サイバー救助犬
|
|
|
- たしろう やぶき
- 5 years ago
- Views:
Transcription
")
1 サイバー救助犬 大野和則 ( 東北大学 ) 2018/06/14
")



2 2 サイバー救助犬分科会主査 : 大野和則 ( 東北大 ) 人間と犬とロボティクス知能を融合した世界初の被災者捜索 犬 ( 優れた嗅覚 運動能力 ) 人間 ( 高い判断力 ) ロボティクス知能 : センシング 遠隔認識推定 制御 救助犬 救助犬に不足する能力を災害対応ロボットの技術で補う 災害対応ロボット サイバー救助犬
 サイバー救助犬 センサを備えた非侵襲で軽量なサイバー救助犬スーツを装着 センサ (IMU 他 ) 情報から 犬の位置 やる気 疲れを推定 吠えた対象 周囲状況を認識 ( 画像 3D 音声 )")
3 救助犬による捜索と課題 3 優れた嗅覚 運動能力で被災者を発見 救助に必要な情報が不足 救助に必要な情報 = 被災者の位置 + 健康状態 + 救助を要する人数 + 周囲の状況 救助犬の課題 犬の位置 行動の把握 犬が吠えた理由の特定 犬のやる気や疲れの把握 犬の行動を指示できない 犬の訓練に時間がかかる 東日本大震災宮城県名取市要救助者捜索日本救助犬協会 (JRDA) サイバー救助犬 センサを備えた非侵襲で軽量なサイバー救助犬スーツを装着 センサ (IMU 他 ) 情報から 犬の位置 やる気 疲れを推定 吠えた対象 周囲状況を認識 ( 画像 3D 音声 )
4 サイバー救助犬の開発体制 1. 救助犬の探査活動 やる気 疲れの推定 4. 災害対応ロボットと連携 2. 災害救助犬の活動の記録と配信 作業の指示 Cloud Server ハンドラー 指揮命令者 3. 指揮本部と情報共有 開発中の技術 ( 激しく動く犬に利用可能なタフセンシング ) 1. 動きを妨げないサイバー救助犬スーツの開発 : 大野和則 ( 東北大学 ) 2. 激しく動く犬の目線カメラに写る対象を認識 : 山崎公俊 ( 信州大学 ) 3. スーツ搭載センサから犬の行動を推定 : 徳山豪 篠原歩 ( 東北大学 ) 4. 犬の生体信号と行動から犬の情動を推定 : 菊水健史 ( 麻布大学 ) 5. 犬搭載カメラ映像から犬の探査軌跡を推定 : 岡谷貴之 ( 東北大学 ) 4
 複数犬の捜索活動を表示するインタフェース ( 東北大 信州大 ドーン ソフトバンク Texas A &M 共同開発")
5 サイバー救助犬 1. 救助犬の探査活動 やる気 疲れの推定 4. 災害対応ロボットと連携 2. 災害救助犬の活動の記録と配信 作業の指示 Cloud Server ハンドラー 指揮命令者 3. 指揮本部と情報共有 実用的なサイバー救助犬スーツ ( 東北大学 古野電気共同開発 ) 複数犬の捜索活動を表示するインタフェース ( 東北大 信州大 ドーン ソフトバンク Texas A &M 共同開発 ) 5
6 サイバー救助犬スーツ 6 実用的なサイバー救助犬スーツを古野電気と共同開発 軽量 ( 犬の体重の 10% 未満 ) 動きを妨げない機器配置 カメラ マイク GPS 慣性センサで捜索活動を計測 映像 位置や軌跡 行動推定の結果をクラウドで情報共有 重量 1.50 kg (15kg 以上の犬に装着可能 ) カメラ マイク スピーカー GNSS 慣性センサ モバイルルータ バッテリー 温度 配信 記録 : , 約 モノラル 防水 振動スピーカー 単独測位 ( 数 m 精度 ), 周波高精度 GNSS( 数 cm 精度 ),5Hz 3 軸加速度,3 軸 速度背中, 胸元に各 1 個装備 3G/4G 対応 (microsim) 5200mAh ( リチウムイオン ) 2 時間稼働 0 40 度
7 捜索活動を表示するインタフェース 7 インタフェースをドーン Prof. Robin Murphy と共同開発 救助犬の捜索情報の共有に必要な機能 3 頭の救助犬の捜索軌跡や映像を表示する機能 本部が設捜索エリアを設定する機能 犬カメラの映像のキャプチャやメモ書きの機能 捜索エリア + 探査軌跡 犬視線カメラ映像


8 本実証実験のチャレンジ サイバー救助犬スーツ搭載の4つの機能で 救助犬の捜索を記録 可視化 1. 低遅延の映像 音声配信 サイバー救助犬 4Gの通信環境で1秒程度の遅れで多点に配信 ソフトバンク 大野G 東北大 2. 探査軌跡の地図上への表示 最新の航空写真上に探査軌跡を表示 木村 五 嵐G 長岡技大 大野G 東北大 遺留品発見 3. 遺留品発見 犬カメラ映像に映っていた遺留品の発見 山崎G 信州大 大野G 東北大 4. 慣性センサに基づく探査行動の推定 新技術 行動推定 歩く 走る 止まる 匂いを嗅ぐ 吠えるなどの 6種類の犬の行動を認識 徳山 篠原G 東北大 大野G 東北大 8

9 9 スーツ搭載センサから犬の行動を推定 PI: 徳山豪 篠原歩 ( 東北大学 ) サイバースーツの慣性センサーのみを入力として, 救助犬の行動として重要な 6 行動を推定して提示する. 走る, 歩く, 止まる, 吠える, 物体臭を嗅ぐ, 浮遊臭を嗅ぐ 救助犬の行動記録を俯瞰的に検証できる. 救助犬の活動量 疲れを客観的に把握できる. 周囲の雑音や, 他の犬の鳴き声に左右されない.
10 行動推定 : 機械学習システム PI: 徳山豪 篠原歩 ( 東北大学 ) 特徴ベクトル : 短時間フーリエ変換後の振幅スペクトル 学習手法 :XGBoost を使用 学習データ :4 頭の救助犬から計 20 回の探査行動データ 入力データ 特徴ベクトル 行動分類器 3 軸の加速度 3 軸の角速度 3 軸の姿勢 短時間フーリエ変換 各波形の振幅スペクトルを連結 XGBoost による学習 救助犬の各行動毎に個別に作成された分類器の組み合わせ 分類精度の検証 吠える走る浮遊臭を嗅ぐ物体臭を嗅ぐ止まる歩く平均 走る, 歩く, 止まる, 吠えるについては高精度で分類可能. 物体臭を嗅ぐ, 浮遊臭を嗅ぐの分類は現状ではまだ不 分. 犬搭載 Raspberry Pi2 で実時間で分類可能. 10

11 行動推定の可視化システム 慣性センサーから犬の6つの行動を推定し地図に実時間表示 犬が吠えた位置を自動で地図に記載 11
 次の捜索場所に移動中に遺留品を探査し発見 犬が被災者 2 を捜索 犬の行動を 映像 軌跡 行動推定で可視化 被災者 2")
12 サイバー救助犬の捜索デモ 12 シナリオ : 救助犬が行方不明者 2 名 ( 男性 ) の捜索 スタート 1 エリア 1( 青 ) 犬が被災者 1 を捜索 犬の行動を 映像 軌跡 行動推定で可視化 被災者 1 を発見し位置を自動で地図上に記載 遺留品 2 エリア 2( 緑 ) 次の捜索場所に移動中に遺留品を探査し発見 犬が被災者 2 を捜索 犬の行動を 映像 軌跡 行動推定で可視化 被災者 2 を発見し位置を自動で地図上に記載
13 フィールドカメラ に切り換えて下さい




14 遺留品の発見 これまでの活動 探索活動を補助する画像認識システム - その場で 迅速に 捜索対象を見つけ出せる技術 UI での結果表示 (GNSS, 時刻などとの統合 ) - いつ どこで 何が 発見されたかを 目で把握 畳み込みオートエンコーダ 特徴ベクトル 識別結果 識別ネットワーク 特徴量 識別結果 候補物体の提示 識別結果の表示 操作者 画像認識手法の構造 検出結果の表示 14


15 認識技術 : 進捗状況 1. 捜索対象の登録方法の拡張 複数の部位を つの対象として登録 認識の確信度を向上 作業服 手袋 ニーパッド 作業者 2. 処理の効率化 各画像に対する処理を単純化 2 倍の高速化を実現 (5fps 10fps) 15
16 フィールドカメラ に切り換えて下さい


17 救助犬の捜索を支援する新技術開発 カメラ映像からの救助犬の移動軌跡推定 PI: 岡谷貴之, 東北大 2. 犬の歩容と慣性センサを利用した軌跡推定 PI: 大野和則, 東北大 3. 心拍変動に基づく犬の情動推定 PI: 菊水健史, 麻布大, 池田和司, 奈良先

18 18 カメラ映像からの救助犬の移動軌跡推定 PI: 岡谷貴之, 東北大学 目標 : 救助犬カメラ映像で視覚 SLAM 利点 : カメラのみで使える非 GPS 環境で移動軌跡が求まる 問題 : 救助犬の激しい動き 画像不連続性
19 19 カメラ映像からの救助犬の移動軌跡推定 PI: 岡谷貴之, 東北大学 目標 : 救助犬カメラ映像で視覚 SLAM 利点 : カメラのみで使える非 GPS 環境で移動軌跡が求まる 問題 : 救助犬の激しい動き 画像不連続性




20 カメラ映像からの救助犬の移動軌跡推定 PI: 岡谷貴之, 東北大学 解決策 :1 高速カメラ + フレーム選択 2IMU との統合 3 深層ニューラル特徴 途切れることなく軌跡を推定 1 2 オンボード PC 全フレーム処理は計算量が過大 3 高速カメラ IMU [Detone+2017] 20
21 21 カメラ映像からの救助犬の移動軌跡推定 PI: 岡谷貴之, 東北大学


")
22 犬の歩容と慣性センサを利用した軌跡推定 PI: 大野和則東北大学 手法 : 慣性センサの積分で速度や軌跡を推定 課題 : 積分誤差が累積 世界初 : 犬の歩容から速度ゼロ時点 (ZVP) を検出 誤差修正 高周期で向きを含んだ 3 次元軌跡を推定可能 茶 : 速度青 : 加速度 茶 : 速度青 : 加速度 ZVP ZVP 横方向 上下方向 加速度から速度ゼロ時点 (ZVP) を検出 22

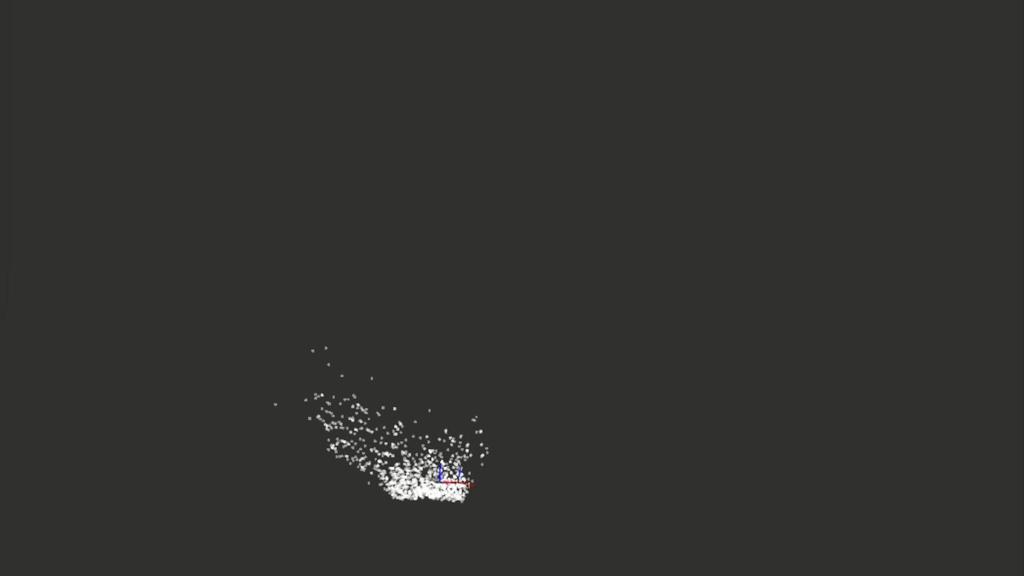
![z[m] 上りの斜度約 20~30 度 水色 : 推定結果赤 : 真値 高さ約 0.6~1.](/docs-images/94/118887432/images/23-5.jpg "5m 幅約 3~4m 下りの斜度約 40~50 度 平面の移動 x[m] y[m]")
23 犬の歩容と慣性センサを利用した軌跡推定 ZVPを利用して誤差を修正, 犬の3 次元軌跡を推定探査範囲の地形計測にも応用可能 y[m] 水色 : 推定結果赤 : 真値 z[m] 上りの斜度約 20~30 度 水色 : 推定結果赤 : 真値 高さ約 0.6~1.5m 幅約 3~4m 下りの斜度約 40~50 度 平面の移動 x[m] y[m] 階段の昇降 x[m] 23
24 心拍変動に基づく犬の情動推定 RMSSD PI 菊水健史 ( 麻布大学 ) 池田和司 ( 奈良先端科学技術大学院大学 ) 世界での救助犬の課題 遠隔では, 犬の集中度や疲れがわからない ( 連続 20 分が限界 ) 訓練困難. 長期間, 適正の高い犬は少数, 訓練するまでわからない 災害現場で活躍するイヌの行動と内的状態をリアルタイムでモニタし 災害現場で活躍するイヌの認知心理的 行動学的に支援する 心拍変動に基づくイヌの情動判定 心拍の間隔 (RRI) は変動 HRV(Heart Rate Variability) R 波 R 波 機械学習による推定 ( ランダムフォレスト ) RRI SDNN 加速度データとの統合 ( 作業中のタフネス ) 情動推定の補完判定結果の信頼性判定 24
