PowerPoint プレゼンテーション
|
|
|
- あまめ くだら
- 5 years ago
- Views:
Transcription
1 復習 ) 時系列のモデリング ~a. 離散時間モデル ~ y k + a 1 z 1 y k + + a na z n ay k = b 0 u k + b 1 z 1 u k + + b nb z n bu k y k = G z 1 u k = B(z 1 ) A(z 1 u k ) ARMA モデル A z 1 B z 1 = 1 + a 1 z a na z n a = b 0 + b 1 z b nb z n b 連続時間モデルと離散時間モデルは z 変換によって関連付けられる. 計算機へのプログラミングや実装では, 未来のデータを利用することはできない. 過去のデータ系列を明記するために z 1 演算子を利用する. 伝達関数の形, 誤差の伝達関数の形によって, 多様なモデルがある. e.g. AR, MA, ARIMA, CARMA, etc. 1
2 復習 ) 時系列のモデリング ~a. 離散時間モデル ~ ARMA モデルの様々な表現形式 y k = B(z 1 ) A(z 1 u k ) スカラ関数 = b 0 + b 1 z b nb z n b 1 + a 1 z a na z n a = β 0 + β 1z β nb z nb 1 + a 1 z a na z n a n y k = a i=1 n a i y k i + b j=0 b j u k j 1 可観測正準形 x 1 k + 1 x k + 1 x n k + 1 = 0 0 a na a na a na a 1 y k = x 1 k x k x n k x 1 k x k x n k x(k + 1) A x(k) b c T x(k) + β 0 u(k) 直達項 + β 1 β β n u(k)
 の場合 y k = H z 1 G z 1 u k = z 1 B(z 1 ) A(z 1 u k ) ZOH があれば直達項は存在しない y(k) = b 0z 1 + b 1 z + + b nb z n b 1 1 +")
3 復習 ) 時系列のモデリング ~a. 離散時間モデル ~ 実用に際しては, ホールドの伝達関数を考慮する必要がある. ZOH(zero-order hold) の場合 y k = H z 1 G z 1 u k = z 1 B(z 1 ) A(z 1 u k ) ZOH があれば直達項は存在しない y(k) = b 0z 1 + b 1 z + + b nb z n b a 1 z a na z n a = β 0z β nb z n b a 1 z a na z n a 3
4 3. システムのモデリング 4
5 3.1 信号とシステム モデリング (modeling) 入力信号 u と出力信号 y が与えられたときシステムの特性 G を求める. 解析 (analysis) 入力信号 u とシステムの特性 G が与えられたとき出力信号 y の性質を求める. 設計 (design) システムの特性 G と出力信号 y の目標値 r が与えられたとき入力信号 u を求める. これれらの語句の正確な違いを理解するのは重要 5
6 3. 制御のためのモデリング モデルベースト制御 (MBC: model-based control) 現代制御 ロバスト制御 モデル予測制御 etc. モデルフリー制御 (MFC: model-free control) PID 制御 ファジィ制御 ニューロ制御 etc. 近年, 産業界では MBC の重要性が認識され始めている. 計算機の発展と低価格化によって,MBC の実装が容易になっている. 6
7 3. 制御のためのモデリング ホワイトボックスモデリング (white-box modeling) 第一原理モデリング (first principle modeling) や物理モデリングとも呼ばれる. 対象を支配する第一原理 ( 運動方程式, 回路方程式, 電磁界方程式, 保存則, 化学反応式などの科学原理 ) に基づいてモデリングを行う方法. 利点 対象の挙動が忠実に再現できる. 計算機上での解析や予測に利用するシミュレータの構築に役立つ. 問題点 一般に, 非線形 偏微分方程式で記述され複雑である. 制御系設計にそのまま利用することは難しい. 実験を行わなければ正確な値が分からない ( 実験が困難な場合も多い ) パラメータが存在する. 7
8 3. 制御のためのモデリング ブラックボックスモデリング (black-box modeling) システム同定 (system identification) とも呼ばれる. 対象をブラックボックスと見なして, その入出力データから統計的な手法でモデリングを行う手法. 線形システム同定は論理体系が完備されている. ビッグデータからモデル化に有用な情報をいかに抽出するかは, 重要な課題の一つとして注目されている. 利点 複雑なシステムに対しても, 実験データから比較的簡潔なモデルを得ることができる. 様々なシステム同定法が提案されており, それを実行するソフトウェアも MATLAB に用意されている. 問題点実験的モデリング手法であるので, モノが無いとモデリングできない. 8
9 3. 制御のためのモデリンググレーボックスモデリング (grey-box modeling) 部分的な物理情報が利用できる場合のモデリング法. 利点 最も現実的なモデリング法であり, 実際の制御の現場で用いられるモデリング法のほとんどは, この範疇に含まれる. 問題点 対象や実験環境に大きく依存するため, グレーボックスモデリングの一般的な方法論を構築するのは難しい. 9


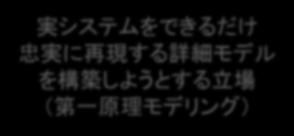
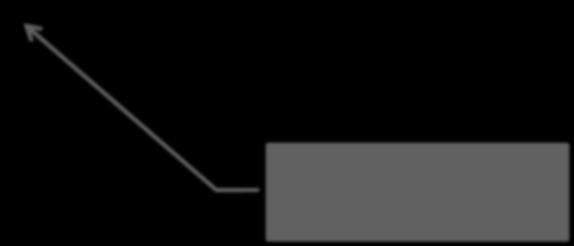
10 3.5 制御のためのモデリングのポイント 実システム 詳細モデル ノミナルモデル 実システムをできるだけ忠実に再現する詳細モデルを構築しようとする立場 ( 第一原理モデリング ) ノミナルモデルと実システムの差が モデルの不確かさ 制御用ノミナルモデルはできるだけ簡単なものが望ましい 1. どれだけ第一原理モデルを実際の制御対象に近づけられるか?. 制御用ノミナルモデルが第一原理モデルの重要な部分をよく近似しているか? 3. 近似しきれなかった部分を定量的に評価できるか? 不確かさのモデリング と呼ばれる研究分野 10
11 4. スカラ変数とベクトル変数に対する最小二乗法 11
12 4.1 最小二乗推定法 ( スカラの場合 ) 最小二乗推定値の導出 確率変数 : x(k) 観測雑音 : w(k) 観測 : y k = cx k + w(k) 既知確率変数の平均値 : E x(k) = x 確率変数の分散 : E x k x = σ x 観測雑音の平均値 : E w(k) = w 観測雑音の分散 : E w k w = σ w 推定問題 : x k = αy k + β (α, β) を求める. 条件 : e k = x k x k の平均二乗誤差の最小化 1
 = E x(k) x = E x k αy(k) β = E x k α cx k + w k β = 1 αc = 0 x α w β β = 1 αc x α w =")
13 4.1 最小二乗推定法 ( スカラの場合 ) 1 1 次モーメントに関する条件 推定誤差の平均値を最小化する (α, β) の関係性は? どのようなものだろう? E e(k) = E x(k) x = E x k αy(k) β = E x k α cx k + w k β = 1 αc = 0 x α w β β = 1 αc x α w = x α c x + w 13
14 4.1 最小二乗推定法 ( スカラの場合 ) 次モーメントに関する条件 推定誤差の分散を最小化する (α, β) の関係性は? どのようなものだろう? E e k E[e(k)] = E x(k) αy(k) β 1 αc x α w β = E x(k) α cx(k) + w(k) 1 αc x + α w = 1 αc E x(k) x 1 αc αe x k x w k w +α E w(k) w 0 = 1 αc σ x + α σ w さらに α についての平方完成により = c σ x + σ w α cσ x α + σ x cσ x = c σ x + σ w α c σ x + σ w cσ w = c σ x + σ w α σ x + c σ w cσ x 4 + σ x c σ x + σ w 1 + σ x + c σ w 14
15 4.1 最小二乗推定法 ( スカラの場合 ) cσ w E e k E[e(k)] = c σ x + σ w α σ x + c σ w 1 + σ x + c σ w = c σ x + σ w α cσ w σ + σ σ これより,α = cσ w σ のとき, 推定誤差分散は最小値 E e k E[e(k)] = σ をとる. また, x k の推定値は, x k = αy k + β = cσ w σ y k + x cσ w σ c x + w = x + cσ w σ y k c x + w で与えられる. 15
16 4.1 最小二乗推定法 ( スカラの場合 ) 直交性の原理 最小二乗推定値 x(k) と推定誤差 e(k) の相関関数を計算してみる E x k e k = E x + cσ σ w y k c x + w e k = x cσ σ w c x + w E e(k) + cσ σ w E[y(k)e(k)] = cσ σ w E[y(k) x(k) x(k) ] ここで E e(k) = 0 を利用した 次に式の中の E[y(k) x(k) x(k) ] を計算する 16
17 4.1 最小二乗推定法 ( スカラの場合 ) E y(k) x(k) x(k) = E cx(k) + w(k) x(k) x + cσ σ w y(k) c x + w = cx k + w k 1 cσ σ w x k x cσ σ w w k w = c 1 cσ E x k x k x σ w cσ σ w E w k w k w となる. ここで, E x(k) x(k) x = E x(k) x x(k) x + x x(k) x = σ x E w(k) w(k) w = E w(k) w w(k) w + w w(k) w = σ w を代入すると, 17
18 4.1 最小二乗推定法 ( スカラの場合 ) E y k x k x k = c 1 cσ σ w σ x cσ σ w σ w = c 1 σ c σ w + 1 σ x + σ σ x σ x cσ となり, が成り立つことが導かれた = c 1 σ 1 σ + σ σ x σ x cσ = 0 E e(k)y(k) = 0 この式は, 最小二乗推定誤差と観測は無相関である ことを示す. これは直交性の原理とよばれる 18
19 4. 最小二乗推定法 ( 多変数の場合 ) 対象 y k = Cx k + w(k) 確率変数 : x(k) R n 観測雑音 : w(k) R n 観測ベクトル : y(k) R n 観測行列 : C R n n 既知 x(k) とw(k) は無相関確率変数の平均値 : E x(k) = x 確率変数の分散 : E (x k x) x k x T = Σ x 観測雑音の平均値 : E w(k) = w 観測雑音の分散 : E (w k w) w k w T = Σ w (4.39) (4.40) 19
20 4. 最小二乗推定法 ( 多変数の場合 ) 出力の平均ベクトル E y = E Cx + w = C x + w 共分散行列 E (y E y )(y E y ) T = E (Cx + w C x w)(cx + w C x w) T = E C x x + (w w) {C x x + (w w)} T = CΣ x C T + Σ w 推定誤差ベクトル e k = x k x k 推定問題 x k = Fy k + d (F R n n, d R n ) を求める. (4.4) 0
 次モーメントに関する条件? 推定誤差の分散を最小化する F はどのようなものだろう? P E ee T 誤差共分散行列 P = E[(x Fy d)(x Fy d) T ] = E[{x F Cx + w d}{x F Cx + w d} T ] (4.47) 1")
21 4. 最小二乗推定法 ( 多変数の場合 ) 1 1 次モーメントに関する条件? 推定誤差の平均値を最小化する d はどのようなものだろう? E e = E x Fy d = x F C x + w d = 0 d = x F C x + w = I FC x F w (4.45) 次モーメントに関する条件? 推定誤差の分散を最小化する F はどのようなものだろう? P E ee T 誤差共分散行列 P = E[(x Fy d)(x Fy d) T ] = E[{x F Cx + w d}{x F Cx + w d} T ] (4.47) 1
22 4. 最小二乗推定法 ( 多変数の場合 ) x F Cx + w d = I FC x Fw d = I FC x Fw I FC x + F w = I FC (x x) F(w w) Eq. (4.45) を利用 (4.48) Eq. (4.48) を Eq. (4.47) に代入 P = E[{ I FC (x x) F(w w)}{ I FC x x F w w } T ] = I FC E x x x x T I FC T + FE[ w w w w T ]F T = I FC Σ x I FC T + FΣ w F T Eq (4.40) を利用 = F CΣ x C T + Σ w F T FCΣ x Σ x C T F T + Σ x A B (4.50) P = FAF T FB B T F T + Σ x (4.51)
23 4. 最小二乗推定法 ( 多変数の場合 ) P = F B T A 1 A(F B T A 1 ) T +Σ x B T A 1 B F = B T A 1 のとき P は最小 F = Σ x C T (CΣ x C T + Σ w ) 1 (4.55) P = Σ x B T A 1 B (4.54) Eq. 4.45,(4.55) をEq. 4.4 に代入 x k = Fy + I FC x F w = x + F{y (C x + w)} = x + Σ x C T (CΣ x C T + Σ w ) 1 {y (C x + w)} 最小二乗推定ベクトル 3
 最小二乗推定 x k = x + F{y(k) (C x + w)} F = Σ x C T (CΣ x C T + Σ w ) 1 P = Σ x Σ x C T (Σ w + CΣ x C T ) 1 CΣ x 4")
24 4. 最小二乗推定法 ( 多変数の場合 ) P = Σ x Σ x C T (Σ w + CΣ x C T ) 1 CΣ x Eq (4.50) を利用 = (Σ x 1 + C T Σ w 1 C) 1 (4.60) Eq を変形 F = PC T Σ w 1 (4.6) 最小二乗推定 x k = x + F{y(k) (C x + w)} F = Σ x C T (CΣ x C T + Σ w ) 1 P = Σ x Σ x C T (Σ w + CΣ x C T ) 1 CΣ x 4
航空機の運動方程式
 オブザーバ 状態フィードバックにはすべての状態変数の値が必要であった. しかしながら, システムの外部から観測できるのは出力だけであり, すべての状態変数が観測できるとは限らない. そこで, 制御対象システムの状態変数を, システムのモデルに基づいてその入出力信号から推定する方法を考える.. オブザーバとは 次元 m 入力 r 出力線形時不変システム x Ax Bu y Cx () の状態変数ベクトル
オブザーバ 状態フィードバックにはすべての状態変数の値が必要であった. しかしながら, システムの外部から観測できるのは出力だけであり, すべての状態変数が観測できるとは限らない. そこで, 制御対象システムの状態変数を, システムのモデルに基づいてその入出力信号から推定する方法を考える.. オブザーバとは 次元 m 入力 r 出力線形時不変システム x Ax Bu y Cx () の状態変数ベクトル
