Microsoft PowerPoint ppt [互換モード]
|
|
|
- ふみな てっちがわら
- 4 years ago
- Views:
Transcription
1 RT ミドルウェア講習会 日時 :2012 年 5 月 22 日 ( 水 ) 10:00~16:45 場所 : つくば国際会議場小会議室 303 RT ミドルウェア講習会 10:00-10:50 11:00-11:50 11:50-12:00 12:00-13:00 13:00-14:00 14:00-16:45 第 1 部 ( その1): インターネットを利用したロボットサービスとRSiの取り組み ( 最新動向 ) 担当 : 成田雅彦 ( 産業技術大学院大学 ) 概要 : インターネットやクラウドとロボットとの連携は急速に注目を集めている領域です 本講演では インターネットやクラウドとロボットとの連携の動向を外観し RSi( ロボットサービスイニシアティブ ) の仕様である RSNP と最新の取り組みを紹介します 第 1 部 ( その2):OpenRTM-aistおよびRTコンポーネントプログラミングの概要担当 : 安藤慶昭 ( 産業技術総合研究所 ) 概要 :RT ミドルウエアはロボットシステムをコンポーネント指向で構築するソフトウエアプラットフォームです RT ミドルウエアを利用することで 既存のコンポーネントを再利用し モジュール指向の柔軟なロボットシステムを構築することができます RT ミドルウエアの産総研による実装である OpenRTM-aist についてその概要および RT コンポーネントの機能やプログラミングの流れについて説明します 質疑応答 意見交換 昼食 第 2 部 :RTコンポーネントの作成入門担当 : 坂本武志 ( 株式会社グローバルアシスト ) 概要 :RTCBuilderを使用したRTコンポーネントの作成方法を実習形式で体験していただきます 第 3 部 : プログラミング実習担当 :Geoffrey Biggs, 原功, 安藤慶昭 ( 産業技術総合研究所 ), 坂本武志 ( 株式会社グローバルアシスト ) 概要 :OpenRTM-aistを利用してコンポーネントを作成し実際にロボットを動かしていただきます 今回は2つのコース (Kobuki & Raspberry Piコース, G-ROBOT & Choreonoidコース ) を用意しました ROBOMEC2013 RTM 講習会 2


2 第 2 部 RT コンポーネントの作成入門 株式会社グローバルアシスト坂本武志 ROBOMEC2013 RTM 講習会 3 OpenRT Platform ロボット知能ソフトウェアプラットフォーム システム設計, シミュレーション, 動作生成, シナリオ生成などをサポート OpenRT Platform ツール群 コンポーネント開発, システム開発における各開発フェーズの作業支援 開発プラットフォームにEclipseを採用 構成 RTCビルダ RTCデバッガ RTシステムエディタ ロボット設計支援ツール シミュレータ 動作設計ツール シナリオ作成ツールなど ROBOMEC2013 RTM 講習会 4
")

3 統合開発環境 Eclipse オープンソース コミュニティで開発されている統合開発環境 マルチプラットフォーム対応. Windows や Linux など複数 OS 上で利用可能 Plug-in 形式を採用しており, 新たなツールの追加, 機能のカスタマイズが可能 RCP(Rich Client Platform) を利用することで, 簡単に単独アプリ化が可能 コミュニティから提供されているプラグイン ユーザが開発したプラグイン Eclipse SDK JDT CDT PyDev RTCBuilder RTSystemEditor Eclipse Platform Java VM ROBOMEC2013 RTM 講習会 5 RTCBuilder,RTSystemEditor のインストール ダウンロードし, 解凍するだけ Java の実行環境については, 別途インストールが必要 ROBOMEC2013 RTM 講習会 6

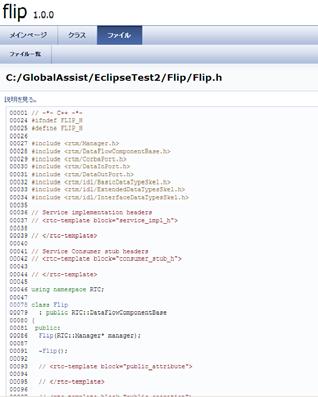
4 Flip コンポーネントについて 入力画像を反転して出力するコンポーネント OpenCV の cvflip 関数を利用 ROBOMEC2013 RTM 講習会 7 コンポーネント開発ツール RTCBuilder について


5 RTCBuilder 概要 RTCBuilder とは? コンポーネントのプロファイル情報を入力し, ソースコード等の雛形を生成するツール 開発言語用プラグインを追加することにより, 各言語向けRTCの雛形を生成することが可能 C++ Java Python C++ 用コード生成機能は RtcBuilder 本体に含まれています. その他の言語用コード生成機能は追加プラグインとして提供されています ROBOMEC2013 RTM 講習会 9 画面構成 RTC プロファイルエディタ ヒント パッケージ エクスプローラ ビルドビュー ROBOMEC2013 RTM 講習会 10



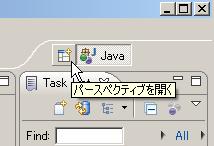
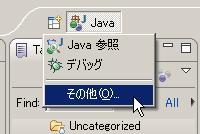

6 ツールの起動 Windows の場合 Eclipse.exeをダブルクリック Unix 系の場合 ターミナルを利用してコマンドラインから起動 Ex) $ /usr/local/eclipse/eclipse ワークスペースの選択 ( 初回起動時 ) ワークスペースの切替 ( 通常時 ) ワークスペース Eclipse で開発を行う際の作業領域 Eclipse 上でプロジェクトやファイルを作成するとワークスペースとして指定したディレクトリ以下に実際のディレクトリ, ファイルを作成する ROBOMEC2013 RTM 講習会 11 準備 初期画面のクローズ 初回起動時のみ パースペクティブ Eclipse 上でツールの構成を管理する単位メニュー, ツールバー, エディタ, ビューなど使用目的に応じて組み合わせる独自の構成を登録することも可能 パースペクティブの切り替え 1 画面右上の パースペクティブを開く を選択し, 一覧から その他 を選択 2 一覧画面から対象ツールを選択 ROBOMEC2013 RTM 講習会 12






7 プロジェクト作成 / エディタ起動 1 ツールバー内のアイコンをクリック 2 プロジェクト名 欄に入力し, 終了 メニューから ファイル - 新規 - プロジェクト を選択 新規プロジェクト 画面にて その他 - RtcBuilder を選択し, 次へ メニューから ファイル - Open New Builder Editor を選択 任意の場所にプロジェクトを作成したい場合 2 にて デフォルト ロケーションの使用 チェックボックスを外す 参照 ボタンにて対象ディレクトリを選択 物理的にはワークスペース以外の場所に作成される論理的にはワークスペース配下に紐付けされる プロジェクト名 : Flip ROBOMEC2013 RTM 講習会 13 プロファイルインポート 1 基本 タブ下部の インポート ボタンをクリック 2 インポート 画面にて対象ファイルを選択 作成済みのRTコンポーネント情報を再利用 エクスポート 機能を利用して出力したファイルの読み込みが可能 コード生成時に作成されるRtcProfileの情報を読み込み可能 XML 形式,YAML 形式での入出力が可能 ROBOMEC2013 RTM 講習会 14



 1GUI")


8 コード生成 コード生成 コード生成実行後, パースペクティブを自動切替 生成コードが表示されない場合には, リフレッシュ を実行 C++ 版 RTC CDT Java 版 RTC JDT ( デフォルトインストール済み ) Python 版 PyDev ROBOMEC2013 RTM 講習会 15 コンパイル (Windows,CMake 利用 ) 1GUI 版 Cmake を起動し,source, binary のディレクトリを指定 2 Configure を実行し, 使用するプラットフォームを選択 binary には,source とは別のディレクトリを指定する事を推奨 日本語は文字化けしてしまうため英数字のみのディレクトリを推奨 ROBOMEC2013 RTM 講習会 16



9 コンパイル (Windows,CMake 利用 ) 3 正常終了後, Generate を実行 4binary として指定したディレクトリ内にあるソリューションファイルを開き, ソリューションをビルド を実行 ROBOMEC2013 RTM 講習会 17 RTC プロファイルエディタ 画面要素名基本プロファイルアクティビティ プロファイルデータポート プロファイルサービスポート プロファイルコンフィギュレーションドキュメント生成言語 環境 RTC.xml 説明 RT コンポーネントのプロファイル情報など, コンポーネントの基本情報を設定. コード生成, インポート / エクスポート, パッケージング処理を実行 RT コンポーネントがサポートしているアクティビティ情報を設定 RT コンポーネントに付属するデータポートに関する情報を設定 RT コンポーネントに付属するサービスポートおよび各サービスポートに付属するサービスインターフェースに関する情報を設定 RT コンポーネントに設定するユーザ定義のコンフィギュレーション パラメータセット情報およびシステムのコンフィギュレーション情報を設定 生成したコードに追加する各種ドキュメント情報を設定 生成対象コードの選択や OS などの実行環境に関する情報を設定 設定した情報を基に生成した RTC 仕様 (RtcProfile) を表示 ROBOMEC2013 RTM 講習会 18
 モジュールカテゴリ : 任意 (Category) コンポーネント型 : STATIC アクティビティ型 : PERIODIC コンポーネントの種類 : DataFlow 最大インスタンス数 : 1 実行型 : PeriodicExecutionContext 実行周期 :")

10 基本プロファイル RT コンポーネントの名称など, 基本的な情報を設定 モジュール名 : Flip モジュール概要 : 任意 (Flip image component) バージョン : ベンダ名 : 任意 (AIST) モジュールカテゴリ : 任意 (Category) コンポーネント型 : STATIC アクティビティ型 : PERIODIC コンポーネントの種類 : DataFlow 最大インスタンス数 : 1 実行型 : PeriodicExecutionContext 実行周期 : エディタ内の項目名が赤字の要素は必須入力項目 画面右側は各入力項目に関する説明 ROBOMEC2013 RTM 講習会 19 アクティビティ プロファイル 生成対象 RTC で実装予定のアクティビティを設定 1 設定対象のアクティビティを選択 2 使用 / 未使用を設定 以下をチェック : onactivated ondeactivated onexecute 現在選択中のアクティビティは, 一覧画面にて赤字で表示 使用 (ON) が選択されているアクティビティは, 一覧画面にて背景を水色で表示 各アクティビティには, 動作概要 事前条件 事後条件 を記述可能 記述した各種コメントは, 生成コード内に Doxygen 形式で追加される ROBOMEC2013 RTM 講習会 20




11 データポート プロファイル 生成対象 RTC に付加する DataPort の情報を設定 1 該当種類の欄の Add ボタンをクリックし, ポートを追加後, 直接入力で名称設定 2 設定する型情報を一覧から選択 データ型は, 型定義が記載された IDL ファイルを設定画面にて追加することで追加可能 OpenRTM-aist にて事前定義されている型については, デフォルトで使用可能 [RTM_Root]rtm/idl 以下に存在する IDL ファイルで定義された型 各ポートに対する説明記述を設定可能 記述した各種コメントは, 生成コード内に Doxygen 形式で追加される ROBOMEC2013 RTM 講習会 21 データポート プロファイル Port の設定内容に応じて, 下部の BuildView の表示が変化 InPort ポート名 : originalimage データ型 : RTC::CameraImage 変数名 : originalimage 表示位置 : left OutPort ポート名 : flippedimage データ型 : RTC::CameraImage 変数名 : flippedimage 表示位置 : right ROBOMEC2013 RTM 講習会 22
 Widget:")
12 サービスポート プロファイル 生成対象 RTC に付加する ServicePort の情報を設定 サービスインターフェースの指定 IDL ファイルを指定すると, 定義されたインターフェース情報を表示 今回のサンプルでは未使用 ROBOMEC2013 RTM 講習会 23 コンフィギュレーション プロファイル 生成対象 RTC で使用する設定情報を設定 1 Add ボタンをクリックし, 追加後, 直接入力で名称設定 2 詳細画面にて, 型情報, 変数名などを設定 名称 : flipmode データ型 : int デフォルト値 : 0 変数名 : flipmode 制約条件 : (-1, 0, 1) Widget: radio データ型は,short,int,long,float,double,string から選択可能 ( 直接入力も可能 ) 制約情報と Widget 情報を入力することで,RTSystemEditor のコンフィギュレーションビューの表示を設定することが可能 ROBOMEC2013 RTM 講習会 24
13 制約条件,Widget の設定方法 制約条件について データポートとコンフィギュレーションに設定可能 チェックはあくまでもコンポーネント開発者側の責務 ミドルウェア側で検証を行っているわけではない 制約の記述書式 指定なし : 空白 即値 : 値そのもの 例 ) 100 範囲 :<,>,<=,>= 例 ) 0<=x<=100 列挙型 : ( 値 1, 値 2, ) 例 ) (val0, val1, val2) 配列型 : 値 1, 値 2, 例 ) val0, val1, val2 ハッシュ型 : { key0: 値 0, key1: 値 1, } 例 ) { key0:val0, key1:val1} Widget text( テキストボックス ) デフォルト slider( スライダ ) 数値型に対して範囲指定の場合 刻み幅を step にて指定可能 spin( スピナ ) 数値型に対して範囲指定の場合 刻み幅を step にて指定可能 radio( ラジオボタン ) 制約が列挙型の場合に指定可能 指定した Widget と制約条件がマッチしない場合は, テキストボックスを使用 ROBOMEC2013 RTM 講習会 25 言語 環境 プロファイル 生成対象 RTC を実装する言語, 動作環境に関する情報を設定 このチェックボックスを ON にすると, 旧バージョンと同様なコード (Cmake を利用しない形式 ) を生成 C++ を選択 ROBOMEC2013 RTM 講習会 26
14 システム構築支援ツール RTSystemEditor について 準備 パースペクティブの切り替え 1 画面右上の パースペクティブを開く を選択し, 一覧から その他 を選択 2 一覧画面から対象ツールを選択 パースペクティブ Eclipse 上でツールの構成を管理する単位メニュー, ツールバー, エディタ, ビューなど使用目的に応じて組み合わせる独自の構成を登録することも可能 ROBOMEC2013 RTM 講習会 28






15 RTSystemEditor 概要 RTSystemEditor とは? RT コンポーネントを組み合わせて,RT システムを構築するためのツール ROBOMEC2013 RTM 講習会 29 画面構成 システムエディタ ネームサービスビュー プロパティビュー コンフィギュレーションビュー マネージャビュー 複合コンポーネントビュー 実行コンテキストビュー ログビュー ROBOMEC2013 RTM 講習会 30
![カメラ関連コンポーネントの起動 Naming Serviceの起動 [ スタート ] メニューから [](/docs-images/101/150326876/images/16-0.jpg "プログラム ] [OpenRTM-aist 1.")
![1] [C++] [tools] [Start Naming Service]](/docs-images/101/150326876/images/16-1.jpg "CameraViewerCompの起動 [ スタート ] メニューから起動 [ 1] [C++]")
![[components] [opencv-rtcs] [CameraViewerComp.](/docs-images/101/150326876/images/16-2.jpg "exe] DirectShowCamCompの起動 [ スタート ] メニューから起動 [ 1]")
![[C++] [components] [opencv-rtcs] [DirectShowCamComp.](/docs-images/101/150326876/images/16-3.jpg "exe] 2013.5.")

