PowerPoint プレゼンテーション
|
|
|
- せせら ちづ
- 5 years ago
- Views:
Transcription
1 信号処理システム特論 本日の内容 適応フィルタ ( 時間領域 ) 適応アルゴリズム (LMS,NLMS,RLS) 適応フィルタの応用例
2 適応処理 非適応処理 : 状況によらずいつでも同じ処理 適応処理 : 状況に応じた適切な処理 高度な適応処理の例 雑音抑圧, 音響エコーキャンセラ, 騒音制御など
3 時間領域の適応フィルタ 誤差信号 与えられた手順に従ってフィルタ係数を更新し 自動的に所望の信号を得るフィルタ e が小さくなるようにフィルタ係数を更新 x 適応フィルタ y 所望信号 d 誤差信号 e
4 適応フィルタの内部構成 x フィルタ部 適応アルゴリズム フィルタ係数 y e フィルタ部 (FIR フィルタの場合 ) x M y フィルタ係数 {, 1, 2,..., 0 M } は時間によって変化
5 最適性基準 誤差パワーの最小化 J = E[ e 2 ] = E[{ d y } 2 ] E [ ] : 期待値 出力信号のベクトル表記 y = x 所望信号 適応フィルタの出力信号 = [ M ] x = [ x 1 x 2... x M + 1 x ] 誤差パワー J は係数に関する 2 次関数
6 評価関数 J ( 誤差パワー ) J = E[ e 2 ] = E[{ d J y y 2 } ] = x M+1 次元空間 1 â 1 â 0 評価関数 J のイメージ 0 唯一の最適解が存在 解析的に求めることが可能
7 Wiener 解 xd xx r R 1 = 0 = + = xx xd R r J 正規方程式を解くことで解を得ることが可能 E d E d E d d E d d E e E J ] x [x ] x [ ] [x ] [ ] ) x )( x [( ] [ 2 + = = = xx H dx xd d R r r J 2 + = σ ], x [x : ], [ : 2 xx d E R d d = E = σ 入力の自己相関行列 ] [x : ], x [d : xd dx d E r E r = = 入力と所望信号の相互相関ベクトル
8 反復近似解法 正規方程式を解く方法 : 自己相関行列を解くのは演算量大 計算資源の問題定常性の仮定も必要 通常の用途では非定常信号を扱う 代表的なもの : 解決策 反復近似 = 係数を少しづつ更新して, 最適解を得る LMS アルゴリズム (Lest Men Squre) NLMS アルゴリズム (Normlized LMS) RLS アルゴリズム (Recursive Lest Squre)
9 最急降下アルゴリズム 1 + = 更新量の決定法 勾配ベクトル : J ( 更新は勾配と逆方向 ) 更新量 = r R 1 xd + xx 1 1 = µ ( r xd + R xx 1 係数更新式 ) µ: ステップサイズ = + µ ( rxd Rxx 1 1 = 1 + µe[x ( d x 1)] e = d - 1 = 1 + µe[x e ] x ) J J 1 â 1 â 0 0 評価関数 J のイメージ 傾きの符号と逆の方向に更新 <m> 0 â 0 0 更新の方向係数更新のイメージ
10 LMS と NLMS アルゴリズム LMS アルゴリズム : 期待値の代わりに瞬時値を利用 係数更新式 = 1 + µ x 0 < µ < 2 / λ mx e mx λ : 入力の自己相関行列の最大固有値 R xx NLMS アルゴリズム :LMS を入力信号の平均電力で正規化 = 1 + µ ' 2 ( M 1 + 1) σ ステップサイズの設定が LMS より簡単 x e 0 < µ ' < 2 2 σ : 入力信号の分散
11 RLS アルゴリズム 現在までの入力サンプルの情報を用いて, 逆行列計算を逐時的に行う ステップサイズが自動的に決まる 初期値 : P 0 = α 1 I α : 任意の大きな整数 係数ベクトルの更新 : = 1 + g e ゲインベクトル : g 1 = P 1 x (1 + x P 1x ) 事前推定誤差 : e = d 1 x - 自己相関行列の逆行列の更新 : P = ( I g x ) P 1
12 各種適応アルゴリズムの特徴 アルゴリズム LMS NLMS 特徴 演算量は少ない ステップサイズに収束特性が大きく影響 有色信号で収束速度が低下 LMS よりもパラメータの設定が簡単 演算量 ( タップ数 :N=M+1) 2N 3N RLS 法 有色信号に対して白色雑音と同等の収束速度 演算量の関係から高次のタップ数が必要な音響用途の応用が困難 2N 2 適応フィルタの参考書 ) Ali H. Syed, Adptive Filters, Wiley.
13 その他の代表的な適応アルゴリズムの特徴 アルゴリズム 特徴 演算量 ( タップ数 :N) J-FHF (J- ユニタリアレイ形式を導入した J- 高速 H フィルタ ) FDAF ( 周波数領域 LMS) FAP ( 高速アフィン射影法 ) 収束速度が速い 有色信号で収束性能が高い 並列化可能なアルゴリズム 有色信号を擬似的に白色化し収束性能を向上連続的な動作と収束の安定性が両立しにくい FF と逆 FF の演算量 (N log2n) が必要 高次の射影次数に対する演算量を削減従来の AP 法の特性を保持誤差累積による性能劣化防止など安定性の改善が課題 7N 2N + N log2n 2N + 20Np (Np: 射影次数 )
14 適応フィルタの応用例
15 応用 1) システム同定 特性の分かっていない伝達系に既知の信号を入力し, その入力信号に対する出力信号からその伝達系がどのような特性であるかを推定する技術 Unnown System d x e A dptive filter y x : 入力 d: システム出力 y : フィルタ出力 e : 誤差信号

16 システム同定のシミュレーション Unnown System d δ x e A dptive filter y δ : 外乱
17 シミュレーション結果
18 各種法の収束特性 MSE ime
19 音響エコー応用 2) 音響エコーキャンセラへの応用 音響エコーキャンセラ携帯電話や固定電話のハンズフリー使用やインターネットによる Web 会議システムで使われているスピーカとマイクロホンを利用した双方向通信では音響エコーを抑制 除去する機能 マイク もしも ~ し もしも ~ し マイク もしも ~ し もしも ~ し 伝送路
20 音響エコー応用 2) 音響エコーキャンセラへの応用 伝送路 マイク もしも ~ し はいは ~ い マイクもしも~ はいはし ~い もしも~し x 入力信号 適応フィルタ e y 所望信号 d
21 エコーキャンセラのシミュレーション結果
22 応用 3) 胎児心電図の信号分離への応用 腹部からの測定信号 ( 母体 + 胎児の心電 ) x 適応フィルタ y + - 所望信号 ( 母体心電信号 ) d 誤差信号 e
23 抽出できるか?
24 胎児の心電信号の抽出結果
, 音源の方向を推定 ( 音源定位 ) する技術 目的音 観測音 目的音 ( 雑音含む ) 抽出音")
25 応用 4) マイクロホン アレー技術 複数のマイクロホンを用いて, 特定方向の音を選択的に取り出したり ( 目的音抽出 ), 特定方向の音源の音を抑圧したり ( 雑音除去 ), 音源の方向を推定 ( 音源定位 ) する技術 目的音 観測音 目的音 ( 雑音含む ) 抽出音 雑音のみ ( 目的音なし )





26 応用 5) アクティブノイズコントロールへの応用 アクティブノイズコントロール (Active Noise Control, ANC) ノイズの逆位相の音を予測, 生成して制御用スピーカから発生させ, ノイズをキャンセル消音する技術 * ただし スピーカーから誤差検出マイクまでの伝達特性は既知である必要がある ANCの基本構成例 ノイズ x 騒音検出マイク ( 未知経路 ) C(z) d y 誤差検出マイク e = d + y C ˆ( z ) 適応フィルタ 適応アルゴリズム
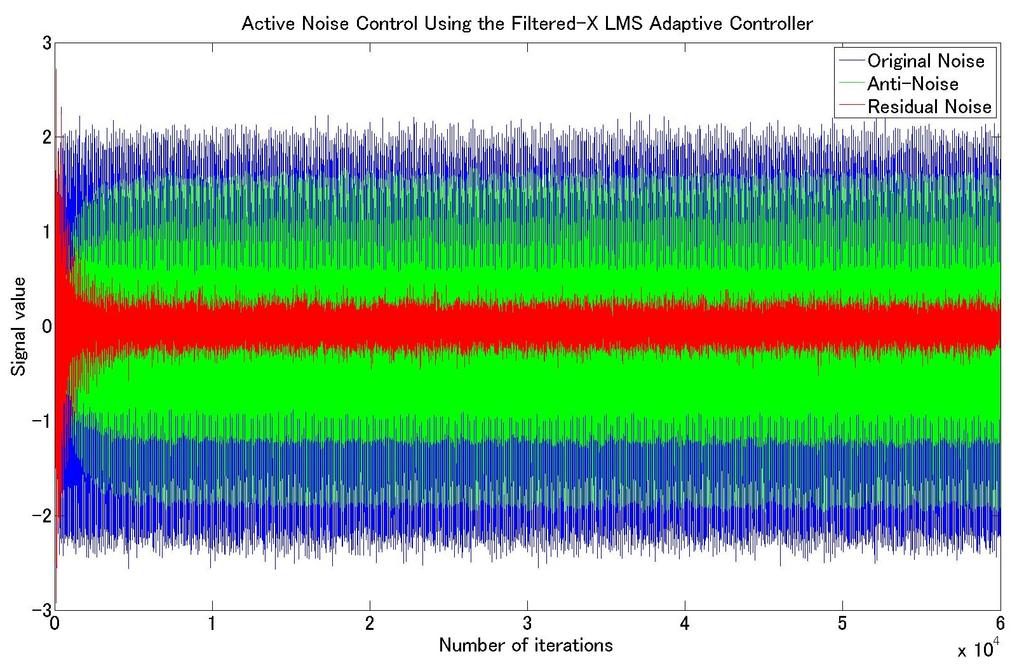
27
28 まとめ 適応フィルタ : 状況の変化に応じて適切な処理を実現 システムの高性能化に不可欠 さまざまな分野で期待大 適応フィルタに要求される性能 課題 良好な収束性能 : 動作開始後 短時間での性能発揮 高速サンプリングレート : 広帯域信号処理への対応 短い出力滞在時間 : 出力を得るまでの時間 応答性 小規模化 : 小規模 LSI で実装可能 ( 低コスト化 ) 低消費電力 : スマホ 携帯電話など小型端末でも長時間使用が可能
SAP11_03
 第 3 回 音声音響信号処理 ( 線形予測分析と自己回帰モデル ) 亀岡弘和 東京大学大学院情報理工学系研究科日本電信電話株式会社 NTT コミュニケーション科学基礎研究所 講義内容 ( キーワード ) 信号処理 符号化 標準化の実用システム例の紹介情報通信の基本 ( 誤り検出 訂正符号 変調 IP) 符号化技術の基本 ( 量子化 予測 変換 圧縮 ) 音声分析 合成 認識 強調 音楽信号処理統計的信号処理の基礎
第 3 回 音声音響信号処理 ( 線形予測分析と自己回帰モデル ) 亀岡弘和 東京大学大学院情報理工学系研究科日本電信電話株式会社 NTT コミュニケーション科学基礎研究所 講義内容 ( キーワード ) 信号処理 符号化 標準化の実用システム例の紹介情報通信の基本 ( 誤り検出 訂正符号 変調 IP) 符号化技術の基本 ( 量子化 予測 変換 圧縮 ) 音声分析 合成 認識 強調 音楽信号処理統計的信号処理の基礎
Microsoft PowerPoint - H17-5時限(パターン認識).ppt
.ppt") パターン認識早稲田大学講義 平成 7 年度 独 産業技術総合研究所栗田多喜夫 赤穂昭太郎 統計的特徴抽出 パターン認識過程 特徴抽出 認識対象から何らかの特徴量を計測 抽出 する必要がある 認識に有効な情報 特徴 を抽出し 次元を縮小した効率の良い空間を構成する過程 文字認識 : スキャナ等で取り込んだ画像から文字の識別に必要な本質的な特徴のみを抽出 例 文字線の傾き 曲率 面積など 識別 与えられた未知の対象を
パターン認識早稲田大学講義 平成 7 年度 独 産業技術総合研究所栗田多喜夫 赤穂昭太郎 統計的特徴抽出 パターン認識過程 特徴抽出 認識対象から何らかの特徴量を計測 抽出 する必要がある 認識に有効な情報 特徴 を抽出し 次元を縮小した効率の良い空間を構成する過程 文字認識 : スキャナ等で取り込んだ画像から文字の識別に必要な本質的な特徴のみを抽出 例 文字線の傾き 曲率 面積など 識別 与えられた未知の対象を
PowerPoint プレゼンテーション
 復習 ) 時系列のモデリング ~a. 離散時間モデル ~ y k + a 1 z 1 y k + + a na z n ay k = b 0 u k + b 1 z 1 u k + + b nb z n bu k y k = G z 1 u k = B(z 1 ) A(z 1 u k ) ARMA モデル A z 1 B z 1 = 1 + a 1 z 1 + + a na z n a = b 0
復習 ) 時系列のモデリング ~a. 離散時間モデル ~ y k + a 1 z 1 y k + + a na z n ay k = b 0 u k + b 1 z 1 u k + + b nb z n bu k y k = G z 1 u k = B(z 1 ) A(z 1 u k ) ARMA モデル A z 1 B z 1 = 1 + a 1 z 1 + + a na z n a = b 0
Microsoft PowerPoint - 6.PID制御.pptx
 プロセス制御工学 6.PID 制御 京都大学 加納学 Division of Process Control & Process Systems Engineering Department of Chemical Engineering, Kyoto University manabu@cheme.kyoto-u.ac.jp http://www-pse.cheme.kyoto-u.ac.jp/~kano/
プロセス制御工学 6.PID 制御 京都大学 加納学 Division of Process Control & Process Systems Engineering Department of Chemical Engineering, Kyoto University manabu@cheme.kyoto-u.ac.jp http://www-pse.cheme.kyoto-u.ac.jp/~kano/
Microsoft PowerPoint - 資料04 重回帰分析.ppt
 04. 重回帰分析 京都大学 加納学 Division of Process Control & Process Sstems Engineering Department of Chemical Engineering, Koto Universit manabu@cheme.koto-u.ac.jp http://www-pse.cheme.koto-u.ac.jp/~kano/ Outline
04. 重回帰分析 京都大学 加納学 Division of Process Control & Process Sstems Engineering Department of Chemical Engineering, Koto Universit manabu@cheme.koto-u.ac.jp http://www-pse.cheme.koto-u.ac.jp/~kano/ Outline
遅延デジタルフィルタの分散型積和演算回路を用いたFPGA実装の検討
 第 回電気学会東京支部栃木 群馬支所合同研究発表会 ETT--7 遅延デジタルフィルタの分散型積和演算回路を用いた FPGA 実装の検討 易茹 * 立岩武徳 ( 群馬大学 ) 浅見幸司 ( 株式会社アドバンテスト ) 小林春夫 ( 群馬大学 ) 発表内容 研究の背景 目的 分散型積和演算回路 実装の検討 まとめ 今後の課題 発表内容 研究の背景 目的 分散型積和演算回路 実装の検討 まとめ 今後の課題
第 回電気学会東京支部栃木 群馬支所合同研究発表会 ETT--7 遅延デジタルフィルタの分散型積和演算回路を用いた FPGA 実装の検討 易茹 * 立岩武徳 ( 群馬大学 ) 浅見幸司 ( 株式会社アドバンテスト ) 小林春夫 ( 群馬大学 ) 発表内容 研究の背景 目的 分散型積和演算回路 実装の検討 まとめ 今後の課題 発表内容 研究の背景 目的 分散型積和演算回路 実装の検討 まとめ 今後の課題
第6章 実験モード解析
 第 6 章実験モード解析 6. 実験モード解析とは 6. 有限自由度系の実験モード解析 6.3 連続体の実験モード解析 6. 実験モード解析とは 実験モード解析とは加振実験によって測定された外力と応答を用いてモードパラメータ ( 固有振動数, モード減衰比, 正規固有モードなど ) を求める ( 同定する ) 方法である. 力計 試験体 変位計 / 加速度計 実験モード解析の概念 時間領域データを利用する方法
第 6 章実験モード解析 6. 実験モード解析とは 6. 有限自由度系の実験モード解析 6.3 連続体の実験モード解析 6. 実験モード解析とは 実験モード解析とは加振実験によって測定された外力と応答を用いてモードパラメータ ( 固有振動数, モード減衰比, 正規固有モードなど ) を求める ( 同定する ) 方法である. 力計 試験体 変位計 / 加速度計 実験モード解析の概念 時間領域データを利用する方法
Introduction to System Identification
 y(t) モデルベースデザイン 制御系設計のためのシステム同定入門 s 2 Teja Muppirala t s 2 3s 4 2012 The MathWorks, Inc. 1 モデルベースデザイン 正確なモデルがあることが大前提 実行可能な仕様書 シミュレーションによる設計 モデル 連続したテスト 検証 コード生成による実装 2 動的システムのモデリング モデリング手法 第一原理モデリング データドリブンモデリング
