名古屋大学.indd
|
|
|
- きよたつ かみいしづ
- 5 years ago
- Views:
Transcription


1


 2015 年 6 月現在")


-6.")
 における車両の動的な挙動を検討 3D VR(UC-win/Road) 3 次元リアルタイム バーチャルリアリティソフト")
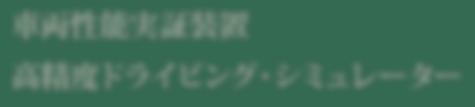
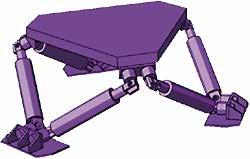
2 車両性能実証装置高精度ドライビング シミュレーターシステム 世界で初めて 1) 本格的バーチャルリアリティ (VR) 空間内での運転 車両走行模擬を実現した大型 5 面立体視ドライビング シミュレーター 運転時の視覚環境 振動環境を高精度に再現する事により 運転車の特性や感性のモニタリングおよび数学モデル構築を目指します 約 240インチの高輝度高精細な大型ディスプレイで囲ま 1 れた空間で視野角 315 度を確保 運転者視点位置に合わせた立体視で 物体と物体の重なり具合を現実と同じよう表示し 奥行き感や距離感をリアルに再現します まるで 運転者自身がVR 空間の中に居るかのような没入感を得られます 従来型シミュレーターでは 運転者がまずシミュレー 2 ターに慣れる という段階が必要でしたが 本シミュレーターは実際の車両や道路を走行している感覚で運転でき 広範囲の被験者による精度の高い実験が可能です 人間特性の研究 人間 - 自動車系システムの研究開発に活用できます 1) 2015 年 6 月現在 公開されているシミュレータとして 大型 5 面没入型ディスプレイとモーション付コクピット部の組合せは世界初 モーション モーション制御 (MOOG) 33.5 キャビン 運転に必要な車両部品 センサーおよび音響装置などの制御部品で構成され 実際の車両と同様の運転条件が再現できるように設計されています 1595 ( キャノピー OEPN 時 2340) プロジェクター 4K 解像度 120Hz 対応 3-chip DLP 3Dアクティブステレオ対応プロジェクター Christie Mirage 4K35 6 軸モーションベースは 6 本の電動シリンダが伸縮し 応答性良く6 自由度の動きを実現 画面映像の動きに合わせ座席を前後 左右 上下に動揺させる パネル解像度 4K(4096x2160 ピクセル ) 光出力 ( 最大 ) 35,000 Center ルーメン (32,500 ANSIルーメン )-6.0kW ランプ 車両ダイナミクス CarMaker/CRUISE さまざまな運転条件 ( アクセル ブレーキ ハンドル シフト操作 ) と環境条件 ( 摩擦係数や高さ変化のある道路コース 横風など ) における車両の動的な挙動を検討 3D VR(UC-win/Road) 3 次元リアルタイム バーチャルリアリティソフト 各種プロジェクトの 3 次元大規模空間を簡単なPC 操作で作成し 多様なシミュレーションが可能 交通流シミュレーター (Aimsun) UC-win/Roadと連携して道路交通環境をリアルタイムにシミュレート ダイナミック経路選択で ITS 関連の検討が可能 2 3
















3 車両性能実証装置高精度ドライビング シミュレーター ドライビングシミュレーターとは ドライビングシミュレーターは何ができるか 3 次元 VR で構築された道路や街並みに交通流などを設定し 実際の自動車と同様のコクピットに乗車してリアルタイムに運転を模擬できるシステム 車両モデルにより現実の車の運動を再現し 視覚 聴覚 体感等によって運転状態をシミュレーションできる 目的に応じて各種シナリオを設定することで 人の飛び出し 周辺車両の制御など多様な環境を短時間に再現可能 3D-VR モデルにより道路や街並みを再現 運転状態に応じたイベント発生が可能 ( シナリオ機能 ) 作の流れシナリオの流れ+ + 音声 効果音 走行開始 A 地点通過 B 地点到達通過 B 走行終了 Start 音声 効果音操イベント [1] 発生 モデル動作 結果処理など +メッセージ イベント [2] 発生 モデル動作 結果処理など +メッセージ End STOP GO STOP GO 交通の流れを再現 運転車両 運転者のモニタリングや運転操作の記録が容易 ( ログ機能 ) 同一環境を何度でも再現可能 ( リプレイ機能 ) ログ出力データ ( 主要ログ項目抜粋 ) 基本データシミュレーション時間 モデル名 モデルID モデル種別座標 姿勢 X 座標 Y 座標 Z 座標 ピッチ角 ヨー角 ロール角 ベクトル動力 速度エンジン回転数 ギヤ番号 車速 (km/h, m/s) 速度制限入力ハンドル角 アクセル開度 ブレーキ量 自動運転距離走行距離 道路始点からの距離 道路端部からの距離 リプレイ記録対象 車両歩行者交通信号コンテキスト 座標 ロール ピッチ ヨー ウィンカー ブレーキランプなど座標 動作 ロール ピッチ ヨー点灯状況シナリオ実行時のコンテキスト TRS 交通状態記録ファイル 本シミュレーターの活用例奥行き感 距離感をリアルに再現する特性を生かした 人間 - 自動車系の研究開発に最適 車両モデルにより車の運動を再現 ロールピッチヨー リアルな奥行感による追従走行時の低燃費を誘導する車両加減速特性の研究 速度差と交通流に対する ドライバの理解メカニズムを把握することで 交通流に乗り易い車両加減速特性の導出が可能になる 先行車 自車 先行車 1 先行車 3 先行車 2 視点の動きに着目した見通しの悪い状況でのドライバの前方確認行動の研究 視覚 ( 映像 ) 聴覚 ( 音 ) 体感 ( 加速度 振動 ) により運転状態を再現 死角の安全確認のための体の移動など ドライバの前方確認行動を把握することで ドライバ視点での運転し易い車両形状や 運転支援インフラの検討が可能になる 振動領域 自然な運転感覚下でのドライバ疲労 ストレスの研究 サージ スウェイ ヒーブ ロール ピッチ ヨーの 6 自由度運動が可能 6DOF プラットフォーム フォースフィードバック 自然な運転感覚と DS のシナリオ機能 ログ機能 リプレイ機能との融合により ドライバ疲労 ストレスデータの精度良い解析が可能になる 4 5



4 6





5 4K(4096x2160 ) ( ) 35,000 Center 32,500 ANSI -6.0kW 7

6 8







7 9




8 10




9 11


10 TEL TEL TEL TEL TEL TEL TEL TEL TEL TEL TEL TEL TEL TEL TEL FAX FAX FAX FAX FAX FAX FAX FAX FAX FAX FAX FAX FAX
<4D F736F F D E C815B835E837D836A B5F30312E646F63>
 ハイウェイドライビングシミュレータ操作マニュアル 平成 22 年 3 月 1 目次 1. 起動方法... 3 1.1. パソコンセットアップ... 3 1.2. パソコンの電源スイッチを確認する... 4 1.3. DS 電源投入... 4 1.4. UC-win/Road 起動... 5 1.5. 起動時確認事項... 5 1.6. データ読み込み... 5 1.7. 体験シミュレータを開始する...
ハイウェイドライビングシミュレータ操作マニュアル 平成 22 年 3 月 1 目次 1. 起動方法... 3 1.1. パソコンセットアップ... 3 1.2. パソコンの電源スイッチを確認する... 4 1.3. DS 電源投入... 4 1.4. UC-win/Road 起動... 5 1.5. 起動時確認事項... 5 1.6. データ読み込み... 5 1.7. 体験シミュレータを開始する...
ドライビングシミュレータ用実写映像再生ソフトウェア Real Video Drive Player
 東陽テクニカ技術研究所 岩根研究所 共同開発 ドライビングシミュレータ用実写映像再生ソフトウェア Real Video Drive Player Real Video Drive Player Real Video Drive Playerは専用の360 カメラで撮影した走行映像を ステアリング操作やアクセル ブレーキ操作に連動させて再生できるソフトウェアです 専用の動画撮影 加工サービスは任意の道路で行うことができます
東陽テクニカ技術研究所 岩根研究所 共同開発 ドライビングシミュレータ用実写映像再生ソフトウェア Real Video Drive Player Real Video Drive Player Real Video Drive Playerは専用の360 カメラで撮影した走行映像を ステアリング操作やアクセル ブレーキ操作に連動させて再生できるソフトウェアです 専用の動画撮影 加工サービスは任意の道路で行うことができます
本章では 衝突被害軽減ブレーキ 車線逸脱警報 装置 等の自動車に備えられている運転支援装置の特性 Ⅻ. 運転支援装置を 備えるトラックの 適切な運転方法 と使い方を理解した運転の重要性について整理しています 指導においては 装置を過信し 事故に至るケースがあることを理解させましょう また 運転支援装
 本章では 衝突被害軽減ブレーキ 車線逸脱警報 装置 等の自動車に備えられている運転支援装置の特性 Ⅻ. 運転支援装置を 備えるトラックの 適切な運転方法 と使い方を理解した運転の重要性について整理しています 指導においては 装置を過信し 事故に至るケースがあることを理解させましょう また 運転支援装置の限界を心得て正しく使用するために 支援装置の限界とメーカーによる作動等の違いを明確にさせ 支援装置に頼り過ぎた運転にならないように指導しましょう
本章では 衝突被害軽減ブレーキ 車線逸脱警報 装置 等の自動車に備えられている運転支援装置の特性 Ⅻ. 運転支援装置を 備えるトラックの 適切な運転方法 と使い方を理解した運転の重要性について整理しています 指導においては 装置を過信し 事故に至るケースがあることを理解させましょう また 運転支援装置の限界を心得て正しく使用するために 支援装置の限界とメーカーによる作動等の違いを明確にさせ 支援装置に頼り過ぎた運転にならないように指導しましょう
国土技術政策総合研究所 研究資料
 第 7 章 検査基準 7-1 検査の目的 検査の目的は 対向車両情報表示サービス 前方停止車両 低速車両情報表示サービスおよび その組み合わせサービスに必要な機能の品質を確認することである 解説 設備の設置後 機能や性能の総合的な調整を経て 検査基準に従い各設備検査を実施する 各設備検査の合格後 各設備間を接続した完成検査で機能 性能等のサービス仕様を満たしていることを確認する検査を実施し 合否を判定する
第 7 章 検査基準 7-1 検査の目的 検査の目的は 対向車両情報表示サービス 前方停止車両 低速車両情報表示サービスおよび その組み合わせサービスに必要な機能の品質を確認することである 解説 設備の設置後 機能や性能の総合的な調整を経て 検査基準に従い各設備検査を実施する 各設備検査の合格後 各設備間を接続した完成検査で機能 性能等のサービス仕様を満たしていることを確認する検査を実施し 合否を判定する
スマートフォン利用が 自動車運転に与える影響について
 自動車運転中のスマートフォン利用実態の把握とテキスト入力が運転挙動に及ぼす影響の定量的分析 リスク工学グループ演習第 9 班 山本智基中川紗菜美佐藤祥路 アドバイザー教員 : 伊藤誠 1 発表の流れ 01 研究の背景 目的 02 研究の流れ 位置づけ 03 運転中のスマートフォン利用実態把握 04 シミュレーション準備 測定方法 05 実験結果 考察 06 まとめ 背景 目的 4 背景 図 主な情報通信機器の世帯保有状況
自動車運転中のスマートフォン利用実態の把握とテキスト入力が運転挙動に及ぼす影響の定量的分析 リスク工学グループ演習第 9 班 山本智基中川紗菜美佐藤祥路 アドバイザー教員 : 伊藤誠 1 発表の流れ 01 研究の背景 目的 02 研究の流れ 位置づけ 03 運転中のスマートフォン利用実態把握 04 シミュレーション準備 測定方法 05 実験結果 考察 06 まとめ 背景 目的 4 背景 図 主な情報通信機器の世帯保有状況
[2] [3] [4] [] TTC 2 9 SAS[6] 2 SAS 4 DS 2. SAS 28 ( 2 ) 6 ( ) (PV:Preceding Vehicle) (FV:Fo
![[2] [3] [4] [] TTC 2 9 SAS[6] 2 SAS 4 DS 2. SAS 28 ( 2 ) 6 ( ) (PV:Preceding Vehicle) (FV:Fo](/thumbs/93/113996976.jpg "[2] [3] [4] [] TTC 2 9 SAS[6] 2 SAS 4 DS 2. SAS 28 ( 2 ) 6 ( ) (PV:Preceding Vehicle) (FV:Fo") Vol.26-ITS-64 No. 26/3/7,a),b),c),d) 24 TTC THW Driver characteristic estimation using vehicle behavior data while preceding vehicle decelerating Chisato Shibata,a) Yurie Iribe,b) Haruki Kawanaka,c) Koji
Vol.26-ITS-64 No. 26/3/7,a),b),c),d) 24 TTC THW Driver characteristic estimation using vehicle behavior data while preceding vehicle decelerating Chisato Shibata,a) Yurie Iribe,b) Haruki Kawanaka,c) Koji
