクト指向開発 言語 OS の壁を越えて利用できる インターフェースを IDL で定義 各言語へ自動変換 OS アーキテクチャの違いを吸収 ネットワーク透過に利用できる 分散システムを容易に構築可能 分散オブジェクトから RTC へ インターフェースがきちんと決まっている IDL で定義された標準インターフェース 呼び出しに対する振る舞いが決まっている (OMG RTC 標準仕様 ) 同じ部品として扱える コンポーネントのメタ情報を取得することができる 動的な接続や構成の変更ができる ロボットシステムに特有な機能を提供 後述 51

 に入れたもの =RT コンポーネント (RTC) RTC")
=RT ミドルウエア (RTM)")
52 RT ミドルウエアと RT コンポーネント ロジック デバイス制御 制御アルゴリズム アプリケーション etc RT コンポーネントフレームワーク RT コンポーネント ロジックを箱 ( フレームワーク ) に入れたもの =RT コンポーネント (RTC) RTC RTC RTC RTC RTC RTC RTC RTC RT ミドルウエア RTC の実行環境 (OS のようなもの )=RT ミドルウエア (RTM) RTC はネットワーク上に分散可能 52
53 RT コンポーネントの主な機能 アクティビティ 実行コンテキスト データポート 共通の状態遷移 Inactive Active 複合実行 センサ RTC 制御 RTC データ指向ポート 連続的なデータの送受信 動的な接続 切断 目標値 位置 電圧 サーボの例 Error アクチュエータ RTC ライフサイクルの管理 コアロジックの実行 エンコーダコンポーネント 位置 - 1 TI s TDs 制御器コンポーネント データ指向通信機能 + Kp アクチュエータコンポーネント サービスポート 定義可能なインターフェースを持つ 内部の詳細な機能にアクセス パラメータ取得 設定 モード切替 etc ステレオビジョンインターフェース モード設定関数 座標系設定関数 キャリブレーション etc 画像データ サービス指向相互作用機能 ステレオビジョンの例 ステレオビジョンコンポーネント サービスポート 3D デプスデータ データポート コンフィギュレーション パラメータを保持する仕組み いくつかのセットを保持可能 実行時に動的に変更可能 セット名 セット名 名前値 名前値 複数のセットを動作時に切り替えて使用可能
54 RTC の分割と連携 ロボット体内のコンポーネントによる構成例 画像データ ポート カメラコンポーネント 顔位置問合せ 顔認識コンポーネント データ コマンドの流れ カメラコンポーネント 画像データ ステレオビジョンコンポーネント カメラコントロール 人物データ表情データ ジェスチャ軌道データ 頭 腕駆動コンポーネント 音声データ 音声認識コンポーネント 文字データ 対話コンポーネント 文字データ 音声合成コンポーネント マイクコンポーネント ( モジュール ) 情報の隠蔽と公開のルールが重要





55 RT ミドルウエアによる分散システム RTM により ネットワーク上に分散する RTC を OS 言語の壁を越えて接続することができる ネットワーク ロボット A RTC RTC RTM VxWorks ロボット B RTC RTC RTM FreeBSD ロボット C RTC RTC RTC RTM ARTLinux Linux RTM RTC RTC Windows RTM RTC RTC uitron RTM RTC RTC RTC 同士の接続は プログラム実行中に動的に行うことが出来る アプリケーション操作デバイスセンサ
")







56 プラットフォーム概要 ( 例 ) 介助犬ロボットの開発 ( 対話による拾上げ動作の実装 ) システム設計 検索 参照 仕様作成 ロボット設計支援ツール 構想 動作確認 RTシステムエディタシミュレータ RT リポジトリ 設計 HW SW の検証 ロボットの仕様 ロボットの RT システム 製作 拾上げ動作設計ロボットの仕様 ( アプリケーション開発 ) 動作の概略作成 動作設計ツール 補完動作列生成 ( 安全動作列生成 ) 動作記述の生成 保存 安全性の確認 シミュレータ 動作の検証 動作 DB 対話による作業命令 ( アプリケーション開発 ) 動作の確認 ロボットの仕様シナリオ作成ツール実時間 SW 設計ツール検証シミュレータ 動作聴覚 シナリオ記述接近作業対話 ロボットへ実装 56


57 ツールチェーン RTCBuilder RT コンポーネント設計 コード生成 RTSystemEditor RTC を組み合わせてシステムを設計 RTC RTM 統合開発環境の整備 RTシステムを簡単に設計 操作可能コンポーネント設計をすばやく簡単にオンライン編集機能 C++ Java Python C# のコードを自動生成 RTC 設計 実装 デバッグ RTMによるインテグレーション デバッグまでをオフライン編集機能一貫して行うことができる統合開発環境をEclipse 上に構築 57
58 RT-Middleware 関連プロジェクト RTM0.1 リリース OpenRTM-aist リリース from 2002~ OpenRTM-aist リリース OpenRTM-aist 1.0 リリース OMG RTC spec. draft OMG RTC spec. approved OMG RTC 標準仕様リリース FY RT ミドルウエアプロジェクト 科研費若手 (B) 科振費分散コンポーネントシミュレータ NEDO 次世代ロボット共通基盤開発 ロボット大賞 2007 工業標準部標準基盤研究 科振費環境と作業構造のユニバーサルデザイン さまざまなプロジェクトで標準ソフトウエアプラットフォームとして採用されている 産総研イニシアチブ UCROA NEDO 戦略的先端ロボット要素技術開発 経済産業省 NEDO 次世代ロボット知能化技術開発プロジェクト


59 RT ミドルウエア PJ FY FY2004 名称 :NEDO 21 世紀ロボットチャレンジプログラム ロボット機能発現のために必要な要素技術開発 目的 : RT 要素の部品化 ( モジュール化 ) の研究開発 分散オブジェクト指向開発 RT 要素の分類 モジュール化に必要な機能 インタフェース仕様の明確化 予算規模 : 65 百万円 全体 百万円 59



60 NEDO 基盤 PJ FY2003-FY2007 その他のロボット開発ツールプラグイン 名称 : 運動制御デバイスおよびモジュールの開発 目的 : 運動制御デバイスの開発 デバイスに搭載するRTCの開発 その他モーションコントロールに資するRTM/RTCの開発 予算規模 : 15 百万円 / 年 371 百万円 全体 1,259 百万円 Java 開発環境プラグイン C++ 開発環境プラグイン Eclipse Paltform JavaVM RtcLink プラグイン ツールの Eclipse プラグイン化 追加 拡張 RTC-CAN の開発 dspic 版 RTC-Lite の開発 60



61 名称 : 次世代ロボット知能化技術開発プロジェクト 目的 ソフトウエアプラットフォームの開発 作業知能 移動知能 コミュニケーション知能に関するモジュールの開発 予算 : 400 百万円 全体 7,000 百万円 研究グループ 15 グループ 知能化 PJ FY2007-FY


62 NEDO オープンイノベーションプロジェクト RT ミドルウエアを基盤として 多数の福祉機器同士を連携 62





63 RT ルーム モニタ 表示系 RTC 家電 窓制御 RTC 群 Web 表示 窓開閉制御 家電制御 タブレッド 玄関ドア制御 シナリオコントロール RTC 制御シナリオ制御シナリオ制御シナリオ RTC RTC RTC 入退出管理 RTC 群 音声認識 音声合成 人感センサ RFID による人状態検出 インタラクション系 RTC 群 センシング系 RTC 群 63
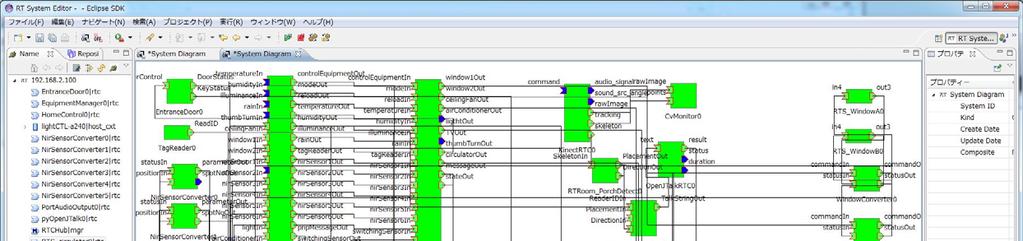
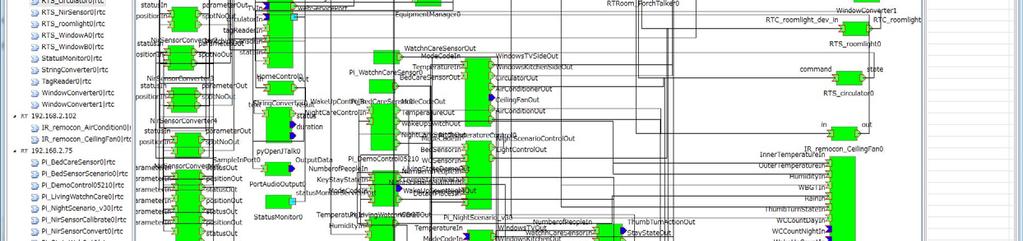
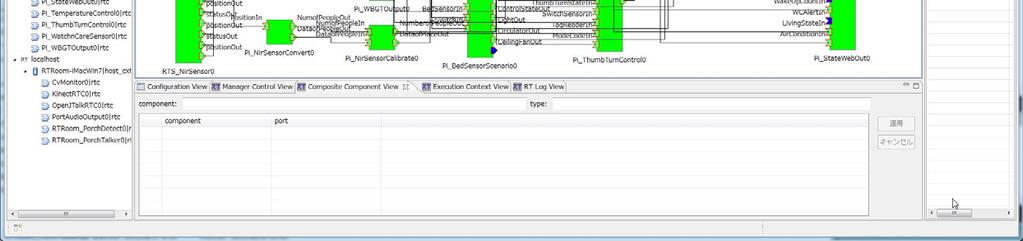


64 RTルームのRTコンポーネント群 センサコンポーネント シナリオコンポーネント サービス提供 コンポーネント 64













65 応用例 HRP-4/4C: Kawada/AIST HIRO: Kawada/GRX TAIZOU: GRX DAQ-Middleware: KEK/J-PARC KEK: High Energy Accelerator Research Organization J-PARC: Japan Proton Accelerator Research Complex Life Robotics:RAPUDA アーム 前川製作所 アールティ : OROCHI 新日本電工他 : Mobile SEM VSTONE: ビュートローバー RTC/RTC-BT 新日本電工他 : 小型ベクレルカウンタ 65
 OS: Scientific Linux 5.")
