基底関数ネットワーク
|
|
|
- みさき くまじ
- 5 years ago
- Views:
Transcription
1 6. 基底関数ネットワーク (Bass Functon Network) 6-1 基底関数ネットワーク研究の背景 (1)( 階層型 ) ニューラルネットワークの問題点の回避 設計性の悪さ ローカルミニマム問題 (2) 級数展開の利用 基底関数が周期関数 フーリエ級数
2
3 フーリエ級数

4 フーリエ級数 F1 フーリエ係数 F2 信号 + F3 F4
5 フーリエ展開で関数を近似した例
6 フーリエ係数の意味 F1 F2 F3 F4 スペクトル スペクトル F1 F3 F4 F2 それぞれの波の成分がどれぐらいふくまれるか 信号の特徴が分かる 周波数 1Hz 2Hz 8Hz

7 フーリエ係数 信号がどのような成分から成り立っているか いつ, その成分が現れているのか ウェーブレット理論 いつ, その成分が現れているのか


8 ウェーブレット関数 一部に局在する関数 ( 例 ) Harr ウェーブレット ψ-10 ψ00 ψ10 ψ11 ψab : 基底関数 a b : 基底の幅を決める : 基底の位置を決める ψ20 ψ21 ψ30
9 ウェーブレット級数


10 ウェーブレット級数 W -1 0 W00 W10 信号 + W11 W20 W21 W22 W23
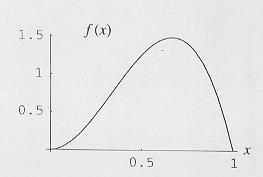
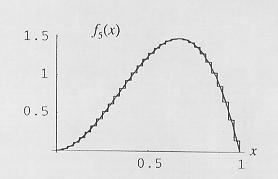
11 関数近似の例

 時間")

12 信号解析 Wj ウェーブレット係数 周波数 ( 関数の幅 ) 時間 スペクトル値

13 九州東海大学ソーラーカープロジェクト NEXTAGE号


14 ウェーブレット解析例 加速時 減速時 ソーラーカー車内音のウェーブレット解析結果 ( 縦軸 : 周波数, 横軸 : ステップ数 ( サンプリングレート /sec))

15 離散コサイン変換 DCT JPEG 1 96圧縮 離散ウェーブレット変換 DWT JPEG2000 1 96圧縮 出典
16 6. 基底関数ネットワーク (Bass Functon Network) 6-1 基底関数ネットワーク研究の背景 (1)( 階層型 ) ニューラルネットワークの問題点の回避 設計性の悪さ ローカルミニマム問題 (2) 級数展開の利用 基底関数が周期関数 フーリエ級数
17 6 2 基底関数ネットワークの基礎 (1) 基本構造 さっきのフーリエ級数展開の図 f ( x) = F g ( x)
18 (2) 基底関数の種類 ガウス関数 RBF(Radal Bass Functon) ネットワーク ウェーブレット関数 詳しくはのちほど... ファジィメンバーシップ関数 その他 前件部 : 相補型メンバーシップ関数後件部 : シングルトン
19 (3) 特徴 ローカルミニマム問題の回避 設計性の向上 汎化能力の低下 (4) 演算方法 学習 最小二乗法 ( 逆行列計算 ) (5) 応用例 ウェーブレットネットワーク
20 ウェーブレット理論 (Wavelet Theory) wavelet ってなに?
21 ウェーブレット理論 (Wavelet Theory) wavelet ってなに? wave 波 let 小さいという意味の接尾語
22 ウェーブレット理論 (Wavelet Theory) wavelet ってなに? wave 波 let 小さいという意味の接尾語 小波, さざなみ
23 ウェーブレット理論 (Wavelet Theory) wavelet ってなに? wave 波 let 小さいという意味の接尾語 小波, さざなみ さざなみ を利用した理論
24 ウェーブレット理論 (Wavelet Theory) wavelet ってなに? wave 波 let 小さいという意味の接尾語 小波, さざなみ さざなみ を利用した理論
25 ウェーブレットニューロン (Wavelet Neuron) x 1 ニューロンの数式モデル x 2 w 1 w 2 θ y w n x n θ : 閾値
 w x k0,0 f k ( x k ) k Ψ x ) 1,0( k w k1,0 w, Ψ m, m ( xk ) k m m Weght Wavelet")
26 ウェーブレットニューロン (Wavelet Neuron) ニューロンの数式モデル 非線形シナプスニューロン x 1 x 1 x 2 w 2 w 1 θ y x 2 f 2 f 1 y w n f n x n θ : 閾値 x n f k 非線形シナプス 期待される効果 ローカルミニマム問題の回避 局所的な非線形性の記述 設計性の向上 Ψ0,0( x k ) w x k0,0 f k ( x k ) k Ψ x ) 1,0( k w k1,0 w, Ψ m, m ( xk ) k m m Weght Wavelet Bass
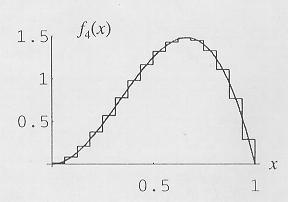
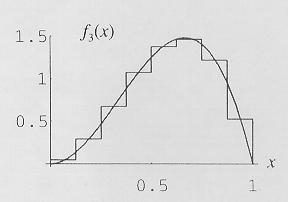
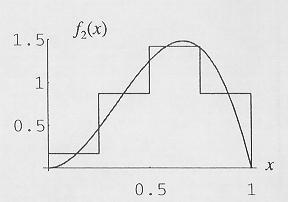
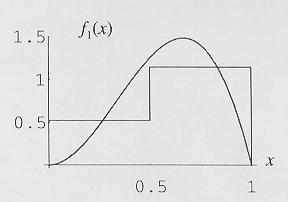
27 Approxmaton of a Functon by a Nonlnear Synapse Pecewse Lnear Part Smooth Part Leanng Data (101 ponts, samplng nterval 0.01)
28 Convex wavelet 1 ψ ( a, b)( x) =ψ ( ax b) ψ (0,0) -1/2 0 1/2 ψ (1,0) ψ (1,1 ) ψ ( x) = cosπx 0 x 1 2 ( otherwse) ψ (2,0) ψ (2,1) ψ (2,2 ) ψ (3,0) ψ (3,1) ψ (3,2) ψ (3,3 ) ψ (M,0) ψ (M,1) ψ ( M, M ) Non-Orthogonal Convex Smooth Compactly Supported f ( x) = a a= 0 b= 0 W a x (, b) ψ ( a, b) ( ) Convergent seres (1996)
29 Approxmaton of a Functon by a Nonlnear Synapse Compactly Supported Convex Wavelet (M=15, 136 weghts ) Leanng Tme:100 tmes Generalzaton Set Learnng Data
30 Approxmaton of a Functon by a Nonlnear Synapse Harr Wavelet Leanng Tme:100 tmes Generalzaton Set Learnng Data
31 Approxmaton of a Functon by a Nonlnear Synapse Non-convex Wavelet Leanng Tme:100 tmes Generalzaton Set Learnng Data
32 R.M.S.Error vs. Number of Bases 学習データ

33 Applcaton to System Modelng Modelng of Nonlnear Dynamcal System Modelng(Learnng) Predcton x 5x t t+ 1 = 0.5x t xt xt 2 1+ xt ( x = 0.2, x1 = 0.3, x2 0 = 1.0)
34 The Wavelet Neuron Achevng Modelng and Predcton Leanng Phase (Modelng) x t D x t 1 error = x t xˆ t D x t 2 f 2 f 1 xˆt D xt n f n Iterated Predcton Phase D x = ˆ t x t x t 1 D x t 2 f 2 f 1 xˆt D xt n f n
35 R.M.S.Error vs. Number of Synapses The 3 synapses (delay elements) are employed here. Number of Synapses
36 Mappng Functons Obtaned by Leanng Real W.Synapse Real W.Synapse Real W.Synapse x ( ) f 1 f1 x f2 x ( ) f2 x 3 x f f ( x 3 ) x t D x t 1 D D x t 2 xt n f 1 f 2 f 3 xˆt
37 Results of Iterated Predcton Well Predcted Wavelet Neuron 4-Layerd Neural Network
38 Solvng dfferental equaton Dfferental equaton f 2 dy d y x, y,, 2 dx dx n d y,, n dx = 0
39 Solvng dfferental equaton f Dfferental equaton x 2 n dy d y d y y,,,, n dx dx dx, 2 = 0 y = W ψ
40 Solvng dfferental equaton f Dfferental equaton x 2 n dy d y d y y,,,, n dx dx dx, 2 = 0 y dy dx = = W W ψ dψ dx known 2 d y 2 dx = W 2 d ψ 2 dx n d y n dx = W n d ψ n dx
41 Solvng dfferental equaton f Dfferental equaton x 2 n dy d y d y y,,,, n dx dx dx, 2 = 0 y dy dx = = W W ψ dψ dx known 2 d y 2 dx = W 2 d ψ 2 dx n d y n dx = W n d ψ n dx 入出力関係 学習で W を求める y
42 Rccat dfferental equaton (nonlnear dfferental equaton) f ( x) dy 2 = + P1 ( x) y + P2 ( x) y = 0, y(0) = dx 1 dy dx x x d ψ (0,0 ) dx d ψ (1,0 ) dx d ψ ( M, M ) P 1 ( x) y + x f (x) P 2 ( x) W ( a, b) y y :common dx ψ (0,0) ψ (1,0) W (1,0) W (0,0) W (1,0) W (0,0) Σ W( M, M ) ψ ( M, M ) W( M, M ) dy ( x) dx Σ y(x) 1 dψ dx 1/ 2 1/ 2 2 /π 1/π ψ 1/ 2 1/ 2
43 Soluton of Rccat dfferental equaton 解は級数
44 Conclusons ウェーブレット (wavelet) 時間 - 周波数解析 高い圧縮能力 ウェーブレットニューロン (wavelet neuron) 局所的な非線形性の記述ローカルミニマム問題の回避設計性の向上高い汎化能力
知能科学:ニューラルネットワーク
 2 3 4 (Neural Network) (Deep Learning) (Deep Learning) ( x x = ax + b x x x ? x x x w σ b = σ(wx + b) x w b w b .2.8.6 σ(x) = + e x.4.2 -.2 - -5 5 x w x2 w2 σ x3 w3 b = σ(w x + w 2 x 2 + w 3 x 3 + b) x,
2 3 4 (Neural Network) (Deep Learning) (Deep Learning) ( x x = ax + b x x x ? x x x w σ b = σ(wx + b) x w b w b .2.8.6 σ(x) = + e x.4.2 -.2 - -5 5 x w x2 w2 σ x3 w3 b = σ(w x + w 2 x 2 + w 3 x 3 + b) x,
知能科学:ニューラルネットワーク
 2 3 4 (Neural Network) (Deep Learning) (Deep Learning) ( x x = ax + b x x x ? x x x w σ b = σ(wx + b) x w b w b .2.8.6 σ(x) = + e x.4.2 -.2 - -5 5 x w x2 w2 σ x3 w3 b = σ(w x + w 2 x 2 + w 3 x 3 + b) x,
2 3 4 (Neural Network) (Deep Learning) (Deep Learning) ( x x = ax + b x x x ? x x x w σ b = σ(wx + b) x w b w b .2.8.6 σ(x) = + e x.4.2 -.2 - -5 5 x w x2 w2 σ x3 w3 b = σ(w x + w 2 x 2 + w 3 x 3 + b) x,
日本物理学会2013年秋季大会 於 高知大学朝倉campus 講演21aSB-6 (2013年9月21日) 高スピン間の回転行列の数値評価における著しい桁落の回避方法 田嶋直樹 福井大工 1.回転演算子の角運動量固有状態基底での表現行列 D関数 をWignerの公 式で数値的に求めると 角運動量jが
 高スピン間の回転行列の数値評価における著しい桁落の回避方法 田嶋直樹 福井大工 1.回転演算子の角運動量固有状態基底での表現行列 D関数 をWignerの公 式で数値的に求めると 角運動量jが") 日本物理学会013年秋季大会 於 高知大学朝倉campus 講演1aSB-6 (013年9月1日 高スピン間の回転行列の数値評価における著しい桁落の回避方法 田嶋直樹 福井大工 1.回転演算子の角運動量固有状態基底での表現行列 D関数 をWignerの公 式で数値的に求めると 角運動量jが大きいとき著しい桁落ちが起きる j=1/ないし1との角運動量合成に関連する漸化式 で求める場合も同程 度の桁落ちが起きる.
日本物理学会013年秋季大会 於 高知大学朝倉campus 講演1aSB-6 (013年9月1日 高スピン間の回転行列の数値評価における著しい桁落の回避方法 田嶋直樹 福井大工 1.回転演算子の角運動量固有状態基底での表現行列 D関数 をWignerの公 式で数値的に求めると 角運動量jが大きいとき著しい桁落ちが起きる j=1/ないし1との角運動量合成に関連する漸化式 で求める場合も同程 度の桁落ちが起きる.
