直樹卒業論文
|
|
|
- あつの ながだき
- 7 years ago
- Views:
Transcription
1 Kinect PCL
2 3 Xbox360 Kinect Kinect SDK PCL(Point Cloud Library) 3 Kinect 3 RGB 3 3 PCL SAC-IA(Sample Consensus Initial Alignment) ICP(Interative Closest Point)
 ICP(Interative")
3 Kinect Fusion Kinect 3.1 Kinect PCL PCL ICP

4 1 1.1 Nintendo 3DS Kinect Xbox 360 Kinect RGB 3 3 Kinect Kinect 3 Kinect PCL Point Cloud Library PCL Kinect PCL 3 3D 3D 3D 3D Kinect 3 3 PCL 1.2 2

5 3 Kinect 4 3 5

6
7 3 Kinect DERiVE[1] Kinec 2 2 Kinect 3 Kinect RapidformXOM PCL 3 Kinect PCL kd-tree octree RANSAC

8 2 2.3 KinectFusion Kinect KinectFusion KinectFusion Kinect 3 ICP Interative Closest Point KinectFusion 3D Kinect KinectFusion 3 KinectFusion 3

9 3 KinectFusion 2.4 KinectFusion Kinect 3 PCL 3 3 CAD 3D 4 4 Kinect PCL Kinect SDK VisualStudio 2010 C++

10 4 3 3D

11 3 Kinect 3.1 Kinect Kinect for Xbox Xbox Microsoft Windows Kinect for Windows Kinect for Xbox 360 Kinect for Windows Kinect RGB RGB Xbox 360 PC Kinect SDK lib C# C++ Kinect 3D 4m Kinect Kinect mm 1 3 X Y Z Z X Y

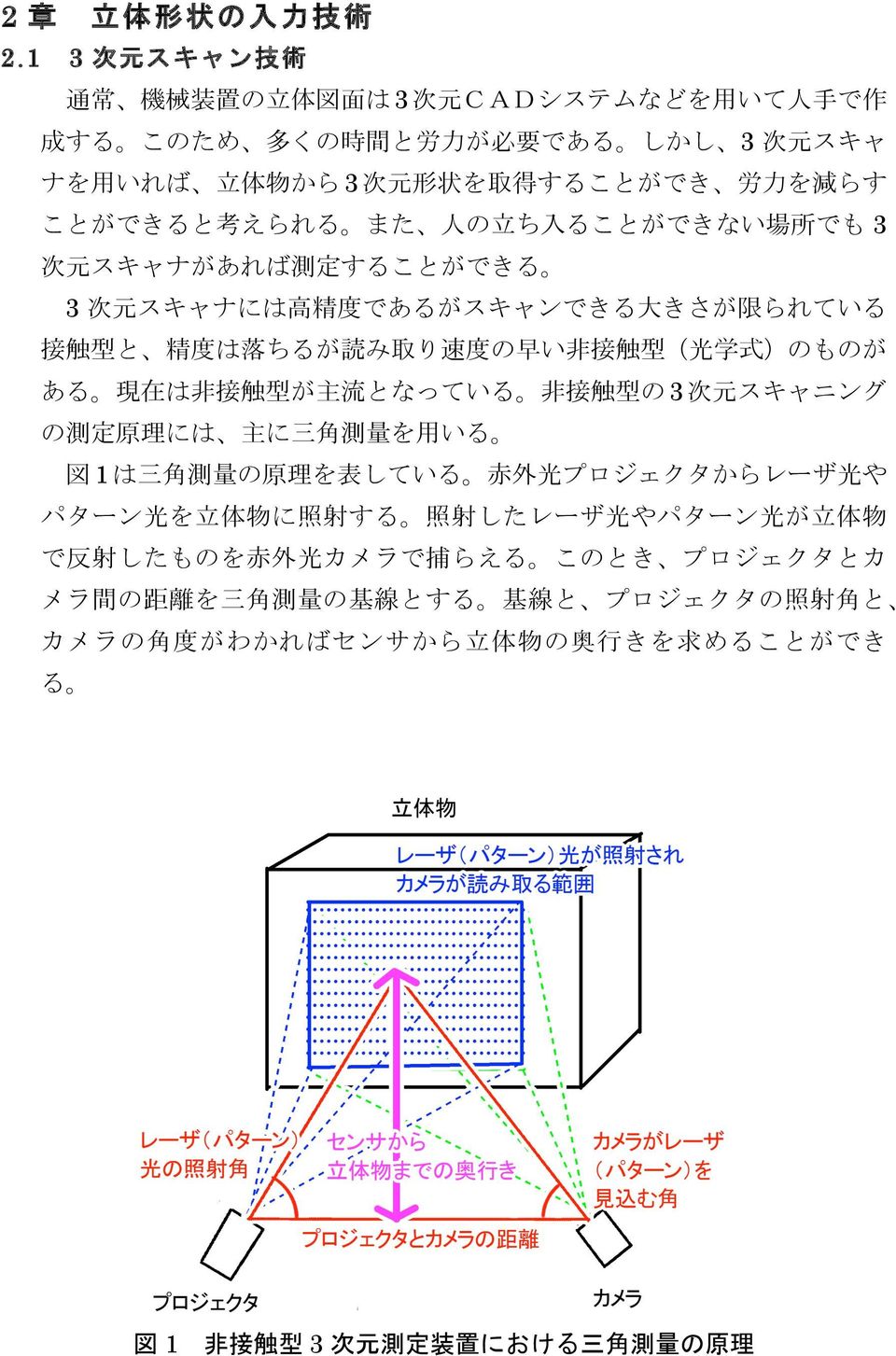
12 Z Kinect Kinect P 3 (X,Y,Z) X P (B) ABC ABD 28.5 P X AD Z tan P 320:w=Z tan28.5:x X=(w Z tan28.5)/320 w Z P 3 X Y P Y ABD 21.5 AD

