国土技術政策総合研究所 研究資料
|
|
|
- もえり やすこ
- 5 years ago
- Views:
Transcription
 を作成した また とりま とめた要件に基づき 必要となる空間データ ( 以下 道路構造データ という ) の仕 様を定めるために 走行支援サービスのための道路構造データ製品仕様書 ( 案 ) を作 成した さらに")
1 3. 走行支援サービスに必要な大縮尺道路地図の整備 更新手法の研究 3.1 整備手法の検討ステップ本共同研究では 走行支援サービスに利用する大縮尺道路地図の要件をとりまと めるべく 走行支援サービスに資する地図の要件定義書 ( 案 ) を作成した また とりま とめた要件に基づき 必要となる空間データ ( 以下 道路構造データ という ) の仕 様を定めるために 走行支援サービスのための道路構造データ製品仕様書 ( 案 ) を作 成した さらに 既存の道路基盤地図情報の加工手法や追加する地物 属性の整備 手法を検討し 走行支援サービスのための道路構造データ製品仕様書 ( 案 ) に則した 道路構造データを整備する際の既存資源および整備手法などを規定した走行支援サ ービスのための道路構造データ整備要領 ( 案 ) を作成した 走行支援サービスに必要な大縮尺道路地図の整備手法の検討ステップを図 3-1 に示す 図 3-1 走行支援サービスに必要な大縮尺道路地図の整備手法の検討ステップ 図 3-1 の検討ステップの詳細を以下に示す 1 要件定義要件は オートパイロットシステムに関する検討会 ( 国土交通省 ) 資料および本共同研究における議論をもとに 高速道路における運転支援の高度化で実現を目指すサービスを整理した上で具体化し 走行支援サービスに資する地図の要件定義書 ( 案 ) を作成した また 走行支援サービスに利用する大縮尺道路地図は 道路管理者での活用も想定できることから 道路管理者の大縮尺道路地図への要件もとりまとめた 26
2 2 製品仕様の検討前項で定義した要件を満足する地物 属性の一覧を整理した 次に 共同研究者との議論を踏まえ 本共同研究で定める走行支援サービスのための大縮尺道路地図の位置づけおよびデータ構造を明確化し 走行支援サービスのための道路構造データ製品仕様書 ( 案 ) を作成した さらに 地図試作 評価 ( 走行実験など ) を踏まえ 製品仕様を見直した 3 整備手法の検討走行支援サービスに資する大縮尺道路地図は 既存の道路基盤地図情報以外の新たな地物 属性が追加される そのため 机上検討だけで 実用的な整備手法を具体化するのは困難と考えた そこで 共同研究者で地図を試作し トライ & エラーを繰り返しながら 作業手順を具体化した この結果を踏まえて 整備手法を定式化し 走行支援サービスのための道路構造データ整備要領 ( 案 ) を作成した さらに 地図試作 評価 ( 走行実験など ) を踏まえ 整備要領を見直した 4 地図試作 評価前項に示したとおり 地図を試作してトライ & エラーを繰り返し あわせて評価も進めた 具体的には 第一次の試作として対象地域 地物を限定して試作した 次に 第一次の試作で顕在化した課題への対応方策の具体化を目的として 第二次の試作として 第一次の試作よりも規模を拡大して試作 評価した これらの検討を踏まえ 様々な高速道路を対象に地図を試作 評価した 次に 試作した地図を用いて アプリケーションでの有用性検証を目的とした走行実験を実施した 5 規程類のとりまとめ 4 地図試作 評価で得られた知見を整理し 1~3のステップで作成した走行支援サービスに資する地図の要件定義書 ( 案 ) 走行支援サービスのための道路構造データ製品仕様書 ( 案 ) および走行支援サービスのための道路構造データ整備要領 ( 案 ) の 3 つを最終化した 27
3 3.2 地図への要件定義および製品仕様書 ( 案 ) の作成 走行支援サービスに資する地図の要件定義書 ( 案 ) の作成 本共同研究では 走行支援サービスに利用する大縮尺道路地図の要件をとりまと めるべく 走行支援サービスに資する地図の要件定義書 ( 案 ) を作成した 要件は オートパイロットシステムに関する検討会 ( 国土交通省 ) 資料および本共同 研究における議論をもとに 高速道路における運転支援の高度化で実現を目指すサ ービス 各サービスの要件と必要な情報 適用範囲外の要件などにより構成した また 走行支援サービスに利用する大縮尺道路地図は 道路管理者での活用も想定できる ことから 道路管理者の大縮尺道路地図への要件を附属書として整理した 表 3-1 に 具体化した大縮尺道路地図を用いた走行支援サービスの要件一覧を示す 要件は 5 つの分類のもと 12 の要件で構成している あわせて 附属書に道路管理者の要件 として 3 つの要件を整理した 表 3-1 大縮尺道路地図を用いた走行支援サービスの要件一覧 分類車両走行の制御 ( 左右方向 ) 車両走行の制御 ( 前後方向 ) 区画線等の認識自車位置の把握操舵制御 ( 車線変更 ) ( 附属書 ) 道路管理者の要件 要件要件 1: 曲率半径の小さいカーブ区間での車線維持要件 2: 複雑な形状の道路での車線維持要件 3: 走行車線の維持要件 4: 道路形状変化に応じた速度制御要件 5: 付帯設備に応じた速度制御要件 6: 速度規制情報に従った速度制御要件 7: 区画認識率の向上要件 8: トンネル等の出入り口地点の把握要件 9: 視界不良となった場合の適切な車線区分線の把握要件 10: 道路上の地物を用いた自車位置の把握要件 11: 分合流や誘導線等 複数の区画線が存在する場合の適切な車線区分線の把握要件 12: 本線もしくはランプ上の複数の区画線が存在する場合の適切な車線区分線の把握要件 1: 車線単位での情報の収集 蓄積 分析 活用要件 2: 既存の道路ネットワークとの連携要件 3: 車両が物理的に走行可能な範囲の特定 28
4 本項目の研究成果となる走行支援サービスに資する地図の要件定義書 ( 案 ) は 巻末資料として添付する その目次構成は図 3-2 のとおりである 1 章では背景 目的 2 章では適用範囲 3 章では実現を目指すサービスを示す 4 章で各サービスの要件を整理したうえで 要件毎に必要な情報を示す 5 章では適用範囲外の要件を示す 1. 概論 1.1 背景 1.2 目的 2. 適用範囲 3. 高速道路における運転支援の高度化 で実現を目指すサービス 4. 各サービスの要件と必要な情報 4.1. 車両走行の制御 ( 左右方向 ) 4.2 車両走行の制御 ( 前後方向 ) 4.3 区画線等の認識 4.4 自車位置の把握 4.5 操舵制御 ( 車線変更 ) 5. 適用範囲外の要件 5.1 気象条件が不良な場合 附属書 1( 参考 ) 走行支援サービスの要件を実現するために必要な情報附属書 2( 参考 ) 走行支援サービスに必要な情報に関する用語の整理附属書 3( 参考 ) 道路管理者のサービスの要件図 3-2 走行支援サービスに資する地図の要件定義書 ( 案 ) の目次構成 29
 に組み込む流れを想定している 図 3-3 に データの流れからみた道路構造データおよび本製品仕様書の位置づけを示す 本製品仕様書は 各社が共通的に利用 ( 変換 加工 ) できる汎用性の高いデータ構造を定義しており 道路基盤地図情報を元に 電子地図や点群座標データなどの様々な既存資源を組み合わせて整備することを前提にした内容になっている")
5 3.2.2 走行支援サービスのための道路構造データ製品仕様書 ( 案 ) の作成前項で定義した要件に基づき 必要となる空間データ ( 以下 道路構造データ という ) の仕様を定めるために 走行支援サービスのための道路構造データ製品仕様書 ( 案 )( 以下 本製品仕様書 という ) をとりまとめた 道路構造データの利用方法としては 地図利用者が用途に合わせて変換 加工し 自社の走行支援サービス ( アプリケーション ) に組み込む流れを想定している 図 3-3 に データの流れからみた道路構造データおよび本製品仕様書の位置づけを示す 本製品仕様書は 各社が共通的に利用 ( 変換 加工 ) できる汎用性の高いデータ構造を定義しており 道路基盤地図情報を元に 電子地図や点群座標データなどの様々な既存資源を組み合わせて整備することを前提にした内容になっている こうして整備された道路構造データは 直接各社の走行支援アプリケーションで用いるのではなく その前段階で各社が変換 加工を行うことを念頭においた位置づけのものとしている 既存資源 走行支援サービスのための道路構造データ製品仕様書 ( 案 ) 走行支援サービスのための道路構造データ整備要領 ( 案 ) 走行支援サービスに資する地図の要件定義書 ( 案 ) 各社の走行支援アプリケーション 道路基盤地図情報 整備 社で変換 加工 社アプリケーション 社で変換 加工 社アプリケーション 電子地図 点群座標データ等 各社が共通的に利用できる汎用性の高いデータ C 社で変換 加工 C 社アプリケーション 道路基盤地図情報製品仕様書 ( 案 ) 地理情報標準プロファイル (JPGIS)Ver.2.1 日本版メタデータプロファイル (JMP2.0 仕様書 ) 図 3-3 走行支援サービスのための道路構造データおよび本製品仕様書の 位置づけ 30

6 走行支援サービスのための道路構造データ製品仕様書 ( 案 ) では 道路構造デー タは図 3-4 に示す 4 層構造で定義することとし 道路構造の一部をとりだして用いるこ とを可能にするなど 汎用性を確保した 第 1 層 : 道路基盤地図情報プロファイル道路基盤地図情報のうち 走行支援サービスの実現に必要な地物 第 2 層 : 道路基盤地図情報の拡張道路基盤地図情報の既定義地物に属性を追加 あるいは加工して新たに作成した地物 第 3 層 : ネットワーク車線のつながりを示す位相 第 4 層 : 制約走行中の制約条件 図 3-4 道路構造データの概略構成 また 本製品仕様書の具体的な規定にあたっては 以下に示す 3 つの観点に留意した また 作成に際しては 道路の区間 ID 方式などの発行済みの関連する国際標準に則った記述となるよう留意した 1 道路構造データの地図調製者および地図利用者の創意工夫の妨げにならないこと ( 競争領域には踏み込まないこと ) 31
7 2 国内外における複数の実装例を許容できること 3 国際標準化を見据えた規程の構成や文書表現とすること 本項目の研究成果となる本製品仕様書は 巻末資料として添付する その目次構成は図 3-5 のとおりである その目次構成は 空間データ製品仕様書の構成を規格化した国際標準である ISO Data Product Specification に則るよう設定した 本目次構成は 道路基盤地図情報製品仕様書 ( 案 ) および道路基盤地図情報 ( 整備促進版 ) 製品仕様書 ( 案 ) と同一のものとなる 具体的には 1 章では 本製品仕様書が対象とする地理空間データ製品の概要を示す 2 章では 空間的 時間的な観点から本製品仕様書の適用範囲を示す 3 章では 本製品仕様書が対象とする地理空間データ製品の識別に関する情報を示す 4 章では応用スキーマを示す 5 章では 座標および暦に関する情報を示す 6 章では 品質要求および評価手法を示す 7 章では 符号化仕様を示す 8 章では メタデータの記述方法を示す 1 概覧 1.1 製品仕様書の作成情報 1.2 目的 1.3 本製品仕様書で定義する道路構造データの基本構造 1.4 空間範囲 1.5 時間範囲 1.6 引用規格 1.7 用語と定義 1.8 略語 2 適用範囲 3 データ製品識別 4 データ内容および構造 4.1 応用スキーマ UML クラス図 走行支援サービスのための道路構造データ応用スキーマ 道路構造データパッケージ 道路基盤地図情報プロファイルパッケージ 道路基盤地図情報の拡張パッケージ ネットワークパッケージ 制約パッケージ 4.2 応用スキーマ文書 道路基盤地図情報プロファイルパッケージ 道路基盤地図情報の拡張パッケージ 32
8 4.2.3 ネットワークパッケージ 制約パッケージ 5 参照系 5.1 座標参照系 5.2 時間参照系 6 データ品質 6.1 データ集合全体 6.2 道路基盤地図情報プロファイルパッケージ 6.3 道路基盤地図情報拡張パッケージ 6.4 ネットワークパッケージ 6.5 制約パッケージ 7 データ製品配布 7.1 配布書式情報 7.1.1JPGIS 付属書 8( 参考 ) による符号化 7.2 配布媒体情報 8 メタデータ 9 その他 附属書 1( 規定 ) 試作データのための符号化仕様 (XML ファイル ) 附属書 2( 参考 ) 道路基盤地図情報プロファイルの例附属書 3( 参考 ) 走行実験等を踏まえた各地物 属性の評価結果附属書 4( 参考 ) 本共同研究成果に基づく実装形式 1 ( 新高度 DRM-DRev0.4.01) 一般財団法人日本デジタル道路地図協会 図 3-5 走行支援サービスのための道路構造データ製品仕様書 ( 案 ) の目次構成 33
9 3.3 既存の道路基盤地図情報の加工手法や追加する地物 属性の整備手法の検討本共同研究では 既存の道路基盤地図情報の加工手法や追加する地物 属性の 整備手法として 走行支援サービスのための道路構造データ製品仕様書 ( 案 ) に則し た道路構造データを整備する際の既存資源 道路構造データの整備手法および品 質評価にあたっての留意事項などを走行支援サービスのための道路構造データ整備 要領 ( 案 )( 以下 本要領 という ) として作成した 本要領で具体化した道路構造データの各層を整備する基本的な作業手順を図 3-6 に示す なお 道路構造データの地図調製者および地図利用者の創意工夫の妨 げにならないことを念頭に 本要領では基本的な作業手順のみを規定し 詳細な作業 手順は規定しないこととした また 本共同研究では 更新手法に関しては地図の試 作などを含む詳細な検討までは至らなかったことから 現段階では更新のことは規定 しないこととした 道路構造データの基本的な作業手順 1 道路基盤地図情報を利用して第 1 層を作成する 2 道路基盤地図情報 道路の区間 ID テーブルを利用して第 2 層を作成する 3 第 2 層 道路の区間 ID テーブルを利用して第 3 層を作成する 4 第 1 層 第 2 層を利用して第 4 層を作成する なお 制約条件の位置は第 3 層 に反映する 5 第 1 層 第 2 層 第 4 層の作成にあたっては その他の既存資源を補完的に利 用する その他の既存資源 5 ( 第 4 層 ) 制約 道路の区間 ID テーブル 3 2 ( 第 3 層 ) ネットワーク 3 ( 第 2 層 ) 道路基盤地情報の拡張 道路基盤地図情報 2 1 ( 第 1 層 ) 道路基盤地情報プロファイル 図 3-6 道路構造データ整備の基本的な作業手順 凡例 利用 補完 34
10 道路構造データを作成する際には 本要領だけではなく 道路構造データ製品仕様書を入手する必要がある データの内容 構造や符号化仕様など 道路構造データの詳細は この道路構造データ製品仕様書を確認しなければならない また 道路構造データ製品仕様書は 道路基盤地図情報製品仕様書 ( 案 ) JPGIS2.1 および JMP2.0 を参考にしているため 必要に応じてこれらを入手し 参照すること 本項目の研究成果となる本要領は 巻末資料として添付する その目次構成は図 3-7 のとおりである 1 章では 本要領の目的 背景および構成を説明する 2 章では 道路構造データ製品仕様書 ( 案 ) の概要および道路構造データの基本構造を解説する 3 章では 道路構造データを整備する際に使用する既存資源を述べる 4 章では 2 章で示した道路構造データを 3 章に示した既存資源を用いて整備する際の作業上の留意点を示す 5 章では 整備した道路構造データの品質評価の方法を示す 1 概覧 1.1. 目的 1.2. 適用範囲 1.3. 用語 1.4. 本要領の位置づけ 1.5. 本要領の構成 2 道路構造データ製品仕様書の解説 2.1. 道路構造データの基本構造 2.2. 製品仕様書の構成 2.3. 道路基盤地図情報プロファイル 基本的な考え方 道路基盤地図情報プロファイルの指定 道路基盤地図情報プロファイルの作成 3 道路構造データ整備のための既存資源 3.1. 本要領で定義する既存資源 3.2. 既存資源から取得可能な地物 道路基盤地図情報プロファイルパッケージ 道路基盤地図情報の拡張パッケージ ネットワークパッケージ 制約パッケージ 3.3. 既存資源の要件 3.4. 既存資源に関する留意事項 既存資源の使用手順 35
11 3.4.2 既存資源に関する留意事項 4 道路構造データの整備 4.1. 道路構造データ整備の基本的な作業手順 4.2. 各層の作業手順と作業上の留意事項 道路基盤地図情報プロファイルパッケージ 道路基盤地図情報の拡張パッケージ ネットワークパッケージ 制約パッケージ 4.3. 成果品の作成 ファイルフォーマット ファイル単位 成果品作成時の留意点 5 道路構造データの品質評価 5.1. 品質評価結果の記録方法 5.2. 既存資源の要件を満たさない場合 附属書 1( 参考 ): 道路基盤地図情報プロファイル取得項目一覧 図 3-7 本要領の目次構成 36
12 3.4 地図の試作による適用可能性の検証本共同研究では 道路構造データを試作してトライ & エラーを繰り返しながら あわ せて評価を進めた 具体的には 第一次の試作として対象地域 地物を限定して試作 した 次に 第一次の試作で顕在化した課題への対応方策の具体化を目的として 第 二次の試作として 第一次の試作よりも規模を拡大して試作 評価した これらの試作 を通じ 10 以上の課題が顕在化し 試作 評価および共同研究者による議論を重ね て これら全ての課題への対応策を明確化した これらの検討を踏まえ 様々な高速 道路を対象とした走行実験などへ向けて道路構造データを試作 評価した 本共同研究では 走行支援サービスに必要な大縮尺道路地図の整備に関する検 証および走行実験の準備を目的とし 地図調製者と国土技術政策総合研究所とで分 担し 延べ約 440 kmの道路構造データを試作した 道路構造データの試作の成果として 地物 属性毎の整備手法や基本的な作業手 順 整備における作業上の留意点などを明らかにし 本共同研究で定めた規程類へ 反映した 本共同研究において実施した試作の概要を表 3-2 に示す 試作エリアの条件 分合流部 二階層構造箇所 路線の接続箇所を含むこと 電子地図 ( オルソ画像 ) では地物の整備が難しい箇所を含むこと 様々なカーブの曲率 車線数の組み合わせを含むこと 数十 m の範囲で高さが大きく変化する区間を含むこと 表 3-2 共同研究で試作した道路構造データの概要 エリア 阪神高速道路 (1 号環状線 ( 一部 ) 13 号東大阪線 ( 一部 ) 15 号堺線 ( 一部 )) 約 15km 首都高速道路 ( 都心環状線内回り ) 約 15km 首都高速道路 ( 10 号晴海線 - 湾岸線 ( 一部 )-9 号深川線豊洲 IC- 福住 IC( 上下線 )) 約 14km さがみ縦貫道路 ( 寒川北 IC- 寒川南 IC( 上下線 )) 約 6km 試作した層 1 層 2 層 3 層 4 層 国土技術政策総合研究所 国土技術政策総合研究所 ( 一財 ) 日本デジタル道路地図協会 パスコ パスコ 国土技術政策 ゼンリン ゼンリン 総合研究所 ゼンリン アジア航測 アジア航測 国土技術政策 NTT 空間情報 NTT 空間情報 総合研究所 アジア航測 アジア航測 ( 一財 ) 日本デ パスコ パスコ ジタル道路地 ゼンリン ゼンリン 図協会 ゼンリン ( 一財 ) 日本デジタル道路地図協会 国土技術政策総合研究所 ゼンリン 国土技術政策総合研究所 ( 一財 ) 日本デジタル道路地図協会 ゼンリン 37
13 エリア 東名高速道路 ( 横浜町田 IC- 厚木 IC( 上下線 )) 約 30km 試作した層 1 層 2 層 3 層 4 層 パスコ パスコ 国土技術政策 国土技術政策 総合研究所 総合研究所 38
14 3.5 試作した道路構造データによる走行実験の実施 トヨタ自動車株式会社による有用性の検証 (1) 走行実験の目的 本走行実験の目的は 道路形状変化に応じた速度制御 曲率半径の小さいカーブ 区間の走行 ( 走行支援サービスに資する地図の要件定義書 要件 4) における 試作した道路構造データの有用性の検証とした 有用性は 試作した道路構造デー タの曲率を用いてカーブ進入前に速度制御が可能か否かを以て検証した (2) 検証内容 本走行実験では 道路構造データから抽出した曲率 ( 以下 地図曲率 という ) を 用いてカーブ区間の走行時に横加速度 ( 車両の進行方向に垂直な向きにかかる加速 度 ) が上限値以下となるように速度制御支援を実施した 試作した道路構造データの 有用性は 地図曲率と走行中のステアリングの舵角 ( 以下 ステア角 という ) より推 定した曲率 ( 以下 推定曲率 という ) との比較により検証した 速度制御支援における横加速度の上限 a は 曲率半径を R 速度の上限値を v と すると以下の式 1 で求められる 2 v a v ar R 式 1: 横加速度の上限 a 曲率半径 R 速度の上限 v の関係 例えば 横加速度 a=0.2g R=300m のとき 速度の上限値 v=87.2km/h となる ここで G は重力加速度 9.8m/s 2 を意味する 参考までに 横加速度 a=0.2g の場合の 曲率 R と速度の上限 v の関係を図 3-8 に示す 図 3-8 横加速度 a=0.2g の場合の曲率半径 R と速度の上限 v の関係 39
 走行実験結果に示す各箇所の番号を表している 2 7 11 3 9 10 6 5 8 1( 北上 ) 4( 南下 ) 500m 図 3-9 走行路線")
15 (3) 走行実験の内容 1) 走行路線 区間本走行実験は阪神高速道路の 1 号環状線 13 号東大阪線および 15 号堺線の一部路線で行った 図 3-9 の青線は走行区間を示している 横加速度が上限値以下となるよう速度を制御して減速した場所を黄色の円で示す また 数字は (4) 走行実験結果に示す各箇所の番号を表している ( 北上 ) 4( 南下 ) 500m 図 3-9 走行路線 出典 :NTT 空間情報株式会社 GEOSPCE オルソ画像 40
