スライド 1
|
|
|
- みずき のえ
- 4 years ago
- Views:
Transcription
1 第 2 部 RT コンポーネント作成入門 宮本信彦 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センターロボットソフトウェアプラットフォーム研究チーム
2 資料 (USB メモリで配布 ) ppt 第 2 部 WEB ページ ( 手順を記載したページ ) 第 2 部 (Windows) 第 2 部 (Ubuntu) installer OpenRTM-aist のインストールに問題があった場合に使用してください script この講習で使うシミュレータのインストールスクリプト (Ubuntu 用 ) EXE RaspberryPiMouseSimulatorComp.exe( シミュレータ ) sample RobotController( 本実習で作成するコンポーネントの見本 ) 2
3 インストールの確認 (Windows) OpenRTM-aist OpenRTM-aist RELEASE_x86_64.msi Visual Studio 2019 をインストールした場合は OpenRTM-aist RC をインストールする インストール後に再起動する (2 回再起動を必要とする環境もある ) Python python amd64.msi OpenRTM-aist の 64bit 版をインストールする場合は Python も 64bit 版をインストールする CMake cmake win64-x64.msi Doxygen doxygen setup.exe Visual Studio Visual Studio 2017 Community Edition もしくは Visual Studio 2019 vs_installer_2019 vs_community _2019.exe 3
4 4 インストールの確認 (Ubuntu) OpenRTM-aist $ wget $ sudo sh pkg_install_ubuntu.sh CMake $ sudo apt-get install cmake cmake-gui Doxygen $ sudo apt-get install doxygen Java $ sudo apt-get install openjdk-8-jdk Code::Blocks( 任意 ) $ sudo apt-get install codeblocks RaspberryPiMouseSimulatorComp $ wget spimouse_simulator.sh sudo sh install_raspimouse_simulator.sh
")

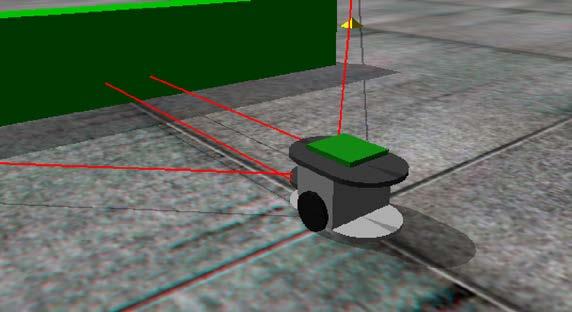
5 実習内容 シミュレータ上の車輪型移動ロボット (Raspberry Piマウス ) の操作を行うコンポーネントの作成 GUIにより目標速度入力 センサ値が一定以上の場合に停止 5

6 Raspberry Pi マウス概要 Raspberry Pi マウスはアールティが販売している独立二輪駆動型の移動ロボット 6
7 7 全体の手順 RTC Builder によるソースコード等のひな型の作成 ソースコードの編集 ビルド ビルドに必要な各種ファイルを生成 CMake により各種ファイル生成 ソースコードの編集 RobotController.h RobotController.cpp の編集 ビルド Visual Studio Code::Blocks RT システムエディタによる RT システム作成 動作確認 RT システム作成 データポート接続 コンフィギュレーションパラメータ設定
8 8 コンポーネント開発ツール RTC Builder について

9 9 RTC Builder コンポーネントのプロファイル情報を入力し, ソースコード等のひな型を生成するツール C++ Python Java Lua のソースコードを出力
10 10 RTC Builder の起動 起動する手順 Windows(OpenRTM-aist 1.2) デスクトップのショートカットをダブルクリック デスクトップのショートカットがない場合 Windows 7 スタート すべてのプログラム OpenRTM-aist Tools OpenRTP Windows 8.1 スタート アプリビュー ( 右下矢印 ) OpenRTM-aist OpenRTP 同じフォルダに RTSystemEditorRCP がありますが これは RTC Builder が使えないので今回は OpenRTP を起動してください Windows 10 左下の ここに入力して検索 に OpenRTP と入力して 表示された OpenRTP を起動 Ubuntu 以下のコマンドを入力 $ openrtp

")
11 RTC Builder の起動 Windows 8.1(OpenRTM-aist 以前 ) デスクトップスタート画面アプリビュー 11
 左下の ここに入力して検索 に OpenRTP と入力 12")
12 RTC Builder の起動 Windows 10(OpenRTM-aist 以前 ) 左下の ここに入力して検索 に OpenRTP と入力 12

13 RTC Builder の起動 13

14 RTC Builder の起動 14

15 15 プロジェクト作成 RobotController コンポーネントのスケルトンコードを作成する 車輪型移動ロボット操作コンポーネント GUI でロボットを操作 センサ値が一定以上の場合に停止
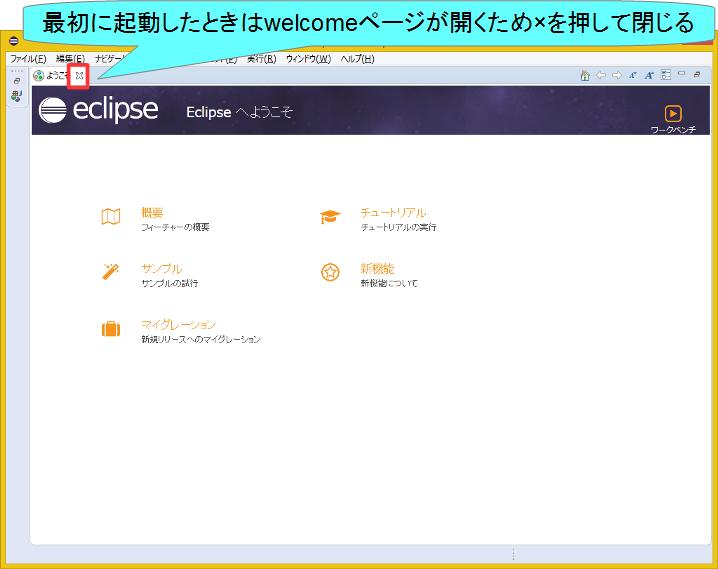
16 16 資料 USB メモリで配布 WEB ページ フォルダの HTML ファイルを開く チュートリアル (Raspberry Pi Mouse C++ Windows 強化月間用 ) _ OpenRTM-aist.html チュートリアル (Raspberry Pi Mouse C++ Windows 強化月間用 ) _ OpenRTM-aist.html もしくは RT ミドルウェア講習会のページからリンクをクリック チュートリアル ( 第 2 部 Windows) チュートリアル ( 第 2 部 Ubuntu)


17 プロジェクト作成 Eclipse 起動時にワークスペースに指定したディレクトリに RobotController というフォルダが作成される この時点では RTC.xml と.project のみが生成されている 以下の項目が設定する 基本プロファイル アクティビティ プロファイル データポート プロファイル サービスポート プロファイル コンフィギュレーション ドキュメント 言語環境 RTC.xml 17


18 18 基本プロファイルの入力 RT コンポーネントのプロファイル情報など, コンポーネントの基本情報を設定. コード生成, インポート / エクスポート, パッケージング処理を実行
 ベンダ名 任意 モジュールカテゴリ 任意 (Controller) コンポーネント型 STATIC アクティビティ型 PERIODIC コンポーネントの種類 DataFlow 最大インスタンス数 1 実行型")
19 19 基本プロファイルの入力 モジュール名 RobotController モジュール概要 任意 (Robot Controller Component) バージョン 任意 (1.0.0) ベンダ名 任意 モジュールカテゴリ 任意 (Controller) コンポーネント型 STATIC アクティビティ型 PERIODIC コンポーネントの種類 DataFlow 最大インスタンス数 1 実行型 PeriodicExecutionContext 実行周期 概要 任意
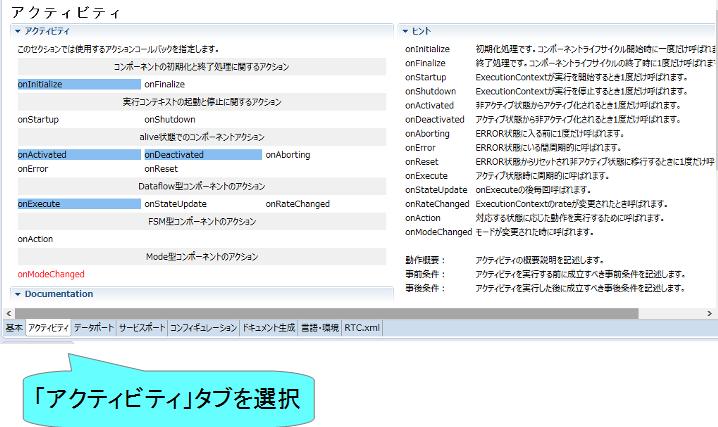
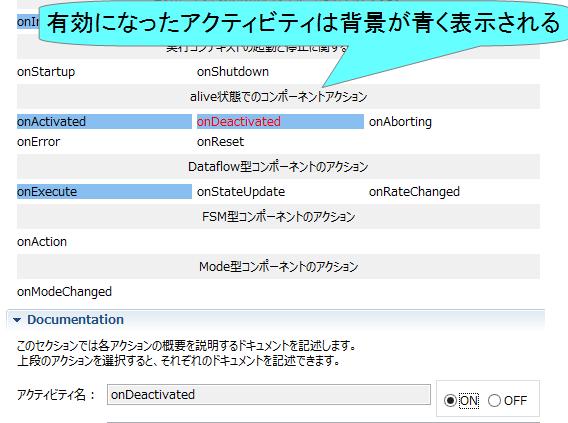
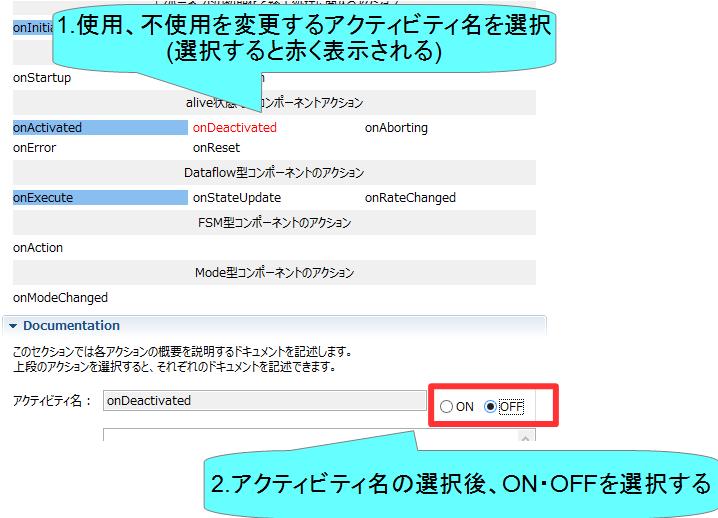

20 アクティビティの設定 使用するアクティビティを設定する 指定アクティビティを有効にする手順
21 コールバック関数 oninitialize onactivated onexecute ondeactivated onaborting onreset onerror onfinalize onstateupdate onratechanged onstartup onshutdown アクティビティの設定 処理 初期化処理 アクティブ化されるとき 1 度だけ呼ばれる アクティブ状態時に周期的に呼ばれる 非アクティブ化されるとき 1 度だけ呼ばれる ERROR 状態に入る前に 1 度だけ呼ばれる reset される時に 1 度だけ呼ばれる ERROR 状態のときに周期的に呼ばれる 終了時に 1 度だけ呼ばれる onexecute の後毎回呼ばれる ExecutionContext の rate が変更されたとき 1 度だけ呼ばれる ExecutionContext が実行を開始するとき 1 度だけ呼ばれる ExecutionContext が実行を停止するとき 1 度だけ呼ばれる 21

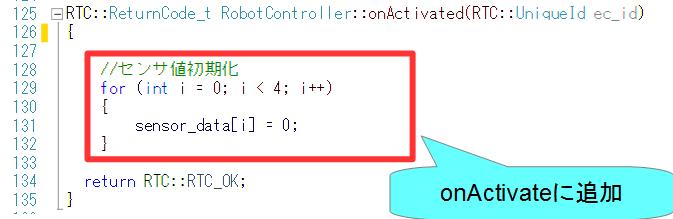
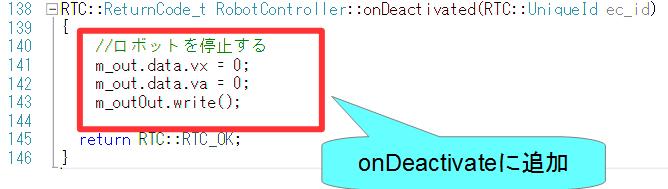
22 22 アクティビティの設定 以下のアクティビティを有効にする oninitialize onactivated ondeactivated onexecute 今回は練習のため Documentation は空白でも大丈夫です


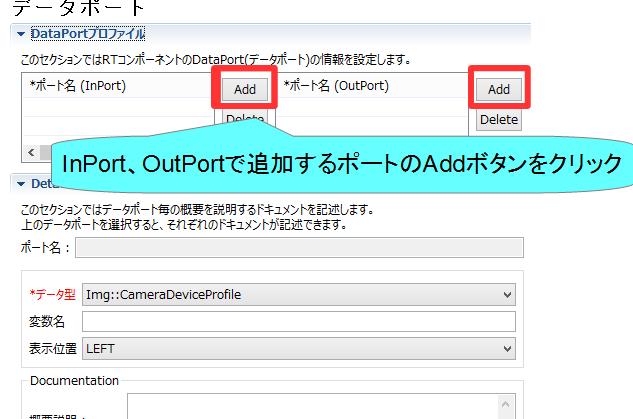
23 データポートの設定 InPort OutPort の追加 設定を行う データポートを追加する手順

24 データポートの設定 以下の OutPort を設定する out データ型 : RTC::TimedVelocity2D 他の項目は任意 TimedVelocity3D 型 TimedVector2D と間違えないようにしてください 以下の InPort を設定する in データ型 : RTC::TimedShortSeq 他の項目は任意 TimedShort 型と間違えないようにしてください データ型はドロップダウンリストから選択する
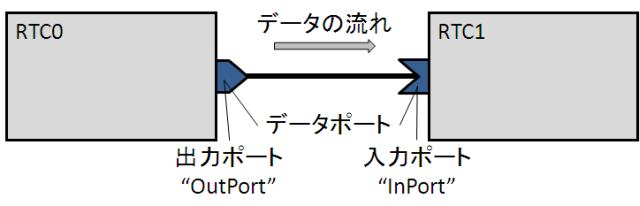
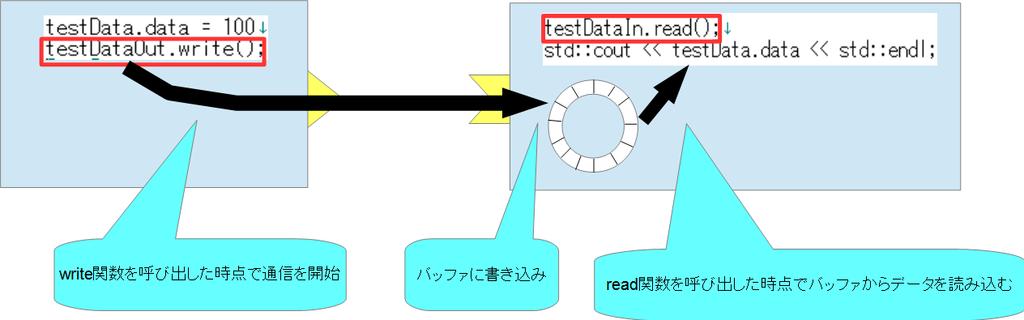
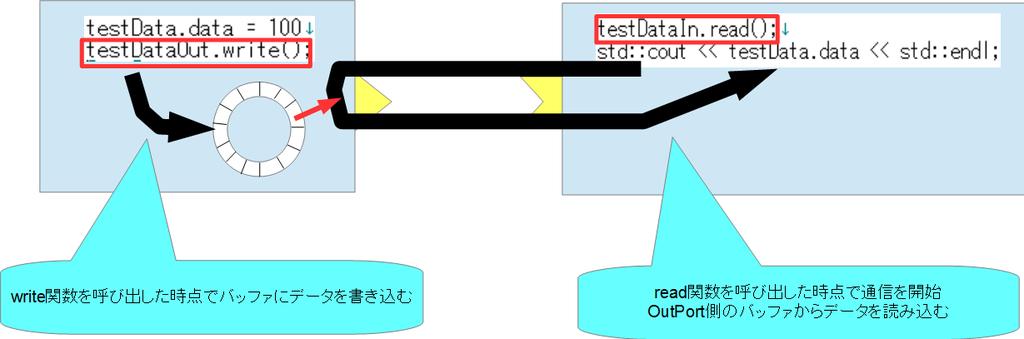
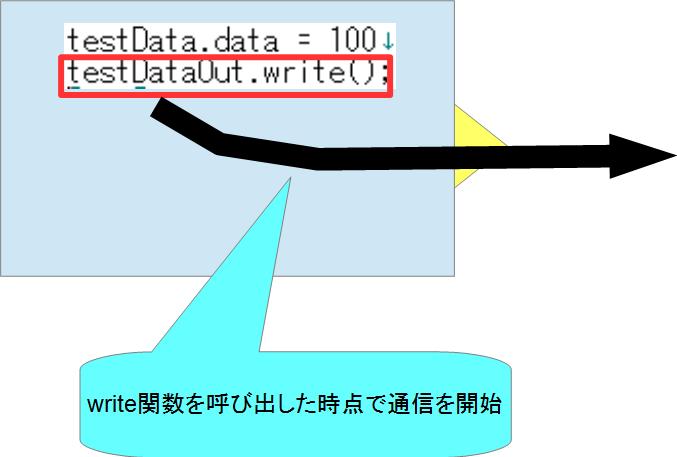
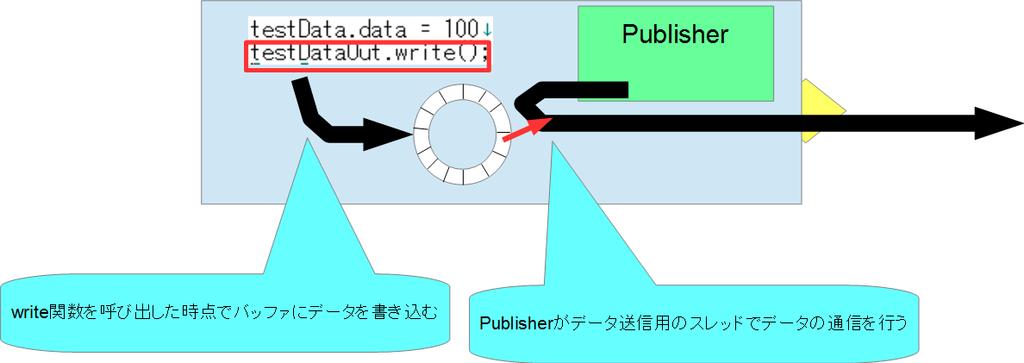
25 データポートについて 連続したデータを通信するためのポート 以下の例はデータフロー型が push サブスクリプション型が flush インターフェース型が corba_cdr の場合
26 RTC::TimedVelocity2D 型について ExtendedDataTypes.idl で定義されている移動ロボットの速度を表現するためのデータ型 vx: X 軸方向の速度 vy: Y 軸方向の速度 ( 車輪が横滑りしないと仮定すると 0) va: Z 軸周りの角速度 vx で直進速度 va で回転速度を設定
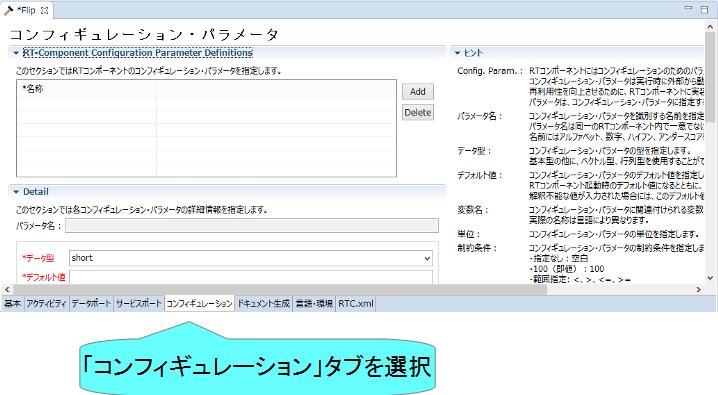
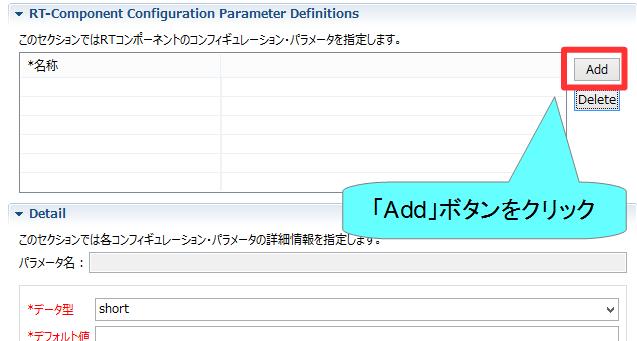
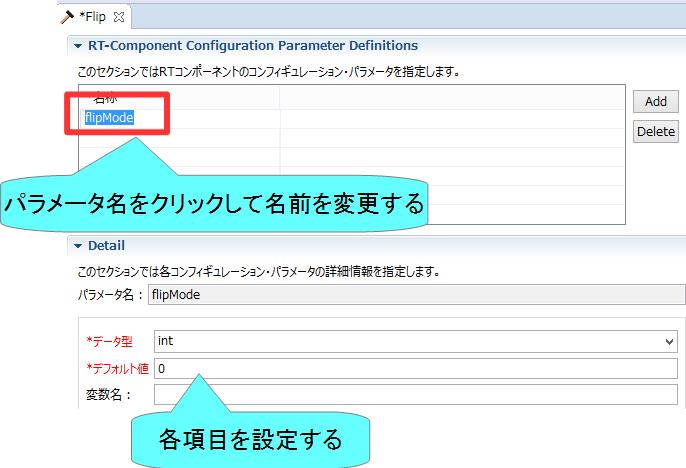
27 コンフィギュレーションの設定 コンフィギュレーションパラメータの追加 設定を行う コンフィギュレーションパラメータを追加する手順


28 コンフィギュレーションの設定 以下のコンフィギュレーションパラメータを設定する speed_x データ型 :double デフォルト値 : 0.0 制約条件 :-1.5<x<1.5 Widget:slider Step: 0.01 他の項目は任意 speed_r データ型 :double デフォルト値 : 0.0 制約条件 :-2.0<x<2.0 Widget:slider Step: 0.01 他の項目は任意 GUI( スライダー ) による移動ロボットの操作ができるようにする
29 コンフィギュレーションパラメータの制約 Widget の設定 RT System Editor でコンフィギュレーションパラメータを編集する際に GUI を表示する Widget:text 制約条件 :0<=x<=100 Widget:spin Step:10 制約条件 :0<=x<=100 Widget:slider Step:10
30 コンフィギュレーションパラメータの制約 Widget の設定 制約条件 :(0,1,2,3) Widget:radio 制約条件 :(0,1,2,3) Widget:checkbox 制約条件 :(0,1,2,3) Widget:ordered_list

31 コンフィギュレーションの設定 以下のコンフィギュレーションパラメータを追加 stop_d データ型 :int デフォルト値 : 30 他の項目は任意 センサ値がこの値以上の場合に停止

32 Raspberry Pi マウスの距離センサ Raspberry Pi マウス実機には距離センサが搭載されている 計測した値は物体までの距離が近いほど大きな値となる シミュレータでもこのデータに近い値を計算して出力している

33 各種ドキュメント情報を設定 ドキュメントの設定 今回は適当に設定しておいてください 空白でも大丈夫です

34 言語の設定 実装する言語, 動作環境に関する情報を設定
 ヘッダーファイル (.")

