円筒面で利用可能なARマーカ
|
|
|
- こごろう とどろき
- 5 years ago
- Views:
Transcription
")
1 円筒面で利用可能な AR マーカ AR Marker for Cylindrical Surface 2014 年 11 月 14 日 ( 金 ) 眞鍋佳嗣千葉大学大学院融合科学研究科

2 マーカベース AR 二次元マーカはカメラ姿勢の推定, 拡張現実等広い研究分野で利用されている 現実の風景 表示される画像 デジタル情報を付加 カメラで撮影し, ディスプレイに表示 使用方法の単純性, 認識の安定性からマーカベース AR は今後も利用されるといえる

3 研究背景 ARToolKit や ARTag では黒い四角の縁をもったマーカを使用している ARToolKit ARTag 四角形の 4 つの角をもとに変換行列を計算 画像上でマーカが歪むと検出できない




4 従来手法の問題点 平 面 円 筒 面 円筒面上の場合, 歪みやオクルージョンのため, マーカ検出できない姿勢がある 歪みのため, 正しく仮想物体を表示できない

5 歪みに強いマーカ Deformable random dot marker フレームごとに歪みを補正し, 歪んだ面でも認識可能 1 フレーム目は平面でなくてはならない Uchiyama, Marchand:Deformable random dot markers. proce. of ISMAR, pp (2011)
6 研究目的と目標 研究目的 はじめから曲面に配置されていても認識できるマーカを作成する この研究では比較的に人工物に多い円筒面に注目 研究目標 円筒面上においても検出可能な AR マーカの提案 円筒面上に適切な仮想情報の提示



7 提案マーカ 曲率算出点群 上下にそれぞれ 5 つの点 曲率推定に用いる 間隔は一定 マーカ検出点群 左右にそれぞれ 4 つの点 マーカ検出に用いる 間隔は任意 4 点の複比を ID 情報として用いる 円筒の中心軸とマーカ検出点群が平行になるように配置 このマーカを CURV(Cylinder's Unfixed Radius Valuation) Marker とする
8 複比とは? 同一直線上にある 4 点の複比 cr(a,b,c,d) は 以下のように定義される 任意の直線への射影変換による 像を A',B',C',D' とすると 複比は射影変換によって不変 直線上にある 4 点の複比はカメラで撮影した 画像平面上でも一定の値になる


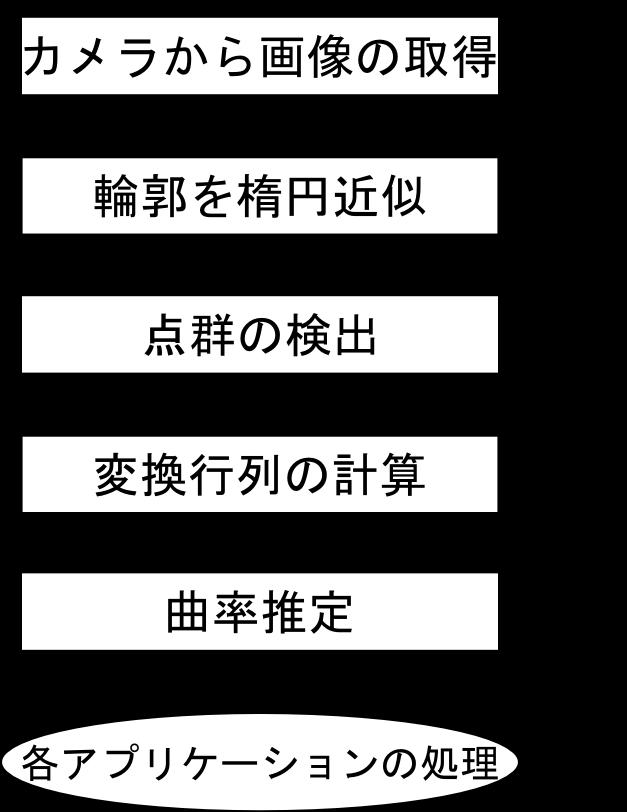
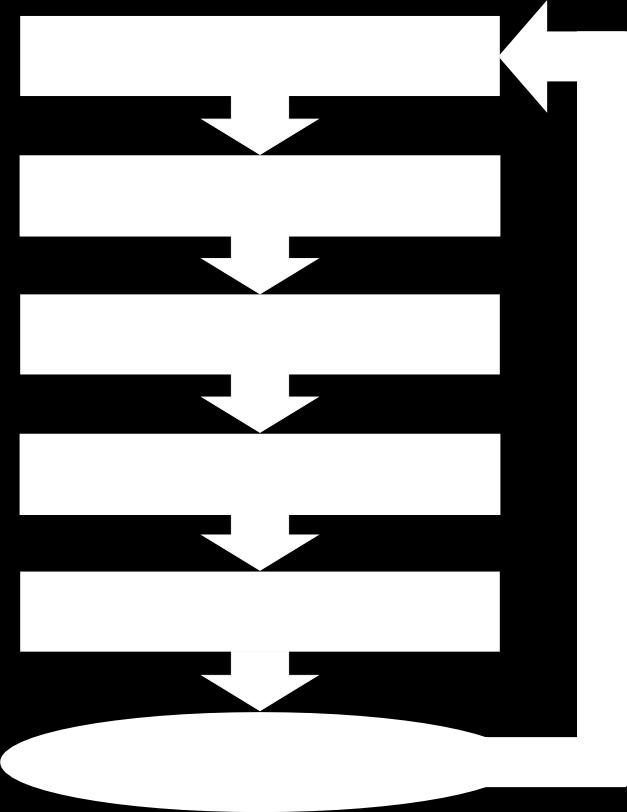
9 提案手法の流れ 曲率 法線推定

10 点群の検出 円筒の中心軸とマーカ検出点群が平行になるように配置されているため, マーカ検出点群の直線性は保たれる マーカ検出点群の複比も一定に保たれる 点群の直線性から検出, 複比から識別を行う

11 マーカ検出点群の検出, および ID 識別 抽出した楕円の中心のなかで 4 点が一直線上にある 中心点が白で点の間が黒 長径が大きく変化していない となっている点の組み合わせを探す 4 点の複比がマーカのものと一致しているか識別を行う

12 曲率算出点群の検出 見つけたマーカ検出点群の位置を基に 中心点が白で点の間が黒 マーカ検出点群の近傍である 2 点を結ぶとマーカ検出点群と平行になる 長径と 2 点の距離が大きく変化していない となる 2 点を探す 見つけられた 2 点の位置を基に探索を繰り返す

13 曲率計算の流れ 曲率算出点群から面を分割し, それぞれの変換行列を求める 変換行列から, 面同士の角度が求められる マーカの大きさは既知 角度から半径などの円筒の情報が求まる
14 法線推定 マーカ法線と同じ法線をもつ仮想平面 P を考える 平面 S 1 から平面 P への変換行列 T 1P は r は θで求められるので T 1P の成分は全てθによる S 1 の位置姿勢とθのみで 法線方向が推定可能

15 実験結果 実行速度約 15fps カメラ PC 製品名 HD Pro Webcam C910 (Logicool) 解像度 フレームレート 30 fps OS Windows 7 CPU Intel Core-i GHz メモリ 4GB


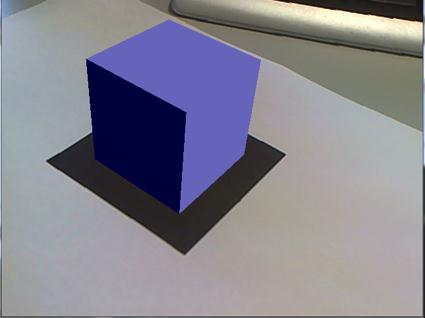
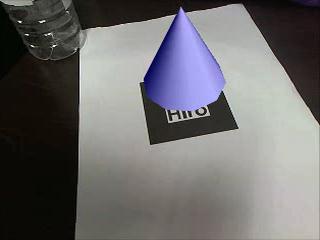
16 複数マーカの認識 青い円錐を表示 赤い円錐を表示 マーカが複数あったとしてもきちんと識別できる
17 評価実験 仰角 θ, 回転角 φ を 5deg ずつ変えながら 認識できるかどうかの評価実験を行う
18 比較対象 ARToolKit Deformable Random Dot Marker
19 計測結果 ARToolKit 提案マーカ ( 曲率推定 + 位置姿勢推定 ) Deformable Random Dot Marker 提案マーカ ( 位置姿勢推定のみ ) 認識率 [%] 縦軸 : 回転角 φ[deg], 横軸 : 仰角 θ[deg]


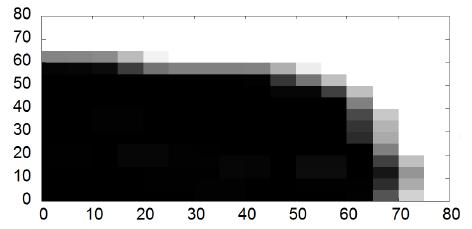







20 計測結果 ARToolKit 提案マーカ ( 曲率推定 + 位置姿勢推定 ) Deformable Random Dot Marker 提案マーカ ( 位置姿勢推定のみ ) 認識率 [%] 縦軸 : 回転角 φ[deg], 横軸 : 仰角 θ[deg]
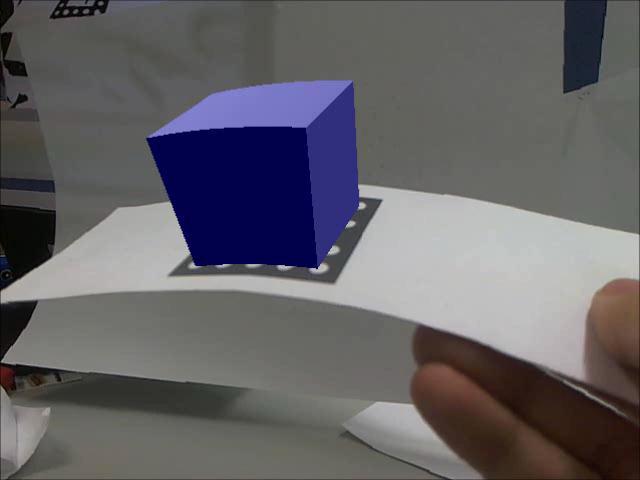
21 物体形状に合わせた重畳表示 マーカから取得した情報を用いて物体形状に合った仮想物体を表示が可能
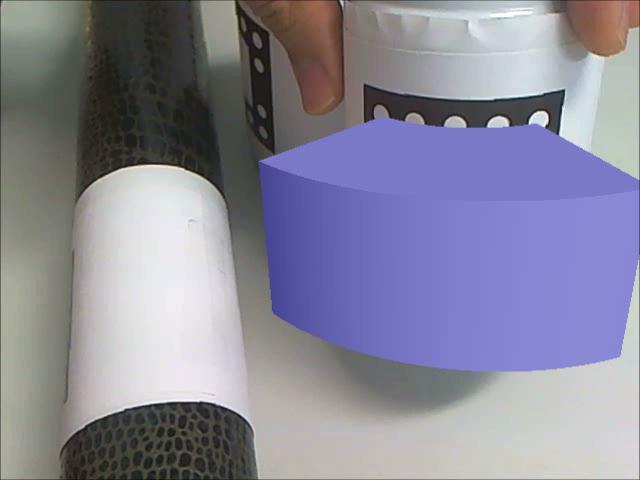
22 物体形状に合わせた重畳表示 マーカから取得した情報を用いて物体形状に合った仮想物体を表示が可能