16 2) 使用した道路構造データ 本走行実験では 道路の各位置の曲率を求めるために 本製品仕様書の既定義 地物である車線中心線と表 3-3 に示す属性情報を用いた 表 3-3 走行実験で使用した道路構造データ 地物名 属性 関連役割名 使用 用途 車線中心線 場所 形状 ( 車線リンク ) 参照点 ID - 線形種別 線形判定 ( 直線 / クロソイド / 曲線 ) 車線種別 - 管理用図面等からの取得 - の有無 カーブ方向 - クロソイド方向 - パラメータ 線形種別が曲線の場合は曲線半径 クロソイドの場合はクロソイド一般式 R L=2 の 緩和曲線長 緩和曲線長 ( クロソイド区間の長さ ) オフセット距離 - 線形種別の判別方法 - 右側境界 - 左側境界 - 覆う - 41
17 (4) 走行実験の結果試作した道路構造データの線形種別にクロソイドが含まれる場合 地図曲率と推定曲率は比較的一致していたが クロソイドが含まれない場合には地図曲率と推定曲率が乖離していた 1) 地図曲率と推定曲率が比較的一致した例地図曲率と推定曲率が比較的一致している場合の結果を図 3-10 と図 3-11 に示す 4および8の箇所では 試作した道路構造データの曲率半径に応じて減速し 横加速度を上限値以下におさえた走行を実現できた 図 の箇所の結果 図 の箇所の結果 42
18 < 参考 : 外的要因によって推定曲率に影響が生じた例 > 外的要因によって推定曲率に影響が生じた例を図 3-12 と図 3-13 に示す 1および5は先行車のために減速する等の他の要因で減速した事例であり カーブの曲率に応じて減速したわけではないが 地図曲率と推定曲率の比較のために掲載した 図 の箇所の結果 図 の箇所の結果 43
19 2) 地図曲率と推定曲率が乖離した例試作した道路構造データの線形種別にクロソイドが含まれない場合 曲線の区間の前後の直線部では曲率は 0 となり 曲線の区間では曲率が一定値 ( 曲率半径の逆数 ) となるため 横軸に距離 縦軸に曲率をとったグラフを描くと方形波となる 試作した道路構造データの線形種別が曲線のみの箇所 ( ) では 図 3-14~ 図 3-17 に示すように地図曲率と推定曲率が乖離する場合があり 速度制御支援において以下の課題が生じた 地図曲率が上昇する位置がカーブ区間の前方となるため カーブ進入前の減速タイミングが想定よりも早くなる 地図曲率が低下する位置がカーブ区間の後方となるため カーブ終了後の速度復帰タイミングが想定よりも遅くなる 図 の箇所の結果 44
20 図 の箇所の結果 図 の箇所の結果 45
21 図 の箇所の結果 46
22 (5) 考察本走行実験においては 線形種別にクロソイドを含んでいる場合には地図曲率と推定曲率が比較的一致していたが 線形種別にクロソイドを含まない場合には地図曲率と推定曲率が乖離していた 以降では 線形種別にクロソイドを含んでいる場合とクロソイドを含まない場合における速度制御支援に与える影響を考察する 1) 考察に用いる想定の道路形状本考察では 図 3-18 に示すように 直線区間からクロソイド区間を経て 一定曲率 ) 区間となり その後 クロソイド区間を経て 直線区間へ変化する道路形状を想定した なお 一定曲率区間における曲率半径は 300m とした クロソイド 100m (R=300m 直線 ) 直線 100m 一定曲率 200m(R=300m) クロソイド 100m ( 直線 R=300m) 直線 100m 図 3-18 考察に用いた道路形状 ( クロソイド ) また 比較対象として図 3-19 に示すように 図 3-18 のクロソイド区間を一定曲率 区間とする道路形状を想定した 一定曲率 100m (R=300m) 直線 100m 一定曲率 200m(R=300m) 一定曲率 100m (R=300m) 直線 100m 図 3-19 考察に用いた道路形状 ( 曲線 ) 47
23 2) 線形種別にクロソイドを含む場合の曲率と上限速度の関係線形種別がクロソイドの場合の曲率と上限速度の関係を図 3-20 に示す 青曲線が図 3-18 の道路形状の曲率を表しており 赤曲線が青曲線の曲率に対し横加速度を 0.2G に保つ上限速度を計算した結果である 曲率 速度 ( km/h ) 図 3-20 線形種別がクロソイドの場合の曲率と上限速度の関係 3) 線形種別がクロソイドを含まない場合の曲率と上限速度の関係図 3-19 に示す道路形状に対し 横加速度を 0.2G に保つ上限速度を計算した結果を図 3-21 に示す これにより 特にカーブの開始と終了の部分で上限速度が真の値から大きく乖離することがわかる 曲率 速度 ( km/h ) 開始 図 3-21 終了 線形種別が曲線の場合の曲率と上限速度の関係 48
24 4) クロソイドの曲率にノイズが含まれる場合の速度制御支援へ与える影響クロソイドの曲率は 既存資源の入手可否や地図調製方法によって差異が生じる場合がある そこで 本項ではクロソイドの曲率にノイズが含まれた場合の速度制御支援へ与える影響を考察する 図 3-20 に示す線形種別にクロソイドを含む場合の曲率に ±10% のノイズを加え それに対して横加速度を 0.2G に保つ上限速度 ( 速度 3) を計算した結果を図 3-22 に示す 上限速度と真値との乖離は 線形種別が曲線のみの場合 ( 図 3-21) と比べて相当小さいことがわかる 曲率 速度 ( km/h ) 図 3-22 クロソイドの曲率に ±10% のノイズを加えた場合 仮に ±10% のノイズがのった曲率に対して算出した上限速度 ( 速度 3) で走行した場合 生じる横加速度は約 0.18G~0.22G となり 狙い値の 0.2G に対して ±10% 程度の差異が生じる ( 式 2 参照 ) そのため クロソイドの曲率にノイズが生じるとしても 道路構造データにはクロソイドの情報を省かないことが 本制御にとって望ましい 式 2: 曲率誤差と横加速度 ( 横 G) との関係 49
25 (6) まとめ試作した道路構造データを用いて 走行支援サービスに資する地図の 要件 4: 道路形状変化に応じた速度制御の 曲率半径の小さいカーブ区間の走行 を実施し 道路構造データの有用性を検証した 道路構造データの曲率の情報を用いてカーブ区間に対して事前に減速を実施し 横加速度を上限値以下に抑えた安心感のある走行を実現することができ 道路構造データの有用性を確認できた 一方 一部のカーブ区間では 道路構造データのクロソイド区間を含んでおらず 曲線区間のみとなる場合があった その場合はカーブ入り口に対する減速が早すぎたり カーブ出口に対する速度復帰が遅すぎたりした そこで 道路構造データにクロソイド区間を含んでいない場合の速度制御支援への影響を考察した その結果 ±10% 程度のノイズが曲率に生じたとしても 線形種別にクロソイドを含む方が曲線のみの場合に比べて速度誤差が小さくなることが明らかとなった そのため 既存資源の入手可否や地図調製方法によりクロソイドの曲率に差異が生じるとしても 道路構造データにはクロソイドに関する情報を省かないことが 本制御にとって望ましい 50
 における 試作した道路構造データの有用性の検証とした 具体的には 量産車に搭載可能なレベルの車載カメラおよびセンサ等で測定した地物寸法と 道路構造データの地物寸法の相対精度が自車位置推定の実用レベルであるかを検証した (2) 走行実験の内容 1) 走行実験システムの概要 (a) 全体のシステム構成車載カメラおよびセンサ等で自車位置を特定し")
26 3.5.2 日産自動車株式会社による有用性の検証 道路構造データの 1 層 2 層を用いた走行実験の結果 (1) 走行実験の目的本走行実験の目的は 道路上の地物を用いた自車位置の把握 ( 走行支援サービスに資する地図の要件定義書 要件 10) における 試作した道路構造データの有用性の検証とした 具体的には 量産車に搭載可能なレベルの車載カメラおよびセンサ等で測定した地物寸法と 道路構造データの地物寸法の相対精度が自車位置推定の実用レベルであるかを検証した (2) 走行実験の内容 1) 走行実験システムの概要 (a) 全体のシステム構成車載カメラおよびセンサ等で自車位置を特定し 道路構造データ上に自車位置をマッチングさせる高精度ロケータ機能をもつシステム ( 以下 高精度ロケータ という ) を開発した システムの全体構成を図 3-23 に示す 道路構造データ 図 3-23 全体のシステム構成 51
 システムの初期設定")

27 ディスプレイは図 3-24 に示すとおり 道路構造データ上における自車位置 認識 した地物 認識した区画線および測定データを表示する ディスプレイ左上画面にお ける青点は GPS で測位した位置 赤点は本システムを用いて推定した自車位置を表 している ディスプレイ左下画面における水色線は区画線の左端 緑色線は走行して いる車線の左右の区画線 黄線は区画線の右端を表している 道路構造データ上での自車位置表示 図 3-24 走行実験システムの画面表示例 (b) システムの初期設定 予め計測済みの区画線幅をカメラで認識し システムを初期設定した (c) 自車位置特定フロー自車位置特定フローを図 3-25 に示す 1 車載カメラにより道路上の地物 ( 速度規制標識 非常電話案内標識 ) の有無を認識する 対象となる地物を認識した場合 2 自車から地物までの距離を測定し 距離情報をもとに道路構造データ上の自車位置を補正する さらに 3 車両の走行速度情報を用いて移動距離を算出することで進行方向の自車位置を特定する 最後に 4 自車から左右区画線までの距離を測定することで横方向の自車位置を特定する 52


 ( 寒川北 IC 寒川南 IC) 図 3-26")
28 2 地物認識時の自車との距離情報等をもとに 道路構造データ上の自車位置を補正 3 車両走行速度情報を用いて道路構造データ上の移動距離を算出 4 自車から左右の区画線までの距離を測定し 道路構造データ上の自車位置を特定 図 3-25 自車位置特定フロー 2) 走行路線 区間本走行実験は さがみ縦貫道の寒川南 IC~ 寒川北 IC と 阪神高速道路の 1 号環状線 13 号東大阪線 15 号堺線の一部路線で行った 走行区間を図 3-26 および図 3-27 に示す 約 3.5km 約 3.5km ( 寒川南 IC 寒川北 IC) ( 寒川北 IC 寒川南 IC) 図 3-26 さがみ縦貫道の走行実験区間 53
29 End Start 1 周目 200m 2 周目 200m 図 3-27 阪神高速道路の走行実験区間 出典 :NTT 空間情報株式会社 GEOSPCE オルソ画像 54
30 3) 使用した道路構造データ 本走行実験では 本製品仕様書で規定した地物である区画線 車線中心線 車道 部 道路標識のうち 表 3-4 に示す属性の情報を用いた 表 3-4 走行実験で使用した道路構造データ 地物名 属性 関連役割名 使用 用途 区画線 場所 形状 ( 区画線形状 ) コード 区画線種別 ( 車線境界線 導流帯等 ) 線種 区画線パターン ( 実線 破線等 ) 推測有無 - 車線中心線 場所 形状 ( 車線リンク ) 参照点 ID - 線形種別 線形判定 ( 直線 曲線等 ) 車線種別 車線判定 ( 変速車線 すりつけ等 ) 管理用図面等からの取 - 得の有無 カーブ方向 - クロソイド方向 - パラメータ - 緩和曲線長 - オフセット距離 - 線形種別の判別方法 - 右側境界 車線中心線 ID と左右区画線 ID の 左側境界 紐付け ( 自車位置判定 ) 覆う - 車道部 範囲 形状 ( 道路面 ) 道路標識 地点 高さ - コード 規制標識 ( 最高速度 ) 案内標識 ( 非常電話 ) 55
31 4) 走行実験時の走行ログ取得データ 走行実験時に取得した走行ログは表 3-5 のとおりであり 道路構造データからは走 行車線の番号や区画線種別 Lane 幅 地物タイプを取得した 表 3-5 走行ログ取得データ No 項目 道路構造データからの取得情報 1 System Time 2 GPS Time 3 GPS 緯度経度 ( 世界測地系 ) 4 カメラ Locator 出力緯度経度 ( 世界測地系 ) 5 走行車線の番号 8 左区画線種別 9 右区画線種別 11 Lane 幅 (Map) 14 自車と右区間線までの距離 15 自車と左区間線までの距離 16 地物までの距離 18 地物タイプ 19 地物 Calibration Flag 21 地物 Calibration 前の緯度経度 22 地物 Calibration 後の緯度経度 56
32 (3) 走行実験の結果 試作した道路構造データを真値とし 車載カメラおよびセンサ等を用いた高精度ロ ケータの利用可能性を検証するため 表 3-6 に示す分析内容に基づき 走行実験を 実施した 表 3-6 分析の観点と分析内容 分析の観点 分析内容 横方向 1) 車線幅の相対精 車線幅の相対精度検証 度 2) 相対精度の要因分析 交通状況 周辺状況 ( 車両 遮蔽物 ) による影響の確認道路形状 ( 直線部 カーブ部 ) 路面状況による影響の確認 進行方向 3) 進行方向の相対精度 進行方向の相対精度検証進行方向位置補正用の地物間距離と修正量の関係から 対象地物の種類と間隔の妥当性の確認 4) 地物の認識率 交通状況 周辺状況 ( 車両 遮蔽物 ) による影響の確認 道路形状 ( 直線部 カーブ部 ) 地物種類による影響の確 認 1) 車線幅の相対精度道路構造データの車線幅と 車載カメラの測位結果による車線幅の差とを比較した さがみ縦貫道の寒川南 IC 寒川北 IC における比較結果を図 3-28 寒川北 IC 寒川南 IC における比較結果を図 3-29 阪神高速道路における比較結果を図 3-30 に示す 車載カメラの測位による異常値 ( 例 : 車線変更時の測位エラー カメラの認識エラー等 ) を除いた状態で車線幅の差の平均は さがみ縦貫道の場合は約 200mm 阪神高速道路の場合は約 600mm とほぼ一定であった 区画線幅差平均 226mm 縦軸 : 幅差 (mm) (= 地図データの区画線幅 - カメラ測位による区画線幅 ) 図 3-28 寒川南 IC 寒川北 IC における比較結果 横軸 : 走行距離 57
 横軸 : 走行距離 図")


33 区画線幅差平均 185mm 縦軸 : 幅差 (mm) (= 地図データの区画線幅 -カメラ測位による区画線幅) 横軸 : 走行距離 図 3-29 寒川北 IC 寒川南 IC における比較結果区画線幅差平均 569mm 特徴点 1 特徴点 2 特徴点 3 特徴点 4 特徴点 6 特徴点 7 特徴点 5 縦軸 : 幅差 (mm) (= 地図データの区画線幅 -カメラ測位による区画線幅) 横軸 : 走行距離 図 3-30 阪神高速道路における比較結果 58

 要因 特徴点 2.")
34 図 3-30 の特徴点 (1~7) が生じた要因の分析結果を図 3-31~ 図 3-33 に示す 図 3-31 に示すとおり 特徴点 1 では 合流地点での区画線形状が道路構造データと道路のペイントとで異なること要因であった 特徴点 2 では 右側の区画線の内側ペイントが広くなっており カメラで認識した左側区画線から右側区画線までの距離が狭くなった 特徴点 1 特徴点 2 特徴点 1. 1 合流地点での道路構造データ ( 区画線形状 ) 要因 特徴点 2. 2 右側の区画線の内側ペイントが広くなり 右側区画線までのカメラ測位の距離が狭 くなった 図 3-31 特徴点 1 2 の補足 59



35 図 3-32 に示すとおり 特徴点 3 では 右側区画線のペイントが消えておりカメラが 検知できなかった 特徴点 3. 3 右側の区画線ペイントが消えてカメラ測位不可 特徴点 3 特徴点 4 特徴点 4. 4 上記特徴点 1 と同じ 1の要因と同様図 3-32 特徴点 3 4 の補足 60


36 図 3-33 に示すとおり 特徴点 5 と特徴点 7 はカーブ区間でありカメラによる測位にばらつきがあった 特徴点 6 では 強調区画線ペイントの区間であるが 道路構造データに強調区画線ペイントの情報が含まれておらず カメラによる測位と道路構造データとで誤差が発生した 特徴点 6 特徴点 7 特徴点 5 特徴点 5. 5 カーブでのカメラ測位ばらつきおよび強調区画線ペイントによるカメラ測位誤差 特徴点 6. 6 強調区画線ペイントによるカメラ測位誤差 特徴点 7. 7 上記特徴点 5 と同じ 5 と同様 図 3-33 特徴点 の補足 61
37 2) 相対精度の要因分析 (a) 車線幅の差に関する交通状況 周辺状況の影響今回の走行ログを用いて 交通状況や車両 遮蔽物等の周辺状況による測定した車線幅への影響を目視ですべて確認した その結果 今回の走行実験では 車両の前方直近の車線幅を測定しているため 交通状況や周辺状況の影響がないことがわかった (b) 車線幅の差に関する道路形状の影響走行ログを用いて直線部とカーブ部に分けて分析し 道路形状が測定した車線幅に及ぼす影響を確認した結果を表 3-7 に示す さがみ縦貫道のような曲率の大きいカーブでは直線部と同様に道路形状による影響はあまりないことが分かった 一方 阪神高速道路の JCT のような急なカーブではばらつきが大きくなるが 車線内の自車位置は維持できており 問題ないと考える 表 3-7 カメラ測位異常値を除いた道路形状別の車線幅の差の平均とばらつき (σ) 道路形状 寒川南 IC 寒川北 IC 幅差平均 (mm) さがみ縦貫道 σ 寒川北 IC 寒川南 IC 幅差平均 (mm) σ 阪神高速道路 幅差平均 (mm) 直線部 カーブ部 σ 3) 進行方向の相対精度検証 (a) 阪神高速道路における検証の結果阪神高速道路における 位置補正用地物間の距離と自車位置補正量との関係を図 3-34 に示す 図 3-34 から 数 mから数十 mの自車位置補正が発生していることが確認できた 自車位置補正量が大きくなった地点 1 と地点 2 の状況は 図 3-35 に示すとおりであり 地点 1 では 地図データにはない実世界の道路標識があり かつ自車位置の 1 車線ずれがある場合の自車位置補正量であり 地点 2 は 道路構造データと異なる地点に実世界の道路標識があった場合の自車位置補正量であった 62

38 地点 1 地点 2 2 自車位置補正量 ( ) m 位置補正用の地物間の距離 (m) 図 3-34 阪神高速道路における自車位置補正用地物間の距離と自車位置補正量の関係地点 1. 1 道路構造データとほぼ同じ地点で 道路構造データに存在しない実世界の看板があった場合の自車位置補正量の誤計算 但し自車位置も1 車線ずれあり 地点 2. 2 道路構造データの位置と異なる地点に実世界の看板があった場合の自車位置補 正量の誤計算 図 3-35 阪神高速道路における進行方向の相対精度検証の補足 63
39 (b) さがみ縦貫道における検証の結果さがみ縦貫道の走行実験では 阪神高速道路における走行実験の結果を踏まえ 実験機器のシステムチューニングを行うことにより 車速情報の精度を高めた これによって 図 3-36 のさがみ縦貫道における位置補正用地物間の距離と自車位置補正量との関係に示すとおり 位置補正用の地物を用いた自車位置補正が数 m で収まっていることが確認できた 自車位置補正量 ( ) m 位置補正用の地物間の距離 (m) 図 3-36 さがみ縦貫道における自車位置補正用地物間の距離と 自車位置補正量の関係 4) 地物の認識率進行方向に対する自車位置補正用地物として 道路標識 ( 規制標識 ( 最高速度 ) 規制標識 ( 特定の種類の車両の最高速度 ) 案内標識( 非常電話 )) を用い 進行方向位置補正の可否検証を実施した (a) 進行方向に対する自車位置補正用地物の整備個所進行方向に対する自車位置補正に用いる道路構造データの地物である道路標識 ( 規制標識 ( 最高速度 ) 規制標識( 特定の種類の車両の最高速度 ) 案内標識( 非常電話 )) の試作箇所を各図 ( さがみ縦貫道を図 3-37 阪神高速道路を図 3-38 に示す 64
 ( 寒川北 IC 寒川南 IC) 図")

40 約 3.5km 約 3.5km ( 寒川南 IC 寒川北 IC) ( 寒川北 IC 寒川南 IC) 図 3-37 さがみ縦貫道の進行方向に対する自車位置補正用地物の整備箇所 図 3-38 阪神高速道路の進行方向に対する自車位置補正用地物の整備箇所 出典 :NTT 空間情報株式会社 GEOSPCE オルソ画像 65
 19 地点 (86%) NG 車両等の遮蔽物によ 2 地点 (3%) 0 地点数 り看板認識せず エラー ( 実験システム 15 地点 (25%) 3 地点 (14%) が認識できず ) (4) 考察")
41 (*) (*) (b) 進行方向位置補正結果 道路標識 ( 規制標識 ( 最高速度 ) 規制標識( 特定の種類の車両の最高速度 ) 案 内標識 ( 非常電話 )) を用いて進行方向に対する自車位置補正を実施した結果を表 3-8 に示す 走行実験時点では 海老名 JCT~ 寒川北 IC 間が未開通であったため 交通量が少なく渋滞のないさがみ縦貫道の交通状況では 86% の地物の認識を確認 した 表 3-8 進行方向に対する自車位置補正結果 阪神高速道路 さがみ縦貫道 走行ルートに基づく進行方向位置 60 地点 22 地点 補正予定地点数 進行方向位置補正 OK 地点数 43 地点 (72%) 19 地点 (86%) NG 車両等の遮蔽物によ 2 地点 (3%) 0 地点数 り看板認識せず エラー ( 実験システム 15 地点 (25%) 3 地点 (14%) が認識できず ) (4) 考察 1) 横方向区画線幅の相対精度 ( 道路構造データの区画線幅とカメラ測位による区画線幅の差 以降 区画線幅差 ) の平均値は 図 3-39~ 図 3-41 のようにルートにより異なる 各ルートの区画線幅差はおおむね一定であり安定している したがって 道路構造データによる影響ではなく システムの初期設定による影響と考えられる 区画線幅差 走行距離 区画線幅差平均 226mm (*) 幅差 (mm) = 地図データの区画線幅 - カメラ測位による区画線幅 図 3-39 さがみ縦貫道 ( 寒川南 IC 寒川北 IC) における比較結果 区画線幅差 走行距離 図 3-40 さがみ縦貫道 ( 寒川北 IC 寒川南 IC) における比較結果 区画線幅差平均 185mm 66

