Automatic Detection of Circular Objects by Ellipse Growing Mitsuo OKABE, Kenichi KANATANI, and Naoya OHTA 1. [4], [5], [18], [19] [14], [17] [28], [32
|
|
|
- たいち しげまつ
- 4 years ago
- Views:
Transcription
1 Automatic Detection of Circular Objects by Ellipse Growing Mitsuo OKABE, Kenichi KANATANI, and Naoya OHTA 1. [4], [5], [18], [19] [14], [17] [28], [32] [6], [21], [27] Fujitsu Cadtech, Ltd., Oyama-shi, Japan Department of Information Technology, Okayama University, Okayama-shi, Japan Department of Computer Science, Gunma University, Kiryushi, Japan [2], [3], [7] [10], [22] [26], [31], [33] [39] D II Vol. J85 D II No. 12 pp
2 2002/12 Vol. J85 D II No. 12 edge detection voting for the center of the circle voting for the radius of the circle ellipse growth outlier detection ellipse fitting Does the edge segment mostly cover the ellipse? no yes search for the other segment end Fig. 1 1 Flowchart of the procedure. [2] 2 [30] LMedS [29] Sobel Fig. 2 2 The evolute of an ellipse and its singularities [11] 4 2 [1] [16] P k 2 P C r 3(a) C γr k k = 30, γ = 1/10 1/ r C
 A pixel away from the estimated center C by distance R votes the value R with weight e R2 /2s 2 cos φ.")
3 3 Fig. 3 (a) (b) (c) (a) P k 2. (b) C R e R2 /2s 2 cos φ R (c) δ (a) Voting around the center of the circle passing through P and the two points away from it by k pixels on both sides. (b) A pixel away from the estimated center C by distance R votes the value R with weight e R2 /2s 2 cos φ. (c) Fitting an ellipse to the longest edge segment inside the region within distance δ from the estimated ellipse. C P R [11] R 1 e R2 /2s 2 cos φ 2 φ P Sobel CP 3(b) s C R s 1/4 R ±1 e 1/2 R 1 ) e R2 /2s 2 C s cos φ 0 C δ 2 e x2 3(c) [12], [13], [15] 3 [18] Ax 2 +2Bxy+Cy 2 +2f(Dx+Ey)+f 2 F =0 (1) f AC B 2 > 0 (2) x Q x/f A B D x = y/f, Q = B C E (3) 1 D E F (1) [14], [16] (x, Qx) = 0 (4) (a, b) a, b
4 2002/12 Vol. J85 D II No. 12 δ Q (+), Q ( ) 1 S c c ( A S = B B C ), c = c = (c, S 1 c) F (5) 2 S λ 1, λ 2 ( D E u 1, u 2 3 1, 2 1 = 2 = c ( c/λ 1 ± δ/f) 2 c (6) ( c/λ 2 ± δ/f) 2 4 S (+), S ( ) ( ) S (±) = U 1 2 ) U (7) U u 1, u Q (+), Q ( ) Q (±) = ( S (±) S (±) S 1 c (S (±) S 1 c) F +(c, S 1 (S (±) S)S 1 c) (8) (4) δ (x, Q (+) x)(x, Q ( ) x) < 0 (9) (1) 2 δ = 4 (2) δ 1 δ = LMedS [29] ) 4 Fig. 4 Judging if the edge segment covers more than half of the ellipse. 4 (3) {x α }, α = 1,..., N Q m = O, S m = 1 {x α } Q (1) A, B,..., F (2) 3 S = med N (x α, Qx α ) 2 α=1 (10) P k Qx α 2 P k = diag(1, 1, 0) 1, 1, 0 Q x α [15] 4 S < S m Q m Q, S m S 10 S > = S m x α (x α, Qx α) 2 < 10Sm (11) P k Qx α 2 [29] σ σ S m Q 2.13σ e
 The detected circle and the fitted ellipse. (b) Voting for the center.")
 for the radius R of the initial circle (abscissa).")
 e 4 1 + γ (6) 1 = λ 1 (1 ± γ) 2, λ(±) 2 = λ 2 (1 ± γ) 2 (12) 1 ± γ γ = 1.")
5 (a) (b) (c) 5 (a) (b) (c) Fig. 5 Estimation of the center of the initial circle. (a) The detected circle and the fitted ellipse. (b) Voting for the center. (c) Simple Hough transform R (a) R 6 R (a) (b) Fig. 6 The number of votes (ordinate) for the radius R of the initial circle (abscissa). (a) Proposed method. (b) Simple voting. (b) e γ (6) 1 = λ 1 (1 ± γ) 2, λ(±) 2 = λ 2 (1 ± γ) 2 (12) 1 ± γ γ = e e 4, e 1 e, e (10) e, e (11) 3. 5(a) 5(b) 5(c) 1 [11] 6(a) R 6(b) ±1 1 [11] 6(a) 0 7(a) 1827
 (1) The initial circle, (2) the hyperbola resulting from the ellipse growing, (3) the ellipse fitted by LMedS, and (4) the ellipse fitted after detecting another segment.")
6 2002/12 Vol. J85 D II No. 12 (a) (b) 7 Fig. 7 (a) (b)(1) (2) (3) (4) (a) The edge image used. (b) (1) The initial circle, (2) the hyperbola resulting from the ellipse growing, (3) the ellipse fitted by LMedS, and (4) the ellipse fitted after detecting another segment. δ = 10 7(b) (1) (2) (3) (4) 8 1, 2 4, CPU Pentium III 600MHz OS Linux [32] cm cm [17], [28], [32] (2) No [1],,, [2],,,, PRMU98-123, Nov [3] Y. C. Cheng and S. C. Lee, A new method for quadratic curve detection using K-RANSAC with acceleration techniques, Pattern Recognit., vol.28, no.5, pp , May [4] W. Chojnacki, M. J. Brooks, and A. van den Hen- 1828
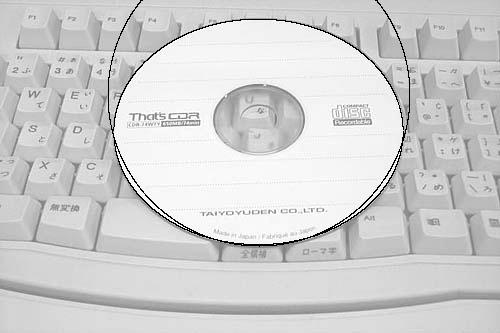
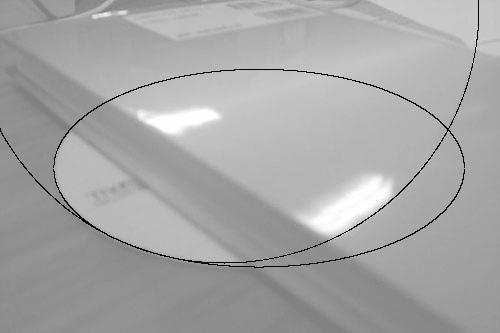
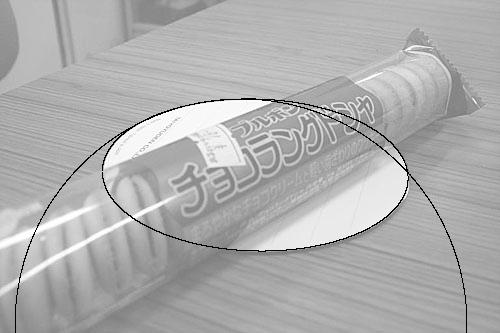
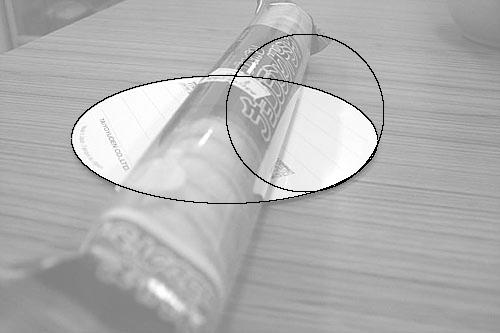





7 論文 楕円成長法による円形物体の自動検出 図 8 当てはめ例 上段はエッジ画像 下段は初期円と当てはめた楕円を原画像に重ねた もの Fig. 8 Examples of ellipse fitting: the edge images (upper rows); the initial circles and the fitted ellipses superimposed on the original images (lower rows). 1829
![2002/12 Vol. J85 D II No. 12 Fig. 9 9 Calibration of a turntable. gel, Rationalising the renormalisation method of Kanatani, J. Math. Imaging Vision, vol.14, no.1, pp.21 38, Feb. 2001. [5] W.](/docs-images/101/148861312/images/8-1.jpg "Chojnacki, M. J. Brooks, A. van den Hengel, and D. Gawley, On the fitting of surfaces to data with covariances, IEEE Trans. Pattern Anal. & Mach. Intell., vol.22, no.11, pp.1294 1303, Nov. 2000.")
