Presentation Title
|
|
|
- ゆきさ のあき
- 5 years ago
- Views:
Transcription

1 Robo- 剣 Conference 2017/05/20(Sat) - Robo- 剣における MATLAB/Simulink の活用 MathWorks Japan 三田宇洋 2012 The MathWorks, Inc. 1
2 Robo- 剣 Conference 2017 年 05 月 20 日土曜日講習会 13:00-18:00 会場 : 県立青少年センター 2. ロボット作りへのMatlab 活用 ( 制御 画像処理など ) 45 分 マスワークス三田宇洋 -- 講演概要 -- Matlabをロボットプログラミングでどのように活用すれば良いかを解説します 2
3 3. MATLAB と Simulink の使い方 3
4 MATLAB とは? 今回 競技参加者の皆さんに貸し出すツールは下記の通りです (1) MATLAB 数値計算を得意とするインタープリター型スクリプト言語 (2) Simulink 時間の概念を持つブロック線図環境のシミュレータ (3) StateFlow 状態遷移図 フローチャート等で表現されるシーケンス制御ロジックを記述する Simulink のオプション (4) SimMechnics TM Simulink 上での機構系 ( 剛体 ) のモデリングオプション (5) Simscape TM Simulink 上での物理モデリングの基本環境 (6) Simulink Coder TM Simulink のモデルの等価 C コード自動生成 (7) Real-Time Windows Target Simulink のモデルのリアルタイム動作 (8) Image Acquisition Toolbox TM 実画像データと MATLAB のインターフェース (9) DSP System Toolbox TM 信号処理のオプションライブラリ (10) Image processing Toolbox TM 画像処理の基本 (11) Control System Toolbox MATLAB における制御工学 (12) Computer Vision System Toolbox 動画像の処理 (13) DSP System Toolbox 信号処理の基本 (14 )MATLAB Coder MATLAB ソースをコード生成する (15 )Simulink coder Simulink モデルをコード生成する (16 )Robotics System Toolbox MATLAB と ROS をリンクする 4
5 MATLAB をうまく使いこなそう ロボットモデル作成に効率の良いアプローチ 真似できるところは真似る 標準デモ 参考文献 ( 特にこれは参考にしよう ) 市販の文献 MathWorks HP の情報を活用しよう FAQ MATLAB Central 5
6 この本も参考になります 注 : 文献 [1],[2] と一部内容が重なります 7
7 MATLAB の特徴 インタープリター型スクリプト言語 数学 ( 行列 ベクトル 関数 ) 計算が得意 数百もの数学関数 この競技で予想される使い方 スクリプト計算 パラメータ定義 関数化 8
8 Simulink の基本 静的システム 動的システム 代数方程式 Etc. 常微分方程式 ( 連続時間 ) 差分方程式 ( 離散時間 ) 連続時間システム 離散時間システム マルチレートシステム ( 異なるサンプリングレート ) ハイブリッドシステム ( 連続時間 + 離散時間 ) Simulink で表現できるシステムは? イベントドリブンシステム 線形システム 非線形システム < 非線形要素 > 摩擦空気抵抗ギヤのすべり量ヒステリシス Etc. 9
9 シミュレーションステップ Simulink は数値計算をベースにしたシミュレータ 各変数は有限の時間刻み ( ステップサイズ ) で計算 ステップサイズ :Δt 0 Δt t 可変ステップ ステップサイズがシミュレーション中に自動調節される 固定ステップ シミュレーション中にステップサイズが変化しない 10
10 モデリング ( 直接表現 ) 運動方程式は m x ( cx ) ( kx) 整理すると u m x cx kx u x ( 0) 0, x (0) 0, x(0) 初期値は 0 x とする k kx cx m u c 図機械系ダイナミクスの例 (1 自由度振動系 ) 11
11 Simulink 連続モデルの作成の基本原則 STEP0 準備 微分回数最大の変数を左辺に移項 残りを右辺に移項 STEP1 微積分変数の位置関係 式に登場する微分積分の関係を 積分器 (Integrator) を使って表現する STEP2 右辺各項の要素作成 式の右辺に登場する項を 線を分岐させ作成する STEP3 左辺と右辺の整合性 右辺と左辺の整合性をモデルに表現する どんな複雑なモデルでも基本原則は変わらない 12
12 STEP1 微積分変数の位置関係 x x x 加速度速度位置 2 階の微分方程式 13
 ( kx) u 1 x u 3 x 2 x")
13 STEP2 右辺各項の要素作成 m x ( cx ) ( kx) u 1 x u 3 x 2 x 14
 u x 作成のための割り算に注意 4 x u m x x")
14 STEP3 左辺と右辺の整合性 4 m x ( cx ) ( kx) u x 作成のための割り算に注意 4 x u m x x x 15

15 サブシステム化 サブシステム化したい箇所を選択 ( マウス左クリック範囲指定 ) 16

16 編集 サブシステム化 17
17 サブシステム ダブルクリックでモデル表示 18

18 連続系便利な機能 Tips 背景色の変更 ( スクリーンカラー ) 前景色 背景色ドロップシャドウ テキスト挿入 テキスト挿入 (sdof.mdl) 19

19 ロボットモデルに有益なデモ コマンドウィンドウから >>demo[enter] 各ツールのユーザーガイド関数例デモなどが見れる 20

20 MATLAB 参考になりそうな標準デモ (1) デモ名 : スペクトル解析のための FFT ファイル名 :fftdemo.m 21

")
21 Simulink 参考になりそうな標準デモ (1) デモ名 : 跳ねるボールのシミュレーション ファイル名 : sldemo_bounce.mdl エッセンス : 連続系 (s の世界 ) のモデリングが理解できる 22
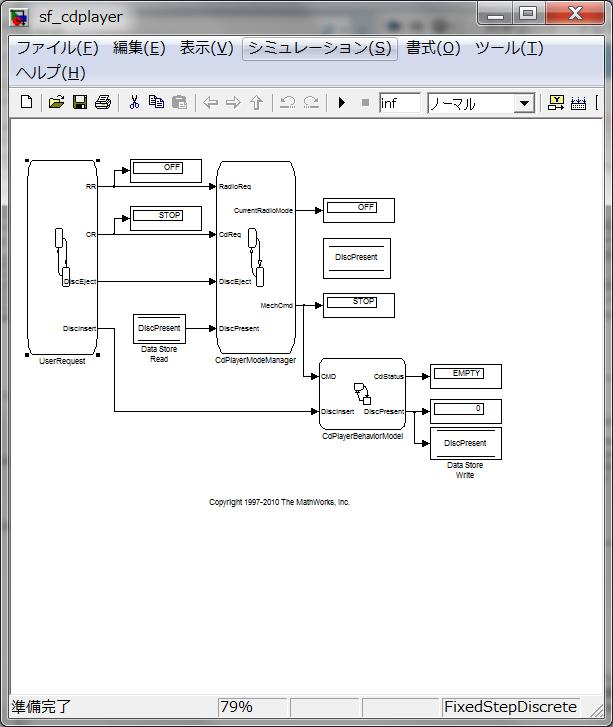

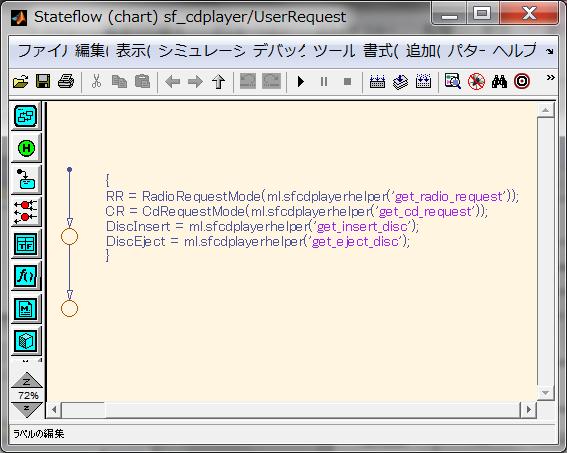
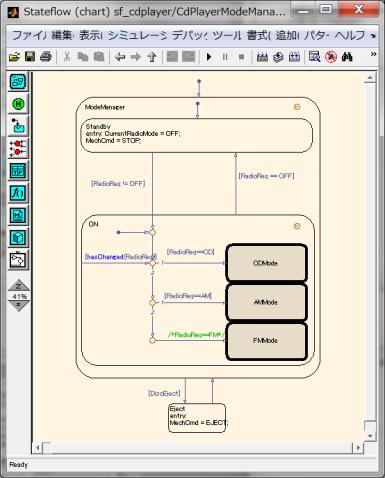
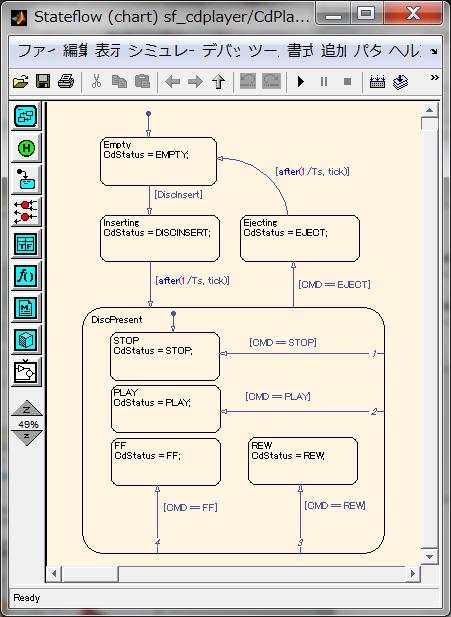
22 Stateflow 参考になりそうな標準デモ (1) デモ名 : 列挙型のデータ型を使った CD プレーヤー / ラジオのモデル化 ファイル名 :sf_cdplayer.mdl エッセンス :Stateflow の基本的な 機能が網羅 23
")

23 Stateflow 参考になりそうな一般デモ (2) シミュレーションモデル倒立振り子 フィードバック制御 Stateflowによるモード管理モード制御 (invert_pend_sim_vr.mdl) コントローラモデル 24

 を揺動させ徐々に鉛直上向きに近づけるモード")
![[2] Wake Up モード :](/docs-images/94/120398483/images/24-3.jpg "振子全体の安定化制御を行うモード [3] Hold")
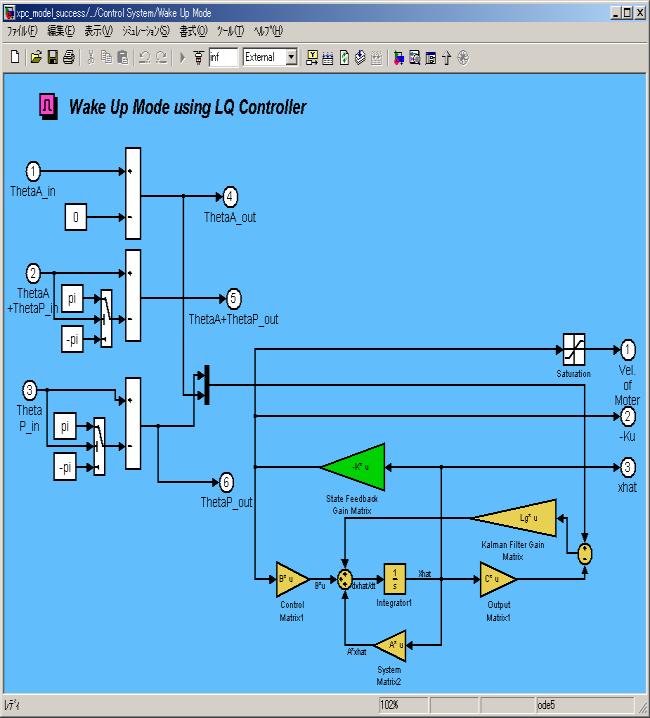
24 各モードのコントローラロジック 最適レギュレータとオブザーバ [1] Swing モード : 腕 (Arm) を定周期で左右に振り 振子 (Pend) を揺動させ徐々に鉛直上向きに近づけるモード [2] Wake Up モード : 振子全体の安定化制御を行うモード [3] Hold モード : 制御を停止したモード 25

25 シミュレーションモデル上級編 Stateflow によるモード管理ロジック 26


26 SimMechanics First Generation 参考になりそうな標準デモ (1) First Generation: 先代までの SimMechanics デモ :Robot Arm with Virtual Reality Scene ファイル名 :mech_robot_vr.mdl エッセンス : 多リンクのロボットアームのモデル化のイメージ (A) 27
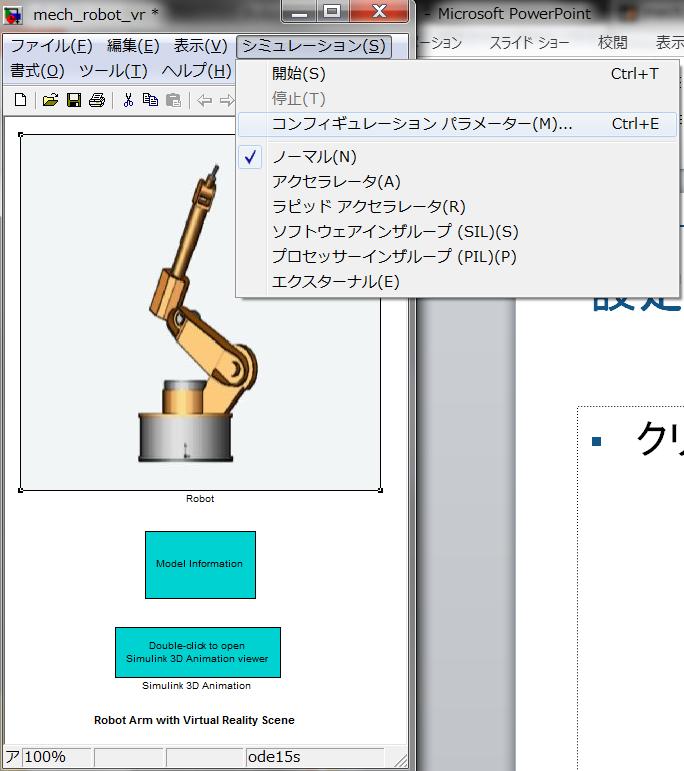
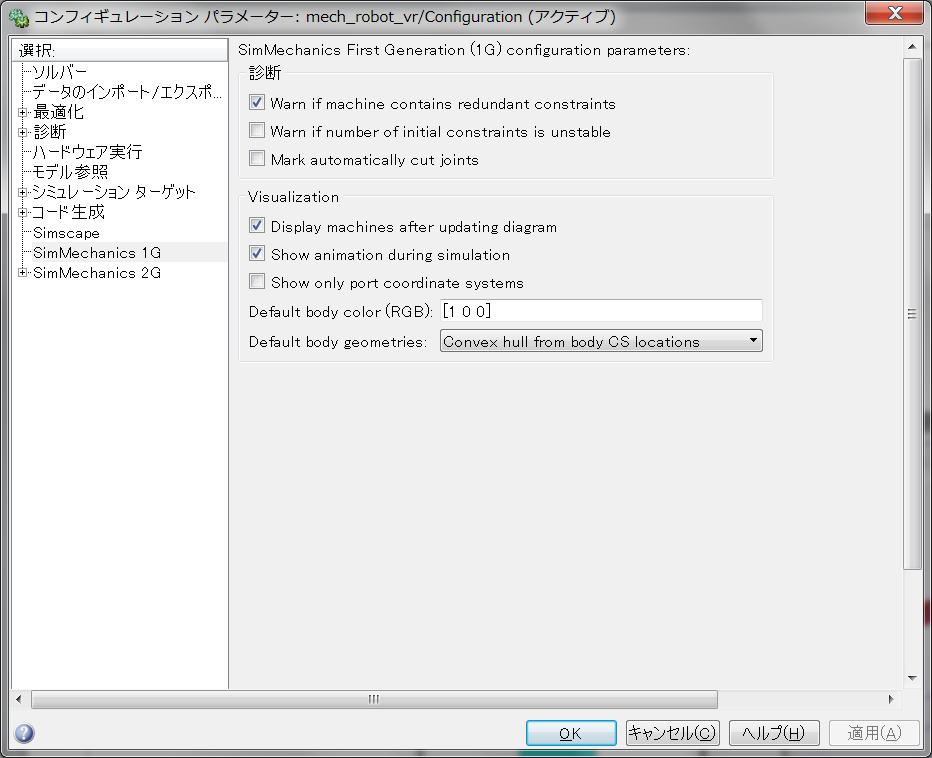
27 設定 28

