PowerPoint プレゼンテーション
|
|
|
- ひろじ あざみ
- 5 years ago
- Views:
Transcription
1 Arduino 入門勉強会 #2 センサによる入出力 平成 27 年 7 月 7 日 ソフトピアジャパンドリーム コア 1F ネクストコア





2 センサ入出力 Arduino にセンサなど様々な入出力部品を取り付け動作させてみます 今回の勉強会で扱うのは以下の部品です 入力 : タクトスイッチ ボリューム抵抗 ( 半固定抵抗 ) 光センサ (CDS) 温度センサ 出力 :LED( 単色 ) ピエゾスピーカー サーボ フルカラー LED タクトスイッチ ボリューム抵抗 ( 半固定抵抗 ) 光センサ (CDS) 温度センサ LED( 単色 ) ピエゾスピーカーサーボフルカラー LED
3 デジタル入力 デジタル入力ピンでは digitalread 関数を用いて 5V 電圧の ON/OFF 状態を読み取ることができます デジタル入出力ピン (pin0 13)


4 サンプル Button タクトスイッチのボタンを押すと LED が点灯するサンプルスケッチです メニューから ファイル スケッチの例 02.digital Button と選択します

5 サンプル Button : 回路 10 分 スイッチの ON/OFF 状態を判断するための回路と LED を点灯するための回路の組み合わせです LED LED タクトスイッチ 抵抗 10KΩ アノード + タクトスイッチ 脚の長い方が + です カソード 抵抗 330Ω Pin13 Pin2 抵抗 10KΩ 茶黒橙金 抵抗 330Ω 橙橙茶金 5V GND
6 サンプル Button : コード 定数の宣言 変数の宣言 初期化 // constants won't change. They're used here to // set pin numbers: const int buttonpin = 2; // the number of the pushbutton pin const int ledpin = 13; // the number of the LED pin // variables will change: int buttonstate = 0; // variable for reading the pushbutton status void setup() { // initialize the LED pin as an output: pinmode(ledpin, OUTPUT); LED 用のピンを出力に設定 // initialize the pushbutton pin as an input: pinmode(buttonpin, INPUT); ボタン用のピンを入力に設定 ボタン ( スイッチ ) に使用するピン番号の定義 LED に使うデジタルピンの番号の定義 ボタンの状態を表す変数 void loop() { // read the state of the pushbutton value: buttonstate = digitalread(buttonpin); ボタン用ピンにかかっている電圧が ON(HIGH) か OFF(LOW) か読み取り メイン処理の記述 // check if the pushbutton is pressed. // if it is, the buttonstate is HIGH: if (buttonstate == HIGH) { // turn LED on: digitalwrite(ledpin, HIGH); LEDを点ける (LEDピンの電圧をHIGHにする) else { // turn LED off: digitalwrite(ledpin, LOW); LEDを消す (LEDピンの電圧をLOWにする) 条件分岐 : もしも ボタン用ピンの電圧が ON(HIGH) ならば ボタンが ON(HIGH) の場合 ボタンが OFF(LOW) の場合


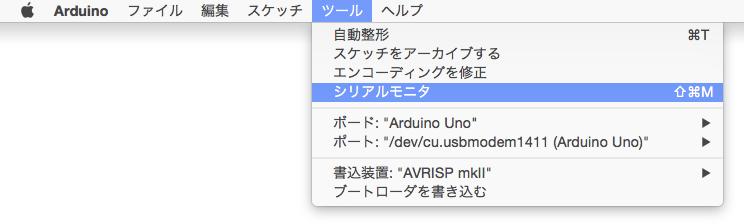
7 シリアルモニタを使ってみよう Arduino と PC は USB ケーブルを通じてシリアル通信をすることができます PC と Arduino を USB ケーブルで接続した後 ウィンドウ右上のシリアルモニタアイコンをクリックします シリアルモニタアイコン メニューからの場合 ツール シリアルモニタ と選択します PC(Windows,Mac,Linux) USB Arduino ボード

8 シリアルモニタ シリアルモニタを使用すると Aruduino からシリアル通信で送信された情報を表示させることが出来ます 送信文字列の記入 送信ボタン 受信内容の表示 改行コードの設定 通信速度の設定

9 シリアルモニタ 以下のプログラムを書き込み シリアルモニタで表示してみましょう 5 分
10 シリアルモニタ Arduino から送信された文字列 Hello, world! が表示されます
11 コード解説 Arduino ではシリアル通信の処理が予め用意されており Serial.begin() 関数を呼び出せば 以後シリアル通信が可能になります 初期化 メイン処理 void setup() { // put your setup code here, to run once: Serial.begin(9600); シリアル通信の開始 ( 通信速度 9600bps) void loop() { // put your main code here, to run repeatedly: Serial.println("Hello, world!"); delay(300); 300 ミリ秒待機する シリアルに文字列 Hello, world! を書き出す シリアルへの書き出しにはいくつかの関数が用意されており 文字列出力の場合は 改行有りと改行なしの 2 つが用意されています 改行有り :Serial.println( Hello, world! ); 改行無し :Serial.print( Hello, world! );

12 アナログ入力 アナログ入力ピンでは analogread 関数を用いて 0 から 5V までの電圧を 0 から 1023 までの値としてを読み取ることができます アナログ入力ピン (A0~A5)


13 サンプル AnalogInOutSerial センサからのアナログ入力値に応じて LED の明るさが変化するサンプルスケッチです PC でセンサの入力値をチェックできるようシリアル通信も行います メニューから ファイル スケッチの例 AnalogInOutSerial と選択します 03.Analog



14 AnalogInOutSerial : 回路 10 分 センサの状態を読み取る回路と LED を点灯するための回路の組み合わせです LED LED 脚の長い方が + です ボリューム抵抗 10KΩ アノード + カソード 抵抗 330Ω ボリューム抵抗 10KΩ Pin キット収容品 ピン 1 を電源 (5V ) ピン 2 をアナログ入力ピン ピン 3 を GND へ繋ぎます 抵抗 330Ω 5V GND Pin A0 橙橙茶金
15 AnalogInOutSerial : コード 定数の宣言 変数の宣言 初期化 // These constants won't change. They're used to give names アナログ入力に使用するピン番号の定義 // to the pins used: const int analoginpin = A0; // Analog input pin that the potentiometer is attached to const int analogoutpin = 9; // Analog output pin that the LED is attached to LEDに使うピンの番号の定義 int sensorvalue = 0; int outputvalue = 0; // value read from the pot // value output to the PWM (analog out) void setup() { // initialize serial communications at 9600 bps: Serial.begin(9600); シリアル通信の開始 ( 通信速度 9600bps) センサー入力値 LED 用出力値 void loop() { // read the analog in value: アナログ入力値を読み取る (0 1023) sensorvalue = analogread(analoginpin); // map it to the range of the analog out: 値の調整 :0 1023のsensorValueを0 255に割り振ってoutputValueへ outputvalue = map(sensorvalue, 0, 1023, 0, 255); // change the analog out value: アナログ出力ピンから出力 analogwrite(analogoutpin, outputvalue); メイン処理の記述 // print the results to the serial monitor: 文字列 sensor = をシリアルポートに書き出す Serial.print("sensor = " ); Serial.print(sensorValue); センサ読み取り値をシリアルポートに書き出す Serial.print(" t output = "); Serial.println(outputValue); 文字列 t output = をシリアルポートに書き出す // wait 2 milliseconds before the next loop // for the analog-to-digital converter to settle // after the last reading: delay(2); 2ミリ秒待機 LED 用出力値をシリアルポートに書き出す
16 入力センサを変えてみよう 5 分 入力に用いるセンサをボリューム抵抗から光センサ (CSD) に変更します LED LED 光センサ (CDS) 抵抗 10KΩ アノード + 脚の長い方が + です カソード 抵抗 330Ω 光センサ (CDS) Pin 9 極性はありません 抵抗 10KΩ 茶黒橙金 抵抗 330Ω Pin A0 橙橙茶金 5V GND
17 定数の宣言 反応を良くしてみよう シリアルモニタの情報を基にセンサの値をより有効に使用しよう // These constants won't change. They're used to give names // to the pins used: const int analoginpin = A0; // Analog input pin that the potentiometer is attached to const int analogoutpin = 9; // Analog output pin that the LED is attached to 5 分 変数の宣言 int sensorvalue = 0; int outputvalue = 0; // value read from the pot // value output to the PWM (analog out) 初期化 void setup() { // initialize serial communications at 9600 bps: Serial.begin(9600); void loop() { // read the analog in value: sensorvalue = analogread(analoginpin); // map it to the range of the analog out: outputvalue = map(sensorvalue, 150, 700, 0, 255); // change the analog out value: analogwrite(analogoutpin, outputvalue); 光センサからの入力値が 150 から 700 までなのでそこを有効な値として使用する メイン処理の記述 // print the results to the serial monitor: Serial.print("sensor = " ); Serial.print(sensorValue); Serial.print(" t output = "); Serial.println(outputValue); // wait 2 milliseconds before the next loop // for the analog-to-digital converter to settle // after the last reading: delay(2);
 極性はありません 抵抗 10KΩ Pin A0 茶黒橙金")
18 出力装置を変えてみよう 1 LED をピエゾスピーカーと変えてみましょう 5 分 ピエゾスピーカ 光センサ (CDS) ピエゾスピーカ 抵抗 10KΩ Pin 9 光センサ (CDS) 極性はありません 抵抗 10KΩ Pin A0 茶黒橙金 5V GND
19 tone() 関数 tone(pin, frequency) tone(pin, frequency, duration) 指定した周波数の矩形波を生成します 時間 (duration) を指定しなかった場合 notone() を実行するまで動作を続けます 出力ピンに圧電ブザーやスピーカに接続することで 一定ピッチの音を再生できます パラメータ pin: トーンを出力するピン frequency: 周波数 (Hz) duration: 出力する時間をミリ秒で指定できます ( オプション )
20 スピーカー用にコード書き換え 5 分 定数の宣言 // These constants won't change. They're used to give names // to the pins used: const int analoginpin = A0; // Analog input pin that the potentiometer is attached to const int analogoutpin = 9; // Analog output pin that the LED is attached to 変数の宣言 int sensorvalue = 0; int outputvalue = 0; // value read from the pot // value output to the PWM (analog out) 初期化 void setup() { // initialize serial communications at 9600 bps: Serial.begin(9600); void loop() { // read the analog in value: sensorvalue = analogread(analoginpin); // map it to the range of the analog out: 値の調整 : のsensorValueを に割り振ってoutputValueへ outputvalue = map(sensorvalue, 150, 700, 20, 1000); // change the analog out value: tone(analogoutpin, outputvalue); アナログ出力ピンから指定の周波数の波形出力する関数 メイン処理の記述 // print the results to the serial monitor: Serial.print("sensor = " ); Serial.print(sensorValue); Serial.print(" t output = "); Serial.println(outputValue); // wait 2 milliseconds before the next loop // for the analog-to-digital converter to settle // after the last reading: delay(2);
 サーボ 抵抗 10KΩ 黄 :")
 極性はありません 抵抗 10KΩ 茶黒橙金 Pin A0")
21 出力装置を変えてみよう 2 ピエゾスピーカーをサーボに変えてみましょう 5 分 サーボ 光センサ (CDS) サーボ 抵抗 10KΩ 黄 : 信号赤 : 電源 (5V) 茶 :GND Pin 9 光センサ (CDS) 極性はありません 抵抗 10KΩ 茶黒橙金 Pin A0 5V GND
22 Servo クラス このライブラリは RC サーボモータのコントロールに用います 標準的なサーボでは 0 から 180 度の範囲でシャフトの位置 ( 角度 ) を指定します コーディング例 : ピン 9 に接続されたサーボを 90 度にセットする #include <Servo.h> Servo myservo; void setup(){ myservo.attach(9); myservo.write(90); Servoクラスのヘッダファイルを読み込むする Servoクラスのインスタンスをmyservoとして宣言デジタル9 番ピンをサーボ制御に指定サーボのシャフトを90 度にセットする void loop() {
23 サーボ用にコード書き換え 10 分 ヘッダの宣言定数の宣言変数の宣言初期化 #include <Servo.h> サーボクラスのヘッダファイルを読み込み // These constants won't change. They're used to give names // to the pins used: const int analoginpin = A0; // Analog input pin that the potentiometer is attached to const int analogoutpin = 9; // Analog output pin that the LED is attached to int sensorvalue = 0; int outputvalue = 0; Servo myservo; // value read from the pot // value output to the PWM (analog out) サーボの変数名の宣言 void setup() { // initialize serial communications at 9600 bps: Serial.begin(9600); myservo.attach(analogoutpin); サーボ制御ピンを割り当て void loop() { // read the analog in value: sensorvalue = analogread(analoginpin); 値の調整 : のsensorValueを0 180に割り振ってoutputValueへ // map it to the range of the analog out: outputvalue = map(sensorvalue, 0, 1023, 0, 255); // change the analog out value: myservo.write(outputvalue); サーボの回転角度を指示 メイン処理の記述 // print the results to the serial monitor: Serial.print("sensor = " ); Serial.print(sensorValue); Serial.print(" t output = "); Serial.println(outputValue); // wait 2 milliseconds before the next loop // for the analog-to-digital converter to settle // after the last reading: delay(100); 待機を100ミリ秒に増加
 カソードR( ー ) カソードB( ー ) アノード (+) 光センサ (CDS) Pin 9 11 極性はありません 抵抗 10KΩ 茶黒橙金 抵抗 330Ω 5V GND Pin A0")
24 発展 : フルカラー LED で表示 10 分 光センサの入力量に応じてフルカラー LED を発光させてみます フルカラー LED フルカラー LED 抵抗 330KΩ x 3 光センサ (CDS) 抵抗 10KΩ カソードG( ー ) カソードR( ー ) カソードB( ー ) アノード (+) 光センサ (CDS) Pin 9 11 極性はありません 抵抗 10KΩ 茶黒橙金 抵抗 330Ω 5V GND Pin A0 橙橙茶金
