スライド 1
|
|
|
- しなつ いまいだ
- 4 years ago
- Views:
Transcription
1 swk(at)ic.is.tohoku.ac.jp
2 2
3 Outline 3
4 ? 4
5 S/N CCD 5
6 Q Q V 6
7 CMOS 1 7
8 1 2 N 1 2 N 8
9 CCD: CMOS: 9
10 : / 10
11 A-D A D C A D C A D C A D C A D C A D C ADC 11
12 A-D ADC ADC ADC ADC ADC ADC ADC ADC ADC A-D 12
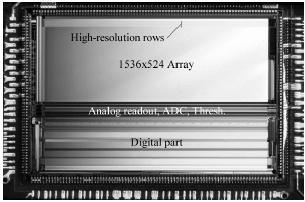
13 ADC TX reset analog ramp digita ramp 1 8 write 8-bit read mem 8 digital pixel value row read [Kleinfelder2001] CMOS 0.18um 352x288 pixels ~ 10,000fps 8 13
14 CCD: CMOS: 14
15 ( PC ) e.g. [ 2002] [Muehlmann2004] frame N frame N+1 15
16 SIMD (Single Instruction stream, Multiple Data stream)

![org] CM-2, by Thinking Machines Corp.](/docs-images/102/155078348/images/17-1.jpg "(65536 x 1-bit processors) [svisions.")
17 SIMD ILLIAC IV (64 x 64-bit processors) [ed-thelen.org] CM-2, by Thinking Machines Corp. (65536 x 1-bit processors) [svisions.com] Several attempts, no lasting successes. [Hennessy2003] 17
18 SIMD Intel MMX SSE SSE2 AMD 3D Now! Enhanced 3D Now! 18
![SIMD Pixel-Parallel Image Processor (MIT) [Gealow1999]](/docs-images/102/155078348/images/19-0.jpg "IMAP-VISION (NEC) (linear processor array) [ 1995] [nec.co.")
19 SIMD Pixel-Parallel Image Processor (MIT) [Gealow1999] IMAP-VISION (NEC) (linear processor array) [ 1995] [nec.co.jp] 19
20 SIMD Programmable Artificial Retina ( ) Near Sensor Image Processing ( ) Sensory Processing Element ( ) 20

21 Programmable Artificial Retina [Bernard1993] 3 2 AND NOT AND / NOT 21
22 Near Sensor Image Processing [Astrom1996] 9 22

23 Sensory Processing Element [ 1998] 24 23
24 SIMD 3? 24
25 A D C A D C A D C high-speed image processor 25
26 IVP MAPP [Johansson2003] 26
 [ 2001]")
27 Column-Parallel Vision System II ADC ADC ADC (S 3 PE) [ 2001] 27
28 SIMD [ 2003] 1000fps CMOS (Micron ) + FPGA + PC [ 2005] 1000fps CMOS (Micron ) + FPGA 28
29 ? ASIC? FPGA 29
30 References [Kleinfelder2001] S. Kleinfelder, S. Lim, X. Liu and A. El Gamal: A Frames/s CMOS Digital Pixel Sensor, IEEE J. Solid-State Circuits, vol.36, no.12, pp , [ 2002] :, 20, 3A15, [Muehlmann2004] U. Muehlmann, M. Ribo, P. Lang and A. Pinz, A New High Speed CMOS Camera for Real-Time Tracking Applications, Proc IEEE Int. Conf. Robotics and Automation, pp , [ed-thelen.org] [svisions.com] [Hennessy2003] J. L. Hennessy and D. A. Patterson: Computer Architecture A Quantitative Approach, Third Edition, Morgan Kaufmann, [Gealow1999] J. C. Gealow and C. G. Sodini: A Pixel-Parallel Image Processor Using Logic Pitch-Matched to Dynamic Memory, IEEE J. Solid-State Circuits, vol.34, no.6, pp , [ 1995],,,, : SIMD IMAP, (D-I), vol.j78-d-ii, no.2, pp.82-90, [nec.co.jp] [Bernard1993] T. M. Bernard, Y. Zavidovique and F. J. Devos: A Programmable Artificial Retina, IEEE J. Solid-State Circuits, vol.28, no.7, pp , [Astrom1996] A. Astrom, J.-E. Eklund and R. Forchheimer: Global Feature Extraction Operations for Near-Sensor Image Processing, IEEE Trans. Image Processing, vol.5, no.1, pp , [ 1998],,, :, (D-I), vol.j81-d-i, no.2, pp.70-76, [Johansson2003] R. Johansson, L. Lindgren, J. Melander and B. Moller: A Multi-Resolution 1000 GOPS 4 Gpixels/s Programmable CMOS Image Sensor for Machine Vision, Proc. IEEE Workshop on Charge-Coupled Devices and Advanced Image Sensors, [ 2001] : : CPV-II 19, pp , [ 2003],, : fps --, 21, 1K13, [ 2005] CMOS FPGA,, 2A1-N-094,
スライド 1
 CMOS : swk(at)ic.is.tohoku.ac.jp [ 2003] [Wong1999] 2 : CCD CMOS 3 : CCD Q Q V 4 : CMOS V C 5 6 CMOS light input photon shot noise α quantum efficiency dark current dark current shot noise dt time integration
CMOS : swk(at)ic.is.tohoku.ac.jp [ 2003] [Wong1999] 2 : CCD CMOS 3 : CCD Q Q V 4 : CMOS V C 5 6 CMOS light input photon shot noise α quantum efficiency dark current dark current shot noise dt time integration
sumi.indd
 S/N S/N CCDCMOS CCD CMOS & E-mail hirofumi.sumi@jp.sony.com & E-mail Tadakuni.Narabu@jp.sony.com & E-mail Shinichiro.Saito@jp.sony.com Hirofumi SUMI, Non - Member and Tadakuni NARABU, Member and Shinichiro
S/N S/N CCDCMOS CCD CMOS & E-mail hirofumi.sumi@jp.sony.com & E-mail Tadakuni.Narabu@jp.sony.com & E-mail Shinichiro.Saito@jp.sony.com Hirofumi SUMI, Non - Member and Tadakuni NARABU, Member and Shinichiro
IEEE HDD RAID MPI MPU/CPU GPGPU GPU cm I m cm /g I I n/ cm 2 s X n/ cm s cm g/cm
 Neutron Visual Sensing Techniques Making Good Use of Computer Science J-PARC CT CT-PET TB IEEE HDD RAID MPI MPU/CPU GPGPU GPU cm I m cm /g I I n/ cm 2 s X n/ cm s cm g/cm cm cm barn cm thn/ cm s n/ cm
Neutron Visual Sensing Techniques Making Good Use of Computer Science J-PARC CT CT-PET TB IEEE HDD RAID MPI MPU/CPU GPGPU GPU cm I m cm /g I I n/ cm 2 s X n/ cm s cm g/cm cm cm barn cm thn/ cm s n/ cm
Chip Size and Performance Evaluations of Shared Cache for On-chip Multiprocessor Takahiro SASAKI, Tomohiro INOUE, Nobuhiko OMORI, Tetsuo HIRONAKA, Han
 Chip Size and Performance Evaluations of Shared Cache for On-chip Multiprocessor Takahiro SASAKI, Tomohiro INOUE, Nobuhiko OMORI, Tetsuo HIRONAKA, Hans J. MATTAUSCH, and Tetsushi KOIDE 1 1 2 0.5 µm CMOS
Chip Size and Performance Evaluations of Shared Cache for On-chip Multiprocessor Takahiro SASAKI, Tomohiro INOUE, Nobuhiko OMORI, Tetsuo HIRONAKA, Hans J. MATTAUSCH, and Tetsushi KOIDE 1 1 2 0.5 µm CMOS
2.2 (a) = 1, M = 9, p i 1 = p i = p i+1 = 0 (b) = 1, M = 9, p i 1 = 0, p i = 1, p i+1 = 1 1: M 2 M 2 w i [j] w i [j] = 1 j= w i w i = (w i [ ],, w i [
![2.2 (a) = 1, M = 9, p i 1 = p i = p i+1 = 0 (b) = 1, M = 9, p i 1 = 0, p i = 1, p i+1 = 1 1: M 2 M 2 w i [j] w i [j] = 1 j= w i w i = (w i [ ],, w i [](/thumbs/93/111684107.jpg "2.2 (a) = 1, M = 9, p i 1 = p i = p i+1 = 0 (b) = 1, M = 9, p i 1 = 0, p i = 1, p i+1 = 1 1: M 2 M 2 w i [j] w i [j] = 1 j= w i w i = (w i [ ],, w i [") RI-002 Encoding-oriented video generation algorithm based on control with high temporal resolution Yukihiro BANDOH, Seishi TAKAMURA, Atsushi SHIMIZU 1 1T / CMOS [1] 4K (4096 2160 /) 900 Hz 50Hz,60Hz 240Hz
RI-002 Encoding-oriented video generation algorithm based on control with high temporal resolution Yukihiro BANDOH, Seishi TAKAMURA, Atsushi SHIMIZU 1 1T / CMOS [1] 4K (4096 2160 /) 900 Hz 50Hz,60Hz 240Hz
1 Kinect for Windows M = [X Y Z] T M = [X Y Z ] T f (u,v) w 3.2 [11] [7] u = f X +u Z 0 δ u (X,Y,Z ) (5) v = f Y Z +v 0 δ v (X,Y,Z ) (6) w = Z +
![1 Kinect for Windows M = [X Y Z] T M = [X Y Z ] T f (u,v) w 3.2 [11] [7] u = f X +u Z 0 δ u (X,Y,Z ) (5) v = f Y Z +v 0 δ v (X,Y,Z ) (6) w = Z +](/thumbs/81/83701592.jpg "1 Kinect for Windows M = [X Y Z] T M = [X Y Z ] T f (u,v) w 3.2 [11] [7] u = f X +u Z 0 δ u (X,Y,Z ) (5) v = f Y Z +v 0 δ v (X,Y,Z ) (6) w = Z +") 3 3D 1,a) 1 1 Kinect (X, Y) 3D 3D 1. 2010 Microsoft Kinect for Windows SDK( (Kinect) SDK ) 3D [1], [2] [3] [4] [5] [10] 30fps [10] 3 Kinect 3 Kinect Kinect for Windows SDK 3 Microsoft 3 Kinect for Windows
3 3D 1,a) 1 1 Kinect (X, Y) 3D 3D 1. 2010 Microsoft Kinect for Windows SDK( (Kinect) SDK ) 3D [1], [2] [3] [4] [5] [10] 30fps [10] 3 Kinect 3 Kinect Kinect for Windows SDK 3 Microsoft 3 Kinect for Windows
IPSJ SIG Technical Report iphone iphone,,., OpenGl ES 2.0 GLSL(OpenGL Shading Language), iphone GPGPU(General-Purpose Computing on Graphics Proc
, iphone GPGPU(General-Purpose Computing on Graphics Proc") iphone 1 1 1 iphone,,., OpenGl ES 2.0 GLSL(OpenGL Shading Language), iphone GPGPU(General-Purpose Computing on Graphics Processing Unit)., AR Realtime Natural Feature Tracking Library for iphone Makoto
iphone 1 1 1 iphone,,., OpenGl ES 2.0 GLSL(OpenGL Shading Language), iphone GPGPU(General-Purpose Computing on Graphics Processing Unit)., AR Realtime Natural Feature Tracking Library for iphone Makoto
Vol. 48 No. SIG 1(CVIM 17) Feb Visconti Visconti ITS Image Recognition LSI Visconti and Its Applications to Safety and Security Hiroaki Nakai, J
