Microsoft PowerPoint DAQセミナー_Ando.pptx
|
|
|
- ふさこ たけくま
- 5 years ago
- Views:
Transcription
1 2013 年 9 月 9 日データ収集技術講演会, 広島工業大学 ロボットミドルウエア標準 RT ミドルウエア ( 独 ) 産業技術総合研究所知能システム研究部門安藤慶昭 1


2 つくば研究学園都市 KEK 筑波大 東京 ( 秋葉原 ) から45 分 1970 年代から開発 20 以上の国の研究機関 大学 企業等の研究所 人以上の研究者 博士 7000 人以上 つくば駅 JAXA 産総研 2










3 産総研 独立行政法人産業技術総合研究所 ライフサイエンス 情報 通信 環境 エネルギー ナノテク 材料 製造 地質 海洋 標準 計測 の 6 分野 研究者 : 約 2000 名 知能システム研究部門 統合知能 タスクビジョン ヒューマノイド ディペンダブルシステム サービスロボティクス フォールドロボティクス スマートコミュニケーション 社会知能 の 8 グループ AIST-CNRS ロボット工学連携研究体 ソフトウエアプラットフォーム研究班 研究者 : 約 80 名 3
4 概要 RTミドルウエアとは プロジェクト 標準化 RTミドルウエアの展開 まとめ 4
5 RT ミドルウエアとは 5
6 RT とは? RT = Robot Technology cf. IT Real-time 単体のロボットだけでなく さまざまなロボット技術に基づく機能要素をも含む ( センサ アクチュエータ, 制御スキーム アルゴリズム etc.) 産総研版 RT ミドルウエア OpenRTM-aist RT-Middleware (RTM) RT 要素のインテグレーションのためのミドルウエア RT-Component (RTC) RT-Middleware におけるソフトウエアの基本単位 RT-Middleware 6
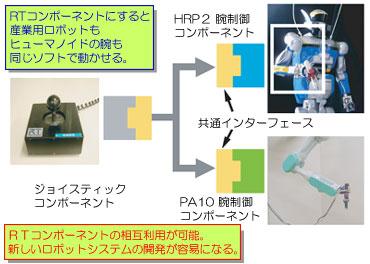
7 RT ミドルウエアの目的 モジュール化による問題解決 仕様の明確化 最新技術を容易に利用可能 誰でもロボットが作れる コストの問題技術の問題ニーズの問題 A 社製移動ベース B 社製アーム C 社製センサ 最新の理論 アルゴリズム 多様なユーザ!!!! RT コンポーネント化 仕様 モジュール化 再利用 ロボットの低コスト化 システム開発者 最新技術を利用可能 カスタマイズが容易に 多様なニーズに対応 ロボットシステムインテグレーションによるイノベーション 7

 に入れたもの =RT コンポーネント (RTC) RTC")
=RT ミドルウエア (RTM)")
8 RT ミドルウエアと RT コンポーネント ロジック デバイス制御 制御アルゴリズム アプリケーション etc RT コンポーネントフレームワーク RT コンポーネント ロジックを箱 ( フレームワーク ) に入れたもの =RT コンポーネント (RTC) RTC RTC RTC RTC RTC RTC RTC RTC RT ミドルウエア RTC の実行環境 (OS のようなもの )=RT ミドルウエア (RTM) RTC はネットワーク上に分散可能 8
9 RT コンポーネントの主な機能 アクティビティ 実行コンテキスト共通の状態遷移複合実行 Inactive Active Error センサ RTC 制御 RTC アクチュエータ RTC ライフサイクルの管理 コアロジックの実行 データポート データ指向ポート 連続的なデータの送受信 動的な接続 切断 目標値 エンコーダコンポーネント 位置 位置 - 1 TI s TDs Kp 制御器コンポーネント + 電圧 データ指向通信機能 サーボの例 アクチュエータコンポーネント サービスポート 定義可能なインターフェースを持つ 内部の詳細な機能にアクセス パラメータ取得 設定 ステレオビジョンの例 モード切替 サービスポート etc ステレオビジョンインターフェース モード設定関数 座標系設定関数 キャリブレーション etc 画像データ ステレオビジョンコンポーネント サービス指向相互作用機能 3D デプスデータ データポート コンフィギュレーション パラメータを保持する仕組み いくつかのセットを保持可能 実行時に動的に変更可能 セット名 セット名 名前値 名前値 複数のセットを動作時に切り替えて使用可能 9
10 RTC コアロジックの実行 実行コンテキスト (ExecutionContext) = 実行主体 スレッド RT コンポーネント 実行コンテキスト : 動的に関連付けられる RT ミドルウエア 実行コンテキスト B 標準コンテキスト 実行コンテキスト A RT コンポーネント RT コンポーネント モジュールの動的ロード コンテキストをアタッチ コンテキストをアタッチ 異なる実行コンテキストを関連付けることにより動作形態を動的に変更できる 10
11 外部トリガ実行コンテキスト 外部トリガ実行コンテキスト インターフェースを拡張 tick() オペレーションをコール ロジックが1tick 分だけ進む ロジックの実行タイミングを外部から制御 シミュレータ デバッガなどに利用可能 シミュレータ時間 シミュレータでは 関連する全コンポーネントの実行タイミングを制御する必要がある tick! tick! 外部トリガ実行コンテキスト 拡張インターフェース 同一のコンポーネントを実機 シミュレータ両方で利用可能 11
12 データポート データ指向 (Data Centric) なストリームポート 型 :long, double 6, etc ユーザが任意に定義可能 出力 :OutPort 入力 :InPort 接続制御 ( 接続時に選択可能 ) Interface type CORBA,TCP socket, other protocol, etc Data flow type push/pull Subscription type Flush, New, Periodic Activity Notify inport.put(data) put(data) operation (a) new type subscription Raw TCP Socket (a) Push (publisher/subscriber) communication model Activity Publisher asynchronous Activity buffer Timer buffer Publisher synchronous CORBA I/F Original Protocol put(data) outport.get() operation Connected by original protocol (b) periodic type subscription Data transfer through Original Protocol (b) Pull put(data) communication model (c) flush type subscription 12
13 InPort InPort のテンプレート第 2 引数 : バッファ ユーザ定義のバッファが利用可能 InPort のメソッド read(): InPort バッファからバインドされた変数へ最新値を読み込む >> : ある変数へ最新値を読み込む 基本的に OutPort と対になる InPort read() operator>> 最新値バインドされた変数リングバッファ 例 データポートの型を同じにする必要あり Sensor Data Robot Component
14 OutPort OutPort のテンプレート第 2 引数 : バッファ ユーザ定義のバッファが利用可能 OutPort のメソッド write(): OutPort バッファへバインドされた変数の最新値として書き込む >> : ある変数の内容を最新値としてリングバッファに書き込む 基本的に InPort と対になる OutPort write() operator<< 最新値バインドされた変数リングバッファ 例 データポートの型を同じにする必要あり Sensor Component Sensor Data


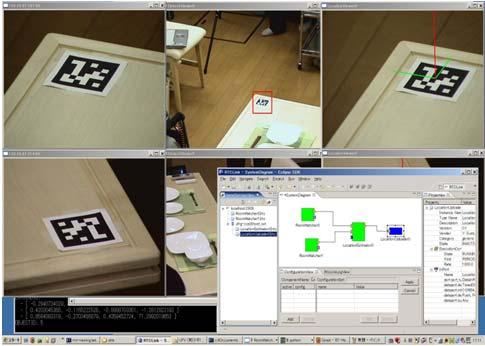
15 開発環境 RTCBuilder (GUI 版 ) rtc-template (CUI) RT コンポーネントのコードジェネレータ GUI 画面で必要事項を入力 C++, Python, Java, C# 等のコードを自動生成 RTSystemEditor ネットワーク上のすべてのコンポーネントの操作が可能 コンポーネントの ON/OFF パラメータの変更 状態監視 コンポーネント間の接続 RTCBuilder RTSystemEditor RTC RTM 統合開発環境の整備 RTC 設計 実装 デバッグ RTM によるインテグレーション デバッグまでを一貫して行うことができる統合開発環境を Eclipse 上に構築
16 OpenRTM を使った開発の流れ コンポーネントの仕様 RtcTemplate (RTCBuilder) どのようなコンポーネントか? 名前 データポート サービスポート コンフィギュレーション コードの雛型 (C++ のクラス ) コアロジック RTC 開発者が開発したプログラム資産 マネージャ ( ミドルウエア ) コード生成.so or DLL 実行 コンパイル 雛型にコアロジックを埋め込む
17 RTC の分割と連携 ロボット体内のコンポーネントによる構成例 画像データ ポート カメラコンポーネント 顔位置問合せ 顔認識コンポーネント データ コマンドの流れ カメラコンポーネント 画像データ ステレオビジョンコンポーネント カメラコントロール 人物データ表情データ ジェスチャ軌道データ 頭 腕駆動コンポーネント 音声データ 音声認識コンポーネント 文字データ 対話コンポーネント 文字データ 音声合成コンポーネント マイクコンポーネント ( モジュール ) 情報の隠蔽と公開のルールが重要






18 RT ミドルウエアによる分散システム RTM により ネットワーク上に分散する RTC を OS 言語の壁を越えて接続することができる ネットワーク ロボット A RTC RTC RTM Solaris ロボット B RTC RTC RTM FreeBSD ロボット C RTC RTC RTC RTM ARTLinux Linux Windows TRON RTM RTM RTM RTC RTC RTC RTC RTC RTC アプリケーション操作デバイスセンサ RTC 同士の接続は プログラム実行中に動的に行うことが出来る



19 RTUnit(2003 年 ~) /RTC-Lite(2005 年 ~) ネットワーク型マイコン機器 small/μrtunit を RTM で統合 RTUnit 仕様 MPU ROM RAM EEPROM クロック A/D DIO シリアル通信電源 Microchip PIC16F877A 8kwords 368 bytes 256 bytes max 20MHz 10bit 8ch 24ch 2ch LANTRONIX XPort DC 5V μrtunit small RTUnit 19
20 モデルに基づくコード生成 フル規格 RTC から C++ backend コンポーネント仕様 name: category: description: comp_type: act_type: InPorts: OutPorts: MyComp temp.sensor device temp. sensor RTC STATIC PERIODIC PC mode:timedbool temp: TimedDouble Template code generator Java backend Proxy Component Python backend RTC-Lite protocol 同一のRTC 仕様からは言語が異なっていても 同じ ( コンポーネントモデルの )RTCが生成される フル規格 RTC へ RTC-Lite backend RTC source for C++ RTC source for Java RTC-Lite RTC source for Python RTC-Lite source for PIC C RTC-Lite proxy code class MyComp : public DataflowComponent { public: virutal onexecute(ec_id); : private: TimedBool m_mode; TimedDouble m_temp; }; import RTC.DataFlowComponent; public class MyCompImpl extends DataFlowComponent { public ConsoleInImpl(mgr) { } : }; #/usr/bin/env python import RTC class MyComp( DataFlowComponent): def init (self, manager): : I/O Small RT-Unit def onexecute(self, ec_id): : #include <16f877a.h> #include "rtc_base.c int main (void) { rtc_connect_proxy(); rtc_mainloop(); return 0; } #/usr/bin/env python import RTC class Proxy( DataFlowComponent): def init (self, manager): : def onexecute(self, ec_id): : 20




 普通の Linux")



21 PiRT-Unit PiRT-Unit 諸元 AD コンバータ DA コンバータ 10bit, 4ch, 200S/s 12bit, 2ch PWR シリアルポート RS232C DSUB 9pin PWM 出力 RS232C XBee 電源入力 1ch, RC サーボモータ用 D-SUB 9pin コネクタ Xbee とジャンパにて切り替え Xbee モジュール接続コネクタ 5V DC 入力 RaspberryPi へ電源供給可能 RaspberryPi からの電源供給でも動作 ( 例 : 秋月のアダプタ ) 普通の Linux から普通に触れる入出力ボード クロスコンパイル不要 マシン語 アセンブリ言語不要手軽にセンサ アクチュエータ等を試せる環境 SDA SCL 3.3V GND In 5V GND In 5V GND In 5V GND In 5V GND AD 4ch I2C I2C AD0 AD1 AD2 AD3 PiRT-Unit DA0 DA1 DA 2ch PWM Zigbee XBee モジュール PWM 21





22 PiRT-Unit 特長 Xbeeを利用可能 手軽に無線利用 Phidget センサを利用可能 様々なセンサを手軽に利用可能 チュートリアルとセットアップスクリプト 環境構築を支援するプログラムを提供 In 5V GND Phidgetセンサユニット PiRT-Unit ADCコネクタ AD 22
")
 に登録")



23 RTM 講習会での利用 ROBOMEC2013(5 月 22 日 ) それぞれにネームサーバを立てる localhost( デフォルト ) に登録 localhost( デフォルト ) に登録 NS vel targetvelocity NS Ministick Sensor Ministick と Kobuki を接続 RaspberryPi + PiRT-Unit PC Raspberry Pi + Kobuki RTSystemEditor に両方のネームサーバを登録
24 プロジェクト 標準化 24
25 RT-Middleware 関連プロジェクト RTM0.1 リリース OpenRTM-aist リリース from 2002~ OpenRTM-aist リリース OpenRTM-aist 1.0 リリース OMG RTC spec. draft OMG RTC spec. approved OMG RTC 標準仕様リリース FY RT ミドルウエアプロジェクト 科研費若手 (B) 科振費分散コンポーネントシミュレータ NEDO 次世代ロボット共通基盤開発 ロボット大賞 2007 工業標準部標準基盤研究 科振費環境と作業構造のユニバーサルデザイン さまざまなプロジェクトで標準ソフトウエアプラットフォームとして採用されている 産総研イニシアチブ UCROA NEDO 戦略的先端ロボット要素技術開発 経済産業省 NEDO 次世代ロボット知能化技術開発プロジェクト
")

26 名称 :NEDO 21 世紀ロボットチャレンジプログラム ロボット機能発現のために必要な要素技術開発 目的 : RT 要素の部品化 ( モジュール化 ) の研究開発 分散オブジェクト指向開発 RT 要素の分類 モジュール化に必要な機能 インタフェース仕様の明確化 予算規模 : 65 百万円 全体 百万円 RT ミドルウエア PJ FY FY



27 NEDO 基盤 PJ FY2003-FY2007 その他のロボット開発ツールプラグイン 名称 : 運動制御デバイスおよびモジュールの開発 目的 : 運動制御デバイスの開発 デバイスに搭載するRTCの開発 その他モーションコントロールに資するRTM/RTCの開発 予算規模 : 15 百万円 / 年 371 百万円 全体 1,259 百万円 Java 開発環境プラグイン C++ 開発環境プラグイン Eclipse Paltform JavaVM RtcLink プラグイン ツールの Eclipse プラグイン化 追加 拡張 RTC-CAN の開発 dspic 版 RTC-Lite の開発 27



