伝統芸能のデジタルアーカイブと ロボットによる実体提示
|
|
|
- しげのぶ あかさか
- 4 years ago
- Views:
Transcription
1 三次元データ認識による災害状況自動計測システムの研究開発 中澤篤志 安福健佑大阪大学サイバーメディアセンター



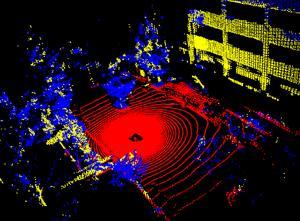
2 プロジェクトの概要 目的自律移動ロボットを用いて周囲の3 次元状況を把握し 被災状況の把握を行うシステムを構築する ロボットは レーザー距離センサが搭載されるため 環境を移動しながら被害状況を計測 把握し 被害状況マップを構築する 災害状況移動ロボット 環境 被害情報 自己位置推定 周辺被害状況の計測 認識 サーバー 期待される研究成果及び意義自然災害による被害の大きい我が国で提案技術が開発されることは 人道面 産業面の両面で大きな意義があり また我が国の最新技術を同様の自然災害に苦しむ諸外国への援助 輸出等にもつなげられることに出来るという言う意味で 大きな社会的 経済的効果がある 距離センサと全方位センサを搭載した移動ロボット 被害状況マップ 距離画像とカラー画像によるシーンの認識 被害状況の認識 赤 青 : 地面 構造物緑 : 樹木等
3 レーザー距離データとは? レーザーを使って三次元形状 ( 方向 + 奥行き ) を獲得する 建築, 文化財のデジタル化等に利用
4 研究開発項目 計測システム レーザースキャンロボット 台車センサー 3D データからのシーン認識 3Dデータからの物体認識 被害箇所の認識 3D データからの地図作成 インターネット地図 (Google Map) との統合提示 災害環境への適用 物体認識結果の避難シミュレーションへの応用

 姿勢センサ")


")


5 研究項目の関連性 レーザーレンジセンサ 画像センサ ( カメラ ) 姿勢センサ 移動させながら撮影 台車型レーザーレンジセンサで災害地計測 災害 ( 崩壊 ) 建物の自動認識 ( 緑 : 非崩壊, 赤 : 崩壊 ) 三次元幾何データ 災害状況下での避難シミュレーション 領域を認識 ( 建物 樹木 人 車両など ) 三次元デジタルマップ (3D グーグルマップ )






6 レーザ計測ロボットシステム Ladar Rotation Stage Omnidirectional Laser Sensor PC 3D Geometry Laser scan Mobile robot Odometry Environemntal Map Mobile robot
")

7 計測の様子 ( ロボット )


8 機器の構成 ( 台車型レーザーセンサ ) 制御用 PC カメラ ( 自己位置推定 ) バッテリ レーザレンジセンサ ( 形状計測 ) 8
9 計測の様子 ( 台車型センサ )
10 距離データの認識 距離データだけでは何も分からない 距離データの認識が重要 応用例 ITS, 被災状況認識 シーン中の物体 : 建物 人 車両 etc どこが被害を受けているか? デジタル文化財データ 3D 遺跡データの認識 ダメージを受けた箇所を見つける

")
11 距離画像認識の例 Range data (source) Result
12 MMM-Classification 法による 距離画像認識 [ICRA2009] MMM-Classfication Micro( 小領域 ) Meso( 中領域 ) Macro( 大領域 ) 情報を使った認識法 Micro-classification 距離データ各点での局所特徴 Meso-classification 物体サイズの情報 Macro-classification シーン全体に対するエネルギー最適化問題
13 手法の流れ 正解データを準備しデータベースに保存 k-means++ 法でデータセットを量子化 地面領域を削除 入力データから特徴ベクトルを取得する 入力データと正解データとの相関を k-nn により評価し クラス所属確率を得る 全体エネルギーを Markov Random Fields により最適化する

14 局所特徴 :Local Shape Histogram Separate space around point into blocks Each block corresponds to bin of a histogram Count number of points in each bin Local Coordinates Point Distribution Local Shape Histogram

15 Meso: オブジェクトサイズ 分離されたオブジェクトの大きさを共分散行列で表現する 入力データに対して最も近い大きさの物に尤度を与える
16 Macro: マルコフランダム場 マルコフランダム場 Node potential: P(l) Edge potential: large constant if nodes have same label, small constant if nodes have different label Find pseudo-optimal solution using alpha expansion (Graph-Cut).


17 認識結果 Ground Truth Result
18 認識結果
19 三次元データからの被害領域の 認識 取得した街の 3D データからどこが被災しているか? を知りたい 一方で 被災した街 ( 建物 ) のデータを取ることは難しい ( 機械学習により ) 正常なデータのみから被災 ( 異常 ) が生じた領域を見つける

20 災害 ( 異常 ) 領域の認識手法 ランダムに選択した注目点まわりの特徴ベクトルを取得しデータベース化 教師データ( 正常な建物 ) 注目点をランダムに選択注目点まわりの特徴ベクトルを得る 認識対象 認識対象の注目点の最近傍ベクトルを DB から探索 倒壊部分を認識 ベクトル間の距離が閾値を越えた点を倒壊点とする
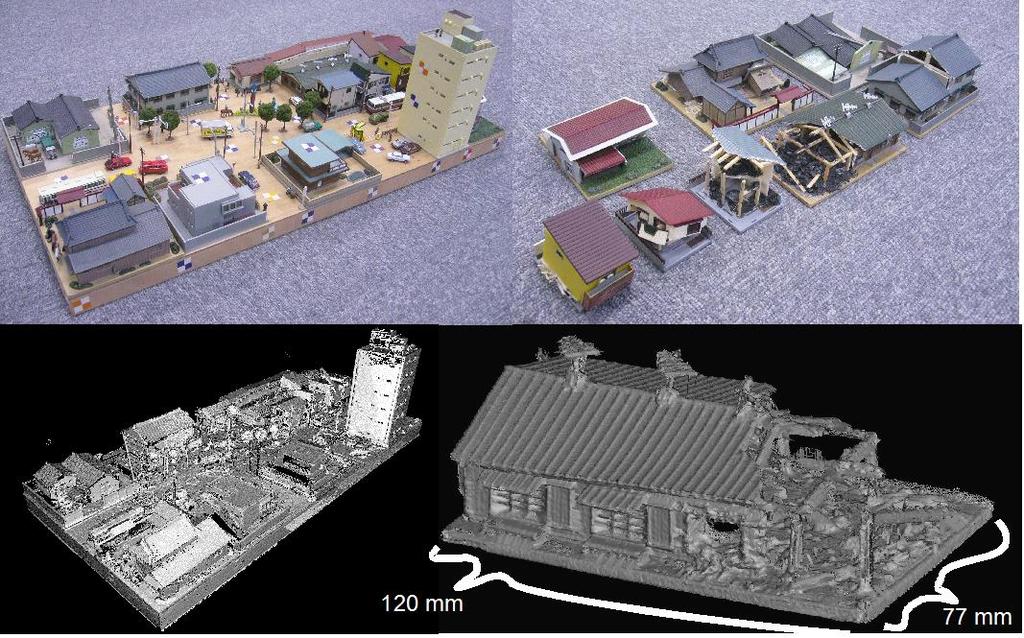
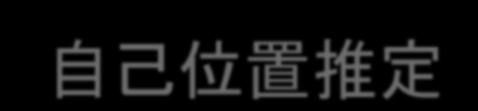
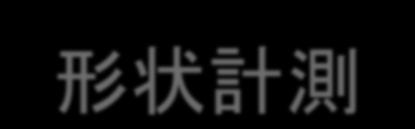
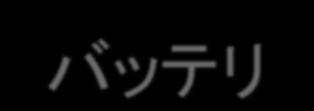
21 災害状況の認識 ミニチュアモデルを用いた実験
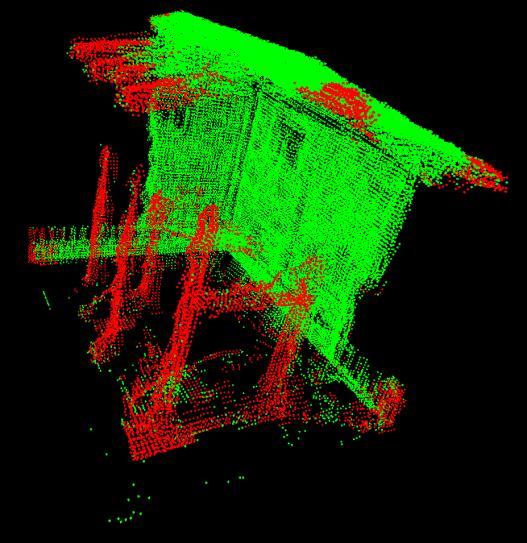
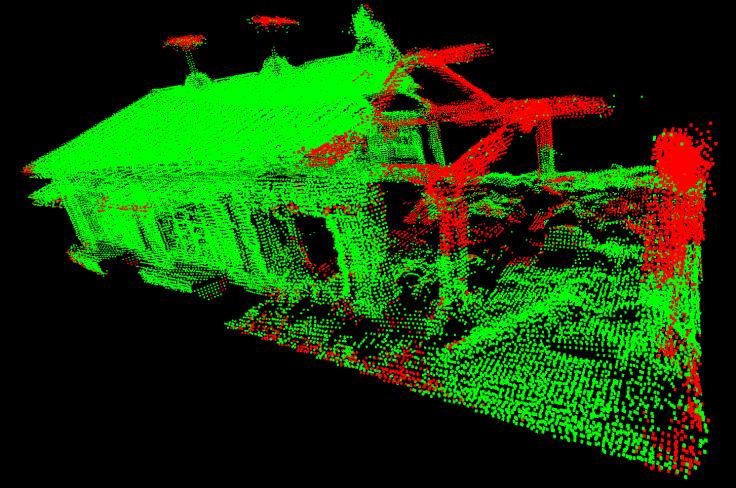



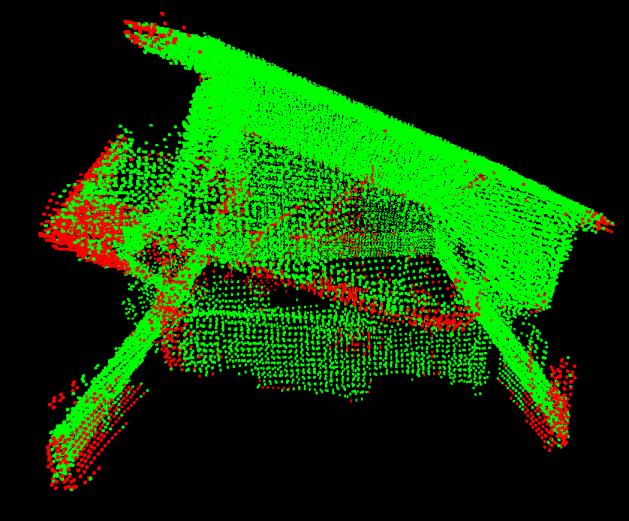
22 認識結果
23 認識率 全点数 正常と認識された点数 異常と認識された点数 異常率 建物 1 建物 2 建物 3 正常 % 異常 % 正常 % 異常 % 正常 % 異常 %
 地図 + 衛星 ( 航空 ) 画像 + 建物 CADモデル")
 提案手法 Google Map +")
24 デジタル 3D 地図 デジタル 3D マップ 既存システム (e.g. Google earth) 地図 + 衛星 ( 航空 ) 画像 + 建物 CADモデル CADモデル : 単純な幾何形状 手動作成 3D 距離データとこのようなデジタル 3D マップを統合 Google Map (Earth) 提案手法 Google Map + Range Image
 Easy")


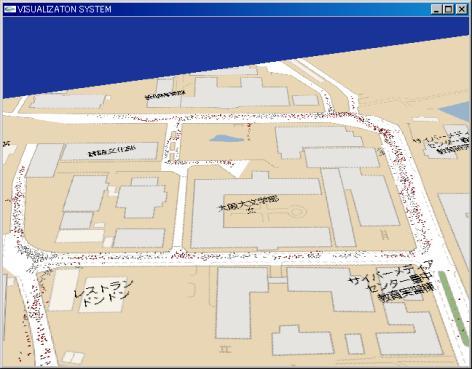
25 提案手法 Google Map を用いる (Map and Satellite) Easy to obtain world-wide map data 本手法で取得した距離データ ユーザーは Google Map の領域から距離画像が得られたおおよその場所を指定すると システムが自動的に場所を判定
26 問題 視点が全く異なる Google Map = from upward, Range image = from ground 両画像を共通のクラス表現 (e.g. building, tree, roads and etc.) に変換しマッチングを行う.