 Feb Visconti Visconti ITS Image Recognition LSI Visconti and Its Applications to Safety and Security Hiroaki Nakai, J") Vol. 48 No. SIG 1(CVIM 17) Feb. 2007 Visconti Visconti ITS Image Recognition LSI Visconti and Its Applications to Safety and Security Hiroaki Nakai, Jun Tanabe, Kenji Furukawa, Tatsuo Kozakaya, Takashi
Vol. 48 No. SIG 1(CVIM 17) Feb. 2007 Visconti Visconti ITS Image Recognition LSI Visconti and Its Applications to Safety and Security Hiroaki Nakai, Jun Tanabe, Kenji Furukawa, Tatsuo Kozakaya, Takashi
26 FPGA 11 05340 1 FPGA (Field Programmable Gate Array) ASIC (Application Specific Integrated Circuit) FPGA FPGA FPGA FPGA Linux FreeDOS skewed way L1
 ASIC (Application Specific Integrated Circuit) FPGA FPGA FPGA FPGA Linux FreeDOS skewed way L1") FPGA 272 11 05340 26 FPGA 11 05340 1 FPGA (Field Programmable Gate Array) ASIC (Application Specific Integrated Circuit) FPGA FPGA FPGA FPGA Linux FreeDOS skewed way L1 FPGA skewed L2 FPGA skewed Linux
FPGA 272 11 05340 26 FPGA 11 05340 1 FPGA (Field Programmable Gate Array) ASIC (Application Specific Integrated Circuit) FPGA FPGA FPGA FPGA Linux FreeDOS skewed way L1 FPGA skewed L2 FPGA skewed Linux
LED a) A New LED Array Acquisition Method Focusing on Time-Gradient and Space- Gradient Values for Road to Vehicle Visible Light Communication Syunsuk
 A New LED Array Acquisition Method Focusing on Time-Gradient and Space- Gradient Values for Road to Vehicle Visible Light Communication Syunsuk") VOL. J97-B NO. 7 JULY 2014 本 PDF の扱いは 電子情報通信学会著作権規定に従うこと なお 本 PDF は研究教育目的 ( 非営利 ) に限り 著者が第三者に直接配布することができる 著者以外からの配布は禁じられている LED a) A New LED Array Acquisition Method Focusing on Time-Gradient and Space-
VOL. J97-B NO. 7 JULY 2014 本 PDF の扱いは 電子情報通信学会著作権規定に従うこと なお 本 PDF は研究教育目的 ( 非営利 ) に限り 著者が第三者に直接配布することができる 著者以外からの配布は禁じられている LED a) A New LED Array Acquisition Method Focusing on Time-Gradient and Space-
P2P P2P peer peer P2P peer P2P peer P2P i
 26 P2P Proposed a system for the purpose of idle resource utilization of the computer using the P2P 1150373 2015 2 27 P2P P2P peer peer P2P peer P2P peer P2P i Abstract Proposed a system for the purpose
26 P2P Proposed a system for the purpose of idle resource utilization of the computer using the P2P 1150373 2015 2 27 P2P P2P peer peer P2P peer P2P peer P2P i Abstract Proposed a system for the purpose
光学
 Range Image Sensors Using Active Stereo Methods Kazunori UMEDA and Kenji TERABAYASHI Active stereo methods, which include the traditional light-section method and the talked-about Kinect sensor, are typical
Range Image Sensors Using Active Stereo Methods Kazunori UMEDA and Kenji TERABAYASHI Active stereo methods, which include the traditional light-section method and the talked-about Kinect sensor, are typical
3 2 2 (1) (2) (3) (4) 4 4 AdaBoost 2. [11] Onishi&Yoda [8] Iwashita&Stoica [5] 4 [3] 3. 3 (1) (2) (3)
![3 2 2 (1) (2) (3) (4) 4 4 AdaBoost 2. [11] Onishi&Yoda [8] Iwashita&Stoica [5] 4 [3] 3. 3 (1) (2) (3)](/thumbs/68/59204737.jpg "3 2 2 (1) (2) (3) (4) 4 4 AdaBoost 2. [11] Onishi&Yoda [8] Iwashita&Stoica [5] 4 [3] 3. 3 (1) (2) (3)") (MIRU2012) 2012 8 820-8502 680-4 E-mail: {d kouno,shimada,endo}@pluto.ai.kyutech.ac.jp (1) (2) (3) (4) 4 AdaBoost 1. Kanade [6] CLAFIC [12] EigenFace [10] 1 1 2 1 [7] 3 2 2 (1) (2) (3) (4) 4 4 AdaBoost
(MIRU2012) 2012 8 820-8502 680-4 E-mail: {d kouno,shimada,endo}@pluto.ai.kyutech.ac.jp (1) (2) (3) (4) 4 AdaBoost 1. Kanade [6] CLAFIC [12] EigenFace [10] 1 1 2 1 [7] 3 2 2 (1) (2) (3) (4) 4 4 AdaBoost
2003/3 Vol. J86 D II No.3 2.3. 4. 5. 6. 2. 1 1 Fig. 1 An exterior view of eye scanner. CCD [7] 640 480 1 CCD PC USB PC 2 334 PC USB RS-232C PC 3 2.1 2
![2003/3 Vol. J86 D II No.3 2.3. 4. 5. 6. 2. 1 1 Fig. 1 An exterior view of eye scanner. CCD [7] 640 480 1 CCD PC USB PC 2 334 PC USB RS-232C PC 3 2.1 2](/thumbs/42/22941906.jpg "2003/3 Vol. J86 D II No.3 2.3. 4. 5. 6. 2. 1 1 Fig. 1 An exterior view of eye scanner. CCD [7] 640 480 1 CCD PC USB PC 2 334 PC USB RS-232C PC 3 2.1 2") Curved Document Imaging with Eye Scanner Toshiyuki AMANO, Tsutomu ABE, Osamu NISHIKAWA, Tetsuo IYODA, and Yukio SATO 1. Shape From Shading SFS [1] [2] 3 2 Department of Electrical and Computer Engineering,
Curved Document Imaging with Eye Scanner Toshiyuki AMANO, Tsutomu ABE, Osamu NISHIKAWA, Tetsuo IYODA, and Yukio SATO 1. Shape From Shading SFS [1] [2] 3 2 Department of Electrical and Computer Engineering,
パナソニック技報
 Panasonic Technical Journal Vol. 63 No. 1 May 2017 Development of Simultaneous-Capture Wide-dynamic-range Technology and Global Shutter Technology for Organic Photoconductive Film Image Sensor Masashi
Panasonic Technical Journal Vol. 63 No. 1 May 2017 Development of Simultaneous-Capture Wide-dynamic-range Technology and Global Shutter Technology for Organic Photoconductive Film Image Sensor Masashi
& Vol.5 No (Oct. 2015) TV 1,2,a) , Augmented TV TV AR Augmented Reality 3DCG TV Estimation of TV Screen Position and Ro
 TV 1,2,a) , Augmented TV TV AR Augmented Reality 3DCG TV Estimation of TV Screen Position and Ro") TV 1,2,a) 1 2 2015 1 26, 2015 5 21 Augmented TV TV AR Augmented Reality 3DCG TV Estimation of TV Screen Position and Rotation Using Mobile Device Hiroyuki Kawakita 1,2,a) Toshio Nakagawa 1 Makoto Sato
TV 1,2,a) 1 2 2015 1 26, 2015 5 21 Augmented TV TV AR Augmented Reality 3DCG TV Estimation of TV Screen Position and Rotation Using Mobile Device Hiroyuki Kawakita 1,2,a) Toshio Nakagawa 1 Makoto Sato
12 DCT A Data-Driven Implementation of Shape Adaptive DCT
 12 DCT A Data-Driven Implementation of Shape Adaptive DCT 1010431 2001 2 5 DCT MPEG H261,H263 LSI DDMP [1]DDMP MPEG4 DDMP MPEG4 SA-DCT SA-DCT DCT SA-DCT DDMP SA-DCT MPEG4, DDMP,, SA-DCT,, ο i Abstract
12 DCT A Data-Driven Implementation of Shape Adaptive DCT 1010431 2001 2 5 DCT MPEG H261,H263 LSI DDMP [1]DDMP MPEG4 DDMP MPEG4 SA-DCT SA-DCT DCT SA-DCT DDMP SA-DCT MPEG4, DDMP,, SA-DCT,, ο i Abstract
P361
 ΣAD -RFDAC - High-Speed Continuous-Time Bandpass ΣAD Modulator Architecture Employing Sub-Sampling Technnique with 376-8515 1-5-1 Masafumi Uemori Tomonari Ichikawa Haruo Kobayashi Department of Electronic
ΣAD -RFDAC - High-Speed Continuous-Time Bandpass ΣAD Modulator Architecture Employing Sub-Sampling Technnique with 376-8515 1-5-1 Masafumi Uemori Tomonari Ichikawa Haruo Kobayashi Department of Electronic
スパコンに通じる並列プログラミングの基礎
 2018.09.10 furihata@cmc.osaka-u.ac.jp ( ) 2018.09.10 1 / 59 furihata@cmc.osaka-u.ac.jp ( ) 2018.09.10 2 / 59 Windows, Mac Unix 0444-J furihata@cmc.osaka-u.ac.jp ( ) 2018.09.10 3 / 59 Part I Unix GUI CUI:
2018.09.10 furihata@cmc.osaka-u.ac.jp ( ) 2018.09.10 1 / 59 furihata@cmc.osaka-u.ac.jp ( ) 2018.09.10 2 / 59 Windows, Mac Unix 0444-J furihata@cmc.osaka-u.ac.jp ( ) 2018.09.10 3 / 59 Part I Unix GUI CUI:
スパコンに通じる並列プログラミングの基礎
 2018.06.04 2018.06.04 1 / 62 2018.06.04 2 / 62 Windows, Mac Unix 0444-J 2018.06.04 3 / 62 Part I Unix GUI CUI: Unix, Windows, Mac OS Part II 2018.06.04 4 / 62 0444-J ( : ) 6 4 ( ) 6 5 * 6 19 SX-ACE * 6
2018.06.04 2018.06.04 1 / 62 2018.06.04 2 / 62 Windows, Mac Unix 0444-J 2018.06.04 3 / 62 Part I Unix GUI CUI: Unix, Windows, Mac OS Part II 2018.06.04 4 / 62 0444-J ( : ) 6 4 ( ) 6 5 * 6 19 SX-ACE * 6
 26102 (1/2) LSISoC: (1) (*) (*) GPU SIMD MIMD FPGA DES, AES (2/2) (2) FPGA(8bit) (ISS: Instruction Set Simulator) (3) (4) LSI ECU110100ECU1 ECU ECU ECU ECU FPGA ECU main() { int i, j, k for { } 1 GP-GPU
26102 (1/2) LSISoC: (1) (*) (*) GPU SIMD MIMD FPGA DES, AES (2/2) (2) FPGA(8bit) (ISS: Instruction Set Simulator) (3) (4) LSI ECU110100ECU1 ECU ECU ECU ECU FPGA ECU main() { int i, j, k for { } 1 GP-GPU
258 5) GPS 1 GPS 6) GPS DP 7) 8) 10) GPS GPS 2 3 4 5 2. 2.1 3 1) GPS Global Positioning System
 GPS 1 GPS 6) GPS DP 7) 8) 10) GPS GPS 2 3 4 5 2. 2.1 3 1) GPS Global Positioning System") Vol. 52 No. 1 257 268 (Jan. 2011) 1 2, 1 1 measurement. In this paper, a dynamic road map making system is proposed. The proposition system uses probe-cars which has an in-vehicle camera and a GPS receiver.
