2018 年 12 月 4 日第 3 回 STAMP ワークショップ STAMP/STPA を用いた 自動運転車両の安全解析 ~ 操舵系に関するミスユース ~ JARI 第 31 研究室株式会社ジェイテクト研究開発本部システム創生研究部森木紘平 ( 発表者 ) 一般社団法人日本自動車研究所 ITS
|
|
|
- ゆゆこ おまた
- 4 years ago
- Views:
Transcription
1 2018 年 12 月 4 日第 3 回 STAMP ワークショップ STAMP/STPA を用いた 自動運転車両の安全解析 ~ 操舵系に関するミスユース ~ JARI 第 31 研究室株式会社ジェイテクト研究開発本部システム創生研究部森木紘平 ( 発表者 ) 一般社団法人日本自動車研究所 ITS 研究部 1
2 発表内容 1. 背景および目的 2. ミスユース安全設計 3.STAMP/STPAによる分析 4. 課題に対する取組み 5. まとめ 2
3 会社紹介 会社名 (2006 年 1 月に光洋精工と豊田工機が合併 ) 本店 本社所在地 名古屋本社名古屋市中村区名駅 4 丁目 7 番 1 号ミッドランドスクエア 15 階大阪本社 ( 本店 ) 大阪市中央区南船場 3 丁目 5 番 8 号 資本金 売上高 従業員数 資本金 :45,591 百万円 ( 平成 30 年 3 月現在 ) 売上高 : 連結 : 1,441,170 百万円 単独 : 647,101 百万円 ( 平成 30 年 3 月期 ) 従業員数 : 連結 : 49,589 名 単独 : 11,763 名 ( 平成 30 年 3 月現在 ) トヨタグループ トヨタ自動車株式会社 株式会社豊田自動織機 愛知製鋼株式会社 株式会社ジェイテクト トヨタ車体株式会社 豊田通商株式会社 アイシン精機株式会社 株式会社デンソー トヨタ紡織株式会社 東和不動産株式会社 株式会社豊田中央研究所 トヨタ自動車東日本株式会社 豊田合成株式会社 日野自動車株式会社 ダイハツ工業株式会社 トヨタホーム株式会社 トヨタ自動車九州株式会社 3


























4 会社紹介 ステアリング 軸受 ( ベアリング ) 部品として 協調制御 協調制御 部品としてつくる フィードバック 部品をつくる 駆動系部品 工作機械 メカトロニクス 4
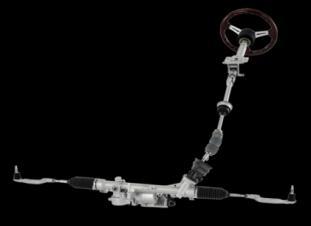
 モータが発生する回転力によって運転者の操舵力をアシスト")
5 電動パワーステアリング紹介 ECU モータ 中間シャフト ステアリンク ホイール ステアリンク コラムトルクセンサ 減速機 電動パワーステアリング (EPS:Electric Power Steering) モータが発生する回転力によって運転者の操舵力をアシスト ステアリンク キ ヤ 5
6 研究背景 自動運転社会の実現に向け国内外問わず開発が進む 自動運転社会の実現による主な効果 国際競争力の強化 運転快適性の向上 高齢者の運転支援 交通事故削減 渋滞解消 緩和 本研究背景 環境負荷の低減 引用元 : 平成 25 年度国交省 オートパイロットシステムの実現に向けて 中間とりまとめ案 6

7 研究実施体系 高度な自動走行システムの社会実装に向けた研究開発 実証事業 テーマ名 : セーフティ セキュリティ技術評価環境の構築 第 31 研究室 JARI 研究室として参画 平成 26 年度から 5 ヵ年 協調領域の取り組み JARI は一般財団法人日本自動車研究所の商標登録である 7
8 研究対象 高度な自動走行システムの社会実装に向けた研究開発 実証事業 テーマ名 : セーフティ セキュリティ技術評価環境の構築 交通事故を削減 = 自動運転に起因する事故リスク減 想定される自動運転に起因する事故原因 ( 例 ) 自動運転システムの故障 要求された機能を実行するエレメントの能力の停止 自動運転システムの性能限界 設計時に想定する作動範囲を外れたり 外乱等で意図した性能が発揮できない状態 ドライバの誤使用 誤操作 設計者が本来意図している使い方と異なった 使用者による不適切な使用( 誤使用 ) 使用者には設計者が意図した通りに使う意思があるが 操作を誤る( 誤操作 ) 8
9 自動運転の課題とレベル定義 高度な自動走行システムの社会実装に向けた研究開発 実証事業 テーマ名 : セーフティ セキュリティ技術評価環境の構築 ドライバの誤使用 誤操作に対する課題 システムに故障が無くても誤使用 誤操作により非安全な状態に陥る可能性がある 自動運転のレベル定義 : システム主体 SAE レベル SAE 名称 操作の実行主体 走行環境監視 バックアップ ( 緊急時 ) システム能力 0 非自動化ドライバドライバドライバ制限あり ドライバの誤使用 誤操作が発生する可能性がある通常時の操作と走行環境監視はシステムが主体 1 支援ドライバ + システムドライバドライバ制限あり 2 一部自動化システムドライバドライバ制限あり 3 条件付自動化システムシステムドライバ制限あり 4 高度自動化システムシステムシステム制限あり 5 完全自動化システムシステムシステム制限なし SAE: Society of Automotive Engineers 9
10 研究目的と目標 高度な自動走行システムの社会実装に向けた研究開発 実証事業 テーマ名 : セーフティ セキュリティ技術評価環境の構築 目的 自動運転システム (SAE レベル 3) において 非安全な状態を引き起こしかねない ミスユース ( 誤使用 誤操作 ) を考慮することが必要 操舵制御系を例題に ミスユース課題に対する安全設計方法 および 検証 評価方法 ( プロセス含 ) の事例を提示 目標 得られた成果 ( 安全設計 / 検証評価の考え方 方法事例 ) を 個社開発 実証事業 などのバックデータとして活用頂く 10

11 目標に対する提案内容 高度な自動走行システムの社会実装に向けた研究開発 実証事業 テーマ名 : セーフティ セキュリティ技術評価環境の構築 ミスユース安全設計検討プロセス 11
 ドライビングシミュレータ検証 (")

12 研究実施計画 高度な自動走行システムの社会実装に向けた研究開発 実証事業 テーマ名 : セーフティ セキュリティ技術評価環境の構築 平成 28 年度平成 29 年度平成 30 年度 調査 定義 事例整理安全要件抽出 ( 全体系 ) ドライビングシミュレータ検証 ( 操舵系 ) 車両検証 本日発表する内容 平成 29 年度までの公開内容 : 自動運転の安全設計や課題 検証方法 注 ) 本研究の成果は 平成 28~29 年度の経済産業省委託業務 高度な自動走行システムの社会実装に向けた研究開発 実証事業 で得られたものである 12
13 発表内容 1. 背景および目的 2. ミスユース安全設計 3.STAMP/STPAによる分析 4. 課題に対する取組み 5. まとめ 13
14 ミスユース安全設計 ミスユースの定義 誤使用 誤操作を ミスユース と総称する 誤使用 : 設計者が本来意図 / 推奨している使い方と異なった 使用者による不適切な使用のこと 本事業では 悪意をもった使用 も含んだ意味と捉える 誤操作 : 使用者には設計者が意図した通りに使用する意思があるが 結果として操作を誤ること 引用元 : 自動走行ビジネス検討会公開資料 自動走行ビジネス検討会今後の取組方針 14

15 自動運転レベル別詳細内容 ミスユース安全設計 引用元 : 国土交通省 HP 15
16 想定する自動運転車両 ミスユース安全設計 自動運転レベル 3 一般的な乗用車 オーバーライドによる権限委譲可能 TOR(Take Over Request) で権限委譲依頼を受け運転者が応答 16
17 ミスユース安全設計 日本での自動車業界と航空機業界との免許制度の比較 自動車運転者航空機操縦士 操縦可能機種数無制限機種毎 免許更新 5 年 or3 年 講習 視力検査 半年 ( 機長 ) 実技試験 身体検査 免許保有数 82,000,000 人 (H29 年 ) 5,686 人 (H25 年 ) 自動運転でミスユースの発生する可能性 自動車運転者 > 航空機操縦士 17
18 自動操縦設計思想 ミスユース安全設計 航空機業界における自動操縦でのミスユース事故事例 エアバス社 システム優先 自動操舵中 機体傾き安全範囲を超える操縦は全てキャンセルされる 安全範囲内は制御可能 ボーイング社 人間優先 機体傾き安全範囲を超える操縦は桿が重くなる事で抑止させる 更に強い力で押し込むと その行為が必要だと判断し主権を人間に与え安全範囲を超えて機体が傾く 自動操縦解除方法 ボタン + 操縦桿操作 (A320 以降 ) 以前は所定のシーケンス要 操縦桿操作 事故事例 自動操縦の解除ができず手動操縦と干渉が発生 パイロットが自身の子どもを操縦席に座らせていたところ 自動操縦解除させた事に気づかなかった 誤って操縦桿を動かした事に気づかず自動操縦が継続していると思い込んだ 18

19 ミスユース安全設計 自動運転車で想定するミスユース ( 一例 ) 自動運転車両 ドライバ 自動運転切り替え要請 自動運転切り替え指示 ミスユースにより非安全な状態に陥る可能性がある ミスユースを安全解析する必要がある 19
20 ミスユース安全設計 自動運転車両のミスユースの安全解析への対応 安全解析での懸念点 1ミスユースはシステムが故障していないため 従来の故障解析を適用しにくいのではないか 2 自動運転車両と人間とのやり取りであり システムが複雑となっていて システムを把握できないのではないか STPA の利点 システムの構成要素が故障していなくても 構成要素間の非安全な相互作用による事故の安全解析ができる 非常に複雑なシステムを安全解析することができる STAMP/STPA による安全分析手法を選択 20
21 発表内容 1. 背景および目的 2. ミスユース安全設計 3.STAMP/STPAによる分析 4. 課題に対する取組み 5. まとめ 21
22 STAMP/STPAによる分析 システムにおけるミスユース対象範囲の明確化 Step0 Step1 Step2 アクシデント ハザード 安全制約の定義 コントロールストラクチャの構築とコントロール仕様の定義 ミスユースに関連する非安全シナリオの抽出 非安全シナリオに対するハザード要因の抽出 22


")
23 STAMP/STPA による分析 前提条件 自動運転レベル 3 一般的な乗用車 オーバーライドによる権限委譲可能 TOR(Take Over Request) で権限委譲依頼を受け運転者が応答 23
24 アクシデント ハザード 安全制約の識別 (STEP0-1) 想定するアクシデントの一例 STAMP/STPA による分析 自動運転中 自動運転が解除され手動運転に切り替わる 車両が制御を失い人や車に接触する 手動運転に切り替わったことをドライバが気づいていなければ 24
25 STAMP/STPA による分析 アクシデント ハザード 安全制約の識別 (STEP0-1) アクシデントハザード安全制約 自動運転車両が 人 車と衝突する 運転者の意図なしに自動運転モードが切り替 わる ( 第三者の悪意による切り替えを含む ) 運転者が意図しない状況では自動運転モードを 切り替えない 車両の正しい自動運転モードが正しいタイミングで運転者に伝わらず 運転者が車両状態と異なる運転操作を行う ( または 必要な運転操作を行わない ) システムが自動運転解除を必要とする時に 運転者が自動運転解除を認識しない ( 悪意を含む ) 運転者が十分追従できるタイミングで意図する自動運転モードに切り替える もしくは運転者の意図 ( 操作 ) と車両状態の不一致がある場合は運転者に気づかせる自動運転解除要求を運転者に確実に認知させる 自動運転システムが正常に作動している時は事故に至らない 不具合や性能限界に起因するアクシデントは分析の対象外 安全性に関わらない事象は対象外 25
26 STAMP/STPA による分析 コントロールストラクチャの構築 (STEP0-2) ミスユースが発生すると想定するシステムステアリング ( 操舵系 ) を含むシステムで検討を行う 自動運転車両 音 光 振動 ( 伝達装置 ) ドライバ 状態を告知する 切り替えを指示する ボタン 声 ジェスチャー ( 操作装置 ) 26
27 STAMP/STPA による分析 コントロールストラクチャの構築 (STEP0-2) 運転者 自動運転切替制御モデル 操作 : 自動運転開始 自動運転解除 通知 (A): 自動運転開始 OK/NG 自動運転解除 OK/NG 通知 (B): 自動運転解除要求 自動運転判定機能 運転者認知モデル 情報伝達手段は限定せず 視覚 聴覚 触覚による情報伝達全般を対象 網羅的な検証とするため 詳細な仕様策定はしない 27
: 自動運転解除要求 自動運転判定機能 運転者認知モデル 情報伝達手段は限定せず 視覚 聴覚 触覚による情報伝達全般を対象 網羅的な検証とするため 詳細な仕様策定はしない")
28 STAMP/STPA による分析 コントロールストラクチャの構築 (STEP0-2) 運転者 自動運転切替制御モデル コントロールアクション 操作 : 自動運転開始 自動運転解除 フィードバック 通知 (A): 自動運転開始 OK/NG 自動運転解除 OK/NG 通知 (B): 自動運転解除要求 自動運転判定機能 運転者認知モデル 情報伝達手段は限定せず 視覚 聴覚 触覚による情報伝達全般を対象 網羅的な検証とするため 詳細な仕様策定はしない 28
29 STAMP/STPA による分析 コントロールストラクチャの構築 (STEP0-2) 運転者 フィードバックは無し 操作 : 自動運転開始 自動運転解除 自動運転切替制御モデル 通知 (A): 自動運転開始 OK/NG 自動運転解除 OK/NG コントロールアクション 通知 (B): 自動運転解除要求 自動運転判定機能 運転者認知モデル 情報伝達手段は限定せず 視覚 聴覚 触覚による情報伝達全般を対象 網羅的な検証とするため 詳細な仕様策定はしない 29

30 STAMP/STPA による分析 コントロールストラクチャの構築 (STEP0-2) 運転者 自動運転切替制御モデル 操作 : 自動運転開始 自動運転解除 通知 (A): 自動運転開始 OK/NG 自動運転解除 OK/NG 通知 (B): 自動運転解除要求 コントロールアクションに対する状態変数 車両走行モード自動運転判定機能 周囲環境に起因する運転切替判定 運転者認知モデル 自動運転中 / 手動運転中 運転モード切替許可 / 禁止 情報伝達手段は限定せず 視覚 聴覚 触覚による情報伝達全般を対象 網羅的な検証とするため 詳細な仕様策定はしない 30
31 STAMP/STPA による分析 ミスユースに関連する非安全シナリオの抽出 (STEP1) ガイドワード コンポーネント間 Action 運転手自動運転開始コントロール 自動運転判定機能 アクション conext 自動運転中 / 状態自動運転解除許可 変数 自動運転中 / 自動運転解除不許可手動運転中 / 自動運転開始許可 手動運転中 / 自動運転開始不許可 Not providing causes hazard 運転手 does not provide 自動運転開始 when 手動運転モード中でモード切替許可 運転手 provides 自動運転解除 when 自動運転モード中でモード切替許可 < 供給意図あり > 悪意の場合 SC2 違反 < 供給意図なし > SC1 違反 < 供給意図あり> < 供給意図あり> 運転手 が切り替わっていない事を認識していない場悪意の場合 SC5 違反合 SC6 違反 < 供給意図なし> SC4 違反 運転手 does not provide 自動運転開始 when 手動運転モード中でモード切替不許可 < 供給意図あり> 運転手 が切り替わっていない事を認識していない場合 SC6 違反 Providing causes hazard ガイドワード 非安全シナリオ UCA(Unsafe Control Action) 運転手 provides 自動運転開始 when 手動運 運転手 provides 自動運転開始 more than TBD 転モード中でモード切替許可 seconds after 意図したタイミング when 手動運転モード中でモード切替許可 運転者の操作意図の有無についても考慮する Incorrect Timing / order (Early,Late,Out) TBD seconds 間誰も運転していない可能性がある SC6 違反 Stopped too soon / Applied too long 運転手 stops 自動運転開始 before XX when 手動運転モード中でモード切替許可 通知が確定する前に stop すると供給できていないことになる SC6 違反 自動運転判定機能 運転手及び同乗者 自動運転開始 OK 自動運転中 / 自動運転解除許可自動運転中 / 自動運転解除不許可手動運転中 / 自動運転開始許可 自動運転判定機能 does not provide 自動運転開始 OK when 手動運転モード中でモード切替許可中 SC3 違反 ( 人は手動と認識 システムは自動の点では SC3 の状況に近い ) 自動運転判定機能 provide 自動運転開始 OK when 手動運転モード中でモード切替許可中 運転手 が自動運転開始を意図的に供給した場合 safe 運転手 の意図に反している場合 SC4 違反 ( 人は手動と認識 システムは自動の状況 ) 自動運転判定機能 provide 自動運転開始 OK before 自動運転開始 OK 判定 when 手動運転モード中でモード切替許可中 SC6 違反 ( 人は自動と認識 システムは手動の点では SC6 の状況に近い ) 自動運転判定機能 provide 自動運転開始 OK more than Xsec after 手動運転モード中でモード切替許可中 SC4 違反 ( 人は手動と認識 システムは自動の状況 ) 自動運転判定機能 stop too soon 自動運転開始 OK when 手動運転モード中でモード切替許可中 供給が Stop するので自動運転開始 OK を認識できない SC3 違反 ( 人は手動と認識 システムは自動の点では SC3 の状況に近い ) 自動運転開始 NG 手動運転中 / 自動運転開始不許可自動運転中 / 自動運転解除許可自動運転中 / 自動運転解除不許可手動運転中 / 自動運転開始許可 手動運転中 / 自動運転開始不許可 自動運転判定機能 does not provide 自動運転開始 NG when 手動運転モード中でモード切替不許可中 人は自動運転開始 NG である事を認識しない (SC6 違反 ) 自動運転判定機能 provide 自動運転開始 OK when 手動運転モード中でモード切替不許可中 人が手動モードにもかかわらず 自動運転モードと思ってしまう (SC* 違反 ) モード判定条件を故意に操作 (SC* 違反 ) 自動運転判定機能 stop too soon 自動運転開始 NG before 運転手が認識する 運転手が自動運転開始 NG を認識できない (SC6 違反 ) 31
