(Microsoft PowerPoint - RTM\203T\203}\201[\203L\203\203\203\223\203v \224z\225z\227p)
|
|
|
- みそら にばし
- 4 years ago
- Views:
Transcription
1 RT RT RTC RTC
2 RT RT RTC RTC RTC I/F RTC (RTC ) 2

3 Systems Engineering Consultants Co.,LTD
4 モバイルネットワーク BF ワイヤレス BF 社会基盤 BF インターネット BF 宇宙先端 BF 4
5 2002 5
6 RT RT WG RT SICE RSi (Robot Services initiative) OMG Robotics DTF RooBO 6

7 RT RT RT RT NEC RT RT Think IT 6 SE RT 7
8 8
9 知能モジュール ( 知能化 PJ) を搭載した RT ミドルウェア対応の各種ロボット ORiN DeviceNet RSNP RSi RoIS EMS RSNP RT PJ 組込み向け RT ミドルウェアや RT ミドルウェア対応センサ 電力線通信 (PLC) を利用
10 RT RT RT RTC RTC RTC RTC I/F RTC (RTC ) 10
11 11

12 12
.NET Framework 3.5 Mono 2.4 C# / Visual Basic / C++ / CLI.")
13 OpenRTM.NET OpenRTM.NET OMG RT OpenRTM.NET C# Visual Basic RT RT IDL CORBA CORBA WCF RTC RTC RTC RTC RTC OpenRTM.NET CORBA RT WCF OS 3D OpenRTM.NET Windows XP / Vista / 7 Linux (Ubuntu / opensuse ).NET Framework 3.5 Mono 2.4 C# / Visual Basic / C++ / CLI.NET Framework / Mono RTC CORBA / WCF / Local OMG RTC Specification

14 RTM on Android Android RT UI Android Android Android RT 14
15 RT RT OpenRTM.NET RTM on Android OpenRTM-aist OpenRTM-aist for VxWorks RT RTC-CANopen minirtcs-can micrortcs-zigbee RTC-Lite 15

 は OS 言語の壁を越えて接続することが可能")
16 RT RT ミドルウェア (RTM) により コンポーネントをネットワーク上に分散配置 ロボット A RTC RTC RTM ロボット B RTC RTC RTM ロボット C RTC RTC RTC RTM ネットワーク Solaris FreeBSD ARTLinux Linux RTM RTC RTC Windows RTM RTC RTC TRON RTM RTC RTC コンポーネント (RTC) は OS 言語の壁を越えて接続することが可能 アプリケーション操作デバイスセンサ 16
17 RTC ロボット体内のコンポーネントによる構成例 画像データ ポート カメラコンポーネント 顔位置問合せ 顔認識コンポーネント データ コマンドの流れ カメラコンポーネント 画像データ ステレオビジョンコンポーネント カメラコントロール 人物データ表情データ ジェスチャ軌道データ 頭 腕駆動コンポーネント 音声データ 音声認識コンポーネント 文字データ 対話コンポーネント 文字データ 音声合成コンポーネント マイクコンポーネント ( モジュール ) 情報の隠蔽と公開のルールが重要 17
18 OpenHRI OpenHRI 18

19 Robot Inspection and Poster Session(RISP) Follow Me Go Get It! Who Is Who General Purpose Service Robot Shopping Mall 19
20 モジュール分類 モジュール名 モジュール補足 利用可能なライブラリ 大域的経路計画 地図からの経路生成 知能化 PJモジュール 局所的経路計画 軌道追従 衝突回避 知能化 PJモジュール 障害物検知 LRF 知能化 PJモジュール 自律移動 自己位置推定オドメトリ SLAM 知能化 PJモジュール地図更新 SLAM 知能化 PJモジュール 人検知 追跡 カメラ 知能化 PJモジュール モータ出力 動作指令 知能化 PJモジュール センサ入力 LRF ( ステレオ ) カメラ - 音声認識 日本語 英語 対話スクリプト - 音声合成 - OpenHRI 音声出力 スピーカー コミュニケーション 顔認識 認証 見知らぬ人の顔と名前を覚える オムロン OKIAO Vision マニピュレーション システム ジェスチャー認識 身振り 手振りの認識 OpenCV オムロン OKIAO Vision OpenCV センサ入力 カメラ マイクロフォンアレイ 音声認識モジュール 順 逆運動学計算 - OpenRAVE 軌道生成 - OpenRAVE ハンドアイマニピュレーション - OpenRAVE 物体探索 移動 認識 把持 ペットボトル ドア 冷蔵庫 缶 OpenRAVE パンチルト台オブジェクトの発見 識別 - OpenCV センサ入力 TOF ステレオカメラ - コントローラ マニピュレーション制御 - タスク管理 シナリオによるタスク実行制御 シナリオエディタフィロソフィー モジュール操作 RTシステムエディタの自動化 rtsshell rtcshell システム管理 動作状況管理 ログ管理 - 20
 音声応答 動作指示 状態遷移の情報を通知 SEAT 移動指示 処理結果 台車制御 RTC 群 MobileRobots 社のロボットを制御するためのライブラリ ARIA を利用した RTC 群 (http:// http://robots.")
21 Follow Me 音声指示 音声対話 RTC 群 OpenHRI を利用 ( openhri.net/) 音声応答 動作指示 状態遷移の情報を通知 SEAT 移動指示 処理結果 台車制御 RTC 群 MobileRobots 社のロボットを制御するためのライブラリ ARIA を利用した RTC 群 ( robots.mobilerobots.com/wiki/aria /wiki/aria) 21
22 Follow Me 音声処理 状態遷移管理 人認識 移動制御 22
23 (A) (B) (C) 対応 PJ RT ミドルウェア PJ (02-04) 共通基盤 PJ (05-07) ロボット知能化 PJ (07-11) ロボットの機能要素 画像認識モジュール ソフトウェア機能モシ ュール 共通通信規格を規定規定 音声認識モジュール ソフトウェア機能モシ ュール 運動制御モジュール ソフトウェア機能モシ ュール 筋肉 力センサ NEDO ロボット用途 目 ソフトウェア ジャイロ 耳 力センサ 基盤通信モジュール ( 開発対象 ) (D) オープンイノベ PJ (08-10) 温度センサ 力センサ 力センサ 温度センサ ( 市販品等 ) 照度センサ ( 市販品等 ) 駆動部品等 ( 市販品等 ) 研究開発の内容 RT 要素部品 ( 開発対象 ) RTシステムの種々の既存部品既存部品に 基盤通信基盤通信モジュールモジュール を組み合わせわせ 専用処理専用処理ソフト構築と実証を組み込んでんで種々の RT 要素部品 と呼ぶモジュールモジュールを開発開発するする これを組み合わせて RT システムを構築構築 実証実証するする 研究開発の狙い 1 市場拡大 ( 生活空間や職場職場での RT 応用 ) 各種センサセンサ類 2 新規参入の促進 ( 接続 制御方法制御方法の標準化標準化 オープンオープン化 ) 3 市場に存在存在するする資産 ( 部品 ) の有効活用 ( プラグ & プレイ機能機能の実現 ) 成果の応用例生活環境や職場での RT 応用による市場の拡大 安全 安心省エネ快適 23



24 インテリジェント空調システム パワーアシストウインドウ セキュリティシステム プラグアンドプレイ 24

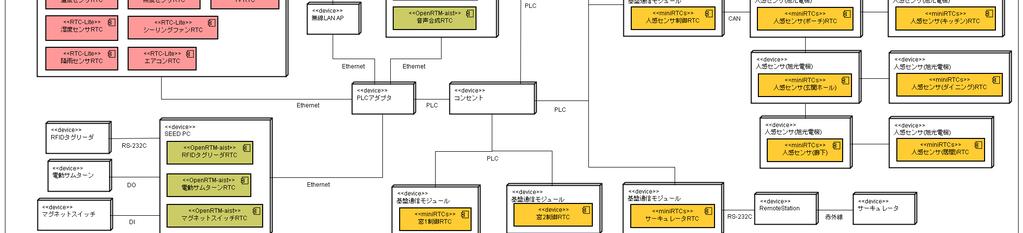
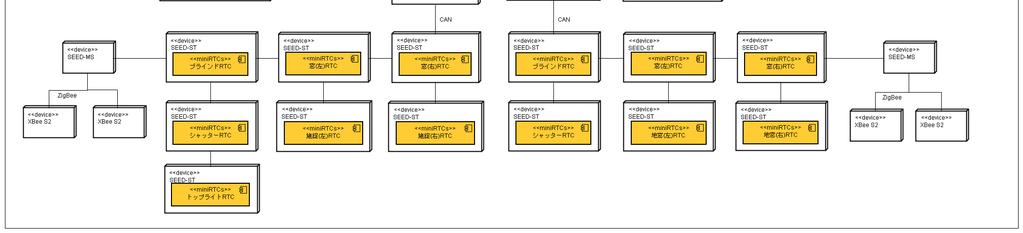
25 RT RT RT RT RT RT RT CAN Zigbee PLC Zigbee エンドデバイス 組込みモジュールのスペック CAN Zigbee CPU TI AM1808(375MHz) CPU CAN/Zigbee SH7214/SH2(100MHz) CPU ARM7(60MHz) CPU TI CC2530(16MHz) ROM 2GB ROM 1MB ROM 256KB ROM 256KB RAM 256MB RAM 128KB RAM 16KB RAM 8KB OS Linux OS TOPPERS ASP OS OS RTM OpenRTM-aist RTM minirtcs / micrortcs RTM minirtcs RTM micrortcs 25
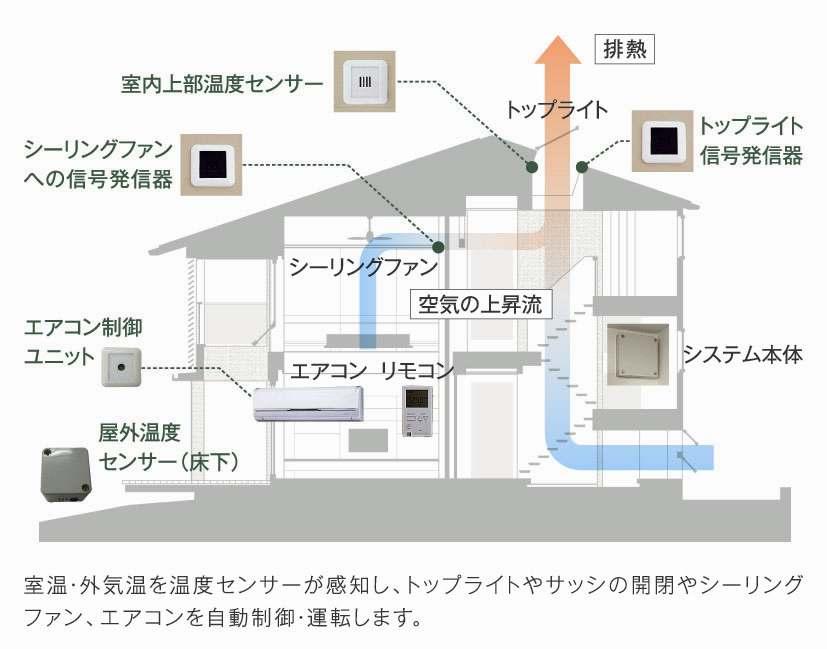
26 ~ エアコン等の空調装置だけに頼らず 通風や排熱を適切にコントロールして屋内環境を快適に保つ総合的な空調システム ~ 夏季の空調動作イメージ 26


27 ~ 利便性 操作性 防犯性 快適性等を向上させる新しい住宅用窓システム ~ 3 人感センサモジュール 人感センサモジュール 感圧センサモジュール 窓駆動モジュール 施錠モジュール 生体認証センサモジュール等 加速度センサモジュール 27



28 THK THK 1 小型通信ドライバーモジュール小型通信ドライバーモジュール 5インテリジェントウインドウシステムインテリジェントウインドウシステム 3 小型リニアアクチュエータ小型リニアアクチュエータ 2RTC 2RTC 対応パラメータエディタ対応パラメータエディタ Systems Engineering Consultants Co., LTD. 4RT 4RT All 要素部品のラインナッップ要素部品のラインナッップ rights reserved. 28





29 温度センサモジュール ZigBee モジュール シーリングファンモジュール エアコンモジュール テレビモジュール 降雨センサモジュール 湿度センサモジュール RT minirtcs ViS-M4000 isearch 29
30 PJ PJ 30
31 RT RT RTC RTC RTC I/F RTC (RTC ) 31
32 PC OMG Robotic Technology Component 32
33 33
34 URG Viewer Component URG Sensor Component Crime Prevention Component Robot Control Component Motor Component 34
35 / 35
36 36
37 USB SICK LRF 37
38 38
39 URG Viewer Component URG Sensor Component Crime Prevention Component Motor Component 39
40 URG Viewer Component URG Sensor Component Crime Prevention Component Robot Control Component Motor Component 40
 CPU 1.")