")
25 25 心拍変動に基づく犬の情動推定 PI 菊水健史 ( 麻布大学 ) 池田和司 ( 奈良先端科学技術大学院大学 ) 日本救助犬協会の認定救助犬の捜索中の情動を推定


26 犬の情動推定の汎用性の検証 26 災害救助犬のトレーニング中における捜索結果との照合 同システムが他の災害救助犬でも適応可能かの検証
27 まとめ 1. 救助犬の探査活動 やる気 疲れの推定 4. 災害対応ロボットと連携 2. 災害救助犬の活動の記録と配信 作業の指示 Cloud Server ハンドラー 指揮命令者 3. 指揮本部と情報共有 開発中の技術 ( 激しく動く犬に利用可能なタフセンシング ) 1. 動きを妨げないサイバー救助犬スーツの開発 : 大野和則 ( 東北大学 ) 2. 激しく動く犬の目線カメラに写る対象を認識 : 山崎公俊 ( 信州大学 ) 3. スーツ搭載センサから犬の行動を推定 : 徳山豪 篠原歩 ( 東北大学 ) 4. 犬の生体信号と行動から犬の情動を推定 : 菊水健史 ( 麻布大学 ) 5. 犬搭載カメラ映像から犬の探査軌跡を推定 : 岡谷貴之 ( 東北大学 ) 27
円筒面で利用可能なARマーカ
 円筒面で利用可能な AR マーカ AR Marker for Cylindrical Surface 2014 年 11 月 14 日 ( 金 ) 眞鍋佳嗣千葉大学大学院融合科学研究科 マーカベース AR 二次元マーカはカメラ姿勢の推定, 拡張現実等広い研究分野で利用されている 現実の風景 表示される画像 デジタル情報を付加 カメラで撮影し, ディスプレイに表示 使用方法の単純性, 認識の安定性からマーカベース
円筒面で利用可能な AR マーカ AR Marker for Cylindrical Surface 2014 年 11 月 14 日 ( 金 ) 眞鍋佳嗣千葉大学大学院融合科学研究科 マーカベース AR 二次元マーカはカメラ姿勢の推定, 拡張現実等広い研究分野で利用されている 現実の風景 表示される画像 デジタル情報を付加 カメラで撮影し, ディスプレイに表示 使用方法の単純性, 認識の安定性からマーカベース
小型移動ロボット
 小型移動ロボット 千葉工業大学 未来ロボット技術研究センター 吉田智章 背景 過去に開発した災害対応ロボット Hibiscus (2006) Kenaf (2007-2009) Quince (2009-2010) 4 大都市大震災軽減化特別プロジェクト ( 文科省 ) 戦略的先端ロボット要素技術開発プロジェクト (NEDO) 2006-2010 2002 2006 2011 2012 Kenaf
小型移動ロボット 千葉工業大学 未来ロボット技術研究センター 吉田智章 背景 過去に開発した災害対応ロボット Hibiscus (2006) Kenaf (2007-2009) Quince (2009-2010) 4 大都市大震災軽減化特別プロジェクト ( 文科省 ) 戦略的先端ロボット要素技術開発プロジェクト (NEDO) 2006-2010 2002 2006 2011 2012 Kenaf
人間の視野と同等の広視野画像を取得・提示する簡易な装置
 人間の視野と同等の広視野画像 を取得 提示する簡易な装置 公立はこだて未来大学 システム情報科学部複雑系知能学科 准教授鈴木昭二 研究背景 2 画像情報は有用である 多様な情報 ( 明るさ, 色, 形, 動きなど ) 見ればわかる しかし, カメラの画角は狭い 見える範囲が限定される 全体像を把握しくい 移動する物体を見失いやすい 広視野画像の取得 ( 従来方法 ) 3 多数のカメラを搭載 多数の画像を合成し高解像度の画像取得
人間の視野と同等の広視野画像 を取得 提示する簡易な装置 公立はこだて未来大学 システム情報科学部複雑系知能学科 准教授鈴木昭二 研究背景 2 画像情報は有用である 多様な情報 ( 明るさ, 色, 形, 動きなど ) 見ればわかる しかし, カメラの画角は狭い 見える範囲が限定される 全体像を把握しくい 移動する物体を見失いやすい 広視野画像の取得 ( 従来方法 ) 3 多数のカメラを搭載 多数の画像を合成し高解像度の画像取得
屋内 3 次元 測位 + 地図 総合技術開発 現状 屋内 3 次元測位統一的な測位手法 情報交換手順がなく 共通の位置情報基盤が効率的に整備されない 技術開発 屋内外のシームレス測位の実用化 (1) 都市部での衛星測位の適用範囲拡大 (2) パブリックタグ 屋内測位の標準仕様策定 効果 3 次元屋内
 都市部での衛星測位の適用範囲拡大 (2) パブリックタグ 屋内測位の標準仕様策定 効果 3 次元屋内") 資料 4 国土交通省総合技術開発プロジェクト 3 次元地理空間情報を活用した安全 安心 快適な社会実現のための技術開発プロジェクト概要 平成 30 年 3 月 Ministry of Land, Infrastructure, Transport and Tourism Geospatial Information Authority of Japan 屋内 3 次元 測位 + 地図 総合技術開発
資料 4 国土交通省総合技術開発プロジェクト 3 次元地理空間情報を活用した安全 安心 快適な社会実現のための技術開発プロジェクト概要 平成 30 年 3 月 Ministry of Land, Infrastructure, Transport and Tourism Geospatial Information Authority of Japan 屋内 3 次元 測位 + 地図 総合技術開発
AI 人物検索サービス Takumi Eyes 監視カメラ映像から特定の人物をリアルタイムに追跡 ~ 2018 年 10 月 4 日 NTTコミュニケーションズ株式会社 アプリケーション & コンテンツサービス部 AI 推進室 宮原拓磨 Copyright NTT Communications Co
 AI 人物検索サービス Takumi Eyes 監視カメラ映像から特定の人物をリアルタイムに追跡 ~ 2018 年 10 月 4 日 NTTコミュニケーションズ株式会社 アプリケーション & コンテンツサービス部 AI 推進室 宮原拓磨 NTT コミュニケーションズといえば ネットワーク 電話 クラウド データセンター etc 2 実は NTT コミュニケーションズ AI もやっています 3 NTT
AI 人物検索サービス Takumi Eyes 監視カメラ映像から特定の人物をリアルタイムに追跡 ~ 2018 年 10 月 4 日 NTTコミュニケーションズ株式会社 アプリケーション & コンテンツサービス部 AI 推進室 宮原拓磨 NTT コミュニケーションズといえば ネットワーク 電話 クラウド データセンター etc 2 実は NTT コミュニケーションズ AI もやっています 3 NTT
課題情報シート テーマ名 : 動画中継ラジコンカーの製作 担当指導員名 : 土山博剛実施年度 : 25 年度施設名 : 四国職業能力開発大学校課程名 : 専門課程訓練科名 : 電子情報技術科課題の区分 : 総合制作実習課題学生数 : 1 時間 : 12 単位 (216h) 課題制作 開発のポイント
 課題制作 開発のポイント") 課題情報シート テーマ名 : 担当指導員名 : 土山博剛実施年度 : 25 年度施設名 : 四国職業能力開発大学校課程名 : 専門課程訓練科名 : 電子情報技術科課題の区分 : 総合制作実習課題学生数 : 1 時間 : 12 単位 (216h) 課題制作 開発のポイント 開発( 制作 ) のポイント 今回製作したシステムでは 専門課程で習得した総合的な知識 ( ネットワーク技術 電子回路技術 C プログラミング技術
課題情報シート テーマ名 : 担当指導員名 : 土山博剛実施年度 : 25 年度施設名 : 四国職業能力開発大学校課程名 : 専門課程訓練科名 : 電子情報技術科課題の区分 : 総合制作実習課題学生数 : 1 時間 : 12 単位 (216h) 課題制作 開発のポイント 開発( 制作 ) のポイント 今回製作したシステムでは 専門課程で習得した総合的な知識 ( ネットワーク技術 電子回路技術 C プログラミング技術
スライド 1
 2009 年度 VMStudio & TMStudio 学生研究奨励賞 テキストマイニングツールを 利用した視線データの分析 東京大学大学院工学系研究科 白山研究室 江川陽 樋渡哲郎 1 目次 背景 目的 手法 実験 結果 考察 結論 2 背景 : 視線分析とは 視線分析とは 人間の視線の移動軌跡や分布 ( 視線データ ) を計測 分析することにより 人の認知処理を観察 解明するための手法 近年,
2009 年度 VMStudio & TMStudio 学生研究奨励賞 テキストマイニングツールを 利用した視線データの分析 東京大学大学院工学系研究科 白山研究室 江川陽 樋渡哲郎 1 目次 背景 目的 手法 実験 結果 考察 結論 2 背景 : 視線分析とは 視線分析とは 人間の視線の移動軌跡や分布 ( 視線データ ) を計測 分析することにより 人の認知処理を観察 解明するための手法 近年,
高分解能衛星データによる地形図作成手法に関する調査研究 ( 第 2 年次 ) 実施期間平成 18 年度 ~ 測図部測図技術開発室水田良幸小井土今朝巳田中宏明 佐藤壮紀大野裕幸 1. はじめに国土地理院では, 平成 18 年 1 月に打ち上げられた陸域観測技術衛星 ALOS に関して, 宇宙航空研究開
 実施期間平成 18 年度 ~ 測図部測図技術開発室水田良幸小井土今朝巳田中宏明 佐藤壮紀大野裕幸 1. はじめに国土地理院では, 平成 18 年 1 月に打ち上げられた陸域観測技術衛星 ALOS に関して, 宇宙航空研究開") 高分解能衛星データによる地形図作成手法に関する調査研究 ( 第 2 年次 ) 実施期間平成 18 年度 ~ 測図部測図技術開発室水田良幸小井土今朝巳田中宏明 佐藤壮紀大野裕幸 1. はじめに国土地理院では, 平成 18 年 1 月に打ち上げられた陸域観測技術衛星 ALOS に関して, 宇宙航空研究開発機構 ( JAXA ) と共同研究協定を締結している. 測図部では,2 万 5 千分 1 地形図の作成及びリアルタイム修正の実証及び
高分解能衛星データによる地形図作成手法に関する調査研究 ( 第 2 年次 ) 実施期間平成 18 年度 ~ 測図部測図技術開発室水田良幸小井土今朝巳田中宏明 佐藤壮紀大野裕幸 1. はじめに国土地理院では, 平成 18 年 1 月に打ち上げられた陸域観測技術衛星 ALOS に関して, 宇宙航空研究開発機構 ( JAXA ) と共同研究協定を締結している. 測図部では,2 万 5 千分 1 地形図の作成及びリアルタイム修正の実証及び
先行的評価の対象とするユースケース 整理中. 災害対応に関するユースケース. 健康に関するユースケース. 移動に関するユースケース. 教育に関するユースケース. 小売 物流に関するユースケース 6. 製造 ( 提供した製品の保守を含む ) に関するユースケース 7. 農業に関するユースケース 8.
