main.dvi
|
|
|
- かずただ はしかわ
- 4 years ago
- Views:
Transcription
1 A 1/4 1 1/ 1/ (Vergence) (Convergence) (Divergence) ( ) ( ) 97
2 1) S. Fukushima, M. Takahashi, and H. Yoshikawa: A STUDY ON VR-BASED MUTUAL ADAPTIVE CAI SYSTEM FOR NUCLEAR POWER PLANT, Proc. of FIFTH International Topical Meeting on Nuclear Thermal Hydraulics, Operations, & Safety (NUTHOS-), pp.dd3-1-dd3-6, (1997). 2) : Eye-Sensing HMD, (1997) 3) : 39 Vol /22 (1996) 4) :, (1993) ) :,, (198). 6) :,, (1991). 7) :,, (199). 8) NHK : (199) 9) :, Vol. No.9 13/131 (1996) 1) : TECHNICAL REPORT OF IEICE (199-12) 11) J.L.Andreassi :,, (198). 12) D Noton & L. Stark :Scanpath in eye movements during pattern perception Science Vol.771 pp (1971). 13) M. Fujii, R. Fukatsu, Y. Aizawa, N. Takahata, M. Yamada, & S. Murakami :Cognitive disturbances in visual information processing in Alzheimer's disease, Vision, Memory and the Temporal Lobe pp (199). 14) : Vol.33 pp (1989). 1) : (199) 16) : (1994) 96
3 .,,,. 9
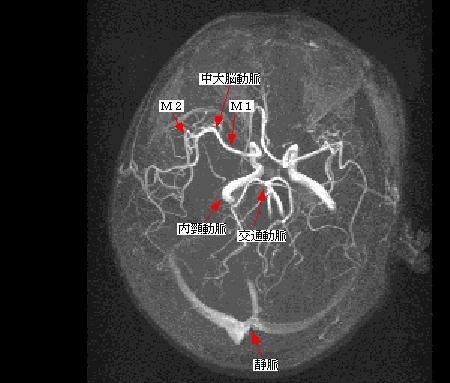
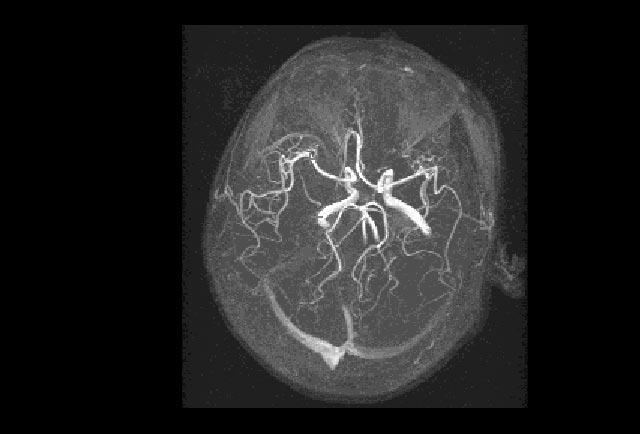
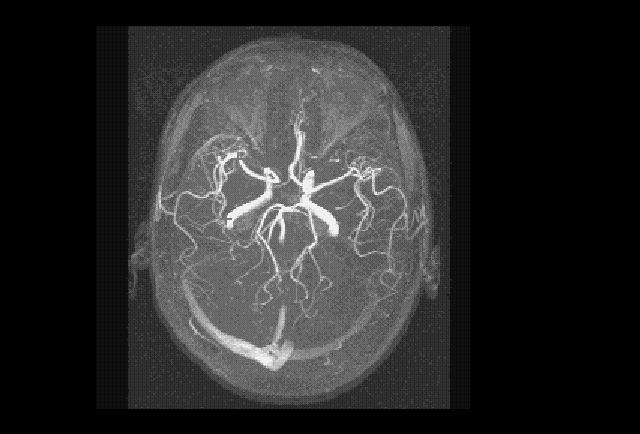
4 3cm MR MR HMD 94
5 6 Eye-Sensing HMD 3 Eye-Sensing HMD [deg/sec] 93
6 6 4 Eyeball rotation [deg] Time [sec.] 6.23: SF 4 Eyeball rotation [deg] Time [sec.].24: SF 92
7 8 Left eye 7 Pupil diameter [mm] Time [sec.].21: SF Right eye 8 7 Pupil diameter [mm] Time [sec.].22: SF 91
8 6 Left eye Pupil diameter [mm] Time [sec.].19: TM Right eye 6 Pupil diameter [mm] Time [sec.].2: TM 9
9 6 Left eye. Pupil diameter [mm] Time [sec.].17: DM Left eye 6. Pupil diameter [mm] Time [sec.].18: DM 89
10 6 Left eye Pupil diameter [mm] Time [sec.].16: 2 YA 88
11 8 6 Eyeball rotation [deg] Time [sec.].1: YA 87
12 6 Left eye Pupil diameter [mm] Time [sec.].13: YA Left eye 6 Pupil diameter [mm] Time [sec.].14: YA 86
13 6 Left eye. Pupil diameter [mm] Time [sec.].11: SF Right eye 6. Pupil diameter [mm] Time [sec.].12: SF 8
14 SF YA YA DM TM SF
15 : 83
16 c a 1 p d END.9: 82
17 ES-HMD ES-HMD SF YA DM TM
18 1, 16) 1 1 (Pre-attentive Process) 2 (Attentive Process) 1, 16) ) 8
19 .8: 79
20 2 1 1 Vertical [cm] Horizontal [cm].7: ( 78
21 M1 M2.7 ES-HMD MR ES-HMD.2 MR
22 Measured gaze points on the display (64*434) Vertical [dots] Horizontal [dots].6: !!!!.8 76
23 68.42cm 2cm. 1cm Depth [cm] Time [sec].: 7
24 .4: 74
25 .2:.3: 73
26 M2 ES-HMD
27 .1: 71
28 Eye-Sensing HMD.1 MR MR MRI.1 12).1 13) 14).2.3 MR 2 ES-HMD 7
29 2 Left eye 1 1 Vertical [cm] Horizontal [cm] 4.42: ( 2 Right eye 1 1 Vertical [cm] Horizontal [cm] 4.43: ( 69
30 2 1 Eyeball rotation [deg] Time [sec] 4.4: ( 2 1 Eyeball rotation [deg] Time [sec] 4.41: ( 68
31 Eyeball rotation [deg.] Time [sec.] 4.38: ( 2 1 Eyeball rotation [deg.] Time [sec.] 4.39: ( 67
32 2 Left eye 1 1 Vertical [cm] Horizontal [cm] 4.36: ( 2 Right eye 1 1 Vertical [cm] Horizontal [cm] 4.37: ( 66
33 2 1 Eyeball rotation [deg] Time [sec] 4.34: ( 2 1 Eyeball rotation [deg] Time [sec] 4.3: ( 6
34 Eyeball rotation [deg.] Time [sec.] 4.32: ( 2 1 Eyeball rotation [deg.] Time [sec.] 4.33: ( 64
35