23 応用例 ~ 円筒面上に動画を表示 ~ 缶や瓶などの表面に CM 映像などを表示することができる
24 まとめ 研究目標 円筒面上においても検出可能な AR マーカの提案 円筒面上に適切な仮想情報の提示 結果 提案したマーカが円筒面上でも検出可能なことを示した 物体形状を取得し, その情報を用いて重畳表示を行った
25 想定される用途 本技術は, 身の回りにある様々な円筒形状のもの ( 例えば, ビン, 缶, 電柱 ) に仮想情報を重畳表示することが可能である. そのため, 案内表示など必要な人にだけ必要な情報を提供する事が可能となる. また, 薬のビンなどに使用することで, 必要な人にしか中身が分からなくするなど, セキュリティにも利用可能である.
26 実用化に向けた課題 マーカをもう少し目立たなくし, 他のデザインと調和できるような工夫が必要. このようなマーカデザインを現在検討中. 処理速度を高速化し, さらに安定した処理ができるようにアルゴリズムの改良が必要. また, 曲面だけではなく折れ曲がった面への対応を現在検討中.
27 企業への期待 新しい AR 技術の応用を考えている企業との共同研究を希望. 応用方法, マーカデザイン, 情報の提示方法など AR 技術は, 今後ますます様々な場面で利用され, 一般にも普及して行くと考えられる. 実証実験, 商品化も含めて連携を考えたい.
28 本技術に関する知的財産権 発明の名称 : マーカー マーカーが付された物体 マーカー解析方法 及び画像作成方法出願番号 : 特願 出願人 発明者 : 千葉大学 : 眞鍋佳嗣, 矢田紀子, 鈴木朝日
29 お問い合わせ先 千葉大学学術研究推進機構産業連携研究推進ステーション特任教授 / 産学官連携コーディネーター小柏猛 ogashiwa@chiba-u.jp Tel: Fax:
2008 年度下期未踏 IT 人材発掘 育成事業採択案件評価書 1. 担当 PM 田中二郎 PM ( 筑波大学大学院システム情報工学研究科教授 ) 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3.
 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3.") 2008 年度下期未踏 IT 人材発掘 育成事業採択案件評価書 1. 担当 PM 田中二郎 PM ( 筑波大学大学院システム情報工学研究科教授 ) 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3. プロジェクト管理組織 株式会社オープンテクノロジーズ 4. 委託金支払額 3,000,000 円 5.
2008 年度下期未踏 IT 人材発掘 育成事業採択案件評価書 1. 担当 PM 田中二郎 PM ( 筑波大学大学院システム情報工学研究科教授 ) 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3. プロジェクト管理組織 株式会社オープンテクノロジーズ 4. 委託金支払額 3,000,000 円 5.
0 21 カラー反射率 slope aspect 図 2.9: 復元結果例 2.4 画像生成技術としての計算フォトグラフィ 3 次元情報を復元することにより, 画像生成 ( レンダリング ) に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生
 に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生") 0 21 カラー反射率 slope aspect 図 2.9: 復元結果例 2.4 画像生成技術としての計算フォトグラフィ 3 次元情報を復元することにより, 画像生成 ( レンダリング ) に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生まれ, コンピューテーショナルフォトグラフィ ( 計算フォトグラフィ ) と呼ばれている.3 次元画像認識技術の計算フォトグラフィへの応用として,
0 21 カラー反射率 slope aspect 図 2.9: 復元結果例 2.4 画像生成技術としての計算フォトグラフィ 3 次元情報を復元することにより, 画像生成 ( レンダリング ) に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生まれ, コンピューテーショナルフォトグラフィ ( 計算フォトグラフィ ) と呼ばれている.3 次元画像認識技術の計算フォトグラフィへの応用として,
vecrot
 1. ベクトル ベクトル : 方向を持つ量 ベクトルには 1 方向 2 大きさ ( 長さ ) という 2 つの属性がある ベクトルの例 : 物体の移動速度 移動量電場 磁場の強さ風速力トルクなど 2. ベクトルの表現 2.1 矢印で表現される 矢印の長さ : ベクトルの大きさ 矢印の向き : ベクトルの方向 2.2 2 個の点を用いて表現する 始点 () と終点 () を結ぶ半直線の向き : ベクトルの方向
1. ベクトル ベクトル : 方向を持つ量 ベクトルには 1 方向 2 大きさ ( 長さ ) という 2 つの属性がある ベクトルの例 : 物体の移動速度 移動量電場 磁場の強さ風速力トルクなど 2. ベクトルの表現 2.1 矢印で表現される 矢印の長さ : ベクトルの大きさ 矢印の向き : ベクトルの方向 2.2 2 個の点を用いて表現する 始点 () と終点 () を結ぶ半直線の向き : ベクトルの方向
人間の視野と同等の広視野画像を取得・提示する簡易な装置
 人間の視野と同等の広視野画像 を取得 提示する簡易な装置 公立はこだて未来大学 システム情報科学部複雑系知能学科 准教授鈴木昭二 研究背景 2 画像情報は有用である 多様な情報 ( 明るさ, 色, 形, 動きなど ) 見ればわかる しかし, カメラの画角は狭い 見える範囲が限定される 全体像を把握しくい 移動する物体を見失いやすい 広視野画像の取得 ( 従来方法 ) 3 多数のカメラを搭載 多数の画像を合成し高解像度の画像取得
人間の視野と同等の広視野画像 を取得 提示する簡易な装置 公立はこだて未来大学 システム情報科学部複雑系知能学科 准教授鈴木昭二 研究背景 2 画像情報は有用である 多様な情報 ( 明るさ, 色, 形, 動きなど ) 見ればわかる しかし, カメラの画角は狭い 見える範囲が限定される 全体像を把握しくい 移動する物体を見失いやすい 広視野画像の取得 ( 従来方法 ) 3 多数のカメラを搭載 多数の画像を合成し高解像度の画像取得
コンピュータグラフィックス第8回
 コンピュータグラフィックス 第 8 回 レンダリング技法 1 ~ 基礎と概要, 隠面消去 ~ 理工学部 兼任講師藤堂英樹 レポート提出状況 課題 1 の選択が多い (STAND BY ME ドラえもん ) 体験演習型 ( 課題 3, 課題 4) の選択も多い 内訳 課題 1 課題 2 課題 3 課題 4 課題 5 2014/11/24 コンピュータグラフィックス 2 次回レポートの体験演習型 メタセコイア,
コンピュータグラフィックス 第 8 回 レンダリング技法 1 ~ 基礎と概要, 隠面消去 ~ 理工学部 兼任講師藤堂英樹 レポート提出状況 課題 1 の選択が多い (STAND BY ME ドラえもん ) 体験演習型 ( 課題 3, 課題 4) の選択も多い 内訳 課題 1 課題 2 課題 3 課題 4 課題 5 2014/11/24 コンピュータグラフィックス 2 次回レポートの体験演習型 メタセコイア,
5104-toku3.indd
 基礎 : 開発用ツール 橋本 直 ( 独 ) 科学技術振興機構 敷居が低くなった AR 開発 2007 AR AR 1 CPU GPU AR CG AR PC AR 2 Web Web Web 5,000 USB Web 10 1280 960 0fps AR PC AR AR 2007 AR AR Web PC AR Flash AR FLARToolKit Web AR IT AR ツールキットが提供する基本的な機能と開発者に求められるスキル
基礎 : 開発用ツール 橋本 直 ( 独 ) 科学技術振興機構 敷居が低くなった AR 開発 2007 AR AR 1 CPU GPU AR CG AR PC AR 2 Web Web Web 5,000 USB Web 10 1280 960 0fps AR PC AR AR 2007 AR AR Web PC AR Flash AR FLARToolKit Web AR IT AR ツールキットが提供する基本的な機能と開発者に求められるスキル
コンピュータグラフィックス第6回
 コンピュータグラフィックス 第 6 回 モデリング技法 1 ~3 次元形状表現 ~ 理工学部 兼任講師藤堂英樹 本日の講義内容 モデリング技法 1 様々な形状モデル 曲線 曲面 2014/11/10 コンピュータグラフィックス 2 CG 制作の主なワークフロー 3DCG ソフトウェアの場合 モデリング カメラ シーン アニメーション テクスチャ 質感 ライティング 画像生成 2014/11/10 コンピュータグラフィックス
コンピュータグラフィックス 第 6 回 モデリング技法 1 ~3 次元形状表現 ~ 理工学部 兼任講師藤堂英樹 本日の講義内容 モデリング技法 1 様々な形状モデル 曲線 曲面 2014/11/10 コンピュータグラフィックス 2 CG 制作の主なワークフロー 3DCG ソフトウェアの場合 モデリング カメラ シーン アニメーション テクスチャ 質感 ライティング 画像生成 2014/11/10 コンピュータグラフィックス
Microsoft PowerPoint - pr_12_template-bs.pptx
 12 回パターン検出と画像特徴 テンプレートマッチング 領域分割 画像特徴 テンプレート マッチング 1 テンプレートマッチング ( 図形 画像などの ) 型照合 Template Matching テンプレートと呼ばれる小さな一部の画像領域と同じパターンが画像全体の中に存在するかどうかを調べる方法 画像内にある対象物体の位置検出 物体数のカウント 物体移動の検出などに使われる テンプレートマッチングの計算
12 回パターン検出と画像特徴 テンプレートマッチング 領域分割 画像特徴 テンプレート マッチング 1 テンプレートマッチング ( 図形 画像などの ) 型照合 Template Matching テンプレートと呼ばれる小さな一部の画像領域と同じパターンが画像全体の中に存在するかどうかを調べる方法 画像内にある対象物体の位置検出 物体数のカウント 物体移動の検出などに使われる テンプレートマッチングの計算
Microsoft Word - 6_D_秋本.docx
 45 ARマーカーを利用した3D 環境モデル構築手法の提案秋本高明 早川玲央 * A method for 3D environment model construction using the AR marker Takaaki AKIMOTO and Reo HAYAKAWA Abstract This paper proposes a method for constructing a 3D
45 ARマーカーを利用した3D 環境モデル構築手法の提案秋本高明 早川玲央 * A method for 3D environment model construction using the AR marker Takaaki AKIMOTO and Reo HAYAKAWA Abstract This paper proposes a method for constructing a 3D
Microsoft PowerPoint - 9.pptx
 9. 線形写像 ここでは 行列の積によって 写像を定義できることをみていく また 行列の積によって定義される写像の性質を調べていく 行列演算と写像 ( 次変換 3 拡大とスカラー倍 p ' = ( ', ' = ( k, kk p = (, k 倍 k 倍 拡大後 k 倍拡大の関係は スカラー倍を用いて次のように表現できる ' = k ' 拡大前 拡大 4 拡大と行列の積 p ' = ( ', '
9. 線形写像 ここでは 行列の積によって 写像を定義できることをみていく また 行列の積によって定義される写像の性質を調べていく 行列演算と写像 ( 次変換 3 拡大とスカラー倍 p ' = ( ', ' = ( k, kk p = (, k 倍 k 倍 拡大後 k 倍拡大の関係は スカラー倍を用いて次のように表現できる ' = k ' 拡大前 拡大 4 拡大と行列の積 p ' = ( ', '
Microsoft PowerPoint - 9.pptx
 9/7/8( 水 9. 線形写像 ここでは 行列の積によって 写像を定義できることをみていく また 行列の積によって定義される写像の性質を調べていく 拡大とスカラー倍 行列演算と写像 ( 次変換 拡大後 k 倍 k 倍 k 倍拡大の関係は スカラー倍を用いて次のように表現できる p = (, ' = k ' 拡大前 p ' = ( ', ' = ( k, k 拡大 4 拡大と行列の積 拡大後 k 倍
9/7/8( 水 9. 線形写像 ここでは 行列の積によって 写像を定義できることをみていく また 行列の積によって定義される写像の性質を調べていく 拡大とスカラー倍 行列演算と写像 ( 次変換 拡大後 k 倍 k 倍 k 倍拡大の関係は スカラー倍を用いて次のように表現できる p = (, ' = k ' 拡大前 p ' = ( ', ' = ( k, k 拡大 4 拡大と行列の積 拡大後 k 倍
ドライビングシミュレータ用実写映像再生ソフトウェア Real Video Drive Player
 東陽テクニカ技術研究所 岩根研究所 共同開発 ドライビングシミュレータ用実写映像再生ソフトウェア Real Video Drive Player Real Video Drive Player Real Video Drive Playerは専用の360 カメラで撮影した走行映像を ステアリング操作やアクセル ブレーキ操作に連動させて再生できるソフトウェアです 専用の動画撮影 加工サービスは任意の道路で行うことができます
東陽テクニカ技術研究所 岩根研究所 共同開発 ドライビングシミュレータ用実写映像再生ソフトウェア Real Video Drive Player Real Video Drive Player Real Video Drive Playerは専用の360 カメラで撮影した走行映像を ステアリング操作やアクセル ブレーキ操作に連動させて再生できるソフトウェアです 専用の動画撮影 加工サービスは任意の道路で行うことができます
 27 24 24115059 i 1 1 2 4 2.1...................... 4 2.1.1.............................. 5 2.1.2...................... 7 2.2............................ 9 2.2.1.................................. 10 2.2.2...............................
27 24 24115059 i 1 1 2 4 2.1...................... 4 2.1.1.............................. 5 2.1.2...................... 7 2.2............................ 9 2.2.1.................................. 10 2.2.2...............................
Microsoft PowerPoint - H24全国大会_発表資料.ppt [互換モード]