 と Joint( 関節 : 自由度 )")
28 SimMechanics First Generation 参考になりそうな標準デモ (1) デモ :Four Bar Mechanism with Custom Body Visualization Data ファイル名 :mech_four_bar_vis.mdl エッセンス :4 リンク ボディ ( 剛体 ) と Joint( 関節 : 自由度 ) の関係 STL ファイルの張り方 29


29 SimMechanics Second Generation 参考になりそうな標準デモ (1) デモ :How to Build a Model ファイル名 :sm_double_crank_aiming.m 30


30 Simscape 参考になりそうな標準デモ (1) デモ : 永久磁石 DC モータ ファイル名 : ssc_dcmotor.mdl エッセンス :Simscape 標準ブロックでの電気 + 機械モデルの作り方 31
 デモ")
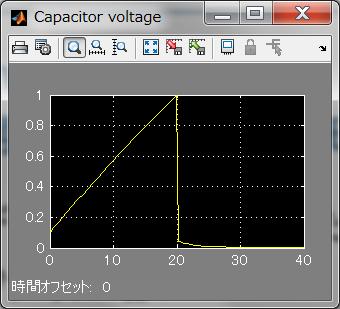
31 Simscape 参考になりそうな標準デモ (2) デモ : カスタマイズしたコンデンサライブラリを使ったモデル ファイル名 :ssc_ultracapacitor.mdl エッセンス :Simscape 言語によるオリジナルモデルの作り方 32


32 Simulink 3D Animation 参考になりそうな標準デモ (1) デモ :Manipulator Moving a Load with use of Global Coordinates ファイル名 :vrmanipul_global.mdl エッセンス : ロボットアームの VRML 表示 33

33 Image Processing Toolbox 参考になりそうな標準デモ (1) デモ : 動いている振子の長さを検出 ファイル名 : PendulumLengthExample.m エッセンス : 静画像の処理 34
 デモ")

34 Computer Vision Toolbox 参考になりそうな標準デモ (1) デモ :Abandoned Object Detection ファイル名 :vipabandonedobj.mdl エッセンス : 動画像の処理 35
 ベストテクノロジー")
35 4. Simulink によるサーボモータのモデル化 サーボモータ 例 Dynamixel EX-106+ ( 株 ) ベストテクノロジー 36
36 一般的なフィードバック制御の構造 ( 設定値追従制御 ) 物理モデリングの対象 設定値 + - 制御器 ( コントローラ ) D/A 変換 アクチュエータ 制御対象 ( プラント ) センサ A/D 変換 操作 計測 実体 計算機上で動くアルゴリズム プログラム 物理の世界電気 機械 流体 熱等 分類 デジタル アナログ 例 :DC モータの角度制御の場合 : データの流れ 角度指令値 * - + PID 制御 I/O ハード / ソフトの I/F モータドライブ回路 DC モータ 角度センサ ハード / ソフトの I/F I/O カウント値 角度変換 検出角度 37
37 フィードバック制御の構造 設定値 + - 制御器 ( コントローラ ) D/A 変換 アクチュエータ 制御対象 ( プラント ) センサ A/D 変換 操作 計測 実体 計算機上で動くアルゴリズム プログラム 物理の世界電気 機械 流体 熱等 系 離散系 連続系 分類 デジタル アナログ 38
38 簡単にすると v 行う作業 (1) 制御構造の設計 (2) 制御パラメータのチューニング r + - C(s) + + G(s) y 設定値外乱例 :PID 制御器制御対象 ( 例 : 一次遅れ + 無駄時間系 ) 39
39 モータのモデリング 要旨 DC モータの数式モデルを例として データフローの Simulink と 物理モデリングの Simscape を比べ 物理モデリングの基礎を掴む [ ポイント ] Simscape 標準ブロックによるモデリング Simulink モデルと比較 [ 記号 ] T,: トルクK : トルク定数 ( K : 角速度 [ rad / s] d dt K V T di Ri L Ke dt 2 d d Kti I c 2 dt dt V : 電圧 [ V ], R : 抵抗 [ ], i : 電流 [ A], L : 自己インダクタンス[ H ], K t 動特性式 t 電気系 機械系 e ), I : 慣性モーメント[ kg m 2 e : 逆起定数 [ V s / rad], ], c : 粘性係数 [ N m rad 1 s] 40
; c=0.2;i=0.1; (ssc_dcmotor_2.")
40 モータのモデル (Simulink/Simscape) 機械系モデル 電気系モデル エネルギー変換 Simscape Simscape と Simulink モデルシミュレーション結果 ( ほぼ等価 ) 0.4 電流 Current x Velocity 角速度 Time Simulink 注記 : パラメータ値 V=1.5;R=3.9;L=12e-3; Kt=Ke=0.072e-3/(2*pi/60); c=0.2;i=0.1; (ssc_dcmotor_2.mdl) 41

41 サーボモータのモデル ( 連続系 ) PI 制御器 モータ モータ PI 制御器 (ssc_dcmotor_2_fb.mdl) 42
")

42 サーボモータのモデル ( 連続系 ) Subsystem 版 r + - C(s) G(s) y 黄 : パルス状の設定値紫 : 制御量 (ssc_dcmotor_2_fb2.mdl) 43