32 STAMP/STPA による分析 ミスユースに関連する非安全シナリオの抽出 (STEP1) コンポーネント間 Action context Not providing causes hazard Providing causes hazard ガイドワード Incorrect Timing / order (Early,Late,Out) Stopped too soon / Applied too long 運転者 自動運転判定機能 自動運転解除を通知 (= 手動運転開始を通知 ) 自動運転中 / 自動運転解除許可 運転者が does not provide 自動運転解除 when 自動運転モード中でモード切替許可 Safe 運転者の意図が無い場合 安全制約違反運転者が意図している場合切り替わっていないことを認識していない 運転者が provides 自動運転解除通知を when 自動運転モード中でモード切替許可 安全制約違反運転者の意図が無い場合 Safe 運転者が意図している場合 N/A 運転者が provides 自動運転解除通知を before 自動運転切替 Safe N/A 運転者が stopped too soon 自動運転解除通知を before 自動運転中で切替許可判定条件に入る Safe 安全制約 運転者が意図しない状況では自動運転モードを切り替えない 運転者が十分追従できるタイミングで意図する自動運転モードに切り替える もしくは運転者の意図 ( 操作 ) と車両状態の不一致がある場合は運転者に気付かせる 32
33 STAMP/STPA による分析 非安全シナリオに対するハザード要因の抽出 (STEP2) 引用元 : はじめての STAMP/STPA~ システム思考に基づく新しい安全解析手法 ~ 33
34 非安全シナリオに対するハザード要因の抽出 (STEP2) 同乗者等による操作 外乱 7 不正な操作 制御ループ外の障害 STAMP/STPA による分析 1 不適切な操作 不正確な入力 操作の遅れ 障害 < 操作 > 自動運転開始 自動運転解除 2 運転者の落ち度 操作の衝突 認知 操作アルゴリズム 周辺認知 意図 運転者 自動運転切替制御モデル 外乱 3 外部情報の誤りや喪失 制御ループ外の障害 障害 物による表示の遮蔽 外乱 伝達表示が西日等で掻き消される 6 表示の衝突制御ループ外の障害 操作装置 伝達装置 自動運転判定機能 < 通知 > 自動運転切替 OK/NG 自動運転解除 OK/NG 自動運転解除要求 5 不正確な入力 入力の欠如 表示の遅れ 車両状況 ( 走行モード 周囲環境 ) 8 外部情報の誤りや喪失 制御ループ外の障害 判定 制御アルゴリズム 運転者認知モデル 自動運転制御機能 4 不適切なフィードバック あるいはフィードバックの遅れ 喪失 不適切な機能コンポーネント インタフェース 外部要素 34
35 STAMP/STPA による分析 非安全シナリオに対するハザード要因の抽出 (STEP2) 非安全シナリオ 非安全なコントロールアクション ガイドワード 不整合 不完全 または不正確コンポーネントの不具合 経年なプロセスモデル 不適切な操による変化作 不適切なフィードバック あるいはフィードバックの喪失 フィードバックの遅れ 不正確な情報の供給 または情報の欠如 測定の不正確性 フィードバックの遅れ 操作の遅れ 不適切または無効なコントロールアクション コントロールアクションの喪失 コントロールアクションの衝突 未確認 または範囲外の障害プロセス入力の喪失または誤り 運転手 provides 自動運転開始 when 手動運転モード中でモード切替許可 < 供給意図あり > 悪意の場合 SC5 違反 < 供給意図なし > SC4 違反 N/A ハザード要因 HCF(Hazard Causal Factor) 自動運転開始操作端だと気付 居眠り運転中 意図せず操作かず操作してしまう端に触れてしまう 手動運転操作中 意図せず操作端に触れてしまう サイバー攻撃 運転手が悪意を持って操作端 N/A N/A N/A N/A N/A 同乗者が悪意を持って不許可 に触れる 許可にする (ex. センサ カメラを操作 ) 同乗者が悪意を持って操作端に触れる N/A N/A N/A N/A N/A 同乗者が意図せず操作端に 触れる (ex. 寝ている ) 自動運転判定機能 provide 自動運転開始 OK when 手動運転モード中でモード切替不許可中 人が手動モードにもかかわらず 自動運転モードと思ってしまう (SC* 違反 ) N/A 運転不切替許可の期間で 運転手が 別の伝達物 (e.g. 表示物 ) を OK 判定と誤認識してしまう N/A 自動運転判定機能(HMI 表示 N/A 側 ) が故障し 運転切替不許可の期間で OK 表示してしまう 運転不切替許可の期間で 自動運転判定機能の制御が不適切なため OK 指令を出してしまう N/A インパネなどの伝達経路に意図的に細工を施す 論理反転改造など モード判定条件を故意に操作 (SC* 違反 ) 自動運転判定機能 stop too soon 自動運転開始 NG before 運転手が認識する 運転手が自動運転開始 NG を認識できない (SC6 違反 ) N/A 運転切替不許可の期間で NG 表示後すぐに運転手が非覚醒状態になり NG 表示に気づかない ( 供給されない ) N/A 自動運転判定機能(HMI 表示 N/A 側 ) が故障しNG 判定後 既定の時間より早くNG 表示をOFFしてしまう 運転不切替許可の期間で 自動運転判定機能が誤認識し 自動運転判定機能の制御が N/A 不適切なため NG 判定後 既定の時間より早くNG 指令をOFF してしまう NG 表示後すぐに障害物などにより 目視確認できなくなる ( 悪意アリ / ナシ ) インパネなどの伝達経路に意図的に細工を施す ハザード要因 : 合計 63 個抽出 63 個を整理して グループ分けを実施 35
36 STAMP/STPA による分析 非安全シナリオに対するハザード要因の抽出 (STEP2) 非安全シナリオ 1 不適切な操作 不正確な入力 操作の遅れ 障害 2 運転者の落ち度 操作の衝突 3 外部情報の誤りや喪失 制御ループ外の障害 4 不適切なフィードバック あるいはフィードバックの遅れ 喪失 不適切な機能 5 不正確な入力 入力の欠如 表示の遅れ 6 表示の衝突 制御ループ外の障害 7 不正な操作 制御ループ外の障害 8 外部情報の誤りや喪失 制御ループ外の障害 運転者が provides 自動運転解除通知を when 自動運転モード中でモード切替許可 安全制約違反運転者の意図が無い場合 他の操作をしようとして 誤って自動運転解除通知操作をする その操作が自動運転解除操作と知らずに操作する 突然の病気等で倒れた拍子に自動運転解除通知操作をしてしまう 同乗者等により 運転者が知らないうちに自動運転解除通知が操作される 36
37 STAMP/STPA による分析 ハザード要因と安全要件の抽出 ハザード要因 運転者に意図が無くモード切替操作が実施され モードが切替ったことを運転者が認識していない 運転者が自動運転車の知識が無く モード切替操作と知らずにモード切替操作が実施されてしまう 運転者が意図を持ってモード切替操作を実施したが モードが切り替わらないことを運転者が認識していない 4 運転者に表示の内容が伝わらない 運転者が運転モードを認識していない 5 運転者に伝達音の内容が伝わらない 6 運転者が表示の内容を誤認識してしまう 7 不適切な表示により 運転者が運転の誤操作をしてしまう ( 手動運転中 ) 8 自動運転切替動作に対する運転者の対応遅れ 9 環境認識機能 ( 外部センサ ドライバモニタ等 ) の誤認識により 実際の環境状況と判定結果が不一致 運転者が運転モードを認識している 機器の故障も抽出したが スコープ外として除外した 37
38 STAMP/STPA による分析 ハザード要因と安全要件の抽出 ハザード要因 運転者に意図が無くモード切替操作が実施され モードが切替ったことを運転者が認識していない 運転者が自動運転車の知識が無く モード切替操作と知らずにモード切替操作が実施されてしまう 運転者が意図を持ってモード切替操作を実施したが モードが切り替わらないことを運転者が認識していない 安全要件 運転者が認識していない状態ではモード切替操作が行われても モード切替をしない 運転者は自動運転車の機能について熟知していること 運転者の意図に対し適切な操作を促す操作端であること 4 運転者に表示の内容が伝わらない システム意図を確実に運転者に伝えること 5 運転者に伝達音の内容が伝わらない システム意図を確実に運転者に伝えること 6 運転者が表示の内容を誤認識してしまう 運転者に誤認識させない表示であること 7 不適切な表示により 運転者が運転の誤操作をしてしまう ( 手動運転中 ) 運転者を驚かせない表示を供給すること 8 自動運転切替動作に対する運転者の対応遅れ 運転者へ運転権限を委譲するまでの時間と切替制御が適切であること 9 環境認識機能 ( 外部センサ ドライバモニタ等 ) の誤認識により 実際の環境状況と判定結果が不一致 実際の環境状況と判定結果に不一致無いこと ハザード要因を制御 除去し安全となるために必要な条件 38
39 STAMP/STPA による分析 ハザード要因と安全要件の抽出 ハザード要因 安全要件 運転者に意図が無くモード切替操作が実施され モードが切替ったことを運転者が認識していない 運転者が自動運転車の知識が無く モード切替操作と知らずにモード切替操作が実施されてしまう 運転者が意図を持ってモード切替操作を実施したが モードが切り替わらないことを運転者が認識していない 運転者が認識していない状態ではモード切替操作が行われても モード切替をしない 運転者は自動運転車の機能について熟知していること 運転者の意図に対し適切な操作を促す操作端であること 4 運転者に表示の内容が伝わらない システム意図を確実に運転者に伝えること 5 運転者に伝達音の内容が伝わらない システム意図を確実に運転者に伝えること 6 運転者が表示の内容を誤認識してしまう 運転者に誤認識させない表示であること 7 不適切な表示により 運転者が運転の誤操作をしてしまう ( 手動運転中 ) 運転者を驚かせない表示を供給すること 8 自動運転切替動作に対する運転者の対応遅れ 運転者へ運転権限を委譲するまでの時間と切替制御が適切であること 9 安全要件 運転者が認識していない状態ではモード切替操作が行われても モード切替をしない 安全要件を実現するための具体的な課題を抽出 課題 1 不意な操作では作動しないHMIの配置 2 不意な操作で作動しない手法確立 3 認識してない状態をどう認識するか 4セキュリティ ( ハッキング対策 ) 5 耐環境性の保証 6 同乗者による操作をどう認識するか 7 意図しないモード切り替えの禁止 環境認識機能 ( 外部センサ ドライバモニタ等 ) の誤認識により 実際 ( オーバーライド仕様 ) の環境状況と判定結果が不一致 実際の環境状況と判定結果に不一致無いこと ハザード要因を制御 除去し安全となるために必要な条件 39
40 課題の抽出と整理 STAMP/STPA による分析 ハザード要因 1 運転者に意図が無くモード切替操作が実施され モードが切替ったことを運転者が認識していない 無意識 ( 非覚醒 睡眠 他事中 余所見 意図しないオーバーライド ) 病気等で倒れた時に誤って操作 同乗者による操作 ( モード切替操作を知っている 知っていないに関わらない 悪意による操作 ) 同乗者がモード切替と知っていて 運転者が見てないときに操作実施 外部の音 衝撃に注意が向いたときに 誤って操作 車室内の物が飛来してきて 操作実施 外部からのハッキングにより 操作実施 落雷などのノイズにより 操作実施 安全要件 運転者が認識していない状態ではモード切替操作が行われても モード切替をしない 課題 1 不意な操作では作動しない HMI の配置 2 不意な操作で作動しない手法確立 3 認識してない状態をどう認識するか 4 セキュリティ ( ハッキング対策 ) 5 耐環境性の保証 6 同乗者による操作をどう認識するか 7 意図しないモード切り替えの禁止 ( オーバーライド仕様 ) 2 運転者が自動運転車の知識が無く モード切替操作と知らずにモード切替操作が実施されてしまう モード切替操作であると知らなかった ( モード切替操作をそもそも知らない ) モード切替操作だと気づかなかった ( モード切替操作があることは知っている ) 3 運転者が意図を持ってモード切替操作を実施したが モードが切り替わらないことを運転者が認識していない 運転者の操作間違いにより モード切替が伝達されない( 例 : ボタン押しきれてない レバーが逆 ) 運転者が操作方法を間違えて覚えており モード切替が伝達されない 運転者が複数同時操作の一部を欠如してしまい モード切替が伝達されない 運転者が複数連続操作の一部を欠如または順序を間違えてしまい モード切替が伝達されない 同時に複数操作をして 信号が衝突して モード切替が伝達されない( 例 : 開始と解除の同時供給 ) 障害により操作端の操作が出来ず モード切替が伝達されない課題総数 第 3 者及び未知の要因により 操作端を操作通知ができないようにしている ( 例 : メカ的 電気的破壊 ) 信号伝達経路の信号線を物理的に断線させる モード切替の条件成立前に 操作をやめてしまった 運転者は自動運転車の機能について熟知していること 運転者の意図に対し適切な操作を促す操作端であること ハザード要因 : 大分類 9 種類小分類 63 個 :39 個 1 操作端の統一の要否 2 運転者への教育の要否 1 操作のし易さ ( 配置 確実性 ) 2ソフトウェア要件への適合性確認 3 運転者への教育の要否 4 障害物の検知の要否 5 操作端の故障検知 6 運転者のシステム依存度の把握 40
41 STAMP/STPA による分析 操舵系に関するミスユース課題の選別 本事業 自動走行ビジネス検討会経産省 国交省が設置している 自動走行において競争力を確保し世界の交通事故の削減等に貢献するために必要な取組みを 産官学で検討を行う検討会 戦略的イノベーション創造プログラム (SIP) 科学技術イノベーションを実現するために創設され 府省 分野を超えた横断型のプログラム SIP:Cross-ministerial Strategic Innovation Promotion Program SIP の自動運転関係ヒューマンファクター事業でも同様の研究を行っているため 課題の棲み分けを実施 41
42 STAMP/STPAによる分析 操舵系に関するミスユース課題の抽出 課題A 運転者が意図しない自動運転モード解除の回避 オーバーライドにおける課題 操舵入力 オーバーライド 機械の動作を人間が意思を持って打ち消すこと 意思を持たなくてもオーバーライドと誤判定され 自動運転が勝手に解除され アクシデントへ至ることを懸念 課題B システムが運転者へ運転権限を委譲する際の適切な操舵トルク切替制御 自動から手動への切替え時の課題 権限委譲時の操舵トルク制御の 不適切な遷移仕様により 運転者の 不安定な操舵を招き アクシデントに 至ることを懸念 42
43 発表内容 1. 背景および目的 2. ミスユース安全設計 3.STAMP/STPAによる分析 4. 課題に対する取組み 5. まとめ 43
44 課題に対する取組み 提案するミスユース安全設計検討プロセス STAMP/STPA で安全解析を実施 安全解析 検証課題決定 課題に対して検証実施 課題検証シナリオ設定 課題検証シナリオ評価 課題検証工程 対策要否判断 要対策 対策内容検討対策シナリオ設定対策シナリオ評価 対策工程 有 残検証課題有無 無 終了 44



45 課題に対する取組み 抽出した操舵系に関するミスユース課題 課題A 運転者が意図しない自動運転モード解除の回避 オーバーライドにおける課題 操舵入力 オーバーライド 機械の動作を人間が意思を持って打ち消すこと 意思を持たなくてもオーバーライドと誤判定され 自動運転が勝手に解除され アクシデントへ至ることを懸念 オーバーライドで自動運転解除する機能あり 課題B システムが運転者へ運転権限を委譲する際の適切な操舵トルク切替制御 自動から手動への切替え時の課題 権限委譲時の操舵トルク制御の 不適切な遷移仕様により 運転者の 不安定な操舵を招き アクシデントに 至ることを懸念 45

46 課題に対する取組み 抽出した操舵系に関するミスユース課題 < 提案する検証プロセス > < 抽出した検証課題 > 運転者が意図しない自動運転モード解除の回避 ( 課題 A) システムが運転者へ運転権限を委譲する際の適切な操舵トルク切替制御 ( 課題 B) 運転モード切替を誤操作しない HMI システムのデザイン 運転モード切替時の運転者の状態認識方法 周辺環境により誤動作しない運転モード切替システム構築 運転者の無知による運転モード状態の誤解の回避 etc < 課題検証の設定項目 > 課題 A 意図しない自動運転モード解除要因 音 衝撃に驚き操舵入力 後部座席の物を取ろうとして操舵入力 急病で倒れてハンドルを保舵 etc 操舵入力方法 ハンドルの下端から上方向に手で操舵 ハンドルの上端から下方向に手で操舵 ハンドル下端に膝が当たって操舵 etc 走行シチュエーション 高速 R380@100km/h で走行中 一般道低速で交差点右折 (or 左折 ) 急カーブ直前の直線走行中 etc 具体例 ( 印 ) を用いてプロセスの手順を説明 46



47 課題に対する取組み 課題 A: 実験条件 具体例として 音や衝撃に驚いて 操舵する という意図しないオーバーライドを抽出 良否判定条件 逸脱しない : 安全 逸脱する : 非安全 操舵系においては車両の横移動に着目し 車線逸脱するかどうかを判定基準とした 走行状態 R 任意のタイミングにて操舵入力を行う ドライバー状態 ドライバー姿勢 操舵方法 定常円旋回 R380m 100km/h ワーストケースとして 高速走行中に意図しないオーバーライドが発生することを想定した 両手は膝の上前を向く ハンドルに下から手を当てて瞬間的な操舵トルクを掛けるその後ハンドルに触れない 網羅的または最悪条件を検討すべきだが複数の候補から具体例一つ抽出し プロセスの手順を説明した 47