 3 GeV")
 88MB/s = 704 Mbps KEK PSDs x816 Readout modules x102 J-PARC = Japan Proton Accelerator Research")
66 Japan Proton Accelerator Research Complex Model : Dell PowerEdge SC1430 CPU :Intel Xeon 1.86GHz 2 Cores 2 Memory: 2GB NIC: Intel Pro 1000 PCI/e (1GbE) OS: Scientific Linux 5.4 (i386) Source Sink (J-PARC, 大強度陽子加速器施設 ) 核変換施設 Nuclear Transmutation 物質 生命科学実験施設 Materials and Life Science Experimental Facility ハドロン実験施設 Hadron Beam Facility 500 m Ethernet Linac (350m) 3 GeV Synchrotron (25 Hz, 1MW) ニュートリノ実験施設 Neutrino to Kamiokande 50 GeV Synchrotron (0.75 MW) 88MB/s = 704 Mbps KEK PSDs x816 Readout modules x102 J-PARC = Japan Proton Accelerator Research Complex Joint Project between KEK and JAEA (former JAERI) KEK
67 Comparison of open frameworks Target Open spec/source Realtime Language OS modularity communica tion OpenRTM-aist Universal / OMG RTC ROS Universal / OROCOS Universal / OPRoS Universal / OMG RTC YARP Humanoid/ Universal / C++, C, Python, Java,.NET, Android C++, Python, Java, LISP, Matlab UNIX, Mac OS X, Windows, uitron, QNX, VxWorks Linux, (OS X, Windows) C++, (scripting: Lua) Linux, Windows, Etc.. CBSD Free style CBSD C++ Windows, Linux CBSD C++, Java, Python, Lua, Matlab Linux, Windows, Mac OS X ORCA/ORCA2 Universal / C++, Python RTLinux, Other Free style MSRS Universal /.NET(C++,C#,VB,etc.) Windows SOA CBSD CORBA original protocol Ice, CORBA Original protocol Original protocol CORBA, CURD, Ice DSS SOAP 67
68 Comparison of open frameworks Target Open spec/source Realtime Language OS modularity communica tion OpenRTM-aist Universal / OMG RTC ORiN FA robots / ISO ORiN RSNP Internet Service / RSi RSNP C++, C, Python, Java,.NET, Android UNIX, Mac OS X, Windows, uitron, QNX, VxWorks CBSD C++ Windows OOP Java Java VM OOP CORBA DCOM, CORBA SOAP UNR Platform PlayerStage OPEN-R Open Robot Controller Architecture Internet Service / OMG RoIS/RLS Mobile robot / Java Java VM OOP C, C++, Tcl, LISP, Java, and Python Linux, Etc.. AIBO, C++ Linux / SDR3X OOP Universal / Java, Python Linux, Etc.. PO OOP SOAP original protocol original protocol HORB 68
69 標準化 69
70 標準の役割 単純化 互換性 伝達手段 記号の統一 経済効果 安全 生命 健康の確保 消費者利益保護 消費社会の利益保護 貿易障壁の除去 新宅純二郎他, `` コンセンサス標準戦略 事業活用のすべて, p.3, 日本経済新聞出版社, 2008, ISBN
71 標準の類型 合意標準 デジュール標準 国際機関標準 :ISO IEC 等 国家標準 :JIS JAS 等 コンセンサス標準 ( もともとは国際標準を指す用語 ) 業界標準 : 業界団体主導 コンソーシアム標準 : 興味のある企業連合 複数分野 フォーラム標準 : 現在ではコンソーシアム標準と区別が難しい 単独標準 デファクト標準 デファクト標準のオープン化 狭義のデファクト :1 社独占 OMG 標準 複雑化した現代的システムではデファクトによる市場独占は困難である このほか 公開 非公開による分類も可能であり かつ類型の境界があいまいな標準もあるため 単純には分類できない 71
72 なぜ標準が必要? RTミドルウエアの目的 人々の間で共有される共通ソフトウエアモデル オープンな仕様を提供 誰でも実装可能 実装の多様性 仕様を策定することが主たる目的 実装 (OpenRTM-aist): 仕様の妥当性検証 実装技術に非依存なソフトウエアモデル 特定の言語 OS 分散オブジェクトミドルウエアに依存しないモデル (PIM: Platform Independent Model) 標準化された仕様 OMG (Object Management Group) における標準化 オープンな標準化プロセス 72
73 インターフェース標準の特徴 標準化する範囲が狭い= 差別化領域を確保 製品標準化による差別化困難というデメリットが起こりにくい インターフェース両側ともにプロダクトイノベーションを継続可能 互換性の確保によるユーザの安心感 市場拡大効果はそれほど大きくないが 市場と市場を接続する効果がある 新宅純二郎他, `` コンセンサス標準戦略 事業活用のすべて, p.29 日本経済新聞出版社, 2008, ISBN
 プラットフォーム ( ここでは CORBA, JavaRMI, SOAP, HORB 等分散オブジェクトプラットフォームを指す ) に依存しないモデル PSM (Platform Specific Model) プラットフォーム毎に PSM から変換されたモデル CORBA PSM, SOAP PSM etc")
74 OMG における標準化 OMG (Object Management Group) ソフトウエア標準化団体 UML CORBA などの仕様策定で実績 MDA システムを PIM 化することにより 抽象化されたモデルの寿命が延び実行可能性変数 ( 品質 コスト 寿命の積 ) が向上する (MDA: Model Driven Architecture の考え方 ) PIM (Platform Independent Model) プラットフォーム ( ここでは CORBA, JavaRMI, SOAP, HORB 等分散オブジェクトプラットフォームを指す ) に依存しないモデル PSM (Platform Specific Model) プラットフォーム毎に PSM から変換されたモデル CORBA PSM, SOAP PSM etc 74
75 OMG RTC 標準化 2005 年 9 RFP: Robot Technology Components (RTCs) 公開 2006 年 2 Initial Response : PIM and PSM for RTComponent を執筆し提出提案者 :AIST( ) RTI( ) 2006 年 4 両者の提案を統合した仕様を提案 2006 年 9 AB にて承認 事実上の国際標準獲得 FTF が組織され最終 書化開始 2007 年 8 FTF の最後の投票が終了 2007 年 9 AB にて FTF の結果を報告 承認 2008 年 4 OMG RTC 標準仕様 ver.1.0 公式リリース 2010 年 1 OpenRTM-aist-1.0 リリース 2012 年 9 ver. 1.1 改定 75
76 PIM (Platform Independent Model) pd RTC Packages «profile» RTC SDOPackage Execution Semantics Introspection (from External Models) Lightw eight RTC (from Robotic Technology Components) OMG RTC 仕様は3つのパッケージから構成される : Lightweight RTC Execution Semantics Introspection 76
77 パッケージ 1: Lightweight RTC pd RTC Packages «profile» RTC Execution Semantics Lightweight RTC Introspection (from Robotic Technology Components) コンポーネント SDOPackage (from External Models) Lightweight RTC コンポーネント ポート コネクタ等のスレレオタイプ コンポーネントライフサイクル 実行コンテキスト コンポーネントのメタ情報を取得するイントロスペクション機能は含まれない 静的に構成されるコンポーネント ポート 状態マシン 77
78 パッケージ 2: Execution Semantics pd RTC Packages «profile» RTC Execution Semantics Data flow FSM Lightweight RTC Introspection (from Robotic Technology Components) request response SDOPackage (from External Models) Execution Semantics ロボットシステム一般によく用いられる振舞いのパターンを提供する 1. 時刻に同期して データの流れにより駆動されるタイプ ( データフロー型 ) 2. Stimulus-response 型あるいはイベントドリブン型の実行タイプ (FSM) 3. 幾つかのモードを内包するモード型 Multi Modal 78
79 パッケージ 2: Introspection pd RTC Packages «profile» RTC Execution Semantics Lightweight RTC Introspection (from Robotic Technology Components) RTC コンポーネント SDO SDOPackage (from External Models) Introspection コンポーネントのメタ情報取得のためのインターフェースを提供 別のOMG 標準である SDO(Super Distributed Object) に準拠 動的な構成 ( コンポーネント間の接続等 ) が可能なコンポーネント ポート 状態マシン 79
 RTM on Android SEC Android 版 RT ミドルウエア H-RTM ( 仮称 ) 本田 R&D OpenRTM-aist 互換 FSM 型コンポーネントをサポート RTC-Lite AIST PIC, dspic 上の実装〇 ( ブリッジ ) minirtc,")
 PALRO 富士ソフト小型ヒューマノイドのための C++ PSM 実装 OPRoS ETRI 韓国国家プロジェクトでの実装 GostaiRTC GOSTAI, THALES ロボット言語上で動作する C++ PSM 実装")
80 OMG RTC ファミリ 名称ベンダ特徴互換性 OpenRTM-aist AIST C++, Python, Java --- OpenRTM.NET SEC.NET(C#,VB,C++/CLI, F#, etc..) RTM on Android SEC Android 版 RT ミドルウエア H-RTM ( 仮称 ) 本田 R&D OpenRTM-aist 互換 FSM 型コンポーネントをサポート RTC-Lite AIST PIC, dspic 上の実装〇 ( ブリッジ ) minirtc, micrortc SEC CAN ZigBee 等を利用した組込用 RTC 実装〇 ( ブリッジ ) RTMSafety SEC/AIST 機能安全認証 (IEC61508) capable な RTM 実装, 商用〇 ( ブリッジ ) RTC CANOpen SIT, CiA CANOpen-RTC マッピングを定めた CiA 標準〇 ( ブリッジ ) PALRO 富士ソフト小型ヒューマノイドのための C++ PSM 実装 OPRoS ETRI 韓国国家プロジェクトでの実装 GostaiRTC GOSTAI, THALES ロボット言語上で動作する C++ PSM 実装 同一標準仕様に基づく多様な実装により 実装 ( 製品 ) の継続性を保証 実装間での相互利用がより容易に 80
81 その他の OMG ロボット関連標準 OMG 標準 Robotic Localization Service (RLS) Robotic Interaction Service Framework (RoIS) Robotic Technology Component (RTC) Finite State Machine for RTC (FSM4RTC) 策定中 Hardware Abstraction Layer for RT (HAL4RT) 策定中 クラウドアプリケーションデータベース ビッグデータロギング メンテナンス クラウド / インターネット 標準規格 RLS アプリケーションインターフェース ローレベル制御ロボット体内 LAN 家庭内 LAN 標準規格 RoIS ( 上位から下位をカバーする ) 標準に基づくロボットシステムのインテグレーション 標準規格 RTC
82 終わりに RTM の目的 アーキテクチャ 応用 共通プラットフォーム導入によるあらたなロボットビジネス市場の創生 現在のロボットソフトウエアの動向 標準化 詳しくは 検索 openrtm 本日の資料は openrtm.org に掲載します 82





83 サマーキャンプ 毎年夏に1 週間開催 今年 :7 月 29 日 ~8 月 2 日 募集人数 :10 名 場所 : 産総研つくばセンター 座学と実習を1 週間行い 最後にそれぞれが成果を発表 産総研内のさくら館に宿泊しながら夜通し? コーディングを行う! 83

:10 件 奨励賞 ( 個人協賛 ):5 件 詳細は Web ページ : openrtm.")
84 RT ミドルウエアコンテスト SICE SI ( 計測自動制御学会システムインテグレーション部門講演会 ) のセッションとして開催 エントリー〆切 :9 月ごろ ソフトウエア登録 :10 月ごろ 講演原稿〆切 :10 月ごろ 発表 授賞式 :12 月ごろ 2012 年度実績 応募数 :17 件 計測自動制御学会学会 RTミドルウエア賞 ( 副賞 10 万円 ) 奨励賞 ( 賞品協賛 ):3 件 奨励賞 ( 団体協賛 ):10 件 奨励賞 ( 個人協賛 ):5 件 詳細は Web ページ : openrtm.org コミュニティー イベントをご覧ください 84
Microsoft PowerPoint - NEDO講座・RTMセミナー.pptx
 NEDO 特別講座 :RTM RTC セミナー ( 2013 年 5 月 28 日 ) ロボットミドルウエア標準 RTミドルウエア ( 独 ) 産業技術総合研究所知能システム研究部門安藤慶昭 1 RT とは? RT = Robot Technology 1) cf. IT Real-time 単体のロボットだけでなく さまざまなロボット技術に基づく機能要素をも含む ( センサ アクチュエータ, 制御スキーム
NEDO 特別講座 :RTM RTC セミナー ( 2013 年 5 月 28 日 ) ロボットミドルウエア標準 RTミドルウエア ( 独 ) 産業技術総合研究所知能システム研究部門安藤慶昭 1 RT とは? RT = Robot Technology 1) cf. IT Real-time 単体のロボットだけでなく さまざまなロボット技術に基づく機能要素をも含む ( センサ アクチュエータ, 制御スキーム
Microsoft PowerPoint DAQセミナー_Ando.pptx
 2013 年 9 月 9 日データ収集技術講演会, 広島工業大学 ロボットミドルウエア標準 RT ミドルウエア ( 独 ) 産業技術総合研究所知能システム研究部門安藤慶昭 1 つくば研究学園都市 KEK 筑波大 東京 ( 秋葉原 ) から45 分 1970 年代から開発 20 以上の国の研究機関 大学 企業等の研究所 20000 人以上の研究者 博士 7000 人以上 つくば駅 JAXA 産総研 2
2013 年 9 月 9 日データ収集技術講演会, 広島工業大学 ロボットミドルウエア標準 RT ミドルウエア ( 独 ) 産業技術総合研究所知能システム研究部門安藤慶昭 1 つくば研究学園都市 KEK 筑波大 東京 ( 秋葉原 ) から45 分 1970 年代から開発 20 以上の国の研究機関 大学 企業等の研究所 20000 人以上の研究者 博士 7000 人以上 つくば駅 JAXA 産総研 2
Microsoft PowerPoint RT講習会(送付用)_ [互換モード]
![Microsoft PowerPoint RT講習会(送付用)_ [互換モード]](/thumbs/96/126720805.jpg "Microsoft PowerPoint RT講習会(送付用)_ [互換モード]") データ収集技術講演会 日時 :2012 年 12 月 1 日 ( 土 ) 13:00~17:00 場所 : 広島工業大学五日市キャンパス三宅の森 Nexus21 607 教室 RT-Middleware 活用 株式会社グローバルアシスト坂本武志 RT ミドルウェアとは? 2012.12.1 データ収集技術講演会 Copyright (C) Advanced Industrial Science And
データ収集技術講演会 日時 :2012 年 12 月 1 日 ( 土 ) 13:00~17:00 場所 : 広島工業大学五日市キャンパス三宅の森 Nexus21 607 教室 RT-Middleware 活用 株式会社グローバルアシスト坂本武志 RT ミドルウェアとは? 2012.12.1 データ収集技術講演会 Copyright (C) Advanced Industrial Science And
<4D F736F F F696E74202D F938C8D4891E58EF68BC D837B B5A8F E9197BF>
 ロボットミドルウエア 安藤慶昭 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センターロボットソフトウェアプラットフォーム研究チーム長 概要 ロボットとソフトウェア ロボットミドルウエアとは? RTミドルウエア:OpenRTM-aist 様々なミドルウエア / プラットフォーム 終わりに 2 センサ ロボットを構成する要素 エンコーダ 力 磁気 加速度など アクチュエータ モータなど
ロボットミドルウエア 安藤慶昭 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センターロボットソフトウェアプラットフォーム研究チーム長 概要 ロボットとソフトウェア ロボットミドルウエアとは? RTミドルウエア:OpenRTM-aist 様々なミドルウエア / プラットフォーム 終わりに 2 センサ ロボットを構成する要素 エンコーダ 力 磁気 加速度など アクチュエータ モータなど
<4D F736F F F696E74202D CA48B868CF097AC95D78BAD89EF205B8CDD8AB B83685D>
 TSC 研究交流勉強会 14:30~15:30 産総研 臨海副都心センター別館 ( 新館 )11 階 11205~6 ロボット用ミドルウェアと半導体への期待 安藤慶昭 独立行政法人産業技術総合研究所知能システム研究部門 産総研 独立行政法人産業技術総合研究所 ライフサイエンス 情報 通信 環境 エネルギー ナノテク 材料 製造 地質 海洋 標準 計測 の6 分野 研究者 : 約 2000 名 知能システム研究部門
TSC 研究交流勉強会 14:30~15:30 産総研 臨海副都心センター別館 ( 新館 )11 階 11205~6 ロボット用ミドルウェアと半導体への期待 安藤慶昭 独立行政法人産業技術総合研究所知能システム研究部門 産総研 独立行政法人産業技術総合研究所 ライフサイエンス 情報 通信 環境 エネルギー ナノテク 材料 製造 地質 海洋 標準 計測 の6 分野 研究者 : 約 2000 名 知能システム研究部門
ホンダにおける RT ミドルウェア開発と標準化活動 株式会社本田技術研究所基礎技術研究センター関谷眞
 ホンダにおける RT ミドルウェア開発と標準化活動 株式会社本田技術研究所基礎技術研究センター関谷眞 目次 知能ロボットシステム概要 コンポーネント指向ミドルウェア HRTMの開発 ASIMOへの適用 HRTMとOpenRTM-aistの連携動作 標準化活動 知能ロボットシステム概要 センサーやアクチュエーターは追加や変更される システム構成は変更したくない センサー, アクチュエーターの関係を抽象化した
ホンダにおける RT ミドルウェア開発と標準化活動 株式会社本田技術研究所基礎技術研究センター関谷眞 目次 知能ロボットシステム概要 コンポーネント指向ミドルウェア HRTMの開発 ASIMOへの適用 HRTMとOpenRTM-aistの連携動作 標準化活動 知能ロボットシステム概要 センサーやアクチュエーターは追加や変更される システム構成は変更したくない センサー, アクチュエーターの関係を抽象化した
スライド 1
 RT ミドルウエアサマーキャンプ 2011 RT ミドルウエア概要 日時 : 2011 年 8 月 29 日 ( 月 ) 14:20-15:30 場所 : 産業技術総合研究所つくば第 2 事業所本部 情報棟 1 階交流会議室 ( 独 ) 産業技術総合研究所知能システム研究部門 栗原眞二 神徳徹雄 安藤慶昭 http://www.openrtm.org/ 概要 RTミドルウエア概要 OpenRTM-aistについて
RT ミドルウエアサマーキャンプ 2011 RT ミドルウエア概要 日時 : 2011 年 8 月 29 日 ( 月 ) 14:20-15:30 場所 : 産業技術総合研究所つくば第 2 事業所本部 情報棟 1 階交流会議室 ( 独 ) 産業技術総合研究所知能システム研究部門 栗原眞二 神徳徹雄 安藤慶昭 http://www.openrtm.org/ 概要 RTミドルウエア概要 OpenRTM-aistについて
Microsoft PowerPoint _SCSK_OSS勉強会(配布資料)
") 2018 年 3 12 ( ) OSS ユーザーのための勉強会 ロボット開発 / RT-Middleware の特 と最新動向 国 研究開発法 産業技術総合研究所ロボットイノベーション研究センター ロボットソフトウェアプラットフォーム研究チーム 安藤慶昭 1 RT ミドルウェアとは? モジュール化されたソフトウェアを組み合わせてシステムを構成するミドルウェア ツール群 2 RT ミドルウェアとは?
