PowerPoint プレゼンテーション
|
|
|
- たつや ありたけ
- 5 years ago
- Views:
Transcription

1 ロボットの計画と制御 マルコフ決定過程 確率ロボティクス 14 章 1
2 14.1 動機付けロボットの行動選択のための確率的なアルゴリズム 目的 予想される不確かさを最小化したい. ロボットの動作につての不確かさ (MDP で考える ) 決定論的な要素 ロボット工学の理論の多くは, 動作の影響は決定論的であるという仮定のもとに成り立っている. しかしこれだけでは説明できない事象が混入するのが通常. 統計的な要素 ロボットや周囲の環境の確率論的な性質から生ずる. ロボットの知覚についての不確かさ (MDP POMDP へ ) 完全可観測な系 vs. 部分観測可能な系 2
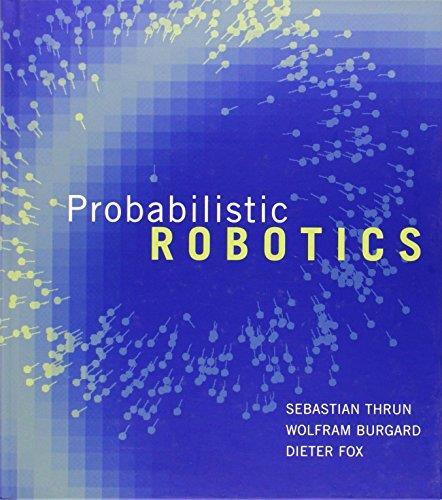
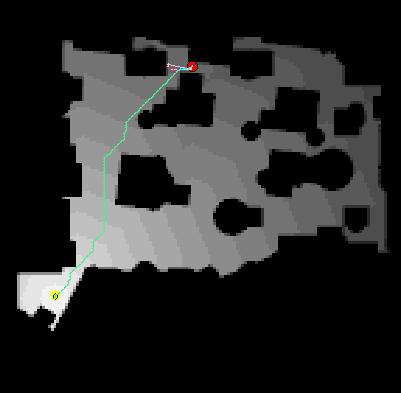
3 14.2 ロボットの行動選択における不確かさ ロボットはどちらの経路を進むのが良いだろうか 2 Goal 1 Start 古典的な制御手法では 1 が選ばれる. 狭い経路を通ると, 途中で壁をこするかもしれない ロボットは壁を検知するためにスピードを落とさなければならないかもしれない 2 を選ぶ方法はどのように構成すればよいだろう? 3

4 Deterministic, fully observable 4
5 Stochastic, Fully Observable 5

6 Stochastic, Partially Observable 6
7 14.2 行動選択における不確かさ マルコフ決定過程 (MDPs: Markov decision processes) ロボットの動作に関する不確かさのみを考慮する枠組み. 任意の時間において, 環境の状態が完全に計測できることを仮定する. p y x p x k u k 1, x k 1 知覚モデルは決定論的で全単射を仮定 行動モデルは非決定論的. 単一の行動シーケンスを計画するのでは不十分であるので, 複数の行動シーケンスを計画可能でなければならない. ロボットが出あうすべての状態に対して行動選択のための方策を生成する? 制御方策 ユニバーサルプラン ナビゲーション関数 など 7
8 14.2 行動選択における不確かさ 部分観測マルコフ決定過程 (POMDPs: partially observable Markov decision processes) ロボットモーションにおける不確かさを考慮する枠組み p y x 実用において計測には雑音が混入する 信念空間 ( 情報空間 ) ロボットが環境内で持つ可能性のある信念 すべてから構成される. POMDPs では信念空間において行動を割り当てる. しかし計算複雑性の問題がつきまとう. 信念 : ベイズ統計の用語 ベイズ統計では 確率はあくまでも何らかの主観的な根拠に基づいて計算されるものであり 計算された確率分布を 信念 ある事象に対する確率を 信念の度合い と呼ぶ 8
9 14.3 価値反復価値反復 : 報酬関数に対する各行動の有効性を再帰的に計算する手法仮定 : 環境の状態が各時刻において完全観測可能 (MDPを考える) 終端状態と報酬 報酬関数の簡単な例 r x, u = (u により終端状態に到達する場合 ) ( その他の場合 ) 報酬関数の導入の意義 統一的にコストを評価する 様々な要因のコストのトレードオフを表現するため ゴールへ到達する確率を高めることが 余分なエネルギーや時間に見合うだろうか? など 9
10 14.3 価値反復 制御方策の表現 π: y 1:k 1, u 1:k 1 u k 制御方策 : 過去の制御入力系列と観測系列のデータを現時刻の制御入力 u k に写像する関数完全観測可能な場合は状態量を知り得るので π: x 1:k u k 期待累積報酬 報酬を得る時刻には遅延が生ずるのが一般的. 将来の報酬の和が最大となるような行動を選択することが目標. R T = E T τ=1 γ τ r k+τ T は計画区間 ロボットが時刻 k から k + T まで累積した報酬 r k+τ γ τ は割引率.γ [0; 1] この値が小さいと, 未来の報酬が指数的に割り引かれる 10
11 14.3 価値反復 T 期待累積報酬 R T = E γ τ r k+τ T は計画区間 τ=1 T = 1 の場合 グリーディアルゴリズム : すぐ次の報酬を最大化する. 計算は早い. T > 1 の場合 有限区間 : 通常 γ = 1 として報酬を割り引かない. 計算は複雑化する. T = の場合 無限区間 :γ < 1 かつ r < r max で R を最大化する. R r max + γr max + γ 2 r max + γ 3 r max + = r max 1 γ 11
12 14.3 価値反復 累積報酬と状態との関連付けの表記 複数の制御方策毎の報酬を比較 選択する場合に便利 R T (x k ) = E T τ=1 γ τ r k+τ x k 累積報酬と制御方策との関連付け ( 状態との依存関係を明示すると ) T R π T (x k ) = E γ τ r k+τ u k+τ = π(y 1:k+τ 1, u 1:k+τ 1 ) τ=1 各 π についての R T π (x k ) を比較し, 将来の報酬が多いものを選べる. 12
13 14.3 価値反復 完全観測可能な場合の最適制御方策の発見 事後確率 p x k y 1:k, u 1:k が期待値 E p x k y 1:k, u 1:k で表現できる応用を想定 ( 運動モデルに誤差や外乱の混入がほとんどないシステム ) π k : x k u k 制御方策 : 状態から最適入力への写像 ( ある状態 x を実行するための最適入力 u を決める関数を π と呼ぼう ) T = 1 の場合 (1 ステップ後の報酬を最大化する方策 π 1 に興味がある場合 ) 1 ステップ後の報酬 r(x k+1, u k+1 ) を最大化する制御方策を選ぶ π k+1 x k+1 = argmax u k+1 r(x k+1, u k+1 ) 報酬 r(x k+1, u k+1 ) は対応する価値関数を持つ V 1 x k+1 = γmax u k+1 r(x k+1, u k+1 ) ( x は固定で u を様々に変更し, 最大の報酬を探す.) (γ で割引された次の最大報酬を与える関数 ) 13
14 14.3 価値反復 T > 1 の場合 (T ステップ後の報酬を最大化する方策 π T に興味がある場合 ) π k+2 x k+2 = argmax u k+2 r x k+2, u k+2 + V 1 x k+1 p x k+1 u k+2, x k+2 dx k+1 V 2 x k+2 = γmax u k+1 r(x k+1, u k+1 ) 再帰的に繰り返す π k+t x k+t = argmax u k+t r x k+t, u k+t + V T 1 x k+t 1 p x k+t 1 u k+t, x k+t dx k+t 1 V T x k+t = γmax u k+t 1 r(x k+t 1, u k+t 1 ) π k+t x k+t は計画対象区間 T において最適 最適な制御方策を求めるアルゴリズムができそう! 14
15 14.3 価値反復 Algorithm MDP_discrete_value_iteration () : for i = 1 to N do V x i r min endfor repeat until convergence for i = 1 to N do endfor V x i endrepeat return V γmax u T r x i, u + V x j p x j u, x i j=1 Algorithm policy_mdp (x, V) : π x = argmax u r x, u + N j=1 V x j p x j u, x i
16 Value Iteration for Motion Planning 16
17 14.4 ロボット制御への応用 価値反復の特徴 ロボットが取りうるすべての状態空間全体 ( たとえば x, y, θ, v, ω ) で定義されるロボットがどこにいようとも行動を選択できる. 大域的な位置推定を行っている最中には実行できない. 実応用に利用するためには 状態空間と制御入力空間を離散化して求める. 関数 V x k はルックアップテーブルで実装する. 次元の呪いがあるので 離散化で分解表現が利用できるのは低次元の状態空間表現に限られる. 高次元の場合には 価値関数を表現するために学習アルゴリズムの導入が一般的. 17
18 15.1 部分観測マルコフ決定過程 部分観測マルコフ決定過程 (POMDPs: partially observable Markov decision processes) MDPsでは行動の不確かさのみを考慮していた. 計測の不確かさも考慮に入れるにはPOMDPsを利用する. 計測の不確かさと制御の不確かさの両立を考慮する必要がある. 部分 とは, 環境の全状態を直接計測できないことを表す. 状態空間, 行動空間, 観測空間, 計画対象区間 Tがすべて有限であれば, 最適制御方策を発見するアルゴリズムは存在する. しかし, 計算量が大きくなるため, 近似的なアルゴリズムになる. 18
19 15.1 部分観測マルコフ決定過程 V T x = γmax u r x, u + T j=1 V T 1 x p x u, x dx V 1 x = γmax u x は部分観測可能 r(x, u) x が部分的に観測できない V T b = γmax u r b, u + T j=1 V T 1 b p b u, b db V 1 b = γmax u E x r(x, u) 事後確率分布 ( 信念空間 b) において価値評価を行う T 制御方策の決定 π T b = argmax u r b, u + j=1 V T 1 b p b u, b db
20 15.1 部分観測マルコフ決定過程 制御方策の決定アルゴリズム POMDP: 有限的な POMDS アルゴリズムよりも正確だが計算量に問題がある. ロボットが明快な信念状態から行動を開始するとき, その後取りうる信念状態の数はごく少数に限られることが多い. 価値関数が適切な信念状態だけではなく全ての信念状態に対して計算されるということは, 価値反復アルゴリズムの欠点. PBVI: ポイントベースド価値反復 典型的な信念状態の組み合わせを考え, 価値関数をその組み合わせ内で最大化するように制限する. 与えられる現状のどの信念状態とも対応しない関連しない拘束を生成しないことで価値計算を効率化する. 20
21 15.1 部分観測マルコフ決定過程 制御方策の決定アルゴリズム QMDP: MDP と POMDP のハイブリッド手法. 行動を一回行うと, 状態が完全に観測可能になるという仮定のもと, 信念空間における正確な価値関数を得ることができる.MDP と同じ計算複雑性を持つ. 拡張 MDP: AMDP: augmented MDP 信念状態を低次元な十分統計量に落として, その低次元空間で価値反復を行う方法. もっとも基本的な実装では, 最尤な状態とエントロピーで計算された不確かさの度合いを組み合わせた表現を用いる. MDP の計算量よりも効率は良くならないが, 精度は向上する. MC-POMDP: モンテカルロ POMDP POMDP のパーティクルフィルタバージョン. 信念をパーティクルで近似する. 信念を動的に生成することで, 信念の数を比較的少なくできる. 連続量の状態, 行動, 計測に適用可能である. ただし, パーティクルフィルタの一般的な手法と同等の問題や,MC-POMDP 特有の問題が生ずる. 21
ベイズ統計入門
 ベイズ統計入門 条件付確率 事象 F が起こったことが既知であるという条件の下で E が起こる確率を条件付確率 (codtoal probablt) という P ( E F ) P ( E F ) P( F ) 定義式を変形すると 確率の乗法公式となる ( E F ) P( F ) P( E F ) P( E) P( F E) P 事象の独立 ある事象の生起する確率が 他のある事象が生起するかどうかによって変化しないとき
ベイズ統計入門 条件付確率 事象 F が起こったことが既知であるという条件の下で E が起こる確率を条件付確率 (codtoal probablt) という P ( E F ) P ( E F ) P( F ) 定義式を変形すると 確率の乗法公式となる ( E F ) P( F ) P( E F ) P( E) P( F E) P 事象の独立 ある事象の生起する確率が 他のある事象が生起するかどうかによって変化しないとき
PowerPoint プレゼンテーション
 担当教員名 単位数西田健 2 単位 教室 時間 4-1A 教室火曜 4 限 目的不確定性を有する対象の制御に有効な確率システム制御理論について解説する また 確率的要因を考慮した状態推定のために 宇宙ロケットや自律ロボットなどの幅広い分野で利用されているカルマンフィルタやパーティクルフィルタについて解説し それらを用いる制御系の構成手法を教授する 授業計画 (1) ガイダンスと導入 (2) 線形動的システムの時系列モデリング
担当教員名 単位数西田健 2 単位 教室 時間 4-1A 教室火曜 4 限 目的不確定性を有する対象の制御に有効な確率システム制御理論について解説する また 確率的要因を考慮した状態推定のために 宇宙ロケットや自律ロボットなどの幅広い分野で利用されているカルマンフィルタやパーティクルフィルタについて解説し それらを用いる制御系の構成手法を教授する 授業計画 (1) ガイダンスと導入 (2) 線形動的システムの時系列モデリング
生命情報学
 生命情報学 5 隠れマルコフモデル 阿久津達也 京都大学化学研究所 バイオインフォマティクスセンター 内容 配列モチーフ 最尤推定 ベイズ推定 M 推定 隠れマルコフモデル HMM Verアルゴリズム EMアルゴリズム Baum-Welchアルゴリズム 前向きアルゴリズム 後向きアルゴリズム プロファイル HMM 配列モチーフ モチーフ発見 配列モチーフ : 同じ機能を持つ遺伝子配列などに見られる共通の文字列パターン
