PowerPoint Presentation
|
|
|
- ほだか ほうねん
- 4 years ago
- Views:
Transcription
1 知能システム論1 (15) 情報システム学研究科 情報メディアシステム学専攻 知能システム学講座 末廣尚士
2 - 参考URL OpenRTM-aist ロボット開発にフル活用するRTミドルウエア SEのためのRTシステム概論 2


3 - RTミドルウェア(OpenRTM)とは OMG*標準をベースとしたロボットのソフトウェ アシステム構築のミドルウェア 分散オブジェクト技術を利用したロボットシステ ムの構築技術 分散オブジェクト層での高い相互運用性に ネットワーク透過性 実装プラットフォームを規定しない 既存技術のラッピングが容易 Object Management Group. CORBAやUMLなどで有 名な分散オブジェクト技術を中心としたソフトウェアの国際 的な標準化団体 3
4 - RTコンポーネントを用いた ロボットシステム 4
5 - 社会的背景 生活支援ロボットへの期待 新ロボット開発における課題 ヒューマノイドの実現 Roombaの成功 少子高齢化 要介護者の増加 開発効率の向上 低コスト化 ユーザニーズに応じたカスタムメイドロボットの実現 Robot Technology (RT) のコンセプト1 モジュール化 空間分散化 ロボットはソフトウェアの時代に 1) 平成12年度 21世紀におけるロボット社会創造のための技術戦略調査報告書 社 日本機械工業連合会 社 日本ロボット工業会 5
6 - RTミドルウェアプロジェクト( ) モジュール化に基づいたロボット 従来のロボット ロボット Aアプリ ロボット Bアプリ ロボット Cアプリ ロボットC ロボットB ロボットA 通信ネットワーク ソ フ トブ ウ エ ア モータ セ ラ イ ラ リ ソ フ ト モー セ ラ イ サーボ 制御 力センサ モータ 本研究開発では こ の流れを実現するた めの基盤技術を確立 する 各ロボットは必要なロボットの要素を全部 一体として開発する 各ロボットの要素の切れ目が明確でなく 他のロボットには転用ができない 1つのロボットを作るのにコストがかかる 新しいロボットの開発が難しい サーボ 制御 力センサ モータ すでに供給されているモジュールを利用して新しいロ ボットを簡単に作ることができる 1つのロボットを作るためのコストが下がる モジュールのみの供給ができる ハードを持たないメーカもロボット産業に参入できる 新しいロボットが容易に開発できる 6
7 - RTミドルウェアの相互運用性 RTコンポーネントにすると 産業用ロボットも ヒューマノイドの腕も 同じソフトで動かせる HRP2 腕制御 コンポーネント ジョイスティック コンポーネント ロボットアーム制御用 共通インターフェース ヒューマノイド HRP2 プロメテ PA10 腕制御 コンポーネント 操縦用ジョイスティック RTコンポーネントの相互利用が可能 新しいロボットシステムの開発が容易になる 7
8 - RTMの仕組み 通信仕様の共通化 分散オブジェクト技術 既存 を利用 ロボット要素で必要な基本機能の共通化 RTコンポーネント RTC RTC ユーザ プログラム ユーザ プログラム 共通的 インタフェース 共通的 インタフェース ここの仕様を共通化する RTMユーザからはこ の部分は見えなくなる 8
9 - RTMがないと ユーザ プログラム モジュール間の切り口が不明確 開発者以外の再利用が困難 プログラム全部を作りこむ必要がある 9
10 - RTMがないと ユーザ プログラム 通信 プログラム ユーザ プログラム 通信 プログラム 非標準のプログラムでは仲間内でしか運用ができない 基本的に技術の共有 再利用が困難となる 10
11 - RTCとRT-Middleware logic device control algorithms applications etc RT Component Framework RT Component Logic/algorithm with common interfaces = RT-Component RTC RTC RTC RTC RTC RTC RTC RTC RTC RT-Middleware Execution environment for RTC RT-Middleware RTM RTCs can be distributed on network 11
12 - RT-Middlewareの階層 Advancement of software architecture RTC Application Application Library Library Object OS OS Object oriented development Overcome difference among languages OS Interface definition by IDL Well defined mapping to various languages Independent from OS, architecture Distributed objects to RTC Easy development distributed systems Well defined interfaces Standard interfaces defined by IDL Standard behavior defined by OMG RTC standard Utilize as common unit Introspection Network transparent RTM Object Middleware CORBA Conventional software to distributed objects RTC Middleware CORBA OS RTC Application Meta-data available from I/F Dynamic changes of connection/structure RTC provides robot specific functions 12
13 - RTCの構造 SDO Interfaces RTC Interfaces RTCEx Interfaces RTComponent Service RTCS Consumer RTComponent Consumer Service Proxy provide Consumer Proxy サービスフロー Activity State Machine InPort 0 Buffer InPort n put InPort Buffer Service use get reply provide OutPort0 Buffer データフロー put OutPort n Buffer get, subscribe reply push OutPort 13
14 - サーボコントロールRTC 14
15 - センサRTC センサから 15
16 - モータRTC モータへ 16
17 - サーボプログラムの動作1 RTCのオブジェクトリファレンスを取得 17
18 - サーボプログラムの動作2 IOポート情報を取得 18
19 - サーボプログラムの動作3 IOポートの接続 19
20 - サーボプログラムの動作4 20
21 - OpenRTMの使い方の概要(1) プラットフォーム OS: Linux, Windows,.. 計算機言語: C++(VC++), Python, Java ツール OpenRTM本体 Eclips開発環境 RTCBuilder, RTSystemEditor Pythonシステム統合環境: RtcHandle UML Modeling との連携 21
22 - OpenRTMの使い方概要(2) インストール Linux用 Windows用 RTCで何が出来るかの理解 サービスポート 入出力ポート 状態遷移モデル 状態遷移および状態ごとの振る舞いのプログラミング 入出力ポートのコールバック動作 コンフィギュレーション 多数のRTCの連携によるシステム構築 22
23 - OpenRTMの使い方概要(3) まずRTCの形を決める 何をするものか サービスポートの設計 入出力ポートの設計 RTCBuilderでテンプレートを作成 サービスや各状態での振る舞いのプログラム 各RTCの実行 RTSystemEditorやRtcHandleによるシステ ム構築およびシステムの動作制御 23
24 - OpenRTM-aist-Python Python-2.5.1がインストールされているなら OpenRTMのページから omniorbpy-3.1 OpenRTM-aist Python2.5-RC2 をインストールして 環境変数をセットするだけ さらにRtcLinkもインストールしておくと良い 24
25 - example(consolein) C:\Program Files\OpenRTM-aist\0.4\examples\Python\SimpleIO コンソールから入力された数値を出力ポートに出 力するだけ 25
26 - example(consolein) C:\Program Files\OpenRTM-aist\0.4\examples\Python\SimpleIO #/usr/bin/env python # -*- Python -*.. class ConsoleIn(OpenRTM.DataFlowComponentBase): def init (self, manager):.... def onexecute(self, ec_id): print "Please input number: ", self._data.data = long(sys.stdin.readline()) print "Sending to subscriber: ", self._data.data self._outport.write() return RTC.RTC_OK 26
27 - example(consoleout) C:\Program Files\OpenRTM-aist\0.4\examples\Python\SimpleIO 入力ポートから受け取ったデータをコンソールに出 力するだけ 27
28 - example(consoleout) C:\Program Files\OpenRTM-aist\0.4\examples\Python\SimpleIO #/usr/bin/env python # -*- Python -*.. class ConsoleOut(OpenRTM.DataFlowComponentBase): def init (self, manager):.... def onexecute(self, ec_id): if self._inport.isnew(): data = self._inport.read() print "Received: ", data.data print "TimeStamp: ", data.tm.sec, "[s] ", data.tm.nsec, "[ns]" time.sleep(0.001) return RTC.RTC_OK 28
29 - exampleの実行例 rtm-namingの実行 RtcLinkの実行 ConsoleInの実行 ConsoleOutの実行 ポートの接続 コンポーネントのactivate データの授受 29
30 - 7自由度アームの分解運動速度制御 30

31 - 力制御と遠隔操縦 31
32 - ロボティックルーム インターホン親機 モニタテレビ ディスプレイ 用PC リビング照明 キッチン照明 ダイニング照明 入出力 ホーム 制御PC サーバ PDA ヒューマンマシンI/F 移動ロボット 冷蔵庫ドア 無線LAN カメラ付き インターホン 子器 電動ドア 電気錠 32

33 - ロボティックルーム 33
34 - RTM開発の歴史 RTM (2003) OpenRTM (2005) コンポーネントモデルの整理 仕様提案のためのプロトタイプ OpenRTM-aist (2007) 最初のプロトタイプ 最終仕様策定のための参照モデル 2007今年のロボット大賞優秀賞受賞 OpenRTM-aist (2009予定) 公式仕様準拠 34
35 - OMGにおけるRTCの標準化の歴史 2004 Robot Information Forum ケベッ ク カナダ :RTCのRFPを発行 :RTC仕様の最終原案を採択 :RTCの公式仕様を発行 35
36 - RTCの仕様と実装の関係 RTC PIM RTC Level Spec. of RTC Interoperability in Concept Level Interoperability in Interfaces RTC PSM RTC PSM (CORBA) OpenRTM RTM Level OpenRTM-aist RTC PSM Other Other RTC Otherbased RTM RTC based RTM RTC based RTM Other Other OpenRTM Other OpenRTM implementation OpenRTM implementation implementation RTC PSM Some Extensions of Spec. RTC implementation models API for User Code Implementation and Tools Depends on Platforms (CPU, OS, Corba Implementation, Language, etc. ) 36
37 - OpenRTMのファミリー OpenRTM-aist OpenRTM-aist-Python OpenRTM-aist-Java OpenRTM.NET LW-RTCs RTC/CAN => RTC/CAN-Open RTC/PIC OpenRTM for DAQ... 37
38 - RTMの今後 ライバルたち 普及へ向けて プロジェクト ロボットビジネス推進協議会 海外 韓国 米国 EUなど 連携 ツールチェーンの完成 ロボットのMDAnの確立 Microsoft RSDK Willow Garage ROS RSi, NRF ロボットシステム全体構築モデル ロボット以外の分野へ 情報家電 情報化ハウス 自動車 38
39 - RTミドルウェアコンテスト < RTミドルウェアの普及 ロボット技術の共有と蓄積 RTミドルウェア技術者の育成 副賞 賞金 付き SICE SI2007, SI2008に SI2009も 39
40 - 知能システム論1のまとめ 本講義で身に付けて欲しかったこと 座標系の取り扱い 座標系でロボットを動かす 座標系で環境を記述する 関節 手先座標系 作業座標系の変換 Python言語のプログラミング ロボットアームの表示モデル 最小2乗法 ニュートン法 特異値分解 ロボットの モデル 環境 作業 世界観 これから知能ロボットの新しい流れがくるか 40
スライド 1
 UEC Tokyo Dept. of Mechanical Engineering and Intelligent Systems OpenRTM を使ってみよう! - 基本編 ( コンソール版 )- 電気通信大学情報理工学研究科 知能機械工学専攻 長井隆行 中村友昭 RTM とは Robot Technology Middleware コンポーネント ( モジュール ) を動かす実行環境のこと ミドルウェア上で動作するコンポーネントであれば
UEC Tokyo Dept. of Mechanical Engineering and Intelligent Systems OpenRTM を使ってみよう! - 基本編 ( コンソール版 )- 電気通信大学情報理工学研究科 知能機械工学専攻 長井隆行 中村友昭 RTM とは Robot Technology Middleware コンポーネント ( モジュール ) を動かす実行環境のこと ミドルウェア上で動作するコンポーネントであれば
スライド 1
 UEC Tokyo Dept. of Mechanical Engineering and Intelligent Systems OpenRTM を使ってみよう! - 基本編 - 電気通信大学情報理工学研究科 知能機械工学専攻 長井隆行 中村友昭 RTM とは Robot Technology Middleware コンポーネント ( モジュール ) を動かす実行環境のこと ミドルウェア上で動作するコンポーネントであれば
UEC Tokyo Dept. of Mechanical Engineering and Intelligent Systems OpenRTM を使ってみよう! - 基本編 - 電気通信大学情報理工学研究科 知能機械工学専攻 長井隆行 中村友昭 RTM とは Robot Technology Middleware コンポーネント ( モジュール ) を動かす実行環境のこと ミドルウェア上で動作するコンポーネントであれば
ホンダにおける RT ミドルウェア開発と標準化活動 株式会社本田技術研究所基礎技術研究センター関谷眞
 ホンダにおける RT ミドルウェア開発と標準化活動 株式会社本田技術研究所基礎技術研究センター関谷眞 目次 知能ロボットシステム概要 コンポーネント指向ミドルウェア HRTMの開発 ASIMOへの適用 HRTMとOpenRTM-aistの連携動作 標準化活動 知能ロボットシステム概要 センサーやアクチュエーターは追加や変更される システム構成は変更したくない センサー, アクチュエーターの関係を抽象化した
ホンダにおける RT ミドルウェア開発と標準化活動 株式会社本田技術研究所基礎技術研究センター関谷眞 目次 知能ロボットシステム概要 コンポーネント指向ミドルウェア HRTMの開発 ASIMOへの適用 HRTMとOpenRTM-aistの連携動作 標準化活動 知能ロボットシステム概要 センサーやアクチュエーターは追加や変更される システム構成は変更したくない センサー, アクチュエーターの関係を抽象化した
二次元連続動的計画法による知的画像処理システム ImageFileSelector RTC 機能仕様書 ImageFileSelectorRTC Ver.1.0 ( 株 ) 東日本計算センター 1 / 11
 東日本計算センター 1 / 11") 機能仕様書 ImageFileSelectorRTC Ver.1.0 ( 株 ) 東日本計算センター 1 / 11 改版履歴 Ver 改版日 内容 0.5 2016/02/15 新規作成 0.6 2016/03/1 GUI 釦配置変更 1.0 2016/3/14 初版リリース 2 / 11 目次 目次...3 1. はじめに...4 1.1. 対象読者... 4 1.2. 適応範囲... 4 1.3.