y(t) モデルベースデザイン 制御系設計のためのシステム同定入門 s 2 Teja Muppirala t s 2 3s 4 2012 The MathWorks, Inc. 1 モデルベースデザイン 正確なモデルがあることが大前提 実行可能な仕様書 シミュレーションによる設計 モデル 連続したテスト 検証 コード生成による実装 2 動的システムのモデリング モデリング手法 第一原理モデリング データドリブンモデリング
PowerPoint プレゼンテーション
 データ解析 第 7 回 : 時系列分析 渡辺澄夫 過去から未来を予測する 観測データ 回帰 判別分析 解析方法 主成分 因子 クラスタ分析 時系列予測 時系列を予測する 無限個の確率変数 ( 確率変数が作る無限数列 ){X(t) ; t は整数 } を生成する情報源を考える {X(t)} を確率過程という 確率過程に ついて過去の値から未来を予測するにはどうしたらよいだろうか X(t-K),X(t-K+1),,X(t-1)
データ解析 第 7 回 : 時系列分析 渡辺澄夫 過去から未来を予測する 観測データ 回帰 判別分析 解析方法 主成分 因子 クラスタ分析 時系列予測 時系列を予測する 無限個の確率変数 ( 確率変数が作る無限数列 ){X(t) ; t は整数 } を生成する情報源を考える {X(t)} を確率過程という 確率過程に ついて過去の値から未来を予測するにはどうしたらよいだろうか X(t-K),X(t-K+1),,X(t-1)
Microsoft PowerPoint - H22制御工学I-2回.ppt
 制御工学 I 第二回ラプラス変換 平成 年 4 月 9 日 /4/9 授業の予定 制御工学概論 ( 回 ) 制御技術は現在様々な工学分野において重要な基本技術となっている 工学における制御工学の位置づけと歴史について説明する さらに 制御システムの基本構成と種類を紹介する ラプラス変換 ( 回 ) 制御工学 特に古典制御ではラプラス変換が重要な役割を果たしている ラプラス変換と逆ラプラス変換の定義を紹介し
制御工学 I 第二回ラプラス変換 平成 年 4 月 9 日 /4/9 授業の予定 制御工学概論 ( 回 ) 制御技術は現在様々な工学分野において重要な基本技術となっている 工学における制御工学の位置づけと歴史について説明する さらに 制御システムの基本構成と種類を紹介する ラプラス変換 ( 回 ) 制御工学 特に古典制御ではラプラス変換が重要な役割を果たしている ラプラス変換と逆ラプラス変換の定義を紹介し
15群(○○○)-8編
-8編") 群 ( 画像 音 言語 )- 6 編 ( 音響信号処理 ) 5 章音響エコーキャンセラ 電子情報通信学会 知識ベース 電子情報通信学会 01 1/(17) 5-1 通信における音響エコー 電子情報通信学会 知識の森 (http://www.ieice-hbkb.org/) ( 執筆者 : 羽田陽一 )[011 年 11 月受領 ] 通信相手がスピーカとマイクロホンを用いた拡声通話を行っている場合に,
群 ( 画像 音 言語 )- 6 編 ( 音響信号処理 ) 5 章音響エコーキャンセラ 電子情報通信学会 知識ベース 電子情報通信学会 01 1/(17) 5-1 通信における音響エコー 電子情報通信学会 知識の森 (http://www.ieice-hbkb.org/) ( 執筆者 : 羽田陽一 )[011 年 11 月受領 ] 通信相手がスピーカとマイクロホンを用いた拡声通話を行っている場合に,
インターリーブADCでのタイミングスキュー影響のデジタル補正技術
 1 インターリーブADCでのタイミングスキュー影響のデジタル補正技術 浅見幸司 黒沢烈士 立岩武徳 宮島広行 小林春夫 ( 株 ) アドバンテスト 群馬大学 2 目次 1. 研究背景 目的 2. インターリーブADCの原理 3. チャネル間ミスマッチの影響 3.1. オフセットミスマッチの影響 3.2. ゲインミスマッチの影響 3.3. タイミングスキューの影響 4. 提案手法 4.1. インターリーブタイミングミスマッチ補正フィルタ
1 インターリーブADCでのタイミングスキュー影響のデジタル補正技術 浅見幸司 黒沢烈士 立岩武徳 宮島広行 小林春夫 ( 株 ) アドバンテスト 群馬大学 2 目次 1. 研究背景 目的 2. インターリーブADCの原理 3. チャネル間ミスマッチの影響 3.1. オフセットミスマッチの影響 3.2. ゲインミスマッチの影響 3.3. タイミングスキューの影響 4. 提案手法 4.1. インターリーブタイミングミスマッチ補正フィルタ
Microsoft PowerPoint - chap8.ppt
 第 8 章 : フィードバック制御系の設計法 第 8 章 : フィードバック制御系の設計法 8. 設計手順と性能評価 キーワード : 設計手順, 性能評価 8. 補償による制御系設計 キーワード : ( 比例 ),( 積分 ),( 微分 ) 学習目標 : 一般的な制御系設計における手順と制御系の性能評価について学ぶ. 学習目標 : 補償の有効性について理解し, その設計手順を習得する. 第 8 章
第 8 章 : フィードバック制御系の設計法 第 8 章 : フィードバック制御系の設計法 8. 設計手順と性能評価 キーワード : 設計手順, 性能評価 8. 補償による制御系設計 キーワード : ( 比例 ),( 積分 ),( 微分 ) 学習目標 : 一般的な制御系設計における手順と制御系の性能評価について学ぶ. 学習目標 : 補償の有効性について理解し, その設計手順を習得する. 第 8 章
Microsoft PowerPoint - spe1_handout10.ppt
 目次 信号処理工学 Ⅰ 第 回 : ディジタルフィルタ 電気通信大学電子工学専攻電子知能システム学講座 問題は何か? フィルタとは? 離散時間システムとディジタルフィルタ ディジタルフィルタの種類 FIRフィルタの設計 長井隆行 問題は何か? 初心に戻る o.4 のスライド 重要なことは? 所望の信号を得るためにどのようなシステムにすれば良いか? 安定性を保つ必要もある ノイズ除去の例 周波数領域で見る
目次 信号処理工学 Ⅰ 第 回 : ディジタルフィルタ 電気通信大学電子工学専攻電子知能システム学講座 問題は何か? フィルタとは? 離散時間システムとディジタルフィルタ ディジタルフィルタの種類 FIRフィルタの設計 長井隆行 問題は何か? 初心に戻る o.4 のスライド 重要なことは? 所望の信号を得るためにどのようなシステムにすれば良いか? 安定性を保つ必要もある ノイズ除去の例 周波数領域で見る
Kumamoto University Center for Multimedia and Information Technologies Lab. 熊本大学アプリケーション実験 ~ 実環境における無線 LAN 受信電波強度を用いた位置推定手法の検討 ~ InKIAI 宮崎県美郷
 熊本大学アプリケーション実験 ~ 実環境における無線 LAN 受信電波強度を用いた位置推定手法の検討 ~ InKIAI プロジェクト @ 宮崎県美郷町 熊本大学副島慶人川村諒 1 実験の目的 従来 信号の受信電波強度 (RSSI:RecevedSgnal StrengthIndcator) により 対象の位置を推定する手法として 無線 LAN の AP(AccessPont) から受信する信号の減衰量をもとに位置を推定する手法が多く検討されている
熊本大学アプリケーション実験 ~ 実環境における無線 LAN 受信電波強度を用いた位置推定手法の検討 ~ InKIAI プロジェクト @ 宮崎県美郷町 熊本大学副島慶人川村諒 1 実験の目的 従来 信号の受信電波強度 (RSSI:RecevedSgnal StrengthIndcator) により 対象の位置を推定する手法として 無線 LAN の AP(AccessPont) から受信する信号の減衰量をもとに位置を推定する手法が多く検討されている
ボルツマンマシンの高速化
 1. はじめに ボルツマン学習と平均場近似 山梨大学工学部宗久研究室 G04MK016 鳥居圭太 ボルツマンマシンは学習可能な相互結合型ネットワー クの代表的なものである. ボルツマンマシンには, 学習のための統計平均を取る必要があり, 結果を求めるまでに長い時間がかかってしまうという欠点がある. そこで, 学習の高速化のために, 統計を取る2つのステップについて, 以下のことを行う. まず1つ目のステップでは,
1. はじめに ボルツマン学習と平均場近似 山梨大学工学部宗久研究室 G04MK016 鳥居圭太 ボルツマンマシンは学習可能な相互結合型ネットワー クの代表的なものである. ボルツマンマシンには, 学習のための統計平均を取る必要があり, 結果を求めるまでに長い時間がかかってしまうという欠点がある. そこで, 学習の高速化のために, 統計を取る2つのステップについて, 以下のことを行う. まず1つ目のステップでは,
航空機の運動方程式
 オブザーバ 状態フィードバックにはすべての状態変数の値が必要であった. しかしながら, システムの外部から観測できるのは出力だけであり, すべての状態変数が観測できるとは限らない. そこで, 制御対象システムの状態変数を, システムのモデルに基づいてその入出力信号から推定する方法を考える.. オブザーバとは 次元 m 入力 r 出力線形時不変システム x Ax Bu y Cx () の状態変数ベクトル
オブザーバ 状態フィードバックにはすべての状態変数の値が必要であった. しかしながら, システムの外部から観測できるのは出力だけであり, すべての状態変数が観測できるとは限らない. そこで, 制御対象システムの状態変数を, システムのモデルに基づいてその入出力信号から推定する方法を考える.. オブザーバとは 次元 m 入力 r 出力線形時不変システム x Ax Bu y Cx () の状態変数ベクトル
0 21 カラー反射率 slope aspect 図 2.9: 復元結果例 2.4 画像生成技術としての計算フォトグラフィ 3 次元情報を復元することにより, 画像生成 ( レンダリング ) に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生
 に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生") 0 21 カラー反射率 slope aspect 図 2.9: 復元結果例 2.4 画像生成技術としての計算フォトグラフィ 3 次元情報を復元することにより, 画像生成 ( レンダリング ) に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生まれ, コンピューテーショナルフォトグラフィ ( 計算フォトグラフィ ) と呼ばれている.3 次元画像認識技術の計算フォトグラフィへの応用として,
0 21 カラー反射率 slope aspect 図 2.9: 復元結果例 2.4 画像生成技術としての計算フォトグラフィ 3 次元情報を復元することにより, 画像生成 ( レンダリング ) に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生まれ, コンピューテーショナルフォトグラフィ ( 計算フォトグラフィ ) と呼ばれている.3 次元画像認識技術の計算フォトグラフィへの応用として,
Microsoft PowerPoint - ce07-13b.ppt
 制御工学 3 第 8 章 : フィードバック制御系の設計法 8. 設計手順と性能評価キーワード : 設計手順, 性能評価 8. ID 補償による制御系設計キーワード : ( 比例 ),I( 積分 ),D( 微分 ) 8.3 進み 遅れ補償による制御系設計キーワード : 遅れ補償, 進み補償 学習目標 : 一般的な制御系設計における手順と制御系の性能評価について学ぶ. ループ整形の考え方を用いて, 遅れ補償,
制御工学 3 第 8 章 : フィードバック制御系の設計法 8. 設計手順と性能評価キーワード : 設計手順, 性能評価 8. ID 補償による制御系設計キーワード : ( 比例 ),I( 積分 ),D( 微分 ) 8.3 進み 遅れ補償による制御系設計キーワード : 遅れ補償, 進み補償 学習目標 : 一般的な制御系設計における手順と制御系の性能評価について学ぶ. ループ整形の考え方を用いて, 遅れ補償,
統計的データ解析
 統計的データ解析 011 011.11.9 林田清 ( 大阪大学大学院理学研究科 ) 連続確率分布の平均値 分散 比較のため P(c ) c 分布 自由度 の ( カイ c 平均値 0, 標準偏差 1の正規分布 に従う変数 xの自乗和 c x =1 が従う分布を自由度 の分布と呼ぶ 一般に自由度の分布は f /1 c / / ( c ) {( c ) e }/ ( / ) 期待値 二乗 ) 分布 c
統計的データ解析 011 011.11.9 林田清 ( 大阪大学大学院理学研究科 ) 連続確率分布の平均値 分散 比較のため P(c ) c 分布 自由度 の ( カイ c 平均値 0, 標準偏差 1の正規分布 に従う変数 xの自乗和 c x =1 が従う分布を自由度 の分布と呼ぶ 一般に自由度の分布は f /1 c / / ( c ) {( c ) e }/ ( / ) 期待値 二乗 ) 分布 c
スポーツ中継向け ターゲットマイク技術 を開発 ~ 歓声に埋もれたスポーツの競技音をクリアに抽出 NHK との実証実験を実施 ~ NTT メディアインテリジェンス研究所 音声言語メディアプロジェクト Copyright 2015 NTT corp. All Rights Reserved. 1
 スポーツ中継向け ターゲットマイク技術 を開発 ~ 歓声に埋もれたスポーツの競技音をクリアに抽出 NHK との実証実験を実施 ~ NTT メディアインテリジェンス研究所 音声言語メディアプロジェクト Copyright 2015 NTT corp. All Rights Reserved. 1 背景 欲しい音をクリアに集音したいという需要が高まっている 放送 遠隔会議 車 工場 遠くにいる選手の競技音
スポーツ中継向け ターゲットマイク技術 を開発 ~ 歓声に埋もれたスポーツの競技音をクリアに抽出 NHK との実証実験を実施 ~ NTT メディアインテリジェンス研究所 音声言語メディアプロジェクト Copyright 2015 NTT corp. All Rights Reserved. 1 背景 欲しい音をクリアに集音したいという需要が高まっている 放送 遠隔会議 車 工場 遠くにいる選手の競技音
Probit , Mixed logit
 Probit, Mixed logit 2016/5/16 スタートアップゼミ #5 B4 後藤祥孝 1 0. 目次 Probit モデルについて 1. モデル概要 2. 定式化と理解 3. 推定 Mixed logit モデルについて 4. モデル概要 5. 定式化と理解 6. 推定 2 1.Probit 概要 プロビットモデルとは. 効用関数の誤差項に多変量正規分布を仮定したもの. 誤差項には様々な要因が存在するため,
Probit, Mixed logit 2016/5/16 スタートアップゼミ #5 B4 後藤祥孝 1 0. 目次 Probit モデルについて 1. モデル概要 2. 定式化と理解 3. 推定 Mixed logit モデルについて 4. モデル概要 5. 定式化と理解 6. 推定 2 1.Probit 概要 プロビットモデルとは. 効用関数の誤差項に多変量正規分布を仮定したもの. 誤差項には様々な要因が存在するため,
15群(○○○)-8編
-8編") 2 群 ( 画像 音 言語 )- 6 編 ( 音響信号処理 ) 6 章アクティブノイズコントロール 概要 ( 執筆者 : 西村正治 梶川嘉延 )[2011 年 11 月受領 アクティブノイズコントロール ( 以下 ANC) は逆位相の音で元の音をキャンセル消音する 技術であり, 騒音対策の一手法として使われ始めている. ここでは, その原理, 制御アルゴリズム, 実現化手法について概説する. より詳細を知りたい場合は参考文献を参照されたい.
