航空機の縦系モデルに対する、非線形制御の適用例
|
|
|
- こうしろう ありはら
- 5 years ago
- Views:
Transcription
1 制御システム工学研究グルプ 航空機の縦系モデルに対する非線形最適制御の適用例 菊池芳光 * * 名古屋大学 MBD 年 12 月 18 日
2 目次 はじめに 先行研究 提案手法 縦系航空機モデル シミュレーション結果 おわりに
3 はじめに PIO(Pilot Induced Oscillation) Category II 速度飽和 位相遅れ PIO 事故 PIOにより墜落するGripen (Sweden) 縦方向の PIO 現象 (NASA)
4 先行研究 -Windup Anti-windup 補償器 飽和要素をモデルに考慮していない全体の最適性は失われる 安定多様体法 [2] による非線形最適安定問題 [2] + 線形出力レギュレーション問題 [3] 飽和の非線形性を考慮した最適安定化サーボ系としての最適性がない SAAB Compensator [1] SAAB 社 (Gripen) demand Filter 1 Filter 2 To physical rate limiter [1] Sarah L. Gatley. A comparison of rate-limit compensation schemes for pilot-induced-oscillation avoidance [2] Noboru Sakamoto. Case studies on the application of the stable manifold approach for nonlinear optimal control design. Automatica, 2013 [3] Yamagishi S, Sakamoto N, Sato M. 非線形最適制御による PIO を防止する飛行制御系設計. 2013
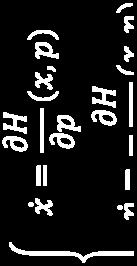
![先行研究 実証試験 :PIO Anti-windup 補償法の実証試験 [4] Pilot Rating](/docs-images/92/109118161/images/5-0.jpg "追従性能の向上 (Flight Condition を設定した試験 ) H anti-windup")
![補償器の有効性を実証 DLR Anti-windup 補償制御 [4] O.Brieger.](/docs-images/92/109118161/images/5-1.jpg "Flight testing of a rate saturation compensation scheme on")
5 先行研究 実証試験 :PIO Anti-windup 補償法の実証試験 [4] Pilot Rating 追従性能の向上 (Flight Condition を設定した試験 ) H anti-windup 補償器の有効性を実証 DLR Anti-windup 補償制御 [4] O.Brieger. Flight testing of a rate saturation compensation scheme on the ATTAS aircraft. 2009
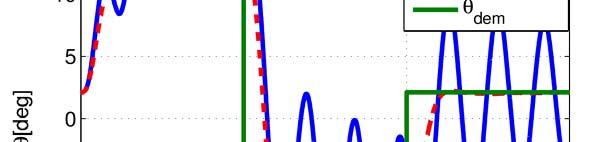
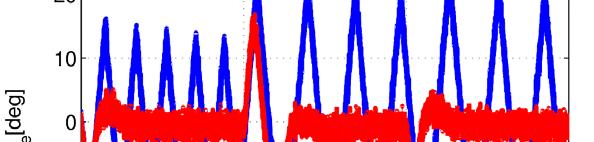
![先行研究 非線形最適制御 安定多様体法 [2] 非線形最適制御系の設計手法](/docs-images/92/109118161/images/6-0.jpg "Hamilton-Jacobi 方程式 (HJE) を解く必要 安定多様体法")
![[2]:HJE の解を精度よく求められる 適用例 : 倒立振子の振り上げ制御](/docs-images/92/109118161/images/6-1.jpg "1 つの非線形コントローラで振り上げ 安定化を行う!")
![名古屋大学大学院工学研究科航空宇宙工学専攻 [2] Noboru](/docs-images/92/109118161/images/6-2.jpg "Sakamoto.")

6 先行研究 非線形最適制御 安定多様体法 [2] 非線形最適制御系の設計手法 Hamilton-Jacobi 方程式 (HJE) を解く必要 安定多様体法 [2]:HJE の解を精度よく求められる 適用例 : 倒立振子の振り上げ制御 1 つの非線形コントローラで振り上げ 安定化を行う! 名古屋大学大学院工学研究科航空宇宙工学専攻 [2] Noboru Sakamoto. Case studies on the application of the stable manifold approach for nonlinear optimal control design. Automatica, 2013 制御システム工学研究グループ
7 目次 はじめに 先行研究 提案手法 縦系航空機モデル シミュレーション結果 おわりに
8 提案手法 概要 提案手法 中心安定多様体法 [5] : 速度飽和をモデルに考慮した非線形最適サーボ系の設計 非線形システム + 速度飽和 評価関数 速度飽和はそのままでは扱いづらい 航空機系の場合, ピッチレート [5] Sakamoto N, Rehak B. Iterative methods to compute center and center-stable manifolds with application to the optimal output regulation problem. 2011
9 提案手法 拡大係数系 速度飽和の近似 Saturation 拡大系
10 縦系航空機モデル 制御系の構成 Pilot model ler Actuator model Aircraft model Observer 15 F-16 短周期近似モデル [6] [de eg] 10 0 ft m/s rad rad time [s] 0 rad/s rad ノミナルな飛行条件 [6] Stevens, Lewis. Aircraft and Simulation. 1992
11 縦系航空機モデル パイロットモデル OLOP(Open Loop Onset Point) 基準 [7] パイロット+ 航空機系制御器の性能評価法パイロットモデル PIO に陥った時, 定数ゲインとなると仮定 OLOP 基準は非線形特性も含めて評価 PIO 発生時のパイロットモデルは定数ゲインで表現できる. Pilot model ler Actuator model Aircraft model Observer [7] H. Duda. Prediction of Adverse Aircraft-Pilot Coupling in the Roll Axis due to Rate Limiting in Flight. 1996
 線形モデル : 一次遅れ系近似")

12 縦系航空機モデル アクチュエータモデル アクチュエータ (F-16 モデル ) 線形モデル : 一次遅れ系近似 速度飽和特性を考慮した近似モデル 航空機 + アクチュエータモデルの拡大系 状態量 :1 次元増加 提案手法は速度飽和を設計モデルに考慮
13 縦系航空機モデル 拡大系 拡大系 : 航空機モデル + アクチュエータモデル ( 速度飽和 ) 追従誤差 外部システム ( 目標値を生成するシステム ) 評価関数 評価関数を最小化する非線形最適制御系の設計

14 縦系航空機モデル 評価関数の決定 評価関数 航空機の操縦性評価法 黄色の領域内 : 飛行性能が最も良い 線形領域における性能評価 + 非線形領域の性能向上 [8] Stevens Lewis. Aircraft and Simulation. 1992






15 縦系航空機モデル 中心安定多様体法の適用 Hamilton-Jacobi 方程式 等価 Hamilton の正準方程式 ブロック対角化 積分漸化式 繰り返し数値計算 非線形最適フィードバックコントローラ
16 目次 はじめに 先行研究 提案手法 縦系航空機モデル シミュレーション結果 おわりに

17 シミュレーション結果 1 速度飽和の影響が見られる 線形制御器も追従を達成


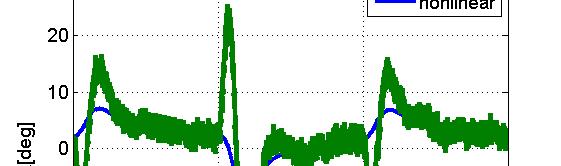
18 シミュレーション結果 2 ピッチ角コマンドが大きい 線形制御器は発散 Anti-windup, 非線形最適サーボ系は追従を達成