13 240 P 3 Y 3.3 RGB KinectSDK NuiImageGetColorPixelCoordinatesFromDepthPixel
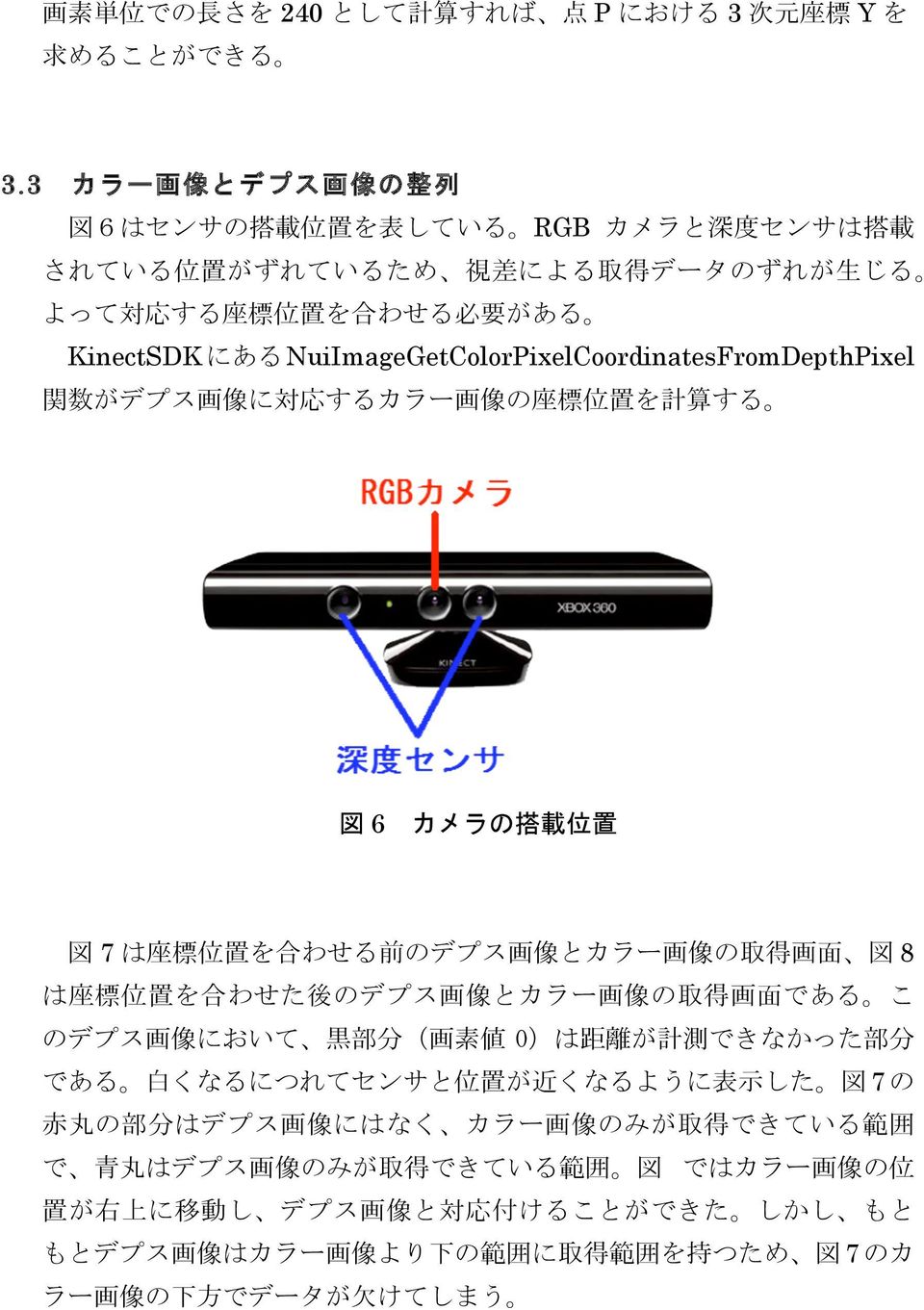
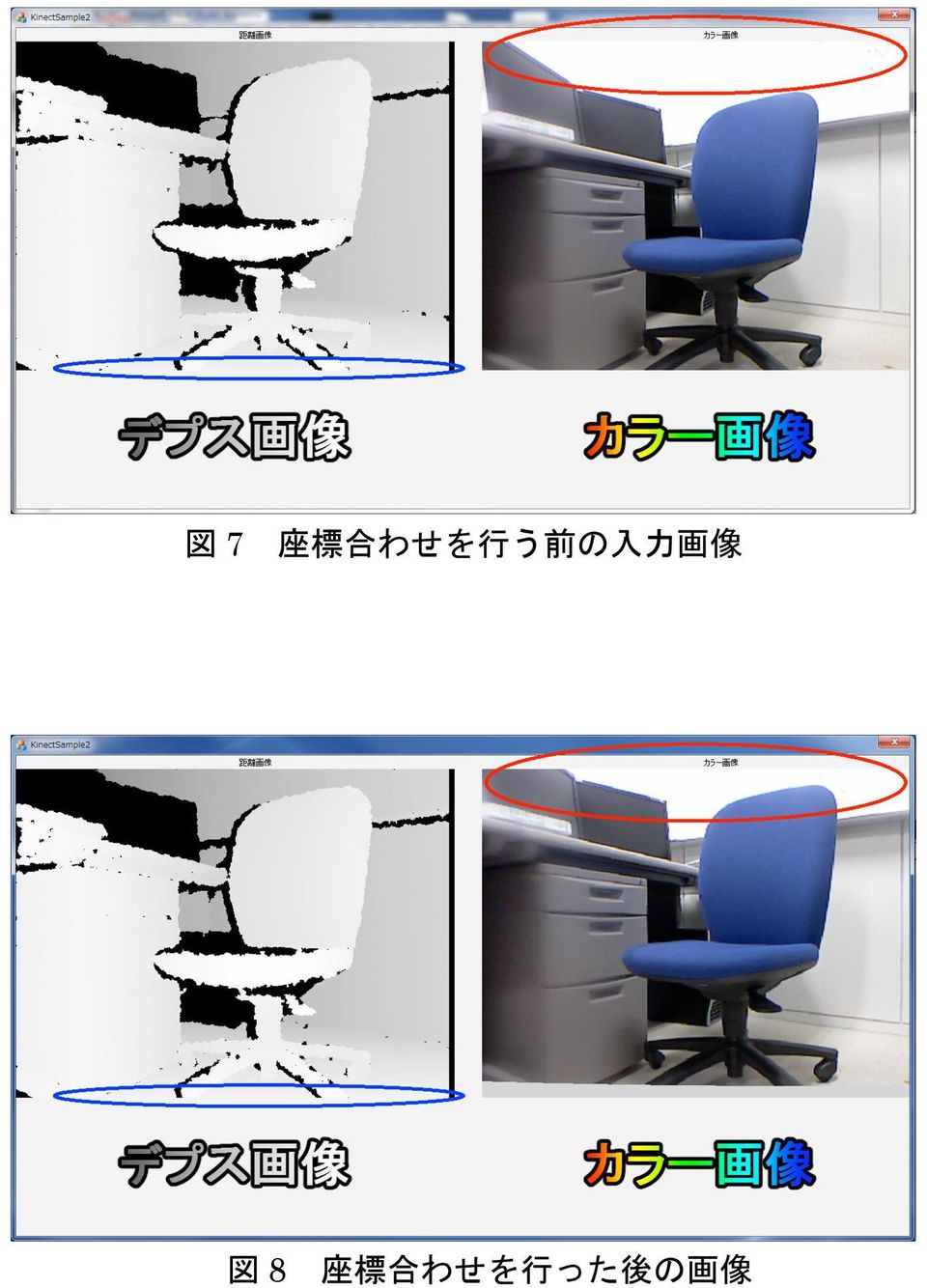
14 図 7 座標合わせを行う前の入力画像 図 8 座標合わせを行った後の画像
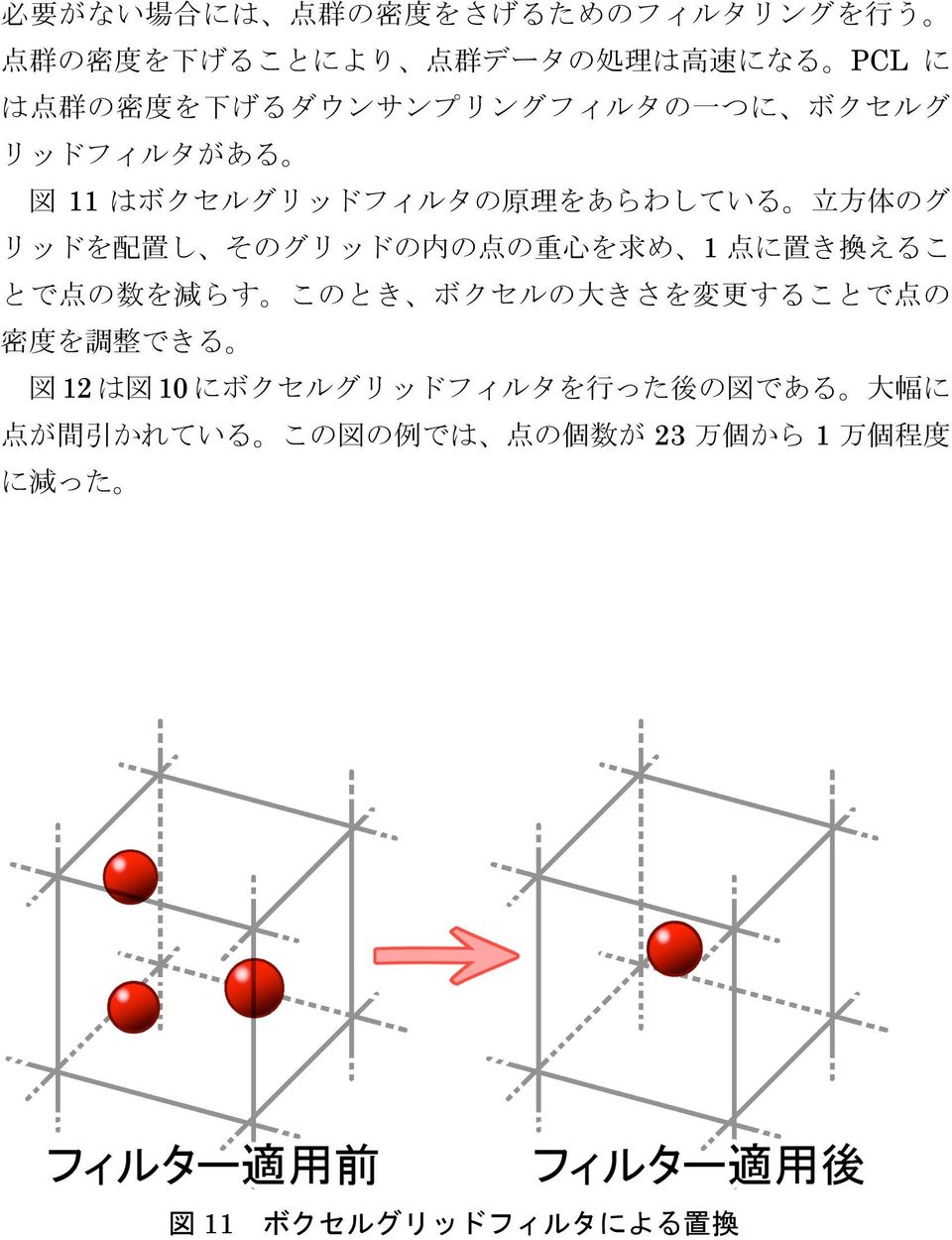
15 4 4.1 PCL(Point Cloud Library) PCL 3 3 PCL 3 PCL Kinect PCL (pcd ) Kinect PCL 4.2 Kinect 3 3 σ σ

