スライド 1
|
|
|
- ああす そめや
- 5 years ago
- Views:
Transcription

1 機構学 Part6: ロボットの運動学 金子真


2 きんにく筋肉 筋紡錘 : 筋肉の長さを測るセンサ




3 モータ センサ ロボットの運動学
4 関節にモータがついている場合の角度の取り方
5 関節にモータがついている場合の角度の取り方
6 関節にモータがついている場合の角度の取り方
7 関節にモータがついている場合の角度の取り方
8 関節にモータがついている場合の角度の取り方
9 ワイヤ駆動式ロボット
10 ワイヤ駆動式ロボット
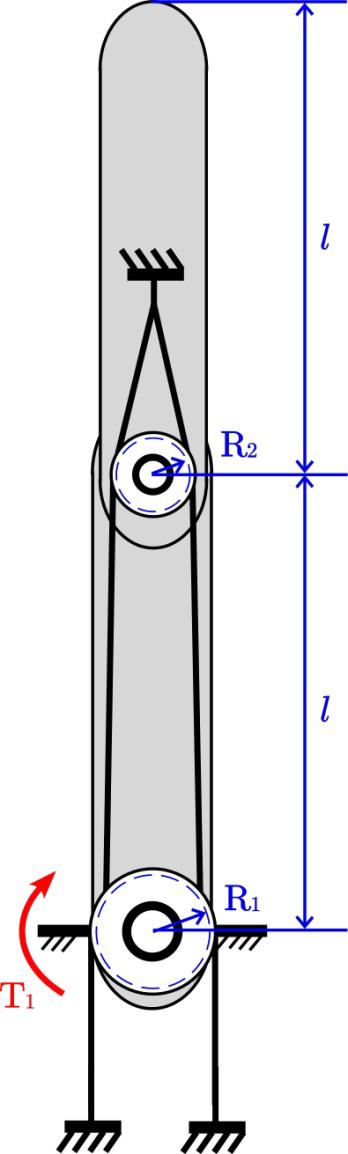
11 ワイヤプーリ機構の場合
12 ワイヤプーリ機構の場合
13 絶対系にモータがついている場合の角度の取り方
14 絶対系にモータがついている場合の角度の取り方
15 絶対系にモータがついている場合の角度の取り方
16 絶対系にモータがついている場合の角度の取り方

17 順問題 関節角度を与えて手先位置を求める. (x, y) y x
 を求める ( ) cos cos ( ) sin sin")
18 順問題 ( 簡単 ) y (x, y) (, ) x y を与えて (x, y) を求める ( ) cos cos ( ) sin sin x
19 逆問題の必要性 Mov e A to B モータが関節に埋め込まれている場合 y B A? x
20 逆問題 手先位置を与えて関節角度を求める. y (x, y) x y ( ) cos cos ( ) sin sin x (?, )
21 非線形関数の線形化
( d d ) dx sin sin( ) sin( ) d dy cos cos( ) cos( ) d dx Jd J ( ヤコビ行列 )")
22 y (x, y) x y ( ) cos cos ( ) sin sin x dx sin d sin( )( d d ) dy cos d ( )( d d ) dx sin sin( ) sin( ) d dy cos cos( ) cos( ) d dx Jd J ( ヤコビ行列 )
23 y x (x, y) d c c dx dy - J dx ( if J 0) s s c c cos, s sin s c d d ( ), ( ) cos s sin dx Jd J J - J c c c s s s { s c s c s c s c } sin
 sin(, sin C C S S J x d d 0 sin π n 0 J 特異姿勢 : リンクロボットの場合")
24 ) ( ) ( C C C S S S d d C C d dy d d S d S dx J ) cos(, cos ) sin(, sin C C S S J x d d 0 sin π n 0 J 特異姿勢 : リンクロボットの場合
25 課題 :3 リンクロボットについて以下の問いに答えよ 手先位置 姿勢 (x, y, φ) に対して特異姿勢を求め図示せよ.
26 0 J 0 sin π n 課題 : 解答 ) ( ) ( ) ( ) ( C C C C C C S S S S S S d d d d d d d C d d C C d dy d d d S d d S d S dx J φ ) cos( ), cos(, cos ) sin( ), sin(, sin C C C S S S J x d d
27 特異姿勢が存在しない 次元 3 自由度ロボットは存在するか?
28 3 リンクロボットの リンクロボットに対する運動学的優位性は?
29 3 リンクロボットの リンクロボットに対する運動学的優位性は?
30 3 リンクロボットの リンクロボットに対する運動学的優位性は?
 6 z f (,,, ) x J J 3 6 4 6 5 6 (,,, 6) 6 f f 6 f6 f6 6")
31 γ 6 自由度ロボットの場合 α β 4 x f (,,, ) α f (,,, ) β f (,,, ) γ f 6 y f (,,, ) 6 z f (,,, ) x J J (,,, 6) 6 f f 6 f6 f6 6
32 d x dx Jd x y z x y z 6 自由度ロボットの特異姿勢 6 6 J R d d J dx S S E E W W S S E E 3 W W 4 det J 0-3Sin[ E] Sin[ W]( Sin[ S] 3Sin[ E S]) 0
33 6 自由度ロボットの特異姿勢 - Sin[ E] Sin[ W]( Sin[ S] 3Sin[ E S]) 肘特異姿勢 Sin[ E] 0 E E nπ (n : 整数 )
34 6 自由度ロボットの特異姿勢 - Sin[ E] Sin[ W]( Sin[ S] 3Sin[ E S]) 手首特異姿勢 Sin[ W] 0 W W nπ (n : 整数 )
35 6 自由度ロボットの特異姿勢 - Sin[ E] Sin[ W]( Sin[ S] 3Sin[ E S]) 肩特異姿勢 Sin[ S] 3Sin[ E S] 0 E 3 S
36 ロボットで力を環境に加えるには? f
37 力のつりあいから y f x f y f f f x y x τ τ f y{ cos cos( )} f x{ sin sin( )} τ f y cos( ) f x sin( ) 0 τ s s τ s c c c s sin s sin( ) c cos f f x y c 0 cos( )
38 J を使って表すと y τ x f x dx dy f y τ s s τ s τ J t f f s s c c d x Jd c f f x y s c c c d d f f x y s sin s sin( ) c cos c cos( )
")
39 仮想仕事の原理 x f f x τ τ f τ / ( x )
40 仮想仕事の原理による τ f t J の誘導 () 関節アクチュエータがする仕事 () 手先力がする仕事 W j τ d τ d τ ( ) d d τ dτ t We f xdx f y dy ( ) x dx dy f y dx t f f W j W e だから t t d τ dx f (Jd ) d t J t t τ J f t f f
41 課題 : リンクロボットに対して次の問いに答えよ ロボット先端に (fx, fy)(.0,.0)[n] 発生させるためには関節トルク ( τ, τ ) を何 [Nm] 加えたらよいか. y (x, y) [ m] π / 6 x
42 問題. () ヤコビ行列 Jを求めよ. () 特異姿勢を与える (, ) を求めよ. リンク長 : * リンクの幅は無視してよい. 問題 ロボット先端を (Δx, Δy)(0., 0.)[m] 移動させるのに必要な各関節の角度変化, を求めよ. y (x, y) ( ) [ m] π / 6
43 リンク長 :. ヤコビ行列 Jを求めよ.. 特異姿勢を与える (, ) を求めよ. * リンクの幅は無視してよい. ロボット先端を (Δx, Δy)(0., 0.)[m] 移動させるのに必要な各関節の角度変化 (, ) を求めよ. y (x, y) [ m] π / 6
44 . ヤコビ行列 J を求めよ.. 特異姿勢を与える (, ) を求めよ. リンク長 : * リンクの幅は無視してよい. 特異姿勢を与える関係式 J 0 より sin( ) 0 nπ ( n 0,,...)
45 ロボット先端を (Δx, Δy)(0., 0.)[m] 移動させるのに必要な各関節の角度変化 (, ) を求めよ. - d J dx ( if J 0) y (x, y) dx dy s s c c s c d d c c cos, s sin ( ), ( ) cos s sin π [ m] / 6 x J J - J c c c s s s { s c s c s c s c } sin
46 課題 : リンクロボットに対して次の問いに答えよ ロボット先端を (Δx, Δy)(0., 0.)[m] 移動させるのに必要な各関節の角度変化を求めよ. (, ) y (x, y) [ m] π / 6 x
47 課題 解答 y dx Jd (x, y) x c c d dx dy - J dx ( if J 0) s s c c cos, s sin s c d d ( ), ( ) cos s sin J J - J c c c s s s { s c s c s c s c } sin
Microsoft PowerPoint - ロボットの運動学forUpload'C5Q [互換モード]
![Microsoft PowerPoint - ロボットの運動学forUpload'C5Q [互換モード]](/thumbs/104/163308363.jpg "Microsoft PowerPoint - ロボットの運動学forUpload'C5Q [互換モード]") ロボットの運動学 順運動学とは 座標系の回転と並進 同次座標変換行列 Denavit-Hartenberg の表記法 多関節ロボットの順運動学 レポート課題 & 中間試験について 逆運動学とは ヤコビアン行列 運動方程式 ( 微分方程式 ) ロボットの運動学 動力学 Equation of motion f ( ( t), ( t), ( t)) τ( t) 姿勢 ( 関節角の組合せ ) Posture
ロボットの運動学 順運動学とは 座標系の回転と並進 同次座標変換行列 Denavit-Hartenberg の表記法 多関節ロボットの順運動学 レポート課題 & 中間試験について 逆運動学とは ヤコビアン行列 運動方程式 ( 微分方程式 ) ロボットの運動学 動力学 Equation of motion f ( ( t), ( t), ( t)) τ( t) 姿勢 ( 関節角の組合せ ) Posture




機構学 平面機構の運動学
 問題 1 静止座標系 - 平面上を運動する節 b 上に2 定点,Bを考える. いま,2 点の座標は(0,0),B(50,0) である. 2 点間の距離は 50 mm, 点の速度が a 150 mm/s, 点 Bの速度の向きが150 である. 以下の問いに答えよ. (1) 点 Bの速度を求めよ. (2) 瞬間中心を求めよ. 節 b a (0,0) b 150 B(50,0) 問題 1(1) 解答 b
問題 1 静止座標系 - 平面上を運動する節 b 上に2 定点,Bを考える. いま,2 点の座標は(0,0),B(50,0) である. 2 点間の距離は 50 mm, 点の速度が a 150 mm/s, 点 Bの速度の向きが150 である. 以下の問いに答えよ. (1) 点 Bの速度を求めよ. (2) 瞬間中心を求めよ. 節 b a (0,0) b 150 B(50,0) 問題 1(1) 解答 b
")
() x + y + y + x dy dx = 0 () dy + xy = x dx y + x y ( 5) ( s55906) 0.7. (). 5 (). ( 6) ( s6590) 0.8 m n. 0.9 n n A. ( 6) ( s6590) f A (λ) = det(a λi)
 x + y + y + x dy dx = 0 () dy + xy = x dx y + x y ( 5) ( s55906) 0.7. (). 5 (). ( 6) ( s6590) 0.8 m n. 0.9 n n A. ( 6) ( s6590) f A (λ) = det(a λi)") 0. A A = 4 IC () det A () A () x + y + z = x y z X Y Z = A x y z ( 5) ( s5590) 0. a + b + c b c () a a + b + c c a b a + b + c 0 a b c () a 0 c b b c 0 a c b a 0 0. A A = 7 5 4 5 0 ( 5) ( s5590) () A ()
0. A A = 4 IC () det A () A () x + y + z = x y z X Y Z = A x y z ( 5) ( s5590) 0. a + b + c b c () a a + b + c c a b a + b + c 0 a b c () a 0 c b b c 0 a c b a 0 0. A A = 7 5 4 5 0 ( 5) ( s5590) () A ()
(iii) 0 V, x V, x + 0 = x. 0. (iv) x V, y V, x + y = 0., y x, y = x. (v) 1x = x. (vii) (α + β)x = αx + βx. (viii) (αβ)x = α(βx)., V, C.,,., (1)
 0 V, x V, x + 0 = x. 0. (iv) x V, y V, x + y = 0., y x, y = x. (v) 1x = x. (vii) (α + β)x = αx + βx. (viii) (αβ)x = α(βx)., V, C.,,., (1)") 1. 1.1...,. 1.1.1 V, V x, y, x y x + y x + y V,, V x α, αx αx V,, (i) (viii) : x, y, z V, α, β C, (i) x + y = y + x. (ii) (x + y) + z = x + (y + z). 1 (iii) 0 V, x V, x + 0 = x. 0. (iv) x V, y V, x + y
1. 1.1...,. 1.1.1 V, V x, y, x y x + y x + y V,, V x α, αx αx V,, (i) (viii) : x, y, z V, α, β C, (i) x + y = y + x. (ii) (x + y) + z = x + (y + z). 1 (iii) 0 V, x V, x + 0 = x. 0. (iv) x V, y V, x + y
Gmech08.dvi
 145 13 13.1 13.1.1 0 m mg S 13.1 F 13.1 F /m S F F 13.1 F mg S F F mg 13.1: m d2 r 2 = F + F = 0 (13.1) 146 13 F = F (13.2) S S S S S P r S P r r = r 0 + r (13.3) r 0 S S m d2 r 2 = F (13.4) (13.3) d 2
145 13 13.1 13.1.1 0 m mg S 13.1 F 13.1 F /m S F F 13.1 F mg S F F mg 13.1: m d2 r 2 = F + F = 0 (13.1) 146 13 F = F (13.2) S S S S S P r S P r r = r 0 + r (13.3) r 0 S S m d2 r 2 = F (13.4) (13.3) d 2
untitled
 . 96. 99. ( 000 SIC SIC N88 SIC for Windows95 6 6 3 0 . amano No.008 6. 6.. z σ v σ v γ z (6. σ 0 (a (b 6. (b 0 0 0 6. σ σ v σ σ 0 / v σ v γ z σ σ 0 σ v 0γ z σ / σ ν /( ν, ν ( 0 0.5 0.0 0 v sinφ, φ 0 (6.