25 フルカラー LED 用にコード書き換え 1 サンプル AnalogInOutSerial を読み込み以下の下線の箇所を書き換えます 15 分 定数の宣言 変数の宣言 初期化 // These constants won't change. They're used to give names // to the pins used: const int analoginpin = A0; // Analog input pin that the potentiometer is attached to const int analogoutpinr = 9; // Analog output pin that the LED is attached to const int analogoutping = 11; // Analog output pin that the LED is attached to const int analogoutpinb = 10; // Analog output pin that the LED is attached to int sensorvalue = 0; int outputvalue = 0; // value read from the pot // value output to the PWM (analog out) void setup() { // initialize serial communications at 9600 bps: Serial.begin(9600); RGB 三色分のピンを宣言する つづく
26 フルカラー LED 用にコード書き換え 2 メイン処理の記述 つづき void loop() { // read the analog in value: sensorvalue = analogread(analoginpin); // map it to the range of the analog out: 値の調整 : のsensorValueを0 511に割り振ってoutputValueへ outputvalue = map(sensorvalue, 150, 700, 0, 511); outputvalueが以下かどうかで条件分岐 // change the analog out value: if(outputvalue <= 255){ analogwrite(analogoutpinr, 255); 赤成分は消灯 analogwrite(analogoutping, outputvalue); 青 緑の色変化緑成分は徐々に明るく analogwrite(analogoutpinb, outputvalue); 青成分は徐々に暗く else{ outputvalue = outputvalue - 256; 赤成分は徐々に明るく analogwrite(analogoutpinr, outputvalue); analogwrite(analogoutping, outputvalue); 緑 赤の色変化緑成分は徐々に暗く analogwrite(analogoutpinb, 255); // print the results to the serial monitor: Serial.print("sensor = " ); Serial.print(sensorValue); Serial.print(" t output = "); Serial.println(outputValue); // wait 2 milliseconds before the next loop // for the analog-to-digital converter to settle // after the last reading: delay(2);
 アノード (+) 抵抗 330KΩ x 3 温度センサ LM35 Pin 9 11 1 2 3 1: 電源 (5V) 2: 信号 3:GND 抵抗 330Ω Pin A0 橙橙茶金 5V GND")
27 入力センサを変えてみよう 5 分 光センサ (CDS) を温度センサに変えてみましょう フルカラー LED フルカラー LED 温度センサ カソード G( ー ) カソード R( ー ) カソード B( ー ) アノード (+) 抵抗 330KΩ x 3 温度センサ LM35 Pin : 電源 (5V) 2: 信号 3:GND 抵抗 330Ω Pin A0 橙橙茶金 5V GND
28 温度センサ用にコード書き換え 1 温度センサ用にコードを一部書き換えます 5 分 定数の宣言 変数の宣言 初期化 // These constants won't change. They're used to give names // to the pins used: const int analoginpin = A0; // Analog input pin that the potentiometer is attached to const int analogoutpinr = 9; // Analog output pin that the LED is attached to const int analogoutping = 11; // Analog output pin that the LED is attached to const int analogoutpinb = 10; // Analog output pin that the LED is attached to int sensorvalue = 0; int outputvalue = 0; // value read from the pot // value output to the PWM (analog out) void setup() { // initialize serial communications at 9600 bps: Serial.begin(9600); 変更なし つづく
29 温度センサ用にコード書き換え 2 メイン処理の記述 つづき void loop() { // read the analog in value: sensorvalue = analogread(analoginpin); sensorvalue = sensorvalue * 0.48; センサ読み取り値に係数 0.48をかけて温度に変換 // map it to the range of the analog out: outputvalue = map(sensorvalue, 25, 30, 0, 511); // change the analog out value: if(outputvalue <= 255){ 値の調整 :25 30のsensorValueを0 511に割り振ってoutputValueへ analogwrite(analogoutpinr, 255); analogwrite(analogoutping, outputvalue); analogwrite(analogoutpinb, outputvalue); else{ outputvalue = outputvalue - 256; analogwrite(analogoutpinr, outputvalue); analogwrite(analogoutping, outputvalue); analogwrite(analogoutpinb, 255); // print the results to the serial monitor: Serial.print("sensor = " ); Serial.print(sensorValue); Serial.print(" t output = "); Serial.println(outputValue); // wait 2 milliseconds before the next loop // for the analog-to-digital converter to settle // after the last reading: delay(2);
arduino プログラミング課題集 ( Ver /06/01 ) arduino と各種ボードを組み合わせ 制御するためのプログラミングを学 ぼう! 1 入出力ポートの設定と利用方法 (1) 制御( コントロール ) する とは 外部装置( ペリフェラル ) が必要とする信号をマイ
 arduino と各種ボードを組み合わせ 制御するためのプログラミングを学 ぼう! 1 入出力ポートの設定と利用方法 (1) 制御( コントロール ) する とは 外部装置( ペリフェラル ) が必要とする信号をマイ") arduino プログラミング課題集 ( Ver.5.0 2017/06/01 ) arduino と各種ボードを組み合わせ 制御するためのプログラミングを学 ぼう! 1 入出力ポートの設定と利用方法 (1) 制御( コントロール ) する とは 外部装置( ペリフェラル ) が必要とする信号をマイコンから伝える 外部装置の状態をマイコンで確認する 信号の授受は 入出力ポート 経由で行う (2) 入出力ポートとは?
arduino プログラミング課題集 ( Ver.5.0 2017/06/01 ) arduino と各種ボードを組み合わせ 制御するためのプログラミングを学 ぼう! 1 入出力ポートの設定と利用方法 (1) 制御( コントロール ) する とは 外部装置( ペリフェラル ) が必要とする信号をマイコンから伝える 外部装置の状態をマイコンで確認する 信号の授受は 入出力ポート 経由で行う (2) 入出力ポートとは?
スライド 1
 マイコンをはじめよう 割り込みを使おう 徳島大学大学院ソシオテクノサイエンス研究部 技術専門職員辻明典 連絡先 : 770-8506 徳島市南常三島町 2-1 TEL/FAX: 088-656-7485 E-mail::a-tsuji@is.tokushima-u.ac.jp 割り込みを使おう 第 8 回 2013/9/14(Sat) 10:00 11:30 2 本日の予定 1 割り込みについて 2
マイコンをはじめよう 割り込みを使おう 徳島大学大学院ソシオテクノサイエンス研究部 技術専門職員辻明典 連絡先 : 770-8506 徳島市南常三島町 2-1 TEL/FAX: 088-656-7485 E-mail::a-tsuji@is.tokushima-u.ac.jp 割り込みを使おう 第 8 回 2013/9/14(Sat) 10:00 11:30 2 本日の予定 1 割り込みについて 2
スライド 1
 2013 年 6 月 10 日 : 草稿 2013 年 7 月 19 日 : 初稿 マイコンをはじめよう センサを使おう 徳島大学大学院ソシオテクノサイエンス研究部 技術専門職員辻明典 連絡先 : 770-8506 徳島市南常三島町 2-1 TEL/FAX: 088-656-7485 E-mail::a-tsuji@is.tokushima-u.ac.jp センサを使おう 第 3 回 2013/8/3(Sat)
2013 年 6 月 10 日 : 草稿 2013 年 7 月 19 日 : 初稿 マイコンをはじめよう センサを使おう 徳島大学大学院ソシオテクノサイエンス研究部 技術専門職員辻明典 連絡先 : 770-8506 徳島市南常三島町 2-1 TEL/FAX: 088-656-7485 E-mail::a-tsuji@is.tokushima-u.ac.jp センサを使おう 第 3 回 2013/8/3(Sat)
Microsoft Word - SU1204教本(Driver)原稿.docx
原稿.docx") void setup(){ pinmode(13, OUTPUT); //13 void loop(){ digitalwrite(13, HIGH); //13 HIGH delay(500); digitalwrite(13, LOW); //13 LOW delay(500); setup pinmode loop delay C M B void setup(){ pinmode(12,output);
void setup(){ pinmode(13, OUTPUT); //13 void loop(){ digitalwrite(13, HIGH); //13 HIGH delay(500); digitalwrite(13, LOW); //13 LOW delay(500); setup pinmode loop delay C M B void setup(){ pinmode(12,output);
<4D F736F F F696E74202D F4B87555F A838B B F5F91E63389F12E >
 プログラミング演習 Ⅱ フィジカルコンピューティング 第 3 回 Processing 連携 サーボモータ 圧電スピーカの使い方 担当 : 橋本 今日の内容 Processing と Arduino の連携 データの受信 (Arduino Processing) センサからの入力値を Processing で可視化する データの送信 (Processing Arduino) Processing からの指令で
プログラミング演習 Ⅱ フィジカルコンピューティング 第 3 回 Processing 連携 サーボモータ 圧電スピーカの使い方 担当 : 橋本 今日の内容 Processing と Arduino の連携 データの受信 (Arduino Processing) センサからの入力値を Processing で可視化する データの送信 (Processing Arduino) Processing からの指令で
 AREF RESET L TX RX ON 12 ~11 ~10 ~9 8 7 ~6 ~5 4 ~3 2 TX->1 RX
AREF RESET L TX RX ON 12 ~11 ~10 ~9 8 7 ~6 ~5 4 ~3 2 TX->1 RX Taro-テキスト.jtd
 付録 1 実習テキスト Arduinoスケッチプログラミング Arduinoスケッチプログラミング Arduinoスケッチプログラミング 1. 的 作成 : 米田文彦 Arduino アルドゥイーノ の基本構成 機能を理解し 簡単なスケッチ * を行える能力を身につける また パソコンの標準的なキーボードやマウスといった入出力デバイスではなく センサやモータのような物理的な情報を扱える入出力デバイスを用いた制御をすることで
付録 1 実習テキスト Arduinoスケッチプログラミング Arduinoスケッチプログラミング Arduinoスケッチプログラミング 1. 的 作成 : 米田文彦 Arduino アルドゥイーノ の基本構成 機能を理解し 簡単なスケッチ * を行える能力を身につける また パソコンの標準的なキーボードやマウスといった入出力デバイスではなく センサやモータのような物理的な情報を扱える入出力デバイスを用いた制御をすることで
講習会 Arduino
 講習会 Arduino 6 回目 タイマー ( 時間の関数 ) 目的 時間に関する関数を覚え プログラムの制御に使う タイマー割込みを知る 制御をするときにセンサー等の外部入力以外にも時間で制御したい時があるかもしれない 例えば一定の間隔をあけてから制御したい場合や制御してからある時間以内ではこの制御 過ぎてからはこの制御をしたいなど 時間に関する関数を紹介する 時間による割り込みを入れることにより正確な計測を行うことができる
講習会 Arduino 6 回目 タイマー ( 時間の関数 ) 目的 時間に関する関数を覚え プログラムの制御に使う タイマー割込みを知る 制御をするときにセンサー等の外部入力以外にも時間で制御したい時があるかもしれない 例えば一定の間隔をあけてから制御したい場合や制御してからある時間以内ではこの制御 過ぎてからはこの制御をしたいなど 時間に関する関数を紹介する 時間による割り込みを入れることにより正確な計測を行うことができる
Arduino の勉強会 平成 23 年 1 月 5 日於 : 鳥取大学
 Arduino の勉強会 平成 23 年 1 月 5 日於 : 鳥取大学 内容 1 Arduino とは... 2 2 インストールと動作チェック... 2 3 LED の点滅回路... 4 4 液晶 (LCD) の表示... 6 5 電圧計測... 7 6 アナログ出力... 8 7 サーボの動作... 9 8 例題 : ボリュームに応じて LED の明るさを変化させましょう... 10 9 例題
Arduino の勉強会 平成 23 年 1 月 5 日於 : 鳥取大学 内容 1 Arduino とは... 2 2 インストールと動作チェック... 2 3 LED の点滅回路... 4 4 液晶 (LCD) の表示... 6 5 電圧計測... 7 6 アナログ出力... 8 7 サーボの動作... 9 8 例題 : ボリュームに応じて LED の明るさを変化させましょう... 10 9 例題
<4D F736F F F696E74202D F4B87555F A838B B F5F91E63189F12E >
 プログラミング演習 Ⅱ フィジカルコンピューティング 第 1 回 Arduino をはじめよう 担当 : 橋本 フィジカルコンピューティングとは コンピュータにさまざまな入出力デバイスをつないで実世界との物理的なやりとりを実現する方法 プログラミングと電子工作の融合 電気的な装置をプログラムから操れる! 入力 プログラム 出力 人の活動や物理現象 2 センサとアクチュエータ センサ ( 入力 ) 光センサ
プログラミング演習 Ⅱ フィジカルコンピューティング 第 1 回 Arduino をはじめよう 担当 : 橋本 フィジカルコンピューティングとは コンピュータにさまざまな入出力デバイスをつないで実世界との物理的なやりとりを実現する方法 プログラミングと電子工作の融合 電気的な装置をプログラムから操れる! 入力 プログラム 出力 人の活動や物理現象 2 センサとアクチュエータ センサ ( 入力 ) 光センサ
1 1 Arduino とは Arduino アルドゥイーノ は ワンボードマイコンの一種で オープンソースハードウェアであ り 組み立て済みの基板を購入することもできるほか 誰でも自分の手で Arduino を組み立てる ことができます USBコネクタでPCと接続して利用します デジタルポートとア
 1 1 Arduino とは Arduino アルドゥイーノ は ワンボードマイコンの一種で オープンソースハードウェアであ り 組み立て済みの基板を購入することもできるほか 誰でも自分の手で Arduino を組み立てる ことができます USBコネクタでPCと接続して利用します デジタルポートとアナログポートを利用し 様々 なセンサーを接続したり デジタルポートの出力により モーターや各種機器をコントロールする
1 1 Arduino とは Arduino アルドゥイーノ は ワンボードマイコンの一種で オープンソースハードウェアであ り 組み立て済みの基板を購入することもできるほか 誰でも自分の手で Arduino を組み立てる ことができます USBコネクタでPCと接続して利用します デジタルポートとアナログポートを利用し 様々 なセンサーを接続したり デジタルポートの出力により モーターや各種機器をコントロールする
Microsoft Word - SU1203教本(Sens)原稿.docx
原稿.docx") int valsw; // void setup(){ pinmode(13, OUTPUT); pinmode(a4, INPUT_PULLUP); //13 //A4 } void loop(){ valsw = digitalread(a4); if(valsw == 0){ //A4 valsw //valsw } digitalwrite(13, HIGH); //valsw 0LED ------(A)
int valsw; // void setup(){ pinmode(13, OUTPUT); pinmode(a4, INPUT_PULLUP); //13 //A4 } void loop(){ valsw = digitalread(a4); if(valsw == 0){ //A4 valsw //valsw } digitalwrite(13, HIGH); //valsw 0LED ------(A)
Arduino UNO IS Report No. Report Medical Information System Laboratory
 Arduino UNO 2015 2 25 IS Report No. Report Medical Information System Laboratory Abstract ( ) Arduino / Arduino Bluetooth Bluetooth : Arduino Arduino UNO Arduino IDE micro computer LED 1............................
Arduino UNO 2015 2 25 IS Report No. Report Medical Information System Laboratory Abstract ( ) Arduino / Arduino Bluetooth Bluetooth : Arduino Arduino UNO Arduino IDE micro computer LED 1............................