![Microsoft PowerPoint - H24全国大会_発表資料.ppt [互換モード]](/thumbs/94/118755799.jpg "Microsoft PowerPoint - H24全国大会_発表資料.ppt [互換モード]") 第 47 回地盤工学研究発表会 モアレを利用した変位計測システムの開発 ( 計測原理と画像解析 ) 平成 24 年 7 月 15 日 山形設計 ( 株 ) 技術部長堀内宏信 1. はじめに ひびわれ計測の必要性 高度成長期に建設された社会基盤の多くが老朽化を迎え, また近年多発している地震などの災害により, 何らかの損傷を有する構造物は膨大な数に上ると想定される 老朽化による劣化や外的要因による損傷などが生じた構造物の適切な維持管理による健全性の確保と長寿命化のためには,
第 47 回地盤工学研究発表会 モアレを利用した変位計測システムの開発 ( 計測原理と画像解析 ) 平成 24 年 7 月 15 日 山形設計 ( 株 ) 技術部長堀内宏信 1. はじめに ひびわれ計測の必要性 高度成長期に建設された社会基盤の多くが老朽化を迎え, また近年多発している地震などの災害により, 何らかの損傷を有する構造物は膨大な数に上ると想定される 老朽化による劣化や外的要因による損傷などが生じた構造物の適切な維持管理による健全性の確保と長寿命化のためには,
例題1 転がり摩擦
 重心 5.. 重心問題解法虎の巻. 半円 分円. 円弧. 扇形. 半球殻 5. 半球体 6. 厚みのある半球殻 7. 三角形 8. 円錐 9. 円錐台. 穴あき板. 空洞のある半球ボール 重心問題解法虎の巻 関西大学工学部物理学教室 齊藤正 重心を求める場合 質点系の重心の求め方が基本 実際の物体では連続体であるので 積分形式で求める場合が多い これらの式は 次元のベクトル形式で書かれている通り つの式は実際には
重心 5.. 重心問題解法虎の巻. 半円 分円. 円弧. 扇形. 半球殻 5. 半球体 6. 厚みのある半球殻 7. 三角形 8. 円錐 9. 円錐台. 穴あき板. 空洞のある半球ボール 重心問題解法虎の巻 関西大学工学部物理学教室 齊藤正 重心を求める場合 質点系の重心の求め方が基本 実際の物体では連続体であるので 積分形式で求める場合が多い これらの式は 次元のベクトル形式で書かれている通り つの式は実際には
Microsoft PowerPoint - 三次元座標測定 ppt
 冗長座標測定機 ()( 三次元座標計測 ( 第 9 回 ) 5 年度大学院講義 6 年 月 7 日 冗長性を持つ 次元座標測定機 次元 辺測量 : 冗長性を出すために つのレーザトラッカを配置し, キャッツアイまでの距離から座標を測定する つのカメラ ( 次元的なカメラ ) とレーザスキャナ : つの角度測定システムによる座標測定 つの回転関節による 次元 自由度多関節機構 高増潔東京大学工学系研究科精密機械工学専攻
冗長座標測定機 ()( 三次元座標計測 ( 第 9 回 ) 5 年度大学院講義 6 年 月 7 日 冗長性を持つ 次元座標測定機 次元 辺測量 : 冗長性を出すために つのレーザトラッカを配置し, キャッツアイまでの距離から座標を測定する つのカメラ ( 次元的なカメラ ) とレーザスキャナ : つの角度測定システムによる座標測定 つの回転関節による 次元 自由度多関節機構 高増潔東京大学工学系研究科精密機械工学専攻
 修士論文の和文要旨 研究科 専攻大学院情報理工学研究科情報 通信工学専攻博士前期課程 氏名春田英和学籍番号 1231074 論文題目 さわれる拡張現実感システムの検討 要 旨 本研究では,AR(Augmented Reality,AR) と様々な入力デバイスを用いた 3DCG モデリングシステムを実装し, さらに物理エンジンと組み合わせることで, さわれる拡張現実感 (AR) システムの有効性を確認した.
修士論文の和文要旨 研究科 専攻大学院情報理工学研究科情報 通信工学専攻博士前期課程 氏名春田英和学籍番号 1231074 論文題目 さわれる拡張現実感システムの検討 要 旨 本研究では,AR(Augmented Reality,AR) と様々な入力デバイスを用いた 3DCG モデリングシステムを実装し, さらに物理エンジンと組み合わせることで, さわれる拡張現実感 (AR) システムの有効性を確認した.
問題-1.indd
 科目名学科 学年 組学籍番号氏名採点結果 016 年度材料力学 Ⅲ 問題 1 1 3 次元的に外力負荷を受ける物体を考える際にデカルト直交座標 - を採る 物体 内のある点 を取り囲む微小六面体上に働く応力 が v =- 40, = 60 =- 30 v = 0 = 10 v = 60 である 図 1 の 面上にこれらの応力 の作用方向を矢印で記入し その脇にその矢印が示す応力成分を記入しなさい 図
科目名学科 学年 組学籍番号氏名採点結果 016 年度材料力学 Ⅲ 問題 1 1 3 次元的に外力負荷を受ける物体を考える際にデカルト直交座標 - を採る 物体 内のある点 を取り囲む微小六面体上に働く応力 が v =- 40, = 60 =- 30 v = 0 = 10 v = 60 である 図 1 の 面上にこれらの応力 の作用方向を矢印で記入し その脇にその矢印が示す応力成分を記入しなさい 図
27 AR
 27 AR 28 2 19 12111002 AR AR 1 3 1.1....................... 3 1.1.1...................... 3 1.1.2.................. 4 1.2............................ 4 1.2.1 AR......................... 5 1.2.2......................
27 AR 28 2 19 12111002 AR AR 1 3 1.1....................... 3 1.1.1...................... 3 1.1.2.................. 4 1.2............................ 4 1.2.1 AR......................... 5 1.2.2......................
Microsoft Word - thesis.doc
 剛体の基礎理論 -. 剛体の基礎理論初めに本論文で大域的に使用する記号を定義する. 使用する記号トルク撃力力角運動量角速度姿勢対角化された慣性テンソル慣性テンソル運動量速度位置質量時間 J W f F P p .. 質点の並進運動 質点は位置 と速度 P を用いる. ニュートンの運動方程式 という状態を持つ. 但し ここでは速度ではなく運動量 F P F.... より質点の運動は既に明らかであり 質点の状態ベクトル
剛体の基礎理論 -. 剛体の基礎理論初めに本論文で大域的に使用する記号を定義する. 使用する記号トルク撃力力角運動量角速度姿勢対角化された慣性テンソル慣性テンソル運動量速度位置質量時間 J W f F P p .. 質点の並進運動 質点は位置 と速度 P を用いる. ニュートンの運動方程式 という状態を持つ. 但し ここでは速度ではなく運動量 F P F.... より質点の運動は既に明らかであり 質点の状態ベクトル
tc15_tutorial02
 第 章 D 機能の基本操作 この章では TurboCAD v Professionalおよび TurboCAD v Stan dardに備えられている D 機能について説明します TurboSketch v をお使いの場合は D 機能は使用することはできません - TurboCAD の D 機能の基本 D オブジェクトを作成するためのツールは メニューの挿入 D オブ ジェクトもしくは [ 作図 ]
第 章 D 機能の基本操作 この章では TurboCAD v Professionalおよび TurboCAD v Stan dardに備えられている D 機能について説明します TurboSketch v をお使いの場合は D 機能は使用することはできません - TurboCAD の D 機能の基本 D オブジェクトを作成するためのツールは メニューの挿入 D オブ ジェクトもしくは [ 作図 ]
連続講座 断層映像法の基礎第 34 回 : 篠原 広行 他 放射状に 線を照射し 対面に検出器の列を置いておき 一度に 1 つの角度データを取得する 後は全体を 1 回転しながら次々と角度データを取得することで計測を終了する この計測で得られる投影はとなる ここで l はファンビームのファンに沿った
 連続講座 断層映像法の基礎第 34 回 : 篠原広行 他 篠原 広行 桑山 潤 小川 亙 中世古 和真 断層映像法の基礎第 34 回スパイラルスキャン CT 1) 軽部修平 2) 橋本雄幸 1) 小島慎也 1) 藤堂幸宏 1) 3) 首都大学東京人間健康科学研究科放射線科学域 2) 東邦大学医療センター大橋病院 3) 横浜創英短期大学情報学科 1) はじめに第 33 回では検出確率 C ij の関係を行列とベクトルの計算式に置き換えて解を求める最小二乗法を利用した方法について解説した
連続講座 断層映像法の基礎第 34 回 : 篠原広行 他 篠原 広行 桑山 潤 小川 亙 中世古 和真 断層映像法の基礎第 34 回スパイラルスキャン CT 1) 軽部修平 2) 橋本雄幸 1) 小島慎也 1) 藤堂幸宏 1) 3) 首都大学東京人間健康科学研究科放射線科学域 2) 東邦大学医療センター大橋病院 3) 横浜創英短期大学情報学科 1) はじめに第 33 回では検出確率 C ij の関係を行列とベクトルの計算式に置き換えて解を求める最小二乗法を利用した方法について解説した
補足 中学で学習したフレミング左手の法則 ( 電 磁 力 ) と関連付けると覚えやすい 電磁力は電流と磁界の外積で表される 力 F 磁 電磁力 F li 右ねじの回転の向き電 li ( l は導線の長さ ) 補足 有向線分とベクトル有向線分 : 矢印の位
 と関連付けると覚えやすい 電磁力は電流と磁界の外積で表される 力 F 磁 電磁力 F li 右ねじの回転の向き電 li ( l は導線の長さ ) 補足 有向線分とベクトル有向線分 : 矢印の位") http://totemt.sur.ne.p 外積 ( ベクトル積 ) の活用 ( 面積, 法線ベクトル, 平面の方程式 ) 3 次元空間の つのベクトルの積が つのベクトルを与えるようなベクトルの掛け算 ベクトルの積がベクトルを与えることからベクトル積とも呼ばれる これに対し内積は符号と大きさをもつ量 ( スカラー量 ) を与えるので, スカラー積とも呼ばれる 外積を使うと, 平行四辺形や三角形の面積,
http://totemt.sur.ne.p 外積 ( ベクトル積 ) の活用 ( 面積, 法線ベクトル, 平面の方程式 ) 3 次元空間の つのベクトルの積が つのベクトルを与えるようなベクトルの掛け算 ベクトルの積がベクトルを与えることからベクトル積とも呼ばれる これに対し内積は符号と大きさをもつ量 ( スカラー量 ) を与えるので, スカラー積とも呼ばれる 外積を使うと, 平行四辺形や三角形の面積,
代数 幾何 < ベクトル > 1 ベクトルの演算 和 差 実数倍については 文字の計算と同様 2 ベクトルの成分表示 平面ベクトル : a x e y e x, ) ( 1 y1 空間ベクトル : a x e y e z e x, y, ) ( 1 1 z1
 ( 1 y1 空間ベクトル : a x e y e z e x, y, ) ( 1 1 z1") 代数 幾何 < ベクトル > ベクトルの演算 和 差 実数倍については 文字の計算と同様 ベクトルの成分表示 平面ベクトル :, 空間ベクトル : z,, z 成分での計算ができるようにすること ベクトルの内積 : os 平面ベクトル :,, 空間ベクトル :,,,, z z zz 4 ベクトルの大きさ 平面上 : 空間上 : z は 良く用いられる 5 m: に分ける点 : m m 図形への応用
代数 幾何 < ベクトル > ベクトルの演算 和 差 実数倍については 文字の計算と同様 ベクトルの成分表示 平面ベクトル :, 空間ベクトル : z,, z 成分での計算ができるようにすること ベクトルの内積 : os 平面ベクトル :,, 空間ベクトル :,,,, z z zz 4 ベクトルの大きさ 平面上 : 空間上 : z は 良く用いられる 5 m: に分ける点 : m m 図形への応用
Raspberry Pi BF BF BF Raspberry Pi PC USB HDMI OS SD SD OS Raspberry Pi Model B MicroUSB MicroSD OS SD GPIO HDMI USB LAN Raspberry Pi MicroUSB MicroSD
 Raspberry Pi Arduino Arduino Raspberry Pi Arduino URL Raspberry Pi HDMI USB SD https://www.raspberrypi.org/ Python, Scratch Arduino PC USB https://www.arduino.cc/ Arduino SDK Processing Kinect for Windows,
Raspberry Pi Arduino Arduino Raspberry Pi Arduino URL Raspberry Pi HDMI USB SD https://www.raspberrypi.org/ Python, Scratch Arduino PC USB https://www.arduino.cc/ Arduino SDK Processing Kinect for Windows,
Coding theorems for correlated sources with cooperative information
 グラフコストの逐次更新を用いた映像顕著領域の自動抽出 2009 年 5 月 28 日 福地賢宮里洸司 (2) 木村昭悟 (1) 高木茂 (2) 大和淳司 (1) (1) 日本電信電話 ( 株 )NTT) コミュニケーション科学基礎研究所メディア情報研究部メディア認識研究グループ (2) 国立沖縄工業高等専門学校情報通信システム工学科 背景 ヒトはどのようにして もの を認識する能力を獲得するのか?
グラフコストの逐次更新を用いた映像顕著領域の自動抽出 2009 年 5 月 28 日 福地賢宮里洸司 (2) 木村昭悟 (1) 高木茂 (2) 大和淳司 (1) (1) 日本電信電話 ( 株 )NTT) コミュニケーション科学基礎研究所メディア情報研究部メディア認識研究グループ (2) 国立沖縄工業高等専門学校情報通信システム工学科 背景 ヒトはどのようにして もの を認識する能力を獲得するのか?
木村の物理小ネタ ケプラーの第 2 法則と角運動量保存則 A. 面積速度面積速度とは平面内に定点 O と動点 P があるとき, 定点 O と動点 P を結ぶ線分 OP( 動径 OP という) が単位時間に描く面積を 動点 P の定点 O に
 が単位時間に描く面積を 動点 P の定点 O に") ケプラーの第 法則と角運動量保存則 A. 面積速度面積速度とは平面内に定点 O と動点 P があるとき, 定点 O と動点 P を結ぶ線分 OP( 動径 OP という が単位時間に描く面積を 動点 P の定点 O に関する面積速度の大きさ という 定点 O まわりを回る面積速度の導き方導き方 A ( x( + D, y( + D v ( q r ( A ( x (, y( 動点 P が xy 座標平面上を時刻
ケプラーの第 法則と角運動量保存則 A. 面積速度面積速度とは平面内に定点 O と動点 P があるとき, 定点 O と動点 P を結ぶ線分 OP( 動径 OP という が単位時間に描く面積を 動点 P の定点 O に関する面積速度の大きさ という 定点 O まわりを回る面積速度の導き方導き方 A ( x( + D, y( + D v ( q r ( A ( x (, y( 動点 P が xy 座標平面上を時刻
機構学 平面機構の運動学
 問題 1 静止座標系 - 平面上を運動する節 b 上に2 定点,Bを考える. いま,2 点の座標は(0,0),B(50,0) である. 2 点間の距離は 50 mm, 点の速度が a 150 mm/s, 点 Bの速度の向きが150 である. 以下の問いに答えよ. (1) 点 Bの速度を求めよ. (2) 瞬間中心を求めよ. 節 b a (0,0) b 150 B(50,0) 問題 1(1) 解答 b