2018 年 3 12 ( ) OSS ユーザーのための勉強会 ロボット開発 / RT-Middleware の特 と最新動向 国 研究開発法 産業技術総合研究所ロボットイノベーション研究センター ロボットソフトウェアプラットフォーム研究チーム 安藤慶昭 1 RT ミドルウェアとは? モジュール化されたソフトウェアを組み合わせてシステムを構成するミドルウェア ツール群 2 RT ミドルウェアとは?
(Microsoft PowerPoint - RTM\203T\203}\201[\203L\203\203\203\223\203v \224z\225z\227p)
") RT 2011 2 RT RTC RTC 2011 11 8 30 RT RT RTC RTC RTC I/F RTC (RTC ) 2 Systems Engineering Consultants Co.,LTD. 1970 5 4 7730 2011 6 28 264 2011 4 1 3 モバイルネットワーク BF ワイヤレス BF Realtime@net 社会基盤 BF インターネット
RT 2011 2 RT RTC RTC 2011 11 8 30 RT RT RTC RTC RTC I/F RTC (RTC ) 2 Systems Engineering Consultants Co.,LTD. 1970 5 4 7730 2011 6 28 264 2011 4 1 3 モバイルネットワーク BF ワイヤレス BF Realtime@net 社会基盤 BF インターネット
Microsoft PowerPoint RT講習会(説明用)_ [互換モード]
![Microsoft PowerPoint RT講習会(説明用)_ [互換モード]](/thumbs/96/129105636.jpg "Microsoft PowerPoint RT講習会(説明用)_ [互換モード]") マイクロマシン /MEMS 展 ROBOTECH 次世代ロボット製造技術展 RT ミドルウェア講習会 RT ミドルウェアインストールワークショップ 日時 :2012 年 7 月 13 日 ( 金 ) 10:30~12:30 場所 : 東京ビッグサイト東ホール特設会場 株式会社グローバルアシスト坂本武志 RT ミドルウェアの概要 RT ミドルウェアとは? RT = Robot Technology Real-time
マイクロマシン /MEMS 展 ROBOTECH 次世代ロボット製造技術展 RT ミドルウェア講習会 RT ミドルウェアインストールワークショップ 日時 :2012 年 7 月 13 日 ( 金 ) 10:30~12:30 場所 : 東京ビッグサイト東ホール特設会場 株式会社グローバルアシスト坂本武志 RT ミドルウェアの概要 RT ミドルウェアとは? RT = Robot Technology Real-time
PowerPoint Presentation
 知能システム論1 (15) 2009.7.21 情報システム学研究科 情報メディアシステム学専攻 知能システム学講座 末廣尚士 - 参考URL OpenRTM-aist ロボット開発にフル活用するRTミドルウエア http://www.is.aist.go.jp/rt/openrtm-aist/html/ http://thinkit.jp/article/948/1/ SEのためのRTシステム概論
知能システム論1 (15) 2009.7.21 情報システム学研究科 情報メディアシステム学専攻 知能システム学講座 末廣尚士 - 参考URL OpenRTM-aist ロボット開発にフル活用するRTミドルウエア http://www.is.aist.go.jp/rt/openrtm-aist/html/ http://thinkit.jp/article/948/1/ SEのためのRTシステム概論
(Microsoft PowerPoint - daqmiddware-overview [\214\335\212\267\203\202\201[\203h])
![(Microsoft PowerPoint - daqmiddware-overview [\214\335\212\267\203\202\201[\203h])](/thumbs/99/141152602.jpg "(Microsoft PowerPoint - daqmiddware-overview [\214\335\212\267\203\202\201[\203h])") DAQ ミドルウエアの概要 2008 年 8 月 5 6 日 DAQ 実習 -DAQ-Middleware KEK エレクトロニクスシステムグループ KEK 測定器開発室 DAQ プロジェクト安芳次 DAQ ミドルウエアの狙い 多数の計算機を使ったネットワーク分散型 D AQ ソフトウエア ソフトウエアの汎用化 国際標準ロボット技術 (RT ミドルウエア ) の利用 XML によるデータ収集パラメータの記述
DAQ ミドルウエアの概要 2008 年 8 月 5 6 日 DAQ 実習 -DAQ-Middleware KEK エレクトロニクスシステムグループ KEK 測定器開発室 DAQ プロジェクト安芳次 DAQ ミドルウエアの狙い 多数の計算機を使ったネットワーク分散型 D AQ ソフトウエア ソフトウエアの汎用化 国際標準ロボット技術 (RT ミドルウエア ) の利用 XML によるデータ収集パラメータの記述
Jude を DSL エディタとして使う -Jude API 活用法 年 11 月 14 日稚内北星学園大学東京サテライト校浅海智晴 本日のテーマ Why Jude API What Jude API How Jude API 1
 Jude を DSL エディタとして使う -Jude API 活用法 - 2006 年 11 月 14 日稚内北星学園大学東京サテライト校浅海智晴 本日のテーマ Why Jude API What Jude API How Jude API 1 技術トレンド テクノロジとしての Web 2.0 Web がプラットフォームになる シン クライアントからリッチ クライアントへ Web の単純な UI では限界
Jude を DSL エディタとして使う -Jude API 活用法 - 2006 年 11 月 14 日稚内北星学園大学東京サテライト校浅海智晴 本日のテーマ Why Jude API What Jude API How Jude API 1 技術トレンド テクノロジとしての Web 2.0 Web がプラットフォームになる シン クライアントからリッチ クライアントへ Web の単純な UI では限界
株式会社セックにおける ロボティクス分野への取り込み
 RT ミドルウェアサマーキャンプ 2014 RTM on Android の紹介 2014 年 8 月 5 日 開発本部第四開発部 中本啓之 さまざまな RT ミドルウェア 用途に合わせ 多様な RT ミドルウェアを開発 提供しています エンタープライズ層 OpenRTM.NET PC/ タブレット向け Android 版 RT ミドルウェア RTM on Android TM OpenRTM-aist
RT ミドルウェアサマーキャンプ 2014 RTM on Android の紹介 2014 年 8 月 5 日 開発本部第四開発部 中本啓之 さまざまな RT ミドルウェア 用途に合わせ 多様な RT ミドルウェアを開発 提供しています エンタープライズ層 OpenRTM.NET PC/ タブレット向け Android 版 RT ミドルウェア RTM on Android TM OpenRTM-aist
Oracle Un お問合せ : Oracle Data Integrator 11g: データ統合設定と管理 期間 ( 標準日数 ):5 コースの概要 Oracle Data Integratorは すべてのデータ統合要件 ( 大量の高パフォーマンス バッチ ローブンの統合プロセスおよ
:5 コースの概要 Oracle Data Integratorは すべてのデータ統合要件 ( 大量の高パフォーマンス バッチ ローブンの統合プロセスおよ") Oracle Un お問合せ : 0120- Oracle Data Integrator 11g: データ統合設定と管理 期間 ( 標準日数 ):5 コースの概要 Oracle Data Integratorは すべてのデータ統合要件 ( 大量の高パフォーマンス バッチ ローブンの統合プロセスおよびSOA 対応データ サービスへ ) を網羅する総合的なデータ統合プラットフォームです Oracle
Oracle Un お問合せ : 0120- Oracle Data Integrator 11g: データ統合設定と管理 期間 ( 標準日数 ):5 コースの概要 Oracle Data Integratorは すべてのデータ統合要件 ( 大量の高パフォーマンス バッチ ローブンの統合プロセスおよびSOA 対応データ サービスへ ) を網羅する総合的なデータ統合プラットフォームです Oracle
PNopenseminar_2011_開発stack
 PROFINET Open Seminar 開発セミナー Software Stack FPGA IP core PROFINET 対応製品の開発 2 ユーザ要求要求は多種多様 複雑な規格の仕様を一から勉強するのはちょっと.. できるだけ短期間で 柔軟なスケジュールで進めたい既存のハードウェアを変更することなく PN を対応させたい将来的な仕様拡張に対してシームレスに統合したい同じハードウェアで複数の
PROFINET Open Seminar 開発セミナー Software Stack FPGA IP core PROFINET 対応製品の開発 2 ユーザ要求要求は多種多様 複雑な規格の仕様を一から勉強するのはちょっと.. できるだけ短期間で 柔軟なスケジュールで進めたい既存のハードウェアを変更することなく PN を対応させたい将来的な仕様拡張に対してシームレスに統合したい同じハードウェアで複数の
組込み用Linuxボード,BeagleBone Blackにおける RTミドルウェアの動作と開発支援ツール
 組込み用 Linux ボード,BeagleBone Black における RT ミドルウェアの動作と開発支援ツール 村上青児 ( 筑波大学 / 産総研 ) 安藤慶昭 ( 産総研 ) 関山守 ( 産総研 ) 鍛冶良作 ( 産総研 ) 谷川民生 ( 産総研 ) 神徳徹雄 ( 産総研 ) 1. はじめに 現在の組込みシステムの開発は専門性が求められるため開発の敷居が一般的に高い. これに対し, ロボットの要素技術をより開発者が使いやすいと感じる仕組みを作り,
組込み用 Linux ボード,BeagleBone Black における RT ミドルウェアの動作と開発支援ツール 村上青児 ( 筑波大学 / 産総研 ) 安藤慶昭 ( 産総研 ) 関山守 ( 産総研 ) 鍛冶良作 ( 産総研 ) 谷川民生 ( 産総研 ) 神徳徹雄 ( 産総研 ) 1. はじめに 現在の組込みシステムの開発は専門性が求められるため開発の敷居が一般的に高い. これに対し, ロボットの要素技術をより開発者が使いやすいと感じる仕組みを作り,
RTM セミナー RT ミドルウェアによる実時間ロボット 制御系の構築とソフトウェア教育 静岡大学大学院工学研究科機械工学専攻 清水昌幸
 RTM セミナー 2013.11.12 RT ミドルウェアによる実時間ロボット 制御系の構築とソフトウェア教育 静岡大学大学院工学研究科機械工学専攻 清水昌幸 2 内容 RT ミドルウェアを用いた実時間ロボット制御系の構築 実時間制御の実現方法. ART-Linux を用いた実現例と実時間性能. ソフトウェア教育 研究室配属学生 ( 学部 4 年生 ) への導入教育の実施内容と結果. 3 ロボット制御系の一例
RTM セミナー 2013.11.12 RT ミドルウェアによる実時間ロボット 制御系の構築とソフトウェア教育 静岡大学大学院工学研究科機械工学専攻 清水昌幸 2 内容 RT ミドルウェアを用いた実時間ロボット制御系の構築 実時間制御の実現方法. ART-Linux を用いた実現例と実時間性能. ソフトウェア教育 研究室配属学生 ( 学部 4 年生 ) への導入教育の実施内容と結果. 3 ロボット制御系の一例
組込みシステムにおける UMLモデルカタログの実践研究
 Modeling Forum 2015 組込みシステムの設計実装への モデルカタログの活用 仙台高等専門学校 情報システム工学科 力武克彰, 新村祐太 ( 豊橋技科大 ), 菊池雄太郎 ( 仙台高専 ) 概要 組込み分野のための UML モデルカタログ (*) のモデルを実装してみました (* 以下 モデルカタログと呼びます ) 2 概要 モデルカタログ : 目標制御モデル モデルカタログより引用
Modeling Forum 2015 組込みシステムの設計実装への モデルカタログの活用 仙台高等専門学校 情報システム工学科 力武克彰, 新村祐太 ( 豊橋技科大 ), 菊池雄太郎 ( 仙台高専 ) 概要 組込み分野のための UML モデルカタログ (*) のモデルを実装してみました (* 以下 モデルカタログと呼びます ) 2 概要 モデルカタログ : 目標制御モデル モデルカタログより引用
(Microsoft PowerPoint - 070507_RT\215u\217K\211\357)
") RTミドルウエア ミドルウエアの 各 種 ツール 群 について RTコンポーネント 開 発 環 境 RTコンポーネントの 開 発 効 率 を 向 上 させるためのツール 群 RTミドルウェア コンポーネント フレームワーク 固 有 の 定 型 作 業 を 低 減 開 発 プラットフォームにEclipseを 採 用 設 計 ~ 実 装 ~テストまで, 開 発 サイクル 全 体 の 作 業 を 支 援
RTミドルウエア ミドルウエアの 各 種 ツール 群 について RTコンポーネント 開 発 環 境 RTコンポーネントの 開 発 効 率 を 向 上 させるためのツール 群 RTミドルウェア コンポーネント フレームワーク 固 有 の 定 型 作 業 を 低 減 開 発 プラットフォームにEclipseを 採 用 設 計 ~ 実 装 ~テストまで, 開 発 サイクル 全 体 の 作 業 を 支 援
Oracle Cloud Adapter for Oracle RightNow Cloud Service
 Oracle Cloud Adapter for Oracle RightNow Cloud Service Oracle Cloud Adapter for Oracle RightNow Cloud Service を使用すると RightNow Cloud Service をシームレスに接続および統合できるため Service Cloud プラットフォームを拡張して信頼性のある優れたカスタマ
Oracle Cloud Adapter for Oracle RightNow Cloud Service Oracle Cloud Adapter for Oracle RightNow Cloud Service を使用すると RightNow Cloud Service をシームレスに接続および統合できるため Service Cloud プラットフォームを拡張して信頼性のある優れたカスタマ
スキル領域 職種 : ソフトウェアデベロップメント スキル領域と SWD 経済産業省, 独立行政法人情報処理推進機構
 スキル領域と (8) ソフトウェアデベロップメント スキル領域と SWD-1 2012 経済産業省, 独立行政法人情報処理推進機構 スキル領域 職種 : ソフトウェアデベロップメント スキル領域と SWD-2 2012 経済産業省, 独立行政法人情報処理推進機構 専門分野 ソフトウェアデベロップメントのスキル領域 スキル項目 職種共通スキル 項目 全専門分野 ソフトウェアエンジニアリング Web アプリケーション技術
スキル領域と (8) ソフトウェアデベロップメント スキル領域と SWD-1 2012 経済産業省, 独立行政法人情報処理推進機構 スキル領域 職種 : ソフトウェアデベロップメント スキル領域と SWD-2 2012 経済産業省, 独立行政法人情報処理推進機構 専門分野 ソフトウェアデベロップメントのスキル領域 スキル項目 職種共通スキル 項目 全専門分野 ソフトウェアエンジニアリング Web アプリケーション技術
改版履歴 Ver 改版日内容 /02/07 新規作成 2 / 18
 多目的俯瞰画像合成システム 機能仕様書 Crawler View 画像合成 RTC 発行日 2017 年 3 月 30 日 公立大学法人会津大学 株式会社東日本計算センター 1 / 18 改版履歴 Ver 改版日内容 1.0 2016/02/07 新規作成 2 / 18 1. 内容 1. はじめに... 4 1.1. 対象読者... 4 1.2. 適応範囲... 4 1.3. 開発環境及び使用機器...
