第1回情報ネットワーク科学研究会
|
|
|
- のぶあき うるしはた
- 5 years ago
- Views:
Transcription
1 アナログ電子回路系における 確率共鳴とカオス共鳴 北海道大学大学院情報科学研究科 浅井哲也
 http://www.uragi.osaka-u.ac.")
2 生体ゆらぎに学ぶ知的人工物と情報システム 平成 8- 年度文部科学省科学技術振興調整費 先端融合領域イノベーション創出拠点の形成 プログラム大阪大学 ( オムロン 日本電子 NTT ニプロ 松下電器 三菱重工 AT NIT 国立循環器病センター )
( コスト ) を満たす u(t) のダイナミクスを求める u( 状態 )")
 を高温から低温に徐々に下げていくことで local minimum を避ける手法 :")
3 雑音利用情報処理 ( 古典的 ) ( アナログコンピュータ / ニューラルネットを用いた最適化問題 ) 最急降下法 H(u)( コスト ) を満たす u(t) のダイナミクスを求める u( 状態 ) このダイナミクスに雑音を加える (= ゆらぎ方程式 ) * これに平均場 (<u(t)>) の概念を導入し 温度 ( 状態遷移確率 ) を高温から低温に徐々に下げていくことで local minimum を避ける手法 : シミュレーテッドアニーリング

4 生物に学ぶ雑音利用情報処理 ( トップダウン ) (From ITS 0 ED hapter, EA Section Draft)
5 ゆらぎを積極的に利用するナノ情報処理システムの開拓科研費新学術領域研究 分子ナノシステムの創発化学 (H0-4 年度 ) 確率共鳴センサ 雑音の力を借りて微小信号を検出 A/D 変換 雑音の力を借りて低周波雑音を抑制 高速信号伝送 雑音の力を借りて超低速 超低消費電力回路の集団で高速パルス伝送 雑音誘起位相同期 雑音の力を借りて独立した回路群の位相を強制同期 確率共鳴メモリ 雑音の力を借りて極低電圧 低消費電力メモリを正しく動作させる 脳型学習回路 雑音の力を借りて記憶を行う

6 二重井戸系における確率共鳴 領域 0 領域 外力 U(,t) = Asin(πft) + ξ(t) ノイズ ξ(t)ξ(0) = Dδ(t) ノイズ大 確率的遷移 ノイズ小 雑音による振動 外力によるしきいの変化 L. Gammaitoni, et al"stochastic resonance eviews of Modern Phsics, Vol. 70, No., Januar 998
 n + = a( n")



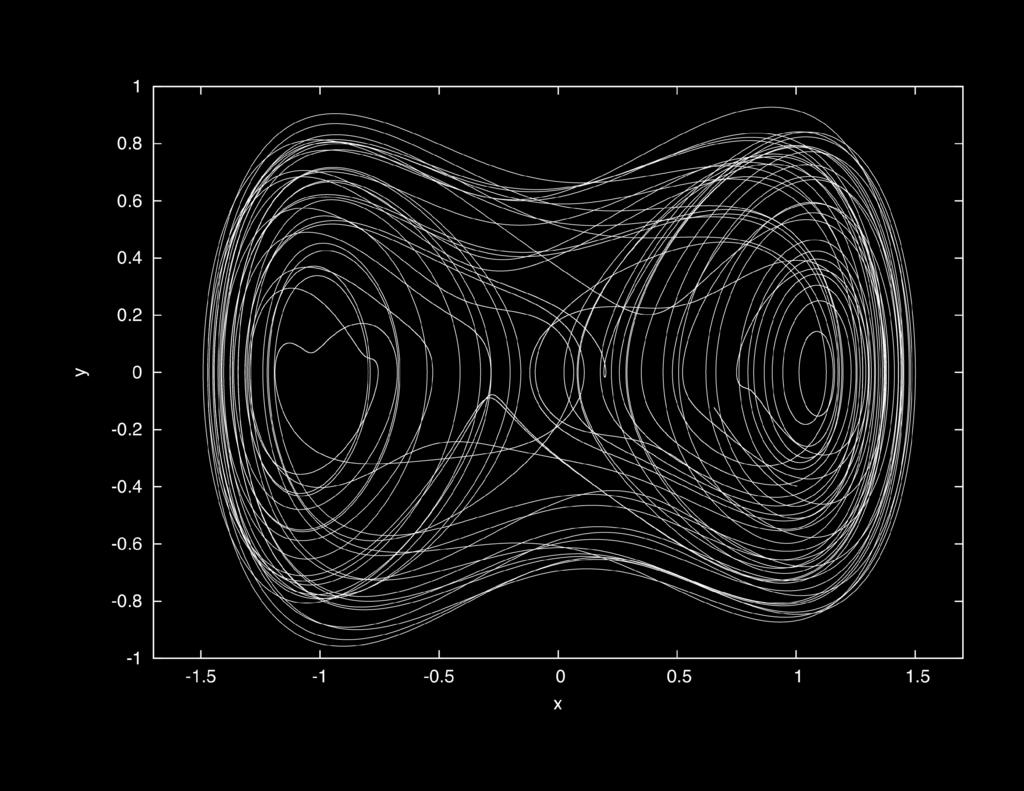
7 カオス共鳴? 離散時間系 (ubic 写像 ) n + = a( n n 3 )ep( n /b) + AsinπΩn A=0.005,b=0,Ω=0. つのアトラクタ 外部信号 連続時間系ローレンツ系 ダブルスクロール系 ダフィン系 []. 西村治彦, et al. カオス系における決定論的共鳴の特性評価 IEIE technical report. ircuits and sstems 06(73), 5-8,
 空気抵抗 δ http://www.")
8 ダフィング系 d = d = δ + β α 3 + γ cos ωt ( ) 外力 外力 γ cos( ωt) 空気抵抗 δ δ = 0., β =, α =, γ = 0.3, ω =


9 d = ダフィング系のパラメータ d = δ + β α 3 + γ cos( πft) δ>0 δ=0 β>0 β<0 領域 0 領域 領域 0 領域
10 回路向け擬似ダフィング方程式 ダフィング方程式 d = d = δ + β α 3 + γ cos( ωt) = 0 = 3. =0 d = d ヌルクライン 擬似ダフィング方程式 非線形項 = + tanh k = 0 ( ) 外力項 ( ) ( ) + Asin πft = arctanh( ) k ( k ) = Fukuda E.S., Tovar G.M., Asai T., Hirose T., and Amemia Y., "Neuromorphic MOS circuits implementing a novel neural segmentation model based on smmetric STDP learning, Journal of Signal Processing, vol., no. 6, pp (007).
11 擬似ダフィン系のハミルトニアン d = d = + tanh( k( ) ) H = + k lncosh k H = { ( )} k のとき - で近似 < 0 H = $ + + & ' + ) % ( H = $ + & ' + ) % ( > 0 H = $ + + & ' ) % ( H = $ + & ' ) % ( H(, ) = ( + ) asgn( )


 asgn(")

12 z ダフィング方程式 擬似ダフィング方程式 H(, ) = H(, ) = + z ( ) asgn( ) 領域 0 領域 領域 0 領域
13 位相平面上の振舞い () ダフィング方程式 d = d = δ + β α 3 + γ cos πft ( ) δ = 0., β =, α =, γ = 0.3 d = d 擬似ダフィング方程式 = + sgn( ) + Asin( πft) A = 0.5 f=0.06hz 領域 0 領域 領域 0 f=5hz 領域 領域 0 または にトラップ
 ( ) 擬似ダフィング方程式 d =")

14 ダフィング方程式 d = d = δ + β α 3 + γ cos πft f=0.6hz 領域 0 領域 位相平面上の振舞い () ( ) 擬似ダフィング方程式 d = d = + sgn( ) + Asin( πft) 領域 0 f=0.4hz 0.4 δ = 0., β =, α =, γ = 0.3 A = 0. 5 つの領域を遷移 領域
15 d d = 周波数をパラメータとした分岐図 ダフィング方程式 = δ + β α 3 + γ cos ( πft) 擬似ダフィング方程式 d = d = + sgn + ( ) Asin( πft) Frequenc[Hz] Frequenc[Hz] δ = 0., β =, α =, γ = 0.3 A = 0. 5
 -V dd A sin(πft) = + a sgn( ) + Asin(")

16 個別部品回路による実装とパラメータ設定 V dd -V dd - V dd -V dd V dd -V dd τ d = τ d V dd r V dd sgn(-) -V dd A sin(πft) = + a sgn( ) + Asin( πft),, a, Aは電圧, τ =, a = V dd /r V dd =5V, r = 5MΩ, = MΩ, = µF, オペアンプ :LM648IN, 入力振幅 A: 0.5V pp ~ 減衰が支配的にならないよう時定数を調整
 反転増幅回路 d = τ d = d = ( + r V dd i sin = Asin(πft) sgn( ) + Asin(πft) τ d = + a sgn( ) + Asin(")
17 擬似ダフィング方程式のアナログ電子回路 V dd -V dd - V dd -V dd V dd -V dd i = 積分回路 i = V dd r V dd sgn(-) -V dd A sin(πft) ~ - i sgn = V dd r sgn( ) 反転増幅回路 d = τ d = d = ( + r V dd i sin = Asin(πft) sgn( ) + Asin(πft) τ d = + a sgn( ) + Asin( πft)
 -V dd A sin(πft) V dd")
,(v),(V) 0. 0-0. -0.4-0.6-0.")
 領域 0 または にトラップ")
18 試作回路の応答 (f=5hz) 領域 0 領域 V dd -V dd - V dd -V dd V dd r V dd sgn(-) -V dd A sin(πft) V dd -V dd ~ (500mV/div) (500mV/div) 領域 0 領域 0 領域 領域 (500mV/div),(v),(V) TIME(s) time(s) 領域 0 または にトラップ
19 試作回路の応答 (f=3hz) (500mV/div) 領域 0 (500mV/div) 領域,(v) TIME (s) ゆらぎにより つの領域を確率的に遷移
20 試作した擬似ダフィング回路の分岐図 周波数 f でスイープ (V) 多周期領域 周期 周期 frequenc(hz),(v),(v) TIME(s) TIME (s)

21 (500mV/div) 領域 0 多周期領域での SN の算出 (500mV/div) 領域 (f=3hz) 出力信号 を二値化,(v) 領域 TIME (s) 領域間遷移のみ評価 Input, 入力信号 領域 0 Time(s)
 SN(dB) 0")
22 多周期領域での SN (V) 多周期領域 周期 周期 frequenc(hz) SN(dB) frequenc (Hz)
")


23 二領域間遷移について (500mV/div) Input, (500mV/div) 状態がゆらぐ 外力で軌道が逸れる Time(s) 入力信号の最大 最小値での遷移が少ない カオス共鳴?




24 出力信号 Input,Output カオス共鳴を起こす為に 十分なゆらぎが必要 Time(s) 入力信号 外力に十分なゆらぎが付加されていない 入力信号 出力信号 入力信号周波数 < ゆらぎ 入力信号 出力信号


 ( ) ( ) (")
25 ダブルスクロール アトラクタローレンツ アトラクタ bz dz z d d = + = + = γ σ σ ) ( ) ( ) ( L L v di L i v v G dv v g v v G dv = + = = P P B v m m B v m m m v v g = ) ( ) ( ) ( 0 0 0
 ( + ) =5.6, =, 3 = 33,m 0 = 8 /7,m = 5 /7,A =.3 分岐図 ( 左の図の 0- Hz を拡大したもの )")
26 hua のダブルスクロール系に外力を加えてみる = ( g()) = ( + z) z = 3 + Asin(π ft) 外力 相平面 (-) g(v ) = m + (m m 0 ) ( + ) =5.6, =, 3 = 33,m 0 = 8 /7,m = 5 /7,A =.3 分岐図 ( 左の図の 0- Hz を拡大したもの )


27 領域 + にトラップ 領域 - にトラップ 外力(点線) 応答 : 実線 応答 : 実線 外力(点線)
 SN[dB] 0 8 6 遷移領域 遷移領域 4 0 0 0. 0.4 0.6 0.8..4 frequenc[hz]")
28 領域 -, + 間を遷移 出力 ( 実線 ) 外力 ( 点線 ) 6 外力の周波数 4 トラップ領域 Power (db) SN[dB] 遷移領域 遷移領域 frequenc[hz]

29 回路試作 & 実験結果 3 khz 3 khz khz
30 まとめ 力学系自らが生み出すゆらぎ ( カオス ) による確率共鳴 =カオス共鳴 ( と呼びたい ). 連続時間力学系でのカオス共鳴の観測 二重井戸型の擬似ダフィング系を提案 個別部品による回路実装ゆらぎによる二領域間の確率的な遷移 SNは 8dB ただし 弱い共鳴. ダブルスクロール系におけるカオス共鳴 hua 回路にて 強い共鳴 を観測
(Microsoft Word - PLL\203f\203\202\216\221\227\277-2-\203T\203\223\203v\203\213.doc)
") ディジタル PLL 理論と実践 有限会社 SP システム 目次 - 目次 1. はじめに...3 2. アナログ PLL...4 2.1 PLL の系...4 2.1.1 位相比較器...4 2.1.2 ループフィルタ...4 2.1.3 電圧制御発振器 (VCO)...4 2.1.4 分周器...5 2.2 ループフィルタ抜きの PLL 伝達関数...5 2.3 ループフィルタ...6 2.3.1
ディジタル PLL 理論と実践 有限会社 SP システム 目次 - 目次 1. はじめに...3 2. アナログ PLL...4 2.1 PLL の系...4 2.1.1 位相比較器...4 2.1.2 ループフィルタ...4 2.1.3 電圧制御発振器 (VCO)...4 2.1.4 分周器...5 2.2 ループフィルタ抜きの PLL 伝達関数...5 2.3 ループフィルタ...6 2.3.1