43 MathWorks の Robo-One 紹介ページ 関連プロダクト 関連デモ 初歩 44
44 御清聴ありがとうございました 45
Presentation Title
 Robo- 剣 Conference 2014/10/04(Sat) - Robo- 剣における MATLAB/Simulink の活用 - MathWorks Japan 三田宇洋 2012 The MathWorks, Inc. 1 Robo- 剣 Conference 10 月 04 日土曜日講習会 会場 : 県立青少年センター 当日のスケジュール : 13:00- 一般社団法人二足歩行ロボット協会理事長挨拶
Robo- 剣 Conference 2014/10/04(Sat) - Robo- 剣における MATLAB/Simulink の活用 - MathWorks Japan 三田宇洋 2012 The MathWorks, Inc. 1 Robo- 剣 Conference 10 月 04 日土曜日講習会 会場 : 県立青少年センター 当日のスケジュール : 13:00- 一般社団法人二足歩行ロボット協会理事長挨拶
Microsoft PowerPoint - 【最終提出版】 MATLAB_EXPO2014講演資料_ルネサス菅原.pptx
 MATLAB/Simulink を使用したモータ制御アプリのモデルベース開発事例 ルネサスエレクトロニクス株式会社 第二ソリューション事業本部産業第一事業部家電ソリューション部 Rev. 1.00 2014 Renesas Electronics Corporation. All rights reserved. IAAS-AA-14-0202-1 目次 1. はじめに 1.1 モデルベース開発とは?
MATLAB/Simulink を使用したモータ制御アプリのモデルベース開発事例 ルネサスエレクトロニクス株式会社 第二ソリューション事業本部産業第一事業部家電ソリューション部 Rev. 1.00 2014 Renesas Electronics Corporation. All rights reserved. IAAS-AA-14-0202-1 目次 1. はじめに 1.1 モデルベース開発とは?
Presentation Title
 Simulink R / Stateflow R 入門 MathWorks Japan アプリケーションエンジニアリング部 小林昇洋 2016 The MathWorks, Inc. 1 本セッションで対象としている方々 Q : Simulink / Stateflow は使ったことがない どんなツールなのか? A : お使いいただいているシーン 理由などご紹介します 2 Simulink とは?
Simulink R / Stateflow R 入門 MathWorks Japan アプリケーションエンジニアリング部 小林昇洋 2016 The MathWorks, Inc. 1 本セッションで対象としている方々 Q : Simulink / Stateflow は使ったことがない どんなツールなのか? A : お使いいただいているシーン 理由などご紹介します 2 Simulink とは?
制御のためのSimulink入門
 今から始める Simulink 入門 ~ 制御編 ~ MathWorks Japan アプリケーションエンジニアリング部アプリケーションエンジニア張莉 2013 The MathWorks, Inc. 1 What is Simulink? 2 Why use Simulink? 例 : アポロ月着陸船のデジタル自動操縦の開発 3 Simulink を使うと? 当時の設計者が自ら Simulink
今から始める Simulink 入門 ~ 制御編 ~ MathWorks Japan アプリケーションエンジニアリング部アプリケーションエンジニア張莉 2013 The MathWorks, Inc. 1 What is Simulink? 2 Why use Simulink? 例 : アポロ月着陸船のデジタル自動操縦の開発 3 Simulink を使うと? 当時の設計者が自ら Simulink
SimscapeプラントモデルのFPGAアクセラレーション
 Simscape TM プラントモデルの FPGA アクセラレーション MathWorks Japan アプリケーションエンジニアリング部 松本充史 2018 The MathWorks, Inc. 1 アジェンダ ユーザ事例 HILS とは? Simscape の電気系ライブラリ Simscape モデルを FPGA 実装する 2 つのアプローチ Simscape HDL Workflow Advisor
Simscape TM プラントモデルの FPGA アクセラレーション MathWorks Japan アプリケーションエンジニアリング部 松本充史 2018 The MathWorks, Inc. 1 アジェンダ ユーザ事例 HILS とは? Simscape の電気系ライブラリ Simscape モデルを FPGA 実装する 2 つのアプローチ Simscape HDL Workflow Advisor
MATLAB EXPO 2019 Japan プレゼン資料の検討
 自動運転向けソフトウェア Autoware と MATLAB /Simulink の連携 ~ 事例紹介 ~ 2019 年 5 月 28 日株式会社ネクスティエレクトロニクス SW 開発部技術開発グループ太田徳幸 Copyright TOMEN Electronics Corp. 目次 2/31 1. 会社概要 2. Autoware Toolbox 紹介 1. 取り組み背景 2. Autoware
自動運転向けソフトウェア Autoware と MATLAB /Simulink の連携 ~ 事例紹介 ~ 2019 年 5 月 28 日株式会社ネクスティエレクトロニクス SW 開発部技術開発グループ太田徳幸 Copyright TOMEN Electronics Corp. 目次 2/31 1. 会社概要 2. Autoware Toolbox 紹介 1. 取り組み背景 2. Autoware
物理モデリングツールによる モデリングとシミュレーション入門
 Simscape TM による物理モデリング入門 ~Simscape + Sim シリーズの紹介 ~ MathWorks Japan アプリケーションエンジニア 渡辺修治 基本ツール MATLAB Simulink Stateflow 便利ツール Simulink Coder TM Simulink Control Design TM Simulink Design Optimization TM
Simscape TM による物理モデリング入門 ~Simscape + Sim シリーズの紹介 ~ MathWorks Japan アプリケーションエンジニア 渡辺修治 基本ツール MATLAB Simulink Stateflow 便利ツール Simulink Coder TM Simulink Control Design TM Simulink Design Optimization TM
SimulinkによるReal-Time Test環境の構築
 Simulink モデルを使ったリアルタイムテスト環境の構築 MathWorks Japan アプリケーションエンジニアリング部シニアアプリケーションエンジニア高島博 2012 The MathWorks, Inc. 1 はじめに Simulink はバーチャルなテスト環境 2 はじめに Simulink はバーチャルなテスト環境 3 はじめに Simulink はバーチャルなテスト環境 シミュレーション開始ボタンをクリック
Simulink モデルを使ったリアルタイムテスト環境の構築 MathWorks Japan アプリケーションエンジニアリング部シニアアプリケーションエンジニア高島博 2012 The MathWorks, Inc. 1 はじめに Simulink はバーチャルなテスト環境 2 はじめに Simulink はバーチャルなテスト環境 3 はじめに Simulink はバーチャルなテスト環境 シミュレーション開始ボタンをクリック
PowerPoint プレゼンテーション
 回転型クレーン / 倒立振子の制御 回転型クレーンの制御 状態方程式 コントローラ設計 ( 極配置法 ) コントローラ設計 ( 最適レギュレータ ) 回転型倒立振子の制御 状態方程式 コントローラ設計 コントローラの形式 : 状態フィードバック P-D コントローラ アームの P-D 振子の P-D 目標値 状態フィードバック制御 回転型クレーン コントローラ で 状態フィードバック制御 回転型クレーン
回転型クレーン / 倒立振子の制御 回転型クレーンの制御 状態方程式 コントローラ設計 ( 極配置法 ) コントローラ設計 ( 最適レギュレータ ) 回転型倒立振子の制御 状態方程式 コントローラ設計 コントローラの形式 : 状態フィードバック P-D コントローラ アームの P-D 振子の P-D 目標値 状態フィードバック制御 回転型クレーン コントローラ で 状態フィードバック制御 回転型クレーン
Introduction to System Identification
 y(t) モデルベースデザイン 制御系設計のためのシステム同定入門 s 2 Teja Muppirala t s 2 3s 4 2012 The MathWorks, Inc. 1 モデルベースデザイン 正確なモデルがあることが大前提 実行可能な仕様書 シミュレーションによる設計 モデル 連続したテスト 検証 コード生成による実装 2 動的システムのモデリング モデリング手法 第一原理モデリング データドリブンモデリング
y(t) モデルベースデザイン 制御系設計のためのシステム同定入門 s 2 Teja Muppirala t s 2 3s 4 2012 The MathWorks, Inc. 1 モデルベースデザイン 正確なモデルがあることが大前提 実行可能な仕様書 シミュレーションによる設計 モデル 連続したテスト 検証 コード生成による実装 2 動的システムのモデリング モデリング手法 第一原理モデリング データドリブンモデリング
Microsoft PowerPoint - EXPO2012_AKASAKA_rev.2.pptx
 リアルタイム制御環境を活用したフィードバック制御系設計実践 MathWorks Japan アプリケーションエンジニアリング部アプリケーションエンジニア赤阪大介 212 The MathWorks, Inc. 1 本講演では.. ギャップ? - フィードバック制御器の設計 設計 シミュレーション リアルタイム制御テスト ( ラピッドプロトタイピング ) 実機環境を活用し 制御系設計を効率的に行うには?
リアルタイム制御環境を活用したフィードバック制御系設計実践 MathWorks Japan アプリケーションエンジニアリング部アプリケーションエンジニア赤阪大介 212 The MathWorks, Inc. 1 本講演では.. ギャップ? - フィードバック制御器の設計 設計 シミュレーション リアルタイム制御テスト ( ラピッドプロトタイピング ) 実機環境を活用し 制御系設計を効率的に行うには?
Microsoft PowerPoint - H22制御工学I-2回.ppt
 制御工学 I 第二回ラプラス変換 平成 年 4 月 9 日 /4/9 授業の予定 制御工学概論 ( 回 ) 制御技術は現在様々な工学分野において重要な基本技術となっている 工学における制御工学の位置づけと歴史について説明する さらに 制御システムの基本構成と種類を紹介する ラプラス変換 ( 回 ) 制御工学 特に古典制御ではラプラス変換が重要な役割を果たしている ラプラス変換と逆ラプラス変換の定義を紹介し
制御工学 I 第二回ラプラス変換 平成 年 4 月 9 日 /4/9 授業の予定 制御工学概論 ( 回 ) 制御技術は現在様々な工学分野において重要な基本技術となっている 工学における制御工学の位置づけと歴史について説明する さらに 制御システムの基本構成と種類を紹介する ラプラス変換 ( 回 ) 制御工学 特に古典制御ではラプラス変換が重要な役割を果たしている ラプラス変換と逆ラプラス変換の定義を紹介し
回路シミュレータ/MATLABリンク~詳細回路設計におけるシステムレベル検証~
 回路シミュレータ /MATLAB リンク ~ 詳細回路設計におけるシステムレベル検証 ~ MathWorks Japan アプリケーションエンジニアリング部シニアアプリケーションエンジニア初井良治 2017 The MathWorks, Inc. 1 MathWorks と Cadence 社パートナーシップ OrCAD PSpice 回路設計アナログ デジタル混在の回路シミュレーション 回路設計者
回路シミュレータ /MATLAB リンク ~ 詳細回路設計におけるシステムレベル検証 ~ MathWorks Japan アプリケーションエンジニアリング部シニアアプリケーションエンジニア初井良治 2017 The MathWorks, Inc. 1 MathWorks と Cadence 社パートナーシップ OrCAD PSpice 回路設計アナログ デジタル混在の回路シミュレーション 回路設計者
Microsoft Word - 実験テキスト2005.doc
 7. プロセスの動特性 [Ⅰ] 目的液レベル制御実験および同シミュレーションを通して ステップ応答に基づくプロセス伝達関数の同定方法 ステップ応答法による PI 制御パラメータの調整方法 および PI 制御パラメータが制御性能へ与える影響について習熟する さらに 制御シミュレーションを通して むだ時間を有するプロセスに対するスミス補償型制御の有効性を確認する [Ⅱ] 理論 2.1 ステップ応答実験による伝達関数の同定
7. プロセスの動特性 [Ⅰ] 目的液レベル制御実験および同シミュレーションを通して ステップ応答に基づくプロセス伝達関数の同定方法 ステップ応答法による PI 制御パラメータの調整方法 および PI 制御パラメータが制御性能へ与える影響について習熟する さらに 制御シミュレーションを通して むだ時間を有するプロセスに対するスミス補償型制御の有効性を確認する [Ⅱ] 理論 2.1 ステップ応答実験による伝達関数の同定
PowerPoint プレゼンテーション
 復習 ) 時系列のモデリング ~a. 離散時間モデル ~ y k + a 1 z 1 y k + + a na z n ay k = b 0 u k + b 1 z 1 u k + + b nb z n bu k y k = G z 1 u k = B(z 1 ) A(z 1 u k ) ARMA モデル A z 1 B z 1 = 1 + a 1 z 1 + + a na z n a = b 0
復習 ) 時系列のモデリング ~a. 離散時間モデル ~ y k + a 1 z 1 y k + + a na z n ay k = b 0 u k + b 1 z 1 u k + + b nb z n bu k y k = G z 1 u k = B(z 1 ) A(z 1 u k ) ARMA モデル A z 1 B z 1 = 1 + a 1 z 1 + + a na z n a = b 0
Clipboard
 機械システム工学実験 Ⅲ 現代制御実験 授業 ( 時間程度 シミュレーション ( 時間 実験 ( 時間 - 時間半 課題 ( 時間 - 時間半 レポート提出に関して日時 : 翌週の月曜 時 3 分場所 : 9 号館 553 室 質問があれば鎌田研究室 (9 号館 35 室 まで 制御とは? 対象とする物 ( またはシステム を自分の思うように操る 制御するためには何が必要か? コントローラ ( 制御器
機械システム工学実験 Ⅲ 現代制御実験 授業 ( 時間程度 シミュレーション ( 時間 実験 ( 時間 - 時間半 課題 ( 時間 - 時間半 レポート提出に関して日時 : 翌週の月曜 時 3 分場所 : 9 号館 553 室 質問があれば鎌田研究室 (9 号館 35 室 まで 制御とは? 対象とする物 ( またはシステム を自分の思うように操る 制御するためには何が必要か? コントローラ ( 制御器
パソコンシミュレータの現状
 第 2 章微分 偏微分, 写像 豊橋技術科学大学森謙一郎 2. 連続関数と微分 工学において物理現象を支配する方程式は微分方程式で表されていることが多く, 有限要素法も微分方程式を解く数値解析法であり, 定式化においては微分 積分が一般的に用いられており. 数学の基礎知識が必要になる. 図 2. に示すように, 微分は連続な関数 f() の傾きを求めることであり, 微小な に対して傾きを表し, を無限に
第 2 章微分 偏微分, 写像 豊橋技術科学大学森謙一郎 2. 連続関数と微分 工学において物理現象を支配する方程式は微分方程式で表されていることが多く, 有限要素法も微分方程式を解く数値解析法であり, 定式化においては微分 積分が一般的に用いられており. 数学の基礎知識が必要になる. 図 2. に示すように, 微分は連続な関数 f() の傾きを求めることであり, 微小な に対して傾きを表し, を無限に
Presentation Title
 Simulink 環境で実施する ADAS( 先進運転支援システム ) 実験 MathWorks Japan アプリケーションエンジニアリング部制御 村上直也 2015 The MathWorks, Inc. 1 Agenda はじめに 弊社 ADAS 環境関連紹介 弊社 ADAS 関連製品を使用した DEMO ADAS 関連開発適用事例 まとめ 2 はじめに ADAS システムは今後もますます普及が進むと考えられる
Simulink 環境で実施する ADAS( 先進運転支援システム ) 実験 MathWorks Japan アプリケーションエンジニアリング部制御 村上直也 2015 The MathWorks, Inc. 1 Agenda はじめに 弊社 ADAS 環境関連紹介 弊社 ADAS 関連製品を使用した DEMO ADAS 関連開発適用事例 まとめ 2 はじめに ADAS システムは今後もますます普及が進むと考えられる
Simulink 環境における小規模マイクログリッドのシミュレーション第 2 報 - フェーザー法による 24 時間のシミュレーション - 三田宇洋, テクニカルコンサルティング部, MathWorks Japan 1. 導入文献 [1] では 実用的な時間でシミュレーションを行う小規模のマイクログ