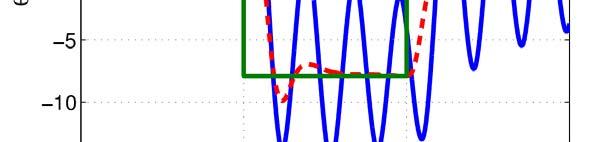
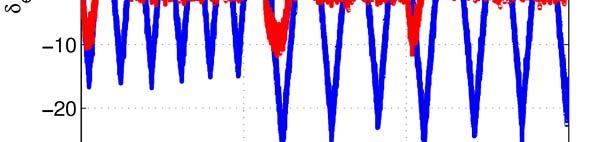
19 シミュレーション結果 3 ロバスト性能評価
20 おわりに 縦系 PIO 既存の解決法 最適性を考慮した非線形最適サーボ系の設計を行った研究はない 提案手法速度飽和を含む系に対する非線形最適サーボ系設計 アクチュエータの速度飽和を1 次遅れと飽和で近似 中心安定多様体法 HJ 方程式を解くことで非線形最適サーボ系設計ロバスト性能の向上今後の課題 JAXAの実証試験機での検証
21
22
Microsoft PowerPoint - 6.PID制御.pptx
 プロセス制御工学 6.PID 制御 京都大学 加納学 Division of Process Control & Process Systems Engineering Department of Chemical Engineering, Kyoto University manabu@cheme.kyoto-u.ac.jp http://www-pse.cheme.kyoto-u.ac.jp/~kano/
プロセス制御工学 6.PID 制御 京都大学 加納学 Division of Process Control & Process Systems Engineering Department of Chemical Engineering, Kyoto University manabu@cheme.kyoto-u.ac.jp http://www-pse.cheme.kyoto-u.ac.jp/~kano/
Microsoft PowerPoint - chap8.ppt
 第 8 章 : フィードバック制御系の設計法 第 8 章 : フィードバック制御系の設計法 8. 設計手順と性能評価 キーワード : 設計手順, 性能評価 8. 補償による制御系設計 キーワード : ( 比例 ),( 積分 ),( 微分 ) 学習目標 : 一般的な制御系設計における手順と制御系の性能評価について学ぶ. 学習目標 : 補償の有効性について理解し, その設計手順を習得する. 第 8 章
第 8 章 : フィードバック制御系の設計法 第 8 章 : フィードバック制御系の設計法 8. 設計手順と性能評価 キーワード : 設計手順, 性能評価 8. 補償による制御系設計 キーワード : ( 比例 ),( 積分 ),( 微分 ) 学習目標 : 一般的な制御系設計における手順と制御系の性能評価について学ぶ. 学習目標 : 補償の有効性について理解し, その設計手順を習得する. 第 8 章
PowerPoint プレゼンテーション
 回転型クレーン / 倒立振子の制御 回転型クレーンの制御 状態方程式 コントローラ設計 ( 極配置法 ) コントローラ設計 ( 最適レギュレータ ) 回転型倒立振子の制御 状態方程式 コントローラ設計 コントローラの形式 : 状態フィードバック P-D コントローラ アームの P-D 振子の P-D 目標値 状態フィードバック制御 回転型クレーン コントローラ で 状態フィードバック制御 回転型クレーン
回転型クレーン / 倒立振子の制御 回転型クレーンの制御 状態方程式 コントローラ設計 ( 極配置法 ) コントローラ設計 ( 最適レギュレータ ) 回転型倒立振子の制御 状態方程式 コントローラ設計 コントローラの形式 : 状態フィードバック P-D コントローラ アームの P-D 振子の P-D 目標値 状態フィードバック制御 回転型クレーン コントローラ で 状態フィードバック制御 回転型クレーン
Microsoft PowerPoint - ce07-12c.ppt
 制御工学 第 8 章 : フィードバック制御系の設計法 8. 設計手順と性能評価キーワード : 設計手順, 性能評価 8. 補償による制御系設計キーワード : ( 比例 ),( 積分 ),( 微分 ) 8.3 進み 遅れ補償による制御系設計キーワード : 遅れ補償, 進み補償 学習目標 : 一般的な制御系設計における手順と制御系の性能評価について学ぶ. ループ整形の考え方を用いて, 遅れ補償, 進み補償による制御系設計を習得する.
制御工学 第 8 章 : フィードバック制御系の設計法 8. 設計手順と性能評価キーワード : 設計手順, 性能評価 8. 補償による制御系設計キーワード : ( 比例 ),( 積分 ),( 微分 ) 8.3 進み 遅れ補償による制御系設計キーワード : 遅れ補償, 進み補償 学習目標 : 一般的な制御系設計における手順と制御系の性能評価について学ぶ. ループ整形の考え方を用いて, 遅れ補償, 進み補償による制御系設計を習得する.
Microsoft PowerPoint - ce07-13b.ppt
 制御工学 3 第 8 章 : フィードバック制御系の設計法 8. 設計手順と性能評価キーワード : 設計手順, 性能評価 8. ID 補償による制御系設計キーワード : ( 比例 ),I( 積分 ),D( 微分 ) 8.3 進み 遅れ補償による制御系設計キーワード : 遅れ補償, 進み補償 学習目標 : 一般的な制御系設計における手順と制御系の性能評価について学ぶ. ループ整形の考え方を用いて, 遅れ補償,
制御工学 3 第 8 章 : フィードバック制御系の設計法 8. 設計手順と性能評価キーワード : 設計手順, 性能評価 8. ID 補償による制御系設計キーワード : ( 比例 ),I( 積分 ),D( 微分 ) 8.3 進み 遅れ補償による制御系設計キーワード : 遅れ補償, 進み補償 学習目標 : 一般的な制御系設計における手順と制御系の性能評価について学ぶ. ループ整形の考え方を用いて, 遅れ補償,
Introduction to System Identification
 y(t) モデルベースデザイン 制御系設計のためのシステム同定入門 s 2 Teja Muppirala t s 2 3s 4 2012 The MathWorks, Inc. 1 モデルベースデザイン 正確なモデルがあることが大前提 実行可能な仕様書 シミュレーションによる設計 モデル 連続したテスト 検証 コード生成による実装 2 動的システムのモデリング モデリング手法 第一原理モデリング データドリブンモデリング
y(t) モデルベースデザイン 制御系設計のためのシステム同定入門 s 2 Teja Muppirala t s 2 3s 4 2012 The MathWorks, Inc. 1 モデルベースデザイン 正確なモデルがあることが大前提 実行可能な仕様書 シミュレーションによる設計 モデル 連続したテスト 検証 コード生成による実装 2 動的システムのモデリング モデリング手法 第一原理モデリング データドリブンモデリング
運動解析プログラム
 安全な飛行制御系とは () - 根軌跡で極の動きを確認しておけば安心 KMAP( ケーマッフ ) 研究会 (*) 代表片柳亮二. フィードバック制御系の安定化領域を広げる工夫安全な飛行制御則とは () で説明したように, フィードバック制御系はゲインを高くしていく不安定 と必ず不安定となることを説明した. このよう な性質を持つフィードバック制御系を安全に利安定がよく用していくには, ゲインを高くしていった時の応答も速い根軌跡が,
安全な飛行制御系とは () - 根軌跡で極の動きを確認しておけば安心 KMAP( ケーマッフ ) 研究会 (*) 代表片柳亮二. フィードバック制御系の安定化領域を広げる工夫安全な飛行制御則とは () で説明したように, フィードバック制御系はゲインを高くしていく不安定 と必ず不安定となることを説明した. このよう な性質を持つフィードバック制御系を安全に利安定がよく用していくには, ゲインを高くしていった時の応答も速い根軌跡が,
Microsoft Word - 実験テキスト2005.doc
 7. プロセスの動特性 [Ⅰ] 目的液レベル制御実験および同シミュレーションを通して ステップ応答に基づくプロセス伝達関数の同定方法 ステップ応答法による PI 制御パラメータの調整方法 および PI 制御パラメータが制御性能へ与える影響について習熟する さらに 制御シミュレーションを通して むだ時間を有するプロセスに対するスミス補償型制御の有効性を確認する [Ⅱ] 理論 2.1 ステップ応答実験による伝達関数の同定
7. プロセスの動特性 [Ⅰ] 目的液レベル制御実験および同シミュレーションを通して ステップ応答に基づくプロセス伝達関数の同定方法 ステップ応答法による PI 制御パラメータの調整方法 および PI 制御パラメータが制御性能へ与える影響について習熟する さらに 制御シミュレーションを通して むだ時間を有するプロセスに対するスミス補償型制御の有効性を確認する [Ⅱ] 理論 2.1 ステップ応答実験による伝達関数の同定
航空機の運動方程式
 過渡応答 定常応答 線形時不変のシステムの入出力関係は伝達関数で表された. システムに対する基本的な 入力に対する過渡応答と定常応答の特性を理解する必要がある.. 伝達関数の応答. 一般的なシステムの応答システムの入力の変化に対する出力の変化の様相を応答 ( 時間応答, 動的応答 ) という. 過渡応答 システムで, 入力がある定常状態から別の定常状態に変化したとき, 出力が変化後の定常状態に達するまでの応答.
過渡応答 定常応答 線形時不変のシステムの入出力関係は伝達関数で表された. システムに対する基本的な 入力に対する過渡応答と定常応答の特性を理解する必要がある.. 伝達関数の応答. 一般的なシステムの応答システムの入力の変化に対する出力の変化の様相を応答 ( 時間応答, 動的応答 ) という. 過渡応答 システムで, 入力がある定常状態から別の定常状態に変化したとき, 出力が変化後の定常状態に達するまでの応答.
Microsoft PowerPoint - H22制御工学I-10回.ppt
 制御工学 I 第 回 安定性 ラウス, フルビッツの安定判別 平成 年 6 月 日 /6/ 授業の予定 制御工学概論 ( 回 ) 制御技術は現在様々な工学分野において重要な基本技術となっている 工学における制御工学の位置づけと歴史について説明する さらに 制御システムの基本構成と種類を紹介する ラプラス変換 ( 回 ) 制御工学 特に古典制御ではラプラス変換が重要な役割を果たしている ラプラス変換と逆ラプラス変換の定義を紹介し
制御工学 I 第 回 安定性 ラウス, フルビッツの安定判別 平成 年 6 月 日 /6/ 授業の予定 制御工学概論 ( 回 ) 制御技術は現在様々な工学分野において重要な基本技術となっている 工学における制御工学の位置づけと歴史について説明する さらに 制御システムの基本構成と種類を紹介する ラプラス変換 ( 回 ) 制御工学 特に古典制御ではラプラス変換が重要な役割を果たしている ラプラス変換と逆ラプラス変換の定義を紹介し
システム工学実験 パラメータ推定手順
 システム工学実験パラメータ推定手順 大木健太郎 2014/11/14 2014 年度システム工学実験 : フレキシブルリンク 1 アウトライン 1. 線形システムと周波数情報 2. パラメータ推定 3. 実際の手順 2014/11/14 2014 年度システム工学実験 : フレキシブルリンク 2 線形時不変システムと伝達関数 入力と出力の関係が線形な定係数微分方程式で与えられるとき, この方程式を線形時不変システムという
システム工学実験パラメータ推定手順 大木健太郎 2014/11/14 2014 年度システム工学実験 : フレキシブルリンク 1 アウトライン 1. 線形システムと周波数情報 2. パラメータ推定 3. 実際の手順 2014/11/14 2014 年度システム工学実験 : フレキシブルリンク 2 線形時不変システムと伝達関数 入力と出力の関係が線形な定係数微分方程式で与えられるとき, この方程式を線形時不変システムという
Microsoft Word - NumericalComputation.docx
 数値計算入門 武尾英哉. 離散数学と数値計算 数学的解法の中には理論計算では求められないものもある. 例えば, 定積分は, まずは積分 ( 被積分関数の原始関数をみつけること できなければ値を得ることはできない. また, ある関数の所定の値における微分値を得るには, まずその関数の微分ができなければならない. さらに代数方程式の解を得るためには, 解析的に代数方程式を解く必要がある. ところが, これらは必ずしも解析的に導けるとは限らない.
数値計算入門 武尾英哉. 離散数学と数値計算 数学的解法の中には理論計算では求められないものもある. 例えば, 定積分は, まずは積分 ( 被積分関数の原始関数をみつけること できなければ値を得ることはできない. また, ある関数の所定の値における微分値を得るには, まずその関数の微分ができなければならない. さらに代数方程式の解を得るためには, 解析的に代数方程式を解く必要がある. ところが, これらは必ずしも解析的に導けるとは限らない.
Microsoft Word - 知能機械実験・実習プリント_ docx
 018 年 5 月 1 日版 知能機械実験 実習 Ⅳ Ⅳ-1. 制御工学実験 1. 実験概要と目的 ロボットをはじめとするメカトロニクス機器において 高度な動作を実現している背景には 制御技術がある 制御とは 物体の運動を意図した位置や速度で動かす技術である 精度の高い制御を行うためには 正しく制御理論を理解した上に 物体の運動を正しく解析し モデル化する技術や 制御を行うためのパラメータの同定方法を身につける必要がある
018 年 5 月 1 日版 知能機械実験 実習 Ⅳ Ⅳ-1. 制御工学実験 1. 実験概要と目的 ロボットをはじめとするメカトロニクス機器において 高度な動作を実現している背景には 制御技術がある 制御とは 物体の運動を意図した位置や速度で動かす技術である 精度の高い制御を行うためには 正しく制御理論を理解した上に 物体の運動を正しく解析し モデル化する技術や 制御を行うためのパラメータの同定方法を身につける必要がある
Microsoft PowerPoint pptx
 4.2 小信号パラメータ 1 電圧利得をどのように求めるか 電圧ー電流変換 入力信号の変化 dv BE I I e 1 v be の振幅から i b を求めるのは難しい? 電流増幅 電流ー電圧変換 di B di C h FE 電流と電圧の関係が指数関数になっているのが問題 (-RC), ただし RL がない場合 dv CE 出力信号の変化 2 pn 接合の非線形性への対処 I B 直流バイアスに対する抵抗
4.2 小信号パラメータ 1 電圧利得をどのように求めるか 電圧ー電流変換 入力信号の変化 dv BE I I e 1 v be の振幅から i b を求めるのは難しい? 電流増幅 電流ー電圧変換 di B di C h FE 電流と電圧の関係が指数関数になっているのが問題 (-RC), ただし RL がない場合 dv CE 出力信号の変化 2 pn 接合の非線形性への対処 I B 直流バイアスに対する抵抗
DVIOUT
 最適レギュレータ 松尾研究室資料 第 最適レギュレータ 節時不変型無限時間最適レギュレータ 状態フィードバックの可能な場合の無限時間問題における最適レギュレータについて確定系について説明する. ここで, レギュレータとは状態量をゼロにするようなコントローラのことである. なぜ, 無限時間問題のみを述べるかという理由は以下のとおりである. 有限時間の最適レギュレータ問題の場合の最適フィードバックゲインは微分方程式の解から構成される時間関数として表現される.
最適レギュレータ 松尾研究室資料 第 最適レギュレータ 節時不変型無限時間最適レギュレータ 状態フィードバックの可能な場合の無限時間問題における最適レギュレータについて確定系について説明する. ここで, レギュレータとは状態量をゼロにするようなコントローラのことである. なぜ, 無限時間問題のみを述べるかという理由は以下のとおりである. 有限時間の最適レギュレータ問題の場合の最適フィードバックゲインは微分方程式の解から構成される時間関数として表現される.
Microsoft PowerPoint - H22制御工学I-2回.ppt
 制御工学 I 第二回ラプラス変換 平成 年 4 月 9 日 /4/9 授業の予定 制御工学概論 ( 回 ) 制御技術は現在様々な工学分野において重要な基本技術となっている 工学における制御工学の位置づけと歴史について説明する さらに 制御システムの基本構成と種類を紹介する ラプラス変換 ( 回 ) 制御工学 特に古典制御ではラプラス変換が重要な役割を果たしている ラプラス変換と逆ラプラス変換の定義を紹介し
制御工学 I 第二回ラプラス変換 平成 年 4 月 9 日 /4/9 授業の予定 制御工学概論 ( 回 ) 制御技術は現在様々な工学分野において重要な基本技術となっている 工学における制御工学の位置づけと歴史について説明する さらに 制御システムの基本構成と種類を紹介する ラプラス変換 ( 回 ) 制御工学 特に古典制御ではラプラス変換が重要な役割を果たしている ラプラス変換と逆ラプラス変換の定義を紹介し
板バネの元は固定にします x[0] は常に0です : > x[0]:=t->0; (1.2) 初期値の設定をします 以降 for 文処理のため 空集合を生成しておきます : > init:={}: 30 番目 ( 端 ) 以外については 初期高さおよび初速は全て 0 にします 初期高さを x[j]
![板バネの元は固定にします x[0] は常に0です : > x[0]:=t->0; (1.2) 初期値の設定をします 以降 for 文処理のため 空集合を生成しておきます : > init:={}: 30 番目 ( 端 ) 以外については 初期高さおよび初速は全て 0 にします 初期高さを x[j]](/thumbs/93/112208237.jpg "板バネの元は固定にします x[0] は常に0です : > x[0]:=t->0; (1.2) 初期値の設定をします 以降 for 文処理のため 空集合を生成しておきます : > init:={}: 30 番目 ( 端 ) 以外については 初期高さおよび初速は全て 0 にします 初期高さを x[j]") 機械振動論固有振動と振動モード 本事例では 板バネを解析対象として 数値計算 ( シミュレーション ) と固有値問題を解くことにより振動解析を行っています 実際の振動は振動モードと呼ばれる特定パターンが複数組み合わされますが 各振動モードによる振動に分けて解析を行うことでその現象を捉え易くすることが出来ます そこで 本事例では アニメーションを活用した解析結果の可視化も取り入れています 板バネの振動
機械振動論固有振動と振動モード 本事例では 板バネを解析対象として 数値計算 ( シミュレーション ) と固有値問題を解くことにより振動解析を行っています 実際の振動は振動モードと呼ばれる特定パターンが複数組み合わされますが 各振動モードによる振動に分けて解析を行うことでその現象を捉え易くすることが出来ます そこで 本事例では アニメーションを活用した解析結果の可視化も取り入れています 板バネの振動
インターリーブADCでのタイミングスキュー影響のデジタル補正技術
 1 インターリーブADCでのタイミングスキュー影響のデジタル補正技術 浅見幸司 黒沢烈士 立岩武徳 宮島広行 小林春夫 ( 株 ) アドバンテスト 群馬大学 2 目次 1. 研究背景 目的 2. インターリーブADCの原理 3. チャネル間ミスマッチの影響 3.1. オフセットミスマッチの影響 3.2. ゲインミスマッチの影響 3.3. タイミングスキューの影響 4. 提案手法 4.1. インターリーブタイミングミスマッチ補正フィルタ
1 インターリーブADCでのタイミングスキュー影響のデジタル補正技術 浅見幸司 黒沢烈士 立岩武徳 宮島広行 小林春夫 ( 株 ) アドバンテスト 群馬大学 2 目次 1. 研究背景 目的 2. インターリーブADCの原理 3. チャネル間ミスマッチの影響 3.1. オフセットミスマッチの影響 3.2. ゲインミスマッチの影響 3.3. タイミングスキューの影響 4. 提案手法 4.1. インターリーブタイミングミスマッチ補正フィルタ
A Precise Calculation Method of the Gradient Operator in Numerical Computation with the MPS Tsunakiyo IRIBE and Eizo NAKAZA A highly precise numerical
 A Precise Calculation Method of the Gradient Operator in Numerical Computation with the MPS Tsunakiyo IRIBE and Eizo NAKAZA A highly precise numerical calculation method of the gradient as a differential
A Precise Calculation Method of the Gradient Operator in Numerical Computation with the MPS Tsunakiyo IRIBE and Eizo NAKAZA A highly precise numerical calculation method of the gradient as a differential
集中理論談話会 #9 Bhat, C.R., Sidharthan, R.: A simulation evaluation of the maximum approximate composite marginal likelihood (MACML) estimator for mixed mu
 estimator for mixed mu") 集中理論談話会 #9 Bhat, C.R., Sidharthan, R.: A simulation evaluation of the maximum approximate composite marginal likelihood (MACML) estimator for mixed multinomial probit models, Transportation Research Part
集中理論談話会 #9 Bhat, C.R., Sidharthan, R.: A simulation evaluation of the maximum approximate composite marginal likelihood (MACML) estimator for mixed multinomial probit models, Transportation Research Part
PowerPoint プレゼンテーション
 PID 制御の基礎 ON/OFF 制御 PID 制御 P 制御 過渡特性を改善しよう PD 制御と P-D 制御 定常特性を改善しよう PI-D 制御 4.2 節 I-PD 制御 角度制御実験装置 0 [deg] 30 [deg] 角度制御実験装置 目標値 コントローラ ( マイコン ) アクチュエータ (DC モータ ) 制御対象 ( アーム ) 角度 センサ ( ロータリエンコーダ ) ON/OFF
PID 制御の基礎 ON/OFF 制御 PID 制御 P 制御 過渡特性を改善しよう PD 制御と P-D 制御 定常特性を改善しよう PI-D 制御 4.2 節 I-PD 制御 角度制御実験装置 0 [deg] 30 [deg] 角度制御実験装置 目標値 コントローラ ( マイコン ) アクチュエータ (DC モータ ) 制御対象 ( アーム ) 角度 センサ ( ロータリエンコーダ ) ON/OFF
Microsoft PowerPoint - EXPO2012_AKASAKA_rev.2.pptx
 リアルタイム制御環境を活用したフィードバック制御系設計実践 MathWorks Japan アプリケーションエンジニアリング部アプリケーションエンジニア赤阪大介 212 The MathWorks, Inc. 1 本講演では.. ギャップ? - フィードバック制御器の設計 設計 シミュレーション リアルタイム制御テスト ( ラピッドプロトタイピング ) 実機環境を活用し 制御系設計を効率的に行うには?
リアルタイム制御環境を活用したフィードバック制御系設計実践 MathWorks Japan アプリケーションエンジニアリング部アプリケーションエンジニア赤阪大介 212 The MathWorks, Inc. 1 本講演では.. ギャップ? - フィードバック制御器の設計 設計 シミュレーション リアルタイム制御テスト ( ラピッドプロトタイピング ) 実機環境を活用し 制御系設計を効率的に行うには?
2018 年 5 月 31 日版 知能機械実験 実習 Ⅳ Ⅳ-1. 制御工学実験 1. 実験概要と目的 ロボットをはじめとするメカトロニクス機器において 高度な動作を実現している背景には 制御技術がある 制御とは 物体の運動を意図した位置や速度で動かす技術である 精度の高い制御を行うためには 正しく
 2018 年 5 月 31 日版 知能機械実験 実習 Ⅳ Ⅳ-1. 制御工学実験 1. 実験概要と目的 ロボットをはじめとするメカトロニクス機器において 高度な動作を実現している背景には 制御技術がある 制御とは 物体の運動を意図した位置や速度で動かす技術である 精度の高い制御を行うためには 正しく制御理論を理解した上に 物体の運動を正しく解析し モデル化する技術や 制御を行うためのパラメータの同定方法を身につける必要がある
2018 年 5 月 31 日版 知能機械実験 実習 Ⅳ Ⅳ-1. 制御工学実験 1. 実験概要と目的 ロボットをはじめとするメカトロニクス機器において 高度な動作を実現している背景には 制御技術がある 制御とは 物体の運動を意図した位置や速度で動かす技術である 精度の高い制御を行うためには 正しく制御理論を理解した上に 物体の運動を正しく解析し モデル化する技術や 制御を行うためのパラメータの同定方法を身につける必要がある
八戸工業大学紀要 No.30
 バックステッピング方式による電子スロットルの非線形制御 林寛 張揚 栗原伸夫 Electronic throttle control based on back-stepping approach Hiroshi Hayashi, Yang Zhang and Nobuo Kurihara ABSTRACT An application of the back-stepping control theory
バックステッピング方式による電子スロットルの非線形制御 林寛 張揚 栗原伸夫 Electronic throttle control based on back-stepping approach Hiroshi Hayashi, Yang Zhang and Nobuo Kurihara ABSTRACT An application of the back-stepping control theory
Microsoft PowerPoint - 9.Analog.ppt
 9 章 CMOS アナログ基本回路 1 デジタル情報とアナログ情報 アナログ情報 大きさ デジタル信号アナログ信号 デジタル情報 時間 情報処理システムにおけるアナログ技術 通信 ネットワークの高度化 無線通信, 高速ネットワーク, 光通信 ヒューマンインタフェース高度化 人間の視覚, 聴覚, 感性にせまる 脳型コンピュータの実現 テ シ タルコンヒ ュータと相補的な情報処理 省エネルギーなシステム
9 章 CMOS アナログ基本回路 1 デジタル情報とアナログ情報 アナログ情報 大きさ デジタル信号アナログ信号 デジタル情報 時間 情報処理システムにおけるアナログ技術 通信 ネットワークの高度化 無線通信, 高速ネットワーク, 光通信 ヒューマンインタフェース高度化 人間の視覚, 聴覚, 感性にせまる 脳型コンピュータの実現 テ シ タルコンヒ ュータと相補的な情報処理 省エネルギーなシステム
大気環境シミュレーション
 第 3 回 (Q) 各自 eelを用いて 次の漸化式 + = の解の初期値依存性を調べよ.は50まで () 0 =.0 () 0 =.5 (3) 0 =.0 締切 04 年 月 6 日 ( 月 ) 夕方まで 提出先 347 室 オーバーフロー失敗ゴメンなさい (Q) 各自 eelを用いて 次の漸化式 + = の解の初期値依存性を調べよ.は50まで () 0 =.330 () 0 =.33 (3) 0
第 3 回 (Q) 各自 eelを用いて 次の漸化式 + = の解の初期値依存性を調べよ.は50まで () 0 =.0 () 0 =.5 (3) 0 =.0 締切 04 年 月 6 日 ( 月 ) 夕方まで 提出先 347 室 オーバーフロー失敗ゴメンなさい (Q) 各自 eelを用いて 次の漸化式 + = の解の初期値依存性を調べよ.は50まで () 0 =.330 () 0 =.33 (3) 0
(Microsoft Word - PLL\203f\203\202\216\221\227\277-2-\203T\203\223\203v\203\213.doc)
") ディジタル PLL 理論と実践 有限会社 SP システム 目次 - 目次 1. はじめに...3 2. アナログ PLL...4 2.1 PLL の系...4 2.1.1 位相比較器...4 2.1.2 ループフィルタ...4 2.1.3 電圧制御発振器 (VCO)...4 2.1.4 分周器...5 2.2 ループフィルタ抜きの PLL 伝達関数...5 2.3 ループフィルタ...6 2.3.1
ディジタル PLL 理論と実践 有限会社 SP システム 目次 - 目次 1. はじめに...3 2. アナログ PLL...4 2.1 PLL の系...4 2.1.1 位相比較器...4 2.1.2 ループフィルタ...4 2.1.3 電圧制御発振器 (VCO)...4 2.1.4 分周器...5 2.2 ループフィルタ抜きの PLL 伝達関数...5 2.3 ループフィルタ...6 2.3.1