16 カメラ関連コンポーネントの起動 Naming Serviceの起動 [ スタート ] メニューから [ プログラム ] [OpenRTM-aist 1.1] [C++] [tools] [Start Naming Service] CameraViewerCompの起動 [ スタート ] メニューから起動 [ プログラム ] [OpenRTM-aist 1.1] [C++] [components] [opencv-rtcs] [CameraViewerComp.exe] DirectShowCamCompの起動 [ スタート ] メニューから起動 [ プログラム ] [OpenRTM-aist 1.1] [C++] [components] [opencv-rtcs] [DirectShowCamComp.exe] ROBOMEC2013 RTM 講習会 31 RT システム構築の基本操作 ネームサービスへ接続 対象ネームサーバのアドレス, ポートを指定 ポート省略時のポート番号は設定画面にて設定可能 システムエディタの起動 ROBOMEC2013 RTM 講習会 32





17 RT システム構築の基本操作 RT コンポーネントの配置 ネームサービスビューから対象コンポーネントをドラッグアンドドロップ ポートの接続 1 接続元のポートから接続先の2 接続プロファイルを入力ポートまでドラッグ ポートのプロパティが異なる場合など, 接続不可能なポートの場合にはアイコンが変化 ROBOMEC2013 RTM 講習会 33 RT システム構築の基本操作 コンポーネントの起動 各 RTC 単位で起動する場合 全ての RTC を一括で起動する場合 停止は Deactivate を実行 RTC 間の接続を切る場合には接続線を Delete もしくは, 右クリックメニューから Delete を選択 ROBOMEC2013 RTM 講習会 34

18 RT コンポーネントの動作シーケンス 3 参照を取得 ネームサーバ 4 ポートを接続 1 参照を登録 2 参照を登録 ROBOMEC2013 RTM 講習会 35 ネームサービスに接続できない場合 ネットワークインターフェースが 2 つある場合 RTC-A (Address B) RTC-A (Address B) ってどこ? Address B ネームサーバ RTC-A 登録はアドレスB 側のネームサーバ 登録はアドレスB 側のネームサーバ Address A こちらのアドレスを基に CORBA 参照を生成 RTC.confについて RTC 起動時の登録先 NamingServiceや 登録情報などについて記述 記述例 : corba.nameservers: localhost:9876 naming.formats: SimpleComponent/%n.rtc corba.endpoints: : ROBOMEC2013 RTM 講習会 36
 の動作を停止する 各コンポーネント単位での動作変更 全コンポーネントの動作を一括変更 ポップアップメニュー中でのキーバインドを追加 単独 RTC の Activate/Deactivate については, グローバルはショートカットキー定義を追加 2013.5.")
TimedOctet,TimedShortなどデータを送受信するポートの型.ex)corba_cdrなどデータの送信方法.ex)push, pullなど データ送信タイミング. 送信方法が Push の場合有効.New, Periodic, Flush から選択 データ送信周期 ( 単位 :Hz).SubscriptionType が Periodic の場合のみ有効 データ送信ポリシー.")
19 RT コンポーネントの動作 アクション名 Activate Deactivate Reset Exit Start Stop 説明対象 RTCを活性化する対象 RTCを非活性化する対象 RTCをエラー状態からリセットする対象 RTCの実行主体 (ExecutionContext) を停止し, 終了する実行主体 (ExecutionContext) の動作を開始する実行主体 (ExecutionContext) の動作を停止する 各コンポーネント単位での動作変更 全コンポーネントの動作を一括変更 ポップアップメニュー中でのキーバインドを追加 単独 RTC の Activate/Deactivate については, グローバルはショートカットキー定義を追加 ROBOMEC2013 RTM 講習会 37 接続プロファイル (DataPort) について 項目 Name DataType InterfaceType DataFlowType SubscriptionType Push Rate Push Policy Skip Count 設定内容接続の名称 ポート間で送受信するデータの型.ex)TimedOctet,TimedShortなどデータを送受信するポートの型.ex)corba_cdrなどデータの送信方法.ex)push, pullなど データ送信タイミング. 送信方法が Push の場合有効.New, Periodic, Flush から選択 データ送信周期 ( 単位 :Hz).SubscriptionType が Periodic の場合のみ有効 データ送信ポリシー.SubscriptionTypeがNew,Periodicの場合のみ有効. all,fifo,skip,newから選択送信データスキップ数.push PolicyがSkipの場合のみ有効 SubscriptionType New : バッファ内に新規データが格納されたタイミングで送信 Periodic : 一定周期で定期的にデータを送信 Flush : バッファを介さず即座に同期的に送信 Push Policy all : バッファ内のデータを一括送信 fifo : バッファ内のデータを FIFO で 1 個ずつ送信 skip : バッファ内のデータを間引いて送信 new : バッファ内のデータの最新値を送信 ( 古い値は捨てられる ) ROBOMEC2013 RTM 講習会 38
 データ読み出し時に, バッファが空だった場合の処理.")

20 接続プロファイル (DataPort) について 項目 Buffer length Buffer full policy Buffer write timeout Buffer empty policy Buffer read timeout 設定内容バッファの大きさ データ書き込み時に, バッファフルだった場合の処理. overwrite,do_nothing,blockから選択データ書き込み時に, タイムアウトイベントを発生させるまでの時間 ( 単位 : 秒 ) データ読み出し時に, バッファが空だった場合の処理. readback,do_nothing,blockから選択データ読み出し時に, タイムアウトイベントを発生させるまでの時間 ( 単位 : 秒 ) OutPort 側のバッファ,InPort 側のバッファそれぞれに設定可能 timeout として 0.0 を設定した場合は, タイムアウトしない Buffer Policy overwrite : 上書き readback : 最後の要素を再読み出し block : ブロック do_nothing : なにもしない Buffer Policy = Block+timeout 時間の指定で, 一定時間後読み出し / 書き込み不可能な場合にタイムアウトを発生させる処理となる ROBOMEC2013 RTM 講習会 39 接続プロファイル (ServicePort) について 項目 Name インターフェース情報 設定内容接続の名称 接続するインターフェースを設定. 接続対象の ServicePort に複数の ServiceInterface が定義されていた場合, どのインターフェースを実際に接続するかを指定 ROBOMEC2013 RTM 講習会 40

![exe]) [ スタート ] メニューから起動 [ プログラム ] [OpenRTM-aist 1.1] [C++] [components] [opencv-rtcs] [EdgeComp.exe] 2013.5.](/docs-images/101/150326876/images/21-1.jpg "22 ROBOMEC2013 RTM 講習会 41 システムの構成 Flip 側との接続 DirectShowCam Flip CameraViewerと接続 ( 接続プロファイルはデフォルト設定 )")
21 画像処理関連コンポーネントの起動 画像処理用コンポーネントの起動 Flipコンポーネントの起動先ほどコンパイルしたコンポーネントの起動 binaryにて指定したディレクトリ以下のsrc/debug 内のFlipComp.exeを起動 ([ プログラム ] [OpenRTM-aist 1.1] [C++] [components] [opencv-rtcs] [FlipComp.exe]) [ スタート ] メニューから起動 [ プログラム ] [OpenRTM-aist 1.1] [C++] [components] [opencv-rtcs] [EdgeComp.exe] ROBOMEC2013 RTM 講習会 41 システムの構成 Flip 側との接続 DirectShowCam Flip CameraViewerと接続 ( 接続プロファイルはデフォルト設定 ) AllActivateを実行 ROBOMEC2013 RTM 講習会 42







22 コンフィギュレーションの変更 ConfigurationView の 編集 表示されたダイアログ内で flip_mode の値を変更 Apply のチェックボックス flip_mode=1 flip_mode=0 flip_mode= ROBOMEC2013 RTM 講習会 43 システム構成の変更 Edge 側への差し替え Flipに繋がっている接続線を選択 Flip 側のPort 部分に表示されているハンドルをEdge 側のPortに繋ぎ替え 接続プロファイルはデフォルト設定のまま ROBOMEC2013 RTM 講習会 44

 binary")

23 RTCBuilder 補足説明 ドキュメント作成 (Windows,CMake 利用 ) binary にて指定したディレクトリ以下の doc/html/doxygen/html 以下にドキュメント 生成されたドキュメントの例 ROBOMEC2013 RTM 講習会 46




24 配布用パッケージ作成 (Windows,CMake 利用 ) ソリューション中の PACKAGE をビルド binary にて指定したディレクトリ直下に msi 形式のインストールパッケージを生成 コンポーネントのインストール先 C: Program Files OpenRTM-aist 1.1 components < 言語 >/< パッケージ名 > ROBOMEC2013 RTM 講習会 47 各種設定 DataPortにて利用するデータ型の指定 データ型を定義したIDLファイルが格納されているディレクトリを指定 1 メニューから ウインドウ - 設定 2 RtcBuilder を選択 3 新規 ボタンにて表示されるディレクトリ選択ダイアログにて場所を指定 独自に定義したデータ型を使用する場合のみ必要な設定 OpenRTM-aistにて標準で用意されている型のみを使用する場合には設定不要 標準型の定義内容格納位置 : [RTM_Root]rtm/idl BasicDataType.idl, ExtendedDataTypes.idlなど デフォルト設定では,[RTM_Root]=C:/Program Files/OpenRTM-aist/1.1/ ROBOMEC2013 RTM 講習会 48



")



25 コンパイル 実行 (Windows) 1 コード生成先ディレクトリ内の copyprops.bat をダブルクリックして, 設定ファイルをコピー 2VisualStudio を用いたビルド 3FlipComp Debug 内の FlipComp.exe を起動 ROBOMEC2013 RTM 講習会 49 ドキュメント作成 (Windows) 1Doxygen 用 GUI ツールを起動作業用ディレクトリ, ソース格納場所, 生成ファイル出力先, プロジェクト名を指定 2 Mode セクションにて, 出力内容, 使用言語を指定 3 Output セクションにて,html 出力を指定 3 Run タブにて, Run doxygen を実行 ROBOMEC2013 RTM 講習会 50
26 RTSystemEditor 補足説明 既存コンポーネントの再利用 プロジェクトとは ユーザが作成した様々なコンポーネントやツールの公開場所 ユーザ登録すれば 誰でも自分の成果物の紹介ページを作成可能 他のユーザに自分のコンポーネント等を紹介することができる プロジェクトのカテゴリ RTコンポーネント : 1つのコンポーネントまたは複数のコンポーネント群などが登録されています RTミドルウエア :OpenRTM-aistや他のミドルウエア ミドルウエア拡張モジュール等が登録されています ツール : 各種ツール (RTSystemEditorやrtshellを含む) ツールはこのカテゴリになります 関連ドキュメント : 関連ドキュメントとは 各種インターフェースの仕様書やマニュアル等を含みます ROBOMEC2013 RTM 講習会 52



27 プロジェクトページ タイプ 登録数 RTコンポーネント群 638 RTミドルウエア 29 ツール 39 仕様 文書 4 ハードウエア ROBOMEC2013 RTM 講習会 53 既存コンポーネントの再利用 プロジェクトから対象コンポーネントを取得 顔検出コンポーネント 対象コンポーネントをダウンロード ROBOMEC2013 RTM 講習会 54
 を解凍 解凍したディレクトリ内の以下のファイルを実行し, システムエディタ上に配置 $(FaceDetect_Root)/build/Release/FaceDetectComp.exe 2013.5.")
 をクリックして, 上記のIPアドレスを入力する")
28 既存コンポーネントの再利用 ダウンロードしたファイル (FaceDetect.zip) を解凍 解凍したディレクトリ内の以下のファイルを実行し, システムエディタ上に配置 $(FaceDetect_Root)/build/Release/FaceDetectComp.exe ROBOMEC2013 RTM 講習会 55 ネットワーク上の他の RTC との接続 IP アドレスの確認 スタートメニュー中の 全てのプログラム - アクセサリ - コマンドプロンプト コマンド ipconfig を実行 他 PC 上で動作する RTC との接続 隣の方の IP アドレスを聞く RTSystemEditorの ネームサーバを追加 ( コンセントのアイコン ) をクリックして, 上記のIPアドレスを入力する 隣の方のネームサーバ内の階層化にあるDirectShowCamをシステムエディタにDnDする 上記でDnDしたDirectShowCamと自分のPC 上で起動したCameraViewerのデータポートを接続する ROBOMEC2013 RTM 講習会 56
 example.configsample.")
![config_file: configsample.conf コンフィギュレーションファイル内 コンフィギュレーション情報 conf.[ コンフィグセット名 ].[ コンフィグパラメータ名 ] : [ デフォルト値 ] 例 ) conf.mode0.int_param0: 123 Widget 情報 conf. widget.](/docs-images/101/150326876/images/29-1.jpg "[ コンフィグパラメータ名 ] : [Widget 名 ] 例 ) conf. widget.str_param0: radio 制約情報 conf. constraints.[ コンフィグパラメータ名 ] : [ 制約情報 ] 例 ) conf. constraints.str_param0: (bar,foo,foo,dara) conf. [ コンフィグセット名 ].")
29 コンフィギュレーションビュー RT コンポーネントのコンフィギュレーション情報の確認 / 編集 変更あり 編集 ボタンにより, 各種コントロールを用いた一括編集が可能 Apply チェックボックスが ON の場合, 設定値を変更すると即座にコンポーネントに反映 テキストボックスからフォーカス外れる, ラジオボタンを選択する, スライドバーを操作する, スピナを変更する, などのタイミング コンフィギュレーション情報を複数保持している場合, 上部のタブで編集対象を切り替え 制約違反 即時反映 ROBOMEC2013 RTM 講習会 57 コンフィギュレーション情報の設定方法 rtc.conf 内 [ カテゴリ名 ].[ コンポーネント名 ].config_file: [ コンフィギュレーションファイル名 ] 例 ) example.configsample.config_file: configsample.conf コンフィギュレーションファイル内 コンフィギュレーション情報 conf.[ コンフィグセット名 ].[ コンフィグパラメータ名 ] : [ デフォルト値 ] 例 ) conf.mode0.int_param0: 123 Widget 情報 conf. widget.[ コンフィグパラメータ名 ] : [Widget 名 ] 例 ) conf. widget.str_param0: radio 制約情報 conf. constraints.[ コンフィグパラメータ名 ] : [ 制約情報 ] 例 ) conf. constraints.str_param0: (bar,foo,foo,dara) conf. [ コンフィグセット名 ].[ コンフィグパラメータ名 ] : [ 制約情報 ] 例 ) conf. mode1.str_param0: (bar2,foo2,dara2) RTC の利用者が設定するのではなく,RTC 開発者,RTC 管理者が設定することを想定. RTCBuilder を使用することで設定可能 ROBOMEC2013 RTM 講習会 58

 対象 EC を所有しているオーナー RTC のインスタンス名対象 EC に参加中の RTC の数 対象 EC")

30 実行コンテキストビュー RT コンポーネントが属する実行コンテキスト (EC) を一覧表示 属性名 id kind state component state owner participants 説明 ECのID. オンラインの場合には,context_handleを表示 ECの種別 (PERIODIC/EVENT_DRIVEN/OTHER) ECの状態 (RUNNING/STOPPING) 対象 RTCの状態 (ACTIVE/INACTIVE/ERROR) 対象 EC を所有しているオーナー RTC のインスタンス名対象 EC に参加中の RTC の数 対象 EC の実行周期の変更,EC 自身の動作開始 / 終了, 新規 RTC へのアタッチ, アタッチ済み RTC のデタッチも可能 ROBOMEC2013 RTM 講習会 59 マネージャビュー RT コンポーネントの新規インスタンスの生成 RTC 種別選択 コンフィギュレーション指定パラメータ conf.[configset 名 ].[Config パラメータ名 ]=[ 設定値 ] の形式にて ConfigurationSet の値も設定可能 コンフィギュレーション指定パラメータ設定 ROBOMEC2013 RTM 講習会 60





31 ログビュー 選択した RTC から収集したログ情報を一覧表示 近日機能追加予定 ログ収集の開始 / 停止 ログ情報のフィルタリング ROBOMEC2013 RTM 講習会 61 複合コンポーネント 複数の RTC をまとめて,1 つの RTC として扱うための仕組み 複合コンポーネントの作成方法 1 複数 RTC を選択している状態で右クリック 3 複合コンポーネントを生成 2 複合コンポーネントのプロパティを設定 項目 Manager Name Type Path Port 設定内容 複合コンポーネントを制御するマネージャを選択 複合コンポーネントのインスタンス名を入力 複合コンポーネントの型を選択 複合コンポーネントのパスを入力 外部に公開するポートを選択 生成対象複合コンポーネント外部と接続されている Port は強制的に公開されます ROBOMEC2013 RTM 講習会 62




32 複合コンポーネント 複合コンポーネントのタイプについて タイプ名 PeriodicECShared PeriodicStateShared Grouping 説明 複合コンポーネントエディタ 実行主体である ExecutionContext のみを共有. 各子コンポーネントはそれぞれの状態を持つ 実行主体であるExecutionContextと状態を共有便宜的にツール上のみでグループ化 複合コンポーネントをダブルクリックすることで表示 公開ポート 非公開ポート エディタ内に別 RTC を DnD することで, 子コンポーネントの追加が可能 追加した RTC のポートは全て非公開に設定 エディタ内の RTC を削除することで, 子コンポーネントの削除が可能 削除された RTC は, 親エディタに表示 ROBOMEC2013 RTM 講習会 63 複合コンポーネント 公開ポートの設定 複合コンポーネントビュー ポート公開情報 ポート公開情報を変更し, 適用 をクリック 複合コンポーネントエディタ 非公開ポートを 公開 公開ポートを 非公開 外部コンポーネントと接続されているポートを 非公開 に設定することはできません ROBOMEC2013 RTM 講習会 64




33 複合コンポーネント 複合コンポーネントの解除 1 複合 RTCを右クリックし, 複合コンポーネントの解除を選択 2 複合コンポーネントが分解され, 内部のRTCが表示 ネームサーバの登録 も解除される エディタ上で, (Delete キーなどで ) 単純に削除した場合は, エディタから表示が消えるのみ複合コンポーネントは解除されない ROBOMEC2013 RTM 講習会 65 オフラインエディタ RT コンポーネントの仕様を用いて RT システムを構築 実際の RT コンポーネントが動作している必要はない リポジトリビュー オフライン システムエディタ プロパティビュー コンフィギュレーションビュー ROBOMEC2013 RTM 講習会 66
 を行う形 OpenRTM-aist-1.")