35 スケルトンコードの生成 基本タブからコード生成ボタンを押すことでスケルトンコードが生成される Workspace RobotController 以下に生成 ソースコード C++ ソースファイル (.cpp) ヘッダーファイル (.h)» このソースコードにロボットを操作する処理を記述する CMake の設定ファイル (CMakeLists.txt) rtc.conf RobotController.conf 以下略 生成したファイルの確認 作成したプロジェクトを右クリックして 表示方法 システムエクスプローラー を選択する エクスプローラーでワークスペースのフォルダが開くため 上記のファイルが存在するかを確認する
36 36 手順 ビルドに必要な各種ファイルを生成 CMake により各種ファイル生成 ソースコードの編集 RobotController.h の編集 RobotController.cpp の編集 ビルド Windows: Visual Studio Ubuntu: Code::Blocks
37 ソースコードの編集 RTC のビルド 37

38 CMake ビルドに必要な各種ファイルを生成 CMakeLists.txtに設定を記述 RTC Builderでスケルトンコードを作成した時にCMakeLists.txtも生成されている 38
 CMake CMake (cmake-gui) Windows 10 左下の ここに入力して検索 にCMakeと入力して表示されたCMake(cmake-gui) を起動")
39 ビルドに必要なファイルの生成 CMakeを使用する Windows 7 スタート すべてのプログラム CMake CMake (cmake-gui) Windows 8.1 スタート アプリビュー( 右下矢印 ) CMake CMake (cmake-gui) Windows 10 左下の ここに入力して検索 にCMakeと入力して表示されたCMake(cmake-gui) を起動 Ubuntu コマンドで cmake-gui を入力 39

40 40 cmake-gui の起動 Windows 8.1 デスクトップスタート画面アプリビュー

41 41 cmake-gui の起動 Windows 10 左下の ここに入力して検索 に cmake と入力

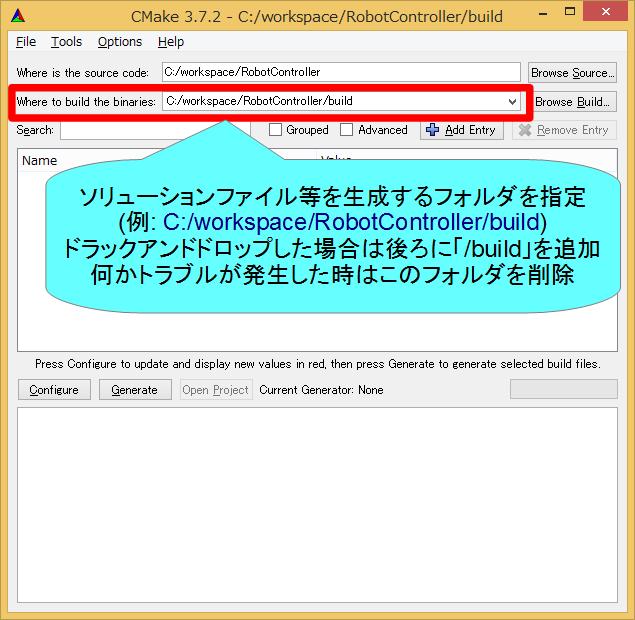
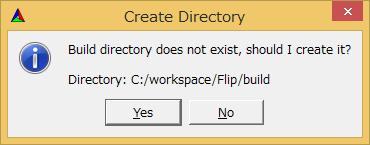
42 ビルドに必要なファイルの生成 CMakeLists.txt を cmake-gui にドラックアンドドロップ CMakeLists.txt は RTC Builder で生成したプロジェクトのフォルダ ( 例 : C: workspace RobotController) 42
43 ビルドに必要なファイルの生成 43
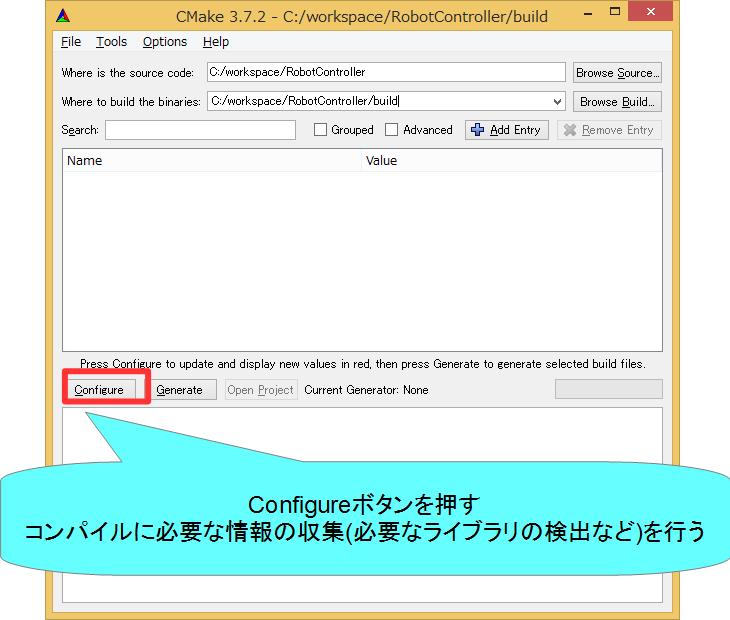
44 ビルドに必要なファイルの生成 44
45 CMake 3.14 以降の場合 ビルド環境の設定 Visual Studio 2019 Visual Studio Visual Studio 2013 Visual Studio 貸し出した PC では Visual Studio を指定 X64 を選択する 設定後 Finish ボタンを押す 45

46 CMake 3.13 以前の場合 46
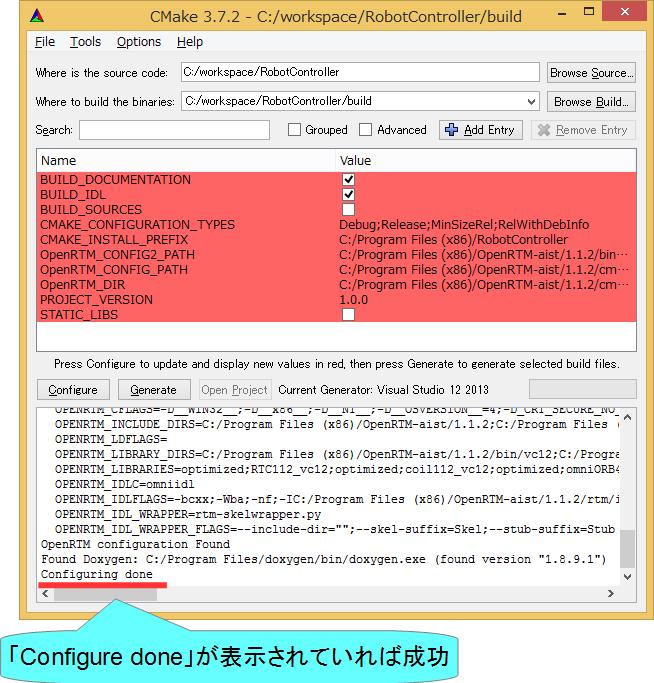
47 ビルドに必要なファイルの生成 47
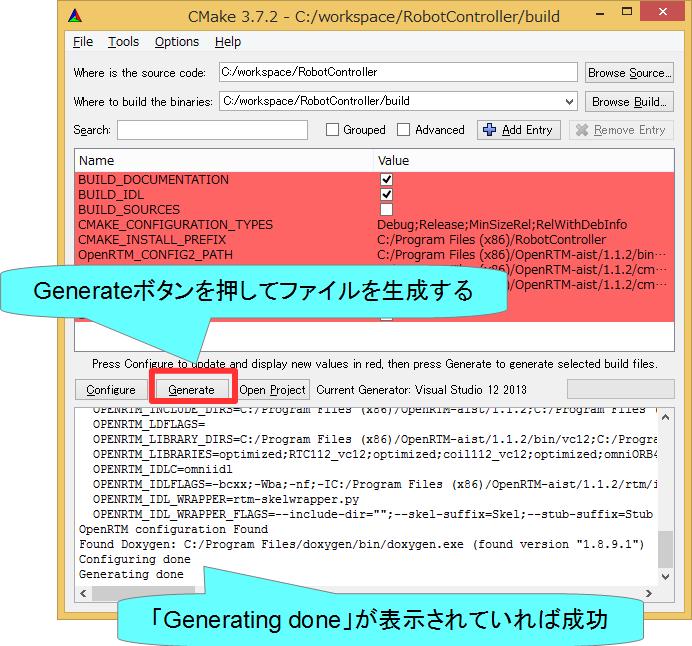
48 ビルドに必要なファイルの生成 48

49 ソースコードの編集 49


50 ソースコードの編集 CMake-gui のバージョンが古い場合は Open Project ボタンがないため ファイルをダブルクリックして開く Windows build フォルダの RobotController.sln をダブルクリックして開く Ubuntu build フォルダの RobotController.cbp をダブルクリックして開く 50


51 51 ソースコードの編集 Windows Visual Studio が起動 Ubuntu Code::Blocks が起動


52 RobotController.h の編集 ソースコードの編集 Visual Studio Code::Blocks 52

53 RobotController.h の編集 ソースコードの編集 53


54 ソースコードの編集 RobotController.cpp の編集 詳細は USB メモリの資料を参考にしてください Visual Studio Code::Blocks 54
55 RobotController.cpp の編集 ソースコードの編集 55
56 RobotController.cpp の編集 ソースコードの編集 56

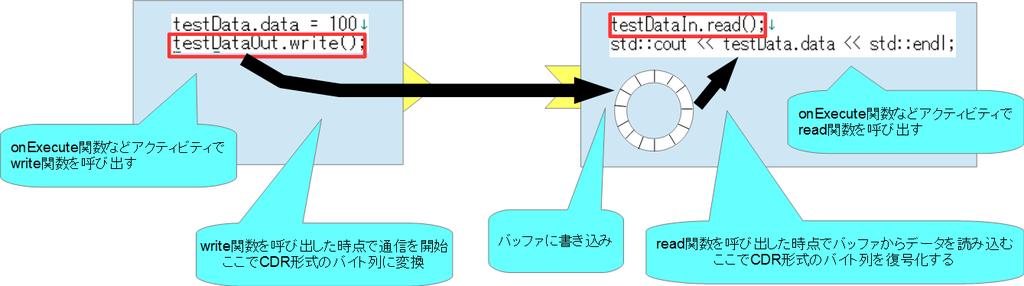
57 57 ソースコードの編集 データを読み込む手順

58 58 ソースコードの編集 データを書き込む手順


59 59 ソースコードのコンパイル Visual Studio Code::Blocks 成功した場合 実行ファイルが生成される Windows build src フォルダの Release( もしくは Debug) フォルダ内に RobotControllerComp.exe が生成される Ubuntu build/src フォルダに RobotControllerComp が生成される
60 60 システム構築支援ツール RT System Editor について

61 RT System Editor RTC を GUI で操作するためのツール データポート サービスポートの接続 アクティブ化 非アクティブ化 リセット 終了 コンフィギュレーションパラメータの操作 実行コンテキストの操作 実行周期変更 実行コンテキストの関連付け 複合化 マネージャから RTC を起動 作成した RT システムの保存 復元 61

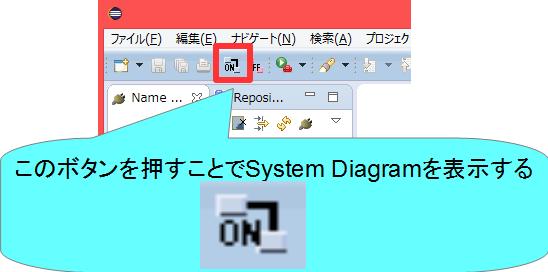
62 RT System Editor の起動 62

63 RT System Editor の画面構成 63
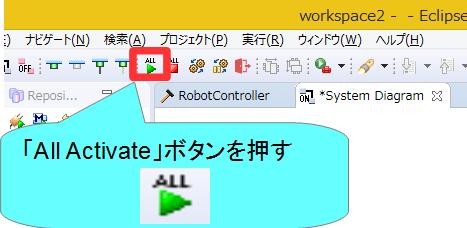
64 64 RobotController コンポーネントの動作確認 シミュレータコンポーネントと接続してシミュレータ上のロボットを操作する RT システムを作成する ネームサーバーを起動する RaspberryPiMouseSimulator コンポーネントを起動する Windows 配布 USB メモリの EXE フォルダ内 RaspberryPiMouseSimulatorComp.exe をダブルクリック Ubuntu 配布 USB メモリ内のスクリプトでインストール ( インストールしていない場合 )» $ sh install_raspimouse_simulator_usb.sh RasPiMouseSimulatorRTC に移動して以下のコマンドを実行» $ build/src/raspberrypimousesimulatorcomp RobotController コンポーネント起動 RaspberryPiMouseSimulator コンポーネントと RobotController コンポーネントを接続して All Activate を行う

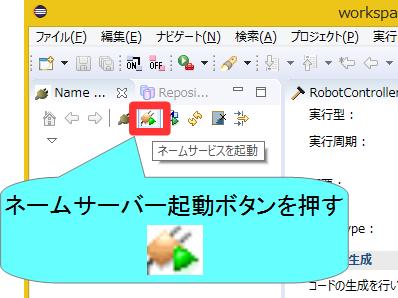
65 65 ネームサーバーの起動 オブジェクトを名前で管理するサービス RTCを一意の名前で登録する RT System Editor 等のツールはネームサーバーから名前でRTCの参照を取得する 起動する手順


")

66 66 ネームサーバーの起動 OpenRTM-aist 以前の手順 Windows 7 スタート すべてのプログラム OpenRTM-aist Tools Start Naming Service Windows 8.1 スタート アプリビュー( 右下矢印 ) OpenRTM-aist Start Naming Service Windows 10 左下の ここに入力して検索 にStart Naming Serviceと入力して起動 Ubuntu $ rtm-naming
67 67 RobotController コンポーネントの動作確認 シミュレータコンポーネントと接続してシミュレータ上のロボットを操作する RT システムを作成する ネームサーバーを起動する RaspberryPiMouseSimulator コンポーネントを起動する Windows 配布 USB メモリの EXE フォルダ内 RaspberryPiMouseSimulatorComp.exe をダブルクリック Ubuntu 配布 USB メモリ内のスクリプトでインストール ( インストールしていない場合 )» $sudo sh install_raspimouse_simulator_usb.sh RasPiMouseSimulatorRTC に移動して以下のコマンドを実行» build/src/raspberrypimousesimulatorcomp RobotController コンポーネント起動 Windows build src フォルダの Release( もしくは Debug) フォルダ内に RobotControllerComp.exe が生成されているためこれを起動する Ubuntu build/src フォルダに RobotControllerComp が生成されているためこれを起動する RobotController コンポーネント RasPiMouseSimulator コンポーネントを接続して All Activate を行う
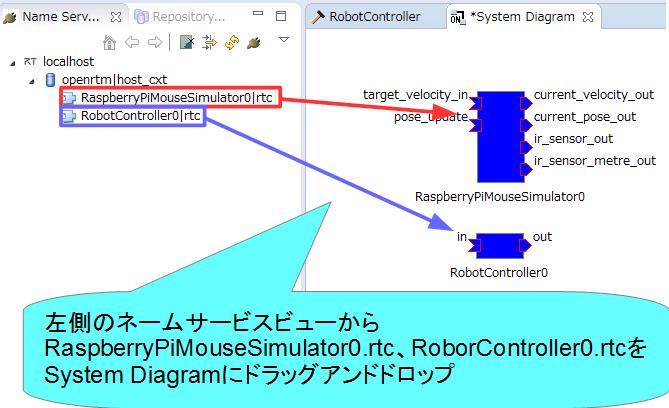
68 データポートの接続
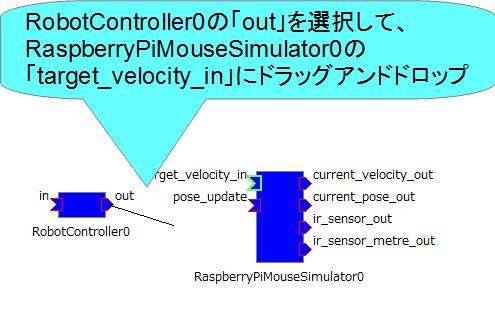
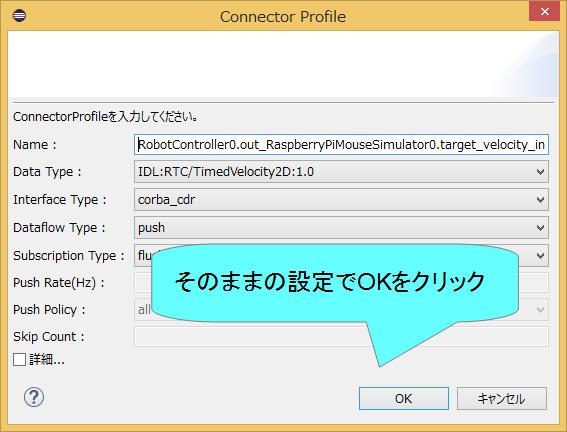
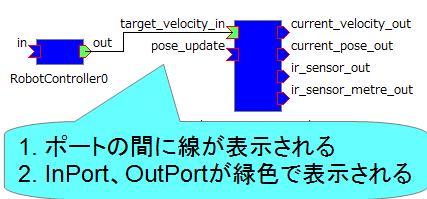
69 データポートの接続
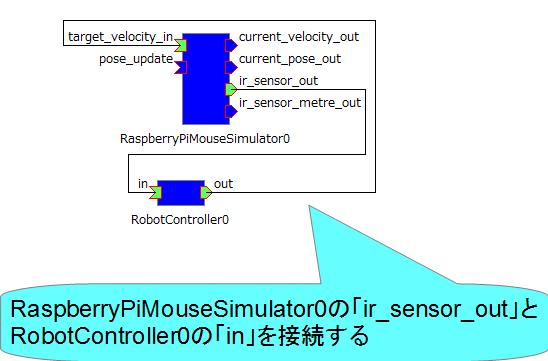

70 データポートの接続
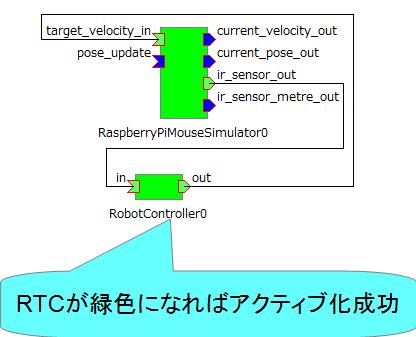

71 アクティブ化


72 72 コンフィギュレーションパラメータの操作 コンフィギュレーションパラメータを RT System Editor から操作する 以下の動作ができるか確認 シミュレータ上のロボットがスライダーで操作できるか? ロボットが障害物に近づくと停止するか?
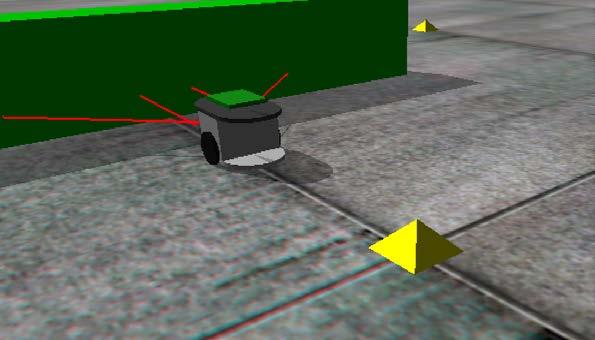
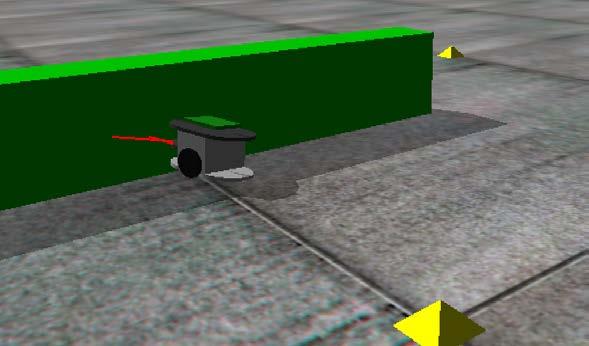
73 73 動作確認 タッチセンサがオンになった時に停止した場合 壁まで前進する タッチセンサがオンになっても停止しない場合 壁の手前に停止する 壁に接触後も前進を続ける
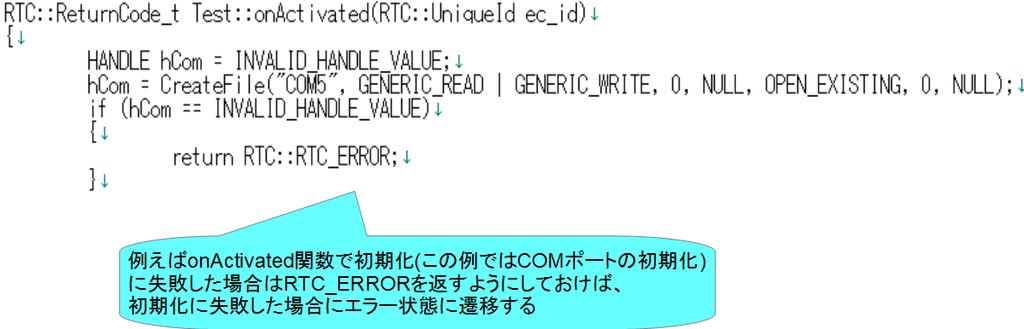
74 RT コンポーネントの状態遷移 RTC には以下の状態が存在する Created 生成状態 実行コンテキストを生成し start() が呼ばれて実行コンテキストのスレッドが実行中 (Runnning) 状態になる 自動的に Inactive 状態に遷移する Inactive 非活性状態 activate_component メソッドを呼び出すと活性状態に遷移する RT System Editor 上での表示は青 Active 活性状態 onexecute コールバックが実行コンテキストにより実行される リターンコードが RTC_OK 以外の場合はエラー状態に遷移する RT System Editor 上での表示は緑 Error エラー状態 onerror コールバックが実行コンテキストにより実行される reset_component メソッドを呼び出すと非活性状態に遷移する RT System Editor 上での表示は赤 終了状態
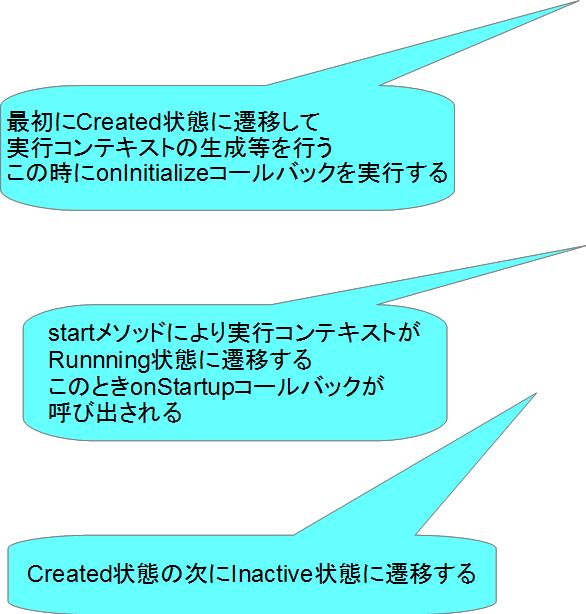