() x + y + y + x dy dx = 0 () dy + xy = x dx y + x y ( 5) ( s55906) 0.7. (). 5 (). ( 6) ( s6590) 0.8 m n. 0.9 n n A. ( 6) ( s6590) f A (λ) = det(a λi)
 x + y + y + x dy dx = 0 () dy + xy = x dx y + x y ( 5) ( s55906) 0.7. (). 5 (). ( 6) ( s6590) 0.8 m n. 0.9 n n A. ( 6) ( s6590) f A (λ) = det(a λi)") 0. A A = 4 IC () det A () A () x + y + z = x y z X Y Z = A x y z ( 5) ( s5590) 0. a + b + c b c () a a + b + c c a b a + b + c 0 a b c () a 0 c b b c 0 a c b a 0 0. A A = 7 5 4 5 0 ( 5) ( s5590) () A ()
0. A A = 4 IC () det A () A () x + y + z = x y z X Y Z = A x y z ( 5) ( s5590) 0. a + b + c b c () a a + b + c c a b a + b + c 0 a b c () a 0 c b b c 0 a c b a 0 0. A A = 7 5 4 5 0 ( 5) ( s5590) () A ()
untitled
 - k k k = y. k = ky. y du dx = ε ux ( ) ux ( ) = ax+ b x u() = ; u( ) = AE u() = b= u () = a= ; a= d x du ε x = = = dx dx N = σ da = E ε da = EA ε A x A x x - σ x σ x = Eε x N = EAε x = EA = N = EA k =
- k k k = y. k = ky. y du dx = ε ux ( ) ux ( ) = ax+ b x u() = ; u( ) = AE u() = b= u () = a= ; a= d x du ε x = = = dx dx N = σ da = E ε da = EA ε A x A x x - σ x σ x = Eε x N = EAε x = EA = N = EA k =
Microsoft PowerPoint - 物情数学C(2012)(フーリエ前半)_up
(フーリエ前半)_up") 年度物理情報工学科 年生秋学期 物理情報数学 C フーリエ解析 (Fourier lysis) 年 月 5 日 フーリエ ( フランス ) (768~83: ナポレオンの時代 ) 歳で Ecole Polyechique ( フランス国立理工科大学 ) の教授 ナポレオンのエジプト遠征に従軍 (798) 87: 任意の関数は三角関数によって級数展開できる という フーリエ級数 の概念を提唱 ( 論文を提出
年度物理情報工学科 年生秋学期 物理情報数学 C フーリエ解析 (Fourier lysis) 年 月 5 日 フーリエ ( フランス ) (768~83: ナポレオンの時代 ) 歳で Ecole Polyechique ( フランス国立理工科大学 ) の教授 ナポレオンのエジプト遠征に従軍 (798) 87: 任意の関数は三角関数によって級数展開できる という フーリエ級数 の概念を提唱 ( 論文を提出
参考書 (1) 中村, 山本, 吉田 : ウェーブレットによる信号処理と画像処理, 共立出版 応用の紹介とプログラムリストが中心, 理論的背景はほとんどなし 意味不明の比喩を多用 各時代 各国別に美女を探すのが窓フーリエ変換である 応用テーマ : 不連続信号検出, 相関の検出, ノイズ除去, 画像デ
 中村, 山本, 吉田 : ウェーブレットによる信号処理と画像処理, 共立出版 応用の紹介とプログラムリストが中心, 理論的背景はほとんどなし 意味不明の比喩を多用 各時代 各国別に美女を探すのが窓フーリエ変換である 応用テーマ : 不連続信号検出, 相関の検出, ノイズ除去, 画像デ") Wavelet 変換 伊藤 彰則 aito@fw.ipsj.or.jp 1 参考書 (1) 中村, 山本, 吉田 : ウェーブレットによる信号処理と画像処理, 共立出版 応用の紹介とプログラムリストが中心, 理論的背景はほとんどなし 意味不明の比喩を多用 各時代 各国別に美女を探すのが窓フーリエ変換である 応用テーマ : 不連続信号検出, 相関の検出, ノイズ除去, 画像データ圧縮, 劣化画像復元
Wavelet 変換 伊藤 彰則 aito@fw.ipsj.or.jp 1 参考書 (1) 中村, 山本, 吉田 : ウェーブレットによる信号処理と画像処理, 共立出版 応用の紹介とプログラムリストが中心, 理論的背景はほとんどなし 意味不明の比喩を多用 各時代 各国別に美女を探すのが窓フーリエ変換である 応用テーマ : 不連続信号検出, 相関の検出, ノイズ除去, 画像データ圧縮, 劣化画像復元
18 ( ) I II III A B C(100 ) 1, 2, 3, 5 I II A B (100 ) 1, 2, 3 I II A B (80 ) 6 8 I II III A B C(80 ) 1 n (1 + x) n (1) n C 1 + n C
 I II III A B C(100 ) 1, 2, 3, 5 I II A B (100 ) 1, 2, 3 I II A B (80 ) 6 8 I II III A B C(80 ) 1 n (1 + x) n (1) n C 1 + n C") 8 ( ) 8 5 4 I II III A B C( ),,, 5 I II A B ( ),, I II A B (8 ) 6 8 I II III A B C(8 ) n ( + x) n () n C + n C + + n C n = 7 n () 7 9 C : y = x x A(, 6) () A C () C P AP Q () () () 4 A(,, ) B(,, ) C(,,
8 ( ) 8 5 4 I II III A B C( ),,, 5 I II A B ( ),, I II A B (8 ) 6 8 I II III A B C(8 ) n ( + x) n () n C + n C + + n C n = 7 n () 7 9 C : y = x x A(, 6) () A C () C P AP Q () () () 4 A(,, ) B(,, ) C(,,
DVIOUT
 第 章 離散フーリエ変換 離散フーリエ変換 これまで 私たちは連続関数に対するフーリエ変換およびフーリエ積分 ( 逆フーリエ変換 ) について学んできました この節では フーリエ変換を離散化した離散フーリエ変換について学びましょう 自然現象 ( 音声 ) などを観測して得られる波 ( 信号値 ; 観測値 ) は 通常 電気信号による連続的な波として観測機器から出力されます しかしながら コンピュータはこの様な連続的な波を直接扱うことができないため
第 章 離散フーリエ変換 離散フーリエ変換 これまで 私たちは連続関数に対するフーリエ変換およびフーリエ積分 ( 逆フーリエ変換 ) について学んできました この節では フーリエ変換を離散化した離散フーリエ変換について学びましょう 自然現象 ( 音声 ) などを観測して得られる波 ( 信号値 ; 観測値 ) は 通常 電気信号による連続的な波として観測機器から出力されます しかしながら コンピュータはこの様な連続的な波を直接扱うことができないため
数学 t t t t t 加法定理 t t t 倍角公式加法定理で α=β と置く. 三角関数
 . 三角関数 基本関係 t cot c sc c cot sc t 還元公式 t t t t t t cot t cot t 数学 数学 t t t t t 加法定理 t t t 倍角公式加法定理で α=β と置く. 三角関数 数学. 三角関数 5 積和公式 6 和積公式 数学. 三角関数 7 合成 t V v t V v t V V V V VV V V V t V v v 8 べき乗 5 6 6
. 三角関数 基本関係 t cot c sc c cot sc t 還元公式 t t t t t t cot t cot t 数学 数学 t t t t t 加法定理 t t t 倍角公式加法定理で α=β と置く. 三角関数 数学. 三角関数 5 積和公式 6 和積公式 数学. 三角関数 7 合成 t V v t V v t V V V V VV V V V t V v v 8 べき乗 5 6 6
 00 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0.... 0........ 0 0 0 0 0 0 0 0 0 0..0..........0 0 0 0 0 0 0 0 0 0 0.... 0........ 0 0 0 0 0 0 0 0 0 0... 0...... 0... 0 0 0 0 0 0..0 0... 0 0 0 0 0.0.....0.
00 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0.... 0........ 0 0 0 0 0 0 0 0 0 0..0..........0 0 0 0 0 0 0 0 0 0 0.... 0........ 0 0 0 0 0 0 0 0 0 0... 0...... 0... 0 0 0 0 0 0..0 0... 0 0 0 0 0.0.....0.
Microsoft PowerPoint - dm1_6.pptx
 スケジュール 09/5 イントロダクション1 : デジタル画像とは, 量 化と標本化,Dynamic Range 10/0 イントロダクション : デジタルカメラ, 間の視覚, 表 系 10/09 画像処理演習 0 : python (PC 教室 : 課題締め切り 11/13 3:59) 10/16 フィルタ処理 1 : トーンカーブ, 線形フィルタ デジタルメディア処理 1 担当 : 井尻敬 10/3
スケジュール 09/5 イントロダクション1 : デジタル画像とは, 量 化と標本化,Dynamic Range 10/0 イントロダクション : デジタルカメラ, 間の視覚, 表 系 10/09 画像処理演習 0 : python (PC 教室 : 課題締め切り 11/13 3:59) 10/16 フィルタ処理 1 : トーンカーブ, 線形フィルタ デジタルメディア処理 1 担当 : 井尻敬 10/3
B's Recorderマニュアル_B's Recorderマニュアル
 5 Part 6 - 8 9 - 0 5 A C B AB A B A B C 7-6 - 8 9-5 0 5 7 A D B C E F A B C D F E 6 9 8 0 Part - - 5 5 7 6 9-7 6 8 0 5 5-6 7 9 8 5-5 50 5 5 5 -6 5 55 5 57-7 56 59 8 7 6 58 0 8 9 6 6 7 6 5 60 7 5 6 6-8
5 Part 6 - 8 9 - 0 5 A C B AB A B A B C 7-6 - 8 9-5 0 5 7 A D B C E F A B C D F E 6 9 8 0 Part - - 5 5 7 6 9-7 6 8 0 5 5-6 7 9 8 5-5 50 5 5 5 -6 5 55 5 57-7 56 59 8 7 6 58 0 8 9 6 6 7 6 5 60 7 5 6 6-8
B's Recorderマニュアル
 2 3 4 5 Part 1 6 1-1 8 9 1-2 10 11 12 13 A B C A C B AB A B 14 15 17 1-4 2 1 16 1-3 18 19 1-5 2 1 20 21 22 23 24 25 A B C D E F A B C D E F 26 27 28 29 30 31 Part 2 32 2-1 2-2 1 2 34 35 5 37 4 3 36 6 2-3
2 3 4 5 Part 1 6 1-1 8 9 1-2 10 11 12 13 A B C A C B AB A B 14 15 17 1-4 2 1 16 1-3 18 19 1-5 2 1 20 21 22 23 24 25 A B C D E F A B C D E F 26 27 28 29 30 31 Part 2 32 2-1 2-2 1 2 34 35 5 37 4 3 36 6 2-3
Microsoft PowerPoint - 第3回2.ppt
 講義内容 講義内容 次元ベクトル 関数の直交性フーリエ級数 次元代表的な対の諸性質コンボリューション たたみこみ積分 サンプリング定理 次元離散 次元空間周波数の概念 次元代表的な 次元対 次元離散 次元ベクトル 関数の直交性フーリエ級数 次元代表的な対の諸性質コンボリューション たたみこみ積分 サンプリング定理 次元離散 次元空間周波数の概念 次元代表的な 次元対 次元離散 ベクトルの直交性 3
講義内容 講義内容 次元ベクトル 関数の直交性フーリエ級数 次元代表的な対の諸性質コンボリューション たたみこみ積分 サンプリング定理 次元離散 次元空間周波数の概念 次元代表的な 次元対 次元離散 次元ベクトル 関数の直交性フーリエ級数 次元代表的な対の諸性質コンボリューション たたみこみ積分 サンプリング定理 次元離散 次元空間周波数の概念 次元代表的な 次元対 次元離散 ベクトルの直交性 3
Microsoft PowerPoint - DigitalMedia2_3b.pptx
 Contents デジタルメディア処理 2 の概要 フーリエ級数展開と 離散とその性質 周波数フィルタリング 担当 : 井尻敬 とは ( ) FourierSound.py とは ( ) FourierSound.py 横軸が時間の関数を 横軸が周波数の関数に変換する 法 声周波数 周波数 ( 係数番号 ) 後の関数は元信号に含まれる正弦波の量を す 中央に近いほど低周波, 外ほどが 周波 中央 (
Contents デジタルメディア処理 2 の概要 フーリエ級数展開と 離散とその性質 周波数フィルタリング 担当 : 井尻敬 とは ( ) FourierSound.py とは ( ) FourierSound.py 横軸が時間の関数を 横軸が周波数の関数に変換する 法 声周波数 周波数 ( 係数番号 ) 後の関数は元信号に含まれる正弦波の量を す 中央に近いほど低周波, 外ほどが 周波 中央 (