多目的俯瞰画像合成システム 機能仕様書 Crawler View 画像合成 RTC 発行日 2017 年 3 月 30 日 公立大学法人会津大学 株式会社東日本計算センター 1 / 18 改版履歴 Ver 改版日内容 1.0 2016/02/07 新規作成 2 / 18 1. 内容 1. はじめに... 4 1.1. 対象読者... 4 1.2. 適応範囲... 4 1.3. 開発環境及び使用機器...
働く人間型ロボット研究開発用プラットフォームHRP-4 を開発
 働く人間型ロボット研究開発用プラットフォーム HRP-4 を開発 - 2011 年 1 月より外部研究機関へ提供開始 - 平成 22 年 9 月 15 日川田工業株式会社独立行政法人産業技術総合研究所 ポイント HRP シリーズの流れをくむ軽量でスリムな新しいボディー 仕様の最適化や部品の共通化 簡素化を推し進めることにより低価格化を実現 OpenRTM-aist の採用で 国内外のソフトウエア資産が利用可能となり研究効率が向上
働く人間型ロボット研究開発用プラットフォーム HRP-4 を開発 - 2011 年 1 月より外部研究機関へ提供開始 - 平成 22 年 9 月 15 日川田工業株式会社独立行政法人産業技術総合研究所 ポイント HRP シリーズの流れをくむ軽量でスリムな新しいボディー 仕様の最適化や部品の共通化 簡素化を推し進めることにより低価格化を実現 OpenRTM-aist の採用で 国内外のソフトウエア資産が利用可能となり研究効率が向上
IBM Rational Software Delivery Platform v7.0 What's
 IBM Rational Software Delivery Platform V7.0 デスクトップ製品 V7.0 リリースの全体像および製品共通の新機能 2006 年 12 月 15 日 当資料は 2006/12/15 時点の情報に基づいて作成されていますが 事前の予告なく変更される場合があります IBM Tivoli WebSphere ClearCase ClearQuest Rational
IBM Rational Software Delivery Platform V7.0 デスクトップ製品 V7.0 リリースの全体像および製品共通の新機能 2006 年 12 月 15 日 当資料は 2006/12/15 時点の情報に基づいて作成されていますが 事前の予告なく変更される場合があります IBM Tivoli WebSphere ClearCase ClearQuest Rational
Microsoft PowerPoint - IAF フォーラム2015講演資料_PLCopenJapan_A02.pptx
 PLCopen / OPC UA 通信仕様と PLCopen XML の紹介 ~PLC プログラムの生産システムエンジニアリング連携に向けて ~ Industrial Automation Forum - Forum 2015 PLCopen Japan Page 1 PLCopen の主な取り組み PLCopen は IEC 61131-3 プログラミングの普及促進と関連技術仕様の策定を う 営利団体
PLCopen / OPC UA 通信仕様と PLCopen XML の紹介 ~PLC プログラムの生産システムエンジニアリング連携に向けて ~ Industrial Automation Forum - Forum 2015 PLCopen Japan Page 1 PLCopen の主な取り組み PLCopen は IEC 61131-3 プログラミングの普及促進と関連技術仕様の策定を う 営利団体
目次 はじめに 4 概要 4 背景 4 対象 5 スケジュール 5 目標点 6 使用機材 6 第 1 章 C# 言語 7 C# 言語の歴史 7 基本構文 8 C 言語との違い 9 Java 言語との違い 10.Netフレームワーク 10 開発資料 10 第 2 章 Mono 11 Monoの歴史 1
 ポリテクセンター埼玉セミナー資料 組込み技術者のための C# Monoを用いたマルチプラットフォームアプリケーション開発技術 第 1.2 版 2018 年 8 月 Microbrains Inc. 渋谷 目次 はじめに 4 概要 4 背景 4 対象 5 スケジュール 5 目標点 6 使用機材 6 第 1 章 C# 言語 7 C# 言語の歴史 7 基本構文 8 C 言語との違い 9 Java 言語との違い
ポリテクセンター埼玉セミナー資料 組込み技術者のための C# Monoを用いたマルチプラットフォームアプリケーション開発技術 第 1.2 版 2018 年 8 月 Microbrains Inc. 渋谷 目次 はじめに 4 概要 4 背景 4 対象 5 スケジュール 5 目標点 6 使用機材 6 第 1 章 C# 言語 7 C# 言語の歴史 7 基本構文 8 C 言語との違い 9 Java 言語との違い
Oracle Business Rules
 Oracle Business Rules Manoj Das(manoj.das@oracle.com) Product Management, Oracle Integration 3 Oracle Business Rules について Oracle Business Rules とはビジネスの重要な決定と方針 ビジネスの方針 実行方針 承認基盤など 制約 有効な設定 規制要件など 計算 割引
Oracle Business Rules Manoj Das(manoj.das@oracle.com) Product Management, Oracle Integration 3 Oracle Business Rules について Oracle Business Rules とはビジネスの重要な決定と方針 ビジネスの方針 実行方針 承認基盤など 制約 有効な設定 規制要件など 計算 割引
CA Federation ご紹介資料
 CA Federation r12 ご紹介 旧製品名 :CA SiteMinder Federation 2017 年 10 月富士通株式会社 概要 1 フェデレーション (Federation) とは インターネットドメインを越えてシングルサインオンを実現 SAMLやADFSなどの仕様を利用して相互認証連携を行う仕組み IDやパスワードの情報を送付せず認証情報のみ連携先へ送付して認証 USER INTERNET
CA Federation r12 ご紹介 旧製品名 :CA SiteMinder Federation 2017 年 10 月富士通株式会社 概要 1 フェデレーション (Federation) とは インターネットドメインを越えてシングルサインオンを実現 SAMLやADFSなどの仕様を利用して相互認証連携を行う仕組み IDやパスワードの情報を送付せず認証情報のみ連携先へ送付して認証 USER INTERNET
f2-system-requirement-system-composer-mw
 Simulink Requirements と新製品 System Composer によるシステムズエンジニアリング MathWorks Japan アプリケーションエンジニアリング部大越亮二 2015 The MathWorks, Inc. 1 エンジニアリングの活動 要求レベル システムレベル 要求分析 システム記述 表現 高 システム分析 システム結合 抽象度 サブシステム コンポーネントレベル
Simulink Requirements と新製品 System Composer によるシステムズエンジニアリング MathWorks Japan アプリケーションエンジニアリング部大越亮二 2015 The MathWorks, Inc. 1 エンジニアリングの活動 要求レベル システムレベル 要求分析 システム記述 表現 高 システム分析 システム結合 抽象度 サブシステム コンポーネントレベル
ユーザーズマニュアル 有線ネットワークシステム 発行日 2016 年 3 月 30 日
 ユーザーズマニュアル 有線ネットワークシステム 発行日 2016 年 3 月 30 日 目次 1 2 3 はじめに...1 1.1 前提知識...1 1.2 システム概要...1 1.3 動作環境...4 1.3.1 IP 経路情報監視 RTC...4 1.3.2 IP 経路情報ビューア RTC...6 インストール...7 2.1 RTC の入手方法...7 2.2 IP 経路情報監視 RTC...7
ユーザーズマニュアル 有線ネットワークシステム 発行日 2016 年 3 月 30 日 目次 1 2 3 はじめに...1 1.1 前提知識...1 1.2 システム概要...1 1.3 動作環境...4 1.3.1 IP 経路情報監視 RTC...4 1.3.2 IP 経路情報ビューア RTC...6 インストール...7 2.1 RTC の入手方法...7 2.2 IP 経路情報監視 RTC...7
PowerPoint プレゼンテーション
 5 月 Java 基礎 1 タイトル Java 基礎 2 日間 概要 目的 サーバサイドのプログラミング言語で最もシェアの高い Java SE の基本を習得します 当研修ではひとつの技術ごとに実用的なアプリケーションを作成するため 効果的な学習ができます Java SE の多くの API の中で 仕事でよく利用するものを中心に効率よく学びます 実際の業務で最も利用される開発環境である Eclipse
5 月 Java 基礎 1 タイトル Java 基礎 2 日間 概要 目的 サーバサイドのプログラミング言語で最もシェアの高い Java SE の基本を習得します 当研修ではひとつの技術ごとに実用的なアプリケーションを作成するため 効果的な学習ができます Java SE の多くの API の中で 仕事でよく利用するものを中心に効率よく学びます 実際の業務で最も利用される開発環境である Eclipse
PowerPoint プレゼンテーション
 LAN 1. LAN,. NAT,., LAN. NTMobile Network Traversal with Mobilty [1]. NTMobile. OS TUN/TAP, LAN. 2. NTMobile NTMobile NAT, IPv4/IPv6,,. NTMobile. DC Direction Coordinator. NTMobile. DC,. NTMobile NTMfw.
LAN 1. LAN,. NAT,., LAN. NTMobile Network Traversal with Mobilty [1]. NTMobile. OS TUN/TAP, LAN. 2. NTMobile NTMobile NAT, IPv4/IPv6,,. NTMobile. DC Direction Coordinator. NTMobile. DC,. NTMobile NTMfw.
ic3_cf_p1-70_1018.indd
 章オペレーティングシステム()の基いソフトウェアで 基本ソフトウェア とも呼ばれます 第礎第 章 オペレーティングシステム () の基礎 - の役割と動作 ここでは コンピューターの基本的な構成やオペレーティングシステムの基本的な役割と操作を学習します -- コンピューターの基本構成 現代社会では さまざまな種類のコンピューター機器が各分野で利用されています 身近なものでは パソコン タブレット スマートフォンなどがありますが
章オペレーティングシステム()の基いソフトウェアで 基本ソフトウェア とも呼ばれます 第礎第 章 オペレーティングシステム () の基礎 - の役割と動作 ここでは コンピューターの基本的な構成やオペレーティングシステムの基本的な役割と操作を学習します -- コンピューターの基本構成 現代社会では さまざまな種類のコンピューター機器が各分野で利用されています 身近なものでは パソコン タブレット スマートフォンなどがありますが
Microsoft PowerPoint _ncessympotakada [互換モード]
![Microsoft PowerPoint _ncessympotakada [互換モード]](/thumbs/92/108593149.jpg "Microsoft PowerPoint _ncessympotakada [互換モード]") 第 3 回 NCES シンポジウム 宇宙機向けソフトウェアプラットフォーム (SpaceWire OS) の開発 212 年 1 月 1 日高田光隆附属組込みシステム研究センター研究員 mtakada@nces.is.nagoya-u.ac.jp 1 宇宙機向けソフトウェアプラットフォームの開発目次 SpaceWire について SpaceWire OSプロジェクトの趣旨 活動 リアルタイム性保証の検討
第 3 回 NCES シンポジウム 宇宙機向けソフトウェアプラットフォーム (SpaceWire OS) の開発 212 年 1 月 1 日高田光隆附属組込みシステム研究センター研究員 mtakada@nces.is.nagoya-u.ac.jp 1 宇宙機向けソフトウェアプラットフォームの開発目次 SpaceWire について SpaceWire OSプロジェクトの趣旨 活動 リアルタイム性保証の検討
PowerPoint プレゼンテーション
 D-3 今だからこそ考える エンタープライズ モバイル アプリケーション開発 2015/07/15 株式会社エクサ テクノロジーイノベーション部開発品質技術室 原嶋徹 2015 EXA CORPORATION Web 技術を使ったモバイル アプリで 業務改善してみませんか? Apache Cordova のご紹介 1 エンタープライズの定義 エンタープライズ 企業向けアプリケーション例 : 営業管理
D-3 今だからこそ考える エンタープライズ モバイル アプリケーション開発 2015/07/15 株式会社エクサ テクノロジーイノベーション部開発品質技術室 原嶋徹 2015 EXA CORPORATION Web 技術を使ったモバイル アプリで 業務改善してみませんか? Apache Cordova のご紹介 1 エンタープライズの定義 エンタープライズ 企業向けアプリケーション例 : 営業管理
V8.1新規機能紹介記事
 WebOTX V8.1 新規機能 EJB 3.0 WebOTX V8.1より Java EE 5(Java Platform, Enterprise Edition 5) に対応しました これによりいろいろな機能追加が行われていますが 特に大きな変更であるEJB 3.0 対応についてご紹介いたします なお WebOTX V7で対応したEJB 2.1についてもWebOTX V8.1で引き続き利用することが可能です
WebOTX V8.1 新規機能 EJB 3.0 WebOTX V8.1より Java EE 5(Java Platform, Enterprise Edition 5) に対応しました これによりいろいろな機能追加が行われていますが 特に大きな変更であるEJB 3.0 対応についてご紹介いたします なお WebOTX V7で対応したEJB 2.1についてもWebOTX V8.1で引き続き利用することが可能です
2015 TRON Symposium セッション 組込み機器のための機能安全対応 TRON Safe Kernel TRON Safe Kernel の紹介 2015/12/10 株式会社日立超 LSIシステムズ製品ソリューション設計部トロンフォーラム TRON Safe Kernel WG 幹事
 2015 TRON Symposium セッション 組込み機器のための機能安全対応 TRON Safe Kernel TRON Safe Kernel の紹介 2015/12/10 株式会社日立超 LSIシステムズ製品ソリューション設計部トロンフォーラム TRON Safe Kernel WG 幹事 豊山 祐一 Hitachi ULSI Systems Co., Ltd. 2015. All rights
2015 TRON Symposium セッション 組込み機器のための機能安全対応 TRON Safe Kernel TRON Safe Kernel の紹介 2015/12/10 株式会社日立超 LSIシステムズ製品ソリューション設計部トロンフォーラム TRON Safe Kernel WG 幹事 豊山 祐一 Hitachi ULSI Systems Co., Ltd. 2015. All rights
高信頼RTミドルウエアの開発
 P04 RT,,,,,,,,,,,, Development of Dependable RT-Middleware Noriaki Ando, Geoffrey Biggs, Yoshihiro Nakabo, Daichi Mizuguchi, Kiyoshi Fujiwara, Isao Hara, Tetsuo Kotoku, AIST, Masayoshi Kondo, Mitsuhiro
P04 RT,,,,,,,,,,,, Development of Dependable RT-Middleware Noriaki Ando, Geoffrey Biggs, Yoshihiro Nakabo, Daichi Mizuguchi, Kiyoshi Fujiwara, Isao Hara, Tetsuo Kotoku, AIST, Masayoshi Kondo, Mitsuhiro
Raspberry Pi で WEB カメラを使用 会津大学 RT ミドルウェア講習会 2017 The University of Aizu
 会津大学 RT ミドルウェア講習会 2017 The University of Aizu 目次 1 コンポーネントをダウンロードする... 1 2 コンポーネントを Raspberry Pi へコピーする... 2 2.1 Raspberry Pi へコピーする... 2 3 Raspberry Pi 上でコンポーネントをビルドする... 3 3.1 コピーされたファイルを解凍する... 3 3.2
会津大学 RT ミドルウェア講習会 2017 The University of Aizu 目次 1 コンポーネントをダウンロードする... 1 2 コンポーネントを Raspberry Pi へコピーする... 2 2.1 Raspberry Pi へコピーする... 2 3 Raspberry Pi 上でコンポーネントをビルドする... 3 3.1 コピーされたファイルを解凍する... 3 3.2
 Visual Studio と.NET Framework 概要 Runtime Libraries Languag es Tool.NET Visual Studio 概要 http://download.microsoft.com/download/c/7/1/c710b336-1979-4522-921b-590edf63426b/vs2010_guidebook_pdf.zip 1.