36 4.31: TO TO
37 1 Eyeball rotation [deg.] Time [sec.] TM 4 1 Eyeball rotation [deg.] Time [sec.] TM 2 4.3: TM ( 61
38 1 Eyeball rotation [deg.] Time [sec.] TM 16 1 Eyeball rotation [deg.] Time [sec.] TM : TM ( 6
39 1 Eyeball rotation [deg] Time [sec] NI 4 1 Eyeball rotation [deg] Time [sec] NI : NI ( 9
40 1 Eyeball rotation [deg] Time [sec] NI 16 1 Eyeball rotation [deg] Time [sec] NI : NI ( 8
41 1 Eyeball rotation [deg] Time [sec] HF 4 1 Eyeball rotation [deg] Time [sec] HF : HF ( 7
42 1 Eyeball rotation [deg] Time [sec] HF 16 1 Eyeball rotation [deg] Time [sec] HF 8 4.2: HF ( 6
43 1 Eyeball rotation [deg.] Time [sec.] DM 4 1 Eyeball rotation [deg.] Time [sec.] DM : DM (
44 1 Eyeball rotation [deg.] Time [sec.] DM 16 1 Eyeball rotation [deg.] Time [sec.] DM : DM ( 4
45 1 Eyeball rotation [deg.] Time [sec.] SF 4 1 Eyeball rotation [deg.] Time [sec.] SF : SF ( 3
46 1 Eyeball rotation [deg.] Time [sec.] SF 16 1 Eyeball rotation [deg.] Time [sec.] SF : SF ( 2
47 1 Eyeball rotation [deg.] Time [sec.] TK 4 1 Convergence angle [deg.] Time [sec.] TK 2 4.2: TK ( 1
48 1 Eyeball rotation [deg.] Time [sec.] TK 16 1 Eyeball rotation [deg.] Time [sec.] TK : TK (
49 1 Eyeball rotation [deg] Time [sec] YA 4 1 Eyeball rotation [deg] Time [sec] YA : YA ( 49
50 1 Eyeball rotation [deg] Time [sec] YA 16 1 Eyeball rotation [deg] Time [sec] YA : YA ( 48
51 1 Eyeball rotation [deg.] Time [sec.] TO 4 1 Eyeball rotation [deg.] Time [sec.] TO : TO ( 47
52 1 Eyeball rotation [deg.] Time [sec.] TO 16 1 Eyeball rotation [deg.] Time [sec.] TO 8 4.1: TO ( 46
53 4.3: TO YA TK SF DM HF NI TM HF NI TM :
54 TO 2 TO 2 1m SF 2 4 DM 2 2 YA TK HF NI TM HF HF NI NI TM 16. NI TM ES-HMD TO YA TK SF DM 44
55 2 Depth distance [cm] Given angle to the target [deg] 4.14: TO 43
56 1 Left eye Measured convergence angle [deg] Given angle to the target [deg] 4.12: ( NI Right eye 1 Measured convergence angle [deg] Given angle to the target [deg] 4.13: ( NI 42
57 16 Measured convergence angle [deg] Given angle to the target [deg] 4.11: NI 41
58 16 Measured convergence angle [deg] Given angle to the target [deg] 4.9: DM 16 Measured convergence angle [deg] Given angle to the target [deg] 4.1: HF 4
59 16 Measured convergence angle [deg] Given angle to the target [deg] 4.7: TK 16 Measured convergence angle [deg] Given angle to the target [deg] 4.8: SF 39
60 16 Measured convergence angle [deg] Given angle to the target [deg] 4.: TO 16 Measured convergence angle [deg] Given angle to the target [deg] 4.6: YA 38
61 4.14 TO 4.3 CCD
62 4.2: TO YA.2 1. TK SF DM HF NI TM TO SF YA TK DM HF NI TM HF NI TO SF YA TK DM NI NI 36
63 4.1: (cm) ( ) (cm) ( 4.2) TO SF. YA TK DM 4.8 3
 ES-HMD 16 9 ES-HMD 4.")
64 4.4: ( ) ( ) ES-HMD 16 9 ES-HMD
65 1 4.2: : ES-HMD 33
66 4.1: v = 18 :19 2 x sin1 [deg.] (4:2) 13: 4.2 ( + ) L 6: L = [cm] (4:3) tan + tan x CCD (4.2) ES-HMD
67 ES-HMD ES-HMD.421mm.19mm 1 13.mm 11) 6mm ES-HMD CCD 4.1 CCD x h v h = 18 :421 2 x sin1 [deg.] (4:1) 13: 31
68 Measured gaze point (Light eye) Vertical [dots] Horizontal [dots] 3.18: Measured gaze point (Light eye) Vertical [dots] Horizontal [dots] 3.19: 3
69 3.3: [dots] [dots] : [dots] [dots]
70 x X y y > f TL (x) y > f RT (x) Y p TL T p RT L R p LB B p BR Display image at calibration. y > f LB (x) y > f BR (x) Areas divided by five obtained pupil center positions. 3.16: Input pupil center position (x,y). y > f TL (x) No Yes y > f LB (x) No y > f RT (x) No Yes Area L Yes Area T y > f BR (x) No y > f BR (x) No Yes Area R Yes Area R Area B Area B 3.17: 28
71 Measured gaze point (Left eye) Vertical [dots] Horizontal [dots] 3.14: Measured gaze point (Right eye) Vertical [dots] Horizontal [dots] 3.1: 27
72 k; l k; l P (X; Y X Y 1 A = X RT Y RT 1 A + X TL Y TL 1 A X c Y c 1 A (3:7) X c ;Y c ,6,17, ,19,
73 ,6,28, CCD 4 4! p TL ;! p LB ;! p BR ;! p RT 4 T; L; B; R y = f TL (x);y = f LB (x);y = f BR (x);y = f RT (x) ! ; p =(x; y) T p RT ;p TL ;! p RT =! P RT =(X RT ;Y RT );! P TL =(X TL ; Y TL ) (x RT ;y RT );! p TL = (x TL ;y TL x y 1 A = x RT y RT 1 A + x TL y TL 1 A (3:6) 2
74 x x c y y c x x c y y c X = X c X lb x c x lb (x x c )+X c Y = Y c Y lb y c y lb (y y c )+Y c (3.4) X = X c X rb x c x rb (x x c )+X c Y = Y c Y rb y c y rb (y y c )+Y c (3.) ,6,17, ,, ,19,
75 3.13: 2 23
76 : X c X lt X c X = x c x lt x c x Y c Y lt Y c Y = y c y lt y c y (X; Y ) (3.1) X = X c X lt x c x lt x x c y y c (x x c )+X c Y = Y c Y lt y c y lt (y y c )+Y c (3.2) X = X c X rt x c x rt (x x c )+X c Y = Y c Y rt y c y rt (y y c )+Y c (3.3) 22
77 3.12 ES-HMD (X c ;Y c ), (X lt ;Y lt ), (X rt ;Y rt ), (X lb ;Y lb ), (X rb ;Y rb ) X Y CCD (x c ;y c ), (x lt ;y lt ), (x rt ;y rt ), (x lb ;y lb ), (x rb ;y rb ) x y CCD CCD CCD 4 (x; y) (x c ;y c ) 4 x x c y y c x x c y>y c x>x c y>y c x>x c y y c 3.13 (X; Y ) CCD (x; y) x x c y y c 21
78 Measured gaze point (Left eye) Vertical [dots] Horizontal [dots] 3.1: 2 Measured gaze point (Right eye) Vertical [dots] Horizontal [dots] 3.11: 2 2
79 Measured center positions of pupil on the CCD camera (Left eye) Vertical [mm] mm 1mm Horizontal [mm] 3.8: Measured center positions of pupil on the CCD camera (Right eye) Vertical [mm] mm 28 1mm Horizontal [mm] 3.9: 19
80 Target points on the display (64*4) Vertical [dots] Horizontal [dots] 3.7: CCD CCD 2 2) 18
81 3.2 HMD CCD HMD ES-HMD 3.7 PC98 NTSC ES-HMD [dots] 4[dots] 3 14 [dots] [dots] TO 1 CCD CCD 6mm mm CCD
82 1mm 1mm 3.6: 3.2 LED CCD NTSC CCD PC mm.19mm ) Eye-Sensing HMD 16




83 3.4: CCD 3.: LED 1
84 : LED CCD CRT LED CCD 3.4 CCD B CRT CCD CCD LK-M41MR JK-L24M2 LED A B CCD 14
85 3.1: CRT ( ) ( ) 1m 3TV 1f L CCD 3.2: 6.4mm mm 1/2 CCD CCD 7TV 2 3 2: kHz 9.9Hz 24.mm 14mm 13

86 3.1: Eye-Sensing HMD 3.2: Eye-Sensing HMD 12
87 3 Eye-Sensing HMD 3.1 Eye-Sensing HMD ES-HMD ES-HMD CCD ES-HMD ES-HMD ES-HMD ES-HMD HMD STV-E CRT 1 CRT NTSC 3.3 CRT 1m A 43. A B HMD CRT CRT
88 1 Eye-Sensing HMD 2 Eye-Sensing HMD 3 Eye-Sensing HMD MRI(Magnetic Resonance Imaging) Eye-Sensing HMD Eye-Sensing HMD 1
89 2.3 Eye-Sensing HMD Eye- Sensing HMD(ES-HMD) 2) HMD ES-HMD ES-HMD VR Eye-Sensing HMD Eye-Sensing HMD 9
90 D 1D D=1D D 1D 8
91 Accomodation 2 3 7
92 B A L R E L ER 2.1: A B L R B E L OA E R OB 6
93 (Divergence), 6, 7) (Depth Perception) (Stereoscopic Vision) 2.1 8) 2.1: 6.cm A 2.1 A ( 2.1 ) 2m
94 2.2 4) (Convergence) 4
95 2 2.1 CAI 1) Eye-Sensing HMD 2)3) Eye-Sensing HMD 3
96 ES-HMD. 2, Eye-Sensing HMD 3, Eye-Sensing HMD 4, MR 6 2
97 (REM ) (Eye-Sensing Head Mounted Display;ES-HMD) 1
98 2.1 : : : : : : : : : : : : : : : : : : : : : : : : : 3.1 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 4 vi
99 4.39 ( : : : : : : : : : : : : : : : : : : : : ( : : : : : : : : : : : : : : : : : : ( : : : : : : : : : : : : : : : : : : ( : : : : : : : : : : : : : : : : : : : : ( : : : : : : : : : : : : : : : : : : : : 69.1 : : : : : : : : : : : : : : : : : : : 71.2 : : : : : : : : : : : : : : : : : : : : : : : : : : 73.3 : : : : : : : : : : : : : : : : : : : : : : : : : : 73.4 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 74. : : : : : : : : : : : : : : : : : : : : : : : : 7.6 : : : : : : : : : : : : : : : : 76.7 ( : : : : : : : : : : : : : : : : : : : : : : : : : : : : 78.8 : : : : : : : : : : : : : : : : : : : : : : : : : 79.9 : : : : : : : : : : : : : : : : : : : : : : 82.1 : : : : : : : : : : : : : : : : : : : : : SF : : : : : : : : : : : : : 8.12 SF : : : : : : : : : : : : : 8.13 YA : : : : : : : : : : : : : YA : : : : : : : : : : : : : 86.1 YA : : : : : : : : : : : : YA : : : : : : : : : : : : : DM : : : : : : : : : : : : : DM : : : : : : : : : : : : : TM : : : : : : : : : : : : : 9.2 TM : : : : : : : : : : : : : 9.21 SF : : : : : : : : : : : : SF : : : : : : : : : : : : SF : : : : : : : : : : : : : : : : : : SF : : : : : : : : : : : : : : : : : : 92 v
100 4.7 TK : : : : : : : : : : : SF : : : : : : : : : : : : DM : : : : : : : : : : : HF : : : : : : : : : : : NI : : : : : : : : : : : : ( NI : : : : : : ( NI : : : : : : : : : : : : : : : : : TO : : : : TO : : YA : : : : YA : : : : TK : : : : 4.2 TK : : : : SF : : : : SF : : : : DM : : : : DM : : : : 4.2 HF : : : : HF : : : : NI : : : : NI : : : : TM : : : : TM : : : : : : : : : : : : : : : : : : : : : : : : ( : : : : : : : : : : : : : : : : : : : ( : : : : : : : : : : : : : : : : : : : ( : : : : : : : : : : : : : : : : : ( : : : : : : : : : : : : : : : : : ( : : : : : : : : : : : : : : : : : : : ( : : : : : : : : : : : : : : : : : : : ( : : : : : : : : : : : : : : : : : : : : 67 iv
101 2.1 : : : : : : : : : : : : : : : : : : : : : : : : : : : : Eye-Sensing HMD : : : : : : : : : : : : : : : : : : : : : : : Eye-Sensing HMD : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : CCD : : : : : : : : : : : : : : : : : : : : : 1 3. LED : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : ES-HMD : : : : : : : : : : : : : : : : : : ( ) : : : : : : : : : : : : : : : : : : : TO : : : : : : : : : : : YA : : : : : : : : : : : 38 iii
102 4.4.1 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 76.2 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : A 97 ii
103 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : Eye-Sensing HMD : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 9 3 Eye-Sensing HMD Eye-Sensing HMD : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 4 i
104 Eye-Sensing HMD 1 2 1
i
 14 i ii iii iv v vi 14 13 86 13 12 28 14 16 14 15 31 (1) 13 12 28 20 (2) (3) 2 (4) (5) 14 14 50 48 3 11 11 22 14 15 10 14 20 21 20 (1) 14 (2) 14 4 (3) (4) (5) 12 12 (6) 14 15 5 6 7 8 9 10 7
14 i ii iii iv v vi 14 13 86 13 12 28 14 16 14 15 31 (1) 13 12 28 20 (2) (3) 2 (4) (5) 14 14 50 48 3 11 11 22 14 15 10 14 20 21 20 (1) 14 (2) 14 4 (3) (4) (5) 12 12 (6) 14 15 5 6 7 8 9 10 7