生命情報学 5 隠れマルコフモデル 阿久津達也 京都大学化学研究所 バイオインフォマティクスセンター 内容 配列モチーフ 最尤推定 ベイズ推定 M 推定 隠れマルコフモデル HMM Verアルゴリズム EMアルゴリズム Baum-Welchアルゴリズム 前向きアルゴリズム 後向きアルゴリズム プロファイル HMM 配列モチーフ モチーフ発見 配列モチーフ : 同じ機能を持つ遺伝子配列などに見られる共通の文字列パターン
Microsoft PowerPoint - 12RL.ppt
 まず MDP について 情報意味論 ( 強化学習 櫻井彰人慶應義塾大学理工学部 確率過程 マルコフ性 マルコフ鎖 マルコフ決定過程 強化学習 強化学習の技法 確率過程 確率過程の例 簡単に言えば : ランダムな時系列 しばしば インデックスのついた確率変数の集まりと考える 基本 : 状態とその状態にいる確率 ( 時刻でインデックスされている の集合 離散確率過程を考える 古典 : ランダムウォーク
まず MDP について 情報意味論 ( 強化学習 櫻井彰人慶應義塾大学理工学部 確率過程 マルコフ性 マルコフ鎖 マルコフ決定過程 強化学習 強化学習の技法 確率過程 確率過程の例 簡単に言えば : ランダムな時系列 しばしば インデックスのついた確率変数の集まりと考える 基本 : 状態とその状態にいる確率 ( 時刻でインデックスされている の集合 離散確率過程を考える 古典 : ランダムウォーク
様々なミクロ計量モデル†
 担当 : 長倉大輔 ( ながくらだいすけ ) この資料は私の講義において使用するために作成した資料です WEB ページ上で公開しており 自由に参照して頂いて構いません ただし 内容について 一応検証してありますが もし間違いがあった場合でもそれによって生じるいかなる損害 不利益について責任を負いかねますのでご了承ください 間違いは発見次第 継続的に直していますが まだ存在する可能性があります 1 カウントデータモデル
担当 : 長倉大輔 ( ながくらだいすけ ) この資料は私の講義において使用するために作成した資料です WEB ページ上で公開しており 自由に参照して頂いて構いません ただし 内容について 一応検証してありますが もし間違いがあった場合でもそれによって生じるいかなる損害 不利益について責任を負いかねますのでご了承ください 間違いは発見次第 継続的に直していますが まだ存在する可能性があります 1 カウントデータモデル
ଗȨɍɫȮĘർǻ 図 : a)3 次元自由粒子の波数空間におけるエネルギー固有値の分布の様子 b) マクロなサイズの系 L ) における W E) と ΩE) の対応 として与えられる 周期境界条件を満たす波数 kn は kn = πn, L n = 0, ±, ±, 7) となる 長さ L の有限
3 次元自由粒子の波数空間におけるエネルギー固有値の分布の様子 b) マクロなサイズの系 L ) における W E) と ΩE) の対応 として与えられる 周期境界条件を満たす波数 kn は kn = πn, L n = 0, ±, ±, 7) となる 長さ L の有限") : Email: mizushima@mp.es.osaka-u.ac.jp, D38 0 08 5 S = k B ln W ) W n [] [] 5 N. 6 d h m dx ϕ nx) = E n ϕ n x) ) L 5 ϕ n x = 0) = ϕ n x = L) = 0, N k n ϕ n = N sink n x), E n = h k n m 3) k n = nπ, n =,,
: Email: mizushima@mp.es.osaka-u.ac.jp, D38 0 08 5 S = k B ln W ) W n [] [] 5 N. 6 d h m dx ϕ nx) = E n ϕ n x) ) L 5 ϕ n x = 0) = ϕ n x = L) = 0, N k n ϕ n = N sink n x), E n = h k n m 3) k n = nπ, n =,,
Microsoft Word - lec_student-chp3_1-representative
 1. はじめに この節でのテーマ データ分布の中心位置を数値で表す 可視化でとらえた分布の中心位置を数量化する 平均値とメジアン, 幾何平均 この節での到達目標 1 平均値 メジアン 幾何平均の定義を書ける 2 平均値とメジアン, 幾何平均の特徴と使える状況を説明できる. 3 平均値 メジアン 幾何平均を計算できる 2. 特性値 集めたデータを度数分布表やヒストグラムに整理する ( 可視化する )
1. はじめに この節でのテーマ データ分布の中心位置を数値で表す 可視化でとらえた分布の中心位置を数量化する 平均値とメジアン, 幾何平均 この節での到達目標 1 平均値 メジアン 幾何平均の定義を書ける 2 平均値とメジアン, 幾何平均の特徴と使える状況を説明できる. 3 平均値 メジアン 幾何平均を計算できる 2. 特性値 集めたデータを度数分布表やヒストグラムに整理する ( 可視化する )
Autodesk Inventor Skill Builders Autodesk Inventor 2010 構造解析の精度改良 メッシュリファインメントによる収束計算 予想作業時間:15 分 対象のバージョン:Inventor 2010 もしくはそれ以降のバージョン シミュレーションを設定する際
 Autodesk Inventor Skill Builders Autodesk Inventor 2010 構造解析の精度改良 メッシュリファインメントによる収束計算 予想作業時間:15 分 対象のバージョン:Inventor 2010 もしくはそれ以降のバージョン シミュレーションを設定する際に 収束判定に関するデフォルトの設定をそのまま使うか 修正をします 応力解析ソルバーでは計算の終了を判断するときにこの設定を使います
Autodesk Inventor Skill Builders Autodesk Inventor 2010 構造解析の精度改良 メッシュリファインメントによる収束計算 予想作業時間:15 分 対象のバージョン:Inventor 2010 もしくはそれ以降のバージョン シミュレーションを設定する際に 収束判定に関するデフォルトの設定をそのまま使うか 修正をします 応力解析ソルバーでは計算の終了を判断するときにこの設定を使います
Probit , Mixed logit
 Probit, Mixed logit 2016/5/16 スタートアップゼミ #5 B4 後藤祥孝 1 0. 目次 Probit モデルについて 1. モデル概要 2. 定式化と理解 3. 推定 Mixed logit モデルについて 4. モデル概要 5. 定式化と理解 6. 推定 2 1.Probit 概要 プロビットモデルとは. 効用関数の誤差項に多変量正規分布を仮定したもの. 誤差項には様々な要因が存在するため,
Probit, Mixed logit 2016/5/16 スタートアップゼミ #5 B4 後藤祥孝 1 0. 目次 Probit モデルについて 1. モデル概要 2. 定式化と理解 3. 推定 Mixed logit モデルについて 4. モデル概要 5. 定式化と理解 6. 推定 2 1.Probit 概要 プロビットモデルとは. 効用関数の誤差項に多変量正規分布を仮定したもの. 誤差項には様々な要因が存在するため,
Microsoft PowerPoint SIGAL.ppt
 アメリカン アジアンオプションの 価格の近似に対する 計算幾何的アプローチ 渋谷彰信, 塩浦昭義, 徳山豪 ( 東北大学大学院情報科学研究科 ) 発表の概要 アメリカン アジアンオプション金融派生商品の一つ価格付け ( 価格の計算 ) は重要な問題 二項モデルにおける価格付けは計算困難な問題 目的 : 近似精度保証をもつ近似アルゴリズムの提案 アイディア : 区分線形関数を計算幾何手法により近似 問題の説明
アメリカン アジアンオプションの 価格の近似に対する 計算幾何的アプローチ 渋谷彰信, 塩浦昭義, 徳山豪 ( 東北大学大学院情報科学研究科 ) 発表の概要 アメリカン アジアンオプション金融派生商品の一つ価格付け ( 価格の計算 ) は重要な問題 二項モデルにおける価格付けは計算困難な問題 目的 : 近似精度保証をもつ近似アルゴリズムの提案 アイディア : 区分線形関数を計算幾何手法により近似 問題の説明
Microsoft PowerPoint - 基礎・経済統計6.ppt
 . 確率変数 基礎 経済統計 6 確率分布 事象を数値化したもの ( 事象ー > 数値 の関数 自然に数値されている場合 さいころの目 量的尺度 数値化が必要な場合 質的尺度, 順序的尺度 それらの尺度に数値を割り当てる 例えば, コインの表が出たら, 裏なら 0. 離散確率変数と連続確率変数 確率変数の値 連続値をとるもの 身長, 体重, 実質 GDP など とびとびの値 離散値をとるもの 新生児の性別
. 確率変数 基礎 経済統計 6 確率分布 事象を数値化したもの ( 事象ー > 数値 の関数 自然に数値されている場合 さいころの目 量的尺度 数値化が必要な場合 質的尺度, 順序的尺度 それらの尺度に数値を割り当てる 例えば, コインの表が出たら, 裏なら 0. 離散確率変数と連続確率変数 確率変数の値 連続値をとるもの 身長, 体重, 実質 GDP など とびとびの値 離散値をとるもの 新生児の性別
混沌系工学特論 #5
 混沌系工学特論 #5 情報科学研究科井上純一 URL : htt://chaosweb.comlex.eng.hokudai.ac.j/~j_inoue/ Mirror : htt://www5.u.so-net.ne.j/j_inoue/index.html 平成 17 年 11 月 14 日第 5 回講義 デジタルデータの転送と復元再考 P ({ σ} ) = ex σ ( σσ ) < ij>
混沌系工学特論 #5 情報科学研究科井上純一 URL : htt://chaosweb.comlex.eng.hokudai.ac.j/~j_inoue/ Mirror : htt://www5.u.so-net.ne.j/j_inoue/index.html 平成 17 年 11 月 14 日第 5 回講義 デジタルデータの転送と復元再考 P ({ σ} ) = ex σ ( σσ ) < ij>
4 段階推定法とは 予測に使うモデルの紹介 4 段階推定法の課題 2
 4 段階推定法 羽藤研 4 芝原貴史 1 4 段階推定法とは 予測に使うモデルの紹介 4 段階推定法の課題 2 4 段階推定法とは 交通需要予測の実用的な予測手法 1950 年代のアメリカで開発 シカゴで高速道路の需要予測に利用 日本では 1967 年の広島都市圏での適用が初 その後 1968 年の東京都市圏など 人口 30 万人以上の 56 都市圏に適用 3 ゾーニング ゾーニングとネットワークゾーン間のトリップはゾーン内の中心点
4 段階推定法 羽藤研 4 芝原貴史 1 4 段階推定法とは 予測に使うモデルの紹介 4 段階推定法の課題 2 4 段階推定法とは 交通需要予測の実用的な予測手法 1950 年代のアメリカで開発 シカゴで高速道路の需要予測に利用 日本では 1967 年の広島都市圏での適用が初 その後 1968 年の東京都市圏など 人口 30 万人以上の 56 都市圏に適用 3 ゾーニング ゾーニングとネットワークゾーン間のトリップはゾーン内の中心点
講義「○○○○」
 講義 信頼度の推定と立証 内容. 点推定と区間推定. 指数分布の点推定 区間推定 3. 指数分布 正規分布の信頼度推定 担当 : 倉敷哲生 ( ビジネスエンジニアリング専攻 ) 統計的推測 標本から得られる情報を基に 母集団に関する結論の導出が目的 測定値 x x x 3 : x 母集団 (populaio) 母集団の特性値 統計的推測 標本 (sample) 標本の特性値 分布のパラメータ ( 母数
講義 信頼度の推定と立証 内容. 点推定と区間推定. 指数分布の点推定 区間推定 3. 指数分布 正規分布の信頼度推定 担当 : 倉敷哲生 ( ビジネスエンジニアリング専攻 ) 統計的推測 標本から得られる情報を基に 母集団に関する結論の導出が目的 測定値 x x x 3 : x 母集団 (populaio) 母集団の特性値 統計的推測 標本 (sample) 標本の特性値 分布のパラメータ ( 母数
統計的データ解析
 統計的データ解析 011 011.11.9 林田清 ( 大阪大学大学院理学研究科 ) 連続確率分布の平均値 分散 比較のため P(c ) c 分布 自由度 の ( カイ c 平均値 0, 標準偏差 1の正規分布 に従う変数 xの自乗和 c x =1 が従う分布を自由度 の分布と呼ぶ 一般に自由度の分布は f /1 c / / ( c ) {( c ) e }/ ( / ) 期待値 二乗 ) 分布 c
統計的データ解析 011 011.11.9 林田清 ( 大阪大学大学院理学研究科 ) 連続確率分布の平均値 分散 比較のため P(c ) c 分布 自由度 の ( カイ c 平均値 0, 標準偏差 1の正規分布 に従う変数 xの自乗和 c x =1 が従う分布を自由度 の分布と呼ぶ 一般に自由度の分布は f /1 c / / ( c ) {( c ) e }/ ( / ) 期待値 二乗 ) 分布 c
Microsoft Word - NumericalComputation.docx
 数値計算入門 武尾英哉. 離散数学と数値計算 数学的解法の中には理論計算では求められないものもある. 例えば, 定積分は, まずは積分 ( 被積分関数の原始関数をみつけること できなければ値を得ることはできない. また, ある関数の所定の値における微分値を得るには, まずその関数の微分ができなければならない. さらに代数方程式の解を得るためには, 解析的に代数方程式を解く必要がある. ところが, これらは必ずしも解析的に導けるとは限らない.
数値計算入門 武尾英哉. 離散数学と数値計算 数学的解法の中には理論計算では求められないものもある. 例えば, 定積分は, まずは積分 ( 被積分関数の原始関数をみつけること できなければ値を得ることはできない. また, ある関数の所定の値における微分値を得るには, まずその関数の微分ができなければならない. さらに代数方程式の解を得るためには, 解析的に代数方程式を解く必要がある. ところが, これらは必ずしも解析的に導けるとは限らない.