8 2002/12 Vol. J85 D II No. 12 Fig. 9 9 Calibration of a turntable. gel, Rationalising the renormalisation method of Kanatani, J. Math. Imaging Vision, vol.14, no.1, pp.21 38, Feb [5] W. Chojnacki, M. J. Brooks, A. van den Hengel, and D. Gawley, On the fitting of surfaces to data with covariances, IEEE Trans. Pattern Anal. & Mach. Intell., vol.22, no.11, pp , Nov [6] D. B. Cooper and N. Yalabik, On the computational cost of approximating and recognizing nose-perturbed straight lines and quadratic arcs in the plane, IEEE Trans. Comput., vol.25, no.10, pp , Oct [7],,, θ-ρ, D-II, vol.j74-d-ii, no.9, pp , Sept [8] N. Guil and E. L. Zapata, Lower order circle and ellipse Hough transform, Pattern Recognit., vol.30, no.10, pp , Oct [9] C.-T. Ho and L.-H. Chen, A fast ellipse/circle detector using geometric symmetry, Pattern Recognit., vol.28, no.1, pp , Jan [10] C. L. Huang, Elliptical feature extraction via an improved Hough transform, Pattern Recognit. Lett., vol.10, no.2, pp , Feb [11] D. Ioannou, W. Huda, and A. F. Laine, Circle recognition through a 2D Hough Trnasform and radius histogramming, Image Vision Comput., vol.17, pp.15 26, Jan [12],,, vol.35, no.2, pp , Feb [13],,, [14] K. Kanatani, Geometric Computation for Machine Vision, Oxford University Press, Oxford, [15] K. Kanatani, Statistical Optimization for Geometric Computation: Theory and Practice, Elsevier, Amsterdam, [16],,, [17] K. Kanatani and W. Liu, 3-D interpretation of conics and orthogonality, CVGIP: Image Understanding, vol.58, no.3, pp , Nov [18] Y. Kanazawa and K. Kanatani, Optimal conic fitting and reliability evaluation, IEICE Trans. Inf. & Syst., vol.e79-d, no.9, pp , Sept [19] Y. Leedan and P. Meer, Heteroscedastic regression in computer vision: Problems with bilinear constraint, Int. J. Comput. Vision, vol.37, no.2, pp , June [20] B. Matei and P. Meer, Reduction of bias in maximum likelihood ellipse fitting, Proc. 15th Int. Conf. Pattern Recognit., vol.3, pp , Barcelona, Spain, Sept [21],,,, D-II, vol.j84-d-ii, no.2, pp , Feb [22],,, D-II, vol.j81-d-ii, no.9, pp , Sept [23],,, Hough, D-II, vol.j72-d-ii, no.10, pp , Oct [24] D. Pao, H. F. Li, and R. Jayakumar, A decomposable parameter space for the detection of ellipses, Pattern Recognit., vol.14, no.12, pp , Dec [25] G. Roth and M. D. Levine, Extracting geometric primitives, CVGIP: Image Understanding, vol.58, no.1, pp.1 22, July [26] G. Roth and M. D. Levine, Geometric primitive extraction using a genetic alorithm IEEE Trans. Pattern Anal. & Mach. Intell., vol.16, no.9, pp , Sept [27] P. L. Rosin and G. A. W. West, Nonparametric segmentation of curves into various representations, IEEE Trans. Pattern Anal. & Mach. Intell., vol.17, no.12, pp , Dec [28] C. A. Rothwell, A. Zisserman, C. I. Marinos, D. A. Forsyth, and J. L. Mundy, Relative motion and pose from arbitrary plane curves, Image Vision Computing, vol.10, no.4, pp , May [29] P. J. Rousseeuw and A. M. Leroy, Robust Regression and Outlier Detection, Wiley, New York, [30], Hough,, vol.32, no.2, pp , Feb [31] S. Tsuji and F. Matsumoto, Detection of ellipses by 1830
9 a modified Hough transform, IEEE Trans. Comput., vol.27, no.8, pp , Aug [32],,,, 6, pp ,, June [33],,,, D-II, vol.j82-d-ii, no.12, pp , Dec [34],,,, Li-Lavin-Le Master, D-II, vol.j76-d-ii, no.12, pp , Dec [35],, Hough, D-II, vol.j73-d-ii, no.2, pp , Feb [36] W.-Y. Wu and M.-J. J. Wang, Elliptical object detection by using its geometric properties, Pattern Recognit., vol.26, no.10, pp , Oct [37],,,,, D-II, vol.j72-d-ii, no.7, pp , July [38] H. K. Yuen, J. Illingworth, and J. Kittler, Detecting partially occluded ellpises using the Hough transform, Image Vision Comput., vol.7, no.1, pp.31 37, Feb [39] J. H. Yoo and I. K. Seth, An ellipse detection method from the polar and pole definition of conics, Pattern Recognit., vol.26, no.2, pp , Feb (1), (3) f x y z Q r Q det Q = 1 det Q = 0 2 [14], [16] Q λ 1, λ 2, λ 3 u 1, u 2, u 3 λ 3 < 0 < λ 1 < = λ 2 [14] [ ] λ 2 λ 1 λ 1 λ 3 n = N u 2 ± u 3 (A 1) λ 2 λ 3 λ 2 λ 3 n 1 n 3 < = 0 d = λ 3 1 r. (A 2) x C = Z[Q 1 n] (A 3) Z[ ] Z 1 r C = dx C (n, x C ) (A 4) θ = cos 1 n 3 (A 5) IEEE N[ ]
(a) (b) (c) Canny (d) 1 ( x α, y α ) 3 (x α, y α ) (a) A 2 + B 2 + C 2 + D 2 + E 2 + F 2 = 1 (3) u ξ α u (A, B, C, D, E, F ) (4) ξ α (x 2 α, 2x α y α,
 (b) (c) Canny (d) 1 ( x α, y α ) 3 (x α, y α ) (a) A 2 + B 2 + C 2 + D 2 + E 2 + F 2 = 1 (3) u ξ α u (A, B, C, D, E, F ) (4) ξ α (x 2 α, 2x α y α,") [II] Optimization Computation for 3-D Understanding of Images [II]: Ellipse Fitting 1. (1) 2. (2) (edge detection) (edge) (zero-crossing) Canny (Canny operator) (3) 1(a) [I] [II] [III] [IV ] E-mail sugaya@iim.ics.tut.ac.jp
[II] Optimization Computation for 3-D Understanding of Images [II]: Ellipse Fitting 1. (1) 2. (2) (edge detection) (edge) (zero-crossing) Canny (Canny operator) (3) 1(a) [I] [II] [III] [IV ] E-mail sugaya@iim.ics.tut.ac.jp
IPSJ SIG Technical Report Taubin Ellipse Fitting by Hyperaccurate Least Squares Yuuki Iwamoto, 1 Prasanna Rangarajan 2 and Kenichi Kanatani
 1 2 1 2 Taubin Ellipse Fitting by Hyperaccurate Least Squares Yuuki Iwamoto, 1 Prasanna Rangarajan 2 and Kenichi Kanatani 1 This paper presents a new method for fitting an ellipse to a point sequence extracted
1 2 1 2 Taubin Ellipse Fitting by Hyperaccurate Least Squares Yuuki Iwamoto, 1 Prasanna Rangarajan 2 and Kenichi Kanatani 1 This paper presents a new method for fitting an ellipse to a point sequence extracted
, ( ξ/) ξ(x), ( ξ/) x = x 1,. ξ ξ ( ξ, u) = 0. M LS ξ ξ (6) u,, u M LS 3).,.. ξ x ξ = ξ(x),, 1. J = (ξ ξ, V [ξ ] 1 (ξ ξ )) (7) ( ξ, u) = 0, = 1,..., N
![, ( ξ/) ξ(x), ( ξ/) x = x 1,. ξ ξ ( ξ, u) = 0. M LS ξ ξ (6) u,, u M LS 3).,.. ξ x ξ = ξ(x),, 1. J = (ξ ξ, V [ξ ] 1 (ξ ξ )) (7) ( ξ, u) = 0, = 1,..., N](/thumbs/80/81723780.jpg ", ( ξ/) ξ(x), ( ξ/) x = x 1,. ξ ξ ( ξ, u) = 0. M LS ξ ξ (6) u,, u M LS 3).,.. ξ x ξ = ξ(x),, 1. J = (ξ ξ, V [ξ ] 1 (ξ ξ )) (7) ( ξ, u) = 0, = 1,..., N") 1,,.,.. Maximum Likelihood Estimation for Geometric Fitting Yasuyuki Sugaya 1 Geometric fitting, the problem which estimates a geometric model of a scene from extracted image data, is one of the most fundamental
1,,.,.. Maximum Likelihood Estimation for Geometric Fitting Yasuyuki Sugaya 1 Geometric fitting, the problem which estimates a geometric model of a scene from extracted image data, is one of the most fundamental
4. C i k = 2 k-means C 1 i, C 2 i 5. C i x i p [ f(θ i ; x) = (2π) p 2 Vi 1 2 exp (x µ ] i) t V 1 i (x µ i ) 2 BIC BIC = 2 log L( ˆθ i ; x i C i ) + q
![4. C i k = 2 k-means C 1 i, C 2 i 5. C i x i p [ f(θ i ; x) = (2π) p 2 Vi 1 2 exp (x µ ] i) t V 1 i (x µ i ) 2 BIC BIC = 2 log L( ˆθ i ; x i C i ) + q](/thumbs/92/110416683.jpg "4. C i k = 2 k-means C 1 i, C 2 i 5. C i x i p [ f(θ i ; x) = (2π) p 2 Vi 1 2 exp (x µ ] i) t V 1 i (x µ i ) 2 BIC BIC = 2 log L( ˆθ i ; x i C i ) + q") x-means 1 2 2 x-means, x-means k-means Bayesian Information Criterion BIC Watershed x-means Moving Object Extraction Using the Number of Clusters Determined by X-means Clustering Naoki Kubo, 1 Kousuke
x-means 1 2 2 x-means, x-means k-means Bayesian Information Criterion BIC Watershed x-means Moving Object Extraction Using the Number of Clusters Determined by X-means Clustering Naoki Kubo, 1 Kousuke
28 Horizontal angle correction using straight line detection in an equirectangular image
 28 Horizontal angle correction using straight line detection in an equirectangular image 1170283 2017 3 1 2 i Abstract Horizontal angle correction using straight line detection in an equirectangular image
28 Horizontal angle correction using straight line detection in an equirectangular image 1170283 2017 3 1 2 i Abstract Horizontal angle correction using straight line detection in an equirectangular image
2007/8 Vol. J90 D No. 8 Stauffer [7] 2 2 I 1 I 2 2 (I 1(x),I 2(x)) 2 [13] I 2 = CI 1 (C >0) (I 1,I 2) (I 1,I 2) Field Monitoring Server
![2007/8 Vol. J90 D No. 8 Stauffer [7] 2 2 I 1 I 2 2 (I 1(x),I 2(x)) 2 [13] I 2 = CI 1 (C >0) (I 1,I 2) (I 1,I 2) Field Monitoring Server](/thumbs/91/107223763.jpg "2007/8 Vol. J90 D No. 8 Stauffer [7] 2 2 I 1 I 2 2 (I 1(x),I 2(x)) 2 [13] I 2 = CI 1 (C >0) (I 1,I 2) (I 1,I 2) Field Monitoring Server") a) Change Detection Using Joint Intensity Histogram Yasuyo KITA a) 2 (0 255) (I 1 (x),i 2 (x)) I 2 = CI 1 (C>0) (I 1,I 2 ) (I 1,I 2 ) 2 1. [1] 2 [2] [3] [5] [6] [8] Intelligent Systems Research Institute,
a) Change Detection Using Joint Intensity Histogram Yasuyo KITA a) 2 (0 255) (I 1 (x),i 2 (x)) I 2 = CI 1 (C>0) (I 1,I 2 ) (I 1,I 2 ) 2 1. [1] 2 [2] [3] [5] [6] [8] Intelligent Systems Research Institute,
Vol.-CVIM-7 No.7 /3/8 NLPCA kernel PCA KPCA 4),) NLPCA KPCA NLPCA KPCA principle curve principle surface KPCA ) ),),6),8),),3) ) Jacobian KPCA PCA ) P
,) NLPCA KPCA NLPCA KPCA principle curve principle surface KPCA ) ),),6),8),),3) ) Jacobian KPCA PCA ) P") Vol.-CVIM-7 No.7 /3/8 RANSAC M Subspace fitting via robust Jacobian kernel PCA Jun Fujiki and Shotaro Akaho The subspace fitting method based on the original kernel principle component analysis (PCA),
Vol.-CVIM-7 No.7 /3/8 RANSAC M Subspace fitting via robust Jacobian kernel PCA Jun Fujiki and Shotaro Akaho The subspace fitting method based on the original kernel principle component analysis (PCA),
IPSJ SIG Technical Report Vol.2012-CG-149 No.13 Vol.2012-CVIM-184 No /12/4 3 1,a) ( ) DB 3D DB 2D,,,, PnP(Perspective n-point), Ransa
 ( ) DB 3D DB 2D,,,, PnP(Perspective n-point), Ransa") 3,a) 3 3 ( ) DB 3D DB 2D,,,, PnP(Perspective n-point), Ransac. DB [] [2] 3 DB Web Web DB Web NTT NTT Media Intelligence Laboratories, - Hikarinooka Yokosuka-Shi, Kanagawa 239-0847 Japan a) yabushita.hiroko@lab.ntt.co.jp
3,a) 3 3 ( ) DB 3D DB 2D,,,, PnP(Perspective n-point), Ransac. DB [] [2] 3 DB Web Web DB Web NTT NTT Media Intelligence Laboratories, - Hikarinooka Yokosuka-Shi, Kanagawa 239-0847 Japan a) yabushita.hiroko@lab.ntt.co.jp
3 1 Table 1 1 Feature classification of frames included in a comic magazine Type A Type B Type C Others 81.5% 10.3% 5.0% 3.2% Fig. 1 A co
 1 2 3 3 1 Hough 0.9 0.7 0.9 A Study on Frame Corner Detection of Comic Image Daisuke Ishii, 1 Kei Kawamura, 2 Keiichiro Hoashi, 3 Yasuhiro Takishima 3 and Hiroshi Watanabe 1 In this paper, we propose and
1 2 3 3 1 Hough 0.9 0.7 0.9 A Study on Frame Corner Detection of Comic Image Daisuke Ishii, 1 Kei Kawamura, 2 Keiichiro Hoashi, 3 Yasuhiro Takishima 3 and Hiroshi Watanabe 1 In this paper, we propose and
a) Extraction of Similarities and Differences in Human Behavior Using Singular Value Decomposition Kenichi MISHIMA, Sayaka KANATA, Hiroaki NAKANISHI a
 Extraction of Similarities and Differences in Human Behavior Using Singular Value Decomposition Kenichi MISHIMA, Sayaka KANATA, Hiroaki NAKANISHI a") a) Extraction of Similarities and Differences in Human Behavior Using Singular Value Decomposition Kenichi MISHIMA, Sayaka KANATA, Hiroaki NAKANISHI a), Tetsuo SAWARAGI, and Yukio HORIGUCHI 1. Johansson
a) Extraction of Similarities and Differences in Human Behavior Using Singular Value Decomposition Kenichi MISHIMA, Sayaka KANATA, Hiroaki NAKANISHI a), Tetsuo SAWARAGI, and Yukio HORIGUCHI 1. Johansson
xx/xx Vol. Jxx A No. xx 1 Fig. 1 PAL(Panoramic Annular Lens) PAL(Panoramic Annular Lens) PAL (2) PAL PAL 2 PAL 3 2 PAL 1 PAL 3 PAL PAL 2. 1 PAL
 PAL(Panoramic Annular Lens) PAL (2) PAL PAL 2 PAL 3 2 PAL 1 PAL 3 PAL PAL 2. 1 PAL") PAL On the Precision of 3D Measurement by Stereo PAL Images Hiroyuki HASE,HirofumiKAWAI,FrankEKPAR, Masaaki YONEDA,andJien KATO PAL 3 PAL Panoramic Annular Lens 1985 Greguss PAL 1 PAL PAL 2 3 2 PAL DP
PAL On the Precision of 3D Measurement by Stereo PAL Images Hiroyuki HASE,HirofumiKAWAI,FrankEKPAR, Masaaki YONEDA,andJien KATO PAL 3 PAL Panoramic Annular Lens 1985 Greguss PAL 1 PAL PAL 2 3 2 PAL DP
258 5) GPS 1 GPS 6) GPS DP 7) 8) 10) GPS GPS 2 3 4 5 2. 2.1 3 1) GPS Global Positioning System
 GPS 1 GPS 6) GPS DP 7) 8) 10) GPS GPS 2 3 4 5 2. 2.1 3 1) GPS Global Positioning System") Vol. 52 No. 1 257 268 (Jan. 2011) 1 2, 1 1 measurement. In this paper, a dynamic road map making system is proposed. The proposition system uses probe-cars which has an in-vehicle camera and a GPS receiver.
