タイトル
|
|
|
- ふじよし まるこ
- 5 years ago
- Views:
Transcription

1 生活支援ロボット HSR 向け 自律動作アプリケーション開発 アプリケーションエンジニアリング部木川田亘 2015 The MathWorks, Inc. 1

2 実演 :HSR による あいさつ アプリケーションの開発 2
3 アジェンダ 自律ロボット開発における MATLAB ROS を使った HSR との連携ワークフロー まとめ 3
4 アジェンダ 自律ロボット開発における MATLAB ROS を使った HSR との連携ワークフロー まとめ 4
5 あいさつ アプリケーションには複合的な要素が不可欠 こんにちは カメラ画像の取得 顔検出 顔のトラッキング軌道テキスト生成 発話 センサー連携 (ROS) ディープラーニング コンピュータービジョン 軌道生成 アクチュエータ連携 (ROS) 5


6 ROSを使ったHSRとの連携ワークフロー センサー ROS購読 カメラ LiDAR 物体検出 画像処理 点群処理 外界環境 状況認識 フュージョン 自己位置推定 障害物追尾 実機 物理モデル 判断 意思決定 状態管理 プランニング ROS配信 操舵制御 追従制御 こんにちは カメラ画像の取得 顔検出 顔のトラッキング 軌道テキスト生成 発話 6














7 MATLAB/Simulink が支援する自律ロボットシステム開発 制御 センシング 認識 Control System Toolbox Computer Vision Automated Driving HW Support Packages Robotics System Toolbox Phased Array Data Acquisition Toolbox Stateflow Simscape Statistics and Machine Learning Deep Learning Model Predictive Control Toolbox 経路計画 Communications WLAN Robotics System Toolbox 通信 実装 Simulink Real-Time MATLAB Coder Simulink Coder HDL Coder GPU Coder 7
8 アジェンダ 自律ロボット開発における MATLAB ROS を使った HSR との連携ワークフロー まとめ 8
9 ROSを使ったHSRとの連携ワークフロー センサー ROS購読 カメラ LiDAR 物体検出 画像処理 点群処理 外界環境 状況認識 フュージョン 自己位置推定 障害物追尾 実機 物理モデル 判断 意思決定 状態管理 プランニング ROS配信 操舵制御 追従制御 こんにちは カメラ画像の取得 顔検出 顔のトラッキング 軌道テキスト生成 発話 9


")

10 Robotics System Toolbox による ROS 連携機能 Robotics System Toolbox 検出認識 経路計画意思決定 制御 MATLAB 直接 ROS に接続してプロトタイピング シミュレーター Simulink Windows/Mac/Linux ROS ノード生成でスタンドアローン実装 (C++ コード生成 ) rosbag ROS ノード Linux 実機 rosbag を読み込んでオフラインで解析 MATLAB/Simulink 開発 PC ROS 用 PC 10
11 Simulink の ROS サポートの拡充 Robotics System Toolbox ROS Topic ブロック ROS Topic の Subscriber/Publisher C コード生成対応 ROS Service Call ブロック ROS Service を Simulink から呼び出し C コード生成対応 ROS Time ブロック 現在の ROS time を取得可能 C コード生成対応 rosbag Playback ブロック rosbag ログデータをタイムスタンプに合わせて Simulink 上で再生可能 11



12 センサーやアクチュエーターデバイスの探索 Robotics System Toolbox RGB-D センサーデータの取得 台車の制御 2D LiDAR スキャンデータの取得 アームの制御 ROS を介して様々なセンサーやアクチュエーターにアクセス可能 12


13 rosbagを使ったオフライン解析 Robotics System Toolbox rosbag読み出しのsimulinkブロック シミュレーター ROSノード 実機 rosbag Linux Windows/Mac/Linux rosbagをmatlab/simulink上で可視化 解析が可能 ROS用PC MATLAB/Simulink 開発PC 13
14 ROSを使ったHSRとの連携ワークフロー センサー ROS購読 カメラ LiDAR 物体検出 画像処理 点群処理 外界環境 状況認識 フュージョン 自己位置推定 障害物追尾 実機 物理モデル 判断 意思決定 状態管理 プランニング ROS配信 操舵制御 追従制御 こんにちは カメラ画像の取得 顔検出 顔のトラッキング 軌道テキスト生成 発話 14
 Haar/LBP/HOG の特徴量を使った弱検出器 ( 軽量 )")
 vision.")
15 カスケード検出器による顔検出アルゴリズム Computer Vision System Toolbox 顔検出 (Viola-Jones アルゴリズム ) Haar/LBP/HOG の特徴量を使った弱検出器 ( 軽量 ) をカスケード接続 さまざまなスケールに対応するため画像ピラミッドで走査 % 顔認識用のオブジェクト (Viola-Jones アルゴリズム ) vision.cascadeobjectdetector() 関数を使ってすばやくプロトタイプ でも 精度を改善したい場合は? 15



16 ディープラーニングベースの顔検出アルゴリズム Computer Vision System Toolbox Deep Learning Toolbox 他のフレームワークで学習した YOLO ベースの顔検出器をインポート Model importer ONNX Converter 学習済みモデル さまざまなディープラーニングのネットワークを試行錯誤可能 16
17 ROSを使ったHSRとの連携ワークフロー センサー ROS購読 カメラ LiDAR 物体検出 画像処理 点群処理 外界環境 状況認識 フュージョン 自己位置推定 障害物追尾 実機 物理モデル 判断 意思決定 状態管理 プランニング ROS配信 操舵制御 追従制御 こんにちは カメラ画像の取得 顔検出 顔のトラッキング 軌道テキスト生成 発話 17
18 顔追尾アルゴリズム : 特徴点検出 Computer Vision System Toolbox マッチング 検出対象画像からキーポイント特徴点および特徴量抽出 > 特徴点の検出 points = detectsurffeatures(g) %SURF 特徴点 detectharrisfeatures() %Harris( コーナー ) detectfastfeatures() %FAST( コーナー ) detectmineigenfeatures() % 最小固有値 ( コーナー ) detectbriskfeatures() %BRISK( コーナー ) detectmserfeatures() %MSER 特徴点 > 特徴量の抽出 (SURF/FREAK/BLOCK/BRISK/HOG) [f, vpoints] = extractfeatures(g, points) [f, vpoints] = extracthogfeatures(i, points) 18


19 顔追尾アルゴリズム : 特徴点のトラッキング Computer Vision System Toolbox トラッキングしたい領域 (ROI) を検出 ROI 中でコーナー等の特徴点を検出 画像ピラミッドを生成オプティカルフロー検出 トラッカーの初期化 pointtracker = vision.pointtracker; % トラッカーのオブジェクトの生成 initialize(pointtracker, points, frame1); % 検出した点で トラッカーを初期化 点を次フレーム上でトラッキング [points, isfound] = step(pointtracker, frame2); 19
20 ROSを使ったHSRとの連携ワークフロー センサー ROS購読 カメラ LiDAR 物体検出 画像処理 点群処理 外界環境 状況認識 フュージョン 自己位置推定 障害物追尾 実機 物理モデル 判断 意思決定 状態管理 プランニング ROS配信 操舵制御 追従制御 こんにちは カメラ画像の取得 顔検出 顔のトラッキング 軌道テキスト生成 発話 20
21 判断 意思決定 : 状態遷移をチャートで管理 Stateflow 顔を探索 あいさつ 推定年齢の発話 顔を近づけるように指示 年齢推定 アプリケーションの状態 状態遷移図 ( 仕様 ) StateFlow のチャートを使って記述 さまざまな状態や判断を直感的に記述可能 21
22 ROSを使ったHSRとの連携ワークフロー センサー ROS購読 カメラ LiDAR 物体検出 画像処理 点群処理 外界環境 状況認識 フュージョン 自己位置推定 障害物追尾 実機 物理モデル 判断 意思決定 状態管理 プランニング ROS配信 操舵制御 追従制御 こんにちは カメラ画像の取得 顔検出 顔のトラッキング 軌道テキスト生成 発話 22


23 シミュレーターを使った検証 3D ロボットシミュレータ Gazebo カメラ レーザーレンジファインダなどのセンサーシミュレーションが可能 ROS との連携も充実 Gazebo API を MATLAB から操作可能 モデルの生成 モデルの削除 モデルの姿勢位置変更 力を加える 23

24 ROS を通じて Gazebo と接続しテスト Robotics System Toolbox シミュレーター上でアルゴリズムの検討が可能 24




25 ROS を通じて実機と接続しテスト Robotics System Toolbox 接続先 IP アドレスを変えるだけで実機と接続し検証可能 25
26 アジェンダ 自律ロボット開発における MATLAB ROS を使った HSR との連携ワークフロー その他のアルゴリズム例 26



27 ロボット向け各種アルゴリズム 画像処理アルゴリズム 移動体向けアルゴリズム ディープラーニング GPU 実装 SLAM パスプランニング 点群処理アルゴリズム ロボットアーム向けアルゴリズム 点群処理 トラッキング 運動学 / 逆運動学 動力学 / 逆動力学 27





28 認識アルゴリズムの例 : 物体認識と Jetson 実装 Deep Learning Toolbox Computer Vision System Toolbox MATLAB Coder GPU Coder 学習用画像の収集 学習画像のラベル付け CNN 学習 学習済みモデル GPU Coder 学習済みモデル (CUDA C による GPU 実行 ) 28

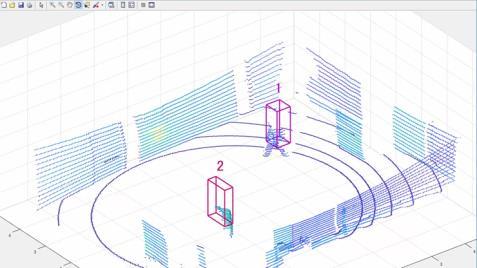
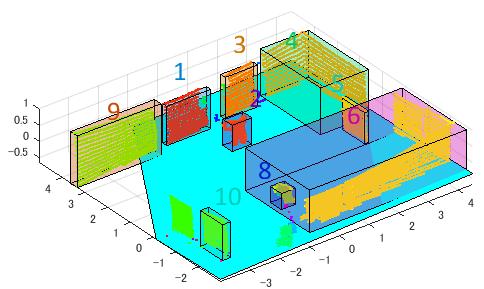
29 点群処理アルゴリズムの例 人の検出とトラッキング Computer Vision System Toolbox Automated Driving System Toolbox Sensor Fusion and Tracking Toolbox ファイル入出力 位置合わせ pcregistericp pcregisterndt pointcloud velodynefilereader pcread pcwrite 前処理 セグメンテーション pcdenoise pcdownsample pctransform pcsegdist segmentlidardata pcfitplane 29


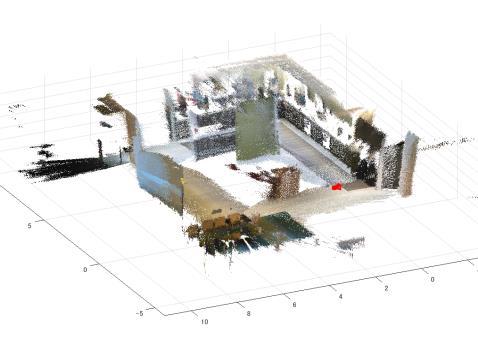
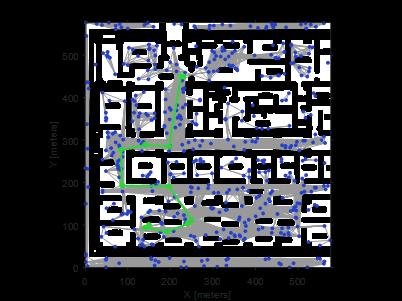
30 移動体向けアルゴリズム例 :SLAM による地図作成 Robotics System Toolbox 2D の LiDAR とホイールオドメトリを使った自己位置推定と地図作成 (SLAM) 閉ループ検出点および逐次スキャンのマッチング結果を手動修正可能 アプリを活用することでユーザーフレンドリに地図作成 >> slammapbuilder SLAM Map Builder 30



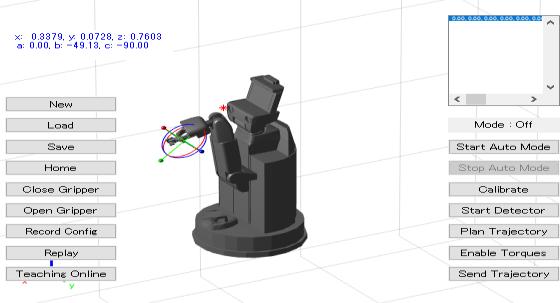
31 ロボットアームアルゴリズム例 逆運動学による関節角計算 Robotics System Toolbox Simscape Multibody 逆運動学を解いて与えられた姿勢を 満たすような各関節値を出力 Simscape Multibody 他のSimulinkマニピュレーターブロックと 組み合わせて使用可能 Cコード生成にも対応 >> robotmaniplib CADモデル 物理モデルを構築 (動力学/逆動力学) 運動学モデル構築 (運動学/逆運動学) 31
32 アジェンダ 自律ロボット開発におけるMATLAB ROSを使ったHSRとの連携ワークフロー その他のアルゴリズム例 まとめ 32
33 まとめ HSR を用いた自律動作ロボットアプリケーションの開発例をご紹介 ROS に詳しくない方でもすぐにはじめられる開発環境 認識 移動体 マニピュレーターなどの自律ロボット開発に役立つ高度なアルゴリズム 関数 ブロックを提供 自律動作ロボットの開発に MATLAB/Simulink をご活用ください 33