航空機の運動方程式
 可制御性 可観測性. 可制御性システムの状態を, 適切な操作によって, 有限時間内に, 任意の状態から別の任意の状態に移動させることができるか否かという特性を可制御性という. 可制御性を有するシステムに対し, システムは可制御である, 可制御なシステム という言い方をする. 状態方程式, 出力方程式が以下で表されるn 次元 m 入力 r 出力線形時不変システム x Ax u y x Du () に対し,
可制御性 可観測性. 可制御性システムの状態を, 適切な操作によって, 有限時間内に, 任意の状態から別の任意の状態に移動させることができるか否かという特性を可制御性という. 可制御性を有するシステムに対し, システムは可制御である, 可制御なシステム という言い方をする. 状態方程式, 出力方程式が以下で表されるn 次元 m 入力 r 出力線形時不変システム x Ax u y x Du () に対し,
4 月 東京都立蔵前工業高等学校平成 30 年度教科 ( 工業 ) 科目 ( プログラミング技術 ) 年間授業計画 教科 :( 工業 ) 科目 :( プログラミング技術 ) 単位数 : 2 単位 対象学年組 :( 第 3 学年電気科 ) 教科担当者 :( 高橋寛 三枝明夫 ) 使用教科書 :( プロ
 科目 ( プログラミング技術 ) 年間授業計画 教科 :( 工業 ) 科目 :( プログラミング技術 ) 単位数 : 2 単位 対象学年組 :( 第 3 学年電気科 ) 教科担当者 :( 高橋寛 三枝明夫 ) 使用教科書 :( プロ") 4 東京都立蔵前工業高等学校平成 30 年度教科 ( 工業 ) 科目 ( プログラミング技術 ) 年間授業計画 教科 :( 工業 ) 科目 :( プログラミング技術 ) 単位数 : 2 単位 対象学年組 :( 第 3 学年電気科 ) 教科担当者 :( 高橋寛 三枝明夫 ) 使用教科書 :( プログラミング技術 工業 333 実教出版 ) 共通 : 科目 プログラミング技術 のオリエンテーション プログラミング技術は
4 東京都立蔵前工業高等学校平成 30 年度教科 ( 工業 ) 科目 ( プログラミング技術 ) 年間授業計画 教科 :( 工業 ) 科目 :( プログラミング技術 ) 単位数 : 2 単位 対象学年組 :( 第 3 学年電気科 ) 教科担当者 :( 高橋寛 三枝明夫 ) 使用教科書 :( プログラミング技術 工業 333 実教出版 ) 共通 : 科目 プログラミング技術 のオリエンテーション プログラミング技術は
PowerPoint プレゼンテーション
 復習 ) 時系列のモデリング ~a. 離散時間モデル ~ y k + a 1 z 1 y k + + a na z n ay k = b 0 u k + b 1 z 1 u k + + b nb z n bu k y k = G z 1 u k = B(z 1 ) A(z 1 u k ) ARMA モデル A z 1 B z 1 = 1 + a 1 z 1 + + a na z n a = b 0
復習 ) 時系列のモデリング ~a. 離散時間モデル ~ y k + a 1 z 1 y k + + a na z n ay k = b 0 u k + b 1 z 1 u k + + b nb z n bu k y k = G z 1 u k = B(z 1 ) A(z 1 u k ) ARMA モデル A z 1 B z 1 = 1 + a 1 z 1 + + a na z n a = b 0
フィードバック ~ 様々な電子回路の性質 ~ 実験 (1) 目的実験 (1) では 非反転増幅器の増幅率や位相差が 回路を構成する抵抗値や入力信号の周波数によってどのように変わるのかを調べる 実験方法 図 1 のような自由振動回路を組み オペアンプの + 入力端子を接地したときの出力電圧 が 0 と
 目的実験 (1) では 非反転増幅器の増幅率や位相差が 回路を構成する抵抗値や入力信号の周波数によってどのように変わるのかを調べる 実験方法 図 1 のような自由振動回路を組み オペアンプの + 入力端子を接地したときの出力電圧 が 0 と") フィードバック ~ 様々な電子回路の性質 ~ 実験 (1) 目的実験 (1) では 非反転増幅器の増幅率や位相差が 回路を構成する抵抗値や入力信号の周波数によってどのように変わるのかを調べる 実験方法 図 1 のような自由振動回路を組み オペアンプの + 入力端子を接地したときの出力電圧 が 0 となるように半固定抵抗器を調整する ( ゼロ点調整のため ) 図 1 非反転増幅器 2010 年度版物理工学実験法
フィードバック ~ 様々な電子回路の性質 ~ 実験 (1) 目的実験 (1) では 非反転増幅器の増幅率や位相差が 回路を構成する抵抗値や入力信号の周波数によってどのように変わるのかを調べる 実験方法 図 1 のような自由振動回路を組み オペアンプの + 入力端子を接地したときの出力電圧 が 0 となるように半固定抵抗器を調整する ( ゼロ点調整のため ) 図 1 非反転増幅器 2010 年度版物理工学実験法
CBRC CBRC DNA
 2001 3 2001 4 2004 4 CBRC CBRC DNA 生命現象のシステム的理解のために 生命の単位 細胞は非常に複雑 システム バイオロジー 生命現象を記述するモデル 細胞はいつ なにをするのか 生命現象は遺伝子が制御している 遺伝子ネットワーク 遺伝子発現を記述するモデル 構造解明 医療技術 創薬 シミュレーション 2001 2002 2003 2004 2005 1. 2001-2005
2001 3 2001 4 2004 4 CBRC CBRC DNA 生命現象のシステム的理解のために 生命の単位 細胞は非常に複雑 システム バイオロジー 生命現象を記述するモデル 細胞はいつ なにをするのか 生命現象は遺伝子が制御している 遺伝子ネットワーク 遺伝子発現を記述するモデル 構造解明 医療技術 創薬 シミュレーション 2001 2002 2003 2004 2005 1. 2001-2005
Microsoft PowerPoint - 宇宙学セミナー16slides.pptx
 京都大学宇宙総合学研究ユニット 宇宙学セミナー 京都大学吉田キャンパス, 2016 年 7 月 4 日 最適制御の考え方と最近の展開 京都大学大学院情報学研究科 システム科学専攻大塚敏之 自己紹介 氏名大塚敏之 所属情報学研究科システム科学専攻 兼担工学部物理工学科機械システム学コース 専門非線形システム理論, 最適制御 モノの上手な動かし方 機械システム ( 自動車, ロボット, etc.), 宇宙構造物,
京都大学宇宙総合学研究ユニット 宇宙学セミナー 京都大学吉田キャンパス, 2016 年 7 月 4 日 最適制御の考え方と最近の展開 京都大学大学院情報学研究科 システム科学専攻大塚敏之 自己紹介 氏名大塚敏之 所属情報学研究科システム科学専攻 兼担工学部物理工学科機械システム学コース 専門非線形システム理論, 最適制御 モノの上手な動かし方 機械システム ( 自動車, ロボット, etc.), 宇宙構造物,
パソコンシミュレータの現状
 第 2 章微分 偏微分, 写像 豊橋技術科学大学森謙一郎 2. 連続関数と微分 工学において物理現象を支配する方程式は微分方程式で表されていることが多く, 有限要素法も微分方程式を解く数値解析法であり, 定式化においては微分 積分が一般的に用いられており. 数学の基礎知識が必要になる. 図 2. に示すように, 微分は連続な関数 f() の傾きを求めることであり, 微小な に対して傾きを表し, を無限に
第 2 章微分 偏微分, 写像 豊橋技術科学大学森謙一郎 2. 連続関数と微分 工学において物理現象を支配する方程式は微分方程式で表されていることが多く, 有限要素法も微分方程式を解く数値解析法であり, 定式化においては微分 積分が一般的に用いられており. 数学の基礎知識が必要になる. 図 2. に示すように, 微分は連続な関数 f() の傾きを求めることであり, 微小な に対して傾きを表し, を無限に
...Y..FEM.pm5
 . 剛塑性有限要素法 名古屋大学大学院工学研究科. はじめに. 剛塑性体の構成式.. 降伏条件.. 構成方程式 ([D] マトリックス ). 節点速度 ひずみ速度関係..[B] マトリックス.. 四角形一次要素の [B] マトリックス.4 4 仮想仕事の原理 ( 剛性マトリックス ([K] マトリックス )).5 非線形方程式の解法.5. 直接代入法.5.wto-Raphso 法.6 非圧縮性の拘束と数値積分.7
. 剛塑性有限要素法 名古屋大学大学院工学研究科. はじめに. 剛塑性体の構成式.. 降伏条件.. 構成方程式 ([D] マトリックス ). 節点速度 ひずみ速度関係..[B] マトリックス.. 四角形一次要素の [B] マトリックス.4 4 仮想仕事の原理 ( 剛性マトリックス ([K] マトリックス )).5 非線形方程式の解法.5. 直接代入法.5.wto-Raphso 法.6 非圧縮性の拘束と数値積分.7
Microsoft PowerPoint - ce07-04e.ppt
 制御工学 4 5. ボード線図 キーワード : ボード線図, ゲイン曲線, 曲線 周波数 に対し 5. ボード線図 j の変化を表すゲイン曲線 j の変化を表す曲線 5.4 ボード線図の性質 キーワード : ボード線図の利点 6 横軸 : 周波数 を対数目盛り 縦軸 : ゲイン曲線 lg j 曲線 ( 度 ( デカード (dec デシベル値 ( 絶対値 j. デシベル値 6 4 7 積分系 j j
制御工学 4 5. ボード線図 キーワード : ボード線図, ゲイン曲線, 曲線 周波数 に対し 5. ボード線図 j の変化を表すゲイン曲線 j の変化を表す曲線 5.4 ボード線図の性質 キーワード : ボード線図の利点 6 横軸 : 周波数 を対数目盛り 縦軸 : ゲイン曲線 lg j 曲線 ( 度 ( デカード (dec デシベル値 ( 絶対値 j. デシベル値 6 4 7 積分系 j j
Microsoft PowerPoint - シミュレーション工学-2010-第1回.ppt
 シミュレーション工学 ( 後半 ) 東京大学人工物工学研究センター 鈴木克幸 CA( Compter Aded geerg ) r. Jaso Lemo (SC, 98) 設計者が解析ツールを使いこなすことにより 設計の評価 設計の質の向上を図る geerg の本質の 計算機による支援 (CA CAM などより広い名前 ) 様々な汎用ソフトの登場 工業製品の設計に不可欠のツール 構造解析 流体解析
シミュレーション工学 ( 後半 ) 東京大学人工物工学研究センター 鈴木克幸 CA( Compter Aded geerg ) r. Jaso Lemo (SC, 98) 設計者が解析ツールを使いこなすことにより 設計の評価 設計の質の向上を図る geerg の本質の 計算機による支援 (CA CAM などより広い名前 ) 様々な汎用ソフトの登場 工業製品の設計に不可欠のツール 構造解析 流体解析
航空機の運動方程式
 オブザーバ 状態フィードバックにはすべての状態変数の値が必要であった. しかしながら, システムの外部から観測できるのは出力だけであり, すべての状態変数が観測できるとは限らない. そこで, 制御対象システムの状態変数を, システムのモデルに基づいてその入出力信号から推定する方法を考える.. オブザーバとは 次元 m 入力 r 出力線形時不変システム x Ax Bu y Cx () の状態変数ベクトル
オブザーバ 状態フィードバックにはすべての状態変数の値が必要であった. しかしながら, システムの外部から観測できるのは出力だけであり, すべての状態変数が観測できるとは限らない. そこで, 制御対象システムの状態変数を, システムのモデルに基づいてその入出力信号から推定する方法を考える.. オブザーバとは 次元 m 入力 r 出力線形時不変システム x Ax Bu y Cx () の状態変数ベクトル
博士学位請求論文審査報告書 申請者 : 植松良公 論文題目 :Statistical Analysis of Nonlinear Time Series 1. 論文の主題と構成経済時系列分析においては, 基礎となる理論は定常性や線形性を仮定して構築されるが, 実際の経済データにおいては, 非定常性や
 Title 非線形時系列の統計解析 Author(s) 植松, 良公 Citation Issue 2013-09-30 Date Type Thesis or Dissertation Text Version ETD URL http://doi.org/10.15057/25906 Right Hitotsubashi University Repository 博士学位請求論文審査報告書 申請者
Title 非線形時系列の統計解析 Author(s) 植松, 良公 Citation Issue 2013-09-30 Date Type Thesis or Dissertation Text Version ETD URL http://doi.org/10.15057/25906 Right Hitotsubashi University Repository 博士学位請求論文審査報告書 申請者
OpenFOAM(R) ソースコード入門 pt1 熱伝導方程式の解法から有限体積法の実装について考える 前編 : 有限体積法の基礎確認 2013/11/17 オープンCAE 富山富山県立大学中川慎二
 ソースコード入門 pt1 熱伝導方程式の解法から有限体積法の実装について考える 前編 : 有限体積法の基礎確認 2013/11/17 オープンCAE 富山富山県立大学中川慎二") OpenFOAM(R) ソースコード入門 pt1 熱伝導方程式の解法から有限体積法の実装について考える 前編 : 有限体積法の基礎確認 2013/11/17 オープンCAE 勉強会 @ 富山富山県立大学中川慎二 * OpenFOAM のソースコードでは, 基礎式を偏微分方程式の形で記述する.OpenFOAM 内部では, 有限体積法を使ってこの微分方程式を解いている. どのようにして, 有限体積法に基づく離散化が実現されているのか,
OpenFOAM(R) ソースコード入門 pt1 熱伝導方程式の解法から有限体積法の実装について考える 前編 : 有限体積法の基礎確認 2013/11/17 オープンCAE 勉強会 @ 富山富山県立大学中川慎二 * OpenFOAM のソースコードでは, 基礎式を偏微分方程式の形で記述する.OpenFOAM 内部では, 有限体積法を使ってこの微分方程式を解いている. どのようにして, 有限体積法に基づく離散化が実現されているのか,
PowerPoint プレゼンテーション
 非線形カルマンフィルタ ~a. 問題設定 ~ 離散時間非線形状態空間表現 x k + 1 = f x k y k = h x k + bv k + w k f : ベクトル値をとるx k の非線形関数 h : スカラ値をとるx k の非線形関数 v k システム雑音 ( 平均値 0, 分散 σ v 2 k ) x k + 1 = f x k,v k w k 観測雑音 ( 平均値 0, 分散 σ w
非線形カルマンフィルタ ~a. 問題設定 ~ 離散時間非線形状態空間表現 x k + 1 = f x k y k = h x k + bv k + w k f : ベクトル値をとるx k の非線形関数 h : スカラ値をとるx k の非線形関数 v k システム雑音 ( 平均値 0, 分散 σ v 2 k ) x k + 1 = f x k,v k w k 観測雑音 ( 平均値 0, 分散 σ w
ディジタル信号処理
 ディジタルフィルタの設計法. 逆フィルター. 直線位相 FIR フィルタの設計. 窓関数法による FIR フィルタの設計.5 時間領域での FIR フィルタの設計 3. アナログフィルタを基にしたディジタル IIR フィルタの設計法 I 4. アナログフィルタを基にしたディジタル IIR フィルタの設計法 II 5. 双 次フィルタ LI 離散時間システムの基礎式の証明 [ ] 4. ] [ ]*
ディジタルフィルタの設計法. 逆フィルター. 直線位相 FIR フィルタの設計. 窓関数法による FIR フィルタの設計.5 時間領域での FIR フィルタの設計 3. アナログフィルタを基にしたディジタル IIR フィルタの設計法 I 4. アナログフィルタを基にしたディジタル IIR フィルタの設計法 II 5. 双 次フィルタ LI 離散時間システムの基礎式の証明 [ ] 4. ] [ ]*
CLEFIA_ISEC発表
 128 ビットブロック暗号 CLEFIA 白井太三 渋谷香士 秋下徹 盛合志帆 岩田哲 ソニー株式会社 名古屋大学 目次 背景 アルゴリズム仕様 設計方針 安全性評価 実装性能評価 まとめ 2 背景 AES プロジェクト開始 (1997~) から 10 年 AES プロジェクト 攻撃法の進化 代数攻撃 関連鍵攻撃 新しい攻撃法への対策 暗号設計法の進化 IC カード, RFID などのアプリケーション拡大
128 ビットブロック暗号 CLEFIA 白井太三 渋谷香士 秋下徹 盛合志帆 岩田哲 ソニー株式会社 名古屋大学 目次 背景 アルゴリズム仕様 設計方針 安全性評価 実装性能評価 まとめ 2 背景 AES プロジェクト開始 (1997~) から 10 年 AES プロジェクト 攻撃法の進化 代数攻撃 関連鍵攻撃 新しい攻撃法への対策 暗号設計法の進化 IC カード, RFID などのアプリケーション拡大

