2007 3DCG : M DCG 3DCG 3DCG 3D (huristic method) C++
|
|
|
- せとか まきい
- 7 years ago
- Views:
Transcription
1 2007 3DCG M

2 2007 3DCG : M DCG 3DCG 3DCG 3D (huristic method) C++

3 D I

4 D i IK IK II

5 DCG [1] 3DCG [2][3][4] Born Digital CAT(Character Animation Technologies)[5] CAT 3dMax CAT [6] 1
[5] CAT")
6 3D CG [7][8] [9] CG 2
![[9] CG 2](/docs-images/43/23163882/images/page_6.jpg)
7 1 1 3 (huristic method) 2 FK[10]

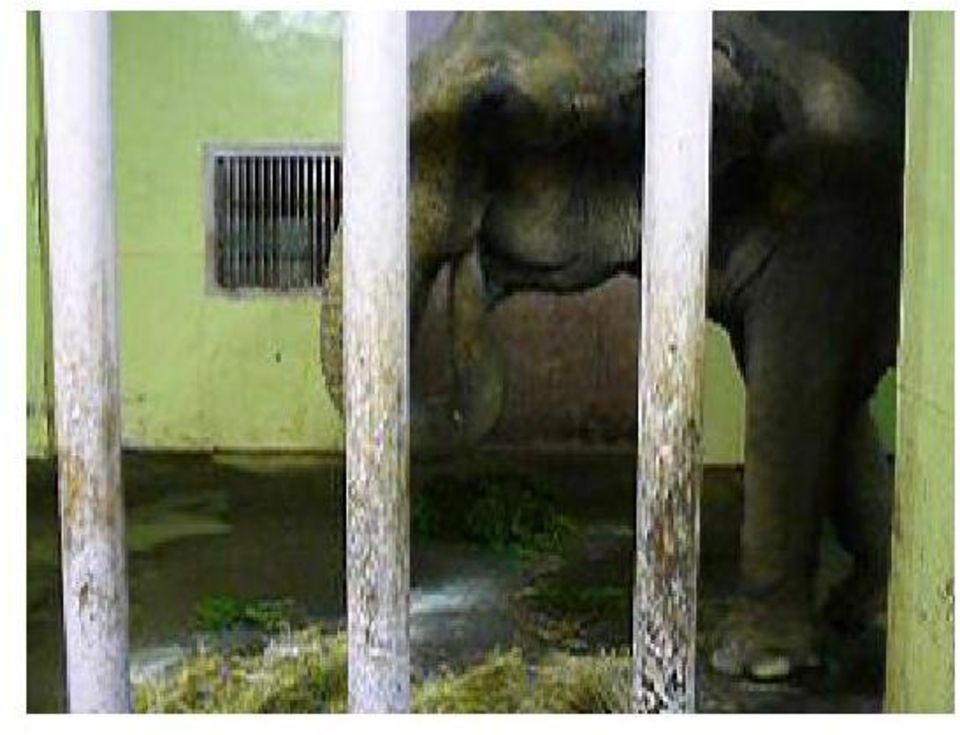
8 (African Elephant) (Elephas Maximus) [11] 2.1 [12]
 [11] 2.")

9 2.1: : 10cm 2.6 5

10 2.3: 2.4:

11 2.5: 2.6: 7

12 2.7: 2.8: 8

13 D 3D D 5 : 1 P 0 P 20 P i w i (3.1) P i P i+1 l i i+1 (3.2) w i = w 0 ( 1 5 ) i 20 (3.1) l i i+1 = w i 2 (3.2) 9
 w i = w 0 ( 1 5 ) i 20 (3.")

14 P D 3.1: 3D 3.2: 10

15 (Inverse Kinematics)[13][14] 3 [15][16] θ X X = f(θ) θ = f 1 (X) θ (Iterative Solution) 2 [17] (Heuristic Method) i L i L i L i 1 P i P end P goal P end P goal (3.3) E = P goal P end (3.3) Li P i θ P end P i P goal P i 3.3 Li 11
 E = P goal P end (3.3) Li P i θ P end P i P goal P i 3.")
16 θ θ 2 P end P i P goal P i [?] L i 1 L i 2 P end P i 1 P goal P i 1 θ L 1 0 L i 3.4 L i L i 1 θ 3.3: 12

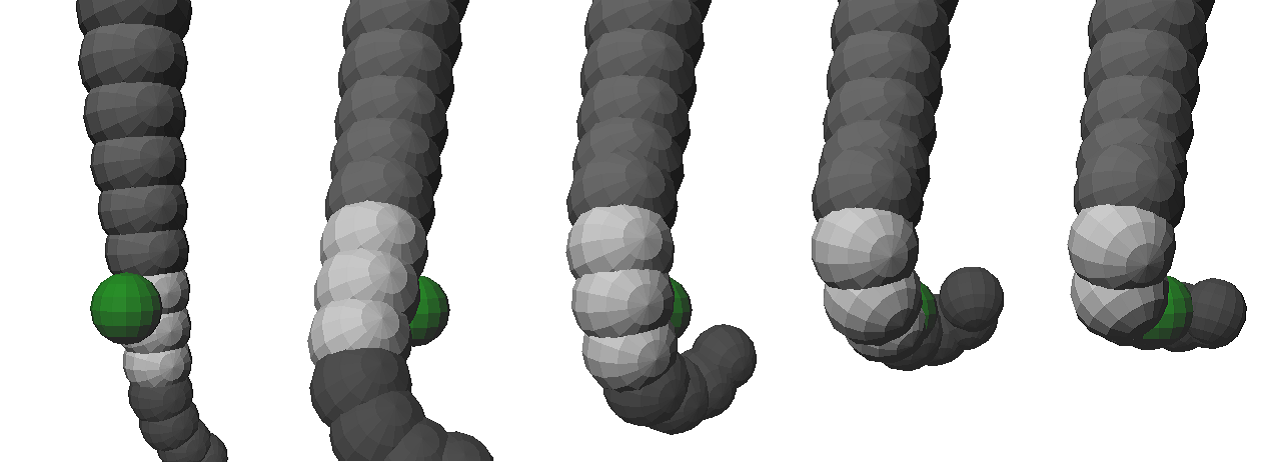
17 3.4: i (Heuristic Method) θ P 0 i P i 13