34 ROSをこれからはじめる方へ : 実用ロボット開発のためのROSプログラミング 実用ロボット開発に役立つ知識が満載 ROS の仕組みから実践的な利用方法まで解説 自作ロボットに ROS を導入するためのノウハウ OpenCV を使った画像処理 プラグインの開発 MATLAB との連携 幅広いロボットエンジニア必読の一冊 ROS の初心者 スキルアップを目指す人 産業用ロボットに ROS を導入したい人 MathWorks ウェブサイトでの紹介 著者 : 西田健, 九州工業大学森田賢, 株式会社安川電機岡田浩之, 玉川大学原祥尭, 千葉工業大学山崎公俊, 信州大学田向権, 九州工業大学垣内洋平, 東京大学大川一也, 千葉大学齋藤功田中良道, 九州工業大学有田裕太, 九州工業大学石田裕太郎, 九州工業大学 森北出版, 2018 ISBN: 言語 : Japanese 34




 ロボットアルゴリズム開発の支援")
 の便利な関数群")
")

35 ロボットアルゴリズム開発ソリューション Robotics System Toolbox ROSのインターフェイス提供 MATLABをROSマスター ノードとして起動 直接ROSネットワークに接続して検証 シミュレータや実機とのROS連携 ROSノード生成 SimulinkモデルからC++ ROSノードを生成 (Simulink Coder必須) ロボットアルゴリズム開発の支援 オイラー角 クォータニオン 座標変換など 自己位置推定(AMCL) の便利な関数群 SLAM パスプランニング VFH+ モンテカルロローカリゼーション(MCL) などの高度な移動用ロボットアルゴリズム ツリー構造表現 逆運動学解析などの マニピュレーターアルゴリズム LiDAR-SLAM 確率的ロードマップ法(PRM) 衝突回避(VFH+) ロボットマニピュレーターアルゴリズム開発 35
36 センサーフュージョンによる自己位置推定とトラッキング Sensor Fusion and Tracking Toolbox センサーシミュレーションとシナリオ生成 トラッキングと位置推定のアルゴリズム 可視化と精度指標コード生成とハードウェア接続 1 1 アドオンでサポート 36












37 画像処理 コンピュータービジョン 機械学習 Computer Vision System Toolbox カメラキャリブレーション 特徴点 特徴量抽出 機械学習による物体認識 動画ストリーミング処理 Image Processing Toolbox コーナー 円検出 幾何学的変換 各種画像フィルタ処理 レジストレーション 位置合せ セグメンテーション 領域分割 トラッキング ステレオビジョン 3D 画像の領域の定量評価 Deep Learning Toolbox ディープラーニングの学習推論 CNNによる物体認識 R-CNN/Fast R-CNN/Faster R-CNN SegNet/U-Netによる セマンティックセグメンテーション LSTMによる時系列予測 Dog Cat Statistics and Machine Learning Toolbox 機械学習 多変量統計 確率分布 回帰と分散分析 実験計画 統計的工程管理 37