27 提案手法 Google Map Images Range Images 1 2 認識 3 認識結果に基づくマッチング 認識 結果
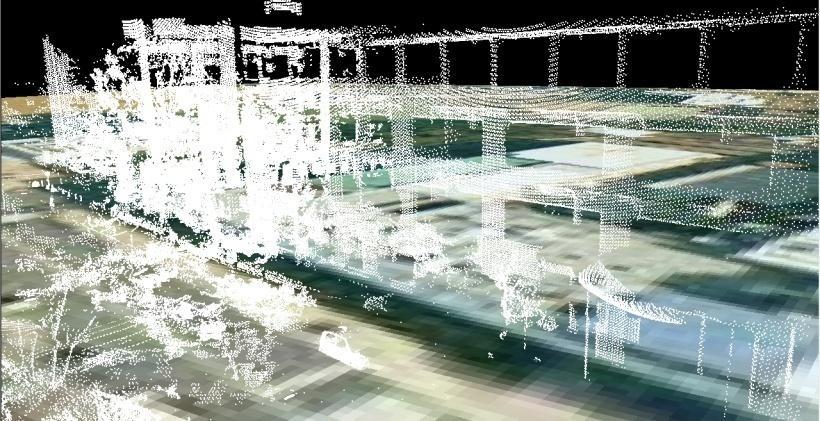
28 デジタル 3D 地図作成結果 ( レーザー距離データ +GoogleMap) 3d_reconstruction.wmv
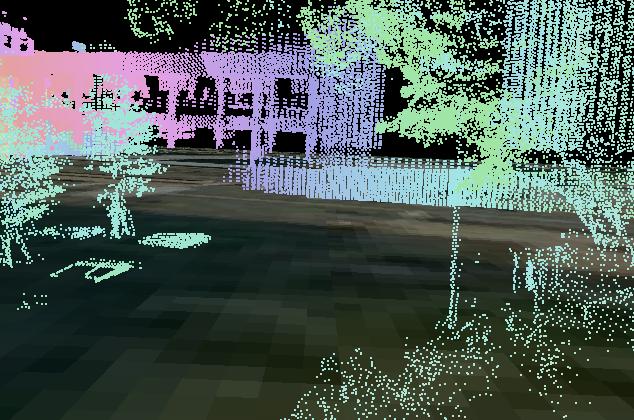


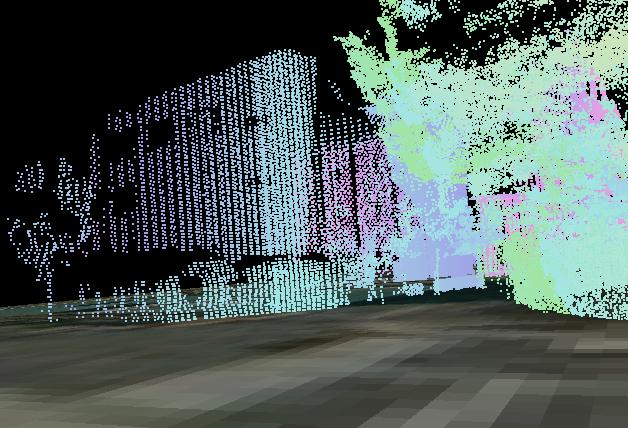
29 実シーンとの比較
30 認識結果を用いた 災害状況避難シミュレーション 建築物内における避難行動予測の重要性 災害事例の数には限りがある 実物大実験は安全上やコスト上問題がある マルチエージェント型避難シミュレーション 個々の人間をエージェントとしてモデル化 各分野で人間の行動モデルが提案されている 大規模災害発生時の広域避難 屋外空間では 災害によって避難経路が通行不能になることで避難や救助が遅れ 人的被害をさらに増大させることが危惧されることから より迅速な被害状況を把握することが重要である. Social Force 型避難行動モデルの開発と地図データベースを利用した広域避難シミュレーション



31 避難者数 ( 人 ) 地図データベースを利用した広域避難シミュレーション 経過時間 ( 秒 ) 航空画像 地図画像による経路情報データ生成 8000 人で避難シミュレーションフレームレート 20fps 動画は早送り
32 まとめ 本プロジェクトでは 屋外シーンの距離データを用いて災害状況の認識を行うための手法を確立した 具体的には 以下の技術の開発を行った ロボット型距離センサ 台車型距離センサ 距離画像の認識法 災害状況の認識法 距離画像への地図データへのマッピング法 認識距離画像データからの災害避難シミュレーション法 一連の技術開発により 距離画像データの災害状況への適用する可能性が示されたと考えている 実災害シーン ( 類似環境含む ) での実験を行う必要
Microsoft PowerPoint - pr_12_template-bs.pptx
 12 回パターン検出と画像特徴 テンプレートマッチング 領域分割 画像特徴 テンプレート マッチング 1 テンプレートマッチング ( 図形 画像などの ) 型照合 Template Matching テンプレートと呼ばれる小さな一部の画像領域と同じパターンが画像全体の中に存在するかどうかを調べる方法 画像内にある対象物体の位置検出 物体数のカウント 物体移動の検出などに使われる テンプレートマッチングの計算
12 回パターン検出と画像特徴 テンプレートマッチング 領域分割 画像特徴 テンプレート マッチング 1 テンプレートマッチング ( 図形 画像などの ) 型照合 Template Matching テンプレートと呼ばれる小さな一部の画像領域と同じパターンが画像全体の中に存在するかどうかを調べる方法 画像内にある対象物体の位置検出 物体数のカウント 物体移動の検出などに使われる テンプレートマッチングの計算
この演習について Autoware 演習 1: データの記録 再生 Autoware 演習 2: センサーキャリブレーション Autoware 演習 3:3 次元地図の作成 Autoware 演習 4: 自己位置推定 Autoware 演習 5: パラメータ調整 Autoware 演習 6: 物体検
 version 1.0 TIER IV ACADEMY 自動運転システム構築塾 Day4 Autoware 演習 2 Autoware 演習 6: 物体検出とトラッキング この演習について Autoware 演習 1: データの記録 再生 Autoware 演習 2: センサーキャリブレーション Autoware 演習 3:3 次元地図の作成 Autoware 演習 4: 自己位置推定 Autoware
version 1.0 TIER IV ACADEMY 自動運転システム構築塾 Day4 Autoware 演習 2 Autoware 演習 6: 物体検出とトラッキング この演習について Autoware 演習 1: データの記録 再生 Autoware 演習 2: センサーキャリブレーション Autoware 演習 3:3 次元地図の作成 Autoware 演習 4: 自己位置推定 Autoware
光学
 Range Image Sensors Using Active Stereo Methods Kazunori UMEDA and Kenji TERABAYASHI Active stereo methods, which include the traditional light-section method and the talked-about Kinect sensor, are typical
Range Image Sensors Using Active Stereo Methods Kazunori UMEDA and Kenji TERABAYASHI Active stereo methods, which include the traditional light-section method and the talked-about Kinect sensor, are typical
コンピュータグラフィックス第6回
 コンピュータグラフィックス 第 6 回 モデリング技法 1 ~3 次元形状表現 ~ 理工学部 兼任講師藤堂英樹 本日の講義内容 モデリング技法 1 様々な形状モデル 曲線 曲面 2014/11/10 コンピュータグラフィックス 2 CG 制作の主なワークフロー 3DCG ソフトウェアの場合 モデリング カメラ シーン アニメーション テクスチャ 質感 ライティング 画像生成 2014/11/10 コンピュータグラフィックス
コンピュータグラフィックス 第 6 回 モデリング技法 1 ~3 次元形状表現 ~ 理工学部 兼任講師藤堂英樹 本日の講義内容 モデリング技法 1 様々な形状モデル 曲線 曲面 2014/11/10 コンピュータグラフィックス 2 CG 制作の主なワークフロー 3DCG ソフトウェアの場合 モデリング カメラ シーン アニメーション テクスチャ 質感 ライティング 画像生成 2014/11/10 コンピュータグラフィックス
円筒面で利用可能なARマーカ
 円筒面で利用可能な AR マーカ AR Marker for Cylindrical Surface 2014 年 11 月 14 日 ( 金 ) 眞鍋佳嗣千葉大学大学院融合科学研究科 マーカベース AR 二次元マーカはカメラ姿勢の推定, 拡張現実等広い研究分野で利用されている 現実の風景 表示される画像 デジタル情報を付加 カメラで撮影し, ディスプレイに表示 使用方法の単純性, 認識の安定性からマーカベース
円筒面で利用可能な AR マーカ AR Marker for Cylindrical Surface 2014 年 11 月 14 日 ( 金 ) 眞鍋佳嗣千葉大学大学院融合科学研究科 マーカベース AR 二次元マーカはカメラ姿勢の推定, 拡張現実等広い研究分野で利用されている 現実の風景 表示される画像 デジタル情報を付加 カメラで撮影し, ディスプレイに表示 使用方法の単純性, 認識の安定性からマーカベース