機能仕様書 ImageFileSelectorRTC Ver.1.0 ( 株 ) 東日本計算センター 1 / 11 改版履歴 Ver 改版日 内容 0.5 2016/02/15 新規作成 0.6 2016/03/1 GUI 釦配置変更 1.0 2016/3/14 初版リリース 2 / 11 目次 目次...3 1. はじめに...4 1.1. 対象読者... 4 1.2. 適応範囲... 4 1.3.
(Microsoft PowerPoint - 070507_RT\215u\217K\211\357)
") RTミドルウエア ミドルウエアの 各 種 ツール 群 について RTコンポーネント 開 発 環 境 RTコンポーネントの 開 発 効 率 を 向 上 させるためのツール 群 RTミドルウェア コンポーネント フレームワーク 固 有 の 定 型 作 業 を 低 減 開 発 プラットフォームにEclipseを 採 用 設 計 ~ 実 装 ~テストまで, 開 発 サイクル 全 体 の 作 業 を 支 援
RTミドルウエア ミドルウエアの 各 種 ツール 群 について RTコンポーネント 開 発 環 境 RTコンポーネントの 開 発 効 率 を 向 上 させるためのツール 群 RTミドルウェア コンポーネント フレームワーク 固 有 の 定 型 作 業 を 低 減 開 発 プラットフォームにEclipseを 採 用 設 計 ~ 実 装 ~テストまで, 開 発 サイクル 全 体 の 作 業 を 支 援
Microsoft PowerPoint RT講習会(送付用)_ [互換モード]
![Microsoft PowerPoint RT講習会(送付用)_ [互換モード]](/thumbs/96/126720805.jpg "Microsoft PowerPoint RT講習会(送付用)_ [互換モード]") データ収集技術講演会 日時 :2012 年 12 月 1 日 ( 土 ) 13:00~17:00 場所 : 広島工業大学五日市キャンパス三宅の森 Nexus21 607 教室 RT-Middleware 活用 株式会社グローバルアシスト坂本武志 RT ミドルウェアとは? 2012.12.1 データ収集技術講演会 Copyright (C) Advanced Industrial Science And
データ収集技術講演会 日時 :2012 年 12 月 1 日 ( 土 ) 13:00~17:00 場所 : 広島工業大学五日市キャンパス三宅の森 Nexus21 607 教室 RT-Middleware 活用 株式会社グローバルアシスト坂本武志 RT ミドルウェアとは? 2012.12.1 データ収集技術講演会 Copyright (C) Advanced Industrial Science And
高信頼RTミドルウエアの開発
 P04 RT,,,,,,,,,,,, Development of Dependable RT-Middleware Noriaki Ando, Geoffrey Biggs, Yoshihiro Nakabo, Daichi Mizuguchi, Kiyoshi Fujiwara, Isao Hara, Tetsuo Kotoku, AIST, Masayoshi Kondo, Mitsuhiro
P04 RT,,,,,,,,,,,, Development of Dependable RT-Middleware Noriaki Ando, Geoffrey Biggs, Yoshihiro Nakabo, Daichi Mizuguchi, Kiyoshi Fujiwara, Isao Hara, Tetsuo Kotoku, AIST, Masayoshi Kondo, Mitsuhiro
(Microsoft PowerPoint - daqmiddware-overview [\214\335\212\267\203\202\201[\203h])
![(Microsoft PowerPoint - daqmiddware-overview [\214\335\212\267\203\202\201[\203h])](/thumbs/99/141152602.jpg "(Microsoft PowerPoint - daqmiddware-overview [\214\335\212\267\203\202\201[\203h])") DAQ ミドルウエアの概要 2008 年 8 月 5 6 日 DAQ 実習 -DAQ-Middleware KEK エレクトロニクスシステムグループ KEK 測定器開発室 DAQ プロジェクト安芳次 DAQ ミドルウエアの狙い 多数の計算機を使ったネットワーク分散型 D AQ ソフトウエア ソフトウエアの汎用化 国際標準ロボット技術 (RT ミドルウエア ) の利用 XML によるデータ収集パラメータの記述
DAQ ミドルウエアの概要 2008 年 8 月 5 6 日 DAQ 実習 -DAQ-Middleware KEK エレクトロニクスシステムグループ KEK 測定器開発室 DAQ プロジェクト安芳次 DAQ ミドルウエアの狙い 多数の計算機を使ったネットワーク分散型 D AQ ソフトウエア ソフトウエアの汎用化 国際標準ロボット技術 (RT ミドルウエア ) の利用 XML によるデータ収集パラメータの記述
スライド 1
 (10-1) 2019.6.19 電気通信大学大学院情報理工学研究科末廣尚士 16. ロボットアーム RTC - 6 自由度ロボットアーム 6 回転関節シリアルリンク 2 - ロボットアーム RTC 入力 目標関節角度 :target_joints TimedDoubleSeq 型 ( 長さ 6), 単位はラジアン ハンドの開き幅 :h_width TimedDouble 型単位はメートル 出力 実際の関節角度
(10-1) 2019.6.19 電気通信大学大学院情報理工学研究科末廣尚士 16. ロボットアーム RTC - 6 自由度ロボットアーム 6 回転関節シリアルリンク 2 - ロボットアーム RTC 入力 目標関節角度 :target_joints TimedDoubleSeq 型 ( 長さ 6), 単位はラジアン ハンドの開き幅 :h_width TimedDouble 型単位はメートル 出力 実際の関節角度
RTM セミナー RT ミドルウェアによる実時間ロボット 制御系の構築とソフトウェア教育 静岡大学大学院工学研究科機械工学専攻 清水昌幸
 RTM セミナー 2013.11.12 RT ミドルウェアによる実時間ロボット 制御系の構築とソフトウェア教育 静岡大学大学院工学研究科機械工学専攻 清水昌幸 2 内容 RT ミドルウェアを用いた実時間ロボット制御系の構築 実時間制御の実現方法. ART-Linux を用いた実現例と実時間性能. ソフトウェア教育 研究室配属学生 ( 学部 4 年生 ) への導入教育の実施内容と結果. 3 ロボット制御系の一例
RTM セミナー 2013.11.12 RT ミドルウェアによる実時間ロボット 制御系の構築とソフトウェア教育 静岡大学大学院工学研究科機械工学専攻 清水昌幸 2 内容 RT ミドルウェアを用いた実時間ロボット制御系の構築 実時間制御の実現方法. ART-Linux を用いた実現例と実時間性能. ソフトウェア教育 研究室配属学生 ( 学部 4 年生 ) への導入教育の実施内容と結果. 3 ロボット制御系の一例
PowerPoint Presentation
 知能システム論 1 (9) 2015.6.17 情報システム学研究科情報メディアシステム学専攻知能システム学講座末廣尚士 13. アームモデルの Python による表現 理想ロボット :ArmWithHand 構造は関係なし move: 手先や持った物を動かす ハンド :Hand open, close, width アームのリンクの計算 :Link set_jparam シリアルリンクアーム :LinkedArm
知能システム論 1 (9) 2015.6.17 情報システム学研究科情報メディアシステム学専攻知能システム学講座末廣尚士 13. アームモデルの Python による表現 理想ロボット :ArmWithHand 構造は関係なし move: 手先や持った物を動かす ハンド :Hand open, close, width アームのリンクの計算 :Link set_jparam シリアルリンクアーム :LinkedArm
HMD を用いた PT カメラのインターネット遠隔操作芝浦工業大学知能機械システム研究室 HMD(Head Mounted Display) を用いた PT(Pan-Tilt) カメラのインターネット遠隔操作 ユーザマニュアル (ver1.0) 2014 年 10 月 23 日 芝浦工業大学知能機械
 を用いた PT(Pan-Tilt) カメラのインターネット遠隔操作 ユーザマニュアル (ver1.0) 2014 年 10 月 23 日 芝浦工業大学知能機械") 芝浦工業大学知能機械システム研究室 HMD(Head Mounted Display) を用いた PT(Pan-Tilt) カメラのインターネット遠隔操作 ユーザマニュアル (ver1.0) 2014 年 10 月 23 日 芝浦工業大学知能機械システム研究室 荻谷浩史, 石田真一, 安田福啓, 松日楽信人 目次 1. はじめに... 2 1.1 RTC 群概要... 2 1.2 システム構成...
芝浦工業大学知能機械システム研究室 HMD(Head Mounted Display) を用いた PT(Pan-Tilt) カメラのインターネット遠隔操作 ユーザマニュアル (ver1.0) 2014 年 10 月 23 日 芝浦工業大学知能機械システム研究室 荻谷浩史, 石田真一, 安田福啓, 松日楽信人 目次 1. はじめに... 2 1.1 RTC 群概要... 2 1.2 システム構成...
組込み用Linuxボード,BeagleBone Blackにおける RTミドルウェアの動作と開発支援ツール
 組込み用 Linux ボード,BeagleBone Black における RT ミドルウェアの動作と開発支援ツール 村上青児 ( 筑波大学 / 産総研 ) 安藤慶昭 ( 産総研 ) 関山守 ( 産総研 ) 鍛冶良作 ( 産総研 ) 谷川民生 ( 産総研 ) 神徳徹雄 ( 産総研 ) 1. はじめに 現在の組込みシステムの開発は専門性が求められるため開発の敷居が一般的に高い. これに対し, ロボットの要素技術をより開発者が使いやすいと感じる仕組みを作り,
組込み用 Linux ボード,BeagleBone Black における RT ミドルウェアの動作と開発支援ツール 村上青児 ( 筑波大学 / 産総研 ) 安藤慶昭 ( 産総研 ) 関山守 ( 産総研 ) 鍛冶良作 ( 産総研 ) 谷川民生 ( 産総研 ) 神徳徹雄 ( 産総研 ) 1. はじめに 現在の組込みシステムの開発は専門性が求められるため開発の敷居が一般的に高い. これに対し, ロボットの要素技術をより開発者が使いやすいと感じる仕組みを作り,
<4D F736F F F696E74202D CA48B868CF097AC95D78BAD89EF205B8CDD8AB B83685D>
 TSC 研究交流勉強会 14:30~15:30 産総研 臨海副都心センター別館 ( 新館 )11 階 11205~6 ロボット用ミドルウェアと半導体への期待 安藤慶昭 独立行政法人産業技術総合研究所知能システム研究部門 産総研 独立行政法人産業技術総合研究所 ライフサイエンス 情報 通信 環境 エネルギー ナノテク 材料 製造 地質 海洋 標準 計測 の6 分野 研究者 : 約 2000 名 知能システム研究部門
TSC 研究交流勉強会 14:30~15:30 産総研 臨海副都心センター別館 ( 新館 )11 階 11205~6 ロボット用ミドルウェアと半導体への期待 安藤慶昭 独立行政法人産業技術総合研究所知能システム研究部門 産総研 独立行政法人産業技術総合研究所 ライフサイエンス 情報 通信 環境 エネルギー ナノテク 材料 製造 地質 海洋 標準 計測 の6 分野 研究者 : 約 2000 名 知能システム研究部門
Microsoft Word - RTSystemBuilderOnTheEA操作マニュアル_
 RT システムビルダー操作マニュアル Ver.0.7.1 2015/08/02 株式会社グローバルアシスト 目次 1 概要... 3 1.1 ツール概要... 3 1.2 対象... 3 1.3 制限... 3 2 インストールと設定... 4 2.1 RT システムビルダーのインストール... 4 2.2 RT システムビルダーの初期設定... 6 2.3 RT システムビルダー画面の起動...