Visual Studio と.NET Framework 概要 Runtime Libraries Languag es Tool.NET Visual Studio 概要 http://download.microsoft.com/download/c/7/1/c710b336-1979-4522-921b-590edf63426b/vs2010_guidebook_pdf.zip 1.
デザインパターン第一章「生成《
 変化に強いプログラミング ~ デザインパターン第一章 生成 ~ 梅林 ( 高田明宏 )@ わんくま同盟 デザインパターンとは何か (1) デザインパターンの定義 ソフトウェア開発におけるデザインパターンとは 過去のソフトウェア設計者が発見し編み出した設計ノウハウを蓄積し 名前をつけ 再利用しやすいように特定の規約に従ってカタログ化したもの (Wikipedia) 参考書籍 オブジェクト指向における再利用のためのデザインパターン
変化に強いプログラミング ~ デザインパターン第一章 生成 ~ 梅林 ( 高田明宏 )@ わんくま同盟 デザインパターンとは何か (1) デザインパターンの定義 ソフトウェア開発におけるデザインパターンとは 過去のソフトウェア設計者が発見し編み出した設計ノウハウを蓄積し 名前をつけ 再利用しやすいように特定の規約に従ってカタログ化したもの (Wikipedia) 参考書籍 オブジェクト指向における再利用のためのデザインパターン
HMD を用いた PT カメラのインターネット遠隔操作芝浦工業大学知能機械システム研究室 HMD(Head Mounted Display) を用いた PT(Pan-Tilt) カメラのインターネット遠隔操作 ユーザマニュアル (ver1.0) 2014 年 10 月 23 日 芝浦工業大学知能機械
 を用いた PT(Pan-Tilt) カメラのインターネット遠隔操作 ユーザマニュアル (ver1.0) 2014 年 10 月 23 日 芝浦工業大学知能機械") 芝浦工業大学知能機械システム研究室 HMD(Head Mounted Display) を用いた PT(Pan-Tilt) カメラのインターネット遠隔操作 ユーザマニュアル (ver1.0) 2014 年 10 月 23 日 芝浦工業大学知能機械システム研究室 荻谷浩史, 石田真一, 安田福啓, 松日楽信人 目次 1. はじめに... 2 1.1 RTC 群概要... 2 1.2 システム構成...
芝浦工業大学知能機械システム研究室 HMD(Head Mounted Display) を用いた PT(Pan-Tilt) カメラのインターネット遠隔操作 ユーザマニュアル (ver1.0) 2014 年 10 月 23 日 芝浦工業大学知能機械システム研究室 荻谷浩史, 石田真一, 安田福啓, 松日楽信人 目次 1. はじめに... 2 1.1 RTC 群概要... 2 1.2 システム構成...
IBM 次世代クラウド・プラットフォーム コードネーム “BlueMix”ご紹介
 IBM Bluemix www.bluemix.net IBM Bluemix オンラインセミナー今からはじめる Bluemix シリーズ第 3 期進化する Bluemix 第 2 回 プライベート API カタログ 日本アイ ビー エムシステムズ エンジニアリング株式会社 クラウド ソリューション 松井学 2014 年 11 月 20 日の Global アナウンス 1. DevOps に関する更なる機能拡張
IBM Bluemix www.bluemix.net IBM Bluemix オンラインセミナー今からはじめる Bluemix シリーズ第 3 期進化する Bluemix 第 2 回 プライベート API カタログ 日本アイ ビー エムシステムズ エンジニアリング株式会社 クラウド ソリューション 松井学 2014 年 11 月 20 日の Global アナウンス 1. DevOps に関する更なる機能拡張
Microsoft PowerPoint - 04_01_text_UML_03-Sequence-Com.ppt
 システム設計 (1) シーケンス図 コミュニケーション図等 1 今日の演習のねらい 2 今日の演習のねらい 情報システムを構成するオブジェクトの考え方を理解す る 業務プロセスでのオブジェクトの相互作用を考える シーケンス図 コミュニケーション図を作成する 前回までの講義システム開発の上流工程として 要求仕様を確定パソコンを注文するまでのユースケースユースケースから画面の検討イベントフロー アクティビティ図
システム設計 (1) シーケンス図 コミュニケーション図等 1 今日の演習のねらい 2 今日の演習のねらい 情報システムを構成するオブジェクトの考え方を理解す る 業務プロセスでのオブジェクトの相互作用を考える シーケンス図 コミュニケーション図を作成する 前回までの講義システム開発の上流工程として 要求仕様を確定パソコンを注文するまでのユースケースユースケースから画面の検討イベントフロー アクティビティ図
PowerPoint Presentation
 ETAS の AUTO ソリューションイータス株式会社 1 Public STJ2/ETAS 2014-01 ETAS GmbH 2014. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, イータス株式会社会社概要 ETAS Driving Embedded Excellence
ETAS の AUTO ソリューションイータス株式会社 1 Public STJ2/ETAS 2014-01 ETAS GmbH 2014. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, イータス株式会社会社概要 ETAS Driving Embedded Excellence
FIDO技術のさらなる広がり
 FIDO アライアンス東京セミナー (2015 年 11 月 20 日 ) FIDO 技術のさらなる広がり ヤフー株式会社 Yahoo! JAPAN 研究所上席研究員五味秀仁 FIDOの目指す認証モデル 安全性 Security 強 OTP (One-Time Password) 308934 PIN パスワード ID: Pwd: 1234 弱 悪 良 利便性 Usability 2 コンセプト 認証の部品化
FIDO アライアンス東京セミナー (2015 年 11 月 20 日 ) FIDO 技術のさらなる広がり ヤフー株式会社 Yahoo! JAPAN 研究所上席研究員五味秀仁 FIDOの目指す認証モデル 安全性 Security 強 OTP (One-Time Password) 308934 PIN パスワード ID: Pwd: 1234 弱 悪 良 利便性 Usability 2 コンセプト 認証の部品化
アジェンダ 会社紹介 OFCONFIGについて NETCONFおよびYANGについて OFCONFIGユースケース A.I.Corporation 2
 NETCONF および YANG を使った OpenFlow スイッチの管理 A.I.Corporation 1 アジェンダ 会社紹介 OFCONFIGについて NETCONFおよびYANGについて OFCONFIGユースケース A.I.Corporation 2 会社紹介 A.I.Corporation 3 株式会社エーアイコーポレーション 会社業務 特長 機器組込み用ソフトウェア (Embedded
NETCONF および YANG を使った OpenFlow スイッチの管理 A.I.Corporation 1 アジェンダ 会社紹介 OFCONFIGについて NETCONFおよびYANGについて OFCONFIGユースケース A.I.Corporation 2 会社紹介 A.I.Corporation 3 株式会社エーアイコーポレーション 会社業務 特長 機器組込み用ソフトウェア (Embedded
二次元連続動的計画法による知的画像処理システム ImageFileSelector RTC 機能仕様書 ImageFileSelectorRTC Ver.1.0 ( 株 ) 東日本計算センター 1 / 11
 東日本計算センター 1 / 11") 機能仕様書 ImageFileSelectorRTC Ver.1.0 ( 株 ) 東日本計算センター 1 / 11 改版履歴 Ver 改版日 内容 0.5 2016/02/15 新規作成 0.6 2016/03/1 GUI 釦配置変更 1.0 2016/3/14 初版リリース 2 / 11 目次 目次...3 1. はじめに...4 1.1. 対象読者... 4 1.2. 適応範囲... 4 1.3.
機能仕様書 ImageFileSelectorRTC Ver.1.0 ( 株 ) 東日本計算センター 1 / 11 改版履歴 Ver 改版日 内容 0.5 2016/02/15 新規作成 0.6 2016/03/1 GUI 釦配置変更 1.0 2016/3/14 初版リリース 2 / 11 目次 目次...3 1. はじめに...4 1.1. 対象読者... 4 1.2. 適応範囲... 4 1.3.
Oracle Access ManagerとOracle Identity Managerの同時配置
 Oracle Access Manager と Oracle Identity Manager の同時配置 オラクル ホワイト ペーパー 2006 年 11 月 Oracle Access Manager と Oracle Identity Manager の同時配置 概要... 3 はじめに... 3 Oracle Identity Manager 中心の配置... 5 説明... 5 配置ガイドライン...
Oracle Access Manager と Oracle Identity Manager の同時配置 オラクル ホワイト ペーパー 2006 年 11 月 Oracle Access Manager と Oracle Identity Manager の同時配置 概要... 3 はじめに... 3 Oracle Identity Manager 中心の配置... 5 説明... 5 配置ガイドライン...
ObjectPartner Pro
 Open Factory 21/ 資産を分散システム Web システムへ 日本電気株式会社 製品概要 は Web システム環境において 資産を活用する ためのコンポーネント生成機能を提供します 新機能 Ver2.4 の強化内容 Microsoft Visual C++ 2008 対応 Microsoft Visual C++ 2008 を使用する環境でアプリケーションの開発が可能 次の機能は Microsoft
Open Factory 21/ 資産を分散システム Web システムへ 日本電気株式会社 製品概要 は Web システム環境において 資産を活用する ためのコンポーネント生成機能を提供します 新機能 Ver2.4 の強化内容 Microsoft Visual C++ 2008 対応 Microsoft Visual C++ 2008 を使用する環境でアプリケーションの開発が可能 次の機能は Microsoft
Microsoft PowerPoint - A3② JaSST_MISRA2004ソースコード品質診断.ppt
 ISO/IEC9126 & MISRA-C:2004 ベースソースコード品質診断 ~ MISRA-C:2004 ベース品質診断のご紹介 ~ 株式会社東陽テクニカソフトウェア ソリューション MISRA とは Motor Industry Software Reliability Association の略 ヨーロッパ自動車技術会 (MIRA) の下部組織 MIRA: Motor Industry
ISO/IEC9126 & MISRA-C:2004 ベースソースコード品質診断 ~ MISRA-C:2004 ベース品質診断のご紹介 ~ 株式会社東陽テクニカソフトウェア ソリューション MISRA とは Motor Industry Software Reliability Association の略 ヨーロッパ自動車技術会 (MIRA) の下部組織 MIRA: Motor Industry
Microsoft Word 基_シラバス.doc
 4-5- 基 Web アプリケーション開発に関する知識 1 4-5- 基 Web アプリケーション開発に関する知識 スクリプト言語や Java 言語を利用して Ruby on Rails やその他 Web フレームワークを活用して HTML(4, 5) XHTML JavaScript DOM CSS といったマークアップ言語およびスクリプト言語を活用しながら Ⅰ. 概要ダイナミックなWebサービスを提供するアプリケーションを開発する際に
4-5- 基 Web アプリケーション開発に関する知識 1 4-5- 基 Web アプリケーション開発に関する知識 スクリプト言語や Java 言語を利用して Ruby on Rails やその他 Web フレームワークを活用して HTML(4, 5) XHTML JavaScript DOM CSS といったマークアップ言語およびスクリプト言語を活用しながら Ⅰ. 概要ダイナミックなWebサービスを提供するアプリケーションを開発する際に
Server and Cloud Platform template
 利用形態に合わせたクラウド利用 クラウドプラットフォーム 利用形態に合わせたクラウド利用 アプリケーション アプリケーション アプリケーション データ データ データ ランタイム ランタイム ミドルウエア ミドルウエア OS OS 仮想化 サーバー ストレージ ネットワーク Windows Server Microsoft Azure 仮想マシン Windows Server Hyper-V Microsoft
利用形態に合わせたクラウド利用 クラウドプラットフォーム 利用形態に合わせたクラウド利用 アプリケーション アプリケーション アプリケーション データ データ データ ランタイム ランタイム ミドルウエア ミドルウエア OS OS 仮想化 サーバー ストレージ ネットワーク Windows Server Microsoft Azure 仮想マシン Windows Server Hyper-V Microsoft
PowerPoint プレゼンテーション
 BRMS への取り組みと導入事例 2013 年 11 月 15 日 ( 金 ) SCSK 株式会社 IT エンジニアリング事業本部ミドルウェア部 本日の内容 BRMS 適用のポイント BRMS の可能性 Page 1 Page 2 アプリケーション連携基盤 SCSKのRed Hat JBoss / ミドルウェア技術に関する取り組みの取り組み 世界のオープンソース コミュニティーから製品化されたソフトウェア
BRMS への取り組みと導入事例 2013 年 11 月 15 日 ( 金 ) SCSK 株式会社 IT エンジニアリング事業本部ミドルウェア部 本日の内容 BRMS 適用のポイント BRMS の可能性 Page 1 Page 2 アプリケーション連携基盤 SCSKのRed Hat JBoss / ミドルウェア技術に関する取り組みの取り組み 世界のオープンソース コミュニティーから製品化されたソフトウェア
IPSJ SIG Technical Report Vol.2011-DPS-148 No.14 Vol.2011-GN-81 No.14 Vol.2011-EIP-53 No /9/ PC Robot Service Network Protocol RSNP RSN
 1 1 1 PC Robot Service Network Protocol RSNP RSNP A Personal Cloud System using Robot Service Network Protocol Yuka Kato, 1 Yosuke Tsuchiya 1 and Masahiko Narita 1 Personal cloud is a technology that we
1 1 1 PC Robot Service Network Protocol RSNP RSNP A Personal Cloud System using Robot Service Network Protocol Yuka Kato, 1 Yosuke Tsuchiya 1 and Masahiko Narita 1 Personal cloud is a technology that we
Microsoft PowerPoint - 【最終提出版】 MATLAB_EXPO2014講演資料_ルネサス菅原.pptx
 MATLAB/Simulink を使用したモータ制御アプリのモデルベース開発事例 ルネサスエレクトロニクス株式会社 第二ソリューション事業本部産業第一事業部家電ソリューション部 Rev. 1.00 2014 Renesas Electronics Corporation. All rights reserved. IAAS-AA-14-0202-1 目次 1. はじめに 1.1 モデルベース開発とは?