42 (*) 区画線幅差 図 3-41 阪神高速道路における比較結果 走行距離 区画線幅差平均 569mm 図 3-39~ 図 3-41 の区画線幅差のばらつきの影響を考察する 今回のシステムではカメラ位置から左右の区画線までの測定距離を按分し 高精度地図上に自車位置をマッチングさせるため 車線内の自車位置を特定する点で問題はない 具体的には 図 3-42 のとおり : = : となるよう 自車位置をマッチングさせる仕組みとしている カメラ映像 図 3-42 自車位置のマッチング ナビ画面 ただし 自動運転に必要な高精度ロケータを実現するためには システムとしては相対精度 200mm~300mm を必要としており システムの改善が必要である また 強調部区画線の車線幅に対応したシステムになっていないため 図 3-43 に示すように計測誤差が発生した 今後のシステムの改善課題である 67
43 図 3-43 計測誤差の発生 2) 進行方向さがみ縦貫道では ~5m 程度の距離補正が生じた 横方向と同様に自動運転に必要な高精度ロケータでは 200mm~300mm の相対精度が必要とされ システムの精度向上が必要である 今回の走行実験は さがみ縦貫道と阪神高速道路の 2 路線のみであったが 安定して進行方向の位置補正をするには 道路標識だけでなく他の地物の整備も必要になることが想定される 特に一般道では案内標識 ( 非常電話 ) は非常に少なく対象地物の選定が必要である 今回の検証により 下記のシステムの改善の必要性が明らかとなった 共同研究で道路構造データの精度を検証するためにシンプルな仕組みとしており システム処理の遅れや車速により誤差が発生している 図 3-44 に示すように道路構造データに存在していない道路標識を誤認識し 誤った進行方向位置補正を行った 図 3-44 道路標識の誤認識 68
44 (5) 地図への要望 1) 横方向図 3-45 に示すように 道路構造データの区画線の接合部が実世界とあっていない箇所があり 道路構造データの改善が必要である 図 3-45 道路構造データの区画線と実世界の区画線の不一致 2) 進行方向 図 3-46 に示すように 道路標識の位置情報が実世界の地物の位置情報と合致して いないため 道路構造データの改善が必要である 図 3-46 道路標識の位置情報の不一致 また 道路標識 ( 規制標識 ( 最高速度 ) 規制標識 ( 特定の種類の車両の最高速度 ) 案内標識 ( 非常電話 )) 以外にも 自車位置補正用の地物データの整備が必要であ る 69
45 道路構造データの 3 層 4 層を用いた走行実験の結果 (1) 走行実験の目的本走行実験の目的は 本線もしくはランプ上の複数の区画線が存在する場合の適切な車線区分線の把握 ( 走行支援サービスに資する地図の要件定義 要件 12) における 試作した道路構造データの有用性の検証とした 具体的には 試作した道路構造データのうち 3 層 : ネットワーク 4 層 : 制約のデータを用いて 車線別に整備された事故多発地点情報を活用した車線別ルート探索および誘導の妥当性を検証し 道路構造データの課題を明確化した (2) 走行実験の内容 1) 走行実験のためのシステムの概要本走行実験のシステムは 道路構造データの 1 層および 2 層の走行実験で使用したシステム構成と同一とした ( 図 3-23 参照 ) また 道路構造データの 1 層および 2 層の走行実験で使用したシステムに加え 本走行実験では 道路構造データの車線ごとのネットワークデータを用いて 車線別のルート探索および誘導を実施するため 探索機能と表示機能 誘導機能を実装した 各機能の詳細を以降に示す (a) 探索機能探索機能は 目的地設定 経由地設定 車線別ルート探索の各機能を実装した さらに 推奨ルートや推奨車線から逸脱した場合にリルート リレーン探索を行う機能も実装した 車線別ルート探索における車線リンクコスト ( 優先的に走行する車線を選定するための車線別の値 ) として 事故多発地点情報を元に 時間帯別 車線別の値を定義した 車線別ルート探索の結果のイメージを図 3-47 に示す 70
46 終了 ( 続く ) ( 続き ) (c) 推奨走行車線 ( 例, 走行ルート 2) 推奨走行車線推奨走行車線と高リスク車線重複部高リスク車線 図 3-47 車線別ルート探索結果イメージ 出典 : 阪神高速道路株式会社の地図に車線別ルート探索イメージを重畳 71



47 (b) 表示機能表示機能は 図 3-48 に示すとおり ディスプレイの右側に通常地図 通常地図上での探索ルートおよび自車位置の表示機能を実装した また ディスプレイの左側に道路構造データ 推奨走行車線 事故多発地点などの危険エリアおよび自車位置の表示機能を実装した 危険エリア表示 通常地図表示 誘導車線表示 ルート表示 自車位置表示 自車位置表示 道路構造データ表示高精度地図表示 図 3-48 表示機能のイメージ なお 本走行実験で用いた時間帯別の事故多発地点情報を図 3-49 に示す 72

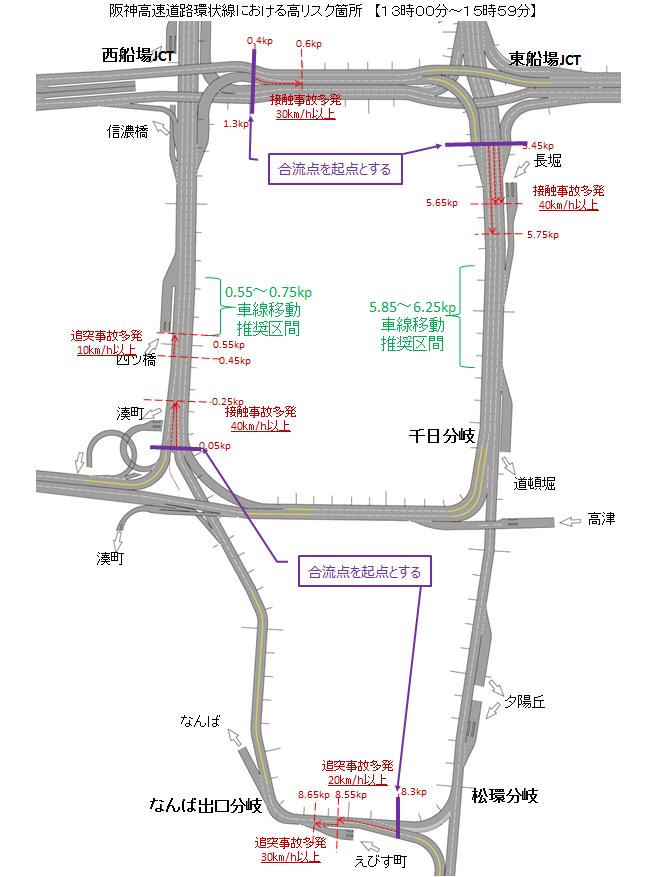
48 赤色の が車線毎危険エリアを表す 図 3-49 時間別事故多発地点情報 出典 阪神高速道路株式会社の地図に時間別事故多発地点情報を重畳 73
 に対応している 車両進路 誘導音声パターンコード 図 3-50 分岐 合流車線別誘導パターン例 74")
49 (c) 誘導機能誘導機能は 車線別ルート誘導 ( 表示 音声 ) 従来ナビと同様の車道別ルート誘導および危険エリアの警告機能を実装した 分岐 合流車線別の誘導パターン例を図 3-50 に 分岐 合流誘導音声の例を表 3-9 に示す また 危険エリア車線別の誘導パターン例を図 3-51 に 危険エリア車線別誘導音声例を表 3-10 に示す なお 表 の誘導音声は それぞれ図 に記載している地点 ( 英数字 ) に対応している 車両進路 誘導音声パターンコード 図 3-50 分岐 合流車線別誘導パターン例 74
50 13 表 3-9 分岐 合流誘導音声例 (20km/h 以下の場合 ) 誘導タイミング 2km 手前 1.5km 手前 700m 手前 300m 手前 100m 手前 およそ 2 キロメートル先 [ 右方向 左方向 ] [ 方面名称 ] 方面です ( 有料道路出口です ) 一番 側車線に移動して下さい およそ 1.5 キロメートル先 [ 右方向 左方向 ] [ 方面名称 ] 方面です ( 有料道路出口です ) 今の車線を維持して下さいおよそ 1.5 キロメートル先 [ 右方向 左方向 ] [ 方面名称 ] 方面です ( 有料道路出口です ) 側車線に移動して下さい およそ 1 キロメートル先 [ 右方向 左方向 ] [ 方面名称 ] 方面です ( 有料道路出口です ) 今の車線を維持して下さい 3 およそ 300 メートル先 [ 右方向 左方向 ] [ 方面名称 ] 方面です ( 有料道路出口です ) 1 まもなく [ 右方向 左方向 ] [ 方面名称 ] 方面です ( 有料道路出口です ) およそ 1 キロメートル先 [ 右方向 左方向 ] [ 方面名称 ] 方面です ( 有料道路出口です ) 側車線に移動して下さい およそ 1.5 キロメートル先 [ 右方向 左方向 ] [ 方面名称 ] 方面です ( 有料道路出口です ) 一番 側車線に移動して下さい およそ 1 キロメートル先 [ 右方向 左方向 ] [ 方面名称 ] 方面です ( 有料道路出口です ) 今の車線を維持して下さいおよそ 1 キロメートル先 [ 右方向 左方向 ] [ 方面名称 ] 方面です ( 有料道路出口です ) 側車線に移動して下さい およそ 1 キロメートル先 [ 右方向 左方向 ] [ 方面名称 ] 方面です ( 有料道路出口です ) 一番 側車線に移動して下さい およそ 300 メートル先 [ 右方向 左方向 ] [ 方面名称 ] 方面です ( 有料道路出口です ) 側車線に移動して下さい およそ 300 メートル先 [ 右方向 左方向 ] [ 方面名称 ] 方面です ( 有料道路出口です ) およそ 300 メートル先 [ 右方向 左方向 ] [ 方面名称 ] 方面です ( 有料道路出口です ) 側車線に移動して下さい およそ 300 メートル先 [ 右方向 左方向 ] [ 方面名称 ] 方面です ( 有料道路出口です ) およそ 300 メートル先 [ 右方向 左方向 ] [ 方面名称 ] 方面です ( 有料道路出口です ) 側車線に移動して下さい 凡例 : 上に同じ 75

51 誘導音声パターンコード 危険エリア 図 3-51 危険エリア車線別誘導パターン例 Q 表 3-10 危険エリア車線別誘導音声例 (20km/h 以上の場合 ) 誘導タイミング 2km 手前 1.5km 手前 700m 手前 300m 手前 100m 手前 危険エリア内 およそ 2km 先 [ 接触事故 追突事故 ] が多い区間です 3 車線 側に移動して下さい E Q N 事故多発区間回避のため今の車線を維持して下さい およそ 1.5km 先 [ 接触事故 追突事故 ] が多い区間です 側車線に移動して下さい Q N J E 事故多発区間回避のため今の車線を維持して下さい E 事故多発区間回避のため今の車線を維持して下さい - E E およそ 700m 先 [ 接触事故 追突事故 ] が多い区間です 側車線に移動して下さい Q N J F E およそ 300m 先 [ 接触事故 追突事故 ] が多い区間です 側車線に移動して下さい Q N J F C Q O およそ 1.5km 先 [ 接触事故 追突事故 ] が多い区間です 2 車線 側に移動して下さい Q O J E 事故多発区間回避のため今の車線を維持して下さい およそ 700m 先 [ 接触事故 追突事故 ] が多い区間です 側車線に移動して下さい E 事故多発区間回避のため今の車線を維持して下さい まもなく [ 接触事故 追突事故 ] が多い区間です - E [ 進路変更による事故 追突事故 ] が多い地点です 76
52 誘導タイミング 2km 手前 1.5km 手前 700m 手前 300m 手前 100m 手前 危険エリア内 Q O J F およそ 300m 先 [ 接触事故 追突事故 ] が多い区間です 側車線に移動して下さい C まもなく [ 接触事故 追突事故 ] が多い区間です Q O J F - Q O K およそ 700m 先 [ 接触事故 追突事故 ] が多い区間です 2 車線 側に移動して下さい Q O K F E 事故多発区間回避のため今の車線を維持して下さい およそ 300m 先 [ 接触事故 追突事故 ] が多い区間です 側車線に移動して下さい Q O K F C Q O K G Q P およそ 1.5km 先 [ 接触事故 追突事故 ] が多い区間です 3 車線 側に移動して下さい Q P J E 事故多発区間回避のため今の車線を維持して下さい およそ 700m 先 [ 接触事故 追突事故 ] が多い区間です 側車線に移動して下さい Q P J F E およそ 300m 先 [ 接触事故 追突事故 ] が多い区間です 事故多発区間回避のため今の車線を維持して下さい まもなく [ 接触事故 追突事故 ] が多い区間です C - F およそ 300m 先 [ 接触事故 追突事故 ] が多い区間です 側車線に移動して下さい Q P H F C Q P K およそ 700m 先 [ 接触事故 追突事故 ] が多い区間です 2 車線 側に移動して下さい Q P K F E 事故多発区間回避のため今の車線を維持して下さい およそ 300m 先 [ 接触事故 追突事故 ] が多い区間です 側車線に移動して下さい Q P K F C Q P K G Q P L 700m 先 危険エリアです 3 車線 側に移動して下さい Q P L F およそ 300m 先 [ 接触事故 追突事故 ] が多い区間です 事故多発区間回避のため今の車線を維持して下さいおよそ 300m 先 [ 接触事故 追突事故 ] が多い区間です 側車線に移動して下さい Q P L F C Q P L G E およそ 300m 先 [ 接触事故 追突事故 ] が多い区間です まもなく [ 接触事故 追突事故 ] が多い区間です - まもなく [ 接触事故 追突事故 ] が多い区間です C - まもなく [ 接触事故 追突事故 ] が多い区間です C [ 進路変更による事故 追突事故 ] が多い地点です [ 進路変更による事故 追突事故 ] が多い地点です [ 進路変更による事故 追突事故 ] が多い地点です [ 進路変更による事故 追突事故 ] が多い地点です [ 進路変更による事故 追突事故 ] が多い地点です [ 進路変更による事故 追突事故 ] が多い地点です [ 進路変更による事故 追突事故 ] が多い地点です [ 進路変更による事故 追突事故 ] が多い地点です 凡例 : 上に同じ 77
53 2) 実験方法本走行実験は 以下の手順で実施した 1 指定された場所 経由地 目的地を使用し ルート探索を行う 2 探索結果により得られたルートに基づき走行する 3ルートを逸脱し リルート機能を検証する 3) 走行路線 区間本走行実験では 阪神高速道路の 1 号環状線 13 号東大阪線 15 号堺線の一部路線で 2 通りの走行区間を設定した 走行区間 1 を図 3-52 走行区間 2 を図 3-53 に示す ピンク線は 探索結果ルートを示している 走行区間 1 は 探索結果ルートに沿って走行する 走行区間 2 は リルート機能を検証するため 探索結果ルートを逸脱し 走行区間 1 と同一のルート1を走行する 2 周目は探索結果ルート2に沿って走行する Start=>Goal Goal Start 探索結果ルート 図 3-52 走行区間 1 出典 : 阪神高速道路株式会社の阪神高速道路案内エーマップに走行区間を重畳 78
54 Start=>1=>2=>Goal Goal ルート逸脱 Start 1 探索結果ルート 2 図 3-53 走行区間 2 出典 : 阪神高速道路株式会社の阪神高速道路案内エーマップに走行区間を重畳 79
55 4) 使用した道路構造データ走行実験では 本製品仕様書に 3 層 4 層として規定された地物のうち 表 3-11 に示す属性の情報を用いた 表 3-11 走行実験で使用したデータ 区分 地物名 属性 関連役割名 使用 3 層 : ネットワークノード 起点側が交差する区間 ID 終点側が交差する区間 ID 方向フラグ - ノードが示す位置の区間 参照点の距離の割合 - ノードが示す方向と区間 ID の示す方向の一致 - 不一致 地点 - 開始リンク 終了リンク 経由リンク リンク リンク長 開始ノード 終了ノード 経由点 車道リンク 車道リンク方向 - 車道リンク種別 - ジオメトリ参照 - 車線リンク 車線リンク種別 車線数 開始番号 車線番号 枝番号 - 対応する車道リンク - ジオメトリ参照 4 層 : 制約 リンク属性 開始点 終了点 参照方向種別 共通属性明示 制約 リンク - 制約 種別 制約要素 通行規制属性 コード 規制値 規制内容 補助内容 - 変更禁止位置 - 矢印方向 - ETC 設置情報属性 ETC 設置種別 - 80
56 5) 走行実験時の走行ログ取得データ 走行実験時に取得した走行ログは表 3-12 のとおりであり 道路構造データからは 走行車線の番号や区画線種別 Lane 幅 Lane 数 地物タイプを取得した 表 3-12 走行ログ取得データ No 項目 道路構造データからの取得情報 1 System Time 2 GPS Time 3 GPS 緯度経度 ( 世界測地系 ) 4 カメラ Locator 出力緯度経度 ( 世界測地系 ) 5 走行車線の番号 6 左区画線種別 7 右区画線種別 8 Lane 幅 (Map) 9 Lane 数 (Map) 10 自車と右区間線までの距離 11 自車と左区間線までの距離 12 地物までの距離 13 地物タイプ 14 地物 Calibration Flag 15 地物 Calibration 前の緯度経度 16 地物 Calibration 後の緯度経度 81
57 (3) 走行実験の結果 1) システム評価結果 走行実験では 各システムの機能の作動状況を確認した その結果 表 3-13 に示 すとおり 多くの評価項目で各機能が問題なく作動したことを確認した ただし 表示 機能の自車位置表示において 自車が正しい車線に表示されているか 自車位 置が正しい位置に表示されているか ( 進行方向 ) 自車位置表示追従性 の 3 項目 で C; 懸案が有り検討必要 という評価結果となった 表 3-13 システム評価結果 OK; 問題無し C; 懸案が有り検討必要システム評価評価項目評価の観点判定補足 探索機能 表示機能 目的地設定機能 目的地設定機能が正常に作動するか OK 経由地設定機能 経由地設定機能機能が正常に作動するか OK 車線別ルート探索機能が正車線別ルート探索機能常に作動するか OK 事故多発地点は時間帯事故多発地点を回避したル別 車線別の車線リンート探索が出来ているかクコストとして定義 OK 推奨ルートから逸脱した場合はリルート及びリレーン探索を行う リルート及びリレーン探索が行われているか OK 通常地図を表示 通常地図が表示されているか OK 通常地図上に探索ルー通常地図上に探索ルート表トを表示示されているか OK 道路構造データが表示され道路構造データを表示ているか OK 推奨走行車線表示 推奨走行車線が表示されているか OK 推奨走行車線はゾーン推奨走行車線がゾーンで表で表示示されているか OK 事故多発エリア等危険事故多発エリア等危険エリエリアをゾーン表示アをゾーン表示しているか OK 自車位置が表示 ( 通常地図 上及び道路構造データ上 ) OK されているか 自車位置が正しい車線に表自車位置表示示されているか C ( 通常地図上及び道路 自車位置が正しい位置に表 構造データ上 ) 示されているか OK 横方向 ( 車線内位置 ) 自車位置が正しい位置に表 示されているか C 進行方向 道路構造データ 2 画面表示にて対応道路構造データ 2 画面表示にて対応 推奨車線青表示走行可能車線緑表示 道路構造データ 2 画面表示にて対応 稀に車線ずれ有り 目視上ほぼ問題無し 視認にて数メートル程度のずれが時々確認された 82
58 システム評価評価項目評価の観点判定補足 車線別ルート誘導 ( 表示 / 音声 ) 自車位置表示追従性 車線別ルート誘導 ( 表示 / 音声 ) が行われているか C OK 若干の遅れが認められるも 通常ナビと同レベル 誘導機能 従来ナビで行っている経路誘導 推奨レーンの走行を誘導する音声案内 従来ナビで行っている経路誘導が行われているか OK 推奨レーンの走行を誘導する音声案内がされているか OK 危険エリアの警告 危険エリアの警告がされているか OK 2) 課題本走行実験によるシステム評価結果を踏まえ 今後の課題として以下の 5 点が挙げられる 車線ずれ発生の原因分析 対策検討 進行方向位置ずれの原因分析 対策検討 自車位置表示追従性についての定量的分析 悪環境における性能確認 対策検討 夜間における性能確認 対策検討 3) 考察および要望本走行実験では 道路構造データの 3 層および 4 層のデータを用いて車線別ルート探索および誘導を行った 実験の結果 車線別ルート探索およびリルート探索機能ともに正常に作動するとともに 問題なく誘導できることを確認した 以上より 道路構造データは 車線別ルート探索および誘導において実用可能レベルであることが検証された また 本走行実験では進行方向の自車位置の検出のために 道路構造データのうち 規制標識 ( 最高速度 ) 案内標識( 非常電話 ) を使用したが 2) に示すとおり自車位置に関する課題が明らかとなったため 今後 自車位置特定の精度向上のため 街路灯 方面看板 キロポスト 自動車ナンバー自動読取装置 自動速度取締装置などの地物データの整備検討が必要と考えられる 83
59 3.6 走行実験結果等による試作地図の有用性の検証前節 3.5 で整理した各地図利用者による走行実験結果を踏まえ 道路構造データ の地物 属性の利用の優性順位を整理した 優先順位は S: 必須 : 需要が高い : 今後需要が生じる可能性がある C: 他の地物に比べると優先度は低い の 4 段階 とした 整理結果は表 3-14 のとおりであり S として 路面標示 停止線 区画線 車 線中心線 車線中心線上の標高 道路中心線 路肩 交通信号機および道路標識が 挙げられた 表 3-14 道路構造データの地物 属性の優先順位 製品仕様書 対象階層地物名称属性名称 第 1 層 : 道路基盤地図情報プロファイル 距離標 測点 島 分離帯 車道部 中央帯 車道交差部 乗合自動車停車所 非常駐車帯 柵 壁 料金徴収施設 路面標示 FID 地点路線番号上下区分種別 FID 地点 高さ横断勾配 ( 左 ) 横断勾配 ( 右 ) FID 範囲 FID 範囲 FID 範囲 FID 範囲 FID 範囲 FID 範囲 FID 範囲 FID 形状 FID 範囲 FID 形状 優先順位 S S 84
60 製品仕様書 対象階層地物名称属性名称 第 2 層 : 道路基盤地図情報の拡張 停止線 橋梁 トンネル ボックスカルバート シェッド シェルター 道路地物集合施設 区画線 車線中心線 線形パラメータ 標高データ集合 種別コード FID 場所 FID 範囲名称 FID 範囲 FID 範囲 FID 範囲 FID 範囲 FID 名称種別 FID 場所コード線種推測有無 FID 場所参照点 ID 線形種別 車線種別 線形パラメータ関連 1( 左側境界 ) 関連 2( 右側境界 ) 関連 3( 覆う ) FID 管理用図面等からの取得の有無カーブ方向 クロソイド方向 パラメータ 緩和曲線長オフセット距離線形種別の判別方法 FID 取得方法 優先順位 S S S S S S S S S C C C 85