Kumamoto University Center for Multimedia and Information Technologies Lab. 熊本大学アプリケーション実験 ~ 実環境における無線 LAN 受信電波強度を用いた位置推定手法の検討 ~ InKIAI 宮崎県美郷
 熊本大学アプリケーション実験 ~ 実環境における無線 LAN 受信電波強度を用いた位置推定手法の検討 ~ InKIAI プロジェクト @ 宮崎県美郷町 熊本大学副島慶人川村諒 1 実験の目的 従来 信号の受信電波強度 (RSSI:RecevedSgnal StrengthIndcator) により 対象の位置を推定する手法として 無線 LAN の AP(AccessPont) から受信する信号の減衰量をもとに位置を推定する手法が多く検討されている
熊本大学アプリケーション実験 ~ 実環境における無線 LAN 受信電波強度を用いた位置推定手法の検討 ~ InKIAI プロジェクト @ 宮崎県美郷町 熊本大学副島慶人川村諒 1 実験の目的 従来 信号の受信電波強度 (RSSI:RecevedSgnal StrengthIndcator) により 対象の位置を推定する手法として 無線 LAN の AP(AccessPont) から受信する信号の減衰量をもとに位置を推定する手法が多く検討されている
パソコンシミュレータの現状
 第 2 章微分 偏微分, 写像 豊橋技術科学大学森謙一郎 2. 連続関数と微分 工学において物理現象を支配する方程式は微分方程式で表されていることが多く, 有限要素法も微分方程式を解く数値解析法であり, 定式化においては微分 積分が一般的に用いられており. 数学の基礎知識が必要になる. 図 2. に示すように, 微分は連続な関数 f() の傾きを求めることであり, 微小な に対して傾きを表し, を無限に
第 2 章微分 偏微分, 写像 豊橋技術科学大学森謙一郎 2. 連続関数と微分 工学において物理現象を支配する方程式は微分方程式で表されていることが多く, 有限要素法も微分方程式を解く数値解析法であり, 定式化においては微分 積分が一般的に用いられており. 数学の基礎知識が必要になる. 図 2. に示すように, 微分は連続な関数 f() の傾きを求めることであり, 微小な に対して傾きを表し, を無限に
Microsoft PowerPoint - ca ppt [互換モード]
![Microsoft PowerPoint - ca ppt [互換モード]](/thumbs/91/107496045.jpg "Microsoft PowerPoint - ca ppt [互換モード]") 大阪電気通信大学情報通信工学部光システム工学科 2 年次配当科目 コンピュータアルゴリズム 良いアルゴリズムとは 第 2 講 : 平成 20 年 10 月 10 日 ( 金 ) 4 限 E252 教室 中村嘉隆 ( なかむらよしたか ) 奈良先端科学技術大学院大学助教 y-nakamr@is.naist.jp http://narayama.naist.jp/~y-nakamr/ 第 1 講の復習
大阪電気通信大学情報通信工学部光システム工学科 2 年次配当科目 コンピュータアルゴリズム 良いアルゴリズムとは 第 2 講 : 平成 20 年 10 月 10 日 ( 金 ) 4 限 E252 教室 中村嘉隆 ( なかむらよしたか ) 奈良先端科学技術大学院大学助教 y-nakamr@is.naist.jp http://narayama.naist.jp/~y-nakamr/ 第 1 講の復習
カイ二乗フィット検定、パラメータの誤差
 統計的データ解析 008 008.. 林田清 ( 大阪大学大学院理学研究科 ) 問題 C (, ) ( x xˆ) ( y yˆ) σ x πσ σ y y Pabx (, ;,,, ) ˆ y σx σ y = dx exp exp πσx ただし xy ˆ ˆ はyˆ = axˆ+ bであらわされる直線モデル上の点 ( ˆ) ( ˆ ) ( ) x x y ax b y ax b Pabx (,
統計的データ解析 008 008.. 林田清 ( 大阪大学大学院理学研究科 ) 問題 C (, ) ( x xˆ) ( y yˆ) σ x πσ σ y y Pabx (, ;,,, ) ˆ y σx σ y = dx exp exp πσx ただし xy ˆ ˆ はyˆ = axˆ+ bであらわされる直線モデル上の点 ( ˆ) ( ˆ ) ( ) x x y ax b y ax b Pabx (,
スライド 1
 第 13 章系列データ 2015/9/20 夏合宿 PRML 輪読ゼミ B4 三木真理子 目次 2 1. 系列データと状態空間モデル 2. 隠れマルコフモデル 2.1 定式化とその性質 2.2 最尤推定法 2.3 潜在変数の系列を知るには 3. 線形動的システム この章の目標 : 系列データを扱う際に有効な状態空間モデルのうち 代表的な 2 例である隠れマルコフモデルと線形動的システムの性質を知り
第 13 章系列データ 2015/9/20 夏合宿 PRML 輪読ゼミ B4 三木真理子 目次 2 1. 系列データと状態空間モデル 2. 隠れマルコフモデル 2.1 定式化とその性質 2.2 最尤推定法 2.3 潜在変数の系列を知るには 3. 線形動的システム この章の目標 : 系列データを扱う際に有効な状態空間モデルのうち 代表的な 2 例である隠れマルコフモデルと線形動的システムの性質を知り
Microsoft PowerPoint - H17-5時限(パターン認識).ppt
.ppt") パターン認識早稲田大学講義 平成 7 年度 独 産業技術総合研究所栗田多喜夫 赤穂昭太郎 統計的特徴抽出 パターン認識過程 特徴抽出 認識対象から何らかの特徴量を計測 抽出 する必要がある 認識に有効な情報 特徴 を抽出し 次元を縮小した効率の良い空間を構成する過程 文字認識 : スキャナ等で取り込んだ画像から文字の識別に必要な本質的な特徴のみを抽出 例 文字線の傾き 曲率 面積など 識別 与えられた未知の対象を
パターン認識早稲田大学講義 平成 7 年度 独 産業技術総合研究所栗田多喜夫 赤穂昭太郎 統計的特徴抽出 パターン認識過程 特徴抽出 認識対象から何らかの特徴量を計測 抽出 する必要がある 認識に有効な情報 特徴 を抽出し 次元を縮小した効率の良い空間を構成する過程 文字認識 : スキャナ等で取り込んだ画像から文字の識別に必要な本質的な特徴のみを抽出 例 文字線の傾き 曲率 面積など 識別 与えられた未知の対象を
PowerPoint プレゼンテーション
 復習 ) 時系列のモデリング ~a. 離散時間モデル ~ y k + a 1 z 1 y k + + a na z n ay k = b 0 u k + b 1 z 1 u k + + b nb z n bu k y k = G z 1 u k = B(z 1 ) A(z 1 u k ) ARMA モデル A z 1 B z 1 = 1 + a 1 z 1 + + a na z n a = b 0
復習 ) 時系列のモデリング ~a. 離散時間モデル ~ y k + a 1 z 1 y k + + a na z n ay k = b 0 u k + b 1 z 1 u k + + b nb z n bu k y k = G z 1 u k = B(z 1 ) A(z 1 u k ) ARMA モデル A z 1 B z 1 = 1 + a 1 z 1 + + a na z n a = b 0
Microsoft PowerPoint - 測量学.ppt [互換モード]
![Microsoft PowerPoint - 測量学.ppt [互換モード]](/thumbs/92/109082022.jpg "Microsoft PowerPoint - 測量学.ppt [互換モード]") 8/5/ 誤差理論 測定の分類 性格による分類 独立 ( な ) 測定 : 測定値がある条件を満たさなければならないなどの拘束や制約を持たないで独立して行う測定 条件 ( 付き ) 測定 : 三角形の 3 つの内角の和のように, 個々の測定値間に満たすべき条件式が存在する場合の測定 方法による分類 直接測定 : 距離や角度などを機器を用いて直接行う測定 間接測定 : 求めるべき量を直接測定するのではなく,
8/5/ 誤差理論 測定の分類 性格による分類 独立 ( な ) 測定 : 測定値がある条件を満たさなければならないなどの拘束や制約を持たないで独立して行う測定 条件 ( 付き ) 測定 : 三角形の 3 つの内角の和のように, 個々の測定値間に満たすべき条件式が存在する場合の測定 方法による分類 直接測定 : 距離や角度などを機器を用いて直接行う測定 間接測定 : 求めるべき量を直接測定するのではなく,
情報 システム工学概論 コンピュータゲームプレイヤ 鶴岡慶雅 工学部電子情報工学科 情報理工学系研究科電子情報学専攻
 情報 システム工学概論 2018-1-15 コンピュータゲームプレイヤ 鶴岡慶雅 工学部電子情報工学科 情報理工学系研究科電子情報学専攻 DEEP Q-NETWORK (DQN) Deep Q-Network (Mnih et al., 2015) Atari 2600 Games ブロック崩し スペースインベーダー ピンポン etc. 同一のプログラムですべてのゲームを学習 CNN+ 強化学習 (Q-Learning)
情報 システム工学概論 2018-1-15 コンピュータゲームプレイヤ 鶴岡慶雅 工学部電子情報工学科 情報理工学系研究科電子情報学専攻 DEEP Q-NETWORK (DQN) Deep Q-Network (Mnih et al., 2015) Atari 2600 Games ブロック崩し スペースインベーダー ピンポン etc. 同一のプログラムですべてのゲームを学習 CNN+ 強化学習 (Q-Learning)
画像処理工学
 画像処理工学 画像の空間周波数解析とテクスチャ特徴 フーリエ変換の基本概念 信号波形のフーリエ変換 信号波形を周波数の異なる三角関数 ( 正弦波など ) に分解する 逆に, 周波数の異なる三角関数を重ねあわせることにより, 任意の信号波形を合成できる 正弦波の重ね合わせによる矩形波の表現 フーリエ変換の基本概念 フーリエ変換 次元信号 f (t) のフーリエ変換 変換 ( ω) ( ) ωt F f
画像処理工学 画像の空間周波数解析とテクスチャ特徴 フーリエ変換の基本概念 信号波形のフーリエ変換 信号波形を周波数の異なる三角関数 ( 正弦波など ) に分解する 逆に, 周波数の異なる三角関数を重ねあわせることにより, 任意の信号波形を合成できる 正弦波の重ね合わせによる矩形波の表現 フーリエ変換の基本概念 フーリエ変換 次元信号 f (t) のフーリエ変換 変換 ( ω) ( ) ωt F f
数値計算法
 数値計算法 008 4/3 林田清 ( 大阪大学大学院理学研究科 ) 実験データの統計処理その 誤差について 母集団と標本 平均値と標準偏差 誤差伝播 最尤法 平均値につく誤差 誤差 (Error): 真の値からのずれ 測定誤差 物差しが曲がっていた 測定する対象が室温が低いため縮んでいた g の単位までしかデジタル表示されない計りで g 以下 計りの目盛りを読み取る角度によって値が異なる 統計誤差
数値計算法 008 4/3 林田清 ( 大阪大学大学院理学研究科 ) 実験データの統計処理その 誤差について 母集団と標本 平均値と標準偏差 誤差伝播 最尤法 平均値につく誤差 誤差 (Error): 真の値からのずれ 測定誤差 物差しが曲がっていた 測定する対象が室温が低いため縮んでいた g の単位までしかデジタル表示されない計りで g 以下 計りの目盛りを読み取る角度によって値が異なる 統計誤差
Microsoft PowerPoint - 13approx.pptx
 I482F 実践的アルゴリズム特論 13,14 回目 : 近似アルゴリズム 上原隆平 (uehara@jaist.ac.jp) ソートの下界の話 比較に基づく任意のソートアルゴリズムはΩ(n log n) 時間の計算時間が必要である 証明 ( 概略 ) k 回の比較で区別できる場合の数は高々 2 k 種類しかない n 個の要素の異なる並べ方は n! 通りある したがって少なくとも k n 2 n!
I482F 実践的アルゴリズム特論 13,14 回目 : 近似アルゴリズム 上原隆平 (uehara@jaist.ac.jp) ソートの下界の話 比較に基づく任意のソートアルゴリズムはΩ(n log n) 時間の計算時間が必要である 証明 ( 概略 ) k 回の比較で区別できる場合の数は高々 2 k 種類しかない n 個の要素の異なる並べ方は n! 通りある したがって少なくとも k n 2 n!