先行的評価の対象とするユースケース 整理中. 災害対応に関するユースケース. 健康に関するユースケース. 移動に関するユースケース. 教育に関するユースケース. 小売 物流に関するユースケース 6. 製造 ( 提供した製品の保守を含む ) に関するユースケース 7. 農業に関するユースケース 8.
 に関するユースケース 7. 農業に関するユースケース 8.") 資料 先行的評価について - ユースケースとシナリオ分析 平成 9 年 月 日事務局資料 先行的評価の対象とするユースケース 整理中. 災害対応に関するユースケース. 健康に関するユースケース. 移動に関するユースケース. 教育に関するユースケース. 小売 物流に関するユースケース 6. 製造 ( 提供した製品の保守を含む ) に関するユースケース 7. 農業に関するユースケース 8. 金融に関するユースケース
資料 先行的評価について - ユースケースとシナリオ分析 平成 9 年 月 日事務局資料 先行的評価の対象とするユースケース 整理中. 災害対応に関するユースケース. 健康に関するユースケース. 移動に関するユースケース. 教育に関するユースケース. 小売 物流に関するユースケース 6. 製造 ( 提供した製品の保守を含む ) に関するユースケース 7. 農業に関するユースケース 8. 金融に関するユースケース
2008 年度下期未踏 IT 人材発掘 育成事業採択案件評価書 1. 担当 PM 田中二郎 PM ( 筑波大学大学院システム情報工学研究科教授 ) 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3.
 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3.") 2008 年度下期未踏 IT 人材発掘 育成事業採択案件評価書 1. 担当 PM 田中二郎 PM ( 筑波大学大学院システム情報工学研究科教授 ) 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3. プロジェクト管理組織 株式会社オープンテクノロジーズ 4. 委託金支払額 3,000,000 円 5.
2008 年度下期未踏 IT 人材発掘 育成事業採択案件評価書 1. 担当 PM 田中二郎 PM ( 筑波大学大学院システム情報工学研究科教授 ) 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3. プロジェクト管理組織 株式会社オープンテクノロジーズ 4. 委託金支払額 3,000,000 円 5.
Microsoft PowerPoint - 三次元座標測定 ppt
 冗長座標測定機 ()( 三次元座標計測 ( 第 9 回 ) 5 年度大学院講義 6 年 月 7 日 冗長性を持つ 次元座標測定機 次元 辺測量 : 冗長性を出すために つのレーザトラッカを配置し, キャッツアイまでの距離から座標を測定する つのカメラ ( 次元的なカメラ ) とレーザスキャナ : つの角度測定システムによる座標測定 つの回転関節による 次元 自由度多関節機構 高増潔東京大学工学系研究科精密機械工学専攻
冗長座標測定機 ()( 三次元座標計測 ( 第 9 回 ) 5 年度大学院講義 6 年 月 7 日 冗長性を持つ 次元座標測定機 次元 辺測量 : 冗長性を出すために つのレーザトラッカを配置し, キャッツアイまでの距離から座標を測定する つのカメラ ( 次元的なカメラ ) とレーザスキャナ : つの角度測定システムによる座標測定 つの回転関節による 次元 自由度多関節機構 高増潔東京大学工学系研究科精密機械工学専攻
0 21 カラー反射率 slope aspect 図 2.9: 復元結果例 2.4 画像生成技術としての計算フォトグラフィ 3 次元情報を復元することにより, 画像生成 ( レンダリング ) に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生
 に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生") 0 21 カラー反射率 slope aspect 図 2.9: 復元結果例 2.4 画像生成技術としての計算フォトグラフィ 3 次元情報を復元することにより, 画像生成 ( レンダリング ) に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生まれ, コンピューテーショナルフォトグラフィ ( 計算フォトグラフィ ) と呼ばれている.3 次元画像認識技術の計算フォトグラフィへの応用として,
0 21 カラー反射率 slope aspect 図 2.9: 復元結果例 2.4 画像生成技術としての計算フォトグラフィ 3 次元情報を復元することにより, 画像生成 ( レンダリング ) に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生まれ, コンピューテーショナルフォトグラフィ ( 計算フォトグラフィ ) と呼ばれている.3 次元画像認識技術の計算フォトグラフィへの応用として,
(Microsoft PowerPoint -
 ERDAS IMAGINE 2011 新機能 1. リボンインターフェイス 1. リボンインターフェイス ERDAS IMAGINE 2010 から実装されたリボンインターフェイスについて ご紹介します 1.1 インターフェイスの概要 1.2 よく使う機能の集約 1 - Quick Access Toolbar - 1.3 よく使う機能の集約 2 - My Workflow Tab - 1.4 よく使うデータのショートカット
ERDAS IMAGINE 2011 新機能 1. リボンインターフェイス 1. リボンインターフェイス ERDAS IMAGINE 2010 から実装されたリボンインターフェイスについて ご紹介します 1.1 インターフェイスの概要 1.2 よく使う機能の集約 1 - Quick Access Toolbar - 1.3 よく使う機能の集約 2 - My Workflow Tab - 1.4 よく使うデータのショートカット
Mobile robotics KUKA Navigation Solution JP
 Mobile robotics KUKA Navigation Solution JP 自律型 インテリジェント ハードウェア非依存型 KUKA Navigation Solution は 移動型ロボット分野で使用されている自己ナビゲーション車両向けの SLAM 手法に基づいて設計されている 自己学習型ナビゲーションシステムです この中には 多数の車両を同時に管理 制御するソフトウェアと自己経路検出機能を含めた
Mobile robotics KUKA Navigation Solution JP 自律型 インテリジェント ハードウェア非依存型 KUKA Navigation Solution は 移動型ロボット分野で使用されている自己ナビゲーション車両向けの SLAM 手法に基づいて設計されている 自己学習型ナビゲーションシステムです この中には 多数の車両を同時に管理 制御するソフトウェアと自己経路検出機能を含めた
スライド 1
 膨大なデータからの価値創出 ~ 画像 映像処理技術の最先端 ~ 長谷山美紀 第 9 回インフラ イノベーション研究会 IST Information Science and Technology Hokkaido University 本日の講演内容 1. はじめに大量ディジタルデータ時代の到来 2. 画像 映像処理の最先端 いかにして望む情報を獲得するか? 3. 実データ適用の試み 4. まとめディジタルデータ時代のこれから
膨大なデータからの価値創出 ~ 画像 映像処理技術の最先端 ~ 長谷山美紀 第 9 回インフラ イノベーション研究会 IST Information Science and Technology Hokkaido University 本日の講演内容 1. はじめに大量ディジタルデータ時代の到来 2. 画像 映像処理の最先端 いかにして望む情報を獲得するか? 3. 実データ適用の試み 4. まとめディジタルデータ時代のこれから