第 4 週コンボリューションその 2, 正弦波による分解 教科書 p. 16~ 目標コンボリューションの演習. 正弦波による信号の分解の考え方の理解. 正弦波の複素表現を学ぶ. 演習問題 問 1. 以下の図にならって,1 と 2 の δ 関数を図示せよ δ (t) 2
 2") 第 4 週コンボリューションその, 正弦波による分解 教科書 p. 6~ 目標コンボリューションの演習. 正弦波による信号の分解の考え方の理解. 正弦波の複素表現を学ぶ. 演習問題 問. 以下の図にならって, と の δ 関数を図示せよ. - - - δ () δ ( ) - - - 図 δ 関数の図示の例 δ ( ) δ ( ) δ ( ) δ ( ) δ ( ) - - - - - - - -
第 4 週コンボリューションその, 正弦波による分解 教科書 p. 6~ 目標コンボリューションの演習. 正弦波による信号の分解の考え方の理解. 正弦波の複素表現を学ぶ. 演習問題 問. 以下の図にならって, と の δ 関数を図示せよ. - - - δ () δ ( ) - - - 図 δ 関数の図示の例 δ ( ) δ ( ) δ ( ) δ ( ) δ ( ) - - - - - - - -
Microsoft PowerPoint - dm1_5.pptx
 デジタルメディア処理 1 017( 後期 ) 09/6 イントロダクション1 : デジタル画像とは, 量 化と標本化,Dynamic Range 10/03 イントロダクション : デジタルカメラ, 間の視覚, 表 系 10/10 フィルタ処理 1 : トーンカーブ, 線形フィルタ デジタルメディア処理 1 担当 : 井尻敬 10/17 フィルタ処理 : 線形フィルタ, ハーフトーニング 10/4
デジタルメディア処理 1 017( 後期 ) 09/6 イントロダクション1 : デジタル画像とは, 量 化と標本化,Dynamic Range 10/03 イントロダクション : デジタルカメラ, 間の視覚, 表 系 10/10 フィルタ処理 1 : トーンカーブ, 線形フィルタ デジタルメディア処理 1 担当 : 井尻敬 10/17 フィルタ処理 : 線形フィルタ, ハーフトーニング 10/4
画像処理工学
 画像処理工学 画像の空間周波数解析とテクスチャ特徴 フーリエ変換の基本概念 信号波形のフーリエ変換 信号波形を周波数の異なる三角関数 ( 正弦波など ) に分解する 逆に, 周波数の異なる三角関数を重ねあわせることにより, 任意の信号波形を合成できる 正弦波の重ね合わせによる矩形波の表現 フーリエ変換の基本概念 フーリエ変換 次元信号 f (t) のフーリエ変換 変換 ( ω) ( ) ωt F f
画像処理工学 画像の空間周波数解析とテクスチャ特徴 フーリエ変換の基本概念 信号波形のフーリエ変換 信号波形を周波数の異なる三角関数 ( 正弦波など ) に分解する 逆に, 周波数の異なる三角関数を重ねあわせることにより, 任意の信号波形を合成できる 正弦波の重ね合わせによる矩形波の表現 フーリエ変換の基本概念 フーリエ変換 次元信号 f (t) のフーリエ変換 変換 ( ω) ( ) ωt F f
Microsoft PowerPoint - 配布資料・演習18.pptx
 学年学科学籍番号氏名 宿題 ( 複素正弦波 jω ) メディアと信号処理第 回 ( 金田 ). 複素数とは 実数部と虚数部を持った数である 例えば 虚数単位を j と表すと 4+ j は複素数で 実数部は 4 で 虚数部が である 一般的に 実数部を 虚数部を とすると 複素数 z は z = + j と表される 複素数の 大きさ は 絶対値 (r jθ の r ) で定義される z の絶対値は z
学年学科学籍番号氏名 宿題 ( 複素正弦波 jω ) メディアと信号処理第 回 ( 金田 ). 複素数とは 実数部と虚数部を持った数である 例えば 虚数単位を j と表すと 4+ j は複素数で 実数部は 4 で 虚数部が である 一般的に 実数部を 虚数部を とすると 複素数 z は z = + j と表される 複素数の 大きさ は 絶対値 (r jθ の r ) で定義される z の絶対値は z
物性基礎
 水素様原子 水素原子 水素様原子 エネルギー固有値 波動関数 主量子数 角運動量 方位量子数 磁気量子数 原子核 + 電子 個 F p F = V = 水素様原子 古典力学 水素様原子 量子力学 角運動量 L p F p L 運動方程式 d dt p = d d d p p = p + dt dt dt = p p = d dt L = 角運動量の保存則 ポテンシャルエネルギー V = 4πε =
水素様原子 水素原子 水素様原子 エネルギー固有値 波動関数 主量子数 角運動量 方位量子数 磁気量子数 原子核 + 電子 個 F p F = V = 水素様原子 古典力学 水素様原子 量子力学 角運動量 L p F p L 運動方程式 d dt p = d d d p p = p + dt dt dt = p p = d dt L = 角運動量の保存則 ポテンシャルエネルギー V = 4πε =
TOP URL 1
 TOP URL http://amonphys.web.fc.com/ 3.............................. 3.............................. 4.3 4................... 5.4........................ 6.5........................ 8.6...........................7
TOP URL http://amonphys.web.fc.com/ 3.............................. 3.............................. 4.3 4................... 5.4........................ 6.5........................ 8.6...........................7
Microsoft PowerPoint - CSA_B3_EX2.pptx
 Computer Science A Hardware Design Excise 2 Handout V2.01 May 27 th.,2019 CSAHW Computer Science A, Meiji University CSA_B3_EX2.pptx 32 Slides Renji Mikami 1 CSAHW2 ハード演習内容 2.1 二次元空間でのベクトルの直交 2.2 Reserved
Computer Science A Hardware Design Excise 2 Handout V2.01 May 27 th.,2019 CSAHW Computer Science A, Meiji University CSA_B3_EX2.pptx 32 Slides Renji Mikami 1 CSAHW2 ハード演習内容 2.1 二次元空間でのベクトルの直交 2.2 Reserved
Microsoft Word - FT_2010.doc
 3. フーリエ変換 3. 周期的な複雑な波形 (t) si(ωt), (t) si(ωt), (t) si(3ωt) のグラフを図 3 に示す 単純にこれらの波形を重ね合わ せると (t) si(ωt) + si(ωt) + si(3ωt) は右図のように複雑な波形となる この合成波の時間方向の移 動は見られない ( 時間方向を波の位相と呼ぶ ) しかし 振幅の変調が見られる 3 3Hz (t) Hz
3. フーリエ変換 3. 周期的な複雑な波形 (t) si(ωt), (t) si(ωt), (t) si(3ωt) のグラフを図 3 に示す 単純にこれらの波形を重ね合わ せると (t) si(ωt) + si(ωt) + si(3ωt) は右図のように複雑な波形となる この合成波の時間方向の移 動は見られない ( 時間方向を波の位相と呼ぶ ) しかし 振幅の変調が見られる 3 3Hz (t) Hz
(Microsoft Word - PLL\203f\203\202\216\221\227\277-2-\203T\203\223\203v\203\213.doc)
") ディジタル PLL 理論と実践 有限会社 SP システム 目次 - 目次 1. はじめに...3 2. アナログ PLL...4 2.1 PLL の系...4 2.1.1 位相比較器...4 2.1.2 ループフィルタ...4 2.1.3 電圧制御発振器 (VCO)...4 2.1.4 分周器...5 2.2 ループフィルタ抜きの PLL 伝達関数...5 2.3 ループフィルタ...6 2.3.1
ディジタル PLL 理論と実践 有限会社 SP システム 目次 - 目次 1. はじめに...3 2. アナログ PLL...4 2.1 PLL の系...4 2.1.1 位相比較器...4 2.1.2 ループフィルタ...4 2.1.3 電圧制御発振器 (VCO)...4 2.1.4 分周器...5 2.2 ループフィルタ抜きの PLL 伝達関数...5 2.3 ループフィルタ...6 2.3.1
mugensho.dvi
 1 1 f (t) lim t a f (t) = 0 f (t) t a 1.1 (1) lim(t 1) 2 = 0 t 1 (t 1) 2 t 1 (2) lim(t 1) 3 = 0 t 1 (t 1) 3 t 1 2 f (t), g(t) t a lim t a f (t) g(t) g(t) f (t) = o(g(t)) (t a) = 0 f (t) (t 1) 3 1.2 lim
1 1 f (t) lim t a f (t) = 0 f (t) t a 1.1 (1) lim(t 1) 2 = 0 t 1 (t 1) 2 t 1 (2) lim(t 1) 3 = 0 t 1 (t 1) 3 t 1 2 f (t), g(t) t a lim t a f (t) g(t) g(t) f (t) = o(g(t)) (t a) = 0 f (t) (t 1) 3 1.2 lim
Microsoft Word - note02.doc
 年度 物理化学 Ⅱ 講義ノート. 二原子分子の振動. 調和振動子近似 モデル 分子 = 理想的なバネでつながった原子 r : 核間距離, r e : 平衡核間距離, : 変位 ( = r r e ), k f : 力の定数ポテンシャルエネルギー ( ) k V = f (.) 古典運動方程式 [ 振動数 ] 3.3 d kf (.) dt μ : 換算質量 (m, m : 原子, の質量 ) mm
年度 物理化学 Ⅱ 講義ノート. 二原子分子の振動. 調和振動子近似 モデル 分子 = 理想的なバネでつながった原子 r : 核間距離, r e : 平衡核間距離, : 変位 ( = r r e ), k f : 力の定数ポテンシャルエネルギー ( ) k V = f (.) 古典運動方程式 [ 振動数 ] 3.3 d kf (.) dt μ : 換算質量 (m, m : 原子, の質量 ) mm
スライド 1
 非線形数理秋の学校 パターン形成の数理とその周辺 - 反応拡散方程式理論による時 空間パターンの解析を中心に - 2007 年 9 月 25 日 -27 日 モデル方程式を通してみるパターン解析ー進行波からヘリカル波の分岐を例としてー 池田勉 ( 龍谷大学理工学部 ) 講義概要, 講義資料, 講義中に使用する C 言語プログラムと初期値データ, ヘリカル波のアニメーションをウェブで公開しています :
非線形数理秋の学校 パターン形成の数理とその周辺 - 反応拡散方程式理論による時 空間パターンの解析を中心に - 2007 年 9 月 25 日 -27 日 モデル方程式を通してみるパターン解析ー進行波からヘリカル波の分岐を例としてー 池田勉 ( 龍谷大学理工学部 ) 講義概要, 講義資料, 講義中に使用する C 言語プログラムと初期値データ, ヘリカル波のアニメーションをウェブで公開しています :
( ) sin 1 x, cos 1 x, tan 1 x sin x, cos x, tan x, arcsin x, arccos x, arctan x. π 2 sin 1 x π 2, 0 cos 1 x π, π 2 < tan 1 x < π 2 1 (1) (
 sin 1 x, cos 1 x, tan 1 x sin x, cos x, tan x, arcsin x, arccos x, arctan x. π 2 sin 1 x π 2, 0 cos 1 x π, π 2 < tan 1 x < π 2 1 (1) (") 6 20 ( ) sin, cos, tan sin, cos, tan, arcsin, arccos, arctan. π 2 sin π 2, 0 cos π, π 2 < tan < π 2 () ( 2 2 lim 2 ( 2 ) ) 2 = 3 sin (2) lim 5 0 = 2 2 0 0 2 2 3 3 4 5 5 2 5 6 3 5 7 4 5 8 4 9 3 4 a 3 b
6 20 ( ) sin, cos, tan sin, cos, tan, arcsin, arccos, arctan. π 2 sin π 2, 0 cos π, π 2 < tan < π 2 () ( 2 2 lim 2 ( 2 ) ) 2 = 3 sin (2) lim 5 0 = 2 2 0 0 2 2 3 3 4 5 5 2 5 6 3 5 7 4 5 8 4 9 3 4 a 3 b
横浜市環境科学研究所
 周期時系列の統計解析 単回帰分析 io 8 年 3 日 周期時系列に季節調整を行わないで単回帰分析を適用すると, 回帰係数には周期成分の影響が加わる. ここでは, 周期時系列をコサイン関数モデルで近似し単回帰分析によりモデルの回帰係数を求め, 周期成分の影響を検討した. また, その結果を気温時系列に当てはめ, 課題等について考察した. 気温時系列とコサイン関数モデル第 報の結果を利用するので, その一部を再掲する.
周期時系列の統計解析 単回帰分析 io 8 年 3 日 周期時系列に季節調整を行わないで単回帰分析を適用すると, 回帰係数には周期成分の影響が加わる. ここでは, 周期時系列をコサイン関数モデルで近似し単回帰分析によりモデルの回帰係数を求め, 周期成分の影響を検討した. また, その結果を気温時系列に当てはめ, 課題等について考察した. 気温時系列とコサイン関数モデル第 報の結果を利用するので, その一部を再掲する.