. 96. 99. ( 000 SIC SIC N88 SIC for Windows95 6 6 3 0 . amano No.008 6. 6.. z σ v σ v γ z (6. σ 0 (a (b 6. (b 0 0 0 6. σ σ v σ σ 0 / v σ v γ z σ σ 0 σ v 0γ z σ / σ ν /( ν, ν ( 0 0.5 0.0 0 v sinφ, φ 0 (6.
x () g(x) = f(t) dt f(x), F (x) 3x () g(x) g (x) f(x), F (x) (3) h(x) = x 3x tf(t) dt.9 = {(x, y) ; x, y, x + y } f(x, y) = xy( x y). h (x) f(x), F (x
 g(x) = f(t) dt f(x), F (x) 3x () g(x) g (x) f(x), F (x) (3) h(x) = x 3x tf(t) dt.9 = {(x, y) ; x, y, x + y } f(x, y) = xy( x y). h (x) f(x), F (x") [ ] IC. f(x) = e x () f(x) f (x) () lim f(x) lim f(x) x + x (3) lim f(x) lim f(x) x + x (4) y = f(x) ( ) ( s46). < a < () a () lim a log xdx a log xdx ( ) n (3) lim log k log n n n k=.3 z = log(x + y ),
[ ] IC. f(x) = e x () f(x) f (x) () lim f(x) lim f(x) x + x (3) lim f(x) lim f(x) x + x (4) y = f(x) ( ) ( s46). < a < () a () lim a log xdx a log xdx ( ) n (3) lim log k log n n n k=.3 z = log(x + y ),
第10章 アイソパラメトリック要素
 June 5, 2019 1 / 26 10.1 ( ) 2 / 26 10.2 8 2 3 4 3 4 6 10.1 4 2 3 4 3 (a) 4 (b) 2 3 (c) 2 4 10.1: 3 / 26 8.3 3 5.1 4 10.4 Gauss 10.1 Ω i 2 3 4 Ξ 3 4 6 Ξ ( ) Ξ 5.1 Gauss ˆx : Ξ Ω i ˆx h u 4 / 26 10.2.1
June 5, 2019 1 / 26 10.1 ( ) 2 / 26 10.2 8 2 3 4 3 4 6 10.1 4 2 3 4 3 (a) 4 (b) 2 3 (c) 2 4 10.1: 3 / 26 8.3 3 5.1 4 10.4 Gauss 10.1 Ω i 2 3 4 Ξ 3 4 6 Ξ ( ) Ξ 5.1 Gauss ˆx : Ξ Ω i ˆx h u 4 / 26 10.2.1

")

: α α α f B - 3: Barle 4: α, β, Θ, θ α β θ Θ
 17 6 8.1 1: Bragg-Brenano x 1 Bragg-Brenano focal geomer 1 Bragg-Brenano α α 1 1 α < α < f B α 3 α α Barle 1. 4 α β θ 1 : α α α f B - 3: Barle 4: α, β, Θ, θ α β θ Θ Θ θ θ Θ α, β θ Θ 5 a, a, a, b, b, b
17 6 8.1 1: Bragg-Brenano x 1 Bragg-Brenano focal geomer 1 Bragg-Brenano α α 1 1 α < α < f B α 3 α α Barle 1. 4 α β θ 1 : α α α f B - 3: Barle 4: α, β, Θ, θ α β θ Θ Θ θ θ Θ α, β θ Θ 5 a, a, a, b, b, b
1 1 sin cos P (primary) S (secondly) 2 P S A sin(ω2πt + α) A ω 1 ω α V T m T m 1 100Hz m 2 36km 500Hz. 36km 1
 S (secondly) 2 P S A sin(ω2πt + α) A ω 1 ω α V T m T m 1 100Hz m 2 36km 500Hz. 36km 1") sin cos P (primary) S (secondly) 2 P S A sin(ω2πt + α) A ω ω α 3 3 2 2V 3 33+.6T m T 5 34m Hz. 34 3.4m 2 36km 5Hz. 36km m 34 m 5 34 + m 5 33 5 =.66m 34m 34 x =.66 55Hz, 35 5 =.7 485.7Hz 2 V 5Hz.5V.5V V
sin cos P (primary) S (secondly) 2 P S A sin(ω2πt + α) A ω ω α 3 3 2 2V 3 33+.6T m T 5 34m Hz. 34 3.4m 2 36km 5Hz. 36km m 34 m 5 34 + m 5 33 5 =.66m 34m 34 x =.66 55Hz, 35 5 =.7 485.7Hz 2 V 5Hz.5V.5V V
 20 4 20 i 1 1 1.1............................ 1 1.2............................ 4 2 11 2.1................... 11 2.2......................... 11 2.3....................... 19 3 25 3.1.............................
20 4 20 i 1 1 1.1............................ 1 1.2............................ 4 2 11 2.1................... 11 2.2......................... 11 2.3....................... 19 3 25 3.1.............................
今週の内容 後半全体のおさらい ラグランジュの運動方程式の導出 リンク機構のラグランジュの運動方程式 慣性行列 リンク機構のエネルギー保存則 エネルギー パワー 速度 力の関係 外力が作用する場合の運動方程式 粘性 粘性によるエネルギーの消散 慣性 粘性 剛性と微分方程式 拘束条件 ラグランジュの未
 力学 III GA 工業力学演習 X5 解析力学 5X 5 週目 立命館大学機械システム系 8 年度後期 今週の内容 後半全体のおさらい ラグランジュの運動方程式の導出 リンク機構のラグランジュの運動方程式 慣性行列 リンク機構のエネルギー保存則 エネルギー パワー 速度 力の関係 外力が作用する場合の運動方程式 粘性 粘性によるエネルギーの消散 慣性 粘性 剛性と微分方程式 拘束条件 ラグランジュの未定乗数法
力学 III GA 工業力学演習 X5 解析力学 5X 5 週目 立命館大学機械システム系 8 年度後期 今週の内容 後半全体のおさらい ラグランジュの運動方程式の導出 リンク機構のラグランジュの運動方程式 慣性行列 リンク機構のエネルギー保存則 エネルギー パワー 速度 力の関係 外力が作用する場合の運動方程式 粘性 粘性によるエネルギーの消散 慣性 粘性 剛性と微分方程式 拘束条件 ラグランジュの未定乗数法
微分積分 サンプルページ この本の定価 判型などは, 以下の URL からご覧いただけます. このサンプルページの内容は, 初版 1 刷発行時のものです.
 微分積分 サンプルページ この本の定価 判型などは, 以下の URL からご覧いただけます. ttp://www.morikita.co.jp/books/mid/00571 このサンプルページの内容は, 初版 1 刷発行時のものです. i ii 014 10 iii [note] 1 3 iv 4 5 3 6 4 x 0 sin x x 1 5 6 z = f(x, y) 1 y = f(x)
微分積分 サンプルページ この本の定価 判型などは, 以下の URL からご覧いただけます. ttp://www.morikita.co.jp/books/mid/00571 このサンプルページの内容は, 初版 1 刷発行時のものです. i ii 014 10 iii [note] 1 3 iv 4 5 3 6 4 x 0 sin x x 1 5 6 z = f(x, y) 1 y = f(x)
O1-1 O1-2 O1-3 O1-4 O1-5 O1-6
 O1-1 O1-2 O1-3 O1-4 O1-5 O1-6 O1-7 O1-8 O1-9 O1-10 O1-11 O1-12 O1-13 O1-14 O1-15 O1-16 O1-17 O1-18 O1-19 O1-20 O1-21 O1-22 O1-23 O1-24 O1-25 O1-26 O1-27 O1-28 O1-29 O1-30 O1-31 O1-32 O1-33 O1-34 O1-35
O1-1 O1-2 O1-3 O1-4 O1-5 O1-6 O1-7 O1-8 O1-9 O1-10 O1-11 O1-12 O1-13 O1-14 O1-15 O1-16 O1-17 O1-18 O1-19 O1-20 O1-21 O1-22 O1-23 O1-24 O1-25 O1-26 O1-27 O1-28 O1-29 O1-30 O1-31 O1-32 O1-33 O1-34 O1-35

/HOHS‐05(基礎二次)")

Chap11.dvi
 . () x 3 + dx () (x )(x ) dx + sin x sin x( + cos x) dx () x 3 3 x + + 3 x + 3 x x + x 3 + dx 3 x + dx 6 x x x + dx + 3 log x + 6 log x x + + 3 rctn ( ) dx x + 3 4 ( x 3 ) + C x () t x t tn x dx x. t x
. () x 3 + dx () (x )(x ) dx + sin x sin x( + cos x) dx () x 3 3 x + + 3 x + 3 x x + x 3 + dx 3 x + dx 6 x x x + dx + 3 log x + 6 log x x + + 3 rctn ( ) dx x + 3 4 ( x 3 ) + C x () t x t tn x dx x. t x
スライド 1
 (10) 2016.6.22 電気通信大学大学院情報理工学研究科末廣尚士 14. ロボットアームの逆運動学 ( 幾何 学的 ( 解析的 ) 解法 ) 何をしたいか 手首, 手先, ツールの 3 次元空間での位置や姿勢から, それを実現する関節角度を計算する. アームソリューション, アームの解とも呼ぶ 何のために たとえばビジョンで認識された物をつかむ場合, 物の位置 姿勢は 3 次元空間で表現されることが普通である.