粒子画像流速測定法を用いた室内流速測定法に関する研究
 可視化手法を用いた室内気流分布の測定法に関する研究 -PIV を用いた通風時及び空調吹出気流の測定 - T08K729D 大久保肇 指導教員 赤林伸一教授 流れの可視化は古来より流れの特性を直感的に把握する手法として様々な測定法が試みられている 近年の画像処理技術の発展及び PC の性能向上により粒子画像流速測定法 (PIV ) が実用化されている Particle Image Velocimetry
可視化手法を用いた室内気流分布の測定法に関する研究 -PIV を用いた通風時及び空調吹出気流の測定 - T08K729D 大久保肇 指導教員 赤林伸一教授 流れの可視化は古来より流れの特性を直感的に把握する手法として様々な測定法が試みられている 近年の画像処理技術の発展及び PC の性能向上により粒子画像流速測定法 (PIV ) が実用化されている Particle Image Velocimetry
04_テクレポ22_内田様.indd
 津波浸水シミュレーション結果の 3 次元動画作成 エンジニアリング本部防災 環境解析部 内田 照久 1. はじめに想定を超える被害をもたらした東日本大震災をきっかけに 津波被害に対して関心が高まっている 近年 発生する確率が高いとされている南海ト (1) ラフ巨大地震による津波の被害想定では 建物全壊が約 13.2 万棟 ~ 約 16.9 万棟 死者数が約 11.7 万人 ~ 約 22.4 万人にのぼるとされている
津波浸水シミュレーション結果の 3 次元動画作成 エンジニアリング本部防災 環境解析部 内田 照久 1. はじめに想定を超える被害をもたらした東日本大震災をきっかけに 津波被害に対して関心が高まっている 近年 発生する確率が高いとされている南海ト (1) ラフ巨大地震による津波の被害想定では 建物全壊が約 13.2 万棟 ~ 約 16.9 万棟 死者数が約 11.7 万人 ~ 約 22.4 万人にのぼるとされている
地図情報の差分更新・自動図化 概要版
 戦略的イノベーション創造プログラム (SIP) 自動走行システム / / 大規模実証実験 / ダイナミックマップ / 地図情報の差分更新 自動図化 報告書 平成 29 年度報告 平成 30 年 3 月 31 日 三菱電機株式会社 目次 1. 研究開発の目的 2. 静的高精度 3D 地図データの自動図化 / 差分抽出技術の実用性検証 (2) 自動図化 / 差分抽出技術適用による改善効果検証 3. リアルタイム自動図化
戦略的イノベーション創造プログラム (SIP) 自動走行システム / / 大規模実証実験 / ダイナミックマップ / 地図情報の差分更新 自動図化 報告書 平成 29 年度報告 平成 30 年 3 月 31 日 三菱電機株式会社 目次 1. 研究開発の目的 2. 静的高精度 3D 地図データの自動図化 / 差分抽出技術の実用性検証 (2) 自動図化 / 差分抽出技術適用による改善効果検証 3. リアルタイム自動図化
1
 1 2 9 3 4 5 6 7 2 8 9 http://t.pia.jp/ Point Point TOP 10 11 http://apps.microsoft.com/windows/ja-jp/app/49b9d8c8-278d-4ebe-b320-1d81ad07ff36 http://s.pia.jp/pia/ 12 http://t2.pia.jp/info/api.html 13 http://t2.pia.jp/feature/music/musiccomplex/index.html
1 2 9 3 4 5 6 7 2 8 9 http://t.pia.jp/ Point Point TOP 10 11 http://apps.microsoft.com/windows/ja-jp/app/49b9d8c8-278d-4ebe-b320-1d81ad07ff36 http://s.pia.jp/pia/ 12 http://t2.pia.jp/info/api.html 13 http://t2.pia.jp/feature/music/musiccomplex/index.html
特別寄稿.indd
 特別寄稿 ソフトインフラとしてのデジタル地図を活用した自動運転システム Autonomous vehicle using digital map as a soft infrastructure 菅沼直樹 Naoki SUGANUMA 1. はじめに 1) 2008 2012 ITS 2) CO 2 3) 4) Door to door Door to door Door to door DARPA(
特別寄稿 ソフトインフラとしてのデジタル地図を活用した自動運転システム Autonomous vehicle using digital map as a soft infrastructure 菅沼直樹 Naoki SUGANUMA 1. はじめに 1) 2008 2012 ITS 2) CO 2 3) 4) Door to door Door to door Door to door DARPA(
小型移動ロボット
 小型移動ロボット 千葉工業大学 未来ロボット技術研究センター 吉田智章 背景 過去に開発した災害対応ロボット Hibiscus (2006) Kenaf (2007-2009) Quince (2009-2010) 4 大都市大震災軽減化特別プロジェクト ( 文科省 ) 戦略的先端ロボット要素技術開発プロジェクト (NEDO) 2006-2010 2002 2006 2011 2012 Kenaf
小型移動ロボット 千葉工業大学 未来ロボット技術研究センター 吉田智章 背景 過去に開発した災害対応ロボット Hibiscus (2006) Kenaf (2007-2009) Quince (2009-2010) 4 大都市大震災軽減化特別プロジェクト ( 文科省 ) 戦略的先端ロボット要素技術開発プロジェクト (NEDO) 2006-2010 2002 2006 2011 2012 Kenaf
平成19年度・地球工学研究所の知的財産に関する報告会 - 資料集
 地盤環境モニタリングの広域化とコスト低減のための無線センサネットワークの実用化に関する検討 地球工学研究所地圏科学領域池川洋二郎 Email:ikegawa@criepi.denken.or.jp 1 背景と目的 背景 : 豪雨, 地震などによる斜面災害に対する維持管理や減災技術の適用による効果や機能をモニタリングにより評価することが重要である. 必要性 : モニタリングの広域化と, 低コスト化が可能な技術開発が望まれる.
地盤環境モニタリングの広域化とコスト低減のための無線センサネットワークの実用化に関する検討 地球工学研究所地圏科学領域池川洋二郎 Email:ikegawa@criepi.denken.or.jp 1 背景と目的 背景 : 豪雨, 地震などによる斜面災害に対する維持管理や減災技術の適用による効果や機能をモニタリングにより評価することが重要である. 必要性 : モニタリングの広域化と, 低コスト化が可能な技術開発が望まれる.
三菱電線工業時報 第 105 号 2008 年 10 月 1 High-speed disaster prevention radio information system R-LCX50-4SL-75 LANIEEE b/g R-LCX50-4SL D 2 1
 1 GHz GHz 帯長距離漏洩同軸ケーブルを用いた高速防災無線情報システムの研究開発 High Speed Communication System for Emergencies Using Long-distance GHz Leaky Coaxial Cables 長野県工業技術総合センター 国立大学法人信州大学 株式会社サーキットデザイン 加賀電子株式会社 菱星通信システム株式会社ネットワーク技術部
1 GHz GHz 帯長距離漏洩同軸ケーブルを用いた高速防災無線情報システムの研究開発 High Speed Communication System for Emergencies Using Long-distance GHz Leaky Coaxial Cables 長野県工業技術総合センター 国立大学法人信州大学 株式会社サーキットデザイン 加賀電子株式会社 菱星通信システム株式会社ネットワーク技術部
基礎輪講2週目 Kinectの話
 基礎輪講 2 週目 Kinect の話 3D Computer Vision カメラから 3 次元の情報を取得 3 次元再構築 :2 次元の画像から 3 次元形状の復元 多視点画像群 3 次元再構築結果 3 次元の情報を持つ画像ってないの? 2 距離画像 Depth( 距離 ) の情報を持った画像 各画素の部分に距離の値が入る. 距離画像 距離画像を取得する機器が必要 3 距離画像センサ 実世界の距離情報を取得できる.
基礎輪講 2 週目 Kinect の話 3D Computer Vision カメラから 3 次元の情報を取得 3 次元再構築 :2 次元の画像から 3 次元形状の復元 多視点画像群 3 次元再構築結果 3 次元の情報を持つ画像ってないの? 2 距離画像 Depth( 距離 ) の情報を持った画像 各画素の部分に距離の値が入る. 距離画像 距離画像を取得する機器が必要 3 距離画像センサ 実世界の距離情報を取得できる.
高分解能衛星データによる地形図作成手法に関する調査研究 ( 第 2 年次 ) 実施期間平成 18 年度 ~ 測図部測図技術開発室水田良幸小井土今朝巳田中宏明 佐藤壮紀大野裕幸 1. はじめに国土地理院では, 平成 18 年 1 月に打ち上げられた陸域観測技術衛星 ALOS に関して, 宇宙航空研究開
 実施期間平成 18 年度 ~ 測図部測図技術開発室水田良幸小井土今朝巳田中宏明 佐藤壮紀大野裕幸 1. はじめに国土地理院では, 平成 18 年 1 月に打ち上げられた陸域観測技術衛星 ALOS に関して, 宇宙航空研究開") 高分解能衛星データによる地形図作成手法に関する調査研究 ( 第 2 年次 ) 実施期間平成 18 年度 ~ 測図部測図技術開発室水田良幸小井土今朝巳田中宏明 佐藤壮紀大野裕幸 1. はじめに国土地理院では, 平成 18 年 1 月に打ち上げられた陸域観測技術衛星 ALOS に関して, 宇宙航空研究開発機構 ( JAXA ) と共同研究協定を締結している. 測図部では,2 万 5 千分 1 地形図の作成及びリアルタイム修正の実証及び
高分解能衛星データによる地形図作成手法に関する調査研究 ( 第 2 年次 ) 実施期間平成 18 年度 ~ 測図部測図技術開発室水田良幸小井土今朝巳田中宏明 佐藤壮紀大野裕幸 1. はじめに国土地理院では, 平成 18 年 1 月に打ち上げられた陸域観測技術衛星 ALOS に関して, 宇宙航空研究開発機構 ( JAXA ) と共同研究協定を締結している. 測図部では,2 万 5 千分 1 地形図の作成及びリアルタイム修正の実証及び
Web UX Web Web Web 1.2 Web GIF Kevin Burg Jamie Beck GIF GIF [2] Flixel Cinemagraph pro *1 Adobe Photoshop *2 GIMP *3 Web *1 Flixel Photos Inc. *2 *3
![Web UX Web Web Web 1.2 Web GIF Kevin Burg Jamie Beck GIF GIF [2] Flixel Cinemagraph pro *1 Adobe Photoshop *2 GIMP *3 Web *1 Flixel Photos Inc. *2 *3](/thumbs/89/99926796.jpg "Web UX Web Web Web 1.2 Web GIF Kevin Burg Jamie Beck GIF GIF [2] Flixel Cinemagraph pro *1 Adobe Photoshop *2 GIMP *3 Web *1 Flixel Photos Inc. *2 *3") 1 1 1 Web Web SNS 1 The Proposition of New Method to Generate Cinemagraph in Simple Way Isono Yuuka 1 Ando Daichi 1 Kasahafa Shinichi 1 Abstract: Recently, many animations are used for the web design.
1 1 1 Web Web SNS 1 The Proposition of New Method to Generate Cinemagraph in Simple Way Isono Yuuka 1 Ando Daichi 1 Kasahafa Shinichi 1 Abstract: Recently, many animations are used for the web design.
コンピュータグラフィックス第8回
 コンピュータグラフィックス 第 8 回 レンダリング技法 1 ~ 基礎と概要, 隠面消去 ~ 理工学部 兼任講師藤堂英樹 レポート提出状況 課題 1 の選択が多い (STAND BY ME ドラえもん ) 体験演習型 ( 課題 3, 課題 4) の選択も多い 内訳 課題 1 課題 2 課題 3 課題 4 課題 5 2014/11/24 コンピュータグラフィックス 2 次回レポートの体験演習型 メタセコイア,
コンピュータグラフィックス 第 8 回 レンダリング技法 1 ~ 基礎と概要, 隠面消去 ~ 理工学部 兼任講師藤堂英樹 レポート提出状況 課題 1 の選択が多い (STAND BY ME ドラえもん ) 体験演習型 ( 課題 3, 課題 4) の選択も多い 内訳 課題 1 課題 2 課題 3 課題 4 課題 5 2014/11/24 コンピュータグラフィックス 2 次回レポートの体験演習型 メタセコイア,
3 Abstract CAD 3-D ( ) 4 Spin Image Correspondence Grouping 46.1% 17.4% 97.6% ICP [0.6mm/point] 1 CAD [1][2]
![3 Abstract CAD 3-D ( ) 4 Spin Image Correspondence Grouping 46.1% 17.4% 97.6% ICP [0.6mm/point] 1 CAD [1][2]](/thumbs/94/118738978.jpg "3 Abstract CAD 3-D ( ) 4 Spin Image Correspondence Grouping 46.1% 17.4% 97.6% ICP [0.6mm/point] 1 CAD [1][2]") 3 E-mail: {akizuki}@isl.sist.chukyo-u.ac.jp Abstract CAD 3-D ( ) 4 Spin Image Correspondence Grouping 46.1% 17.4% 97.6% ICP [0.6mm/point] 1 CAD [1][2] Shape Index [3] [4][5] 3 SHOT [6] [7] Point Pair Feature
3 E-mail: {akizuki}@isl.sist.chukyo-u.ac.jp Abstract CAD 3-D ( ) 4 Spin Image Correspondence Grouping 46.1% 17.4% 97.6% ICP [0.6mm/point] 1 CAD [1][2] Shape Index [3] [4][5] 3 SHOT [6] [7] Point Pair Feature
Kumamoto University Center for Multimedia and Information Technologies Lab. 熊本大学アプリケーション実験 ~ 実環境における無線 LAN 受信電波強度を用いた位置推定手法の検討 ~ InKIAI 宮崎県美郷
 熊本大学アプリケーション実験 ~ 実環境における無線 LAN 受信電波強度を用いた位置推定手法の検討 ~ InKIAI プロジェクト @ 宮崎県美郷町 熊本大学副島慶人川村諒 1 実験の目的 従来 信号の受信電波強度 (RSSI:RecevedSgnal StrengthIndcator) により 対象の位置を推定する手法として 無線 LAN の AP(AccessPont) から受信する信号の減衰量をもとに位置を推定する手法が多く検討されている
熊本大学アプリケーション実験 ~ 実環境における無線 LAN 受信電波強度を用いた位置推定手法の検討 ~ InKIAI プロジェクト @ 宮崎県美郷町 熊本大学副島慶人川村諒 1 実験の目的 従来 信号の受信電波強度 (RSSI:RecevedSgnal StrengthIndcator) により 対象の位置を推定する手法として 無線 LAN の AP(AccessPont) から受信する信号の減衰量をもとに位置を推定する手法が多く検討されている
Microsoft PowerPoint - 技術概要・有効性資料
 情報分析 意思決定 援システム 更新更新 概要 地震直後に 可能な地震動分布に基づく施設被害推測情報 CCTV カメラ画像や施設点検情報 衛星 SAR 航空機 SAR の画像判読による被災情報等を統合 更新する 効果 災害対応従事者の意思決定を 援 災害発 初期推測情報の反映 反映情報 発 した地震のマグニチュード 位置情報等 インフラ施設の被害推測 CCTV カメラ画像等の情報の反映 反映情報 CCTV