38 2018 The MathWorks, Inc. MATLAB and Simulink are registered trademarks of The MathWorks, Inc. See for a list of additional trademarks. Other product or brand names may be trademarks or registered trademarks of their respective holders. 38
MATLAB ではじめる画像処理とロボットビジョン ~ 機械学習による物体認識と SLAM~ MathWorks Japan アプリケーションエンジニアリング部信号処理 通信 木川田亘 2015 The MathWorks, 1Inc.
 MATLAB ではじめる画像処理とロボットビジョン ~ 機械学習による物体認識と SLAM~ MathWorks Japan アプリケーションエンジニアリング部信号処理 通信 木川田亘 2015 The MathWorks, 1Inc. ロボットビジョンとは ロボットに搭載することを目的としたコンピュータービジョン技術の一分野 標識認識などさまざまな環境下での物体認識や複雑なシーンの理解 未知の領域を探索する際にロボット自身の位置推定と地図作成(SLAM)
MATLAB ではじめる画像処理とロボットビジョン ~ 機械学習による物体認識と SLAM~ MathWorks Japan アプリケーションエンジニアリング部信号処理 通信 木川田亘 2015 The MathWorks, 1Inc. ロボットビジョンとは ロボットに搭載することを目的としたコンピュータービジョン技術の一分野 標識認識などさまざまな環境下での物体認識や複雑なシーンの理解 未知の領域を探索する際にロボット自身の位置推定と地図作成(SLAM)
MATLAB EXPO 2019 Japan プレゼン資料の検討
 自動運転向けソフトウェア Autoware と MATLAB /Simulink の連携 ~ 事例紹介 ~ 2019 年 5 月 28 日株式会社ネクスティエレクトロニクス SW 開発部技術開発グループ太田徳幸 Copyright TOMEN Electronics Corp. 目次 2/31 1. 会社概要 2. Autoware Toolbox 紹介 1. 取り組み背景 2. Autoware
自動運転向けソフトウェア Autoware と MATLAB /Simulink の連携 ~ 事例紹介 ~ 2019 年 5 月 28 日株式会社ネクスティエレクトロニクス SW 開発部技術開発グループ太田徳幸 Copyright TOMEN Electronics Corp. 目次 2/31 1. 会社概要 2. Autoware Toolbox 紹介 1. 取り組み背景 2. Autoware
SimulinkによるReal-Time Test環境の構築
 Simulink モデルを使ったリアルタイムテスト環境の構築 MathWorks Japan アプリケーションエンジニアリング部シニアアプリケーションエンジニア高島博 2012 The MathWorks, Inc. 1 はじめに Simulink はバーチャルなテスト環境 2 はじめに Simulink はバーチャルなテスト環境 3 はじめに Simulink はバーチャルなテスト環境 シミュレーション開始ボタンをクリック
Simulink モデルを使ったリアルタイムテスト環境の構築 MathWorks Japan アプリケーションエンジニアリング部シニアアプリケーションエンジニア高島博 2012 The MathWorks, Inc. 1 はじめに Simulink はバーチャルなテスト環境 2 はじめに Simulink はバーチャルなテスト環境 3 はじめに Simulink はバーチャルなテスト環境 シミュレーション開始ボタンをクリック
d4-automated-driving-mw
 ADAS 自動運転アルゴリズム検証のためのシナリオ生成とシミュレーション アプリケーションエンジニアリング部大塚慶太郎 2015 The MathWorks, Inc. 1 ADAS 自動運転システムの開発 with MATLAB and Simulink 統合シミュレーション 認識 プランニング 制御 2 ADAS 自動運転 : 運転シナリオの定義 with MATLAB and Simulink
ADAS 自動運転アルゴリズム検証のためのシナリオ生成とシミュレーション アプリケーションエンジニアリング部大塚慶太郎 2015 The MathWorks, Inc. 1 ADAS 自動運転システムの開発 with MATLAB and Simulink 統合シミュレーション 認識 プランニング 制御 2 ADAS 自動運転 : 運転シナリオの定義 with MATLAB and Simulink
SimscapeプラントモデルのFPGAアクセラレーション
 Simscape TM プラントモデルの FPGA アクセラレーション MathWorks Japan アプリケーションエンジニアリング部 松本充史 2018 The MathWorks, Inc. 1 アジェンダ ユーザ事例 HILS とは? Simscape の電気系ライブラリ Simscape モデルを FPGA 実装する 2 つのアプローチ Simscape HDL Workflow Advisor
Simscape TM プラントモデルの FPGA アクセラレーション MathWorks Japan アプリケーションエンジニアリング部 松本充史 2018 The MathWorks, Inc. 1 アジェンダ ユーザ事例 HILS とは? Simscape の電気系ライブラリ Simscape モデルを FPGA 実装する 2 つのアプローチ Simscape HDL Workflow Advisor
f2-system-requirement-system-composer-mw
 Simulink Requirements と新製品 System Composer によるシステムズエンジニアリング MathWorks Japan アプリケーションエンジニアリング部大越亮二 2015 The MathWorks, Inc. 1 エンジニアリングの活動 要求レベル システムレベル 要求分析 システム記述 表現 高 システム分析 システム結合 抽象度 サブシステム コンポーネントレベル
Simulink Requirements と新製品 System Composer によるシステムズエンジニアリング MathWorks Japan アプリケーションエンジニアリング部大越亮二 2015 The MathWorks, Inc. 1 エンジニアリングの活動 要求レベル システムレベル 要求分析 システム記述 表現 高 システム分析 システム結合 抽象度 サブシステム コンポーネントレベル
Presentation Title
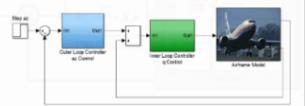
 モデルベースデザインではじめる自律型アームロボットの開発 導入 アプリケーションエンジニアリング部小林昇洋 2015 The MathWorks, Inc. 1 本セッションでお伝えしたいこと 自律ロボットシステムの開発のキーポイント : 1. マルチドメインシミュレーション 2. 複雑な開発要素をトータルでサポートする開発環境 3. モデルベースデザイン 2 自律ロボットシステムの開発における課題
モデルベースデザインではじめる自律型アームロボットの開発 導入 アプリケーションエンジニアリング部小林昇洋 2015 The MathWorks, Inc. 1 本セッションでお伝えしたいこと 自律ロボットシステムの開発のキーポイント : 1. マルチドメインシミュレーション 2. 複雑な開発要素をトータルでサポートする開発環境 3. モデルベースデザイン 2 自律ロボットシステムの開発における課題
ディープラーニングの組み込み機器実装ソリューション ~GPC/CPU編~
 ディープラーニングの組み込み機器実装ソリューション ~GPU/CPU 編 ~ MathWorks Japan アプリケーションエンジニアリング部大塚慶太郎 Kei.Otsuka@mathworks.co.jp 2018 The MathWorks, Inc. 1 自動運転 : 車 歩行者等の物体認識 白線検出 組み込み GPU への実装 モデル GPU 実装 / 配布 3 医用画像 : 腫瘍等 特定の部位の検出
ディープラーニングの組み込み機器実装ソリューション ~GPU/CPU 編 ~ MathWorks Japan アプリケーションエンジニアリング部大塚慶太郎 Kei.Otsuka@mathworks.co.jp 2018 The MathWorks, Inc. 1 自動運転 : 車 歩行者等の物体認識 白線検出 組み込み GPU への実装 モデル GPU 実装 / 配布 3 医用画像 : 腫瘍等 特定の部位の検出
いまからはじめる、MATLABによる 画像処理・コンピュータビジョン
 いまからはじめる MATLAB による画像処理 コンピュータビジョン MathWorks Japan アプリケーションエンジニアリング部シニアアプリケーションエンジニア大谷卓也 2012 The MathWorks, Inc. 1 Demo: 顔検出 画像から 人間の顔認識を行い 数のカウントを行う 2 Demo: MRI Analysis モンタージュ画像からの 3 次元構築 3 MATLAB/Simulink
いまからはじめる MATLAB による画像処理 コンピュータビジョン MathWorks Japan アプリケーションエンジニアリング部シニアアプリケーションエンジニア大谷卓也 2012 The MathWorks, Inc. 1 Demo: 顔検出 画像から 人間の顔認識を行い 数のカウントを行う 2 Demo: MRI Analysis モンタージュ画像からの 3 次元構築 3 MATLAB/Simulink
Presentation Title
 Simulink R / Stateflow R 入門 MathWorks Japan アプリケーションエンジニアリング部 小林昇洋 2016 The MathWorks, Inc. 1 本セッションで対象としている方々 Q : Simulink / Stateflow は使ったことがない どんなツールなのか? A : お使いいただいているシーン 理由などご紹介します 2 Simulink とは?
Simulink R / Stateflow R 入門 MathWorks Japan アプリケーションエンジニアリング部 小林昇洋 2016 The MathWorks, Inc. 1 本セッションで対象としている方々 Q : Simulink / Stateflow は使ったことがない どんなツールなのか? A : お使いいただいているシーン 理由などご紹介します 2 Simulink とは?
Presentation Title
 Simulink 環境で実施する ADAS( 先進運転支援システム ) 実験 MathWorks Japan アプリケーションエンジニアリング部制御 村上直也 2015 The MathWorks, Inc. 1 Agenda はじめに 弊社 ADAS 環境関連紹介 弊社 ADAS 関連製品を使用した DEMO ADAS 関連開発適用事例 まとめ 2 はじめに ADAS システムは今後もますます普及が進むと考えられる
Simulink 環境で実施する ADAS( 先進運転支援システム ) 実験 MathWorks Japan アプリケーションエンジニアリング部制御 村上直也 2015 The MathWorks, Inc. 1 Agenda はじめに 弊社 ADAS 環境関連紹介 弊社 ADAS 関連製品を使用した DEMO ADAS 関連開発適用事例 まとめ 2 はじめに ADAS システムは今後もますます普及が進むと考えられる
PowerPoint Presentation
 Simulink +Unreal Engine 連携による ADAS/ 自動運転シミュレーション環境 MathWorks Japan アプリケーションエンジニアリング部宮川浩 2015 The MathWorks, Inc. 1 Session Key Take Away MathWorks は 自動運転システム開発に必要な フルビークルモデルを提供します 3 自動車業界のメガトレンド Connectivity
Simulink +Unreal Engine 連携による ADAS/ 自動運転シミュレーション環境 MathWorks Japan アプリケーションエンジニアリング部宮川浩 2015 The MathWorks, Inc. 1 Session Key Take Away MathWorks は 自動運転システム開発に必要な フルビークルモデルを提供します 3 自動車業界のメガトレンド Connectivity
PowerPoint Presentation
 MATLAB による 大規模フリートデータ解析 アプリケーションエンジニアリング部齊藤甲次朗 2015 The MathWorks, Inc. 1 アジェンダ はじめに ビッグデータ解析の課題 MATLAB を活用したフリートデータ解析事例 フリートデータ解析実践 デスクトップでの解析 クラスターへのスケールアウト MATLAB 解析のシステムへの統合 まとめ 2 25 GB / 1hour 4 フリートデータ解析を含むビッグデータ解析の課題
MATLAB による 大規模フリートデータ解析 アプリケーションエンジニアリング部齊藤甲次朗 2015 The MathWorks, Inc. 1 アジェンダ はじめに ビッグデータ解析の課題 MATLAB を活用したフリートデータ解析事例 フリートデータ解析実践 デスクトップでの解析 クラスターへのスケールアウト MATLAB 解析のシステムへの統合 まとめ 2 25 GB / 1hour 4 フリートデータ解析を含むビッグデータ解析の課題
MATLAB/Simulinkによる無人航空機の設計・開発
 MATLAB /Simulink による無人航空機の設計 開発 MathWorks Japan Application Engineering Application Engineer 能戸フレッド Fred Noto 2017 The MathWorks, Inc. 1 無人航空機の進化 2 Model-Based Design はじめに Platform Sense 無人航空機 (UAV) はますます普及
MATLAB /Simulink による無人航空機の設計 開発 MathWorks Japan Application Engineering Application Engineer 能戸フレッド Fred Noto 2017 The MathWorks, Inc. 1 無人航空機の進化 2 Model-Based Design はじめに Platform Sense 無人航空機 (UAV) はますます普及
医用画像を題材とした3次元画像解析とディープラーニング
 医用画像を題材とした 3 次元画像解析とディープラーニング MathWorks Japan シニアアプリケーションエンジニア大塚慶太郎 kei.otsuka@mathworks.co.jp 2018 The MathWorks, Inc. 1 リリース毎に進化する MATLAB の機能 医用画像処理 自動運転 ロボティクス セキュリティ 3-D Image 3-D Vision SfM Point
医用画像を題材とした 3 次元画像解析とディープラーニング MathWorks Japan シニアアプリケーションエンジニア大塚慶太郎 kei.otsuka@mathworks.co.jp 2018 The MathWorks, Inc. 1 リリース毎に進化する MATLAB の機能 医用画像処理 自動運転 ロボティクス セキュリティ 3-D Image 3-D Vision SfM Point
d1-ros-picking-system-yasukawa
 2019 年 5 月 28 日 / 出典 :https://jp.mathworks.com/products/simulink.html 環境 社会システム事業部 森田賢 開発部 出典 :http://wiki.ros.org 出典 :http://gazebosim.org/ : The MathWorks, Inc. の商標 発表者自己紹介 Qiita : Increments 株式会社の商標
2019 年 5 月 28 日 / 出典 :https://jp.mathworks.com/products/simulink.html 環境 社会システム事業部 森田賢 開発部 出典 :http://wiki.ros.org 出典 :http://gazebosim.org/ : The MathWorks, Inc. の商標 発表者自己紹介 Qiita : Increments 株式会社の商標
b4-deeplearning-embedded-c-mw
 ディープラーニングアプリケーション の組み込み GPU/CPU 実装 アプリケーションエンジニアリング部町田和也 2015 The MathWorks, Inc. 1 アジェンダ MATLAB Coder/GPU Coder の概要 ディープニューラルネットワークの組み込み実装ワークフロー パフォーマンスに関して まとめ 2 ディープラーニングワークフローのおさらい Application logic