RT システムビルダー操作マニュアル Ver.0.7.1 2015/08/02 株式会社グローバルアシスト 目次 1 概要... 3 1.1 ツール概要... 3 1.2 対象... 3 1.3 制限... 3 2 インストールと設定... 4 2.1 RT システムビルダーのインストール... 4 2.2 RT システムビルダーの初期設定... 6 2.3 RT システムビルダー画面の起動...
第3部:プログラミング実習
 第 3 部 : プログラミング実習 会津大学 university of aizu 1 手順 1: サンプルコンポーネントの実行 university of aizu 2 実習概要 サンプルコンポーネントで起動したコンポーネントの接続の仕方などを学びます university of aizu 3 使用機材 Raspberry Pi ARM プロセッサを搭載したシングルボードコンピュータ SD カードに書き込んだ
第 3 部 : プログラミング実習 会津大学 university of aizu 1 手順 1: サンプルコンポーネントの実行 university of aizu 2 実習概要 サンプルコンポーネントで起動したコンポーネントの接続の仕方などを学びます university of aizu 3 使用機材 Raspberry Pi ARM プロセッサを搭載したシングルボードコンピュータ SD カードに書き込んだ
株式会社セックにおける ロボティクス分野への取り込み
 RT ミドルウェアサマーキャンプ 2014 RTM on Android の紹介 2014 年 8 月 5 日 開発本部第四開発部 中本啓之 さまざまな RT ミドルウェア 用途に合わせ 多様な RT ミドルウェアを開発 提供しています エンタープライズ層 OpenRTM.NET PC/ タブレット向け Android 版 RT ミドルウェア RTM on Android TM OpenRTM-aist
RT ミドルウェアサマーキャンプ 2014 RTM on Android の紹介 2014 年 8 月 5 日 開発本部第四開発部 中本啓之 さまざまな RT ミドルウェア 用途に合わせ 多様な RT ミドルウェアを開発 提供しています エンタープライズ層 OpenRTM.NET PC/ タブレット向け Android 版 RT ミドルウェア RTM on Android TM OpenRTM-aist
スライド 1
 (11-2) 2019.6.26 電気通信大学大学院情報理工学研究科末廣尚士 - 手先の軌道生成 ( 再掲 ) その都度, 逆運動学計算をするとは少し手間がかかる. 本当に必要か? 分割が小さければ, ニュートン ラフソン法で 収束 させる必要はないかもしれない. 2 - 直線軌道で分割する ( 再掲 ) 3 - 関節角の微少量をもとめる ( 再掲 ) 4 - 分解運動 ( 速度 ) 制御 ( 再掲
(11-2) 2019.6.26 電気通信大学大学院情報理工学研究科末廣尚士 - 手先の軌道生成 ( 再掲 ) その都度, 逆運動学計算をするとは少し手間がかかる. 本当に必要か? 分割が小さければ, ニュートン ラフソン法で 収束 させる必要はないかもしれない. 2 - 直線軌道で分割する ( 再掲 ) 3 - 関節角の微少量をもとめる ( 再掲 ) 4 - 分解運動 ( 速度 ) 制御 ( 再掲
機能仕様書 ロボット Raspberry Pi カメラ RTC Ver 発行日 2017 年 12 月 27 日公立大学法人会津大学株式会社東日本計算センター
 機能仕様書 ロボット Raspberry Pi カメラ RTC Ver.1.0.0 発行日 2017 年 12 月 27 日公立大学法人会津大学株式会社東日本計算センター 改版履歴 Ver 改版日 内容 1.0.0 2017/5/19 新規作成 2017/12/27 正式版発行 目次 1. はじめに... 1 1.1. 対象読者... 1 1.2. 適応範囲... 1 1.3. 開発環境及び使用機器...
機能仕様書 ロボット Raspberry Pi カメラ RTC Ver.1.0.0 発行日 2017 年 12 月 27 日公立大学法人会津大学株式会社東日本計算センター 改版履歴 Ver 改版日 内容 1.0.0 2017/5/19 新規作成 2017/12/27 正式版発行 目次 1. はじめに... 1 1.1. 対象読者... 1 1.2. 適応範囲... 1 1.3. 開発環境及び使用機器...
Microsoft PowerPoint DAQセミナー_Ando.pptx
 2013 年 9 月 9 日データ収集技術講演会, 広島工業大学 ロボットミドルウエア標準 RT ミドルウエア ( 独 ) 産業技術総合研究所知能システム研究部門安藤慶昭 1 つくば研究学園都市 KEK 筑波大 東京 ( 秋葉原 ) から45 分 1970 年代から開発 20 以上の国の研究機関 大学 企業等の研究所 20000 人以上の研究者 博士 7000 人以上 つくば駅 JAXA 産総研 2
2013 年 9 月 9 日データ収集技術講演会, 広島工業大学 ロボットミドルウエア標準 RT ミドルウエア ( 独 ) 産業技術総合研究所知能システム研究部門安藤慶昭 1 つくば研究学園都市 KEK 筑波大 東京 ( 秋葉原 ) から45 分 1970 年代から開発 20 以上の国の研究機関 大学 企業等の研究所 20000 人以上の研究者 博士 7000 人以上 つくば駅 JAXA 産総研 2
Microsoft PowerPoint - NEDO講座・RTMセミナー.pptx
 NEDO 特別講座 :RTM RTC セミナー ( 2013 年 5 月 28 日 ) ロボットミドルウエア標準 RTミドルウエア ( 独 ) 産業技術総合研究所知能システム研究部門安藤慶昭 1 RT とは? RT = Robot Technology 1) cf. IT Real-time 単体のロボットだけでなく さまざまなロボット技術に基づく機能要素をも含む ( センサ アクチュエータ, 制御スキーム
NEDO 特別講座 :RTM RTC セミナー ( 2013 年 5 月 28 日 ) ロボットミドルウエア標準 RTミドルウエア ( 独 ) 産業技術総合研究所知能システム研究部門安藤慶昭 1 RT とは? RT = Robot Technology 1) cf. IT Real-time 単体のロボットだけでなく さまざまなロボット技術に基づく機能要素をも含む ( センサ アクチュエータ, 制御スキーム
ユーザーズマニュアル 有線ネットワークシステム 発行日 2016 年 3 月 30 日
 ユーザーズマニュアル 有線ネットワークシステム 発行日 2016 年 3 月 30 日 目次 1 2 3 はじめに...1 1.1 前提知識...1 1.2 システム概要...1 1.3 動作環境...4 1.3.1 IP 経路情報監視 RTC...4 1.3.2 IP 経路情報ビューア RTC...6 インストール...7 2.1 RTC の入手方法...7 2.2 IP 経路情報監視 RTC...7
ユーザーズマニュアル 有線ネットワークシステム 発行日 2016 年 3 月 30 日 目次 1 2 3 はじめに...1 1.1 前提知識...1 1.2 システム概要...1 1.3 動作環境...4 1.3.1 IP 経路情報監視 RTC...4 1.3.2 IP 経路情報ビューア RTC...6 インストール...7 2.1 RTC の入手方法...7 2.2 IP 経路情報監視 RTC...7
スライド 1
 第 2 部 RT コンポーネント作成入門 宮本信彦 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センターロボットソフトウェアプラットフォーム研究チーム インストールの確認 (Windows) OpenRTM-aist OpenRTM-aist-1.1.2-RELEASE_x86.msi インストール後に再起動する Visual Studio 2013 以外 (2010 2012 2015)
第 2 部 RT コンポーネント作成入門 宮本信彦 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センターロボットソフトウェアプラットフォーム研究チーム インストールの確認 (Windows) OpenRTM-aist OpenRTM-aist-1.1.2-RELEASE_x86.msi インストール後に再起動する Visual Studio 2013 以外 (2010 2012 2015)
スライド 1
 RT ミドルウエアサマーキャンプ 2011 RT ミドルウエア概要 日時 : 2011 年 8 月 29 日 ( 月 ) 14:20-15:30 場所 : 産業技術総合研究所つくば第 2 事業所本部 情報棟 1 階交流会議室 ( 独 ) 産業技術総合研究所知能システム研究部門 栗原眞二 神徳徹雄 安藤慶昭 http://www.openrtm.org/ 概要 RTミドルウエア概要 OpenRTM-aistについて
RT ミドルウエアサマーキャンプ 2011 RT ミドルウエア概要 日時 : 2011 年 8 月 29 日 ( 月 ) 14:20-15:30 場所 : 産業技術総合研究所つくば第 2 事業所本部 情報棟 1 階交流会議室 ( 独 ) 産業技術総合研究所知能システム研究部門 栗原眞二 神徳徹雄 安藤慶昭 http://www.openrtm.org/ 概要 RTミドルウエア概要 OpenRTM-aistについて
Microsoft PowerPoint _3.RTMによるプログラミング_final.pptx
 RT ミドルウェアによるロボットプログラミング技術 3. RTM によるプログラミング インストールの確認 (Windows) OpenRTM-aist OpenRTM-aist-1.1.2-RELEASE_x86.msi インストール後に再起動する Python python-2.7.10.msi 2.7.11 は不具合が発 するため 推奨 OpenRTM-aist の 32bit 版をインストールする場合
RT ミドルウェアによるロボットプログラミング技術 3. RTM によるプログラミング インストールの確認 (Windows) OpenRTM-aist OpenRTM-aist-1.1.2-RELEASE_x86.msi インストール後に再起動する Python python-2.7.10.msi 2.7.11 は不具合が発 するため 推奨 OpenRTM-aist の 32bit 版をインストールする場合
改版履歴 Ver 改版日内容 /02/07 新規作成 2 / 18
 多目的俯瞰画像合成システム 機能仕様書 Crawler View 画像合成 RTC 発行日 2017 年 3 月 30 日 公立大学法人会津大学 株式会社東日本計算センター 1 / 18 改版履歴 Ver 改版日内容 1.0 2016/02/07 新規作成 2 / 18 1. 内容 1. はじめに... 4 1.1. 対象読者... 4 1.2. 適応範囲... 4 1.3. 開発環境及び使用機器...
多目的俯瞰画像合成システム 機能仕様書 Crawler View 画像合成 RTC 発行日 2017 年 3 月 30 日 公立大学法人会津大学 株式会社東日本計算センター 1 / 18 改版履歴 Ver 改版日内容 1.0 2016/02/07 新規作成 2 / 18 1. 内容 1. はじめに... 4 1.1. 対象読者... 4 1.2. 適応範囲... 4 1.3. 開発環境及び使用機器...
