スライド 1
|
|
|
- きよはる しげい
- 5 years ago
- Views:
Transcription
1 センサー工学 2013 年 12 月 18 日 ( 水 ), 2014 年 1 月 8 日 ( 水 ),1 月 15 日 ( 水 ) 第 11 回,12 回,13 回,14 回 知能情報工学科横田孝義 1
2 センサー工学 回授業内容予習 復習内容備考 1 授業のガイダンス 計測工学で学んだ単位系 誤差 精度などの復習を行う 2 ジャイロセンサの仕組みジャイロセンサの仕組み 3 最近の動向 MEMS センサ II MEMS センサシステムの考え方を理解するレポート #1 MEMS センサの動向 4 長さ のセンシング リミットスイッチや光電センサなどが身近に多用されていることを知る変位センサに応用されている物理学を学ぶ 5 6 振動 加速度 のセンシング I 振動 加速度 のセンシング II 基本的な力学的センサーの原理を理解する 基本的な力学的センサーの原理 サイズモの原理を理解する 7 中間テストレポート #2 進捗に合わせて課題を設定 8 力 圧力 のセンシング Ⅰ 9 力 圧力 のセンシング Ⅱ 10 力 圧力 のセンシング Ⅱ 力 圧力の単位を確認し 各種の力 圧力センサの動作原理を理解する 力 圧力の単位を確認し 各種の力 圧力センサの動作原理を理解する 力 圧力の単位を確認し 各種の力 圧力センサの動作原理を理解する 11 釣り合いのセンシング回転体の釣り合いの検出について学ぶ 12 センサフュージョンセンサーフュージョンとは何かを学ぶ センサーフュージョンとカルマンフィルタ I : 状態方程式について学ぶ センサーフュージョンとカルマンフィルタ II : 観測方程式について学ぶ センサーフュージョンとカルマンフィルタ III : カルマンゲインについて学ぶ 異種センサーの組み合わせ技術を理解する 異種センサーの組み合わせ技術を理解する 異種センサーの組み合わせ技術を理解する レポート #3 センサフュージョンについて 2
3 センサーフュージョンとは何か? Sensor Fusion 融合 異なるセンサ ( 情報 ) あるいは複数のセンサ ( 情報 ) を融合して単独のセンサでは得られない情報を引き出したり精度や品質を高める技術 3
GPS (2)Gyro センサ (3) 車速センサ")
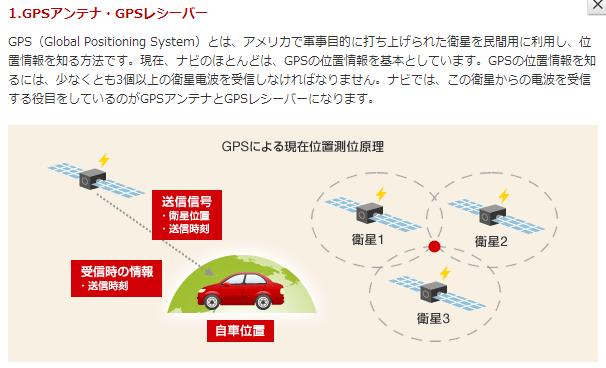
4 センサーフュージョンとは何か? 例カーナビゲーションシステム 位置を正確に推定するために (1)GPS (2)Gyro センサ (3) 車速センサ (4) 加速度センサ (5) ディジタル道路地図 (6) 路車間通信 を駆使している 4
5 センサーフュージョンとは何か? 5
6 センサーフュージョンとは何か? 6
7 センサーフュージョンとは何か? 車速度パルス 積分 走行距離 絶対位置がわかるのは GPS のみ Gyro 加速度センサ GPS 積分 姿勢計算 位置計算 進行方向 車体の傾き 絶対位置 融合 GPS が受からない場所や道路地図のない場所では位置補正ができないため積分の累積誤差が生じやすい 融合処理はカルマンフィルタを用いた高度なものから単純なものまで種々ある 概略位置 高度 ディジタル道路地図 マップマッチング 絶対位置 ディスプレー 7

8 センサーフュージョンとは何か? 車輪 1 回転で 日産は 2 パルスや 8 パルストヨタはほとんど 4 パルスなど 8
9 センサーフュージョンとは何か? 9
10 センサーフュージョンとは何か? 慣性航法 (INS, inertial navigation system)+gps のフュージョン t1 初期方位 t2 t3 t4 t5 GPS で補正 t6 t7 t8 Gyro データによって方位変化を知る 慣性航法による積分誤差の蓄積を GPS によって定期的に補正する ( 通常は 1 秒毎 ) GPS で補正 t11 t9 t10 10
11 センサーフュージョンとは何か? 慣性航法 (INS, inertial navigation system)+gps+ ディジタル道路地図のフュージョン t2 t3 t4 t5 t6 t1 t7 t8 t9 車は道路上を走行しているという前提で最寄りの道路上に位置情報を乗せるマップマッチング処理 t11 t10 11

12 センサーフュージョンとは何か? 京都大山崎ジャンクション付近 並走道路 立体交差が多く マップマッチングが難しい場所 12
13 センサーフュージョンとは何か? Route Identification of Freight Vehicles Tour Using GPS Probe Takayoshi Yokota Procedia - Social and Behavioral Sciences 39 巻 ( 頁 255 ~ 266) 2012 年 07 月 最新アルゴリズム 誤った道路にマッチングしたプローブ情報 正答率 19/25=76% 正答率 100% 13

14 センサーフュージョンとは何か? センサーの種類は同一であるが 複数のセンサ情報を融合する場合もセンサーフュージョンと呼んで良いであろう ミサイルの追尾レーダーなどが良い例 Upgraded Early Warning Radar (UEWR). 14
15 センサーフュージョンとは何か? ミサイルの追跡 ( 簡単のために x,y の 2 次元で扱う ) (PX1,PY1) 複数の観測情報を融合 (PX0,PY0) (PX2,PY2) 15
16 センサーフュージョンとは何か? ミサイルの追跡 ( 簡単のために x,y の 2 次元で扱う ) 対象を状態で捉える. 状態 対象の時間変化をモデル化 状態方程式あるいは状態遷移モデルで表現する 例えば角度 45 度の等速直線運動としてミサイルの軌跡をモデル化すると 外乱 ( 風の影響など ) 16
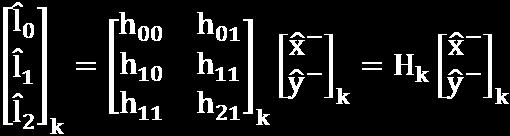
17 センサーフュージョンとは何か? ミサイルの追跡 ( 簡単のために x,y の 2 次元で扱う ) 観測情報と状態変数の関係をモデル化 (PX1,PY1) 観測誤差 (PX0,PY0) (PX2,PY2) 観測情報 (l 0,l 1,l 2 ) と状態 x k,y k は非線形な関係 これを線形近似する 17

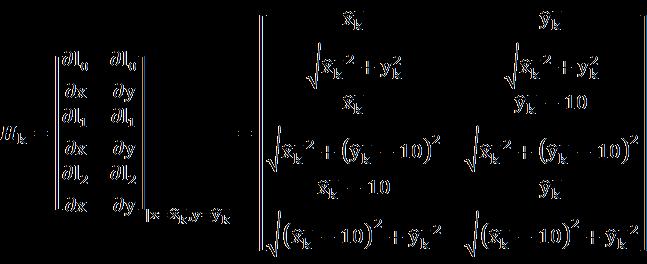
18 センサーフュージョンとは何か? いわゆる Jacob 行列すなわち変数変換を行う行列 18
19 センサーフュージョンとは何か? 観測方程式の線形化 l 0 x k かなり線形性は高いが 下記の近似式 (Taylor 展開 ) を用いて線形化する 19
20 センサーフュージョンとは何か? 観測方程式の線形化 事前推定値 観測値の推定 線形近似で得た観測行列 20
21 センサーフュージョンとは何か? 観測方程式の線形化 l 0 x k かなり線形性は高いが 下記の近似式 (Taylor 展開 ) を用いて線形化する 21
22 センサーフュージョンとは何か? 観測方程式の線形化 事前推定値 観測値の推定 線形近似で得た観測行列 22


23 センサーフュージョンとは何か? 観測値と観測値の推定値との誤差 err err が減るように状態の事前推定値をフィードバック修正し 事後推定値とする 誤差を feedback して事前推定値を修正 事後推定値事前推定値 カルマンゲイン 観測値と 観測値の推定値との誤差 23
24 センサーフュージョンとは何か? カルマンゲインすなわちフィードバックの程度はどのように求めるか? 簡単のために この例では : 事前推定値の推定誤差の共分散行列 : 観測誤差の共分散行列 : 事後推定値の推定誤差の共分散行列 とする 24
25 センサーフュージョンとは何か? カルマンゲイン 簡単のために この例では この導出は省略 : 事前推定値の推定誤差の共分散行列 : 観測誤差の共分散行列 とする : 事後推定値の推定誤差の共分散行列 25
26 実行結果 カルマンゲイン 50 クロック程度で収束 推定誤差の共分散行列 50 クロック程度で収束 26

27 実行結果 Y 誤差 3 程度に収まっている 標準偏差 10 の誤差 X 27
28 先週に引き続きセンサーフュージョンの実例を紹介する 28
29 センサーフュージョンとは何か? 車速度パルス 積分 走行距離 絶対位置がわかるのは GPS のみ Gyro 加速度センサ GPS 積分 姿勢計算 位置計算 進行方向 車体の傾き 絶対位置 融合 GPS が受からない場所や道路地図のない場所では位置補正ができないため積分の累積誤差が生じやすい 融合処理はカルマンフィルタを用いた高度なものから単純なものまで種々ある 概略位置 高度 ディジタル道路地図 マップマッチング 絶対位置 ディスプレー 29

30 車速パルスのないスマートフォンで INS を行う 実験データ 白浜宿舎駐車場から出発して 3 分後に停止するまでの軌跡 :09 40 ~19:12 :40 19: 秒後 19: : 秒後 19: 秒後 30
31 車速パルスのないスマートフォンで INS を行う 19: 秒後 19:09 40 右折右折右折待ち 19: 秒後 19: 秒後 31
32 車速パルスのないスマートフォンで INS を行う バイアス補正 19: 秒後 19: 秒後 19: : 秒後 右折右折右折待ち GPS 速度 32
33 車速パルスのないスマートフォンで INS を行う 方位変化 (GPS) 19: 秒後 19: 秒後 33

34 GPS の停止判定毎に静的なバイアス ( 傾き ) 補正での限界 進行方向 Y X 右折右折右折待ち 34
35 車速パルスのないスマートフォンで INS を行う 観測データ GPS 速度 35


36 車速パルスのないスマートフォンで INS を行う スマートフォン座標系から地球座標系への変換 y a k+1 θ v k x Θ=π/4 だと Θ=0 だと Θ=π/2 だと 36
37 車速パルスのないスマートフォンで INS を行う GPS による積算距離と加速度センサーによる積算距離ではこのような誤差が発生する 積算距離 (m) 経過時間 (s) 37
38 車速パルスのないスマートフォンで INS を行う バイアス補正 ( スマホ座標系 ) 19: 秒後 19: 秒後 19: : 秒後 右折右折右折待ち GPS 速度 38
39 車速パルスのないスマートフォンで INS を行う GPS で得られる速度は測位に失敗すると算出できないような瞬断が生じる場合がある 39
40 車速パルスの取得できないスマートフォンで INS を行う 加速度センサの傾きによって重力加速度の他軸への混入などが影響して累積距離の誤差が大きくなる GPS による絶対位置補正速度補正方位補正 大きくデフォルメされてしまう を実施 (1 秒ピッチ ) 40
41 車速パルスの取得できないスマートフォンで INS を行う GPS による絶対位置補正速度補正方位補正 を実施 (1 秒ピッチ ) 41


42 実験データは Android のスマートフォンで収集,GPS は別途 2012 年 19:10-19:14 yc 進行方向 車 Top View xc θc ys スマホ xs θs 座標軸の対応付けが混乱しやすいので要注意
43 加速度からの速度ベクトルの算出 慣習的に進行方向が x 軸 車速パルス (Wheel Tick) のように 移動距離に比例した出力を得るセンサがない場合 加速度から速度を算出する必要がある vx k+1 =vx k + t ax k vy k+1 =vy k + t ay k ax Y ay Y ay ay ax ax V k =(vx k,vy k ) V k+1 =(vx k+1,vy k+1 ) V k = (vx k,vy k ) θ i θ i V k+1 =(vx k+1,vy k+1 ) X X
 ay X ax V k+1 =(vx k+1,vy k+1")
44 加速度からの速度ベクトルの算出 車速パルス (Wheel Tick) のように 移動距離に比例した出力を得るセンサがない場合 加速度から速度を算出する必要がある Y vx k+1 =vx k + t ax k vy k+1 =vy k + t ay k Θ i =90 deg ax=a y ay=-a x スマホで感じる加速度 ax,ay 地球座標系での加速度 ax,ay V k =(vx k,vy k ) ay X ax V k+1 =(vx k+1,vy k+1 )
45 方位のリファレンスデータ 地磁気を用いた方位センサのと GPS の出力する方位を比較した 走行中であれば GPS は位置の差分から良好な絶対方位を算出できる 一方 地磁気センサ出力は一見安定であるが 車内では金属の影響で大きな誤差が生じてしまい利用不可であった 従って ジャイロと GPS の組み合わせが好ましい
46 加速度センサと GPS の融合 融合 0% 融合 50% 46
47 加速度センサと GPS の融合 融合 80 融合 95% 47
48 加速度センサと GPS の融合 絶対位置に関しては加速度センサより計算した値よりも GPS の方が信頼できる 従って 100% 絶対位置は GPS によるものを採用する ただし 1 秒毎にしか得られない 残りの 980msec は加速度センサの値から積分した走行距離を採用する 融合 100% 48

49 カルマンフィルタ ルドルフ カルマン (Rudolf Emil Kalman 1930 年 5 月 16 日 - ) ハンガリー系アメリカ人 米国国家科学賞 (2008 年 ) カルマンフィルタについて分かりやすく説明された文献は非常に少ない 考え方 : 複数の情報源からの情報をブレンドして最終的な情報を求める 信頼性の高い情報源の情報ほど高い重みでブレンドする それによって信頼性の高い情報を得ることができる カルマンフィルターの特性は扱うデータに依存して決定されるために 説明が難しいのも原因 49
50 カルマンフィルタの基礎 カルマンフィルタは一群の方程式二乗誤差を最小にするようにプロセスの状態を逐次推定する 状態方程式 状態ベクトル 状態遷移行列 制御入力ベクトル プロセス雑音と観測雑音は独立 制御入力を状態に反映させる行列プロセス雑音観測方程式観測値ベクトル観測行列観測雑音 分布は 共分散行列 分布は 共分散行列 50
51 カルマンフィルタの基礎 事前推定値 事後推定値観測値を反映して補正 事前推定値の誤差 事後推定値の誤差 事前推定値の誤差の共分散行列 事後推定値の誤差の共分散行列 観測による事前推定値の修正処理 カルマンゲイン K は P k のエネルギー ( 主対角要素の和 ) を最小化するように逐次決定する カルマンゲイン 観測イノベーション 51
52 カルマンフィルタの基礎 事後推定値の誤差の共分散行列 観測による事前推定値の修正処理 カルマンゲイン K は P k のエネルギー ( 主対角要素の和 ) を最小化するように逐次決定する カルマンゲイン 観測イノベーション 最適なカルマンゲインは次の式で与えられる 52