ディープラーニングアプリケーション の組み込み GPU/CPU 実装 アプリケーションエンジニアリング部町田和也 2015 The MathWorks, Inc. 1 アジェンダ MATLAB Coder/GPU Coder の概要 ディープニューラルネットワークの組み込み実装ワークフロー パフォーマンスに関して まとめ 2 ディープラーニングワークフローのおさらい Application logic
いまからはじめる、MATLABによる 画像処理・コンピュータビジョン
 先端運転支援システムへ向けた各種画像 コンピュータビジョンアルゴリズム開発環境 MathWorks Japan アプリケーションエンジニアリング部 シニアアプリケーションエンジニア乙部雅則 2014 The MathWorks, Inc. 1 MATLAB / Simulink テスト検証 Test and measurement Model checking Code verification Certification
先端運転支援システムへ向けた各種画像 コンピュータビジョンアルゴリズム開発環境 MathWorks Japan アプリケーションエンジニアリング部 シニアアプリケーションエンジニア乙部雅則 2014 The MathWorks, Inc. 1 MATLAB / Simulink テスト検証 Test and measurement Model checking Code verification Certification
Presentation Title
 ( ) 2017 The MathWorks, Inc. 1 新型乗用車の CO2 規制の比較 出典 :the International Council on Clean Transportation 2 自動車台数は今後も増加 多くの割合は内燃機関を使用 OEM 各社はコンセプト 想定ターゲットに応じて最適なパワートレインを選択 3 厳しい燃費規制に対応必至 従来の燃焼エンジンからフルバッテリのモータまで
( ) 2017 The MathWorks, Inc. 1 新型乗用車の CO2 規制の比較 出典 :the International Council on Clean Transportation 2 自動車台数は今後も増加 多くの割合は内燃機関を使用 OEM 各社はコンセプト 想定ターゲットに応じて最適なパワートレインを選択 3 厳しい燃費規制に対応必至 従来の燃焼エンジンからフルバッテリのモータまで
Microsoft PowerPoint - 【最終提出版】 MATLAB_EXPO2014講演資料_ルネサス菅原.pptx
 MATLAB/Simulink を使用したモータ制御アプリのモデルベース開発事例 ルネサスエレクトロニクス株式会社 第二ソリューション事業本部産業第一事業部家電ソリューション部 Rev. 1.00 2014 Renesas Electronics Corporation. All rights reserved. IAAS-AA-14-0202-1 目次 1. はじめに 1.1 モデルベース開発とは?
MATLAB/Simulink を使用したモータ制御アプリのモデルベース開発事例 ルネサスエレクトロニクス株式会社 第二ソリューション事業本部産業第一事業部家電ソリューション部 Rev. 1.00 2014 Renesas Electronics Corporation. All rights reserved. IAAS-AA-14-0202-1 目次 1. はじめに 1.1 モデルベース開発とは?
田向研究室PPTテンプレート
 Hibikino-Musashi@Home: ホームサービスロボット開発学生プロジェクトの紹介 18/09/14 ROSCon JP 2018 Hibikino-Musashi@Home 九州工業大学田向研究室 石田裕太郎 hma@brain.kyutech.ac.jp 今日紹介するロボット RoboCup@Home に参戦するホームサービスロボット Eix@ HW: 九工大 SW: 九工大 2018
Hibikino-Musashi@Home: ホームサービスロボット開発学生プロジェクトの紹介 18/09/14 ROSCon JP 2018 Hibikino-Musashi@Home 九州工業大学田向研究室 石田裕太郎 hma@brain.kyutech.ac.jp 今日紹介するロボット RoboCup@Home に参戦するホームサービスロボット Eix@ HW: 九工大 SW: 九工大 2018
Expo 2014
 物理層 &MAC 層のマルチレイヤシミュレーションとコード生成 MathWorks Japan アプリケーションエンジニアリング部シニアアプリケーションエンジニア田中明美 2014 The MathWorks, Inc. 1 Go-Back-N ( クロスレイヤモデル ) BER/PER 特性の確認 Bit レベルで雑音を加えているため PER だけでなく BER も評価可能 2 Go-Back-N
物理層 &MAC 層のマルチレイヤシミュレーションとコード生成 MathWorks Japan アプリケーションエンジニアリング部シニアアプリケーションエンジニア田中明美 2014 The MathWorks, Inc. 1 Go-Back-N ( クロスレイヤモデル ) BER/PER 特性の確認 Bit レベルで雑音を加えているため PER だけでなく BER も評価可能 2 Go-Back-N
Presentation Title
 データの本質を読み解くための機械学習 MATLAB でデータ解析の課題に立ち向かう MathWorks Japan アプリケーションエンジニア部アプリケーションエンジニア井原瑞希 2016 The MathWorks, Inc. 1 Buzzwords IoT 人工知能 / AI データ解析 ビッグデータ 2 データ解析ワークフロー データへのアクセスと探索 データの前処理 予測モデルの構築 システムへの統合
データの本質を読み解くための機械学習 MATLAB でデータ解析の課題に立ち向かう MathWorks Japan アプリケーションエンジニア部アプリケーションエンジニア井原瑞希 2016 The MathWorks, Inc. 1 Buzzwords IoT 人工知能 / AI データ解析 ビッグデータ 2 データ解析ワークフロー データへのアクセスと探索 データの前処理 予測モデルの構築 システムへの統合
MATLAB®製品紹介セミナー
 MATLAB における分類 パターン認識 - 入門編 - MathWorks Japan アプリケーションエンジニアリング部 ( テクニカルコンピューティング部 ) アプリケーションエンジニア大開孝文 2012 The MathWorks, Inc. 1 アジェンダ 回帰モデルと分類モデルについて 分類手法を使ったワインの品質モデリング まとめ 2 分類手法を使ったワインの品質モデリング アプローチ
MATLAB における分類 パターン認識 - 入門編 - MathWorks Japan アプリケーションエンジニアリング部 ( テクニカルコンピューティング部 ) アプリケーションエンジニア大開孝文 2012 The MathWorks, Inc. 1 アジェンダ 回帰モデルと分類モデルについて 分類手法を使ったワインの品質モデリング まとめ 2 分類手法を使ったワインの品質モデリング アプローチ
Presentation Title
 センサーデータ解析と機械学習 ~ 振動データからの異常検出 ~ MathWorks Japan アプリケーションエンジニアリング部 ( テクニカルコンピューティング ) 太田英司 2015 2014 The MathWorks, Inc. 1 構造ヘルスモニタリング センサーとコンピュータにより構造物の健全性を自動監視する 老朽化する構造物 インフラの数 人手のみの監視による限界 人間では検知できない故障や異常の予兆
センサーデータ解析と機械学習 ~ 振動データからの異常検出 ~ MathWorks Japan アプリケーションエンジニアリング部 ( テクニカルコンピューティング ) 太田英司 2015 2014 The MathWorks, Inc. 1 構造ヘルスモニタリング センサーとコンピュータにより構造物の健全性を自動監視する 老朽化する構造物 インフラの数 人手のみの監視による限界 人間では検知できない故障や異常の予兆
Presentation Title
 いまからはじめる MATLAB による画像処理 コンピュータビジョン ( 導入編 ) MathWorks Japan アプリケーションエンジニアリング部シニアアプリケーションエンジニア大谷卓也 2013 The MathWorks, Inc. 1 画像処理とは? 様々なアルゴリズムを使用し 画像の変形や変換 色の補正 ノイズ除去などを行うこと 統計解析などを併用し 画像からデータの数値化を行うこと
いまからはじめる MATLAB による画像処理 コンピュータビジョン ( 導入編 ) MathWorks Japan アプリケーションエンジニアリング部シニアアプリケーションエンジニア大谷卓也 2013 The MathWorks, Inc. 1 画像処理とは? 様々なアルゴリズムを使用し 画像の変形や変換 色の補正 ノイズ除去などを行うこと 統計解析などを併用し 画像からデータの数値化を行うこと
この演習について Autoware 演習 1: データの記録 再生 Autoware 演習 2: センサーキャリブレーション Autoware 演習 3:3 次元地図の作成 Autoware 演習 4: 自己位置推定 Autoware 演習 5: パラメータ調整 Autoware 演習 6: 物体検
 version 1.0 TIER IV ACADEMY 自動運転システム構築塾 Day4 Autoware 演習 2 Autoware 演習 6: 物体検出とトラッキング この演習について Autoware 演習 1: データの記録 再生 Autoware 演習 2: センサーキャリブレーション Autoware 演習 3:3 次元地図の作成 Autoware 演習 4: 自己位置推定 Autoware
version 1.0 TIER IV ACADEMY 自動運転システム構築塾 Day4 Autoware 演習 2 Autoware 演習 6: 物体検出とトラッキング この演習について Autoware 演習 1: データの記録 再生 Autoware 演習 2: センサーキャリブレーション Autoware 演習 3:3 次元地図の作成 Autoware 演習 4: 自己位置推定 Autoware
Presentation Title
 ディープラーニングの システムへの展開 ~ エッジからクラウドまで ~ アプリケーションエンジニアリング部福本拓司 2015 The MathWorks, Inc. 1 機械学習 ディープラーニング関連セッション 2 ディープラーニング学習のイメージできましたでしょうか? カメラ データベースでのデータ取得 簡潔なコーディングで学習 & 検証 豊富なサンプルコード ユーザー成功事例 Deep Dream
ディープラーニングの システムへの展開 ~ エッジからクラウドまで ~ アプリケーションエンジニアリング部福本拓司 2015 The MathWorks, Inc. 1 機械学習 ディープラーニング関連セッション 2 ディープラーニング学習のイメージできましたでしょうか? カメラ データベースでのデータ取得 簡潔なコーディングで学習 & 検証 豊富なサンプルコード ユーザー成功事例 Deep Dream
いまからはじめる組み込みGPU実装
 いまからはじめる組み込み GPU 実装 ~ コンピュータービジョン ディープラーニング編 ~ MathWorks Japan アプリケーションエンジニアリング部シニアアプリケーションエンジニア大塚慶太郎 2017 The MathWorks, Inc. 1 コンピュータービジョン ディープラーニングによる 様々な可能性 自動運転 ロボティクス 予知保全 ( 製造設備 ) セキュリティ 2 転移学習を使った画像分類
いまからはじめる組み込み GPU 実装 ~ コンピュータービジョン ディープラーニング編 ~ MathWorks Japan アプリケーションエンジニアリング部シニアアプリケーションエンジニア大塚慶太郎 2017 The MathWorks, Inc. 1 コンピュータービジョン ディープラーニングによる 様々な可能性 自動運転 ロボティクス 予知保全 ( 製造設備 ) セキュリティ 2 転移学習を使った画像分類
制御のためのSimulink入門
 今から始める Simulink 入門 ~ 制御編 ~ MathWorks Japan アプリケーションエンジニアリング部アプリケーションエンジニア張莉 2013 The MathWorks, Inc. 1 What is Simulink? 2 Why use Simulink? 例 : アポロ月着陸船のデジタル自動操縦の開発 3 Simulink を使うと? 当時の設計者が自ら Simulink
今から始める Simulink 入門 ~ 制御編 ~ MathWorks Japan アプリケーションエンジニアリング部アプリケーションエンジニア張莉 2013 The MathWorks, Inc. 1 What is Simulink? 2 Why use Simulink? 例 : アポロ月着陸船のデジタル自動操縦の開発 3 Simulink を使うと? 当時の設計者が自ら Simulink
PowerPoint Presentation
 ディープラーニングの 実践的な適用ワークフロー MathWorks Japan テクニカルコンサルティング部縣亮 2015 The MathWorks, Inc. 1 アジェンダ ディープラーニングとは?( おさらい ) ディープラーニングの適用ワークフロー ワークフローの全体像 MATLAB によるニューラルネットワークの構築 学習 検証 配布 MATLAB ではじめるメリット 試行錯誤のやりやすさ
ディープラーニングの 実践的な適用ワークフロー MathWorks Japan テクニカルコンサルティング部縣亮 2015 The MathWorks, Inc. 1 アジェンダ ディープラーニングとは?( おさらい ) ディープラーニングの適用ワークフロー ワークフローの全体像 MATLAB によるニューラルネットワークの構築 学習 検証 配布 MATLAB ではじめるメリット 試行錯誤のやりやすさ
MATLAB®製品紹介セミナー
 いまからはじめる MATLABによる 画 像 処 理 コンピュータービジョン ( 活 用 編 ) MathWorks Japan アプリケーションエンジニアリング 部 シニアアプリケーションエンジニア 乙 部 雅 則 2013 The MathWorks, Inc. 1 デモ デモ Microsoft Kinectとの 連 携 ハードウェアからの 容 易 なデータ 取 り 込 み 3 次 元 座 標
いまからはじめる MATLABによる 画 像 処 理 コンピュータービジョン ( 活 用 編 ) MathWorks Japan アプリケーションエンジニアリング 部 シニアアプリケーションエンジニア 乙 部 雅 則 2013 The MathWorks, Inc. 1 デモ デモ Microsoft Kinectとの 連 携 ハードウェアからの 容 易 なデータ 取 り 込 み 3 次 元 座 標
製品開発の現場では 各種のセンサーや測定環境を利用したデータ解析が行われ シミュレーションや動作検証等に役立てられています しかし 日々収集されるデータ量は増加し 解析も複雑化しており データ解析の負荷は徐々に重くなっています 例えば自動車の車両計測データを解析する場合 取得したデータをそのまま解析
 ホワイトペーパー Excel と MATLAB の連携がデータ解析の課題を解決 製品開発の現場では 各種のセンサーや測定環境を利用したデータ解析が行われ シミュレーションや動作検証等に役立てられています しかし 日々収集されるデータ量は増加し 解析も複雑化しており データ解析の負荷は徐々に重くなっています 例えば自動車の車両計測データを解析する場合 取得したデータをそのまま解析に使用することはできず
ホワイトペーパー Excel と MATLAB の連携がデータ解析の課題を解決 製品開発の現場では 各種のセンサーや測定環境を利用したデータ解析が行われ シミュレーションや動作検証等に役立てられています しかし 日々収集されるデータ量は増加し 解析も複雑化しており データ解析の負荷は徐々に重くなっています 例えば自動車の車両計測データを解析する場合 取得したデータをそのまま解析に使用することはできず
Presentation Title
 MATLAB の講習会 機械学習によるまばたきのリアルタイム認識 MathWorks Japan アプリケーションエンジニアリング部 木川田亘 2017 The MathWorks, Inc. 1 瞬きの回数計測 >> eyeblinkdetection_live 関数を組み合わせることで複雑な処理を簡単に実現! Image Processing Toolbox Computer Vision System
MATLAB の講習会 機械学習によるまばたきのリアルタイム認識 MathWorks Japan アプリケーションエンジニアリング部 木川田亘 2017 The MathWorks, Inc. 1 瞬きの回数計測 >> eyeblinkdetection_live 関数を組み合わせることで複雑な処理を簡単に実現! Image Processing Toolbox Computer Vision System