48 課題に対する取組み 課題 A: 実験結果 オーバーライド判定条件 ハンドル操舵力 25N 以上 継続時間 0.1s ACSF のオーバーライド判定条件 (50N 以下 ) から判定条件を検討 ACSF:Automatically commanded Steering Function 実験結果 ( 逸脱しない : 安全 ) 実験結果 ( 逸脱する : 非安全 ) 0.1s 25N 25N 25N を超えるが 継続時間が 0.1s 未満であるので オーバーライド判定せずに車線逸脱しなかった 25N 以上が 0.1s 継続したため オーバーライド判定され車線逸脱した 48
49 発表内容 1. 背景および目的 2. 操舵系に関するミスユース安全設計 3.STAMP/STPAによる分析 4. 課題に対する取組み 5. まとめ 49
50 STAMP/STPA による分析作業 まとめ ガイドワードを参考とし 網羅的に抽出可能な手法であるが 各ステップでの抽出項目には個人の技量の差が包含される 検討を進める途中で 新しい検討項目が抽出された 新しい検討項目の一例 ハザード要因 8 自動運転切替動作に対する運転者の対応遅れ 同乗者による切替操作が不意であり 運転者がその切り替わりに対応できない 意図しない切替操作に対し 運転者がその切り替わりに対応できない 安全要件 運転者へ運転権限を委譲するまでの時間と切替制御が適切であること 課題 1 運転権限委譲までの時間仕様 2 運転切り替え開始から完了までの制御仕様 対象を限定しない状態でのミスユース課題抽出には有効な手段であると考える 抜け漏れなく実施するには 繰返し検討を実施し技量を高める必要がある 新たな気付きを抽出するには 高い技量が必要となる 50
51 ご清聴ありがとうございました 51
STAMP/STPA を用いた 自動運転システムのリスク分析 - 高速道路での合流 - 堀雅年 * 伊藤信行 梶克彦 * 内藤克浩 * 水野忠則 * 中條直也 * * 愛知工業大学 三菱電機エンジニアリング 1
 STAMP/STPA を用いた 自動運転システムのリスク分析 - 高速道路での合流 - 堀雅年 * 伊藤信行 梶克彦 * 内藤克浩 * 水野忠則 * 中條直也 * * 愛知工業大学 三菱電機エンジニアリング 1 はじめに 近年 先進運転支援システムが発展 オートクルーズコントロール レーンキープアシスト 2020 年を目処にレベル3 自動運転車の市場化が期待 運転システムが複雑化 出典 : 官民 ITS
STAMP/STPA を用いた 自動運転システムのリスク分析 - 高速道路での合流 - 堀雅年 * 伊藤信行 梶克彦 * 内藤克浩 * 水野忠則 * 中條直也 * * 愛知工業大学 三菱電機エンジニアリング 1 はじめに 近年 先進運転支援システムが発展 オートクルーズコントロール レーンキープアシスト 2020 年を目処にレベル3 自動運転車の市場化が期待 運転システムが複雑化 出典 : 官民 ITS
目次 1. 目的 2. STPA の手順 3. エアバッグの要求仕様 4. Step 0 準備 1:Accident Hazard 安全制約の識別 5. Step 0 準備 2:Control Structure の構築 6. Step 1:UCA(Unsafe Control Action) の抽
 の抽") STAMP/STPA 演習 ~ エアバッグの安全性分析 ~ 2017 年 9 月 22 日独立行政法人情報処理推進機構 (IPA) 技術本部ソフトウェア高信頼化センター (SEC) 石井正悟 目次 1. 目的 2. STPA の手順 3. エアバッグの要求仕様 4. Step 0 準備 1:Accident Hazard 安全制約の識別 5. Step 0 準備 2:Control Structure
STAMP/STPA 演習 ~ エアバッグの安全性分析 ~ 2017 年 9 月 22 日独立行政法人情報処理推進機構 (IPA) 技術本部ソフトウェア高信頼化センター (SEC) 石井正悟 目次 1. 目的 2. STPA の手順 3. エアバッグの要求仕様 4. Step 0 準備 1:Accident Hazard 安全制約の識別 5. Step 0 準備 2:Control Structure
 コントローラー プロセスモデル コントロールアクション フィードバックデータ 被コントロールプロセス コンポーネント A コマンド 3 コマンド 1 データ 1 コンポーネント B コマンド 2 データ 2 コンポーネント C コマンド 1 の通信遅れ Controller: コンポーネント A コマンド 1 の送信条件の誤り データ 1 の解釈誤り プロセスモデルの不整合 コンポーネント C は
コントローラー プロセスモデル コントロールアクション フィードバックデータ 被コントロールプロセス コンポーネント A コマンド 3 コマンド 1 データ 1 コンポーネント B コマンド 2 データ 2 コンポーネント C コマンド 1 の通信遅れ Controller: コンポーネント A コマンド 1 の送信条件の誤り データ 1 の解釈誤り プロセスモデルの不整合 コンポーネント C は
本章では 衝突被害軽減ブレーキ 車線逸脱警報 装置 等の自動車に備えられている運転支援装置の特性 Ⅻ. 運転支援装置を 備えるトラックの 適切な運転方法 と使い方を理解した運転の重要性について整理しています 指導においては 装置を過信し 事故に至るケースがあることを理解させましょう また 運転支援装
 本章では 衝突被害軽減ブレーキ 車線逸脱警報 装置 等の自動車に備えられている運転支援装置の特性 Ⅻ. 運転支援装置を 備えるトラックの 適切な運転方法 と使い方を理解した運転の重要性について整理しています 指導においては 装置を過信し 事故に至るケースがあることを理解させましょう また 運転支援装置の限界を心得て正しく使用するために 支援装置の限界とメーカーによる作動等の違いを明確にさせ 支援装置に頼り過ぎた運転にならないように指導しましょう
本章では 衝突被害軽減ブレーキ 車線逸脱警報 装置 等の自動車に備えられている運転支援装置の特性 Ⅻ. 運転支援装置を 備えるトラックの 適切な運転方法 と使い方を理解した運転の重要性について整理しています 指導においては 装置を過信し 事故に至るケースがあることを理解させましょう また 運転支援装置の限界を心得て正しく使用するために 支援装置の限界とメーカーによる作動等の違いを明確にさせ 支援装置に頼り過ぎた運転にならないように指導しましょう
IoT を含む医療機器システムのセキュリティ / セーフティ評価手法の提案と適用 東京電機大学早川拓郎金子朋子佐々木良一 Information Security Lab. 1
 IoT を含む医療機器システムのセキュリティ / セーフティ評価手法の提案と適用 東京電機大学早川拓郎金子朋子佐々木良一 Information Security Lab. 1 目次 IoTの現状 ツリー分析とSTPAの課題 提案手法 試適用 今後の展望 Information Security Lab. 2 IoT( モノのインターネット ) の普及 IoT の普及により様々な モノ がインターネットと接続
IoT を含む医療機器システムのセキュリティ / セーフティ評価手法の提案と適用 東京電機大学早川拓郎金子朋子佐々木良一 Information Security Lab. 1 目次 IoTの現状 ツリー分析とSTPAの課題 提案手法 試適用 今後の展望 Information Security Lab. 2 IoT( モノのインターネット ) の普及 IoT の普及により様々な モノ がインターネットと接続
平成 28 年度第 2 回車両安全対策検討会平成 28 年 12 月 9 日 安全 - 資料 9 自動運転に係る国際基準の検討状況
 平成 28 年度第 2 回車両安全対策検討会平成 28 年 12 月 9 日 安全 - 資料 9 自動運転に係る国際基準の検討状況 自動運転の導入を巡る国際的動向 国連欧州経済委員会 (UN-ECE) の政府間会合 (WP29) において自動車の安全 環境基準に関する国際調和活動を実施しているところ 平成 26 年 11 月に開催された WP29 において 自動運転について議論する 自動運転分科会
平成 28 年度第 2 回車両安全対策検討会平成 28 年 12 月 9 日 安全 - 資料 9 自動運転に係る国際基準の検討状況 自動運転の導入を巡る国際的動向 国連欧州経済委員会 (UN-ECE) の政府間会合 (WP29) において自動車の安全 環境基準に関する国際調和活動を実施しているところ 平成 26 年 11 月に開催された WP29 において 自動運転について議論する 自動運転分科会
国土技術政策総合研究所 研究資料
 第 7 章 検査基準 7-1 検査の目的 検査の目的は 対向車両情報表示サービス 前方停止車両 低速車両情報表示サービスおよび その組み合わせサービスに必要な機能の品質を確認することである 解説 設備の設置後 機能や性能の総合的な調整を経て 検査基準に従い各設備検査を実施する 各設備検査の合格後 各設備間を接続した完成検査で機能 性能等のサービス仕様を満たしていることを確認する検査を実施し 合否を判定する
第 7 章 検査基準 7-1 検査の目的 検査の目的は 対向車両情報表示サービス 前方停止車両 低速車両情報表示サービスおよび その組み合わせサービスに必要な機能の品質を確認することである 解説 設備の設置後 機能や性能の総合的な調整を経て 検査基準に従い各設備検査を実施する 各設備検査の合格後 各設備間を接続した完成検査で機能 性能等のサービス仕様を満たしていることを確認する検査を実施し 合否を判定する
社員証型センサを いた 健康増進システムへの STAMP/STPA の適 検討 林良輔 * 伊藤信 梶克彦 内藤克浩 水野忠則 中條直也 * 愛知工業大学大学院 三菱電機エンジニアリング 愛知工業大学 1
 社員証型センサを いた 健康増進システムへの STAMP/STPA の適 検討 林良輔 * 伊藤信 梶克彦 内藤克浩 水野忠則 中條直也 * 愛知工業大学大学院 三菱電機エンジニアリング 愛知工業大学 1 次 研究背景 健康増進システム 社員証型センサを いた運動量測定 オフィスでの歩 軌跡推定に基づく運動量推定 エルゴ x ウェアラブル 拍計を使った運動実験 システムの高信頼化 研究課題 研究 的
社員証型センサを いた 健康増進システムへの STAMP/STPA の適 検討 林良輔 * 伊藤信 梶克彦 内藤克浩 水野忠則 中條直也 * 愛知工業大学大学院 三菱電機エンジニアリング 愛知工業大学 1 次 研究背景 健康増進システム 社員証型センサを いた運動量測定 オフィスでの歩 軌跡推定に基づく運動量推定 エルゴ x ウェアラブル 拍計を使った運動実験 システムの高信頼化 研究課題 研究 的
ET ロボコンにおける STAMP/STPA の試 およびウエブベース STPA ツールの設計と開発 阿部惇朗 古川優也 松野裕 本 学岡本圭史仙台 専 2016 阿部惇朗 古川優也 松野裕 岡本圭史
 ET ロボコンにおける STAMP/STPA の試 およびウエブベース STPA ツールの設計と開発 阿部惇朗 古川優也 松野裕 本 学岡本圭史仙台 専 内容 研究背景 : 複雑化するシステムのリスク分析 ET ロボコンにおける STAMP/STPA の試 他のリスク分析 法との 較 試 をもとにした STAMP/STPA ツールの設計 ウエブベースツールの開発およびデモ 研究背景 : 複雑化するシステムのリスク分析
ET ロボコンにおける STAMP/STPA の試 およびウエブベース STPA ツールの設計と開発 阿部惇朗 古川優也 松野裕 本 学岡本圭史仙台 専 内容 研究背景 : 複雑化するシステムのリスク分析 ET ロボコンにおける STAMP/STPA の試 他のリスク分析 法との 較 試 をもとにした STAMP/STPA ツールの設計 ウエブベースツールの開発およびデモ 研究背景 : 複雑化するシステムのリスク分析
目次 1: 安全性とソフトウェア 2: 宇宙機ソフトウェアにおける 安全 とは 3:CBCS 安全要求とは 4: 宇宙機ソフトウェアの実装例 5: 安全設計から得た新たな知見 6: 今後 2
 宇宙機ソフトウェアにおける 安全要求と設計事例 宇宙航空研究開発機構 (JAXA) 情報 計算工学センター (JEDI) 梅田浩貴 (Hiroki Umeda) 目次 1: 安全性とソフトウェア 2: 宇宙機ソフトウェアにおける 安全 とは 3:CBCS 安全要求とは 4: 宇宙機ソフトウェアの実装例 5: 安全設計から得た新たな知見 6: 今後 2 1.1 安全性とは 安全性と信頼性の違いの例開かない踏切りは
宇宙機ソフトウェアにおける 安全要求と設計事例 宇宙航空研究開発機構 (JAXA) 情報 計算工学センター (JEDI) 梅田浩貴 (Hiroki Umeda) 目次 1: 安全性とソフトウェア 2: 宇宙機ソフトウェアにおける 安全 とは 3:CBCS 安全要求とは 4: 宇宙機ソフトウェアの実装例 5: 安全設計から得た新たな知見 6: 今後 2 1.1 安全性とは 安全性と信頼性の違いの例開かない踏切りは
1 趣旨このガイドラインは 日本国内の公道 ( 道路交通法 ( 昭和 35 年法律第 105 号 ) 第 2 条第 1 項第 1 号に規定する 道路 をいう 以下同じ ) において 自動走行システム ( 加速 操舵 制動のうち複数の操作を一度に行い 又はその全てを行うシステムをいう 以下同じ ) を
 第 2 条第 1 項第 1 号に規定する 道路 をいう 以下同じ ) において 自動走行システム ( 加速 操舵 制動のうち複数の操作を一度に行い 又はその全てを行うシステムをいう 以下同じ ) を") 自動走行システムに関する公道実証実験のためのガイドライン 平成 28 年 5 月 警察庁 1 趣旨このガイドラインは 日本国内の公道 ( 道路交通法 ( 昭和 35 年法律第 105 号 ) 第 2 条第 1 項第 1 号に規定する 道路 をいう 以下同じ ) において 自動走行システム ( 加速 操舵 制動のうち複数の操作を一度に行い 又はその全てを行うシステムをいう 以下同じ ) を用いて自動車を走行させる実証実験
自動走行システムに関する公道実証実験のためのガイドライン 平成 28 年 5 月 警察庁 1 趣旨このガイドラインは 日本国内の公道 ( 道路交通法 ( 昭和 35 年法律第 105 号 ) 第 2 条第 1 項第 1 号に規定する 道路 をいう 以下同じ ) において 自動走行システム ( 加速 操舵 制動のうち複数の操作を一度に行い 又はその全てを行うシステムをいう 以下同じ ) を用いて自動車を走行させる実証実験
概要 入門者を対象とした STAMP/STPA チュートリアル ( 時間のある限り ) 実際に手と頭を動かして分析を体験 [I] の手順を基に [T]3 章の方法を加えて系統的に解説 [T] の事例 ( 列車ドア自動開閉システム ) を分析 参考資料 [I] はじめての STAMP/STPA, IP
![概要 入門者を対象とした STAMP/STPA チュートリアル ( 時間のある限り ) 実際に手と頭を動かして分析を体験 [I] の手順を基に [T]3 章の方法を加えて系統的に解説 [T] の事例 ( 列車ドア自動開閉システム ) を分析 参考資料 [I] はじめての STAMP/STPA, IP](/thumbs/93/111454153.jpg "概要 入門者を対象とした STAMP/STPA チュートリアル ( 時間のある限り ) 実際に手と頭を動かして分析を体験 [I] の手順を基に [T]3 章の方法を加えて系統的に解説 [T] の事例 ( 列車ドア自動開閉システム ) を分析 参考資料 [I] はじめての STAMP/STPA, IP") STAMP/STPA チュートリアル ( 入門編 ) 仙台高等専門学校岡本圭史 概要 入門者を対象とした STAMP/STPA チュートリアル ( 時間のある限り ) 実際に手と頭を動かして分析を体験 [I] の手順を基に [T]3 章の方法を加えて系統的に解説 [T] の事例 ( 列車ドア自動開閉システム ) を分析 参考資料 [I] はじめての STAMP/STPA, IPA (2016) [M]
STAMP/STPA チュートリアル ( 入門編 ) 仙台高等専門学校岡本圭史 概要 入門者を対象とした STAMP/STPA チュートリアル ( 時間のある限り ) 実際に手と頭を動かして分析を体験 [I] の手順を基に [T]3 章の方法を加えて系統的に解説 [T] の事例 ( 列車ドア自動開閉システム ) を分析 参考資料 [I] はじめての STAMP/STPA, IPA (2016) [M]
03 【資料1】自動走行をめぐる最近の動向と今後の調査検討事項
 自動走行をめぐる最近の動向と 今後の調査検討事項について 平成 27 年 10 月 23 日警察庁交通局 目 次 1 交通事故情勢 2 自動走行の現状 3 自動走行の課題 4 調査検討事項 1 交通事故情勢 交通事故発生状況の推移 1 1 交通事故情勢 c 平成 26 年中の交通事故発生状況 交通事故発生件数 57 万 3,465 件 ( 前年比 -8.8%) 10 年連続で減少 交通事故死者数 4,113
自動走行をめぐる最近の動向と 今後の調査検討事項について 平成 27 年 10 月 23 日警察庁交通局 目 次 1 交通事故情勢 2 自動走行の現状 3 自動走行の課題 4 調査検討事項 1 交通事故情勢 交通事故発生状況の推移 1 1 交通事故情勢 c 平成 26 年中の交通事故発生状況 交通事故発生件数 57 万 3,465 件 ( 前年比 -8.8%) 10 年連続で減少 交通事故死者数 4,113
自動運転に係る国際基準の動向
 自動運転に係る国際基準の動向 平成 28 年 12 月 自動運転の導入を巡る国際的動向 国連欧州経済委員会 (UN-ECE) の政府間会合 (WP29) において自動車の安全 環境基準に関する国際調和活動を実施しているところ 平成 26 年 11 月に開催された WP29 において 自動運転について議論する 自動運転分科会 を立ち上げることが合意された この分科会では日本と英国が共同議長に就任し 自動運転に関する国際的な議論を主導している