53 カルマンフィルタの基礎 観測による事前推定値の修正処理 最適なカルマンゲイン カルマンゲイン 観測イノベーション すなわち もし 観測雑音が 0 になると となり 観測値を最大限信頼し 事前推定値を軽視する すなわち もし 事前推定値の誤差が 0 になると となり 観測イノベーションに影響されなくなる 53
54 カルマンフィルタの基礎 離散的カルマンフィルタのアルゴリズム カルマンフィルタはフィードバック制御系の一種 初期値 時間更新 状態を進める 事後推定誤差の共分散行列の算出 この導出は次ページ 観測更新 カルマンゲインの算出 観測により事後推定 事後推定誤差の共分散行列の算出 この導出は煩雑 54

55 カルマンフィルタの基礎 の導出 の導出は省略 55
56 カルマンフィルタの基礎 簡単な例 ( スカラー ) 雑音に埋もれた一定電圧を計測する例 状態方程式 観測方程式 56
57 カルマンフィルタの基礎 簡単な例 ( スカラーの例 ) 初期値 時間更新 状態を進める 事後推定誤差の共分散行列 ( 分散 ) の算出 観測更新 カルマンゲインの算出 観測により事後推定 事後推定誤差の共分散行列 ( 分散 ) の算出 57
58 カルマンフィルタの基礎 R: 観測雑音の分散 0.01 とした場合実際も 0.01 適正な反応 真値 58
59 カルマンフィルタの基礎 R: 観測雑音の分散 1 とした場合実際は 0.01 やや反応が遅い 真値 59
60 カルマンフィルタの基礎 R: 観測雑音の分散 5 とした場合実際は 0.01 反応が遅い 真値 60
61 カルマンフィルタの基礎 R: 観測雑音の分散 とした場合実際は 0.01 過剰に反応 真値 61
62 カルマンフィルタの基礎 事後推定値の誤差の分散 P k の推移の例 R: 観測雑音の分散 0.01とした場合実際も
航空機の運動方程式
 オブザーバ 状態フィードバックにはすべての状態変数の値が必要であった. しかしながら, システムの外部から観測できるのは出力だけであり, すべての状態変数が観測できるとは限らない. そこで, 制御対象システムの状態変数を, システムのモデルに基づいてその入出力信号から推定する方法を考える.. オブザーバとは 次元 m 入力 r 出力線形時不変システム x Ax Bu y Cx () の状態変数ベクトル
オブザーバ 状態フィードバックにはすべての状態変数の値が必要であった. しかしながら, システムの外部から観測できるのは出力だけであり, すべての状態変数が観測できるとは限らない. そこで, 制御対象システムの状態変数を, システムのモデルに基づいてその入出力信号から推定する方法を考える.. オブザーバとは 次元 m 入力 r 出力線形時不変システム x Ax Bu y Cx () の状態変数ベクトル
PowerPoint プレゼンテーション
 非線形カルマンフィルタ ~a. 問題設定 ~ 離散時間非線形状態空間表現 x k + 1 = f x k y k = h x k + bv k + w k f : ベクトル値をとるx k の非線形関数 h : スカラ値をとるx k の非線形関数 v k システム雑音 ( 平均値 0, 分散 σ v 2 k ) x k + 1 = f x k,v k w k 観測雑音 ( 平均値 0, 分散 σ w
非線形カルマンフィルタ ~a. 問題設定 ~ 離散時間非線形状態空間表現 x k + 1 = f x k y k = h x k + bv k + w k f : ベクトル値をとるx k の非線形関数 h : スカラ値をとるx k の非線形関数 v k システム雑音 ( 平均値 0, 分散 σ v 2 k ) x k + 1 = f x k,v k w k 観測雑音 ( 平均値 0, 分散 σ w
PowerPoint プレゼンテーション
 復習 ) 時系列のモデリング ~a. 離散時間モデル ~ y k + a 1 z 1 y k + + a na z n ay k = b 0 u k + b 1 z 1 u k + + b nb z n bu k y k = G z 1 u k = B(z 1 ) A(z 1 u k ) ARMA モデル A z 1 B z 1 = 1 + a 1 z 1 + + a na z n a = b 0
復習 ) 時系列のモデリング ~a. 離散時間モデル ~ y k + a 1 z 1 y k + + a na z n ay k = b 0 u k + b 1 z 1 u k + + b nb z n bu k y k = G z 1 u k = B(z 1 ) A(z 1 u k ) ARMA モデル A z 1 B z 1 = 1 + a 1 z 1 + + a na z n a = b 0
PowerPoint プレゼンテーション
 回転型クレーン / 倒立振子の制御 回転型クレーンの制御 状態方程式 コントローラ設計 ( 極配置法 ) コントローラ設計 ( 最適レギュレータ ) 回転型倒立振子の制御 状態方程式 コントローラ設計 コントローラの形式 : 状態フィードバック P-D コントローラ アームの P-D 振子の P-D 目標値 状態フィードバック制御 回転型クレーン コントローラ で 状態フィードバック制御 回転型クレーン
回転型クレーン / 倒立振子の制御 回転型クレーンの制御 状態方程式 コントローラ設計 ( 極配置法 ) コントローラ設計 ( 最適レギュレータ ) 回転型倒立振子の制御 状態方程式 コントローラ設計 コントローラの形式 : 状態フィードバック P-D コントローラ アームの P-D 振子の P-D 目標値 状態フィードバック制御 回転型クレーン コントローラ で 状態フィードバック制御 回転型クレーン
航空機の運動方程式
 可制御性 可観測性. 可制御性システムの状態を, 適切な操作によって, 有限時間内に, 任意の状態から別の任意の状態に移動させることができるか否かという特性を可制御性という. 可制御性を有するシステムに対し, システムは可制御である, 可制御なシステム という言い方をする. 状態方程式, 出力方程式が以下で表されるn 次元 m 入力 r 出力線形時不変システム x Ax u y x Du () に対し,
可制御性 可観測性. 可制御性システムの状態を, 適切な操作によって, 有限時間内に, 任意の状態から別の任意の状態に移動させることができるか否かという特性を可制御性という. 可制御性を有するシステムに対し, システムは可制御である, 可制御なシステム という言い方をする. 状態方程式, 出力方程式が以下で表されるn 次元 m 入力 r 出力線形時不変システム x Ax u y x Du () に対し,
Microsoft PowerPoint - 三次元座標測定 ppt
 冗長座標測定機 ()( 三次元座標計測 ( 第 9 回 ) 5 年度大学院講義 6 年 月 7 日 冗長性を持つ 次元座標測定機 次元 辺測量 : 冗長性を出すために つのレーザトラッカを配置し, キャッツアイまでの距離から座標を測定する つのカメラ ( 次元的なカメラ ) とレーザスキャナ : つの角度測定システムによる座標測定 つの回転関節による 次元 自由度多関節機構 高増潔東京大学工学系研究科精密機械工学専攻
冗長座標測定機 ()( 三次元座標計測 ( 第 9 回 ) 5 年度大学院講義 6 年 月 7 日 冗長性を持つ 次元座標測定機 次元 辺測量 : 冗長性を出すために つのレーザトラッカを配置し, キャッツアイまでの距離から座標を測定する つのカメラ ( 次元的なカメラ ) とレーザスキャナ : つの角度測定システムによる座標測定 つの回転関節による 次元 自由度多関節機構 高増潔東京大学工学系研究科精密機械工学専攻
X 線天文衛星ひとみ (ASTRO-H) への FRAM 適用 有人宇宙システム株式会社 IV&V 研究センター道浦康貴 宇宙航空研究開発機構第 3 研究ユニット片平真史 石濱直樹有人宇宙システム株式会社 IV&V 研究センター野本秀樹 道浦康貴 JAXA All Rights
 への FRAM 適用 有人宇宙システム株式会社 IV&V 研究センター道浦康貴 宇宙航空研究開発機構第 3 研究ユニット片平真史 石濱直樹有人宇宙システム株式会社 IV&V 研究センター野本秀樹 道浦康貴 JAXA All Rights") X 線天文衛星ひとみ (ASTRO-H) への FRAM 適用 2017.11.8 有人宇宙システム株式会社 IV&V 研究センター道浦康貴 宇宙航空研究開発機構第 3 研究ユニット片平真史 石濱直樹有人宇宙システム株式会社 IV&V 研究センター野本秀樹 道浦康貴 概要 X 線天文衛星 ASTRO-H ひとみ 異常事象調査報告書 を基に FRAM 分析を実施した結果を FRAM の分析手順に沿って紹介する
X 線天文衛星ひとみ (ASTRO-H) への FRAM 適用 2017.11.8 有人宇宙システム株式会社 IV&V 研究センター道浦康貴 宇宙航空研究開発機構第 3 研究ユニット片平真史 石濱直樹有人宇宙システム株式会社 IV&V 研究センター野本秀樹 道浦康貴 概要 X 線天文衛星 ASTRO-H ひとみ 異常事象調査報告書 を基に FRAM 分析を実施した結果を FRAM の分析手順に沿って紹介する
サーボ加速度計本装置の加速度検出用に内蔵するセンサはサーボ加速度計であり その原理を図 に示す 図 サーボ加速度計の構造 図 において加速度が 方向から印加された場合 Hinge に繋がった Forcer Coil 部分が加速度方向に変
 4-3-3- サーボ加速度計本装置の加速度検出用に内蔵するセンサはサーボ加速度計であり その原理を図 4-3-3- に示す 図 4-3-3-3 サーボ加速度計の構造 図 4-3-3-3 において加速度が 方向から印加された場合 Hinge に繋がった Forcer Coil 部分が加速度方向に変位し Capacitive Pickoff によりその変位が検出される この検出された変位を Servo
4-3-3- サーボ加速度計本装置の加速度検出用に内蔵するセンサはサーボ加速度計であり その原理を図 4-3-3- に示す 図 4-3-3-3 サーボ加速度計の構造 図 4-3-3-3 において加速度が 方向から印加された場合 Hinge に繋がった Forcer Coil 部分が加速度方向に変位し Capacitive Pickoff によりその変位が検出される この検出された変位を Servo
Microsoft PowerPoint - 資料04 重回帰分析.ppt
 04. 重回帰分析 京都大学 加納学 Division of Process Control & Process Sstems Engineering Department of Chemical Engineering, Koto Universit manabu@cheme.koto-u.ac.jp http://www-pse.cheme.koto-u.ac.jp/~kano/ Outline
04. 重回帰分析 京都大学 加納学 Division of Process Control & Process Sstems Engineering Department of Chemical Engineering, Koto Universit manabu@cheme.koto-u.ac.jp http://www-pse.cheme.koto-u.ac.jp/~kano/ Outline
PowerPoint プレゼンテーション
 担当教員名 単位数西田健 2 単位 教室 時間 4-1A 教室火曜 4 限 目的不確定性を有する対象の制御に有効な確率システム制御理論について解説する また 確率的要因を考慮した状態推定のために 宇宙ロケットや自律ロボットなどの幅広い分野で利用されているカルマンフィルタやパーティクルフィルタについて解説し それらを用いる制御系の構成手法を教授する 授業計画 (1) ガイダンスと導入 (2) 線形動的システムの時系列モデリング
担当教員名 単位数西田健 2 単位 教室 時間 4-1A 教室火曜 4 限 目的不確定性を有する対象の制御に有効な確率システム制御理論について解説する また 確率的要因を考慮した状態推定のために 宇宙ロケットや自律ロボットなどの幅広い分野で利用されているカルマンフィルタやパーティクルフィルタについて解説し それらを用いる制御系の構成手法を教授する 授業計画 (1) ガイダンスと導入 (2) 線形動的システムの時系列モデリング
Microsoft Word - 補論3.2
 補論 3. 多変量 GARC モデル 07//6 新谷元嗣 藪友良 対数尤度関数 3 章 7 節では 変量の対数尤度を求めた ここでは多変量の場合 とくに 変量について対数尤度を求める 誤差項 は平均 0 で 次元の正規分布に従うとする 単純化のため 分散と共分散は時間を通じて一定としよう ( この仮定は後で変更される ) したがって ij から添え字 を除くことができる このとき と の尤度関数は
補論 3. 多変量 GARC モデル 07//6 新谷元嗣 藪友良 対数尤度関数 3 章 7 節では 変量の対数尤度を求めた ここでは多変量の場合 とくに 変量について対数尤度を求める 誤差項 は平均 0 で 次元の正規分布に従うとする 単純化のため 分散と共分散は時間を通じて一定としよう ( この仮定は後で変更される ) したがって ij から添え字 を除くことができる このとき と の尤度関数は
数値計算で学ぶ物理学 4 放物運動と惑星運動 地上のように下向きに重力がはたらいているような場においては 物体を投げると放物運動をする 一方 中心星のまわりの重力場中では 惑星は 円 だ円 放物線または双曲線を描きながら運動する ここでは 放物運動と惑星運動を 運動方程式を導出したうえで 数値シミュ
 数値計算で学ぶ物理学 4 放物運動と惑星運動 地上のように下向きに重力がはたらいているような場においては 物体を投げると放物運動をする 一方 中心星のまわりの重力場中では 惑星は 円 だ円 放物線または双曲線を描きながら運動する ここでは 放物運動と惑星運動を 運動方程式を導出したうえで 数値シミュレーションによって計算してみる 4.1 放物運動一様な重力場における放物運動を考える 一般に質量の物体に作用する力をとすると運動方程式は
数値計算で学ぶ物理学 4 放物運動と惑星運動 地上のように下向きに重力がはたらいているような場においては 物体を投げると放物運動をする 一方 中心星のまわりの重力場中では 惑星は 円 だ円 放物線または双曲線を描きながら運動する ここでは 放物運動と惑星運動を 運動方程式を導出したうえで 数値シミュレーションによって計算してみる 4.1 放物運動一様な重力場における放物運動を考える 一般に質量の物体に作用する力をとすると運動方程式は
Microsoft PowerPoint - 1章 [互換モード]