2 群 ( 画像 音 言語 )- 6 編 ( 音響信号処理 ) 6 章アクティブノイズコントロール 概要 ( 執筆者 : 西村正治 梶川嘉延 )[2011 年 11 月受領 アクティブノイズコントロール ( 以下 ANC) は逆位相の音で元の音をキャンセル消音する 技術であり, 騒音対策の一手法として使われ始めている. ここでは, その原理, 制御アルゴリズム, 実現化手法について概説する. より詳細を知りたい場合は参考文献を参照されたい.
ディジタル信号処理
 ディジタルフィルタの設計法. 逆フィルター. 直線位相 FIR フィルタの設計. 窓関数法による FIR フィルタの設計.5 時間領域での FIR フィルタの設計 3. アナログフィルタを基にしたディジタル IIR フィルタの設計法 I 4. アナログフィルタを基にしたディジタル IIR フィルタの設計法 II 5. 双 次フィルタ LI 離散時間システムの基礎式の証明 [ ] 4. ] [ ]*
ディジタルフィルタの設計法. 逆フィルター. 直線位相 FIR フィルタの設計. 窓関数法による FIR フィルタの設計.5 時間領域での FIR フィルタの設計 3. アナログフィルタを基にしたディジタル IIR フィルタの設計法 I 4. アナログフィルタを基にしたディジタル IIR フィルタの設計法 II 5. 双 次フィルタ LI 離散時間システムの基礎式の証明 [ ] 4. ] [ ]*
カイ二乗フィット検定、パラメータの誤差
 統計的データ解析 008 008.. 林田清 ( 大阪大学大学院理学研究科 ) 問題 C (, ) ( x xˆ) ( y yˆ) σ x πσ σ y y Pabx (, ;,,, ) ˆ y σx σ y = dx exp exp πσx ただし xy ˆ ˆ はyˆ = axˆ+ bであらわされる直線モデル上の点 ( ˆ) ( ˆ ) ( ) x x y ax b y ax b Pabx (,
統計的データ解析 008 008.. 林田清 ( 大阪大学大学院理学研究科 ) 問題 C (, ) ( x xˆ) ( y yˆ) σ x πσ σ y y Pabx (, ;,,, ) ˆ y σx σ y = dx exp exp πσx ただし xy ˆ ˆ はyˆ = axˆ+ bであらわされる直線モデル上の点 ( ˆ) ( ˆ ) ( ) x x y ax b y ax b Pabx (,
OpenFOAM(R) ソースコード入門 pt1 熱伝導方程式の解法から有限体積法の実装について考える 前編 : 有限体積法の基礎確認 2013/11/17 オープンCAE 富山富山県立大学中川慎二
 ソースコード入門 pt1 熱伝導方程式の解法から有限体積法の実装について考える 前編 : 有限体積法の基礎確認 2013/11/17 オープンCAE 富山富山県立大学中川慎二") OpenFOAM(R) ソースコード入門 pt1 熱伝導方程式の解法から有限体積法の実装について考える 前編 : 有限体積法の基礎確認 2013/11/17 オープンCAE 勉強会 @ 富山富山県立大学中川慎二 * OpenFOAM のソースコードでは, 基礎式を偏微分方程式の形で記述する.OpenFOAM 内部では, 有限体積法を使ってこの微分方程式を解いている. どのようにして, 有限体積法に基づく離散化が実現されているのか,
OpenFOAM(R) ソースコード入門 pt1 熱伝導方程式の解法から有限体積法の実装について考える 前編 : 有限体積法の基礎確認 2013/11/17 オープンCAE 勉強会 @ 富山富山県立大学中川慎二 * OpenFOAM のソースコードでは, 基礎式を偏微分方程式の形で記述する.OpenFOAM 内部では, 有限体積法を使ってこの微分方程式を解いている. どのようにして, 有限体積法に基づく離散化が実現されているのか,
PowerPoint Presentation
 付録 2 2 次元アフィン変換 直交変換 たたみ込み 1.2 次元のアフィン変換 座標 (x,y ) を (x,y) に移すことを 2 次元での変換. 特に, 変換が と書けるとき, アフィン変換, アフィン変換は, その 1 次の項による変換 と 0 次の項による変換 アフィン変換 0 次の項は平行移動 1 次の項は座標 (x, y ) をベクトルと考えて とすれば このようなもの 2 次元ベクトルの線形写像
付録 2 2 次元アフィン変換 直交変換 たたみ込み 1.2 次元のアフィン変換 座標 (x,y ) を (x,y) に移すことを 2 次元での変換. 特に, 変換が と書けるとき, アフィン変換, アフィン変換は, その 1 次の項による変換 と 0 次の項による変換 アフィン変換 0 次の項は平行移動 1 次の項は座標 (x, y ) をベクトルと考えて とすれば このようなもの 2 次元ベクトルの線形写像
Microsoft PowerPoint - ce07-12c.ppt
 制御工学 第 8 章 : フィードバック制御系の設計法 8. 設計手順と性能評価キーワード : 設計手順, 性能評価 8. 補償による制御系設計キーワード : ( 比例 ),( 積分 ),( 微分 ) 8.3 進み 遅れ補償による制御系設計キーワード : 遅れ補償, 進み補償 学習目標 : 一般的な制御系設計における手順と制御系の性能評価について学ぶ. ループ整形の考え方を用いて, 遅れ補償, 進み補償による制御系設計を習得する.
制御工学 第 8 章 : フィードバック制御系の設計法 8. 設計手順と性能評価キーワード : 設計手順, 性能評価 8. 補償による制御系設計キーワード : ( 比例 ),( 積分 ),( 微分 ) 8.3 進み 遅れ補償による制御系設計キーワード : 遅れ補償, 進み補償 学習目標 : 一般的な制御系設計における手順と制御系の性能評価について学ぶ. ループ整形の考え方を用いて, 遅れ補償, 進み補償による制御系設計を習得する.
Microsoft Word - 補論3.2
 補論 3. 多変量 GARC モデル 07//6 新谷元嗣 藪友良 対数尤度関数 3 章 7 節では 変量の対数尤度を求めた ここでは多変量の場合 とくに 変量について対数尤度を求める 誤差項 は平均 0 で 次元の正規分布に従うとする 単純化のため 分散と共分散は時間を通じて一定としよう ( この仮定は後で変更される ) したがって ij から添え字 を除くことができる このとき と の尤度関数は
補論 3. 多変量 GARC モデル 07//6 新谷元嗣 藪友良 対数尤度関数 3 章 7 節では 変量の対数尤度を求めた ここでは多変量の場合 とくに 変量について対数尤度を求める 誤差項 は平均 0 で 次元の正規分布に従うとする 単純化のため 分散と共分散は時間を通じて一定としよう ( この仮定は後で変更される ) したがって ij から添え字 を除くことができる このとき と の尤度関数は
PowerPoint プレゼンテーション
 非線形カルマンフィルタ ~a. 問題設定 ~ 離散時間非線形状態空間表現 x k + 1 = f x k y k = h x k + bv k + w k f : ベクトル値をとるx k の非線形関数 h : スカラ値をとるx k の非線形関数 v k システム雑音 ( 平均値 0, 分散 σ v 2 k ) x k + 1 = f x k,v k w k 観測雑音 ( 平均値 0, 分散 σ w
非線形カルマンフィルタ ~a. 問題設定 ~ 離散時間非線形状態空間表現 x k + 1 = f x k y k = h x k + bv k + w k f : ベクトル値をとるx k の非線形関数 h : スカラ値をとるx k の非線形関数 v k システム雑音 ( 平均値 0, 分散 σ v 2 k ) x k + 1 = f x k,v k w k 観測雑音 ( 平均値 0, 分散 σ w
景気指標の新しい動向
 内閣府経済社会総合研究所 経済分析 22 年第 166 号 4 時系列因子分析モデル 4.1 時系列因子分析モデル (Stock-Watson モデル の理論的解説 4.1.1 景気循環の状態空間表現 Stock and Watson (1989,1991 は観測される景気指標を状態空間表現と呼ば れるモデルで表し, 景気の状態を示す指標を開発した. 状態空間表現とは, わ れわれの目に見える実際に観測される変数は,
内閣府経済社会総合研究所 経済分析 22 年第 166 号 4 時系列因子分析モデル 4.1 時系列因子分析モデル (Stock-Watson モデル の理論的解説 4.1.1 景気循環の状態空間表現 Stock and Watson (1989,1991 は観測される景気指標を状態空間表現と呼ば れるモデルで表し, 景気の状態を示す指標を開発した. 状態空間表現とは, わ れわれの目に見える実際に観測される変数は,
PowerPoint プレゼンテーション
 ロボットの計画と制御 マルコフ決定過程 確率ロボティクス 14 章 http://www.probabilistic-robotics.org/ 1 14.1 動機付けロボットの行動選択のための確率的なアルゴリズム 目的 予想される不確かさを最小化したい. ロボットの動作につての不確かさ (MDP で考える ) 決定論的な要素 ロボット工学の理論の多くは, 動作の影響は決定論的であるという仮定のもとに成り立っている.
ロボットの計画と制御 マルコフ決定過程 確率ロボティクス 14 章 http://www.probabilistic-robotics.org/ 1 14.1 動機付けロボットの行動選択のための確率的なアルゴリズム 目的 予想される不確かさを最小化したい. ロボットの動作につての不確かさ (MDP で考える ) 決定論的な要素 ロボット工学の理論の多くは, 動作の影響は決定論的であるという仮定のもとに成り立っている.