")
Microsoft PowerPoint - 9.Analog.ppt
 9 章 CMOS アナログ基本回路 1 デジタル情報とアナログ情報 アナログ情報 大きさ デジタル信号アナログ信号 デジタル情報 時間 情報処理システムにおけるアナログ技術 通信 ネットワークの高度化 無線通信, 高速ネットワーク, 光通信 ヒューマンインタフェース高度化 人間の視覚, 聴覚, 感性にせまる 脳型コンピュータの実現 テ シ タルコンヒ ュータと相補的な情報処理 省エネルギーなシステム
9 章 CMOS アナログ基本回路 1 デジタル情報とアナログ情報 アナログ情報 大きさ デジタル信号アナログ信号 デジタル情報 時間 情報処理システムにおけるアナログ技術 通信 ネットワークの高度化 無線通信, 高速ネットワーク, 光通信 ヒューマンインタフェース高度化 人間の視覚, 聴覚, 感性にせまる 脳型コンピュータの実現 テ シ タルコンヒ ュータと相補的な情報処理 省エネルギーなシステム

Microsoft Word - note02.doc
 年度 物理化学 Ⅱ 講義ノート. 二原子分子の振動. 調和振動子近似 モデル 分子 = 理想的なバネでつながった原子 r : 核間距離, r e : 平衡核間距離, : 変位 ( = r r e ), k f : 力の定数ポテンシャルエネルギー ( ) k V = f (.) 古典運動方程式 [ 振動数 ] 3.3 d kf (.) dt μ : 換算質量 (m, m : 原子, の質量 ) mm
年度 物理化学 Ⅱ 講義ノート. 二原子分子の振動. 調和振動子近似 モデル 分子 = 理想的なバネでつながった原子 r : 核間距離, r e : 平衡核間距離, : 変位 ( = r r e ), k f : 力の定数ポテンシャルエネルギー ( ) k V = f (.) 古典運動方程式 [ 振動数 ] 3.3 d kf (.) dt μ : 換算質量 (m, m : 原子, の質量 ) mm
<8AEE B43979D985F F196DA C8E323893FA>
 基礎電気理論 4 回目 月 8 日 ( 月 ) 共振回路, 電力教科書 4 ページから 4 ページ 期末試験の日程, 教室 試験日 : 月 4 日 ( 月 ) 時限 教室 :B-4 試験範囲 : 教科書 4ページまでの予定 http://ir.cs.yamanashi.ac.jp/~ysuzuki/kisodenki/ 特別試験 ( 予定 ) 月 5 日 ( 水 ) 学習日 月 6 日 ( 木 )
基礎電気理論 4 回目 月 8 日 ( 月 ) 共振回路, 電力教科書 4 ページから 4 ページ 期末試験の日程, 教室 試験日 : 月 4 日 ( 月 ) 時限 教室 :B-4 試験範囲 : 教科書 4ページまでの予定 http://ir.cs.yamanashi.ac.jp/~ysuzuki/kisodenki/ 特別試験 ( 予定 ) 月 5 日 ( 水 ) 学習日 月 6 日 ( 木 )
Gauss Gauss ɛ 0 E ds = Q (1) xy σ (x, y, z) (2) a ρ(x, y, z) = x 2 + y 2 (r, θ, φ) (1) xy A Gauss ɛ 0 E ds = ɛ 0 EA Q = ρa ɛ 0 EA = ρea E = (ρ/ɛ 0 )e
 xy σ (x, y, z) (2) a ρ(x, y, z) = x 2 + y 2 (r, θ, φ) (1) xy A Gauss ɛ 0 E ds = ɛ 0 EA Q = ρa ɛ 0 EA = ρea E = (ρ/ɛ 0 )e") 7 -a 7 -a February 4, 2007 1. 2. 3. 4. 1. 2. 3. 1 Gauss Gauss ɛ 0 E ds = Q (1) xy σ (x, y, z) (2) a ρ(x, y, z) = x 2 + y 2 (r, θ, φ) (1) xy A Gauss ɛ 0 E ds = ɛ 0 EA Q = ρa ɛ 0 EA = ρea E = (ρ/ɛ 0 )e z
7 -a 7 -a February 4, 2007 1. 2. 3. 4. 1. 2. 3. 1 Gauss Gauss ɛ 0 E ds = Q (1) xy σ (x, y, z) (2) a ρ(x, y, z) = x 2 + y 2 (r, θ, φ) (1) xy A Gauss ɛ 0 E ds = ɛ 0 EA Q = ρa ɛ 0 EA = ρea E = (ρ/ɛ 0 )e z
Microsoft Word - 11問題表紙(選択).docx
.docx") A B A.70g/cm 3 B.74g/cm 3 B C 70at% %A C B at% 80at% %B 350 C γ δ y=00 x-y ρ l S ρ C p k C p ρ C p T ρ l t l S S ξ S t = ( k T ) ξ ( ) S = ( k T) ( ) t y ξ S ξ / t S v T T / t = v T / y 00 x v S dy dx
A B A.70g/cm 3 B.74g/cm 3 B C 70at% %A C B at% 80at% %B 350 C γ δ y=00 x-y ρ l S ρ C p k C p ρ C p T ρ l t l S S ξ S t = ( k T ) ξ ( ) S = ( k T) ( ) t y ξ S ξ / t S v T T / t = v T / y 00 x v S dy dx
RLC 共振回路 概要 RLC 回路は, ラジオや通信工学, 発信器などに広く使われる. この回路の目的は, 特定の周波数のときに大きな電流を得ることである. 使い方には, 周波数を設定し外へ発する, 外部からの周波数に合わせて同調する, がある. このように, 周波数を扱うことから, 交流を考える
 共振回路 概要 回路は ラジオや通信工学 などに広く使われる この回路の目的は 特定の周波数のときに大きな電流を得ることである 使い方には 周波数を設定し外へ発する 外部からの周波数に合わせて同調する がある このように 周波数を扱うことから 交流を考える 特に ( キャパシタ ) と ( インダクタ ) のそれぞれが 周波数によってインピーダンス *) が変わることが回路解釈の鍵になることに注目する
共振回路 概要 回路は ラジオや通信工学 などに広く使われる この回路の目的は 特定の周波数のときに大きな電流を得ることである 使い方には 周波数を設定し外へ発する 外部からの周波数に合わせて同調する がある このように 周波数を扱うことから 交流を考える 特に ( キャパシタ ) と ( インダクタ ) のそれぞれが 周波数によってインピーダンス *) が変わることが回路解釈の鍵になることに注目する
ディジタル信号処理
 ディジタルフィルタの設計法. 逆フィルター. 直線位相 FIR フィルタの設計. 窓関数法による FIR フィルタの設計.5 時間領域での FIR フィルタの設計 3. アナログフィルタを基にしたディジタル IIR フィルタの設計法 I 4. アナログフィルタを基にしたディジタル IIR フィルタの設計法 II 5. 双 次フィルタ LI 離散時間システムの基礎式の証明 [ ] 4. ] [ ]*
ディジタルフィルタの設計法. 逆フィルター. 直線位相 FIR フィルタの設計. 窓関数法による FIR フィルタの設計.5 時間領域での FIR フィルタの設計 3. アナログフィルタを基にしたディジタル IIR フィルタの設計法 I 4. アナログフィルタを基にしたディジタル IIR フィルタの設計法 II 5. 双 次フィルタ LI 離散時間システムの基礎式の証明 [ ] 4. ] [ ]*

I-2 (100 ) (1) y(x) y dy dx y d2 y dx 2 (a) y + 2y 3y = 9e 2x (b) x 2 y 6y = 5x 4 (2) Bernoulli B n (n = 0, 1, 2,...) x e x 1 = n=0 B 0 B 1 B 2 (3) co
 (1) y(x) y dy dx y d2 y dx 2 (a) y + 2y 3y = 9e 2x (b) x 2 y 6y = 5x 4 (2) Bernoulli B n (n = 0, 1, 2,...) x e x 1 = n=0 B 0 B 1 B 2 (3) co") 16 I ( ) (1) I-1 I-2 I-3 (2) I-1 ( ) (100 ) 2l x x = 0 y t y(x, t) y(±l, t) = 0 m T g y(x, t) l y(x, t) c = 2 y(x, t) c 2 2 y(x, t) = g (A) t 2 x 2 T/m (1) y 0 (x) y 0 (x) = g c 2 (l2 x 2 ) (B) (2) (1)
16 I ( ) (1) I-1 I-2 I-3 (2) I-1 ( ) (100 ) 2l x x = 0 y t y(x, t) y(±l, t) = 0 m T g y(x, t) l y(x, t) c = 2 y(x, t) c 2 2 y(x, t) = g (A) t 2 x 2 T/m (1) y 0 (x) y 0 (x) = g c 2 (l2 x 2 ) (B) (2) (1)

フィードバック ~ 様々な電子回路の性質 ~ 実験 (1) 目的実験 (1) では 非反転増幅器の増幅率や位相差が 回路を構成する抵抗値や入力信号の周波数によってどのように変わるのかを調べる 実験方法 図 1 のような自由振動回路を組み オペアンプの + 入力端子を接地したときの出力電圧 が 0 と
 目的実験 (1) では 非反転増幅器の増幅率や位相差が 回路を構成する抵抗値や入力信号の周波数によってどのように変わるのかを調べる 実験方法 図 1 のような自由振動回路を組み オペアンプの + 入力端子を接地したときの出力電圧 が 0 と") フィードバック ~ 様々な電子回路の性質 ~ 実験 (1) 目的実験 (1) では 非反転増幅器の増幅率や位相差が 回路を構成する抵抗値や入力信号の周波数によってどのように変わるのかを調べる 実験方法 図 1 のような自由振動回路を組み オペアンプの + 入力端子を接地したときの出力電圧 が 0 となるように半固定抵抗器を調整する ( ゼロ点調整のため ) 図 1 非反転増幅器 2010 年度版物理工学実験法
フィードバック ~ 様々な電子回路の性質 ~ 実験 (1) 目的実験 (1) では 非反転増幅器の増幅率や位相差が 回路を構成する抵抗値や入力信号の周波数によってどのように変わるのかを調べる 実験方法 図 1 のような自由振動回路を組み オペアンプの + 入力端子を接地したときの出力電圧 が 0 となるように半固定抵抗器を調整する ( ゼロ点調整のため ) 図 1 非反転増幅器 2010 年度版物理工学実験法