 USB Camera")

41 PC for Monitoring Pentium M(Intel) CPU 1.60GHz, 512 MB RAM OS Windows XP Scanning Laser Range Finder URG-04LX( ) USB Camera Qcam Orbit(Logicool) USB Camera USB2.0 Bluetooth Serial PC Serial Motor Controller USB2.0 Scanning Laser Range Finder 41

42 42

43 RT 43
44 RT RT OMG Object Management Group OpenRTM-aist コンポーネントを組み合わせるだけでロボットを容易に開発 44
45 RT RT ロジック デバイス制御 制御アルゴリズム アプリケーション etc RT コンポーネントフレームワーク RT コンポーネント ロジックを箱 ( フレームワーク ) に入れたもの =RT コンポーネント (RTC) RTC RTC RTC RTC RTC RTC RTC RTC RT ミドルウエア RTCの実行環境 (OSのようなもの)=RTミドルウエア(RTM) RTCはネットワーク上に分散可能 45
46 コストの問題技術の問題ニーズの問題 A 社製移動ベース B 社製アーム C 社製センサ 最新の理論 アルゴリズム 多様なユーザ!!!! RT コンポーネント化 仕様 モジュール化 再利用 ロボットの低コスト化 システム開発者 最新技術を利用可能 カスタマイズが容易に 多様なニーズに対応 ロボットシステムインテグレーションのイノベーション 46
47 RT ソフトウエアアーキテクチャの違い RTC アプリ アプリケーション RTC RTC アプリケーション オブジェクト オブジェクト RTM ライブラリ ライブラリ ミドルウエア (CORBA) ミドルウエア (CORBA) OS OS OS OS IDL OS RTC IDL (OMG RTC ) 47
48 48
49 RT LAN 49
50 50
51 ( What) ( How) 入力情報 : アームを移動させたいさせたい位置 出力情報 : アームの現在位置 公開するする情報 目的 : アームの位置位置を制御するするコンポーネント Arm Component 手段 : 制御を利用利用してロボットアームを駆動駆動させる 隠蔽するする情報 51
52 PA10 Component XX 制御 Controller Component アームを移動させたい位置 交換可能 Arm Component 制御 52
53 53
54 外乱 指令 制御器 制御量 制御対象 出力 センサの計測値 センサ 54
55 ユーザ指令 コントローラコンポーネント 制御量 アクチュエータコンポーネント 出力 センサの計測値 センサコンポーネント 55
56 56
57 x,y,z[mm] 57
58 Crime Prevention Component コントローラ モータの向き Motor Component アクチュエータ 障害物までの距離データ URG Sensor Component センサ 58
59 I/F I/F I/F OpenRTM-aist BasicDataType ExtendedDataTypes 59


60 RT RT RT RT RT RT RT RT RT etc etc RT OS Java Eclipse RTC RT Java OS JDK 6 Update 10 Eclipse 3.2 OMG RTC Specification 1.0 OpenRTM-aist-0.4.2/1.0.0 OpenRTM.NET-0.4/1.0/1.1 60
61 RTC NEDO OpenRT Platform OpenRT Platform RT RT (RTC) RTC デバッガ :OpenRT: Platform における RTC の検証ツール 61
62 OpenRT Platform 開発プロセス システム設計 RTC 開発 設計 RT システム開発 設計 運用 テスト 実装 テスト 実装 主なツール RTC ビルダ (RtcTemplate) RTC デバッガ RT システムエディタ (RtcLink) RTC シミュレータ RTC 単体を作成 RT システムに組込 62
63 RTC RTC RTC RTC 検証の汎用的なツールとして RTC デバッガを開発 63

64 RTC Ⅰ Ⅴ Ⅱ Ⅲ Ⅳ Eclipse Plug-in Ⅰ Ⅱ Ⅲ Ⅳ Ⅴ 64
65 RTC / 65
66 RTC I O Target RTC O I RTC Debugger RTC Profile Data Log File RTC Profile RTC RTC Data Log File RTC RTC 66

67 ExecutionContext (OnExecute1 プロファイルビュー 67

68 MIN/MAX/ データ入力ポートビュー TimedStringSeq 型データの送信 68
69 RTC データ出力ポートビュー TimedStringSeq 型データの受信 69
")
70 (Provider) サービスポートビュー string echo(in string msg) の呼出 70
71 再生RTCデバッガを利用RTC(Source) / RTC(Source) RTC(Target) デバイス一般的に 再現は容易ではない通常一般的に 再現は容易ではない デバイス RTC Debugger Data Log File RTC Debugger 記録 Java Serialize, CSV RTC(Target) 再現性の確保 ハード使用面の省力化 71
 データプロットビュー")
72 ( ) Auto or ( ) ( ) データプロットビュー 72
73 73
74 RTC RTC SPEC RTC 2KStep 2 [Provider] 2 5 RTC 40% ドライバ / スタブの作成が不要 データの可視化によるスムーズな動作確認 74
 ( ) (mm) (m)")
 (OpenRTM.NET-1.")
75 (URG) URG-04LX( URG ) UTM-30LX ( TOP-URG ) RT SCIP2 OpenHRP3 RT ( ) ( ) (mm) (m) (OpenRTM-aist RELEASE Windows / Linux) (OpenRTM.NET-1.x Windows) ( ) version 1.2 Date
76 URG URG URG RS-232C USB [deg]( ) 0.35[deg] TOP-URG RS-232C USB [deg]( ) 0.25[deg] ( ) URG URG [ ] 1080[ ] 600[rpm] 2400[rpm] 5600[mm] 60000[mm] ( ) [bps] [mm] [bps] [mm] [m] - [m] [deg] - - [deg] - [rad] - [deg] - [rad] - [deg] / [deg] - [rad] - / [deg] - [rad] [m] - - [m] - [mm] - [rad] - [mm] - [rad] - [deg] - [deg] / [deg] - / [deg] - [deg] - [deg] - [mm] - [mm] - [mm] - [mm] [ms] - [ms] [rpm] - [rpm] - [bps] - [bps]