16 Kinect
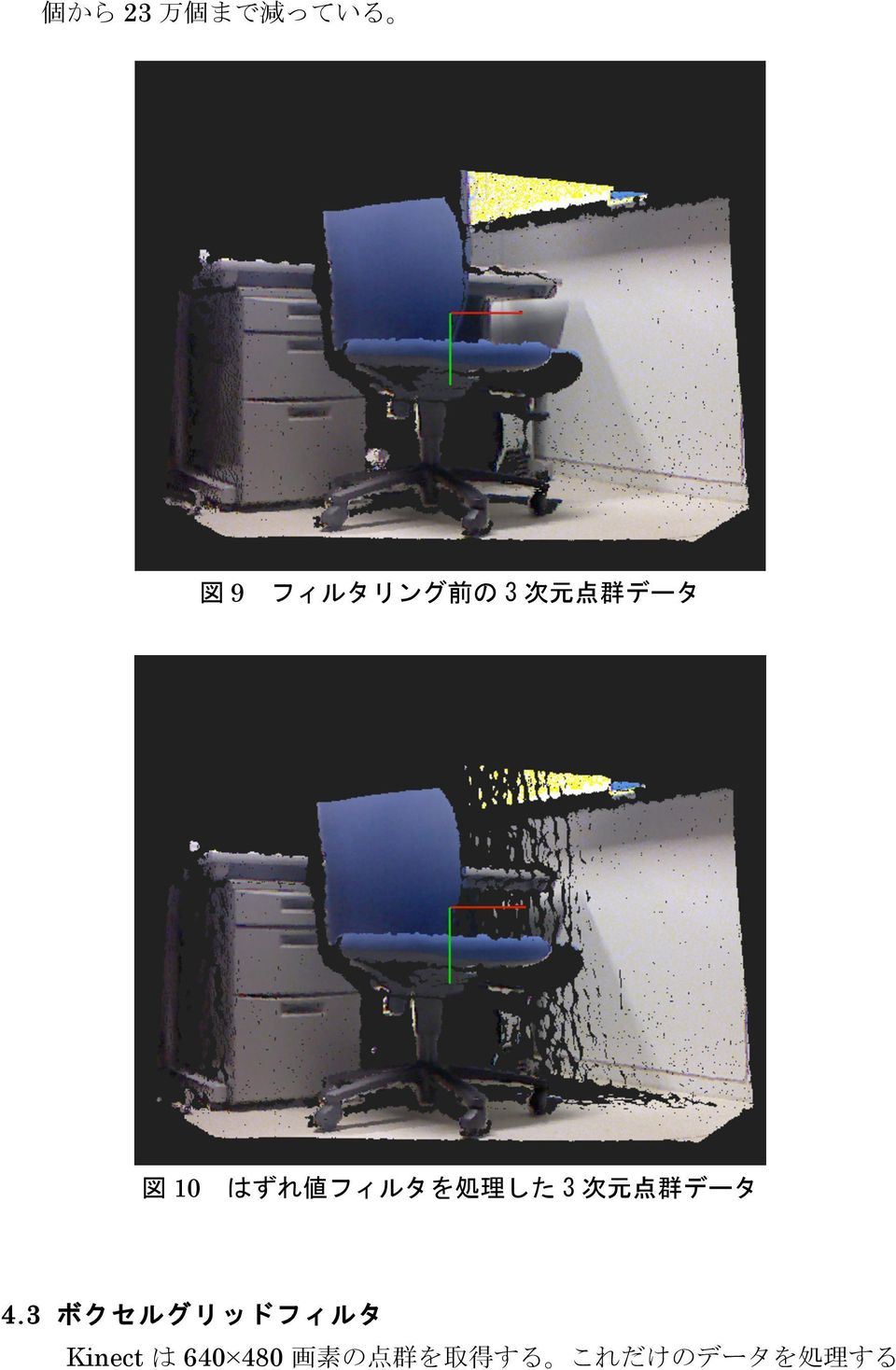
17 PCL
18 Kinect ICP ICP 2 3 SAC-IA(Sample Consensus Initial Alignment) SAC-IA RANSAC Randum Sample Consensus 2 3 2
 SAC-IA")
19 ように座標変換を行う そのときに生じる位置の差を 特徴点の誤差とす る この対応付けを一定回数行い 最も 2 つの特徴点の誤差が低くなった場 合を座標変換として採用する そしてターゲットに合わせてインプットを 回転 拡大縮小 平行移動をおこない 再配置することで 大まかな位置 を合わせることができる SAC-IA は点群の特徴点からそれらを整列するので まず FPFH(Fast Point Feature Histograms)で特徴点を求める さらに FPFH を使用すると きに法線ベクトルも必要となる よって位置合わせは 法線ベクトルの推 定 特徴点の推定 SAC-IA の実行 ICP アルゴリズムの実行という手順を 踏む 図 13 は 2 つの異なる測定位置から立体物の計測を行った図である 視点 1 では立体物の上面 視点 2 では立体物の側面を計測した 図 14 は 図 13 の測定結果から 2 つの 3 次元点群データを求め 初期位置合わせを行わず ICP アルゴリズムによる精密位置合わせを行ったものである 2 つの点群デ ータの測定位置が大きく違うため 正しい位置に収束していない 図 13 2 つの異なる測定位置から立体を計測した図