NEDO次世代ロボット知能化技術開発プロジェクト
 ロボット用スクリプトエンジン モジュールマニュアル 1.0 版 九州工業大学 株式会社セック 改版履歴 版数改版日改版内容備考 1.0 2012/02/29 初版作成 -i- 目次 1 総則... 1 1.1. 目的...1 1.2. 適用範囲...1 1.3. 関連文書等...1 1.3.1. 適用文書...1 1.3.2. 関連文書...1 1.3.3. 参考文書...1 1.4. 定義...2
ロボット用スクリプトエンジン モジュールマニュアル 1.0 版 九州工業大学 株式会社セック 改版履歴 版数改版日改版内容備考 1.0 2012/02/29 初版作成 -i- 目次 1 総則... 1 1.1. 目的...1 1.2. 適用範囲...1 1.3. 関連文書等...1 1.3.1. 適用文書...1 1.3.2. 関連文書...1 1.3.3. 参考文書...1 1.4. 定義...2
Raspberry Pi で WEB カメラを使用 会津大学 RT ミドルウェア講習会 2017 The University of Aizu
 会津大学 RT ミドルウェア講習会 2017 The University of Aizu 目次 1 コンポーネントをダウンロードする... 1 2 コンポーネントを Raspberry Pi へコピーする... 2 2.1 Raspberry Pi へコピーする... 2 3 Raspberry Pi 上でコンポーネントをビルドする... 3 3.1 コピーされたファイルを解凍する... 3 3.2
会津大学 RT ミドルウェア講習会 2017 The University of Aizu 目次 1 コンポーネントをダウンロードする... 1 2 コンポーネントを Raspberry Pi へコピーする... 2 2.1 Raspberry Pi へコピーする... 2 3 Raspberry Pi 上でコンポーネントをビルドする... 3 3.1 コピーされたファイルを解凍する... 3 3.2
PowerPoint Presentation
 知能システム論 1 (12) 2013.6.26 情報システム学研究科情報メディアシステム学専攻知能システム学講座末廣尚士 - 自由な構造のシリアルアームを作る larm_w_hand_arm_sol.py arm6dof のうち以下の関数は関節数が 6 以上ならいくつでも使えるので larm_w_hand_arm_sol.py に移す solve() ready(), park() move()
知能システム論 1 (12) 2013.6.26 情報システム学研究科情報メディアシステム学専攻知能システム学講座末廣尚士 - 自由な構造のシリアルアームを作る larm_w_hand_arm_sol.py arm6dof のうち以下の関数は関節数が 6 以上ならいくつでも使えるので larm_w_hand_arm_sol.py に移す solve() ready(), park() move()
組込みシステムにおける UMLモデルカタログの実践研究
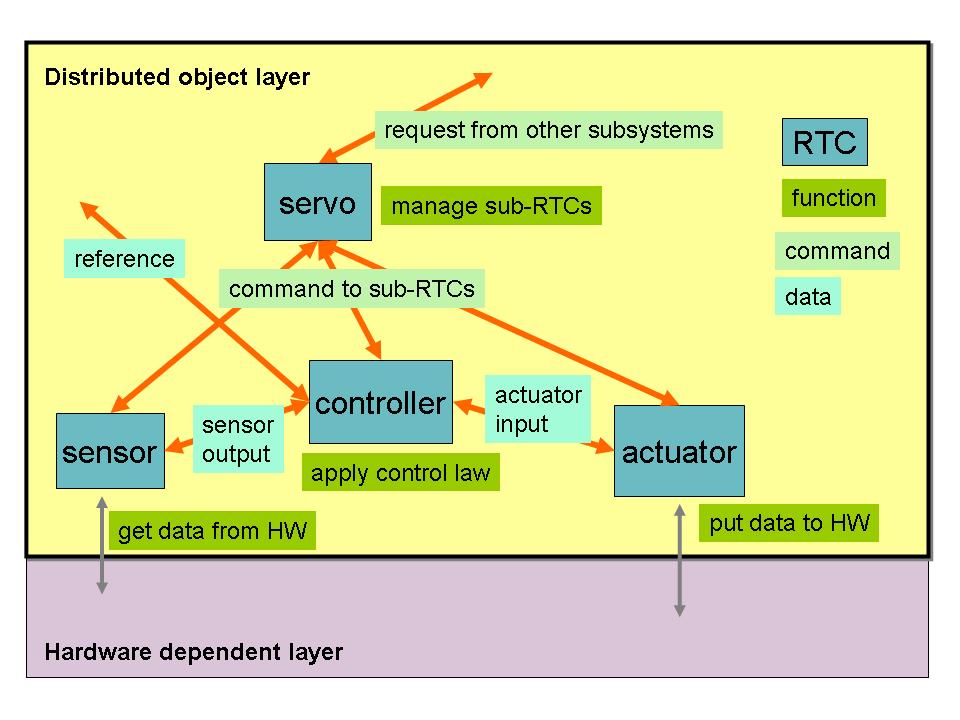
 Modeling Forum 2015 組込みシステムの設計実装への モデルカタログの活用 仙台高等専門学校 情報システム工学科 力武克彰, 新村祐太 ( 豊橋技科大 ), 菊池雄太郎 ( 仙台高専 ) 概要 組込み分野のための UML モデルカタログ (*) のモデルを実装してみました (* 以下 モデルカタログと呼びます ) 2 概要 モデルカタログ : 目標制御モデル モデルカタログより引用
Modeling Forum 2015 組込みシステムの設計実装への モデルカタログの活用 仙台高等専門学校 情報システム工学科 力武克彰, 新村祐太 ( 豊橋技科大 ), 菊池雄太郎 ( 仙台高専 ) 概要 組込み分野のための UML モデルカタログ (*) のモデルを実装してみました (* 以下 モデルカタログと呼びます ) 2 概要 モデルカタログ : 目標制御モデル モデルカタログより引用
EV3 の初期設定
 目次 1 SD カードの準備... 2 2 EV3 へのアクセスの仕方... 3 3 OpenRTM-aist のインストール... 6 4 unzip のインストール... 8 当ドキュメントは下記ページを参考にしています LEGO Mindstorms EV3 活用事例 http://www.openrtm.org/openrtm/ja/casestudy/lego_mindstorm_ev3
目次 1 SD カードの準備... 2 2 EV3 へのアクセスの仕方... 3 3 OpenRTM-aist のインストール... 6 4 unzip のインストール... 8 当ドキュメントは下記ページを参考にしています LEGO Mindstorms EV3 活用事例 http://www.openrtm.org/openrtm/ja/casestudy/lego_mindstorm_ev3
ユーザーズマニュアル 有線無線通信ネットワークシステム Wi-Fi 経路情報ビューア 発行日 2017 年 3 月 30 日 公立大学法人会津大学 株式会社東日本計算センター
 ユーザーズマニュアル 有線無線通信ネットワークシステム Wi-Fi 経路情報ビューア 発行日 2017 年 3 月 30 日 公立大学法人会津大学 株式会社東日本計算センター 目次 1 2 3 はじめに...1 1.1 前提知識...1 1.2 システム概要...1 1.3 動作環境...4 1.3.1 Wi-Fi 経路情報監視 RTC...4 1.3.2 Wi-Fi 経路情報ビューア RTC...6
ユーザーズマニュアル 有線無線通信ネットワークシステム Wi-Fi 経路情報ビューア 発行日 2017 年 3 月 30 日 公立大学法人会津大学 株式会社東日本計算センター 目次 1 2 3 はじめに...1 1.1 前提知識...1 1.2 システム概要...1 1.3 動作環境...4 1.3.1 Wi-Fi 経路情報監視 RTC...4 1.3.2 Wi-Fi 経路情報ビューア RTC...6
Microsoft PowerPoint RT講習会(説明用)_ [互換モード]
![Microsoft PowerPoint RT講習会(説明用)_ [互換モード]](/thumbs/96/129105636.jpg "Microsoft PowerPoint RT講習会(説明用)_ [互換モード]") マイクロマシン /MEMS 展 ROBOTECH 次世代ロボット製造技術展 RT ミドルウェア講習会 RT ミドルウェアインストールワークショップ 日時 :2012 年 7 月 13 日 ( 金 ) 10:30~12:30 場所 : 東京ビッグサイト東ホール特設会場 株式会社グローバルアシスト坂本武志 RT ミドルウェアの概要 RT ミドルウェアとは? RT = Robot Technology Real-time
マイクロマシン /MEMS 展 ROBOTECH 次世代ロボット製造技術展 RT ミドルウェア講習会 RT ミドルウェアインストールワークショップ 日時 :2012 年 7 月 13 日 ( 金 ) 10:30~12:30 場所 : 東京ビッグサイト東ホール特設会場 株式会社グローバルアシスト坂本武志 RT ミドルウェアの概要 RT ミドルウェアとは? RT = Robot Technology Real-time
VDM-SL ISO.VDM++ VDM-SL VDM- RT VDM++ VDM,.VDM, [5]. VDM VDM++.,,, [7]., VDM++.,., [7] VDM++.,,,,,,,.,,, VDM VDMTools OvertureTo
![VDM-SL ISO.VDM++ VDM-SL VDM- RT VDM++ VDM,.VDM, [5]. VDM VDM++.,,, [7]., VDM++.,., [7] VDM++.,,,,,,,.,,, VDM VDMTools OvertureTo](/thumbs/71/65592156.jpg "VDM-SL ISO.VDM++ VDM-SL VDM- RT VDM++ VDM,.VDM, [5]. VDM VDM++.,,, [7]., VDM++.,., [7] VDM++.,,,,,,,.,,, VDM VDMTools OvertureTo") KAOS 1 1 1 1 1,.,. ( ). KAOS VDM++.,.,,, 1. 1.1,, [1].,,, [2].,, [3]. 1.2 ( ),, [3] KAOS, VDM++, KAOS VDM++ 1 Kyushu University, KAOS,, KAOS, KAOS, VDM++., 1.3 2,., 3, KAOS VDM++. 4, 3,. 5 2. 2.1,,,,,
KAOS 1 1 1 1 1,.,. ( ). KAOS VDM++.,.,,, 1. 1.1,, [1].,,, [2].,, [3]. 1.2 ( ),, [3] KAOS, VDM++, KAOS VDM++ 1 Kyushu University, KAOS,, KAOS, KAOS, VDM++., 1.3 2,., 3, KAOS VDM++. 4, 3,. 5 2. 2.1,,,,,
情報分野のアクセシビリティ標準について
 情報分野のアクセシビリティ標準について 経済産業省国際電気標準課 小出啓介 Agenda 1. 障害者白書 2. JTC 1/SC 35 で開発しているアクセシビリティ関連規格の紹介 3. 映像字幕事業 (ISO/IEC 20071-23) の取り組みの紹介 4. JIS X 8341-3 の改正について 5. Web Accessibility, BSI Code of Practice 規格の開発と国内対応について
情報分野のアクセシビリティ標準について 経済産業省国際電気標準課 小出啓介 Agenda 1. 障害者白書 2. JTC 1/SC 35 で開発しているアクセシビリティ関連規格の紹介 3. 映像字幕事業 (ISO/IEC 20071-23) の取り組みの紹介 4. JIS X 8341-3 の改正について 5. Web Accessibility, BSI Code of Practice 規格の開発と国内対応について
Microsoft Word - AHRTC_Manual.docx
 エアホッケーロボットシステム RTC 群説明書 電気通信大学大学院情報システム学研究科 情報メディアシステム学専攻知能システム学講座 佐藤雄也 [ 目次 ] 1. システム概要 2. エアホッケーロボットの構成 2.0 エアホッケー台の寸法 2.1 ロボットアーム 2.2 高速カメラ 2.3 測域センサ 2.4 各センサ アーム制御用計算機 3. ソフトウェア構成 4. ソースコードのディレクトリ構成およびコンパイル方法
エアホッケーロボットシステム RTC 群説明書 電気通信大学大学院情報システム学研究科 情報メディアシステム学専攻知能システム学講座 佐藤雄也 [ 目次 ] 1. システム概要 2. エアホッケーロボットの構成 2.0 エアホッケー台の寸法 2.1 ロボットアーム 2.2 高速カメラ 2.3 測域センサ 2.4 各センサ アーム制御用計算機 3. ソフトウェア構成 4. ソースコードのディレクトリ構成およびコンパイル方法
Jude を DSL エディタとして使う -Jude API 活用法 年 11 月 14 日稚内北星学園大学東京サテライト校浅海智晴 本日のテーマ Why Jude API What Jude API How Jude API 1
 Jude を DSL エディタとして使う -Jude API 活用法 - 2006 年 11 月 14 日稚内北星学園大学東京サテライト校浅海智晴 本日のテーマ Why Jude API What Jude API How Jude API 1 技術トレンド テクノロジとしての Web 2.0 Web がプラットフォームになる シン クライアントからリッチ クライアントへ Web の単純な UI では限界
Jude を DSL エディタとして使う -Jude API 活用法 - 2006 年 11 月 14 日稚内北星学園大学東京サテライト校浅海智晴 本日のテーマ Why Jude API What Jude API How Jude API 1 技術トレンド テクノロジとしての Web 2.0 Web がプラットフォームになる シン クライアントからリッチ クライアントへ Web の単純な UI では限界
Testing XML Performance
 - DataPower Technology, Inc. XML Web 2003 5 DATAPOWER XML WEB - Copyright 2003DataPower Technology, Inc. All Rights Reserved. DataPower Technology, Inc. DataPower DataPower ( ) DataPower 2003 5 2/17 DATAPOWER
- DataPower Technology, Inc. XML Web 2003 5 DATAPOWER XML WEB - Copyright 2003DataPower Technology, Inc. All Rights Reserved. DataPower Technology, Inc. DataPower DataPower ( ) DataPower 2003 5 2/17 DATAPOWER
RTMツール講習会
 1 第 3 部の資料 設定ファイルの差し替え [OpenRTM_Root]/1.0/bin 配下にある以下の設定ファイルを差し替え rtc.conf,configsample.conf デフォルト設定でインストールした場合 C: Program Files OpenRTM-aist 1.0 bin 2 RT ミドルウエア講習会 日時 :2011 年 1 月 21 日 ( 金 ) 11:00~17:00
1 第 3 部の資料 設定ファイルの差し替え [OpenRTM_Root]/1.0/bin 配下にある以下の設定ファイルを差し替え rtc.conf,configsample.conf デフォルト設定でインストールした場合 C: Program Files OpenRTM-aist 1.0 bin 2 RT ミドルウエア講習会 日時 :2011 年 1 月 21 日 ( 金 ) 11:00~17:00
スライド 1
 第 2 部 RT コンポーネント作成入門 宮本信彦 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センターロボットソフトウェアプラットフォーム研究チーム インストールの確認 (Windows) OpenRTM-aist OpenRTM-aist-1.1.2-RELEASE_x86.msi インストール後に再起動する Visual Studio 2013 以外 (2010 2012 2015)
第 2 部 RT コンポーネント作成入門 宮本信彦 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センターロボットソフトウェアプラットフォーム研究チーム インストールの確認 (Windows) OpenRTM-aist OpenRTM-aist-1.1.2-RELEASE_x86.msi インストール後に再起動する Visual Studio 2013 以外 (2010 2012 2015)
スライド 1
 第 2 部 RT コンポーネント作成入門 宮本信彦 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センターロボットソフトウェアプラットフォーム研究チーム インストールの確認 (Windows) OpenRTM-aist OpenRTM-aist-1.1.2-RELEASE_x86.msi インストール後に再起動する Visual Studio 2013 以外 (2010 2012 2015)
第 2 部 RT コンポーネント作成入門 宮本信彦 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センターロボットソフトウェアプラットフォーム研究チーム インストールの確認 (Windows) OpenRTM-aist OpenRTM-aist-1.1.2-RELEASE_x86.msi インストール後に再起動する Visual Studio 2013 以外 (2010 2012 2015)