(10) 2016.6.22 電気通信大学大学院情報理工学研究科末廣尚士 14. ロボットアームの逆運動学 ( 幾何 学的 ( 解析的 ) 解法 ) 何をしたいか 手首, 手先, ツールの 3 次元空間での位置や姿勢から, それを実現する関節角度を計算する. アームソリューション, アームの解とも呼ぶ 何のために たとえばビジョンで認識された物をつかむ場合, 物の位置 姿勢は 3 次元空間で表現されることが普通である.
 1 911 9001030 9:00 A B C D E F G H I J K L M 1A0900 1B0900 1C0900 1D0900 1E0900 1F0900 1G0900 1H0900 1I0900 1J0900 1K0900 1L0900 1M0900 9:15 1A0915 1B0915 1C0915 1D0915 1E0915 1F0915 1G0915 1H0915 1I0915
1 911 9001030 9:00 A B C D E F G H I J K L M 1A0900 1B0900 1C0900 1D0900 1E0900 1F0900 1G0900 1H0900 1I0900 1J0900 1K0900 1L0900 1M0900 9:15 1A0915 1B0915 1C0915 1D0915 1E0915 1F0915 1G0915 1H0915 1I0915
 21 2 26 i 1 1 1.1............................ 1 1.2............................ 3 2 9 2.1................... 9 2.2.......... 9 2.3................... 11 2.4....................... 12 3 15 3.1..........
21 2 26 i 1 1 1.1............................ 1 1.2............................ 3 2 9 2.1................... 9 2.2.......... 9 2.3................... 11 2.4....................... 12 3 15 3.1..........
春期講座 ~ 極限 1 1, 1 2, 1 3, 1 4,, 1 n, n n {a n } n a n α {a n } α {a n } α lim n an = α n a n α α {a n } {a n } {a n } 1. a n = 2 n {a n } 2, 4, 8, 16,
 春期講座 ~ 極限 1 1, 1 2, 1 3, 1 4,, 1 n, n n {a n } n a n α {a n } α {a n } α lim an = α n a n α α {a n } {a n } {a n } 1. a n = 2 n {a n } 2, 4, 8, 16, 32, n a n {a n } {a n } 2. a n = 10n + 1 {a n } lim an
春期講座 ~ 極限 1 1, 1 2, 1 3, 1 4,, 1 n, n n {a n } n a n α {a n } α {a n } α lim an = α n a n α α {a n } {a n } {a n } 1. a n = 2 n {a n } 2, 4, 8, 16, 32, n a n {a n } {a n } 2. a n = 10n + 1 {a n } lim an
N cos s s cos ψ e e e e 3 3 e e 3 e 3 e
 3 3 5 5 5 3 3 7 5 33 5 33 9 5 8 > e > f U f U u u > u ue u e u ue u ue u e u e u u e u u e u N cos s s cos ψ e e e e 3 3 e e 3 e 3 e 3 > A A > A E A f A A f A [ ] f A A e > > A e[ ] > f A E A < < f ; >
3 3 5 5 5 3 3 7 5 33 5 33 9 5 8 > e > f U f U u u > u ue u e u ue u ue u e u e u u e u u e u N cos s s cos ψ e e e e 3 3 e e 3 e 3 e 3 > A A > A E A f A A f A [ ] f A A e > > A e[ ] > f A E A < < f ; >
body.dvi
 ..1 f(x) n = 1 b n = 1 f f(x) cos nx dx, n =, 1,,... f(x) sin nx dx, n =1,, 3,... f(x) = + ( n cos nx + b n sin nx) n=1 1 1 5 1.1........................... 5 1.......................... 14 1.3...........................
..1 f(x) n = 1 b n = 1 f f(x) cos nx dx, n =, 1,,... f(x) sin nx dx, n =1,, 3,... f(x) = + ( n cos nx + b n sin nx) n=1 1 1 5 1.1........................... 5 1.......................... 14 1.3...........................
TOP URL 1
 TOP URL http://amonphys.web.fc2.com/ 1 6 3 6.1................................ 3 6.2.............................. 4 6.3................................ 5 6.4.......................... 6 6.5......................
TOP URL http://amonphys.web.fc2.com/ 1 6 3 6.1................................ 3 6.2.............................. 4 6.3................................ 5 6.4.......................... 6 6.5......................
°ÌÁê¿ô³ØII
 July 14, 2007 Brouwer f f(x) = x x f(z) = 0 2 f : S 2 R 2 f(x) = f( x) x S 2 3 3 2 - - - 1. X x X U(x) U(x) x U = {U(x) x X} X 1. U(x) A U(x) x 2. A U(x), A B B U(x) 3. A, B U(x) A B U(x) 4. A U(x),
July 14, 2007 Brouwer f f(x) = x x f(z) = 0 2 f : S 2 R 2 f(x) = f( x) x S 2 3 3 2 - - - 1. X x X U(x) U(x) x U = {U(x) x X} X 1. U(x) A U(x) x 2. A U(x), A B B U(x) 3. A, B U(x) A B U(x) 4. A U(x),
#A A A F, F d F P + F P = d P F, F y P F F x A.1 ( α, 0), (α, 0) α > 0) (x, y) (x + α) 2 + y 2, (x α) 2 + y 2 d (x + α)2 + y 2 + (x α) 2 + y 2 =
, (α, 0) α > 0) (x, y) (x + α) 2 + y 2, (x α) 2 + y 2 d (x + α)2 + y 2 + (x α) 2 + y 2 =") #A A A. F, F d F P + F P = d P F, F P F F A. α, 0, α, 0 α > 0, + α +, α + d + α + + α + = d d F, F 0 < α < d + α + = d α + + α + = d d α + + α + d α + = d 4 4d α + = d 4 8d + 6 http://mth.cs.kitmi-it.c.jp/
#A A A. F, F d F P + F P = d P F, F P F F A. α, 0, α, 0 α > 0, + α +, α + d + α + + α + = d d F, F 0 < α < d + α + = d α + + α + = d d α + + α + d α + = d 4 4d α + = d 4 8d + 6 http://mth.cs.kitmi-it.c.jp/
スライド 1
 (8) 2017.6.7 電気通信大学大学院情報理工学研究科末廣尚士 9. ロボットアームの逆運動学 ( 幾何 学的 ( 解析的 ) 解法 ) 何をしたいか 手首, 手先, ツールの 3 次元空間での位置や姿勢から, それを実現する関節角度を計算する. アームソリューション, アームの解とも呼ぶ 何のために たとえばビジョンで認識された物をつかむ場合, 物の位置 姿勢は 3 次元空間で表現されることが普通である.
(8) 2017.6.7 電気通信大学大学院情報理工学研究科末廣尚士 9. ロボットアームの逆運動学 ( 幾何 学的 ( 解析的 ) 解法 ) 何をしたいか 手首, 手先, ツールの 3 次元空間での位置や姿勢から, それを実現する関節角度を計算する. アームソリューション, アームの解とも呼ぶ 何のために たとえばビジョンで認識された物をつかむ場合, 物の位置 姿勢は 3 次元空間で表現されることが普通である.
9 2 1 f(x, y) = xy sin x cos y x y cos y y x sin x d (x, y) = y cos y (x sin x) = y cos y(sin x + x cos x) x dx d (x, y) = x sin x (y cos y) = x sin x
 = xy sin x cos y x y cos y y x sin x d (x, y) = y cos y (x sin x) = y cos y(sin x + x cos x) x dx d (x, y) = x sin x (y cos y) = x sin x") 2009 9 6 16 7 1 7.1 1 1 1 9 2 1 f(x, y) = xy sin x cos y x y cos y y x sin x d (x, y) = y cos y (x sin x) = y cos y(sin x + x cos x) x dx d (x, y) = x sin x (y cos y) = x sin x(cos y y sin y) y dy 1 sin
2009 9 6 16 7 1 7.1 1 1 1 9 2 1 f(x, y) = xy sin x cos y x y cos y y x sin x d (x, y) = y cos y (x sin x) = y cos y(sin x + x cos x) x dx d (x, y) = x sin x (y cos y) = x sin x(cos y y sin y) y dy 1 sin

1 I 1.1 ± e = = - = C C MKSA [m], [Kg] [s] [A] 1C 1A 1 MKSA 1C 1C +q q +q q 1
![1 I 1.1 ± e = = - = C C MKSA [m], [Kg] [s] [A] 1C 1A 1 MKSA 1C 1C +q q +q q 1](/thumbs/94/121802164.jpg "1 I 1.1 ± e = = - = C C MKSA [m], [Kg] [s] [A] 1C 1A 1 MKSA 1C 1C +q q +q q 1") 1 I 1.1 ± e = = - =1.602 10 19 C C MKA [m], [Kg] [s] [A] 1C 1A 1 MKA 1C 1C +q q +q q 1 1.1 r 1,2 q 1, q 2 r 12 2 q 1, q 2 2 F 12 = k q 1q 2 r 12 2 (1.1) k 2 k 2 ( r 1 r 2 ) ( r 2 r 1 ) q 1 q 2 (q 1 q 2
1 I 1.1 ± e = = - =1.602 10 19 C C MKA [m], [Kg] [s] [A] 1C 1A 1 MKA 1C 1C +q q +q q 1 1.1 r 1,2 q 1, q 2 r 12 2 q 1, q 2 2 F 12 = k q 1q 2 r 12 2 (1.1) k 2 k 2 ( r 1 r 2 ) ( r 2 r 1 ) q 1 q 2 (q 1 q 2
- II
 - II- - -.................................................................................................... 3.3.............................................. 4 6...........................................
- II- - -.................................................................................................... 3.3.............................................. 4 6...........................................