20
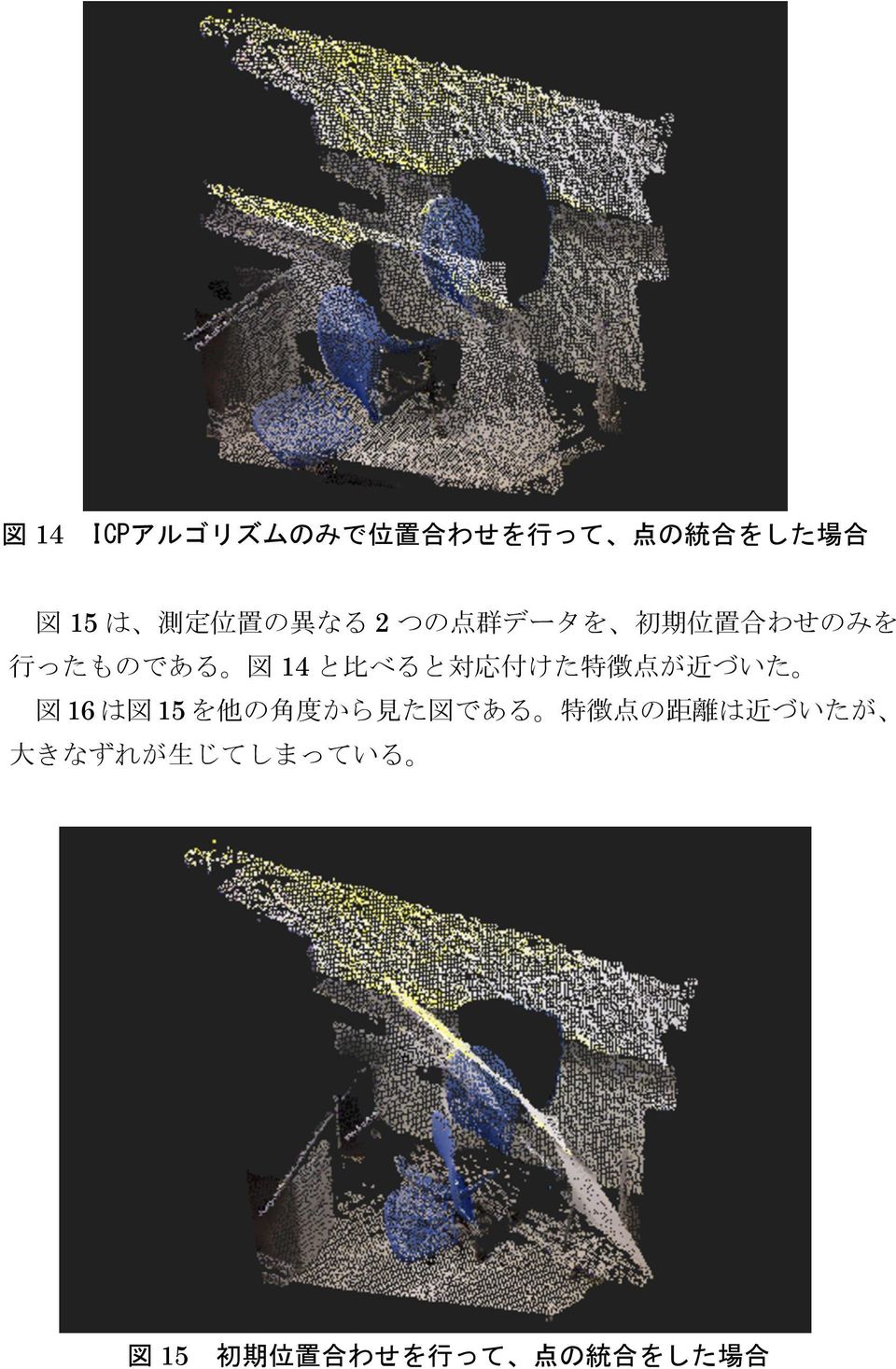
21 ICP ICP 3 ICP 2 3 ICP ICP ICP
22 17 18
23 5 5.1 Kinect PCL 3D 3 3 3D Kinect 3D SAC-IA ICP Kinect PCL Kinect
24 2 3 3
25
26 50 1 x,y,z 0.15m 0.03m 0.08m SAC-IA 5 1m SAC-IA 50 ICP RANSAC 0.1m 0.1m ICP 100
27 CkinectViewer.cpp KinectSample2.cpp KinectSample2Dlg.cpp PCLFirstTime.cpp KinectSample2 PCLFirstTime Kinect 3 PCL 3
4 1 2 34 56 1
 2016 8 2 2 4 1 2 34 56 1 3 2 4 2 78 910 2 1 3 10,000 A 100 A 9,900 9,900 A 100 100 POINT! 4 2 2 2 5 2100 100 3 50 5050100 POINT! 6 3 2 7 ABC 2 10010,0001100 2 100 2 5,000 1 50 32 16,000 13,000 10,000 7,000
2016 8 2 2 4 1 2 34 56 1 3 2 4 2 78 910 2 1 3 10,000 A 100 A 9,900 9,900 A 100 100 POINT! 4 2 2 2 5 2100 100 3 50 5050100 POINT! 6 3 2 7 ABC 2 10010,0001100 2 100 2 5,000 1 50 32 16,000 13,000 10,000 7,000
要約 本研究の目的は Kinect 1 と PCL 2 を使って 立体物の3 次元モデルを作成することである Kinect はゲーム機用のヒューマンインタフェースデバイスであるが これを用いて立体物の形状を表す3 次元点群を獲得する PCL(Point Cloud Library) は3 次元点群を
 は3 次元点群を") コンピュータ理工学特別研究報告書 題目 Kinect と PCL を用いた 立体物の 3 次元モデリング 学生証番号 045245 提出日 氏名 山本晃 平成 25 年 1 月 28 日 指導教員 蚊野浩 京都産業大学 コンピュータ理工学部 1 要約 本研究の目的は Kinect 1 と PCL 2 を使って 立体物の3 次元モデルを作成することである Kinect はゲーム機用のヒューマンインタフェースデバイスであるが
コンピュータ理工学特別研究報告書 題目 Kinect と PCL を用いた 立体物の 3 次元モデリング 学生証番号 045245 提出日 氏名 山本晃 平成 25 年 1 月 28 日 指導教員 蚊野浩 京都産業大学 コンピュータ理工学部 1 要約 本研究の目的は Kinect 1 と PCL 2 を使って 立体物の3 次元モデルを作成することである Kinect はゲーム機用のヒューマンインタフェースデバイスであるが
基礎輪講2週目 Kinectの話
 基礎輪講 2 週目 Kinect の話 3D Computer Vision カメラから 3 次元の情報を取得 3 次元再構築 :2 次元の画像から 3 次元形状の復元 多視点画像群 3 次元再構築結果 3 次元の情報を持つ画像ってないの? 2 距離画像 Depth( 距離 ) の情報を持った画像 各画素の部分に距離の値が入る. 距離画像 距離画像を取得する機器が必要 3 距離画像センサ 実世界の距離情報を取得できる.
基礎輪講 2 週目 Kinect の話 3D Computer Vision カメラから 3 次元の情報を取得 3 次元再構築 :2 次元の画像から 3 次元形状の復元 多視点画像群 3 次元再構築結果 3 次元の情報を持つ画像ってないの? 2 距離画像 Depth( 距離 ) の情報を持った画像 各画素の部分に距離の値が入る. 距離画像 距離画像を取得する機器が必要 3 距離画像センサ 実世界の距離情報を取得できる.
Microsoft Word - KimuraIwautiNakahara2016JASNAOE.docx
 日本船舶海洋工学会講演会論文集 ( この行は学会にて記入します ) 高速 3D スキャンデータの重ね合わせ処理による高精度計測に関する研究 正会員木村元学生会員岩内也樹 * ** 学生会員 中原勇登 High Precision Measurement by Superposition Processing of High-Speed 3D Scan Data by Hajime Kimura, Member
日本船舶海洋工学会講演会論文集 ( この行は学会にて記入します ) 高速 3D スキャンデータの重ね合わせ処理による高精度計測に関する研究 正会員木村元学生会員岩内也樹 * ** 学生会員 中原勇登 High Precision Measurement by Superposition Processing of High-Speed 3D Scan Data by Hajime Kimura, Member