IPSJ SIG Technical Report Vol.2011-CVIM-177 No /5/19 Inside-out 1 1 Inside-Out Inside-Out Inside-Out 73 A Method of Estimating Gaze Point from
 Inside-out 1 1 Inside-Out Inside-Out Inside-Out 73 A Method of Estimating Gaze Point from Eye Convergence Measured with an Inside-Out Camera Yuto Goto 1 and Hironobu Fujiyoshi 1 This paper proposes a method
Inside-out 1 1 Inside-Out Inside-Out Inside-Out 73 A Method of Estimating Gaze Point from Eye Convergence Measured with an Inside-Out Camera Yuto Goto 1 and Hironobu Fujiyoshi 1 This paper proposes a method
& Vol.5 No (Oct. 2015) TV 1,2,a) , Augmented TV TV AR Augmented Reality 3DCG TV Estimation of TV Screen Position and Ro
 TV 1,2,a) , Augmented TV TV AR Augmented Reality 3DCG TV Estimation of TV Screen Position and Ro") TV 1,2,a) 1 2 2015 1 26, 2015 5 21 Augmented TV TV AR Augmented Reality 3DCG TV Estimation of TV Screen Position and Rotation Using Mobile Device Hiroyuki Kawakita 1,2,a) Toshio Nakagawa 1 Makoto Sato
TV 1,2,a) 1 2 2015 1 26, 2015 5 21 Augmented TV TV AR Augmented Reality 3DCG TV Estimation of TV Screen Position and Rotation Using Mobile Device Hiroyuki Kawakita 1,2,a) Toshio Nakagawa 1 Makoto Sato
24 Depth scaling of binocular stereopsis by observer s own movements
 24 Depth scaling of binocular stereopsis by observer s own movements 1130313 2013 3 1 3D 3D 3D 2 2 i Abstract Depth scaling of binocular stereopsis by observer s own movements It will become more usual
24 Depth scaling of binocular stereopsis by observer s own movements 1130313 2013 3 1 3D 3D 3D 2 2 i Abstract Depth scaling of binocular stereopsis by observer s own movements It will become more usual
27 VR Effects of the position of viewpoint on self body in VR environment
 27 VR Effects of the position of viewpoint on self body in VR environment 1160298 2015 2 25 VR (HMD), HMD (VR). VR,.. HMD,., VR,.,.,,,,., VR,. HMD VR i Abstract Effects of the position of viewpoint on
27 VR Effects of the position of viewpoint on self body in VR environment 1160298 2015 2 25 VR (HMD), HMD (VR). VR,.. HMD,., VR,.,.,,,,., VR,. HMD VR i Abstract Effects of the position of viewpoint on
86 7 I ( 13 ) II ( )
 II ( )") 10 I 86 II 86 III 89 IV 92 V 2001 93 VI 95 86 7 I 2001 6 12 10 2001 ( 13 ) 10 66 2000 2001 4 100 1 3000 II 1988 1990 1991 ( ) 500 1994 2 87 1 1994 2 1000 1000 1000 2 1994 12 21 1000 700 5 800 ( 97 ) 1000
10 I 86 II 86 III 89 IV 92 V 2001 93 VI 95 86 7 I 2001 6 12 10 2001 ( 13 ) 10 66 2000 2001 4 100 1 3000 II 1988 1990 1991 ( ) 500 1994 2 87 1 1994 2 1000 1000 1000 2 1994 12 21 1000 700 5 800 ( 97 ) 1000
25 D Effects of viewpoints of head mounted wearable 3D display on human task performance
 25 D Effects of viewpoints of head mounted wearable 3D display on human task performance 1140322 2014 2 28 D HMD HMD HMD HMD 3D HMD HMD HMD HMD i Abstract Effects of viewpoints of head mounted wearable
25 D Effects of viewpoints of head mounted wearable 3D display on human task performance 1140322 2014 2 28 D HMD HMD HMD HMD 3D HMD HMD HMD HMD i Abstract Effects of viewpoints of head mounted wearable
xx/xx Vol. Jxx A No. xx 1 Fig. 1 PAL(Panoramic Annular Lens) PAL(Panoramic Annular Lens) PAL (2) PAL PAL 2 PAL 3 2 PAL 1 PAL 3 PAL PAL 2. 1 PAL
 PAL(Panoramic Annular Lens) PAL (2) PAL PAL 2 PAL 3 2 PAL 1 PAL 3 PAL PAL 2. 1 PAL") PAL On the Precision of 3D Measurement by Stereo PAL Images Hiroyuki HASE,HirofumiKAWAI,FrankEKPAR, Masaaki YONEDA,andJien KATO PAL 3 PAL Panoramic Annular Lens 1985 Greguss PAL 1 PAL PAL 2 3 2 PAL DP
PAL On the Precision of 3D Measurement by Stereo PAL Images Hiroyuki HASE,HirofumiKAWAI,FrankEKPAR, Masaaki YONEDA,andJien KATO PAL 3 PAL Panoramic Annular Lens 1985 Greguss PAL 1 PAL PAL 2 3 2 PAL DP
2003/3 Vol. J86 D II No.3 2.3. 4. 5. 6. 2. 1 1 Fig. 1 An exterior view of eye scanner. CCD [7] 640 480 1 CCD PC USB PC 2 334 PC USB RS-232C PC 3 2.1 2
![2003/3 Vol. J86 D II No.3 2.3. 4. 5. 6. 2. 1 1 Fig. 1 An exterior view of eye scanner. CCD [7] 640 480 1 CCD PC USB PC 2 334 PC USB RS-232C PC 3 2.1 2](/thumbs/42/22941906.jpg "2003/3 Vol. J86 D II No.3 2.3. 4. 5. 6. 2. 1 1 Fig. 1 An exterior view of eye scanner. CCD [7] 640 480 1 CCD PC USB PC 2 334 PC USB RS-232C PC 3 2.1 2") Curved Document Imaging with Eye Scanner Toshiyuki AMANO, Tsutomu ABE, Osamu NISHIKAWA, Tetsuo IYODA, and Yukio SATO 1. Shape From Shading SFS [1] [2] 3 2 Department of Electrical and Computer Engineering,
Curved Document Imaging with Eye Scanner Toshiyuki AMANO, Tsutomu ABE, Osamu NISHIKAWA, Tetsuo IYODA, and Yukio SATO 1. Shape From Shading SFS [1] [2] 3 2 Department of Electrical and Computer Engineering,
1(a) (b),(c) - [5], [6] Itti [12] [13] gaze eyeball head 2: [time] [7] Stahl [8], [9] Fang [1], [11] 3 -
![1(a) (b),(c) - [5], [6] Itti [12] [13] gaze eyeball head 2: [time] [7] Stahl [8], [9] Fang [1], [11] 3 -](/thumbs/89/100816452.jpg "1(a) (b),(c) - [5], [6] Itti [12] [13] gaze eyeball head 2: [time] [7] Stahl [8], [9] Fang [1], [11] 3 -") Vol216-CVIM-22 No18 216/5/12 1 1 1 Structure from Motion - 1 8% Tobii Pro TX3 NAC EMR ACTUS Eye Tribe Tobii Pro Glass NAC EMR-9 Pupil Headset Ville [1] EMR-9 [2] 1 Osaka University Gaze Head Eye (a) deg
Vol216-CVIM-22 No18 216/5/12 1 1 1 Structure from Motion - 1 8% Tobii Pro TX3 NAC EMR ACTUS Eye Tribe Tobii Pro Glass NAC EMR-9 Pupil Headset Ville [1] EMR-9 [2] 1 Osaka University Gaze Head Eye (a) deg
o 2o 3o 3 1. I o 3. 1o 2o 31. I 3o PDF Adobe Reader 4o 2 1o I 2o 3o 4o 5o 6o 7o 2197/ o 1o 1 1o
 78 2 78... 2 22201011... 4... 9... 7... 29 1 1214 2 7 1 8 2 2 3 1 2 1o 2o 3o 3 1. I 1124 4o 3. 1o 2o 31. I 3o PDF Adobe Reader 4o 2 1o 72 1. I 2o 3o 4o 5o 6o 7o 2197/6 9. 9 8o 1o 1 1o 2o / 3o 4o 5o 6o
78 2 78... 2 22201011... 4... 9... 7... 29 1 1214 2 7 1 8 2 2 3 1 2 1o 2o 3o 3 1. I 1124 4o 3. 1o 2o 31. I 3o PDF Adobe Reader 4o 2 1o 72 1. I 2o 3o 4o 5o 6o 7o 2197/6 9. 9 8o 1o 1 1o 2o / 3o 4o 5o 6o