Microsoft Word - 簡単な計算と作図.doc
 エクセルを用いた簡単な技術計算と作図について 画像処理 Ⅰ 配付資料 ( 岡山理科大学澤見英男 2006 年作成 ) 表計算ソフト エクセル を用いた簡単な技術計算と作図について紹介します 例として正弦波の標本化と周波数特性の計算を取り上げることにします (1) 正弦波の描画先ず表計算ソフト エクセル を立ち上げます 以下の様な表示が現れます この中のA 列を横座標軸 ( 工学単位 ; 度 ) に割り当てます
エクセルを用いた簡単な技術計算と作図について 画像処理 Ⅰ 配付資料 ( 岡山理科大学澤見英男 2006 年作成 ) 表計算ソフト エクセル を用いた簡単な技術計算と作図について紹介します 例として正弦波の標本化と周波数特性の計算を取り上げることにします (1) 正弦波の描画先ず表計算ソフト エクセル を立ち上げます 以下の様な表示が現れます この中のA 列を横座標軸 ( 工学単位 ; 度 ) に割り当てます
I, II 1, A = A 4 : 6 = max{ A, } A A 10 10%
 1 2006.4.17. A 3-312 tel: 092-726-4774, e-mail: hara@math.kyushu-u.ac.jp, http://www.math.kyushu-u.ac.jp/ hara/lectures/lectures-j.html Office hours: B A I ɛ-δ ɛ-δ 1. 2. A 1. 1. 2. 3. 4. 5. 2. ɛ-δ 1. ɛ-n
1 2006.4.17. A 3-312 tel: 092-726-4774, e-mail: hara@math.kyushu-u.ac.jp, http://www.math.kyushu-u.ac.jp/ hara/lectures/lectures-j.html Office hours: B A I ɛ-δ ɛ-δ 1. 2. A 1. 1. 2. 3. 4. 5. 2. ɛ-δ 1. ɛ-n
工業数学F2-04(ウェブ用).pptx
.pptx") 工業数学 F2 #4 フーリエ級数を極める 京都大学加納学 京都大学大学院情報学研究科システム科学専攻 Human Systems Lab., Dept. of Systems Science Graduate School of Informatics, Kyoto University 復習 1: 複素フーリエ級数 2 周期 2π の周期関数 f(x) の複素フーリエ級数展開 複素フーリエ係数
工業数学 F2 #4 フーリエ級数を極める 京都大学加納学 京都大学大学院情報学研究科システム科学専攻 Human Systems Lab., Dept. of Systems Science Graduate School of Informatics, Kyoto University 復習 1: 複素フーリエ級数 2 周期 2π の周期関数 f(x) の複素フーリエ級数展開 複素フーリエ係数
Microsoft PowerPoint - Lec14 [互換モード]
![Microsoft PowerPoint - Lec14 [互換モード]](/thumbs/88/115993382.jpg "Microsoft PowerPoint - Lec14 [互換モード]") 第 回講義水曜日 限教室 68 情報デザイン専攻 画像情報処理論及び演習 II - 周波数分解 - フーリエ変換 DCT と周波数操作 吉澤信 shin@riken.jp, 非常勤講師 大妻女子大学社会情報学部 今日の授業内容 www.riken.jp/brict/yoshizawa/ectures/inde.html www.riken.jp/brict/yoshizawa/ectures/ec4.pdf.
第 回講義水曜日 限教室 68 情報デザイン専攻 画像情報処理論及び演習 II - 周波数分解 - フーリエ変換 DCT と周波数操作 吉澤信 shin@riken.jp, 非常勤講師 大妻女子大学社会情報学部 今日の授業内容 www.riken.jp/brict/yoshizawa/ectures/inde.html www.riken.jp/brict/yoshizawa/ectures/ec4.pdf.

( ) ( )
 ( )") 20 21 2 8 1 2 2 3 21 3 22 3 23 4 24 5 25 5 26 6 27 8 28 ( ) 9 3 10 31 10 32 ( ) 12 4 13 41 0 13 42 14 43 0 15 44 17 5 18 6 18 1 1 2 2 1 2 1 0 2 0 3 0 4 0 2 2 21 t (x(t) y(t)) 2 x(t) y(t) γ(t) (x(t) y(t))
20 21 2 8 1 2 2 3 21 3 22 3 23 4 24 5 25 5 26 6 27 8 28 ( ) 9 3 10 31 10 32 ( ) 12 4 13 41 0 13 42 14 43 0 15 44 17 5 18 6 18 1 1 2 2 1 2 1 0 2 0 3 0 4 0 2 2 21 t (x(t) y(t)) 2 x(t) y(t) γ(t) (x(t) y(t))
http//umercalbra.org/lectures/deep-learg/ z l l-1 = f w l 1 z l 1 1 f x = 1 + e x x x > 0 f x = 0 x 0 z l l-1 = f w l 1 z l 1
 http//umercalbra.org/lectures/deep-learg/ z l l-1 = f w l 1 z l 1 1 f x = 1 + e x x x > 0 f x = 0 x 0 z l l-1 = f w l 1 z l 1 typedef struct Layer *layer; Coecto *coecto; sfmt_t rg; t ; Networ; double
http//umercalbra.org/lectures/deep-learg/ z l l-1 = f w l 1 z l 1 1 f x = 1 + e x x x > 0 f x = 0 x 0 z l l-1 = f w l 1 z l 1 typedef struct Layer *layer; Coecto *coecto; sfmt_t rg; t ; Networ; double
PowerPoint Presentation
 付録 2 2 次元アフィン変換 直交変換 たたみ込み 1.2 次元のアフィン変換 座標 (x,y ) を (x,y) に移すことを 2 次元での変換. 特に, 変換が と書けるとき, アフィン変換, アフィン変換は, その 1 次の項による変換 と 0 次の項による変換 アフィン変換 0 次の項は平行移動 1 次の項は座標 (x, y ) をベクトルと考えて とすれば このようなもの 2 次元ベクトルの線形写像
付録 2 2 次元アフィン変換 直交変換 たたみ込み 1.2 次元のアフィン変換 座標 (x,y ) を (x,y) に移すことを 2 次元での変換. 特に, 変換が と書けるとき, アフィン変換, アフィン変換は, その 1 次の項による変換 と 0 次の項による変換 アフィン変換 0 次の項は平行移動 1 次の項は座標 (x, y ) をベクトルと考えて とすれば このようなもの 2 次元ベクトルの線形写像
Microsoft PowerPoint - 計測工学第7回.pptx
 計測工学講義 第 7 回目 担当 : 西野信博 A3-525 号室 nishino@hiroshima-u.ac.jp home.hiroshima-u.ac.jp/nishino/ 1 プラズマ実験装置 NSTX(Princeton) 目 次 第 2 章スペクトル解析 フーリエ展開とフーリエ変換 相関関数とパワースペクトル 2 3 演習 スペクトル解析とはどのようなものかを わかりやすく簡潔に説明せよ
計測工学講義 第 7 回目 担当 : 西野信博 A3-525 号室 nishino@hiroshima-u.ac.jp home.hiroshima-u.ac.jp/nishino/ 1 プラズマ実験装置 NSTX(Princeton) 目 次 第 2 章スペクトル解析 フーリエ展開とフーリエ変換 相関関数とパワースペクトル 2 3 演習 スペクトル解析とはどのようなものかを わかりやすく簡潔に説明せよ
9 2 1 f(x, y) = xy sin x cos y x y cos y y x sin x d (x, y) = y cos y (x sin x) = y cos y(sin x + x cos x) x dx d (x, y) = x sin x (y cos y) = x sin x
 = xy sin x cos y x y cos y y x sin x d (x, y) = y cos y (x sin x) = y cos y(sin x + x cos x) x dx d (x, y) = x sin x (y cos y) = x sin x") 2009 9 6 16 7 1 7.1 1 1 1 9 2 1 f(x, y) = xy sin x cos y x y cos y y x sin x d (x, y) = y cos y (x sin x) = y cos y(sin x + x cos x) x dx d (x, y) = x sin x (y cos y) = x sin x(cos y y sin y) y dy 1 sin
2009 9 6 16 7 1 7.1 1 1 1 9 2 1 f(x, y) = xy sin x cos y x y cos y y x sin x d (x, y) = y cos y (x sin x) = y cos y(sin x + x cos x) x dx d (x, y) = x sin x (y cos y) = x sin x(cos y y sin y) y dy 1 sin
QMI_09.dvi
 25 3 19 Erwin Schrödinger 1925 3.1 3.1.1 3.1.2 σ τ 2 2 ux, t) = ux, t) 3.1) 2 x2 ux, t) σ τ 2 u/ 2 m p E E = p2 3.2) E ν ω E = hν = hω. 3.3) k p k = p h. 3.4) 26 3 hω = E = p2 = h2 k 2 ψkx ωt) ψ 3.5) h
25 3 19 Erwin Schrödinger 1925 3.1 3.1.1 3.1.2 σ τ 2 2 ux, t) = ux, t) 3.1) 2 x2 ux, t) σ τ 2 u/ 2 m p E E = p2 3.2) E ν ω E = hν = hω. 3.3) k p k = p h. 3.4) 26 3 hω = E = p2 = h2 k 2 ψkx ωt) ψ 3.5) h
QMI_10.dvi
 25 3 19 Erwin Schrödinger 1925 3.1 3.1.1 σ τ x u u x t ux, t) u 3.1 t x P ux, t) Q θ P Q Δx x + Δx Q P ux + Δx, t) Q θ P u+δu x u x σ τ P x) Q x+δx) P Q x 3.1: θ P θ Q P Q equation of motion P τ Q τ σδx
25 3 19 Erwin Schrödinger 1925 3.1 3.1.1 σ τ x u u x t ux, t) u 3.1 t x P ux, t) Q θ P Q Δx x + Δx Q P ux + Δx, t) Q θ P u+δu x u x σ τ P x) Q x+δx) P Q x 3.1: θ P θ Q P Q equation of motion P τ Q τ σδx
18 2 F 12 r 2 r 1 (3) Coulomb km Coulomb M = kg F G = ( ) ( ) ( ) 2 = [N]. Coulomb
![18 2 F 12 r 2 r 1 (3) Coulomb km Coulomb M = kg F G = ( ) ( ) ( ) 2 = [N]. Coulomb](/thumbs/93/114079295.jpg "18 2 F 12 r 2 r 1 (3) Coulomb km Coulomb M = kg F G = ( ) ( ) ( ) 2 = [N]. Coulomb") r 1 r 2 r 1 r 2 2 Coulomb Gauss Coulomb 2.1 Coulomb 1 2 r 1 r 2 1 2 F 12 2 1 F 21 F 12 = F 21 = 1 4πε 0 1 2 r 1 r 2 2 r 1 r 2 r 1 r 2 (2.1) Coulomb ε 0 = 107 4πc 2 =8.854 187 817 10 12 C 2 N 1 m 2 (2.2)
r 1 r 2 r 1 r 2 2 Coulomb Gauss Coulomb 2.1 Coulomb 1 2 r 1 r 2 1 2 F 12 2 1 F 21 F 12 = F 21 = 1 4πε 0 1 2 r 1 r 2 2 r 1 r 2 r 1 r 2 (2.1) Coulomb ε 0 = 107 4πc 2 =8.854 187 817 10 12 C 2 N 1 m 2 (2.2)
meiji_resume_1.PDF
 β β β (q 1,q,..., q n ; p 1, p,..., p n ) H(q 1,q,..., q n ; p 1, p,..., p n ) Hψ = εψ ε k = k +1/ ε k = k(k 1) (x, y, z; p x, p y, p z ) (r; p r ), (θ; p θ ), (ϕ; p ϕ ) ε k = 1/ k p i dq i E total = E
β β β (q 1,q,..., q n ; p 1, p,..., p n ) H(q 1,q,..., q n ; p 1, p,..., p n ) Hψ = εψ ε k = k +1/ ε k = k(k 1) (x, y, z; p x, p y, p z ) (r; p r ), (θ; p θ ), (ϕ; p ϕ ) ε k = 1/ k p i dq i E total = E
1 12 ( )150 ( ( ) ) x M x 0 1 M 2 5x 2 + 4x + 3 x 2 1 M x M 2 1 M x (x + 1) 2 (1) x 2 + x + 1 M (2) 1 3 M (3) x 4 +