28 名称 : 次世代ロボット知能化技術開発プロジェクト 目的 ソフトウエアプラットフォームの開発 作業知能 移動知能 コミュニケーション知能に関するモジュールの開発 予算 : 400 百万円 全体 7,000 百万円 研究グループ 15 グループ 知能化 PJ FY2007-FY

29 NEDO RT コンポーネント集 に NEDO 知能化 PJ 成果物の特別ページを設置 ツール 作業知能モジュール 移動知能モジュール 対話知能モジュール 商用ライセンスモジュールの5カテゴリに分けて掲載


30 NEDO オープンイノベーションプロジェクト RT ミドルウエアを基盤として 多数の福祉機器同士を連携 30
31 なぜ標準が必要? RTミドルウエアの目的 人々の間で共有される共通ソフトウエアモデル オープンな仕様を提供 誰でも実装可能 実装の多様性 仕様を策定することが主たる目的 実装 (OpenRTM-aist): 仕様の妥当性検証 実装技術に非依存なソフトウエアモデル 特定の言語 OS 分散オブジェクトミドルウエアに依存しないモデル (PIM: Platform Independent Model) 標準化された仕様 OMG (Object Management Group) における標準化 オープンな標準化プロセス 31
32 OMG RTC 標準化 2005 年 9 月 RFP: Robot Technology Components (RTCs) 公開 2006 年 2 月 Initial Response : PIM and PSM for RTComponent を執筆し提出提案者 :AIST( 日 ) RTI( 米 ) 2006 年 4 月両者の提案を統合した仕様を提案 2006 年 9 月 AB にて承認 事実上の国際標準獲得 FTF が組織され最終文書化開始 2007 年 8 月 FTF の最後の投票が終了 2007 年 9 月 AB にて FTF の結果を報告 承認 2008 年 4 月 OMG RTC 標準仕様 ver.1.0 公式リリース 2010 年 1 月 OpenRTM-aist-1.0 リリース 2012 年 9 月 ver. 1.1 改定 32

 minirtc, micrortc SEC CAN ZigBee 等を利用した組込用 RTC 実装〇 ( ブリッジ )")
 PALRO 富士ソフト小型ヒューマノイドのための C++ PSM 実装 OPRoS ETRI")
33 OMG RTC ファミリ 名称ベンダ特徴互換性 OpenRTM-aist AIST C++, Python, Java --- OpenRTM.NET SEC.NET(C#,VB,C++/CLI, F#, etc..) RTM on Android SEC Android 版 RT ミドルウエア H-RTM ( 仮称 ) 本田 R&D OpenRTM-aist 互換 FSM 型コンポーネントをサポート RTC-Lite AIST PIC, dspic 上の実装〇 ( ブリッジ ) minirtc, micrortc SEC CAN ZigBee 等を利用した組込用 RTC 実装〇 ( ブリッジ ) RTMSafety SEC/AIST 機能安全認証 (IEC61508) capable な RTM 実装, 商用〇 ( ブリッジ ) RTC CANOpen SIT, CiA CANOpen-RTC マッピングを定めた CiA 標準〇 ( ブリッジ ) PALRO 富士ソフト小型ヒューマノイドのための C++ PSM 実装 OPRoS ETRI 韓国国家プロジェクトでの実装 GostaiRTC GOSTAI, THALES ロボット言語上で動作する C++ PSM 実装 同一標準仕様に基づく多様な実装により 実装 ( 製品 ) の継続性を保証 実装間での相互利用がより容易に 33

34 OMG 標準と OpenRTM-aist PIM PSM 標準化作業 <<PIM>> RTC Specification <<mapping>> <<PSM>> RTC CORBA PSM <<use>> <<PSM>> RTC CCM PSM <<PSM>> RTC Local PSM 他のプラットフォームにおけるモデル <<PIM>> SDO Specification 拡張仕様の追加 <<interface>> OpenRTM-aist Ext. interface <<type>> OpenRTM-aist Basic types 実際に使用するにはインターフェースや仕様の追加が必要 実装 OpenRTM-aist <<implements>> Other RTM AIST による実装 他のベンダによる実装
35 RT ミドルウエアの展開 35





36 Success stories DAQ-Middleware: KEK/J-PARC KEK: High Energy Accelerator Research Organization J-PARC: Japan Proton Accelerator Research Complex HRP-4: Kawada/AIST TAIZOU: General Robotics Inc. HIRO: Kawada/GRX HRP-4C: Kawada/AIST 36
37 RT ミドルウエアの広がり ダウンロード数 2012 年 2 月現在 2008 年 2009 年 2010 年 2011 年 2012 年 合計 C Python Java Tool All ユーザ数 タイプ Webページユーザ Webページアクセスメーリングリスト講習会利用組織 (Google Map) 登録数 733 人 約 300 visit/day 約 1000 view/day 447 人 のべ 668 人 46 組織 プロジェクト登録数 タイプ 登録数 RTコンポーネント群 287 RTミドルウエア 14 ツール 19 仕様 文書 4 ハードウエア 28 OMG RTC 規格実装 (11 種類 ) Name Vendor Feature OpenRTM-aist AIST C++, Python, Java OpenRTM.NET SEC.NET(C#,VB,C++/CLI, F#, etc..) minirtc, micrortc SEC CAN ZigBee 等を利用した組込用 RTC 実装 Dependable RTM SEC/AIST 機能安全認証 (IEC61508) capable な RTM 実装 RTC CANOpen SIT, CiA CANOpenのためのCiA (Can in automation) に おけるRTC 標準 PALRO 富士ソフト小型ヒューマノイドのための C++ PSM 実装 OPRoS ETRI 韓国国家プロジェクトでの実装 GostaiRTC GOSTAI, THALES ロボット言語上で動作する C++ PSM 実装 H-RTM ホンダ R&D OpenRTM 互換 FSM 実装 37

 (")
 YARP")


")

38 他のミドルウエア ROS(Robot Operating Systems) ( 米国 ) OROCOS ( 欧州 ) YARP ( 欧州 ) SMARTSOFT ( 欧州 ) RSi(Robot Service Initiative) ( 日本 ) OPRoS(Open Platform for Robotic Services) ( 韓国 ) 38

39 プロジェクトページ ユーザが自分の作品を登録 他のユーザの作った RTCを探すことができる タイプ 登録数 RT コンポーネント群 287 RT ミドルウエア 14 ツール 19 仕様 文書 4 ハードウエア 28 39
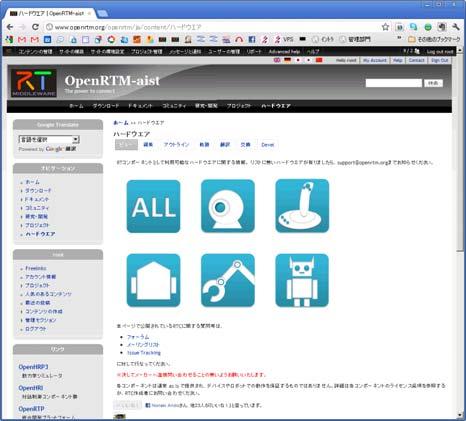


40 OpenRTMで利用可能なハードウエアのリスト ハードウエアを利用するために利用できるコンポーネントのリスト ハードウエア集 40





41 サマーキャンプ 毎年夏に1 週間開催 今年 :7 月 29 日 ~8 月 2 日 募集人数 :10 名 場所 : 産総研つくばセンター 座学と実習を1 週間行い 最後にそれぞれが成果を発表 産総研内のさくら館に宿泊しながら夜通し? コーディングを行う! _ / ( д ) < もう寝る! \ ~\ \ \ 41