Microsoft Word - Time Series Basic - Modeling.doc
 時系列解析入門 モデリング. 確率分布と統計的モデル が確率変数 (radom varable のとき すべての実数 R に対して となる確 率 Prob( が定められる これを の関数とみなして G( Prob ( とあらわすとき G( を確率変数 の分布関数 (probablt dstrbuto ucto と呼 ぶ 時系列解析で用いられる確率変数は通常連続型と呼ばれるもので その分布関数は (
時系列解析入門 モデリング. 確率分布と統計的モデル が確率変数 (radom varable のとき すべての実数 R に対して となる確 率 Prob( が定められる これを の関数とみなして G( Prob ( とあらわすとき G( を確率変数 の分布関数 (probablt dstrbuto ucto と呼 ぶ 時系列解析で用いられる確率変数は通常連続型と呼ばれるもので その分布関数は (
様々なミクロ計量モデル†
 担当 : 長倉大輔 ( ながくらだいすけ ) この資料は私の講義において使用するために作成した資料です WEB ページ上で公開しており 自由に参照して頂いて構いません ただし 内容について 一応検証してありますが もし間違いがあった場合でもそれによって生じるいかなる損害 不利益について責任を負いかねますのでご了承ください 間違いは発見次第 継続的に直していますが まだ存在する可能性があります 1 カウントデータモデル
担当 : 長倉大輔 ( ながくらだいすけ ) この資料は私の講義において使用するために作成した資料です WEB ページ上で公開しており 自由に参照して頂いて構いません ただし 内容について 一応検証してありますが もし間違いがあった場合でもそれによって生じるいかなる損害 不利益について責任を負いかねますのでご了承ください 間違いは発見次第 継続的に直していますが まだ存在する可能性があります 1 カウントデータモデル
memo
 数理情報工学特論第一 機械学習とデータマイニング 4 章 : 教師なし学習 3 かしまひさし 鹿島久嗣 ( 数理 6 研 ) kashima@mist.i.~ DEPARTMENT OF MATHEMATICAL INFORMATICS 1 グラフィカルモデルについて学びます グラフィカルモデル グラフィカルラッソ グラフィカルラッソの推定アルゴリズム 2 グラフィカルモデル 3 教師なし学習の主要タスクは
数理情報工学特論第一 機械学習とデータマイニング 4 章 : 教師なし学習 3 かしまひさし 鹿島久嗣 ( 数理 6 研 ) kashima@mist.i.~ DEPARTMENT OF MATHEMATICAL INFORMATICS 1 グラフィカルモデルについて学びます グラフィカルモデル グラフィカルラッソ グラフィカルラッソの推定アルゴリズム 2 グラフィカルモデル 3 教師なし学習の主要タスクは
<4D F736F F F696E74202D2091E6824F82518FCD E838B C68CEB82E894AD90B B2E >
 目次 参考文献安達著 : 通信システム工学, 朝倉書店,7 年. ディジタル変調. ディジタル伝送系モデル 3. 符号判定誤り確率 4. 元対称通信路 安達 : コミュニケーション符号理論 安達 : コミュニケーション符号理論 変調とは?. ディジタル変調 基底帯域 ( ベースバンド ) 伝送の信号波形は零周波数付近のスペクトルを持っている. しかし, 現実の大部分の通信路は零周波数付近を殆ど伝送することができない帯域通信路とみなされる.
目次 参考文献安達著 : 通信システム工学, 朝倉書店,7 年. ディジタル変調. ディジタル伝送系モデル 3. 符号判定誤り確率 4. 元対称通信路 安達 : コミュニケーション符号理論 安達 : コミュニケーション符号理論 変調とは?. ディジタル変調 基底帯域 ( ベースバンド ) 伝送の信号波形は零周波数付近のスペクトルを持っている. しかし, 現実の大部分の通信路は零周波数付近を殆ど伝送することができない帯域通信路とみなされる.
周波数特性解析
 周波数特性解析 株式会社スマートエナジー研究所 Version 1.0.0, 2018-08-03 目次 1. アナログ / デジタルの周波数特性解析................................... 1 2. 一巡周波数特性 ( 電圧フィードバック )................................... 4 2.1. 部分周波数特性解析..........................................
周波数特性解析 株式会社スマートエナジー研究所 Version 1.0.0, 2018-08-03 目次 1. アナログ / デジタルの周波数特性解析................................... 1 2. 一巡周波数特性 ( 電圧フィードバック )................................... 4 2.1. 部分周波数特性解析..........................................
( 前半 ) 目次 1. 辞書学習の導入と先行研究の紹介. 辞書学習の応用事例 3. 辞書学習のサンプル複雑度とは ( 後半 ) 4. 既存の辞書学習のアルゴリズム 5.Bayes 推定を用いた辞書学習のアルゴリズム /53
 目次 1. 辞書学習の導入と先行研究の紹介. 辞書学習の応用事例 3. 辞書学習のサンプル複雑度とは ( 後半 ) 4. 既存の辞書学習のアルゴリズム 5.Bayes 推定を用いた辞書学習のアルゴリズム /53") スパース表現を探す - 辞書学習におけるサンプル複雑度と アルゴリズム - 坂田綾香 A, 樺島祥介 B A 統計数理研究所, B 東京工業大学 1/53 ( 前半 ) 目次 1. 辞書学習の導入と先行研究の紹介. 辞書学習の応用事例 3. 辞書学習のサンプル複雑度とは ( 後半 ) 4. 既存の辞書学習のアルゴリズム 5.Bayes 推定を用いた辞書学習のアルゴリズム /53 ( 前半 ) 目次
スパース表現を探す - 辞書学習におけるサンプル複雑度と アルゴリズム - 坂田綾香 A, 樺島祥介 B A 統計数理研究所, B 東京工業大学 1/53 ( 前半 ) 目次 1. 辞書学習の導入と先行研究の紹介. 辞書学習の応用事例 3. 辞書学習のサンプル複雑度とは ( 後半 ) 4. 既存の辞書学習のアルゴリズム 5.Bayes 推定を用いた辞書学習のアルゴリズム /53 ( 前半 ) 目次
資料2-3 要求条件案.doc
 資料 2-3 社団法人電波産業会デジタル放送システム開発部会 高度 BS デジタル放送及び高度広帯域 CS デジタル放送の要求条件 ( 案 ) 1 システム インターオペラビリティ 衛星放送 地上放送 CATV 蓄積メディアなど様々なメディア間でできる限り互換性を有すること サービス 実時間性 高機能化 / 多様化 拡張性 アクセサビリティ システム制御 著作権保護 個人情報保護 現行のデジタルHDTVを基本とした高画質サービスを可能とすること
資料 2-3 社団法人電波産業会デジタル放送システム開発部会 高度 BS デジタル放送及び高度広帯域 CS デジタル放送の要求条件 ( 案 ) 1 システム インターオペラビリティ 衛星放送 地上放送 CATV 蓄積メディアなど様々なメディア間でできる限り互換性を有すること サービス 実時間性 高機能化 / 多様化 拡張性 アクセサビリティ システム制御 著作権保護 個人情報保護 現行のデジタルHDTVを基本とした高画質サービスを可能とすること
航空機の運動方程式
 可制御性 可観測性. 可制御性システムの状態を, 適切な操作によって, 有限時間内に, 任意の状態から別の任意の状態に移動させることができるか否かという特性を可制御性という. 可制御性を有するシステムに対し, システムは可制御である, 可制御なシステム という言い方をする. 状態方程式, 出力方程式が以下で表されるn 次元 m 入力 r 出力線形時不変システム x Ax u y x Du () に対し,
可制御性 可観測性. 可制御性システムの状態を, 適切な操作によって, 有限時間内に, 任意の状態から別の任意の状態に移動させることができるか否かという特性を可制御性という. 可制御性を有するシステムに対し, システムは可制御である, 可制御なシステム という言い方をする. 状態方程式, 出力方程式が以下で表されるn 次元 m 入力 r 出力線形時不変システム x Ax u y x Du () に対し,
PowerPoint Presentation
 . カーネル法への招待 正定値カーネルによるデータ解析 - カーネル法の基礎と展開 - 福水健次統計数理研究所 / 総合研究大学院大学 統計数理研究所公開講座 0 年 月 34 日 概要 カーネル法の基本 線形データ解析と非線形データ解析 カーネル法の原理 カーネル法の つの例 カーネル主成分分析 : PCA の非線形拡張 リッジ回帰とそのカーネル化 概要 カーネル法の基本 線形データ解析と非線形データ解析
. カーネル法への招待 正定値カーネルによるデータ解析 - カーネル法の基礎と展開 - 福水健次統計数理研究所 / 総合研究大学院大学 統計数理研究所公開講座 0 年 月 34 日 概要 カーネル法の基本 線形データ解析と非線形データ解析 カーネル法の原理 カーネル法の つの例 カーネル主成分分析 : PCA の非線形拡張 リッジ回帰とそのカーネル化 概要 カーネル法の基本 線形データ解析と非線形データ解析
Microsoft PowerPoint - 14回パラメータ推定配布用.pptx
 パラメータ推定の理論と実践 BEhavior Study for Transportation Graduate school, Univ. of Yamanashi 山梨大学佐々木邦明 最尤推定法 点推定量を求める最もポピュラーな方法 L n x n i1 f x i 右上の式を θ の関数とみなしたものが尤度関数 データ (a,b) が得られたとき, 全体の平均がいくつとするのがよいか 平均がいくつだったら
パラメータ推定の理論と実践 BEhavior Study for Transportation Graduate school, Univ. of Yamanashi 山梨大学佐々木邦明 最尤推定法 点推定量を求める最もポピュラーな方法 L n x n i1 f x i 右上の式を θ の関数とみなしたものが尤度関数 データ (a,b) が得られたとき, 全体の平均がいくつとするのがよいか 平均がいくつだったら
Microsoft Word - NumericalComputation.docx
 数値計算入門 武尾英哉. 離散数学と数値計算 数学的解法の中には理論計算では求められないものもある. 例えば, 定積分は, まずは積分 ( 被積分関数の原始関数をみつけること できなければ値を得ることはできない. また, ある関数の所定の値における微分値を得るには, まずその関数の微分ができなければならない. さらに代数方程式の解を得るためには, 解析的に代数方程式を解く必要がある. ところが, これらは必ずしも解析的に導けるとは限らない.
数値計算入門 武尾英哉. 離散数学と数値計算 数学的解法の中には理論計算では求められないものもある. 例えば, 定積分は, まずは積分 ( 被積分関数の原始関数をみつけること できなければ値を得ることはできない. また, ある関数の所定の値における微分値を得るには, まずその関数の微分ができなければならない. さらに代数方程式の解を得るためには, 解析的に代数方程式を解く必要がある. ところが, これらは必ずしも解析的に導けるとは限らない.