150 ( ( ) ) x M x 0 1 M 2 5x 2 + 4x + 3 x 2 1 M x M 2 1 M x (x + 1) 2 (1) x 2 + x + 1 M (2) 1 3 M (3) x 4 +") ( )5 ( ( ) ) 4 6 7 9 M M 5 + 4 + M + M M + ( + ) () + + M () M () 4 + + M a b y = a + b a > () a b () y V a () V a b V n f() = n k= k k () < f() = log( ) t dt log () n+ (i) dt t (n + ) (ii) < t dt n+ n
( )5 ( ( ) ) 4 6 7 9 M M 5 + 4 + M + M M + ( + ) () + + M () M () 4 + + M a b y = a + b a > () a b () y V a () V a b V n f() = n k= k k () < f() = log( ) t dt log () n+ (i) dt t (n + ) (ii) < t dt n+ n
) a + b = i + 6 b c = 6i j ) a = 0 b = c = 0 ) â = i + j 0 ˆb = 4) a b = b c = j + ) cos α = cos β = 6) a ˆb = b ĉ = 0 7) a b = 6i j b c = i + 6j + 8)
 a + b = i + 6 b c = 6i j ) a = 0 b = c = 0 ) â = i + j 0 ˆb = 4) a b = b c = j + ) cos α = cos β = 6) a ˆb = b ĉ = 0 7) a b = 6i j b c = i + 6j + 8)") 4 4 ) a + b = i + 6 b c = 6i j ) a = 0 b = c = 0 ) â = i + j 0 ˆb = 4) a b = b c = j + ) cos α = cos β = 6) a ˆb = b ĉ = 0 7) a b = 6i j b c = i + 6j + 8) a b a b = 6i j 4 b c b c 9) a b = 4 a b) c = 7
4 4 ) a + b = i + 6 b c = 6i j ) a = 0 b = c = 0 ) â = i + j 0 ˆb = 4) a b = b c = j + ) cos α = cos β = 6) a ˆb = b ĉ = 0 7) a b = 6i j b c = i + 6j + 8) a b a b = 6i j 4 b c b c 9) a b = 4 a b) c = 7
周期時系列の統計解析 (3) 移動平均とフーリエ変換 nino 2017 年 12 月 18 日 移動平均は, 周期時系列における特定の周期成分の消去や不規則変動 ( ノイズ ) の低減に汎用されている統計手法である. ここでは, 周期時系列をコサイン関数で近似し, その移動平均により周期成分の振幅
 移動平均とフーリエ変換 nino 2017 年 12 月 18 日 移動平均は, 周期時系列における特定の周期成分の消去や不規則変動 ( ノイズ ) の低減に汎用されている統計手法である. ここでは, 周期時系列をコサイン関数で近似し, その移動平均により周期成分の振幅") 周期時系列の統計解析 3 移動平均とフーリエ変換 io 07 年 月 8 日 移動平均は, 周期時系列における特定の周期成分の消去や不規則変動 ノイズ の低減に汎用されている統計手法である. ここでは, 周期時系列をコサイン関数で近似し, その移動平均により周期成分のがどのように変化するのか等について検討する. また, 気温の実測値に移動平均を適用した結果についてフーリエ変換も併用して考察する. 単純移動平均の計算式移動平均には,
周期時系列の統計解析 3 移動平均とフーリエ変換 io 07 年 月 8 日 移動平均は, 周期時系列における特定の周期成分の消去や不規則変動 ノイズ の低減に汎用されている統計手法である. ここでは, 周期時系列をコサイン関数で近似し, その移動平均により周期成分のがどのように変化するのか等について検討する. また, 気温の実測値に移動平均を適用した結果についてフーリエ変換も併用して考察する. 単純移動平均の計算式移動平均には,
振動学特論火曜 1 限 TA332J 藤井康介 6 章スペクトルの平滑化 スペクトルの平滑化とはギザギザした地震波のフーリエ スペクトルやパワ スペクトルでは正確にスペクトルの山がどこにあるかはよく分からない このようなスペクトルから不純なものを取り去って 本当の性質を浮き彫
 6 章スペクトルの平滑化 スペクトルの平滑化とはギザギザした地震波のフーリエ スペクトルやパワ スペクトルでは正確にスペクトルの山がどこにあるかはよく分からない このようなスペクトルから不純なものを取り去って 本当の性質を浮き彫りにするために スペクトルを滑らかにする操作のことをいう 6.1 合積のフーリエ変換スペクトルの平滑化を行う際に必要な 合積とそのフーリエ変換について説明する 6.2 データ
6 章スペクトルの平滑化 スペクトルの平滑化とはギザギザした地震波のフーリエ スペクトルやパワ スペクトルでは正確にスペクトルの山がどこにあるかはよく分からない このようなスペクトルから不純なものを取り去って 本当の性質を浮き彫りにするために スペクトルを滑らかにする操作のことをいう 6.1 合積のフーリエ変換スペクトルの平滑化を行う際に必要な 合積とそのフーリエ変換について説明する 6.2 データ
PowerPoint プレゼンテーション
 復習 ) 時系列のモデリング ~a. 離散時間モデル ~ y k + a 1 z 1 y k + + a na z n ay k = b 0 u k + b 1 z 1 u k + + b nb z n bu k y k = G z 1 u k = B(z 1 ) A(z 1 u k ) ARMA モデル A z 1 B z 1 = 1 + a 1 z 1 + + a na z n a = b 0
復習 ) 時系列のモデリング ~a. 離散時間モデル ~ y k + a 1 z 1 y k + + a na z n ay k = b 0 u k + b 1 z 1 u k + + b nb z n bu k y k = G z 1 u k = B(z 1 ) A(z 1 u k ) ARMA モデル A z 1 B z 1 = 1 + a 1 z 1 + + a na z n a = b 0
p = mv p x > h/4π λ = h p m v Ψ 2 Ψ
 II p = mv p x > h/4π λ = h p m v Ψ 2 Ψ Ψ Ψ 2 0 x P'(x) m d 2 x = mω 2 x = kx = F(x) dt 2 x = cos(ωt + φ) mω 2 = k ω = m k v = dx = -ωsin(ωt + φ) dt = d 2 x dt 2 0 y v θ P(x,y) θ = ωt + φ ν = ω [Hz] 2π
II p = mv p x > h/4π λ = h p m v Ψ 2 Ψ Ψ Ψ 2 0 x P'(x) m d 2 x = mω 2 x = kx = F(x) dt 2 x = cos(ωt + φ) mω 2 = k ω = m k v = dx = -ωsin(ωt + φ) dt = d 2 x dt 2 0 y v θ P(x,y) θ = ωt + φ ν = ω [Hz] 2π
ディジタル信号処理
 ディジタルフィルタの設計法. 逆フィルター. 直線位相 FIR フィルタの設計. 窓関数法による FIR フィルタの設計.5 時間領域での FIR フィルタの設計 3. アナログフィルタを基にしたディジタル IIR フィルタの設計法 I 4. アナログフィルタを基にしたディジタル IIR フィルタの設計法 II 5. 双 次フィルタ LI 離散時間システムの基礎式の証明 [ ] 4. ] [ ]*
ディジタルフィルタの設計法. 逆フィルター. 直線位相 FIR フィルタの設計. 窓関数法による FIR フィルタの設計.5 時間領域での FIR フィルタの設計 3. アナログフィルタを基にしたディジタル IIR フィルタの設計法 I 4. アナログフィルタを基にしたディジタル IIR フィルタの設計法 II 5. 双 次フィルタ LI 離散時間システムの基礎式の証明 [ ] 4. ] [ ]*
, 3, 6 = 3, 3,,,, 3,, 9, 3, 9, 3, 3, 4, 43, 4, 3, 9, 6, 6,, 0 p, p, p 3,..., p n N = p p p 3 p n + N p n N p p p, p 3,..., p n p, p,..., p n N, 3,,,,
 6,,3,4,, 3 4 8 6 6................................. 6.................................. , 3, 6 = 3, 3,,,, 3,, 9, 3, 9, 3, 3, 4, 43, 4, 3, 9, 6, 6,, 0 p, p, p 3,..., p n N = p p p 3 p n + N p n N p p p,
6,,3,4,, 3 4 8 6 6................................. 6.................................. , 3, 6 = 3, 3,,,, 3,, 9, 3, 9, 3, 3, 4, 43, 4, 3, 9, 6, 6,, 0 p, p, p 3,..., p n N = p p p 3 p n + N p n N p p p,
50 2 I SI MKSA r q r q F F = 1 qq 4πε 0 r r 2 r r r r (2.2 ε 0 = 1 c 2 µ 0 c = m/s q 2.1 r q' F r = 0 µ 0 = 4π 10 7 N/A 2 k = 1/(4πε 0 qq
 49 2 I II 2.1 3 e e = 1.602 10 19 A s (2.1 50 2 I SI MKSA 2.1.1 r q r q F F = 1 qq 4πε 0 r r 2 r r r r (2.2 ε 0 = 1 c 2 µ 0 c = 3 10 8 m/s q 2.1 r q' F r = 0 µ 0 = 4π 10 7 N/A 2 k = 1/(4πε 0 qq F = k r
49 2 I II 2.1 3 e e = 1.602 10 19 A s (2.1 50 2 I SI MKSA 2.1.1 r q r q F F = 1 qq 4πε 0 r r 2 r r r r (2.2 ε 0 = 1 c 2 µ 0 c = 3 10 8 m/s q 2.1 r q' F r = 0 µ 0 = 4π 10 7 N/A 2 k = 1/(4πε 0 qq F = k r
1 No.1 5 C 1 I III F 1 F 2 F 1 F 2 2 Φ 2 (t) = Φ 1 (t) Φ 1 (t t). = Φ 1(t) t = ( 1.5e 0.5t 2.4e 4t 2e 10t ) τ < 0 t > τ Φ 2 (t) < 0 lim t Φ 2 (t) = 0
 = Φ 1 (t) Φ 1 (t t). = Φ 1(t) t = ( 1.5e 0.5t 2.4e 4t 2e 10t ) τ < 0 t > τ Φ 2 (t) < 0 lim t Φ 2 (t) = 0") 1 No.1 5 C 1 I III F 1 F 2 F 1 F 2 2 Φ 2 (t) = Φ 1 (t) Φ 1 (t t). = Φ 1(t) t = ( 1.5e 0.5t 2.4e 4t 2e 10t ) τ < 0 t > τ Φ 2 (t) < 0 lim t Φ 2 (t) = 0 0 < t < τ I II 0 No.2 2 C x y x y > 0 x 0 x > b a dx
1 No.1 5 C 1 I III F 1 F 2 F 1 F 2 2 Φ 2 (t) = Φ 1 (t) Φ 1 (t t). = Φ 1(t) t = ( 1.5e 0.5t 2.4e 4t 2e 10t ) τ < 0 t > τ Φ 2 (t) < 0 lim t Φ 2 (t) = 0 0 < t < τ I II 0 No.2 2 C x y x y > 0 x 0 x > b a dx
untitled
 yoshi@image.med.osaka-u.ac.jp http://www.image.med.osaka-u.ac.jp/member/yoshi/ II Excel, Mathematica Mathematica Osaka Electro-Communication University (2007 Apr) 09849-31503-64015-30704-18799-390 http://www.image.med.osaka-u.ac.jp/member/yoshi/
yoshi@image.med.osaka-u.ac.jp http://www.image.med.osaka-u.ac.jp/member/yoshi/ II Excel, Mathematica Mathematica Osaka Electro-Communication University (2007 Apr) 09849-31503-64015-30704-18799-390 http://www.image.med.osaka-u.ac.jp/member/yoshi/
x = a 1 f (a r, a + r) f(a) r a f f(a) 2 2. (a, b) 2 f (a, b) r f(a, b) r (a, b) f f(a, b)
 f(a) r a f f(a) 2 2. (a, b) 2 f (a, b) r f(a, b) r (a, b) f f(a, b)") 2011 I 2 II III 17, 18, 19 7 7 1 2 2 2 1 2 1 1 1.1.............................. 2 1.2 : 1.................... 4 1.2.1 2............................... 5 1.3 : 2.................... 5 1.3.1 2.....................................
2011 I 2 II III 17, 18, 19 7 7 1 2 2 2 1 2 1 1 1.1.............................. 2 1.2 : 1.................... 4 1.2.1 2............................... 5 1.3 : 2.................... 5 1.3.1 2.....................................