CA Federation ご紹介資料
 CA Federation r12 ご紹介 旧製品名 :CA SiteMinder Federation 2017 年 10 月富士通株式会社 概要 1 フェデレーション (Federation) とは インターネットドメインを越えてシングルサインオンを実現 SAMLやADFSなどの仕様を利用して相互認証連携を行う仕組み IDやパスワードの情報を送付せず認証情報のみ連携先へ送付して認証 USER INTERNET
CA Federation r12 ご紹介 旧製品名 :CA SiteMinder Federation 2017 年 10 月富士通株式会社 概要 1 フェデレーション (Federation) とは インターネットドメインを越えてシングルサインオンを実現 SAMLやADFSなどの仕様を利用して相互認証連携を行う仕組み IDやパスワードの情報を送付せず認証情報のみ連携先へ送付して認証 USER INTERNET
NEDO次世代ロボット知能化技術開発プロジェクト
 NEDO 次世代ロボット知能化技術開発プロジェクト 音声対話システムマニュアル ( 別冊 ) 1.0 版 独立行政法人産業技術総合研究所 株式会社セック 改版履歴 版数改版日改版内容備考 1.0 2012/02/29 初版作成 -i- 目次 1 総則... 1 1.1. 目的...1 1.2. 適用範囲...1 1.3. 関連文書等...1 1.3.1. 適用文書...1 1.3.2. 関連文書...1
NEDO 次世代ロボット知能化技術開発プロジェクト 音声対話システムマニュアル ( 別冊 ) 1.0 版 独立行政法人産業技術総合研究所 株式会社セック 改版履歴 版数改版日改版内容備考 1.0 2012/02/29 初版作成 -i- 目次 1 総則... 1 1.1. 目的...1 1.2. 適用範囲...1 1.3. 関連文書等...1 1.3.1. 適用文書...1 1.3.2. 関連文書...1
MDA
 JAIST Reposi https://dspacej Title 組込みシステム向け MDA 開発環境の研究 Author(s) 細合, 晋太郎 Citation Issue Date 2007-03 Type Thesis or Dissertation Text version author URL http://hdlhandlenet/10119/3597 Rights Description
JAIST Reposi https://dspacej Title 組込みシステム向け MDA 開発環境の研究 Author(s) 細合, 晋太郎 Citation Issue Date 2007-03 Type Thesis or Dissertation Text version author URL http://hdlhandlenet/10119/3597 Rights Description
情報処理学会研究報告 IPSJ SIG Technical Report Vol.2015-CE-131 No /10/10 1,a) 1,b) 1,c) 2,d) 1,e) 1,f) Raspberry Pi GPIO I2C Raspberry Pi Linux HTTP, Rasp
 1,b) 1,c) 2,d) 1,e) 1,f) Raspberry Pi GPIO I2C Raspberry Pi Linux HTTP, Rasp") 1,a) 1,b) 1,c),d) 1,e) 1,f) Raspberry Pi GPIO IC Raspberry Pi Linux HTTP, Raspberry Pi, Hayashi Kohei 1,a) Nishikawa Hiroyuki 1,b) Kobayashi Fumiya 1,c) Manabe Hiroki,d) Omura Motomasa 1,e) Kanemune Susumu
1,a) 1,b) 1,c),d) 1,e) 1,f) Raspberry Pi GPIO IC Raspberry Pi Linux HTTP, Raspberry Pi, Hayashi Kohei 1,a) Nishikawa Hiroyuki 1,b) Kobayashi Fumiya 1,c) Manabe Hiroki,d) Omura Motomasa 1,e) Kanemune Susumu
(Microsoft PowerPoint - RTM\203T\203}\201[\203L\203\203\203\223\203v \224z\225z\227p)
") RT 2011 2 RT RTC RTC 2011 11 8 30 RT RT RTC RTC RTC I/F RTC (RTC ) 2 Systems Engineering Consultants Co.,LTD. 1970 5 4 7730 2011 6 28 264 2011 4 1 3 モバイルネットワーク BF ワイヤレス BF Realtime@net 社会基盤 BF インターネット
RT 2011 2 RT RTC RTC 2011 11 8 30 RT RT RTC RTC RTC I/F RTC (RTC ) 2 Systems Engineering Consultants Co.,LTD. 1970 5 4 7730 2011 6 28 264 2011 4 1 3 モバイルネットワーク BF ワイヤレス BF Realtime@net 社会基盤 BF インターネット
課題情報シート テーマ名 : 動画中継ラジコンカーの製作 担当指導員名 : 土山博剛実施年度 : 25 年度施設名 : 四国職業能力開発大学校課程名 : 専門課程訓練科名 : 電子情報技術科課題の区分 : 総合制作実習課題学生数 : 1 時間 : 12 単位 (216h) 課題制作 開発のポイント
 課題制作 開発のポイント") 課題情報シート テーマ名 : 担当指導員名 : 土山博剛実施年度 : 25 年度施設名 : 四国職業能力開発大学校課程名 : 専門課程訓練科名 : 電子情報技術科課題の区分 : 総合制作実習課題学生数 : 1 時間 : 12 単位 (216h) 課題制作 開発のポイント 開発( 制作 ) のポイント 今回製作したシステムでは 専門課程で習得した総合的な知識 ( ネットワーク技術 電子回路技術 C プログラミング技術
課題情報シート テーマ名 : 担当指導員名 : 土山博剛実施年度 : 25 年度施設名 : 四国職業能力開発大学校課程名 : 専門課程訓練科名 : 電子情報技術科課題の区分 : 総合制作実習課題学生数 : 1 時間 : 12 単位 (216h) 課題制作 開発のポイント 開発( 制作 ) のポイント 今回製作したシステムでは 専門課程で習得した総合的な知識 ( ネットワーク技術 電子回路技術 C プログラミング技術
オフィスソフトを操作するためのRTC群
 オフィスソフトを 操 作 するための RTC 群 宮 本 信 彦 開 発 概 要 Microsoft Office OpenOfficeの 表 計 算 機 能 文 書 作 成 機 能 等 をRTミドル ウェアを 用 いたシステムで 利 用 するためのRTC 群 Excel Calc( 表 計 算 )を 操 作 するRTC セルのデータをデータポートから 入 出 力 Draw( 図 形 描 画 )を
オフィスソフトを 操 作 するための RTC 群 宮 本 信 彦 開 発 概 要 Microsoft Office OpenOfficeの 表 計 算 機 能 文 書 作 成 機 能 等 をRTミドル ウェアを 用 いたシステムで 利 用 するためのRTC 群 Excel Calc( 表 計 算 )を 操 作 するRTC セルのデータをデータポートから 入 出 力 Draw( 図 形 描 画 )を
wpEnterpriseSvr.doc
 COBOLJava.NETWeb IT COBOL Micro Focus Enterprise Server Enterprise Server COBOL Enterprise Server COBOL Enterprise Server COBOL COBOL COBOL Java.NET IT Micro Focus COBOLJ2EE.NET Web COBOL Enterprise Server
COBOLJava.NETWeb IT COBOL Micro Focus Enterprise Server Enterprise Server COBOL Enterprise Server COBOL Enterprise Server COBOL COBOL COBOL Java.NET IT Micro Focus COBOLJ2EE.NET Web COBOL Enterprise Server
IBM Rational Software Delivery Platform v7.0 What's
 IBM Rational Software Delivery Platform V7.0 デスクトップ製品 V7.0 リリースの全体像および製品共通の新機能 2006 年 12 月 15 日 当資料は 2006/12/15 時点の情報に基づいて作成されていますが 事前の予告なく変更される場合があります IBM Tivoli WebSphere ClearCase ClearQuest Rational
IBM Rational Software Delivery Platform V7.0 デスクトップ製品 V7.0 リリースの全体像および製品共通の新機能 2006 年 12 月 15 日 当資料は 2006/12/15 時点の情報に基づいて作成されていますが 事前の予告なく変更される場合があります IBM Tivoli WebSphere ClearCase ClearQuest Rational
2008 年度下期未踏 IT 人材発掘 育成事業採択案件評価書 1. 担当 PM 石川裕 PM ( 東京大学大学院情報理工学系研究科教授 ) 2. 採択者氏名 チーフクリエータ : 加藤淳 ( 東京大学理学部情報科学科学部学生 ) コクリエータ : なし 3. プロジェクト管理組織 株式会社メルコホ
 2. 採択者氏名 チーフクリエータ : 加藤淳 ( 東京大学理学部情報科学科学部学生 ) コクリエータ : なし 3. プロジェクト管理組織 株式会社メルコホ") 2008 年度下期未踏 IT 人材発掘 育成事業採択案件評価書 1. 担当 PM 石川裕 PM ( 東京大学大学院情報理工学系研究科教授 ) 2. 採択者氏名 チーフクリエータ : 加藤淳 ( 東京大学理学部情報科学科学部学生 ) コクリエータ : なし 3. プロジェクト管理組織 株式会社メルコホールディングス 4. 委託金支払額 6,496,266 円 5. テーマ名 matereal: 小型ロボットの簡単な行動デザイン用ツールキット
2008 年度下期未踏 IT 人材発掘 育成事業採択案件評価書 1. 担当 PM 石川裕 PM ( 東京大学大学院情報理工学系研究科教授 ) 2. 採択者氏名 チーフクリエータ : 加藤淳 ( 東京大学理学部情報科学科学部学生 ) コクリエータ : なし 3. プロジェクト管理組織 株式会社メルコホールディングス 4. 委託金支払額 6,496,266 円 5. テーマ名 matereal: 小型ロボットの簡単な行動デザイン用ツールキット
新技術説明会 様式例
 1 ロボットへの FPGA 導入を 容易化する コンポーネント技術 宇都宮大学大学院工学研究科情報システム科学専攻助教大川猛 2 従来技術とその問題点 FPGA(Field Programmable Gate Array) は 任意のディジタル論理回路をプログラム可能な LSI ソフトウェアでは時間がかかる画像認識処理等を ハードウェア化して 高速化 低消費電力化可能 問題点 FPGA 上の回路設計が難しい
1 ロボットへの FPGA 導入を 容易化する コンポーネント技術 宇都宮大学大学院工学研究科情報システム科学専攻助教大川猛 2 従来技術とその問題点 FPGA(Field Programmable Gate Array) は 任意のディジタル論理回路をプログラム可能な LSI ソフトウェアでは時間がかかる画像認識処理等を ハードウェア化して 高速化 低消費電力化可能 問題点 FPGA 上の回路設計が難しい
ユーザーズマニュアル 有線無線通信ネットワークシステム STP ポート状態ビューア 発行日 2017 年 3 月 30 日 公立大学法人会津大学 株式会社東日本計算センター
 ユーザーズマニュアル 有線無線通信ネットワークシステム STP ポート状態ビューア 発行日 2017 年 3 月 30 日 公立大学法人会津大学 株式会社東日本計算センター 目次 1 2 3 はじめに...1 1.1 前提知識...1 1.2 システム概要...1 1.3 動作環境...4 1.3.1 STP ポート状態監視 RTC...4 1.3.2 STP ポート状態ビューア RTC...5 インストール...6
ユーザーズマニュアル 有線無線通信ネットワークシステム STP ポート状態ビューア 発行日 2017 年 3 月 30 日 公立大学法人会津大学 株式会社東日本計算センター 目次 1 2 3 はじめに...1 1.1 前提知識...1 1.2 システム概要...1 1.3 動作環境...4 1.3.1 STP ポート状態監視 RTC...4 1.3.2 STP ポート状態ビューア RTC...5 インストール...6
24 LED A visual programming environment for art work using a LED matrix
 24 LED A visual programming environment for art work using a LED matrix 1130302 2013 3 1 LED,,,.,. Arduino. Arduino,,,., Arduino,.,, LED,., Arduino, LED, i Abstract A visual programming environment for
24 LED A visual programming environment for art work using a LED matrix 1130302 2013 3 1 LED,,,.,. Arduino. Arduino,,,., Arduino,.,, LED,., Arduino, LED, i Abstract A visual programming environment for
Ver ceil floor FunctionGenerator (PTZCameraSony)
") RT 2011 9 18 2009 11 15 1 2009 11 20 2009 12 4 1.2 Ver.1.0.2 ceil floor 3.2.1 4 FunctionGenerator 4.1 2009 12 7 4.2 2009 12 18 1.4 - - (PTZCameraSony) 2.2 - - 4.3 - - 2009 12 27 1.1 2011 9 18 OpenRTM-aist-1.0.0
RT 2011 9 18 2009 11 15 1 2009 11 20 2009 12 4 1.2 Ver.1.0.2 ceil floor 3.2.1 4 FunctionGenerator 4.1 2009 12 7 4.2 2009 12 18 1.4 - - (PTZCameraSony) 2.2 - - 4.3 - - 2009 12 27 1.1 2011 9 18 OpenRTM-aist-1.0.0
PowerPoint
 2011 12 6PTC Live TechForum TOKYO manji@rd.denso.co.jp 1/ 52 1949 12 16 1,874 ( ) 1 9,457 3 1,315 ( ) 38,318 123,165 ( ) 2011 3 31 Gr. Gr. Gr. Gr. Gr. PF 2/ 52 1 2 3 4PMT 5 Integrity 6 7 8 1/2 3/ 52 OEM