18 P 20 P i θ i (3.4) i θ i = ai (3.4) a P food 3 P food P i P 20 P food P 20 ( ) ( ) 2 (3.5) (x i, y i, z i ) = (P 20 P i ) (P food P i ) (3.5) P i θ hi θ pi (3.6)(3.7) ai (z i > 0) θ hi = ai (z i < 0) 0 ( ) ( ) ( ) ai (x i > 0) (y i < 0) (x i < 0) (y i > 0) ( ) ( ) θ pi = ai (x i > 0) (y i > 0) (x i < 0) (y i < 0) 0 ( ) (3.6) (3.7) 14
 ai (z i > 0) θ hi = ai (z i < 0) 0 ( ) ( ) ( ) ai (x i > 0) (y i < 0) (x i < 0)")

19 X Z : 15

 (x food, y food, z food ) 16")
20 3.6: 2 P 20 P food P food 3 P 0 P 13 P 14 P 16 P 17 P 19 3 Q 1 Q 2 Q r P food (x, y, z) (x food, y food, z food ) 16

 (P 14 P i ) (Q 1 P i ) (0 i 13) (P 17 P i ) (Q 2 P i ) (14 i 16) (P 20 P i ) (Q 3 P i ) (17 i 19) (3.")
21 3 Q 1 (x food 2r, y food, z food +2.5r) Q 2 (x food, y food, z food 2.1r) Q 3 (x food + 1.8r, y food, z food 0.5r) 3.7: (3.8) (P 14 P i ) (Q 1 P i ) (0 i 13) (P 17 P i ) (Q 2 P i ) (14 i 16) (P 20 P i ) (Q 3 P i ) (17 i 19) (3.8) P 20 P food P food y Q 1 Q 2 Q 3 17
22 3.2.4 [18][19] [20] A B Q a Q b (3.9) Q(t) = (1 t)q a + tq b (1 t)q a + tq b (3.9)
23 IK(Inverse Kinematics)

24 4.1: 4.2: IK 4.3: 4.4: 4.5: 4.6: 4.7: IK 4.10 IK
25 4.14 IK 4.8: 4.9: IK 4.10: 4.11: 4.12: 4.13: 21
26 4.14: 22
27 5 (Heuristic Method) 1 IK 23
28 24
29 [1], ,, [2],,, No7, , [3] Petros Faloutsos, Michiel van de Panne, Demetri Terzopoulos3, Composable Controllers for Physics-Based Character Animatio, SIGGRAPH, [4] Harold C. Sun, Dimitris N. Metaxas, Automating gait generation, SIGGRAPH, [5] Born Digital CAT, < [6],?,, [7] CGWORLDvol.32,,2001. [8],!,,2004. [9] Adam Kirk, James F. O Brien, David A. Forsyth, Skeletal Parameter Estimation from Optical Motion Capture Data, SIGGRAPH,
30 [10], FK Tool Kit System, < [11] DK, 4 ANIMALS,, [12], 42,, [13],,, C MAGAZINE, , 7, [14] Jeff Landar, Game Developer Magazine,Sep 1998 Sep,1998 Nov, < [15] Monacha D and Zhu Y, A Fast Algorithm and System for the Inverse Kinematics of General Serial Manipulators, IEEE International Conference on Robotics and Automation, [16] Chin K, Closed-Form and Generalized Inverse Kinematic Solutions for Animating the Human Articulated Structure, Bachelor s Thesis in Computer Science, Curtin University of Technology, [17] Welman Chris, Inverse Kinematics and Geometric Constraints for Articulated Figure Manipulation, < [18] EricLengyel, 3D,, [19], 3D-CG,,2004. [20], 3DCG,,
 24 21 21115025 i 1 1 2 5 2.1.................................. 6 2.1.1........................... 6 2.1.2........................... 7 2.2...................................... 8 2.3............................
24 21 21115025 i 1 1 2 5 2.1.................................. 6 2.1.1........................... 6 2.1.2........................... 7 2.2...................................... 8 2.3............................
2005 3DCG 3DCG M
 2005 3DCG 3DCG M0102244 2005 3DCG : M0102244 3DCG Inverse Kinematics 3DCG 3DCG 1 1 1.1................................. 1 1.2.............................. 2 2 3 2.1............................. 3 2.2............................
2005 3DCG 3DCG M0102244 2005 3DCG : M0102244 3DCG Inverse Kinematics 3DCG 3DCG 1 1 1.1................................. 1 1.2.............................. 2 2 3 2.1............................. 3 2.2............................
2010 : M
 2010 M0107288 2010 : M0107288 1 1 1.1............................ 1 1.2............................... 3 2 4 2.1................ 4 2.2....................... 6 3 9 3.1......................... 9 3.1.1..............................
2010 M0107288 2010 : M0107288 1 1 1.1............................ 1 1.2............................... 3 2 4 2.1................ 4 2.2....................... 6 3 9 3.1......................... 9 3.1.1..............................
 27 24 24115059 i 1 1 2 4 2.1...................... 4 2.1.1.............................. 5 2.1.2...................... 7 2.2............................ 9 2.2.1.................................. 10 2.2.2...............................
27 24 24115059 i 1 1 2 4 2.1...................... 4 2.1.1.............................. 5 2.1.2...................... 7 2.2............................ 9 2.2.1.................................. 10 2.2.2...............................
[2] 2. [3 5] 3D [6 8] Morishima [9] N n 24 24FPS k k = 1, 2,..., N i i = 1, 2,..., n Algorithm 1 N io user-specified number of inbetween omis
![[2] 2. [3 5] 3D [6 8] Morishima [9] N n 24 24FPS k k = 1, 2,..., N i i = 1, 2,..., n Algorithm 1 N io user-specified number of inbetween omis](/thumbs/76/74386791.jpg "[2] 2. [3 5] 3D [6 8] Morishima [9] N n 24 24FPS k k = 1, 2,..., N i i = 1, 2,..., n Algorithm 1 N io user-specified number of inbetween omis") 1,a) 2 2 2 1 2 3 24 Motion Frame Omission for Cartoon-like Effects Abstract: Limited animation is a hand-drawn animation style that holds each drawing for two or three successive frames to make up 24 frames
1,a) 2 2 2 1 2 3 24 Motion Frame Omission for Cartoon-like Effects Abstract: Limited animation is a hand-drawn animation style that holds each drawing for two or three successive frames to make up 24 frames