スライド 1
 計測工学第 12 回以降 測定値の誤差と精度編 2014 年 7 月 2 日 ( 水 )~7 月 16 日 ( 水 ) 知能情報工学科 横田孝義 1 授業計画 4/9 4/16 4/23 5/7 5/14 5/21 5/28 6/4 6/11 6/18 6/25 7/2 7/9 7/16 7/23 2 誤差とその取扱い 3 誤差 = 測定値 真の値 相対誤差 = 誤差 / 真の値 4 誤差 (error)
計測工学第 12 回以降 測定値の誤差と精度編 2014 年 7 月 2 日 ( 水 )~7 月 16 日 ( 水 ) 知能情報工学科 横田孝義 1 授業計画 4/9 4/16 4/23 5/7 5/14 5/21 5/28 6/4 6/11 6/18 6/25 7/2 7/9 7/16 7/23 2 誤差とその取扱い 3 誤差 = 測定値 真の値 相対誤差 = 誤差 / 真の値 4 誤差 (error)
スライド 1
 1 非対称通信路の通信路容量を達成する 符号化法に関する最近の進展 東京大学大学院新領域創成科学研究科複雑理工学専攻講師本多淳也 情報理論研究会 2018/5/18 概要 2 非対称通信路の符号化 polar 符号を用いる方式 無歪み圧縮を用いた符号化法の一般的な枠組み Miyake-Muramatsuの方式 連鎖構造に基づく方式 無歪み圧縮の逆操作について 通信路符号化 3 ノイズを含む通信路を用いて情報を伝送したい
1 非対称通信路の通信路容量を達成する 符号化法に関する最近の進展 東京大学大学院新領域創成科学研究科複雑理工学専攻講師本多淳也 情報理論研究会 2018/5/18 概要 2 非対称通信路の符号化 polar 符号を用いる方式 無歪み圧縮を用いた符号化法の一般的な枠組み Miyake-Muramatsuの方式 連鎖構造に基づく方式 無歪み圧縮の逆操作について 通信路符号化 3 ノイズを含む通信路を用いて情報を伝送したい
ディジタル信号処理
 ディジタルフィルタの設計法. 逆フィルター. 直線位相 FIR フィルタの設計. 窓関数法による FIR フィルタの設計.5 時間領域での FIR フィルタの設計 3. アナログフィルタを基にしたディジタル IIR フィルタの設計法 I 4. アナログフィルタを基にしたディジタル IIR フィルタの設計法 II 5. 双 次フィルタ LI 離散時間システムの基礎式の証明 [ ] 4. ] [ ]*
ディジタルフィルタの設計法. 逆フィルター. 直線位相 FIR フィルタの設計. 窓関数法による FIR フィルタの設計.5 時間領域での FIR フィルタの設計 3. アナログフィルタを基にしたディジタル IIR フィルタの設計法 I 4. アナログフィルタを基にしたディジタル IIR フィルタの設計法 II 5. 双 次フィルタ LI 離散時間システムの基礎式の証明 [ ] 4. ] [ ]*
Microsoft PowerPoint - qcomp.ppt [互換モード]
![Microsoft PowerPoint - qcomp.ppt [互換モード]](/thumbs/85/91243661.jpg "Microsoft PowerPoint - qcomp.ppt [互換モード]") 量子計算基礎 東京工業大学 河内亮周 概要 計算って何? 数理科学的に 計算 を扱うには 量子力学を計算に使おう! 量子情報とは? 量子情報に対する演算 = 量子計算 一般的な量子回路の構成方法 計算って何? 計算とは? 計算 = 入力情報から出力情報への変換 入力 計算機構 ( デジタルコンピュータ,etc ) 出力 計算とは? 計算 = 入力情報から出力情報への変換 この関数はどれくらい計算が大変か??
量子計算基礎 東京工業大学 河内亮周 概要 計算って何? 数理科学的に 計算 を扱うには 量子力学を計算に使おう! 量子情報とは? 量子情報に対する演算 = 量子計算 一般的な量子回路の構成方法 計算って何? 計算とは? 計算 = 入力情報から出力情報への変換 入力 計算機構 ( デジタルコンピュータ,etc ) 出力 計算とは? 計算 = 入力情報から出力情報への変換 この関数はどれくらい計算が大変か??
Microsoft Word - Time Series Basic - Modeling.doc
 時系列解析入門 モデリング. 確率分布と統計的モデル が確率変数 (radom varable のとき すべての実数 R に対して となる確 率 Prob( が定められる これを の関数とみなして G( Prob ( とあらわすとき G( を確率変数 の分布関数 (probablt dstrbuto ucto と呼 ぶ 時系列解析で用いられる確率変数は通常連続型と呼ばれるもので その分布関数は (
時系列解析入門 モデリング. 確率分布と統計的モデル が確率変数 (radom varable のとき すべての実数 R に対して となる確 率 Prob( が定められる これを の関数とみなして G( Prob ( とあらわすとき G( を確率変数 の分布関数 (probablt dstrbuto ucto と呼 ぶ 時系列解析で用いられる確率変数は通常連続型と呼ばれるもので その分布関数は (
Information Theory
 前回の復習 情報をコンパクトに表現するための符号化方式を考える 情報源符号化における基礎的な性質 一意復号可能性 瞬時復号可能性 クラフトの不等式 2 l 1 + + 2 l M 1 ハフマン符号の構成法 (2 元符号の場合 ) D. Huffman 1 前回の練習問題 : ハフマン符号 符号木を再帰的に構成し, 符号を作る A B C D E F 確率 0.3 0.2 0.2 0.1 0.1 0.1
前回の復習 情報をコンパクトに表現するための符号化方式を考える 情報源符号化における基礎的な性質 一意復号可能性 瞬時復号可能性 クラフトの不等式 2 l 1 + + 2 l M 1 ハフマン符号の構成法 (2 元符号の場合 ) D. Huffman 1 前回の練習問題 : ハフマン符号 符号木を再帰的に構成し, 符号を作る A B C D E F 確率 0.3 0.2 0.2 0.1 0.1 0.1
PowerPoint プレゼンテーション
 非線形カルマンフィルタ ~a. 問題設定 ~ 離散時間非線形状態空間表現 x k + 1 = f x k y k = h x k + bv k + w k f : ベクトル値をとるx k の非線形関数 h : スカラ値をとるx k の非線形関数 v k システム雑音 ( 平均値 0, 分散 σ v 2 k ) x k + 1 = f x k,v k w k 観測雑音 ( 平均値 0, 分散 σ w
非線形カルマンフィルタ ~a. 問題設定 ~ 離散時間非線形状態空間表現 x k + 1 = f x k y k = h x k + bv k + w k f : ベクトル値をとるx k の非線形関数 h : スカラ値をとるx k の非線形関数 v k システム雑音 ( 平均値 0, 分散 σ v 2 k ) x k + 1 = f x k,v k w k 観測雑音 ( 平均値 0, 分散 σ w
ファイナンスのための数学基礎 第1回 オリエンテーション、ベクトル
 時系列分析 変量時系列モデルとその性質 担当 : 長倉大輔 ( ながくらだいすけ 時系列モデル 時系列モデルとは時系列データを生み出すメカニズムとなるものである これは実際には未知である 私たちにできるのは観測された時系列データからその背後にある時系列モデルを推測 推定するだけである 以下ではいくつかの代表的な時系列モデルを考察する 自己回帰モデル (Auoregressive Model もっとも頻繁に使われる時系列モデルは自己回帰モデル
時系列分析 変量時系列モデルとその性質 担当 : 長倉大輔 ( ながくらだいすけ 時系列モデル 時系列モデルとは時系列データを生み出すメカニズムとなるものである これは実際には未知である 私たちにできるのは観測された時系列データからその背後にある時系列モデルを推測 推定するだけである 以下ではいくつかの代表的な時系列モデルを考察する 自己回帰モデル (Auoregressive Model もっとも頻繁に使われる時系列モデルは自己回帰モデル
A Constructive Approach to Gene Expression Dynamics
 配列アラインメント (I): 大域アラインメント http://www.lab.tohou.ac.jp/sci/is/nacher/eaching/bioinformatics/ week.pdf 08/4/0 08/4/0 基本的な考え方 バイオインフォマティクスにはさまざまなアルゴリズムがありますが その多くにおいて基本的な考え方は 配列が類似していれば 機能も類似している というものである 例えば
配列アラインメント (I): 大域アラインメント http://www.lab.tohou.ac.jp/sci/is/nacher/eaching/bioinformatics/ week.pdf 08/4/0 08/4/0 基本的な考え方 バイオインフォマティクスにはさまざまなアルゴリズムがありますが その多くにおいて基本的な考え方は 配列が類似していれば 機能も類似している というものである 例えば
Microsoft PowerPoint - 05.pptx
 アルゴリズムとデータ構造第 5 回 : データ構造 (1) 探索問題に対応するデータ構造 担当 : 上原隆平 (uehara) 2015/04/17 アルゴリズムとデータ構造 アルゴリズム : 問題を解く手順を記述 データ構造 : データや計算の途中結果を蓄える形式 計算の効率に大きく影響を与える 例 : 配列 連結リスト スタック キュー 優先順位付きキュー 木構造 今回と次回で探索問題を例に説明
アルゴリズムとデータ構造第 5 回 : データ構造 (1) 探索問題に対応するデータ構造 担当 : 上原隆平 (uehara) 2015/04/17 アルゴリズムとデータ構造 アルゴリズム : 問題を解く手順を記述 データ構造 : データや計算の途中結果を蓄える形式 計算の効率に大きく影響を与える 例 : 配列 連結リスト スタック キュー 優先順位付きキュー 木構造 今回と次回で探索問題を例に説明
PowerPoint プレゼンテーション
 パーティクルフィルタ 理論と特性 11.1 パーティクルフィルタの理論的導出 状態遷移とマルコフ性 p x k x 1:k 1, y 1:k 1 = f x k x k 1 p y k x 1:k, y 1:k 1 k = 0,1, = h y k x k x 1:k x 1, x 2,, x k y 1:k y 1, y 2,, y k 確率分布で表現される現時刻の状態が, 前時刻までの状態と観測の条件付き確率によって定まる.
パーティクルフィルタ 理論と特性 11.1 パーティクルフィルタの理論的導出 状態遷移とマルコフ性 p x k x 1:k 1, y 1:k 1 = f x k x k 1 p y k x 1:k, y 1:k 1 k = 0,1, = h y k x k x 1:k x 1, x 2,, x k y 1:k y 1, y 2,, y k 確率分布で表現される現時刻の状態が, 前時刻までの状態と観測の条件付き確率によって定まる.
0 21 カラー反射率 slope aspect 図 2.9: 復元結果例 2.4 画像生成技術としての計算フォトグラフィ 3 次元情報を復元することにより, 画像生成 ( レンダリング ) に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生
 に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生") 0 21 カラー反射率 slope aspect 図 2.9: 復元結果例 2.4 画像生成技術としての計算フォトグラフィ 3 次元情報を復元することにより, 画像生成 ( レンダリング ) に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生まれ, コンピューテーショナルフォトグラフィ ( 計算フォトグラフィ ) と呼ばれている.3 次元画像認識技術の計算フォトグラフィへの応用として,
0 21 カラー反射率 slope aspect 図 2.9: 復元結果例 2.4 画像生成技術としての計算フォトグラフィ 3 次元情報を復元することにより, 画像生成 ( レンダリング ) に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生まれ, コンピューテーショナルフォトグラフィ ( 計算フォトグラフィ ) と呼ばれている.3 次元画像認識技術の計算フォトグラフィへの応用として,
Functional Programming
 PROGRAMMING IN HASKELL プログラミング Haskell Chapter 12 Lazy Evaluation 遅延評価 愛知県立大学情報科学部計算機言語論 ( 山本晋一郎 大久保弘崇 2011 年 ) 講義資料オリジナルは http://www.cs.nott.ac.uk/~gmh/book.html を参照のこと 0 用語 評価 (evaluation, evaluate)
PROGRAMMING IN HASKELL プログラミング Haskell Chapter 12 Lazy Evaluation 遅延評価 愛知県立大学情報科学部計算機言語論 ( 山本晋一郎 大久保弘崇 2011 年 ) 講義資料オリジナルは http://www.cs.nott.ac.uk/~gmh/book.html を参照のこと 0 用語 評価 (evaluation, evaluate)
スライド 1