![Microsoft PowerPoint - 1章 [互換モード]](/thumbs/88/116912294.jpg "Microsoft PowerPoint - 1章 [互換モード]") 1. 直線運動 キーワード 速さ ( 等速直線運動, 変位 ) 加速度 ( 等加速度直線運動 ) 重力加速度 ( 自由落下 ) 力学 I 内容 1. 直線運動 2. ベクトル 3. 平面運動 4. 運動の法則 5. 摩擦力と抵抗 6. 振動 7. 仕事とエネルギー 8. 運動量と力積, 衝突 9. 角運動量 3 章以降は, 運動の向きを考えなければならない 1. 直線運動 キーワード 速さ ( 等速直線運動,
1. 直線運動 キーワード 速さ ( 等速直線運動, 変位 ) 加速度 ( 等加速度直線運動 ) 重力加速度 ( 自由落下 ) 力学 I 内容 1. 直線運動 2. ベクトル 3. 平面運動 4. 運動の法則 5. 摩擦力と抵抗 6. 振動 7. 仕事とエネルギー 8. 運動量と力積, 衝突 9. 角運動量 3 章以降は, 運動の向きを考えなければならない 1. 直線運動 キーワード 速さ ( 等速直線運動,
スライド 1
 センサー工学 2012 年 11 月 28 日 ( 水 ) 第 8 回 知能情報工学科横田孝義 1 センサー工学 10/03 10/10 10/17 10/24 11/7 11/14 11/21 11/28 12/05 12/12 12/19 1/09 1/16 1/23 1/30 2 前々回から振動センサーを学習しています 今回が最終回の予定 3 振動の測定教科書 計測工学 の 194 ページ 二つのケースがある
センサー工学 2012 年 11 月 28 日 ( 水 ) 第 8 回 知能情報工学科横田孝義 1 センサー工学 10/03 10/10 10/17 10/24 11/7 11/14 11/21 11/28 12/05 12/12 12/19 1/09 1/16 1/23 1/30 2 前々回から振動センサーを学習しています 今回が最終回の予定 3 振動の測定教科書 計測工学 の 194 ページ 二つのケースがある
Probit , Mixed logit
 Probit, Mixed logit 2016/5/16 スタートアップゼミ #5 B4 後藤祥孝 1 0. 目次 Probit モデルについて 1. モデル概要 2. 定式化と理解 3. 推定 Mixed logit モデルについて 4. モデル概要 5. 定式化と理解 6. 推定 2 1.Probit 概要 プロビットモデルとは. 効用関数の誤差項に多変量正規分布を仮定したもの. 誤差項には様々な要因が存在するため,
Probit, Mixed logit 2016/5/16 スタートアップゼミ #5 B4 後藤祥孝 1 0. 目次 Probit モデルについて 1. モデル概要 2. 定式化と理解 3. 推定 Mixed logit モデルについて 4. モデル概要 5. 定式化と理解 6. 推定 2 1.Probit 概要 プロビットモデルとは. 効用関数の誤差項に多変量正規分布を仮定したもの. 誤差項には様々な要因が存在するため,
ニュートン重力理論.pptx
 3 ニュートン重力理論 1. ニュートン重力理論の基本 : 慣性系とガリレイ変換不変性 2. ニュートン重力理論の定式化 3. 等価原理 4. 流体力学方程式とその基礎 3.1 ニュートン重力理論の基本 u ニュートンの第一法則 = 力がかからなければ 等速直線運動を続ける u 等速直線運動に見える系を 慣性系 と呼ぶ ² 直線とはどんな空間の直線か? ニュートン理論では 3 次元ユークリッド空間
3 ニュートン重力理論 1. ニュートン重力理論の基本 : 慣性系とガリレイ変換不変性 2. ニュートン重力理論の定式化 3. 等価原理 4. 流体力学方程式とその基礎 3.1 ニュートン重力理論の基本 u ニュートンの第一法則 = 力がかからなければ 等速直線運動を続ける u 等速直線運動に見える系を 慣性系 と呼ぶ ² 直線とはどんな空間の直線か? ニュートン理論では 3 次元ユークリッド空間
受信機時計誤差項の が残ったままであるが これをも消去するのが 重位相差である. 重位相差ある時刻に 衛星 から送られてくる搬送波位相データを 台の受信機 でそれぞれ測定する このとき各受信機で測定された衛星 からの搬送波位相データを Φ Φ とし 同様に衛星 からの搬送波位相データを Φ Φ とす
 RTK-GPS 測位計算アルゴリズム -FLOT 解 - 東京海洋大学冨永貴樹. はじめに GPS 測量を行う際 実時間で測位結果を得ることが出来るのは今のところ RTK-GPS 測位のみである GPS 測量では GPS 衛星からの搬送波位相データを使用するため 整数値バイアスを決定しなければならず これが測位計算を複雑にしている所以である この整数値バイアスを決定するためのつの方法として FLOT
RTK-GPS 測位計算アルゴリズム -FLOT 解 - 東京海洋大学冨永貴樹. はじめに GPS 測量を行う際 実時間で測位結果を得ることが出来るのは今のところ RTK-GPS 測位のみである GPS 測量では GPS 衛星からの搬送波位相データを使用するため 整数値バイアスを決定しなければならず これが測位計算を複雑にしている所以である この整数値バイアスを決定するためのつの方法として FLOT
eq2:=m[g]*diff(x[g](t),t$2)=-s*sin(th eq3:=m[g]*diff(z[g](t),t$2)=m[g]*g-s* 負荷の座標は 以下の通りです eq4:=x[g](t)=x[k](t)+r*sin(theta(t)) eq5:=z[g](t)=r*cos(the
![eq2:=m[g]*diff(x[g](t),t$2)=-s*sin(th eq3:=m[g]*diff(z[g](t),t$2)=m[g]*g-s* 負荷の座標は 以下の通りです eq4:=x[g](t)=x[k](t)+r*sin(theta(t)) eq5:=z[g](t)=r*cos(the](/thumbs/86/93366319.jpg "eq2:=m[g]*diff(x[g](t),t$2)=-s*sin(th eq3:=m[g]*diff(z[g](t),t$2)=m[g]*g-s* 負荷の座標は 以下の通りです eq4:=x[g](t)=x[k](t)+r*sin(theta(t)) eq5:=z[g](t)=r*cos(the") 7. 制御設計の例 7.1 ローディングブリッジの制御装置 はじめに restart: ローディング ブリッジは 負荷をある地点から別の地点に運びます 台車の加速と減速は好ましくない振動を発生してしまいます そのため負荷はさらに安定し難くなり 時間もかかってしまいます 負荷がある地点から他の地点へ素早く移動し すみやかに安定するような制御装置を設計します 問題の定義 ローディング ブリッジのパラメータは以下の通りです
7. 制御設計の例 7.1 ローディングブリッジの制御装置 はじめに restart: ローディング ブリッジは 負荷をある地点から別の地点に運びます 台車の加速と減速は好ましくない振動を発生してしまいます そのため負荷はさらに安定し難くなり 時間もかかってしまいます 負荷がある地点から他の地点へ素早く移動し すみやかに安定するような制御装置を設計します 問題の定義 ローディング ブリッジのパラメータは以下の通りです
14 化学実験法 II( 吉村 ( 洋 mmol/l の半分だったから さんの測定値は くんの測定値の 4 倍の重みがあり 推定値 としては 0.68 mmol/l その標準偏差は mmol/l 程度ということになる 測定値を 特徴づけるパラメータ t を推定するこの手
 14 化学実験法 II( 吉村 ( 洋 014.6.1. 最小 乗法のはなし 014.6.1. 内容 最小 乗法のはなし...1 最小 乗法の考え方...1 最小 乗法によるパラメータの決定... パラメータの信頼区間...3 重みの異なるデータの取扱い...4 相関係数 決定係数 ( 最小 乗法を語るもう一つの立場...5 実験条件の誤差の影響...5 問題...6 最小 乗法の考え方 飲料水中のカルシウム濃度を
14 化学実験法 II( 吉村 ( 洋 014.6.1. 最小 乗法のはなし 014.6.1. 内容 最小 乗法のはなし...1 最小 乗法の考え方...1 最小 乗法によるパラメータの決定... パラメータの信頼区間...3 重みの異なるデータの取扱い...4 相関係数 決定係数 ( 最小 乗法を語るもう一つの立場...5 実験条件の誤差の影響...5 問題...6 最小 乗法の考え方 飲料水中のカルシウム濃度を
実験題吊 「加速度センサーを作ってみよう《
 加速度センサーを作ってみよう 茨城工業高等専門学校専攻科 山越好太 1. 加速度センサー? 最近話題のセンサーに 加速度センサー というものがあります これは文字通り 加速度 を測るセンサーで 主に動きの検出に使われたり 地球から受ける重力加速度を測定することで傾きを測ることなどにも使われています 最近ではゲーム機をはじめ携帯電話などにも搭載されるようになってきています 2. 加速度センサーの仕組み加速度センサーにも様々な種類があります
加速度センサーを作ってみよう 茨城工業高等専門学校専攻科 山越好太 1. 加速度センサー? 最近話題のセンサーに 加速度センサー というものがあります これは文字通り 加速度 を測るセンサーで 主に動きの検出に使われたり 地球から受ける重力加速度を測定することで傾きを測ることなどにも使われています 最近ではゲーム機をはじめ携帯電話などにも搭載されるようになってきています 2. 加速度センサーの仕組み加速度センサーにも様々な種類があります
memo
 数理情報工学特論第一 機械学習とデータマイニング 4 章 : 教師なし学習 3 かしまひさし 鹿島久嗣 ( 数理 6 研 ) kashima@mist.i.~ DEPARTMENT OF MATHEMATICAL INFORMATICS 1 グラフィカルモデルについて学びます グラフィカルモデル グラフィカルラッソ グラフィカルラッソの推定アルゴリズム 2 グラフィカルモデル 3 教師なし学習の主要タスクは
数理情報工学特論第一 機械学習とデータマイニング 4 章 : 教師なし学習 3 かしまひさし 鹿島久嗣 ( 数理 6 研 ) kashima@mist.i.~ DEPARTMENT OF MATHEMATICAL INFORMATICS 1 グラフィカルモデルについて学びます グラフィカルモデル グラフィカルラッソ グラフィカルラッソの推定アルゴリズム 2 グラフィカルモデル 3 教師なし学習の主要タスクは
Microsoft PowerPoint - H17-5時限(パターン認識).ppt
.ppt") パターン認識早稲田大学講義 平成 7 年度 独 産業技術総合研究所栗田多喜夫 赤穂昭太郎 統計的特徴抽出 パターン認識過程 特徴抽出 認識対象から何らかの特徴量を計測 抽出 する必要がある 認識に有効な情報 特徴 を抽出し 次元を縮小した効率の良い空間を構成する過程 文字認識 : スキャナ等で取り込んだ画像から文字の識別に必要な本質的な特徴のみを抽出 例 文字線の傾き 曲率 面積など 識別 与えられた未知の対象を
パターン認識早稲田大学講義 平成 7 年度 独 産業技術総合研究所栗田多喜夫 赤穂昭太郎 統計的特徴抽出 パターン認識過程 特徴抽出 認識対象から何らかの特徴量を計測 抽出 する必要がある 認識に有効な情報 特徴 を抽出し 次元を縮小した効率の良い空間を構成する過程 文字認識 : スキャナ等で取り込んだ画像から文字の識別に必要な本質的な特徴のみを抽出 例 文字線の傾き 曲率 面積など 識別 与えられた未知の対象を
Microsoft PowerPoint - 1.プロセス制御の概要.pptx
 プロセス制御工学 1. プロセス制御の概要 京都大学 加納学 Division of Process Control & Process Systems Engineering Department of Chemical Engineering, Kyoto University manabu@cheme.kyoto-u.ac.jp http://www-pse.cheme.kyoto-u.ac.jp/~kano/
プロセス制御工学 1. プロセス制御の概要 京都大学 加納学 Division of Process Control & Process Systems Engineering Department of Chemical Engineering, Kyoto University manabu@cheme.kyoto-u.ac.jp http://www-pse.cheme.kyoto-u.ac.jp/~kano/
国土技術政策総合研究所 研究資料
 章 RK-GPS 高速初期化処理 - 処理フロー RK-GPS 高速初期化技術の処理内容について説明する 全体処理フローを図 -- に示す GPS 観測データの取得 電波強度によるマルチパスの検出 躍度モデルの算出 検出マルチパス観測データの削除 検出せず サイクルスリップの検出検出 検出せず 仰角マスクカット パラメータの初期設定 電源 時衛星増加時 電源 時より後で衛星増加時以外 カルマンフィルタ演算
章 RK-GPS 高速初期化処理 - 処理フロー RK-GPS 高速初期化技術の処理内容について説明する 全体処理フローを図 -- に示す GPS 観測データの取得 電波強度によるマルチパスの検出 躍度モデルの算出 検出マルチパス観測データの削除 検出せず サイクルスリップの検出検出 検出せず 仰角マスクカット パラメータの初期設定 電源 時衛星増加時 電源 時より後で衛星増加時以外 カルマンフィルタ演算
連続講座 断層映像法の基礎第 34 回 : 篠原 広行 他 放射状に 線を照射し 対面に検出器の列を置いておき 一度に 1 つの角度データを取得する 後は全体を 1 回転しながら次々と角度データを取得することで計測を終了する この計測で得られる投影はとなる ここで l はファンビームのファンに沿った
 連続講座 断層映像法の基礎第 34 回 : 篠原広行 他 篠原 広行 桑山 潤 小川 亙 中世古 和真 断層映像法の基礎第 34 回スパイラルスキャン CT 1) 軽部修平 2) 橋本雄幸 1) 小島慎也 1) 藤堂幸宏 1) 3) 首都大学東京人間健康科学研究科放射線科学域 2) 東邦大学医療センター大橋病院 3) 横浜創英短期大学情報学科 1) はじめに第 33 回では検出確率 C ij の関係を行列とベクトルの計算式に置き換えて解を求める最小二乗法を利用した方法について解説した
連続講座 断層映像法の基礎第 34 回 : 篠原広行 他 篠原 広行 桑山 潤 小川 亙 中世古 和真 断層映像法の基礎第 34 回スパイラルスキャン CT 1) 軽部修平 2) 橋本雄幸 1) 小島慎也 1) 藤堂幸宏 1) 3) 首都大学東京人間健康科学研究科放射線科学域 2) 東邦大学医療センター大橋病院 3) 横浜創英短期大学情報学科 1) はじめに第 33 回では検出確率 C ij の関係を行列とベクトルの計算式に置き換えて解を求める最小二乗法を利用した方法について解説した