6 2 2 x y x y t P P = P t P = I P P P ( ) ( ) ,, ( ) ( ) cos θ sin θ cos θ sin θ, sin θ cos θ sin θ cos θ y x θ x θ P
 ( ) ,, ( ) ( ) cos θ sin θ cos θ sin θ, sin θ cos θ sin θ cos θ y x θ x θ P") 6 x x 6.1 t P P = P t P = I P P P 1 0 1 0,, 0 1 0 1 cos θ sin θ cos θ sin θ, sin θ cos θ sin θ cos θ x θ x θ P x P x, P ) = t P x)p ) = t x t P P ) = t x = x, ) 6.1) x = Figure 6.1 Px = x, P=, θ = θ P
6 x x 6.1 t P P = P t P = I P P P 1 0 1 0,, 0 1 0 1 cos θ sin θ cos θ sin θ, sin θ cos θ sin θ cos θ x θ x θ P x P x, P ) = t P x)p ) = t x t P P ) = t x = x, ) 6.1) x = Figure 6.1 Px = x, P=, θ = θ P
t θ, τ, α, β S(, 0 P sin(θ P θ S x cos(θ SP = θ P (cos(θ, sin(θ sin(θ P t tan(θ θ 0 cos(θ tan(θ = sin(θ cos(θ ( 0t tan(θ
 4 5 ( 5 3 9 4 0 5 ( 4 6 7 7 ( 0 8 3 9 ( 8 t θ, τ, α, β S(, 0 P sin(θ P θ S x cos(θ SP = θ P (cos(θ, sin(θ sin(θ P t tan(θ θ 0 cos(θ tan(θ = sin(θ cos(θ ( 0t tan(θ S θ > 0 θ < 0 ( P S(, 0 θ > 0 ( 60 θ
4 5 ( 5 3 9 4 0 5 ( 4 6 7 7 ( 0 8 3 9 ( 8 t θ, τ, α, β S(, 0 P sin(θ P θ S x cos(θ SP = θ P (cos(θ, sin(θ sin(θ P t tan(θ θ 0 cos(θ tan(θ = sin(θ cos(θ ( 0t tan(θ S θ > 0 θ < 0 ( P S(, 0 θ > 0 ( 60 θ
TOP URL 1
 TOP URL http://amonphys.web.fc.com/ 1 19 3 19.1................... 3 19.............................. 4 19.3............................... 6 19.4.............................. 8 19.5.............................
TOP URL http://amonphys.web.fc.com/ 1 19 3 19.1................... 3 19.............................. 4 19.3............................... 6 19.4.............................. 8 19.5.............................
all.dvi
 72 9 Hooke,,,. Hooke. 9.1 Hooke 1 Hooke. 1, 1 Hooke. σ, ε, Young. σ ε (9.1), Young. τ γ G τ Gγ (9.2) X 1, X 2. Poisson, Poisson ν. ν ε 22 (9.) ε 11 F F X 2 X 1 9.1: Poisson 9.1. Hooke 7 Young Poisson G
72 9 Hooke,,,. Hooke. 9.1 Hooke 1 Hooke. 1, 1 Hooke. σ, ε, Young. σ ε (9.1), Young. τ γ G τ Gγ (9.2) X 1, X 2. Poisson, Poisson ν. ν ε 22 (9.) ε 11 F F X 2 X 1 9.1: Poisson 9.1. Hooke 7 Young Poisson G
2.2 h h l L h L = l cot h (1) (1) L l L l l = L tan h (2) (2) L l 2 l 3 h 2.3 a h a h (a, h)
 (1) L l L l l = L tan h (2) (2) L l 2 l 3 h 2.3 a h a h (a, h)") 1 16 10 5 1 2 2.1 a a a 1 1 1 2.2 h h l L h L = l cot h (1) (1) L l L l l = L tan h (2) (2) L l 2 l 3 h 2.3 a h a h (a, h) 4 2 3 4 2 5 2.4 x y (x,y) l a x = l cot h cos a, (3) y = l cot h sin a (4) h a
1 16 10 5 1 2 2.1 a a a 1 1 1 2.2 h h l L h L = l cot h (1) (1) L l L l l = L tan h (2) (2) L l 2 l 3 h 2.3 a h a h (a, h) 4 2 3 4 2 5 2.4 x y (x,y) l a x = l cot h cos a, (3) y = l cot h sin a (4) h a
 1 3 1.1.......................... 3 1............................... 3 1.3....................... 5 1.4.......................... 6 1.5........................ 7 8.1......................... 8..............................
1 3 1.1.......................... 3 1............................... 3 1.3....................... 5 1.4.......................... 6 1.5........................ 7 8.1......................... 8..............................
x A Aω ẋ ẋ 2 + ω 2 x 2 = ω 2 A 2. (ẋ, ωx) ζ ẋ + iωx ζ ζ dζ = ẍ + iωẋ = ẍ + iω(ζ iωx) dt dζ dt iωζ = ẍ + ω2 x (2.1) ζ ζ = Aωe iωt = Aω cos ωt + iaω sin
 ζ ẋ + iωx ζ ζ dζ = ẍ + iωẋ = ẍ + iω(ζ iωx) dt dζ dt iωζ = ẍ + ω2 x (2.1) ζ ζ = Aωe iωt = Aω cos ωt + iaω sin") 2 2.1 F (t) 2.1.1 mẍ + kx = F (t). m ẍ + ω 2 x = F (t)/m ω = k/m. 1 : (ẋ, x) x = A sin ωt, ẋ = Aω cos ωt 1 2-1 x A Aω ẋ ẋ 2 + ω 2 x 2 = ω 2 A 2. (ẋ, ωx) ζ ẋ + iωx ζ ζ dζ = ẍ + iωẋ = ẍ + iω(ζ iωx) dt dζ
2 2.1 F (t) 2.1.1 mẍ + kx = F (t). m ẍ + ω 2 x = F (t)/m ω = k/m. 1 : (ẋ, x) x = A sin ωt, ẋ = Aω cos ωt 1 2-1 x A Aω ẋ ẋ 2 + ω 2 x 2 = ω 2 A 2. (ẋ, ωx) ζ ẋ + iωx ζ ζ dζ = ẍ + iωẋ = ẍ + iω(ζ iωx) dt dζ
TOP URL 1
 TOP URL http://amonphys.web.fc2.com/ 1 30 3 30.1.............. 3 30.2........................... 4 30.3...................... 5 30.4........................ 6 30.5.................................. 8 30.6...............................
TOP URL http://amonphys.web.fc2.com/ 1 30 3 30.1.............. 3 30.2........................... 4 30.3...................... 5 30.4........................ 6 30.5.................................. 8 30.6...............................
1. z dr er r sinθ dϕ eϕ r dθ eθ dr θ dr dθ r x 0 ϕ r sinθ dϕ r sinθ dϕ y dr dr er r dθ eθ r sinθ dϕ eϕ 2. (r, θ, φ) 2 dr 1 h r dr 1 e r h θ dθ 1 e θ h
 2 dr 1 h r dr 1 e r h θ dθ 1 e θ h") IB IIA 1 1 r, θ, φ 1 (r, θ, φ)., r, θ, φ 0 r
IB IIA 1 1 r, θ, φ 1 (r, θ, φ)., r, θ, φ 0 r
n=1 1 n 2 = π = π f(z) f(z) 2 f(z) = u(z) + iv(z) *1 f (z) u(x, y), v(x, y) f(z) f (z) = f/ x u x = v y, u y = v x
 f(z) 2 f(z) = u(z) + iv(z) *1 f (z) u(x, y), v(x, y) f(z) f (z) = f/ x u x = v y, u y = v x") n= n 2 = π2 6 3 2 28 + 4 + 9 + = π2 6 2 f(z) f(z) 2 f(z) = u(z) + iv(z) * f (z) u(x, y), v(x, y) f(z) f (z) = f/ x u x = v y, u y = v x f x = i f y * u, v 3 3. 3 f(t) = u(t) + v(t) [, b] f(t)dt = u(t)dt
n= n 2 = π2 6 3 2 28 + 4 + 9 + = π2 6 2 f(z) f(z) 2 f(z) = u(z) + iv(z) * f (z) u(x, y), v(x, y) f(z) f (z) = f/ x u x = v y, u y = v x f x = i f y * u, v 3 3. 3 f(t) = u(t) + v(t) [, b] f(t)dt = u(t)dt
mugensho.dvi
 1 1 f (t) lim t a f (t) = 0 f (t) t a 1.1 (1) lim(t 1) 2 = 0 t 1 (t 1) 2 t 1 (2) lim(t 1) 3 = 0 t 1 (t 1) 3 t 1 2 f (t), g(t) t a lim t a f (t) g(t) g(t) f (t) = o(g(t)) (t a) = 0 f (t) (t 1) 3 1.2 lim
1 1 f (t) lim t a f (t) = 0 f (t) t a 1.1 (1) lim(t 1) 2 = 0 t 1 (t 1) 2 t 1 (2) lim(t 1) 3 = 0 t 1 (t 1) 3 t 1 2 f (t), g(t) t a lim t a f (t) g(t) g(t) f (t) = o(g(t)) (t a) = 0 f (t) (t 1) 3 1.2 lim
.5 z = a + b + c n.6 = a sin t y = b cos t dy d a e e b e + e c e e e + e 3 s36 3 a + y = a, b > b 3 s363.7 y = + 3 y = + 3 s364.8 cos a 3 s365.9 y =,
 [ ] IC. r, θ r, θ π, y y = 3 3 = r cos θ r sin θ D D = {, y ; y }, y D r, θ ep y yddy D D 9 s96. d y dt + 3dy + y = cos t dt t = y = e π + e π +. t = π y =.9 s6.3 d y d + dy d + y = y =, dy d = 3 a, b