Introduction to System Identification
 y(t) モデルベースデザイン 制御系設計のためのシステム同定入門 s 2 Teja Muppirala t s 2 3s 4 2012 The MathWorks, Inc. 1 モデルベースデザイン 正確なモデルがあることが大前提 実行可能な仕様書 シミュレーションによる設計 モデル 連続したテスト 検証 コード生成による実装 2 動的システムのモデリング モデリング手法 第一原理モデリング データドリブンモデリング
y(t) モデルベースデザイン 制御系設計のためのシステム同定入門 s 2 Teja Muppirala t s 2 3s 4 2012 The MathWorks, Inc. 1 モデルベースデザイン 正確なモデルがあることが大前提 実行可能な仕様書 シミュレーションによる設計 モデル 連続したテスト 検証 コード生成による実装 2 動的システムのモデリング モデリング手法 第一原理モデリング データドリブンモデリング
PowerPoint プレゼンテーション
 非線形カルマンフィルタ ~a. 問題設定 ~ 離散時間非線形状態空間表現 x k + 1 = f x k y k = h x k + bv k + w k f : ベクトル値をとるx k の非線形関数 h : スカラ値をとるx k の非線形関数 v k システム雑音 ( 平均値 0, 分散 σ v 2 k ) x k + 1 = f x k,v k w k 観測雑音 ( 平均値 0, 分散 σ w
非線形カルマンフィルタ ~a. 問題設定 ~ 離散時間非線形状態空間表現 x k + 1 = f x k y k = h x k + bv k + w k f : ベクトル値をとるx k の非線形関数 h : スカラ値をとるx k の非線形関数 v k システム雑音 ( 平均値 0, 分散 σ v 2 k ) x k + 1 = f x k,v k w k 観測雑音 ( 平均値 0, 分散 σ w
航空機の運動方程式
 可制御性 可観測性. 可制御性システムの状態を, 適切な操作によって, 有限時間内に, 任意の状態から別の任意の状態に移動させることができるか否かという特性を可制御性という. 可制御性を有するシステムに対し, システムは可制御である, 可制御なシステム という言い方をする. 状態方程式, 出力方程式が以下で表されるn 次元 m 入力 r 出力線形時不変システム x Ax u y x Du () に対し,
可制御性 可観測性. 可制御性システムの状態を, 適切な操作によって, 有限時間内に, 任意の状態から別の任意の状態に移動させることができるか否かという特性を可制御性という. 可制御性を有するシステムに対し, システムは可制御である, 可制御なシステム という言い方をする. 状態方程式, 出力方程式が以下で表されるn 次元 m 入力 r 出力線形時不変システム x Ax u y x Du () に対し,
景気指標の新しい動向
 内閣府経済社会総合研究所 経済分析 22 年第 166 号 4 時系列因子分析モデル 4.1 時系列因子分析モデル (Stock-Watson モデル の理論的解説 4.1.1 景気循環の状態空間表現 Stock and Watson (1989,1991 は観測される景気指標を状態空間表現と呼ば れるモデルで表し, 景気の状態を示す指標を開発した. 状態空間表現とは, わ れわれの目に見える実際に観測される変数は,
内閣府経済社会総合研究所 経済分析 22 年第 166 号 4 時系列因子分析モデル 4.1 時系列因子分析モデル (Stock-Watson モデル の理論的解説 4.1.1 景気循環の状態空間表現 Stock and Watson (1989,1991 は観測される景気指標を状態空間表現と呼ば れるモデルで表し, 景気の状態を示す指標を開発した. 状態空間表現とは, わ れわれの目に見える実際に観測される変数は,
Probit , Mixed logit
 Probit, Mixed logit 2016/5/16 スタートアップゼミ #5 B4 後藤祥孝 1 0. 目次 Probit モデルについて 1. モデル概要 2. 定式化と理解 3. 推定 Mixed logit モデルについて 4. モデル概要 5. 定式化と理解 6. 推定 2 1.Probit 概要 プロビットモデルとは. 効用関数の誤差項に多変量正規分布を仮定したもの. 誤差項には様々な要因が存在するため,
Probit, Mixed logit 2016/5/16 スタートアップゼミ #5 B4 後藤祥孝 1 0. 目次 Probit モデルについて 1. モデル概要 2. 定式化と理解 3. 推定 Mixed logit モデルについて 4. モデル概要 5. 定式化と理解 6. 推定 2 1.Probit 概要 プロビットモデルとは. 効用関数の誤差項に多変量正規分布を仮定したもの. 誤差項には様々な要因が存在するため,
Microsoft PowerPoint - 資料04 重回帰分析.ppt
 04. 重回帰分析 京都大学 加納学 Division of Process Control & Process Sstems Engineering Department of Chemical Engineering, Koto Universit manabu@cheme.koto-u.ac.jp http://www-pse.cheme.koto-u.ac.jp/~kano/ Outline
04. 重回帰分析 京都大学 加納学 Division of Process Control & Process Sstems Engineering Department of Chemical Engineering, Koto Universit manabu@cheme.koto-u.ac.jp http://www-pse.cheme.koto-u.ac.jp/~kano/ Outline
Microsoft PowerPoint - e-stat(OLS).pptx
.pptx") 経済統計学 ( 補足 ) 最小二乗法について 担当 : 小塚匡文 2015 年 11 月 19 日 ( 改訂版 ) 神戸大学経済学部 2015 年度後期開講授業 補足 : 最小二乗法 ( 単回帰分析 ) 1.( 単純 ) 回帰分析とは? 標本サイズTの2 変数 ( ここではXとY) のデータが存在 YをXで説明する回帰方程式を推定するための方法 Y: 被説明変数 ( または従属変数 ) X: 説明変数
経済統計学 ( 補足 ) 最小二乗法について 担当 : 小塚匡文 2015 年 11 月 19 日 ( 改訂版 ) 神戸大学経済学部 2015 年度後期開講授業 補足 : 最小二乗法 ( 単回帰分析 ) 1.( 単純 ) 回帰分析とは? 標本サイズTの2 変数 ( ここではXとY) のデータが存在 YをXで説明する回帰方程式を推定するための方法 Y: 被説明変数 ( または従属変数 ) X: 説明変数
PowerPoint プレゼンテーション
 担当教員名 単位数西田健 2 単位 教室 時間 4-1A 教室火曜 4 限 目的不確定性を有する対象の制御に有効な確率システム制御理論について解説する また 確率的要因を考慮した状態推定のために 宇宙ロケットや自律ロボットなどの幅広い分野で利用されているカルマンフィルタやパーティクルフィルタについて解説し それらを用いる制御系の構成手法を教授する 授業計画 (1) ガイダンスと導入 (2) 線形動的システムの時系列モデリング
担当教員名 単位数西田健 2 単位 教室 時間 4-1A 教室火曜 4 限 目的不確定性を有する対象の制御に有効な確率システム制御理論について解説する また 確率的要因を考慮した状態推定のために 宇宙ロケットや自律ロボットなどの幅広い分野で利用されているカルマンフィルタやパーティクルフィルタについて解説し それらを用いる制御系の構成手法を教授する 授業計画 (1) ガイダンスと導入 (2) 線形動的システムの時系列モデリング
ファイナンスのための数学基礎 第1回 オリエンテーション、ベクトル
 時系列分析 変量時系列モデルとその性質 担当 : 長倉大輔 ( ながくらだいすけ 時系列モデル 時系列モデルとは時系列データを生み出すメカニズムとなるものである これは実際には未知である 私たちにできるのは観測された時系列データからその背後にある時系列モデルを推測 推定するだけである 以下ではいくつかの代表的な時系列モデルを考察する 自己回帰モデル (Auoregressive Model もっとも頻繁に使われる時系列モデルは自己回帰モデル
時系列分析 変量時系列モデルとその性質 担当 : 長倉大輔 ( ながくらだいすけ 時系列モデル 時系列モデルとは時系列データを生み出すメカニズムとなるものである これは実際には未知である 私たちにできるのは観測された時系列データからその背後にある時系列モデルを推測 推定するだけである 以下ではいくつかの代表的な時系列モデルを考察する 自己回帰モデル (Auoregressive Model もっとも頻繁に使われる時系列モデルは自己回帰モデル
Microsoft PowerPoint - H22制御工学I-2回.ppt
 制御工学 I 第二回ラプラス変換 平成 年 4 月 9 日 /4/9 授業の予定 制御工学概論 ( 回 ) 制御技術は現在様々な工学分野において重要な基本技術となっている 工学における制御工学の位置づけと歴史について説明する さらに 制御システムの基本構成と種類を紹介する ラプラス変換 ( 回 ) 制御工学 特に古典制御ではラプラス変換が重要な役割を果たしている ラプラス変換と逆ラプラス変換の定義を紹介し
制御工学 I 第二回ラプラス変換 平成 年 4 月 9 日 /4/9 授業の予定 制御工学概論 ( 回 ) 制御技術は現在様々な工学分野において重要な基本技術となっている 工学における制御工学の位置づけと歴史について説明する さらに 制御システムの基本構成と種類を紹介する ラプラス変換 ( 回 ) 制御工学 特に古典制御ではラプラス変換が重要な役割を果たしている ラプラス変換と逆ラプラス変換の定義を紹介し
PowerPoint プレゼンテーション
 回転型クレーン / 倒立振子の制御 回転型クレーンの制御 状態方程式 コントローラ設計 ( 極配置法 ) コントローラ設計 ( 最適レギュレータ ) 回転型倒立振子の制御 状態方程式 コントローラ設計 コントローラの形式 : 状態フィードバック P-D コントローラ アームの P-D 振子の P-D 目標値 状態フィードバック制御 回転型クレーン コントローラ で 状態フィードバック制御 回転型クレーン
回転型クレーン / 倒立振子の制御 回転型クレーンの制御 状態方程式 コントローラ設計 ( 極配置法 ) コントローラ設計 ( 最適レギュレータ ) 回転型倒立振子の制御 状態方程式 コントローラ設計 コントローラの形式 : 状態フィードバック P-D コントローラ アームの P-D 振子の P-D 目標値 状態フィードバック制御 回転型クレーン コントローラ で 状態フィードバック制御 回転型クレーン
FEM原理講座 (サンプルテキスト)
") サンプルテキスト FEM 原理講座 サイバネットシステム株式会社 8 年 月 9 日作成 サンプルテキストについて 各講師が 講義の内容が伝わりやすいページ を選びました テキストのページは必ずしも連続していません 一部を抜粋しています 幾何光学講座については 実物のテキストではなくガイダンスを掲載いたします 対象とする構造系 物理モデル 連続体 固体 弾性体 / 弾塑性体 / 粘弾性体 / 固体
サンプルテキスト FEM 原理講座 サイバネットシステム株式会社 8 年 月 9 日作成 サンプルテキストについて 各講師が 講義の内容が伝わりやすいページ を選びました テキストのページは必ずしも連続していません 一部を抜粋しています 幾何光学講座については 実物のテキストではなくガイダンスを掲載いたします 対象とする構造系 物理モデル 連続体 固体 弾性体 / 弾塑性体 / 粘弾性体 / 固体
Microsoft Word - 訋é⁄‘組渋å�¦H29æœ�末試é¨fi解ç�fl仟㆓.docx
 07 年 8 月 日計量経済学期末試験問. 次元ベクトル x ( x..., x)', w ( w.., w )', v ( v.., v )' は非確率変数であり 一次独立である 最小二乗推定法の残差と説明変数が直交することは証明無く用いてよい 確率ベクトル e ( e... ) ' は E( e ) 0, V ( e ),cov( e j ) 0 ( j) とし 確率ベクトル y=( y...,
07 年 8 月 日計量経済学期末試験問. 次元ベクトル x ( x..., x)', w ( w.., w )', v ( v.., v )' は非確率変数であり 一次独立である 最小二乗推定法の残差と説明変数が直交することは証明無く用いてよい 確率ベクトル e ( e... ) ' は E( e ) 0, V ( e ),cov( e j ) 0 ( j) とし 確率ベクトル y=( y...,
14 化学実験法 II( 吉村 ( 洋 mmol/l の半分だったから さんの測定値は くんの測定値の 4 倍の重みがあり 推定値 としては 0.68 mmol/l その標準偏差は mmol/l 程度ということになる 測定値を 特徴づけるパラメータ t を推定するこの手
 14 化学実験法 II( 吉村 ( 洋 014.6.1. 最小 乗法のはなし 014.6.1. 内容 最小 乗法のはなし...1 最小 乗法の考え方...1 最小 乗法によるパラメータの決定... パラメータの信頼区間...3 重みの異なるデータの取扱い...4 相関係数 決定係数 ( 最小 乗法を語るもう一つの立場...5 実験条件の誤差の影響...5 問題...6 最小 乗法の考え方 飲料水中のカルシウム濃度を
14 化学実験法 II( 吉村 ( 洋 014.6.1. 最小 乗法のはなし 014.6.1. 内容 最小 乗法のはなし...1 最小 乗法の考え方...1 最小 乗法によるパラメータの決定... パラメータの信頼区間...3 重みの異なるデータの取扱い...4 相関係数 決定係数 ( 最小 乗法を語るもう一つの立場...5 実験条件の誤差の影響...5 問題...6 最小 乗法の考え方 飲料水中のカルシウム濃度を
Microsoft PowerPoint - H17-5時限(パターン認識).ppt
.ppt") パターン認識早稲田大学講義 平成 7 年度 独 産業技術総合研究所栗田多喜夫 赤穂昭太郎 統計的特徴抽出 パターン認識過程 特徴抽出 認識対象から何らかの特徴量を計測 抽出 する必要がある 認識に有効な情報 特徴 を抽出し 次元を縮小した効率の良い空間を構成する過程 文字認識 : スキャナ等で取り込んだ画像から文字の識別に必要な本質的な特徴のみを抽出 例 文字線の傾き 曲率 面積など 識別 与えられた未知の対象を
パターン認識早稲田大学講義 平成 7 年度 独 産業技術総合研究所栗田多喜夫 赤穂昭太郎 統計的特徴抽出 パターン認識過程 特徴抽出 認識対象から何らかの特徴量を計測 抽出 する必要がある 認識に有効な情報 特徴 を抽出し 次元を縮小した効率の良い空間を構成する過程 文字認識 : スキャナ等で取り込んだ画像から文字の識別に必要な本質的な特徴のみを抽出 例 文字線の傾き 曲率 面積など 識別 与えられた未知の対象を
横浜市環境科学研究所
 周期時系列の統計解析 単回帰分析 io 8 年 3 日 周期時系列に季節調整を行わないで単回帰分析を適用すると, 回帰係数には周期成分の影響が加わる. ここでは, 周期時系列をコサイン関数モデルで近似し単回帰分析によりモデルの回帰係数を求め, 周期成分の影響を検討した. また, その結果を気温時系列に当てはめ, 課題等について考察した. 気温時系列とコサイン関数モデル第 報の結果を利用するので, その一部を再掲する.