問題 1 静止座標系 - 平面上を運動する節 b 上に2 定点,Bを考える. いま,2 点の座標は(0,0),B(50,0) である. 2 点間の距離は 50 mm, 点の速度が a 150 mm/s, 点 Bの速度の向きが150 である. 以下の問いに答えよ. (1) 点 Bの速度を求めよ. (2) 瞬間中心を求めよ. 節 b a (0,0) b 150 B(50,0) 問題 1(1) 解答 b
EnSightのご紹介
 オープン CAE シンポジウム 2014 汎用ポストプロセッサー EnSight の大規模データ対応 CEI ソフトウェア株式会社代表取締役吉川慈人 http://www.ceisoftware.co.jp/ 内容 大規模データで時間のかかる処理 クライアント サーバー機能 マルチスレッドによる並列処理 サーバーの分散処理 クライアントの分散処理 ( 分散レンダリング ) EnSightのOpenFOAMインターフェース
オープン CAE シンポジウム 2014 汎用ポストプロセッサー EnSight の大規模データ対応 CEI ソフトウェア株式会社代表取締役吉川慈人 http://www.ceisoftware.co.jp/ 内容 大規模データで時間のかかる処理 クライアント サーバー機能 マルチスレッドによる並列処理 サーバーの分散処理 クライアントの分散処理 ( 分散レンダリング ) EnSightのOpenFOAMインターフェース
Microsoft Word - 201hyouka-tangen-1.doc
 数学 Ⅰ 評価規準の作成 ( 単元ごと ) 数学 Ⅰ の目標及び図形と計量について理解させ 基礎的な知識の習得と技能の習熟を図り それらを的確に活用する機能を伸ばすとともに 数学的な見方や考え方のよさを認識できるようにする 評価の観点の趣旨 式と不等式 二次関数及び図形と計量における考え方に関 心をもつとともに 数学的な見方や考え方のよさを認識し それらを事象の考察に活用しようとする 式と不等式 二次関数及び図形と計量における数学的な見
数学 Ⅰ 評価規準の作成 ( 単元ごと ) 数学 Ⅰ の目標及び図形と計量について理解させ 基礎的な知識の習得と技能の習熟を図り それらを的確に活用する機能を伸ばすとともに 数学的な見方や考え方のよさを認識できるようにする 評価の観点の趣旨 式と不等式 二次関数及び図形と計量における考え方に関 心をもつとともに 数学的な見方や考え方のよさを認識し それらを事象の考察に活用しようとする 式と不等式 二次関数及び図形と計量における数学的な見
Microsoft PowerPoint - zairiki_3
 材料力学講義 (3) 応力と変形 Ⅲ ( 曲げモーメント, 垂直応力度, 曲率 ) 今回は, 曲げモーメントに関する, 断面力 - 応力度 - 変形 - 変位の関係について学びます 1 曲げモーメント 曲げモーメント M 静定力学で求めた曲げモーメントも, 仮想的に断面を切ることによって現れる内力です 軸方向力は断面に働く力 曲げモーメント M は断面力 曲げモーメントも, 一つのモーメントとして表しますが,
材料力学講義 (3) 応力と変形 Ⅲ ( 曲げモーメント, 垂直応力度, 曲率 ) 今回は, 曲げモーメントに関する, 断面力 - 応力度 - 変形 - 変位の関係について学びます 1 曲げモーメント 曲げモーメント M 静定力学で求めた曲げモーメントも, 仮想的に断面を切ることによって現れる内力です 軸方向力は断面に働く力 曲げモーメント M は断面力 曲げモーメントも, 一つのモーメントとして表しますが,
画像類似度測定の初歩的な手法の検証
 画像類似度測定の初歩的な手法の検証 島根大学総合理工学部数理 情報システム学科 計算機科学講座田中研究室 S539 森瀧昌志 1 目次 第 1 章序論第 章画像間類似度測定の初歩的な手法について.1 A. 画素値の平均を用いる手法.. 画素値のヒストグラムを用いる手法.3 C. 相関係数を用いる手法.4 D. 解像度を合わせる手法.5 E. 振れ幅のヒストグラムを用いる手法.6 F. 周波数ごとの振れ幅を比較する手法第
画像類似度測定の初歩的な手法の検証 島根大学総合理工学部数理 情報システム学科 計算機科学講座田中研究室 S539 森瀧昌志 1 目次 第 1 章序論第 章画像間類似度測定の初歩的な手法について.1 A. 画素値の平均を用いる手法.. 画素値のヒストグラムを用いる手法.3 C. 相関係数を用いる手法.4 D. 解像度を合わせる手法.5 E. 振れ幅のヒストグラムを用いる手法.6 F. 周波数ごとの振れ幅を比較する手法第
Release Note for Media File Player v1.6.3 (Japanese)
") Media File Player Version 1.6.4 リリースノート第 1 版 最終修正日 2013 年 11 月 1 日 c 2013 Sony Corporation 著作権について権利者の許諾を得ることなく このソフトウェアおよび本書の内容の全部または一部を複写すること およびこのソフトウェアを賃貸に使用することは 著作権法上禁止されております ソフトウェアを使用したことによるお客様の損害
Media File Player Version 1.6.4 リリースノート第 1 版 最終修正日 2013 年 11 月 1 日 c 2013 Sony Corporation 著作権について権利者の許諾を得ることなく このソフトウェアおよび本書の内容の全部または一部を複写すること およびこのソフトウェアを賃貸に使用することは 著作権法上禁止されております ソフトウェアを使用したことによるお客様の損害
-1-1 1 1 1 1 12 31 2 2 3 4
 2007 -1-1 1 1 1 1 12 31 2 2 3 4 -2-5 6 CPU 3 Windows98 1 -3-2. 3. -4-4 2 5 1 1 1 -5- 50000 50000 50000 50000 50000 50000 50000 50000 50000 50000-6- -7-1 Windows 2 -8-1 2 3 4 - - 100,000 200,000 500,000
2007 -1-1 1 1 1 1 12 31 2 2 3 4 -2-5 6 CPU 3 Windows98 1 -3-2. 3. -4-4 2 5 1 1 1 -5- 50000 50000 50000 50000 50000 50000 50000 50000 50000 50000-6- -7-1 Windows 2 -8-1 2 3 4 - - 100,000 200,000 500,000
ARToolKit プログラムの仕組み 1: ヘッダファイルのインクルード 2: Main 関数 3: Main Loop 関数 4: マウス入力処理関数 5: キーボード入力処理関数 6: 終了処理関数 3: Main Loop 関数 1カメラ画像の取得 2カメラ画像の描画 3マーカの検出と認識
 ARToolKit プログラムの仕組み 1: ヘッダファイルのインクルード 2: Main 関数 3: Main Loop 関数 4: マウス入力処理関数 5: キーボード入力処理関数 6: 終了処理関数 3: Main Loop 関数 1カメラ画像の取得 2カメラ画像の描画 3マーカの検出と認識 4 次の画像のキャプチャ指示 5マーカの信頼度の比較 6マーカの位置 姿勢の計算 7バッファの内容を画面に表示
ARToolKit プログラムの仕組み 1: ヘッダファイルのインクルード 2: Main 関数 3: Main Loop 関数 4: マウス入力処理関数 5: キーボード入力処理関数 6: 終了処理関数 3: Main Loop 関数 1カメラ画像の取得 2カメラ画像の描画 3マーカの検出と認識 4 次の画像のキャプチャ指示 5マーカの信頼度の比較 6マーカの位置 姿勢の計算 7バッファの内容を画面に表示
数学 ⅡB < 公理 > 公理を論拠に定義を用いて定理を証明する 1 大小関係の公理 順序 (a > b, a = b, a > b 1 つ成立 a > b, b > c a > c 成立 ) 順序と演算 (a > b a + c > b + c (a > b, c > 0 ac > bc) 2 図
 順序と演算 (a > b a + c > b + c (a > b, c > 0 ac > bc) 2 図") 数学 Ⅱ < 公理 > 公理を論拠に定義を用いて定理を証明する 大小関係の公理 順序 >, =, > つ成立 >, > > 成立 順序と演算 > + > + >, > > 図形の公理 平行線の性質 錯角 同位角 三角形の合同条件 三角形の合同相似 量の公理 角の大きさ 線分の長さ < 空間における座漂とベクトル > ベクトルの演算 和 差 実数倍については 文字の計算と同様 ベクトルの成分表示 平面ベクトル
数学 Ⅱ < 公理 > 公理を論拠に定義を用いて定理を証明する 大小関係の公理 順序 >, =, > つ成立 >, > > 成立 順序と演算 > + > + >, > > 図形の公理 平行線の性質 錯角 同位角 三角形の合同条件 三角形の合同相似 量の公理 角の大きさ 線分の長さ < 空間における座漂とベクトル > ベクトルの演算 和 差 実数倍については 文字の計算と同様 ベクトルの成分表示 平面ベクトル
クイックマニュアル(SV)_PVCXC-M011-D
_PVCXC-M011-D") 目次 本書は xsync Classroom を起動し 各種機能を使用する手順の説明書です 起動と終了... 2 xsync Classroom を起動する... 2 xsync Classroom を終了する... 2 ホーム画面... 3 ホワイトボード... 3 ペンで描く... 3 消しゴムで消す... 4 拡大表示する... 4 画面の一部を切り取る / 貼り付ける... 5 保存する...
目次 本書は xsync Classroom を起動し 各種機能を使用する手順の説明書です 起動と終了... 2 xsync Classroom を起動する... 2 xsync Classroom を終了する... 2 ホーム画面... 3 ホワイトボード... 3 ペンで描く... 3 消しゴムで消す... 4 拡大表示する... 4 画面の一部を切り取る / 貼り付ける... 5 保存する...
断面の諸量
 断面の諸量 建設システム工学科高谷富也 断面 次モーメント 定義 G d G d 座標軸の平行移動 断面 次モーメント 軸に平行な X Y 軸に関する断面 次モーメント G X G Y を求める X G d d d Y 0 0 G 0 G d d d 0 0 G 0 重心 軸に関する断面 次モーメントを G G とし 軸に平行な座標軸 X Y の原点が断面の重心に一致するものとする G G, G G
断面の諸量 建設システム工学科高谷富也 断面 次モーメント 定義 G d G d 座標軸の平行移動 断面 次モーメント 軸に平行な X Y 軸に関する断面 次モーメント G X G Y を求める X G d d d Y 0 0 G 0 G d d d 0 0 G 0 重心 軸に関する断面 次モーメントを G G とし 軸に平行な座標軸 X Y の原点が断面の重心に一致するものとする G G, G G
[課題案]
![[課題案]](/thumbs/89/98101788.jpg "[課題案]") デザイン情報演習 Ⅴ 課題その 2 テーマ : 実世界指向インタラクション ディスプレイを覗くと世界が変わる 私たちの実世界での活動を支援する新しいインタラクションシステムを構築する. KEYWORD: 実世界指向インターフェース, タンジブルインターフェース (tangible interface) ミックスドリアリティ (Mixed Reality; 複合現実感 ) オーグメンティドリアリティ
デザイン情報演習 Ⅴ 課題その 2 テーマ : 実世界指向インタラクション ディスプレイを覗くと世界が変わる 私たちの実世界での活動を支援する新しいインタラクションシステムを構築する. KEYWORD: 実世界指向インターフェース, タンジブルインターフェース (tangible interface) ミックスドリアリティ (Mixed Reality; 複合現実感 ) オーグメンティドリアリティ
ARCHITREND ZERO 汎用コマンド一覧
 ARCHITREND ZERO 汎用コマンド一覧 一覧表でグレーに塗りつぶされているコマンドは 初期状態では表示されていません 使用するには コマンドカスタマイズで表示する必要があります 情報メニュー 2 線間の距離 角度を計測します また 計測結果の距離をそのまま寸法線として入力できます 2 点間の距離 角度 水平距離 垂直距離を計測します また 計測結果の距離をそのまま寸法線として入力できます
ARCHITREND ZERO 汎用コマンド一覧 一覧表でグレーに塗りつぶされているコマンドは 初期状態では表示されていません 使用するには コマンドカスタマイズで表示する必要があります 情報メニュー 2 線間の距離 角度を計測します また 計測結果の距離をそのまま寸法線として入力できます 2 点間の距離 角度 水平距離 垂直距離を計測します また 計測結果の距離をそのまま寸法線として入力できます
2015-2017年度 2次数学セレクション(複素数)解答解説
解答解説") 05 次数学セレクション解答解説 [ 筑波大 ] ( + より, 0 となり, + から, ( (,, よって, の描く図形 C は, 点 を中心とし半径が の円である すなわち, 原 点を通る円となる ( は虚数, は正の実数より, である さて, w ( ( とおくと, ( ( ( w ( ( ( ここで, w は純虚数より, は純虚数となる すると, の描く図形 L は, 点 を通り, 点 と点
05 次数学セレクション解答解説 [ 筑波大 ] ( + より, 0 となり, + から, ( (,, よって, の描く図形 C は, 点 を中心とし半径が の円である すなわち, 原 点を通る円となる ( は虚数, は正の実数より, である さて, w ( ( とおくと, ( ( ( w ( ( ( ここで, w は純虚数より, は純虚数となる すると, の描く図形 L は, 点 を通り, 点 と点
 次元圧縮法を導入したクエリに基づくバイクラスタリング 情報推薦への応用 武内充三浦功輝岡田吉史 ( 室蘭工業大学 ) 概要以前, 我々はクエリに基づくバイクラスタリングを用いた情報推薦手法を提案した. 本研究では, 新たに推薦スコアが非常に良く似たユーザまたはアイテムを融合する次元圧縮法を導入した. 実験として, 縮減前と縮減後のデータセットのサイズとバイクラスタ計算時間の比較を行う. キーワード
次元圧縮法を導入したクエリに基づくバイクラスタリング 情報推薦への応用 武内充三浦功輝岡田吉史 ( 室蘭工業大学 ) 概要以前, 我々はクエリに基づくバイクラスタリングを用いた情報推薦手法を提案した. 本研究では, 新たに推薦スコアが非常に良く似たユーザまたはアイテムを融合する次元圧縮法を導入した. 実験として, 縮減前と縮減後のデータセットのサイズとバイクラスタ計算時間の比較を行う. キーワード
自由落下と非慣性系における運動方程式 目次無重力... 2 加速度計は重力加速度を測れない... 3 重量は質量と同じ数値で kg が使える... 3 慣性系における運動方程式... 4 非慣性系における運動方程式... 6 見かけの力... 7 慣性系には実在する慣
 自由落下と非慣性系における運動方程式 1 1 2 3 4 5 6 7 目次無重力... 2 加速度計は重力加速度を測れない... 3 重量は質量と同じ数値で kg が使える... 3 慣性系における運動方程式... 4 非慣性系における運動方程式... 6 見かけの力... 7 慣性系には実在する慣性力があるか... 7 1 2 無重力 (1) 非慣性系の住人は無重力を体感できる (a) 併進的な加速度運動をしている非慣性系の住人
自由落下と非慣性系における運動方程式 1 1 2 3 4 5 6 7 目次無重力... 2 加速度計は重力加速度を測れない... 3 重量は質量と同じ数値で kg が使える... 3 慣性系における運動方程式... 4 非慣性系における運動方程式... 6 見かけの力... 7 慣性系には実在する慣性力があるか... 7 1 2 無重力 (1) 非慣性系の住人は無重力を体感できる (a) 併進的な加速度運動をしている非慣性系の住人