75 RT コンポーネントの状態遷移 ( 生成直後 )
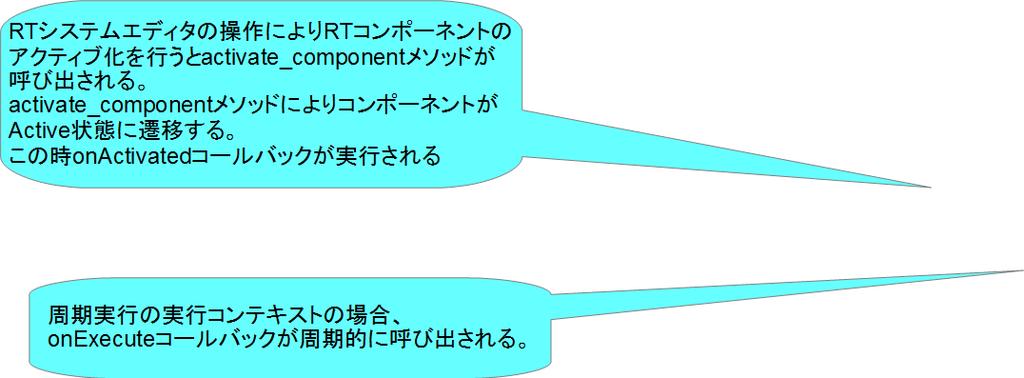
76 RT コンポーネントの状態遷移 ( アクティブ化 )
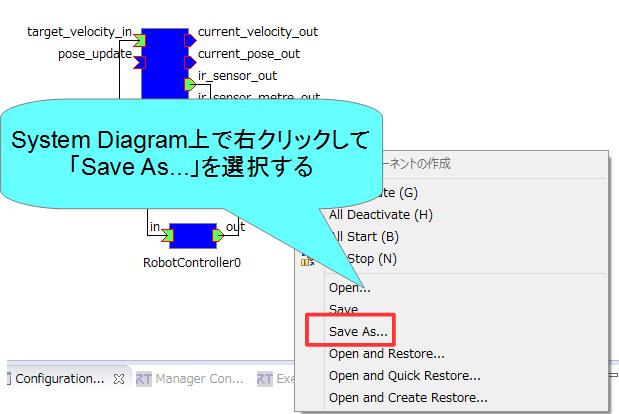
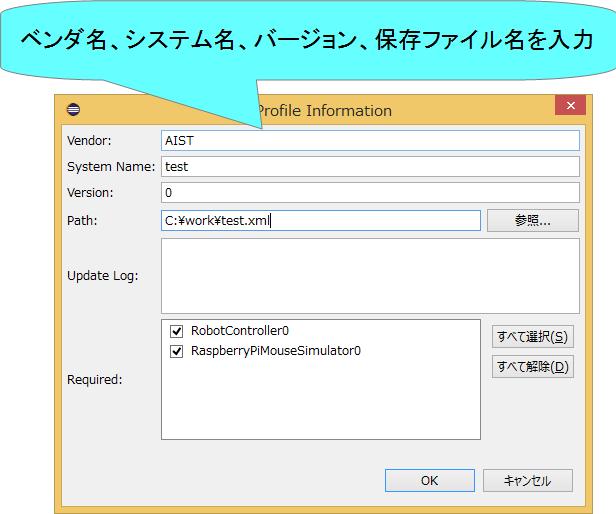
77 システムの保存



78 システムの復元 以下の内容を復元 ポート間の接続 コンフィギュレーション Open and Create Restore を選択した場合はマネージャからコンポーネント起動

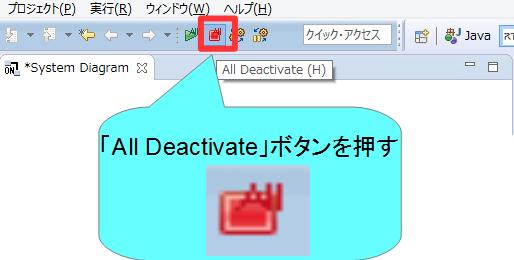
79 非アクティブ化 非アクティブ化 終了 終了
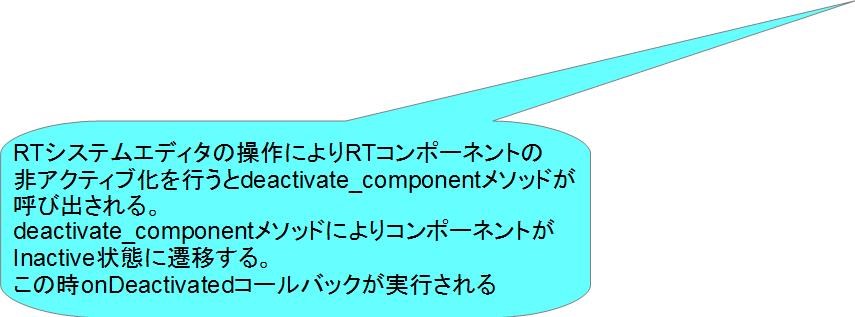

80 RT コンポーネントの状態遷移 ( 非アクティブ化 )


81 Raspberry Pi マウス実機との接続 Raspberry Pi とノート PC を無線 LAN で接続 Raspberry Pi が無線 LAN アクセスポイントになる 注意事項 ノート PC に複数のネットワークインターフェースが存在する場合に RTC の通信ができなくなる可能性があります 問題が発生した場合は個別に対応します Raspberry Pi アクセスポイント接続後はインターネットに接続できなくなります Raspberry Pi アクセスポイント接続後に 起動済みのネームサーバーと RTC は再起動してください Raspberry Pi はシャットダウンしてから電源スイッチをオフにするようにしてください モーター電源スイッチはこまめに切るようにしてください

82 Raspberry Pi の電源投入 内側のスイッチをオンにする Raspberry Pi との接続 電源を切る場合 3 つ並んだスイッチの中央のボタンを 1 秒以上押す 10 秒ほどでシャットダウンするため その後に電源スイッチをオフにする
 画面右下のネットワークアイコンをクリック raspberrypi_xx に接続後")
83 Raspberry Pi との接続 無線 LAN アクセスポイントとの接続 SSID パスワードは Raspberry Pi マウス上のシールに記載 接続手順 (Windows) 画面右下のネットワークアイコンをクリック raspberrypi_xx に接続後 パスワードを入力
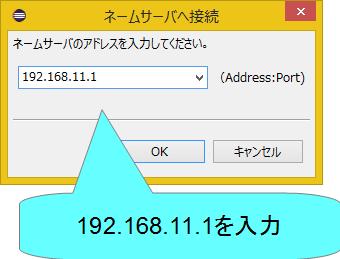
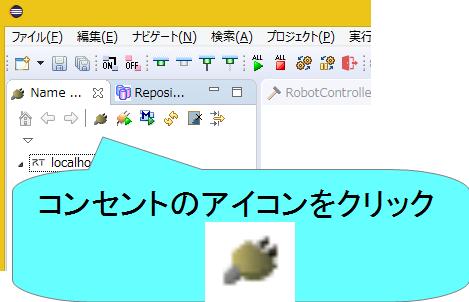
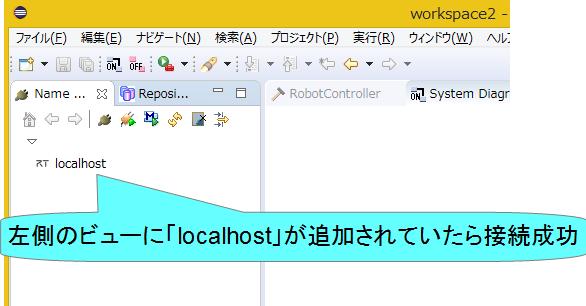
84 ネームサーバーとの接続


85 起動済みの RTC ネームサーバー再起動 ネームサーバーを再起動する OpenRTM-aist 1.2 の場合はネームサーバー起動ボタンで再起動 OpenRTM-aist の場合はネームサーバーのプロセス終了後 Start Naming Service を再度実行 RTC 再起動 RTC を exit するか RTC 起動時に表示したウインドウの ボタンを押して終了する 実行ファイル (RobotControllerComp.exe) を再度実行
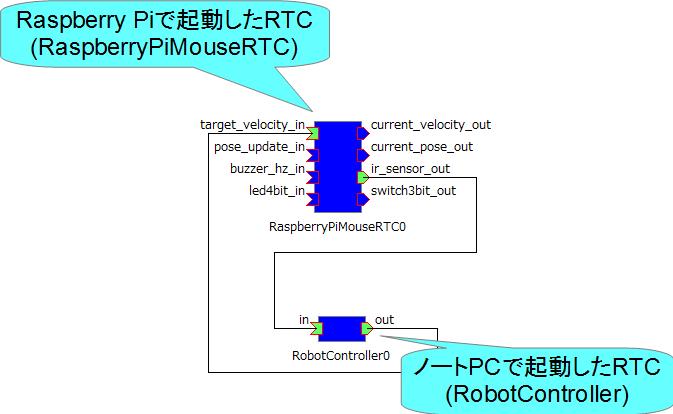
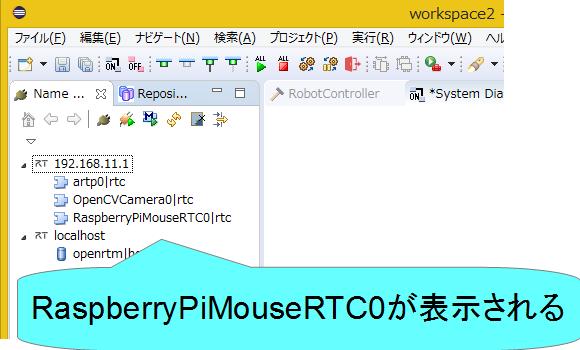
86 ポートの接続 RobotController0 と RapberryPiMouseRTC0 を接続する
87 動作確認 モーターの電源投入 外側のスイッチを ON にする RTC をアクティブ化して動作確認


88 リセット RTC がエラー状態に遷移した場合にエディタ上には赤く表示される 以下の操作で非アクティブ状態に戻す
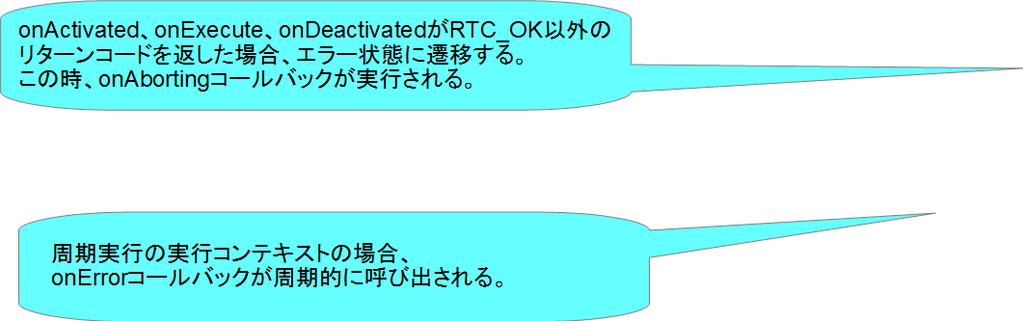
89 RT コンポーネントの状態遷移 ( エラー )
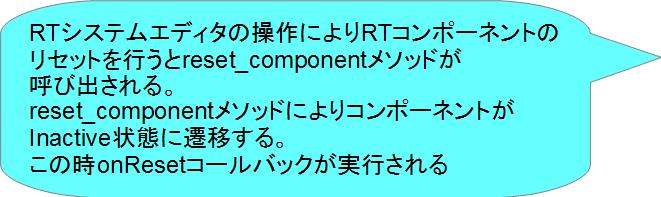
90 RT コンポーネントの状態遷移 ( リセット )
91 91 RTC Builder 補足
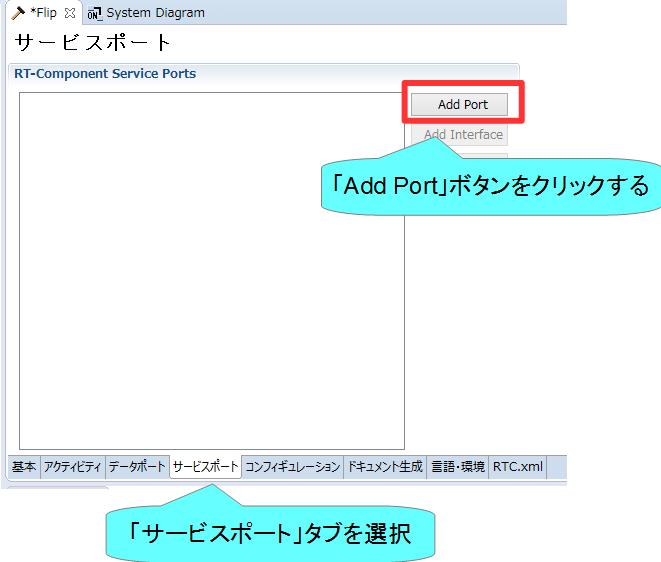
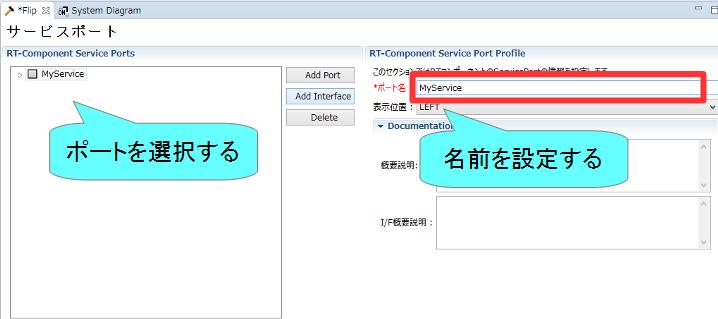
92 サービスポートの設定 サービスポートの追加 インターフェースの追加 設定を行う
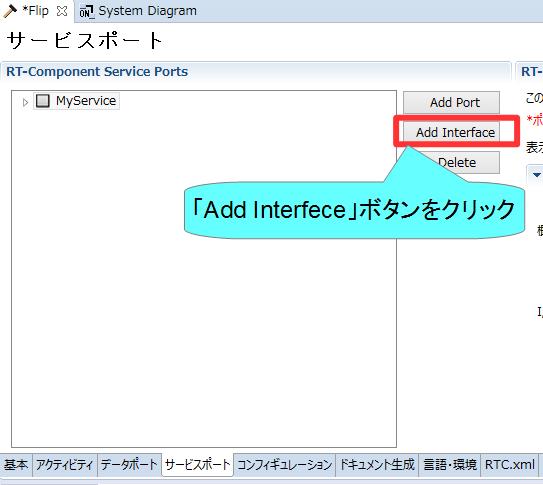

93 サービスポートの設定 インターフェースを追加する


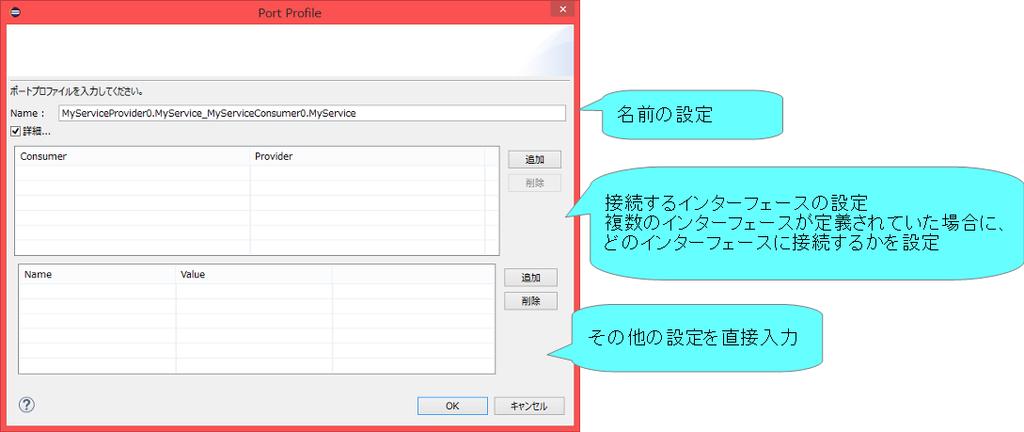
94 サービスポートの設定 インターフェースの設定を行う コード生成後 Python の場合は idlcompile.bat(idlcompile.sh) を起動する
95 サービスポートの設定 IDL ファイルについて プログラミング言語に非依存のインターフェース定義言語 コンシュマー側でプロバイダ側の echo get_value などのオペレーションを呼び出す

96 RTC Builder に関する設定

97 RTC Builder に関する設定
 作成 別の IDL")
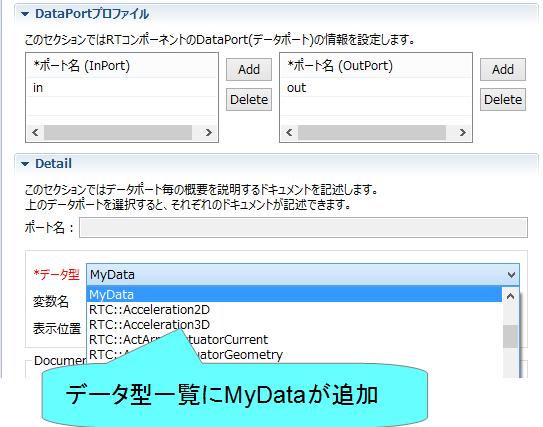
98 独自のデータ型の利用 独自のデータ型でデータポートの通信を行う手順 IDL ファイルを作成する MyDataType.idl を任意のフォルダ ( ここでは C: UserDefType) 作成 別の IDL ファイルをインクルードしている場合は同じフォルダにコピーする
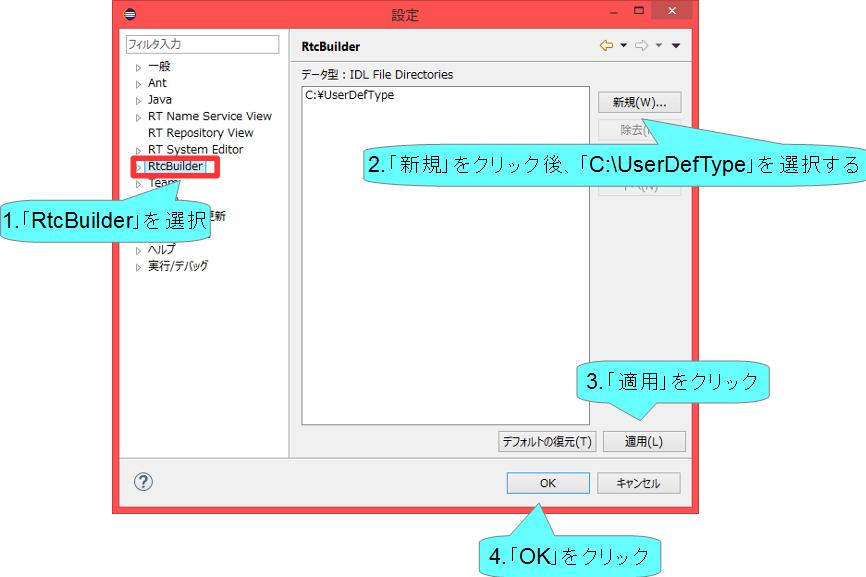
99 独自のデータ型の利用 独自のデータ型でデータポートの通信を行う手順 RTC Builder の設定で IDL ファイルの存在するディレクトリを追加
100 独自のデータ型の利用 独自のデータ型でデータポートの通信を行う手順
101 101 RT System Editor 補足
102 項目 Name コネクタプロファイルの設定 設定内容 接続の名称 DataType ポート間で送受信するデータの型. ex)timedoctet,timedshort など InterfaceType DataFlowType SubscriptionType Push Rate Push Policy Skip Count データを送信方法.ex)corba_cdr など データの送信手順.ex)push, pull など データ送信タイミング. 送信方法が Push の場合有効.New, Periodic, Flush から選択 データ送信周期 ( 単位 :Hz). SubscriptionType が Periodic の場合のみ有効 データ送信ポリシー.SubscriptionType が New,Periodic の場合のみ有効. all,fifo, skip,new から選択 送信データスキップ数.Push Policy が Skip の場合のみ有効
 のみ選択可能 1.2.")
103 コネクタプロファイルの設定 InterfaceTye データの送信方法 では corba_cdr(corba による通信 ) のみ選択可能 では以下の通信方法も選択可能になる予定 direct( 同一プロセスで起動した RTC 間でデータを直接変数に渡す ) shared_memory( 共有メモリによる通信 ) DataFlowType データの送信手順 Push OutPort が InPort にデータを送る Pull InPort が OutPort に問い合わせてデータを受け取る SubscriptionType データ送信タイミング (DataFlowType が Push 型のみ有効 ) flush( 同期 ) バッファを介さず即座に同期的に送信 new( 非同期 ) バッファ内に新規データが格納されたタイミングで送信 periodic( 非同期 ) 一定周期で定期的にデータを送信 Push Policy(SubscriptionType が new periodic のみ有効 ) データ送信ポリシー all バッファ内のデータを一括送信 fifo バッファ内のデータを FIFO で 1 個ずつ送信 skip バッファ内のデータを間引いて送信 new バッファ内のデータの最新値を送信 ( 古い値は捨てられる )

104 コネクタプロファイルの設定 DataFlowType Push Pull
105 コネクタプロファイルの設定 SubscriptionType flush( 同期 ) new periodic( 非同期 )
 データ読み出し時に, バッファが空だった場合の処理.")
106 コネクタプロファイルの設定 項目 Buffer length Buffer full policy Buffer write timeout Buffer empty policy Buffer read timeout 設定内容 バッファの大きさ データ書き込み時に, バッファフルだった場合の処理. overwrite,do_nothing, block から選択 データ書き込み時に, タイムアウトイベントを発生させるまでの時間 ( 単位 : 秒 ) データ読み出し時に, バッファが空だった場合の処理.readback, do_nothing,block から選択 データ読み出し時に, タイムアウトイベントを発生させるまでの時間 ( 単位 : 秒 )