Vol. 52 No. 1 257 268 (Jan. 2011) 1 2, 1 1 measurement. In this paper, a dynamic road map making system is proposed. The proposition system uses probe-cars which has an in-vehicle camera and a GPS receiver.
CMOS GPS GPS HARP CCD CMOS CMOS CMOS CMOS CCD i
 23 CMOS A Study of Capturing Star by Conventional CMOS Camera with Small Lens 1120224 2012 3 1 CMOS GPS GPS HARP CCD CMOS CMOS CMOS CMOS CCD i Abstract A Study of Capturing Star by Conventional CMOS Camera
23 CMOS A Study of Capturing Star by Conventional CMOS Camera with Small Lens 1120224 2012 3 1 CMOS GPS GPS HARP CCD CMOS CMOS CMOS CMOS CCD i Abstract A Study of Capturing Star by Conventional CMOS Camera
 24 21 21115025 i 1 1 2 5 2.1.................................. 6 2.1.1........................... 6 2.1.2........................... 7 2.2...................................... 8 2.3............................
24 21 21115025 i 1 1 2 5 2.1.................................. 6 2.1.1........................... 6 2.1.2........................... 7 2.2...................................... 8 2.3............................
(3.6 ) (4.6 ) 2. [3], [6], [12] [7] [2], [5], [11] [14] [9] [8] [10] (1) Voodoo 3 : 3 Voodoo[1] 3 ( 3D ) (2) : Voodoo 3D (3) : 3D (Welc
![(3.6 ) (4.6 ) 2. [3], [6], [12] [7] [2], [5], [11] [14] [9] [8] [10] (1) Voodoo 3 : 3 Voodoo[1] 3 ( 3D ) (2) : Voodoo 3D (3) : 3D (Welc](/thumbs/65/54056306.jpg "(3.6 ) (4.6 ) 2. [3], [6], [12] [7] [2], [5], [11] [14] [9] [8] [10] (1) Voodoo 3 : 3 Voodoo[1] 3 ( 3D ) (2) : Voodoo 3D (3) : 3D (Welc") 1,a) 1,b) Obstacle Detection from Monocular On-Vehicle Camera in units of Delaunay Triangles Abstract: An algorithm to detect obstacles by using a monocular on-vehicle video camera is developed. Since
1,a) 1,b) Obstacle Detection from Monocular On-Vehicle Camera in units of Delaunay Triangles Abstract: An algorithm to detect obstacles by using a monocular on-vehicle video camera is developed. Since
IPSJ SIG Technical Report Vol.2013-CVIM-188 No /9/2 1,a) D. Marr D. Marr 1. (feature-based) (area-based) (Dense Stereo Vision) van der Ma
 D. Marr D. Marr 1. (feature-based) (area-based) (Dense Stereo Vision) van der Ma") ,a) D. Marr D. Marr. (feature-based) (area-based) (Dense Stereo Vision) van der Mark [] (Intelligent Vehicle: IV) SAD(Sum of Absolute Difference) Intel x86 CPU SSE2(Streaming SIMD Extensions 2) CPU IV
,a) D. Marr D. Marr. (feature-based) (area-based) (Dense Stereo Vision) van der Mark [] (Intelligent Vehicle: IV) SAD(Sum of Absolute Difference) Intel x86 CPU SSE2(Streaming SIMD Extensions 2) CPU IV
paper.dvi
 SIFT 23 (410M5B1) SIFT(Scale Invariant Feature Transform) SIFT SIFT SIFT SIMD SIFT SIMD MIMD Gaussian SIMD Abstract Currently, with the development of image-recognition technique, to recognize a large
SIFT 23 (410M5B1) SIFT(Scale Invariant Feature Transform) SIFT SIFT SIFT SIMD SIFT SIMD MIMD Gaussian SIMD Abstract Currently, with the development of image-recognition technique, to recognize a large
"Moir6 Patterns on Video Pictures Taken by Solid State Image Sensors" by Okio Yoshida and Akito Iwamoto (Toshiba Research and Development Center, Tosh
 "Moir6 Patterns on Video Pictures Taken by Solid State Image Sensors" by Okio Yoshida and Akito Iwamoto (Toshiba Research and Development Center, Toshiba Corporation, Kawasaki) Reproduced resolution chart
"Moir6 Patterns on Video Pictures Taken by Solid State Image Sensors" by Okio Yoshida and Akito Iwamoto (Toshiba Research and Development Center, Toshiba Corporation, Kawasaki) Reproduced resolution chart
23 Fig. 2: hwmodulev2 3. Reconfigurable HPC 3.1 hw/sw hw/sw hw/sw FPGA PC FPGA PC FPGA HPC FPGA FPGA hw/sw hw/sw hw- Module FPGA hwmodule hw/sw FPGA h
 23 FPGA CUDA Performance Comparison of FPGA Array with CUDA on Poisson Equation (lijiang@sekine-lab.ei.tuat.ac.jp), (kazuki@sekine-lab.ei.tuat.ac.jp), (takahashi@sekine-lab.ei.tuat.ac.jp), (tamukoh@cc.tuat.ac.jp),
23 FPGA CUDA Performance Comparison of FPGA Array with CUDA on Poisson Equation (lijiang@sekine-lab.ei.tuat.ac.jp), (kazuki@sekine-lab.ei.tuat.ac.jp), (takahashi@sekine-lab.ei.tuat.ac.jp), (tamukoh@cc.tuat.ac.jp),
main.dvi
 PC 1 1 [1][2] [3][4] ( ) GPU(Graphics Processing Unit) GPU PC GPU PC ( 2 GPU ) GPU Harris Corner Detector[5] CPU ( ) ( ) CPU GPU 2 3 GPU 4 5 6 7 1 toyohiro@isc.kyutech.ac.jp 45 2 ( ) CPU ( ) ( ) () 2.1
PC 1 1 [1][2] [3][4] ( ) GPU(Graphics Processing Unit) GPU PC GPU PC ( 2 GPU ) GPU Harris Corner Detector[5] CPU ( ) ( ) CPU GPU 2 3 GPU 4 5 6 7 1 toyohiro@isc.kyutech.ac.jp 45 2 ( ) CPU ( ) ( ) () 2.1

2007/8 Vol. J90 D No. 8 Stauffer [7] 2 2 I 1 I 2 2 (I 1(x),I 2(x)) 2 [13] I 2 = CI 1 (C >0) (I 1,I 2) (I 1,I 2) Field Monitoring Server
![2007/8 Vol. J90 D No. 8 Stauffer [7] 2 2 I 1 I 2 2 (I 1(x),I 2(x)) 2 [13] I 2 = CI 1 (C >0) (I 1,I 2) (I 1,I 2) Field Monitoring Server](/thumbs/91/107223763.jpg "2007/8 Vol. J90 D No. 8 Stauffer [7] 2 2 I 1 I 2 2 (I 1(x),I 2(x)) 2 [13] I 2 = CI 1 (C >0) (I 1,I 2) (I 1,I 2) Field Monitoring Server") a) Change Detection Using Joint Intensity Histogram Yasuyo KITA a) 2 (0 255) (I 1 (x),i 2 (x)) I 2 = CI 1 (C>0) (I 1,I 2 ) (I 1,I 2 ) 2 1. [1] 2 [2] [3] [5] [6] [8] Intelligent Systems Research Institute,
a) Change Detection Using Joint Intensity Histogram Yasuyo KITA a) 2 (0 255) (I 1 (x),i 2 (x)) I 2 = CI 1 (C>0) (I 1,I 2 ) (I 1,I 2 ) 2 1. [1] 2 [2] [3] [5] [6] [8] Intelligent Systems Research Institute,
スパコンに通じる並列プログラミングの基礎
 2016.06.06 2016.06.06 1 / 60 2016.06.06 2 / 60 Windows, Mac Unix 0444-J 2016.06.06 3 / 60 Part I Unix GUI CUI: Unix, Windows, Mac OS Part II 0444-J 2016.06.06 4 / 60 ( : ) 6 6 ( ) 6 10 6 16 SX-ACE 6 17
2016.06.06 2016.06.06 1 / 60 2016.06.06 2 / 60 Windows, Mac Unix 0444-J 2016.06.06 3 / 60 Part I Unix GUI CUI: Unix, Windows, Mac OS Part II 0444-J 2016.06.06 4 / 60 ( : ) 6 6 ( ) 6 10 6 16 SX-ACE 6 17
DC-DC Control Circuit for Single Inductor Dual Output DC-DC Converter with Charge Pump (AKM AKM Kenji TAKAHASHI Hajime YOKOO Shunsuke MIWA Hiroyuki IW
 DC-DC Control Circuit for Single Inductor Dual Output DC-DC Converter with Charge Pump (AKM AKM Kenji TAKAHASHI Hajime YOKOO Shunsuke MIWA Hiroyuki IWASE Nobukazu TAKAI Haruo KOBAYASHI Takahiro ODAGUCHI