 に関するユースケース 7. 農業に関するユースケース 8.") 資料 先行的評価について - ユースケースとシナリオ分析 平成 9 年 月 日事務局資料 先行的評価の対象とするユースケース 整理中. 災害対応に関するユースケース. 健康に関するユースケース. 移動に関するユースケース. 教育に関するユースケース. 小売 物流に関するユースケース 6. 製造 ( 提供した製品の保守を含む ) に関するユースケース 7. 農業に関するユースケース 8. 金融に関するユースケース
資料 先行的評価について - ユースケースとシナリオ分析 平成 9 年 月 日事務局資料 先行的評価の対象とするユースケース 整理中. 災害対応に関するユースケース. 健康に関するユースケース. 移動に関するユースケース. 教育に関するユースケース. 小売 物流に関するユースケース 6. 製造 ( 提供した製品の保守を含む ) に関するユースケース 7. 農業に関するユースケース 8. 金融に関するユースケース
Slide 1
 ハンズオン受講の為の準備講座 これから始める人の為の ディープラーニング基礎講座 村上真奈 NVIDIA CUDA & Deep Learning Solution Architect NVIDIA Corporation 1 機械学習とディープラーニングの関係 AGENDA ディープラーニングとは? ニューラルネットワークの構造 ディープラーニングの学習とは 畳み込みニューラルネットワーク 午後に予定しているハンズオンの為の基礎講座ディープラーニングをこれから始める方を対象に基礎概念や用語の解説を行います
ハンズオン受講の為の準備講座 これから始める人の為の ディープラーニング基礎講座 村上真奈 NVIDIA CUDA & Deep Learning Solution Architect NVIDIA Corporation 1 機械学習とディープラーニングの関係 AGENDA ディープラーニングとは? ニューラルネットワークの構造 ディープラーニングの学習とは 畳み込みニューラルネットワーク 午後に予定しているハンズオンの為の基礎講座ディープラーニングをこれから始める方を対象に基礎概念や用語の解説を行います
する距離を一定に保ち温度を変化させた場合のセンサーのカウント ( センサーが計測した距離 ) の変化を調べた ( 図 4) 実験で得られたセンサーの温度変化とカウント変化の一例をグラフ 1 に載せる グラフにおいて赤いデータ点がセンサーのカウント値である 計測距離一定で実験を行ったので理想的にはカウ
 の変化を調べた ( 図 4) 実験で得られたセンサーの温度変化とカウント変化の一例をグラフ 1 に載せる グラフにおいて赤いデータ点がセンサーのカウント値である 計測距離一定で実験を行ったので理想的にはカウ") 岡山 3.8m 新望遠鏡制御系のための多点温度計開発 京都大学理学研究科宇宙物理学教室 M1 出口和弘 1. 岡山 3.8m 新望遠鏡に使われる分割鏡のメリットと技術的ハードル我々は現在 京都大学を中心として国立天文台 岡山天体物理観測所に新技術を用いた口径 3.8m の可視 近赤外望遠鏡の建設を計画している ( 図 1) 新技術の一つとして望遠鏡の主鏡に一枚鏡ではなく 扇型のセグメントを組み合わせて一枚の円形の鏡にする分割鏡を採用している
岡山 3.8m 新望遠鏡制御系のための多点温度計開発 京都大学理学研究科宇宙物理学教室 M1 出口和弘 1. 岡山 3.8m 新望遠鏡に使われる分割鏡のメリットと技術的ハードル我々は現在 京都大学を中心として国立天文台 岡山天体物理観測所に新技術を用いた口径 3.8m の可視 近赤外望遠鏡の建設を計画している ( 図 1) 新技術の一つとして望遠鏡の主鏡に一枚鏡ではなく 扇型のセグメントを組み合わせて一枚の円形の鏡にする分割鏡を採用している
スライド 1
 スペクトル変化量のピーク間隔 F0 MFCC を用いた歌声と朗読音声の自動識別システム 阿曽慎平 ( 京大 ), 齋藤毅 ( 金沢大 ), 後藤真孝 ( 産総研 ), 糸山克寿, 高橋徹, 尾形哲也, 奥乃博 ( 京大 ) サウンドテスト 人 : 歌声 話声 ( 朗読音声含む ) 聞き分け応答 奥乃研 音楽情報処理グループの日常 天気悪いなぁ 雨降るらしいで アイウォンチュ ~ アイウォンチュ ~
スペクトル変化量のピーク間隔 F0 MFCC を用いた歌声と朗読音声の自動識別システム 阿曽慎平 ( 京大 ), 齋藤毅 ( 金沢大 ), 後藤真孝 ( 産総研 ), 糸山克寿, 高橋徹, 尾形哲也, 奥乃博 ( 京大 ) サウンドテスト 人 : 歌声 話声 ( 朗読音声含む ) 聞き分け応答 奥乃研 音楽情報処理グループの日常 天気悪いなぁ 雨降るらしいで アイウォンチュ ~ アイウォンチュ ~
PowerPoint プレゼンテーション
 基本操作アプリご利用手順 目次 1. はじめに 2. 準備物 3. ユーザ登録 4. ログイン 5. カメラ接続 6. カメラ名の変更 削除 7. 客層分析 7.1 客層分析のメイン画面 7.2 客層分析の開始 7.3 客層分析の計測結果表示 7.4 客層分析の設定変更 7.5 客層分析の結果表示 7.6 客層分析の結果の削除 転送 7.7 ライブビュー 8. 人数カウンター 8.1 人数カウンターのメイン画面
基本操作アプリご利用手順 目次 1. はじめに 2. 準備物 3. ユーザ登録 4. ログイン 5. カメラ接続 6. カメラ名の変更 削除 7. 客層分析 7.1 客層分析のメイン画面 7.2 客層分析の開始 7.3 客層分析の計測結果表示 7.4 客層分析の設定変更 7.5 客層分析の結果表示 7.6 客層分析の結果の削除 転送 7.7 ライブビュー 8. 人数カウンター 8.1 人数カウンターのメイン画面
T
 ! " 位置決め 人間と共存 代替可能なバリ取りロボットを開発 安全 コンパクトで高精度な技術を持つロボットが実現 研究開発のきっかけ 自動車や家電製品等において樹脂部品の割合は増加しているが その成形時に生じるバリについて 主に費用対効 果の問題から 小物部品のバリ除去の自動化が遅れている 現在 人海戦術でバリを取っているが 除去が不十分で信頼性に欠け 研削具の巻き込み危険や粉塵による人体への
! " 位置決め 人間と共存 代替可能なバリ取りロボットを開発 安全 コンパクトで高精度な技術を持つロボットが実現 研究開発のきっかけ 自動車や家電製品等において樹脂部品の割合は増加しているが その成形時に生じるバリについて 主に費用対効 果の問題から 小物部品のバリ除去の自動化が遅れている 現在 人海戦術でバリを取っているが 除去が不十分で信頼性に欠け 研削具の巻き込み危険や粉塵による人体への
Microsoft PowerPoint - ip02_01.ppt [互換モード]
![Microsoft PowerPoint - ip02_01.ppt [互換モード]](/thumbs/96/127250376.jpg "Microsoft PowerPoint - ip02_01.ppt [互換モード]") 空間周波数 周波数領域での処理 空間周波数 (spatial frquncy) とは 単位長さ当たりの正弦波状の濃淡変化の繰り返し回数を表したもの 正弦波 : y sin( t) 周期 : 周波数 : T f / T 角周波数 : f 画像処理 空間周波数 周波数領域での処理 波形が違うと 周波数も違う 画像処理 空間周波数 周波数領域での処理 画像処理 3 周波数領域での処理 周波数は一つしかない?-
空間周波数 周波数領域での処理 空間周波数 (spatial frquncy) とは 単位長さ当たりの正弦波状の濃淡変化の繰り返し回数を表したもの 正弦波 : y sin( t) 周期 : 周波数 : T f / T 角周波数 : f 画像処理 空間周波数 周波数領域での処理 波形が違うと 周波数も違う 画像処理 空間周波数 周波数領域での処理 画像処理 3 周波数領域での処理 周波数は一つしかない?-
新技術説明会 様式例
 1 テレビ電話によるロボットの遠隔制御と アイドル応援システム 埼玉大学 大学院理工学研究科数理電子情報部門准教授小林貴訓 2 本日の内容 人を中心としたセンシングとそのインタラクションシステムへの応用 テレビ電話によるロボットの遠隔制御 アイドル応援システム 人と人の間で役立つ情報 / ロボット技術 ユーザ 人を中心としたセンシング カメラ距離センサ 加速度センサ 実世界事象の計算機理解 縦一列
1 テレビ電話によるロボットの遠隔制御と アイドル応援システム 埼玉大学 大学院理工学研究科数理電子情報部門准教授小林貴訓 2 本日の内容 人を中心としたセンシングとそのインタラクションシステムへの応用 テレビ電話によるロボットの遠隔制御 アイドル応援システム 人と人の間で役立つ情報 / ロボット技術 ユーザ 人を中心としたセンシング カメラ距離センサ 加速度センサ 実世界事象の計算機理解 縦一列
Taro-3_大下
 3 口蹄疫画像転送システムの問題点と解決策 西部家畜保健衛生所 大下雄三青萩芳幸小西博敏河本悟 1 はじめに平成 23 年 10 月の家伝法改正に伴い 口蹄疫の防疫指針も改正され 診断のための写真撮影が必要となった これにより 異常家畜の撮影画像は 家保から県庁経由で農林水産省に送られ 病性判定の材料とされる ( 図 1) 平成 24 年 2 月 この流れを検証するため全国一斉の口蹄疫防疫演習が行われ
3 口蹄疫画像転送システムの問題点と解決策 西部家畜保健衛生所 大下雄三青萩芳幸小西博敏河本悟 1 はじめに平成 23 年 10 月の家伝法改正に伴い 口蹄疫の防疫指針も改正され 診断のための写真撮影が必要となった これにより 異常家畜の撮影画像は 家保から県庁経由で農林水産省に送られ 病性判定の材料とされる ( 図 1) 平成 24 年 2 月 この流れを検証するため全国一斉の口蹄疫防疫演習が行われ
例 e 指数関数的に減衰する信号を h( a < + a a すると, それらのラプラス変換は, H ( ) { e } e インパルス応答が h( a < ( ただし a >, U( ) { } となるシステムにステップ信号 ( y( のラプラス変換 Y () は, Y ( ) H ( ) X (
 { e } e インパルス応答が h( a < ( ただし a >, U( ) { } となるシステムにステップ信号 ( y( のラプラス変換 Y () は, Y ( ) H ( ) X (") 第 週ラプラス変換 教科書 p.34~ 目標ラプラス変換の定義と意味を理解する フーリエ変換や Z 変換と並ぶ 信号解析やシステム設計における重要なツール ラプラス変換は波動現象や電気回路など様々な分野で 微分方程式を解くために利用されてきた ラプラス変換を用いることで微分方程式は代数方程式に変換される また 工学上使われる主要な関数のラプラス変換は簡単な形の関数で表されるので これを ラプラス変換表
第 週ラプラス変換 教科書 p.34~ 目標ラプラス変換の定義と意味を理解する フーリエ変換や Z 変換と並ぶ 信号解析やシステム設計における重要なツール ラプラス変換は波動現象や電気回路など様々な分野で 微分方程式を解くために利用されてきた ラプラス変換を用いることで微分方程式は代数方程式に変換される また 工学上使われる主要な関数のラプラス変換は簡単な形の関数で表されるので これを ラプラス変換表
Visual班
 Multimedia(Visual) 班 早稲田大学基幹理工学部情報通信学科甲藤研究室 1 Multimedia 班とは 画像処理の研究を中心に扱っています 主な研究分野 動画像圧縮符号化 圧縮動画像の画質推定 画像認識 4K, 8K, HDR 車載画像処理 画像信号処理からコンピュータビジョンまで 動画像に関する研究を幅広く扱っています 動画像に関係するものであれば 何でも研究できる! 2 動画像圧縮符号化
Multimedia(Visual) 班 早稲田大学基幹理工学部情報通信学科甲藤研究室 1 Multimedia 班とは 画像処理の研究を中心に扱っています 主な研究分野 動画像圧縮符号化 圧縮動画像の画質推定 画像認識 4K, 8K, HDR 車載画像処理 画像信号処理からコンピュータビジョンまで 動画像に関する研究を幅広く扱っています 動画像に関係するものであれば 何でも研究できる! 2 動画像圧縮符号化
Microsoft PowerPoint - CSA_B3_EX2.pptx
 Computer Science A Hardware Design Excise 2 Handout V2.01 May 27 th.,2019 CSAHW Computer Science A, Meiji University CSA_B3_EX2.pptx 32 Slides Renji Mikami 1 CSAHW2 ハード演習内容 2.1 二次元空間でのベクトルの直交 2.2 Reserved
Computer Science A Hardware Design Excise 2 Handout V2.01 May 27 th.,2019 CSAHW Computer Science A, Meiji University CSA_B3_EX2.pptx 32 Slides Renji Mikami 1 CSAHW2 ハード演習内容 2.1 二次元空間でのベクトルの直交 2.2 Reserved
Microsoft PowerPoint - 発表II-3原稿r02.ppt [互換モード]
![Microsoft PowerPoint - 発表II-3原稿r02.ppt [互換モード]](/thumbs/91/105561911.jpg "Microsoft PowerPoint - 発表II-3原稿r02.ppt [互換モード]") 地震時の原子力発電所燃料プールからの溢水量解析プログラム 地球工学研究所田中伸和豊田幸宏 Central Research Institute of Electric Power Industry 1 1. はじめに ( その 1) 2003 年十勝沖地震では 震源から離れた苫小牧地区の石油タンクに スロッシング ( 液面揺動 ) による火災被害が生じた 2007 年中越沖地震では 原子力発電所内の燃料プールからの溢水があり
地震時の原子力発電所燃料プールからの溢水量解析プログラム 地球工学研究所田中伸和豊田幸宏 Central Research Institute of Electric Power Industry 1 1. はじめに ( その 1) 2003 年十勝沖地震では 震源から離れた苫小牧地区の石油タンクに スロッシング ( 液面揺動 ) による火災被害が生じた 2007 年中越沖地震では 原子力発電所内の燃料プールからの溢水があり
産総研プレス発表資料
 視覚障害者のための聴覚空間認知訓練システムを無償配布 - ノートパソコンを利用して音を手がかりにした歩行訓練ができる - ポイント 歩行しているときの周囲の音を 3 次元音響技術で再現 平成 25 年 4 月 11 日 独立行政法人産業技術総合研究所 国立大学法人東北大学電気通信研究所 特殊な装置は不要で パソコンと市販のゲームコントローラー内蔵センサーで利用可能 安全で効果的な歩行訓練の実現により
視覚障害者のための聴覚空間認知訓練システムを無償配布 - ノートパソコンを利用して音を手がかりにした歩行訓練ができる - ポイント 歩行しているときの周囲の音を 3 次元音響技術で再現 平成 25 年 4 月 11 日 独立行政法人産業技術総合研究所 国立大学法人東北大学電気通信研究所 特殊な装置は不要で パソコンと市販のゲームコントローラー内蔵センサーで利用可能 安全で効果的な歩行訓練の実現により
Raspberry Pi BF BF BF Raspberry Pi PC USB HDMI OS SD SD OS Raspberry Pi Model B MicroUSB MicroSD OS SD GPIO HDMI USB LAN Raspberry Pi MicroUSB MicroSD
 Raspberry Pi Arduino Arduino Raspberry Pi Arduino URL Raspberry Pi HDMI USB SD https://www.raspberrypi.org/ Python, Scratch Arduino PC USB https://www.arduino.cc/ Arduino SDK Processing Kinect for Windows,
Raspberry Pi Arduino Arduino Raspberry Pi Arduino URL Raspberry Pi HDMI USB SD https://www.raspberrypi.org/ Python, Scratch Arduino PC USB https://www.arduino.cc/ Arduino SDK Processing Kinect for Windows,
Microsoft Word - 卒業論文.doc
 006 年度卒業研究 画像補間法を用いた拡大画像の比較 岡山理科大学総合情報学部情報科学科 澤見研究室 I03I04 兼安俊治 I03I050 境永 目次 はじめに ラスタ画像 3 画像補間法 3. ニアレストネイバー法 3. バイリニア法 3.3 バイキュービック法 4 DCT を用いた拡大画像手法 5 FIR 法 6 評価 6. SNR 6. PSNR 7 実験 7. 主観評価 7. 客観評価
006 年度卒業研究 画像補間法を用いた拡大画像の比較 岡山理科大学総合情報学部情報科学科 澤見研究室 I03I04 兼安俊治 I03I050 境永 目次 はじめに ラスタ画像 3 画像補間法 3. ニアレストネイバー法 3. バイリニア法 3.3 バイキュービック法 4 DCT を用いた拡大画像手法 5 FIR 法 6 評価 6. SNR 6. PSNR 7 実験 7. 主観評価 7. 客観評価
News Release 国立研究開発法人新エネルギー 産業技術総合開発機構 福島県 南相馬市 株式会社 SUBARU 日本無線株式会社 日本アビオニクス株式会社 三菱電機株式会社 株式会社自律制御システム研究所 世界初 無人航空機に搭載した衝突回避システムの探知性能試験を実施
 News Release 2018.12.14 国立研究開発法人新エネルギー 産業技術総合開発機構 福島県 南相馬市 株式会社 SUBARU 日本無線株式会社 日本アビオニクス株式会社 三菱電機株式会社 株式会社自律制御システム研究所 世界初 無人航空機に搭載した衝突回避システムの探知性能試験を実施 福島ロボットテストフィールドで 有人ヘリコプター衝突回避の模擬飛行試験 NEDO ( 株 )SUBARU
News Release 2018.12.14 国立研究開発法人新エネルギー 産業技術総合開発機構 福島県 南相馬市 株式会社 SUBARU 日本無線株式会社 日本アビオニクス株式会社 三菱電機株式会社 株式会社自律制御システム研究所 世界初 無人航空機に搭載した衝突回避システムの探知性能試験を実施 福島ロボットテストフィールドで 有人ヘリコプター衝突回避の模擬飛行試験 NEDO ( 株 )SUBARU
GPS仰角15度
 SPAC シンポジウム 2012 GPS, QZS, GLONASS を利用した 高精度測位の現状 2012 年 11 月 21 日 幹事細谷素之 協議会の目的 ( 以下 協議会 という ) は 国土交通省国土地理院が所有する電子基準点リアルタイムデータの民間開放を要望するとともに リアルタイムデータの利活用と普及を推進することを目的として平成 13 年 11 月に設立されました 2 電子基準点を利用した
SPAC シンポジウム 2012 GPS, QZS, GLONASS を利用した 高精度測位の現状 2012 年 11 月 21 日 幹事細谷素之 協議会の目的 ( 以下 協議会 という ) は 国土交通省国土地理院が所有する電子基準点リアルタイムデータの民間開放を要望するとともに リアルタイムデータの利活用と普及を推進することを目的として平成 13 年 11 月に設立されました 2 電子基準点を利用した
<4D F736F F F696E74202D2091E FCD91BD8F6489BB82C691BD8F E835A83582E >
 多重伝送と多重アクセス コミュニケーション工学 A 第 4 章 多重伝送と多重アクセス 多重伝送周波数分割多重 (FDM) 時分割多重 (DM) 符号分割多重 (CDM) 多重アクセス 多重伝送 地点から他の地点へ複数チャネルの信号を伝送するときに, チャネル毎に異なる通信路を用いることは不経済である. そこでつの通信路を用いて複数チャネルの信号を伝送するのが多重伝送である. 多重伝送の概念図 チャネル
多重伝送と多重アクセス コミュニケーション工学 A 第 4 章 多重伝送と多重アクセス 多重伝送周波数分割多重 (FDM) 時分割多重 (DM) 符号分割多重 (CDM) 多重アクセス 多重伝送 地点から他の地点へ複数チャネルの信号を伝送するときに, チャネル毎に異なる通信路を用いることは不経済である. そこでつの通信路を用いて複数チャネルの信号を伝送するのが多重伝送である. 多重伝送の概念図 チャネル
2008 年度下期未踏 IT 人材発掘 育成事業採択案件評価書 1. 担当 PM 田中二郎 PM ( 筑波大学大学院システム情報工学研究科教授 ) 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3.