2011 12 6PTC Live TechForum TOKYO manji@rd.denso.co.jp 1/ 52 1949 12 16 1,874 ( ) 1 9,457 3 1,315 ( ) 38,318 123,165 ( ) 2011 3 31 Gr. Gr. Gr. Gr. Gr. PF 2/ 52 1 2 3 4PMT 5 Integrity 6 7 8 1/2 3/ 52 OEM
アジェンダ 会社紹介 OFCONFIGについて NETCONFおよびYANGについて OFCONFIGユースケース A.I.Corporation 2
 NETCONF および YANG を使った OpenFlow スイッチの管理 A.I.Corporation 1 アジェンダ 会社紹介 OFCONFIGについて NETCONFおよびYANGについて OFCONFIGユースケース A.I.Corporation 2 会社紹介 A.I.Corporation 3 株式会社エーアイコーポレーション 会社業務 特長 機器組込み用ソフトウェア (Embedded
NETCONF および YANG を使った OpenFlow スイッチの管理 A.I.Corporation 1 アジェンダ 会社紹介 OFCONFIGについて NETCONFおよびYANGについて OFCONFIGユースケース A.I.Corporation 2 会社紹介 A.I.Corporation 3 株式会社エーアイコーポレーション 会社業務 特長 機器組込み用ソフトウェア (Embedded
Microsoft PowerPoint RTM講習会_初級(第4部) [互換モード]
![Microsoft PowerPoint RTM講習会_初級(第4部) [互換モード]](/thumbs/101/150326877.jpg "Microsoft PowerPoint RTM講習会_初級(第4部) [互換モード]") PFCore(RT ミドルウェア ) トレーニング初級編 日時 :2013 年 1 月 21 日 ( 月 ) 13:00~17:00 場所 : 大阪大学吹田キャンパス産学連携本部 B 棟 1F 会議室 PFCore(RT ミドルウェア ) トレーニング初級編 13:00-13:20 13:20-14:10 14:10-15:05 15:05-15:20 15:20-17:00 第 1 部 : 先端計測分野における
PFCore(RT ミドルウェア ) トレーニング初級編 日時 :2013 年 1 月 21 日 ( 月 ) 13:00~17:00 場所 : 大阪大学吹田キャンパス産学連携本部 B 棟 1F 会議室 PFCore(RT ミドルウェア ) トレーニング初級編 13:00-13:20 13:20-14:10 14:10-15:05 15:05-15:20 15:20-17:00 第 1 部 : 先端計測分野における
DAQ- Middleware の新機能と 実験への展開千代浩司 A,F 濱田英太郎 A,F 井上栄二 A,F 長坂康史 B,F 味村周平 C,F 神徳徹雄 D,F 安藤慶昭 D,F 和田正樹 E 高エネルギー加速器研究機構素粒子原子核研究所 A 広島工業大学 B 大坂大学 C 産業技術総合研究所
 DAQ- Middleware の新機能と 実験への展開千代浩司 A,F 濱田英太郎 A,F 井上栄二 A,F 長坂康史 B,F 味村周平 C,F 神徳徹雄 D,F 安藤慶昭 D,F 和田正樹 E 高エネルギー加速器研究機構素粒子原子核研究所 A 広島工業大学 B 大坂大学 C 産業技術総合研究所 D ( 株 )Bee Beans Technologies E Open- It F もくじ DAQ-
DAQ- Middleware の新機能と 実験への展開千代浩司 A,F 濱田英太郎 A,F 井上栄二 A,F 長坂康史 B,F 味村周平 C,F 神徳徹雄 D,F 安藤慶昭 D,F 和田正樹 E 高エネルギー加速器研究機構素粒子原子核研究所 A 広島工業大学 B 大坂大学 C 産業技術総合研究所 D ( 株 )Bee Beans Technologies E Open- It F もくじ DAQ-
PowerPoint Presentation
 知能システム論 1 (9) 201365 情報システム学研究科情報メディアシステム学専攻知能システム学講座末廣尚士 12 ロボットアームの逆運動学 ( 幾何学的 ( 解析的 ) 解法 ) 何をしたいか 手首 手先 ツールの3 次元空間での位置や姿勢から それを実現する関節角度を計算する アームソリューション アームの解とも呼ぶ 何のために たとえばビジョンで認識された物をつかむ場合 物の位置 姿勢は3
知能システム論 1 (9) 201365 情報システム学研究科情報メディアシステム学専攻知能システム学講座末廣尚士 12 ロボットアームの逆運動学 ( 幾何学的 ( 解析的 ) 解法 ) 何をしたいか 手首 手先 ツールの3 次元空間での位置や姿勢から それを実現する関節角度を計算する アームソリューション アームの解とも呼ぶ 何のために たとえばビジョンで認識された物をつかむ場合 物の位置 姿勢は3
PowerPoint プレゼンテーション
 第 2 部 RT コンポーネント作成入門 第 2 部の目的 RT System Editor を用いた RTC ベースのシステム構築方法の習得 (RTC 運用時に必要な知識 ) RTC Builder を用いた RT コンポーネントのひな形作成方法の習得 (RTC 開発時に必要な知識 ) 2016/7/7 RT ミドルウェア講習会 @ 名城大学 1 OpenRTM-aist の開発支援ツール ロボット知能ソフトウェアプラットフォーム
第 2 部 RT コンポーネント作成入門 第 2 部の目的 RT System Editor を用いた RTC ベースのシステム構築方法の習得 (RTC 運用時に必要な知識 ) RTC Builder を用いた RT コンポーネントのひな形作成方法の習得 (RTC 開発時に必要な知識 ) 2016/7/7 RT ミドルウェア講習会 @ 名城大学 1 OpenRTM-aist の開発支援ツール ロボット知能ソフトウェアプラットフォーム
Arduino をドリトルから 制御する教材の試行 鈴木裕貴 1
 Arduino をドリトルから 制御する教材の試行 鈴木裕貴 1 目次 1. はじめに 1.1. 背景と目的 1.2. ScratchとViscuit 1.3. ドリトル 2. 準備 2.1. ArduinoとRaspberry Pi 3. 演習内容 3.1. ドリトル 3.2. 指導内容例 4. まとめ 2 1. はじめに ( 背景 ) 原理 理解 活用社会 3 1. はじめに ( 背景 ) 原理
Arduino をドリトルから 制御する教材の試行 鈴木裕貴 1 目次 1. はじめに 1.1. 背景と目的 1.2. ScratchとViscuit 1.3. ドリトル 2. 準備 2.1. ArduinoとRaspberry Pi 3. 演習内容 3.1. ドリトル 3.2. 指導内容例 4. まとめ 2 1. はじめに ( 背景 ) 原理 理解 活用社会 3 1. はじめに ( 背景 ) 原理
T - Telecommunication and Internet Protocol Harmonization Over Networks (TIPHON); Service and Network Management Framework; Part 1: Overview and Intro
; Service and Network Management Framework; Part 1: Overview and Intro") T - Telecommunication and Internet Protocol Harmonization Over Networks (TIPHON); Service and Network Management Framework; Part 1: Overview and Introduction (DTR/TIPHON-01004-1 V0.1.5) 1.0 2001 8 30 THE
T - Telecommunication and Internet Protocol Harmonization Over Networks (TIPHON); Service and Network Management Framework; Part 1: Overview and Introduction (DTR/TIPHON-01004-1 V0.1.5) 1.0 2001 8 30 THE
ObjectPartner Pro
 Open Factory 21/ 資産を分散システム Web システムへ 日本電気株式会社 製品概要 は Web システム環境において 資産を活用する ためのコンポーネント生成機能を提供します 新機能 Ver2.4 の強化内容 Microsoft Visual C++ 2008 対応 Microsoft Visual C++ 2008 を使用する環境でアプリケーションの開発が可能 次の機能は Microsoft
Open Factory 21/ 資産を分散システム Web システムへ 日本電気株式会社 製品概要 は Web システム環境において 資産を活用する ためのコンポーネント生成機能を提供します 新機能 Ver2.4 の強化内容 Microsoft Visual C++ 2008 対応 Microsoft Visual C++ 2008 を使用する環境でアプリケーションの開発が可能 次の機能は Microsoft
Microsoft PowerPoint - IAF フォーラム2015講演資料_PLCopenJapan_A02.pptx
 PLCopen / OPC UA 通信仕様と PLCopen XML の紹介 ~PLC プログラムの生産システムエンジニアリング連携に向けて ~ Industrial Automation Forum - Forum 2015 PLCopen Japan Page 1 PLCopen の主な取り組み PLCopen は IEC 61131-3 プログラミングの普及促進と関連技術仕様の策定を う 営利団体
PLCopen / OPC UA 通信仕様と PLCopen XML の紹介 ~PLC プログラムの生産システムエンジニアリング連携に向けて ~ Industrial Automation Forum - Forum 2015 PLCopen Japan Page 1 PLCopen の主な取り組み PLCopen は IEC 61131-3 プログラミングの普及促進と関連技術仕様の策定を う 営利団体
FUJITSU Software Systemwalker Centric Manager Lite Edition V13.5 機能紹介資料
 FUJITSU Software Systemwalker Centric Manager Lite Edition V13.5 機能ご紹介 2014 年 3 月富士通株式会社 目次 特長 機能 システム構成 プラットフォーム 各エディションの機能比較表 < ご参考 > Systemwalker Centric Manager Lite Edition は 被管理サーバの数が数台 ~30 サーバ以内の規模で
FUJITSU Software Systemwalker Centric Manager Lite Edition V13.5 機能ご紹介 2014 年 3 月富士通株式会社 目次 特長 機能 システム構成 プラットフォーム 各エディションの機能比較表 < ご参考 > Systemwalker Centric Manager Lite Edition は 被管理サーバの数が数台 ~30 サーバ以内の規模で
OPCインターフェースによるPLC計装システムの実践的ソリューション
 OPC を利用した PLC 計装システムの実践的ソリューション オムロン ( 株 ) 三木信史 / 奥野誠 1. はじめに国内の生産現場における制御システムは 連続系としてのPA 領域とディスクリート系であるFA 領域では異なる制御システムとして発展を遂げてきた PA 分野においては分散型制御システム ( 以下,DCS) FA 分野においてはプログラマブルコントローラ ( 以下,PLC) を主とした制御システムが利用されてきた
OPC を利用した PLC 計装システムの実践的ソリューション オムロン ( 株 ) 三木信史 / 奥野誠 1. はじめに国内の生産現場における制御システムは 連続系としてのPA 領域とディスクリート系であるFA 領域では異なる制御システムとして発展を遂げてきた PA 分野においては分散型制御システム ( 以下,DCS) FA 分野においてはプログラマブルコントローラ ( 以下,PLC) を主とした制御システムが利用されてきた
Microsoft PowerPoint pptx
 PFCore(RT ミドルウェア ) トレーニング中級編 10:00-11:00 第 1 部 :RT コンポーネントプログラミングの概要 担当 : 安藤慶昭 ( 産業技術総合研究所 ) 概要 :RT コンポーネントの作成方法, 設計時の注意点などの概要について解説します 第 2 部 :RT ミドルウェア (PFcore) 開発支援ツールと RT コンポーネントの作成方法 11:00-12:00 12:00-13:00
PFCore(RT ミドルウェア ) トレーニング中級編 10:00-11:00 第 1 部 :RT コンポーネントプログラミングの概要 担当 : 安藤慶昭 ( 産業技術総合研究所 ) 概要 :RT コンポーネントの作成方法, 設計時の注意点などの概要について解説します 第 2 部 :RT ミドルウェア (PFcore) 開発支援ツールと RT コンポーネントの作成方法 11:00-12:00 12:00-13:00
発表の流れ 1. 研究の背景と目的 2. 相互接続の概観 3. ワームホールデバイスの動作の概要 4. 実験 性能評価 5. まとめ DICOMO2007 2
 マルチメディア, 分散, 協調とモバイル (DICOMO2007) シンポジウム ワームホールデバイス : DLNA 情報家電の 遠隔相互接続支援機構 武藤大悟 吉永努 電気通信大学大学院 情報システム学研究科 DICOMO2007 1 発表の流れ 1. 研究の背景と目的 2. 相互接続の概観 3. ワームホールデバイスの動作の概要 4. 実験 性能評価 5. まとめ DICOMO2007 2 発表の流れ
マルチメディア, 分散, 協調とモバイル (DICOMO2007) シンポジウム ワームホールデバイス : DLNA 情報家電の 遠隔相互接続支援機構 武藤大悟 吉永努 電気通信大学大学院 情報システム学研究科 DICOMO2007 1 発表の流れ 1. 研究の背景と目的 2. 相互接続の概観 3. ワームホールデバイスの動作の概要 4. 実験 性能評価 5. まとめ DICOMO2007 2 発表の流れ
ICTのメガトレンドに向けたハイパーコネクテッド・クラウドへの取組み
 ICT Project on Hyper-connected Cloud to Embrace Megatrends in ICT 飯田一朗 あらまし ICT SI ICT Abstract With significant changes occurring on a daily basis, the information and communications technology (ICT)
ICT Project on Hyper-connected Cloud to Embrace Megatrends in ICT 飯田一朗 あらまし ICT SI ICT Abstract With significant changes occurring on a daily basis, the information and communications technology (ICT)
スライド 1
 (10) 2016.6.22 電気通信大学大学院情報理工学研究科末廣尚士 14. ロボットアームの逆運動学 ( 幾何 学的 ( 解析的 ) 解法 ) 何をしたいか 手首, 手先, ツールの 3 次元空間での位置や姿勢から, それを実現する関節角度を計算する. アームソリューション, アームの解とも呼ぶ 何のために たとえばビジョンで認識された物をつかむ場合, 物の位置 姿勢は 3 次元空間で表現されることが普通である.