34 設定画面 接続 - 状態通知オブザーバ RTCの生存確認用オブザーバに関する設定 RTSE 側から生存確認を行うのではなく,RTC 側から通知 ( ハートビート ) を行う形 OpenRTM-aist-1.1 以降で対応 ハートビート有効化 : ハートビートによる生存確認機能の有効化 ハートビート受信間隔 : ハートビートの受信間隔. この間隔以内にRTC 側からハートビートが送られてこないと生存確認失敗と判断 ハートビート受信回数 : この回数を超えて生存確認に失敗した場合, 対象 RTCに異常が発生したと判断 ROBOMEC2013 RTM 講習会 67 設定画面 RT Name Service View - 接続 接続周期 ネームサービスビューが, ネームサーバに情報を問い合わせる周期 RT Name Service View - 同期 タイムアウト待ち時間 ネームサービスビューが, リモートオブジェクトのレスポンスを待つ時間 RT System Editor - 接続 接続周期 システムエディタが, ネームサーバに情報を問い合わせる周期 接続周期 をゼロに設定するとネームサーバとの同期を行わない ROBOMEC2013 RTM 講習会 68
 10:00~16:45 場所 :")
35 設定画面 RT System Editor - アイコン 表示アイコン RTC 内に表示するアイコンを指定可能 カテゴリ単位,RTC 名称単位で設定が可能 ROBOMEC2013 RTM 講習会 69 RT ミドルウェア講習会 日時 :2012 年 5 月 22 日 ( 水 ) 10:00~16:45 場所 : つくば国際会議場小会議室 303
Microsoft PowerPoint RT講習会(説明用) [互換モード]
![Microsoft PowerPoint RT講習会(説明用) [互換モード]](/thumbs/101/150326987.jpg "Microsoft PowerPoint RT講習会(説明用) [互換モード]") RT ミドルウェア講習会 日時 :2012 年 7 月 19 日 ( 金 ) 13:00~17:00 場所 : 名城大学天白キャンパス研究実験棟 Ⅱ メカトロニクス工学科会議室 OpenRT Platform ロボット知能ソフトウェアプラットフォーム http://www.openrtp.jp/wiki/ システム設計, シミュレーション, 動作生成, シナリオ生成などをサポート OpenRT Platform
RT ミドルウェア講習会 日時 :2012 年 7 月 19 日 ( 金 ) 13:00~17:00 場所 : 名城大学天白キャンパス研究実験棟 Ⅱ メカトロニクス工学科会議室 OpenRT Platform ロボット知能ソフトウェアプラットフォーム http://www.openrtp.jp/wiki/ システム設計, シミュレーション, 動作生成, シナリオ生成などをサポート OpenRT Platform
RTMツール講習会
 青梅商工会議所主催 RTM 講習会 日時 :2011 年 7 月 25 日 ( 月 ) 10:30~17:30 場所 : 産業技術総合研究所中央第 2 本部情報棟 1F ネットワーク会議室 RT ミドルウェア講習会 10:30-11:15 11:15-12:00 13:00-14:00 14:15-15:15 15:30-16:00 16:15-17:30 第 1 部 :RTミドルウェアの概略紹介担当
青梅商工会議所主催 RTM 講習会 日時 :2011 年 7 月 25 日 ( 月 ) 10:30~17:30 場所 : 産業技術総合研究所中央第 2 本部情報棟 1F ネットワーク会議室 RT ミドルウェア講習会 10:30-11:15 11:15-12:00 13:00-14:00 14:15-15:15 15:30-16:00 16:15-17:30 第 1 部 :RTミドルウェアの概略紹介担当
Microsoft PowerPoint
 第 2 部 :RT コンポーネントの作成入門 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センター安藤慶昭 1 OpenRT Platform ロボット知能ソフトウェアプラットフォーム http://www.openrtp.jp/wiki/ システム設計, シミュレーション, 動作生成, シナリオ生成などをサポート OpenRT Platform ツール群 コンポーネント開発, システム開発における各開発フェーズの作業支援
第 2 部 :RT コンポーネントの作成入門 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センター安藤慶昭 1 OpenRT Platform ロボット知能ソフトウェアプラットフォーム http://www.openrtp.jp/wiki/ システム設計, シミュレーション, 動作生成, シナリオ生成などをサポート OpenRT Platform ツール群 コンポーネント開発, システム開発における各開発フェーズの作業支援
Microsoft PowerPoint RTM講習会(第2部) [互換モード]
![Microsoft PowerPoint RTM講習会(第2部) [互換モード]](/thumbs/103/159704025.jpg "Microsoft PowerPoint RTM講習会(第2部) [互換モード]") RT ミドルウェア講習会 日時 :2014 年 5 月 25 日 ( 日 ) 10:00~16:45 場所 : 富山国際会議場 2F 多目的会議室 (201 室 ) RT ミドルウェア講習会 10:00-10:50 11:00-11:50 11:50-12:00 12:00-13:00 13:00-15:00 15:00-16:45 第 1 部 ( その1): インターネットを利用したロボットサービスとRSiの取り組み
RT ミドルウェア講習会 日時 :2014 年 5 月 25 日 ( 日 ) 10:00~16:45 場所 : 富山国際会議場 2F 多目的会議室 (201 室 ) RT ミドルウェア講習会 10:00-10:50 11:00-11:50 11:50-12:00 12:00-13:00 13:00-15:00 15:00-16:45 第 1 部 ( その1): インターネットを利用したロボットサービスとRSiの取り組み
PowerPoint プレゼンテーション
 第 2 部 RT コンポーネント作成入門 第 2 部の目的 RT System Editor を用いた RTC ベースのシステム構築方法の習得 (RTC 運用時に必要な知識 ) RTC Builder を用いた RT コンポーネントのひな形作成方法の習得 (RTC 開発時に必要な知識 ) 2016/7/7 RT ミドルウェア講習会 @ 名城大学 1 OpenRTM-aist の開発支援ツール ロボット知能ソフトウェアプラットフォーム
第 2 部 RT コンポーネント作成入門 第 2 部の目的 RT System Editor を用いた RTC ベースのシステム構築方法の習得 (RTC 運用時に必要な知識 ) RTC Builder を用いた RT コンポーネントのひな形作成方法の習得 (RTC 開発時に必要な知識 ) 2016/7/7 RT ミドルウェア講習会 @ 名城大学 1 OpenRTM-aist の開発支援ツール ロボット知能ソフトウェアプラットフォーム
RTMツール講習会
 1 第 3 部の資料 設定ファイルの差し替え [OpenRTM_Root]/1.0/bin 配下にある以下の設定ファイルを差し替え rtc.conf,configsample.conf デフォルト設定でインストールした場合 C: Program Files OpenRTM-aist 1.0 bin 2 RT ミドルウエア講習会 日時 :2011 年 1 月 21 日 ( 金 ) 11:00~17:00
1 第 3 部の資料 設定ファイルの差し替え [OpenRTM_Root]/1.0/bin 配下にある以下の設定ファイルを差し替え rtc.conf,configsample.conf デフォルト設定でインストールした場合 C: Program Files OpenRTM-aist 1.0 bin 2 RT ミドルウエア講習会 日時 :2011 年 1 月 21 日 ( 金 ) 11:00~17:00
Microsoft PowerPoint RTM講習会_初級(第4部) [互換モード]
![Microsoft PowerPoint RTM講習会_初級(第4部) [互換モード]](/thumbs/101/150326877.jpg "Microsoft PowerPoint RTM講習会_初級(第4部) [互換モード]") PFCore(RT ミドルウェア ) トレーニング初級編 日時 :2013 年 1 月 21 日 ( 月 ) 13:00~17:00 場所 : 大阪大学吹田キャンパス産学連携本部 B 棟 1F 会議室 PFCore(RT ミドルウェア ) トレーニング初級編 13:00-13:20 13:20-14:10 14:10-15:05 15:05-15:20 15:20-17:00 第 1 部 : 先端計測分野における
PFCore(RT ミドルウェア ) トレーニング初級編 日時 :2013 年 1 月 21 日 ( 月 ) 13:00~17:00 場所 : 大阪大学吹田キャンパス産学連携本部 B 棟 1F 会議室 PFCore(RT ミドルウェア ) トレーニング初級編 13:00-13:20 13:20-14:10 14:10-15:05 15:05-15:20 15:20-17:00 第 1 部 : 先端計測分野における
スライド 1
 第 2 部 RT コンポーネント作成入門 宮本信彦 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センターロボットソフトウェアプラットフォーム研究チーム インストールの確認 (Windows) OpenRTM-aist OpenRTM-aist-1.1.2-RELEASE_x86.msi インストール後に再起動する Visual Studio 2013 以外 (2010 2012 2015)
第 2 部 RT コンポーネント作成入門 宮本信彦 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センターロボットソフトウェアプラットフォーム研究チーム インストールの確認 (Windows) OpenRTM-aist OpenRTM-aist-1.1.2-RELEASE_x86.msi インストール後に再起動する Visual Studio 2013 以外 (2010 2012 2015)
Microsoft PowerPoint RT講習会(説明用)_ [互換モード]
![Microsoft PowerPoint RT講習会(説明用)_ [互換モード]](/thumbs/96/129105636.jpg "Microsoft PowerPoint RT講習会(説明用)_ [互換モード]") マイクロマシン /MEMS 展 ROBOTECH 次世代ロボット製造技術展 RT ミドルウェア講習会 RT ミドルウェアインストールワークショップ 日時 :2012 年 7 月 13 日 ( 金 ) 10:30~12:30 場所 : 東京ビッグサイト東ホール特設会場 株式会社グローバルアシスト坂本武志 RT ミドルウェアの概要 RT ミドルウェアとは? RT = Robot Technology Real-time
マイクロマシン /MEMS 展 ROBOTECH 次世代ロボット製造技術展 RT ミドルウェア講習会 RT ミドルウェアインストールワークショップ 日時 :2012 年 7 月 13 日 ( 金 ) 10:30~12:30 場所 : 東京ビッグサイト東ホール特設会場 株式会社グローバルアシスト坂本武志 RT ミドルウェアの概要 RT ミドルウェアとは? RT = Robot Technology Real-time
Microsoft PowerPoint _3.RTMによるプログラミング_final.pptx
 RT ミドルウェアによるロボットプログラミング技術 3. RTM によるプログラミング インストールの確認 (Windows) OpenRTM-aist OpenRTM-aist-1.1.2-RELEASE_x86.msi インストール後に再起動する Python python-2.7.10.msi 2.7.11 は不具合が発 するため 推奨 OpenRTM-aist の 32bit 版をインストールする場合
RT ミドルウェアによるロボットプログラミング技術 3. RTM によるプログラミング インストールの確認 (Windows) OpenRTM-aist OpenRTM-aist-1.1.2-RELEASE_x86.msi インストール後に再起動する Python python-2.7.10.msi 2.7.11 は不具合が発 するため 推奨 OpenRTM-aist の 32bit 版をインストールする場合
スライド 1
 第 2 部 RT コンポーネント作成入門 宮本信彦 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センターロボットソフトウェアプラットフォーム研究チーム インストールの確認 (Windows) OpenRTM-aist OpenRTM-aist-1.1.2-RELEASE_x86.msi インストール後に再起動する Visual Studio 2013 以外 (2010 2012 2015)
第 2 部 RT コンポーネント作成入門 宮本信彦 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センターロボットソフトウェアプラットフォーム研究チーム インストールの確認 (Windows) OpenRTM-aist OpenRTM-aist-1.1.2-RELEASE_x86.msi インストール後に再起動する Visual Studio 2013 以外 (2010 2012 2015)
スライド 1
 第 2 部 RT コンポーネント作成入門 宮本信彦 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センターロボットソフトウェアプラットフォーム研究チーム インストールの確認 (Windows) OpenRTM-aist OpenRTM-aist-1.1.2-RELEASE_x86.msi インストール後に再起動する Visual Studio 2013 以外 (2010 2012 2015)
第 2 部 RT コンポーネント作成入門 宮本信彦 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センターロボットソフトウェアプラットフォーム研究チーム インストールの確認 (Windows) OpenRTM-aist OpenRTM-aist-1.1.2-RELEASE_x86.msi インストール後に再起動する Visual Studio 2013 以外 (2010 2012 2015)
Microsoft Word - RTSystemBuilderOnTheEA操作マニュアル_
 RT システムビルダー操作マニュアル Ver.0.7.1 2015/08/02 株式会社グローバルアシスト 目次 1 概要... 3 1.1 ツール概要... 3 1.2 対象... 3 1.3 制限... 3 2 インストールと設定... 4 2.1 RT システムビルダーのインストール... 4 2.2 RT システムビルダーの初期設定... 6 2.3 RT システムビルダー画面の起動...
RT システムビルダー操作マニュアル Ver.0.7.1 2015/08/02 株式会社グローバルアシスト 目次 1 概要... 3 1.1 ツール概要... 3 1.2 対象... 3 1.3 制限... 3 2 インストールと設定... 4 2.1 RT システムビルダーのインストール... 4 2.2 RT システムビルダーの初期設定... 6 2.3 RT システムビルダー画面の起動...
Raspberry Pi で WEB カメラを使用 会津大学 RT ミドルウェア講習会 2017 The University of Aizu
 会津大学 RT ミドルウェア講習会 2017 The University of Aizu 目次 1 コンポーネントをダウンロードする... 1 2 コンポーネントを Raspberry Pi へコピーする... 2 2.1 Raspberry Pi へコピーする... 2 3 Raspberry Pi 上でコンポーネントをビルドする... 3 3.1 コピーされたファイルを解凍する... 3 3.2
会津大学 RT ミドルウェア講習会 2017 The University of Aizu 目次 1 コンポーネントをダウンロードする... 1 2 コンポーネントを Raspberry Pi へコピーする... 2 2.1 Raspberry Pi へコピーする... 2 3 Raspberry Pi 上でコンポーネントをビルドする... 3 3.1 コピーされたファイルを解凍する... 3 3.2
Microsoft PowerPoint RT講習会(送付用)_ [互換モード]
![Microsoft PowerPoint RT講習会(送付用)_ [互換モード]](/thumbs/96/126720805.jpg "Microsoft PowerPoint RT講習会(送付用)_ [互換モード]") データ収集技術講演会 日時 :2012 年 12 月 1 日 ( 土 ) 13:00~17:00 場所 : 広島工業大学五日市キャンパス三宅の森 Nexus21 607 教室 RT-Middleware 活用 株式会社グローバルアシスト坂本武志 RT ミドルウェアとは? 2012.12.1 データ収集技術講演会 Copyright (C) Advanced Industrial Science And
データ収集技術講演会 日時 :2012 年 12 月 1 日 ( 土 ) 13:00~17:00 場所 : 広島工業大学五日市キャンパス三宅の森 Nexus21 607 教室 RT-Middleware 活用 株式会社グローバルアシスト坂本武志 RT ミドルウェアとは? 2012.12.1 データ収集技術講演会 Copyright (C) Advanced Industrial Science And
スライド 1
 第 2 部 RT コンポーネント作成入門 宮本信彦 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センターロボットソフトウェアプラットフォーム研究チーム 資料 (USB メモリで配布 ) ppt 第 2 部 WEB ページ ( 手順を記載したページ ) 第 2 部 (Windows) 第 2 部 (Ubuntu) installer OpenRTM-aist のインストールに問題があった場合に使用してください