PowerPoint プレゼンテーション
 20150528 信号処理システム特論 本日の内容 適応フィルタ ( 時間領域 ) 適応アルゴリズム (LMS,NLMS,RLS) 適応フィルタの応用例 適応処理 非適応処理 : 状況によらずいつでも同じ処理 適応処理 : 状況に応じた適切な処理 高度な適応処理の例 雑音抑圧, 音響エコーキャンセラ, 騒音制御など 時間領域の適応フィルタ 誤差信号 与えられた手順に従ってフィルタ係数を更新し 自動的に所望の信号を得るフィルタ
20150528 信号処理システム特論 本日の内容 適応フィルタ ( 時間領域 ) 適応アルゴリズム (LMS,NLMS,RLS) 適応フィルタの応用例 適応処理 非適応処理 : 状況によらずいつでも同じ処理 適応処理 : 状況に応じた適切な処理 高度な適応処理の例 雑音抑圧, 音響エコーキャンセラ, 騒音制御など 時間領域の適応フィルタ 誤差信号 与えられた手順に従ってフィルタ係数を更新し 自動的に所望の信号を得るフィルタ
homes01_P027-084_chousa_sai.indd
 1 027 1 028 029 030 031 032 033 2 034 035 3 3-1 1 036 2 3 037 038 4 039 3-2 1 040 041 2 category 1 042 043 category 2 044 045 category 3 046 047 category 4 048 049 category 5 050 051 category 6 052 053
1 027 1 028 029 030 031 032 033 2 034 035 3 3-1 1 036 2 3 037 038 4 039 3-2 1 040 041 2 category 1 042 043 category 2 044 045 category 3 046 047 category 4 048 049 category 5 050 051 category 6 052 053
SICE東北支部研究集会資料(2012年)
") 77 (..3) 77- Simulation of Disturbance Compensation Control of Dual Manipulator for an Inverted Pendulum Robot Using The Extended State Observer Luis Canete Kenta Nagano, Takuma Sato, Luis Canete,Takayuki
77 (..3) 77- Simulation of Disturbance Compensation Control of Dual Manipulator for an Inverted Pendulum Robot Using The Extended State Observer Luis Canete Kenta Nagano, Takuma Sato, Luis Canete,Takayuki
認識行動システム論
 04/7/ インタラクティブシステム論第 9 回 梶本裕之 Twitter ID kajimoto ハッシュタグ #ninshiki 日程 4/0 インタラクティブシステム入門 4/7 Scilab 入門 4/4 フーリエ変換 5/ 出張 5/8 フーリエ変換と線形システム 5/5 出張 5/ 信号処理の基礎 5/9 出張 6/5 信号処理応用 相関 ) 6/ 信号処理応用 画像処理 ) 6/9 ラプラス変換
04/7/ インタラクティブシステム論第 9 回 梶本裕之 Twitter ID kajimoto ハッシュタグ #ninshiki 日程 4/0 インタラクティブシステム入門 4/7 Scilab 入門 4/4 フーリエ変換 5/ 出張 5/8 フーリエ変換と線形システム 5/5 出張 5/ 信号処理の基礎 5/9 出張 6/5 信号処理応用 相関 ) 6/ 信号処理応用 画像処理 ) 6/9 ラプラス変換
Microsoft PowerPoint - mp11-02.pptx
 数理計画法第 2 回 塩浦昭義情報科学研究科准教授 shioura@dais.is.tohoku.ac.jp http://www.dais.is.tohoku.ac.jp/~shioura/teaching 前回の復習 数理計画とは? 数理計画 ( 復習 ) 数理計画問題とは? 狭義には : 数理 ( 数学 ) を使って計画を立てるための問題 広義には : 与えられた評価尺度に関して最も良い解を求める問題
数理計画法第 2 回 塩浦昭義情報科学研究科准教授 shioura@dais.is.tohoku.ac.jp http://www.dais.is.tohoku.ac.jp/~shioura/teaching 前回の復習 数理計画とは? 数理計画 ( 復習 ) 数理計画問題とは? 狭義には : 数理 ( 数学 ) を使って計画を立てるための問題 広義には : 与えられた評価尺度に関して最も良い解を求める問題
Microsoft PowerPoint - spe1_handout10.ppt
 目次 信号処理工学 Ⅰ 第 回 : ディジタルフィルタ 電気通信大学電子工学専攻電子知能システム学講座 問題は何か? フィルタとは? 離散時間システムとディジタルフィルタ ディジタルフィルタの種類 FIRフィルタの設計 長井隆行 問題は何か? 初心に戻る o.4 のスライド 重要なことは? 所望の信号を得るためにどのようなシステムにすれば良いか? 安定性を保つ必要もある ノイズ除去の例 周波数領域で見る
目次 信号処理工学 Ⅰ 第 回 : ディジタルフィルタ 電気通信大学電子工学専攻電子知能システム学講座 問題は何か? フィルタとは? 離散時間システムとディジタルフィルタ ディジタルフィルタの種類 FIRフィルタの設計 長井隆行 問題は何か? 初心に戻る o.4 のスライド 重要なことは? 所望の信号を得るためにどのようなシステムにすれば良いか? 安定性を保つ必要もある ノイズ除去の例 周波数領域で見る
Microsoft PowerPoint - 卒業論文 pptx
 時間に依存するポテンシャルによる 量子状態の変化 龍谷大学理工学部数理情報学科 T966 二正寺章指導教員飯田晋司 目次 はじめに 次元のシュレーディンガー方程式 3 井戸型ポテンシャルの固有エネルギーと固有関数 4 4 中央に障壁のある井戸型ポテンシャルの固有エネルギーと固有関数 3 5 障壁が時間によって変化する場合 7 6 まとめ 5 一次元のシュレディンガー方程式量子力学の基本方程式 ψ (
時間に依存するポテンシャルによる 量子状態の変化 龍谷大学理工学部数理情報学科 T966 二正寺章指導教員飯田晋司 目次 はじめに 次元のシュレーディンガー方程式 3 井戸型ポテンシャルの固有エネルギーと固有関数 4 4 中央に障壁のある井戸型ポテンシャルの固有エネルギーと固有関数 3 5 障壁が時間によって変化する場合 7 6 まとめ 5 一次元のシュレディンガー方程式量子力学の基本方程式 ψ (
eq2:=m[g]*diff(x[g](t),t$2)=-s*sin(th eq3:=m[g]*diff(z[g](t),t$2)=m[g]*g-s* 負荷の座標は 以下の通りです eq4:=x[g](t)=x[k](t)+r*sin(theta(t)) eq5:=z[g](t)=r*cos(the
![eq2:=m[g]*diff(x[g](t),t$2)=-s*sin(th eq3:=m[g]*diff(z[g](t),t$2)=m[g]*g-s* 負荷の座標は 以下の通りです eq4:=x[g](t)=x[k](t)+r*sin(theta(t)) eq5:=z[g](t)=r*cos(the](/thumbs/86/93366319.jpg "eq2:=m[g]*diff(x[g](t),t$2)=-s*sin(th eq3:=m[g]*diff(z[g](t),t$2)=m[g]*g-s* 負荷の座標は 以下の通りです eq4:=x[g](t)=x[k](t)+r*sin(theta(t)) eq5:=z[g](t)=r*cos(the") 7. 制御設計の例 7.1 ローディングブリッジの制御装置 はじめに restart: ローディング ブリッジは 負荷をある地点から別の地点に運びます 台車の加速と減速は好ましくない振動を発生してしまいます そのため負荷はさらに安定し難くなり 時間もかかってしまいます 負荷がある地点から他の地点へ素早く移動し すみやかに安定するような制御装置を設計します 問題の定義 ローディング ブリッジのパラメータは以下の通りです
7. 制御設計の例 7.1 ローディングブリッジの制御装置 はじめに restart: ローディング ブリッジは 負荷をある地点から別の地点に運びます 台車の加速と減速は好ましくない振動を発生してしまいます そのため負荷はさらに安定し難くなり 時間もかかってしまいます 負荷がある地点から他の地点へ素早く移動し すみやかに安定するような制御装置を設計します 問題の定義 ローディング ブリッジのパラメータは以下の通りです
Microsoft PowerPoint - 1.プロセス制御の概要.pptx
 プロセス制御工学 1. プロセス制御の概要 京都大学 加納学 Division of Process Control & Process Systems Engineering Department of Chemical Engineering, Kyoto University manabu@cheme.kyoto-u.ac.jp http://www-pse.cheme.kyoto-u.ac.jp/~kano/
プロセス制御工学 1. プロセス制御の概要 京都大学 加納学 Division of Process Control & Process Systems Engineering Department of Chemical Engineering, Kyoto University manabu@cheme.kyoto-u.ac.jp http://www-pse.cheme.kyoto-u.ac.jp/~kano/
TR-1341.p65
 STOL 1 STOL Evaluation of STOL approach and landing of the Quiet STOL experimental aircraft ASKA Masaru NAKAMURA and Yushi TERUI Abstract The quiet STOL experimental aircraft ASKA was developed by the
STOL 1 STOL Evaluation of STOL approach and landing of the Quiet STOL experimental aircraft ASKA Masaru NAKAMURA and Yushi TERUI Abstract The quiet STOL experimental aircraft ASKA was developed by the
Microsoft PowerPoint - 【最終提出版】 MATLAB_EXPO2014講演資料_ルネサス菅原.pptx
 MATLAB/Simulink を使用したモータ制御アプリのモデルベース開発事例 ルネサスエレクトロニクス株式会社 第二ソリューション事業本部産業第一事業部家電ソリューション部 Rev. 1.00 2014 Renesas Electronics Corporation. All rights reserved. IAAS-AA-14-0202-1 目次 1. はじめに 1.1 モデルベース開発とは?
MATLAB/Simulink を使用したモータ制御アプリのモデルベース開発事例 ルネサスエレクトロニクス株式会社 第二ソリューション事業本部産業第一事業部家電ソリューション部 Rev. 1.00 2014 Renesas Electronics Corporation. All rights reserved. IAAS-AA-14-0202-1 目次 1. はじめに 1.1 モデルベース開発とは?