Gaze Head Eye (a) deg (b) 45 deg (c) 9 deg 1: - 1(b) - [5], [6] [7] Stahl [8], [9] Fang [1], [11] Itti [12] Itti [13] [7] Fang [1],
![Gaze Head Eye (a) deg (b) 45 deg (c) 9 deg 1: - 1(b) - [5], [6] [7] Stahl [8], [9] Fang [1], [11] Itti [12] Itti [13] [7] Fang [1],](/thumbs/92/110933465.jpg "Gaze Head Eye (a) deg (b) 45 deg (c) 9 deg 1: - 1(b) - [5], [6] [7] Stahl [8], [9] Fang [1], [11] Itti [12] Itti [13] [7] Fang [1],") 1 1 1 Structure from Motion - 1 Ville [1] NAC EMR-9 [2] 1 Osaka University [3], [4] 1 1(a) 1(c) 9 9 9 c 216 Information Processing Society of Japan 1 Gaze Head Eye (a) deg (b) 45 deg (c) 9 deg 1: - 1(b)
1 1 1 Structure from Motion - 1 Ville [1] NAC EMR-9 [2] 1 Osaka University [3], [4] 1 1(a) 1(c) 9 9 9 c 216 Information Processing Society of Japan 1 Gaze Head Eye (a) deg (b) 45 deg (c) 9 deg 1: - 1(b)
24 Perceived depth position of autostereoscopic stimulus
 24 Perceived depth position of autostereoscopic stimulus 1130382 2013 3 1 i Abstract Perceived depth position of autostereoscopic stimulus Kazuki HOJI The glassless stereogram which is known as autostereogram
24 Perceived depth position of autostereoscopic stimulus 1130382 2013 3 1 i Abstract Perceived depth position of autostereoscopic stimulus Kazuki HOJI The glassless stereogram which is known as autostereogram
 i ii iii iv v vi vii ( ー ー ) ( ) ( ) ( ) ( ) ー ( ) ( ) ー ー ( ) ( ) ( ) ( ) ( ) 13 202 24122783 3622316 (1) (2) (3) (4) 2483 (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) 11 11 2483 13
i ii iii iv v vi vii ( ー ー ) ( ) ( ) ( ) ( ) ー ( ) ( ) ー ー ( ) ( ) ( ) ( ) ( ) 13 202 24122783 3622316 (1) (2) (3) (4) 2483 (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) 11 11 2483 13

 262014 3 1 1 6 3 2 198810 2/ 198810 2 1 3 4 http://www.pref.hiroshima.lg.jp/site/monjokan/ 1... 1... 1... 2... 2... 4... 5... 9... 9... 10... 10... 10... 10... 13 2... 13 3... 15... 15... 15... 16 4...
262014 3 1 1 6 3 2 198810 2/ 198810 2 1 3 4 http://www.pref.hiroshima.lg.jp/site/monjokan/ 1... 1... 1... 2... 2... 4... 5... 9... 9... 10... 10... 10... 10... 13 2... 13 3... 15... 15... 15... 16 4...
...J......1803.QX
 5 7 9 11 13 15 17 19 21 23 45-1111 48-2314 1 I II 100,000 80,000 60,000 40,000 20,000 0 272,437 80,348 82,207 81,393 82,293 83,696 84,028 82,232 248,983 80,411 4,615 4,757 248,434 248,688 76,708 6,299
5 7 9 11 13 15 17 19 21 23 45-1111 48-2314 1 I II 100,000 80,000 60,000 40,000 20,000 0 272,437 80,348 82,207 81,393 82,293 83,696 84,028 82,232 248,983 80,411 4,615 4,757 248,434 248,688 76,708 6,299
2 The Characteristics of Two Negative Peaks on Visual Evoked Potentials with Depth Perception Yoichi MIYAWAKI, Yasuyuki YANAGIDA, Taro MAEDA, and Susu
 2 The Characteristics of Two Negative Peaks on Visual Evoked Potentials with Depth Perception Yoichi MIYAWAKI, Yasuyuki YANAGIDA, Taro MAEDA, and Susumu TACHI Random-Dot Stereogram 200 ms 40 180 ms 280
2 The Characteristics of Two Negative Peaks on Visual Evoked Potentials with Depth Perception Yoichi MIYAWAKI, Yasuyuki YANAGIDA, Taro MAEDA, and Susumu TACHI Random-Dot Stereogram 200 ms 40 180 ms 280

44 4 I (1) ( ) (10 15 ) ( 17 ) ( 3 1 ) (2)
 ( ) (10 15 ) ( 17 ) ( 3 1 ) (2)") (1) I 44 II 45 III 47 IV 52 44 4 I (1) ( ) 1945 8 9 (10 15 ) ( 17 ) ( 3 1 ) (2) 45 II 1 (3) 511 ( 451 1 ) ( ) 365 1 2 512 1 2 365 1 2 363 2 ( ) 3 ( ) ( 451 2 ( 314 1 ) ( 339 1 4 ) 337 2 3 ) 363 (4) 46
(1) I 44 II 45 III 47 IV 52 44 4 I (1) ( ) 1945 8 9 (10 15 ) ( 17 ) ( 3 1 ) (2) 45 II 1 (3) 511 ( 451 1 ) ( ) 365 1 2 512 1 2 365 1 2 363 2 ( ) 3 ( ) ( 451 2 ( 314 1 ) ( 339 1 4 ) 337 2 3 ) 363 (4) 46