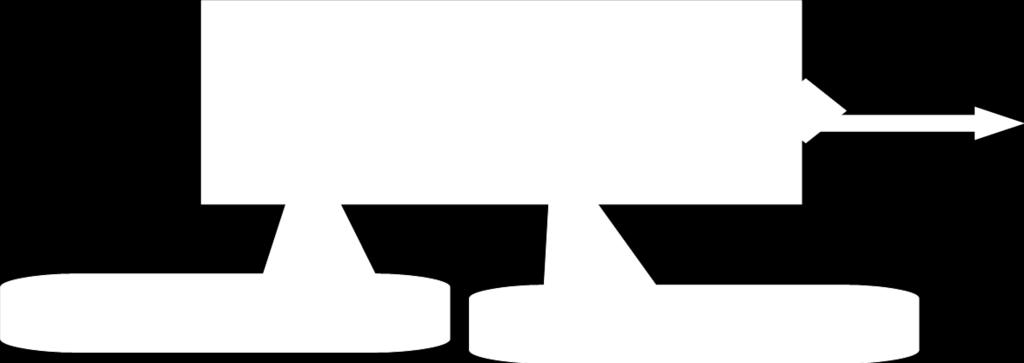
107 サービスポートについて コマンドレベルのやり取りを行うための仕組み 任意のタイミングで操作を行いたい時などに使用 例えばロボットアームのサーボを停止させる ハンドを閉じる等 コンシューマ側がプロバイダ側が提供する関数群 ( オペレーション メソッド ) を呼び出す インターフェースは IDL ファイルで定義する
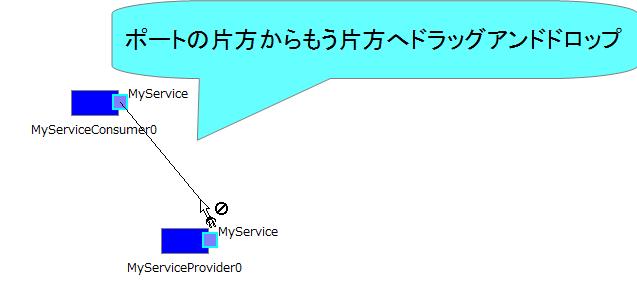


108 サービスポートの接続

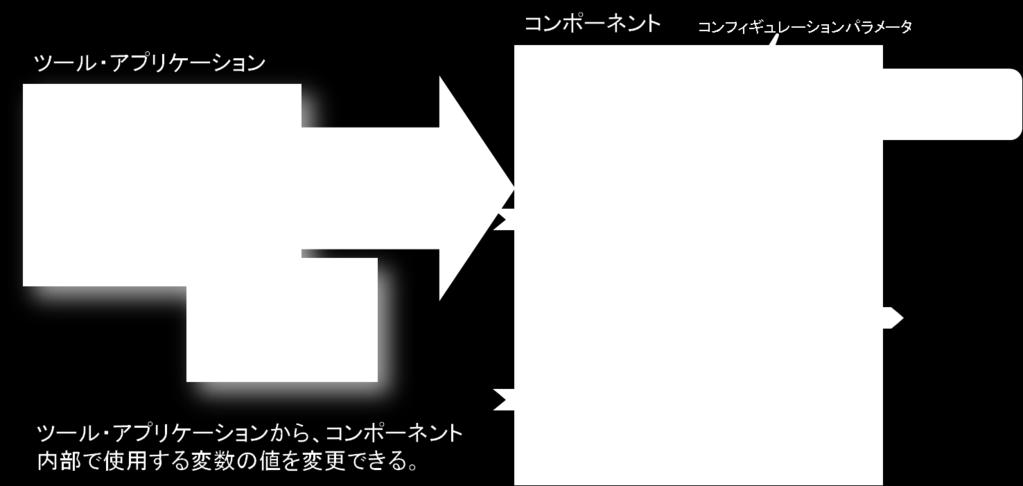
109 コンフィギュレーションパラメータについて パラメータを外部から操作する仕組み コンポーネント作成後に変更が必要なパラメータを設定する 例えばデバイスが接続されている COM ポート番号の設定等
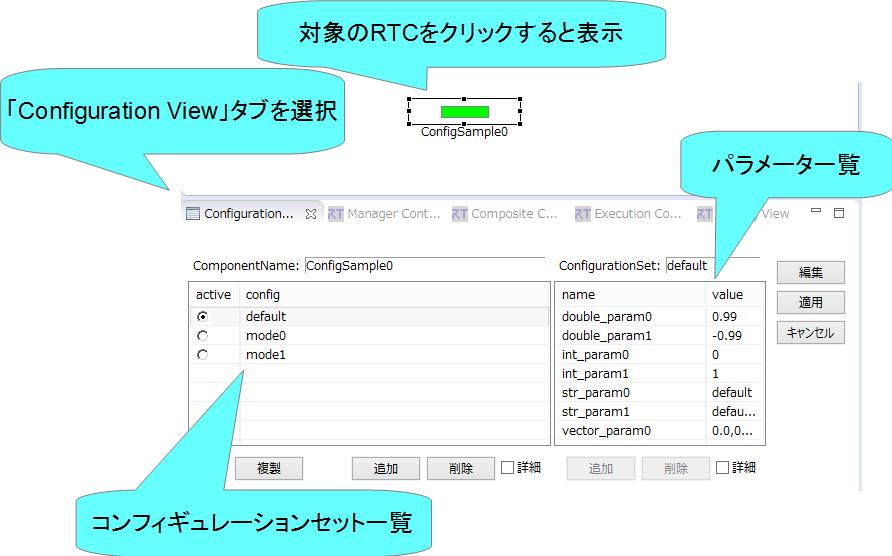
110 コンフィギュレーションパラメータの設定
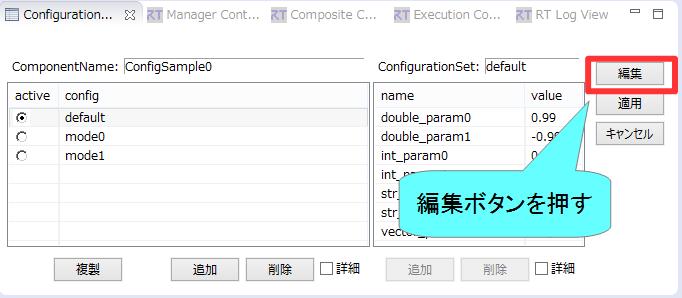
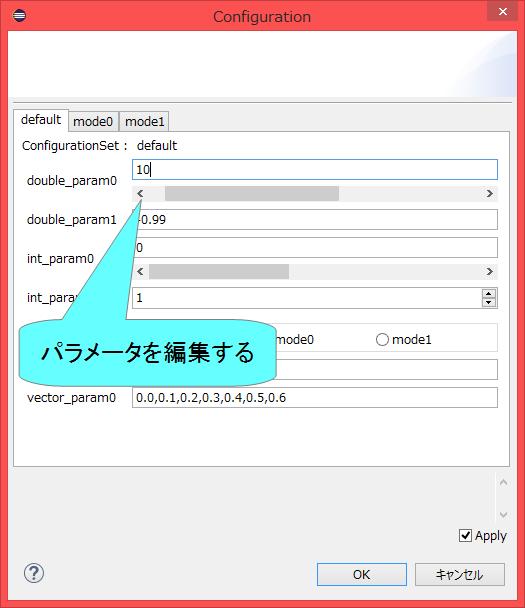
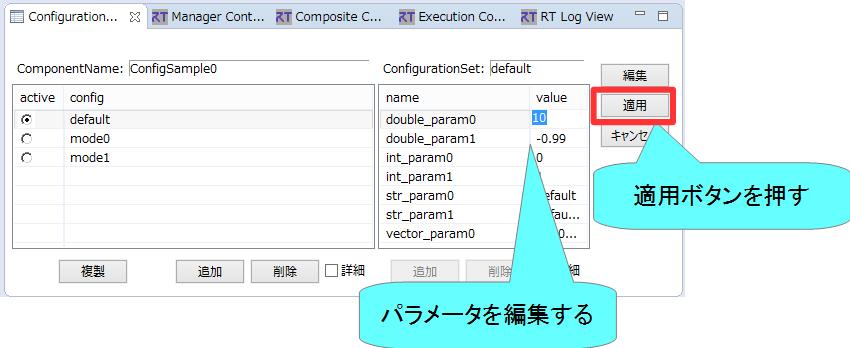
111 コンフィギュレーションパラメータの設定 方法 1 方法 2


112 マネージャの操作 CameraViewerComp.exe OpenCVCameraComp.exe のプロセスではマネージャが起動している マネージャがコンポーネントを起動する
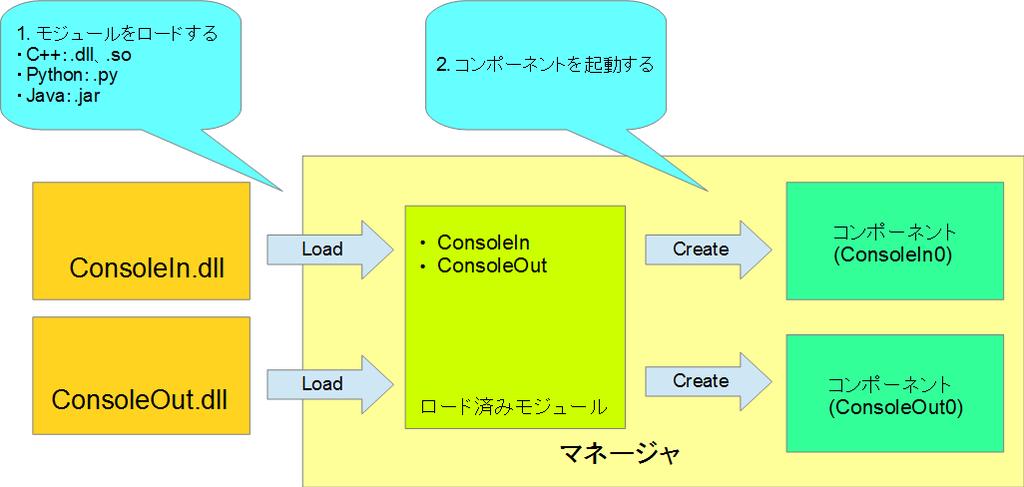
113 マネージャの操作
114 マネージャの操作 マスターマネージャの起動 RT System Editor からの操作による RTC の生成までの手順を説明する rtc.conf の設定 manager.is_master を YES に設定して起動するマネージャをマスターに設定する manager.is_master: YES モジュール探索パスの設定 manager.modules.load_path:., C: Program Files (x86) OpenRTMaist Components C++ Examples vc12 作成した rtc.conf を設定ファイルの指定して rtcd.exe を起動する rtcd はコマンドプロンプトから rtcd.exe を入力するか OpenRTM-aist をインストールしたフォルダからコピーして使用する rtcd はマネージャの起動のみを行う ~Comp.exe は起動時に特定のコンポーネントの起動も行う RT Syetem Editor のネームサービスビューにマネージャが表示される

115 モジュールのロード マネージャの操作

116 モジュールのロード マネージャの操作

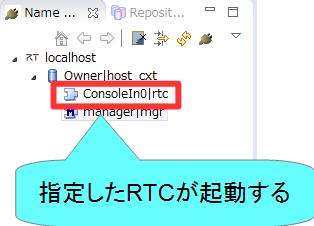
117 RTC の生成 マネージャの操作
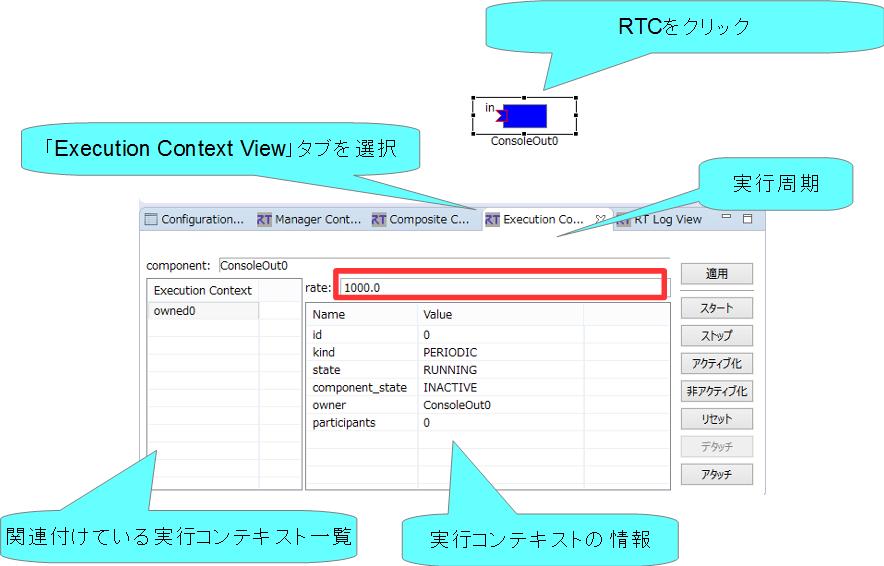
118 実行コンテキストの操作
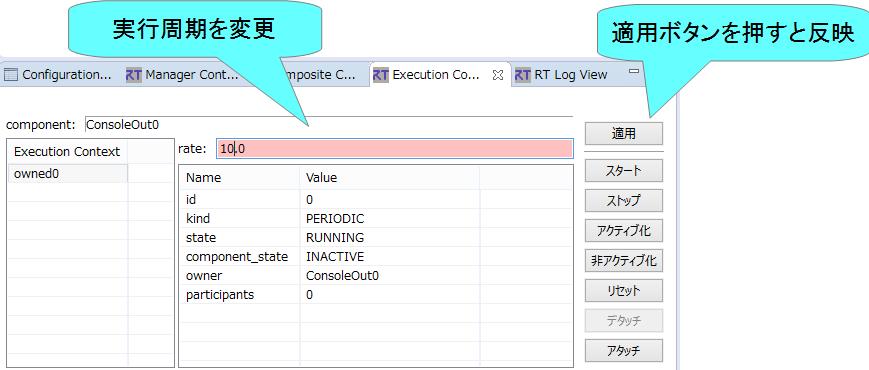

119 実行周期の設定 実行コンテキストの操作

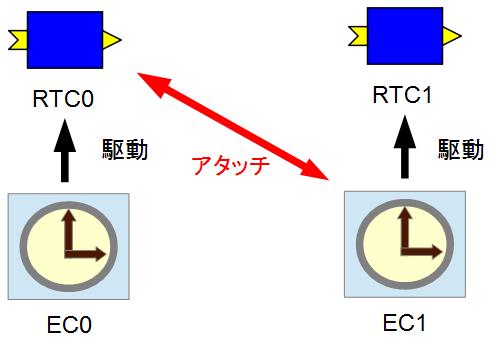
120 実行コンテキストの操作 実行コンテキストの関連付け RTC 起動時に生成した実行コンテキスト以外の実行コンテキストと関連付け 関連付けた実行コンテキストで RTC を駆動させる 他の RTC との実行を同期させる
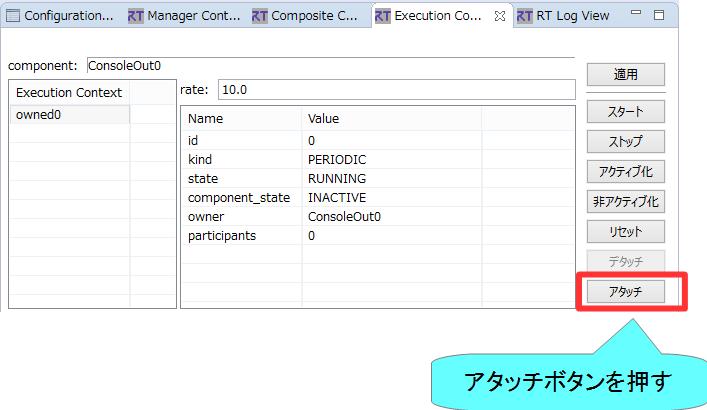

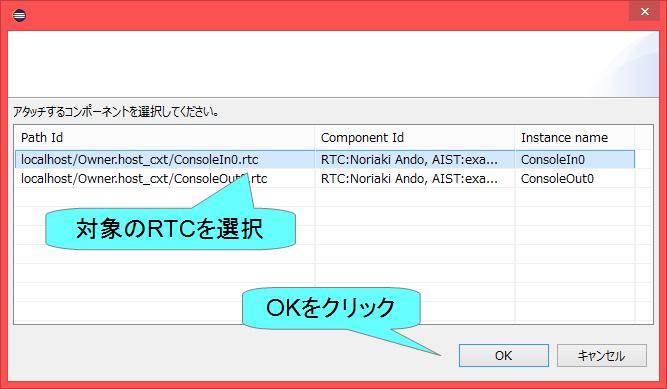
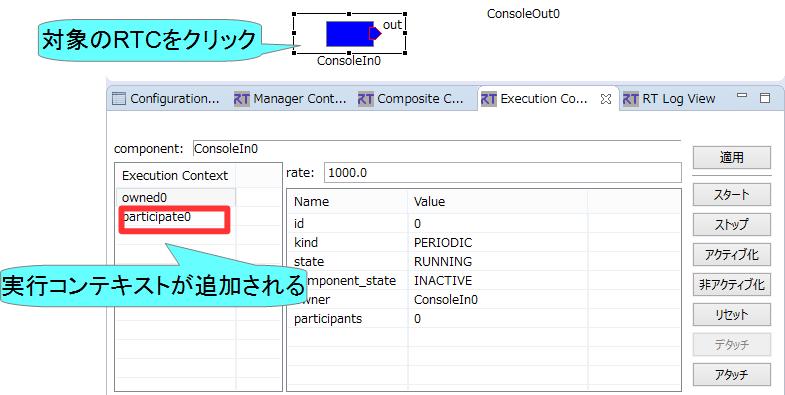
121 実行コンテキストの操作 実行コンテキストの関連付け
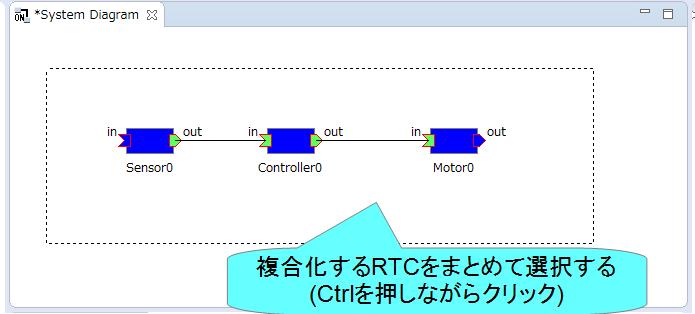

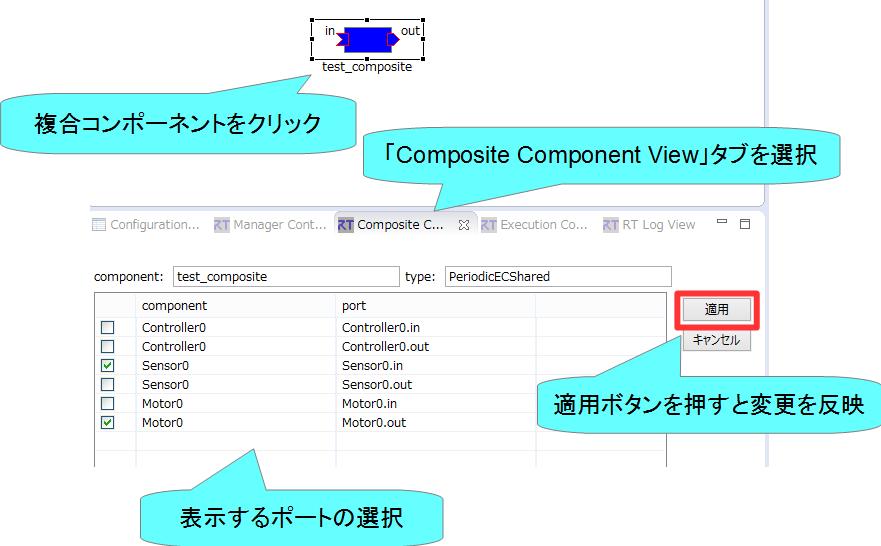
122 複合コンポーネントの操作 複合コンポーネントの生成


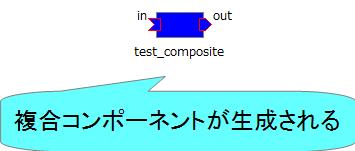
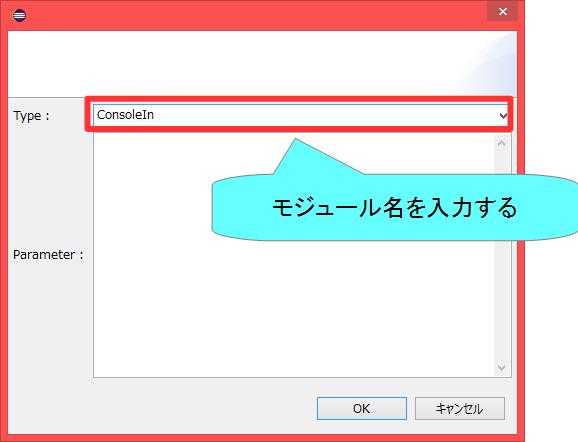
123 複合コンポーネントの操作 複合コンポーネントの生成 Type 以下の 3 種類から選択可能 PeriodicECShared 実行コンテキストの共有 PeriodicStateShared 実行コンテキスト 状態の共有 Grouping グループ化のみ

124 複合コンポーネントの操作

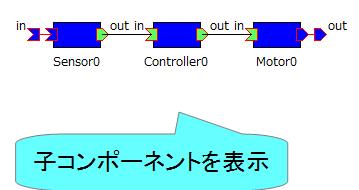

125 複合コンポーネントの操作

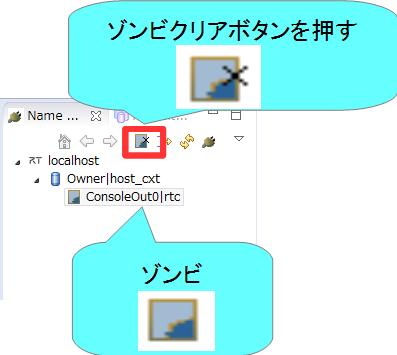
126 ゾンビの削除 RTC のプロセスが異常終了する等してネームサーバーにゾンビが残った場合 以下の手順で削除する