77
Microsoft PowerPoint RT講習会(送付用)_ [互換モード]
![Microsoft PowerPoint RT講習会(送付用)_ [互換モード]](/thumbs/96/126720805.jpg "Microsoft PowerPoint RT講習会(送付用)_ [互換モード]") データ収集技術講演会 日時 :2012 年 12 月 1 日 ( 土 ) 13:00~17:00 場所 : 広島工業大学五日市キャンパス三宅の森 Nexus21 607 教室 RT-Middleware 活用 株式会社グローバルアシスト坂本武志 RT ミドルウェアとは? 2012.12.1 データ収集技術講演会 Copyright (C) Advanced Industrial Science And
データ収集技術講演会 日時 :2012 年 12 月 1 日 ( 土 ) 13:00~17:00 場所 : 広島工業大学五日市キャンパス三宅の森 Nexus21 607 教室 RT-Middleware 活用 株式会社グローバルアシスト坂本武志 RT ミドルウェアとは? 2012.12.1 データ収集技術講演会 Copyright (C) Advanced Industrial Science And
株式会社セックにおける ロボティクス分野への取り込み
 RT ミドルウェアサマーキャンプ 2014 RTM on Android の紹介 2014 年 8 月 5 日 開発本部第四開発部 中本啓之 さまざまな RT ミドルウェア 用途に合わせ 多様な RT ミドルウェアを開発 提供しています エンタープライズ層 OpenRTM.NET PC/ タブレット向け Android 版 RT ミドルウェア RTM on Android TM OpenRTM-aist
RT ミドルウェアサマーキャンプ 2014 RTM on Android の紹介 2014 年 8 月 5 日 開発本部第四開発部 中本啓之 さまざまな RT ミドルウェア 用途に合わせ 多様な RT ミドルウェアを開発 提供しています エンタープライズ層 OpenRTM.NET PC/ タブレット向け Android 版 RT ミドルウェア RTM on Android TM OpenRTM-aist
組込み用Linuxボード,BeagleBone Blackにおける RTミドルウェアの動作と開発支援ツール
 組込み用 Linux ボード,BeagleBone Black における RT ミドルウェアの動作と開発支援ツール 村上青児 ( 筑波大学 / 産総研 ) 安藤慶昭 ( 産総研 ) 関山守 ( 産総研 ) 鍛冶良作 ( 産総研 ) 谷川民生 ( 産総研 ) 神徳徹雄 ( 産総研 ) 1. はじめに 現在の組込みシステムの開発は専門性が求められるため開発の敷居が一般的に高い. これに対し, ロボットの要素技術をより開発者が使いやすいと感じる仕組みを作り,
組込み用 Linux ボード,BeagleBone Black における RT ミドルウェアの動作と開発支援ツール 村上青児 ( 筑波大学 / 産総研 ) 安藤慶昭 ( 産総研 ) 関山守 ( 産総研 ) 鍛冶良作 ( 産総研 ) 谷川民生 ( 産総研 ) 神徳徹雄 ( 産総研 ) 1. はじめに 現在の組込みシステムの開発は専門性が求められるため開発の敷居が一般的に高い. これに対し, ロボットの要素技術をより開発者が使いやすいと感じる仕組みを作り,
スライド 1
 RT ミドルウエアサマーキャンプ 2011 RT ミドルウエア概要 日時 : 2011 年 8 月 29 日 ( 月 ) 14:20-15:30 場所 : 産業技術総合研究所つくば第 2 事業所本部 情報棟 1 階交流会議室 ( 独 ) 産業技術総合研究所知能システム研究部門 栗原眞二 神徳徹雄 安藤慶昭 http://www.openrtm.org/ 概要 RTミドルウエア概要 OpenRTM-aistについて
RT ミドルウエアサマーキャンプ 2011 RT ミドルウエア概要 日時 : 2011 年 8 月 29 日 ( 月 ) 14:20-15:30 場所 : 産業技術総合研究所つくば第 2 事業所本部 情報棟 1 階交流会議室 ( 独 ) 産業技術総合研究所知能システム研究部門 栗原眞二 神徳徹雄 安藤慶昭 http://www.openrtm.org/ 概要 RTミドルウエア概要 OpenRTM-aistについて
ホンダにおける RT ミドルウェア開発と標準化活動 株式会社本田技術研究所基礎技術研究センター関谷眞
 ホンダにおける RT ミドルウェア開発と標準化活動 株式会社本田技術研究所基礎技術研究センター関谷眞 目次 知能ロボットシステム概要 コンポーネント指向ミドルウェア HRTMの開発 ASIMOへの適用 HRTMとOpenRTM-aistの連携動作 標準化活動 知能ロボットシステム概要 センサーやアクチュエーターは追加や変更される システム構成は変更したくない センサー, アクチュエーターの関係を抽象化した
ホンダにおける RT ミドルウェア開発と標準化活動 株式会社本田技術研究所基礎技術研究センター関谷眞 目次 知能ロボットシステム概要 コンポーネント指向ミドルウェア HRTMの開発 ASIMOへの適用 HRTMとOpenRTM-aistの連携動作 標準化活動 知能ロボットシステム概要 センサーやアクチュエーターは追加や変更される システム構成は変更したくない センサー, アクチュエーターの関係を抽象化した
Microsoft PowerPoint - NEDO講座・RTMセミナー.pptx
 NEDO 特別講座 :RTM RTC セミナー ( 2013 年 5 月 28 日 ) ロボットミドルウエア標準 RTミドルウエア ( 独 ) 産業技術総合研究所知能システム研究部門安藤慶昭 1 RT とは? RT = Robot Technology 1) cf. IT Real-time 単体のロボットだけでなく さまざまなロボット技術に基づく機能要素をも含む ( センサ アクチュエータ, 制御スキーム
NEDO 特別講座 :RTM RTC セミナー ( 2013 年 5 月 28 日 ) ロボットミドルウエア標準 RTミドルウエア ( 独 ) 産業技術総合研究所知能システム研究部門安藤慶昭 1 RT とは? RT = Robot Technology 1) cf. IT Real-time 単体のロボットだけでなく さまざまなロボット技術に基づく機能要素をも含む ( センサ アクチュエータ, 制御スキーム
機能仕様書 ロボット Raspberry Pi カメラ RTC Ver 発行日 2017 年 12 月 27 日公立大学法人会津大学株式会社東日本計算センター
 機能仕様書 ロボット Raspberry Pi カメラ RTC Ver.1.0.0 発行日 2017 年 12 月 27 日公立大学法人会津大学株式会社東日本計算センター 改版履歴 Ver 改版日 内容 1.0.0 2017/5/19 新規作成 2017/12/27 正式版発行 目次 1. はじめに... 1 1.1. 対象読者... 1 1.2. 適応範囲... 1 1.3. 開発環境及び使用機器...
機能仕様書 ロボット Raspberry Pi カメラ RTC Ver.1.0.0 発行日 2017 年 12 月 27 日公立大学法人会津大学株式会社東日本計算センター 改版履歴 Ver 改版日 内容 1.0.0 2017/5/19 新規作成 2017/12/27 正式版発行 目次 1. はじめに... 1 1.1. 対象読者... 1 1.2. 適応範囲... 1 1.3. 開発環境及び使用機器...
ChoreonoidとOpenHRIを用いたシステム構築事例
 Choreonoid と OpenHRI を用いた システム構築事例 産業技術総合研究所 原 功 Choreonoid Choreonoid オープンソースのロボット用統合 GUI ソフトウェア 動作振り付けソフトウェアとして キーフレームベースの動作生成 CG の動作生成のような UI 動力学シミュレータとして OpenHRP3, ODE, Bullet Physics Engne など利用可 開発フレームワークとして
Choreonoid と OpenHRI を用いた システム構築事例 産業技術総合研究所 原 功 Choreonoid Choreonoid オープンソースのロボット用統合 GUI ソフトウェア 動作振り付けソフトウェアとして キーフレームベースの動作生成 CG の動作生成のような UI 動力学シミュレータとして OpenHRP3, ODE, Bullet Physics Engne など利用可 開発フレームワークとして
課題情報シート テーマ名 : 動画中継ラジコンカーの製作 担当指導員名 : 土山博剛実施年度 : 25 年度施設名 : 四国職業能力開発大学校課程名 : 専門課程訓練科名 : 電子情報技術科課題の区分 : 総合制作実習課題学生数 : 1 時間 : 12 単位 (216h) 課題制作 開発のポイント
 課題制作 開発のポイント") 課題情報シート テーマ名 : 担当指導員名 : 土山博剛実施年度 : 25 年度施設名 : 四国職業能力開発大学校課程名 : 専門課程訓練科名 : 電子情報技術科課題の区分 : 総合制作実習課題学生数 : 1 時間 : 12 単位 (216h) 課題制作 開発のポイント 開発( 制作 ) のポイント 今回製作したシステムでは 専門課程で習得した総合的な知識 ( ネットワーク技術 電子回路技術 C プログラミング技術
課題情報シート テーマ名 : 担当指導員名 : 土山博剛実施年度 : 25 年度施設名 : 四国職業能力開発大学校課程名 : 専門課程訓練科名 : 電子情報技術科課題の区分 : 総合制作実習課題学生数 : 1 時間 : 12 単位 (216h) 課題制作 開発のポイント 開発( 制作 ) のポイント 今回製作したシステムでは 専門課程で習得した総合的な知識 ( ネットワーク技術 電子回路技術 C プログラミング技術
2015 TRON Symposium セッション 組込み機器のための機能安全対応 TRON Safe Kernel TRON Safe Kernel の紹介 2015/12/10 株式会社日立超 LSIシステムズ製品ソリューション設計部トロンフォーラム TRON Safe Kernel WG 幹事
 2015 TRON Symposium セッション 組込み機器のための機能安全対応 TRON Safe Kernel TRON Safe Kernel の紹介 2015/12/10 株式会社日立超 LSIシステムズ製品ソリューション設計部トロンフォーラム TRON Safe Kernel WG 幹事 豊山 祐一 Hitachi ULSI Systems Co., Ltd. 2015. All rights
2015 TRON Symposium セッション 組込み機器のための機能安全対応 TRON Safe Kernel TRON Safe Kernel の紹介 2015/12/10 株式会社日立超 LSIシステムズ製品ソリューション設計部トロンフォーラム TRON Safe Kernel WG 幹事 豊山 祐一 Hitachi ULSI Systems Co., Ltd. 2015. All rights
ハード・ソフト協調検証サービス
 ハード ソフトのトータルサービス 富士通エレクトロニクス株式会社株式会社富士通ソフトウェアテクノロジーズ 目次 モデル概要 モデル 特徴 このサービス利用のメリット サービスメニュー 1 企画から開発 量産までトータルでサポート 富士通エレクトロニクスと富士通ソフトウェアテクノロジーズはお客様の製品開発を 企画段階から開発 量産までサポートします 製品開発をサポートする検証 認定作業のご提供 製品要求仕様の作成をコンサルティング
ハード ソフトのトータルサービス 富士通エレクトロニクス株式会社株式会社富士通ソフトウェアテクノロジーズ 目次 モデル概要 モデル 特徴 このサービス利用のメリット サービスメニュー 1 企画から開発 量産までトータルでサポート 富士通エレクトロニクスと富士通ソフトウェアテクノロジーズはお客様の製品開発を 企画段階から開発 量産までサポートします 製品開発をサポートする検証 認定作業のご提供 製品要求仕様の作成をコンサルティング
コミュニケーションユーティリティー編
 はじめに動付録デジタル複合機用 取扱説明書ソフトウェア ( コミュニケーションユーティリティー編 ) スキャナー設定作環境 Microsoft MS-DOS Windows Windows Server Windows Vista Internet Explorer Excel PowerPoint Outlook Windows Microsoft Corporation Microsoft Corporation
はじめに動付録デジタル複合機用 取扱説明書ソフトウェア ( コミュニケーションユーティリティー編 ) スキャナー設定作環境 Microsoft MS-DOS Windows Windows Server Windows Vista Internet Explorer Excel PowerPoint Outlook Windows Microsoft Corporation Microsoft Corporation
<4D F736F F F696E74202D CA48B868CF097AC95D78BAD89EF205B8CDD8AB B83685D>
 TSC 研究交流勉強会 14:30~15:30 産総研 臨海副都心センター別館 ( 新館 )11 階 11205~6 ロボット用ミドルウェアと半導体への期待 安藤慶昭 独立行政法人産業技術総合研究所知能システム研究部門 産総研 独立行政法人産業技術総合研究所 ライフサイエンス 情報 通信 環境 エネルギー ナノテク 材料 製造 地質 海洋 標準 計測 の6 分野 研究者 : 約 2000 名 知能システム研究部門
TSC 研究交流勉強会 14:30~15:30 産総研 臨海副都心センター別館 ( 新館 )11 階 11205~6 ロボット用ミドルウェアと半導体への期待 安藤慶昭 独立行政法人産業技術総合研究所知能システム研究部門 産総研 独立行政法人産業技術総合研究所 ライフサイエンス 情報 通信 環境 エネルギー ナノテク 材料 製造 地質 海洋 標準 計測 の6 分野 研究者 : 約 2000 名 知能システム研究部門
ネットワーク装置設定/ アドレス帳編集編
 動作環境はじめに付録ネットワーク装置設定/アドレス帳編集の起動ネットワーク装置設定/アドレス帳編集の使い方取扱説明書ソフトウェア ( ネットワーク装置設定 / アドレス帳編集編 ) デジタル複合機用 Microsoft MS-DOS Windows Windows Server Windows Vista Internet Explorer Excel PowerPoint Outlook Windows
動作環境はじめに付録ネットワーク装置設定/アドレス帳編集の起動ネットワーク装置設定/アドレス帳編集の使い方取扱説明書ソフトウェア ( ネットワーク装置設定 / アドレス帳編集編 ) デジタル複合機用 Microsoft MS-DOS Windows Windows Server Windows Vista Internet Explorer Excel PowerPoint Outlook Windows
HMD を用いた PT カメラのインターネット遠隔操作芝浦工業大学知能機械システム研究室 HMD(Head Mounted Display) を用いた PT(Pan-Tilt) カメラのインターネット遠隔操作 ユーザマニュアル (ver1.0) 2014 年 10 月 23 日 芝浦工業大学知能機械
 を用いた PT(Pan-Tilt) カメラのインターネット遠隔操作 ユーザマニュアル (ver1.0) 2014 年 10 月 23 日 芝浦工業大学知能機械") 芝浦工業大学知能機械システム研究室 HMD(Head Mounted Display) を用いた PT(Pan-Tilt) カメラのインターネット遠隔操作 ユーザマニュアル (ver1.0) 2014 年 10 月 23 日 芝浦工業大学知能機械システム研究室 荻谷浩史, 石田真一, 安田福啓, 松日楽信人 目次 1. はじめに... 2 1.1 RTC 群概要... 2 1.2 システム構成...
芝浦工業大学知能機械システム研究室 HMD(Head Mounted Display) を用いた PT(Pan-Tilt) カメラのインターネット遠隔操作 ユーザマニュアル (ver1.0) 2014 年 10 月 23 日 芝浦工業大学知能機械システム研究室 荻谷浩史, 石田真一, 安田福啓, 松日楽信人 目次 1. はじめに... 2 1.1 RTC 群概要... 2 1.2 システム構成...
3 無線 / 有線接続で制御 メガローバー Ver2.0 は Wi-Fi / BLE / Bluetooth Classic の 3 種の無線通信と 有線の USB シリアル通信に対応しています 指定のコマンドを用いることで PC やタブレットなど 様々なデバイスからメガローバー Ver2.0 を制
 関係各位 2018 年 8 月 29 日 ヴイストン株式会社 研究開発用台車ロボット メガローバー Ver2.0 を発売 ~ 新開発の制御基板を搭載し ROS や Arduino IDE に対応 ~ ヴイストン株式会社 ( 本社 : 大阪府大阪市 代表取締役 : 大和信夫 ) は 2018 年 8 月 30 日より 研究開発用台車ロボット メガローバー Ver2.0 の販売を開始いたします 製品の概要
関係各位 2018 年 8 月 29 日 ヴイストン株式会社 研究開発用台車ロボット メガローバー Ver2.0 を発売 ~ 新開発の制御基板を搭載し ROS や Arduino IDE に対応 ~ ヴイストン株式会社 ( 本社 : 大阪府大阪市 代表取締役 : 大和信夫 ) は 2018 年 8 月 30 日より 研究開発用台車ロボット メガローバー Ver2.0 の販売を開始いたします 製品の概要
REX-USB56 「FAX送信」編 第6.0版
 OS 付属ソフトの設定から まで REX-USB56 2016 年 3 月第 6.0 版 Windows 10 Vista の場合の場合 付属の FAX ソフトの設定など詳細は Microsoft 社にお問い合せください 1. FAX の設定をする 1-1. 1-3. 1 ツール をクリック 2 すべてのアプリ をクリック 2 FAX の設定 をクリック 1 スタート をクリック 1-2. 1-4.