:10 件 奨励賞 ( 個人協賛 ):5 件 詳細は Web ページ : openrtm.")
42 RT ミドルウエアコンテスト SICE SI ( 計測自動制御学会システムインテグレーション部門講演会 ) のセッションとして開催 エントリー〆切 :9 月ごろ ソフトウエア登録 :10 月ごろ 講演原稿〆切 :10 月ごろ 発表 授賞式 :12 月ごろ 2012 年度実績 応募数 :17 件 計測自動制御学会学会 RTミドルウエア賞 ( 副賞 10 万円 ) 奨励賞 ( 賞品協賛 ):3 件 奨励賞 ( 団体協賛 ):10 件 奨励賞 ( 個人協賛 ):5 件 詳細は Web ページ : openrtm.org コミュニティー イベントをご覧ください 42
43 まとめ RT ミドルウエア 基本機能 標準化 適用例 過去のプロジェクト 普及活動 :Webページ 講習会 コンテスト 詳しくは 検索 openrtm 本日の資料は openrtm.org に掲載します 43
Microsoft PowerPoint - NEDO講座・RTMセミナー.pptx
 NEDO 特別講座 :RTM RTC セミナー ( 2013 年 5 月 28 日 ) ロボットミドルウエア標準 RTミドルウエア ( 独 ) 産業技術総合研究所知能システム研究部門安藤慶昭 1 RT とは? RT = Robot Technology 1) cf. IT Real-time 単体のロボットだけでなく さまざまなロボット技術に基づく機能要素をも含む ( センサ アクチュエータ, 制御スキーム
NEDO 特別講座 :RTM RTC セミナー ( 2013 年 5 月 28 日 ) ロボットミドルウエア標準 RTミドルウエア ( 独 ) 産業技術総合研究所知能システム研究部門安藤慶昭 1 RT とは? RT = Robot Technology 1) cf. IT Real-time 単体のロボットだけでなく さまざまなロボット技術に基づく機能要素をも含む ( センサ アクチュエータ, 制御スキーム
スライド 1
 RT ミドルウエアサマーキャンプ 2011 RT ミドルウエア概要 日時 : 2011 年 8 月 29 日 ( 月 ) 14:20-15:30 場所 : 産業技術総合研究所つくば第 2 事業所本部 情報棟 1 階交流会議室 ( 独 ) 産業技術総合研究所知能システム研究部門 栗原眞二 神徳徹雄 安藤慶昭 http://www.openrtm.org/ 概要 RTミドルウエア概要 OpenRTM-aistについて
RT ミドルウエアサマーキャンプ 2011 RT ミドルウエア概要 日時 : 2011 年 8 月 29 日 ( 月 ) 14:20-15:30 場所 : 産業技術総合研究所つくば第 2 事業所本部 情報棟 1 階交流会議室 ( 独 ) 産業技術総合研究所知能システム研究部門 栗原眞二 神徳徹雄 安藤慶昭 http://www.openrtm.org/ 概要 RTミドルウエア概要 OpenRTM-aistについて
Microsoft PowerPoint RT講習会(送付用)_ [互換モード]
![Microsoft PowerPoint RT講習会(送付用)_ [互換モード]](/thumbs/96/126720805.jpg "Microsoft PowerPoint RT講習会(送付用)_ [互換モード]") データ収集技術講演会 日時 :2012 年 12 月 1 日 ( 土 ) 13:00~17:00 場所 : 広島工業大学五日市キャンパス三宅の森 Nexus21 607 教室 RT-Middleware 活用 株式会社グローバルアシスト坂本武志 RT ミドルウェアとは? 2012.12.1 データ収集技術講演会 Copyright (C) Advanced Industrial Science And
データ収集技術講演会 日時 :2012 年 12 月 1 日 ( 土 ) 13:00~17:00 場所 : 広島工業大学五日市キャンパス三宅の森 Nexus21 607 教室 RT-Middleware 活用 株式会社グローバルアシスト坂本武志 RT ミドルウェアとは? 2012.12.1 データ収集技術講演会 Copyright (C) Advanced Industrial Science And
Microsoft PowerPoint RT講習会(説明用)_ [互換モード]
![Microsoft PowerPoint RT講習会(説明用)_ [互換モード]](/thumbs/96/129105636.jpg "Microsoft PowerPoint RT講習会(説明用)_ [互換モード]") マイクロマシン /MEMS 展 ROBOTECH 次世代ロボット製造技術展 RT ミドルウェア講習会 RT ミドルウェアインストールワークショップ 日時 :2012 年 7 月 13 日 ( 金 ) 10:30~12:30 場所 : 東京ビッグサイト東ホール特設会場 株式会社グローバルアシスト坂本武志 RT ミドルウェアの概要 RT ミドルウェアとは? RT = Robot Technology Real-time
マイクロマシン /MEMS 展 ROBOTECH 次世代ロボット製造技術展 RT ミドルウェア講習会 RT ミドルウェアインストールワークショップ 日時 :2012 年 7 月 13 日 ( 金 ) 10:30~12:30 場所 : 東京ビッグサイト東ホール特設会場 株式会社グローバルアシスト坂本武志 RT ミドルウェアの概要 RT ミドルウェアとは? RT = Robot Technology Real-time
<4D F736F F F696E74202D CA48B868CF097AC95D78BAD89EF205B8CDD8AB B83685D>
 TSC 研究交流勉強会 14:30~15:30 産総研 臨海副都心センター別館 ( 新館 )11 階 11205~6 ロボット用ミドルウェアと半導体への期待 安藤慶昭 独立行政法人産業技術総合研究所知能システム研究部門 産総研 独立行政法人産業技術総合研究所 ライフサイエンス 情報 通信 環境 エネルギー ナノテク 材料 製造 地質 海洋 標準 計測 の6 分野 研究者 : 約 2000 名 知能システム研究部門
TSC 研究交流勉強会 14:30~15:30 産総研 臨海副都心センター別館 ( 新館 )11 階 11205~6 ロボット用ミドルウェアと半導体への期待 安藤慶昭 独立行政法人産業技術総合研究所知能システム研究部門 産総研 独立行政法人産業技術総合研究所 ライフサイエンス 情報 通信 環境 エネルギー ナノテク 材料 製造 地質 海洋 標準 計測 の6 分野 研究者 : 約 2000 名 知能システム研究部門
<4D F736F F F696E74202D F82C282C882AA82E98D488FEA95AA89C889EF E B E9197BF>
 ロボットミドルウエア標準 RT ミドルウェア 安藤慶昭 経済産業省製造産業局産業機械課情報化推進係長 ( 独 ) 産業技術総合研究所知能システム研究部門主任研究員 概要 ロボットミドルウエアとは? RTミドルウエア:OpenRTM-aist 様々なミドルウエア / プラットフォーム 標準化 終わりに 2 ロボットミドルウエアとは? ロボットシステム構築を効率化するための共通機能を提供するソフトウエア
ロボットミドルウエア標準 RT ミドルウェア 安藤慶昭 経済産業省製造産業局産業機械課情報化推進係長 ( 独 ) 産業技術総合研究所知能システム研究部門主任研究員 概要 ロボットミドルウエアとは? RTミドルウエア:OpenRTM-aist 様々なミドルウエア / プラットフォーム 標準化 終わりに 2 ロボットミドルウエアとは? ロボットシステム構築を効率化するための共通機能を提供するソフトウエア
ホンダにおける RT ミドルウェア開発と標準化活動 株式会社本田技術研究所基礎技術研究センター関谷眞
 ホンダにおける RT ミドルウェア開発と標準化活動 株式会社本田技術研究所基礎技術研究センター関谷眞 目次 知能ロボットシステム概要 コンポーネント指向ミドルウェア HRTMの開発 ASIMOへの適用 HRTMとOpenRTM-aistの連携動作 標準化活動 知能ロボットシステム概要 センサーやアクチュエーターは追加や変更される システム構成は変更したくない センサー, アクチュエーターの関係を抽象化した
ホンダにおける RT ミドルウェア開発と標準化活動 株式会社本田技術研究所基礎技術研究センター関谷眞 目次 知能ロボットシステム概要 コンポーネント指向ミドルウェア HRTMの開発 ASIMOへの適用 HRTMとOpenRTM-aistの連携動作 標準化活動 知能ロボットシステム概要 センサーやアクチュエーターは追加や変更される システム構成は変更したくない センサー, アクチュエーターの関係を抽象化した
PowerPoint Presentation
 知能システム論1 (15) 2009.7.21 情報システム学研究科 情報メディアシステム学専攻 知能システム学講座 末廣尚士 - 参考URL OpenRTM-aist ロボット開発にフル活用するRTミドルウエア http://www.is.aist.go.jp/rt/openrtm-aist/html/ http://thinkit.jp/article/948/1/ SEのためのRTシステム概論
知能システム論1 (15) 2009.7.21 情報システム学研究科 情報メディアシステム学専攻 知能システム学講座 末廣尚士 - 参考URL OpenRTM-aist ロボット開発にフル活用するRTミドルウエア http://www.is.aist.go.jp/rt/openrtm-aist/html/ http://thinkit.jp/article/948/1/ SEのためのRTシステム概論
(Microsoft PowerPoint - daqmiddware-overview [\214\335\212\267\203\202\201[\203h])
![(Microsoft PowerPoint - daqmiddware-overview [\214\335\212\267\203\202\201[\203h])](/thumbs/99/141152602.jpg "(Microsoft PowerPoint - daqmiddware-overview [\214\335\212\267\203\202\201[\203h])") DAQ ミドルウエアの概要 2008 年 8 月 5 6 日 DAQ 実習 -DAQ-Middleware KEK エレクトロニクスシステムグループ KEK 測定器開発室 DAQ プロジェクト安芳次 DAQ ミドルウエアの狙い 多数の計算機を使ったネットワーク分散型 D AQ ソフトウエア ソフトウエアの汎用化 国際標準ロボット技術 (RT ミドルウエア ) の利用 XML によるデータ収集パラメータの記述
DAQ ミドルウエアの概要 2008 年 8 月 5 6 日 DAQ 実習 -DAQ-Middleware KEK エレクトロニクスシステムグループ KEK 測定器開発室 DAQ プロジェクト安芳次 DAQ ミドルウエアの狙い 多数の計算機を使ったネットワーク分散型 D AQ ソフトウエア ソフトウエアの汎用化 国際標準ロボット技術 (RT ミドルウエア ) の利用 XML によるデータ収集パラメータの記述
組込み用Linuxボード,BeagleBone Blackにおける RTミドルウェアの動作と開発支援ツール
 組込み用 Linux ボード,BeagleBone Black における RT ミドルウェアの動作と開発支援ツール 村上青児 ( 筑波大学 / 産総研 ) 安藤慶昭 ( 産総研 ) 関山守 ( 産総研 ) 鍛冶良作 ( 産総研 ) 谷川民生 ( 産総研 ) 神徳徹雄 ( 産総研 ) 1. はじめに 現在の組込みシステムの開発は専門性が求められるため開発の敷居が一般的に高い. これに対し, ロボットの要素技術をより開発者が使いやすいと感じる仕組みを作り,
組込み用 Linux ボード,BeagleBone Black における RT ミドルウェアの動作と開発支援ツール 村上青児 ( 筑波大学 / 産総研 ) 安藤慶昭 ( 産総研 ) 関山守 ( 産総研 ) 鍛冶良作 ( 産総研 ) 谷川民生 ( 産総研 ) 神徳徹雄 ( 産総研 ) 1. はじめに 現在の組込みシステムの開発は専門性が求められるため開発の敷居が一般的に高い. これに対し, ロボットの要素技術をより開発者が使いやすいと感じる仕組みを作り,
(Microsoft PowerPoint - RTM\203T\203}\201[\203L\203\203\203\223\203v \224z\225z\227p)
") RT 2011 2 RT RTC RTC 2011 11 8 30 RT RT RTC RTC RTC I/F RTC (RTC ) 2 Systems Engineering Consultants Co.,LTD. 1970 5 4 7730 2011 6 28 264 2011 4 1 3 モバイルネットワーク BF ワイヤレス BF Realtime@net 社会基盤 BF インターネット
RT 2011 2 RT RTC RTC 2011 11 8 30 RT RT RTC RTC RTC I/F RTC (RTC ) 2 Systems Engineering Consultants Co.,LTD. 1970 5 4 7730 2011 6 28 264 2011 4 1 3 モバイルネットワーク BF ワイヤレス BF Realtime@net 社会基盤 BF インターネット
Raspberry Pi で WEB カメラを使用 会津大学 RT ミドルウェア講習会 2017 The University of Aizu
 会津大学 RT ミドルウェア講習会 2017 The University of Aizu 目次 1 コンポーネントをダウンロードする... 1 2 コンポーネントを Raspberry Pi へコピーする... 2 2.1 Raspberry Pi へコピーする... 2 3 Raspberry Pi 上でコンポーネントをビルドする... 3 3.1 コピーされたファイルを解凍する... 3 3.2
会津大学 RT ミドルウェア講習会 2017 The University of Aizu 目次 1 コンポーネントをダウンロードする... 1 2 コンポーネントを Raspberry Pi へコピーする... 2 2.1 Raspberry Pi へコピーする... 2 3 Raspberry Pi 上でコンポーネントをビルドする... 3 3.1 コピーされたファイルを解凍する... 3 3.2
株式会社セックにおける ロボティクス分野への取り込み
 RT ミドルウェアサマーキャンプ 2014 RTM on Android の紹介 2014 年 8 月 5 日 開発本部第四開発部 中本啓之 さまざまな RT ミドルウェア 用途に合わせ 多様な RT ミドルウェアを開発 提供しています エンタープライズ層 OpenRTM.NET PC/ タブレット向け Android 版 RT ミドルウェア RTM on Android TM OpenRTM-aist
RT ミドルウェアサマーキャンプ 2014 RTM on Android の紹介 2014 年 8 月 5 日 開発本部第四開発部 中本啓之 さまざまな RT ミドルウェア 用途に合わせ 多様な RT ミドルウェアを開発 提供しています エンタープライズ層 OpenRTM.NET PC/ タブレット向け Android 版 RT ミドルウェア RTM on Android TM OpenRTM-aist
スライド 1
 UEC Tokyo Dept. of Mechanical Engineering and Intelligent Systems OpenRTM を使ってみよう! - 基本編 ( コンソール版 )- 電気通信大学情報理工学研究科 知能機械工学専攻 長井隆行 中村友昭 RTM とは Robot Technology Middleware コンポーネント ( モジュール ) を動かす実行環境のこと ミドルウェア上で動作するコンポーネントであれば
UEC Tokyo Dept. of Mechanical Engineering and Intelligent Systems OpenRTM を使ってみよう! - 基本編 ( コンソール版 )- 電気通信大学情報理工学研究科 知能機械工学専攻 長井隆行 中村友昭 RTM とは Robot Technology Middleware コンポーネント ( モジュール ) を動かす実行環境のこと ミドルウェア上で動作するコンポーネントであれば
RTM セミナー RT ミドルウェアによる実時間ロボット 制御系の構築とソフトウェア教育 静岡大学大学院工学研究科機械工学専攻 清水昌幸
 RTM セミナー 2013.11.12 RT ミドルウェアによる実時間ロボット 制御系の構築とソフトウェア教育 静岡大学大学院工学研究科機械工学専攻 清水昌幸 2 内容 RT ミドルウェアを用いた実時間ロボット制御系の構築 実時間制御の実現方法. ART-Linux を用いた実現例と実時間性能. ソフトウェア教育 研究室配属学生 ( 学部 4 年生 ) への導入教育の実施内容と結果. 3 ロボット制御系の一例
RTM セミナー 2013.11.12 RT ミドルウェアによる実時間ロボット 制御系の構築とソフトウェア教育 静岡大学大学院工学研究科機械工学専攻 清水昌幸 2 内容 RT ミドルウェアを用いた実時間ロボット制御系の構築 実時間制御の実現方法. ART-Linux を用いた実現例と実時間性能. ソフトウェア教育 研究室配属学生 ( 学部 4 年生 ) への導入教育の実施内容と結果. 3 ロボット制御系の一例
Microsoft PowerPoint _SCSK_OSS勉強会(配布資料)
") 2018 年 3 12 ( ) OSS ユーザーのための勉強会 ロボット開発 / RT-Middleware の特 と最新動向 国 研究開発法 産業技術総合研究所ロボットイノベーション研究センター ロボットソフトウェアプラットフォーム研究チーム 安藤慶昭 1 RT ミドルウェアとは? モジュール化されたソフトウェアを組み合わせてシステムを構成するミドルウェア ツール群 2 RT ミドルウェアとは?