第1回日本産婦人科
 e e TEL045-231-0960 TEL03-3433-1111 3360 4 2 1 1024768 OS RGB -15pins Dsub-15pins PowerPoint PC WindowsXPMicrosoft PowerPoint2002 Microsoft Power Point ( PC ) Windows USB CD-R PC 30 PC PC 36
e e TEL045-231-0960 TEL03-3433-1111 3360 4 2 1 1024768 OS RGB -15pins Dsub-15pins PowerPoint PC WindowsXPMicrosoft PowerPoint2002 Microsoft Power Point ( PC ) Windows USB CD-R PC 30 PC PC 36

aisatu.pdf
 1 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71
1 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71



tottori2013-print.key
 1 / 152 3 / 152 2 / 152 4 / 152 5 / 152 7 / 152 6 / 152 8 / 152 9 / 152 11 / 152 Red: [R,G,B] = [255,0,0] Yellow [R,G,B] = [255, 255, 0] Magenta [R,G,B] = [255, 0, 255] W [R,G,B] = [ Green: [R,G,B] = [0,
1 / 152 3 / 152 2 / 152 4 / 152 5 / 152 7 / 152 6 / 152 8 / 152 9 / 152 11 / 152 Red: [R,G,B] = [255,0,0] Yellow [R,G,B] = [255, 255, 0] Magenta [R,G,B] = [255, 0, 255] W [R,G,B] = [ Green: [R,G,B] = [0,
0 21 カラー反射率 slope aspect 図 2.9: 復元結果例 2.4 画像生成技術としての計算フォトグラフィ 3 次元情報を復元することにより, 画像生成 ( レンダリング ) に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生
 に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生") 0 21 カラー反射率 slope aspect 図 2.9: 復元結果例 2.4 画像生成技術としての計算フォトグラフィ 3 次元情報を復元することにより, 画像生成 ( レンダリング ) に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生まれ, コンピューテーショナルフォトグラフィ ( 計算フォトグラフィ ) と呼ばれている.3 次元画像認識技術の計算フォトグラフィへの応用として,
0 21 カラー反射率 slope aspect 図 2.9: 復元結果例 2.4 画像生成技術としての計算フォトグラフィ 3 次元情報を復元することにより, 画像生成 ( レンダリング ) に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生まれ, コンピューテーショナルフォトグラフィ ( 計算フォトグラフィ ) と呼ばれている.3 次元画像認識技術の計算フォトグラフィへの応用として,
Raspberry Pi BF BF BF Raspberry Pi PC USB HDMI OS SD SD OS Raspberry Pi Model B MicroUSB MicroSD OS SD GPIO HDMI USB LAN Raspberry Pi MicroUSB MicroSD
 Raspberry Pi Arduino Arduino Raspberry Pi Arduino URL Raspberry Pi HDMI USB SD https://www.raspberrypi.org/ Python, Scratch Arduino PC USB https://www.arduino.cc/ Arduino SDK Processing Kinect for Windows,
Raspberry Pi Arduino Arduino Raspberry Pi Arduino URL Raspberry Pi HDMI USB SD https://www.raspberrypi.org/ Python, Scratch Arduino PC USB https://www.arduino.cc/ Arduino SDK Processing Kinect for Windows,
株主通信:第18期 中間
 19 01 02 03 04 290,826 342,459 1,250,678 276,387 601,695 2,128,760 31,096 114,946 193,064 45,455 18,478 10,590 199,810 22,785 2,494 3,400,763 284,979 319,372 1,197,774 422,502 513,081 2,133,357 25,023
19 01 02 03 04 290,826 342,459 1,250,678 276,387 601,695 2,128,760 31,096 114,946 193,064 45,455 18,478 10,590 199,810 22,785 2,494 3,400,763 284,979 319,372 1,197,774 422,502 513,081 2,133,357 25,023


1003shinseihin.pdf
 1 1 1 2 2 3 4 4 P.14 2 P.5 3 P.620 6 7 8 9 10 11 13 14 18 20 00 P.21 1 1 2 3 4 5 2 6 P7 P14 P13 P11 P14 P13 P11 3 P13 7 8 9 10 Point! Point! 11 12 13 14 Point! Point! 15 16 17 18 19 Point! Point! 20 21
1 1 1 2 2 3 4 4 P.14 2 P.5 3 P.620 6 7 8 9 10 11 13 14 18 20 00 P.21 1 1 2 3 4 5 2 6 P7 P14 P13 P11 P14 P13 P11 3 P13 7 8 9 10 Point! Point! 11 12 13 14 Point! Point! 15 16 17 18 19 Point! Point! 20 21

ワタベウェディング株式会社
 1 2 3 4 140,000 100,000 60,000 20,000 0 0 5 10 15 20 25 30 35 40 45 50 55 60 65 70 5 6 71 2 13 14 7 8 9 10 11 12 1 2 2 point 1 point 2 1 1 3 point 3 4 4 5 6 point 4 point 5 point 6 13 14 15 16 point 17
1 2 3 4 140,000 100,000 60,000 20,000 0 0 5 10 15 20 25 30 35 40 45 50 55 60 65 70 5 6 71 2 13 14 7 8 9 10 11 12 1 2 2 point 1 point 2 1 1 3 point 3 4 4 5 6 point 4 point 5 point 6 13 14 15 16 point 17



untitled
 1 2 3 4 5 6 7 Point 60,000 50,000 40,000 30,000 20,000 10,000 0 29,979 41,972 31,726 45,468 35,837 37,251 24,000 20,000 16,000 12,000 8,000 4,000 0 16,795 22,071 20,378 14 13 12 11 10 0 12.19 12.43 12.40
1 2 3 4 5 6 7 Point 60,000 50,000 40,000 30,000 20,000 10,000 0 29,979 41,972 31,726 45,468 35,837 37,251 24,000 20,000 16,000 12,000 8,000 4,000 0 16,795 22,071 20,378 14 13 12 11 10 0 12.19 12.43 12.40

株主通信 第16 期 報告書
 10 15 01 02 1 2 3 03 04 4 05 06 5 153,476 232,822 6,962 19,799 133,362 276,221 344,360 440,112 412,477 846,445 164,935 422,265 1,433,645 26,694 336,206 935,497 352,675 451,321 1,739,493 30,593 48,894 153,612
10 15 01 02 1 2 3 03 04 4 05 06 5 153,476 232,822 6,962 19,799 133,362 276,221 344,360 440,112 412,477 846,445 164,935 422,265 1,433,645 26,694 336,206 935,497 352,675 451,321 1,739,493 30,593 48,894 153,612
![[商品カタログ]ゼンリン電子地図帳Zi16](/thumbs/48/24409875.jpg "[商品カタログ]ゼンリン電子地図帳Zi16")





 -- 0 500 1000 1500 2000 2500 3000 () 0% 20% 40% 60%23 47.5% 16.0% 26.8% 27.6% 10,000 -- 350 322 300 286 250 200 150 100 50 0 20 21 22 23 24 25 26 27 28 29 -- ) 300 280 260 240 163,558 165,000 160,000
-- 0 500 1000 1500 2000 2500 3000 () 0% 20% 40% 60%23 47.5% 16.0% 26.8% 27.6% 10,000 -- 350 322 300 286 250 200 150 100 50 0 20 21 22 23 24 25 26 27 28 29 -- ) 300 280 260 240 163,558 165,000 160,000

p01.qxd
 2 s 1 1 2 6 2 POINT 23 23 32 15 3 4 s 1 3 2 4 6 2 7003800 1600 1200 45 5 3 11 POINT 2 7003800 7 11 7003800 8 12 9 10 POINT 2003 5 s 45700 3800 5 6 s3 1 POINT POINT 45 2700 3800 7 s 5 8 s3 1 POINT POINT
2 s 1 1 2 6 2 POINT 23 23 32 15 3 4 s 1 3 2 4 6 2 7003800 1600 1200 45 5 3 11 POINT 2 7003800 7 11 7003800 8 12 9 10 POINT 2003 5 s 45700 3800 5 6 s3 1 POINT POINT 45 2700 3800 7 s 5 8 s3 1 POINT POINT
")









ヤフー株式会社 株主通信VOL.16
 01 260,602264,402 122,795125,595 64,84366,493 107110 120,260123,060 0 500 300 400 200 100 700 600 800 39.8% 23.7% 36.6% 26.6% 21.1% 52.4% 545 700 0 50 200 150 100 250 300 350 312 276 151 171 02 03 04 POINT
01 260,602264,402 122,795125,595 64,84366,493 107110 120,260123,060 0 500 300 400 200 100 700 600 800 39.8% 23.7% 36.6% 26.6% 21.1% 52.4% 545 700 0 50 200 150 100 250 300 350 312 276 151 171 02 03 04 POINT

2 3
 Sample 2 3 4 5 6 7 8 9 3 18 24 32 34 40 45 55 63 70 77 82 96 118 121 123 131 143 149 158 167 173 187 192 204 217 224 231 17 285 290 292 1 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38
Sample 2 3 4 5 6 7 8 9 3 18 24 32 34 40 45 55 63 70 77 82 96 118 121 123 131 143 149 158 167 173 187 192 204 217 224 231 17 285 290 292 1 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38