IPSJ SIG Technical Report Vol.2012-CG-148 No /8/29 3DCG 1,a) On rigid body animation taking into account the 3D computer graphics came
 On rigid body animation taking into account the 3D computer graphics came") 3DCG 1,a) 2 2 2 2 3 On rigid body animation taking into account the 3D computer graphics camera viewpoint Abstract: In using computer graphics for making games or motion pictures, physics simulation is
3DCG 1,a) 2 2 2 2 3 On rigid body animation taking into account the 3D computer graphics camera viewpoint Abstract: In using computer graphics for making games or motion pictures, physics simulation is
「諸雑公文書」整理の中間報告
 30 10 3 from to 10 from to ( ) ( ) 20 20 20 20 20 35 8 39 11 41 10 41 9 41 7 43 13 41 11 42 7 42 11 41 7 42 10 4 4 8 4 30 10 ( ) ( ) 17 23 5 11 5 8 8 11 11 13 14 15 16 17 121 767 1,225 2.9 18.7 29.8 3.9
30 10 3 from to 10 from to ( ) ( ) 20 20 20 20 20 35 8 39 11 41 10 41 9 41 7 43 13 41 11 42 7 42 11 41 7 42 10 4 4 8 4 30 10 ( ) ( ) 17 23 5 11 5 8 8 11 11 13 14 15 16 17 121 767 1,225 2.9 18.7 29.8 3.9
2009 : M (CG)
") 2009 M0106262 2009 : M0106262 (CG) 2 2 2 2 2 2 1 1 1.1............................. 1 1.2.............................. 3 2 4 2.1............................... 4 2.2............................... 6 2.3.............................
2009 M0106262 2009 : M0106262 (CG) 2 2 2 2 2 2 1 1 1.1............................. 1 1.2.............................. 3 2 4 2.1............................... 4 2.2............................... 6 2.3.............................

(a) (b) (c) Canny (d) 1 ( x α, y α ) 3 (x α, y α ) (a) A 2 + B 2 + C 2 + D 2 + E 2 + F 2 = 1 (3) u ξ α u (A, B, C, D, E, F ) (4) ξ α (x 2 α, 2x α y α,
 (b) (c) Canny (d) 1 ( x α, y α ) 3 (x α, y α ) (a) A 2 + B 2 + C 2 + D 2 + E 2 + F 2 = 1 (3) u ξ α u (A, B, C, D, E, F ) (4) ξ α (x 2 α, 2x α y α,") [II] Optimization Computation for 3-D Understanding of Images [II]: Ellipse Fitting 1. (1) 2. (2) (edge detection) (edge) (zero-crossing) Canny (Canny operator) (3) 1(a) [I] [II] [III] [IV ] E-mail sugaya@iim.ics.tut.ac.jp
[II] Optimization Computation for 3-D Understanding of Images [II]: Ellipse Fitting 1. (1) 2. (2) (edge detection) (edge) (zero-crossing) Canny (Canny operator) (3) 1(a) [I] [II] [III] [IV ] E-mail sugaya@iim.ics.tut.ac.jp
14 2 5
 14 2 5 i ii Surface Reconstruction from Point Cloud of Human Body in Arbitrary Postures Isao MORO Abstract We propose a method for surface reconstruction from point cloud of human body in arbitrary postures.
14 2 5 i ii Surface Reconstruction from Point Cloud of Human Body in Arbitrary Postures Isao MORO Abstract We propose a method for surface reconstruction from point cloud of human body in arbitrary postures.

- (20 ) 400 () 3DCG No.51 No.61 No.62 No.11 P 2 16
 400 () 3DCG No.51 No.61 No.62 No.11 P 2 16") - (20 ) 226-8503 1974 6 10 29 4259 Tel:045-924-5050 Fax:045-924-5016 E-mail:hase@hi.pi.titech.ac.jp Tel: Fax: E-mail: Tel:03-3786-5650 Tel:090-6036-8520 P 1 16 - (20 ) 400 () 3DCG No.51 No.61 No.62 No.11
- (20 ) 226-8503 1974 6 10 29 4259 Tel:045-924-5050 Fax:045-924-5016 E-mail:hase@hi.pi.titech.ac.jp Tel: Fax: E-mail: Tel:03-3786-5650 Tel:090-6036-8520 P 1 16 - (20 ) 400 () 3DCG No.51 No.61 No.62 No.11
Vol. 9 No. 3, pp A Drawing-Based Interface For Motion Design Haruki Koda 1 Ichiroh Kanaya 2 Kosuke Sato 1 1 Graduate School of Engi
 Vol. 9 No. 3, pp. 119 129 1 2 1 1 2 A Drawing-Based Interface For Motion Design Haruki Koda 1 Ichiroh Kanaya 2 Kosuke Sato 1 1 Graduate School of Engineering Science, Osaka University 2 Graduate School
Vol. 9 No. 3, pp. 119 129 1 2 1 1 2 A Drawing-Based Interface For Motion Design Haruki Koda 1 Ichiroh Kanaya 2 Kosuke Sato 1 1 Graduate School of Engineering Science, Osaka University 2 Graduate School
... 3... 3... 3... 3... 4... 7... 10... 10... 11... 12... 12... 13... 14... 15... 18... 19... 20... 22... 22... 23 2
 1 ... 3... 3... 3... 3... 4... 7... 10... 10... 11... 12... 12... 13... 14... 15... 18... 19... 20... 22... 22... 23 2 3 4 5 6 7 8 9 Excel2007 10 Excel2007 11 12 13 - 14 15 16 17 18 19 20 21 22 Excel2007
1 ... 3... 3... 3... 3... 4... 7... 10... 10... 11... 12... 12... 13... 14... 15... 18... 19... 20... 22... 22... 23 2 3 4 5 6 7 8 9 Excel2007 10 Excel2007 11 12 13 - 14 15 16 17 18 19 20 21 22 Excel2007
 C O N T E N T S 2 2 2 4 6 6 8 9 11 12 12 12 12 15 18 18 18 18 18 19 22 22 22 22 26 27 34 34 34 34 34 C O N T E N T S 40 40 40 40 41 41 43 43 43 43 44 48 63 64 65 72 78 79 81 91 91 91 92 92 93 96 98 101
C O N T E N T S 2 2 2 4 6 6 8 9 11 12 12 12 12 15 18 18 18 18 18 19 22 22 22 22 26 27 34 34 34 34 34 C O N T E N T S 40 40 40 40 41 41 43 43 43 43 44 48 63 64 65 72 78 79 81 91 91 91 92 92 93 96 98 101