2018 年 3 12 ( ) OSS ユーザーのための勉強会 ロボット開発 / RT-Middleware の特 と最新動向 国 研究開発法 産業技術総合研究所ロボットイノベーション研究センター ロボットソフトウェアプラットフォーム研究チーム 安藤慶昭 1 RT ミドルウェアとは? モジュール化されたソフトウェアを組み合わせてシステムを構成するミドルウェア ツール群 2 RT ミドルウェアとは?
(Microsoft PowerPoint - 070507_RT\215u\217K\211\357)
") RTミドルウエア ミドルウエアの 各 種 ツール 群 について RTコンポーネント 開 発 環 境 RTコンポーネントの 開 発 効 率 を 向 上 させるためのツール 群 RTミドルウェア コンポーネント フレームワーク 固 有 の 定 型 作 業 を 低 減 開 発 プラットフォームにEclipseを 採 用 設 計 ~ 実 装 ~テストまで, 開 発 サイクル 全 体 の 作 業 を 支 援
RTミドルウエア ミドルウエアの 各 種 ツール 群 について RTコンポーネント 開 発 環 境 RTコンポーネントの 開 発 効 率 を 向 上 させるためのツール 群 RTミドルウェア コンポーネント フレームワーク 固 有 の 定 型 作 業 を 低 減 開 発 プラットフォームにEclipseを 採 用 設 計 ~ 実 装 ~テストまで, 開 発 サイクル 全 体 の 作 業 を 支 援
改版履歴 Ver 改版日内容 /02/07 新規作成 2 / 18
 多目的俯瞰画像合成システム 機能仕様書 Crawler View 画像合成 RTC 発行日 2017 年 3 月 30 日 公立大学法人会津大学 株式会社東日本計算センター 1 / 18 改版履歴 Ver 改版日内容 1.0 2016/02/07 新規作成 2 / 18 1. 内容 1. はじめに... 4 1.1. 対象読者... 4 1.2. 適応範囲... 4 1.3. 開発環境及び使用機器...
多目的俯瞰画像合成システム 機能仕様書 Crawler View 画像合成 RTC 発行日 2017 年 3 月 30 日 公立大学法人会津大学 株式会社東日本計算センター 1 / 18 改版履歴 Ver 改版日内容 1.0 2016/02/07 新規作成 2 / 18 1. 内容 1. はじめに... 4 1.1. 対象読者... 4 1.2. 適応範囲... 4 1.3. 開発環境及び使用機器...
第3部:プログラミング実習
 第 3 部 : プログラミング実習 会津大学 university of aizu 1 手順 1: サンプルコンポーネントの実行 university of aizu 2 実習概要 サンプルコンポーネントで起動したコンポーネントの接続の仕方などを学びます university of aizu 3 使用機材 Raspberry Pi ARM プロセッサを搭載したシングルボードコンピュータ SD カードに書き込んだ
第 3 部 : プログラミング実習 会津大学 university of aizu 1 手順 1: サンプルコンポーネントの実行 university of aizu 2 実習概要 サンプルコンポーネントで起動したコンポーネントの接続の仕方などを学びます university of aizu 3 使用機材 Raspberry Pi ARM プロセッサを搭載したシングルボードコンピュータ SD カードに書き込んだ
スライド 1
 UEC Tokyo Dept. of Mechanical Engineering and Intelligent Systems OpenRTM を使ってみよう! - 基本編 - 電気通信大学情報理工学研究科 知能機械工学専攻 長井隆行 中村友昭 RTM とは Robot Technology Middleware コンポーネント ( モジュール ) を動かす実行環境のこと ミドルウェア上で動作するコンポーネントであれば
UEC Tokyo Dept. of Mechanical Engineering and Intelligent Systems OpenRTM を使ってみよう! - 基本編 - 電気通信大学情報理工学研究科 知能機械工学専攻 長井隆行 中村友昭 RTM とは Robot Technology Middleware コンポーネント ( モジュール ) を動かす実行環境のこと ミドルウェア上で動作するコンポーネントであれば
二次元連続動的計画法による知的画像処理システム ImageFileSelector RTC 機能仕様書 ImageFileSelectorRTC Ver.1.0 ( 株 ) 東日本計算センター 1 / 11
 東日本計算センター 1 / 11") 機能仕様書 ImageFileSelectorRTC Ver.1.0 ( 株 ) 東日本計算センター 1 / 11 改版履歴 Ver 改版日 内容 0.5 2016/02/15 新規作成 0.6 2016/03/1 GUI 釦配置変更 1.0 2016/3/14 初版リリース 2 / 11 目次 目次...3 1. はじめに...4 1.1. 対象読者... 4 1.2. 適応範囲... 4 1.3.
機能仕様書 ImageFileSelectorRTC Ver.1.0 ( 株 ) 東日本計算センター 1 / 11 改版履歴 Ver 改版日 内容 0.5 2016/02/15 新規作成 0.6 2016/03/1 GUI 釦配置変更 1.0 2016/3/14 初版リリース 2 / 11 目次 目次...3 1. はじめに...4 1.1. 対象読者... 4 1.2. 適応範囲... 4 1.3.
スライド 1
 第 2 部 RT コンポーネント作成入門 宮本信彦 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センターロボットソフトウェアプラットフォーム研究チーム インストールの確認 (Windows) OpenRTM-aist OpenRTM-aist-1.1.2-RELEASE_x86.msi インストール後に再起動する Visual Studio 2013 以外 (2010 2012 2015)
第 2 部 RT コンポーネント作成入門 宮本信彦 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センターロボットソフトウェアプラットフォーム研究チーム インストールの確認 (Windows) OpenRTM-aist OpenRTM-aist-1.1.2-RELEASE_x86.msi インストール後に再起動する Visual Studio 2013 以外 (2010 2012 2015)
組込みシステムにおける UMLモデルカタログの実践研究
 Modeling Forum 2015 組込みシステムの設計実装への モデルカタログの活用 仙台高等専門学校 情報システム工学科 力武克彰, 新村祐太 ( 豊橋技科大 ), 菊池雄太郎 ( 仙台高専 ) 概要 組込み分野のための UML モデルカタログ (*) のモデルを実装してみました (* 以下 モデルカタログと呼びます ) 2 概要 モデルカタログ : 目標制御モデル モデルカタログより引用
Modeling Forum 2015 組込みシステムの設計実装への モデルカタログの活用 仙台高等専門学校 情報システム工学科 力武克彰, 新村祐太 ( 豊橋技科大 ), 菊池雄太郎 ( 仙台高専 ) 概要 組込み分野のための UML モデルカタログ (*) のモデルを実装してみました (* 以下 モデルカタログと呼びます ) 2 概要 モデルカタログ : 目標制御モデル モデルカタログより引用
Microsoft PowerPoint pptx
 PFCore(RT ミドルウェア ) トレーニング中級編 10:00-11:00 第 1 部 :RT コンポーネントプログラミングの概要 担当 : 安藤慶昭 ( 産業技術総合研究所 ) 概要 :RT コンポーネントの作成方法, 設計時の注意点などの概要について解説します 第 2 部 :RT ミドルウェア (PFcore) 開発支援ツールと RT コンポーネントの作成方法 11:00-12:00 12:00-13:00
PFCore(RT ミドルウェア ) トレーニング中級編 10:00-11:00 第 1 部 :RT コンポーネントプログラミングの概要 担当 : 安藤慶昭 ( 産業技術総合研究所 ) 概要 :RT コンポーネントの作成方法, 設計時の注意点などの概要について解説します 第 2 部 :RT ミドルウェア (PFcore) 開発支援ツールと RT コンポーネントの作成方法 11:00-12:00 12:00-13:00
Microsoft PowerPoint RTM講習会_初級(第4部) [互換モード]
![Microsoft PowerPoint RTM講習会_初級(第4部) [互換モード]](/thumbs/101/150326877.jpg "Microsoft PowerPoint RTM講習会_初級(第4部) [互換モード]") PFCore(RT ミドルウェア ) トレーニング初級編 日時 :2013 年 1 月 21 日 ( 月 ) 13:00~17:00 場所 : 大阪大学吹田キャンパス産学連携本部 B 棟 1F 会議室 PFCore(RT ミドルウェア ) トレーニング初級編 13:00-13:20 13:20-14:10 14:10-15:05 15:05-15:20 15:20-17:00 第 1 部 : 先端計測分野における
PFCore(RT ミドルウェア ) トレーニング初級編 日時 :2013 年 1 月 21 日 ( 月 ) 13:00~17:00 場所 : 大阪大学吹田キャンパス産学連携本部 B 棟 1F 会議室 PFCore(RT ミドルウェア ) トレーニング初級編 13:00-13:20 13:20-14:10 14:10-15:05 15:05-15:20 15:20-17:00 第 1 部 : 先端計測分野における
機能仕様書 ロボット Raspberry Pi カメラ RTC Ver 発行日 2017 年 12 月 27 日公立大学法人会津大学株式会社東日本計算センター
 機能仕様書 ロボット Raspberry Pi カメラ RTC Ver.1.0.0 発行日 2017 年 12 月 27 日公立大学法人会津大学株式会社東日本計算センター 改版履歴 Ver 改版日 内容 1.0.0 2017/5/19 新規作成 2017/12/27 正式版発行 目次 1. はじめに... 1 1.1. 対象読者... 1 1.2. 適応範囲... 1 1.3. 開発環境及び使用機器...
機能仕様書 ロボット Raspberry Pi カメラ RTC Ver.1.0.0 発行日 2017 年 12 月 27 日公立大学法人会津大学株式会社東日本計算センター 改版履歴 Ver 改版日 内容 1.0.0 2017/5/19 新規作成 2017/12/27 正式版発行 目次 1. はじめに... 1 1.1. 対象読者... 1 1.2. 適応範囲... 1 1.3. 開発環境及び使用機器...
CCD リニアイメージセンサ用駆動回路 C CCD リニアイメージセンサ (S11155/S ) 用 C は 当社製 CCDリニアイメージセンサ S11155/S 用に開発された駆動回路です S11155/S11156-
 用 C は 当社製 CCDリニアイメージセンサ S11155/S 用に開発された駆動回路です S11155/S11156-") CCD リニアイメージセンサ用駆動回路 C11165-02 CCD リニアイメージセンサ (S11155/S11156-2048-02) 用 C11165-02は 当社製 CCDリニアイメージセンサ S11155/S11156-2048-02 用に開発された駆動回路です S11155/S11156-2048-02と組み合わせることにより分光器に使用できます C11165-02 は CCD 駆動回路
CCD リニアイメージセンサ用駆動回路 C11165-02 CCD リニアイメージセンサ (S11155/S11156-2048-02) 用 C11165-02は 当社製 CCDリニアイメージセンサ S11155/S11156-2048-02 用に開発された駆動回路です S11155/S11156-2048-02と組み合わせることにより分光器に使用できます C11165-02 は CCD 駆動回路
CoIDE 用 F4D_VCP の説明 V /07/05 USB の VCP( 仮想 COM ポート ) による非同期シリアル通信を行うプログラムです Free の開発ツール CoIDE で作成した STM32F4 Discovery 用のプロジェクトです プログラムの開始番地は 0x
 による非同期シリアル通信を行うプログラムです Free の開発ツール CoIDE で作成した STM32F4 Discovery 用のプロジェクトです プログラムの開始番地は 0x") CoIDE 用 F4D_VCP の説明 V001 2014/07/05 USB の VCP( 仮想 COM ポート ) による非同期シリアル通信を行うプログラムです Free の開発ツール CoIDE で作成した STM32F4 Discovery 用のプロジェクトです プログラムの開始番地は 0x08000000 です デバッグが可能です 目次 1. USB の VCP( 仮想 COM ポート )
CoIDE 用 F4D_VCP の説明 V001 2014/07/05 USB の VCP( 仮想 COM ポート ) による非同期シリアル通信を行うプログラムです Free の開発ツール CoIDE で作成した STM32F4 Discovery 用のプロジェクトです プログラムの開始番地は 0x08000000 です デバッグが可能です 目次 1. USB の VCP( 仮想 COM ポート )
Microsoft PowerPoint - 安藤
 RTミドルウエア サマーキャンプ2012 RTコンポーネントの 開 発 手 順 に ついて 日 時 : 2012 年 7 月 31 日 ( 火 ) 場 所 : 産 総 研 中 央 第 2 ネットワーク 会 議 室 ( 独 ) 産 業 技 術 総 合 研 究 所 知 能 システム 研 究 部 門 安 藤 慶 昭 概 要 RTミドルウエア 概 要 RTコンポーネントの 作 り 方 OpenRTM-aist-1.1.0の
RTミドルウエア サマーキャンプ2012 RTコンポーネントの 開 発 手 順 に ついて 日 時 : 2012 年 7 月 31 日 ( 火 ) 場 所 : 産 総 研 中 央 第 2 ネットワーク 会 議 室 ( 独 ) 産 業 技 術 総 合 研 究 所 知 能 システム 研 究 部 門 安 藤 慶 昭 概 要 RTミドルウエア 概 要 RTコンポーネントの 作 り 方 OpenRTM-aist-1.1.0の
1. UART について UART は Universal Asynchronous Receiver Transmitter の頭文字をとったもので 非同期シリアル通信と呼ばれます シリアル通信とは 一本の信号線でデータをやりとりするために 1bit ずつデータを送出することをいいます データを受
 STM32L_UART1 の説明 V004 2014/03/30 STM32L-Discovery の UART 1 の送受信を行うプログラムです 無料の開発ツール Atollic TrueSTUDIO for ARM Lite( 試用版 ) で作成したプロジェクトです プログラムの開始番地は 0x08000000 です デバッグが可能です PC アプリケーションの Access_SerialPort
STM32L_UART1 の説明 V004 2014/03/30 STM32L-Discovery の UART 1 の送受信を行うプログラムです 無料の開発ツール Atollic TrueSTUDIO for ARM Lite( 試用版 ) で作成したプロジェクトです プログラムの開始番地は 0x08000000 です デバッグが可能です PC アプリケーションの Access_SerialPort
目次 はじめに 4 概要 4 背景 4 対象 5 スケジュール 5 目標点 6 使用機材 6 第 1 章 C# 言語 7 C# 言語の歴史 7 基本構文 8 C 言語との違い 9 Java 言語との違い 10.Netフレームワーク 10 開発資料 10 第 2 章 Mono 11 Monoの歴史 1
 ポリテクセンター埼玉セミナー資料 組込み技術者のための C# Monoを用いたマルチプラットフォームアプリケーション開発技術 第 1.2 版 2018 年 8 月 Microbrains Inc. 渋谷 目次 はじめに 4 概要 4 背景 4 対象 5 スケジュール 5 目標点 6 使用機材 6 第 1 章 C# 言語 7 C# 言語の歴史 7 基本構文 8 C 言語との違い 9 Java 言語との違い
ポリテクセンター埼玉セミナー資料 組込み技術者のための C# Monoを用いたマルチプラットフォームアプリケーション開発技術 第 1.2 版 2018 年 8 月 Microbrains Inc. 渋谷 目次 はじめに 4 概要 4 背景 4 対象 5 スケジュール 5 目標点 6 使用機材 6 第 1 章 C# 言語 7 C# 言語の歴史 7 基本構文 8 C 言語との違い 9 Java 言語との違い
1. A/D 入力について分解能 12bit の A/D コンバータ入力です A/D 入力電圧とディジタル値との対応は理論上 入力電圧 0V : 0 入力電圧 +3V : 4095 です 実際はオフセットと傾きがあり ぴったりこの数値にはなりません 2. A/D 入力に使用する信号 STM32L_A
 STM32L_ADC の説明 V003 2014/03/30 STM32L-Discovery の A/D 入力を行うプログラムです A/D CH0 ~ A/D CH3 の 4 本の入力が可能です 提供する PC のアプリケーション Access_SerialPort を使用して UART( 非同期シリアル通信 ) により A/D 入力の表示を行うことができます 無料の開発ツール Atollic TrueSTUDIO
STM32L_ADC の説明 V003 2014/03/30 STM32L-Discovery の A/D 入力を行うプログラムです A/D CH0 ~ A/D CH3 の 4 本の入力が可能です 提供する PC のアプリケーション Access_SerialPort を使用して UART( 非同期シリアル通信 ) により A/D 入力の表示を行うことができます 無料の開発ツール Atollic TrueSTUDIO