スライド 1
 flex-ds ドライビング シミュレータ 製品カタログ コンセプトラフィック活用例その1活用例その3モジュール群グ製品情報flex-DS - コンセプト - データ設定自由度の高い 拡張性の高い柔軟な DS システムをご提案致します モジュールと CG 描画を行う 他車両の走行制御のための交通シミュレーション ASSTranse-DS モ ジュールから構成されています また 道路環境 交通状況を独自に設定
flex-ds ドライビング シミュレータ 製品カタログ コンセプトラフィック活用例その1活用例その3モジュール群グ製品情報flex-DS - コンセプト - データ設定自由度の高い 拡張性の高い柔軟な DS システムをご提案致します モジュールと CG 描画を行う 他車両の走行制御のための交通シミュレーション ASSTranse-DS モ ジュールから構成されています また 道路環境 交通状況を独自に設定
資料 四輪車の加速走行騒音規制について ( 乗用車 小型車 ) 現行加速走行騒音試験法の課題 新加速走行騒音試験法の概要 国内走行実態との比較による新加速走行騒音試験法の検証 1
 現行加速走行騒音試験法の課題 新加速走行騒音試験法の概要 国内走行実態との比較による新加速走行騒音試験法の検証 1") 資料 13-3-1 四輪車の加速走行騒音規制について ( 乗用車 小型車 ) 現行加速走行騒音試験法の課題 新加速走行騒音試験法の概要 国内走行実態との比較による新加速走行騒音試験法の検証 1 現行加速走行騒音試験法の課題 ( 乗用車 小型車 ) 現行の加速走行騒音試験方法 ( 以下 TRIAS という ) は ISO362 をベースとしており 車種に応じたギヤ位置により 一定速度で騒音測定区間 (A-A
資料 13-3-1 四輪車の加速走行騒音規制について ( 乗用車 小型車 ) 現行加速走行騒音試験法の課題 新加速走行騒音試験法の概要 国内走行実態との比較による新加速走行騒音試験法の検証 1 現行加速走行騒音試験法の課題 ( 乗用車 小型車 ) 現行の加速走行騒音試験方法 ( 以下 TRIAS という ) は ISO362 をベースとしており 車種に応じたギヤ位置により 一定速度で騒音測定区間 (A-A
高速道路への完全自動運転導入によるリスク低減効果の分析 リスク工学専攻グループ演習 10 班 田村聡宮本智明鄭起宅 ( アドバイザー教員伊藤誠 )
") 高速道路への完全自動運転導入によるリスク低減効果の分析 リスク工学専攻グループ演習 10 班 田村聡宮本智明鄭起宅 ( アドバイザー教員伊藤誠 ) はじめに 研究背景 自動運転の定義 研究目的 発表の流れ 交通流シミュレーションを用いた分析 分析手法 評価指標 分析結果および考察 ドライブシミュレータを用いた分析 分析手法 評価方法 分析結果および考察 まとめ 研究背景交通システムの現状 交通事故の死傷者数が一定の割合で推移
高速道路への完全自動運転導入によるリスク低減効果の分析 リスク工学専攻グループ演習 10 班 田村聡宮本智明鄭起宅 ( アドバイザー教員伊藤誠 ) はじめに 研究背景 自動運転の定義 研究目的 発表の流れ 交通流シミュレーションを用いた分析 分析手法 評価指標 分析結果および考察 ドライブシミュレータを用いた分析 分析手法 評価方法 分析結果および考察 まとめ 研究背景交通システムの現状 交通事故の死傷者数が一定の割合で推移
 メイン表示 例 ミニメーター画面表示 例 平均燃費 一般高速平均燃費 / 移動平均燃費 燃料流量 / スロットル開度 G モニター 瞬間燃費 平均燃費 エンジン水温 今回燃費 一般道平均燃費 現在の燃料流量 電源OFF毎にクリア 累積クリアまたはデータ クリアで初期化 燃料流量インジケーター Gボール 燃費バー 平均燃費針 現在値を表示 車両にかかるGの 方向を表示 0 40km/lを表示 0 40km/lを表示
メイン表示 例 ミニメーター画面表示 例 平均燃費 一般高速平均燃費 / 移動平均燃費 燃料流量 / スロットル開度 G モニター 瞬間燃費 平均燃費 エンジン水温 今回燃費 一般道平均燃費 現在の燃料流量 電源OFF毎にクリア 累積クリアまたはデータ クリアで初期化 燃料流量インジケーター Gボール 燃費バー 平均燃費針 現在値を表示 車両にかかるGの 方向を表示 0 40km/lを表示 0 40km/lを表示
FANUC i Series CNC/SERVO
 + Series CNC/SERVO * * 2 * * 3 Series 0+-MODEL F * * * Series 30+/31+/32+/35+-MODEL B * Power Motion +-MODEL A * PANEL +H * PANEL +H Pro * MT-LINK+ * MT-LINKi 4 サーボラインアップ @*-B series SERVO α*-bシリーズサーボは
+ Series CNC/SERVO * * 2 * * 3 Series 0+-MODEL F * * * Series 30+/31+/32+/35+-MODEL B * Power Motion +-MODEL A * PANEL +H * PANEL +H Pro * MT-LINK+ * MT-LINKi 4 サーボラインアップ @*-B series SERVO α*-bシリーズサーボは
この演習について Autoware 演習 1: データの記録 再生 Autoware 演習 2: センサーキャリブレーション Autoware 演習 3:3 次元地図の作成 Autoware 演習 4: 自己位置推定 Autoware 演習 5: パラメータ調整 Autoware 演習 6: 物体検
 version 1.0 TIER IV ACADEMY 自動運転システム構築塾 Day4 Autoware 演習 2 Autoware 演習 6: 物体検出とトラッキング この演習について Autoware 演習 1: データの記録 再生 Autoware 演習 2: センサーキャリブレーション Autoware 演習 3:3 次元地図の作成 Autoware 演習 4: 自己位置推定 Autoware
version 1.0 TIER IV ACADEMY 自動運転システム構築塾 Day4 Autoware 演習 2 Autoware 演習 6: 物体検出とトラッキング この演習について Autoware 演習 1: データの記録 再生 Autoware 演習 2: センサーキャリブレーション Autoware 演習 3:3 次元地図の作成 Autoware 演習 4: 自己位置推定 Autoware
投写距離カリキュレーター シンプルモードとアドバンスモードを切り替えることができます シンプルモード アドバンスモード
 投写距離カリキュレーター シンプルモードとアドバンスモードを切り替えることができます シンプルモード アドバンスモード シンプルモード / アドバンスモード共通 1 2 5 3 4 6 8 9 7 10 11 1 言語選択 日本語と英語の切り替えができます 2 モード切替えボタン シンプルモードとアドバンスモードの切替えができます 3 ヘルプボタン このヘルプファイルを表示します 4 印刷ボタン ブラウザの印刷機能を呼び出します
投写距離カリキュレーター シンプルモードとアドバンスモードを切り替えることができます シンプルモード アドバンスモード シンプルモード / アドバンスモード共通 1 2 5 3 4 6 8 9 7 10 11 1 言語選択 日本語と英語の切り替えができます 2 モード切替えボタン シンプルモードとアドバンスモードの切替えができます 3 ヘルプボタン このヘルプファイルを表示します 4 印刷ボタン ブラウザの印刷機能を呼び出します
速度規制の目的と現状 警察庁交通局 1
 速度規制の目的と現状 警察庁交通局 1 1 最高速度規制の必要性 2 規制速度決定の基本的考え方 3 一般道路における速度規制基準の概要 4 最高速度規制の見直し状況 ( 平成 21 年度 ~23 年度 ) 5 最高速度違反による交通事故対策検討会の開催 2 1 最高速度規制の必要性 最高速度規制は 交通事故の抑止 ( 交通の安全 ) 交通の円滑化 道路交通に起因する障害の防止 の観点から 必要に応じて実施
速度規制の目的と現状 警察庁交通局 1 1 最高速度規制の必要性 2 規制速度決定の基本的考え方 3 一般道路における速度規制基準の概要 4 最高速度規制の見直し状況 ( 平成 21 年度 ~23 年度 ) 5 最高速度違反による交通事故対策検討会の開催 2 1 最高速度規制の必要性 最高速度規制は 交通事故の抑止 ( 交通の安全 ) 交通の円滑化 道路交通に起因する障害の防止 の観点から 必要に応じて実施
03 【資料1】自動走行をめぐる最近の動向と今後の調査検討事項
 自動走行をめぐる最近の動向と 今後の調査検討事項について 平成 27 年 10 月 23 日警察庁交通局 目 次 1 交通事故情勢 2 自動走行の現状 3 自動走行の課題 4 調査検討事項 1 交通事故情勢 交通事故発生状況の推移 1 1 交通事故情勢 c 平成 26 年中の交通事故発生状況 交通事故発生件数 57 万 3,465 件 ( 前年比 -8.8%) 10 年連続で減少 交通事故死者数 4,113
自動走行をめぐる最近の動向と 今後の調査検討事項について 平成 27 年 10 月 23 日警察庁交通局 目 次 1 交通事故情勢 2 自動走行の現状 3 自動走行の課題 4 調査検討事項 1 交通事故情勢 交通事故発生状況の推移 1 1 交通事故情勢 c 平成 26 年中の交通事故発生状況 交通事故発生件数 57 万 3,465 件 ( 前年比 -8.8%) 10 年連続で減少 交通事故死者数 4,113
起動時
 De-Works Release NC 自動プログラミング CAD/CAM ソフトウェア De-WORKS 進化論 NC プログラム作成を強力にサポート! NCプログラム作成の手順 2 加工図面の作成 3 図面からNCプログラムの作成 4 NCプログラムの編集とチェック 7 商品の選択 タイプ別構成とオプションの説明 8 Godo System Machine Corporation. NC プログラム作成の手順
De-Works Release NC 自動プログラミング CAD/CAM ソフトウェア De-WORKS 進化論 NC プログラム作成を強力にサポート! NCプログラム作成の手順 2 加工図面の作成 3 図面からNCプログラムの作成 4 NCプログラムの編集とチェック 7 商品の選択 タイプ別構成とオプションの説明 8 Godo System Machine Corporation. NC プログラム作成の手順
人間の視野と同等の広視野画像を取得・提示する簡易な装置
 人間の視野と同等の広視野画像 を取得 提示する簡易な装置 公立はこだて未来大学 システム情報科学部複雑系知能学科 准教授鈴木昭二 研究背景 2 画像情報は有用である 多様な情報 ( 明るさ, 色, 形, 動きなど ) 見ればわかる しかし, カメラの画角は狭い 見える範囲が限定される 全体像を把握しくい 移動する物体を見失いやすい 広視野画像の取得 ( 従来方法 ) 3 多数のカメラを搭載 多数の画像を合成し高解像度の画像取得
人間の視野と同等の広視野画像 を取得 提示する簡易な装置 公立はこだて未来大学 システム情報科学部複雑系知能学科 准教授鈴木昭二 研究背景 2 画像情報は有用である 多様な情報 ( 明るさ, 色, 形, 動きなど ) 見ればわかる しかし, カメラの画角は狭い 見える範囲が限定される 全体像を把握しくい 移動する物体を見失いやすい 広視野画像の取得 ( 従来方法 ) 3 多数のカメラを搭載 多数の画像を合成し高解像度の画像取得
ドライブレコーダーにより記録すべき情報及びドライブレコーダーの性能要件を定める告示 ( 平成 28 年 11 月 17 日国土交通省告示 1346 号 ) ( 総則 ) 第一条一般貸切旅客自動車運送事業者が 旅客自動車運送事業運輸規則 ( 昭和 31 年運輸省令第 44 号 ) 第 38 条第 1
 ( 総則 ) 第一条一般貸切旅客自動車運送事業者が 旅客自動車運送事業運輸規則 ( 昭和 31 年運輸省令第 44 号 ) 第 38 条第 1") ドライブレコーダーにより記録すべき情報及びドライブレコーダーの性能要件を定める告示 ( 平成 28 年 11 月 17 日国土交通省告示 1346 号 ) ( 総則 ) 第一条一般貸切旅客自動車運送事業者が 旅客自動車運送事業運輸規則 ( 昭和 31 年運輸省令第 44 号 ) 第 38 条第 1 項及び第 2 項の規定に基づきその事業用自動車の運転者に対して指導監督及び特別な指導 ( 以下 指導監督等
ドライブレコーダーにより記録すべき情報及びドライブレコーダーの性能要件を定める告示 ( 平成 28 年 11 月 17 日国土交通省告示 1346 号 ) ( 総則 ) 第一条一般貸切旅客自動車運送事業者が 旅客自動車運送事業運輸規則 ( 昭和 31 年運輸省令第 44 号 ) 第 38 条第 1 項及び第 2 項の規定に基づきその事業用自動車の運転者に対して指導監督及び特別な指導 ( 以下 指導監督等
dji.htm - 無題 <標準モード>
 Mavic Air MAVIC PRO 主な特長 主な特長 32MPスフィアパノラマ折りたたみ設計 & 優れた携帯性 3 軸ジンバル & 4Kカメラ 3 方向障害物検知スマートキャプチャー最大飛行時間 21 分高度操縦支援システム (APAS) 折りたたみ式 4Kカメラ RAWフォーマット写真 7km 動画伝送最大 27 分の飛行時間 ハイライト 寸法 168 83 49 mm (L W H) 168