自動運転に係る国際基準の動向 平成 28 年 12 月 自動運転の導入を巡る国際的動向 国連欧州経済委員会 (UN-ECE) の政府間会合 (WP29) において自動車の安全 環境基準に関する国際調和活動を実施しているところ 平成 26 年 11 月に開催された WP29 において 自動運転について議論する 自動運転分科会 を立ち上げることが合意された この分科会では日本と英国が共同議長に就任し 自動運転に関する国際的な議論を主導している
見出しタイトル
 2013 No.42 国内における自動車の自動運転システムの将来像 2013 年 9 月 13 日に政府の総合科学技術会議において 来年度創設される府省横断事業 戦略的イノベーション創造プログラム 1 の課題候補として 自動車の自動運転システムを含む 10 テーマが決定された これらは新聞でも大きく取り上げられ 自動車メーカーにおける自動運転システム開発の動きも加速している 10 月 14 日 ~
2013 No.42 国内における自動車の自動運転システムの将来像 2013 年 9 月 13 日に政府の総合科学技術会議において 来年度創設される府省横断事業 戦略的イノベーション創造プログラム 1 の課題候補として 自動車の自動運転システムを含む 10 テーマが決定された これらは新聞でも大きく取り上げられ 自動車メーカーにおける自動運転システム開発の動きも加速している 10 月 14 日 ~
( おさらい ) 自動運転とは レベルレベル1 レベル2 レベル3 レベル4 定義 加速 操舵 制動のいずれかの操作をシステムが行う 加速 操舵 制動のうち複数の操作を一度にシステムが行う ( 自動運転中であっても 運転責任はドライバーにある ) 加速 操舵 制動をすべてシステムが行い システムが要
 自動運転とは レベルレベル1 レベル2 レベル3 レベル4 定義 加速 操舵 制動のいずれかの操作をシステムが行う 加速 操舵 制動のうち複数の操作を一度にシステムが行う ( 自動運転中であっても 運転責任はドライバーにある ) 加速 操舵 制動をすべてシステムが行い システムが要") 自動運転と損害賠償 ~ 自動運転者事故の責任は誰が負うべきか ~ 2016 年 12 月 16 日一般社団法人日本損害保険協会大坪護 ( おさらい ) 自動運転とは レベルレベル1 レベル2 レベル3 レベル4 定義 加速 操舵 制動のいずれかの操作をシステムが行う 加速 操舵 制動のうち複数の操作を一度にシステムが行う ( 自動運転中であっても 運転責任はドライバーにある ) 加速 操舵 制動をすべてシステムが行い
自動運転と損害賠償 ~ 自動運転者事故の責任は誰が負うべきか ~ 2016 年 12 月 16 日一般社団法人日本損害保険協会大坪護 ( おさらい ) 自動運転とは レベルレベル1 レベル2 レベル3 レベル4 定義 加速 操舵 制動のいずれかの操作をシステムが行う 加速 操舵 制動のうち複数の操作を一度にシステムが行う ( 自動運転中であっても 運転責任はドライバーにある ) 加速 操舵 制動をすべてシステムが行い
Microsoft Word - 資料4(修正).docx
.docx") 資料 4 運転支援機能の表示に関する規約運用の考え方 平成 30 年 11 月 20 日一般社団法人自動車公正取引協議会新車委員会 大型車委員会決定 衝突被害軽減ブレーキや車線逸脱警報装置 ペダル踏み間違い時加速抑制装置や自動運転化技術レベル2までの段階の機能や技術 ( 以下 運転支援機能 という ) について 一般消費者への理解促進を図るとともに 過信や誤解を招くような表示が行われることのないよう
資料 4 運転支援機能の表示に関する規約運用の考え方 平成 30 年 11 月 20 日一般社団法人自動車公正取引協議会新車委員会 大型車委員会決定 衝突被害軽減ブレーキや車線逸脱警報装置 ペダル踏み間違い時加速抑制装置や自動運転化技術レベル2までの段階の機能や技術 ( 以下 運転支援機能 という ) について 一般消費者への理解促進を図るとともに 過信や誤解を招くような表示が行われることのないよう
040402.ユニットテスト
 2. ユニットテスト ユニットテスト ( 単体テスト ) ユニットテストとはユニットテストはプログラムの最小単位であるモジュールの品質をテストすることであり その目的は結合テスト前にモジュール内のエラーを発見することである テストは機能テストと構造テストの2つの観点から行う モジュールはプログラムを構成する要素であるから 単体では動作しない ドライバとスタブというテスト支援ツールを使用してテストを行う
2. ユニットテスト ユニットテスト ( 単体テスト ) ユニットテストとはユニットテストはプログラムの最小単位であるモジュールの品質をテストすることであり その目的は結合テスト前にモジュール内のエラーを発見することである テストは機能テストと構造テストの2つの観点から行う モジュールはプログラムを構成する要素であるから 単体では動作しない ドライバとスタブというテスト支援ツールを使用してテストを行う
どのような便益があり得るか? より重要な ( ハイリスクの ) プロセス及びそれらのアウトプットに焦点が当たる 相互に依存するプロセスについての理解 定義及び統合が改善される プロセス及びマネジメントシステム全体の計画策定 実施 確認及び改善の体系的なマネジメント 資源の有効利用及び説明責任の強化
 プロセス及びそれらのアウトプットに焦点が当たる 相互に依存するプロセスについての理解 定義及び統合が改善される プロセス及びマネジメントシステム全体の計画策定 実施 確認及び改善の体系的なマネジメント 資源の有効利用及び説明責任の強化") ISO 9001:2015 におけるプロセスアプローチ この文書の目的 : この文書の目的は ISO 9001:2015 におけるプロセスアプローチについて説明することである プロセスアプローチは 業種 形態 規模又は複雑さに関わらず あらゆる組織及びマネジメントシステムに適用することができる プロセスアプローチとは何か? 全ての組織が目標達成のためにプロセスを用いている プロセスとは : インプットを使用して意図した結果を生み出す
ISO 9001:2015 におけるプロセスアプローチ この文書の目的 : この文書の目的は ISO 9001:2015 におけるプロセスアプローチについて説明することである プロセスアプローチは 業種 形態 規模又は複雑さに関わらず あらゆる組織及びマネジメントシステムに適用することができる プロセスアプローチとは何か? 全ての組織が目標達成のためにプロセスを用いている プロセスとは : インプットを使用して意図した結果を生み出す
1 日本再興戦略 2016 改革 2020 隊列走行の実現 隊列走行活用事業モデルの明確化ニーズの明確化 ( 実施場所 事業性等 ) 技術開発 実証 制度 事業環境検討プロジェクト工程表技高齢者等の移動手段の確保 ( ラストワンマイル自動走行 ) 事業モデルの明確化 ( 実施主体 場所 事業性等 )
 技術開発 実証 制度 事業環境検討プロジェクト工程表技高齢者等の移動手段の確保 ( ラストワンマイル自動走行 ) 事業モデルの明確化 ( 実施主体 場所 事業性等 )") 参考資料 4 自動走行に関する取組について 平成 2 8 年 1 2 月 経 済 産 業 省 国 土 交 通 省 1 日本再興戦略 2016 改革 2020 隊列走行の実現 隊列走行活用事業モデルの明確化ニーズの明確化 ( 実施場所 事業性等 ) 技術開発 実証 制度 事業環境検討プロジェクト工程表技高齢者等の移動手段の確保 ( ラストワンマイル自動走行 ) 事業モデルの明確化 ( 実施主体 場所
参考資料 4 自動走行に関する取組について 平成 2 8 年 1 2 月 経 済 産 業 省 国 土 交 通 省 1 日本再興戦略 2016 改革 2020 隊列走行の実現 隊列走行活用事業モデルの明確化ニーズの明確化 ( 実施場所 事業性等 ) 技術開発 実証 制度 事業環境検討プロジェクト工程表技高齢者等の移動手段の確保 ( ラストワンマイル自動走行 ) 事業モデルの明確化 ( 実施主体 場所
1. 調査の背景 目的 (1) 本調査の背景 1 自動走行システムに関する技術開発が活発化する中 自動走行システムの機能や性能限界等に関する消費者の認識状況 自動走行システムの普及に必要な社会的受容性への正しい理解など 解消すべき不安 ( リスク ) についての事前調査および議論が広範かつ十分に深ま
 本調査の背景 1 自動走行システムに関する技術開発が活発化する中 自動走行システムの機能や性能限界等に関する消費者の認識状況 自動走行システムの普及に必要な社会的受容性への正しい理解など 解消すべき不安 ( リスク ) についての事前調査および議論が広範かつ十分に深ま") 自動走行システムの社会的受容性等に関する調査結果 ( 概要 ) について 2016 年 9 月 5 日 1. 調査の背景 目的 (1) 本調査の背景 1 自動走行システムに関する技術開発が活発化する中 自動走行システムの機能や性能限界等に関する消費者の認識状況 自動走行システムの普及に必要な社会的受容性への正しい理解など 解消すべき不安 ( リスク ) についての事前調査および議論が広範かつ十分に深まっているとまでは言えないと考えたことから
自動走行システムの社会的受容性等に関する調査結果 ( 概要 ) について 2016 年 9 月 5 日 1. 調査の背景 目的 (1) 本調査の背景 1 自動走行システムに関する技術開発が活発化する中 自動走行システムの機能や性能限界等に関する消費者の認識状況 自動走行システムの普及に必要な社会的受容性への正しい理解など 解消すべき不安 ( リスク ) についての事前調査および議論が広範かつ十分に深まっているとまでは言えないと考えたことから
Microsoft PowerPoint - 23_電子制御情報の交換(配布用a).pptx
.pptx") JAMA 電子情報フォーラム 2018 デジタルエンジニアリング プロセスの 一般社団法人 適用範囲拡大 電子制御情報の交換 本 動 業会 電子情報委員会デジタルエンジニアリング部会電子制御情報の交換タスクタスクリーダー : 菊地洋輔 2018 年 2 月 16 日 目次 1 活動の背景 2 活動のゴール 進め方 3 成果目標 4 活動計画 5 2017 年度の取り組み 6 2018 年度以降の取り組み
JAMA 電子情報フォーラム 2018 デジタルエンジニアリング プロセスの 一般社団法人 適用範囲拡大 電子制御情報の交換 本 動 業会 電子情報委員会デジタルエンジニアリング部会電子制御情報の交換タスクタスクリーダー : 菊地洋輔 2018 年 2 月 16 日 目次 1 活動の背景 2 活動のゴール 進め方 3 成果目標 4 活動計画 5 2017 年度の取り組み 6 2018 年度以降の取り組み
2010年2月3日
 報道発表資料 2012 年 3 月 30 日 KDDI 株式会社 重大事故への対応について 当社は 2011 年 4 月から 2012 年 2 月に発生した計 5 件の重大事故に対し 再発防止策を含む十全な対策を早急に講じ その実施結果および今後の取組みについて報告するよう総務省より 2012 年 2 月 15 日に指導を受けました また 2012 年 2 月 22 日総務省開催の携帯電話通信障害対策連絡会においても
報道発表資料 2012 年 3 月 30 日 KDDI 株式会社 重大事故への対応について 当社は 2011 年 4 月から 2012 年 2 月に発生した計 5 件の重大事故に対し 再発防止策を含む十全な対策を早急に講じ その実施結果および今後の取組みについて報告するよう総務省より 2012 年 2 月 15 日に指導を受けました また 2012 年 2 月 22 日総務省開催の携帯電話通信障害対策連絡会においても
15288解説_D.pptx
 ISO/IEC 15288:2015 テクニカルプロセス解説 2015/8/26 システムビューロ システムライフサイクル 2 テクニカルプロセス a) Business or mission analysis process b) Stakeholder needs and requirements definieon process c) System requirements definieon
ISO/IEC 15288:2015 テクニカルプロセス解説 2015/8/26 システムビューロ システムライフサイクル 2 テクニカルプロセス a) Business or mission analysis process b) Stakeholder needs and requirements definieon process c) System requirements definieon
ISO9001:2015規格要求事項解説テキスト(サンプル) 株式会社ハピネックス提供資料
 株式会社ハピネックス提供資料") テキストの構造 1. 適用範囲 2. 引用規格 3. 用語及び定義 4. 規格要求事項 要求事項 網掛け部分です 罫線を引いている部分は Shall 事項 (~ すること ) 部分です 解 ISO9001:2015FDIS 規格要求事項 Shall 事項は S001~S126 まで計 126 個あります 説 網掛け部分の規格要求事項を講師がわかりやすく解説したものです
テキストの構造 1. 適用範囲 2. 引用規格 3. 用語及び定義 4. 規格要求事項 要求事項 網掛け部分です 罫線を引いている部分は Shall 事項 (~ すること ) 部分です 解 ISO9001:2015FDIS 規格要求事項 Shall 事項は S001~S126 まで計 126 個あります 説 網掛け部分の規格要求事項を講師がわかりやすく解説したものです
品質マニュアル(サンプル)|株式会社ハピネックス
|株式会社ハピネックス") 文書番号 QM-01 制定日 2015.12.01 改訂日 改訂版数 1 株式会社ハピネックス (TEL:03-5614-4311 平日 9:00~18:00) 移行支援 改訂コンサルティングはお任せください 品質マニュアル 承認 作成 品質マニュアル 文書番号 QM-01 改訂版数 1 目次 1. 適用範囲... 1 2. 引用規格... 2 3. 用語の定義... 2 4. 組織の状況... 3
文書番号 QM-01 制定日 2015.12.01 改訂日 改訂版数 1 株式会社ハピネックス (TEL:03-5614-4311 平日 9:00~18:00) 移行支援 改訂コンサルティングはお任せください 品質マニュアル 承認 作成 品質マニュアル 文書番号 QM-01 改訂版数 1 目次 1. 適用範囲... 1 2. 引用規格... 2 3. 用語の定義... 2 4. 組織の状況... 3
<4D F736F F F696E74202D20895E935D8E D BB8C7689E68A C4816A72332E >
 運転 援システム 度化計画 ( 概要 ) 的 ヒトやモノが安全 快適に移動することのできる社会 の実現に向け 関係府省の連携による研究開発 政府主導の実証計画等によって構成される計画を策定する ( 本再興戦略 ( 平成 25 年 6 14 閣議決定 )) 運転 援システム 動 システムによって得られる効果 1 渋滞の解消 緩和 2 交通事故の削減 3 環境負荷の低減 4 齢者等の移動 援 5 運転の快適性の向上
運転 援システム 度化計画 ( 概要 ) 的 ヒトやモノが安全 快適に移動することのできる社会 の実現に向け 関係府省の連携による研究開発 政府主導の実証計画等によって構成される計画を策定する ( 本再興戦略 ( 平成 25 年 6 14 閣議決定 )) 運転 援システム 動 システムによって得られる効果 1 渋滞の解消 緩和 2 交通事故の削減 3 環境負荷の低減 4 齢者等の移動 援 5 運転の快適性の向上
先行的評価の対象とするユースケース 整理中. 災害対応に関するユースケース. 健康に関するユースケース. 移動に関するユースケース. 教育に関するユースケース. 小売 物流に関するユースケース 6. 製造 ( 提供した製品の保守を含む ) に関するユースケース 7. 農業に関するユースケース 8.
 に関するユースケース 7. 農業に関するユースケース 8.") 資料 先行的評価について - ユースケースとシナリオ分析 平成 9 年 月 日事務局資料 先行的評価の対象とするユースケース 整理中. 災害対応に関するユースケース. 健康に関するユースケース. 移動に関するユースケース. 教育に関するユースケース. 小売 物流に関するユースケース 6. 製造 ( 提供した製品の保守を含む ) に関するユースケース 7. 農業に関するユースケース 8. 金融に関するユースケース
資料 先行的評価について - ユースケースとシナリオ分析 平成 9 年 月 日事務局資料 先行的評価の対象とするユースケース 整理中. 災害対応に関するユースケース. 健康に関するユースケース. 移動に関するユースケース. 教育に関するユースケース. 小売 物流に関するユースケース 6. 製造 ( 提供した製品の保守を含む ) に関するユースケース 7. 農業に関するユースケース 8. 金融に関するユースケース
Microsoft PowerPoint - 【最終提出版】 MATLAB_EXPO2014講演資料_ルネサス菅原.pptx
 MATLAB/Simulink を使用したモータ制御アプリのモデルベース開発事例 ルネサスエレクトロニクス株式会社 第二ソリューション事業本部産業第一事業部家電ソリューション部 Rev. 1.00 2014 Renesas Electronics Corporation. All rights reserved. IAAS-AA-14-0202-1 目次 1. はじめに 1.1 モデルベース開発とは?
MATLAB/Simulink を使用したモータ制御アプリのモデルベース開発事例 ルネサスエレクトロニクス株式会社 第二ソリューション事業本部産業第一事業部家電ソリューション部 Rev. 1.00 2014 Renesas Electronics Corporation. All rights reserved. IAAS-AA-14-0202-1 目次 1. はじめに 1.1 モデルベース開発とは?