IPSJ SIG Technical Report Vol.2017-HCI-173 No.5 Vol.2017-EC-44 No /6/1 1,a) 1,2,b) 3,c) 1,d) 3D * 1* Graduate School of Engineerin
 1,2,b) 3,c) 1,d) 3D * 1* Graduate School of Engineerin") 1,a) 1,2,b) 3,c) 1,d) 3D 1. 2.5 * 1*2 2.5 1 Graduate School of Engineering, Kobe University 2 PRESTO, Japan Science and Technology Agency 3 School of Information Science and Engineering, Ritsumeikan University
1,a) 1,2,b) 3,c) 1,d) 3D 1. 2.5 * 1*2 2.5 1 Graduate School of Engineering, Kobe University 2 PRESTO, Japan Science and Technology Agency 3 School of Information Science and Engineering, Ritsumeikan University
2006 3D M
 2006 3D M0103190 2006 3D : M0103190 3DCG 3DCG 3DCG 3D 3 3D SKETCH 3D Teddy 1 1 2 3DModelingTool Dice 5 2.1................................... 5 2.2.............................. 6 2.2.1.............. 6
2006 3D M0103190 2006 3D : M0103190 3DCG 3DCG 3DCG 3D 3 3D SKETCH 3D Teddy 1 1 2 3DModelingTool Dice 5 2.1................................... 5 2.2.............................. 6 2.2.1.............. 6
5D1 SY0004/14/ SICE 1, 2 Dynamically Consistent Motion Design of Humanoid Robots even at the Limit of Kinematics Kenya TANAKA 1 and Tomo
 5D1 SY4/14/-485 214 SICE 1, 2 Dynamically Consistent Motion Design of Humanoid Robots even at the Limit of Kinematics Kenya TANAKA 1 and Tomomichi SUGIHARA 2 1 School of Engineering, Osaka University 2-1
5D1 SY4/14/-485 214 SICE 1, 2 Dynamically Consistent Motion Design of Humanoid Robots even at the Limit of Kinematics Kenya TANAKA 1 and Tomomichi SUGIHARA 2 1 School of Engineering, Osaka University 2-1
 http://banso.cocolog-nifty.com/ 100 100 250 5 1 1 http://www.banso.com/ 2009 5 2 10 http://www.banso.com/ 2009 5 2 http://www.banso.com/ 2009 5 2 http://www.banso.com/ < /> < /> / http://www.banso.com/
http://banso.cocolog-nifty.com/ 100 100 250 5 1 1 http://www.banso.com/ 2009 5 2 10 http://www.banso.com/ 2009 5 2 http://www.banso.com/ 2009 5 2 http://www.banso.com/ < /> < /> / http://www.banso.com/
proc.dvi
 M. D. Wheler Cyra Technologies, Inc. 3 3 CAD albedo Mapping textures on 3D geometric model using reflectance image Ryo Kurazume M. D. Wheler Katsushi Ikeuchi The University oftokyo Cyra Technologies, Inc.
M. D. Wheler Cyra Technologies, Inc. 3 3 CAD albedo Mapping textures on 3D geometric model using reflectance image Ryo Kurazume M. D. Wheler Katsushi Ikeuchi The University oftokyo Cyra Technologies, Inc.
 n=360 28.6% 34.4% 36.9% n=360 2.5% 17.8% 19.2% n=64 0.8% 0.3% n=69 1.7% 3.6% 0.6% 1.4% 1.9% < > n=218 1.4% 5.6% 3.1% 60.6% 0.6% 6.9% 10.8% 6.4% 10.3% 33.1% 1.4% 3.6% 1.1% 0.0% 3.1% n=360 0% 50%
n=360 28.6% 34.4% 36.9% n=360 2.5% 17.8% 19.2% n=64 0.8% 0.3% n=69 1.7% 3.6% 0.6% 1.4% 1.9% < > n=218 1.4% 5.6% 3.1% 60.6% 0.6% 6.9% 10.8% 6.4% 10.3% 33.1% 1.4% 3.6% 1.1% 0.0% 3.1% n=360 0% 50%
/岩波文庫")

PowerPoint プレゼンテーション
 0 1 2 3 4 5 6 1964 1978 7 0.0015+0.013 8 1 π 2 2 2 1 2 2 ( r 1 + r3 ) + π ( r2 + r3 ) 2 = +1,2100 9 10 11 1.9m 3 0.64m 3 12 13 14 15 16 17 () 0.095% 0.019% 1.29% (0.348%) 0.024% 0.0048% 0.32% (0.0864%)
0 1 2 3 4 5 6 1964 1978 7 0.0015+0.013 8 1 π 2 2 2 1 2 2 ( r 1 + r3 ) + π ( r2 + r3 ) 2 = +1,2100 9 10 11 1.9m 3 0.64m 3 12 13 14 15 16 17 () 0.095% 0.019% 1.29% (0.348%) 0.024% 0.0048% 0.32% (0.0864%)
( )
") NAIST-IS-MT9951117 2001 2 9 ( ) 3 CG, VR.,,,.,,,,,.,, 2, 3 3,.,, 2, 3.,,,,,.,,,.,,.,,, 3, NAIST-IS- MT9951117, 2001 2 9. i Intaractive terrain generation within Immersive Modeling System 3 Ryutarou Morimoto
NAIST-IS-MT9951117 2001 2 9 ( ) 3 CG, VR.,,,.,,,,,.,, 2, 3 3,.,, 2, 3.,,,,,.,,,.,,.,,, 3, NAIST-IS- MT9951117, 2001 2 9. i Intaractive terrain generation within Immersive Modeling System 3 Ryutarou Morimoto
 H24.12.23")
2009 3DCG : M0106423 3DCG,,,, 3DCG 2D 3DCG 2D 3DCG 3DCG
 2009 3DCG M0106423 2009 3DCG : M0106423 3DCG,,,, 3DCG 2D 3DCG 2D 3DCG 3DCG 1 1 1.1................................. 1 1.2................................. 1 1.3............................... 3 1.4.................................
2009 3DCG M0106423 2009 3DCG : M0106423 3DCG,,,, 3DCG 2D 3DCG 2D 3DCG 3DCG 1 1 1.1................................. 1 1.2................................. 1 1.3............................... 3 1.4.................................