スライド 1
 ~MATLAB EXPO 2012~ スライディングモード制御の インクジェットプリンターへの適用 2012/10/30 ブラザー工業株式会社畠山雄一 MathWorks Japan 赤阪大介 2012 Brother Industries, Ltd. & The MathWorks, Inc. All Rights Reserved. 1 本講演の背景 提供している製品 技術の有用性を確認したい
~MATLAB EXPO 2012~ スライディングモード制御の インクジェットプリンターへの適用 2012/10/30 ブラザー工業株式会社畠山雄一 MathWorks Japan 赤阪大介 2012 Brother Industries, Ltd. & The MathWorks, Inc. All Rights Reserved. 1 本講演の背景 提供している製品 技術の有用性を確認したい
Proceedings of the 61st Annual Conference of the Institute of Systems, Control and Information Engineers (ISCIE), Kyoto, May 23-25, 2017 The Visual Se
, Kyoto, May 23-25, 2017 The Visual Se") The Visual Servo Control of Drone in Consideration of Dead Time,, Junpei Shirai and Takashi Yamaguchi and Kiyotsugu Takaba Ritsumeikan University Abstract Recently, the use of drones has been expected
The Visual Servo Control of Drone in Consideration of Dead Time,, Junpei Shirai and Takashi Yamaguchi and Kiyotsugu Takaba Ritsumeikan University Abstract Recently, the use of drones has been expected