 i ii i iii iv 1 3 3 10 14 17 17 18 22 23 28 29 31 36 37 39 40 43 48 59 70 75 75 77 90 95 102 107 109 110 118 125 128 130 132 134 48 43 43 51 52 61 61 64 62 124 70 58 3 10 17 29 78 82 85 102 95 109 iii
i ii i iii iv 1 3 3 10 14 17 17 18 22 23 28 29 31 36 37 39 40 43 48 59 70 75 75 77 90 95 102 107 109 110 118 125 128 130 132 134 48 43 43 51 52 61 61 64 62 124 70 58 3 10 17 29 78 82 85 102 95 109 iii
178 5 I 1 ( ) ( ) 10 3 13 3 1 8891 8 3023 6317 ( 10 1914 7152 ) 16 5 1 ( ) 6 13 3 13 3 8575 3896 8 1715 779 6 (1) 2 7 4 ( 2 ) 13 11 26 12 21 14 11 21
 ( ) 10 3 13 3 1 8891 8 3023 6317 ( 10 1914 7152 ) 16 5 1 ( ) 6 13 3 13 3 8575 3896 8 1715 779 6 (1) 2 7 4 ( 2 ) 13 11 26 12 21 14 11 21") I 178 II 180 III ( ) 181 IV 183 V 185 VI 186 178 5 I 1 ( ) ( ) 10 3 13 3 1 8891 8 3023 6317 ( 10 1914 7152 ) 16 5 1 ( ) 6 13 3 13 3 8575 3896 8 1715 779 6 (1) 2 7 4 ( 2 ) 13 11 26 12 21 14 11 21 4 10 (
I 178 II 180 III ( ) 181 IV 183 V 185 VI 186 178 5 I 1 ( ) ( ) 10 3 13 3 1 8891 8 3023 6317 ( 10 1914 7152 ) 16 5 1 ( ) 6 13 3 13 3 8575 3896 8 1715 779 6 (1) 2 7 4 ( 2 ) 13 11 26 12 21 14 11 21 4 10 (
cm H.11.3 P.13 2 3-106-
 H11.3 H.11.3 P.4-105- cm H.11.3 P.13 2 3-106- 2 H.11.3 P.47 H.11.3 P.27 i vl1 vl2-107- 3 h vl l1 l2 1 2 0 ii H.11.3 P.49 2 iii i 2 vl1 vl2-108- H.11.3 P.50 ii 2 H.11.3 P.52 cm -109- H.11.3 P.44 S S H.11.3
H11.3 H.11.3 P.4-105- cm H.11.3 P.13 2 3-106- 2 H.11.3 P.47 H.11.3 P.27 i vl1 vl2-107- 3 h vl l1 l2 1 2 0 ii H.11.3 P.49 2 iii i 2 vl1 vl2-108- H.11.3 P.50 ii 2 H.11.3 P.52 cm -109- H.11.3 P.44 S S H.11.3
2007/8 Vol. J90 D No. 8 Stauffer [7] 2 2 I 1 I 2 2 (I 1(x),I 2(x)) 2 [13] I 2 = CI 1 (C >0) (I 1,I 2) (I 1,I 2) Field Monitoring Server
![2007/8 Vol. J90 D No. 8 Stauffer [7] 2 2 I 1 I 2 2 (I 1(x),I 2(x)) 2 [13] I 2 = CI 1 (C >0) (I 1,I 2) (I 1,I 2) Field Monitoring Server](/thumbs/91/107223763.jpg "2007/8 Vol. J90 D No. 8 Stauffer [7] 2 2 I 1 I 2 2 (I 1(x),I 2(x)) 2 [13] I 2 = CI 1 (C >0) (I 1,I 2) (I 1,I 2) Field Monitoring Server") a) Change Detection Using Joint Intensity Histogram Yasuyo KITA a) 2 (0 255) (I 1 (x),i 2 (x)) I 2 = CI 1 (C>0) (I 1,I 2 ) (I 1,I 2 ) 2 1. [1] 2 [2] [3] [5] [6] [8] Intelligent Systems Research Institute,
a) Change Detection Using Joint Intensity Histogram Yasuyo KITA a) 2 (0 255) (I 1 (x),i 2 (x)) I 2 = CI 1 (C>0) (I 1,I 2 ) (I 1,I 2 ) 2 1. [1] 2 [2] [3] [5] [6] [8] Intelligent Systems Research Institute,
28 Horizontal angle correction using straight line detection in an equirectangular image
 28 Horizontal angle correction using straight line detection in an equirectangular image 1170283 2017 3 1 2 i Abstract Horizontal angle correction using straight line detection in an equirectangular image
28 Horizontal angle correction using straight line detection in an equirectangular image 1170283 2017 3 1 2 i Abstract Horizontal angle correction using straight line detection in an equirectangular image
空気の屈折率変調を光学的に検出する超指向性マイクロホン
 23 2 1M36268 2 2 4 5 6 7 8 13 15 2 21 2 23 2 2 3 32 34 38 38 54 57 62 63 1-1 ( 1) ( 2) 1-1 a ( sinθ ) 2J D ( θ ) = 1 (1-1) kaka sinθ ( 3) 1-2 1 Back face hole Amplifier Diaphragm Equiphase wave surface
23 2 1M36268 2 2 4 5 6 7 8 13 15 2 21 2 23 2 2 3 32 34 38 38 54 57 62 63 1-1 ( 1) ( 2) 1-1 a ( sinθ ) 2J D ( θ ) = 1 (1-1) kaka sinθ ( 3) 1-2 1 Back face hole Amplifier Diaphragm Equiphase wave surface
IPSJ SIG Technical Report Vol.2015-CVIM-196 No /3/6 1,a) 1,b) 1,c) U,,,, The Camera Position Alignment on a Gimbal Head for Fixed Viewpoint Swi
 1,b) 1,c) U,,,, The Camera Position Alignment on a Gimbal Head for Fixed Viewpoint Swi") 1,a) 1,b) 1,c) U,,,, The Camera Position Alignment on a Gimbal Head for Fixed Viewpoint Swiveling using a Misalignment Model Abstract: When the camera sets on a gimbal head as a fixed-view-point, it is
1,a) 1,b) 1,c) U,,,, The Camera Position Alignment on a Gimbal Head for Fixed Viewpoint Swiveling using a Misalignment Model Abstract: When the camera sets on a gimbal head as a fixed-view-point, it is
 16 16 16 1 16 2 16 3 24 4 24 5 25 6 33 7 33 33 1 33 2 34 3 34 34 34 34 34 34 4 34-1 - 5 34 34 34 1 34 34 35 36 36 2 38 38 41 46 47 48 1 48 48 48-2 - 49 50 51 2 52 52 53 53 1 54 2 54 54 54 56 57 57 58 59
16 16 16 1 16 2 16 3 24 4 24 5 25 6 33 7 33 33 1 33 2 34 3 34 34 34 34 34 34 4 34-1 - 5 34 34 34 1 34 34 35 36 36 2 38 38 41 46 47 48 1 48 48 48-2 - 49 50 51 2 52 52 53 53 1 54 2 54 54 54 56 57 57 58 59
?
 240-8501 79-2 Email: nakamoto@ynu.ac.jp 1 3 1.1...................................... 3 1.2?................................. 6 1.3..................................... 8 1.4.......................................
240-8501 79-2 Email: nakamoto@ynu.ac.jp 1 3 1.1...................................... 3 1.2?................................. 6 1.3..................................... 8 1.4.......................................
,, 2. Matlab Simulink 2018 PC Matlab Scilab 2
 (2018 ) ( -1) TA Email : ohki@i.kyoto-u.ac.jp, ske.ta@bode.amp.i.kyoto-u.ac.jp : 411 : 10 308 1 1 2 2 2.1............................................ 2 2.2..................................................
(2018 ) ( -1) TA Email : ohki@i.kyoto-u.ac.jp, ske.ta@bode.amp.i.kyoto-u.ac.jp : 411 : 10 308 1 1 2 2 2.1............................................ 2 2.2..................................................
1 1983 5 1985 10 1991 5 1994 4 1995 8 10 40 12 1996 3 1997 3 1998 3 10 1999 9 2000 11 12 2001 1 6 6 7 2002 12 12 2003 1 12 2004 1 5 8 3 12 2005 2 3 5
 14 12 eye 1 1983 5 1985 10 1991 5 1994 4 1995 8 10 40 12 1996 3 1997 3 1998 3 10 1999 9 2000 11 12 2001 1 6 6 7 2002 12 12 2003 1 12 2004 1 5 8 3 12 2005 2 3 5 9 2006 12 2007 8 8 2008 2 2009 6 8 8 11 5
14 12 eye 1 1983 5 1985 10 1991 5 1994 4 1995 8 10 40 12 1996 3 1997 3 1998 3 10 1999 9 2000 11 12 2001 1 6 6 7 2002 12 12 2003 1 12 2004 1 5 8 3 12 2005 2 3 5 9 2006 12 2007 8 8 2008 2 2009 6 8 8 11 5
インターネットを活用した公開天文台の可能性とその展望.PDF
 17 - 2 - ...- 4-1....- 5-2....- 7-2.1....- 7-2.2....- 7-2.3....- 8-3....- 9-3.1....- 9-3.2....- 10-3.3....- 13-3.4....- 14-4....- 15-4.1....- 15-4.2....- 16-4.3....- 18-4.4....- 19-4.4.1....- 19-4.4.2....-
17 - 2 - ...- 4-1....- 5-2....- 7-2.1....- 7-2.2....- 7-2.3....- 8-3....- 9-3.1....- 9-3.2....- 10-3.3....- 13-3.4....- 14-4....- 15-4.1....- 15-4.2....- 16-4.3....- 18-4.4....- 19-4.4.1....- 19-4.4.2....-
1
 KC KC H.13 1. 3 2. 4 3. 5 3.1. 5 3.2. 6 4. 7 4.1. 8 4.1.1. 8 4.1.2. 9 4.1.3. 10 4.1.4. MATLAB 11 4.1.5. 20 4.1.6. 21 4.1.7. 26 4.2. 28 4.2.1. 28 4.2.2. 30 4.2.3. 31 4.2.4. 36 4.3. 37 5. 40 5.1. 40 5.2.
KC KC H.13 1. 3 2. 4 3. 5 3.1. 5 3.2. 6 4. 7 4.1. 8 4.1.1. 8 4.1.2. 9 4.1.3. 10 4.1.4. MATLAB 11 4.1.5. 20 4.1.6. 21 4.1.7. 26 4.2. 28 4.2.1. 28 4.2.2. 30 4.2.3. 31 4.2.4. 36 4.3. 37 5. 40 5.1. 40 5.2.
Chap10.dvi
 =0. f = 2 +3 { 2 +3 0 2 f = 1 =0 { sin 0 3 f = 1 =0 2 sin 1 0 4 f = 0 =0 { 1 0 5 f = 0 =0 f 3 2 lim = lim 0 0 0 =0 =0. f 0 = 0. 2 =0. 3 4 f 1 lim 0 0 = lim 0 sin 2 cos 1 = lim 0 2 sin = lim =0 0 2 =0.
=0. f = 2 +3 { 2 +3 0 2 f = 1 =0 { sin 0 3 f = 1 =0 2 sin 1 0 4 f = 0 =0 { 1 0 5 f = 0 =0 f 3 2 lim = lim 0 0 0 =0 =0. f 0 = 0. 2 =0. 3 4 f 1 lim 0 0 = lim 0 sin 2 cos 1 = lim 0 2 sin = lim =0 0 2 =0.
!!
 YA= !! [ ] [ ] [ ] PC http://www.library.city.kita.tokyo.jp/ http://www.library.city.kita.tokyo.jp/m/ ( ) ( ) ( ) [ ] [ ][ ] PC http://www.library.city.kita.tokyo.jp/ http://www.library.city.kita.tokyo.jp/m/
YA= !! [ ] [ ] [ ] PC http://www.library.city.kita.tokyo.jp/ http://www.library.city.kita.tokyo.jp/m/ ( ) ( ) ( ) [ ] [ ][ ] PC http://www.library.city.kita.tokyo.jp/ http://www.library.city.kita.tokyo.jp/m/
 3 12 [ ] [ ] PC http://www.library.city.kita.tokyo.jp/ http://www.library.city.kita.tokyo.jp/m/ 3 4 5 24 27 ( ). [ ] [ ] [ ] PC http://www.library.city.kita.tokyo.jp/ http://www.library.city.kita.tokyo.jp/m/
3 12 [ ] [ ] PC http://www.library.city.kita.tokyo.jp/ http://www.library.city.kita.tokyo.jp/m/ 3 4 5 24 27 ( ). [ ] [ ] [ ] PC http://www.library.city.kita.tokyo.jp/ http://www.library.city.kita.tokyo.jp/m/

日本経済新聞社編『経済学の巨人危機と闘う─達人が読み解く先人の知恵』
 2012 309pp. Yasuo Suzuki / I 2008 4 3-16 1 2 3 174 2013 winter / No.398 4 5 6 7 8 J S 9 10 11 12 13 14 15 16 17 II 9 2011 11 9 9 16 175 6-8 1 1 1 2 7 13 15 10 280 281-286 176 2013 winter / No.398 281 286-298
2012 309pp. Yasuo Suzuki / I 2008 4 3-16 1 2 3 174 2013 winter / No.398 4 5 6 7 8 J S 9 10 11 12 13 14 15 16 17 II 9 2011 11 9 9 16 175 6-8 1 1 1 2 7 13 15 10 280 281-286 176 2013 winter / No.398 281 286-298
2). 3) 4) 1.2 NICTNICT DCRA Dihedral Corner Reflector micro-arraysdcra DCRA DCRA DCRA 3D DCRA PC USB PC PC ON / OFF Velleman K8055 K8055 K8055
. 3) 4) 1.2 NICTNICT DCRA Dihedral Corner Reflector micro-arraysdcra DCRA DCRA DCRA 3D DCRA PC USB PC PC ON / OFF Velleman K8055 K8055 K8055") 1 1 1 2 DCRA 1. 1.1 1) 1 Tactile Interface with Air Jets for Floating Images Aya Higuchi, 1 Nomin, 1 Sandor Markon 1 and Satoshi Maekawa 2 The new optical device DCRA can display floating images in free
1 1 1 2 DCRA 1. 1.1 1) 1 Tactile Interface with Air Jets for Floating Images Aya Higuchi, 1 Nomin, 1 Sandor Markon 1 and Satoshi Maekawa 2 The new optical device DCRA can display floating images in free
untitled
 i ii iii iv v 43 43 vi 43 vii T+1 T+2 1 viii 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 a) ( ) b) ( ) 51
i ii iii iv v 43 43 vi 43 vii T+1 T+2 1 viii 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 a) ( ) b) ( ) 51