Mavic Air MAVIC PRO 主な特長 主な特長 32MPスフィアパノラマ折りたたみ設計 & 優れた携帯性 3 軸ジンバル & 4Kカメラ 3 方向障害物検知スマートキャプチャー最大飛行時間 21 分高度操縦支援システム (APAS) 折りたたみ式 4Kカメラ RAWフォーマット写真 7km 動画伝送最大 27 分の飛行時間 ハイライト 寸法 168 83 49 mm (L W H) 168
平成 28 年度第 2 回車両安全対策検討会平成 28 年 12 月 9 日 安全 - 資料 9 自動運転に係る国際基準の検討状況
 平成 28 年度第 2 回車両安全対策検討会平成 28 年 12 月 9 日 安全 - 資料 9 自動運転に係る国際基準の検討状況 自動運転の導入を巡る国際的動向 国連欧州経済委員会 (UN-ECE) の政府間会合 (WP29) において自動車の安全 環境基準に関する国際調和活動を実施しているところ 平成 26 年 11 月に開催された WP29 において 自動運転について議論する 自動運転分科会
平成 28 年度第 2 回車両安全対策検討会平成 28 年 12 月 9 日 安全 - 資料 9 自動運転に係る国際基準の検討状況 自動運転の導入を巡る国際的動向 国連欧州経済委員会 (UN-ECE) の政府間会合 (WP29) において自動車の安全 環境基準に関する国際調和活動を実施しているところ 平成 26 年 11 月に開催された WP29 において 自動運転について議論する 自動運転分科会
メイン表示 例 バーグラフ表示 例 平均燃費 1 一般道高速道平均燃費 1/ 移動平均燃費 1 燃料流量 1/ スロットル開度 1 燃費インジケーター 時計 スピード コンパス 2 標高 2 車両電圧 燃料流量インジケーター 瞬間燃費を表示 燃費インジケーター 今回燃費 瞬間燃費を表示 電源OFF毎
 メイン表示 例 バーグラフ表示 例 平均燃費 1 一般道高速道平均燃費 1/ 移動平均燃費 1 燃料流量 1/ スロットル開度 1 燃費インジケーター 時計 スピード コンパス 2 標高 2 車両電圧 燃料流量インジケーター 瞬間燃費を表示 燃費インジケーター 今回燃費 瞬間燃費を表示 電源OFF毎にクリア 一般道平均燃費 平均燃費 現在値を表示 現在の燃料流量 累積クリアまたはデータ クリアで初期化
メイン表示 例 バーグラフ表示 例 平均燃費 1 一般道高速道平均燃費 1/ 移動平均燃費 1 燃料流量 1/ スロットル開度 1 燃費インジケーター 時計 スピード コンパス 2 標高 2 車両電圧 燃料流量インジケーター 瞬間燃費を表示 燃費インジケーター 今回燃費 瞬間燃費を表示 電源OFF毎にクリア 一般道平均燃費 平均燃費 現在値を表示 現在の燃料流量 累積クリアまたはデータ クリアで初期化
HDMI 機器を使う 本機にポータブルビデオなどの外部映像機器を接続すると その映像を本機の AV ソース (HDMI) として見ることができます 本機に外部映像機器を接続するには 別売の HDMI 入力ケーブルと市販の HDMIケーブルが必要です 映像入力の設定をする 1 を押し 設定 編集 -
 として見ることができます 本機に外部映像機器を接続するには 別売の HDMI 入力ケーブルと市販の HDMIケーブルが必要です 映像入力の設定をする 1 を押し 設定 編集 -") AUX を使う (MP313D-W のみ ) 本機正面の AUX 端子にポータブルオーディオプレーヤーなどの外部音声機器を接続すると その音声を本機の AV ソース (AUX) として聞くことができます 本機正面の AUX 端子に外部機器を接続するには 別売の音声ケーブル (φ3.5 mmステレオ音声用 ) が必要です 外部機器の音声を聞く 1 音声ケーブル (3.5φ) を本機の AUX 端子に接続する
AUX を使う (MP313D-W のみ ) 本機正面の AUX 端子にポータブルオーディオプレーヤーなどの外部音声機器を接続すると その音声を本機の AV ソース (AUX) として聞くことができます 本機正面の AUX 端子に外部機器を接続するには 別売の音声ケーブル (φ3.5 mmステレオ音声用 ) が必要です 外部機器の音声を聞く 1 音声ケーブル (3.5φ) を本機の AUX 端子に接続する
ZERO704V
 メイン表示 例 バーグラフ表示 例 平均燃費 1 一般道高速道平均燃費 1/ 移動平均燃費 1 燃料流量 1/ スロットル開度 1 燃費インジケーター カレンダー 時計 スピード コンパス 2 標高 2 車両電圧 燃料流量インジケーター 瞬間燃費を表示 燃費インジケーター 今回燃費 瞬間燃費を表示 電源OFF毎にクリア 一般道平均燃費 平均燃費 現在値を表示 現在の燃料流量 累積クリアまたはデータ
メイン表示 例 バーグラフ表示 例 平均燃費 1 一般道高速道平均燃費 1/ 移動平均燃費 1 燃料流量 1/ スロットル開度 1 燃費インジケーター カレンダー 時計 スピード コンパス 2 標高 2 車両電圧 燃料流量インジケーター 瞬間燃費を表示 燃費インジケーター 今回燃費 瞬間燃費を表示 電源OFF毎にクリア 一般道平均燃費 平均燃費 現在値を表示 現在の燃料流量 累積クリアまたはデータ
選定技術の テーマ Ⅰ ウェッジハンプ 舗装面にくさび型の非対称の段差 ( ウェッジハンプ ) を設置し 走行時の衝撃により逆走車両に注意喚起するもの 全景 設置イメージ図 逆走車両に衝撃で注意喚起を行い 順行車両には走行に支障の無い形状としている 段差部分には超高強度繊維補強コンクリートを使用し
 を設置し 走行時の衝撃により逆走車両に注意喚起するもの 全景 設置イメージ図 逆走車両に衝撃で注意喚起を行い 順行車両には走行に支障の無い形状としている 段差部分には超高強度繊維補強コンクリートを使用し") 選定技術の 資料 5-3 選定技術の テーマ Ⅰ ウェッジハンプ 舗装面にくさび型の非対称の段差 ( ウェッジハンプ ) を設置し 走行時の衝撃により逆走車両に注意喚起するもの 全景 設置イメージ図 逆走車両に衝撃で注意喚起を行い 順行車両には走行に支障の無い形状としている 段差部分には超高強度繊維補強コンクリートを使用し 大型車が走行しても衝突に十分な強度有している 2 選定技術の テーマ Ⅰ 防眩板応用注意喚起
選定技術の 資料 5-3 選定技術の テーマ Ⅰ ウェッジハンプ 舗装面にくさび型の非対称の段差 ( ウェッジハンプ ) を設置し 走行時の衝撃により逆走車両に注意喚起するもの 全景 設置イメージ図 逆走車両に衝撃で注意喚起を行い 順行車両には走行に支障の無い形状としている 段差部分には超高強度繊維補強コンクリートを使用し 大型車が走行しても衝突に十分な強度有している 2 選定技術の テーマ Ⅰ 防眩板応用注意喚起
1 日本再興戦略 2016 改革 2020 隊列走行の実現 隊列走行活用事業モデルの明確化ニーズの明確化 ( 実施場所 事業性等 ) 技術開発 実証 制度 事業環境検討プロジェクト工程表技高齢者等の移動手段の確保 ( ラストワンマイル自動走行 ) 事業モデルの明確化 ( 実施主体 場所 事業性等 )
 技術開発 実証 制度 事業環境検討プロジェクト工程表技高齢者等の移動手段の確保 ( ラストワンマイル自動走行 ) 事業モデルの明確化 ( 実施主体 場所 事業性等 )") 参考資料 4 自動走行に関する取組について 平成 2 8 年 1 2 月 経 済 産 業 省 国 土 交 通 省 1 日本再興戦略 2016 改革 2020 隊列走行の実現 隊列走行活用事業モデルの明確化ニーズの明確化 ( 実施場所 事業性等 ) 技術開発 実証 制度 事業環境検討プロジェクト工程表技高齢者等の移動手段の確保 ( ラストワンマイル自動走行 ) 事業モデルの明確化 ( 実施主体 場所
参考資料 4 自動走行に関する取組について 平成 2 8 年 1 2 月 経 済 産 業 省 国 土 交 通 省 1 日本再興戦略 2016 改革 2020 隊列走行の実現 隊列走行活用事業モデルの明確化ニーズの明確化 ( 実施場所 事業性等 ) 技術開発 実証 制度 事業環境検討プロジェクト工程表技高齢者等の移動手段の確保 ( ラストワンマイル自動走行 ) 事業モデルの明確化 ( 実施主体 場所
PowerPoint プレゼンテーション
 1 2017 年度ベンチマーク試験について エネルギーフロー車両試験 (2 台 ) (1) Chevrolet Malibu (2) BMW 320i エンジンユニット単体試験 (2 ユニット ) (3) Mercedes C200 (M274) (4) Audi A4 (EA888) エンジンフリクション測定 (2 ユニット ) (5) Chevrolet Malibu(Ecotec 1.5L )
1 2017 年度ベンチマーク試験について エネルギーフロー車両試験 (2 台 ) (1) Chevrolet Malibu (2) BMW 320i エンジンユニット単体試験 (2 ユニット ) (3) Mercedes C200 (M274) (4) Audi A4 (EA888) エンジンフリクション測定 (2 ユニット ) (5) Chevrolet Malibu(Ecotec 1.5L )
 メイン表示 例 バーグラフ表示 例 平均燃費 1 一般道高速道平均燃費 1/ 移動平均燃費 1 燃料流量 1/ スロットル開度 1 燃費インジケーター 時計 スピード コンパス 2 標高 2 車両電圧 燃料流量インジケーター 瞬間燃費を表示 燃費インジケーター 今回燃費 瞬間燃費を表示 電源OFF毎にクリア 一般道平均燃費 平均燃費 現在値を表示 現在の燃料流量 累積クリアまたはデータ クリアで初期化
メイン表示 例 バーグラフ表示 例 平均燃費 1 一般道高速道平均燃費 1/ 移動平均燃費 1 燃料流量 1/ スロットル開度 1 燃費インジケーター 時計 スピード コンパス 2 標高 2 車両電圧 燃料流量インジケーター 瞬間燃費を表示 燃費インジケーター 今回燃費 瞬間燃費を表示 電源OFF毎にクリア 一般道平均燃費 平均燃費 現在値を表示 現在の燃料流量 累積クリアまたはデータ クリアで初期化
P01
 0.7 1.5ton3way 01 車両の向きを変えずに 左 右 前方に 3 方向の荷役が可能 シフト ローテート フォークが左右にシフト ローテート 回転 シフト することで 車 両の向きを変えずに左 右の ラックへの荷役が可能です ジョイスティックレバー レバー1本でシフト ローテート操作が可能 シフト ローテート シンクロ シフト ローテートのシンクロ動作もワンタッチ 従来の3本レバーもオプションで設定できます
0.7 1.5ton3way 01 車両の向きを変えずに 左 右 前方に 3 方向の荷役が可能 シフト ローテート フォークが左右にシフト ローテート 回転 シフト することで 車 両の向きを変えずに左 右の ラックへの荷役が可能です ジョイスティックレバー レバー1本でシフト ローテート操作が可能 シフト ローテート シンクロ シフト ローテートのシンクロ動作もワンタッチ 従来の3本レバーもオプションで設定できます
21m 車両の検証項目 ダブル連結トラック実験 高速道路 3 交通流への影響 4 道路構造への影響 合流部 : 本線 合流部 : ランプ 追越時 車線変更部 検証項目 分析視点 データ等 1 省人化 同一量輸送時のドライバー数 乗務記録表 環境負荷 同一量輸送時のCO2 排出量 2 走行 カーブ (
 21m ダブル連結トラック実験の実施状況 効果検証 ( 中間とりまとめ ) 21m 車両の検証項目 ダブル連結トラック実験 高速道路 3 交通流への影響 4 道路構造への影響 合流部 : 本線 合流部 : ランプ 追越時 車線変更部 検証項目 分析視点 データ等 1 省人化 同一量輸送時のドライバー数 乗務記録表 環境負荷 同一量輸送時のCO2 排出量 2 走行 カーブ ( 降坂部 ) 速度分布(
21m ダブル連結トラック実験の実施状況 効果検証 ( 中間とりまとめ ) 21m 車両の検証項目 ダブル連結トラック実験 高速道路 3 交通流への影響 4 道路構造への影響 合流部 : 本線 合流部 : ランプ 追越時 車線変更部 検証項目 分析視点 データ等 1 省人化 同一量輸送時のドライバー数 乗務記録表 環境負荷 同一量輸送時のCO2 排出量 2 走行 カーブ ( 降坂部 ) 速度分布(
クラウドアイFAQ 修正版(2014_6_2)_docx
_docx") Q 本体の青いランプがなかなか点灯しません A GPS が測位出来ていません 以下のことをご確認ください フロントガラスから空が見えるかどうか 建物の中にいないか エンジンをつけてから 5 分以内の場合は GPS が測位できるまで最大 5 分程度かかる場合がありますので お待ちください 上記ご確認後でもランプがつかない場合には 一度エンジンを切って 再度エンジンをかけ直してみてください Q ディスプレイに表示されているマークなどの意味がわからない
Q 本体の青いランプがなかなか点灯しません A GPS が測位出来ていません 以下のことをご確認ください フロントガラスから空が見えるかどうか 建物の中にいないか エンジンをつけてから 5 分以内の場合は GPS が測位できるまで最大 5 分程度かかる場合がありますので お待ちください 上記ご確認後でもランプがつかない場合には 一度エンジンを切って 再度エンジンをかけ直してみてください Q ディスプレイに表示されているマークなどの意味がわからない