61 製品仕様書 対象階層地物名称属性名称 第 3 層 : ネットワーク 第 4 層 : 制約 標高 区画線上の標高 車線中心線上の標高 道路中心線 路肩 交通信号機 道路標識 FID 地点 FID 地点 FID 地点 FID 場所 参照点 ID FID 範囲 FID 地点 高さ FID 地点 高さ コード 優先順位 車線ネットワー 区画 ID ク要素 参照点 ID 起点側が交差する区間 ID 終点側が交差する区間 ID 方向フラグ ノードノードが示す位置の区間 参照点の距離の割合 ノードが示す方向と区間 ID の示す方向の一致 不一致 リンク リンク長 車道リンク 車道リンク方向 車道リンク種別 車線リンク種別 車線数 車線リンク 開始番号 車線幅 車線番号 枝番号 開始点 リンク属性 終了点 参照方向種別 S S S S S S S S S S S S 86
62 製品仕様書 対象階層地物名称属性名称 共通属性明示 始点 終点 優先順位 制約種別 通行規制属性 ETC 設置情報属性 FID コード 規制値 規制内容 補助内容 変更禁止位置 矢印方向 進路変更 ETC 設置種別 87
<4D F736F F F696E74202D2093B CC8BE68AD B B82CC8AD AF95FB96405F88EA94CA ED28CFC82AF82C995D28F575F826C A6D94462E >
 道路の区間 ID テーブルの関連付け方法 ( 一般利用者向け ) 自者地図に道路ネットワークが設定されていない利用者 ( 道路の区間 IDテーブルに該当する道路 NWを作成し関連付け ) 目次 本書の位置づけ 2 Ⅰ. 既存地図データへの設定方法の解説 5 Ⅱ. 更新方法の解説 13 1 本書の位置づけ 1) 背景 平成 24 年より 一般財団法人日本デジタル道路地図協会 ( 以降 DRM 協会 という
道路の区間 ID テーブルの関連付け方法 ( 一般利用者向け ) 自者地図に道路ネットワークが設定されていない利用者 ( 道路の区間 IDテーブルに該当する道路 NWを作成し関連付け ) 目次 本書の位置づけ 2 Ⅰ. 既存地図データへの設定方法の解説 5 Ⅱ. 更新方法の解説 13 1 本書の位置づけ 1) 背景 平成 24 年より 一般財団法人日本デジタル道路地図協会 ( 以降 DRM 協会 という
<4D F736F F F696E74202D E838B93B E907D8BA689EF82CC8EE E B8CDD8AB B83685D>
 東大 CSISi/ITS Japan シンポジウム Ⅱ. 次世代デジタル道路情報に関するセッション デジタル道路地図協会における取組 Ⅰ. Ⅰ. 高度 DRM-DBの検討 Ⅱ. 方式テーブルの概要 2010 年 7 月 27 日 ( 財 ) 日本デジタル道路地図協会 1 検討内容 2 検討会のねらいと検討経緯 高度デジタル道路情報対応検討会 を開催 (H19 年度 ~) して検討 1 自動車 / カーナビの
東大 CSISi/ITS Japan シンポジウム Ⅱ. 次世代デジタル道路情報に関するセッション デジタル道路地図協会における取組 Ⅰ. Ⅰ. 高度 DRM-DBの検討 Ⅱ. 方式テーブルの概要 2010 年 7 月 27 日 ( 財 ) 日本デジタル道路地図協会 1 検討内容 2 検討会のねらいと検討経緯 高度デジタル道路情報対応検討会 を開催 (H19 年度 ~) して検討 1 自動車 / カーナビの
地図情報の差分更新・自動図化 概要版
 戦略的イノベーション創造プログラム (SIP) 自動走行システム / / 大規模実証実験 / ダイナミックマップ / 地図情報の差分更新 自動図化 報告書 平成 29 年度報告 平成 30 年 3 月 31 日 三菱電機株式会社 目次 1. 研究開発の目的 2. 静的高精度 3D 地図データの自動図化 / 差分抽出技術の実用性検証 (2) 自動図化 / 差分抽出技術適用による改善効果検証 3. リアルタイム自動図化
戦略的イノベーション創造プログラム (SIP) 自動走行システム / / 大規模実証実験 / ダイナミックマップ / 地図情報の差分更新 自動図化 報告書 平成 29 年度報告 平成 30 年 3 月 31 日 三菱電機株式会社 目次 1. 研究開発の目的 2. 静的高精度 3D 地図データの自動図化 / 差分抽出技術の実用性検証 (2) 自動図化 / 差分抽出技術適用による改善効果検証 3. リアルタイム自動図化
国土技術政策総合研究所 研究資料
 第 7 章 検査基準 7-1 検査の目的 検査の目的は 対向車両情報表示サービス 前方停止車両 低速車両情報表示サービスおよび その組み合わせサービスに必要な機能の品質を確認することである 解説 設備の設置後 機能や性能の総合的な調整を経て 検査基準に従い各設備検査を実施する 各設備検査の合格後 各設備間を接続した完成検査で機能 性能等のサービス仕様を満たしていることを確認する検査を実施し 合否を判定する
第 7 章 検査基準 7-1 検査の目的 検査の目的は 対向車両情報表示サービス 前方停止車両 低速車両情報表示サービスおよび その組み合わせサービスに必要な機能の品質を確認することである 解説 設備の設置後 機能や性能の総合的な調整を経て 検査基準に従い各設備検査を実施する 各設備検査の合格後 各設備間を接続した完成検査で機能 性能等のサービス仕様を満たしていることを確認する検査を実施し 合否を判定する
Microsoft Word - 道路設計要領.doc
 Autodesk Civil 3D 2008 熊本大学三次元地形設計演習 Civil3D による三次元道路設計 1 1. 図面設定 (1) Civil3D を起動し dwg ファイルを開く サンプルファイル ( 道路作成用.dwg) 新規作成の場合は 開く からテンプレートを使用 2008 ならば 国土交通省仕様 100m 測点.dwt ワークスペース (2) ワークスペースが civil3d コンプリート
Autodesk Civil 3D 2008 熊本大学三次元地形設計演習 Civil3D による三次元道路設計 1 1. 図面設定 (1) Civil3D を起動し dwg ファイルを開く サンプルファイル ( 道路作成用.dwg) 新規作成の場合は 開く からテンプレートを使用 2008 ならば 国土交通省仕様 100m 測点.dwt ワークスペース (2) ワークスペースが civil3d コンプリート
38 39
 38 39 地図の紹介 地図の表示 案内図の表示 市街地図 ハイウェイマップ 縮尺 25 m 50 m 100 m 1 ルート案内中に都市高速 都市間高速道路 一部の有料 道路を走行すると自動的に表示されます SA PA IC JCTの名称 自車からの距離 SA PAの施設がわかり やすく表示されます SAなどの看板表示を選ぶと 選択施設詳細情報が表示 されます を選ぶと スクロールできます 選択施設詳細情報
38 39 地図の紹介 地図の表示 案内図の表示 市街地図 ハイウェイマップ 縮尺 25 m 50 m 100 m 1 ルート案内中に都市高速 都市間高速道路 一部の有料 道路を走行すると自動的に表示されます SA PA IC JCTの名称 自車からの距離 SA PAの施設がわかり やすく表示されます SAなどの看板表示を選ぶと 選択施設詳細情報が表示 されます を選ぶと スクロールできます 選択施設詳細情報
第 2 章横断面の構成 2-1 総則 道路の横断面の基本的な考え方 必要とされる交通機能や空間機能に応じて, 構成要素の組合せ と 総幅員 総幅員 双方の観点から検討 必要とされる道路の機能の設定 通行機能 交通機能アクセス機能 滞留機能 環境空間 防災空間 空間機能 収容空間 市街地形成 横断面構
 2-1 総則 道路の横断面の基本的な考え方 必要とされる交通機能や空間機能に応じて, 構成要素の組合せ と 総幅員 総幅員 双方の観点から検討 必要とされる道路の機能の設定 通行機能 交通機能アクセス機能 滞留機能 環境空間 防災空間 空間機能 収容空間 市街地形成 横断面構成要素とその幅員の検討ネットワークや沿道状況に応交通状況にじたサーヒ ス提供応じて設定を考慮して設定 横断面構成要素の組合せ
2-1 総則 道路の横断面の基本的な考え方 必要とされる交通機能や空間機能に応じて, 構成要素の組合せ と 総幅員 総幅員 双方の観点から検討 必要とされる道路の機能の設定 通行機能 交通機能アクセス機能 滞留機能 環境空間 防災空間 空間機能 収容空間 市街地形成 横断面構成要素とその幅員の検討ネットワークや沿道状況に応交通状況にじたサーヒ ス提供応じて設定を考慮して設定 横断面構成要素の組合せ
PowerPoint プレゼンテーション
 ダイナミックマップ基盤企画 株式会社の概要と今後の展望 2016 年 6 月 17 日 ダイナミックマップ基盤企画株式会社 代表取締役社長中島務 1. なぜ 3 次元が必要なのか 日本の道路は複雑に交差しており 上下の識別をする必要がある 高精度 3 次元位置情報を活用することで 高さも含めた正確な位置を把握することができる 安全運転支援 自動走行には ( ローカル ) ダイナミックマップが必要不可欠である
ダイナミックマップ基盤企画 株式会社の概要と今後の展望 2016 年 6 月 17 日 ダイナミックマップ基盤企画株式会社 代表取締役社長中島務 1. なぜ 3 次元が必要なのか 日本の道路は複雑に交差しており 上下の識別をする必要がある 高精度 3 次元位置情報を活用することで 高さも含めた正確な位置を把握することができる 安全運転支援 自動走行には ( ローカル ) ダイナミックマップが必要不可欠である
1 基本的な整備内容 道路標識 専用通行帯 (327 の 4) の設置 ( 架空標識の場合の例 ) 自 転 車 ピクトグラム ( 自転車マーク等 ) の設置 始点部および中間部 道路標示 専用通行帯 (109 の 6) の設置 ( 過度な表示は行わない ) 専 用 道路標示 車両通行帯 (109)
 の設置 ( 架空標識の場合の例 ) 自 転 車 ピクトグラム ( 自転車マーク等 ) の設置 始点部および中間部 道路標示 専用通行帯 (109 の 6) の設置 ( 過度な表示は行わない ) 専 用 道路標示 車両通行帯 (109)") 第 3 整備ガイドライン 本章では 安全で快適な自転車利用環境創出ガイドライン ( 国土交通省道路局 警察庁交通 局 ) を踏まえ 自転車走行空間の整備にあたって留意する事項などについて定めます 3.1 単路部における整備の考え方 (1) 自転車専用通行帯自転車専用通行帯の整備にあたっては 交通規制に必要な道路標識や道路標示のほか 自動車ドライバーに対して自転車専用の通行帯であることが分かるよう法定外の路面表示や舗装のカラー化を行います
第 3 整備ガイドライン 本章では 安全で快適な自転車利用環境創出ガイドライン ( 国土交通省道路局 警察庁交通 局 ) を踏まえ 自転車走行空間の整備にあたって留意する事項などについて定めます 3.1 単路部における整備の考え方 (1) 自転車専用通行帯自転車専用通行帯の整備にあたっては 交通規制に必要な道路標識や道路標示のほか 自動車ドライバーに対して自転車専用の通行帯であることが分かるよう法定外の路面表示や舗装のカラー化を行います
国土技術政策総合研究所 研究資料
 走行支援サービスのための道路構造データ製品仕様書 ( 案 ) 平成 27 年 5 月 はじめに 道路分野や自動車分野で研究開発 実用化が進んできた ITS 1 は 交通事故の削減や渋滞の解消 緩和に貢献してきた そして これらの問題の抜本的な解決を図るために インフラと自動車の協調システムの実現など 従来の ITS 技術をさらに高度化し融合させた次世代 ITS の導入が期待されている このような背景のもと
走行支援サービスのための道路構造データ製品仕様書 ( 案 ) 平成 27 年 5 月 はじめに 道路分野や自動車分野で研究開発 実用化が進んできた ITS 1 は 交通事故の削減や渋滞の解消 緩和に貢献してきた そして これらの問題の抜本的な解決を図るために インフラと自動車の協調システムの実現など 従来の ITS 技術をさらに高度化し融合させた次世代 ITS の導入が期待されている このような背景のもと
と案 目的地を探したら ルートを設定します ルートが設定されると案内がはじまりますので ルート案内にしたがって走行してください 検索した地点を確認 設定する 52 現在の条件でルートを探索する 52 ルートの確認や設定をする 52 検索した地点の位置を修正する 53 検索した地点をルート上に追加する
 と案 目的地を探したら ルートを設定します ルートが設定されると案内がはじまりますので ルート案内にしたがって走行してください 検索した地点を確認 設定する 52 現在の条件でルートを探索する 52 ルートの確認や設定をする 52 検索した地点の位置を修正する 53 検索した地点をルート上に追加する 53 検索した地点を本機に登録する 53 検索した地点周辺の駐車場を探す 53 検索した地点の施設情報を表示する
と案 目的地を探したら ルートを設定します ルートが設定されると案内がはじまりますので ルート案内にしたがって走行してください 検索した地点を確認 設定する 52 現在の条件でルートを探索する 52 ルートの確認や設定をする 52 検索した地点の位置を修正する 53 検索した地点をルート上に追加する 53 検索した地点を本機に登録する 53 検索した地点周辺の駐車場を探す 53 検索した地点の施設情報を表示する
本章では 衝突被害軽減ブレーキ 車線逸脱警報 装置 等の自動車に備えられている運転支援装置の特性 Ⅻ. 運転支援装置を 備えるトラックの 適切な運転方法 と使い方を理解した運転の重要性について整理しています 指導においては 装置を過信し 事故に至るケースがあることを理解させましょう また 運転支援装
 本章では 衝突被害軽減ブレーキ 車線逸脱警報 装置 等の自動車に備えられている運転支援装置の特性 Ⅻ. 運転支援装置を 備えるトラックの 適切な運転方法 と使い方を理解した運転の重要性について整理しています 指導においては 装置を過信し 事故に至るケースがあることを理解させましょう また 運転支援装置の限界を心得て正しく使用するために 支援装置の限界とメーカーによる作動等の違いを明確にさせ 支援装置に頼り過ぎた運転にならないように指導しましょう
本章では 衝突被害軽減ブレーキ 車線逸脱警報 装置 等の自動車に備えられている運転支援装置の特性 Ⅻ. 運転支援装置を 備えるトラックの 適切な運転方法 と使い方を理解した運転の重要性について整理しています 指導においては 装置を過信し 事故に至るケースがあることを理解させましょう また 運転支援装置の限界を心得て正しく使用するために 支援装置の限界とメーカーによる作動等の違いを明確にさせ 支援装置に頼り過ぎた運転にならないように指導しましょう
 1 1 1 1 7 1 6 1 1 1 1 1 1 9 1 1 1 8 5 1 1 1 50 51 1 1 ルートを探索する 行き先に設定する 行き先に設定する (ルートが設定されていない場合) 1 地点を検索する 経由地に設定する 設定されているルートを消去し 行き先を新たに設定する 1 地点を検索する 検索のしかた P.6 51 ここに行く を選ぶ 1 地点を検索する ここに行く を選ぶ 1 地図をスクロールさせ
1 1 1 1 7 1 6 1 1 1 1 1 1 9 1 1 1 8 5 1 1 1 50 51 1 1 ルートを探索する 行き先に設定する 行き先に設定する (ルートが設定されていない場合) 1 地点を検索する 経由地に設定する 設定されているルートを消去し 行き先を新たに設定する 1 地点を検索する 検索のしかた P.6 51 ここに行く を選ぶ 1 地点を検索する ここに行く を選ぶ 1 地図をスクロールさせ
DMtoJPGISVer1.0 操作説明書 平成 19 年 3 月 国土交通省国土地理院
 DMtoJPGISVer1.0 操作説明書 平成 19 年 3 月 国土交通省国土地理院 目 次 はじめに...3 1. 使用準備...5 1.1 動作環境...5 1.2 インストール...5 1.3 アンインストール...5 2. 操作方法...6 2.1 システムの起動...6 2.2 システムの終了...6 2.3 変換...7 2.4 ログファイルの表示...9 はじめに このソフトウェアは
DMtoJPGISVer1.0 操作説明書 平成 19 年 3 月 国土交通省国土地理院 目 次 はじめに...3 1. 使用準備...5 1.1 動作環境...5 1.2 インストール...5 1.3 アンインストール...5 2. 操作方法...6 2.1 システムの起動...6 2.2 システムの終了...6 2.3 変換...7 2.4 ログファイルの表示...9 はじめに このソフトウェアは
やってみようINFINITY-製品仕様書 品質評価表 メタデータ 編-
 やってみよう for Wingneo INFINITY( ) はじめに 目的このプログラムは 空間データ製品仕様書作成を支援するシステムです 空間データ製品仕様書 (Microsoft Word 文書 ) を作成する場合は Microsoft Word がインストールされている必要があります 操作手順 製品仕様書作成から品質評価表を経由して簡易メタデータを作成し 国土交通省国土地理院のメタデータエディターに取り込みまでを解説しています
やってみよう for Wingneo INFINITY( ) はじめに 目的このプログラムは 空間データ製品仕様書作成を支援するシステムです 空間データ製品仕様書 (Microsoft Word 文書 ) を作成する場合は Microsoft Word がインストールされている必要があります 操作手順 製品仕様書作成から品質評価表を経由して簡易メタデータを作成し 国土交通省国土地理院のメタデータエディターに取り込みまでを解説しています
屋内 3 次元 測位 + 地図 総合技術開発 現状 屋内 3 次元測位統一的な測位手法 情報交換手順がなく 共通の位置情報基盤が効率的に整備されない 技術開発 屋内外のシームレス測位の実用化 (1) 都市部での衛星測位の適用範囲拡大 (2) パブリックタグ 屋内測位の標準仕様策定 効果 3 次元屋内
 都市部での衛星測位の適用範囲拡大 (2) パブリックタグ 屋内測位の標準仕様策定 効果 3 次元屋内") 資料 4 国土交通省総合技術開発プロジェクト 3 次元地理空間情報を活用した安全 安心 快適な社会実現のための技術開発プロジェクト概要 平成 30 年 3 月 Ministry of Land, Infrastructure, Transport and Tourism Geospatial Information Authority of Japan 屋内 3 次元 測位 + 地図 総合技術開発
資料 4 国土交通省総合技術開発プロジェクト 3 次元地理空間情報を活用した安全 安心 快適な社会実現のための技術開発プロジェクト概要 平成 30 年 3 月 Ministry of Land, Infrastructure, Transport and Tourism Geospatial Information Authority of Japan 屋内 3 次元 測位 + 地図 総合技術開発
目次 1. はじめに 製品仕様書 製品仕様書とは 製品仕様書概説 JPGIS に準拠した DM データ作成作業 作業フロー 作業概要 作業内容 JPGIS に準拠した D
 地理情報標準 (JPGIS) に準拠した DM データ作成 マニュアル 平成 19 年 3 月 19 日 国土交通省国土地理院 目次 1. はじめに...1 2. 製品仕様書...2 2.1 製品仕様書とは...2 2.2 製品仕様書概説...4 3. JPGIS に準拠した DM データ作成作業...12 3.1 作業フロー...12 3.2 作業概要...12 3.3 作業内容...14 4.
地理情報標準 (JPGIS) に準拠した DM データ作成 マニュアル 平成 19 年 3 月 19 日 国土交通省国土地理院 目次 1. はじめに...1 2. 製品仕様書...2 2.1 製品仕様書とは...2 2.2 製品仕様書概説...4 3. JPGIS に準拠した DM データ作成作業...12 3.1 作業フロー...12 3.2 作業概要...12 3.3 作業内容...14 4.
<4D F736F F D205B95BD90AC E93785D8AEE91628E9197BF8DEC90AC977697CC817C8E7392AC91BA AD6938C2E646F6378>
 平成 29 年度デジタル道路地図基礎資料作成要領 市町村道 ( 政令市を除く ) 農道 林道 臨港道路等 ( 市町村 ) ( 平成 29 年度開通予定道路 ) 国土交通省関東地方整備局 国土交通省国土地理院関東地方測量部 < 目次 > 1. デジタル道路地図基礎資料作成の目的... 2 2. 作成 提供いただく資料... 3 (1) 作成いただく資料... 3 (2) 提供いただく資料... 3 3.
平成 29 年度デジタル道路地図基礎資料作成要領 市町村道 ( 政令市を除く ) 農道 林道 臨港道路等 ( 市町村 ) ( 平成 29 年度開通予定道路 ) 国土交通省関東地方整備局 国土交通省国土地理院関東地方測量部 < 目次 > 1. デジタル道路地図基礎資料作成の目的... 2 2. 作成 提供いただく資料... 3 (1) 作成いただく資料... 3 (2) 提供いただく資料... 3 3.
AutoCAD LT2000i
 空間デザイン演習資料 ( 第 10 回 -14 回 ) 課題 国土地理院の基盤地図情報数値標高モデルから東北地方の任意地域の標高データと航空写真を取得し, 以下の設計条件を満足する道路設計を行いなさい. また, 走行シミュレーションのアニメーションを作成しなさい.(Civil3D の新規 国土交通省仕様 100m 測点.dwt を用いて設計をすること ) 注意 : これまでの配布資料を忘れずに持参しなさい.
空間デザイン演習資料 ( 第 10 回 -14 回 ) 課題 国土地理院の基盤地図情報数値標高モデルから東北地方の任意地域の標高データと航空写真を取得し, 以下の設計条件を満足する道路設計を行いなさい. また, 走行シミュレーションのアニメーションを作成しなさい.(Civil3D の新規 国土交通省仕様 100m 測点.dwt を用いて設計をすること ) 注意 : これまでの配布資料を忘れずに持参しなさい.