[ ] IC. r, θ r, θ π, y y = 3 3 = r cos θ r sin θ D D = {, y ; y }, y D r, θ ep y yddy D D 9 s96. d y dt + 3dy + y = cos t dt t = y = e π + e π +. t = π y =.9 s6.3 d y d + dy d + y = y =, dy d = 3 a, b
III ϵ-n ϵ-n lim n a n = α n a n α 1 lim a n = 0 1 n a k n n k= ϵ-n 1.1
 III http://www2.mth.kyushu-u.c.jp/~hr/lectures/lectures-j.html 1 1 1.1 ϵ-n ϵ-n lim n = α n n α 1 lim n = 0 1 n k n k=1 0 1.1.7 ϵ-n 1.1.1 n α n n α lim n = α ϵ Nϵ n > Nϵ n α < ϵ 1.1.1 ϵ n > Nϵ n α < ϵ 1.1.2
III http://www2.mth.kyushu-u.c.jp/~hr/lectures/lectures-j.html 1 1 1.1 ϵ-n ϵ-n lim n = α n n α 1 lim n = 0 1 n k n k=1 0 1.1.7 ϵ-n 1.1.1 n α n n α lim n = α ϵ Nϵ n > Nϵ n α < ϵ 1.1.1 ϵ n > Nϵ n α < ϵ 1.1.2
1 1.1 ( ). z = a + bi, a, b R 0 a, b 0 a 2 + b 2 0 z = a + bi = ( ) a 2 + b 2 a a 2 + b + b 2 a 2 + b i 2 r = a 2 + b 2 θ cos θ = a a 2 + b 2, sin θ =
. z = a + bi, a, b R 0 a, b 0 a 2 + b 2 0 z = a + bi = ( ) a 2 + b 2 a a 2 + b + b 2 a 2 + b i 2 r = a 2 + b 2 θ cos θ = a a 2 + b 2, sin θ =") 1 1.1 ( ). z = + bi,, b R 0, b 0 2 + b 2 0 z = + bi = ( ) 2 + b 2 2 + b + b 2 2 + b i 2 r = 2 + b 2 θ cos θ = 2 + b 2, sin θ = b 2 + b 2 2π z = r(cos θ + i sin θ) 1.2 (, ). 1. < 2. > 3. ±,, 1.3 ( ). A
1 1.1 ( ). z = + bi,, b R 0, b 0 2 + b 2 0 z = + bi = ( ) 2 + b 2 2 + b + b 2 2 + b i 2 r = 2 + b 2 θ cos θ = 2 + b 2, sin θ = b 2 + b 2 2π z = r(cos θ + i sin θ) 1.2 (, ). 1. < 2. > 3. ±,, 1.3 ( ). A
1.2 y + P (x)y + Q(x)y = 0 (1) y 1 (x), y 2 (x) y 1 (x), y 2 (x) (1) y(x) c 1, c 2 y(x) = c 1 y 1 (x) + c 2 y 2 (x) 3 y 1 (x) y 1 (x) e R P (x)dx y 2
y + Q(x)y = 0 (1) y 1 (x), y 2 (x) y 1 (x), y 2 (x) (1) y(x) c 1, c 2 y(x) = c 1 y 1 (x) + c 2 y 2 (x) 3 y 1 (x) y 1 (x) e R P (x)dx y 2") 1 1.1 R(x) = 0 y + P (x)y + Q(x)y = R(x)...(1) y + P (x)y + Q(x)y = 0...(2) 1 2 u(x) v(x) c 1 u(x)+ c 2 v(x) = 0 c 1 = c 2 = 0 c 1 = c 2 = 0 2 0 2 u(x) v(x) u(x) u (x) W (u, v)(x) = v(x) v (x) 0 1 1.2
1 1.1 R(x) = 0 y + P (x)y + Q(x)y = R(x)...(1) y + P (x)y + Q(x)y = 0...(2) 1 2 u(x) v(x) c 1 u(x)+ c 2 v(x) = 0 c 1 = c 2 = 0 c 1 = c 2 = 0 2 0 2 u(x) v(x) u(x) u (x) W (u, v)(x) = v(x) v (x) 0 1 1.2
1. 1 A : l l : (1) l m (m 3) (2) m (3) n (n 3) (4) A α, β γ α β + γ = 2 m l lm n nα nα = lm. α = lm n. m lm 2β 2β = lm β = lm 2. γ l 2. 3
 l m (m 3) (2) m (3) n (n 3) (4) A α, β γ α β + γ = 2 m l lm n nα nα = lm. α = lm n. m lm 2β 2β = lm β = lm 2. γ l 2. 3") 1. 1 A : l l : (1) l m (m 3) (2) m (3) n (n 3) (4) A 2 1 2 1 2 3 α, β γ α β + γ = 2 m l lm n nα nα = lm. α = lm n. m lm 2β 2β = lm β = lm 2. γ l 2. 3 4 P, Q R n = {(x 1, x 2,, x n ) ; x 1, x 2,, x n R}
1. 1 A : l l : (1) l m (m 3) (2) m (3) n (n 3) (4) A 2 1 2 1 2 3 α, β γ α β + γ = 2 m l lm n nα nα = lm. α = lm n. m lm 2β 2β = lm β = lm 2. γ l 2. 3 4 P, Q R n = {(x 1, x 2,, x n ) ; x 1, x 2,, x n R}
4 4 θ X θ P θ 4. 0, 405 P 0 X 405 X P 4. () 60 () 45 () 40 (4) 765 (5) 40 B 60 0 P = 90, = ( ) = X
 60 () 45 () 40 (4) 765 (5) 40 B 60 0 P = 90, = ( ) = X") 4 4. 4.. 5 5 0 A P P P X X X X +45 45 0 45 60 70 X 60 X 0 P P 4 4 θ X θ P θ 4. 0, 405 P 0 X 405 X P 4. () 60 () 45 () 40 (4) 765 (5) 40 B 60 0 P 0 0 + 60 = 90, 0 + 60 = 750 0 + 60 ( ) = 0 90 750 0 90 0
4 4. 4.. 5 5 0 A P P P X X X X +45 45 0 45 60 70 X 60 X 0 P P 4 4 θ X θ P θ 4. 0, 405 P 0 X 405 X P 4. () 60 () 45 () 40 (4) 765 (5) 40 B 60 0 P 0 0 + 60 = 90, 0 + 60 = 750 0 + 60 ( ) = 0 90 750 0 90 0
nsg04-28/ky208684356100043077
 δ!!! μ μ μ γ UBE3A Ube3a Ube3a δ !!!! α α α α α α α α α α μ μ α β α β β !!!!!!!! μ! Suncus murinus μ Ω! π μ Ω in vivo! μ μ μ!!! ! in situ! in vivo δ δ !!!!!!!!!! ! in vivo Orexin-Arch Orexin-Arch !!
δ!!! μ μ μ γ UBE3A Ube3a Ube3a δ !!!! α α α α α α α α α α μ μ α β α β β !!!!!!!! μ! Suncus murinus μ Ω! π μ Ω in vivo! μ μ μ!!! ! in situ! in vivo δ δ !!!!!!!!!! ! in vivo Orexin-Arch Orexin-Arch !!
1 (Berry,1975) 2-6 p (S πr 2 )p πr 2 p 2πRγ p p = 2γ R (2.5).1-1 : : : : ( ).2 α, β α, β () X S = X X α X β (.1) 1 2
 2-6 p (S πr 2 )p πr 2 p 2πRγ p p = 2γ R (2.5).1-1 : : : : ( ).2 α, β α, β () X S = X X α X β (.1) 1 2") 2005 9/8-11 2 2.2 ( 2-5) γ ( ) γ cos θ 2πr πρhr 2 g h = 2γ cos θ ρgr (2.1) γ = ρgrh (2.2) 2 cos θ θ cos θ = 1 (2.2) γ = 1 ρgrh (2.) 2 2. p p ρgh p ( ) p p = p ρgh (2.) h p p = 2γ r 1 1 (Berry,1975) 2-6
2005 9/8-11 2 2.2 ( 2-5) γ ( ) γ cos θ 2πr πρhr 2 g h = 2γ cos θ ρgr (2.1) γ = ρgrh (2.2) 2 cos θ θ cos θ = 1 (2.2) γ = 1 ρgrh (2.) 2 2. p p ρgh p ( ) p p = p ρgh (2.) h p p = 2γ r 1 1 (Berry,1975) 2-6
85 4
 85 4 86 Copright c 005 Kumanekosha 4.1 ( ) ( t ) t, t 4.1.1 t Step! (Step 1) (, 0) (Step ) ±V t (, t) I Check! P P V t π 54 t = 0 + V (, t) π θ : = θ : π ) θ = π ± sin ± cos t = 0 (, 0) = sin π V + t +V
85 4 86 Copright c 005 Kumanekosha 4.1 ( ) ( t ) t, t 4.1.1 t Step! (Step 1) (, 0) (Step ) ±V t (, t) I Check! P P V t π 54 t = 0 + V (, t) π θ : = θ : π ) θ = π ± sin ± cos t = 0 (, 0) = sin π V + t +V
Microsoft Word - 11問題表紙(選択).docx
.docx") A B A.70g/cm 3 B.74g/cm 3 B C 70at% %A C B at% 80at% %B 350 C γ δ y=00 x-y ρ l S ρ C p k C p ρ C p T ρ l t l S S ξ S t = ( k T ) ξ ( ) S = ( k T) ( ) t y ξ S ξ / t S v T T / t = v T / y 00 x v S dy dx
A B A.70g/cm 3 B.74g/cm 3 B C 70at% %A C B at% 80at% %B 350 C γ δ y=00 x-y ρ l S ρ C p k C p ρ C p T ρ l t l S S ξ S t = ( k T ) ξ ( ) S = ( k T) ( ) t y ξ S ξ / t S v T T / t = v T / y 00 x v S dy dx
Korteweg-de Vries
 Korteweg-de Vries 2011 03 29 ,.,.,.,, Korteweg-de Vries,. 1 1 3 1.1 K-dV........................ 3 1.2.............................. 4 2 K-dV 5 2.1............................. 5 2.2..............................
Korteweg-de Vries 2011 03 29 ,.,.,.,, Korteweg-de Vries,. 1 1 3 1.1 K-dV........................ 3 1.2.............................. 4 2 K-dV 5 2.1............................. 5 2.2..............................