Vol. 52 No. 1 257 268 (Jan. 2011) 1 2, 1 1 measurement. In this paper, a dynamic road map making system is proposed. The proposition system uses probe-cars which has an in-vehicle camera and a GPS receiver.
Duplicate Near Duplicate Intact Partial Copy Original Image Near Partial Copy Near Partial Copy with a background (a) (b) 2 1 [6] SIFT SIFT SIF
![Duplicate Near Duplicate Intact Partial Copy Original Image Near Partial Copy Near Partial Copy with a background (a) (b) 2 1 [6] SIFT SIFT SIF](/thumbs/82/86406952.jpg "Duplicate Near Duplicate Intact Partial Copy Original Image Near Partial Copy Near Partial Copy with a background (a) (b) 2 1 [6] SIFT SIFT SIF") Partial Copy Detection of Line Drawings from a Large-Scale Database Weihan Sun, Koichi Kise Graduate School of Engineering, Osaka Prefecture University E-mail: sunweihan@m.cs.osakafu-u.ac.jp, kise@cs.osakafu-u.ac.jp
Partial Copy Detection of Line Drawings from a Large-Scale Database Weihan Sun, Koichi Kise Graduate School of Engineering, Osaka Prefecture University E-mail: sunweihan@m.cs.osakafu-u.ac.jp, kise@cs.osakafu-u.ac.jp
[2] OCR [3], [4] [5] [6] [4], [7] [8], [9] 1 [10] Fig. 1 Current arrangement and size of ruby. 2 Fig. 2 Typography combined with printing
![[2] OCR [3], [4] [5] [6] [4], [7] [8], [9] 1 [10] Fig. 1 Current arrangement and size of ruby. 2 Fig. 2 Typography combined with printing](/thumbs/93/112070099.jpg "[2] OCR [3], [4] [5] [6] [4], [7] [8], [9] 1 [10] Fig. 1 Current arrangement and size of ruby. 2 Fig. 2 Typography combined with printing") 1,a) 1,b) 1,c) 2012 11 8 2012 12 18, 2013 1 27 WEB Ruby Removal Filters Using Genetic Programming for Early-modern Japanese Printed Books Taeka Awazu 1,a) Masami Takata 1,b) Kazuki Joe 1,c) Received: November
1,a) 1,b) 1,c) 2012 11 8 2012 12 18, 2013 1 27 WEB Ruby Removal Filters Using Genetic Programming for Early-modern Japanese Printed Books Taeka Awazu 1,a) Masami Takata 1,b) Kazuki Joe 1,c) Received: November
[1] SBS [2] SBS Random Forests[3] Random Forests ii
![[1] SBS [2] SBS Random Forests[3] Random Forests ii](/thumbs/74/70333192.jpg "[1] SBS [2] SBS Random Forests[3] Random Forests ii") Random Forests 2013 3 A Graduation Thesis of College of Engineering, Chubu University Proposal of an efficient feature selection using the contribution rate of Random Forests Katsuya Shimazaki [1] SBS
Random Forests 2013 3 A Graduation Thesis of College of Engineering, Chubu University Proposal of an efficient feature selection using the contribution rate of Random Forests Katsuya Shimazaki [1] SBS
2003/3 Vol. J86 D II No.3 2.3. 4. 5. 6. 2. 1 1 Fig. 1 An exterior view of eye scanner. CCD [7] 640 480 1 CCD PC USB PC 2 334 PC USB RS-232C PC 3 2.1 2
![2003/3 Vol. J86 D II No.3 2.3. 4. 5. 6. 2. 1 1 Fig. 1 An exterior view of eye scanner. CCD [7] 640 480 1 CCD PC USB PC 2 334 PC USB RS-232C PC 3 2.1 2](/thumbs/42/22941906.jpg "2003/3 Vol. J86 D II No.3 2.3. 4. 5. 6. 2. 1 1 Fig. 1 An exterior view of eye scanner. CCD [7] 640 480 1 CCD PC USB PC 2 334 PC USB RS-232C PC 3 2.1 2") Curved Document Imaging with Eye Scanner Toshiyuki AMANO, Tsutomu ABE, Osamu NISHIKAWA, Tetsuo IYODA, and Yukio SATO 1. Shape From Shading SFS [1] [2] 3 2 Department of Electrical and Computer Engineering,
Curved Document Imaging with Eye Scanner Toshiyuki AMANO, Tsutomu ABE, Osamu NISHIKAWA, Tetsuo IYODA, and Yukio SATO 1. Shape From Shading SFS [1] [2] 3 2 Department of Electrical and Computer Engineering,
untitled
 (Robot Vision) Vision ( (computer) Machine VisionComputer Vision ( ) ( ) ( ) ( ) ( ) 1 DTV 2 DTV D 3 ( ( ( ( ( DTV D 4 () 5 A B C D E F G H I A B C D E F G H I I = A + D + G - C - F - I J = A + B + C -
(Robot Vision) Vision ( (computer) Machine VisionComputer Vision ( ) ( ) ( ) ( ) ( ) 1 DTV 2 DTV D 3 ( ( ( ( ( DTV D 4 () 5 A B C D E F G H I A B C D E F G H I I = A + D + G - C - F - I J = A + B + C -
IPSJ SIG Technical Report Vol.2009-CVIM-168 No /8/ (2003) Costeira Kanade (1998) AIC Vidal (2005) GPCA Taubin 3 2 EM Multi-stage Opt
 Costeira Kanade (1998) AIC Vidal (2005) GPCA Taubin 3 2 EM Multi-stage Opt") () osteira Kanade (998) AI Vidal (5) GPA Taubin EM Multi-stage Optimization of Multi-body Motion Segmentation Using Generalized Principal omponent Analysis Shinya Tanaka, Yuuki Tanaka, Hirotaka Hara, Yasuyuki
() osteira Kanade (998) AI Vidal (5) GPA Taubin EM Multi-stage Optimization of Multi-body Motion Segmentation Using Generalized Principal omponent Analysis Shinya Tanaka, Yuuki Tanaka, Hirotaka Hara, Yasuyuki
Silhouette on Image Object Silhouette on Images Object 1 Fig. 1 Visual cone Fig. 2 2 Volume intersection method Fig. 3 3 Background subtraction Fig. 4
 Image-based Modeling 1 1 Object Extraction Method for Image-based Modeling using Projection Transformation of Multi-viewpoint Images Masanori Ibaraki 1 and Yuji Sakamoto 1 The volume intersection method
Image-based Modeling 1 1 Object Extraction Method for Image-based Modeling using Projection Transformation of Multi-viewpoint Images Masanori Ibaraki 1 and Yuji Sakamoto 1 The volume intersection method
IPSJ SIG Technical Report Vol.2009-CVIM-167 No /6/10 Real AdaBoost HOG 1 1 1, 2 1 Real AdaBoost HOG HOG Real AdaBoost HOG A Method for Reducing
 Real AdaBoost HOG 1 1 1, 2 1 Real AdaBoost HOG HOG Real AdaBoost HOG A Method for Reducing number of HOG Features based on Real AdaBoost Chika Matsushima, 1 Yuji Yamauchi, 1 Takayoshi Yamashita 1, 2 and
Real AdaBoost HOG 1 1 1, 2 1 Real AdaBoost HOG HOG Real AdaBoost HOG A Method for Reducing number of HOG Features based on Real AdaBoost Chika Matsushima, 1 Yuji Yamauchi, 1 Takayoshi Yamashita 1, 2 and
1 Kinect for Windows M = [X Y Z] T M = [X Y Z ] T f (u,v) w 3.2 [11] [7] u = f X +u Z 0 δ u (X,Y,Z ) (5) v = f Y Z +v 0 δ v (X,Y,Z ) (6) w = Z +
![1 Kinect for Windows M = [X Y Z] T M = [X Y Z ] T f (u,v) w 3.2 [11] [7] u = f X +u Z 0 δ u (X,Y,Z ) (5) v = f Y Z +v 0 δ v (X,Y,Z ) (6) w = Z +](/thumbs/81/83701592.jpg "1 Kinect for Windows M = [X Y Z] T M = [X Y Z ] T f (u,v) w 3.2 [11] [7] u = f X +u Z 0 δ u (X,Y,Z ) (5) v = f Y Z +v 0 δ v (X,Y,Z ) (6) w = Z +") 3 3D 1,a) 1 1 Kinect (X, Y) 3D 3D 1. 2010 Microsoft Kinect for Windows SDK( (Kinect) SDK ) 3D [1], [2] [3] [4] [5] [10] 30fps [10] 3 Kinect 3 Kinect Kinect for Windows SDK 3 Microsoft 3 Kinect for Windows
3 3D 1,a) 1 1 Kinect (X, Y) 3D 3D 1. 2010 Microsoft Kinect for Windows SDK( (Kinect) SDK ) 3D [1], [2] [3] [4] [5] [10] 30fps [10] 3 Kinect 3 Kinect Kinect for Windows SDK 3 Microsoft 3 Kinect for Windows
(MIRU2008) HOG Histograms of Oriented Gradients (HOG)
 HOG Histograms of Oriented Gradients (HOG)") (MIRU2008) 2008 7 HOG - - E-mail: katsu0920@me.cs.scitec.kobe-u.ac.jp, {takigu,ariki}@kobe-u.ac.jp Histograms of Oriented Gradients (HOG) HOG Shape Contexts HOG 5.5 Histograms of Oriented Gradients D Human
(MIRU2008) 2008 7 HOG - - E-mail: katsu0920@me.cs.scitec.kobe-u.ac.jp, {takigu,ariki}@kobe-u.ac.jp Histograms of Oriented Gradients (HOG) HOG Shape Contexts HOG 5.5 Histograms of Oriented Gradients D Human
本文6(599) (Page 601)
 (Page 601)") (MIRU2008) 2008 7 525 8577 1 1 1 E-mail: matsuzaki@i.ci.ritsumei.ac.jp, shimada@ci.ritsumei.ac.jp Object Recognition by Observing Grasping Scene from Image Sequence Hironori KASAHARA, Jun MATSUZAKI, Nobutaka
(MIRU2008) 2008 7 525 8577 1 1 1 E-mail: matsuzaki@i.ci.ritsumei.ac.jp, shimada@ci.ritsumei.ac.jp Object Recognition by Observing Grasping Scene from Image Sequence Hironori KASAHARA, Jun MATSUZAKI, Nobutaka
2 Fig D human model. 1 Fig. 1 The flow of proposed method )9)10) 2.2 3)4)7) 5)11)12)13)14) TOF 1 3 TOF 3 2 c 2011 Information
9)10) 2.2 3)4)7) 5)11)12)13)14) TOF 1 3 TOF 3 2 c 2011 Information") 1 1 2 TOF 2 (D-HOG HOG) Recall D-HOG 0.07 HOG 0.16 Pose Estimation by Regression Analysis with Depth Information Yoshiki Agata 1 and Hironobu Fujiyoshi 1 A method for estimating the pose of a human from
1 1 2 TOF 2 (D-HOG HOG) Recall D-HOG 0.07 HOG 0.16 Pose Estimation by Regression Analysis with Depth Information Yoshiki Agata 1 and Hironobu Fujiyoshi 1 A method for estimating the pose of a human from
LED a) A New LED Array Acquisition Method Focusing on Time-Gradient and Space- Gradient Values for Road to Vehicle Visible Light Communication Syunsuk