形式 :WYPD 絶縁 2 出力計装用変換器 W UNIT シリーズ パルスアイソレータ ( センサ用電源付 2 出力形 ) 主な機能と特長 パルス入力信号を絶縁して各種のパルス出力信号に変換 オープンコレクタ 電圧パルス リレー接点パルス出力を用意 センサ用電源内蔵 耐電圧 2000V AC 密着
 主な機能と特長 パルス入力信号を絶縁して各種のパルス出力信号に変換 オープンコレクタ 電圧パルス リレー接点パルス出力を用意 センサ用電源内蔵 耐電圧 2000V AC 密着") 絶縁 2 出力計装用変換器 W UNIT シリーズ パルスアイソレータ ( センサ用電源付 2 出力形 ) 主な機能と特長 パルス入力信号を絶縁して各種のパルス出力信号に変換 オープンコレクタ 電圧パルス リレー接点パルス出力を用意 センサ用電源内蔵 耐電圧 2000V AC 密着取付可能 アプリケーション例 フィールド側のパルス信号を直流的に絶縁してノイズ対策を行う パルス出力の種類を変換 ( 例
絶縁 2 出力計装用変換器 W UNIT シリーズ パルスアイソレータ ( センサ用電源付 2 出力形 ) 主な機能と特長 パルス入力信号を絶縁して各種のパルス出力信号に変換 オープンコレクタ 電圧パルス リレー接点パルス出力を用意 センサ用電源内蔵 耐電圧 2000V AC 密着取付可能 アプリケーション例 フィールド側のパルス信号を直流的に絶縁してノイズ対策を行う パルス出力の種類を変換 ( 例
知能科学:ニューラルネットワーク
 2 3 4 (Neural Network) (Deep Learning) (Deep Learning) ( x x = ax + b x x x ? x x x w σ b = σ(wx + b) x w b w b .2.8.6 σ(x) = + e x.4.2 -.2 - -5 5 x w x2 w2 σ x3 w3 b = σ(w x + w 2 x 2 + w 3 x 3 + b) x,
2 3 4 (Neural Network) (Deep Learning) (Deep Learning) ( x x = ax + b x x x ? x x x w σ b = σ(wx + b) x w b w b .2.8.6 σ(x) = + e x.4.2 -.2 - -5 5 x w x2 w2 σ x3 w3 b = σ(w x + w 2 x 2 + w 3 x 3 + b) x,
知能科学:ニューラルネットワーク
 2 3 4 (Neural Network) (Deep Learning) (Deep Learning) ( x x = ax + b x x x ? x x x w σ b = σ(wx + b) x w b w b .2.8.6 σ(x) = + e x.4.2 -.2 - -5 5 x w x2 w2 σ x3 w3 b = σ(w x + w 2 x 2 + w 3 x 3 + b) x,
2 3 4 (Neural Network) (Deep Learning) (Deep Learning) ( x x = ax + b x x x ? x x x w σ b = σ(wx + b) x w b w b .2.8.6 σ(x) = + e x.4.2 -.2 - -5 5 x w x2 w2 σ x3 w3 b = σ(w x + w 2 x 2 + w 3 x 3 + b) x,
nsg04-28/ky208684356100043077
 δ!!! μ μ μ γ UBE3A Ube3a Ube3a δ !!!! α α α α α α α α α α μ μ α β α β β !!!!!!!! μ! Suncus murinus μ Ω! π μ Ω in vivo! μ μ μ!!! ! in situ! in vivo δ δ !!!!!!!!!! ! in vivo Orexin-Arch Orexin-Arch !!
δ!!! μ μ μ γ UBE3A Ube3a Ube3a δ !!!! α α α α α α α α α α μ μ α β α β β !!!!!!!! μ! Suncus murinus μ Ω! π μ Ω in vivo! μ μ μ!!! ! in situ! in vivo δ δ !!!!!!!!!! ! in vivo Orexin-Arch Orexin-Arch !!
2009 年 11 月 16 日版 ( 久家 ) 遠地 P 波の変位波形の作成 遠地 P 波の変位波形 ( 変位の時間関数 ) は 波線理論をもとに P U () t = S()* t E()* t P() t で近似的に計算できる * は畳み込み積分 (convolution) を表す ( 付録
 遠地 P 波の変位波形の作成 遠地 P 波の変位波形 ( 変位の時間関数 ) は 波線理論をもとに P U () t = S()* t E()* t P() t で近似的に計算できる * は畳み込み積分 (convolution) を表す ( 付録") 遠地 波の変位波形の作成 遠地 波の変位波形 ( 変位の時間関数 ) は 波線理論をもとに U () t S() t E() t () t で近似的に計算できる は畳み込み積分 (convolution) を表す ( 付録 参照 ) ここで St () は地震の断層運動によって決まる時間関数 1 E() t は地下構造によって生じる種々の波の到着を与える時間関数 ( ここでは 直達 波とともに 震源そばの地表での反射波や変換波を与える時間関数
遠地 波の変位波形の作成 遠地 波の変位波形 ( 変位の時間関数 ) は 波線理論をもとに U () t S() t E() t () t で近似的に計算できる は畳み込み積分 (convolution) を表す ( 付録 参照 ) ここで St () は地震の断層運動によって決まる時間関数 1 E() t は地下構造によって生じる種々の波の到着を与える時間関数 ( ここでは 直達 波とともに 震源そばの地表での反射波や変換波を与える時間関数
V")
) a + b = i + 6 b c = 6i j ) a = 0 b = c = 0 ) â = i + j 0 ˆb = 4) a b = b c = j + ) cos α = cos β = 6) a ˆb = b ĉ = 0 7) a b = 6i j b c = i + 6j + 8)
 a + b = i + 6 b c = 6i j ) a = 0 b = c = 0 ) â = i + j 0 ˆb = 4) a b = b c = j + ) cos α = cos β = 6) a ˆb = b ĉ = 0 7) a b = 6i j b c = i + 6j + 8)") 4 4 ) a + b = i + 6 b c = 6i j ) a = 0 b = c = 0 ) â = i + j 0 ˆb = 4) a b = b c = j + ) cos α = cos β = 6) a ˆb = b ĉ = 0 7) a b = 6i j b c = i + 6j + 8) a b a b = 6i j 4 b c b c 9) a b = 4 a b) c = 7
4 4 ) a + b = i + 6 b c = 6i j ) a = 0 b = c = 0 ) â = i + j 0 ˆb = 4) a b = b c = j + ) cos α = cos β = 6) a ˆb = b ĉ = 0 7) a b = 6i j b c = i + 6j + 8) a b a b = 6i j 4 b c b c 9) a b = 4 a b) c = 7
第 4 週コンボリューションその 2, 正弦波による分解 教科書 p. 16~ 目標コンボリューションの演習. 正弦波による信号の分解の考え方の理解. 正弦波の複素表現を学ぶ. 演習問題 問 1. 以下の図にならって,1 と 2 の δ 関数を図示せよ δ (t) 2
 2") 第 4 週コンボリューションその, 正弦波による分解 教科書 p. 6~ 目標コンボリューションの演習. 正弦波による信号の分解の考え方の理解. 正弦波の複素表現を学ぶ. 演習問題 問. 以下の図にならって, と の δ 関数を図示せよ. - - - δ () δ ( ) - - - 図 δ 関数の図示の例 δ ( ) δ ( ) δ ( ) δ ( ) δ ( ) - - - - - - - -
第 4 週コンボリューションその, 正弦波による分解 教科書 p. 6~ 目標コンボリューションの演習. 正弦波による信号の分解の考え方の理解. 正弦波の複素表現を学ぶ. 演習問題 問. 以下の図にならって, と の δ 関数を図示せよ. - - - δ () δ ( ) - - - 図 δ 関数の図示の例 δ ( ) δ ( ) δ ( ) δ ( ) δ ( ) - - - - - - - -
インターリーブADCでのタイミングスキュー影響のデジタル補正技術
 1 インターリーブADCでのタイミングスキュー影響のデジタル補正技術 浅見幸司 黒沢烈士 立岩武徳 宮島広行 小林春夫 ( 株 ) アドバンテスト 群馬大学 2 目次 1. 研究背景 目的 2. インターリーブADCの原理 3. チャネル間ミスマッチの影響 3.1. オフセットミスマッチの影響 3.2. ゲインミスマッチの影響 3.3. タイミングスキューの影響 4. 提案手法 4.1. インターリーブタイミングミスマッチ補正フィルタ
1 インターリーブADCでのタイミングスキュー影響のデジタル補正技術 浅見幸司 黒沢烈士 立岩武徳 宮島広行 小林春夫 ( 株 ) アドバンテスト 群馬大学 2 目次 1. 研究背景 目的 2. インターリーブADCの原理 3. チャネル間ミスマッチの影響 3.1. オフセットミスマッチの影響 3.2. ゲインミスマッチの影響 3.3. タイミングスキューの影響 4. 提案手法 4.1. インターリーブタイミングミスマッチ補正フィルタ
PowerPoint プレゼンテーション
 復習 ) 時系列のモデリング ~a. 離散時間モデル ~ y k + a 1 z 1 y k + + a na z n ay k = b 0 u k + b 1 z 1 u k + + b nb z n bu k y k = G z 1 u k = B(z 1 ) A(z 1 u k ) ARMA モデル A z 1 B z 1 = 1 + a 1 z 1 + + a na z n a = b 0
復習 ) 時系列のモデリング ~a. 離散時間モデル ~ y k + a 1 z 1 y k + + a na z n ay k = b 0 u k + b 1 z 1 u k + + b nb z n bu k y k = G z 1 u k = B(z 1 ) A(z 1 u k ) ARMA モデル A z 1 B z 1 = 1 + a 1 z 1 + + a na z n a = b 0
オペアンプの容量負荷による発振について
 Alicatin Nte オペアンプシリーズ オペアンプの容量負荷による発振について 目次 :. オペアンプの周波数特性について 2. 位相遅れと発振について 3. オペアンプの位相遅れの原因 4. 安定性の確認方法 ( 増幅回路 ) 5. 安定性の確認方法 ( 全帰還回路 / ボルテージフォロア ) 6. 安定性の確認方法まとめ 7. 容量負荷による発振の対策方法 ( 出力分離抵抗 ) 8. 容量負荷による発振の対策方法
Alicatin Nte オペアンプシリーズ オペアンプの容量負荷による発振について 目次 :. オペアンプの周波数特性について 2. 位相遅れと発振について 3. オペアンプの位相遅れの原因 4. 安定性の確認方法 ( 増幅回路 ) 5. 安定性の確認方法 ( 全帰還回路 / ボルテージフォロア ) 6. 安定性の確認方法まとめ 7. 容量負荷による発振の対策方法 ( 出力分離抵抗 ) 8. 容量負荷による発振の対策方法
NJM78L00 3 端子正定電圧電源 概要高利得誤差増幅器, 温度補償回路, 定電圧ダイオードなどにより構成され, さらに内部に電流制限回路, 熱暴走に対する保護回路を有する, 高性能安定化電源用素子で, ツェナーダイオード / 抵抗の組合せ回路に比べ出力インピーダンスが改良され, 無効電流が小さ
 3 端子正定電圧電源 概要高利得誤差増幅器, 温度補償回路, 定電圧ダイオードなどにより構成され, さらに内部に電流制限回路, 熱暴走に対する保護回路を有する, 高性能安定化電源用素子で, ツェナーダイオード / 抵抗の組合せ回路に比べ出力インピーダンスが改良され, 無効電流が小さくなり, さらに雑音特性も改良されています 外形 UA EA (5V,9V,12V のみ ) 特徴 過電流保護回路内蔵
3 端子正定電圧電源 概要高利得誤差増幅器, 温度補償回路, 定電圧ダイオードなどにより構成され, さらに内部に電流制限回路, 熱暴走に対する保護回路を有する, 高性能安定化電源用素子で, ツェナーダイオード / 抵抗の組合せ回路に比べ出力インピーダンスが改良され, 無効電流が小さくなり, さらに雑音特性も改良されています 外形 UA EA (5V,9V,12V のみ ) 特徴 過電流保護回路内蔵
研修コーナー
 l l l l l l l l l l l α α β l µ l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l
l l l l l l l l l l l α α β l µ l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l l