周期時系列の統計解析 単回帰分析 io 8 年 3 日 周期時系列に季節調整を行わないで単回帰分析を適用すると, 回帰係数には周期成分の影響が加わる. ここでは, 周期時系列をコサイン関数モデルで近似し単回帰分析によりモデルの回帰係数を求め, 周期成分の影響を検討した. また, その結果を気温時系列に当てはめ, 課題等について考察した. 気温時系列とコサイン関数モデル第 報の結果を利用するので, その一部を再掲する.
Microsoft Word - 補論3.2
 補論 3. 多変量 GARC モデル 07//6 新谷元嗣 藪友良 対数尤度関数 3 章 7 節では 変量の対数尤度を求めた ここでは多変量の場合 とくに 変量について対数尤度を求める 誤差項 は平均 0 で 次元の正規分布に従うとする 単純化のため 分散と共分散は時間を通じて一定としよう ( この仮定は後で変更される ) したがって ij から添え字 を除くことができる このとき と の尤度関数は
補論 3. 多変量 GARC モデル 07//6 新谷元嗣 藪友良 対数尤度関数 3 章 7 節では 変量の対数尤度を求めた ここでは多変量の場合 とくに 変量について対数尤度を求める 誤差項 は平均 0 で 次元の正規分布に従うとする 単純化のため 分散と共分散は時間を通じて一定としよう ( この仮定は後で変更される ) したがって ij から添え字 を除くことができる このとき と の尤度関数は
Microsoft Word - 実験テキスト2005.doc
 7. プロセスの動特性 [Ⅰ] 目的液レベル制御実験および同シミュレーションを通して ステップ応答に基づくプロセス伝達関数の同定方法 ステップ応答法による PI 制御パラメータの調整方法 および PI 制御パラメータが制御性能へ与える影響について習熟する さらに 制御シミュレーションを通して むだ時間を有するプロセスに対するスミス補償型制御の有効性を確認する [Ⅱ] 理論 2.1 ステップ応答実験による伝達関数の同定
7. プロセスの動特性 [Ⅰ] 目的液レベル制御実験および同シミュレーションを通して ステップ応答に基づくプロセス伝達関数の同定方法 ステップ応答法による PI 制御パラメータの調整方法 および PI 制御パラメータが制御性能へ与える影響について習熟する さらに 制御シミュレーションを通して むだ時間を有するプロセスに対するスミス補償型制御の有効性を確認する [Ⅱ] 理論 2.1 ステップ応答実験による伝達関数の同定
Kumamoto University Center for Multimedia and Information Technologies Lab. 熊本大学アプリケーション実験 ~ 実環境における無線 LAN 受信電波強度を用いた位置推定手法の検討 ~ InKIAI 宮崎県美郷
 熊本大学アプリケーション実験 ~ 実環境における無線 LAN 受信電波強度を用いた位置推定手法の検討 ~ InKIAI プロジェクト @ 宮崎県美郷町 熊本大学副島慶人川村諒 1 実験の目的 従来 信号の受信電波強度 (RSSI:RecevedSgnal StrengthIndcator) により 対象の位置を推定する手法として 無線 LAN の AP(AccessPont) から受信する信号の減衰量をもとに位置を推定する手法が多く検討されている
熊本大学アプリケーション実験 ~ 実環境における無線 LAN 受信電波強度を用いた位置推定手法の検討 ~ InKIAI プロジェクト @ 宮崎県美郷町 熊本大学副島慶人川村諒 1 実験の目的 従来 信号の受信電波強度 (RSSI:RecevedSgnal StrengthIndcator) により 対象の位置を推定する手法として 無線 LAN の AP(AccessPont) から受信する信号の減衰量をもとに位置を推定する手法が多く検討されている
Microsoft Word - reg2.doc
 回帰分析 重回帰 麻生良文. 前提 個の説明変数からなるモデルを考える 重回帰モデル : multple regresso model α β β β u : 被説明変数 epled vrle, 従属変数 depedet vrle, regressd :,,.., 説明変数 epltor vrle, 独立変数 depedet vrle, regressor u: 誤差項 error term, 撹乱項
回帰分析 重回帰 麻生良文. 前提 個の説明変数からなるモデルを考える 重回帰モデル : multple regresso model α β β β u : 被説明変数 epled vrle, 従属変数 depedet vrle, regressd :,,.., 説明変数 epltor vrle, 独立変数 depedet vrle, regressor u: 誤差項 error term, 撹乱項
DVIOUT
 最適レギュレータ 松尾研究室資料 第 最適レギュレータ 節時不変型無限時間最適レギュレータ 状態フィードバックの可能な場合の無限時間問題における最適レギュレータについて確定系について説明する. ここで, レギュレータとは状態量をゼロにするようなコントローラのことである. なぜ, 無限時間問題のみを述べるかという理由は以下のとおりである. 有限時間の最適レギュレータ問題の場合の最適フィードバックゲインは微分方程式の解から構成される時間関数として表現される.
最適レギュレータ 松尾研究室資料 第 最適レギュレータ 節時不変型無限時間最適レギュレータ 状態フィードバックの可能な場合の無限時間問題における最適レギュレータについて確定系について説明する. ここで, レギュレータとは状態量をゼロにするようなコントローラのことである. なぜ, 無限時間問題のみを述べるかという理由は以下のとおりである. 有限時間の最適レギュレータ問題の場合の最適フィードバックゲインは微分方程式の解から構成される時間関数として表現される.
0 部分的最小二乗回帰 Partial Least Squares Regression PLS 明治大学理 学部応用化学科 データ化学 学研究室 弘昌
 0 部分的最小二乗回帰 Parial Leas Squares Regressio PLS 明治大学理 学部応用化学科 データ化学 学研究室 弘昌 部分的最小二乗回帰 (PLS) とは? 部分的最小二乗回帰 (Parial Leas Squares Regressio, PLS) 線形の回帰分析手法の つ 説明変数 ( 記述 ) の数がサンプルの数より多くても計算可能 回帰式を作るときにノイズの影響を受けにくい
0 部分的最小二乗回帰 Parial Leas Squares Regressio PLS 明治大学理 学部応用化学科 データ化学 学研究室 弘昌 部分的最小二乗回帰 (PLS) とは? 部分的最小二乗回帰 (Parial Leas Squares Regressio, PLS) 線形の回帰分析手法の つ 説明変数 ( 記述 ) の数がサンプルの数より多くても計算可能 回帰式を作るときにノイズの影響を受けにくい
パソコンシミュレータの現状
 第 2 章微分 偏微分, 写像 豊橋技術科学大学森謙一郎 2. 連続関数と微分 工学において物理現象を支配する方程式は微分方程式で表されていることが多く, 有限要素法も微分方程式を解く数値解析法であり, 定式化においては微分 積分が一般的に用いられており. 数学の基礎知識が必要になる. 図 2. に示すように, 微分は連続な関数 f() の傾きを求めることであり, 微小な に対して傾きを表し, を無限に
第 2 章微分 偏微分, 写像 豊橋技術科学大学森謙一郎 2. 連続関数と微分 工学において物理現象を支配する方程式は微分方程式で表されていることが多く, 有限要素法も微分方程式を解く数値解析法であり, 定式化においては微分 積分が一般的に用いられており. 数学の基礎知識が必要になる. 図 2. に示すように, 微分は連続な関数 f() の傾きを求めることであり, 微小な に対して傾きを表し, を無限に
13章 回帰分析
 単回帰分析 つ以上の変数についての関係を見る つの 目的 被説明 変数を その他の 説明 変数を使って 予測しようというものである 因果関係とは限らない ここで勉強すること 最小 乗法と回帰直線 決定係数とは何か? 最小 乗法と回帰直線 これまで 変数の間の関係の深さについて考えてきた 相関係数 ここでは 変数に役割を与え 一方の 説明 変数を用いて他方の 目的 被説明 変数を説明することを考える
単回帰分析 つ以上の変数についての関係を見る つの 目的 被説明 変数を その他の 説明 変数を使って 予測しようというものである 因果関係とは限らない ここで勉強すること 最小 乗法と回帰直線 決定係数とは何か? 最小 乗法と回帰直線 これまで 変数の間の関係の深さについて考えてきた 相関係数 ここでは 変数に役割を与え 一方の 説明 変数を用いて他方の 目的 被説明 変数を説明することを考える
Microsoft Word - 第2章 ブロック線図.doc
 NAOSIE: Nagaaki Univriy' Ac il ディジタル制御システム Auhor() 辻, 峰男 Ciaion ディジタル制御システム ; 06 Iu Da 06 URL hp://hdl.handl.n/0069/3686 Righ hi documn i downloadd hp://naoi.lb.nagaaki-u.ac.jp 第 章ブロック線図. インパルス列を用いた z
NAOSIE: Nagaaki Univriy' Ac il ディジタル制御システム Auhor() 辻, 峰男 Ciaion ディジタル制御システム ; 06 Iu Da 06 URL hp://hdl.handl.n/0069/3686 Righ hi documn i downloadd hp://naoi.lb.nagaaki-u.ac.jp 第 章ブロック線図. インパルス列を用いた z
ビジネス統計 統計基礎とエクセル分析 正誤表
 ビジネス統計統計基礎とエクセル分析 ビジネス統計スペシャリスト エクセル分析スペシャリスト 公式テキスト正誤表と学習用データ更新履歴 平成 30 年 5 月 14 日現在 公式テキスト正誤表 頁場所誤正修正 6 知識編第 章 -3-3 最頻値の解説内容 たとえば, 表.1 のデータであれば, 最頻値は 167.5cm というたとえば, 表.1 のデータであれば, 最頻値は 165.0cm ということになります
ビジネス統計統計基礎とエクセル分析 ビジネス統計スペシャリスト エクセル分析スペシャリスト 公式テキスト正誤表と学習用データ更新履歴 平成 30 年 5 月 14 日現在 公式テキスト正誤表 頁場所誤正修正 6 知識編第 章 -3-3 最頻値の解説内容 たとえば, 表.1 のデータであれば, 最頻値は 167.5cm というたとえば, 表.1 のデータであれば, 最頻値は 165.0cm ということになります
PowerPoint プレゼンテーション
 データ解析 第 7 回 : 時系列分析 渡辺澄夫 過去から未来を予測する 観測データ 回帰 判別分析 解析方法 主成分 因子 クラスタ分析 時系列予測 時系列を予測する 無限個の確率変数 ( 確率変数が作る無限数列 ){X(t) ; t は整数 } を生成する情報源を考える {X(t)} を確率過程という 確率過程に ついて過去の値から未来を予測するにはどうしたらよいだろうか X(t-K),X(t-K+1),,X(t-1)
データ解析 第 7 回 : 時系列分析 渡辺澄夫 過去から未来を予測する 観測データ 回帰 判別分析 解析方法 主成分 因子 クラスタ分析 時系列予測 時系列を予測する 無限個の確率変数 ( 確率変数が作る無限数列 ){X(t) ; t は整数 } を生成する情報源を考える {X(t)} を確率過程という 確率過程に ついて過去の値から未来を予測するにはどうしたらよいだろうか X(t-K),X(t-K+1),,X(t-1)
PowerPoint プレゼンテーション
 20150528 信号処理システム特論 本日の内容 適応フィルタ ( 時間領域 ) 適応アルゴリズム (LMS,NLMS,RLS) 適応フィルタの応用例 適応処理 非適応処理 : 状況によらずいつでも同じ処理 適応処理 : 状況に応じた適切な処理 高度な適応処理の例 雑音抑圧, 音響エコーキャンセラ, 騒音制御など 時間領域の適応フィルタ 誤差信号 与えられた手順に従ってフィルタ係数を更新し 自動的に所望の信号を得るフィルタ
20150528 信号処理システム特論 本日の内容 適応フィルタ ( 時間領域 ) 適応アルゴリズム (LMS,NLMS,RLS) 適応フィルタの応用例 適応処理 非適応処理 : 状況によらずいつでも同じ処理 適応処理 : 状況に応じた適切な処理 高度な適応処理の例 雑音抑圧, 音響エコーキャンセラ, 騒音制御など 時間領域の適応フィルタ 誤差信号 与えられた手順に従ってフィルタ係数を更新し 自動的に所望の信号を得るフィルタ
PowerPoint Presentation
 付録 2 2 次元アフィン変換 直交変換 たたみ込み 1.2 次元のアフィン変換 座標 (x,y ) を (x,y) に移すことを 2 次元での変換. 特に, 変換が と書けるとき, アフィン変換, アフィン変換は, その 1 次の項による変換 と 0 次の項による変換 アフィン変換 0 次の項は平行移動 1 次の項は座標 (x, y ) をベクトルと考えて とすれば このようなもの 2 次元ベクトルの線形写像
付録 2 2 次元アフィン変換 直交変換 たたみ込み 1.2 次元のアフィン変換 座標 (x,y ) を (x,y) に移すことを 2 次元での変換. 特に, 変換が と書けるとき, アフィン変換, アフィン変換は, その 1 次の項による変換 と 0 次の項による変換 アフィン変換 0 次の項は平行移動 1 次の項は座標 (x, y ) をベクトルと考えて とすれば このようなもの 2 次元ベクトルの線形写像
統計的データ解析
 統計的データ解析 011 011.11.9 林田清 ( 大阪大学大学院理学研究科 ) 連続確率分布の平均値 分散 比較のため P(c ) c 分布 自由度 の ( カイ c 平均値 0, 標準偏差 1の正規分布 に従う変数 xの自乗和 c x =1 が従う分布を自由度 の分布と呼ぶ 一般に自由度の分布は f /1 c / / ( c ) {( c ) e }/ ( / ) 期待値 二乗 ) 分布 c
統計的データ解析 011 011.11.9 林田清 ( 大阪大学大学院理学研究科 ) 連続確率分布の平均値 分散 比較のため P(c ) c 分布 自由度 の ( カイ c 平均値 0, 標準偏差 1の正規分布 に従う変数 xの自乗和 c x =1 が従う分布を自由度 の分布と呼ぶ 一般に自由度の分布は f /1 c / / ( c ) {( c ) e }/ ( / ) 期待値 二乗 ) 分布 c
講義「○○○○」
 講義 信頼度の推定と立証 内容. 点推定と区間推定. 指数分布の点推定 区間推定 3. 指数分布 正規分布の信頼度推定 担当 : 倉敷哲生 ( ビジネスエンジニアリング専攻 ) 統計的推測 標本から得られる情報を基に 母集団に関する結論の導出が目的 測定値 x x x 3 : x 母集団 (populaio) 母集団の特性値 統計的推測 標本 (sample) 標本の特性値 分布のパラメータ ( 母数
講義 信頼度の推定と立証 内容. 点推定と区間推定. 指数分布の点推定 区間推定 3. 指数分布 正規分布の信頼度推定 担当 : 倉敷哲生 ( ビジネスエンジニアリング専攻 ) 統計的推測 標本から得られる情報を基に 母集団に関する結論の導出が目的 測定値 x x x 3 : x 母集団 (populaio) 母集団の特性値 統計的推測 標本 (sample) 標本の特性値 分布のパラメータ ( 母数
If(A) Vx(V) 1 最小 2 乗法で実験式のパラメータが導出できる測定で得られたデータをよく近似する式を実験式という. その利点は (M1) 多量のデータの特徴を一つの式で簡潔に表現できること. また (M2) y = f ( x ) の関係から, 任意の x のときの y が求まるので,
 Vx(V) 1 最小 2 乗法で実験式のパラメータが導出できる測定で得られたデータをよく近似する式を実験式という. その利点は (M1) 多量のデータの特徴を一つの式で簡潔に表現できること. また (M2) y = f ( x ) の関係から, 任意の x のときの y が求まるので,") If(A) Vx(V) 1 最小 乗法で実験式のパラメータが導出できる測定で得られたデータをよく近似する式を実験式という. その利点は (M1) 多量のデータの特徴を一つの式で簡潔に表現できること. また (M) y = f ( x ) の関係から, 任意の x のときの y が求まるので, 未測定点の予測ができること. また (M3) 現象が比較的単純であれば, 現象を支配 する原理の式が分かることである.