 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3.") 2008 年度下期未踏 IT 人材発掘 育成事業採択案件評価書 1. 担当 PM 田中二郎 PM ( 筑波大学大学院システム情報工学研究科教授 ) 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3. プロジェクト管理組織 株式会社オープンテクノロジーズ 4. 委託金支払額 3,000,000 円 5.
2008 年度下期未踏 IT 人材発掘 育成事業採択案件評価書 1. 担当 PM 田中二郎 PM ( 筑波大学大学院システム情報工学研究科教授 ) 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3. プロジェクト管理組織 株式会社オープンテクノロジーズ 4. 委託金支払額 3,000,000 円 5.
ロボット技術の紹介
 賢いロボットの作り方 ~ 自分で考えて行動するロボットをつくる ~ 関東学院大学 理工学部 ( 届出設置書類提出中 ) 准教授元木誠 夢ナビライブ東京賢いロボットの作り方 1 本日の講義内容 周囲の状況を認識し, 自分で考えて行動するロボットのことを知能ロボットといいます 知能ロボットは賢さのレベルによって作り方が違います 生物の脳をモデルにしたシステム ( ニューラルネットワーク ) で作る方法を紹介します!
賢いロボットの作り方 ~ 自分で考えて行動するロボットをつくる ~ 関東学院大学 理工学部 ( 届出設置書類提出中 ) 准教授元木誠 夢ナビライブ東京賢いロボットの作り方 1 本日の講義内容 周囲の状況を認識し, 自分で考えて行動するロボットのことを知能ロボットといいます 知能ロボットは賢さのレベルによって作り方が違います 生物の脳をモデルにしたシステム ( ニューラルネットワーク ) で作る方法を紹介します!
 招待論文 フルスペック 8K スーパーハイビジョン圧縮記録装置の開発 3.3 記録制御機能と記録媒体 144 Gbps の映像信号を 1/8 に圧縮した場合 18 Gbps 程度 の転送速度が要求される さらに音声データやその他のメ タデータを同時に記録すると 記録再生には 20 Gbps 程度 の転送性能が必要となる また 記録媒体は記録装置から 着脱して持ち運ぶため 不慮の落下などにも耐性のあるこ
招待論文 フルスペック 8K スーパーハイビジョン圧縮記録装置の開発 3.3 記録制御機能と記録媒体 144 Gbps の映像信号を 1/8 に圧縮した場合 18 Gbps 程度 の転送速度が要求される さらに音声データやその他のメ タデータを同時に記録すると 記録再生には 20 Gbps 程度 の転送性能が必要となる また 記録媒体は記録装置から 着脱して持ち運ぶため 不慮の落下などにも耐性のあるこ
この演習について Autoware 演習 1: データの記録 再生 Autoware 演習 2: センサーキャリブレーション Autoware 演習 3:3 次元地図の作成 Autoware 演習 4: 自己位置推定 Autoware 演習 5: パラメータ調整 Autoware 演習 6: 物体検
 version 1.0 TIER IV ACADEMY 自動運転システム構築塾 Day4 Autoware 演習 2 Autoware 演習 6: 物体検出とトラッキング この演習について Autoware 演習 1: データの記録 再生 Autoware 演習 2: センサーキャリブレーション Autoware 演習 3:3 次元地図の作成 Autoware 演習 4: 自己位置推定 Autoware
version 1.0 TIER IV ACADEMY 自動運転システム構築塾 Day4 Autoware 演習 2 Autoware 演習 6: 物体検出とトラッキング この演習について Autoware 演習 1: データの記録 再生 Autoware 演習 2: センサーキャリブレーション Autoware 演習 3:3 次元地図の作成 Autoware 演習 4: 自己位置推定 Autoware
dji.htm - 無題 <標準モード>
 Mavic Air MAVIC PRO 主な特長 主な特長 32MPスフィアパノラマ折りたたみ設計 & 優れた携帯性 3 軸ジンバル & 4Kカメラ 3 方向障害物検知スマートキャプチャー最大飛行時間 21 分高度操縦支援システム (APAS) 折りたたみ式 4Kカメラ RAWフォーマット写真 7km 動画伝送最大 27 分の飛行時間 ハイライト 寸法 168 83 49 mm (L W H) 168
Mavic Air MAVIC PRO 主な特長 主な特長 32MPスフィアパノラマ折りたたみ設計 & 優れた携帯性 3 軸ジンバル & 4Kカメラ 3 方向障害物検知スマートキャプチャー最大飛行時間 21 分高度操縦支援システム (APAS) 折りたたみ式 4Kカメラ RAWフォーマット写真 7km 動画伝送最大 27 分の飛行時間 ハイライト 寸法 168 83 49 mm (L W H) 168
 6 12 10661 93100 227213202 222208197 85kg cm 20 64.521 106856142 2 1 4 3 9767 100 35 cm 7747 208198 90kg 23 5828 10661 93100 cm 227213202 10639 61 64.521 85kg 78kg 70kg 61 100 197204.5 cm 15 61
6 12 10661 93100 227213202 222208197 85kg cm 20 64.521 106856142 2 1 4 3 9767 100 35 cm 7747 208198 90kg 23 5828 10661 93100 cm 227213202 10639 61 64.521 85kg 78kg 70kg 61 100 197204.5 cm 15 61
<82D282A982C1746F95F18D908F57967B95B E696E6464>
 1 2 (90cm 70cm 2015) 3 (68cm 28cm 30cm 12kg 2015) (77.5 109.5cm 2015) 4 (22cm 50cm 50cm 4.6kg 2015) (45cm 62.5cm 2015) (47.4cm 62.5cm 2014) 5 (28.5cm 23.5cm) (45cm 62cm 2015) (97cm 107cm 2015) 6 7 8 9
1 2 (90cm 70cm 2015) 3 (68cm 28cm 30cm 12kg 2015) (77.5 109.5cm 2015) 4 (22cm 50cm 50cm 4.6kg 2015) (45cm 62.5cm 2015) (47.4cm 62.5cm 2014) 5 (28.5cm 23.5cm) (45cm 62cm 2015) (97cm 107cm 2015) 6 7 8 9

180 140 22
 21 180 140 22 23 25 50 1 3 350 140 500cm 600 140 24 25 26 27 28 29 30 31 1/12 8.3 1/15 6.7 10 1/8 12.5 1/20 140 90 75 150 60 150 10 30 15 35 2,000 30 32 1 1 1 2 1 3 1 4 1 5 1 6 1 7 1 8 1 9 % 100 50 33.3
21 180 140 22 23 25 50 1 3 350 140 500cm 600 140 24 25 26 27 28 29 30 31 1/12 8.3 1/15 6.7 10 1/8 12.5 1/20 140 90 75 150 60 150 10 30 15 35 2,000 30 32 1 1 1 2 1 3 1 4 1 5 1 6 1 7 1 8 1 9 % 100 50 33.3
1. 研究背景 目的 2. 使用機器 3. 橋梁点検システム 4. 選定橋梁 5. 安全対策 橋梁点検フロー 6. 計測結果 計測条件 7. まとめ - 2 -
 ひび割れ計測機と飛行ロボットによる橋梁点検支援システムに関する研究 大阪市立大学大学院教授プロジェクトリーダー 山口隆司大阪市立大学大学院学生堂ノ本翔平菱田伸鉄工業 ( 株 ) 菱田聡クモノスコーポレーション ( 株 ) 藤田誠二近畿地方整備局道路部, 近畿技術事務所, 大阪国道事務所 - 1 - 1. 研究背景 目的 2. 使用機器 3. 橋梁点検システム 4. 選定橋梁 5. 安全対策 橋梁点検フロー
ひび割れ計測機と飛行ロボットによる橋梁点検支援システムに関する研究 大阪市立大学大学院教授プロジェクトリーダー 山口隆司大阪市立大学大学院学生堂ノ本翔平菱田伸鉄工業 ( 株 ) 菱田聡クモノスコーポレーション ( 株 ) 藤田誠二近畿地方整備局道路部, 近畿技術事務所, 大阪国道事務所 - 1 - 1. 研究背景 目的 2. 使用機器 3. 橋梁点検システム 4. 選定橋梁 5. 安全対策 橋梁点検フロー
技術論文 GPS と慣性センサを利用した車両姿勢角推定 * 平野 麻衣子 ) 天野 真輝 ) 服部 義和 小野 英一 ) 福田 光雄 ) 廣瀬 太郎 Estimation of Vehicle Attitude Integrating Inertial Sensors
 天野 真輝 ) 服部 義和 小野 英一 ) 福田 光雄 ) 廣瀬 太郎 Estimation of Vehicle Attitude Integrating Inertial Sensors") 技術論文 25429 234 * 平野 麻衣子 ) 天野 真輝 ) 服部 義和 小野 英一 ) 福田 光雄 ) 廣瀬 太郎 timation o Vehicle Attitude Interatin Inertial Senor and S Maiko Hirano Maateru Amano Yohikazu Hattori iichi Ono Mituo Fukuda Taro Hiroe S
技術論文 25429 234 * 平野 麻衣子 ) 天野 真輝 ) 服部 義和 小野 英一 ) 福田 光雄 ) 廣瀬 太郎 timation o Vehicle Attitude Interatin Inertial Senor and S Maiko Hirano Maateru Amano Yohikazu Hattori iichi Ono Mituo Fukuda Taro Hiroe S
DVIOUT
 5.3 音声を加工してみよう! 5.3. 音声を加工してみよう! 129 この節では 図 5.11 の音声 あ の離散化された波 (x n ) のグラフおよび図 5.12 の音声 あ の離散フーリエ変換 ( 周波数スペクトル密度 ) の絶対値 ( X k ) のグラフを基準に 離散フーリエ変換および離散フーリエ積分を使って この離散化された波の検証や加工を行なってみましよう 6 図 5.11: 音声
5.3 音声を加工してみよう! 5.3. 音声を加工してみよう! 129 この節では 図 5.11 の音声 あ の離散化された波 (x n ) のグラフおよび図 5.12 の音声 あ の離散フーリエ変換 ( 周波数スペクトル密度 ) の絶対値 ( X k ) のグラフを基準に 離散フーリエ変換および離散フーリエ積分を使って この離散化された波の検証や加工を行なってみましよう 6 図 5.11: 音声
SICEセミナー 制御のためのシステム同定
 状態推定班 ロケット ( 企業共研 ) 電気自動車用リチウムイオン電池 ( 企業共研 ) モデリングと制御班 ヘリコプタ実験 エンジン制御 ( 企業共研 ) RoboCar 実験 制御実験装置 複写機の制御 ( 企業共研 ) 異常検出 基礎理論研究 モデリング Multi-domain modeling 非線形同定 JIT,PLS,PCA,... 統計的学習理論ベイジアン,RVM スパース推定 状態推定
状態推定班 ロケット ( 企業共研 ) 電気自動車用リチウムイオン電池 ( 企業共研 ) モデリングと制御班 ヘリコプタ実験 エンジン制御 ( 企業共研 ) RoboCar 実験 制御実験装置 複写機の制御 ( 企業共研 ) 異常検出 基礎理論研究 モデリング Multi-domain modeling 非線形同定 JIT,PLS,PCA,... 統計的学習理論ベイジアン,RVM スパース推定 状態推定
PC配信&エンコーダー設定_LINELIVEマニュアル
 LINE LIVE マニュアル (PC 配信 ) Ver. 1.0.0 OUTLINE LINE LIVE で PC からライブ配信する場合 下記のステップが必要になります 配信ソフトウェアのインストール 配信ソフトウェアをインストールします ストリーム Key と URL の確認 PCWeb 版 LINE LIVE にてストリーム Key と URL を確認します 配信ソフトウェアの設定 利用する配信ソフトウェアの設定をします
LINE LIVE マニュアル (PC 配信 ) Ver. 1.0.0 OUTLINE LINE LIVE で PC からライブ配信する場合 下記のステップが必要になります 配信ソフトウェアのインストール 配信ソフトウェアをインストールします ストリーム Key と URL の確認 PCWeb 版 LINE LIVE にてストリーム Key と URL を確認します 配信ソフトウェアの設定 利用する配信ソフトウェアの設定をします
PowerPoint プレゼンテーション
 200534 chiba_ryozo@hirobo.co. 125cc GPS PC Zooming,Focus (ON/OFF) CCD CCD I/F CC 2,500mm L 2.4/ 2.4/ 2.4G 3 自律制御システムの概要 制御装置のブロック図 制御装置のブロック図 単独測位データ 単独測位データ 制御装置本体 制御装置本体 オペレーターアシスト 速度制御 オペレーターアシスト
200534 chiba_ryozo@hirobo.co. 125cc GPS PC Zooming,Focus (ON/OFF) CCD CCD I/F CC 2,500mm L 2.4/ 2.4/ 2.4G 3 自律制御システムの概要 制御装置のブロック図 制御装置のブロック図 単独測位データ 単独測位データ 制御装置本体 制御装置本体 オペレーターアシスト 速度制御 オペレーターアシスト
Mode S Daps 技術
 SSR モード S のネットワーク技術について 監視通信領域 古賀禎 目次 1. 背景 2. 課題 3. モードSネットワーク 4. 実験ネットワーク 5. 確認実験の結果 6. まとめ 1. 背景 二次監視レーダモード S SSR Mode S (Secondary Surveillance Radar) 監視性能を向上するとともにデータリンク機能を付加した SSR 1. 背景 SSR モード S