 2009 SEP. No.664 9 18 100460345 209710798 %0.11 3350955 9750799 12.1 0.93 100350 19 100600453 209700800 %0.03 3200065 9740873 11.0 0.98 90490 20 100750364 209680396 %0.81 321 844 978 591 11.6
2009 SEP. No.664 9 18 100460345 209710798 %0.11 3350955 9750799 12.1 0.93 100350 19 100600453 209700800 %0.03 3200065 9740873 11.0 0.98 90490 20 100750364 209680396 %0.81 321 844 978 591 11.6



 1 2 3 4 5 1 1 136 2 137 2 1 1 138 2 1 2 139 140 141 142 3 143 3 144 145 4 1 2 146 3 4 147 5 1 2 3 148 1 2 149 3 5 1 2 150 3 151 1 152 2 153 6 1 2 154 3 155 4 1 156 2 3 4 5 157 7 1 2 3 4 158 5 159 6 8 1
1 2 3 4 5 1 1 136 2 137 2 1 1 138 2 1 2 139 140 141 142 3 143 3 144 145 4 1 2 146 3 4 147 5 1 2 3 148 1 2 149 3 5 1 2 150 3 151 1 152 2 153 6 1 2 154 3 155 4 1 156 2 3 4 5 157 7 1 2 3 4 158 5 159 6 8 1

untitled
 1 211022 2 11150 211022384 3 1000 23% 77% 10% 10% 5% 20% 15% 40% 5% 3% 8% 16% 15% 42% 5% 6% 4 =1000 = 66 5 =1000 = 59 6 52%(42% 1000 7 56% 41% 40% 97% 3% 11%, 2% 3%, 41 7% 49% 30%, 18%, 40%, 83% =1000
1 211022 2 11150 211022384 3 1000 23% 77% 10% 10% 5% 20% 15% 40% 5% 3% 8% 16% 15% 42% 5% 6% 4 =1000 = 66 5 =1000 = 59 6 52%(42% 1000 7 56% 41% 40% 97% 3% 11%, 2% 3%, 41 7% 49% 30%, 18%, 40%, 83% =1000

2010 : M CG 3DCG 3 3
 2010 M0107432 2010 : M0107432 3 3 CG 3DCG 3 3 1 1 1.1............................ 1 1.2.............................. 2 2 3 2.1................................. 3 2.2 3........................ 4 2.3.................................
2010 M0107432 2010 : M0107432 3 3 CG 3DCG 3 3 1 1 1.1............................ 1 1.2.............................. 2 2 3 2.1................................. 3 2.2 3........................ 4 2.3.................................
項 目
 1 1 2 3 11 4 6 5 7,000 2 120 1.3 4,000 04 450 < > 5 3 6 7 8 9 4 10 11 5 12 45 6 13 E. 7 B. C. 14 15 16 17 18 19 20 21 22 23 8 24 25 9 27 2 26 6 27 3 1 3 3 28 29 30 9 31 32 33 500 1 4000 0 2~3 10 10 34
1 1 2 3 11 4 6 5 7,000 2 120 1.3 4,000 04 450 < > 5 3 6 7 8 9 4 10 11 5 12 45 6 13 E. 7 B. C. 14 15 16 17 18 19 20 21 22 23 8 24 25 9 27 2 26 6 27 3 1 3 3 28 29 30 9 31 32 33 500 1 4000 0 2~3 10 10 34




38
 3 37 38 3.1. 3.1.1. 3.1-1 2005 12 5 7 2006 5 31 6 2 2006 8 10 11 14 2006 10 18 20 3.1-1 9 00 17 3 3.1.2. 3.1-2 3.1-1 9 9 3.1-2 M- M-2 M-3 N- N-2 N-3 S- S-2 S-3 3.1.2.1. 25 26 3.1.2.2. 3.1-3 25 26 39 3.1-1
3 37 38 3.1. 3.1.1. 3.1-1 2005 12 5 7 2006 5 31 6 2 2006 8 10 11 14 2006 10 18 20 3.1-1 9 00 17 3 3.1.2. 3.1-2 3.1-1 9 9 3.1-2 M- M-2 M-3 N- N-2 N-3 S- S-2 S-3 3.1.2.1. 25 26 3.1.2.2. 3.1-3 25 26 39 3.1-1
●70974_100_AC009160_KAPヘ<3099>ーシス自動車約款(11.10).indb
.indb") " # $ % & ' ( ) * +, -. / 0 1 2 3 4 5 6 7 8 9 : ; < = >? @ A B C D E F G H I J K L M N O P Q R S T U V W X Y " # $ % & ' ( ) * + , -. / 0 1 2 3 4 5 6 7 8 9 : ; < = > ? @ A B
" # $ % & ' ( ) * +, -. / 0 1 2 3 4 5 6 7 8 9 : ; < = >? @ A B C D E F G H I J K L M N O P Q R S T U V W X Y " # $ % & ' ( ) * + , -. / 0 1 2 3 4 5 6 7 8 9 : ; < = > ? @ A B
[2][3][4][5] 4 ( 1 ) ( 2 ) ( 3 ) ( 4 ) 2. Shiratori [2] Shiratori [3] [4] GP [5] [6] [7] [8][9] Kinect Choi [10] 3. 1 c 2016 Information Processing So
![[2][3][4][5] 4 ( 1 ) ( 2 ) ( 3 ) ( 4 ) 2. Shiratori [2] Shiratori [3] [4] GP [5] [6] [7] [8][9] Kinect Choi [10] 3. 1 c 2016 Information Processing So](/thumbs/76/74386745.jpg "[2][3][4][5] 4 ( 1 ) ( 2 ) ( 3 ) ( 4 ) 2. Shiratori [2] Shiratori [3] [4] GP [5] [6] [7] [8][9] Kinect Choi [10] 3. 1 c 2016 Information Processing So") 1,a) 2 2 1 2,b) 3,c) A choreographic authoring system reflecting a user s preference Ryo Kakitsuka 1,a) Kosetsu Tsukuda 2 Satoru Fukayama 2 Naoya Iwamoto 1 Masataka Goto 2,b) Shigeo Morishima 3,c) Abstract:
1,a) 2 2 1 2,b) 3,c) A choreographic authoring system reflecting a user s preference Ryo Kakitsuka 1,a) Kosetsu Tsukuda 2 Satoru Fukayama 2 Naoya Iwamoto 1 Masataka Goto 2,b) Shigeo Morishima 3,c) Abstract:
CRA2656-A
 FH-401 2 3 4 C O N T E N T S 5 1 0 0 2 3 0 6 7 1 1 2 8 3 9 2 1 2 2 3 3 2 10 q 3 4 0 11 3 1 2 12 q 3 4 0 13 4 1 2 2 3 3 2 14 q 3 4 0 15 5 1 2 16 3 2 3 3 2 4 5 q 17 1 2 18 1 3 2 19 2 3 1 20 2 3 2 2 3 21
FH-401 2 3 4 C O N T E N T S 5 1 0 0 2 3 0 6 7 1 1 2 8 3 9 2 1 2 2 3 3 2 10 q 3 4 0 11 3 1 2 12 q 3 4 0 13 4 1 2 2 3 3 2 14 q 3 4 0 15 5 1 2 16 3 2 3 3 2 4 5 q 17 1 2 18 1 3 2 19 2 3 1 20 2 3 2 2 3 21
untitled
 280 200 5 7,800 6 8,600 28 1 1 18 7 8 2 ( 31 ) 7 42 2 / / / / / / / / / / 1 3 (1) 4 5 3 1 1 1 A B C D 6 (1) -----) (2) -- ()) (3) ----(). ()() () ( )( )( )( ) ( ) ( )( )( )( ) () (). () ()() 7 () ( ) 1
280 200 5 7,800 6 8,600 28 1 1 18 7 8 2 ( 31 ) 7 42 2 / / / / / / / / / / 1 3 (1) 4 5 3 1 1 1 A B C D 6 (1) -----) (2) -- ()) (3) ----(). ()() () ( )( )( )( ) ( ) ( )( )( )( ) () (). () ()() 7 () ( ) 1