If(A) Vx(V) 1 最小 乗法で実験式のパラメータが導出できる測定で得られたデータをよく近似する式を実験式という. その利点は (M1) 多量のデータの特徴を一つの式で簡潔に表現できること. また (M) y = f ( x ) の関係から, 任意の x のときの y が求まるので, 未測定点の予測ができること. また (M3) 現象が比較的単純であれば, 現象を支配 する原理の式が分かることである.
多変量解析 ~ 重回帰分析 ~ 2006 年 4 月 21 日 ( 金 ) 南慶典
 南慶典") 多変量解析 ~ 重回帰分析 ~ 2006 年 4 月 21 日 ( 金 ) 南慶典 重回帰分析とは? 重回帰分析とは複数の説明変数から目的変数との関係性を予測 評価説明変数 ( 数量データ ) は目的変数を説明するのに有効であるか得られた関係性より未知のデータの妥当性を判断する これを重回帰分析という つまり どんなことをするのか? 1 最小 2 乗法により重回帰モデルを想定 2 自由度調整済寄与率を求め
多変量解析 ~ 重回帰分析 ~ 2006 年 4 月 21 日 ( 金 ) 南慶典 重回帰分析とは? 重回帰分析とは複数の説明変数から目的変数との関係性を予測 評価説明変数 ( 数量データ ) は目的変数を説明するのに有効であるか得られた関係性より未知のデータの妥当性を判断する これを重回帰分析という つまり どんなことをするのか? 1 最小 2 乗法により重回帰モデルを想定 2 自由度調整済寄与率を求め
画像解析論(2) 講義内容
 講義内容") 画像解析論 画像解析論 東京工業大学長橋宏 主な講義内容 信号処理と画像処理 二次元システムとその表現 二次元システムの特性解析 各種の画像フィルタ 信号処理と画像処理 画像解析論 処理の応答 記憶域 入出力の流れ 信号処理系 実時間性が求められる メモリ容量に対する制限が厳しい オンラインでの対応が厳しく求められる 画像処理系 ある程度の処理時間が許容される 大容量のメモリ使用が容認され易い オフラインでの対応が容認され易い
画像解析論 画像解析論 東京工業大学長橋宏 主な講義内容 信号処理と画像処理 二次元システムとその表現 二次元システムの特性解析 各種の画像フィルタ 信号処理と画像処理 画像解析論 処理の応答 記憶域 入出力の流れ 信号処理系 実時間性が求められる メモリ容量に対する制限が厳しい オンラインでの対応が厳しく求められる 画像処理系 ある程度の処理時間が許容される 大容量のメモリ使用が容認され易い オフラインでの対応が容認され易い
スライド 1
 データ解析特論第 10 回 ( 全 15 回 ) 2012 年 12 月 11 日 ( 火 ) 情報エレクトロニクス専攻横田孝義 1 終了 11/13 11/20 重回帰分析をしばらくやります 12/4 12/11 12/18 2 前回から回帰分析について学習しています 3 ( 単 ) 回帰分析 単回帰分析では一つの従属変数 ( 目的変数 ) を 一つの独立変数 ( 説明変数 ) で予測する事を考える
データ解析特論第 10 回 ( 全 15 回 ) 2012 年 12 月 11 日 ( 火 ) 情報エレクトロニクス専攻横田孝義 1 終了 11/13 11/20 重回帰分析をしばらくやります 12/4 12/11 12/18 2 前回から回帰分析について学習しています 3 ( 単 ) 回帰分析 単回帰分析では一つの従属変数 ( 目的変数 ) を 一つの独立変数 ( 説明変数 ) で予測する事を考える
Microsoft PowerPoint - H21生物計算化学2.ppt
 演算子の行列表現 > L いま 次元ベクトル空間の基底をケットと書くことにする この基底は完全系を成すとすると 空間内の任意のケットベクトルは > > > これより 一度基底を与えてしまえば 任意のベクトルはその基底についての成分で完全に記述することができる これらの成分を列行列の形に書くと M これをベクトル の基底 { >} による行列表現という ところで 行列 A の共役 dont 行列は A
演算子の行列表現 > L いま 次元ベクトル空間の基底をケットと書くことにする この基底は完全系を成すとすると 空間内の任意のケットベクトルは > > > これより 一度基底を与えてしまえば 任意のベクトルはその基底についての成分で完全に記述することができる これらの成分を列行列の形に書くと M これをベクトル の基底 { >} による行列表現という ところで 行列 A の共役 dont 行列は A
Microsoft PowerPoint - qcomp.ppt [互換モード]
![Microsoft PowerPoint - qcomp.ppt [互換モード]](/thumbs/85/91243661.jpg "Microsoft PowerPoint - qcomp.ppt [互換モード]") 量子計算基礎 東京工業大学 河内亮周 概要 計算って何? 数理科学的に 計算 を扱うには 量子力学を計算に使おう! 量子情報とは? 量子情報に対する演算 = 量子計算 一般的な量子回路の構成方法 計算って何? 計算とは? 計算 = 入力情報から出力情報への変換 入力 計算機構 ( デジタルコンピュータ,etc ) 出力 計算とは? 計算 = 入力情報から出力情報への変換 この関数はどれくらい計算が大変か??
量子計算基礎 東京工業大学 河内亮周 概要 計算って何? 数理科学的に 計算 を扱うには 量子力学を計算に使おう! 量子情報とは? 量子情報に対する演算 = 量子計算 一般的な量子回路の構成方法 計算って何? 計算とは? 計算 = 入力情報から出力情報への変換 入力 計算機構 ( デジタルコンピュータ,etc ) 出力 計算とは? 計算 = 入力情報から出力情報への変換 この関数はどれくらい計算が大変か??
スライド 1
 データ解析特論第 5 回 ( 全 15 回 ) 2012 年 10 月 30 日 ( 火 ) 情報エレクトロニクス専攻横田孝義 1 をもっとやります 2 第 2 回 3 データマイニングの分野ではマクロ ( 巨視的 ) な視点で全体を捉える能力が求められる 1. コンピュータは数値の集合として全体を把握していますので 意味ある情報として全体を見ることが不得意 2. 逆に人間には もともと空間的に全体像を捉える能力が得意
データ解析特論第 5 回 ( 全 15 回 ) 2012 年 10 月 30 日 ( 火 ) 情報エレクトロニクス専攻横田孝義 1 をもっとやります 2 第 2 回 3 データマイニングの分野ではマクロ ( 巨視的 ) な視点で全体を捉える能力が求められる 1. コンピュータは数値の集合として全体を把握していますので 意味ある情報として全体を見ることが不得意 2. 逆に人間には もともと空間的に全体像を捉える能力が得意
構造方程式モデリング Structural Equation Modeling (SEM)
") 時間でだいたいわかる 構造方程式モデリング Structural Equaton Modlng (SEM) 構造方程式モデリングとは何か 構造方程式モデリング (Structural Equaton Modlng, SEM) とは : 別名 共分散構造分析 (coaranc structural analyss) 構成概念やの性質を調べるために集めた多くのを同時に分析するための統計的方法 本来 構造方程式モデリングは主に以下の3つを含みます
時間でだいたいわかる 構造方程式モデリング Structural Equaton Modlng (SEM) 構造方程式モデリングとは何か 構造方程式モデリング (Structural Equaton Modlng, SEM) とは : 別名 共分散構造分析 (coaranc structural analyss) 構成概念やの性質を調べるために集めた多くのを同時に分析するための統計的方法 本来 構造方程式モデリングは主に以下の3つを含みます
ベイズ統計入門
 ベイズ統計入門 条件付確率 事象 F が起こったことが既知であるという条件の下で E が起こる確率を条件付確率 (codtoal probablt) という P ( E F ) P ( E F ) P( F ) 定義式を変形すると 確率の乗法公式となる ( E F ) P( F ) P( E F ) P( E) P( F E) P 事象の独立 ある事象の生起する確率が 他のある事象が生起するかどうかによって変化しないとき
ベイズ統計入門 条件付確率 事象 F が起こったことが既知であるという条件の下で E が起こる確率を条件付確率 (codtoal probablt) という P ( E F ) P ( E F ) P( F ) 定義式を変形すると 確率の乗法公式となる ( E F ) P( F ) P( E F ) P( E) P( F E) P 事象の独立 ある事象の生起する確率が 他のある事象が生起するかどうかによって変化しないとき
PowerPoint Presentation
 . カーネル法への招待 正定値カーネルによるデータ解析 - カーネル法の基礎と展開 - 福水健次統計数理研究所 / 総合研究大学院大学 統計数理研究所公開講座 0 年 月 34 日 概要 カーネル法の基本 線形データ解析と非線形データ解析 カーネル法の原理 カーネル法の つの例 カーネル主成分分析 : PCA の非線形拡張 リッジ回帰とそのカーネル化 概要 カーネル法の基本 線形データ解析と非線形データ解析
. カーネル法への招待 正定値カーネルによるデータ解析 - カーネル法の基礎と展開 - 福水健次統計数理研究所 / 総合研究大学院大学 統計数理研究所公開講座 0 年 月 34 日 概要 カーネル法の基本 線形データ解析と非線形データ解析 カーネル法の原理 カーネル法の つの例 カーネル主成分分析 : PCA の非線形拡張 リッジ回帰とそのカーネル化 概要 カーネル法の基本 線形データ解析と非線形データ解析
Clipboard
 機械システム工学実験 Ⅲ 現代制御実験 授業 ( 時間程度 シミュレーション ( 時間 実験 ( 時間 - 時間半 課題 ( 時間 - 時間半 レポート提出に関して日時 : 翌週の月曜 時 3 分場所 : 9 号館 553 室 質問があれば鎌田研究室 (9 号館 35 室 まで 制御とは? 対象とする物 ( またはシステム を自分の思うように操る 制御するためには何が必要か? コントローラ ( 制御器
機械システム工学実験 Ⅲ 現代制御実験 授業 ( 時間程度 シミュレーション ( 時間 実験 ( 時間 - 時間半 課題 ( 時間 - 時間半 レポート提出に関して日時 : 翌週の月曜 時 3 分場所 : 9 号館 553 室 質問があれば鎌田研究室 (9 号館 35 室 まで 制御とは? 対象とする物 ( またはシステム を自分の思うように操る 制御するためには何が必要か? コントローラ ( 制御器
様々なミクロ計量モデル†
 担当 : 長倉大輔 ( ながくらだいすけ ) この資料は私の講義において使用するために作成した資料です WEB ページ上で公開しており 自由に参照して頂いて構いません ただし 内容について 一応検証してありますが もし間違いがあった場合でもそれによって生じるいかなる損害 不利益について責任を負いかねますのでご了承ください 間違いは発見次第 継続的に直していますが まだ存在する可能性があります 1 カウントデータモデル
担当 : 長倉大輔 ( ながくらだいすけ ) この資料は私の講義において使用するために作成した資料です WEB ページ上で公開しており 自由に参照して頂いて構いません ただし 内容について 一応検証してありますが もし間違いがあった場合でもそれによって生じるいかなる損害 不利益について責任を負いかねますのでご了承ください 間違いは発見次第 継続的に直していますが まだ存在する可能性があります 1 カウントデータモデル
多次元レーザー分光で探る凝縮分子系の超高速動力学
 波動方程式と量子力学 谷村吉隆 京都大学理学研究科化学専攻 http:theochem.kuchem.kyoto-u.ac.jp TA: 岩元佑樹 iwamoto.y@kuchem.kyoto-u.ac.jp ベクトルと行列の作法 A 列ベクトル c = c c 行ベクトル A = [ c c c ] 転置ベクトル T A = [ c c c ] AA 内積 c AA = [ c c c ] c =
波動方程式と量子力学 谷村吉隆 京都大学理学研究科化学専攻 http:theochem.kuchem.kyoto-u.ac.jp TA: 岩元佑樹 iwamoto.y@kuchem.kyoto-u.ac.jp ベクトルと行列の作法 A 列ベクトル c = c c 行ベクトル A = [ c c c ] 転置ベクトル T A = [ c c c ] AA 内積 c AA = [ c c c ] c =
NLMIXED プロシジャを用いた生存時間解析 伊藤要二アストラゼネカ株式会社臨床統計 プログラミング グループグルプ Survival analysis using PROC NLMIXED Yohji Itoh Clinical Statistics & Programming Group, A
 NLMIXED プロシジャを用いた生存時間解析 伊藤要二アストラゼネカ株式会社臨床統計 プログラミング グループグルプ Survival analysis using PROC NLMIXED Yohji Itoh Clinical Statistics & Programming Group, AstraZeneca KK 要旨 : NLMIXEDプロシジャの最尤推定の機能を用いて 指数分布 Weibull
NLMIXED プロシジャを用いた生存時間解析 伊藤要二アストラゼネカ株式会社臨床統計 プログラミング グループグルプ Survival analysis using PROC NLMIXED Yohji Itoh Clinical Statistics & Programming Group, AstraZeneca KK 要旨 : NLMIXEDプロシジャの最尤推定の機能を用いて 指数分布 Weibull
Microsoft PowerPoint - 6.PID制御.pptx
 プロセス制御工学 6.PID 制御 京都大学 加納学 Division of Process Control & Process Systems Engineering Department of Chemical Engineering, Kyoto University manabu@cheme.kyoto-u.ac.jp http://www-pse.cheme.kyoto-u.ac.jp/~kano/
プロセス制御工学 6.PID 制御 京都大学 加納学 Division of Process Control & Process Systems Engineering Department of Chemical Engineering, Kyoto University manabu@cheme.kyoto-u.ac.jp http://www-pse.cheme.kyoto-u.ac.jp/~kano/
0 21 カラー反射率 slope aspect 図 2.9: 復元結果例 2.4 画像生成技術としての計算フォトグラフィ 3 次元情報を復元することにより, 画像生成 ( レンダリング ) に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生
 に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生") 0 21 カラー反射率 slope aspect 図 2.9: 復元結果例 2.4 画像生成技術としての計算フォトグラフィ 3 次元情報を復元することにより, 画像生成 ( レンダリング ) に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生まれ, コンピューテーショナルフォトグラフィ ( 計算フォトグラフィ ) と呼ばれている.3 次元画像認識技術の計算フォトグラフィへの応用として,
0 21 カラー反射率 slope aspect 図 2.9: 復元結果例 2.4 画像生成技術としての計算フォトグラフィ 3 次元情報を復元することにより, 画像生成 ( レンダリング ) に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生まれ, コンピューテーショナルフォトグラフィ ( 計算フォトグラフィ ) と呼ばれている.3 次元画像認識技術の計算フォトグラフィへの応用として,
日心TWS
 2017.09.22 (15:40~17:10) 日本心理学会第 81 回大会 TWS ベイジアンデータ解析入門 回帰分析を例に ベイジアンデータ解析 を体験してみる 広島大学大学院教育学研究科平川真 ベイジアン分析のステップ (p.24) 1) データの特定 2) モデルの定義 ( 解釈可能な ) モデルの作成 3) パラメタの事前分布の設定 4) ベイズ推論を用いて パラメタの値に確信度を再配分ベイズ推定