1. 調査の背景 目的 (1) 本調査の背景 1 自動運転システムに関する技術開発が日進月歩で進化する中 自動運転システムの機能や性能限界等に関する消費者の認識状況 自動運転システムの普及に必要な社会的受容性への正しい理解等 解消すべき不安 ( リスク ) についての事前調査および議論がまだ広範かつ
 本調査の背景 1 自動運転システムに関する技術開発が日進月歩で進化する中 自動運転システムの機能や性能限界等に関する消費者の認識状況 自動運転システムの普及に必要な社会的受容性への正しい理解等 解消すべき不安 ( リスク ) についての事前調査および議論がまだ広範かつ") 自動走行システムの社会的受容性等に関する調査結果 ( 概要 ) について (2017 年度版 ) 2017 年 11 月 9 日 1. 調査の背景 目的 (1) 本調査の背景 1 自動運転システムに関する技術開発が日進月歩で進化する中 自動運転システムの機能や性能限界等に関する消費者の認識状況 自動運転システムの普及に必要な社会的受容性への正しい理解等 解消すべき不安 ( リスク ) についての事前調査および議論がまだ広範かつ十分に深まっているとまでは言えないと考えたことから
自動走行システムの社会的受容性等に関する調査結果 ( 概要 ) について (2017 年度版 ) 2017 年 11 月 9 日 1. 調査の背景 目的 (1) 本調査の背景 1 自動運転システムに関する技術開発が日進月歩で進化する中 自動運転システムの機能や性能限界等に関する消費者の認識状況 自動運転システムの普及に必要な社会的受容性への正しい理解等 解消すべき不安 ( リスク ) についての事前調査および議論がまだ広範かつ十分に深まっているとまでは言えないと考えたことから
「自動運転車」に関する意識調査(アンケート調査)~「自動運転技術」に対する認知度はドイツの消費者の方が高いことが判明~_損保ジャパン日本興亜
~「自動運転技術」に対する認知度はドイツの消費者の方が高いことが判明~_損保ジャパン日本興亜") 2018 年 4 月 10 日 自動運転車 に関する意識調査 ( アンケート調査 ) ~ 自動運転技術 に対する認知度はドイツの消費者の方が高いことが判明 ~ 損害保険ジャパン日本興亜株式会社 ( 社長 : 西澤敬二 以下 損保ジャパン日本興亜 ) は 4 月 10 日の 交通事故死ゼロを目指す日 を前に 事故のない安心 安全な社会の実現 の重要な手段と考えられている自動運転技術の普及促進に向けて
2018 年 4 月 10 日 自動運転車 に関する意識調査 ( アンケート調査 ) ~ 自動運転技術 に対する認知度はドイツの消費者の方が高いことが判明 ~ 損害保険ジャパン日本興亜株式会社 ( 社長 : 西澤敬二 以下 損保ジャパン日本興亜 ) は 4 月 10 日の 交通事故死ゼロを目指す日 を前に 事故のない安心 安全な社会の実現 の重要な手段と考えられている自動運転技術の普及促進に向けて
安全解析 法 STAMP/STPA の概要と事例紹介 平成 26 年 1 21 有 宇宙システム株式会社 Japan Manned Space Systems Corporation (JAMSS) 安全開発保証部ソフトウェアグループ星野伸
 安全開発保証部ソフトウェアグループ星野伸") 安全解析 法 STAMP/STPA の概要と事例紹介 平成 26 年 1 21 有 宇宙システム株式会社 Japan Manned Space Systems Corporation (JAMSS) 安全開発保証部ソフトウェアグループ星野伸 (hoshino.nobuyuki@jamss.co.jp) Contents 1. 会社紹介 (10 分 ) 2. STAMP/STPA の概要 (20 分
安全解析 法 STAMP/STPA の概要と事例紹介 平成 26 年 1 21 有 宇宙システム株式会社 Japan Manned Space Systems Corporation (JAMSS) 安全開発保証部ソフトウェアグループ星野伸 (hoshino.nobuyuki@jamss.co.jp) Contents 1. 会社紹介 (10 分 ) 2. STAMP/STPA の概要 (20 分
Microsoft PowerPoint - chap8.ppt
 第 8 章 : フィードバック制御系の設計法 第 8 章 : フィードバック制御系の設計法 8. 設計手順と性能評価 キーワード : 設計手順, 性能評価 8. 補償による制御系設計 キーワード : ( 比例 ),( 積分 ),( 微分 ) 学習目標 : 一般的な制御系設計における手順と制御系の性能評価について学ぶ. 学習目標 : 補償の有効性について理解し, その設計手順を習得する. 第 8 章
第 8 章 : フィードバック制御系の設計法 第 8 章 : フィードバック制御系の設計法 8. 設計手順と性能評価 キーワード : 設計手順, 性能評価 8. 補償による制御系設計 キーワード : ( 比例 ),( 積分 ),( 微分 ) 学習目標 : 一般的な制御系設計における手順と制御系の性能評価について学ぶ. 学習目標 : 補償の有効性について理解し, その設計手順を習得する. 第 8 章
智美塾 ゆもつよメソッドのアーキテクチャ
 ゆもつよメソッドのテスト要求分析とテストアーキテクチャ設計 JaSST13 東京智美塾 2013 年 1 月 30 日 湯本剛 ( 日本 HP) tsuyoshi.yumoto@hp.com ゆもつよ風テスト開発プロセス テスト計画 実現したい品質の具体的把握 テスト箇所の選択 テストの目的設定 テスト対象アイテム特定 テスト分析 テストタイプ特定 機能の整理 & 再分類 テスト条件となる仕様項目特定
ゆもつよメソッドのテスト要求分析とテストアーキテクチャ設計 JaSST13 東京智美塾 2013 年 1 月 30 日 湯本剛 ( 日本 HP) tsuyoshi.yumoto@hp.com ゆもつよ風テスト開発プロセス テスト計画 実現したい品質の具体的把握 テスト箇所の選択 テストの目的設定 テスト対象アイテム特定 テスト分析 テストタイプ特定 機能の整理 & 再分類 テスト条件となる仕様項目特定
CSM_XS2_DS_J_11_2
 XS2 1 XS2 2 0120-919-066 055-982-5015 XS2 3 XS2 0120-919-066 055-982-5015 4 5 XS2 XS2 6 0120-919-066 055-982-5015 XS2 7 XS2 0120-919-066 055-982-5015 8 XS2 9 XS2 0120-919-066 055-982-5015 10 XS2 11 XS2
XS2 1 XS2 2 0120-919-066 055-982-5015 XS2 3 XS2 0120-919-066 055-982-5015 4 5 XS2 XS2 6 0120-919-066 055-982-5015 XS2 7 XS2 0120-919-066 055-982-5015 8 XS2 9 XS2 0120-919-066 055-982-5015 10 XS2 11 XS2
X 線天文衛星ひとみ (ASTRO-H) への FRAM 適用 有人宇宙システム株式会社 IV&V 研究センター道浦康貴 宇宙航空研究開発機構第 3 研究ユニット片平真史 石濱直樹有人宇宙システム株式会社 IV&V 研究センター野本秀樹 道浦康貴 JAXA All Rights
 への FRAM 適用 有人宇宙システム株式会社 IV&V 研究センター道浦康貴 宇宙航空研究開発機構第 3 研究ユニット片平真史 石濱直樹有人宇宙システム株式会社 IV&V 研究センター野本秀樹 道浦康貴 JAXA All Rights") X 線天文衛星ひとみ (ASTRO-H) への FRAM 適用 2017.11.8 有人宇宙システム株式会社 IV&V 研究センター道浦康貴 宇宙航空研究開発機構第 3 研究ユニット片平真史 石濱直樹有人宇宙システム株式会社 IV&V 研究センター野本秀樹 道浦康貴 概要 X 線天文衛星 ASTRO-H ひとみ 異常事象調査報告書 を基に FRAM 分析を実施した結果を FRAM の分析手順に沿って紹介する
X 線天文衛星ひとみ (ASTRO-H) への FRAM 適用 2017.11.8 有人宇宙システム株式会社 IV&V 研究センター道浦康貴 宇宙航空研究開発機構第 3 研究ユニット片平真史 石濱直樹有人宇宙システム株式会社 IV&V 研究センター野本秀樹 道浦康貴 概要 X 線天文衛星 ASTRO-H ひとみ 異常事象調査報告書 を基に FRAM 分析を実施した結果を FRAM の分析手順に沿って紹介する
OmniTrust
 Centrally Managed Content Security Systems OmniTrust for Documents Internet Explorer 9 設定ガイド リリース 3.6.0-Rev1 2011 年 11 月 24 日 株式会社クレアリア東京都北区豊島 8-4-1 更新履歴 項番 更新年月日 更新区分 ( 新規 修正 ) 更新箇所更新内容更新者 1 2011/11/22
Centrally Managed Content Security Systems OmniTrust for Documents Internet Explorer 9 設定ガイド リリース 3.6.0-Rev1 2011 年 11 月 24 日 株式会社クレアリア東京都北区豊島 8-4-1 更新履歴 項番 更新年月日 更新区分 ( 新規 修正 ) 更新箇所更新内容更新者 1 2011/11/22
Imation Lock について Imation Lock を使用するとイメーション Pocket Pro フラッシュドライブ ( 以下フラッシュドラ イブ ) にパスワードで保護されたセキュリティエリアを設定することができます 対応環境 Windows XP Home & Professiona
 にパスワードで保護されたセキュリティエリアを設定することができます 対応環境 Windows XP Home & Professiona") Imation Lock セキュリティソフトウェア ユーザーガイド v1.0 Imation Lock について Imation Lock を使用するとイメーション Pocket Pro フラッシュドライブ ( 以下フラッシュドラ イブ ) にパスワードで保護されたセキュリティエリアを設定することができます 対応環境 Windows XP Home & Professional (32bit 版 )
Imation Lock セキュリティソフトウェア ユーザーガイド v1.0 Imation Lock について Imation Lock を使用するとイメーション Pocket Pro フラッシュドライブ ( 以下フラッシュドラ イブ ) にパスワードで保護されたセキュリティエリアを設定することができます 対応環境 Windows XP Home & Professional (32bit 版 )
5. エイジレス80 と Collabo80+ のデータ不整合の解消手順について エイジレス80 と Collabo80+ で会員連携を開始する前に 以下のフローにて データ差異が存在しない状態にしてください 連携開始時には エイジレス80 側を正とさせていただきますので Collabo80+ 側の
 シルバー人材センター連合会 シルバー人材センター 御中 NRI 社会情報システム株式会社 エイジレス 80 Collabo80+ 開発担当 エイジレス 80 アクティブ と Collabo80+ の会員データ連携について 拝啓時下益々ご隆昌のこととお慶び申し上げます 平素は エイジレス 80アクティブ ( 以下 エイジレス 80 ) ならびに Collabo80+ をご利用賜り 厚く御礼申し上げます
シルバー人材センター連合会 シルバー人材センター 御中 NRI 社会情報システム株式会社 エイジレス 80 Collabo80+ 開発担当 エイジレス 80 アクティブ と Collabo80+ の会員データ連携について 拝啓時下益々ご隆昌のこととお慶び申し上げます 平素は エイジレス 80アクティブ ( 以下 エイジレス 80 ) ならびに Collabo80+ をご利用賜り 厚く御礼申し上げます
変更の影響範囲を特定するための 「標準調査プロセス」の提案 2014年ソフトウェア品質管理研究会(30SQiP-A)
") 変更の影響範囲を特定するための 標準調査プロセス の提案 2014 年ソフトウェア品質管理研究会 [ 第 6 分科会 A グループ ] リーダー : 宇田泰子 ( アンリツエンジニアリング株式会社 ) 夛田一成 ( アンリツエンジニアリング株式会社 ) 川井めぐみ ( サントリーシステムテクノロジー株式会社 ) 伊藤友一 (TIS 株式会社 ) 1. 研究の動機 研究員の現場では 調査を行なっているにも関わらず
変更の影響範囲を特定するための 標準調査プロセス の提案 2014 年ソフトウェア品質管理研究会 [ 第 6 分科会 A グループ ] リーダー : 宇田泰子 ( アンリツエンジニアリング株式会社 ) 夛田一成 ( アンリツエンジニアリング株式会社 ) 川井めぐみ ( サントリーシステムテクノロジー株式会社 ) 伊藤友一 (TIS 株式会社 ) 1. 研究の動機 研究員の現場では 調査を行なっているにも関わらず
Microsoft PowerPoint - 04_01_text_UML_03-Sequence-Com.ppt
 システム設計 (1) シーケンス図 コミュニケーション図等 1 今日の演習のねらい 2 今日の演習のねらい 情報システムを構成するオブジェクトの考え方を理解す る 業務プロセスでのオブジェクトの相互作用を考える シーケンス図 コミュニケーション図を作成する 前回までの講義システム開発の上流工程として 要求仕様を確定パソコンを注文するまでのユースケースユースケースから画面の検討イベントフロー アクティビティ図
システム設計 (1) シーケンス図 コミュニケーション図等 1 今日の演習のねらい 2 今日の演習のねらい 情報システムを構成するオブジェクトの考え方を理解す る 業務プロセスでのオブジェクトの相互作用を考える シーケンス図 コミュニケーション図を作成する 前回までの講義システム開発の上流工程として 要求仕様を確定パソコンを注文するまでのユースケースユースケースから画面の検討イベントフロー アクティビティ図
CSM_G5Q_DS_J_1_14
 0120-919-066 055-982-5015 1 2 www.fa.omron.co.jp/ 0120-919-066 055-982-5015 3 オムロン商品ご購入のお客様へ ご承諾事項 平素はオムロン株式会社 ( 以下 当社 ) の商品をご愛用いただき誠にありがとうございます 当社商品 のご購入については お客様のご購入先にかかわらず 本ご承諾事項記載の条件を適用いたします ご承諾のうえご注文ください
0120-919-066 055-982-5015 1 2 www.fa.omron.co.jp/ 0120-919-066 055-982-5015 3 オムロン商品ご購入のお客様へ ご承諾事項 平素はオムロン株式会社 ( 以下 当社 ) の商品をご愛用いただき誠にありがとうございます 当社商品 のご購入については お客様のご購入先にかかわらず 本ご承諾事項記載の条件を適用いたします ご承諾のうえご注文ください
CSM_G7L_DS_J_1_15
 1 0120-919-066 055-982-5015 TÜV 2 www.fa.omron.co.jp/ 2 0120-919-066 055-982-5015 3 4 www.fa.omron.co.jp/ 0120-919-066 055-982-5015 5 6 www.fa.omron.co.jp/ 7 0120-919-066 055-982-5015 8 www.fa.omron.co.jp/
1 0120-919-066 055-982-5015 TÜV 2 www.fa.omron.co.jp/ 2 0120-919-066 055-982-5015 3 4 www.fa.omron.co.jp/ 0120-919-066 055-982-5015 5 6 www.fa.omron.co.jp/ 7 0120-919-066 055-982-5015 8 www.fa.omron.co.jp/
CSM_G6J-Y_DS_J_1_8
 G6J-Y 0120-919-066 055-982-5015 1 G6J-Y 2 www.fa.omron.co.jp/ G6J-Y 0120-919-066 055-982-5015 3 G6J-Y 4 www.fa.omron.co.jp/ G6J-Y 0120-919-066 055-982-5015 5 6 www.fa.omron.co.jp/ G6J-Y G6J-Y 0120-919-066
G6J-Y 0120-919-066 055-982-5015 1 G6J-Y 2 www.fa.omron.co.jp/ G6J-Y 0120-919-066 055-982-5015 3 G6J-Y 4 www.fa.omron.co.jp/ G6J-Y 0120-919-066 055-982-5015 5 6 www.fa.omron.co.jp/ G6J-Y G6J-Y 0120-919-066
三菱ふそう車をお買い上げいただきありがとうございます 本書は,Truckonnect,Remote Truck 及びデジタルタコグラフを安全に正しく使用していただくため, 正しい取扱い及び万一のときの処置について説明してあります 取扱い及び万一のときの処置を誤りますと思わぬ故障や事故の原因となります
 MH994905 '17-3 取扱説明書 Truckonnect,Remote Truck 及びデジタルタコグラフの取扱いについて 三菱ふそう車をお買い上げいただきありがとうございます 本書は,Truckonnect,Remote Truck 及びデジタルタコグラフを安全に正しく使用していただくため, 正しい取扱い及び万一のときの処置について説明してあります 取扱い及び万一のときの処置を誤りますと思わぬ故障や事故の原因となりますので,
MH994905 '17-3 取扱説明書 Truckonnect,Remote Truck 及びデジタルタコグラフの取扱いについて 三菱ふそう車をお買い上げいただきありがとうございます 本書は,Truckonnect,Remote Truck 及びデジタルタコグラフを安全に正しく使用していただくため, 正しい取扱い及び万一のときの処置について説明してあります 取扱い及び万一のときの処置を誤りますと思わぬ故障や事故の原因となりますので,
沖縄でのバス自動運転実証実験の実施について
 プレスリリース 平成 28 年 12 月 26 日内閣府政策統括官 ( 科学技術 イノヘ ーション担当 ) 沖縄振興局 沖縄でのバス自動運転実証実験の実施について 戦略的イノベーション創造プログラム (SIP) 自動走行システム では 高齢者や車いす利用者などの交通制約者の方々にとっても利用しやすい 新たな公共バスシステムの実現を目指す 次世代都市交通システム の開発について 東京都や関係企業などと連携しつつ
プレスリリース 平成 28 年 12 月 26 日内閣府政策統括官 ( 科学技術 イノヘ ーション担当 ) 沖縄振興局 沖縄でのバス自動運転実証実験の実施について 戦略的イノベーション創造プログラム (SIP) 自動走行システム では 高齢者や車いす利用者などの交通制約者の方々にとっても利用しやすい 新たな公共バスシステムの実現を目指す 次世代都市交通システム の開発について 東京都や関係企業などと連携しつつ
PowerPoint プレゼンテーション
 GSN を応用したナレッジマネジメントシステムの提案 2017 年 10 月 27 日 D-Case 研究会 国立研究開発法人宇宙航空研究開発機構 研究開発部門第三研究ユニット 梅田浩貴 2017/3/27 C Copyright 2017 JAXA All rights reserved 1 目次 1 課題説明 SECI モデル 2 GSN を応用したナレッジマネジメントシステム概要 3 ツリー型チェックリスト分析
GSN を応用したナレッジマネジメントシステムの提案 2017 年 10 月 27 日 D-Case 研究会 国立研究開発法人宇宙航空研究開発機構 研究開発部門第三研究ユニット 梅田浩貴 2017/3/27 C Copyright 2017 JAXA All rights reserved 1 目次 1 課題説明 SECI モデル 2 GSN を応用したナレッジマネジメントシステム概要 3 ツリー型チェックリスト分析
目次 1. 会社紹介 2. 小規模ソフトウェア開発のプロセス改善 3. 改善後の開発現場に現れてきた気になる傾向 4. 小集団改善活動 5. 当社が考える小規模開発 1/20
 車載ソフトウェア開発におけるプロセス改善 ( 株 ) 東海理化エレクトロニクス技術部中田武志, 日高建二 共同執筆 : 日本電気 ( 株 ) コンサルティング事業部福原綾介 目次 1. 会社紹介 2. 小規模ソフトウェア開発のプロセス改善 3. 改善後の開発現場に現れてきた気になる傾向 4. 小集団改善活動 5. 当社が考える小規模開発 1/20 目次 1. 会社紹介 2. 小規模ソフトウェア開発のプロセス改善
車載ソフトウェア開発におけるプロセス改善 ( 株 ) 東海理化エレクトロニクス技術部中田武志, 日高建二 共同執筆 : 日本電気 ( 株 ) コンサルティング事業部福原綾介 目次 1. 会社紹介 2. 小規模ソフトウェア開発のプロセス改善 3. 改善後の開発現場に現れてきた気になる傾向 4. 小集団改善活動 5. 当社が考える小規模開発 1/20 目次 1. 会社紹介 2. 小規模ソフトウェア開発のプロセス改善
延命セキュリティ製品 製品名お客様の想定対象 OS McAfee Embedded Control 特定の業務で利用する物理 PC 仮想 PC や Server 2003 Server 2003 ホワイトリスト型 Trend Micro Safe Lock 特定の業務で利用するスタンドアロン PC
 延命セキュリティ二つの対策方法 対策 1 ホワイトリスト型 概要 : 動作させてもよいアプリケーションのみ許可し それ以外の全ての動作をブロックすることで 不正な動作を防止します 特長 : 特定用途やスタンドアロンの PC の延命に効果的です リストに登録されたアプリケーションのみ許可 アプリケーション起動制御 不許可アプリケーションは防止 対策 2 仮想パッチ型 概要 : OS アプリケーションの脆弱性を狙った通信をブロックし
延命セキュリティ二つの対策方法 対策 1 ホワイトリスト型 概要 : 動作させてもよいアプリケーションのみ許可し それ以外の全ての動作をブロックすることで 不正な動作を防止します 特長 : 特定用途やスタンドアロンの PC の延命に効果的です リストに登録されたアプリケーションのみ許可 アプリケーション起動制御 不許可アプリケーションは防止 対策 2 仮想パッチ型 概要 : OS アプリケーションの脆弱性を狙った通信をブロックし
PowerPoint プレゼンテーション
 SPI Japan 2012 車載ソフトウェア搭載製品の 機能安全監査と審査 2012 年 10 月 11 日 パナソニック株式会社デバイス社 菅沼由美子 パナソニックのデバイス製品 SPI Japan 2012 2 パナソニック デバイス社のソフト搭載製品 車載スピーカーアクティブ消音アクティブ創音歩行者用警告音 スマートエントリー グローバルに顧客対応 ソフトウェア搭載製品 車載 複合スイッチパネル
SPI Japan 2012 車載ソフトウェア搭載製品の 機能安全監査と審査 2012 年 10 月 11 日 パナソニック株式会社デバイス社 菅沼由美子 パナソニックのデバイス製品 SPI Japan 2012 2 パナソニック デバイス社のソフト搭載製品 車載スピーカーアクティブ消音アクティブ創音歩行者用警告音 スマートエントリー グローバルに顧客対応 ソフトウェア搭載製品 車載 複合スイッチパネル
障害管理テンプレート仕様書
 目次 1. テンプレート利用の前提... 2 1.1 対象... 2 1.2 役割... 2 1.3 受付区分内容と運用への影響... 2 1.4 プロセス... 2 1.5 ステータス... 3 2. テンプレートの項目... 5 2.1 入力項目... 5 2.2 入力方法および属性... 6 2.3 他の属性... 7 3. トラッキングユニットの設定... 8 3.1 メール送信一覧...