127 RT System Editor に関する設定
スライド 1
 第 2 部 RT コンポーネント作成入門 宮本信彦 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センターロボットソフトウェアプラットフォーム研究チーム インストールの確認 (Windows) OpenRTM-aist OpenRTM-aist-1.1.2-RELEASE_x86.msi インストール後に再起動する Visual Studio 2013 以外 (2010 2012 2015)
第 2 部 RT コンポーネント作成入門 宮本信彦 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センターロボットソフトウェアプラットフォーム研究チーム インストールの確認 (Windows) OpenRTM-aist OpenRTM-aist-1.1.2-RELEASE_x86.msi インストール後に再起動する Visual Studio 2013 以外 (2010 2012 2015)
スライド 1
 第 2 部 RT コンポーネント作成入門 宮本信彦 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センターロボットソフトウェアプラットフォーム研究チーム 資料 (USB メモリで配布 ) ppt 第 2 部 第 3 部のスライド WEB ページ ( 手順を記載したページ ) 第 2 部 (Windows) 第 2 部 (Ubuntu) 第 3 部 第 4 部 OpenRTM-aist_1.2.0
第 2 部 RT コンポーネント作成入門 宮本信彦 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センターロボットソフトウェアプラットフォーム研究チーム 資料 (USB メモリで配布 ) ppt 第 2 部 第 3 部のスライド WEB ページ ( 手順を記載したページ ) 第 2 部 (Windows) 第 2 部 (Ubuntu) 第 3 部 第 4 部 OpenRTM-aist_1.2.0
スライド 1
 第 2 部 RT コンポーネント作成入門 宮本信彦 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センターロボットソフトウェアプラットフォーム研究チーム インストールの確認 (Windows) OpenRTM-aist OpenRTM-aist-1.1.2-RELEASE_x86.msi インストール後に再起動する Visual Studio 2013 以外 (2010 2012 2015)
第 2 部 RT コンポーネント作成入門 宮本信彦 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センターロボットソフトウェアプラットフォーム研究チーム インストールの確認 (Windows) OpenRTM-aist OpenRTM-aist-1.1.2-RELEASE_x86.msi インストール後に再起動する Visual Studio 2013 以外 (2010 2012 2015)
スライド 1
 第 2 部 RT コンポーネント作成入門 宮本信彦 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センターロボットソフトウェアプラットフォーム研究チーム インストールの確認 (Windows) OpenRTM-aist OpenRTM-aist-1.1.2-RELEASE_x86.msi インストール後に再起動する Visual Studio 2013 以外 (2010 2012 2015)
第 2 部 RT コンポーネント作成入門 宮本信彦 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センターロボットソフトウェアプラットフォーム研究チーム インストールの確認 (Windows) OpenRTM-aist OpenRTM-aist-1.1.2-RELEASE_x86.msi インストール後に再起動する Visual Studio 2013 以外 (2010 2012 2015)
Microsoft PowerPoint _3.RTMによるプログラミング_final.pptx
 RT ミドルウェアによるロボットプログラミング技術 3. RTM によるプログラミング インストールの確認 (Windows) OpenRTM-aist OpenRTM-aist-1.1.2-RELEASE_x86.msi インストール後に再起動する Python python-2.7.10.msi 2.7.11 は不具合が発 するため 推奨 OpenRTM-aist の 32bit 版をインストールする場合
RT ミドルウェアによるロボットプログラミング技術 3. RTM によるプログラミング インストールの確認 (Windows) OpenRTM-aist OpenRTM-aist-1.1.2-RELEASE_x86.msi インストール後に再起動する Python python-2.7.10.msi 2.7.11 は不具合が発 するため 推奨 OpenRTM-aist の 32bit 版をインストールする場合
PowerPoint プレゼンテーション
 第 2 部 RT コンポーネント作成入門 第 2 部の目的 RT System Editor を用いた RTC ベースのシステム構築方法の習得 (RTC 運用時に必要な知識 ) RTC Builder を用いた RT コンポーネントのひな形作成方法の習得 (RTC 開発時に必要な知識 ) 2016/7/7 RT ミドルウェア講習会 @ 名城大学 1 OpenRTM-aist の開発支援ツール ロボット知能ソフトウェアプラットフォーム
第 2 部 RT コンポーネント作成入門 第 2 部の目的 RT System Editor を用いた RTC ベースのシステム構築方法の習得 (RTC 運用時に必要な知識 ) RTC Builder を用いた RT コンポーネントのひな形作成方法の習得 (RTC 開発時に必要な知識 ) 2016/7/7 RT ミドルウェア講習会 @ 名城大学 1 OpenRTM-aist の開発支援ツール ロボット知能ソフトウェアプラットフォーム
Raspberry Pi で WEB カメラを使用 会津大学 RT ミドルウェア講習会 2017 The University of Aizu
 会津大学 RT ミドルウェア講習会 2017 The University of Aizu 目次 1 コンポーネントをダウンロードする... 1 2 コンポーネントを Raspberry Pi へコピーする... 2 2.1 Raspberry Pi へコピーする... 2 3 Raspberry Pi 上でコンポーネントをビルドする... 3 3.1 コピーされたファイルを解凍する... 3 3.2
会津大学 RT ミドルウェア講習会 2017 The University of Aizu 目次 1 コンポーネントをダウンロードする... 1 2 コンポーネントを Raspberry Pi へコピーする... 2 2.1 Raspberry Pi へコピーする... 2 3 Raspberry Pi 上でコンポーネントをビルドする... 3 3.1 コピーされたファイルを解凍する... 3 3.2
RTMツール講習会
 青梅商工会議所主催 RTM 講習会 日時 :2011 年 7 月 25 日 ( 月 ) 10:30~17:30 場所 : 産業技術総合研究所中央第 2 本部情報棟 1F ネットワーク会議室 RT ミドルウェア講習会 10:30-11:15 11:15-12:00 13:00-14:00 14:15-15:15 15:30-16:00 16:15-17:30 第 1 部 :RTミドルウェアの概略紹介担当
青梅商工会議所主催 RTM 講習会 日時 :2011 年 7 月 25 日 ( 月 ) 10:30~17:30 場所 : 産業技術総合研究所中央第 2 本部情報棟 1F ネットワーク会議室 RT ミドルウェア講習会 10:30-11:15 11:15-12:00 13:00-14:00 14:15-15:15 15:30-16:00 16:15-17:30 第 1 部 :RTミドルウェアの概略紹介担当
RTMツール講習会
 1 第 3 部の資料 設定ファイルの差し替え [OpenRTM_Root]/1.0/bin 配下にある以下の設定ファイルを差し替え rtc.conf,configsample.conf デフォルト設定でインストールした場合 C: Program Files OpenRTM-aist 1.0 bin 2 RT ミドルウエア講習会 日時 :2011 年 1 月 21 日 ( 金 ) 11:00~17:00
1 第 3 部の資料 設定ファイルの差し替え [OpenRTM_Root]/1.0/bin 配下にある以下の設定ファイルを差し替え rtc.conf,configsample.conf デフォルト設定でインストールした場合 C: Program Files OpenRTM-aist 1.0 bin 2 RT ミドルウエア講習会 日時 :2011 年 1 月 21 日 ( 金 ) 11:00~17:00
Microsoft PowerPoint _2.プログラミングの基礎_final
 RT ミドルウェアによるロボットプログラミング技術 2. プログラミングの基礎 概要 1. プログラミングの基礎 2. Linuxでのプログラミング 3. Windowsでのプログラミング 目標 : 1.Linux および Windows での開発手法 ( 主に C++) を学ぶ 2.CMake を利用して 同じプログラムを Linux と Windows とでコンパイルして動作させる 2 プログラミングの流れ
RT ミドルウェアによるロボットプログラミング技術 2. プログラミングの基礎 概要 1. プログラミングの基礎 2. Linuxでのプログラミング 3. Windowsでのプログラミング 目標 : 1.Linux および Windows での開発手法 ( 主に C++) を学ぶ 2.CMake を利用して 同じプログラムを Linux と Windows とでコンパイルして動作させる 2 プログラミングの流れ
Microsoft PowerPoint RT講習会(説明用) [互換モード]
![Microsoft PowerPoint RT講習会(説明用) [互換モード]](/thumbs/101/150326987.jpg "Microsoft PowerPoint RT講習会(説明用) [互換モード]") RT ミドルウェア講習会 日時 :2012 年 7 月 19 日 ( 金 ) 13:00~17:00 場所 : 名城大学天白キャンパス研究実験棟 Ⅱ メカトロニクス工学科会議室 OpenRT Platform ロボット知能ソフトウェアプラットフォーム http://www.openrtp.jp/wiki/ システム設計, シミュレーション, 動作生成, シナリオ生成などをサポート OpenRT Platform
RT ミドルウェア講習会 日時 :2012 年 7 月 19 日 ( 金 ) 13:00~17:00 場所 : 名城大学天白キャンパス研究実験棟 Ⅱ メカトロニクス工学科会議室 OpenRT Platform ロボット知能ソフトウェアプラットフォーム http://www.openrtp.jp/wiki/ システム設計, シミュレーション, 動作生成, シナリオ生成などをサポート OpenRT Platform
Microsoft PowerPoint _2.プログラミングの基礎_final.pptx
 RT ミドルウェアによるロボットプログラミング技術 2. プログラミングの基礎 概要 1. プログラミングの基礎 2. Linuxでのプログラミング 3. Windowsでのプログラミング 目標 : 1.Linux および Windows での開発手法 ( 主に C++) を学ぶ 2.CMake を利用して 同じプログラムを Linux と Windows とでコンパイルして動作させる 2 プログラミングの流れ
RT ミドルウェアによるロボットプログラミング技術 2. プログラミングの基礎 概要 1. プログラミングの基礎 2. Linuxでのプログラミング 3. Windowsでのプログラミング 目標 : 1.Linux および Windows での開発手法 ( 主に C++) を学ぶ 2.CMake を利用して 同じプログラムを Linux と Windows とでコンパイルして動作させる 2 プログラミングの流れ
Microsoft PowerPoint
 第 2 部 :RT コンポーネントの作成入門 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センター安藤慶昭 1 OpenRT Platform ロボット知能ソフトウェアプラットフォーム http://www.openrtp.jp/wiki/ システム設計, シミュレーション, 動作生成, シナリオ生成などをサポート OpenRT Platform ツール群 コンポーネント開発, システム開発における各開発フェーズの作業支援
第 2 部 :RT コンポーネントの作成入門 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センター安藤慶昭 1 OpenRT Platform ロボット知能ソフトウェアプラットフォーム http://www.openrtp.jp/wiki/ システム設計, シミュレーション, 動作生成, シナリオ生成などをサポート OpenRT Platform ツール群 コンポーネント開発, システム開発における各開発フェーズの作業支援
Microsoft PowerPoint ppt [互換モード]
![Microsoft PowerPoint ppt [互換モード]](/thumbs/101/150326876.jpg "Microsoft PowerPoint ppt [互換モード]") RT ミドルウェア講習会 日時 :2012 年 5 月 22 日 ( 水 ) 10:00~16:45 場所 : つくば国際会議場小会議室 303 RT ミドルウェア講習会 10:00-10:50 11:00-11:50 11:50-12:00 12:00-13:00 13:00-14:00 14:00-16:45 第 1 部 ( その1): インターネットを利用したロボットサービスとRSiの取り組み
RT ミドルウェア講習会 日時 :2012 年 5 月 22 日 ( 水 ) 10:00~16:45 場所 : つくば国際会議場小会議室 303 RT ミドルウェア講習会 10:00-10:50 11:00-11:50 11:50-12:00 12:00-13:00 13:00-14:00 14:00-16:45 第 1 部 ( その1): インターネットを利用したロボットサービスとRSiの取り組み
Microsoft PowerPoint RTM講習会(第2部) [互換モード]
![Microsoft PowerPoint RTM講習会(第2部) [互換モード]](/thumbs/103/159704025.jpg "Microsoft PowerPoint RTM講習会(第2部) [互換モード]") RT ミドルウェア講習会 日時 :2014 年 5 月 25 日 ( 日 ) 10:00~16:45 場所 : 富山国際会議場 2F 多目的会議室 (201 室 ) RT ミドルウェア講習会 10:00-10:50 11:00-11:50 11:50-12:00 12:00-13:00 13:00-15:00 15:00-16:45 第 1 部 ( その1): インターネットを利用したロボットサービスとRSiの取り組み
RT ミドルウェア講習会 日時 :2014 年 5 月 25 日 ( 日 ) 10:00~16:45 場所 : 富山国際会議場 2F 多目的会議室 (201 室 ) RT ミドルウェア講習会 10:00-10:50 11:00-11:50 11:50-12:00 12:00-13:00 13:00-15:00 15:00-16:45 第 1 部 ( その1): インターネットを利用したロボットサービスとRSiの取り組み
二次元連続動的計画法による知的画像処理システム ImageFileSelector RTC 機能仕様書 ImageFileSelectorRTC Ver.1.0 ( 株 ) 東日本計算センター 1 / 11
 東日本計算センター 1 / 11") 機能仕様書 ImageFileSelectorRTC Ver.1.0 ( 株 ) 東日本計算センター 1 / 11 改版履歴 Ver 改版日 内容 0.5 2016/02/15 新規作成 0.6 2016/03/1 GUI 釦配置変更 1.0 2016/3/14 初版リリース 2 / 11 目次 目次...3 1. はじめに...4 1.1. 対象読者... 4 1.2. 適応範囲... 4 1.3.
機能仕様書 ImageFileSelectorRTC Ver.1.0 ( 株 ) 東日本計算センター 1 / 11 改版履歴 Ver 改版日 内容 0.5 2016/02/15 新規作成 0.6 2016/03/1 GUI 釦配置変更 1.0 2016/3/14 初版リリース 2 / 11 目次 目次...3 1. はじめに...4 1.1. 対象読者... 4 1.2. 適応範囲... 4 1.3.
インテル(R) Visual Fortran コンパイラ 10.0
 Visual Fortran コンパイラ 10.0") インテル (R) Visual Fortran コンパイラー 10.0 日本語版スペシャル エディション 入門ガイド 目次 概要インテル (R) Visual Fortran コンパイラーの設定はじめに検証用ソースファイル適切なインストールの確認コンパイラーの起動 ( コマンドライン ) コンパイル ( 最適化オプションなし ) 実行 / プログラムの検証コンパイル ( 最適化オプションあり ) 実行
インテル (R) Visual Fortran コンパイラー 10.0 日本語版スペシャル エディション 入門ガイド 目次 概要インテル (R) Visual Fortran コンパイラーの設定はじめに検証用ソースファイル適切なインストールの確認コンパイラーの起動 ( コマンドライン ) コンパイル ( 最適化オプションなし ) 実行 / プログラムの検証コンパイル ( 最適化オプションあり ) 実行
機能仕様書 ロボット Raspberry Pi カメラ RTC Ver 発行日 2017 年 12 月 27 日公立大学法人会津大学株式会社東日本計算センター
 機能仕様書 ロボット Raspberry Pi カメラ RTC Ver.1.0.0 発行日 2017 年 12 月 27 日公立大学法人会津大学株式会社東日本計算センター 改版履歴 Ver 改版日 内容 1.0.0 2017/5/19 新規作成 2017/12/27 正式版発行 目次 1. はじめに... 1 1.1. 対象読者... 1 1.2. 適応範囲... 1 1.3. 開発環境及び使用機器...
機能仕様書 ロボット Raspberry Pi カメラ RTC Ver.1.0.0 発行日 2017 年 12 月 27 日公立大学法人会津大学株式会社東日本計算センター 改版履歴 Ver 改版日 内容 1.0.0 2017/5/19 新規作成 2017/12/27 正式版発行 目次 1. はじめに... 1 1.1. 対象読者... 1 1.2. 適応範囲... 1 1.3. 開発環境及び使用機器...
カルテダウンロード 操作マニュアル
 カルテ ZERO 操作マニュアル カルテダウンロード Ver1. 3 目 次 カルテダウンロード カルテダウンロード時の注意点 1. インストール 2. カルテダウンロード 2-1. 時間を設定し自動でダウンロードする方法 2-2. 手動でダウンロードする方法 3. 補足説明 P.3 P.4 P.9 P.14 P.18 P.20 カルテダウンロード時の注意点 カルテダウンロードは Windows 7
カルテ ZERO 操作マニュアル カルテダウンロード Ver1. 3 目 次 カルテダウンロード カルテダウンロード時の注意点 1. インストール 2. カルテダウンロード 2-1. 時間を設定し自動でダウンロードする方法 2-2. 手動でダウンロードする方法 3. 補足説明 P.3 P.4 P.9 P.14 P.18 P.20 カルテダウンロード時の注意点 カルテダウンロードは Windows 7
Android アプリを作るための環境設定 Android アプリを作るのに必要なものは Android SDK と Java 開発環境の Eclipse です 環境設定作業の概要はまず Android SDK と Eclipse をそれぞれインストールします その後 Eclipse を起動し An
 Android アプリを作るための環境設定 Android アプリを作るのに必要なものは Android SDK と Java 開発環境の Eclipse です 環境設定作業の概要はまず Android SDK と Eclipse をそれぞれインストールします その後 Eclipse を起動し Android SDK の plugin を Eclipse にインストールします Eclipse のインストール時に
Android アプリを作るための環境設定 Android アプリを作るのに必要なものは Android SDK と Java 開発環境の Eclipse です 環境設定作業の概要はまず Android SDK と Eclipse をそれぞれインストールします その後 Eclipse を起動し Android SDK の plugin を Eclipse にインストールします Eclipse のインストール時に
RTM セミナー RT ミドルウェアによる実時間ロボット 制御系の構築とソフトウェア教育 静岡大学大学院工学研究科機械工学専攻 清水昌幸
 RTM セミナー 2013.11.12 RT ミドルウェアによる実時間ロボット 制御系の構築とソフトウェア教育 静岡大学大学院工学研究科機械工学専攻 清水昌幸 2 内容 RT ミドルウェアを用いた実時間ロボット制御系の構築 実時間制御の実現方法. ART-Linux を用いた実現例と実時間性能. ソフトウェア教育 研究室配属学生 ( 学部 4 年生 ) への導入教育の実施内容と結果. 3 ロボット制御系の一例
RTM セミナー 2013.11.12 RT ミドルウェアによる実時間ロボット 制御系の構築とソフトウェア教育 静岡大学大学院工学研究科機械工学専攻 清水昌幸 2 内容 RT ミドルウェアを用いた実時間ロボット制御系の構築 実時間制御の実現方法. ART-Linux を用いた実現例と実時間性能. ソフトウェア教育 研究室配属学生 ( 学部 4 年生 ) への導入教育の実施内容と結果. 3 ロボット制御系の一例
ユーザーズマニュアル 有線ネットワークシステム 発行日 2016 年 3 月 30 日
 ユーザーズマニュアル 有線ネットワークシステム 発行日 2016 年 3 月 30 日 目次 1 2 3 はじめに...1 1.1 前提知識...1 1.2 システム概要...1 1.3 動作環境...4 1.3.1 IP 経路情報監視 RTC...4 1.3.2 IP 経路情報ビューア RTC...6 インストール...7 2.1 RTC の入手方法...7 2.2 IP 経路情報監視 RTC...7
ユーザーズマニュアル 有線ネットワークシステム 発行日 2016 年 3 月 30 日 目次 1 2 3 はじめに...1 1.1 前提知識...1 1.2 システム概要...1 1.3 動作環境...4 1.3.1 IP 経路情報監視 RTC...4 1.3.2 IP 経路情報ビューア RTC...6 インストール...7 2.1 RTC の入手方法...7 2.2 IP 経路情報監視 RTC...7
EV3 の初期設定
 目次 1 SD カードの準備... 2 2 EV3 へのアクセスの仕方... 3 3 OpenRTM-aist のインストール... 6 4 unzip のインストール... 8 当ドキュメントは下記ページを参考にしています LEGO Mindstorms EV3 活用事例 http://www.openrtm.org/openrtm/ja/casestudy/lego_mindstorm_ev3
目次 1 SD カードの準備... 2 2 EV3 へのアクセスの仕方... 3 3 OpenRTM-aist のインストール... 6 4 unzip のインストール... 8 当ドキュメントは下記ページを参考にしています LEGO Mindstorms EV3 活用事例 http://www.openrtm.org/openrtm/ja/casestudy/lego_mindstorm_ev3
Taro-ラズパイのインストールと設定
 目 次 1 Rasbian のインストール 1 1-1 SD カードのフォーマット 1 1-2 Raspbian のダウンロード 2 1-3 Raspbian のインストール 2 2 設定 5 2-1 Raspbian の設定 5 2-2 VNC サーバーの設定 8 2-3 Wifi の接続設定 8 5 3 PC との接続 8 3-1 VNC サーバーへの接続 8 3-2 SSH での接続 10 4
目 次 1 Rasbian のインストール 1 1-1 SD カードのフォーマット 1 1-2 Raspbian のダウンロード 2 1-3 Raspbian のインストール 2 2 設定 5 2-1 Raspbian の設定 5 2-2 VNC サーバーの設定 8 2-3 Wifi の接続設定 8 5 3 PC との接続 8 3-1 VNC サーバーへの接続 8 3-2 SSH での接続 10 4
CS-DRC1操作説明書
 操作説明書 プログラミングソフトウェア Windows 用 CS-DRC1 Rev. 1.0 IC-DRC1 デジタル小電力コミュニティ無線機 ご注意 : 設定内容の変更についてプログラミングソフトウェア (CS-DRC1) を起動したときの初期設定と無線機 (IC-DRC1) の設定値は 異なる場合があります 無線機の設定を変更する場合は 下記の手順 (1~3) で操作することをおすすめします 1
操作説明書 プログラミングソフトウェア Windows 用 CS-DRC1 Rev. 1.0 IC-DRC1 デジタル小電力コミュニティ無線機 ご注意 : 設定内容の変更についてプログラミングソフトウェア (CS-DRC1) を起動したときの初期設定と無線機 (IC-DRC1) の設定値は 異なる場合があります 無線機の設定を変更する場合は 下記の手順 (1~3) で操作することをおすすめします 1
Studuinoソフトウェアのインストール
 Studuino プログラミング環境 Studuino ソフトウェアのインストール 2014/11/01 作成 2018/03/30 改訂 改訂履歴 改訂日付 改訂内容 2014/11/01 初版発行 2017/01/16 Studuino web サイトリニューアルに伴う改訂 2017/04/14 Studuino web サイトリニューアルに伴う改訂 2018/01/22 ソフトウェア OS のバージョンアップに伴う改訂
Studuino プログラミング環境 Studuino ソフトウェアのインストール 2014/11/01 作成 2018/03/30 改訂 改訂履歴 改訂日付 改訂内容 2014/11/01 初版発行 2017/01/16 Studuino web サイトリニューアルに伴う改訂 2017/04/14 Studuino web サイトリニューアルに伴う改訂 2018/01/22 ソフトウェア OS のバージョンアップに伴う改訂
Microsoft Word - RTSystemBuilderOnTheEA操作マニュアル_