PowerPoint Presentation
 付録 2 2 次元アフィン変換 直交変換 たたみ込み 1.2 次元のアフィン変換 座標 (x,y ) を (x,y) に移すことを 2 次元での変換. 特に, 変換が と書けるとき, アフィン変換, アフィン変換は, その 1 次の項による変換 と 0 次の項による変換 アフィン変換 0 次の項は平行移動 1 次の項は座標 (x, y ) をベクトルと考えて とすれば このようなもの 2 次元ベクトルの線形写像
付録 2 2 次元アフィン変換 直交変換 たたみ込み 1.2 次元のアフィン変換 座標 (x,y ) を (x,y) に移すことを 2 次元での変換. 特に, 変換が と書けるとき, アフィン変換, アフィン変換は, その 1 次の項による変換 と 0 次の項による変換 アフィン変換 0 次の項は平行移動 1 次の項は座標 (x, y ) をベクトルと考えて とすれば このようなもの 2 次元ベクトルの線形写像
Microsoft Word - ㅎ㇤ㇺå®ı璃ㆨAIã†®æŁ°ç’ƒ.docx
 ベイズの定理から AI の数理 ベイズ更新とロジステック曲線について 松本睦郎 ( 札幌啓成高等学校講師 ) Episode ロジステック曲線 菌やウイルスの増殖数や 人口増加等を表現する曲線の一つにロジステック曲線があります 例 シャーレの中で培養された大腸菌の数について考察する シャーレ内に栄養が十分に存在するとき 菌は栄養を吸収しながら 一定時間ごとに細胞分裂をして増 殖する 菌の数 u u(t)
ベイズの定理から AI の数理 ベイズ更新とロジステック曲線について 松本睦郎 ( 札幌啓成高等学校講師 ) Episode ロジステック曲線 菌やウイルスの増殖数や 人口増加等を表現する曲線の一つにロジステック曲線があります 例 シャーレの中で培養された大腸菌の数について考察する シャーレ内に栄養が十分に存在するとき 菌は栄養を吸収しながら 一定時間ごとに細胞分裂をして増 殖する 菌の数 u u(t)
スライド 1
 計測工学第 12 回以降 測定値の誤差と精度編 2014 年 7 月 2 日 ( 水 )~7 月 16 日 ( 水 ) 知能情報工学科 横田孝義 1 授業計画 4/9 4/16 4/23 5/7 5/14 5/21 5/28 6/4 6/11 6/18 6/25 7/2 7/9 7/16 7/23 2 誤差とその取扱い 3 誤差 = 測定値 真の値 相対誤差 = 誤差 / 真の値 4 誤差 (error)
計測工学第 12 回以降 測定値の誤差と精度編 2014 年 7 月 2 日 ( 水 )~7 月 16 日 ( 水 ) 知能情報工学科 横田孝義 1 授業計画 4/9 4/16 4/23 5/7 5/14 5/21 5/28 6/4 6/11 6/18 6/25 7/2 7/9 7/16 7/23 2 誤差とその取扱い 3 誤差 = 測定値 真の値 相対誤差 = 誤差 / 真の値 4 誤差 (error)
スライド 1
 データ解析特論重回帰分析編 2017 年 7 月 10 日 ( 月 )~ 情報エレクトロニクスコース横田孝義 1 ( 単 ) 回帰分析 単回帰分析では一つの従属変数 ( 目的変数 ) を 一つの独立変数 ( 説明変数 ) で予測する事を考える 具体的には y = a + bx という回帰直線 ( モデル ) でデータを代表させる このためにデータからこの回帰直線の切片 (a) と傾き (b) を最小
データ解析特論重回帰分析編 2017 年 7 月 10 日 ( 月 )~ 情報エレクトロニクスコース横田孝義 1 ( 単 ) 回帰分析 単回帰分析では一つの従属変数 ( 目的変数 ) を 一つの独立変数 ( 説明変数 ) で予測する事を考える 具体的には y = a + bx という回帰直線 ( モデル ) でデータを代表させる このためにデータからこの回帰直線の切片 (a) と傾き (b) を最小
Microsoft PowerPoint - ロボットの運動学forUpload'C5Q [互換モード]
![Microsoft PowerPoint - ロボットの運動学forUpload'C5Q [互換モード]](/thumbs/104/163308363.jpg "Microsoft PowerPoint - ロボットの運動学forUpload'C5Q [互換モード]") ロボットの運動学 順運動学とは 座標系の回転と並進 同次座標変換行列 Denavit-Hartenberg の表記法 多関節ロボットの順運動学 レポート課題 & 中間試験について 逆運動学とは ヤコビアン行列 運動方程式 ( 微分方程式 ) ロボットの運動学 動力学 Equation of motion f ( ( t), ( t), ( t)) τ( t) 姿勢 ( 関節角の組合せ ) Posture
ロボットの運動学 順運動学とは 座標系の回転と並進 同次座標変換行列 Denavit-Hartenberg の表記法 多関節ロボットの順運動学 レポート課題 & 中間試験について 逆運動学とは ヤコビアン行列 運動方程式 ( 微分方程式 ) ロボットの運動学 動力学 Equation of motion f ( ( t), ( t), ( t)) τ( t) 姿勢 ( 関節角の組合せ ) Posture
<4D F736F F D BD8A7091AA97CA8AED8B4082CC90AB945C8DB782C982E682E98CEB8DB782C982C282A E646F6378>
 (2) 測量器機の性能差による誤差につい (1) 多角 ( 混合 ) 測量における誤差について,(2) 測量器機の性能差による誤差につい, (3) 多角 ( 混合 ) 測量の計算方式による誤差について,(4) 多角 ( 混合 ) 測量における相対誤差についてのなかの (2) です 現在, 境界測量に使われている測量器機はトータルステーション (TS) と言いまして距離と角度を同じ器機で測定出来るものです,
(2) 測量器機の性能差による誤差につい (1) 多角 ( 混合 ) 測量における誤差について,(2) 測量器機の性能差による誤差につい, (3) 多角 ( 混合 ) 測量の計算方式による誤差について,(4) 多角 ( 混合 ) 測量における相対誤差についてのなかの (2) です 現在, 境界測量に使われている測量器機はトータルステーション (TS) と言いまして距離と角度を同じ器機で測定出来るものです,
vecrot
 1. ベクトル ベクトル : 方向を持つ量 ベクトルには 1 方向 2 大きさ ( 長さ ) という 2 つの属性がある ベクトルの例 : 物体の移動速度 移動量電場 磁場の強さ風速力トルクなど 2. ベクトルの表現 2.1 矢印で表現される 矢印の長さ : ベクトルの大きさ 矢印の向き : ベクトルの方向 2.2 2 個の点を用いて表現する 始点 () と終点 () を結ぶ半直線の向き : ベクトルの方向
1. ベクトル ベクトル : 方向を持つ量 ベクトルには 1 方向 2 大きさ ( 長さ ) という 2 つの属性がある ベクトルの例 : 物体の移動速度 移動量電場 磁場の強さ風速力トルクなど 2. ベクトルの表現 2.1 矢印で表現される 矢印の長さ : ベクトルの大きさ 矢印の向き : ベクトルの方向 2.2 2 個の点を用いて表現する 始点 () と終点 () を結ぶ半直線の向き : ベクトルの方向
OCW-iダランベールの原理
 講義名連続体力学配布資料 OCW- 第 2 回ダランベールの原理 無機材料工学科准教授安田公一 1 はじめに今回の講義では, まず, 前半でダランベールの原理について説明する これを用いると, 動力学の問題を静力学の問題として解くことができ, さらに, 前回の仮想仕事の原理を適用すると動力学問題も簡単に解くことができるようになる また, 後半では, ダランベールの原理の応用として ラグランジュ方程式の導出を示す
講義名連続体力学配布資料 OCW- 第 2 回ダランベールの原理 無機材料工学科准教授安田公一 1 はじめに今回の講義では, まず, 前半でダランベールの原理について説明する これを用いると, 動力学の問題を静力学の問題として解くことができ, さらに, 前回の仮想仕事の原理を適用すると動力学問題も簡単に解くことができるようになる また, 後半では, ダランベールの原理の応用として ラグランジュ方程式の導出を示す
DVIOUT
 最適レギュレータ 松尾研究室資料 第 最適レギュレータ 節時不変型無限時間最適レギュレータ 状態フィードバックの可能な場合の無限時間問題における最適レギュレータについて確定系について説明する. ここで, レギュレータとは状態量をゼロにするようなコントローラのことである. なぜ, 無限時間問題のみを述べるかという理由は以下のとおりである. 有限時間の最適レギュレータ問題の場合の最適フィードバックゲインは微分方程式の解から構成される時間関数として表現される.
最適レギュレータ 松尾研究室資料 第 最適レギュレータ 節時不変型無限時間最適レギュレータ 状態フィードバックの可能な場合の無限時間問題における最適レギュレータについて確定系について説明する. ここで, レギュレータとは状態量をゼロにするようなコントローラのことである. なぜ, 無限時間問題のみを述べるかという理由は以下のとおりである. 有限時間の最適レギュレータ問題の場合の最適フィードバックゲインは微分方程式の解から構成される時間関数として表現される.
2 図微小要素の流体の流入出 方向の断面の流体の流入出の収支断面 Ⅰ から微小要素に流入出する流体の流量 Q 断面 Ⅰ は 以下のように定式化できる Q 断面 Ⅰ 流量 密度 流速 断面 Ⅰ の面積 微小要素の断面 Ⅰ から だけ移動した断面 Ⅱ を流入出する流体の流量 Q 断面 Ⅱ は以下のように
 3 章 Web に Link 解説 連続式 微分表示 の誘導.64 *4. 連続式連続式は ある領域の内部にある流体の質量の収支が その表面からの流入出の合計と等しくなることを定式化したものであり 流体における質量保存則を示したものである 2. 連続式 微分表示 の誘導図のような微小要素 コントロールボリューム の領域内の流体の増減と外部からの流体の流入出を考えることで定式化できる 微小要素 流入
3 章 Web に Link 解説 連続式 微分表示 の誘導.64 *4. 連続式連続式は ある領域の内部にある流体の質量の収支が その表面からの流入出の合計と等しくなることを定式化したものであり 流体における質量保存則を示したものである 2. 連続式 微分表示 の誘導図のような微小要素 コントロールボリューム の領域内の流体の増減と外部からの流体の流入出を考えることで定式化できる 微小要素 流入
Microsoft Word - NumericalComputation.docx
 数値計算入門 武尾英哉. 離散数学と数値計算 数学的解法の中には理論計算では求められないものもある. 例えば, 定積分は, まずは積分 ( 被積分関数の原始関数をみつけること できなければ値を得ることはできない. また, ある関数の所定の値における微分値を得るには, まずその関数の微分ができなければならない. さらに代数方程式の解を得るためには, 解析的に代数方程式を解く必要がある. ところが, これらは必ずしも解析的に導けるとは限らない.
数値計算入門 武尾英哉. 離散数学と数値計算 数学的解法の中には理論計算では求められないものもある. 例えば, 定積分は, まずは積分 ( 被積分関数の原始関数をみつけること できなければ値を得ることはできない. また, ある関数の所定の値における微分値を得るには, まずその関数の微分ができなければならない. さらに代数方程式の解を得るためには, 解析的に代数方程式を解く必要がある. ところが, これらは必ずしも解析的に導けるとは限らない.
Microsoft PowerPoint - H21生物計算化学2.ppt
 演算子の行列表現 > L いま 次元ベクトル空間の基底をケットと書くことにする この基底は完全系を成すとすると 空間内の任意のケットベクトルは > > > これより 一度基底を与えてしまえば 任意のベクトルはその基底についての成分で完全に記述することができる これらの成分を列行列の形に書くと M これをベクトル の基底 { >} による行列表現という ところで 行列 A の共役 dont 行列は A
演算子の行列表現 > L いま 次元ベクトル空間の基底をケットと書くことにする この基底は完全系を成すとすると 空間内の任意のケットベクトルは > > > これより 一度基底を与えてしまえば 任意のベクトルはその基底についての成分で完全に記述することができる これらの成分を列行列の形に書くと M これをベクトル の基底 { >} による行列表現という ところで 行列 A の共役 dont 行列は A
技術論文 GPS と慣性センサを利用した車両姿勢角推定 * 平野 麻衣子 ) 天野 真輝 ) 服部 義和 小野 英一 ) 福田 光雄 ) 廣瀬 太郎 Estimation of Vehicle Attitude Integrating Inertial Sensors
 天野 真輝 ) 服部 義和 小野 英一 ) 福田 光雄 ) 廣瀬 太郎 Estimation of Vehicle Attitude Integrating Inertial Sensors") 技術論文 25429 234 * 平野 麻衣子 ) 天野 真輝 ) 服部 義和 小野 英一 ) 福田 光雄 ) 廣瀬 太郎 timation o Vehicle Attitude Interatin Inertial Senor and S Maiko Hirano Maateru Amano Yohikazu Hattori iichi Ono Mituo Fukuda Taro Hiroe S
技術論文 25429 234 * 平野 麻衣子 ) 天野 真輝 ) 服部 義和 小野 英一 ) 福田 光雄 ) 廣瀬 太郎 timation o Vehicle Attitude Interatin Inertial Senor and S Maiko Hirano Maateru Amano Yohikazu Hattori iichi Ono Mituo Fukuda Taro Hiroe S
Microsoft Word - thesis.doc
 剛体の基礎理論 -. 剛体の基礎理論初めに本論文で大域的に使用する記号を定義する. 使用する記号トルク撃力力角運動量角速度姿勢対角化された慣性テンソル慣性テンソル運動量速度位置質量時間 J W f F P p .. 質点の並進運動 質点は位置 と速度 P を用いる. ニュートンの運動方程式 という状態を持つ. 但し ここでは速度ではなく運動量 F P F.... より質点の運動は既に明らかであり 質点の状態ベクトル