OS 付属ソフトの設定から まで REX-USB56 2016 年 3 月第 6.0 版 Windows 10 Vista の場合の場合 付属の FAX ソフトの設定など詳細は Microsoft 社にお問い合せください 1. FAX の設定をする 1-1. 1-3. 1 ツール をクリック 2 すべてのアプリ をクリック 2 FAX の設定 をクリック 1 スタート をクリック 1-2. 1-4.
二次元連続動的計画法による知的画像処理システム ImageFileSelector RTC 機能仕様書 ImageFileSelectorRTC Ver.1.0 ( 株 ) 東日本計算センター 1 / 11
 東日本計算センター 1 / 11") 機能仕様書 ImageFileSelectorRTC Ver.1.0 ( 株 ) 東日本計算センター 1 / 11 改版履歴 Ver 改版日 内容 0.5 2016/02/15 新規作成 0.6 2016/03/1 GUI 釦配置変更 1.0 2016/3/14 初版リリース 2 / 11 目次 目次...3 1. はじめに...4 1.1. 対象読者... 4 1.2. 適応範囲... 4 1.3.
機能仕様書 ImageFileSelectorRTC Ver.1.0 ( 株 ) 東日本計算センター 1 / 11 改版履歴 Ver 改版日 内容 0.5 2016/02/15 新規作成 0.6 2016/03/1 GUI 釦配置変更 1.0 2016/3/14 初版リリース 2 / 11 目次 目次...3 1. はじめに...4 1.1. 対象読者... 4 1.2. 適応範囲... 4 1.3.
情報漏洩対策ソリューション ESS REC のご説明
 ESS-REC for SuperStream の概要について 平成 18 年 6 月 株式会社ソルクシーズ ソリューションビジネス事業本部 セキュリティソリューション部 目次 背景 目的 製品概要 製品概要図 製品構成 機能概要 詳細機能 ハード構成 その他 背景 毎日のように報道される情報漏洩事故や一部企業で問題になっている財務報告に関する虚偽記載など IT の発展によりこれまでに考えられない事件が多発しています
ESS-REC for SuperStream の概要について 平成 18 年 6 月 株式会社ソルクシーズ ソリューションビジネス事業本部 セキュリティソリューション部 目次 背景 目的 製品概要 製品概要図 製品構成 機能概要 詳細機能 ハード構成 その他 背景 毎日のように報道される情報漏洩事故や一部企業で問題になっている財務報告に関する虚偽記載など IT の発展によりこれまでに考えられない事件が多発しています
Microsoft PowerPoint - 【最終提出版】 MATLAB_EXPO2014講演資料_ルネサス菅原.pptx
 MATLAB/Simulink を使用したモータ制御アプリのモデルベース開発事例 ルネサスエレクトロニクス株式会社 第二ソリューション事業本部産業第一事業部家電ソリューション部 Rev. 1.00 2014 Renesas Electronics Corporation. All rights reserved. IAAS-AA-14-0202-1 目次 1. はじめに 1.1 モデルベース開発とは?
MATLAB/Simulink を使用したモータ制御アプリのモデルベース開発事例 ルネサスエレクトロニクス株式会社 第二ソリューション事業本部産業第一事業部家電ソリューション部 Rev. 1.00 2014 Renesas Electronics Corporation. All rights reserved. IAAS-AA-14-0202-1 目次 1. はじめに 1.1 モデルベース開発とは?
Macintosh
 Macintosh アプリケーションをお使いになる前に 下記の点にご留意ください プリンター本体のセットアップや プリンターのメンテナンスを行う手順は Windows PC と同様です 取扱説 明書を参照してください Macintosh で [GT-3 Maintenance] を起動する場合は [Finder]>[ アプリケーション ]>[GT-3 Maintenance] を選択してください
Macintosh アプリケーションをお使いになる前に 下記の点にご留意ください プリンター本体のセットアップや プリンターのメンテナンスを行う手順は Windows PC と同様です 取扱説 明書を参照してください Macintosh で [GT-3 Maintenance] を起動する場合は [Finder]>[ アプリケーション ]>[GT-3 Maintenance] を選択してください
ファクス送信ドライバー編
 はじめに動信する取扱説明書 付録ソフトウェア ( ファクス送信ドライバー編 ) デジタル複合機用 作環境システム構成文書を送 Microsoft MS-DOS Windows Windows Server Windows Vista Internet Explorer Excel PowerPoint Outlook Windows Microsoft Corporation Microsoft Corporation
はじめに動信する取扱説明書 付録ソフトウェア ( ファクス送信ドライバー編 ) デジタル複合機用 作環境システム構成文書を送 Microsoft MS-DOS Windows Windows Server Windows Vista Internet Explorer Excel PowerPoint Outlook Windows Microsoft Corporation Microsoft Corporation
Macintosh
 Macintosh アプリケーションをお使いになる前に 下記の点にご留意ください プリンター本体のセットアップや プリンターのメンテナンスを行う手順は Windows PC と同様です 取扱説 明書を参照してください Macintosh で GTX-4 Maintenance を起動する場合は [Finder]>[ アプリケーション ] から GTX-4 Maintenance を選択してください
Macintosh アプリケーションをお使いになる前に 下記の点にご留意ください プリンター本体のセットアップや プリンターのメンテナンスを行う手順は Windows PC と同様です 取扱説 明書を参照してください Macintosh で GTX-4 Maintenance を起動する場合は [Finder]>[ アプリケーション ] から GTX-4 Maintenance を選択してください
スライド 1
 UEC Tokyo Dept. of Mechanical Engineering and Intelligent Systems OpenRTM を使ってみよう! - 基本編 ( コンソール版 )- 電気通信大学情報理工学研究科 知能機械工学専攻 長井隆行 中村友昭 RTM とは Robot Technology Middleware コンポーネント ( モジュール ) を動かす実行環境のこと ミドルウェア上で動作するコンポーネントであれば
UEC Tokyo Dept. of Mechanical Engineering and Intelligent Systems OpenRTM を使ってみよう! - 基本編 ( コンソール版 )- 電気通信大学情報理工学研究科 知能機械工学専攻 長井隆行 中村友昭 RTM とは Robot Technology Middleware コンポーネント ( モジュール ) を動かす実行環境のこと ミドルウェア上で動作するコンポーネントであれば
NEDO講座 Hara
 ロボットシステム開発における RTM の有用性および開発ツール群 ( 独 ) 産業技術総合研究所知能システム研究部門原功 これまでの主な研究 所内事情通ロボット (1996-2001) オフィス内の情報サービス 訪問者受付 案内 紹介 配達 連絡 人探し メンバスケジュール管理 ミーティングアレンジ等 いろいろなオフィス環境で 自律的に情報収集 学習し 事情通になってゆく 独自仕様のモジュール化システム
ロボットシステム開発における RTM の有用性および開発ツール群 ( 独 ) 産業技術総合研究所知能システム研究部門原功 これまでの主な研究 所内事情通ロボット (1996-2001) オフィス内の情報サービス 訪問者受付 案内 紹介 配達 連絡 人探し メンバスケジュール管理 ミーティングアレンジ等 いろいろなオフィス環境で 自律的に情報収集 学習し 事情通になってゆく 独自仕様のモジュール化システム
Microsoft PowerPoint DAQセミナー_Ando.pptx
 2013 年 9 月 9 日データ収集技術講演会, 広島工業大学 ロボットミドルウエア標準 RT ミドルウエア ( 独 ) 産業技術総合研究所知能システム研究部門安藤慶昭 1 つくば研究学園都市 KEK 筑波大 東京 ( 秋葉原 ) から45 分 1970 年代から開発 20 以上の国の研究機関 大学 企業等の研究所 20000 人以上の研究者 博士 7000 人以上 つくば駅 JAXA 産総研 2
2013 年 9 月 9 日データ収集技術講演会, 広島工業大学 ロボットミドルウエア標準 RT ミドルウエア ( 独 ) 産業技術総合研究所知能システム研究部門安藤慶昭 1 つくば研究学園都市 KEK 筑波大 東京 ( 秋葉原 ) から45 分 1970 年代から開発 20 以上の国の研究機関 大学 企業等の研究所 20000 人以上の研究者 博士 7000 人以上 つくば駅 JAXA 産総研 2
Raspberry Pi BF BF BF Raspberry Pi PC USB HDMI OS SD SD OS Raspberry Pi Model B MicroUSB MicroSD OS SD GPIO HDMI USB LAN Raspberry Pi MicroUSB MicroSD
 Raspberry Pi Arduino Arduino Raspberry Pi Arduino URL Raspberry Pi HDMI USB SD https://www.raspberrypi.org/ Python, Scratch Arduino PC USB https://www.arduino.cc/ Arduino SDK Processing Kinect for Windows,
Raspberry Pi Arduino Arduino Raspberry Pi Arduino URL Raspberry Pi HDMI USB SD https://www.raspberrypi.org/ Python, Scratch Arduino PC USB https://www.arduino.cc/ Arduino SDK Processing Kinect for Windows,
Q-SYS Designer Version 5.4 Release Note ソフトウェア要件 Q-SYS Designer は下記の OS での動作確認をしております Windows 7 Professional 32-bit / 64-bit Windows 8.1 Professional
 Q-SYS Designer Version 5.4 Release Note ソフトウェア要件 Q-SYS Designer は下記の OS での動作確認をしております Windows 7 Professional 32-bit / 64-bit Windows 8.1 Professional 32-bit / 64-bit Windows 10 Pro 64bit Windows XP および
Q-SYS Designer Version 5.4 Release Note ソフトウェア要件 Q-SYS Designer は下記の OS での動作確認をしております Windows 7 Professional 32-bit / 64-bit Windows 8.1 Professional 32-bit / 64-bit Windows 10 Pro 64bit Windows XP および
REX-C56EX FAX送信 第5.0版
 OS 付属ソフトの設定から FAX 送信まで FAX 送信 REX-C56EX 2015 年 10 月第 5.0 版 Windows 10 Vista の場合の場合 付属の FAX ソフトの設定など詳細は Microsoft 社にお問い合せください 1. FAX の設定をする 1-1. 1-3. 1 ツール をクリック 2 すべてのアプリ をクリック 2 FAX の設定 をクリック 1 スタート をクリック
OS 付属ソフトの設定から FAX 送信まで FAX 送信 REX-C56EX 2015 年 10 月第 5.0 版 Windows 10 Vista の場合の場合 付属の FAX ソフトの設定など詳細は Microsoft 社にお問い合せください 1. FAX の設定をする 1-1. 1-3. 1 ツール をクリック 2 すべてのアプリ をクリック 2 FAX の設定 をクリック 1 スタート をクリック
改版履歴 Ver 改版日内容 /02/07 新規作成 2 / 18
 多目的俯瞰画像合成システム 機能仕様書 Crawler View 画像合成 RTC 発行日 2017 年 3 月 30 日 公立大学法人会津大学 株式会社東日本計算センター 1 / 18 改版履歴 Ver 改版日内容 1.0 2016/02/07 新規作成 2 / 18 1. 内容 1. はじめに... 4 1.1. 対象読者... 4 1.2. 適応範囲... 4 1.3. 開発環境及び使用機器...
多目的俯瞰画像合成システム 機能仕様書 Crawler View 画像合成 RTC 発行日 2017 年 3 月 30 日 公立大学法人会津大学 株式会社東日本計算センター 1 / 18 改版履歴 Ver 改版日内容 1.0 2016/02/07 新規作成 2 / 18 1. 内容 1. はじめに... 4 1.1. 対象読者... 4 1.2. 適応範囲... 4 1.3. 開発環境及び使用機器...
RTM セミナー RT ミドルウェアによる実時間ロボット 制御系の構築とソフトウェア教育 静岡大学大学院工学研究科機械工学専攻 清水昌幸
 RTM セミナー 2013.11.12 RT ミドルウェアによる実時間ロボット 制御系の構築とソフトウェア教育 静岡大学大学院工学研究科機械工学専攻 清水昌幸 2 内容 RT ミドルウェアを用いた実時間ロボット制御系の構築 実時間制御の実現方法. ART-Linux を用いた実現例と実時間性能. ソフトウェア教育 研究室配属学生 ( 学部 4 年生 ) への導入教育の実施内容と結果. 3 ロボット制御系の一例
RTM セミナー 2013.11.12 RT ミドルウェアによる実時間ロボット 制御系の構築とソフトウェア教育 静岡大学大学院工学研究科機械工学専攻 清水昌幸 2 内容 RT ミドルウェアを用いた実時間ロボット制御系の構築 実時間制御の実現方法. ART-Linux を用いた実現例と実時間性能. ソフトウェア教育 研究室配属学生 ( 学部 4 年生 ) への導入教育の実施内容と結果. 3 ロボット制御系の一例
スライド 1
 UEC Tokyo Dept. of Mechanical Engineering and Intelligent Systems OpenRTM を使ってみよう! - 基本編 - 電気通信大学情報理工学研究科 知能機械工学専攻 長井隆行 中村友昭 RTM とは Robot Technology Middleware コンポーネント ( モジュール ) を動かす実行環境のこと ミドルウェア上で動作するコンポーネントであれば
UEC Tokyo Dept. of Mechanical Engineering and Intelligent Systems OpenRTM を使ってみよう! - 基本編 - 電気通信大学情報理工学研究科 知能機械工学専攻 長井隆行 中村友昭 RTM とは Robot Technology Middleware コンポーネント ( モジュール ) を動かす実行環境のこと ミドルウェア上で動作するコンポーネントであれば
コンテンツセントリックネットワーク技術を用いた ストリームデータ配信システムの設計と実装
 コンテンツセントリックネットワークにおけるストリームデータ配信機構の実装 川崎賢弥, 阿多信吾, 村田正幸 大阪大学大学院情報科学研究科 大阪市立大学大学院工学研究科 2 発表内容 研究背景 研究目的 ストリームデータ配信機構の設計 ストリームデータのモデル化 コンテンツの名前構造 ストリームデータの要求とフロー制御 ストリームデータ配信機構の実装 動作デモンストレーション 3 コンテンツセントリックネットワーク
コンテンツセントリックネットワークにおけるストリームデータ配信機構の実装 川崎賢弥, 阿多信吾, 村田正幸 大阪大学大学院情報科学研究科 大阪市立大学大学院工学研究科 2 発表内容 研究背景 研究目的 ストリームデータ配信機構の設計 ストリームデータのモデル化 コンテンツの名前構造 ストリームデータの要求とフロー制御 ストリームデータ配信機構の実装 動作デモンストレーション 3 コンテンツセントリックネットワーク
TeleOffice 3.7
 ご利用前の環境チェックリスト Document Date: 2017.06.18 Document Version: 3.7.001 1 目次 1 目次... 2 2 始めに... 3 3 利用環境について... 3 3.1 Windows 端末... 3 3.2 Android 端末... 4 3.3 ios 端末... 4 3.4 ブラウザ版 TeleOffice クライアント... 4 3.5
ご利用前の環境チェックリスト Document Date: 2017.06.18 Document Version: 3.7.001 1 目次 1 目次... 2 2 始めに... 3 3 利用環境について... 3 3.1 Windows 端末... 3 3.2 Android 端末... 4 3.3 ios 端末... 4 3.4 ブラウザ版 TeleOffice クライアント... 4 3.5