 RT システムビルダー操作マニュアル Ver.0.7.1 2015/08/02 株式会社グローバルアシスト 目次 1 概要... 3 1.1 ツール概要... 3 1.2 対象... 3 1.3 制限... 3 2 インストールと設定... 4 2.1 RT システムビルダーのインストール... 4 2.2 RT システムビルダーの初期設定... 6 2.3 RT システムビルダー画面の起動...
RT システムビルダー操作マニュアル Ver.0.7.1 2015/08/02 株式会社グローバルアシスト 目次 1 概要... 3 1.1 ツール概要... 3 1.2 対象... 3 1.3 制限... 3 2 インストールと設定... 4 2.1 RT システムビルダーのインストール... 4 2.2 RT システムビルダーの初期設定... 6 2.3 RT システムビルダー画面の起動...
『テクノス』V2プログラムインストール説明書
 土木積算システム テクノス V2 プログラム インストール説明書 ( 第 3 版 ) 目 次 1. テクノス V2 プログラム インストールの概要...3 2. テクノス V2 のプログラム ドライバ インストール...4 3. テクノス V2 の初期起動...10 4. アンインストール...11 5. 補足 ( 動作環境 )...11 2. 1. テクノス V2 プログラム インストールの概要
土木積算システム テクノス V2 プログラム インストール説明書 ( 第 3 版 ) 目 次 1. テクノス V2 プログラム インストールの概要...3 2. テクノス V2 のプログラム ドライバ インストール...4 3. テクノス V2 の初期起動...10 4. アンインストール...11 5. 補足 ( 動作環境 )...11 2. 1. テクノス V2 プログラム インストールの概要
本書は INpMac v2.20(intime 5.2 INplc 3 Windows7/8/8.1に対応 ) の内容を元に記載しています Microsoft Windows Visual Studio は 米国 Microsoft Corporation の米国及びその他の国における登録商標です
 の内容を元に記載しています Microsoft Windows Visual Studio は 米国 Microsoft Corporation の米国及びその他の国における登録商標です") ACTIVE TOUCH 拡張部品取扱説明書 - 共有メモリアクセスコンポーネント - 1. はじめに 1 (1) 概要... 1 (2) INpMac のインストール... 1 2. Windows アプリケーションとの連携 2 (1) コントロール ( 部品 ) の登録... 2 (2) データの関連付け... 3 3. INtime アプリケーションとの連携 4 (1) 部品 ( コンポーネント
ACTIVE TOUCH 拡張部品取扱説明書 - 共有メモリアクセスコンポーネント - 1. はじめに 1 (1) 概要... 1 (2) INpMac のインストール... 1 2. Windows アプリケーションとの連携 2 (1) コントロール ( 部品 ) の登録... 2 (2) データの関連付け... 3 3. INtime アプリケーションとの連携 4 (1) 部品 ( コンポーネント
無線LAN JRL-710/720シリーズ ファームウェアバージョンアップマニュアル 第2.1版
 無線 LAN JRL-710/720 シリーズ < 第 2.1 版 > G lobal Communications http://www.jrc.co.jp 目次 1. バージョンアップを行う前に...1 1.1. 用意するもの...1 1.2. 接続の確認...1 2. バージョンアップ手順...4 2.1. 手順 1...6 2.2. 手順 2...8 2.3. 手順 3... 11 本書は,
無線 LAN JRL-710/720 シリーズ < 第 2.1 版 > G lobal Communications http://www.jrc.co.jp 目次 1. バージョンアップを行う前に...1 1.1. 用意するもの...1 1.2. 接続の確認...1 2. バージョンアップ手順...4 2.1. 手順 1...6 2.2. 手順 2...8 2.3. 手順 3... 11 本書は,
アップデート手順概要
 アップデート手順概要 2017 年 1 月富士通株式会社 0 はじめに 本資料の概要 本資料では 各アップデート方式において アップデート手順の一例をご紹介しております 本資料を活用するにあたっての留意事項 本資料の記述は アップデート方式の一部手順を説明したものです 事前準備を含めた全手順については 各種マニュアル 手順書をご参照ください 本資料は 2016 年 9 月時点の情報を元に作成しています
アップデート手順概要 2017 年 1 月富士通株式会社 0 はじめに 本資料の概要 本資料では 各アップデート方式において アップデート手順の一例をご紹介しております 本資料を活用するにあたっての留意事項 本資料の記述は アップデート方式の一部手順を説明したものです 事前準備を含めた全手順については 各種マニュアル 手順書をご参照ください 本資料は 2016 年 9 月時点の情報を元に作成しています
インテル® Parallel Studio XE 2019 Composer Edition for Fortran Windows : インストール・ガイド
 インテル Parallel Studio XE 2019 Composer Edition for Fortran Windows インストール ガイド エクセルソフト株式会社 Version 1.0.0-20180918 目次 1. はじめに....................................................................................
インテル Parallel Studio XE 2019 Composer Edition for Fortran Windows インストール ガイド エクセルソフト株式会社 Version 1.0.0-20180918 目次 1. はじめに....................................................................................
SAC (Jap).indd
.indd") 取扱説明書 機器を使用する前に本マニュアルを十分にお読みください また 以後も参照できるよう保管してください バージョン 1.7 目次 目次 について...3 ご使用になる前に...3 インストール手順...4 ログイン...6 マネージメントソフトウェアプログラムの初期画面... 7 プロジェクタの検索...9 グループの設定... 11 グループ情報画面... 12 グループの削除... 13
取扱説明書 機器を使用する前に本マニュアルを十分にお読みください また 以後も参照できるよう保管してください バージョン 1.7 目次 目次 について...3 ご使用になる前に...3 インストール手順...4 ログイン...6 マネージメントソフトウェアプログラムの初期画面... 7 プロジェクタの検索...9 グループの設定... 11 グループ情報画面... 12 グループの削除... 13
カルテダウンロード 操作マニュアル
 カルテ ZERO 操作マニュアル カルテダウンロード Ver1. 2 目 次 カルテダウンロード カルテダウンロード時の注意点 1. インストール 2. カルテダウンロード 2-1. 時間を設定し自動でダウンロードする方法 2-2. 手動でダウンロードする方法 3. 補足説明 P.4 P.5 P.10 P.15 P.19 P.21 アイコン ボタン説明 カルテ ZERO 内や操作マニュアル内で共通して表示されるアイコンやボタンについて
カルテ ZERO 操作マニュアル カルテダウンロード Ver1. 2 目 次 カルテダウンロード カルテダウンロード時の注意点 1. インストール 2. カルテダウンロード 2-1. 時間を設定し自動でダウンロードする方法 2-2. 手動でダウンロードする方法 3. 補足説明 P.4 P.5 P.10 P.15 P.19 P.21 アイコン ボタン説明 カルテ ZERO 内や操作マニュアル内で共通して表示されるアイコンやボタンについて
ゲームプログラミング講習 第0章 導入
 ゲームプログラミング講習 第 0 章 導入 ゲーム制作に必要なものをインストールします ゲームプログラミング講習第 0 章導入 1 ゲーム制作に必要なもの Microsoft Visual Studio DXライブラリ プロジェクトテンプレート C 言語の知識 ゲームプログラミング講習第 0 章導入 2 Microsoft Visual Studio とは C 言語でプログラミングして Windows
ゲームプログラミング講習 第 0 章 導入 ゲーム制作に必要なものをインストールします ゲームプログラミング講習第 0 章導入 1 ゲーム制作に必要なもの Microsoft Visual Studio DXライブラリ プロジェクトテンプレート C 言語の知識 ゲームプログラミング講習第 0 章導入 2 Microsoft Visual Studio とは C 言語でプログラミングして Windows
目次 専用アプリケーションをインストールする 1 アカウントを設定する 5 Windows クライアントから利用できる機能の紹介 7 1ファイル フォルダのアップロードとダウンロード 8 2ファイル更新履歴の管理 10 3 操作履歴の確認 12 4アクセスチケットの生成 ( フォルダ / ファイルの
 ServersMan@Disk Windows 版専用アプリケーション操作マニュアル 目次 専用アプリケーションをインストールする 1 アカウントを設定する 5 Windows クライアントから利用できる機能の紹介 7 1ファイル フォルダのアップロードとダウンロード 8 2ファイル更新履歴の管理 10 3 操作履歴の確認 12 4アクセスチケットの生成 ( フォルダ / ファイルの公開 ) 13
ServersMan@Disk Windows 版専用アプリケーション操作マニュアル 目次 専用アプリケーションをインストールする 1 アカウントを設定する 5 Windows クライアントから利用できる機能の紹介 7 1ファイル フォルダのアップロードとダウンロード 8 2ファイル更新履歴の管理 10 3 操作履歴の確認 12 4アクセスチケットの生成 ( フォルダ / ファイルの公開 ) 13
NEDO次世代ロボット知能化技術開発プロジェクト
 ロボット用スクリプトエンジン モジュールマニュアル 1.0 版 九州工業大学 株式会社セック 改版履歴 版数改版日改版内容備考 1.0 2012/02/29 初版作成 -i- 目次 1 総則... 1 1.1. 目的...1 1.2. 適用範囲...1 1.3. 関連文書等...1 1.3.1. 適用文書...1 1.3.2. 関連文書...1 1.3.3. 参考文書...1 1.4. 定義...2
ロボット用スクリプトエンジン モジュールマニュアル 1.0 版 九州工業大学 株式会社セック 改版履歴 版数改版日改版内容備考 1.0 2012/02/29 初版作成 -i- 目次 1 総則... 1 1.1. 目的...1 1.2. 適用範囲...1 1.3. 関連文書等...1 1.3.1. 適用文書...1 1.3.2. 関連文書...1 1.3.3. 参考文書...1 1.4. 定義...2
Team Foundation Server 2018 を使用したバージョン管理 補足資料
 Team Foundation Server 2018 を使用したバージョン管理 Magic xpa 3.0/Magic xpa 2.5/uniPaaS V1Plus 補足資料 マジックソフトウェア ジャパン株式会社 2018 年 8 月 24 日 本ドキュメントは Magic xpa 3.0/Magic xpa 2.5/uniPaaS V1Plus で Team Foundation Server(
Team Foundation Server 2018 を使用したバージョン管理 Magic xpa 3.0/Magic xpa 2.5/uniPaaS V1Plus 補足資料 マジックソフトウェア ジャパン株式会社 2018 年 8 月 24 日 本ドキュメントは Magic xpa 3.0/Magic xpa 2.5/uniPaaS V1Plus で Team Foundation Server(
スクールCOBOL2002
 (h) 登録集原文の指定方法 . 登録集原文の指定方法 複数の COBOL プログラムに共通の記述を別のソースファイルとしておき COPY 文で取り込むことができます 登録集原文の概念図を下欄に示します このようにすると コーディング量を削減でき 記述ミスもなくなるため 開発効率を高めることができます ここでは 第 章で実習した reidai.cbl というソースファイルの DATA0 と YYMMDD
(h) 登録集原文の指定方法 . 登録集原文の指定方法 複数の COBOL プログラムに共通の記述を別のソースファイルとしておき COPY 文で取り込むことができます 登録集原文の概念図を下欄に示します このようにすると コーディング量を削減でき 記述ミスもなくなるため 開発効率を高めることができます ここでは 第 章で実習した reidai.cbl というソースファイルの DATA0 と YYMMDD
ご利用のコンピュータを設定する方法 このラボの作業を行うには 事前設定された dcloud ラボを使用するか 自身のコンピュータをセットアップします 詳細については イベントの事前準備 [ 英語 ] とラボの設定 [ 英語 ] の両方のモジュールを参照してください Python を使用した Spar
![ご利用のコンピュータを設定する方法 このラボの作業を行うには 事前設定された dcloud ラボを使用するか 自身のコンピュータをセットアップします 詳細については イベントの事前準備 [ 英語 ] とラボの設定 [ 英語 ] の両方のモジュールを参照してください Python を使用した Spar](/thumbs/95/125438032.jpg "ご利用のコンピュータを設定する方法 このラボの作業を行うには 事前設定された dcloud ラボを使用するか 自身のコンピュータをセットアップします 詳細については イベントの事前準備 [ 英語 ] とラボの設定 [ 英語 ] の両方のモジュールを参照してください Python を使用した Spar") ご利用のコンピュータを設定する方法 このラボの作業を行うには 事前設定された dcloud ラボを使用するか 自身のコンピュータをセットアップします 詳細については イベントの事前準備 [ 英語 ] とラボの設定 [ 英語 ] の両方のモジュールを参照してください Python を使用した Spark API との通信 このラーニングモジュールでは Python を使用した Spark API とのインターフェイスを扱います
ご利用のコンピュータを設定する方法 このラボの作業を行うには 事前設定された dcloud ラボを使用するか 自身のコンピュータをセットアップします 詳細については イベントの事前準備 [ 英語 ] とラボの設定 [ 英語 ] の両方のモジュールを参照してください Python を使用した Spark API との通信 このラーニングモジュールでは Python を使用した Spark API とのインターフェイスを扱います
第 1 章 : はじめに RogueWave Visualization for C++ の Views5.7 に付属している Views Studio を使い 簡単な GUI アプリケーションの開発手順を紹介します この文書では Windows 8 x64 上で Visual Studio2010
 RW View Studio Getting Started (1) : 簡単な GUI アプリケーションを作成する 目次 第 1 章はじめに...1 1.1 アプリケーションの概要... 1 1.2 Views Studio とは... 2 第 2 章 Views Studio を起動する...3 2.1 起動画面 ( メインウィンドウ ) の説明... 4 2.2 ガジェットエクステンション...
RW View Studio Getting Started (1) : 簡単な GUI アプリケーションを作成する 目次 第 1 章はじめに...1 1.1 アプリケーションの概要... 1 1.2 Views Studio とは... 2 第 2 章 Views Studio を起動する...3 2.1 起動画面 ( メインウィンドウ ) の説明... 4 2.2 ガジェットエクステンション...
WebSAM System Navigator JNS isadmin SNMP Trap 連携設定手順書 NEC 2012 年 12 月
 WebSAM System Navigator JNS isadmin SNMP Trap 連携設定手順書 NEC 202 年 2 月 目次. はじめに 2. ナレッジの格納 3.WebSAMSystemNavigator の初期設定 4. トポロジビューの設定 5. ビジネスビューの設定 6. メッセージの表示 Page 2 NEC Corporation 202 . はじめに 本書は JNS 株式会社の
WebSAM System Navigator JNS isadmin SNMP Trap 連携設定手順書 NEC 202 年 2 月 目次. はじめに 2. ナレッジの格納 3.WebSAMSystemNavigator の初期設定 4. トポロジビューの設定 5. ビジネスビューの設定 6. メッセージの表示 Page 2 NEC Corporation 202 . はじめに 本書は JNS 株式会社の
Micro Focus Enterprise Developer チュートリアル メインフレーム COBOL 開発 : MQ メッセージ連携 1. 目的 本チュートリアルでは CICS から入力したメッセージを MQ へ連携する方法の習得を目的としています 2. 前提 使用した OS : Red H
 Micro Focus Enterprise Developer チュートリアル 1. 目的 本チュートリアルでは CICS から入力したメッセージを MQ へ連携する方法の習得を目的としています 2. 前提 使用した OS : Red Hat Enterprise Linux Server release 6.5 x64 使用した WebSphere MQ : IBM WebSphere MQ 7.5.0.1
Micro Focus Enterprise Developer チュートリアル 1. 目的 本チュートリアルでは CICS から入力したメッセージを MQ へ連携する方法の習得を目的としています 2. 前提 使用した OS : Red Hat Enterprise Linux Server release 6.5 x64 使用した WebSphere MQ : IBM WebSphere MQ 7.5.0.1
SDC_SDIO_STM32F4 の説明 2013/09/17 SDIO インターフェースで SD カードをアクセスするプログラムのプロジェクトサンプルです FAT でファイルアクセスするために FatFs( 汎用 FAT ファイルシステム モジュール ) を使用しています VCP(USB 仮想 C
 を使用しています VCP(USB 仮想 C") SDC_SDIO_STM32F4 の説明 2013/09/17 SDIO インターフェースで SD カードをアクセスするプログラムのプロジェクトサンプルです FAT でファイルアクセスするために FatFs( 汎用 FAT ファイルシステム モジュール ) を使用しています VCP(USB 仮想 COM ポート : 非同期シリアル通信 ) を使用して SD カードのアクセスを試験することができます
SDC_SDIO_STM32F4 の説明 2013/09/17 SDIO インターフェースで SD カードをアクセスするプログラムのプロジェクトサンプルです FAT でファイルアクセスするために FatFs( 汎用 FAT ファイルシステム モジュール ) を使用しています VCP(USB 仮想 COM ポート : 非同期シリアル通信 ) を使用して SD カードのアクセスを試験することができます
1. USB の VCP( 仮想 COM ポート ) について USB の VCP( 仮想 COM ポート ) は USB を非同期シリアル通信として使用するための USB のドライバです PC には VCP ドライバをインストールする必要があります USB の VCP( 仮想 COM ポート )
 について USB の VCP( 仮想 COM ポート ) は USB を非同期シリアル通信として使用するための USB のドライバです PC には VCP ドライバをインストールする必要があります USB の VCP( 仮想 COM ポート )") TrueSTUDIO 用 F4D_VCP の説明 V001 2014/07/05 USB の VCP( 仮想 COM ポート ) による非同期シリアル通信を行うプログラムです 無料の試用版開発ツール Atollic TrueSTUDIO for ARM Lite で作成したプロジェクトです ビルド可能なプログラムのコードサイズが 32Kbyte 以内の制限があります プログラムの開始番地は 0x08000000
TrueSTUDIO 用 F4D_VCP の説明 V001 2014/07/05 USB の VCP( 仮想 COM ポート ) による非同期シリアル通信を行うプログラムです 無料の試用版開発ツール Atollic TrueSTUDIO for ARM Lite で作成したプロジェクトです ビルド可能なプログラムのコードサイズが 32Kbyte 以内の制限があります プログラムの開始番地は 0x08000000
CentreCOM VT-Kit2 plus リリースノート
 VT-Kit2 plus この度は をお買いあげいただき 誠にありがとうございます このは 付属のマニュアルに記載されていない内容や ご使用の前にご理解いただきたい注意点など お客様に最新の情報をお知らせするものです 最初にこのをよくお読みになり 本製品を正しくご使用ください 1 取扱説明書の補足 ユーザーマニュアル (J613-M0617-00 Rev.A) の補足事項です 1.1 USB ドライバーのインストールについて
VT-Kit2 plus この度は をお買いあげいただき 誠にありがとうございます このは 付属のマニュアルに記載されていない内容や ご使用の前にご理解いただきたい注意点など お客様に最新の情報をお知らせするものです 最初にこのをよくお読みになり 本製品を正しくご使用ください 1 取扱説明書の補足 ユーザーマニュアル (J613-M0617-00 Rev.A) の補足事項です 1.1 USB ドライバーのインストールについて
Microsoft PowerPoint - Borland C++ Compilerの使用方法(v1.1).ppt [互換モード]
![Microsoft PowerPoint - Borland C++ Compilerの使用方法(v1.1).ppt [互換モード]](/thumbs/92/109692094.jpg "Microsoft PowerPoint - Borland C++ Compilerの使用方法(v1.1).ppt [互換モード]") Borland C++ Compiler の 使用方法 解説書 (v1.1) 1 準備 (1/2) 1. スタートメニューから コントロールパネル を開いて その中に デスクトップのカスタマイズ フォルダーオプション があるので開く エクスプローラー内の ツール フォルダーオプション などからも開ける 2. 表示 タブにある 登録されている拡張子は表示しない のチェックを外して OKを押す これでファイルの拡張子が表示されるようになった
Borland C++ Compiler の 使用方法 解説書 (v1.1) 1 準備 (1/2) 1. スタートメニューから コントロールパネル を開いて その中に デスクトップのカスタマイズ フォルダーオプション があるので開く エクスプローラー内の ツール フォルダーオプション などからも開ける 2. 表示 タブにある 登録されている拡張子は表示しない のチェックを外して OKを押す これでファイルの拡張子が表示されるようになった
目次 1. 動作環境チェック 動作必要環境 Java のインストール Java のインストール Firebird のインストール Firebird のインストール Adobe Reader のインストール
 ORCA PROJECT Linux 対応版インストールマニュアル (Version 2.0.0 対応 ) Ubuntu 10.04 Lucid 用 2.0.0 版 2013 年 3 月 8 日 目次 1. 動作環境チェック...3 1.1. 動作必要環境...3 2. Java のインストール...3 2.1. Java のインストール...3 3. Firebird のインストール...4 3.1.
ORCA PROJECT Linux 対応版インストールマニュアル (Version 2.0.0 対応 ) Ubuntu 10.04 Lucid 用 2.0.0 版 2013 年 3 月 8 日 目次 1. 動作環境チェック...3 1.1. 動作必要環境...3 2. Java のインストール...3 2.1. Java のインストール...3 3. Firebird のインストール...4 3.1.
2. インストールの方法 インストールの手順は まずインストーラーをサイトからダウンロードし イールドブック カリキュレーターと Java Web Start をインストールします 次にイールドブック カリキュレーターを起動してサーバー接続し Java のファイルをダウンロードします 以下の手順に従
 The Yield Book Calculator インストールガイド 本ガイドの内容 1. 必要システム. 1 2. インストールの方法. 2 3. Java Web Start / Java Runtime Environment (JRE). 8 4. プロキシの設定. 9 5. 言語の設定. 10 6. アンインストールの方法. 11 1.. 必要システム イールドブック カリキュレーターのインストールと動作に必要なシステムは以下のとおりです
The Yield Book Calculator インストールガイド 本ガイドの内容 1. 必要システム. 1 2. インストールの方法. 2 3. Java Web Start / Java Runtime Environment (JRE). 8 4. プロキシの設定. 9 5. 言語の設定. 10 6. アンインストールの方法. 11 1.. 必要システム イールドブック カリキュレーターのインストールと動作に必要なシステムは以下のとおりです
Windows AIKを使用したPE2
 Windows AIK を使用した PE2.0 ベースの起動 CD 作成方法 この資料では マイクロソフト社から提供されている Windows AIK( 自動インストールキット ) を使用して Windows PE 2.0 ベースの起動 CD を作成する方法をご紹介します Image Backup や LB コピーコマンダーなどの製品 CD やリカバリーメディアは 主に DOS や Linux 環境で動作するため
Windows AIK を使用した PE2.0 ベースの起動 CD 作成方法 この資料では マイクロソフト社から提供されている Windows AIK( 自動インストールキット ) を使用して Windows PE 2.0 ベースの起動 CD を作成する方法をご紹介します Image Backup や LB コピーコマンダーなどの製品 CD やリカバリーメディアは 主に DOS や Linux 環境で動作するため
CLAIM接続利用手順