GR-SAKURA-SAのサンプルソフト説明
 フルカラーシリアル LED テープ (1m) を GR-KURUMI で使ってみる 2014/2/25 がじぇっとるねさす鈴木 Rev. 1.00 フルカラーシリアル LED の特徴 http://www.switch-science.com/catalog/1399/ 3570 円 1m で 60 個の LED がついている 電源と信号線 1 本で制御する x 24 この信号を 24 個送信して
フルカラーシリアル LED テープ (1m) を GR-KURUMI で使ってみる 2014/2/25 がじぇっとるねさす鈴木 Rev. 1.00 フルカラーシリアル LED の特徴 http://www.switch-science.com/catalog/1399/ 3570 円 1m で 60 個の LED がついている 電源と信号線 1 本で制御する x 24 この信号を 24 個送信して
PowerPoint Presentation
 マイコンシステム 第 12 回 青森大学ソフトウェア情報学部 橋本恭能 haship@aomori-u.ac.jp 目次 講義 内部設計 3 Deviceタブ Actionタブの関数実装 例題 定義した機能を実現する方法を検討する 課題 動作確認 2 講義 内部設計 3 残りの関数を実装 3 組込みシステム開発 週テーマ内容 7 キッチンタイマーの組立キッチンタイマーのハードを製作 確認 8 9 10
マイコンシステム 第 12 回 青森大学ソフトウェア情報学部 橋本恭能 haship@aomori-u.ac.jp 目次 講義 内部設計 3 Deviceタブ Actionタブの関数実装 例題 定義した機能を実現する方法を検討する 課題 動作確認 2 講義 内部設計 3 残りの関数を実装 3 組込みシステム開発 週テーマ内容 7 キッチンタイマーの組立キッチンタイマーのハードを製作 確認 8 9 10
訂正 _ 第 1 回 1 Arduino Arduino を用意する 入力 アナログ Analog 入出力 任意の電圧を扱える 電源系 外部入力 7 12V デジタル digital 入出力 リセットボタン Low High いわゆる 01 が入出力される 通常は Low 0V GND High 5
 訂正 _ 第 1 回 1 Arduino Arduino を用意する 入力 アナログ Analog 入出力 任意の電圧を扱える 電源系 外部入力 7 12V デジタル digital 入出力 リセットボタン Low High いわゆる 01 が入出力される 通常は Low 0V GND High 5V となる アナログピンは入力のみでした 申し訳ない 第3回 Arduino 入門 シリアル通信 パソコン通信編
訂正 _ 第 1 回 1 Arduino Arduino を用意する 入力 アナログ Analog 入出力 任意の電圧を扱える 電源系 外部入力 7 12V デジタル digital 入出力 リセットボタン Low High いわゆる 01 が入出力される 通常は Low 0V GND High 5V となる アナログピンは入力のみでした 申し訳ない 第3回 Arduino 入門 シリアル通信 パソコン通信編
DCモータの制御
 Arduino の紹介 京都大学防災研究所技術室 中川潤 目次 はじめに Arduino とは DC モーターの制御 振動台模型の活用 センサーの液晶表示 センサー液晶表示の活用 おわりに 参考文献 はじめに 目的 Arduino の簡単な使い方を学んでもらい 業務に役立てるきっかけにする Arduino が実際にどんなものに使用できるかイメージをつかんでもらう Arduino とは マイコンを使った開発ボードである
Arduino の紹介 京都大学防災研究所技術室 中川潤 目次 はじめに Arduino とは DC モーターの制御 振動台模型の活用 センサーの液晶表示 センサー液晶表示の活用 おわりに 参考文献 はじめに 目的 Arduino の簡単な使い方を学んでもらい 業務に役立てるきっかけにする Arduino が実際にどんなものに使用できるかイメージをつかんでもらう Arduino とは マイコンを使った開発ボードである
目次 1 I2Cとは 13 結線写真 2 センサの多くがI2Cに対応 14 WHO_AM_I 3 マイコンでのI2C通信例 15 I2C読込みプログラム 4 とは 16 I2C読込みスクリプト概要① 5 タイミングパラメータ 17 I2C読込みスクリプト概要② 6 書込み 18 センサ読込みプログラ
 第5回 Arduino入門 I2C通信編 プレゼン by いっちー 目次 1 I2Cとは 13 結線写真 2 センサの多くがI2Cに対応 14 WHO_AM_I 3 マイコンでのI2C通信例 15 I2C読込みプログラム 4 とは 16 I2C読込みスクリプト概要① 5 タイミングパラメータ 17 I2C読込みスクリプト概要② 6 書込み 18 センサ読込みプログラム 7 読込み 19 センサ読込み概要①
第5回 Arduino入門 I2C通信編 プレゼン by いっちー 目次 1 I2Cとは 13 結線写真 2 センサの多くがI2Cに対応 14 WHO_AM_I 3 マイコンでのI2C通信例 15 I2C読込みプログラム 4 とは 16 I2C読込みスクリプト概要① 5 タイミングパラメータ 17 I2C読込みスクリプト概要② 6 書込み 18 センサ読込みプログラム 7 読込み 19 センサ読込み概要①
Arduinoで組込み制御
 Arduino で組込み制御 Arduino で組込み制御 目次 1 Arduino とは? 2 Arduino をダウンロードしよう 3 Arduino のサンプルを使ってみよう 4 フルカラー LED を点灯させるプログラムを書いてみよう 5 LCD ディスプレイで文字を表示してみよう 6 小型 DC モータを制御してみよう 7 マトリクス LED で文字を点灯させよう Arduino とは?1
Arduino で組込み制御 Arduino で組込み制御 目次 1 Arduino とは? 2 Arduino をダウンロードしよう 3 Arduino のサンプルを使ってみよう 4 フルカラー LED を点灯させるプログラムを書いてみよう 5 LCD ディスプレイで文字を表示してみよう 6 小型 DC モータを制御してみよう 7 マトリクス LED で文字を点灯させよう Arduino とは?1
86Duino EduCake Analog I/O ピン機能応用編 1. Analog I/O 紹介 アナログ vs デジタル : 前篇では 86Duino EduCake の基本仕様と IDE の簡単な使い方やデジタル IO を説明しました この章では アナログ
 EduCake Analog I/O ピン機能応用編 1. Analog I/O 紹介 アナログ vs デジタル : 前篇では EduCake の基本仕様と IDE の簡単な使い方やデジタル IO を説明しました この章では アナログ IO 機能を紹介します アナログ信号の説明の前に デジタルとは何かをお話してデジタルとの比較を紹介します 前篇ではデジタル信号についてお話ししましたが一般的に 2 つの状態を表す電圧信号
EduCake Analog I/O ピン機能応用編 1. Analog I/O 紹介 アナログ vs デジタル : 前篇では EduCake の基本仕様と IDE の簡単な使い方やデジタル IO を説明しました この章では アナログ IO 機能を紹介します アナログ信号の説明の前に デジタルとは何かをお話してデジタルとの比較を紹介します 前篇ではデジタル信号についてお話ししましたが一般的に 2 つの状態を表す電圧信号
Taro-テキスト.jtd
 付録 7 実習テキスト Processingスケッチプログラミング Processingスケッチプログラミング Processingスケッチプログラミング 1. 的 作成 : 米田文彦 Processing プロセッシング を使い プログラムによるビジュアル表現を学ぶ また Arduino と連携させ デジタルとフィジカルの融合がどのように行われているのかを知る 2. 使 機器 パソコン Processing
付録 7 実習テキスト Processingスケッチプログラミング Processingスケッチプログラミング Processingスケッチプログラミング 1. 的 作成 : 米田文彦 Processing プロセッシング を使い プログラムによるビジュアル表現を学ぶ また Arduino と連携させ デジタルとフィジカルの融合がどのように行われているのかを知る 2. 使 機器 パソコン Processing
まず,13 行目の HardwareTimer Timer(1); は,HardwareTimer というクラスを利用するという宣言である. この宣言によって Timer というインスタンスが生成される.Timer(1) の 1 は,OpenCM に 4 個用意されているタイマのうち,1 番のタイマ
; は,HardwareTimer というクラスを利用するという宣言である. この宣言によって Timer というインスタンスが生成される.Timer(1) の 1 は,OpenCM に 4 個用意されているタイマのうち,1 番のタイマ") 8 タイマ割り込みを使ってみよう割り込み (Interrupt) とは, 言葉の意味の通り, ある作業中に割り込むことである. マイコンにおいてはとても重要な機能の一つである. 例えば, インスタントカップ麺にお湯を入れて 3 分間待ってから食べることを想像してみよう. お湯を入れてカップ麺ができるまでの 3 分間, 時計の針だけを見つめ続けて, 他には何にもせずに待ち続ける人はほとんどいないだろう.
8 タイマ割り込みを使ってみよう割り込み (Interrupt) とは, 言葉の意味の通り, ある作業中に割り込むことである. マイコンにおいてはとても重要な機能の一つである. 例えば, インスタントカップ麺にお湯を入れて 3 分間待ってから食べることを想像してみよう. お湯を入れてカップ麺ができるまでの 3 分間, 時計の針だけを見つめ続けて, 他には何にもせずに待ち続ける人はほとんどいないだろう.
Microsoft Word - SU1202教本(Disp)原稿.docx
原稿.docx") void setup(){ pinmode(9, OUTPUT); void loop(){ digitalwrite(9, HIGH); digitalwrite9,high 9 制限抵抗 A K P 型 N 型 基板 ( 土台 ) + P 型半導体 - N 型半導体 1.2 R(Ω) 1.8 20m 3V digitalwrite(13,high); digitalwrite(13,low);
void setup(){ pinmode(9, OUTPUT); void loop(){ digitalwrite(9, HIGH); digitalwrite9,high 9 制限抵抗 A K P 型 N 型 基板 ( 土台 ) + P 型半導体 - N 型半導体 1.2 R(Ω) 1.8 20m 3V digitalwrite(13,high); digitalwrite(13,low);
CoIDE 用 F4D_VCP の説明 V /07/05 USB の VCP( 仮想 COM ポート ) による非同期シリアル通信を行うプログラムです Free の開発ツール CoIDE で作成した STM32F4 Discovery 用のプロジェクトです プログラムの開始番地は 0x
 による非同期シリアル通信を行うプログラムです Free の開発ツール CoIDE で作成した STM32F4 Discovery 用のプロジェクトです プログラムの開始番地は 0x") CoIDE 用 F4D_VCP の説明 V001 2014/07/05 USB の VCP( 仮想 COM ポート ) による非同期シリアル通信を行うプログラムです Free の開発ツール CoIDE で作成した STM32F4 Discovery 用のプロジェクトです プログラムの開始番地は 0x08000000 です デバッグが可能です 目次 1. USB の VCP( 仮想 COM ポート )
CoIDE 用 F4D_VCP の説明 V001 2014/07/05 USB の VCP( 仮想 COM ポート ) による非同期シリアル通信を行うプログラムです Free の開発ツール CoIDE で作成した STM32F4 Discovery 用のプロジェクトです プログラムの開始番地は 0x08000000 です デバッグが可能です 目次 1. USB の VCP( 仮想 COM ポート )
す Alt メニューのファイル スケッチから開かせます 動作確認もしておきます 最初に接続した際に音が鳴らないよう 空のスケッチを最後に入れておきます 実施手順の詳細 導入部分 概要を説明し 以下の用語説明をします Arduino とは今日使う小さなコンピュータである スケッチ とは Arduino
 コンピュータシステムを 作っちゃおう 目的 ねらい パソコンとは違う小さなシステムを自分で組み上げる体験を通して ハードウェアに対する理解 を深めるとともに 身の回りのシステムに興味をもって欲しいと考えています プログラムをす べて理解させるのではなく 特に初心者に対しては数値を変えたら動きが変わった という体験 をさせることに重点を置いてください 上級者に対しては 自分でどんどん変えさせて構いませ
コンピュータシステムを 作っちゃおう 目的 ねらい パソコンとは違う小さなシステムを自分で組み上げる体験を通して ハードウェアに対する理解 を深めるとともに 身の回りのシステムに興味をもって欲しいと考えています プログラムをす べて理解させるのではなく 特に初心者に対しては数値を変えたら動きが変わった という体験 をさせることに重点を置いてください 上級者に対しては 自分でどんどん変えさせて構いませ
Microsoft Word - SU1201MotorDriverSheildManual.doc
 モータードライバーシールドスタートマニュアル はじめにはじめにモータードライバーシールド (SU-1201) は Arduino によって動作させることを前提としています このマニュアルでは モータードライバーシールドを動かすときの具体的な設定や サンプルプログラムについて解説しています 対応する Arduino 2012 年 9 月 1 日現在 Arduino 基板 : Duemilanove UNO(R3)
モータードライバーシールドスタートマニュアル はじめにはじめにモータードライバーシールド (SU-1201) は Arduino によって動作させることを前提としています このマニュアルでは モータードライバーシールドを動かすときの具体的な設定や サンプルプログラムについて解説しています 対応する Arduino 2012 年 9 月 1 日現在 Arduino 基板 : Duemilanove UNO(R3)
Arduinoで計る,測る,量る
 [ 第 4 章 ] 決められた入出力ポートだが逆に使いやすいアナログ入出力もスケッチが用意されていて使い方は簡単 本章では,Arduino のアナログ入力として, センサからの出力の代わりにボリュームを用いて, 0V から電源電圧まで変化する電圧を読み取り, この変化した電圧に対応した出力を LED に加えてアナログ入出力のテストを行います. 続いて, アナログ入力の具体例として温度の測定を行います.
[ 第 4 章 ] 決められた入出力ポートだが逆に使いやすいアナログ入出力もスケッチが用意されていて使い方は簡単 本章では,Arduino のアナログ入力として, センサからの出力の代わりにボリュームを用いて, 0V から電源電圧まで変化する電圧を読み取り, この変化した電圧に対応した出力を LED に加えてアナログ入出力のテストを行います. 続いて, アナログ入力の具体例として温度の測定を行います.
Arduino をはじめよう オープンソースハードウェア入門 ~ Arduino( アルドゥイーノ ) 始めてみませんか?