国土技術政策総合研究所 研究資料
 既存資源を活用した道路基盤地図情報整備 更新要領 ( 案 ) 平成 27 年 5 月 はじめに 国土交通省は 平成 18 年 8 月から直轄国道を対象に大縮尺道路地図である道路基盤地図情報の整備を開始している また 高速道路各社も同様に道路基盤地図情報の整備を推進しており 一定の見通しがたってきた状況にある この道路基盤地図情報は 道路管理の支援システムや走行支援サービス等への利用に期待されている
既存資源を活用した道路基盤地図情報整備 更新要領 ( 案 ) 平成 27 年 5 月 はじめに 国土交通省は 平成 18 年 8 月から直轄国道を対象に大縮尺道路地図である道路基盤地図情報の整備を開始している また 高速道路各社も同様に道路基盤地図情報の整備を推進しており 一定の見通しがたってきた状況にある この道路基盤地図情報は 道路管理の支援システムや走行支援サービス等への利用に期待されている
21m 車両の検証項目 ダブル連結トラック実験 高速道路 3 交通流への影響 4 道路構造への影響 合流部 : 本線 合流部 : ランプ 追越時 車線変更部 検証項目 分析視点 データ等 1 省人化 同一量輸送時のドライバー数 乗務記録表 環境負荷 同一量輸送時のCO2 排出量 2 走行 カーブ (
 21m ダブル連結トラック実験の実施状況 効果検証 ( 中間とりまとめ ) 21m 車両の検証項目 ダブル連結トラック実験 高速道路 3 交通流への影響 4 道路構造への影響 合流部 : 本線 合流部 : ランプ 追越時 車線変更部 検証項目 分析視点 データ等 1 省人化 同一量輸送時のドライバー数 乗務記録表 環境負荷 同一量輸送時のCO2 排出量 2 走行 カーブ ( 降坂部 ) 速度分布(
21m ダブル連結トラック実験の実施状況 効果検証 ( 中間とりまとめ ) 21m 車両の検証項目 ダブル連結トラック実験 高速道路 3 交通流への影響 4 道路構造への影響 合流部 : 本線 合流部 : ランプ 追越時 車線変更部 検証項目 分析視点 データ等 1 省人化 同一量輸送時のドライバー数 乗務記録表 環境負荷 同一量輸送時のCO2 排出量 2 走行 カーブ ( 降坂部 ) 速度分布(
I 引索引 索索引 I 2 I 1
 I 引索引 索索引 I 2 I 1 索引 (1) 数字 アルファベット 1 ルート探索をする D 6 3D ビュー B 12 3D ビューの角度調整 F 4 ETC システム利用規程 H 28 ETC 情報を見る E 27 ETC について G 17 ETC の各機能を設定する G 19 ETC を利用する G 18 GPS 衛星の電波受信と測位 A 14 GPS 情報を見る E 25 NAVI MENU
I 引索引 索索引 I 2 I 1 索引 (1) 数字 アルファベット 1 ルート探索をする D 6 3D ビュー B 12 3D ビューの角度調整 F 4 ETC システム利用規程 H 28 ETC 情報を見る E 27 ETC について G 17 ETC の各機能を設定する G 19 ETC を利用する G 18 GPS 衛星の電波受信と測位 A 14 GPS 情報を見る E 25 NAVI MENU
事故及び渋滞対策の取り組み 福岡都市高速 北九州都市高速 福岡北九州高速道路公社
 事故及び渋滞対策の取り組み 福岡都市高速 北九州都市高速 福岡北九州高速道路公社 < 目次 > 1. 福岡 北九州都市高速道路の現状 P1 1) はじめに 2) 交通事故の現状 3) 交通渋滞の現状 4) これまでの事故 渋滞の取り組み 2. 事故 渋滞対策の取り組み P8 1) 事故 渋滞の特性と取り組み方針 2) これからの主な対策メニュー 3. 事故 渋滞に関する情報について P12 1. 福岡
事故及び渋滞対策の取り組み 福岡都市高速 北九州都市高速 福岡北九州高速道路公社 < 目次 > 1. 福岡 北九州都市高速道路の現状 P1 1) はじめに 2) 交通事故の現状 3) 交通渋滞の現状 4) これまでの事故 渋滞の取り組み 2. 事故 渋滞対策の取り組み P8 1) 事故 渋滞の特性と取り組み方針 2) これからの主な対策メニュー 3. 事故 渋滞に関する情報について P12 1. 福岡
LED 道路 トンネル照明の設置に関する補完資料 Ⅰ LED 道路照明 ( 連続照明 ) の設置について 道路照明のうち連続照明の設計については 道路照明施設設置基準 同解説に基づき 性能指標 ( 規定値 ) 及び推奨値 ( 以下 性能指標等 という ) から所定の計算方法により設置間隔等を算出し
 の設置について 道路照明のうち連続照明の設計については 道路照明施設設置基準 同解説に基づき 性能指標 ( 規定値 ) 及び推奨値 ( 以下 性能指標等 という ) から所定の計算方法により設置間隔等を算出し") LED 道路 トンネル照明の設置に関する補完資料 Ⅰ LED 道路照明 ( 連続照明 ) の設置について 道路照明のうち連続照明の設計については 道路照明施設設置基準 同解説に基づき 性能指標 ( 規定値 ) 及び推奨値 ( 以下 性能指標等 という ) から所定の計算方法により設置間隔等を算出し 経済性等も勘案して照明施設を決定している しかしながら LED 照明の場合既存の照明灯具のように規格化されておらず
LED 道路 トンネル照明の設置に関する補完資料 Ⅰ LED 道路照明 ( 連続照明 ) の設置について 道路照明のうち連続照明の設計については 道路照明施設設置基準 同解説に基づき 性能指標 ( 規定値 ) 及び推奨値 ( 以下 性能指標等 という ) から所定の計算方法により設置間隔等を算出し 経済性等も勘案して照明施設を決定している しかしながら LED 照明の場合既存の照明灯具のように規格化されておらず
505_切削オーバーレイ
 切削オーバーレイ [ 測量計算 ] の [ 切削オーバーレイ ] について 簡単な操作例で解説します 解説内容がオプションプログラムの説明である場合があります ご了承ください 目次 切削オーバーレイ. 作業設定 - [ 建設 CAD] を起動する - [ 切削オーバーレイ ] を起動する - 設計層を設定する. 現地盤の入力 - 入力条件を確認する - 測点を自動入力する - 地盤高を入力する 6
切削オーバーレイ [ 測量計算 ] の [ 切削オーバーレイ ] について 簡単な操作例で解説します 解説内容がオプションプログラムの説明である場合があります ご了承ください 目次 切削オーバーレイ. 作業設定 - [ 建設 CAD] を起動する - [ 切削オーバーレイ ] を起動する - 設計層を設定する. 現地盤の入力 - 入力条件を確認する - 測点を自動入力する - 地盤高を入力する 6
スライド 1
 国土交通省総合技術開発プロジェクト H27~29 年度 3 次元地理空間情報を活用した安全 安心 快適な社会実現のための技術開発 資料 -3 社会基盤としての 3 次元地図の整備 更新技術の開発 13 次元地図の整備 更新技術 - 既存資料等からの地図作成 - 国土地理院地理地殻活動研究センター 平成 29 年 3 月 Ministry of Land, Infrastructure, Transport
国土交通省総合技術開発プロジェクト H27~29 年度 3 次元地理空間情報を活用した安全 安心 快適な社会実現のための技術開発 資料 -3 社会基盤としての 3 次元地図の整備 更新技術の開発 13 次元地図の整備 更新技術 - 既存資料等からの地図作成 - 国土地理院地理地殻活動研究センター 平成 29 年 3 月 Ministry of Land, Infrastructure, Transport
資料 7-1 特殊車両の通行に関する指導取締要領の一部改正について 国土交通省関東地方整備局道路部交通対策課 1 (1) 特殊車両通行許可制度 2
 特殊車両通行許可制度 2") 資料 7-1 特殊車両の通行に関する指導取締要領の一部改正について 国土交通省関東地方整備局道路部交通対策課 1 (1) 特殊車両通行許可制度 2 特殊車両通行許可制度の必要性 道路法の道路は 道路構造令 により 1 重量 =25t( 旧基準は20t) 2 寸法 長さ=12m( 普通自動車 ) 幅 =2.5m 高さ=3.8 m の車両が安全 円滑に走行できるよう設計されている 上記 12を超える車両が走行すると下記の危険性が
資料 7-1 特殊車両の通行に関する指導取締要領の一部改正について 国土交通省関東地方整備局道路部交通対策課 1 (1) 特殊車両通行許可制度 2 特殊車両通行許可制度の必要性 道路法の道路は 道路構造令 により 1 重量 =25t( 旧基準は20t) 2 寸法 長さ=12m( 普通自動車 ) 幅 =2.5m 高さ=3.8 m の車両が安全 円滑に走行できるよう設計されている 上記 12を超える車両が走行すると下記の危険性が
6. 高速道路 SA PA 等 への充電設備設置事業の説明と提出書類 高速道路 SA PA 等 への充電設備設置事業の 説明と提出書類 事業名 事業内容 申請できる方 高速道路 SA PA 及び道の駅等への充電設備設置事業 ( 経路充電 ) 高速道路 SA PA 等 ( 注 1) におけ
 高速道路 SA PA 等 ( 注 1) におけ") 6. 高速道路 SA PA 等 への充電設備設置事業の説明と提出書類 -1 6. 高速道路 SA PA 等 への充電設備設置事業の 説明と提出書類 事業名 事業内容 申請できる方 高速道路 SA PA 及び道の駅等への充電設備設置事業 ( 経路充電 ) 高速道路 SA PA 等 ( 注 1) における電欠防止の観点から重要 ( 注な経路充電 2) または電気自動車等の利便性向上の観点から特に有効と考えられる施設における充電のための充電設備設置事業地方公共団体
6. 高速道路 SA PA 等 への充電設備設置事業の説明と提出書類 -1 6. 高速道路 SA PA 等 への充電設備設置事業の 説明と提出書類 事業名 事業内容 申請できる方 高速道路 SA PA 及び道の駅等への充電設備設置事業 ( 経路充電 ) 高速道路 SA PA 等 ( 注 1) における電欠防止の観点から重要 ( 注な経路充電 2) または電気自動車等の利便性向上の観点から特に有効と考えられる施設における充電のための充電設備設置事業地方公共団体
ひっかけ問題 ( 緊急対策ゼミ ) ステップ A B C D 39.4% 学科試験パーフェクト分析から ひっかけ問題 に重点をおいた特別ゼミ! 2 段階 出題頻度 39.4% D ゼミ / 内容 *(2 段階 24.07%+ 安知 15.28%=39.4
 ステップ A B C D 39.4% 学科試験パーフェクト分析から ひっかけ問題 に重点をおいた特別ゼミ! 2 段階 出題頻度 39.4% D ゼミ / 内容 *(2 段階 24.07%+ 安知 15.28%=39.4") ひっかけ問題 ( 緊急対策ゼミ ) ステップ A B C D 39.4% http://www.derutoko.kp 学科試験パーフェクト分析から ひっかけ問題 に重点をおいた特別ゼミ! 2 段階 出題頻度 39.4% D ゼミ / 内容 *(2 段階 24.07%+ 安知 15.28%=39.4%) 16 経路の設計 0.19%( 予想出題数 0~1 問 ) 17 高速道路での運転 8.33%(
ひっかけ問題 ( 緊急対策ゼミ ) ステップ A B C D 39.4% http://www.derutoko.kp 学科試験パーフェクト分析から ひっかけ問題 に重点をおいた特別ゼミ! 2 段階 出題頻度 39.4% D ゼミ / 内容 *(2 段階 24.07%+ 安知 15.28%=39.4%) 16 経路の設計 0.19%( 予想出題数 0~1 問 ) 17 高速道路での運転 8.33%(
Microsoft PowerPoint - 2_資料(最終訂正版1)
") 一般道路における最高速度規制の点検 見直し結果について ( 平成 26 年度 ~ 平成 28 年度 ) 1 これまでの最高速度規制の点検 見直しの経緯 p.1 2 今回の点検 見直し結果の概要 p.2 3 今回の点検 見直し結果の詳細 p.4 4 今回の点検 見直しの特徴 課題と今後の取組 p.12 平成 29 年 8 月 3 日警察庁交通局 1 これまでの最高速度規制の点検 見直しの経緯 昭和 41
一般道路における最高速度規制の点検 見直し結果について ( 平成 26 年度 ~ 平成 28 年度 ) 1 これまでの最高速度規制の点検 見直しの経緯 p.1 2 今回の点検 見直し結果の概要 p.2 3 今回の点検 見直し結果の詳細 p.4 4 今回の点検 見直しの特徴 課題と今後の取組 p.12 平成 29 年 8 月 3 日警察庁交通局 1 これまでの最高速度規制の点検 見直しの経緯 昭和 41
速度規制の目的と現状 警察庁交通局 1
 速度規制の目的と現状 警察庁交通局 1 1 最高速度規制の必要性 2 規制速度決定の基本的考え方 3 一般道路における速度規制基準の概要 4 最高速度規制の見直し状況 ( 平成 21 年度 ~23 年度 ) 5 最高速度違反による交通事故対策検討会の開催 2 1 最高速度規制の必要性 最高速度規制は 交通事故の抑止 ( 交通の安全 ) 交通の円滑化 道路交通に起因する障害の防止 の観点から 必要に応じて実施
速度規制の目的と現状 警察庁交通局 1 1 最高速度規制の必要性 2 規制速度決定の基本的考え方 3 一般道路における速度規制基準の概要 4 最高速度規制の見直し状況 ( 平成 21 年度 ~23 年度 ) 5 最高速度違反による交通事故対策検討会の開催 2 1 最高速度規制の必要性 最高速度規制は 交通事故の抑止 ( 交通の安全 ) 交通の円滑化 道路交通に起因する障害の防止 の観点から 必要に応じて実施
Microsoft PowerPoint - H24全国大会_発表資料.ppt [互換モード]
![Microsoft PowerPoint - H24全国大会_発表資料.ppt [互換モード]](/thumbs/94/118755799.jpg "Microsoft PowerPoint - H24全国大会_発表資料.ppt [互換モード]") 第 47 回地盤工学研究発表会 モアレを利用した変位計測システムの開発 ( 計測原理と画像解析 ) 平成 24 年 7 月 15 日 山形設計 ( 株 ) 技術部長堀内宏信 1. はじめに ひびわれ計測の必要性 高度成長期に建設された社会基盤の多くが老朽化を迎え, また近年多発している地震などの災害により, 何らかの損傷を有する構造物は膨大な数に上ると想定される 老朽化による劣化や外的要因による損傷などが生じた構造物の適切な維持管理による健全性の確保と長寿命化のためには,
第 47 回地盤工学研究発表会 モアレを利用した変位計測システムの開発 ( 計測原理と画像解析 ) 平成 24 年 7 月 15 日 山形設計 ( 株 ) 技術部長堀内宏信 1. はじめに ひびわれ計測の必要性 高度成長期に建設された社会基盤の多くが老朽化を迎え, また近年多発している地震などの災害により, 何らかの損傷を有する構造物は膨大な数に上ると想定される 老朽化による劣化や外的要因による損傷などが生じた構造物の適切な維持管理による健全性の確保と長寿命化のためには,
円筒面で利用可能なARマーカ
 円筒面で利用可能な AR マーカ AR Marker for Cylindrical Surface 2014 年 11 月 14 日 ( 金 ) 眞鍋佳嗣千葉大学大学院融合科学研究科 マーカベース AR 二次元マーカはカメラ姿勢の推定, 拡張現実等広い研究分野で利用されている 現実の風景 表示される画像 デジタル情報を付加 カメラで撮影し, ディスプレイに表示 使用方法の単純性, 認識の安定性からマーカベース
円筒面で利用可能な AR マーカ AR Marker for Cylindrical Surface 2014 年 11 月 14 日 ( 金 ) 眞鍋佳嗣千葉大学大学院融合科学研究科 マーカベース AR 二次元マーカはカメラ姿勢の推定, 拡張現実等広い研究分野で利用されている 現実の風景 表示される画像 デジタル情報を付加 カメラで撮影し, ディスプレイに表示 使用方法の単純性, 認識の安定性からマーカベース
BIM/CIM 活用における 段階モデル確認書 作成マニュアル 試行版 ( 案 ) 平成 31 年 3 月 国土交通省 大臣官房技術調査課
 平成 31 年 3 月 国土交通省 大臣官房技術調査課") BIM/CIM 活用における 段階モデル確認書 作成マニュアル 試行版 ( 案 ) 平成 31 年 3 月 国土交通省 大臣官房技術調査課 目次 総則... 3 1.1 本マニュアルの位置づけ 目的... 3 1.2 適用範囲... 3 1.3 本マニュアルの構成... 3 1.4 段階モデル確認書の概要... 4 1.5 用語の定義... 6 段階モデル確認書の作成方法... 7 2.1 段階モデル確認書の作成手順...
BIM/CIM 活用における 段階モデル確認書 作成マニュアル 試行版 ( 案 ) 平成 31 年 3 月 国土交通省 大臣官房技術調査課 目次 総則... 3 1.1 本マニュアルの位置づけ 目的... 3 1.2 適用範囲... 3 1.3 本マニュアルの構成... 3 1.4 段階モデル確認書の概要... 4 1.5 用語の定義... 6 段階モデル確認書の作成方法... 7 2.1 段階モデル確認書の作成手順...