 20190809_01 日医標準レセプトソフトクラウド版 CLAIM 接続利用手順 ベンダー向け 2019 年 8 月 9 日 日本医師会 ORCA 管理機構株式会社 目次 1 更新履歴... 2 2 概要... 3 2.1 動作環境... 3 2.2 インストール及び設定... 3 2.2.1 Windows 環境... 3 2.2.2 Linux 環境... 5 2.3 動作の確認... 6 1
20190809_01 日医標準レセプトソフトクラウド版 CLAIM 接続利用手順 ベンダー向け 2019 年 8 月 9 日 日本医師会 ORCA 管理機構株式会社 目次 1 更新履歴... 2 2 概要... 3 2.1 動作環境... 3 2.2 インストール及び設定... 3 2.2.1 Windows 環境... 3 2.2.2 Linux 環境... 5 2.3 動作の確認... 6 1
C1Live
 C1Live 2014.01.30 更新 グレープシティ株式会社 Copyright GrapeCity, Inc. All rights reserved. C1Live 目次 i 目次 ComponentOne Studio Live 更新ユーティリティの概要 1 Studio Live について 2 Studio Live 製品グリッド... 3 Studio Live メニュー... 4 Studio
C1Live 2014.01.30 更新 グレープシティ株式会社 Copyright GrapeCity, Inc. All rights reserved. C1Live 目次 i 目次 ComponentOne Studio Live 更新ユーティリティの概要 1 Studio Live について 2 Studio Live 製品グリッド... 3 Studio Live メニュー... 4 Studio
内容 1 はじめに インストールの手順 起動の手順 Enterprise Architect のプロジェクトファイルを開く 内容を参照する プロジェクトブラウザを利用する ダイアグラムを開く 便利な機能.
 Viewer manual by SparxSystems Japan Enterprise Architect 読み込み専用版 (Viewer) 利用マニュアル 内容 1 はじめに...3 2 インストールの手順...3 3 起動の手順...6 4 Enterprise Architect のプロジェクトファイルを開く...7 5 内容を参照する...8 5.1 プロジェクトブラウザを利用する...8
Viewer manual by SparxSystems Japan Enterprise Architect 読み込み専用版 (Viewer) 利用マニュアル 内容 1 はじめに...3 2 インストールの手順...3 3 起動の手順...6 4 Enterprise Architect のプロジェクトファイルを開く...7 5 内容を参照する...8 5.1 プロジェクトブラウザを利用する...8
XIMERA(Ver1
 ワイヤレステクノロジ株式会社製 小型無線加速度センサ データ収集用ソフトウエア AccelRealTime Software manual Version 1.0.4 株式会社 ATR-Promotions Copyright 2006 ATR-Promotions,Inc. All rights reserved. 更新履歴 2006 年 9 月 28 日 Version1.0.1 用新規作成 2006
ワイヤレステクノロジ株式会社製 小型無線加速度センサ データ収集用ソフトウエア AccelRealTime Software manual Version 1.0.4 株式会社 ATR-Promotions Copyright 2006 ATR-Promotions,Inc. All rights reserved. 更新履歴 2006 年 9 月 28 日 Version1.0.1 用新規作成 2006
Microsoft PowerPoint RT講習会(送付用)_ [互換モード]
![Microsoft PowerPoint RT講習会(送付用)_ [互換モード]](/thumbs/96/126720805.jpg "Microsoft PowerPoint RT講習会(送付用)_ [互換モード]") データ収集技術講演会 日時 :2012 年 12 月 1 日 ( 土 ) 13:00~17:00 場所 : 広島工業大学五日市キャンパス三宅の森 Nexus21 607 教室 RT-Middleware 活用 株式会社グローバルアシスト坂本武志 RT ミドルウェアとは? 2012.12.1 データ収集技術講演会 Copyright (C) Advanced Industrial Science And
データ収集技術講演会 日時 :2012 年 12 月 1 日 ( 土 ) 13:00~17:00 場所 : 広島工業大学五日市キャンパス三宅の森 Nexus21 607 教室 RT-Middleware 活用 株式会社グローバルアシスト坂本武志 RT ミドルウェアとは? 2012.12.1 データ収集技術講演会 Copyright (C) Advanced Industrial Science And
プログラマブル LED 制御モジュール アプリ操作説明書 プログラマブル LED 制御モジュール設定アプリ操作説明書 適用モジュール 改訂番号 エレラボドットコム 1
 設定 適用モジュール 041-1 改訂番号 20161024 エレラボドットコム 1 ( 用アプリの利用可能環境 ) Windows7 8.1 10 のいずれかが動作する PC Windows8 以降の場合は 次ページ記載の Windows8 以降の.NET Framework の有効化 (p3~7) の操作をするか 設定されていることを確認してからアプリをインストールしてください.NET Framework2.0
設定 適用モジュール 041-1 改訂番号 20161024 エレラボドットコム 1 ( 用アプリの利用可能環境 ) Windows7 8.1 10 のいずれかが動作する PC Windows8 以降の場合は 次ページ記載の Windows8 以降の.NET Framework の有効化 (p3~7) の操作をするか 設定されていることを確認してからアプリをインストールしてください.NET Framework2.0
Microsoft PowerPoint ï½žéł»å�’å–¥æœ�ㇷㇹㅃㅀ㇤ㅳㇹㅋㅼㅫ曉逃.ppt [äº™æ‘łã…¢ã…¼ã…›]
![Microsoft PowerPoint ï½žéł»å�’å–¥æœ�ㇷㇹㅃㅀ㇤ㅳㇹㅋㅼㅫ曉逃.ppt [äº™æ‘łã…¢ã…¼ã…›]](/thumbs/92/109918223.jpg "Microsoft PowerPoint ï½žéł»å�’å–¥æœ�ㇷㇹㅃㅀ㇤ㅳㇹㅋㅼㅫ曉逃.ppt [äº™æ‘łã…¢ã…¼ã…›]") 電子入札システムクライアント V4 インストール手順 平成 30 年 3 月 富山市財務部契約課 注意事項 平成 30 年 3 月以降は現在インストールしていただいている 電子入札システムクライアント V3 は使用できなくなります 本手順に従い必ず 電子入札システムクライアント V4 をインストールしてください Windows10 の標準ブラウザ Microsoft Edge は富山市電子入札システムを使用できません
電子入札システムクライアント V4 インストール手順 平成 30 年 3 月 富山市財務部契約課 注意事項 平成 30 年 3 月以降は現在インストールしていただいている 電子入札システムクライアント V3 は使用できなくなります 本手順に従い必ず 電子入札システムクライアント V4 をインストールしてください Windows10 の標準ブラウザ Microsoft Edge は富山市電子入札システムを使用できません
改訂履歴 改訂日付 改訂内容 2014/11/01 初版発行 2017/01/16 Studuino web サイトリニューアルに伴う改訂 2017/04/14 Studuino web サイトリニューアルに伴うアクセス方法の説明変更 2018/01/22 Mac 版インストール手順変更に伴う改訂
 Arduino IDE 環境 設定手順書 Windows/Mac 用 2014/11/01 作成 2018/01/22 改訂 改訂履歴 改訂日付 改訂内容 2014/11/01 初版発行 2017/01/16 Studuino web サイトリニューアルに伴う改訂 2017/04/14 Studuino web サイトリニューアルに伴うアクセス方法の説明変更 2018/01/22 Mac 版インストール手順変更に伴う改訂
Arduino IDE 環境 設定手順書 Windows/Mac 用 2014/11/01 作成 2018/01/22 改訂 改訂履歴 改訂日付 改訂内容 2014/11/01 初版発行 2017/01/16 Studuino web サイトリニューアルに伴う改訂 2017/04/14 Studuino web サイトリニューアルに伴うアクセス方法の説明変更 2018/01/22 Mac 版インストール手順変更に伴う改訂
Microsoft PowerPoint RTM講習会_初級(第4部) [互換モード]
![Microsoft PowerPoint RTM講習会_初級(第4部) [互換モード]](/thumbs/101/150326877.jpg "Microsoft PowerPoint RTM講習会_初級(第4部) [互換モード]") PFCore(RT ミドルウェア ) トレーニング初級編 日時 :2013 年 1 月 21 日 ( 月 ) 13:00~17:00 場所 : 大阪大学吹田キャンパス産学連携本部 B 棟 1F 会議室 PFCore(RT ミドルウェア ) トレーニング初級編 13:00-13:20 13:20-14:10 14:10-15:05 15:05-15:20 15:20-17:00 第 1 部 : 先端計測分野における
PFCore(RT ミドルウェア ) トレーニング初級編 日時 :2013 年 1 月 21 日 ( 月 ) 13:00~17:00 場所 : 大阪大学吹田キャンパス産学連携本部 B 棟 1F 会議室 PFCore(RT ミドルウェア ) トレーニング初級編 13:00-13:20 13:20-14:10 14:10-15:05 15:05-15:20 15:20-17:00 第 1 部 : 先端計測分野における
G800SE HTMLdocument update
 HTML ドキュメントアップデート手順説明書 本説明書では 弊社ホームページから G800SE の HTML ドキュメントをダウンロードし アップデートを行う方法を説明しています HTML ドキュメントのアップデートを行うには 下記の操作を行ってください 操作フロー 1. ご使用のカメラのHTMLドキュメントバージョンを確認する (P.2) 2. ダウンロードしてHTMLドキュメントのファイルを準備する
HTML ドキュメントアップデート手順説明書 本説明書では 弊社ホームページから G800SE の HTML ドキュメントをダウンロードし アップデートを行う方法を説明しています HTML ドキュメントのアップデートを行うには 下記の操作を行ってください 操作フロー 1. ご使用のカメラのHTMLドキュメントバージョンを確認する (P.2) 2. ダウンロードしてHTMLドキュメントのファイルを準備する
改版履歴 Ver 改版日内容 /02/07 新規作成 2 / 18
 多目的俯瞰画像合成システム 機能仕様書 Crawler View 画像合成 RTC 発行日 2017 年 3 月 30 日 公立大学法人会津大学 株式会社東日本計算センター 1 / 18 改版履歴 Ver 改版日内容 1.0 2016/02/07 新規作成 2 / 18 1. 内容 1. はじめに... 4 1.1. 対象読者... 4 1.2. 適応範囲... 4 1.3. 開発環境及び使用機器...
多目的俯瞰画像合成システム 機能仕様書 Crawler View 画像合成 RTC 発行日 2017 年 3 月 30 日 公立大学法人会津大学 株式会社東日本計算センター 1 / 18 改版履歴 Ver 改版日内容 1.0 2016/02/07 新規作成 2 / 18 1. 内容 1. はじめに... 4 1.1. 対象読者... 4 1.2. 適応範囲... 4 1.3. 開発環境及び使用機器...
Visual Studio 2017 RC インストール & ファーストステップガイド 2016 年 11 月 16 日 (V1.0)
") Visual Studio 2017 RC インストール & ファーストステップガイド 2016 年 11 月 16 日 (V1.0) このドキュメントは現状版として提供されます このドキュメントに記載されている情報や見解 (URL 等のインターネット Web サイトに関する情報を含む ) は 将来予告なしに変更されることがあります このドキュメントに記載された例は 説明のみを目的とした架空のものです
Visual Studio 2017 RC インストール & ファーストステップガイド 2016 年 11 月 16 日 (V1.0) このドキュメントは現状版として提供されます このドキュメントに記載されている情報や見解 (URL 等のインターネット Web サイトに関する情報を含む ) は 将来予告なしに変更されることがあります このドキュメントに記載された例は 説明のみを目的とした架空のものです
Oracle Business Intelligence Standard Edition One のインストール
 Oracle Business Intelligence Standard Edition One のインストール 第 1 版 作成日 :2007 年 7 月 31 日 更新日 :2007 年 7 月 31 日 目次 はじめに... 3 Ⅰ. インストール作業... 4 Ⅱ. 起動状況の確認... 8 Ⅱ-1. Oracle BI Administration Tool の起動... 8 Ⅱ-2.
Oracle Business Intelligence Standard Edition One のインストール 第 1 版 作成日 :2007 年 7 月 31 日 更新日 :2007 年 7 月 31 日 目次 はじめに... 3 Ⅰ. インストール作業... 4 Ⅱ. 起動状況の確認... 8 Ⅱ-1. Oracle BI Administration Tool の起動... 8 Ⅱ-2.
CoIDE 用 F4D_VCP の説明 V /07/05 USB の VCP( 仮想 COM ポート ) による非同期シリアル通信を行うプログラムです Free の開発ツール CoIDE で作成した STM32F4 Discovery 用のプロジェクトです プログラムの開始番地は 0x
 による非同期シリアル通信を行うプログラムです Free の開発ツール CoIDE で作成した STM32F4 Discovery 用のプロジェクトです プログラムの開始番地は 0x") CoIDE 用 F4D_VCP の説明 V001 2014/07/05 USB の VCP( 仮想 COM ポート ) による非同期シリアル通信を行うプログラムです Free の開発ツール CoIDE で作成した STM32F4 Discovery 用のプロジェクトです プログラムの開始番地は 0x08000000 です デバッグが可能です 目次 1. USB の VCP( 仮想 COM ポート )
CoIDE 用 F4D_VCP の説明 V001 2014/07/05 USB の VCP( 仮想 COM ポート ) による非同期シリアル通信を行うプログラムです Free の開発ツール CoIDE で作成した STM32F4 Discovery 用のプロジェクトです プログラムの開始番地は 0x08000000 です デバッグが可能です 目次 1. USB の VCP( 仮想 COM ポート )
Microsoft Word - Android_実習環境
 Android 実習環境 Android アプリケーションを実習するために必要となる環境について説明します 1 パソコン教室の環境 OS: Windows7 Professional 32 ビット CPU:Intel Core i5 メモリ : 4GB 生徒個人フォルダ : Z ドライブ ( サーバ ) JDK(Java Development Kit) Android SDK ADT(Android
Android 実習環境 Android アプリケーションを実習するために必要となる環境について説明します 1 パソコン教室の環境 OS: Windows7 Professional 32 ビット CPU:Intel Core i5 メモリ : 4GB 生徒個人フォルダ : Z ドライブ ( サーバ ) JDK(Java Development Kit) Android SDK ADT(Android
SetupVerup_dl_M
 最新版プログラムのダウンロード EX-TREND 武蔵 Ver.18 シリーズ FC コンシェルジュの 最新版へのアップグレード サービスを利用して お使いの EX-TREND 武蔵シリーズ を EX-TREND 武蔵 Ver.18 シリーズ にバージョンアップする方法を解説します 1. プロテクトの更新は お済みですか? プログラムをバージョンアップした場合は プロテクトの更新が必要です まだ更新していない場合は
最新版プログラムのダウンロード EX-TREND 武蔵 Ver.18 シリーズ FC コンシェルジュの 最新版へのアップグレード サービスを利用して お使いの EX-TREND 武蔵シリーズ を EX-TREND 武蔵 Ver.18 シリーズ にバージョンアップする方法を解説します 1. プロテクトの更新は お済みですか? プログラムをバージョンアップした場合は プロテクトの更新が必要です まだ更新していない場合は
Windows 7ファイル送信方法 SMB編
 プッシュスキャン ~ Windows 7 編 ~ プッシュスキャン ~SMB 送信設定の概略 ~... 2 作業 1 PC 側送信先共有フォルダーの設定... 3 1-1 ユーザーアカウントの作成 4 1-2 共有フォルダーの作成 8 作業 2 imagerunner 側の送信設定... 13 設定方法 1 リモート UI から宛先の登録 14 設定方法 2 imagerunner のタッチパネルから宛先の登録
プッシュスキャン ~ Windows 7 編 ~ プッシュスキャン ~SMB 送信設定の概略 ~... 2 作業 1 PC 側送信先共有フォルダーの設定... 3 1-1 ユーザーアカウントの作成 4 1-2 共有フォルダーの作成 8 作業 2 imagerunner 側の送信設定... 13 設定方法 1 リモート UI から宛先の登録 14 設定方法 2 imagerunner のタッチパネルから宛先の登録
Windows用タブレットドライバー簡易ガイド
 プリンストンテクノロジー製タブレット Windows 用ドライバー簡易ガイド ドライバー名 :Princeton Tablet Driver V4.16 対応機種 :PTB-ST12 シリーズ PTB-ST5 PTB-S1BK PTB-MT2 シリーズ対応 OS :Windows7 SP1(32bit/64bit) / WindowsVista SP2(32bit/64bit) / :WindowsXP
プリンストンテクノロジー製タブレット Windows 用ドライバー簡易ガイド ドライバー名 :Princeton Tablet Driver V4.16 対応機種 :PTB-ST12 シリーズ PTB-ST5 PTB-S1BK PTB-MT2 シリーズ対応 OS :Windows7 SP1(32bit/64bit) / WindowsVista SP2(32bit/64bit) / :WindowsXP
WebOTXマニュアル
 WebOTX アプリケーション開発ガイド WebOTX アプリケーション開発ガイドバージョン : 7.1 版数 : 第 2 版リリース : 2010 年 1 月 Copyright (C) 1998-2010 NEC Corporation. All rights reserved. 3-1 目次 3. J2EE WebOTX...3 3.1. Webアプリケーション...3 3.1.1. WARファイルをインポートするとタスクにエラーが表示される...3
WebOTX アプリケーション開発ガイド WebOTX アプリケーション開発ガイドバージョン : 7.1 版数 : 第 2 版リリース : 2010 年 1 月 Copyright (C) 1998-2010 NEC Corporation. All rights reserved. 3-1 目次 3. J2EE WebOTX...3 3.1. Webアプリケーション...3 3.1.1. WARファイルをインポートするとタスクにエラーが表示される...3
項番 現象 原因 対応手順書など 4 代理店コードでのダウンロード時に以下のメッセージの画面が表示される サービス時間外のため 現在 このサービスはご利用になれません 当機能のサービス時間外です 以下の時間帯にダウンロードしてください 月曜日 ~ 金曜日 7:00~21:00 土曜日 7:00~17
 D-Web インストールエラー対応 順書 Ⅰ. エラー対象 1. エラー対象の確認 Setup.exe (D-Web 実行環境 ) インストール中にエラーが発生した場合は はじめに D-Web を利用できるパソコン環境であることをご確認ください 利用環境の詳細は 下記ボタンよりご確認ください 利用可能環境について詳しく見る 表 1: エラー対象一覧項番 現象 原因 対応手順書など 1 Setup.exe
D-Web インストールエラー対応 順書 Ⅰ. エラー対象 1. エラー対象の確認 Setup.exe (D-Web 実行環境 ) インストール中にエラーが発生した場合は はじめに D-Web を利用できるパソコン環境であることをご確認ください 利用環境の詳細は 下記ボタンよりご確認ください 利用可能環境について詳しく見る 表 1: エラー対象一覧項番 現象 原因 対応手順書など 1 Setup.exe
ユーザーズマニュアル 2DCDP システム 発行日 2016 年 3 月 30 日
 ユーザーズマニュアル 2DCDP システム 発行日 2016 年 3 月 30 日 目次 1. はじめに... 1 2DCDP システムとは... 1 動作環境... 1 使用機器... 2 関連資料... 2 2. 本システムでできること... 2 3. 本システムのユーザインターフェースについて... 3 制御画面の構成... 3 2DCDP 専用ビューアの構成... 7 4. システム配置図...
ユーザーズマニュアル 2DCDP システム 発行日 2016 年 3 月 30 日 目次 1. はじめに... 1 2DCDP システムとは... 1 動作環境... 1 使用機器... 2 関連資料... 2 2. 本システムでできること... 2 3. 本システムのユーザインターフェースについて... 3 制御画面の構成... 3 2DCDP 専用ビューアの構成... 7 4. システム配置図...
Android アプリを作るための環境設定 Android アプリを作るのに必要なものは Android SDK と Java 開発環境の Eclipse です 環境設定作業の概要はまず Android SDK と Eclipse をそれぞれインストールします その後 Eclipse を起動し An
 Android アプリを作るための環境設定 Android アプリを作るのに必要なものは Android SDK と Java 開発環境の Eclipse です 環境設定作業の概要はまず Android SDK と Eclipse をそれぞれインストールします その後 Eclipse を起動し Android SDK の plugin を Eclipse にインストールします Eclipse のインストール時に
Android アプリを作るための環境設定 Android アプリを作るのに必要なものは Android SDK と Java 開発環境の Eclipse です 環境設定作業の概要はまず Android SDK と Eclipse をそれぞれインストールします その後 Eclipse を起動し Android SDK の plugin を Eclipse にインストールします Eclipse のインストール時に
2013年『STSSスキルコミュニティ』 テーマ別Kickoff資料
 STSS スキルコミュニティ 2014 PC で体験する Kimchi による簡単 KVM 操作 日本アイビーエム株式会社 TSS 事業統括 SW サービス事業部 2014.11 はじめに Kimchi は IBM が作成した HTML5 のインターフェースで KVM を管理するソフトウェアで PowerKVM の管理にも使われます Kimchi はオープンソース化され PC 向けのビルドも提供されています
STSS スキルコミュニティ 2014 PC で体験する Kimchi による簡単 KVM 操作 日本アイビーエム株式会社 TSS 事業統括 SW サービス事業部 2014.11 はじめに Kimchi は IBM が作成した HTML5 のインターフェースで KVM を管理するソフトウェアで PowerKVM の管理にも使われます Kimchi はオープンソース化され PC 向けのビルドも提供されています
monologue Sound Librarian 取扱説明書
 J 3 目次 はじめに... 2 monologue Sound Librarian とは?... 2 使用上のご注意... 2 動作環境... 2 インストール... 3 Mac へのインストール... 3 Windows へのインストール... 3 クイック スタート... 4 monologue Sound Librarian を起動する... 4 monologue Sound Librarian
J 3 目次 はじめに... 2 monologue Sound Librarian とは?... 2 使用上のご注意... 2 動作環境... 2 インストール... 3 Mac へのインストール... 3 Windows へのインストール... 3 クイック スタート... 4 monologue Sound Librarian を起動する... 4 monologue Sound Librarian
再起動した状態になり パスワードを入力すると 図 2 のように DEXCS2011 のアイコ ンがデスクトップ上に表示される 2 端末を準備する メニューバーにある端末の形を左クリック 図 2 デスクトップ メニューバーに端末の形がない場合 図 3 メニューバー アプリケーション アクセサリー 端末
 OpenFOAM の使い方準備編 目次 DALAB 鍔田 12/7/14 1. DEXCS2011 をインストール 2. OpenFOAM-2.1.1 を DEXCS に導入する 3. 例題を実行する 4. ParaView でのマウスによる操作方法 5. Tab キーの活用 6. 講習に使用するファイルのダウンロード この構築は Windows7(64bit メモリ :4GB) のパソコン上の仮想マシン
OpenFOAM の使い方準備編 目次 DALAB 鍔田 12/7/14 1. DEXCS2011 をインストール 2. OpenFOAM-2.1.1 を DEXCS に導入する 3. 例題を実行する 4. ParaView でのマウスによる操作方法 5. Tab キーの活用 6. 講習に使用するファイルのダウンロード この構築は Windows7(64bit メモリ :4GB) のパソコン上の仮想マシン
(Microsoft Word - HMS SYCON Windows7 XP Mode \203C\203\223\203X\203g\201[\203\213\216\350\217\207\225\342\221\253\220\340\226\276\216\221\227\277_A00.doc)