モデルベースデザイン(MBD)を始めましょう!
を始めましょう!") モデルベースデザイン (MBD) を始めましょう! MathWorks Japan アプリケーションエンジニアリング部シニアアプリケーションエンジニア村上直也 2014 The MathWorks, Inc. 1 モデルベースデザイン (MBD) を始めましょう! ますます増えていくスマートシステム多機能なソフトウェアモデルベースデザイン開発プロセスを加速 2 はじめに スマートシステムの増加 ソフトの高機能化
モデルベースデザイン (MBD) を始めましょう! MathWorks Japan アプリケーションエンジニアリング部シニアアプリケーションエンジニア村上直也 2014 The MathWorks, Inc. 1 モデルベースデザイン (MBD) を始めましょう! ますます増えていくスマートシステム多機能なソフトウェアモデルベースデザイン開発プロセスを加速 2 はじめに スマートシステムの増加 ソフトの高機能化
de:code 2019 CM04 Azure Kinect DK 徹底解説 ~ 進化したテクノロジーとその実装 ~ 技術統括室 千葉慎二 Ph.D.
 de:code 2019 CM04 Azure Kinect DK 徹底解説 ~ 進化したテクノロジーとその実装 ~ 技術統括室 千葉慎二 Ph.D. Mixed Reality の全体像 Kinect はただのカメラではない 3D 空間の認識 ( 深度 ) 人の全身の動きをとらえる Azure Kinect Development Environment Azure Kinect DK 開発環境
de:code 2019 CM04 Azure Kinect DK 徹底解説 ~ 進化したテクノロジーとその実装 ~ 技術統括室 千葉慎二 Ph.D. Mixed Reality の全体像 Kinect はただのカメラではない 3D 空間の認識 ( 深度 ) 人の全身の動きをとらえる Azure Kinect Development Environment Azure Kinect DK 開発環境
AI技術の紹介とセンサーデータ解析への応用
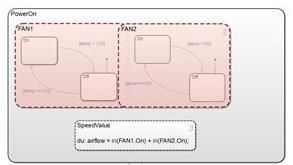
 AI を活用したセンサーデータ解析 MathWorks Japan アプリケーションエンジニアリンググループアプリケーションエンジニア吉田剛士 2018 The MathWorks, Inc. 1 AI を活用したセンサーデータ解析 11:20-11:50 MATLAB による AI 作成 アプリを使った簡易的な解析 学習モデルのパラメータ自動調整 学習モデルのスタンドアロン化 2 課題 : ターボファンエンジンの予知保全
AI を活用したセンサーデータ解析 MathWorks Japan アプリケーションエンジニアリンググループアプリケーションエンジニア吉田剛士 2018 The MathWorks, Inc. 1 AI を活用したセンサーデータ解析 11:20-11:50 MATLAB による AI 作成 アプリを使った簡易的な解析 学習モデルのパラメータ自動調整 学習モデルのスタンドアロン化 2 課題 : ターボファンエンジンの予知保全
Introduction to System Identification
 y(t) モデルベースデザイン 制御系設計のためのシステム同定入門 s 2 Teja Muppirala t s 2 3s 4 2012 The MathWorks, Inc. 1 モデルベースデザイン 正確なモデルがあることが大前提 実行可能な仕様書 シミュレーションによる設計 モデル 連続したテスト 検証 コード生成による実装 2 動的システムのモデリング モデリング手法 第一原理モデリング データドリブンモデリング
y(t) モデルベースデザイン 制御系設計のためのシステム同定入門 s 2 Teja Muppirala t s 2 3s 4 2012 The MathWorks, Inc. 1 モデルベースデザイン 正確なモデルがあることが大前提 実行可能な仕様書 シミュレーションによる設計 モデル 連続したテスト 検証 コード生成による実装 2 動的システムのモデリング モデリング手法 第一原理モデリング データドリブンモデリング
機械学習のご紹介
 機械学習とは? 機械学習とは 人間や動物にとって当たり前のことをコンピュータに教えるということを意味します つまり 経験から学ぶ ということです 機械学習のアルゴリズムでは モデルと呼ばれる事前に定められた方程式に頼らずに 計算的な手法を使ってデータから情報を直接学び取ります こうしたアルゴリズムは学習に使えるサンプル数の増大に伴って 適応的にその性能を向上させるようになっています もっと多くのデータ
機械学習とは? 機械学習とは 人間や動物にとって当たり前のことをコンピュータに教えるということを意味します つまり 経験から学ぶ ということです 機械学習のアルゴリズムでは モデルと呼ばれる事前に定められた方程式に頼らずに 計算的な手法を使ってデータから情報を直接学び取ります こうしたアルゴリズムは学習に使えるサンプル数の増大に伴って 適応的にその性能を向上させるようになっています もっと多くのデータ
AMS Expoコンテンツ
 高速伝送路での信号特性の解析 ~ 新しい MATLAB /Simulink の使い方 ~ MathWorks Japan アプリケーションエンジニアリング部初井良治 2014 The MathWorks, Inc. 1 Demo MATLAB/Simulink 高速伝送特性シミュレーション DFE CDR ビット生成プリエンファシス伝送路特性データ 8B10Bエンコーダ アナログイコライザ 8B10B
高速伝送路での信号特性の解析 ~ 新しい MATLAB /Simulink の使い方 ~ MathWorks Japan アプリケーションエンジニアリング部初井良治 2014 The MathWorks, Inc. 1 Demo MATLAB/Simulink 高速伝送特性シミュレーション DFE CDR ビット生成プリエンファシス伝送路特性データ 8B10Bエンコーダ アナログイコライザ 8B10B
Presentation Title
 ディープラーニングによる画像認識の基礎と実践ワークフロー MathWorks Japan アプリケーションエンジニアリング部アプリケーションエンジニア福本拓司 2018 The MathWorks, Inc. 1 一般的におこなわれる目視による評価 製造ライン 医用データ 作業現場 インフラ 研究データ 現場での目視 大量画像の収集 専門家によるチェック 2 スマートフォンで撮影した映像をその場で評価
ディープラーニングによる画像認識の基礎と実践ワークフロー MathWorks Japan アプリケーションエンジニアリング部アプリケーションエンジニア福本拓司 2018 The MathWorks, Inc. 1 一般的におこなわれる目視による評価 製造ライン 医用データ 作業現場 インフラ 研究データ 現場での目視 大量画像の収集 専門家によるチェック 2 スマートフォンで撮影した映像をその場で評価
Presentation Title
 手軽にはじめる画像処理 コンピュータービジョン MathWorks Japan アプリケーションエンジニアリング部 ( 信号処理 通信 ) アプリケーションエンジニア福本拓司 2016 The MathWorks, Inc. 1 画像処理とは? 画像の変形や変換 色の補正 ノイズ除去などを行うこと 例えば デジタルカメラの内部処理 統計解析などを併用し 画像からデータの数値化を行うこと 数を数える
手軽にはじめる画像処理 コンピュータービジョン MathWorks Japan アプリケーションエンジニアリング部 ( 信号処理 通信 ) アプリケーションエンジニア福本拓司 2016 The MathWorks, Inc. 1 画像処理とは? 画像の変形や変換 色の補正 ノイズ除去などを行うこと 例えば デジタルカメラの内部処理 統計解析などを併用し 画像からデータの数値化を行うこと 数を数える
Slide 1
 ハンズオン受講の為の準備講座 これから始める人の為の ディープラーニング基礎講座 村上真奈 NVIDIA CUDA & Deep Learning Solution Architect NVIDIA Corporation 1 機械学習とディープラーニングの関係 AGENDA ディープラーニングとは? ニューラルネットワークの構造 ディープラーニングの学習とは 畳み込みニューラルネットワーク 午後に予定しているハンズオンの為の基礎講座ディープラーニングをこれから始める方を対象に基礎概念や用語の解説を行います
ハンズオン受講の為の準備講座 これから始める人の為の ディープラーニング基礎講座 村上真奈 NVIDIA CUDA & Deep Learning Solution Architect NVIDIA Corporation 1 機械学習とディープラーニングの関係 AGENDA ディープラーニングとは? ニューラルネットワークの構造 ディープラーニングの学習とは 畳み込みニューラルネットワーク 午後に予定しているハンズオンの為の基礎講座ディープラーニングをこれから始める方を対象に基礎概念や用語の解説を行います
Presentation Title プレゼンテーションのタイトル
 MATLAB/Simulink を用いた次世代イメージングシステムの FPGA 実装 2016 年 10 月 19 日オリンパス株式会社技術開発部門モバイルシステム開発本部画像技術部吉崎和徳, 山田博 Agenda 1. オリンパス概要 ( 吉崎 ) 2. 次世代イメージングシステム研究開発 ( 吉崎 ) 3. MATLAB/Simulink を用いた FPGA 実装 ( 山田 ) 4. まとめ (
MATLAB/Simulink を用いた次世代イメージングシステムの FPGA 実装 2016 年 10 月 19 日オリンパス株式会社技術開発部門モバイルシステム開発本部画像技術部吉崎和徳, 山田博 Agenda 1. オリンパス概要 ( 吉崎 ) 2. 次世代イメージングシステム研究開発 ( 吉崎 ) 3. MATLAB/Simulink を用いた FPGA 実装 ( 山田 ) 4. まとめ (
AutoCAD のCitrix XenApp 対応
 AutoCAD ニューテクノロジーセミナー AutoCAD の Citrix XenApp 対応 オートデスク株式会社伊勢崎俊明 Citrix 対応 AutoCAD 2012 とは オートデスクのデスクトップ製品用ライセンス方式 Flexera Software 社 FLEXnet テクノロジを利用 スタンドアロンライセンス 1 つのコンピュータに 1 つのラインセンスをインストール アクティベーション処理でライセンスを有効化
AutoCAD ニューテクノロジーセミナー AutoCAD の Citrix XenApp 対応 オートデスク株式会社伊勢崎俊明 Citrix 対応 AutoCAD 2012 とは オートデスクのデスクトップ製品用ライセンス方式 Flexera Software 社 FLEXnet テクノロジを利用 スタンドアロンライセンス 1 つのコンピュータに 1 つのラインセンスをインストール アクティベーション処理でライセンスを有効化
2008 年度下期未踏 IT 人材発掘 育成事業採択案件評価書 1. 担当 PM 田中二郎 PM ( 筑波大学大学院システム情報工学研究科教授 ) 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3.
 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3.") 2008 年度下期未踏 IT 人材発掘 育成事業採択案件評価書 1. 担当 PM 田中二郎 PM ( 筑波大学大学院システム情報工学研究科教授 ) 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3. プロジェクト管理組織 株式会社オープンテクノロジーズ 4. 委託金支払額 3,000,000 円 5.
2008 年度下期未踏 IT 人材発掘 育成事業採択案件評価書 1. 担当 PM 田中二郎 PM ( 筑波大学大学院システム情報工学研究科教授 ) 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3. プロジェクト管理組織 株式会社オープンテクノロジーズ 4. 委託金支払額 3,000,000 円 5.
PowerPoint Presentation
 第 18 回 Autodesk Moldflow ライブヘルプ What s New Autodesk Moldflow 2018 オートデスク株式会社 プロダクトサポート Autodesk Moldflow ライブヘルプ Web 会議システムによる 気軽に参加いただく 1 時間のサポートセッション 目的 多くのユーザ様を直接ヘルプできる 直接フィードバックを頂くことができる (Q&A セッション
第 18 回 Autodesk Moldflow ライブヘルプ What s New Autodesk Moldflow 2018 オートデスク株式会社 プロダクトサポート Autodesk Moldflow ライブヘルプ Web 会議システムによる 気軽に参加いただく 1 時間のサポートセッション 目的 多くのユーザ様を直接ヘルプできる 直接フィードバックを頂くことができる (Q&A セッション
Microsoft PowerPoint - pr_12_template-bs.pptx
 12 回パターン検出と画像特徴 テンプレートマッチング 領域分割 画像特徴 テンプレート マッチング 1 テンプレートマッチング ( 図形 画像などの ) 型照合 Template Matching テンプレートと呼ばれる小さな一部の画像領域と同じパターンが画像全体の中に存在するかどうかを調べる方法 画像内にある対象物体の位置検出 物体数のカウント 物体移動の検出などに使われる テンプレートマッチングの計算
12 回パターン検出と画像特徴 テンプレートマッチング 領域分割 画像特徴 テンプレート マッチング 1 テンプレートマッチング ( 図形 画像などの ) 型照合 Template Matching テンプレートと呼ばれる小さな一部の画像領域と同じパターンが画像全体の中に存在するかどうかを調べる方法 画像内にある対象物体の位置検出 物体数のカウント 物体移動の検出などに使われる テンプレートマッチングの計算
Mobile robotics KUKA Navigation Solution JP
 Mobile robotics KUKA Navigation Solution JP 自律型 インテリジェント ハードウェア非依存型 KUKA Navigation Solution は 移動型ロボット分野で使用されている自己ナビゲーション車両向けの SLAM 手法に基づいて設計されている 自己学習型ナビゲーションシステムです この中には 多数の車両を同時に管理 制御するソフトウェアと自己経路検出機能を含めた
Mobile robotics KUKA Navigation Solution JP 自律型 インテリジェント ハードウェア非依存型 KUKA Navigation Solution は 移動型ロボット分野で使用されている自己ナビゲーション車両向けの SLAM 手法に基づいて設計されている 自己学習型ナビゲーションシステムです この中には 多数の車両を同時に管理 制御するソフトウェアと自己経路検出機能を含めた
PowerPoint Resources
 2009 The MathWorks, Inc. ET ロボコンを通じた MBD 人材育成 MathWorks Japan アドバンストサポート部 ET ロボコン 2009 実行委員会技術委員 / 性能審査委員 近政隆 背景 (1) 自動車業界における MBD の浸透 JMAAB(Japan MATLAB Automotive Advisory Board) と MathWorks の協調による開発手法
2009 The MathWorks, Inc. ET ロボコンを通じた MBD 人材育成 MathWorks Japan アドバンストサポート部 ET ロボコン 2009 実行委員会技術委員 / 性能審査委員 近政隆 背景 (1) 自動車業界における MBD の浸透 JMAAB(Japan MATLAB Automotive Advisory Board) と MathWorks の協調による開発手法
Presentation Title
 次世代 Simulink が導入する 新 MBD 環境 MathWorks Japan アプリケーションエンジニアリング部シニアアプリケーションエンジニア山本順久 2012 The MathWorks, Inc. 1 これまでの歴史 5 年ぶりのメジャーバージョンアップ! 2002 R13 Simulink Stateflow 5.0 2004 R14 Simulink Stateflow 6.0
次世代 Simulink が導入する 新 MBD 環境 MathWorks Japan アプリケーションエンジニアリング部シニアアプリケーションエンジニア山本順久 2012 The MathWorks, Inc. 1 これまでの歴史 5 年ぶりのメジャーバージョンアップ! 2002 R13 Simulink Stateflow 5.0 2004 R14 Simulink Stateflow 6.0