 K E N Z U 2012 7 16 HP M. 1 1 4 1.1 3.......................... 4 1.2................................... 4 1.2.1..................................... 4 1.2.2.................................... 5................................
K E N Z U 2012 7 16 HP M. 1 1 4 1.1 3.......................... 4 1.2................................... 4 1.2.1..................................... 4 1.2.2.................................... 5................................
NJM78L00S 3 端子正定電圧電源 概要 NJM78L00S は Io=100mA の 3 端子正定電圧電源です 既存の NJM78L00 と比較し 出力電圧精度の向上 動作温度範囲の拡大 セラミックコンデンサ対応および 3.3V の出力電圧もラインアップしました 外形図 特長 出力電流 10
 端子正定電圧電源 概要 は Io=mA の 端子正定電圧電源です 既存の NJM78L と比較し 出力電圧精度の向上 動作温度範囲の拡大 セラミックコンデンサ対応および.V の出力電圧もラインアップしました 外形図 特長 出力電流 ma max. 出力電圧精度 V O ±.% 高リップルリジェクション セラミックコンデンサ対応 過電流保護機能内蔵 サーマルシャットダウン回路内蔵 電圧ランク V,.V,
端子正定電圧電源 概要 は Io=mA の 端子正定電圧電源です 既存の NJM78L と比較し 出力電圧精度の向上 動作温度範囲の拡大 セラミックコンデンサ対応および.V の出力電圧もラインアップしました 外形図 特長 出力電流 ma max. 出力電圧精度 V O ±.% 高リップルリジェクション セラミックコンデンサ対応 過電流保護機能内蔵 サーマルシャットダウン回路内蔵 電圧ランク V,.V,
3.5 トランジスタ基本増幅回路 ベース接地基本増幅回路 C 1 C n n 2 R E p v V 2 v R E p 1 v EE 0 VCC 結合コンデンサ ベース接地基本増幅回路 V EE =0, V CC =0として交流分の回路 (C 1, C 2 により短絡 ) トランジスタ
 トランジスタ") 3.4 の特性を表す諸量 入力 i 2 出力 負荷抵抗 4 端子 (2 端子対 ) 回路としての の動作量 (i) 入力インピーダンス : Z i = (ii) 電圧利得 : A v = (iii) 電流利得 : A i = (iv) 電力利得 : A p = i 2 v2 i 2 i 2 =i 2 (v) 出力インピーダンス : Z o = i 2 = 0 i 2 入力 出力 出力インピーダンスの求め方
3.4 の特性を表す諸量 入力 i 2 出力 負荷抵抗 4 端子 (2 端子対 ) 回路としての の動作量 (i) 入力インピーダンス : Z i = (ii) 電圧利得 : A v = (iii) 電流利得 : A i = (iv) 電力利得 : A p = i 2 v2 i 2 i 2 =i 2 (v) 出力インピーダンス : Z o = i 2 = 0 i 2 入力 出力 出力インピーダンスの求め方
形式 :PDU 計装用プラグイン形変換器 M UNIT シリーズ パルス分周変換器 ( レンジ可変形 ) 主な機能と特長 パルス入力信号を分周 絶縁して単位パルス出力信号に変換 センサ用電源内蔵 パルス分周比は前面のスイッチで可変 出力は均等パルス オープンコレクタ 電圧パルス リレー接点パルス出力
 主な機能と特長 パルス入力信号を分周 絶縁して単位パルス出力信号に変換 センサ用電源内蔵 パルス分周比は前面のスイッチで可変 出力は均等パルス オープンコレクタ 電圧パルス リレー接点パルス出力") 計装用プラグイン形変換器 M UNIT シリーズ パルス分周変換器 ( レンジ可変形 ) 主な機能と特長 パルス入力信号を分周 絶縁して単位パルス出力信号に変換 センサ用電源内蔵 パルス分周比は前面のスイッチで可変 出力は均等パルス オープンコレクタ 電圧パルス リレー接点パルス出力を用意 密着取付可能 アプリケーション例 容積式流量計のパルス信号を単位パルスに変換 機械の回転による無接点信号を単位パルスに変換
計装用プラグイン形変換器 M UNIT シリーズ パルス分周変換器 ( レンジ可変形 ) 主な機能と特長 パルス入力信号を分周 絶縁して単位パルス出力信号に変換 センサ用電源内蔵 パルス分周比は前面のスイッチで可変 出力は均等パルス オープンコレクタ 電圧パルス リレー接点パルス出力を用意 密着取付可能 アプリケーション例 容積式流量計のパルス信号を単位パルスに変換 機械の回転による無接点信号を単位パルスに変換
<4D F736F F F696E74202D20906C8D488AC28BAB90DD8C7689F090CD8D488A D91E F1>
 人工環境設計解析工学構造力学と有限要素法 ( 第 回 ) 東京大学新領域創成科学研究科 鈴木克幸 固体力学の基礎方程式 変位 - ひずみの関係 適合条件式 ひずみ - 応力の関係 構成方程式 応力 - 外力の関係 平衡方程式 境界条件 変位規定境界 反力規定境界 境界条件 荷重応力ひずみ変形 場の方程式 Γ t Γ t 平衡方程式構成方程式適合条件式 構造力学の基礎式 ひずみ 一軸 荷重応力ひずみ変形
人工環境設計解析工学構造力学と有限要素法 ( 第 回 ) 東京大学新領域創成科学研究科 鈴木克幸 固体力学の基礎方程式 変位 - ひずみの関係 適合条件式 ひずみ - 応力の関係 構成方程式 応力 - 外力の関係 平衡方程式 境界条件 変位規定境界 反力規定境界 境界条件 荷重応力ひずみ変形 場の方程式 Γ t Γ t 平衡方程式構成方程式適合条件式 構造力学の基礎式 ひずみ 一軸 荷重応力ひずみ変形
")
領域シンポ発表
 1 次元の減衰運動の中の強制振動 ) ( f d d d d d e f e ce ) ( si ) ( 1 ) ( cos ω =ω -γ とおくと 一般解は 外力 f()=f siω の場合 f d d d d si f ce f ce si ) cos( cos si ) cos( この一般解は 1 φ は外力と変位との間の位相差で a 時間が経つと 第 1 項は無視できる この場合の振幅を
1 次元の減衰運動の中の強制振動 ) ( f d d d d d e f e ce ) ( si ) ( 1 ) ( cos ω =ω -γ とおくと 一般解は 外力 f()=f siω の場合 f d d d d si f ce f ce si ) cos( cos si ) cos( この一般解は 1 φ は外力と変位との間の位相差で a 時間が経つと 第 1 項は無視できる この場合の振幅を
1. z dr er r sinθ dϕ eϕ r dθ eθ dr θ dr dθ r x 0 ϕ r sinθ dϕ r sinθ dϕ y dr dr er r dθ eθ r sinθ dϕ eϕ 2. (r, θ, φ) 2 dr 1 h r dr 1 e r h θ dθ 1 e θ h
 2 dr 1 h r dr 1 e r h θ dθ 1 e θ h") IB IIA 1 1 r, θ, φ 1 (r, θ, φ)., r, θ, φ 0 r
IB IIA 1 1 r, θ, φ 1 (r, θ, φ)., r, θ, φ 0 r
例 e 指数関数的に減衰する信号を h( a < + a a すると, それらのラプラス変換は, H ( ) { e } e インパルス応答が h( a < ( ただし a >, U( ) { } となるシステムにステップ信号 ( y( のラプラス変換 Y () は, Y ( ) H ( ) X (
 { e } e インパルス応答が h( a < ( ただし a >, U( ) { } となるシステムにステップ信号 ( y( のラプラス変換 Y () は, Y ( ) H ( ) X (") 第 週ラプラス変換 教科書 p.34~ 目標ラプラス変換の定義と意味を理解する フーリエ変換や Z 変換と並ぶ 信号解析やシステム設計における重要なツール ラプラス変換は波動現象や電気回路など様々な分野で 微分方程式を解くために利用されてきた ラプラス変換を用いることで微分方程式は代数方程式に変換される また 工学上使われる主要な関数のラプラス変換は簡単な形の関数で表されるので これを ラプラス変換表
第 週ラプラス変換 教科書 p.34~ 目標ラプラス変換の定義と意味を理解する フーリエ変換や Z 変換と並ぶ 信号解析やシステム設計における重要なツール ラプラス変換は波動現象や電気回路など様々な分野で 微分方程式を解くために利用されてきた ラプラス変換を用いることで微分方程式は代数方程式に変換される また 工学上使われる主要な関数のラプラス変換は簡単な形の関数で表されるので これを ラプラス変換表
光変調型フォト IC S , S6809, S6846, S6986, S7136/-10, S10053 外乱光下でも誤動作の少ない検出が可能なフォト IC 外乱光下の光同期検出用に開発されたフォトICです フォトICチップ内にフォトダイオード プリアンプ コンパレータ 発振回路 LE
 外乱光下でも誤動作の少ない検出が可能なフォト IC 外乱光下の光同期検出用に開発されたフォトICです フォトICチップ内にフォトダイオード プリアンプ コンパレータ 発振回路 LED 駆動回路 および信号処理回路などが集積化されています 外部に赤外 LEDを接続することによって 外乱光の影響の少ない光同期検出型のフォトリフレクタやフォトインタラプタが簡単に構成できます 独自の回路設計により 外乱光許容照度が10000
外乱光下でも誤動作の少ない検出が可能なフォト IC 外乱光下の光同期検出用に開発されたフォトICです フォトICチップ内にフォトダイオード プリアンプ コンパレータ 発振回路 LED 駆動回路 および信号処理回路などが集積化されています 外部に赤外 LEDを接続することによって 外乱光の影響の少ない光同期検出型のフォトリフレクタやフォトインタラプタが簡単に構成できます 独自の回路設計により 外乱光許容照度が10000
(3) E-I 特性の傾きが出力コンダクタンス である 添え字 は utput( 出力 ) を意味する (4) E-BE 特性の傾きが電圧帰還率 r である 添え字 r は rrs( 逆 ) を表す 定数の値は, トランジスタの種類によって異なるばかりでなく, 同一のトランジスタでも,I, E, 周
 E-I 特性の傾きが出力コンダクタンス である 添え字 は utput( 出力 ) を意味する (4) E-BE 特性の傾きが電圧帰還率 r である 添え字 r は rrs( 逆 ) を表す 定数の値は, トランジスタの種類によって異なるばかりでなく, 同一のトランジスタでも,I, E, 周") トランジスタ増幅回路設計入門 pyrgt y Km Ksaka 005..06. 等価回路についてトランジスタの動作は図 のように非線形なので, その動作を簡単な数式で表すことができない しかし, アナログ信号を扱う回路では, 特性グラフのの直線部分に動作点を置くので線形のパラメータにより, その動作を簡単な数式 ( 一次式 ) で表すことができる 図. パラメータトランジスタの各静特性の直線部分の傾きを数値として特性を表したものが
トランジスタ増幅回路設計入門 pyrgt y Km Ksaka 005..06. 等価回路についてトランジスタの動作は図 のように非線形なので, その動作を簡単な数式で表すことができない しかし, アナログ信号を扱う回路では, 特性グラフのの直線部分に動作点を置くので線形のパラメータにより, その動作を簡単な数式 ( 一次式 ) で表すことができる 図. パラメータトランジスタの各静特性の直線部分の傾きを数値として特性を表したものが
p.3 p 各種パラメータとデータシート N Package Power Dissipation 670mW ( N Package)
") p.1 p.2 3. オペアンプ回路の基礎 3.1.2 理想オペアンプ Vcc A: Open Loop Gain 3.1 オペアンプとは ~ 計測基礎回路 ~ 1 2 Zin Zout =A(12) Vcc 理想条件下のオペアンプは上記のような等価回路として考えることができる 1. 2. 3. 4. 一般的な回路記号 新 JIS 記号 5. 6. 市販製品外観例 内部の構成回路例 (NJM4580DD)
p.1 p.2 3. オペアンプ回路の基礎 3.1.2 理想オペアンプ Vcc A: Open Loop Gain 3.1 オペアンプとは ~ 計測基礎回路 ~ 1 2 Zin Zout =A(12) Vcc 理想条件下のオペアンプは上記のような等価回路として考えることができる 1. 2. 3. 4. 一般的な回路記号 新 JIS 記号 5. 6. 市販製品外観例 内部の構成回路例 (NJM4580DD)
スライド 1
 かなり意地悪な問題である 電池の電圧や抵抗値が3 本とも対称性に並んでいることを見抜けば この回路には電流が流れないことが判る だから 全ての抵抗の端子間には電圧が発生しない P 点とアース間の電位差は 電池の電圧と同じ 1V 答 3) 負帰還 (NFB; Negative Feedback) 増幅回路 増幅回路の周波数特性を改善させる回路 負帰還回路 ( NFB : Negative Feedback
かなり意地悪な問題である 電池の電圧や抵抗値が3 本とも対称性に並んでいることを見抜けば この回路には電流が流れないことが判る だから 全ての抵抗の端子間には電圧が発生しない P 点とアース間の電位差は 電池の電圧と同じ 1V 答 3) 負帰還 (NFB; Negative Feedback) 増幅回路 増幅回路の周波数特性を改善させる回路 負帰還回路 ( NFB : Negative Feedback
回路シミュレーションに必要な電子部品の SPICE モデル 回路シミュレータでシミュレーションを行うためには 使用する部品に対応した SPICE モデル が必要です SPICE モデルは 回路のシミュレーションを行うために必要な電子部品の振る舞い が記述されており いわば 回路シミュレーション用の部
 当社 SPICE モデルを用いたいたシミュレーションシミュレーション例 この資料は 当社 日本ケミコン ( 株 ) がご提供する SPICE モデルのシミュレーション例をご紹介しています この資料は OrCAD Capture 6.( 日本語化 ) に基づいて作成しています 当社 SPICE モデルの取り扱いに関するご注意 当社 SPICE モデルは OrCAD Capture/PSpice 及び
当社 SPICE モデルを用いたいたシミュレーションシミュレーション例 この資料は 当社 日本ケミコン ( 株 ) がご提供する SPICE モデルのシミュレーション例をご紹介しています この資料は OrCAD Capture 6.( 日本語化 ) に基づいて作成しています 当社 SPICE モデルの取り扱いに関するご注意 当社 SPICE モデルは OrCAD Capture/PSpice 及び
Gmech08.dvi
 145 13 13.1 13.1.1 0 m mg S 13.1 F 13.1 F /m S F F 13.1 F mg S F F mg 13.1: m d2 r 2 = F + F = 0 (13.1) 146 13 F = F (13.2) S S S S S P r S P r r = r 0 + r (13.3) r 0 S S m d2 r 2 = F (13.4) (13.3) d 2
145 13 13.1 13.1.1 0 m mg S 13.1 F 13.1 F /m S F F 13.1 F mg S F F mg 13.1: m d2 r 2 = F + F = 0 (13.1) 146 13 F = F (13.2) S S S S S P r S P r r = r 0 + r (13.3) r 0 S S m d2 r 2 = F (13.4) (13.3) d 2
Microsoft PowerPoint - 集積回路工学(5)_ pptm
_ pptm") 集積回路工学 東京工業大学大学院理工学研究科電子物理工学専攻 松澤昭 2009/0/4 集積回路工学 A.Matuzawa (5MOS 論理回路の電気特性とスケーリング則 資料は松澤研のホームページ htt://c.e.titech.ac.j にあります 2009/0/4 集積回路工学 A.Matuzawa 2 インバータ回路 このようなインバータ回路をシミュレーションした 2009/0/4 集積回路工学
集積回路工学 東京工業大学大学院理工学研究科電子物理工学専攻 松澤昭 2009/0/4 集積回路工学 A.Matuzawa (5MOS 論理回路の電気特性とスケーリング則 資料は松澤研のホームページ htt://c.e.titech.ac.j にあります 2009/0/4 集積回路工学 A.Matuzawa 2 インバータ回路 このようなインバータ回路をシミュレーションした 2009/0/4 集積回路工学
PowerPoint プレゼンテーション