Missing Data NMF
 月 4 2013 冬学期 [4830-1032] 第 4 回 音声音響信号処理 ( 線形予測分析と自己回帰モデル ) 亀岡弘和 東京大学大学院情報理工学系研究科日本電信電話株式会社 NTT コミュニケーション科学基礎研究所 講義内容 ( キーワード ) 信号処理 符号化 標準化の実用システム例の紹介 情報通信の基本 ( 誤り検出 訂正符号 変調 IP) 符号化技術の基本 ( 量子化 予測 変換 圧縮
月 4 2013 冬学期 [4830-1032] 第 4 回 音声音響信号処理 ( 線形予測分析と自己回帰モデル ) 亀岡弘和 東京大学大学院情報理工学系研究科日本電信電話株式会社 NTT コミュニケーション科学基礎研究所 講義内容 ( キーワード ) 信号処理 符号化 標準化の実用システム例の紹介 情報通信の基本 ( 誤り検出 訂正符号 変調 IP) 符号化技術の基本 ( 量子化 予測 変換 圧縮
音情報処理I
 音情報処理論 音声処理における信号処理 ~ 線形予測分析 ~ 東京大学大学院情報理工学系研究科 / 奈良先端大 猿渡洋 4 年 月 準備 :Z 変換 Z 変換 離散的な時系列の特性を解析する 手法 準備 : は離散時間波形 x x { x,..., x, x,..., x } 実数 定義 正 Z 変換 ; 時間領域から Z 領域へ ここで X x は サンプル時間遅れを表す演算子 定義 逆 Z 変換
音情報処理論 音声処理における信号処理 ~ 線形予測分析 ~ 東京大学大学院情報理工学系研究科 / 奈良先端大 猿渡洋 4 年 月 準備 :Z 変換 Z 変換 離散的な時系列の特性を解析する 手法 準備 : は離散時間波形 x x { x,..., x, x,..., x } 実数 定義 正 Z 変換 ; 時間領域から Z 領域へ ここで X x は サンプル時間遅れを表す演算子 定義 逆 Z 変換
Microsoft PowerPoint - SPECTPETの原理2012.ppt [互換モード]
![Microsoft PowerPoint - SPECTPETの原理2012.ppt [互換モード]](/thumbs/94/121508518.jpg "Microsoft PowerPoint - SPECTPETの原理2012.ppt [互換モード]") 22 年国家試験解答 1,5 フーリエ変換は線形変換 FFT はデータ数に 2 の累乗数を要求するが DFT は任意のデータ数に対応 123I-IMP Brain SPECT FBP with Ramp filter 123I-IMP Brain SPECT FBP with Shepp&Logan filter 99mTc-MIBI Myocardial SPECT における ストリークアーチファクト
22 年国家試験解答 1,5 フーリエ変換は線形変換 FFT はデータ数に 2 の累乗数を要求するが DFT は任意のデータ数に対応 123I-IMP Brain SPECT FBP with Ramp filter 123I-IMP Brain SPECT FBP with Shepp&Logan filter 99mTc-MIBI Myocardial SPECT における ストリークアーチファクト
Microsoft PowerPoint - e-stat(OLS).pptx
.pptx") 経済統計学 ( 補足 ) 最小二乗法について 担当 : 小塚匡文 2015 年 11 月 19 日 ( 改訂版 ) 神戸大学経済学部 2015 年度後期開講授業 補足 : 最小二乗法 ( 単回帰分析 ) 1.( 単純 ) 回帰分析とは? 標本サイズTの2 変数 ( ここではXとY) のデータが存在 YをXで説明する回帰方程式を推定するための方法 Y: 被説明変数 ( または従属変数 ) X: 説明変数
経済統計学 ( 補足 ) 最小二乗法について 担当 : 小塚匡文 2015 年 11 月 19 日 ( 改訂版 ) 神戸大学経済学部 2015 年度後期開講授業 補足 : 最小二乗法 ( 単回帰分析 ) 1.( 単純 ) 回帰分析とは? 標本サイズTの2 変数 ( ここではXとY) のデータが存在 YをXで説明する回帰方程式を推定するための方法 Y: 被説明変数 ( または従属変数 ) X: 説明変数
DVIOUT
 ロバスト適応同定手法によるエコーキャンセラの設計題目変更 井上智文 大分大学福祉環境工学科 加入者 研究の目的 雑音中の信号抽出などの手法として欠かせないものに適応処理があるが, これは古くはに始まり, その後広い分野で多くの研究者によって改善され, 実用化されて現在最も注目されている手法のつになっている. 適応信号処理は, 雑音と信号が混在している時系列サンプルに対して, ある重みを逐次乗じることによって得られた値と,
ロバスト適応同定手法によるエコーキャンセラの設計題目変更 井上智文 大分大学福祉環境工学科 加入者 研究の目的 雑音中の信号抽出などの手法として欠かせないものに適応処理があるが, これは古くはに始まり, その後広い分野で多くの研究者によって改善され, 実用化されて現在最も注目されている手法のつになっている. 適応信号処理は, 雑音と信号が混在している時系列サンプルに対して, ある重みを逐次乗じることによって得られた値と,
受信機時計誤差項の が残ったままであるが これをも消去するのが 重位相差である. 重位相差ある時刻に 衛星 から送られてくる搬送波位相データを 台の受信機 でそれぞれ測定する このとき各受信機で測定された衛星 からの搬送波位相データを Φ Φ とし 同様に衛星 からの搬送波位相データを Φ Φ とす
 RTK-GPS 測位計算アルゴリズム -FLOT 解 - 東京海洋大学冨永貴樹. はじめに GPS 測量を行う際 実時間で測位結果を得ることが出来るのは今のところ RTK-GPS 測位のみである GPS 測量では GPS 衛星からの搬送波位相データを使用するため 整数値バイアスを決定しなければならず これが測位計算を複雑にしている所以である この整数値バイアスを決定するためのつの方法として FLOT
RTK-GPS 測位計算アルゴリズム -FLOT 解 - 東京海洋大学冨永貴樹. はじめに GPS 測量を行う際 実時間で測位結果を得ることが出来るのは今のところ RTK-GPS 測位のみである GPS 測量では GPS 衛星からの搬送波位相データを使用するため 整数値バイアスを決定しなければならず これが測位計算を複雑にしている所以である この整数値バイアスを決定するためのつの方法として FLOT
Microsoft PowerPoint - ›žŠpfidŠÍŁÏ−·“H−w5›ñŒÚ.ppt
 応用電力変換工学舟木剛 第 5 回本日のテーマ交流 - 直流変換半端整流回路 平成 6 年 月 7 日 整流器 (cfr) とは 交流を直流に変換する 半波整流器は 交直変換半波整流回路 小電力用途 入力電源側の平均電流が零にならない あんまり使われていない 全波整流回路の基本回路 変圧器が直流偏磁しやすい 変圧器の負荷電流に直流分を含むと その直流分により 鉄心が一方向に磁化する これにより 鉄心の磁束密度の増大
応用電力変換工学舟木剛 第 5 回本日のテーマ交流 - 直流変換半端整流回路 平成 6 年 月 7 日 整流器 (cfr) とは 交流を直流に変換する 半波整流器は 交直変換半波整流回路 小電力用途 入力電源側の平均電流が零にならない あんまり使われていない 全波整流回路の基本回路 変圧器が直流偏磁しやすい 変圧器の負荷電流に直流分を含むと その直流分により 鉄心が一方向に磁化する これにより 鉄心の磁束密度の増大
Microsoft PowerPoint - 第3回2.ppt
 講義内容 講義内容 次元ベクトル 関数の直交性フーリエ級数 次元代表的な対の諸性質コンボリューション たたみこみ積分 サンプリング定理 次元離散 次元空間周波数の概念 次元代表的な 次元対 次元離散 次元ベクトル 関数の直交性フーリエ級数 次元代表的な対の諸性質コンボリューション たたみこみ積分 サンプリング定理 次元離散 次元空間周波数の概念 次元代表的な 次元対 次元離散 ベクトルの直交性 3
講義内容 講義内容 次元ベクトル 関数の直交性フーリエ級数 次元代表的な対の諸性質コンボリューション たたみこみ積分 サンプリング定理 次元離散 次元空間周波数の概念 次元代表的な 次元対 次元離散 次元ベクトル 関数の直交性フーリエ級数 次元代表的な対の諸性質コンボリューション たたみこみ積分 サンプリング定理 次元離散 次元空間周波数の概念 次元代表的な 次元対 次元離散 ベクトルの直交性 3
untitled
 KLT はエネルギを集約する カルーネンレーベ変換 (KLT) で 情報を集約する 要点 分散 7. 9. 8.3 3.7 4.5 4.0 KLT 前 集約 分散 0.3 0.4 4.5 7.4 3.4 00.7 KLT 後 分散 = エネルギ密度 エネルギ と表現 最大を 55, 最小を 0 に正規化して表示した 情報圧縮に応用できないか? エネルギ集約 データ圧縮 分散 ( 平均 ) KLT 前
KLT はエネルギを集約する カルーネンレーベ変換 (KLT) で 情報を集約する 要点 分散 7. 9. 8.3 3.7 4.5 4.0 KLT 前 集約 分散 0.3 0.4 4.5 7.4 3.4 00.7 KLT 後 分散 = エネルギ密度 エネルギ と表現 最大を 55, 最小を 0 に正規化して表示した 情報圧縮に応用できないか? エネルギ集約 データ圧縮 分散 ( 平均 ) KLT 前
参考書 (1) 中村, 山本, 吉田 : ウェーブレットによる信号処理と画像処理, 共立出版 応用の紹介とプログラムリストが中心, 理論的背景はほとんどなし 意味不明の比喩を多用 各時代 各国別に美女を探すのが窓フーリエ変換である 応用テーマ : 不連続信号検出, 相関の検出, ノイズ除去, 画像デ
 中村, 山本, 吉田 : ウェーブレットによる信号処理と画像処理, 共立出版 応用の紹介とプログラムリストが中心, 理論的背景はほとんどなし 意味不明の比喩を多用 各時代 各国別に美女を探すのが窓フーリエ変換である 応用テーマ : 不連続信号検出, 相関の検出, ノイズ除去, 画像デ") Wavelet 変換 伊藤 彰則 aito@fw.ipsj.or.jp 1 参考書 (1) 中村, 山本, 吉田 : ウェーブレットによる信号処理と画像処理, 共立出版 応用の紹介とプログラムリストが中心, 理論的背景はほとんどなし 意味不明の比喩を多用 各時代 各国別に美女を探すのが窓フーリエ変換である 応用テーマ : 不連続信号検出, 相関の検出, ノイズ除去, 画像データ圧縮, 劣化画像復元
Wavelet 変換 伊藤 彰則 aito@fw.ipsj.or.jp 1 参考書 (1) 中村, 山本, 吉田 : ウェーブレットによる信号処理と画像処理, 共立出版 応用の紹介とプログラムリストが中心, 理論的背景はほとんどなし 意味不明の比喩を多用 各時代 各国別に美女を探すのが窓フーリエ変換である 応用テーマ : 不連続信号検出, 相関の検出, ノイズ除去, 画像データ圧縮, 劣化画像復元
Microsoft PowerPoint - qcomp.ppt [互換モード]
![Microsoft PowerPoint - qcomp.ppt [互換モード]](/thumbs/85/91243661.jpg "Microsoft PowerPoint - qcomp.ppt [互換モード]") 量子計算基礎 東京工業大学 河内亮周 概要 計算って何? 数理科学的に 計算 を扱うには 量子力学を計算に使おう! 量子情報とは? 量子情報に対する演算 = 量子計算 一般的な量子回路の構成方法 計算って何? 計算とは? 計算 = 入力情報から出力情報への変換 入力 計算機構 ( デジタルコンピュータ,etc ) 出力 計算とは? 計算 = 入力情報から出力情報への変換 この関数はどれくらい計算が大変か??
量子計算基礎 東京工業大学 河内亮周 概要 計算って何? 数理科学的に 計算 を扱うには 量子力学を計算に使おう! 量子情報とは? 量子情報に対する演算 = 量子計算 一般的な量子回路の構成方法 計算って何? 計算とは? 計算 = 入力情報から出力情報への変換 入力 計算機構 ( デジタルコンピュータ,etc ) 出力 計算とは? 計算 = 入力情報から出力情報への変換 この関数はどれくらい計算が大変か??
Microsoft PowerPoint - spe1_handout11.ppt
 目次 信号処理工学 Ⅰ 第 回 : ディジタルフィルタ 電気通信大学電子工学専攻電子知能システム学講座 ディジタルフィルタ ( 復習 ) FIR フィルタの補足 IIR フィルタの設計 IIR フィルタの実現 FIR フィルタと IIR フィルタの比較 最後の課題 長井隆行 ディジタルフィルタ ( 復習 ) 線形位相 FIR フィルタの補足 FIR フィルタ フィードバックがない インパルス応答が有限
目次 信号処理工学 Ⅰ 第 回 : ディジタルフィルタ 電気通信大学電子工学専攻電子知能システム学講座 ディジタルフィルタ ( 復習 ) FIR フィルタの補足 IIR フィルタの設計 IIR フィルタの実現 FIR フィルタと IIR フィルタの比較 最後の課題 長井隆行 ディジタルフィルタ ( 復習 ) 線形位相 FIR フィルタの補足 FIR フィルタ フィードバックがない インパルス応答が有限
21世紀型パラメータ設計―標準SN比の活用―
 世紀のパラメータ設計ースイッチ機構のモデル化ー 接点 ゴム 変位 スイッチ動作前 スイッチ動作後 反転ばねでスイッチの クリック感 を実現した構造 世紀型パラメータ設計 標準 SN 比の活用 0 世紀の品質工学においては,SN 比の中に, 信号因子の乱れである 次誤差 (S res ) もノイズの効果の中に加えて評価してきた.のパラメータ設計の例では, 比例関係が理想であるから, 次誤差も誤差の仲間と考えてもよかったが,
世紀のパラメータ設計ースイッチ機構のモデル化ー 接点 ゴム 変位 スイッチ動作前 スイッチ動作後 反転ばねでスイッチの クリック感 を実現した構造 世紀型パラメータ設計 標準 SN 比の活用 0 世紀の品質工学においては,SN 比の中に, 信号因子の乱れである 次誤差 (S res ) もノイズの効果の中に加えて評価してきた.のパラメータ設計の例では, 比例関係が理想であるから, 次誤差も誤差の仲間と考えてもよかったが,
0 部分的最小二乗回帰 Partial Least Squares Regression PLS 明治大学理 学部応用化学科 データ化学 学研究室 弘昌
 0 部分的最小二乗回帰 Parial Leas Squares Regressio PLS 明治大学理 学部応用化学科 データ化学 学研究室 弘昌 部分的最小二乗回帰 (PLS) とは? 部分的最小二乗回帰 (Parial Leas Squares Regressio, PLS) 線形の回帰分析手法の つ 説明変数 ( 記述 ) の数がサンプルの数より多くても計算可能 回帰式を作るときにノイズの影響を受けにくい
0 部分的最小二乗回帰 Parial Leas Squares Regressio PLS 明治大学理 学部応用化学科 データ化学 学研究室 弘昌 部分的最小二乗回帰 (PLS) とは? 部分的最小二乗回帰 (Parial Leas Squares Regressio, PLS) 線形の回帰分析手法の つ 説明変数 ( 記述 ) の数がサンプルの数より多くても計算可能 回帰式を作るときにノイズの影響を受けにくい
2008 年度下期未踏 IT 人材発掘 育成事業採択案件評価書 1. 担当 PM 田中二郎 PM ( 筑波大学大学院システム情報工学研究科教授 ) 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3.
 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3.") 2008 年度下期未踏 IT 人材発掘 育成事業採択案件評価書 1. 担当 PM 田中二郎 PM ( 筑波大学大学院システム情報工学研究科教授 ) 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3. プロジェクト管理組織 株式会社オープンテクノロジーズ 4. 委託金支払額 3,000,000 円 5.
2008 年度下期未踏 IT 人材発掘 育成事業採択案件評価書 1. 担当 PM 田中二郎 PM ( 筑波大学大学院システム情報工学研究科教授 ) 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3. プロジェクト管理組織 株式会社オープンテクノロジーズ 4. 委託金支払額 3,000,000 円 5.
例 e 指数関数的に減衰する信号を h( a < + a a すると, それらのラプラス変換は, H ( ) { e } e インパルス応答が h( a < ( ただし a >, U( ) { } となるシステムにステップ信号 ( y( のラプラス変換 Y () は, Y ( ) H ( ) X (
 { e } e インパルス応答が h( a < ( ただし a >, U( ) { } となるシステムにステップ信号 ( y( のラプラス変換 Y () は, Y ( ) H ( ) X (") 第 週ラプラス変換 教科書 p.34~ 目標ラプラス変換の定義と意味を理解する フーリエ変換や Z 変換と並ぶ 信号解析やシステム設計における重要なツール ラプラス変換は波動現象や電気回路など様々な分野で 微分方程式を解くために利用されてきた ラプラス変換を用いることで微分方程式は代数方程式に変換される また 工学上使われる主要な関数のラプラス変換は簡単な形の関数で表されるので これを ラプラス変換表
第 週ラプラス変換 教科書 p.34~ 目標ラプラス変換の定義と意味を理解する フーリエ変換や Z 変換と並ぶ 信号解析やシステム設計における重要なツール ラプラス変換は波動現象や電気回路など様々な分野で 微分方程式を解くために利用されてきた ラプラス変換を用いることで微分方程式は代数方程式に変換される また 工学上使われる主要な関数のラプラス変換は簡単な形の関数で表されるので これを ラプラス変換表
ii 3.,. 4. F. (), ,,. 8.,. 1. (75% ) (25% ) =9 7, =9 8 (. ). 1.,, (). 3.,. 1. ( ).,.,.,.,.,. ( ) (1 2 )., ( ), 0. 2., 1., 0,.