ICT を活用した ITS の概要 1 ITS は内閣府 警察庁 総務省 経済産業省 国土交通省が連携して推進 道路交通情報 VICS (1996 年 ~) FM 多重放送 電波ビーコン 光ビーコンで情報配信 ( 約 5,100 万台 :2016 年 6 月末 ) プローブ情報 携帯電話ネットワーク
 FM 多重放送 電波ビーコン 光ビーコンで情報配信 ( 約 5,100 万台 :2016 年 6 月末 ) プローブ情報 携帯電話ネットワーク") 参考資料 3 自動走行の実現に向けた総務省の取組 平成 28 年 12 月 15 日総務省 ICT を活用した ITS の概要 1 ITS は内閣府 警察庁 総務省 経済産業省 国土交通省が連携して推進 道路交通情報 VICS (1996 年 ~) FM 多重放送 電波ビーコン 光ビーコンで情報配信 ( 約 5,100 万台 :2016 年 6 月末 ) プローブ情報 携帯電話ネットワーク等自動車メーカー等では
参考資料 3 自動走行の実現に向けた総務省の取組 平成 28 年 12 月 15 日総務省 ICT を活用した ITS の概要 1 ITS は内閣府 警察庁 総務省 経済産業省 国土交通省が連携して推進 道路交通情報 VICS (1996 年 ~) FM 多重放送 電波ビーコン 光ビーコンで情報配信 ( 約 5,100 万台 :2016 年 6 月末 ) プローブ情報 携帯電話ネットワーク等自動車メーカー等では
Microsoft PowerPoint - chap8.ppt
 第 8 章 : フィードバック制御系の設計法 第 8 章 : フィードバック制御系の設計法 8. 設計手順と性能評価 キーワード : 設計手順, 性能評価 8. 補償による制御系設計 キーワード : ( 比例 ),( 積分 ),( 微分 ) 学習目標 : 一般的な制御系設計における手順と制御系の性能評価について学ぶ. 学習目標 : 補償の有効性について理解し, その設計手順を習得する. 第 8 章
第 8 章 : フィードバック制御系の設計法 第 8 章 : フィードバック制御系の設計法 8. 設計手順と性能評価 キーワード : 設計手順, 性能評価 8. 補償による制御系設計 キーワード : ( 比例 ),( 積分 ),( 微分 ) 学習目標 : 一般的な制御系設計における手順と制御系の性能評価について学ぶ. 学習目標 : 補償の有効性について理解し, その設計手順を習得する. 第 8 章
円筒面で利用可能なARマーカ
 円筒面で利用可能な AR マーカ AR Marker for Cylindrical Surface 2014 年 11 月 14 日 ( 金 ) 眞鍋佳嗣千葉大学大学院融合科学研究科 マーカベース AR 二次元マーカはカメラ姿勢の推定, 拡張現実等広い研究分野で利用されている 現実の風景 表示される画像 デジタル情報を付加 カメラで撮影し, ディスプレイに表示 使用方法の単純性, 認識の安定性からマーカベース
円筒面で利用可能な AR マーカ AR Marker for Cylindrical Surface 2014 年 11 月 14 日 ( 金 ) 眞鍋佳嗣千葉大学大学院融合科学研究科 マーカベース AR 二次元マーカはカメラ姿勢の推定, 拡張現実等広い研究分野で利用されている 現実の風景 表示される画像 デジタル情報を付加 カメラで撮影し, ディスプレイに表示 使用方法の単純性, 認識の安定性からマーカベース
全地連"次世代CALS"対応研究会 報告書
 4. GIS アプリケーションソフト 4.1 入手可能なソフト GIS アプリケーションソフトは, 大きく 2 区分することができる 1) 汎用 GIS ソフト 2) 管理 支援ソフト汎用 GIS ソフトは, ある目的に対して拡張機能を利用して GIS システムを開発することができる 一方管理 支援ソフトは, ある1つの目的に対して開発されたソフトであり, ユーザーがデータを入力することによりすぐに使用できる反面拡張性が少ない
4. GIS アプリケーションソフト 4.1 入手可能なソフト GIS アプリケーションソフトは, 大きく 2 区分することができる 1) 汎用 GIS ソフト 2) 管理 支援ソフト汎用 GIS ソフトは, ある目的に対して拡張機能を利用して GIS システムを開発することができる 一方管理 支援ソフトは, ある1つの目的に対して開発されたソフトであり, ユーザーがデータを入力することによりすぐに使用できる反面拡張性が少ない
Microsoft PowerPoint - tpms_session_matsuura
 1 このプレゼンテーションでは 5 つの項目について紹介します 2 近年 より快適 安全に環境に優しく高性能な自動車を開発すべく 各自動車メーカーが切磋琢磨しています 自動車を取り巻く数々の技術の中から ここではタイヤの空気圧を車両から監視し より安全に低燃費を実現するために用いられる タイヤ圧力監視システム の開発に役立つツールを紹介します 2000 年頃 米国内でタイヤの空気圧低下による事故が多発しました
1 このプレゼンテーションでは 5 つの項目について紹介します 2 近年 より快適 安全に環境に優しく高性能な自動車を開発すべく 各自動車メーカーが切磋琢磨しています 自動車を取り巻く数々の技術の中から ここではタイヤの空気圧を車両から監視し より安全に低燃費を実現するために用いられる タイヤ圧力監視システム の開発に役立つツールを紹介します 2000 年頃 米国内でタイヤの空気圧低下による事故が多発しました
Microsoft Word - 資料6(修正).docx
.docx") 運転支援機能の表示に関する規約運用の考え方 に基づく表示例 資料 6 カタログ (Webを含む) の表示例 < 表示例 1> カタログの表示例 運転支援機能に関する説明や注意喚起等の詳細を表示した上で その他の頁では スペース等の関係により 運転支援機能に関する説明や注意喚起等を全て表示できない場合の例 < 運転支援機能の内容説明 作動条件や作動しない条件等の詳細を表示した頁 > 新型 は止まるをサホ
運転支援機能の表示に関する規約運用の考え方 に基づく表示例 資料 6 カタログ (Webを含む) の表示例 < 表示例 1> カタログの表示例 運転支援機能に関する説明や注意喚起等の詳細を表示した上で その他の頁では スペース等の関係により 運転支援機能に関する説明や注意喚起等を全て表示できない場合の例 < 運転支援機能の内容説明 作動条件や作動しない条件等の詳細を表示した頁 > 新型 は止まるをサホ
IPSJ SIG Technical Report Vol.2012-EMB-26 No /9/10 1,a) 1,b) 1,c) 1,d) 1,e) 1,f) 1,g) 5 3D HILS HILS An Integrated Driving Simulator for Interdi
 1,b) 1,c) 1,d) 1,e) 1,f) 1,g) 5 3D HILS HILS An Integrated Driving Simulator for Interdi") 1,a) 1,b) 1,c) 1,d) 1,e) 1,f) 1,g) 5 3D HILS HILS An Integrated Driving Simulator for Interdisciplinary Education of Automotive Science in Kyushu University Makoto Uchiyama 1,a) Taketoshi Kawabe 1,b) Katsumi
1,a) 1,b) 1,c) 1,d) 1,e) 1,f) 1,g) 5 3D HILS HILS An Integrated Driving Simulator for Interdisciplinary Education of Automotive Science in Kyushu University Makoto Uchiyama 1,a) Taketoshi Kawabe 1,b) Katsumi
X-Swingカタログ P1 表紙
 X-Swing とは ゴルフ科学に基づき開発された 最先端のゴルフシミュレーター 驚くほどリアル あなたはシミュレーションゴルフに対する 偏見を捨てることになる 新しく開発された X-Swing なら 実際にフィールドでラウンドしてるかのような リアリティーを体感できます X-SWING PRODUCT COMPONENTS I-Swing PRODUCT COMPONENTS Z-Swing PRODUCT
X-Swing とは ゴルフ科学に基づき開発された 最先端のゴルフシミュレーター 驚くほどリアル あなたはシミュレーションゴルフに対する 偏見を捨てることになる 新しく開発された X-Swing なら 実際にフィールドでラウンドしてるかのような リアリティーを体感できます X-SWING PRODUCT COMPONENTS I-Swing PRODUCT COMPONENTS Z-Swing PRODUCT
Ⅰ. はじめに P1 Ⅱ. 交通渋滞 環境問題と ITS P2 1. 交通渋滞と環境問題の概況 P2 2. 交通渋滞のメカニズムと交通渋滞対策 P2 3. 交通渋滞対策 環境問題においてITSが果たすべき役割 P3 Ⅲ. 交通安全と ITS P4 1. 交通事故の概況 P4 2. 交通安全対策の概要
 資料 1 ITS に関するタスクフォース 報告書 ( 素案 ) 2011 年 1 月 事務局 Ⅰ. はじめに P1 Ⅱ. 交通渋滞 環境問題と ITS P2 1. 交通渋滞と環境問題の概況 P2 2. 交通渋滞のメカニズムと交通渋滞対策 P2 3. 交通渋滞対策 環境問題においてITSが果たすべき役割 P3 Ⅲ. 交通安全と ITS P4 1. 交通事故の概況 P4 2. 交通安全対策の概要 P4
資料 1 ITS に関するタスクフォース 報告書 ( 素案 ) 2011 年 1 月 事務局 Ⅰ. はじめに P1 Ⅱ. 交通渋滞 環境問題と ITS P2 1. 交通渋滞と環境問題の概況 P2 2. 交通渋滞のメカニズムと交通渋滞対策 P2 3. 交通渋滞対策 環境問題においてITSが果たすべき役割 P3 Ⅲ. 交通安全と ITS P4 1. 交通事故の概況 P4 2. 交通安全対策の概要 P4
STAMP/STPA を用いた 自動運転システムのリスク分析 - 高速道路での合流 - 堀雅年 * 伊藤信行 梶克彦 * 内藤克浩 * 水野忠則 * 中條直也 * * 愛知工業大学 三菱電機エンジニアリング 1
 STAMP/STPA を用いた 自動運転システムのリスク分析 - 高速道路での合流 - 堀雅年 * 伊藤信行 梶克彦 * 内藤克浩 * 水野忠則 * 中條直也 * * 愛知工業大学 三菱電機エンジニアリング 1 はじめに 近年 先進運転支援システムが発展 オートクルーズコントロール レーンキープアシスト 2020 年を目処にレベル3 自動運転車の市場化が期待 運転システムが複雑化 出典 : 官民 ITS
STAMP/STPA を用いた 自動運転システムのリスク分析 - 高速道路での合流 - 堀雅年 * 伊藤信行 梶克彦 * 内藤克浩 * 水野忠則 * 中條直也 * * 愛知工業大学 三菱電機エンジニアリング 1 はじめに 近年 先進運転支援システムが発展 オートクルーズコントロール レーンキープアシスト 2020 年を目処にレベル3 自動運転車の市場化が期待 運転システムが複雑化 出典 : 官民 ITS
国産BIM建築設計システム「GLOOBE 2018」2017年9月20日発売
 2017 年 8 月 7 日 国産 BIM 建築設計システム GLOOBE 2018 2017 年 9 月 20 日発売 福井コンピュータホールディングス株式会社 ( コード番号 :9790 東証第一部 ) 福井コンピュータアーキテクト株式会社 当社 連結子会社である福井コンピュータアーキテクト株式会社 ( 本社 : 福井県坂井市 代表取締役社長 : 林治克 ) では 国産 BIM 建築設計システム
2017 年 8 月 7 日 国産 BIM 建築設計システム GLOOBE 2018 2017 年 9 月 20 日発売 福井コンピュータホールディングス株式会社 ( コード番号 :9790 東証第一部 ) 福井コンピュータアーキテクト株式会社 当社 連結子会社である福井コンピュータアーキテクト株式会社 ( 本社 : 福井県坂井市 代表取締役社長 : 林治克 ) では 国産 BIM 建築設計システム
<4D F736F F D20837E836A837D E82CC88D98FED E12E646F63>
 振動分析計 VA-12 を用いた精密診断事例 リオン株式会社 振動分析計 VA-12 を用いた精密診断事例を紹介します 振動分析計 VA-12 は 振動計と高機能 FFT アナライザが一体となったハンディタイプの測定器です 振動計として使用する場合は加速度 速度 変位の同時計測 FFT アナライザとして使用する場合は 3200 ライン分解能 20kHz の連続リアルタイム分析が可能です また カラー液晶に日本語表示がされます
振動分析計 VA-12 を用いた精密診断事例 リオン株式会社 振動分析計 VA-12 を用いた精密診断事例を紹介します 振動分析計 VA-12 は 振動計と高機能 FFT アナライザが一体となったハンディタイプの測定器です 振動計として使用する場合は加速度 速度 変位の同時計測 FFT アナライザとして使用する場合は 3200 ライン分解能 20kHz の連続リアルタイム分析が可能です また カラー液晶に日本語表示がされます
IMAGENICS MS-802MS-803 取扱説明書 2