MATLAB/Simulink を使用したモータ制御アプリのモデルベース開発事例 ルネサスエレクトロニクス株式会社 第二ソリューション事業本部産業第一事業部家電ソリューション部 Rev. 1.00 2014 Renesas Electronics Corporation. All rights reserved. IAAS-AA-14-0202-1 目次 1. はじめに 1.1 モデルベース開発とは?
(Microsoft PowerPoint - Java\221\3462\225\224\211\357\224\255\225\\\216\221\227\ ppt)
") システム開発における 生産性の検証 平成 19 年度 OISA 技術研究会 JAVA 第 2 部会 1 2008.02.19 目次 1. 部員紹介 2. 生産性向上に向けて 3.Seasar2 4. テストプログラムによる検証 5. 考察 6. まとめ 2 1. 部員紹介 3 部員紹介 葛城啓之 ( 株式会社オーイーシー ) 工藤寿彦 ( 九州東芝エンシ ニアリンク 株式会社 ) 白石和稔 ( 大銀コンヒ
システム開発における 生産性の検証 平成 19 年度 OISA 技術研究会 JAVA 第 2 部会 1 2008.02.19 目次 1. 部員紹介 2. 生産性向上に向けて 3.Seasar2 4. テストプログラムによる検証 5. 考察 6. まとめ 2 1. 部員紹介 3 部員紹介 葛城啓之 ( 株式会社オーイーシー ) 工藤寿彦 ( 九州東芝エンシ ニアリンク 株式会社 ) 白石和稔 ( 大銀コンヒ
NSW キャリア採用募集職種一覧 2018/8/16 現在 求人番号 職種対象業務必要とするスキル 経験 資格等勤務地 1 営業スペシャリスト金融 ( 損保 生保 クレジット ) 業でのソリューション営業 IT 業界での営業経験 金融業界 IT 業界での人脈がある方尚可 渋谷 2 プロジェクトマネー
 業でのソリューション営業 IT 業界での営業経験 金融業界 IT 業界での人脈がある方尚可 渋谷 2 プロジェクトマネー") NSW キャリア採用募集職種一覧 2018/8/16 現在 1 営業スペシャリスト金融 ( 損保 生保 クレジット ) 業でのソリューション営業 IT 業界での営業経験 金融業界 IT 業界での人脈がある方尚可 2 プロジェクトマネージャシステム開発またはインフラ構築のプロジェクトマネージャ プロジェクトマネージャ経験 PMP の資格保有者 高度情報処理試験資格保有者尚可 3 プロジェクトマネージャ生保または損保システム開発のプロジェクトマネージャ
NSW キャリア採用募集職種一覧 2018/8/16 現在 1 営業スペシャリスト金融 ( 損保 生保 クレジット ) 業でのソリューション営業 IT 業界での営業経験 金融業界 IT 業界での人脈がある方尚可 2 プロジェクトマネージャシステム開発またはインフラ構築のプロジェクトマネージャ プロジェクトマネージャ経験 PMP の資格保有者 高度情報処理試験資格保有者尚可 3 プロジェクトマネージャ生保または損保システム開発のプロジェクトマネージャ
Microsoft PowerPoint pptx
 PFCore(RT ミドルウェア ) トレーニング中級編 10:00-11:00 第 1 部 :RT コンポーネントプログラミングの概要 担当 : 安藤慶昭 ( 産業技術総合研究所 ) 概要 :RT コンポーネントの作成方法, 設計時の注意点などの概要について解説します 第 2 部 :RT ミドルウェア (PFcore) 開発支援ツールと RT コンポーネントの作成方法 11:00-12:00 12:00-13:00
PFCore(RT ミドルウェア ) トレーニング中級編 10:00-11:00 第 1 部 :RT コンポーネントプログラミングの概要 担当 : 安藤慶昭 ( 産業技術総合研究所 ) 概要 :RT コンポーネントの作成方法, 設計時の注意点などの概要について解説します 第 2 部 :RT ミドルウェア (PFcore) 開発支援ツールと RT コンポーネントの作成方法 11:00-12:00 12:00-13:00
ハード・ソフト協調検証サービス
 ハード ソフトのトータルサービス 富士通エレクトロニクス株式会社株式会社富士通ソフトウェアテクノロジーズ 目次 モデル概要 モデル 特徴 このサービス利用のメリット サービスメニュー 1 企画から開発 量産までトータルでサポート 富士通エレクトロニクスと富士通ソフトウェアテクノロジーズはお客様の製品開発を 企画段階から開発 量産までサポートします 製品開発をサポートする検証 認定作業のご提供 製品要求仕様の作成をコンサルティング
ハード ソフトのトータルサービス 富士通エレクトロニクス株式会社株式会社富士通ソフトウェアテクノロジーズ 目次 モデル概要 モデル 特徴 このサービス利用のメリット サービスメニュー 1 企画から開発 量産までトータルでサポート 富士通エレクトロニクスと富士通ソフトウェアテクノロジーズはお客様の製品開発を 企画段階から開発 量産までサポートします 製品開発をサポートする検証 認定作業のご提供 製品要求仕様の作成をコンサルティング
Notesアプリが iPadで動くDomino Mobile Apps ご紹介
 Notes アプリが ipad で動く Domino Mobile Apps ご紹介 Copyright 2019 HCL Technologies Limited www.hcltechsw.com Domino Mobile Apps のご紹介 Domino Mobile Apps とは? Domino サーバー アプリケーション XPages 既存の Notes アプリ (nsf) を そのまま実行する
Notes アプリが ipad で動く Domino Mobile Apps ご紹介 Copyright 2019 HCL Technologies Limited www.hcltechsw.com Domino Mobile Apps のご紹介 Domino Mobile Apps とは? Domino サーバー アプリケーション XPages 既存の Notes アプリ (nsf) を そのまま実行する
wpEnterpriseSvr.doc
 COBOLJava.NETWeb IT COBOL Micro Focus Enterprise Server Enterprise Server COBOL Enterprise Server COBOL Enterprise Server COBOL COBOL COBOL Java.NET IT Micro Focus COBOLJ2EE.NET Web COBOL Enterprise Server
COBOLJava.NETWeb IT COBOL Micro Focus Enterprise Server Enterprise Server COBOL Enterprise Server COBOL Enterprise Server COBOL COBOL COBOL Java.NET IT Micro Focus COBOLJ2EE.NET Web COBOL Enterprise Server
「RAD Studio XE5によるマルチ言語/マルチデバイス開発の進め方」
 C1 Delphi/C++ チュートリアルセッション RAD Studio XE5 によるマルチ言語 / マルチデバイス開発の進め方 エンバカデロ テクノロジーズエヴァンジェリスト高橋智宏 アジェンダ RAD Studio XE5 の概要 Delphi or C++ Intel or ARM Windows / OS X / ios / Android プロジェクトとは? FireMonkey HD
C1 Delphi/C++ チュートリアルセッション RAD Studio XE5 によるマルチ言語 / マルチデバイス開発の進め方 エンバカデロ テクノロジーズエヴァンジェリスト高橋智宏 アジェンダ RAD Studio XE5 の概要 Delphi or C++ Intel or ARM Windows / OS X / ios / Android プロジェクトとは? FireMonkey HD
S2Pradoの紹介
 2007 Autumn S2Prado の紹介 S2Container.PHP5 と連携した PRADO アプリケーションの構築 植山能成 紹介 丙午 クリスマスイヴうまれの 40 才 福岡県福岡市在住 株式会社アイティー勤務 主業務 : 通信系システム開発 業務での PHP 開発経験 約半年 (SIP,P2P) P2P) 次 PRADO Framework とは デモその 1 S2Prado.PHP5
2007 Autumn S2Prado の紹介 S2Container.PHP5 と連携した PRADO アプリケーションの構築 植山能成 紹介 丙午 クリスマスイヴうまれの 40 才 福岡県福岡市在住 株式会社アイティー勤務 主業務 : 通信系システム開発 業務での PHP 開発経験 約半年 (SIP,P2P) P2P) 次 PRADO Framework とは デモその 1 S2Prado.PHP5
11 ソフトウェア工学 Software Engineering デザインパターン DESIGN PATTERNS デザインパターンとは? デザインパターン 過去のソフトウェア設計者が生み出したオブジェクト指向設計に関して, ノウハウを蓄積し 名前をつけ 再利用しやすいようにカタログ化したもの 各デ
 11 ソフトウェア工学 Software Engineering デザインパターン DESIGN PATTERNS デザインパターンとは? デザインパターン 過去のソフトウェア設計者が生み出したオブジェクト指向設計に関して, ノウハウを蓄積し 名前をつけ 再利用しやすいようにカタログ化したもの 各デザインパターンの主な内容 そのデザインパターンの目的と効果 どのような役割の部品 ( クラス, インタフェース
11 ソフトウェア工学 Software Engineering デザインパターン DESIGN PATTERNS デザインパターンとは? デザインパターン 過去のソフトウェア設計者が生み出したオブジェクト指向設計に関して, ノウハウを蓄積し 名前をつけ 再利用しやすいようにカタログ化したもの 各デザインパターンの主な内容 そのデザインパターンの目的と効果 どのような役割の部品 ( クラス, インタフェース
LDAP Manager SupportList
 LDAP Manager 2017/8/1 現在 動作環境 OS メタ LDAP PostgreSQL ELM Interface for Java for Windows for Linux システム プロダクト LDAP Manager 本体のバージョン Windows Server 2003 Standard Edition (32bit/64bit) Windows Server 2003
LDAP Manager 2017/8/1 現在 動作環境 OS メタ LDAP PostgreSQL ELM Interface for Java for Windows for Linux システム プロダクト LDAP Manager 本体のバージョン Windows Server 2003 Standard Edition (32bit/64bit) Windows Server 2003
機能仕様書 ロボット Raspberry Pi カメラ RTC Ver 発行日 2017 年 12 月 27 日公立大学法人会津大学株式会社東日本計算センター
 機能仕様書 ロボット Raspberry Pi カメラ RTC Ver.1.0.0 発行日 2017 年 12 月 27 日公立大学法人会津大学株式会社東日本計算センター 改版履歴 Ver 改版日 内容 1.0.0 2017/5/19 新規作成 2017/12/27 正式版発行 目次 1. はじめに... 1 1.1. 対象読者... 1 1.2. 適応範囲... 1 1.3. 開発環境及び使用機器...
機能仕様書 ロボット Raspberry Pi カメラ RTC Ver.1.0.0 発行日 2017 年 12 月 27 日公立大学法人会津大学株式会社東日本計算センター 改版履歴 Ver 改版日 内容 1.0.0 2017/5/19 新規作成 2017/12/27 正式版発行 目次 1. はじめに... 1 1.1. 対象読者... 1 1.2. 適応範囲... 1 1.3. 開発環境及び使用機器...
untitled
 池田泉州キャピタルピザ タイム アロハ セッション Aloha ベンチャーセッション : ロボットの先端技術と事例紹介 クラウド ロボットで拡がる ビジネスの可能性 平成 25 年 8 月 20 日 宮下敬宏株式会社国際電気通信基礎技術研究所 (ATR) 社会メディア総合研究所研究企画部長 知能ロボティクス研究所ネットワークロボット研究室室長 ロボットってなに? みなさんのイメージは?? 3つの要素
池田泉州キャピタルピザ タイム アロハ セッション Aloha ベンチャーセッション : ロボットの先端技術と事例紹介 クラウド ロボットで拡がる ビジネスの可能性 平成 25 年 8 月 20 日 宮下敬宏株式会社国際電気通信基礎技術研究所 (ATR) 社会メディア総合研究所研究企画部長 知能ロボティクス研究所ネットワークロボット研究室室長 ロボットってなに? みなさんのイメージは?? 3つの要素
最終版 _IBMストレージ_講演_西村様
 AKB48 の映像編集を える 速システム基盤 IBM SDS+All Flash Storage アジェンダ 1. 会社紹介 2. 業務紹介 3. 課題 4. 解決 法 5. 導 結果 6. 今後の展望 2 1. 会社紹介 3 会社紹介 社名 株式会社ヴィジュアルノーツ (VISUALNOTES Inc.) 所在地 東京都千代 区外神 6-1-8 思い出ビル 7F 代表者 代表取締役 原 潤 創
AKB48 の映像編集を える 速システム基盤 IBM SDS+All Flash Storage アジェンダ 1. 会社紹介 2. 業務紹介 3. 課題 4. 解決 法 5. 導 結果 6. 今後の展望 2 1. 会社紹介 3 会社紹介 社名 株式会社ヴィジュアルノーツ (VISUALNOTES Inc.) 所在地 東京都千代 区外神 6-1-8 思い出ビル 7F 代表者 代表取締役 原 潤 創
2 概要 市場で不具合が発生にした時 修正箇所は正常に動作するようにしたけど将来のことを考えるとメンテナンス性を向上させたいと考えた リファクタリングを実施して改善しようと考えた レガシーコードなのでどこから手をつけて良いものかわからない メトリクスを使ってリファクタリング対象を自動抽出する仕組みを
 メトリクス利用によるリファクタリング対象の自動抽出 ローランドディー. ジー. 株式会社 第 4 開発部 SC02 小林光一 e-mail:kouichi.kobayashi@rolanddg.co.jp 2 概要 市場で不具合が発生にした時 修正箇所は正常に動作するようにしたけど将来のことを考えるとメンテナンス性を向上させたいと考えた リファクタリングを実施して改善しようと考えた レガシーコードなのでどこから手をつけて良いものかわからない
メトリクス利用によるリファクタリング対象の自動抽出 ローランドディー. ジー. 株式会社 第 4 開発部 SC02 小林光一 e-mail:kouichi.kobayashi@rolanddg.co.jp 2 概要 市場で不具合が発生にした時 修正箇所は正常に動作するようにしたけど将来のことを考えるとメンテナンス性を向上させたいと考えた リファクタリングを実施して改善しようと考えた レガシーコードなのでどこから手をつけて良いものかわからない
OSSTechプレゼンテーション
 Ver.3 ~ クラウド時代の ID 連携を支援する ~ オープンソース ソリューション テクノロジ株式会社 http://www.osstech.co.jp/ Copyright 2016 Open Source Solution Technology, Corp. 1 クラウド時代の ID 管理 1. 管理対象の分散化 オンプレミスとクラウドサービスの混在 システムごとの ID 管理 2. 3.