 20150528 信号処理システム特論 本日の内容 適応フィルタ ( 時間領域 ) 適応アルゴリズム (LMS,NLMS,RLS) 適応フィルタの応用例 適応処理 非適応処理 : 状況によらずいつでも同じ処理 適応処理 : 状況に応じた適切な処理 高度な適応処理の例 雑音抑圧, 音響エコーキャンセラ, 騒音制御など 時間領域の適応フィルタ 誤差信号 与えられた手順に従ってフィルタ係数を更新し 自動的に所望の信号を得るフィルタ
20150528 信号処理システム特論 本日の内容 適応フィルタ ( 時間領域 ) 適応アルゴリズム (LMS,NLMS,RLS) 適応フィルタの応用例 適応処理 非適応処理 : 状況によらずいつでも同じ処理 適応処理 : 状況に応じた適切な処理 高度な適応処理の例 雑音抑圧, 音響エコーキャンセラ, 騒音制御など 時間領域の適応フィルタ 誤差信号 与えられた手順に従ってフィルタ係数を更新し 自動的に所望の信号を得るフィルタ
c y /2 ddy = = 2π sin θ /2 dθd /2 [ ] 2π cos θ d = log 2 + a 2 d = log 2 + a 2 = log 2 + a a 2 d d + 2 = l
![c y /2 ddy = = 2π sin θ /2 dθd /2 [ ] 2π cos θ d = log 2 + a 2 d = log 2 + a 2 = log 2 + a a 2 d d + 2 = l](/thumbs/85/91372642.jpg "c y /2 ddy = = 2π sin θ /2 dθd /2 [ ] 2π cos θ d = log 2 + a 2 d = log 2 + a 2 = log 2 + a a 2 d d + 2 = l") c 28. 2, y 2, θ = cos θ y = sin θ 2 3, y, 3, θ, ϕ = sin θ cos ϕ 3 y = sin θ sin ϕ 4 = cos θ 5.2 2 e, e y 2 e, e θ e = cos θ e sin θ e θ 6 e y = sin θ e + cos θ e θ 7.3 sgn sgn = = { = + > 2 < 8.4 a b 2
c 28. 2, y 2, θ = cos θ y = sin θ 2 3, y, 3, θ, ϕ = sin θ cos ϕ 3 y = sin θ sin ϕ 4 = cos θ 5.2 2 e, e y 2 e, e θ e = cos θ e sin θ e θ 6 e y = sin θ e + cos θ e θ 7.3 sgn sgn = = { = + > 2 < 8.4 a b 2
Microsoft PowerPoint pptx
 4.2 小信号パラメータ 1 電圧利得をどのように求めるか 電圧ー電流変換 入力信号の変化 dv BE I I e 1 v be の振幅から i b を求めるのは難しい? 電流増幅 電流ー電圧変換 di B di C h FE 電流と電圧の関係が指数関数になっているのが問題 (-RC), ただし RL がない場合 dv CE 出力信号の変化 2 pn 接合の非線形性への対処 I B 直流バイアスに対する抵抗
4.2 小信号パラメータ 1 電圧利得をどのように求めるか 電圧ー電流変換 入力信号の変化 dv BE I I e 1 v be の振幅から i b を求めるのは難しい? 電流増幅 電流ー電圧変換 di B di C h FE 電流と電圧の関係が指数関数になっているのが問題 (-RC), ただし RL がない場合 dv CE 出力信号の変化 2 pn 接合の非線形性への対処 I B 直流バイアスに対する抵抗
Gmech08.dvi
 51 5 5.1 5.1.1 P r P z θ P P P z e r e, z ) r, θ, ) 5.1 z r e θ,, z r, θ, = r sin θ cos = r sin θ sin 5.1) e θ e z = r cos θ r, θ, 5.1: 0 r
51 5 5.1 5.1.1 P r P z θ P P P z e r e, z ) r, θ, ) 5.1 z r e θ,, z r, θ, = r sin θ cos = r sin θ sin 5.1) e θ e z = r cos θ r, θ, 5.1: 0 r
Microsoft Word - NJM2718_DataJ_v1.doc
 2 回路入り高耐圧単電源オペアンプ 概要 NJM2718 は 2 回路入り単電源高速オペアンプです 動作電圧は 3V~36V と広範囲でスルーレート 9V/µs の高速性と入力オフセット電圧 4mV の特徴をもっており ローサイド電流検出に適しております また 容量性負荷に対して安定しておりますので FET 駆動等のプリドライバ用途やバッファ用途等に適しております 外形 NJM2718E NJM2718V
2 回路入り高耐圧単電源オペアンプ 概要 NJM2718 は 2 回路入り単電源高速オペアンプです 動作電圧は 3V~36V と広範囲でスルーレート 9V/µs の高速性と入力オフセット電圧 4mV の特徴をもっており ローサイド電流検出に適しております また 容量性負荷に対して安定しておりますので FET 駆動等のプリドライバ用途やバッファ用途等に適しております 外形 NJM2718E NJM2718V
4.6: 3 sin 5 sin θ θ t θ 2t θ 4t : sin ωt ω sin θ θ ωt sin ωt 1 ω ω [rad/sec] 1 [sec] ω[rad] [rad/sec] 5.3 ω [rad/sec] 5.7: 2t 4t sin 2t sin 4t
![4.6: 3 sin 5 sin θ θ t θ 2t θ 4t : sin ωt ω sin θ θ ωt sin ωt 1 ω ω [rad/sec] 1 [sec] ω[rad] [rad/sec] 5.3 ω [rad/sec] 5.7: 2t 4t sin 2t sin 4t](/thumbs/70/62705042.jpg "4.6: 3 sin 5 sin θ θ t θ 2t θ 4t : sin ωt ω sin θ θ ωt sin ωt 1 ω ω [rad/sec] 1 [sec] ω[rad] [rad/sec] 5.3 ω [rad/sec] 5.7: 2t 4t sin 2t sin 4t") 1 1.1 sin 2π [rad] 3 ft 3 sin 2t π 4 3.1 2 1.1: sin θ 2.2 sin θ ft t t [sec] t sin 2t π 4 [rad] sin 3.1 3 sin θ θ t θ 2t π 4 3.2 3.1 3.4 3.4: 2.2: sin θ θ θ [rad] 2.3 0 [rad] 4 sin θ sin 2t π 4 sin 1 1
1 1.1 sin 2π [rad] 3 ft 3 sin 2t π 4 3.1 2 1.1: sin θ 2.2 sin θ ft t t [sec] t sin 2t π 4 [rad] sin 3.1 3 sin θ θ t θ 2t π 4 3.2 3.1 3.4 3.4: 2.2: sin θ θ θ [rad] 2.3 0 [rad] 4 sin θ sin 2t π 4 sin 1 1
4 Mindlin -Reissner 4 δ T T T εσdω= δ ubdω+ δ utd Γ Ω Ω Γ T εσ (1.1) ε σ u b t 3 σ ε. u T T T = = = { σx σ y σ z τxy τ yz τzx} { εx εy εz γ xy γ yz γ
 ε σ u b t 3 σ ε. u T T T = = = { σx σ y σ z τxy τ yz τzx} { εx εy εz γ xy γ yz γ") Mindlin -Rissnr δ εσd δ ubd+ δ utd Γ Γ εσ (.) ε σ u b t σ ε. u { σ σ σ z τ τ z τz} { ε ε εz γ γ z γ z} { u u uz} { b b bz} b t { t t tz}. ε u u u u z u u u z u u z ε + + + (.) z z z (.) u u NU (.) N U
Mindlin -Rissnr δ εσd δ ubd+ δ utd Γ Γ εσ (.) ε σ u b t σ ε. u { σ σ σ z τ τ z τz} { ε ε εz γ γ z γ z} { u u uz} { b b bz} b t { t t tz}. ε u u u u z u u u z u u z ε + + + (.) z z z (.) u u NU (.) N U
CMOS リニアイメージセンサ用駆動回路 C CMOS リニアイメージセンサ S 等用 C は当社製 CMOSリニアイメージセンサ S 等用に開発された駆動回路です USB 2.0インターフェースを用いて C と PCを接続
 CMOS リニアイメージセンサ用駆動回路 C13015-01 CMOS リニアイメージセンサ S11639-01 等用 C13015-01は当社製 CMOSリニアイメージセンサ S11639-01 等用に開発された駆動回路です USB 2.0インターフェースを用いて C13015-01と PCを接続することにより PCからC13015-01 を制御して センサのアナログビデオ信号を 16-bitデジタル出力に変換した数値データを
CMOS リニアイメージセンサ用駆動回路 C13015-01 CMOS リニアイメージセンサ S11639-01 等用 C13015-01は当社製 CMOSリニアイメージセンサ S11639-01 等用に開発された駆動回路です USB 2.0インターフェースを用いて C13015-01と PCを接続することにより PCからC13015-01 を制御して センサのアナログビデオ信号を 16-bitデジタル出力に変換した数値データを
( ) Note (e ) (µ ) (τ ) ( (ν e,e ) e- (ν µ, µ ) µ- (ν τ,τ ) τ- ) ( ) ( ) (SU(2) ) (W +,Z 0,W ) * 1) 3 * 2) [ ] [ ] [ ] ν e ν µ ν τ e
![( ) Note (e ) (µ ) (τ ) ( (ν e,e ) e- (ν µ, µ ) µ- (ν τ,τ ) τ- ) ( ) ( ) (SU(2) ) (W +,Z 0,W ) * 1) 3 * 2) [ ] [ ] [ ] ν e ν µ ν τ e](/thumbs/98/136160482.jpg "( ) Note (e ) (µ ) (τ ) ( (ν e,e ) e- (ν µ, µ ) µ- (ν τ,τ ) τ- ) ( ) ( ) (SU(2) ) (W +,Z 0,W ) * 1) 3 * 2) [ ] [ ] [ ] ν e ν µ ν τ e") ( ) Note 3 19 12 13 8 8.1 (e ) (µ ) (τ ) ( (ν e,e ) e- (ν µ, µ ) µ- (ν τ,τ ) τ- ) ( ) ( ) (SU(2) ) (W +,Z 0,W ) * 1) 3 * 2) [ ] [ ] [ ] ν e ν µ ν τ e µ τ, e R, µ R, τ R (1a) L ( ) ) * 3) W Z 1/2 ( - )
( ) Note 3 19 12 13 8 8.1 (e ) (µ ) (τ ) ( (ν e,e ) e- (ν µ, µ ) µ- (ν τ,τ ) τ- ) ( ) ( ) (SU(2) ) (W +,Z 0,W ) * 1) 3 * 2) [ ] [ ] [ ] ν e ν µ ν τ e µ τ, e R, µ R, τ R (1a) L ( ) ) * 3) W Z 1/2 ( - )
NMR_wakate_ ppt
 NMR 基礎講義 & 2 第 0 回若手 NMR 研究会 2009 年 9 月 4 日 ( 金 )-6 日 ( 日 ) IPC 生産性国際交流センター ( 湘南国際村 ) 大阪大学蛋白質研究所構造プロテオミクス研究系 池上貴久 化学シフトの直積演算子 (product-operator) I " I cos (#t) + I sin (#t) x x y ω : 角速度 (rad/s) z 一周の長さ
NMR 基礎講義 & 2 第 0 回若手 NMR 研究会 2009 年 9 月 4 日 ( 金 )-6 日 ( 日 ) IPC 生産性国際交流センター ( 湘南国際村 ) 大阪大学蛋白質研究所構造プロテオミクス研究系 池上貴久 化学シフトの直積演算子 (product-operator) I " I cos (#t) + I sin (#t) x x y ω : 角速度 (rad/s) z 一周の長さ
微分積分 サンプルページ この本の定価 判型などは, 以下の URL からご覧いただけます. このサンプルページの内容は, 初版 1 刷発行時のものです.
 微分積分 サンプルページ この本の定価 判型などは, 以下の URL からご覧いただけます. ttp://www.morikita.co.jp/books/mid/00571 このサンプルページの内容は, 初版 1 刷発行時のものです. i ii 014 10 iii [note] 1 3 iv 4 5 3 6 4 x 0 sin x x 1 5 6 z = f(x, y) 1 y = f(x)
微分積分 サンプルページ この本の定価 判型などは, 以下の URL からご覧いただけます. ttp://www.morikita.co.jp/books/mid/00571 このサンプルページの内容は, 初版 1 刷発行時のものです. i ii 014 10 iii [note] 1 3 iv 4 5 3 6 4 x 0 sin x x 1 5 6 z = f(x, y) 1 y = f(x)
1 (Berry,1975) 2-6 p (S πr 2 )p πr 2 p 2πRγ p p = 2γ R (2.5).1-1 : : : : ( ).2 α, β α, β () X S = X X α X β (.1) 1 2
 2-6 p (S πr 2 )p πr 2 p 2πRγ p p = 2γ R (2.5).1-1 : : : : ( ).2 α, β α, β () X S = X X α X β (.1) 1 2") 2005 9/8-11 2 2.2 ( 2-5) γ ( ) γ cos θ 2πr πρhr 2 g h = 2γ cos θ ρgr (2.1) γ = ρgrh (2.2) 2 cos θ θ cos θ = 1 (2.2) γ = 1 ρgrh (2.) 2 2. p p ρgh p ( ) p p = p ρgh (2.) h p p = 2γ r 1 1 (Berry,1975) 2-6
2005 9/8-11 2 2.2 ( 2-5) γ ( ) γ cos θ 2πr πρhr 2 g h = 2γ cos θ ρgr (2.1) γ = ρgrh (2.2) 2 cos θ θ cos θ = 1 (2.2) γ = 1 ρgrh (2.) 2 2. p p ρgh p ( ) p p = p ρgh (2.) h p p = 2γ r 1 1 (Berry,1975) 2-6
形式 :RPPD 計装用プラグイン形変換器 M UNIT シリーズ パルスアイソレータ ( センサ用電源付 ロータリエンコーダ用 ) 主な機能と特長 ロータリエンコーダの 2 相パルス入力信号を絶縁して各種の 2 相パルス出力信号に変換 オープンコレクタ 電圧パルス パワーフォト MOS リレー R
 主な機能と特長 ロータリエンコーダの 2 相パルス入力信号を絶縁して各種の 2 相パルス出力信号に変換 オープンコレクタ 電圧パルス パワーフォト MOS リレー R") 計装用プラグイン形変換器 M UNIT シリーズ パルスアイソレータ ( センサ用電源付 ロータリエンコーダ用 ) 主な機能と特長 ロータリエンコーダの 2 相パルス入力信号を絶縁して各種の 2 相パルス出力信号に変換 オープンコレクタ 電圧パルス パワーフォト MOS リレー RS-422 ラインドライバ パルス出力を用意 入出力仕様の異なる 2 系統のパルスアイソレータとしても使用可能 RS-422
計装用プラグイン形変換器 M UNIT シリーズ パルスアイソレータ ( センサ用電源付 ロータリエンコーダ用 ) 主な機能と特長 ロータリエンコーダの 2 相パルス入力信号を絶縁して各種の 2 相パルス出力信号に変換 オープンコレクタ 電圧パルス パワーフォト MOS リレー RS-422 ラインドライバ パルス出力を用意 入出力仕様の異なる 2 系統のパルスアイソレータとしても使用可能 RS-422
第6章 実験モード解析
 第 6 章実験モード解析 6. 実験モード解析とは 6. 有限自由度系の実験モード解析 6.3 連続体の実験モード解析 6. 実験モード解析とは 実験モード解析とは加振実験によって測定された外力と応答を用いてモードパラメータ ( 固有振動数, モード減衰比, 正規固有モードなど ) を求める ( 同定する ) 方法である. 力計 試験体 変位計 / 加速度計 実験モード解析の概念 時間領域データを利用する方法
第 6 章実験モード解析 6. 実験モード解析とは 6. 有限自由度系の実験モード解析 6.3 連続体の実験モード解析 6. 実験モード解析とは 実験モード解析とは加振実験によって測定された外力と応答を用いてモードパラメータ ( 固有振動数, モード減衰比, 正規固有モードなど ) を求める ( 同定する ) 方法である. 力計 試験体 変位計 / 加速度計 実験モード解析の概念 時間領域データを利用する方法