カイ二乗フィット検定、パラメータの誤差
 統計的データ解析 008 008.. 林田清 ( 大阪大学大学院理学研究科 ) 問題 C (, ) ( x xˆ) ( y yˆ) σ x πσ σ y y Pabx (, ;,,, ) ˆ y σx σ y = dx exp exp πσx ただし xy ˆ ˆ はyˆ = axˆ+ bであらわされる直線モデル上の点 ( ˆ) ( ˆ ) ( ) x x y ax b y ax b Pabx (,
統計的データ解析 008 008.. 林田清 ( 大阪大学大学院理学研究科 ) 問題 C (, ) ( x xˆ) ( y yˆ) σ x πσ σ y y Pabx (, ;,,, ) ˆ y σx σ y = dx exp exp πσx ただし xy ˆ ˆ はyˆ = axˆ+ bであらわされる直線モデル上の点 ( ˆ) ( ˆ ) ( ) x x y ax b y ax b Pabx (,
サービス付き高齢者向け住宅賠償責任保険.indd
 1 2 1 CASE 1 1 2 CASE 2 CASE 3 CASE 4 3 CASE 5 4 3 4 5 6 2 CASE 1 CASE 2 CASE 3 7 8 3 9 10 CASE 1 CASE 2 CASE 3 CASE 4 11 12 13 14 1 1 2 FAX:03-3375-8470 2 3 3 4 4 3 15 16 FAX:03-3375-8470 1 2 0570-022808
1 2 1 CASE 1 1 2 CASE 2 CASE 3 CASE 4 3 CASE 5 4 3 4 5 6 2 CASE 1 CASE 2 CASE 3 7 8 3 9 10 CASE 1 CASE 2 CASE 3 CASE 4 11 12 13 14 1 1 2 FAX:03-3375-8470 2 3 3 4 4 3 15 16 FAX:03-3375-8470 1 2 0570-022808
PowerPoint プレゼンテーション
 データ解析 第 7 回 : 時系列分析 渡辺澄夫 過去から未来を予測する 観測データ 回帰 判別分析 解析方法 主成分 因子 クラスタ分析 時系列予測 時系列を予測する 無限個の確率変数 ( 確率変数が作る無限数列 ){X(t) ; t は整数 } を生成する情報源を考える {X(t)} を確率過程という 確率過程に ついて過去の値から未来を予測するにはどうしたらよいだろうか X(t-K),X(t-K+1),,X(t-1)
データ解析 第 7 回 : 時系列分析 渡辺澄夫 過去から未来を予測する 観測データ 回帰 判別分析 解析方法 主成分 因子 クラスタ分析 時系列予測 時系列を予測する 無限個の確率変数 ( 確率変数が作る無限数列 ){X(t) ; t は整数 } を生成する情報源を考える {X(t)} を確率過程という 確率過程に ついて過去の値から未来を予測するにはどうしたらよいだろうか X(t-K),X(t-K+1),,X(t-1)
Microsoft PowerPoint - 資料04 重回帰分析.ppt
 04. 重回帰分析 京都大学 加納学 Division of Process Control & Process Sstems Engineering Department of Chemical Engineering, Koto Universit manabu@cheme.koto-u.ac.jp http://www-pse.cheme.koto-u.ac.jp/~kano/ Outline
04. 重回帰分析 京都大学 加納学 Division of Process Control & Process Sstems Engineering Department of Chemical Engineering, Koto Universit manabu@cheme.koto-u.ac.jp http://www-pse.cheme.koto-u.ac.jp/~kano/ Outline
(Microsoft PowerPoint - \221\34613\211\361)
") 計算力学 ~ 第 回弾性問題の有限要素解析 (Ⅱ)~ 修士 年後期 ( 選択科目 ) 担当 : 岩佐貴史 講義の概要 全 5 講義. 計算力学概論, ガイダンス. 自然現象の数理モデル化. 行列 場とその演算. 数値計算法 (Ⅰ) 5. 数値計算法 (Ⅱ) 6. 初期値 境界値問題 (Ⅰ) 7. 初期値 境界値問題 (Ⅱ) 8. マトリックス変位法による構造解析 9. トラス構造の有限要素解析. 重み付き残差法と古典的近似解法.
計算力学 ~ 第 回弾性問題の有限要素解析 (Ⅱ)~ 修士 年後期 ( 選択科目 ) 担当 : 岩佐貴史 講義の概要 全 5 講義. 計算力学概論, ガイダンス. 自然現象の数理モデル化. 行列 場とその演算. 数値計算法 (Ⅰ) 5. 数値計算法 (Ⅱ) 6. 初期値 境界値問題 (Ⅰ) 7. 初期値 境界値問題 (Ⅱ) 8. マトリックス変位法による構造解析 9. トラス構造の有限要素解析. 重み付き残差法と古典的近似解法.
位相最適化?
 均質化設計法 藤井大地 ( 東京大学 ) 位相最適化? 従来の考え方 境界形状を変化させて最適な形状 位相を求める Γ t Ω b Γ D 境界形状を変化させる問題点 解析が進むにつれて, 有限要素メッシュが異形になり, 再メッシュが必要になる 位相が変化する問題への適応が難しい Γ Γ t t Ω b Ω b Γ D Γ D 領域の拡張と特性関数の導入 χ Ω ( x) = f 0 f x Ω x
均質化設計法 藤井大地 ( 東京大学 ) 位相最適化? 従来の考え方 境界形状を変化させて最適な形状 位相を求める Γ t Ω b Γ D 境界形状を変化させる問題点 解析が進むにつれて, 有限要素メッシュが異形になり, 再メッシュが必要になる 位相が変化する問題への適応が難しい Γ Γ t t Ω b Ω b Γ D Γ D 領域の拡張と特性関数の導入 χ Ω ( x) = f 0 f x Ω x
スライド 1
 第 47 回集積回路技術リテラシー研究会 2017/10/2 トリガ回路を用いた 積分型時間デジタイザ回路 佐々木優斗 小澤祐喜 小林春夫 群馬大学理工学部電子情報理工学科小林研究室学部 4 年佐々木優斗 t14304053@gunma-u.ac.jp @ 東京工業大学すずかけ台キャンパス Kobayashi Lab. Gunma University アウトライン 2/36 研究背景 従来の時間デジタイザ回路
第 47 回集積回路技術リテラシー研究会 2017/10/2 トリガ回路を用いた 積分型時間デジタイザ回路 佐々木優斗 小澤祐喜 小林春夫 群馬大学理工学部電子情報理工学科小林研究室学部 4 年佐々木優斗 t14304053@gunma-u.ac.jp @ 東京工業大学すずかけ台キャンパス Kobayashi Lab. Gunma University アウトライン 2/36 研究背景 従来の時間デジタイザ回路
Robot Platform Project(RPP) "Spur" "YP-Spur" rev. 4 [ ] Robot Platform Project(RPP) WATANABE Atsushi 1.,,., Fig. 1.,,,,,.,,,..,,..,,..,,,,. "
![Robot Platform Project(RPP) Spur YP-Spur rev. 4 [ ] Robot Platform Project(RPP) WATANABE Atsushi 1.,,., Fig. 1.,,,,,.,,,..,,..,,..,,,,.](/thumbs/93/117962738.jpg "Robot Platform Project(RPP) Spur YP-Spur rev. 4 [ ] Robot Platform Project(RPP) WATANABE Atsushi 1.,,., Fig. 1.,,,,,.,,,..,,..,,..,,,,.") Robot Platform Project(RPP) "Spur" "YP-Spur" ev. 4 [.8.9] Robot Platform Project(RPP) WATANABE Atsushi.,,., Fig..,,,,,.,,,..,,..,,..,,,,. "",,, Spur.,, Robot Platform Project, "YP-Spur".,,, 98 99,. [][3][4].,,,
Robot Platform Project(RPP) "Spur" "YP-Spur" ev. 4 [.8.9] Robot Platform Project(RPP) WATANABE Atsushi.,,., Fig..,,,,,.,,,..,,..,,..,,,,. "",,, Spur.,, Robot Platform Project, "YP-Spur".,,, 98 99,. [][3][4].,,,
Microsoft PowerPoint - NA03-09black.ppt
 きょうの講義 数値 記号処理 2003.2.6 櫻井彰人 NumSymbol@soft.ae.keo.ac.jp http://www.sakura.comp.ae.keo.ac.jp/ 数値計算手法の定石 多項式近似 ( 復習 )» 誤差と手間の解析も 漸化式» 非線型方程式の求解 数値演算上の誤差 数値計算上の誤差 打ち切り誤差 (truncaton error)» 使う公式を有限項で打ち切る
きょうの講義 数値 記号処理 2003.2.6 櫻井彰人 NumSymbol@soft.ae.keo.ac.jp http://www.sakura.comp.ae.keo.ac.jp/ 数値計算手法の定石 多項式近似 ( 復習 )» 誤差と手間の解析も 漸化式» 非線型方程式の求解 数値演算上の誤差 数値計算上の誤差 打ち切り誤差 (truncaton error)» 使う公式を有限項で打ち切る
<4D F736F F F696E74202D208CB48E7197CD8A7789EF F4882CC91E589EF8AE989E A2E B8CDD8AB B83685D>
 数値解析技術と標準 (3) 数値解析の信頼性に関する標準 平成 24 年 9 月 21 日原子力学会 2012 秋の大会標準委員会セッション5( 基盤 応用専門部会 ) 独立行政法人原子力安全基盤機構原子力システム安全部堀田亮年 AESJ MTG 2012 Autumn @Hiroshima 1 シミュレーションの信頼性 WG 報告書の構成 本文 (118 頁 ):V&Vの構造案解説 A) V&V
数値解析技術と標準 (3) 数値解析の信頼性に関する標準 平成 24 年 9 月 21 日原子力学会 2012 秋の大会標準委員会セッション5( 基盤 応用専門部会 ) 独立行政法人原子力安全基盤機構原子力システム安全部堀田亮年 AESJ MTG 2012 Autumn @Hiroshima 1 シミュレーションの信頼性 WG 報告書の構成 本文 (118 頁 ):V&Vの構造案解説 A) V&V
")
以下 変数の上のドットは時間に関する微分を表わしている (ex. 2 dx d x x, x 2 dt dt ) 付録 E 非線形微分方程式の平衡点の安定性解析 E-1) 非線形方程式の線形近似特に言及してこなかったが これまでは線形微分方程式 ( x や x, x などがすべて 1 次で なおかつ
 付録 E 非線形微分方程式の平衡点の安定性解析 E-1) 非線形方程式の線形近似特に言及してこなかったが これまでは線形微分方程式 ( x や x, x などがすべて 1 次で なおかつ") 以下 変数の上のドットは時間に関する微分を表わしている (e. d d, dt dt ) 付録 E 非線形微分方程式の平衡点の安定性解析 E-) 非線形方程式の線形近似特に言及してこなかったが これまでは線形微分方程式 ( や, などがすべて 次で なおかつそれらの係数が定数であるような微分方程式 ) に対して安定性の解析を行ってきた しかしながら 実際には非線形の微分方程式で記述される現象も多く存在する
以下 変数の上のドットは時間に関する微分を表わしている (e. d d, dt dt ) 付録 E 非線形微分方程式の平衡点の安定性解析 E-) 非線形方程式の線形近似特に言及してこなかったが これまでは線形微分方程式 ( や, などがすべて 次で なおかつそれらの係数が定数であるような微分方程式 ) に対して安定性の解析を行ってきた しかしながら 実際には非線形の微分方程式で記述される現象も多く存在する
データ解析
 データ解析 ( 前期 ) 最小二乗法 向井厚志 005 年度テキスト 0 データ解析 - 最小二乗法 - 目次 第 回 Σ の計算 第 回ヒストグラム 第 3 回平均と標準偏差 6 第 回誤差の伝播 8 第 5 回正規分布 0 第 6 回最尤性原理 第 7 回正規分布の 分布の幅 第 8 回最小二乗法 6 第 9 回最小二乗法の練習 8 第 0 回最小二乗法の推定誤差 0 第 回推定誤差の計算 第
データ解析 ( 前期 ) 最小二乗法 向井厚志 005 年度テキスト 0 データ解析 - 最小二乗法 - 目次 第 回 Σ の計算 第 回ヒストグラム 第 3 回平均と標準偏差 6 第 回誤差の伝播 8 第 5 回正規分布 0 第 6 回最尤性原理 第 7 回正規分布の 分布の幅 第 8 回最小二乗法 6 第 9 回最小二乗法の練習 8 第 0 回最小二乗法の推定誤差 0 第 回推定誤差の計算 第
オープン CAE 関東 数値流体力学 輪講 第 6 回 第 3 章 : 乱流とそのモデリング (5) [3.7.2 p.76~84] 日時 :2014 年 2 月 22 日 14:00~ 場所 : 日本 新宿 2013/02/22 数値流体力学 輪講第 6 回 1
![オープン CAE 関東 数値流体力学 輪講 第 6 回 第 3 章 : 乱流とそのモデリング (5) [3.7.2 p.76~84] 日時 :2014 年 2 月 22 日 14:00~ 場所 : 日本 新宿 2013/02/22 数値流体力学 輪講第 6 回 1](/thumbs/103/161321829.jpg "オープン CAE 関東 数値流体力学 輪講 第 6 回 第 3 章 : 乱流とそのモデリング (5) [3.7.2 p.76~84] 日時 :2014 年 2 月 22 日 14:00~ 場所 : 日本 新宿 2013/02/22 数値流体力学 輪講第 6 回 1") オープン CAE 勉強会 @ 関東 数値流体力学 輪講 第 6 回 第 章 : 乱流とそのモデリング (5) [.7. p.76~84] 日時 :04 年 月 日 4:00~ 場所 : 日本 ESI@ 新宿 本日 日程パート部分ページ 04.0 第 章 : 乱流とそのモデリング担当セクション :.7. p.76~84 今回は北風が担当しました ご質問 記述ミス等に関するご指摘がありましたら 以下までご連絡下さい
オープン CAE 勉強会 @ 関東 数値流体力学 輪講 第 6 回 第 章 : 乱流とそのモデリング (5) [.7. p.76~84] 日時 :04 年 月 日 4:00~ 場所 : 日本 ESI@ 新宿 本日 日程パート部分ページ 04.0 第 章 : 乱流とそのモデリング担当セクション :.7. p.76~84 今回は北風が担当しました ご質問 記述ミス等に関するご指摘がありましたら 以下までご連絡下さい
Presentation Title
 コード生成製品の普及と最新の技術動向 MathWorks Japan パイロットエンジニアリング部 東達也 2014 The MathWorks, Inc. 1 MBD 概要 MATLABおよびSimulinkを使用したモデルベース デザイン ( モデルベース開発 ) 紹介ビデオ 2 MBD による制御開発フローとコード生成製品の活用 制御設計の最適化で性能改善 設計図ですぐに挙動確認 MILS:
コード生成製品の普及と最新の技術動向 MathWorks Japan パイロットエンジニアリング部 東達也 2014 The MathWorks, Inc. 1 MBD 概要 MATLABおよびSimulinkを使用したモデルベース デザイン ( モデルベース開発 ) 紹介ビデオ 2 MBD による制御開発フローとコード生成製品の活用 制御設計の最適化で性能改善 設計図ですぐに挙動確認 MILS:
Microsoft PowerPoint SIGAL.ppt
 アメリカン アジアンオプションの 価格の近似に対する 計算幾何的アプローチ 渋谷彰信, 塩浦昭義, 徳山豪 ( 東北大学大学院情報科学研究科 ) 発表の概要 アメリカン アジアンオプション金融派生商品の一つ価格付け ( 価格の計算 ) は重要な問題 二項モデルにおける価格付けは計算困難な問題 目的 : 近似精度保証をもつ近似アルゴリズムの提案 アイディア : 区分線形関数を計算幾何手法により近似 問題の説明
アメリカン アジアンオプションの 価格の近似に対する 計算幾何的アプローチ 渋谷彰信, 塩浦昭義, 徳山豪 ( 東北大学大学院情報科学研究科 ) 発表の概要 アメリカン アジアンオプション金融派生商品の一つ価格付け ( 価格の計算 ) は重要な問題 二項モデルにおける価格付けは計算困難な問題 目的 : 近似精度保証をもつ近似アルゴリズムの提案 アイディア : 区分線形関数を計算幾何手法により近似 問題の説明
Microsoft PowerPoint - 13approx.pptx
 I482F 実践的アルゴリズム特論 13,14 回目 : 近似アルゴリズム 上原隆平 (uehara@jaist.ac.jp) ソートの下界の話 比較に基づく任意のソートアルゴリズムはΩ(n log n) 時間の計算時間が必要である 証明 ( 概略 ) k 回の比較で区別できる場合の数は高々 2 k 種類しかない n 個の要素の異なる並べ方は n! 通りある したがって少なくとも k n 2 n!
I482F 実践的アルゴリズム特論 13,14 回目 : 近似アルゴリズム 上原隆平 (uehara@jaist.ac.jp) ソートの下界の話 比較に基づく任意のソートアルゴリズムはΩ(n log n) 時間の計算時間が必要である 証明 ( 概略 ) k 回の比較で区別できる場合の数は高々 2 k 種類しかない n 個の要素の異なる並べ方は n! 通りある したがって少なくとも k n 2 n!