& Vol.5 No (Oct. 2015) TV 1,2,a) , Augmented TV TV AR Augmented Reality 3DCG TV Estimation of TV Screen Position and Ro
 TV 1,2,a) , Augmented TV TV AR Augmented Reality 3DCG TV Estimation of TV Screen Position and Ro") TV 1,2,a) 1 2 2015 1 26, 2015 5 21 Augmented TV TV AR Augmented Reality 3DCG TV Estimation of TV Screen Position and Rotation Using Mobile Device Hiroyuki Kawakita 1,2,a) Toshio Nakagawa 1 Makoto Sato
TV 1,2,a) 1 2 2015 1 26, 2015 5 21 Augmented TV TV AR Augmented Reality 3DCG TV Estimation of TV Screen Position and Rotation Using Mobile Device Hiroyuki Kawakita 1,2,a) Toshio Nakagawa 1 Makoto Sato
「hoge」
 ICS-06M-404 255 1 7 1.1................................... 7 1.1.1........................... 7 1.1.2........................ 8 1.1.3............................ 9 1.2..................................
ICS-06M-404 255 1 7 1.1................................... 7 1.1.1........................... 7 1.1.2........................ 8 1.1.3............................ 9 1.2..................................
兵庫県立大学学報vol.17
 THE UNIVERSITY OF HYOGO NEWS 2014 VOL.17 THE UNIVERSITY OF HYOGO NEWS 2014 VOL.17 THE UNIVERSITY OF HYOGO NEWS 2014 VOL.17 THE UNIVERSITY OF HYOGO NEWS 2014 VOL.17 School of Human Science and Environment
THE UNIVERSITY OF HYOGO NEWS 2014 VOL.17 THE UNIVERSITY OF HYOGO NEWS 2014 VOL.17 THE UNIVERSITY OF HYOGO NEWS 2014 VOL.17 THE UNIVERSITY OF HYOGO NEWS 2014 VOL.17 School of Human Science and Environment
")
VR Copyright 2006 by Hiroshi Yabu
 JAIST Reposi https://dspace.j Title 直感的身体動作を用いた VR アプリケーションに関する 研究 Author(s) 薮, 博史 Citation Issue Date 2006-03 Type Thesis or Dissertation Text version author URL http://hdl.handle.net/10119/266 Rights
JAIST Reposi https://dspace.j Title 直感的身体動作を用いた VR アプリケーションに関する 研究 Author(s) 薮, 博史 Citation Issue Date 2006-03 Type Thesis or Dissertation Text version author URL http://hdl.handle.net/10119/266 Rights
Gaze Head Eye (a) deg (b) 45 deg (c) 9 deg 1: - 1(b) - [5], [6] [7] Stahl [8], [9] Fang [1], [11] Itti [12] Itti [13] [7] Fang [1],
![Gaze Head Eye (a) deg (b) 45 deg (c) 9 deg 1: - 1(b) - [5], [6] [7] Stahl [8], [9] Fang [1], [11] Itti [12] Itti [13] [7] Fang [1],](/thumbs/92/110933465.jpg "Gaze Head Eye (a) deg (b) 45 deg (c) 9 deg 1: - 1(b) - [5], [6] [7] Stahl [8], [9] Fang [1], [11] Itti [12] Itti [13] [7] Fang [1],") 1 1 1 Structure from Motion - 1 Ville [1] NAC EMR-9 [2] 1 Osaka University [3], [4] 1 1(a) 1(c) 9 9 9 c 216 Information Processing Society of Japan 1 Gaze Head Eye (a) deg (b) 45 deg (c) 9 deg 1: - 1(b)
1 1 1 Structure from Motion - 1 Ville [1] NAC EMR-9 [2] 1 Osaka University [3], [4] 1 1(a) 1(c) 9 9 9 c 216 Information Processing Society of Japan 1 Gaze Head Eye (a) deg (b) 45 deg (c) 9 deg 1: - 1(b)