新たな基礎年金制度の構築に向けて
 [ ] 1 1 4 60 1 ( 1 ) 1 1 1 4 1 1 1 1 1 4 1 2 1 1 1 ( ) 2 1 1 1 1 1 1 1996 1 3 4.3(2) 1997 1 65 1 1 2 1/3 ( )2/3 1 1/3 ( ) 1 1 2 3 2 4 6 2.1 1 2 1 ( ) 13 1 1 1 1 2 2 ( ) ( ) 1 ( ) 60 1 1 2.2 (1) (3) ( 9
[ ] 1 1 4 60 1 ( 1 ) 1 1 1 4 1 1 1 1 1 4 1 2 1 1 1 ( ) 2 1 1 1 1 1 1 1996 1 3 4.3(2) 1997 1 65 1 1 2 1/3 ( )2/3 1 1/3 ( ) 1 1 2 3 2 4 6 2.1 1 2 1 ( ) 13 1 1 1 1 2 2 ( ) ( ) 1 ( ) 60 1 1 2.2 (1) (3) ( 9
Netcommunity SYSTEM X7000 IPコードレス電話機 取扱説明書
 4 5 6 7 8 9 . 4 DS 0 4 5 4 4 4 5 5 6 7 8 9 0 4 5 6 7 8 9 4 5 6 4 0 4 4 4 4 5 6 7 8 9 40 4 4 4 4 44 45 4 6 7 5 46 47 4 5 6 48 49 50 5 4 5 4 5 6 5 5 6 4 54 4 5 6 7 55 5 6 4 56 4 5 6 57 4 5 6 7 58 4
4 5 6 7 8 9 . 4 DS 0 4 5 4 4 4 5 5 6 7 8 9 0 4 5 6 7 8 9 4 5 6 4 0 4 4 4 4 5 6 7 8 9 40 4 4 4 4 44 45 4 6 7 5 46 47 4 5 6 48 49 50 5 4 5 4 5 6 5 5 6 4 54 4 5 6 7 55 5 6 4 56 4 5 6 57 4 5 6 7 58 4
.A. D.S
 1999-1- .A. D.S 1996 2001 1999-2- -3- 1 p.16 17 18 19 2-4- 1-5- 1~2 1~2 2 5 1 34 2 10 3 2.6 2.85 3.05 2.9 2.9 3.16 4 7 9 9 17 9 25 10 3 10 8 10 17 10 18 10 22 11 29-6- 1 p.1-7- p.5-8- p.9 10 12 13-9- 2
1999-1- .A. D.S 1996 2001 1999-2- -3- 1 p.16 17 18 19 2-4- 1-5- 1~2 1~2 2 5 1 34 2 10 3 2.6 2.85 3.05 2.9 2.9 3.16 4 7 9 9 17 9 25 10 3 10 8 10 17 10 18 10 22 11 29-6- 1 p.1-7- p.5-8- p.9 10 12 13-9- 2

 1 2 3 4 5 6 X Y ABC A ABC B 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 13 18 30 P331 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 ( ) 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59
1 2 3 4 5 6 X Y ABC A ABC B 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 13 18 30 P331 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 ( ) 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59
(PDF)")
 26 2 3 4 5 8 9 6 7 2 3 4 5 2 6 7 3 8 9 3 0 4 2 4 3 4 4 5 6 5 7 6 2 2 A B C ABC 8 9 6 3 3 4 4 20 2 6 2 2 3 3 4 4 5 5 22 6 6 7 7 23 6 2 2 3 3 4 4 24 2 2 3 3 4 4 25 6 2 2 3 3 4 4 26 2 2 3 3 27 6 4 4 5 5
26 2 3 4 5 8 9 6 7 2 3 4 5 2 6 7 3 8 9 3 0 4 2 4 3 4 4 5 6 5 7 6 2 2 A B C ABC 8 9 6 3 3 4 4 20 2 6 2 2 3 3 4 4 5 5 22 6 6 7 7 23 6 2 2 3 3 4 4 24 2 2 3 3 4 4 25 6 2 2 3 3 4 4 26 2 2 3 3 27 6 4 4 5 5
mogiJugyo_slide_full.dvi
 a 2 + b 2 = c 2 (a, b, c) a 2 a 2 = a a a 1/ 78 2/ 78 3/ 78 4/ 78 180 5/ 78 http://www.kaijo.ed.jp/ 6/ 78 a, b, c ABC C a b B c A C 90 a 2 + b 2 = c 2 7/ 78 C a b a 2 +b 2 = c 2 B c A a 2 a a 2 = a a 8/
a 2 + b 2 = c 2 (a, b, c) a 2 a 2 = a a a 1/ 78 2/ 78 3/ 78 4/ 78 180 5/ 78 http://www.kaijo.ed.jp/ 6/ 78 a, b, c ABC C a b B c A C 90 a 2 + b 2 = c 2 7/ 78 C a b a 2 +b 2 = c 2 B c A a 2 a a 2 = a a 8/
航空機の運動方程式
 オブザーバ 状態フィードバックにはすべての状態変数の値が必要であった. しかしながら, システムの外部から観測できるのは出力だけであり, すべての状態変数が観測できるとは限らない. そこで, 制御対象システムの状態変数を, システムのモデルに基づいてその入出力信号から推定する方法を考える.. オブザーバとは 次元 m 入力 r 出力線形時不変システム x Ax Bu y Cx () の状態変数ベクトル
オブザーバ 状態フィードバックにはすべての状態変数の値が必要であった. しかしながら, システムの外部から観測できるのは出力だけであり, すべての状態変数が観測できるとは限らない. そこで, 制御対象システムの状態変数を, システムのモデルに基づいてその入出力信号から推定する方法を考える.. オブザーバとは 次元 m 入力 r 出力線形時不変システム x Ax Bu y Cx () の状態変数ベクトル
geoinformatics
 空間情報構築特論 レーザースキャニング 2017 年度スケジュール 空間情報構築特論 1. (4/12) ガイダンス 2. (4/19) [ 空間情報の要素技術 ] レーザースキャニング 3. (4/26) [ 空間情報の要素技術 ] GNSS 4. (5/10) ( 休講 ) 学会のため 5. (5/17) [ 空間情報の要素技術 ] リモートセンシング 6. (5/24) [ 空間情報の要素技術
空間情報構築特論 レーザースキャニング 2017 年度スケジュール 空間情報構築特論 1. (4/12) ガイダンス 2. (4/19) [ 空間情報の要素技術 ] レーザースキャニング 3. (4/26) [ 空間情報の要素技術 ] GNSS 4. (5/10) ( 休講 ) 学会のため 5. (5/17) [ 空間情報の要素技術 ] リモートセンシング 6. (5/24) [ 空間情報の要素技術


 1 23G 2 1 2 3 4 5 6 7 3 a a b c a 4 1 18G 18G 6 6 3 30 34 2 23G 48 23G 1 25 45 5 20 145mm 20 26 0.6 1.000 0.7 1.000mm a b c a 20 b c 24 28 a c d 3 60 70 / a RC 5 15 b 1 3 c 0.5 1 4 6 5 a 5 1 b a b a d
1 23G 2 1 2 3 4 5 6 7 3 a a b c a 4 1 18G 18G 6 6 3 30 34 2 23G 48 23G 1 25 45 5 20 145mm 20 26 0.6 1.000 0.7 1.000mm a b c a 20 b c 24 28 a c d 3 60 70 / a RC 5 15 b 1 3 c 0.5 1 4 6 5 a 5 1 b a b a d
スライド 1
 5.5.2 画像の間引き 5.1 線形変換 5.2 アフィン変換 5.3 同次座標 5.4 平面射影変換 5.5 再標本化 1. 画素数の減少による表現能力の低下 画像の縮小 変形を行う際 結果画像の 画素数 < 入力画像の 画素数 ( 画素の密度 ) ( 画素の密度 ) になることがある この場合 結果画像の表現力 < 入力画像の表現力 ( 情報量 ) ( 情報量 ) 結果的に 情報の損失が生じる!
5.5.2 画像の間引き 5.1 線形変換 5.2 アフィン変換 5.3 同次座標 5.4 平面射影変換 5.5 再標本化 1. 画素数の減少による表現能力の低下 画像の縮小 変形を行う際 結果画像の 画素数 < 入力画像の 画素数 ( 画素の密度 ) ( 画素の密度 ) になることがある この場合 結果画像の表現力 < 入力画像の表現力 ( 情報量 ) ( 情報量 ) 結果的に 情報の損失が生じる!
IPSJ SIG Technical Report Vol.2012-ICS-167 No /3/ ,,., 3, 3., 3, 3. Automatic 3D Map Generation by Using a Small Unmanned Vehicle
 1. 3 1 2 2 3,,., 3, 3., 3, 3. Automatic 3D Map Generation by Using a Small Unmanned Vehicle Hiroki Osaki, 1 Ken Watanabe 2 and Katashi Nagao 2 While 3D maps are useful to visualize complicated shapes of
1. 3 1 2 2 3,,., 3, 3., 3, 3. Automatic 3D Map Generation by Using a Small Unmanned Vehicle Hiroki Osaki, 1 Ken Watanabe 2 and Katashi Nagao 2 While 3D maps are useful to visualize complicated shapes of
2014-11.key
 2014-11 1 2 3 4 5 7 8 9 10 11 12 PC 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 45 46 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68
2014-11 1 2 3 4 5 7 8 9 10 11 12 PC 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 45 46 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68