25 AR 3 Property of three-dimensional perception in the wearable AR environment
 25 AR 3 Property of three-dimensional perception in the wearable AR environment 1140378 2014 2 28 AR 3 AR.. AR,. AR. 2, [2]., [3]., AR. AR. 3D 3D,,., 3D..,,,,. AR,, HMD,, 3 i Abstract Property of three-dimensional
25 AR 3 Property of three-dimensional perception in the wearable AR environment 1140378 2014 2 28 AR 3 AR.. AR,. AR. 2, [2]., [3]., AR. AR. 3D 3D,,., 3D..,,,,. AR,, HMD,, 3 i Abstract Property of three-dimensional
基礎輪講2週目 Kinectの話
 基礎輪講 2 週目 Kinect の話 3D Computer Vision カメラから 3 次元の情報を取得 3 次元再構築 :2 次元の画像から 3 次元形状の復元 多視点画像群 3 次元再構築結果 3 次元の情報を持つ画像ってないの? 2 距離画像 Depth( 距離 ) の情報を持った画像 各画素の部分に距離の値が入る. 距離画像 距離画像を取得する機器が必要 3 距離画像センサ 実世界の距離情報を取得できる.
基礎輪講 2 週目 Kinect の話 3D Computer Vision カメラから 3 次元の情報を取得 3 次元再構築 :2 次元の画像から 3 次元形状の復元 多視点画像群 3 次元再構築結果 3 次元の情報を持つ画像ってないの? 2 距離画像 Depth( 距離 ) の情報を持った画像 各画素の部分に距離の値が入る. 距離画像 距離画像を取得する機器が必要 3 距離画像センサ 実世界の距離情報を取得できる.
 (2) (3) (4) (5) 2.1 ( ) 2")
情報処理学会研究報告 IPSJ SIG Technical Report Vol.2015-CVIM-195 No /1/22 AR マーカ除去のための実時間背景画像変形 *1 1 1 Abstract 本稿では, 拡張現実感で用いられる AR マーカの違和感のない視覚的除去を実現するた
 AR マーカ除去のための実時間背景画像変形 *1 1 1 Abstract 本稿では, 拡張現実感で用いられる AR マーカの違和感のない視覚的除去を実現するための, 背景画像の実時間変形手法を提案する. 従来,AR マーカの実時間除去は, マーカが平面上に存在するという仮定のもと, カメラ位置姿勢に基づく単一の射影変換行列を用いて, 背景画像を変形し, マーカ上に重畳することで実現していた. しかし,
AR マーカ除去のための実時間背景画像変形 *1 1 1 Abstract 本稿では, 拡張現実感で用いられる AR マーカの違和感のない視覚的除去を実現するための, 背景画像の実時間変形手法を提案する. 従来,AR マーカの実時間除去は, マーカが平面上に存在するという仮定のもと, カメラ位置姿勢に基づく単一の射影変換行列を用いて, 背景画像を変形し, マーカ上に重畳することで実現していた. しかし,
Microsoft Word - 断面諸量
 応用力学 Ⅱ 講義資料 / 断面諸量 断面諸量 断面 次 次モーメントの定義 図 - に示すような形状を有する横断面を考え その全断面積を とする いま任意に定めた直交座標軸 O-, をとり また図中の斜線部の微小面積要素を d とするとき d, d () で定義される, をそれぞれ与えられた横断面の 軸, 軸に関する断面 次モーメント (geometrcal moment of area) という
応用力学 Ⅱ 講義資料 / 断面諸量 断面諸量 断面 次 次モーメントの定義 図 - に示すような形状を有する横断面を考え その全断面積を とする いま任意に定めた直交座標軸 O-, をとり また図中の斜線部の微小面積要素を d とするとき d, d () で定義される, をそれぞれ与えられた横断面の 軸, 軸に関する断面 次モーメント (geometrcal moment of area) という
学習指導要領
 (1) 数と式 ア数と集合 ( ア ) 実数数を実数まで拡張する意義を理解し 簡単な無理数の四則計算をすること 絶対値の意味を理解し適切な処理することができる 例題 1-3 の絶対値をはずせ 展開公式 ( a + b ) ( a - b ) = a 2 - b 2 を利用して根号を含む分数の分母を有理化することができる 例題 5 5 + 2 の分母を有理化せよ 実数の整数部分と小数部分の表し方を理解している
(1) 数と式 ア数と集合 ( ア ) 実数数を実数まで拡張する意義を理解し 簡単な無理数の四則計算をすること 絶対値の意味を理解し適切な処理することができる 例題 1-3 の絶対値をはずせ 展開公式 ( a + b ) ( a - b ) = a 2 - b 2 を利用して根号を含む分数の分母を有理化することができる 例題 5 5 + 2 の分母を有理化せよ 実数の整数部分と小数部分の表し方を理解している
idoperation SC のコンセプト idoperation SC は パソコンやサーバにインストールする 防犯カメラ ソリューションです パソコンやサーバのデスクトップ内でのユーザ操作をビデオで記録し 証跡として残します 録画 保管 再生 2
 PC 操作記録ソフトウェア アイディーオペレーション セキュリティカメラ ご紹介資料 1 idoperation SC のコンセプト idoperation SC は パソコンやサーバにインストールする 防犯カメラ ソリューションです パソコンやサーバのデスクトップ内でのユーザ操作をビデオで記録し 証跡として残します 録画 保管 再生 2 idoperation SC 製品概要 録画 idoperation
PC 操作記録ソフトウェア アイディーオペレーション セキュリティカメラ ご紹介資料 1 idoperation SC のコンセプト idoperation SC は パソコンやサーバにインストールする 防犯カメラ ソリューションです パソコンやサーバのデスクトップ内でのユーザ操作をビデオで記録し 証跡として残します 録画 保管 再生 2 idoperation SC 製品概要 録画 idoperation
untitled
 for Windows 読む いつもの本を 読むように 検索 辞書 観る 266点の動画が さくさく再生 残す マーカー メモ ノート しおり スクラップでらくらく整理 41巻 1万ページ 2万語 辞書からすぐに検索 解く のべ3,035問の 国試対策問題集 デジタル看護教科書 for Windows 2016 デジタル ナーシング グラフィカ2016 for Windows 商品概要
for Windows 読む いつもの本を 読むように 検索 辞書 観る 266点の動画が さくさく再生 残す マーカー メモ ノート しおり スクラップでらくらく整理 41巻 1万ページ 2万語 辞書からすぐに検索 解く のべ3,035問の 国試対策問題集 デジタル看護教科書 for Windows 2016 デジタル ナーシング グラフィカ2016 for Windows 商品概要
Microsoft Word - kojima.doc
 小径ボールエンドミルによる 3 次元曲面加工の高精度化 小島龍広 1), 扇谷保彦 2), 矢澤孝哲 1) 長崎大学工学部教育研究支援部 2) 長崎大学工学部機械システム工学講座 2) 1. 緒言金型加工では製品の高性能化や小型化に伴い, 複雑形状を高精度に効率よく加工する必要性が高まっている. 金型加工には, 従来, 放電加工機が用いられてきたが, マシニングセンタおよび性能の向上に伴い, 仕上げ加工までを小径ボールエンドミル加工で効率的に行うことが増えてきている.
小径ボールエンドミルによる 3 次元曲面加工の高精度化 小島龍広 1), 扇谷保彦 2), 矢澤孝哲 1) 長崎大学工学部教育研究支援部 2) 長崎大学工学部機械システム工学講座 2) 1. 緒言金型加工では製品の高性能化や小型化に伴い, 複雑形状を高精度に効率よく加工する必要性が高まっている. 金型加工には, 従来, 放電加工機が用いられてきたが, マシニングセンタおよび性能の向上に伴い, 仕上げ加工までを小径ボールエンドミル加工で効率的に行うことが増えてきている.
PoincareDisk-3.doc
 3. ポアンカレ円盤上の 次分数変換この節以降では, 単に双曲的直線, 双曲的円などといえば, 全てポアンカレ円盤上の基本図形とします. また, 点 と点 B のポアンカレ円盤上での双曲的距離を,[,B] と表します. 3. 双曲的垂直 等分線 ユークリッドの原論 において 円 双曲的円, 直線 双曲的直線 の置き換えを行うだけで, 双曲的垂直 等分線, 双曲的内心, 双曲的外心などを 機械的に (
3. ポアンカレ円盤上の 次分数変換この節以降では, 単に双曲的直線, 双曲的円などといえば, 全てポアンカレ円盤上の基本図形とします. また, 点 と点 B のポアンカレ円盤上での双曲的距離を,[,B] と表します. 3. 双曲的垂直 等分線 ユークリッドの原論 において 円 双曲的円, 直線 双曲的直線 の置き換えを行うだけで, 双曲的垂直 等分線, 双曲的内心, 双曲的外心などを 機械的に (
2 Hermite-Gaussian モード 2-1 Hermite-Gaussian モード 自由空間を伝搬するレーザ光は次のような Hermite-gaussian Modes を持つ光波として扱う ことができる ここで U lm (x, y, z) U l (x, z)u m (y, z) e
 U l (x, z)u m (y, z) e") Wavefront Sensor 法による三角共振器のミスアラインメント検出 齊藤高大 新潟大学大学院自然科学研究科電気情報工学専攻博士後期課程 2 年 214 年 8 月 6 日 1 はじめに Input Mode Cleaner(IMC) は Fig.1 に示すような三角共振器である 懸架鏡の共振などにより IMC を構成する各ミラーが角度変化を起こすと 入射光軸と共振器軸との間にずれが生じる
Wavefront Sensor 法による三角共振器のミスアラインメント検出 齊藤高大 新潟大学大学院自然科学研究科電気情報工学専攻博士後期課程 2 年 214 年 8 月 6 日 1 はじめに Input Mode Cleaner(IMC) は Fig.1 に示すような三角共振器である 懸架鏡の共振などにより IMC を構成する各ミラーが角度変化を起こすと 入射光軸と共振器軸との間にずれが生じる
Mate J & VersaPro J インテル第5、第4世代CPU搭載モデルカタログ 2016年5月
 NEC PC 54CPU Windows 10 Pro PC 2 in 1PC IGZOPC 2 HD PC HD 4CPU HDPC HD 3 AC PC PC 4 & 22.6mm Web 22.6mm PC 5 4 Core PC CPU PC 6 Core i5core i3celeroncpu & PC LAN 1LPC 7 Web NEC http://jpn.nec.com/bpc/versapro_j/
NEC PC 54CPU Windows 10 Pro PC 2 in 1PC IGZOPC 2 HD PC HD 4CPU HDPC HD 3 AC PC PC 4 & 22.6mm Web 22.6mm PC 5 4 Core PC CPU PC 6 Core i5core i3celeroncpu & PC LAN 1LPC 7 Web NEC http://jpn.nec.com/bpc/versapro_j/
isai300413web.indd
 2012.4 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 研究動向紹介 修士論文概要 次元計測に基づくテレオペレーションシステム 中京大学大学院 情報科学研究科 情報科学専攻 日比野 翔太郎 高所や災害現場などの極限環境での作業には人的被害が起こりやすいというリスクが常に伴う その 対策の一つとしてテレオペレーションロボットと呼ばれる遠隔操作ロボットによる作業が挙げられる
2012.4 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 研究動向紹介 修士論文概要 次元計測に基づくテレオペレーションシステム 中京大学大学院 情報科学研究科 情報科学専攻 日比野 翔太郎 高所や災害現場などの極限環境での作業には人的被害が起こりやすいというリスクが常に伴う その 対策の一つとしてテレオペレーションロボットと呼ばれる遠隔操作ロボットによる作業が挙げられる
PowerPoint プレゼンテーション
 ~ 座標付き 360 度連続画像の作成 ~ 簡単計測 情報共有ツール ~ CV TECHNOLOGY Produced by Suported by Info360 サービス 建築 土木 鉄道 高速道路といったさまざまな分野において 現地調査や点検 計測など第三者を含む複数人に対して 現実空間の情報を共有する仕組みが求められている 特に 現地での作業が早く簡単に 一人で操作可能なシステム が必要である
~ 座標付き 360 度連続画像の作成 ~ 簡単計測 情報共有ツール ~ CV TECHNOLOGY Produced by Suported by Info360 サービス 建築 土木 鉄道 高速道路といったさまざまな分野において 現地調査や点検 計測など第三者を含む複数人に対して 現実空間の情報を共有する仕組みが求められている 特に 現地での作業が早く簡単に 一人で操作可能なシステム が必要である
小型移動ロボット
 小型移動ロボット 千葉工業大学 未来ロボット技術研究センター 吉田智章 背景 過去に開発した災害対応ロボット Hibiscus (2006) Kenaf (2007-2009) Quince (2009-2010) 4 大都市大震災軽減化特別プロジェクト ( 文科省 ) 戦略的先端ロボット要素技術開発プロジェクト (NEDO) 2006-2010 2002 2006 2011 2012 Kenaf
小型移動ロボット 千葉工業大学 未来ロボット技術研究センター 吉田智章 背景 過去に開発した災害対応ロボット Hibiscus (2006) Kenaf (2007-2009) Quince (2009-2010) 4 大都市大震災軽減化特別プロジェクト ( 文科省 ) 戦略的先端ロボット要素技術開発プロジェクト (NEDO) 2006-2010 2002 2006 2011 2012 Kenaf
PowerPoint Presentation
 知能システム論 1 (11) 2012.6.20 情報システム学研究科情報メディアシステム学専攻知能システム学講座末廣尚士 13. ロボットアームの逆運動学 ( 幾何的解法 ) 何をしたいか 手首 手先 ツールの3 次元空間での位置や姿勢から それを実現する関節角度を計算する アームソリューション アームの解とも呼ぶ 何のために たとえばビジョンで認識された物をつかむ場合 物の位置 姿勢は3 次元空間で表現されることが普通である
知能システム論 1 (11) 2012.6.20 情報システム学研究科情報メディアシステム学専攻知能システム学講座末廣尚士 13. ロボットアームの逆運動学 ( 幾何的解法 ) 何をしたいか 手首 手先 ツールの3 次元空間での位置や姿勢から それを実現する関節角度を計算する アームソリューション アームの解とも呼ぶ 何のために たとえばビジョンで認識された物をつかむ場合 物の位置 姿勢は3 次元空間で表現されることが普通である
Release Note for Media File Player v1.6.5 (Japanese)