2
 16 1050026 1050042 1 2 1 1.1 3 1.2 3 1.3 3 2 2.1 4 2.2 4 2.2.1 5 2.2.2 5 2.3 7 2.3.1 1Basic 7 2.3.2 2 8 2.3.3 3 9 2.3.4 4window size 10 2.3.5 5 11 3 3.1 12 3.2 CCF 1 13 3.3 14 3.4 2 15 3.5 3 17 20 20 20
16 1050026 1050042 1 2 1 1.1 3 1.2 3 1.3 3 2 2.1 4 2.2 4 2.2.1 5 2.2.2 5 2.3 7 2.3.1 1Basic 7 2.3.2 2 8 2.3.3 3 9 2.3.4 4window size 10 2.3.5 5 11 3 3.1 12 3.2 CCF 1 13 3.3 14 3.4 2 15 3.5 3 17 20 20 20
W u = u(x, t) u tt = a 2 u xx, a > 0 (1) D := {(x, t) : 0 x l, t 0} u (0, t) = 0, u (l, t) = 0, t 0 (2)
 u tt = a 2 u xx, a > 0 (1) D := {(x, t) : 0 x l, t 0} u (0, t) = 0, u (l, t) = 0, t 0 (2)") 3 215 4 27 1 1 u u(x, t) u tt a 2 u xx, a > (1) D : {(x, t) : x, t } u (, t), u (, t), t (2) u(x, ) f(x), u(x, ) t 2, x (3) u(x, t) X(x)T (t) u (1) 1 T (t) a 2 T (t) X (x) X(x) α (2) T (t) αa 2 T (t) (4)
3 215 4 27 1 1 u u(x, t) u tt a 2 u xx, a > (1) D : {(x, t) : x, t } u (, t), u (, t), t (2) u(x, ) f(x), u(x, ) t 2, x (3) u(x, t) X(x)T (t) u (1) 1 T (t) a 2 T (t) X (x) X(x) α (2) T (t) αa 2 T (t) (4)
18 ( ) I II III A B C(100 ) 1, 2, 3, 5 I II A B (100 ) 1, 2, 3 I II A B (80 ) 6 8 I II III A B C(80 ) 1 n (1 + x) n (1) n C 1 + n C
 I II III A B C(100 ) 1, 2, 3, 5 I II A B (100 ) 1, 2, 3 I II A B (80 ) 6 8 I II III A B C(80 ) 1 n (1 + x) n (1) n C 1 + n C") 8 ( ) 8 5 4 I II III A B C( ),,, 5 I II A B ( ),, I II A B (8 ) 6 8 I II III A B C(8 ) n ( + x) n () n C + n C + + n C n = 7 n () 7 9 C : y = x x A(, 6) () A C () C P AP Q () () () 4 A(,, ) B(,, ) C(,,
8 ( ) 8 5 4 I II III A B C( ),,, 5 I II A B ( ),, I II A B (8 ) 6 8 I II III A B C(8 ) n ( + x) n () n C + n C + + n C n = 7 n () 7 9 C : y = x x A(, 6) () A C () C P AP Q () () () 4 A(,, ) B(,, ) C(,,
ma22-9 u ( v w) = u v w sin θê = v w sin θ u cos φ = = 2.3 ( a b) ( c d) = ( a c)( b d) ( a d)( b c) ( a b) ( c d) = (a 2 b 3 a 3 b 2 )(c 2 d 3 c 3 d
 = u v w sin θê = v w sin θ u cos φ = = 2.3 ( a b) ( c d) = ( a c)( b d) ( a d)( b c) ( a b) ( c d) = (a 2 b 3 a 3 b 2 )(c 2 d 3 c 3 d") A 2. x F (t) =f sin ωt x(0) = ẋ(0) = 0 ω θ sin θ θ 3! θ3 v = f mω cos ωt x = f mω (t sin ωt) ω t 0 = f ( cos ωt) mω x ma2-2 t ω x f (t mω ω (ωt ) 6 (ωt)3 = f 6m ωt3 2.2 u ( v w) = v ( w u) = w ( u v) ma22-9
A 2. x F (t) =f sin ωt x(0) = ẋ(0) = 0 ω θ sin θ θ 3! θ3 v = f mω cos ωt x = f mω (t sin ωt) ω t 0 = f ( cos ωt) mω x ma2-2 t ω x f (t mω ω (ωt ) 6 (ωt)3 = f 6m ωt3 2.2 u ( v w) = v ( w u) = w ( u v) ma22-9
SFGÇÃÉXÉyÉNÉgÉãå`.pdf
 SFG 1 SFG SFG I SFG (ω) χ SFG (ω). SFG χ χ SFG (ω) = χ NR e iϕ +. ω ω + iγ SFG φ = ±π/, χ φ = ±π 3 χ SFG χ SFG = χ NR + χ (ω ω ) + Γ + χ NR χ (ω ω ) (ω ω ) + Γ cosϕ χ NR χ Γ (ω ω ) + Γ sinϕ. 3 (θ) 180
SFG 1 SFG SFG I SFG (ω) χ SFG (ω). SFG χ χ SFG (ω) = χ NR e iϕ +. ω ω + iγ SFG φ = ±π/, χ φ = ±π 3 χ SFG χ SFG = χ NR + χ (ω ω ) + Γ + χ NR χ (ω ω ) (ω ω ) + Γ cosϕ χ NR χ Γ (ω ω ) + Γ sinϕ. 3 (θ) 180
, 1 ( f n (x))dx d dx ( f n (x)) 1 f n (x)dx d dx f n(x) lim f n (x) = [, 1] x f n (x) = n x x 1 f n (x) = x f n (x) = x 1 x n n f n(x) = [, 1] f n (x
![, 1 ( f n (x))dx d dx ( f n (x)) 1 f n (x)dx d dx f n(x) lim f n (x) = [, 1] x f n (x) = n x x 1 f n (x) = x f n (x) = x 1 x n n f n(x) = [, 1] f n (x](/thumbs/93/113428934.jpg ", 1 ( f n (x))dx d dx ( f n (x)) 1 f n (x)dx d dx f n(x) lim f n (x) = [, 1] x f n (x) = n x x 1 f n (x) = x f n (x) = x 1 x n n f n(x) = [, 1] f n (x") 1 1.1 4n 2 x, x 1 2n f n (x) = 4n 2 ( 1 x), 1 x 1 n 2n n, 1 x n n 1 1 f n (x)dx = 1, n = 1, 2,.. 1 lim 1 lim 1 f n (x)dx = 1 lim f n(x) = ( lim f n (x))dx = f n (x)dx 1 ( lim f n (x))dx d dx ( lim f d
1 1.1 4n 2 x, x 1 2n f n (x) = 4n 2 ( 1 x), 1 x 1 n 2n n, 1 x n n 1 1 f n (x)dx = 1, n = 1, 2,.. 1 lim 1 lim 1 f n (x)dx = 1 lim f n(x) = ( lim f n (x))dx = f n (x)dx 1 ( lim f n (x))dx d dx ( lim f d
v v = v 1 v 2 v 3 (1) R = (R ij ) (2) R (R 1 ) ij = R ji (3) 3 R ij R ik = δ jk (4) i=1 δ ij Kronecker δ ij = { 1 (i = j) 0 (i
 R = (R ij ) (2) R (R 1 ) ij = R ji (3) 3 R ij R ik = δ jk (4) i=1 δ ij Kronecker δ ij = { 1 (i = j) 0 (i") 1. 1 1.1 1.1.1 1.1.1.1 v v = v 1 v 2 v 3 (1) R = (R ij ) (2) R (R 1 ) ij = R ji (3) R ij R ik = δ jk (4) δ ij Kronecker δ ij = { 1 (i = j) 0 (i j) (5) 1 1.1. v1.1 2011/04/10 1. 1 2 v i = R ij v j (6) [
1. 1 1.1 1.1.1 1.1.1.1 v v = v 1 v 2 v 3 (1) R = (R ij ) (2) R (R 1 ) ij = R ji (3) R ij R ik = δ jk (4) δ ij Kronecker δ ij = { 1 (i = j) 0 (i j) (5) 1 1.1. v1.1 2011/04/10 1. 1 2 v i = R ij v j (6) [
DVIOUT-HYOU
 () P. () AB () AB ³ ³, BA, BA ³ ³ P. A B B A IA (B B)A B (BA) B A ³, A ³ ³ B ³ ³ x z ³ A AA w ³ AA ³ x z ³ x + z +w ³ w x + z +w ½ x + ½ z +w x + z +w x,,z,w ³ A ³ AA I x,, z, w ³ A ³ ³ + + A ³ A A P.
() P. () AB () AB ³ ³, BA, BA ³ ³ P. A B B A IA (B B)A B (BA) B A ³, A ³ ³ B ³ ³ x z ³ A AA w ³ AA ³ x z ³ x + z +w ³ w x + z +w ½ x + ½ z +w x + z +w x,,z,w ³ A ³ AA I x,, z, w ³ A ³ ³ + + A ³ A A P.
meiji_resume_1.PDF
 β β β (q 1,q,..., q n ; p 1, p,..., p n ) H(q 1,q,..., q n ; p 1, p,..., p n ) Hψ = εψ ε k = k +1/ ε k = k(k 1) (x, y, z; p x, p y, p z ) (r; p r ), (θ; p θ ), (ϕ; p ϕ ) ε k = 1/ k p i dq i E total = E
β β β (q 1,q,..., q n ; p 1, p,..., p n ) H(q 1,q,..., q n ; p 1, p,..., p n ) Hψ = εψ ε k = k +1/ ε k = k(k 1) (x, y, z; p x, p y, p z ) (r; p r ), (θ; p θ ), (ϕ; p ϕ ) ε k = 1/ k p i dq i E total = E
2010年度 筑波大・理系数学
 00 筑波大学 ( 理系 ) 前期日程問題 解答解説のページへ f( x) x ax とおく ただしa>0 とする () f( ) f() となるa の範囲を求めよ () f(x) の極小値が f ( ) 以下になる a の範囲を求めよ () x における f(x) の最小値をa を用いて表せ -- 00 筑波大学 ( 理系 ) 前期日程問題 解答解説のページへ つの曲線 C : y six ( 0
00 筑波大学 ( 理系 ) 前期日程問題 解答解説のページへ f( x) x ax とおく ただしa>0 とする () f( ) f() となるa の範囲を求めよ () f(x) の極小値が f ( ) 以下になる a の範囲を求めよ () x における f(x) の最小値をa を用いて表せ -- 00 筑波大学 ( 理系 ) 前期日程問題 解答解説のページへ つの曲線 C : y six ( 0
V")
2 2 1?? 2 1 1, 2 1, 2 1, 2, 3,... 1, 2 1, 3? , 2 2, 3? k, l m, n k, l m, n kn > ml...? 2 m, n n m
 2009 IA I 22, 23, 24, 25, 26, 27 4 21 1 1 2 1! 4, 5 1? 50 1 2 1 1 2 1 4 2 2 2 1?? 2 1 1, 2 1, 2 1, 2, 3,... 1, 2 1, 3? 2 1 3 1 2 1 1, 2 2, 3? 2 1 3 2 3 2 k, l m, n k, l m, n kn > ml...? 2 m, n n m 3 2
2009 IA I 22, 23, 24, 25, 26, 27 4 21 1 1 2 1! 4, 5 1? 50 1 2 1 1 2 1 4 2 2 2 1?? 2 1 1, 2 1, 2 1, 2, 3,... 1, 2 1, 3? 2 1 3 1 2 1 1, 2 2, 3? 2 1 3 2 3 2 k, l m, n k, l m, n kn > ml...? 2 m, n n m 3 2
f(x,y) (x,y) x (x,y), y (x,y) f(x,y) x y f x (x,y),f y (x,y) B p.1/14
 (x,y) x (x,y), y (x,y) f(x,y) x y f x (x,y),f y (x,y) B p.1/14") B p.1/14 f(x,y) (x,y) x (x,y), y (x,y) f(x,y) x y f x (x,y),f y (x,y) B p.1/14 f(x,y) (x,y) x (x,y), y (x,y) f(x,y) x y f x (x,y),f y (x,y) f(x 1,...,x n ) (x 1 x 0,...,x n 0), (x 1,...,x n ) i x i f xi
B p.1/14 f(x,y) (x,y) x (x,y), y (x,y) f(x,y) x y f x (x,y),f y (x,y) B p.1/14 f(x,y) (x,y) x (x,y), y (x,y) f(x,y) x y f x (x,y),f y (x,y) f(x 1,...,x n ) (x 1 x 0,...,x n 0), (x 1,...,x n ) i x i f xi
i
 i 3 4 4 7 5 6 3 ( ).. () 3 () (3) (4) /. 3. 4/3 7. /e 8. a > a, a = /, > a >. () a >, a =, > a > () a > b, a = b, a < b. c c n a n + b n + c n 3c n..... () /3 () + (3) / (4) /4 (5) m > n, a b >, m > n,
i 3 4 4 7 5 6 3 ( ).. () 3 () (3) (4) /. 3. 4/3 7. /e 8. a > a, a = /, > a >. () a >, a =, > a > () a > b, a = b, a < b. c c n a n + b n + c n 3c n..... () /3 () + (3) / (4) /4 (5) m > n, a b >, m > n,