 移動体観測を活用した交通 NW の リアルタイムマネジメントに向けて : プローブカーデータを用いた動的 OD 交通量のリアルタイム推定 名古屋大学山本俊行 背景 : マルチモード経路案内システム PRONAVI 2 プローブカーデータの概要 プローブカー : タクシー 157 台 蓄積用データ収集期間 : 22 年 1 月 ~3 月,1 月 ~23 年 3 月 データ送信はイベントベース : 車両発進
移動体観測を活用した交通 NW の リアルタイムマネジメントに向けて : プローブカーデータを用いた動的 OD 交通量のリアルタイム推定 名古屋大学山本俊行 背景 : マルチモード経路案内システム PRONAVI 2 プローブカーデータの概要 プローブカー : タクシー 157 台 蓄積用データ収集期間 : 22 年 1 月 ~3 月,1 月 ~23 年 3 月 データ送信はイベントベース : 車両発進
NLMIXED プロシジャを用いた生存時間解析 伊藤要二アストラゼネカ株式会社臨床統計 プログラミング グループグルプ Survival analysis using PROC NLMIXED Yohji Itoh Clinical Statistics & Programming Group, A
 NLMIXED プロシジャを用いた生存時間解析 伊藤要二アストラゼネカ株式会社臨床統計 プログラミング グループグルプ Survival analysis using PROC NLMIXED Yohji Itoh Clinical Statistics & Programming Group, AstraZeneca KK 要旨 : NLMIXEDプロシジャの最尤推定の機能を用いて 指数分布 Weibull
NLMIXED プロシジャを用いた生存時間解析 伊藤要二アストラゼネカ株式会社臨床統計 プログラミング グループグルプ Survival analysis using PROC NLMIXED Yohji Itoh Clinical Statistics & Programming Group, AstraZeneca KK 要旨 : NLMIXEDプロシジャの最尤推定の機能を用いて 指数分布 Weibull
SAP11_03
 第 3 回 音声音響信号処理 ( 線形予測分析と自己回帰モデル ) 亀岡弘和 東京大学大学院情報理工学系研究科日本電信電話株式会社 NTT コミュニケーション科学基礎研究所 講義内容 ( キーワード ) 信号処理 符号化 標準化の実用システム例の紹介情報通信の基本 ( 誤り検出 訂正符号 変調 IP) 符号化技術の基本 ( 量子化 予測 変換 圧縮 ) 音声分析 合成 認識 強調 音楽信号処理統計的信号処理の基礎
第 3 回 音声音響信号処理 ( 線形予測分析と自己回帰モデル ) 亀岡弘和 東京大学大学院情報理工学系研究科日本電信電話株式会社 NTT コミュニケーション科学基礎研究所 講義内容 ( キーワード ) 信号処理 符号化 標準化の実用システム例の紹介情報通信の基本 ( 誤り検出 訂正符号 変調 IP) 符号化技術の基本 ( 量子化 予測 変換 圧縮 ) 音声分析 合成 認識 強調 音楽信号処理統計的信号処理の基礎
Microsoft Word - 補論3.2
 補論 3. 多変量 GARC モデル 07//6 新谷元嗣 藪友良 対数尤度関数 3 章 7 節では 変量の対数尤度を求めた ここでは多変量の場合 とくに 変量について対数尤度を求める 誤差項 は平均 0 で 次元の正規分布に従うとする 単純化のため 分散と共分散は時間を通じて一定としよう ( この仮定は後で変更される ) したがって ij から添え字 を除くことができる このとき と の尤度関数は
補論 3. 多変量 GARC モデル 07//6 新谷元嗣 藪友良 対数尤度関数 3 章 7 節では 変量の対数尤度を求めた ここでは多変量の場合 とくに 変量について対数尤度を求める 誤差項 は平均 0 で 次元の正規分布に従うとする 単純化のため 分散と共分散は時間を通じて一定としよう ( この仮定は後で変更される ) したがって ij から添え字 を除くことができる このとき と の尤度関数は
リスク分析・シミュレーション
 はじめての Crystal Ball 操作マニュアル編 株式会社構造計画研究所 164-0012 東京都中野区中央 4-5-3 TEL:03-5342-1090 Copyright 2012 KOZO KEIKAKU ENGINEERING Inc. All Rights Reserved. はじめに 本マニュアルは 初めて Crystal Ball を操作する方向けに作成された入門マニュアルです
はじめての Crystal Ball 操作マニュアル編 株式会社構造計画研究所 164-0012 東京都中野区中央 4-5-3 TEL:03-5342-1090 Copyright 2012 KOZO KEIKAKU ENGINEERING Inc. All Rights Reserved. はじめに 本マニュアルは 初めて Crystal Ball を操作する方向けに作成された入門マニュアルです
Microsoft PowerPoint - H21生物計算化学2.ppt
 演算子の行列表現 > L いま 次元ベクトル空間の基底をケットと書くことにする この基底は完全系を成すとすると 空間内の任意のケットベクトルは > > > これより 一度基底を与えてしまえば 任意のベクトルはその基底についての成分で完全に記述することができる これらの成分を列行列の形に書くと M これをベクトル の基底 { >} による行列表現という ところで 行列 A の共役 dont 行列は A
演算子の行列表現 > L いま 次元ベクトル空間の基底をケットと書くことにする この基底は完全系を成すとすると 空間内の任意のケットベクトルは > > > これより 一度基底を与えてしまえば 任意のベクトルはその基底についての成分で完全に記述することができる これらの成分を列行列の形に書くと M これをベクトル の基底 { >} による行列表現という ところで 行列 A の共役 dont 行列は A
例 e 指数関数的に減衰する信号を h( a < + a a すると, それらのラプラス変換は, H ( ) { e } e インパルス応答が h( a < ( ただし a >, U( ) { } となるシステムにステップ信号 ( y( のラプラス変換 Y () は, Y ( ) H ( ) X (
 { e } e インパルス応答が h( a < ( ただし a >, U( ) { } となるシステムにステップ信号 ( y( のラプラス変換 Y () は, Y ( ) H ( ) X (") 第 週ラプラス変換 教科書 p.34~ 目標ラプラス変換の定義と意味を理解する フーリエ変換や Z 変換と並ぶ 信号解析やシステム設計における重要なツール ラプラス変換は波動現象や電気回路など様々な分野で 微分方程式を解くために利用されてきた ラプラス変換を用いることで微分方程式は代数方程式に変換される また 工学上使われる主要な関数のラプラス変換は簡単な形の関数で表されるので これを ラプラス変換表
第 週ラプラス変換 教科書 p.34~ 目標ラプラス変換の定義と意味を理解する フーリエ変換や Z 変換と並ぶ 信号解析やシステム設計における重要なツール ラプラス変換は波動現象や電気回路など様々な分野で 微分方程式を解くために利用されてきた ラプラス変換を用いることで微分方程式は代数方程式に変換される また 工学上使われる主要な関数のラプラス変換は簡単な形の関数で表されるので これを ラプラス変換表
Microsoft PowerPoint - 14MDL.pptx
 オッカムの剃刀 (Occam s razor) MDL 原理 データマイニング 機械学習の仕事は データを表現するモデルを探すことだと言える 例 : ガウス混合モデル, ( 等方正規分布の ) 混合 (k means 法 ). Model vs Hypotesis では 正しいモデルとは何か? どうやって選ぶか? オッカムの剃刀 : それ以外の条件が全て同じなら, 最も単純なモデルが最良である. 人生訓としてもよかろう
オッカムの剃刀 (Occam s razor) MDL 原理 データマイニング 機械学習の仕事は データを表現するモデルを探すことだと言える 例 : ガウス混合モデル, ( 等方正規分布の ) 混合 (k means 法 ). Model vs Hypotesis では 正しいモデルとは何か? どうやって選ぶか? オッカムの剃刀 : それ以外の条件が全て同じなら, 最も単純なモデルが最良である. 人生訓としてもよかろう
ii 3.,. 4. F. (), ,,. 8.,. 1. (75% ) (25% ) =9 7, =9 8 (. ). 1.,, (). 3.,. 1. ( ).,.,.,.,.,. ( ) (1 2 )., ( ), 0. 2., 1., 0,.
, ,,. 8.,. 1. (75% ) (25% ) =9 7, =9 8 (. ). 1.,, (). 3.,. 1. ( ).,.,.,.,.,. ( ) (1 2 )., ( ), 0. 2., 1., 0,.") 23(2011) (1 C104) 5 11 (2 C206) 5 12 http://www.math.is.tohoku.ac.jp/~obata,.,,,.. 1. 2. 3. 4. 5. 6. 7.,,. 1., 2007 ( ). 2. P. G. Hoel, 1995. 3... 1... 2.,,. ii 3.,. 4. F. (),.. 5.. 6.. 7.,,. 8.,. 1. (75%
23(2011) (1 C104) 5 11 (2 C206) 5 12 http://www.math.is.tohoku.ac.jp/~obata,.,,,.. 1. 2. 3. 4. 5. 6. 7.,,. 1., 2007 ( ). 2. P. G. Hoel, 1995. 3... 1... 2.,,. ii 3.,. 4. F. (),.. 5.. 6.. 7.,,. 8.,. 1. (75%
アルゴリズムとデータ構造
 講義 アルゴリズムとデータ構造 第 2 回アルゴリズムと計算量 大学院情報科学研究科情報理工学専攻情報知識ネットワーク研究室喜田拓也 講義資料 2018/5/23 今日の内容 アルゴリズムの計算量とは? 漸近的計算量オーダーの計算の方法最悪計算量と平均計算量 ポイント オーダー記法 ビッグオー (O), ビッグオメガ (Ω), ビッグシータ (Θ) 2 お風呂スケジューリング問題 お風呂に入る順番を決めよう!
講義 アルゴリズムとデータ構造 第 2 回アルゴリズムと計算量 大学院情報科学研究科情報理工学専攻情報知識ネットワーク研究室喜田拓也 講義資料 2018/5/23 今日の内容 アルゴリズムの計算量とは? 漸近的計算量オーダーの計算の方法最悪計算量と平均計算量 ポイント オーダー記法 ビッグオー (O), ビッグオメガ (Ω), ビッグシータ (Θ) 2 お風呂スケジューリング問題 お風呂に入る順番を決めよう!

memo
 数理情報工学特論第一 機械学習とデータマイニング 4 章 : 教師なし学習 3 かしまひさし 鹿島久嗣 ( 数理 6 研 ) kashima@mist.i.~ DEPARTMENT OF MATHEMATICAL INFORMATICS 1 グラフィカルモデルについて学びます グラフィカルモデル グラフィカルラッソ グラフィカルラッソの推定アルゴリズム 2 グラフィカルモデル 3 教師なし学習の主要タスクは
数理情報工学特論第一 機械学習とデータマイニング 4 章 : 教師なし学習 3 かしまひさし 鹿島久嗣 ( 数理 6 研 ) kashima@mist.i.~ DEPARTMENT OF MATHEMATICAL INFORMATICS 1 グラフィカルモデルについて学びます グラフィカルモデル グラフィカルラッソ グラフィカルラッソの推定アルゴリズム 2 グラフィカルモデル 3 教師なし学習の主要タスクは
ダンゴムシの 交替性転向反応に 関する研究 3A15 今野直輝
 ダンゴムシの 交替性転向反応に 関する研究 3A15 今野直輝 1. 研究の動機 ダンゴムシには 右に曲がった後は左に 左に曲がった後は右に曲がる という交替性転向反応という習性がある 数多くの生物において この習性は見受けられるのだが なかでもダンゴムシやその仲間のワラジムシは その行動が特に顕著であるとして有名である そのため図 1のような道をダンゴムシに歩かせると 前の突き当りでどちらの方向に曲がったかを見ることによって
ダンゴムシの 交替性転向反応に 関する研究 3A15 今野直輝 1. 研究の動機 ダンゴムシには 右に曲がった後は左に 左に曲がった後は右に曲がる という交替性転向反応という習性がある 数多くの生物において この習性は見受けられるのだが なかでもダンゴムシやその仲間のワラジムシは その行動が特に顕著であるとして有名である そのため図 1のような道をダンゴムシに歩かせると 前の突き当りでどちらの方向に曲がったかを見ることによって
Microsoft PowerPoint - IntroAlgDs-05-4.ppt
 アルゴリズムとデータ構造入門 2005 年 0 月 25 日 アルゴリズムとデータ構造入門. 手続きによる抽象の構築.2 Procedures and the Processes They generate ( 手続きとそれが生成するプロセス ) 奥乃 博. TUT Scheme が公開されました. Windows は動きます. Linux, Cygwin も動きます. 0 月 25 日 本日のメニュー.2.
アルゴリズムとデータ構造入門 2005 年 0 月 25 日 アルゴリズムとデータ構造入門. 手続きによる抽象の構築.2 Procedures and the Processes They generate ( 手続きとそれが生成するプロセス ) 奥乃 博. TUT Scheme が公開されました. Windows は動きます. Linux, Cygwin も動きます. 0 月 25 日 本日のメニュー.2.