![Simulink 環境における小規模マイクログリッドのシミュレーション第 2 報 - フェーザー法による 24 時間のシミュレーション - 三田宇洋, テクニカルコンサルティング部, MathWorks Japan 1. 導入文献 [1] では 実用的な時間でシミュレーションを行う小規模のマイクログ](/thumbs/100/145768709.jpg "Simulink 環境における小規模マイクログリッドのシミュレーション第 2 報 - フェーザー法による 24 時間のシミュレーション - 三田宇洋, テクニカルコンサルティング部, MathWorks Japan 1. 導入文献 [1] では 実用的な時間でシミュレーションを行う小規模のマイクログ") Simulink 環境における小規模マイクログリッドのシミュレーション第 2 報 - フェーザー法による 24 時間のシミュレーション - 三田宇洋, テクニカルコンサルティング部, MathWorks Japan 1. 導入文献 [1] では 実用的な時間でシミュレーションを行う小規模のマイクログリッドのシミュレーションモデルを紹介した モデルはコンバータやインバータとそのスイッチング制御を省略し
Simulink 環境における小規模マイクログリッドのシミュレーション第 2 報 - フェーザー法による 24 時間のシミュレーション - 三田宇洋, テクニカルコンサルティング部, MathWorks Japan 1. 導入文献 [1] では 実用的な時間でシミュレーションを行う小規模のマイクログリッドのシミュレーションモデルを紹介した モデルはコンバータやインバータとそのスイッチング制御を省略し
eq2:=m[g]*diff(x[g](t),t$2)=-s*sin(th eq3:=m[g]*diff(z[g](t),t$2)=m[g]*g-s* 負荷の座標は 以下の通りです eq4:=x[g](t)=x[k](t)+r*sin(theta(t)) eq5:=z[g](t)=r*cos(the
![eq2:=m[g]*diff(x[g](t),t$2)=-s*sin(th eq3:=m[g]*diff(z[g](t),t$2)=m[g]*g-s* 負荷の座標は 以下の通りです eq4:=x[g](t)=x[k](t)+r*sin(theta(t)) eq5:=z[g](t)=r*cos(the](/thumbs/86/93366319.jpg "eq2:=m[g]*diff(x[g](t),t$2)=-s*sin(th eq3:=m[g]*diff(z[g](t),t$2)=m[g]*g-s* 負荷の座標は 以下の通りです eq4:=x[g](t)=x[k](t)+r*sin(theta(t)) eq5:=z[g](t)=r*cos(the") 7. 制御設計の例 7.1 ローディングブリッジの制御装置 はじめに restart: ローディング ブリッジは 負荷をある地点から別の地点に運びます 台車の加速と減速は好ましくない振動を発生してしまいます そのため負荷はさらに安定し難くなり 時間もかかってしまいます 負荷がある地点から他の地点へ素早く移動し すみやかに安定するような制御装置を設計します 問題の定義 ローディング ブリッジのパラメータは以下の通りです
7. 制御設計の例 7.1 ローディングブリッジの制御装置 はじめに restart: ローディング ブリッジは 負荷をある地点から別の地点に運びます 台車の加速と減速は好ましくない振動を発生してしまいます そのため負荷はさらに安定し難くなり 時間もかかってしまいます 負荷がある地点から他の地点へ素早く移動し すみやかに安定するような制御装置を設計します 問題の定義 ローディング ブリッジのパラメータは以下の通りです
AMS Expoコンテンツ
 MATLAB /Simulink を活用した電源システム設計フロー紹介 MathWorks Japan アプリケーションエンジニアリング部初井良治 2013 The MathWorks, Inc. 1 内容 MATLAB /Simulink アナログ ミックスドシグナルシステム設計フロー 適用事例 ( アナログ ミックスドシグナル ) システム設計フロー MATLAB /Simulink の利点 MATLAB
MATLAB /Simulink を活用した電源システム設計フロー紹介 MathWorks Japan アプリケーションエンジニアリング部初井良治 2013 The MathWorks, Inc. 1 内容 MATLAB /Simulink アナログ ミックスドシグナルシステム設計フロー 適用事例 ( アナログ ミックスドシグナル ) システム設計フロー MATLAB /Simulink の利点 MATLAB
Microsoft PowerPoint - 6.PID制御.pptx
 プロセス制御工学 6.PID 制御 京都大学 加納学 Division of Process Control & Process Systems Engineering Department of Chemical Engineering, Kyoto University manabu@cheme.kyoto-u.ac.jp http://www-pse.cheme.kyoto-u.ac.jp/~kano/
プロセス制御工学 6.PID 制御 京都大学 加納学 Division of Process Control & Process Systems Engineering Department of Chemical Engineering, Kyoto University manabu@cheme.kyoto-u.ac.jp http://www-pse.cheme.kyoto-u.ac.jp/~kano/
今週の内容 後半全体のおさらい ラグランジュの運動方程式の導出 リンク機構のラグランジュの運動方程式 慣性行列 リンク機構のエネルギー保存則 エネルギー パワー 速度 力の関係 外力が作用する場合の運動方程式 粘性 粘性によるエネルギーの消散 慣性 粘性 剛性と微分方程式 拘束条件 ラグランジュの未
 力学 III GA 工業力学演習 X5 解析力学 5X 5 週目 立命館大学機械システム系 8 年度後期 今週の内容 後半全体のおさらい ラグランジュの運動方程式の導出 リンク機構のラグランジュの運動方程式 慣性行列 リンク機構のエネルギー保存則 エネルギー パワー 速度 力の関係 外力が作用する場合の運動方程式 粘性 粘性によるエネルギーの消散 慣性 粘性 剛性と微分方程式 拘束条件 ラグランジュの未定乗数法
力学 III GA 工業力学演習 X5 解析力学 5X 5 週目 立命館大学機械システム系 8 年度後期 今週の内容 後半全体のおさらい ラグランジュの運動方程式の導出 リンク機構のラグランジュの運動方程式 慣性行列 リンク機構のエネルギー保存則 エネルギー パワー 速度 力の関係 外力が作用する場合の運動方程式 粘性 粘性によるエネルギーの消散 慣性 粘性 剛性と微分方程式 拘束条件 ラグランジュの未定乗数法
PowerPoint プレゼンテーション
 PID 制御の基礎 ON/OFF 制御 PID 制御 P 制御 過渡特性を改善しよう PD 制御と P-D 制御 定常特性を改善しよう PI-D 制御 4.2 節 I-PD 制御 角度制御実験装置 0 [deg] 30 [deg] 角度制御実験装置 目標値 コントローラ ( マイコン ) アクチュエータ (DC モータ ) 制御対象 ( アーム ) 角度 センサ ( ロータリエンコーダ ) ON/OFF
PID 制御の基礎 ON/OFF 制御 PID 制御 P 制御 過渡特性を改善しよう PD 制御と P-D 制御 定常特性を改善しよう PI-D 制御 4.2 節 I-PD 制御 角度制御実験装置 0 [deg] 30 [deg] 角度制御実験装置 目標値 コントローラ ( マイコン ) アクチュエータ (DC モータ ) 制御対象 ( アーム ) 角度 センサ ( ロータリエンコーダ ) ON/OFF
PowerPoint Resources
 2009 The MathWorks, Inc. ET ロボコンを通じた MBD 人材育成 MathWorks Japan アドバンストサポート部 ET ロボコン 2009 実行委員会技術委員 / 性能審査委員 近政隆 背景 (1) 自動車業界における MBD の浸透 JMAAB(Japan MATLAB Automotive Advisory Board) と MathWorks の協調による開発手法
2009 The MathWorks, Inc. ET ロボコンを通じた MBD 人材育成 MathWorks Japan アドバンストサポート部 ET ロボコン 2009 実行委員会技術委員 / 性能審査委員 近政隆 背景 (1) 自動車業界における MBD の浸透 JMAAB(Japan MATLAB Automotive Advisory Board) と MathWorks の協調による開発手法
Microsoft Word - 知能機械実験・実習プリント_ docx
 018 年 5 月 1 日版 知能機械実験 実習 Ⅳ Ⅳ-1. 制御工学実験 1. 実験概要と目的 ロボットをはじめとするメカトロニクス機器において 高度な動作を実現している背景には 制御技術がある 制御とは 物体の運動を意図した位置や速度で動かす技術である 精度の高い制御を行うためには 正しく制御理論を理解した上に 物体の運動を正しく解析し モデル化する技術や 制御を行うためのパラメータの同定方法を身につける必要がある
018 年 5 月 1 日版 知能機械実験 実習 Ⅳ Ⅳ-1. 制御工学実験 1. 実験概要と目的 ロボットをはじめとするメカトロニクス機器において 高度な動作を実現している背景には 制御技術がある 制御とは 物体の運動を意図した位置や速度で動かす技術である 精度の高い制御を行うためには 正しく制御理論を理解した上に 物体の運動を正しく解析し モデル化する技術や 制御を行うためのパラメータの同定方法を身につける必要がある
八戸工業大学紀要 No.30
 バックステッピング方式による電子スロットルの非線形制御 林寛 張揚 栗原伸夫 Electronic throttle control based on back-stepping approach Hiroshi Hayashi, Yang Zhang and Nobuo Kurihara ABSTRACT An application of the back-stepping control theory
バックステッピング方式による電子スロットルの非線形制御 林寛 張揚 栗原伸夫 Electronic throttle control based on back-stepping approach Hiroshi Hayashi, Yang Zhang and Nobuo Kurihara ABSTRACT An application of the back-stepping control theory
e3-ac-servo-high-precision-control-mitsubishielectric
 AC サーボモータを用いた放電加工機の 高精度制御に関する MATLAB 適用事例 三菱電機株式会社先端技術総合研究所メカトロニクス技術部門技術顧問今城昭彦 ( 一社 ) 日本機械学会理事 自動運転に関する分野横断型研究会幹事 診断 メンテナンス技術に関する研究会委員 1D モデリング研究会員 ( 一社 ) システム制御情報学会代表会員 ( 一社 ) 日本航空宇宙学会正員 1 イントロダクション 2
AC サーボモータを用いた放電加工機の 高精度制御に関する MATLAB 適用事例 三菱電機株式会社先端技術総合研究所メカトロニクス技術部門技術顧問今城昭彦 ( 一社 ) 日本機械学会理事 自動運転に関する分野横断型研究会幹事 診断 メンテナンス技術に関する研究会委員 1D モデリング研究会員 ( 一社 ) システム制御情報学会代表会員 ( 一社 ) 日本航空宇宙学会正員 1 イントロダクション 2
認識行動システム論
 04/7/ インタラクティブシステム論第 9 回 梶本裕之 Twitter ID kajimoto ハッシュタグ #ninshiki 日程 4/0 インタラクティブシステム入門 4/7 Scilab 入門 4/4 フーリエ変換 5/ 出張 5/8 フーリエ変換と線形システム 5/5 出張 5/ 信号処理の基礎 5/9 出張 6/5 信号処理応用 相関 ) 6/ 信号処理応用 画像処理 ) 6/9 ラプラス変換
04/7/ インタラクティブシステム論第 9 回 梶本裕之 Twitter ID kajimoto ハッシュタグ #ninshiki 日程 4/0 インタラクティブシステム入門 4/7 Scilab 入門 4/4 フーリエ変換 5/ 出張 5/8 フーリエ変換と線形システム 5/5 出張 5/ 信号処理の基礎 5/9 出張 6/5 信号処理応用 相関 ) 6/ 信号処理応用 画像処理 ) 6/9 ラプラス変換
目次 商標について.1 表記内容について.1 1 エディタ.2 1.1bluefish.2 1.2texi2html.2 2 科学.3 2.1chemtool.3 2.2Rasmol.3 2.3celestia.3 3 画像.4 3.1Blender.4 3.2tgif.4 4 数学.5 4.1ge
 USB-KNOPPIX 追加可能 アプリケーション一覧 2009 年 07 月株式会社アルファシステムズ 目次 商標について.1 表記内容について.1 1 エディタ.2 1.1bluefish.2 1.2texi2html.2 2 科学.3 2.1chemtool.3 2.2Rasmol.3 2.3celestia.3 3 画像.4 3.1Blender.4 3.2tgif.4 4 数学.5 4.1geg.5
USB-KNOPPIX 追加可能 アプリケーション一覧 2009 年 07 月株式会社アルファシステムズ 目次 商標について.1 表記内容について.1 1 エディタ.2 1.1bluefish.2 1.2texi2html.2 2 科学.3 2.1chemtool.3 2.2Rasmol.3 2.3celestia.3 3 画像.4 3.1Blender.4 3.2tgif.4 4 数学.5 4.1geg.5
組込みシステムにおける UMLモデルカタログの実践研究
 Modeling Forum 2015 組込みシステムの設計実装への モデルカタログの活用 仙台高等専門学校 情報システム工学科 力武克彰, 新村祐太 ( 豊橋技科大 ), 菊池雄太郎 ( 仙台高専 ) 概要 組込み分野のための UML モデルカタログ (*) のモデルを実装してみました (* 以下 モデルカタログと呼びます ) 2 概要 モデルカタログ : 目標制御モデル モデルカタログより引用
Modeling Forum 2015 組込みシステムの設計実装への モデルカタログの活用 仙台高等専門学校 情報システム工学科 力武克彰, 新村祐太 ( 豊橋技科大 ), 菊池雄太郎 ( 仙台高専 ) 概要 組込み分野のための UML モデルカタログ (*) のモデルを実装してみました (* 以下 モデルカタログと呼びます ) 2 概要 モデルカタログ : 目標制御モデル モデルカタログより引用
例 e 指数関数的に減衰する信号を h( a < + a a すると, それらのラプラス変換は, H ( ) { e } e インパルス応答が h( a < ( ただし a >, U( ) { } となるシステムにステップ信号 ( y( のラプラス変換 Y () は, Y ( ) H ( ) X (
 { e } e インパルス応答が h( a < ( ただし a >, U( ) { } となるシステムにステップ信号 ( y( のラプラス変換 Y () は, Y ( ) H ( ) X (") 第 週ラプラス変換 教科書 p.34~ 目標ラプラス変換の定義と意味を理解する フーリエ変換や Z 変換と並ぶ 信号解析やシステム設計における重要なツール ラプラス変換は波動現象や電気回路など様々な分野で 微分方程式を解くために利用されてきた ラプラス変換を用いることで微分方程式は代数方程式に変換される また 工学上使われる主要な関数のラプラス変換は簡単な形の関数で表されるので これを ラプラス変換表
第 週ラプラス変換 教科書 p.34~ 目標ラプラス変換の定義と意味を理解する フーリエ変換や Z 変換と並ぶ 信号解析やシステム設計における重要なツール ラプラス変換は波動現象や電気回路など様々な分野で 微分方程式を解くために利用されてきた ラプラス変換を用いることで微分方程式は代数方程式に変換される また 工学上使われる主要な関数のラプラス変換は簡単な形の関数で表されるので これを ラプラス変換表
f2-system-requirement-system-composer-mw
 Simulink Requirements と新製品 System Composer によるシステムズエンジニアリング MathWorks Japan アプリケーションエンジニアリング部大越亮二 2015 The MathWorks, Inc. 1 エンジニアリングの活動 要求レベル システムレベル 要求分析 システム記述 表現 高 システム分析 システム結合 抽象度 サブシステム コンポーネントレベル
Simulink Requirements と新製品 System Composer によるシステムズエンジニアリング MathWorks Japan アプリケーションエンジニアリング部大越亮二 2015 The MathWorks, Inc. 1 エンジニアリングの活動 要求レベル システムレベル 要求分析 システム記述 表現 高 システム分析 システム結合 抽象度 サブシステム コンポーネントレベル
Code_Aster / Salome-Meca 中級者への道 2015年5月31日
 Code_Aster / Salome-Meca 中級者への道 2015年5月31日 目次 1.Code_Aster / Salome-Meca とは 2.初心者 中級者 上級者の定義 3.Eficas, ASTK で何ができる 4.公式 Documentation, Validation を活用しよ う 5.メッセージファイルを読んでエラーを解決 目次 6.コマンドファイルをテキストエディタで 編集しなければならない場合はどうする