IPSJ SIG Technical Report Vol.2012-HCI-149 No /7/20 1 1,2 1 (HMD: Head Mounted Display) HMD HMD,,,, An Information Presentation Method for Weara
 HMD HMD,,,, An Information Presentation Method for Weara") 1 1,2 1 (: Head Mounted Display),,,, An Information Presentation Method for Wearable Displays Considering Surrounding Conditions in Wearable Computing Environments Masayuki Nakao 1 Tsutomu Terada 1,2 Masahiko
1 1,2 1 (: Head Mounted Display),,,, An Information Presentation Method for Wearable Displays Considering Surrounding Conditions in Wearable Computing Environments Masayuki Nakao 1 Tsutomu Terada 1,2 Masahiko
mt_4.dvi
 ( ) 2006 1 PI 1 1 1.1................................. 1 1.2................................... 1 2 2 2.1...................................... 2 2.1.1.......................... 2 2.1.2..............................
( ) 2006 1 PI 1 1 1.1................................. 1 1.2................................... 1 2 2 2.1...................................... 2 2.1.1.......................... 2 2.1.2..............................
,,,,,,,,,,,,,,,,,,, 976%, i
 20 Individual Recognition using positions of facial parts 1115081 2009 3 5 ,,,,,,,,,,,,,,,,,,, 976%, i Abstract Individual Recognition using positions of facial parts YOSHIHIRO Arisawa A facial recognition
20 Individual Recognition using positions of facial parts 1115081 2009 3 5 ,,,,,,,,,,,,,,,,,,, 976%, i Abstract Individual Recognition using positions of facial parts YOSHIHIRO Arisawa A facial recognition
AccessflÌfl—−ÇŠš1
 ACCESS ACCESS i ii ACCESS iii iv ACCESS v vi ACCESS CONTENTS ACCESS CONTENTS ACCESS 1 ACCESS 1 2 ACCESS 3 1 4 ACCESS 5 1 6 ACCESS 7 1 8 9 ACCESS 10 1 ACCESS 11 1 12 ACCESS 13 1 14 ACCESS 15 1 v 16 ACCESS
ACCESS ACCESS i ii ACCESS iii iv ACCESS v vi ACCESS CONTENTS ACCESS CONTENTS ACCESS 1 ACCESS 1 2 ACCESS 3 1 4 ACCESS 5 1 6 ACCESS 7 1 8 9 ACCESS 10 1 ACCESS 11 1 12 ACCESS 13 1 14 ACCESS 15 1 v 16 ACCESS
IEEE HDD RAID MPI MPU/CPU GPGPU GPU cm I m cm /g I I n/ cm 2 s X n/ cm s cm g/cm
 Neutron Visual Sensing Techniques Making Good Use of Computer Science J-PARC CT CT-PET TB IEEE HDD RAID MPI MPU/CPU GPGPU GPU cm I m cm /g I I n/ cm 2 s X n/ cm s cm g/cm cm cm barn cm thn/ cm s n/ cm
Neutron Visual Sensing Techniques Making Good Use of Computer Science J-PARC CT CT-PET TB IEEE HDD RAID MPI MPU/CPU GPGPU GPU cm I m cm /g I I n/ cm 2 s X n/ cm s cm g/cm cm cm barn cm thn/ cm s n/ cm
() n C + n C + n C + + n C n n (3) n C + n C + n C 4 + n C + n C 3 + n C 5 + (5) (6 ) n C + nc + 3 nc n nc n (7 ) n C + nc + 3 nc n nc n (
 n C + n C + n C + + n C n n (3) n C + n C + n C 4 + n C + n C 3 + n C 5 + (5) (6 ) n C + nc + 3 nc n nc n (7 ) n C + nc + 3 nc n nc n (") 3 n nc k+ k + 3 () n C r n C n r nc r C r + C r ( r n ) () n C + n C + n C + + n C n n (3) n C + n C + n C 4 + n C + n C 3 + n C 5 + (4) n C n n C + n C + n C + + n C n (5) k k n C k n C k (6) n C + nc
3 n nc k+ k + 3 () n C r n C n r nc r C r + C r ( r n ) () n C + n C + n C + + n C n n (3) n C + n C + n C 4 + n C + n C 3 + n C 5 + (4) n C n n C + n C + n C + + n C n (5) k k n C k n C k (6) n C + nc
2
 1 2 3 4 5 6 7 8 9 10 I II III 11 IV 12 V 13 VI VII 14 VIII. 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 _ 33 _ 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 VII 51 52 53 54 55 56 57 58 59
1 2 3 4 5 6 7 8 9 10 I II III 11 IV 12 V 13 VI VII 14 VIII. 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 _ 33 _ 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 VII 51 52 53 54 55 56 57 58 59
untitled
 vacuum assisted grouting SEEE 2001 11 2002 10 150 SEEE PC PC 2002 PC PC PC PC PC 1 SEEE PC 1 JIS 0MPa 0.1MPa 100 MPa0.1MPa1 760Torr 100 0.1MPa l /min 2 0.09MPa 90% -2.1 90 0.09MPa -2.1 0.09MPa 0.1
vacuum assisted grouting SEEE 2001 11 2002 10 150 SEEE PC PC 2002 PC PC PC PC PC 1 SEEE PC 1 JIS 0MPa 0.1MPa 100 MPa0.1MPa1 760Torr 100 0.1MPa l /min 2 0.09MPa 90% -2.1 90 0.09MPa -2.1 0.09MPa 0.1
活用ガイド (ソフトウェア編)
") ii iii iv NEC Corporation 1998 v vi PA RT 1 vii PA RT 2 viii PA RT 3 PA RT 4 ix P A R T 1 2 3 1 4 5 1 1 2 1 2 3 4 6 1 2 3 4 5 7 1 6 7 8 1 9 1 10 1 2 3 4 5 6 7 8 9 10 11 11 1 12 12 1 13 1 1 14 2 3 4 5 1
ii iii iv NEC Corporation 1998 v vi PA RT 1 vii PA RT 2 viii PA RT 3 PA RT 4 ix P A R T 1 2 3 1 4 5 1 1 2 1 2 3 4 6 1 2 3 4 5 7 1 6 7 8 1 9 1 10 1 2 3 4 5 6 7 8 9 10 11 11 1 12 12 1 13 1 1 14 2 3 4 5 1
 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 () - 1 - - 2 - - 3 - - 4 - - 5 - 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 () - 1 - - 2 - - 3 - - 4 - - 5 - 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57
IP IIS Construction of Overhead View Images by Estimating Intrinsic and Extrinsic Camera Parameters of Multiple Fish-Eye Cameras Shota Kas
 I-08- IIS-08- Construction of Overead View Images by Estimating Intrinsic and Extrinsic Camera arameters of Multiple Fis-Eye Cameras Sota Kase, Ryota Okutsu, Hisanori Mitsumoto (Cuo University) Yoei Aragaki,
I-08- IIS-08- Construction of Overead View Images by Estimating Intrinsic and Extrinsic Camera arameters of Multiple Fis-Eye Cameras Sota Kase, Ryota Okutsu, Hisanori Mitsumoto (Cuo University) Yoei Aragaki,
untitled
 13 50 15 6.0 0.25 220 23 92 960 16 16 3.9 3.9 12.8 83.3 7 10 1150 90 1035 1981 1850 4700 4700 15 15 1150 1150 10 12 31 1.5 3.7%(224 ) 1.0 1.5 25.4%(1522 ) 0.7 30.6 1835 ) 0.7 1.0 40.3 (2421 ) 7.3
13 50 15 6.0 0.25 220 23 92 960 16 16 3.9 3.9 12.8 83.3 7 10 1150 90 1035 1981 1850 4700 4700 15 15 1150 1150 10 12 31 1.5 3.7%(224 ) 1.0 1.5 25.4%(1522 ) 0.7 30.6 1835 ) 0.7 1.0 40.3 (2421 ) 7.3
™¼fi⁄CTPŠp
 2003.4 2 3 2003.4 m m m m m m m m m m m 4 m m m m m m m m 5 2003.4 1 1 1 1 6 1 1 1 7 2003.4.102003.5.9 N A O S H I M A C A L E N D A R 2003. A P R I L / M A Y 1 2003.4 1 1 10 1 1 11 2003.4 12 CAMERA REPORT
2003.4 2 3 2003.4 m m m m m m m m m m m 4 m m m m m m m m 5 2003.4 1 1 1 1 6 1 1 1 7 2003.4.102003.5.9 N A O S H I M A C A L E N D A R 2003. A P R I L / M A Y 1 2003.4 1 1 10 1 1 11 2003.4 12 CAMERA REPORT
™¼fi⁄CTPŠp
 2003.2 2 1 1 1 3 2003.2 1 1 1 4 1 1 5 2003.2.102003.3.9 N A O S H I M A C A L E N D A R 2003. F E B R U A R Y / M A R C H 1 2003.2 8 CAMERA REPORT 9 2002.2 1 1 1 1 1 1 1 1 10 1 1 1 1 1 1 1 11 2003.2 1
2003.2 2 1 1 1 3 2003.2 1 1 1 4 1 1 5 2003.2.102003.3.9 N A O S H I M A C A L E N D A R 2003. F E B R U A R Y / M A R C H 1 2003.2 8 CAMERA REPORT 9 2002.2 1 1 1 1 1 1 1 1 10 1 1 1 1 1 1 1 11 2003.2 1
™¼fi⁄10„”Šp
 2004 No.615 2 2004.10 3 2004.10 1 1 1 1 1 4 1 1 1 1 5 2004.10 6 2 7 2004.10.162004.11.15 N A O S H I M A C A L E N D A R 2004. O C T O B E R / N O V E M B E R 1 2004.10 1 1 1 1 1 10 3 1 1 11 2004.10 12
2004 No.615 2 2004.10 3 2004.10 1 1 1 1 1 4 1 1 1 1 5 2004.10 6 2 7 2004.10.162004.11.15 N A O S H I M A C A L E N D A R 2004. O C T O B E R / N O V E M B E R 1 2004.10 1 1 1 1 1 10 3 1 1 11 2004.10 12
2002.3 2
 2002 No.584 2002.3 2 Q A 3 2002.3 1 1 1 1 1 4 1 1 1 1 1 1 5 2002.3.104.9 N A O S H I M A C A L E N D A R 2002. M A R C H / A P R I L 1 2002.3 1 1 1 1 8 1 1 1 9 2002.3 10 CAMERA REPORT 11 2002.3 22 1 12
2002 No.584 2002.3 2 Q A 3 2002.3 1 1 1 1 1 4 1 1 1 1 1 1 5 2002.3.104.9 N A O S H I M A C A L E N D A R 2002. M A R C H / A P R I L 1 2002.3 1 1 1 1 8 1 1 1 9 2002.3 10 CAMERA REPORT 11 2002.3 22 1 12
™¼fi⁄PDFŠp
 2003 No.602 2 2003.9 Q A Q A 3 1 4 2003.9 1 1 1 1 5 2003.9.102003.10.9 N A O S H I M A C A L E N D A R 2003. S E P T E M B E R / O C T O B E R 1 1 1 1 8 2003.9 2 11 1 1 9 2003.9 10 CAMERA REPORT 11 2003.9
2003 No.602 2 2003.9 Q A Q A 3 1 4 2003.9 1 1 1 1 5 2003.9.102003.10.9 N A O S H I M A C A L E N D A R 2003. S E P T E M B E R / O C T O B E R 1 1 1 1 8 2003.9 2 11 1 1 9 2003.9 10 CAMERA REPORT 11 2003.9
SICE東北支部研究集会資料(2004年)
") 219 (2004.11.05) 219-4 Development of a 3D Range Sensor Based on Equiphase Light-Section Method KUMAGAI Masaaki * *Tohoku Gakuin University : (Vision sensor), (3-D range sensor), (Light-section method),
219 (2004.11.05) 219-4 Development of a 3D Range Sensor Based on Equiphase Light-Section Method KUMAGAI Masaaki * *Tohoku Gakuin University : (Vision sensor), (3-D range sensor), (Light-section method),
Gauss Gauss ɛ 0 E ds = Q (1) xy σ (x, y, z) (2) a ρ(x, y, z) = x 2 + y 2 (r, θ, φ) (1) xy A Gauss ɛ 0 E ds = ɛ 0 EA Q = ρa ɛ 0 EA = ρea E = (ρ/ɛ 0 )e
 xy σ (x, y, z) (2) a ρ(x, y, z) = x 2 + y 2 (r, θ, φ) (1) xy A Gauss ɛ 0 E ds = ɛ 0 EA Q = ρa ɛ 0 EA = ρea E = (ρ/ɛ 0 )e") 7 -a 7 -a February 4, 2007 1. 2. 3. 4. 1. 2. 3. 1 Gauss Gauss ɛ 0 E ds = Q (1) xy σ (x, y, z) (2) a ρ(x, y, z) = x 2 + y 2 (r, θ, φ) (1) xy A Gauss ɛ 0 E ds = ɛ 0 EA Q = ρa ɛ 0 EA = ρea E = (ρ/ɛ 0 )e z
7 -a 7 -a February 4, 2007 1. 2. 3. 4. 1. 2. 3. 1 Gauss Gauss ɛ 0 E ds = Q (1) xy σ (x, y, z) (2) a ρ(x, y, z) = x 2 + y 2 (r, θ, φ) (1) xy A Gauss ɛ 0 E ds = ɛ 0 EA Q = ρa ɛ 0 EA = ρea E = (ρ/ɛ 0 )e z