第 2 部 RT コンポーネント作成入門 宮本信彦 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センターロボットソフトウェアプラットフォーム研究チーム 資料 (USB メモリで配布 ) ppt 第 2 部 WEB ページ ( 手順を記載したページ ) 第 2 部 (Windows) 第 2 部 (Ubuntu) installer OpenRTM-aist のインストールに問題があった場合に使用してください
スライド 1
 第 2 部 RT コンポーネント作成入門 宮本信彦 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センターロボットソフトウェアプラットフォーム研究チーム 資料 (USB メモリで配布 ) ppt 第 2 部 第 3 部のスライド WEB ページ ( 手順を記載したページ ) 第 2 部 (Windows) 第 2 部 (Ubuntu) 第 3 部 第 4 部 OpenRTM-aist_1.2.0
第 2 部 RT コンポーネント作成入門 宮本信彦 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センターロボットソフトウェアプラットフォーム研究チーム 資料 (USB メモリで配布 ) ppt 第 2 部 第 3 部のスライド WEB ページ ( 手順を記載したページ ) 第 2 部 (Windows) 第 2 部 (Ubuntu) 第 3 部 第 4 部 OpenRTM-aist_1.2.0
Microsoft Word - ModelAnalys操作マニュアル_
 モデル分析アドイン操作マニュアル Ver.0.5.0 205/0/05 株式会社グローバルアシスト 目次 概要... 3. ツール概要... 3.2 対象... 3 2 インストールと設定... 4 2. モデル分析アドインのインストール... 4 2.2 モデル分析アドイン画面の起動... 6 3 モデル分析機能... 7 3. 要求分析機能... 7 3.. ID について... 0 3.2 要求ツリー抽出機能...
モデル分析アドイン操作マニュアル Ver.0.5.0 205/0/05 株式会社グローバルアシスト 目次 概要... 3. ツール概要... 3.2 対象... 3 2 インストールと設定... 4 2. モデル分析アドインのインストール... 4 2.2 モデル分析アドイン画面の起動... 6 3 モデル分析機能... 7 3. 要求分析機能... 7 3.. ID について... 0 3.2 要求ツリー抽出機能...
二次元連続動的計画法による知的画像処理システム ImageFileSelector RTC 機能仕様書 ImageFileSelectorRTC Ver.1.0 ( 株 ) 東日本計算センター 1 / 11
 東日本計算センター 1 / 11") 機能仕様書 ImageFileSelectorRTC Ver.1.0 ( 株 ) 東日本計算センター 1 / 11 改版履歴 Ver 改版日 内容 0.5 2016/02/15 新規作成 0.6 2016/03/1 GUI 釦配置変更 1.0 2016/3/14 初版リリース 2 / 11 目次 目次...3 1. はじめに...4 1.1. 対象読者... 4 1.2. 適応範囲... 4 1.3.
機能仕様書 ImageFileSelectorRTC Ver.1.0 ( 株 ) 東日本計算センター 1 / 11 改版履歴 Ver 改版日 内容 0.5 2016/02/15 新規作成 0.6 2016/03/1 GUI 釦配置変更 1.0 2016/3/14 初版リリース 2 / 11 目次 目次...3 1. はじめに...4 1.1. 対象読者... 4 1.2. 適応範囲... 4 1.3.
(Microsoft PowerPoint - 070507_RT\215u\217K\211\357)
") RTミドルウエア ミドルウエアの 各 種 ツール 群 について RTコンポーネント 開 発 環 境 RTコンポーネントの 開 発 効 率 を 向 上 させるためのツール 群 RTミドルウェア コンポーネント フレームワーク 固 有 の 定 型 作 業 を 低 減 開 発 プラットフォームにEclipseを 採 用 設 計 ~ 実 装 ~テストまで, 開 発 サイクル 全 体 の 作 業 を 支 援
RTミドルウエア ミドルウエアの 各 種 ツール 群 について RTコンポーネント 開 発 環 境 RTコンポーネントの 開 発 効 率 を 向 上 させるためのツール 群 RTミドルウェア コンポーネント フレームワーク 固 有 の 定 型 作 業 を 低 減 開 発 プラットフォームにEclipseを 採 用 設 計 ~ 実 装 ~テストまで, 開 発 サイクル 全 体 の 作 業 を 支 援
Microsoft PowerPoint _2.プログラミングの基礎_final
 RT ミドルウェアによるロボットプログラミング技術 2. プログラミングの基礎 概要 1. プログラミングの基礎 2. Linuxでのプログラミング 3. Windowsでのプログラミング 目標 : 1.Linux および Windows での開発手法 ( 主に C++) を学ぶ 2.CMake を利用して 同じプログラムを Linux と Windows とでコンパイルして動作させる 2 プログラミングの流れ
RT ミドルウェアによるロボットプログラミング技術 2. プログラミングの基礎 概要 1. プログラミングの基礎 2. Linuxでのプログラミング 3. Windowsでのプログラミング 目標 : 1.Linux および Windows での開発手法 ( 主に C++) を学ぶ 2.CMake を利用して 同じプログラムを Linux と Windows とでコンパイルして動作させる 2 プログラミングの流れ
Microsoft PowerPoint _2.プログラミングの基礎_final.pptx
 RT ミドルウェアによるロボットプログラミング技術 2. プログラミングの基礎 概要 1. プログラミングの基礎 2. Linuxでのプログラミング 3. Windowsでのプログラミング 目標 : 1.Linux および Windows での開発手法 ( 主に C++) を学ぶ 2.CMake を利用して 同じプログラムを Linux と Windows とでコンパイルして動作させる 2 プログラミングの流れ
RT ミドルウェアによるロボットプログラミング技術 2. プログラミングの基礎 概要 1. プログラミングの基礎 2. Linuxでのプログラミング 3. Windowsでのプログラミング 目標 : 1.Linux および Windows での開発手法 ( 主に C++) を学ぶ 2.CMake を利用して 同じプログラムを Linux と Windows とでコンパイルして動作させる 2 プログラミングの流れ
GettingStartedTK2
 T-Kernel 2.0 Getting Started T-Engine フォーラム ダウンロード T-Engine フォーラムの web ページから T-Kernel 2.0 Software Package をダウンロード 必要なソフトウェアや開発環境が全て含まれている 2 Copyright 2011 by T-Engine Forum, All Rights Reserved. 1 ReadMe.txt
T-Kernel 2.0 Getting Started T-Engine フォーラム ダウンロード T-Engine フォーラムの web ページから T-Kernel 2.0 Software Package をダウンロード 必要なソフトウェアや開発環境が全て含まれている 2 Copyright 2011 by T-Engine Forum, All Rights Reserved. 1 ReadMe.txt
ユーザーズマニュアル 有線ネットワークシステム 発行日 2016 年 3 月 30 日
 ユーザーズマニュアル 有線ネットワークシステム 発行日 2016 年 3 月 30 日 目次 1 2 3 はじめに...1 1.1 前提知識...1 1.2 システム概要...1 1.3 動作環境...4 1.3.1 IP 経路情報監視 RTC...4 1.3.2 IP 経路情報ビューア RTC...6 インストール...7 2.1 RTC の入手方法...7 2.2 IP 経路情報監視 RTC...7
ユーザーズマニュアル 有線ネットワークシステム 発行日 2016 年 3 月 30 日 目次 1 2 3 はじめに...1 1.1 前提知識...1 1.2 システム概要...1 1.3 動作環境...4 1.3.1 IP 経路情報監視 RTC...4 1.3.2 IP 経路情報ビューア RTC...6 インストール...7 2.1 RTC の入手方法...7 2.2 IP 経路情報監視 RTC...7
HDC-EDI Manager Ver レベルアップ詳細情報 < 製品一覧 > 製品名バージョン HDC-EDI Manager < 対応 JavaVM> Java 2 Software Development Kit, Standard Edition 1.4 Java 2
 レベルアップ詳細情報 < 製品一覧 > 製品名バージョン HDC-EDI Manager 2.2.0 < 対応 JavaVM> Java 2 Software Development Kit, Standard Edition 1.4 Java 2 Platform Standard Edition Development Kit 5.0 Java SE Development Kit 6 < 追加機能一覧
レベルアップ詳細情報 < 製品一覧 > 製品名バージョン HDC-EDI Manager 2.2.0 < 対応 JavaVM> Java 2 Software Development Kit, Standard Edition 1.4 Java 2 Platform Standard Edition Development Kit 5.0 Java SE Development Kit 6 < 追加機能一覧
Microsoft Word - XOOPS インストールマニュアルv12.doc
 XOOPS インストールマニュアル ( 第 1 版 ) 目次 1 はじめに 1 2 XOOPS のダウンロード 2 3 パッケージの解凍 4 4 FFFTP によるファイルアップロード手順 5 5 ファイルアップロード後の作業 11 6 XOOPS のインストール 15 7 インストール後の作業 22 8 XOOPS ログイン後の作業 24 愛媛県総合教育センター情報教育研究室 Ver.1.0.2
XOOPS インストールマニュアル ( 第 1 版 ) 目次 1 はじめに 1 2 XOOPS のダウンロード 2 3 パッケージの解凍 4 4 FFFTP によるファイルアップロード手順 5 5 ファイルアップロード後の作業 11 6 XOOPS のインストール 15 7 インストール後の作業 22 8 XOOPS ログイン後の作業 24 愛媛県総合教育センター情報教育研究室 Ver.1.0.2
EV3 の初期設定
 目次 1 SD カードの準備... 2 2 EV3 へのアクセスの仕方... 3 3 OpenRTM-aist のインストール... 6 4 unzip のインストール... 8 当ドキュメントは下記ページを参考にしています LEGO Mindstorms EV3 活用事例 http://www.openrtm.org/openrtm/ja/casestudy/lego_mindstorm_ev3
目次 1 SD カードの準備... 2 2 EV3 へのアクセスの仕方... 3 3 OpenRTM-aist のインストール... 6 4 unzip のインストール... 8 当ドキュメントは下記ページを参考にしています LEGO Mindstorms EV3 活用事例 http://www.openrtm.org/openrtm/ja/casestudy/lego_mindstorm_ev3
Maser - User Operation Manual
 Maser 3 Cell Innovation User Operation Manual 2013.4.1 1 目次 1. はじめに... 3 1.1. 推奨動作環境... 3 2. データの登録... 4 2.1. プロジェクトの作成... 4 2.2. Projectへのデータのアップロード... 8 2.2.1. HTTPSでのアップロード... 8 2.2.2. SFTPでのアップロード...
Maser 3 Cell Innovation User Operation Manual 2013.4.1 1 目次 1. はじめに... 3 1.1. 推奨動作環境... 3 2. データの登録... 4 2.1. プロジェクトの作成... 4 2.2. Projectへのデータのアップロード... 8 2.2.1. HTTPSでのアップロード... 8 2.2.2. SFTPでのアップロード...
インテル(R) Visual Fortran コンパイラ 10.0
 Visual Fortran コンパイラ 10.0") インテル (R) Visual Fortran コンパイラー 10.0 日本語版スペシャル エディション 入門ガイド 目次 概要インテル (R) Visual Fortran コンパイラーの設定はじめに検証用ソースファイル適切なインストールの確認コンパイラーの起動 ( コマンドライン ) コンパイル ( 最適化オプションなし ) 実行 / プログラムの検証コンパイル ( 最適化オプションあり ) 実行
インテル (R) Visual Fortran コンパイラー 10.0 日本語版スペシャル エディション 入門ガイド 目次 概要インテル (R) Visual Fortran コンパイラーの設定はじめに検証用ソースファイル適切なインストールの確認コンパイラーの起動 ( コマンドライン ) コンパイル ( 最適化オプションなし ) 実行 / プログラムの検証コンパイル ( 最適化オプションあり ) 実行
メールサーバ仕様変更に伴うメール設定変更方法
 Proself 利用方法 大阪産業大学 情報科学センター 2012 年 8 月 29 日初版 目次 1.Proself とは... 3 2.Proself の開始方法... 4 3.Proself の終了方法... 5 4.Proself の使い方... 6 1ファイルのアップロード方法... 6 2ファイルのダウンロード方法... 10 3フォルダ / ファイルの削除方法... 12 4フォルダの作成方法...
Proself 利用方法 大阪産業大学 情報科学センター 2012 年 8 月 29 日初版 目次 1.Proself とは... 3 2.Proself の開始方法... 4 3.Proself の終了方法... 5 4.Proself の使い方... 6 1ファイルのアップロード方法... 6 2ファイルのダウンロード方法... 10 3フォルダ / ファイルの削除方法... 12 4フォルダの作成方法...
ch2_android_2pri.indd
 Android SDK をインストールしよう Android Developers サイトから Android SDK をダウンロードして インストールします 1 インターネットブラウザのアドレスバーに http://dl.google.com/android/ installer_r20-windows.exe と入力して g キーを押す 1 ファイルを保存するメッセージが表示される 2 [ 保存
Android SDK をインストールしよう Android Developers サイトから Android SDK をダウンロードして インストールします 1 インターネットブラウザのアドレスバーに http://dl.google.com/android/ installer_r20-windows.exe と入力して g キーを押す 1 ファイルを保存するメッセージが表示される 2 [ 保存
V-Client for Mac ユーザーズガイド
 V-Client for Mac ユーザーズガイド 対応 Ver.3.0.0.1 1. 概要 V-Client を Mac にインストールすることにより 外出先などから V-edge へ接続することができます 2. 対象プラットフォーム macos(sierra 10.12.x, High Sierra 10.13.x, Mojave 10.14.x) 1 V-Client を利用できるようにするため
V-Client for Mac ユーザーズガイド 対応 Ver.3.0.0.1 1. 概要 V-Client を Mac にインストールすることにより 外出先などから V-edge へ接続することができます 2. 対象プラットフォーム macos(sierra 10.12.x, High Sierra 10.13.x, Mojave 10.14.x) 1 V-Client を利用できるようにするため
BizBrowser SmartDevice Android開発用スタートアップガイド
 Biz/Browser SmartDevice Android 開発用 スタートアップガイド 株式会社オープンストリーム Copyright(c) Open Stream, Inc. All Rights Reserved 1 目次 1. 事前準備... 3 2. Biz/Browser SmartDevice のインストール... 4 3. プロジェクトの作成 Hello World-... 5
Biz/Browser SmartDevice Android 開発用 スタートアップガイド 株式会社オープンストリーム Copyright(c) Open Stream, Inc. All Rights Reserved 1 目次 1. 事前準備... 3 2. Biz/Browser SmartDevice のインストール... 4 3. プロジェクトの作成 Hello World-... 5
Shareresearchオンラインマニュアル
 Chrome の初期設定 以下の手順で設定してください 1. ポップアップブロックの設定 2. 推奨する文字サイズの設定 3. 規定のブラウザに設定 4. ダウンロードファイルの保存先の設定 5.PDFレイアウトの印刷設定 6. ランキングやハイライトの印刷設定 7. 注意事項 なお 本マニュアルの内容は バージョン 61.0.3163.79 の Chrome を基に説明しています Chrome の設定手順や画面については
Chrome の初期設定 以下の手順で設定してください 1. ポップアップブロックの設定 2. 推奨する文字サイズの設定 3. 規定のブラウザに設定 4. ダウンロードファイルの保存先の設定 5.PDFレイアウトの印刷設定 6. ランキングやハイライトの印刷設定 7. 注意事項 なお 本マニュアルの内容は バージョン 61.0.3163.79 の Chrome を基に説明しています Chrome の設定手順や画面については
Team Foundation Server 2018 を使用したバージョン管理 補足資料