モデリングとは
 コンピュータグラフィックス基礎 第 5 回曲線 曲面の表現 ベジェ曲線 金森由博 学習の目標 滑らかな曲線を扱う方法を学習する パラメトリック曲線について理解する 広く一般的に使われているベジェ曲線を理解する 制御点を入力することで ベジェ曲線を描画するアプリケーションの開発を行えるようになる C++ 言語の便利な機能を使えるようになる 要素数が可変な配列としての std::vector の活用 計算機による曲線の表現
コンピュータグラフィックス基礎 第 5 回曲線 曲面の表現 ベジェ曲線 金森由博 学習の目標 滑らかな曲線を扱う方法を学習する パラメトリック曲線について理解する 広く一般的に使われているベジェ曲線を理解する 制御点を入力することで ベジェ曲線を描画するアプリケーションの開発を行えるようになる C++ 言語の便利な機能を使えるようになる 要素数が可変な配列としての std::vector の活用 計算機による曲線の表現
<4D F736F F D ED97AA2D8D F8D E646F63>
 WIF-7-3:January 27 インフラストラクチャー投資の戦略的価値 高森寛, 高嶋隆太 インフラストラクチャー投資の戦略的価値 A Sragic Valu of Infrasracur Planning 高森寛, 高嶋隆太 2* Hiroshi AKAMORI and Ryua AKASHIMA 早稲田大学大学院ファイナンス研究科 2 東京大学大学院工学系研究科 要旨不透明な未来に向けて
WIF-7-3:January 27 インフラストラクチャー投資の戦略的価値 高森寛, 高嶋隆太 インフラストラクチャー投資の戦略的価値 A Sragic Valu of Infrasracur Planning 高森寛, 高嶋隆太 2* Hiroshi AKAMORI and Ryua AKASHIMA 早稲田大学大学院ファイナンス研究科 2 東京大学大学院工学系研究科 要旨不透明な未来に向けて
<4D F736F F F696E74202D208CA48B868FD089EE288FDA82B582A294C5292E B8CDD8AB B83685D>
 フィルタリングルール最適化問題の解法ル最適化問題の解法 神奈川大学理学部情報科学科 田中研究室 インターネットの仕組み IP アドレス - パケット 00 送り先 IPアドレス発信元 IPアドレスを含む 確実に相手に届く ルータ ルータ 00 IP アドレス ルータ自宅.55.5. ルータ 大学.7.5.0 インターネットの仕組み パケット - ルータ 00 00 ルータ パケット 00 000 00
フィルタリングルール最適化問題の解法ル最適化問題の解法 神奈川大学理学部情報科学科 田中研究室 インターネットの仕組み IP アドレス - パケット 00 送り先 IPアドレス発信元 IPアドレスを含む 確実に相手に届く ルータ ルータ 00 IP アドレス ルータ自宅.55.5. ルータ 大学.7.5.0 インターネットの仕組み パケット - ルータ 00 00 ルータ パケット 00 000 00
データ解析
 データ解析 ( 前期 ) 最小二乗法 向井厚志 005 年度テキスト 0 データ解析 - 最小二乗法 - 目次 第 回 Σ の計算 第 回ヒストグラム 第 3 回平均と標準偏差 6 第 回誤差の伝播 8 第 5 回正規分布 0 第 6 回最尤性原理 第 7 回正規分布の 分布の幅 第 8 回最小二乗法 6 第 9 回最小二乗法の練習 8 第 0 回最小二乗法の推定誤差 0 第 回推定誤差の計算 第
データ解析 ( 前期 ) 最小二乗法 向井厚志 005 年度テキスト 0 データ解析 - 最小二乗法 - 目次 第 回 Σ の計算 第 回ヒストグラム 第 3 回平均と標準偏差 6 第 回誤差の伝播 8 第 5 回正規分布 0 第 6 回最尤性原理 第 7 回正規分布の 分布の幅 第 8 回最小二乗法 6 第 9 回最小二乗法の練習 8 第 0 回最小二乗法の推定誤差 0 第 回推定誤差の計算 第
オートマトン 形式言語及び演習 1. 有限オートマトンとは 酒井正彦 形式言語 言語とは : 文字列の集合例 : 偶数個の 1 の後に 0 を持つ列からなる集合 {0, 110, 11110,
 オートマトン 形式言語及び演習 1 有限オートマトンとは 酒井正彦 wwwtrscssinagoya-uacjp/~sakai/lecture/automata/ 形式言語 言語とは : 文字列の集合例 : 偶数個の 1 の後に 0 を持つ列からなる集合 {0, 110, 11110, } 形式言語 : 数学モデルに基づいて定義された言語 認識機械 : 文字列が該当言語に属するか? 文字列 機械 受理
オートマトン 形式言語及び演習 1 有限オートマトンとは 酒井正彦 wwwtrscssinagoya-uacjp/~sakai/lecture/automata/ 形式言語 言語とは : 文字列の集合例 : 偶数個の 1 の後に 0 を持つ列からなる集合 {0, 110, 11110, } 形式言語 : 数学モデルに基づいて定義された言語 認識機械 : 文字列が該当言語に属するか? 文字列 機械 受理
PowerPoint プレゼンテーション
 20150528 信号処理システム特論 本日の内容 適応フィルタ ( 時間領域 ) 適応アルゴリズム (LMS,NLMS,RLS) 適応フィルタの応用例 適応処理 非適応処理 : 状況によらずいつでも同じ処理 適応処理 : 状況に応じた適切な処理 高度な適応処理の例 雑音抑圧, 音響エコーキャンセラ, 騒音制御など 時間領域の適応フィルタ 誤差信号 与えられた手順に従ってフィルタ係数を更新し 自動的に所望の信号を得るフィルタ
20150528 信号処理システム特論 本日の内容 適応フィルタ ( 時間領域 ) 適応アルゴリズム (LMS,NLMS,RLS) 適応フィルタの応用例 適応処理 非適応処理 : 状況によらずいつでも同じ処理 適応処理 : 状況に応じた適切な処理 高度な適応処理の例 雑音抑圧, 音響エコーキャンセラ, 騒音制御など 時間領域の適応フィルタ 誤差信号 与えられた手順に従ってフィルタ係数を更新し 自動的に所望の信号を得るフィルタ
スライド 1
 Keal H. Sahn A R. Crc: A dual teperature sulated annealng approach for solvng blevel prograng probles Coputers and Checal Engneerng Vol. 23 pp. 11-251998. 第 12 回論文ゼミ 2013/07/12( 金 ) #4 M1 今泉孝章 2 段階計画問題とは
Keal H. Sahn A R. Crc: A dual teperature sulated annealng approach for solvng blevel prograng probles Coputers and Checal Engneerng Vol. 23 pp. 11-251998. 第 12 回論文ゼミ 2013/07/12( 金 ) #4 M1 今泉孝章 2 段階計画問題とは
発電単価 [JPY/kWh] 差が大きい ピークシフトによる経済的価値が大きい Time 0 時 23 時 30 分 発電単価 [JPY/kWh] 差が小さい ピークシフトしても経済的価値
![発電単価 [JPY/kWh] 差が大きい ピークシフトによる経済的価値が大きい Time 0 時 23 時 30 分 発電単価 [JPY/kWh] 差が小さい ピークシフトしても経済的価値](/thumbs/100/144491359.jpg "発電単価 [JPY/kWh] 差が大きい ピークシフトによる経済的価値が大きい Time 0 時 23 時 30 分 発電単価 [JPY/kWh] 差が小さい ピークシフトしても経済的価値") 差が大きい ピークシフトによる経済的価値が大きい 3 3 4 4 時 23 時 3 分 差が小さい ピークシフトしても経済的価値が小さい 3 3 4 4 時 23 時 3 分 電力使用量を調整する経済的価値を明らかに ~ 発電コストの時間変動に着目した解析 制御技術を開発 ~ ポイント 電力需要ピーク時に電力使用量を調整するデマンドレスポンスは その経済的価値が明らかになっていなかった デマンドレスポンスが費用対効果を最大化するための制御技術を新たに開発
差が大きい ピークシフトによる経済的価値が大きい 3 3 4 4 時 23 時 3 分 差が小さい ピークシフトしても経済的価値が小さい 3 3 4 4 時 23 時 3 分 電力使用量を調整する経済的価値を明らかに ~ 発電コストの時間変動に着目した解析 制御技術を開発 ~ ポイント 電力需要ピーク時に電力使用量を調整するデマンドレスポンスは その経済的価値が明らかになっていなかった デマンドレスポンスが費用対効果を最大化するための制御技術を新たに開発
Microsoft PowerPoint ppt
 情報科学第 07 回データ解析と統計代表値 平均 分散 度数分布表 1 本日の内容 データ解析とは 統計の基礎的な値 平均と分散 度数分布表とヒストグラム 講義のページ 第 7 回のその他の欄に 本日使用する教材があります 171025.xls というファイルがありますので ダウンロードして デスクトップに保存してください 2/45 はじめに データ解析とは この世の中には多くのデータが溢れています
情報科学第 07 回データ解析と統計代表値 平均 分散 度数分布表 1 本日の内容 データ解析とは 統計の基礎的な値 平均と分散 度数分布表とヒストグラム 講義のページ 第 7 回のその他の欄に 本日使用する教材があります 171025.xls というファイルがありますので ダウンロードして デスクトップに保存してください 2/45 はじめに データ解析とは この世の中には多くのデータが溢れています
Microsoft PowerPoint - 03ModelBased.ppt
 本日の目的 知的情報処理 3. 原因があって結果がある ( か?) 櫻井彰人慶應義塾大学理工学部 データを生成する法則が存在すると仮定し それを推定することを考える その場合 推定できるのか? 推定する方法はあるのか? 推定しなくてもよいということはないのか? という問いを背景に モデル という概念 モデル を推定するということ モデル を推定しないということを知る なお 事例ベース学習は 丸暗記
本日の目的 知的情報処理 3. 原因があって結果がある ( か?) 櫻井彰人慶應義塾大学理工学部 データを生成する法則が存在すると仮定し それを推定することを考える その場合 推定できるのか? 推定する方法はあるのか? 推定しなくてもよいということはないのか? という問いを背景に モデル という概念 モデル を推定するということ モデル を推定しないということを知る なお 事例ベース学習は 丸暗記
Microsoft PowerPoint - H22制御工学I-2回.ppt
 制御工学 I 第二回ラプラス変換 平成 年 4 月 9 日 /4/9 授業の予定 制御工学概論 ( 回 ) 制御技術は現在様々な工学分野において重要な基本技術となっている 工学における制御工学の位置づけと歴史について説明する さらに 制御システムの基本構成と種類を紹介する ラプラス変換 ( 回 ) 制御工学 特に古典制御ではラプラス変換が重要な役割を果たしている ラプラス変換と逆ラプラス変換の定義を紹介し
制御工学 I 第二回ラプラス変換 平成 年 4 月 9 日 /4/9 授業の予定 制御工学概論 ( 回 ) 制御技術は現在様々な工学分野において重要な基本技術となっている 工学における制御工学の位置づけと歴史について説明する さらに 制御システムの基本構成と種類を紹介する ラプラス変換 ( 回 ) 制御工学 特に古典制御ではラプラス変換が重要な役割を果たしている ラプラス変換と逆ラプラス変換の定義を紹介し
技術開発懇談会-感性工学.ppt
 ! - 1955GNP - 1956!!!! !. - 1989, 1986 (1992)! - 4060 (1988 - - /!! ! 199810 2011913!!! 平成24年1月23日 技術開発懇談会 in 魚沼 感性工学によるデザイン 因果の順推論 感性評価 感性デザイン 因果の逆推論 物理形状 モノ イメージ 言葉 物理形状をどのように表現するか イメージをどのように表現するか 物理形状とイメージの関係づけと変換はどうするか
! - 1955GNP - 1956!!!! !. - 1989, 1986 (1992)! - 4060 (1988 - - /!! ! 199810 2011913!!! 平成24年1月23日 技術開発懇談会 in 魚沼 感性工学によるデザイン 因果の順推論 感性評価 感性デザイン 因果の逆推論 物理形状 モノ イメージ 言葉 物理形状をどのように表現するか イメージをどのように表現するか 物理形状とイメージの関係づけと変換はどうするか
FEM原理講座 (サンプルテキスト)
") サンプルテキスト FEM 原理講座 サイバネットシステム株式会社 8 年 月 9 日作成 サンプルテキストについて 各講師が 講義の内容が伝わりやすいページ を選びました テキストのページは必ずしも連続していません 一部を抜粋しています 幾何光学講座については 実物のテキストではなくガイダンスを掲載いたします 対象とする構造系 物理モデル 連続体 固体 弾性体 / 弾塑性体 / 粘弾性体 / 固体
サンプルテキスト FEM 原理講座 サイバネットシステム株式会社 8 年 月 9 日作成 サンプルテキストについて 各講師が 講義の内容が伝わりやすいページ を選びました テキストのページは必ずしも連続していません 一部を抜粋しています 幾何光学講座については 実物のテキストではなくガイダンスを掲載いたします 対象とする構造系 物理モデル 連続体 固体 弾性体 / 弾塑性体 / 粘弾性体 / 固体
2014 BinN 論文セミナーについて
 2014 BinN 論文セミナーについて 内容 論文ゼミは,BinN で毎年行なっているゼミの 1 つで, 昨年度から外部に公開してやっています. 毎週 2 人のひとが, 各自論文 ( 基本英語 ) を読んでその内容をまとめ, 発表 議論するものです. 単に論文を理解するだけでなく, 先生方を交えてどのように応用可能か, 自分の研究にどう生かせそうかなどを議論できる場となっています. 論文ゼミ 基本事項
2014 BinN 論文セミナーについて 内容 論文ゼミは,BinN で毎年行なっているゼミの 1 つで, 昨年度から外部に公開してやっています. 毎週 2 人のひとが, 各自論文 ( 基本英語 ) を読んでその内容をまとめ, 発表 議論するものです. 単に論文を理解するだけでなく, 先生方を交えてどのように応用可能か, 自分の研究にどう生かせそうかなどを議論できる場となっています. 論文ゼミ 基本事項
Microsoft PowerPoint - H22制御工学I-10回.ppt
 制御工学 I 第 回 安定性 ラウス, フルビッツの安定判別 平成 年 6 月 日 /6/ 授業の予定 制御工学概論 ( 回 ) 制御技術は現在様々な工学分野において重要な基本技術となっている 工学における制御工学の位置づけと歴史について説明する さらに 制御システムの基本構成と種類を紹介する ラプラス変換 ( 回 ) 制御工学 特に古典制御ではラプラス変換が重要な役割を果たしている ラプラス変換と逆ラプラス変換の定義を紹介し
制御工学 I 第 回 安定性 ラウス, フルビッツの安定判別 平成 年 6 月 日 /6/ 授業の予定 制御工学概論 ( 回 ) 制御技術は現在様々な工学分野において重要な基本技術となっている 工学における制御工学の位置づけと歴史について説明する さらに 制御システムの基本構成と種類を紹介する ラプラス変換 ( 回 ) 制御工学 特に古典制御ではラプラス変換が重要な役割を果たしている ラプラス変換と逆ラプラス変換の定義を紹介し
目次 ガウス過程 (Gaussian Process; GP) 序論 GPによる回帰 GPによる識別 GP 状態空間モデル 概括 GP 状態空間モデルによる音楽ムードの推定