 6 30 2005 10 1 65 2,682 00 21.9 481 1 2,776 21.0 15 1,740 00 5.8 107 13.6 40 2025 24.2-0 - -1 - -2 - -3 - -4 - -5 - -6 - -7 - -8- -9 - - 10 - -11 - - 12 - - 13-10 11 59 4 59 3 10 17 - 14 - - 15 - - 16
6 30 2005 10 1 65 2,682 00 21.9 481 1 2,776 21.0 15 1,740 00 5.8 107 13.6 40 2025 24.2-0 - -1 - -2 - -3 - -4 - -5 - -6 - -7 - -8- -9 - - 10 - -11 - - 12 - - 13-10 11 59 4 59 3 10 17 - 14 - - 15 - - 16
「東京こどもネット・ケータイヘルプデスク(こたエール)」平成22年度相談実績の概要
」平成22年度相談実績の概要") 734, 35% 62, 11% 84, 16% 530, 26% 235, 11% PC) 396, 73% 579, 28% ) (21 ) 2 3 4 5 6 7 8 9 10 11 12 13 200 150 100 22 182 200 150 100 22 50 54 PC 49 52 PC 50 41 14 17 1 1 4 16 3 6 14 180 250 200 150 235
734, 35% 62, 11% 84, 16% 530, 26% 235, 11% PC) 396, 73% 579, 28% ) (21 ) 2 3 4 5 6 7 8 9 10 11 12 13 200 150 100 22 182 200 150 100 22 50 54 PC 49 52 PC 50 41 14 17 1 1 4 16 3 6 14 180 250 200 150 235
vecrot
 1. ベクトル ベクトル : 方向を持つ量 ベクトルには 1 方向 2 大きさ ( 長さ ) という 2 つの属性がある ベクトルの例 : 物体の移動速度 移動量電場 磁場の強さ風速力トルクなど 2. ベクトルの表現 2.1 矢印で表現される 矢印の長さ : ベクトルの大きさ 矢印の向き : ベクトルの方向 2.2 2 個の点を用いて表現する 始点 () と終点 () を結ぶ半直線の向き : ベクトルの方向
1. ベクトル ベクトル : 方向を持つ量 ベクトルには 1 方向 2 大きさ ( 長さ ) という 2 つの属性がある ベクトルの例 : 物体の移動速度 移動量電場 磁場の強さ風速力トルクなど 2. ベクトルの表現 2.1 矢印で表現される 矢印の長さ : ベクトルの大きさ 矢印の向き : ベクトルの方向 2.2 2 個の点を用いて表現する 始点 () と終点 () を結ぶ半直線の向き : ベクトルの方向


 1 2 http://www.japan-shop.jp/ 3 4 http://www.japan-shop.jp/ 5 6 http://www.japan-shop.jp/ 7 2,930mm 2,700 mm 2,950mm 2,930mm 2,950mm 2,700mm 2,930mm 2,950mm 2,700mm 8 http://www.japan-shop.jp/ 9 10 http://www.japan-shop.jp/
1 2 http://www.japan-shop.jp/ 3 4 http://www.japan-shop.jp/ 5 6 http://www.japan-shop.jp/ 7 2,930mm 2,700 mm 2,950mm 2,930mm 2,950mm 2,700mm 2,930mm 2,950mm 2,700mm 8 http://www.japan-shop.jp/ 9 10 http://www.japan-shop.jp/


")
液晶ディスプレイ取説TD-E432/TD-E502/TD-E552/TD-E652/TD-E432D/TD-E502D
 1 2 3 4 5 6 7 1 2 3 4 5 6 7 2 2 2 1 1 2 9 10 11 12 13 14 15 16 17 1 8 2 3 4 5 6 7 1 2 3 4 5 6 7 8 9 10 9 11 12 13 13 14 15 16 17 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 1 2 3 4 5 6 7 8 9 11 12
1 2 3 4 5 6 7 1 2 3 4 5 6 7 2 2 2 1 1 2 9 10 11 12 13 14 15 16 17 1 8 2 3 4 5 6 7 1 2 3 4 5 6 7 8 9 10 9 11 12 13 13 14 15 16 17 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 1 2 3 4 5 6 7 8 9 11 12
 () ()")
000-.\..
 1 1 1 2 3 4 5 6 7 8 9 e e 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 10mm 150mm 60mm 25mm 40mm 30mm 25 26 27 1 28 29 30 31 32 e e e e e e 33 e 34 35 35 e e e e 36 37 38 38 e e 39 e 1 40 e 41 e 42 43
1 1 1 2 3 4 5 6 7 8 9 e e 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 10mm 150mm 60mm 25mm 40mm 30mm 25 26 27 1 28 29 30 31 32 e e e e e e 33 e 34 35 35 e e e e 36 37 38 38 e e 39 e 1 40 e 41 e 42 43
 1 1 36 223 42 14 92 4 3 2 1 4 3 4 3429 13536 5 6 7 8 9 2.4m/ (M) (M) (M) (M) (M) 6.67.3 6.57.2 6.97.6 7.27.8 8.4 5 6 5 6 5 5 74 1,239 0 30 21 ( ) 1,639 3,898 0 1,084 887 2 5 0 2 2 4 22 1 3 1 ( :) 426 1500
1 1 36 223 42 14 92 4 3 2 1 4 3 4 3429 13536 5 6 7 8 9 2.4m/ (M) (M) (M) (M) (M) 6.67.3 6.57.2 6.97.6 7.27.8 8.4 5 6 5 6 5 5 74 1,239 0 30 21 ( ) 1,639 3,898 0 1,084 887 2 5 0 2 2 4 22 1 3 1 ( :) 426 1500
1 C 2 C 3 C 4 C 1 C 2 C 3 C
 1 e N >. C 40 41 2 >. C 3 >.. C 26 >.. C .mm 4 C 106 e A 107 1 C 2 C 3 C 4 C 1 C 2 C 3 C 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124
1 e N >. C 40 41 2 >. C 3 >.. C 26 >.. C .mm 4 C 106 e A 107 1 C 2 C 3 C 4 C 1 C 2 C 3 C 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124