Microsoft PowerPoint - 01.【最終版】第2回東名WG_本編資料151217
 神奈川県東名軸渋滞ボトルネック検討 WG 第 2 回資料 資料 1. 第 1 回 WG 以降の状況 平成 27 年 月 日 目次 1. 第 1 回 WG 以降の対策等の進捗 ------------------------------------------------------ P 2 2. 交通状況の変化 1) 東名本線 1 交通量 ---------------------------------------------------------------------------
神奈川県東名軸渋滞ボトルネック検討 WG 第 2 回資料 資料 1. 第 1 回 WG 以降の状況 平成 27 年 月 日 目次 1. 第 1 回 WG 以降の対策等の進捗 ------------------------------------------------------ P 2 2. 交通状況の変化 1) 東名本線 1 交通量 ---------------------------------------------------------------------------
活用が広がる 共通語彙基盤 (IMI) イベント 技術セッション 公園への応用 加藤文彦 国立情報学研究所 2016 年 6 月 3 日
 イベント 技術セッション 公園への応用 加藤文彦 国立情報学研究所 2016 年 6 月 3 日") 活用が広がる 共通語彙基盤 (IMI) イベント 技術セッション 公園への応用 加藤文彦 国立情報学研究所 2016 年 6 月 3 日 アウトライン Open Park データ設計 データ作成 2 Open Park 3 Open Park 公園 都市から街区まで 場所 遊具 写真 データ 横浜市金沢区オープンデータ IMI2.3.1 RDF 版を拡張 API http://openpark.jp
活用が広がる 共通語彙基盤 (IMI) イベント 技術セッション 公園への応用 加藤文彦 国立情報学研究所 2016 年 6 月 3 日 アウトライン Open Park データ設計 データ作成 2 Open Park 3 Open Park 公園 都市から街区まで 場所 遊具 写真 データ 横浜市金沢区オープンデータ IMI2.3.1 RDF 版を拡張 API http://openpark.jp
検証概要 本実証では NTT 空間情報とゼンリンと共同で 既存の屋内地図データを活用して 階層別屋内地図仕様に基づいた地図データの作成を行い 効果的な作成手法の検証を通して 問題点およびコストの精査を行うことで 今後の屋内地図整備の範囲拡大を目指すうえでの全般的な課題の確認を行った また合わせて屋内
 サービス事業者実証 2 報告 2018 年 3 月 12 日 NTT 空間情報株式会社 株式会社ゼンリン To the frontier! GEOSPACE 1 検証概要 本実証では NTT 空間情報とゼンリンと共同で 既存の屋内地図データを活用して 階層別屋内地図仕様に基づいた地図データの作成を行い 効果的な作成手法の検証を通して 問題点およびコストの精査を行うことで 今後の屋内地図整備の範囲拡大を目指すうえでの全般的な課題の確認を行った
サービス事業者実証 2 報告 2018 年 3 月 12 日 NTT 空間情報株式会社 株式会社ゼンリン To the frontier! GEOSPACE 1 検証概要 本実証では NTT 空間情報とゼンリンと共同で 既存の屋内地図データを活用して 階層別屋内地図仕様に基づいた地図データの作成を行い 効果的な作成手法の検証を通して 問題点およびコストの精査を行うことで 今後の屋内地図整備の範囲拡大を目指すうえでの全般的な課題の確認を行った
スライド 0
 第 2 章情報記入とプラン地図上に情報記入や 行動計画をシミュレーションするプランの説明をします 2-1 カスタム情報の記入カスタム情報とは 地図上に名称 ( タイトル ) としてアイコンと文字 ( または画像 ) を表示し 内部に住所などのコメントや写真 動画 EXCEL ファイル PDF Web リンクを持つことができるものです 初期状態 ( デフォルト ) では テキスト作成時の動作は カスタム情報記入ウィザードを開くように設定されています
第 2 章情報記入とプラン地図上に情報記入や 行動計画をシミュレーションするプランの説明をします 2-1 カスタム情報の記入カスタム情報とは 地図上に名称 ( タイトル ) としてアイコンと文字 ( または画像 ) を表示し 内部に住所などのコメントや写真 動画 EXCEL ファイル PDF Web リンクを持つことができるものです 初期状態 ( デフォルト ) では テキスト作成時の動作は カスタム情報記入ウィザードを開くように設定されています
選定技術の テーマ Ⅰ ウェッジハンプ 舗装面にくさび型の非対称の段差 ( ウェッジハンプ ) を設置し 走行時の衝撃により逆走車両に注意喚起するもの 全景 設置イメージ図 逆走車両に衝撃で注意喚起を行い 順行車両には走行に支障の無い形状としている 段差部分には超高強度繊維補強コンクリートを使用し
 を設置し 走行時の衝撃により逆走車両に注意喚起するもの 全景 設置イメージ図 逆走車両に衝撃で注意喚起を行い 順行車両には走行に支障の無い形状としている 段差部分には超高強度繊維補強コンクリートを使用し") 選定技術の 資料 5-3 選定技術の テーマ Ⅰ ウェッジハンプ 舗装面にくさび型の非対称の段差 ( ウェッジハンプ ) を設置し 走行時の衝撃により逆走車両に注意喚起するもの 全景 設置イメージ図 逆走車両に衝撃で注意喚起を行い 順行車両には走行に支障の無い形状としている 段差部分には超高強度繊維補強コンクリートを使用し 大型車が走行しても衝突に十分な強度有している 2 選定技術の テーマ Ⅰ 防眩板応用注意喚起
選定技術の 資料 5-3 選定技術の テーマ Ⅰ ウェッジハンプ 舗装面にくさび型の非対称の段差 ( ウェッジハンプ ) を設置し 走行時の衝撃により逆走車両に注意喚起するもの 全景 設置イメージ図 逆走車両に衝撃で注意喚起を行い 順行車両には走行に支障の無い形状としている 段差部分には超高強度繊維補強コンクリートを使用し 大型車が走行しても衝突に十分な強度有している 2 選定技術の テーマ Ⅰ 防眩板応用注意喚起
<4D F736F F D BC792B792CA E093B98D5C91A28AEE8F80816A967B95B62E646F63>
 歩道の一般的構造に関する基準 Ⅰ 歩道の一般的構造 1 歩道の設置の基本的考え方歩道の設置にあたっては 道路構造令 の規定に基づき 地形や当該道路の歩行者等の交通の状況を考慮し かつ 対象とする道路の種類 ネットワーク特性 沿道の立地状況等の地域特性を十分に考慮し 歩道の設置の要否や幅員等の構造を決定するものとする 特に 地方部における第三種の道路においては 道路構造令第 11 条第 2 項により
歩道の一般的構造に関する基準 Ⅰ 歩道の一般的構造 1 歩道の設置の基本的考え方歩道の設置にあたっては 道路構造令 の規定に基づき 地形や当該道路の歩行者等の交通の状況を考慮し かつ 対象とする道路の種類 ネットワーク特性 沿道の立地状況等の地域特性を十分に考慮し 歩道の設置の要否や幅員等の構造を決定するものとする 特に 地方部における第三種の道路においては 道路構造令第 11 条第 2 項により
Microsoft Word - 資料4(修正).docx
.docx") 資料 4 運転支援機能の表示に関する規約運用の考え方 平成 30 年 11 月 20 日一般社団法人自動車公正取引協議会新車委員会 大型車委員会決定 衝突被害軽減ブレーキや車線逸脱警報装置 ペダル踏み間違い時加速抑制装置や自動運転化技術レベル2までの段階の機能や技術 ( 以下 運転支援機能 という ) について 一般消費者への理解促進を図るとともに 過信や誤解を招くような表示が行われることのないよう
資料 4 運転支援機能の表示に関する規約運用の考え方 平成 30 年 11 月 20 日一般社団法人自動車公正取引協議会新車委員会 大型車委員会決定 衝突被害軽減ブレーキや車線逸脱警報装置 ペダル踏み間違い時加速抑制装置や自動運転化技術レベル2までの段階の機能や技術 ( 以下 運転支援機能 という ) について 一般消費者への理解促進を図るとともに 過信や誤解を招くような表示が行われることのないよう
<4D F736F F D205B8A6D92E894C55D8E528C6093B9838A836A B B8D488E96928B96E B18ED490FC8B4B90A72E646F6378>
 平成 31 年 3 月 18 日東日本高速道路株式会社東北支社山形管理事務所 ~ 老朽化した高速道路を長期に安心してご利用いただけるための取り組み ~ E48 山形自動車道関沢 IC 笹谷 IC 間 ( 上り線 ) リニューアル工事による昼夜連続車線規制 ( 平日のみ ) を実施 NEXCO 東日本山形管理事務所 ( 山形県山形市 ) は E48 山形自動車道関沢インターチェンジ (IC) 笹谷 IC
平成 31 年 3 月 18 日東日本高速道路株式会社東北支社山形管理事務所 ~ 老朽化した高速道路を長期に安心してご利用いただけるための取り組み ~ E48 山形自動車道関沢 IC 笹谷 IC 間 ( 上り線 ) リニューアル工事による昼夜連続車線規制 ( 平日のみ ) を実施 NEXCO 東日本山形管理事務所 ( 山形県山形市 ) は E48 山形自動車道関沢インターチェンジ (IC) 笹谷 IC
<4D F736F F F696E74202D A B998488D5C91A297DF82CC89F090E0205B8CDD8AB B83685D>
 4 線形 道路構造の線形は 横方向の平面線形と 縦方向の縦断線形の組み合わせにより規定され 交通の安全性 円滑性の観点から設計速度に密接に関係する 平面線形の規定は 曲線半径 曲線部の片勾配 拡幅 緩和区間で構成される 縦断線形の規定は 縦断勾配 縦断曲線で構成される 線形に関する規定 平面線形に関する規定 第 15 条 曲線半径 曲線部の片勾配 曲線部の拡幅 第 18 条 緩和区間 第 16 条
4 線形 道路構造の線形は 横方向の平面線形と 縦方向の縦断線形の組み合わせにより規定され 交通の安全性 円滑性の観点から設計速度に密接に関係する 平面線形の規定は 曲線半径 曲線部の片勾配 拡幅 緩和区間で構成される 縦断線形の規定は 縦断勾配 縦断曲線で構成される 線形に関する規定 平面線形に関する規定 第 15 条 曲線半径 曲線部の片勾配 曲線部の拡幅 第 18 条 緩和区間 第 16 条
国土交通省「歩行空間のバリアフリーに関する情報をデータ化するツール」を提供
 ( 報道資料 ) 2017 年 9 月 5 日 株式会社パスコ 国土交通省 歩行空間のバリアフリーに関する情報をデータ化するツール を提供パスコはツールを共同開発し 普及と活用促進に協力します 国土交通省では ユニバーサル社会の構築に向けて 例えば 車いすの方が通行できるバリアフリールートについてスマートフォンを通じてナビゲーションするなど ICT を活用した歩行者移動支援サービスの普及展開を目指し
( 報道資料 ) 2017 年 9 月 5 日 株式会社パスコ 国土交通省 歩行空間のバリアフリーに関する情報をデータ化するツール を提供パスコはツールを共同開発し 普及と活用促進に協力します 国土交通省では ユニバーサル社会の構築に向けて 例えば 車いすの方が通行できるバリアフリールートについてスマートフォンを通じてナビゲーションするなど ICT を活用した歩行者移動支援サービスの普及展開を目指し
1 見出し1
 9.17.1 現況調査 (1) 調査事項及びその選択理由調査事項及びその選択理由は 表 9.17-1 に示すとおりである 調査事項 1 交通量等の状況 2 道路等の状況 3 土地利用の状況 4 規制等の状況 表 9.17-1 調査事項及びその選択理由 選択理由事業の実施に伴い交通渋滞の発生又は解消等 交通量及び交通流の変化が考えられることから 計画地及びその周辺について 左記の事項に係る調査が必要である
9.17.1 現況調査 (1) 調査事項及びその選択理由調査事項及びその選択理由は 表 9.17-1 に示すとおりである 調査事項 1 交通量等の状況 2 道路等の状況 3 土地利用の状況 4 規制等の状況 表 9.17-1 調査事項及びその選択理由 選択理由事業の実施に伴い交通渋滞の発生又は解消等 交通量及び交通流の変化が考えられることから 計画地及びその周辺について 左記の事項に係る調査が必要である
簡易版メタデータ
 簡易版メタデータ (OOMP:Oceanographic Observation Metadata Profile) エディタマニュアル 操作説明書 平成 20 年 3 月発行 東北沿岸域環境情報センター - 目次 - 1 はじめに...- 1-2 注意事項...- 1-3 操作全体フロー...- 2-4 メタデータ作成方法...- 2-4 メタデータ作成方法...- 3-4.1 エディタの起動...-
簡易版メタデータ (OOMP:Oceanographic Observation Metadata Profile) エディタマニュアル 操作説明書 平成 20 年 3 月発行 東北沿岸域環境情報センター - 目次 - 1 はじめに...- 1-2 注意事項...- 1-3 操作全体フロー...- 2-4 メタデータ作成方法...- 2-4 メタデータ作成方法...- 3-4.1 エディタの起動...-
NITAS の基本機能 1. 経路探索条件の設定 (1) 交通モードの設定 交通モードの設定 とは どのような交通手段のネットワークを用いて経路探索を行うかを設定するものです NITASの交通モードは 大きく 人流 ( 旅客移動 ) 物流( 貨物移動 ) に分かれ それぞれのネットワークを用いた経路
 交通モードの設定 交通モードの設定 とは どのような交通手段のネットワークを用いて経路探索を行うかを設定するものです NITASの交通モードは 大きく 人流 ( 旅客移動 ) 物流( 貨物移動 ) に分かれ それぞれのネットワークを用いた経路") NITAS の基本機能 1. 経路探索条件の設定 (1) 交通モードの設定 交通モードの設定 とは どのような交通手段のネットワークを用いて経路探索を行うかを設定するものです NITASの交通モードは 大きく 人流 ( 旅客移動 ) 物流( 貨物移動 ) に分かれ それぞれのネットワークを用いた経路探索を行うことができます また 道路 + 船モード 鉄道 + 航空モード 道路 + 鉄道モード では
NITAS の基本機能 1. 経路探索条件の設定 (1) 交通モードの設定 交通モードの設定 とは どのような交通手段のネットワークを用いて経路探索を行うかを設定するものです NITASの交通モードは 大きく 人流 ( 旅客移動 ) 物流( 貨物移動 ) に分かれ それぞれのネットワークを用いた経路探索を行うことができます また 道路 + 船モード 鉄道 + 航空モード 道路 + 鉄道モード では
Kumamoto University Center for Multimedia and Information Technologies Lab. 熊本大学アプリケーション実験 ~ 実環境における無線 LAN 受信電波強度を用いた位置推定手法の検討 ~ InKIAI 宮崎県美郷
 熊本大学アプリケーション実験 ~ 実環境における無線 LAN 受信電波強度を用いた位置推定手法の検討 ~ InKIAI プロジェクト @ 宮崎県美郷町 熊本大学副島慶人川村諒 1 実験の目的 従来 信号の受信電波強度 (RSSI:RecevedSgnal StrengthIndcator) により 対象の位置を推定する手法として 無線 LAN の AP(AccessPont) から受信する信号の減衰量をもとに位置を推定する手法が多く検討されている
熊本大学アプリケーション実験 ~ 実環境における無線 LAN 受信電波強度を用いた位置推定手法の検討 ~ InKIAI プロジェクト @ 宮崎県美郷町 熊本大学副島慶人川村諒 1 実験の目的 従来 信号の受信電波強度 (RSSI:RecevedSgnal StrengthIndcator) により 対象の位置を推定する手法として 無線 LAN の AP(AccessPont) から受信する信号の減衰量をもとに位置を推定する手法が多く検討されている
資料 1 逆走事案のデータ分析結果 1. 逆走事案の発生状況 2. 逆走事案の詳細分析
 資料 1 逆走事案のデータ分析結果 1. 逆走事案の発生状況 2. 逆走事案の詳細分析 1. 逆走事案の発生状況 1 逆走事案の発生状況 逆走事案の約 6 割は インターチェンジ (IC) ジャンクション (JCT) で発生 の割合は 免許保有者の 6% であるのに対し 逆走した運転者の 45% を占める 逆走発生件数 ( 件 300 ) 250 200 150 100 50 24% 24% 25%
資料 1 逆走事案のデータ分析結果 1. 逆走事案の発生状況 2. 逆走事案の詳細分析 1. 逆走事案の発生状況 1 逆走事案の発生状況 逆走事案の約 6 割は インターチェンジ (IC) ジャンクション (JCT) で発生 の割合は 免許保有者の 6% であるのに対し 逆走した運転者の 45% を占める 逆走発生件数 ( 件 300 ) 250 200 150 100 50 24% 24% 25%
路面補修 切削オーバーレイ工 施工前 施工後 4車線化工事 白鳥IC 飛騨清見IC 対面通行区間の中央分離帯の改良 施工前 施工後 車線切替を実施しⅠ期線の改良を実施 左 Ⅰ期線 右 Ⅱ期線 左 Ⅱ期線 右 Ⅰ期線
 1 主な工事内容 道路構造物を安全にご利用いただくために トンネル内設備などの点検 清掃 トンネル換気設備やトンネル照明設備などの点検や清掃をおこないます トンネルジェットファン点検 トンネル照明設備点検 土木構造物などの点検 橋梁やトンネルなどで詳細な点検をおこないます 橋梁点検車を用いた橋梁下面及び橋桁の点検 高所作業車を用いたトンネル点検 お客さまの走行安全性を高めるために 道路付属物などの補修
1 主な工事内容 道路構造物を安全にご利用いただくために トンネル内設備などの点検 清掃 トンネル換気設備やトンネル照明設備などの点検や清掃をおこないます トンネルジェットファン点検 トンネル照明設備点検 土木構造物などの点検 橋梁やトンネルなどで詳細な点検をおこないます 橋梁点検車を用いた橋梁下面及び橋桁の点検 高所作業車を用いたトンネル点検 お客さまの走行安全性を高めるために 道路付属物などの補修
報道発表資料(新宿駅屋内地図オープンデータ)
") 別紙 東京都 新宿区同時発表 平成 29 年 11 月 16 日 政策統括官 ( 国土 土地 国会等移転 ) 高精度な屋内地図を初めてオープンデータ化 ~ 新宿駅周辺の屋内地図の公開により屋内ナビゲーションアプリの開発が容易に~ 国土交通省は 屋内外の測位環境を活用した様々な民間サービスの創出が図られることを目指し 新宿駅周辺の屋内地図をG 空間情報センター 1 にて本日から公開します これにより
別紙 東京都 新宿区同時発表 平成 29 年 11 月 16 日 政策統括官 ( 国土 土地 国会等移転 ) 高精度な屋内地図を初めてオープンデータ化 ~ 新宿駅周辺の屋内地図の公開により屋内ナビゲーションアプリの開発が容易に~ 国土交通省は 屋内外の測位環境を活用した様々な民間サービスの創出が図られることを目指し 新宿駅周辺の屋内地図をG 空間情報センター 1 にて本日から公開します これにより
Microsoft PowerPoint - 2_「ゾーン30」の推進状況について
 ゾーン 3 の推進状況について 1 ゾーン3 の概要 P 1 2 ゾーン3 の経緯 P 2 3 整備状況 P 5 4 整備効果 P 7 5 効果的な整備事例 P11 6 今後の取組 P14 平成 29 年 12 月 7 日警察庁交通局 1 ゾーン 3 の概要 生活道路における歩行者等の安全な通行を確保することを目的として 区域 ( ゾーン ) を定めて最高速度 3km/hの速度規制を実施するとともに
ゾーン 3 の推進状況について 1 ゾーン3 の概要 P 1 2 ゾーン3 の経緯 P 2 3 整備状況 P 5 4 整備効果 P 7 5 効果的な整備事例 P11 6 今後の取組 P14 平成 29 年 12 月 7 日警察庁交通局 1 ゾーン 3 の概要 生活道路における歩行者等の安全な通行を確保することを目的として 区域 ( ゾーン ) を定めて最高速度 3km/hの速度規制を実施するとともに
改訂履歴 版 更新日 改訂内容 第 1.0 版 2014 年 3 月 初版 第 1.1 版 2015 年 3 月 指定年月日 のデータ型を修正 上記修正に伴う符号化仕様の修正
 国土数値情報 ( 景観重要建造物 樹木 ) 製品仕様書 第 1.1 版 平成 27 年 3 月 国土交通省国土政策局 改訂履歴 版 更新日 改訂内容 第 1.0 版 2014 年 3 月 初版 第 1.1 版 2015 年 3 月 指定年月日 のデータ型を修正 上記修正に伴う符号化仕様の修正 目次 1 概覧... 1 1.1 空間データ製品仕様書の作成情報... 1 1.2 目的... 1 1.3
国土数値情報 ( 景観重要建造物 樹木 ) 製品仕様書 第 1.1 版 平成 27 年 3 月 国土交通省国土政策局 改訂履歴 版 更新日 改訂内容 第 1.0 版 2014 年 3 月 初版 第 1.1 版 2015 年 3 月 指定年月日 のデータ型を修正 上記修正に伴う符号化仕様の修正 目次 1 概覧... 1 1.1 空間データ製品仕様書の作成情報... 1 1.2 目的... 1 1.3
PowerPoint プレゼンテーション
 1 企業管理者用 ドライブエージェント Web システム 利用マニュアル ver1.4 東京海上日動火災保険株式会社 目次 P.2-3 1. ドライブエージェント Web システムの概要 P.5 2. Webシステム内の画面遷移 P.6 3. 運転評価 画面で確認できること P.8 4. Webシステムの操作方法 ( ログイン ) P.9 5. Webシステムの操作方法 ( 全社運転評価 組織運転評価
1 企業管理者用 ドライブエージェント Web システム 利用マニュアル ver1.4 東京海上日動火災保険株式会社 目次 P.2-3 1. ドライブエージェント Web システムの概要 P.5 2. Webシステム内の画面遷移 P.6 3. 運転評価 画面で確認できること P.8 4. Webシステムの操作方法 ( ログイン ) P.9 5. Webシステムの操作方法 ( 全社運転評価 組織運転評価