Code_Aster / Salome-Meca 中級者への道 2015年5月31日 目次 1.Code_Aster / Salome-Meca とは 2.初心者 中級者 上級者の定義 3.Eficas, ASTK で何ができる 4.公式 Documentation, Validation を活用しよ う 5.メッセージファイルを読んでエラーを解決 目次 6.コマンドファイルをテキストエディタで 編集しなければならない場合はどうする
Microsoft PowerPoint - シミュレーション工学-2010-第1回.ppt
 シミュレーション工学 ( 後半 ) 東京大学人工物工学研究センター 鈴木克幸 CA( Compter Aded geerg ) r. Jaso Lemo (SC, 98) 設計者が解析ツールを使いこなすことにより 設計の評価 設計の質の向上を図る geerg の本質の 計算機による支援 (CA CAM などより広い名前 ) 様々な汎用ソフトの登場 工業製品の設計に不可欠のツール 構造解析 流体解析
シミュレーション工学 ( 後半 ) 東京大学人工物工学研究センター 鈴木克幸 CA( Compter Aded geerg ) r. Jaso Lemo (SC, 98) 設計者が解析ツールを使いこなすことにより 設計の評価 設計の質の向上を図る geerg の本質の 計算機による支援 (CA CAM などより広い名前 ) 様々な汎用ソフトの登場 工業製品の設計に不可欠のツール 構造解析 流体解析
PowerPoint Presentation
 Simulink +Unreal Engine 連携による ADAS/ 自動運転シミュレーション環境 MathWorks Japan アプリケーションエンジニアリング部宮川浩 2015 The MathWorks, Inc. 1 Session Key Take Away MathWorks は 自動運転システム開発に必要な フルビークルモデルを提供します 3 自動車業界のメガトレンド Connectivity
Simulink +Unreal Engine 連携による ADAS/ 自動運転シミュレーション環境 MathWorks Japan アプリケーションエンジニアリング部宮川浩 2015 The MathWorks, Inc. 1 Session Key Take Away MathWorks は 自動運転システム開発に必要な フルビークルモデルを提供します 3 自動車業界のメガトレンド Connectivity
AMS Expoコンテンツ
 高速伝送路での信号特性の解析 ~ 新しい MATLAB /Simulink の使い方 ~ MathWorks Japan アプリケーションエンジニアリング部初井良治 2014 The MathWorks, Inc. 1 Demo MATLAB/Simulink 高速伝送特性シミュレーション DFE CDR ビット生成プリエンファシス伝送路特性データ 8B10Bエンコーダ アナログイコライザ 8B10B
高速伝送路での信号特性の解析 ~ 新しい MATLAB /Simulink の使い方 ~ MathWorks Japan アプリケーションエンジニアリング部初井良治 2014 The MathWorks, Inc. 1 Demo MATLAB/Simulink 高速伝送特性シミュレーション DFE CDR ビット生成プリエンファシス伝送路特性データ 8B10Bエンコーダ アナログイコライザ 8B10B
モータ・モーション制御MBD実践 ~組み込みコード生成編~
 モーター モーション制御モデルベースデザイン実践 プラントモデリング 編 MathWorks Japan アプリケーションエンジニアリング部アプリケーションエンジニア福井慶一 2013 The MathWorks, Inc. 1 モーター モーション制御とは? 負荷の動き ( 速度 位置 ) を意図した通りに制御 駆動回路モーター負荷 熱 制御信号 制御 モーター制御 制御指令 モーターの状態 (
モーター モーション制御モデルベースデザイン実践 プラントモデリング 編 MathWorks Japan アプリケーションエンジニアリング部アプリケーションエンジニア福井慶一 2013 The MathWorks, Inc. 1 モーター モーション制御とは? 負荷の動き ( 速度 位置 ) を意図した通りに制御 駆動回路モーター負荷 熱 制御信号 制御 モーター制御 制御指令 モーターの状態 (
39 Fig. 2 倒立 2 輪ロボットシステム Fig. 4 倒立 2 輪ロボットモデル Table. 1 物理パラメータ る そしてその角度情報がターミナルボードを介して, ディジタルコントロールボードに送られ, その情報をもとに を利用して 内で演算され, 制御に必要なモータトルクの指令信号が
 38 佐藤光 * 木澤悟 Stabilization of the Wheeled Inverted Pendulum with Optimal Robust Servo System * ( 平成 年 月 日受理 ) 1. 緒言 近年, セグウェイ等に代表されるような倒立 輪ロボットの開発, 研究が盛んに行われている そこで本研究では, 実際に一から倒立 輪ロボットを製作し, そして製作したロボットをモデル化することにより,
38 佐藤光 * 木澤悟 Stabilization of the Wheeled Inverted Pendulum with Optimal Robust Servo System * ( 平成 年 月 日受理 ) 1. 緒言 近年, セグウェイ等に代表されるような倒立 輪ロボットの開発, 研究が盛んに行われている そこで本研究では, 実際に一から倒立 輪ロボットを製作し, そして製作したロボットをモデル化することにより,
2018 年 5 月 31 日版 知能機械実験 実習 Ⅳ Ⅳ-1. 制御工学実験 1. 実験概要と目的 ロボットをはじめとするメカトロニクス機器において 高度な動作を実現している背景には 制御技術がある 制御とは 物体の運動を意図した位置や速度で動かす技術である 精度の高い制御を行うためには 正しく
 2018 年 5 月 31 日版 知能機械実験 実習 Ⅳ Ⅳ-1. 制御工学実験 1. 実験概要と目的 ロボットをはじめとするメカトロニクス機器において 高度な動作を実現している背景には 制御技術がある 制御とは 物体の運動を意図した位置や速度で動かす技術である 精度の高い制御を行うためには 正しく制御理論を理解した上に 物体の運動を正しく解析し モデル化する技術や 制御を行うためのパラメータの同定方法を身につける必要がある
2018 年 5 月 31 日版 知能機械実験 実習 Ⅳ Ⅳ-1. 制御工学実験 1. 実験概要と目的 ロボットをはじめとするメカトロニクス機器において 高度な動作を実現している背景には 制御技術がある 制御とは 物体の運動を意図した位置や速度で動かす技術である 精度の高い制御を行うためには 正しく制御理論を理解した上に 物体の運動を正しく解析し モデル化する技術や 制御を行うためのパラメータの同定方法を身につける必要がある
Microsoft Word - matlab-coder-code-generation-quick-start-guide-japanese-r2016a
 MATLAB コードを使用した C コードの生成クイックスタートガイド (R2016a) 最初のスタンドアロン C コードの生成 スタンドアロン C コードを生成するには [ ビルド ] を [ ソースコード ] [ スタティックライブラリ ] [ ダイナミックライブラリ ] または [ 実行ファイル ] のいずれかに切り替えます MATLAB Coder を使用することで MATLAB コードから
MATLAB コードを使用した C コードの生成クイックスタートガイド (R2016a) 最初のスタンドアロン C コードの生成 スタンドアロン C コードを生成するには [ ビルド ] を [ ソースコード ] [ スタティックライブラリ ] [ ダイナミックライブラリ ] または [ 実行ファイル ] のいずれかに切り替えます MATLAB Coder を使用することで MATLAB コードから
板バネの元は固定にします x[0] は常に0です : > x[0]:=t->0; (1.2) 初期値の設定をします 以降 for 文処理のため 空集合を生成しておきます : > init:={}: 30 番目 ( 端 ) 以外については 初期高さおよび初速は全て 0 にします 初期高さを x[j]
![板バネの元は固定にします x[0] は常に0です : > x[0]:=t->0; (1.2) 初期値の設定をします 以降 for 文処理のため 空集合を生成しておきます : > init:={}: 30 番目 ( 端 ) 以外については 初期高さおよび初速は全て 0 にします 初期高さを x[j]](/thumbs/93/112208237.jpg "板バネの元は固定にします x[0] は常に0です : > x[0]:=t->0; (1.2) 初期値の設定をします 以降 for 文処理のため 空集合を生成しておきます : > init:={}: 30 番目 ( 端 ) 以外については 初期高さおよび初速は全て 0 にします 初期高さを x[j]") 機械振動論固有振動と振動モード 本事例では 板バネを解析対象として 数値計算 ( シミュレーション ) と固有値問題を解くことにより振動解析を行っています 実際の振動は振動モードと呼ばれる特定パターンが複数組み合わされますが 各振動モードによる振動に分けて解析を行うことでその現象を捉え易くすることが出来ます そこで 本事例では アニメーションを活用した解析結果の可視化も取り入れています 板バネの振動
機械振動論固有振動と振動モード 本事例では 板バネを解析対象として 数値計算 ( シミュレーション ) と固有値問題を解くことにより振動解析を行っています 実際の振動は振動モードと呼ばれる特定パターンが複数組み合わされますが 各振動モードによる振動に分けて解析を行うことでその現象を捉え易くすることが出来ます そこで 本事例では アニメーションを活用した解析結果の可視化も取り入れています 板バネの振動
MATLAB/SimulinkによるAMS活用事例 ~Mixed-Signal Library 2.0のご紹介~
 MATLAB/Simulink による AMS 活用事例 ~Mixed-Signal Library 2.0 のご紹介 ~ MathWorks Japan アプリケーションエンジニアリング部シニアアプリケーションエンジニア竹本佳充 2012 The MathWorks, Inc. 1 Agenda 1. AMS 設計活用事例 I. ミックスドシグナルトップダウン設計 II. MATLAB/Simulinkの導入メリット
MATLAB/Simulink による AMS 活用事例 ~Mixed-Signal Library 2.0 のご紹介 ~ MathWorks Japan アプリケーションエンジニアリング部シニアアプリケーションエンジニア竹本佳充 2012 The MathWorks, Inc. 1 Agenda 1. AMS 設計活用事例 I. ミックスドシグナルトップダウン設計 II. MATLAB/Simulinkの導入メリット
FEM原理講座 (サンプルテキスト)
") サンプルテキスト FEM 原理講座 サイバネットシステム株式会社 8 年 月 9 日作成 サンプルテキストについて 各講師が 講義の内容が伝わりやすいページ を選びました テキストのページは必ずしも連続していません 一部を抜粋しています 幾何光学講座については 実物のテキストではなくガイダンスを掲載いたします 対象とする構造系 物理モデル 連続体 固体 弾性体 / 弾塑性体 / 粘弾性体 / 固体
サンプルテキスト FEM 原理講座 サイバネットシステム株式会社 8 年 月 9 日作成 サンプルテキストについて 各講師が 講義の内容が伝わりやすいページ を選びました テキストのページは必ずしも連続していません 一部を抜粋しています 幾何光学講座については 実物のテキストではなくガイダンスを掲載いたします 対象とする構造系 物理モデル 連続体 固体 弾性体 / 弾塑性体 / 粘弾性体 / 固体
モータ HILS の概要 1 はじめに モータ HILS の需要 自動車の電子化及び 電気自動車やハイブリッド車の実用化に伴い モータの使用数が増大しています 従来行われていた駆動用モータ単体のシミュレーション レシプロエンジンとモータの駆動力分配制御シミュレーションの利用に加え パワーウインドやサ
 モータ HILS の概要 1 はじめに モータ HILS の需要 自動車の電子化及び 電気自動車やハイブリッド車の実用化に伴い モータの使用数が増大しています 従来行われていた駆動用モータ単体のシミュレーション レシプロエンジンとモータの駆動力分配制御シミュレーションの利用に加え パワーウインドやサンルーフなどのボディー系 電動パワーステアリングやそのアシスト機能など 高度な制御 大電流の制御などが要求されています
モータ HILS の概要 1 はじめに モータ HILS の需要 自動車の電子化及び 電気自動車やハイブリッド車の実用化に伴い モータの使用数が増大しています 従来行われていた駆動用モータ単体のシミュレーション レシプロエンジンとモータの駆動力分配制御シミュレーションの利用に加え パワーウインドやサンルーフなどのボディー系 電動パワーステアリングやそのアシスト機能など 高度な制御 大電流の制御などが要求されています
ギリシャ文字の読み方を教えてください
 埼玉工業大学機械工学学習支援セミナー ( 小西克享 ) 単振り子の振動の近似解と厳密解 -/ テーマ H: 単振り子の振動の近似解と厳密解. 運動方程式図 のように, 質量 m のおもりが糸で吊り下げられている時, おもりには重力 W と糸の張力 が作用しています. おもりは静止した状態なので,W と F は釣り合った状態注 ) になっています. すなわち, W です.W は質量 m と重力加速度
埼玉工業大学機械工学学習支援セミナー ( 小西克享 ) 単振り子の振動の近似解と厳密解 -/ テーマ H: 単振り子の振動の近似解と厳密解. 運動方程式図 のように, 質量 m のおもりが糸で吊り下げられている時, おもりには重力 W と糸の張力 が作用しています. おもりは静止した状態なので,W と F は釣り合った状態注 ) になっています. すなわち, W です.W は質量 m と重力加速度
生成された C コードの理解 コメント元になった MATLAB コードを C コード内にコメントとして追加しておくと その C コードの由来をより簡単に理解できることがよくありま [ 詳細設定 ] [ コード外観 ] を選択 C コードのカスタマイズ より効率的な C コードを生成するベストプラクテ
![生成された C コードの理解 コメント元になった MATLAB コードを C コード内にコメントとして追加しておくと その C コードの由来をより簡単に理解できることがよくありま [ 詳細設定 ] [ コード外観 ] を選択 C コードのカスタマイズ より効率的な C コードを生成するベストプラクテ](/thumbs/71/64602839.jpg "生成された C コードの理解 コメント元になった MATLAB コードを C コード内にコメントとして追加しておくと その C コードの由来をより簡単に理解できることがよくありま [ 詳細設定 ] [ コード外観 ] を選択 C コードのカスタマイズ より効率的な C コードを生成するベストプラクテ") MATLAB コードを使用した C コードの生成クイックスタートガイド (R2012a) 最初のスタンドアロン C コードの生成 スタンドアロン C コードを生成するには MATLAB Coder のペインを [ ビルド ] に切り替えて [C/C++ スタティックライブラリ ] [C/C++ ダイナミックライブラリ ] または [C/C++ 実行ファイル ] のいずれかを選択しま MATLAB Coder
MATLAB コードを使用した C コードの生成クイックスタートガイド (R2012a) 最初のスタンドアロン C コードの生成 スタンドアロン C コードを生成するには MATLAB Coder のペインを [ ビルド ] に切り替えて [C/C++ スタティックライブラリ ] [C/C++ ダイナミックライブラリ ] または [C/C++ 実行ファイル ] のいずれかを選択しま MATLAB Coder
Microsoft PowerPoint - CSA_B3_EX2.pptx
 Computer Science A Hardware Design Excise 2 Handout V2.01 May 27 th.,2019 CSAHW Computer Science A, Meiji University CSA_B3_EX2.pptx 32 Slides Renji Mikami 1 CSAHW2 ハード演習内容 2.1 二次元空間でのベクトルの直交 2.2 Reserved
Computer Science A Hardware Design Excise 2 Handout V2.01 May 27 th.,2019 CSAHW Computer Science A, Meiji University CSA_B3_EX2.pptx 32 Slides Renji Mikami 1 CSAHW2 ハード演習内容 2.1 二次元空間でのベクトルの直交 2.2 Reserved
SICEセミナー 制御のためのシステム同定
 状態推定班 ロケット ( 企業共研 ) 電気自動車用リチウムイオン電池 ( 企業共研 ) モデリングと制御班 ヘリコプタ実験 エンジン制御 ( 企業共研 ) RoboCar 実験 制御実験装置 複写機の制御 ( 企業共研 ) 異常検出 基礎理論研究 モデリング Multi-domain modeling 非線形同定 JIT,PLS,PCA,... 統計的学習理論ベイジアン,RVM スパース推定 状態推定