Ver.3 ~ クラウド時代の ID 連携を支援する ~ オープンソース ソリューション テクノロジ株式会社 http://www.osstech.co.jp/ Copyright 2016 Open Source Solution Technology, Corp. 1 クラウド時代の ID 管理 1. 管理対象の分散化 オンプレミスとクラウドサービスの混在 システムごとの ID 管理 2. 3.
日経ビジネス Center 2
 Software Engineering Center Information-technology Promotion Agency, Japan ソフトウェアの品質向上のために 仕様を厳密に 独立行政法人情報処理推進機構 ソフトウェア エンジニアリング センター 調査役新谷勝利 Center 1 日経ビジネス 2012.4.16 Center 2 SW 開発ライフサイクルの調査統計データ ソフトウェア産業の実態把握に関する調査
Software Engineering Center Information-technology Promotion Agency, Japan ソフトウェアの品質向上のために 仕様を厳密に 独立行政法人情報処理推進機構 ソフトウェア エンジニアリング センター 調査役新谷勝利 Center 1 日経ビジネス 2012.4.16 Center 2 SW 開発ライフサイクルの調査統計データ ソフトウェア産業の実態把握に関する調査
使用する前に
 この章では Cisco Secure ACS リリース 5.5 以降から Cisco ISE リリース 2.4 システムへのデー タ移行に使用される Cisco Secure ACS to Cisco ISE Migration Tool について説明します 移行の概要 1 ページ Cisco Secure ACS から データ移行 1 ページ Cisco Secure ACS to Cisco ISE
この章では Cisco Secure ACS リリース 5.5 以降から Cisco ISE リリース 2.4 システムへのデー タ移行に使用される Cisco Secure ACS to Cisco ISE Migration Tool について説明します 移行の概要 1 ページ Cisco Secure ACS から データ移行 1 ページ Cisco Secure ACS to Cisco ISE
R80.10_FireWall_Config_Guide_Rev1
 R80.10 ファイアウォール設定ガイド 1 はじめに 本ガイドでは基本的な FireWall ポリシーを作成することを目的とします 基本的な Security Management Security Gateway はすでにセットアップ済みであることを想定しています 分散構成セットアップ ガイド スタンドアロン構成セットアップ ガイド等を参照してください [Protected] Distribution
R80.10 ファイアウォール設定ガイド 1 はじめに 本ガイドでは基本的な FireWall ポリシーを作成することを目的とします 基本的な Security Management Security Gateway はすでにセットアップ済みであることを想定しています 分散構成セットアップ ガイド スタンドアロン構成セットアップ ガイド等を参照してください [Protected] Distribution
Microsoft Visual Studio 2010 Professional Data Sheet
 Microsoft Visual Studio 2010 Professional はビジネスの要件やユーザ ーのニーズに最適なアプリケーションを選択し それを構築するために必須の機能を提供します RIA ベースのリッチな Web アプリケーション SharePoint ベースの高度な Web ポータル Windows Azure ベースのクラウドアプリケーションなど 最新テクノロジに対応したアプリケーションを既存の知識や経験を活かして開発することができます
Microsoft Visual Studio 2010 Professional はビジネスの要件やユーザ ーのニーズに最適なアプリケーションを選択し それを構築するために必須の機能を提供します RIA ベースのリッチな Web アプリケーション SharePoint ベースの高度な Web ポータル Windows Azure ベースのクラウドアプリケーションなど 最新テクノロジに対応したアプリケーションを既存の知識や経験を活かして開発することができます
LightSwitch で申請システム Windows ストアアプリで受付システムを構築してみた 情報政策グループ技術職員金森浩治 1. はじめに総合情報基盤センターでは 仮想サーバホスティングサービスや ソフトウェアライセンス貸与といった さまざまなエンドユーザ向けサービスを行っている 上記のよう
 LightSwitch で申請システム Windows ストアアプリで受付システムを構築してみた 情報政策グループ技術職員金森浩治 1. はじめに総合情報基盤センターでは 仮想サーバホスティングサービスや ソフトウェアライセンス貸与といった さまざまなエンドユーザ向けサービスを行っている 上記のようなサービスを利用する際 エンドユーザは利用申請を行うが 利用申請手段はメールや紙となっている そのため
LightSwitch で申請システム Windows ストアアプリで受付システムを構築してみた 情報政策グループ技術職員金森浩治 1. はじめに総合情報基盤センターでは 仮想サーバホスティングサービスや ソフトウェアライセンス貸与といった さまざまなエンドユーザ向けサービスを行っている 上記のようなサービスを利用する際 エンドユーザは利用申請を行うが 利用申請手段はメールや紙となっている そのため
ChoreonoidとOpenHRIを用いたシステム構築事例
 Choreonoid と OpenHRI を用いた システム構築事例 産業技術総合研究所 原 功 Choreonoid Choreonoid オープンソースのロボット用統合 GUI ソフトウェア 動作振り付けソフトウェアとして キーフレームベースの動作生成 CG の動作生成のような UI 動力学シミュレータとして OpenHRP3, ODE, Bullet Physics Engne など利用可 開発フレームワークとして
Choreonoid と OpenHRI を用いた システム構築事例 産業技術総合研究所 原 功 Choreonoid Choreonoid オープンソースのロボット用統合 GUI ソフトウェア 動作振り付けソフトウェアとして キーフレームベースの動作生成 CG の動作生成のような UI 動力学シミュレータとして OpenHRP3, ODE, Bullet Physics Engne など利用可 開発フレームワークとして
CLUSTERPRO MC ProcessSaver 1.2 for Windows 導入ガイド 第 4 版 2014 年 3 月 日本電気株式会社
 CLUSTERPRO MC ProcessSaver 1.2 for Windows 導入ガイド 第 4 版 2014 年 3 月 日本電気株式会社 目次 はじめに 本製品のねらい こんな障害が発生したら 導入効果 適用例 1 適用例 2 ProcessSaver 機能紹介 ProcessSaver とは? 消滅監視の概要 運用管理製品との連携 システム要件 製品価格 保守 / サービス関連情報 購入時のご注意
CLUSTERPRO MC ProcessSaver 1.2 for Windows 導入ガイド 第 4 版 2014 年 3 月 日本電気株式会社 目次 はじめに 本製品のねらい こんな障害が発生したら 導入効果 適用例 1 適用例 2 ProcessSaver 機能紹介 ProcessSaver とは? 消滅監視の概要 運用管理製品との連携 システム要件 製品価格 保守 / サービス関連情報 購入時のご注意
スライド 1
 UEC Tokyo Dept. of Mechanical Engineering and Intelligent Systems OpenRTM を使ってみよう! - 基本編 ( コンソール版 )- 電気通信大学情報理工学研究科 知能機械工学専攻 長井隆行 中村友昭 RTM とは Robot Technology Middleware コンポーネント ( モジュール ) を動かす実行環境のこと ミドルウェア上で動作するコンポーネントであれば
UEC Tokyo Dept. of Mechanical Engineering and Intelligent Systems OpenRTM を使ってみよう! - 基本編 ( コンソール版 )- 電気通信大学情報理工学研究科 知能機械工学専攻 長井隆行 中村友昭 RTM とは Robot Technology Middleware コンポーネント ( モジュール ) を動かす実行環境のこと ミドルウェア上で動作するコンポーネントであれば
個人依存開発から組織的開発への移行事例 ~ 要求モデル定義と開発プロセスの形式化 による高生産性 / 高信頼性化 ~ 三菱電機メカトロニクスソフトウエア ( 株 ) 和歌山支所岩橋正実 1
 和歌山支所岩橋正実 1") 個人依存開発から組織的開発への移行事例 ~ 要求モデル定義と開発プロセスの形式化 による高生産性 / 高信頼性化 ~ 三菱電機メカトロニクスソフトウエア ( 株 ) 和歌山支所岩橋正実 iwahashi@est.hi-ho.ne.jp Iwahashi.Masami@wak.msw.co.jp 1 改善効果 品質 : フロントローディングが進み流出不具合 0 継続生産性 : 平均 130% 改善 工数割合分析
個人依存開発から組織的開発への移行事例 ~ 要求モデル定義と開発プロセスの形式化 による高生産性 / 高信頼性化 ~ 三菱電機メカトロニクスソフトウエア ( 株 ) 和歌山支所岩橋正実 iwahashi@est.hi-ho.ne.jp Iwahashi.Masami@wak.msw.co.jp 1 改善効果 品質 : フロントローディングが進み流出不具合 0 継続生産性 : 平均 130% 改善 工数割合分析
Copyright Compita Japan ISO33k シリーズとは? これまで使用されてきたプロセスアセスメント標準 (ISO/IEC 本稿では以降 ISO15504 と略称する ) は 2006 年に基本セットが完成し 既に 8 年以上が経過しています ISO
 は 2006 年に基本セットが完成し 既に 8 年以上が経過しています ISO") 新アセスメント規格 ISO 33K シリーズの概要 2015 年 4 月 9 日 コンピータジャパン Copyright Compita Japan 2015 2 ISO33k シリーズとは? これまで使用されてきたプロセスアセスメント標準 (ISO/IEC 15504 - 本稿では以降 ISO15504 と略称する ) は 2006 年に基本セットが完成し 既に 8 年以上が経過しています ISO15504
新アセスメント規格 ISO 33K シリーズの概要 2015 年 4 月 9 日 コンピータジャパン Copyright Compita Japan 2015 2 ISO33k シリーズとは? これまで使用されてきたプロセスアセスメント標準 (ISO/IEC 15504 - 本稿では以降 ISO15504 と略称する ) は 2006 年に基本セットが完成し 既に 8 年以上が経過しています ISO15504
Microsoft PowerPoint _札幌_講演資料_ver1.3.ppt
 オープンソースで SOA を実現する JBoss ミドルウェア 2006 年 11 月 29 日 株式会社野村総合研究所情報技術本部ー テクニカルエンジニア松野洋希 240-0005 神奈川県横浜市保土ヶ谷区神戸町 134 目次 1. SOA 概要 2. 3. まとめ Copyright(C) 2006 Nomura Research Institute, Ltd. All rights reserved.
オープンソースで SOA を実現する JBoss ミドルウェア 2006 年 11 月 29 日 株式会社野村総合研究所情報技術本部ー テクニカルエンジニア松野洋希 240-0005 神奈川県横浜市保土ヶ谷区神戸町 134 目次 1. SOA 概要 2. 3. まとめ Copyright(C) 2006 Nomura Research Institute, Ltd. All rights reserved.