Microsoft PowerPoint pptx
 第 5 章周波数特性 回路が扱える信号の周波数範囲の解析 1 5.1 周波数特性の解析方法 2 周波数特性解析の必要性 利得の周波数特性 増幅回路 ( アナログ回路 ) は 信号の周波数が高くなるほど増幅率が下がり 最後には 増幅しなくなる ディジタル回路は 高い周波数 ( クロック周波数 ) では論理振幅が小さくなり 最後には 不定値しか出力できなくなる 回路がどの周波数まで動作するかによって 回路のスループット
第 5 章周波数特性 回路が扱える信号の周波数範囲の解析 1 5.1 周波数特性の解析方法 2 周波数特性解析の必要性 利得の周波数特性 増幅回路 ( アナログ回路 ) は 信号の周波数が高くなるほど増幅率が下がり 最後には 増幅しなくなる ディジタル回路は 高い周波数 ( クロック周波数 ) では論理振幅が小さくなり 最後には 不定値しか出力できなくなる 回路がどの周波数まで動作するかによって 回路のスループット
e a b a b b a a a 1 a a 1 = a 1 a = e G G G : x ( x =, 8, 1 ) x 1,, 60 θ, ϕ ψ θ G G H H G x. n n 1 n 1 n σ = (σ 1, σ,..., σ N ) i σ i i n S n n = 1,,
 x 1,, 60 θ, ϕ ψ θ G G H H G x. n n 1 n 1 n σ = (σ 1, σ,..., σ N ) i σ i i n S n n = 1,,") 01 10 18 ( ) 1 6 6 1 8 8 1 6 1 0 0 0 0 1 Table 1: 10 0 8 180 1 1 1. ( : 60 60 ) : 1. 1 e a b a b b a a a 1 a a 1 = a 1 a = e G G G : x ( x =, 8, 1 ) x 1,, 60 θ, ϕ ψ θ G G H H G x. n n 1 n 1 n σ = (σ 1,
01 10 18 ( ) 1 6 6 1 8 8 1 6 1 0 0 0 0 1 Table 1: 10 0 8 180 1 1 1. ( : 60 60 ) : 1. 1 e a b a b b a a a 1 a a 1 = a 1 a = e G G G : x ( x =, 8, 1 ) x 1,, 60 θ, ϕ ψ θ G G H H G x. n n 1 n 1 n σ = (σ 1,
FEM原理講座 (サンプルテキスト)
") サンプルテキスト FEM 原理講座 サイバネットシステム株式会社 8 年 月 9 日作成 サンプルテキストについて 各講師が 講義の内容が伝わりやすいページ を選びました テキストのページは必ずしも連続していません 一部を抜粋しています 幾何光学講座については 実物のテキストではなくガイダンスを掲載いたします 対象とする構造系 物理モデル 連続体 固体 弾性体 / 弾塑性体 / 粘弾性体 / 固体
サンプルテキスト FEM 原理講座 サイバネットシステム株式会社 8 年 月 9 日作成 サンプルテキストについて 各講師が 講義の内容が伝わりやすいページ を選びました テキストのページは必ずしも連続していません 一部を抜粋しています 幾何光学講座については 実物のテキストではなくガイダンスを掲載いたします 対象とする構造系 物理モデル 連続体 固体 弾性体 / 弾塑性体 / 粘弾性体 / 固体
Microsoft PowerPoint - 計測2.ppt [互換モード]
![Microsoft PowerPoint - 計測2.ppt [互換モード]](/thumbs/92/108700833.jpg "Microsoft PowerPoint - 計測2.ppt [互換モード]") Ⅱ データ変換と信号処理 1. アナログとデジタル 5. 周波数解析 2. オペアンプ 5.2 離散フーリエ変換 2.1 加算 減算回路 5.3 窓関数 2.2 微分 積分回路 6. ラプラス変換とz 変換 3. 変換器 ( アナログ入出力 ) 6.1 ラプラス変換 6.2 z 変換 3.3 サンプル ホールド回路 7. 信号処理 3.4 アナログ マルチプレクサ 7.1 不規則信号 4. データ変換
Ⅱ データ変換と信号処理 1. アナログとデジタル 5. 周波数解析 2. オペアンプ 5.2 離散フーリエ変換 2.1 加算 減算回路 5.3 窓関数 2.2 微分 積分回路 6. ラプラス変換とz 変換 3. 変換器 ( アナログ入出力 ) 6.1 ラプラス変換 6.2 z 変換 3.3 サンプル ホールド回路 7. 信号処理 3.4 アナログ マルチプレクサ 7.1 不規則信号 4. データ変換
Quiz x y i, j, k 3 A A i A j A k x y z A x A y A z x y z A A A A A A x y z P (x, y,z) r x i y j zk P r r r r r r x y z P ( x 1, y 1, z 1 )
 r x i y j zk P r r r r r r x y z P ( x 1, y 1, z 1 )") Quiz x y i, j, k 3 A A i A j A k x y z A x A y A z x y z A A A A A A x y z P (x, y,z) x i y j zk P x y z P ( x 1, y 1, z 1 ) Q ( x, y, z ) 1 OP x1i y1 j z1k OQ x i y j z k 1 P Q PQ 1 PQ x x y y z z 1 1
Quiz x y i, j, k 3 A A i A j A k x y z A x A y A z x y z A A A A A A x y z P (x, y,z) x i y j zk P x y z P ( x 1, y 1, z 1 ) Q ( x, y, z ) 1 OP x1i y1 j z1k OQ x i y j z k 1 P Q PQ 1 PQ x x y y z z 1 1
スライド 1
 作成 : 群馬大学電気電子教員 電子回路設計 OP アンプ (2) 小林春夫 桑名杏奈 Email: koba@gunma-u.ac.jp Tel: 277-3-788 オフィスアワー : AM9:~AM:( 平日 ) 電気電子棟 (3 号館 )4F 44 室 電子回路設計 授業の内容 第 回講義内容の説明と電子回路設計の基礎知識 第 2 回キルヒホッフ則を用いた回路解析と演習 第 3 回集積回路のデバイス
作成 : 群馬大学電気電子教員 電子回路設計 OP アンプ (2) 小林春夫 桑名杏奈 Email: koba@gunma-u.ac.jp Tel: 277-3-788 オフィスアワー : AM9:~AM:( 平日 ) 電気電子棟 (3 号館 )4F 44 室 電子回路設計 授業の内容 第 回講義内容の説明と電子回路設計の基礎知識 第 2 回キルヒホッフ則を用いた回路解析と演習 第 3 回集積回路のデバイス
1
 GL (a) (b) Ph l P N P h l l Ph Ph Ph Ph l l l l P Ph l P N h l P l .9 αl B βlt D E. 5.5 L r..8 e g s e,e l l W l s l g W W s g l l W W e s g e s g r e l ( s ) l ( l s ) r e l ( s ) l ( l s ) e R e r
GL (a) (b) Ph l P N P h l l Ph Ph Ph Ph l l l l P Ph l P N h l P l .9 αl B βlt D E. 5.5 L r..8 e g s e,e l l W l s l g W W s g l l W W e s g e s g r e l ( s ) l ( l s ) r e l ( s ) l ( l s ) e R e r
DVIOUT
 第 章 離散フーリエ変換 離散フーリエ変換 これまで 私たちは連続関数に対するフーリエ変換およびフーリエ積分 ( 逆フーリエ変換 ) について学んできました この節では フーリエ変換を離散化した離散フーリエ変換について学びましょう 自然現象 ( 音声 ) などを観測して得られる波 ( 信号値 ; 観測値 ) は 通常 電気信号による連続的な波として観測機器から出力されます しかしながら コンピュータはこの様な連続的な波を直接扱うことができないため
第 章 離散フーリエ変換 離散フーリエ変換 これまで 私たちは連続関数に対するフーリエ変換およびフーリエ積分 ( 逆フーリエ変換 ) について学んできました この節では フーリエ変換を離散化した離散フーリエ変換について学びましょう 自然現象 ( 音声 ) などを観測して得られる波 ( 信号値 ; 観測値 ) は 通常 電気信号による連続的な波として観測機器から出力されます しかしながら コンピュータはこの様な連続的な波を直接扱うことができないため
1 1 sin cos P (primary) S (secondly) 2 P S A sin(ω2πt + α) A ω 1 ω α V T m T m 1 100Hz m 2 36km 500Hz. 36km 1
 S (secondly) 2 P S A sin(ω2πt + α) A ω 1 ω α V T m T m 1 100Hz m 2 36km 500Hz. 36km 1") sin cos P (primary) S (secondly) 2 P S A sin(ω2πt + α) A ω ω α 3 3 2 2V 3 33+.6T m T 5 34m Hz. 34 3.4m 2 36km 5Hz. 36km m 34 m 5 34 + m 5 33 5 =.66m 34m 34 x =.66 55Hz, 35 5 =.7 485.7Hz 2 V 5Hz.5V.5V V
sin cos P (primary) S (secondly) 2 P S A sin(ω2πt + α) A ω ω α 3 3 2 2V 3 33+.6T m T 5 34m Hz. 34 3.4m 2 36km 5Hz. 36km m 34 m 5 34 + m 5 33 5 =.66m 34m 34 x =.66 55Hz, 35 5 =.7 485.7Hz 2 V 5Hz.5V.5V V
【NanotechJapan Bulletin】10-9 INNOVATIONの最先端<第4回>
 企画特集 10-9 INNOVATION の最先端 Life & Green Nanotechnology が培う新技術 < 第 4 回 > プリンテッドエレクトロニクス時代実現に向けた材料 プロセス基盤技術の開拓 NEDO プロジェクトプロジェクトリーダー東京 学教授染 隆夫 に聞く 図6 4 3 解像度を変えた TFT アレイによる電子ペーパー 提供 凸版印刷 株 大面積圧力センサの開発
企画特集 10-9 INNOVATION の最先端 Life & Green Nanotechnology が培う新技術 < 第 4 回 > プリンテッドエレクトロニクス時代実現に向けた材料 プロセス基盤技術の開拓 NEDO プロジェクトプロジェクトリーダー東京 学教授染 隆夫 に聞く 図6 4 3 解像度を変えた TFT アレイによる電子ペーパー 提供 凸版印刷 株 大面積圧力センサの開発
第 5 章復調回路 古橋武 5.1 組み立て 5.2 理論 ダイオードの特性と復調波形 バイアス回路と復調波形 復調回路 (II) 5.3 倍電圧検波回路 倍電圧検波回路 (I) バイアス回路付き倍電圧検波回路 本稿の Web ページ ht
 5.3 倍電圧検波回路 倍電圧検波回路 (I) バイアス回路付き倍電圧検波回路 本稿の Web ページ ht") 第 章復調回路 古橋武.1 組み立て.2 理論.2.1 ダイオードの特性と復調波形.2.2 バイアス回路と復調波形.2.3 復調回路 (II).3 倍電圧検波回路.3.1 倍電圧検波回路 (I).3.2 バイアス回路付き倍電圧検波回路 本稿の Web ページ http://mybook-pub-site.sakura.ne.jp/radio_note/index.html 1 C 4 C 4 C 6
第 章復調回路 古橋武.1 組み立て.2 理論.2.1 ダイオードの特性と復調波形.2.2 バイアス回路と復調波形.2.3 復調回路 (II).3 倍電圧検波回路.3.1 倍電圧検波回路 (I).3.2 バイアス回路付き倍電圧検波回路 本稿の Web ページ http://mybook-pub-site.sakura.ne.jp/radio_note/index.html 1 C 4 C 4 C 6
絶対最大定格 (T a =25 ) 項目記号定格単位 入力電圧 V IN 消費電力 P D (7805~7810) 35 (7812~7815) 35 (7818~7824) 40 TO-220F 16(T C 70 ) TO (T C 25 ) 1(Ta=25 ) V W 接合部温度
 項目記号定格単位 入力電圧 V IN 消費電力 P D (7805~7810) 35 (7812~7815) 35 (7818~7824) 40 TO-220F 16(T C 70 ) TO (T C 25 ) 1(Ta=25 ) V W 接合部温度") 3 端子正定電圧電源 概要 NJM7800 シリーズは, シリーズレギュレータ回路を,I チップ上に集積した正出力 3 端子レギュレータ ICです 放熱板を付けることにより,1A 以上の出力電流にて使用可能です 外形 特徴 過電流保護回路内蔵 サーマルシャットダウン内蔵 高リップルリジェクション 高出力電流 (1.5A max.) バイポーラ構造 外形 TO-220F, TO-252 NJM7800FA
3 端子正定電圧電源 概要 NJM7800 シリーズは, シリーズレギュレータ回路を,I チップ上に集積した正出力 3 端子レギュレータ ICです 放熱板を付けることにより,1A 以上の出力電流にて使用可能です 外形 特徴 過電流保護回路内蔵 サーマルシャットダウン内蔵 高リップルリジェクション 高出力電流 (1.5A max.) バイポーラ構造 外形 TO-220F, TO-252 NJM7800FA
アジェンダ 1. イントロダクション 2. アナログ回路での単位 db などの見方 考え方 3. SPICEツールNI Multisim の基本機能 4. 周波数特性の検討 5. 異常発振してしまう原理 6. まとめ 2 Analog Devices Proprietary Information
 The World Leader in High Performance Signal Processing Solutions SPICE ツールで適切な周波数特性と異常発振しない OP アンプ回路を実現する 基礎編 アナログ デバイセズ株式会社石井聡 1 アジェンダ 1. イントロダクション 2. アナログ回路での単位 db などの見方 考え方 3. SPICEツールNI Multisim の基本機能
The World Leader in High Performance Signal Processing Solutions SPICE ツールで適切な周波数特性と異常発振しない OP アンプ回路を実現する 基礎編 アナログ デバイセズ株式会社石井聡 1 アジェンダ 1. イントロダクション 2. アナログ回路での単位 db などの見方 考え方 3. SPICEツールNI Multisim の基本機能
周波数特性解析
 周波数特性解析 株式会社スマートエナジー研究所 Version 1.0.0, 2018-08-03 目次 1. アナログ / デジタルの周波数特性解析................................... 1 2. 一巡周波数特性 ( 電圧フィードバック )................................... 4 2.1. 部分周波数特性解析..........................................
周波数特性解析 株式会社スマートエナジー研究所 Version 1.0.0, 2018-08-03 目次 1. アナログ / デジタルの周波数特性解析................................... 1 2. 一巡周波数特性 ( 電圧フィードバック )................................... 4 2.1. 部分周波数特性解析..........................................
スライド 1
 アクティブインダクタを用いた コモンモードノイズ低減フィルタ 北海道大学大学院情報科学研究科准教授池辺将之 研究背景 アナログ回路におけるインダクタ 高インダクタ部品は 外付けでサイズが大きい オンチップ用途では インダクタンスとQ 値が低い 開発目標 アクティブインダクタを用いた 小面積 チューナブルな有用回路の実現 ( 本提案 ) 増幅機能も有するコモンモードノイズ低減フィルタ アクティブインダクタ回路
アクティブインダクタを用いた コモンモードノイズ低減フィルタ 北海道大学大学院情報科学研究科准教授池辺将之 研究背景 アナログ回路におけるインダクタ 高インダクタ部品は 外付けでサイズが大きい オンチップ用途では インダクタンスとQ 値が低い 開発目標 アクティブインダクタを用いた 小面積 チューナブルな有用回路の実現 ( 本提案 ) 増幅機能も有するコモンモードノイズ低減フィルタ アクティブインダクタ回路