DC-DC Control Circuit for Single Inductor Dual Output DC-DC Converter with Charge Pump (AKM AKM Kenji TAKAHASHI Hajime YOKOO Shunsuke MIWA Hiroyuki IWASE Nobukazu TAKAI Haruo KOBAYASHI Takahiro ODAGUCHI
xx/xx Vol. Jxx A No. xx 1 Fig. 1 PAL(Panoramic Annular Lens) PAL(Panoramic Annular Lens) PAL (2) PAL PAL 2 PAL 3 2 PAL 1 PAL 3 PAL PAL 2. 1 PAL
 PAL(Panoramic Annular Lens) PAL (2) PAL PAL 2 PAL 3 2 PAL 1 PAL 3 PAL PAL 2. 1 PAL") PAL On the Precision of 3D Measurement by Stereo PAL Images Hiroyuki HASE,HirofumiKAWAI,FrankEKPAR, Masaaki YONEDA,andJien KATO PAL 3 PAL Panoramic Annular Lens 1985 Greguss PAL 1 PAL PAL 2 3 2 PAL DP
PAL On the Precision of 3D Measurement by Stereo PAL Images Hiroyuki HASE,HirofumiKAWAI,FrankEKPAR, Masaaki YONEDA,andJien KATO PAL 3 PAL Panoramic Annular Lens 1985 Greguss PAL 1 PAL PAL 2 3 2 PAL DP
P.01 C Global Value Corp. PAT.P 2008'
 Value Point system *1 2009. 2. 25 2009. 2. 25 C Global Value Corp. PAT.P 2008' P.01 C Global Value Corp. PAT.P 2008' C Global Value Corp. PAT.P 2008' P.03 P.06 C Global Value Corp. PAT.P 2008' C Global
Value Point system *1 2009. 2. 25 2009. 2. 25 C Global Value Corp. PAT.P 2008' P.01 C Global Value Corp. PAT.P 2008' C Global Value Corp. PAT.P 2008' P.03 P.06 C Global Value Corp. PAT.P 2008' C Global
A Responsive Processor for Parallel/Distributed Real-time Processing
 E-mail: yamasaki@{ics.keio.ac.jp, etl.go.jp} http://www.ny.ics.keio.ac.jp etc. CPU) I/O I/O or Home Automation, Factory Automation, (SPARC) (SDRAM I/F, DMAC, PCI, USB, Timers/Counters, SIO, PIO, )
E-mail: yamasaki@{ics.keio.ac.jp, etl.go.jp} http://www.ny.ics.keio.ac.jp etc. CPU) I/O I/O or Home Automation, Factory Automation, (SPARC) (SDRAM I/F, DMAC, PCI, USB, Timers/Counters, SIO, PIO, )
3: 2: 2. 2 Semi-supervised learning Semi-supervised learning [5,6] Semi-supervised learning Self-training [13] [14] Self-training Self-training Semi-s
![3: 2: 2. 2 Semi-supervised learning Semi-supervised learning [5,6] Semi-supervised learning Self-training [13] [14] Self-training Self-training Semi-s](/thumbs/72/67985311.jpg "3: 2: 2. 2 Semi-supervised learning Semi-supervised learning [5,6] Semi-supervised learning Self-training [13] [14] Self-training Self-training Semi-s") THE INSTITUTE OF ELECTRONICS, INFORMATION AND COMMUNICATION ENGINEERS TECHNICAL REPORT OF IEICE. 599-8531 1-1 E-mail: tsukada@m.cs.osakafu-u.ac.jp, {masa,kise}@cs.osakafu-u.ac.jp Semi-supervised learning
THE INSTITUTE OF ELECTRONICS, INFORMATION AND COMMUNICATION ENGINEERS TECHNICAL REPORT OF IEICE. 599-8531 1-1 E-mail: tsukada@m.cs.osakafu-u.ac.jp, {masa,kise}@cs.osakafu-u.ac.jp Semi-supervised learning
Microsoft Word - archip.doc
 131 71 71 71 7 1 71 71 71 71 71 71 7 1 71 71 71 71 71 71 7-1 71 71 71 71 71 71 7-1 71 71 7 1 71 71 71 71 71 71 71 71 71 71 71 71 71 71 7 1 71 71 71 71 71 71 7 1 71 71 71 71 71 71 71 71 71 71 71 71 71 71
131 71 71 71 7 1 71 71 71 71 71 71 7 1 71 71 71 71 71 71 7-1 71 71 71 71 71 71 7-1 71 71 7 1 71 71 71 71 71 71 71 71 71 71 71 71 71 71 7 1 71 71 71 71 71 71 7 1 71 71 71 71 71 71 71 71 71 71 71 71 71 71
RaVioli SIMD
 RaVioli SIMD 17 17115074 i RaVioli SIMD PC PC PC PC CPU RaVioli RaVioli CPU RaVioli CPU SIMD RaVioli RaVioli SIMD RaVioli SIMD RaVioli SIMD 1 1 2 RaVioli 2 2.1 RaVioli.......................................
RaVioli SIMD 17 17115074 i RaVioli SIMD PC PC PC PC CPU RaVioli RaVioli CPU RaVioli CPU SIMD RaVioli RaVioli SIMD RaVioli SIMD RaVioli SIMD 1 1 2 RaVioli 2 2.1 RaVioli.......................................
CPU Levels in the memory hierarchy Level 1 Level 2... Increasing distance from the CPU in access time Level n Size of the memory at each level 1: 2.2
 FFT 1 Fourier fast Fourier transform FFT FFT FFT 1 FFT FFT 2 Fourier 2.1 Fourier FFT Fourier discrete Fourier transform DFT DFT n 1 y k = j=0 x j ω jk n, 0 k n 1 (1) x j y k ω n = e 2πi/n i = 1 (1) n DFT
FFT 1 Fourier fast Fourier transform FFT FFT FFT 1 FFT FFT 2 Fourier 2.1 Fourier FFT Fourier discrete Fourier transform DFT DFT n 1 y k = j=0 x j ω jk n, 0 k n 1 (1) x j y k ω n = e 2πi/n i = 1 (1) n DFT
2. CABAC CABAC CABAC 1 1 CABAC Figure 1 Overview of CABAC 2 DCT 2 0/ /1 CABAC [3] 3. 2 値化部 コンテキスト計算部 2 値算術符号化部 CABAC CABAC
![2. CABAC CABAC CABAC 1 1 CABAC Figure 1 Overview of CABAC 2 DCT 2 0/ /1 CABAC [3] 3. 2 値化部 コンテキスト計算部 2 値算術符号化部 CABAC CABAC](/thumbs/92/108208872.jpg "2. CABAC CABAC CABAC 1 1 CABAC Figure 1 Overview of CABAC 2 DCT 2 0/ /1 CABAC [3] 3. 2 値化部 コンテキスト計算部 2 値算術符号化部 CABAC CABAC") H.264 CABAC 1 1 1 1 1 2, CABAC(Context-based Adaptive Binary Arithmetic Coding) H.264, CABAC, A Parallelization Technology of H.264 CABAC For Real Time Encoder of Moving Picture YUSUKE YATABE 1 HIRONORI
H.264 CABAC 1 1 1 1 1 2, CABAC(Context-based Adaptive Binary Arithmetic Coding) H.264, CABAC, A Parallelization Technology of H.264 CABAC For Real Time Encoder of Moving Picture YUSUKE YATABE 1 HIRONORI
main
 RaVioli 21 21115135 25 2 12 i RaVioli CPU RaVioli RaVioli CPU RaVioli RaVioli RaVioli RaVioli RaVioli 1 1 2 2 2.1........................................... 2 2.1.1.......................... 2 2.1.2.....
RaVioli 21 21115135 25 2 12 i RaVioli CPU RaVioli RaVioli CPU RaVioli RaVioli RaVioli RaVioli RaVioli 1 1 2 2 2.1........................................... 2 2.1.1.......................... 2 2.1.2.....
Silhouette on Image Object Silhouette on Images Object 1 Fig. 1 Visual cone Fig. 2 2 Volume intersection method Fig. 3 3 Background subtraction Fig. 4
 Image-based Modeling 1 1 Object Extraction Method for Image-based Modeling using Projection Transformation of Multi-viewpoint Images Masanori Ibaraki 1 and Yuji Sakamoto 1 The volume intersection method
Image-based Modeling 1 1 Object Extraction Method for Image-based Modeling using Projection Transformation of Multi-viewpoint Images Masanori Ibaraki 1 and Yuji Sakamoto 1 The volume intersection method
14 2 5
 14 2 5 i ii Surface Reconstruction from Point Cloud of Human Body in Arbitrary Postures Isao MORO Abstract We propose a method for surface reconstruction from point cloud of human body in arbitrary postures.
14 2 5 i ii Surface Reconstruction from Point Cloud of Human Body in Arbitrary Postures Isao MORO Abstract We propose a method for surface reconstruction from point cloud of human body in arbitrary postures.