 始めてみませんか?") Arduino をはじめよう オープンソースハードウェア入門 ~ Arduino( アルドゥイーノ ) 始めてみませんか? A ワーク創造館 共立電子産業株式会社 株式会社チアーズ Arduino とは Arduino( アルドゥイーノ ) は AVR マイコン 入出力ポートを備えた基板 C++ 言語風の Arduino 言語とそれの統合開発環境から構成されるシステム Arduino はスタンドアロン型のインタラクティブデバイス開発だけでなく
Arduino をはじめよう オープンソースハードウェア入門 ~ Arduino( アルドゥイーノ ) 始めてみませんか? A ワーク創造館 共立電子産業株式会社 株式会社チアーズ Arduino とは Arduino( アルドゥイーノ ) は AVR マイコン 入出力ポートを備えた基板 C++ 言語風の Arduino 言語とそれの統合開発環境から構成されるシステム Arduino はスタンドアロン型のインタラクティブデバイス開発だけでなく
1. UART について UART は Universal Asynchronous Receiver Transmitter の頭文字をとったもので 非同期シリアル通信と呼ばれます シリアル通信とは 一本の信号線でデータをやりとりするために 1bit ずつデータを送出することをいいます データを受
 STM32L_UART1 の説明 V004 2014/03/30 STM32L-Discovery の UART 1 の送受信を行うプログラムです 無料の開発ツール Atollic TrueSTUDIO for ARM Lite( 試用版 ) で作成したプロジェクトです プログラムの開始番地は 0x08000000 です デバッグが可能です PC アプリケーションの Access_SerialPort
STM32L_UART1 の説明 V004 2014/03/30 STM32L-Discovery の UART 1 の送受信を行うプログラムです 無料の開発ツール Atollic TrueSTUDIO for ARM Lite( 試用版 ) で作成したプロジェクトです プログラムの開始番地は 0x08000000 です デバッグが可能です PC アプリケーションの Access_SerialPort
1. USB の VCP( 仮想 COM ポート ) について USB の VCP( 仮想 COM ポート ) は USB を非同期シリアル通信として使用するための USB のドライバです PC には VCP ドライバをインストールする必要があります USB の VCP( 仮想 COM ポート )
 について USB の VCP( 仮想 COM ポート ) は USB を非同期シリアル通信として使用するための USB のドライバです PC には VCP ドライバをインストールする必要があります USB の VCP( 仮想 COM ポート )") TrueSTUDIO 用 F4D_VCP の説明 V001 2014/07/05 USB の VCP( 仮想 COM ポート ) による非同期シリアル通信を行うプログラムです 無料の試用版開発ツール Atollic TrueSTUDIO for ARM Lite で作成したプロジェクトです ビルド可能なプログラムのコードサイズが 32Kbyte 以内の制限があります プログラムの開始番地は 0x08000000
TrueSTUDIO 用 F4D_VCP の説明 V001 2014/07/05 USB の VCP( 仮想 COM ポート ) による非同期シリアル通信を行うプログラムです 無料の試用版開発ツール Atollic TrueSTUDIO for ARM Lite で作成したプロジェクトです ビルド可能なプログラムのコードサイズが 32Kbyte 以内の制限があります プログラムの開始番地は 0x08000000
Mathematica で Arduino を利用する (2012 年度 ) はじめに情報工学部では全学科で Arduino を導入して フィジカルコンピューティングに関連した教育を行ってきている 電子情報工学科ではいくつかの実験演習を通じて Arduino を取り入れてきている ここでは 電子情報
 はじめに情報工学部では全学科で Arduino を導入して フィジカルコンピューティングに関連した教育を行ってきている 電子情報工学科ではいくつかの実験演習を通じて Arduino を取り入れてきている ここでは 電子情報") Mathematica で Arduino を利用する (2012 年度 ) はじめに情報工学部では全学科で Arduino を導入して フィジカルコンピューティングに関連した教育を行ってきている 電子情報工学科ではいくつかの実験演習を通じて Arduino を取り入れてきている ここでは 電子情報工学実験 I の Mathematica のテーマで Arduino を利用した実習をすることを考えた
Mathematica で Arduino を利用する (2012 年度 ) はじめに情報工学部では全学科で Arduino を導入して フィジカルコンピューティングに関連した教育を行ってきている 電子情報工学科ではいくつかの実験演習を通じて Arduino を取り入れてきている ここでは 電子情報工学実験 I の Mathematica のテーマで Arduino を利用した実習をすることを考えた
講習会 Arduino
 講習会 Arduino 10 回目 シリアル ( パソコンに表示 ) 目的 シリアル通信を利用して Arduino の処理によって生まれた数値をパソコンに表示する Arduino で作ったタイマーを Processing を利用して表示する シリアル通信とは 電気通信において伝送路上を一度に 1 ビットずつ 逐次的にデータを送ることをいう また コンピュータにおいては バス上を一度に 1 ビットずつ
講習会 Arduino 10 回目 シリアル ( パソコンに表示 ) 目的 シリアル通信を利用して Arduino の処理によって生まれた数値をパソコンに表示する Arduino で作ったタイマーを Processing を利用して表示する シリアル通信とは 電気通信において伝送路上を一度に 1 ビットずつ 逐次的にデータを送ることをいう また コンピュータにおいては バス上を一度に 1 ビットずつ
ETCB Manual
 ETCB Manual HARDWARE & PROGRAMMING MANUAL 目次 始めに ETCB 仕様 開発環境の構築 01 始めに 始めに 始めに 注意事項 免責事項 同梱品 02 始めに サポート 03 ETCB 仕様 ETCB 仕様 概要 仕様 項目サブ項目内容電源推奨入力電圧 6.6V~12V 最大入力電圧 16V 出力電圧内部 3.3V 外部 5.0V 最大出力電流値最大 2.2A
ETCB Manual HARDWARE & PROGRAMMING MANUAL 目次 始めに ETCB 仕様 開発環境の構築 01 始めに 始めに 始めに 注意事項 免責事項 同梱品 02 始めに サポート 03 ETCB 仕様 ETCB 仕様 概要 仕様 項目サブ項目内容電源推奨入力電圧 6.6V~12V 最大入力電圧 16V 出力電圧内部 3.3V 外部 5.0V 最大出力電流値最大 2.2A
図 1 で示すように割り込み作業に対応していない間は CPU が他の作業を行えま す 割り込みが発生した時に作業中の仕事を一時停止し 割り込みハンドラに 入ってタスクを実行します 割り込み作業が終わった後停止した作業を再開し ます 割り込み対応コードが停止したプロセスに影響ありますので なるべく 最
 EduCake: 割り込みとイベント 1. 割り込みやイベント紹介 前の章では 86Duino Educake と外部周辺機器 ( デジタル IO アナログ入出力 センサ モータ等 ) のインターフェイスについて話しました 本章では反応が良く効率的なアプリケーションの開発に重要な割り込みとイベントについて話します 以前に digitalread/write() analogread/write()
EduCake: 割り込みとイベント 1. 割り込みやイベント紹介 前の章では 86Duino Educake と外部周辺機器 ( デジタル IO アナログ入出力 センサ モータ等 ) のインターフェイスについて話しました 本章では反応が良く効率的なアプリケーションの開発に重要な割り込みとイベントについて話します 以前に digitalread/write() analogread/write()
1. A/D 入力について分解能 12bit の A/D コンバータ入力です A/D 入力電圧とディジタル値との対応は理論上 入力電圧 0V : 0 入力電圧 +3V : 4095 です 実際はオフセットと傾きがあり ぴったりこの数値にはなりません 2. A/D 入力に使用する信号 STM32L_A
 STM32L_ADC の説明 V003 2014/03/30 STM32L-Discovery の A/D 入力を行うプログラムです A/D CH0 ~ A/D CH3 の 4 本の入力が可能です 提供する PC のアプリケーション Access_SerialPort を使用して UART( 非同期シリアル通信 ) により A/D 入力の表示を行うことができます 無料の開発ツール Atollic TrueSTUDIO
STM32L_ADC の説明 V003 2014/03/30 STM32L-Discovery の A/D 入力を行うプログラムです A/D CH0 ~ A/D CH3 の 4 本の入力が可能です 提供する PC のアプリケーション Access_SerialPort を使用して UART( 非同期シリアル通信 ) により A/D 入力の表示を行うことができます 無料の開発ツール Atollic TrueSTUDIO
1. 使用する信号 1.1. UART 信号 UART 通信に使用する信号と接続相手との接続は以下の通りです UART 信号表 番号 CPU 機能名 CPU 信号名 基板コネクタピン番号 方向 接続相手の信号名 1 USART1_TX PA9 CN > RxD 2 USART1_R
 TrueSTUDIO 用 L152CD_UART1 の説明 V001 2014/10/22 UART( 非同期シリアル通信 ) で送受信を行う STM32L152C-DISCO のプロジェクトサンプルです STM32L152C-DISCO は STMicroelectronics 社製の Cortex-M3 ARM CPU である STM32L152RCT6 を搭載した基板です 試用版の開発ツール
TrueSTUDIO 用 L152CD_UART1 の説明 V001 2014/10/22 UART( 非同期シリアル通信 ) で送受信を行う STM32L152C-DISCO のプロジェクトサンプルです STM32L152C-DISCO は STMicroelectronics 社製の Cortex-M3 ARM CPU である STM32L152RCT6 を搭載した基板です 試用版の開発ツール
SpeC記述のC記述への変換 (SpecCによるソフトウェア記述の実装記述への変換)
") シングルタスク プログラミング 本田晋也名古屋大学大学院情報科学研究科准教授 TOPPERSプロジェクトシニアテクニカルエキスパート honda@ertl.jp 最終更新 2016/6/27 1 自己紹介 所属 名古屋大学情報科学研究科組込みリアルタイムシステム研究室 TOPPERSプロジェクト TOPPERS/R2CA 設計 開発 メンテ 最近注力している内容 TOPPERS/ASP GR-PEACH
シングルタスク プログラミング 本田晋也名古屋大学大学院情報科学研究科准教授 TOPPERSプロジェクトシニアテクニカルエキスパート honda@ertl.jp 最終更新 2016/6/27 1 自己紹介 所属 名古屋大学情報科学研究科組込みリアルタイムシステム研究室 TOPPERSプロジェクト TOPPERS/R2CA 設計 開発 メンテ 最近注力している内容 TOPPERS/ASP GR-PEACH
CoIDE 用 STM32F4_UART2 の説明 V /03/30 STM32F4 Discovery の非同期シリアル通信ポート UART2 の送受信を行うプログラムです Free の開発ツール CoIDE で作成したプロジェクトサンプルです プログラムの開始番地は 0x08000
 CoIDE 用 STM32F4_UART2 の説明 V002 2014/03/30 STM32F4 Discovery の非同期シリアル通信ポート UART2 の送受信を行うプログラムです Free の開発ツール CoIDE で作成したプロジェクトサンプルです プログラムの開始番地は 0x08000000 です デバッグが可能です 提供する PC のアプリケーションの Access_SerialPort
CoIDE 用 STM32F4_UART2 の説明 V002 2014/03/30 STM32F4 Discovery の非同期シリアル通信ポート UART2 の送受信を行うプログラムです Free の開発ツール CoIDE で作成したプロジェクトサンプルです プログラムの開始番地は 0x08000000 です デバッグが可能です 提供する PC のアプリケーションの Access_SerialPort
ESP8266-CORE-R Copyrig
 ESP8266-CORE-R1 http://www.microfan.jp/ https://store.shopping.yahoo.co.jp/microfan/ https://www.amazon.co.jp/s?merchant=a28nhprkjdc95b 2018 3 Copyright c 2017-2018 MicroFan, All Rights Reserved. i 1 ESP8266-CORE-R1
ESP8266-CORE-R1 http://www.microfan.jp/ https://store.shopping.yahoo.co.jp/microfan/ https://www.amazon.co.jp/s?merchant=a28nhprkjdc95b 2018 3 Copyright c 2017-2018 MicroFan, All Rights Reserved. i 1 ESP8266-CORE-R1
HDLトレーナーサンプルプログラム説明書
 H8-BASE2 拡張キット説明書 June 10,2007 株式会社ソリトンウェーブ 目次 本製品の付属品について...3 本製品に付属するサンプルプログラムについて...4 サンプルソースの説明...5 1.TimerATest...5 2.LcdTest...5 3.AdcTest...5 4.AdcTest2...5 5.ComTest...5 6.PS2Test...6 7.FanTest...6
H8-BASE2 拡張キット説明書 June 10,2007 株式会社ソリトンウェーブ 目次 本製品の付属品について...3 本製品に付属するサンプルプログラムについて...4 サンプルソースの説明...5 1.TimerATest...5 2.LcdTest...5 3.AdcTest...5 4.AdcTest2...5 5.ComTest...5 6.PS2Test...6 7.FanTest...6
みんなの Arduino 入門 課題と演習 本資料は みんなの Arduino 入門 を使っている方々への課題 ( 演習含む ) を参考としてま とめたものです 本書の理解度の確認と今後のステップアップのためにご利用下さい ( 最終更新日 :2014 年 4 月 25 日 ) 株式会社タブレイン T
 を参考としてま とめたものです 本書の理解度の確認と今後のステップアップのためにご利用下さい ( 最終更新日 :2014 年 4 月 25 日 ) 株式会社タブレイン T") みんなの Arduino 入門 課題と演習 本資料は みんなの Arduino 入門 を使っている方々への課題 ( 演習含む ) を参考としてま とめたものです 本書の理解度の確認と今後のステップアップのためにご利用下さい ( 最終更新日 :2014 年 4 月 25 日 ) 株式会社タブレイン T.Takamoto Ph.D. 第 1 章の課題と演習 1) 人間の五感と ICT のセンサーとの違いをまとめて人間の五感が
みんなの Arduino 入門 課題と演習 本資料は みんなの Arduino 入門 を使っている方々への課題 ( 演習含む ) を参考としてま とめたものです 本書の理解度の確認と今後のステップアップのためにご利用下さい ( 最終更新日 :2014 年 4 月 25 日 ) 株式会社タブレイン T.Takamoto Ph.D. 第 1 章の課題と演習 1) 人間の五感と ICT のセンサーとの違いをまとめて人間の五感が
パーツリスト 組み立て前にすべてのパーツがそろっているかご確認ください 種類 品番 数 種類 品番 数 基板 I2C LCD 1 コンデンサ 0.1uF (104) 積層セラミック 1 IC ATtiny コンデンサ 10uF 電解 1 半固定抵抗 10~50kΩ 1 コネクタ IC ソ
 積層セラミック 1 IC ATtiny コンデンサ 10uF 電解 1 半固定抵抗 10~50kΩ 1 コネクタ IC ソ") Arduino Shield series 汎用 LCD I2C 化アダプター I2C LCD Galileo 7 Printed 2010-02-06 本製品について 豊富に出回っている汎用のキャラクター液晶ディスプレイモジュールは パラレル接続でコントロールするようになっていますが これを I2C(TWI) でコントロールできるようにするアダプターです 電源以外に 2 本の制御線をつなぐだけでコントロールできるため
Arduino Shield series 汎用 LCD I2C 化アダプター I2C LCD Galileo 7 Printed 2010-02-06 本製品について 豊富に出回っている汎用のキャラクター液晶ディスプレイモジュールは パラレル接続でコントロールするようになっていますが これを I2C(TWI) でコントロールできるようにするアダプターです 電源以外に 2 本の制御線をつなぐだけでコントロールできるため
PowerPoint プレゼンテーション
 ネットワーク分野 研究室ローテーション Raspberry Pi と Processing による IoT デバイス作成演習 第 2 回 Processing 入門 ディジタル入出力 アナログーディジタル変換とセンサ 編集履歴 2016/12/12 福嶋 2017/04/18 前田 福嶋 2018/05/31 前田 はじめに (1/3) 身の周りにはコンピュータがたくさん パソコン 携帯 テレビ 自動車...