Introduction to System Identification
 y(t) モデルベースデザイン 制御系設計のためのシステム同定入門 s 2 Teja Muppirala t s 2 3s 4 2012 The MathWorks, Inc. 1 モデルベースデザイン 正確なモデルがあることが大前提 実行可能な仕様書 シミュレーションによる設計 モデル 連続したテスト 検証 コード生成による実装 2 動的システムのモデリング モデリング手法 第一原理モデリング データドリブンモデリング
y(t) モデルベースデザイン 制御系設計のためのシステム同定入門 s 2 Teja Muppirala t s 2 3s 4 2012 The MathWorks, Inc. 1 モデルベースデザイン 正確なモデルがあることが大前提 実行可能な仕様書 シミュレーションによる設計 モデル 連続したテスト 検証 コード生成による実装 2 動的システムのモデリング モデリング手法 第一原理モデリング データドリブンモデリング
.2 ρ dv dt = ρk grad p + 3 η grad (divv) + η 2 v.3 divh = 0, rote + c H t = 0 dive = ρ, H = 0, E = ρ, roth c E t = c ρv E + H c t = 0 H c E t = c ρv T
 + η 2 v.3 divh = 0, rote + c H t = 0 dive = ρ, H = 0, E = ρ, roth c E t = c ρv E + H c t = 0 H c E t = c ρv T") NHK 204 2 0 203 2 24 ( ) 7 00 7 50 203 2 25 ( ) 7 00 7 50 203 2 26 ( ) 7 00 7 50 203 2 27 ( ) 7 00 7 50 I. ( ν R n 2 ) m 2 n m, R = e 2 8πε 0 hca B =.09737 0 7 m ( ν = ) λ a B = 4πε 0ħ 2 m e e 2 = 5.2977
NHK 204 2 0 203 2 24 ( ) 7 00 7 50 203 2 25 ( ) 7 00 7 50 203 2 26 ( ) 7 00 7 50 203 2 27 ( ) 7 00 7 50 I. ( ν R n 2 ) m 2 n m, R = e 2 8πε 0 hca B =.09737 0 7 m ( ν = ) λ a B = 4πε 0ħ 2 m e e 2 = 5.2977
1 I 1.1 ± e = = - = C C MKSA [m], [Kg] [s] [A] 1C 1A 1 MKSA 1C 1C +q q +q q 1
![1 I 1.1 ± e = = - = C C MKSA [m], [Kg] [s] [A] 1C 1A 1 MKSA 1C 1C +q q +q q 1](/thumbs/94/121802164.jpg "1 I 1.1 ± e = = - = C C MKSA [m], [Kg] [s] [A] 1C 1A 1 MKSA 1C 1C +q q +q q 1") 1 I 1.1 ± e = = - =1.602 10 19 C C MKA [m], [Kg] [s] [A] 1C 1A 1 MKA 1C 1C +q q +q q 1 1.1 r 1,2 q 1, q 2 r 12 2 q 1, q 2 2 F 12 = k q 1q 2 r 12 2 (1.1) k 2 k 2 ( r 1 r 2 ) ( r 2 r 1 ) q 1 q 2 (q 1 q 2
1 I 1.1 ± e = = - =1.602 10 19 C C MKA [m], [Kg] [s] [A] 1C 1A 1 MKA 1C 1C +q q +q q 1 1.1 r 1,2 q 1, q 2 r 12 2 q 1, q 2 2 F 12 = k q 1q 2 r 12 2 (1.1) k 2 k 2 ( r 1 r 2 ) ( r 2 r 1 ) q 1 q 2 (q 1 q 2
II A A441 : October 02, 2014 Version : Kawahira, Tomoki TA (Kondo, Hirotaka )
") II 214-1 : October 2, 214 Version : 1.1 Kawahira, Tomoki TA (Kondo, Hirotaka ) http://www.math.nagoya-u.ac.jp/~kawahira/courses/14w-biseki.html pdf 1 2 1 9 1 16 1 23 1 3 11 6 11 13 11 2 11 27 12 4 12 11
II 214-1 : October 2, 214 Version : 1.1 Kawahira, Tomoki TA (Kondo, Hirotaka ) http://www.math.nagoya-u.ac.jp/~kawahira/courses/14w-biseki.html pdf 1 2 1 9 1 16 1 23 1 3 11 6 11 13 11 2 11 27 12 4 12 11
I, II 1, 2 ɛ-δ 100 A = A 4 : 6 = max{ A, } A A 10
 1 2007.4.13. A 3-312 tel: 092-726-4774, e-mail: hara@math.kyushu-u.ac.jp, http://www.math.kyushu-u.ac.jp/ hara/lectures/lectures-j.html Office hours: B A I ɛ-δ ɛ-δ 1. 2. A 0. 1. 1. 2. 3. 2. ɛ-δ 1. ɛ-n
1 2007.4.13. A 3-312 tel: 092-726-4774, e-mail: hara@math.kyushu-u.ac.jp, http://www.math.kyushu-u.ac.jp/ hara/lectures/lectures-j.html Office hours: B A I ɛ-δ ɛ-δ 1. 2. A 0. 1. 1. 2. 3. 2. ɛ-δ 1. ɛ-n
7. y fx, z gy z gfx dz dx dz dy dy dx. g f a g bf a b fa 7., chain ule Ω, D R n, R m a Ω, f : Ω R m, g : D R l, fω D, b fa, f a g b g f a g f a g bf a
 9 203 6 7 WWW http://www.math.meiji.ac.jp/~mk/lectue/tahensuu-203/ 2 8 8 7. 7 7. y fx, z gy z gfx dz dx dz dy dy dx. g f a g bf a b fa 7., chain ule Ω, D R n, R m a Ω, f : Ω R m, g : D R l, fω D, b fa,
9 203 6 7 WWW http://www.math.meiji.ac.jp/~mk/lectue/tahensuu-203/ 2 8 8 7. 7 7. y fx, z gy z gfx dz dx dz dy dy dx. g f a g bf a b fa 7., chain ule Ω, D R n, R m a Ω, f : Ω R m, g : D R l, fω D, b fa,
1 8, : 8.1 1, 2 z = ax + by + c ax by + z c = a b +1 x y z c = 0, (0, 0, c), n = ( a, b, 1). f = n i=1 a ii x 2 i + i<j 2a ij x i x j = ( x, A x), f =
, n = ( a, b, 1). f = n i=1 a ii x 2 i + i<j 2a ij x i x j = ( x, A x), f =") 1 8, : 8.1 1, z = ax + by + c ax by + z c = a b +1 x y z c = 0, (0, 0, c), n = ( a, b, 1). f = a ii x i + i
1 8, : 8.1 1, z = ax + by + c ax by + z c = a b +1 x y z c = 0, (0, 0, c), n = ( a, b, 1). f = a ii x i + i
演習2
 神戸市立工業高等専門学校電気工学科 / 電子工学科専門科目 数値解析 2017.6.2 演習 2 山浦剛 (tyamaura@riken.jp) 講義資料ページ h t t p://clim ate.aic s. riken. jp/m embers/yamaura/num erical_analysis. html 曲線の推定 N 次多項式ラグランジュ補間 y = p N x = σ N x x
神戸市立工業高等専門学校電気工学科 / 電子工学科専門科目 数値解析 2017.6.2 演習 2 山浦剛 (tyamaura@riken.jp) 講義資料ページ h t t p://clim ate.aic s. riken. jp/m embers/yamaura/num erical_analysis. html 曲線の推定 N 次多項式ラグランジュ補間 y = p N x = σ N x x
SOWC04....
 99 100 101 2004 284 265 260 257 235 225 222 211 207 205 200 197 192 190 183 183 183 183 180 176 171 169 166 165 156 152 149 143 141 141 138 138 136 126 126 125 123 123 122 118 110 109 108 107 107 105 100
99 100 101 2004 284 265 260 257 235 225 222 211 207 205 200 197 192 190 183 183 183 183 180 176 171 169 166 165 156 152 149 143 141 141 138 138 136 126 126 125 123 123 122 118 110 109 108 107 107 105 100

I-2 (100 ) (1) y(x) y dy dx y d2 y dx 2 (a) y + 2y 3y = 9e 2x (b) x 2 y 6y = 5x 4 (2) Bernoulli B n (n = 0, 1, 2,...) x e x 1 = n=0 B 0 B 1 B 2 (3) co
 (1) y(x) y dy dx y d2 y dx 2 (a) y + 2y 3y = 9e 2x (b) x 2 y 6y = 5x 4 (2) Bernoulli B n (n = 0, 1, 2,...) x e x 1 = n=0 B 0 B 1 B 2 (3) co") 16 I ( ) (1) I-1 I-2 I-3 (2) I-1 ( ) (100 ) 2l x x = 0 y t y(x, t) y(±l, t) = 0 m T g y(x, t) l y(x, t) c = 2 y(x, t) c 2 2 y(x, t) = g (A) t 2 x 2 T/m (1) y 0 (x) y 0 (x) = g c 2 (l2 x 2 ) (B) (2) (1)
16 I ( ) (1) I-1 I-2 I-3 (2) I-1 ( ) (100 ) 2l x x = 0 y t y(x, t) y(±l, t) = 0 m T g y(x, t) l y(x, t) c = 2 y(x, t) c 2 2 y(x, t) = g (A) t 2 x 2 T/m (1) y 0 (x) y 0 (x) = g c 2 (l2 x 2 ) (B) (2) (1)
If(A) Vx(V) 1 最小 2 乗法で実験式のパラメータが導出できる測定で得られたデータをよく近似する式を実験式という. その利点は (M1) 多量のデータの特徴を一つの式で簡潔に表現できること. また (M2) y = f ( x ) の関係から, 任意の x のときの y が求まるので,
 Vx(V) 1 最小 2 乗法で実験式のパラメータが導出できる測定で得られたデータをよく近似する式を実験式という. その利点は (M1) 多量のデータの特徴を一つの式で簡潔に表現できること. また (M2) y = f ( x ) の関係から, 任意の x のときの y が求まるので,") If(A) Vx(V) 1 最小 乗法で実験式のパラメータが導出できる測定で得られたデータをよく近似する式を実験式という. その利点は (M1) 多量のデータの特徴を一つの式で簡潔に表現できること. また (M) y = f ( x ) の関係から, 任意の x のときの y が求まるので, 未測定点の予測ができること. また (M3) 現象が比較的単純であれば, 現象を支配 する原理の式が分かることである.
If(A) Vx(V) 1 最小 乗法で実験式のパラメータが導出できる測定で得られたデータをよく近似する式を実験式という. その利点は (M1) 多量のデータの特徴を一つの式で簡潔に表現できること. また (M) y = f ( x ) の関係から, 任意の x のときの y が求まるので, 未測定点の予測ができること. また (M3) 現象が比較的単純であれば, 現象を支配 する原理の式が分かることである.
R R 16 ( 3 )
") (017 ) 9 4 7 ( ) ( 3 ) ( 010 ) 1 (P3) 1 11 (P4) 1 1 (P4) 1 (P15) 1 (P16) (P0) 3 (P18) 3 4 (P3) 4 3 4 31 1 5 3 5 4 6 5 9 51 9 5 9 6 9 61 9 6 α β 9 63 û 11 64 R 1 65 13 66 14 7 14 71 15 7 R R 16 http://wwwecoosaka-uacjp/~tazak/class/017
(017 ) 9 4 7 ( ) ( 3 ) ( 010 ) 1 (P3) 1 11 (P4) 1 1 (P4) 1 (P15) 1 (P16) (P0) 3 (P18) 3 4 (P3) 4 3 4 31 1 5 3 5 4 6 5 9 51 9 5 9 6 9 61 9 6 α β 9 63 û 11 64 R 1 65 13 66 14 7 14 71 15 7 R R 16 http://wwwecoosaka-uacjp/~tazak/class/017
SAP11_03
 第 3 回 音声音響信号処理 ( 線形予測分析と自己回帰モデル ) 亀岡弘和 東京大学大学院情報理工学系研究科日本電信電話株式会社 NTT コミュニケーション科学基礎研究所 講義内容 ( キーワード ) 信号処理 符号化 標準化の実用システム例の紹介情報通信の基本 ( 誤り検出 訂正符号 変調 IP) 符号化技術の基本 ( 量子化 予測 変換 圧縮 ) 音声分析 合成 認識 強調 音楽信号処理統計的信号処理の基礎
第 3 回 音声音響信号処理 ( 線形予測分析と自己回帰モデル ) 亀岡弘和 東京大学大学院情報理工学系研究科日本電信電話株式会社 NTT コミュニケーション科学基礎研究所 講義内容 ( キーワード ) 信号処理 符号化 標準化の実用システム例の紹介情報通信の基本 ( 誤り検出 訂正符号 変調 IP) 符号化技術の基本 ( 量子化 予測 変換 圧縮 ) 音声分析 合成 認識 強調 音楽信号処理統計的信号処理の基礎
6 2 2 x y x y t P P = P t P = I P P P ( ) ( ) ,, ( ) ( ) cos θ sin θ cos θ sin θ, sin θ cos θ sin θ cos θ y x θ x θ P
 ( ) ,, ( ) ( ) cos θ sin θ cos θ sin θ, sin θ cos θ sin θ cos θ y x θ x θ P") 6 x x 6.1 t P P = P t P = I P P P 1 0 1 0,, 0 1 0 1 cos θ sin θ cos θ sin θ, sin θ cos θ sin θ cos θ x θ x θ P x P x, P ) = t P x)p ) = t x t P P ) = t x = x, ) 6.1) x = Figure 6.1 Px = x, P=, θ = θ P
6 x x 6.1 t P P = P t P = I P P P 1 0 1 0,, 0 1 0 1 cos θ sin θ cos θ sin θ, sin θ cos θ sin θ cos θ x θ x θ P x P x, P ) = t P x)p ) = t x t P P ) = t x = x, ) 6.1) x = Figure 6.1 Px = x, P=, θ = θ P
Microsoft PowerPoint - LectureB1_17woAN.pptx
 本講義の範囲 都市防災工学 後半第 回 : 導入 確率過程の基礎 千葉大学大学院工学研究院都市環境システムコース岡野創 http://oko-lb.tu.chib-u.c.jp/oshibousi/. ランダム振動論 地震動を不規則波形 ( 確率過程 ) と捉えて, 構造物の地震応答を評価する理論. 震源モデルによる地震動評価 断層の動きを仮定して, 断層から発せられる地震動を評価する方法 ( 運動学的モデル
本講義の範囲 都市防災工学 後半第 回 : 導入 確率過程の基礎 千葉大学大学院工学研究院都市環境システムコース岡野創 http://oko-lb.tu.chib-u.c.jp/oshibousi/. ランダム振動論 地震動を不規則波形 ( 確率過程 ) と捉えて, 構造物の地震応答を評価する理論. 震源モデルによる地震動評価 断層の動きを仮定して, 断層から発せられる地震動を評価する方法 ( 運動学的モデル
Gmech08.dvi
 145 13 13.1 13.1.1 0 m mg S 13.1 F 13.1 F /m S F F 13.1 F mg S F F mg 13.1: m d2 r 2 = F + F = 0 (13.1) 146 13 F = F (13.2) S S S S S P r S P r r = r 0 + r (13.3) r 0 S S m d2 r 2 = F (13.4) (13.3) d 2
145 13 13.1 13.1.1 0 m mg S 13.1 F 13.1 F /m S F F 13.1 F mg S F F mg 13.1: m d2 r 2 = F + F = 0 (13.1) 146 13 F = F (13.2) S S S S S P r S P r r = r 0 + r (13.3) r 0 S S m d2 r 2 = F (13.4) (13.3) d 2