情報分析 意思決定 援システム 更新更新 概要 地震直後に 可能な地震動分布に基づく施設被害推測情報 CCTV カメラ画像や施設点検情報 衛星 SAR 航空機 SAR の画像判読による被災情報等を統合 更新する 効果 災害対応従事者の意思決定を 援 災害発 初期推測情報の反映 反映情報 発 した地震のマグニチュード 位置情報等 インフラ施設の被害推測 CCTV カメラ画像等の情報の反映 反映情報 CCTV
Microsoft Word - BentleyV8XM_GoogleEarth.docx
 Bentley Architecture Google Earth ツール マニュアル Copyright(C) 2008 ITAILAB All rights reserved Google Earth ツールについて Google Earth(http://earth.google.com/) は 地球のどこからでもイメージを表示できる 3 次元インターフェイス機能があるアプリケーションです Google
Bentley Architecture Google Earth ツール マニュアル Copyright(C) 2008 ITAILAB All rights reserved Google Earth ツールについて Google Earth(http://earth.google.com/) は 地球のどこからでもイメージを表示できる 3 次元インターフェイス機能があるアプリケーションです Google
緒言 GIS ソフトウエア開発動向の一つに 3 次元化表示 がある. 代表的な GIS ソフトである ESRI 社の ArcGIS では, 建物や樹木等を平面 GIS に上乗せすることを 3 次元表示と呼ぶことが多い. 一方, 地下構造を表現できる 真 3 次元 化は, ソリッドモデル又はボクセルモ
 日本情報地質学会シンポジウム 2016 講演論文集, 1-17, 2016 i-const./cim 時代の地形 地質三次元モデリング フリーソフトによる衛星データの 3 次元表示 * 古宇田亮一 3D visualization of satellite image data using free and open-source software Ryoichi Kouda * * 特定国立研究開発法人産業技術総合研究所
日本情報地質学会シンポジウム 2016 講演論文集, 1-17, 2016 i-const./cim 時代の地形 地質三次元モデリング フリーソフトによる衛星データの 3 次元表示 * 古宇田亮一 3D visualization of satellite image data using free and open-source software Ryoichi Kouda * * 特定国立研究開発法人産業技術総合研究所
( ), ( ) Patrol Mobile Robot To Greet Passing People Takemi KIMURA(Univ. of Tsukuba), and Akihisa OHYA(Univ. of Tsukuba) Abstract This research aims a
, ( ) Patrol Mobile Robot To Greet Passing People Takemi KIMURA(Univ. of Tsukuba), and Akihisa OHYA(Univ. of Tsukuba) Abstract This research aims a") ( ), ( ) Patrol Mobile Robot To Greet Passing People Takemi KIMURA(Univ. of Tsukuba), and Akihisa OHYA(Univ. of Tsukuba) Abstract This research aims at the development of a mobile robot to perform greetings
( ), ( ) Patrol Mobile Robot To Greet Passing People Takemi KIMURA(Univ. of Tsukuba), and Akihisa OHYA(Univ. of Tsukuba) Abstract This research aims at the development of a mobile robot to perform greetings
IPSJ SIG Technical Report Vol.2012-CG-149 No.13 Vol.2012-CVIM-184 No /12/4 3 1,a) ( ) DB 3D DB 2D,,,, PnP(Perspective n-point), Ransa
 ( ) DB 3D DB 2D,,,, PnP(Perspective n-point), Ransa") 3,a) 3 3 ( ) DB 3D DB 2D,,,, PnP(Perspective n-point), Ransac. DB [] [2] 3 DB Web Web DB Web NTT NTT Media Intelligence Laboratories, - Hikarinooka Yokosuka-Shi, Kanagawa 239-0847 Japan a) yabushita.hiroko@lab.ntt.co.jp
3,a) 3 3 ( ) DB 3D DB 2D,,,, PnP(Perspective n-point), Ransac. DB [] [2] 3 DB Web Web DB Web NTT NTT Media Intelligence Laboratories, - Hikarinooka Yokosuka-Shi, Kanagawa 239-0847 Japan a) yabushita.hiroko@lab.ntt.co.jp
スライド 1
 CNN を用いた弱教師学習による画像領域分割 下田和, 柳井啓司 電気通信大学 大学院情報理工学 研究科 総合情報学専攻 c 2015 UEC Tokyo. Convolutional Neural Network CNN クラス分類タスクにおいてトップの精度 CNN の応用 ( 物体位置の認識 ) 物体検出 物体に BB を付与 領域分割 ピクセル単位の認識 CNN を用いた領域分割 CNN による完全教師ありのセグメンテーション
CNN を用いた弱教師学習による画像領域分割 下田和, 柳井啓司 電気通信大学 大学院情報理工学 研究科 総合情報学専攻 c 2015 UEC Tokyo. Convolutional Neural Network CNN クラス分類タスクにおいてトップの精度 CNN の応用 ( 物体位置の認識 ) 物体検出 物体に BB を付与 領域分割 ピクセル単位の認識 CNN を用いた領域分割 CNN による完全教師ありのセグメンテーション
Microsoft Word - deim2016再提出.docx
 DEIM Forum 2016 F2-4 推薦システムにおける文脈適応及び計算時間短縮を実現する切り出し法と構成モジュールの自動合成方式 福田正向 清木康 慶應義塾大学環境情報学部 252-0882 神奈川県藤沢市遠藤 5322 E-mail: {t13504yf, kiyoki}@sfc.keio.ac.jp あらまし E コマース市場の拡大に伴い, Web 上に流通する商品数が増大し, 限られた時間で多数の商品の中からユーザーの嗜好や文脈にマッチした商品を探索することが困難になる情報過多問題が深刻化している
DEIM Forum 2016 F2-4 推薦システムにおける文脈適応及び計算時間短縮を実現する切り出し法と構成モジュールの自動合成方式 福田正向 清木康 慶應義塾大学環境情報学部 252-0882 神奈川県藤沢市遠藤 5322 E-mail: {t13504yf, kiyoki}@sfc.keio.ac.jp あらまし E コマース市場の拡大に伴い, Web 上に流通する商品数が増大し, 限られた時間で多数の商品の中からユーザーの嗜好や文脈にマッチした商品を探索することが困難になる情報過多問題が深刻化している
100326_セミナー資料_物体認識.pptx
 !! "#! "#"! "#$! "#%! $#! $#"! $#$! $#%! $#&! % 物体認識 検出 について '()*++,-./#,0121#3)+,04.50+6789+":; '()*++)010;216,#3)+9,+0;.?>65.6#'@4A 物体検出は簡単か 多様な変動要素が存在して難しい 変動要素に対応する特徴量 学習手法がキー カメラの角度 姿勢
!! "#! "#"! "#$! "#%! $#! $#"! $#$! $#%! $#&! % 物体認識 検出 について '()*++,-./#,0121#3)+,04.50+6789+":; '()*++)010;216,#3)+9,+0;.?>65.6#'@4A 物体検出は簡単か 多様な変動要素が存在して難しい 変動要素に対応する特徴量 学習手法がキー カメラの角度 姿勢
IS2-06 第21回画像センシングシンポジウム 横浜 2015年6月 画像をスーパーピクセルに変換する手法として SLIC[5] を用いる Achanta らによって提案された SLIC 2.2 グラフマッチング は K-means をベースにした手法で 単純な K-means に いる SPIN
![IS2-06 第21回画像センシングシンポジウム 横浜 2015年6月 画像をスーパーピクセルに変換する手法として SLIC[5] を用いる Achanta らによって提案された SLIC 2.2 グラフマッチング は K-means をベースにした手法で 単純な K-means に いる SPIN](/thumbs/92/107948919.jpg "IS2-06 第21回画像センシングシンポジウム 横浜 2015年6月 画像をスーパーピクセルに変換する手法として SLIC[5] を用いる Achanta らによって提案された SLIC 2.2 グラフマッチング は K-means をベースにした手法で 単純な K-means に いる SPIN") Cosegmentation E-mail: {tamanaha, nakayama}@nlab.ci.i.u-tokyo.ac.jp Abstract Cosegmentation Cosegmentation Cosegmentation 1 Never Ending Image Learner[1] Google Cosegmentation Cosegmentation Rother [2]
Cosegmentation E-mail: {tamanaha, nakayama}@nlab.ci.i.u-tokyo.ac.jp Abstract Cosegmentation Cosegmentation Cosegmentation 1 Never Ending Image Learner[1] Google Cosegmentation Cosegmentation Rother [2]
研究成果報告書
 様式 C-19 科学研究費補助金研究成果報告書 平成 23 年 4 月 30 日現在 機関番号 :32641 研究種目 : 基盤研究 (C) 研究期間 : 2008 ~ 2010 課題番号 :20500164 研究課題名 ( 和文 ) 屋外利用可能な高速小型距離画像センサの構築と三次元環境モデリング応用研究課題名 ( 英文 ) Construction of a fast and compact range
様式 C-19 科学研究費補助金研究成果報告書 平成 23 年 4 月 30 日現在 機関番号 :32641 研究種目 : 基盤研究 (C) 研究期間 : 2008 ~ 2010 課題番号 :20500164 研究課題名 ( 和文 ) 屋外利用可能な高速小型距離画像センサの構築と三次元環境モデリング応用研究課題名 ( 英文 ) Construction of a fast and compact range
(a) (b) 2 2 (Bosch, IR Illuminator 850 nm, UFLED30-8BD) ( 7[m] 6[m]) 3 (PointGrey Research Inc.Grasshopper2 M/C) Hz (a) (b
![(a) (b) 2 2 (Bosch, IR Illuminator 850 nm, UFLED30-8BD) ( 7[m] 6[m]) 3 (PointGrey Research Inc.Grasshopper2 M/C) Hz (a) (b](/thumbs/91/105641706.jpg "(a) (b) 2 2 (Bosch, IR Illuminator 850 nm, UFLED30-8BD) ( 7[m] 6[m]) 3 (PointGrey Research Inc.Grasshopper2 M/C) Hz (a) (b") (MIRU202) 202 8 AdrianStoica 89 0395 744 89 0395 744 Jet Propulsion Laboratory 4800 Oak Grove Drive, Pasadena, CA 909, USA E-mail: uchino@irvs.ait.kyushu-u.ac.jp, {yumi,kurazume}@ait.kyushu-u.ac.jp 2 nearest
(MIRU202) 202 8 AdrianStoica 89 0395 744 89 0395 744 Jet Propulsion Laboratory 4800 Oak Grove Drive, Pasadena, CA 909, USA E-mail: uchino@irvs.ait.kyushu-u.ac.jp, {yumi,kurazume}@ait.kyushu-u.ac.jp 2 nearest
土砂災害警戒情報って何? 土砂災害警戒情報とは 大雨警報が発表されている状況でさらに土砂災害の危険性が高まったときに, 市町村長が避難勧告等を発令する際の判断や住民の方々が自主避難をする際の参考となるよう, 宮城県と仙台管区気象台が共同で発表する防災情報です 気象庁 HP より :
 宮城県土砂災害 警戒情報システム 操作マニュアル 平成 22 年 9 月 宮城県土木部防災砂防課 土砂災害警戒情報って何? 土砂災害警戒情報とは 大雨警報が発表されている状況でさらに土砂災害の危険性が高まったときに, 市町村長が避難勧告等を発令する際の判断や住民の方々が自主避難をする際の参考となるよう, 宮城県と仙台管区気象台が共同で発表する防災情報です 気象庁 HP より :http://www.jma.go.jp/jma/kishou/know/bosai/index.html
宮城県土砂災害 警戒情報システム 操作マニュアル 平成 22 年 9 月 宮城県土木部防災砂防課 土砂災害警戒情報って何? 土砂災害警戒情報とは 大雨警報が発表されている状況でさらに土砂災害の危険性が高まったときに, 市町村長が避難勧告等を発令する際の判断や住民の方々が自主避難をする際の参考となるよう, 宮城県と仙台管区気象台が共同で発表する防災情報です 気象庁 HP より :http://www.jma.go.jp/jma/kishou/know/bosai/index.html
Coding theorems for correlated sources with cooperative information
 グラフコストの逐次更新を用いた映像顕著領域の自動抽出 2009 年 5 月 28 日 福地賢宮里洸司 (2) 木村昭悟 (1) 高木茂 (2) 大和淳司 (1) (1) 日本電信電話 ( 株 )NTT) コミュニケーション科学基礎研究所メディア情報研究部メディア認識研究グループ (2) 国立沖縄工業高等専門学校情報通信システム工学科 背景 ヒトはどのようにして もの を認識する能力を獲得するのか?
グラフコストの逐次更新を用いた映像顕著領域の自動抽出 2009 年 5 月 28 日 福地賢宮里洸司 (2) 木村昭悟 (1) 高木茂 (2) 大和淳司 (1) (1) 日本電信電話 ( 株 )NTT) コミュニケーション科学基礎研究所メディア情報研究部メディア認識研究グループ (2) 国立沖縄工業高等専門学校情報通信システム工学科 背景 ヒトはどのようにして もの を認識する能力を獲得するのか?
Microsoft PowerPoint - 資料04 重回帰分析.ppt
 04. 重回帰分析 京都大学 加納学 Division of Process Control & Process Sstems Engineering Department of Chemical Engineering, Koto Universit manabu@cheme.koto-u.ac.jp http://www-pse.cheme.koto-u.ac.jp/~kano/ Outline
04. 重回帰分析 京都大学 加納学 Division of Process Control & Process Sstems Engineering Department of Chemical Engineering, Koto Universit manabu@cheme.koto-u.ac.jp http://www-pse.cheme.koto-u.ac.jp/~kano/ Outline