2017.09.22 (15:40~17:10) 日本心理学会第 81 回大会 TWS ベイジアンデータ解析入門 回帰分析を例に ベイジアンデータ解析 を体験してみる 広島大学大学院教育学研究科平川真 ベイジアン分析のステップ (p.24) 1) データの特定 2) モデルの定義 ( 解釈可能な ) モデルの作成 3) パラメタの事前分布の設定 4) ベイズ推論を用いて パラメタの値に確信度を再配分ベイズ推定
SAP11_03
 第 3 回 音声音響信号処理 ( 線形予測分析と自己回帰モデル ) 亀岡弘和 東京大学大学院情報理工学系研究科日本電信電話株式会社 NTT コミュニケーション科学基礎研究所 講義内容 ( キーワード ) 信号処理 符号化 標準化の実用システム例の紹介情報通信の基本 ( 誤り検出 訂正符号 変調 IP) 符号化技術の基本 ( 量子化 予測 変換 圧縮 ) 音声分析 合成 認識 強調 音楽信号処理統計的信号処理の基礎
第 3 回 音声音響信号処理 ( 線形予測分析と自己回帰モデル ) 亀岡弘和 東京大学大学院情報理工学系研究科日本電信電話株式会社 NTT コミュニケーション科学基礎研究所 講義内容 ( キーワード ) 信号処理 符号化 標準化の実用システム例の紹介情報通信の基本 ( 誤り検出 訂正符号 変調 IP) 符号化技術の基本 ( 量子化 予測 変換 圧縮 ) 音声分析 合成 認識 強調 音楽信号処理統計的信号処理の基礎
システム工学実験 パラメータ推定手順
 システム工学実験パラメータ推定手順 大木健太郎 2014/11/14 2014 年度システム工学実験 : フレキシブルリンク 1 アウトライン 1. 線形システムと周波数情報 2. パラメータ推定 3. 実際の手順 2014/11/14 2014 年度システム工学実験 : フレキシブルリンク 2 線形時不変システムと伝達関数 入力と出力の関係が線形な定係数微分方程式で与えられるとき, この方程式を線形時不変システムという
システム工学実験パラメータ推定手順 大木健太郎 2014/11/14 2014 年度システム工学実験 : フレキシブルリンク 1 アウトライン 1. 線形システムと周波数情報 2. パラメータ推定 3. 実際の手順 2014/11/14 2014 年度システム工学実験 : フレキシブルリンク 2 線形時不変システムと伝達関数 入力と出力の関係が線形な定係数微分方程式で与えられるとき, この方程式を線形時不変システムという
スライド 1
 データ解析特論重回帰分析編 2017 年 7 月 10 日 ( 月 )~ 情報エレクトロニクスコース横田孝義 1 ( 単 ) 回帰分析 単回帰分析では一つの従属変数 ( 目的変数 ) を 一つの独立変数 ( 説明変数 ) で予測する事を考える 具体的には y = a + bx という回帰直線 ( モデル ) でデータを代表させる このためにデータからこの回帰直線の切片 (a) と傾き (b) を最小
データ解析特論重回帰分析編 2017 年 7 月 10 日 ( 月 )~ 情報エレクトロニクスコース横田孝義 1 ( 単 ) 回帰分析 単回帰分析では一つの従属変数 ( 目的変数 ) を 一つの独立変数 ( 説明変数 ) で予測する事を考える 具体的には y = a + bx という回帰直線 ( モデル ) でデータを代表させる このためにデータからこの回帰直線の切片 (a) と傾き (b) を最小
Microsoft Word - reg.doc
 回帰分析 単回帰 麻生良文. 回帰分析の前提 次のようなモデルを考える 単回帰モデル : mple regreo moel : 被説明変数 eple vrble 従属変数 epeet vrble regre : 説明変数 epltor vrble 独立変数 epeet vrble regreor : 誤差項 error term 撹乱項 trbe term emple Kee 型消費関数 C YD
回帰分析 単回帰 麻生良文. 回帰分析の前提 次のようなモデルを考える 単回帰モデル : mple regreo moel : 被説明変数 eple vrble 従属変数 epeet vrble regre : 説明変数 epltor vrble 独立変数 epeet vrble regreor : 誤差項 error term 撹乱項 trbe term emple Kee 型消費関数 C YD
統計学 - 社会統計の基礎 - 正規分布 標準正規分布累積分布関数の逆関数 t 分布正規分布に従うサンプルの平均の信頼区間 担当 : 岸 康人 資料ページ :
 統計学 - 社会統計の基礎 - 正規分布 標準正規分布累積分布関数の逆関数 t 分布正規分布に従うサンプルの平均の信頼区間 担当 : 岸 康人 資料ページ : https://goo.gl/qw1djw 正規分布 ( 復習 ) 正規分布 (Normal Distribution)N (μ, σ 2 ) 別名 : ガウス分布 (Gaussian Distribution) 密度関数 Excel:= NORM.DIST
統計学 - 社会統計の基礎 - 正規分布 標準正規分布累積分布関数の逆関数 t 分布正規分布に従うサンプルの平均の信頼区間 担当 : 岸 康人 資料ページ : https://goo.gl/qw1djw 正規分布 ( 復習 ) 正規分布 (Normal Distribution)N (μ, σ 2 ) 別名 : ガウス分布 (Gaussian Distribution) 密度関数 Excel:= NORM.DIST
Microsoft PowerPoint - 三次元座標測定 ppt
 冗長座標測定機 ()( 三次元座標計測 ( 第 9 回 ) 5 年度大学院講義 6 年 月 7 日 冗長性を持つ 次元座標測定機 次元 辺測量 : 冗長性を出すために つのレーザトラッカを配置し, キャッツアイまでの距離から座標を測定する つのカメラ ( 次元的なカメラ ) とレーザスキャナ : つの角度測定システムによる座標測定 つの回転関節による 次元 自由度多関節機構 高増潔東京大学工学系研究科精密機械工学専攻
冗長座標測定機 ()( 三次元座標計測 ( 第 9 回 ) 5 年度大学院講義 6 年 月 7 日 冗長性を持つ 次元座標測定機 次元 辺測量 : 冗長性を出すために つのレーザトラッカを配置し, キャッツアイまでの距離から座標を測定する つのカメラ ( 次元的なカメラ ) とレーザスキャナ : つの角度測定システムによる座標測定 つの回転関節による 次元 自由度多関節機構 高増潔東京大学工学系研究科精密機械工学専攻
memo
 数理情報工学特論第一 機械学習とデータマイニング 4 章 : 教師なし学習 3 かしまひさし 鹿島久嗣 ( 数理 6 研 ) kashima@mist.i.~ DEPARTMENT OF MATHEMATICAL INFORMATICS 1 グラフィカルモデルについて学びます グラフィカルモデル グラフィカルラッソ グラフィカルラッソの推定アルゴリズム 2 グラフィカルモデル 3 教師なし学習の主要タスクは
数理情報工学特論第一 機械学習とデータマイニング 4 章 : 教師なし学習 3 かしまひさし 鹿島久嗣 ( 数理 6 研 ) kashima@mist.i.~ DEPARTMENT OF MATHEMATICAL INFORMATICS 1 グラフィカルモデルについて学びます グラフィカルモデル グラフィカルラッソ グラフィカルラッソの推定アルゴリズム 2 グラフィカルモデル 3 教師なし学習の主要タスクは
Microsoft Word - Time Series Basic - Modeling.doc
 時系列解析入門 モデリング. 確率分布と統計的モデル が確率変数 (radom varable のとき すべての実数 R に対して となる確 率 Prob( が定められる これを の関数とみなして G( Prob ( とあらわすとき G( を確率変数 の分布関数 (probablt dstrbuto ucto と呼 ぶ 時系列解析で用いられる確率変数は通常連続型と呼ばれるもので その分布関数は (
時系列解析入門 モデリング. 確率分布と統計的モデル が確率変数 (radom varable のとき すべての実数 R に対して となる確 率 Prob( が定められる これを の関数とみなして G( Prob ( とあらわすとき G( を確率変数 の分布関数 (probablt dstrbuto ucto と呼 ぶ 時系列解析で用いられる確率変数は通常連続型と呼ばれるもので その分布関数は (
第6章 実験モード解析
 第 6 章実験モード解析 6. 実験モード解析とは 6. 有限自由度系の実験モード解析 6.3 連続体の実験モード解析 6. 実験モード解析とは 実験モード解析とは加振実験によって測定された外力と応答を用いてモードパラメータ ( 固有振動数, モード減衰比, 正規固有モードなど ) を求める ( 同定する ) 方法である. 力計 試験体 変位計 / 加速度計 実験モード解析の概念 時間領域データを利用する方法
第 6 章実験モード解析 6. 実験モード解析とは 6. 有限自由度系の実験モード解析 6.3 連続体の実験モード解析 6. 実験モード解析とは 実験モード解析とは加振実験によって測定された外力と応答を用いてモードパラメータ ( 固有振動数, モード減衰比, 正規固有モードなど ) を求める ( 同定する ) 方法である. 力計 試験体 変位計 / 加速度計 実験モード解析の概念 時間領域データを利用する方法
集中理論談話会 #9 Bhat, C.R., Sidharthan, R.: A simulation evaluation of the maximum approximate composite marginal likelihood (MACML) estimator for mixed mu
 estimator for mixed mu") 集中理論談話会 #9 Bhat, C.R., Sidharthan, R.: A simulation evaluation of the maximum approximate composite marginal likelihood (MACML) estimator for mixed multinomial probit models, Transportation Research Part
集中理論談話会 #9 Bhat, C.R., Sidharthan, R.: A simulation evaluation of the maximum approximate composite marginal likelihood (MACML) estimator for mixed multinomial probit models, Transportation Research Part
Microsoft Word - å“Ÿåłžå¸°173.docx
 回帰分析 ( その 3) 経済情報処理 価格弾力性の推定ある商品について その購入量を w 単価を p とし それぞれの変化量を w p で表 w w すことにする この時 この商品の価格弾力性 は により定義される これ p p は p が 1 パーセント変化した場合に w が何パーセント変化するかを示したものである ここで p を 0 に近づけていった極限を考えると d ln w 1 dw dw
回帰分析 ( その 3) 経済情報処理 価格弾力性の推定ある商品について その購入量を w 単価を p とし それぞれの変化量を w p で表 w w すことにする この時 この商品の価格弾力性 は により定義される これ p p は p が 1 パーセント変化した場合に w が何パーセント変化するかを示したものである ここで p を 0 に近づけていった極限を考えると d ln w 1 dw dw
Microsoft Word - 5章摂動法.doc
 5 章摂動法 ( 次の Moller-Plesset (MP) 法のために ) // 水素原子など 電子系を除いては 原子系の Schrödiger 方程式を解析的に解くことはできない 分子系の Schrödiger 方程式の正確な数値解を求めることも困難である そこで Hartree-Fock(H-F) 法を導入した H-F 法は Schrödiger 方程式が与える全エネルギーの 99% を再現することができる優れた近似方法である
5 章摂動法 ( 次の Moller-Plesset (MP) 法のために ) // 水素原子など 電子系を除いては 原子系の Schrödiger 方程式を解析的に解くことはできない 分子系の Schrödiger 方程式の正確な数値解を求めることも困難である そこで Hartree-Fock(H-F) 法を導入した H-F 法は Schrödiger 方程式が与える全エネルギーの 99% を再現することができる優れた近似方法である
例 e 指数関数的に減衰する信号を h( a < + a a すると, それらのラプラス変換は, H ( ) { e } e インパルス応答が h( a < ( ただし a >, U( ) { } となるシステムにステップ信号 ( y( のラプラス変換 Y () は, Y ( ) H ( ) X (
 { e } e インパルス応答が h( a < ( ただし a >, U( ) { } となるシステムにステップ信号 ( y( のラプラス変換 Y () は, Y ( ) H ( ) X (") 第 週ラプラス変換 教科書 p.34~ 目標ラプラス変換の定義と意味を理解する フーリエ変換や Z 変換と並ぶ 信号解析やシステム設計における重要なツール ラプラス変換は波動現象や電気回路など様々な分野で 微分方程式を解くために利用されてきた ラプラス変換を用いることで微分方程式は代数方程式に変換される また 工学上使われる主要な関数のラプラス変換は簡単な形の関数で表されるので これを ラプラス変換表
第 週ラプラス変換 教科書 p.34~ 目標ラプラス変換の定義と意味を理解する フーリエ変換や Z 変換と並ぶ 信号解析やシステム設計における重要なツール ラプラス変換は波動現象や電気回路など様々な分野で 微分方程式を解くために利用されてきた ラプラス変換を用いることで微分方程式は代数方程式に変換される また 工学上使われる主要な関数のラプラス変換は簡単な形の関数で表されるので これを ラプラス変換表
Microsoft PowerPoint - NA03-09black.ppt
 きょうの講義 数値 記号処理 2003.2.6 櫻井彰人 NumSymbol@soft.ae.keo.ac.jp http://www.sakura.comp.ae.keo.ac.jp/ 数値計算手法の定石 多項式近似 ( 復習 )» 誤差と手間の解析も 漸化式» 非線型方程式の求解 数値演算上の誤差 数値計算上の誤差 打ち切り誤差 (truncaton error)» 使う公式を有限項で打ち切る
きょうの講義 数値 記号処理 2003.2.6 櫻井彰人 NumSymbol@soft.ae.keo.ac.jp http://www.sakura.comp.ae.keo.ac.jp/ 数値計算手法の定石 多項式近似 ( 復習 )» 誤差と手間の解析も 漸化式» 非線型方程式の求解 数値演算上の誤差 数値計算上の誤差 打ち切り誤差 (truncaton error)» 使う公式を有限項で打ち切る
1. 線形シフト不変システムと z 変換 ここで言う システム とは? 入力数列 T[ ] 出力数列 一意変換 ( 演算子 ) 概念的には,, x 2, x 1, x 0, x 1, x 2, を入力すると, y 2, y 1, y 0, y 1, y 2, が出力される. 線形システム : 線形シ
![1. 線形シフト不変システムと z 変換 ここで言う システム とは? 入力数列 T[ ] 出力数列 一意変換 ( 演算子 ) 概念的には,, x 2, x 1, x 0, x 1, x 2, を入力すると, y 2, y 1, y 0, y 1, y 2, が出力される. 線形システム : 線形シ](/thumbs/88/116737326.jpg "1. 線形シフト不変システムと z 変換 ここで言う システム とは? 入力数列 T[ ] 出力数列 一意変換 ( 演算子 ) 概念的には,, x 2, x 1, x 0, x 1, x 2, を入力すると, y 2, y 1, y 0, y 1, y 2, が出力される. 線形システム : 線形シ") 1. 線形シフト不変システムと z 変換 ここで言う システム とは? 入力数列 T[ ] 出力数列 一意変換 ( 演算子 ) 概念的には,, x 2, x 1, x, x1, x2, を入力すると, y 2, y 1, y, y1, y2, が出力される. 線形システム : 線形システムの例 x nxn 1 yn= 2 線形でないシステムの例 xn yn={ 2 xn xn othewise なぜ線形システム?