 A New LED Array Acquisition Method Focusing on Time-Gradient and Space- Gradient Values for Road to Vehicle Visible Light Communication Syunsuk") VOL. J97-B NO. 7 JULY 2014 本 PDF の扱いは 電子情報通信学会著作権規定に従うこと なお 本 PDF は研究教育目的 ( 非営利 ) に限り 著者が第三者に直接配布することができる 著者以外からの配布は禁じられている LED a) A New LED Array Acquisition Method Focusing on Time-Gradient and Space-
VOL. J97-B NO. 7 JULY 2014 本 PDF の扱いは 電子情報通信学会著作権規定に従うこと なお 本 PDF は研究教育目的 ( 非営利 ) に限り 著者が第三者に直接配布することができる 著者以外からの配布は禁じられている LED a) A New LED Array Acquisition Method Focusing on Time-Gradient and Space-
VRSJ-SIG-MR_okada_79dce8c8.pdf
 THE INSTITUTE OF ELECTRONICS, INFORMATION AND COMMUNICATION ENGINEERS TECHNICAL REPORT OF IEICE. 630-0192 8916-5 E-mail: {kaduya-o,takafumi-t,goshiro,uranishi,miyazaki,kato}@is.naist.jp,.,,.,,,.,,., CG.,,,
THE INSTITUTE OF ELECTRONICS, INFORMATION AND COMMUNICATION ENGINEERS TECHNICAL REPORT OF IEICE. 630-0192 8916-5 E-mail: {kaduya-o,takafumi-t,goshiro,uranishi,miyazaki,kato}@is.naist.jp,.,,.,,,.,,., CG.,,,
Optical Flow t t + δt 1 Motion Field 3 3 1) 2) 3) Lucas-Kanade 4) 1 t (x, y) I(x, y, t)
 2) 3) Lucas-Kanade 4) 1 t (x, y) I(x, y, t)") http://wwwieice-hbkborg/ 2 2 4 2 -- 2 4 2010 9 3 3 4-1 Lucas-Kanade 4-2 Mean Shift 3 4-3 2 c 2013 1/(18) http://wwwieice-hbkborg/ 2 2 4 2 -- 2 -- 4 4--1 2010 9 4--1--1 Optical Flow t t + δt 1 Motion Field
http://wwwieice-hbkborg/ 2 2 4 2 -- 2 4 2010 9 3 3 4-1 Lucas-Kanade 4-2 Mean Shift 3 4-3 2 c 2013 1/(18) http://wwwieice-hbkborg/ 2 2 4 2 -- 2 -- 4 4--1 2010 9 4--1--1 Optical Flow t t + δt 1 Motion Field
光学
 Fundamentals of Projector-Camera Systems and Their Calibration Methods Takayuki OKATANI To make the images projected by projector s appear as desired, it is e ective and sometimes an only choice to capture
Fundamentals of Projector-Camera Systems and Their Calibration Methods Takayuki OKATANI To make the images projected by projector s appear as desired, it is e ective and sometimes an only choice to capture
IPSJ SIG Technical Report 1, Instrument Separation in Reverberant Environments Using Crystal Microphone Arrays Nobutaka ITO, 1, 2 Yu KITANO, 1
 1, 2 1 1 1 Instrument Separation in Reverberant Environments Using Crystal Microphone Arrays Nobutaka ITO, 1, 2 Yu KITANO, 1 Nobutaka ONO 1 and Shigeki SAGAYAMA 1 This paper deals with instrument separation
1, 2 1 1 1 Instrument Separation in Reverberant Environments Using Crystal Microphone Arrays Nobutaka ITO, 1, 2 Yu KITANO, 1 Nobutaka ONO 1 and Shigeki SAGAYAMA 1 This paper deals with instrument separation
Fig. 3 Flow diagram of image processing. Black rectangle in the photo indicates the processing area (128 x 32 pixels).
.") Fig. 1 The scheme of glottal area as a function of time Fig. 3 Flow diagram of image processing. Black rectangle in the photo indicates the processing area (128 x 32 pixels). Fig, 4 Parametric representation
Fig. 1 The scheme of glottal area as a function of time Fig. 3 Flow diagram of image processing. Black rectangle in the photo indicates the processing area (128 x 32 pixels). Fig, 4 Parametric representation
1 Fig. 1 Extraction of motion,.,,, 4,,, 3., 1, 2. 2.,. CHLAC,. 2.1,. (256 ).,., CHLAC. CHLAC, HLAC. 2.3 (HLAC ) r,.,. HLAC. N. 2 HLAC Fig. 2
.,., CHLAC. CHLAC, HLAC. 2.3 (HLAC ) r,.,. HLAC. N. 2 HLAC Fig. 2") CHLAC 1 2 3 3,. (CHLAC), 1).,.,, CHLAC,.,. Suspicious Behavior Detection based on CHLAC Method Hideaki Imanishi, 1 Toyohiro Hayashi, 2 Shuichi Enokida 3 and Toshiaki Ejima 3 We have proposed a method for
CHLAC 1 2 3 3,. (CHLAC), 1).,.,, CHLAC,.,. Suspicious Behavior Detection based on CHLAC Method Hideaki Imanishi, 1 Toyohiro Hayashi, 2 Shuichi Enokida 3 and Toshiaki Ejima 3 We have proposed a method for
IPSJ SIG Technical Report iphone iphone,,., OpenGl ES 2.0 GLSL(OpenGL Shading Language), iphone GPGPU(General-Purpose Computing on Graphics Proc
, iphone GPGPU(General-Purpose Computing on Graphics Proc") iphone 1 1 1 iphone,,., OpenGl ES 2.0 GLSL(OpenGL Shading Language), iphone GPGPU(General-Purpose Computing on Graphics Processing Unit)., AR Realtime Natural Feature Tracking Library for iphone Makoto
iphone 1 1 1 iphone,,., OpenGl ES 2.0 GLSL(OpenGL Shading Language), iphone GPGPU(General-Purpose Computing on Graphics Processing Unit)., AR Realtime Natural Feature Tracking Library for iphone Makoto
Accuracy Improvement by Compound Discriminant Functions for Resembling Character Recognition Takashi NAKAJIMA, Tetsushi WAKABAYASHI, Fumitaka KIMURA,
 Journal Article / 学 術 雑 誌 論 文 混 合 識 別 関 数 による 類 似 文 字 認 識 の 高 精 度 化 Accuracy improvement by compoun for resembling character recogn 中 嶋, 孝 ; 若 林, 哲 史 ; 木 村, 文 隆 ; 三 宅, 康 二 Nakajima, Takashi; Wakabayashi,
Journal Article / 学 術 雑 誌 論 文 混 合 識 別 関 数 による 類 似 文 字 認 識 の 高 精 度 化 Accuracy improvement by compoun for resembling character recogn 中 嶋, 孝 ; 若 林, 哲 史 ; 木 村, 文 隆 ; 三 宅, 康 二 Nakajima, Takashi; Wakabayashi,
(a) 1 (b) 3. Gilbert Pernicka[2] Treibitz Schechner[3] Narasimhan [4] Kim [5] Nayar [6] [7][8][9] 2. X X X [10] [11] L L t L s L = L t + L s
![(a) 1 (b) 3. Gilbert Pernicka[2] Treibitz Schechner[3] Narasimhan [4] Kim [5] Nayar [6] [7][8][9] 2. X X X [10] [11] L L t L s L = L t + L s](/thumbs/75/72066128.jpg "(a) 1 (b) 3. Gilbert Pernicka[2] Treibitz Schechner[3] Narasimhan [4] Kim [5] Nayar [6] [7][8][9] 2. X X X [10] [11] L L t L s L = L t + L s") 1 1 1, Extraction of Transmitted Light using Parallel High-frequency Illumination Kenichiro Tanaka 1 Yasuhiro Mukaigawa 1 Yasushi Yagi 1 Abstract: We propose a new sharpening method of transmitted scene
1 1 1, Extraction of Transmitted Light using Parallel High-frequency Illumination Kenichiro Tanaka 1 Yasuhiro Mukaigawa 1 Yasushi Yagi 1 Abstract: We propose a new sharpening method of transmitted scene
Run-Based Trieから構成される 決定木の枝刈り法
 Run-Based Trie 2 2 25 6 Run-Based Trie Simple Search Run-Based Trie Network A Network B Packet Router Packet Filtering Policy Rule Network A, K Network B Network C, D Action Permit Deny Permit Network
Run-Based Trie 2 2 25 6 Run-Based Trie Simple Search Run-Based Trie Network A Network B Packet Router Packet Filtering Policy Rule Network A, K Network B Network C, D Action Permit Deny Permit Network
IPSJ SIG Technical Report Vol.2010-CVIM-170 No /1/ Visual Recognition of Wire Harnesses for Automated Wiring Masaki Yoneda, 1 Ta
 1 1 1 1 2 1. Visual Recognition of Wire Harnesses for Automated Wiring Masaki Yoneda, 1 Takayuki Okatani 1 and Koichiro Deguchi 1 This paper presents a method for recognizing the pose of a wire harness
1 1 1 1 2 1. Visual Recognition of Wire Harnesses for Automated Wiring Masaki Yoneda, 1 Takayuki Okatani 1 and Koichiro Deguchi 1 This paper presents a method for recognizing the pose of a wire harness
3: 2: 2. 2 Semi-supervised learning Semi-supervised learning [5,6] Semi-supervised learning Self-training [13] [14] Self-training Self-training Semi-s
![3: 2: 2. 2 Semi-supervised learning Semi-supervised learning [5,6] Semi-supervised learning Self-training [13] [14] Self-training Self-training Semi-s](/thumbs/72/67985311.jpg "3: 2: 2. 2 Semi-supervised learning Semi-supervised learning [5,6] Semi-supervised learning Self-training [13] [14] Self-training Self-training Semi-s") THE INSTITUTE OF ELECTRONICS, INFORMATION AND COMMUNICATION ENGINEERS TECHNICAL REPORT OF IEICE. 599-8531 1-1 E-mail: tsukada@m.cs.osakafu-u.ac.jp, {masa,kise}@cs.osakafu-u.ac.jp Semi-supervised learning
THE INSTITUTE OF ELECTRONICS, INFORMATION AND COMMUNICATION ENGINEERS TECHNICAL REPORT OF IEICE. 599-8531 1-1 E-mail: tsukada@m.cs.osakafu-u.ac.jp, {masa,kise}@cs.osakafu-u.ac.jp Semi-supervised learning
Sobel Canny i
 21 Edge Feature for Monochrome Image Retrieval 1100311 2010 3 1 3 3 2 2 7 200 Sobel Canny i Abstract Edge Feature for Monochrome Image Retrieval Naoto Suzue Content based image retrieval (CBIR) has been
21 Edge Feature for Monochrome Image Retrieval 1100311 2010 3 1 3 3 2 2 7 200 Sobel Canny i Abstract Edge Feature for Monochrome Image Retrieval Naoto Suzue Content based image retrieval (CBIR) has been
IPSJ SIG Technical Report GPS LAN GPS LAN GPS LAN Location Identification by sphere image and hybrid sensing Takayuki Katahira, 1 Yoshio Iwai 1
 1 1 1 GPS LAN GPS LAN GPS LAN Location Identification by sphere image and hybrid sensing Takayuki Katahira, 1 Yoshio Iwai 1 and Hiroshi Ishiguro 1 Self-location is very informative for wearable systems.
1 1 1 GPS LAN GPS LAN GPS LAN Location Identification by sphere image and hybrid sensing Takayuki Katahira, 1 Yoshio Iwai 1 and Hiroshi Ishiguro 1 Self-location is very informative for wearable systems.