untitled
 KLT はエネルギを集約する カルーネンレーベ変換 (KLT) で 情報を集約する 要点 分散 7. 9. 8.3 3.7 4.5 4.0 KLT 前 集約 分散 0.3 0.4 4.5 7.4 3.4 00.7 KLT 後 分散 = エネルギ密度 エネルギ と表現 最大を 55, 最小を 0 に正規化して表示した 情報圧縮に応用できないか? エネルギ集約 データ圧縮 分散 ( 平均 ) KLT 前
KLT はエネルギを集約する カルーネンレーベ変換 (KLT) で 情報を集約する 要点 分散 7. 9. 8.3 3.7 4.5 4.0 KLT 前 集約 分散 0.3 0.4 4.5 7.4 3.4 00.7 KLT 後 分散 = エネルギ密度 エネルギ と表現 最大を 55, 最小を 0 に正規化して表示した 情報圧縮に応用できないか? エネルギ集約 データ圧縮 分散 ( 平均 ) KLT 前
Rの基本操作
 Microsoft Azure 高校生のための Azure Machine Learning By M. Takezawa 機械学習 (Machine Learning) とは 機械学習とは 機械にデータを学習させ データに潜むパターンや特性を発見し予測させることです Microsoft Azure Machine Learning とは Microsoft 社が提供する Azure の機能の一つであり
Microsoft Azure 高校生のための Azure Machine Learning By M. Takezawa 機械学習 (Machine Learning) とは 機械学習とは 機械にデータを学習させ データに潜むパターンや特性を発見し予測させることです Microsoft Azure Machine Learning とは Microsoft 社が提供する Azure の機能の一つであり
Java KK-MAS チュートリアル
 artisoc チュートリアル お問合せは創造工学部まで TEL : 03-5342-1125 E-mail : artisoc@kke.co.jp 株式会社 構造計画研究所 164-0012 東京都中野区本町 4-38-13 創造工学部 TEL:03-5342-1125 FAX:03-5342-1225 社会現象をシミュレーションしよう ユーザフレンドリーなマルチエージェント シミュレータ artisoc
artisoc チュートリアル お問合せは創造工学部まで TEL : 03-5342-1125 E-mail : artisoc@kke.co.jp 株式会社 構造計画研究所 164-0012 東京都中野区本町 4-38-13 創造工学部 TEL:03-5342-1125 FAX:03-5342-1225 社会現象をシミュレーションしよう ユーザフレンドリーなマルチエージェント シミュレータ artisoc
屋内 3 次元 測位 + 地図 総合技術開発 現状 屋内 3 次元測位統一的な測位手法 情報交換手順がなく 共通の位置情報基盤が効率的に整備されない 技術開発 屋内外のシームレス測位の実用化 (1) 都市部での衛星測位の適用範囲拡大 (2) パブリックタグ 屋内測位の標準仕様策定 効果 3 次元屋内
 都市部での衛星測位の適用範囲拡大 (2) パブリックタグ 屋内測位の標準仕様策定 効果 3 次元屋内") 資料 4 国土交通省総合技術開発プロジェクト 3 次元地理空間情報を活用した安全 安心 快適な社会実現のための技術開発プロジェクト概要 平成 30 年 3 月 Ministry of Land, Infrastructure, Transport and Tourism Geospatial Information Authority of Japan 屋内 3 次元 測位 + 地図 総合技術開発
資料 4 国土交通省総合技術開発プロジェクト 3 次元地理空間情報を活用した安全 安心 快適な社会実現のための技術開発プロジェクト概要 平成 30 年 3 月 Ministry of Land, Infrastructure, Transport and Tourism Geospatial Information Authority of Japan 屋内 3 次元 測位 + 地図 総合技術開発
116 エジプト メンフィス ネクロポリスの文化財保存面から観た遺跡整備計画の学際的研究 研究報告集第 1 号 Fig.1 レーザレンジセンサ (Leica Geosystems 社製 HDS3000) とができない隠れ部位を計測することは出来ない そこで 全ての対象領域を計測するためには センサの
 とができない隠れ部位を計測することは出来ない そこで 全ての対象領域を計測するためには センサの") 5. 先端的科学 技術による保存研究アブ シール南丘陵遺跡における三次元レーザー スキャンについて 115 アブ シール南丘陵遺跡における 三次元レーザー スキャンについて * 阪野貴彦 1 * 2 池内克史 1. はじめに 2009 年度の調査では アブ シール南丘陵遺跡ではレーザレンジセンサを持ち込み 三次元形状計測を行った 我々はこれまで 鎌倉大仏や奈良大仏 (Ikeuchi et al. 2003)
5. 先端的科学 技術による保存研究アブ シール南丘陵遺跡における三次元レーザー スキャンについて 115 アブ シール南丘陵遺跡における 三次元レーザー スキャンについて * 阪野貴彦 1 * 2 池内克史 1. はじめに 2009 年度の調査では アブ シール南丘陵遺跡ではレーザレンジセンサを持ち込み 三次元形状計測を行った 我々はこれまで 鎌倉大仏や奈良大仏 (Ikeuchi et al. 2003)
JOURNAL OF THE JAPANESE ASSOCIATION FOR PETROLEUM TECHNOLOGY VOL. 66, NO. 6 (Nov., 2001) (Received August 10, 2001; accepted November 9, 2001) Alterna
 (Received August 10, 2001; accepted November 9, 2001) Alterna") JOURNAL OF THE JAPANESE ASSOCIATION FOR PETROLEUM TECHNOLOGY VOL. 66, NO. 6 (Nov., 2001) (Received August 10, 2001; accepted November 9, 2001) Alternative approach using the Monte Carlo simulation to evaluate
JOURNAL OF THE JAPANESE ASSOCIATION FOR PETROLEUM TECHNOLOGY VOL. 66, NO. 6 (Nov., 2001) (Received August 10, 2001; accepted November 9, 2001) Alternative approach using the Monte Carlo simulation to evaluate
 次元圧縮法を導入したクエリに基づくバイクラスタリング 情報推薦への応用 武内充三浦功輝岡田吉史 ( 室蘭工業大学 ) 概要以前, 我々はクエリに基づくバイクラスタリングを用いた情報推薦手法を提案した. 本研究では, 新たに推薦スコアが非常に良く似たユーザまたはアイテムを融合する次元圧縮法を導入した. 実験として, 縮減前と縮減後のデータセットのサイズとバイクラスタ計算時間の比較を行う. キーワード
次元圧縮法を導入したクエリに基づくバイクラスタリング 情報推薦への応用 武内充三浦功輝岡田吉史 ( 室蘭工業大学 ) 概要以前, 我々はクエリに基づくバイクラスタリングを用いた情報推薦手法を提案した. 本研究では, 新たに推薦スコアが非常に良く似たユーザまたはアイテムを融合する次元圧縮法を導入した. 実験として, 縮減前と縮減後のデータセットのサイズとバイクラスタ計算時間の比較を行う. キーワード
図 2: 高周波成分を用いた超解像 解像度度画像とそれらを低解像度化して得られる 低解像度画像との差により低解像度の高周波成分 を得る 高解像度と低解像度の高周波成分から位 置関係を保ったままパッチ領域をそれぞれ切り出 し 高解像度パッチ画像と低解像度パッチ画像の ペアとしてデータベースに登録する
 Exemplar-Based Super-Resolution of Human Body Image in Surveillance Video 1 1,2 1 1 1 Kento Nishibori 1, Tomokazu TAKAHASHI 1,2, Daisuke DEGUCHI 1, Ichiro IDE 1 and Hiroshi MURASE 1 1 2 nishiborik@murase.m.is.nagoya-u.ac.jp
Exemplar-Based Super-Resolution of Human Body Image in Surveillance Video 1 1,2 1 1 1 Kento Nishibori 1, Tomokazu TAKAHASHI 1,2, Daisuke DEGUCHI 1, Ichiro IDE 1 and Hiroshi MURASE 1 1 2 nishiborik@murase.m.is.nagoya-u.ac.jp
1. World Trade Center 5). 6).. 3. Massive 3.1 Massive Massive D 2 7)8). Massive.. Maya 3 9) Massive ). 2 c2011 Information Processing Soc
. 6).. 3. Massive 3.1 Massive Massive D 2 7)8). Massive.. Maya 3 9) Massive ). 2 c2011 Information Processing Soc") . Massive Development of evacuation model in disaster Yuji Hashiura Tokuro Matsuo Takayuki Ito If big disasters occurs in the city, evacuation is important to reduce the various damage. During the disaster,
. Massive Development of evacuation model in disaster Yuji Hashiura Tokuro Matsuo Takayuki Ito If big disasters occurs in the city, evacuation is important to reduce the various damage. During the disaster,
 1 1 1 1 7 1 6 1 1 1 1 1 1 9 1 1 1 8 5 1 1 1 50 51 1 1 ルートを探索する 行き先に設定する 行き先に設定する (ルートが設定されていない場合) 1 地点を検索する 経由地に設定する 設定されているルートを消去し 行き先を新たに設定する 1 地点を検索する 検索のしかた P.6 51 ここに行く を選ぶ 1 地点を検索する ここに行く を選ぶ 1 地図をスクロールさせ
1 1 1 1 7 1 6 1 1 1 1 1 1 9 1 1 1 8 5 1 1 1 50 51 1 1 ルートを探索する 行き先に設定する 行き先に設定する (ルートが設定されていない場合) 1 地点を検索する 経由地に設定する 設定されているルートを消去し 行き先を新たに設定する 1 地点を検索する 検索のしかた P.6 51 ここに行く を選ぶ 1 地点を検索する ここに行く を選ぶ 1 地図をスクロールさせ
民間事業者等によるサービス実証成果報告(日本電信電話・ジェイアール東日本コンサルタンツ)
") サービス事業者実証報告 2017 年 3 月 14 日 日本電信電話株式会社 ジェイアール東日本コンサルタンツ株式会社 検証概要 本検証では 施設内においてデジタルサイネージを利用し 立体表現でわかりやすい地図表現を用いたナビゲーションシステムを試作し Felicaカード ( 電子チケット ) を用いた座席までのナビゲーションについての実現性 有用性について効果の確認を行った ナビゲーションアプリ交通機関
サービス事業者実証報告 2017 年 3 月 14 日 日本電信電話株式会社 ジェイアール東日本コンサルタンツ株式会社 検証概要 本検証では 施設内においてデジタルサイネージを利用し 立体表現でわかりやすい地図表現を用いたナビゲーションシステムを試作し Felicaカード ( 電子チケット ) を用いた座席までのナビゲーションについての実現性 有用性について効果の確認を行った ナビゲーションアプリ交通機関
人間の視野と同等の広視野画像を取得・提示する簡易な装置
 人間の視野と同等の広視野画像 を取得 提示する簡易な装置 公立はこだて未来大学 システム情報科学部複雑系知能学科 准教授鈴木昭二 研究背景 2 画像情報は有用である 多様な情報 ( 明るさ, 色, 形, 動きなど ) 見ればわかる しかし, カメラの画角は狭い 見える範囲が限定される 全体像を把握しくい 移動する物体を見失いやすい 広視野画像の取得 ( 従来方法 ) 3 多数のカメラを搭載 多数の画像を合成し高解像度の画像取得
人間の視野と同等の広視野画像 を取得 提示する簡易な装置 公立はこだて未来大学 システム情報科学部複雑系知能学科 准教授鈴木昭二 研究背景 2 画像情報は有用である 多様な情報 ( 明るさ, 色, 形, 動きなど ) 見ればわかる しかし, カメラの画角は狭い 見える範囲が限定される 全体像を把握しくい 移動する物体を見失いやすい 広視野画像の取得 ( 従来方法 ) 3 多数のカメラを搭載 多数の画像を合成し高解像度の画像取得
全地連"次世代CALS"対応研究会 報告書
 4. GIS アプリケーションソフト 4.1 入手可能なソフト GIS アプリケーションソフトは, 大きく 2 区分することができる 1) 汎用 GIS ソフト 2) 管理 支援ソフト汎用 GIS ソフトは, ある目的に対して拡張機能を利用して GIS システムを開発することができる 一方管理 支援ソフトは, ある1つの目的に対して開発されたソフトであり, ユーザーがデータを入力することによりすぐに使用できる反面拡張性が少ない
4. GIS アプリケーションソフト 4.1 入手可能なソフト GIS アプリケーションソフトは, 大きく 2 区分することができる 1) 汎用 GIS ソフト 2) 管理 支援ソフト汎用 GIS ソフトは, ある目的に対して拡張機能を利用して GIS システムを開発することができる 一方管理 支援ソフトは, ある1つの目的に対して開発されたソフトであり, ユーザーがデータを入力することによりすぐに使用できる反面拡張性が少ない
1 2 3 1 34060120 1,00040 2,000 1 5 10 50 2014B 305,000140 285 5 6 9 1,838 50 922 78 5025 50 10 1 2
 0120-563-506 / 9001800 9001700 123113 0120-860-777 163-8626 6-13-1 Tel.03-6742-3111 http://www.himawari-life.co.jp 1 2 3 1 34060120 1,00040 2,000 1 5 10 50 2014B 305,000140 285 5 6 9 1,838 50 922 78 5025
0120-563-506 / 9001800 9001700 123113 0120-860-777 163-8626 6-13-1 Tel.03-6742-3111 http://www.himawari-life.co.jp 1 2 3 1 34060120 1,00040 2,000 1 5 10 50 2014B 305,000140 285 5 6 9 1,838 50 922 78 5025
MATLAB ではじめる画像処理とロボットビジョン ~ 機械学習による物体認識と SLAM~ MathWorks Japan アプリケーションエンジニアリング部信号処理 通信 木川田亘 2015 The MathWorks, 1Inc.
 MATLAB ではじめる画像処理とロボットビジョン ~ 機械学習による物体認識と SLAM~ MathWorks Japan アプリケーションエンジニアリング部信号処理 通信 木川田亘 2015 The MathWorks, 1Inc. ロボットビジョンとは ロボットに搭載することを目的としたコンピュータービジョン技術の一分野 標識認識などさまざまな環境下での物体認識や複雑なシーンの理解 未知の領域を探索する際にロボット自身の位置推定と地図作成(SLAM)
MATLAB ではじめる画像処理とロボットビジョン ~ 機械学習による物体認識と SLAM~ MathWorks Japan アプリケーションエンジニアリング部信号処理 通信 木川田亘 2015 The MathWorks, 1Inc. ロボットビジョンとは ロボットに搭載することを目的としたコンピュータービジョン技術の一分野 標識認識などさまざまな環境下での物体認識や複雑なシーンの理解 未知の領域を探索する際にロボット自身の位置推定と地図作成(SLAM)
PowerPoint プレゼンテーション
 復習 ) 時系列のモデリング ~a. 離散時間モデル ~ y k + a 1 z 1 y k + + a na z n ay k = b 0 u k + b 1 z 1 u k + + b nb z n bu k y k = G z 1 u k = B(z 1 ) A(z 1 u k ) ARMA モデル A z 1 B z 1 = 1 + a 1 z 1 + + a na z n a = b 0
復習 ) 時系列のモデリング ~a. 離散時間モデル ~ y k + a 1 z 1 y k + + a na z n ay k = b 0 u k + b 1 z 1 u k + + b nb z n bu k y k = G z 1 u k = B(z 1 ) A(z 1 u k ) ARMA モデル A z 1 B z 1 = 1 + a 1 z 1 + + a na z n a = b 0
スライド 1
 NTT Information Sharing Platform Laboratories NTT 情報流通プラットフォーム研究所 セマンティック Web 技術を用いた社内情報の連携 森田大翼 飯塚京士 ( 日本電信電話株式会社 NTT 情報流通プラットフォーム研究所 ) セマンティック Web コンファレンス 2012 2012 年 3 月 8 日 ( 木 ) 2012 NTT Information
NTT Information Sharing Platform Laboratories NTT 情報流通プラットフォーム研究所 セマンティック Web 技術を用いた社内情報の連携 森田大翼 飯塚京士 ( 日本電信電話株式会社 NTT 情報流通プラットフォーム研究所 ) セマンティック Web コンファレンス 2012 2012 年 3 月 8 日 ( 木 ) 2012 NTT Information
Journal of Geography 116 (6) Configuration of Rapid Digital Mapping System Using Tablet PC and its Application to Obtaining Ground Truth
 Configuration of Rapid Digital Mapping System Using Tablet PC and its Application to Obtaining Ground Truth") Journal of Geography 116 (6) 749-758 2007 Configuration of Rapid Digital Mapping System Using Tablet PC and its Application to Obtaining Ground Truth Data: A Case Study of a Snow Survey in Chuetsu District,
Journal of Geography 116 (6) 749-758 2007 Configuration of Rapid Digital Mapping System Using Tablet PC and its Application to Obtaining Ground Truth Data: A Case Study of a Snow Survey in Chuetsu District,
Microsoft PowerPoint - SSII_harada pptx
 The state of the world The gathered data The processed data w d r I( W; D) I( W; R) The data processing theorem states that data processing can only destroy information. David J.C. MacKay. Information