, ,,. 8.,. 1. (75% ) (25% ) =9 7, =9 8 (. ). 1.,, (). 3.,. 1. ( ).,.,.,.,.,. ( ) (1 2 )., ( ), 0. 2., 1., 0,.") 23(2011) (1 C104) 5 11 (2 C206) 5 12 http://www.math.is.tohoku.ac.jp/~obata,.,,,.. 1. 2. 3. 4. 5. 6. 7.,,. 1., 2007 ( ). 2. P. G. Hoel, 1995. 3... 1... 2.,,. ii 3.,. 4. F. (),.. 5.. 6.. 7.,,. 8.,. 1. (75%
23(2011) (1 C104) 5 11 (2 C206) 5 12 http://www.math.is.tohoku.ac.jp/~obata,.,,,.. 1. 2. 3. 4. 5. 6. 7.,,. 1., 2007 ( ). 2. P. G. Hoel, 1995. 3... 1... 2.,,. ii 3.,. 4. F. (),.. 5.. 6.. 7.,,. 8.,. 1. (75%
画像処理工学
 画像処理工学 画像の空間周波数解析とテクスチャ特徴 フーリエ変換の基本概念 信号波形のフーリエ変換 信号波形を周波数の異なる三角関数 ( 正弦波など ) に分解する 逆に, 周波数の異なる三角関数を重ねあわせることにより, 任意の信号波形を合成できる 正弦波の重ね合わせによる矩形波の表現 フーリエ変換の基本概念 フーリエ変換 次元信号 f (t) のフーリエ変換 変換 ( ω) ( ) ωt F f
画像処理工学 画像の空間周波数解析とテクスチャ特徴 フーリエ変換の基本概念 信号波形のフーリエ変換 信号波形を周波数の異なる三角関数 ( 正弦波など ) に分解する 逆に, 周波数の異なる三角関数を重ねあわせることにより, 任意の信号波形を合成できる 正弦波の重ね合わせによる矩形波の表現 フーリエ変換の基本概念 フーリエ変換 次元信号 f (t) のフーリエ変換 変換 ( ω) ( ) ωt F f
画像解析論(2) 講義内容
 講義内容") 画像解析論 画像解析論 東京工業大学長橋宏 主な講義内容 信号処理と画像処理 二次元システムとその表現 二次元システムの特性解析 各種の画像フィルタ 信号処理と画像処理 画像解析論 処理の応答 記憶域 入出力の流れ 信号処理系 実時間性が求められる メモリ容量に対する制限が厳しい オンラインでの対応が厳しく求められる 画像処理系 ある程度の処理時間が許容される 大容量のメモリ使用が容認され易い オフラインでの対応が容認され易い
画像解析論 画像解析論 東京工業大学長橋宏 主な講義内容 信号処理と画像処理 二次元システムとその表現 二次元システムの特性解析 各種の画像フィルタ 信号処理と画像処理 画像解析論 処理の応答 記憶域 入出力の流れ 信号処理系 実時間性が求められる メモリ容量に対する制限が厳しい オンラインでの対応が厳しく求められる 画像処理系 ある程度の処理時間が許容される 大容量のメモリ使用が容認され易い オフラインでの対応が容認され易い
14 化学実験法 II( 吉村 ( 洋 mmol/l の半分だったから さんの測定値は くんの測定値の 4 倍の重みがあり 推定値 としては 0.68 mmol/l その標準偏差は mmol/l 程度ということになる 測定値を 特徴づけるパラメータ t を推定するこの手
 14 化学実験法 II( 吉村 ( 洋 014.6.1. 最小 乗法のはなし 014.6.1. 内容 最小 乗法のはなし...1 最小 乗法の考え方...1 最小 乗法によるパラメータの決定... パラメータの信頼区間...3 重みの異なるデータの取扱い...4 相関係数 決定係数 ( 最小 乗法を語るもう一つの立場...5 実験条件の誤差の影響...5 問題...6 最小 乗法の考え方 飲料水中のカルシウム濃度を
14 化学実験法 II( 吉村 ( 洋 014.6.1. 最小 乗法のはなし 014.6.1. 内容 最小 乗法のはなし...1 最小 乗法の考え方...1 最小 乗法によるパラメータの決定... パラメータの信頼区間...3 重みの異なるデータの取扱い...4 相関係数 決定係数 ( 最小 乗法を語るもう一つの立場...5 実験条件の誤差の影響...5 問題...6 最小 乗法の考え方 飲料水中のカルシウム濃度を
2014 BinN 論文セミナーについて
 2014 BinN 論文セミナーについて 内容 論文ゼミは,BinN で毎年行なっているゼミの 1 つで, 昨年度から外部に公開してやっています. 毎週 2 人のひとが, 各自論文 ( 基本英語 ) を読んでその内容をまとめ, 発表 議論するものです. 単に論文を理解するだけでなく, 先生方を交えてどのように応用可能か, 自分の研究にどう生かせそうかなどを議論できる場となっています. 論文ゼミ 基本事項
2014 BinN 論文セミナーについて 内容 論文ゼミは,BinN で毎年行なっているゼミの 1 つで, 昨年度から外部に公開してやっています. 毎週 2 人のひとが, 各自論文 ( 基本英語 ) を読んでその内容をまとめ, 発表 議論するものです. 単に論文を理解するだけでなく, 先生方を交えてどのように応用可能か, 自分の研究にどう生かせそうかなどを議論できる場となっています. 論文ゼミ 基本事項
Microsoft PowerPoint - H22制御工学I-10回.ppt
 制御工学 I 第 回 安定性 ラウス, フルビッツの安定判別 平成 年 6 月 日 /6/ 授業の予定 制御工学概論 ( 回 ) 制御技術は現在様々な工学分野において重要な基本技術となっている 工学における制御工学の位置づけと歴史について説明する さらに 制御システムの基本構成と種類を紹介する ラプラス変換 ( 回 ) 制御工学 特に古典制御ではラプラス変換が重要な役割を果たしている ラプラス変換と逆ラプラス変換の定義を紹介し
制御工学 I 第 回 安定性 ラウス, フルビッツの安定判別 平成 年 6 月 日 /6/ 授業の予定 制御工学概論 ( 回 ) 制御技術は現在様々な工学分野において重要な基本技術となっている 工学における制御工学の位置づけと歴史について説明する さらに 制御システムの基本構成と種類を紹介する ラプラス変換 ( 回 ) 制御工学 特に古典制御ではラプラス変換が重要な役割を果たしている ラプラス変換と逆ラプラス変換の定義を紹介し
Microsoft Word - 02__⁄T_ŒÚ”�.doc
 目 次 はじめに 目次 1. 目的 1 2. 適用範囲 1 3. 参照文書 1 4. 定義 2 5. 略語 6 6. 構成 7 7. 共通事項 8 7.1 適用範囲 8 7.2 送信ネットワーク 8 7.2.1 送信ネットワークの分類 8 7.2.2 送信ネットワークの定義 10 7.3 取り扱う主な信号の形式 12 7.3.1 放送 TS 信号形式 12 7.3.2 OFDM 信号形式 14 7.4
目 次 はじめに 目次 1. 目的 1 2. 適用範囲 1 3. 参照文書 1 4. 定義 2 5. 略語 6 6. 構成 7 7. 共通事項 8 7.1 適用範囲 8 7.2 送信ネットワーク 8 7.2.1 送信ネットワークの分類 8 7.2.2 送信ネットワークの定義 10 7.3 取り扱う主な信号の形式 12 7.3.1 放送 TS 信号形式 12 7.3.2 OFDM 信号形式 14 7.4
 招待論文 フルスペック 8K スーパーハイビジョン圧縮記録装置の開発 3.3 記録制御機能と記録媒体 144 Gbps の映像信号を 1/8 に圧縮した場合 18 Gbps 程度 の転送速度が要求される さらに音声データやその他のメ タデータを同時に記録すると 記録再生には 20 Gbps 程度 の転送性能が必要となる また 記録媒体は記録装置から 着脱して持ち運ぶため 不慮の落下などにも耐性のあるこ
招待論文 フルスペック 8K スーパーハイビジョン圧縮記録装置の開発 3.3 記録制御機能と記録媒体 144 Gbps の映像信号を 1/8 に圧縮した場合 18 Gbps 程度 の転送速度が要求される さらに音声データやその他のメ タデータを同時に記録すると 記録再生には 20 Gbps 程度 の転送性能が必要となる また 記録媒体は記録装置から 着脱して持ち運ぶため 不慮の落下などにも耐性のあるこ
(Microsoft Word - PLL\203f\203\202\216\221\227\277-2-\203T\203\223\203v\203\213.doc)
") ディジタル PLL 理論と実践 有限会社 SP システム 目次 - 目次 1. はじめに...3 2. アナログ PLL...4 2.1 PLL の系...4 2.1.1 位相比較器...4 2.1.2 ループフィルタ...4 2.1.3 電圧制御発振器 (VCO)...4 2.1.4 分周器...5 2.2 ループフィルタ抜きの PLL 伝達関数...5 2.3 ループフィルタ...6 2.3.1
ディジタル PLL 理論と実践 有限会社 SP システム 目次 - 目次 1. はじめに...3 2. アナログ PLL...4 2.1 PLL の系...4 2.1.1 位相比較器...4 2.1.2 ループフィルタ...4 2.1.3 電圧制御発振器 (VCO)...4 2.1.4 分周器...5 2.2 ループフィルタ抜きの PLL 伝達関数...5 2.3 ループフィルタ...6 2.3.1
PowerPoint プレゼンテーション
 回転型クレーン / 倒立振子の制御 回転型クレーンの制御 状態方程式 コントローラ設計 ( 極配置法 ) コントローラ設計 ( 最適レギュレータ ) 回転型倒立振子の制御 状態方程式 コントローラ設計 コントローラの形式 : 状態フィードバック P-D コントローラ アームの P-D 振子の P-D 目標値 状態フィードバック制御 回転型クレーン コントローラ で 状態フィードバック制御 回転型クレーン
回転型クレーン / 倒立振子の制御 回転型クレーンの制御 状態方程式 コントローラ設計 ( 極配置法 ) コントローラ設計 ( 最適レギュレータ ) 回転型倒立振子の制御 状態方程式 コントローラ設計 コントローラの形式 : 状態フィードバック P-D コントローラ アームの P-D 振子の P-D 目標値 状態フィードバック制御 回転型クレーン コントローラ で 状態フィードバック制御 回転型クレーン
Microsoft PowerPoint - 三次元座標測定 ppt
 冗長座標測定機 ()( 三次元座標計測 ( 第 9 回 ) 5 年度大学院講義 6 年 月 7 日 冗長性を持つ 次元座標測定機 次元 辺測量 : 冗長性を出すために つのレーザトラッカを配置し, キャッツアイまでの距離から座標を測定する つのカメラ ( 次元的なカメラ ) とレーザスキャナ : つの角度測定システムによる座標測定 つの回転関節による 次元 自由度多関節機構 高増潔東京大学工学系研究科精密機械工学専攻
冗長座標測定機 ()( 三次元座標計測 ( 第 9 回 ) 5 年度大学院講義 6 年 月 7 日 冗長性を持つ 次元座標測定機 次元 辺測量 : 冗長性を出すために つのレーザトラッカを配置し, キャッツアイまでの距離から座標を測定する つのカメラ ( 次元的なカメラ ) とレーザスキャナ : つの角度測定システムによる座標測定 つの回転関節による 次元 自由度多関節機構 高増潔東京大学工学系研究科精密機械工学専攻
スライド 1
 大規模連立一次方程式に対する 高並列前処理技術について 今倉暁筑波大学計算科学研究センター 共同研究者櫻井鉄也 ( 筑波大学 ), 住吉光介 ( 沼津高専 ), 松古栄夫 (KEK) 1 /49 本日のトピック 大規模連立一次方程式 のための ( 前処理付き )Krylov 部分空間法の概略について紹介する. 高並列性を考慮した前処理として, 反復法を用いた重み付き定常反復型前処理を導入し, そのパラメータを最適化手法を提案
大規模連立一次方程式に対する 高並列前処理技術について 今倉暁筑波大学計算科学研究センター 共同研究者櫻井鉄也 ( 筑波大学 ), 住吉光介 ( 沼津高専 ), 松古栄夫 (KEK) 1 /49 本日のトピック 大規模連立一次方程式 のための ( 前処理付き )Krylov 部分空間法の概略について紹介する. 高並列性を考慮した前処理として, 反復法を用いた重み付き定常反復型前処理を導入し, そのパラメータを最適化手法を提案
8. 自由曲線と曲面の概要 陽関数 陰関数 f x f x x y y y f f x y z g x y z パラメータ表現された 次元曲線 パラメータ表現は xyx 毎のパラメータによる陽関数表現 形状普遍性 座標独立性 曲線上の点を直接に計算可能 多価の曲線も表現可能 gx 低次の多項式は 計
 8. 自由曲線 曲面. 概論. ベジエ曲線 曲面. ベジエ曲線 曲面の数学. OeGLによる実行. URS. スプライン関数. スプライン曲線 曲面. URS 曲線 曲面 4. OeGLによる実行 8. 自由曲線と曲面の概要 陽関数 陰関数 f x f x x y y y f f x y z g x y z パラメータ表現された 次元曲線 パラメータ表現は xyx 毎のパラメータによる陽関数表現 形状普遍性
8. 自由曲線 曲面. 概論. ベジエ曲線 曲面. ベジエ曲線 曲面の数学. OeGLによる実行. URS. スプライン関数. スプライン曲線 曲面. URS 曲線 曲面 4. OeGLによる実行 8. 自由曲線と曲面の概要 陽関数 陰関数 f x f x x y y y f f x y z g x y z パラメータ表現された 次元曲線 パラメータ表現は xyx 毎のパラメータによる陽関数表現 形状普遍性
多変量解析 ~ 重回帰分析 ~ 2006 年 4 月 21 日 ( 金 ) 南慶典
 南慶典") 多変量解析 ~ 重回帰分析 ~ 2006 年 4 月 21 日 ( 金 ) 南慶典 重回帰分析とは? 重回帰分析とは複数の説明変数から目的変数との関係性を予測 評価説明変数 ( 数量データ ) は目的変数を説明するのに有効であるか得られた関係性より未知のデータの妥当性を判断する これを重回帰分析という つまり どんなことをするのか? 1 最小 2 乗法により重回帰モデルを想定 2 自由度調整済寄与率を求め
多変量解析 ~ 重回帰分析 ~ 2006 年 4 月 21 日 ( 金 ) 南慶典 重回帰分析とは? 重回帰分析とは複数の説明変数から目的変数との関係性を予測 評価説明変数 ( 数量データ ) は目的変数を説明するのに有効であるか得られた関係性より未知のデータの妥当性を判断する これを重回帰分析という つまり どんなことをするのか? 1 最小 2 乗法により重回帰モデルを想定 2 自由度調整済寄与率を求め
NJM78L00 3 端子正定電圧電源 概要高利得誤差増幅器, 温度補償回路, 定電圧ダイオードなどにより構成され, さらに内部に電流制限回路, 熱暴走に対する保護回路を有する, 高性能安定化電源用素子で, ツェナーダイオード / 抵抗の組合せ回路に比べ出力インピーダンスが改良され, 無効電流が小さ
 3 端子正定電圧電源 概要高利得誤差増幅器, 温度補償回路, 定電圧ダイオードなどにより構成され, さらに内部に電流制限回路, 熱暴走に対する保護回路を有する, 高性能安定化電源用素子で, ツェナーダイオード / 抵抗の組合せ回路に比べ出力インピーダンスが改良され, 無効電流が小さくなり, さらに雑音特性も改良されています 外形 UA EA (5V,9V,12V のみ ) 特徴 過電流保護回路内蔵
3 端子正定電圧電源 概要高利得誤差増幅器, 温度補償回路, 定電圧ダイオードなどにより構成され, さらに内部に電流制限回路, 熱暴走に対する保護回路を有する, 高性能安定化電源用素子で, ツェナーダイオード / 抵抗の組合せ回路に比べ出力インピーダンスが改良され, 無効電流が小さくなり, さらに雑音特性も改良されています 外形 UA EA (5V,9V,12V のみ ) 特徴 過電流保護回路内蔵
微分方程式による現象記述と解きかた
 微分方程式による現象記述と解きかた 土木工学 : 公共諸施設 構造物の有用目的にむけた合理的な実現をはかる方法 ( 技術 ) に関する学 橋梁 トンネル ダム 道路 港湾 治水利水施設 安全化 利便化 快適化 合法則的 経済的 自然および人口素材によって作られた 質量保存則 構造物の自然的な性質 作用 ( 外力による応答 ) エネルギー則 の解明 社会的諸現象のうち マスとしての移動 流通 運動量則
微分方程式による現象記述と解きかた 土木工学 : 公共諸施設 構造物の有用目的にむけた合理的な実現をはかる方法 ( 技術 ) に関する学 橋梁 トンネル ダム 道路 港湾 治水利水施設 安全化 利便化 快適化 合法則的 経済的 自然および人口素材によって作られた 質量保存則 構造物の自然的な性質 作用 ( 外力による応答 ) エネルギー則 の解明 社会的諸現象のうち マスとしての移動 流通 運動量則
NJM78M00 3 端子正定電圧電源 概要 NJM78M00 シリーズは,NJM78L00 シリーズを更に高性能化した安定化電源用 ICです 出力電流が 500mA と大きいので, 余裕ある回路設計が可能になります 用途はテレビ, ステレオ, 等の民生用機器から通信機, 測定器等の工業用電子機器迄
 3 端子正定電圧電源 概要 シリーズは,NJM78L00 シリーズを更に高性能化した安定化電源用 ICです 出力電流が 500mA と大きいので, 余裕ある回路設計が可能になります 用途はテレビ, ステレオ, 等の民生用機器から通信機, 測定器等の工業用電子機器迄広くご利用頂けます 外形 特徴 過電流保護回路内蔵 サーマルシャットダウン内蔵 高リップルリジェクション 高出力電流 (500mA max.)