64bit SSE2 SSE2 FPU Visual C++ 64bit Inline Assembler 4 FPU SSE2 4.1 FPU Control Word FPU 16bit R R R IC RC(2) PC(2) R R PM UM OM ZM DM IM R: reserved
 PC(2) R R PM UM OM ZM DM IM R: reserved") (Version: 2013/5/16) Intel CPU (kashi@waseda.jp) 1 Intel CPU( AMD CPU) 64bit SIMD Inline Assemler Windows Visual C++ Linux gcc 2 FPU SSE2 Intel CPU double 8087 FPU (floating point number processing unit)
(Version: 2013/5/16) Intel CPU (kashi@waseda.jp) 1 Intel CPU( AMD CPU) 64bit SIMD Inline Assemler Windows Visual C++ Linux gcc 2 FPU SSE2 Intel CPU double 8087 FPU (floating point number processing unit)
[1] SBS [2] SBS Random Forests[3] Random Forests ii
![[1] SBS [2] SBS Random Forests[3] Random Forests ii](/thumbs/74/70333192.jpg "[1] SBS [2] SBS Random Forests[3] Random Forests ii") Random Forests 2013 3 A Graduation Thesis of College of Engineering, Chubu University Proposal of an efficient feature selection using the contribution rate of Random Forests Katsuya Shimazaki [1] SBS
Random Forests 2013 3 A Graduation Thesis of College of Engineering, Chubu University Proposal of an efficient feature selection using the contribution rate of Random Forests Katsuya Shimazaki [1] SBS
IPSJ SIG Technical Report Vol.2012-IS-119 No /3/ Web A Multi-story e-picture Book with the Degree-of-interest Extraction Function
 1 2 2 3 4 2 Web A Multi-story e-picture Book with the Degree-of-interest Extraction Function Kunimichi Shibata, 1 Masakuni Moriyama, 2 Kazuhide Yukawa, 2 Koji Ueno, 3 Kazuo Takahashi 4 and Shigeo Kaneda
1 2 2 3 4 2 Web A Multi-story e-picture Book with the Degree-of-interest Extraction Function Kunimichi Shibata, 1 Masakuni Moriyama, 2 Kazuhide Yukawa, 2 Koji Ueno, 3 Kazuo Takahashi 4 and Shigeo Kaneda
Computer Security Symposium October ,a) 1,b) Microsoft Kinect Kinect, Takafumi Mori 1,a) Hiroaki Kikuchi 1,b) [1] 1 Meiji U
![Computer Security Symposium October ,a) 1,b) Microsoft Kinect Kinect, Takafumi Mori 1,a) Hiroaki Kikuchi 1,b) [1] 1 Meiji U](/thumbs/101/150229680.jpg "Computer Security Symposium October ,a) 1,b) Microsoft Kinect Kinect, Takafumi Mori 1,a) Hiroaki Kikuchi 1,b) [1] 1 Meiji U") Computer Security Symposium 017 3-5 October 017 1,a) 1,b) Microsoft Kinect Kinect, Takafumi Mori 1,a) Hiroaki Kikuchi 1,b) 1. 017 5 [1] 1 Meiji University Graduate School of Advanced Mathematical Science
Computer Security Symposium 017 3-5 October 017 1,a) 1,b) Microsoft Kinect Kinect, Takafumi Mori 1,a) Hiroaki Kikuchi 1,b) 1. 017 5 [1] 1 Meiji University Graduate School of Advanced Mathematical Science
Joji Iisaka, S. Ito, T. Fujisaki and Y. Takao, " A Compound Computer System for Image data Processing, A chapter of "Real Time /Parallel Computing" Pl
 Joji Iisaka, S. Ito, T. Fujisaki and Y. Takao, " A Compound Computer System for Image data Processing, A chapter of "Real Time /Parallel Computing" Plenum Publishing Co., New York, USA, 1981. Measurements
Joji Iisaka, S. Ito, T. Fujisaki and Y. Takao, " A Compound Computer System for Image data Processing, A chapter of "Real Time /Parallel Computing" Plenum Publishing Co., New York, USA, 1981. Measurements
Operation_test_of_SOFIST
 ILC :SOFIST 2 29 1 18 SOI ILC SOI SOFIST SOFISTver.1 SOFISTver.1 SOFIST SOFISTver.1 S/N BPW 1 1 4 1.1............... 4 1.1.1... 4 1.1.2... 5 1.2 ILC... 6 1.2.1 ILC... 6 1.2.2 ILD...........................
ILC :SOFIST 2 29 1 18 SOI ILC SOI SOFIST SOFISTver.1 SOFISTver.1 SOFIST SOFISTver.1 S/N BPW 1 1 4 1.1............... 4 1.1.1... 4 1.1.2... 5 1.2 ILC... 6 1.2.1 ILC... 6 1.2.2 ILD...........................
IPSJ SIG Technical Report Vol.2015-MUS-107 No /5/23 HARK-Binaural Raspberry Pi 2 1,a) ( ) HARK 2 HARK-Binaural A/D Raspberry Pi 2 1.
 ( ) HARK 2 HARK-Binaural A/D Raspberry Pi 2 1.") HARK-Binaural Raspberry Pi 2 1,a) 1 1 1 2 3 () HARK 2 HARK-Binaural A/D Raspberry Pi 2 1. [1,2] [2 5] () HARK (Honda Research Institute Japan audition for robots with Kyoto University) *1 GUI ( 1) Python
HARK-Binaural Raspberry Pi 2 1,a) 1 1 1 2 3 () HARK 2 HARK-Binaural A/D Raspberry Pi 2 1. [1,2] [2 5] () HARK (Honda Research Institute Japan audition for robots with Kyoto University) *1 GUI ( 1) Python
a) Extraction of Similarities and Differences in Human Behavior Using Singular Value Decomposition Kenichi MISHIMA, Sayaka KANATA, Hiroaki NAKANISHI a
 Extraction of Similarities and Differences in Human Behavior Using Singular Value Decomposition Kenichi MISHIMA, Sayaka KANATA, Hiroaki NAKANISHI a") a) Extraction of Similarities and Differences in Human Behavior Using Singular Value Decomposition Kenichi MISHIMA, Sayaka KANATA, Hiroaki NAKANISHI a), Tetsuo SAWARAGI, and Yukio HORIGUCHI 1. Johansson
a) Extraction of Similarities and Differences in Human Behavior Using Singular Value Decomposition Kenichi MISHIMA, Sayaka KANATA, Hiroaki NAKANISHI a), Tetsuo SAWARAGI, and Yukio HORIGUCHI 1. Johansson
デジタルカメラ用ISP:Milbeaut
 ISP Milbeaut Image Signal Processor: Milbeaut あらまし MilbeautISP Image Signal Processor 20 Mpixel Milbeaut6 MB91696AM MB91696AM Abstract Milbeaut is an image signal processor (ISP) that realizes a digital
ISP Milbeaut Image Signal Processor: Milbeaut あらまし MilbeautISP Image Signal Processor 20 Mpixel Milbeaut6 MB91696AM MB91696AM Abstract Milbeaut is an image signal processor (ISP) that realizes a digital
IPSJ SIG Technical Report GPS LAN GPS LAN GPS LAN Location Identification by sphere image and hybrid sensing Takayuki Katahira, 1 Yoshio Iwai 1
 1 1 1 GPS LAN GPS LAN GPS LAN Location Identification by sphere image and hybrid sensing Takayuki Katahira, 1 Yoshio Iwai 1 and Hiroshi Ishiguro 1 Self-location is very informative for wearable systems.
1 1 1 GPS LAN GPS LAN GPS LAN Location Identification by sphere image and hybrid sensing Takayuki Katahira, 1 Yoshio Iwai 1 and Hiroshi Ishiguro 1 Self-location is very informative for wearable systems.
1 Table 1: Identification by color of voxel Voxel Mode of expression Nothing Other 1 Orange 2 Blue 3 Yellow 4 SSL Humanoid SSL-Vision 3 3 [, 21] 8 325
![1 Table 1: Identification by color of voxel Voxel Mode of expression Nothing Other 1 Orange 2 Blue 3 Yellow 4 SSL Humanoid SSL-Vision 3 3 [, 21] 8 325](/thumbs/91/105378470.jpg "1 Table 1: Identification by color of voxel Voxel Mode of expression Nothing Other 1 Orange 2 Blue 3 Yellow 4 SSL Humanoid SSL-Vision 3 3 [, 21] 8 325") 社団法人人工知能学会 Japanese Society for Artificial Intelligence 人工知能学会研究会資料 JSAI Technical Report SIG-Challenge-B3 (5/5) RoboCup SSL Humanoid A Proposal and its Application of Color Voxel Server for RoboCup SSL
社団法人人工知能学会 Japanese Society for Artificial Intelligence 人工知能学会研究会資料 JSAI Technical Report SIG-Challenge-B3 (5/5) RoboCup SSL Humanoid A Proposal and its Application of Color Voxel Server for RoboCup SSL
VHDL-AMS Department of Electrical Engineering, Doshisha University, Tatara, Kyotanabe, Kyoto, Japan TOYOTA Motor Corporation, Susono, Shizuok
 VHDL-AMS 1-3 1200 Department of Electrical Engineering, Doshisha University, Tatara, Kyotanabe, Kyoto, Japan TOYOTA Motor Corporation, Susono, Shizuoka, Japan E-mail: tkato@mail.doshisha.ac.jp E-mail:
VHDL-AMS 1-3 1200 Department of Electrical Engineering, Doshisha University, Tatara, Kyotanabe, Kyoto, Japan TOYOTA Motor Corporation, Susono, Shizuoka, Japan E-mail: tkato@mail.doshisha.ac.jp E-mail:
(a) 1 (b) 3. Gilbert Pernicka[2] Treibitz Schechner[3] Narasimhan [4] Kim [5] Nayar [6] [7][8][9] 2. X X X [10] [11] L L t L s L = L t + L s
![(a) 1 (b) 3. Gilbert Pernicka[2] Treibitz Schechner[3] Narasimhan [4] Kim [5] Nayar [6] [7][8][9] 2. X X X [10] [11] L L t L s L = L t + L s](/thumbs/75/72066128.jpg "(a) 1 (b) 3. Gilbert Pernicka[2] Treibitz Schechner[3] Narasimhan [4] Kim [5] Nayar [6] [7][8][9] 2. X X X [10] [11] L L t L s L = L t + L s") 1 1 1, Extraction of Transmitted Light using Parallel High-frequency Illumination Kenichiro Tanaka 1 Yasuhiro Mukaigawa 1 Yasushi Yagi 1 Abstract: We propose a new sharpening method of transmitted scene