The state of the world The gathered data The processed data w d r I( W; D) I( W; R) The data processing theorem states that data processing can only destroy information. David J.C. MacKay. Information
(Microsoft Word - \221\262\213\306\230_\225\266_\213\321\220D_\215\305\217I.doc)
") 3D 学校内地図システムの開発 松江工業高等専門学校情報工学科 研究者 : 錦織優子 指導教員 : 越田高志 2010 年 02 月 04 日 目次 1 はじめに...1 2 研究目標...1 3 システム開発について...1 3.1 要素技術について...1 3.2 システムの実装...2 3.2.1 外観の 3D モデルの作成...2 3.2.2 ウォークスルー可能な 3D モデルの作成...4
3D 学校内地図システムの開発 松江工業高等専門学校情報工学科 研究者 : 錦織優子 指導教員 : 越田高志 2010 年 02 月 04 日 目次 1 はじめに...1 2 研究目標...1 3 システム開発について...1 3.1 要素技術について...1 3.2 システムの実装...2 3.2.1 外観の 3D モデルの作成...2 3.2.2 ウォークスルー可能な 3D モデルの作成...4
既存の内視鏡を使用して体内の3次元形状を精密に取得する技術を開発
 既存の内視鏡を使用して体内の 3 次元形状を精密に取得する技術を開発 超小型パターンプロジェクタによるアクティブ 3 次元計測 平成 28 年 10 月 6 日公立大学法人広島市立大学国立大学法人鹿児島大学国立大学法人広島大学 ポイント 光の損失を 5% 程度に抑えて 段差のある格子状のパターン光を投影可能な超小型光源を開発し 内視鏡による人体内部の 3 次元形状計測を実現 鉗子口を通るサイズのため
既存の内視鏡を使用して体内の 3 次元形状を精密に取得する技術を開発 超小型パターンプロジェクタによるアクティブ 3 次元計測 平成 28 年 10 月 6 日公立大学法人広島市立大学国立大学法人鹿児島大学国立大学法人広島大学 ポイント 光の損失を 5% 程度に抑えて 段差のある格子状のパターン光を投影可能な超小型光源を開発し 内視鏡による人体内部の 3 次元形状計測を実現 鉗子口を通るサイズのため
 ( 資料 3-4) ロボット ドローンが活躍する省エネルギー社会の実現プロジェクト プロジェクト概要 (H29-33:5 年間 H29 予算 :33 億円 ) 小口輸送の増加や積載率の低下などエネルギー使用の効率化が求められる物流分野や 効果的かつ効率的な点検を通じた長寿命化による資源のリデュースが喫緊の課題となるインフラ点検分野等において 無人航空機やロボットの活用による省エネルギー化の実現が期待されている
( 資料 3-4) ロボット ドローンが活躍する省エネルギー社会の実現プロジェクト プロジェクト概要 (H29-33:5 年間 H29 予算 :33 億円 ) 小口輸送の増加や積載率の低下などエネルギー使用の効率化が求められる物流分野や 効果的かつ効率的な点検を通じた長寿命化による資源のリデュースが喫緊の課題となるインフラ点検分野等において 無人航空機やロボットの活用による省エネルギー化の実現が期待されている
Microsoft Word - JP FEA Post Text Neutral File Format.doc
 FEA Post Text File Format 1. 共通事項 (1) ファイル拡張子 *.fpt (FEA Post Text File Format) () 脚注 脚注記号 : セミコロン (;) 脚注記号の後に来るテキストは変換されない (3) データ区分 データ区分記号 :, (4) コマンド表示 コマンドの前は * 記号を付けてデータと区分する Example. 単位のコマンド *UNIT
FEA Post Text File Format 1. 共通事項 (1) ファイル拡張子 *.fpt (FEA Post Text File Format) () 脚注 脚注記号 : セミコロン (;) 脚注記号の後に来るテキストは変換されない (3) データ区分 データ区分記号 :, (4) コマンド表示 コマンドの前は * 記号を付けてデータと区分する Example. 単位のコマンド *UNIT
Microsoft PowerPoint - H17-5時限(パターン認識).ppt
.ppt") パターン認識早稲田大学講義 平成 7 年度 独 産業技術総合研究所栗田多喜夫 赤穂昭太郎 統計的特徴抽出 パターン認識過程 特徴抽出 認識対象から何らかの特徴量を計測 抽出 する必要がある 認識に有効な情報 特徴 を抽出し 次元を縮小した効率の良い空間を構成する過程 文字認識 : スキャナ等で取り込んだ画像から文字の識別に必要な本質的な特徴のみを抽出 例 文字線の傾き 曲率 面積など 識別 与えられた未知の対象を
パターン認識早稲田大学講義 平成 7 年度 独 産業技術総合研究所栗田多喜夫 赤穂昭太郎 統計的特徴抽出 パターン認識過程 特徴抽出 認識対象から何らかの特徴量を計測 抽出 する必要がある 認識に有効な情報 特徴 を抽出し 次元を縮小した効率の良い空間を構成する過程 文字認識 : スキャナ等で取り込んだ画像から文字の識別に必要な本質的な特徴のみを抽出 例 文字線の傾き 曲率 面積など 識別 与えられた未知の対象を
1. 研究背景 目的 2. 使用機器 3. 橋梁点検システム 4. 選定橋梁 5. 安全対策 橋梁点検フロー 6. 計測結果 計測条件 7. まとめ - 2 -
 ひび割れ計測機と飛行ロボットによる橋梁点検支援システムに関する研究 大阪市立大学大学院教授プロジェクトリーダー 山口隆司大阪市立大学大学院学生堂ノ本翔平菱田伸鉄工業 ( 株 ) 菱田聡クモノスコーポレーション ( 株 ) 藤田誠二近畿地方整備局道路部, 近畿技術事務所, 大阪国道事務所 - 1 - 1. 研究背景 目的 2. 使用機器 3. 橋梁点検システム 4. 選定橋梁 5. 安全対策 橋梁点検フロー
ひび割れ計測機と飛行ロボットによる橋梁点検支援システムに関する研究 大阪市立大学大学院教授プロジェクトリーダー 山口隆司大阪市立大学大学院学生堂ノ本翔平菱田伸鉄工業 ( 株 ) 菱田聡クモノスコーポレーション ( 株 ) 藤田誠二近畿地方整備局道路部, 近畿技術事務所, 大阪国道事務所 - 1 - 1. 研究背景 目的 2. 使用機器 3. 橋梁点検システム 4. 選定橋梁 5. 安全対策 橋梁点検フロー
データマネジメントを取り巻く IT の課題 大規模データの実践的活用に向けて レッドハット株式会社 Senior Solution Architect and Cloud Evangelist 中井悦司 2012/04/13 version1.0
 データマネジメントを取り巻く IT の課題 大規模データの実践的活用に向けて レッドハット株式会社 Senior Solution Architect and Cloud Evangelist 中井悦司 2012/04/13 version1.0 はじめに あなたには何色が見えますか 2 Contents 3 ビジネスにおけるデータの役割 企業データの構造変化とデータマネジメントの課題 これからのビジネスを支える新しいデータ構造
データマネジメントを取り巻く IT の課題 大規模データの実践的活用に向けて レッドハット株式会社 Senior Solution Architect and Cloud Evangelist 中井悦司 2012/04/13 version1.0 はじめに あなたには何色が見えますか 2 Contents 3 ビジネスにおけるデータの役割 企業データの構造変化とデータマネジメントの課題 これからのビジネスを支える新しいデータ構造
平成 23 年度 JAXA 航空プログラム公募型研究報告会資料集 (23 年度採用分 ) 21 計測ひずみによる CFRP 翼構造の荷重 応力同定と損傷モニタリング 東北大学福永久雄 ひずみ応答の計測データ 静的分布荷重同定動的分布荷重同定 ひずみゲージ応力 ひずみ分布の予測 or PZT センサ損
 21 計測ひずみによる CFRP 翼構造の荷重 応力同定と損傷モニタリング 東北大学福永久雄 ひずみ応答の計測データ 静的分布荷重同定動的分布荷重同定 ひずみゲージ応力 ひずみ分布の予測 or PZT センサ損") 平成 3 年度 JAXA 航空プログラム公募型研究報告会資料集 (3 年度採用分 1 計測ひずみによる CFRP 翼構造の荷重 応力同定と損傷モニタリング 東北大学福永久雄 ひずみ応答の計測データ 静的分布荷重同定動的分布荷重同定 ひずみゲージ応力 ひずみ分布の予測 or PZT センサ損傷発生位置の推定発表内容 (1 荷重同定 1:11 点衝撃荷重同定 ( 荷重同定 : 分布荷重同定 (3 今後の予定
平成 3 年度 JAXA 航空プログラム公募型研究報告会資料集 (3 年度採用分 1 計測ひずみによる CFRP 翼構造の荷重 応力同定と損傷モニタリング 東北大学福永久雄 ひずみ応答の計測データ 静的分布荷重同定動的分布荷重同定 ひずみゲージ応力 ひずみ分布の予測 or PZT センサ損傷発生位置の推定発表内容 (1 荷重同定 1:11 点衝撃荷重同定 ( 荷重同定 : 分布荷重同定 (3 今後の予定
画像類似度測定の初歩的な手法の検証
 画像類似度測定の初歩的な手法の検証 島根大学総合理工学部数理 情報システム学科 計算機科学講座田中研究室 S539 森瀧昌志 1 目次 第 1 章序論第 章画像間類似度測定の初歩的な手法について.1 A. 画素値の平均を用いる手法.. 画素値のヒストグラムを用いる手法.3 C. 相関係数を用いる手法.4 D. 解像度を合わせる手法.5 E. 振れ幅のヒストグラムを用いる手法.6 F. 周波数ごとの振れ幅を比較する手法第
画像類似度測定の初歩的な手法の検証 島根大学総合理工学部数理 情報システム学科 計算機科学講座田中研究室 S539 森瀧昌志 1 目次 第 1 章序論第 章画像間類似度測定の初歩的な手法について.1 A. 画素値の平均を用いる手法.. 画素値のヒストグラムを用いる手法.3 C. 相関係数を用いる手法.4 D. 解像度を合わせる手法.5 E. 振れ幅のヒストグラムを用いる手法.6 F. 周波数ごとの振れ幅を比較する手法第
untitled
 インクジェットを利用した微小液滴形成における粘度及び表面張力が与える影響 色染化学チーム 向井俊博 要旨インクジェットとは微小な液滴を吐出し, メディアに対して着滴させる印刷方式の総称である 現在では, 家庭用のプリンターをはじめとした印刷分野以外にも, 多岐にわたる産業分野において使用されている技術である 本報では, 多価アルコールや界面活性剤から成る様々な物性値のインクを吐出し, マイクロ秒オーダーにおける液滴形成を観察することで,
インクジェットを利用した微小液滴形成における粘度及び表面張力が与える影響 色染化学チーム 向井俊博 要旨インクジェットとは微小な液滴を吐出し, メディアに対して着滴させる印刷方式の総称である 現在では, 家庭用のプリンターをはじめとした印刷分野以外にも, 多岐にわたる産業分野において使用されている技術である 本報では, 多価アルコールや界面活性剤から成る様々な物性値のインクを吐出し, マイクロ秒オーダーにおける液滴形成を観察することで,
DJI All Rights Reserved.
 DJI GS PRO V2.0 2017.11 2 2017 DJI All Rights Reserved. 2 4 4 5 DJI GS Pro 5 5 6 6 6 6 6 DJI GS Pro 7 9 9 11 12 12 13 13 13 14 14 15 15 17 18 19 22 25 25 26 27 27 2017 DJI All Rights Reserved. 3 DJI GS
DJI GS PRO V2.0 2017.11 2 2017 DJI All Rights Reserved. 2 4 4 5 DJI GS Pro 5 5 6 6 6 6 6 DJI GS Pro 7 9 9 11 12 12 13 13 13 14 14 15 15 17 18 19 22 25 25 26 27 27 2017 DJI All Rights Reserved. 3 DJI GS
IPSJ SIG Technical Report Vol.2015-CVIM-196 No /3/6 1,a) 1,b) 1,c) U,,,, The Camera Position Alignment on a Gimbal Head for Fixed Viewpoint Swi
 1,b) 1,c) U,,,, The Camera Position Alignment on a Gimbal Head for Fixed Viewpoint Swi") 1,a) 1,b) 1,c) U,,,, The Camera Position Alignment on a Gimbal Head for Fixed Viewpoint Swiveling using a Misalignment Model Abstract: When the camera sets on a gimbal head as a fixed-view-point, it is
1,a) 1,b) 1,c) U,,,, The Camera Position Alignment on a Gimbal Head for Fixed Viewpoint Swiveling using a Misalignment Model Abstract: When the camera sets on a gimbal head as a fixed-view-point, it is
D-Cubis [5] [6] 3D D-Cubis PasQ( ) PasQ PasQ Web HotMedia HotMedia [7] IBM Java 3D Audio 360 Web HotMedia PanoramaStudio Panorama
![D-Cubis [5] [6] 3D D-Cubis PasQ( ) PasQ PasQ Web HotMedia HotMedia [7] IBM Java 3D Audio 360 Web HotMedia PanoramaStudio Panorama](/thumbs/91/105186955.jpg "D-Cubis [5] [6] 3D D-Cubis PasQ( ) PasQ PasQ Web HotMedia HotMedia [7] IBM Java 3D Audio 360 Web HotMedia PanoramaStudio Panorama") DEWS2006 4B-i12 719 1197 111 719 1197 111 E-mail: {ikeda,knamba,awata,kunishi,yokota}@c.oka-pu.ac.jp GPS GPS Constructing Virtual Spaces Based on Panorama Images Shun IKEDA, Koichiro NAMBA, Tomoko AWATA,
DEWS2006 4B-i12 719 1197 111 719 1197 111 E-mail: {ikeda,knamba,awata,kunishi,yokota}@c.oka-pu.ac.jp GPS GPS Constructing Virtual Spaces Based on Panorama Images Shun IKEDA, Koichiro NAMBA, Tomoko AWATA,
2
 from One 1 2 24 2 3 4 30 4 5 47 13 6 7 34 2 13 8 34.................................. 9 15-1-5 15-1-4 10 11 12 12 13 14 15 A ( 1) A A 2 B B 16 2 2 17 3 C C 18 3 19 ( ) 15 2 5 ( 56 2 16 20 2 5 ) (1) (2)
from One 1 2 24 2 3 4 30 4 5 47 13 6 7 34 2 13 8 34.................................. 9 15-1-5 15-1-4 10 11 12 12 13 14 15 A ( 1) A A 2 B B 16 2 2 17 3 C C 18 3 19 ( ) 15 2 5 ( 56 2 16 20 2 5 ) (1) (2)
< 用語解説 > *1 ソーシャルネットワーキングサービス (SNS) インターネット上の交流を通して社会的ネットワークを構築するサービス全般を指す 代表的な SNS として Twitter mixi GREE Mobage Ameba Facebook Google+ Myspace Linked
 インターネット上の交流を通して社会的ネットワークを構築するサービス全般を指す 代表的な SNS として Twitter mixi GREE Mobage Ameba Facebook Google+ Myspace Linked") プレスリリース平成 27 年 4 月 8 日 刻々と変わる SNS の情報をリアルタイムに平易な質問で分析 検索 ~ 対災害 SNS 情報分析システム DISAANA のリアルタイム版を試験公開 ~ ポイント Twitter の災害関連情報の投稿をリアルタイムに自動分析し 検索できるシステムを公開 パソコンの Web ブラウザからの利用に加えて スマートフォンにも対応 DISAANA リアルタイム版公開サイト
プレスリリース平成 27 年 4 月 8 日 刻々と変わる SNS の情報をリアルタイムに平易な質問で分析 検索 ~ 対災害 SNS 情報分析システム DISAANA のリアルタイム版を試験公開 ~ ポイント Twitter の災害関連情報の投稿をリアルタイムに自動分析し 検索できるシステムを公開 パソコンの Web ブラウザからの利用に加えて スマートフォンにも対応 DISAANA リアルタイム版公開サイト
目次 1 はじめに 稼働環境 GUI の起動 画面構成 メニュー Google Map 検索データ一覧 データの検索 出典情報の確認 検索領域の指定と
 操作手順書 i 目次 1 はじめに... 1 1.1 稼働環境... 1 2 GUI の起動... 2 3 画面構成... 2 3.1 メニュー... 3 3.2 Google Map... 3 3.3 検索データ一覧... 4 4 データの検索... 5 4.1 出典情報の確認... 5 4.2 検索領域の指定と検索... 5 4.2.1 Google Map 上で 2 点を指定してデータを検索する...
操作手順書 i 目次 1 はじめに... 1 1.1 稼働環境... 1 2 GUI の起動... 2 3 画面構成... 2 3.1 メニュー... 3 3.2 Google Map... 3 3.3 検索データ一覧... 4 4 データの検索... 5 4.1 出典情報の確認... 5 4.2 検索領域の指定と検索... 5 4.2.1 Google Map 上で 2 点を指定してデータを検索する...
Microsoft PowerPoint - Lec11 [互換モード]
![Microsoft PowerPoint - Lec11 [互換モード]](/thumbs/88/114651022.jpg "Microsoft PowerPoint - Lec11 [互換モード]") 第 11 回講義水曜日 1 限教室 6215 情報デザイン専攻 画像情報処理論及び演習 I - 画像合成 類推 - Poisson Image Analogy 吉澤信 shin@riken.jp, 非常勤講師 大妻女子大学社会情報学部 1 2 今日の授業内容 www.riken.jp/brict/yoshizawa/lectures/index.html www.riken.jp/brict/yoshizawa/lectures/lec11.pdf
第 11 回講義水曜日 1 限教室 6215 情報デザイン専攻 画像情報処理論及び演習 I - 画像合成 類推 - Poisson Image Analogy 吉澤信 shin@riken.jp, 非常勤講師 大妻女子大学社会情報学部 1 2 今日の授業内容 www.riken.jp/brict/yoshizawa/lectures/index.html www.riken.jp/brict/yoshizawa/lectures/lec11.pdf
endo.PDF
 MAP 18 19 20 21 3 1173 MAP 22 700800 106 3000 23 24 59 1984 358 358 399 25 12 8 1996 3 39 24 20 10 1998 9,000 1,400 5,200 250 12 26 4 1996 156 1.3 1990 27 28 29 8 606 290 250 30 11 24 8 1779 31 22 42 9
MAP 18 19 20 21 3 1173 MAP 22 700800 106 3000 23 24 59 1984 358 358 399 25 12 8 1996 3 39 24 20 10 1998 9,000 1,400 5,200 250 12 26 4 1996 156 1.3 1990 27 28 29 8 606 290 250 30 11 24 8 1779 31 22 42 9