ネットワーク分野 研究室ローテーション Raspberry Pi と Processing による IoT デバイス作成演習 第 2 回 Processing 入門 ディジタル入出力 アナログーディジタル変換とセンサ 編集履歴 2016/12/12 福嶋 2017/04/18 前田 福嶋 2018/05/31 前田 はじめに (1/3) 身の周りにはコンピュータがたくさん パソコン 携帯 テレビ 自動車...
RTC_STM32F4 の説明 2013/10/20 STM32F4 内蔵 RTC の日付 時刻の設定および読み込みを行うプログラムです UART2( 非同期シリアル通信ポート 2) を使用して RTC の設定および読み込みを行います 無料の開発ツール Atollic TrueSTUDIO for
 を使用して RTC の設定および読み込みを行います 無料の開発ツール Atollic TrueSTUDIO for") RTC_STM32F4 の説明 2013/10/20 STM32F4 内蔵 RTC の日付 時刻の設定および読み込みを行うプログラムです UART2( 非同期シリアル通信ポート 2) を使用して RTC の設定および読み込みを行います 無料の開発ツール Atollic TrueSTUDIO for ARM Lite 4.2.0 で作成した STM32F4 Discovery 基板用のプロジェクトです
RTC_STM32F4 の説明 2013/10/20 STM32F4 内蔵 RTC の日付 時刻の設定および読み込みを行うプログラムです UART2( 非同期シリアル通信ポート 2) を使用して RTC の設定および読み込みを行います 無料の開発ツール Atollic TrueSTUDIO for ARM Lite 4.2.0 で作成した STM32F4 Discovery 基板用のプロジェクトです
商品番号 : UTS-422 USB-RS422( シリアル ) 変換ケーブル (USB1.1 規格対応 ) 概要 UTS-422 は RS-422 インターフェースを持つ外部周辺機器をパソコンの USB ポートを介してコントロールするための USB-RS422 変換ケーブルです 最大 3Mbps
 変換ケーブル (USB1.1 規格対応 ) 概要 UTS-422 は RS-422 インターフェースを持つ外部周辺機器をパソコンの USB ポートを介してコントロールするための USB-RS422 変換ケーブルです 最大 3Mbps") 商品番号 : UTS-422 USB-RS422( シリアル ) 変換ケーブル (USB1.1 規格対応 ) 概要 UTS-422 は RS-422 インターフェースを持つ外部周辺機器をパソコンの USB ポートを介してコントロールするための USB-RS422 変換ケーブルです 最大 3Mbps の転送速度で最大 1.2km までの通信が可能で 工場などでの RS-422 インターフェースを持つ複数台の計測機器や制御機器と
商品番号 : UTS-422 USB-RS422( シリアル ) 変換ケーブル (USB1.1 規格対応 ) 概要 UTS-422 は RS-422 インターフェースを持つ外部周辺機器をパソコンの USB ポートを介してコントロールするための USB-RS422 変換ケーブルです 最大 3Mbps の転送速度で最大 1.2km までの通信が可能で 工場などでの RS-422 インターフェースを持つ複数台の計測機器や制御機器と
Microsoft Word - PIC-USBマイコンボード_v1-02@WEB公開用資料.docx
 PIC-USB マイコンボード C 言語による PIC プログラミング入門 ( 浅川毅著 ) にて使用しているマイコンボードです プログラム ファームウェア 基板単体 パーツ類 URL1 より全てダウンロード可能 URL2 より購入可能 URL2 または電子パーツ店より購入可能 URL1 ソースファイルほか http://www.tdupress.jp/download/robot-mpu/isbn978-4-501-55350-0-2.html
PIC-USB マイコンボード C 言語による PIC プログラミング入門 ( 浅川毅著 ) にて使用しているマイコンボードです プログラム ファームウェア 基板単体 パーツ類 URL1 より全てダウンロード可能 URL2 より購入可能 URL2 または電子パーツ店より購入可能 URL1 ソースファイルほか http://www.tdupress.jp/download/robot-mpu/isbn978-4-501-55350-0-2.html
ESP32-KEY-KIT-R1 (ESP-WROOM-32 ) Copyright c 2
 Copyright c 2") ESP32-KEY-KIT-R1 (ESP-WROOM-32 ) http://www.microfan.jp/ http://store.shopping.yahoo.co.jp/microfan/ http://www.microfan.jp/shop/ 2017 4 Copyright c 2017 MicroFan, All Rights Reserved. i 1 ESP32-KEY-KIT-R1
ESP32-KEY-KIT-R1 (ESP-WROOM-32 ) http://www.microfan.jp/ http://store.shopping.yahoo.co.jp/microfan/ http://www.microfan.jp/shop/ 2017 4 Copyright c 2017 MicroFan, All Rights Reserved. i 1 ESP32-KEY-KIT-R1
画像ファイルを扱う これまでに学んだ条件分岐, 繰り返し, 配列, ファイル入出力を使って, 画像を扱うプログラムにチャレンジしてみよう
 第 14 回 応用 情報処理演習 ( テキスト : 第 10 章 ) 画像ファイルを扱う これまでに学んだ条件分岐, 繰り返し, 配列, ファイル入出力を使って, 画像を扱うプログラムにチャレンジしてみよう 特定色の画素の検出 ( テキスト 134 ページ ) 画像データが保存されているファイルを読み込んで, 特定色の画素の位置を検出するプログラムを作成しなさい 元画像生成画像 ( 結果の画像 )
第 14 回 応用 情報処理演習 ( テキスト : 第 10 章 ) 画像ファイルを扱う これまでに学んだ条件分岐, 繰り返し, 配列, ファイル入出力を使って, 画像を扱うプログラムにチャレンジしてみよう 特定色の画素の検出 ( テキスト 134 ページ ) 画像データが保存されているファイルを読み込んで, 特定色の画素の位置を検出するプログラムを作成しなさい 元画像生成画像 ( 結果の画像 )
INDEX 1 必要なものを準備しよう 各部の名称を確認しよう 電源を入れよう スイッチで LED を光らせよう BiZduino で Wi-Fi 通信しよう RTC を使ってみよう 参考資料 7 困ったら... 21
 INDEX 1 必要なものを準備しよう... 1 2 各部の名称を確認しよう... 2 3 電源を入れよう... 3 4 スイッチで LED を光らせよう... 4 5 BiZduino で Wi-Fi 通信しよう... 8 6 RTC を使ってみよう... 17 参考資料 7 困ったら... 21 8 基板レイアウト図... 22 9 改訂履歴... 23 1 必要なものを準備しよう まずは BiZduino
INDEX 1 必要なものを準備しよう... 1 2 各部の名称を確認しよう... 2 3 電源を入れよう... 3 4 スイッチで LED を光らせよう... 4 5 BiZduino で Wi-Fi 通信しよう... 8 6 RTC を使ってみよう... 17 参考資料 7 困ったら... 21 8 基板レイアウト図... 22 9 改訂履歴... 23 1 必要なものを準備しよう まずは BiZduino
講習会 Arduino
 講習会 Arduino 12 回目最後 センサー入力 目的 3 回目 ディジタル入力と出力 と 4 回目 アナログ入力と出力 を応用してセンサーの値を入力 Arduino の処理として利用する 入手したセンサー値から適切な処理を行う センサー 自然現象や人工物の機械的 電磁気的 熱的 音響的 化学的性質あるいはそれらで示される空間情報 時間情報を 何らかの科学的原理を応用して 人間や機械が扱い易い別媒体の信号に置き換える装置のことをいい
講習会 Arduino 12 回目最後 センサー入力 目的 3 回目 ディジタル入力と出力 と 4 回目 アナログ入力と出力 を応用してセンサーの値を入力 Arduino の処理として利用する 入手したセンサー値から適切な処理を行う センサー 自然現象や人工物の機械的 電磁気的 熱的 音響的 化学的性質あるいはそれらで示される空間情報 時間情報を 何らかの科学的原理を応用して 人間や機械が扱い易い別媒体の信号に置き換える装置のことをいい
次に プログラム中の定数について解説する PINNO は圧電スピーカーと接続されたピンの番号に対応している FL,FR,BL,BR はそれぞれ 前面左, 前面右, 背面左, 背面右に設置されたスイッチに接続されているピンの番号に対応している スイッチ回路のプルアップ抵抗は Arduino 内部のもの
 6-2.Arduino Arduino では 車体の制御 音声出力 赤外線センサ処理 接触センサ処理 PIC への発光パターン及び発光タイミングの指定 制限時間の管理 被弾後の無敵時間の設定を担当している 以下に それぞれの処理を実現するプログラムについての解説を示す 6-2-1.Arduino( プログラム ) Arduino が電源を供給されて実行する関数には setup() と loop()
6-2.Arduino Arduino では 車体の制御 音声出力 赤外線センサ処理 接触センサ処理 PIC への発光パターン及び発光タイミングの指定 制限時間の管理 被弾後の無敵時間の設定を担当している 以下に それぞれの処理を実現するプログラムについての解説を示す 6-2-1.Arduino( プログラム ) Arduino が電源を供給されて実行する関数には setup() と loop()
GR-SAKURA-SAのサンプルソフト説明
 GR-KURUMI-SN( 仮 ) ( センサーネットワークシールド ) 生きてるってなんだろう 見えないものでつながってる がじぇっとるねさす 2013/11/23 Rev. 1.00 もくじ Sensor Network(SN) シールド概要 くるみが一人で測って 計算して データを飛ばす複数のくるみとさくらがつながる サンプルプログラムの使い方 つながる広がるエレクトリカルものづくり Smart
GR-KURUMI-SN( 仮 ) ( センサーネットワークシールド ) 生きてるってなんだろう 見えないものでつながってる がじぇっとるねさす 2013/11/23 Rev. 1.00 もくじ Sensor Network(SN) シールド概要 くるみが一人で測って 計算して データを飛ばす複数のくるみとさくらがつながる サンプルプログラムの使い方 つながる広がるエレクトリカルものづくり Smart
Taro-82ADAカ.jtd
 デジタル & アナログ絶縁入出力ユニット解説書製品型式 8 2 A D A - K C 製品型式 8 2 A D A - B D 製品型式 D A C S - 8 2 0 0 この解説書は 8 2 A D A または D A C S - 8 2 0 0 の動作と使用方法について簡単に説明したものです D A C S - 8 2 0 0 の場合は この解説書の 8 2 A D A という表現を 一部
デジタル & アナログ絶縁入出力ユニット解説書製品型式 8 2 A D A - K C 製品型式 8 2 A D A - B D 製品型式 D A C S - 8 2 0 0 この解説書は 8 2 A D A または D A C S - 8 2 0 0 の動作と使用方法について簡単に説明したものです D A C S - 8 2 0 0 の場合は この解説書の 8 2 A D A という表現を 一部
Microsoft Word - 実験4_FPGA実験2_2015
 FPGA の実験 Ⅱ 1. 目的 (1)FPGA を用いて組合せ回路や順序回路を設計する方法を理解する (2) スイッチや表示器の動作を理解し 入出力信号を正しく扱う 2. スケジュール項目 FPGAの実験 Ⅱ( その1) FPGAの実験 Ⅱ( その2) FPGAの実験 Ⅱ( その3) FPGAの実験 Ⅱ( その4) FPGAの実験 Ⅱ( その5) FPGAの実験 Ⅱ( その6) FPGAの実験 Ⅱ(
FPGA の実験 Ⅱ 1. 目的 (1)FPGA を用いて組合せ回路や順序回路を設計する方法を理解する (2) スイッチや表示器の動作を理解し 入出力信号を正しく扱う 2. スケジュール項目 FPGAの実験 Ⅱ( その1) FPGAの実験 Ⅱ( その2) FPGAの実験 Ⅱ( その3) FPGAの実験 Ⅱ( その4) FPGAの実験 Ⅱ( その5) FPGAの実験 Ⅱ( その6) FPGAの実験 Ⅱ(
1. はじめにローテータをパソコンでコントロールする仕掛けを作りました もともと ローテータのコントローラ自体がリモコンな訳ですから リモコンのリモコンということになります 最近は 無線機をパソコンに接続してリモートシャックから運用されている方もかなりいらっしゃるようです となると 無線機だけではな
 Arduino で作る ローテータ用リモコン 製作メモ 2013 年 11 月 30 日 難波秀文 1 1. はじめにローテータをパソコンでコントロールする仕掛けを作りました もともと ローテータのコントローラ自体がリモコンな訳ですから リモコンのリモコンということになります 最近は 無線機をパソコンに接続してリモートシャックから運用されている方もかなりいらっしゃるようです となると 無線機だけではなくて
Arduino で作る ローテータ用リモコン 製作メモ 2013 年 11 月 30 日 難波秀文 1 1. はじめにローテータをパソコンでコントロールする仕掛けを作りました もともと ローテータのコントローラ自体がリモコンな訳ですから リモコンのリモコンということになります 最近は 無線機をパソコンに接続してリモートシャックから運用されている方もかなりいらっしゃるようです となると 無線機だけではなくて
書式に示すように表示したい文字列をダブルクォーテーション (") の間に書けば良い ダブルクォーテーションで囲まれた文字列は 文字列リテラル と呼ばれる プログラム中では以下のように用いる プログラム例 1 printf(" 情報処理基礎 "); printf("c 言語の練習 "); printf
 の間に書けば良い ダブルクォーテーションで囲まれた文字列は 文字列リテラル と呼ばれる プログラム中では以下のように用いる プログラム例 1 printf( 情報処理基礎 ); printf(c 言語の練習 ); printf") 情報処理基礎 C 言語についてプログラミング言語は 1950 年以前の機械語 アセンブリ言語 ( アセンブラ ) の開発を始めとして 現在までに非常に多くの言語が開発 発表された 情報処理基礎で習う C 言語は 1972 年にアメリカの AT&T ベル研究所でオペレーションシステムである UNIX を作成するために開発された C 言語は現在使われている多数のプログラミング言語に大きな影響を与えている
情報処理基礎 C 言語についてプログラミング言語は 1950 年以前の機械語 アセンブリ言語 ( アセンブラ ) の開発を始めとして 現在までに非常に多くの言語が開発 発表された 情報処理基礎で習う C 言語は 1972 年にアメリカの AT&T ベル研究所でオペレーションシステムである UNIX を作成するために開発された C 言語は現在使われている多数のプログラミング言語に大きな影響を与えている
前回の内容 マイクロコンピュータにおけるプログラミング PC上で作成 コンパイル マイコンに転送 実行 プログラムを用いて外部の装置を動作させる LED turnonled turnoffled LCD printf プログラムを用いて外部の装置の状態を読み取る プッシュスイッチ getpushsw
 ものづくり基礎工学 情報工学分野 前回の内容 マイクロコンピュータにおけるプログラミング PC上で作成 コンパイル マイコンに転送 実行 プログラムを用いて外部の装置を動作させる LED turnonled turnoffled LCD printf プログラムを用いて外部の装置の状態を読み取る プッシュスイッチ getpushsw ディップスイッチ getdipsw スイッチの状態によって関数の戻り値が変わる
ものづくり基礎工学 情報工学分野 前回の内容 マイクロコンピュータにおけるプログラミング PC上で作成 コンパイル マイコンに転送 実行 プログラムを用いて外部の装置を動作させる LED turnonled turnoffled LCD printf プログラムを用いて外部の装置の状態を読み取る プッシュスイッチ getpushsw ディップスイッチ getdipsw スイッチの状態によって関数の戻り値が変わる