状態推定班 ロケット ( 企業共研 ) 電気自動車用リチウムイオン電池 ( 企業共研 ) モデリングと制御班 ヘリコプタ実験 エンジン制御 ( 企業共研 ) RoboCar 実験 制御実験装置 複写機の制御 ( 企業共研 ) 異常検出 基礎理論研究 モデリング Multi-domain modeling 非線形同定 JIT,PLS,PCA,... 統計的学習理論ベイジアン,RVM スパース推定 状態推定
微分代数方程式とINDEXの低減
 SICE プラントモデリング研究会 微分代数方程式と INDEX の低減 2009/09/25 モデルベース開発推進室石塚真一 . 準備体操 2. 微分代数方程式とは? 3. INDEX の概念 4. INDEX の低減 5. ベンチマーク まとめ 発表内容 2009 CYBERNET SYSTEMS CO.,LTD. All Rights Reserved. 2 . 準備体操 : 初期値問題と境界値問題
SICE プラントモデリング研究会 微分代数方程式と INDEX の低減 2009/09/25 モデルベース開発推進室石塚真一 . 準備体操 2. 微分代数方程式とは? 3. INDEX の概念 4. INDEX の低減 5. ベンチマーク まとめ 発表内容 2009 CYBERNET SYSTEMS CO.,LTD. All Rights Reserved. 2 . 準備体操 : 初期値問題と境界値問題
微分方程式による現象記述と解きかた
 微分方程式による現象記述と解きかた 土木工学 : 公共諸施設 構造物の有用目的にむけた合理的な実現をはかる方法 ( 技術 ) に関する学 橋梁 トンネル ダム 道路 港湾 治水利水施設 安全化 利便化 快適化 合法則的 経済的 自然および人口素材によって作られた 質量保存則 構造物の自然的な性質 作用 ( 外力による応答 ) エネルギー則 の解明 社会的諸現象のうち マスとしての移動 流通 運動量則
微分方程式による現象記述と解きかた 土木工学 : 公共諸施設 構造物の有用目的にむけた合理的な実現をはかる方法 ( 技術 ) に関する学 橋梁 トンネル ダム 道路 港湾 治水利水施設 安全化 利便化 快適化 合法則的 経済的 自然および人口素材によって作られた 質量保存則 構造物の自然的な性質 作用 ( 外力による応答 ) エネルギー則 の解明 社会的諸現象のうち マスとしての移動 流通 運動量則
Simulinkモデル開発における工夫事例
 MBD 中部コンファレンス PMA2:MATLAB 開発 Simulink モデル開発における 工夫事例 2014 年 12 月 18 日オムロンオートモーティブエレクトロニクス株式会社開発統括室ボディコントロールシステム開発部町井紀善 はじめに Simulink の導入 開発手法 環境をそれぞれの事情 ( 会社 部署 個人 開発アイテム ビジネスモデル 等 ) に合せ込むことで効率化を実現します
MBD 中部コンファレンス PMA2:MATLAB 開発 Simulink モデル開発における 工夫事例 2014 年 12 月 18 日オムロンオートモーティブエレクトロニクス株式会社開発統括室ボディコントロールシステム開発部町井紀善 はじめに Simulink の導入 開発手法 環境をそれぞれの事情 ( 会社 部署 個人 開発アイテム ビジネスモデル 等 ) に合せ込むことで効率化を実現します
各学科 課程 専攻別開設授業科目 ( 教職関係 ) 総合情報学科 ( 昼間コース ) 中学校教諭 1 種免許状 ( 数学 ) 高等学校教諭 1 種免許状 ( 数学 ) 代数学 線形代数学第一 2 線形代数学第二 2 離散数学 2 応用代数学 2 オペレーションズ リサーチ基礎 2 数論アルゴリズム
 総合情報学科 ( 昼間コース ) 中学校教諭 1 種免許状 ( 数学 ) 高等学校教諭 1 種免許状 ( 数学 ) 代数学 線形代数学第一 2 線形代数学第二 2 離散数学 2 応用代数学 2 オペレーションズ リサーチ基礎 2 数論アルゴリズム") 免許状取得に必要な履修科目 教育職員免許法施行規則に 左に該当する本学の 履修 高等学校教諭 高等学校教諭 中学校教諭 定める修得を要する科目 開設科目及び単位数 年次 専修免許状 1 種免許状 1 種免許状 教職の意義等に関する科目教職論 2 1 年 2 単位 2 単位 2 単位 教 教育原理 2 1 年 職 に教育の基礎理論に関する科教育心理学 2 1 年 6 単位 6 単位 6 単位 関目 す
免許状取得に必要な履修科目 教育職員免許法施行規則に 左に該当する本学の 履修 高等学校教諭 高等学校教諭 中学校教諭 定める修得を要する科目 開設科目及び単位数 年次 専修免許状 1 種免許状 1 種免許状 教職の意義等に関する科目教職論 2 1 年 2 単位 2 単位 2 単位 教 教育原理 2 1 年 職 に教育の基礎理論に関する科教育心理学 2 1 年 6 単位 6 単位 6 単位 関目 す
CANapeを用いたラピッドコントロールプロトタイピングのバイパス手法による制御モデル開発
 ape を用いたラピッドコントロールプロトタイピングのバイパス手法による制御モデル開発 近年 自動車のソフトウェア開発において 開発期間の短縮やコスト削減の面からモデルベース開発が注目されています アイシン エィ ダブリュ株式会社は ラピッドコントロールプロトタイピングのバイパス手法による制御モデル開発にベクターの測定 / キャリブレーションツール ape ( キャナピー ) を導入しました 本稿では
ape を用いたラピッドコントロールプロトタイピングのバイパス手法による制御モデル開発 近年 自動車のソフトウェア開発において 開発期間の短縮やコスト削減の面からモデルベース開発が注目されています アイシン エィ ダブリュ株式会社は ラピッドコントロールプロトタイピングのバイパス手法による制御モデル開発にベクターの測定 / キャリブレーションツール ape ( キャナピー ) を導入しました 本稿では
PowerPoint Presentation
 付録 2 2 次元アフィン変換 直交変換 たたみ込み 1.2 次元のアフィン変換 座標 (x,y ) を (x,y) に移すことを 2 次元での変換. 特に, 変換が と書けるとき, アフィン変換, アフィン変換は, その 1 次の項による変換 と 0 次の項による変換 アフィン変換 0 次の項は平行移動 1 次の項は座標 (x, y ) をベクトルと考えて とすれば このようなもの 2 次元ベクトルの線形写像
付録 2 2 次元アフィン変換 直交変換 たたみ込み 1.2 次元のアフィン変換 座標 (x,y ) を (x,y) に移すことを 2 次元での変換. 特に, 変換が と書けるとき, アフィン変換, アフィン変換は, その 1 次の項による変換 と 0 次の項による変換 アフィン変換 0 次の項は平行移動 1 次の項は座標 (x, y ) をベクトルと考えて とすれば このようなもの 2 次元ベクトルの線形写像
スライド 1
 Katsura Laboratory Integrated Design Engineering Keio University ( 位置 力再現方法および位置 力再現装置 ) Department of Electrical Engineering Nagaoka University of Technology 長岡技術科学大学助教横倉勇希 新技術説明会 触覚 力覚情報の伝送 聴覚情報の伝送 視覚情報の伝送
Katsura Laboratory Integrated Design Engineering Keio University ( 位置 力再現方法および位置 力再現装置 ) Department of Electrical Engineering Nagaoka University of Technology 長岡技術科学大学助教横倉勇希 新技術説明会 触覚 力覚情報の伝送 聴覚情報の伝送 視覚情報の伝送
製品開発の現場では 各種のセンサーや測定環境を利用したデータ解析が行われ シミュレーションや動作検証等に役立てられています しかし 日々収集されるデータ量は増加し 解析も複雑化しており データ解析の負荷は徐々に重くなっています 例えば自動車の車両計測データを解析する場合 取得したデータをそのまま解析
 ホワイトペーパー Excel と MATLAB の連携がデータ解析の課題を解決 製品開発の現場では 各種のセンサーや測定環境を利用したデータ解析が行われ シミュレーションや動作検証等に役立てられています しかし 日々収集されるデータ量は増加し 解析も複雑化しており データ解析の負荷は徐々に重くなっています 例えば自動車の車両計測データを解析する場合 取得したデータをそのまま解析に使用することはできず
ホワイトペーパー Excel と MATLAB の連携がデータ解析の課題を解決 製品開発の現場では 各種のセンサーや測定環境を利用したデータ解析が行われ シミュレーションや動作検証等に役立てられています しかし 日々収集されるデータ量は増加し 解析も複雑化しており データ解析の負荷は徐々に重くなっています 例えば自動車の車両計測データを解析する場合 取得したデータをそのまま解析に使用することはできず
Microsoft PowerPoint - H22制御工学I-10回.ppt
 制御工学 I 第 回 安定性 ラウス, フルビッツの安定判別 平成 年 6 月 日 /6/ 授業の予定 制御工学概論 ( 回 ) 制御技術は現在様々な工学分野において重要な基本技術となっている 工学における制御工学の位置づけと歴史について説明する さらに 制御システムの基本構成と種類を紹介する ラプラス変換 ( 回 ) 制御工学 特に古典制御ではラプラス変換が重要な役割を果たしている ラプラス変換と逆ラプラス変換の定義を紹介し
制御工学 I 第 回 安定性 ラウス, フルビッツの安定判別 平成 年 6 月 日 /6/ 授業の予定 制御工学概論 ( 回 ) 制御技術は現在様々な工学分野において重要な基本技術となっている 工学における制御工学の位置づけと歴史について説明する さらに 制御システムの基本構成と種類を紹介する ラプラス変換 ( 回 ) 制御工学 特に古典制御ではラプラス変換が重要な役割を果たしている ラプラス変換と逆ラプラス変換の定義を紹介し
スライド 1
 機構学 Part6: ロボットの運動学 金子真 きんにく筋肉 筋紡錘 : 筋肉の長さを測るセンサ モータ センサ ロボットの運動学 関節にモータがついている場合の角度の取り方 関節にモータがついている場合の角度の取り方 関節にモータがついている場合の角度の取り方 関節にモータがついている場合の角度の取り方 関節にモータがついている場合の角度の取り方 ワイヤ駆動式ロボット ワイヤ駆動式ロボット ワイヤプーリ機構の場合
機構学 Part6: ロボットの運動学 金子真 きんにく筋肉 筋紡錘 : 筋肉の長さを測るセンサ モータ センサ ロボットの運動学 関節にモータがついている場合の角度の取り方 関節にモータがついている場合の角度の取り方 関節にモータがついている場合の角度の取り方 関節にモータがついている場合の角度の取り方 関節にモータがついている場合の角度の取り方 ワイヤ駆動式ロボット ワイヤ駆動式ロボット ワイヤプーリ機構の場合
HEVの車両全体シミュレーションによるシステム最適化
 HEV の車両全体シミュレーションによるシステム最適化 MathWorks Japan アプリケーションエンジニアリング部アプリケーションエンジニア張莉 2016 The MathWorks, Inc. 1 マルチモードハイブリッド自動車 Engine Mode EV Mode SHEV Mode 1. Higuchi, N., Sunaga, Y., Tanaka, M., Shimada, H.:
HEV の車両全体シミュレーションによるシステム最適化 MathWorks Japan アプリケーションエンジニアリング部アプリケーションエンジニア張莉 2016 The MathWorks, Inc. 1 マルチモードハイブリッド自動車 Engine Mode EV Mode SHEV Mode 1. Higuchi, N., Sunaga, Y., Tanaka, M., Shimada, H.:
Microsoft Word - NumericalComputation.docx
 数値計算入門 武尾英哉. 離散数学と数値計算 数学的解法の中には理論計算では求められないものもある. 例えば, 定積分は, まずは積分 ( 被積分関数の原始関数をみつけること できなければ値を得ることはできない. また, ある関数の所定の値における微分値を得るには, まずその関数の微分ができなければならない. さらに代数方程式の解を得るためには, 解析的に代数方程式を解く必要がある. ところが, これらは必ずしも解析的に導けるとは限らない.
数値計算入門 武尾英哉. 離散数学と数値計算 数学的解法の中には理論計算では求められないものもある. 例えば, 定積分は, まずは積分 ( 被積分関数の原始関数をみつけること できなければ値を得ることはできない. また, ある関数の所定の値における微分値を得るには, まずその関数の微分ができなければならない. さらに代数方程式の解を得るためには, 解析的に代数方程式を解く必要がある. ところが, これらは必ずしも解析的に導けるとは限らない.
OpenFOAM(R) ソースコード入門 pt1 熱伝導方程式の解法から有限体積法の実装について考える 前編 : 有限体積法の基礎確認 2013/11/17 オープンCAE 富山富山県立大学中川慎二
 ソースコード入門 pt1 熱伝導方程式の解法から有限体積法の実装について考える 前編 : 有限体積法の基礎確認 2013/11/17 オープンCAE 富山富山県立大学中川慎二") OpenFOAM(R) ソースコード入門 pt1 熱伝導方程式の解法から有限体積法の実装について考える 前編 : 有限体積法の基礎確認 2013/11/17 オープンCAE 勉強会 @ 富山富山県立大学中川慎二 * OpenFOAM のソースコードでは, 基礎式を偏微分方程式の形で記述する.OpenFOAM 内部では, 有限体積法を使ってこの微分方程式を解いている. どのようにして, 有限体積法に基づく離散化が実現されているのか,
OpenFOAM(R) ソースコード入門 pt1 熱伝導方程式の解法から有限体積法の実装について考える 前編 : 有限体積法の基礎確認 2013/11/17 オープンCAE 勉強会 @ 富山富山県立大学中川慎二 * OpenFOAM のソースコードでは, 基礎式を偏微分方程式の形で記述する.OpenFOAM 内部では, 有限体積法を使ってこの微分方程式を解いている. どのようにして, 有限体積法に基づく離散化が実現されているのか,
Presentation Title
 コード生成製品の普及と最新の技術動向 MathWorks Japan パイロットエンジニアリング部 東達也 2014 The MathWorks, Inc. 1 MBD 概要 MATLABおよびSimulinkを使用したモデルベース デザイン ( モデルベース開発 ) 紹介ビデオ 2 MBD による制御開発フローとコード生成製品の活用 制御設計の最適化で性能改善 設計図ですぐに挙動確認 MILS:
コード生成製品の普及と最新の技術動向 MathWorks Japan パイロットエンジニアリング部 東達也 2014 The MathWorks, Inc. 1 MBD 概要 MATLABおよびSimulinkを使用したモデルベース デザイン ( モデルベース開発 ) 紹介ビデオ 2 MBD による制御開発フローとコード生成製品の活用 制御設計の最適化で性能改善 設計図ですぐに挙動確認 MILS:
054_10モデルベースデザイン
 技術紹介 モデルベースデザインによる制御設計 石田修一 Ishida Shuuichi *1 近年 制御システムは高機能化や大規模化が急速に進み 従来の開発手法では開発費用の増加 開発期間の拡大 および品質の確保が困難となった 対して顧客からは 開発期間の短縮やコストダウンへの強い要求がある この現状を改善する方法として モデルベースデザイン (MBD:Model-Based Design) が自動車分野
技術紹介 モデルベースデザインによる制御設計 石田修一 Ishida Shuuichi *1 近年 制御システムは高機能化や大規模化が急速に進み 従来の開発手法では開発費用の増加 開発期間の拡大 および品質の確保が困難となった 対して顧客からは 開発期間の短縮やコストダウンへの強い要求がある この現状を改善する方法として モデルベースデザイン (MBD:Model-Based Design) が自動車分野
航空機の縦系モデルに対する、非線形制御の適用例
 制御システム工学研究グルプ 航空機の縦系モデルに対する非線形最適制御の適用例 菊池芳光 * * 名古屋大学 MBD 中部コンファレンス @2014 年 12 月 18 日 目次 はじめに 先行研究 提案手法 縦系航空機モデル シミュレーション結果 おわりに はじめに PIO(Pilot Induced Oscillation) Category II 速度飽和 位相遅れ PIO 事故 PIOにより墜落するGripen
制御システム工学研究グルプ 航空機の縦系モデルに対する非線形最適制御の適用例 菊池芳光 * * 名古屋大学 MBD 中部コンファレンス @2014 年 12 月 18 日 目次 はじめに 先行研究 提案手法 縦系航空機モデル シミュレーション結果 おわりに はじめに PIO(Pilot Induced Oscillation) Category II 速度飽和 位相遅れ PIO 事故 PIOにより墜落するGripen
Microsoft Word - 秋田高専紀要論文kai2
 フライホイール型倒立振子の安定化制御 工藤駿 * 木澤悟 Stbiliztion of Inverted Pendulu with Inerti Rotor Shun KUDOU * nd Storu KIZAWA ( 平成 年 月 5 日受理 ) Abstrt-his pper desribes the ontrol of n under tuted syste lled the Inverted
フライホイール型倒立振子の安定化制御 工藤駿 * 木澤悟 Stbiliztion of Inverted Pendulu with Inerti Rotor Shun KUDOU * nd Storu KIZAWA ( 平成 年 月 5 日受理 ) Abstrt-his pper desribes the ontrol of n under tuted syste lled the Inverted