剛体の基礎理論 -. 剛体の基礎理論初めに本論文で大域的に使用する記号を定義する. 使用する記号トルク撃力力角運動量角速度姿勢対角化された慣性テンソル慣性テンソル運動量速度位置質量時間 J W f F P p .. 質点の並進運動 質点は位置 と速度 P を用いる. ニュートンの運動方程式 という状態を持つ. 但し ここでは速度ではなく運動量 F P F.... より質点の運動は既に明らかであり 質点の状態ベクトル
Microsoft PowerPoint - 10.pptx
 m u. 固有値とその応用 8/7/( 水 ). 固有値とその応用 固有値と固有ベクトル 行列による写像から固有ベクトルへ m m 行列 によって線形写像 f : R R が表せることを見てきた ここでは 次元平面の行列による写像を調べる とし 写像 f : を考える R R まず 単位ベクトルの像 u y y f : R R u u, u この事から 線形写像の性質を用いると 次の格子上の点全ての写像先が求まる
m u. 固有値とその応用 8/7/( 水 ). 固有値とその応用 固有値と固有ベクトル 行列による写像から固有ベクトルへ m m 行列 によって線形写像 f : R R が表せることを見てきた ここでは 次元平面の行列による写像を調べる とし 写像 f : を考える R R まず 単位ベクトルの像 u y y f : R R u u, u この事から 線形写像の性質を用いると 次の格子上の点全ての写像先が求まる
Microsoft PowerPoint - H22制御工学I-2回.ppt
 制御工学 I 第二回ラプラス変換 平成 年 4 月 9 日 /4/9 授業の予定 制御工学概論 ( 回 ) 制御技術は現在様々な工学分野において重要な基本技術となっている 工学における制御工学の位置づけと歴史について説明する さらに 制御システムの基本構成と種類を紹介する ラプラス変換 ( 回 ) 制御工学 特に古典制御ではラプラス変換が重要な役割を果たしている ラプラス変換と逆ラプラス変換の定義を紹介し
制御工学 I 第二回ラプラス変換 平成 年 4 月 9 日 /4/9 授業の予定 制御工学概論 ( 回 ) 制御技術は現在様々な工学分野において重要な基本技術となっている 工学における制御工学の位置づけと歴史について説明する さらに 制御システムの基本構成と種類を紹介する ラプラス変換 ( 回 ) 制御工学 特に古典制御ではラプラス変換が重要な役割を果たしている ラプラス変換と逆ラプラス変換の定義を紹介し
Microsoft PowerPoint - 6.PID制御.pptx
 プロセス制御工学 6.PID 制御 京都大学 加納学 Division of Process Control & Process Systems Engineering Department of Chemical Engineering, Kyoto University manabu@cheme.kyoto-u.ac.jp http://www-pse.cheme.kyoto-u.ac.jp/~kano/
プロセス制御工学 6.PID 制御 京都大学 加納学 Division of Process Control & Process Systems Engineering Department of Chemical Engineering, Kyoto University manabu@cheme.kyoto-u.ac.jp http://www-pse.cheme.kyoto-u.ac.jp/~kano/
PowerPoint プレゼンテーション
 20150528 信号処理システム特論 本日の内容 適応フィルタ ( 時間領域 ) 適応アルゴリズム (LMS,NLMS,RLS) 適応フィルタの応用例 適応処理 非適応処理 : 状況によらずいつでも同じ処理 適応処理 : 状況に応じた適切な処理 高度な適応処理の例 雑音抑圧, 音響エコーキャンセラ, 騒音制御など 時間領域の適応フィルタ 誤差信号 与えられた手順に従ってフィルタ係数を更新し 自動的に所望の信号を得るフィルタ
20150528 信号処理システム特論 本日の内容 適応フィルタ ( 時間領域 ) 適応アルゴリズム (LMS,NLMS,RLS) 適応フィルタの応用例 適応処理 非適応処理 : 状況によらずいつでも同じ処理 適応処理 : 状況に応じた適切な処理 高度な適応処理の例 雑音抑圧, 音響エコーキャンセラ, 騒音制御など 時間領域の適応フィルタ 誤差信号 与えられた手順に従ってフィルタ係数を更新し 自動的に所望の信号を得るフィルタ
カイ二乗フィット検定、パラメータの誤差
 統計的データ解析 008 008.. 林田清 ( 大阪大学大学院理学研究科 ) 問題 C (, ) ( x xˆ) ( y yˆ) σ x πσ σ y y Pabx (, ;,,, ) ˆ y σx σ y = dx exp exp πσx ただし xy ˆ ˆ はyˆ = axˆ+ bであらわされる直線モデル上の点 ( ˆ) ( ˆ ) ( ) x x y ax b y ax b Pabx (,
統計的データ解析 008 008.. 林田清 ( 大阪大学大学院理学研究科 ) 問題 C (, ) ( x xˆ) ( y yˆ) σ x πσ σ y y Pabx (, ;,,, ) ˆ y σx σ y = dx exp exp πσx ただし xy ˆ ˆ はyˆ = axˆ+ bであらわされる直線モデル上の点 ( ˆ) ( ˆ ) ( ) x x y ax b y ax b Pabx (,
スライド 1
 センサー工学 2012 年 11 月 14 日 ( 水 ) 第 6 回 知能情報工学科横田孝義 1 センサー工学 10/03 10/10 10/17 10/24 11/7 11/14 11/21 11/28 12/05 12/12 12/19 1/09 1/16 1/23 1/30 2 先週の復習 定点検出センサ接触式マイクロスイッチ JIS C4505 規格 非接触式 光電センサ 高周波近接センサ
センサー工学 2012 年 11 月 14 日 ( 水 ) 第 6 回 知能情報工学科横田孝義 1 センサー工学 10/03 10/10 10/17 10/24 11/7 11/14 11/21 11/28 12/05 12/12 12/19 1/09 1/16 1/23 1/30 2 先週の復習 定点検出センサ接触式マイクロスイッチ JIS C4505 規格 非接触式 光電センサ 高周波近接センサ
自由落下と非慣性系における運動方程式 目次無重力... 2 加速度計は重力加速度を測れない... 3 重量は質量と同じ数値で kg が使える... 3 慣性系における運動方程式... 4 非慣性系における運動方程式... 6 見かけの力... 7 慣性系には実在する慣
 自由落下と非慣性系における運動方程式 1 1 2 3 4 5 6 7 目次無重力... 2 加速度計は重力加速度を測れない... 3 重量は質量と同じ数値で kg が使える... 3 慣性系における運動方程式... 4 非慣性系における運動方程式... 6 見かけの力... 7 慣性系には実在する慣性力があるか... 7 1 2 無重力 (1) 非慣性系の住人は無重力を体感できる (a) 併進的な加速度運動をしている非慣性系の住人
自由落下と非慣性系における運動方程式 1 1 2 3 4 5 6 7 目次無重力... 2 加速度計は重力加速度を測れない... 3 重量は質量と同じ数値で kg が使える... 3 慣性系における運動方程式... 4 非慣性系における運動方程式... 6 見かけの力... 7 慣性系には実在する慣性力があるか... 7 1 2 無重力 (1) 非慣性系の住人は無重力を体感できる (a) 併進的な加速度運動をしている非慣性系の住人
Microsoft PowerPoint - ce07-04e.ppt
 制御工学 4 5. ボード線図 キーワード : ボード線図, ゲイン曲線, 曲線 周波数 に対し 5. ボード線図 j の変化を表すゲイン曲線 j の変化を表す曲線 5.4 ボード線図の性質 キーワード : ボード線図の利点 6 横軸 : 周波数 を対数目盛り 縦軸 : ゲイン曲線 lg j 曲線 ( 度 ( デカード (dec デシベル値 ( 絶対値 j. デシベル値 6 4 7 積分系 j j
制御工学 4 5. ボード線図 キーワード : ボード線図, ゲイン曲線, 曲線 周波数 に対し 5. ボード線図 j の変化を表すゲイン曲線 j の変化を表す曲線 5.4 ボード線図の性質 キーワード : ボード線図の利点 6 横軸 : 周波数 を対数目盛り 縦軸 : ゲイン曲線 lg j 曲線 ( 度 ( デカード (dec デシベル値 ( 絶対値 j. デシベル値 6 4 7 積分系 j j
Microsoft PowerPoint - chap8.ppt
 第 8 章 : フィードバック制御系の設計法 第 8 章 : フィードバック制御系の設計法 8. 設計手順と性能評価 キーワード : 設計手順, 性能評価 8. 補償による制御系設計 キーワード : ( 比例 ),( 積分 ),( 微分 ) 学習目標 : 一般的な制御系設計における手順と制御系の性能評価について学ぶ. 学習目標 : 補償の有効性について理解し, その設計手順を習得する. 第 8 章
第 8 章 : フィードバック制御系の設計法 第 8 章 : フィードバック制御系の設計法 8. 設計手順と性能評価 キーワード : 設計手順, 性能評価 8. 補償による制御系設計 キーワード : ( 比例 ),( 積分 ),( 微分 ) 学習目標 : 一般的な制御系設計における手順と制御系の性能評価について学ぶ. 学習目標 : 補償の有効性について理解し, その設計手順を習得する. 第 8 章
ボルツマンマシンの高速化
 1. はじめに ボルツマン学習と平均場近似 山梨大学工学部宗久研究室 G04MK016 鳥居圭太 ボルツマンマシンは学習可能な相互結合型ネットワー クの代表的なものである. ボルツマンマシンには, 学習のための統計平均を取る必要があり, 結果を求めるまでに長い時間がかかってしまうという欠点がある. そこで, 学習の高速化のために, 統計を取る2つのステップについて, 以下のことを行う. まず1つ目のステップでは,
1. はじめに ボルツマン学習と平均場近似 山梨大学工学部宗久研究室 G04MK016 鳥居圭太 ボルツマンマシンは学習可能な相互結合型ネットワー クの代表的なものである. ボルツマンマシンには, 学習のための統計平均を取る必要があり, 結果を求めるまでに長い時間がかかってしまうという欠点がある. そこで, 学習の高速化のために, 統計を取る2つのステップについて, 以下のことを行う. まず1つ目のステップでは,
0 21 カラー反射率 slope aspect 図 2.9: 復元結果例 2.4 画像生成技術としての計算フォトグラフィ 3 次元情報を復元することにより, 画像生成 ( レンダリング ) に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生
 に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生") 0 21 カラー反射率 slope aspect 図 2.9: 復元結果例 2.4 画像生成技術としての計算フォトグラフィ 3 次元情報を復元することにより, 画像生成 ( レンダリング ) に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生まれ, コンピューテーショナルフォトグラフィ ( 計算フォトグラフィ ) と呼ばれている.3 次元画像認識技術の計算フォトグラフィへの応用として,
0 21 カラー反射率 slope aspect 図 2.9: 復元結果例 2.4 画像生成技術としての計算フォトグラフィ 3 次元情報を復元することにより, 画像生成 ( レンダリング ) に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生まれ, コンピューテーショナルフォトグラフィ ( 計算フォトグラフィ ) と呼ばれている.3 次元画像認識技術の計算フォトグラフィへの応用として,
パソコンシミュレータの現状
 第 2 章微分 偏微分, 写像 豊橋技術科学大学森謙一郎 2. 連続関数と微分 工学において物理現象を支配する方程式は微分方程式で表されていることが多く, 有限要素法も微分方程式を解く数値解析法であり, 定式化においては微分 積分が一般的に用いられており. 数学の基礎知識が必要になる. 図 2. に示すように, 微分は連続な関数 f() の傾きを求めることであり, 微小な に対して傾きを表し, を無限に
第 2 章微分 偏微分, 写像 豊橋技術科学大学森謙一郎 2. 連続関数と微分 工学において物理現象を支配する方程式は微分方程式で表されていることが多く, 有限要素法も微分方程式を解く数値解析法であり, 定式化においては微分 積分が一般的に用いられており. 数学の基礎知識が必要になる. 図 2. に示すように, 微分は連続な関数 f() の傾きを求めることであり, 微小な に対して傾きを表し, を無限に
景気指標の新しい動向
 内閣府経済社会総合研究所 経済分析 22 年第 166 号 4 時系列因子分析モデル 4.1 時系列因子分析モデル (Stock-Watson モデル の理論的解説 4.1.1 景気循環の状態空間表現 Stock and Watson (1989,1991 は観測される景気指標を状態空間表現と呼ば れるモデルで表し, 景気の状態を示す指標を開発した. 状態空間表現とは, わ れわれの目に見える実際に観測される変数は,
内閣府経済社会総合研究所 経済分析 22 年第 166 号 4 時系列因子分析モデル 4.1 時系列因子分析モデル (Stock-Watson モデル の理論的解説 4.1.1 景気循環の状態空間表現 Stock and Watson (1989,1991 は観測される景気指標を状態空間表現と呼ば れるモデルで表し, 景気の状態を示す指標を開発した. 状態空間表現とは, わ れわれの目に見える実際に観測される変数は,
計算機シミュレーション
 . 運動方程式の数値解法.. ニュートン方程式の近似速度は, 位置座標 の時間微分で, d と定義されます. これを成分で書くと, d d li li とかけます. 本来は が の極限をとらなければいけませんが, 有限の小さな値とすると 秒後の位置座標は速度を用いて, と近似できます. 同様にして, 加速度は, 速度 の時間微分で, d と定義されます. これを成分で書くと, d d li li とかけます.
. 運動方程式の数値解法.. ニュートン方程式の近似速度は, 位置座標 の時間微分で, d と定義されます. これを成分で書くと, d d li li とかけます. 本来は が の極限をとらなければいけませんが, 有限の小さな値とすると 秒後の位置座標は速度を用いて, と近似できます. 同様にして, 加速度は, 速度 の時間微分で, d と定義されます. これを成分で書くと, d d li li とかけます.