 IMAGENICS MULTISIGNAL MATRIX SWITCHER MS-802 MS-803 IMAGENICS MS-802MS-803 取扱説明書 2 IMAGENICS MS-802MS-803 取扱説明書 3 IMAGENICS MS-802MS-803 取扱説明書 4 IMAGENICS MS-802MS-803 取扱説明書 プロジェクター 1 プロジェクター 2 プロジェクター
IMAGENICS MULTISIGNAL MATRIX SWITCHER MS-802 MS-803 IMAGENICS MS-802MS-803 取扱説明書 2 IMAGENICS MS-802MS-803 取扱説明書 3 IMAGENICS MS-802MS-803 取扱説明書 4 IMAGENICS MS-802MS-803 取扱説明書 プロジェクター 1 プロジェクター 2 プロジェクター
Microsoft PowerPoint - 9.Analog.ppt
 9 章 CMOS アナログ基本回路 1 デジタル情報とアナログ情報 アナログ情報 大きさ デジタル信号アナログ信号 デジタル情報 時間 情報処理システムにおけるアナログ技術 通信 ネットワークの高度化 無線通信, 高速ネットワーク, 光通信 ヒューマンインタフェース高度化 人間の視覚, 聴覚, 感性にせまる 脳型コンピュータの実現 テ シ タルコンヒ ュータと相補的な情報処理 省エネルギーなシステム
9 章 CMOS アナログ基本回路 1 デジタル情報とアナログ情報 アナログ情報 大きさ デジタル信号アナログ信号 デジタル情報 時間 情報処理システムにおけるアナログ技術 通信 ネットワークの高度化 無線通信, 高速ネットワーク, 光通信 ヒューマンインタフェース高度化 人間の視覚, 聴覚, 感性にせまる 脳型コンピュータの実現 テ シ タルコンヒ ュータと相補的な情報処理 省エネルギーなシステム
Microsoft PowerPoint - 6.PID制御.pptx
 プロセス制御工学 6.PID 制御 京都大学 加納学 Division of Process Control & Process Systems Engineering Department of Chemical Engineering, Kyoto University manabu@cheme.kyoto-u.ac.jp http://www-pse.cheme.kyoto-u.ac.jp/~kano/
プロセス制御工学 6.PID 制御 京都大学 加納学 Division of Process Control & Process Systems Engineering Department of Chemical Engineering, Kyoto University manabu@cheme.kyoto-u.ac.jp http://www-pse.cheme.kyoto-u.ac.jp/~kano/
仕様書
 3DLP プロジェクター LX-4K3500Z 製品概要本製品は 高解像度コンピューターの画面や高画質デジタル映像を 高輝度で大画面に投写可能なレンズ交換方式の3DLP 方式のレーザー光源プロジェクターです * 本製品は交換レンズ方式のプロジェクターです 設置条件に合わせ 別売の交換レンズをお求めください 基本仕様 機種 LX-4K3500Z 方式 3 チップ DLP 方式 DMD パネル サイズ
3DLP プロジェクター LX-4K3500Z 製品概要本製品は 高解像度コンピューターの画面や高画質デジタル映像を 高輝度で大画面に投写可能なレンズ交換方式の3DLP 方式のレーザー光源プロジェクターです * 本製品は交換レンズ方式のプロジェクターです 設置条件に合わせ 別売の交換レンズをお求めください 基本仕様 機種 LX-4K3500Z 方式 3 チップ DLP 方式 DMD パネル サイズ
 DIRECT DRIVE ACTUATOR, QUICK RESPONSE TYPE, AX1000T, AX2000T, AX4000T SERIES CC-995 11 AX1000T AX2000T AX4000T AX9000TS AX9000TH AX0180 AX1000T Series AX1 022 TS B C DM04 J1 P1 U0 AX1000T
DIRECT DRIVE ACTUATOR, QUICK RESPONSE TYPE, AX1000T, AX2000T, AX4000T SERIES CC-995 11 AX1000T AX2000T AX4000T AX9000TS AX9000TH AX0180 AX1000T Series AX1 022 TS B C DM04 J1 P1 U0 AX1000T
スライド 1
 Katsura Laboratory Integrated Design Engineering Keio University ( 位置 力再現方法および位置 力再現装置 ) Department of Electrical Engineering Nagaoka University of Technology 長岡技術科学大学助教横倉勇希 新技術説明会 触覚 力覚情報の伝送 聴覚情報の伝送 視覚情報の伝送
Katsura Laboratory Integrated Design Engineering Keio University ( 位置 力再現方法および位置 力再現装置 ) Department of Electrical Engineering Nagaoka University of Technology 長岡技術科学大学助教横倉勇希 新技術説明会 触覚 力覚情報の伝送 聴覚情報の伝送 視覚情報の伝送
ニュースレター「SEI WORLD」2016年6月号
 1 SEIWORLD JUNE 2016 JUNE 2016 SEIWORLD 2 ITS Intelligent Transport Systems 安心 安全 で 快適 な モビリティ社会に貢献しています 今回ご紹介した製品 ソリューションは 住 友 電 工グル ープは い つから ITS関連製品を提 供しているの 当社 Webサイトで詳しくご紹介しています ぜひご覧ください http://www.sei.co.jp/products/its/
1 SEIWORLD JUNE 2016 JUNE 2016 SEIWORLD 2 ITS Intelligent Transport Systems 安心 安全 で 快適 な モビリティ社会に貢献しています 今回ご紹介した製品 ソリューションは 住 友 電 工グル ープは い つから ITS関連製品を提 供しているの 当社 Webサイトで詳しくご紹介しています ぜひご覧ください http://www.sei.co.jp/products/its/
スライド 1
 平成 28 年度経済産業省 国土交通省委託事業 自動走行の民事上の責任及び社会受容性に関する研究 シンポジウム 平成 29 年 3 月 7 日於 TKPガーデンシティPREMIUM 神保町 自動運転技術の動向について 独立行政法人自動車技術総合機構交通安全環境研究所自動車研究部河合英直 1 Agenda 1. 交通安全環境研究所について 2. 自動運転車とは 3. 運転支援技術の現状 4. 最後に
平成 28 年度経済産業省 国土交通省委託事業 自動走行の民事上の責任及び社会受容性に関する研究 シンポジウム 平成 29 年 3 月 7 日於 TKPガーデンシティPREMIUM 神保町 自動運転技術の動向について 独立行政法人自動車技術総合機構交通安全環境研究所自動車研究部河合英直 1 Agenda 1. 交通安全環境研究所について 2. 自動運転車とは 3. 運転支援技術の現状 4. 最後に
ITS とは 1 ITS の役割 ITS (Intelligent Transport Systemsys) 高度道路交通システム 人と道路と自動車の間で情報の受発信を行い 道路交通が抱える事故や渋滞 環境対策など 様々な課題を解決するためのシステムとして考えられました 常に最先端の情報通信や制御技
 高度道路交通システム 人と道路と自動車の間で情報の受発信を行い 道路交通が抱える事故や渋滞 環境対策など 様々な課題を解決するためのシステムとして考えられました 常に最先端の情報通信や制御技") 文部科学省委託事業 次世代自動車エキスパート養成教育プログラム開発事業 実証実験授業講座名 次世代自動車基礎地域版 社会における ITS の役割について 氏名 1 ITS とは 1 ITS の役割 ITS (Intelligent Transport Systemsys) 高度道路交通システム 人と道路と自動車の間で情報の受発信を行い 道路交通が抱える事故や渋滞 環境対策など 様々な課題を解決するためのシステムとして考えられました
文部科学省委託事業 次世代自動車エキスパート養成教育プログラム開発事業 実証実験授業講座名 次世代自動車基礎地域版 社会における ITS の役割について 氏名 1 ITS とは 1 ITS の役割 ITS (Intelligent Transport Systemsys) 高度道路交通システム 人と道路と自動車の間で情報の受発信を行い 道路交通が抱える事故や渋滞 環境対策など 様々な課題を解決するためのシステムとして考えられました
IMUシュミレータインストール方法
 IMU Simulator for Motioncoder GPS アプリケーション説明 IMU Simulator インストール方法 1 添付ファイルの setup.exe をクリックします 2 インストール先のフォルダを指定します 3 デスクトップにショートカットを作成するか選択します 4 インストールが開始されます 5 インストール完了ダイアログボックスが表示され 閉じる ボタンで終了します
IMU Simulator for Motioncoder GPS アプリケーション説明 IMU Simulator インストール方法 1 添付ファイルの setup.exe をクリックします 2 インストール先のフォルダを指定します 3 デスクトップにショートカットを作成するか選択します 4 インストールが開始されます 5 インストール完了ダイアログボックスが表示され 閉じる ボタンで終了します
Microsoft Word - 資料4(修正).docx
.docx") 資料 4 運転支援機能の表示に関する規約運用の考え方 平成 30 年 11 月 20 日一般社団法人自動車公正取引協議会新車委員会 大型車委員会決定 衝突被害軽減ブレーキや車線逸脱警報装置 ペダル踏み間違い時加速抑制装置や自動運転化技術レベル2までの段階の機能や技術 ( 以下 運転支援機能 という ) について 一般消費者への理解促進を図るとともに 過信や誤解を招くような表示が行われることのないよう
資料 4 運転支援機能の表示に関する規約運用の考え方 平成 30 年 11 月 20 日一般社団法人自動車公正取引協議会新車委員会 大型車委員会決定 衝突被害軽減ブレーキや車線逸脱警報装置 ペダル踏み間違い時加速抑制装置や自動運転化技術レベル2までの段階の機能や技術 ( 以下 運転支援機能 という ) について 一般消費者への理解促進を図るとともに 過信や誤解を招くような表示が行われることのないよう
 ZERO 74V 待機画面説明書 メイン表示 例 Ver.1 921041 注意 運転者は走行中に本製品を絶対に操作しないでください 必ず同乗者が操作を行なってください 画面のタッチは指で軽く触れてください 画面の反応がないときは 一度指を離してから再度タッチしてください 画面を強く押したり 先の鋭いもので押さないでください タッチパネルが割れて ケガの原因となります 本製品は抵抗膜方式のタッチパネルを採用しています
ZERO 74V 待機画面説明書 メイン表示 例 Ver.1 921041 注意 運転者は走行中に本製品を絶対に操作しないでください 必ず同乗者が操作を行なってください 画面のタッチは指で軽く触れてください 画面の反応がないときは 一度指を離してから再度タッチしてください 画面を強く押したり 先の鋭いもので押さないでください タッチパネルが割れて ケガの原因となります 本製品は抵抗膜方式のタッチパネルを採用しています
(Microsoft PowerPoint - \216\251\223]\216\324\224F\216\257\202\314\223\256\214\374.pptx)
![(Microsoft PowerPoint - \216\251\223]\216\324\224F\216\257\202\314\223\256\214\374.pptx)](/thumbs/91/107002316.jpg "(Microsoft PowerPoint - \216\251\223]\216\324\224F\216\257\202\314\223\256\214\374.pptx)") 車載認識装置における自転車認識技術の動向 - トピック分析による認識技術の分類 - 歩行者認識の技術でテーマの内容を説明 特許庁 : 自動運転自動車より 2017.11.30 発表 JFE テクノリサーチ 平川雅彦 1 目 次 1. 調査の目的 2. 概念検索 3. 検索結果 4. 自転車認識技術の特徴 5. トピックモデルトピック分析と多次元尺度法との対比トピック KW によるランキング解析 6.
車載認識装置における自転車認識技術の動向 - トピック分析による認識技術の分類 - 歩行者認識の技術でテーマの内容を説明 特許庁 : 自動運転自動車より 2017.11.30 発表 JFE テクノリサーチ 平川雅彦 1 目 次 1. 調査の目的 2. 概念検索 3. 検索結果 4. 自転車認識技術の特徴 5. トピックモデルトピック分析と多次元尺度法との対比トピック KW によるランキング解析 6.