Study on Application of the cos a Method to Neutron Stress Measurement Toshihiko SASAKI*3 and Yukio HIROSE Department of Materials Science and Enginee
 Study on Application of the cos a Method to Neutron Stress Measurement Toshihiko SASAKI*3 and Yukio HIROSE Department of Materials Science and Engineering, Kanazawa University, Kakuma-machi, Kanazawa-shi,
Study on Application of the cos a Method to Neutron Stress Measurement Toshihiko SASAKI*3 and Yukio HIROSE Department of Materials Science and Engineering, Kanazawa University, Kakuma-machi, Kanazawa-shi,
5b_08.dvi
 , Circularly Polarized Patch Antennas Combining Different Shaped Linealy Polarized Elements Takanori NORO,, Yasuhiro KAZAMA, Masaharu TAKAHASHI, and Koichi ITO 1. GPS LAN 10% [1] Graduate School of Science
, Circularly Polarized Patch Antennas Combining Different Shaped Linealy Polarized Elements Takanori NORO,, Yasuhiro KAZAMA, Masaharu TAKAHASHI, and Koichi ITO 1. GPS LAN 10% [1] Graduate School of Science
& Vol.5 No (Oct. 2015) TV 1,2,a) , Augmented TV TV AR Augmented Reality 3DCG TV Estimation of TV Screen Position and Ro
 TV 1,2,a) , Augmented TV TV AR Augmented Reality 3DCG TV Estimation of TV Screen Position and Ro") TV 1,2,a) 1 2 2015 1 26, 2015 5 21 Augmented TV TV AR Augmented Reality 3DCG TV Estimation of TV Screen Position and Rotation Using Mobile Device Hiroyuki Kawakita 1,2,a) Toshio Nakagawa 1 Makoto Sato
TV 1,2,a) 1 2 2015 1 26, 2015 5 21 Augmented TV TV AR Augmented Reality 3DCG TV Estimation of TV Screen Position and Rotation Using Mobile Device Hiroyuki Kawakita 1,2,a) Toshio Nakagawa 1 Makoto Sato
On the Limited Sample Effect of the Optimum Classifier by Bayesian Approach he Case of Independent Sample Size for Each Class Xuexian HA, etsushi WAKA
 Journal Article / 学術雑誌論文 ベイズアプローチによる最適識別系の有限 標本効果に関する考察 : 学習標本の大きさ がクラス間で異なる場合 (< 論文小特集 > パ ターン認識のための学習 : 基礎と応用 On the limited sample effect of bayesian approach : the case of each class 韓, 雪仙 ; 若林, 哲史
Journal Article / 学術雑誌論文 ベイズアプローチによる最適識別系の有限 標本効果に関する考察 : 学習標本の大きさ がクラス間で異なる場合 (< 論文小特集 > パ ターン認識のための学習 : 基礎と応用 On the limited sample effect of bayesian approach : the case of each class 韓, 雪仙 ; 若林, 哲史
情報処理学会研究報告 IPSJ SIG Technical Report Vol.2017-CG-166 No /3/ HUNTEXHUNTER1 NARUTO44 Dr.SLUMP1,,, Jito Hiroki Satoru MORITA The
 755-8611 2-16-1 HUNTEXHUNTER1 NARUTO44 Dr.SLUMP1,,, Jito Hiroki Satoru MORITA The Graduate School of Science and Engineering,Yamaguchi University 2-16-1 Tokiwadai, Ube, 755-8611, Japan It is not easy to
755-8611 2-16-1 HUNTEXHUNTER1 NARUTO44 Dr.SLUMP1,,, Jito Hiroki Satoru MORITA The Graduate School of Science and Engineering,Yamaguchi University 2-16-1 Tokiwadai, Ube, 755-8611, Japan It is not easy to
K 2 X = 4 MWG(f), X P 2 F, υ 0 : X P 2 2,, {f λ : X λ P 1 } λ Λ NS(X λ ), (υ 0 ) λ : X λ P 2 ( 1) X 6, f λ K X + F, f ( 1), n, n 1 (cf [10]) X, f : X
![K 2 X = 4 MWG(f), X P 2 F, υ 0 : X P 2 2,, {f λ : X λ P 1 } λ Λ NS(X λ ), (υ 0 ) λ : X λ P 2 ( 1) X 6, f λ K X + F, f ( 1), n, n 1 (cf [10]) X, f : X](/thumbs/91/106734137.jpg "K 2 X = 4 MWG(f), X P 2 F, υ 0 : X P 2 2,, {f λ : X λ P 1 } λ Λ NS(X λ ), (υ 0 ) λ : X λ P 2 ( 1) X 6, f λ K X + F, f ( 1), n, n 1 (cf [10]) X, f : X") 2 E 8 1, E 8, [6], II II, E 8, 2, E 8,,, 2 [14],, X/C, f : X P 1 2 3, f, (O), f X NS(X), (O) T ( 1), NS(X), T [15] : MWG(f) NS(X)/T, MWL(f) 0 (T ) NS(X), MWL(f) MWL(f) 0, : {f λ : X λ P 1 } λ Λ NS(X λ
2 E 8 1, E 8, [6], II II, E 8, 2, E 8,,, 2 [14],, X/C, f : X P 1 2 3, f, (O), f X NS(X), (O) T ( 1), NS(X), T [15] : MWG(f) NS(X)/T, MWL(f) 0 (T ) NS(X), MWL(f) MWL(f) 0, : {f λ : X λ P 1 } λ Λ NS(X λ
(3.6 ) (4.6 ) 2. [3], [6], [12] [7] [2], [5], [11] [14] [9] [8] [10] (1) Voodoo 3 : 3 Voodoo[1] 3 ( 3D ) (2) : Voodoo 3D (3) : 3D (Welc
![(3.6 ) (4.6 ) 2. [3], [6], [12] [7] [2], [5], [11] [14] [9] [8] [10] (1) Voodoo 3 : 3 Voodoo[1] 3 ( 3D ) (2) : Voodoo 3D (3) : 3D (Welc](/thumbs/65/54056306.jpg "(3.6 ) (4.6 ) 2. [3], [6], [12] [7] [2], [5], [11] [14] [9] [8] [10] (1) Voodoo 3 : 3 Voodoo[1] 3 ( 3D ) (2) : Voodoo 3D (3) : 3D (Welc") 1,a) 1,b) Obstacle Detection from Monocular On-Vehicle Camera in units of Delaunay Triangles Abstract: An algorithm to detect obstacles by using a monocular on-vehicle video camera is developed. Since
1,a) 1,b) Obstacle Detection from Monocular On-Vehicle Camera in units of Delaunay Triangles Abstract: An algorithm to detect obstacles by using a monocular on-vehicle video camera is developed. Since
Vol. 44 No. SIG 9(CVIM 7) ) 2) 1) 1 2) 3 7) 1) 2) 3 3) 4) 5) (a) (d) (g) (b) (e) (h) No Convergence? End (f) (c) Yes * ** * ** 1
 ) 2) 1) 1 2) 3 7) 1) 2) 3 3) 4) 5) (a) (d) (g) (b) (e) (h) No Convergence? End (f) (c) Yes * ** * ** 1") Vol. 44 No. SIG 9(CVIM 7) July 2003, Robby T. Tan, 1 Estimating Illumination Position, Color and Surface Reflectance Properties from a Single Image Kenji Hara,, Robby T. Tan, Ko Nishino, Atsushi Nakazawa,
Vol. 44 No. SIG 9(CVIM 7) July 2003, Robby T. Tan, 1 Estimating Illumination Position, Color and Surface Reflectance Properties from a Single Image Kenji Hara,, Robby T. Tan, Ko Nishino, Atsushi Nakazawa,
 18 2 20 W/C W/C W/C 4-4-1 0.05 1.0 1000 1. 1 1.1 1 1.2 3 2. 4 2.1 4 (1) 4 (2) 4 2.2 5 (1) 5 (2) 5 2.3 7 3. 8 3.1 8 3.2 ( ) 11 3.3 11 (1) 12 (2) 12 4. 14 4.1 14 4.2 14 (1) 15 (2) 16 (3) 17 4.3 17 5. 19
18 2 20 W/C W/C W/C 4-4-1 0.05 1.0 1000 1. 1 1.1 1 1.2 3 2. 4 2.1 4 (1) 4 (2) 4 2.2 5 (1) 5 (2) 5 2.3 7 3. 8 3.1 8 3.2 ( ) 11 3.3 11 (1) 12 (2) 12 4. 14 4.1 14 4.2 14 (1) 15 (2) 16 (3) 17 4.3 17 5. 19
it-ken_open.key
 深層学習技術の進展 ImageNet Classification 画像認識 音声認識 自然言語処理 機械翻訳 深層学習技術は これらの分野において 特に圧倒的な強みを見せている Figure (Left) Eight ILSVRC-2010 test Deep images and the cited4: from: ``ImageNet Classification with Networks et
深層学習技術の進展 ImageNet Classification 画像認識 音声認識 自然言語処理 機械翻訳 深層学習技術は これらの分野において 特に圧倒的な強みを見せている Figure (Left) Eight ILSVRC-2010 test Deep images and the cited4: from: ``ImageNet Classification with Networks et
SICE東北支部研究集会資料(2013年)
") 280 (2013.5.29) 280-4 SURF A Study of SURF Algorithm using Edge Image and Color Information Yoshihiro Sasaki, Syunichi Konno, Yoshitaka Tsunekawa * *Iwate University : SURF (Speeded Up Robust Features)
280 (2013.5.29) 280-4 SURF A Study of SURF Algorithm using Edge Image and Color Information Yoshihiro Sasaki, Syunichi Konno, Yoshitaka Tsunekawa * *Iwate University : SURF (Speeded Up Robust Features)
2014/3 Vol. J97 D No. 3 Recognition-based segmentation [7] 1 DP 1 Conditional random field; CRF [8] [10] CRF / OCR 2 2 2 2 OCR 2 2 2 2. 2 2 2 [11], [1
![2014/3 Vol. J97 D No. 3 Recognition-based segmentation [7] 1 DP 1 Conditional random field; CRF [8] [10] CRF / OCR 2 2 2 2 OCR 2 2 2 2. 2 2 2 [11], [1](/thumbs/42/22940740.jpg "2014/3 Vol. J97 D No. 3 Recognition-based segmentation [7] 1 DP 1 Conditional random field; CRF [8] [10] CRF / OCR 2 2 2 2 OCR 2 2 2 2. 2 2 2 [11], [1") 2, a) Scene Character Extraction by an Optimal Two-Dimensional Segmentation Hiroaki TAKEBE, a) and Seiichi UCHIDA / 2 2 2 2 2 2 1. FUJITSU LABORATORIES LTD., 4 1 1 Kamikodanaka, Nakahara-ku, Kawasaki-shi,
2, a) Scene Character Extraction by an Optimal Two-Dimensional Segmentation Hiroaki TAKEBE, a) and Seiichi UCHIDA / 2 2 2 2 2 2 1. FUJITSU LABORATORIES LTD., 4 1 1 Kamikodanaka, Nakahara-ku, Kawasaki-shi,
11) 13) 11),12) 13) Y c Z c Image plane Y m iy O m Z m Marker coordinate system T, d X m f O c X c Camera coordinate system 1 Coordinates and problem
 13) 11),12) 13) Y c Z c Image plane Y m iy O m Z m Marker coordinate system T, d X m f O c X c Camera coordinate system 1 Coordinates and problem") 1 1 1 Posture Esimation by Using 2-D Fourier Transform Yuya Ono, 1 Yoshio Iwai 1 and Hiroshi Ishiguro 1 Recently, research fields of augmented reality and robot navigation are actively investigated. Estimating
1 1 1 Posture Esimation by Using 2-D Fourier Transform Yuya Ono, 1 Yoshio Iwai 1 and Hiroshi Ishiguro 1 Recently, research fields of augmented reality and robot navigation are actively investigated. Estimating
THE INSTITUTE OF ELECTRONICS, INFORMATION AND COMMUNICATION ENGINEERS TECHNICAL REPORT OF IEICE.