Kumamoto University Center for Multimedia and Information Technologies Lab. 熊本大学アプリケーション実験 ~ 実環境における無線 LAN 受信電波強度を用いた位置推定手法の検討 ~ InKIAI 宮崎県美郷
 熊本大学アプリケーション実験 ~ 実環境における無線 LAN 受信電波強度を用いた位置推定手法の検討 ~ InKIAI プロジェクト @ 宮崎県美郷町 熊本大学副島慶人川村諒 1 実験の目的 従来 信号の受信電波強度 (RSSI:RecevedSgnal StrengthIndcator) により 対象の位置を推定する手法として 無線 LAN の AP(AccessPont) から受信する信号の減衰量をもとに位置を推定する手法が多く検討されている
熊本大学アプリケーション実験 ~ 実環境における無線 LAN 受信電波強度を用いた位置推定手法の検討 ~ InKIAI プロジェクト @ 宮崎県美郷町 熊本大学副島慶人川村諒 1 実験の目的 従来 信号の受信電波強度 (RSSI:RecevedSgnal StrengthIndcator) により 対象の位置を推定する手法として 無線 LAN の AP(AccessPont) から受信する信号の減衰量をもとに位置を推定する手法が多く検討されている
画像解析論(2) 講義内容
 講義内容") 画像解析論 画像解析論 東京工業大学長橋宏 主な講義内容 信号処理と画像処理 二次元システムとその表現 二次元システムの特性解析 各種の画像フィルタ 信号処理と画像処理 画像解析論 処理の応答 記憶域 入出力の流れ 信号処理系 実時間性が求められる メモリ容量に対する制限が厳しい オンラインでの対応が厳しく求められる 画像処理系 ある程度の処理時間が許容される 大容量のメモリ使用が容認され易い オフラインでの対応が容認され易い
画像解析論 画像解析論 東京工業大学長橋宏 主な講義内容 信号処理と画像処理 二次元システムとその表現 二次元システムの特性解析 各種の画像フィルタ 信号処理と画像処理 画像解析論 処理の応答 記憶域 入出力の流れ 信号処理系 実時間性が求められる メモリ容量に対する制限が厳しい オンラインでの対応が厳しく求められる 画像処理系 ある程度の処理時間が許容される 大容量のメモリ使用が容認され易い オフラインでの対応が容認され易い
Microsoft PowerPoint - e-stat(OLS).pptx
.pptx") 経済統計学 ( 補足 ) 最小二乗法について 担当 : 小塚匡文 2015 年 11 月 19 日 ( 改訂版 ) 神戸大学経済学部 2015 年度後期開講授業 補足 : 最小二乗法 ( 単回帰分析 ) 1.( 単純 ) 回帰分析とは? 標本サイズTの2 変数 ( ここではXとY) のデータが存在 YをXで説明する回帰方程式を推定するための方法 Y: 被説明変数 ( または従属変数 ) X: 説明変数
経済統計学 ( 補足 ) 最小二乗法について 担当 : 小塚匡文 2015 年 11 月 19 日 ( 改訂版 ) 神戸大学経済学部 2015 年度後期開講授業 補足 : 最小二乗法 ( 単回帰分析 ) 1.( 単純 ) 回帰分析とは? 標本サイズTの2 変数 ( ここではXとY) のデータが存在 YをXで説明する回帰方程式を推定するための方法 Y: 被説明変数 ( または従属変数 ) X: 説明変数
ベイズ統計入門
 ベイズ統計入門 条件付確率 事象 F が起こったことが既知であるという条件の下で E が起こる確率を条件付確率 (codtoal probablt) という P ( E F ) P ( E F ) P( F ) 定義式を変形すると 確率の乗法公式となる ( E F ) P( F ) P( E F ) P( E) P( F E) P 事象の独立 ある事象の生起する確率が 他のある事象が生起するかどうかによって変化しないとき
ベイズ統計入門 条件付確率 事象 F が起こったことが既知であるという条件の下で E が起こる確率を条件付確率 (codtoal probablt) という P ( E F ) P ( E F ) P( F ) 定義式を変形すると 確率の乗法公式となる ( E F ) P( F ) P( E F ) P( E) P( F E) P 事象の独立 ある事象の生起する確率が 他のある事象が生起するかどうかによって変化しないとき
2 Hermite-Gaussian モード 2-1 Hermite-Gaussian モード 自由空間を伝搬するレーザ光は次のような Hermite-gaussian Modes を持つ光波として扱う ことができる ここで U lm (x, y, z) U l (x, z)u m (y, z) e
 U l (x, z)u m (y, z) e") Wavefront Sensor 法による三角共振器のミスアラインメント検出 齊藤高大 新潟大学大学院自然科学研究科電気情報工学専攻博士後期課程 2 年 214 年 8 月 6 日 1 はじめに Input Mode Cleaner(IMC) は Fig.1 に示すような三角共振器である 懸架鏡の共振などにより IMC を構成する各ミラーが角度変化を起こすと 入射光軸と共振器軸との間にずれが生じる
Wavefront Sensor 法による三角共振器のミスアラインメント検出 齊藤高大 新潟大学大学院自然科学研究科電気情報工学専攻博士後期課程 2 年 214 年 8 月 6 日 1 はじめに Input Mode Cleaner(IMC) は Fig.1 に示すような三角共振器である 懸架鏡の共振などにより IMC を構成する各ミラーが角度変化を起こすと 入射光軸と共振器軸との間にずれが生じる
Microsoft PowerPoint - 測量学.ppt [互換モード]
![Microsoft PowerPoint - 測量学.ppt [互換モード]](/thumbs/92/109082022.jpg "Microsoft PowerPoint - 測量学.ppt [互換モード]") 8/5/ 誤差理論 測定の分類 性格による分類 独立 ( な ) 測定 : 測定値がある条件を満たさなければならないなどの拘束や制約を持たないで独立して行う測定 条件 ( 付き ) 測定 : 三角形の 3 つの内角の和のように, 個々の測定値間に満たすべき条件式が存在する場合の測定 方法による分類 直接測定 : 距離や角度などを機器を用いて直接行う測定 間接測定 : 求めるべき量を直接測定するのではなく,
8/5/ 誤差理論 測定の分類 性格による分類 独立 ( な ) 測定 : 測定値がある条件を満たさなければならないなどの拘束や制約を持たないで独立して行う測定 条件 ( 付き ) 測定 : 三角形の 3 つの内角の和のように, 個々の測定値間に満たすべき条件式が存在する場合の測定 方法による分類 直接測定 : 距離や角度などを機器を用いて直接行う測定 間接測定 : 求めるべき量を直接測定するのではなく,
第 5 章 構造振動学 棒の振動を縦振動, 捩り振動, 曲げ振動に分けて考える. 5.1 棒の縦振動と捩り振動 まっすぐな棒の縦振動の固有振動数 f[ Hz] f = l 2pL である. ただし, L [ 単位 m] は棒の長さ, [ 2 N / m ] 3 r[ 単位 Kg / m ] E r
![第 5 章 構造振動学 棒の振動を縦振動, 捩り振動, 曲げ振動に分けて考える. 5.1 棒の縦振動と捩り振動 まっすぐな棒の縦振動の固有振動数 f[ Hz] f = l 2pL である. ただし, L [ 単位 m] は棒の長さ, [ 2 N / m ] 3 r[ 単位 Kg / m ] E r](/thumbs/94/120041361.jpg "第 5 章 構造振動学 棒の振動を縦振動, 捩り振動, 曲げ振動に分けて考える. 5.1 棒の縦振動と捩り振動 まっすぐな棒の縦振動の固有振動数 f[ Hz] f = l 2pL である. ただし, L [ 単位 m] は棒の長さ, [ 2 N / m ] 3 r[ 単位 Kg / m ] E r") 第 5 章 構造振動学 棒の振動を縦振動, 捩り振動, 曲げ振動に分けて考える 5 棒の縦振動と捩り振動 まっすぐな棒の縦振動の固有振動数 f[ Hz] f l pl である ただし, L [ 単位 m] は棒の長さ, [ N / m ] [ 単位 Kg / m ] E は (5) E 単位は棒の材料の縦弾性係数 ( ヤング率 ) は棒の材料の単位体積当りの質量である l は境界条件と振動モードによって決まる無
第 5 章 構造振動学 棒の振動を縦振動, 捩り振動, 曲げ振動に分けて考える 5 棒の縦振動と捩り振動 まっすぐな棒の縦振動の固有振動数 f[ Hz] f l pl である ただし, L [ 単位 m] は棒の長さ, [ N / m ] [ 単位 Kg / m ] E は (5) E 単位は棒の材料の縦弾性係数 ( ヤング率 ) は棒の材料の単位体積当りの質量である l は境界条件と振動モードによって決まる無
PowerPoint プレゼンテーション
 エージェントベースドシミュレーションによる店舗内回遊モデル構築に関する研究 大阪府立大学 現代システム科学域 知識情報システム学類石丸悠太郎 指導教員 森田裕之 背景 顧客の店舗内回遊シミュレーションは 店舗内でのプロモーションや商品配置の影響を実施する前に結果を予測することが可能となるため 実施前に効果を確認することでコストや時間を削減することができる 従来は 購買履歴やアンケート結果を用いたモデルを行わざるを得なかったため
エージェントベースドシミュレーションによる店舗内回遊モデル構築に関する研究 大阪府立大学 現代システム科学域 知識情報システム学類石丸悠太郎 指導教員 森田裕之 背景 顧客の店舗内回遊シミュレーションは 店舗内でのプロモーションや商品配置の影響を実施する前に結果を予測することが可能となるため 実施前に効果を確認することでコストや時間を削減することができる 従来は 購買履歴やアンケート結果を用いたモデルを行わざるを得なかったため
1. 多変量解析の基本的な概念 1. 多変量解析の基本的な概念 1.1 多変量解析の目的 人間のデータは多変量データが多いので多変量解析が有用 特性概括評価特性概括評価 症 例 主 治 医 の 主 観 症 例 主 治 医 の 主 観 単変量解析 客観的規準のある要約多変量解析 要約値 客観的規準のな
 1.1 多変量解析の目的 人間のデータは多変量データが多いので多変量解析が有用 特性概括評価特性概括評価 症 例 治 医 の 観 症 例 治 医 の 観 単変量解析 客観的規準のある要約多変量解析 要約値 客観的規準のない要約知識 直感 知識 直感 総合的評価 考察 総合的評価 考察 単変量解析の場合 多変量解析の場合 < 表 1.1 脂質異常症患者の TC と TG と重症度 > 症例 No. TC
1.1 多変量解析の目的 人間のデータは多変量データが多いので多変量解析が有用 特性概括評価特性概括評価 症 例 治 医 の 観 症 例 治 医 の 観 単変量解析 客観的規準のある要約多変量解析 要約値 客観的規準のない要約知識 直感 知識 直感 総合的評価 考察 総合的評価 考察 単変量解析の場合 多変量解析の場合 < 表 1.1 脂質異常症患者の TC と TG と重症度 > 症例 No. TC
前期募集 令和 2 年度山梨大学大学院医工農学総合教育部修士課程工学専攻 入学試験問題 No.1/2 コース等 メカトロニクス工学コース 試験科目 数学 問 1 図 1 は, 原点 O の直交座標系 x,y,z に関して, 線分 OA,OB,OC を 3 辺にもつ平行六面体を示す. ここで, 点 A
 No.1/2 数学 問 1 図 1 は, 原点 O の直交座標系 x,y,z に関して, 線分 OA,OB,OC を 3 辺にもつ平行六面体を示す. ここで, 点 A,B,C の座標はそれぞれ A (,6,-2), B (4,-5,3),C (-5.1,4.9,.9) である. 次の問いに答えよ. (1) を求めよ. (2) および の向きを解答用紙の図 1 に描け. (3) 図 1 の平行六面体の体積
No.1/2 数学 問 1 図 1 は, 原点 O の直交座標系 x,y,z に関して, 線分 OA,OB,OC を 3 辺にもつ平行六面体を示す. ここで, 点 A,B,C の座標はそれぞれ A (,6,-2), B (4,-5,3),C (-5.1,4.9,.9) である. 次の問いに答えよ. (1) を求めよ. (2) および の向きを解答用紙の図 1 に描け. (3) 図 1 の平行六面体の体積
PowerPoint プレゼンテーション
 PID 制御の基礎 ON/OFF 制御 PID 制御 P 制御 過渡特性を改善しよう PD 制御と P-D 制御 定常特性を改善しよう PI-D 制御 4.2 節 I-PD 制御 角度制御実験装置 0 [deg] 30 [deg] 角度制御実験装置 目標値 コントローラ ( マイコン ) アクチュエータ (DC モータ ) 制御対象 ( アーム ) 角度 センサ ( ロータリエンコーダ ) ON/OFF
PID 制御の基礎 ON/OFF 制御 PID 制御 P 制御 過渡特性を改善しよう PD 制御と P-D 制御 定常特性を改善しよう PI-D 制御 4.2 節 I-PD 制御 角度制御実験装置 0 [deg] 30 [deg] 角度制御実験装置 目標値 コントローラ ( マイコン ) アクチュエータ (DC モータ ) 制御対象 ( アーム ) 角度 センサ ( ロータリエンコーダ ) ON/OFF
例 e 指数関数的に減衰する信号を h( a < + a a すると, それらのラプラス変換は, H ( ) { e } e インパルス応答が h( a < ( ただし a >, U( ) { } となるシステムにステップ信号 ( y( のラプラス変換 Y () は, Y ( ) H ( ) X (
 { e } e インパルス応答が h( a < ( ただし a >, U( ) { } となるシステムにステップ信号 ( y( のラプラス変換 Y () は, Y ( ) H ( ) X (") 第 週ラプラス変換 教科書 p.34~ 目標ラプラス変換の定義と意味を理解する フーリエ変換や Z 変換と並ぶ 信号解析やシステム設計における重要なツール ラプラス変換は波動現象や電気回路など様々な分野で 微分方程式を解くために利用されてきた ラプラス変換を用いることで微分方程式は代数方程式に変換される また 工学上使われる主要な関数のラプラス変換は簡単な形の関数で表されるので これを ラプラス変換表
第 週ラプラス変換 教科書 p.34~ 目標ラプラス変換の定義と意味を理解する フーリエ変換や Z 変換と並ぶ 信号解析やシステム設計における重要なツール ラプラス変換は波動現象や電気回路など様々な分野で 微分方程式を解くために利用されてきた ラプラス変換を用いることで微分方程式は代数方程式に変換される また 工学上使われる主要な関数のラプラス変換は簡単な形の関数で表されるので これを ラプラス変換表
13章 回帰分析
 単回帰分析 つ以上の変数についての関係を見る つの 目的 被説明 変数を その他の 説明 変数を使って 予測しようというものである 因果関係とは限らない ここで勉強すること 最小 乗法と回帰直線 決定係数とは何か? 最小 乗法と回帰直線 これまで 変数の間の関係の深さについて考えてきた 相関係数 ここでは 変数に役割を与え 一方の 説明 変数を用いて他方の 目的 被説明 変数を説明することを考える
単回帰分析 つ以上の変数についての関係を見る つの 目的 被説明 変数を その他の 説明 変数を使って 予測しようというものである 因果関係とは限らない ここで勉強すること 最小 乗法と回帰直線 決定係数とは何か? 最小 乗法と回帰直線 これまで 変数の間の関係の深さについて考えてきた 相関係数 ここでは 変数に役割を与え 一方の 説明 変数を用いて他方の 目的 被説明 変数を説明することを考える
SAP11_03
 第 3 回 音声音響信号処理 ( 線形予測分析と自己回帰モデル ) 亀岡弘和 東京大学大学院情報理工学系研究科日本電信電話株式会社 NTT コミュニケーション科学基礎研究所 講義内容 ( キーワード ) 信号処理 符号化 標準化の実用システム例の紹介情報通信の基本 ( 誤り検出 訂正符号 変調 IP) 符号化技術の基本 ( 量子化 予測 変換 圧縮 ) 音声分析 合成 認識 強調 音楽信号処理統計的信号処理の基礎
第 3 回 音声音響信号処理 ( 線形予測分析と自己回帰モデル ) 亀岡弘和 東京大学大学院情報理工学系研究科日本電信電話株式会社 NTT コミュニケーション科学基礎研究所 講義内容 ( キーワード ) 信号処理 符号化 標準化の実用システム例の紹介情報通信の基本 ( 誤り検出 訂正符号 変調 IP) 符号化技術の基本 ( 量子化 予測 変換 圧縮 ) 音声分析 合成 認識 強調 音楽信号処理統計的信号処理の基礎
PowerPoint プレゼンテーション
 ロボティックス Robotics 先端工学基礎課程講義 小泉憲裕 2016/5/6 講義情報 当面はこちらのサイト, http://www.medigit.mi.uec.ac.jp/lect_robotics.html ロボットの運動学 ロボットの運動学 ロボットの運動学は現在 ニュートン力学を発展させた解析力学を基盤とすることが多い 解析力学では物体を 剛体としてあらわす 第 4 回 座標変換平行
ロボティックス Robotics 先端工学基礎課程講義 小泉憲裕 2016/5/6 講義情報 当面はこちらのサイト, http://www.medigit.mi.uec.ac.jp/lect_robotics.html ロボットの運動学 ロボットの運動学 ロボットの運動学は現在 ニュートン力学を発展させた解析力学を基盤とすることが多い 解析力学では物体を 剛体としてあらわす 第 4 回 座標変換平行
統計的データ解析
 統計的データ解析 011 011.11.9 林田清 ( 大阪大学大学院理学研究科 ) 連続確率分布の平均値 分散 比較のため P(c ) c 分布 自由度 の ( カイ c 平均値 0, 標準偏差 1の正規分布 に従う変数 xの自乗和 c x =1 が従う分布を自由度 の分布と呼ぶ 一般に自由度の分布は f /1 c / / ( c ) {( c ) e }/ ( / ) 期待値 二乗 ) 分布 c
統計的データ解析 011 011.11.9 林田清 ( 大阪大学大学院理学研究科 ) 連続確率分布の平均値 分散 比較のため P(c ) c 分布 自由度 の ( カイ c 平均値 0, 標準偏差 1の正規分布 に従う変数 xの自乗和 c x =1 が従う分布を自由度 の分布と呼ぶ 一般に自由度の分布は f /1 c / / ( c ) {( c ) e }/ ( / ) 期待値 二乗 ) 分布 c
2011年度 大阪大・理系数学
 0 大阪大学 ( 理系 ) 前期日程問題 解答解説のページへ a a を自然数とする O を原点とする座標平面上で行列 A= a の表す 次変換 を f とする cosθ siθ () >0 および0θ
0 大阪大学 ( 理系 ) 前期日程問題 解答解説のページへ a a を自然数とする O を原点とする座標平面上で行列 A= a の表す 次変換 を f とする cosθ siθ () >0 および0θ
様々なミクロ計量モデル†
 担当 : 長倉大輔 ( ながくらだいすけ ) この資料は私の講義において使用するために作成した資料です WEB ページ上で公開しており 自由に参照して頂いて構いません ただし 内容について 一応検証してありますが もし間違いがあった場合でもそれによって生じるいかなる損害 不利益について責任を負いかねますのでご了承ください 間違いは発見次第 継続的に直していますが まだ存在する可能性があります 1 カウントデータモデル
担当 : 長倉大輔 ( ながくらだいすけ ) この資料は私の講義において使用するために作成した資料です WEB ページ上で公開しており 自由に参照して頂いて構いません ただし 内容について 一応検証してありますが もし間違いがあった場合でもそれによって生じるいかなる損害 不利益について責任を負いかねますのでご了承ください 間違いは発見次第 継続的に直していますが まだ存在する可能性があります 1 カウントデータモデル
スライド 1
 データ解析特論第 10 回 ( 全 15 回 ) 2012 年 12 月 11 日 ( 火 ) 情報エレクトロニクス専攻横田孝義 1 終了 11/13 11/20 重回帰分析をしばらくやります 12/4 12/11 12/18 2 前回から回帰分析について学習しています 3 ( 単 ) 回帰分析 単回帰分析では一つの従属変数 ( 目的変数 ) を 一つの独立変数 ( 説明変数 ) で予測する事を考える
データ解析特論第 10 回 ( 全 15 回 ) 2012 年 12 月 11 日 ( 火 ) 情報エレクトロニクス専攻横田孝義 1 終了 11/13 11/20 重回帰分析をしばらくやります 12/4 12/11 12/18 2 前回から回帰分析について学習しています 3 ( 単 ) 回帰分析 単回帰分析では一つの従属変数 ( 目的変数 ) を 一つの独立変数 ( 説明変数 ) で予測する事を考える
PowerPoint プレゼンテーション
 ロボットの計画と制御 マルコフ決定過程 確率ロボティクス 14 章 http://www.probabilistic-robotics.org/ 1 14.1 動機付けロボットの行動選択のための確率的なアルゴリズム 目的 予想される不確かさを最小化したい. ロボットの動作につての不確かさ (MDP で考える ) 決定論的な要素 ロボット工学の理論の多くは, 動作の影響は決定論的であるという仮定のもとに成り立っている.