SSR モード S のネットワーク技術について 監視通信領域 古賀禎 目次 1. 背景 2. 課題 3. モードSネットワーク 4. 実験ネットワーク 5. 確認実験の結果 6. まとめ 1. 背景 二次監視レーダモード S SSR Mode S (Secondary Surveillance Radar) 監視性能を向上するとともにデータリンク機能を付加した SSR 1. 背景 SSR モード S
名古屋大学.indd
 車両性能実証装置高精度ドライビング シミュレーターシステム 世界で初めて 1) 本格的バーチャルリアリティ (VR) 空間内での運転 車両走行模擬を実現した大型 5 面立体視ドライビング シミュレーター 運転時の視覚環境 振動環境を高精度に再現する事により 運転車の特性や感性のモニタリングおよび数学モデル構築を目指します 約 240インチの高輝度高精細な大型ディスプレイで囲ま 1 れた空間で視野角
車両性能実証装置高精度ドライビング シミュレーターシステム 世界で初めて 1) 本格的バーチャルリアリティ (VR) 空間内での運転 車両走行模擬を実現した大型 5 面立体視ドライビング シミュレーター 運転時の視覚環境 振動環境を高精度に再現する事により 運転車の特性や感性のモニタリングおよび数学モデル構築を目指します 約 240インチの高輝度高精細な大型ディスプレイで囲ま 1 れた空間で視野角
<4D F736F F D20837E836A837D E82CC88D98FED E12E646F63>
 振動分析計 VA-12 を用いた精密診断事例 リオン株式会社 振動分析計 VA-12 を用いた精密診断事例を紹介します 振動分析計 VA-12 は 振動計と高機能 FFT アナライザが一体となったハンディタイプの測定器です 振動計として使用する場合は加速度 速度 変位の同時計測 FFT アナライザとして使用する場合は 3200 ライン分解能 20kHz の連続リアルタイム分析が可能です また カラー液晶に日本語表示がされます
振動分析計 VA-12 を用いた精密診断事例 リオン株式会社 振動分析計 VA-12 を用いた精密診断事例を紹介します 振動分析計 VA-12 は 振動計と高機能 FFT アナライザが一体となったハンディタイプの測定器です 振動計として使用する場合は加速度 速度 変位の同時計測 FFT アナライザとして使用する場合は 3200 ライン分解能 20kHz の連続リアルタイム分析が可能です また カラー液晶に日本語表示がされます
isai300413web.indd
 2012.4 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 研究動向紹介 修士論文概要 次元計測に基づくテレオペレーションシステム 中京大学大学院 情報科学研究科 情報科学専攻 日比野 翔太郎 高所や災害現場などの極限環境での作業には人的被害が起こりやすいというリスクが常に伴う その 対策の一つとしてテレオペレーションロボットと呼ばれる遠隔操作ロボットによる作業が挙げられる
2012.4 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 研究動向紹介 修士論文概要 次元計測に基づくテレオペレーションシステム 中京大学大学院 情報科学研究科 情報科学専攻 日比野 翔太郎 高所や災害現場などの極限環境での作業には人的被害が起こりやすいというリスクが常に伴う その 対策の一つとしてテレオペレーションロボットと呼ばれる遠隔操作ロボットによる作業が挙げられる
Microsoft PowerPoint - chap8.ppt
 第 8 章 : フィードバック制御系の設計法 第 8 章 : フィードバック制御系の設計法 8. 設計手順と性能評価 キーワード : 設計手順, 性能評価 8. 補償による制御系設計 キーワード : ( 比例 ),( 積分 ),( 微分 ) 学習目標 : 一般的な制御系設計における手順と制御系の性能評価について学ぶ. 学習目標 : 補償の有効性について理解し, その設計手順を習得する. 第 8 章
第 8 章 : フィードバック制御系の設計法 第 8 章 : フィードバック制御系の設計法 8. 設計手順と性能評価 キーワード : 設計手順, 性能評価 8. 補償による制御系設計 キーワード : ( 比例 ),( 積分 ),( 微分 ) 学習目標 : 一般的な制御系設計における手順と制御系の性能評価について学ぶ. 学習目標 : 補償の有効性について理解し, その設計手順を習得する. 第 8 章
de:code 2019 CM05 HoloLens を活用した働き方改革! Dynamics 365 Guides / Remote Assist 活用手法と環境構築を解説します 日本マイクロソフトマイクロソフトテクノロジーセンター鈴木敦史 ベストカラアゲニスト xr (VR/AR/MR) アンバ
 アンバ") de:code 2019 CM05 HoloLens を活用した働き方改革! Dynamics 365 Guides / Remote Assist 活用手法と環境構築を解説します 日本マイクロソフトマイクロソフトテクノロジーセンター鈴木敦史 ベストカラアゲニスト xr (VR/AR/MR) アンバサダー有野いく 本日の内容 Mixed Reality の全体像 ファーストラインワーカーの働き方改革
de:code 2019 CM05 HoloLens を活用した働き方改革! Dynamics 365 Guides / Remote Assist 活用手法と環境構築を解説します 日本マイクロソフトマイクロソフトテクノロジーセンター鈴木敦史 ベストカラアゲニスト xr (VR/AR/MR) アンバサダー有野いく 本日の内容 Mixed Reality の全体像 ファーストラインワーカーの働き方改革
Microsoft PowerPoint SIGAL.ppt
 アメリカン アジアンオプションの 価格の近似に対する 計算幾何的アプローチ 渋谷彰信, 塩浦昭義, 徳山豪 ( 東北大学大学院情報科学研究科 ) 発表の概要 アメリカン アジアンオプション金融派生商品の一つ価格付け ( 価格の計算 ) は重要な問題 二項モデルにおける価格付けは計算困難な問題 目的 : 近似精度保証をもつ近似アルゴリズムの提案 アイディア : 区分線形関数を計算幾何手法により近似 問題の説明
アメリカン アジアンオプションの 価格の近似に対する 計算幾何的アプローチ 渋谷彰信, 塩浦昭義, 徳山豪 ( 東北大学大学院情報科学研究科 ) 発表の概要 アメリカン アジアンオプション金融派生商品の一つ価格付け ( 価格の計算 ) は重要な問題 二項モデルにおける価格付けは計算困難な問題 目的 : 近似精度保証をもつ近似アルゴリズムの提案 アイディア : 区分線形関数を計算幾何手法により近似 問題の説明
5Gビジネス創出をめざす実証実験を海外に拡大
 トピックス 2019 年 3 月 27 日 株式会社 N T T ドコモ 5G ビジネス創出をめざす実証実験を海外に拡大 ~ 社会課題の解決に向けて 国境を越えたパートナー協創を開始 ~ 株式会社 NTT ドコモ ( 以下 ドコモ ) は 第 5 世代移動通信方式 ( 以下 5G) を活用した新たな利用シーン の創出に向けて 日本に加え 米国 イスラエルなどの海外企業 団体と共同で 5G ネットワークを活用し
トピックス 2019 年 3 月 27 日 株式会社 N T T ドコモ 5G ビジネス創出をめざす実証実験を海外に拡大 ~ 社会課題の解決に向けて 国境を越えたパートナー協創を開始 ~ 株式会社 NTT ドコモ ( 以下 ドコモ ) は 第 5 世代移動通信方式 ( 以下 5G) を活用した新たな利用シーン の創出に向けて 日本に加え 米国 イスラエルなどの海外企業 団体と共同で 5G ネットワークを活用し
JABRA SPORT PACE WIRELESS L ユーザーマニュアル jabra.com/sportpace
 L ユーザーマニュアル jabra.com/sportpace 2015 GN Netcom A/S.All rights reserved.jabra は GN Netcom A/ S の登録商標です ここに記載されているその他のすべての商標は 各権利者に帰属するものです Bluetooth のワードマークとロゴは Bluetooth SIG, Inc. が所有するものであり GN Netcom
L ユーザーマニュアル jabra.com/sportpace 2015 GN Netcom A/S.All rights reserved.jabra は GN Netcom A/ S の登録商標です ここに記載されているその他のすべての商標は 各権利者に帰属するものです Bluetooth のワードマークとロゴは Bluetooth SIG, Inc. が所有するものであり GN Netcom
Microsoft PowerPoint - comprog11.pptx
 Outline プログラミング演習第 回エッジを検出する on 3..4 電気通信大学情報理工学部知能機械工学科長井隆行 画像の本質 輝度の境目に情報あり! 画像の微分と 階微分 エッジ検出 画像をぼかす 本日の課題 画像の本質 エッジ抽出 画像の情報は境目にあり! エッジ 輝度が大きく変化しているところ ( 境界 ) 画像の情報はエッジにあり 輝度 人間の視覚系でも特定のエッジの方向に発火するニューロンが見つかっている
Outline プログラミング演習第 回エッジを検出する on 3..4 電気通信大学情報理工学部知能機械工学科長井隆行 画像の本質 輝度の境目に情報あり! 画像の微分と 階微分 エッジ検出 画像をぼかす 本日の課題 画像の本質 エッジ抽出 画像の情報は境目にあり! エッジ 輝度が大きく変化しているところ ( 境界 ) 画像の情報はエッジにあり 輝度 人間の視覚系でも特定のエッジの方向に発火するニューロンが見つかっている
Microsoft PowerPoint - DigitalMedia2_3b.pptx
 Contents デジタルメディア処理 2 の概要 フーリエ級数展開と 離散とその性質 周波数フィルタリング 担当 : 井尻敬 とは ( ) FourierSound.py とは ( ) FourierSound.py 横軸が時間の関数を 横軸が周波数の関数に変換する 法 声周波数 周波数 ( 係数番号 ) 後の関数は元信号に含まれる正弦波の量を す 中央に近いほど低周波, 外ほどが 周波 中央 (
Contents デジタルメディア処理 2 の概要 フーリエ級数展開と 離散とその性質 周波数フィルタリング 担当 : 井尻敬 とは ( ) FourierSound.py とは ( ) FourierSound.py 横軸が時間の関数を 横軸が周波数の関数に変換する 法 声周波数 周波数 ( 係数番号 ) 後の関数は元信号に含まれる正弦波の量を す 中央に近いほど低周波, 外ほどが 周波 中央 (
<4D F736F F F696E74202D F817993FA967B90BB8E8695A897AC817A89DD95A892C790D F6C30362E707074>
 - スマートフォン (Android ) 利用による - 貨物追跡システム ( 位置情報サービス ASP サービス DP2) 日本製紙物流株式会社 http://www.np-log.co.jp/ システム導入目的について 導入目的 自社 / 配車センターと車両 ( トラック ) との情報共有 システム導入時のユーザー要望について 1. 配送進捗状況 車両最新位置 をリアルタイムで把握したい ユーザーからの配送
- スマートフォン (Android ) 利用による - 貨物追跡システム ( 位置情報サービス ASP サービス DP2) 日本製紙物流株式会社 http://www.np-log.co.jp/ システム導入目的について 導入目的 自社 / 配車センターと車両 ( トラック ) との情報共有 システム導入時のユーザー要望について 1. 配送進捗状況 車両最新位置 をリアルタイムで把握したい ユーザーからの配送
Microsoft PowerPoint - JSAI2015_rev.pptx
 環境制約を用いた GPS 移動軌跡からの 旅 者状態推定 笠原秀, 森幹彦, 椋木雅之, 美濃導彦 京都大学学術情報メディアセンター 宮崎大学工学教育研究部情報システム工学科 1 旅 者の移動状態把握の必要性 筆者らは修学旅 向け安否確認システム ETSS を開発 修学旅 の所在や安否情報を教員間で共有 災害時には生徒に最寄りの避難所の所在を知らせて避難を支援 今後 移動モード等旅 者の状態にパーソナライズした防災情報を提供したい
環境制約を用いた GPS 移動軌跡からの 旅 者状態推定 笠原秀, 森幹彦, 椋木雅之, 美濃導彦 京都大学学術情報メディアセンター 宮崎大学工学教育研究部情報システム工学科 1 旅 者の移動状態把握の必要性 筆者らは修学旅 向け安否確認システム ETSS を開発 修学旅 の所在や安否情報を教員間で共有 災害時には生徒に最寄りの避難所の所在を知らせて避難を支援 今後 移動モード等旅 者の状態にパーソナライズした防災情報を提供したい
サーボ加速度計本装置の加速度検出用に内蔵するセンサはサーボ加速度計であり その原理を図 に示す 図 サーボ加速度計の構造 図 において加速度が 方向から印加された場合 Hinge に繋がった Forcer Coil 部分が加速度方向に変
 4-3-3- サーボ加速度計本装置の加速度検出用に内蔵するセンサはサーボ加速度計であり その原理を図 4-3-3- に示す 図 4-3-3-3 サーボ加速度計の構造 図 4-3-3-3 において加速度が 方向から印加された場合 Hinge に繋がった Forcer Coil 部分が加速度方向に変位し Capacitive Pickoff によりその変位が検出される この検出された変位を Servo
4-3-3- サーボ加速度計本装置の加速度検出用に内蔵するセンサはサーボ加速度計であり その原理を図 4-3-3- に示す 図 4-3-3-3 サーボ加速度計の構造 図 4-3-3-3 において加速度が 方向から印加された場合 Hinge に繋がった Forcer Coil 部分が加速度方向に変位し Capacitive Pickoff によりその変位が検出される この検出された変位を Servo
Microsoft Word - 白井散策マップ_日本語マニュアル.docx
 白井散策マップ 日本語マニュアル (iphone アプリ名 : 白井散策 Map ) Ver. 0.01 白井市教育委員会文化課 東京大学空間情報科学研究センター 2017 年 8 月 13 日 目次 1. 準備... 1 2. 起動方法... 2 3. メイン画面の説明... 3 4. マップ操作の説明... 4 4.1 進行方向を上向きにマップ表示... 4 4.2 現在地を画面中心にマップ表示...