(10) 2016.6.22 電気通信大学大学院情報理工学研究科末廣尚士 14. ロボットアームの逆運動学 ( 幾何 学的 ( 解析的 ) 解法 ) 何をしたいか 手首, 手先, ツールの 3 次元空間での位置や姿勢から, それを実現する関節角度を計算する. アームソリューション, アームの解とも呼ぶ 何のために たとえばビジョンで認識された物をつかむ場合, 物の位置 姿勢は 3 次元空間で表現されることが普通である.
R76/Gaia ブリッジ構成設定ガイド
 R76/GAiA ブリッジ構成設定ガイド ( スタンドアロン構成 ) Last updated Aug 16, 2013 Ver 1.0 はじめに 本章の手順は 以下の項目が満たされている事を前提条件としています 事前に GAiA R76 のインストールが完了していること 管理コンソールに SmartConsole がインストールされていること 対象となるアプライアンス機器は Model 2200
R76/GAiA ブリッジ構成設定ガイド ( スタンドアロン構成 ) Last updated Aug 16, 2013 Ver 1.0 はじめに 本章の手順は 以下の項目が満たされている事を前提条件としています 事前に GAiA R76 のインストールが完了していること 管理コンソールに SmartConsole がインストールされていること 対象となるアプライアンス機器は Model 2200
fiš„v8.dvi
 (2001) 49 2 333 343 Java Jasp 1 2 3 4 2001 4 13 2001 9 17 Java Jasp (JAva based Statistical Processor) Jasp Jasp. Java. 1. Jasp CPU 1 106 8569 4 6 7; fuji@ism.ac.jp 2 106 8569 4 6 7; nakanoj@ism.ac.jp
(2001) 49 2 333 343 Java Jasp 1 2 3 4 2001 4 13 2001 9 17 Java Jasp (JAva based Statistical Processor) Jasp Jasp. Java. 1. Jasp CPU 1 106 8569 4 6 7; fuji@ism.ac.jp 2 106 8569 4 6 7; nakanoj@ism.ac.jp
RTMツール講習会
 青梅商工会議所主催 RTM 講習会 日時 :2011 年 7 月 25 日 ( 月 ) 10:30~17:30 場所 : 産業技術総合研究所中央第 2 本部情報棟 1F ネットワーク会議室 RT ミドルウェア講習会 10:30-11:15 11:15-12:00 13:00-14:00 14:15-15:15 15:30-16:00 16:15-17:30 第 1 部 :RTミドルウェアの概略紹介担当
青梅商工会議所主催 RTM 講習会 日時 :2011 年 7 月 25 日 ( 月 ) 10:30~17:30 場所 : 産業技術総合研究所中央第 2 本部情報棟 1F ネットワーク会議室 RT ミドルウェア講習会 10:30-11:15 11:15-12:00 13:00-14:00 14:15-15:15 15:30-16:00 16:15-17:30 第 1 部 :RTミドルウェアの概略紹介担当
システムインテグレータのIPv6対応
 システムインテグレータの IPv6 対応 2012 年 11 月 22 日株式会社 NTT データビジネスソリューション事業本部ネットワークソリューション BU 馬場達也 自己紹介 1995 年に NTT データに入社 R&D 部門でネットワークセキュリティの研究開発 現在は エンタープライズのお客様のネットワークの設計 構築 運用ビジネスを行う部門で新ネットワークサービスの開発を担当 2006 年
システムインテグレータの IPv6 対応 2012 年 11 月 22 日株式会社 NTT データビジネスソリューション事業本部ネットワークソリューション BU 馬場達也 自己紹介 1995 年に NTT データに入社 R&D 部門でネットワークセキュリティの研究開発 現在は エンタープライズのお客様のネットワークの設計 構築 運用ビジネスを行う部門で新ネットワークサービスの開発を担当 2006 年
ChoreonoidとOpenHRIを用いたシステム構築事例
 Choreonoid と OpenHRI を用いた システム構築事例 産業技術総合研究所 原 功 Choreonoid Choreonoid オープンソースのロボット用統合 GUI ソフトウェア 動作振り付けソフトウェアとして キーフレームベースの動作生成 CG の動作生成のような UI 動力学シミュレータとして OpenHRP3, ODE, Bullet Physics Engne など利用可 開発フレームワークとして
Choreonoid と OpenHRI を用いた システム構築事例 産業技術総合研究所 原 功 Choreonoid Choreonoid オープンソースのロボット用統合 GUI ソフトウェア 動作振り付けソフトウェアとして キーフレームベースの動作生成 CG の動作生成のような UI 動力学シミュレータとして OpenHRP3, ODE, Bullet Physics Engne など利用可 開発フレームワークとして
,,,,., C Java,,.,,.,., ,,.,, i
 24 Development of the programming s learning tool for children be derived from maze 1130353 2013 3 1 ,,,,., C Java,,.,,.,., 1 6 1 2.,,.,, i Abstract Development of the programming s learning tool for children
24 Development of the programming s learning tool for children be derived from maze 1130353 2013 3 1 ,,,,., C Java,,.,,.,., 1 6 1 2.,,.,, i Abstract Development of the programming s learning tool for children
Vol. 48 No. 4 Apr LAN TCP/IP LAN TCP/IP 1 PC TCP/IP 1 PC User-mode Linux 12 Development of a System to Visualize Computer Network Behavior for L
 Vol. 48 No. 4 Apr. 2007 LAN TCP/IP LAN TCP/IP 1 PC TCP/IP 1 PC User-mode Linux 12 Development of a System to Visualize Computer Network Behavior for Learning to Associate LAN Construction Skills with TCP/IP
Vol. 48 No. 4 Apr. 2007 LAN TCP/IP LAN TCP/IP 1 PC TCP/IP 1 PC User-mode Linux 12 Development of a System to Visualize Computer Network Behavior for Learning to Associate LAN Construction Skills with TCP/IP
スライド 1
 第 2 部 RT コンポーネント作成入門 宮本信彦 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センターロボットソフトウェアプラットフォーム研究チーム 資料 (USB メモリで配布 ) ppt 第 2 部 第 3 部のスライド WEB ページ ( 手順を記載したページ ) 第 2 部 (Windows) 第 2 部 (Ubuntu) 第 3 部 第 4 部 OpenRTM-aist_1.2.0
第 2 部 RT コンポーネント作成入門 宮本信彦 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センターロボットソフトウェアプラットフォーム研究チーム 資料 (USB メモリで配布 ) ppt 第 2 部 第 3 部のスライド WEB ページ ( 手順を記載したページ ) 第 2 部 (Windows) 第 2 部 (Ubuntu) 第 3 部 第 4 部 OpenRTM-aist_1.2.0
sox_tutorial_sigmod
 SOX / Sensorizer Tutorial 中澤仁 米澤拓郎 慶應義塾大学 この資料は http://sox.ht.sfc.keio.ac.jp からダウンロードできます 目次 チュートリアルの範囲 SOXについて アプリの事例紹介 サンプルプログラム ライブラリ紹介 (JavaScript / Java) センサライザの使い方 Live Open Data Stream 基盤 Core Stream
SOX / Sensorizer Tutorial 中澤仁 米澤拓郎 慶應義塾大学 この資料は http://sox.ht.sfc.keio.ac.jp からダウンロードできます 目次 チュートリアルの範囲 SOXについて アプリの事例紹介 サンプルプログラム ライブラリ紹介 (JavaScript / Java) センサライザの使い方 Live Open Data Stream 基盤 Core Stream
XJTAG
 LDRA/ T-VEC/ MetaEdit+ Domain Specific Modeling Ashling/Jtag ARC SmartCards LAUTERBACH /Jtag ARM PowerPC K MIPS XJTAG HW Domain-Specific Modeling Domain-Specific Modeling Software Technology 30 Copyright
LDRA/ T-VEC/ MetaEdit+ Domain Specific Modeling Ashling/Jtag ARC SmartCards LAUTERBACH /Jtag ARM PowerPC K MIPS XJTAG HW Domain-Specific Modeling Domain-Specific Modeling Software Technology 30 Copyright
untitled
 IT IT IT IT 1 IT 2 Software as a Service (SaaS 3 ) IT SaaS 4 SaaS SaaS PC SaaS SaaS Web SaaS ID IT SaaS IT 1 2 3 Software as a Service ASP(Application Service Provider) SaaS 4 ASPIC SaaS SaaS SaaS SaaS
IT IT IT IT 1 IT 2 Software as a Service (SaaS 3 ) IT SaaS 4 SaaS SaaS PC SaaS SaaS Web SaaS ID IT SaaS IT 1 2 3 Software as a Service ASP(Application Service Provider) SaaS 4 ASPIC SaaS SaaS SaaS SaaS
f2-system-requirement-system-composer-mw
 Simulink Requirements と新製品 System Composer によるシステムズエンジニアリング MathWorks Japan アプリケーションエンジニアリング部大越亮二 2015 The MathWorks, Inc. 1 エンジニアリングの活動 要求レベル システムレベル 要求分析 システム記述 表現 高 システム分析 システム結合 抽象度 サブシステム コンポーネントレベル
Simulink Requirements と新製品 System Composer によるシステムズエンジニアリング MathWorks Japan アプリケーションエンジニアリング部大越亮二 2015 The MathWorks, Inc. 1 エンジニアリングの活動 要求レベル システムレベル 要求分析 システム記述 表現 高 システム分析 システム結合 抽象度 サブシステム コンポーネントレベル
ServerViewのWebアクセス制限方法
 [ 重要 ]ServerView のセキュリティ 1. 説明 ServerView コンソール (ServerView 管理コンソール ServerView WebExtension ServerView S2 Serverview AlarmService) の扱う情報の中には 管理者名等の個人情報や その他の重要情報が含まれています 外部からアクセスできるドメインに設置する装置には ServerView
[ 重要 ]ServerView のセキュリティ 1. 説明 ServerView コンソール (ServerView 管理コンソール ServerView WebExtension ServerView S2 Serverview AlarmService) の扱う情報の中には 管理者名等の個人情報や その他の重要情報が含まれています 外部からアクセスできるドメインに設置する装置には ServerView
PowerPoint Presentation
 知能システム論 1 (11) 2012.6.20 情報システム学研究科情報メディアシステム学専攻知能システム学講座末廣尚士 13. ロボットアームの逆運動学 ( 幾何的解法 ) 何をしたいか 手首 手先 ツールの3 次元空間での位置や姿勢から それを実現する関節角度を計算する アームソリューション アームの解とも呼ぶ 何のために たとえばビジョンで認識された物をつかむ場合 物の位置 姿勢は3 次元空間で表現されることが普通である
知能システム論 1 (11) 2012.6.20 情報システム学研究科情報メディアシステム学専攻知能システム学講座末廣尚士 13. ロボットアームの逆運動学 ( 幾何的解法 ) 何をしたいか 手首 手先 ツールの3 次元空間での位置や姿勢から それを実現する関節角度を計算する アームソリューション アームの解とも呼ぶ 何のために たとえばビジョンで認識された物をつかむ場合 物の位置 姿勢は3 次元空間で表現されることが普通である
Consuming a simple Web Service
 Consume a Simple Web Service シンプルな Web サービスを利用する 目次 1 Introduction はじめに... 2 2 Importing a WSDL WSDL をインポートする... 3 3 Creating Logic to Call the Web Service Web サービスを呼び出すロジックを作成する... 5 4 Related Content