") Media File Player Version 1.6.5 リリースノート第 1 版 最終修正日 2014 年 6 月 30 日 c 2014 Sony Corporation 著作権について権利者の許諾を得ることなく このソフトウェアおよび本書の内容の全部または一部を複写すること およびこのソフトウェアを賃貸に使用することは 著作権法上禁止されております ソフトウェアを使用したことによるお客様の損害
Media File Player Version 1.6.5 リリースノート第 1 版 最終修正日 2014 年 6 月 30 日 c 2014 Sony Corporation 著作権について権利者の許諾を得ることなく このソフトウェアおよび本書の内容の全部または一部を複写すること およびこのソフトウェアを賃貸に使用することは 著作権法上禁止されております ソフトウェアを使用したことによるお客様の損害
CADdoctor 製品構成 / 動作環境 製品バージョン : Ver 発行日 : 2019/7/26 製品構成 CADdoctor は 標準パッケージと追加オプションで構成されます 標準パッケージ (IGES 入出力 STL 出力 ) に入出力オプションを追加することにより 高精度の
 に入出力オプションを追加することにより 高精度の") CADdoctor 構成 / 動作環境 バージョン : Ver. 8.1.1 発行日 : 2019/7/26 構成 CADdoctor は 標準パッケージと追加オプションで構成されます 標準パッケージ (IGES 入出力 STL 出力 ) に入出力オプションを追加することにより 高精度のデータ変換や用途に応じた効果的なデータ活用が可能になります また 形状簡略化オプション をはじめ データの利用目的に応じて形状を最適化するためのさまざまな機能拡張オプションをご用意しています
CADdoctor 構成 / 動作環境 バージョン : Ver. 8.1.1 発行日 : 2019/7/26 構成 CADdoctor は 標準パッケージと追加オプションで構成されます 標準パッケージ (IGES 入出力 STL 出力 ) に入出力オプションを追加することにより 高精度のデータ変換や用途に応じた効果的なデータ活用が可能になります また 形状簡略化オプション をはじめ データの利用目的に応じて形状を最適化するためのさまざまな機能拡張オプションをご用意しています
Vectorworks 投影シミュレーションプラグイン
 1 概要 Vectorworks 投影シミュレーションプラグイン 利用ガイド 第 1 版 2015 年 4 月 2 日 1 Copyright 2015 ORIHALCON Technologies.All Rights Reserved. 1 概要 1 概要 投影シミュレーションプラグイン は Vectorworks 上で実際のプロジェクターやレンズパラメータを もとに 正確な 3D 投影シミュレーションを行うためのツールです
1 概要 Vectorworks 投影シミュレーションプラグイン 利用ガイド 第 1 版 2015 年 4 月 2 日 1 Copyright 2015 ORIHALCON Technologies.All Rights Reserved. 1 概要 1 概要 投影シミュレーションプラグイン は Vectorworks 上で実際のプロジェクターやレンズパラメータを もとに 正確な 3D 投影シミュレーションを行うためのツールです
この演習について Autoware 演習 1: データの記録 再生 Autoware 演習 2: センサーキャリブレーション Autoware 演習 3:3 次元地図の作成 Autoware 演習 4: 自己位置推定 Autoware 演習 5: パラメータ調整 Autoware 演習 6: 物体検
 version 1.0 TIER IV ACADEMY 自動運転システム構築塾 Day4 Autoware 演習 2 Autoware 演習 6: 物体検出とトラッキング この演習について Autoware 演習 1: データの記録 再生 Autoware 演習 2: センサーキャリブレーション Autoware 演習 3:3 次元地図の作成 Autoware 演習 4: 自己位置推定 Autoware
version 1.0 TIER IV ACADEMY 自動運転システム構築塾 Day4 Autoware 演習 2 Autoware 演習 6: 物体検出とトラッキング この演習について Autoware 演習 1: データの記録 再生 Autoware 演習 2: センサーキャリブレーション Autoware 演習 3:3 次元地図の作成 Autoware 演習 4: 自己位置推定 Autoware
θ T [N] φ T os φ mg T sin φ mg tn φ T sin φ mg tn φ θ 0 sin θ tn θ θ sin φ tn φ φ θ φ mg θ f J mg f π J mg π J J 4π f mg 4π f () () /8
![θ T [N] φ T os φ mg T sin φ mg tn φ T sin φ mg tn φ θ 0 sin θ tn θ θ sin φ tn φ φ θ φ mg θ f J mg f π J mg π J J 4π f mg 4π f () () /8](/thumbs/90/101831562.jpg "θ T [N] φ T os φ mg T sin φ mg tn φ T sin φ mg tn φ θ 0 sin θ tn θ θ sin φ tn φ φ θ φ mg θ f J mg f π J mg π J J 4π f mg 4π f () () /8") [N/m] m[g] mẍ x (N) x. f[hz] f π ω π m ω πf[rd/s] m ω 4π f [Nm/rd] J[gm ] J θ θ (gm ) θ. f[hz] f π ω π J J ω 4π f /8 θ T [N] φ T os φ mg T sin φ mg tn φ T sin φ mg tn φ θ 0 sin θ tn θ θ sin φ tn φ φ θ
[N/m] m[g] mẍ x (N) x. f[hz] f π ω π m ω πf[rd/s] m ω 4π f [Nm/rd] J[gm ] J θ θ (gm ) θ. f[hz] f π ω π J J ω 4π f /8 θ T [N] φ T os φ mg T sin φ mg tn φ T sin φ mg tn φ θ 0 sin θ tn θ θ sin φ tn φ φ θ
AR技術を用いたグリーティングカード作成ソフトの開発
 平成 25 年度卒業研究中間発表 所属大隈研究室指導教員大隈ひとみ発表者渡邉賢明 目次 1. はじめに 2. テーマ変更について 3. 使用ソフトについて 4. 現在までにできていることについて 5. CG 映し出しのプログラムの説明と問題点 6. 音声再生のプログラムと改良点 7. 今後の課題 8. 開発環境 9. 参考文献 IKEA の事例 1. はじめに 筒井浩平氏 Android 端末での
平成 25 年度卒業研究中間発表 所属大隈研究室指導教員大隈ひとみ発表者渡邉賢明 目次 1. はじめに 2. テーマ変更について 3. 使用ソフトについて 4. 現在までにできていることについて 5. CG 映し出しのプログラムの説明と問題点 6. 音声再生のプログラムと改良点 7. 今後の課題 8. 開発環境 9. 参考文献 IKEA の事例 1. はじめに 筒井浩平氏 Android 端末での
問 1 図 1 の図形を作るプログラムを作成せよ 但し ウィンドウの大きさは と し 座標の関係は図 2 に示すものとする 図 1 作成する図形 原点 (0,0) (280,0) (80,0) (180,0) (260,0) (380,0) (0,160) 図 2 座標関係 問 2
 (280,0) (80,0) (180,0) (260,0) (380,0) (0,160) 図 2 座標関係 問 2") 問 1 図 1 の図形を作るプログラムを作成せよ 但し ウィンドウの大きさは 400 200 と し 座標の関係は図 2 に示すものとする 図 1 作成する図形 原点 (0,0) (280,0) (80,0) (180,0) (260,0) (380,0) (0,160) 図 2 座標関係 問 2 for 文を用いて図 3 の様な図形を描くプログラムを作成せよ 但し ウィンドウのサイズは 300 300
問 1 図 1 の図形を作るプログラムを作成せよ 但し ウィンドウの大きさは 400 200 と し 座標の関係は図 2 に示すものとする 図 1 作成する図形 原点 (0,0) (280,0) (80,0) (180,0) (260,0) (380,0) (0,160) 図 2 座標関係 問 2 for 文を用いて図 3 の様な図形を描くプログラムを作成せよ 但し ウィンドウのサイズは 300 300
2011年度 東京工大・数学
 東京工業大学前期日程問題 解答解説のページへ n n を自然数とする 平面上で行列 n( n+ ) n+ の表す 次変換 ( 移動とも いう ) を n とする 次の問いに答えよ () 原点 O(, ) を通る直線で, その直線上のすべての点が n により同じ直線上に移 されるものが 本あることを示し, この 直線の方程式を求めよ () () で得られた 直線と曲線 (3) を求めよ n Sn 6
東京工業大学前期日程問題 解答解説のページへ n n を自然数とする 平面上で行列 n( n+ ) n+ の表す 次変換 ( 移動とも いう ) を n とする 次の問いに答えよ () 原点 O(, ) を通る直線で, その直線上のすべての点が n により同じ直線上に移 されるものが 本あることを示し, この 直線の方程式を求めよ () () で得られた 直線と曲線 (3) を求めよ n Sn 6
情報工学実験 Ⅱ グラフィックプログラミング基礎 担当教員名 : 赤嶺有平 提出日 :2010 年 12 月 9 日 学籍番号 : B 氏名 : 大城佳明 - 1 -
 情報工学実験 Ⅱ グラフィックプログラミング基礎 担当教員名 : 赤嶺有平 提出日 :2010 年 12 月 9 日 学籍番号 : 095707 B 氏名 : 大城佳明 - 1 - 課題 1 図形の描画直線やポリゴン, 座標変換を用いて, オリジナルの図形をアニメーション表示するプログラムを作成してください. 1. 18 18 のマス 01 void display(void)
情報工学実験 Ⅱ グラフィックプログラミング基礎 担当教員名 : 赤嶺有平 提出日 :2010 年 12 月 9 日 学籍番号 : 095707 B 氏名 : 大城佳明 - 1 - 課題 1 図形の描画直線やポリゴン, 座標変換を用いて, オリジナルの図形をアニメーション表示するプログラムを作成してください. 1. 18 18 のマス 01 void display(void)
スライド 1
 (8) 2017.6.7 電気通信大学大学院情報理工学研究科末廣尚士 9. ロボットアームの逆運動学 ( 幾何 学的 ( 解析的 ) 解法 ) 何をしたいか 手首, 手先, ツールの 3 次元空間での位置や姿勢から, それを実現する関節角度を計算する. アームソリューション, アームの解とも呼ぶ 何のために たとえばビジョンで認識された物をつかむ場合, 物の位置 姿勢は 3 次元空間で表現されることが普通である.
(8) 2017.6.7 電気通信大学大学院情報理工学研究科末廣尚士 9. ロボットアームの逆運動学 ( 幾何 学的 ( 解析的 ) 解法 ) 何をしたいか 手首, 手先, ツールの 3 次元空間での位置や姿勢から, それを実現する関節角度を計算する. アームソリューション, アームの解とも呼ぶ 何のために たとえばビジョンで認識された物をつかむ場合, 物の位置 姿勢は 3 次元空間で表現されることが普通である.
idoperation SC のコンセプト idoperation SC は パソコンやサーバにインストールする 防犯カメラ ソリューションです パソコンやサーバのデスクトップ内でのユーザ操作をビデオで記録し 証跡として残します 録画 保管 再生 2017 NTT TechnoCross Corpo
 画面操作録画ソフトウェア アイディーオペレーション セキュリティカメラ 製品説明資料 2017 NTT TechnoCross Corporation 1 idoperation SC のコンセプト idoperation SC は パソコンやサーバにインストールする 防犯カメラ ソリューションです パソコンやサーバのデスクトップ内でのユーザ操作をビデオで記録し 証跡として残します 録画 保管 再生
画面操作録画ソフトウェア アイディーオペレーション セキュリティカメラ 製品説明資料 2017 NTT TechnoCross Corporation 1 idoperation SC のコンセプト idoperation SC は パソコンやサーバにインストールする 防犯カメラ ソリューションです パソコンやサーバのデスクトップ内でのユーザ操作をビデオで記録し 証跡として残します 録画 保管 再生
Touch Panel Settings Tool
 インフォメーションディスプレイ タッチパネル設定ツール取扱説明書 バージョン 2.0 対応機種 (2015 年 11 月現在 ) PN-L603A/PN-L603B/PN-L603W/PN-L703A/PN-L703B/PN-L703W/PN-L803C もくじ はじめに 3 動作条件 3 コンピューターのセットアップ 4 インストールする 4 タッチパネルの設定 5 設定のしかた 5 キャリブレーション
インフォメーションディスプレイ タッチパネル設定ツール取扱説明書 バージョン 2.0 対応機種 (2015 年 11 月現在 ) PN-L603A/PN-L603B/PN-L603W/PN-L703A/PN-L703B/PN-L703W/PN-L803C もくじ はじめに 3 動作条件 3 コンピューターのセットアップ 4 インストールする 4 タッチパネルの設定 5 設定のしかた 5 キャリブレーション
パソコンシミュレータの現状
 第 2 章微分 偏微分, 写像 豊橋技術科学大学森謙一郎 2. 連続関数と微分 工学において物理現象を支配する方程式は微分方程式で表されていることが多く, 有限要素法も微分方程式を解く数値解析法であり, 定式化においては微分 積分が一般的に用いられており. 数学の基礎知識が必要になる. 図 2. に示すように, 微分は連続な関数 f() の傾きを求めることであり, 微小な に対して傾きを表し, を無限に
第 2 章微分 偏微分, 写像 豊橋技術科学大学森謙一郎 2. 連続関数と微分 工学において物理現象を支配する方程式は微分方程式で表されていることが多く, 有限要素法も微分方程式を解く数値解析法であり, 定式化においては微分 積分が一般的に用いられており. 数学の基礎知識が必要になる. 図 2. に示すように, 微分は連続な関数 f() の傾きを求めることであり, 微小な に対して傾きを表し, を無限に
NITAS Ver.2.4 システムの概要 利用上の注意等 1.NITAS の概要 動作環境 利用対象者 (1)NITAS の概要総合交通分析システム (NITAS:National Integrated Transport Analysis System) は 道路 鉄道 航空 船舶の各交通機関を
NITAS の概要総合交通分析システム (NITAS:National Integrated Transport Analysis System) は 道路 鉄道 航空 船舶の各交通機関を") NITAS Ver.2.4 システムの概要 利用上の注意等 1.NITAS の概要 動作環境 利用対象者 (1)NITAS の概要総合交通分析システム (NITAS:National Integrated Transport Analysis System) は 道路 鉄道 航空 船舶の各交通機関を組み合わせて総合的に交通体系の分析を行うシステムです 全国的な視点から地方レベルの課題まで様々な問題意識に対応して