Microsoft Word - axies
 プログラミング入門教育を教わった後の Arduino の活用効果について 土肥紳一 東京電機大学情報環境学部 dohi@chiba.dendai.ac.jp 概要 : プログラミング入門教育は, 一般的に受講者が所有するノート PC や大学が設置している情報端末などを活用して授業が行われる. この場合, 標準出力はディスプレイ, 標準入力はキーボードとなるが, 何か物足りない. プログラミング入門教育で学習した知識を使って,
プログラミング入門教育を教わった後の Arduino の活用効果について 土肥紳一 東京電機大学情報環境学部 dohi@chiba.dendai.ac.jp 概要 : プログラミング入門教育は, 一般的に受講者が所有するノート PC や大学が設置している情報端末などを活用して授業が行われる. この場合, 標準出力はディスプレイ, 標準入力はキーボードとなるが, 何か物足りない. プログラミング入門教育で学習した知識を使って,
slide5.pptx
 ソフトウェア工学入門 第 5 回コマンド作成 1 head コマンド作成 1 早速ですが 次のプログラムを head.c という名前で作成してください #include #include static void do_head(file *f, long nlines); int main(int argc, char *argv[]) { if (argc!=
ソフトウェア工学入門 第 5 回コマンド作成 1 head コマンド作成 1 早速ですが 次のプログラムを head.c という名前で作成してください #include #include static void do_head(file *f, long nlines); int main(int argc, char *argv[]) { if (argc!=
GR-SAKURA-SAのサンプルソフト説明
 MA11 IFTTT ハンズオン体験まとめ GR-SAKURA から 30 分で動く! 簡単メール送信できる IFTTT( イフト ) を使って見よう 2015/8/19 がじぇっとるねさす鈴木 Rev. 1.00 IFTTT( イフト ) って何? IF THIS THEN THAT IFTTT( イフト ) とは レシピ と呼ばれる個人作成もしくは公に共有しているプロフィールを使って数あ る Web
MA11 IFTTT ハンズオン体験まとめ GR-SAKURA から 30 分で動く! 簡単メール送信できる IFTTT( イフト ) を使って見よう 2015/8/19 がじぇっとるねさす鈴木 Rev. 1.00 IFTTT( イフト ) って何? IF THIS THEN THAT IFTTT( イフト ) とは レシピ と呼ばれる個人作成もしくは公に共有しているプロフィールを使って数あ る Web
3 5 動作試験 変調せず超音波を出し続ける (DC 出力) と, 最初の 15 秒程度は ピーーー という高周波音が聞こえ, そ れから ブブブブ というノイズが混ざり始めた. DC 出力の超音波焦点を電子秤に照射したところ, 最初は 0.60 g と表示されるものの, ノイズが混ざり始めると 0
 と, 最初の 15 秒程度は ピーーー という高周波音が聞こえ, そ れから ブブブブ というノイズが混ざり始めた. DC 出力の超音波焦点を電子秤に照射したところ, 最初は 0.60 g と表示されるものの, ノイズが混ざり始めると 0") 1. Arduino Due, (1) (40 khz) (2)., [1] FPGA. FPGA 1, 50 MHz,, I/O,., CPU,, I/O,. Arduino Due [3] (84 MHz ). 5 40 khz., DIY [2]. 2. Arduino Due 40 khz... 2 1 tone() tone [4]. 1, Due [5]. 2 2 2 [6]. 5..
1. Arduino Due, (1) (40 khz) (2)., [1] FPGA. FPGA 1, 50 MHz,, I/O,., CPU,, I/O,. Arduino Due [3] (84 MHz ). 5 40 khz., DIY [2]. 2. Arduino Due 40 khz... 2 1 tone() tone [4]. 1, Due [5]. 2 2 2 [6]. 5..
第二回ArdProc講習会2013年10月波背景.pptx
 Arduino でタミヤの模型を思いどお りに動かしてみよう つくれば工房 2013 年 10 月 19 日 ( 遠藤一太 ) 本日の目標 1. 自分の PC で Arduino のスケッチ ( プログラムのこと ) が描ける 2. 反射光センサーの値を PC に表示することができる 3. H ブリッジ IC を用いて タミヤの模型用モーターの回転を制御することができる 4. センサーの値に応じて
Arduino でタミヤの模型を思いどお りに動かしてみよう つくれば工房 2013 年 10 月 19 日 ( 遠藤一太 ) 本日の目標 1. 自分の PC で Arduino のスケッチ ( プログラムのこと ) が描ける 2. 反射光センサーの値を PC に表示することができる 3. H ブリッジ IC を用いて タミヤの模型用モーターの回転を制御することができる 4. センサーの値に応じて
自作デバイスボード製作 データ作成 データ登録方法 Rev.A 2017/07/29 Mille-feuille のプロジェクトに自作のデバイスを追加して自分で販売したい方向けの情報です 誰でも参加可能なコミュニティにしていきたいと思っています 大まかな流れは以下の通りです 基本的には回路設計がわか
 自作デバイスボード製作 データ作成 データ登録方法 Rev.A 2017/07/29 Mille-feuille のプロジェクトに自作のデバイスを追加して自分で販売したい方向けの情報です 誰でも参加可能なコミュニティにしていきたいと思っています 大まかな流れは以下の通りです 基本的には回路設計がわかっている方か 回路設計に十分慣れてからデバイスボードを作るようにしてください デバイスボード部分はオープンソースハードになっているので
自作デバイスボード製作 データ作成 データ登録方法 Rev.A 2017/07/29 Mille-feuille のプロジェクトに自作のデバイスを追加して自分で販売したい方向けの情報です 誰でも参加可能なコミュニティにしていきたいと思っています 大まかな流れは以下の通りです 基本的には回路設計がわかっている方か 回路設計に十分慣れてからデバイスボードを作るようにしてください デバイスボード部分はオープンソースハードになっているので
Studuinoプログラミング環境
 Studuino ロボット用ブルートゥースモジュール 取扱説明書 Ver1.0.0 2015/4/1 本資料は Studuino( スタディーノ ) プログラミング環境の取扱説明書になります Studuino プログラミング環境の変更に伴い 加筆 修正が加えられる可能性があります また 本取扱説明書は 下記の資料を参照します Studuino ソフトウェアのインストール URL:http://artec-kk.co.jp/studuino/docs/jp/Studuino_setup_software.pdf
Studuino ロボット用ブルートゥースモジュール 取扱説明書 Ver1.0.0 2015/4/1 本資料は Studuino( スタディーノ ) プログラミング環境の取扱説明書になります Studuino プログラミング環境の変更に伴い 加筆 修正が加えられる可能性があります また 本取扱説明書は 下記の資料を参照します Studuino ソフトウェアのインストール URL:http://artec-kk.co.jp/studuino/docs/jp/Studuino_setup_software.pdf
内容 MD00Manager とは?... MD00Manager をインストールする.... ソフトのインストール... MD00Manager の使い方.... 起動をする... 機能説明...7 機能説明 ( メニューバー )...8 機能説明 ( ステータスバー )...8 機能説明 ( コ
...8 機能説明 ( ステータスバー )...8 機能説明 ( コ") MD00Manager マニュアル このマニュアルでは MD00Manager の詳細設定を行うことが出来ます MD00Manager では MD00 の設定変更や読み取ったデータを CSV に出力 照合用のデータベースの作成を行えます MD00 についてはそれぞれのマニュアルを確認して下さい Ver.0 内容 MD00Manager とは?... MD00Manager をインストールする....
MD00Manager マニュアル このマニュアルでは MD00Manager の詳細設定を行うことが出来ます MD00Manager では MD00 の設定変更や読み取ったデータを CSV に出力 照合用のデータベースの作成を行えます MD00 についてはそれぞれのマニュアルを確認して下さい Ver.0 内容 MD00Manager とは?... MD00Manager をインストールする....
iCLR
 RF24N1D-05-TK 無線モジュール簡易評価キット 取扱説明書 第 1.02 版 2014 年 05 月 01 日 株式会社 TOUA 1/10 目次 1. はじめに... 3 1.1. 無線モジュール簡易評価キットの概要... 3 1.2. 免責事項... 3 2. 無線モジュール簡易評価キットの構成... 3 3. 評価ボードの説明... 4 4. 事前準備... 5 5. 評価キットの実機動作...
RF24N1D-05-TK 無線モジュール簡易評価キット 取扱説明書 第 1.02 版 2014 年 05 月 01 日 株式会社 TOUA 1/10 目次 1. はじめに... 3 1.1. 無線モジュール簡易評価キットの概要... 3 1.2. 免責事項... 3 2. 無線モジュール簡易評価キットの構成... 3 3. 評価ボードの説明... 4 4. 事前準備... 5 5. 評価キットの実機動作...
接続例 ピンアサイン ポート端子台 配線可能電線太さ : AWG 16~AWG 28 端子番号信号名 1 Data + 2 Data GND Data (=TxD + RxD) : 送受信データ ( 入出力 ) - は 無接続です ご注意 : 無接続端子の
 : 送受信データ ( 入出力 ) - は 無接続です ご注意 : 無接続端子の") 商品番号 : UTS-485TB-V2 USB-RS485( シリアル ) 変換ケーブル (USB1.1 規格 端子台タイプ ) 概要 UTS-485TB-V2 は RS-485 インターフェースを持つ外部周辺機器をパソコンの USB ポートを介してコントロールするための USB-RS485 変換ケーブルです 最大 1.2km までの通信が可能で RS-485 の特徴を生かした最大 32 台までのマルチポイント接続も可能ですので
商品番号 : UTS-485TB-V2 USB-RS485( シリアル ) 変換ケーブル (USB1.1 規格 端子台タイプ ) 概要 UTS-485TB-V2 は RS-485 インターフェースを持つ外部周辺機器をパソコンの USB ポートを介してコントロールするための USB-RS485 変換ケーブルです 最大 1.2km までの通信が可能で RS-485 の特徴を生かした最大 32 台までのマルチポイント接続も可能ですので
デジタル表現論・第4回
 デジタル表現論 第 4 回 劉雪峰 ( リュウシュウフォン ) 2016 年 5 月 2 日 劉 雪峰 ( リュウシュウフォン ) デジタル表現論 第 4 回 2016 年 5 月 2 日 1 / 14 本日の目標 Java プログラミングの基礎 出力の復習 メソッドの定義と使用 劉 雪峰 ( リュウシュウフォン ) デジタル表現論 第 4 回 2016 年 5 月 2 日 2 / 14 出力 Systemoutprint()
デジタル表現論 第 4 回 劉雪峰 ( リュウシュウフォン ) 2016 年 5 月 2 日 劉 雪峰 ( リュウシュウフォン ) デジタル表現論 第 4 回 2016 年 5 月 2 日 1 / 14 本日の目標 Java プログラミングの基礎 出力の復習 メソッドの定義と使用 劉 雪峰 ( リュウシュウフォン ) デジタル表現論 第 4 回 2016 年 5 月 2 日 2 / 14 出力 Systemoutprint()
tri_s_tg12864_vcp の説明 2014/02/05 飛石伝ひ CPU 基板 の LCD TG12864 の表示プログラムです 漢字表示 (JIS208) を行うことができます USB の VCP ( 仮想 COM ポート ) を使用して非同期シリアル通信により 表示試験を行うことができ
 を行うことができます USB の VCP ( 仮想 COM ポート ) を使用して非同期シリアル通信により 表示試験を行うことができ") tri_s_tg12864_vcp の説明 2014/02/05 飛石伝ひ CPU 基板 の LCD TG12864 の表示プログラムです 漢字表示 (JIS208) を行うことができます USB の VCP ( 仮想 COM ポート ) を使用して非同期シリアル通信により 表示試験を行うことができます 無料の開発ツール Atollic TrueSTUDIO for ARM Lite 4.2.0 で作成したプロジェクトです
tri_s_tg12864_vcp の説明 2014/02/05 飛石伝ひ CPU 基板 の LCD TG12864 の表示プログラムです 漢字表示 (JIS208) を行うことができます USB の VCP ( 仮想 COM ポート ) を使用して非同期シリアル通信により 表示試験を行うことができます 無料の開発ツール Atollic TrueSTUDIO for ARM Lite 4.2.0 で作成したプロジェクトです
Microsoft Word - no15.docx
 7. ファイルいままでは プログラムを実行したとき その結果を画面で確認していました 簡単なものならそれでもいいのですか 複雑な結果は画面で見るだけでなく ファイルに保存できればよいでしょう ここでは このファイルについて説明します 使う関数のプロトタイプは次のとおりです FILE *fopen(const char *filename, const char *mode); ファイルを読み書きできるようにする
7. ファイルいままでは プログラムを実行したとき その結果を画面で確認していました 簡単なものならそれでもいいのですか 複雑な結果は画面で見るだけでなく ファイルに保存できればよいでしょう ここでは このファイルについて説明します 使う関数のプロトタイプは次のとおりです FILE *fopen(const char *filename, const char *mode); ファイルを読み書きできるようにする
RS-422/485 ボード取扱説明書 RS-422/485 ボード取扱説明書 Revision 0.3 コアスタッフ株式会社技術部エンジニアリング課 Copyright 2009 Core Staff Co.,Ltd. All Rights Reserved - 1 of 17
 Revision.3 コアスタッフ株式会社技術部エンジニアリング課 Copyright 29 Core Staff Co.,Ltd. All Rights Reserved - of 7 目次 はじめに 3. 概要 4 2. 主要緒言 5 3. 各種インターフェース機能説明 8 4. 外形寸法 4 Copyright 29 Core Staff Co.,Ltd. All Rights Reserved
Revision.3 コアスタッフ株式会社技術部エンジニアリング課 Copyright 29 Core Staff Co.,Ltd. All Rights Reserved - of 7 目次 はじめに 3. 概要 4 2. 主要緒言 5 3. 各種インターフェース機能説明 8 4. 外形寸法 4 Copyright 29 Core Staff Co.,Ltd. All Rights Reserved
1. プログラム実行時の動作プログラムを実行すると以下のように動作します 1) NUCLEO-F401RE 上の LED LD2( 緑 ) が 200mSec 間隔で点滅します 2. プロジェクトの構成 2.1. プロジェクト F401N_BlinkLD2 の起動画面 TrueSTUDIO で作成し