モータ HILS の概要 1 はじめに モータ HILS の需要 自動車の電子化及び 電気自動車やハイブリッド車の実用化に伴い モータの使用数が増大しています 従来行われていた駆動用モータ単体のシミュレーション レシプロエンジンとモータの駆動力分配制御シミュレーションの利用に加え パワーウインドやサ
 モータ HILS の概要 1 はじめに モータ HILS の需要 自動車の電子化及び 電気自動車やハイブリッド車の実用化に伴い モータの使用数が増大しています 従来行われていた駆動用モータ単体のシミュレーション レシプロエンジンとモータの駆動力分配制御シミュレーションの利用に加え パワーウインドやサンルーフなどのボディー系 電動パワーステアリングやそのアシスト機能など 高度な制御 大電流の制御などが要求されています
モータ HILS の概要 1 はじめに モータ HILS の需要 自動車の電子化及び 電気自動車やハイブリッド車の実用化に伴い モータの使用数が増大しています 従来行われていた駆動用モータ単体のシミュレーション レシプロエンジンとモータの駆動力分配制御シミュレーションの利用に加え パワーウインドやサンルーフなどのボディー系 電動パワーステアリングやそのアシスト機能など 高度な制御 大電流の制御などが要求されています
1 趣旨このガイドラインは 日本国内の公道 ( 道路交通法 ( 昭和 35 年法律第 105 号 ) 第 2 条第 1 項第 1 号に規定する 道路 をいう 以下同じ ) において 自動走行システム ( 加速 操舵 制動のうち複数の操作を一度に行い 又はその全てを行うシステムをいう 以下同じ ) を
 第 2 条第 1 項第 1 号に規定する 道路 をいう 以下同じ ) において 自動走行システム ( 加速 操舵 制動のうち複数の操作を一度に行い 又はその全てを行うシステムをいう 以下同じ ) を") 自動走行システムに関する公道実証実験のためのガイドライン 平成 28 年 5 月 警察庁 1 趣旨このガイドラインは 日本国内の公道 ( 道路交通法 ( 昭和 35 年法律第 105 号 ) 第 2 条第 1 項第 1 号に規定する 道路 をいう 以下同じ ) において 自動走行システム ( 加速 操舵 制動のうち複数の操作を一度に行い 又はその全てを行うシステムをいう 以下同じ ) を用いて自動車を走行させる実証実験
自動走行システムに関する公道実証実験のためのガイドライン 平成 28 年 5 月 警察庁 1 趣旨このガイドラインは 日本国内の公道 ( 道路交通法 ( 昭和 35 年法律第 105 号 ) 第 2 条第 1 項第 1 号に規定する 道路 をいう 以下同じ ) において 自動走行システム ( 加速 操舵 制動のうち複数の操作を一度に行い 又はその全てを行うシステムをいう 以下同じ ) を用いて自動車を走行させる実証実験
Microsoft PowerPoint - 発表II-3原稿r02.ppt [互換モード]
![Microsoft PowerPoint - 発表II-3原稿r02.ppt [互換モード]](/thumbs/91/105561911.jpg "Microsoft PowerPoint - 発表II-3原稿r02.ppt [互換モード]") 地震時の原子力発電所燃料プールからの溢水量解析プログラム 地球工学研究所田中伸和豊田幸宏 Central Research Institute of Electric Power Industry 1 1. はじめに ( その 1) 2003 年十勝沖地震では 震源から離れた苫小牧地区の石油タンクに スロッシング ( 液面揺動 ) による火災被害が生じた 2007 年中越沖地震では 原子力発電所内の燃料プールからの溢水があり
地震時の原子力発電所燃料プールからの溢水量解析プログラム 地球工学研究所田中伸和豊田幸宏 Central Research Institute of Electric Power Industry 1 1. はじめに ( その 1) 2003 年十勝沖地震では 震源から離れた苫小牧地区の石油タンクに スロッシング ( 液面揺動 ) による火災被害が生じた 2007 年中越沖地震では 原子力発電所内の燃料プールからの溢水があり
がある. 傾向を空間座標上の確率分布として示す手法を構築した. 具体的な手法を以下に記す. 周辺視野 中心視 ( 注視点 ) 有効視野 図 1 視野のイメージ 2. 2 視認行動の指標ドライバの視認行動を表す指標としては, 注視位置 ( 注視時間 ) や光点検出反応 ( ドライバの周囲に点灯した光点
 有効視野 図 1 視野のイメージ 2. 2 視認行動の指標ドライバの視認行動を表す指標としては, 注視位置 ( 注視時間 ) や光点検出反応 ( ドライバの周囲に点灯した光点") 技術資料 JARI Research Journal 20130801 実車環境での視覚的注意の評価手法に関する検討 Visual Analysis Techinique of Drivers' Attention Area in Actual Vehicle Driving Conditions 菊地一範 佐藤健治 本間亮平 田川 傑 Kazunori KIKUCHI Kenji SATO Ryohei
技術資料 JARI Research Journal 20130801 実車環境での視覚的注意の評価手法に関する検討 Visual Analysis Techinique of Drivers' Attention Area in Actual Vehicle Driving Conditions 菊地一範 佐藤健治 本間亮平 田川 傑 Kazunori KIKUCHI Kenji SATO Ryohei
 PA3-145 213-214 Kodensy.Co.Ltd.KDS 励磁突入電流発生のメカニズムとその抑制のためのアルゴリズム. 励磁突入電流抑制のアルゴリズム 弊社特許方式 変圧器の励磁突入電流の原因となる残留磁束とは変圧器の解列瞬時の鉄心内磁束ではありません 一般に 変圧器の 2次側 負荷側 開放で励磁課電中の変圧器を 1 次側 高圧側 遮断器の開操作で解列する時 その遮断直後は 変圧器鉄心
PA3-145 213-214 Kodensy.Co.Ltd.KDS 励磁突入電流発生のメカニズムとその抑制のためのアルゴリズム. 励磁突入電流抑制のアルゴリズム 弊社特許方式 変圧器の励磁突入電流の原因となる残留磁束とは変圧器の解列瞬時の鉄心内磁束ではありません 一般に 変圧器の 2次側 負荷側 開放で励磁課電中の変圧器を 1 次側 高圧側 遮断器の開操作で解列する時 その遮断直後は 変圧器鉄心
はじめに 構成シミュレーションと注文 受け取り 1
 はじめに 構成シミュレーションと注文 受け取り 1 [mm] [mm] [mm] [kg/m] [m] [ C] E E Z Z ウェブガイド の使い方 製品写真の横に サイズや走行距離などの製品概要があります オレンジ色のカタログ クイックリンク (www.igus.co.jp/web/...) は オンラインの製品情報に直接つながり 製品の構成 比較 3D データ作成 寿命計算 見積り依頼をすることが可能です
はじめに 構成シミュレーションと注文 受け取り 1 [mm] [mm] [mm] [kg/m] [m] [ C] E E Z Z ウェブガイド の使い方 製品写真の横に サイズや走行距離などの製品概要があります オレンジ色のカタログ クイックリンク (www.igus.co.jp/web/...) は オンラインの製品情報に直接つながり 製品の構成 比較 3D データ作成 寿命計算 見積り依頼をすることが可能です
<4D F736F F F696E74202D20895E935D8E D BB8C7689E68A C4816A72332E >
 運転 援システム 度化計画 ( 概要 ) 的 ヒトやモノが安全 快適に移動することのできる社会 の実現に向け 関係府省の連携による研究開発 政府主導の実証計画等によって構成される計画を策定する ( 本再興戦略 ( 平成 25 年 6 14 閣議決定 )) 運転 援システム 動 システムによって得られる効果 1 渋滞の解消 緩和 2 交通事故の削減 3 環境負荷の低減 4 齢者等の移動 援 5 運転の快適性の向上
運転 援システム 度化計画 ( 概要 ) 的 ヒトやモノが安全 快適に移動することのできる社会 の実現に向け 関係府省の連携による研究開発 政府主導の実証計画等によって構成される計画を策定する ( 本再興戦略 ( 平成 25 年 6 14 閣議決定 )) 運転 援システム 動 システムによって得られる効果 1 渋滞の解消 緩和 2 交通事故の削減 3 環境負荷の低減 4 齢者等の移動 援 5 運転の快適性の向上
Microsoft PowerPoint - day1-l05.pptx
 自動運転の実現に向けた 警察の取組について 平成 30 年 11 月 14 日警察庁交通局交通企画課自動運転企画室長杉俊弘 概 要 1 日本における交通事故の発生状況等 2 自動運転の概要と制度整備大綱 3 自動運転の実現に向けた警察の取組 1 日本における交通事故の発生状況 ( 人 ) 7,000 6,000 5,000 4,000 3,000 2,000 1,000 0 平成 6,415 5,796
自動運転の実現に向けた 警察の取組について 平成 30 年 11 月 14 日警察庁交通局交通企画課自動運転企画室長杉俊弘 概 要 1 日本における交通事故の発生状況等 2 自動運転の概要と制度整備大綱 3 自動運転の実現に向けた警察の取組 1 日本における交通事故の発生状況 ( 人 ) 7,000 6,000 5,000 4,000 3,000 2,000 1,000 0 平成 6,415 5,796

<4D F736F F F696E74202D E E096BE8E9197BF B998488AC28BAB89DB2E B8CDD8AB B83685D>
 資料 9 観光案内サイン整備ガイドラインの 改訂について 平成 28 年 5 月 23 日県土マネジメント部道路環境課 0 〇観光案内サイン整備ガイドラインについて歩行者系案内サイン 公園案内板 ( 図解 ) 矢羽根型看板石標 ( トイレ案内 ) 園地案内 問題点 歴史の道案内板 羽根型看板 1 統一性がなく わかりにくい 2 案内が広範囲である 3 ローマ字表記がない 4 トイレ等のピクト表記がない
資料 9 観光案内サイン整備ガイドラインの 改訂について 平成 28 年 5 月 23 日県土マネジメント部道路環境課 0 〇観光案内サイン整備ガイドラインについて歩行者系案内サイン 公園案内板 ( 図解 ) 矢羽根型看板石標 ( トイレ案内 ) 園地案内 問題点 歴史の道案内板 羽根型看板 1 統一性がなく わかりにくい 2 案内が広範囲である 3 ローマ字表記がない 4 トイレ等のピクト表記がない
Microsoft PowerPoint - 渡辺.pptx
 2010 年 11 月 29 日 筑波大学大学院システム情報工学研究科 准教授渡辺俊 景観シミュレーションション - 開発側のツール?- 1985 年頃 ~ フォトリアリスティックな映像の探究 印刷物 / 室内でのオンスクリーン プレゼンテーションによる提示 平面画像による空間認識と実空間での空間認識の違い 地理情報科学と都市工学を融合した空間解析手法の新展開 Page 1 地理情報科学と都市工学を融合した空間解析手法の新展開
2010 年 11 月 29 日 筑波大学大学院システム情報工学研究科 准教授渡辺俊 景観シミュレーションション - 開発側のツール?- 1985 年頃 ~ フォトリアリスティックな映像の探究 印刷物 / 室内でのオンスクリーン プレゼンテーションによる提示 平面画像による空間認識と実空間での空間認識の違い 地理情報科学と都市工学を融合した空間解析手法の新展開 Page 1 地理情報科学と都市工学を融合した空間解析手法の新展開
【生産性革命プロジェクト】 産業界における気象情報利活用
 クルマの ICT 革命 ~ 自動運転 社会実装 ~ 自動運転技術の実用化により 安全性の向上 運送効率の向上 新たな交通サービスの創出等が図られ 大幅な生産性向上に資する可能性 これらの実現に向けて ルールの整備やシステムの実証を進める 政策課題 交通事故の 96% は運転者に起因 法令違反別死亡事故発生件数 (H25 年 ) トラックの隊列走行 運転者の法令違反 96% 将来ビジョンと実用化に向けた課題
クルマの ICT 革命 ~ 自動運転 社会実装 ~ 自動運転技術の実用化により 安全性の向上 運送効率の向上 新たな交通サービスの創出等が図られ 大幅な生産性向上に資する可能性 これらの実現に向けて ルールの整備やシステムの実証を進める 政策課題 交通事故の 96% は運転者に起因 法令違反別死亡事故発生件数 (H25 年 ) トラックの隊列走行 運転者の法令違反 96% 将来ビジョンと実用化に向けた課題
230 V ホットランナシステム用コントローラー 年間保証 HPS-C-SLOT + 経済的なスロットコントローラー HPS-C-SLOT + コントローラは キャビティ数の少ないホットランナシステムの精密な制御のために設計されています 1 つのコントローラーは最高 12 ゾーンま
 HPS-C-SLOT + / 230 V HPS-C-PRO + / 230 V HPS-C-E / 5 V HPS-C ホットランナコントローラー 230 V 及び 5 V システム用 エビコン 230 V ホットランナシステム用コントローラー 2-24 5 - 年間保証 HPS-C-SLOT + 経済的なスロットコントローラー HPS-C-SLOT + コントローラは キャビティ数の少ないホットランナシステムの精密な制御のために設計されています
HPS-C-SLOT + / 230 V HPS-C-PRO + / 230 V HPS-C-E / 5 V HPS-C ホットランナコントローラー 230 V 及び 5 V システム用 エビコン 230 V ホットランナシステム用コントローラー 2-24 5 - 年間保証 HPS-C-SLOT + 経済的なスロットコントローラー HPS-C-SLOT + コントローラは キャビティ数の少ないホットランナシステムの精密な制御のために設計されています
文字数と行数を指定テンプレート
 Chapter 5 アイソメ図の作成 まず簡単なアイソメ図を作成してみよう 0 PIPE2000 にて アイソメ図を作成する手順は通常下記のフローのようになります 5-1 PIPE2000 の起動及び初期設定 5-2 画面設定 5-11 材料欄作成 5-3 PMS クラスの設定 5-12 属性表示 OFF 5-4 配管ルートの作成 5-13 終了 5-5&6 T 入力 & オートエルボ実行 5-7
Chapter 5 アイソメ図の作成 まず簡単なアイソメ図を作成してみよう 0 PIPE2000 にて アイソメ図を作成する手順は通常下記のフローのようになります 5-1 PIPE2000 の起動及び初期設定 5-2 画面設定 5-11 材料欄作成 5-3 PMS クラスの設定 5-12 属性表示 OFF 5-4 配管ルートの作成 5-13 終了 5-5&6 T 入力 & オートエルボ実行 5-7
資料 3 社会資本整備審議会道路分科会基本政策部会 先進モビリティ ( 株 ) における 自動運転技術開発の取り組み 先進モビリティ株式会社代表取締役 青木 啓二 Advanced Smart Mobility 1
 における 自動運転技術開発の取り組み 先進モビリティ株式会社代表取締役 青木 啓二 Advanced Smart Mobility 1") 資料 3 社会資本整備審議会道路分科会基本政策部会 先進モビリティ ( 株 ) における 自動運転技術開発の取り組み 先進モビリティ株式会社代表取締役 青木 啓二 Advanced Smart Mobility 1 先進モビリティ ( 株 ) における技術開発の取り組み 大型トラック隊列走行技術 ITS 関係府省 トラックドライバー不足対策のため 高速道路上での後続車無人隊列走行を実現する自動運転トラックを開発中
資料 3 社会資本整備審議会道路分科会基本政策部会 先進モビリティ ( 株 ) における 自動運転技術開発の取り組み 先進モビリティ株式会社代表取締役 青木 啓二 Advanced Smart Mobility 1 先進モビリティ ( 株 ) における技術開発の取り組み 大型トラック隊列走行技術 ITS 関係府省 トラックドライバー不足対策のため 高速道路上での後続車無人隊列走行を実現する自動運転トラックを開発中
Microsoft PowerPoint - C⑥O&M_Part_III_JWPA_seminar-UL Rev3.pptx
 O&M パート III メンテナンスの最適化 Michaël Drexler - 2015 年 3 月 3 日 サイト評価 風力タービン評価 送電系統統合 デューディリジェンス アドバイザリーサービス 本書は参考和訳です 翻訳に疑義が生じた場合は 原文の内容が優先されます アジェンダ 1. メンテナンスの指針 I. 予防保全 II. 事後保全 III. メンテナンスの最適化 2. 状態監視システム