NITAS Ver.2.4 システムの概要 利用上の注意等 1.NITAS の概要 動作環境 利用対象者 (1)NITAS の概要総合交通分析システム (NITAS:National Integrated Transport Analysis System) は 道路 鉄道 航空 船舶の各交通機関を組み合わせて総合的に交通体系の分析を行うシステムです 全国的な視点から地方レベルの課題まで様々な問題意識に対応して
User’s Manual
 Micro D Player ビュワーソフトマニュアル Vr.2.0 日本セキュリティー機器販売株式会社 1 この仕様は予告なしに変更することがあります 第 1 章 : パソコンとOSの仕様要件 PC 要件 03 第 2 章 : サポートしている O/S OSオペレーションシステム 03 第 3 章インストール方法 Micro D Player のインストール 03 第 4 章 : Micro D
Micro D Player ビュワーソフトマニュアル Vr.2.0 日本セキュリティー機器販売株式会社 1 この仕様は予告なしに変更することがあります 第 1 章 : パソコンとOSの仕様要件 PC 要件 03 第 2 章 : サポートしている O/S OSオペレーションシステム 03 第 3 章インストール方法 Micro D Player のインストール 03 第 4 章 : Micro D
1. 研究背景 目的 2. 使用機器 3. 橋梁点検システム 4. 選定橋梁 5. 安全対策 橋梁点検フロー 6. 計測結果 計測条件 7. まとめ - 2 -
 ひび割れ計測機と飛行ロボットによる橋梁点検支援システムに関する研究 大阪市立大学大学院教授プロジェクトリーダー 山口隆司大阪市立大学大学院学生堂ノ本翔平菱田伸鉄工業 ( 株 ) 菱田聡クモノスコーポレーション ( 株 ) 藤田誠二近畿地方整備局道路部, 近畿技術事務所, 大阪国道事務所 - 1 - 1. 研究背景 目的 2. 使用機器 3. 橋梁点検システム 4. 選定橋梁 5. 安全対策 橋梁点検フロー
ひび割れ計測機と飛行ロボットによる橋梁点検支援システムに関する研究 大阪市立大学大学院教授プロジェクトリーダー 山口隆司大阪市立大学大学院学生堂ノ本翔平菱田伸鉄工業 ( 株 ) 菱田聡クモノスコーポレーション ( 株 ) 藤田誠二近畿地方整備局道路部, 近畿技術事務所, 大阪国道事務所 - 1 - 1. 研究背景 目的 2. 使用機器 3. 橋梁点検システム 4. 選定橋梁 5. 安全対策 橋梁点検フロー
また おすすめはしませんが C: Program Files Adobe Adobe After Effects [version] Support Files Plug-ins に配置することによって After Effects からのみ使用できます macos の場合 /Library/Appl
![また おすすめはしませんが C: Program Files Adobe Adobe After Effects [version] Support Files Plug-ins に配置することによって After Effects からのみ使用できます macos の場合 /Library/Appl](/thumbs/89/98423442.jpg "また おすすめはしませんが C: Program Files Adobe Adobe After Effects [version] Support Files Plug-ins に配置することによって After Effects からのみ使用できます macos の場合 /Library/Appl") Fast Camera Lens Blur User Guide 高速なブラー グローをあなたに 動作環境 OS : Windows / Mac Adobe After Effects / Premiere Pro CS6 - CC 2018 実際に動作を確認した環境については 最後の動作確認環境をご覧ください インストール方法 Windows の場合 C: Program Files Adobe
Fast Camera Lens Blur User Guide 高速なブラー グローをあなたに 動作環境 OS : Windows / Mac Adobe After Effects / Premiere Pro CS6 - CC 2018 実際に動作を確認した環境については 最後の動作確認環境をご覧ください インストール方法 Windows の場合 C: Program Files Adobe
Microsoft Word - 01.docx
 京都大学 MU レーダーで宇宙ごみの姿を捉える ~ 観測波長より小さいスペースデブリのサイズやスピンの推定に成功 ~ 概要高度数百 km の地球周回軌道上にあるスペースデブリ ( 宇宙ごみ ) のうち レーダー観測装置の波長と比較して 大きさが同程度以下のスペースデブリのサイズ スピン 概形等の状態の推定をする観測手法を提案し 大型大気レーダーである京都大学生存圏研究所 MU レーダー ( 周波数
京都大学 MU レーダーで宇宙ごみの姿を捉える ~ 観測波長より小さいスペースデブリのサイズやスピンの推定に成功 ~ 概要高度数百 km の地球周回軌道上にあるスペースデブリ ( 宇宙ごみ ) のうち レーダー観測装置の波長と比較して 大きさが同程度以下のスペースデブリのサイズ スピン 概形等の状態の推定をする観測手法を提案し 大型大気レーダーである京都大学生存圏研究所 MU レーダー ( 周波数
(Microsoft PowerPoint -
 NX 5 新機能紹介 Gateway / Styling / Modeling / Assemblies NX Sheet Metal / Drafting 1 Gateway ダイアログの改善 テンプレート リドゥ (Redo) ビュートライアド カメラ PDF 出力 2 Gateway ユーザビリティ ダイアログの改善 コマンド間でのダイアログ構成の統一 ガイド表示の追加 ( 選択ステップのハイライト等
NX 5 新機能紹介 Gateway / Styling / Modeling / Assemblies NX Sheet Metal / Drafting 1 Gateway ダイアログの改善 テンプレート リドゥ (Redo) ビュートライアド カメラ PDF 出力 2 Gateway ユーザビリティ ダイアログの改善 コマンド間でのダイアログ構成の統一 ガイド表示の追加 ( 選択ステップのハイライト等
1/10 平成 29 年 3 月 24 日午後 1 時 37 分第 5 章ローレンツ変換と回転 第 5 章ローレンツ変換と回転 Ⅰ. 回転 第 3 章光速度不変の原理とローレンツ変換 では 時間の遅れをローレンツ変換 ct 移動 v相対 v相対 ct - x x - ct = c, x c 2 移動
 / 平成 9 年 3 月 4 日午後 時 37 分第 5 章ローレンツ変換と回転 第 5 章ローレンツ変換と回転 Ⅰ. 回転 第 3 章光速度不変の原理とローレンツ変換 では 時間の遅れをローレンツ変換 t t - x x - t, x 静止静止静止静止 を導いた これを 図の場合に当てはめると t - x x - t t, x t + x x + t t, x (5.) (5.) (5.3) を得る
/ 平成 9 年 3 月 4 日午後 時 37 分第 5 章ローレンツ変換と回転 第 5 章ローレンツ変換と回転 Ⅰ. 回転 第 3 章光速度不変の原理とローレンツ変換 では 時間の遅れをローレンツ変換 t t - x x - t, x 静止静止静止静止 を導いた これを 図の場合に当てはめると t - x x - t t, x t + x x + t t, x (5.) (5.) (5.3) を得る
直樹卒業論文
 Kinect PCL 3 2013 2 5 3 Xbox360 Kinect Kinect SDK PCL(Point Cloud Library) 3 Kinect 3 RGB 3 3 PCL SAC-IA(Sample Consensus Initial Alignment) ICP(Interative Closest Point) 1 1.1 1.2 2 2.1 3 2.2 3 2.3 Kinect
Kinect PCL 3 2013 2 5 3 Xbox360 Kinect Kinect SDK PCL(Point Cloud Library) 3 Kinect 3 RGB 3 3 PCL SAC-IA(Sample Consensus Initial Alignment) ICP(Interative Closest Point) 1 1.1 1.2 2 2.1 3 2.2 3 2.3 Kinect
ムーアの法則に関するレポート
 情報理工学実験レポート 実験テーマ名 : ムーアの法則に関する調査 職員番号 4570 氏名蚊野浩 提出日 2019 年 4 月 9 日 要約 大規模集積回路のトランジスタ数が 18 ヶ月で2 倍になる というムーアの法則を検証した その結果 Intel 社のマイクロプロセッサに関して 1971 年から 2016 年の平均で 26.4 ヶ月に2 倍 というペースであった このことからムーアの法則のペースが遅くなっていることがわかった
情報理工学実験レポート 実験テーマ名 : ムーアの法則に関する調査 職員番号 4570 氏名蚊野浩 提出日 2019 年 4 月 9 日 要約 大規模集積回路のトランジスタ数が 18 ヶ月で2 倍になる というムーアの法則を検証した その結果 Intel 社のマイクロプロセッサに関して 1971 年から 2016 年の平均で 26.4 ヶ月に2 倍 というペースであった このことからムーアの法則のペースが遅くなっていることがわかった
manual_ezcap_edit
 EzCAP 簡単編集マニュアル Ver. 014118 編集 Windows での編集の準備 映像の分割 (1)~(4) 字幕の入力 (1)~(4) ファイル形式の変換 (1)~() DVD 作成 DVD 作成の準備 Windows での DVD 作成 (1)~(4) チャプターの作成 (1)~() サポート テクニカルサポート ソフトのインストール 接続について EzCAP 使い方マニュアル をご参照ください
EzCAP 簡単編集マニュアル Ver. 014118 編集 Windows での編集の準備 映像の分割 (1)~(4) 字幕の入力 (1)~(4) ファイル形式の変換 (1)~() DVD 作成 DVD 作成の準備 Windows での DVD 作成 (1)~(4) チャプターの作成 (1)~() サポート テクニカルサポート ソフトのインストール 接続について EzCAP 使い方マニュアル をご参照ください
Microsoft PowerPoint - [150421] CMP実習Ⅰ(2015) 橋本 CG編 第1回 幾何変換.pptx
![Microsoft PowerPoint - [150421] CMP実習Ⅰ(2015) 橋本 CG編 第1回 幾何変換.pptx](/thumbs/94/118433001.jpg "Microsoft PowerPoint - [150421] CMP実習Ⅰ(2015) 橋本 CG編 第1回 幾何変換.pptx") コンテンツ メディア プログラミング実習 Ⅰ コンピュータグラフィックス編 1 幾何変換 橋本直 今日大事なのは プログラムをじっくり読んで なぜそうなるか? を考えよう 命令によって起きていることを頭の中でイメージしよう 2 本題の前に確認 Processingでは画面の 左上隅 が原点 (0,0) x 軸の正の向きは 右 y 軸の正の向きは 下 x y : (0,0) 3 幾何変換の基本 4 幾何変換とは
コンテンツ メディア プログラミング実習 Ⅰ コンピュータグラフィックス編 1 幾何変換 橋本直 今日大事なのは プログラムをじっくり読んで なぜそうなるか? を考えよう 命令によって起きていることを頭の中でイメージしよう 2 本題の前に確認 Processingでは画面の 左上隅 が原点 (0,0) x 軸の正の向きは 右 y 軸の正の向きは 下 x y : (0,0) 3 幾何変換の基本 4 幾何変換とは
Chap3.key
 区分求積法. 面積 ( )/ f () > n + n, S 長方形の和集合で近似 n f (n ) リーマン和 f (n ) 区分求積法 リーマン和 S S n n / n n f ()d リーマン積分 ( + ) + S (, f ( )) 微分の心 Zoom In して局所的な性質を調べる 積分の心 Zoom Ou して大域的な性質を調べる 曲線の長さ 領域の面積や体積 ある領域に含まれる物質の質量
区分求積法. 面積 ( )/ f () > n + n, S 長方形の和集合で近似 n f (n ) リーマン和 f (n ) 区分求積法 リーマン和 S S n n / n n f ()d リーマン積分 ( + ) + S (, f ( )) 微分の心 Zoom In して局所的な性質を調べる 積分の心 Zoom Ou して大域的な性質を調べる 曲線の長さ 領域の面積や体積 ある領域に含まれる物質の質量
 直観的な使い易いユーザーインターフェースで多次元の視覚化と定量解析 日本語 英語画面表示対応 背景輝度の均一化 豊富な画質調整 画像処理 画像解析機能を搭載 マクロ自動記録 特定用途向けアプリでの利用で 複数データでのバッチ処理が可能 コントラスト強調 平坦化フィルタ ハイパスフィルタ ノイズ除去 境界線の強調 ローパスフィルタ 局部イコライズフィルタ エッジや模様の強調 ディスタンスマップ バリアンスフィルタ
直観的な使い易いユーザーインターフェースで多次元の視覚化と定量解析 日本語 英語画面表示対応 背景輝度の均一化 豊富な画質調整 画像処理 画像解析機能を搭載 マクロ自動記録 特定用途向けアプリでの利用で 複数データでのバッチ処理が可能 コントラスト強調 平坦化フィルタ ハイパスフィルタ ノイズ除去 境界線の強調 ローパスフィルタ 局部イコライズフィルタ エッジや模様の強調 ディスタンスマップ バリアンスフィルタ
Microsoft PowerPoint - 第9回電磁気学
 017 年 1 月 04 日 ( 月 ) 13:00-14:30 C13 平成 9 年度工 V 系 ( 社会環境工学科 ) 第 9 回電磁気学 Ⅰ 天野浩 mno@nuee.ngoy-u.c.jp 9 1 月 04 日 第 5 章 電流の間に働く力 磁場 微分形で表したア ンペールの法則 ビオ サバールの法則 第 5 章電流の作る場 http://www.ntt-est.co.jp/business/mgzine/netwok_histoy/0/
017 年 1 月 04 日 ( 月 ) 13:00-14:30 C13 平成 9 年度工 V 系 ( 社会環境工学科 ) 第 9 回電磁気学 Ⅰ 天野浩 mno@nuee.ngoy-u.c.jp 9 1 月 04 日 第 5 章 電流の間に働く力 磁場 微分形で表したア ンペールの法則 ビオ サバールの法則 第 5 章電流の作る場 http://www.ntt-est.co.jp/business/mgzine/netwok_histoy/0/
する距離を一定に保ち温度を変化させた場合のセンサーのカウント ( センサーが計測した距離 ) の変化を調べた ( 図 4) 実験で得られたセンサーの温度変化とカウント変化の一例をグラフ 1 に載せる グラフにおいて赤いデータ点がセンサーのカウント値である 計測距離一定で実験を行ったので理想的にはカウ
 の変化を調べた ( 図 4) 実験で得られたセンサーの温度変化とカウント変化の一例をグラフ 1 に載せる グラフにおいて赤いデータ点がセンサーのカウント値である 計測距離一定で実験を行ったので理想的にはカウ") 岡山 3.8m 新望遠鏡制御系のための多点温度計開発 京都大学理学研究科宇宙物理学教室 M1 出口和弘 1. 岡山 3.8m 新望遠鏡に使われる分割鏡のメリットと技術的ハードル我々は現在 京都大学を中心として国立天文台 岡山天体物理観測所に新技術を用いた口径 3.8m の可視 近赤外望遠鏡の建設を計画している ( 図 1) 新技術の一つとして望遠鏡の主鏡に一枚鏡ではなく 扇型のセグメントを組み合わせて一枚の円形の鏡にする分割鏡を採用している