DAQ- Middleware の新機能と 実験への展開千代浩司 A,F 濱田英太郎 A,F 井上栄二 A,F 長坂康史 B,F 味村周平 C,F 神徳徹雄 D,F 安藤慶昭 D,F 和田正樹 E 高エネルギー加速器研究機構素粒子原子核研究所 A 広島工業大学 B 大坂大学 C 産業技術総合研究所
 DAQ- Middleware の新機能と 実験への展開千代浩司 A,F 濱田英太郎 A,F 井上栄二 A,F 長坂康史 B,F 味村周平 C,F 神徳徹雄 D,F 安藤慶昭 D,F 和田正樹 E 高エネルギー加速器研究機構素粒子原子核研究所 A 広島工業大学 B 大坂大学 C 産業技術総合研究所 D ( 株 )Bee Beans Technologies E Open- It F もくじ DAQ-
DAQ- Middleware の新機能と 実験への展開千代浩司 A,F 濱田英太郎 A,F 井上栄二 A,F 長坂康史 B,F 味村周平 C,F 神徳徹雄 D,F 安藤慶昭 D,F 和田正樹 E 高エネルギー加速器研究機構素粒子原子核研究所 A 広島工業大学 B 大坂大学 C 産業技術総合研究所 D ( 株 )Bee Beans Technologies E Open- It F もくじ DAQ-
CLUSTERPROXSingleServerSafe SingleServerSafe ご紹介 2007 年 10 月
 CLUSTERPROXSingleServerSafe SingleServerSafe ご紹介 2007 年 10 月 目 次 可用性向上のニーズ XSingleServerSafe のターゲット アピールポイント 監視イメージ 簡単インストール & 設定 製品体系 システム要件 お問い合わせ先 NEC Corp. All Right Reserved. 1 可用性向上のニーズ 可用性の要求は従来の基幹システム中心から
CLUSTERPROXSingleServerSafe SingleServerSafe ご紹介 2007 年 10 月 目 次 可用性向上のニーズ XSingleServerSafe のターゲット アピールポイント 監視イメージ 簡単インストール & 設定 製品体系 システム要件 お問い合わせ先 NEC Corp. All Right Reserved. 1 可用性向上のニーズ 可用性の要求は従来の基幹システム中心から
1. 開発ツールの概要 1.1 OSS の開発ツール本書では OSS( オープンソースソフトウェア ) の開発ツールを使用します 一般に OSS は営利企業ではない特定のグループが開発するソフトウェアで ソースコードが公開されており無償で使用できます OSS は誰でも開発に参加できますが 大規模な
 の開発ツールを使用します 一般に OSS は営利企業ではない特定のグループが開発するソフトウェアで ソースコードが公開されており無償で使用できます OSS は誰でも開発に参加できますが 大規模な") 1. 開発ツールの概要 1.1 OSS の開発ツール本書では OSS( オープンソースソフトウェア ) の開発ツールを使用します 一般に OSS は営利企業ではない特定のグループが開発するソフトウェアで ソースコードが公開されており無償で使用できます OSS は誰でも開発に参加できますが 大規模な OSS の場合 企業などから支援を受けて安定した財政基盤の下で先端的なソフトウェアを開発しています 企業にとっても
1. 開発ツールの概要 1.1 OSS の開発ツール本書では OSS( オープンソースソフトウェア ) の開発ツールを使用します 一般に OSS は営利企業ではない特定のグループが開発するソフトウェアで ソースコードが公開されており無償で使用できます OSS は誰でも開発に参加できますが 大規模な OSS の場合 企業などから支援を受けて安定した財政基盤の下で先端的なソフトウェアを開発しています 企業にとっても
Fujitsu Standard Tool
 スマートシティプロジェクト ( 第 1 回 ) 技術 標準化分科会 ( 第 6 回 ) 通信プロトコルタスクフォース ( 第 6 回 ) IoT 共通基盤技術の確立 実証課題 Ⅱ 効率的かつ安定的な IoT デバイス接続 エリアネットワーク運用管理技術の確立 2016 年 12 月 20 日代表研究機関 : 富士通株式会社共同研究機関 : SMK 株式会社北陸先端科学技術大学院大学 0 はじめに IoT
スマートシティプロジェクト ( 第 1 回 ) 技術 標準化分科会 ( 第 6 回 ) 通信プロトコルタスクフォース ( 第 6 回 ) IoT 共通基盤技術の確立 実証課題 Ⅱ 効率的かつ安定的な IoT デバイス接続 エリアネットワーク運用管理技術の確立 2016 年 12 月 20 日代表研究機関 : 富士通株式会社共同研究機関 : SMK 株式会社北陸先端科学技術大学院大学 0 はじめに IoT
情報連携用語彙データベースと連携するデータ設計 作成支援ツール群の試作及び試用並びに概念モデルの構築 ( 神戸市こども家庭局こども企画育成部 千葉市総務局情報経営部業務改革推進課 川口市企画財政部情報政策課 ) データ構造設計支援ツール設計書 2014 年 9 月 30 日 実施企業 : 株式会社ア
 データ構造設計支援ツール設計書 2014 年 9 月 30 日 実施企業 : 株式会社ア") 情報連携用語彙データベースと連携するデータ設計 作成支援ツール群の試作及び試用並びに概念モデルの構築 ( 神戸市こども家庭局こども企画育成部 千葉市総務局情報経営部業務改革推進課 川口市企画財政部情報政策課 ) データ構造設計支援ツール設計書 2014 年 9 月 30 日 実施企業 : 株式会社アスコエパートナーズ 独立行政法人情報処理推進機構 (IPA) 試作ツールは MIT ライセンスによって提供いたします
情報連携用語彙データベースと連携するデータ設計 作成支援ツール群の試作及び試用並びに概念モデルの構築 ( 神戸市こども家庭局こども企画育成部 千葉市総務局情報経営部業務改革推進課 川口市企画財政部情報政策課 ) データ構造設計支援ツール設計書 2014 年 9 月 30 日 実施企業 : 株式会社アスコエパートナーズ 独立行政法人情報処理推進機構 (IPA) 試作ツールは MIT ライセンスによって提供いたします
PowerPoint プレゼンテーション
 HEMS- 重点機器通信方式検討結果 平成 25 年 5 月 15 日 JSCA スマートハウス ビル標準 事業促進検討会 0 概要 1. 本報告は JSCAスマートハウス ビル標準 事業促進検討会 ( 平成 24 年 9 月開催 ) において各重点機器とHEMSとの間の通信に関しては アプリケーション層のECHONET Liteに加えて 下位層に位置する物理メディアに関しても公知な標準メディアを通信方式に採用することが決定されたことに基づき
HEMS- 重点機器通信方式検討結果 平成 25 年 5 月 15 日 JSCA スマートハウス ビル標準 事業促進検討会 0 概要 1. 本報告は JSCAスマートハウス ビル標準 事業促進検討会 ( 平成 24 年 9 月開催 ) において各重点機器とHEMSとの間の通信に関しては アプリケーション層のECHONET Liteに加えて 下位層に位置する物理メディアに関しても公知な標準メディアを通信方式に採用することが決定されたことに基づき
5-3- 応統合開発環境に関する知識 1 独立行政法人情報処理推進機構
 5-3- 応統合開発環境に関する知識 1 5-3- 応統合開発環境に関する知識 統合開発環境と バグ管理ツール ビルドツールなど様々な開発ツールとの連携や MVCフレームワークなどの Javaフレームワークとの連 Ⅰ. 概要携 C 言語やスクリプト言語など Java 以外の言語での利用方法について学ぶ Ⅱ. 対象専門分野職種共通 Ⅲ. 受講対象者 本カリキュラムの 5-3- 基統合開発環境に関する知識
5-3- 応統合開発環境に関する知識 1 5-3- 応統合開発環境に関する知識 統合開発環境と バグ管理ツール ビルドツールなど様々な開発ツールとの連携や MVCフレームワークなどの Javaフレームワークとの連 Ⅰ. 概要携 C 言語やスクリプト言語など Java 以外の言語での利用方法について学ぶ Ⅱ. 対象専門分野職種共通 Ⅲ. 受講対象者 本カリキュラムの 5-3- 基統合開発環境に関する知識
新技術説明会 様式例
 1 ロボットへの FPGA 導入を 容易化する コンポーネント技術 宇都宮大学大学院工学研究科情報システム科学専攻助教大川猛 2 従来技術とその問題点 FPGA(Field Programmable Gate Array) は 任意のディジタル論理回路をプログラム可能な LSI ソフトウェアでは時間がかかる画像認識処理等を ハードウェア化して 高速化 低消費電力化可能 問題点 FPGA 上の回路設計が難しい
1 ロボットへの FPGA 導入を 容易化する コンポーネント技術 宇都宮大学大学院工学研究科情報システム科学専攻助教大川猛 2 従来技術とその問題点 FPGA(Field Programmable Gate Array) は 任意のディジタル論理回路をプログラム可能な LSI ソフトウェアでは時間がかかる画像認識処理等を ハードウェア化して 高速化 低消費電力化可能 問題点 FPGA 上の回路設計が難しい
ユーザーズマニュアル 有線無線通信ネットワークシステム Wi-Fi 経路情報ビューア 発行日 2017 年 3 月 30 日 公立大学法人会津大学 株式会社東日本計算センター
 ユーザーズマニュアル 有線無線通信ネットワークシステム Wi-Fi 経路情報ビューア 発行日 2017 年 3 月 30 日 公立大学法人会津大学 株式会社東日本計算センター 目次 1 2 3 はじめに...1 1.1 前提知識...1 1.2 システム概要...1 1.3 動作環境...4 1.3.1 Wi-Fi 経路情報監視 RTC...4 1.3.2 Wi-Fi 経路情報ビューア RTC...6
ユーザーズマニュアル 有線無線通信ネットワークシステム Wi-Fi 経路情報ビューア 発行日 2017 年 3 月 30 日 公立大学法人会津大学 株式会社東日本計算センター 目次 1 2 3 はじめに...1 1.1 前提知識...1 1.2 システム概要...1 1.3 動作環境...4 1.3.1 Wi-Fi 経路情報監視 RTC...4 1.3.2 Wi-Fi 経路情報ビューア RTC...6
第 69 回情報処理学会全国大会 情報家電ネットワークの遠隔相互接続のためのネットワークアーキテクチャ 武藤大悟 吉永努 電気通信大学大学院情報システム学研究科 2007/11/28 The 69th National Convention of IPSJ 1
 第 69 回情報処理学会全国大会 情報家電ネットワークの遠隔相互接続のためのネットワークアーキテクチャ 武藤大悟 吉永努 電気通信大学大学院情報システム学研究科 The 69th National Convention of IPSJ 1 発表の流れ 1. 研究の背景と目的 2. 相互接続網の概観 3. 相互接続の動作 4. 実証実験 5. まとめと今後の予定 The 69th National Convention
第 69 回情報処理学会全国大会 情報家電ネットワークの遠隔相互接続のためのネットワークアーキテクチャ 武藤大悟 吉永努 電気通信大学大学院情報システム学研究科 The 69th National Convention of IPSJ 1 発表の流れ 1. 研究の背景と目的 2. 相互接続網の概観 3. 相互接続の動作 4. 実証実験 5. まとめと今後の予定 The 69th National Convention
Oracle SQL Developerの移行機能を使用したOracle Databaseへの移行
 < ここに画像を挿入 > Oracle SQL Developer の移行機能を使用した Oracle Database への移行 以下の事項は 弊社の一般的な製品の方向性に関する概要を説明するものです また 情報提供を唯一の目的とするものであり いかなる契約にも組み込むことはできません 以下の事項は マテリアルやコード 機能を提供することをコミットメント ( 確約 ) するものではないため 購買決定を行う際の判断材料になさらないで下さい
< ここに画像を挿入 > Oracle SQL Developer の移行機能を使用した Oracle Database への移行 以下の事項は 弊社の一般的な製品の方向性に関する概要を説明するものです また 情報提供を唯一の目的とするものであり いかなる契約にも組み込むことはできません 以下の事項は マテリアルやコード 機能を提供することをコミットメント ( 確約 ) するものではないため 購買決定を行う際の判断材料になさらないで下さい
rcp-add-01:アーキテクチャ設計書
 Web 注文管理システム ( サンプル ) 履歴 バージョン 改訂内容 改訂者 改訂日 0.1 新規作成 山下 2010/11/1 目次 1. はじめに 1.1 本文書の目的 1.2 参照資料 / 文献 2. 概説 2.1 アーキテクチャ要件 2.3 対象とする機能要件 ( ユースケース ) 2.4 アーキテクチャ設計方針 2.4 仮定と依存 3. 構造及び構成 3.1 物理配置図 3.2 実行環境
Web 注文管理システム ( サンプル ) 履歴 バージョン 改訂内容 改訂者 改訂日 0.1 新規作成 山下 2010/11/1 目次 1. はじめに 1.1 本文書の目的 1.2 参照資料 / 文献 2. 概説 2.1 アーキテクチャ要件 2.3 対象とする機能要件 ( ユースケース ) 2.4 アーキテクチャ設計方針 2.4 仮定と依存 3. 構造及び構成 3.1 物理配置図 3.2 実行環境
講座内容 第 1 回オープンソースの理念 ( 講義 90 分 ) オープンソースという言葉の定義と概念を理解する あわせてオープンソースの基本的なライセンスを理 解する (1) オープンソースの登場と理念 1. オープンソースの定義 2. ネットスケープ社製品のソースコード公開 3. Open So
 オープンソースという言葉の定義と概念を理解する あわせてオープンソースの基本的なライセンスを理 解する (1) オープンソースの登場と理念 1. オープンソースの定義 2. ネットスケープ社製品のソースコード公開 3. Open So") 調査 5 モデルカリキュラムの提言コースウェア 1.OSS の概要に関する知識 ソフトウェアの新たな開発手法となりソフトウェア業界で大きな影響力 を持つようになったオープンソースについて解説する 本講義では Ⅰ. 概要 オープンソースの登場から現在に至る発展の経緯や代表的なソフト ウェアの特徴を解説する 講義の後半では実際にソフトウェアを PC にインストールしながら演習を行う Ⅱ. 対象専門分野
調査 5 モデルカリキュラムの提言コースウェア 1.OSS の概要に関する知識 ソフトウェアの新たな開発手法となりソフトウェア業界で大きな影響力 を持つようになったオープンソースについて解説する 本講義では Ⅰ. 概要 オープンソースの登場から現在に至る発展の経緯や代表的なソフト ウェアの特徴を解説する 講義の後半では実際にソフトウェアを PC にインストールしながら演習を行う Ⅱ. 対象専門分野
EM10gR3記者発表
 トップダウンのアプリケーション管理を実現する Oracle Enterprise Manager 10g Release 3 日本オラクル株式会社常務執行役員システム製品統括本部長三澤智光 2007 年 4 月 10 日 構成管理 サービス レベル管理 Oracle Enterprise Manager アプリケーション パフォーマンス管理 ライフサイクル管理
トップダウンのアプリケーション管理を実現する Oracle Enterprise Manager 10g Release 3 日本オラクル株式会社常務執行役員システム製品統括本部長三澤智光 2007 年 4 月 10 日 構成管理 サービス レベル管理 Oracle Enterprise Manager アプリケーション パフォーマンス管理 ライフサイクル管理
スライド 1
 第 2 部 RT コンポーネント作成入門 宮本信彦 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センターロボットソフトウェアプラットフォーム研究チーム インストールの確認 (Windows) OpenRTM-aist OpenRTM-aist-1.1.2-RELEASE_x86.msi インストール後に再起動する Visual Studio 2013 以外 (2010 2012 2015)
第 2 部 RT コンポーネント作成入門 宮本信彦 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センターロボットソフトウェアプラットフォーム研究チーム インストールの確認 (Windows) OpenRTM-aist OpenRTM-aist-1.1.2-RELEASE_x86.msi インストール後に再起動する Visual Studio 2013 以外 (2010 2012 2015)
1-1- 基 OSS 概要に関する知識 ソフトウェアの新たな開発手法となりソフトウェア業界で大きな影響力を持つようになったオープンソースについて学習する 本カリキュラム Ⅰ. 概要では オープンソースの登場から現在に至る発展の経緯や代表的なソフトウェアの特徴を理解する 講義の後半では実際にソフトウェ
 1-1- 基 OSS 概要に関する知識 1 1-1- 基 OSS 概要に関する知識 ソフトウェアの新たな開発手法となりソフトウェア業界で大きな影響力を持つようになったオープンソースについて学習する 本カリキュラム Ⅰ. 概要では オープンソースの登場から現在に至る発展の経緯や代表的なソフトウェアの特徴を理解する 講義の後半では実際にソフトウェアを PC にインストールしながら演習を行う Ⅱ. 対象専門分野職種共通
1-1- 基 OSS 概要に関する知識 1 1-1- 基 OSS 概要に関する知識 ソフトウェアの新たな開発手法となりソフトウェア業界で大きな影響力を持つようになったオープンソースについて学習する 本カリキュラム Ⅰ. 概要では オープンソースの登場から現在に至る発展の経緯や代表的なソフトウェアの特徴を理解する 講義の後半では実際にソフトウェアを PC にインストールしながら演習を行う Ⅱ. 対象専門分野職種共通