1. USB の VCP( 仮想 COM ポート ) について USB の VCP( 仮想 COM ポート ) は USB を非同期シリアル通信として使用するための USB のドライバです PC には VCP ドライバをインストールする必要があります USB の VCP( 仮想 COM ポート )
 について USB の VCP( 仮想 COM ポート ) は USB を非同期シリアル通信として使用するための USB のドライバです PC には VCP ドライバをインストールする必要があります USB の VCP( 仮想 COM ポート )") TrueSTUDIO 用 F4D_VCP の説明 V001 2014/07/05 USB の VCP( 仮想 COM ポート ) による非同期シリアル通信を行うプログラムです 無料の試用版開発ツール Atollic TrueSTUDIO for ARM Lite で作成したプロジェクトです ビルド可能なプログラムのコードサイズが 32Kbyte 以内の制限があります プログラムの開始番地は 0x08000000
TrueSTUDIO 用 F4D_VCP の説明 V001 2014/07/05 USB の VCP( 仮想 COM ポート ) による非同期シリアル通信を行うプログラムです 無料の試用版開発ツール Atollic TrueSTUDIO for ARM Lite で作成したプロジェクトです ビルド可能なプログラムのコードサイズが 32Kbyte 以内の制限があります プログラムの開始番地は 0x08000000
ユーザーズマニュアル 有線ネットワークシステム 発行日 2016 年 3 月 30 日
 ユーザーズマニュアル 有線ネットワークシステム 発行日 2016 年 3 月 30 日 目次 1 2 3 はじめに...1 1.1 前提知識...1 1.2 システム概要...1 1.3 動作環境...4 1.3.1 IP 経路情報監視 RTC...4 1.3.2 IP 経路情報ビューア RTC...6 インストール...7 2.1 RTC の入手方法...7 2.2 IP 経路情報監視 RTC...7
ユーザーズマニュアル 有線ネットワークシステム 発行日 2016 年 3 月 30 日 目次 1 2 3 はじめに...1 1.1 前提知識...1 1.2 システム概要...1 1.3 動作環境...4 1.3.1 IP 経路情報監視 RTC...4 1.3.2 IP 経路情報ビューア RTC...6 インストール...7 2.1 RTC の入手方法...7 2.2 IP 経路情報監視 RTC...7
HMD を用いた PT カメラのインターネット遠隔操作芝浦工業大学知能機械システム研究室 HMD(Head Mounted Display) を用いた PT(Pan-Tilt) カメラのインターネット遠隔操作 ユーザマニュアル (ver1.0) 2014 年 10 月 23 日 芝浦工業大学知能機械
 を用いた PT(Pan-Tilt) カメラのインターネット遠隔操作 ユーザマニュアル (ver1.0) 2014 年 10 月 23 日 芝浦工業大学知能機械") 芝浦工業大学知能機械システム研究室 HMD(Head Mounted Display) を用いた PT(Pan-Tilt) カメラのインターネット遠隔操作 ユーザマニュアル (ver1.0) 2014 年 10 月 23 日 芝浦工業大学知能機械システム研究室 荻谷浩史, 石田真一, 安田福啓, 松日楽信人 目次 1. はじめに... 2 1.1 RTC 群概要... 2 1.2 システム構成...
芝浦工業大学知能機械システム研究室 HMD(Head Mounted Display) を用いた PT(Pan-Tilt) カメラのインターネット遠隔操作 ユーザマニュアル (ver1.0) 2014 年 10 月 23 日 芝浦工業大学知能機械システム研究室 荻谷浩史, 石田真一, 安田福啓, 松日楽信人 目次 1. はじめに... 2 1.1 RTC 群概要... 2 1.2 システム構成...
高信頼RTミドルウエアの開発
 P04 RT,,,,,,,,,,,, Development of Dependable RT-Middleware Noriaki Ando, Geoffrey Biggs, Yoshihiro Nakabo, Daichi Mizuguchi, Kiyoshi Fujiwara, Isao Hara, Tetsuo Kotoku, AIST, Masayoshi Kondo, Mitsuhiro
P04 RT,,,,,,,,,,,, Development of Dependable RT-Middleware Noriaki Ando, Geoffrey Biggs, Yoshihiro Nakabo, Daichi Mizuguchi, Kiyoshi Fujiwara, Isao Hara, Tetsuo Kotoku, AIST, Masayoshi Kondo, Mitsuhiro
スライド 1
 第 2 部 RT コンポーネント作成入門 宮本信彦 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センターロボットソフトウェアプラットフォーム研究チーム インストールの確認 (Windows) OpenRTM-aist OpenRTM-aist-1.1.2-RELEASE_x86.msi インストール後に再起動する Visual Studio 2013 以外 (2010 2012 2015)
第 2 部 RT コンポーネント作成入門 宮本信彦 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センターロボットソフトウェアプラットフォーム研究チーム インストールの確認 (Windows) OpenRTM-aist OpenRTM-aist-1.1.2-RELEASE_x86.msi インストール後に再起動する Visual Studio 2013 以外 (2010 2012 2015)
DAQ- Middleware の新機能と 実験への展開千代浩司 A,F 濱田英太郎 A,F 井上栄二 A,F 長坂康史 B,F 味村周平 C,F 神徳徹雄 D,F 安藤慶昭 D,F 和田正樹 E 高エネルギー加速器研究機構素粒子原子核研究所 A 広島工業大学 B 大坂大学 C 産業技術総合研究所
 DAQ- Middleware の新機能と 実験への展開千代浩司 A,F 濱田英太郎 A,F 井上栄二 A,F 長坂康史 B,F 味村周平 C,F 神徳徹雄 D,F 安藤慶昭 D,F 和田正樹 E 高エネルギー加速器研究機構素粒子原子核研究所 A 広島工業大学 B 大坂大学 C 産業技術総合研究所 D ( 株 )Bee Beans Technologies E Open- It F もくじ DAQ-
DAQ- Middleware の新機能と 実験への展開千代浩司 A,F 濱田英太郎 A,F 井上栄二 A,F 長坂康史 B,F 味村周平 C,F 神徳徹雄 D,F 安藤慶昭 D,F 和田正樹 E 高エネルギー加速器研究機構素粒子原子核研究所 A 広島工業大学 B 大坂大学 C 産業技術総合研究所 D ( 株 )Bee Beans Technologies E Open- It F もくじ DAQ-
スライド 1
 第 2 部 RT コンポーネント作成入門 宮本信彦 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センターロボットソフトウェアプラットフォーム研究チーム インストールの確認 (Windows) OpenRTM-aist OpenRTM-aist-1.1.2-RELEASE_x86.msi インストール後に再起動する Visual Studio 2013 以外 (2010 2012 2015)
第 2 部 RT コンポーネント作成入門 宮本信彦 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センターロボットソフトウェアプラットフォーム研究チーム インストールの確認 (Windows) OpenRTM-aist OpenRTM-aist-1.1.2-RELEASE_x86.msi インストール後に再起動する Visual Studio 2013 以外 (2010 2012 2015)
Oracle Un お問合せ : Oracle Data Integrator 11g: データ統合設定と管理 期間 ( 標準日数 ):5 コースの概要 Oracle Data Integratorは すべてのデータ統合要件 ( 大量の高パフォーマンス バッチ ローブンの統合プロセスおよ
:5 コースの概要 Oracle Data Integratorは すべてのデータ統合要件 ( 大量の高パフォーマンス バッチ ローブンの統合プロセスおよ") Oracle Un お問合せ : 0120- Oracle Data Integrator 11g: データ統合設定と管理 期間 ( 標準日数 ):5 コースの概要 Oracle Data Integratorは すべてのデータ統合要件 ( 大量の高パフォーマンス バッチ ローブンの統合プロセスおよびSOA 対応データ サービスへ ) を網羅する総合的なデータ統合プラットフォームです Oracle
Oracle Un お問合せ : 0120- Oracle Data Integrator 11g: データ統合設定と管理 期間 ( 標準日数 ):5 コースの概要 Oracle Data Integratorは すべてのデータ統合要件 ( 大量の高パフォーマンス バッチ ローブンの統合プロセスおよびSOA 対応データ サービスへ ) を網羅する総合的なデータ統合プラットフォームです Oracle
Microsoft PowerPoint ppt [互換モード]
![Microsoft PowerPoint ppt [互換モード]](/thumbs/101/150326876.jpg "Microsoft PowerPoint ppt [互換モード]") RT ミドルウェア講習会 日時 :2012 年 5 月 22 日 ( 水 ) 10:00~16:45 場所 : つくば国際会議場小会議室 303 RT ミドルウェア講習会 10:00-10:50 11:00-11:50 11:50-12:00 12:00-13:00 13:00-14:00 14:00-16:45 第 1 部 ( その1): インターネットを利用したロボットサービスとRSiの取り組み
RT ミドルウェア講習会 日時 :2012 年 5 月 22 日 ( 水 ) 10:00~16:45 場所 : つくば国際会議場小会議室 303 RT ミドルウェア講習会 10:00-10:50 11:00-11:50 11:50-12:00 12:00-13:00 13:00-14:00 14:00-16:45 第 1 部 ( その1): インターネットを利用したロボットサービスとRSiの取り組み
S2Pradoの紹介
 2007 Autumn S2Prado の紹介 S2Container.PHP5 と連携した PRADO アプリケーションの構築 植山能成 紹介 丙午 クリスマスイヴうまれの 40 才 福岡県福岡市在住 株式会社アイティー勤務 主業務 : 通信系システム開発 業務での PHP 開発経験 約半年 (SIP,P2P) P2P) 次 PRADO Framework とは デモその 1 S2Prado.PHP5
2007 Autumn S2Prado の紹介 S2Container.PHP5 と連携した PRADO アプリケーションの構築 植山能成 紹介 丙午 クリスマスイヴうまれの 40 才 福岡県福岡市在住 株式会社アイティー勤務 主業務 : 通信系システム開発 業務での PHP 開発経験 約半年 (SIP,P2P) P2P) 次 PRADO Framework とは デモその 1 S2Prado.PHP5
Microsoft PowerPoint _3.RTMによるプログラミング_final.pptx
 RT ミドルウェアによるロボットプログラミング技術 3. RTM によるプログラミング インストールの確認 (Windows) OpenRTM-aist OpenRTM-aist-1.1.2-RELEASE_x86.msi インストール後に再起動する Python python-2.7.10.msi 2.7.11 は不具合が発 するため 推奨 OpenRTM-aist の 32bit 版をインストールする場合
RT ミドルウェアによるロボットプログラミング技術 3. RTM によるプログラミング インストールの確認 (Windows) OpenRTM-aist OpenRTM-aist-1.1.2-RELEASE_x86.msi インストール後に再起動する Python python-2.7.10.msi 2.7.11 は不具合が発 するため 推奨 OpenRTM-aist の 32bit 版をインストールする場合
V8.1新規機能紹介記事
 WebOTX V8.1 新規機能 EJB 3.0 WebOTX V8.1より Java EE 5(Java Platform, Enterprise Edition 5) に対応しました これによりいろいろな機能追加が行われていますが 特に大きな変更であるEJB 3.0 対応についてご紹介いたします なお WebOTX V7で対応したEJB 2.1についてもWebOTX V8.1で引き続き利用することが可能です
WebOTX V8.1 新規機能 EJB 3.0 WebOTX V8.1より Java EE 5(Java Platform, Enterprise Edition 5) に対応しました これによりいろいろな機能追加が行われていますが 特に大きな変更であるEJB 3.0 対応についてご紹介いたします なお WebOTX V7で対応したEJB 2.1についてもWebOTX V8.1で引き続き利用することが可能です
JavaプログラミングⅠ
 Java プログラミング Ⅱ 8 回目抽象クラスとインタフェース課題 確認 問題次の各文は正しいか誤っているか答えなさい (1) 抽象クラスのオブジェクトは生成できる (2) 抽象メソッドとはメソッドの本体が未定義のメソッドである (3) 抽象メソッドをメンバーにもつクラスは抽象クラスである (4) 抽象クラスを拡張してすべての抽象メソッドをオーバーライドすれば サブクラスのオブジェクトを生成できる
Java プログラミング Ⅱ 8 回目抽象クラスとインタフェース課題 確認 問題次の各文は正しいか誤っているか答えなさい (1) 抽象クラスのオブジェクトは生成できる (2) 抽象メソッドとはメソッドの本体が未定義のメソッドである (3) 抽象メソッドをメンバーにもつクラスは抽象クラスである (4) 抽象クラスを拡張してすべての抽象メソッドをオーバーライドすれば サブクラスのオブジェクトを生成できる
智美塾 ゆもつよメソッドのアーキテクチャ
 ゆもつよメソッドのテスト要求分析とテストアーキテクチャ設計 JaSST13 東京智美塾 2013 年 1 月 30 日 湯本剛 ( 日本 HP) tsuyoshi.yumoto@hp.com ゆもつよ風テスト開発プロセス テスト計画 実現したい品質の具体的把握 テスト箇所の選択 テストの目的設定 テスト対象アイテム特定 テスト分析 テストタイプ特定 機能の整理 & 再分類 テスト条件となる仕様項目特定
ゆもつよメソッドのテスト要求分析とテストアーキテクチャ設計 JaSST13 東京智美塾 2013 年 1 月 30 日 湯本剛 ( 日本 HP) tsuyoshi.yumoto@hp.com ゆもつよ風テスト開発プロセス テスト計画 実現したい品質の具体的把握 テスト箇所の選択 テストの目的設定 テスト対象アイテム特定 テスト分析 テストタイプ特定 機能の整理 & 再分類 テスト条件となる仕様項目特定
Industrial shields brochure_JP
 信頼性の高いオープンソースハードウェア 供給電圧 I/O デジタルアナログリレー オープンソースハードウェア オープンソース PLC およびパネル PC ついに実現! オープンソースハードウェアで プロトタイプから製品化まで対応 自由自在に革新的な開発が可能 オープンソース PLC ラインアップ (Arduino 搭載 ) の概要 リレーアナログデジタル アナログデジタル アナログ リレー I/O
信頼性の高いオープンソースハードウェア 供給電圧 I/O デジタルアナログリレー オープンソースハードウェア オープンソース PLC およびパネル PC ついに実現! オープンソースハードウェアで プロトタイプから製品化まで対応 自由自在に革新的な開発が可能 オープンソース PLC ラインアップ (Arduino 搭載 ) の概要 リレーアナログデジタル アナログデジタル アナログ リレー I/O
ChoreonoidとOpenHRIを用いたシステム構築事例
 Choreonoid と OpenHRI を用いた システム構築事例 産業技術総合研究所 原 功 Choreonoid Choreonoid オープンソースのロボット用統合 GUI ソフトウェア 動作振り付けソフトウェアとして キーフレームベースの動作生成 CG の動作生成のような UI 動力学シミュレータとして OpenHRP3, ODE, Bullet Physics Engne など利用可 開発フレームワークとして
Choreonoid と OpenHRI を用いた システム構築事例 産業技術総合研究所 原 功 Choreonoid Choreonoid オープンソースのロボット用統合 GUI ソフトウェア 動作振り付けソフトウェアとして キーフレームベースの動作生成 CG の動作生成のような UI 動力学シミュレータとして OpenHRP3, ODE, Bullet Physics Engne など利用可 開発フレームワークとして
Microsoft PowerPoint RT講習会(説明用) [互換モード]
![Microsoft PowerPoint RT講習会(説明用) [互換モード]](/thumbs/101/150326987.jpg "Microsoft PowerPoint RT講習会(説明用) [互換モード]") RT ミドルウェア講習会 日時 :2012 年 7 月 19 日 ( 金 ) 13:00~17:00 場所 : 名城大学天白キャンパス研究実験棟 Ⅱ メカトロニクス工学科会議室 OpenRT Platform ロボット知能ソフトウェアプラットフォーム http://www.openrtp.jp/wiki/ システム設計, シミュレーション, 動作生成, シナリオ生成などをサポート OpenRT Platform