3 端子正定電圧電源 概要 シリーズは,NJM78L00 シリーズを更に高性能化した安定化電源用 ICです 出力電流が 500mA と大きいので, 余裕ある回路設計が可能になります 用途はテレビ, ステレオ, 等の民生用機器から通信機, 測定器等の工業用電子機器迄広くご利用頂けます 外形 特徴 過電流保護回路内蔵 サーマルシャットダウン内蔵 高リップルリジェクション 高出力電流 (500mA max.)
1. 線形シフト不変システムと z 変換 ここで言う システム とは? 入力数列 T[ ] 出力数列 一意変換 ( 演算子 ) 概念的には,, x 2, x 1, x 0, x 1, x 2, を入力すると, y 2, y 1, y 0, y 1, y 2, が出力される. 線形システム : 線形シ
![1. 線形シフト不変システムと z 変換 ここで言う システム とは? 入力数列 T[ ] 出力数列 一意変換 ( 演算子 ) 概念的には,, x 2, x 1, x 0, x 1, x 2, を入力すると, y 2, y 1, y 0, y 1, y 2, が出力される. 線形システム : 線形シ](/thumbs/88/116737326.jpg "1. 線形シフト不変システムと z 変換 ここで言う システム とは? 入力数列 T[ ] 出力数列 一意変換 ( 演算子 ) 概念的には,, x 2, x 1, x 0, x 1, x 2, を入力すると, y 2, y 1, y 0, y 1, y 2, が出力される. 線形システム : 線形シ") 1. 線形シフト不変システムと z 変換 ここで言う システム とは? 入力数列 T[ ] 出力数列 一意変換 ( 演算子 ) 概念的には,, x 2, x 1, x, x1, x2, を入力すると, y 2, y 1, y, y1, y2, が出力される. 線形システム : 線形システムの例 x nxn 1 yn= 2 線形でないシステムの例 xn yn={ 2 xn xn othewise なぜ線形システム?
1. 線形シフト不変システムと z 変換 ここで言う システム とは? 入力数列 T[ ] 出力数列 一意変換 ( 演算子 ) 概念的には,, x 2, x 1, x, x1, x2, を入力すると, y 2, y 1, y, y1, y2, が出力される. 線形システム : 線形システムの例 x nxn 1 yn= 2 線形でないシステムの例 xn yn={ 2 xn xn othewise なぜ線形システム?
ハートレー近似(Hartree aproximation)
") ハートリー近似 ( 量子多体系の平均場近似 1) 0. ハミルトニアンの期待値の変分がシュレディンガー方程式と等価であること 1. 独立粒子近似という考え方. 電子系におけるハートリー近似 3.3 電子系におけるハートリー近似 Mde by R. Okmoto (Kyushu Institute of Technology) filenme=rtree080609.ppt (0) ハミルトニアンの期待値の変分と
ハートリー近似 ( 量子多体系の平均場近似 1) 0. ハミルトニアンの期待値の変分がシュレディンガー方程式と等価であること 1. 独立粒子近似という考え方. 電子系におけるハートリー近似 3.3 電子系におけるハートリー近似 Mde by R. Okmoto (Kyushu Institute of Technology) filenme=rtree080609.ppt (0) ハミルトニアンの期待値の変分と
混沌系工学特論 #5
 混沌系工学特論 #5 情報科学研究科井上純一 URL : htt://chaosweb.comlex.eng.hokudai.ac.j/~j_inoue/ Mirror : htt://www5.u.so-net.ne.j/j_inoue/index.html 平成 17 年 11 月 14 日第 5 回講義 デジタルデータの転送と復元再考 P ({ σ} ) = ex σ ( σσ ) < ij>
混沌系工学特論 #5 情報科学研究科井上純一 URL : htt://chaosweb.comlex.eng.hokudai.ac.j/~j_inoue/ Mirror : htt://www5.u.so-net.ne.j/j_inoue/index.html 平成 17 年 11 月 14 日第 5 回講義 デジタルデータの転送と復元再考 P ({ σ} ) = ex σ ( σσ ) < ij>
SICEセミナー 制御のためのシステム同定
 状態推定班 ロケット ( 企業共研 ) 電気自動車用リチウムイオン電池 ( 企業共研 ) モデリングと制御班 ヘリコプタ実験 エンジン制御 ( 企業共研 ) RoboCar 実験 制御実験装置 複写機の制御 ( 企業共研 ) 異常検出 基礎理論研究 モデリング Multi-domain modeling 非線形同定 JIT,PLS,PCA,... 統計的学習理論ベイジアン,RVM スパース推定 状態推定
状態推定班 ロケット ( 企業共研 ) 電気自動車用リチウムイオン電池 ( 企業共研 ) モデリングと制御班 ヘリコプタ実験 エンジン制御 ( 企業共研 ) RoboCar 実験 制御実験装置 複写機の制御 ( 企業共研 ) 異常検出 基礎理論研究 モデリング Multi-domain modeling 非線形同定 JIT,PLS,PCA,... 統計的学習理論ベイジアン,RVM スパース推定 状態推定
(Microsoft PowerPoint - \221\34613\211\361)
") 計算力学 ~ 第 回弾性問題の有限要素解析 (Ⅱ)~ 修士 年後期 ( 選択科目 ) 担当 : 岩佐貴史 講義の概要 全 5 講義. 計算力学概論, ガイダンス. 自然現象の数理モデル化. 行列 場とその演算. 数値計算法 (Ⅰ) 5. 数値計算法 (Ⅱ) 6. 初期値 境界値問題 (Ⅰ) 7. 初期値 境界値問題 (Ⅱ) 8. マトリックス変位法による構造解析 9. トラス構造の有限要素解析. 重み付き残差法と古典的近似解法.
計算力学 ~ 第 回弾性問題の有限要素解析 (Ⅱ)~ 修士 年後期 ( 選択科目 ) 担当 : 岩佐貴史 講義の概要 全 5 講義. 計算力学概論, ガイダンス. 自然現象の数理モデル化. 行列 場とその演算. 数値計算法 (Ⅰ) 5. 数値計算法 (Ⅱ) 6. 初期値 境界値問題 (Ⅰ) 7. 初期値 境界値問題 (Ⅱ) 8. マトリックス変位法による構造解析 9. トラス構造の有限要素解析. 重み付き残差法と古典的近似解法.
スライド 1
 平成 22 年 3 月電子回路研究会 ECT-10-046 開ループアンプを用いた パイプライン ADC の Split ADC 構成による バックグラウンド自己校正法 八木拓哉上森聡丹陽平伊藤聡志 ( 群馬大学 ) 松浦達治臼井邦彦 ( ルネサステクノロジ ) 小林春夫 ( 群馬大学 ) アウトライン 2 研究背景と目的 パイプライン AD 変換器のバックグラウンド自己校正法の提案 3 次の非線形性の補正方法
平成 22 年 3 月電子回路研究会 ECT-10-046 開ループアンプを用いた パイプライン ADC の Split ADC 構成による バックグラウンド自己校正法 八木拓哉上森聡丹陽平伊藤聡志 ( 群馬大学 ) 松浦達治臼井邦彦 ( ルネサステクノロジ ) 小林春夫 ( 群馬大学 ) アウトライン 2 研究背景と目的 パイプライン AD 変換器のバックグラウンド自己校正法の提案 3 次の非線形性の補正方法
モデリングとは
 コンピュータグラフィックス基礎 第 5 回曲線 曲面の表現 ベジェ曲線 金森由博 学習の目標 滑らかな曲線を扱う方法を学習する パラメトリック曲線について理解する 広く一般的に使われているベジェ曲線を理解する 制御点を入力することで ベジェ曲線を描画するアプリケーションの開発を行えるようになる C++ 言語の便利な機能を使えるようになる 要素数が可変な配列としての std::vector の活用 計算機による曲線の表現
コンピュータグラフィックス基礎 第 5 回曲線 曲面の表現 ベジェ曲線 金森由博 学習の目標 滑らかな曲線を扱う方法を学習する パラメトリック曲線について理解する 広く一般的に使われているベジェ曲線を理解する 制御点を入力することで ベジェ曲線を描画するアプリケーションの開発を行えるようになる C++ 言語の便利な機能を使えるようになる 要素数が可変な配列としての std::vector の活用 計算機による曲線の表現
Microsoft PowerPoint - 【最終提出版】 MATLAB_EXPO2014講演資料_ルネサス菅原.pptx
 MATLAB/Simulink を使用したモータ制御アプリのモデルベース開発事例 ルネサスエレクトロニクス株式会社 第二ソリューション事業本部産業第一事業部家電ソリューション部 Rev. 1.00 2014 Renesas Electronics Corporation. All rights reserved. IAAS-AA-14-0202-1 目次 1. はじめに 1.1 モデルベース開発とは?
MATLAB/Simulink を使用したモータ制御アプリのモデルベース開発事例 ルネサスエレクトロニクス株式会社 第二ソリューション事業本部産業第一事業部家電ソリューション部 Rev. 1.00 2014 Renesas Electronics Corporation. All rights reserved. IAAS-AA-14-0202-1 目次 1. はじめに 1.1 モデルベース開発とは?