") HMS SYCON Windows7 XP Mode インストール手順補足説明資料 Version: A00 エイチエムエス インダストリアルネットワークス株式会社 222-0033 神奈川県横浜市港北区新横浜 3-19-5 新横浜第 2 センタービル 6F TEL : 045-478-5340 FAX : 045-476-0315 URL www.anybus.jp EMAIL セールス :jp-sales@hms-networks.com
HMS SYCON Windows7 XP Mode インストール手順補足説明資料 Version: A00 エイチエムエス インダストリアルネットワークス株式会社 222-0033 神奈川県横浜市港北区新横浜 3-19-5 新横浜第 2 センタービル 6F TEL : 045-478-5340 FAX : 045-476-0315 URL www.anybus.jp EMAIL セールス :jp-sales@hms-networks.com
目次 第 1 章概要....1 第 2 章インストールの前に... 2 第 3 章 Windows OS でのインストール...2 第 4 章 Windows OS でのアプリケーション設定 TP-LINK USB プリンターコントローラーを起動 / 終了するには
 プリントサーバー 設定 ガイド このガイドは以下のモデルに該当します TL-WR842ND TL-WR1042ND TL-WR1043ND TL-WR2543ND TL-WDR4300 目次 第 1 章概要....1 第 2 章インストールの前に... 2 第 3 章 Windows OS でのインストール...2 第 4 章 Windows OS でのアプリケーション設定...7 4.1 TP-LINK
プリントサーバー 設定 ガイド このガイドは以下のモデルに該当します TL-WR842ND TL-WR1042ND TL-WR1043ND TL-WR2543ND TL-WDR4300 目次 第 1 章概要....1 第 2 章インストールの前に... 2 第 3 章 Windows OS でのインストール...2 第 4 章 Windows OS でのアプリケーション設定...7 4.1 TP-LINK
(Microsoft PowerPoint - 070507_RT\215u\217K\211\357)
") RTミドルウエア ミドルウエアの 各 種 ツール 群 について RTコンポーネント 開 発 環 境 RTコンポーネントの 開 発 効 率 を 向 上 させるためのツール 群 RTミドルウェア コンポーネント フレームワーク 固 有 の 定 型 作 業 を 低 減 開 発 プラットフォームにEclipseを 採 用 設 計 ~ 実 装 ~テストまで, 開 発 サイクル 全 体 の 作 業 を 支 援
RTミドルウエア ミドルウエアの 各 種 ツール 群 について RTコンポーネント 開 発 環 境 RTコンポーネントの 開 発 効 率 を 向 上 させるためのツール 群 RTミドルウェア コンポーネント フレームワーク 固 有 の 定 型 作 業 を 低 減 開 発 プラットフォームにEclipseを 採 用 設 計 ~ 実 装 ~テストまで, 開 発 サイクル 全 体 の 作 業 を 支 援
オフィスソフトを操作するためのRTC群
 オフィスソフトを 操 作 するための RTC 群 宮 本 信 彦 開 発 概 要 Microsoft Office OpenOfficeの 表 計 算 機 能 文 書 作 成 機 能 等 をRTミドル ウェアを 用 いたシステムで 利 用 するためのRTC 群 Excel Calc( 表 計 算 )を 操 作 するRTC セルのデータをデータポートから 入 出 力 Draw( 図 形 描 画 )を
オフィスソフトを 操 作 するための RTC 群 宮 本 信 彦 開 発 概 要 Microsoft Office OpenOfficeの 表 計 算 機 能 文 書 作 成 機 能 等 をRTミドル ウェアを 用 いたシステムで 利 用 するためのRTC 群 Excel Calc( 表 計 算 )を 操 作 するRTC セルのデータをデータポートから 入 出 力 Draw( 図 形 描 画 )を
ch2_android_2pri.indd
 Android SDK をインストールしよう Android Developers サイトから Android SDK をダウンロードして インストールします 1 インターネットブラウザのアドレスバーに http://dl.google.com/android/ installer_r20-windows.exe と入力して g キーを押す 1 ファイルを保存するメッセージが表示される 2 [ 保存
Android SDK をインストールしよう Android Developers サイトから Android SDK をダウンロードして インストールします 1 インターネットブラウザのアドレスバーに http://dl.google.com/android/ installer_r20-windows.exe と入力して g キーを押す 1 ファイルを保存するメッセージが表示される 2 [ 保存
QLabセットアップガイド for CL/QL/TFシリーズ
 QLab セットアップガイド for CL/QL/TF シリーズ 目次 1. はじめに... 3 2. QLab から制御可能な機能およびパラメーター... 3 3. 使用機材... 4 4. スクリプトテンプレートのダウンロード... 5 5. コンソールと Mac の接続... 6 6. IP アドレスの設定... 7 7. スクリプトテンプレートの設定... 8 8. QLab のプログラミング
QLab セットアップガイド for CL/QL/TF シリーズ 目次 1. はじめに... 3 2. QLab から制御可能な機能およびパラメーター... 3 3. 使用機材... 4 4. スクリプトテンプレートのダウンロード... 5 5. コンソールと Mac の接続... 6 6. IP アドレスの設定... 7 7. スクリプトテンプレートの設定... 8 8. QLab のプログラミング
Microsoft Word - DWR-S01D_Updater_取扱説明書_120514A.doc
 DWR-S01D Updater 取扱説明書 発行日 :2012/5/14 目次 概要...3 機能...3 準備するもの...3 本ソフトウェアについて...3 インストール手順...4 USBドライバーのインストール手順...8 デバイスマネージャーからのUSBドライバーのインストール手順...11 アップデート手順...16 アップデート後の確認...17 アップデートに失敗した場合...17
DWR-S01D Updater 取扱説明書 発行日 :2012/5/14 目次 概要...3 機能...3 準備するもの...3 本ソフトウェアについて...3 インストール手順...4 USBドライバーのインストール手順...8 デバイスマネージャーからのUSBドライバーのインストール手順...11 アップデート手順...16 アップデート後の確認...17 アップデートに失敗した場合...17
基礎からの MySQL 改訂版 は Windows10 や Windows8.1 にも対応しています Windows10 および Windows8.1 をお使いの読者が 基礎からの MySQL 改訂版 を読み進めると きの補足説明 1. 基礎からの MySQL 改訂版 の Windows10 および
 基礎からの MySQL 改訂版 は Windows10 や Windows8.1 にも対応しています Windows10 および Windows8.1 をお使いの読者が 基礎からの MySQL 改訂版 を読み進めると きの補足説明 1. 基礎からの MySQL 改訂版 の Windows10 および Windows8.1 への対応 基礎からの MySQL 改訂版 は Windows7 WindowsVista
基礎からの MySQL 改訂版 は Windows10 や Windows8.1 にも対応しています Windows10 および Windows8.1 をお使いの読者が 基礎からの MySQL 改訂版 を読み進めると きの補足説明 1. 基礎からの MySQL 改訂版 の Windows10 および Windows8.1 への対応 基礎からの MySQL 改訂版 は Windows7 WindowsVista
Microsoft PowerPoint - Tutorial_2_upd.ppt
 2 Eclipse を使った Bluemix アプリケーション開発 1 ハンズオン手順 ハンズオンの概要 Eclipse から Java アプリをデプロイする 公開されているプロジェクトをインポートする インポートしたプロジェクトをBluemixにデプロイする ここでは PostgreSQL サービスを提供する ElephantSQL というサービスを使用します デプロイしたアプリケーションを確認する
2 Eclipse を使った Bluemix アプリケーション開発 1 ハンズオン手順 ハンズオンの概要 Eclipse から Java アプリをデプロイする 公開されているプロジェクトをインポートする インポートしたプロジェクトをBluemixにデプロイする ここでは PostgreSQL サービスを提供する ElephantSQL というサービスを使用します デプロイしたアプリケーションを確認する
SLCONFIG の操作 JF1PYE Ⅰ. PC と slconfig の通信設定 Ⅱ. Slconfig の操作 Ⅲ. 端末ソフトによる Command 機能 Ⅳ. slconfig 実行形式プログラムの作成 Ⅴ. 端末ソフト Tera Term のダウンロード インストー
 SLCONFIG の操作 2011.03.02 JF1PYE Ⅰ. PC と slconfig の通信設定 Ⅱ. Slconfig の操作 Ⅲ. 端末ソフトによる Command 機能 Ⅳ. slconfig 実行形式プログラムの作成 Ⅴ. 端末ソフト Tera Term のダウンロード インストール 設定 Soliloc-10G Slconfig の開発 提供ならびに本書を作成するに当たり情報提供を頂いた
SLCONFIG の操作 2011.03.02 JF1PYE Ⅰ. PC と slconfig の通信設定 Ⅱ. Slconfig の操作 Ⅲ. 端末ソフトによる Command 機能 Ⅳ. slconfig 実行形式プログラムの作成 Ⅴ. 端末ソフト Tera Term のダウンロード インストール 設定 Soliloc-10G Slconfig の開発 提供ならびに本書を作成するに当たり情報提供を頂いた
京都大学認証基盤ドライバソフト 導入手順書 (WindowsVista ~ Windows10 版 ) 京都大学情報環境機構 第 1 版第 2 版第 3 版 2015 年 3 月 27 日 2015 年 6 月 17 日 2015 年 12 月 9 日
 京都大学情報環境機構 第 1 版第 2 版第 3 版 2015 年 3 月 27 日 2015 年 6 月 17 日 2015 年 12 月 9 日") 京都大学認証基盤ドライバソフト 導入手順書 (WindowsVista ~ Windows10 版 ) 京都大学情報環境機構 第 1 版第 2 版第 3 版 2015 年 3 月 27 日 2015 年 6 月 17 日 2015 年 12 月 9 日 作業の流れ 1 事前の注意事項 2 必要ファイルのダウンロードと展開 3 PKIドライバのインストール 4 PKCS#11ドライバモジュールの登録
京都大学認証基盤ドライバソフト 導入手順書 (WindowsVista ~ Windows10 版 ) 京都大学情報環境機構 第 1 版第 2 版第 3 版 2015 年 3 月 27 日 2015 年 6 月 17 日 2015 年 12 月 9 日 作業の流れ 1 事前の注意事項 2 必要ファイルのダウンロードと展開 3 PKIドライバのインストール 4 PKCS#11ドライバモジュールの登録
ユーザーズマニュアル 有線無線通信ネットワークシステム Wi-Fi 経路情報ビューア 発行日 2017 年 3 月 30 日 公立大学法人会津大学 株式会社東日本計算センター
 ユーザーズマニュアル 有線無線通信ネットワークシステム Wi-Fi 経路情報ビューア 発行日 2017 年 3 月 30 日 公立大学法人会津大学 株式会社東日本計算センター 目次 1 2 3 はじめに...1 1.1 前提知識...1 1.2 システム概要...1 1.3 動作環境...4 1.3.1 Wi-Fi 経路情報監視 RTC...4 1.3.2 Wi-Fi 経路情報ビューア RTC...6
ユーザーズマニュアル 有線無線通信ネットワークシステム Wi-Fi 経路情報ビューア 発行日 2017 年 3 月 30 日 公立大学法人会津大学 株式会社東日本計算センター 目次 1 2 3 はじめに...1 1.1 前提知識...1 1.2 システム概要...1 1.3 動作環境...4 1.3.1 Wi-Fi 経路情報監視 RTC...4 1.3.2 Wi-Fi 経路情報ビューア RTC...6
CLAIM接続利用手順
 20181012_01 日医標準レセプトソフトクラウド版 CLAIM 接続利用手順 ベンダー向け 2018 年 10 月 12 日 日本医師会 ORCA 管理機構株式会社 目次 1 更新履歴... 2 2 概要... 3 2.1 動作環境... 3 2.2 インストール及び設定... 3 2.2.1 Windows 環境... 3 2.2.2 Linux 環境... 5 2.3 動作の確認... 6
20181012_01 日医標準レセプトソフトクラウド版 CLAIM 接続利用手順 ベンダー向け 2018 年 10 月 12 日 日本医師会 ORCA 管理機構株式会社 目次 1 更新履歴... 2 2 概要... 3 2.1 動作環境... 3 2.2 インストール及び設定... 3 2.2.1 Windows 環境... 3 2.2.2 Linux 環境... 5 2.3 動作の確認... 6
クラウド内の Java - 動画スクリプト 皆さん こんにちは Steve Perry です 私たちが作成した人事アプリケーションを覚えていますか? 今回は そのアプリケーションをクラウド内で実行しましょう コードは GitHub の
 クラウド内の Java - 動画スクリプト 皆さん こんにちは Steve Perry です 私たちが作成した人事アプリケーションを覚えていますか? 今回は そのアプリケーションをクラウド内で実行しましょう コードは GitHub の https://github.com/makotogo/javainthecloud からダウンロードでき この動画では 次の方法を説明し WebSphere Application
クラウド内の Java - 動画スクリプト 皆さん こんにちは Steve Perry です 私たちが作成した人事アプリケーションを覚えていますか? 今回は そのアプリケーションをクラウド内で実行しましょう コードは GitHub の https://github.com/makotogo/javainthecloud からダウンロードでき この動画では 次の方法を説明し WebSphere Application
(3) ソフトウェアのアップデート (3-0) アップデートの開始 今すぐアップデート ボタンをクリックする (3-1) 最新版のダウンロード準備完了 ポップアップウィンドウポップアップウィンドウをクリックする ( マークは避けてクリックすること ) (3-2) ダウンロード準備完了 Java(TM
 ソフトウェアのアップデート (3-0) アップデートの開始 今すぐアップデート ボタンをクリックする (3-1) 最新版のダウンロード準備完了 ポップアップウィンドウポップアップウィンドウをクリックする ( マークは避けてクリックすること ) (3-2) ダウンロード準備完了 Java(TM") WinXP14 (2005-06-15 版 ) Microsoft Windows XP Professional での各種アプリケーションの導入 ( その 3) 1. Sun Java 2 SDK の導入 1.1 ダウンロード ftp.cs.tohoku-gakuin.ac.jp の /TG-Local/NotePC/WinXP/ フォルダから j2se フォルダを D:\Download フォルダにダウンロードする
WinXP14 (2005-06-15 版 ) Microsoft Windows XP Professional での各種アプリケーションの導入 ( その 3) 1. Sun Java 2 SDK の導入 1.1 ダウンロード ftp.cs.tohoku-gakuin.ac.jp の /TG-Local/NotePC/WinXP/ フォルダから j2se フォルダを D:\Download フォルダにダウンロードする
_01 日医標準レセプトソフトクラウド版 CLAIM 接続利用手順 ベンダー向け 2017 年 8 月 23 日 日本医師会 ORCA 管理機構株式会社
 20170922_01 日医標準レセプトソフトクラウド版 CLAIM 接続利用手順 ベンダー向け 2017 年 8 月 23 日 日本医師会 ORCA 管理機構株式会社 目次 1 概要... 2 1.1 動作環境... 2 1.2 インストール及び設定... 2 1.2.1 Windows 環境... 2 1.2.2 Linux 環境... 4 1.3 動作の確認... 5 1 1 概要 ベンダー及び医療機関が
20170922_01 日医標準レセプトソフトクラウド版 CLAIM 接続利用手順 ベンダー向け 2017 年 8 月 23 日 日本医師会 ORCA 管理機構株式会社 目次 1 概要... 2 1.1 動作環境... 2 1.2 インストール及び設定... 2 1.2.1 Windows 環境... 2 1.2.2 Linux 環境... 4 1.3 動作の確認... 5 1 1 概要 ベンダー及び医療機関が
設定 1 USB キー証明書ソフトの更新手順 1 産科医療補償制度のホームページ ( へアクセスし 分娩機関の皆さまへ 加入手続き をクリックしてください 2 専用 Web システムの導入要件 をクリックしてくださ
 分娩機関の皆様へ Windows7 Windows8 Windows8.1 を導入したパソコンのご使用にあたり 以下の設定作業を行っていただく必要があります 誠にお手数ですが 次ページ以降に記載しております手順に従い更新作業を行っていただきますようお願い申し上げます お使いのパソコンの Internet Explorer
分娩機関の皆様へ Windows7 Windows8 Windows8.1 を導入したパソコンのご使用にあたり 以下の設定作業を行っていただく必要があります 誠にお手数ですが 次ページ以降に記載しております手順に従い更新作業を行っていただきますようお願い申し上げます お使いのパソコンの Internet Explorer
HMD を用いた PT カメラのインターネット遠隔操作芝浦工業大学知能機械システム研究室 HMD(Head Mounted Display) を用いた PT(Pan-Tilt) カメラのインターネット遠隔操作 ユーザマニュアル (ver1.0) 2014 年 10 月 23 日 芝浦工業大学知能機械
 を用いた PT(Pan-Tilt) カメラのインターネット遠隔操作 ユーザマニュアル (ver1.0) 2014 年 10 月 23 日 芝浦工業大学知能機械") 芝浦工業大学知能機械システム研究室 HMD(Head Mounted Display) を用いた PT(Pan-Tilt) カメラのインターネット遠隔操作 ユーザマニュアル (ver1.0) 2014 年 10 月 23 日 芝浦工業大学知能機械システム研究室 荻谷浩史, 石田真一, 安田福啓, 松日楽信人 目次 1. はじめに... 2 1.1 RTC 群概要... 2 1.2 システム構成...
芝浦工業大学知能機械システム研究室 HMD(Head Mounted Display) を用いた PT(Pan-Tilt) カメラのインターネット遠隔操作 ユーザマニュアル (ver1.0) 2014 年 10 月 23 日 芝浦工業大学知能機械システム研究室 荻谷浩史, 石田真一, 安田福啓, 松日楽信人 目次 1. はじめに... 2 1.1 RTC 群概要... 2 1.2 システム構成...
Microsoft PowerPoint - 1_コンパイラ入門セミナー.ppt
 インテルコンパイラー 入門セミナー [ 対象製品 ] インテル C++ コンパイラー 9.1 Windows* 版インテル Visual Fortran コンパイラー 9.1 Windows* 版 資料作成 : エクセルソフト株式会社 Copyright 1998-2007 XLsoft Corporation. All Rights Reserved. 1 インテル コンパイラー入門 本セミナーの内容
インテルコンパイラー 入門セミナー [ 対象製品 ] インテル C++ コンパイラー 9.1 Windows* 版インテル Visual Fortran コンパイラー 9.1 Windows* 版 資料作成 : エクセルソフト株式会社 Copyright 1998-2007 XLsoft Corporation. All Rights Reserved. 1 インテル コンパイラー入門 本セミナーの内容
インストールマニュアル
 Install manual by SparxSystems Japan Enterprise Architect 日本語版インストールマニュアル 1 1. はじめに このインストールマニュアルは Enterprise Architect 日本語版バージョン 14.1 をインストールするための マニュアルです インストールには管理者権限が必要です 管理者権限を持つユーザー (Administrator
Install manual by SparxSystems Japan Enterprise Architect 日本語版インストールマニュアル 1 1. はじめに このインストールマニュアルは Enterprise Architect 日本語版バージョン 14.1 をインストールするための マニュアルです インストールには管理者権限が必要です 管理者権限を持つユーザー (Administrator
SMB送信機能
 NW-FAX 受信設定マニュアル ECOSYS M6535cidn/M6530cdn/M6526cidn/M6526cdn ECOSYS M5526cdw/6635cidn ECOSYS M3540idn/M2640idw/M2540dw/M2535dn/M3645idn Ver.1.3 1. ネットワークの設定を確認する 1-1. Windows 10 設定時は管理者 (Administrators)
NW-FAX 受信設定マニュアル ECOSYS M6535cidn/M6530cdn/M6526cidn/M6526cdn ECOSYS M5526cdw/6635cidn ECOSYS M3540idn/M2640idw/M2540dw/M2535dn/M3645idn Ver.1.3 1. ネットワークの設定を確認する 1-1. Windows 10 設定時は管理者 (Administrators)
InstallShield FAQ < 独自の InstallShield 前提条件を作成する > 注 ) このドキュメントは InstallShield 2014 Premier Edition を基に作成しています InstallShield 2014 以外のバージョンでは設定名などが異なる場合
 このドキュメントは InstallShield 2014 Premier Edition を基に作成しています InstallShield 2014 以外のバージョンでは設定名などが異なる場合") < 独自の InstallShield 前提条件を作成する > 注 ) このドキュメントは InstallShield 2014 Premier Edition を基に作成しています InstallShield 2014 以外のバージョンでは設定名などが異なる場合もあります 概要 InstallShield 前提条件は 製品が必要とする他製品やテクノロジ フレームワークをインストールするための機能を提供しています
< 独自の InstallShield 前提条件を作成する > 注 ) このドキュメントは InstallShield 2014 Premier Edition を基に作成しています InstallShield 2014 以外のバージョンでは設定名などが異なる場合もあります 概要 InstallShield 前提条件は 製品が必要とする他製品やテクノロジ フレームワークをインストールするための機能を提供しています
Microsoft Word - Mac版 Eclipseの導入と設定.docx
 Mac OS X 版 Eclipse の導入と プログラムの作成方法 このドキュメントは下記のシステムで検証しました -1- Copyright (C) Takashi Kawaba 2012 目次 A. Eclipse を日本語化する 1. ダウンロードと解凍 3 2. features フォルダ内のファイルをコピーする 3 3. plugins 内のファイルをコピーする 4 B. Eclipse
Mac OS X 版 Eclipse の導入と プログラムの作成方法 このドキュメントは下記のシステムで検証しました -1- Copyright (C) Takashi Kawaba 2012 目次 A. Eclipse を日本語化する 1. ダウンロードと解凍 3 2. features フォルダ内のファイルをコピーする 3 3. plugins 内のファイルをコピーする 4 B. Eclipse
インテル® Parallel Studio XE 2019 Composer Edition for Fortran Windows 日本語版 : インストール・ガイド
 インテル Parallel Studio XE 2019 Composer Edition for Fortran Windows 日本語版インストール ガイド エクセルソフト株式会社 Version 2.1.0-20190405 目次 1. はじめに.................................................................................
インテル Parallel Studio XE 2019 Composer Edition for Fortran Windows 日本語版インストール ガイド エクセルソフト株式会社 Version 2.1.0-20190405 目次 1. はじめに.................................................................................
論文誌用MS-Wordテンプレートファイル
 1. eclipse のインストール eclipse は 統合開発環境 (IDE) の一つで 高機能ながらオープンソースであり Java をはじめとするいくつかの言語に対応しているものである こちらを用いてマリオ AI の開発を行う この章では eclipse のダウンロード方法 eclipse のインストール方法 マリオ AI を開発する上での必要な eclipse の設定に関して書いてある 1.1
1. eclipse のインストール eclipse は 統合開発環境 (IDE) の一つで 高機能ながらオープンソースであり Java をはじめとするいくつかの言語に対応しているものである こちらを用いてマリオ AI の開発を行う この章では eclipse のダウンロード方法 eclipse のインストール方法 マリオ AI を開発する上での必要な eclipse の設定に関して書いてある 1.1