untitled
 主成分分析 (Prncpal Component Analy) で情報を集約する マルチスペクトル画像 なし が情報を集約する 69.68 77.97 85.73 96.7 98.8 画像 : NASA 除去できる一部に集約 あり.24.35 4.63 7.65 3.9 分散の比率 最大を 255, 最小を に正規化して表示 3 つの成分から画像を再生した 信号処理の手順 行列 A 共分散行列に対する
主成分分析 (Prncpal Component Analy) で情報を集約する マルチスペクトル画像 なし が情報を集約する 69.68 77.97 85.73 96.7 98.8 画像 : NASA 除去できる一部に集約 あり.24.35 4.63 7.65 3.9 分散の比率 最大を 255, 最小を に正規化して表示 3 つの成分から画像を再生した 信号処理の手順 行列 A 共分散行列に対する
120 9 I I 1 I 2 I 1 I 2 ( a) ( b) ( c ) I I 2 I 1 I ( d) ( e) ( f ) 9.1: Ampère (c) (d) (e) S I 1 I 2 B ds = µ 0 ( I 1 I 2 ) I 1 I 2 B ds =0. I 1 I 2
 ( b) ( c ) I I 2 I 1 I ( d) ( e) ( f ) 9.1: Ampère (c) (d) (e) S I 1 I 2 B ds = µ 0 ( I 1 I 2 ) I 1 I 2 B ds =0. I 1 I 2") 9 E B 9.1 9.1.1 Ampère Ampère Ampère s law B S µ 0 B ds = µ 0 j ds (9.1) S rot B = µ 0 j (9.2) S Ampère Biot-Savart oulomb Gauss Ampère rot B 0 Ampère µ 0 9.1 (a) (b) I B ds = µ 0 I. I 1 I 2 B ds = µ 0
9 E B 9.1 9.1.1 Ampère Ampère Ampère s law B S µ 0 B ds = µ 0 j ds (9.1) S rot B = µ 0 j (9.2) S Ampère Biot-Savart oulomb Gauss Ampère rot B 0 Ampère µ 0 9.1 (a) (b) I B ds = µ 0 I. I 1 I 2 B ds = µ 0
統計的データ解析
 統計的データ解析 011 011.11.9 林田清 ( 大阪大学大学院理学研究科 ) 連続確率分布の平均値 分散 比較のため P(c ) c 分布 自由度 の ( カイ c 平均値 0, 標準偏差 1の正規分布 に従う変数 xの自乗和 c x =1 が従う分布を自由度 の分布と呼ぶ 一般に自由度の分布は f /1 c / / ( c ) {( c ) e }/ ( / ) 期待値 二乗 ) 分布 c
統計的データ解析 011 011.11.9 林田清 ( 大阪大学大学院理学研究科 ) 連続確率分布の平均値 分散 比較のため P(c ) c 分布 自由度 の ( カイ c 平均値 0, 標準偏差 1の正規分布 に従う変数 xの自乗和 c x =1 が従う分布を自由度 の分布と呼ぶ 一般に自由度の分布は f /1 c / / ( c ) {( c ) e }/ ( / ) 期待値 二乗 ) 分布 c
Microsoft PowerPoint - multi_media05-dct_jpeg [互換モード]
![Microsoft PowerPoint - multi_media05-dct_jpeg [互換モード]](/thumbs/66/54949554.jpg "Microsoft PowerPoint - multi_media05-dct_jpeg [互換モード]") マルチメディア工学 マルチメディアデータの解析データ圧縮 : 離散コサイン変換と JPEG マルチメディア工学 : 講義計画 イントロダクション コンピュータグラフィックス (Computer Graphics: CG) マルチメディアデータの解析 佐藤嘉伸 大阪大学大学院医学系研究科放射線統合医学講座 yoshi@image.med.osaka u.ac.jp http://www.image.med.osaka
マルチメディア工学 マルチメディアデータの解析データ圧縮 : 離散コサイン変換と JPEG マルチメディア工学 : 講義計画 イントロダクション コンピュータグラフィックス (Computer Graphics: CG) マルチメディアデータの解析 佐藤嘉伸 大阪大学大学院医学系研究科放射線統合医学講座 yoshi@image.med.osaka u.ac.jp http://www.image.med.osaka
Microsoft PowerPoint - multi_media05-dct_jpeg [互換モード]
![Microsoft PowerPoint - multi_media05-dct_jpeg [互換モード]](/thumbs/66/54949621.jpg "Microsoft PowerPoint - multi_media05-dct_jpeg [互換モード]") マルチメディア工学マルチメディアデータの解析データ圧縮 : 離散コサイン変換と JPEG 佐藤嘉伸 マルチメディア工学 : 講義計画 マルチメディアデータの解析 基礎数理 代表的解析手法 データ圧縮 : 離散コサイン変換 JPEG データ表現 : 形状の主成分分析 奈良先端科学技術大学院大学情報科学研究科生体医用画像研究室 yoshi@is.naist.jp http://icb lab.naist.jp/members/yoshi/
マルチメディア工学マルチメディアデータの解析データ圧縮 : 離散コサイン変換と JPEG 佐藤嘉伸 マルチメディア工学 : 講義計画 マルチメディアデータの解析 基礎数理 代表的解析手法 データ圧縮 : 離散コサイン変換 JPEG データ表現 : 形状の主成分分析 奈良先端科学技術大学院大学情報科学研究科生体医用画像研究室 yoshi@is.naist.jp http://icb lab.naist.jp/members/yoshi/
N cos s s cos ψ e e e e 3 3 e e 3 e 3 e
 3 3 5 5 5 3 3 7 5 33 5 33 9 5 8 > e > f U f U u u > u ue u e u ue u ue u e u e u u e u u e u N cos s s cos ψ e e e e 3 3 e e 3 e 3 e 3 > A A > A E A f A A f A [ ] f A A e > > A e[ ] > f A E A < < f ; >
3 3 5 5 5 3 3 7 5 33 5 33 9 5 8 > e > f U f U u u > u ue u e u ue u ue u e u e u u e u u e u N cos s s cos ψ e e e e 3 3 e e 3 e 3 e 3 > A A > A E A f A A f A [ ] f A A e > > A e[ ] > f A E A < < f ; >
i
 i 3 4 4 7 5 6 3 ( ).. () 3 () (3) (4) /. 3. 4/3 7. /e 8. a > a, a = /, > a >. () a >, a =, > a > () a > b, a = b, a < b. c c n a n + b n + c n 3c n..... () /3 () + (3) / (4) /4 (5) m > n, a b >, m > n,
i 3 4 4 7 5 6 3 ( ).. () 3 () (3) (4) /. 3. 4/3 7. /e 8. a > a, a = /, > a >. () a >, a =, > a > () a > b, a = b, a < b. c c n a n + b n + c n 3c n..... () /3 () + (3) / (4) /4 (5) m > n, a b >, m > n,
,. Black-Scholes u t t, x c u 0 t, x x u t t, x c u t, x x u t t, x + σ x u t, x + rx ut, x rux, t 0 x x,,.,. Step 3, 7,,, Step 6., Step 4,. Step 5,,.
 9 α ν β Ξ ξ Γ γ o δ Π π ε ρ ζ Σ σ η τ Θ θ Υ υ ι Φ φ κ χ Λ λ Ψ ψ µ Ω ω Def, Prop, Th, Lem, Note, Remark, Ex,, Proof, R, N, Q, C [a, b {x R : a x b} : a, b {x R : a < x < b} : [a, b {x R : a x < b} : a,
9 α ν β Ξ ξ Γ γ o δ Π π ε ρ ζ Σ σ η τ Θ θ Υ υ ι Φ φ κ χ Λ λ Ψ ψ µ Ω ω Def, Prop, Th, Lem, Note, Remark, Ex,, Proof, R, N, Q, C [a, b {x R : a x b} : a, b {x R : a < x < b} : [a, b {x R : a x < b} : a,
Microsoft PowerPoint - 資料04 重回帰分析.ppt
 04. 重回帰分析 京都大学 加納学 Division of Process Control & Process Sstems Engineering Department of Chemical Engineering, Koto Universit manabu@cheme.koto-u.ac.jp http://www-pse.cheme.koto-u.ac.jp/~kano/ Outline
04. 重回帰分析 京都大学 加納学 Division of Process Control & Process Sstems Engineering Department of Chemical Engineering, Koto Universit manabu@cheme.koto-u.ac.jp http://www-pse.cheme.koto-u.ac.jp/~kano/ Outline
PowerPoint Presentation
 Non-linea factue mechanics き裂先端付近の塑性変形 塑性域 R 破壊進行領域応カ特異場 Ω R R Hutchinson, Rice and Rosengen 全ひずみ塑性理論に基づいた解析 現段階のひずみは 除荷がないとすると現段階の応力で一義的に決まる 単純引張り時の応カーひずみ関係 ( 構成方程式 ): ( ) ( ) n () y y y ここで α,n 定数, /
Non-linea factue mechanics き裂先端付近の塑性変形 塑性域 R 破壊進行領域応カ特異場 Ω R R Hutchinson, Rice and Rosengen 全ひずみ塑性理論に基づいた解析 現段階のひずみは 除荷がないとすると現段階の応力で一義的に決まる 単純引張り時の応カーひずみ関係 ( 構成方程式 ): ( ) ( ) n () y y y ここで α,n 定数, /
曲面のパラメタ表示と接線ベクトル
 L11(2011-07-06 Wed) :Time-stamp: 2011-07-06 Wed 13:08 JST hig 1,,. 2. http://hig3.net () (L11) 2011-07-06 Wed 1 / 18 ( ) 1 V = (xy2 ) x + (2y) y = y 2 + 2. 2 V = 4y., D V ds = 2 2 ( ) 4 x 2 4y dy dx =
L11(2011-07-06 Wed) :Time-stamp: 2011-07-06 Wed 13:08 JST hig 1,,. 2. http://hig3.net () (L11) 2011-07-06 Wed 1 / 18 ( ) 1 V = (xy2 ) x + (2y) y = y 2 + 2. 2 V = 4y., D V ds = 2 2 ( ) 4 x 2 4y dy dx =
ii 3.,. 4. F. (), ,,. 8.,. 1. (75%) (25%) =7 20, =7 21 (. ). 1.,, (). 3.,. 1. ().,.,.,.,.,. () (12 )., (), 0. 2., 1., 0,.
, ,,. 8.,. 1. (75%) (25%) =7 20, =7 21 (. ). 1.,, (). 3.,. 1. ().,.,.,.,.,. () (12 )., (), 0. 2., 1., 0,.") 24(2012) (1 C106) 4 11 (2 C206) 4 12 http://www.math.is.tohoku.ac.jp/~obata,.,,,.. 1. 2. 3. 4. 5. 6. 7.,,. 1., 2007 (). 2. P. G. Hoel, 1995. 3... 1... 2.,,. ii 3.,. 4. F. (),.. 5... 6.. 7.,,. 8.,. 1. (75%)
24(2012) (1 C106) 4 11 (2 C206) 4 12 http://www.math.is.tohoku.ac.jp/~obata,.,,,.. 1. 2. 3. 4. 5. 6. 7.,,. 1., 2007 (). 2. P. G. Hoel, 1995. 3... 1... 2.,,. ii 3.,. 4. F. (),.. 5... 6.. 7.,,. 8.,. 1. (75%)
ma22-9 u ( v w) = u v w sin θê = v w sin θ u cos φ = = 2.3 ( a b) ( c d) = ( a c)( b d) ( a d)( b c) ( a b) ( c d) = (a 2 b 3 a 3 b 2 )(c 2 d 3 c 3 d
 = u v w sin θê = v w sin θ u cos φ = = 2.3 ( a b) ( c d) = ( a c)( b d) ( a d)( b c) ( a b) ( c d) = (a 2 b 3 a 3 b 2 )(c 2 d 3 c 3 d") A 2. x F (t) =f sin ωt x(0) = ẋ(0) = 0 ω θ sin θ θ 3! θ3 v = f mω cos ωt x = f mω (t sin ωt) ω t 0 = f ( cos ωt) mω x ma2-2 t ω x f (t mω ω (ωt ) 6 (ωt)3 = f 6m ωt3 2.2 u ( v w) = v ( w u) = w ( u v) ma22-9
A 2. x F (t) =f sin ωt x(0) = ẋ(0) = 0 ω θ sin θ θ 3! θ3 v = f mω cos ωt x = f mω (t sin ωt) ω t 0 = f ( cos ωt) mω x ma2-2 t ω x f (t mω ω (ωt ) 6 (ωt)3 = f 6m ωt3 2.2 u ( v w) = v ( w u) = w ( u v) ma22-9
2010年度 筑波大・理系数学
 00 筑波大学 ( 理系 ) 前期日程問題 解答解説のページへ f( x) x ax とおく ただしa>0 とする () f( ) f() となるa の範囲を求めよ () f(x) の極小値が f ( ) 以下になる a の範囲を求めよ () x における f(x) の最小値をa を用いて表せ -- 00 筑波大学 ( 理系 ) 前期日程問題 解答解説のページへ つの曲線 C : y six ( 0
00 筑波大学 ( 理系 ) 前期日程問題 解答解説のページへ f( x) x ax とおく ただしa>0 とする () f( ) f() となるa の範囲を求めよ () f(x) の極小値が f ( ) 以下になる a の範囲を求めよ () x における f(x) の最小値をa を用いて表せ -- 00 筑波大学 ( 理系 ) 前期日程問題 解答解説のページへ つの曲線 C : y six ( 0
Microsoft Word - 03-数値計算の基礎.docx
 δx f x 0 + δ x n=0 a n = f ( n) ( x 0 ) n δx n f x x=0 sin x = x x3 3 + x5 5 x7 7 +... x ( ) = a n δ x n ( ) = sin x ak = (-mod(k,2))**(k/2) / fact_k 10 11 I = f x dx a ΔS = f ( x)h I = f a h I = h b (
δx f x 0 + δ x n=0 a n = f ( n) ( x 0 ) n δx n f x x=0 sin x = x x3 3 + x5 5 x7 7 +... x ( ) = a n δ x n ( ) = sin x ak = (-mod(k,2))**(k/2) / fact_k 10 11 I = f x dx a ΔS = f ( x)h I = f a h I = h b (
カイ二乗フィット検定、パラメータの誤差
 統計的データ解析 008 008.. 林田清 ( 大阪大学大学院理学研究科 ) 問題 C (, ) ( x xˆ) ( y yˆ) σ x πσ σ y y Pabx (, ;,,, ) ˆ y σx σ y = dx exp exp πσx ただし xy ˆ ˆ はyˆ = axˆ+ bであらわされる直線モデル上の点 ( ˆ) ( ˆ ) ( ) x x y ax b y ax b Pabx (,
統計的データ解析 008 008.. 林田清 ( 大阪大学大学院理学研究科 ) 問題 C (, ) ( x xˆ) ( y yˆ) σ x πσ σ y y Pabx (, ;,,, ) ˆ y σx σ y = dx exp exp πσx ただし xy ˆ ˆ はyˆ = axˆ+ bであらわされる直線モデル上の点 ( ˆ) ( ˆ ) ( ) x x y ax b y ax b Pabx (,
Xray.dvi
 1 X 1 X 1 1.1.............................. 1 1.2.................................. 3 1.3........................ 3 2 4 2.1.................................. 6 2.2 n ( )............. 6 3 7 3.1 ( ).....................