28 Horizontal angle correction using straight line detection in an equirectangular image
 28 Horizontal angle correction using straight line detection in an equirectangular image 1170283 2017 3 1 2 i Abstract Horizontal angle correction using straight line detection in an equirectangular image
28 Horizontal angle correction using straight line detection in an equirectangular image 1170283 2017 3 1 2 i Abstract Horizontal angle correction using straight line detection in an equirectangular image
1. 1 1840-1919 2 1642 3 3 4 5 6 (1875-1950) 7 1879 8 1881-1946 9 10 1904-1998 11 12 1 2005 pp.17-19 2 1890 1959 p.21 3 1642 3 1893 11 1932 489,pp.340-
 7 1879 8 1881-1946 9 10 1904-1998 11 12 1 2005 pp.17-19 2 1890 1959 p.21 3 1642 3 1893 11 1932 489,pp.340-") * 12 Shigeru JOCHI ** 1642?-1708 300 1775-1849 1782-1838 1847-1931 12 1690-12 * 2007 8 21 ** (Graduate School of Japanese Studies, National Kaohsiung First University of Science and Technology) 1 1. 1
* 12 Shigeru JOCHI ** 1642?-1708 300 1775-1849 1782-1838 1847-1931 12 1690-12 * 2007 8 21 ** (Graduate School of Japanese Studies, National Kaohsiung First University of Science and Technology) 1 1. 1
untitled
 A2P21032 1 1 2 3 4 1 2 1 2 1 2 1 95 e 1 240 e 99 11 1 1 2 E 60 48 3 4 3 5 01 2 e 2. ETC( ETC ETC ETC 4 CG 3 G Link 3 1 5 GM 6 24 3 G Link 4 3 5 400 3 100 6 60100 3 2005 6 1 24 12 6 1 2 1 2005 6 1 2 1 12
A2P21032 1 1 2 3 4 1 2 1 2 1 2 1 95 e 1 240 e 99 11 1 1 2 E 60 48 3 4 3 5 01 2 e 2. ETC( ETC ETC ETC 4 CG 3 G Link 3 1 5 GM 6 24 3 G Link 4 3 5 400 3 100 6 60100 3 2005 6 1 24 12 6 1 2 1 2005 6 1 2 1 12




 O157 6/23 7/4 6 25 1000 117,050 6 14:00~15:30 1 2 22 22 14:30~15:30 8 12 1 5 20 6 20 10 11 30 9 10 6 1 30 6 6 0 30 6 19 0 3 27 6 20 0 50 1 2 6 4 61 1 6 5 1 2 1 2 6 19 6 4 15 6 1 6 30 6 24 30 59
O157 6/23 7/4 6 25 1000 117,050 6 14:00~15:30 1 2 22 22 14:30~15:30 8 12 1 5 20 6 20 10 11 30 9 10 6 1 30 6 6 0 30 6 19 0 3 27 6 20 0 50 1 2 6 4 61 1 6 5 1 2 1 2 6 19 6 4 15 6 1 6 30 6 24 30 59
JRSJ Vol. 27 No Dec., 2009
 27 10 1 2009 12 JRSJ Vol. 27 No. 10 2 Dec., 2009 27 10 3 2009 12 JRSJ Vol. 27 No. 10 4 Dec., 2009 27 10 5 2009 12 JRSJ Vol. 27 No. 10 6 Dec., 2009 27 10 7 2009 12 JRSJ Vol. 27 No. 10 8 Dec., 2009 27 10
27 10 1 2009 12 JRSJ Vol. 27 No. 10 2 Dec., 2009 27 10 3 2009 12 JRSJ Vol. 27 No. 10 4 Dec., 2009 27 10 5 2009 12 JRSJ Vol. 27 No. 10 6 Dec., 2009 27 10 7 2009 12 JRSJ Vol. 27 No. 10 8 Dec., 2009 27 10
1 Kinect for Windows M = [X Y Z] T M = [X Y Z ] T f (u,v) w 3.2 [11] [7] u = f X +u Z 0 δ u (X,Y,Z ) (5) v = f Y Z +v 0 δ v (X,Y,Z ) (6) w = Z +
![1 Kinect for Windows M = [X Y Z] T M = [X Y Z ] T f (u,v) w 3.2 [11] [7] u = f X +u Z 0 δ u (X,Y,Z ) (5) v = f Y Z +v 0 δ v (X,Y,Z ) (6) w = Z +](/thumbs/81/83701592.jpg "1 Kinect for Windows M = [X Y Z] T M = [X Y Z ] T f (u,v) w 3.2 [11] [7] u = f X +u Z 0 δ u (X,Y,Z ) (5) v = f Y Z +v 0 δ v (X,Y,Z ) (6) w = Z +") 3 3D 1,a) 1 1 Kinect (X, Y) 3D 3D 1. 2010 Microsoft Kinect for Windows SDK( (Kinect) SDK ) 3D [1], [2] [3] [4] [5] [10] 30fps [10] 3 Kinect 3 Kinect Kinect for Windows SDK 3 Microsoft 3 Kinect for Windows
3 3D 1,a) 1 1 Kinect (X, Y) 3D 3D 1. 2010 Microsoft Kinect for Windows SDK( (Kinect) SDK ) 3D [1], [2] [3] [4] [5] [10] 30fps [10] 3 Kinect 3 Kinect Kinect for Windows SDK 3 Microsoft 3 Kinect for Windows

1(a) (b),(c) - [5], [6] Itti [12] [13] gaze eyeball head 2: [time] [7] Stahl [8], [9] Fang [1], [11] 3 -
![1(a) (b),(c) - [5], [6] Itti [12] [13] gaze eyeball head 2: [time] [7] Stahl [8], [9] Fang [1], [11] 3 -](/thumbs/89/100816452.jpg "1(a) (b),(c) - [5], [6] Itti [12] [13] gaze eyeball head 2: [time] [7] Stahl [8], [9] Fang [1], [11] 3 -") Vol216-CVIM-22 No18 216/5/12 1 1 1 Structure from Motion - 1 8% Tobii Pro TX3 NAC EMR ACTUS Eye Tribe Tobii Pro Glass NAC EMR-9 Pupil Headset Ville [1] EMR-9 [2] 1 Osaka University Gaze Head Eye (a) deg
Vol216-CVIM-22 No18 216/5/12 1 1 1 Structure from Motion - 1 8% Tobii Pro TX3 NAC EMR ACTUS Eye Tribe Tobii Pro Glass NAC EMR-9 Pupil Headset Ville [1] EMR-9 [2] 1 Osaka University Gaze Head Eye (a) deg
2010 : M0107189 3DCG 3 (3DCG) 3DCG 3DCG 3DCG S
 3DCG 3DCG 3DCG S") 2010 M0107189 2010 : M0107189 3DCG 3 (3DCG) 3DCG 3DCG 3DCG S 1 1 1.1............................ 1 1.2.............................. 4 2 5 2.1............................ 5 2.2.............................
2010 M0107189 2010 : M0107189 3DCG 3 (3DCG) 3DCG 3DCG 3DCG S 1 1 1.1............................ 1 1.2.............................. 4 2 5 2.1............................ 5 2.2.............................
P001-040(表1表4).ai
.ai") 3-STEP SYSTEM THE NEW STYLE OF Solution MODEL STEP.1 STEP.3 STEP.2 Ubiquitous Solutions 1 2 3 P5 P6 P7 P8 P9 P10 P11 P13 P14 P15 P16 4 P17 P18 P19 P20 5 P21 P22 P23 6 P24 P29 P30 7 P31 8 P32 9 P33 P34
3-STEP SYSTEM THE NEW STYLE OF Solution MODEL STEP.1 STEP.3 STEP.2 Ubiquitous Solutions 1 2 3 P5 P6 P7 P8 P9 P10 P11 P13 P14 P15 P16 4 P17 P18 P19 P20 5 P21 P22 P23 6 P24 P29 P30 7 P31 8 P32 9 P33 P34
パナソニック技報
 Panasonic Technical Journal Vol. 64 No. 2 Nov. 2018 Optical Disc Archiving System with 100 Years Lifespan of Digital Data Takuto Yamazaki Yasushi Kobayashi Blu-ray Disc 1 Archival Disc 2 3300 GB 10012
Panasonic Technical Journal Vol. 64 No. 2 Nov. 2018 Optical Disc Archiving System with 100 Years Lifespan of Digital Data Takuto Yamazaki Yasushi Kobayashi Blu-ray Disc 1 Archival Disc 2 3300 GB 10012