1 Jensen et al.[6] GRT S&P500 GRT RT GRT Kiriu and Hibiki[8] Jensen et al.[6] GRT 3 GRT Generalized Recovery Theorem (Jensen et al.[6])
![1 Jensen et al.[6] GRT S&P500 GRT RT GRT Kiriu and Hibiki[8] Jensen et al.[6] GRT 3 GRT Generalized Recovery Theorem (Jensen et al.[6])](/thumbs/92/109954619.jpg "1 Jensen et al.[6] GRT S&P500 GRT RT GRT Kiriu and Hibiki[8] Jensen et al.[6] GRT 3 GRT Generalized Recovery Theorem (Jensen et al.[6])") Generalized Recovery Theorem Ross[11] Recovery Theorem(RT) RT forward looking Kiriu and Hibiki[8] Generalized Recovery Theorem(GRT) Jensen et al.[6] GRT RT Kiriu and Hibiki[8] 1 backward looking forward
Generalized Recovery Theorem Ross[11] Recovery Theorem(RT) RT forward looking Kiriu and Hibiki[8] Generalized Recovery Theorem(GRT) Jensen et al.[6] GRT RT Kiriu and Hibiki[8] 1 backward looking forward
Microsoft Word - thesis.doc
 剛体の基礎理論 -. 剛体の基礎理論初めに本論文で大域的に使用する記号を定義する. 使用する記号トルク撃力力角運動量角速度姿勢対角化された慣性テンソル慣性テンソル運動量速度位置質量時間 J W f F P p .. 質点の並進運動 質点は位置 と速度 P を用いる. ニュートンの運動方程式 という状態を持つ. 但し ここでは速度ではなく運動量 F P F.... より質点の運動は既に明らかであり 質点の状態ベクトル
剛体の基礎理論 -. 剛体の基礎理論初めに本論文で大域的に使用する記号を定義する. 使用する記号トルク撃力力角運動量角速度姿勢対角化された慣性テンソル慣性テンソル運動量速度位置質量時間 J W f F P p .. 質点の並進運動 質点は位置 と速度 P を用いる. ニュートンの運動方程式 という状態を持つ. 但し ここでは速度ではなく運動量 F P F.... より質点の運動は既に明らかであり 質点の状態ベクトル
微分方程式による現象記述と解きかた
 微分方程式による現象記述と解きかた 土木工学 : 公共諸施設 構造物の有用目的にむけた合理的な実現をはかる方法 ( 技術 ) に関する学 橋梁 トンネル ダム 道路 港湾 治水利水施設 安全化 利便化 快適化 合法則的 経済的 自然および人口素材によって作られた 質量保存則 構造物の自然的な性質 作用 ( 外力による応答 ) エネルギー則 の解明 社会的諸現象のうち マスとしての移動 流通 運動量則
微分方程式による現象記述と解きかた 土木工学 : 公共諸施設 構造物の有用目的にむけた合理的な実現をはかる方法 ( 技術 ) に関する学 橋梁 トンネル ダム 道路 港湾 治水利水施設 安全化 利便化 快適化 合法則的 経済的 自然および人口素材によって作られた 質量保存則 構造物の自然的な性質 作用 ( 外力による応答 ) エネルギー則 の解明 社会的諸現象のうち マスとしての移動 流通 運動量則
例 e 指数関数的に減衰する信号を h( a < + a a すると, それらのラプラス変換は, H ( ) { e } e インパルス応答が h( a < ( ただし a >, U( ) { } となるシステムにステップ信号 ( y( のラプラス変換 Y () は, Y ( ) H ( ) X (
 { e } e インパルス応答が h( a < ( ただし a >, U( ) { } となるシステムにステップ信号 ( y( のラプラス変換 Y () は, Y ( ) H ( ) X (") 第 週ラプラス変換 教科書 p.34~ 目標ラプラス変換の定義と意味を理解する フーリエ変換や Z 変換と並ぶ 信号解析やシステム設計における重要なツール ラプラス変換は波動現象や電気回路など様々な分野で 微分方程式を解くために利用されてきた ラプラス変換を用いることで微分方程式は代数方程式に変換される また 工学上使われる主要な関数のラプラス変換は簡単な形の関数で表されるので これを ラプラス変換表
第 週ラプラス変換 教科書 p.34~ 目標ラプラス変換の定義と意味を理解する フーリエ変換や Z 変換と並ぶ 信号解析やシステム設計における重要なツール ラプラス変換は波動現象や電気回路など様々な分野で 微分方程式を解くために利用されてきた ラプラス変換を用いることで微分方程式は代数方程式に変換される また 工学上使われる主要な関数のラプラス変換は簡単な形の関数で表されるので これを ラプラス変換表
Clipboard
 機械システム工学実験 Ⅲ 現代制御実験 授業 ( 時間程度 シミュレーション ( 時間 実験 ( 時間 - 時間半 課題 ( 時間 - 時間半 レポート提出に関して日時 : 翌週の月曜 時 3 分場所 : 9 号館 553 室 質問があれば鎌田研究室 (9 号館 35 室 まで 制御とは? 対象とする物 ( またはシステム を自分の思うように操る 制御するためには何が必要か? コントローラ ( 制御器
機械システム工学実験 Ⅲ 現代制御実験 授業 ( 時間程度 シミュレーション ( 時間 実験 ( 時間 - 時間半 課題 ( 時間 - 時間半 レポート提出に関して日時 : 翌週の月曜 時 3 分場所 : 9 号館 553 室 質問があれば鎌田研究室 (9 号館 35 室 まで 制御とは? 対象とする物 ( またはシステム を自分の思うように操る 制御するためには何が必要か? コントローラ ( 制御器
高周波動作 (小信号モデル)
") 平成 9 年度集積回路設計技術 次世代集積回路工学特論資料 高周波動作 小信号モデル 群馬大学松田順一 概要 完全 QS モデル 等価回路の導出 容量評価 - パラメータモデル NQSNon-Qua-Sac モデル NQS モデルの導出 NQS 高周波用 等価回路 RF アプリケーションへの考察 注 以下の本を参考に 本資料を作成 Yann T Operaon an Moeln of he MOS
平成 9 年度集積回路設計技術 次世代集積回路工学特論資料 高周波動作 小信号モデル 群馬大学松田順一 概要 完全 QS モデル 等価回路の導出 容量評価 - パラメータモデル NQSNon-Qua-Sac モデル NQS モデルの導出 NQS 高周波用 等価回路 RF アプリケーションへの考察 注 以下の本を参考に 本資料を作成 Yann T Operaon an Moeln of he MOS
p01.qxd
 2 s 1 1 2 6 2 POINT 23 23 32 15 3 4 s 1 3 2 4 6 2 7003800 1600 1200 45 5 3 11 POINT 2 7003800 7 11 7003800 8 12 9 10 POINT 2003 5 s 45700 3800 5 6 s3 1 POINT POINT 45 2700 3800 7 s 5 8 s3 1 POINT POINT
2 s 1 1 2 6 2 POINT 23 23 32 15 3 4 s 1 3 2 4 6 2 7003800 1600 1200 45 5 3 11 POINT 2 7003800 7 11 7003800 8 12 9 10 POINT 2003 5 s 45700 3800 5 6 s3 1 POINT POINT 45 2700 3800 7 s 5 8 s3 1 POINT POINT
株主通信:第18期 中間
 19 01 02 03 04 290,826 342,459 1,250,678 276,387 601,695 2,128,760 31,096 114,946 193,064 45,455 18,478 10,590 199,810 22,785 2,494 3,400,763 284,979 319,372 1,197,774 422,502 513,081 2,133,357 25,023
19 01 02 03 04 290,826 342,459 1,250,678 276,387 601,695 2,128,760 31,096 114,946 193,064 45,455 18,478 10,590 199,810 22,785 2,494 3,400,763 284,979 319,372 1,197,774 422,502 513,081 2,133,357 25,023