1 1 1, Extraction of Transmitted Light using Parallel High-frequency Illumination Kenichiro Tanaka 1 Yasuhiro Mukaigawa 1 Yasushi Yagi 1 Abstract: We propose a new sharpening method of transmitted scene
IPSJ SIG Technical Report Vol.2016-ARC-221 No /8/9 GC 1 1 GC GC GC GC DalvikVM GC 12.4% 5.7% 1. Garbage Collection: GC GC Java GC GC GC GC Dalv
 GC 1 1 GC GC GC GC DalvikVM GC 12.4% 5.7% 1. Garbage Collection: GC GC Java GC GC GC GC DalvikVM[1] GC 1 Nagoya Institute of Technology GC GC 2. GC GC 2.1 GC 1 c 2016 Information Processing Society of
GC 1 1 GC GC GC GC DalvikVM GC 12.4% 5.7% 1. Garbage Collection: GC GC Java GC GC GC GC DalvikVM[1] GC 1 Nagoya Institute of Technology GC GC 2. GC GC 2.1 GC 1 c 2016 Information Processing Society of
 (2) (3) (4) (5) 2.1 ( ) 2")
(SAD) x86 MPSADBW H.264/AVC H.264/AVC SAD SAD x86 SAD MPSADBW SAD 3x3 3 9 SAD SAD SAD x86 MPSADBW SAD 9 SAD SAD 4.6
 x86 MPSADBW H.264/AVC H.264/AVC SAD SAD x86 SAD MPSADBW SAD 3x3 3 9 SAD SAD SAD x86 MPSADBW SAD 9 SAD SAD 4.6") SAD 23 (410M520) (SAD) x86 MPSADBW H.264/AVC H.264/AVC SAD SAD x86 SAD MPSADBW SAD 3x3 3 9 SAD SAD SAD x86 MPSADBW SAD 9 SAD SAD 4.6 Abstract In recent years, the high definition of video image has made
SAD 23 (410M520) (SAD) x86 MPSADBW H.264/AVC H.264/AVC SAD SAD x86 SAD MPSADBW SAD 3x3 3 9 SAD SAD SAD x86 MPSADBW SAD 9 SAD SAD 4.6 Abstract In recent years, the high definition of video image has made
JIIAセミナー
 Digital Interface IIDC URL teli.co.jp/ E-Mail http://www.toshiba-teli.co.jp teli.co.jp/ s-itokawa@toshiba-teli.co.jpteli.co.jp EIA,NTSC EIA,NTSC 4-5 JIIA JIIA - / Digital Interface Digital Interface IEEE1394
Digital Interface IIDC URL teli.co.jp/ E-Mail http://www.toshiba-teli.co.jp teli.co.jp/ s-itokawa@toshiba-teli.co.jpteli.co.jp EIA,NTSC EIA,NTSC 4-5 JIIA JIIA - / Digital Interface Digital Interface IEEE1394
[2] OCR [3], [4] [5] [6] [4], [7] [8], [9] 1 [10] Fig. 1 Current arrangement and size of ruby. 2 Fig. 2 Typography combined with printing
![[2] OCR [3], [4] [5] [6] [4], [7] [8], [9] 1 [10] Fig. 1 Current arrangement and size of ruby. 2 Fig. 2 Typography combined with printing](/thumbs/93/112070099.jpg "[2] OCR [3], [4] [5] [6] [4], [7] [8], [9] 1 [10] Fig. 1 Current arrangement and size of ruby. 2 Fig. 2 Typography combined with printing") 1,a) 1,b) 1,c) 2012 11 8 2012 12 18, 2013 1 27 WEB Ruby Removal Filters Using Genetic Programming for Early-modern Japanese Printed Books Taeka Awazu 1,a) Masami Takata 1,b) Kazuki Joe 1,c) Received: November
1,a) 1,b) 1,c) 2012 11 8 2012 12 18, 2013 1 27 WEB Ruby Removal Filters Using Genetic Programming for Early-modern Japanese Printed Books Taeka Awazu 1,a) Masami Takata 1,b) Kazuki Joe 1,c) Received: November
IPSJ SIG Technical Report Vol.2009-CVIM-167 No /6/10 Real AdaBoost HOG 1 1 1, 2 1 Real AdaBoost HOG HOG Real AdaBoost HOG A Method for Reducing
 Real AdaBoost HOG 1 1 1, 2 1 Real AdaBoost HOG HOG Real AdaBoost HOG A Method for Reducing number of HOG Features based on Real AdaBoost Chika Matsushima, 1 Yuji Yamauchi, 1 Takayoshi Yamashita 1, 2 and
Real AdaBoost HOG 1 1 1, 2 1 Real AdaBoost HOG HOG Real AdaBoost HOG A Method for Reducing number of HOG Features based on Real AdaBoost Chika Matsushima, 1 Yuji Yamauchi, 1 Takayoshi Yamashita 1, 2 and
GRAPE-DR /
 GRAPE-DR / GRAPE GRAPE-DR GRAPE ( ): (Barnes-Hut tree, FMM, Particle- Mesh Ewald(PPPM)...): ( ) 1988 32 IC 200 0.1m 3 400 GRAPE-1(1989) 16 8 32 48 240Mflops GRAPE-2(1990) 8 ( ) 40Mflops GRAPE-3(1991) 24
GRAPE-DR / GRAPE GRAPE-DR GRAPE ( ): (Barnes-Hut tree, FMM, Particle- Mesh Ewald(PPPM)...): ( ) 1988 32 IC 200 0.1m 3 400 GRAPE-1(1989) 16 8 32 48 240Mflops GRAPE-2(1990) 8 ( ) 40Mflops GRAPE-3(1991) 24
16 2020 H.264/AVC 2 H.265/HEVC 1 H.265 JCT-VC HM(HEVC Test Model) HM 5 5 SIMD HM 33%
 HM 5 5 SIMD HM 33%") H.265/HEVC 2014 (410808) 16 2020 H.264/AVC 2 H.265/HEVC 1 H.265 JCT-VC HM(HEVC Test Model) HM 5 5 SIMD HM 33% Abstract In recent years, high resolution video technology has been developed in order to start
H.265/HEVC 2014 (410808) 16 2020 H.264/AVC 2 H.265/HEVC 1 H.265 JCT-VC HM(HEVC Test Model) HM 5 5 SIMD HM 33% Abstract In recent years, high resolution video technology has been developed in order to start
1 3DCG [2] 3DCG CG 3DCG [3] 3DCG 3 3 API 2 3DCG 3 (1) Saito [4] (a) 1920x1080 (b) 1280x720 (c) 640x360 (d) 320x G-Buffer Decaudin[5] G-Buffer D
![1 3DCG [2] 3DCG CG 3DCG [3] 3DCG 3 3 API 2 3DCG 3 (1) Saito [4] (a) 1920x1080 (b) 1280x720 (c) 640x360 (d) 320x G-Buffer Decaudin[5] G-Buffer D](/thumbs/91/105248386.jpg "1 3DCG [2] 3DCG CG 3DCG [3] 3DCG 3 3 API 2 3DCG 3 (1) Saito [4] (a) 1920x1080 (b) 1280x720 (c) 640x360 (d) 320x G-Buffer Decaudin[5] G-Buffer D") 3DCG 1) ( ) 2) 2) 1) 2) Real-Time Line Drawing Using Image Processing and Deforming Process Together in 3DCG Takeshi Okuya 1) Katsuaki Tanaka 2) Shigekazu Sakai 2) 1) Department of Intermedia Art and Science,
3DCG 1) ( ) 2) 2) 1) 2) Real-Time Line Drawing Using Image Processing and Deforming Process Together in 3DCG Takeshi Okuya 1) Katsuaki Tanaka 2) Shigekazu Sakai 2) 1) Department of Intermedia Art and Science,
4 4 2 RAW 4 4 4 (PCA) 4 4 4 4 RAW RAW [5] 4 RAW 4 Park [12] Park 2 RAW RAW 2 RAW y = Mx + n. (1) y RAW x RGB M CFA n.. R G B σr 2, σ2 G, σ2 B D n ( )
![4 4 2 RAW 4 4 4 (PCA) 4 4 4 4 RAW RAW [5] 4 RAW 4 Park [12] Park 2 RAW RAW 2 RAW y = Mx + n. (1) y RAW x RGB M CFA n.. R G B σr 2, σ2 G, σ2 B D n ( )](/thumbs/40/20574692.jpg "4 4 2 RAW 4 4 4 (PCA) 4 4 4 4 RAW RAW [5] 4 RAW 4 Park [12] Park 2 RAW RAW 2 RAW y = Mx + n. (1) y RAW x RGB M CFA n.. R G B σr 2, σ2 G, σ2 B D n ( )") RAW 4 E-mail: hakiyama@ok.ctrl.titech.ac.jp Abstract RAW RAW RAW RAW RAW 4 RAW RAW RAW 1 (CFA) CFA Bayer CFA [1] RAW CFA 1 2 [2, 3, 4, 5]. RAW RAW RAW RAW 3 [2, 3, 4, 5] (AWGN) [13, 14] RAW 2 RAW RAW RAW
RAW 4 E-mail: hakiyama@ok.ctrl.titech.ac.jp Abstract RAW RAW RAW RAW RAW 4 RAW RAW RAW 1 (CFA) CFA Bayer CFA [1] RAW CFA 1 2 [2, 3, 4, 5]. RAW RAW RAW RAW 3 [2, 3, 4, 5] (AWGN) [13, 14] RAW 2 RAW RAW RAW
28 TCG SURF Card recognition using SURF in TCG play video
 28 TCG SURF Card recognition using SURF in TCG play video 1170374 2017 3 2 TCG SURF TCG TCG OCG SURF Bof 20 20 30 10 1 SURF Bag of features i Abstract Card recognition using SURF in TCG play video Haruka
28 TCG SURF Card recognition using SURF in TCG play video 1170374 2017 3 2 TCG SURF TCG TCG OCG SURF Bof 20 20 30 10 1 SURF Bag of features i Abstract Card recognition using SURF in TCG play video Haruka
1 Web [2] Web [3] [4] [5], [6] [7] [8] S.W. [9] 3. MeetingShelf Web MeetingShelf MeetingShelf (1) (2) (3) (4) (5) Web MeetingShelf
![1 Web [2] Web [3] [4] [5], [6] [7] [8] S.W. [9] 3. MeetingShelf Web MeetingShelf MeetingShelf (1) (2) (3) (4) (5) Web MeetingShelf](/thumbs/79/80104027.jpg "1 Web [2] Web [3] [4] [5], [6] [7] [8] S.W. [9] 3. MeetingShelf Web MeetingShelf MeetingShelf (1) (2) (3) (4) (5) Web MeetingShelf") 1,a) 2,b) 4,c) 3,d) 4,e) Web A Review Supporting System for Whiteboard Logging Movies Based on Notes Timeline Taniguchi Yoshihide 1,a) Horiguchi Satoshi 2,b) Inoue Akifumi 4,c) Igaki Hiroshi 3,d) Hoshi
1,a) 2,b) 4,c) 3,d) 4,e) Web A Review Supporting System for Whiteboard Logging Movies Based on Notes Timeline Taniguchi Yoshihide 1,a) Horiguchi Satoshi 2,b) Inoue Akifumi 4,c) Igaki Hiroshi 3,d) Hoshi
) 1 2 2[m] % H W T (x, y) I D(x, y) d d = 1 [T (p, q) I D(x + p, y + q)] HW 2 (1) p q t 3 (X t,y t,z t) x t [ ] T x t
![) 1 2 2[m] % H W T (x, y) I D(x, y) d d = 1 [T (p, q) I D(x + p, y + q)] HW 2 (1) p q t 3 (X t,y t,z t) x t [ ] T x t](/thumbs/89/98284076.jpg ") 1 2 2[m] % H W T (x, y) I D(x, y) d d = 1 [T (p, q) I D(x + p, y + q)] HW 2 (1) p q t 3 (X t,y t,z t) x t [ ] T x t") 1 1 Multi-Person Tracking for a Mobile Robot using Overlapping Silhouette Templates Junji Satake 1 and Jun Miura 1 This paper describes a stereo-based person tracking method for a person following robot.