 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 ( ) 24 25 26 27 28 29 30 ( ) ( ) ( ) 31 32 ( ) ( ) 33 34 35 36 37 38 39 40 41 42 43 44 ) i ii i ii 45 46 47 2 48 49 50 51 52 53 54 55 56 57 58
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 ( ) 24 25 26 27 28 29 30 ( ) ( ) ( ) 31 32 ( ) ( ) 33 34 35 36 37 38 39 40 41 42 43 44 ) i ii i ii 45 46 47 2 48 49 50 51 52 53 54 55 56 57 58

untitled
 i ii (1) (1) (2) (1) (3) (1) (1) (2) (1) (3) (1) (1) (2) (1) (3) (2) (3) (1) (2) (3) (1) (1) (1) (1) (2) (1) (3) (1) (2) (1) (3) (1) (1) (1) (2) (1) (3) (1) (1) (2) (1) (3)
i ii (1) (1) (2) (1) (3) (1) (1) (2) (1) (3) (1) (1) (2) (1) (3) (2) (3) (1) (2) (3) (1) (1) (1) (1) (2) (1) (3) (1) (2) (1) (3) (1) (1) (1) (2) (1) (3) (1) (1) (2) (1) (3)



 23 15961615 1659 1657 14 1701 1711 1715 11 15 22 15 35 18 22 35 23 17 17 106 1.25 21 27 12 17 420,845 23 32 58.7 32 17 11.4 71.3 17.3 32 13.3 66.4 20.3 17 10,657 k 23 20 12 17 23 17 490,708 420,845 23
23 15961615 1659 1657 14 1701 1711 1715 11 15 22 15 35 18 22 35 23 17 17 106 1.25 21 27 12 17 420,845 23 32 58.7 32 17 11.4 71.3 17.3 32 13.3 66.4 20.3 17 10,657 k 23 20 12 17 23 17 490,708 420,845 23



平成18年度「商品先物取引に関する実態調査」報告書
 ... 1.... 5-1.... 6-2.... 9-3.... 10-4.... 12-5.... 13-6.... 15-7.... 16-8.... 17-9.... 20-10.... 22-11.... 24-12.... 27-13... 29-14.... 32-15... 37-16.... 39-17.... 41-18... 43-19... 45.... 49-1... 50-2...
... 1.... 5-1.... 6-2.... 9-3.... 10-4.... 12-5.... 13-6.... 15-7.... 16-8.... 17-9.... 20-10.... 22-11.... 24-12.... 27-13... 29-14.... 32-15... 37-16.... 39-17.... 41-18... 43-19... 45.... 49-1... 50-2...
untitled
 2007 55 2 235 254 c 2007 1 2 3 3 2007 6 12 2007 11 1 20 8 2 1. 2004 Sakata et al. 2004 1 610 0394 1 3 2 176 8525 2 42 1 3 525 8577 1 1 1 236 55 2 2007 2003 2004 Camurri et al. 1999 2002 2005 CG 1987 1
2007 55 2 235 254 c 2007 1 2 3 3 2007 6 12 2007 11 1 20 8 2 1. 2004 Sakata et al. 2004 1 610 0394 1 3 2 176 8525 2 42 1 3 525 8577 1 1 1 236 55 2 2007 2003 2004 Camurri et al. 1999 2002 2005 CG 1987 1
日本感性工学会論文誌
 pp.343-351 2013 Changes in Three Attributes of Color by Reproduction of Memorized Colors Hiroaki MIYAKE, Takeshi KINOSHITA and Atsushi OSA Graduate School of Science and Engineering, Yamaguchi University,
pp.343-351 2013 Changes in Three Attributes of Color by Reproduction of Memorized Colors Hiroaki MIYAKE, Takeshi KINOSHITA and Atsushi OSA Graduate School of Science and Engineering, Yamaguchi University,
3.1 Thalmic Lab Myo * Bluetooth PC Myo 8 RMS RMS t RMS(t) i (i = 1, 2,, 8) 8 SVM libsvm *2 ν-svm 1 Myo 2 8 RMS 3.2 Myo (Root
 i (i = 1, 2,, 8) 8 SVM libsvm *2 ν-svm 1 Myo 2 8 RMS 3.2 Myo (Root") 1,a) 2 2 1. 1 College of Information Science, School of Informatics, University of Tsukuba 2 Faculty of Engineering, Information and Systems, University of Tsukuba a) oharada@iplab.cs.tsukuba.ac.jp 2.
1,a) 2 2 1. 1 College of Information Science, School of Informatics, University of Tsukuba 2 Faculty of Engineering, Information and Systems, University of Tsukuba a) oharada@iplab.cs.tsukuba.ac.jp 2.
249 Fig PONG Fig. 3 CRT 1962 * 7 Spacewar CRT 1972 * 8 PONG Fig D ビデオゲーム の描画 2.1 走査方式 CRT ベクタースキャン Fig. 3 * 7 Steve Rus
 248 2014 77 3 248 256 解説 Imaging Technologies Used for Games * Masanobu Endoh * 要旨 19 1960 CRT 1970 CG Abstract Coin operated electrical amusement machine was born at the end of the 19th century. Then,
248 2014 77 3 248 256 解説 Imaging Technologies Used for Games * Masanobu Endoh * 要旨 19 1960 CRT 1970 CG Abstract Coin operated electrical amusement machine was born at the end of the 19th century. Then,