#A A A F, F d F P + F P = d P F, F y P F F x A.1 ( α, 0), (α, 0) α > 0) (x, y) (x + α) 2 + y 2, (x α) 2 + y 2 d (x + α)2 + y 2 + (x α) 2 + y 2 =
, (α, 0) α > 0) (x, y) (x + α) 2 + y 2, (x α) 2 + y 2 d (x + α)2 + y 2 + (x α) 2 + y 2 =") #A A A. F, F d F P + F P = d P F, F P F F A. α, 0, α, 0 α > 0, + α +, α + d + α + + α + = d d F, F 0 < α < d + α + = d α + + α + = d d α + + α + d α + = d 4 4d α + = d 4 8d + 6 http://mth.cs.kitmi-it.c.jp/
#A A A. F, F d F P + F P = d P F, F P F F A. α, 0, α, 0 α > 0, + α +, α + d + α + + α + = d d F, F 0 < α < d + α + = d α + + α + = d d α + + α + d α + = d 4 4d α + = d 4 8d + 6 http://mth.cs.kitmi-it.c.jp/
Microsoft PowerPoint - qcomp.ppt [互換モード]
![Microsoft PowerPoint - qcomp.ppt [互換モード]](/thumbs/85/91243661.jpg "Microsoft PowerPoint - qcomp.ppt [互換モード]") 量子計算基礎 東京工業大学 河内亮周 概要 計算って何? 数理科学的に 計算 を扱うには 量子力学を計算に使おう! 量子情報とは? 量子情報に対する演算 = 量子計算 一般的な量子回路の構成方法 計算って何? 計算とは? 計算 = 入力情報から出力情報への変換 入力 計算機構 ( デジタルコンピュータ,etc ) 出力 計算とは? 計算 = 入力情報から出力情報への変換 この関数はどれくらい計算が大変か??
量子計算基礎 東京工業大学 河内亮周 概要 計算って何? 数理科学的に 計算 を扱うには 量子力学を計算に使おう! 量子情報とは? 量子情報に対する演算 = 量子計算 一般的な量子回路の構成方法 計算って何? 計算とは? 計算 = 入力情報から出力情報への変換 入力 計算機構 ( デジタルコンピュータ,etc ) 出力 計算とは? 計算 = 入力情報から出力情報への変換 この関数はどれくらい計算が大変か??
通信理論
 情報通信 振幅変調 (1) 情報信号を搬送波に載せて送信する方式情報信号 : 変調信号 変調 信号に応じて搬送波のパラメータの一つを変化させる操作 変調信号 + 搬送波 被変調波変調 復調 : 元の情報信号を抽出 情報を表す変調信号搬送波変調 ( 被 ) 変調波復調 変調の種類 振幅変調 AM(Amplitude Modulation) 周波数変調 FM (Frequency Modulation)
情報通信 振幅変調 (1) 情報信号を搬送波に載せて送信する方式情報信号 : 変調信号 変調 信号に応じて搬送波のパラメータの一つを変化させる操作 変調信号 + 搬送波 被変調波変調 復調 : 元の情報信号を抽出 情報を表す変調信号搬送波変調 ( 被 ) 変調波復調 変調の種類 振幅変調 AM(Amplitude Modulation) 周波数変調 FM (Frequency Modulation)
N cos s s cos ψ e e e e 3 3 e e 3 e 3 e
 3 3 5 5 5 3 3 7 5 33 5 33 9 5 8 > e > f U f U u u > u ue u e u ue u ue u e u e u u e u u e u N cos s s cos ψ e e e e 3 3 e e 3 e 3 e 3 > A A > A E A f A A f A [ ] f A A e > > A e[ ] > f A E A < < f ; >
3 3 5 5 5 3 3 7 5 33 5 33 9 5 8 > e > f U f U u u > u ue u e u ue u ue u e u e u u e u u e u N cos s s cos ψ e e e e 3 3 e e 3 e 3 e 3 > A A > A E A f A A f A [ ] f A A e > > A e[ ] > f A E A < < f ; >
Microsoft PowerPoint - H22制御工学I-10回.ppt
 制御工学 I 第 回 安定性 ラウス, フルビッツの安定判別 平成 年 6 月 日 /6/ 授業の予定 制御工学概論 ( 回 ) 制御技術は現在様々な工学分野において重要な基本技術となっている 工学における制御工学の位置づけと歴史について説明する さらに 制御システムの基本構成と種類を紹介する ラプラス変換 ( 回 ) 制御工学 特に古典制御ではラプラス変換が重要な役割を果たしている ラプラス変換と逆ラプラス変換の定義を紹介し
制御工学 I 第 回 安定性 ラウス, フルビッツの安定判別 平成 年 6 月 日 /6/ 授業の予定 制御工学概論 ( 回 ) 制御技術は現在様々な工学分野において重要な基本技術となっている 工学における制御工学の位置づけと歴史について説明する さらに 制御システムの基本構成と種類を紹介する ラプラス変換 ( 回 ) 制御工学 特に古典制御ではラプラス変換が重要な役割を果たしている ラプラス変換と逆ラプラス変換の定義を紹介し
Z: Q: R: C: sin 6 5 ζ a, b
 Z: Q: R: C: 3 3 7 4 sin 6 5 ζ 9 6 6............................... 6............................... 6.3......................... 4 7 6 8 8 9 3 33 a, b a bc c b a a b 5 3 5 3 5 5 3 a a a a p > p p p, 3,
Z: Q: R: C: 3 3 7 4 sin 6 5 ζ 9 6 6............................... 6............................... 6.3......................... 4 7 6 8 8 9 3 33 a, b a bc c b a a b 5 3 5 3 5 5 3 a a a a p > p p p, 3,
zz + 3i(z z) + 5 = 0 + i z + i = z 2i z z z y zz + 3i (z z) + 5 = 0 (z 3i) (z + 3i) = 9 5 = 4 z 3i = 2 (3i) zz i (z z) + 1 = a 2 {
 + 5 = 0 + i z + i = z 2i z z z y zz + 3i (z z) + 5 = 0 (z 3i) (z + 3i) = 9 5 = 4 z 3i = 2 (3i) zz i (z z) + 1 = a 2 {") 04 zz + iz z) + 5 = 0 + i z + i = z i z z z 970 0 y zz + i z z) + 5 = 0 z i) z + i) = 9 5 = 4 z i = i) zz i z z) + = a {zz + i z z) + 4} a ) zz + a + ) z z) + 4a = 0 4a a = 5 a = x i) i) : c Darumafactory
04 zz + iz z) + 5 = 0 + i z + i = z i z z z 970 0 y zz + i z z) + 5 = 0 z i) z + i) = 9 5 = 4 z i = i) zz i z z) + = a {zz + i z z) + 4} a ) zz + a + ) z z) + 4a = 0 4a a = 5 a = x i) i) : c Darumafactory
交流 のための三角関数 1. 次の変数 t についての関数を微分しなさい ただし A および ω は定数とする 1 f(t) = sin t 2 f(t) = A sin t 3 f(t) = A sinωt 4 f(t) = A cosωt 2. 次の変数 t についての関数を積分しなさい ただし
 = sin t 2 f(t) = A sin t 3 f(t) = A sinωt 4 f(t) = A cosωt 2. 次の変数 t についての関数を積分しなさい ただし") 交流 のための三角関数 1. 次の変数 t についての関数を微分しなさい ただし A および ω は定数とする 1 f(t) = sin t 2 f(t) = A sin t 3 f(t) = A sinωt 4 f(t) = A cosωt 2. 次の変数 t についての関数を積分しなさい ただし 積分定数を 0 とすること 1 f(t) = sin t 2 f(t) = A sin t 3 f(t)
交流 のための三角関数 1. 次の変数 t についての関数を微分しなさい ただし A および ω は定数とする 1 f(t) = sin t 2 f(t) = A sin t 3 f(t) = A sinωt 4 f(t) = A cosωt 2. 次の変数 t についての関数を積分しなさい ただし 積分定数を 0 とすること 1 f(t) = sin t 2 f(t) = A sin t 3 f(t)
LOS Detection Comparison in Optical Receiver
 Design Note: HFDN-34.0 Rev. 1; 04/08 MAX3991 を使用した 10Gbps 光レシーバでの正確なロスオブシグナル (LOS) 検出 AAILABLE MAX3991 を使用した 10Gbps 光レシーバでの正確なロスオブシグナル (LOS) 検出 1 はじめに ロスオブシグナル (LOS) のモニタは 10Gbps XFP 光モジュールでシステムのディジタル診断を行う場合に必要となります
Design Note: HFDN-34.0 Rev. 1; 04/08 MAX3991 を使用した 10Gbps 光レシーバでの正確なロスオブシグナル (LOS) 検出 AAILABLE MAX3991 を使用した 10Gbps 光レシーバでの正確なロスオブシグナル (LOS) 検出 1 はじめに ロスオブシグナル (LOS) のモニタは 10Gbps XFP 光モジュールでシステムのディジタル診断を行う場合に必要となります
電子回路I_6.ppt
 電子回路 Ⅰ 第 6 回 電子回路 Ⅰ 7 講義内容. 半導体素子 ( ダイオードとトランジスタ ). 基本回路 3. 増幅回路 バイポーラトランジスタの パラメータと小信号等価回路 二端子対回路 パラメータ 小信号等価回路 FET(MOFET) の基本増幅回路と等価回路 MOFET の基本増幅回路 MOFET の小信号等価回路 電子回路 Ⅰ 7 増幅回路の入出力インピーダンス 増幅度 ( 利得 )
電子回路 Ⅰ 第 6 回 電子回路 Ⅰ 7 講義内容. 半導体素子 ( ダイオードとトランジスタ ). 基本回路 3. 増幅回路 バイポーラトランジスタの パラメータと小信号等価回路 二端子対回路 パラメータ 小信号等価回路 FET(MOFET) の基本増幅回路と等価回路 MOFET の基本増幅回路 MOFET の小信号等価回路 電子回路 Ⅰ 7 増幅回路の入出力インピーダンス 増幅度 ( 利得 )
電子回路I_8.ppt
 電子回路 Ⅰ 第 8 回 電子回路 Ⅰ 9 1 講義内容 1. 半導体素子 ( ダイオードとトランジスタ ) 2. 基本回路 3. 増幅回路 小信号増幅回路 (1) 結合増幅回路 電子回路 Ⅰ 9 2 増幅の原理 増幅度 ( 利得 ) 信号源 増幅回路 負荷 電源 電子回路 Ⅰ 9 3 増幅度と利得 ii io vi 増幅回路 vo 増幅度 v P o o o A v =,Ai =,Ap = = vi
電子回路 Ⅰ 第 8 回 電子回路 Ⅰ 9 1 講義内容 1. 半導体素子 ( ダイオードとトランジスタ ) 2. 基本回路 3. 増幅回路 小信号増幅回路 (1) 結合増幅回路 電子回路 Ⅰ 9 2 増幅の原理 増幅度 ( 利得 ) 信号源 増幅回路 負荷 電源 電子回路 Ⅰ 9 3 増幅度と利得 ii io vi 増幅回路 vo 増幅度 v P o o o A v =,Ai =,Ap = = vi