 NUCLEO-F401RE 上の LED LD2( 緑 ) が 200mSec 間隔で点滅します 2. プロジェクトの構成 2.1. プロジェクト F401N_BlinkLD2 の起動画面 TrueSTUDIO で作成し") TrueSTUDIO 用 F401N_BlinkLD2 の説明 V003 2014/10/01 TIM11 の割り込みを使用して LED 点滅を行う NUCLEO-F401RE のプロジェクトサンプルです NUCLEO-F401RE は STMicroelectronics 社製の Cortex-M4 ARM CPU である STM32F401RET6 を搭載した基板です 試用版の開発ツール Atollic
TrueSTUDIO 用 F401N_BlinkLD2 の説明 V003 2014/10/01 TIM11 の割り込みを使用して LED 点滅を行う NUCLEO-F401RE のプロジェクトサンプルです NUCLEO-F401RE は STMicroelectronics 社製の Cortex-M4 ARM CPU である STM32F401RET6 を搭載した基板です 試用版の開発ツール Atollic
2CH DC (PU-2709) DC DC Arduino 製作に必要な部品などを表にまとめてみましょう 用意するもの 型番など 必要数 メモ Arduino Arduino UNO R3 1 パルスを作るマイコンボード 28BYJ-48 1 ACアダプター DC5V 1 DCジャック
 DC DC Arduino 製作に必要な部品などを表にまとめてみましょう 用意するもの 型番など 必要数 メモ Arduino Arduino UNO R3 1 パルスを作るマイコンボード 28BYJ-48 1 ACアダプター DC5V 1 DCジャック") 2CHDC(PU-2709)DC DC180 1 Arduino 製作に必要な部品などを表にまとめてみましょう 用意するもの 型番など 必要数 メモ Arduino Arduino UNO R3 1 パルスを作るマイコンボード 28BYJ-48 1 ACアダプター DC5V 1 DCジャック AC 1 基板 ブレッドボード 1 ユニバーサル基板などで作ってもOK WindowsMachintoshOK
2CHDC(PU-2709)DC DC180 1 Arduino 製作に必要な部品などを表にまとめてみましょう 用意するもの 型番など 必要数 メモ Arduino Arduino UNO R3 1 パルスを作るマイコンボード 28BYJ-48 1 ACアダプター DC5V 1 DCジャック AC 1 基板 ブレッドボード 1 ユニバーサル基板などで作ってもOK WindowsMachintoshOK
Microsoft Word - USB60F_Raspi_ doc
 REX-USB60F USB RS-232C 変換アダプタ REX-USB60F の Raspberry Pi での使用について 1. 概要 2 2. 設定手順 2 2-1. REX-USB60F の装着と確認 2 3. 通信の確認 4 3-1. cutecom による確認 4 4. Python での使用 8 4-1. データ送信のスクリプト 8 4-2. データ受信のスクリプト 9 2016 年
REX-USB60F USB RS-232C 変換アダプタ REX-USB60F の Raspberry Pi での使用について 1. 概要 2 2. 設定手順 2 2-1. REX-USB60F の装着と確認 2 3. 通信の確認 4 3-1. cutecom による確認 4 4. Python での使用 8 4-1. データ送信のスクリプト 8 4-2. データ受信のスクリプト 9 2016 年
商品番号 : UTS-485 USB-RS485( シリアル ) 変換ケーブル (USB1.1 規格対応 ) 概要 UTS-485 は RS-485 インターフェースを持つ外部周辺機器をパソコンの USB ポートを介してコントロールするための USB-RS485 変換ケーブルです 最大 1.2km
 変換ケーブル (USB1.1 規格対応 ) 概要 UTS-485 は RS-485 インターフェースを持つ外部周辺機器をパソコンの USB ポートを介してコントロールするための USB-RS485 変換ケーブルです 最大 1.2km") 商品番号 : UTS-485 USB-RS485( シリアル ) 変換ケーブル (USB1.1 規格対応 ) 概要 UTS-485 は RS-485 インターフェースを持つ外部周辺機器をパソコンの USB ポートを介してコントロールするための USB-RS485 変換ケーブルです 最大 1.2km までの通信が可能で RS-485 の特徴を生かした最大 32 台までのマルチポイント接続も可能ですので
商品番号 : UTS-485 USB-RS485( シリアル ) 変換ケーブル (USB1.1 規格対応 ) 概要 UTS-485 は RS-485 インターフェースを持つ外部周辺機器をパソコンの USB ポートを介してコントロールするための USB-RS485 変換ケーブルです 最大 1.2km までの通信が可能で RS-485 の特徴を生かした最大 32 台までのマルチポイント接続も可能ですので
Microsoft PowerPoint - CproNt02.ppt [互換モード]
![Microsoft PowerPoint - CproNt02.ppt [互換モード]](/thumbs/95/124866096.jpg "Microsoft PowerPoint - CproNt02.ppt [互換モード]") 第 2 章 C プログラムの書き方 CPro:02-01 概要 C プログラムの構成要素は関数 ( プログラム = 関数の集まり ) 関数は, ヘッダと本体からなる 使用する関数は, プログラムの先頭 ( 厳密には, 使用場所より前 ) で型宣言 ( プロトタイプ宣言 ) する 関数は仮引数を用いることができる ( なくてもよい ) 関数には戻り値がある ( なくてもよい void 型 ) コメント
第 2 章 C プログラムの書き方 CPro:02-01 概要 C プログラムの構成要素は関数 ( プログラム = 関数の集まり ) 関数は, ヘッダと本体からなる 使用する関数は, プログラムの先頭 ( 厳密には, 使用場所より前 ) で型宣言 ( プロトタイプ宣言 ) する 関数は仮引数を用いることができる ( なくてもよい ) 関数には戻り値がある ( なくてもよい void 型 ) コメント
User's Manual
 デジモード ソフト設定例 RigExpert TI-7 USB トランシーバ インターフェース 取説もご熟読の上 TI-7 をご活用ください 日本語版作成 JA1SCW 日下 第1版 2014.07.20 覚 目 次 1. DigiPan...3 1.1 オーディオ設定...3 1.2 PTT 設定...3 2. MixW...4 2.1 オーディオ設定...4 2.2 CAT 設定...4 2.3
デジモード ソフト設定例 RigExpert TI-7 USB トランシーバ インターフェース 取説もご熟読の上 TI-7 をご活用ください 日本語版作成 JA1SCW 日下 第1版 2014.07.20 覚 目 次 1. DigiPan...3 1.1 オーディオ設定...3 1.2 PTT 設定...3 2. MixW...4 2.1 オーディオ設定...4 2.2 CAT 設定...4 2.3
PIC
 PIC - 1 ページ 2 週目 UBW を使用してみる 2010 年 5 月 23 日 15:28 前回の Gainer mini はあくまでも PC 側にプログラムがあり PIC は IO ボックス的な使用しかできなかった 入出力デバイスとして PIC を使う場合は 簡易で便利であるが それ以上の事 (PC なしでの動作 PC と対等の動作 ) は出来ない 今週からは 本来の PIC としての使い方を学ぶ
PIC - 1 ページ 2 週目 UBW を使用してみる 2010 年 5 月 23 日 15:28 前回の Gainer mini はあくまでも PC 側にプログラムがあり PIC は IO ボックス的な使用しかできなかった 入出力デバイスとして PIC を使う場合は 簡易で便利であるが それ以上の事 (PC なしでの動作 PC と対等の動作 ) は出来ない 今週からは 本来の PIC としての使い方を学ぶ
Arduino Processing and ) Fig1. Arduino Homepage : h;p://www.arduino.cc/
 Fig1. Arduino Homepage : h;p://www.arduino.cc/") Arduino Horiuchi* Oguri* Ueda* Tani* Eto* Arduino Processing and ) Fig1. Arduino Homepage : h;p://www.arduino.cc/ : Arduino Java Fig2. Arduino SoGware Download : h;p://arduino.cc/en/main/sogware Hardware
Arduino Horiuchi* Oguri* Ueda* Tani* Eto* Arduino Processing and ) Fig1. Arduino Homepage : h;p://www.arduino.cc/ : Arduino Java Fig2. Arduino SoGware Download : h;p://arduino.cc/en/main/sogware Hardware
アスラテック株式会社 会社案内
 V-Sido CONNECT RC スタートアップガイド DARWIN-MINI 編 アスラテック株式会社 はじめに 本マニュアルの概要 このマニュアルでは ROBOTIS のロボット DARWIN-MINI で V-Sido CONNECT RC を利用するための初期設定例を解説した スタートアップガイドです ここでは V-Sido CONNECT RC で Bluetooth による無線通信が行えるように設定し
V-Sido CONNECT RC スタートアップガイド DARWIN-MINI 編 アスラテック株式会社 はじめに 本マニュアルの概要 このマニュアルでは ROBOTIS のロボット DARWIN-MINI で V-Sido CONNECT RC を利用するための初期設定例を解説した スタートアップガイドです ここでは V-Sido CONNECT RC で Bluetooth による無線通信が行えるように設定し
デジモード ソフト設定例 RigExpert TI-8 USB トランシーバインターフェース 取説もご熟読の上 TI-8 をご活用ください 日本語版作成 :JA1SCW 日下覚 第 1 版
 デジモード ソフト設定例 RigExpert TI-8 USB トランシーバインターフェース 取説もご熟読の上 TI-8 をご活用ください 日本語版作成 :JA1SCW 日下覚 第 1 版 2016.05.20 目 次 1. DigiPan... 3 1.1 オーディオ設定... 3 1.2 PTT 設定... 3 2. MixW (MixW version 2.20)... 5 2.1 オーディオ設定...
デジモード ソフト設定例 RigExpert TI-8 USB トランシーバインターフェース 取説もご熟読の上 TI-8 をご活用ください 日本語版作成 :JA1SCW 日下覚 第 1 版 2016.05.20 目 次 1. DigiPan... 3 1.1 オーディオ設定... 3 1.2 PTT 設定... 3 2. MixW (MixW version 2.20)... 5 2.1 オーディオ設定...
Arduino 2016/03/26 京都大学学術情報メディアセンター 喜多一 1
 Arduino をはじめよう @KYOTO-U 2016/03/26 京都大学学術情報メディアセンター 喜多一 1 目次 1. この資料で学ぶこと 5 2. Arduino の使い方 6 2.1 今回の学習目標... 6 2.2 作業の心得... 6 2.3 準備... 6 2.4 例題の実行... 8 2.5 例題の変更と再実行... 9 2.6 エラーを経験する... 9 2.7 例題を最初から書いてみる...
Arduino をはじめよう @KYOTO-U 2016/03/26 京都大学学術情報メディアセンター 喜多一 1 目次 1. この資料で学ぶこと 5 2. Arduino の使い方 6 2.1 今回の学習目標... 6 2.2 作業の心得... 6 2.3 準備... 6 2.4 例題の実行... 8 2.5 例題の変更と再実行... 9 2.6 エラーを経験する... 9 2.7 例題を最初から書いてみる...
プログラマブル LED 制御モジュール アプリ操作説明書 プログラマブル LED 制御モジュール設定アプリ操作説明書 適用モジュール 改訂番号 エレラボドットコム 1
 設定 適用モジュール 041-1 改訂番号 20161024 エレラボドットコム 1 ( 用アプリの利用可能環境 ) Windows7 8.1 10 のいずれかが動作する PC Windows8 以降の場合は 次ページ記載の Windows8 以降の.NET Framework の有効化 (p3~7) の操作をするか 設定されていることを確認してからアプリをインストールしてください.NET Framework2.0
設定 適用モジュール 041-1 改訂番号 20161024 エレラボドットコム 1 ( 用アプリの利用可能環境 ) Windows7 8.1 10 のいずれかが動作する PC Windows8 以降の場合は 次ページ記載の Windows8 以降の.NET Framework の有効化 (p3~7) の操作をするか 設定されていることを確認してからアプリをインストールしてください.NET Framework2.0
赤外線レーザー 360 距離センサ XV-11 LIDAR Sensor 取り扱い説明書 もくじ お使いになるまえに 各部のなまえと扱い方 2 使い方 (Processing GUI で使う ) 必要なソフトのインストール 3 接続方法 3 GUI の操作方法 4 使い方 ( ロボットに組み込む )
 必要なソフトのインストール 3 接続方法 3 GUI の操作方法 4 使い方 ( ロボットに組み込む )") 赤外線レーザー 360 距離センサ XV-11 LIDAR Sensor 取り扱い説明書 もくじ お使いになるまえに 各部のなまえと扱い方 2 使い方 (Processing GUI で使う ) 必要なソフトのインストール 3 接続方法 3 GUI の操作方法 4 使い方 ( ロボットに組み込む ) 接続方法 6 データ出力フォーマット 7 コマンド入力フォーマット 8 技術資料 このたびはお買い上げいただき
赤外線レーザー 360 距離センサ XV-11 LIDAR Sensor 取り扱い説明書 もくじ お使いになるまえに 各部のなまえと扱い方 2 使い方 (Processing GUI で使う ) 必要なソフトのインストール 3 接続方法 3 GUI の操作方法 4 使い方 ( ロボットに組み込む ) 接続方法 6 データ出力フォーマット 7 コマンド入力フォーマット 8 技術資料 このたびはお買い上げいただき
デジタル表現論・第6回
 デジタル表現論 第 6 回 劉雪峰 ( リュウシュウフォン ) 2016 年 5 月 16 日 劉 雪峰 ( リュウシュウフォン ) デジタル表現論 第 6 回 2016 年 5 月 16 日 1 / 16 本日の目標 Java プログラミングの基礎配列 ( 復習 関数の値を配列に格納する ) 文字列ファイルの書き込み 劉 雪峰 ( リュウシュウフォン ) デジタル表現論 第 6 回 2016 年
デジタル表現論 第 6 回 劉雪峰 ( リュウシュウフォン ) 2016 年 5 月 16 日 劉 雪峰 ( リュウシュウフォン ) デジタル表現論 第 6 回 2016 年 5 月 16 日 1 / 16 本日の目標 Java プログラミングの基礎配列 ( 復習 関数の値を配列に格納する ) 文字列ファイルの書き込み 劉 雪峰 ( リュウシュウフォン ) デジタル表現論 第 6 回 2016 年
第 1 章 : はじめに RogueWave Visualization for C++ の Views5.7 に付属している Views Studio を使い 簡単な GUI アプリケーションの開発手順を紹介します この文書では Windows 8 x64 上で Visual Studio2010
 RW View Studio Getting Started (1) : 簡単な GUI アプリケーションを作成する 目次 第 1 章はじめに...1 1.1 アプリケーションの概要... 1 1.2 Views Studio とは... 2 第 2 章 Views Studio を起動する...3 2.1 起動画面 ( メインウィンドウ ) の説明... 4 2.2 ガジェットエクステンション...