B. 41 II: 2 ;; 4 B [ ] S 1 S 2 S 1 S O S 1 S P 2 3 P P : 2.13:
![B. 41 II: 2 ;; 4 B [ ] S 1 S 2 S 1 S O S 1 S P 2 3 P P : 2.13:](/thumbs/94/118646867.jpg "B. 41 II: 2 ;; 4 B [ ] S 1 S 2 S 1 S O S 1 S P 2 3 P P : 2.13:") B. 41 II: ;; 4 B [] S 1 S S 1 S.1 O S 1 S 1.13 P 3 P 5 7 P.1:.13: 4 4.14 C d A B x l l d C B 1 l.14: AB A 1 B 0 AB 0 O OP = x P l AP BP AB AP BP 1 (.4)(.5) x l x sin = p l + x x l (.4)(.5) m d A x P O
B. 41 II: ;; 4 B [] S 1 S S 1 S.1 O S 1 S 1.13 P 3 P 5 7 P.1:.13: 4 4.14 C d A B x l l d C B 1 l.14: AB A 1 B 0 AB 0 O OP = x P l AP BP AB AP BP 1 (.4)(.5) x l x sin = p l + x x l (.4)(.5) m d A x P O
IPSJ SIG Technical Report Vol.2009-CVIM-167 No /6/ Gaze Reactive Display Simultaneously Presenting Defocus Blur and Motion Parallax Ta
 1 1 1 3 Gaze Reactive Display Simultaneously Presenting Defocus Blur and Motion Parallax Takaaki Suzuki, 1 Takayuki Okatani 1 and Koichiro Deguchi 1 When we see a three-dimensional scene, our eyes automatically
1 1 1 3 Gaze Reactive Display Simultaneously Presenting Defocus Blur and Motion Parallax Takaaki Suzuki, 1 Takayuki Okatani 1 and Koichiro Deguchi 1 When we see a three-dimensional scene, our eyes automatically
104 100 60 9,195,336 409 0.004 24 8 31 9,025,983 568 0.006 2012 8 31 6,634,686 956 ( 0.014 ) 2 2011 8 26
 2 2011 8 26") 25 25 3 5 MMR 1 104 100 60 9,195,336 409 0.004 24 8 31 9,025,983 568 0.006 2012 8 31 6,634,686 956 ( 0.014 ) 2 2011 8 26 2012 8 31 1,032,660 132 ( 0.013 ) 3 2010 6 11 3 11 15.4 1 1 ( ) 12 2 2 3 ER ) (
25 25 3 5 MMR 1 104 100 60 9,195,336 409 0.004 24 8 31 9,025,983 568 0.006 2012 8 31 6,634,686 956 ( 0.014 ) 2 2011 8 26 2012 8 31 1,032,660 132 ( 0.013 ) 3 2010 6 11 3 11 15.4 1 1 ( ) 12 2 2 3 ER ) (
2
 2013 Vol.18 No.2 3 24 25 8 22 2 23 26 9 15 20 2 3 4 5 6 7 8 point1 point 2 point3 point4 10 11 point1 point 2 point 3 point 4 12 13 14 15 16 17 18 19 20 http://www.taishukan.co.jp/kateika/ 21 22 23 24
2013 Vol.18 No.2 3 24 25 8 22 2 23 26 9 15 20 2 3 4 5 6 7 8 point1 point 2 point3 point4 10 11 point1 point 2 point 3 point 4 12 13 14 15 16 17 18 19 20 http://www.taishukan.co.jp/kateika/ 21 22 23 24
Autumn 06 1 2005 100 100 1 100 1 2003 2005 10 2003 2005 2
 2005 25-2 17 395.6 149.1 1 2004 2 2003p.13 3 Autumn 06 1 2005 100 100 1 100 1 2003 2005 10 2003 2005 2 Vol. 42 No. 2 2 100 20052005 2002 20052005 3 2005 10 1 II III IV 1 1 1 2 1 4 15-2 30 4,091 54.5 2
2005 25-2 17 395.6 149.1 1 2004 2 2003p.13 3 Autumn 06 1 2005 100 100 1 100 1 2003 2005 10 2003 2005 2 Vol. 42 No. 2 2 100 20052005 2002 20052005 3 2005 10 1 II III IV 1 1 1 2 1 4 15-2 30 4,091 54.5 2
, (GPS: Global Positioning Systemg),.,, (LBS: Local Based Services).. GPS,.,. RFID LAN,.,.,.,,,.,..,.,.,,, i
,.,, (LBS: Local Based Services).. GPS,.,. RFID LAN,.,.,.,,,.,..,.,.,,, i") 25 Estimation scheme of indoor positioning using difference of times which chirp signals arrive 114348 214 3 6 , (GPS: Global Positioning Systemg),.,, (LBS: Local Based Services).. GPS,.,. RFID LAN,.,.,.,,,.,..,.,.,,,
25 Estimation scheme of indoor positioning using difference of times which chirp signals arrive 114348 214 3 6 , (GPS: Global Positioning Systemg),.,, (LBS: Local Based Services).. GPS,.,. RFID LAN,.,.,.,,,.,..,.,.,,,
2007-Kanai-paper.dvi
 19 Estimation of Sound Source Zone using The Arrival Time Interval 1080351 2008 3 7 S/N 2 2 2 i Abstract Estimation of Sound Source Zone using The Arrival Time Interval Koichiro Kanai The microphone array
19 Estimation of Sound Source Zone using The Arrival Time Interval 1080351 2008 3 7 S/N 2 2 2 i Abstract Estimation of Sound Source Zone using The Arrival Time Interval Koichiro Kanai The microphone array

Abstract This paper concerns with a method of dynamic image cognition. Our image cognition method has two distinguished features. One is that the imag
 2004 RGB A STUDY OF RGB COLOR INFORMATION AND ITS APPLICATION 03R3237 Abstract This paper concerns with a method of dynamic image cognition. Our image cognition method has two distinguished features. One
2004 RGB A STUDY OF RGB COLOR INFORMATION AND ITS APPLICATION 03R3237 Abstract This paper concerns with a method of dynamic image cognition. Our image cognition method has two distinguished features. One
28 TCG SURF Card recognition using SURF in TCG play video
 28 TCG SURF Card recognition using SURF in TCG play video 1170374 2017 3 2 TCG SURF TCG TCG OCG SURF Bof 20 20 30 10 1 SURF Bag of features i Abstract Card recognition using SURF in TCG play video Haruka
28 TCG SURF Card recognition using SURF in TCG play video 1170374 2017 3 2 TCG SURF TCG TCG OCG SURF Bof 20 20 30 10 1 SURF Bag of features i Abstract Card recognition using SURF in TCG play video Haruka
Vol.11-HCI-15 No. 11//1 Xangle 5 Xangle 7. 5 Ubi-WA Finger-Mount 9 Digitrack 11 1 Fig. 1 Pointing operations with our method Xangle Xa
 Vol.11-HCI-15 No. 11//1 GUI 1 1 1, 1 GUI Graphical User Interface Xangle Xangle A Pointing Method Using Accelerometers for Graphical User Interfaces Tatsuya Horie, 1 Takuya Katayama, 1 Tsutomu Terada 1,
Vol.11-HCI-15 No. 11//1 GUI 1 1 1, 1 GUI Graphical User Interface Xangle Xangle A Pointing Method Using Accelerometers for Graphical User Interfaces Tatsuya Horie, 1 Takuya Katayama, 1 Tsutomu Terada 1,
「若年不安定就労・不安定住居者聞取り調査」報告書
 2008 3 2006 2007 3 19 6 7 5,400 2007 4 5 19 94 1 2 2007 5 i 2007 6 12 100 100 1 2 2008 3 ii 1960 1990 iii = 1990 = = iv 5 5 v & = 2 24 = 1990 10 vi vii i iii 1 3 1.1.............................................
2008 3 2006 2007 3 19 6 7 5,400 2007 4 5 19 94 1 2 2007 5 i 2007 6 12 100 100 1 2 2008 3 ii 1960 1990 iii = 1990 = = iv 5 5 v & = 2 24 = 1990 10 vi vii i iii 1 3 1.1.............................................
入門ガイド
 ii iii iv NEC Corporation 1998 v P A R 1 P A R 2 P A R 3 T T T vi P A R T 4 P A R T 5 P A R T 6 P A R T 7 vii 1P A R T 1 2 2 1 3 1 4 1 1 5 2 3 6 4 1 7 1 2 3 8 1 1 2 3 9 1 2 10 1 1 2 11 3 12 1 2 1 3 4 13
ii iii iv NEC Corporation 1998 v P A R 1 P A R 2 P A R 3 T T T vi P A R T 4 P A R T 5 P A R T 6 P A R T 7 vii 1P A R T 1 2 2 1 3 1 4 1 1 5 2 3 6 4 1 7 1 2 3 8 1 1 2 3 9 1 2 10 1 1 2 11 3 12 1 2 1 3 4 13
表紙4_1/山道 小川内 小川内 芦塚
 1 2008.1Vol.23 2008.1Vol.23 2 2008.1Vol.23 3 2008.1Vol.23 4 5 2008.1Vol.23 2008.1Vol.23 6 7 2008.1Vol.23 2008.1Vol.23 8 9 2008.1Vol.23 10 2008.1Vol.23 11 2008.1Vol.23 12 2008.1Vol.23 Center 13 2008.1Vol.23
1 2008.1Vol.23 2008.1Vol.23 2 2008.1Vol.23 3 2008.1Vol.23 4 5 2008.1Vol.23 2008.1Vol.23 6 7 2008.1Vol.23 2008.1Vol.23 8 9 2008.1Vol.23 10 2008.1Vol.23 11 2008.1Vol.23 12 2008.1Vol.23 Center 13 2008.1Vol.23
<4D6963726F736F667420506F776572506F696E74202D208376838C835B83938365815B835683878393312E707074205B8CDD8AB78382815B83685D>
 i i vi ii iii iv v vi vii viii ix 2 3 4 5 6 7 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60
i i vi ii iii iv v vi vii viii ix 2 3 4 5 6 7 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60