nsg02-13/ky045059301600033210
 φ φ φ φ κ κ α α μ μ α α μ χ et al Neurosci. Res. Trpv J Physiol μ μ α α α β in vivo β β β β β β β β in vitro β γ μ δ μδ δ δ α θ α θ α In Biomechanics at Micro- and Nanoscale Levels, Volume I W W v W
φ φ φ φ κ κ α α μ μ α α μ χ et al Neurosci. Res. Trpv J Physiol μ μ α α α β in vivo β β β β β β β β in vitro β γ μ δ μδ δ δ α θ α θ α In Biomechanics at Micro- and Nanoscale Levels, Volume I W W v W
I II III IV V
 I II III IV V N/m 2 640 980 50 200 290 440 2m 50 4m 100 100 150 200 290 390 590 150 340 4m 6m 8m 100 170 250 µ = E FRVβ β N/mm 2 N/mm 2 1.1 F c t.1 3 1 1.1 1.1 2 2 2 2 F F b F s F c F t F b F s 3 3 3
I II III IV V N/m 2 640 980 50 200 290 440 2m 50 4m 100 100 150 200 290 390 590 150 340 4m 6m 8m 100 170 250 µ = E FRVβ β N/mm 2 N/mm 2 1.1 F c t.1 3 1 1.1 1.1 2 2 2 2 F F b F s F c F t F b F s 3 3 3
Q
 埼玉工業大学機械工学学習支援セミナー ( 小西克享 ) 自由振動と強制振動 -1/6 テーマ H3: 自由振動と強制振動 振動の形態には, 自由振動と強制振動の 種類があります. 一般に, 外力が作用しなくても固有振動数で振動を継続する場合は自由振動であり, 外力が作用することによって強制的に振動が引き起こされる場合は強制振動になります. 摩擦抵抗の有無によって減衰系と非減衰系に区分されるため, 振動の分類は次のようになる.
埼玉工業大学機械工学学習支援セミナー ( 小西克享 ) 自由振動と強制振動 -1/6 テーマ H3: 自由振動と強制振動 振動の形態には, 自由振動と強制振動の 種類があります. 一般に, 外力が作用しなくても固有振動数で振動を継続する場合は自由振動であり, 外力が作用することによって強制的に振動が引き起こされる場合は強制振動になります. 摩擦抵抗の有無によって減衰系と非減衰系に区分されるため, 振動の分類は次のようになる.
Microsoft PowerPoint - 第06章振幅変調.pptx
 通信システムのモデル コミュニケーション工学 A 第 6 章アナログ変調方式 : 振幅変調 変調の種類振幅変調 () 検波出力の信号対雑音電力比 (S/N) 送信機 送信メッセージ ( 例えば音声 ) をアナログまたはディジタル電気信号に変換. 変調 : 通信路で伝送するのに適した周波数帯の信号波形へ変換. 受信機フィルタで邪魔な雑音を除去し, 処理しやすい電圧まで増幅. 復調 : もとの周波数帯の電気信号波形に変換し,
通信システムのモデル コミュニケーション工学 A 第 6 章アナログ変調方式 : 振幅変調 変調の種類振幅変調 () 検波出力の信号対雑音電力比 (S/N) 送信機 送信メッセージ ( 例えば音声 ) をアナログまたはディジタル電気信号に変換. 変調 : 通信路で伝送するのに適した周波数帯の信号波形へ変換. 受信機フィルタで邪魔な雑音を除去し, 処理しやすい電圧まで増幅. 復調 : もとの周波数帯の電気信号波形に変換し,
スライド 1
 電子回路研究会 24 年 月 9 日 マルチビットデルタシグマ型 タイムデジタイザ回路の FPGA 実現 測定検証 中條剛志 平林大樹 荒船拓也 佐藤幸志 2 小林春夫 : 群馬大学 2: 光サイエンス Suppored by STARC Gunma niversiy Kobayashi Lab アウトライン 研究背景 シングルビットΔΣTDC マルチビットΔΣTDC 測定 評価 まとめ 今後の課題
電子回路研究会 24 年 月 9 日 マルチビットデルタシグマ型 タイムデジタイザ回路の FPGA 実現 測定検証 中條剛志 平林大樹 荒船拓也 佐藤幸志 2 小林春夫 : 群馬大学 2: 光サイエンス Suppored by STARC Gunma niversiy Kobayashi Lab アウトライン 研究背景 シングルビットΔΣTDC マルチビットΔΣTDC 測定 評価 まとめ 今後の課題
.5 z = a + b + c n.6 = a sin t y = b cos t dy d a e e b e + e c e e e + e 3 s36 3 a + y = a, b > b 3 s363.7 y = + 3 y = + 3 s364.8 cos a 3 s365.9 y =,
 [ ] IC. r, θ r, θ π, y y = 3 3 = r cos θ r sin θ D D = {, y ; y }, y D r, θ ep y yddy D D 9 s96. d y dt + 3dy + y = cos t dt t = y = e π + e π +. t = π y =.9 s6.3 d y d + dy d + y = y =, dy d = 3 a, b
[ ] IC. r, θ r, θ π, y y = 3 3 = r cos θ r sin θ D D = {, y ; y }, y D r, θ ep y yddy D D 9 s96. d y dt + 3dy + y = cos t dt t = y = e π + e π +. t = π y =.9 s6.3 d y d + dy d + y = y =, dy d = 3 a, b
2 Hermite-Gaussian モード 2-1 Hermite-Gaussian モード 自由空間を伝搬するレーザ光は次のような Hermite-gaussian Modes を持つ光波として扱う ことができる ここで U lm (x, y, z) U l (x, z)u m (y, z) e
 U l (x, z)u m (y, z) e") Wavefront Sensor 法による三角共振器のミスアラインメント検出 齊藤高大 新潟大学大学院自然科学研究科電気情報工学専攻博士後期課程 2 年 214 年 8 月 6 日 1 はじめに Input Mode Cleaner(IMC) は Fig.1 に示すような三角共振器である 懸架鏡の共振などにより IMC を構成する各ミラーが角度変化を起こすと 入射光軸と共振器軸との間にずれが生じる
Wavefront Sensor 法による三角共振器のミスアラインメント検出 齊藤高大 新潟大学大学院自然科学研究科電気情報工学専攻博士後期課程 2 年 214 年 8 月 6 日 1 はじめに Input Mode Cleaner(IMC) は Fig.1 に示すような三角共振器である 懸架鏡の共振などにより IMC を構成する各ミラーが角度変化を起こすと 入射光軸と共振器軸との間にずれが生じる
NJM78M00 3 端子正定電圧電源 概要 NJM78M00 シリーズは,NJM78L00 シリーズを更に高性能化した安定化電源用 ICです 出力電流が 500mA と大きいので, 余裕ある回路設計が可能になります 用途はテレビ, ステレオ, 等の民生用機器から通信機, 測定器等の工業用電子機器迄
 3 端子正定電圧電源 概要 シリーズは,NJM78L00 シリーズを更に高性能化した安定化電源用 ICです 出力電流が 500mA と大きいので, 余裕ある回路設計が可能になります 用途はテレビ, ステレオ, 等の民生用機器から通信機, 測定器等の工業用電子機器迄広くご利用頂けます 外形 特徴 過電流保護回路内蔵 サーマルシャットダウン内蔵 高リップルリジェクション 高出力電流 (500mA max.)
3 端子正定電圧電源 概要 シリーズは,NJM78L00 シリーズを更に高性能化した安定化電源用 ICです 出力電流が 500mA と大きいので, 余裕ある回路設計が可能になります 用途はテレビ, ステレオ, 等の民生用機器から通信機, 測定器等の工業用電子機器迄広くご利用頂けます 外形 特徴 過電流保護回路内蔵 サーマルシャットダウン内蔵 高リップルリジェクション 高出力電流 (500mA max.)
<4D F736F F F696E74202D2088E B691CC8C7691AA F C82512E B8CDD8AB B83685D>
 前回の復習 医用生体計測磁気共鳴イメージング :2 回目 数理物質科学研究科電子 物理工学専攻巨瀬勝美 203-7-8 NMRとMRI:( 強い ) 静磁場と高周波 ( 磁場 ) を必要とする NMRとMRIの歴史 :952 年と2003 年にノーベル賞 ( 他に2 回 ) 数学的準備 : フーリエ変換 ( 信号の中に, どのような周波数成分が, どれだけ含まれているか ( スペクトル ) を求める方法
前回の復習 医用生体計測磁気共鳴イメージング :2 回目 数理物質科学研究科電子 物理工学専攻巨瀬勝美 203-7-8 NMRとMRI:( 強い ) 静磁場と高周波 ( 磁場 ) を必要とする NMRとMRIの歴史 :952 年と2003 年にノーベル賞 ( 他に2 回 ) 数学的準備 : フーリエ変換 ( 信号の中に, どのような周波数成分が, どれだけ含まれているか ( スペクトル ) を求める方法
,, 2. Matlab Simulink 2018 PC Matlab Scilab 2
 (2018 ) ( -1) TA Email : ohki@i.kyoto-u.ac.jp, ske.ta@bode.amp.i.kyoto-u.ac.jp : 411 : 10 308 1 1 2 2 2.1............................................ 2 2.2..................................................
(2018 ) ( -1) TA Email : ohki@i.kyoto-u.ac.jp, ske.ta@bode.amp.i.kyoto-u.ac.jp : 411 : 10 308 1 1 2 2 2.1............................................ 2 2.2..................................................
: (a) ( ) A (b) B ( ) A B 11.: (a) x,y (b) r,θ (c) A (x) V A B (x + dx) ( ) ( 11.(a)) dv dt = 0 (11.6) r= θ =
 ( ) A (b) B ( ) A B 11.: (a) x,y (b) r,θ (c) A (x) V A B (x + dx) ( ) ( 11.(a)) dv dt = 0 (11.6) r= θ =") 1 11 11.1 ψ e iα ψ, ψ ψe iα (11.1) *1) L = ψ(x)(γ µ i µ m)ψ(x) ) ( ) ψ e iα(x) ψ(x), ψ(x) ψ(x)e iα(x) (11.3) µ µ + iqa µ (x) (11.4) A µ (x) A µ(x) = A µ (x) + 1 q µα(x) (11.5) 11.1.1 ( ) ( 11.1 ) * 1)
1 11 11.1 ψ e iα ψ, ψ ψe iα (11.1) *1) L = ψ(x)(γ µ i µ m)ψ(x) ) ( ) ψ e iα(x) ψ(x), ψ(x) ψ(x)e iα(x) (11.3) µ µ + iqa µ (x) (11.4) A µ (x) A µ(x) = A µ (x) + 1 q µα(x) (11.5) 11.1.1 ( ) ( 11.1 ) * 1)