白井散策マップ 日本語マニュアル (iphone アプリ名 : 白井散策 Map ) Ver. 0.01 白井市教育委員会文化課 東京大学空間情報科学研究センター 2017 年 8 月 13 日 目次 1. 準備... 1 2. 起動方法... 2 3. メイン画面の説明... 3 4. マップ操作の説明... 4 4.1 進行方向を上向きにマップ表示... 4 4.2 現在地を画面中心にマップ表示...
粒子画像流速測定法を用いた室内流速測定法に関する研究
 可視化手法を用いた室内気流分布の測定法に関する研究 -PIV を用いた通風時及び空調吹出気流の測定 - T08K729D 大久保肇 指導教員 赤林伸一教授 流れの可視化は古来より流れの特性を直感的に把握する手法として様々な測定法が試みられている 近年の画像処理技術の発展及び PC の性能向上により粒子画像流速測定法 (PIV ) が実用化されている Particle Image Velocimetry
可視化手法を用いた室内気流分布の測定法に関する研究 -PIV を用いた通風時及び空調吹出気流の測定 - T08K729D 大久保肇 指導教員 赤林伸一教授 流れの可視化は古来より流れの特性を直感的に把握する手法として様々な測定法が試みられている 近年の画像処理技術の発展及び PC の性能向上により粒子画像流速測定法 (PIV ) が実用化されている Particle Image Velocimetry
国交省様向け Web版道路ビデオGISのご紹介
 国土交通省様向け道路ビデオ GIS Web 版道路ビデオ GIS とは お手元に現場を! 全周囲 CV 映像 地図 / 図面 WebGIS GIS DB 現実世界をそのままキャプチャー 属性情報 上下カメラ 2 台の全周囲 CV 映像による道路現況確認システム 全周囲 CV 映像と地図 / 図面 属性情報がリンクした WebGIS システム 道路及び周辺構造物を電子化して一元管理する DB システム
国土交通省様向け道路ビデオ GIS Web 版道路ビデオ GIS とは お手元に現場を! 全周囲 CV 映像 地図 / 図面 WebGIS GIS DB 現実世界をそのままキャプチャー 属性情報 上下カメラ 2 台の全周囲 CV 映像による道路現況確認システム 全周囲 CV 映像と地図 / 図面 属性情報がリンクした WebGIS システム 道路及び周辺構造物を電子化して一元管理する DB システム
Microsoft PowerPoint - dm1_6.pptx
 スケジュール 09/5 イントロダクション1 : デジタル画像とは, 量 化と標本化,Dynamic Range 10/0 イントロダクション : デジタルカメラ, 間の視覚, 表 系 10/09 画像処理演習 0 : python (PC 教室 : 課題締め切り 11/13 3:59) 10/16 フィルタ処理 1 : トーンカーブ, 線形フィルタ デジタルメディア処理 1 担当 : 井尻敬 10/3
スケジュール 09/5 イントロダクション1 : デジタル画像とは, 量 化と標本化,Dynamic Range 10/0 イントロダクション : デジタルカメラ, 間の視覚, 表 系 10/09 画像処理演習 0 : python (PC 教室 : 課題締め切り 11/13 3:59) 10/16 フィルタ処理 1 : トーンカーブ, 線形フィルタ デジタルメディア処理 1 担当 : 井尻敬 10/3
スライド 1
 センサー工学 2012 年 11 月 14 日 ( 水 ) 第 6 回 知能情報工学科横田孝義 1 センサー工学 10/03 10/10 10/17 10/24 11/7 11/14 11/21 11/28 12/05 12/12 12/19 1/09 1/16 1/23 1/30 2 先週の復習 定点検出センサ接触式マイクロスイッチ JIS C4505 規格 非接触式 光電センサ 高周波近接センサ
センサー工学 2012 年 11 月 14 日 ( 水 ) 第 6 回 知能情報工学科横田孝義 1 センサー工学 10/03 10/10 10/17 10/24 11/7 11/14 11/21 11/28 12/05 12/12 12/19 1/09 1/16 1/23 1/30 2 先週の復習 定点検出センサ接触式マイクロスイッチ JIS C4505 規格 非接触式 光電センサ 高周波近接センサ
平成19年度・地球工学研究所の知的財産に関する報告会 - 資料集
 地盤環境モニタリングの広域化とコスト低減のための無線センサネットワークの実用化に関する検討 地球工学研究所地圏科学領域池川洋二郎 Email:ikegawa@criepi.denken.or.jp 1 背景と目的 背景 : 豪雨, 地震などによる斜面災害に対する維持管理や減災技術の適用による効果や機能をモニタリングにより評価することが重要である. 必要性 : モニタリングの広域化と, 低コスト化が可能な技術開発が望まれる.
地盤環境モニタリングの広域化とコスト低減のための無線センサネットワークの実用化に関する検討 地球工学研究所地圏科学領域池川洋二郎 Email:ikegawa@criepi.denken.or.jp 1 背景と目的 背景 : 豪雨, 地震などによる斜面災害に対する維持管理や減災技術の適用による効果や機能をモニタリングにより評価することが重要である. 必要性 : モニタリングの広域化と, 低コスト化が可能な技術開発が望まれる.
WISS 2006 2 PowerPoint [3] [16] Mehrabian [10] 7% 93% [10] [19][18] Hindus [7] Lyons [9] [8] [14] TalkMan [4] [5] [6] 3 [19][18] [19] [19] 1 F0 [11] 7
![WISS 2006 2 PowerPoint [3] [16] Mehrabian [10] 7% 93% [10] [19][18] Hindus [7] Lyons [9] [8] [14] TalkMan [4] [5] [6] 3 [19][18] [19] [19] 1 F0 [11] 7](/thumbs/41/22686825.jpg "WISS 2006 2 PowerPoint [3] [16] Mehrabian [10] 7% 93% [10] [19][18] Hindus [7] Lyons [9] [8] [14] TalkMan [4] [5] [6] 3 [19][18] [19] [19] 1 F0 [11] 7") WISS2006 A Presentation Training System using Speech and Image Processing. Web 1 [19] Copyright is held by the author(s). Kazutaka Kurihara and Takeo Igarashi,, Masataka Goto and Jun Ogata and Yosuke Matsusaka,,
WISS2006 A Presentation Training System using Speech and Image Processing. Web 1 [19] Copyright is held by the author(s). Kazutaka Kurihara and Takeo Igarashi,, Masataka Goto and Jun Ogata and Yosuke Matsusaka,,
スライド 1
 センサー工学 2013 年 12 月 18 日 ( 水 ), 2014 年 1 月 8 日 ( 水 ),1 月 15 日 ( 水 ) 第 11 回,12 回,13 回,14 回 知能情報工学科横田孝義 1 センサー工学 回授業内容予習 復習内容備考 1 授業のガイダンス 計測工学で学んだ単位系 誤差 精度などの復習を行う 2 ジャイロセンサの仕組みジャイロセンサの仕組み 3 最近の動向 MEMS センサ
センサー工学 2013 年 12 月 18 日 ( 水 ), 2014 年 1 月 8 日 ( 水 ),1 月 15 日 ( 水 ) 第 11 回,12 回,13 回,14 回 知能情報工学科横田孝義 1 センサー工学 回授業内容予習 復習内容備考 1 授業のガイダンス 計測工学で学んだ単位系 誤差 精度などの復習を行う 2 ジャイロセンサの仕組みジャイロセンサの仕組み 3 最近の動向 MEMS センサ
平成 23 年度 JAXA 航空プログラム公募型研究報告会資料集 (23 年度採用分 ) 21 計測ひずみによる CFRP 翼構造の荷重 応力同定と損傷モニタリング 東北大学福永久雄 ひずみ応答の計測データ 静的分布荷重同定動的分布荷重同定 ひずみゲージ応力 ひずみ分布の予測 or PZT センサ損
 21 計測ひずみによる CFRP 翼構造の荷重 応力同定と損傷モニタリング 東北大学福永久雄 ひずみ応答の計測データ 静的分布荷重同定動的分布荷重同定 ひずみゲージ応力 ひずみ分布の予測 or PZT センサ損") 平成 3 年度 JAXA 航空プログラム公募型研究報告会資料集 (3 年度採用分 1 計測ひずみによる CFRP 翼構造の荷重 応力同定と損傷モニタリング 東北大学福永久雄 ひずみ応答の計測データ 静的分布荷重同定動的分布荷重同定 ひずみゲージ応力 ひずみ分布の予測 or PZT センサ損傷発生位置の推定発表内容 (1 荷重同定 1:11 点衝撃荷重同定 ( 荷重同定 : 分布荷重同定 (3 今後の予定
平成 3 年度 JAXA 航空プログラム公募型研究報告会資料集 (3 年度採用分 1 計測ひずみによる CFRP 翼構造の荷重 応力同定と損傷モニタリング 東北大学福永久雄 ひずみ応答の計測データ 静的分布荷重同定動的分布荷重同定 ひずみゲージ応力 ひずみ分布の予測 or PZT センサ損傷発生位置の推定発表内容 (1 荷重同定 1:11 点衝撃荷重同定 ( 荷重同定 : 分布荷重同定 (3 今後の予定
概要 突発的に発生する会話に焦点を当てたスマートフォンを利 用するユーザグルーピングシステム プロトタイプアルゴリズムの紹介 今後のシステム改良について
 概要 突発的に発生する会話に焦点を当てたスマートフォンを利 用するユーザグルーピングシステム プロトタイプアルゴリズムの紹介 今後のシステム改良について 背景 コンテキストアウェアサービスの将来的な実現 携帯端末に搭載されるセンサの高性能化 スマートフォンで取得した情報に基づくコンテキスト情 報の抽出 Aさん行動記録 モチベーション 雑談 懇談グループに関するコンテキスト情報の抽出の実現 人々が行う対面での会話に関する情報
概要 突発的に発生する会話に焦点を当てたスマートフォンを利 用するユーザグルーピングシステム プロトタイプアルゴリズムの紹介 今後のシステム改良について 背景 コンテキストアウェアサービスの将来的な実現 携帯端末に搭載されるセンサの高性能化 スマートフォンで取得した情報に基づくコンテキスト情 報の抽出 Aさん行動記録 モチベーション 雑談 懇談グループに関するコンテキスト情報の抽出の実現 人々が行う対面での会話に関する情報
デプスカメラと加速度センサを用いた歩行可能な平面領域の検出
 一般社団法人電子情報通信学会 HCGシンポジウム2016 THE INSTITUTE OF ELECTRONICS, HUMAN COMMUNICATION GROUP SYMPOSI INFORMATION AND COMMUNICATION ENGINEERS HCG2016-D-9-1 デプスカメラと加速度センサを用いた歩行可能な平面領域の検出 今井健太 北原格 亀田能成 筑波大学 305-8573
一般社団法人電子情報通信学会 HCGシンポジウム2016 THE INSTITUTE OF ELECTRONICS, HUMAN COMMUNICATION GROUP SYMPOSI INFORMATION AND COMMUNICATION ENGINEERS HCG2016-D-9-1 デプスカメラと加速度センサを用いた歩行可能な平面領域の検出 今井健太 北原格 亀田能成 筑波大学 305-8573
デジタルカメラ EXILIM を使ったプラグイン開発と商用展開について カシオ計算機株式会社コンシューマ開発本部開発統轄部第一開発部 11 開発室山田卓也 PAGE 1
 デジタルカメラ EXILIM を使ったプラグイン開発と商用展開について カシオ計算機株式会社コンシューマ開発本部開発統轄部第一開発部 11 開発室山田卓也 1 今回のお話 デバイス WebAPI を使った活動 カメラの通信システムのプラグイン化 試作システムの作成 現在の状況 プラグインのリリース つながるカメラ の展開 市場の拡大の可能性 2 これまでの活動 デバイス WebAPI を使った活動
デジタルカメラ EXILIM を使ったプラグイン開発と商用展開について カシオ計算機株式会社コンシューマ開発本部開発統轄部第一開発部 11 開発室山田卓也 1 今回のお話 デバイス WebAPI を使った活動 カメラの通信システムのプラグイン化 試作システムの作成 現在の状況 プラグインのリリース つながるカメラ の展開 市場の拡大の可能性 2 これまでの活動 デバイス WebAPI を使った活動
技術名
 統合環境制御装置の開発 農業技術センター [ 背景 ねらい ] 県内の先進的農家では光合成を促進することなどを目的に ハウス内の温度 湿度 炭酸ガス濃度を制御する栽培方法が行われている この栽培方法では その日の気象状況により 温度 湿度 炭酸ガス濃度を制御する装置の設定値を自動的に調整する統合環境制御が効率的であるが 既存の装置では刻々と変化する気象状況に応じて設定条件を変更することは不可能である
統合環境制御装置の開発 農業技術センター [ 背景 ねらい ] 県内の先進的農家では光合成を促進することなどを目的に ハウス内の温度 湿度 炭酸ガス濃度を制御する栽培方法が行われている この栽培方法では その日の気象状況により 温度 湿度 炭酸ガス濃度を制御する装置の設定値を自動的に調整する統合環境制御が効率的であるが 既存の装置では刻々と変化する気象状況に応じて設定条件を変更することは不可能である
PowerPoint プレゼンテーション
 広域マルチラテレーションの概要と 評価について 電子航法研究所 宮崎裕己 1 広域マルチラテレーションとは? (WAM: Wide Area Multilateration) 最終進入エリア 空港 航空路空域を覆域に持つ航空機監視システム 航空機からの信号を複数の受信局で検出受信局 A D 監視 B C 電子研では WAM 実験装置の試作 評価を進行中 2 講演内容 評価の背景 WAMの概要 実験装置の概要
広域マルチラテレーションの概要と 評価について 電子航法研究所 宮崎裕己 1 広域マルチラテレーションとは? (WAM: Wide Area Multilateration) 最終進入エリア 空港 航空路空域を覆域に持つ航空機監視システム 航空機からの信号を複数の受信局で検出受信局 A D 監視 B C 電子研では WAM 実験装置の試作 評価を進行中 2 講演内容 評価の背景 WAMの概要 実験装置の概要
Microsoft PowerPoint - 口頭発表_折り畳み自転車
 1 公道走行を再現した振動試験による折り畳み自転車の破損状況 ~ 公道での繰り返し走行を再現した結果 ~ 2 公道走行を想定した試験用路面について 九州支所製品安全技術課清水寛治 目次 1. 折り畳み自転車のフレームはどのように破損するのか公道の走行振動を再現する自転車用ロードシミュレータについて繰り返し走行を想定した折り畳み自転車の破損部の特徴 ~ 公道による振動を繰り返し再現した結果 ~ 2.