組込みシステムにおける UMLモデルカタログの実践研究
 Modeling Forum 2015 組込みシステムの設計実装への モデルカタログの活用 仙台高等専門学校 情報システム工学科 力武克彰, 新村祐太 ( 豊橋技科大 ), 菊池雄太郎 ( 仙台高専 ) 概要 組込み分野のための UML モデルカタログ (*) のモデルを実装してみました (* 以下 モデルカタログと呼びます ) 2 概要 モデルカタログ : 目標制御モデル モデルカタログより引用
Modeling Forum 2015 組込みシステムの設計実装への モデルカタログの活用 仙台高等専門学校 情報システム工学科 力武克彰, 新村祐太 ( 豊橋技科大 ), 菊池雄太郎 ( 仙台高専 ) 概要 組込み分野のための UML モデルカタログ (*) のモデルを実装してみました (* 以下 モデルカタログと呼びます ) 2 概要 モデルカタログ : 目標制御モデル モデルカタログより引用
Raspberry Pi で WEB カメラを使用 会津大学 RT ミドルウェア講習会 2017 The University of Aizu
 会津大学 RT ミドルウェア講習会 2017 The University of Aizu 目次 1 コンポーネントをダウンロードする... 1 2 コンポーネントを Raspberry Pi へコピーする... 2 2.1 Raspberry Pi へコピーする... 2 3 Raspberry Pi 上でコンポーネントをビルドする... 3 3.1 コピーされたファイルを解凍する... 3 3.2
会津大学 RT ミドルウェア講習会 2017 The University of Aizu 目次 1 コンポーネントをダウンロードする... 1 2 コンポーネントを Raspberry Pi へコピーする... 2 2.1 Raspberry Pi へコピーする... 2 3 Raspberry Pi 上でコンポーネントをビルドする... 3 3.1 コピーされたファイルを解凍する... 3 3.2
PN-T321
 インフォメーションディスプレイ 形名 PN-T321 USB メモリーファイル書き込みツール取扱説明書 もくじ はじめに 2 インストール / アンインストールする 3 動作条件 3 インストールする 3 アンインストールする 3 USB メモリーファイル書き込みツールを使う 4 USB メモリーを新規作成する 4 USB メモリーを編集する 5 はじめに 本ソフトウェアは インフォメーションディスプレイ
インフォメーションディスプレイ 形名 PN-T321 USB メモリーファイル書き込みツール取扱説明書 もくじ はじめに 2 インストール / アンインストールする 3 動作条件 3 インストールする 3 アンインストールする 3 USB メモリーファイル書き込みツールを使う 4 USB メモリーを新規作成する 4 USB メモリーを編集する 5 はじめに 本ソフトウェアは インフォメーションディスプレイ
NSW キャリア採用募集職種一覧 2018/8/16 現在 求人番号 職種対象業務必要とするスキル 経験 資格等勤務地 1 営業スペシャリスト金融 ( 損保 生保 クレジット ) 業でのソリューション営業 IT 業界での営業経験 金融業界 IT 業界での人脈がある方尚可 渋谷 2 プロジェクトマネー
 業でのソリューション営業 IT 業界での営業経験 金融業界 IT 業界での人脈がある方尚可 渋谷 2 プロジェクトマネー") NSW キャリア採用募集職種一覧 2018/8/16 現在 1 営業スペシャリスト金融 ( 損保 生保 クレジット ) 業でのソリューション営業 IT 業界での営業経験 金融業界 IT 業界での人脈がある方尚可 2 プロジェクトマネージャシステム開発またはインフラ構築のプロジェクトマネージャ プロジェクトマネージャ経験 PMP の資格保有者 高度情報処理試験資格保有者尚可 3 プロジェクトマネージャ生保または損保システム開発のプロジェクトマネージャ
NSW キャリア採用募集職種一覧 2018/8/16 現在 1 営業スペシャリスト金融 ( 損保 生保 クレジット ) 業でのソリューション営業 IT 業界での営業経験 金融業界 IT 業界での人脈がある方尚可 2 プロジェクトマネージャシステム開発またはインフラ構築のプロジェクトマネージャ プロジェクトマネージャ経験 PMP の資格保有者 高度情報処理試験資格保有者尚可 3 プロジェクトマネージャ生保または損保システム開発のプロジェクトマネージャ
Printer Driverセットアップ編
 Microsoft MS-DOS Windows Windows Server Windows Vista Internet Explorer PowerPoint Outlook Microsoft Corporation Microsoft Corporation Intel Intel Inside Itanium Pentium Intel Corporation USB-IF Universal
Microsoft MS-DOS Windows Windows Server Windows Vista Internet Explorer PowerPoint Outlook Microsoft Corporation Microsoft Corporation Intel Intel Inside Itanium Pentium Intel Corporation USB-IF Universal
CLUSTERPROXSingleServerSafe SingleServerSafe ご紹介 2007 年 10 月
 CLUSTERPROXSingleServerSafe SingleServerSafe ご紹介 2007 年 10 月 目 次 可用性向上のニーズ XSingleServerSafe のターゲット アピールポイント 監視イメージ 簡単インストール & 設定 製品体系 システム要件 お問い合わせ先 NEC Corp. All Right Reserved. 1 可用性向上のニーズ 可用性の要求は従来の基幹システム中心から
CLUSTERPROXSingleServerSafe SingleServerSafe ご紹介 2007 年 10 月 目 次 可用性向上のニーズ XSingleServerSafe のターゲット アピールポイント 監視イメージ 簡単インストール & 設定 製品体系 システム要件 お問い合わせ先 NEC Corp. All Right Reserved. 1 可用性向上のニーズ 可用性の要求は従来の基幹システム中心から
PNopenseminar_2011_開発stack
 PROFINET Open Seminar 開発セミナー Software Stack FPGA IP core PROFINET 対応製品の開発 2 ユーザ要求要求は多種多様 複雑な規格の仕様を一から勉強するのはちょっと.. できるだけ短期間で 柔軟なスケジュールで進めたい既存のハードウェアを変更することなく PN を対応させたい将来的な仕様拡張に対してシームレスに統合したい同じハードウェアで複数の
PROFINET Open Seminar 開発セミナー Software Stack FPGA IP core PROFINET 対応製品の開発 2 ユーザ要求要求は多種多様 複雑な規格の仕様を一から勉強するのはちょっと.. できるだけ短期間で 柔軟なスケジュールで進めたい既存のハードウェアを変更することなく PN を対応させたい将来的な仕様拡張に対してシームレスに統合したい同じハードウェアで複数の
はじめにお読みください
 はじめにお読みください - 重要 - 本製品の梱包箱に添付されていた ソフトウェアのご使用条件 は本製品の使用許諾についての証明になりますので 大切に保管してください 本製品の内容は 予告なく変更されることがあります 本製品に関する最新の情報は ハンディターミナルポータルサイトをご利用ください < ハンディターミナルポータルサイト > https://www.necplatforms.co.jp/ts/potdev/
はじめにお読みください - 重要 - 本製品の梱包箱に添付されていた ソフトウェアのご使用条件 は本製品の使用許諾についての証明になりますので 大切に保管してください 本製品の内容は 予告なく変更されることがあります 本製品に関する最新の情報は ハンディターミナルポータルサイトをご利用ください < ハンディターミナルポータルサイト > https://www.necplatforms.co.jp/ts/potdev/
<4D F736F F F696E74202D F817993FA967B90BB8E8695A897AC817A89DD95A892C790D F6C30362E707074>
 - スマートフォン (Android ) 利用による - 貨物追跡システム ( 位置情報サービス ASP サービス DP2) 日本製紙物流株式会社 http://www.np-log.co.jp/ システム導入目的について 導入目的 自社 / 配車センターと車両 ( トラック ) との情報共有 システム導入時のユーザー要望について 1. 配送進捗状況 車両最新位置 をリアルタイムで把握したい ユーザーからの配送
- スマートフォン (Android ) 利用による - 貨物追跡システム ( 位置情報サービス ASP サービス DP2) 日本製紙物流株式会社 http://www.np-log.co.jp/ システム導入目的について 導入目的 自社 / 配車センターと車両 ( トラック ) との情報共有 システム導入時のユーザー要望について 1. 配送進捗状況 車両最新位置 をリアルタイムで把握したい ユーザーからの配送
PowerPoint Presentation
 知能システム論1 (15) 2009.7.21 情報システム学研究科 情報メディアシステム学専攻 知能システム学講座 末廣尚士 - 参考URL OpenRTM-aist ロボット開発にフル活用するRTミドルウエア http://www.is.aist.go.jp/rt/openrtm-aist/html/ http://thinkit.jp/article/948/1/ SEのためのRTシステム概論
知能システム論1 (15) 2009.7.21 情報システム学研究科 情報メディアシステム学専攻 知能システム学講座 末廣尚士 - 参考URL OpenRTM-aist ロボット開発にフル活用するRTミドルウエア http://www.is.aist.go.jp/rt/openrtm-aist/html/ http://thinkit.jp/article/948/1/ SEのためのRTシステム概論
VM-53PA1取扱説明書
 VM-53PA1 VM-53PA1 VM-53 VM-53A VM-52 VM-52A VM-53PA1 VM-53PA1 VM-53A CF i ii VM-53 VM-53A VM-52 VM-52A CD-ROM iii VM-53PA1 Microsoft Windows 98SE operating system Microsoft Windows 2000 operating system
VM-53PA1 VM-53PA1 VM-53 VM-53A VM-52 VM-52A VM-53PA1 VM-53PA1 VM-53A CF i ii VM-53 VM-53A VM-52 VM-52A CD-ROM iii VM-53PA1 Microsoft Windows 98SE operating system Microsoft Windows 2000 operating system
管理者から携帯電話に向けて命令や位置確認を行います 携帯電話からリアルタイムに情報をアップロードするとともに サーバ側のデータと同期をします GPS 測位を用いて 現在位置や軌跡を管理します 携帯電話からシステム契機でメールを送付します 基幹サーバと連携するためのデータファイルの出力や プリンタ連携
 ~ モバイル機器を使った ~ 組み上げソリューションのご案内 1 管理者から携帯電話に向けて命令や位置確認を行います 携帯電話からリアルタイムに情報をアップロードするとともに サーバ側のデータと同期をします GPS 測位を用いて 現在位置や軌跡を管理します 携帯電話からシステム契機でメールを送付します 基幹サーバと連携するためのデータファイルの出力や プリンタ連携などを行います システム情報を 管理者
~ モバイル機器を使った ~ 組み上げソリューションのご案内 1 管理者から携帯電話に向けて命令や位置確認を行います 携帯電話からリアルタイムに情報をアップロードするとともに サーバ側のデータと同期をします GPS 測位を用いて 現在位置や軌跡を管理します 携帯電話からシステム契機でメールを送付します 基幹サーバと連携するためのデータファイルの出力や プリンタ連携などを行います システム情報を 管理者
智美塾 ゆもつよメソッドのアーキテクチャ
 ゆもつよメソッドのテスト要求分析とテストアーキテクチャ設計 JaSST13 東京智美塾 2013 年 1 月 30 日 湯本剛 ( 日本 HP) tsuyoshi.yumoto@hp.com ゆもつよ風テスト開発プロセス テスト計画 実現したい品質の具体的把握 テスト箇所の選択 テストの目的設定 テスト対象アイテム特定 テスト分析 テストタイプ特定 機能の整理 & 再分類 テスト条件となる仕様項目特定
ゆもつよメソッドのテスト要求分析とテストアーキテクチャ設計 JaSST13 東京智美塾 2013 年 1 月 30 日 湯本剛 ( 日本 HP) tsuyoshi.yumoto@hp.com ゆもつよ風テスト開発プロセス テスト計画 実現したい品質の具体的把握 テスト箇所の選択 テストの目的設定 テスト対象アイテム特定 テスト分析 テストタイプ特定 機能の整理 & 再分類 テスト条件となる仕様項目特定
PC Link Tool PC Link Tool PC Link Tool PC Link Tool
 Ver. 1.04 ... 3 1.... 3 1.1. PC Link Tool... 3 1.2. PC Link Tool... 4 1.3.... 4 2.... 5 2.1.... 5 2.2. PC Link Tool... 6 2.3. PC Link Tool... 7 3....11 3.1.... 11 3.2.... 13 3.3.... 14 3.4.... 19 3.5....
Ver. 1.04 ... 3 1.... 3 1.1. PC Link Tool... 3 1.2. PC Link Tool... 4 1.3.... 4 2.... 5 2.1.... 5 2.2. PC Link Tool... 6 2.3. PC Link Tool... 7 3....11 3.1.... 11 3.2.... 13 3.3.... 14 3.4.... 19 3.5....
小型移動ロボット
 小型移動ロボット 千葉工業大学 未来ロボット技術研究センター 吉田智章 背景 過去に開発した災害対応ロボット Hibiscus (2006) Kenaf (2007-2009) Quince (2009-2010) 4 大都市大震災軽減化特別プロジェクト ( 文科省 ) 戦略的先端ロボット要素技術開発プロジェクト (NEDO) 2006-2010 2002 2006 2011 2012 Kenaf
小型移動ロボット 千葉工業大学 未来ロボット技術研究センター 吉田智章 背景 過去に開発した災害対応ロボット Hibiscus (2006) Kenaf (2007-2009) Quince (2009-2010) 4 大都市大震災軽減化特別プロジェクト ( 文科省 ) 戦略的先端ロボット要素技術開発プロジェクト (NEDO) 2006-2010 2002 2006 2011 2012 Kenaf
Access PE - Alarm Management
 Alarm Management ja Operation Manual 目次 ja 3 目次 1 概要 4 2 全般 5 2.1 ユーザーログイン 5 3 アラーム管理 8 3.1 マップビューアーとアラーム管理 9 4 UL 294 要件 11 Bosch Access Systems GmbH 2017-04 APE-UL Alarm Management 4 ja 概要 1 概要 System(
Alarm Management ja Operation Manual 目次 ja 3 目次 1 概要 4 2 全般 5 2.1 ユーザーログイン 5 3 アラーム管理 8 3.1 マップビューアーとアラーム管理 9 4 UL 294 要件 11 Bosch Access Systems GmbH 2017-04 APE-UL Alarm Management 4 ja 概要 1 概要 System(
Ver.2.00
 Ver.2.00 ... 3 1.... 3 1.1. PC Link Tool... 3 1.2. PC Link Tool... 4 1.3.... 4 2.... 5 2.1.... 5 2.2. PC Link Tool... 6 2.3. PC Link Tool... 7 3.... 12 3.1.... 12 3.2.... 14 3.3.... 15 3.4.... 20 3.5....
Ver.2.00 ... 3 1.... 3 1.1. PC Link Tool... 3 1.2. PC Link Tool... 4 1.3.... 4 2.... 5 2.1.... 5 2.2. PC Link Tool... 6 2.3. PC Link Tool... 7 3.... 12 3.1.... 12 3.2.... 14 3.3.... 15 3.4.... 20 3.5....
目次 Windows 2003 への新規インストール... 3 Windows 2008 への新規インストール... 4 Windows 2012 への新規インストール... 6 Microsoft SQL のサポート... 8 IPv4/IPv6 のサポート... 8 制限事項... 9 Web
 トレンドマイクロ株式会社は 本書および本書に記載されている製品を予告なしに変更する権利を有しています ソフトウェアをインストールして使用する前に Readme ファイル リリースノート および最新のユーザドキュメントを確認してください これらは 次のトレンドマイクロ Web サイトから入手できます http://downloadcenter.trendmicro.com/index.php?regs=jp