 Team Foundation Server 2018 を使用したバージョン管理 Magic xpa 3.0/Magic xpa 2.5/uniPaaS V1Plus 補足資料 マジックソフトウェア ジャパン株式会社 2018 年 8 月 24 日 本ドキュメントは Magic xpa 3.0/Magic xpa 2.5/uniPaaS V1Plus で Team Foundation Server(
Team Foundation Server 2018 を使用したバージョン管理 Magic xpa 3.0/Magic xpa 2.5/uniPaaS V1Plus 補足資料 マジックソフトウェア ジャパン株式会社 2018 年 8 月 24 日 本ドキュメントは Magic xpa 3.0/Magic xpa 2.5/uniPaaS V1Plus で Team Foundation Server(
1 開発ツールのインストール 最初に JDK をインストールし 次に IDE をインストールする という手順になります 1. JDK のインストール JDK のダウンロードとインストール JDK は次の URL でオラクル社のウェブページからダウンロードします
 1 開発ツールのインストール 最初に JDK をインストールし 次に IDE をインストールする という手順になります 1. JDK のインストール JDK のダウンロードとインストール JDK は次の URL でオラクル社のウェブページからダウンロードします http://www.oracle.com/technetwork/java/javase/downloads/index.html なお
1 開発ツールのインストール 最初に JDK をインストールし 次に IDE をインストールする という手順になります 1. JDK のインストール JDK のダウンロードとインストール JDK は次の URL でオラクル社のウェブページからダウンロードします http://www.oracle.com/technetwork/java/javase/downloads/index.html なお
Android アプリを作るための環境設定 Android アプリを作るのに必要なものは Android SDK と Java 開発環境の Eclipse です 環境設定作業の概要はまず Android SDK と Eclipse をそれぞれインストールします その後 Eclipse を起動し An
 Android アプリを作るための環境設定 Android アプリを作るのに必要なものは Android SDK と Java 開発環境の Eclipse です 環境設定作業の概要はまず Android SDK と Eclipse をそれぞれインストールします その後 Eclipse を起動し Android SDK の plugin を Eclipse にインストールします Eclipse のインストール時に
Android アプリを作るための環境設定 Android アプリを作るのに必要なものは Android SDK と Java 開発環境の Eclipse です 環境設定作業の概要はまず Android SDK と Eclipse をそれぞれインストールします その後 Eclipse を起動し Android SDK の plugin を Eclipse にインストールします Eclipse のインストール時に
スライド 1
 UEC Tokyo Dept. of Mechanical Engineering and Intelligent Systems OpenRTM を使ってみよう! - 基本編 ( コンソール版 )- 電気通信大学情報理工学研究科 知能機械工学専攻 長井隆行 中村友昭 RTM とは Robot Technology Middleware コンポーネント ( モジュール ) を動かす実行環境のこと ミドルウェア上で動作するコンポーネントであれば
UEC Tokyo Dept. of Mechanical Engineering and Intelligent Systems OpenRTM を使ってみよう! - 基本編 ( コンソール版 )- 電気通信大学情報理工学研究科 知能機械工学専攻 長井隆行 中村友昭 RTM とは Robot Technology Middleware コンポーネント ( モジュール ) を動かす実行環境のこと ミドルウェア上で動作するコンポーネントであれば
独立行政法人産業技術総合研究所 PMID-Extractor ユーザ利用マニュアル バイオメディシナル情報研究センター 2009/03/09 第 1.0 版
 独立行政法人産業技術総合研究所 PMID-Extractor ユーザ利用マニュアル バイオメディシナル情報研究センター 2009/03/09 第 1.0 版 目次 1. はじめに... 3 2. インストール方法... 4 3. プログラムの実行... 5 4. プログラムの終了... 5 5. 操作方法... 6 6. 画面の説明... 8 付録 A:Java のインストール方法について... 11
独立行政法人産業技術総合研究所 PMID-Extractor ユーザ利用マニュアル バイオメディシナル情報研究センター 2009/03/09 第 1.0 版 目次 1. はじめに... 3 2. インストール方法... 4 3. プログラムの実行... 5 4. プログラムの終了... 5 5. 操作方法... 6 6. 画面の説明... 8 付録 A:Java のインストール方法について... 11
スマートにプログラミング Android 入門編第 2 版 SDK4/2.3 対応 よくあるご質問 (FAQ) ここでは 読者の皆様から寄せられた質問の中で 比較的多く見受けられたトラブル事例とその解決策を集め掲載致しました お困りの際の解決のヒントとしてご利用下さい なお スマートにプログラミング
 ここでは 読者の皆様から寄せられた質問の中で 比較的多く見受けられたトラブル事例とその解決策を集め掲載致しました お困りの際の解決のヒントとしてご利用下さい なお スマートにプログラミング") スマートにプログラミング Android 入門編第 2 版 SDK4/2.3 対応 よくあるご質問 (FAQ) ここでは 読者の皆様から寄せられた質問の中で 比較的多く見受けられたトラブル事例とその解決策を集め掲載致しました お困りの際の解決のヒントとしてご利用下さい なお スマートにプログラミング入門編第 2 版 SDK4/2.3 における更新情報は 現時点では特にございません index 株式会社リックテレコム書籍出版部
スマートにプログラミング Android 入門編第 2 版 SDK4/2.3 対応 よくあるご質問 (FAQ) ここでは 読者の皆様から寄せられた質問の中で 比較的多く見受けられたトラブル事例とその解決策を集め掲載致しました お困りの際の解決のヒントとしてご利用下さい なお スマートにプログラミング入門編第 2 版 SDK4/2.3 における更新情報は 現時点では特にございません index 株式会社リックテレコム書籍出版部
zabbix エージェント インストールマニュアル [Windows Server] 第 1.2 版 2018 年 05 月 18 日 青い森クラウドベース株式会社
![zabbix エージェント インストールマニュアル [Windows Server] 第 1.2 版 2018 年 05 月 18 日 青い森クラウドベース株式会社](/thumbs/96/129418140.jpg "zabbix エージェント インストールマニュアル [Windows Server] 第 1.2 版 2018 年 05 月 18 日 青い森クラウドベース株式会社") zabbix エージェント インストールマニュアル [Windows Server] 第 1.2 版 2018 年 05 月 18 日 青い森クラウドベース株式会社 目次 1. はじめに... 1 1.1. 本書の内容... 1 1.2. 本書の記述範囲... 1 2. 事前準備... 2 2.1. zabbix エージェントのダウンロード... 2 2.2. ダウンロードファイルの展開... 3
zabbix エージェント インストールマニュアル [Windows Server] 第 1.2 版 2018 年 05 月 18 日 青い森クラウドベース株式会社 目次 1. はじめに... 1 1.1. 本書の内容... 1 1.2. 本書の記述範囲... 1 2. 事前準備... 2 2.1. zabbix エージェントのダウンロード... 2 2.2. ダウンロードファイルの展開... 3
ユーザーズマニュアル 2DCDP システム 発行日 2016 年 3 月 30 日
 ユーザーズマニュアル 2DCDP システム 発行日 2016 年 3 月 30 日 目次 1. はじめに... 1 2DCDP システムとは... 1 動作環境... 1 使用機器... 2 関連資料... 2 2. 本システムでできること... 2 3. 本システムのユーザインターフェースについて... 3 制御画面の構成... 3 2DCDP 専用ビューアの構成... 7 4. システム配置図...
ユーザーズマニュアル 2DCDP システム 発行日 2016 年 3 月 30 日 目次 1. はじめに... 1 2DCDP システムとは... 1 動作環境... 1 使用機器... 2 関連資料... 2 2. 本システムでできること... 2 3. 本システムのユーザインターフェースについて... 3 制御画面の構成... 3 2DCDP 専用ビューアの構成... 7 4. システム配置図...
機能仕様書 ロボット Raspberry Pi カメラ RTC Ver 発行日 2017 年 12 月 27 日公立大学法人会津大学株式会社東日本計算センター
 機能仕様書 ロボット Raspberry Pi カメラ RTC Ver.1.0.0 発行日 2017 年 12 月 27 日公立大学法人会津大学株式会社東日本計算センター 改版履歴 Ver 改版日 内容 1.0.0 2017/5/19 新規作成 2017/12/27 正式版発行 目次 1. はじめに... 1 1.1. 対象読者... 1 1.2. 適応範囲... 1 1.3. 開発環境及び使用機器...
機能仕様書 ロボット Raspberry Pi カメラ RTC Ver.1.0.0 発行日 2017 年 12 月 27 日公立大学法人会津大学株式会社東日本計算センター 改版履歴 Ver 改版日 内容 1.0.0 2017/5/19 新規作成 2017/12/27 正式版発行 目次 1. はじめに... 1 1.1. 対象読者... 1 1.2. 適応範囲... 1 1.3. 開発環境及び使用機器...
目次 専用アプリケーションをインストールする 1 アカウントを設定する 5 Windows クライアントから利用できる機能の紹介 7 1ファイル フォルダのアップロードとダウンロード 8 2ファイル更新履歴の管理 10 3 操作履歴の確認 12 4アクセスチケットの生成 ( フォルダ / ファイルの
 ServersMan@Disk Windows 版専用アプリケーション操作マニュアル 目次 専用アプリケーションをインストールする 1 アカウントを設定する 5 Windows クライアントから利用できる機能の紹介 7 1ファイル フォルダのアップロードとダウンロード 8 2ファイル更新履歴の管理 10 3 操作履歴の確認 12 4アクセスチケットの生成 ( フォルダ / ファイルの公開 ) 13
ServersMan@Disk Windows 版専用アプリケーション操作マニュアル 目次 専用アプリケーションをインストールする 1 アカウントを設定する 5 Windows クライアントから利用できる機能の紹介 7 1ファイル フォルダのアップロードとダウンロード 8 2ファイル更新履歴の管理 10 3 操作履歴の確認 12 4アクセスチケットの生成 ( フォルダ / ファイルの公開 ) 13
LCV-Net ファイルコンテナ ユーザーマニュアル
 LCV-Net ファイルコンテナ ユーザーマニュアル 目次 本手順について... 1 用語 機能解説 新機能について...... 2 3 1. ログイン方法... 4 1.1. ファイルコンテナ の画面の構成... 5 1.2. ファイル一覧... 6 2. 基本操作 2.1. フォルダの種類... 7 2.2. フォルダを作成する... 8 2.3.ファイルをアップロードする 2.3.1. ファイルを指定してアップロード...
LCV-Net ファイルコンテナ ユーザーマニュアル 目次 本手順について... 1 用語 機能解説 新機能について...... 2 3 1. ログイン方法... 4 1.1. ファイルコンテナ の画面の構成... 5 1.2. ファイル一覧... 6 2. 基本操作 2.1. フォルダの種類... 7 2.2. フォルダを作成する... 8 2.3.ファイルをアップロードする 2.3.1. ファイルを指定してアップロード...
改版履歴 Ver 改版日内容 /02/07 新規作成 2 / 18
 多目的俯瞰画像合成システム 機能仕様書 Crawler View 画像合成 RTC 発行日 2017 年 3 月 30 日 公立大学法人会津大学 株式会社東日本計算センター 1 / 18 改版履歴 Ver 改版日内容 1.0 2016/02/07 新規作成 2 / 18 1. 内容 1. はじめに... 4 1.1. 対象読者... 4 1.2. 適応範囲... 4 1.3. 開発環境及び使用機器...
多目的俯瞰画像合成システム 機能仕様書 Crawler View 画像合成 RTC 発行日 2017 年 3 月 30 日 公立大学法人会津大学 株式会社東日本計算センター 1 / 18 改版履歴 Ver 改版日内容 1.0 2016/02/07 新規作成 2 / 18 1. 内容 1. はじめに... 4 1.1. 対象読者... 4 1.2. 適応範囲... 4 1.3. 開発環境及び使用機器...
eWide利用者ガイド
 0 リファレンスマニュアル 日本語 FUJITSU 建設業ソリューション ewide 建設業向けパッケージ SaaS サービス リファレンスマニュアル ( 利用者ガイド ) 第 2.2 版 2014.10.02 改訂履歴 版数 日付 内容 1.0 2001.08.01 新規作成 2.0 2006.12.26 サービスメニューリニューアル 2.1 2010.02.23 構成の見直し 2.2 2014.10.02
0 リファレンスマニュアル 日本語 FUJITSU 建設業ソリューション ewide 建設業向けパッケージ SaaS サービス リファレンスマニュアル ( 利用者ガイド ) 第 2.2 版 2014.10.02 改訂履歴 版数 日付 内容 1.0 2001.08.01 新規作成 2.0 2006.12.26 サービスメニューリニューアル 2.1 2010.02.23 構成の見直し 2.2 2014.10.02
Oracle Enterprise Managerシステム監視プラグイン・インストレーション・ガイドfor Juniper Networks NetScreen Firewall, 10gリリース2(10.2)
") Oracle Enterprise Manager システム監視プラグイン インストレーション ガイド for Juniper Networks NetScreen Firewall 10g リリース 2(10.2) 部品番号 : B28468-01 原典情報 : B28041-01 Oracle Enterprise Manager System Monitoring Plug-in Installation
Oracle Enterprise Manager システム監視プラグイン インストレーション ガイド for Juniper Networks NetScreen Firewall 10g リリース 2(10.2) 部品番号 : B28468-01 原典情報 : B28041-01 Oracle Enterprise Manager System Monitoring Plug-in Installation
ホンダにおける RT ミドルウェア開発と標準化活動 株式会社本田技術研究所基礎技術研究センター関谷眞
 ホンダにおける RT ミドルウェア開発と標準化活動 株式会社本田技術研究所基礎技術研究センター関谷眞 目次 知能ロボットシステム概要 コンポーネント指向ミドルウェア HRTMの開発 ASIMOへの適用 HRTMとOpenRTM-aistの連携動作 標準化活動 知能ロボットシステム概要 センサーやアクチュエーターは追加や変更される システム構成は変更したくない センサー, アクチュエーターの関係を抽象化した
ホンダにおける RT ミドルウェア開発と標準化活動 株式会社本田技術研究所基礎技術研究センター関谷眞 目次 知能ロボットシステム概要 コンポーネント指向ミドルウェア HRTMの開発 ASIMOへの適用 HRTMとOpenRTM-aistの連携動作 標準化活動 知能ロボットシステム概要 センサーやアクチュエーターは追加や変更される システム構成は変更したくない センサー, アクチュエーターの関係を抽象化した
PRONETA
 PRONETA 操作概要 PROFINET IO デバイスの無償診断ツール シーメンス株式会社デジタルファクトリー事業本部ファクトリーオートメーション部 2015 年 12 月 22 日 目次 ここで紹介している操作は PRONETA バージョン 2.2 を基にしています PRONETA 概要 3 動作環境と起動方法 4 ホーム画面 5 ネットワーク解析画面 6 IOチェック画面 9 設定画面 13
PRONETA 操作概要 PROFINET IO デバイスの無償診断ツール シーメンス株式会社デジタルファクトリー事業本部ファクトリーオートメーション部 2015 年 12 月 22 日 目次 ここで紹介している操作は PRONETA バージョン 2.2 を基にしています PRONETA 概要 3 動作環境と起動方法 4 ホーム画面 5 ネットワーク解析画面 6 IOチェック画面 9 設定画面 13
Eclipse 操作方法 (Servlet/JSP 入門補助テキスト)
") Eclipse 操作方法 (Servlet/JSP 入門補助テキスト) 1. プロジェクトの作成 Eclipse はプロジェクトという単位でプログラムを管理します. 今回のサンプルを実行する為のプロジェクトとして intro プロジェクトを作成します. 1-1. Eclipse 左のツリー画面から空白部分を右クリックし New - Project... を選択します. 1-2. Web - Dynamic
Eclipse 操作方法 (Servlet/JSP 入門補助テキスト) 1. プロジェクトの作成 Eclipse はプロジェクトという単位でプログラムを管理します. 今回のサンプルを実行する為のプロジェクトとして intro プロジェクトを作成します. 1-1. Eclipse 左のツリー画面から空白部分を右クリックし New - Project... を選択します. 1-2. Web - Dynamic
SysMLに関する操作方法について