岡山 3.8m 新望遠鏡制御系のための多点温度計開発 京都大学理学研究科宇宙物理学教室 M1 出口和弘 1. 岡山 3.8m 新望遠鏡に使われる分割鏡のメリットと技術的ハードル我々は現在 京都大学を中心として国立天文台 岡山天体物理観測所に新技術を用いた口径 3.8m の可視 近赤外望遠鏡の建設を計画している ( 図 1) 新技術の一つとして望遠鏡の主鏡に一枚鏡ではなく 扇型のセグメントを組み合わせて一枚の円形の鏡にする分割鏡を採用している
Empower3 Feature Release (FR) 2 の新機能 コンピュータ要件パーソナルまたはクライアント項目 OS CPU メモリハードディスク 最低条件 Windows 7 Enterprise または Professional SP1 64 ビット Windows XP Profe
 2 の新機能 コンピュータ要件パーソナルまたはクライアント項目 OS CPU メモリハードディスク 最低条件 Windows 7 Enterprise または Professional SP1 64 ビット Windows XP Profe") Empower3 Feature Release (FR) 2 の新機能 コンピュータ要件パーソナルまたはクライアント項目 OS CPU メモリハードディスク 最低条件 Windows 7 Enterprise または Professional SP1 64 ビット Windows XP Professional SP3 32 ビット ( クライアントのみ ) Intel Core 2 Duo 2.13GHz
Empower3 Feature Release (FR) 2 の新機能 コンピュータ要件パーソナルまたはクライアント項目 OS CPU メモリハードディスク 最低条件 Windows 7 Enterprise または Professional SP1 64 ビット Windows XP Professional SP3 32 ビット ( クライアントのみ ) Intel Core 2 Duo 2.13GHz
王子計測機器株式会社 LCD における PET フィルムの虹ムラに関する実験結果 はじめに最近 PETフィルムはLCD 関連の部材として バックライトユニットの構成部材 保護シート タッチセンサーの基材等に数多く使用されています 特に 液晶セルの外側にPET フィルムが設けられる状態
 2015.02 王子計測機器株式会社 LCD における PET フィルムの虹ムラに関する実験結果 はじめに最近 PETフィルムはLCD 関連の部材として バックライトユニットの構成部材 保護シート タッチセンサーの基材等に数多く使用されています 特に 液晶セルの外側にPET フィルムが設けられる状態のとき 表示画面を偏光メガネを通して見たときに干渉色いわゆる虹ムラが発生する場合があることはよく知られています
2015.02 王子計測機器株式会社 LCD における PET フィルムの虹ムラに関する実験結果 はじめに最近 PETフィルムはLCD 関連の部材として バックライトユニットの構成部材 保護シート タッチセンサーの基材等に数多く使用されています 特に 液晶セルの外側にPET フィルムが設けられる状態のとき 表示画面を偏光メガネを通して見たときに干渉色いわゆる虹ムラが発生する場合があることはよく知られています
PowerPoint プレゼンテーション
 ロボティックス Robotics 先端工学基礎課程講義 小泉憲裕 2016/5/6 講義情報 当面はこちらのサイト, http://www.medigit.mi.uec.ac.jp/lect_robotics.html ロボットの運動学 ロボットの運動学 ロボットの運動学は現在 ニュートン力学を発展させた解析力学を基盤とすることが多い 解析力学では物体を 剛体としてあらわす 第 4 回 座標変換平行
ロボティックス Robotics 先端工学基礎課程講義 小泉憲裕 2016/5/6 講義情報 当面はこちらのサイト, http://www.medigit.mi.uec.ac.jp/lect_robotics.html ロボットの運動学 ロボットの運動学 ロボットの運動学は現在 ニュートン力学を発展させた解析力学を基盤とすることが多い 解析力学では物体を 剛体としてあらわす 第 4 回 座標変換平行
Microsoft PowerPoint - matlab10.ppt [互換モード]
![Microsoft PowerPoint - matlab10.ppt [互換モード]](/thumbs/94/118611769.jpg "Microsoft PowerPoint - matlab10.ppt [互換モード]") MATLAB の使い方 第 10 回 :3 次元プロット まとめページ :http://hdp.nifs.ac.jp/soken/tanaka/tsukaikata/ 3 次元プロットの流れ プロットするデータ 離散点 数列 x,y 平面に分布する数値データ (2 自由度 ) x,y,z 空間に分布する数値データ (3 自由度 ) x,y,z 空間に分布するベクトルデータ (3 自由度 ) データに適したプロット方法を選択
MATLAB の使い方 第 10 回 :3 次元プロット まとめページ :http://hdp.nifs.ac.jp/soken/tanaka/tsukaikata/ 3 次元プロットの流れ プロットするデータ 離散点 数列 x,y 平面に分布する数値データ (2 自由度 ) x,y,z 空間に分布する数値データ (3 自由度 ) x,y,z 空間に分布するベクトルデータ (3 自由度 ) データに適したプロット方法を選択
29 AR
 29 AR 30 2 13 16350901 AR AR AR AR 2 1 3 1.1....................... 3 1.1.1................. 3 1.1.2 AR............. 4 1.2................................. 5 2 6 2.0.1 AR......................... 6 2.0.2......................
29 AR 30 2 13 16350901 AR AR AR AR 2 1 3 1.1....................... 3 1.1.1................. 3 1.1.2 AR............. 4 1.2................................. 5 2 6 2.0.1 AR......................... 6 2.0.2......................
p tn tn したがって, 点 の 座標は p p tn tn tn また, 直線 l と直線 p の交点 の 座標は p p tn p tn よって, 点 の座標 (, ) は p p, tn tn と表され p 4p p 4p 4p tn tn tn より, 点 は放物線 4 p 上を動くこと
 は p p, tn tn と表され p 4p p 4p 4p tn tn tn より, 点 は放物線 4 p 上を動くこと") 567_ 次曲線の三角関数による媒介変数表示 次曲線の三角関数による媒介変数表示 次曲線 ( 放物線 楕円 双曲線 ) の標準形の, についての方程式と, 三角関数による媒介変数表示は次のように対応している.. 放物線 () 4 p (, ) ( ptn, ptn ) (). 楕円. 双曲線 () () (, p p ), tn tn (, ) ( cos, sin ) (, ), tn cos (,
567_ 次曲線の三角関数による媒介変数表示 次曲線の三角関数による媒介変数表示 次曲線 ( 放物線 楕円 双曲線 ) の標準形の, についての方程式と, 三角関数による媒介変数表示は次のように対応している.. 放物線 () 4 p (, ) ( ptn, ptn ) (). 楕円. 双曲線 () () (, p p ), tn tn (, ) ( cos, sin ) (, ), tn cos (,
学習指導要領
 (1) 数と式 学習指導要領ア数と集合 ( ア ) 実数数を実数まで拡張する意義を理解し 簡単な無理数の四則計算をすること 千早高校学力スタンダード 自然数 整数 有理数 無理数の用語の意味を理解す る ( 例 ) 次の数の中から自然数 整数 有理 数 無理数に分類せよ 3 3,, 0.7, 3,,-, 4 (1) 自然数 () 整数 (3) 有理数 (4) 無理数 自然数 整数 有理数 無理数の包含関係など
(1) 数と式 学習指導要領ア数と集合 ( ア ) 実数数を実数まで拡張する意義を理解し 簡単な無理数の四則計算をすること 千早高校学力スタンダード 自然数 整数 有理数 無理数の用語の意味を理解す る ( 例 ) 次の数の中から自然数 整数 有理 数 無理数に分類せよ 3 3,, 0.7, 3,,-, 4 (1) 自然数 () 整数 (3) 有理数 (4) 無理数 自然数 整数 有理数 無理数の包含関係など
高精度全方位移動ロボットの実運用のための 障害物の画像認識技術およびリアルタイム経路探索技術の開発 東京ロボティクス株式会社岡弘之 高木崇光 松尾雄希 坂本義弘 本研究は 人工知能研究振興財団の助成によって実施されたものです 1
 高精度全方位移動ロボットの実運用のための 障害物の画像認識技術およびリアルタイム経路探索技術の開発 2018.09.26 東京ロボティクス株式会社岡弘之 高木崇光 松尾雄希 坂本義弘 本研究は 人工知能研究振興財団の助成によって実施されたものです 1 弊社の紹介 http://robotics.tokyo 所在地 東京都新宿区西早稲田 事業内容 主にロボットアームを開発 製造 販売 国際ロボット展
高精度全方位移動ロボットの実運用のための 障害物の画像認識技術およびリアルタイム経路探索技術の開発 2018.09.26 東京ロボティクス株式会社岡弘之 高木崇光 松尾雄希 坂本義弘 本研究は 人工知能研究振興財団の助成によって実施されたものです 1 弊社の紹介 http://robotics.tokyo 所在地 東京都新宿区西早稲田 事業内容 主にロボットアームを開発 製造 販売 国際ロボット展
Microsoft PowerPoint - ロボットの運動学forUpload'C5Q [互換モード]
![Microsoft PowerPoint - ロボットの運動学forUpload'C5Q [互換モード]](/thumbs/104/163308363.jpg "Microsoft PowerPoint - ロボットの運動学forUpload'C5Q [互換モード]") ロボットの運動学 順運動学とは 座標系の回転と並進 同次座標変換行列 Denavit-Hartenberg の表記法 多関節ロボットの順運動学 レポート課題 & 中間試験について 逆運動学とは ヤコビアン行列 運動方程式 ( 微分方程式 ) ロボットの運動学 動力学 Equation of motion f ( ( t), ( t), ( t)) τ( t) 姿勢 ( 関節角の組合せ ) Posture
ロボットの運動学 順運動学とは 座標系の回転と並進 同次座標変換行列 Denavit-Hartenberg の表記法 多関節ロボットの順運動学 レポート課題 & 中間試験について 逆運動学とは ヤコビアン行列 運動方程式 ( 微分方程式 ) ロボットの運動学 動力学 Equation of motion f ( ( t), ( t), ( t)) τ( t) 姿勢 ( 関節角の組合せ ) Posture
1段階処理の予測法(One Step Model) を用いた雑音抑圧技術
 を用いた雑音抑圧技術") 動画像や音における不必要情報の抑圧と 目的情報の移動追跡 諏訪東京理科大学 工学部コンピュータメディア工学科 田邉造 (TANABE Nari) 研究背景 様々な場面においてディジタル画像 映像が用いられる 防災 防犯 生活 日常 防災災害映像 監視カメラ映像 車載カメラ モバイル機器 生命 医療 産業 社会 超音波検査装置 CT スキャン画像 エリアセンサカメラ 赤外線カメラ 市場規模の拡大 1
動画像や音における不必要情報の抑圧と 目的情報の移動追跡 諏訪東京理科大学 工学部コンピュータメディア工学科 田邉造 (TANABE Nari) 研究背景 様々な場面においてディジタル画像 映像が用いられる 防災 防犯 生活 日常 防災災害映像 監視カメラ映像 車載カメラ モバイル機器 生命 医療 産業 社会 超音波検査装置 CT スキャン画像 エリアセンサカメラ 赤外線カメラ 市場規模の拡大 1
21 e-learning Development of Real-time Learner Detection System for e-learning
 21 e-learning Development of Real-time Learner Detection System for e-learning 1100349 2010 3 1 e-learning WBT (Web Based training) e-learning LMS (Learning Management System) LMS WBT e-learning e-learning
21 e-learning Development of Real-time Learner Detection System for e-learning 1100349 2010 3 1 e-learning WBT (Web Based training) e-learning LMS (Learning Management System) LMS WBT e-learning e-learning
Microsoft PowerPoint - 10.pptx
 m u. 固有値とその応用 8/7/( 水 ). 固有値とその応用 固有値と固有ベクトル 行列による写像から固有ベクトルへ m m 行列 によって線形写像 f : R R が表せることを見てきた ここでは 次元平面の行列による写像を調べる とし 写像 f : を考える R R まず 単位ベクトルの像 u y y f : R R u u, u この事から 線形写像の性質を用いると 次の格子上の点全ての写像先が求まる
m u. 固有値とその応用 8/7/( 水 ). 固有値とその応用 固有値と固有ベクトル 行列による写像から固有ベクトルへ m m 行列 によって線形写像 f : R R が表せることを見てきた ここでは 次元平面の行列による写像を調べる とし 写像 f : を考える R R まず 単位ベクトルの像 u y y f : R R u u, u この事から 線形写像の性質を用いると 次の格子上の点全ての写像先が求まる
NCVIEW / NCVIEW Neo 2017 リリースノート A) 新機能概要 B) 主な改善 修正内容 (NCVIEW / NCVIEW Neo 2016 以降の改善 修正内容が記載されています ) C) 対応済みサポート受付番号一覧 D) 動作環境 以下文中の () に記載された番号はサポー
 新機能概要 B) 主な改善 修正内容 (NCVIEW / NCVIEW Neo 2016 以降の改善 修正内容が記載されています ) C) 対応済みサポート受付番号一覧 D) 動作環境 以下文中の () に記載された番号はサポー") NCVIEW / NCVIEW Neo 2017 リリースノート A) 新機能概要 B) 主な改善 修正内容 (NCVIEW / NCVIEW Neo 2016 以降の改善 修正内容が記載されています ) C) 対応済みサポート受付番号一覧 D) 動作環境 以下文中の () に記載された番号はサポート受付番号です 以前報告をされたサポートの対応をご確認ください また 次のマークは対応製品をあらわしています
NCVIEW / NCVIEW Neo 2017 リリースノート A) 新機能概要 B) 主な改善 修正内容 (NCVIEW / NCVIEW Neo 2016 以降の改善 修正内容が記載されています ) C) 対応済みサポート受付番号一覧 D) 動作環境 以下文中の () に記載された番号はサポート受付番号です 以前報告をされたサポートの対応をご確認ください また 次のマークは対応製品をあらわしています