トレンドマイクロ株式会社は 本書および本書に記載されている製品を予告なしに変更する権利を有しています ソフトウェアをインストールして使用する前に Readme ファイル リリースノート および最新のユーザドキュメントを確認してください これらは 次のトレンドマイクロ Web サイトから入手できます http://downloadcenter.trendmicro.com/index.php?regs=jp
関係各位 2018 年 10 月 10 日 ヴイストン株式会社 研究開発用台車ロボット メカナムローバー Ver2.0 を発売 ~ Arduino 互換の制御基板を搭載し ROS や Arduino IDE に対応 ~ ヴイストン株式会社 ( 本社 : 大阪府大阪市 代表取締役 : 大和信夫 ) は
 は") 関係各位 2018 年 10 月 10 日 ヴイストン株式会社 研究開発用台車ロボット メカナムローバー Ver2.0 を発売 ~ Arduino 互換の制御基板を搭載し ROS や Arduino IDE に対応 ~ ヴイストン株式会社 ( 本社 : 大阪府大阪市 代表取締役 : 大和信夫 ) は 2018 年 10 月 31 日より 研究開発用台車ロボット メカナムローバー Ver2.0 の販売を開始いたします
関係各位 2018 年 10 月 10 日 ヴイストン株式会社 研究開発用台車ロボット メカナムローバー Ver2.0 を発売 ~ Arduino 互換の制御基板を搭載し ROS や Arduino IDE に対応 ~ ヴイストン株式会社 ( 本社 : 大阪府大阪市 代表取締役 : 大和信夫 ) は 2018 年 10 月 31 日より 研究開発用台車ロボット メカナムローバー Ver2.0 の販売を開始いたします
Microsoft PowerPoint - Session4古賀様.ppt
 Windows Embedded CE の テスト環境と活用 マイクロソフト Windows Embedded Partner ( 株 ) サムシングプレシャス代表取締役社長古賀信哉 普段の開発の立ち位置 はじめに ミドルウェア層の開発が主 (DLNA 関連など ) 必要に応じてデバイスドライバ ( カーネルモジュール ) 概要 特定ターゲット向けの BSP も 開発環境及び開発環境を用いた動作確認
Windows Embedded CE の テスト環境と活用 マイクロソフト Windows Embedded Partner ( 株 ) サムシングプレシャス代表取締役社長古賀信哉 普段の開発の立ち位置 はじめに ミドルウェア層の開発が主 (DLNA 関連など ) 必要に応じてデバイスドライバ ( カーネルモジュール ) 概要 特定ターゲット向けの BSP も 開発環境及び開発環境を用いた動作確認
Windows PC/ BCP () PC (BYOD: Bring Your Own Device) Windows 8 2 Windows 8 Windows 8 Windows Windows 8 Windows 8 Windows 8 PC/ 2
 PC (BYOD: Bring Your Own Device) Windows 8 2 Windows 8 Windows 8 Windows Windows 8 Windows 8 Windows 8 PC/ 2") Windows 8 1 (2012 10 ) Windows PC/ BCP () PC (BYOD: Bring Your Own Device) Windows 8 2 Windows 8 Windows 8 Windows Windows 8 Windows 8 Windows 8 PC/ 2 PC/ IT 4 5 PC 6 7 PC 8 9 3 1 SharePoint PC PC Windows
Windows 8 1 (2012 10 ) Windows PC/ BCP () PC (BYOD: Bring Your Own Device) Windows 8 2 Windows 8 Windows 8 Windows Windows 8 Windows 8 Windows 8 PC/ 2 PC/ IT 4 5 PC 6 7 PC 8 9 3 1 SharePoint PC PC Windows
ピツニーボウズジャパン ソリューションのご紹介
 PC Meter Connect インストール設定手順書 PC Meter Connect(PCMC) とは 〇インターネットに接続していないメーターに対して コンピュータ経由でインターネット接続を実現するソフトウェア 〇メーターのインターネット接続用途 ソフトウェア 料金表更新 残額補充 確認 メーター接続用サーバ (PB) Pitney Bowes Data Center インターネット LAN
PC Meter Connect インストール設定手順書 PC Meter Connect(PCMC) とは 〇インターネットに接続していないメーターに対して コンピュータ経由でインターネット接続を実現するソフトウェア 〇メーターのインターネット接続用途 ソフトウェア 料金表更新 残額補充 確認 メーター接続用サーバ (PB) Pitney Bowes Data Center インターネット LAN
システム要件 Trend Micro Safe Lock 2.0 SP1 Trend Micro Safe Lock 2.0 SP1 エージェントのシステム要件 OS Client OS Server OS Windows 2000 (SP4) [Professional] (32bit) Wind
![システム要件 Trend Micro Safe Lock 2.0 SP1 Trend Micro Safe Lock 2.0 SP1 エージェントのシステム要件 OS Client OS Server OS Windows 2000 (SP4) [Professional] (32bit) Wind](/thumbs/96/129575678.jpg "システム要件 Trend Micro Safe Lock 2.0 SP1 Trend Micro Safe Lock 2.0 SP1 エージェントのシステム要件 OS Client OS Server OS Windows 2000 (SP4) [Professional] (32bit) Wind") Trend Micro Safe Lock 2.0 SP1 Trend Micro Safe Lock 2.0 SP1 エージェントの OS Client OS Server OS Windows 2000 (SP4) [Professional] Windows XP (SP1/SP2/SP3) [Professional] Windows Vista (SP なし /SP1/SP2) [Business
Trend Micro Safe Lock 2.0 SP1 Trend Micro Safe Lock 2.0 SP1 エージェントの OS Client OS Server OS Windows 2000 (SP4) [Professional] Windows XP (SP1/SP2/SP3) [Professional] Windows Vista (SP なし /SP1/SP2) [Business
目次 1. はじめに 本書対象者 PALRO のアプリケーションについて Ubuntu 8.04LTS の入手について Linux 上での開発環境の構築 事前準備 Ubuntu のインストール..
 Developer Documentation アプリケーション開発環境構築ガイド (SPC/PAPPS 共通 ) 2012 FUJISOFT INCORPORATED. All rights reserved. 目次 1. はじめに... 2 1.1 本書対象者... 2 1.2 PALRO のアプリケーションについて... 2 1.3 Ubuntu 8.04LTS の入手について... 2 2.Linux
Developer Documentation アプリケーション開発環境構築ガイド (SPC/PAPPS 共通 ) 2012 FUJISOFT INCORPORATED. All rights reserved. 目次 1. はじめに... 2 1.1 本書対象者... 2 1.2 PALRO のアプリケーションについて... 2 1.3 Ubuntu 8.04LTS の入手について... 2 2.Linux
(Microsoft PowerPoint - daqmiddware-overview [\214\335\212\267\203\202\201[\203h])
![(Microsoft PowerPoint - daqmiddware-overview [\214\335\212\267\203\202\201[\203h])](/thumbs/99/141152602.jpg "(Microsoft PowerPoint - daqmiddware-overview [\214\335\212\267\203\202\201[\203h])") DAQ ミドルウエアの概要 2008 年 8 月 5 6 日 DAQ 実習 -DAQ-Middleware KEK エレクトロニクスシステムグループ KEK 測定器開発室 DAQ プロジェクト安芳次 DAQ ミドルウエアの狙い 多数の計算機を使ったネットワーク分散型 D AQ ソフトウエア ソフトウエアの汎用化 国際標準ロボット技術 (RT ミドルウエア ) の利用 XML によるデータ収集パラメータの記述
DAQ ミドルウエアの概要 2008 年 8 月 5 6 日 DAQ 実習 -DAQ-Middleware KEK エレクトロニクスシステムグループ KEK 測定器開発室 DAQ プロジェクト安芳次 DAQ ミドルウエアの狙い 多数の計算機を使ったネットワーク分散型 D AQ ソフトウエア ソフトウエアの汎用化 国際標準ロボット技術 (RT ミドルウエア ) の利用 XML によるデータ収集パラメータの記述
intra-mart e-Builder ver 5
 e-builder ver 5.0.0 インストールガイド Page 1 ================================================================== 名称 e-builder version 5.0.0 制作者名 NTTDATA INTRAMART Corp. 動作環境 Page Producer (Windows2000, Xp) Framework
e-builder ver 5.0.0 インストールガイド Page 1 ================================================================== 名称 e-builder version 5.0.0 制作者名 NTTDATA INTRAMART Corp. 動作環境 Page Producer (Windows2000, Xp) Framework
ユーザーズマニュアル 有線ネットワークシステム 発行日 2016 年 3 月 30 日
 ユーザーズマニュアル 有線ネットワークシステム 発行日 2016 年 3 月 30 日 目次 1 2 3 はじめに...1 1.1 前提知識...1 1.2 システム概要...1 1.3 動作環境...4 1.3.1 IP 経路情報監視 RTC...4 1.3.2 IP 経路情報ビューア RTC...6 インストール...7 2.1 RTC の入手方法...7 2.2 IP 経路情報監視 RTC...7
ユーザーズマニュアル 有線ネットワークシステム 発行日 2016 年 3 月 30 日 目次 1 2 3 はじめに...1 1.1 前提知識...1 1.2 システム概要...1 1.3 動作環境...4 1.3.1 IP 経路情報監視 RTC...4 1.3.2 IP 経路情報ビューア RTC...6 インストール...7 2.1 RTC の入手方法...7 2.2 IP 経路情報監視 RTC...7
Fujitsu Standard Tool
 スマートシティプロジェクト ( 第 1 回 ) 技術 標準化分科会 ( 第 6 回 ) 通信プロトコルタスクフォース ( 第 6 回 ) IoT 共通基盤技術の確立 実証課題 Ⅱ 効率的かつ安定的な IoT デバイス接続 エリアネットワーク運用管理技術の確立 2016 年 12 月 20 日代表研究機関 : 富士通株式会社共同研究機関 : SMK 株式会社北陸先端科学技術大学院大学 0 はじめに IoT
スマートシティプロジェクト ( 第 1 回 ) 技術 標準化分科会 ( 第 6 回 ) 通信プロトコルタスクフォース ( 第 6 回 ) IoT 共通基盤技術の確立 実証課題 Ⅱ 効率的かつ安定的な IoT デバイス接続 エリアネットワーク運用管理技術の確立 2016 年 12 月 20 日代表研究機関 : 富士通株式会社共同研究機関 : SMK 株式会社北陸先端科学技術大学院大学 0 はじめに IoT
吉田坂本.pptx
 Android 端末間のアドホックネットワークの構築 ユビキタスネットワークシステム研究室 N11-040 坂本浩基 N11-107 吉田和矢 All Rights Reserved, Copyright 2013 Osaka Institute of Technology 背景 l アドホックネットワーク 通信キャリアに頼らず構築することのできる無線ネットワーク 2 All Rights Reserved,
Android 端末間のアドホックネットワークの構築 ユビキタスネットワークシステム研究室 N11-040 坂本浩基 N11-107 吉田和矢 All Rights Reserved, Copyright 2013 Osaka Institute of Technology 背景 l アドホックネットワーク 通信キャリアに頼らず構築することのできる無線ネットワーク 2 All Rights Reserved,
デジタルカメラ EXILIM を使ったプラグイン開発と商用展開について カシオ計算機株式会社コンシューマ開発本部開発統轄部第一開発部 11 開発室山田卓也 PAGE 1
 デジタルカメラ EXILIM を使ったプラグイン開発と商用展開について カシオ計算機株式会社コンシューマ開発本部開発統轄部第一開発部 11 開発室山田卓也 1 今回のお話 デバイス WebAPI を使った活動 カメラの通信システムのプラグイン化 試作システムの作成 現在の状況 プラグインのリリース つながるカメラ の展開 市場の拡大の可能性 2 これまでの活動 デバイス WebAPI を使った活動
デジタルカメラ EXILIM を使ったプラグイン開発と商用展開について カシオ計算機株式会社コンシューマ開発本部開発統轄部第一開発部 11 開発室山田卓也 1 今回のお話 デバイス WebAPI を使った活動 カメラの通信システムのプラグイン化 試作システムの作成 現在の状況 プラグインのリリース つながるカメラ の展開 市場の拡大の可能性 2 これまでの活動 デバイス WebAPI を使った活動
Microsoft PowerPoint RT講習会(説明用)_ [互換モード]
![Microsoft PowerPoint RT講習会(説明用)_ [互換モード]](/thumbs/96/129105636.jpg "Microsoft PowerPoint RT講習会(説明用)_ [互換モード]") マイクロマシン /MEMS 展 ROBOTECH 次世代ロボット製造技術展 RT ミドルウェア講習会 RT ミドルウェアインストールワークショップ 日時 :2012 年 7 月 13 日 ( 金 ) 10:30~12:30 場所 : 東京ビッグサイト東ホール特設会場 株式会社グローバルアシスト坂本武志 RT ミドルウェアの概要 RT ミドルウェアとは? RT = Robot Technology Real-time
マイクロマシン /MEMS 展 ROBOTECH 次世代ロボット製造技術展 RT ミドルウェア講習会 RT ミドルウェアインストールワークショップ 日時 :2012 年 7 月 13 日 ( 金 ) 10:30~12:30 場所 : 東京ビッグサイト東ホール特設会場 株式会社グローバルアシスト坂本武志 RT ミドルウェアの概要 RT ミドルウェアとは? RT = Robot Technology Real-time
目次 2 1 PC Control Utility PD 1 について 動作環境
 PC Control Utility PD 1 説明書 パブリックディスプレイと PC の接続について 目次 2 1 PC Control Utility PD 1 について --------------------------------------------------------------------------- 3 2 動作環境 ---------------------------------------------------------------------------
PC Control Utility PD 1 説明書 パブリックディスプレイと PC の接続について 目次 2 1 PC Control Utility PD 1 について --------------------------------------------------------------------------- 3 2 動作環境 ---------------------------------------------------------------------------
82801pdf.pqxp
 PC Contents Chapter 1 PC / Chapter 2/ 1 2 SMS WAN BITS Chapter 3 SMS 2003 SMS SMS SMS 2003 2 6 8 9 9 10 11 12 13 14 16 17 17 18 19 19 20 20 21 22 24 24 25 25 26 26 27 28 PC PC PC PC PC IT 1 1 PC PC PC