RT ミドルウェア講習会 日時 :2012 年 7 月 19 日 ( 金 ) 13:00~17:00 場所 : 名城大学天白キャンパス研究実験棟 Ⅱ メカトロニクス工学科会議室 OpenRT Platform ロボット知能ソフトウェアプラットフォーム http://www.openrtp.jp/wiki/ システム設計, シミュレーション, 動作生成, シナリオ生成などをサポート OpenRT Platform
スライド 1
 第 2 部 RT コンポーネント作成入門 宮本信彦 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センターロボットソフトウェアプラットフォーム研究チーム 資料 (USB メモリで配布 ) ppt 第 2 部 第 3 部のスライド WEB ページ ( 手順を記載したページ ) 第 2 部 (Windows) 第 2 部 (Ubuntu) 第 3 部 第 4 部 OpenRTM-aist_1.2.0
第 2 部 RT コンポーネント作成入門 宮本信彦 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センターロボットソフトウェアプラットフォーム研究チーム 資料 (USB メモリで配布 ) ppt 第 2 部 第 3 部のスライド WEB ページ ( 手順を記載したページ ) 第 2 部 (Windows) 第 2 部 (Ubuntu) 第 3 部 第 4 部 OpenRTM-aist_1.2.0
Microsoft PowerPoint - IAF フォーラム2015講演資料_PLCopenJapan_A02.pptx
 PLCopen / OPC UA 通信仕様と PLCopen XML の紹介 ~PLC プログラムの生産システムエンジニアリング連携に向けて ~ Industrial Automation Forum - Forum 2015 PLCopen Japan Page 1 PLCopen の主な取り組み PLCopen は IEC 61131-3 プログラミングの普及促進と関連技術仕様の策定を う 営利団体
PLCopen / OPC UA 通信仕様と PLCopen XML の紹介 ~PLC プログラムの生産システムエンジニアリング連携に向けて ~ Industrial Automation Forum - Forum 2015 PLCopen Japan Page 1 PLCopen の主な取り組み PLCopen は IEC 61131-3 プログラミングの普及促進と関連技術仕様の策定を う 営利団体
Arduinoで計る,測る,量る
 [ 第 4 章 ] 決められた入出力ポートだが逆に使いやすいアナログ入出力もスケッチが用意されていて使い方は簡単 本章では,Arduino のアナログ入力として, センサからの出力の代わりにボリュームを用いて, 0V から電源電圧まで変化する電圧を読み取り, この変化した電圧に対応した出力を LED に加えてアナログ入出力のテストを行います. 続いて, アナログ入力の具体例として温度の測定を行います.
[ 第 4 章 ] 決められた入出力ポートだが逆に使いやすいアナログ入出力もスケッチが用意されていて使い方は簡単 本章では,Arduino のアナログ入力として, センサからの出力の代わりにボリュームを用いて, 0V から電源電圧まで変化する電圧を読み取り, この変化した電圧に対応した出力を LED に加えてアナログ入出力のテストを行います. 続いて, アナログ入力の具体例として温度の測定を行います.
Microsoft PowerPoint - 【最終提出版】 MATLAB_EXPO2014講演資料_ルネサス菅原.pptx
 MATLAB/Simulink を使用したモータ制御アプリのモデルベース開発事例 ルネサスエレクトロニクス株式会社 第二ソリューション事業本部産業第一事業部家電ソリューション部 Rev. 1.00 2014 Renesas Electronics Corporation. All rights reserved. IAAS-AA-14-0202-1 目次 1. はじめに 1.1 モデルベース開発とは?
MATLAB/Simulink を使用したモータ制御アプリのモデルベース開発事例 ルネサスエレクトロニクス株式会社 第二ソリューション事業本部産業第一事業部家電ソリューション部 Rev. 1.00 2014 Renesas Electronics Corporation. All rights reserved. IAAS-AA-14-0202-1 目次 1. はじめに 1.1 モデルベース開発とは?
スライド 1
 (10-1) 2019.6.19 電気通信大学大学院情報理工学研究科末廣尚士 16. ロボットアーム RTC - 6 自由度ロボットアーム 6 回転関節シリアルリンク 2 - ロボットアーム RTC 入力 目標関節角度 :target_joints TimedDoubleSeq 型 ( 長さ 6), 単位はラジアン ハンドの開き幅 :h_width TimedDouble 型単位はメートル 出力 実際の関節角度
(10-1) 2019.6.19 電気通信大学大学院情報理工学研究科末廣尚士 16. ロボットアーム RTC - 6 自由度ロボットアーム 6 回転関節シリアルリンク 2 - ロボットアーム RTC 入力 目標関節角度 :target_joints TimedDoubleSeq 型 ( 長さ 6), 単位はラジアン ハンドの開き幅 :h_width TimedDouble 型単位はメートル 出力 実際の関節角度
RTMツール講習会
 青梅商工会議所主催 RTM 講習会 日時 :2011 年 7 月 25 日 ( 月 ) 10:30~17:30 場所 : 産業技術総合研究所中央第 2 本部情報棟 1F ネットワーク会議室 RT ミドルウェア講習会 10:30-11:15 11:15-12:00 13:00-14:00 14:15-15:15 15:30-16:00 16:15-17:30 第 1 部 :RTミドルウェアの概略紹介担当
青梅商工会議所主催 RTM 講習会 日時 :2011 年 7 月 25 日 ( 月 ) 10:30~17:30 場所 : 産業技術総合研究所中央第 2 本部情報棟 1F ネットワーク会議室 RT ミドルウェア講習会 10:30-11:15 11:15-12:00 13:00-14:00 14:15-15:15 15:30-16:00 16:15-17:30 第 1 部 :RTミドルウェアの概略紹介担当
スライド 1
 RL78/G13 周辺機能紹介 ADC A/D コンバータ ルネサスエレクトロニクス株式会社 ルネサス半導体トレーニングセンター 2013/08/02 Rev. 0.00 00000-A コンテンツ ADC の概要 ソフトウエア トリガ セレクト モード 連続変換モードのプログラム サンプル紹介 2 ADC の概要 3 ADC のブロック図 パワー オフが可能 入力 選択 記憶 比較 基準電圧 変換結果
RL78/G13 周辺機能紹介 ADC A/D コンバータ ルネサスエレクトロニクス株式会社 ルネサス半導体トレーニングセンター 2013/08/02 Rev. 0.00 00000-A コンテンツ ADC の概要 ソフトウエア トリガ セレクト モード 連続変換モードのプログラム サンプル紹介 2 ADC の概要 3 ADC のブロック図 パワー オフが可能 入力 選択 記憶 比較 基準電圧 変換結果
NEDO次世代ロボット知能化技術開発プロジェクト
 NEDO 次世代ロボット知能化技術開発プロジェクト 音声対話システムマニュアル ( 別冊 ) 1.0 版 独立行政法人産業技術総合研究所 株式会社セック 改版履歴 版数改版日改版内容備考 1.0 2012/02/29 初版作成 -i- 目次 1 総則... 1 1.1. 目的...1 1.2. 適用範囲...1 1.3. 関連文書等...1 1.3.1. 適用文書...1 1.3.2. 関連文書...1
NEDO 次世代ロボット知能化技術開発プロジェクト 音声対話システムマニュアル ( 別冊 ) 1.0 版 独立行政法人産業技術総合研究所 株式会社セック 改版履歴 版数改版日改版内容備考 1.0 2012/02/29 初版作成 -i- 目次 1 総則... 1 1.1. 目的...1 1.2. 適用範囲...1 1.3. 関連文書等...1 1.3.1. 適用文書...1 1.3.2. 関連文書...1
2015 TRON Symposium セッション 組込み機器のための機能安全対応 TRON Safe Kernel TRON Safe Kernel の紹介 2015/12/10 株式会社日立超 LSIシステムズ製品ソリューション設計部トロンフォーラム TRON Safe Kernel WG 幹事
 2015 TRON Symposium セッション 組込み機器のための機能安全対応 TRON Safe Kernel TRON Safe Kernel の紹介 2015/12/10 株式会社日立超 LSIシステムズ製品ソリューション設計部トロンフォーラム TRON Safe Kernel WG 幹事 豊山 祐一 Hitachi ULSI Systems Co., Ltd. 2015. All rights
2015 TRON Symposium セッション 組込み機器のための機能安全対応 TRON Safe Kernel TRON Safe Kernel の紹介 2015/12/10 株式会社日立超 LSIシステムズ製品ソリューション設計部トロンフォーラム TRON Safe Kernel WG 幹事 豊山 祐一 Hitachi ULSI Systems Co., Ltd. 2015. All rights
Microsoft Word - USB60F_Raspi_ doc
 REX-USB60F USB RS-232C 変換アダプタ REX-USB60F の Raspberry Pi での使用について 1. 概要 2 2. 設定手順 2 2-1. REX-USB60F の装着と確認 2 3. 通信の確認 4 3-1. cutecom による確認 4 4. Python での使用 8 4-1. データ送信のスクリプト 8 4-2. データ受信のスクリプト 9 2016 年
REX-USB60F USB RS-232C 変換アダプタ REX-USB60F の Raspberry Pi での使用について 1. 概要 2 2. 設定手順 2 2-1. REX-USB60F の装着と確認 2 3. 通信の確認 4 3-1. cutecom による確認 4 4. Python での使用 8 4-1. データ送信のスクリプト 8 4-2. データ受信のスクリプト 9 2016 年
Java言語 第1回
 Java 言語 第 2 回簡単な Java プログラムの作成と実行 知的情報システム工学科 久保川淳司 kubokawa@me.it-hiroshima.ac.jp 簡単な Java プログラム Java プログラムのファイル名 Java プログラムのファイル名命名ルール ファイル名とクラス名は同じでなければならない HelloJava.java public class HelloJava { public
Java 言語 第 2 回簡単な Java プログラムの作成と実行 知的情報システム工学科 久保川淳司 kubokawa@me.it-hiroshima.ac.jp 簡単な Java プログラム Java プログラムのファイル名 Java プログラムのファイル名命名ルール ファイル名とクラス名は同じでなければならない HelloJava.java public class HelloJava { public
PowerPoint プレゼンテーション
 第 2 部 RT コンポーネント作成入門 第 2 部の目的 RT System Editor を用いた RTC ベースのシステム構築方法の習得 (RTC 運用時に必要な知識 ) RTC Builder を用いた RT コンポーネントのひな形作成方法の習得 (RTC 開発時に必要な知識 ) 2016/7/7 RT ミドルウェア講習会 @ 名城大学 1 OpenRTM-aist の開発支援ツール ロボット知能ソフトウェアプラットフォーム
第 2 部 RT コンポーネント作成入門 第 2 部の目的 RT System Editor を用いた RTC ベースのシステム構築方法の習得 (RTC 運用時に必要な知識 ) RTC Builder を用いた RT コンポーネントのひな形作成方法の習得 (RTC 開発時に必要な知識 ) 2016/7/7 RT ミドルウェア講習会 @ 名城大学 1 OpenRTM-aist の開発支援ツール ロボット知能ソフトウェアプラットフォーム
CMOS リニアイメージセンサ用駆動回路 C CMOS リニアイメージセンサ S 等用 C は当社製 CMOSリニアイメージセンサ S 等用に開発された駆動回路です USB 2.0インターフェースを用いて C と PCを接続
 CMOS リニアイメージセンサ用駆動回路 C13015-01 CMOS リニアイメージセンサ S11639-01 等用 C13015-01は当社製 CMOSリニアイメージセンサ S11639-01 等用に開発された駆動回路です USB 2.0インターフェースを用いて C13015-01と PCを接続することにより PCからC13015-01 を制御して センサのアナログビデオ信号を 16-bitデジタル出力に変換した数値データを
CMOS リニアイメージセンサ用駆動回路 C13015-01 CMOS リニアイメージセンサ S11639-01 等用 C13015-01は当社製 CMOSリニアイメージセンサ S11639-01 等用に開発された駆動回路です USB 2.0インターフェースを用いて C13015-01と PCを接続することにより PCからC13015-01 を制御して センサのアナログビデオ信号を 16-bitデジタル出力に変換した数値データを
CommCheckerManual_Ver.1.0_.doc
 通信チェックツール (CommChecker) 取扱説明書 (Ver.1.0) 2009 ESPEC Corp. 目次 1. 使用条件 4 2. ダウンロード & インストール 5 3. 環境設定 6 3-1.RS-485 通信 6 3-2.RS-232C 通信 7 3-3.GPIB 通信 8 4. ソフトウェアの使用方法 9 4-1. 起動 9 4-2. 通信設定 10 (1)RS485 通信 10
通信チェックツール (CommChecker) 取扱説明書 (Ver.1.0) 2009 ESPEC Corp. 目次 1. 使用条件 4 2. ダウンロード & インストール 5 3. 環境設定 6 3-1.RS-485 通信 6 3-2.RS-232C 通信 7 3-3.GPIB 通信 8 4. ソフトウェアの使用方法 9 4-1. 起動 9 4-2. 通信設定 10 (1)RS485 通信 10
「RAD Studio XE5によるマルチ言語/マルチデバイス開発の進め方」
 C1 Delphi/C++ チュートリアルセッション RAD Studio XE5 によるマルチ言語 / マルチデバイス開発の進め方 エンバカデロ テクノロジーズエヴァンジェリスト高橋智宏 アジェンダ RAD Studio XE5 の概要 Delphi or C++ Intel or ARM Windows / OS X / ios / Android プロジェクトとは? FireMonkey HD
C1 Delphi/C++ チュートリアルセッション RAD Studio XE5 によるマルチ言語 / マルチデバイス開発の進め方 エンバカデロ テクノロジーズエヴァンジェリスト高橋智宏 アジェンダ RAD Studio XE5 の概要 Delphi or C++ Intel or ARM Windows / OS X / ios / Android プロジェクトとは? FireMonkey HD
RTMツール講習会
 1 第 3 部の資料 設定ファイルの差し替え [OpenRTM_Root]/1.0/bin 配下にある以下の設定ファイルを差し替え rtc.conf,configsample.conf デフォルト設定でインストールした場合 C: Program Files OpenRTM-aist 1.0 bin 2 RT ミドルウエア講習会 日時 :2011 年 1 月 21 日 ( 金 ) 11:00~17:00
1 第 3 部の資料 設定ファイルの差し替え [OpenRTM_Root]/1.0/bin 配下にある以下の設定ファイルを差し替え rtc.conf,configsample.conf デフォルト設定でインストールした場合 C: Program Files OpenRTM-aist 1.0 bin 2 RT ミドルウエア講習会 日時 :2011 年 1 月 21 日 ( 金 ) 11:00~17:00
RTC_STM32F4 の説明 2013/10/20 STM32F4 内蔵 RTC の日付 時刻の設定および読み込みを行うプログラムです UART2( 非同期シリアル通信ポート 2) を使用して RTC の設定および読み込みを行います 無料の開発ツール Atollic TrueSTUDIO for
 を使用して RTC の設定および読み込みを行います 無料の開発ツール Atollic TrueSTUDIO for") RTC_STM32F4 の説明 2013/10/20 STM32F4 内蔵 RTC の日付 時刻の設定および読み込みを行うプログラムです UART2( 非同期シリアル通信ポート 2) を使用して RTC の設定および読み込みを行います 無料の開発ツール Atollic TrueSTUDIO for ARM Lite 4.2.0 で作成した STM32F4 Discovery 基板用のプロジェクトです
RTC_STM32F4 の説明 2013/10/20 STM32F4 内蔵 RTC の日付 時刻の設定および読み込みを行うプログラムです UART2( 非同期シリアル通信ポート 2) を使用して RTC の設定および読み込みを行います 無料の開発ツール Atollic TrueSTUDIO for ARM Lite 4.2.0 で作成した STM32F4 Discovery 基板用のプロジェクトです
Microsoft PowerPoint