2008 年度下期未踏 IT 人材発掘 育成事業採択案件評価書 1. 担当 PM 石川裕 PM ( 東京大学大学院情報理工学系研究科教授 ) 2. 採択者氏名 チーフクリエータ : 加藤淳 ( 東京大学理学部情報科学科学部学生 ) コクリエータ : なし 3. プロジェクト管理組織 株式会社メルコホ
 2. 採択者氏名 チーフクリエータ : 加藤淳 ( 東京大学理学部情報科学科学部学生 ) コクリエータ : なし 3. プロジェクト管理組織 株式会社メルコホ") 2008 年度下期未踏 IT 人材発掘 育成事業採択案件評価書 1. 担当 PM 石川裕 PM ( 東京大学大学院情報理工学系研究科教授 ) 2. 採択者氏名 チーフクリエータ : 加藤淳 ( 東京大学理学部情報科学科学部学生 ) コクリエータ : なし 3. プロジェクト管理組織 株式会社メルコホールディングス 4. 委託金支払額 6,496,266 円 5. テーマ名 matereal: 小型ロボットの簡単な行動デザイン用ツールキット
2008 年度下期未踏 IT 人材発掘 育成事業採択案件評価書 1. 担当 PM 石川裕 PM ( 東京大学大学院情報理工学系研究科教授 ) 2. 採択者氏名 チーフクリエータ : 加藤淳 ( 東京大学理学部情報科学科学部学生 ) コクリエータ : なし 3. プロジェクト管理組織 株式会社メルコホールディングス 4. 委託金支払額 6,496,266 円 5. テーマ名 matereal: 小型ロボットの簡単な行動デザイン用ツールキット
Oracle Un お問合せ : Oracle Data Integrator 11g: データ統合設定と管理 期間 ( 標準日数 ):5 コースの概要 Oracle Data Integratorは すべてのデータ統合要件 ( 大量の高パフォーマンス バッチ ローブンの統合プロセスおよ
:5 コースの概要 Oracle Data Integratorは すべてのデータ統合要件 ( 大量の高パフォーマンス バッチ ローブンの統合プロセスおよ") Oracle Un お問合せ : 0120- Oracle Data Integrator 11g: データ統合設定と管理 期間 ( 標準日数 ):5 コースの概要 Oracle Data Integratorは すべてのデータ統合要件 ( 大量の高パフォーマンス バッチ ローブンの統合プロセスおよびSOA 対応データ サービスへ ) を網羅する総合的なデータ統合プラットフォームです Oracle
Oracle Un お問合せ : 0120- Oracle Data Integrator 11g: データ統合設定と管理 期間 ( 標準日数 ):5 コースの概要 Oracle Data Integratorは すべてのデータ統合要件 ( 大量の高パフォーマンス バッチ ローブンの統合プロセスおよびSOA 対応データ サービスへ ) を網羅する総合的なデータ統合プラットフォームです Oracle
Coding theorems for correlated sources with cooperative information
 グラフコストの逐次更新を用いた映像顕著領域の自動抽出 2009 年 5 月 28 日 福地賢宮里洸司 (2) 木村昭悟 (1) 高木茂 (2) 大和淳司 (1) (1) 日本電信電話 ( 株 )NTT) コミュニケーション科学基礎研究所メディア情報研究部メディア認識研究グループ (2) 国立沖縄工業高等専門学校情報通信システム工学科 背景 ヒトはどのようにして もの を認識する能力を獲得するのか?
グラフコストの逐次更新を用いた映像顕著領域の自動抽出 2009 年 5 月 28 日 福地賢宮里洸司 (2) 木村昭悟 (1) 高木茂 (2) 大和淳司 (1) (1) 日本電信電話 ( 株 )NTT) コミュニケーション科学基礎研究所メディア情報研究部メディア認識研究グループ (2) 国立沖縄工業高等専門学校情報通信システム工学科 背景 ヒトはどのようにして もの を認識する能力を獲得するのか?
基礎輪講2週目 Kinectの話
 基礎輪講 2 週目 Kinect の話 3D Computer Vision カメラから 3 次元の情報を取得 3 次元再構築 :2 次元の画像から 3 次元形状の復元 多視点画像群 3 次元再構築結果 3 次元の情報を持つ画像ってないの? 2 距離画像 Depth( 距離 ) の情報を持った画像 各画素の部分に距離の値が入る. 距離画像 距離画像を取得する機器が必要 3 距離画像センサ 実世界の距離情報を取得できる.
基礎輪講 2 週目 Kinect の話 3D Computer Vision カメラから 3 次元の情報を取得 3 次元再構築 :2 次元の画像から 3 次元形状の復元 多視点画像群 3 次元再構築結果 3 次元の情報を持つ画像ってないの? 2 距離画像 Depth( 距離 ) の情報を持った画像 各画素の部分に距離の値が入る. 距離画像 距離画像を取得する機器が必要 3 距離画像センサ 実世界の距離情報を取得できる.
PowerPoint プレゼンテーション
 復習 ) 時系列のモデリング ~a. 離散時間モデル ~ y k + a 1 z 1 y k + + a na z n ay k = b 0 u k + b 1 z 1 u k + + b nb z n bu k y k = G z 1 u k = B(z 1 ) A(z 1 u k ) ARMA モデル A z 1 B z 1 = 1 + a 1 z 1 + + a na z n a = b 0
復習 ) 時系列のモデリング ~a. 離散時間モデル ~ y k + a 1 z 1 y k + + a na z n ay k = b 0 u k + b 1 z 1 u k + + b nb z n bu k y k = G z 1 u k = B(z 1 ) A(z 1 u k ) ARMA モデル A z 1 B z 1 = 1 + a 1 z 1 + + a na z n a = b 0
CANapeを用いたラピッドコントロールプロトタイピングのバイパス手法による制御モデル開発
 ape を用いたラピッドコントロールプロトタイピングのバイパス手法による制御モデル開発 近年 自動車のソフトウェア開発において 開発期間の短縮やコスト削減の面からモデルベース開発が注目されています アイシン エィ ダブリュ株式会社は ラピッドコントロールプロトタイピングのバイパス手法による制御モデル開発にベクターの測定 / キャリブレーションツール ape ( キャナピー ) を導入しました 本稿では
ape を用いたラピッドコントロールプロトタイピングのバイパス手法による制御モデル開発 近年 自動車のソフトウェア開発において 開発期間の短縮やコスト削減の面からモデルベース開発が注目されています アイシン エィ ダブリュ株式会社は ラピッドコントロールプロトタイピングのバイパス手法による制御モデル開発にベクターの測定 / キャリブレーションツール ape ( キャナピー ) を導入しました 本稿では
2D/3D CAD データ管理導入手法実践セミナー Autodesk Vault 最新バージョン情報 Presenter Name 2013 年 4 月 2013 Autodesk
 2D/3D CAD データ管理導入手法実践セミナー Autodesk Vault 最新バージョン情報 Presenter Name 2013 年 4 月 2013 Autodesk Autodesk Vault 2014 新機能 操作性向上 Inventor ファイルを Vault にチェックインすることなくステータス変更を実行できるようになりました 履歴テーブルの版管理を柔軟に設定できるようになりました
2D/3D CAD データ管理導入手法実践セミナー Autodesk Vault 最新バージョン情報 Presenter Name 2013 年 4 月 2013 Autodesk Autodesk Vault 2014 新機能 操作性向上 Inventor ファイルを Vault にチェックインすることなくステータス変更を実行できるようになりました 履歴テーブルの版管理を柔軟に設定できるようになりました
自動運転・ADASの開発・検証ソリューション
 自動運転 ADAS の開発 検証ソリューション MathWorks Japan アプリケーションエンジニアリング部信号処理 通信 乙部雅則 Automated Driving System Toolbox 2017 The MathWorks, Inc. 1 ADAS/ 自動運転システム レーダー LiDAR ソナー 車両上の IMU 等センサー 外界環境 白線, 標識 天候 障害物 / 歩行者 交通流車両ダイナミクス
自動運転 ADAS の開発 検証ソリューション MathWorks Japan アプリケーションエンジニアリング部信号処理 通信 乙部雅則 Automated Driving System Toolbox 2017 The MathWorks, Inc. 1 ADAS/ 自動運転システム レーダー LiDAR ソナー 車両上の IMU 等センサー 外界環境 白線, 標識 天候 障害物 / 歩行者 交通流車両ダイナミクス
ChoreonoidとOpenHRIを用いたシステム構築事例
 Choreonoid と OpenHRI を用いた システム構築事例 産業技術総合研究所 原 功 Choreonoid Choreonoid オープンソースのロボット用統合 GUI ソフトウェア 動作振り付けソフトウェアとして キーフレームベースの動作生成 CG の動作生成のような UI 動力学シミュレータとして OpenHRP3, ODE, Bullet Physics Engne など利用可 開発フレームワークとして
Choreonoid と OpenHRI を用いた システム構築事例 産業技術総合研究所 原 功 Choreonoid Choreonoid オープンソースのロボット用統合 GUI ソフトウェア 動作振り付けソフトウェアとして キーフレームベースの動作生成 CG の動作生成のような UI 動力学シミュレータとして OpenHRP3, ODE, Bullet Physics Engne など利用可 開発フレームワークとして
回路シミュレータ/MATLABリンク~詳細回路設計におけるシステムレベル検証~
 回路シミュレータ /MATLAB リンク ~ 詳細回路設計におけるシステムレベル検証 ~ MathWorks Japan アプリケーションエンジニアリング部シニアアプリケーションエンジニア初井良治 2017 The MathWorks, Inc. 1 MathWorks と Cadence 社パートナーシップ OrCAD PSpice 回路設計アナログ デジタル混在の回路シミュレーション 回路設計者
回路シミュレータ /MATLAB リンク ~ 詳細回路設計におけるシステムレベル検証 ~ MathWorks Japan アプリケーションエンジニアリング部シニアアプリケーションエンジニア初井良治 2017 The MathWorks, Inc. 1 MathWorks と Cadence 社パートナーシップ OrCAD PSpice 回路設計アナログ デジタル混在の回路シミュレーション 回路設計者
Presentation Title
 画像処理 コンピュータビジョン ~ MATLAB を使うとこんなに簡単 ~ MathWorks Japan アプリケーションエンジニアリング部シニアアプリケーションエンジニア乙部雅則 2014 The MathWorks, Inc. 1 画像処理 コンピュータービジョン 画像の明るさ 色合い 形 視点を調整したい! 何かの検査を自動化したい! ものの数を自動で数えたい! ものを自動で認識したい! 何かを自動でトラッキングしたい!
画像処理 コンピュータビジョン ~ MATLAB を使うとこんなに簡単 ~ MathWorks Japan アプリケーションエンジニアリング部シニアアプリケーションエンジニア乙部雅則 2014 The MathWorks, Inc. 1 画像処理 コンピュータービジョン 画像の明るさ 色合い 形 視点を調整したい! 何かの検査を自動化したい! ものの数を自動で数えたい! ものを自動で認識したい! 何かを自動でトラッキングしたい!
いまからはじめる、MATLABによる 画像処理・コンピュータビジョン
 自動運転開発に向けた MATLAB/Simulink 活用ソリューションの提案 MathWorks Japan アプリケーションエンジニアリング部乙部雅則 2016 The MathWorks, Inc. 1 Agenda 背景 ユーザー事例紹介 ADAS 自動運転開発 / 検証を取り巻く課題 シミュレーション環境 検出 認識 画像処理 コンピュータビジョン LiDAR 信号処理 レーダー信号処理
自動運転開発に向けた MATLAB/Simulink 活用ソリューションの提案 MathWorks Japan アプリケーションエンジニアリング部乙部雅則 2016 The MathWorks, Inc. 1 Agenda 背景 ユーザー事例紹介 ADAS 自動運転開発 / 検証を取り巻く課題 シミュレーション環境 検出 認識 画像処理 コンピュータビジョン LiDAR 信号処理 レーダー信号処理
目次 第 1 章 : データの記録 再生とセンサーキャリブレーション 1. データの記録 生成 2. センサーキャリブレーション第 2 章 :3 次元地図の作成と自己位置推定 1. 3 次元地図の作成 2. 自己位置推定第 3 章 : 物体検出と信号検出 1. 物体検出 2. 信号検出 第 4 章
 version 1.4 TIER IV ACADEMY 自動運転システム構築塾 Day3 Autoware 演習 目次 第 1 章 : データの記録 再生とセンサーキャリブレーション 1. データの記録 生成 2. センサーキャリブレーション第 2 章 :3 次元地図の作成と自己位置推定 1. 3 次元地図の作成 2. 自己位置推定第 3 章 : 物体検出と信号検出 1. 物体検出 2. 信号検出
version 1.4 TIER IV ACADEMY 自動運転システム構築塾 Day3 Autoware 演習 目次 第 1 章 : データの記録 再生とセンサーキャリブレーション 1. データの記録 生成 2. センサーキャリブレーション第 2 章 :3 次元地図の作成と自己位置推定 1. 3 次元地図の作成 2. 自己位置推定第 3 章 : 物体検出と信号検出 1. 物体検出 2. 信号検出
Microsoft Word - HowToSetupVault_mod.doc
 Autodesk Vault 環境設定ガイド Autodesk Vault をインストール後 必要最小限の環境設定方法を説明します ここで 紹介しているのは一般的な環境での設定です すべての環境に当てはまるものではありません 1 条件 Autodesk Data Management Server がインストール済み Autodesk Vault Explorer がクライアント PC にインストール済み
Autodesk Vault 環境設定ガイド Autodesk Vault をインストール後 必要最小限の環境設定方法を説明します ここで 紹介しているのは一般的な環境での設定です すべての環境に当てはまるものではありません 1 条件 Autodesk Data Management Server がインストール済み Autodesk Vault Explorer がクライアント PC にインストール済み
Presentation Title
 並列計算 並列実行による高速化ソリューション MathWorks Japan アプリケーションエンジニアリング部アプリケーションエンジニア吉田剛士 2012 The MathWorks, Inc. 1 アジェンダ MATLAB R2012b ハイライト PCT / MDCS 新機能ハイライト Simulink プロダクトの並列化 まとめ 2 MATLAB R2012b のハイライト 1 新しいデスクトップ
並列計算 並列実行による高速化ソリューション MathWorks Japan アプリケーションエンジニアリング部アプリケーションエンジニア吉田剛士 2012 The MathWorks, Inc. 1 アジェンダ MATLAB R2012b ハイライト PCT / MDCS 新機能ハイライト Simulink プロダクトの並列化 まとめ 2 MATLAB R2012b のハイライト 1 新しいデスクトップ
PowerPoint Presentation
 Up & Ready シリーズ August 2016 シングルユーザーサブスクリプションガイドサブスクリプション注文後 ~ソフトウェア起動までの流れ Shihori Sakurai Customer Service & Support シングルユーザーサブスクリプションガイドコンテンツ P.3-P.6 P.7-P.14 P.15-P.24 P.25-P.34 シングルユーザーサブスクリプション基本情報
Up & Ready シリーズ August 2016 シングルユーザーサブスクリプションガイドサブスクリプション注文後 ~ソフトウェア起動までの流れ Shihori Sakurai Customer Service & Support シングルユーザーサブスクリプションガイドコンテンツ P.3-P.6 P.7-P.14 P.15-P.24 P.25-P.34 シングルユーザーサブスクリプション基本情報
はじめての機械学習