 序論 GPによる回帰 GPによる識別 GP 状態空間モデル 概括 GP 状態空間モデルによる音楽ムードの推定") 公開講座 : ガウス過程の基礎と応用 05/3/3 ガウス過程の基礎 統計数理研究所 松井知子 目次 ガウス過程 (Gaussian Process; GP) 序論 GPによる回帰 GPによる識別 GP 状態空間モデル 概括 GP 状態空間モデルによる音楽ムードの推定 GP 序論 ノンパラメトリック予測 カーネル法の利用 参照文献 : C. E. Rasmussen and C. K. I. Williams
公開講座 : ガウス過程の基礎と応用 05/3/3 ガウス過程の基礎 統計数理研究所 松井知子 目次 ガウス過程 (Gaussian Process; GP) 序論 GPによる回帰 GPによる識別 GP 状態空間モデル 概括 GP 状態空間モデルによる音楽ムードの推定 GP 序論 ノンパラメトリック予測 カーネル法の利用 参照文献 : C. E. Rasmussen and C. K. I. Williams
電気電子工学CH-2_1017_v2済
 i-perc 電気通信 学 基礎電 学 CH-2 曽我部 東 電気通信 学 i- パワードエネルギーシステム研究センター (i-perc) 先週の OUTLINE: 2 体輻射 量 論の誕 光量 論 量 論 電 の古典 学特性 原 構造における電 の早期量 論 電 波とは何? 量 論 今週の概要 : 3 電 波 不確定性原理 量 論 円運動の方程式 量 学 複素数表現の導入 シュレーディンガー方程式の導き
i-perc 電気通信 学 基礎電 学 CH-2 曽我部 東 電気通信 学 i- パワードエネルギーシステム研究センター (i-perc) 先週の OUTLINE: 2 体輻射 量 論の誕 光量 論 量 論 電 の古典 学特性 原 構造における電 の早期量 論 電 波とは何? 量 論 今週の概要 : 3 電 波 不確定性原理 量 論 円運動の方程式 量 学 複素数表現の導入 シュレーディンガー方程式の導き
森林水文 水資源学 2 2. 水文統計 豪雨があった時, 新聞やテレビのニュースで 50 年に一度の大雨だった などと報告されることがある. 今争点となっている川辺川ダムは,80 年に 1 回の洪水を想定して治水計画が立てられている. 畑地かんがいでは,10 年に 1 回の渇水を対象として計画が立て
 . 水文統計 豪雨があった時, 新聞やテレビのニュースで 50 年に一度の大雨だった などと報告されることがある. 今争点となっている川辺川ダムは,80 年に 回の洪水を想定して治水計画が立てられている. 畑地かんがいでは,0 年に 回の渇水を対象として計画が立てられる. このように, 水利構造物の設計や, 治水や利水の計画などでは, 年に 回起こるような降雨事象 ( 最大降雨強度, 最大連続干天日数など
. 水文統計 豪雨があった時, 新聞やテレビのニュースで 50 年に一度の大雨だった などと報告されることがある. 今争点となっている川辺川ダムは,80 年に 回の洪水を想定して治水計画が立てられている. 畑地かんがいでは,0 年に 回の渇水を対象として計画が立てられる. このように, 水利構造物の設計や, 治水や利水の計画などでは, 年に 回起こるような降雨事象 ( 最大降雨強度, 最大連続干天日数など
コンピュータ工学講義プリント (7 月 17 日 ) 今回の講義では フローチャートについて学ぶ フローチャートとはフローチャートは コンピュータプログラムの処理の流れを視覚的に表し 処理の全体像を把握しやすくするために書く図である 日本語では流れ図という 図 1 は ユーザーに 0 以上の整数 n
 今回の講義では フローチャートについて学ぶ フローチャートとはフローチャートは コンピュータプログラムの処理の流れを視覚的に表し 処理の全体像を把握しやすくするために書く図である 日本語では流れ図という 図 1 は ユーザーに 0 以上の整数 n") コンピュータ工学講義プリント (7 月 17 日 ) 今回の講義では フローチャートについて学ぶ フローチャートとはフローチャートは コンピュータプログラムの処理の流れを視覚的に表し 処理の全体像を把握しやすくするために書く図である 日本語では流れ図という 図 1 は ユーザーに 0 以上の整数 n を入力してもらい その後 1 から n までの全ての整数の合計 sum を計算し 最後にその sum
コンピュータ工学講義プリント (7 月 17 日 ) 今回の講義では フローチャートについて学ぶ フローチャートとはフローチャートは コンピュータプログラムの処理の流れを視覚的に表し 処理の全体像を把握しやすくするために書く図である 日本語では流れ図という 図 1 は ユーザーに 0 以上の整数 n を入力してもらい その後 1 から n までの全ての整数の合計 sum を計算し 最後にその sum
ボルツマンマシンの高速化
 1. はじめに ボルツマン学習と平均場近似 山梨大学工学部宗久研究室 G04MK016 鳥居圭太 ボルツマンマシンは学習可能な相互結合型ネットワー クの代表的なものである. ボルツマンマシンには, 学習のための統計平均を取る必要があり, 結果を求めるまでに長い時間がかかってしまうという欠点がある. そこで, 学習の高速化のために, 統計を取る2つのステップについて, 以下のことを行う. まず1つ目のステップでは,
1. はじめに ボルツマン学習と平均場近似 山梨大学工学部宗久研究室 G04MK016 鳥居圭太 ボルツマンマシンは学習可能な相互結合型ネットワー クの代表的なものである. ボルツマンマシンには, 学習のための統計平均を取る必要があり, 結果を求めるまでに長い時間がかかってしまうという欠点がある. そこで, 学習の高速化のために, 統計を取る2つのステップについて, 以下のことを行う. まず1つ目のステップでは,
スライド 1
 2019 年 5 月 7 日 @ 統計モデリング 統計モデリング 第四回配布資料 ( 予習用 ) 文献 : a) A. J. Dobson and A. G. Barnett: An Introduction to Generalized Linear Models. 3rd ed., CRC Press. b) H. Dung, et al: Monitoring the Transmission
2019 年 5 月 7 日 @ 統計モデリング 統計モデリング 第四回配布資料 ( 予習用 ) 文献 : a) A. J. Dobson and A. G. Barnett: An Introduction to Generalized Linear Models. 3rd ed., CRC Press. b) H. Dung, et al: Monitoring the Transmission
DVIOUT
 最適レギュレータ 松尾研究室資料 第 最適レギュレータ 節時不変型無限時間最適レギュレータ 状態フィードバックの可能な場合の無限時間問題における最適レギュレータについて確定系について説明する. ここで, レギュレータとは状態量をゼロにするようなコントローラのことである. なぜ, 無限時間問題のみを述べるかという理由は以下のとおりである. 有限時間の最適レギュレータ問題の場合の最適フィードバックゲインは微分方程式の解から構成される時間関数として表現される.
最適レギュレータ 松尾研究室資料 第 最適レギュレータ 節時不変型無限時間最適レギュレータ 状態フィードバックの可能な場合の無限時間問題における最適レギュレータについて確定系について説明する. ここで, レギュレータとは状態量をゼロにするようなコントローラのことである. なぜ, 無限時間問題のみを述べるかという理由は以下のとおりである. 有限時間の最適レギュレータ問題の場合の最適フィードバックゲインは微分方程式の解から構成される時間関数として表現される.
Microsoft PowerPoint - 5.ppt [互換モード]
![Microsoft PowerPoint - 5.ppt [互換モード]](/thumbs/102/153161196.jpg "Microsoft PowerPoint - 5.ppt [互換モード]") 5. チューリングマシンと計算 1 5-1. チューリングマシンとその計算 これまでのモデルでは テープに直接書き込むことができなかった また 入力テープヘッドの操作は右方向だけしか移動できなかった これらの制限を取り除いた機械を考える このような機械をチューリングマシン (Turing Machine,TM) と呼ぶ ( 実は TMは 現実のコンピュータの能力を持つ ) TM の特徴 (DFA との比較
5. チューリングマシンと計算 1 5-1. チューリングマシンとその計算 これまでのモデルでは テープに直接書き込むことができなかった また 入力テープヘッドの操作は右方向だけしか移動できなかった これらの制限を取り除いた機械を考える このような機械をチューリングマシン (Turing Machine,TM) と呼ぶ ( 実は TMは 現実のコンピュータの能力を持つ ) TM の特徴 (DFA との比較
コンテンツセントリックネットワーク技術を用いた ストリームデータ配信システムの設計と実装
 コンテンツセントリックネットワークにおけるストリームデータ配信機構の実装 川崎賢弥, 阿多信吾, 村田正幸 大阪大学大学院情報科学研究科 大阪市立大学大学院工学研究科 2 発表内容 研究背景 研究目的 ストリームデータ配信機構の設計 ストリームデータのモデル化 コンテンツの名前構造 ストリームデータの要求とフロー制御 ストリームデータ配信機構の実装 動作デモンストレーション 3 コンテンツセントリックネットワーク
コンテンツセントリックネットワークにおけるストリームデータ配信機構の実装 川崎賢弥, 阿多信吾, 村田正幸 大阪大学大学院情報科学研究科 大阪市立大学大学院工学研究科 2 発表内容 研究背景 研究目的 ストリームデータ配信機構の設計 ストリームデータのモデル化 コンテンツの名前構造 ストリームデータの要求とフロー制御 ストリームデータ配信機構の実装 動作デモンストレーション 3 コンテンツセントリックネットワーク
構造化プログラミングと データ抽象
 計算の理論 後半第 3 回 λ 計算と型システム 本日の内容 λ 計算の表現力 ( 前回の復習 ) データの表現 不動点演算子と再帰 λ 計算の重要な性質 チャーチ ロッサー性 簡約戦略 型付き λ 計算 ブール値 組 ブール値と組の表現 true, false を受け取り 対応する要素を返す関数 として表現 T = λt.λf.t F = λt.λf.f if e 1 then e 2 else
計算の理論 後半第 3 回 λ 計算と型システム 本日の内容 λ 計算の表現力 ( 前回の復習 ) データの表現 不動点演算子と再帰 λ 計算の重要な性質 チャーチ ロッサー性 簡約戦略 型付き λ 計算 ブール値 組 ブール値と組の表現 true, false を受け取り 対応する要素を返す関数 として表現 T = λt.λf.t F = λt.λf.f if e 1 then e 2 else
Microsoft Word - å“Ÿåłžå¸°173.docx
 回帰分析 ( その 3) 経済情報処理 価格弾力性の推定ある商品について その購入量を w 単価を p とし それぞれの変化量を w p で表 w w すことにする この時 この商品の価格弾力性 は により定義される これ p p は p が 1 パーセント変化した場合に w が何パーセント変化するかを示したものである ここで p を 0 に近づけていった極限を考えると d ln w 1 dw dw
回帰分析 ( その 3) 経済情報処理 価格弾力性の推定ある商品について その購入量を w 単価を p とし それぞれの変化量を w p で表 w w すことにする この時 この商品の価格弾力性 は により定義される これ p p は p が 1 パーセント変化した場合に w が何パーセント変化するかを示したものである ここで p を 0 に近づけていった極限を考えると d ln w 1 dw dw
ii 2. F. ( ), ,,. 5. G., L., D. ( ) ( ), 2005.,. 6.,,. 7.,. 8. ( ), , (20 ). 1. (75% ) (25% ). 60.,. 2. =8 5, =8 4 (. 1.) 1.,,
, ,,. 5. G., L., D. ( ) ( ), 2005.,. 6.,,. 7.,. 8. ( ), , (20 ). 1. (75% ) (25% ). 60.,. 2. =8 5, =8 4 (. 1.) 1.,,") (1 C205) 4 8 27(2015) http://www.math.is.tohoku.ac.jp/~obata,.,,,..,,. 1. 2. 3. 4. 5. 6. 7.... 1., 2014... 2. P. G., 1995.,. 3.,. 4.. 5., 1996... 1., 2007,. ii 2. F. ( ),.. 3... 4.,,. 5. G., L., D. ( )
(1 C205) 4 8 27(2015) http://www.math.is.tohoku.ac.jp/~obata,.,,,..,,. 1. 2. 3. 4. 5. 6. 7.... 1., 2014... 2. P. G., 1995.,. 3.,. 4.. 5., 1996... 1., 2007,. ii 2. F. ( ),.. 3... 4.,,. 5. G., L., D. ( )
NLP プログラミング勉強会 6 かな漢字変換 自然言語処理プログラミング勉強会 6 - かな漢字変換 Graham Neubig 奈良先端科学技術大学院大学 (NAIST) 1
 1") 自然言語処理プログラミング勉強会 6 - かな漢字変換 Graham Neubig 奈良先端科学技術大学院大学 (NAIST) 1 かな漢字変換のモデル 日本語入力でひらがな列 X をかな漢字混じり文 Y へ変換 かなかんじへんかんはにほんごにゅうりょくのいちぶ かな漢字変換は日本語入力の一部 HMM や単語分割と同じく 構造化予測の一部 2 選択肢が膨大! かなかんじへんかんはにほんごにゅうりょくのいちぶ
自然言語処理プログラミング勉強会 6 - かな漢字変換 Graham Neubig 奈良先端科学技術大学院大学 (NAIST) 1 かな漢字変換のモデル 日本語入力でひらがな列 X をかな漢字混じり文 Y へ変換 かなかんじへんかんはにほんごにゅうりょくのいちぶ かな漢字変換は日本語入力の一部 HMM や単語分割と同じく 構造化予測の一部 2 選択肢が膨大! かなかんじへんかんはにほんごにゅうりょくのいちぶ
観測範囲に制限のあるセンサ情報の外延と統合によるロボットの行動生成法 Motion generation of robot with limited sensing range based on extrapolation and integration of sensor spaces 動に関する
 動に関する整合性を評価することによって 仮想的に観測範囲外での Jacobi 行列を推定するアルゴリズムを開発し 動作生成方法を提案する 具体例として アーム型ロボットによるリーチング動作および移動ロボットの壁沿い走行をあげ 複数のセンサ空間が重ならなくても適切な動作生成が可能であることを示す 小林祐一 ( Yuichi KOBAYASHI Ph. D. ) 静岡大学大学院工学研究科准教授 ( Associate
動に関する整合性を評価することによって 仮想的に観測範囲外での Jacobi 行列を推定するアルゴリズムを開発し 動作生成方法を提案する 具体例として アーム型ロボットによるリーチング動作および移動ロボットの壁沿い走行をあげ 複数のセンサ空間が重ならなくても適切な動作生成が可能であることを示す 小林祐一 ( Yuichi KOBAYASHI Ph. D. ) 静岡大学大学院工学研究科准教授 ( Associate
 第 40 号 平成 30 年 10 月 1 日 博士学位論文 内容の要旨及び審査結果の要旨 ( 平成 30 年度前学期授与分 ) 金沢工業大学 目次 博士 ( 学位記番号 ) ( 学位の種類 ) ( 氏名 ) ( 論文題目 ) 博甲第 115 号博士 ( 工学 ) 清水駿矢自動車用衝撃吸収構造の設計効率化 1 はしがき 本誌は 学位規則 ( 昭和 28 年 4 月 1 日文部省令第 9 号 ) 第