 SysML に関する 操作方法について (2017/12/21 版 ) SparxSystems Japan Co., Ltd. 前提 設定 2 利用条件 以下のいずれかの条件を満たすことが必要 Enterprise Architect+ 有償アドイン MDG Technology for SysML EA Suite システムエンジニアリング版あるいはアルティメット版 ( これらのエディションには
SysML に関する 操作方法について (2017/12/21 版 ) SparxSystems Japan Co., Ltd. 前提 設定 2 利用条件 以下のいずれかの条件を満たすことが必要 Enterprise Architect+ 有償アドイン MDG Technology for SysML EA Suite システムエンジニアリング版あるいはアルティメット版 ( これらのエディションには
Enterprise Architect 12.0 機能ガイド
 Enterprise Architect 12.0 feature guide by SparxSystems Japan (2015/2/18 最終更新 ) Copyright (c) 2015 Sparx Systems Japan 1 このドキュメントでは Enterprise Architect 12.0 で追加 改善された機能についてご紹介します 青字の 文字は操作方法を示しています なお
Enterprise Architect 12.0 feature guide by SparxSystems Japan (2015/2/18 最終更新 ) Copyright (c) 2015 Sparx Systems Japan 1 このドキュメントでは Enterprise Architect 12.0 で追加 改善された機能についてご紹介します 青字の 文字は操作方法を示しています なお
Steinberg 社 - VST3 対応シンセサイザービルド環境テンプレート (Windows 版 ) Quick 説明書 はじめにこの度は Steinberg 社 - VST3 対応シンセサイザービルド環境テンプレートをダウンロードして下さり 誠にありがとうございます 本説明書はビルド環境テンプ
 Quick 説明書 はじめにこの度は Steinberg 社 - VST3 対応シンセサイザービルド環境テンプレートをダウンロードして下さり 誠にありがとうございます 本説明書はビルド環境テンプ") Steinberg 社 - VST3 対応シンセサイザービルド環境テンプレート (Windows 版 ) Quick 説明書 はじめにこの度は Steinberg 社 - VST3 対応シンセサイザービルド環境テンプレートをダウンロードして下さり 誠にありがとうございます 本説明書はビルド環境テンプレートと Steinberg - VST 3.6.0 Audio Plug-Ins SDK に含まれるサンプルプログラムのビルド環境との違い
Steinberg 社 - VST3 対応シンセサイザービルド環境テンプレート (Windows 版 ) Quick 説明書 はじめにこの度は Steinberg 社 - VST3 対応シンセサイザービルド環境テンプレートをダウンロードして下さり 誠にありがとうございます 本説明書はビルド環境テンプレートと Steinberg - VST 3.6.0 Audio Plug-Ins SDK に含まれるサンプルプログラムのビルド環境との違い
クイックセットアップ for モバイル(iOS/Android)
") はじめに はじめに Enterprise DaaS( サーバ OS タイプ ) リモートアクセスオプション ( 以下リモートアクセス ) は 手元端末から対象機器に安全に接続できるリモートアクセスサービスです 手元端末 と は 対象機器 と は アクセスに使用する iphone/ipad Android 端末のことです MagicConnect サーバとは アクセス先となる会社 PC のことです リモートアクセス中継管理用サーバです
はじめに はじめに Enterprise DaaS( サーバ OS タイプ ) リモートアクセスオプション ( 以下リモートアクセス ) は 手元端末から対象機器に安全に接続できるリモートアクセスサービスです 手元端末 と は 対象機器 と は アクセスに使用する iphone/ipad Android 端末のことです MagicConnect サーバとは アクセス先となる会社 PC のことです リモートアクセス中継管理用サーバです
PowerPoint Presentation
 製品ソフトウェアのセットアップ手順 UNIX/Linux 編 1. セットアップファイルの選択開発環境 / 実行環境 / バージョン /Hotfix/ インストール先 OS 2. 対象セットアップファイルのダウンロード開発環境の場合は 2 つのファイルが対象 3. ソフトウェア要件の確認 4. ソフトウェアのインストール 5. ライセンスの認証 1 1. セットアップファイルの選択 選択項目選択肢該当チェック
製品ソフトウェアのセットアップ手順 UNIX/Linux 編 1. セットアップファイルの選択開発環境 / 実行環境 / バージョン /Hotfix/ インストール先 OS 2. 対象セットアップファイルのダウンロード開発環境の場合は 2 つのファイルが対象 3. ソフトウェア要件の確認 4. ソフトウェアのインストール 5. ライセンスの認証 1 1. セットアップファイルの選択 選択項目選択肢該当チェック
<4D F736F F D208D C8FEE95F18DEC90AC A B D836A B2E646F63>
 国土数値情報作成アプリケーション ( 指定地域データ等生成ツール ) 利用マニュアル 平成 20 年 3 月 国土交通省国土計画局 目次 1. ツール名 1 2. 機能概要 1 3. ツールのインストール 1 4. 使用方法 4 5. 動作環境 10 6. ツールのアンインストール 11 7.FAQ 12 1. ツール名 KSJ 指定地域データ等生成ツール -v#_##.exe (#_## はバージョン番号
国土数値情報作成アプリケーション ( 指定地域データ等生成ツール ) 利用マニュアル 平成 20 年 3 月 国土交通省国土計画局 目次 1. ツール名 1 2. 機能概要 1 3. ツールのインストール 1 4. 使用方法 4 5. 動作環境 10 6. ツールのアンインストール 11 7.FAQ 12 1. ツール名 KSJ 指定地域データ等生成ツール -v#_##.exe (#_## はバージョン番号
改訂履歴 日付バージョン記載ページ改訂内容 V2.1 - 初版を発行しました V3.1 P5 ドキュメントラベルが新規追加された事を追記 P7 P8 新しくなったラベルのツリー表示説明を追記 新しくなったラベルの作成 削除操作を追記 P9 ラベルのグループ
 改訂履歴 日付バージョン記載ページ改訂内容 2012-10-23 V2.1 - 初版を発行しました 2013-08-30 V3.1 P5 ドキュメントラベルが新規追加された事を追記 P7 P8 新しくなったラベルのツリー表示説明を追記 新しくなったラベルの作成 削除操作を追記 P9 ラベルのグループ別参照権限設定操作を追記 2015-06-16 V5.0 P27 クラスター入力値を帳票備考にコピーする説明を追記
改訂履歴 日付バージョン記載ページ改訂内容 2012-10-23 V2.1 - 初版を発行しました 2013-08-30 V3.1 P5 ドキュメントラベルが新規追加された事を追記 P7 P8 新しくなったラベルのツリー表示説明を追記 新しくなったラベルの作成 削除操作を追記 P9 ラベルのグループ別参照権限設定操作を追記 2015-06-16 V5.0 P27 クラスター入力値を帳票備考にコピーする説明を追記
任意の間隔での FTP 画像送信イベントの設定方法 はじめに 本ドキュメントでは AXIS ネットワークカメラ / ビデオエンコーダにおいて任意の間隔で画像を FTP サー バーへ送信するイベントの設定手順を説明します 設定手順手順 1:AXIS ネットワークカメラ / ビデオエンコーダの設定ページ
 はじめに 本ドキュメントでは AXIS ネットワークカメラ / ビデオエンコーダにおいて任意の間隔で画像を FTP サー バーへ送信するイベントの設定手順を説明します 設定手順手順 1:AXIS ネットワークカメラ / ビデオエンコーダの設定ページにアクセスする 1.Web ブラウザを起動します FW v6.50 以下の場合は Internet Explorer を FW v7.10 以降の場合は
はじめに 本ドキュメントでは AXIS ネットワークカメラ / ビデオエンコーダにおいて任意の間隔で画像を FTP サー バーへ送信するイベントの設定手順を説明します 設定手順手順 1:AXIS ネットワークカメラ / ビデオエンコーダの設定ページにアクセスする 1.Web ブラウザを起動します FW v6.50 以下の場合は Internet Explorer を FW v7.10 以降の場合は
目 次 1. はじめに ソフトの起動と終了 環境設定 発助 SMS ファイルの操作 電話番号設定 運用条件 回線情報 SMS 送信の開始と停止 ファイル出力... 16
 発助 SMS 操作マニュアル Ver1.2 2018.7.21 ソフトプラン合同会社 1/18 目 次 1. はじめに... 3 2. ソフトの起動と終了... 3 3. 環境設定... 5 4. 発助 SMS ファイルの操作... 7 5. 電話番号設定... 9 6. 運用条件... 11 7. 回線情報... 12 8.SMS 送信の開始と停止... 13 9. ファイル出力... 16 10.
発助 SMS 操作マニュアル Ver1.2 2018.7.21 ソフトプラン合同会社 1/18 目 次 1. はじめに... 3 2. ソフトの起動と終了... 3 3. 環境設定... 5 4. 発助 SMS ファイルの操作... 7 5. 電話番号設定... 9 6. 運用条件... 11 7. 回線情報... 12 8.SMS 送信の開始と停止... 13 9. ファイル出力... 16 10.
Oracle Un お問合せ : Oracle Data Integrator 11g: データ統合設定と管理 期間 ( 標準日数 ):5 コースの概要 Oracle Data Integratorは すべてのデータ統合要件 ( 大量の高パフォーマンス バッチ ローブンの統合プロセスおよ
:5 コースの概要 Oracle Data Integratorは すべてのデータ統合要件 ( 大量の高パフォーマンス バッチ ローブンの統合プロセスおよ") Oracle Un お問合せ : 0120- Oracle Data Integrator 11g: データ統合設定と管理 期間 ( 標準日数 ):5 コースの概要 Oracle Data Integratorは すべてのデータ統合要件 ( 大量の高パフォーマンス バッチ ローブンの統合プロセスおよびSOA 対応データ サービスへ ) を網羅する総合的なデータ統合プラットフォームです Oracle
Oracle Un お問合せ : 0120- Oracle Data Integrator 11g: データ統合設定と管理 期間 ( 標準日数 ):5 コースの概要 Oracle Data Integratorは すべてのデータ統合要件 ( 大量の高パフォーマンス バッチ ローブンの統合プロセスおよびSOA 対応データ サービスへ ) を網羅する総合的なデータ統合プラットフォームです Oracle
PC にソフトをインストールすることによって OpenVPN でセキュア SAMBA へ接続することができます 注意 OpenVPN 接続は仮想 IP を使用します ローカル環境にて IP 設定が被らない事をご確認下さい 万が一仮想 IP とローカル環境 IP が被るとローカル環境内接続が行えなくな
 操作ガイド Ver.2.3 目次 1. インストール... - 2-2. SAMBA Remote 利用... - 9-2.1. 接続確認... - 9-2.2. 自動接続... - 11-2.3. 編集... - 13-2.4. インポート... - 16-2.5. 削除... - 18-2.6. 参考資料 ( 接続状況が不安定な場合の対処方法について )... - 19-2.6.1. サービスの再起動...
操作ガイド Ver.2.3 目次 1. インストール... - 2-2. SAMBA Remote 利用... - 9-2.1. 接続確認... - 9-2.2. 自動接続... - 11-2.3. 編集... - 13-2.4. インポート... - 16-2.5. 削除... - 18-2.6. 参考資料 ( 接続状況が不安定な場合の対処方法について )... - 19-2.6.1. サービスの再起動...
Prog2_6th
 2017 年 11 月 2 日 ( 木 ) 実施 インテントインテントとは Android アプリは複数のアクティビティを持つことが出来, また, アクティビティ以外の要素も持つので, 複数のアクティビティ間, アクティビティとアクティビティ以外の要素との間といったオブジェクト間を結び付ける仕組みが必要となる その役割を担うのがインテントで, 複数のアプリ間やアプリとシステムとの間もインテントで結び付けることが出来る
2017 年 11 月 2 日 ( 木 ) 実施 インテントインテントとは Android アプリは複数のアクティビティを持つことが出来, また, アクティビティ以外の要素も持つので, 複数のアクティビティ間, アクティビティとアクティビティ以外の要素との間といったオブジェクト間を結び付ける仕組みが必要となる その役割を担うのがインテントで, 複数のアプリ間やアプリとシステムとの間もインテントで結び付けることが出来る
1. WebShare(HTML5 版 ) 編 1.1. ログイン / ログアウト ログイン 1 WebShare の URL にアクセスします xxxxx 部分は会社様によって異なります xxxxx 2 ユーザー名 パ
 編 1.1. ログイン / ログアウト ログイン 1 WebShare の URL にアクセスします xxxxx 部分は会社様によって異なります xxxxx 2 ユーザー名 パ") 操作ガイド Ver.2.3.1 目次 1. WebShare(HTML5 版 ) 編... - 2-1.1. ログイン / ログアウト... - 2-1.2. 表示更新... - 4-1.3. ファイル フォルダ一覧... - 5-1.3.1. フォルダ参照方法... - 5-1.3.2. フォルダ作成... - 8-1.3.3. アップロード... - 10-1.3.4. 名称変更... - 14-1.3.5.
操作ガイド Ver.2.3.1 目次 1. WebShare(HTML5 版 ) 編... - 2-1.1. ログイン / ログアウト... - 2-1.2. 表示更新... - 4-1.3. ファイル フォルダ一覧... - 5-1.3.1. フォルダ参照方法... - 5-1.3.2. フォルダ作成... - 8-1.3.3. アップロード... - 10-1.3.4. 名称変更... - 14-1.3.5.
第 1 章 : はじめに RogueWave Visualization for C++ の Views5.7 に付属している Views Studio を使い 簡単な GUI アプリケーションの開発手順を紹介します この文書では Windows 8 x64 上で Visual Studio2010
 RW View Studio Getting Started (1) : 簡単な GUI アプリケーションを作成する 目次 第 1 章はじめに...1 1.1 アプリケーションの概要... 1 1.2 Views Studio とは... 2 第 2 章 Views Studio を起動する...3 2.1 起動画面 ( メインウィンドウ ) の説明... 4 2.2 ガジェットエクステンション...
RW View Studio Getting Started (1) : 簡単な GUI アプリケーションを作成する 目次 第 1 章はじめに...1 1.1 アプリケーションの概要... 1 1.2 Views Studio とは... 2 第 2 章 Views Studio を起動する...3 2.1 起動画面 ( メインウィンドウ ) の説明... 4 2.2 ガジェットエクステンション...
Enterprise Architect 12.1 機能ガイド
 Enterprise Architect 12.1 feature guide by SparxSystems Japan Enterprise Architect 12.1 機能ガイド (2015/10/29 最終更新 ) Copyright (c) 2015 SparxSystems Japan 1 このドキュメントでは Enterprise Architect 12.1 で追加 改善される予定の機能についてご紹介します
Enterprise Architect 12.1 feature guide by SparxSystems Japan Enterprise Architect 12.1 機能ガイド (2015/10/29 最終更新 ) Copyright (c) 2015 SparxSystems Japan 1 このドキュメントでは Enterprise Architect 12.1 で追加 改善される予定の機能についてご紹介します
内容 1 はじめに インストールの手順 起動の手順 Enterprise Architect のプロジェクトファイルを開く 内容を参照する プロジェクトブラウザを利用する ダイアグラムを開く 便利な機能.
 Viewer manual by SparxSystems Japan Enterprise Architect 読み込み専用版 (Viewer) 利用マニュアル 内容 1 はじめに...3 2 インストールの手順...3 3 起動の手順...6 4 Enterprise Architect のプロジェクトファイルを開く...7 5 内容を参照する...8 5.1 プロジェクトブラウザを利用する...8
Viewer manual by SparxSystems Japan Enterprise Architect 読み込み専用版 (Viewer) 利用マニュアル 内容 1 はじめに...3 2 インストールの手順...3 3 起動の手順...6 4 Enterprise Architect のプロジェクトファイルを開く...7 5 内容を参照する...8 5.1 プロジェクトブラウザを利用する...8
HMD を用いた PT カメラのインターネット遠隔操作芝浦工業大学知能機械システム研究室 HMD(Head Mounted Display) を用いた PT(Pan-Tilt) カメラのインターネット遠隔操作 ユーザマニュアル (ver1.0) 2014 年 10 月 23 日 芝浦工業大学知能機械