Microsoft Word - 質問回答.doc
 質問企画提案仕様書 4. 業務内容 ( システム開発 )(4) 位置情報受信 発信プログラムの開発 1. 位置情報受信 発信端末が取得する位置情報の記録 保存 が 記録間隔: 自動 ( 原則 1 秒未満毎 ) 2. 保存した位置情報ファイルの発信 が 発信間隔 :5 分以内毎に自動発信 とあり 端末の電力消費量がかなり多くなると想定されるが 端末を搭載する除雪車からシガーソケット又は USB による端末への給電は可能か
質問企画提案仕様書 4. 業務内容 ( システム開発 )(4) 位置情報受信 発信プログラムの開発 1. 位置情報受信 発信端末が取得する位置情報の記録 保存 が 記録間隔: 自動 ( 原則 1 秒未満毎 ) 2. 保存した位置情報ファイルの発信 が 発信間隔 :5 分以内毎に自動発信 とあり 端末の電力消費量がかなり多くなると想定されるが 端末を搭載する除雪車からシガーソケット又は USB による端末への給電は可能か
 資料 8 自動車の走行速度と道路の設計速度 最高速度規制との関係 1 道路の設計速度 (1) 設計速度の定義等設計速度については 道路構造令 ( 昭和 45 年政令第 320 号 以下 構造令 という ) 第 2 条第 22 号において 道路の設計の基礎とする自動車の速度をいう と規定されている すなわち 道路の幾何構造を検討し決定するための基本となる速度 であり 曲線半径 片勾配 視距のような線形要素と直接的な関係をもつほか
資料 8 自動車の走行速度と道路の設計速度 最高速度規制との関係 1 道路の設計速度 (1) 設計速度の定義等設計速度については 道路構造令 ( 昭和 45 年政令第 320 号 以下 構造令 という ) 第 2 条第 22 号において 道路の設計の基礎とする自動車の速度をいう と規定されている すなわち 道路の幾何構造を検討し決定するための基本となる速度 であり 曲線半径 片勾配 視距のような線形要素と直接的な関係をもつほか
15288解説_D.pptx
 ISO/IEC 15288:2015 テクニカルプロセス解説 2015/8/26 システムビューロ システムライフサイクル 2 テクニカルプロセス a) Business or mission analysis process b) Stakeholder needs and requirements definieon process c) System requirements definieon
ISO/IEC 15288:2015 テクニカルプロセス解説 2015/8/26 システムビューロ システムライフサイクル 2 テクニカルプロセス a) Business or mission analysis process b) Stakeholder needs and requirements definieon process c) System requirements definieon
Microsoft Word - 表紙
 検定合格警備員の配置の基準 ( 規則 条 ) 警備業者は 下表に掲げる警備業務を行うときは 検定合格警備員が当該警備業務に従事している間は 当該検定合格警備員に 当該警備業務の種別に係る合格証明書を携帯させ かつ 関係人の請求があるときは これを提示させなければなりません ( 規則 3 条 ) 規則 とは 警備員等の検定等に関する規則を指します 種 別 高速自動車国道 自動車専用道路において交通誘導警備業務を行う場合
検定合格警備員の配置の基準 ( 規則 条 ) 警備業者は 下表に掲げる警備業務を行うときは 検定合格警備員が当該警備業務に従事している間は 当該検定合格警備員に 当該警備業務の種別に係る合格証明書を携帯させ かつ 関係人の請求があるときは これを提示させなければなりません ( 規則 3 条 ) 規則 とは 警備員等の検定等に関する規則を指します 種 別 高速自動車国道 自動車専用道路において交通誘導警備業務を行う場合
Microsoft Word _tomei_shuchu_WEB
 E1 東名集中工事が終了しました 工事へのご理解とご協力をいただきまして誠にありがとうございました 10 月 6 日 ( 土 ) をもちまして E1 東名高速道路 ( 以下 E1 東名 ) 東京インターチェンジ (IC)~ 豊川 IC 間 ( 上下線 ) 及びC4 首都圏中央連絡自動車道 ( 以下 C4 圏央道 ) 相模原愛川 IC~ 海老名ジャンクション (JCT) 間の集中工事は 予定していたICやパーキングエリア
E1 東名集中工事が終了しました 工事へのご理解とご協力をいただきまして誠にありがとうございました 10 月 6 日 ( 土 ) をもちまして E1 東名高速道路 ( 以下 E1 東名 ) 東京インターチェンジ (IC)~ 豊川 IC 間 ( 上下線 ) 及びC4 首都圏中央連絡自動車道 ( 以下 C4 圏央道 ) 相模原愛川 IC~ 海老名ジャンクション (JCT) 間の集中工事は 予定していたICやパーキングエリア
<4D F736F F F696E74202D A834C A AA89C889EF C835B B E B8CDD8AB B83685D>
 地理情報システム学会セキュリティ分科会 2009.7.17. 大阪市統合型 GIS で取り組んでいる データ管理について 大阪市計画調整局開発調整部内布茂充 大阪市統合型 GIS のコンセプト 1 大阪市統合型 GIS 導入の視点 ( 業務 システム最適化 ) 共通電子地図の整備 皆が共通して利用できる共通電子地図を一元的に整備することで 多種多様な各業務で重複利用している地図データの購入費や整備費が削減できる
地理情報システム学会セキュリティ分科会 2009.7.17. 大阪市統合型 GIS で取り組んでいる データ管理について 大阪市計画調整局開発調整部内布茂充 大阪市統合型 GIS のコンセプト 1 大阪市統合型 GIS 導入の視点 ( 業務 システム最適化 ) 共通電子地図の整備 皆が共通して利用できる共通電子地図を一元的に整備することで 多種多様な各業務で重複利用している地図データの購入費や整備費が削減できる
<4D F736F F F696E74202D E E096BE8E9197BF B998488AC28BAB89DB2E B8CDD8AB B83685D>
 資料 9 観光案内サイン整備ガイドラインの 改訂について 平成 28 年 5 月 23 日県土マネジメント部道路環境課 0 〇観光案内サイン整備ガイドラインについて歩行者系案内サイン 公園案内板 ( 図解 ) 矢羽根型看板石標 ( トイレ案内 ) 園地案内 問題点 歴史の道案内板 羽根型看板 1 統一性がなく わかりにくい 2 案内が広範囲である 3 ローマ字表記がない 4 トイレ等のピクト表記がない
資料 9 観光案内サイン整備ガイドラインの 改訂について 平成 28 年 5 月 23 日県土マネジメント部道路環境課 0 〇観光案内サイン整備ガイドラインについて歩行者系案内サイン 公園案内板 ( 図解 ) 矢羽根型看板石標 ( トイレ案内 ) 園地案内 問題点 歴史の道案内板 羽根型看板 1 統一性がなく わかりにくい 2 案内が広範囲である 3 ローマ字表記がない 4 トイレ等のピクト表記がない
資料 2 主要渋滞箇所 ( 案 ) の抽出方針について ( 一般道 ) 平成 24 年 8 月 9 日
 の抽出方針について ( 一般道 ) 平成 24 年 8 月 9 日") 資料 2 主要渋滞箇所 ( 案 ) の抽出方針について ( 一般道 ) 平成 24 年 8 月 9 日 1. 主要渋滞箇所抽出の考え方 ( 案 ) 交差点損失時間 : 交差点に流入する区間で生じている損失時間 ( 自由に走行できる状態からの遅れで 利用者が損失している時間 ) の合計 渋滞の課題の大きさを交差点損失時間で評価 昼間 12 時間 ピーク時間帯 地域の課題を反映するデータによる補完 交差点流入方向別の平日の最低平均旅行速度
資料 2 主要渋滞箇所 ( 案 ) の抽出方針について ( 一般道 ) 平成 24 年 8 月 9 日 1. 主要渋滞箇所抽出の考え方 ( 案 ) 交差点損失時間 : 交差点に流入する区間で生じている損失時間 ( 自由に走行できる状態からの遅れで 利用者が損失している時間 ) の合計 渋滞の課題の大きさを交差点損失時間で評価 昼間 12 時間 ピーク時間帯 地域の課題を反映するデータによる補完 交差点流入方向別の平日の最低平均旅行速度
スマートフォン利用が 自動車運転に与える影響について
 自動車運転中のスマートフォン利用実態の把握とテキスト入力が運転挙動に及ぼす影響の定量的分析 リスク工学グループ演習第 9 班 山本智基中川紗菜美佐藤祥路 アドバイザー教員 : 伊藤誠 1 発表の流れ 01 研究の背景 目的 02 研究の流れ 位置づけ 03 運転中のスマートフォン利用実態把握 04 シミュレーション準備 測定方法 05 実験結果 考察 06 まとめ 背景 目的 4 背景 図 主な情報通信機器の世帯保有状況
自動車運転中のスマートフォン利用実態の把握とテキスト入力が運転挙動に及ぼす影響の定量的分析 リスク工学グループ演習第 9 班 山本智基中川紗菜美佐藤祥路 アドバイザー教員 : 伊藤誠 1 発表の流れ 01 研究の背景 目的 02 研究の流れ 位置づけ 03 運転中のスマートフォン利用実態把握 04 シミュレーション準備 測定方法 05 実験結果 考察 06 まとめ 背景 目的 4 背景 図 主な情報通信機器の世帯保有状況
第4回 国際的動向を踏まえたオープンサイエンスに関する検討会 参考資料5
 8.5 オープンデータの管理ポリシとメタデータの付与 法 Apache Tika (*) を利 して ファイルのメタデータを 動収集する例 Open Office 4 Writer の 書プロパティ画 Microsoft Word 010 の 書プロパティ画 この 書形式データを Apache Tika で解析 この 書形式データを Apache Tika で解析 作成者 タイトル 作成 時 最終更新
8.5 オープンデータの管理ポリシとメタデータの付与 法 Apache Tika (*) を利 して ファイルのメタデータを 動収集する例 Open Office 4 Writer の 書プロパティ画 Microsoft Word 010 の 書プロパティ画 この 書形式データを Apache Tika で解析 この 書形式データを Apache Tika で解析 作成者 タイトル 作成 時 最終更新
Microsoft Word - 07_今後の課題.docx
 7. 今後の課題 本業務の成果を踏まえ 今後の課題について整理した 7.1 交通データの集計 整理 7.1.1 交通データの集計 整理 本業務の成果 交通量常時観測 ( トラカン ) の毎月の状況を確認するためのトラカンレポートを作成し 精度等を情報共有した 関東地方整備局管内の旅行時間データを整理し 月別路線別平休別上下線別時間帯別旅行速度および時間帯別年間損失時間の集計表を作成 また集計データのビジュアル化を行った
7. 今後の課題 本業務の成果を踏まえ 今後の課題について整理した 7.1 交通データの集計 整理 7.1.1 交通データの集計 整理 本業務の成果 交通量常時観測 ( トラカン ) の毎月の状況を確認するためのトラカンレポートを作成し 精度等を情報共有した 関東地方整備局管内の旅行時間データを整理し 月別路線別平休別上下線別時間帯別旅行速度および時間帯別年間損失時間の集計表を作成 また集計データのビジュアル化を行った
道路規制情報登録システム 平成 25 年 5 月 13 日 GIS 大縮尺空間データ官民共有化推進協議会 支援グループ
 道路規制情報登録システム 平成 25 年 5 月 13 日 GIS 大縮尺空間データ官民共有化推進協議会 支援グループ 道路規制情報登録システムの概要 道路規制情報システムは 登録システムと閲覧システムから構成されており 同一の データベースを参照しています 閲覧システム 閲覧システム 登録システム 登録システム 道路規制情報登録システムは 文字の入力画面と規制情報 迂回路情報を入力する地 図の入力画面から構成されています
道路規制情報登録システム 平成 25 年 5 月 13 日 GIS 大縮尺空間データ官民共有化推進協議会 支援グループ 道路規制情報登録システムの概要 道路規制情報システムは 登録システムと閲覧システムから構成されており 同一の データベースを参照しています 閲覧システム 閲覧システム 登録システム 登録システム 道路規制情報登録システムは 文字の入力画面と規制情報 迂回路情報を入力する地 図の入力画面から構成されています
スライド 0
 第 3 章さまざまな情報を取り込むテキストファイル形式の住所録や写真や GPS ログ等を取り込みます 3-1 テキスト情報の取込み テキスト情報の取り込みとは CSV 形式 またはテキスト形式で顧客管理 販売管理 年賀状ソフトなど他のアプリケーションから出力された情報をスーパーマップル デジタル上にカスタム情報として取り込むことができます 参考 一度に取り込めるデータは データ内容の容量と機種の能力によりますが
第 3 章さまざまな情報を取り込むテキストファイル形式の住所録や写真や GPS ログ等を取り込みます 3-1 テキスト情報の取込み テキスト情報の取り込みとは CSV 形式 またはテキスト形式で顧客管理 販売管理 年賀状ソフトなど他のアプリケーションから出力された情報をスーパーマップル デジタル上にカスタム情報として取り込むことができます 参考 一度に取り込めるデータは データ内容の容量と機種の能力によりますが
資料 1 3 小規模附属物点検要領 ( 案 ) の制定について Ministry of Land, Infrastructure, Transport and Tourism
 の制定について Ministry of Land, Infrastructure, Transport and Tourism") 資料 1 3 小規模附属物点検要領 ( 案 ) の制定について Ministry of Land, Infrastructure, Transport and Tourism 1. 小規模附属物点検要領の構成 目次 1. 適用範囲 2. 点検の目的 3. 用語の定義 4. 点検の基本的な考え方 5. 片持ち式 5-1 点検等の方法 5-2 点検の頻度 5-3 点検の体制 5-4 対策の要否の判定 5-5
資料 1 3 小規模附属物点検要領 ( 案 ) の制定について Ministry of Land, Infrastructure, Transport and Tourism 1. 小規模附属物点検要領の構成 目次 1. 適用範囲 2. 点検の目的 3. 用語の定義 4. 点検の基本的な考え方 5. 片持ち式 5-1 点検等の方法 5-2 点検の頻度 5-3 点検の体制 5-4 対策の要否の判定 5-5
読取革命Ver.15 かんたん操作ガイド
 かんたん操作ガイド 標準モード 編 本ガイドは 読取革命Ver.15 の 標準モード( ) の簡単な基本操作手順を記載 しています 読取革命Ver.15 は かんたんモード と 標準モード を搭載しております 紙が簡単にWordに 使ってみよう 紙 Word 目次 操作の流れ 2 アプリケーションの起動 2 画像の読み込み 3 認識結果をWordへ転送 5 手動で領域枠を作成する 7 領域枠について
かんたん操作ガイド 標準モード 編 本ガイドは 読取革命Ver.15 の 標準モード( ) の簡単な基本操作手順を記載 しています 読取革命Ver.15 は かんたんモード と 標準モード を搭載しております 紙が簡単にWordに 使ってみよう 紙 Word 目次 操作の流れ 2 アプリケーションの起動 2 画像の読み込み 3 認識結果をWordへ転送 5 手動で領域枠を作成する 7 領域枠について
Microsoft PowerPoint - 口頭発表_折り畳み自転車
 1 公道走行を再現した振動試験による折り畳み自転車の破損状況 ~ 公道での繰り返し走行を再現した結果 ~ 2 公道走行を想定した試験用路面について 九州支所製品安全技術課清水寛治 目次 1. 折り畳み自転車のフレームはどのように破損するのか公道の走行振動を再現する自転車用ロードシミュレータについて繰り返し走行を想定した折り畳み自転車の破損部の特徴 ~ 公道による振動を繰り返し再現した結果 ~ 2.
1 公道走行を再現した振動試験による折り畳み自転車の破損状況 ~ 公道での繰り返し走行を再現した結果 ~ 2 公道走行を想定した試験用路面について 九州支所製品安全技術課清水寛治 目次 1. 折り畳み自転車のフレームはどのように破損するのか公道の走行振動を再現する自転車用ロードシミュレータについて繰り返し走行を想定した折り畳み自転車の破損部の特徴 ~ 公道による振動を繰り返し再現した結果 ~ 2.
RMS(Root Mean Square value 実効値 ) 実効値は AC の電圧と電流両方の値を規定する 最も一般的で便利な値です AC 波形の実効値はその波形から得られる パワーのレベルを示すものであり AC 信号の最も重要な属性となります 実効値の計算は AC の電流波形と それによって
 実効値は AC の電圧と電流両方の値を規定する 最も一般的で便利な値です AC 波形の実効値はその波形から得られる パワーのレベルを示すものであり AC 信号の最も重要な属性となります 実効値の計算は AC の電流波形と それによって") 入門書 最近の数多くの AC 電源アプリケーションに伴う複雑な電流 / 電圧波形のため さまざまな測定上の課題が発生しています このような問題に対処する場合 基本的な測定 使用される用語 それらの関係について理解することが重要になります このアプリケーションノートではパワー測定の基本的な考え方やパワー測定において重要な 以下の用語の明確に定義します RMS(Root Mean Square value
入門書 最近の数多くの AC 電源アプリケーションに伴う複雑な電流 / 電圧波形のため さまざまな測定上の課題が発生しています このような問題に対処する場合 基本的な測定 使用される用語 それらの関係について理解することが重要になります このアプリケーションノートではパワー測定の基本的な考え方やパワー測定において重要な 以下の用語の明確に定義します RMS(Root Mean Square value
1 趣旨このガイドラインは 日本国内の公道 ( 道路交通法 ( 昭和 35 年法律第 105 号 ) 第 2 条第 1 項第 1 号に規定する 道路 をいう 以下同じ ) において 自動走行システム ( 加速 操舵 制動のうち複数の操作を一度に行い 又はその全てを行うシステムをいう 以下同じ ) を
 第 2 条第 1 項第 1 号に規定する 道路 をいう 以下同じ ) において 自動走行システム ( 加速 操舵 制動のうち複数の操作を一度に行い 又はその全てを行うシステムをいう 以下同じ ) を") 自動走行システムに関する公道実証実験のためのガイドライン 平成 28 年 5 月 警察庁 1 趣旨このガイドラインは 日本国内の公道 ( 道路交通法 ( 昭和 35 年法律第 105 号 ) 第 2 条第 1 項第 1 号に規定する 道路 をいう 以下同じ ) において 自動走行システム ( 加速 操舵 制動のうち複数の操作を一度に行い 又はその全てを行うシステムをいう 以下同じ ) を用いて自動車を走行させる実証実験
自動走行システムに関する公道実証実験のためのガイドライン 平成 28 年 5 月 警察庁 1 趣旨このガイドラインは 日本国内の公道 ( 道路交通法 ( 昭和 35 年法律第 105 号 ) 第 2 条第 1 項第 1 号に規定する 道路 をいう 以下同じ ) において 自動走行システム ( 加速 操舵 制動のうち複数の操作を一度に行い 又はその全てを行うシステムをいう 以下同じ ) を用いて自動車を走行させる実証実験
<4D F736F F D E817A8AEE916295D22D979A97F082C882B >
 自動車運送事業者が事業用自動車の運転者に対して行う一般的な指導及び監督の実施マニュアル 第 1 編基礎編 トラック事業者編 本マニュアルについて 本マニュアルは トラックにより運送事業を行う事業者が 貨物自動車運送事業者が事業用自動車の運転者に対して行う指導及び監督の指針 / 平成 13 年 8 月 20 日国土交通省告示第 1366 号 ( 以下 指導 監督指針 ) に基づき実施することとされている運転者に対する指導及び監督の実施方法を
自動車運送事業者が事業用自動車の運転者に対して行う一般的な指導及び監督の実施マニュアル 第 1 編基礎編 トラック事業者編 本マニュアルについて 本マニュアルは トラックにより運送事業を行う事業者が 貨物自動車運送事業者が事業用自動車の運転者に対して行う指導及び監督の指針 / 平成 13 年 8 月 20 日国土交通省告示第 1366 号 ( 以下 指導 監督指針 ) に基づき実施することとされている運転者に対する指導及び監督の実施方法を
2/17 目次 I. はじめに... 3 II. 操作手順 (Controlの場合) 断面の作成 寸法測定 異なる断面間の寸法測定 繰り返し処理...11 III. 操作手順 (Verifyの場合) 断面の作成... 1
 断面の作成 寸法測定 異なる断面間の寸法測定 繰り返し処理...11 III. 操作手順 (Verifyの場合) 断面の作成... 1") Geomagic Control / Verify 操作手順書 2D 断面における寸法測定 第 2 版 2016.6.1 会社名 連絡先変更初版 2016.3.10 新規発行 2/17 目次 I. はじめに... 3 II. 操作手順 (Controlの場合)... 4 1. 断面の作成... 4 2. 寸法測定... 6 3. 異なる断面間の寸法測定... 9 4. 繰り返し処理...11 III.
Geomagic Control / Verify 操作手順書 2D 断面における寸法測定 第 2 版 2016.6.1 会社名 連絡先変更初版 2016.3.10 新規発行 2/17 目次 I. はじめに... 3 II. 操作手順 (Controlの場合)... 4 1. 断面の作成... 4 2. 寸法測定... 6 3. 異なる断面間の寸法測定... 9 4. 繰り返し処理...11 III.