線積分.indd
 線積分 線積分 ( n, n, n ) (ξ n, η n, ζ n ) ( n-, n-, n- ) (ξ k, η k, ζ k ) ( k, k, k ) ( k-, k-, k- ) 物体に力 を作用させて位置ベクトル A の点 A から位置ベクトル の点 まで曲線 に沿って物体を移動させたときの仕事 W は 次式で計算された A, A, W : d 6 d+ d+ d@,,, d+ d+
線積分 線積分 ( n, n, n ) (ξ n, η n, ζ n ) ( n-, n-, n- ) (ξ k, η k, ζ k ) ( k, k, k ) ( k-, k-, k- ) 物体に力 を作用させて位置ベクトル A の点 A から位置ベクトル の点 まで曲線 に沿って物体を移動させたときの仕事 W は 次式で計算された A, A, W : d 6 d+ d+ d@,,, d+ d+
Oracle Un お問合せ : Oracle Data Integrator 11g: データ統合設定と管理 期間 ( 標準日数 ):5 コースの概要 Oracle Data Integratorは すべてのデータ統合要件 ( 大量の高パフォーマンス バッチ ローブンの統合プロセスおよ
:5 コースの概要 Oracle Data Integratorは すべてのデータ統合要件 ( 大量の高パフォーマンス バッチ ローブンの統合プロセスおよ") Oracle Un お問合せ : 0120- Oracle Data Integrator 11g: データ統合設定と管理 期間 ( 標準日数 ):5 コースの概要 Oracle Data Integratorは すべてのデータ統合要件 ( 大量の高パフォーマンス バッチ ローブンの統合プロセスおよびSOA 対応データ サービスへ ) を網羅する総合的なデータ統合プラットフォームです Oracle
Oracle Un お問合せ : 0120- Oracle Data Integrator 11g: データ統合設定と管理 期間 ( 標準日数 ):5 コースの概要 Oracle Data Integratorは すべてのデータ統合要件 ( 大量の高パフォーマンス バッチ ローブンの統合プロセスおよびSOA 対応データ サービスへ ) を網羅する総合的なデータ統合プラットフォームです Oracle
トランジスタ回路の解析 ( 直流電源 + 交流電源 ) 交流回路 ( 小 ) 信号 直流回路 ( バイアス計算 ) 動作点 ( 増幅度の計算 ) 直流等価回路 ダイオードモデル (pnp/npn) 交流 ( 小信号 ) 等価回路 T 形等価回路 トランジスタには直流等価回路と交流等価回路がある
 交流回路 ( 小 ) 信号 直流回路 ( バイアス計算 ) 動作点 ( 増幅度の計算 ) 直流等価回路 ダイオードモデル (pnp/npn) 交流 ( 小信号 ) 等価回路 T 形等価回路 トランジスタには直流等価回路と交流等価回路がある") トランジスタ回路の解析 ( 直流電源 + 交流電源 ) 交流回路 ( 小 ) 信号 直流回路 ( バイアス計算 ) 動作点 ( 増幅度の計算 ) 直流等価回路 ダイオードモデル (pnp/npn) 交流 ( 小信号 ) 等価回路 T 形等価回路 トランジスタには直流等価回路と交流等価回路がある 2.6 トランジスタの等価回路 2.6.1 トランジスタの直流等価回路 V I I D 1 D 2 α 0
トランジスタ回路の解析 ( 直流電源 + 交流電源 ) 交流回路 ( 小 ) 信号 直流回路 ( バイアス計算 ) 動作点 ( 増幅度の計算 ) 直流等価回路 ダイオードモデル (pnp/npn) 交流 ( 小信号 ) 等価回路 T 形等価回路 トランジスタには直流等価回路と交流等価回路がある 2.6 トランジスタの等価回路 2.6.1 トランジスタの直流等価回路 V I I D 1 D 2 α 0
Microsoft PowerPoint - chap8.ppt
 第 8 章 : フィードバック制御系の設計法 第 8 章 : フィードバック制御系の設計法 8. 設計手順と性能評価 キーワード : 設計手順, 性能評価 8. 補償による制御系設計 キーワード : ( 比例 ),( 積分 ),( 微分 ) 学習目標 : 一般的な制御系設計における手順と制御系の性能評価について学ぶ. 学習目標 : 補償の有効性について理解し, その設計手順を習得する. 第 8 章
第 8 章 : フィードバック制御系の設計法 第 8 章 : フィードバック制御系の設計法 8. 設計手順と性能評価 キーワード : 設計手順, 性能評価 8. 補償による制御系設計 キーワード : ( 比例 ),( 積分 ),( 微分 ) 学習目標 : 一般的な制御系設計における手順と制御系の性能評価について学ぶ. 学習目標 : 補償の有効性について理解し, その設計手順を習得する. 第 8 章
Microsoft PowerPoint - H21生物計算化学2.ppt
 演算子の行列表現 > L いま 次元ベクトル空間の基底をケットと書くことにする この基底は完全系を成すとすると 空間内の任意のケットベクトルは > > > これより 一度基底を与えてしまえば 任意のベクトルはその基底についての成分で完全に記述することができる これらの成分を列行列の形に書くと M これをベクトル の基底 { >} による行列表現という ところで 行列 A の共役 dont 行列は A
演算子の行列表現 > L いま 次元ベクトル空間の基底をケットと書くことにする この基底は完全系を成すとすると 空間内の任意のケットベクトルは > > > これより 一度基底を与えてしまえば 任意のベクトルはその基底についての成分で完全に記述することができる これらの成分を列行列の形に書くと M これをベクトル の基底 { >} による行列表現という ところで 行列 A の共役 dont 行列は A
C#の基本
 C# の基本 ~ 開発環境の使い方 ~ C# とは プログラミング言語のひとつであり C C++ Java 等に並ぶ代表的な言語の一つである 容易に GUI( グラフィックやボタンとの連携ができる ) プログラミングが可能である メモリ管理等の煩雑な操作が必要なく 比較的初心者向きの言語である C# の利点 C C++ に比べて メモリ管理が必要ない GUIが作りやすい Javaに比べて コードの制限が少ない
C# の基本 ~ 開発環境の使い方 ~ C# とは プログラミング言語のひとつであり C C++ Java 等に並ぶ代表的な言語の一つである 容易に GUI( グラフィックやボタンとの連携ができる ) プログラミングが可能である メモリ管理等の煩雑な操作が必要なく 比較的初心者向きの言語である C# の利点 C C++ に比べて メモリ管理が必要ない GUIが作りやすい Javaに比べて コードの制限が少ない
解析力学B - 第11回: 正準変換
 解析力学 B 第 11 回 : 正準変換 神戸大 : 陰山聡 ホームページ ( 第 6 回から今回までの講義ノート ) http://tinyurl.com/kage2010 2011.01.27 正準変換 バネ問題 ( あえて下手に座標をとった ) ハミルトニアンを考える q 正準方程式は H = p2 2m + k 2 (q l 0) 2 q = H p = p m ṗ = H q = k(q
解析力学 B 第 11 回 : 正準変換 神戸大 : 陰山聡 ホームページ ( 第 6 回から今回までの講義ノート ) http://tinyurl.com/kage2010 2011.01.27 正準変換 バネ問題 ( あえて下手に座標をとった ) ハミルトニアンを考える q 正準方程式は H = p2 2m + k 2 (q l 0) 2 q = H p = p m ṗ = H q = k(q
Presentation Title
 ( ) 2017 The MathWorks, Inc. 1 新型乗用車の CO2 規制の比較 出典 :the International Council on Clean Transportation 2 自動車台数は今後も増加 多くの割合は内燃機関を使用 OEM 各社はコンセプト 想定ターゲットに応じて最適なパワートレインを選択 3 厳しい燃費規制に対応必至 従来の燃焼エンジンからフルバッテリのモータまで
( ) 2017 The MathWorks, Inc. 1 新型乗用車の CO2 規制の比較 出典 :the International Council on Clean Transportation 2 自動車台数は今後も増加 多くの割合は内燃機関を使用 OEM 各社はコンセプト 想定ターゲットに応じて最適なパワートレインを選択 3 厳しい燃費規制に対応必至 従来の燃焼エンジンからフルバッテリのモータまで
(Microsoft PowerPoint - \221\34613\211\361)
") 計算力学 ~ 第 回弾性問題の有限要素解析 (Ⅱ)~ 修士 年後期 ( 選択科目 ) 担当 : 岩佐貴史 講義の概要 全 5 講義. 計算力学概論, ガイダンス. 自然現象の数理モデル化. 行列 場とその演算. 数値計算法 (Ⅰ) 5. 数値計算法 (Ⅱ) 6. 初期値 境界値問題 (Ⅰ) 7. 初期値 境界値問題 (Ⅱ) 8. マトリックス変位法による構造解析 9. トラス構造の有限要素解析. 重み付き残差法と古典的近似解法.
計算力学 ~ 第 回弾性問題の有限要素解析 (Ⅱ)~ 修士 年後期 ( 選択科目 ) 担当 : 岩佐貴史 講義の概要 全 5 講義. 計算力学概論, ガイダンス. 自然現象の数理モデル化. 行列 場とその演算. 数値計算法 (Ⅰ) 5. 数値計算法 (Ⅱ) 6. 初期値 境界値問題 (Ⅰ) 7. 初期値 境界値問題 (Ⅱ) 8. マトリックス変位法による構造解析 9. トラス構造の有限要素解析. 重み付き残差法と古典的近似解法.
d1-ros-picking-system-yasukawa
 2019 年 5 月 28 日 / 出典 :https://jp.mathworks.com/products/simulink.html 環境 社会システム事業部 森田賢 開発部 出典 :http://wiki.ros.org 出典 :http://gazebosim.org/ : The MathWorks, Inc. の商標 発表者自己紹介 Qiita : Increments 株式会社の商標
2019 年 5 月 28 日 / 出典 :https://jp.mathworks.com/products/simulink.html 環境 社会システム事業部 森田賢 開発部 出典 :http://wiki.ros.org 出典 :http://gazebosim.org/ : The MathWorks, Inc. の商標 発表者自己紹介 Qiita : Increments 株式会社の商標
JACi400のご紹介~RPGとHTMLで簡単Web化~
 セッション No.4 JACi400 のご紹介 ~RPG と HTML で簡単 Web 化 ~ 株式会社ミガロ RAD 事業部技術支援課営業推進岩井利枝 1 Agenda ミガロご提供ソリューションのご紹介 JACi400の概要 4つの開発ステップのご紹介 JACi400ご利用のメリット 2 ミガロご提供ソリューション 開発ツール (C/S Web 開発 ) Delphi/400 開発ツール (Web
セッション No.4 JACi400 のご紹介 ~RPG と HTML で簡単 Web 化 ~ 株式会社ミガロ RAD 事業部技術支援課営業推進岩井利枝 1 Agenda ミガロご提供ソリューションのご紹介 JACi400の概要 4つの開発ステップのご紹介 JACi400ご利用のメリット 2 ミガロご提供ソリューション 開発ツール (C/S Web 開発 ) Delphi/400 開発ツール (Web
Microsoft Word - thesis.doc
 剛体の基礎理論 -. 剛体の基礎理論初めに本論文で大域的に使用する記号を定義する. 使用する記号トルク撃力力角運動量角速度姿勢対角化された慣性テンソル慣性テンソル運動量速度位置質量時間 J W f F P p .. 質点の並進運動 質点は位置 と速度 P を用いる. ニュートンの運動方程式 という状態を持つ. 但し ここでは速度ではなく運動量 F P F.... より質点の運動は既に明らかであり 質点の状態ベクトル
剛体の基礎理論 -. 剛体の基礎理論初めに本論文で大域的に使用する記号を定義する. 使用する記号トルク撃力力角運動量角速度姿勢対角化された慣性テンソル慣性テンソル運動量速度位置質量時間 J W f F P p .. 質点の並進運動 質点は位置 と速度 P を用いる. ニュートンの運動方程式 という状態を持つ. 但し ここでは速度ではなく運動量 F P F.... より質点の運動は既に明らかであり 質点の状態ベクトル
Hanako-RMSeminar_No09.jhd
 仙台市 / 仙台市産業振興事業団 ロボット博士の基礎からのメカトロニクスセミナー 第 9 回 制御の基礎 仙台市地域連携フェロー 熊谷正朗 kumagai@tjcc.tohoku-gakuin.ac.jp 東北学院大学工学部ロボット開発工学研究室 RDE C09/Rev 1.01 今回の目的 制御の基礎 テーマ1: 制御の目的と基本 制御するとは 制御の基本 ( フィードバック PID) テーマ2:
仙台市 / 仙台市産業振興事業団 ロボット博士の基礎からのメカトロニクスセミナー 第 9 回 制御の基礎 仙台市地域連携フェロー 熊谷正朗 kumagai@tjcc.tohoku-gakuin.ac.jp 東北学院大学工学部ロボット開発工学研究室 RDE C09/Rev 1.01 今回の目的 制御の基礎 テーマ1: 制御の目的と基本 制御するとは 制御の基本 ( フィードバック PID) テーマ2:
MATLAB ではじめる画像処理とロボットビジョン ~ 機械学習による物体認識と SLAM~ MathWorks Japan アプリケーションエンジニアリング部信号処理 通信 木川田亘 2015 The MathWorks, 1Inc.
 MATLAB ではじめる画像処理とロボットビジョン ~ 機械学習による物体認識と SLAM~ MathWorks Japan アプリケーションエンジニアリング部信号処理 通信 木川田亘 2015 The MathWorks, 1Inc. ロボットビジョンとは ロボットに搭載することを目的としたコンピュータービジョン技術の一分野 標識認識などさまざまな環境下での物体認識や複雑なシーンの理解 未知の領域を探索する際にロボット自身の位置推定と地図作成(SLAM)
MATLAB ではじめる画像処理とロボットビジョン ~ 機械学習による物体認識と SLAM~ MathWorks Japan アプリケーションエンジニアリング部信号処理 通信 木川田亘 2015 The MathWorks, 1Inc. ロボットビジョンとは ロボットに搭載することを目的としたコンピュータービジョン技術の一分野 標識認識などさまざまな環境下での物体認識や複雑なシーンの理解 未知の領域を探索する際にロボット自身の位置推定と地図作成(SLAM)
モデリングとは
 コンピュータグラフィックス基礎 第 5 回曲線 曲面の表現 ベジェ曲線 金森由博 学習の目標 滑らかな曲線を扱う方法を学習する パラメトリック曲線について理解する 広く一般的に使われているベジェ曲線を理解する 制御点を入力することで ベジェ曲線を描画するアプリケーションの開発を行えるようになる C++ 言語の便利な機能を使えるようになる 要素数が可変な配列としての std::vector の活用 計算機による曲線の表現
コンピュータグラフィックス基礎 第 5 回曲線 曲面の表現 ベジェ曲線 金森由博 学習の目標 滑らかな曲線を扱う方法を学習する パラメトリック曲線について理解する 広く一般的に使われているベジェ曲線を理解する 制御点を入力することで ベジェ曲線を描画するアプリケーションの開発を行えるようになる C++ 言語の便利な機能を使えるようになる 要素数が可変な配列としての std::vector の活用 計算機による曲線の表現
サイバネットニュース No.115
 Fall 2005 no.115 C O N T E N T S 1 2 2 3 4 4 5 5 6 7 8 9 10-11 12-14 15 16 CAE CAE CAE CAE CAE CAE CAE CAE CAE CAE CAE CAE CAE CAE CAE CAE CAE BP 1 Just-in-TimeIT epiplex Epiance4.7 CAD/CAE ERPWindows
Fall 2005 no.115 C O N T E N T S 1 2 2 3 4 4 5 5 6 7 8 9 10-11 12-14 15 16 CAE CAE CAE CAE CAE CAE CAE CAE CAE CAE CAE CAE CAE CAE CAE CAE CAE BP 1 Just-in-TimeIT epiplex Epiance4.7 CAD/CAE ERPWindows
Microsoft PowerPoint - ●SWIM_ _INET掲載用.pptx
 シーケンスに基づく検索モデルの検索精度について 東京工芸大学工学部コンピュータ応用学科宇田川佳久 (1/3) (2/3) 要員数 情報システム開発のイメージソースコード検索機能 他人が作ったプログラムを保守する必要がある 実務面での応用 1 バグあるいは脆弱なコードを探す ( 品質の高いシステムを開発する ) 2 プログラム理解を支援する ( 第 3 者が書いたコードを保守する ) 要件定義外部設計内部設計
シーケンスに基づく検索モデルの検索精度について 東京工芸大学工学部コンピュータ応用学科宇田川佳久 (1/3) (2/3) 要員数 情報システム開発のイメージソースコード検索機能 他人が作ったプログラムを保守する必要がある 実務面での応用 1 バグあるいは脆弱なコードを探す ( 品質の高いシステムを開発する ) 2 プログラム理解を支援する ( 第 3 者が書いたコードを保守する ) 要件定義外部設計内部設計