SC-85X2取説
 I II III IV V VI .................. VII VIII IX X 1-1 1-2 1-3 1-4 ( ) 1-5 1-6 2-1 2-2 3-1 3-2 3-3 8 3-4 3-5 3-6 3-7 ) ) - - 3-8 3-9 4-1 4-2 4-3 4-4 4-5 4-6 5-1 5-2 5-3 5-4 5-5 5-6 5-7 5-8 5-9 5-10 5-11
I II III IV V VI .................. VII VIII IX X 1-1 1-2 1-3 1-4 ( ) 1-5 1-6 2-1 2-2 3-1 3-2 3-3 8 3-4 3-5 3-6 3-7 ) ) - - 3-8 3-9 4-1 4-2 4-3 4-4 4-5 4-6 5-1 5-2 5-3 5-4 5-5 5-6 5-7 5-8 5-9 5-10 5-11

 (2) (3) (4) (5) 2.1 ( ) 2")
0.45m1.00m 1.00m 1.00m 0.33m 0.33m 0.33m 0.45m 1.00m 2
 24 11 10 24 12 10 30 1 0.45m1.00m 1.00m 1.00m 0.33m 0.33m 0.33m 0.45m 1.00m 2 23% 29% 71% 67% 6% 4% n=1525 n=1137 6% +6% -4% -2% 21% 30% 5% 35% 6% 6% 11% 40% 37% 36 172 166 371 213 226 177 54 382 704 216
24 11 10 24 12 10 30 1 0.45m1.00m 1.00m 1.00m 0.33m 0.33m 0.33m 0.45m 1.00m 2 23% 29% 71% 67% 6% 4% n=1525 n=1137 6% +6% -4% -2% 21% 30% 5% 35% 6% 6% 11% 40% 37% 36 172 166 371 213 226 177 54 382 704 216
 10 117 5 1 121841 4 15 12 7 27 12 6 31856 8 21 1983-2 - 321899 12 21656 2 45 9 2 131816 4 91812 11 20 1887 461971 11 3 2 161703 11 13 98 3 16201700-3 - 2 35 6 7 8 9 12 13 12 481973 12 2 571982 161703 11
10 117 5 1 121841 4 15 12 7 27 12 6 31856 8 21 1983-2 - 321899 12 21656 2 45 9 2 131816 4 91812 11 20 1887 461971 11 3 2 161703 11 13 98 3 16201700-3 - 2 35 6 7 8 9 12 13 12 481973 12 2 571982 161703 11
21 Effects of background stimuli by changing speed color matching color stimulus
 21 Effects of background stimuli by changing speed color matching color stimulus 1100274 2010 3 1 ,.,,.,.,.,,,,.,, ( FL10N-EDL). ( 10cm, 2cm),,, 3.,,,, 4., ( MSS206-402W2J), ( SDM496)., 1200r/min,1200r/min
21 Effects of background stimuli by changing speed color matching color stimulus 1100274 2010 3 1 ,.,,.,.,.,,,,.,, ( FL10N-EDL). ( 10cm, 2cm),,, 3.,,,, 4., ( MSS206-402W2J), ( SDM496)., 1200r/min,1200r/min
C:/KENAR/0p1.dvi
 2{3. 53 2{3 [ ] 4 2 1 2 10,15 m 10,10 m 2 2 54 2 III 1{I U 2.4 U r (2.16 F U F =, du dt du dr > 0 du dr < 0 O r 0 r 2.4: 1 m =1:00 10 kg 1:20 10 kgf 8:0 kgf g =9:8 m=s 2 (a) x N mg 2.5: N 2{3. 55 (b) x
2{3. 53 2{3 [ ] 4 2 1 2 10,15 m 10,10 m 2 2 54 2 III 1{I U 2.4 U r (2.16 F U F =, du dt du dr > 0 du dr < 0 O r 0 r 2.4: 1 m =1:00 10 kg 1:20 10 kgf 8:0 kgf g =9:8 m=s 2 (a) x N mg 2.5: N 2{3. 55 (b) x
untitled
 23 12 10 12:55 ~ 18:45 KKR Tel0557-85-2000 FAX0557-85-6604 12:55~13:00 13:00~13:38 I 1) 13:00~13:12 2) 13:13~13:25 3) 13:26~13:38 13:39~14:17 II 4) 13:39~13:51 5) 13:52 ~ 14:04 6) 14:05 ~ 14:17 14:18 ~
23 12 10 12:55 ~ 18:45 KKR Tel0557-85-2000 FAX0557-85-6604 12:55~13:00 13:00~13:38 I 1) 13:00~13:12 2) 13:13~13:25 3) 13:26~13:38 13:39~14:17 II 4) 13:39~13:51 5) 13:52 ~ 14:04 6) 14:05 ~ 14:17 14:18 ~
SFCJ2-MisaGrace
 A New Cognitive Model for Oral Reading Processes: Results of Studying Eye Movement Characteristics of a Phonological Dyslexic Patient Kwok, Misa Grace Misa Grace Kwok / Doctoral Program, Graduate School
A New Cognitive Model for Oral Reading Processes: Results of Studying Eye Movement Characteristics of a Phonological Dyslexic Patient Kwok, Misa Grace Misa Grace Kwok / Doctoral Program, Graduate School

岩手県2012-初校.indd
 http://www.kairyudo.co.jp/ 2012 IWATE 2 3 4 16 1 2 3 2 14 165.6 165.2 55.2 54.3 88.6 88.1 cm kg cm 13 160.1 159.7 50.1 49.1 85.1 84.9 12 153.5 152.5 46.3 44.2 81.9 81.3 13 155.4 154.9 48.9 47.3 84.2 83.7
http://www.kairyudo.co.jp/ 2012 IWATE 2 3 4 16 1 2 3 2 14 165.6 165.2 55.2 54.3 88.6 88.1 cm kg cm 13 160.1 159.7 50.1 49.1 85.1 84.9 12 153.5 152.5 46.3 44.2 81.9 81.3 13 155.4 154.9 48.9 47.3 84.2 83.7

第1部 一般的コメント
 (( 2000 11 24 2003 12 31 3122 94 2332 508 26 a () () i ii iii iv (i) (ii) (i) (ii) (iii) (iv) (a) (b)(c)(d) a) / (i) (ii) (iii) (iv) 1996 7 1996 12
(( 2000 11 24 2003 12 31 3122 94 2332 508 26 a () () i ii iii iv (i) (ii) (i) (ii) (iii) (iv) (a) (b)(c)(d) a) / (i) (ii) (iii) (iv) 1996 7 1996 12
光学
 Received January 8, 010; Revised August 4, 010; Accepted September 30, 010 39, 1 010 598 604 808 0135 1 1 815 8540 4 9 1 The Effects of Stimulus Size and Retinal Position on Depth Perception from Binocular
Received January 8, 010; Revised August 4, 010; Accepted September 30, 010 39, 1 010 598 604 808 0135 1 1 815 8540 4 9 1 The Effects of Stimulus Size and Retinal Position on Depth Perception from Binocular
DocuPrint C5450 ユーザーズガイド
 1 2 3 4 5 6 7 8 1 10 1 11 1 12 1 13 1 14 1 15 1 16 17 1 1 18 1 19 1 20 1 21 1 22 1 23 1 24 1 25 1 26 27 1 1 28 1 29 1 30 1 31 1 2 12 13 3 2 10 11 4 9 8 7 6 5 34 24 23 14 15 22 21 20 16 19 18 17 2 35
1 2 3 4 5 6 7 8 1 10 1 11 1 12 1 13 1 14 1 15 1 16 17 1 1 18 1 19 1 20 1 21 1 22 1 23 1 24 1 25 1 26 27 1 1 28 1 29 1 30 1 31 1 2 12 13 3 2 10 11 4 9 8 7 6 5 34 24 23 14 15 22 21 20 16 19 18 17 2 35
技能継承に関するアンケートの結果概要
 I 1 1 1 1 1 1 2 1 3 1 II 2 1 2 2 2 3 2007 2 4 3 III 4 1 4 4 5 6 2 7 7 8 9 3 10 _10 11 _12 _13 _14 15 4 2007 16 2007 16 17 2007 18 5 19 19 I 2007 1 2005 6 21 8 3 3000 2 292 292 9.7 3 100 1 II 1 86 2 OJT
I 1 1 1 1 1 1 2 1 3 1 II 2 1 2 2 2 3 2007 2 4 3 III 4 1 4 4 5 6 2 7 7 8 9 3 10 _10 11 _12 _13 _14 15 4 2007 16 2007 16 17 2007 18 5 19 19 I 2007 1 2005 6 21 8 3 3000 2 292 292 9.7 3 100 1 II 1 86 2 OJT