1 見出し1
 9.17.1 現況調査 (1) 調査事項及びその選択理由調査事項及びその選択理由は 表 9.17-1 に示すとおりである 調査事項 1 交通量等の状況 2 道路等の状況 3 土地利用の状況 4 規制等の状況 表 9.17-1 調査事項及びその選択理由 選択理由事業の実施に伴い交通渋滞の発生又は解消等 交通量及び交通流の変化が考えられることから 計画地及びその周辺について 左記の事項に係る調査が必要である
9.17.1 現況調査 (1) 調査事項及びその選択理由調査事項及びその選択理由は 表 9.17-1 に示すとおりである 調査事項 1 交通量等の状況 2 道路等の状況 3 土地利用の状況 4 規制等の状況 表 9.17-1 調査事項及びその選択理由 選択理由事業の実施に伴い交通渋滞の発生又は解消等 交通量及び交通流の変化が考えられることから 計画地及びその周辺について 左記の事項に係る調査が必要である
1 見出し1
 9.16.1 現況調査 (1) 調査事項及びその選択理由調査事項及びその選択理由は 表 9.16-1 に示すとおりである 調査事項 1 交通量等の状況 2 道路等の状況 3 土地利用の状況 4 規制等の状況 表 9.16-1 調査事項及びその選択理由 選択理由事業の実施に伴い交通渋滞の発生又は解消等 交通量及び交通流の変化が考えられることから 計画地及びその周辺について 左記の事項に係る調査が必要である
9.16.1 現況調査 (1) 調査事項及びその選択理由調査事項及びその選択理由は 表 9.16-1 に示すとおりである 調査事項 1 交通量等の状況 2 道路等の状況 3 土地利用の状況 4 規制等の状況 表 9.16-1 調査事項及びその選択理由 選択理由事業の実施に伴い交通渋滞の発生又は解消等 交通量及び交通流の変化が考えられることから 計画地及びその周辺について 左記の事項に係る調査が必要である
コンテンツセントリックネットワーク技術を用いた ストリームデータ配信システムの設計と実装
 コンテンツセントリックネットワークにおけるストリームデータ配信機構の実装 川崎賢弥, 阿多信吾, 村田正幸 大阪大学大学院情報科学研究科 大阪市立大学大学院工学研究科 2 発表内容 研究背景 研究目的 ストリームデータ配信機構の設計 ストリームデータのモデル化 コンテンツの名前構造 ストリームデータの要求とフロー制御 ストリームデータ配信機構の実装 動作デモンストレーション 3 コンテンツセントリックネットワーク
コンテンツセントリックネットワークにおけるストリームデータ配信機構の実装 川崎賢弥, 阿多信吾, 村田正幸 大阪大学大学院情報科学研究科 大阪市立大学大学院工学研究科 2 発表内容 研究背景 研究目的 ストリームデータ配信機構の設計 ストリームデータのモデル化 コンテンツの名前構造 ストリームデータの要求とフロー制御 ストリームデータ配信機構の実装 動作デモンストレーション 3 コンテンツセントリックネットワーク
拡張 DM エディタ説明書 2008/09/06 有限会社ジオ コーチ システムズ 拡張 DM エディタは 作業規定の準則 の 公共測量標準図式数値地形図データファイル仕様 に記述されているフ ォーマットの
 拡張 DM エディタ説明書 2008/09/06 有限会社ジオ コーチ システムズ http://www.geocoach.co.jp/ info@geocoach.co.jp 拡張 DM エディタは 作業規定の準則 の 公共測量標準図式数値地形図データファイル仕様 に記述されているフ ォーマットのファイルを処理するアプリケーションです 拡張子.dm のファイルを開き 3 次元表示 検査 修正 保存などができます
拡張 DM エディタ説明書 2008/09/06 有限会社ジオ コーチ システムズ http://www.geocoach.co.jp/ info@geocoach.co.jp 拡張 DM エディタは 作業規定の準則 の 公共測量標準図式数値地形図データファイル仕様 に記述されているフ ォーマットのファイルを処理するアプリケーションです 拡張子.dm のファイルを開き 3 次元表示 検査 修正 保存などができます
3-1 道路
 3-1-2 道路の幅員構成 1 開発区域内の敷地に接する道路の幅員 都市計画法施行令第 25 条第 2 号予定建築物等の用途 予定建築物等の敷地の規模等に応じて 6メートル以上 12 メートル以下で国土交通省令で定める幅員 ( 小区間で通行上支障がない場合は 4メートル ) 以上の幅員の道路が当該予定建築物等の敷地に接するように配置されていること ただし 開発区域の規模及び形状 開発区域の周辺の土地の地形及び利用の態様等に照らして
3-1-2 道路の幅員構成 1 開発区域内の敷地に接する道路の幅員 都市計画法施行令第 25 条第 2 号予定建築物等の用途 予定建築物等の敷地の規模等に応じて 6メートル以上 12 メートル以下で国土交通省令で定める幅員 ( 小区間で通行上支障がない場合は 4メートル ) 以上の幅員の道路が当該予定建築物等の敷地に接するように配置されていること ただし 開発区域の規模及び形状 開発区域の周辺の土地の地形及び利用の態様等に照らして
HDMI 機器を使う 本機にポータブルビデオなどの外部映像機器を接続すると その映像を本機の AV ソース (HDMI) として見ることができます 本機に外部映像機器を接続するには 別売の HDMI 入力ケーブルと市販の HDMIケーブルが必要です 映像入力の設定をする 1 を押し 設定 編集 -
 として見ることができます 本機に外部映像機器を接続するには 別売の HDMI 入力ケーブルと市販の HDMIケーブルが必要です 映像入力の設定をする 1 を押し 設定 編集 -") AUX を使う (MP313D-W のみ ) 本機正面の AUX 端子にポータブルオーディオプレーヤーなどの外部音声機器を接続すると その音声を本機の AV ソース (AUX) として聞くことができます 本機正面の AUX 端子に外部機器を接続するには 別売の音声ケーブル (φ3.5 mmステレオ音声用 ) が必要です 外部機器の音声を聞く 1 音声ケーブル (3.5φ) を本機の AUX 端子に接続する
AUX を使う (MP313D-W のみ ) 本機正面の AUX 端子にポータブルオーディオプレーヤーなどの外部音声機器を接続すると その音声を本機の AV ソース (AUX) として聞くことができます 本機正面の AUX 端子に外部機器を接続するには 別売の音声ケーブル (φ3.5 mmステレオ音声用 ) が必要です 外部機器の音声を聞く 1 音声ケーブル (3.5φ) を本機の AUX 端子に接続する
高分解能衛星データによる地形図作成手法に関する調査研究 ( 第 2 年次 ) 実施期間平成 18 年度 ~ 測図部測図技術開発室水田良幸小井土今朝巳田中宏明 佐藤壮紀大野裕幸 1. はじめに国土地理院では, 平成 18 年 1 月に打ち上げられた陸域観測技術衛星 ALOS に関して, 宇宙航空研究開
 実施期間平成 18 年度 ~ 測図部測図技術開発室水田良幸小井土今朝巳田中宏明 佐藤壮紀大野裕幸 1. はじめに国土地理院では, 平成 18 年 1 月に打ち上げられた陸域観測技術衛星 ALOS に関して, 宇宙航空研究開") 高分解能衛星データによる地形図作成手法に関する調査研究 ( 第 2 年次 ) 実施期間平成 18 年度 ~ 測図部測図技術開発室水田良幸小井土今朝巳田中宏明 佐藤壮紀大野裕幸 1. はじめに国土地理院では, 平成 18 年 1 月に打ち上げられた陸域観測技術衛星 ALOS に関して, 宇宙航空研究開発機構 ( JAXA ) と共同研究協定を締結している. 測図部では,2 万 5 千分 1 地形図の作成及びリアルタイム修正の実証及び
高分解能衛星データによる地形図作成手法に関する調査研究 ( 第 2 年次 ) 実施期間平成 18 年度 ~ 測図部測図技術開発室水田良幸小井土今朝巳田中宏明 佐藤壮紀大野裕幸 1. はじめに国土地理院では, 平成 18 年 1 月に打ち上げられた陸域観測技術衛星 ALOS に関して, 宇宙航空研究開発機構 ( JAXA ) と共同研究協定を締結している. 測図部では,2 万 5 千分 1 地形図の作成及びリアルタイム修正の実証及び
STAMP/STPA を用いた 自動運転システムのリスク分析 - 高速道路での合流 - 堀雅年 * 伊藤信行 梶克彦 * 内藤克浩 * 水野忠則 * 中條直也 * * 愛知工業大学 三菱電機エンジニアリング 1
 STAMP/STPA を用いた 自動運転システムのリスク分析 - 高速道路での合流 - 堀雅年 * 伊藤信行 梶克彦 * 内藤克浩 * 水野忠則 * 中條直也 * * 愛知工業大学 三菱電機エンジニアリング 1 はじめに 近年 先進運転支援システムが発展 オートクルーズコントロール レーンキープアシスト 2020 年を目処にレベル3 自動運転車の市場化が期待 運転システムが複雑化 出典 : 官民 ITS
STAMP/STPA を用いた 自動運転システムのリスク分析 - 高速道路での合流 - 堀雅年 * 伊藤信行 梶克彦 * 内藤克浩 * 水野忠則 * 中條直也 * * 愛知工業大学 三菱電機エンジニアリング 1 はじめに 近年 先進運転支援システムが発展 オートクルーズコントロール レーンキープアシスト 2020 年を目処にレベル3 自動運転車の市場化が期待 運転システムが複雑化 出典 : 官民 ITS
Microsoft Word - NJJ-105の平均波処理について_改_OK.doc
 ハンディサーチ NJJ-105 の平均波処理について 2010 年 4 月 株式会社計測技術サービス 1. はじめに平均波処理の処理アルゴリズムの内容と有効性の度合いを現場測定例から示す まず ほぼ同じ鉄筋かぶりの密接鉄筋 壁厚測定時の平均波処理画像について また ダブル筋 千鳥筋の現場測定例へ平均波処理とその他画像処理を施し 処理画像の差について比較検証し 考察を加えた ( 平均波処理画像はその他の各処理画像同様
ハンディサーチ NJJ-105 の平均波処理について 2010 年 4 月 株式会社計測技術サービス 1. はじめに平均波処理の処理アルゴリズムの内容と有効性の度合いを現場測定例から示す まず ほぼ同じ鉄筋かぶりの密接鉄筋 壁厚測定時の平均波処理画像について また ダブル筋 千鳥筋の現場測定例へ平均波処理とその他画像処理を施し 処理画像の差について比較検証し 考察を加えた ( 平均波処理画像はその他の各処理画像同様
目次 1. アニメーションの軌跡の概要と仕組み 3 2. パノラマ写真にアニメーションの軌跡を設定 まとめ 課題にチャレンジ 19 レッスン内容 アニメーションの軌跡の概要と仕組み アニメーションの軌跡とは スライドに配置したオブジェクト ( テキストや図形 画像など ) を
 を") PowerPoint で楽しむムービー作成講座 第 9 回 アニメーションの軌跡で風景を見渡す PowerPoint で楽しむムービー作成講座 では 12 回に分けて デジタルカメラの写真や動画を 素材に ムービー作成ソフトを使用せずに PowerPoint 2010 だけでオリジナルムービーを作成す る方法を紹介します 本テキストの作成環境は 次のとおりです Windows 7 Home Premium
PowerPoint で楽しむムービー作成講座 第 9 回 アニメーションの軌跡で風景を見渡す PowerPoint で楽しむムービー作成講座 では 12 回に分けて デジタルカメラの写真や動画を 素材に ムービー作成ソフトを使用せずに PowerPoint 2010 だけでオリジナルムービーを作成す る方法を紹介します 本テキストの作成環境は 次のとおりです Windows 7 Home Premium
< F8BE091F28EA9935D8ED492CA8D738BF38AD490AE94F5834B C FC92E888C4816A2E786477>
 2. 自転車通行空間の種類と通行ルール 2-1. 自転車通行空間に関する用語の定義 本ガイドラインで用いる用語は 次のように定義する 1) 自転車通行空間 自転車が通行するための道路又は道路の部分をいう 2) 自転車 道路交通法第 63 条の 3 に規定される 普通自転車 をいう なお 普通自転車 とは 車体の大きさ及び構造が内閣府令で定める基準に適合する二輪又は三輪の自転車で 他の車両を牽引 (
2. 自転車通行空間の種類と通行ルール 2-1. 自転車通行空間に関する用語の定義 本ガイドラインで用いる用語は 次のように定義する 1) 自転車通行空間 自転車が通行するための道路又は道路の部分をいう 2) 自転車 道路交通法第 63 条の 3 に規定される 普通自転車 をいう なお 普通自転車 とは 車体の大きさ及び構造が内閣府令で定める基準に適合する二輪又は三輪の自転車で 他の車両を牽引 (
操作マニュアル
 栃木県道路台帳更新システム 更新調書入力システム 操作マニュアル 県土整備部道路保全課 目次 目次 第 1 章 はじめに... 1 1. はじめに... 2 1-1. 更新調書入力システムについて... 2 1-2. 動作環境... 2 1-3. Excel 設定の注意事項... 2 2. システム概要... 3 2-1. 機能概要... 4 2-2. 更新調書データ入力業務の流れ... 5 3.
栃木県道路台帳更新システム 更新調書入力システム 操作マニュアル 県土整備部道路保全課 目次 目次 第 1 章 はじめに... 1 1. はじめに... 2 1-1. 更新調書入力システムについて... 2 1-2. 動作環境... 2 1-3. Excel 設定の注意事項... 2 2. システム概要... 3 2-1. 機能概要... 4 2-2. 更新調書データ入力業務の流れ... 5 3.
2. 目的 1RationalRose を利用する場合にプログラム仕様書としての最低限必要な記述項目を明確にする 2 プログラム仕様書として記載内容に不足がない事をチェックする 3UML の知識があるものであれば 仕様書の内容を理解できること 4Rose にて入力した内容を SoDaWord を利用
 プログラム仕様書 (UML 表記法 ) ガイドライン 本仕様書に UML(Rational Rose 使用 ) を用いてプログラム仕様書を作成する際のガイドラインを記す 1. ドキュメントの様式について 1 ドキュメントは制御単位で作成する 2 表紙 及び変更履歴は SWS にて指定されたものを付加すること 3 下記の目次内で指定している UML 図 記述項目は必須項目とする 4SoDa にてドキュメントを出力する場合は
プログラム仕様書 (UML 表記法 ) ガイドライン 本仕様書に UML(Rational Rose 使用 ) を用いてプログラム仕様書を作成する際のガイドラインを記す 1. ドキュメントの様式について 1 ドキュメントは制御単位で作成する 2 表紙 及び変更履歴は SWS にて指定されたものを付加すること 3 下記の目次内で指定している UML 図 記述項目は必須項目とする 4SoDa にてドキュメントを出力する場合は
Microsoft Word - 資料6(修正).docx
.docx") 運転支援機能の表示に関する規約運用の考え方 に基づく表示例 資料 6 カタログ (Webを含む) の表示例 < 表示例 1> カタログの表示例 運転支援機能に関する説明や注意喚起等の詳細を表示した上で その他の頁では スペース等の関係により 運転支援機能に関する説明や注意喚起等を全て表示できない場合の例 < 運転支援機能の内容説明 作動条件や作動しない条件等の詳細を表示した頁 > 新型 は止まるをサホ
運転支援機能の表示に関する規約運用の考え方 に基づく表示例 資料 6 カタログ (Webを含む) の表示例 < 表示例 1> カタログの表示例 運転支援機能に関する説明や注意喚起等の詳細を表示した上で その他の頁では スペース等の関係により 運転支援機能に関する説明や注意喚起等を全て表示できない場合の例 < 運転支援機能の内容説明 作動条件や作動しない条件等の詳細を表示した頁 > 新型 は止まるをサホ
Microsoft Word - ModelAnalys操作マニュアル_
 モデル分析アドイン操作マニュアル Ver.0.5.0 205/0/05 株式会社グローバルアシスト 目次 概要... 3. ツール概要... 3.2 対象... 3 2 インストールと設定... 4 2. モデル分析アドインのインストール... 4 2.2 モデル分析アドイン画面の起動... 6 3 モデル分析機能... 7 3. 要求分析機能... 7 3.. ID について... 0 3.2 要求ツリー抽出機能...
モデル分析アドイン操作マニュアル Ver.0.5.0 205/0/05 株式会社グローバルアシスト 目次 概要... 3. ツール概要... 3.2 対象... 3 2 インストールと設定... 4 2. モデル分析アドインのインストール... 4 2.2 モデル分析アドイン画面の起動... 6 3 モデル分析機能... 7 3. 要求分析機能... 7 3.. ID について... 0 3.2 要求ツリー抽出機能...
 招待論文 フルスペック 8K スーパーハイビジョン圧縮記録装置の開発 3.3 記録制御機能と記録媒体 144 Gbps の映像信号を 1/8 に圧縮した場合 18 Gbps 程度 の転送速度が要求される さらに音声データやその他のメ タデータを同時に記録すると 記録再生には 20 Gbps 程度 の転送性能が必要となる また 記録媒体は記録装置から 着脱して持ち運ぶため 不慮の落下などにも耐性のあるこ
招待論文 フルスペック 8K スーパーハイビジョン圧縮記録装置の開発 3.3 記録制御機能と記録媒体 144 Gbps の映像信号を 1/8 に圧縮した場合 18 Gbps 程度 の転送速度が要求される さらに音声データやその他のメ タデータを同時に記録すると 記録再生には 20 Gbps 程度 の転送性能が必要となる また 記録媒体は記録装置から 着脱して持ち運ぶため 不慮の落下などにも耐性のあるこ
NITAS Ver.2.4 システムの概要 利用上の注意等 1.NITAS の概要 動作環境 利用対象者 (1)NITAS の概要総合交通分析システム (NITAS:National Integrated Transport Analysis System) は 道路 鉄道 航空 船舶の各交通機関を
NITAS の概要総合交通分析システム (NITAS:National Integrated Transport Analysis System) は 道路 鉄道 航空 船舶の各交通機関を") NITAS Ver.2.4 システムの概要 利用上の注意等 1.NITAS の概要 動作環境 利用対象者 (1)NITAS の概要総合交通分析システム (NITAS:National Integrated Transport Analysis System) は 道路 鉄道 航空 船舶の各交通機関を組み合わせて総合的に交通体系の分析を行うシステムです 全国的な視点から地方レベルの課題まで様々な問題意識に対応して
NITAS Ver.2.4 システムの概要 利用上の注意等 1.NITAS の概要 動作環境 利用対象者 (1)NITAS の概要総合交通分析システム (NITAS:National Integrated Transport Analysis System) は 道路 鉄道 航空 船舶の各交通機関を組み合わせて総合的に交通体系の分析を行うシステムです 全国的な視点から地方レベルの課題まで様々な問題意識に対応して
ICT を活用した ITS の概要 1 ITS は内閣府 警察庁 総務省 経済産業省 国土交通省が連携して推進 道路交通情報 VICS (1996 年 ~) FM 多重放送 電波ビーコン 光ビーコンで情報配信 ( 約 5,100 万台 :2016 年 6 月末 ) プローブ情報 携帯電話ネットワーク
 FM 多重放送 電波ビーコン 光ビーコンで情報配信 ( 約 5,100 万台 :2016 年 6 月末 ) プローブ情報 携帯電話ネットワーク") 参考資料 3 自動走行の実現に向けた総務省の取組 平成 28 年 12 月 15 日総務省 ICT を活用した ITS の概要 1 ITS は内閣府 警察庁 総務省 経済産業省 国土交通省が連携して推進 道路交通情報 VICS (1996 年 ~) FM 多重放送 電波ビーコン 光ビーコンで情報配信 ( 約 5,100 万台 :2016 年 6 月末 ) プローブ情報 携帯電話ネットワーク等自動車メーカー等では
参考資料 3 自動走行の実現に向けた総務省の取組 平成 28 年 12 月 15 日総務省 ICT を活用した ITS の概要 1 ITS は内閣府 警察庁 総務省 経済産業省 国土交通省が連携して推進 道路交通情報 VICS (1996 年 ~) FM 多重放送 電波ビーコン 光ビーコンで情報配信 ( 約 5,100 万台 :2016 年 6 月末 ) プローブ情報 携帯電話ネットワーク等自動車メーカー等では
【資料8】車両安全対策の事後効果評価rev4
 平成 28 年度第 2 回車両安全対策検討会平成 28 年 12 月 9 日 安全 - 資料 -8 車両安全対策の事後効果評価 背景 目的 平成 23 年の交通政策審議会報告書において交通事故死者数削減目標 ( 平成 32 年度までに平成 22 年比で車両安全対策により 1,000 人削減 ) が設定された 中間年である平成 27 年度の調査結果では 735 人の削減効果と試算された 平成 32 年の目標に向けた達成状況について検証するため
平成 28 年度第 2 回車両安全対策検討会平成 28 年 12 月 9 日 安全 - 資料 -8 車両安全対策の事後効果評価 背景 目的 平成 23 年の交通政策審議会報告書において交通事故死者数削減目標 ( 平成 32 年度までに平成 22 年比で車両安全対策により 1,000 人削減 ) が設定された 中間年である平成 27 年度の調査結果では 735 人の削減効果と試算された 平成 32 年の目標に向けた達成状況について検証するため
ドライブレコーダーにより記録すべき情報及びドライブレコーダーの性能要件を定める告示 ( 平成 28 年 11 月 17 日国土交通省告示 1346 号 ) ( 総則 ) 第一条一般貸切旅客自動車運送事業者が 旅客自動車運送事業運輸規則 ( 昭和 31 年運輸省令第 44 号 ) 第 38 条第 1
 ( 総則 ) 第一条一般貸切旅客自動車運送事業者が 旅客自動車運送事業運輸規則 ( 昭和 31 年運輸省令第 44 号 ) 第 38 条第 1") ドライブレコーダーにより記録すべき情報及びドライブレコーダーの性能要件を定める告示 ( 平成 28 年 11 月 17 日国土交通省告示 1346 号 ) ( 総則 ) 第一条一般貸切旅客自動車運送事業者が 旅客自動車運送事業運輸規則 ( 昭和 31 年運輸省令第 44 号 ) 第 38 条第 1 項及び第 2 項の規定に基づきその事業用自動車の運転者に対して指導監督及び特別な指導 ( 以下 指導監督等
ドライブレコーダーにより記録すべき情報及びドライブレコーダーの性能要件を定める告示 ( 平成 28 年 11 月 17 日国土交通省告示 1346 号 ) ( 総則 ) 第一条一般貸切旅客自動車運送事業者が 旅客自動車運送事業運輸規則 ( 昭和 31 年運輸省令第 44 号 ) 第 38 条第 1 項及び第 2 項の規定に基づきその事業用自動車の運転者に対して指導監督及び特別な指導 ( 以下 指導監督等
改訂履歴 版 更新日 改訂内容 Ver 1.0b 2014 年 12 月 試行版 国土数値情報 API 仕様 ( 試行版 )
") 国土数値情報 API 仕様 ( 試行版 ) Ver 1.0b 平成 26 年 12 月 国土交通省国土政策局国土情報課 改訂履歴 版 更新日 改訂内容 Ver 1.0b 2014 年 12 月 試行版 国土数値情報 API 仕様 ( 試行版 ) 目次 1 API 機能の種類 - 1-1.1 国土数値情報の概要情報取得 - 1-1.2 国土数値情報取得の URL 情報取得 - 1-2 API の利用方法
国土数値情報 API 仕様 ( 試行版 ) Ver 1.0b 平成 26 年 12 月 国土交通省国土政策局国土情報課 改訂履歴 版 更新日 改訂内容 Ver 1.0b 2014 年 12 月 試行版 国土数値情報 API 仕様 ( 試行版 ) 目次 1 API 機能の種類 - 1-1.1 国土数値情報の概要情報取得 - 1-1.2 国土数値情報取得の URL 情報取得 - 1-2 API の利用方法
測量試補 重要事項 応用測量
 路線の縦横断測量 < 試験合格へのポイント > 路線測量のうち 縦断測量 横断測量に関する計算問題であるが 過去の出題内容は レベルによる器高式水準測量と TS による対辺測量に関するものである 計算自体は簡単であるため ぜひ正答を導けるようになっておきたい ( : 最重要事項 : 重要事項 : 知っておくと良い ) 縦断測量と横断測量 縦断測量とは 道路 ( 路線 ) 中心線の中心杭高 中心点ならびに中心線上の地形変化点の地盤高及び
路線の縦横断測量 < 試験合格へのポイント > 路線測量のうち 縦断測量 横断測量に関する計算問題であるが 過去の出題内容は レベルによる器高式水準測量と TS による対辺測量に関するものである 計算自体は簡単であるため ぜひ正答を導けるようになっておきたい ( : 最重要事項 : 重要事項 : 知っておくと良い ) 縦断測量と横断測量 縦断測量とは 道路 ( 路線 ) 中心線の中心杭高 中心点ならびに中心線上の地形変化点の地盤高及び
【資料1-2】脳神経外科手術用ナビゲーションユニット基準案あ
 脳神経外科手術用ナビゲーションユニット認証基準 ( 案 ) 医薬品 医療機器等の品質 有効性及び安全性の確保等に関する法律 ( 以下 法 という ) 第二十三条の二の二十三第一項の規定により厚生労働大臣が基準を定めて指定する高度管理医療機器は 別表第一の下欄に掲げる基準に適合する同表の中欄に掲げるもの ( 専ら動物のために使用されることが目的とされているものを除く ) であって 次に掲げる要件の全てに適合するものとする
脳神経外科手術用ナビゲーションユニット認証基準 ( 案 ) 医薬品 医療機器等の品質 有効性及び安全性の確保等に関する法律 ( 以下 法 という ) 第二十三条の二の二十三第一項の規定により厚生労働大臣が基準を定めて指定する高度管理医療機器は 別表第一の下欄に掲げる基準に適合する同表の中欄に掲げるもの ( 専ら動物のために使用されることが目的とされているものを除く ) であって 次に掲げる要件の全てに適合するものとする
UMLプロファイル 機能ガイド
 UML Profile guide by SparxSystems Japan Enterprise Architect 日本語版 UML プロファイル機能ガイド (2016/10/07 最終更新 ) 1. はじめに UML では ステレオタイプを利用することで既存の要素に意味を追加し 拡張して利用することができます このステレオタイプは個々の要素に対して個別に指定することもできますが ステレオタイプの意味と適用する
UML Profile guide by SparxSystems Japan Enterprise Architect 日本語版 UML プロファイル機能ガイド (2016/10/07 最終更新 ) 1. はじめに UML では ステレオタイプを利用することで既存の要素に意味を追加し 拡張して利用することができます このステレオタイプは個々の要素に対して個別に指定することもできますが ステレオタイプの意味と適用する
Microsoft Word - dourohyousiki_kisoku
 静岡県が管理する県道に設ける道路の寸法を定める規則をここに公布する 平成 24 年 3 月 日静岡県知事川勝平太静岡県規則第 33 号静岡県が管理する県道に設ける道路の寸法を定める規則 ( 趣旨 ) 第 1 条この規則は 静岡県が管理する県道の構造の技術的基準等を定める条例 ( 平成 24 年静岡県条例第 2 号 ) 第 3 条の規定に基づき 県が管理する県道 ( 以下 道路 という ) に設ける道路のうち
静岡県が管理する県道に設ける道路の寸法を定める規則をここに公布する 平成 24 年 3 月 日静岡県知事川勝平太静岡県規則第 33 号静岡県が管理する県道に設ける道路の寸法を定める規則 ( 趣旨 ) 第 1 条この規則は 静岡県が管理する県道の構造の技術的基準等を定める条例 ( 平成 24 年静岡県条例第 2 号 ) 第 3 条の規定に基づき 県が管理する県道 ( 以下 道路 という ) に設ける道路のうち
Microsoft Word 交通渋滞(有明アーバン)_181017
_181017") 9.4.1 現況調査 (1) 調査事項及びその選択理由調査事項及びその選択理由は 表 9.4-1 に示すとおりである 調査事項 1 交通量等の状況 2 道路等の状況 3 土地利用の状況 4 規制等の状況 表 9.4-1 調査事項及びその選択理由選択理由 事業の実施に伴い交通渋滞の発生又は解消等 交通量及び交通流の変化が考えられることから 計画地及びその周辺について 左記の事項に係る調査が必要である
9.4.1 現況調査 (1) 調査事項及びその選択理由調査事項及びその選択理由は 表 9.4-1 に示すとおりである 調査事項 1 交通量等の状況 2 道路等の状況 3 土地利用の状況 4 規制等の状況 表 9.4-1 調査事項及びその選択理由選択理由 事業の実施に伴い交通渋滞の発生又は解消等 交通量及び交通流の変化が考えられることから 計画地及びその周辺について 左記の事項に係る調査が必要である