 一直線に進むことはめったにない 機械学習においては 最初から最後まで迷わず一直線に進むということはめったにありません 常にさまざまなアイデアや方法を繰り返し試すことになるでしょう このセクションでは いくつかの重要な決定ポイントに注目しつつ 機械学習の体系的なワークフローについて説明します 機械学習の課題 機械学習における課題の大部分は データ処理と正しいモデルの発見に関連しています データの形式や規模は均一ではありません
一直線に進むことはめったにない 機械学習においては 最初から最後まで迷わず一直線に進むということはめったにありません 常にさまざまなアイデアや方法を繰り返し試すことになるでしょう このセクションでは いくつかの重要な決定ポイントに注目しつつ 機械学習の体系的なワークフローについて説明します 機械学習の課題 機械学習における課題の大部分は データ処理と正しいモデルの発見に関連しています データの形式や規模は均一ではありません
b2-reinforcement-learning-mw
 強化学習 最適制御のためのディープラーニングの応用 吉田剛士 2015 The MathWorks, Inc. 1 はじめに強化学習 = Reinforcement Learning AlphaGo がプロ棋士に勝利 (2015) そして 人類を超える (2017) 強化学習の特徴 自律的に学習し賢くなっていく 2 Agenda : 強化学習 ~ 最適制御のためのディープラーニングの応用 ~ 強化学習とは
強化学習 最適制御のためのディープラーニングの応用 吉田剛士 2015 The MathWorks, Inc. 1 はじめに強化学習 = Reinforcement Learning AlphaGo がプロ棋士に勝利 (2015) そして 人類を超える (2017) 強化学習の特徴 自律的に学習し賢くなっていく 2 Agenda : 強化学習 ~ 最適制御のためのディープラーニングの応用 ~ 強化学習とは
Managing and Sharing MATLAB Code
 MATLAB 入門 ~ 開発向けプログラミング編 ~ MathWorks Japan アプリケーションエンジニアリング部テクニカルコンピューティング 大開孝文 2015 The MathWorks, Inc. 1 プログラミング言語としての MATLAB 2014 年 7 月 IEEE Spectrum による プログラミング言語の人気調査 (12 種類の項目での結果 ) 結果 : MATLAB が
MATLAB 入門 ~ 開発向けプログラミング編 ~ MathWorks Japan アプリケーションエンジニアリング部テクニカルコンピューティング 大開孝文 2015 The MathWorks, Inc. 1 プログラミング言語としての MATLAB 2014 年 7 月 IEEE Spectrum による プログラミング言語の人気調査 (12 種類の項目での結果 ) 結果 : MATLAB が
コンテンツセントリックネットワーク技術を用いた ストリームデータ配信システムの設計と実装
 コンテンツセントリックネットワークにおけるストリームデータ配信機構の実装 川崎賢弥, 阿多信吾, 村田正幸 大阪大学大学院情報科学研究科 大阪市立大学大学院工学研究科 2 発表内容 研究背景 研究目的 ストリームデータ配信機構の設計 ストリームデータのモデル化 コンテンツの名前構造 ストリームデータの要求とフロー制御 ストリームデータ配信機構の実装 動作デモンストレーション 3 コンテンツセントリックネットワーク
コンテンツセントリックネットワークにおけるストリームデータ配信機構の実装 川崎賢弥, 阿多信吾, 村田正幸 大阪大学大学院情報科学研究科 大阪市立大学大学院工学研究科 2 発表内容 研究背景 研究目的 ストリームデータ配信機構の設計 ストリームデータのモデル化 コンテンツの名前構造 ストリームデータの要求とフロー制御 ストリームデータ配信機構の実装 動作デモンストレーション 3 コンテンツセントリックネットワーク
使ってみよう!RDS 2008 Express Edition -1 週間 +α でできること 杉沼麻美 2008 年 12 月 13 日
 使ってみよう!RDS 2008 Express Edition -1 週間 +α でできること 杉沼麻美 2008 年 12 月 13 日 RDS 2008 Express Edition とは? マイクロソフトが提供しているロボットアプリケーションの開発ツール インストールして 1 週間ちょっと使ってみました MSRS 1.0 MDS 2008 (CTP April) RDS 2008 Express
使ってみよう!RDS 2008 Express Edition -1 週間 +α でできること 杉沼麻美 2008 年 12 月 13 日 RDS 2008 Express Edition とは? マイクロソフトが提供しているロボットアプリケーションの開発ツール インストールして 1 週間ちょっと使ってみました MSRS 1.0 MDS 2008 (CTP April) RDS 2008 Express
課題情報シート テーマ名 : 動画中継ラジコンカーの製作 担当指導員名 : 土山博剛実施年度 : 25 年度施設名 : 四国職業能力開発大学校課程名 : 専門課程訓練科名 : 電子情報技術科課題の区分 : 総合制作実習課題学生数 : 1 時間 : 12 単位 (216h) 課題制作 開発のポイント
 課題制作 開発のポイント") 課題情報シート テーマ名 : 担当指導員名 : 土山博剛実施年度 : 25 年度施設名 : 四国職業能力開発大学校課程名 : 専門課程訓練科名 : 電子情報技術科課題の区分 : 総合制作実習課題学生数 : 1 時間 : 12 単位 (216h) 課題制作 開発のポイント 開発( 制作 ) のポイント 今回製作したシステムでは 専門課程で習得した総合的な知識 ( ネットワーク技術 電子回路技術 C プログラミング技術
課題情報シート テーマ名 : 担当指導員名 : 土山博剛実施年度 : 25 年度施設名 : 四国職業能力開発大学校課程名 : 専門課程訓練科名 : 電子情報技術科課題の区分 : 総合制作実習課題学生数 : 1 時間 : 12 単位 (216h) 課題制作 開発のポイント 開発( 制作 ) のポイント 今回製作したシステムでは 専門課程で習得した総合的な知識 ( ネットワーク技術 電子回路技術 C プログラミング技術
ホンダにおける RT ミドルウェア開発と標準化活動 株式会社本田技術研究所基礎技術研究センター関谷眞
 ホンダにおける RT ミドルウェア開発と標準化活動 株式会社本田技術研究所基礎技術研究センター関谷眞 目次 知能ロボットシステム概要 コンポーネント指向ミドルウェア HRTMの開発 ASIMOへの適用 HRTMとOpenRTM-aistの連携動作 標準化活動 知能ロボットシステム概要 センサーやアクチュエーターは追加や変更される システム構成は変更したくない センサー, アクチュエーターの関係を抽象化した
ホンダにおける RT ミドルウェア開発と標準化活動 株式会社本田技術研究所基礎技術研究センター関谷眞 目次 知能ロボットシステム概要 コンポーネント指向ミドルウェア HRTMの開発 ASIMOへの適用 HRTMとOpenRTM-aistの連携動作 標準化活動 知能ロボットシステム概要 センサーやアクチュエーターは追加や変更される システム構成は変更したくない センサー, アクチュエーターの関係を抽象化した
SUALAB INTRODUCTION SUALAB Solution SUALAB は 人工知能 ( ディープラーニング ) による画像解析技術を通して 迅速 正確 そして使いやすいマシンビジョン用のディープラーニングソフトウェアライブラリーである SuaKIT を提供します これは 従来のマシン
 による画像解析技術を通して 迅速 正確 そして使いやすいマシンビジョン用のディープラーニングソフトウェアライブラリーである SuaKIT を提供します これは 従来のマシン") SuaKIT suɑ kít Deep learning S/WLibrary for MachineVision SuaKIT は ディスプレイ 太陽光 PCB 半導体など 様々な分野で使用できる メーカー独自のディープラーニングのマシンビジョンソフトウェアライブラリーです SuaKIT は 様々な産業分野から実際に取得された画像データに基づいて開発されました Samsung LG SK Hanwha
SuaKIT suɑ kít Deep learning S/WLibrary for MachineVision SuaKIT は ディスプレイ 太陽光 PCB 半導体など 様々な分野で使用できる メーカー独自のディープラーニングのマシンビジョンソフトウェアライブラリーです SuaKIT は 様々な産業分野から実際に取得された画像データに基づいて開発されました Samsung LG SK Hanwha
(Microsoft PowerPoint -
 NX 5 新機能紹介 Gateway / Styling / Modeling / Assemblies NX Sheet Metal / Drafting 1 Gateway ダイアログの改善 テンプレート リドゥ (Redo) ビュートライアド カメラ PDF 出力 2 Gateway ユーザビリティ ダイアログの改善 コマンド間でのダイアログ構成の統一 ガイド表示の追加 ( 選択ステップのハイライト等
NX 5 新機能紹介 Gateway / Styling / Modeling / Assemblies NX Sheet Metal / Drafting 1 Gateway ダイアログの改善 テンプレート リドゥ (Redo) ビュートライアド カメラ PDF 出力 2 Gateway ユーザビリティ ダイアログの改善 コマンド間でのダイアログ構成の統一 ガイド表示の追加 ( 選択ステップのハイライト等
Microsoft Word 基_シラバス.doc
 4-5- 基 Web アプリケーション開発に関する知識 1 4-5- 基 Web アプリケーション開発に関する知識 スクリプト言語や Java 言語を利用して Ruby on Rails やその他 Web フレームワークを活用して HTML(4, 5) XHTML JavaScript DOM CSS といったマークアップ言語およびスクリプト言語を活用しながら Ⅰ. 概要ダイナミックなWebサービスを提供するアプリケーションを開発する際に
4-5- 基 Web アプリケーション開発に関する知識 1 4-5- 基 Web アプリケーション開発に関する知識 スクリプト言語や Java 言語を利用して Ruby on Rails やその他 Web フレームワークを活用して HTML(4, 5) XHTML JavaScript DOM CSS といったマークアップ言語およびスクリプト言語を活用しながら Ⅰ. 概要ダイナミックなWebサービスを提供するアプリケーションを開発する際に
Microsoft PowerPoint - ロボットの運動学forUpload'C5Q [互換モード]
![Microsoft PowerPoint - ロボットの運動学forUpload'C5Q [互換モード]](/thumbs/104/163308363.jpg "Microsoft PowerPoint - ロボットの運動学forUpload'C5Q [互換モード]") ロボットの運動学 順運動学とは 座標系の回転と並進 同次座標変換行列 Denavit-Hartenberg の表記法 多関節ロボットの順運動学 レポート課題 & 中間試験について 逆運動学とは ヤコビアン行列 運動方程式 ( 微分方程式 ) ロボットの運動学 動力学 Equation of motion f ( ( t), ( t), ( t)) τ( t) 姿勢 ( 関節角の組合せ ) Posture
ロボットの運動学 順運動学とは 座標系の回転と並進 同次座標変換行列 Denavit-Hartenberg の表記法 多関節ロボットの順運動学 レポート課題 & 中間試験について 逆運動学とは ヤコビアン行列 運動方程式 ( 微分方程式 ) ロボットの運動学 動力学 Equation of motion f ( ( t), ( t), ( t)) τ( t) 姿勢 ( 関節角の組合せ ) Posture
Simulinkモデル開発における工夫事例
 MBD 中部コンファレンス PMA2:MATLAB 開発 Simulink モデル開発における 工夫事例 2014 年 12 月 18 日オムロンオートモーティブエレクトロニクス株式会社開発統括室ボディコントロールシステム開発部町井紀善 はじめに Simulink の導入 開発手法 環境をそれぞれの事情 ( 会社 部署 個人 開発アイテム ビジネスモデル 等 ) に合せ込むことで効率化を実現します
MBD 中部コンファレンス PMA2:MATLAB 開発 Simulink モデル開発における 工夫事例 2014 年 12 月 18 日オムロンオートモーティブエレクトロニクス株式会社開発統括室ボディコントロールシステム開発部町井紀善 はじめに Simulink の導入 開発手法 環境をそれぞれの事情 ( 会社 部署 個人 開発アイテム ビジネスモデル 等 ) に合せ込むことで効率化を実現します
MATLAB®によるビッグデータ解析
 MATLAB によるビッグデータ解析 MathWorks Japan アプリケーションエンジニアリング部 アプリケーションエンジニア 吉田剛士 2013 The MathWorks, Inc. 1 ビッグデータ解析とその背景増え続けるデータ量 ビッグデータとは 100TB ~ 10PB 程度のデータ量 データが膨大になる理由 データソースの多様化と高性能化 スマートフォン位置情報監視カメラ検索情報
MATLAB によるビッグデータ解析 MathWorks Japan アプリケーションエンジニアリング部 アプリケーションエンジニア 吉田剛士 2013 The MathWorks, Inc. 1 ビッグデータ解析とその背景増え続けるデータ量 ビッグデータとは 100TB ~ 10PB 程度のデータ量 データが膨大になる理由 データソースの多様化と高性能化 スマートフォン位置情報監視カメラ検索情報
物理モデリングツールによる モデリングとシミュレーション入門
 Simscape TM による物理モデリング入門 ~Simscape + Sim シリーズの紹介 ~ MathWorks Japan アプリケーションエンジニア 渡辺修治 基本ツール MATLAB Simulink Stateflow 便利ツール Simulink Coder TM Simulink Control Design TM Simulink Design Optimization TM
Simscape TM による物理モデリング入門 ~Simscape + Sim シリーズの紹介 ~ MathWorks Japan アプリケーションエンジニア 渡辺修治 基本ツール MATLAB Simulink Stateflow 便利ツール Simulink Coder TM Simulink Control Design TM Simulink Design Optimization TM
SmartBrowser_document_build30_update.pptx
 SmartBrowser Update for ios / Version 1.3.1 build30 2017 年 8 月 株式会社ブルーテック 更新内容 - 概要 ios Version 1.3.1 build28 の更新内容について 1. 設定をQRから読み込み更新する機能 2.URLをQRから読み込み画面遷移する機能 3.WEBページのローカルファイル保存と外部インテントからの起動 4.JQuery-LoadImageライブラリの組み込み
SmartBrowser Update for ios / Version 1.3.1 build30 2017 年 8 月 株式会社ブルーテック 更新内容 - 概要 ios Version 1.3.1 build28 の更新内容について 1. 設定をQRから読み込み更新する機能 2.URLをQRから読み込み画面遷移する機能 3.WEBページのローカルファイル保存と外部インテントからの起動 4.JQuery-LoadImageライブラリの組み込み
スライド 1
 知能制御システム学 画像追跡 (1) 特徴点の検出と追跡 東北大学大学院情報科学研究科鏡慎吾 swk(at)ic.is.tohoku.ac.jp 2008.07.07 今日の内容 前回までの基本的な画像処理の例を踏まえて, ビジュアルサーボシステムの構成要素となる画像追跡の代表的手法を概説する 画像上の ある点 の追跡 オプティカルフローの拘束式 追跡しやすい点 (Harris オペレータ ) Lucas-Kanade
知能制御システム学 画像追跡 (1) 特徴点の検出と追跡 東北大学大学院情報科学研究科鏡慎吾 swk(at)ic.is.tohoku.ac.jp 2008.07.07 今日の内容 前回までの基本的な画像処理の例を踏まえて, ビジュアルサーボシステムの構成要素となる画像追跡の代表的手法を概説する 画像上の ある点 の追跡 オプティカルフローの拘束式 追跡しやすい点 (Harris オペレータ ) Lucas-Kanade
Presentation Title
 Robo- 剣 Conference 2014/10/04(Sat) - Robo- 剣における MATLAB/Simulink の活用 - MathWorks Japan 三田宇洋 2012 The MathWorks, Inc. 1 Robo- 剣 Conference 10 月 04 日土曜日講習会 会場 : 県立青少年センター 当日のスケジュール : 13:00- 一般社団法人二足歩行ロボット協会理事長挨拶