1 公道走行を再現した振動試験による折り畳み自転車の破損状況 ~ 公道での繰り返し走行を再現した結果 ~ 2 公道走行を想定した試験用路面について 九州支所製品安全技術課清水寛治 目次 1. 折り畳み自転車のフレームはどのように破損するのか公道の走行振動を再現する自転車用ロードシミュレータについて繰り返し走行を想定した折り畳み自転車の破損部の特徴 ~ 公道による振動を繰り返し再現した結果 ~ 2.
ComputerArchitecture.ppt
 1 人間とコンピュータの違い コンピュータ 複雑な科学計算や膨大な量のデータの処理, さまざまな装置の制御, 通信などを定められた手順に従って間違いなく高速に実行する 人間 誰かに命令されなくても自発的に処理したり, 条件が変化しても臨機応変に対処できる 多くの問題解決を経験することで, より高度な問題解決法を考え出す 数値では表しにくい情報の処理ができる 2 コンピュータの構成要素 構成要素 ハードウェア
1 人間とコンピュータの違い コンピュータ 複雑な科学計算や膨大な量のデータの処理, さまざまな装置の制御, 通信などを定められた手順に従って間違いなく高速に実行する 人間 誰かに命令されなくても自発的に処理したり, 条件が変化しても臨機応変に対処できる 多くの問題解決を経験することで, より高度な問題解決法を考え出す 数値では表しにくい情報の処理ができる 2 コンピュータの構成要素 構成要素 ハードウェア
2 クラウド連携版デバイス WebAPI Symphony を開発しました Symphony は開発コードネームです
 クラウド連携版デバイス WebAPI 株式会社 NTT ドコモサービスイノベーション部山下顕 2 クラウド連携版デバイス WebAPI Symphony を開発しました Symphony は開発コードネームです 目次 3 Symphony 活用事例 Symphony とは? 今後の展開 活用事例 1: 未来の家プロジェクト 始動!(2017/6/22) 横浜市 and factory( 株 ) と
クラウド連携版デバイス WebAPI 株式会社 NTT ドコモサービスイノベーション部山下顕 2 クラウド連携版デバイス WebAPI Symphony を開発しました Symphony は開発コードネームです 目次 3 Symphony 活用事例 Symphony とは? 今後の展開 活用事例 1: 未来の家プロジェクト 始動!(2017/6/22) 横浜市 and factory( 株 ) と
Microsoft PowerPoint - [150421] CMP実習Ⅰ(2015) 橋本 CG編 第1回 幾何変換.pptx
![Microsoft PowerPoint - [150421] CMP実習Ⅰ(2015) 橋本 CG編 第1回 幾何変換.pptx](/thumbs/94/118433001.jpg "Microsoft PowerPoint - [150421] CMP実習Ⅰ(2015) 橋本 CG編 第1回 幾何変換.pptx") コンテンツ メディア プログラミング実習 Ⅰ コンピュータグラフィックス編 1 幾何変換 橋本直 今日大事なのは プログラムをじっくり読んで なぜそうなるか? を考えよう 命令によって起きていることを頭の中でイメージしよう 2 本題の前に確認 Processingでは画面の 左上隅 が原点 (0,0) x 軸の正の向きは 右 y 軸の正の向きは 下 x y : (0,0) 3 幾何変換の基本 4 幾何変換とは
コンテンツ メディア プログラミング実習 Ⅰ コンピュータグラフィックス編 1 幾何変換 橋本直 今日大事なのは プログラムをじっくり読んで なぜそうなるか? を考えよう 命令によって起きていることを頭の中でイメージしよう 2 本題の前に確認 Processingでは画面の 左上隅 が原点 (0,0) x 軸の正の向きは 右 y 軸の正の向きは 下 x y : (0,0) 3 幾何変換の基本 4 幾何変換とは
FANUC i Series CNC/SERVO
 + Series CNC/SERVO * * 2 * * 3 Series 0+-MODEL F * * * Series 30+/31+/32+/35+-MODEL B * Power Motion +-MODEL A * PANEL +H * PANEL +H Pro * MT-LINK+ * MT-LINKi 4 サーボラインアップ @*-B series SERVO α*-bシリーズサーボは
+ Series CNC/SERVO * * 2 * * 3 Series 0+-MODEL F * * * Series 30+/31+/32+/35+-MODEL B * Power Motion +-MODEL A * PANEL +H * PANEL +H Pro * MT-LINK+ * MT-LINKi 4 サーボラインアップ @*-B series SERVO α*-bシリーズサーボは
idoperation SC のコンセプト idoperation SC は パソコンやサーバにインストールする 防犯カメラ ソリューションです パソコンやサーバのデスクトップ内でのユーザ操作をビデオで記録し 証跡として残します 録画 保管 再生 2017 NTT TechnoCross Corpo
 画面操作録画ソフトウェア アイディーオペレーション セキュリティカメラ 製品説明資料 2017 NTT TechnoCross Corporation 1 idoperation SC のコンセプト idoperation SC は パソコンやサーバにインストールする 防犯カメラ ソリューションです パソコンやサーバのデスクトップ内でのユーザ操作をビデオで記録し 証跡として残します 録画 保管 再生
画面操作録画ソフトウェア アイディーオペレーション セキュリティカメラ 製品説明資料 2017 NTT TechnoCross Corporation 1 idoperation SC のコンセプト idoperation SC は パソコンやサーバにインストールする 防犯カメラ ソリューションです パソコンやサーバのデスクトップ内でのユーザ操作をビデオで記録し 証跡として残します 録画 保管 再生
Microsoft PowerPoint - 【政務官PT用】委託費概要.ppt
 平成 22 年度宇宙利用促進調整委託費について 平成 22 年度新規分については 測位衛星の新たな利用について 産学官の競争的環境のもとで公募 選定し 宇宙利用の裾野拡大を図ります 参考 目 的 平成 22 年度においては我が国初の測位衛星となる初号機 みちびき の打上げが予定されており 我が国の測位衛星利用の高度化が期待されています 現在 測位衛星利用については カーナビゲーションや GPS 機能付き携帯電話など
平成 22 年度宇宙利用促進調整委託費について 平成 22 年度新規分については 測位衛星の新たな利用について 産学官の競争的環境のもとで公募 選定し 宇宙利用の裾野拡大を図ります 参考 目 的 平成 22 年度においては我が国初の測位衛星となる初号機 みちびき の打上げが予定されており 我が国の測位衛星利用の高度化が期待されています 現在 測位衛星利用については カーナビゲーションや GPS 機能付き携帯電話など
クラウド型健康支援サービス「はらすまダイエット」のラインアップに企業の健康保険組合などが行う特定保健指導を日立が代行する「はらすまダイエット/遠隔保健指導」を追加
 2013 年 9 月 30 日 株式会社日立製作所 クラウド型健康支援サービス はらすまダイエット のラインアップに企業の健康保険組合などが行う特定保健指導を日立が代行する はらすまダイエット / 遠隔保健指導 を追加 株式会社日立製作所 ( 執行役社長 : 中西宏明 / 以下 日立 ) は このたび 効果的な減量プログラムとして開発された はらすまダイエット の手法を活用し 企業の健康保険組合などの公的医療保険の運営主体が行う特定保健指導
2013 年 9 月 30 日 株式会社日立製作所 クラウド型健康支援サービス はらすまダイエット のラインアップに企業の健康保険組合などが行う特定保健指導を日立が代行する はらすまダイエット / 遠隔保健指導 を追加 株式会社日立製作所 ( 執行役社長 : 中西宏明 / 以下 日立 ) は このたび 効果的な減量プログラムとして開発された はらすまダイエット の手法を活用し 企業の健康保険組合などの公的医療保険の運営主体が行う特定保健指導
画像処理工学
 画像処理工学 画像の空間周波数解析とテクスチャ特徴 フーリエ変換の基本概念 信号波形のフーリエ変換 信号波形を周波数の異なる三角関数 ( 正弦波など ) に分解する 逆に, 周波数の異なる三角関数を重ねあわせることにより, 任意の信号波形を合成できる 正弦波の重ね合わせによる矩形波の表現 フーリエ変換の基本概念 フーリエ変換 次元信号 f (t) のフーリエ変換 変換 ( ω) ( ) ωt F f
画像処理工学 画像の空間周波数解析とテクスチャ特徴 フーリエ変換の基本概念 信号波形のフーリエ変換 信号波形を周波数の異なる三角関数 ( 正弦波など ) に分解する 逆に, 周波数の異なる三角関数を重ねあわせることにより, 任意の信号波形を合成できる 正弦波の重ね合わせによる矩形波の表現 フーリエ変換の基本概念 フーリエ変換 次元信号 f (t) のフーリエ変換 変換 ( ω) ( ) ωt F f
FLIRTools+デモ手順書
 FLIRTools+ 簡易取扱説明書 FLIR Tools+ 手順書 1. FLIR ToolsをPCにインストールする 2. Tools+ ライセンス番号を認識させる 3. カメラの電源を入れ USBでPCと接続する 4. 表示設定 5. 静止画を撮影する 6. 動画記録スピードを設定する 7. 動画を記録する / 停止する 8. 動画からグラフを作成する 9. グラフデータ ( 温度値 ) をExcelにペーストする
FLIRTools+ 簡易取扱説明書 FLIR Tools+ 手順書 1. FLIR ToolsをPCにインストールする 2. Tools+ ライセンス番号を認識させる 3. カメラの電源を入れ USBでPCと接続する 4. 表示設定 5. 静止画を撮影する 6. 動画記録スピードを設定する 7. 動画を記録する / 停止する 8. 動画からグラフを作成する 9. グラフデータ ( 温度値 ) をExcelにペーストする
最終版 _IBMストレージ_講演_西村様
 AKB48 の映像編集を える 速システム基盤 IBM SDS+All Flash Storage アジェンダ 1. 会社紹介 2. 業務紹介 3. 課題 4. 解決 法 5. 導 結果 6. 今後の展望 2 1. 会社紹介 3 会社紹介 社名 株式会社ヴィジュアルノーツ (VISUALNOTES Inc.) 所在地 東京都千代 区外神 6-1-8 思い出ビル 7F 代表者 代表取締役 原 潤 創
AKB48 の映像編集を える 速システム基盤 IBM SDS+All Flash Storage アジェンダ 1. 会社紹介 2. 業務紹介 3. 課題 4. 解決 法 5. 導 結果 6. 今後の展望 2 1. 会社紹介 3 会社紹介 社名 株式会社ヴィジュアルノーツ (VISUALNOTES Inc.) 所在地 東京都千代 区外神 6-1-8 思い出ビル 7F 代表者 代表取締役 原 潤 創
SNC-HM662 EdgeStorage manual J
 ネットワークカメラ SNC-HM662 Edge Storage マニュアル ~SD / microsd で映像録画 再生 ~ 目次 1. Edge Strage 機能について 1-1. Edge Storage 機能とは 1-2. Edge Storage 機能を使用する上での注意点 1-3. 使用可能なメモリーカード 2. Edge Storage 機能使用時の推奨設定 3. Edge Storage
ネットワークカメラ SNC-HM662 Edge Storage マニュアル ~SD / microsd で映像録画 再生 ~ 目次 1. Edge Strage 機能について 1-1. Edge Storage 機能とは 1-2. Edge Storage 機能を使用する上での注意点 1-3. 使用可能なメモリーカード 2. Edge Storage 機能使用時の推奨設定 3. Edge Storage
日本海溝海底地震津波観測網の整備と緊急津波速報 ( 仮称 ) システムの現状と将来像 < 日本海溝海底地震津波観測網の整備 > 地震情報 津波情報 その他 ( 研究活動に必要な情報等 ) 海底観測網の整備及び活用の現状 陸域と比べ海域の観測点 ( 地震計 ) は少ない ( 陸上 : 1378 点海域
 システムの現状と将来像 < 日本海溝海底地震津波観測網の整備 > 地震情報 津波情報 その他 ( 研究活動に必要な情報等 ) 海底観測網の整備及び活用の現状 陸域と比べ海域の観測点 ( 地震計 ) は少ない ( 陸上 : 1378 点海域") 資料 2 総合科学技術会議評価専門調査会 日本海溝海底地震津波観測網の整備及び緊急津波速報 ( 仮称 ) に係るシステム開発 評価検討会 ( 第 2 回 ) 資料 平成 23 年 11 月 10 日 文部科学省 研究開発局地震 防災研究課 日本海溝海底地震津波観測網の整備と緊急津波速報 ( 仮称 ) システムの現状と将来像 < 日本海溝海底地震津波観測網の整備 > 地震情報 津波情報 その他 ( 研究活動に必要な情報等
資料 2 総合科学技術会議評価専門調査会 日本海溝海底地震津波観測網の整備及び緊急津波速報 ( 仮称 ) に係るシステム開発 評価検討会 ( 第 2 回 ) 資料 平成 23 年 11 月 10 日 文部科学省 研究開発局地震 防災研究課 日本海溝海底地震津波観測網の整備と緊急津波速報 ( 仮称 ) システムの現状と将来像 < 日本海溝海底地震津波観測網の整備 > 地震情報 津波情報 その他 ( 研究活動に必要な情報等
Microsoft PowerPoint - 三次元座標測定 ppt
 冗長座標測定機 ()( 三次元座標計測 ( 第 9 回 ) 5 年度大学院講義 6 年 月 7 日 冗長性を持つ 次元座標測定機 次元 辺測量 : 冗長性を出すために つのレーザトラッカを配置し, キャッツアイまでの距離から座標を測定する つのカメラ ( 次元的なカメラ ) とレーザスキャナ : つの角度測定システムによる座標測定 つの回転関節による 次元 自由度多関節機構 高増潔東京大学工学系研究科精密機械工学専攻
冗長座標測定機 ()( 三次元座標計測 ( 第 9 回 ) 5 年度大学院講義 6 年 月 7 日 冗長性を持つ 次元座標測定機 次元 辺測量 : 冗長性を出すために つのレーザトラッカを配置し, キャッツアイまでの距離から座標を測定する つのカメラ ( 次元的なカメラ ) とレーザスキャナ : つの角度測定システムによる座標測定 つの回転関節による 次元 自由度多関節機構 高増潔東京大学工学系研究科精密機械工学専攻
第3部:プログラミング実習