O&M パート III メンテナンスの最適化 Michaël Drexler - 2015 年 3 月 3 日 サイト評価 風力タービン評価 送電系統統合 デューディリジェンス アドバイザリーサービス 本書は参考和訳です 翻訳に疑義が生じた場合は 原文の内容が優先されます アジェンダ 1. メンテナンスの指針 I. 予防保全 II. 事後保全 III. メンテナンスの最適化 2. 状態監視システム
Microsoft Word - 実験テキスト2005.doc
 7. プロセスの動特性 [Ⅰ] 目的液レベル制御実験および同シミュレーションを通して ステップ応答に基づくプロセス伝達関数の同定方法 ステップ応答法による PI 制御パラメータの調整方法 および PI 制御パラメータが制御性能へ与える影響について習熟する さらに 制御シミュレーションを通して むだ時間を有するプロセスに対するスミス補償型制御の有効性を確認する [Ⅱ] 理論 2.1 ステップ応答実験による伝達関数の同定
7. プロセスの動特性 [Ⅰ] 目的液レベル制御実験および同シミュレーションを通して ステップ応答に基づくプロセス伝達関数の同定方法 ステップ応答法による PI 制御パラメータの調整方法 および PI 制御パラメータが制御性能へ与える影響について習熟する さらに 制御シミュレーションを通して むだ時間を有するプロセスに対するスミス補償型制御の有効性を確認する [Ⅱ] 理論 2.1 ステップ応答実験による伝達関数の同定
車載式故障診断装置 (OBD) に関する制度と運用の現状 資料 4
 に関する制度と運用の現状 資料 4") 車載式故障診断装置 (OBD) に関する制度と運用の現状 資料 4 OBD( 車載式故障診断装置 ) とは 車載式故障診断装置 (OBD:On-Board Diagnostics) とは エンジンやトランスミッションなどの電子制御装置 (ECU:Electronic Control Unit) 内部に搭載された故障診断機能である ECU は 自動車が安全 環境性能を発揮するため センサからの信号等に基づき最適な制御を行っているが
車載式故障診断装置 (OBD) に関する制度と運用の現状 資料 4 OBD( 車載式故障診断装置 ) とは 車載式故障診断装置 (OBD:On-Board Diagnostics) とは エンジンやトランスミッションなどの電子制御装置 (ECU:Electronic Control Unit) 内部に搭載された故障診断機能である ECU は 自動車が安全 環境性能を発揮するため センサからの信号等に基づき最適な制御を行っているが
スライド 1
 平成 22 年 6 月 11 日改定 ドライブレコーダ取扱補足資料 製品名 :CDR-180 ドライブレコーダ取り扱い補足資料をご利用の場合は 付属の取り扱い本書と併用してご利用ください 日本低炭素開発株式会社 初期本体機器の取付及びファームのソフト設定作業 初期設定 ファームとは CDR-180 本体機器のソフトを示します フロントガラス 両面テープで固定 手順 2 CDR-180 本体に SDHC
平成 22 年 6 月 11 日改定 ドライブレコーダ取扱補足資料 製品名 :CDR-180 ドライブレコーダ取り扱い補足資料をご利用の場合は 付属の取り扱い本書と併用してご利用ください 日本低炭素開発株式会社 初期本体機器の取付及びファームのソフト設定作業 初期設定 ファームとは CDR-180 本体機器のソフトを示します フロントガラス 両面テープで固定 手順 2 CDR-180 本体に SDHC
Microsoft Word Mishima.doc
 研究活動紹介 JARI Rarch Journal 010604 省エネ運転制御を用いた自動運転車両の開発 Dvlopmnt of an autonomou driving control vhicl uing nrgy-aving control 三島康之 *1 Yauyuki MISHIMA 北村高志 *1 Takahi KITAMURA 1. はじめに 自動車から排出される CO の削減および省エ
研究活動紹介 JARI Rarch Journal 010604 省エネ運転制御を用いた自動運転車両の開発 Dvlopmnt of an autonomou driving control vhicl uing nrgy-aving control 三島康之 *1 Yauyuki MISHIMA 北村高志 *1 Takahi KITAMURA 1. はじめに 自動車から排出される CO の削減および省エ
 ZERO 73V 待機画面説明書 メイン表示 例 Ver.1 617031 注意 運転者は走行中に本製品を絶対に操作しないでください 必ず同乗者が操作を行なってください 画面のタッチは指で軽く触れてください 画面の反応がないときは 一度指を離してから再度タッチしてください 画面を強く押したり 先の鋭いもので押さないでください タッチパネルが割れて ケガの原因となります 本製品は抵抗膜方式のタッチパネルを採用しています
ZERO 73V 待機画面説明書 メイン表示 例 Ver.1 617031 注意 運転者は走行中に本製品を絶対に操作しないでください 必ず同乗者が操作を行なってください 画面のタッチは指で軽く触れてください 画面の反応がないときは 一度指を離してから再度タッチしてください 画面を強く押したり 先の鋭いもので押さないでください タッチパネルが割れて ケガの原因となります 本製品は抵抗膜方式のタッチパネルを採用しています
Microsoft Word - 02_プレス資料(別紙).doc
.doc") 道路運送車両の保安基準の細目を定める告示 等の一部改正について 1. 背景我が国の安全 環境基準のレベルを維持しつつ 自動車基準の国際調和 認証の相互承認の推進のため 平成 10 年に国連の 車両等の型式認定相互承認協定 ( 以下 相互承認協定 という ) に加入し その後 相互承認協定に基づく規則 ( 以下 協定規則 という ) について段階的に採用を進めているところです 今般 乗用車の制動装置に係る協定規則
道路運送車両の保安基準の細目を定める告示 等の一部改正について 1. 背景我が国の安全 環境基準のレベルを維持しつつ 自動車基準の国際調和 認証の相互承認の推進のため 平成 10 年に国連の 車両等の型式認定相互承認協定 ( 以下 相互承認協定 という ) に加入し その後 相互承認協定に基づく規則 ( 以下 協定規則 という ) について段階的に採用を進めているところです 今般 乗用車の制動装置に係る協定規則
【3Dプレゼン拡張機能】トレーニングマニュアル1_vol2
 3D プレゼン拡張機能 トレーニングマニュアル 1 ウェブトゥダイレクト 3D 画面周り 実装機能の解説 Vol.2 この章では 3Dプレゼン拡張機能の ウェブトゥダイレクト3D ( 以下 WTD-3D) の画面回りと実装機能の解説を行います パースメニュー画面の WTD-3D は パース作成を行う外観/ 内観の視点登録や 3D 添景部品を専用 WEB からダイレクトに配置してパースモードに移動して仕上実行
3D プレゼン拡張機能 トレーニングマニュアル 1 ウェブトゥダイレクト 3D 画面周り 実装機能の解説 Vol.2 この章では 3Dプレゼン拡張機能の ウェブトゥダイレクト3D ( 以下 WTD-3D) の画面回りと実装機能の解説を行います パースメニュー画面の WTD-3D は パース作成を行う外観/ 内観の視点登録や 3D 添景部品を専用 WEB からダイレクトに配置してパースモードに移動して仕上実行
GE巻頭言.indd
 20 183 日本バーチャルリアリティ学会誌第 7 巻 3 号 2002 年 9 月 1. はじめに NTT GAVA Generation and Acceleration environment for Virtual and Augmented reality communication1 GAVA CAVE 2. 場 の通信 GAVA 1 CG CAVE 2 図 1 場の通信システム GAVA
20 183 日本バーチャルリアリティ学会誌第 7 巻 3 号 2002 年 9 月 1. はじめに NTT GAVA Generation and Acceleration environment for Virtual and Augmented reality communication1 GAVA CAVE 2. 場 の通信 GAVA 1 CG CAVE 2 図 1 場の通信システム GAVA
FFT
 ACTRAN for NASTRAN Product Overview Copyright Free Field Technologies ACTRAN Modules ACTRAN for NASTRAN ACTRAN DGM ACTRAN Vibro-Acoustics ACTRAN Aero-Acoustics ACTRAN TM ACTRAN Acoustics ACTRAN VI 2 Copyright
ACTRAN for NASTRAN Product Overview Copyright Free Field Technologies ACTRAN Modules ACTRAN for NASTRAN ACTRAN DGM ACTRAN Vibro-Acoustics ACTRAN Aero-Acoustics ACTRAN TM ACTRAN Acoustics ACTRAN VI 2 Copyright
2008 年度下期未踏 IT 人材発掘 育成事業採択案件評価書 1. 担当 PM 田中二郎 PM ( 筑波大学大学院システム情報工学研究科教授 ) 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3.
 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3.") 2008 年度下期未踏 IT 人材発掘 育成事業採択案件評価書 1. 担当 PM 田中二郎 PM ( 筑波大学大学院システム情報工学研究科教授 ) 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3. プロジェクト管理組織 株式会社オープンテクノロジーズ 4. 委託金支払額 3,000,000 円 5.
2008 年度下期未踏 IT 人材発掘 育成事業採択案件評価書 1. 担当 PM 田中二郎 PM ( 筑波大学大学院システム情報工学研究科教授 ) 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3. プロジェクト管理組織 株式会社オープンテクノロジーズ 4. 委託金支払額 3,000,000 円 5.
トヨタ 日産 ホンダ 装置名称 歩行者検知機能付 プリクラッシュセーフティシステム ( 衝突回避支援型 ) プリクラッシュセーフティシステム ( 歩行者検知機能付衝突回避支援型 ) エマージンシーブレーキシステム エマージンシーブレーキシステム エマージンシーブレーキシステム シティブレーキアクティ
 プリクラッシュセーフティシステム ( 歩行者検知機能付衝突回避支援型 ) エマージンシーブレーキシステム エマージンシーブレーキシステム エマージンシーブレーキシステム シティブレーキアクティ") 平成 28 年度第 2 回車両安全対策検討会平成 28 年 12 月 9 日 安全 - 資料 4 高齢運転者による交通事故防止対策について 1. 背景 本年 10 月 横浜市において 87 歳の高齢者が運転する軽トラックが集団登校中の小学生の列に突っ込み 小学生 1 名が死亡するなど 高齢運転者による交通事故が相次いでいる このため 11 月 15 日 政府は 高齢運転者による交通事故防止対策に関する関係閣僚会議
平成 28 年度第 2 回車両安全対策検討会平成 28 年 12 月 9 日 安全 - 資料 4 高齢運転者による交通事故防止対策について 1. 背景 本年 10 月 横浜市において 87 歳の高齢者が運転する軽トラックが集団登校中の小学生の列に突っ込み 小学生 1 名が死亡するなど 高齢運転者による交通事故が相次いでいる このため 11 月 15 日 政府は 高齢運転者による交通事故防止対策に関する関係閣僚会議
Vectorworks 投影シミュレーションプラグイン
 1 概要 Vectorworks 投影シミュレーションプラグイン 利用ガイド 第 1 版 2015 年 4 月 2 日 1 Copyright 2015 ORIHALCON Technologies.All Rights Reserved. 1 概要 1 概要 投影シミュレーションプラグイン は Vectorworks 上で実際のプロジェクターやレンズパラメータを もとに 正確な 3D 投影シミュレーションを行うためのツールです
1 概要 Vectorworks 投影シミュレーションプラグイン 利用ガイド 第 1 版 2015 年 4 月 2 日 1 Copyright 2015 ORIHALCON Technologies.All Rights Reserved. 1 概要 1 概要 投影シミュレーションプラグイン は Vectorworks 上で実際のプロジェクターやレンズパラメータを もとに 正確な 3D 投影シミュレーションを行うためのツールです
vecrot
 1. ベクトル ベクトル : 方向を持つ量 ベクトルには 1 方向 2 大きさ ( 長さ ) という 2 つの属性がある ベクトルの例 : 物体の移動速度 移動量電場 磁場の強さ風速力トルクなど 2. ベクトルの表現 2.1 矢印で表現される 矢印の長さ : ベクトルの大きさ 矢印の向き : ベクトルの方向 2.2 2 個の点を用いて表現する 始点 () と終点 () を結ぶ半直線の向き : ベクトルの方向
1. ベクトル ベクトル : 方向を持つ量 ベクトルには 1 方向 2 大きさ ( 長さ ) という 2 つの属性がある ベクトルの例 : 物体の移動速度 移動量電場 磁場の強さ風速力トルクなど 2. ベクトルの表現 2.1 矢印で表現される 矢印の長さ : ベクトルの大きさ 矢印の向き : ベクトルの方向 2.2 2 個の点を用いて表現する 始点 () と終点 () を結ぶ半直線の向き : ベクトルの方向
フォークリフト開発を支えるマルチボディダイナミクス技術展開,三菱重工技報 Vol.47 No.2(2010)
") 交通 物流特集技術論文 24 フォークリフト開発を支えるマルチボディダイナミクス技術展開 Technical Approach to Apply Multibody Dynamics to Development of Forklift Truck *1 長谷川修 *2 赤木朋宏 Osamu Hasegawa Tomohiro Akaki *3 広江隆治 *2 村田直史 Takaharu Hiroe
交通 物流特集技術論文 24 フォークリフト開発を支えるマルチボディダイナミクス技術展開 Technical Approach to Apply Multibody Dynamics to Development of Forklift Truck *1 長谷川修 *2 赤木朋宏 Osamu Hasegawa Tomohiro Akaki *3 広江隆治 *2 村田直史 Takaharu Hiroe
<4D F736F F D E817A899E977095D22D979A97F082C882B >
 Ⅷ. 危険の予測及び回避 本章では 道路状況が運転に与える影響を整理するとともに トラックの運転に関して生じるさまざまな危険について整理しています 指導においては 危険予知訓練の手法を用いて 危険の予測及び回避の方法を理解させるとともに 必要な技能を習得させていくことが重要です 指針第 1 章 2-(8) 1. 危険予測運転の必要性 指導のねらい交通事故を招いているのは 運転者の不注意や安全確認の不履行なども大きな要因となっています
Ⅷ. 危険の予測及び回避 本章では 道路状況が運転に与える影響を整理するとともに トラックの運転に関して生じるさまざまな危険について整理しています 指導においては 危険予知訓練の手法を用いて 危険の予測及び回避の方法を理解させるとともに 必要な技能を習得させていくことが重要です 指針第 1 章 2-(8) 1. 危険予測運転の必要性 指導のねらい交通事故を招いているのは 運転者の不注意や安全確認の不履行なども大きな要因となっています
ドライブレコーダ協議会 (1) ipadアプリhazardtouchの訓練効果 (2) DR 映像を利用した運転評価の可能性 2012/11/02 島崎敢早稲田大学人間科学学術院 中村愛早稲田大学大学院人間科学研究科
 ipadアプリhazardtouchの訓練効果 (2) DR 映像を利用した運転評価の可能性 2012/11/02 島崎敢早稲田大学人間科学学術院 中村愛早稲田大学大学院人間科学研究科") ドライブレコーダ協議会 (1) ipadアプリhazardtouchの訓練効果 (2) DR 映像を利用した運転評価の可能性 2012/11/02 島崎敢早稲田大学人間科学学術院 中村愛早稲田大学大学院人間科学研究科 ドライブレコーダ活用の未来 交通事故処理 これまで主に交通事故処理用途で用いられてきたドラレコ映像を, ドライバ教育と運転評価に用いようという研究です. ドラレコに新たな 2 つの柱を追加します.