PC Contents Chapter 1 PC / Chapter 2/ 1 2 SMS WAN BITS Chapter 3 SMS 2003 SMS SMS SMS 2003 2 6 8 9 9 10 11 12 13 14 16 17 17 18 19 19 20 20 21 22 24 24 25 25 26 26 27 28 PC PC PC PC PC IT 1 1 PC PC PC
2nd-1.dvi
 7 ZEAL : OptiPlex GX 7 ZEAL ZEAL-Z ZEAL-C ZEAL-C CPU Memory OS Intel Pentium (3GHz) GB Windows Vista Business (-bit) ZEAL Microsoft Windows Mobile 5. ZEAL Bluetooth 3 ZEAL 5 Microsoft Visual C# 5 66 OS
7 ZEAL : OptiPlex GX 7 ZEAL ZEAL-Z ZEAL-C ZEAL-C CPU Memory OS Intel Pentium (3GHz) GB Windows Vista Business (-bit) ZEAL Microsoft Windows Mobile 5. ZEAL Bluetooth 3 ZEAL 5 Microsoft Visual C# 5 66 OS
LDAP Manager SupportList
 LDAP Manager 2017/8/1 現在 動作環境 OS メタ LDAP PostgreSQL ELM Interface for Java for Windows for Linux システム プロダクト LDAP Manager 本体のバージョン Windows Server 2003 Standard Edition (32bit/64bit) Windows Server 2003
LDAP Manager 2017/8/1 現在 動作環境 OS メタ LDAP PostgreSQL ELM Interface for Java for Windows for Linux システム プロダクト LDAP Manager 本体のバージョン Windows Server 2003 Standard Edition (32bit/64bit) Windows Server 2003
 製品情報 17.0.0.500 17.0.0.500 製品情報 nexacro platform 17 TOBESOFT 弊社製品のご愛顧について感謝申し上げます TOBESOFTは この文書が提供する情報の正確性を維持するために努力し 特別な言及なしに 変更および補完します 但し この文書に誤った情報が含まれていないことを保証していません この文書の記述により発生する可能性がある直接的または間接的な障害や
製品情報 17.0.0.500 17.0.0.500 製品情報 nexacro platform 17 TOBESOFT 弊社製品のご愛顧について感謝申し上げます TOBESOFTは この文書が提供する情報の正確性を維持するために努力し 特別な言及なしに 変更および補完します 但し この文書に誤った情報が含まれていないことを保証していません この文書の記述により発生する可能性がある直接的または間接的な障害や
第 3 回 TERAS 成果報告会 TERAS V3 紹介と今後の展開 Tool Environment for Reliable and Accountable Software 一般社団法人 TERAS 理事開発委員長渡辺政彦 2014 年 3 月 12 日
 第 3 回 TERAS 成果報告会 TERAS V3 紹介と今後の展開 Tool Environment for Reliable and Accountable Software 一般社団法人 TERAS 理事開発委員長渡辺政彦 2014 年 3 月 12 日 最新 TERAS V3 2011 年度 Ver.1 2012 年度 Ver.2 2013 年度 Ver.3 成果物間リンク - ファイル単位
第 3 回 TERAS 成果報告会 TERAS V3 紹介と今後の展開 Tool Environment for Reliable and Accountable Software 一般社団法人 TERAS 理事開発委員長渡辺政彦 2014 年 3 月 12 日 最新 TERAS V3 2011 年度 Ver.1 2012 年度 Ver.2 2013 年度 Ver.3 成果物間リンク - ファイル単位
目次 はじめに 4 概要 4 背景 4 対象 5 スケジュール 5 目標点 6 使用機材 6 第 1 章 C# 言語 7 C# 言語の歴史 7 基本構文 8 C 言語との違い 9 Java 言語との違い 10.Netフレームワーク 10 開発資料 10 第 2 章 Mono 11 Monoの歴史 1
 ポリテクセンター埼玉セミナー資料 組込み技術者のための C# Monoを用いたマルチプラットフォームアプリケーション開発技術 第 1.2 版 2018 年 8 月 Microbrains Inc. 渋谷 目次 はじめに 4 概要 4 背景 4 対象 5 スケジュール 5 目標点 6 使用機材 6 第 1 章 C# 言語 7 C# 言語の歴史 7 基本構文 8 C 言語との違い 9 Java 言語との違い
ポリテクセンター埼玉セミナー資料 組込み技術者のための C# Monoを用いたマルチプラットフォームアプリケーション開発技術 第 1.2 版 2018 年 8 月 Microbrains Inc. 渋谷 目次 はじめに 4 概要 4 背景 4 対象 5 スケジュール 5 目標点 6 使用機材 6 第 1 章 C# 言語 7 C# 言語の歴史 7 基本構文 8 C 言語との違い 9 Java 言語との違い
スライド 1
 Java を活用するユーザー企業の最新事例ご紹介 株式会社アットマークテクノ http://www.atmark-techno.com/ 2014 年 5 月 22 日 アジェンダ アットマークテクノ Armadillo のご紹介 Java を採用するメリット 他のソフトウェアプラットフォームとの比較 Java SE Embedded 8 の JRE ESEC2014 で ECHONET Lite
Java を活用するユーザー企業の最新事例ご紹介 株式会社アットマークテクノ http://www.atmark-techno.com/ 2014 年 5 月 22 日 アジェンダ アットマークテクノ Armadillo のご紹介 Java を採用するメリット 他のソフトウェアプラットフォームとの比較 Java SE Embedded 8 の JRE ESEC2014 で ECHONET Lite
新技術説明会 様式例
 1 ロボットへの FPGA 導入を 容易化する コンポーネント技術 宇都宮大学大学院工学研究科情報システム科学専攻助教大川猛 2 従来技術とその問題点 FPGA(Field Programmable Gate Array) は 任意のディジタル論理回路をプログラム可能な LSI ソフトウェアでは時間がかかる画像認識処理等を ハードウェア化して 高速化 低消費電力化可能 問題点 FPGA 上の回路設計が難しい
1 ロボットへの FPGA 導入を 容易化する コンポーネント技術 宇都宮大学大学院工学研究科情報システム科学専攻助教大川猛 2 従来技術とその問題点 FPGA(Field Programmable Gate Array) は 任意のディジタル論理回路をプログラム可能な LSI ソフトウェアでは時間がかかる画像認識処理等を ハードウェア化して 高速化 低消費電力化可能 問題点 FPGA 上の回路設計が難しい
ic3_cf_p1-70_1018.indd
 章オペレーティングシステム()の基いソフトウェアで 基本ソフトウェア とも呼ばれます 第礎第 章 オペレーティングシステム () の基礎 - の役割と動作 ここでは コンピューターの基本的な構成やオペレーティングシステムの基本的な役割と操作を学習します -- コンピューターの基本構成 現代社会では さまざまな種類のコンピューター機器が各分野で利用されています 身近なものでは パソコン タブレット スマートフォンなどがありますが
章オペレーティングシステム()の基いソフトウェアで 基本ソフトウェア とも呼ばれます 第礎第 章 オペレーティングシステム () の基礎 - の役割と動作 ここでは コンピューターの基本的な構成やオペレーティングシステムの基本的な役割と操作を学習します -- コンピューターの基本構成 現代社会では さまざまな種類のコンピューター機器が各分野で利用されています 身近なものでは パソコン タブレット スマートフォンなどがありますが
CommCheckerManual_Ver.1.0_.doc
 通信チェックツール (CommChecker) 取扱説明書 (Ver.1.0) 2009 ESPEC Corp. 目次 1. 使用条件 4 2. ダウンロード & インストール 5 3. 環境設定 6 3-1.RS-485 通信 6 3-2.RS-232C 通信 7 3-3.GPIB 通信 8 4. ソフトウェアの使用方法 9 4-1. 起動 9 4-2. 通信設定 10 (1)RS485 通信 10
通信チェックツール (CommChecker) 取扱説明書 (Ver.1.0) 2009 ESPEC Corp. 目次 1. 使用条件 4 2. ダウンロード & インストール 5 3. 環境設定 6 3-1.RS-485 通信 6 3-2.RS-232C 通信 7 3-3.GPIB 通信 8 4. ソフトウェアの使用方法 9 4-1. 起動 9 4-2. 通信設定 10 (1)RS485 通信 10
OPCインターフェースによるPLC計装システムの実践的ソリューション
 OPC を利用した PLC 計装システムの実践的ソリューション オムロン ( 株 ) 三木信史 / 奥野誠 1. はじめに国内の生産現場における制御システムは 連続系としてのPA 領域とディスクリート系であるFA 領域では異なる制御システムとして発展を遂げてきた PA 分野においては分散型制御システム ( 以下,DCS) FA 分野においてはプログラマブルコントローラ ( 以下,PLC) を主とした制御システムが利用されてきた
OPC を利用した PLC 計装システムの実践的ソリューション オムロン ( 株 ) 三木信史 / 奥野誠 1. はじめに国内の生産現場における制御システムは 連続系としてのPA 領域とディスクリート系であるFA 領域では異なる制御システムとして発展を遂げてきた PA 分野においては分散型制御システム ( 以下,DCS) FA 分野においてはプログラマブルコントローラ ( 以下,PLC) を主とした制御システムが利用されてきた
完成版_セミナー発表資料110928
 PROFINET オープンセミナー ASIC を使用した開発 開発セミナー 目次 2 PROFINET の実装 ASIC という選択 PROFINET 機器開発における課題 ASIC による課題の解決 ASIC の特徴ターゲットアプリケーション適用例ラインアップ ASIC 製品紹介 1 PROFINET の実装 3 PROFINET の実装手法 Ethernet ポート付きマイコン FPGA PROFINET
PROFINET オープンセミナー ASIC を使用した開発 開発セミナー 目次 2 PROFINET の実装 ASIC という選択 PROFINET 機器開発における課題 ASIC による課題の解決 ASIC の特徴ターゲットアプリケーション適用例ラインアップ ASIC 製品紹介 1 PROFINET の実装 3 PROFINET の実装手法 Ethernet ポート付きマイコン FPGA PROFINET
SmartLMSユーザーズガイド<講師編>
 SmartLearning Management System SmartLMS (1) (2) (3) (4) (3) (5) Microsoft MS PowerPoint DirectX Windows Windows NT Windows Media Microsoft Corporation Intel Pentium Intel Corporation NEC 2003-2004 NEC
SmartLearning Management System SmartLMS (1) (2) (3) (4) (3) (5) Microsoft MS PowerPoint DirectX Windows Windows NT Windows Media Microsoft Corporation Intel Pentium Intel Corporation NEC 2003-2004 NEC
Microsoft Word - NanoPhotometer用PCソフトウエア操作説明書 Rev 1.00.doc
 NanoPhotometer 用 PC ソフトウエア操作説明書 < 目次 > 1. 概要... 1 2. 動作環境... 1 3. PC との接続... 1 4. ソフトウエアインストール... 1 5. PVC の起動と初期設定... 2 5.1. アクセスコード... 2 5.2. シリアルポート番号の設定... 2 5.3. プリンターの選択... 3 5.4. コンフィグレーション... 4
NanoPhotometer 用 PC ソフトウエア操作説明書 < 目次 > 1. 概要... 1 2. 動作環境... 1 3. PC との接続... 1 4. ソフトウエアインストール... 1 5. PVC の起動と初期設定... 2 5.1. アクセスコード... 2 5.2. シリアルポート番号の設定... 2 5.3. プリンターの選択... 3 5.4. コンフィグレーション... 4
Microsoft PowerPoint - Android+TPMによるセキュアブート_KDDI研_後日配布用
 Android(ARM)+TPM による セキュアブート KDDI 研究所竹森敬祐 (Ph.D) Android OS は 通常利用においてシステム領域の完全性が維持されている 組み込み OS としても利用される Android OS のセキュアブートの意義を考察する 1 背景 : root 権限奪取とシステム改造の流れ 攻撃のシナリオ Step1: root 権限奪取アプリをユーザ領域にインストールし
Android(ARM)+TPM による セキュアブート KDDI 研究所竹森敬祐 (Ph.D) Android OS は 通常利用においてシステム領域の完全性が維持されている 組み込み OS としても利用される Android OS のセキュアブートの意義を考察する 1 背景 : root 権限奪取とシステム改造の流れ 攻撃のシナリオ Step1: root 権限奪取アプリをユーザ領域にインストールし
604HW FAQ(CN) 文書レベル 604HW FAQ(JP) V1.0 Huawei Technologies Co, Ltd. All Rights Reserved 华为机密, 未经许可不得扩散第 1 页, 共 12 页
 文書レベル 604HW FAQ(JP) V1.0 Huawei Technologies Co, Ltd. All Rights Reserved 华为机密, 未经许可不得扩散第 1 页, 共 12 页") 604HW FAQ(JP) V1.0 Huawei Technologies Co, Ltd. All Rights Reserved 2017-7-28 华为机密, 未经许可不得扩散第 1 页, 共 12 页 目次 Q1: 604HWをPCに接続しているのにドライバが自動でインストールされません...3 Q2: PCを接続した後 PCが604HWを認識しません...3 Q3: SIMカードが識別されません...4
604HW FAQ(JP) V1.0 Huawei Technologies Co, Ltd. All Rights Reserved 2017-7-28 华为机密, 未经许可不得扩散第 1 页, 共 12 页 目次 Q1: 604HWをPCに接続しているのにドライバが自動でインストールされません...3 Q2: PCを接続した後 PCが604HWを認識しません...3 Q3: SIMカードが識別されません...4
Scripting Tools for Windows PowerShell リリースノート
 Scripting Tools for Windows PowerShell リリースノート BIOS コマンドレット v1.0.0.1 部品番号 : 823062-192 2016 年 4 月第 1 版 Copyright 2015-2016 Hewlett Packard Enterprise Development LP. 本書の内容は 将来予告なしに変更されることがあります Hewlett
Scripting Tools for Windows PowerShell リリースノート BIOS コマンドレット v1.0.0.1 部品番号 : 823062-192 2016 年 4 月第 1 版 Copyright 2015-2016 Hewlett Packard Enterprise Development LP. 本書の内容は 将来予告なしに変更されることがあります Hewlett
:30 18:00 9:30 12:00 13:00 17:00
 http://pioneer.jp/support/ 0120-944-222 044-572-8102 9:30 18:00 9:30 12:00 13:00 17:00 この取扱説明書について 製品本体の USB DAC 端子に USB ケーブルでパソコンを接続すると パソコンからの音声信号を再生できます この機能を使用するためには 専用のドライバーソフトウェアをパソコンにインストールする必要があります
http://pioneer.jp/support/ 0120-944-222 044-572-8102 9:30 18:00 9:30 12:00 13:00 17:00 この取扱説明書について 製品本体の USB DAC 端子に USB ケーブルでパソコンを接続すると パソコンからの音声信号を再生できます この機能を使用するためには 専用のドライバーソフトウェアをパソコンにインストールする必要があります
XNA Framework