 第 2 部 :RT コンポーネントの作成入門 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センター安藤慶昭 1 OpenRT Platform ロボット知能ソフトウェアプラットフォーム http://www.openrtp.jp/wiki/ システム設計, シミュレーション, 動作生成, シナリオ生成などをサポート OpenRT Platform ツール群 コンポーネント開発, システム開発における各開発フェーズの作業支援
第 2 部 :RT コンポーネントの作成入門 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センター安藤慶昭 1 OpenRT Platform ロボット知能ソフトウェアプラットフォーム http://www.openrtp.jp/wiki/ システム設計, シミュレーション, 動作生成, シナリオ生成などをサポート OpenRT Platform ツール群 コンポーネント開発, システム開発における各開発フェーズの作業支援
CoIDE 用 STM32F4_UART2 の説明 V /03/30 STM32F4 Discovery の非同期シリアル通信ポート UART2 の送受信を行うプログラムです Free の開発ツール CoIDE で作成したプロジェクトサンプルです プログラムの開始番地は 0x08000
 CoIDE 用 STM32F4_UART2 の説明 V002 2014/03/30 STM32F4 Discovery の非同期シリアル通信ポート UART2 の送受信を行うプログラムです Free の開発ツール CoIDE で作成したプロジェクトサンプルです プログラムの開始番地は 0x08000000 です デバッグが可能です 提供する PC のアプリケーションの Access_SerialPort
CoIDE 用 STM32F4_UART2 の説明 V002 2014/03/30 STM32F4 Discovery の非同期シリアル通信ポート UART2 の送受信を行うプログラムです Free の開発ツール CoIDE で作成したプロジェクトサンプルです プログラムの開始番地は 0x08000000 です デバッグが可能です 提供する PC のアプリケーションの Access_SerialPort
Micro Focus Enterprise Developer チュートリアル メインフレーム COBOL 開発 : MQ メッセージ連携 1. 目的 本チュートリアルでは CICS から入力したメッセージを MQ へ連携する方法の習得を目的としています 2. 前提 使用した OS : Red H
 Micro Focus Enterprise Developer チュートリアル 1. 目的 本チュートリアルでは CICS から入力したメッセージを MQ へ連携する方法の習得を目的としています 2. 前提 使用した OS : Red Hat Enterprise Linux Server release 6.5 x64 使用した WebSphere MQ : IBM WebSphere MQ 7.5.0.1
Micro Focus Enterprise Developer チュートリアル 1. 目的 本チュートリアルでは CICS から入力したメッセージを MQ へ連携する方法の習得を目的としています 2. 前提 使用した OS : Red Hat Enterprise Linux Server release 6.5 x64 使用した WebSphere MQ : IBM WebSphere MQ 7.5.0.1
スライド 1
 第 2 部 RT コンポーネント作成入門 宮本信彦 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センターロボットソフトウェアプラットフォーム研究チーム 資料 (USB メモリで配布 ) ppt 第 2 部 WEB ページ ( 手順を記載したページ ) 第 2 部 (Windows) 第 2 部 (Ubuntu) installer OpenRTM-aist のインストールに問題があった場合に使用してください
第 2 部 RT コンポーネント作成入門 宮本信彦 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センターロボットソフトウェアプラットフォーム研究チーム 資料 (USB メモリで配布 ) ppt 第 2 部 WEB ページ ( 手順を記載したページ ) 第 2 部 (Windows) 第 2 部 (Ubuntu) installer OpenRTM-aist のインストールに問題があった場合に使用してください
ETCB Manual
 ETCB Manual HARDWARE & PROGRAMMING MANUAL 目次 始めに ETCB 仕様 開発環境の構築 01 始めに 始めに 始めに 注意事項 免責事項 同梱品 02 始めに サポート 03 ETCB 仕様 ETCB 仕様 概要 仕様 項目サブ項目内容電源推奨入力電圧 6.6V~12V 最大入力電圧 16V 出力電圧内部 3.3V 外部 5.0V 最大出力電流値最大 2.2A
ETCB Manual HARDWARE & PROGRAMMING MANUAL 目次 始めに ETCB 仕様 開発環境の構築 01 始めに 始めに 始めに 注意事項 免責事項 同梱品 02 始めに サポート 03 ETCB 仕様 ETCB 仕様 概要 仕様 項目サブ項目内容電源推奨入力電圧 6.6V~12V 最大入力電圧 16V 出力電圧内部 3.3V 外部 5.0V 最大出力電流値最大 2.2A
AN1526 RX開発環境の使用方法(CS+、Renesas Flash Programmer)
") RX 開発環境の使用方法 (CS+ Renesas Flash Programmer) 第 2 版 2018 年 03 月 13 日 1. 概要 1.1 概要 本アプリケーションノートでは RX シリーズで使用する開発環境についての解説を行います 解説を行う開発環境は以下の 3 つです 1.RX ファミリ用 C/C++ コンパイラパッケージ 2.Renesas Flash Programmer(RFP)
RX 開発環境の使用方法 (CS+ Renesas Flash Programmer) 第 2 版 2018 年 03 月 13 日 1. 概要 1.1 概要 本アプリケーションノートでは RX シリーズで使用する開発環境についての解説を行います 解説を行う開発環境は以下の 3 つです 1.RX ファミリ用 C/C++ コンパイラパッケージ 2.Renesas Flash Programmer(RFP)
使える! IBM Systems Director Navigator for i の新機能
 使える! IBM Systems Director Navigator for i の 新機能 IBM Systems Director Navigator for i とは IBM i 6.1 から OS 標準機能として IBM i を管理するための新しい Web ベース ツール IBM Systems Director Navigator for i( 以下 Director Navigator)
使える! IBM Systems Director Navigator for i の 新機能 IBM Systems Director Navigator for i とは IBM i 6.1 から OS 標準機能として IBM i を管理するための新しい Web ベース ツール IBM Systems Director Navigator for i( 以下 Director Navigator)
目次 1 はじめに BA3-ML1 について BA3L1PLG について 動作環境 インストール アンインストール インストール アンインストール 操作
 Lonworks マスタカード LNS プラグインソフトウェア ( 形式 :BA3L1PLG) 取扱説明書 NM-7274 初版 1/7 目次 1 はじめに... 3 1.1 BA3-ML1 について... 3 1.2 BA3L1PLG について... 3 1.3 動作環境... 3 1.4 インストール アンインストール... 4 1.4.1 インストール... 4 1.4.2 アンインストール...
Lonworks マスタカード LNS プラグインソフトウェア ( 形式 :BA3L1PLG) 取扱説明書 NM-7274 初版 1/7 目次 1 はじめに... 3 1.1 BA3-ML1 について... 3 1.2 BA3L1PLG について... 3 1.3 動作環境... 3 1.4 インストール アンインストール... 4 1.4.1 インストール... 4 1.4.2 アンインストール...
課題情報シート テーマ名 : 動画中継ラジコンカーの製作 担当指導員名 : 土山博剛実施年度 : 25 年度施設名 : 四国職業能力開発大学校課程名 : 専門課程訓練科名 : 電子情報技術科課題の区分 : 総合制作実習課題学生数 : 1 時間 : 12 単位 (216h) 課題制作 開発のポイント
 課題制作 開発のポイント") 課題情報シート テーマ名 : 担当指導員名 : 土山博剛実施年度 : 25 年度施設名 : 四国職業能力開発大学校課程名 : 専門課程訓練科名 : 電子情報技術科課題の区分 : 総合制作実習課題学生数 : 1 時間 : 12 単位 (216h) 課題制作 開発のポイント 開発( 制作 ) のポイント 今回製作したシステムでは 専門課程で習得した総合的な知識 ( ネットワーク技術 電子回路技術 C プログラミング技術
課題情報シート テーマ名 : 担当指導員名 : 土山博剛実施年度 : 25 年度施設名 : 四国職業能力開発大学校課程名 : 専門課程訓練科名 : 電子情報技術科課題の区分 : 総合制作実習課題学生数 : 1 時間 : 12 単位 (216h) 課題制作 開発のポイント 開発( 制作 ) のポイント 今回製作したシステムでは 専門課程で習得した総合的な知識 ( ネットワーク技術 電子回路技術 C プログラミング技術
使用する前に
 この章では Cisco Secure ACS リリース 5.5 以降から Cisco ISE リリース 2.4 システムへのデー タ移行に使用される Cisco Secure ACS to Cisco ISE Migration Tool について説明します 移行の概要 1 ページ Cisco Secure ACS から データ移行 1 ページ Cisco Secure ACS to Cisco ISE
この章では Cisco Secure ACS リリース 5.5 以降から Cisco ISE リリース 2.4 システムへのデー タ移行に使用される Cisco Secure ACS to Cisco ISE Migration Tool について説明します 移行の概要 1 ページ Cisco Secure ACS から データ移行 1 ページ Cisco Secure ACS to Cisco ISE
PowerPoint Presentation
 ETAS の AUTO ソリューションイータス株式会社 1 Public STJ2/ETAS 2014-01 ETAS GmbH 2014. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, イータス株式会社会社概要 ETAS Driving Embedded Excellence
ETAS の AUTO ソリューションイータス株式会社 1 Public STJ2/ETAS 2014-01 ETAS GmbH 2014. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, イータス株式会社会社概要 ETAS Driving Embedded Excellence
2. 仕様 電源 :USB バスパワー (USB 入力の 5V 電源を使用します ) 出力 : 3.5mm ステレオジャック アナログステレオ出力 最大 20mArms 対応ヘッドホンインピーダンス 1Ω~500Ω RCA ピンジャック アナログ 2ch 出力 (L R) ラインレベル ヘッドホンア
 出力 : 3.5mm ステレオジャック アナログステレオ出力 最大 20mArms 対応ヘッドホンインピーダンス 1Ω~500Ω RCA ピンジャック アナログ 2ch 出力 (L R) ラインレベル ヘッドホンア") AK4495SEQ 搭載 USB DAC (I2C 付 ) 簡易取扱説明書 ( 呼称 :AK4495HA2) 2018-01-21 rev02 1. はじめに 本品は USB 接続のハイレゾ対応 D/A コンバータです パソコンなどで再生した音楽を出力します 特徴として 旭化成エレクトロニクスのハイエンド DAC AK4495SEQ を搭載してます また 内部に USB I2S 変換ドーターカードを搭載しています
AK4495SEQ 搭載 USB DAC (I2C 付 ) 簡易取扱説明書 ( 呼称 :AK4495HA2) 2018-01-21 rev02 1. はじめに 本品は USB 接続のハイレゾ対応 D/A コンバータです パソコンなどで再生した音楽を出力します 特徴として 旭化成エレクトロニクスのハイエンド DAC AK4495SEQ を搭載してます また 内部に USB I2S 変換ドーターカードを搭載しています
1. 使用する信号 1.1. UART 信号 UART 通信に使用する信号と接続相手との接続は以下の通りです UART 信号表 番号 CPU 機能名 CPU 信号名 基板コネクタピン番号 方向 接続相手の信号名 1 USART1_TX PA9 CN > RxD 2 USART1_R
 TrueSTUDIO 用 L152CD_UART1 の説明 V001 2014/10/22 UART( 非同期シリアル通信 ) で送受信を行う STM32L152C-DISCO のプロジェクトサンプルです STM32L152C-DISCO は STMicroelectronics 社製の Cortex-M3 ARM CPU である STM32L152RCT6 を搭載した基板です 試用版の開発ツール
TrueSTUDIO 用 L152CD_UART1 の説明 V001 2014/10/22 UART( 非同期シリアル通信 ) で送受信を行う STM32L152C-DISCO のプロジェクトサンプルです STM32L152C-DISCO は STMicroelectronics 社製の Cortex-M3 ARM CPU である STM32L152RCT6 を搭載した基板です 試用版の開発ツール
Microsoft Word - xfinderマニュアル.docx
 XFinder マニュアル 2014.02.19 安藤慶昭 RaspberryPi はヘッドレス状態 ( モニタ キーボードを接続しない状態 ) では IP アドレスなどを知る術がないため初期設定を行うのは少々困難です 最初にモニタとキーボードを接続して ホスト名を設定し前述のように Avahi 経由で IP アドレスをホスト名から知ることも可能ですが 全く設定していない RaspberryPi についてはこの方法も使えません
XFinder マニュアル 2014.02.19 安藤慶昭 RaspberryPi はヘッドレス状態 ( モニタ キーボードを接続しない状態 ) では IP アドレスなどを知る術がないため初期設定を行うのは少々困難です 最初にモニタとキーボードを接続して ホスト名を設定し前述のように Avahi 経由で IP アドレスをホスト名から知ることも可能ですが 全く設定していない RaspberryPi についてはこの方法も使えません
ご利用のコンピュータを設定する方法 このラボの作業を行うには 事前設定された dcloud ラボを使用するか 自身のコンピュータをセットアップします 詳細については イベントの事前準備 [ 英語 ] とラボの設定 [ 英語 ] の両方のモジュールを参照してください Python を使用した Spar
![ご利用のコンピュータを設定する方法 このラボの作業を行うには 事前設定された dcloud ラボを使用するか 自身のコンピュータをセットアップします 詳細については イベントの事前準備 [ 英語 ] とラボの設定 [ 英語 ] の両方のモジュールを参照してください Python を使用した Spar](/thumbs/95/125438032.jpg "ご利用のコンピュータを設定する方法 このラボの作業を行うには 事前設定された dcloud ラボを使用するか 自身のコンピュータをセットアップします 詳細については イベントの事前準備 [ 英語 ] とラボの設定 [ 英語 ] の両方のモジュールを参照してください Python を使用した Spar") ご利用のコンピュータを設定する方法 このラボの作業を行うには 事前設定された dcloud ラボを使用するか 自身のコンピュータをセットアップします 詳細については イベントの事前準備 [ 英語 ] とラボの設定 [ 英語 ] の両方のモジュールを参照してください Python を使用した Spark API との通信 このラーニングモジュールでは Python を使用した Spark API とのインターフェイスを扱います
ご利用のコンピュータを設定する方法 このラボの作業を行うには 事前設定された dcloud ラボを使用するか 自身のコンピュータをセットアップします 詳細については イベントの事前準備 [ 英語 ] とラボの設定 [ 英語 ] の両方のモジュールを参照してください Python を使用した Spark API との通信 このラーニングモジュールでは Python を使用した Spark API とのインターフェイスを扱います
電気的特性 (Ta=25 C) 項目 記号 条件 Min. Typ. Max. 単位 読み出し周波数 * 3 fop khz ラインレート * Hz 変換ゲイン Gc ゲイン =2-5 - e-/adu トリガ出力電圧 Highレベル Vdd V -
 項目 記号 条件 Min. Typ. Max. 単位 読み出し周波数 * 3 fop khz ラインレート * Hz 変換ゲイン Gc ゲイン =2-5 - e-/adu トリガ出力電圧 Highレベル Vdd V -") CCD イメージセンサ S11850-1106, S11511 シリーズ用 は 当社製 CCDイメージセンサ S11850-1106, S11511 シリーズ用に開発された駆動回路です USB 2.0インターフェースを用いて とPCを接続することにより PCからの制御でセンサのアナログビデオ信号をデジタル出力に変換し PCに取り込むことができます は センサを駆動するセンサ基板 センサ基板の駆動と