 THE INSTITUTE OF ELECTRONICS, INFORMATION AND COMMUNICATION ENGINEERS TECHNICAL REPORT OF IEICE. E-mail: {ytamura,takai,tkato,tm}@vision.kuee.kyoto-u.ac.jp Abstract Current Wave Pattern Analysis for Anomaly
THE INSTITUTE OF ELECTRONICS, INFORMATION AND COMMUNICATION ENGINEERS TECHNICAL REPORT OF IEICE. E-mail: {ytamura,takai,tkato,tm}@vision.kuee.kyoto-u.ac.jp Abstract Current Wave Pattern Analysis for Anomaly
(a) (b) 2 2 (Bosch, IR Illuminator 850 nm, UFLED30-8BD) ( 7[m] 6[m]) 3 (PointGrey Research Inc.Grasshopper2 M/C) Hz (a) (b
![(a) (b) 2 2 (Bosch, IR Illuminator 850 nm, UFLED30-8BD) ( 7[m] 6[m]) 3 (PointGrey Research Inc.Grasshopper2 M/C) Hz (a) (b](/thumbs/91/105641706.jpg "(a) (b) 2 2 (Bosch, IR Illuminator 850 nm, UFLED30-8BD) ( 7[m] 6[m]) 3 (PointGrey Research Inc.Grasshopper2 M/C) Hz (a) (b") (MIRU202) 202 8 AdrianStoica 89 0395 744 89 0395 744 Jet Propulsion Laboratory 4800 Oak Grove Drive, Pasadena, CA 909, USA E-mail: uchino@irvs.ait.kyushu-u.ac.jp, {yumi,kurazume}@ait.kyushu-u.ac.jp 2 nearest
(MIRU202) 202 8 AdrianStoica 89 0395 744 89 0395 744 Jet Propulsion Laboratory 4800 Oak Grove Drive, Pasadena, CA 909, USA E-mail: uchino@irvs.ait.kyushu-u.ac.jp, {yumi,kurazume}@ait.kyushu-u.ac.jp 2 nearest
IPSJ SIG Technical Report Vol.2014-DPS-158 No.27 Vol.2014-CSEC-64 No /3/6 1,a) 2,b) 3,c) 1,d) 3 Cappelli Bazen Cappelli Bazen Cappelli 1.,,.,.,
 2,b) 3,c) 1,d) 3 Cappelli Bazen Cappelli Bazen Cappelli 1.,,.,.,") 1,a),b) 3,c) 1,d) 3 Cappelli Bazen Cappelli Bazen Cappelli 1.,,,,,.,,,,.,,.,,,,.,, 1 Department of Electrical Electronic and Communication Engineering Faculty of Science and Engineering Chuo University
1,a),b) 3,c) 1,d) 3 Cappelli Bazen Cappelli Bazen Cappelli 1.,,,,,.,,,,.,,.,,,,.,, 1 Department of Electrical Electronic and Communication Engineering Faculty of Science and Engineering Chuo University
A Graduation Thesis of College of Engineering, Chubu University Pose Estimation by Regression Analysis with Depth Information Yoshiki Agata
 2011 3 A Graduation Thesis of College of Engineering, Chubu University Pose Estimation by Regression Analysis with Depth Information Yoshiki Agata CG [2] [3][4] 3 3 [1] HOG HOG TOF(Time Of Flight) iii
2011 3 A Graduation Thesis of College of Engineering, Chubu University Pose Estimation by Regression Analysis with Depth Information Yoshiki Agata CG [2] [3][4] 3 3 [1] HOG HOG TOF(Time Of Flight) iii
2 (March 13, 2010) N Λ a = i,j=1 x i ( d (a) i,j x j ), Λ h = N i,j=1 x i ( d (h) i,j x j ) B a B h B a = N i,j=1 ν i d (a) i,j, B h = x j N i,j=1 ν i
 N Λ a = i,j=1 x i ( d (a) i,j x j ), Λ h = N i,j=1 x i ( d (h) i,j x j ) B a B h B a = N i,j=1 ν i d (a) i,j, B h = x j N i,j=1 ν i") 1. A. M. Turing [18] 60 Turing A. Gierer H. Meinhardt [1] : (GM) ) a t = D a a xx µa + ρ (c a2 h + ρ 0 (0 < x < l, t > 0) h t = D h h xx νh + c ρ a 2 (0 < x < l, t > 0) a x = h x = 0 (x = 0, l) a = a(x,
1. A. M. Turing [18] 60 Turing A. Gierer H. Meinhardt [1] : (GM) ) a t = D a a xx µa + ρ (c a2 h + ρ 0 (0 < x < l, t > 0) h t = D h h xx νh + c ρ a 2 (0 < x < l, t > 0) a x = h x = 0 (x = 0, l) a = a(x,
% 2 3 [1] Semantic Texton Forests STFs [1] ( ) STFs STFs ColorSelf-Simlarity CSS [2] ii
![% 2 3 [1] Semantic Texton Forests STFs [1] ( ) STFs STFs ColorSelf-Simlarity CSS [2] ii](/thumbs/91/106152959.jpg "% 2 3 [1] Semantic Texton Forests STFs [1] ( ) STFs STFs ColorSelf-Simlarity CSS [2] ii") 2012 3 A Graduation Thesis of College of Engineering, Chubu University High Accurate Semantic Segmentation Using Re-labeling Besed on Color Self Similarity Yuko KAKIMI 2400 90% 2 3 [1] Semantic Texton
2012 3 A Graduation Thesis of College of Engineering, Chubu University High Accurate Semantic Segmentation Using Re-labeling Besed on Color Self Similarity Yuko KAKIMI 2400 90% 2 3 [1] Semantic Texton
数学の基礎訓練I
 I 9 6 13 1 1 1.1............... 1 1................ 1 1.3.................... 1.4............... 1.4.1.............. 1.4................. 3 1.4.3........... 3 1.4.4.. 3 1.5.......... 3 1.5.1..............
I 9 6 13 1 1 1.1............... 1 1................ 1 1.3.................... 1.4............... 1.4.1.............. 1.4................. 3 1.4.3........... 3 1.4.4.. 3 1.5.......... 3 1.5.1..............
JAMSTEC Rep. Res. Dev., Volume 12, March 2011, 27 _ 35 1,2* Pb 210 Pb 214 Pb MCA 210 Pb MCA MCA 210 Pb 214 Pb * 2
 JAMSTEC Rep. Res. Dev., Volume 12, March 2011, 27 _ 35 1,2* 1 1 1 1 210 Pb 210 Pb 214 Pb MCA 210 Pb MCA MCA 210 Pb 214 Pb 2010 10 4 2010 12 10 1 2 * 237-0061 2-15 046-867-9794 ogurik@jamstec.go.jp 27 210
JAMSTEC Rep. Res. Dev., Volume 12, March 2011, 27 _ 35 1,2* 1 1 1 1 210 Pb 210 Pb 214 Pb MCA 210 Pb MCA MCA 210 Pb 214 Pb 2010 10 4 2010 12 10 1 2 * 237-0061 2-15 046-867-9794 ogurik@jamstec.go.jp 27 210
,4) 1 P% P%P=2.5 5%!%! (1) = (2) l l Figure 1 A compilation flow of the proposing sampling based architecture simulation
 1 P% P%P=2.5 5%!%! (1) = (2) l l Figure 1 A compilation flow of the proposing sampling based architecture simulation") 1 1 1 1 SPEC CPU 2000 EQUAKE 1.6 50 500 A Parallelizing Compiler Cooperative Multicore Architecture Simulator with Changeover Mechanism of Simulation Modes GAKUHO TAGUCHI 1 YOUICHI ABE 1 KEIJI KIMURA 1
1 1 1 1 SPEC CPU 2000 EQUAKE 1.6 50 500 A Parallelizing Compiler Cooperative Multicore Architecture Simulator with Changeover Mechanism of Simulation Modes GAKUHO TAGUCHI 1 YOUICHI ABE 1 KEIJI KIMURA 1
2006/11 Vol. J89 D No. 11 [10] [15], [16] [5], [17] [21] Tamura [5] RGB 2% [17] Yannis [18] Li [19] 35 1% Hoover [20] fuzzy convergence 50 82% %
![2006/11 Vol. J89 D No. 11 [10] [15], [16] [5], [17] [21] Tamura [5] RGB 2% [17] Yannis [18] Li [19] 35 1% Hoover [20] fuzzy convergence 50 82% %](/thumbs/93/114344721.jpg "2006/11 Vol. J89 D No. 11 [10] [15], [16] [5], [17] [21] Tamura [5] RGB 2% [17] Yannis [18] Li [19] 35 1% Hoover [20] fuzzy convergence 50 82% %") a) Recognition of Optic Nerve Head Using Blood-Vessel-Erased Image and Its Application to Production of Simulated Stereogram in Computer-Aided Diagnosis System for Retinal Images Toshiaki NAKAGAWA a),
a) Recognition of Optic Nerve Head Using Blood-Vessel-Erased Image and Its Application to Production of Simulated Stereogram in Computer-Aided Diagnosis System for Retinal Images Toshiaki NAKAGAWA a),
IPSJ SIG Technical Report Vol.2012-CG-148 No /8/29 3DCG 1,a) On rigid body animation taking into account the 3D computer graphics came
 On rigid body animation taking into account the 3D computer graphics came") 3DCG 1,a) 2 2 2 2 3 On rigid body animation taking into account the 3D computer graphics camera viewpoint Abstract: In using computer graphics for making games or motion pictures, physics simulation is
3DCG 1,a) 2 2 2 2 3 On rigid body animation taking into account the 3D computer graphics camera viewpoint Abstract: In using computer graphics for making games or motion pictures, physics simulation is
3 2 2 (1) (2) (3) (4) 4 4 AdaBoost 2. [11] Onishi&Yoda [8] Iwashita&Stoica [5] 4 [3] 3. 3 (1) (2) (3)
![3 2 2 (1) (2) (3) (4) 4 4 AdaBoost 2. [11] Onishi&Yoda [8] Iwashita&Stoica [5] 4 [3] 3. 3 (1) (2) (3)](/thumbs/68/59204737.jpg "3 2 2 (1) (2) (3) (4) 4 4 AdaBoost 2. [11] Onishi&Yoda [8] Iwashita&Stoica [5] 4 [3] 3. 3 (1) (2) (3)") (MIRU2012) 2012 8 820-8502 680-4 E-mail: {d kouno,shimada,endo}@pluto.ai.kyutech.ac.jp (1) (2) (3) (4) 4 AdaBoost 1. Kanade [6] CLAFIC [12] EigenFace [10] 1 1 2 1 [7] 3 2 2 (1) (2) (3) (4) 4 4 AdaBoost
(MIRU2012) 2012 8 820-8502 680-4 E-mail: {d kouno,shimada,endo}@pluto.ai.kyutech.ac.jp (1) (2) (3) (4) 4 AdaBoost 1. Kanade [6] CLAFIC [12] EigenFace [10] 1 1 2 1 [7] 3 2 2 (1) (2) (3) (4) 4 4 AdaBoost
12 DCT A Data-Driven Implementation of Shape Adaptive DCT
 12 DCT A Data-Driven Implementation of Shape Adaptive DCT 1010431 2001 2 5 DCT MPEG H261,H263 LSI DDMP [1]DDMP MPEG4 DDMP MPEG4 SA-DCT SA-DCT DCT SA-DCT DDMP SA-DCT MPEG4, DDMP,, SA-DCT,, ο i Abstract
12 DCT A Data-Driven Implementation of Shape Adaptive DCT 1010431 2001 2 5 DCT MPEG H261,H263 LSI DDMP [1]DDMP MPEG4 DDMP MPEG4 SA-DCT SA-DCT DCT SA-DCT DDMP SA-DCT MPEG4, DDMP,, SA-DCT,, ο i Abstract
, 3, STUDY ON IMPORTANCE OF OPTIMIZED GRID STRUCTURE IN GENERAL COORDINATE SYSTEM 1 2 Hiroyasu YASUDA and Tsuyoshi HOSHINO
 , 3, 2012 9 STUDY ON IMPORTANCE OF OPTIMIZED GRID STRUCTURE IN GENERAL COORDINATE SYSTEM 1 2 Hiroyasu YASUDA and Tsuyoshi HOSHINO 1 950-2181 2 8050 2 950-2181 2 8050 Numerical computation of river flows
, 3, 2012 9 STUDY ON IMPORTANCE OF OPTIMIZED GRID STRUCTURE IN GENERAL COORDINATE SYSTEM 1 2 Hiroyasu YASUDA and Tsuyoshi HOSHINO 1 950-2181 2 8050 2 950-2181 2 8050 Numerical computation of river flows
Vol. 23 No. 4 Oct. 2006 37 2 Kitchen of the Future 1 Kitchen of the Future 1 1 Kitchen of the Future LCD [7], [8] (Kitchen of the Future ) WWW [7], [3
![Vol. 23 No. 4 Oct. 2006 37 2 Kitchen of the Future 1 Kitchen of the Future 1 1 Kitchen of the Future LCD [7], [8] (Kitchen of the Future ) WWW [7], [3](/thumbs/41/22750638.jpg "Vol. 23 No. 4 Oct. 2006 37 2 Kitchen of the Future 1 Kitchen of the Future 1 1 Kitchen of the Future LCD [7], [8] (Kitchen of the Future ) WWW [7], [3") 36 Kitchen of the Future: Kitchen of the Future Kitchen of the Future A kitchen is a place of food production, education, and communication. As it is more active place than other parts of a house, there
36 Kitchen of the Future: Kitchen of the Future Kitchen of the Future A kitchen is a place of food production, education, and communication. As it is more active place than other parts of a house, there
1 Table 1: Identification by color of voxel Voxel Mode of expression Nothing Other 1 Orange 2 Blue 3 Yellow 4 SSL Humanoid SSL-Vision 3 3 [, 21] 8 325
![1 Table 1: Identification by color of voxel Voxel Mode of expression Nothing Other 1 Orange 2 Blue 3 Yellow 4 SSL Humanoid SSL-Vision 3 3 [, 21] 8 325](/thumbs/91/105378470.jpg "1 Table 1: Identification by color of voxel Voxel Mode of expression Nothing Other 1 Orange 2 Blue 3 Yellow 4 SSL Humanoid SSL-Vision 3 3 [, 21] 8 325") 社団法人人工知能学会 Japanese Society for Artificial Intelligence 人工知能学会研究会資料 JSAI Technical Report SIG-Challenge-B3 (5/5) RoboCup SSL Humanoid A Proposal and its Application of Color Voxel Server for RoboCup SSL
社団法人人工知能学会 Japanese Society for Artificial Intelligence 人工知能学会研究会資料 JSAI Technical Report SIG-Challenge-B3 (5/5) RoboCup SSL Humanoid A Proposal and its Application of Color Voxel Server for RoboCup SSL
20 Method for Recognizing Expression Considering Fuzzy Based on Optical Flow
 20 Method for Recognizing Expression Considering Fuzzy Based on Optical Flow 1115084 2009 3 5 3.,,,.., HCI(Human Computer Interaction),.,,.,,.,.,,..,. i Abstract Method for Recognizing Expression Considering
20 Method for Recognizing Expression Considering Fuzzy Based on Optical Flow 1115084 2009 3 5 3.,,,.., HCI(Human Computer Interaction),.,,.,,.,.,,..,. i Abstract Method for Recognizing Expression Considering
proc.dvi
 M. D. Wheler Cyra Technologies, Inc. 3 3 CAD albedo Mapping textures on 3D geometric model using reflectance image Ryo Kurazume M. D. Wheler Katsushi Ikeuchi The University oftokyo Cyra Technologies, Inc.