1 X 1 X 1 1.1.............................. 1 1.2.................................. 3 1.3........................ 3 2 4 2.1.................................. 6 2.2 n ( )............. 6 3 7 3.1 ( ).....................
D xy D (x, y) z = f(x, y) f D (2 ) (x, y, z) f R z = 1 x 2 y 2 {(x, y); x 2 +y 2 1} x 2 +y 2 +z 2 = 1 1 z (x, y) R 2 z = x 2 y
 z = f(x, y) f D (2 ) (x, y, z) f R z = 1 x 2 y 2 {(x, y); x 2 +y 2 1} x 2 +y 2 +z 2 = 1 1 z (x, y) R 2 z = x 2 y") 5 5. 2 D xy D (x, y z = f(x, y f D (2 (x, y, z f R 2 5.. z = x 2 y 2 {(x, y; x 2 +y 2 } x 2 +y 2 +z 2 = z 5.2. (x, y R 2 z = x 2 y + 3 (2,,, (, 3,, 3 (,, 5.3 (. (3 ( (a, b, c A : (x, y, z P : (x, y, x
5 5. 2 D xy D (x, y z = f(x, y f D (2 (x, y, z f R 2 5.. z = x 2 y 2 {(x, y; x 2 +y 2 } x 2 +y 2 +z 2 = z 5.2. (x, y R 2 z = x 2 y + 3 (2,,, (, 3,, 3 (,, 5.3 (. (3 ( (a, b, c A : (x, y, z P : (x, y, x
Sample function Re random process Flutter, Galloping, etc. ensemble (mean value) N 1 µ = lim xk( t1) N k = 1 N autocorrelation function N 1 R( t1, t1
 N 1 µ = lim xk( t1) N k = 1 N autocorrelation function N 1 R( t1, t1") Sample function Re random process Flutter, Galloping, etc. ensemble (mean value) µ = lim xk( k = autocorrelation function R( t, t + τ) = lim ( ) ( + τ) xk t xk t k = V p o o R p o, o V S M R realization
Sample function Re random process Flutter, Galloping, etc. ensemble (mean value) µ = lim xk( k = autocorrelation function R( t, t + τ) = lim ( ) ( + τ) xk t xk t k = V p o o R p o, o V S M R realization
スライド 1
 暫定版修正 加筆の可能性あり ( 付録 ) デルタ関数. ローレンツ関数. ガウス関数 3. Sinc 関数 4. Sinc 関数 5. 指数関数 6. 量子力学 : デルタ関数 7. プレメリの公式 8. 電磁気学 : デルタ関数 9. デルタ関数 : スケール 微分 デルタ関数 (delta function) ( ) δ ( ) ( ), δ ( ), δ ( ), δ ( ) f x x dx
暫定版修正 加筆の可能性あり ( 付録 ) デルタ関数. ローレンツ関数. ガウス関数 3. Sinc 関数 4. Sinc 関数 5. 指数関数 6. 量子力学 : デルタ関数 7. プレメリの公式 8. 電磁気学 : デルタ関数 9. デルタ関数 : スケール 微分 デルタ関数 (delta function) ( ) δ ( ) ( ), δ ( ), δ ( ), δ ( ) f x x dx
 II 1 3 2 5 3 7 4 8 5 11 6 13 7 16 8 18 2 1 1. x 2 + xy x y (1 lim (x,y (1,1 x 1 x 3 + y 3 (2 lim (x,y (, x 2 + y 2 x 2 (3 lim (x,y (, x 2 + y 2 xy (4 lim (x,y (, x 2 + y 2 x y (5 lim (x,y (, x + y x 3y
II 1 3 2 5 3 7 4 8 5 11 6 13 7 16 8 18 2 1 1. x 2 + xy x y (1 lim (x,y (1,1 x 1 x 3 + y 3 (2 lim (x,y (, x 2 + y 2 x 2 (3 lim (x,y (, x 2 + y 2 xy (4 lim (x,y (, x 2 + y 2 x y (5 lim (x,y (, x + y x 3y
x () g(x) = f(t) dt f(x), F (x) 3x () g(x) g (x) f(x), F (x) (3) h(x) = x 3x tf(t) dt.9 = {(x, y) ; x, y, x + y } f(x, y) = xy( x y). h (x) f(x), F (x
 g(x) = f(t) dt f(x), F (x) 3x () g(x) g (x) f(x), F (x) (3) h(x) = x 3x tf(t) dt.9 = {(x, y) ; x, y, x + y } f(x, y) = xy( x y). h (x) f(x), F (x") [ ] IC. f(x) = e x () f(x) f (x) () lim f(x) lim f(x) x + x (3) lim f(x) lim f(x) x + x (4) y = f(x) ( ) ( s46). < a < () a () lim a log xdx a log xdx ( ) n (3) lim log k log n n n k=.3 z = log(x + y ),
[ ] IC. f(x) = e x () f(x) f (x) () lim f(x) lim f(x) x + x (3) lim f(x) lim f(x) x + x (4) y = f(x) ( ) ( s46). < a < () a () lim a log xdx a log xdx ( ) n (3) lim log k log n n n k=.3 z = log(x + y ),
II No.01 [n/2] [1]H n (x) H n (x) = ( 1) r n! r!(n 2r)! (2x)n 2r. r=0 [2]H n (x) n,, H n ( x) = ( 1) n H n (x). [3] H n (x) = ( 1) n dn x2 e dx n e x2
![II No.01 [n/2] [1]H n (x) H n (x) = ( 1) r n! r!(n 2r)! (2x)n 2r. r=0 [2]H n (x) n,, H n ( x) = ( 1) n H n (x). [3] H n (x) = ( 1) n dn x2 e dx n e x2](/thumbs/101/149159646.jpg "II No.01 [n/2] [1]H n (x) H n (x) = ( 1) r n! r!(n 2r)! (2x)n 2r. r=0 [2]H n (x) n,, H n ( x) = ( 1) n H n (x). [3] H n (x) = ( 1) n dn x2 e dx n e x2") II No.1 [n/] [1]H n x) H n x) = 1) r n! r!n r)! x)n r r= []H n x) n,, H n x) = 1) n H n x) [3] H n x) = 1) n dn x e dx n e x [4] H n+1 x) = xh n x) nh n 1 x) ) d dx x H n x) = H n+1 x) d dx H nx) = nh
II No.1 [n/] [1]H n x) H n x) = 1) r n! r!n r)! x)n r r= []H n x) n,, H n x) = 1) n H n x) [3] H n x) = 1) n dn x e dx n e x [4] H n+1 x) = xh n x) nh n 1 x) ) d dx x H n x) = H n+1 x) d dx H nx) = nh
(Microsoft Word - 10ta320a_\220U\223\256\212w\223\301\230__6\217\315\221O\224\274\203\214\203W\203\201.docx)
") 6 章スペクトルの平滑化 スペクトルの平滑化とはフーリエスペクトルやパワ スペクトルのギザギザを取り除き 滑らかにする操作のことをいう ただし 波のもっている本質的なものをゆがめてはいけない 図 6-7 パワ スペクトルの平滑化 6. 合積のフーリエ変換スペクトルの平滑化を学ぶ前に 合積とそのフーリエ変換について説明する 6. データ ウィンドウデータ ウィンドウの定義と特徴について説明する 6.3
6 章スペクトルの平滑化 スペクトルの平滑化とはフーリエスペクトルやパワ スペクトルのギザギザを取り除き 滑らかにする操作のことをいう ただし 波のもっている本質的なものをゆがめてはいけない 図 6-7 パワ スペクトルの平滑化 6. 合積のフーリエ変換スペクトルの平滑化を学ぶ前に 合積とそのフーリエ変換について説明する 6. データ ウィンドウデータ ウィンドウの定義と特徴について説明する 6.3
 2005 2006.2.22-1 - 1 Fig. 1 2005 2006.2.22-2 - Element-Free Galerkin Method (EFGM) Meshless Local Petrov-Galerkin Method (MLPGM) 2005 2006.2.22-3 - 2 MLS u h (x) 1 p T (x) = [1, x, y]. (1) φ(x) 0.5 φ(x)
2005 2006.2.22-1 - 1 Fig. 1 2005 2006.2.22-2 - Element-Free Galerkin Method (EFGM) Meshless Local Petrov-Galerkin Method (MLPGM) 2005 2006.2.22-3 - 2 MLS u h (x) 1 p T (x) = [1, x, y]. (1) φ(x) 0.5 φ(x)
2. 2 P M A 2 F = mmg AP AP 2 AP (G > : ) AP/ AP A P P j M j F = n j=1 mm j G AP j AP j 2 AP j 3 P ψ(p) j ψ(p j ) j (P j j ) A F = n j=1 mgψ(p j ) j AP
 AP/ AP A P P j M j F = n j=1 mm j G AP j AP j 2 AP j 3 P ψ(p) j ψ(p j ) j (P j j ) A F = n j=1 mgψ(p j ) j AP") 1. 1 213 1 6 1 3 1: ( ) 2: 3: SF 1 2 3 1: 3 2 A m 2. 2 P M A 2 F = mmg AP AP 2 AP (G > : ) AP/ AP A P P j M j F = n j=1 mm j G AP j AP j 2 AP j 3 P ψ(p) j ψ(p j ) j (P j j ) A F = n j=1 mgψ(p j ) j AP
1. 1 213 1 6 1 3 1: ( ) 2: 3: SF 1 2 3 1: 3 2 A m 2. 2 P M A 2 F = mmg AP AP 2 AP (G > : ) AP/ AP A P P j M j F = n j=1 mm j G AP j AP j 2 AP j 3 P ψ(p) j ψ(p j ) j (P j j ) A F = n j=1 mgψ(p j ) j AP
Microsoft PowerPoint - LectureB1handout.ppt [互換モード]
![Microsoft PowerPoint - LectureB1handout.ppt [互換モード]](/thumbs/89/97916837.jpg "Microsoft PowerPoint - LectureB1handout.ppt [互換モード]") 本講義のスコープ 都市防災工学 後半第 回 : イントロダクション 千葉大学大学院工学研究科建築 都市科学専攻都市環境システムコース岡野創 耐震工学の専門家として知っていた方が良いが 敷居が高く 入り口で挫折しがちな分野をいくつか取り上げて説明 ランダム振動論 地震波形に対する構造物応答の理論的把握 減衰と地震応答 エネルギーバランス 地震動の各種スペクトルの相互関係 震源モデル 近年では震源モデルによる地震動予測が良く行われている
本講義のスコープ 都市防災工学 後半第 回 : イントロダクション 千葉大学大学院工学研究科建築 都市科学専攻都市環境システムコース岡野創 耐震工学の専門家として知っていた方が良いが 敷居が高く 入り口で挫折しがちな分野をいくつか取り上げて説明 ランダム振動論 地震波形に対する構造物応答の理論的把握 減衰と地震応答 エネルギーバランス 地震動の各種スペクトルの相互関係 震源モデル 近年では震源モデルによる地震動予測が良く行われている