1 1 Multi-Person Tracking for a Mobile Robot using Overlapping Silhouette Templates Junji Satake 1 and Jun Miura 1 This paper describes a stereo-based person tracking method for a person following robot.
IS1-09 第 回画像センシングシンポジウム, 横浜,14 年 6 月 2 Hough Forest Hough Forest[6] Random Forest( [5]) Random Forest Hough Forest Hough Forest 2.1 Hough Forest 1 2.2
![IS1-09 第 回画像センシングシンポジウム, 横浜,14 年 6 月 2 Hough Forest Hough Forest[6] Random Forest( [5]) Random Forest Hough Forest Hough Forest 2.1 Hough Forest 1 2.2](/thumbs/91/106196100.jpg "IS1-09 第 回画像センシングシンポジウム, 横浜,14 年 6 月 2 Hough Forest Hough Forest[6] Random Forest( [5]) Random Forest Hough Forest Hough Forest 2.1 Hough Forest 1 2.2") IS1-09 第 回画像センシングシンポジウム, 横浜,14 年 6 月 MI-Hough Forest () E-mail: ym@vision.cs.chubu.ac.jphf@cs.chubu.ac.jp Abstract Hough Forest Random Forest MI-Hough Forest Multiple Instance Learning Bag Hough Forest
IS1-09 第 回画像センシングシンポジウム, 横浜,14 年 6 月 MI-Hough Forest () E-mail: ym@vision.cs.chubu.ac.jphf@cs.chubu.ac.jp Abstract Hough Forest Random Forest MI-Hough Forest Multiple Instance Learning Bag Hough Forest
Microsoft PowerPoint - 【5】説明資料_池辺将之
 Time to digital converter の A/D 変換器への利用とその低電力化 国立大学法人北海道大学 大学院情報科学研究科 准教授池辺将之 背景 センシングされたアナログ情報をデジタル信号へ AD 変換器 (ADC) への要求 低電力 小面積 高速動作 Single-slope ADC に注目 シンプルな構成で小面積 Wikipedia: CMOS image sensor 課題 :
Time to digital converter の A/D 変換器への利用とその低電力化 国立大学法人北海道大学 大学院情報科学研究科 准教授池辺将之 背景 センシングされたアナログ情報をデジタル信号へ AD 変換器 (ADC) への要求 低電力 小面積 高速動作 Single-slope ADC に注目 シンプルな構成で小面積 Wikipedia: CMOS image sensor 課題 :
Fig Measurement data combination. 2 Fig. 2. Ray vector. Fig (12) 1 2 R 1 r t 1 3 p 1,i i 2 3 Fig.2 R 2 t 2 p 2,i [u, v] T (1)(2) r R 1 R 2
![Fig Measurement data combination. 2 Fig. 2. Ray vector. Fig (12) 1 2 R 1 r t 1 3 p 1,i i 2 3 Fig.2 R 2 t 2 p 2,i [u, v] T (1)(2) r R 1 R 2](/thumbs/93/113464882.jpg "Fig Measurement data combination. 2 Fig. 2. Ray vector. Fig (12) 1 2 R 1 r t 1 3 p 1,i i 2 3 Fig.2 R 2 t 2 p 2,i [u, v] T (1)(2) r R 1 R 2") IP 06 16 / IIS 06 32 3 3-D Environment Modeling from Images Acquired with an Omni-Directional Camera Mounted on a Mobile Robot Atsushi Yamashita, Tomoaki Harada, Ryosuke Kawanishi, Toru Kaneko (Shizuoka
IP 06 16 / IIS 06 32 3 3-D Environment Modeling from Images Acquired with an Omni-Directional Camera Mounted on a Mobile Robot Atsushi Yamashita, Tomoaki Harada, Ryosuke Kawanishi, Toru Kaneko (Shizuoka
(a) (b) 2 2 (Bosch, IR Illuminator 850 nm, UFLED30-8BD) ( 7[m] 6[m]) 3 (PointGrey Research Inc.Grasshopper2 M/C) Hz (a) (b
![(a) (b) 2 2 (Bosch, IR Illuminator 850 nm, UFLED30-8BD) ( 7[m] 6[m]) 3 (PointGrey Research Inc.Grasshopper2 M/C) Hz (a) (b](/thumbs/91/105641706.jpg "(a) (b) 2 2 (Bosch, IR Illuminator 850 nm, UFLED30-8BD) ( 7[m] 6[m]) 3 (PointGrey Research Inc.Grasshopper2 M/C) Hz (a) (b") (MIRU202) 202 8 AdrianStoica 89 0395 744 89 0395 744 Jet Propulsion Laboratory 4800 Oak Grove Drive, Pasadena, CA 909, USA E-mail: uchino@irvs.ait.kyushu-u.ac.jp, {yumi,kurazume}@ait.kyushu-u.ac.jp 2 nearest
(MIRU202) 202 8 AdrianStoica 89 0395 744 89 0395 744 Jet Propulsion Laboratory 4800 Oak Grove Drive, Pasadena, CA 909, USA E-mail: uchino@irvs.ait.kyushu-u.ac.jp, {yumi,kurazume}@ait.kyushu-u.ac.jp 2 nearest
Convolutional Neural Network A Graduation Thesis of College of Engineering, Chubu University Investigation of feature extraction by Convolution
 Convolutional Neural Network 2014 3 A Graduation Thesis of College of Engineering, Chubu University Investigation of feature extraction by Convolutional Neural Network Fukui Hiroshi 1940 1980 [1] 90 3
Convolutional Neural Network 2014 3 A Graduation Thesis of College of Engineering, Chubu University Investigation of feature extraction by Convolutional Neural Network Fukui Hiroshi 1940 1980 [1] 90 3
untitled
 IT E- IT http://www.ipa.go.jp/security/ CERT/CC http://www.cert.org/stats/#alerts IPA IPA 2004 52,151 IT 2003 12 Yahoo 451 40 2002 4 18 IT 1/14 2.1 DoS(Denial of Access) IDS(Intrusion Detection System)
IT E- IT http://www.ipa.go.jp/security/ CERT/CC http://www.cert.org/stats/#alerts IPA IPA 2004 52,151 IT 2003 12 Yahoo 451 40 2002 4 18 IT 1/14 2.1 DoS(Denial of Access) IDS(Intrusion Detection System)
17 Proposal of an Algorithm of Image Extraction and Research on Improvement of a Man-machine Interface of Food Intake Measuring System
 1. (1) ( MMI ) 2. 3. MMI Personal Computer(PC) MMI PC 1 1 2 (%) (%) 100.0 95.2 100.0 80.1 2 % 31.3% 2 PC (3 ) (2) MMI 2 ( ),,,, 49,,p531-532,2005 ( ),,,,,2005,p66-p67,2005 17 Proposal of an Algorithm of
1. (1) ( MMI ) 2. 3. MMI Personal Computer(PC) MMI PC 1 1 2 (%) (%) 100.0 95.2 100.0 80.1 2 % 31.3% 2 PC (3 ) (2) MMI 2 ( ),,,, 49,,p531-532,2005 ( ),,,,,2005,p66-p67,2005 17 Proposal of an Algorithm of
 1 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15. 1. 2. 3. 16 17 18 ( ) ( 19 ( ) CG PC 20 ) I want some rice. I want some lice. 21 22 23 24 2001 9 18 3 2000 4 21 3,. 13,. Science/Technology, Design, Experiments,
1 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15. 1. 2. 3. 16 17 18 ( ) ( 19 ( ) CG PC 20 ) I want some rice. I want some lice. 21 22 23 24 2001 9 18 3 2000 4 21 3,. 13,. Science/Technology, Design, Experiments,
4. C i k = 2 k-means C 1 i, C 2 i 5. C i x i p [ f(θ i ; x) = (2π) p 2 Vi 1 2 exp (x µ ] i) t V 1 i (x µ i ) 2 BIC BIC = 2 log L( ˆθ i ; x i C i ) + q
![4. C i k = 2 k-means C 1 i, C 2 i 5. C i x i p [ f(θ i ; x) = (2π) p 2 Vi 1 2 exp (x µ ] i) t V 1 i (x µ i ) 2 BIC BIC = 2 log L( ˆθ i ; x i C i ) + q](/thumbs/92/110416683.jpg "4. C i k = 2 k-means C 1 i, C 2 i 5. C i x i p [ f(θ i ; x) = (2π) p 2 Vi 1 2 exp (x µ ] i) t V 1 i (x µ i ) 2 BIC BIC = 2 log L( ˆθ i ; x i C i ) + q") x-means 1 2 2 x-means, x-means k-means Bayesian Information Criterion BIC Watershed x-means Moving Object Extraction Using the Number of Clusters Determined by X-means Clustering Naoki Kubo, 1 Kousuke
x-means 1 2 2 x-means, x-means k-means Bayesian Information Criterion BIC Watershed x-means Moving Object Extraction Using the Number of Clusters Determined by X-means Clustering Naoki Kubo, 1 Kousuke
 1 osana@eee.u-ryukyu.ac.jp : FPGA : HDL, Xilinx Vivado + Digilent Nexys4 (Artix-7 100T) LSI / PC clock accurate / Artix-7 XC7A100T Kintex-7 XC7K325T : CAD Hands-on: HDL (Verilog) CAD (Vivado HLx) : 28y4
1 osana@eee.u-ryukyu.ac.jp : FPGA : HDL, Xilinx Vivado + Digilent Nexys4 (Artix-7 100T) LSI / PC clock accurate / Artix-7 XC7A100T Kintex-7 XC7K325T : CAD Hands-on: HDL (Verilog) CAD (Vivado HLx) : 28y4
,4) 1 P% P%P=2.5 5%!%! (1) = (2) l l Figure 1 A compilation flow of the proposing sampling based architecture simulation
 1 P% P%P=2.5 5%!%! (1) = (2) l l Figure 1 A compilation flow of the proposing sampling based architecture simulation") 1 1 1 1 SPEC CPU 2000 EQUAKE 1.6 50 500 A Parallelizing Compiler Cooperative Multicore Architecture Simulator with Changeover Mechanism of Simulation Modes GAKUHO TAGUCHI 1 YOUICHI ABE 1 KEIJI KIMURA 1
1 1 1 1 SPEC CPU 2000 EQUAKE 1.6 50 500 A Parallelizing Compiler Cooperative Multicore Architecture Simulator with Changeover Mechanism of Simulation Modes GAKUHO TAGUCHI 1 YOUICHI ABE 1 KEIJI KIMURA 1
179Ł\”ƒ
 2001 6 BGA/CSPSIP Series http://www.rlz.co.jp No.179 C o n t e n t s Feature... 2 Special Issue BGA/CSPSIP... 4... 8... 12, *,, * Series 1... 17 Challenge of Intelligence for Future BREAK THROUGH 2001.6