 第 3 部 : プログラミング実習 会津大学 university of aizu 1 手順 1: サンプルコンポーネントの実行 university of aizu 2 実習概要 サンプルコンポーネントで起動したコンポーネントの接続の仕方などを学びます university of aizu 3 使用機材 Raspberry Pi ARM プロセッサを搭載したシングルボードコンピュータ SD カードに書き込んだ
第 3 部 : プログラミング実習 会津大学 university of aizu 1 手順 1: サンプルコンポーネントの実行 university of aizu 2 実習概要 サンプルコンポーネントで起動したコンポーネントの接続の仕方などを学びます university of aizu 3 使用機材 Raspberry Pi ARM プロセッサを搭載したシングルボードコンピュータ SD カードに書き込んだ

Mobile robotics KUKA Navigation Solution JP
 Mobile robotics KUKA Navigation Solution JP 自律型 インテリジェント ハードウェア非依存型 KUKA Navigation Solution は 移動型ロボット分野で使用されている自己ナビゲーション車両向けの SLAM 手法に基づいて設計されている 自己学習型ナビゲーションシステムです この中には 多数の車両を同時に管理 制御するソフトウェアと自己経路検出機能を含めた
Mobile robotics KUKA Navigation Solution JP 自律型 インテリジェント ハードウェア非依存型 KUKA Navigation Solution は 移動型ロボット分野で使用されている自己ナビゲーション車両向けの SLAM 手法に基づいて設計されている 自己学習型ナビゲーションシステムです この中には 多数の車両を同時に管理 制御するソフトウェアと自己経路検出機能を含めた
国土技術政策総合研究所 研究資料
 第 7 章 検査基準 7-1 検査の目的 検査の目的は 対向車両情報表示サービス 前方停止車両 低速車両情報表示サービスおよび その組み合わせサービスに必要な機能の品質を確認することである 解説 設備の設置後 機能や性能の総合的な調整を経て 検査基準に従い各設備検査を実施する 各設備検査の合格後 各設備間を接続した完成検査で機能 性能等のサービス仕様を満たしていることを確認する検査を実施し 合否を判定する
第 7 章 検査基準 7-1 検査の目的 検査の目的は 対向車両情報表示サービス 前方停止車両 低速車両情報表示サービスおよび その組み合わせサービスに必要な機能の品質を確認することである 解説 設備の設置後 機能や性能の総合的な調整を経て 検査基準に従い各設備検査を実施する 各設備検査の合格後 各設備間を接続した完成検査で機能 性能等のサービス仕様を満たしていることを確認する検査を実施し 合否を判定する
Microsoft PowerPoint - 9.Analog.ppt
 9 章 CMOS アナログ基本回路 1 デジタル情報とアナログ情報 アナログ情報 大きさ デジタル信号アナログ信号 デジタル情報 時間 情報処理システムにおけるアナログ技術 通信 ネットワークの高度化 無線通信, 高速ネットワーク, 光通信 ヒューマンインタフェース高度化 人間の視覚, 聴覚, 感性にせまる 脳型コンピュータの実現 テ シ タルコンヒ ュータと相補的な情報処理 省エネルギーなシステム
9 章 CMOS アナログ基本回路 1 デジタル情報とアナログ情報 アナログ情報 大きさ デジタル信号アナログ信号 デジタル情報 時間 情報処理システムにおけるアナログ技術 通信 ネットワークの高度化 無線通信, 高速ネットワーク, 光通信 ヒューマンインタフェース高度化 人間の視覚, 聴覚, 感性にせまる 脳型コンピュータの実現 テ シ タルコンヒ ュータと相補的な情報処理 省エネルギーなシステム
PowerPoint プレゼンテーション
 20150528 信号処理システム特論 本日の内容 適応フィルタ ( 時間領域 ) 適応アルゴリズム (LMS,NLMS,RLS) 適応フィルタの応用例 適応処理 非適応処理 : 状況によらずいつでも同じ処理 適応処理 : 状況に応じた適切な処理 高度な適応処理の例 雑音抑圧, 音響エコーキャンセラ, 騒音制御など 時間領域の適応フィルタ 誤差信号 与えられた手順に従ってフィルタ係数を更新し 自動的に所望の信号を得るフィルタ
20150528 信号処理システム特論 本日の内容 適応フィルタ ( 時間領域 ) 適応アルゴリズム (LMS,NLMS,RLS) 適応フィルタの応用例 適応処理 非適応処理 : 状況によらずいつでも同じ処理 適応処理 : 状況に応じた適切な処理 高度な適応処理の例 雑音抑圧, 音響エコーキャンセラ, 騒音制御など 時間領域の適応フィルタ 誤差信号 与えられた手順に従ってフィルタ係数を更新し 自動的に所望の信号を得るフィルタ
<4D F736F F D2095BD90AC E93788BF38AD4918D8A878AC4979D8B5A8F708ED28E918A698E8E8CB196E291E830392E392E31312E646F63>
 平成 24 年度空間情報総括監理技術者認定試験 試験実施日時 : 平成 24 年 7 月 28 日 13:30-16:30 注意事項 1) 問 1~ 問 3 に対する解答のファイル名は 受験番号 - 問番号とすること 例 )12-099-1: 受験番号 12-099 の受験者が問 1 を解答する場合 半角数字使用 2) ワープロの字体は明朝体 10.5 ポイント 1 ページは 36 行 40 文字
平成 24 年度空間情報総括監理技術者認定試験 試験実施日時 : 平成 24 年 7 月 28 日 13:30-16:30 注意事項 1) 問 1~ 問 3 に対する解答のファイル名は 受験番号 - 問番号とすること 例 )12-099-1: 受験番号 12-099 の受験者が問 1 を解答する場合 半角数字使用 2) ワープロの字体は明朝体 10.5 ポイント 1 ページは 36 行 40 文字
MSX WIFI Wi-Fi FLIR Tools mobile app Apple ios MSX SD HDMI USB mini USB A LCD FLIR T600 FLIR T620 FLIR T640 640 480 0.0430 40 650 1-4 GPS MSX 640 480
 FLIR T600シリーズ 人間工学デザインによる使いやすさと 高い柔軟性を兼ね備えた高画質 高機能の最先端サーモグラフィ FLIR T600シリーズは 最高640 480ピクセルの高解像度で ほんのわずかな温度差や画像の 詳細まで検出できる鮮明な画像を実現 あらゆるニーズに応える柔軟性の高さと通信機能が特長です 640 x 480 HIGH SENSITIVITY 解像度640 480ピクセル タッチスクリーン
FLIR T600シリーズ 人間工学デザインによる使いやすさと 高い柔軟性を兼ね備えた高画質 高機能の最先端サーモグラフィ FLIR T600シリーズは 最高640 480ピクセルの高解像度で ほんのわずかな温度差や画像の 詳細まで検出できる鮮明な画像を実現 あらゆるニーズに応える柔軟性の高さと通信機能が特長です 640 x 480 HIGH SENSITIVITY 解像度640 480ピクセル タッチスクリーン
Microsoft PowerPoint - dm1_5.pptx
 デジタルメディア処理 1 017( 後期 ) 09/6 イントロダクション1 : デジタル画像とは, 量 化と標本化,Dynamic Range 10/03 イントロダクション : デジタルカメラ, 間の視覚, 表 系 10/10 フィルタ処理 1 : トーンカーブ, 線形フィルタ デジタルメディア処理 1 担当 : 井尻敬 10/17 フィルタ処理 : 線形フィルタ, ハーフトーニング 10/4
デジタルメディア処理 1 017( 後期 ) 09/6 イントロダクション1 : デジタル画像とは, 量 化と標本化,Dynamic Range 10/03 イントロダクション : デジタルカメラ, 間の視覚, 表 系 10/10 フィルタ処理 1 : トーンカーブ, 線形フィルタ デジタルメディア処理 1 担当 : 井尻敬 10/17 フィルタ処理 : 線形フィルタ, ハーフトーニング 10/4
資料 5 自動車検査場における OBD 検査に関する実証実験について 平成 30 年 4 月 ( 独 ) 自動車技術総合機構軽自動車検査協会 Copyright National Agency for Automobile and Land Transport Technology 1
 自動車技術総合機構軽自動車検査協会 Copyright National Agency for Automobile and Land Transport Technology 1") 資料 5 自動車検査場における OBD 検査に関する実証実験について 平成 30 年 4 月 ( 独 ) 自動車技術総合機構軽自動車検査協会 1 目次 1. 実証実験の実施体制 2. 実証実験の概要 3. 実験結果 4.OBD 検査導入に向けた課題と解決策 2 1. 実証実験の実施体制 平成 28 年度及び29 年度 自動車技術総合機構と軽自動車検査協会が連携し スナップオン ツールズ ( 株 )
資料 5 自動車検査場における OBD 検査に関する実証実験について 平成 30 年 4 月 ( 独 ) 自動車技術総合機構軽自動車検査協会 1 目次 1. 実証実験の実施体制 2. 実証実験の概要 3. 実験結果 4.OBD 検査導入に向けた課題と解決策 2 1. 実証実験の実施体制 平成 28 年度及び29 年度 自動車技術総合機構と軽自動車検査協会が連携し スナップオン ツールズ ( 株 )
IMUシュミレータインストール方法
 IMU Simulator for Motioncoder GPS アプリケーション説明 IMU Simulator インストール方法 1 添付ファイルの setup.exe をクリックします 2 インストール先のフォルダを指定します 3 デスクトップにショートカットを作成するか選択します 4 インストールが開始されます 5 インストール完了ダイアログボックスが表示され 閉じる ボタンで終了します
IMU Simulator for Motioncoder GPS アプリケーション説明 IMU Simulator インストール方法 1 添付ファイルの setup.exe をクリックします 2 インストール先のフォルダを指定します 3 デスクトップにショートカットを作成するか選択します 4 インストールが開始されます 5 インストール完了ダイアログボックスが表示され 閉じる ボタンで終了します
ルネサス半導体セミナースケジュール
 1 3ページ 2018 年 7 12 4 6ページ 2018 年 1 6 2018/6/25 ルネサス半導体トレーニングセンター 2018 年 7 12 セミナースケジュール 製品セミナー RL78 RX RZ Renesas Synergy 7 8 9 10 11 12 RL78 1day 速習 動かしてみよう編 コース 8/7 9/26 12/11 1 間 ( 無料 ) 8/23 12/20 RL78
1 3ページ 2018 年 7 12 4 6ページ 2018 年 1 6 2018/6/25 ルネサス半導体トレーニングセンター 2018 年 7 12 セミナースケジュール 製品セミナー RL78 RX RZ Renesas Synergy 7 8 9 10 11 12 RL78 1day 速習 動かしてみよう編 コース 8/7 9/26 12/11 1 間 ( 無料 ) 8/23 12/20 RL78
<4D F736F F F696E74202D2088E B691CC8C7691AA F C82512E B8CDD8AB B83685D>
 前回の復習 医用生体計測磁気共鳴イメージング :2 回目 数理物質科学研究科電子 物理工学専攻巨瀬勝美 203-7-8 NMRとMRI:( 強い ) 静磁場と高周波 ( 磁場 ) を必要とする NMRとMRIの歴史 :952 年と2003 年にノーベル賞 ( 他に2 回 ) 数学的準備 : フーリエ変換 ( 信号の中に, どのような周波数成分が, どれだけ含まれているか ( スペクトル ) を求める方法
前回の復習 医用生体計測磁気共鳴イメージング :2 回目 数理物質科学研究科電子 物理工学専攻巨瀬勝美 203-7-8 NMRとMRI:( 強い ) 静磁場と高周波 ( 磁場 ) を必要とする NMRとMRIの歴史 :952 年と2003 年にノーベル賞 ( 他に2 回 ) 数学的準備 : フーリエ変換 ( 信号の中に, どのような周波数成分が, どれだけ含まれているか ( スペクトル ) を求める方法
Arduino をドリトルから 制御する教材の試行 鈴木裕貴 1
 Arduino をドリトルから 制御する教材の試行 鈴木裕貴 1 目次 1. はじめに 1.1. 背景と目的 1.2. ScratchとViscuit 1.3. ドリトル 2. 準備 2.1. ArduinoとRaspberry Pi 3. 演習内容 3.1. ドリトル 3.2. 指導内容例 4. まとめ 2 1. はじめに ( 背景 ) 原理 理解 活用社会 3 1. はじめに ( 背景 ) 原理
Arduino をドリトルから 制御する教材の試行 鈴木裕貴 1 目次 1. はじめに 1.1. 背景と目的 1.2. ScratchとViscuit 1.3. ドリトル 2. 準備 2.1. ArduinoとRaspberry Pi 3. 演習内容 3.1. ドリトル 3.2. 指導内容例 4. まとめ 2 1. はじめに ( 背景 ) 原理 理解 活用社会 3 1. はじめに ( 背景 ) 原理
課題ア -1 fmri と超多チャンネル MEG による脳活動計測のオンラインアルゴリズム技術 ダイナミクスモデルに基づく階層変分ベイズ推定の有効性の検証 オンライン階層変分ベイズ推定の日をまたがる汎化性能の向上 ダイナミクスモデルに基づく階層変分ベイズ推定 ダイナミクスモデルに基づく階層変分ベイズ
 複数モダリティー統合による脳活動計測技術の研究開発 の開発成果について 1. 施策の目標 我が国が諸外国をリードしている fmri, MEG, NIRS, EEG 等の複数モダリティーを統合した非侵襲型の脳活動計測技術 推定技術を飛躍的に高精度化することにより 安全性の高い 利用者の負担も少ない いつでも どこでも 誰にでも利用可能な非侵襲型脳活動計測による BMI 開発に資す ることで 広く国民に利益をもたらし,
複数モダリティー統合による脳活動計測技術の研究開発 の開発成果について 1. 施策の目標 我が国が諸外国をリードしている fmri, MEG, NIRS, EEG 等の複数モダリティーを統合した非侵襲型の脳活動計測技術 推定技術を飛躍的に高精度化することにより 安全性の高い 利用者の負担も少ない いつでも どこでも 誰にでも利用可能な非侵襲型脳活動計測による BMI 開発に資す ることで 広く国民に利益をもたらし,
/岩波文庫")