ロボットの計画と制御 マルコフ決定過程 確率ロボティクス 14 章 http://www.probabilistic-robotics.org/ 1 14.1 動機付けロボットの行動選択のための確率的なアルゴリズム 目的 予想される不確かさを最小化したい. ロボットの動作につての不確かさ (MDP で考える ) 決定論的な要素 ロボット工学の理論の多くは, 動作の影響は決定論的であるという仮定のもとに成り立っている.
Autodesk Inventor Skill Builders Autodesk Inventor 2010 構造解析の精度改良 メッシュリファインメントによる収束計算 予想作業時間:15 分 対象のバージョン:Inventor 2010 もしくはそれ以降のバージョン シミュレーションを設定する際
 Autodesk Inventor Skill Builders Autodesk Inventor 2010 構造解析の精度改良 メッシュリファインメントによる収束計算 予想作業時間:15 分 対象のバージョン:Inventor 2010 もしくはそれ以降のバージョン シミュレーションを設定する際に 収束判定に関するデフォルトの設定をそのまま使うか 修正をします 応力解析ソルバーでは計算の終了を判断するときにこの設定を使います
Autodesk Inventor Skill Builders Autodesk Inventor 2010 構造解析の精度改良 メッシュリファインメントによる収束計算 予想作業時間:15 分 対象のバージョン:Inventor 2010 もしくはそれ以降のバージョン シミュレーションを設定する際に 収束判定に関するデフォルトの設定をそのまま使うか 修正をします 応力解析ソルバーでは計算の終了を判断するときにこの設定を使います
この演習について Autoware 演習 1: データの記録 再生 Autoware 演習 2: センサーキャリブレーション Autoware 演習 3:3 次元地図の作成 Autoware 演習 4: 自己位置推定 Autoware 演習 5: パラメータ調整 Autoware 演習 6: 物体検
 version 1.0 TIER IV ACADEMY 自動運転システム構築塾 Day4 Autoware 演習 2 Autoware 演習 6: 物体検出とトラッキング この演習について Autoware 演習 1: データの記録 再生 Autoware 演習 2: センサーキャリブレーション Autoware 演習 3:3 次元地図の作成 Autoware 演習 4: 自己位置推定 Autoware
version 1.0 TIER IV ACADEMY 自動運転システム構築塾 Day4 Autoware 演習 2 Autoware 演習 6: 物体検出とトラッキング この演習について Autoware 演習 1: データの記録 再生 Autoware 演習 2: センサーキャリブレーション Autoware 演習 3:3 次元地図の作成 Autoware 演習 4: 自己位置推定 Autoware
ANJ-0005: 加速度センサーとは?
 アプリケーション ノート 加速度センサーとは? by Tomoaki Tsuzuki 加速度センサーとは? 加速度センサーとは加速度の測定を目的とした慣性センサーです 振動センサーと異なり 加速度センサーは直流 (DC) の加速度が検出可能である為 加速度センサーを使って重力を検出する事も可能です 加速度を測定し適切な信号処理を行う事によって 傾きや動き 振動や衝撃等様々な情報が得られます 加速度センサーには
アプリケーション ノート 加速度センサーとは? by Tomoaki Tsuzuki 加速度センサーとは? 加速度センサーとは加速度の測定を目的とした慣性センサーです 振動センサーと異なり 加速度センサーは直流 (DC) の加速度が検出可能である為 加速度センサーを使って重力を検出する事も可能です 加速度を測定し適切な信号処理を行う事によって 傾きや動き 振動や衝撃等様々な情報が得られます 加速度センサーには
Microsoft PowerPoint - mp11-06.pptx
 数理計画法第 6 回 塩浦昭義情報科学研究科准教授 shioura@dais.is.tohoku.ac.jp http://www.dais.is.tohoku.ac.jp/~shioura/teaching 第 5 章組合せ計画 5.2 分枝限定法 組合せ計画問題 組合せ計画問題とは : 有限個の もの の組合せの中から, 目的関数を最小または最大にする組合せを見つける問題 例 1: 整数計画問題全般
数理計画法第 6 回 塩浦昭義情報科学研究科准教授 shioura@dais.is.tohoku.ac.jp http://www.dais.is.tohoku.ac.jp/~shioura/teaching 第 5 章組合せ計画 5.2 分枝限定法 組合せ計画問題 組合せ計画問題とは : 有限個の もの の組合せの中から, 目的関数を最小または最大にする組合せを見つける問題 例 1: 整数計画問題全般
Microsoft PowerPoint - ce07-13b.ppt
 制御工学 3 第 8 章 : フィードバック制御系の設計法 8. 設計手順と性能評価キーワード : 設計手順, 性能評価 8. ID 補償による制御系設計キーワード : ( 比例 ),I( 積分 ),D( 微分 ) 8.3 進み 遅れ補償による制御系設計キーワード : 遅れ補償, 進み補償 学習目標 : 一般的な制御系設計における手順と制御系の性能評価について学ぶ. ループ整形の考え方を用いて, 遅れ補償,
制御工学 3 第 8 章 : フィードバック制御系の設計法 8. 設計手順と性能評価キーワード : 設計手順, 性能評価 8. ID 補償による制御系設計キーワード : ( 比例 ),I( 積分 ),D( 微分 ) 8.3 進み 遅れ補償による制御系設計キーワード : 遅れ補償, 進み補償 学習目標 : 一般的な制御系設計における手順と制御系の性能評価について学ぶ. ループ整形の考え方を用いて, 遅れ補償,
スライド 1
 データ解析特論第 5 回 ( 全 15 回 ) 2012 年 10 月 30 日 ( 火 ) 情報エレクトロニクス専攻横田孝義 1 をもっとやります 2 第 2 回 3 データマイニングの分野ではマクロ ( 巨視的 ) な視点で全体を捉える能力が求められる 1. コンピュータは数値の集合として全体を把握していますので 意味ある情報として全体を見ることが不得意 2. 逆に人間には もともと空間的に全体像を捉える能力が得意
データ解析特論第 5 回 ( 全 15 回 ) 2012 年 10 月 30 日 ( 火 ) 情報エレクトロニクス専攻横田孝義 1 をもっとやります 2 第 2 回 3 データマイニングの分野ではマクロ ( 巨視的 ) な視点で全体を捉える能力が求められる 1. コンピュータは数値の集合として全体を把握していますので 意味ある情報として全体を見ることが不得意 2. 逆に人間には もともと空間的に全体像を捉える能力が得意
NumericalProg09
 数値解析および プログラミング演習 [08 第 9 回目 ] の解法 - 4. Ruge-Kua( ルンゲ クッタ 法 Ruge-Kua-Gill( ルンゲ クッタ ジル / ギル 法 5. 多段解法 解法の対象 常微分方程式 d( d 初期値条件 (, の変化に応じて変化する の値を求める. ( 0 ( 0 と 0 は,give 0 常微分方程式の初期値問題 と言う. 3 Ruge-Kua 法の導出
数値解析および プログラミング演習 [08 第 9 回目 ] の解法 - 4. Ruge-Kua( ルンゲ クッタ 法 Ruge-Kua-Gill( ルンゲ クッタ ジル / ギル 法 5. 多段解法 解法の対象 常微分方程式 d( d 初期値条件 (, の変化に応じて変化する の値を求める. ( 0 ( 0 と 0 は,give 0 常微分方程式の初期値問題 と言う. 3 Ruge-Kua 法の導出
Microsoft Word - planck定数.doc
 . 目的 Plck 定数 光電効果についての理解を深める. また光電管を使い実際に光電効果を観察し,Plck 定数および仕事関数を求める.. 課題 Hg- スペクトルランプから出ている何本かの強いスペクトル線のなかから, フィルターを使い, 特定の波長域のスペクトル線を選択し, それぞれの場合について光電効果により飛び出してくる電子の最高エネルギーを測定する. この測定結果から,Plck 定数 h
. 目的 Plck 定数 光電効果についての理解を深める. また光電管を使い実際に光電効果を観察し,Plck 定数および仕事関数を求める.. 課題 Hg- スペクトルランプから出ている何本かの強いスペクトル線のなかから, フィルターを使い, 特定の波長域のスペクトル線を選択し, それぞれの場合について光電効果により飛び出してくる電子の最高エネルギーを測定する. この測定結果から,Plck 定数 h
行列、ベクトル
 行列 (Mtri) と行列式 (Determinnt). 行列 (Mtri) の演算. 和 差 積.. 行列とは.. 行列の和差 ( 加減算 ).. 行列の積 ( 乗算 ). 転置行列 対称行列 正方行列. 単位行列. 行列式 (Determinnt) と逆行列. 行列式. 逆行列. 多元一次連立方程式のコンピュータによる解法. コンピュータによる逆行列の計算.. 定数項の異なる複数の方程式.. 逆行列の計算
行列 (Mtri) と行列式 (Determinnt). 行列 (Mtri) の演算. 和 差 積.. 行列とは.. 行列の和差 ( 加減算 ).. 行列の積 ( 乗算 ). 転置行列 対称行列 正方行列. 単位行列. 行列式 (Determinnt) と逆行列. 行列式. 逆行列. 多元一次連立方程式のコンピュータによる解法. コンピュータによる逆行列の計算.. 定数項の異なる複数の方程式.. 逆行列の計算
工学応用の観点からのデータ同化とその特徴 明治大学 中村和幸 1
 工学応用の観点からのデータ同化とその特徴 明治大学 中村和幸 1 目次 データ同化と適用例 データ同化とは 適用例 データ同化における定式化とアルゴリズム データ同化と状態空間モデル ベイズ更新 データ同化アルゴリズム 工学応用に向けたデータ同化の位置づけ 他の類似手法との比較 まとめ 2 データ同化の目的 情報を詳細にできる 数値シミュレーション 現実の情報の反映 格子を細かくできる? 現実の情報?
工学応用の観点からのデータ同化とその特徴 明治大学 中村和幸 1 目次 データ同化と適用例 データ同化とは 適用例 データ同化における定式化とアルゴリズム データ同化と状態空間モデル ベイズ更新 データ同化アルゴリズム 工学応用に向けたデータ同化の位置づけ 他の類似手法との比較 まとめ 2 データ同化の目的 情報を詳細にできる 数値シミュレーション 現実の情報の反映 格子を細かくできる? 現実の情報?
(Microsoft PowerPoint - \221\34613\211\361)
") 計算力学 ~ 第 回弾性問題の有限要素解析 (Ⅱ)~ 修士 年後期 ( 選択科目 ) 担当 : 岩佐貴史 講義の概要 全 5 講義. 計算力学概論, ガイダンス. 自然現象の数理モデル化. 行列 場とその演算. 数値計算法 (Ⅰ) 5. 数値計算法 (Ⅱ) 6. 初期値 境界値問題 (Ⅰ) 7. 初期値 境界値問題 (Ⅱ) 8. マトリックス変位法による構造解析 9. トラス構造の有限要素解析. 重み付き残差法と古典的近似解法.