1. 線形シフト不変システムと z 変換 ここで言う システム とは? 入力数列 T[ ] 出力数列 一意変換 ( 演算子 ) 概念的には,, x 2, x 1, x, x1, x2, を入力すると, y 2, y 1, y, y1, y2, が出力される. 線形システム : 線形システムの例 x nxn 1 yn= 2 線形でないシステムの例 xn yn={ 2 xn xn othewise なぜ線形システム?
Excelを用いた行列演算
 を用いた行列演算 ( 統計専門課程国民 県民経済計算の受講に向けて ) 総務省統計研究研修所 この教材の内容について計量経済学における多くの経済モデルは連立方程式を用いて記述されています この教材は こうした科目の演習においてそうした連立方程式の計算をExcelで行う際の技能を補足するものです 冒頭 そもそもどういう場面で連立方程式が登場するのかについて概括的に触れ なぜ この教材で連立方程式の解法について事前に学んでおく必要があるのか理解していただこうと思います
を用いた行列演算 ( 統計専門課程国民 県民経済計算の受講に向けて ) 総務省統計研究研修所 この教材の内容について計量経済学における多くの経済モデルは連立方程式を用いて記述されています この教材は こうした科目の演習においてそうした連立方程式の計算をExcelで行う際の技能を補足するものです 冒頭 そもそもどういう場面で連立方程式が登場するのかについて概括的に触れ なぜ この教材で連立方程式の解法について事前に学んでおく必要があるのか理解していただこうと思います
PowerPoint Presentation
 応用数学 Ⅱ (7) 7 連立微分方程式の立て方と解法. 高階微分方程式による解法. ベクトル微分方程式による解法 3. 演算子による解法 連立微分方程式 未知数が複数個あり, 未知数の数だけ微分方程式が与えられている場合, これらを連立微分方程式という. d d 解法 () 高階微分方程式化による解法 つの方程式から つの未知数を消去して, 未知数が つの方程式に変換 のみの方程式にするために,
応用数学 Ⅱ (7) 7 連立微分方程式の立て方と解法. 高階微分方程式による解法. ベクトル微分方程式による解法 3. 演算子による解法 連立微分方程式 未知数が複数個あり, 未知数の数だけ微分方程式が与えられている場合, これらを連立微分方程式という. d d 解法 () 高階微分方程式化による解法 つの方程式から つの未知数を消去して, 未知数が つの方程式に変換 のみの方程式にするために,
untitled
 に, 月次モデルの場合でも四半期モデルの場合でも, シミュレーション期間とは無関係に一様に RMSPE を最小にするバンドの設定法は存在しないということである 第 2 は, 表で与えた 2 つの期間及びすべての内生変数を見渡して, 全般的にパフォーマンスのよいバンドの設定法は, 最適固定バンドと最適可変バンドのうちの M 2, Q2 である いずれにしても, 以上述べた 3 つのバンド設定法は若干便宜的なものと言わざるを得ない
に, 月次モデルの場合でも四半期モデルの場合でも, シミュレーション期間とは無関係に一様に RMSPE を最小にするバンドの設定法は存在しないということである 第 2 は, 表で与えた 2 つの期間及びすべての内生変数を見渡して, 全般的にパフォーマンスのよいバンドの設定法は, 最適固定バンドと最適可変バンドのうちの M 2, Q2 である いずれにしても, 以上述べた 3 つのバンド設定法は若干便宜的なものと言わざるを得ない
Microsoft PowerPoint - S11_1 2010Econometrics [互換モード]
![Microsoft PowerPoint - S11_1 2010Econometrics [互換モード]](/thumbs/79/79771572.jpg "Microsoft PowerPoint - S11_1 2010Econometrics [互換モード]") S11_1 計量経済学 一般化古典的回帰モデル -3 1 図 7-3 不均一分散の検定と想定の誤り 想定の誤りと不均一分散均一分散を棄却 3つの可能性 1. 不均一分散がある. 不均一分散はないがモデルの想定に誤り 3. 両者が同時に起きている 想定に誤り不均一分散を 検出 したら散布図に戻り関数形の想定や説明変数の選択を再検討 残差 残差 Y 真の関係 e e 線形回帰 X X 1 実行可能な一般化最小二乗法
S11_1 計量経済学 一般化古典的回帰モデル -3 1 図 7-3 不均一分散の検定と想定の誤り 想定の誤りと不均一分散均一分散を棄却 3つの可能性 1. 不均一分散がある. 不均一分散はないがモデルの想定に誤り 3. 両者が同時に起きている 想定に誤り不均一分散を 検出 したら散布図に戻り関数形の想定や説明変数の選択を再検討 残差 残差 Y 真の関係 e e 線形回帰 X X 1 実行可能な一般化最小二乗法
微分方程式による現象記述と解きかた
 微分方程式による現象記述と解きかた 土木工学 : 公共諸施設 構造物の有用目的にむけた合理的な実現をはかる方法 ( 技術 ) に関する学 橋梁 トンネル ダム 道路 港湾 治水利水施設 安全化 利便化 快適化 合法則的 経済的 自然および人口素材によって作られた 質量保存則 構造物の自然的な性質 作用 ( 外力による応答 ) エネルギー則 の解明 社会的諸現象のうち マスとしての移動 流通 運動量則
微分方程式による現象記述と解きかた 土木工学 : 公共諸施設 構造物の有用目的にむけた合理的な実現をはかる方法 ( 技術 ) に関する学 橋梁 トンネル ダム 道路 港湾 治水利水施設 安全化 利便化 快適化 合法則的 経済的 自然および人口素材によって作られた 質量保存則 構造物の自然的な性質 作用 ( 外力による応答 ) エネルギー則 の解明 社会的諸現象のうち マスとしての移動 流通 運動量則
データ解析
 データ解析 ( 前期 ) 最小二乗法 向井厚志 005 年度テキスト 0 データ解析 - 最小二乗法 - 目次 第 回 Σ の計算 第 回ヒストグラム 第 3 回平均と標準偏差 6 第 回誤差の伝播 8 第 5 回正規分布 0 第 6 回最尤性原理 第 7 回正規分布の 分布の幅 第 8 回最小二乗法 6 第 9 回最小二乗法の練習 8 第 0 回最小二乗法の推定誤差 0 第 回推定誤差の計算 第
データ解析 ( 前期 ) 最小二乗法 向井厚志 005 年度テキスト 0 データ解析 - 最小二乗法 - 目次 第 回 Σ の計算 第 回ヒストグラム 第 3 回平均と標準偏差 6 第 回誤差の伝播 8 第 5 回正規分布 0 第 6 回最尤性原理 第 7 回正規分布の 分布の幅 第 8 回最小二乗法 6 第 9 回最小二乗法の練習 8 第 0 回最小二乗法の推定誤差 0 第 回推定誤差の計算 第
 1 911 9001030 9:00 A B C D E F G H I J K L M 1A0900 1B0900 1C0900 1D0900 1E0900 1F0900 1G0900 1H0900 1I0900 1J0900 1K0900 1L0900 1M0900 9:15 1A0915 1B0915 1C0915 1D0915 1E0915 1F0915 1G0915 1H0915 1I0915
1 911 9001030 9:00 A B C D E F G H I J K L M 1A0900 1B0900 1C0900 1D0900 1E0900 1F0900 1G0900 1H0900 1I0900 1J0900 1K0900 1L0900 1M0900 9:15 1A0915 1B0915 1C0915 1D0915 1E0915 1F0915 1G0915 1H0915 1I0915
1.民営化
 参考資料 最小二乗法 数学的性質 経済統計分析 3 年度秋学期 回帰分析と最小二乗法 被説明変数 の動きを説明変数 の動きで説明 = 回帰分析 説明変数がつ 単回帰 説明変数がつ以上 重回帰 被説明変数 従属変数 係数 定数項傾き 説明変数 独立変数 残差... で説明できる部分 説明できない部分 説明できない部分が小さくなるように回帰式の係数 を推定する有力な方法 = 最小二乗法 最小二乗法による回帰の考え方
参考資料 最小二乗法 数学的性質 経済統計分析 3 年度秋学期 回帰分析と最小二乗法 被説明変数 の動きを説明変数 の動きで説明 = 回帰分析 説明変数がつ 単回帰 説明変数がつ以上 重回帰 被説明変数 従属変数 係数 定数項傾き 説明変数 独立変数 残差... で説明できる部分 説明できない部分 説明できない部分が小さくなるように回帰式の係数 を推定する有力な方法 = 最小二乗法 最小二乗法による回帰の考え方
Microsoft Word - thesis.doc
 剛体の基礎理論 -. 剛体の基礎理論初めに本論文で大域的に使用する記号を定義する. 使用する記号トルク撃力力角運動量角速度姿勢対角化された慣性テンソル慣性テンソル運動量速度位置質量時間 J W f F P p .. 質点の並進運動 質点は位置 と速度 P を用いる. ニュートンの運動方程式 という状態を持つ. 但し ここでは速度ではなく運動量 F P F.... より質点の運動は既に明らかであり 質点の状態ベクトル
剛体の基礎理論 -. 剛体の基礎理論初めに本論文で大域的に使用する記号を定義する. 使用する記号トルク撃力力角運動量角速度姿勢対角化された慣性テンソル慣性テンソル運動量速度位置質量時間 J W f F P p .. 質点の並進運動 質点は位置 と速度 P を用いる. ニュートンの運動方程式 という状態を持つ. 但し ここでは速度ではなく運動量 F P F.... より質点の運動は既に明らかであり 質点の状態ベクトル
Microsoft Word doc
 . 正規線形モデルのベイズ推定翠川 大竹距離減衰式 (PGA(Midorikawa, S., and Ohtake, Y. (, Attenuation relationships of peak ground acceleration and velocity considering attenuation characteristics for shallow and deeper earthquakes,
. 正規線形モデルのベイズ推定翠川 大竹距離減衰式 (PGA(Midorikawa, S., and Ohtake, Y. (, Attenuation relationships of peak ground acceleration and velocity considering attenuation characteristics for shallow and deeper earthquakes,
1/30 平成 29 年 3 月 24 日 ( 金 ) 午前 11 時 25 分第三章フェルミ量子場 : スピノール場 ( 次元あり ) 第三章フェルミ量子場 : スピノール場 フェルミ型 ボーズ量子場のエネルギーは 第二章ボーズ量子場 : スカラー場 の (2.18) より ˆ dp 1 1 =
 午前 11 時 25 分第三章フェルミ量子場 : スピノール場 ( 次元あり ) 第三章フェルミ量子場 : スピノール場 フェルミ型 ボーズ量子場のエネルギーは 第二章ボーズ量子場 : スカラー場 の (2.18) より ˆ dp 1 1 =") / 平成 9 年 月 日 ( 金 午前 時 5 分第三章フェルミ量子場 : スピノール場 ( 次元あり 第三章フェルミ量子場 : スピノール場 フェルミ型 ボーズ量子場のエネルギーは 第二章ボーズ量子場 : スカラー場 の (.8 より ˆ ( ( ( q -, ( ( c ( H c c ë é ù û - Ü + c ( ( - に限る (. である 一方 フェルミ型は 成分をもち その成分を,,,,
/ 平成 9 年 月 日 ( 金 午前 時 5 分第三章フェルミ量子場 : スピノール場 ( 次元あり 第三章フェルミ量子場 : スピノール場 フェルミ型 ボーズ量子場のエネルギーは 第二章ボーズ量子場 : スカラー場 の (.8 より ˆ ( ( ( q -, ( ( c ( H c c ë é ù û - Ü + c ( ( - に限る (. である 一方 フェルミ型は 成分をもち その成分を,,,,
以下 変数の上のドットは時間に関する微分を表わしている (ex. 2 dx d x x, x 2 dt dt ) 付録 E 非線形微分方程式の平衡点の安定性解析 E-1) 非線形方程式の線形近似特に言及してこなかったが これまでは線形微分方程式 ( x や x, x などがすべて 1 次で なおかつ
 付録 E 非線形微分方程式の平衡点の安定性解析 E-1) 非線形方程式の線形近似特に言及してこなかったが これまでは線形微分方程式 ( x や x, x などがすべて 1 次で なおかつ") 以下 変数の上のドットは時間に関する微分を表わしている (e. d d, dt dt ) 付録 E 非線形微分方程式の平衡点の安定性解析 E-) 非線形方程式の線形近似特に言及してこなかったが これまでは線形微分方程式 ( や, などがすべて 次で なおかつそれらの係数が定数であるような微分方程式 ) に対して安定性の解析を行ってきた しかしながら 実際には非線形の微分方程式で記述される現象も多く存在する
以下 変数の上のドットは時間に関する微分を表わしている (e. d d, dt dt ) 付録 E 非線形微分方程式の平衡点の安定性解析 E-) 非線形方程式の線形近似特に言及してこなかったが これまでは線形微分方程式 ( や, などがすべて 次で なおかつそれらの係数が定数であるような微分方程式 ) に対して安定性の解析を行ってきた しかしながら 実際には非線形の微分方程式で記述される現象も多く存在する