解析センターを知っていただく キャンペーン
 005..5 SAS 問題設定 目的 PKパラメータ (AUC,Cmax,Tmaxなど) の推定 PKパラメータの群間比較 PKパラメータのバラツキの評価! データの特徴 非反復測定値 個体につき 個の測定値しか得られない plasma concentration 非反復測定値のイメージ図 測定時点間で個体の対応がない 着目する状況 plasma concentration 経時反復測定値のイメージ図
005..5 SAS 問題設定 目的 PKパラメータ (AUC,Cmax,Tmaxなど) の推定 PKパラメータの群間比較 PKパラメータのバラツキの評価! データの特徴 非反復測定値 個体につき 個の測定値しか得られない plasma concentration 非反復測定値のイメージ図 測定時点間で個体の対応がない 着目する状況 plasma concentration 経時反復測定値のイメージ図
T2K 実験 南野彰宏 ( 京都大学 ) 他 T2Kコラボレーション平成 25 年度宇宙線研究所共同利用成果発表会 2013 年 12 月 20 日 1
 他 T2Kコラボレーション平成 25 年度宇宙線研究所共同利用成果発表会 2013 年 12 月 20 日 1") T2K 実験 南野彰宏 ( 京都大学 ) 他 T2Kコラボレーション平成 25 年度宇宙線研究所共同利用成果発表会 2013 年 12 月 20 日 1 T2K 実験 J- PARC でほぼ純粋な ν µμ ビームを生成 生成点直後の前置検出器と 295km 離れたスーパーカミオカンデでニュートリノを観測 ニュートリノ振動の精密測定 T2K 実験における振動モード 1. ν µμ ν e (ν e
T2K 実験 南野彰宏 ( 京都大学 ) 他 T2Kコラボレーション平成 25 年度宇宙線研究所共同利用成果発表会 2013 年 12 月 20 日 1 T2K 実験 J- PARC でほぼ純粋な ν µμ ビームを生成 生成点直後の前置検出器と 295km 離れたスーパーカミオカンデでニュートリノを観測 ニュートリノ振動の精密測定 T2K 実験における振動モード 1. ν µμ ν e (ν e
カメラレディ原稿
 IS2-A2 カメラを回転させた時の特徴点軌跡を用いた魚眼カメラの内部パラメータ推定 - モデルと評価関数の変更による改良 - 田中祐輝, 増山岳人, 梅田和昇 Yuki TANAKA, Gakuto MASUYAMA, Kazunori UMEDA : 中央大学大学院理工学研究科,y.tanaka@sensor.mech.chuo-u.ac.jp 中央大学理工学部,{masuyama, umeda}@mech.chuo-u.ac.jp
IS2-A2 カメラを回転させた時の特徴点軌跡を用いた魚眼カメラの内部パラメータ推定 - モデルと評価関数の変更による改良 - 田中祐輝, 増山岳人, 梅田和昇 Yuki TANAKA, Gakuto MASUYAMA, Kazunori UMEDA : 中央大学大学院理工学研究科,y.tanaka@sensor.mech.chuo-u.ac.jp 中央大学理工学部,{masuyama, umeda}@mech.chuo-u.ac.jp
Microsoft PowerPoint - 時系列解析(10)_講義用.pptx
_講義用.pptx") 時系列解析 () 季節調整モデルと成分分解 信号抽出 東京 学数理 情報教育研究センター 北川源四郎 東京 学北川源四郎数理 法 VII ( 時系列解析 ) 季節調整とは.5 WHARD 月次データ.3..9.7 5 49 73 97 45 何らかの原因で特定の周期で繰り返す成分を除去して本質的な現象を抽出する方法 東京 学北川源四郎数理 法 VII ( 時系列解析 ) 季節調整モデル 観測モデル
時系列解析 () 季節調整モデルと成分分解 信号抽出 東京 学数理 情報教育研究センター 北川源四郎 東京 学北川源四郎数理 法 VII ( 時系列解析 ) 季節調整とは.5 WHARD 月次データ.3..9.7 5 49 73 97 45 何らかの原因で特定の周期で繰り返す成分を除去して本質的な現象を抽出する方法 東京 学北川源四郎数理 法 VII ( 時系列解析 ) 季節調整モデル 観測モデル
(3) E-I 特性の傾きが出力コンダクタンス である 添え字 は utput( 出力 ) を意味する (4) E-BE 特性の傾きが電圧帰還率 r である 添え字 r は rrs( 逆 ) を表す 定数の値は, トランジスタの種類によって異なるばかりでなく, 同一のトランジスタでも,I, E, 周
 E-I 特性の傾きが出力コンダクタンス である 添え字 は utput( 出力 ) を意味する (4) E-BE 特性の傾きが電圧帰還率 r である 添え字 r は rrs( 逆 ) を表す 定数の値は, トランジスタの種類によって異なるばかりでなく, 同一のトランジスタでも,I, E, 周") トランジスタ増幅回路設計入門 pyrgt y Km Ksaka 005..06. 等価回路についてトランジスタの動作は図 のように非線形なので, その動作を簡単な数式で表すことができない しかし, アナログ信号を扱う回路では, 特性グラフのの直線部分に動作点を置くので線形のパラメータにより, その動作を簡単な数式 ( 一次式 ) で表すことができる 図. パラメータトランジスタの各静特性の直線部分の傾きを数値として特性を表したものが
トランジスタ増幅回路設計入門 pyrgt y Km Ksaka 005..06. 等価回路についてトランジスタの動作は図 のように非線形なので, その動作を簡単な数式で表すことができない しかし, アナログ信号を扱う回路では, 特性グラフのの直線部分に動作点を置くので線形のパラメータにより, その動作を簡単な数式 ( 一次式 ) で表すことができる 図. パラメータトランジスタの各静特性の直線部分の傾きを数値として特性を表したものが
Microsoft PowerPoint pptx
 4.2 小信号パラメータ 1 電圧利得をどのように求めるか 電圧ー電流変換 入力信号の変化 dv BE I I e 1 v be の振幅から i b を求めるのは難しい? 電流増幅 電流ー電圧変換 di B di C h FE 電流と電圧の関係が指数関数になっているのが問題 (-RC), ただし RL がない場合 dv CE 出力信号の変化 2 pn 接合の非線形性への対処 I B 直流バイアスに対する抵抗
4.2 小信号パラメータ 1 電圧利得をどのように求めるか 電圧ー電流変換 入力信号の変化 dv BE I I e 1 v be の振幅から i b を求めるのは難しい? 電流増幅 電流ー電圧変換 di B di C h FE 電流と電圧の関係が指数関数になっているのが問題 (-RC), ただし RL がない場合 dv CE 出力信号の変化 2 pn 接合の非線形性への対処 I B 直流バイアスに対する抵抗
Microsoft PowerPoint - 配布資料・演習18.pptx
 学年学科学籍番号氏名 宿題 ( 複素正弦波 jω ) メディアと信号処理第 回 ( 金田 ). 複素数とは 実数部と虚数部を持った数である 例えば 虚数単位を j と表すと 4+ j は複素数で 実数部は 4 で 虚数部が である 一般的に 実数部を 虚数部を とすると 複素数 z は z = + j と表される 複素数の 大きさ は 絶対値 (r jθ の r ) で定義される z の絶対値は z
学年学科学籍番号氏名 宿題 ( 複素正弦波 jω ) メディアと信号処理第 回 ( 金田 ). 複素数とは 実数部と虚数部を持った数である 例えば 虚数単位を j と表すと 4+ j は複素数で 実数部は 4 で 虚数部が である 一般的に 実数部を 虚数部を とすると 複素数 z は z = + j と表される 複素数の 大きさ は 絶対値 (r jθ の r ) で定義される z の絶対値は z
システム工学実験 パラメータ推定手順
 システム工学実験パラメータ推定手順 大木健太郎 2014/11/14 2014 年度システム工学実験 : フレキシブルリンク 1 アウトライン 1. 線形システムと周波数情報 2. パラメータ推定 3. 実際の手順 2014/11/14 2014 年度システム工学実験 : フレキシブルリンク 2 線形時不変システムと伝達関数 入力と出力の関係が線形な定係数微分方程式で与えられるとき, この方程式を線形時不変システムという
システム工学実験パラメータ推定手順 大木健太郎 2014/11/14 2014 年度システム工学実験 : フレキシブルリンク 1 アウトライン 1. 線形システムと周波数情報 2. パラメータ推定 3. 実際の手順 2014/11/14 2014 年度システム工学実験 : フレキシブルリンク 2 線形時不変システムと伝達関数 入力と出力の関係が線形な定係数微分方程式で与えられるとき, この方程式を線形時不変システムという
050920_society_kmiz.odp
 1 リアルタイム伝搬測定にもとづく MIMO 固有モード間相関解析 Correlation Analysis of MIMO Eigenmodes Based on Real-Time Channel Measurement 水谷慶阪口啓高田潤一荒木純道 Kei Mizutani Kei Sakaguchi Jun-ichi Takada Kiyomichi Araki 東京工業大学 発表内容 研究背景
1 リアルタイム伝搬測定にもとづく MIMO 固有モード間相関解析 Correlation Analysis of MIMO Eigenmodes Based on Real-Time Channel Measurement 水谷慶阪口啓高田潤一荒木純道 Kei Mizutani Kei Sakaguchi Jun-ichi Takada Kiyomichi Araki 東京工業大学 発表内容 研究背景
PowerPoint プレゼンテーション
 多倍長計算手法 平成 年度第 四半期 今回はパラメータ の設定と精度に関してまとめて記述しました ループ積分と呼ばれる数値積分計算では 質量 の光子や質量が非常に小さい事はわかっているが その値は不明なニュートリノに対して赤外発散を防ぐため微小量を与えて計算しています この設定する微少量の値により 結果の精度及び反復に要する時間が大きく作用したり 誤った値を得る事があります ここでは典型的な つのケースで説明します
多倍長計算手法 平成 年度第 四半期 今回はパラメータ の設定と精度に関してまとめて記述しました ループ積分と呼ばれる数値積分計算では 質量 の光子や質量が非常に小さい事はわかっているが その値は不明なニュートリノに対して赤外発散を防ぐため微小量を与えて計算しています この設定する微少量の値により 結果の精度及び反復に要する時間が大きく作用したり 誤った値を得る事があります ここでは典型的な つのケースで説明します
パソコンシミュレータの現状
 第 2 章微分 偏微分, 写像 豊橋技術科学大学森謙一郎 2. 連続関数と微分 工学において物理現象を支配する方程式は微分方程式で表されていることが多く, 有限要素法も微分方程式を解く数値解析法であり, 定式化においては微分 積分が一般的に用いられており. 数学の基礎知識が必要になる. 図 2. に示すように, 微分は連続な関数 f() の傾きを求めることであり, 微小な に対して傾きを表し, を無限に
第 2 章微分 偏微分, 写像 豊橋技術科学大学森謙一郎 2. 連続関数と微分 工学において物理現象を支配する方程式は微分方程式で表されていることが多く, 有限要素法も微分方程式を解く数値解析法であり, 定式化においては微分 積分が一般的に用いられており. 数学の基礎知識が必要になる. 図 2. に示すように, 微分は連続な関数 f() の傾きを求めることであり, 微小な に対して傾きを表し, を無限に
Excelを用いた行列演算
 を用いた行列演算 ( 統計専門課程国民 県民経済計算の受講に向けて ) 総務省統計研究研修所 この教材の内容について計量経済学における多くの経済モデルは連立方程式を用いて記述されています この教材は こうした科目の演習においてそうした連立方程式の計算をExcelで行う際の技能を補足するものです 冒頭 そもそもどういう場面で連立方程式が登場するのかについて概括的に触れ なぜ この教材で連立方程式の解法について事前に学んでおく必要があるのか理解していただこうと思います
を用いた行列演算 ( 統計専門課程国民 県民経済計算の受講に向けて ) 総務省統計研究研修所 この教材の内容について計量経済学における多くの経済モデルは連立方程式を用いて記述されています この教材は こうした科目の演習においてそうした連立方程式の計算をExcelで行う際の技能を補足するものです 冒頭 そもそもどういう場面で連立方程式が登場するのかについて概括的に触れ なぜ この教材で連立方程式の解法について事前に学んでおく必要があるのか理解していただこうと思います
経済数学演習問題 2018 年 5 月 29 日 I a, b, c R n に対して a + b + c 2 = a 2 + b 2 + c 2 + 2( a, b) + 2( b, c) + 2( a, c) が成立することを示しましょう.( 線型代数学 教科書 13 ページ 演習 1.17)
 + 2( b, c) + 2( a, c) が成立することを示しましょう.( 線型代数学 教科書 13 ページ 演習 1.17)") 経済数学演習問題 8 年 月 9 日 I a, b, c R n に対して a + b + c a + b + c + a, b + b, c + a, c が成立することを示しましょう. 線型代数学 教科書 ページ 演習.7 II a R n がすべての x R n に対して垂直, すなわち a, x x R n が成立するとします. このとき a となることを示しましょう. 線型代数学 教科書
経済数学演習問題 8 年 月 9 日 I a, b, c R n に対して a + b + c a + b + c + a, b + b, c + a, c が成立することを示しましょう. 線型代数学 教科書 ページ 演習.7 II a R n がすべての x R n に対して垂直, すなわち a, x x R n が成立するとします. このとき a となることを示しましょう. 線型代数学 教科書
数学 t t t t t 加法定理 t t t 倍角公式加法定理で α=β と置く. 三角関数
 . 三角関数 基本関係 t cot c sc c cot sc t 還元公式 t t t t t t cot t cot t 数学 数学 t t t t t 加法定理 t t t 倍角公式加法定理で α=β と置く. 三角関数 数学. 三角関数 5 積和公式 6 和積公式 数学. 三角関数 7 合成 t V v t V v t V V V V VV V V V t V v v 8 べき乗 5 6 6
. 三角関数 基本関係 t cot c sc c cot sc t 還元公式 t t t t t t cot t cot t 数学 数学 t t t t t 加法定理 t t t 倍角公式加法定理で α=β と置く. 三角関数 数学. 三角関数 5 積和公式 6 和積公式 数学. 三角関数 7 合成 t V v t V v t V V V V VV V V V t V v v 8 べき乗 5 6 6
Microsoft PowerPoint - mp11-06.pptx
 数理計画法第 6 回 塩浦昭義情報科学研究科准教授 shioura@dais.is.tohoku.ac.jp http://www.dais.is.tohoku.ac.jp/~shioura/teaching 第 5 章組合せ計画 5.2 分枝限定法 組合せ計画問題 組合せ計画問題とは : 有限個の もの の組合せの中から, 目的関数を最小または最大にする組合せを見つける問題 例 1: 整数計画問題全般
数理計画法第 6 回 塩浦昭義情報科学研究科准教授 shioura@dais.is.tohoku.ac.jp http://www.dais.is.tohoku.ac.jp/~shioura/teaching 第 5 章組合せ計画 5.2 分枝限定法 組合せ計画問題 組合せ計画問題とは : 有限個の もの の組合せの中から, 目的関数を最小または最大にする組合せを見つける問題 例 1: 整数計画問題全般
基礎統計
 基礎統計 第 11 回講義資料 6.4.2 標本平均の差の標本分布 母平均の差 標本平均の差をみれば良い ただし, 母分散に依存するため場合分けをする 1 2 3 分散が既知分散が未知であるが等しい分散が未知であり等しいとは限らない 1 母分散が既知のとき が既知 標準化変量 2 母分散が未知であり, 等しいとき 分散が未知であるが, 等しいということは分かっているとき 標準化変量 自由度 の t
基礎統計 第 11 回講義資料 6.4.2 標本平均の差の標本分布 母平均の差 標本平均の差をみれば良い ただし, 母分散に依存するため場合分けをする 1 2 3 分散が既知分散が未知であるが等しい分散が未知であり等しいとは限らない 1 母分散が既知のとき が既知 標準化変量 2 母分散が未知であり, 等しいとき 分散が未知であるが, 等しいということは分かっているとき 標準化変量 自由度 の t