RW View Studio Getting Started (1) : 簡単な GUI アプリケーションを作成する 目次 第 1 章はじめに...1 1.1 アプリケーションの概要... 1 1.2 Views Studio とは... 2 第 2 章 Views Studio を起動する...3 2.1 起動画面 ( メインウィンドウ ) の説明... 4 2.2 ガジェットエクステンション...
HW-Slides-04.ppt
 ハードウェア実験 組み込みシステム入門第 4 回 2012 年 10 月 11 日 IC TRAINER の導入 2 ブレッドボードとは何か! 手引き書 P8 半田付けせずに 簡単にリード線を差し込むだけで回路の動作を調べることができるボード! 部品挿入エリアでは ABCDE が縦に裏側で接続されている! 電源ラインでは 横に接続されている! 慣例として! 赤 : + 電源! 青 :- 電源または
ハードウェア実験 組み込みシステム入門第 4 回 2012 年 10 月 11 日 IC TRAINER の導入 2 ブレッドボードとは何か! 手引き書 P8 半田付けせずに 簡単にリード線を差し込むだけで回路の動作を調べることができるボード! 部品挿入エリアでは ABCDE が縦に裏側で接続されている! 電源ラインでは 横に接続されている! 慣例として! 赤 : + 電源! 青 :- 電源または
プロジェクト実施要領
 ロボットの製作 (Arduino 互換マイコンボード ) 資料 1.3 版 2014/7/12( 土 ) 10:00~ 徳島大学大学開放実践センター 辻 明典 Copyright 2013-2014, The University of Tokushima, Akinori Tsuji. All rights reserved. 目次 1. ロボットの構成... 1 1.1. 基本構成... 1 1.2.
ロボットの製作 (Arduino 互換マイコンボード ) 資料 1.3 版 2014/7/12( 土 ) 10:00~ 徳島大学大学開放実践センター 辻 明典 Copyright 2013-2014, The University of Tokushima, Akinori Tsuji. All rights reserved. 目次 1. ロボットの構成... 1 1.1. 基本構成... 1 1.2.
PowerPoint プレゼンテーション
 ようこそ COBOL へ! 2018/08/17 伊東 輝 COBOL とは? 1959 年に事務処理用に開発された手続き型言語であり ソースコードの記述内容を上から順番に実行する言語である 約 60 年前から存在する言語でありながら 未だに基本情報処理技術者の午後試験に出題され 金融系システム等のレガシーシステムでは現在も COBOL のプログラムが稼働している 今回は COBOL のコーディングの基礎を発表する
ようこそ COBOL へ! 2018/08/17 伊東 輝 COBOL とは? 1959 年に事務処理用に開発された手続き型言語であり ソースコードの記述内容を上から順番に実行する言語である 約 60 年前から存在する言語でありながら 未だに基本情報処理技術者の午後試験に出題され 金融系システム等のレガシーシステムでは現在も COBOL のプログラムが稼働している 今回は COBOL のコーディングの基礎を発表する
内容 1. 仕様 動作確認条件 ハードウェア説明 使用端子一覧 ソフトウェア説明 動作概要 ファイル構成 オプション設定メモリ 定数一覧 変数一
 RX210 グループ IRQ 割り込みを使用したパルス出力 要旨 本サンプルコードでは IRQ 割り込みが発生すると 一定期間タイマでパルスを出力する 方法について説明します 対象デバイス RX210 1 / 25 内容 1. 仕様... 3 2. 動作確認条件... 3 3. ハードウェア説明... 3 3.1 使用端子一覧... 3 4. ソフトウェア説明... 4 4.1 動作概要... 4
RX210 グループ IRQ 割り込みを使用したパルス出力 要旨 本サンプルコードでは IRQ 割り込みが発生すると 一定期間タイマでパルスを出力する 方法について説明します 対象デバイス RX210 1 / 25 内容 1. 仕様... 3 2. 動作確認条件... 3 3. ハードウェア説明... 3 3.1 使用端子一覧... 3 4. ソフトウェア説明... 4 4.1 動作概要... 4
Microsoft Word - Training10_プリプロセッサ.docx
 Training 10 プリプロセッサ 株式会社イーシーエス出版事業推進委員会 1 Lesson1 マクロ置換 Point マクロ置換を理解しよう!! マクロ置換の機能により 文字列の置き換えをすることが出来ます プログラムの可読性と保守性 ( メンテナンス性 ) を高めることができるため よく用いられます マクロ置換で値を定義しておけば マクロの値を変更するだけで 同じマクロを使用したすべての箇所が変更ができるので便利です
Training 10 プリプロセッサ 株式会社イーシーエス出版事業推進委員会 1 Lesson1 マクロ置換 Point マクロ置換を理解しよう!! マクロ置換の機能により 文字列の置き換えをすることが出来ます プログラムの可読性と保守性 ( メンテナンス性 ) を高めることができるため よく用いられます マクロ置換で値を定義しておけば マクロの値を変更するだけで 同じマクロを使用したすべての箇所が変更ができるので便利です
Microsoft PowerPoint - RL78G1E_スタータキットデモ手順_2012_1119修正版.pptx
 Smart Analog Stick をはじめて動かす RL78G1E STARTER KIT を始めて使う方のために インストールから基本的な使い方を体験する部分を順番にまとめました この順番で動かせば とりあえず体験できるという内容で作成してあります 2 度目からお使いの場合には Stick ボードを USB に接続した状態で 3 から始めてください 詳細な機能説明は ユーザーズマニュアルやオンラインヘルプを参考にしてください
Smart Analog Stick をはじめて動かす RL78G1E STARTER KIT を始めて使う方のために インストールから基本的な使い方を体験する部分を順番にまとめました この順番で動かせば とりあえず体験できるという内容で作成してあります 2 度目からお使いの場合には Stick ボードを USB に接続した状態で 3 から始めてください 詳細な機能説明は ユーザーズマニュアルやオンラインヘルプを参考にしてください
Microsoft Word - 4章.doc
 Ⅳ 赤外線 LED 活用例 ( 赤外線通信 ) 3 実験 (1) 赤外線通信の様子を調べる回路の製作ア使用部品実験に使用する部品を表 Ⅳ-3に示す 表 Ⅳ-3 赤外線通信実験ボード部品表 No 部品名 個数 1 家庭用電化製品のリモコン 1 2 ブレットボード 1 3 赤外線受信モジュール 1 4 抵抗 430Ω 1 5 信号確認用赤色発光ダイオード 1 6 測定用オシロスコープ 1 7 電池 BOX
Ⅳ 赤外線 LED 活用例 ( 赤外線通信 ) 3 実験 (1) 赤外線通信の様子を調べる回路の製作ア使用部品実験に使用する部品を表 Ⅳ-3に示す 表 Ⅳ-3 赤外線通信実験ボード部品表 No 部品名 個数 1 家庭用電化製品のリモコン 1 2 ブレットボード 1 3 赤外線受信モジュール 1 4 抵抗 430Ω 1 5 信号確認用赤色発光ダイオード 1 6 測定用オシロスコープ 1 7 電池 BOX
ReferSTAR 78K/Kx2(CT-781) Applilet EZ PLプログラム集
 Applilet EZ PLプログラム集") マイコン トレーニングキット ReferSTAR 78K/Kx2 (CT-781) Applilet EZ PL プログラム集 アプリケーションノート 1. 概要 Applilet EZ PL 3.0 ReferSTAR 78K/Kx2 LCD PC ReferSTAR 78K/Kx2CT-781 Windows XPUSB2.0 FTDI COM 図 1-1:ReferSTAR 78K/Kx2 とホスト
マイコン トレーニングキット ReferSTAR 78K/Kx2 (CT-781) Applilet EZ PL プログラム集 アプリケーションノート 1. 概要 Applilet EZ PL 3.0 ReferSTAR 78K/Kx2 LCD PC ReferSTAR 78K/Kx2CT-781 Windows XPUSB2.0 FTDI COM 図 1-1:ReferSTAR 78K/Kx2 とホスト
Ver.1-5 Date レゾルバ変換器 (R/D 変換器 ) R D 1416 取扱説明書 レゾルバデジタル変換器 (RD1416) サーボテクノ株式会社 神奈川県相模原市中央区相模原 TEL: FAX:
 R D 1416 取扱説明書 レゾルバデジタル変換器 (RD1416) サーボテクノ株式会社 神奈川県相模原市中央区相模原 TEL: FAX:") Ver.1-5 Date 2014.11.11 レゾルバ変換器 (R/D 変換器 ) R D 1416 取扱説明書 レゾルバデジタル変換器 (RD1416) サーボテクノ株式会社 252-0231 神奈川県相模原市中央区相模原 6-2-18 TEL:042-769-7873 FAX:042-769-7874 目 次 1. 概要... 2 2. 特長... 2 3. 用途... 2 4. 仕様...
Ver.1-5 Date 2014.11.11 レゾルバ変換器 (R/D 変換器 ) R D 1416 取扱説明書 レゾルバデジタル変換器 (RD1416) サーボテクノ株式会社 252-0231 神奈川県相模原市中央区相模原 6-2-18 TEL:042-769-7873 FAX:042-769-7874 目 次 1. 概要... 2 2. 特長... 2 3. 用途... 2 4. 仕様...
Microsoft Word - Arduino K3NG CW ã‡�ㅼㅤㅼ çµ—ã†¿ç«‰ã†¦èª¬æŸ”æł¸_ docx
 Arduino K3NG CW キーヤー組み立て説明書 これは K3NG OM が配布している Arduino による CW キーヤー スケッチに対応した CW キーヤー シールドです K3NG CW キーヤーが実現している機能はとても幅広く このうちこのシールド基板が対応している機能は次の様になります このキーヤーで出来る事 : アイアンビック A/B モードの切り替え Ultimatic モード
Arduino K3NG CW キーヤー組み立て説明書 これは K3NG OM が配布している Arduino による CW キーヤー スケッチに対応した CW キーヤー シールドです K3NG CW キーヤーが実現している機能はとても幅広く このうちこのシールド基板が対応している機能は次の様になります このキーヤーで出来る事 : アイアンビック A/B モードの切り替え Ultimatic モード
ファイル入出力
 C プログラミング Ⅱ の基礎 とは ファイルへデータを書き込んだり ( 出力 ), ファイルからデータを読み込んだり ( 入力 ) する C 言語では キーボードからの入力 画面への出力と同じようなコードで 処理を実現できる プログラム 入力 出力 ファイル 出力 入力 2 入出力の基本 ストリーム プログラム上で様々な装置への入出力を行う機構様々な入出力装置を統一的な方法で扱うことができる ハードディスクなどではファイルデータによって入出力が行われる
C プログラミング Ⅱ の基礎 とは ファイルへデータを書き込んだり ( 出力 ), ファイルからデータを読み込んだり ( 入力 ) する C 言語では キーボードからの入力 画面への出力と同じようなコードで 処理を実現できる プログラム 入力 出力 ファイル 出力 入力 2 入出力の基本 ストリーム プログラム上で様々な装置への入出力を行う機構様々な入出力装置を統一的な方法で扱うことができる ハードディスクなどではファイルデータによって入出力が行われる
User's Manual
 デジモード ソフト設定例 RigExpert TI-8 USB トランシーバ インターフェース 取説もご熟読の上 TI-8 をご活用ください 日本語版作成 JA1SCW 日下 第1版 2016.05.20 覚 目 次 1. DigiPan...3 1.1 オーディオ設定...3 1.2 PTT 設定...3 2. MixW...4 2.1 オーディオ設定...5 2.2 CAT 設定...5 2.3
デジモード ソフト設定例 RigExpert TI-8 USB トランシーバ インターフェース 取説もご熟読の上 TI-8 をご活用ください 日本語版作成 JA1SCW 日下 第1版 2016.05.20 覚 目 次 1. DigiPan...3 1.1 オーディオ設定...3 1.2 PTT 設定...3 2. MixW...4 2.1 オーディオ設定...5 2.2 CAT 設定...5 2.3
目次 Arduino で始めるソフトウェア開発 1 はじめてみよう Arduino 準備編 Arduino の購入 開発環境の準備 体験編 Arduino IDE の起動 Ar
 Arduino で始めるソフトウェア開発 All rights reserved Embedded Property Laboratory(E.P. らぼ ) 目次 Arduino で始めるソフトウェア開発 1 はじめてみよう Arduino... 5 1-1 準備編... 5 1-1-1 Arduino の購入... 5 1-1-2 開発環境の準備... 6 1-2 体験編... 7 1-2-1
Arduino で始めるソフトウェア開発 All rights reserved Embedded Property Laboratory(E.P. らぼ ) 目次 Arduino で始めるソフトウェア開発 1 はじめてみよう Arduino... 5 1-1 準備編... 5 1-1-1 Arduino の購入... 5 1-1-2 開発環境の準備... 6 1-2 体験編... 7 1-2-1
MODLINK-2 Arduino&IoT 組立式開発ボード Manual モジュリンク 2 取扱説明書
 MODLINK-2 Arduino&IoT 組立式開発ボード Manual モジュリンク 2 取扱説明書 1 目次 1. 共通事項... 2 1-1. 概要... 2 1-2. 注意事項... 2 2. 共通事項... 4 2-1. BASE-D16... 4 3. LINK module... 7 3-1. MCU-LINK(UNO)... 7 3-2. UPLOAD-LINK... 10 3-3.
MODLINK-2 Arduino&IoT 組立式開発ボード Manual モジュリンク 2 取扱説明書 1 目次 1. 共通事項... 2 1-1. 概要... 2 1-2. 注意事項... 2 2. 共通事項... 4 2-1. BASE-D16... 4 3. LINK module... 7 3-1. MCU-LINK(UNO)... 7 3-2. UPLOAD-LINK... 10 3-3.