 を用いた PT(Pan-Tilt) カメラのインターネット遠隔操作 ユーザマニュアル (ver1.0) 2014 年 10 月 23 日 芝浦工業大学知能機械") 芝浦工業大学知能機械システム研究室 HMD(Head Mounted Display) を用いた PT(Pan-Tilt) カメラのインターネット遠隔操作 ユーザマニュアル (ver1.0) 2014 年 10 月 23 日 芝浦工業大学知能機械システム研究室 荻谷浩史, 石田真一, 安田福啓, 松日楽信人 目次 1. はじめに... 2 1.1 RTC 群概要... 2 1.2 システム構成...
芝浦工業大学知能機械システム研究室 HMD(Head Mounted Display) を用いた PT(Pan-Tilt) カメラのインターネット遠隔操作 ユーザマニュアル (ver1.0) 2014 年 10 月 23 日 芝浦工業大学知能機械システム研究室 荻谷浩史, 石田真一, 安田福啓, 松日楽信人 目次 1. はじめに... 2 1.1 RTC 群概要... 2 1.2 システム構成...
ServerView Resource Orchestrator V3.0 ネットワーク構成情報ファイルツール(Excel形式)の利用方法
の利用方法") ServerView Resource Orchestrator V3.0 ネットワーク構成情報ファイル作成ツール mknetdevconf-tool-0300-1 本ファイルでは ServerView Resource Orchestrator V3.0 で使用する ネットワーク構成情報ファイル作成ツール の動作条件 使用方法 およびその他の重要な情報について説明しています 本ツールを使用する前に必ず最後まで目を通すようお願いします
ServerView Resource Orchestrator V3.0 ネットワーク構成情報ファイル作成ツール mknetdevconf-tool-0300-1 本ファイルでは ServerView Resource Orchestrator V3.0 で使用する ネットワーク構成情報ファイル作成ツール の動作条件 使用方法 およびその他の重要な情報について説明しています 本ツールを使用する前に必ず最後まで目を通すようお願いします
スライド 1
 UEC Tokyo Dept. of Mechanical Engineering and Intelligent Systems OpenRTM を使ってみよう! - 基本編 - 電気通信大学情報理工学研究科 知能機械工学専攻 長井隆行 中村友昭 RTM とは Robot Technology Middleware コンポーネント ( モジュール ) を動かす実行環境のこと ミドルウェア上で動作するコンポーネントであれば
UEC Tokyo Dept. of Mechanical Engineering and Intelligent Systems OpenRTM を使ってみよう! - 基本編 - 電気通信大学情報理工学研究科 知能機械工学専攻 長井隆行 中村友昭 RTM とは Robot Technology Middleware コンポーネント ( モジュール ) を動かす実行環境のこと ミドルウェア上で動作するコンポーネントであれば
(Microsoft Word - \203C\203\223\203X\203g\201[\203\213\203}\203j\203\205\203A\203\213version1.0 rev1.doc)
") インストールマニュアル 1/33 1 目次 インストールマニュアル... 1 1 目次... 2 2 変更履歴... 3 3 本手順書の範囲... 4 3.1 システム構成... 4 4 推奨環境... 4 4.1 ソフトウェア... 4 4.2 ハードウェア... 4 5 事前準備... 5 5.1 jazz.net のアカウントを作成... 5 5.2 My IBM のアカウントを作成... 6
インストールマニュアル 1/33 1 目次 インストールマニュアル... 1 1 目次... 2 2 変更履歴... 3 3 本手順書の範囲... 4 3.1 システム構成... 4 4 推奨環境... 4 4.1 ソフトウェア... 4 4.2 ハードウェア... 4 5 事前準備... 5 5.1 jazz.net のアカウントを作成... 5 5.2 My IBM のアカウントを作成... 6
PowerPoint プレゼンテーション
 環境設定 (IE11 Edge)(Edge は 国内 + 国外版 国内外 + 翻訳版 のみ ) SRPARTNER では印刷 ダウンロードなどに ActiveX アドオンを使用しており ログイン時にインストールメッセージが表示されます ご使用端末に初期設定いただく必要がございます 以下記載の設定を実施し 設定変更を行ってください 1. 保護モードの解除 1[ コントロールパネル ]-[ インタ -
環境設定 (IE11 Edge)(Edge は 国内 + 国外版 国内外 + 翻訳版 のみ ) SRPARTNER では印刷 ダウンロードなどに ActiveX アドオンを使用しており ログイン時にインストールメッセージが表示されます ご使用端末に初期設定いただく必要がございます 以下記載の設定を実施し 設定変更を行ってください 1. 保護モードの解除 1[ コントロールパネル ]-[ インタ -
CS-DRC1操作説明書
 操作説明書 プログラミングソフトウェア Windows 用 CS-DRC1 Rev. 1.0 IC-DRC1 デジタル小電力コミュニティ無線機 ご注意 : 設定内容の変更についてプログラミングソフトウェア (CS-DRC1) を起動したときの初期設定と無線機 (IC-DRC1) の設定値は 異なる場合があります 無線機の設定を変更する場合は 下記の手順 (1~3) で操作することをおすすめします 1
操作説明書 プログラミングソフトウェア Windows 用 CS-DRC1 Rev. 1.0 IC-DRC1 デジタル小電力コミュニティ無線機 ご注意 : 設定内容の変更についてプログラミングソフトウェア (CS-DRC1) を起動したときの初期設定と無線機 (IC-DRC1) の設定値は 異なる場合があります 無線機の設定を変更する場合は 下記の手順 (1~3) で操作することをおすすめします 1
Microsoft PowerPoint - 1_コンパイラ入門セミナー.ppt
 インテルコンパイラー 入門セミナー [ 対象製品 ] インテル C++ コンパイラー 9.1 Windows* 版インテル Visual Fortran コンパイラー 9.1 Windows* 版 資料作成 : エクセルソフト株式会社 Copyright 1998-2007 XLsoft Corporation. All Rights Reserved. 1 インテル コンパイラー入門 本セミナーの内容
インテルコンパイラー 入門セミナー [ 対象製品 ] インテル C++ コンパイラー 9.1 Windows* 版インテル Visual Fortran コンパイラー 9.1 Windows* 版 資料作成 : エクセルソフト株式会社 Copyright 1998-2007 XLsoft Corporation. All Rights Reserved. 1 インテル コンパイラー入門 本セミナーの内容
1. WebShare 編 1.1. ログイン / ログアウト ログイン 1 WebShare の URL にアクセスします xxxxx 部分は会社様によって異なります xxxxx. 2 ログイン名 パスワードを入力し
 操作ガイド Ver.2.3 目次 1. WebShare 編... - 2-1.1. ログイン / ログアウト... - 2-1.2. 表示更新... - 4-1.3. Java インストール... - 5-1.4. ファイル フォルダ一覧... - 11-1.4.1. フォルダ参照方法... - 11-1.4.2. フォルダ作成... - 16-1.4.3. アップローダ... - 18-1.4.4.
操作ガイド Ver.2.3 目次 1. WebShare 編... - 2-1.1. ログイン / ログアウト... - 2-1.2. 表示更新... - 4-1.3. Java インストール... - 5-1.4. ファイル フォルダ一覧... - 11-1.4.1. フォルダ参照方法... - 11-1.4.2. フォルダ作成... - 16-1.4.3. アップローダ... - 18-1.4.4.
Biz/Designer Vインストールガイド
 Biz/Browser AI 開発用 スタートアップガイド 株式会社オープンストリーム 目次 1. 事前準備... 3 2. Biz/Browser AI のインストール... 4 3. プロジェクトの作成 Hello World-... 5 4. Biz/Designer Mobile でリモートデバッグ設定をする... 13 5. Biz/Browser AI の設定... 14 6. リモートデバッグ...
Biz/Browser AI 開発用 スタートアップガイド 株式会社オープンストリーム 目次 1. 事前準備... 3 2. Biz/Browser AI のインストール... 4 3. プロジェクトの作成 Hello World-... 5 4. Biz/Designer Mobile でリモートデバッグ設定をする... 13 5. Biz/Browser AI の設定... 14 6. リモートデバッグ...
WebNACCS
 WebNACCS 操作説明書 第 1.0 版 2017 年 10 月 輸出入 港湾関連情報処理センター株式会社 改訂履歴 版数改訂日変更箇所変更内容変更理由 0.9 2016/11/30 接続試験版ーー 1.0 2017/10/26 2.3 ご注意 DPI 設定方法を追加問い合わせ対応 目次 はじめに... 1 動作環境... 2 概要... 2 動作確認環境... 3 ご注意... 4 事前準備...
WebNACCS 操作説明書 第 1.0 版 2017 年 10 月 輸出入 港湾関連情報処理センター株式会社 改訂履歴 版数改訂日変更箇所変更内容変更理由 0.9 2016/11/30 接続試験版ーー 1.0 2017/10/26 2.3 ご注意 DPI 設定方法を追加問い合わせ対応 目次 はじめに... 1 動作環境... 2 概要... 2 動作確認環境... 3 ご注意... 4 事前準備...
情報更新日 :2012/5/20 サンプルソースの文字化けについて [ トラブル事例 ] Eclipse に ダウンロードしたソースコードをインポートすると文字化けが起きる ( 関連箇所 : 0-1 はじめに ) [ 回答 ] 本書でその利用を前提としております Tech Fun Eclipse は
![情報更新日 :2012/5/20 サンプルソースの文字化けについて [ トラブル事例 ] Eclipse に ダウンロードしたソースコードをインポートすると文字化けが起きる ( 関連箇所 : 0-1 はじめに ) [ 回答 ] 本書でその利用を前提としております Tech Fun Eclipse は](/thumbs/91/105771928.jpg "情報更新日 :2012/5/20 サンプルソースの文字化けについて [ トラブル事例 ] Eclipse に ダウンロードしたソースコードをインポートすると文字化けが起きる ( 関連箇所 : 0-1 はじめに ) [ 回答 ] 本書でその利用を前提としております Tech Fun Eclipse は") スマートにプログラミング Android 入門編第 2 版 SDK4/2.3 対応 よくあるご質問 (FAQ) ここでは 読者の皆様から寄せられた質問の中で 比較的多く見受けられたトラブル事例 とその解決策を集め掲載致しました お困りの際の解決のヒントとしてご利用下さい index 株式会社リックテレコム書籍出版部 ( 情報更新日 :2012.8.13) ソースコードをインポートすると文字化けが起きる
スマートにプログラミング Android 入門編第 2 版 SDK4/2.3 対応 よくあるご質問 (FAQ) ここでは 読者の皆様から寄せられた質問の中で 比較的多く見受けられたトラブル事例 とその解決策を集め掲載致しました お困りの際の解決のヒントとしてご利用下さい index 株式会社リックテレコム書籍出版部 ( 情報更新日 :2012.8.13) ソースコードをインポートすると文字化けが起きる
Microsoft PowerPoint - Borland C++ Compilerの使用方法(v1.1).ppt [互換モード]
![Microsoft PowerPoint - Borland C++ Compilerの使用方法(v1.1).ppt [互換モード]](/thumbs/92/109692094.jpg "Microsoft PowerPoint - Borland C++ Compilerの使用方法(v1.1).ppt [互換モード]") Borland C++ Compiler の 使用方法 解説書 (v1.1) 1 準備 (1/2) 1. スタートメニューから コントロールパネル を開いて その中に デスクトップのカスタマイズ フォルダーオプション があるので開く エクスプローラー内の ツール フォルダーオプション などからも開ける 2. 表示 タブにある 登録されている拡張子は表示しない のチェックを外して OKを押す これでファイルの拡張子が表示されるようになった
Borland C++ Compiler の 使用方法 解説書 (v1.1) 1 準備 (1/2) 1. スタートメニューから コントロールパネル を開いて その中に デスクトップのカスタマイズ フォルダーオプション があるので開く エクスプローラー内の ツール フォルダーオプション などからも開ける 2. 表示 タブにある 登録されている拡張子は表示しない のチェックを外して OKを押す これでファイルの拡張子が表示されるようになった
対応 OS について WindowsOS への対応状況 2010 年 10 月時点で用意させていただいている CiscoVPN ソフトウェアですが 対応している OS は WindowsXp WindowsVista Windows7 となります また WindowsVista Windows7 の
 CiscoVPN 設定方法 平成 25 年 1 月 18 日版 はじめに CiscoVPN とは CiscoVPN を利用することによって自宅や会社のパソコン ( 以下 PC) から大学のサーバにあるご自身のホームディレクトリと学生 教員用の共通領域へアクセスすることができます 大学内の PC にて作成したファイルをホームディレクトリに保存していれば VPN 接続を行うことにより自宅の PC などからアクセスを行うことが可能となります
CiscoVPN 設定方法 平成 25 年 1 月 18 日版 はじめに CiscoVPN とは CiscoVPN を利用することによって自宅や会社のパソコン ( 以下 PC) から大学のサーバにあるご自身のホームディレクトリと学生 教員用の共通領域へアクセスすることができます 大学内の PC にて作成したファイルをホームディレクトリに保存していれば VPN 接続を行うことにより自宅の PC などからアクセスを行うことが可能となります
SAMBA Stunnel(Mac) 編 1. インストール 1 セキュア SAMBA の URL にアクセスし ログインを行います xxxxx 部分は会社様によって異なります xxxxx 2 Mac OS 版ダウンロー
 編 1. インストール 1 セキュア SAMBA の URL にアクセスし ログインを行います xxxxx 部分は会社様によって異なります xxxxx 2 Mac OS 版ダウンロー") 操作ガイド Ver.2.3 目次 1. インストール... - 2-2. SAMBA Stunnel 利用... - 5-2.1. 接続確認... - 5-2.2. 編集... - 9-2.3. インポート... - 12-2.4. 削除... - 14-3. 動作環境... - 15-4. 参考資料 ( 接続状況が不安定な場合の対処方法について )... - 16-4.1. サービスの再起動...
操作ガイド Ver.2.3 目次 1. インストール... - 2-2. SAMBA Stunnel 利用... - 5-2.1. 接続確認... - 5-2.2. 編集... - 9-2.3. インポート... - 12-2.4. 削除... - 14-3. 動作環境... - 15-4. 参考資料 ( 接続状況が不安定な場合の対処方法について )... - 16-4.1. サービスの再起動...
ホスティングA管理画面[Plesk]マニュアル コンテンツアップロード編
![ホスティングA管理画面[Plesk]マニュアル コンテンツアップロード編](/thumbs/89/99767250.jpg "ホスティングA管理画面[Plesk]マニュアル コンテンツアップロード編") ホスティング A 管理画面 [Plesk] マニュアルコンテンツアップロード編 Copyright (C) 2016 Rismon Business Portal Co.,Ltd. All Rights Reserved. Plesk 管理画面からのコンテンツアップロード Copyright (C) 2016 Rismon Business Portal Co.,Ltd. All Rights Reserved.
ホスティング A 管理画面 [Plesk] マニュアルコンテンツアップロード編 Copyright (C) 2016 Rismon Business Portal Co.,Ltd. All Rights Reserved. Plesk 管理画面からのコンテンツアップロード Copyright (C) 2016 Rismon Business Portal Co.,Ltd. All Rights Reserved.
クイックセットアップ for モバイル(Windows)
") はじめに はじめに Enterprise DaaS( サーバ OS タイプ ) リモートアクセスオプション ( 以下リモートアクセス ) は 手元端末から対象機器に安全に接続できるリモートアクセスサービスです 手元端末 と は 対象機器 と は アクセスに使用する Windows 端末のことです MagicConnect サーバとは アクセス先となる会社 PC のことです リモートアクセス中継管理用サーバです
はじめに はじめに Enterprise DaaS( サーバ OS タイプ ) リモートアクセスオプション ( 以下リモートアクセス ) は 手元端末から対象機器に安全に接続できるリモートアクセスサービスです 手元端末 と は 対象機器 と は アクセスに使用する Windows 端末のことです MagicConnect サーバとは アクセス先となる会社 PC のことです リモートアクセス中継管理用サーバです
厚生労働省版ストレスチェック実施プログラムバージョンアップマニュアル (Ver2.2 から Ver.3.2) 目次 1. プログラム概要 バージョンアップ実施手順 要注意 zip ファイル解凍の準備 Windows によって PC が保護されました と