21世紀型パラメータ設計―標準SN比の活用―
 世紀のパラメータ設計ースイッチ機構のモデル化ー 接点 ゴム 変位 スイッチ動作前 スイッチ動作後 反転ばねでスイッチの クリック感 を実現した構造 世紀型パラメータ設計 標準 SN 比の活用 0 世紀の品質工学においては,SN 比の中に, 信号因子の乱れである 次誤差 (S res ) もノイズの効果の中に加えて評価してきた.のパラメータ設計の例では, 比例関係が理想であるから, 次誤差も誤差の仲間と考えてもよかったが,
世紀のパラメータ設計ースイッチ機構のモデル化ー 接点 ゴム 変位 スイッチ動作前 スイッチ動作後 反転ばねでスイッチの クリック感 を実現した構造 世紀型パラメータ設計 標準 SN 比の活用 0 世紀の品質工学においては,SN 比の中に, 信号因子の乱れである 次誤差 (S res ) もノイズの効果の中に加えて評価してきた.のパラメータ設計の例では, 比例関係が理想であるから, 次誤差も誤差の仲間と考えてもよかったが,
ディジタル信号処理
 ディジタルフィルタの設計法. 逆フィルター. 直線位相 FIR フィルタの設計. 窓関数法による FIR フィルタの設計.5 時間領域での FIR フィルタの設計 3. アナログフィルタを基にしたディジタル IIR フィルタの設計法 I 4. アナログフィルタを基にしたディジタル IIR フィルタの設計法 II 5. 双 次フィルタ LI 離散時間システムの基礎式の証明 [ ] 4. ] [ ]*
ディジタルフィルタの設計法. 逆フィルター. 直線位相 FIR フィルタの設計. 窓関数法による FIR フィルタの設計.5 時間領域での FIR フィルタの設計 3. アナログフィルタを基にしたディジタル IIR フィルタの設計法 I 4. アナログフィルタを基にしたディジタル IIR フィルタの設計法 II 5. 双 次フィルタ LI 離散時間システムの基礎式の証明 [ ] 4. ] [ ]*
OpenFOAM(R) ソースコード入門 pt1 熱伝導方程式の解法から有限体積法の実装について考える 前編 : 有限体積法の基礎確認 2013/11/17 オープンCAE 富山富山県立大学中川慎二
 ソースコード入門 pt1 熱伝導方程式の解法から有限体積法の実装について考える 前編 : 有限体積法の基礎確認 2013/11/17 オープンCAE 富山富山県立大学中川慎二") OpenFOAM(R) ソースコード入門 pt1 熱伝導方程式の解法から有限体積法の実装について考える 前編 : 有限体積法の基礎確認 2013/11/17 オープンCAE 勉強会 @ 富山富山県立大学中川慎二 * OpenFOAM のソースコードでは, 基礎式を偏微分方程式の形で記述する.OpenFOAM 内部では, 有限体積法を使ってこの微分方程式を解いている. どのようにして, 有限体積法に基づく離散化が実現されているのか,
OpenFOAM(R) ソースコード入門 pt1 熱伝導方程式の解法から有限体積法の実装について考える 前編 : 有限体積法の基礎確認 2013/11/17 オープンCAE 勉強会 @ 富山富山県立大学中川慎二 * OpenFOAM のソースコードでは, 基礎式を偏微分方程式の形で記述する.OpenFOAM 内部では, 有限体積法を使ってこの微分方程式を解いている. どのようにして, 有限体積法に基づく離散化が実現されているのか,
CBRC CBRC DNA
 2001 3 2001 4 2004 4 CBRC CBRC DNA 生命現象のシステム的理解のために 生命の単位 細胞は非常に複雑 システム バイオロジー 生命現象を記述するモデル 細胞はいつ なにをするのか 生命現象は遺伝子が制御している 遺伝子ネットワーク 遺伝子発現を記述するモデル 構造解明 医療技術 創薬 シミュレーション 2001 2002 2003 2004 2005 1. 2001-2005
2001 3 2001 4 2004 4 CBRC CBRC DNA 生命現象のシステム的理解のために 生命の単位 細胞は非常に複雑 システム バイオロジー 生命現象を記述するモデル 細胞はいつ なにをするのか 生命現象は遺伝子が制御している 遺伝子ネットワーク 遺伝子発現を記述するモデル 構造解明 医療技術 創薬 シミュレーション 2001 2002 2003 2004 2005 1. 2001-2005
今週の内容 後半全体のおさらい ラグランジュの運動方程式の導出 リンク機構のラグランジュの運動方程式 慣性行列 リンク機構のエネルギー保存則 エネルギー パワー 速度 力の関係 外力が作用する場合の運動方程式 粘性 粘性によるエネルギーの消散 慣性 粘性 剛性と微分方程式 拘束条件 ラグランジュの未
 力学 III GA 工業力学演習 X5 解析力学 5X 5 週目 立命館大学機械システム系 8 年度後期 今週の内容 後半全体のおさらい ラグランジュの運動方程式の導出 リンク機構のラグランジュの運動方程式 慣性行列 リンク機構のエネルギー保存則 エネルギー パワー 速度 力の関係 外力が作用する場合の運動方程式 粘性 粘性によるエネルギーの消散 慣性 粘性 剛性と微分方程式 拘束条件 ラグランジュの未定乗数法
力学 III GA 工業力学演習 X5 解析力学 5X 5 週目 立命館大学機械システム系 8 年度後期 今週の内容 後半全体のおさらい ラグランジュの運動方程式の導出 リンク機構のラグランジュの運動方程式 慣性行列 リンク機構のエネルギー保存則 エネルギー パワー 速度 力の関係 外力が作用する場合の運動方程式 粘性 粘性によるエネルギーの消散 慣性 粘性 剛性と微分方程式 拘束条件 ラグランジュの未定乗数法
(Microsoft PowerPoint - \221\34613\211\361)
") 計算力学 ~ 第 回弾性問題の有限要素解析 (Ⅱ)~ 修士 年後期 ( 選択科目 ) 担当 : 岩佐貴史 講義の概要 全 5 講義. 計算力学概論, ガイダンス. 自然現象の数理モデル化. 行列 場とその演算. 数値計算法 (Ⅰ) 5. 数値計算法 (Ⅱ) 6. 初期値 境界値問題 (Ⅰ) 7. 初期値 境界値問題 (Ⅱ) 8. マトリックス変位法による構造解析 9. トラス構造の有限要素解析. 重み付き残差法と古典的近似解法.
計算力学 ~ 第 回弾性問題の有限要素解析 (Ⅱ)~ 修士 年後期 ( 選択科目 ) 担当 : 岩佐貴史 講義の概要 全 5 講義. 計算力学概論, ガイダンス. 自然現象の数理モデル化. 行列 場とその演算. 数値計算法 (Ⅰ) 5. 数値計算法 (Ⅱ) 6. 初期値 境界値問題 (Ⅰ) 7. 初期値 境界値問題 (Ⅱ) 8. マトリックス変位法による構造解析 9. トラス構造の有限要素解析. 重み付き残差法と古典的近似解法.
混沌系工学特論 #5
 混沌系工学特論 #5 情報科学研究科井上純一 URL : htt://chaosweb.comlex.eng.hokudai.ac.j/~j_inoue/ Mirror : htt://www5.u.so-net.ne.j/j_inoue/index.html 平成 17 年 11 月 14 日第 5 回講義 デジタルデータの転送と復元再考 P ({ σ} ) = ex σ ( σσ ) < ij>
混沌系工学特論 #5 情報科学研究科井上純一 URL : htt://chaosweb.comlex.eng.hokudai.ac.j/~j_inoue/ Mirror : htt://www5.u.so-net.ne.j/j_inoue/index.html 平成 17 年 11 月 14 日第 5 回講義 デジタルデータの転送と復元再考 P ({ σ} ) = ex σ ( σσ ) < ij>
Microsoft PowerPoint pptx
 4.2 小信号パラメータ 1 電圧利得をどのように求めるか 電圧ー電流変換 入力信号の変化 dv BE I I e 1 v be の振幅から i b を求めるのは難しい? 電流増幅 電流ー電圧変換 di B di C h FE 電流と電圧の関係が指数関数になっているのが問題 (-RC), ただし RL がない場合 dv CE 出力信号の変化 2 pn 接合の非線形性への対処 I B 直流バイアスに対する抵抗
4.2 小信号パラメータ 1 電圧利得をどのように求めるか 電圧ー電流変換 入力信号の変化 dv BE I I e 1 v be の振幅から i b を求めるのは難しい? 電流増幅 電流ー電圧変換 di B di C h FE 電流と電圧の関係が指数関数になっているのが問題 (-RC), ただし RL がない場合 dv CE 出力信号の変化 2 pn 接合の非線形性への対処 I B 直流バイアスに対する抵抗
各学科 課程 専攻別開設授業科目 ( 教職関係 ) 総合情報学科 ( 昼間コース ) 中学校教諭 1 種免許状 ( 数学 ) 高等学校教諭 1 種免許状 ( 数学 ) 代数学 線形代数学第一 2 線形代数学第二 2 離散数学 2 応用代数学 2 オペレーションズ リサーチ基礎 2 数論アルゴリズム
 総合情報学科 ( 昼間コース ) 中学校教諭 1 種免許状 ( 数学 ) 高等学校教諭 1 種免許状 ( 数学 ) 代数学 線形代数学第一 2 線形代数学第二 2 離散数学 2 応用代数学 2 オペレーションズ リサーチ基礎 2 数論アルゴリズム") 免許状取得に必要な履修科目 教育職員免許法施行規則に 左に該当する本学の 履修 高等学校教諭 高等学校教諭 中学校教諭 定める修得を要する科目 開設科目及び単位数 年次 専修免許状 1 種免許状 1 種免許状 教職の意義等に関する科目教職論 2 1 年 2 単位 2 単位 2 単位 教 教育原理 2 1 年 職 に教育の基礎理論に関する科教育心理学 2 1 年 6 単位 6 単位 6 単位 関目 す
免許状取得に必要な履修科目 教育職員免許法施行規則に 左に該当する本学の 履修 高等学校教諭 高等学校教諭 中学校教諭 定める修得を要する科目 開設科目及び単位数 年次 専修免許状 1 種免許状 1 種免許状 教職の意義等に関する科目教職論 2 1 年 2 単位 2 単位 2 単位 教 教育原理 2 1 年 職 に教育の基礎理論に関する科教育心理学 2 1 年 6 単位 6 単位 6 単位 関目 す
<4D F736F F D2094F795AA95FB92F68EAE82CC89F082AB95FB E646F63>
 力学 A 金曜 限 : 松田 微分方程式の解き方 微分方程式の解き方のところが分からなかったという声が多いので プリントにまとめます 数学的に厳密な話はしていないので 詳しくは数学の常微分方程式を扱っているテキストを参照してください また os s は既知とします. 微分方程式の分類 常微分方程式とは 独立変数 と その関数 その有限次の導関数 がみたす方程式 F,,, = のことです 次までの導関数を含む方程式を
力学 A 金曜 限 : 松田 微分方程式の解き方 微分方程式の解き方のところが分からなかったという声が多いので プリントにまとめます 数学的に厳密な話はしていないので 詳しくは数学の常微分方程式を扱っているテキストを参照してください また os s は既知とします. 微分方程式の分類 常微分方程式とは 独立変数 と その関数 その有限次の導関数 がみたす方程式 F,,, = のことです 次までの導関数を含む方程式を
4 月 東京都立蔵前工業高等学校平成 30 年度教科 ( 工業 ) 科目 ( プログラミング技術 ) 年間授業計画 教科 :( 工業 ) 科目 :( プログラミング技術 ) 単位数 : 2 単位 対象学年組 :( 第 3 学年電気科 ) 教科担当者 :( 高橋寛 三枝明夫 ) 使用教科書 :( プロ
 科目 ( プログラミング技術 ) 年間授業計画 教科 :( 工業 ) 科目 :( プログラミング技術 ) 単位数 : 2 単位 対象学年組 :( 第 3 学年電気科 ) 教科担当者 :( 高橋寛 三枝明夫 ) 使用教科書 :( プロ") 4 東京都立蔵前工業高等学校平成 30 年度教科 ( 工業 ) 科目 ( プログラミング技術 ) 年間授業計画 教科 :( 工業 ) 科目 :( プログラミング技術 ) 単位数 : 2 単位 対象学年組 :( 第 3 学年電気科 ) 教科担当者 :( 高橋寛 三枝明夫 ) 使用教科書 :( プログラミング技術 工業 333 実教出版 ) 共通 : 科目 プログラミング技術 のオリエンテーション プログラミング技術は
4 東京都立蔵前工業高等学校平成 30 年度教科 ( 工業 ) 科目 ( プログラミング技術 ) 年間授業計画 教科 :( 工業 ) 科目 :( プログラミング技術 ) 単位数 : 2 単位 対象学年組 :( 第 3 学年電気科 ) 教科担当者 :( 高橋寛 三枝明夫 ) 使用教科書 :( プログラミング技術 工業 333 実教出版 ) 共通 : 科目 プログラミング技術 のオリエンテーション プログラミング技術は
MFIV となる Volatility Index Japan(VXJ) を日次で算出 公表している VIX 等と同様にTは約 1 ヶ月に設定 近似ターゲットは V t である 現行バージョンの計算方法は CBOE 方式に準じているが CSFI ではより高い精度で V t を近似する方法を研究開発中