<4D F736F F D2094F795AA95FB92F68EAE82CC89F082AB95FB E646F63>
 力学 A 金曜 限 : 松田 微分方程式の解き方 微分方程式の解き方のところが分からなかったという声が多いので プリントにまとめます 数学的に厳密な話はしていないので 詳しくは数学の常微分方程式を扱っているテキストを参照してください また os s は既知とします. 微分方程式の分類 常微分方程式とは 独立変数 と その関数 その有限次の導関数 がみたす方程式 F,,, = のことです 次までの導関数を含む方程式を
力学 A 金曜 限 : 松田 微分方程式の解き方 微分方程式の解き方のところが分からなかったという声が多いので プリントにまとめます 数学的に厳密な話はしていないので 詳しくは数学の常微分方程式を扱っているテキストを参照してください また os s は既知とします. 微分方程式の分類 常微分方程式とは 独立変数 と その関数 その有限次の導関数 がみたす方程式 F,,, = のことです 次までの導関数を含む方程式を
トルクリップル計測システム 特長 高速リップル計測 : モーターの常用回転数での計測が可能 自動計測 : ブレーキ負荷の PID トルク制御や回転制御で自動計測 使いやすいソフトウェア : タブ切り替えだけの簡単操作 豊富なグラフ表示 : 強度分布 ウォーターフォール表示 次数解析機能 : 特定の次
 トルクリップル計測システム 音 振動に影響する モータの実回転域でのトルクリップル計測 トルクリップル計測システム 特長 高速リップル計測 : モーターの常用回転数での計測が可能 自動計測 : ブレーキ負荷の PID トルク制御や回転制御で自動計測 使いやすいソフトウェア : タブ切り替えだけの簡単操作 豊富なグラフ表示 : 強度分布 ウォーターフォール表示 次数解析機能 : 特定の次数のリップル成分抽出
トルクリップル計測システム 音 振動に影響する モータの実回転域でのトルクリップル計測 トルクリップル計測システム 特長 高速リップル計測 : モーターの常用回転数での計測が可能 自動計測 : ブレーキ負荷の PID トルク制御や回転制御で自動計測 使いやすいソフトウェア : タブ切り替えだけの簡単操作 豊富なグラフ表示 : 強度分布 ウォーターフォール表示 次数解析機能 : 特定の次数のリップル成分抽出
<4D F736F F F696E74202D208CB48E7197CD8A7789EF F4882CC91E589EF8AE989E A2E B8CDD8AB B83685D>
 数値解析技術と標準 (3) 数値解析の信頼性に関する標準 平成 24 年 9 月 21 日原子力学会 2012 秋の大会標準委員会セッション5( 基盤 応用専門部会 ) 独立行政法人原子力安全基盤機構原子力システム安全部堀田亮年 AESJ MTG 2012 Autumn @Hiroshima 1 シミュレーションの信頼性 WG 報告書の構成 本文 (118 頁 ):V&Vの構造案解説 A) V&V
数値解析技術と標準 (3) 数値解析の信頼性に関する標準 平成 24 年 9 月 21 日原子力学会 2012 秋の大会標準委員会セッション5( 基盤 応用専門部会 ) 独立行政法人原子力安全基盤機構原子力システム安全部堀田亮年 AESJ MTG 2012 Autumn @Hiroshima 1 シミュレーションの信頼性 WG 報告書の構成 本文 (118 頁 ):V&Vの構造案解説 A) V&V
DVIOUT
 最適レギュレータ 松尾研究室資料 第 最適レギュレータ 節時不変型無限時間最適レギュレータ 状態フィードバックの可能な場合の無限時間問題における最適レギュレータについて確定系について説明する. ここで, レギュレータとは状態量をゼロにするようなコントローラのことである. なぜ, 無限時間問題のみを述べるかという理由は以下のとおりである. 有限時間の最適レギュレータ問題の場合の最適フィードバックゲインは微分方程式の解から構成される時間関数として表現される.
最適レギュレータ 松尾研究室資料 第 最適レギュレータ 節時不変型無限時間最適レギュレータ 状態フィードバックの可能な場合の無限時間問題における最適レギュレータについて確定系について説明する. ここで, レギュレータとは状態量をゼロにするようなコントローラのことである. なぜ, 無限時間問題のみを述べるかという理由は以下のとおりである. 有限時間の最適レギュレータ問題の場合の最適フィードバックゲインは微分方程式の解から構成される時間関数として表現される.
Signal Processing Toolbox
 Signal Processing Toolbox 信号処理 解析およびアルゴリズム開発の実行 Signal Processing Toolbox は アナログおよびデジタル信号処理 (DSP) の業界標準アルゴリズムを提供 します この Toolbox を使用すると 時間領域および周波数領域での信号の可視化 スペクトル解析 における FFT の計算 FIR および IIR フィルターの設計 コンボリューション
Signal Processing Toolbox 信号処理 解析およびアルゴリズム開発の実行 Signal Processing Toolbox は アナログおよびデジタル信号処理 (DSP) の業界標準アルゴリズムを提供 します この Toolbox を使用すると 時間領域および周波数領域での信号の可視化 スペクトル解析 における FFT の計算 FIR および IIR フィルターの設計 コンボリューション
計算機シミュレーション
 . 運動方程式の数値解法.. ニュートン方程式の近似速度は, 位置座標 の時間微分で, d と定義されます. これを成分で書くと, d d li li とかけます. 本来は が の極限をとらなければいけませんが, 有限の小さな値とすると 秒後の位置座標は速度を用いて, と近似できます. 同様にして, 加速度は, 速度 の時間微分で, d と定義されます. これを成分で書くと, d d li li とかけます.
. 運動方程式の数値解法.. ニュートン方程式の近似速度は, 位置座標 の時間微分で, d と定義されます. これを成分で書くと, d d li li とかけます. 本来は が の極限をとらなければいけませんが, 有限の小さな値とすると 秒後の位置座標は速度を用いて, と近似できます. 同様にして, 加速度は, 速度 の時間微分で, d と定義されます. これを成分で書くと, d d li li とかけます.
maxon hat den richtigen drive
 ようこそ! EPOS( エポス ) へ maxon has the right drive EPOS とはどんな製品か? Easy To Use POsitioning System スタート アップが簡単 理解が容易 動作開始までの手順がわずか シンプルな設定とコマンド アドバンスド テクノロジー 低価格 by maxon Japan, November 2010 EPOS の概要, page 2
ようこそ! EPOS( エポス ) へ maxon has the right drive EPOS とはどんな製品か? Easy To Use POsitioning System スタート アップが簡単 理解が容易 動作開始までの手順がわずか シンプルな設定とコマンド アドバンスド テクノロジー 低価格 by maxon Japan, November 2010 EPOS の概要, page 2
Microsoft PowerPoint - 講習会2.ppt
 平成 年度ものづくり人材育成 確保講座 MATLAB/Simulink による フィードバック制御系設計 第 部 大分大学工学部福祉環境工学科メカトロニクスコース松尾孝美 010/8/3 MATLAB フィードバック制御系設計 1 制御工学とは MATLAB/Slmulink の使い方古典制御系設計伝達関数とブロック線図 LTI オブジェクトステップ応答, インパルス応答, 周波数応答, ボード線図システムの結合と安定性
平成 年度ものづくり人材育成 確保講座 MATLAB/Simulink による フィードバック制御系設計 第 部 大分大学工学部福祉環境工学科メカトロニクスコース松尾孝美 010/8/3 MATLAB フィードバック制御系設計 1 制御工学とは MATLAB/Slmulink の使い方古典制御系設計伝達関数とブロック線図 LTI オブジェクトステップ応答, インパルス応答, 周波数応答, ボード線図システムの結合と安定性
微分方程式 モデリングとシミュレーション
 1 微分方程式モデリングとシミュレーション 2018 年度 2 質点の運動のモデル化 粒子と粒子に働く力 粒子の運動 粒子の位置の時間変化 粒子の位置の変化の割合 速度 速度の変化の割合 加速度 力と加速度の結び付け Newtonの運動方程式 : 微分方程式 解は 時間の関数としての位置 3 Newton の運動方程式 質点の運動は Newton の運動方程式で記述される 加速度は力に比例する 2
1 微分方程式モデリングとシミュレーション 2018 年度 2 質点の運動のモデル化 粒子と粒子に働く力 粒子の運動 粒子の位置の時間変化 粒子の位置の変化の割合 速度 速度の変化の割合 加速度 力と加速度の結び付け Newtonの運動方程式 : 微分方程式 解は 時間の関数としての位置 3 Newton の運動方程式 質点の運動は Newton の運動方程式で記述される 加速度は力に比例する 2
<4D F736F F F696E74202D20836F CC8A C58B858B4F93B982A882E682D1978E89BA814091B28BC68CA48B E >
 バットの角度 打球軌道および落下地点の関係 T999 和田真迪 担当教員 飯田晋司 目次 1. はじめに. ボールとバットの衝突 -1 座標系 -ボールとバットの衝突の前後でのボールの速度 3. ボールの軌道の計算 4. おわりに参考文献 はじめに この研究テーマにした理由は 好きな野球での小さい頃からの疑問であるバッテングについて 角度が変わればどう打球に変化が起こるのかが大学で学んだ物理と数学んだ物理と数学を使って判明できると思ったから
バットの角度 打球軌道および落下地点の関係 T999 和田真迪 担当教員 飯田晋司 目次 1. はじめに. ボールとバットの衝突 -1 座標系 -ボールとバットの衝突の前後でのボールの速度 3. ボールの軌道の計算 4. おわりに参考文献 はじめに この研究テーマにした理由は 好きな野球での小さい頃からの疑問であるバッテングについて 角度が変わればどう打球に変化が起こるのかが大学で学んだ物理と数学んだ物理と数学を使って判明できると思ったから
以下 変数の上のドットは時間に関する微分を表わしている (ex. 2 dx d x x, x 2 dt dt ) 付録 E 非線形微分方程式の平衡点の安定性解析 E-1) 非線形方程式の線形近似特に言及してこなかったが これまでは線形微分方程式 ( x や x, x などがすべて 1 次で なおかつ
 付録 E 非線形微分方程式の平衡点の安定性解析 E-1) 非線形方程式の線形近似特に言及してこなかったが これまでは線形微分方程式 ( x や x, x などがすべて 1 次で なおかつ") 以下 変数の上のドットは時間に関する微分を表わしている (e. d d, dt dt ) 付録 E 非線形微分方程式の平衡点の安定性解析 E-) 非線形方程式の線形近似特に言及してこなかったが これまでは線形微分方程式 ( や, などがすべて 次で なおかつそれらの係数が定数であるような微分方程式 ) に対して安定性の解析を行ってきた しかしながら 実際には非線形の微分方程式で記述される現象も多く存在する
以下 変数の上のドットは時間に関する微分を表わしている (e. d d, dt dt ) 付録 E 非線形微分方程式の平衡点の安定性解析 E-) 非線形方程式の線形近似特に言及してこなかったが これまでは線形微分方程式 ( や, などがすべて 次で なおかつそれらの係数が定数であるような微分方程式 ) に対して安定性の解析を行ってきた しかしながら 実際には非線形の微分方程式で記述される現象も多く存在する
Python によるジオプロセシング スクリプト入門
 アイコンの説明... 8 第 1 章イントロダクション... 9 本コースの目的... 11 講習内容... 11 講習資料... 12 イントロダクション... 12 ArcGIS... 13 Web サイト... 13 開発者向けプログラム / サービス... 14 演習 1: 演習環境の構築... 15 ステップ 1: Windows へのログオン ( オプション )... 15 ステップ 2:
アイコンの説明... 8 第 1 章イントロダクション... 9 本コースの目的... 11 講習内容... 11 講習資料... 12 イントロダクション... 12 ArcGIS... 13 Web サイト... 13 開発者向けプログラム / サービス... 14 演習 1: 演習環境の構築... 15 ステップ 1: Windows へのログオン ( オプション )... 15 ステップ 2:
MAC61、MAC64、GAC61 改造仕様書
 1/14 μgpcdsp シリーズ TDdsPMonitor( ユーティリティ マニュアル ) 発行部門 産業事業部産業工場デジタル開発チーム 年月日来歴適用製命訂正ヘ ーシ 承認調査作成 新規発行 TDdsPMonitor( ユーティリティ マニュアル ) 2/14 目次 1. 概要 -----------------------------------------------------------------
1/14 μgpcdsp シリーズ TDdsPMonitor( ユーティリティ マニュアル ) 発行部門 産業事業部産業工場デジタル開発チーム 年月日来歴適用製命訂正ヘ ーシ 承認調査作成 新規発行 TDdsPMonitor( ユーティリティ マニュアル ) 2/14 目次 1. 概要 -----------------------------------------------------------------
モデルベースデザイン(MBD)を始めましょう!
を始めましょう!") モデルベースデザイン (MBD) を始めましょう! MathWorks Japan アプリケーションエンジニアリング部シニアアプリケーションエンジニア村上直也 2014 The MathWorks, Inc. 1 モデルベースデザイン (MBD) を始めましょう! ますます増えていくスマートシステム多機能なソフトウェアモデルベースデザイン開発プロセスを加速 2 はじめに スマートシステムの増加 ソフトの高機能化
モデルベースデザイン (MBD) を始めましょう! MathWorks Japan アプリケーションエンジニアリング部シニアアプリケーションエンジニア村上直也 2014 The MathWorks, Inc. 1 モデルベースデザイン (MBD) を始めましょう! ますます増えていくスマートシステム多機能なソフトウェアモデルベースデザイン開発プロセスを加速 2 はじめに スマートシステムの増加 ソフトの高機能化
Microsoft PowerPoint - ce07-13b.ppt
 制御工学 3 第 8 章 : フィードバック制御系の設計法 8. 設計手順と性能評価キーワード : 設計手順, 性能評価 8. ID 補償による制御系設計キーワード : ( 比例 ),I( 積分 ),D( 微分 ) 8.3 進み 遅れ補償による制御系設計キーワード : 遅れ補償, 進み補償 学習目標 : 一般的な制御系設計における手順と制御系の性能評価について学ぶ. ループ整形の考え方を用いて, 遅れ補償,
制御工学 3 第 8 章 : フィードバック制御系の設計法 8. 設計手順と性能評価キーワード : 設計手順, 性能評価 8. ID 補償による制御系設計キーワード : ( 比例 ),I( 積分 ),D( 微分 ) 8.3 進み 遅れ補償による制御系設計キーワード : 遅れ補償, 進み補償 学習目標 : 一般的な制御系設計における手順と制御系の性能評価について学ぶ. ループ整形の考え方を用いて, 遅れ補償,
Microsoft Word - 第2章 ブロック線図.doc
 NAOSIE: Nagaaki Univriy' Ac il ディジタル制御システム Auhor() 辻, 峰男 Ciaion ディジタル制御システム ; 06 Iu Da 06 URL hp://hdl.handl.n/0069/3686 Righ hi documn i downloadd hp://naoi.lb.nagaaki-u.ac.jp 第 章ブロック線図. インパルス列を用いた z
NAOSIE: Nagaaki Univriy' Ac il ディジタル制御システム Auhor() 辻, 峰男 Ciaion ディジタル制御システム ; 06 Iu Da 06 URL hp://hdl.handl.n/0069/3686 Righ hi documn i downloadd hp://naoi.lb.nagaaki-u.ac.jp 第 章ブロック線図. インパルス列を用いた z
Microsoft PowerPoint - ce07-12c.ppt
 制御工学 第 8 章 : フィードバック制御系の設計法 8. 設計手順と性能評価キーワード : 設計手順, 性能評価 8. 補償による制御系設計キーワード : ( 比例 ),( 積分 ),( 微分 ) 8.3 進み 遅れ補償による制御系設計キーワード : 遅れ補償, 進み補償 学習目標 : 一般的な制御系設計における手順と制御系の性能評価について学ぶ. ループ整形の考え方を用いて, 遅れ補償, 進み補償による制御系設計を習得する.
制御工学 第 8 章 : フィードバック制御系の設計法 8. 設計手順と性能評価キーワード : 設計手順, 性能評価 8. 補償による制御系設計キーワード : ( 比例 ),( 積分 ),( 微分 ) 8.3 進み 遅れ補償による制御系設計キーワード : 遅れ補償, 進み補償 学習目標 : 一般的な制御系設計における手順と制御系の性能評価について学ぶ. ループ整形の考え方を用いて, 遅れ補償, 進み補償による制御系設計を習得する.