目次 1. テンプレート利用の前提... 2 1.1 対象... 2 1.2 役割... 2 1.3 受付区分内容と運用への影響... 2 1.4 プロセス... 2 1.5 ステータス... 3 2. テンプレートの項目... 5 2.1 入力項目... 5 2.2 入力方法および属性... 6 2.3 他の属性... 7 3. トラッキングユニットの設定... 8 3.1 メール送信一覧...
Microsoft PowerPoint - day1-l05.pptx
 自動運転の実現に向けた 警察の取組について 平成 30 年 11 月 14 日警察庁交通局交通企画課自動運転企画室長杉俊弘 概 要 1 日本における交通事故の発生状況等 2 自動運転の概要と制度整備大綱 3 自動運転の実現に向けた警察の取組 1 日本における交通事故の発生状況 ( 人 ) 7,000 6,000 5,000 4,000 3,000 2,000 1,000 0 平成 6,415 5,796
自動運転の実現に向けた 警察の取組について 平成 30 年 11 月 14 日警察庁交通局交通企画課自動運転企画室長杉俊弘 概 要 1 日本における交通事故の発生状況等 2 自動運転の概要と制度整備大綱 3 自動運転の実現に向けた警察の取組 1 日本における交通事故の発生状況 ( 人 ) 7,000 6,000 5,000 4,000 3,000 2,000 1,000 0 平成 6,415 5,796
自動車の自動運転がドライバーに与える影響とその対策 286 東京海上日動リスクコンサルティング ( 株 ) 自動車グループ主任研究員駒田悠一 自動車の自動運転の技術開発が大きなトレンドとなってきている 大手自動車メーカーは相次いで 自動運転車に
 自動車グループ主任研究員駒田悠一 自動車の自動運転の技術開発が大きなトレンドとなってきている 大手自動車メーカーは相次いで 自動運転車に") 自動車のがドライバーに与える影響とその対策 86 東京海上日動リスクコンサルティング ( 株 ) 自動車グループ主任研究員駒田悠一 自動車のの技術開発が大きなトレンドとなってきている 大手自動車メーカーは相次いで 車に関する開発意思を示し ( 表 1) またインターネットの検索エンジンで知られる Google 社 も車の開発を進めており 既に走行可能なものができていると発表している 1 表 1 主要自動車会社のへの取り組み概要
自動車のがドライバーに与える影響とその対策 86 東京海上日動リスクコンサルティング ( 株 ) 自動車グループ主任研究員駒田悠一 自動車のの技術開発が大きなトレンドとなってきている 大手自動車メーカーは相次いで 車に関する開発意思を示し ( 表 1) またインターネットの検索エンジンで知られる Google 社 も車の開発を進めており 既に走行可能なものができていると発表している 1 表 1 主要自動車会社のへの取り組み概要
Microsoft PowerPoint - 【HB-1000】キーボードマウス操作マニュアル.ppt [互換モード]
![Microsoft PowerPoint - 【HB-1000】キーボードマウス操作マニュアル.ppt [互換モード]](/thumbs/91/105231300.jpg "Microsoft PowerPoint - 【HB-1000】キーボードマウス操作マニュアル.ppt [互換モード]") + 光 BOX (HB-1000) / 操作マニュアル + + 光 BOX にとを接続することで 文字入力と光 BOX の一部操作が行えます はじめにお読みください 対応機種は ELECOM 社製ワイヤレスフル & TK-FDM063BK です (2014 年 4 月現在 ) 対応しているのキー配列は 日本語 108 キー です 日本語 108 キー に対応したであったとしても 対応機種以外の機種では本マニュアル通りの動きにならない場合があります
+ 光 BOX (HB-1000) / 操作マニュアル + + 光 BOX にとを接続することで 文字入力と光 BOX の一部操作が行えます はじめにお読みください 対応機種は ELECOM 社製ワイヤレスフル & TK-FDM063BK です (2014 年 4 月現在 ) 対応しているのキー配列は 日本語 108 キー です 日本語 108 キー に対応したであったとしても 対応機種以外の機種では本マニュアル通りの動きにならない場合があります
ISO9001:2015内部監査チェックリスト
 ISO9001:2015 規格要求事項 チェックリスト ( 質問リスト ) ISO9001:2015 規格要求事項に準拠したチェックリスト ( 質問リスト ) です このチェックリストを参考に 貴社品質マニュアルをベースに貴社なりのチェックリストを作成してください ISO9001:2015 規格要求事項を詳細に分解し 212 個の質問リストをご用意いたしました ISO9001:2015 は Shall
ISO9001:2015 規格要求事項 チェックリスト ( 質問リスト ) ISO9001:2015 規格要求事項に準拠したチェックリスト ( 質問リスト ) です このチェックリストを参考に 貴社品質マニュアルをベースに貴社なりのチェックリストを作成してください ISO9001:2015 規格要求事項を詳細に分解し 212 個の質問リストをご用意いたしました ISO9001:2015 は Shall
J I S J A S O 廃止提案書 1. 対象規格 JASO M 304:02 ( 自動車用発泡体 ) 2. 廃止の背景と理由この規格は自動車用の断熱 防音 防振及びクッション用材料の性能 試験方法を標準化する趣旨で 1969 年に制定され 以後 4 回の改正が行われた なお 本年度の定期見直し
 2. 廃止の背景と理由この規格は自動車用の断熱 防音 防振及びクッション用材料の性能 試験方法を標準化する趣旨で 1969 年に制定され 以後 4 回の改正が行われた なお 本年度の定期見直し") 1. 対象規格 JASO M 304:02 ( 自動車用発泡体 ) 2. 廃止の背景と理由この規格は自動車用の断熱 防音 防振及びクッション用材料の性能 試験方法を標準化する趣旨で 1969 年に制定され 以後 4 回の改正が行われた なお 本年度の定期見直しにおいて この規格の維持要否を確認した結果 現在は各社個別の社内規定での運用 または 2004 年に制定された JIS K6400-1~-8(
1. 対象規格 JASO M 304:02 ( 自動車用発泡体 ) 2. 廃止の背景と理由この規格は自動車用の断熱 防音 防振及びクッション用材料の性能 試験方法を標準化する趣旨で 1969 年に制定され 以後 4 回の改正が行われた なお 本年度の定期見直しにおいて この規格の維持要否を確認した結果 現在は各社個別の社内規定での運用 または 2004 年に制定された JIS K6400-1~-8(
個人依存開発から組織的開発への移行事例 ~ 要求モデル定義と開発プロセスの形式化 による高生産性 / 高信頼性化 ~ 三菱電機メカトロニクスソフトウエア ( 株 ) 和歌山支所岩橋正実 1
 和歌山支所岩橋正実 1") 個人依存開発から組織的開発への移行事例 ~ 要求モデル定義と開発プロセスの形式化 による高生産性 / 高信頼性化 ~ 三菱電機メカトロニクスソフトウエア ( 株 ) 和歌山支所岩橋正実 iwahashi@est.hi-ho.ne.jp Iwahashi.Masami@wak.msw.co.jp 1 改善効果 品質 : フロントローディングが進み流出不具合 0 継続生産性 : 平均 130% 改善 工数割合分析
個人依存開発から組織的開発への移行事例 ~ 要求モデル定義と開発プロセスの形式化 による高生産性 / 高信頼性化 ~ 三菱電機メカトロニクスソフトウエア ( 株 ) 和歌山支所岩橋正実 iwahashi@est.hi-ho.ne.jp Iwahashi.Masami@wak.msw.co.jp 1 改善効果 品質 : フロントローディングが進み流出不具合 0 継続生産性 : 平均 130% 改善 工数割合分析
平成 29 年 4 月 12 日サイバーセキュリティタスクフォース IoT セキュリティ対策に関する提言 あらゆるものがインターネット等のネットワークに接続される IoT/AI 時代が到来し それらに対するサイバーセキュリティの確保は 安心安全な国民生活や 社会経済活動確保の観点から極めて重要な課題
 平成 29 年 4 月 12 日サイバーセキュリティタスクフォース IoT セキュリティ対策に関する提言 あらゆるものがインターネット等のネットワークに接続される IoT/AI 時代が到来し それらに対するサイバーセキュリティの確保は 安心安全な国民生活や 社会経済活動確保の観点から極めて重要な課題となっている 特に IoT 機器については その性質から サイバー攻撃の対象になりやすく 我が国において
平成 29 年 4 月 12 日サイバーセキュリティタスクフォース IoT セキュリティ対策に関する提言 あらゆるものがインターネット等のネットワークに接続される IoT/AI 時代が到来し それらに対するサイバーセキュリティの確保は 安心安全な国民生活や 社会経済活動確保の観点から極めて重要な課題となっている 特に IoT 機器については その性質から サイバー攻撃の対象になりやすく 我が国において
目 次 1. 概要 ホームアプリの主な機能 操作方法 初期設定 初期画面 診断 ( 車両情報選択画面 ) 車両情報の登録 編集 登録した車両を削除する...
 車両情報の登録 編集 登録した車両を削除する...") 目 次 1. 概要... 1 1.1. ホームアプリの主な機能... 1 2. 操作方法... 2 2.1. 初期設定... 2 2.2. 初期画面... 3 2.3. 診断 ( 車両情報選択画面 )... 4 2.3.1. 車両情報の登録 編集... 5 2.3.2. 登録した車両を削除する... 7 2.4. 診断 ( 診断メニュー画面 )... 8 2.5. 保存データを開く... 9 2.5.1.
目 次 1. 概要... 1 1.1. ホームアプリの主な機能... 1 2. 操作方法... 2 2.1. 初期設定... 2 2.2. 初期画面... 3 2.3. 診断 ( 車両情報選択画面 )... 4 2.3.1. 車両情報の登録 編集... 5 2.3.2. 登録した車両を削除する... 7 2.4. 診断 ( 診断メニュー画面 )... 8 2.5. 保存データを開く... 9 2.5.1.
ISO 9001:2015 改定セミナー (JIS Q 9001:2015 準拠 ) 第 4.2 版 株式会社 TBC ソリューションズ プログラム 年版改定の概要 年版の6 大重点ポイントと対策 年版と2008 年版の相違 年版への移行の実務
 第 4.2 版 株式会社 TBC ソリューションズ プログラム 年版改定の概要 年版の6 大重点ポイントと対策 年版と2008 年版の相違 年版への移行の実務") ISO 9001:2015 改定セミナー (JIS Q 9001:2015 準拠 ) 第 4.2 版 株式会社 TBC ソリューションズ プログラム 1.2015 年版改定の概要 2.2015 年版の6 大重点ポイントと対策 3.2015 年版と2008 年版の相違 4.2015 年版への移行の実務 TBC Solutions Co.Ltd. 2 1.1 改定の背景 ISO 9001(QMS) ISO
ISO 9001:2015 改定セミナー (JIS Q 9001:2015 準拠 ) 第 4.2 版 株式会社 TBC ソリューションズ プログラム 1.2015 年版改定の概要 2.2015 年版の6 大重点ポイントと対策 3.2015 年版と2008 年版の相違 4.2015 年版への移行の実務 TBC Solutions Co.Ltd. 2 1.1 改定の背景 ISO 9001(QMS) ISO
プロジェクトマネジメント知識体系ガイド (PMBOK ガイド ) 第 6 版 訂正表 - 第 3 刷り 注 : 次の正誤表は PMBOK ガイド第 6 版 の第 1 刷りと第 2 刷りに関するものです 本 ( または PDF) の印刷部数を確認するには 著作権ページ ( 通知ページおよび目次の前 )
 第 6 版 訂正表 - 第 3 刷り 注 : 次の正誤表は PMBOK ガイド第 6 版 の第 1 刷りと第 2 刷りに関するものです 本 ( または PDF) の印刷部数を確認するには 著作権ページ ( 通知ページおよび目次の前 )") プロジェクトマネジメント知識体系ガイド (PMBOK ガイド ) 第 6 版 訂正表 - 第 3 刷り 注 : 次の正誤表は PMBOK ガイド第 6 版 の第 1 刷りと第 2 刷りに関するものです 本 ( または PDF) の印刷部数を確認するには 著作権ページ ( 通知ページおよび目次の前 ) の一番下を参照してください 10 9 8 などで始まる文字列の 最後の 数字は その特定コピーの印刷を示します
プロジェクトマネジメント知識体系ガイド (PMBOK ガイド ) 第 6 版 訂正表 - 第 3 刷り 注 : 次の正誤表は PMBOK ガイド第 6 版 の第 1 刷りと第 2 刷りに関するものです 本 ( または PDF) の印刷部数を確認するには 著作権ページ ( 通知ページおよび目次の前 ) の一番下を参照してください 10 9 8 などで始まる文字列の 最後の 数字は その特定コピーの印刷を示します
<4D F736F F F696E74202D CC8ED48ED48AD492CA904D82CC8EE D918CF08FC88E9197BF816A2E B8CDD8AB B8
 資料 1-8 ASV における車車間通信の取り組みについて 国土交通省自動車交通局 技術安全部技術企画課 1 交通事故の現状と政府目標 < 交通事故の状況 > 平成 19 年死者数 5,744 人 平成 19 年死傷者数 1,040,189 人 < 政府目標 > ( 警察庁統計より ) 平成 15 年総理施政方針 2012 年までに 死者数を半減し 5000 人以下とする 第 8 次交通安全基本計画
資料 1-8 ASV における車車間通信の取り組みについて 国土交通省自動車交通局 技術安全部技術企画課 1 交通事故の現状と政府目標 < 交通事故の状況 > 平成 19 年死者数 5,744 人 平成 19 年死傷者数 1,040,189 人 < 政府目標 > ( 警察庁統計より ) 平成 15 年総理施政方針 2012 年までに 死者数を半減し 5000 人以下とする 第 8 次交通安全基本計画
卵及び卵製品の高度化基準
 卵製品の高度化基準 1. 製造過程の管理の高度化の目標事業者は 卵製品の製造過程にコーデックスガイドラインに示された7 原則 12 手順に沿った HACCP を適用して 製造過程の管理の高度化を図ることとし このための体制及び施設の整備を行うこととする まず 高度化基盤整備に取り組んだ上で HACCP を適用した製造過程の管理の高度化を図るという段階を踏んだ取組を行う場合は 将来的に HACCP に取り組むこと又はこれを検討することを明らかにした上で
卵製品の高度化基準 1. 製造過程の管理の高度化の目標事業者は 卵製品の製造過程にコーデックスガイドラインに示された7 原則 12 手順に沿った HACCP を適用して 製造過程の管理の高度化を図ることとし このための体制及び施設の整備を行うこととする まず 高度化基盤整備に取り組んだ上で HACCP を適用した製造過程の管理の高度化を図るという段階を踏んだ取組を行う場合は 将来的に HACCP に取り組むこと又はこれを検討することを明らかにした上で
AAプロセスアフローチについて_ テクノファーnews
 品質マネジメントシステム規格国内委員会事務局参考訳 るために必要なすべてのプロセスが含まれる 実現化プロセス これには, 組織の望まれる成果をもたらすすべてのプロセスが含まれる 測定, 分析及び改善プロセス これには, 実施状況の分析並びに有効性及び効率の向上のための, 測定並びにデータ収集に必要となるすべてのプロセスが含まれる それには測定, 監視, 監査, パフォーマンス分析および改善プロセス
品質マネジメントシステム規格国内委員会事務局参考訳 るために必要なすべてのプロセスが含まれる 実現化プロセス これには, 組織の望まれる成果をもたらすすべてのプロセスが含まれる 測定, 分析及び改善プロセス これには, 実施状況の分析並びに有効性及び効率の向上のための, 測定並びにデータ収集に必要となるすべてのプロセスが含まれる それには測定, 監視, 監査, パフォーマンス分析および改善プロセス
第 8 回クリティカルソフトウェアワークショップ 8 th Workshop of Critical Software (WOCS2011) Modeling and Hazard Analysis using STPA ~STAMP/STPA を用いた安全解析手法の検討 ~ M
 Modeling and Hazard Analysis using STPA ~STAMP/STPA を用いた安全解析手法の検討 ~ M") 第 8 回クリティカルソフトウェアワークショップ 8 th Workshop of Critical Software (WOCS2011) Modeling and Hazard Analysis using STPA ~STAMP/STPA を用いた安全解析手法の検討 ~ 2011.1.18 Massachusetts Institute of Technology (MIT) Takuto Ishimatsu,
第 8 回クリティカルソフトウェアワークショップ 8 th Workshop of Critical Software (WOCS2011) Modeling and Hazard Analysis using STPA ~STAMP/STPA を用いた安全解析手法の検討 ~ 2011.1.18 Massachusetts Institute of Technology (MIT) Takuto Ishimatsu,
平成 30 年度需要家側エネルギーリソースを活用したバーチャルパワープラント構築実証事業 (A 事業 ) 東京電力パワーグリッド株式会社関西電力株式会社 2019 年 3 月
 東京電力パワーグリッド株式会社関西電力株式会社 2019 年 3 月") 平成 30 年度需要家側エネルギーリソースを活用したバーチャルパワープラント構築実証事業 (A 事業 ) 東京電力パワーグリッド株式会社関西電力株式会社 2019 年 3 月 1. 実証概要 1 1 簡易指令システムの片拠点システム使用不能時においても反応時間の短い調整力の運用を継続できることを目指し 拠点間連携機能の追加開発を実施 2 アグリゲーションコーディネーター ( 以降 アグリ ) との連携試験にて
平成 30 年度需要家側エネルギーリソースを活用したバーチャルパワープラント構築実証事業 (A 事業 ) 東京電力パワーグリッド株式会社関西電力株式会社 2019 年 3 月 1. 実証概要 1 1 簡易指令システムの片拠点システム使用不能時においても反応時間の短い調整力の運用を継続できることを目指し 拠点間連携機能の追加開発を実施 2 アグリゲーションコーディネーター ( 以降 アグリ ) との連携試験にて
はじめに : ご提案のポイント
 8. モデリングプロセスの構成と手順 モデル検査を用いた設計モデリングのプロセスを分類し それぞれのプロセスの流れと手順を示す 本章の概要は以下の通りである 対象読者目的想定知識得られる知見等 (1) 開発技術者 (2) 開発プロジェクト管理者モデル検査における設計モデリングにおいて 最初に利用できる情報に応じて モデリングプロセスが分類されることを示し その中で典型的なアーキテクチャ情報に基づくモデリングプロセスについて具体的に示す
8. モデリングプロセスの構成と手順 モデル検査を用いた設計モデリングのプロセスを分類し それぞれのプロセスの流れと手順を示す 本章の概要は以下の通りである 対象読者目的想定知識得られる知見等 (1) 開発技術者 (2) 開発プロジェクト管理者モデル検査における設計モデリングにおいて 最初に利用できる情報に応じて モデリングプロセスが分類されることを示し その中で典型的なアーキテクチャ情報に基づくモデリングプロセスについて具体的に示す
目次 移行前の作業 3 ステップ1: 移行元サービス メールソフトの設定変更 3 ステップ2: アルファメール2 メールソフトの設定追加 6 ステップ3: アルファメール2 サーバへの接続テスト 11 ステップ4: 管理者へ完了報告 11 移行完了後の作業 14 作業の流れ 14 ステップ1: メー