 XNA Framework 2.0 M@STER SESSION 01 XNA Framework の技術的背景 システム基盤は.NET Framework マネージ環境で実行 クロスプラットフォーム Windows, Xbox360, Zune DirectX, MDX から独立している 開発 実行環境の構造 XNA Game Studio (Visual Studio 2005) XNA Framework
XNA Framework 2.0 M@STER SESSION 01 XNA Framework の技術的背景 システム基盤は.NET Framework マネージ環境で実行 クロスプラットフォーム Windows, Xbox360, Zune DirectX, MDX から独立している 開発 実行環境の構造 XNA Game Studio (Visual Studio 2005) XNA Framework
IM-SecureSignOn
 IM-SecureSignOn Version 7.2 リリース ノート 2012/02/29 初版 1 はじめに 1. IM-SecureSignOn が動作するには intra-mart WebPlatform/AppFramework Version 7.2 が必要です 最新パッチの適応を推奨します 2. 本ドキュメントは本製品固有の要件を記載しています 以下に記載のないものは intra-mart
IM-SecureSignOn Version 7.2 リリース ノート 2012/02/29 初版 1 はじめに 1. IM-SecureSignOn が動作するには intra-mart WebPlatform/AppFramework Version 7.2 が必要です 最新パッチの適応を推奨します 2. 本ドキュメントは本製品固有の要件を記載しています 以下に記載のないものは intra-mart
PowerPoint プレゼンテーション
 PixeLINK 社は マシンビジョンおよび科学分野でおいて産業用カメラを製造 販売しているカナダ オタワにある会社です PixeLINK 社は 1992 年より世界中のお客様のご要望に合わせたハードウェアおよびソフトウェアを開発 製造 販売サポートをしております 1 オートフォーカスカメラ 高速であらゆるオートフォーカスのアプリケーションに適した USB3.0 オートフォーカスカメラファミリーをご紹介させていただきます
PixeLINK 社は マシンビジョンおよび科学分野でおいて産業用カメラを製造 販売しているカナダ オタワにある会社です PixeLINK 社は 1992 年より世界中のお客様のご要望に合わせたハードウェアおよびソフトウェアを開発 製造 販売サポートをしております 1 オートフォーカスカメラ 高速であらゆるオートフォーカスのアプリケーションに適した USB3.0 オートフォーカスカメラファミリーをご紹介させていただきます
関係各位 2019 年 1 月 31 日 ヴイストン株式会社 4 軸独立ステアリング駆動方式の ROS 対応台車ロボット 4WDS ローバー Ver2.0 を発売 ヴイストン株式会社 ( 本社 : 大阪府大阪市 代表取締役 : 大和信夫 ) は 4 輪独立ステアリング駆動式全方位移動台車ロボット 4
 は 4 輪独立ステアリング駆動式全方位移動台車ロボット 4") 関係各位 2019 年 1 月 31 日 ヴイストン株式会社 4 軸独立ステアリング駆動方式の ROS 対応台車ロボット 4WDS ローバー Ver2.0 を発売 ヴイストン株式会社 ( 本社 : 大阪府大阪市 代表取締役 : 大和信夫 ) は 4 輪独立ステアリング駆動式全方位移動台車ロボット 4WDS ローバー Ver.2.0 をリリースします 旧製品である 4WDS ローバー で好評な機能はそのままに
関係各位 2019 年 1 月 31 日 ヴイストン株式会社 4 軸独立ステアリング駆動方式の ROS 対応台車ロボット 4WDS ローバー Ver2.0 を発売 ヴイストン株式会社 ( 本社 : 大阪府大阪市 代表取締役 : 大和信夫 ) は 4 輪独立ステアリング駆動式全方位移動台車ロボット 4WDS ローバー Ver.2.0 をリリースします 旧製品である 4WDS ローバー で好評な機能はそのままに
目次 初めに必ずお読みください ソフトウェアのインストール ソフトウェアの選択 ソフトウェアのインストール レシーバー用ドライバのインストール WindowsXP のインストール方法 Win
 インストール手順書 Office2010 Version 4.5.4.3 インストールの際に必ずお読みください 第 1 版 2012 年 5 月 木村情報技術株式会社 目次 初めに必ずお読みください... 3 1. ソフトウェアのインストール... 7 1-1 ソフトウェアの選択... 8 1-2 ソフトウェアのインストール... 10 2. レシーバー用ドライバのインストール... 12 2-1
インストール手順書 Office2010 Version 4.5.4.3 インストールの際に必ずお読みください 第 1 版 2012 年 5 月 木村情報技術株式会社 目次 初めに必ずお読みください... 3 1. ソフトウェアのインストール... 7 1-1 ソフトウェアの選択... 8 1-2 ソフトウェアのインストール... 10 2. レシーバー用ドライバのインストール... 12 2-1
Ver ceil floor FunctionGenerator (PTZCameraSony)
") RT 2011 9 18 2009 11 15 1 2009 11 20 2009 12 4 1.2 Ver.1.0.2 ceil floor 3.2.1 4 FunctionGenerator 4.1 2009 12 7 4.2 2009 12 18 1.4 - - (PTZCameraSony) 2.2 - - 4.3 - - 2009 12 27 1.1 2011 9 18 OpenRTM-aist-1.0.0
RT 2011 9 18 2009 11 15 1 2009 11 20 2009 12 4 1.2 Ver.1.0.2 ceil floor 3.2.1 4 FunctionGenerator 4.1 2009 12 7 4.2 2009 12 18 1.4 - - (PTZCameraSony) 2.2 - - 4.3 - - 2009 12 27 1.1 2011 9 18 OpenRTM-aist-1.0.0
Microsoft PowerPoint RTM講習会_初級(第4部) [互換モード]
![Microsoft PowerPoint RTM講習会_初級(第4部) [互換モード]](/thumbs/101/150326877.jpg "Microsoft PowerPoint RTM講習会_初級(第4部) [互換モード]") PFCore(RT ミドルウェア ) トレーニング初級編 日時 :2013 年 1 月 21 日 ( 月 ) 13:00~17:00 場所 : 大阪大学吹田キャンパス産学連携本部 B 棟 1F 会議室 PFCore(RT ミドルウェア ) トレーニング初級編 13:00-13:20 13:20-14:10 14:10-15:05 15:05-15:20 15:20-17:00 第 1 部 : 先端計測分野における
PFCore(RT ミドルウェア ) トレーニング初級編 日時 :2013 年 1 月 21 日 ( 月 ) 13:00~17:00 場所 : 大阪大学吹田キャンパス産学連携本部 B 棟 1F 会議室 PFCore(RT ミドルウェア ) トレーニング初級編 13:00-13:20 13:20-14:10 14:10-15:05 15:05-15:20 15:20-17:00 第 1 部 : 先端計測分野における
<4D F736F F F696E74202D F82C282C882AA82E98D488FEA95AA89C889EF E B E9197BF>
 ロボットミドルウエア標準 RT ミドルウェア 安藤慶昭 経済産業省製造産業局産業機械課情報化推進係長 ( 独 ) 産業技術総合研究所知能システム研究部門主任研究員 概要 ロボットミドルウエアとは? RTミドルウエア:OpenRTM-aist 様々なミドルウエア / プラットフォーム 標準化 終わりに 2 ロボットミドルウエアとは? ロボットシステム構築を効率化するための共通機能を提供するソフトウエア
ロボットミドルウエア標準 RT ミドルウェア 安藤慶昭 経済産業省製造産業局産業機械課情報化推進係長 ( 独 ) 産業技術総合研究所知能システム研究部門主任研究員 概要 ロボットミドルウエアとは? RTミドルウエア:OpenRTM-aist 様々なミドルウエア / プラットフォーム 標準化 終わりに 2 ロボットミドルウエアとは? ロボットシステム構築を効率化するための共通機能を提供するソフトウエア
Microsoft Word - site_protector_sp7_sysreq.doc
 SiteProtector 2.0 Service Pack 7.0 2008 7 14 SiteProtector 2.0 Service Pack 7.0 システム要件... 1 Deployment Manager... 1 Deployment Manager システム要件... 1 Service Pack 7.0 - Recommended オプションシステム要件... 2 Service
SiteProtector 2.0 Service Pack 7.0 2008 7 14 SiteProtector 2.0 Service Pack 7.0 システム要件... 1 Deployment Manager... 1 Deployment Manager システム要件... 1 Service Pack 7.0 - Recommended オプションシステム要件... 2 Service
3. クラスリンク ( 先生の IP アドレス >:< ポート >) を生徒と共有して生徒がブラウザーから接続できるようにします デフォルトのポート番号は 90 ですが これは [Vision 設定 ] から変更できます Netop Vision Student アプリケーションを使
![3. クラスリンク ( 先生の IP アドレス >:< ポート >) を生徒と共有して生徒がブラウザーから接続できるようにします デフォルトのポート番号は 90 ですが これは [Vision 設定 ] から変更できます Netop Vision Student アプリケーションを使](/thumbs/91/104861190.jpg "3. クラスリンク ( 先生の IP アドレス >:< ポート >) を生徒と共有して生徒がブラウザーから接続できるようにします デフォルトのポート番号は 90 ですが これは [Vision 設定 ] から変更できます Netop Vision Student アプリケーションを使") ブラウザーまたは Netop Vision Student アプリから接続する生徒との画面の共有 Windows ベースの生徒 ブラウザーベースの生徒用デバイス および Netop Vision Student アプリで接続する生徒が混在するクラスルームや ブラウザーベースのデバイスのみで構成されるクラスルームを Vision の先生が作成できるようになりました オープンクラスにより 先生が作成するクラスルームの数が少なくなり
ブラウザーまたは Netop Vision Student アプリから接続する生徒との画面の共有 Windows ベースの生徒 ブラウザーベースの生徒用デバイス および Netop Vision Student アプリで接続する生徒が混在するクラスルームや ブラウザーベースのデバイスのみで構成されるクラスルームを Vision の先生が作成できるようになりました オープンクラスにより 先生が作成するクラスルームの数が少なくなり
システム要件 Trend Micro Safe Lock Trend Micro Safe Lock 2.0 エージェントのシステム要件 OS Client OS Server OS Windows 2000 (SP4) [Professional] (32bit) Windows XP (SP1/
![システム要件 Trend Micro Safe Lock Trend Micro Safe Lock 2.0 エージェントのシステム要件 OS Client OS Server OS Windows 2000 (SP4) [Professional] (32bit) Windows XP (SP1/](/thumbs/95/126209574.jpg "システム要件 Trend Micro Safe Lock Trend Micro Safe Lock 2.0 エージェントのシステム要件 OS Client OS Server OS Windows 2000 (SP4) [Professional] (32bit) Windows XP (SP1/") Trend Micro Safe Lock Trend Micro Safe Lock 2.0 エージェントの OS Client OS Server OS Windows 2000 (SP4) [Professional] Windows XP (SP1/SP2/SP3) [Professional] Windows Vista (SP なし /SP1/SP2) [Business / Enterprise
Trend Micro Safe Lock Trend Micro Safe Lock 2.0 エージェントの OS Client OS Server OS Windows 2000 (SP4) [Professional] Windows XP (SP1/SP2/SP3) [Professional] Windows Vista (SP なし /SP1/SP2) [Business / Enterprise
ポニソフト顔認識システムご案内 Face Recognition System (Windows Base ) PONI- 顔認識システムソフトウェアは, 顔の特徴を高速で検出 分析 認識し その特徴を照合の結果 登録された名前の割出し 履歴記録ファィルとの連動 あるいは 男 女の性別と年齢の分類
 PONI- 顔認識システムソフトウェアは, 顔の特徴を高速で検出 分析 認識し その特徴を照合の結果 登録された名前の割出し 履歴記録ファィルとの連動 あるいは 男 女の性別と年齢の分類") ポニソフト顔認識システムご案内 Face Recognition System (Windows Base ) PONI- 顔認識システムソフトウェアは, 顔の特徴を高速で検出 分析 認識し その特徴を照合の結果 登録された名前の割出し 履歴記録ファィルとの連動 あるいは 男 女の性別と年齢の分類 滞在時間の計測 入場者数の集計などの記録のデータ化によりマーケッティング分析や顧客管理 警備保安 入退出管理などのデータベースとして幅広い分野で活用できるアプリケ
ポニソフト顔認識システムご案内 Face Recognition System (Windows Base ) PONI- 顔認識システムソフトウェアは, 顔の特徴を高速で検出 分析 認識し その特徴を照合の結果 登録された名前の割出し 履歴記録ファィルとの連動 あるいは 男 女の性別と年齢の分類 滞在時間の計測 入場者数の集計などの記録のデータ化によりマーケッティング分析や顧客管理 警備保安 入退出管理などのデータベースとして幅広い分野で活用できるアプリケ
PowerPoint プレゼンテーション
 組込み系ソフトウェアで活用する KINECT センサー 日本マイクロソフト株式会社デベロッパー & プラットフォーム統括本部テクニカルエバンジェリスト太田寛 Twitter: Blog: @embedded_george http://blogs.msdn.com/hirosho 内容 KINECT for Windows 事例 KINECT for Windows SDK 組込み制御での Kinect
組込み系ソフトウェアで活用する KINECT センサー 日本マイクロソフト株式会社デベロッパー & プラットフォーム統括本部テクニカルエバンジェリスト太田寛 Twitter: Blog: @embedded_george http://blogs.msdn.com/hirosho 内容 KINECT for Windows 事例 KINECT for Windows SDK 組込み制御での Kinect
(Microsoft PowerPoint - 070507_RT\215u\217K\211\357)
") RTミドルウエア ミドルウエアの 各 種 ツール 群 について RTコンポーネント 開 発 環 境 RTコンポーネントの 開 発 効 率 を 向 上 させるためのツール 群 RTミドルウェア コンポーネント フレームワーク 固 有 の 定 型 作 業 を 低 減 開 発 プラットフォームにEclipseを 採 用 設 計 ~ 実 装 ~テストまで, 開 発 サイクル 全 体 の 作 業 を 支 援
RTミドルウエア ミドルウエアの 各 種 ツール 群 について RTコンポーネント 開 発 環 境 RTコンポーネントの 開 発 効 率 を 向 上 させるためのツール 群 RTミドルウェア コンポーネント フレームワーク 固 有 の 定 型 作 業 を 低 減 開 発 プラットフォームにEclipseを 採 用 設 計 ~ 実 装 ~テストまで, 開 発 サイクル 全 体 の 作 業 を 支 援
セットアップカード
 R3.4 セットアップカード - 第 1.01 版 - Copyright NEC Corporation 2003-2016. All rights reserved. 商標について LogCollector は日本電気株式会社の登録商標です Microsoft Windows Windows Server Windows Vista Internet Explorer および SQL Server
R3.4 セットアップカード - 第 1.01 版 - Copyright NEC Corporation 2003-2016. All rights reserved. 商標について LogCollector は日本電気株式会社の登録商標です Microsoft Windows Windows Server Windows Vista Internet Explorer および SQL Server