 (1519) () 1 ( ) () 1 ( ) - 1 - - 2 - (1531) (25) 5 25,000 (25) 5 30,000 25,000 174 3 323 174 3 323 (1532) () 2 () 2-3 - - 4 - (1533) () 1 (2267)204 () (1)(2) () 1 (2267)204 () (1)(2) (3) (3) 840,000 680,000
(1519) () 1 ( ) () 1 ( ) - 1 - - 2 - (1531) (25) 5 25,000 (25) 5 30,000 25,000 174 3 323 174 3 323 (1532) () 2 () 2-3 - - 4 - (1533) () 1 (2267)204 () (1)(2) () 1 (2267)204 () (1)(2) (3) (3) 840,000 680,000
平成24年財政投融資計画PDF出後8/016‐030
 24 23 28,707,866 2,317,737 26,390,129 29,289,794 2,899,665 24 23 19,084,525 21,036,598 1952,073 24 23 8,603,613 8,393,427 967,631 925,404 202,440 179,834 217,469 219,963 66,716 64,877 3,160,423 2,951,165
24 23 28,707,866 2,317,737 26,390,129 29,289,794 2,899,665 24 23 19,084,525 21,036,598 1952,073 24 23 8,603,613 8,393,427 967,631 925,404 202,440 179,834 217,469 219,963 66,716 64,877 3,160,423 2,951,165
 [mm] [mm] [mm] 70 60 50 40 30 20 10 1H 0 18 19 20 21 22 23 24 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 1 2 3 4 5 6 7 8 9 10 11 12 60 50 40 30 20 10 0 18 19 20 21 22 23 24 1 2 3 4
[mm] [mm] [mm] 70 60 50 40 30 20 10 1H 0 18 19 20 21 22 23 24 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 1 2 3 4 5 6 7 8 9 10 11 12 60 50 40 30 20 10 0 18 19 20 21 22 23 24 1 2 3 4

第18回海岸シンポジウム報告書
 2011.6.25 2011.6.26 L1 2011.6.27 L2 2011.7.6 2011.12.7 2011.10-12 2011.9-10 2012.3.9 23 2012.4, 2013.8.30 2012.6.13 2013.9 2011.7-2011.12-2012.4 2011.12.27 2013.9 1m30 1 2 3 4 5 6 m 5.0m 2.0m -5.0m 1.0m
2011.6.25 2011.6.26 L1 2011.6.27 L2 2011.7.6 2011.12.7 2011.10-12 2011.9-10 2012.3.9 23 2012.4, 2013.8.30 2012.6.13 2013.9 2011.7-2011.12-2012.4 2011.12.27 2013.9 1m30 1 2 3 4 5 6 m 5.0m 2.0m -5.0m 1.0m


 1 911 34/ 22 1012 2/ 20 69 3/ 22 69 1/ 22 69 3/ 22 69 1/ 22 68 3/ 22 68 1/ 3 8 D 0.0900.129mm 0.1300.179mm 0.1800.199mm 0.1000.139mm 0.1400.409mm 0.4101.199mm 0.0900.139mm 0.1400.269mm 0.2700.289mm
1 911 34/ 22 1012 2/ 20 69 3/ 22 69 1/ 22 69 3/ 22 69 1/ 22 68 3/ 22 68 1/ 3 8 D 0.0900.129mm 0.1300.179mm 0.1800.199mm 0.1000.139mm 0.1400.409mm 0.4101.199mm 0.0900.139mm 0.1400.269mm 0.2700.289mm


Spin Image [3] 3D Shape Context [4] Spin Image 2 3D Shape Context Shape Index[5] Local Surface Patch[6] DAI [7], [8] [9], [10] Reference Frame SHO[11]
![Spin Image [3] 3D Shape Context [4] Spin Image 2 3D Shape Context Shape Index[5] Local Surface Patch[6] DAI [7], [8] [9], [10] Reference Frame SHO[11]](/thumbs/87/96951219.jpg "Spin Image [3] 3D Shape Context [4] Spin Image 2 3D Shape Context Shape Index[5] Local Surface Patch[6] DAI [7], [8] [9], [10] Reference Frame SHO[11]") 3-D 1,a) 1 1,b) 3 3 3 1% Spin Image 51.6% 93.8% 9 PCL Point Cloud Library Correspondence Grouping 13.5% 10 3 Extraction of 3-D Feature Point for Effect in Object Recognition based on Local Shape Distinctiveness
3-D 1,a) 1 1,b) 3 3 3 1% Spin Image 51.6% 93.8% 9 PCL Point Cloud Library Correspondence Grouping 13.5% 10 3 Extraction of 3-D Feature Point for Effect in Object Recognition based on Local Shape Distinctiveness
目次第 1 章 : 自己位置推定とは第 2 章 : 位置推定手法の種類第 3 章 :Autoware の自己位置推定システム 第 4 章 : まとめ 1. Autowareの自己位置推定 2. Autowareでの位置推定の実装 自動運転システムの自己位置推定技術 2
 version 1.1 TIER IV ACADEMY 自動運転システム構築塾 Day1 自動運転システム実践解説 自動運転システムの自己位置推定技術 目次第 1 章 : 自己位置推定とは第 2 章 : 位置推定手法の種類第 3 章 :Autoware の自己位置推定システム 第 4 章 : まとめ 1. Autowareの自己位置推定 2. Autowareでの位置推定の実装 自動運転システムの自己位置推定技術
version 1.1 TIER IV ACADEMY 自動運転システム構築塾 Day1 自動運転システム実践解説 自動運転システムの自己位置推定技術 目次第 1 章 : 自己位置推定とは第 2 章 : 位置推定手法の種類第 3 章 :Autoware の自己位置推定システム 第 4 章 : まとめ 1. Autowareの自己位置推定 2. Autowareでの位置推定の実装 自動運転システムの自己位置推定技術
 25 2014 2 i 1 Kinect 17% 0% 100% iii iii v vii 1 1 1.1............................... 1 1.2............................... 2 1.3.............................. 2 2 3 2.1.................................
25 2014 2 i 1 Kinect 17% 0% 100% iii iii v vii 1 1 1.1............................... 1 1.2............................... 2 1.3.............................. 2 2 3 2.1.................................
1. 概要この文書は Raposo, C., Barreto, J. P., & Nunes, U. (2013). Fast and Accurate Calibration of a Kinect Sensor. International Conference on 3D Vision. につ
. Fast and Accurate Calibration of a Kinect Sensor. International Conference on 3D Vision. につ") Fast and Accurate Calibration of a Kinect Sensor 日本語解説 2016 年 04 月 29 日 ビジョン &IT ラボ皆川卓也 1. 概要この文書は Raposo, C., Barreto, J. P., & Nunes, U. (2013). Fast and Accurate Calibration of a Kinect Sensor. International
Fast and Accurate Calibration of a Kinect Sensor 日本語解説 2016 年 04 月 29 日 ビジョン &IT ラボ皆川卓也 1. 概要この文書は Raposo, C., Barreto, J. P., & Nunes, U. (2013). Fast and Accurate Calibration of a Kinect Sensor. International
円筒面で利用可能なARマーカ
 円筒面で利用可能な AR マーカ AR Marker for Cylindrical Surface 2014 年 11 月 14 日 ( 金 ) 眞鍋佳嗣千葉大学大学院融合科学研究科 マーカベース AR 二次元マーカはカメラ姿勢の推定, 拡張現実等広い研究分野で利用されている 現実の風景 表示される画像 デジタル情報を付加 カメラで撮影し, ディスプレイに表示 使用方法の単純性, 認識の安定性からマーカベース
円筒面で利用可能な AR マーカ AR Marker for Cylindrical Surface 2014 年 11 月 14 日 ( 金 ) 眞鍋佳嗣千葉大学大学院融合科学研究科 マーカベース AR 二次元マーカはカメラ姿勢の推定, 拡張現実等広い研究分野で利用されている 現実の風景 表示される画像 デジタル情報を付加 カメラで撮影し, ディスプレイに表示 使用方法の単純性, 認識の安定性からマーカベース

PowerPoint Presentation
 知能システム論 1 (13) 2014.7.2 情報システム学研究科情報メディアシステム学専攻知能システム学講座末廣尚士 16 物体の位置 姿勢計測 ロボットでのハンドリングに不可欠 物差しで測るステレオカメラで測る depthカメラ ( たとえばkinect) で測る depthカメラのデータは座標変換で議論できるイメージカメラの場合は透視投影変換を考える必要がある 物体の位置 姿勢計測は座標系の決定やキャリブレーションの基本でもある
知能システム論 1 (13) 2014.7.2 情報システム学研究科情報メディアシステム学専攻知能システム学講座末廣尚士 16 物体の位置 姿勢計測 ロボットでのハンドリングに不可欠 物差しで測るステレオカメラで測る depthカメラ ( たとえばkinect) で測る depthカメラのデータは座標変換で議論できるイメージカメラの場合は透視投影変換を考える必要がある 物体の位置 姿勢計測は座標系の決定やキャリブレーションの基本でもある