2 1 κ c(t) = (x(t), y(t)) ( ) det(c (t), c x (t)) = det (t) x (t) y (t) y = x (t)y (t) x (t)y (t), (t) c (t) = (x (t)) 2 + (y (t)) 2. c (t) =
 = (x(t), y(t)) ( ) det(c (t), c x (t)) = det (t) x (t) y (t) y = x (t)y (t) x (t)y (t), (t) c (t) = (x (t)) 2 + (y (t)) 2. c (t) =") 1 1 1.1 I R 1.1.1 c : I R 2 (i) c C (ii) t I c (t) (0, 0) c (t) c(i) c c(t) 1.1.2 (1) (2) (3) (1) r > 0 c : R R 2 : t (r cos t, r sin t) (2) C f : I R c : I R 2 : t (t, f(t)) (3) y = x c : R R 2 : t (t,
1 1 1.1 I R 1.1.1 c : I R 2 (i) c C (ii) t I c (t) (0, 0) c (t) c(i) c c(t) 1.1.2 (1) (2) (3) (1) r > 0 c : R R 2 : t (r cos t, r sin t) (2) C f : I R c : I R 2 : t (t, f(t)) (3) y = x c : R R 2 : t (t,
( ) sin 1 x, cos 1 x, tan 1 x sin x, cos x, tan x, arcsin x, arccos x, arctan x. π 2 sin 1 x π 2, 0 cos 1 x π, π 2 < tan 1 x < π 2 1 (1) (
 sin 1 x, cos 1 x, tan 1 x sin x, cos x, tan x, arcsin x, arccos x, arctan x. π 2 sin 1 x π 2, 0 cos 1 x π, π 2 < tan 1 x < π 2 1 (1) (") 6 20 ( ) sin, cos, tan sin, cos, tan, arcsin, arccos, arctan. π 2 sin π 2, 0 cos π, π 2 < tan < π 2 () ( 2 2 lim 2 ( 2 ) ) 2 = 3 sin (2) lim 5 0 = 2 2 0 0 2 2 3 3 4 5 5 2 5 6 3 5 7 4 5 8 4 9 3 4 a 3 b
6 20 ( ) sin, cos, tan sin, cos, tan, arcsin, arccos, arctan. π 2 sin π 2, 0 cos π, π 2 < tan < π 2 () ( 2 2 lim 2 ( 2 ) ) 2 = 3 sin (2) lim 5 0 = 2 2 0 0 2 2 3 3 4 5 5 2 5 6 3 5 7 4 5 8 4 9 3 4 a 3 b
zz + 3i(z z) + 5 = 0 + i z + i = z 2i z z z y zz + 3i (z z) + 5 = 0 (z 3i) (z + 3i) = 9 5 = 4 z 3i = 2 (3i) zz i (z z) + 1 = a 2 {
 + 5 = 0 + i z + i = z 2i z z z y zz + 3i (z z) + 5 = 0 (z 3i) (z + 3i) = 9 5 = 4 z 3i = 2 (3i) zz i (z z) + 1 = a 2 {") 04 zz + iz z) + 5 = 0 + i z + i = z i z z z 970 0 y zz + i z z) + 5 = 0 z i) z + i) = 9 5 = 4 z i = i) zz i z z) + = a {zz + i z z) + 4} a ) zz + a + ) z z) + 4a = 0 4a a = 5 a = x i) i) : c Darumafactory
04 zz + iz z) + 5 = 0 + i z + i = z i z z z 970 0 y zz + i z z) + 5 = 0 z i) z + i) = 9 5 = 4 z i = i) zz i z z) + = a {zz + i z z) + 4} a ) zz + a + ) z z) + 4a = 0 4a a = 5 a = x i) i) : c Darumafactory
x i [, b], (i 0, 1, 2,, n),, [, b], [, b] [x 0, x 1 ] [x 1, x 2 ] [x n 1, x n ] ( 2 ). x 0 x 1 x 2 x 3 x n 1 x n b 2: [, b].,, (1) x 0, x 1, x 2,, x n
![x i [, b], (i 0, 1, 2,, n),, [, b], [, b] [x 0, x 1 ] [x 1, x 2 ] [x n 1, x n ] ( 2 ). x 0 x 1 x 2 x 3 x n 1 x n b 2: [, b].,, (1) x 0, x 1, x 2,, x n](/thumbs/92/108343288.jpg "x i [, b], (i 0, 1, 2,, n),, [, b], [, b] [x 0, x 1 ] [x 1, x 2 ] [x n 1, x n ] ( 2 ). x 0 x 1 x 2 x 3 x n 1 x n b 2: [, b].,, (1) x 0, x 1, x 2,, x n") 1, R f : R R,.,, b R < b, f(x) [, b] f(x)dx,, [, b] f(x) x ( ) ( 1 ). y y f(x) f(x)dx b x 1: f(x)dx, [, b] f(x) x ( ).,,,,,., f(x)dx,,,, f(x)dx. 1.1 Riemnn,, [, b] f(x) x., x 0 < x 1 < x 2 < < x n 1
1, R f : R R,.,, b R < b, f(x) [, b] f(x)dx,, [, b] f(x) x ( ) ( 1 ). y y f(x) f(x)dx b x 1: f(x)dx, [, b] f(x) x ( ).,,,,,., f(x)dx,,,, f(x)dx. 1.1 Riemnn,, [, b] f(x) x., x 0 < x 1 < x 2 < < x n 1
1 (1) ( i ) 60 (ii) 75 (iii) 315 (2) π ( i ) (ii) π (iii) 7 12 π ( (3) r, AOB = θ 0 < θ < π ) OAB A 2 OB P ( AB ) < ( AP ) (4) 0 < θ < π 2 sin θ
 ( i ) 60 (ii) 75 (iii) 315 (2) π ( i ) (ii) π (iii) 7 12 π ( (3) r, AOB = θ 0 < θ < π ) OAB A 2 OB P ( AB ) < ( AP ) (4) 0 < θ < π 2 sin θ") 1 (1) ( i ) 60 (ii) 75 (iii) 15 () ( i ) (ii) 4 (iii) 7 1 ( () r, AOB = θ 0 < θ < ) OAB A OB P ( AB ) < ( AP ) (4) 0 < θ < sin θ < θ < tan θ 0 x, 0 y (1) sin x = sin y (x, y) () cos x cos y (x, y) 1 c
1 (1) ( i ) 60 (ii) 75 (iii) 15 () ( i ) (ii) 4 (iii) 7 1 ( () r, AOB = θ 0 < θ < ) OAB A OB P ( AB ) < ( AP ) (4) 0 < θ < sin θ < θ < tan θ 0 x, 0 y (1) sin x = sin y (x, y) () cos x cos y (x, y) 1 c
M3 x y f(x, y) (= x) (= y) x + y f(x, y) = x + y + *. f(x, y) π y f(x, y) x f(x + x, y) f(x, y) lim x x () f(x,y) x 3 -
 (= x) (= y) x + y f(x, y) = x + y + *. f(x, y) π y f(x, y) x f(x + x, y) f(x, y) lim x x () f(x,y) x 3 -") M3............................................................................................ 3.3................................................... 3 6........................................... 6..........................................
M3............................................................................................ 3.3................................................... 3 6........................................... 6..........................................
1 (1) () (3) I 0 3 I I d θ = L () dt θ L L θ I d θ = L = κθ (3) dt κ T I T = π κ (4) T I κ κ κ L l a θ L r δr δl L θ ϕ ϕ = rθ (5) l
 () (3) I 0 3 I I d θ = L () dt θ L L θ I d θ = L = κθ (3) dt κ T I T = π κ (4) T I κ κ κ L l a θ L r δr δl L θ ϕ ϕ = rθ (5) l") 1 1 ϕ ϕ ϕ S F F = ϕ (1) S 1: F 1 1 (1) () (3) I 0 3 I I d θ = L () dt θ L L θ I d θ = L = κθ (3) dt κ T I T = π κ (4) T I κ κ κ L l a θ L r δr δl L θ ϕ ϕ = rθ (5) l : l r δr θ πrδr δf (1) (5) δf = ϕ πrδr
1 1 ϕ ϕ ϕ S F F = ϕ (1) S 1: F 1 1 (1) () (3) I 0 3 I I d θ = L () dt θ L L θ I d θ = L = κθ (3) dt κ T I T = π κ (4) T I κ κ κ L l a θ L r δr δl L θ ϕ ϕ = rθ (5) l : l r δr θ πrδr δf (1) (5) δf = ϕ πrδr
Chap9.dvi
 .,. f(),, f(),,.,. () lim 2 +3 2 9 (2) lim 3 3 2 9 (4) lim ( ) 2 3 +3 (5) lim 2 9 (6) lim + (7) lim (8) lim (9) lim (0) lim 2 3 + 3 9 2 2 +3 () lim sin 2 sin 2 (2) lim +3 () lim 2 2 9 = 5 5 = 3 (2) lim
.,. f(),, f(),,.,. () lim 2 +3 2 9 (2) lim 3 3 2 9 (4) lim ( ) 2 3 +3 (5) lim 2 9 (6) lim + (7) lim (8) lim (9) lim (0) lim 2 3 + 3 9 2 2 +3 () lim sin 2 sin 2 (2) lim +3 () lim 2 2 9 = 5 5 = 3 (2) lim
 http://www.ns.kogakuin.ac.jp/~ft13389/lecture/physics1a2b/ pdf I 1 1 1.1 ( ) 1. 30 m µm 2. 20 cm km 3. 10 m 2 cm 2 4. 5 cm 3 km 3 5. 1 6. 1 7. 1 1.2 ( ) 1. 1 m + 10 cm 2. 1 hr + 6400 sec 3. 3.0 10 5 kg
http://www.ns.kogakuin.ac.jp/~ft13389/lecture/physics1a2b/ pdf I 1 1 1.1 ( ) 1. 30 m µm 2. 20 cm km 3. 10 m 2 cm 2 4. 5 cm 3 km 3 5. 1 6. 1 7. 1 1.2 ( ) 1. 1 m + 10 cm 2. 1 hr + 6400 sec 3. 3.0 10 5 kg
FEM原理講座 (サンプルテキスト)
") サンプルテキスト FEM 原理講座 サイバネットシステム株式会社 8 年 月 9 日作成 サンプルテキストについて 各講師が 講義の内容が伝わりやすいページ を選びました テキストのページは必ずしも連続していません 一部を抜粋しています 幾何光学講座については 実物のテキストではなくガイダンスを掲載いたします 対象とする構造系 物理モデル 連続体 固体 弾性体 / 弾塑性体 / 粘弾性体 / 固体
サンプルテキスト FEM 原理講座 サイバネットシステム株式会社 8 年 月 9 日作成 サンプルテキストについて 各講師が 講義の内容が伝わりやすいページ を選びました テキストのページは必ずしも連続していません 一部を抜粋しています 幾何光学講座については 実物のテキストではなくガイダンスを掲載いたします 対象とする構造系 物理モデル 連続体 固体 弾性体 / 弾塑性体 / 粘弾性体 / 固体
φ s i = m j=1 f x j ξ j s i (1)? φ i = φ s i f j = f x j x ji = ξ j s i (1) φ 1 φ 2. φ n = m j=1 f jx j1 m j=1 f jx j2. m
? φ i = φ s i f j = f x j x ji = ξ j s i (1) φ 1 φ 2. φ n = m j=1 f jx j1 m j=1 f jx j2. m") 2009 10 6 23 7.5 7.5.1 7.2.5 φ s i m j1 x j ξ j s i (1)? φ i φ s i f j x j x ji ξ j s i (1) φ 1 φ 2. φ n m j1 f jx j1 m j1 f jx j2. m j1 f jx jn x 11 x 21 x m1 x 12 x 22 x m2...... m j1 x j1f j m j1 x
2009 10 6 23 7.5 7.5.1 7.2.5 φ s i m j1 x j ξ j s i (1)? φ i φ s i f j x j x ji ξ j s i (1) φ 1 φ 2. φ n m j1 f jx j1 m j1 f jx j2. m j1 f jx jn x 11 x 21 x m1 x 12 x 22 x m2...... m j1 x j1f j m j1 x
() Remrk I = [0, ] [x i, x i ]. (x : ) f(x) = 0 (x : ) ξ i, (f) = f(ξ i )(x i x i ) = (x i x i ) = ξ i, (f) = f(ξ i )(x i x i ) = 0 (f) 0.