 アルファメール 2 アルファメール 2 コンパクトに移行されるお客様へ アルファメール 2 アルファメール 2 コンパクト メールソフトの移行設定 Outlook 2016 (POP 版 ) https://www.alpha-mail.jp/ 必ずお読みください 本資料はアルファメール 2 アルファメール 2 コンパクトに移行されるお客様の利用されているメールソフトの移行設定用の資料です 手順にそった操作
アルファメール 2 アルファメール 2 コンパクトに移行されるお客様へ アルファメール 2 アルファメール 2 コンパクト メールソフトの移行設定 Outlook 2016 (POP 版 ) https://www.alpha-mail.jp/ 必ずお読みください 本資料はアルファメール 2 アルファメール 2 コンパクトに移行されるお客様の利用されているメールソフトの移行設定用の資料です 手順にそった操作
2015 TRON Symposium セッション 組込み機器のための機能安全対応 TRON Safe Kernel TRON Safe Kernel の紹介 2015/12/10 株式会社日立超 LSIシステムズ製品ソリューション設計部トロンフォーラム TRON Safe Kernel WG 幹事
 2015 TRON Symposium セッション 組込み機器のための機能安全対応 TRON Safe Kernel TRON Safe Kernel の紹介 2015/12/10 株式会社日立超 LSIシステムズ製品ソリューション設計部トロンフォーラム TRON Safe Kernel WG 幹事 豊山 祐一 Hitachi ULSI Systems Co., Ltd. 2015. All rights
2015 TRON Symposium セッション 組込み機器のための機能安全対応 TRON Safe Kernel TRON Safe Kernel の紹介 2015/12/10 株式会社日立超 LSIシステムズ製品ソリューション設計部トロンフォーラム TRON Safe Kernel WG 幹事 豊山 祐一 Hitachi ULSI Systems Co., Ltd. 2015. All rights
アルファメールプレミア 移行設定の手引き Outlook2016
 アルファメールプレミアに移行されるお客様へ アルファメールプレミア メールソフトの移行設定 Outlook 2016 (POP 版 ) http://www.alpha-prm.jp/ 必ずお読みください 本資料はアルファメールプレミアに移行されるお客様の利用されているメールソフトの移行設定用の資料です 手順にそった操作 お手続きが行われない場合 正常に移行が完了できない可能性がございます 必ず本資料をご参照いただけますようお願いいたします
アルファメールプレミアに移行されるお客様へ アルファメールプレミア メールソフトの移行設定 Outlook 2016 (POP 版 ) http://www.alpha-prm.jp/ 必ずお読みください 本資料はアルファメールプレミアに移行されるお客様の利用されているメールソフトの移行設定用の資料です 手順にそった操作 お手続きが行われない場合 正常に移行が完了できない可能性がございます 必ず本資料をご参照いただけますようお願いいたします
Oracle Un お問合せ : Oracle Data Integrator 11g: データ統合設定と管理 期間 ( 標準日数 ):5 コースの概要 Oracle Data Integratorは すべてのデータ統合要件 ( 大量の高パフォーマンス バッチ ローブンの統合プロセスおよ
:5 コースの概要 Oracle Data Integratorは すべてのデータ統合要件 ( 大量の高パフォーマンス バッチ ローブンの統合プロセスおよ") Oracle Un お問合せ : 0120- Oracle Data Integrator 11g: データ統合設定と管理 期間 ( 標準日数 ):5 コースの概要 Oracle Data Integratorは すべてのデータ統合要件 ( 大量の高パフォーマンス バッチ ローブンの統合プロセスおよびSOA 対応データ サービスへ ) を網羅する総合的なデータ統合プラットフォームです Oracle
Oracle Un お問合せ : 0120- Oracle Data Integrator 11g: データ統合設定と管理 期間 ( 標準日数 ):5 コースの概要 Oracle Data Integratorは すべてのデータ統合要件 ( 大量の高パフォーマンス バッチ ローブンの統合プロセスおよびSOA 対応データ サービスへ ) を網羅する総合的なデータ統合プラットフォームです Oracle
資料 5 自動車検査場における OBD 検査に関する実証実験について 平成 30 年 4 月 ( 独 ) 自動車技術総合機構軽自動車検査協会 Copyright National Agency for Automobile and Land Transport Technology 1
 自動車技術総合機構軽自動車検査協会 Copyright National Agency for Automobile and Land Transport Technology 1") 資料 5 自動車検査場における OBD 検査に関する実証実験について 平成 30 年 4 月 ( 独 ) 自動車技術総合機構軽自動車検査協会 1 目次 1. 実証実験の実施体制 2. 実証実験の概要 3. 実験結果 4.OBD 検査導入に向けた課題と解決策 2 1. 実証実験の実施体制 平成 28 年度及び29 年度 自動車技術総合機構と軽自動車検査協会が連携し スナップオン ツールズ ( 株 )
資料 5 自動車検査場における OBD 検査に関する実証実験について 平成 30 年 4 月 ( 独 ) 自動車技術総合機構軽自動車検査協会 1 目次 1. 実証実験の実施体制 2. 実証実験の概要 3. 実験結果 4.OBD 検査導入に向けた課題と解決策 2 1. 実証実験の実施体制 平成 28 年度及び29 年度 自動車技術総合機構と軽自動車検査協会が連携し スナップオン ツールズ ( 株 )
速度規制の目的と現状 警察庁交通局 1
 速度規制の目的と現状 警察庁交通局 1 1 最高速度規制の必要性 2 規制速度決定の基本的考え方 3 一般道路における速度規制基準の概要 4 最高速度規制の見直し状況 ( 平成 21 年度 ~23 年度 ) 5 最高速度違反による交通事故対策検討会の開催 2 1 最高速度規制の必要性 最高速度規制は 交通事故の抑止 ( 交通の安全 ) 交通の円滑化 道路交通に起因する障害の防止 の観点から 必要に応じて実施
速度規制の目的と現状 警察庁交通局 1 1 最高速度規制の必要性 2 規制速度決定の基本的考え方 3 一般道路における速度規制基準の概要 4 最高速度規制の見直し状況 ( 平成 21 年度 ~23 年度 ) 5 最高速度違反による交通事故対策検討会の開催 2 1 最高速度規制の必要性 最高速度規制は 交通事故の抑止 ( 交通の安全 ) 交通の円滑化 道路交通に起因する障害の防止 の観点から 必要に応じて実施
第 2 回 STAMP Workshop in Japan 28 November, 2017 システムモデルを用いた STAMP/STPA 試行の事例紹介 株式会社日立産業制御ソリューションズ橋本岳男 Takeo Hashimoto Embedded Systems Engineering Gro
 第 2 回 STAMP Workshop in Japan 28 November, 2017 システムモデルを用いた STAMP/STPA 試行の事例紹介 株式会社日立産業制御ソリューションズ橋本岳男 Takeo Hashimoto Embedded Systems Engineering Group Hitachi Industry & Control Solutions, Ltd. Contents
第 2 回 STAMP Workshop in Japan 28 November, 2017 システムモデルを用いた STAMP/STPA 試行の事例紹介 株式会社日立産業制御ソリューションズ橋本岳男 Takeo Hashimoto Embedded Systems Engineering Group Hitachi Industry & Control Solutions, Ltd. Contents
LAN ケーブル接続について
 LAN ケーブル接続について LaserCut6.1J において LAN ケーブル接続によりレーザー加工機と接続し 制御する場合の手順を説明します 本資料では USB ケーブル接続での制御ができていることを前提にしています 本資料では 基本的で 最も確実な設定方法を説明します ネットワーク等の設定変更が必要な場合は ユ ーザー様にて行って下さい LAN ケーブルは通常の ストレート タイプを使用します
LAN ケーブル接続について LaserCut6.1J において LAN ケーブル接続によりレーザー加工機と接続し 制御する場合の手順を説明します 本資料では USB ケーブル接続での制御ができていることを前提にしています 本資料では 基本的で 最も確実な設定方法を説明します ネットワーク等の設定変更が必要な場合は ユ ーザー様にて行って下さい LAN ケーブルは通常の ストレート タイプを使用します
組織内CSIRT構築の実作業
 組織内 CSIRT 構築の実作業 一般社団法人 JPCERT コーディネーションセンター 概要 1. キックオフ スケジューリング 2. ゴールの設定とタスクの細分化 3. CSIRT 関連知識 ノウハウ等の勉強会 4. 組織内の現状把握 5. 組織内 CSIRT の設計 6. 組織内 CSIRT 設置に必要な準備 7. 組織内 CSIRT の設置 8. 組織内 CSIRT 運用の訓練 ( 参考 )
組織内 CSIRT 構築の実作業 一般社団法人 JPCERT コーディネーションセンター 概要 1. キックオフ スケジューリング 2. ゴールの設定とタスクの細分化 3. CSIRT 関連知識 ノウハウ等の勉強会 4. 組織内の現状把握 5. 組織内 CSIRT の設計 6. 組織内 CSIRT 設置に必要な準備 7. 組織内 CSIRT の設置 8. 組織内 CSIRT 運用の訓練 ( 参考 )
Microsoft PowerPoint - 6.PID制御.pptx
 プロセス制御工学 6.PID 制御 京都大学 加納学 Division of Process Control & Process Systems Engineering Department of Chemical Engineering, Kyoto University manabu@cheme.kyoto-u.ac.jp http://www-pse.cheme.kyoto-u.ac.jp/~kano/
プロセス制御工学 6.PID 制御 京都大学 加納学 Division of Process Control & Process Systems Engineering Department of Chemical Engineering, Kyoto University manabu@cheme.kyoto-u.ac.jp http://www-pse.cheme.kyoto-u.ac.jp/~kano/
ESET Smart Security 7 リリースノート
 ================================================================== ESET Smart Security 7 リリースノート キヤノンITソリューションズ株式会社 ================================================================== はじめにキヤノンITソリューションズ製品をご愛顧いただき誠にありがとうございます
================================================================== ESET Smart Security 7 リリースノート キヤノンITソリューションズ株式会社 ================================================================== はじめにキヤノンITソリューションズ製品をご愛顧いただき誠にありがとうございます
uPC1093 DS
 お客様各位 カタログ等資料中の旧社名の扱いについて 2010 年 4 月 1 日を以って NEC エレクトロニクス株式会社及び株式会社ルネサステクノロジが合併し 両社の全ての事業が当社に承継されております 従いまして 本資料中には旧社名での表記が残っておりますが 当社の資料として有効ですので ご理解の程宜しくお願い申し上げます ルネサスエレクトロニクスホームページ (http://www.renesas.com)
お客様各位 カタログ等資料中の旧社名の扱いについて 2010 年 4 月 1 日を以って NEC エレクトロニクス株式会社及び株式会社ルネサステクノロジが合併し 両社の全ての事業が当社に承継されております 従いまして 本資料中には旧社名での表記が残っておりますが 当社の資料として有効ですので ご理解の程宜しくお願い申し上げます ルネサスエレクトロニクスホームページ (http://www.renesas.com)
Microsoft PowerPoint - 1.プロセス制御の概要.pptx
 プロセス制御工学 1. プロセス制御の概要 京都大学 加納学 Division of Process Control & Process Systems Engineering Department of Chemical Engineering, Kyoto University manabu@cheme.kyoto-u.ac.jp http://www-pse.cheme.kyoto-u.ac.jp/~kano/
プロセス制御工学 1. プロセス制御の概要 京都大学 加納学 Division of Process Control & Process Systems Engineering Department of Chemical Engineering, Kyoto University manabu@cheme.kyoto-u.ac.jp http://www-pse.cheme.kyoto-u.ac.jp/~kano/
uPC258,4558 DS
 お客様各位 カタログ等資料中の旧社名の扱いについて 2010 年 4 月 1 日を以って NEC エレクトロニクス株式会社及び株式会社ルネサステクノロジが合併し 両社の全ての事業が当社に承継されております 従いまして 本資料中には旧社名での表記が残っておりますが 当社の資料として有効ですので ご理解の程宜しくお願い申し上げます ルネサスエレクトロニクスホームページ (http://www.renesas.com)
お客様各位 カタログ等資料中の旧社名の扱いについて 2010 年 4 月 1 日を以って NEC エレクトロニクス株式会社及び株式会社ルネサステクノロジが合併し 両社の全ての事業が当社に承継されております 従いまして 本資料中には旧社名での表記が残っておりますが 当社の資料として有効ですので ご理解の程宜しくお願い申し上げます ルネサスエレクトロニクスホームページ (http://www.renesas.com)
Microsoft Word - 1 color Normalization Document _Agilent version_ .doc
 color 実験の Normalization color 実験で得られた複数のアレイデータを相互比較するためには Normalization( 正規化 ) が必要です 2 つのサンプルを異なる色素でラベル化し 競合ハイブリダイゼーションさせる 2color 実験では 基本的に Dye Normalization( 色素補正 ) が適用されますが color 実験では データの特徴と実験の目的 (
color 実験の Normalization color 実験で得られた複数のアレイデータを相互比較するためには Normalization( 正規化 ) が必要です 2 つのサンプルを異なる色素でラベル化し 競合ハイブリダイゼーションさせる 2color 実験では 基本的に Dye Normalization( 色素補正 ) が適用されますが color 実験では データの特徴と実験の目的 (
目次 はじめに第章議長権限について 1 自由会議モードと議長会議モード 2 議長になることでできる操作 第 2 章議長専用の機能紹介第章議長専用メニューの使い方 1 会議モードの変更 2 ミュート 3 映像同期化 4 レイアウト同期化 5 会議室の入室制限 6 録画の制限 7 プライベートチャット制
 R 議長用マニュアル ( 版 ) 年 月 - 第 版 - 木村情報技術株式会社 目次 はじめに第章議長権限について 1 自由会議モードと議長会議モード 2 議長になることでできる操作 第 2 章議長専用の機能紹介第章議長専用メニューの使い方 1 会議モードの変更 2 ミュート 3 映像同期化 4 レイアウト同期化 5 会議室の入室制限 6 録画の制限 7 プライベートチャット制限 7 ファイル転送制御
R 議長用マニュアル ( 版 ) 年 月 - 第 版 - 木村情報技術株式会社 目次 はじめに第章議長権限について 1 自由会議モードと議長会議モード 2 議長になることでできる操作 第 2 章議長専用の機能紹介第章議長専用メニューの使い方 1 会議モードの変更 2 ミュート 3 映像同期化 4 レイアウト同期化 5 会議室の入室制限 6 録画の制限 7 プライベートチャット制限 7 ファイル転送制御
スライド 1
 資料 WG 環 3-1 IPv6 環境クラウドサービスの構築 運用ガイドライン骨子 ( 案 ) 1 本骨子案の位置付け 本ガイドライン骨子案は 環境クラウドサービス を構築 運用する際に関連する事業者等が満たすことが望ましい要件等を規定するガイドライン策定のための準備段階として ガイドラインにおいて要件を設定すべき項目をまとめたものである 今後 平成 21 年度第二次補正予算施策 環境負荷軽減型地域
資料 WG 環 3-1 IPv6 環境クラウドサービスの構築 運用ガイドライン骨子 ( 案 ) 1 本骨子案の位置付け 本ガイドライン骨子案は 環境クラウドサービス を構築 運用する際に関連する事業者等が満たすことが望ましい要件等を規定するガイドライン策定のための準備段階として ガイドラインにおいて要件を設定すべき項目をまとめたものである 今後 平成 21 年度第二次補正予算施策 環境負荷軽減型地域
車載式故障診断装置 (OBD) に関する制度と運用の現状 資料 4
 に関する制度と運用の現状 資料 4") 車載式故障診断装置 (OBD) に関する制度と運用の現状 資料 4 OBD( 車載式故障診断装置 ) とは 車載式故障診断装置 (OBD:On-Board Diagnostics) とは エンジンやトランスミッションなどの電子制御装置 (ECU:Electronic Control Unit) 内部に搭載された故障診断機能である ECU は 自動車が安全 環境性能を発揮するため センサからの信号等に基づき最適な制御を行っているが
車載式故障診断装置 (OBD) に関する制度と運用の現状 資料 4 OBD( 車載式故障診断装置 ) とは 車載式故障診断装置 (OBD:On-Board Diagnostics) とは エンジンやトランスミッションなどの電子制御装置 (ECU:Electronic Control Unit) 内部に搭載された故障診断機能である ECU は 自動車が安全 環境性能を発揮するため センサからの信号等に基づき最適な制御を行っているが
【ドコモあんしんスキャン】サービスマニュアル
 あんしんスキャンマニュアル ios 版 ( 利用編 ) 第 1.1.1 版 株式会社 NTT ドコモ 平成 30 年 2 月 28 日 目次 1 ドコモあんしんスキャン とは... 2 機能概要... 2 利用料金... 2 サービス利用注意点... 2 対応機種... 3 2 ドコモあんしんスキャン 利用方法... 4 本アプリのインストール... 4 初期設定... 5 アカウント注意事項...