M. D. Wheler Cyra Technologies, Inc. 3 3 CAD albedo Mapping textures on 3D geometric model using reflectance image Ryo Kurazume M. D. Wheler Katsushi Ikeuchi The University oftokyo Cyra Technologies, Inc.
 24 21 21115025 i 1 1 2 5 2.1.................................. 6 2.1.1........................... 6 2.1.2........................... 7 2.2...................................... 8 2.3............................
24 21 21115025 i 1 1 2 5 2.1.................................. 6 2.1.1........................... 6 2.1.2........................... 7 2.2...................................... 8 2.3............................
1., 1 COOKPAD 2, Web.,,,,,,.,, [1]., 5.,, [2].,,.,.,, 5, [3].,,,.,, [4], 33,.,,.,,.. 2.,, 3.., 4., 5., ,. 1.,,., 2.,. 1,,
![1., 1 COOKPAD 2, Web.,,,,,,.,, [1]., 5.,, [2].,,.,.,, 5, [3].,,,.,, [4], 33,.,,.,,.. 2.,, 3.., 4., 5., ,. 1.,,., 2.,. 1,,](/thumbs/50/25936361.jpg "1., 1 COOKPAD 2, Web.,,,,,,.,, [1]., 5.,, [2].,,.,.,, 5, [3].,,,.,, [4], 33,.,,.,,.. 2.,, 3.., 4., 5., ,. 1.,,., 2.,. 1,,") THE INSTITUTE OF ELECTRONICS, INFORMATION AND COMMUNICATION ENGINEERS TECHNICAL REPORT OF IEICE.,, 464 8601 470 0393 101 464 8601 E-mail: matsunagah@murase.m.is.nagoya-u.ac.jp, {ide,murase,hirayama}@is.nagoya-u.ac.jp,
THE INSTITUTE OF ELECTRONICS, INFORMATION AND COMMUNICATION ENGINEERS TECHNICAL REPORT OF IEICE.,, 464 8601 470 0393 101 464 8601 E-mail: matsunagah@murase.m.is.nagoya-u.ac.jp, {ide,murase,hirayama}@is.nagoya-u.ac.jp,
IPSJ SIG Technical Report 1,a) 1,b) 1,c) 1,d) 2,e) 2,f) 2,g) 1. [1] [2] 2 [3] Osaka Prefecture University 1 1, Gakuencho, Naka, Sakai,
![IPSJ SIG Technical Report 1,a) 1,b) 1,c) 1,d) 2,e) 2,f) 2,g) 1. [1] [2] 2 [3] Osaka Prefecture University 1 1, Gakuencho, Naka, Sakai,](/thumbs/94/119099134.jpg "IPSJ SIG Technical Report 1,a) 1,b) 1,c) 1,d) 2,e) 2,f) 2,g) 1. [1] [2] 2 [3] Osaka Prefecture University 1 1, Gakuencho, Naka, Sakai,") 1,a) 1,b) 1,c) 1,d) 2,e) 2,f) 2,g) 1. [1] [2] 2 [3] 1 599 8531 1 1 Osaka Prefecture University 1 1, Gakuencho, Naka, Sakai, Osaka 599 8531, Japan 2 565 0871 Osaka University 1 1, Yamadaoka, Suita, Osaka
1,a) 1,b) 1,c) 1,d) 2,e) 2,f) 2,g) 1. [1] [2] 2 [3] 1 599 8531 1 1 Osaka Prefecture University 1 1, Gakuencho, Naka, Sakai, Osaka 599 8531, Japan 2 565 0871 Osaka University 1 1, Yamadaoka, Suita, Osaka
9_18.dvi
 Vol. 49 No. 9 3180 3190 (Sep. 2008) 1, 2 3 1 1 1, 2 4 5 6 1 MRC 1 23 MRC Development and Applications of Multiple Risk Communicator Ryoichi Sasaki, 1, 2 Yuu Hidaka, 3 Takashi Moriya, 1 Katsuhiro Taniyama,
Vol. 49 No. 9 3180 3190 (Sep. 2008) 1, 2 3 1 1 1, 2 4 5 6 1 MRC 1 23 MRC Development and Applications of Multiple Risk Communicator Ryoichi Sasaki, 1, 2 Yuu Hidaka, 3 Takashi Moriya, 1 Katsuhiro Taniyama,
IS1-09 第 回画像センシングシンポジウム, 横浜,14 年 6 月 2 Hough Forest Hough Forest[6] Random Forest( [5]) Random Forest Hough Forest Hough Forest 2.1 Hough Forest 1 2.2
![IS1-09 第 回画像センシングシンポジウム, 横浜,14 年 6 月 2 Hough Forest Hough Forest[6] Random Forest( [5]) Random Forest Hough Forest Hough Forest 2.1 Hough Forest 1 2.2](/thumbs/91/106196100.jpg "IS1-09 第 回画像センシングシンポジウム, 横浜,14 年 6 月 2 Hough Forest Hough Forest[6] Random Forest( [5]) Random Forest Hough Forest Hough Forest 2.1 Hough Forest 1 2.2") IS1-09 第 回画像センシングシンポジウム, 横浜,14 年 6 月 MI-Hough Forest () E-mail: ym@vision.cs.chubu.ac.jphf@cs.chubu.ac.jp Abstract Hough Forest Random Forest MI-Hough Forest Multiple Instance Learning Bag Hough Forest
IS1-09 第 回画像センシングシンポジウム, 横浜,14 年 6 月 MI-Hough Forest () E-mail: ym@vision.cs.chubu.ac.jphf@cs.chubu.ac.jp Abstract Hough Forest Random Forest MI-Hough Forest Multiple Instance Learning Bag Hough Forest
IPSJ-CVIM
 1 1 2 1 Estimation of Shielding Object Distribution in Scattering Media by Analyzing Light Transport Shosei Moriguchi, 1 Yasuhiro Mukaigawa, 1 Yasuyuki Matsushita 2 and Yasushi Yagi 1 In this paper, we
1 1 2 1 Estimation of Shielding Object Distribution in Scattering Media by Analyzing Light Transport Shosei Moriguchi, 1 Yasuhiro Mukaigawa, 1 Yasuyuki Matsushita 2 and Yasushi Yagi 1 In this paper, we
2.2 6).,.,.,. Yang, 7).,,.,,. 2.3 SIFT SIFT (Scale-Invariant Feature Transform) 8).,. SIFT,,. SIFT, Mean-Shift 9)., SIFT,., SIFT,. 3.,.,,,,,.,,,., 1,
.,.,.,. Yang, 7).,,.,,. 2.3 SIFT SIFT (Scale-Invariant Feature Transform) 8).,. SIFT,,. SIFT, Mean-Shift 9)., SIFT,., SIFT,. 3.,.,,,,,.,,,., 1,") 1 1 2,,.,.,,, SIFT.,,. Pitching Motion Analysis Using Image Processing Shinya Kasahara, 1 Issei Fujishiro 1 and Yoshio Ohno 2 At present, analysis of pitching motion from baseball videos is timeconsuming
1 1 2,,.,.,,, SIFT.,,. Pitching Motion Analysis Using Image Processing Shinya Kasahara, 1 Issei Fujishiro 1 and Yoshio Ohno 2 At present, analysis of pitching motion from baseball videos is timeconsuming
IPSJ SIG Technical Report Vol.2010-MPS-77 No /3/5 VR SIFT Virtual View Generation in Hallway of Cybercity Buildings from Video Sequen
 VR 1 1 1 1 1 SIFT Virtual View Generation in Hallway of Cybercity Buildings from Video Sequences Sachiyo Yoshida, 1 Masami Takata 1 and Joe Kaduki 1 Appearance of Three-dimensional (3D) building model
VR 1 1 1 1 1 SIFT Virtual View Generation in Hallway of Cybercity Buildings from Video Sequences Sachiyo Yoshida, 1 Masami Takata 1 and Joe Kaduki 1 Appearance of Three-dimensional (3D) building model
JIS Z803: (substitution method) 3 LCR LCR GPIB
 3 LCR LCR GPIB") LCR NMIJ 003 Agilent 8A 500 ppm JIS Z803:000 50 (substitution method) 3 LCR LCR GPIB Taylor 5 LCR LCR meter (Agilent 8A: Basic accuracy 500 ppm) V D z o I V DUT Z 3 V 3 I A Z V = I V = 0 3 6 V, A LCR meter
LCR NMIJ 003 Agilent 8A 500 ppm JIS Z803:000 50 (substitution method) 3 LCR LCR GPIB Taylor 5 LCR LCR meter (Agilent 8A: Basic accuracy 500 ppm) V D z o I V DUT Z 3 V 3 I A Z V = I V = 0 3 6 V, A LCR meter
Summary 3D cinemas are becoming real thanks to digital image processing technology. The most feasible and stable technology based on the binocular dis
 Summary 3D cinemas are becoming real thanks to digital image processing technology. The most feasible and stable technology based on the binocular disparity requires stereoglasses. However, there is still
Summary 3D cinemas are becoming real thanks to digital image processing technology. The most feasible and stable technology based on the binocular disparity requires stereoglasses. However, there is still
untitled
 IT E- IT http://www.ipa.go.jp/security/ CERT/CC http://www.cert.org/stats/#alerts IPA IPA 2004 52,151 IT 2003 12 Yahoo 451 40 2002 4 18 IT 1/14 2.1 DoS(Denial of Access) IDS(Intrusion Detection System)
IT E- IT http://www.ipa.go.jp/security/ CERT/CC http://www.cert.org/stats/#alerts IPA IPA 2004 52,151 IT 2003 12 Yahoo 451 40 2002 4 18 IT 1/14 2.1 DoS(Denial of Access) IDS(Intrusion Detection System)
No. 3 Oct The person to the left of the stool carried the traffic-cone towards the trash-can. α α β α α β α α β α Track2 Track3 Track1 Track0 1
 ACL2013 TACL 1 ACL2013 Grounded Language Learning from Video Described with Sentences (Yu and Siskind 2013) TACL Transactions of the Association for Computational Linguistics What Makes Writing Great?