![() Remrk I = [0, ] [x i, x i ]. (x : ) f(x) = 0 (x : ) ξ i, (f) = f(ξ i )(x i x i ) = (x i x i ) = ξ i, (f) = f(ξ i )(x i x i ) = 0 (f) 0.](/thumbs/89/98384840.jpg "() Remrk I = [0, ] [x i, x i ]. (x : ) f(x) = 0 (x : ) ξ i, (f) = f(ξ i )(x i x i ) = (x i x i ) = ξ i, (f) = f(ξ i )(x i x i ) = 0 (f) 0.") () 6 f(x) [, b] 6. Riemnn [, b] f(x) S f(x) [, b] (Riemnn) = x 0 < x < x < < x n = b. I = [, b] = {x,, x n } mx(x i x i ) =. i [x i, x i ] ξ i n (f) = f(ξ i )(x i x i ) i=. (ξ i ) (f) 0( ), ξ i, S, ε >
() 6 f(x) [, b] 6. Riemnn [, b] f(x) S f(x) [, b] (Riemnn) = x 0 < x < x < < x n = b. I = [, b] = {x,, x n } mx(x i x i ) =. i [x i, x i ] ξ i n (f) = f(ξ i )(x i x i ) i=. (ξ i ) (f) 0( ), ξ i, S, ε >
<4D F736F F D B B83578B6594BB2D834A836F815B82D082C88C60202E646F63>
 電気電子数学入門 サンプルページ この本の定価 判型などは, 以下の URL からご覧いただけます. http://www.morikita.co.jp/books/mid/073471 このサンプルページの内容は, 初版 1 刷発行当時のものです. i 14 (tool) [ ] IT ( ) PC (EXCEL) HP() 1 1 4 15 3 010 9 ii 1... 1 1.1 1 1.
電気電子数学入門 サンプルページ この本の定価 判型などは, 以下の URL からご覧いただけます. http://www.morikita.co.jp/books/mid/073471 このサンプルページの内容は, 初版 1 刷発行当時のものです. i 14 (tool) [ ] IT ( ) PC (EXCEL) HP() 1 1 4 15 3 010 9 ii 1... 1 1.1 1 1.
( ) s n (n = 0, 1,...) n n = δ nn n n = I n=0 ψ = n C n n (1) C n = n ψ α = e 1 2 α 2 n=0 α, β α n n! n (2) β α = e 1 2 α 2 1
 s n (n = 0, 1,...) n n = δ nn n n = I n=0 ψ = n C n n (1) C n = n ψ α = e 1 2 α 2 n=0 α, β α n n! n (2) β α = e 1 2 α 2 1") (3.5 3.8) 03032s 2006.7.0 n (n = 0,,...) n n = δ nn n n = I n=0 ψ = n C n n () C n = n ψ α = e 2 α 2 n=0 α, β α n n (2) β α = e 2 α 2 2 β 2 n=0 =0 = e 2 α 2 β n α 2 β 2 n=0 = e 2 α 2 2 β 2 +β α β n α!
(3.5 3.8) 03032s 2006.7.0 n (n = 0,,...) n n = δ nn n n = I n=0 ψ = n C n n () C n = n ψ α = e 2 α 2 n=0 α, β α n n (2) β α = e 2 α 2 2 β 2 n=0 =0 = e 2 α 2 β n α 2 β 2 n=0 = e 2 α 2 2 β 2 +β α β n α!
i 18 2H 2 + O 2 2H 2 + ( ) 3K
 3K") i 18 2H 2 + O 2 2H 2 + ( ) 3K ii 1 1 1.1.................................. 1 1.2........................................ 3 1.3......................................... 3 1.4....................................
i 18 2H 2 + O 2 2H 2 + ( ) 3K ii 1 1 1.1.................................. 1 1.2........................................ 3 1.3......................................... 3 1.4....................................
2014 S hara/lectures/lectures-j.html r 1 S phone: ,
 14 S1-1+13 http://www.math.kyushu-u.ac.jp/ hara/lectures/lectures-j.html r 1 S1-1+13 14.4.11. 19 phone: 9-8-4441, e-mail: hara@math.kyushu-u.ac.jp Office hours: 1 4/11 web download. I. 1. ϵ-δ 1. 3.1, 3..
14 S1-1+13 http://www.math.kyushu-u.ac.jp/ hara/lectures/lectures-j.html r 1 S1-1+13 14.4.11. 19 phone: 9-8-4441, e-mail: hara@math.kyushu-u.ac.jp Office hours: 1 4/11 web download. I. 1. ϵ-δ 1. 3.1, 3..


18 2 F 12 r 2 r 1 (3) Coulomb km Coulomb M = kg F G = ( ) ( ) ( ) 2 = [N]. Coulomb
![18 2 F 12 r 2 r 1 (3) Coulomb km Coulomb M = kg F G = ( ) ( ) ( ) 2 = [N]. Coulomb](/thumbs/93/114079295.jpg "18 2 F 12 r 2 r 1 (3) Coulomb km Coulomb M = kg F G = ( ) ( ) ( ) 2 = [N]. Coulomb") r 1 r 2 r 1 r 2 2 Coulomb Gauss Coulomb 2.1 Coulomb 1 2 r 1 r 2 1 2 F 12 2 1 F 21 F 12 = F 21 = 1 4πε 0 1 2 r 1 r 2 2 r 1 r 2 r 1 r 2 (2.1) Coulomb ε 0 = 107 4πc 2 =8.854 187 817 10 12 C 2 N 1 m 2 (2.2)
r 1 r 2 r 1 r 2 2 Coulomb Gauss Coulomb 2.1 Coulomb 1 2 r 1 r 2 1 2 F 12 2 1 F 21 F 12 = F 21 = 1 4πε 0 1 2 r 1 r 2 2 r 1 r 2 r 1 r 2 (2.1) Coulomb ε 0 = 107 4πc 2 =8.854 187 817 10 12 C 2 N 1 m 2 (2.2)
研修コーナー
 l l l l l l l l l l l α α β l µ l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l
l l l l l l l l l l l α α β l µ l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l
70 : 20 : A B (20 ) (30 ) 50 1
 (30 ) 50 1") 70 : 0 : A B (0 ) (30 ) 50 1 1 4 1.1................................................ 5 1. A............................................... 6 1.3 B............................................... 7 8.1 A...............................................
70 : 0 : A B (0 ) (30 ) 50 1 1 4 1.1................................................ 5 1. A............................................... 6 1.3 B............................................... 7 8.1 A...............................................
(1) 3 A B E e AE = e AB OE = OA + e AB = (1 35 e ) e OE z 1 1 e E xy e = 0 e = 5 OE = ( 2 0 0) E ( 2 0 0) (2) 3 E P Q k EQ = k EP E y 0
 3 A B E e AE = e AB OE = OA + e AB = (1 35 e ) e OE z 1 1 e E xy e = 0 e = 5 OE = ( 2 0 0) E ( 2 0 0) (2) 3 E P Q k EQ = k EP E y 0") (1) 3 A B E e AE = e AB OE = OA + e AB = (1 35 e 0 1 15 ) e OE z 1 1 e E xy 5 1 1 5 e = 0 e = 5 OE = ( 2 0 0) E ( 2 0 0) (2) 3 E P Q k EQ = k EP E y 0 Q y P y k 2 M N M( 1 0 0) N(1 0 0) 4 P Q M N C EP
(1) 3 A B E e AE = e AB OE = OA + e AB = (1 35 e 0 1 15 ) e OE z 1 1 e E xy 5 1 1 5 e = 0 e = 5 OE = ( 2 0 0) E ( 2 0 0) (2) 3 E P Q k EQ = k EP E y 0 Q y P y k 2 M N M( 1 0 0) N(1 0 0) 4 P Q M N C EP
O x y z O ( O ) O (O ) 3 x y z O O x v t = t = 0 ( 1 ) O t = 0 c t r = ct P (x, y, z) r 2 = x 2 + y 2 + z 2 (t, x, y, z) (ct) 2 x 2 y 2 z 2 = 0
 O (O ) 3 x y z O O x v t = t = 0 ( 1 ) O t = 0 c t r = ct P (x, y, z) r 2 = x 2 + y 2 + z 2 (t, x, y, z) (ct) 2 x 2 y 2 z 2 = 0") 9 O y O ( O ) O (O ) 3 y O O v t = t = 0 ( ) O t = 0 t r = t P (, y, ) r = + y + (t,, y, ) (t) y = 0 () ( )O O t (t ) y = 0 () (t) y = (t ) y = 0 (3) O O v O O v O O O y y O O v P(, y,, t) t (, y,, t )
9 O y O ( O ) O (O ) 3 y O O v t = t = 0 ( ) O t = 0 t r = t P (, y, ) r = + y + (t,, y, ) (t) y = 0 () ( )O O t (t ) y = 0 () (t) y = (t ) y = 0 (3) O O v O O v O O O y y O O v P(, y,, t) t (, y,, t )
 20 9 19 1 3 11 1 3 111 3 112 1 4 12 6 121 6 122 7 13 7 131 8 132 10 133 10 134 12 14 13 141 13 142 13 143 15 144 16 145 17 15 19 151 1 19 152 20 2 21 21 21 211 21 212 1 23 213 1 23 214 25 215 31 22 33
20 9 19 1 3 11 1 3 111 3 112 1 4 12 6 121 6 122 7 13 7 131 8 132 10 133 10 134 12 14 13 141 13 142 13 143 15 144 16 145 17 15 19 151 1 19 152 20 2 21 21 21 211 21 212 1 23 213 1 23 214 25 215 31 22 33