 目次 1. プログラム概要 バージョンアップ実施手順 要注意 zip ファイル解凍の準備 Windows によって PC が保護されました と") 厚生労働省版ストレスチェック実施プログラムバージョンアップマニュアル (Ver2.2 から Ver.3.2) 目次 1. プログラム概要... 2 2. バージョンアップ実施手順... 3 3. 要注意 zip ファイル解凍の準備... 9 4. Windows によって PC が保護されました というダイアログが表示される場合.. 10 5. 初回実行時にインストーラが実行される場合... 11
厚生労働省版ストレスチェック実施プログラムバージョンアップマニュアル (Ver2.2 から Ver.3.2) 目次 1. プログラム概要... 2 2. バージョンアップ実施手順... 3 3. 要注意 zip ファイル解凍の準備... 9 4. Windows によって PC が保護されました というダイアログが表示される場合.. 10 5. 初回実行時にインストーラが実行される場合... 11
クライアント証明書導入マニュアル
 クライアント証明書導入マニュアル Windows10 用 第 1.1 版 2018 年 12 月 13 日 改訂履歴 版改訂日区分改訂箇所改訂内容 1.0 2016/01/08 新規 新規作成 1.1 2018/12/13 修正 画面デザイン変更に伴う修正 2 目次 1. はじめに... 4 2. Internet Explorer のセキュリティ設定について... 5 3. Internet Explorer
クライアント証明書導入マニュアル Windows10 用 第 1.1 版 2018 年 12 月 13 日 改訂履歴 版改訂日区分改訂箇所改訂内容 1.0 2016/01/08 新規 新規作成 1.1 2018/12/13 修正 画面デザイン変更に伴う修正 2 目次 1. はじめに... 4 2. Internet Explorer のセキュリティ設定について... 5 3. Internet Explorer
国土数値情報 XML シェープ変換ツール 操作説明書 平成 23 年 7 月 国土交通省国土政策局
 国土数値情報 XML シェープ変換ツール 操作説明書 平成 23 年 7 月 国土交通省国土政策局 目次 1. インストール...2 1.1. インストーラを起動する...2 1.2. JREをインストールする...3 1.3. 国土数値情報 XMLシェープ変換ツールをインストールする...4 1.4. 国土数値情報 XMLシェープ変換ツールをアンインストールする...6 1.4.1. インストーラからのアンインストール...6
国土数値情報 XML シェープ変換ツール 操作説明書 平成 23 年 7 月 国土交通省国土政策局 目次 1. インストール...2 1.1. インストーラを起動する...2 1.2. JREをインストールする...3 1.3. 国土数値情報 XMLシェープ変換ツールをインストールする...4 1.4. 国土数値情報 XMLシェープ変換ツールをアンインストールする...6 1.4.1. インストーラからのアンインストール...6
NSS利用者マニュアル
 C.1 共有フォルダ接続 操作の概要 C.2 Windows から接続 操作する C.3 Mac OS X から接続 操作する 65 C.1 共有フォルダ接続 操作の概要 アクセスが許可されている研究データ交換システムの個人用共有フォルダまたはメーリングリストの共有フォルダに接続して フォルダを作成したり ファイルをアップロードまたはダウンロードしたりすることができます 参考 共有フォルダのフォルダ名およびファイル名について共有フォルダのフォルダ名およびファイル名には
C.1 共有フォルダ接続 操作の概要 C.2 Windows から接続 操作する C.3 Mac OS X から接続 操作する 65 C.1 共有フォルダ接続 操作の概要 アクセスが許可されている研究データ交換システムの個人用共有フォルダまたはメーリングリストの共有フォルダに接続して フォルダを作成したり ファイルをアップロードまたはダウンロードしたりすることができます 参考 共有フォルダのフォルダ名およびファイル名について共有フォルダのフォルダ名およびファイル名には
各種パスワードについて マイナンバー管理票では 3 種のパスワードを使用します (1) 読み取りパスワード Excel 機能の読み取りパスワードです 任意に設定可能です (2) 管理者パスワード マイナンバー管理表 の管理者のパスワードです 管理者パスワード はパスワードの流出を防ぐ目的で この操作
 読み取りパスワード Excel 機能の読み取りパスワードです 任意に設定可能です (2) 管理者パスワード マイナンバー管理表 の管理者のパスワードです 管理者パスワード はパスワードの流出を防ぐ目的で この操作") マイナンバー管理表 操作説明書 管理者用 2015 年 11 月 30 日 ( 初版 ) 概要 マイナンバー管理表 の動作環境は以下の通りです 対象 OS バージョン Windows7 Windows8 Windows8.1 Windows10 対象 Excel バージョン Excel2010 Excel2013 対象ファイル形式 Microsoft Excel マクロ有効ワークシート (.xlsm)
マイナンバー管理表 操作説明書 管理者用 2015 年 11 月 30 日 ( 初版 ) 概要 マイナンバー管理表 の動作環境は以下の通りです 対象 OS バージョン Windows7 Windows8 Windows8.1 Windows10 対象 Excel バージョン Excel2010 Excel2013 対象ファイル形式 Microsoft Excel マクロ有効ワークシート (.xlsm)
Maple 12 Windows版シングルユーザ/ネットワークライセンス
 Maple Network Tools インストール 設定手順書 更新日 2017/07/27 はじめに この手順書は Windows 32bit Windows 64bit Mac OS Linux に対応しております 詳しい動作環境については こちらを参照願います http://www.cybernet.co.jp/maple/product/system/maple.html この手順書の説明画面は
Maple Network Tools インストール 設定手順書 更新日 2017/07/27 はじめに この手順書は Windows 32bit Windows 64bit Mac OS Linux に対応しております 詳しい動作環境については こちらを参照願います http://www.cybernet.co.jp/maple/product/system/maple.html この手順書の説明画面は
SAMBA Remote(Mac) 編 PC にソフトをインストールすることによって OpenVPN でセキュア SAMBA へ接続することができます 注意 OpenVPN 接続は仮想 IP を使用します ローカル環境にて IP 設定が被らない事をご確認下さい 万が一仮想 IP とローカル環境 IP
 編 PC にソフトをインストールすることによって OpenVPN でセキュア SAMBA へ接続することができます 注意 OpenVPN 接続は仮想 IP を使用します ローカル環境にて IP 設定が被らない事をご確認下さい 万が一仮想 IP とローカル環境 IP") 操作ガイド Ver.2.3 目次 1. インストール... - 2-2. SAMBA Remote 利用... - 5-2.1. 接続確認... - 5-2.2. 自動接続... - 10-2.3. 編集... - 12-2.4. インポート... - 15-2.5. 削除... - 17-2.6. 参考資料 ( 接続状況が不安定な場合の対処方法について )... - 18-2.6.1. サービスの再起動...
操作ガイド Ver.2.3 目次 1. インストール... - 2-2. SAMBA Remote 利用... - 5-2.1. 接続確認... - 5-2.2. 自動接続... - 10-2.3. 編集... - 12-2.4. インポート... - 15-2.5. 削除... - 17-2.6. 参考資料 ( 接続状況が不安定な場合の対処方法について )... - 18-2.6.1. サービスの再起動...
32-2 一般ユーザー用 : ドキュメント カテゴリ MAP での選択または 抽出条件設定画面にて 抽出 をクリックする事で 該当するデータが一覧で表示されます 結果一覧画面 表示項目説明カテゴリカテゴリ名を表示します をクリックすると カテゴリ表示順昇順に並べ替えが行えます をクリックすると カテ
 32-1 一般ユーザー用 : ドキュメント ドキュメントをカテゴリで分類し登録できます 閲覧権限を付ける事が可能です 検索機能により必要なドキュメントが Web 上から取り出せます コラボレーション機能により 取引先 ( 協力会社 ) とも Web 上でドキュメント共有が行なえます ドキュメント一覧を表示する MagicHat より ドキュメント をクリックすると一覧画面が表示されます 画面左 カテゴリ
32-1 一般ユーザー用 : ドキュメント ドキュメントをカテゴリで分類し登録できます 閲覧権限を付ける事が可能です 検索機能により必要なドキュメントが Web 上から取り出せます コラボレーション機能により 取引先 ( 協力会社 ) とも Web 上でドキュメント共有が行なえます ドキュメント一覧を表示する MagicHat より ドキュメント をクリックすると一覧画面が表示されます 画面左 カテゴリ
メール利用マニュアル (Web ブラウザ編 ) 1
 1") メール利用マニュアル (Web ブラウザ編 ) 1 目次 1. メールサービス (OWA) への接続... 4 1.1. 前提条件... 4 1.2. 接続手順... 5 2. 基本設定の変更... 9 2.1. メール表示方法の変更... 9 2.2. 添付ファイルの設定... 10 2.3. 優先受信トレイ... 12 2.4. リンクのプレビュー... 13 2.6. メッセージ形式... 14
メール利用マニュアル (Web ブラウザ編 ) 1 目次 1. メールサービス (OWA) への接続... 4 1.1. 前提条件... 4 1.2. 接続手順... 5 2. 基本設定の変更... 9 2.1. メール表示方法の変更... 9 2.2. 添付ファイルの設定... 10 2.3. 優先受信トレイ... 12 2.4. リンクのプレビュー... 13 2.6. メッセージ形式... 14
intra-mart e-Builder ver 5
 e-builder ver 5.0.0 インストールガイド Page 1 ================================================================== 名称 e-builder version 5.0.0 制作者名 NTTDATA INTRAMART Corp. 動作環境 Page Producer (Windows2000, Xp) Framework
e-builder ver 5.0.0 インストールガイド Page 1 ================================================================== 名称 e-builder version 5.0.0 制作者名 NTTDATA INTRAMART Corp. 動作環境 Page Producer (Windows2000, Xp) Framework
Microsoft Word - Mac版 Eclipseの導入と設定.docx
 Mac OS X 版 Eclipse の導入と プログラムの作成方法 このドキュメントは下記のシステムで検証しました -1- Copyright (C) Takashi Kawaba 2012 目次 A. Eclipse を日本語化する 1. ダウンロードと解凍 3 2. features フォルダ内のファイルをコピーする 3 3. plugins 内のファイルをコピーする 4 B. Eclipse
Mac OS X 版 Eclipse の導入と プログラムの作成方法 このドキュメントは下記のシステムで検証しました -1- Copyright (C) Takashi Kawaba 2012 目次 A. Eclipse を日本語化する 1. ダウンロードと解凍 3 2. features フォルダ内のファイルをコピーする 3 3. plugins 内のファイルをコピーする 4 B. Eclipse
Mental ray for Maya インストール手順 1 Mental ray plug-in のインストール 1.1 下記リンクの NVIDIA mental ray の製品ページにて必要事項を記入し 必要なバージョンのチェックボックスを入れてから 今すぐダウンロード をクリックすると 記載し
 Mental ray for Maya インストール手順 1 Mental ray plug-in のインストール 1.1 下記リンクの NVIDIA mental ray の製品ページにて必要事項を記入し 必要なバージョンのチェックボックスを入れてから 今すぐダウンロード をクリックすると 記載したメールアドレス宛にダウンロードリンクが送られてくるのでインストーラーを入手する http://www.nvidia.co.jp/object/download-mental-ray-jp.html
Mental ray for Maya インストール手順 1 Mental ray plug-in のインストール 1.1 下記リンクの NVIDIA mental ray の製品ページにて必要事項を記入し 必要なバージョンのチェックボックスを入れてから 今すぐダウンロード をクリックすると 記載したメールアドレス宛にダウンロードリンクが送られてくるのでインストーラーを入手する http://www.nvidia.co.jp/object/download-mental-ray-jp.html
平成 31 年 2 月 22 日 岐阜県電子入札システムクライアント PC の Internet Explorer 11 設定手順 ( 受注者用 ) 岐阜県電子入札システムを利用するには インターネットエクスプローラーの設定を行う必要があります 設定項目の一覧 ( クリックすると説明箇所へジャンプし
 岐阜県電子入札システムを利用するには インターネットエクスプローラーの設定を行う必要があります 設定項目の一覧 ( クリックすると説明箇所へジャンプし") 平成 3 年 月 日 岐阜県電子入札システムクライアント PC の Internet Explorer 設定手順 ( 受注者用 ) 岐阜県電子入札システムを利用するには インターネットエクスプローラーの設定を行う必要があります 設定項目の一覧 ( クリックすると説明箇所へジャンプします ) #. お気に入りへの追加 #. 信頼済みサイトへの追加 #3. セキュリティの設定画面よりレベルのカスタマイズを行う
平成 3 年 月 日 岐阜県電子入札システムクライアント PC の Internet Explorer 設定手順 ( 受注者用 ) 岐阜県電子入札システムを利用するには インターネットエクスプローラーの設定を行う必要があります 設定項目の一覧 ( クリックすると説明箇所へジャンプします ) #. お気に入りへの追加 #. 信頼済みサイトへの追加 #3. セキュリティの設定画面よりレベルのカスタマイズを行う
Cuoreテンプレート
 R 1.1 株式会社クオーレ < 1 > 目次 1 XAMPP の設定を行う... 3 1.1 ダウンロード... 3 1.2 初期設定... 4 1.2.1 Apache MySQL の起動... 5 2 ソースコードをダウンロードする... 6 3 WEB サーバにソースコードをアップロードする... 7 4 インストール... 8 5 POSTGRESQL をインストールする... 13 5.1
R 1.1 株式会社クオーレ < 1 > 目次 1 XAMPP の設定を行う... 3 1.1 ダウンロード... 3 1.2 初期設定... 4 1.2.1 Apache MySQL の起動... 5 2 ソースコードをダウンロードする... 6 3 WEB サーバにソースコードをアップロードする... 7 4 インストール... 8 5 POSTGRESQL をインストールする... 13 5.1
ConsoleDA Agent For Serverインストールガイド
 ConsoleDA Agent For Server インストールガイド BDLINKV3-IN-AGFS-03 はじめに ConsoleDA Agent For Server インストールガイドでは ConsoleDA Agent For Server のインストール手順について説明します 以下 説明用画面は全て Windows Server 2008 R2 上で実行したときのイメージです 重要なお知らせ
ConsoleDA Agent For Server インストールガイド BDLINKV3-IN-AGFS-03 はじめに ConsoleDA Agent For Server インストールガイドでは ConsoleDA Agent For Server のインストール手順について説明します 以下 説明用画面は全て Windows Server 2008 R2 上で実行したときのイメージです 重要なお知らせ
2. メンバー管理 2.1 管理者権限 2.2 組織の登録 2.3 役職の登録 2.4 メンバーの登録 2.5 共有アドレス帳 2.6 グループの管理
 LINE WORKS 管理者トレーニング 2. メンバー管理 Ver 4.1.0 2018 年 6 月版 2. メンバー管理 2.1 管理者権限 2.2 組織の登録 2.3 役職の登録 2.4 メンバーの登録 2.5 共有アドレス帳 2.6 グループの管理 メンバーの登録手順 LINE WORKS に組織情報 メンバー情報を追加し サービスを利用開始します 各登録作業には管理者権限が必要になります
LINE WORKS 管理者トレーニング 2. メンバー管理 Ver 4.1.0 2018 年 6 月版 2. メンバー管理 2.1 管理者権限 2.2 組織の登録 2.3 役職の登録 2.4 メンバーの登録 2.5 共有アドレス帳 2.6 グループの管理 メンバーの登録手順 LINE WORKS に組織情報 メンバー情報を追加し サービスを利用開始します 各登録作業には管理者権限が必要になります
システム設計書
 二松學舍大学二松メール (Gmail) 学生向け移行マニュアル バージョン 2.1 発効日 改訂日 2013 年 3 月 29 日 二松学舎大学情報センター i 目次 1. 新二松メール (Gmail) ログイン ログアウト方法...1 1.1. 新二松メール (Gmail) ログイン方法... 1 1.2. 新二松メール (Gmail) ログアウト方法... 4 2. メールデータ移行方法...5
二松學舍大学二松メール (Gmail) 学生向け移行マニュアル バージョン 2.1 発効日 改訂日 2013 年 3 月 29 日 二松学舎大学情報センター i 目次 1. 新二松メール (Gmail) ログイン ログアウト方法...1 1.1. 新二松メール (Gmail) ログイン方法... 1 1.2. 新二松メール (Gmail) ログアウト方法... 4 2. メールデータ移行方法...5