ACL2013 TACL 1 ACL2013 Grounded Language Learning from Video Described with Sentences (Yu and Siskind 2013) TACL Transactions of the Association for Computational Linguistics What Makes Writing Great?
特集_03-07.Q3C
 3-7 Error Detection and Authentication in Quantum Key Distribution YAMAMURA Akihiro and ISHIZUKA Hirokazu Detecting errors in a raw key and authenticating a private key are crucial for quantum key distribution
3-7 Error Detection and Authentication in Quantum Key Distribution YAMAMURA Akihiro and ISHIZUKA Hirokazu Detecting errors in a raw key and authenticating a private key are crucial for quantum key distribution
,,.,.,,.,.,.,.,,.,..,,,, i
 22 A person recognition using color information 1110372 2011 2 13 ,,.,.,,.,.,.,.,,.,..,,,, i Abstract A person recognition using color information Tatsumo HOJI Recently, for the purpose of collection of
22 A person recognition using color information 1110372 2011 2 13 ,,.,.,,.,.,.,.,,.,..,,,, i Abstract A person recognition using color information Tatsumo HOJI Recently, for the purpose of collection of
THE INSTITUTE OF ELECTRONICS, INFORMATION AND COMMUNICATION ENGINEERS TECHNICAL REPORT OF IEICE k
 THE INSTITUTE OF ELECTRONICS, INFORMATION AND COMMUNICATION ENGINEERS TECHNICAL REPORT OF IEICE. 565 0871 2 1 606 8501 606 8501 651 2103 3 1 E-mail: k-nakamura@comm.eng.osaka-u.ac.jp ARToolKit 1. 1 1 2.
THE INSTITUTE OF ELECTRONICS, INFORMATION AND COMMUNICATION ENGINEERS TECHNICAL REPORT OF IEICE. 565 0871 2 1 606 8501 606 8501 651 2103 3 1 E-mail: k-nakamura@comm.eng.osaka-u.ac.jp ARToolKit 1. 1 1 2.
IPSJ SIG Technical Report Vol.2009-CVIM-168 No /9/ Latest Algorithm for 3-D Reconstruction from Two Views Kento Yamada, 1 Yasu
 2 3 2 3 2 3 Latest Algorithm for 3-D Reconstruction from Two Views Kento Yamada, Yasushi Kanazawa, Kenichi Kanatani 2 and Yasuyuki Sugaya 3 This paper presents a new algorithm for reconstructing the 3-D
2 3 2 3 2 3 Latest Algorithm for 3-D Reconstruction from Two Views Kento Yamada, Yasushi Kanazawa, Kenichi Kanatani 2 and Yasuyuki Sugaya 3 This paper presents a new algorithm for reconstructing the 3-D
28 TCG SURF Card recognition using SURF in TCG play video
 28 TCG SURF Card recognition using SURF in TCG play video 1170374 2017 3 2 TCG SURF TCG TCG OCG SURF Bof 20 20 30 10 1 SURF Bag of features i Abstract Card recognition using SURF in TCG play video Haruka
28 TCG SURF Card recognition using SURF in TCG play video 1170374 2017 3 2 TCG SURF TCG TCG OCG SURF Bof 20 20 30 10 1 SURF Bag of features i Abstract Card recognition using SURF in TCG play video Haruka
I
 I 6 4 10 1 1 1.1............... 1 1................ 1 1.3.................... 1.4............... 1.4.1.............. 1.4................. 1.4.3........... 3 1.4.4.. 3 1.5.......... 3 1.5.1..............
I 6 4 10 1 1 1.1............... 1 1................ 1 1.3.................... 1.4............... 1.4.1.............. 1.4................. 1.4.3........... 3 1.4.4.. 3 1.5.......... 3 1.5.1..............
Computer Security Symposium October ,a) 1,b) Microsoft Kinect Kinect, Takafumi Mori 1,a) Hiroaki Kikuchi 1,b) [1] 1 Meiji U
![Computer Security Symposium October ,a) 1,b) Microsoft Kinect Kinect, Takafumi Mori 1,a) Hiroaki Kikuchi 1,b) [1] 1 Meiji U](/thumbs/101/150229680.jpg "Computer Security Symposium October ,a) 1,b) Microsoft Kinect Kinect, Takafumi Mori 1,a) Hiroaki Kikuchi 1,b) [1] 1 Meiji U") Computer Security Symposium 017 3-5 October 017 1,a) 1,b) Microsoft Kinect Kinect, Takafumi Mori 1,a) Hiroaki Kikuchi 1,b) 1. 017 5 [1] 1 Meiji University Graduate School of Advanced Mathematical Science
Computer Security Symposium 017 3-5 October 017 1,a) 1,b) Microsoft Kinect Kinect, Takafumi Mori 1,a) Hiroaki Kikuchi 1,b) 1. 017 5 [1] 1 Meiji University Graduate School of Advanced Mathematical Science
1
 5-3 Photonic Antennas and its Application to Radio-over-Fiber Wireless Communication Systems LI Keren, MATSUI Toshiaki, and IZUTSU Masayuki In this paper, we presented our recent works on development of
5-3 Photonic Antennas and its Application to Radio-over-Fiber Wireless Communication Systems LI Keren, MATSUI Toshiaki, and IZUTSU Masayuki In this paper, we presented our recent works on development of
SICE東北支部研究集会資料(2004年)
") 219 (2004.11.05) 219-4 Development of a 3D Range Sensor Based on Equiphase Light-Section Method KUMAGAI Masaaki * *Tohoku Gakuin University : (Vision sensor), (3-D range sensor), (Light-section method),
219 (2004.11.05) 219-4 Development of a 3D Range Sensor Based on Equiphase Light-Section Method KUMAGAI Masaaki * *Tohoku Gakuin University : (Vision sensor), (3-D range sensor), (Light-section method),
untitled
 Visitor Arrivals and Japanese Overseas Travelers 2008 Visitor Arrivals and Japanese Overseas Travelers Visitor Arrivals by Nationality & Purpose of Visit for Apr. 2008provisional figures Visitor Arrivals
Visitor Arrivals and Japanese Overseas Travelers 2008 Visitor Arrivals and Japanese Overseas Travelers Visitor Arrivals by Nationality & Purpose of Visit for Apr. 2008provisional figures Visitor Arrivals
8.dvi
 3 12 2 4 86453 i 1 1 1.1..................................... 2 1.2.................................. 3 1.3................................ 6 1.3.1........................ 7 1.3.2.........................
3 12 2 4 86453 i 1 1 1.1..................................... 2 1.2.................................. 3 1.3................................ 6 1.3.1........................ 7 1.3.2.........................
 Real AdaBoost HOG 2009 3 A Graduation Thesis of College of Engineering, Chubu University Efficient Reducing Method of HOG Features for Human Detection based on Real AdaBoost Chika Matsushima ITS Graphics
Real AdaBoost HOG 2009 3 A Graduation Thesis of College of Engineering, Chubu University Efficient Reducing Method of HOG Features for Human Detection based on Real AdaBoost Chika Matsushima ITS Graphics
Vol. 43 No. 7 July 2002 ATR-MATRIX,,, ATR ITL ATR-MATRIX ATR-MATRIX 90% ATR-MATRIX Development and Evaluation of ATR-MATRIX Speech Translation System
 Vol. 43 No. 7 July 2002 ATR-MATRIX,,, ATR ITL ATR-MATRIX ATR-MATRIX 90% ATR-MATRIX Development and Evaluation of ATR-MATRIX Speech Translation System Fumiaki Sugaya,,, Toshiyuki Takezawa, Eiichiro Sumita,
Vol. 43 No. 7 July 2002 ATR-MATRIX,,, ATR ITL ATR-MATRIX ATR-MATRIX 90% ATR-MATRIX Development and Evaluation of ATR-MATRIX Speech Translation System Fumiaki Sugaya,,, Toshiyuki Takezawa, Eiichiro Sumita,
Fig. 3 3 Types considered when detecting pattern violations 9)12) 8)9) 2 5 methodx close C Java C Java 3 Java 1 JDT Core 7) ) S P S
12) 8)9) 2 5 methodx close C Java C Java 3 Java 1 JDT Core 7) ) S P S") 1 1 1 Fig. 1 1 Example of a sequential pattern that is exracted from a set of method definitions. A Defect Detection Method for Object-Oriented Programs using Sequential Pattern Mining Goro YAMADA, 1 Norihiro
1 1 1 Fig. 1 1 Example of a sequential pattern that is exracted from a set of method definitions. A Defect Detection Method for Object-Oriented Programs using Sequential Pattern Mining Goro YAMADA, 1 Norihiro
Vol.-ICS-6 No.3 /3/8 Input.8.6 y.4 Fig....5 receptive field x 3 w x y Machband w(x =
 DOG(Difference of two Gaussians 8 A feedback model for the brightness illusion Shoji Nodasaka and Asaki Saito We consider mechanism of the Hermann grid. The mechanism is usually explained by effects of
DOG(Difference of two Gaussians 8 A feedback model for the brightness illusion Shoji Nodasaka and Asaki Saito We consider mechanism of the Hermann grid. The mechanism is usually explained by effects of
23 Fig. 2: hwmodulev2 3. Reconfigurable HPC 3.1 hw/sw hw/sw hw/sw FPGA PC FPGA PC FPGA HPC FPGA FPGA hw/sw hw/sw hw- Module FPGA hwmodule hw/sw FPGA h
 23 FPGA CUDA Performance Comparison of FPGA Array with CUDA on Poisson Equation (lijiang@sekine-lab.ei.tuat.ac.jp), (kazuki@sekine-lab.ei.tuat.ac.jp), (takahashi@sekine-lab.ei.tuat.ac.jp), (tamukoh@cc.tuat.ac.jp),
23 FPGA CUDA Performance Comparison of FPGA Array with CUDA on Poisson Equation (lijiang@sekine-lab.ei.tuat.ac.jp), (kazuki@sekine-lab.ei.tuat.ac.jp), (takahashi@sekine-lab.ei.tuat.ac.jp), (tamukoh@cc.tuat.ac.jp),
main.dvi
 FDTD S A Study on FDTD Analysis based on S-Parameter 18 2 7 04GD168 FDTD FDTD S S FDTD S S S S FDTD FDTD i 1 1 1.1 FDTD.................................... 1 1.2 FDTD..................... 3 2 S 5 2.1 FDTD
FDTD S A Study on FDTD Analysis based on S-Parameter 18 2 7 04GD168 FDTD FDTD S S FDTD S S S S FDTD FDTD i 1 1 1.1 FDTD.................................... 1 1.2 FDTD..................... 3 2 S 5 2.1 FDTD
Spin Image [3] 3D Shape Context [4] Spin Image 2 3D Shape Context Shape Index[5] Local Surface Patch[6] DAI [7], [8] [9], [10] Reference Frame SHO[11]
![Spin Image [3] 3D Shape Context [4] Spin Image 2 3D Shape Context Shape Index[5] Local Surface Patch[6] DAI [7], [8] [9], [10] Reference Frame SHO[11]](/thumbs/87/96951219.jpg "Spin Image [3] 3D Shape Context [4] Spin Image 2 3D Shape Context Shape Index[5] Local Surface Patch[6] DAI [7], [8] [9], [10] Reference Frame SHO[11]") 3-D 1,a) 1 1,b) 3 3 3 1% Spin Image 51.6% 93.8% 9 PCL Point Cloud Library Correspondence Grouping 13.5% 10 3 Extraction of 3-D Feature Point for Effect in Object Recognition based on Local Shape Distinctiveness
3-D 1,a) 1 1,b) 3 3 3 1% Spin Image 51.6% 93.8% 9 PCL Point Cloud Library Correspondence Grouping 13.5% 10 3 Extraction of 3-D Feature Point for Effect in Object Recognition based on Local Shape Distinctiveness