第 40 号 平成 30 年 10 月 1 日 博士学位論文 内容の要旨及び審査結果の要旨 ( 平成 30 年度前学期授与分 ) 金沢工業大学 目次 博士 ( 学位記番号 ) ( 学位の種類 ) ( 氏名 ) ( 論文題目 ) 博甲第 115 号博士 ( 工学 ) 清水駿矢自動車用衝撃吸収構造の設計効率化 1 はしがき 本誌は 学位規則 ( 昭和 28 年 4 月 1 日文部省令第 9 号 ) 第
memo
 計数工学プログラミング演習 ( 第 4 回 ) 2016/05/10 DEPARTMENT OF MATHEMATICA INFORMATICS 1 内容 リスト 疎行列 2 連結リスト (inked ists) オブジェクトをある線形順序に並べて格納するデータ構造 単方向連結リスト (signly linked list) の要素 x キーフィールド key ポインタフィールド next x->next:
計数工学プログラミング演習 ( 第 4 回 ) 2016/05/10 DEPARTMENT OF MATHEMATICA INFORMATICS 1 内容 リスト 疎行列 2 連結リスト (inked ists) オブジェクトをある線形順序に並べて格納するデータ構造 単方向連結リスト (signly linked list) の要素 x キーフィールド key ポインタフィールド next x->next:
Microsoft PowerPoint - 6.PID制御.pptx
 プロセス制御工学 6.PID 制御 京都大学 加納学 Division of Process Control & Process Systems Engineering Department of Chemical Engineering, Kyoto University manabu@cheme.kyoto-u.ac.jp http://www-pse.cheme.kyoto-u.ac.jp/~kano/
プロセス制御工学 6.PID 制御 京都大学 加納学 Division of Process Control & Process Systems Engineering Department of Chemical Engineering, Kyoto University manabu@cheme.kyoto-u.ac.jp http://www-pse.cheme.kyoto-u.ac.jp/~kano/
Information Theory
 前回の復習 講義の概要 chapter 1: 情報を測る... エントロピーの定義 確率変数 X の ( 一次 ) エントロピー M H 1 (X) = p i log 2 p i (bit) i=1 M は実現値の個数,p i は i 番目の実現値が取られる確率 実現値 確率 表 裏 0.5 0.5 H 1 X = 0.5 log 2 0.5 0.5log 2 0.5 = 1bit 1 練習問題の解答
前回の復習 講義の概要 chapter 1: 情報を測る... エントロピーの定義 確率変数 X の ( 一次 ) エントロピー M H 1 (X) = p i log 2 p i (bit) i=1 M は実現値の個数,p i は i 番目の実現値が取られる確率 実現値 確率 表 裏 0.5 0.5 H 1 X = 0.5 log 2 0.5 0.5log 2 0.5 = 1bit 1 練習問題の解答
学習指導要領
 (1) 数と式 ア数と集合 ( ア ) 実数数を実数まで拡張する意義を理解し 簡単な無理数の四則計算をすること 絶対値の意味を理解し適切な処理することができる 例題 1-3 の絶対値をはずせ 展開公式 ( a + b ) ( a - b ) = a 2 - b 2 を利用して根号を含む分数の分母を有理化することができる 例題 5 5 + 2 の分母を有理化せよ 実数の整数部分と小数部分の表し方を理解している
(1) 数と式 ア数と集合 ( ア ) 実数数を実数まで拡張する意義を理解し 簡単な無理数の四則計算をすること 絶対値の意味を理解し適切な処理することができる 例題 1-3 の絶対値をはずせ 展開公式 ( a + b ) ( a - b ) = a 2 - b 2 を利用して根号を含む分数の分母を有理化することができる 例題 5 5 + 2 の分母を有理化せよ 実数の整数部分と小数部分の表し方を理解している
Microsoft PowerPoint - Inoue-statistics [互換モード]
![Microsoft PowerPoint - Inoue-statistics [互換モード]](/thumbs/92/107910528.jpg "Microsoft PowerPoint - Inoue-statistics [互換モード]") 誤差論 神戸大学大学院農学研究科 井上一哉 (Kazuya INOUE) 誤差論 2011 年度前期火曜クラス 1 講義内容 誤差と有効数字 (Slide No.2~8 Text p.76~78) 誤差の分布と標準偏差 (Slide No.9~18 Text p.78~80) 最確値とその誤差 (Slide No.19~25 Text p.80~81) 誤差の伝播 (Slide No.26~32 Text
誤差論 神戸大学大学院農学研究科 井上一哉 (Kazuya INOUE) 誤差論 2011 年度前期火曜クラス 1 講義内容 誤差と有効数字 (Slide No.2~8 Text p.76~78) 誤差の分布と標準偏差 (Slide No.9~18 Text p.78~80) 最確値とその誤差 (Slide No.19~25 Text p.80~81) 誤差の伝播 (Slide No.26~32 Text
Microsoft PowerPoint - 10.pptx
 m u. 固有値とその応用 8/7/( 水 ). 固有値とその応用 固有値と固有ベクトル 行列による写像から固有ベクトルへ m m 行列 によって線形写像 f : R R が表せることを見てきた ここでは 次元平面の行列による写像を調べる とし 写像 f : を考える R R まず 単位ベクトルの像 u y y f : R R u u, u この事から 線形写像の性質を用いると 次の格子上の点全ての写像先が求まる
m u. 固有値とその応用 8/7/( 水 ). 固有値とその応用 固有値と固有ベクトル 行列による写像から固有ベクトルへ m m 行列 によって線形写像 f : R R が表せることを見てきた ここでは 次元平面の行列による写像を調べる とし 写像 f : を考える R R まず 単位ベクトルの像 u y y f : R R u u, u この事から 線形写像の性質を用いると 次の格子上の点全ての写像先が求まる
Microsoft PowerPoint - 3.ppt [互換モード]
![Microsoft PowerPoint - 3.ppt [互換モード]](/thumbs/95/124643964.jpg "Microsoft PowerPoint - 3.ppt [互換モード]") 3. プッシュダウンオートマトンと文脈自由文法 1 3-1. プッシュダウンオートマトン オートマトンはメモリがほとんど無かった この制限を除いた機械を考える 理想的なスタックを利用できるようなオートマトンをプッシュダウンオートマトン (Push Down Automaton,PDA) という 0 1 入力テープ 1 a 1 1 0 1 スタッb 入力テープを一度走査したあと ク2 入力テプを度走査したあと
3. プッシュダウンオートマトンと文脈自由文法 1 3-1. プッシュダウンオートマトン オートマトンはメモリがほとんど無かった この制限を除いた機械を考える 理想的なスタックを利用できるようなオートマトンをプッシュダウンオートマトン (Push Down Automaton,PDA) という 0 1 入力テープ 1 a 1 1 0 1 スタッb 入力テープを一度走査したあと ク2 入力テプを度走査したあと
untitled
 に, 月次モデルの場合でも四半期モデルの場合でも, シミュレーション期間とは無関係に一様に RMSPE を最小にするバンドの設定法は存在しないということである 第 2 は, 表で与えた 2 つの期間及びすべての内生変数を見渡して, 全般的にパフォーマンスのよいバンドの設定法は, 最適固定バンドと最適可変バンドのうちの M 2, Q2 である いずれにしても, 以上述べた 3 つのバンド設定法は若干便宜的なものと言わざるを得ない
に, 月次モデルの場合でも四半期モデルの場合でも, シミュレーション期間とは無関係に一様に RMSPE を最小にするバンドの設定法は存在しないということである 第 2 は, 表で与えた 2 つの期間及びすべての内生変数を見渡して, 全般的にパフォーマンスのよいバンドの設定法は, 最適固定バンドと最適可変バンドのうちの M 2, Q2 である いずれにしても, 以上述べた 3 つのバンド設定法は若干便宜的なものと言わざるを得ない
Microsoft Word doc
 . 正規線形モデルのベイズ推定翠川 大竹距離減衰式 (PGA(Midorikawa, S., and Ohtake, Y. (, Attenuation relationships of peak ground acceleration and velocity considering attenuation characteristics for shallow and deeper earthquakes,
. 正規線形モデルのベイズ推定翠川 大竹距離減衰式 (PGA(Midorikawa, S., and Ohtake, Y. (, Attenuation relationships of peak ground acceleration and velocity considering attenuation characteristics for shallow and deeper earthquakes,
フィードバック ~ 様々な電子回路の性質 ~ 実験 (1) 目的実験 (1) では 非反転増幅器の増幅率や位相差が 回路を構成する抵抗値や入力信号の周波数によってどのように変わるのかを調べる 実験方法 図 1 のような自由振動回路を組み オペアンプの + 入力端子を接地したときの出力電圧 が 0 と
 目的実験 (1) では 非反転増幅器の増幅率や位相差が 回路を構成する抵抗値や入力信号の周波数によってどのように変わるのかを調べる 実験方法 図 1 のような自由振動回路を組み オペアンプの + 入力端子を接地したときの出力電圧 が 0 と") フィードバック ~ 様々な電子回路の性質 ~ 実験 (1) 目的実験 (1) では 非反転増幅器の増幅率や位相差が 回路を構成する抵抗値や入力信号の周波数によってどのように変わるのかを調べる 実験方法 図 1 のような自由振動回路を組み オペアンプの + 入力端子を接地したときの出力電圧 が 0 となるように半固定抵抗器を調整する ( ゼロ点調整のため ) 図 1 非反転増幅器 2010 年度版物理工学実験法
フィードバック ~ 様々な電子回路の性質 ~ 実験 (1) 目的実験 (1) では 非反転増幅器の増幅率や位相差が 回路を構成する抵抗値や入力信号の周波数によってどのように変わるのかを調べる 実験方法 図 1 のような自由振動回路を組み オペアンプの + 入力端子を接地したときの出力電圧 が 0 となるように半固定抵抗器を調整する ( ゼロ点調整のため ) 図 1 非反転増幅器 2010 年度版物理工学実験法
ダイポールアンテナ標準:校正の実際と不確かさ
 ダイポールアンテナ標準 校正の実際と不確かさ ( 独 ) 産業技術総合研究所 森岡健浩 概要 アンテナ係数 3アンテナ法 ( 半自由空間と自由空間 ) 置換法 不確かさ積算 異なるアンテナ校正によるアンテナ係数の一意性 まとめ アンテナ係数の定義 z 波源 V 付属回路 受信アンテナ図 アンテナ係数の定義 V 測定量 : アンテナ係数 ( 水平偏波.0 m 高 または自由空間 ) 校正方法 : 3アンテナ法
ダイポールアンテナ標準 校正の実際と不確かさ ( 独 ) 産業技術総合研究所 森岡健浩 概要 アンテナ係数 3アンテナ法 ( 半自由空間と自由空間 ) 置換法 不確かさ積算 異なるアンテナ校正によるアンテナ係数の一意性 まとめ アンテナ係数の定義 z 波源 V 付属回路 受信アンテナ図 アンテナ係数の定義 V 測定量 : アンテナ係数 ( 水平偏波.0 m 高 または自由空間 ) 校正方法 : 3アンテナ法
第Ⅱ編/労働移動と地域の発展
 Introduction Introduction 京都大学森知也先生講義 空間経済学 HP より転載 Thu nen Fig. Thu nen rings Introduction Thu nen 第 4 章 独占的競争のディクシット = スティグリッツのモデルとその空間経済への拡張 U = M μ A 1'μ (4.1) M: 工業品の消費を示す合成指数 μ: 工業品への支出割合を表す定数 A:
Introduction Introduction 京都大学森知也先生講義 空間経済学 HP より転載 Thu nen Fig. Thu nen rings Introduction Thu nen 第 4 章 独占的競争のディクシット = スティグリッツのモデルとその空間経済への拡張 U = M μ A 1'μ (4.1) M: 工業品の消費を示す合成指数 μ: 工業品への支出割合を表す定数 A:
Microsoft PowerPoint - 9.pptx
 9. 線形写像 ここでは 行列の積によって 写像を定義できることをみていく また 行列の積によって定義される写像の性質を調べていく 行列演算と写像 ( 次変換 3 拡大とスカラー倍 p ' = ( ', ' = ( k, kk p = (, k 倍 k 倍 拡大後 k 倍拡大の関係は スカラー倍を用いて次のように表現できる ' = k ' 拡大前 拡大 4 拡大と行列の積 p ' = ( ', '
9. 線形写像 ここでは 行列の積によって 写像を定義できることをみていく また 行列の積によって定義される写像の性質を調べていく 行列演算と写像 ( 次変換 3 拡大とスカラー倍 p ' = ( ', ' = ( k, kk p = (, k 倍 k 倍 拡大後 k 倍拡大の関係は スカラー倍を用いて次のように表現できる ' = k ' 拡大前 拡大 4 拡大と行列の積 p ' = ( ', '
Microsoft PowerPoint - 物情数学C(2012)(フーリエ前半)_up
(フーリエ前半)_up") 年度物理情報工学科 年生秋学期 物理情報数学 C フーリエ解析 (Fourier lysis) 年 月 5 日 フーリエ ( フランス ) (768~83: ナポレオンの時代 ) 歳で Ecole Polyechique ( フランス国立理工科大学 ) の教授 ナポレオンのエジプト遠征に従軍 (798) 87: 任意の関数は三角関数によって級数展開できる という フーリエ級数 の概念を提唱 ( 論文を提出
年度物理情報工学科 年生秋学期 物理情報数学 C フーリエ解析 (Fourier lysis) 年 月 5 日 フーリエ ( フランス ) (768~83: ナポレオンの時代 ) 歳で Ecole Polyechique ( フランス国立理工科大学 ) の教授 ナポレオンのエジプト遠征に従軍 (798) 87: 任意の関数は三角関数によって級数展開できる という フーリエ級数 の概念を提唱 ( 論文を提出
Microsoft PowerPoint - 9.pptx
 9/7/8( 水 9. 線形写像 ここでは 行列の積によって 写像を定義できることをみていく また 行列の積によって定義される写像の性質を調べていく 拡大とスカラー倍 行列演算と写像 ( 次変換 拡大後 k 倍 k 倍 k 倍拡大の関係は スカラー倍を用いて次のように表現できる p = (, ' = k ' 拡大前 p ' = ( ', ' = ( k, k 拡大 4 拡大と行列の積 拡大後 k 倍
9/7/8( 水 9. 線形写像 ここでは 行列の積によって 写像を定義できることをみていく また 行列の積によって定義される写像の性質を調べていく 拡大とスカラー倍 行列演算と写像 ( 次変換 拡大後 k 倍 k 倍 k 倍拡大の関係は スカラー倍を用いて次のように表現できる p = (, ' = k ' 拡大前 p ' = ( ', ' = ( k, k 拡大 4 拡大と行列の積 拡大後 k 倍