あんしんスキャンマニュアル ios 版 ( 利用編 ) 第 1.1.1 版 株式会社 NTT ドコモ 平成 30 年 2 月 28 日 目次 1 ドコモあんしんスキャン とは... 2 機能概要... 2 利用料金... 2 サービス利用注意点... 2 対応機種... 3 2 ドコモあんしんスキャン 利用方法... 4 本アプリのインストール... 4 初期設定... 5 アカウント注意事項...
PowerPoint プレゼンテーション
 KeepEye のご紹介 S&J 株式会社 KeepEye のサービスコンセプト 背景 高度化するサイバー攻撃を従来の Firewall やウイルス対策ソフトで防御することは困難になっています 一方で 高度なサイバー攻撃を防御するセキュリティ専門家が運用する前提のツールが複数のベンダーから提供されるようになっていますが 各企業でそのツールを運用するセキュリティ専門家を雇用するのが難しく 実際運用ができずに
KeepEye のご紹介 S&J 株式会社 KeepEye のサービスコンセプト 背景 高度化するサイバー攻撃を従来の Firewall やウイルス対策ソフトで防御することは困難になっています 一方で 高度なサイバー攻撃を防御するセキュリティ専門家が運用する前提のツールが複数のベンダーから提供されるようになっていますが 各企業でそのツールを運用するセキュリティ専門家を雇用するのが難しく 実際運用ができずに
組込みシステムにおける UMLモデルカタログの実践研究
 Modeling Forum 2015 組込みシステムの設計実装への モデルカタログの活用 仙台高等専門学校 情報システム工学科 力武克彰, 新村祐太 ( 豊橋技科大 ), 菊池雄太郎 ( 仙台高専 ) 概要 組込み分野のための UML モデルカタログ (*) のモデルを実装してみました (* 以下 モデルカタログと呼びます ) 2 概要 モデルカタログ : 目標制御モデル モデルカタログより引用
Modeling Forum 2015 組込みシステムの設計実装への モデルカタログの活用 仙台高等専門学校 情報システム工学科 力武克彰, 新村祐太 ( 豊橋技科大 ), 菊池雄太郎 ( 仙台高専 ) 概要 組込み分野のための UML モデルカタログ (*) のモデルを実装してみました (* 以下 モデルカタログと呼びます ) 2 概要 モデルカタログ : 目標制御モデル モデルカタログより引用
日本機械学会 生産システム部門研究発表講演会 2015 資料
 ( 社 ) 日本機械学会生産システム部門研究発表講演会 2015 製造オペレーションマネジメント入門 ~ISA-95 が製造業を変える ~ 事例による説明 2015-3-16 Ver.1 IEC/SC65E/JWG5 国内委員アズビル株式会社村手恒夫 目次 事例によるケーススタディの目的 事例 : 果汁入り飲料水製造工場 情報システム構築の流れ 1. 対象問題のドメインと階層の確認 2. 生産現場での課題の調査と整理
( 社 ) 日本機械学会生産システム部門研究発表講演会 2015 製造オペレーションマネジメント入門 ~ISA-95 が製造業を変える ~ 事例による説明 2015-3-16 Ver.1 IEC/SC65E/JWG5 国内委員アズビル株式会社村手恒夫 目次 事例によるケーススタディの目的 事例 : 果汁入り飲料水製造工場 情報システム構築の流れ 1. 対象問題のドメインと階層の確認 2. 生産現場での課題の調査と整理
Microsoft PowerPoint - Userguide-SyoninMail-v1.0.ppt
 モバイルウェブユーザーガイド 承認機能付メール配信設定方法編 Ver. 1.0 本書をご利用いただく前に モバイルウェブユーザーガイド承認機能付メール配信設定方法編 のご利用にあたり 以下をご留意ください 1. 本書の内容について 本書では モバイルウェブの承認機能付メール配信の基本的な使い方を説明しています 使用するソフトウェアやお客さまのご利用状況に応じて 必要な設定内容が異なることがあります
モバイルウェブユーザーガイド 承認機能付メール配信設定方法編 Ver. 1.0 本書をご利用いただく前に モバイルウェブユーザーガイド承認機能付メール配信設定方法編 のご利用にあたり 以下をご留意ください 1. 本書の内容について 本書では モバイルウェブの承認機能付メール配信の基本的な使い方を説明しています 使用するソフトウェアやお客さまのご利用状況に応じて 必要な設定内容が異なることがあります
Microsoft Word - Malleable Attentional Resources Theory.doc
 Malleable Attentional Resources Theory: A New Explanation for the Effects of Mental Underload on Performance Mark S. Young & Neville A. Santon Human Factors, Vol. 44, No. 3, pp. 365-375 (2002) Introduction
Malleable Attentional Resources Theory: A New Explanation for the Effects of Mental Underload on Performance Mark S. Young & Neville A. Santon Human Factors, Vol. 44, No. 3, pp. 365-375 (2002) Introduction
【あんしんナンバーチェック】サービスマニュアル(iPhone)
") あんしんナンバーチェック ios 版 サービスマニュアル ( アプリ利用編 ) 第 1.0 版 株式会社 NTT ドコモ 2017 年 12 月 5 日 目次 1 あんしんナンバーチェック とは... 2 1.1 機能... 2 1.2 サービスイメージ... 2 1.3 利用料金... 3 1.4 利用条件... 3 1.5 サービス利用注意点... 3 2 利用開始まで... 5 2.1 インストールとアップデート...
あんしんナンバーチェック ios 版 サービスマニュアル ( アプリ利用編 ) 第 1.0 版 株式会社 NTT ドコモ 2017 年 12 月 5 日 目次 1 あんしんナンバーチェック とは... 2 1.1 機能... 2 1.2 サービスイメージ... 2 1.3 利用料金... 3 1.4 利用条件... 3 1.5 サービス利用注意点... 3 2 利用開始まで... 5 2.1 インストールとアップデート...
イ -3 ( 法令等へ抵触するおそれが高い分野の法令遵守 ) サービスの態様に応じて 抵触のおそれが高い法令 ( 業法 税法 著作権法等 ) を特に明示して遵守させること イ -4 ( 公序良俗違反行為の禁止 ) 公序良俗に反する行為を禁止すること イ利用規約等 利用規約 / 契約書 イ -5 (
 サービスの態様に応じて 抵触のおそれが高い法令 ( 業法 税法 著作権法等 ) を特に明示して遵守させること イ -4 ( 公序良俗違反行為の禁止 ) 公序良俗に反する行為を禁止すること イ利用規約等 利用規約 / 契約書 イ -5 (") 一覧 項番項目何を根拠資料に判断するか ア -1 ( 連絡手段の確保 ) 連絡手段を確保するため メールアドレス 電話番号 SNS アカウント 住所 氏名のいずれかを登録させること 実際のサービス登録画面のスクリーンショット画像の提出 ( サービス内容によって連絡手段の確保 本人確認の重要性が異なるため ) ア登録事項 ア -2 ( 本人確認 ) 本人確認を行うこと ( 公的身分証明証 金融 / 携帯電話の個別番号等
一覧 項番項目何を根拠資料に判断するか ア -1 ( 連絡手段の確保 ) 連絡手段を確保するため メールアドレス 電話番号 SNS アカウント 住所 氏名のいずれかを登録させること 実際のサービス登録画面のスクリーンショット画像の提出 ( サービス内容によって連絡手段の確保 本人確認の重要性が異なるため ) ア登録事項 ア -2 ( 本人確認 ) 本人確認を行うこと ( 公的身分証明証 金融 / 携帯電話の個別番号等
<4D F736F F F696E74202D E AC7979D95A88EBF895E97708EE88F E B8CDD8AB B83685D>
 1 アイシン管理物質禁止物質 登録手順 2017 年 4 月 10 日改訂 アイシン精機安全衛生環境部 アイシン精機への成分情報について 2 実施項目 日本国内法規に対応したもの ( 日本語のもの ) GHS 対応版 成分情報登録 PRTR WORLD にアップロード PRTR WORLD にアイシン管理 禁止物質の成分情報を登録 ( 全成分開示ではありません ) 納入資材成分報告書作成 ( 当社の書式
1 アイシン管理物質禁止物質 登録手順 2017 年 4 月 10 日改訂 アイシン精機安全衛生環境部 アイシン精機への成分情報について 2 実施項目 日本国内法規に対応したもの ( 日本語のもの ) GHS 対応版 成分情報登録 PRTR WORLD にアップロード PRTR WORLD にアイシン管理 禁止物質の成分情報を登録 ( 全成分開示ではありません ) 納入資材成分報告書作成 ( 当社の書式
Microsoft PowerPoint - kougi7.ppt
 到達目標 スーパバイザモード, 特権命令, 割り込み CPU の割り込みメカニズム 割り込みの種類ごとに, 所定の例外処理が呼び出される スーパーバイザモードに, 自動的に切り替わる 割り込み終了後に 元のモード に戻る ハードウエア割り込みについて 割り込み禁止 割り込み発生時の CPU の挙動 現在の処理を中断 例外処理用のプログラム ( ハンドラともいう ) が起動される プログラム実行の流れ
到達目標 スーパバイザモード, 特権命令, 割り込み CPU の割り込みメカニズム 割り込みの種類ごとに, 所定の例外処理が呼び出される スーパーバイザモードに, 自動的に切り替わる 割り込み終了後に 元のモード に戻る ハードウエア割り込みについて 割り込み禁止 割り込み発生時の CPU の挙動 現在の処理を中断 例外処理用のプログラム ( ハンドラともいう ) が起動される プログラム実行の流れ
Solar Link ARCH ソーラーリンクアーク Step 1 ログイン ログイン方法 1. Web ブラウザを立ち上げて 一括監視画面 URL にアクセスします 2. ログイン画面が表示されます 3. マスター ID とマスターパスワードを入力し ログイン状態を保持する に必ずチェックを入れて
 お客様へ 太陽光発電計測表示 遠隔監視システム ASP サービス仕様 ご利用の前に必ずお読み頂き メールアドレスの登録など重要な設定を行ってください ASP サービスの性質上 予告なくアップデートが行われる場合がございます 予めご了承ください Solar Link ARCH ソーラーリンクアーク Step 1 ログイン ログイン方法 1. Web ブラウザを立ち上げて 一括監視画面 URL にアクセスします
お客様へ 太陽光発電計測表示 遠隔監視システム ASP サービス仕様 ご利用の前に必ずお読み頂き メールアドレスの登録など重要な設定を行ってください ASP サービスの性質上 予告なくアップデートが行われる場合がございます 予めご了承ください Solar Link ARCH ソーラーリンクアーク Step 1 ログイン ログイン方法 1. Web ブラウザを立ち上げて 一括監視画面 URL にアクセスします
Microsoft PowerPoint - 【資料9-2】春日伸予委員提出資料
 資料 10-1 高齢ドライバの事故防止対策案 芝浦工大春日伸予 基本課題高齢者の運転の安全性や安全運転意識を高める技術や教育, 環境を充実させる 一方で, 基準となる検査の結果, 運転の停止が望ましいと判断されたドライバが, 安心して速やかに免許返納を出来る体制と環境を整備する ドライバ自身の判断による自主返納もスムースに出来る体制を整備する 重要項目 1. 運転免許を返納するドライバへの対応返納後,
資料 10-1 高齢ドライバの事故防止対策案 芝浦工大春日伸予 基本課題高齢者の運転の安全性や安全運転意識を高める技術や教育, 環境を充実させる 一方で, 基準となる検査の結果, 運転の停止が望ましいと判断されたドライバが, 安心して速やかに免許返納を出来る体制と環境を整備する ドライバ自身の判断による自主返納もスムースに出来る体制を整備する 重要項目 1. 運転免許を返納するドライバへの対応返納後,
会社概要と私の経歴 1 / 30 会社概要 所在地 : 本社 ( 名古屋市中区 ) 刈谷事業所( 刈谷市 ) 設立 : 売上高 : 40 億 800 万円 (2014 年 3 月期 ) 従業員数 : 235 名 (2014 年 4 月時点 ) 業務内容 : ITSソフト ( ナビ
 刈谷事業所( 刈谷市 ) 設立 : 売上高 : 40 億 800 万円 (2014 年 3 月期 ) 従業員数 : 235 名 (2014 年 4 月時点 ) 業務内容 : ITSソフト ( ナビ") 設計の見える化 (GSN) 入門 Embedded Technology 2015 2015.11.19, パシフィコ横浜 ( 株 ) デンソークリエイト宇都宮浩之 会社概要と私の経歴 1 / 30 会社概要 所在地 : 本社 ( 名古屋市中区 ) 刈谷事業所( 刈谷市 ) 設立 : 1991.2.14 売上高 : 40 億 800 万円 (2014 年 3 月期 ) 従業員数 : 235 名 (2014
設計の見える化 (GSN) 入門 Embedded Technology 2015 2015.11.19, パシフィコ横浜 ( 株 ) デンソークリエイト宇都宮浩之 会社概要と私の経歴 1 / 30 会社概要 所在地 : 本社 ( 名古屋市中区 ) 刈谷事業所( 刈谷市 ) 設立 : 1991.2.14 売上高 : 40 億 800 万円 (2014 年 3 月期 ) 従業員数 : 235 名 (2014
バリデーション基準 1. 医薬品 医薬部外品 GMP 省令に規定するバリデーションについては 品質リスクを考慮し 以下の バリデーション基準 に基づいて実施すること 2. バリデーション基準 (1) バリデーションの目的バリデーションは 製造所の構造設備並びに手順 工程その他の製造管理及び品質管理の
 バリデーションの目的バリデーションは 製造所の構造設備並びに手順 工程その他の製造管理及び品質管理の") バリデーション基準 1. 医薬品 医薬部外品 GMP 省令に規定するバリデーションについては 品質リスクを考慮し 以下の バリデーション基準 に基づいて実施すること 2. バリデーション基準 (1) バリデーションの目的バリデーションは 製造所の構造設備並びに手順 工程その他の製造管理及び品質管理の方法 ( 以下この基準において 製造手順等 という ) が期待される結果を与えることを検証し これを文書とすることによって
バリデーション基準 1. 医薬品 医薬部外品 GMP 省令に規定するバリデーションについては 品質リスクを考慮し 以下の バリデーション基準 に基づいて実施すること 2. バリデーション基準 (1) バリデーションの目的バリデーションは 製造所の構造設備並びに手順 工程その他の製造管理及び品質管理の方法 ( 以下この基準において 製造手順等 という ) が期待される結果を与えることを検証し これを文書とすることによって
共有フォルダ接続手順 1 共有フォルダ接続ツールのダウンロード 展開 CSVEX のトップページから共有フォルダ接続ツールの zip ファイルをダウンロードします ダウンロードした zip ファイルを右クリックして すべて展開 を選択します (Windows 環境では zip ファイルを解凍しなくて
 共有フォルダ接続手順 (Windows 環境 ) 本手順書では 共有フォルダ接続ツールの設定 実行方法を説明します PC から CSVEX の共有フォルダ (WebDAV) に接続すれば いつでもお手元に最新のファイル一式が揃っている状態となり 日々のファイルダウンロード作業が不要となります 共有フォルダ接続ツールは CSVEX の共有フォルダに簡単に接続するためのツールです 必要環境 Windows
共有フォルダ接続手順 (Windows 環境 ) 本手順書では 共有フォルダ接続ツールの設定 実行方法を説明します PC から CSVEX の共有フォルダ (WebDAV) に接続すれば いつでもお手元に最新のファイル一式が揃っている状態となり 日々のファイルダウンロード作業が不要となります 共有フォルダ接続ツールは CSVEX の共有フォルダに簡単に接続するためのツールです 必要環境 Windows