Consume a Simple Web Service シンプルな Web サービスを利用する 目次 1 Introduction はじめに... 2 2 Importing a WSDL WSDL をインポートする... 3 3 Creating Logic to Call the Web Service Web サービスを呼び出すロジックを作成する... 5 4 Related Content
Microsoft PowerPoint ppt [互換モード]
![Microsoft PowerPoint ppt [互換モード]](/thumbs/101/150326876.jpg "Microsoft PowerPoint ppt [互換モード]") RT ミドルウェア講習会 日時 :2012 年 5 月 22 日 ( 水 ) 10:00~16:45 場所 : つくば国際会議場小会議室 303 RT ミドルウェア講習会 10:00-10:50 11:00-11:50 11:50-12:00 12:00-13:00 13:00-14:00 14:00-16:45 第 1 部 ( その1): インターネットを利用したロボットサービスとRSiの取り組み
RT ミドルウェア講習会 日時 :2012 年 5 月 22 日 ( 水 ) 10:00~16:45 場所 : つくば国際会議場小会議室 303 RT ミドルウェア講習会 10:00-10:50 11:00-11:50 11:50-12:00 12:00-13:00 13:00-14:00 14:00-16:45 第 1 部 ( その1): インターネットを利用したロボットサービスとRSiの取り組み
システム開発プロセスへのデザイン技術適用の取組み~HCDからUXデザインへ~
 HCDUX Approach of Applying Design Technology to System Development Process: From HCD to UX Design 善方日出夫 小川俊雄 あらまし HCDHuman Centered Design SE SDEMHCDUIUser Interface RIARich Internet ApplicationUXUser
HCDUX Approach of Applying Design Technology to System Development Process: From HCD to UX Design 善方日出夫 小川俊雄 あらまし HCDHuman Centered Design SE SDEMHCDUIUser Interface RIARich Internet ApplicationUXUser
IT IBM Corporation
 2009/9/25 ATC. 1 2009 IBM Corporation 1. 1. 2. 3. IT 2 2009 IBM Corporation 2006 8 9 (?) Google CEO, Eric Schmidt @ Search Engine Strategies Conference (*) emergent () 10 Network ComputerAjax LAMP (Linux
2009/9/25 ATC. 1 2009 IBM Corporation 1. 1. 2. 3. IT 2 2009 IBM Corporation 2006 8 9 (?) Google CEO, Eric Schmidt @ Search Engine Strategies Conference (*) emergent () 10 Network ComputerAjax LAMP (Linux
2 概要 市場で不具合が発生にした時 修正箇所は正常に動作するようにしたけど将来のことを考えるとメンテナンス性を向上させたいと考えた リファクタリングを実施して改善しようと考えた レガシーコードなのでどこから手をつけて良いものかわからない メトリクスを使ってリファクタリング対象を自動抽出する仕組みを
 メトリクス利用によるリファクタリング対象の自動抽出 ローランドディー. ジー. 株式会社 第 4 開発部 SC02 小林光一 e-mail:kouichi.kobayashi@rolanddg.co.jp 2 概要 市場で不具合が発生にした時 修正箇所は正常に動作するようにしたけど将来のことを考えるとメンテナンス性を向上させたいと考えた リファクタリングを実施して改善しようと考えた レガシーコードなのでどこから手をつけて良いものかわからない
メトリクス利用によるリファクタリング対象の自動抽出 ローランドディー. ジー. 株式会社 第 4 開発部 SC02 小林光一 e-mail:kouichi.kobayashi@rolanddg.co.jp 2 概要 市場で不具合が発生にした時 修正箇所は正常に動作するようにしたけど将来のことを考えるとメンテナンス性を向上させたいと考えた リファクタリングを実施して改善しようと考えた レガシーコードなのでどこから手をつけて良いものかわからない
Microsoft Word - quick_start_guide_16 1_ja.docx
 Quartus Prime ソフトウェア ダウンロードおよびインストール クイック スタート ガイド 2016 Intel Corporation. All rights reserved. Intel, the Intel logo, Intel FPGA, Arria, Cyclone, Enpirion, MAX, Megacore, NIOS, Quartus and Stratix words
Quartus Prime ソフトウェア ダウンロードおよびインストール クイック スタート ガイド 2016 Intel Corporation. All rights reserved. Intel, the Intel logo, Intel FPGA, Arria, Cyclone, Enpirion, MAX, Megacore, NIOS, Quartus and Stratix words
インテル(R) Visual Fortran コンパイラ 10.0
 Visual Fortran コンパイラ 10.0") インテル (R) Visual Fortran コンパイラー 10.0 日本語版スペシャル エディション 入門ガイド 目次 概要インテル (R) Visual Fortran コンパイラーの設定はじめに検証用ソースファイル適切なインストールの確認コンパイラーの起動 ( コマンドライン ) コンパイル ( 最適化オプションなし ) 実行 / プログラムの検証コンパイル ( 最適化オプションあり ) 実行
インテル (R) Visual Fortran コンパイラー 10.0 日本語版スペシャル エディション 入門ガイド 目次 概要インテル (R) Visual Fortran コンパイラーの設定はじめに検証用ソースファイル適切なインストールの確認コンパイラーの起動 ( コマンドライン ) コンパイル ( 最適化オプションなし ) 実行 / プログラムの検証コンパイル ( 最適化オプションあり ) 実行
(Microsoft Word - RS002_PA10\216\346\210\265\220\340\226\276\217\221_05.doc)
") 次世代ロボット知能化技術開発プロジェクト ロボット知能ソフトウェア再利用性向上技術の開発 来訪者受付システム (RS002) PA10 取扱説明書 0.5 版 2011 年 3 月 16 日 RTC 再利用技術研究センター 目次 1 はじめに...1 1.1 目的...1 1.2 本書での書式...1 1.3 用語の定義 略語...1 1.4 参考資料...2 2 システム概要...3 2.1 ハードウェア構成...3
次世代ロボット知能化技術開発プロジェクト ロボット知能ソフトウェア再利用性向上技術の開発 来訪者受付システム (RS002) PA10 取扱説明書 0.5 版 2011 年 3 月 16 日 RTC 再利用技術研究センター 目次 1 はじめに...1 1.1 目的...1 1.2 本書での書式...1 1.3 用語の定義 略語...1 1.4 参考資料...2 2 システム概要...3 2.1 ハードウェア構成...3
Microsoft Windows Internet Explorer は 米国 Microsoft Corporation の 米国およびその他の国における登録商標または商標です Linux は Linus Torvalds 氏の日本およびその他の国における登録商標または商標です Red Hat
 作成日 :2017/07/06 ******************************************************************************* ** ** ** FUJITSU Cloud Service K5 ** ** ** ** ソフトウェアカフェテリアサービス向けソフトウェア説明書 ** ** Linux 版 ** ** Interstage
作成日 :2017/07/06 ******************************************************************************* ** ** ** FUJITSU Cloud Service K5 ** ** ** ** ソフトウェアカフェテリアサービス向けソフトウェア説明書 ** ** Linux 版 ** ** Interstage
AN424 Modbus/TCP クイックスタートガイド CIE-H14
 Modbus/TCP クイックスタートガイド (CIE-H14) 第 1 版 2014 年 3 月 25 日 動作確認 本アプリケーションノートは 弊社取り扱いの以下の機器 ソフトウェアにて動作確認を行っています 動作確認を行った機器 ソフトウェア OS Windows7 ハードウェア CIE-H14 2 台 ソフトウェア ezmanager v3.3a 本製品の内容及び仕様は予告なしに変更されることがありますのでご了承ください
Modbus/TCP クイックスタートガイド (CIE-H14) 第 1 版 2014 年 3 月 25 日 動作確認 本アプリケーションノートは 弊社取り扱いの以下の機器 ソフトウェアにて動作確認を行っています 動作確認を行った機器 ソフトウェア OS Windows7 ハードウェア CIE-H14 2 台 ソフトウェア ezmanager v3.3a 本製品の内容及び仕様は予告なしに変更されることがありますのでご了承ください
<4D F736F F F696E74202D F82C282C882AA82E98D488FEA95AA89C889EF E B E9197BF>
 ロボットミドルウエア標準 RT ミドルウェア 安藤慶昭 経済産業省製造産業局産業機械課情報化推進係長 ( 独 ) 産業技術総合研究所知能システム研究部門主任研究員 概要 ロボットミドルウエアとは? RTミドルウエア:OpenRTM-aist 様々なミドルウエア / プラットフォーム 標準化 終わりに 2 ロボットミドルウエアとは? ロボットシステム構築を効率化するための共通機能を提供するソフトウエア
ロボットミドルウエア標準 RT ミドルウェア 安藤慶昭 経済産業省製造産業局産業機械課情報化推進係長 ( 独 ) 産業技術総合研究所知能システム研究部門主任研究員 概要 ロボットミドルウエアとは? RTミドルウエア:OpenRTM-aist 様々なミドルウエア / プラットフォーム 標準化 終わりに 2 ロボットミドルウエアとは? ロボットシステム構築を効率化するための共通機能を提供するソフトウエア
スライド 1
 第 2 部 RT コンポーネント作成入門 宮本信彦 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センターロボットソフトウェアプラットフォーム研究チーム 資料 (USB メモリで配布 ) ppt 第 2 部 WEB ページ ( 手順を記載したページ ) 第 2 部 (Windows) 第 2 部 (Ubuntu) installer OpenRTM-aist のインストールに問題があった場合に使用してください
第 2 部 RT コンポーネント作成入門 宮本信彦 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センターロボットソフトウェアプラットフォーム研究チーム 資料 (USB メモリで配布 ) ppt 第 2 部 WEB ページ ( 手順を記載したページ ) 第 2 部 (Windows) 第 2 部 (Ubuntu) installer OpenRTM-aist のインストールに問題があった場合に使用してください
Microsoft Word - document-force_pos_hybrid_module.docx
 次世代ロボット知能化技術開発プロジェクト 手先拘束下でのマニピュレーション知能モジュール仕様書 取扱説明書 2011 年 3 月 30 日 国立大学法人東北大学株式会社パイケーク 1 更新履歴 改定日付 2009/12/14 新規作成 2010/05/18 5 章にモデルファイルに関する記述を追加 2010/05/31 コンパイル手順の変更に対応 2011/03/30 OpenRTM1.0 対応 2
次世代ロボット知能化技術開発プロジェクト 手先拘束下でのマニピュレーション知能モジュール仕様書 取扱説明書 2011 年 3 月 30 日 国立大学法人東北大学株式会社パイケーク 1 更新履歴 改定日付 2009/12/14 新規作成 2010/05/18 5 章にモデルファイルに関する記述を追加 2010/05/31 コンパイル手順の変更に対応 2011/03/30 OpenRTM1.0 対応 2
NEDO講座 Hara
 ロボットシステム開発における RTM の有用性および開発ツール群 ( 独 ) 産業技術総合研究所知能システム研究部門原功 これまでの主な研究 所内事情通ロボット (1996-2001) オフィス内の情報サービス 訪問者受付 案内 紹介 配達 連絡 人探し メンバスケジュール管理 ミーティングアレンジ等 いろいろなオフィス環境で 自律的に情報収集 学習し 事情通になってゆく 独自仕様のモジュール化システム
ロボットシステム開発における RTM の有用性および開発ツール群 ( 独 ) 産業技術総合研究所知能システム研究部門原功 これまでの主な研究 所内事情通ロボット (1996-2001) オフィス内の情報サービス 訪問者受付 案内 紹介 配達 連絡 人探し メンバスケジュール管理 ミーティングアレンジ等 いろいろなオフィス環境で 自律的に情報収集 学習し 事情通になってゆく 独自仕様のモジュール化システム