2001 6 BGA/CSPSIP Series http://www.rlz.co.jp No.179 C o n t e n t s Feature... 2 Special Issue BGA/CSPSIP... 4... 8... 12, *,, * Series 1... 17 Challenge of Intelligence for Future BREAK THROUGH 2001.6
smpp_resume.dvi
 6 mmiki@mail.doshisha.ac.jp Parallel Processing Parallel Pseudo-parallel Concurrent 1) 1/60 1) 1997 5 11 IBM Deep Blue Deep Blue 2) PC 2000 167 Rank Manufacturer Computer Rmax Installation Site Country
6 mmiki@mail.doshisha.ac.jp Parallel Processing Parallel Pseudo-parallel Concurrent 1) 1/60 1) 1997 5 11 IBM Deep Blue Deep Blue 2) PC 2000 167 Rank Manufacturer Computer Rmax Installation Site Country
Abstract This paper concerns with a method of dynamic image cognition. Our image cognition method has two distinguished features. One is that the imag
 2004 RGB A STUDY OF RGB COLOR INFORMATION AND ITS APPLICATION 03R3237 Abstract This paper concerns with a method of dynamic image cognition. Our image cognition method has two distinguished features. One
2004 RGB A STUDY OF RGB COLOR INFORMATION AND ITS APPLICATION 03R3237 Abstract This paper concerns with a method of dynamic image cognition. Our image cognition method has two distinguished features. One
main.dvi
 A 1/4 1 1/ 1/1 1 9 6 (Vergence) (Convergence) (Divergence) ( ) ( ) 97 1) S. Fukushima, M. Takahashi, and H. Yoshikawa: A STUDY ON VR-BASED MUTUAL ADAPTIVE CAI SYSTEM FOR NUCLEAR POWER PLANT, Proc. of FIFTH
A 1/4 1 1/ 1/1 1 9 6 (Vergence) (Convergence) (Divergence) ( ) ( ) 97 1) S. Fukushima, M. Takahashi, and H. Yoshikawa: A STUDY ON VR-BASED MUTUAL ADAPTIVE CAI SYSTEM FOR NUCLEAR POWER PLANT, Proc. of FIFTH
24 FFT Self-Timeed Pipeline Implementation of Adaptive FFT for Different Rate Signals
 24 FFT Self-Timeed Pipeline Implementation of Adaptive FFT for Different Rate Signals 1155064 2013 2 5 FFT HetNet (FFT) FFT. (STP) FFT STP FFT FFT FFT FPGA(Altera stratixii) HetNet FFT STP i Abstract Self-Timeed
24 FFT Self-Timeed Pipeline Implementation of Adaptive FFT for Different Rate Signals 1155064 2013 2 5 FFT HetNet (FFT) FFT. (STP) FFT STP FFT FFT FFT FPGA(Altera stratixii) HetNet FFT STP i Abstract Self-Timeed
RW1097-0A-001_V0.1_170106
 INTRODUCTION RW1097 is a dot matrix LCD driver & controller LSI which is fabricated by low power CMOS technology. It can display 1line/2line/3line/4line/5line/6lines x 12 (16 x 16 dot format) with the
INTRODUCTION RW1097 is a dot matrix LCD driver & controller LSI which is fabricated by low power CMOS technology. It can display 1line/2line/3line/4line/5line/6lines x 12 (16 x 16 dot format) with the
(4) ω t(x) = 1 ω min Ω ( (I C (y))) min 0 < ω < C A C = 1 (5) ω (5) t transmission map tmap 1 4(a) 2. 3 2. 2 t 4(a) t tmap RGB 2 (a) RGB (A), (B), (C)
 ω t(x) = 1 ω min Ω ( (I C (y))) min 0 < ω < C A C = 1 (5) ω (5) t transmission map tmap 1 4(a) 2. 3 2. 2 t 4(a) t tmap RGB 2 (a) RGB (A), (B), (C)") (MIRU2011) 2011 7 890 0065 1 21 40 105-6691 1 1 1 731 3194 3 4 1 338 8570 255 346 8524 1836 1 E-mail: {fukumoto,kawasaki}@ibe.kagoshima-u.ac.jp, ryo-f@hiroshima-cu.ac.jp, fukuda@cv.ics.saitama-u.ac.jp,
(MIRU2011) 2011 7 890 0065 1 21 40 105-6691 1 1 1 731 3194 3 4 1 338 8570 255 346 8524 1836 1 E-mail: {fukumoto,kawasaki}@ibe.kagoshima-u.ac.jp, ryo-f@hiroshima-cu.ac.jp, fukuda@cv.ics.saitama-u.ac.jp,
光学
 Fundamentals of Projector-Camera Systems and Their Calibration Methods Takayuki OKATANI To make the images projected by projector s appear as desired, it is e ective and sometimes an only choice to capture
Fundamentals of Projector-Camera Systems and Their Calibration Methods Takayuki OKATANI To make the images projected by projector s appear as desired, it is e ective and sometimes an only choice to capture
untitled
 Application of image correlation technique to determination of in-plane deformation distribution of paper Toshiharu Enomae Graduate School of Agricultural and Life Sciences The University of Tokyo 1 Peters
Application of image correlation technique to determination of in-plane deformation distribution of paper Toshiharu Enomae Graduate School of Agricultural and Life Sciences The University of Tokyo 1 Peters
組込みシステムシンポジウム2011 Embedded Systems Symposium 2011 ESS /10/20 FPGA Android Android Java FPGA Java FPGA Dalvik VM Intel Atom FPGA PCI Express DM
 Android Android Java Java Dalvik VM Intel Atom PCI Express DMA 1.25 Gbps Atom Android Java Acceleration with an Accelerator in an Android Mobile Terminal Keisuke Koike, Atsushi Ohta, Kohta Ohshima, Kaori
Android Android Java Java Dalvik VM Intel Atom PCI Express DMA 1.25 Gbps Atom Android Java Acceleration with an Accelerator in an Android Mobile Terminal Keisuke Koike, Atsushi Ohta, Kohta Ohshima, Kaori

Fig. 1 Relative delay coding.
 An Architecture of Small-scaled Neuro-hardware Using Probabilistically-coded Pulse Neurons Takeshi Kawashima, Non-member (DENSO CORPORATION), Akio Ishiguro, Member (Nagoya University), Shigeru Okuma, Member
An Architecture of Small-scaled Neuro-hardware Using Probabilistically-coded Pulse Neurons Takeshi Kawashima, Non-member (DENSO CORPORATION), Akio Ishiguro, Member (Nagoya University), Shigeru Okuma, Member
c2
 c1 c2 Digital Image Innovation 1 2002 2003 2003... 1,274,109 1,322,453 $11,002,105... 336,108 362,588 3,016,539... 309,912 313,228 2,605,890... 26,196 49,360 410,649... (18,382) 31,629 263,136... (18,432)
c1 c2 Digital Image Innovation 1 2002 2003 2003... 1,274,109 1,322,453 $11,002,105... 336,108 362,588 3,016,539... 309,912 313,228 2,605,890... 26,196 49,360 410,649... (18,382) 31,629 263,136... (18,432)
 Real AdaBoost HOG 2009 3 A Graduation Thesis of College of Engineering, Chubu University Efficient Reducing Method of HOG Features for Human Detection based on Real AdaBoost Chika Matsushima ITS Graphics
Real AdaBoost HOG 2009 3 A Graduation Thesis of College of Engineering, Chubu University Efficient Reducing Method of HOG Features for Human Detection based on Real AdaBoost Chika Matsushima ITS Graphics
H(ω) = ( G H (ω)g(ω) ) 1 G H (ω) (6) 2 H 11 (ω) H 1N (ω) H(ω)= (2) H M1 (ω) H MN (ω) [ X(ω)= X 1 (ω) X 2 (ω) X N (ω) ] T (3)
![H(ω) = ( G H (ω)g(ω) ) 1 G H (ω) (6) 2 H 11 (ω) H 1N (ω) H(ω)= (2) H M1 (ω) H MN (ω) [ X(ω)= X 1 (ω) X 2 (ω) X N (ω) ] T (3)](/thumbs/92/108069141.jpg "H(ω) = ( G H (ω)g(ω) ) 1 G H (ω) (6) 2 H 11 (ω) H 1N (ω) H(ω)= (2) H M1 (ω) H MN (ω) [ X(ω)= X 1 (ω) X 2 (ω) X N (ω) ] T (3)") 72 12 2016 pp. 777 782 777 * 43.60.Pt; 43.38.Md; 43.60.Sx 1. 1 2 [1 8] Flexible acoustic interface based on 3D sound reproduction. Yosuke Tatekura (Shizuoka University, Hamamatsu, 432 8561) 2. 2.1 3 M
72 12 2016 pp. 777 782 777 * 43.60.Pt; 43.38.Md; 43.60.Sx 1. 1 2 [1 8] Flexible acoustic interface based on 3D sound reproduction. Yosuke Tatekura (Shizuoka University, Hamamatsu, 432 8561) 2. 2.1 3 M
GPGPU
 GPGPU 2013 1008 2015 1 23 Abstract In recent years, with the advance of microscope technology, the alive cells have been able to observe. On the other hand, from the standpoint of image processing, the
GPGPU 2013 1008 2015 1 23 Abstract In recent years, with the advance of microscope technology, the alive cells have been able to observe. On the other hand, from the standpoint of image processing, the