ワタベウェディング株式会社
 1 2 3 4 140,000 100,000 60,000 20,000 0 0 5 10 15 20 25 30 35 40 45 50 55 60 65 70 5 6 71 2 13 14 7 8 9 10 11 12 1 2 2 point 1 point 2 1 1 3 point 3 4 4 5 6 point 4 point 5 point 6 13 14 15 16 point 17
1 2 3 4 140,000 100,000 60,000 20,000 0 0 5 10 15 20 25 30 35 40 45 50 55 60 65 70 5 6 71 2 13 14 7 8 9 10 11 12 1 2 2 point 1 point 2 1 1 3 point 3 4 4 5 6 point 4 point 5 point 6 13 14 15 16 point 17



株主通信 第16 期 報告書
 10 15 01 02 1 2 3 03 04 4 05 06 5 153,476 232,822 6,962 19,799 133,362 276,221 344,360 440,112 412,477 846,445 164,935 422,265 1,433,645 26,694 336,206 935,497 352,675 451,321 1,739,493 30,593 48,894 153,612
10 15 01 02 1 2 3 03 04 4 05 06 5 153,476 232,822 6,962 19,799 133,362 276,221 344,360 440,112 412,477 846,445 164,935 422,265 1,433,645 26,694 336,206 935,497 352,675 451,321 1,739,493 30,593 48,894 153,612
![[商品カタログ]ゼンリン電子地図帳Zi16](/thumbs/48/24409875.jpg "[商品カタログ]ゼンリン電子地図帳Zi16")



")