計算力学 ~ 第 回弾性問題の有限要素解析 (Ⅱ)~ 修士 年後期 ( 選択科目 ) 担当 : 岩佐貴史 講義の概要 全 5 講義. 計算力学概論, ガイダンス. 自然現象の数理モデル化. 行列 場とその演算. 数値計算法 (Ⅰ) 5. 数値計算法 (Ⅱ) 6. 初期値 境界値問題 (Ⅰ) 7. 初期値 境界値問題 (Ⅱ) 8. マトリックス変位法による構造解析 9. トラス構造の有限要素解析. 重み付き残差法と古典的近似解法.
untitled
 に, 月次モデルの場合でも四半期モデルの場合でも, シミュレーション期間とは無関係に一様に RMSPE を最小にするバンドの設定法は存在しないということである 第 2 は, 表で与えた 2 つの期間及びすべての内生変数を見渡して, 全般的にパフォーマンスのよいバンドの設定法は, 最適固定バンドと最適可変バンドのうちの M 2, Q2 である いずれにしても, 以上述べた 3 つのバンド設定法は若干便宜的なものと言わざるを得ない
に, 月次モデルの場合でも四半期モデルの場合でも, シミュレーション期間とは無関係に一様に RMSPE を最小にするバンドの設定法は存在しないということである 第 2 は, 表で与えた 2 つの期間及びすべての内生変数を見渡して, 全般的にパフォーマンスのよいバンドの設定法は, 最適固定バンドと最適可変バンドのうちの M 2, Q2 である いずれにしても, 以上述べた 3 つのバンド設定法は若干便宜的なものと言わざるを得ない
解析力学B - 第11回: 正準変換
 解析力学 B 第 11 回 : 正準変換 神戸大 : 陰山聡 ホームページ ( 第 6 回から今回までの講義ノート ) http://tinyurl.com/kage2010 2011.01.27 正準変換 バネ問題 ( あえて下手に座標をとった ) ハミルトニアンを考える q 正準方程式は H = p2 2m + k 2 (q l 0) 2 q = H p = p m ṗ = H q = k(q
解析力学 B 第 11 回 : 正準変換 神戸大 : 陰山聡 ホームページ ( 第 6 回から今回までの講義ノート ) http://tinyurl.com/kage2010 2011.01.27 正準変換 バネ問題 ( あえて下手に座標をとった ) ハミルトニアンを考える q 正準方程式は H = p2 2m + k 2 (q l 0) 2 q = H p = p m ṗ = H q = k(q
untitled
 主成分分析 (Prncpal Component Analy) で情報を集約する マルチスペクトル画像 なし が情報を集約する 69.68 77.97 85.73 96.7 98.8 画像 : NASA 除去できる一部に集約 あり.24.35 4.63 7.65 3.9 分散の比率 最大を 255, 最小を に正規化して表示 3 つの成分から画像を再生した 信号処理の手順 行列 A 共分散行列に対する
主成分分析 (Prncpal Component Analy) で情報を集約する マルチスペクトル画像 なし が情報を集約する 69.68 77.97 85.73 96.7 98.8 画像 : NASA 除去できる一部に集約 あり.24.35 4.63 7.65 3.9 分散の比率 最大を 255, 最小を に正規化して表示 3 つの成分から画像を再生した 信号処理の手順 行列 A 共分散行列に対する
Microsoft Word - Chap17
 第 7 章化学反応に対する磁場効果における三重項機構 その 7.. 節の訂正 年 7 月 日. 節 章の9ページ の赤枠に記載した説明は間違いであった事に気付いた 以下に訂正する しかし.. 式は 結果的には正しいので安心して下さい 磁場 の存在下でのT 状態のハミルトニアン は ゼーマン項 と時間に依存するスピン-スピン相互作用の項 との和となる..=7.. g S = g S z = S z g
第 7 章化学反応に対する磁場効果における三重項機構 その 7.. 節の訂正 年 7 月 日. 節 章の9ページ の赤枠に記載した説明は間違いであった事に気付いた 以下に訂正する しかし.. 式は 結果的には正しいので安心して下さい 磁場 の存在下でのT 状態のハミルトニアン は ゼーマン項 と時間に依存するスピン-スピン相互作用の項 との和となる..=7.. g S = g S z = S z g
カメラレディ原稿
 IS2-A2 カメラを回転させた時の特徴点軌跡を用いた魚眼カメラの内部パラメータ推定 - モデルと評価関数の変更による改良 - 田中祐輝, 増山岳人, 梅田和昇 Yuki TANAKA, Gakuto MASUYAMA, Kazunori UMEDA : 中央大学大学院理工学研究科,y.tanaka@sensor.mech.chuo-u.ac.jp 中央大学理工学部,{masuyama, umeda}@mech.chuo-u.ac.jp
IS2-A2 カメラを回転させた時の特徴点軌跡を用いた魚眼カメラの内部パラメータ推定 - モデルと評価関数の変更による改良 - 田中祐輝, 増山岳人, 梅田和昇 Yuki TANAKA, Gakuto MASUYAMA, Kazunori UMEDA : 中央大学大学院理工学研究科,y.tanaka@sensor.mech.chuo-u.ac.jp 中央大学理工学部,{masuyama, umeda}@mech.chuo-u.ac.jp
Introduction to System Identification
 y(t) モデルベースデザイン 制御系設計のためのシステム同定入門 s 2 Teja Muppirala t s 2 3s 4 2012 The MathWorks, Inc. 1 モデルベースデザイン 正確なモデルがあることが大前提 実行可能な仕様書 シミュレーションによる設計 モデル 連続したテスト 検証 コード生成による実装 2 動的システムのモデリング モデリング手法 第一原理モデリング データドリブンモデリング
y(t) モデルベースデザイン 制御系設計のためのシステム同定入門 s 2 Teja Muppirala t s 2 3s 4 2012 The MathWorks, Inc. 1 モデルベースデザイン 正確なモデルがあることが大前提 実行可能な仕様書 シミュレーションによる設計 モデル 連続したテスト 検証 コード生成による実装 2 動的システムのモデリング モデリング手法 第一原理モデリング データドリブンモデリング
多変量解析 ~ 重回帰分析 ~ 2006 年 4 月 21 日 ( 金 ) 南慶典
 南慶典") 多変量解析 ~ 重回帰分析 ~ 2006 年 4 月 21 日 ( 金 ) 南慶典 重回帰分析とは? 重回帰分析とは複数の説明変数から目的変数との関係性を予測 評価説明変数 ( 数量データ ) は目的変数を説明するのに有効であるか得られた関係性より未知のデータの妥当性を判断する これを重回帰分析という つまり どんなことをするのか? 1 最小 2 乗法により重回帰モデルを想定 2 自由度調整済寄与率を求め
多変量解析 ~ 重回帰分析 ~ 2006 年 4 月 21 日 ( 金 ) 南慶典 重回帰分析とは? 重回帰分析とは複数の説明変数から目的変数との関係性を予測 評価説明変数 ( 数量データ ) は目的変数を説明するのに有効であるか得られた関係性より未知のデータの妥当性を判断する これを重回帰分析という つまり どんなことをするのか? 1 最小 2 乗法により重回帰モデルを想定 2 自由度調整済寄与率を求め
PowerPoint プレゼンテーション
 1 通信工学が生んだフィードバック制御 ニューヨークとシカゴが長距離電話で結ばれた (1892 年 ) 距離に伴う信号の減衰 劣化が問題 レピレータ ( 繰り返し器 中継器 ) の活用の限界 三極真空管の発明 (1906 年 ) アメリカ東海岸と西海岸が結ばれた (1915 年 ) フィードバック増幅器の発明 ( ブラック 1925 年 ) 雑音やゆがみの減衰を理論的に解明 ( ベル研究所 ) フィードバック
1 通信工学が生んだフィードバック制御 ニューヨークとシカゴが長距離電話で結ばれた (1892 年 ) 距離に伴う信号の減衰 劣化が問題 レピレータ ( 繰り返し器 中継器 ) の活用の限界 三極真空管の発明 (1906 年 ) アメリカ東海岸と西海岸が結ばれた (1915 年 ) フィードバック増幅器の発明 ( ブラック 1925 年 ) 雑音やゆがみの減衰を理論的に解明 ( ベル研究所 ) フィードバック
1/12 平成 29 年 3 月 24 日午後 1 時 1 分第 3 章測地線 第 3 章測地線 Ⅰ. 変分法と運動方程式最小作用の原理に基づくラグランジュの方法により 重力場中の粒子の運動方程式が求められる これは 力が未知の時に有効な方法であり 今のような 一般相対性理論における力を求めるのに使
 / 平成 9 年 3 月 4 日午後 時 分第 3 章測地線 第 3 章測地線 Ⅰ. 変分法と運動方程式最小作用の原理に基づくラグランジュの方法により 重力場中の粒子の運動方程式が求められる これは 力が未知の時に有効な方法であり 今のような 一般相対性理論における力を求めるのに使う事ができる 最小作用の原理 : 粒子が時刻 から の間に移動したとき 位置 と速度 v = するのが ラグランジュ関数
/ 平成 9 年 3 月 4 日午後 時 分第 3 章測地線 第 3 章測地線 Ⅰ. 変分法と運動方程式最小作用の原理に基づくラグランジュの方法により 重力場中の粒子の運動方程式が求められる これは 力が未知の時に有効な方法であり 今のような 一般相対性理論における力を求めるのに使う事ができる 最小作用の原理 : 粒子が時刻 から の間に移動したとき 位置 と速度 v = するのが ラグランジュ関数
Microsoft Word - 実験テキスト2005.doc
 7. プロセスの動特性 [Ⅰ] 目的液レベル制御実験および同シミュレーションを通して ステップ応答に基づくプロセス伝達関数の同定方法 ステップ応答法による PI 制御パラメータの調整方法 および PI 制御パラメータが制御性能へ与える影響について習熟する さらに 制御シミュレーションを通して むだ時間を有するプロセスに対するスミス補償型制御の有効性を確認する [Ⅱ] 理論 2.1 ステップ応答実験による伝達関数の同定
7. プロセスの動特性 [Ⅰ] 目的液レベル制御実験および同シミュレーションを通して ステップ応答に基づくプロセス伝達関数の同定方法 ステップ応答法による PI 制御パラメータの調整方法 および PI 制御パラメータが制御性能へ与える影響について習熟する さらに 制御シミュレーションを通して むだ時間を有するプロセスに対するスミス補償型制御の有効性を確認する [Ⅱ] 理論 2.1 ステップ応答実験による伝達関数の同定
スライド 1
 移動体観測を活用した交通 NW の リアルタイムマネジメントに向けて : プローブカーデータを用いた動的 OD 交通量のリアルタイム推定 名古屋大学山本俊行 背景 : マルチモード経路案内システム PRONAVI 2 プローブカーデータの概要 プローブカー : タクシー 157 台 蓄積用データ収集期間 : 22 年 1 月 ~3 月,1 月 ~23 年 3 月 データ送信はイベントベース : 車両発進
移動体観測を活用した交通 NW の リアルタイムマネジメントに向けて : プローブカーデータを用いた動的 OD 交通量のリアルタイム推定 名古屋大学山本俊行 背景 : マルチモード経路案内システム PRONAVI 2 プローブカーデータの概要 プローブカー : タクシー 157 台 蓄積用データ収集期間 : 22 年 1 月 ~3 月,1 月 ~23 年 3 月 データ送信はイベントベース : 車両発進
宇宙機工学 演習問題
 宇宙システム工学演習 重力傾度トルク関連. 図に示すように地球回りの円軌道上を周回する宇宙機の運動 を考察する 地球中心座標系を 系 { } 軌道面基準回転系を 系 { } 機体固定系を 系 { } とする 特に次の右手直交系 : 地心方向単位ベクトル 軌道面内 : 進行方向単位ベクトル 軌道面内 : 面外方向単位ベクトル 軌道面外 を取る 特に この { } Lol Horiotl frme と呼ぶ
宇宙システム工学演習 重力傾度トルク関連. 図に示すように地球回りの円軌道上を周回する宇宙機の運動 を考察する 地球中心座標系を 系 { } 軌道面基準回転系を 系 { } 機体固定系を 系 { } とする 特に次の右手直交系 : 地心方向単位ベクトル 軌道面内 : 進行方向単位ベクトル 軌道面内 : 面外方向単位ベクトル 軌道面外 を取る 特に この { } Lol Horiotl frme と呼ぶ
フジクラ技報 第122号
 電子デバイス研究所小澤直行 1 1 相沢卓也 Ultra Fast Calibratio System o Electroic Compass N. Ozawa, ad. Aizawa 磁気センサを利用した電子コンパスは携帯機器に搭載された状態では, 携帯機器内部の部品が発する漏洩磁場により正確な方位を算出できないため, この漏洩磁場の影響を取り除く必要がある. また, 漏洩磁場は携帯機器外部からの強磁場印加や,
電子デバイス研究所小澤直行 1 1 相沢卓也 Ultra Fast Calibratio System o Electroic Compass N. Ozawa, ad. Aizawa 磁気センサを利用した電子コンパスは携帯機器に搭載された状態では, 携帯機器内部の部品が発する漏洩磁場により正確な方位を算出できないため, この漏洩磁場の影響を取り除く必要がある. また, 漏洩磁場は携帯機器外部からの強磁場印加や,
微分方程式による現象記述と解きかた
 微分方程式による現象記述と解きかた 土木工学 : 公共諸施設 構造物の有用目的にむけた合理的な実現をはかる方法 ( 技術 ) に関する学 橋梁 トンネル ダム 道路 港湾 治水利水施設 安全化 利便化 快適化 合法則的 経済的 自然および人口素材によって作られた 質量保存則 構造物の自然的な性質 作用 ( 外力による応答 ) エネルギー則 の解明 社会的諸現象のうち マスとしての移動 流通 運動量則
微分方程式による現象記述と解きかた 土木工学 : 公共諸施設 構造物の有用目的にむけた合理的な実現をはかる方法 ( 技術 ) に関する学 橋梁 トンネル ダム 道路 港湾 治水利水施設 安全化 利便化 快適化 合法則的 経済的 自然および人口素材によって作られた 質量保存則 構造物の自然的な性質 作用 ( 外力による応答 ) エネルギー則 の解明 社会的諸現象のうち マスとしての移動 流通 運動量則
Microsoft Word - Time Series Basic - Modeling.doc
 時系列解析入門 モデリング. 確率分布と統計的モデル が確率変数 (radom varable のとき すべての実数 R に対して となる確 率 Prob( が定められる これを の関数とみなして G( Prob ( とあらわすとき G( を確率変数 の分布関数 (probablt dstrbuto ucto と呼 ぶ 時系列解析で用いられる確率変数は通常連続型と呼ばれるもので その分布関数は (
時系列解析入門 モデリング. 確率分布と統計的モデル が確率変数 (radom varable のとき すべての実数 R に対して となる確 率 Prob( が定められる これを の関数とみなして G( Prob ( とあらわすとき G( を確率変数 の分布関数 (probablt dstrbuto ucto と呼 ぶ 時系列解析で用いられる確率変数は通常連続型と呼ばれるもので その分布関数は (
.( 斜面上の放物運動 ) 目的 : 放物運動の方向の分け方は, 鉛直と水平だけではない 図のように, 水平面から角 だけ傾いた固定した滑らかな斜面 と, 質量 の小球を用意する 原点 から斜面に垂直な向きに, 速さ V で小球を投げ上げた 重力の加速度を g として, 次の問い に答えよ () 小
 目的 : 放物運動の方向の分け方は, 鉛直と水平だけではない 図のように, 水平面から角 だけ傾いた固定した滑らかな斜面 と, 質量 の小球を用意する 原点 から斜面に垂直な向きに, 速さ V で小球を投げ上げた 重力の加速度を g として, 次の問い に答えよ () 小") 折戸の物理 演習編 ttp://www.orito-buturi.co/ N..( 等加速度運動目的 : 等加速度運動の公式を使いこなす 問題を整理する能力を養う ) 直線上の道路に,A,B の 本の線が 5. の間隔で道路に 垂直に交差して引かれている この線上を一定の加速度で運 動しているトラックが通過する トラックの先端が A を通過してか ら後端が B を通過するまでの時間は.8s であった
折戸の物理 演習編 ttp://www.orito-buturi.co/ N..( 等加速度運動目的 : 等加速度運動の公式を使いこなす 問題を整理する能力を養う ) 直線上の道路に,A,B の 本の線が 5. の間隔で道路に 垂直に交差して引かれている この線上を一定の加速度で運 動しているトラックが通過する トラックの先端が A を通過してか ら後端が B を通過するまでの時間は.8s であった