 を日次で算出 公表している VIX 等と同様にTは約 1 ヶ月に設定 近似ターゲットは V t である 現行バージョンの計算方法は CBOE 方式に準じているが CSFI ではより高い精度で V t を近似する方法を研究開発中") 日本版ボラティリティ インデックス VXJ の時系列特性 大阪大学金融 保険教育研究センター石田功 1 ボラティリティ インデックス 資産価格のボラティリティが デリバティイブの価格付けやヘッジ アセット アロケーション等 投資意思決定のあらゆる分野においてキーとなる重要な要素であることはいうまでもない しかしながら ボラティリティは直接観測できないため 資産価格の過去の時系列データから統計的に推定したものや
日本版ボラティリティ インデックス VXJ の時系列特性 大阪大学金融 保険教育研究センター石田功 1 ボラティリティ インデックス 資産価格のボラティリティが デリバティイブの価格付けやヘッジ アセット アロケーション等 投資意思決定のあらゆる分野においてキーとなる重要な要素であることはいうまでもない しかしながら ボラティリティは直接観測できないため 資産価格の過去の時系列データから統計的に推定したものや
音情報処理I
 音情報処理論 音声処理における信号処理 ~ 線形予測分析 ~ 東京大学大学院情報理工学系研究科 / 奈良先端大 猿渡洋 4 年 月 準備 :Z 変換 Z 変換 離散的な時系列の特性を解析する 手法 準備 : は離散時間波形 x x { x,..., x, x,..., x } 実数 定義 正 Z 変換 ; 時間領域から Z 領域へ ここで X x は サンプル時間遅れを表す演算子 定義 逆 Z 変換
音情報処理論 音声処理における信号処理 ~ 線形予測分析 ~ 東京大学大学院情報理工学系研究科 / 奈良先端大 猿渡洋 4 年 月 準備 :Z 変換 Z 変換 離散的な時系列の特性を解析する 手法 準備 : は離散時間波形 x x { x,..., x, x,..., x } 実数 定義 正 Z 変換 ; 時間領域から Z 領域へ ここで X x は サンプル時間遅れを表す演算子 定義 逆 Z 変換
スライド 1
 第 13 章系列データ 2015/9/20 夏合宿 PRML 輪読ゼミ B4 三木真理子 目次 2 1. 系列データと状態空間モデル 2. 隠れマルコフモデル 2.1 定式化とその性質 2.2 最尤推定法 2.3 潜在変数の系列を知るには 3. 線形動的システム この章の目標 : 系列データを扱う際に有効な状態空間モデルのうち 代表的な 2 例である隠れマルコフモデルと線形動的システムの性質を知り
第 13 章系列データ 2015/9/20 夏合宿 PRML 輪読ゼミ B4 三木真理子 目次 2 1. 系列データと状態空間モデル 2. 隠れマルコフモデル 2.1 定式化とその性質 2.2 最尤推定法 2.3 潜在変数の系列を知るには 3. 線形動的システム この章の目標 : 系列データを扱う際に有効な状態空間モデルのうち 代表的な 2 例である隠れマルコフモデルと線形動的システムの性質を知り
DVIOUT
 第 章 離散フーリエ変換 離散フーリエ変換 これまで 私たちは連続関数に対するフーリエ変換およびフーリエ積分 ( 逆フーリエ変換 ) について学んできました この節では フーリエ変換を離散化した離散フーリエ変換について学びましょう 自然現象 ( 音声 ) などを観測して得られる波 ( 信号値 ; 観測値 ) は 通常 電気信号による連続的な波として観測機器から出力されます しかしながら コンピュータはこの様な連続的な波を直接扱うことができないため
第 章 離散フーリエ変換 離散フーリエ変換 これまで 私たちは連続関数に対するフーリエ変換およびフーリエ積分 ( 逆フーリエ変換 ) について学んできました この節では フーリエ変換を離散化した離散フーリエ変換について学びましょう 自然現象 ( 音声 ) などを観測して得られる波 ( 信号値 ; 観測値 ) は 通常 電気信号による連続的な波として観測機器から出力されます しかしながら コンピュータはこの様な連続的な波を直接扱うことができないため
 早稲田大学大学院理工学研究科 博士論文概要 論文題目 Various statistical methods in time series analysis 時系列解析における種々の統計手法 申請者 天野友之 Tomoyuki AMANO 数理科学専攻数理統計学研究 007 年 月 時とともに変動する偶然量の観測値の系列である時系列の解析は近年 様々な統計手法が導入され自然工学 医学 経済学 など多方面で急速に発展している
早稲田大学大学院理工学研究科 博士論文概要 論文題目 Various statistical methods in time series analysis 時系列解析における種々の統計手法 申請者 天野友之 Tomoyuki AMANO 数理科学専攻数理統計学研究 007 年 月 時とともに変動する偶然量の観測値の系列である時系列の解析は近年 様々な統計手法が導入され自然工学 医学 経済学 など多方面で急速に発展している
JUSE-StatWorks/V5 活用ガイドブック
 4.6 薄膜金属材料の表面加工 ( 直積法 ) 直積法では, 内側に直交配列表または要因配置計画の M 個の実験, 外側に直交配列表または要因配置計画の N 個の実験をわりつけ, その組み合わせの M N のデータを解析します. 直積法を用いることにより, 内側計画の各列と全ての外側因子との交互作用を求めることができます. よって, 環境条件や使用条件のように制御が難しい ( 水準を指定できない )
4.6 薄膜金属材料の表面加工 ( 直積法 ) 直積法では, 内側に直交配列表または要因配置計画の M 個の実験, 外側に直交配列表または要因配置計画の N 個の実験をわりつけ, その組み合わせの M N のデータを解析します. 直積法を用いることにより, 内側計画の各列と全ての外側因子との交互作用を求めることができます. よって, 環境条件や使用条件のように制御が難しい ( 水準を指定できない )
C5 統計的時系列モデリング
 < 第 5 回 > 統計的時系列モデリング 統計数理研究所 川崎能典 kawasaki@ism.ac.jp 統計的時系列モデリング 概要 データサイエンティスト育成クラッシュコース データサイエンティストとして時系列解析を学ぶ際に知っておくべき体系について 定常 非定常 データの変換 平滑化事前分布 状態空間モデルをキーワードに学ぶ 1. 定常時系列 2. 定常から非定常へ : 変換の利用 3. 定常から非定常へ
< 第 5 回 > 統計的時系列モデリング 統計数理研究所 川崎能典 kawasaki@ism.ac.jp 統計的時系列モデリング 概要 データサイエンティスト育成クラッシュコース データサイエンティストとして時系列解析を学ぶ際に知っておくべき体系について 定常 非定常 データの変換 平滑化事前分布 状態空間モデルをキーワードに学ぶ 1. 定常時系列 2. 定常から非定常へ : 変換の利用 3. 定常から非定常へ
カイ二乗フィット検定、パラメータの誤差
 統計的データ解析 008 008.. 林田清 ( 大阪大学大学院理学研究科 ) 問題 C (, ) ( x xˆ) ( y yˆ) σ x πσ σ y y Pabx (, ;,,, ) ˆ y σx σ y = dx exp exp πσx ただし xy ˆ ˆ はyˆ = axˆ+ bであらわされる直線モデル上の点 ( ˆ) ( ˆ ) ( ) x x y ax b y ax b Pabx (,
統計的データ解析 008 008.. 林田清 ( 大阪大学大学院理学研究科 ) 問題 C (, ) ( x xˆ) ( y yˆ) σ x πσ σ y y Pabx (, ;,,, ) ˆ y σx σ y = dx exp exp πσx ただし xy ˆ ˆ はyˆ = axˆ+ bであらわされる直線モデル上の点 ( ˆ) ( ˆ ) ( ) x x y ax b y ax b Pabx (,
. 分析内容及びデータ () 分析内容中長期の代表的金利である円金利スワップを題材に 年 -5 年物のイールドスプレッドの変動を自己回帰誤差モデル * により時系列分析を行った * ) 自己回帰誤差モデル一般に自己回帰モデルは線形回帰モデルと同様な考え方で 外生変数の無いT 期間だけ遅れのある従属変
 分析内容中長期の代表的金利である円金利スワップを題材に 年 -5 年物のイールドスプレッドの変動を自己回帰誤差モデル * により時系列分析を行った * ) 自己回帰誤差モデル一般に自己回帰モデルは線形回帰モデルと同様な考え方で 外生変数の無いT 期間だけ遅れのある従属変") () 現在データは最大 5 営業日前までの自己データが受けたショック ( 変動要因 ) の影響を受け 易い ( 情報の有効性 ) 現在の金利変動は 過去のどのタイミングでのショック ( 変動要因 ) を引きずり変動しているのかの推測 ( 偏自己相関 ) また 将来の変動を予測する上で 政策金利変更等の ショックの持続性 はどの程度 将来の変動に影響を与えるか等の判別に役に立つ可能性がある (2) その中でも
() 現在データは最大 5 営業日前までの自己データが受けたショック ( 変動要因 ) の影響を受け 易い ( 情報の有効性 ) 現在の金利変動は 過去のどのタイミングでのショック ( 変動要因 ) を引きずり変動しているのかの推測 ( 偏自己相関 ) また 将来の変動を予測する上で 政策金利変更等の ショックの持続性 はどの程度 将来の変動に影響を与えるか等の判別に役に立つ可能性がある (2) その中でも
EBNと疫学
 推定と検定 57 ( 復習 ) 記述統計と推測統計 統計解析は大きく 2 つに分けられる 記述統計 推測統計 記述統計 観察集団の特性を示すもの 代表値 ( 平均値や中央値 ) や ばらつきの指標 ( 標準偏差など ) 図表を効果的に使う 推測統計 観察集団のデータから母集団の特性を 推定 する 平均 / 分散 / 係数値などの推定 ( 点推定 ) 点推定値のばらつきを調べる ( 区間推定 ) 検定統計量を用いた検定
推定と検定 57 ( 復習 ) 記述統計と推測統計 統計解析は大きく 2 つに分けられる 記述統計 推測統計 記述統計 観察集団の特性を示すもの 代表値 ( 平均値や中央値 ) や ばらつきの指標 ( 標準偏差など ) 図表を効果的に使う 推測統計 観察集団のデータから母集団の特性を 推定 する 平均 / 分散 / 係数値などの推定 ( 点推定 ) 点推定値のばらつきを調べる ( 区間推定 ) 検定統計量を用いた検定
Microsoft Word - Stattext07.doc
 7 章正規分布 正規分布 (ormal dstrbuto) は 偶発的なデータのゆらぎによって生じる統計学で最も基本的な確率分布です この章では正規分布についてその性質を詳しく見て行きましょう 7. 一般の正規分布正規分布は 平均と分散の つの量によって完全に特徴付けられています 平均 μ 分散 の正規分布は N ( μ, ) 分布とも書かれます ここに N は ormal の頭文字を 表わしています
7 章正規分布 正規分布 (ormal dstrbuto) は 偶発的なデータのゆらぎによって生じる統計学で最も基本的な確率分布です この章では正規分布についてその性質を詳しく見て行きましょう 7. 一般の正規分布正規分布は 平均と分散の つの量によって完全に特徴付けられています 平均 μ 分散 の正規分布は N ( μ, ) 分布とも書かれます ここに N は ormal の頭文字を 表わしています
<4D F736F F D FCD B90DB93AE96402E646F63>
 7 章摂動法講義のメモ 式が複雑なので 黒板を何度も修正したし 間違ったことも書いたので メモを置きます 摂動論の式の導出無摂動系 先ず 厳密に解けている Schrödiger 方程式を考える,,,3,... 3,,,3,... は状態を区別する整数であり 状態 はエネルギー順に並んでいる 即ち は基底状態 は励起状態である { m } は相互に規格直交条件が成立する k m k mdx km k
7 章摂動法講義のメモ 式が複雑なので 黒板を何度も修正したし 間違ったことも書いたので メモを置きます 摂動論の式の導出無摂動系 先ず 厳密に解けている Schrödiger 方程式を考える,,,3,... 3,,,3,... は状態を区別する整数であり 状態 はエネルギー順に並んでいる 即ち は基底状態 は励起状態である { m } は相互に規格直交条件が成立する k m k mdx km k
PowerPoint プレゼンテーション
 パーティクルフィルタ 理論と特性 11.1 パーティクルフィルタの理論的導出 状態遷移とマルコフ性 p x k x 1:k 1, y 1:k 1 = f x k x k 1 p y k x 1:k, y 1:k 1 k = 0,1, = h y k x k x 1:k x 1, x 2,, x k y 1:k y 1, y 2,, y k 確率分布で表現される現時刻の状態が, 前時刻までの状態と観測の条件付き確率によって定まる.
パーティクルフィルタ 理論と特性 11.1 パーティクルフィルタの理論的導出 状態遷移とマルコフ性 p x k x 1:k 1, y 1:k 1 = f x k x k 1 p y k x 1:k, y 1:k 1 k = 0,1, = h y k x k x 1:k x 1, x 2,, x k y 1:k y 1, y 2,, y k 確率分布で表現される現時刻の状態が, 前時刻までの状態と観測の条件付き確率によって定まる.