Robo- 剣 Conference 2014/10/04(Sat) - Robo- 剣における MATLAB/Simulink の活用 - MathWorks Japan 三田宇洋 2012 The MathWorks, Inc. 1 Robo- 剣 Conference 10 月 04 日土曜日講習会 会場 : 県立青少年センター 当日のスケジュール : 13:00- 一般社団法人二足歩行ロボット協会理事長挨拶
PowerPoint プレゼンテーション
 MATLAB 2008 5 22 Quick history - Cleve Moler s original MATLAB program Quick history The MathWorks in 1984 Cleve Moler Jack Little MATLAB/Simulink MATLAB 80 / MATLAB Toolbox 100 Simulink Blockset Stateflow
MATLAB 2008 5 22 Quick history - Cleve Moler s original MATLAB program Quick history The MathWorks in 1984 Cleve Moler Jack Little MATLAB/Simulink MATLAB 80 / MATLAB Toolbox 100 Simulink Blockset Stateflow
Microsoft PowerPoint - EXPO2012_AKASAKA_rev.2.pptx
 リアルタイム制御環境を活用したフィードバック制御系設計実践 MathWorks Japan アプリケーションエンジニアリング部アプリケーションエンジニア赤阪大介 212 The MathWorks, Inc. 1 本講演では.. ギャップ? - フィードバック制御器の設計 設計 シミュレーション リアルタイム制御テスト ( ラピッドプロトタイピング ) 実機環境を活用し 制御系設計を効率的に行うには?
リアルタイム制御環境を活用したフィードバック制御系設計実践 MathWorks Japan アプリケーションエンジニアリング部アプリケーションエンジニア赤阪大介 212 The MathWorks, Inc. 1 本講演では.. ギャップ? - フィードバック制御器の設計 設計 シミュレーション リアルタイム制御テスト ( ラピッドプロトタイピング ) 実機環境を活用し 制御系設計を効率的に行うには?
PowerPoint プレゼンテーション
 Gartner Symposium/ITxpo 2017 オープンシアターセッション (OT-12) ディープラーニングは万能なのか? 2017 年 10 月 31 日株式会社 NTT データ数理システム 目次 1. NTTデータ数理システムのご紹介 2. Deep Learningの最近の動向 3. Deep Learning 事例紹介 4. まとめ 2 NTT データ数理システムのご紹介 会社名
Gartner Symposium/ITxpo 2017 オープンシアターセッション (OT-12) ディープラーニングは万能なのか? 2017 年 10 月 31 日株式会社 NTT データ数理システム 目次 1. NTTデータ数理システムのご紹介 2. Deep Learningの最近の動向 3. Deep Learning 事例紹介 4. まとめ 2 NTT データ数理システムのご紹介 会社名
Presentation Title
 外観検査のための画像処理 ディープラーニングワークフロー MathWorks Japan アプリケーションエンジニアリング部町田和也 2018 The MathWorks, Inc. 1 画像処理 ディープラーニングによるナットの良品判定アプリ 画像処理による内側のキズ検出 ディープラーニングによる分類 2 画像処理による外観検査の自動化 目盛りを読む良否判定数や大きさの測定 人が目で見て行う作業の置き換え
外観検査のための画像処理 ディープラーニングワークフロー MathWorks Japan アプリケーションエンジニアリング部町田和也 2018 The MathWorks, Inc. 1 画像処理 ディープラーニングによるナットの良品判定アプリ 画像処理による内側のキズ検出 ディープラーニングによる分類 2 画像処理による外観検査の自動化 目盛りを読む良否判定数や大きさの測定 人が目で見て行う作業の置き換え
多機種のAndroid(TM)端末でテストシナリオを流用可能に - Androidアプリケーション自動テストツール QCWing for Android Ver.2.7 -
端末でテストシナリオを流用可能に - Androidアプリケーション自動テストツール QCWing for Android Ver.2.7 -") < 報道関係各位 > プレスリリース 2014 年 5 月 13 日 日本ノーベル株式会社 多機種の Android 端末でテストシナリオを流用可能に - Android アプリケーション自動テストツール QCWing for Android Ver.2.7 - 日本ノーベル株式会社 ( 本社 : 東京都北区 代表取締役社長 : 鈴木祥夫 以下日本ノーベル ) は 指定座標の テキスト取得など 多機種のテスト向け機能を強化した
< 報道関係各位 > プレスリリース 2014 年 5 月 13 日 日本ノーベル株式会社 多機種の Android 端末でテストシナリオを流用可能に - Android アプリケーション自動テストツール QCWing for Android Ver.2.7 - 日本ノーベル株式会社 ( 本社 : 東京都北区 代表取締役社長 : 鈴木祥夫 以下日本ノーベル ) は 指定座標の テキスト取得など 多機種のテスト向け機能を強化した
Presentation Title
 Automated Driving System Toolbox TM ~ ADAS/ 自動運転の開発 検証プラットフォーム ~ MathWorks Japan アプリケーションエンジニアリング部 乙部雅則 2017 The MathWorks, Inc. 1 ADAS/ 自動運転開発に関して良くある悩み 1011010101010100101001 0101010100100001010101 0010101001010100101010
Automated Driving System Toolbox TM ~ ADAS/ 自動運転の開発 検証プラットフォーム ~ MathWorks Japan アプリケーションエンジニアリング部 乙部雅則 2017 The MathWorks, Inc. 1 ADAS/ 自動運転開発に関して良くある悩み 1011010101010100101001 0101010100100001010101 0010101001010100101010
平成 28 年 6 月 3 日 報道機関各位 東京工業大学広報センター長 岡田 清 カラー画像と近赤外線画像を同時に撮影可能なイメージングシステムを開発 - 次世代画像センシングに向けオリンパスと共同開発 - 要点 可視光と近赤外光を同時に撮像可能な撮像素子の開発 撮像データをリアルタイムで処理する
 平成 28 年 6 月 3 日 報道機関各位 東京工業大学広報センター長 岡田 清 カラー画像と近赤外線画像を同時に撮影可能なイメージングシステムを開発 - 次世代画像センシングに向けオリンパスと共同開発 - 要点 可視光と近赤外光を同時に撮像可能な撮像素子の開発 撮像データをリアルタイムで処理する画像処理システムの開発 カラー画像と近赤外線画像を同時に撮影可能なプロトタイプシステムの開発 概要 国立大学法人東京工業大学工学院システム制御系の奥富正敏教授らと
平成 28 年 6 月 3 日 報道機関各位 東京工業大学広報センター長 岡田 清 カラー画像と近赤外線画像を同時に撮影可能なイメージングシステムを開発 - 次世代画像センシングに向けオリンパスと共同開発 - 要点 可視光と近赤外光を同時に撮像可能な撮像素子の開発 撮像データをリアルタイムで処理する画像処理システムの開発 カラー画像と近赤外線画像を同時に撮影可能なプロトタイプシステムの開発 概要 国立大学法人東京工業大学工学院システム制御系の奥富正敏教授らと
第 8 回の内容 クライアントサイド処理 JavaScript の基礎
 第 8 回の内容 クライアントサイド処理 JavaScript の基礎 クライアントサイド処理 クライアントサイド / サーバサイド クライアントサイド サーバサイド Web ブラウザ Web サーバ 動的な Web ページ Web ブラウザ Web サーバ Web ブラウザ Web サーバ リソース生成 描画 描画 リソース生成 再描画 描画 再描画 描画 リソース生成 再描画 動的な Web ページとページ遷移
第 8 回の内容 クライアントサイド処理 JavaScript の基礎 クライアントサイド処理 クライアントサイド / サーバサイド クライアントサイド サーバサイド Web ブラウザ Web サーバ 動的な Web ページ Web ブラウザ Web サーバ Web ブラウザ Web サーバ リソース生成 描画 描画 リソース生成 再描画 描画 再描画 描画 リソース生成 再描画 動的な Web ページとページ遷移
IoT時代のアナリティクス ~センサーデータからの価値発見~
 IoT 時 代 のアナリティクス ~センサーデータからの 価 値 発 見 ~ MathWorks Japan アプリケーション エンジニアリング 部 (テクニカルコンピューティング) 部 長 大 谷 卓 也 2015 The MathWorks, Inc. 1 Agenda IoT 時 代 のセンサーデータ 解 析 ウェラブル インフラ 環 境 自 動 車 センサー 信 号 IoT / アナリティクス
IoT 時 代 のアナリティクス ~センサーデータからの 価 値 発 見 ~ MathWorks Japan アプリケーション エンジニアリング 部 (テクニカルコンピューティング) 部 長 大 谷 卓 也 2015 The MathWorks, Inc. 1 Agenda IoT 時 代 のセンサーデータ 解 析 ウェラブル インフラ 環 境 自 動 車 センサー 信 号 IoT / アナリティクス
HULFT の通信をよりセキュアに HULFT と SSH Tectia を組み合わせたセキュアで強力なファイル転送 Compatibility Note 2008 年 9 月 株式会社セゾン情報システムズの企業内 企業間通信ミドルウェアである HULFT は ファイル転送のアプリケーションとして
 HULFT の通信をよりセキュアに HULFT と SSH Tectia を組み合わせたセキュアで強力なファイル転送 Compatibility Note 2008 年 9 月 株式会社セゾン情報システムズの企業内 企業間通信ミドルウェアである HULFT は ファイル転送のアプリケーションとして 主に流通業 製造業で大きなシェアを誇るパッケージソフトウェアです SSH Tectia ソリューションを
HULFT の通信をよりセキュアに HULFT と SSH Tectia を組み合わせたセキュアで強力なファイル転送 Compatibility Note 2008 年 9 月 株式会社セゾン情報システムズの企業内 企業間通信ミドルウェアである HULFT は ファイル転送のアプリケーションとして 主に流通業 製造業で大きなシェアを誇るパッケージソフトウェアです SSH Tectia ソリューションを
.NET テクノロジー概説 /WindowsAzure 入門 コード P-2 0:00~7:00 ( 休憩 時間含む ) 前提条件 Windows の操作経験 ( エクスプローラの操作 ファイルの操作 ) があること 最低開講人数 0 名.NET テクノロジー概説 /WindowsAzure 入門
 前提条件 Windows の操作経験 ( エクスプローラの操作 ファイルの操作 ) があること 最低開講人数 0 名.NET テクノロジー概説 /WindowsAzure 入門") プログラム開発におけるレビュー テスト技術の基礎 コード P- 0:00~7:00 ( 休憩 時間含む ) 前提条件プログラム開発作業の経験があること 最低開講人数 0 名 プログラム開発におけるレビュー テスト技術の基礎 初日 202 年 5 月 日 2 時間 0 分実施日数及び総 2 日間訓練時間数最終日 202 年 5 月 7 日時間換算時間. プログラムの品質を管理するとはどのようなことか理解する
プログラム開発におけるレビュー テスト技術の基礎 コード P- 0:00~7:00 ( 休憩 時間含む ) 前提条件プログラム開発作業の経験があること 最低開講人数 0 名 プログラム開発におけるレビュー テスト技術の基礎 初日 202 年 5 月 日 2 時間 0 分実施日数及び総 2 日間訓練時間数最終日 202 年 5 月 7 日時間換算時間. プログラムの品質を管理するとはどのようなことか理解する
Master 16:9
 自動車エンジニアをソフトウェアエンジニアに仕立てるには ~ 自動運転に向けたセンサーフュージョンロジックの開発環境 ~ Turning Automotive Engineers to Software Engineers ~Development environment aimed the sensor fusion algorithm for the autonomous driving ~ 代表取締役社長宮野隆
自動車エンジニアをソフトウェアエンジニアに仕立てるには ~ 自動運転に向けたセンサーフュージョンロジックの開発環境 ~ Turning Automotive Engineers to Software Engineers ~Development environment aimed the sensor fusion algorithm for the autonomous driving ~ 代表取締役社長宮野隆
WebEx を使用したリモート調査とは お客様のデスクトップ画面を共有し 障害調査を共同で実施するサービスです リモート調査は 精度の高い調査により 障害の早期解決を図るために実施します 対象の機器にアクセスできる中継端末をご用意頂く必要があります インターネット接続が可能な中継端末を経由して調査を
 WebEx を使用したリモート調査 WebEx を使用したリモート調査とは お客様のデスクトップ画面を共有し 障害調査を共同で実施するサービスです リモート調査は 精度の高い調査により 障害の早期解決を図るために実施します 対象の機器にアクセスできる中継端末をご用意頂く必要があります インターネット接続が可能な中継端末を経由して調査を実施します 調査対象の機器がインターネットへ接続されている必要はありません
WebEx を使用したリモート調査 WebEx を使用したリモート調査とは お客様のデスクトップ画面を共有し 障害調査を共同で実施するサービスです リモート調査は 精度の高い調査により 障害の早期解決を図るために実施します 対象の機器にアクセスできる中継端末をご用意頂く必要があります インターネット接続が可能な中継端末を経由して調査を実施します 調査対象の機器がインターネットへ接続されている必要はありません
更新履歴 No 更新箇所版数日付 1 第一版作成 /12/28 2 一部画像差し替え 誤字修正 /02/09 2
 マイアプリインストール手順参考資料 更新履歴 No 更新箇所版数日付 1 第一版作成 1.0 2015/12/28 2 一部画像差し替え 誤字修正 1.1.2 2016/02/09 2 目次 はじめに... 4 マイアプリとは... 5 マイアプリ配信方法... 6 ロボアプリ配信管理 の設定... 6 お仕事かんたん生成 の設定... 14 Pepper の設定... 28 制限事項... 31
マイアプリインストール手順参考資料 更新履歴 No 更新箇所版数日付 1 第一版作成 1.0 2015/12/28 2 一部画像差し替え 誤字修正 1.1.2 2016/02/09 2 目次 はじめに... 4 マイアプリとは... 5 マイアプリ配信方法... 6 ロボアプリ配信管理 の設定... 6 お仕事かんたん生成 の設定... 14 Pepper の設定... 28 制限事項... 31
ネットワークカメラ Edge Storage マニュアル ~SD / microsd で映像録画 再生 ~ ご注意このマニュアルは Firmware が Ver1.9.2 のカメラを対象としています Edge Storage 機能 (SD / microsd で映像録画 再生 ) をお使いになる 場
 をお使いになる 場") ネットワークカメラ Edge Storage マニュアル ~SD / microsd で映像録画 再生 ~ ご注意このマニュアルは Firmware が Ver1.9.2 のカメラを対象としています Edge Storage 機能 (SD / microsd で映像録画 再生 ) をお使いになる 場合は まず Firmware を Ver1.9.2 以上にアップデートしてください 目次 1. Edge
ネットワークカメラ Edge Storage マニュアル ~SD / microsd で映像録画 再生 ~ ご注意このマニュアルは Firmware が Ver1.9.2 のカメラを対象としています Edge Storage 機能 (SD / microsd で映像録画 再生 ) をお使いになる 場合は まず Firmware を Ver1.9.2 以上にアップデートしてください 目次 1. Edge