ドライブレコーダ協議会 (1) ipadアプリhazardtouchの訓練効果 (2) DR 映像を利用した運転評価の可能性 2012/11/02 島崎敢早稲田大学人間科学学術院 中村愛早稲田大学大学院人間科学研究科 ドライブレコーダ活用の未来 交通事故処理 これまで主に交通事故処理用途で用いられてきたドラレコ映像を, ドライバ教育と運転評価に用いようという研究です. ドラレコに新たな 2 つの柱を追加します.
スライド 1
 移動体観測を活用した交通 NW の リアルタイムマネジメントに向けて : プローブカーデータを用いた動的 OD 交通量のリアルタイム推定 名古屋大学山本俊行 背景 : マルチモード経路案内システム PRONAVI 2 プローブカーデータの概要 プローブカー : タクシー 157 台 蓄積用データ収集期間 : 22 年 1 月 ~3 月,1 月 ~23 年 3 月 データ送信はイベントベース : 車両発進
移動体観測を活用した交通 NW の リアルタイムマネジメントに向けて : プローブカーデータを用いた動的 OD 交通量のリアルタイム推定 名古屋大学山本俊行 背景 : マルチモード経路案内システム PRONAVI 2 プローブカーデータの概要 プローブカー : タクシー 157 台 蓄積用データ収集期間 : 22 年 1 月 ~3 月,1 月 ~23 年 3 月 データ送信はイベントベース : 車両発進
(Microsoft Word \217\254\215\373\216q \203G\203R\203h\203\211\203C\203u\202b.doc)
") エコドライブ知識エコドライブ知識 エコドライブチェックからエコドライブの具体的運転方法 平成 24 年 3 月 エコドライブその 1 エコドライブチェックをしましょう 最近 エコドライブ という言葉を聞きませんか? なぜ 今 この言葉が聞かれるようになったのでしょうか? そもそも エコドライブ ってどういうことなのでしょうか? 地球温暖化進行の原因の1つに 自動車利用によるCO2 排出量の増加があります
エコドライブ知識エコドライブ知識 エコドライブチェックからエコドライブの具体的運転方法 平成 24 年 3 月 エコドライブその 1 エコドライブチェックをしましょう 最近 エコドライブ という言葉を聞きませんか? なぜ 今 この言葉が聞かれるようになったのでしょうか? そもそも エコドライブ ってどういうことなのでしょうか? 地球温暖化進行の原因の1つに 自動車利用によるCO2 排出量の増加があります
 平成 25 年度新エネルギー技術フィールドテスト事業太陽光発電新技術等フィールドテスト事業に関する運転データ分析評価等業務 発電量等シミュレーター説明書 平成 26 年 2 月株式会社三菱総合研究所 目次 1. 発電量等シミュレーターの構成... 1 1.1 発電量等シミュレーターの概要... 1 1.2 発電量算出機能... 2 1.3 設置面積算出機能... 3 1.4 フィールドテスト事業実績データの表示機能...
平成 25 年度新エネルギー技術フィールドテスト事業太陽光発電新技術等フィールドテスト事業に関する運転データ分析評価等業務 発電量等シミュレーター説明書 平成 26 年 2 月株式会社三菱総合研究所 目次 1. 発電量等シミュレーターの構成... 1 1.1 発電量等シミュレーターの概要... 1 1.2 発電量算出機能... 2 1.3 設置面積算出機能... 3 1.4 フィールドテスト事業実績データの表示機能...
3.3 モータ運転の留意点 ギヤモータをインバータで運転する場合 ギヤモータをインバータで運転する場合 以下のような注意事項があります 出力軸トルク特性に対する注意事項ギヤモータの出力軸トルク 9544 モータ出力 (kw) SI 単位系 T G = (N m) 出力軸回転数 (r/min) < ギ
 SI 単位系 T G = (N m) 出力軸回転数 (r/min) < ギ") 3.3 モータ運転の留意点 ギヤモータをインバータで運転する場合 ギヤモータをインバータで運転する場合 以下のような注意事項があります 出力軸トルク特性に対する注意事項ギヤモータの出力軸トルク 9544 モータ出力 (kw) SI 単位系 T G = (N m) 出力軸回転数 (r/min) < ギヤで回転数を変えた場合 > トルク モータ出力軸トルク 9544 モータ出力 (kw) SI 単位系
3.3 モータ運転の留意点 ギヤモータをインバータで運転する場合 ギヤモータをインバータで運転する場合 以下のような注意事項があります 出力軸トルク特性に対する注意事項ギヤモータの出力軸トルク 9544 モータ出力 (kw) SI 単位系 T G = (N m) 出力軸回転数 (r/min) < ギヤで回転数を変えた場合 > トルク モータ出力軸トルク 9544 モータ出力 (kw) SI 単位系
g-contents world Geomedia Summit 東京のタクシー IoT 化 サービス向上からデータ活用まで タクシー新配車システムの変遷 ~ 日本でのアプリ配車における これまでの流れと今後の可能性 ~
 g-contents world Geomedia Summit 東京のタクシー IoT 化 サービス向上からデータ活用まで タクシー新配車システムの変遷 ~ 日本でのアプリ配車における これまでの流れと今後の可能性 ~ トヨタ次世代タクシー 10 月 23 日出発式 タクシー産業の現状 ( 全国ハイヤー タクシー連合会資料 ) 東京のタクシーの現状 ( 東京ハイヤー タクシー協会資料 ) 新配車システムの起源
g-contents world Geomedia Summit 東京のタクシー IoT 化 サービス向上からデータ活用まで タクシー新配車システムの変遷 ~ 日本でのアプリ配車における これまでの流れと今後の可能性 ~ トヨタ次世代タクシー 10 月 23 日出発式 タクシー産業の現状 ( 全国ハイヤー タクシー連合会資料 ) 東京のタクシーの現状 ( 東京ハイヤー タクシー協会資料 ) 新配車システムの起源
センサーライト型カメラ LC002 取扱説明書 ご使用前に 正しくご使用いただくために この取扱説明書を必ずお読みください 必要に応じてダウンロードをして保管下さい 最終更新 :2016 年 2 月 5 日 - 1 -
 センサーライト型カメラ LC002 取扱説明書 ご使用前に 正しくご使用いただくために この取扱説明書を必ずお読みください 必要に応じてダウンロードをして保管下さい 最終更新 :2016 年 2 月 5 日 - 1 - 目次 1: スペック... - 3-2: 付属品を確かめる... - 4-3: 時間設定 接続方法... - 4 - ... - 4 -
センサーライト型カメラ LC002 取扱説明書 ご使用前に 正しくご使用いただくために この取扱説明書を必ずお読みください 必要に応じてダウンロードをして保管下さい 最終更新 :2016 年 2 月 5 日 - 1 - 目次 1: スペック... - 3-2: 付属品を確かめる... - 4-3: 時間設定 接続方法... - 4 - ... - 4 -
NITAS の基本機能 1. 経路探索条件の設定 (1) 交通モードの設定 交通モードの設定 とは どのような交通手段のネットワークを用いて経路探索を行うかを設定するものです NITASの交通モードは 大きく 人流 ( 旅客移動 ) 物流( 貨物移動 ) に分かれ それぞれのネットワークを用いた経路
 交通モードの設定 交通モードの設定 とは どのような交通手段のネットワークを用いて経路探索を行うかを設定するものです NITASの交通モードは 大きく 人流 ( 旅客移動 ) 物流( 貨物移動 ) に分かれ それぞれのネットワークを用いた経路") NITAS の基本機能 1. 経路探索条件の設定 (1) 交通モードの設定 交通モードの設定 とは どのような交通手段のネットワークを用いて経路探索を行うかを設定するものです NITASの交通モードは 大きく 人流 ( 旅客移動 ) 物流( 貨物移動 ) に分かれ それぞれのネットワークを用いた経路探索を行うことができます また 道路 + 船モード 鉄道 + 航空モード 道路 + 鉄道モード では
NITAS の基本機能 1. 経路探索条件の設定 (1) 交通モードの設定 交通モードの設定 とは どのような交通手段のネットワークを用いて経路探索を行うかを設定するものです NITASの交通モードは 大きく 人流 ( 旅客移動 ) 物流( 貨物移動 ) に分かれ それぞれのネットワークを用いた経路探索を行うことができます また 道路 + 船モード 鉄道 + 航空モード 道路 + 鉄道モード では
PowerPoint Presentation
 参考資料 3 国内外における自動運転の取り組み概要 1. 単体走行の事例 2. 追随走行 隊列走行の事例 3. 専用道路の事例 1 1. 単体走行の事例 研究開発主体 研究開発期間 1DARPA 主催の技術コンテスト DARPA ( 米国国防総省国防高等研究計画局 ) グランドチャレンジ :2004 年 2005 年アーバンチャレンジ :2007 年 2Google の自動運転への取り組み Google
参考資料 3 国内外における自動運転の取り組み概要 1. 単体走行の事例 2. 追随走行 隊列走行の事例 3. 専用道路の事例 1 1. 単体走行の事例 研究開発主体 研究開発期間 1DARPA 主催の技術コンテスト DARPA ( 米国国防総省国防高等研究計画局 ) グランドチャレンジ :2004 年 2005 年アーバンチャレンジ :2007 年 2Google の自動運転への取り組み Google
04_テクレポ22_内田様.indd
 津波浸水シミュレーション結果の 3 次元動画作成 エンジニアリング本部防災 環境解析部 内田 照久 1. はじめに想定を超える被害をもたらした東日本大震災をきっかけに 津波被害に対して関心が高まっている 近年 発生する確率が高いとされている南海ト (1) ラフ巨大地震による津波の被害想定では 建物全壊が約 13.2 万棟 ~ 約 16.9 万棟 死者数が約 11.7 万人 ~ 約 22.4 万人にのぼるとされている
津波浸水シミュレーション結果の 3 次元動画作成 エンジニアリング本部防災 環境解析部 内田 照久 1. はじめに想定を超える被害をもたらした東日本大震災をきっかけに 津波被害に対して関心が高まっている 近年 発生する確率が高いとされている南海ト (1) ラフ巨大地震による津波の被害想定では 建物全壊が約 13.2 万棟 ~ 約 16.9 万棟 死者数が約 11.7 万人 ~ 約 22.4 万人にのぼるとされている
Twinmoon
 ダウンロードしたサンプルファイルをダブルクリックすると BIMmotion が起動します BIMmotion には 通常のディスプレイから閲覧する BIMmotion と VR ヘッドマウントディスプレイを使用して閲覧する BIMmotion VR があります HTCVIVE または Oculus RiftBIMmotion をお持ちで BIMmotion VR お試しになられる場合は 2.BIMmotion
ダウンロードしたサンプルファイルをダブルクリックすると BIMmotion が起動します BIMmotion には 通常のディスプレイから閲覧する BIMmotion と VR ヘッドマウントディスプレイを使用して閲覧する BIMmotion VR があります HTCVIVE または Oculus RiftBIMmotion をお持ちで BIMmotion VR お試しになられる場合は 2.BIMmotion
<4D F736F F D D834F B835E5F8FDA8DD C E646F63>
 情報電子実験 Ⅲ 2008.04 アナログフィルタ 1.MultiSIM の起動デスクトップのアイコンをクリックまたは [ スタート ]-[ すべてのプログラム ] より [National Instruments]-[Circuit Design Suite 10.0]-[Multisim] を選択して起動する 図 1 起動時の画面 2. パッシブフィルタ (RC 回路 ) の実験 2-1. 以下の式を用いて
情報電子実験 Ⅲ 2008.04 アナログフィルタ 1.MultiSIM の起動デスクトップのアイコンをクリックまたは [ スタート ]-[ すべてのプログラム ] より [National Instruments]-[Circuit Design Suite 10.0]-[Multisim] を選択して起動する 図 1 起動時の画面 2. パッシブフィルタ (RC 回路 ) の実験 2-1. 以下の式を用いて
第 4 週コンボリューションその 2, 正弦波による分解 教科書 p. 16~ 目標コンボリューションの演習. 正弦波による信号の分解の考え方の理解. 正弦波の複素表現を学ぶ. 演習問題 問 1. 以下の図にならって,1 と 2 の δ 関数を図示せよ δ (t) 2
 2") 第 4 週コンボリューションその, 正弦波による分解 教科書 p. 6~ 目標コンボリューションの演習. 正弦波による信号の分解の考え方の理解. 正弦波の複素表現を学ぶ. 演習問題 問. 以下の図にならって, と の δ 関数を図示せよ. - - - δ () δ ( ) - - - 図 δ 関数の図示の例 δ ( ) δ ( ) δ ( ) δ ( ) δ ( ) - - - - - - - -
第 4 週コンボリューションその, 正弦波による分解 教科書 p. 6~ 目標コンボリューションの演習. 正弦波による信号の分解の考え方の理解. 正弦波の複素表現を学ぶ. 演習問題 問. 以下の図にならって, と の δ 関数を図示せよ. - - - δ () δ ( ) - - - 図 δ 関数の図示の例 δ ( ) δ ( ) δ ( ) δ ( ) δ ( ) - - - - - - - -
 5 アンテナ2次元走査装置の作製とその実験結果 システムエ学技術系 阿達透 1 目的 我々の研究室では 従来よりFM CW レーダに よる物体の探査などの研究を行つてきた このFM CWレーダに レーダポーラリメトリを適用さ せ 物体のイメージングを衛うことを目的として研 究している I M CWレ ーダによる物体の探脊では 地 tiや 雪中埋没物をターゲットとしているため 周波数を 低くし その結果アンテナは大きいものを使用する
5 アンテナ2次元走査装置の作製とその実験結果 システムエ学技術系 阿達透 1 目的 我々の研究室では 従来よりFM CW レーダに よる物体の探査などの研究を行つてきた このFM CWレーダに レーダポーラリメトリを適用さ せ 物体のイメージングを衛うことを目的として研 究している I M CWレ ーダによる物体の探脊では 地 tiや 雪中埋没物をターゲットとしているため 周波数を 低くし その結果アンテナは大きいものを使用する