CCD イメージセンサ S11850-1106, S11511 シリーズ用 は 当社製 CCDイメージセンサ S11850-1106, S11511 シリーズ用に開発された駆動回路です USB 2.0インターフェースを用いて とPCを接続することにより PCからの制御でセンサのアナログビデオ信号をデジタル出力に変換し PCに取り込むことができます は センサを駆動するセンサ基板 センサ基板の駆動と
本書は INpMac v2.20(intime 5.2 INplc 3 Windows7/8/8.1に対応 ) の内容を元に記載しています Microsoft Windows Visual Studio は 米国 Microsoft Corporation の米国及びその他の国における登録商標です
 の内容を元に記載しています Microsoft Windows Visual Studio は 米国 Microsoft Corporation の米国及びその他の国における登録商標です") ACTIVE TOUCH 拡張部品取扱説明書 - 共有メモリアクセスコンポーネント - 1. はじめに 1 (1) 概要... 1 (2) INpMac のインストール... 1 2. Windows アプリケーションとの連携 2 (1) コントロール ( 部品 ) の登録... 2 (2) データの関連付け... 3 3. INtime アプリケーションとの連携 4 (1) 部品 ( コンポーネント
ACTIVE TOUCH 拡張部品取扱説明書 - 共有メモリアクセスコンポーネント - 1. はじめに 1 (1) 概要... 1 (2) INpMac のインストール... 1 2. Windows アプリケーションとの連携 2 (1) コントロール ( 部品 ) の登録... 2 (2) データの関連付け... 3 3. INtime アプリケーションとの連携 4 (1) 部品 ( コンポーネント
デザインパターン第一章「生成《
 変化に強いプログラミング ~ デザインパターン第一章 生成 ~ 梅林 ( 高田明宏 )@ わんくま同盟 デザインパターンとは何か (1) デザインパターンの定義 ソフトウェア開発におけるデザインパターンとは 過去のソフトウェア設計者が発見し編み出した設計ノウハウを蓄積し 名前をつけ 再利用しやすいように特定の規約に従ってカタログ化したもの (Wikipedia) 参考書籍 オブジェクト指向における再利用のためのデザインパターン
変化に強いプログラミング ~ デザインパターン第一章 生成 ~ 梅林 ( 高田明宏 )@ わんくま同盟 デザインパターンとは何か (1) デザインパターンの定義 ソフトウェア開発におけるデザインパターンとは 過去のソフトウェア設計者が発見し編み出した設計ノウハウを蓄積し 名前をつけ 再利用しやすいように特定の規約に従ってカタログ化したもの (Wikipedia) 参考書籍 オブジェクト指向における再利用のためのデザインパターン
<4D F736F F F696E74202D F938C8D4891E58EF68BC D837B B5A8F E9197BF>
 ロボットミドルウエア 安藤慶昭 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センターロボットソフトウェアプラットフォーム研究チーム長 概要 ロボットとソフトウェア ロボットミドルウエアとは? RTミドルウエア:OpenRTM-aist 様々なミドルウエア / プラットフォーム 終わりに 2 センサ ロボットを構成する要素 エンコーダ 力 磁気 加速度など アクチュエータ モータなど
ロボットミドルウエア 安藤慶昭 国立研究開発法人産業技術総合研究所ロボットイノベーション研究センターロボットソフトウェアプラットフォーム研究チーム長 概要 ロボットとソフトウェア ロボットミドルウエアとは? RTミドルウエア:OpenRTM-aist 様々なミドルウエア / プラットフォーム 終わりに 2 センサ ロボットを構成する要素 エンコーダ 力 磁気 加速度など アクチュエータ モータなど
8051 개발보드 메뉴얼
 ㄴㄴㄴ標準 U-STYLE ボード (Model:DM-USTYLE V1.0 ) マニュアル 改訂日 : 2015 年 11 月 24 日 1. Arduino At Heartプロトタイプ標準 U STYLEボード (DM-USTYLE V1.0) のご紹介 アドゥイノウノブートローダが書き込んだATMEGA328P-PUを使用 Arduino At Heart( ) プロトタイプのボードの互換コネクタと
ㄴㄴㄴ標準 U-STYLE ボード (Model:DM-USTYLE V1.0 ) マニュアル 改訂日 : 2015 年 11 月 24 日 1. Arduino At Heartプロトタイプ標準 U STYLEボード (DM-USTYLE V1.0) のご紹介 アドゥイノウノブートローダが書き込んだATMEGA328P-PUを使用 Arduino At Heart( ) プロトタイプのボードの互換コネクタと
Program Design (プログラム設計)
") 7. モジュール化設計 内容 : モジュールの定義モジュールの強度又は結合力モジュール連結モジュールの間の交信 7.1 モジュールの定義 プログラムモジュールとは 次の特徴を持つプログラムの単位である モジュールは 一定の機能を提供する 例えば 入力によって ある出力を出す モジュールは 同じ機能仕様を実装しているほかのモジュールに置き換えられる この変化によって プログラム全体に影響をあまり与えない
7. モジュール化設計 内容 : モジュールの定義モジュールの強度又は結合力モジュール連結モジュールの間の交信 7.1 モジュールの定義 プログラムモジュールとは 次の特徴を持つプログラムの単位である モジュールは 一定の機能を提供する 例えば 入力によって ある出力を出す モジュールは 同じ機能仕様を実装しているほかのモジュールに置き換えられる この変化によって プログラム全体に影響をあまり与えない
maxon hat den richtigen drive
 ようこそ! EPOS( エポス ) へ maxon has the right drive EPOS とはどんな製品か? Easy To Use POsitioning System スタート アップが簡単 理解が容易 動作開始までの手順がわずか シンプルな設定とコマンド アドバンスド テクノロジー 低価格 by maxon Japan, November 2010 EPOS の概要, page 2
ようこそ! EPOS( エポス ) へ maxon has the right drive EPOS とはどんな製品か? Easy To Use POsitioning System スタート アップが簡単 理解が容易 動作開始までの手順がわずか シンプルな設定とコマンド アドバンスド テクノロジー 低価格 by maxon Japan, November 2010 EPOS の概要, page 2
Microsoft PowerPoint RTM講習会(第2部) [互換モード]
![Microsoft PowerPoint RTM講習会(第2部) [互換モード]](/thumbs/103/159704025.jpg "Microsoft PowerPoint RTM講習会(第2部) [互換モード]") RT ミドルウェア講習会 日時 :2014 年 5 月 25 日 ( 日 ) 10:00~16:45 場所 : 富山国際会議場 2F 多目的会議室 (201 室 ) RT ミドルウェア講習会 10:00-10:50 11:00-11:50 11:50-12:00 12:00-13:00 13:00-15:00 15:00-16:45 第 1 部 ( その1): インターネットを利用したロボットサービスとRSiの取り組み
RT ミドルウェア講習会 日時 :2014 年 5 月 25 日 ( 日 ) 10:00~16:45 場所 : 富山国際会議場 2F 多目的会議室 (201 室 ) RT ミドルウェア講習会 10:00-10:50 11:00-11:50 11:50-12:00 12:00-13:00 13:00-15:00 15:00-16:45 第 1 部 ( その1): インターネットを利用したロボットサービスとRSiの取り組み
働く人間型ロボット研究開発用プラットフォームHRP-4 を開発
 働く人間型ロボット研究開発用プラットフォーム HRP-4 を開発 - 2011 年 1 月より外部研究機関へ提供開始 - 平成 22 年 9 月 15 日川田工業株式会社独立行政法人産業技術総合研究所 ポイント HRP シリーズの流れをくむ軽量でスリムな新しいボディー 仕様の最適化や部品の共通化 簡素化を推し進めることにより低価格化を実現 OpenRTM-aist の採用で 国内外のソフトウエア資産が利用可能となり研究効率が向上
働く人間型ロボット研究開発用プラットフォーム HRP-4 を開発 - 2011 年 1 月より外部研究機関へ提供開始 - 平成 22 年 9 月 15 日川田工業株式会社独立行政法人産業技術総合研究所 ポイント HRP シリーズの流れをくむ軽量でスリムな新しいボディー 仕様の最適化や部品の共通化 簡素化を推し進めることにより低価格化を実現 OpenRTM-aist の採用で 国内外のソフトウエア資産が利用可能となり研究効率が向上
NEDO講座 Hara
 ロボットシステム開発における RTM の有用性および開発ツール群 ( 独 ) 産業技術総合研究所知能システム研究部門原功 これまでの主な研究 所内事情通ロボット (1996-2001) オフィス内の情報サービス 訪問者受付 案内 紹介 配達 連絡 人探し メンバスケジュール管理 ミーティングアレンジ等 いろいろなオフィス環境で 自律的に情報収集 学習し 事情通になってゆく 独自仕様のモジュール化システム
ロボットシステム開発における RTM の有用性および開発ツール群 ( 独 ) 産業技術総合研究所知能システム研究部門原功 これまでの主な研究 所内事情通ロボット (1996-2001) オフィス内の情報サービス 訪問者受付 案内 紹介 配達 連絡 人探し メンバスケジュール管理 ミーティングアレンジ等 いろいろなオフィス環境で 自律的に情報収集 学習し 事情通になってゆく 独自仕様のモジュール化システム
Microsoft Word - RTSystemBuilderOnTheEA操作マニュアル_
 RT システムビルダー操作マニュアル Ver.0.7.1 2015/08/02 株式会社グローバルアシスト 目次 1 概要... 3 1.1 ツール概要... 3 1.2 対象... 3 1.3 制限... 3 2 インストールと設定... 4 2.1 RT システムビルダーのインストール... 4 2.2 RT システムビルダーの初期設定... 6 2.3 RT システムビルダー画面の起動...
RT システムビルダー操作マニュアル Ver.0.7.1 2015/08/02 株式会社グローバルアシスト 目次 1 概要... 3 1.1 ツール概要... 3 1.2 対象... 3 1.3 制限... 3 2 インストールと設定... 4 2.1 RT システムビルダーのインストール... 4 2.2 RT システムビルダーの初期設定... 6 2.3 RT システムビルダー画面の起動...
Microsoft PowerPoint Java基本技術PrintOut.ppt [互換モード]
![Microsoft PowerPoint Java基本技術PrintOut.ppt [互換モード]](/thumbs/88/116903886.jpg "Microsoft PowerPoint Java基本技術PrintOut.ppt [互換モード]") 第 3 回 Java 基本技術講義 クラス構造と生成 33 クラスの概念 前回の基本文法でも少し出てきたが, オブジェクト指向プログラミングは という概念をうまく活用した手法である. C 言語で言う関数に似ている オブジェクト指向プログラミングはこれら状態と振る舞いを持つオブジェクトの概念をソフトウェア開発の中に適用し 様々な機能を実現する クラス= = いろんなプログラムで使いまわせる 34 クラスの概念
第 3 回 Java 基本技術講義 クラス構造と生成 33 クラスの概念 前回の基本文法でも少し出てきたが, オブジェクト指向プログラミングは という概念をうまく活用した手法である. C 言語で言う関数に似ている オブジェクト指向プログラミングはこれら状態と振る舞いを持つオブジェクトの概念をソフトウェア開発の中に適用し 様々な機能を実現する クラス= = いろんなプログラムで使いまわせる 34 クラスの概念
Microsoft Word - J-jdev_dba_db_developers.doc
 Oracle JDeveloper 2006 1 : Oracle Oracle JDeveloper 2 Oracle JDeveloper :... 2... 4... 4... 4... 5... 6 SQL... 7... 8... 8 SQL... 10 PL/SQL... 11 PL/SQL... 11 Code Editor PL/SQL... 12 Navigator Structure...
Oracle JDeveloper 2006 1 : Oracle Oracle JDeveloper 2 Oracle JDeveloper :... 2... 4... 4... 4... 5... 6 SQL... 7... 8... 8 SQL... 10 PL/SQL... 11 PL/SQL... 11 Code Editor PL/SQL... 12 Navigator Structure...
EV3 の初期設定
 目次 1 SD カードの準備... 2 2 EV3 へのアクセスの仕方... 3 3 OpenRTM-aist のインストール... 6 4 unzip のインストール... 8 当ドキュメントは下記ページを参考にしています LEGO Mindstorms EV3 活用事例 http://www.openrtm.org/openrtm/ja/casestudy/lego_mindstorm_ev3
目次 1 SD カードの準備... 2 2 EV3 へのアクセスの仕方... 3 3 OpenRTM-aist のインストール... 6 4 unzip のインストール... 8 当ドキュメントは下記ページを参考にしています LEGO Mindstorms EV3 活用事例 http://www.openrtm.org/openrtm/ja/casestudy/lego_mindstorm_ev3
PNopenseminar_2011_開発stack
 PROFINET Open Seminar 開発セミナー Software Stack FPGA IP core PROFINET 対応製品の開発 2 ユーザ要求要求は多種多様 複雑な規格の仕様を一から勉強するのはちょっと.. できるだけ短期間で 柔軟なスケジュールで進めたい既存のハードウェアを変更することなく PN を対応させたい将来的な仕様拡張に対してシームレスに統合したい同じハードウェアで複数の
PROFINET Open Seminar 開発セミナー Software Stack FPGA IP core PROFINET 対応製品の開発 2 ユーザ要求要求は多種多様 複雑な規格の仕様を一から勉強するのはちょっと.. できるだけ短期間で 柔軟なスケジュールで進めたい既存のハードウェアを変更することなく PN を対応させたい将来的な仕様拡張に対してシームレスに統合したい同じハードウェアで複数の
Microsoft PowerPoint - OOP.pptx
 第 14 回 第 12 章アプレット 28 8 アプレットとは アプレット : ウェブ上で HTML のソースコードから参照されるプログラム.Web サーバや Web ブラウザ ( アプレットビューア ) から動的にアプレットはダウンロードされる. 289 HelloAp.java アプレットの基本事項 public class HelloAp extends Applet{ public void
第 14 回 第 12 章アプレット 28 8 アプレットとは アプレット : ウェブ上で HTML のソースコードから参照されるプログラム.Web サーバや Web ブラウザ ( アプレットビューア ) から動的にアプレットはダウンロードされる. 289 HelloAp.java アプレットの基本事項 public class HelloAp extends Applet{ public void
Windowsユーザでも 手軽に作れるiPhoneアプリ
 Windows ユーザでも 手軽に作れる iphone アプリ 株式会社フォーサイト バリュー テクノロジー 山本健一 1 2 はじめに iphone アプリを開発するために必要なもの ( 一例 ) OS 開発言語 開発キット Mac OS X 10.5.3 以降 Objective-C iphone SDK 開発環境 Xcode 4.3 iphone SDK は Windows 上では動かせません
Windows ユーザでも 手軽に作れる iphone アプリ 株式会社フォーサイト バリュー テクノロジー 山本健一 1 2 はじめに iphone アプリを開発するために必要なもの ( 一例 ) OS 開発言語 開発キット Mac OS X 10.5.3 以降 Objective-C iphone SDK 開発環境 Xcode 4.3 iphone SDK は Windows 上では動かせません
LDAP Manager SupportList
 LDAP Manager 2017/8/1 現在 動作環境 OS メタ LDAP PostgreSQL ELM Interface for Java for Windows for Linux システム プロダクト LDAP Manager 本体のバージョン Windows Server 2003 Standard Edition (32bit/64bit) Windows Server 2003
LDAP Manager 2017/8/1 現在 動作環境 OS メタ LDAP PostgreSQL ELM Interface for Java for Windows for Linux システム プロダクト LDAP Manager 本体のバージョン Windows Server 2003 Standard Edition (32bit/64bit) Windows Server 2003