Automatic Collection of Web Video Shots Corresponding to Specific Actions using Web Images
 視覚特徴およびタグ共起を用いた 大規模 Web ビデオショットランキング 電気通信大学大学院情報理工学研究科 総合情報学専攻 Do Hang Nga 柳井啓司 背景 Web 動画 : 無限に存在 無料で取得可能 - YouTube, Daily Motion etc. Web 動画による動作データ収集 ただし Web 上の動画はノイズが多い 関連動画 Play trumpet 非関連動画 非対応ショット
視覚特徴およびタグ共起を用いた 大規模 Web ビデオショットランキング 電気通信大学大学院情報理工学研究科 総合情報学専攻 Do Hang Nga 柳井啓司 背景 Web 動画 : 無限に存在 無料で取得可能 - YouTube, Daily Motion etc. Web 動画による動作データ収集 ただし Web 上の動画はノイズが多い 関連動画 Play trumpet 非関連動画 非対応ショット
206“ƒŁ\”ƒ-fl_“H„¤‰ZŁñ
 51 206 51 63 2007 GIS 51 1 60 52 2 60 1 52 3 61 2 52 61 3 58 61 4 58 Summary 63 60 20022005 2004 40km 7,10025 2002 2005 19 3 19 GIS 2005GIS 2006 2002 2004 GIS 52 2062007 1 2004 GIS Fig.1 GIS ESRIArcView
51 206 51 63 2007 GIS 51 1 60 52 2 60 1 52 3 61 2 52 61 3 58 61 4 58 Summary 63 60 20022005 2004 40km 7,10025 2002 2005 19 3 19 GIS 2005GIS 2006 2002 2004 GIS 52 2062007 1 2004 GIS Fig.1 GIS ESRIArcView
PYTHON 資料 電脳梁山泊烏賊塾 PYTHON 入門 ゲームプログラミング スプライト スプライト Pygame では pygame.sprite を用いる事でスプライトの管理 描画 衝突判定等を簡単に行う事が出来る 此れを利用してキャラクター操作に関する各種機能をスプライトクラスとして 1 個
 PYTHON 入門 ゲームプログラミング スプライト スプライト Pygame では pygame.sprite を用いる事でスプライトの管理 描画 衝突判定等を簡単に行う事が出来る 此れを利用してキャラクター操作に関する各種機能をスプライトクラスとして 1 個に纏め 複数のキャラクターを扱い易くしたコードを 下記に示す pygame.sprite.sprite. init (self) self.img
PYTHON 入門 ゲームプログラミング スプライト スプライト Pygame では pygame.sprite を用いる事でスプライトの管理 描画 衝突判定等を簡単に行う事が出来る 此れを利用してキャラクター操作に関する各種機能をスプライトクラスとして 1 個に纏め 複数のキャラクターを扱い易くしたコードを 下記に示す pygame.sprite.sprite. init (self) self.img
カメラレディ原稿
 IS2-A2 カメラを回転させた時の特徴点軌跡を用いた魚眼カメラの内部パラメータ推定 - モデルと評価関数の変更による改良 - 田中祐輝, 増山岳人, 梅田和昇 Yuki TANAKA, Gakuto MASUYAMA, Kazunori UMEDA : 中央大学大学院理工学研究科,y.tanaka@sensor.mech.chuo-u.ac.jp 中央大学理工学部,{masuyama, umeda}@mech.chuo-u.ac.jp
IS2-A2 カメラを回転させた時の特徴点軌跡を用いた魚眼カメラの内部パラメータ推定 - モデルと評価関数の変更による改良 - 田中祐輝, 増山岳人, 梅田和昇 Yuki TANAKA, Gakuto MASUYAMA, Kazunori UMEDA : 中央大学大学院理工学研究科,y.tanaka@sensor.mech.chuo-u.ac.jp 中央大学理工学部,{masuyama, umeda}@mech.chuo-u.ac.jp
Microsoft PowerPoint - SDF2007_nakanishi_2.ppt[読み取り専用]
![Microsoft PowerPoint - SDF2007_nakanishi_2.ppt[読み取り専用]](/thumbs/94/118227082.jpg "Microsoft PowerPoint - SDF2007_nakanishi_2.ppt[読み取り専用]") ばらつきの計測と解析技術 7 年 月 日設計基盤開発部先端回路技術グループ中西甚吾 内容. はじめに. DMA(Device Matrix Array)-TEG. チップ間 チップ内ばらつきの比較. ばらつきの成分分離. 各ばらつき成分の解析. まとめ . はじめに 背景 スケーリングにともない さまざまなばらつきの現象が顕著化しており この先ますます設計困難化が予想される EDA ツール 回路方式
ばらつきの計測と解析技術 7 年 月 日設計基盤開発部先端回路技術グループ中西甚吾 内容. はじめに. DMA(Device Matrix Array)-TEG. チップ間 チップ内ばらつきの比較. ばらつきの成分分離. 各ばらつき成分の解析. まとめ . はじめに 背景 スケーリングにともない さまざまなばらつきの現象が顕著化しており この先ますます設計困難化が予想される EDA ツール 回路方式
デプスカメラと加速度センサを用いた歩行可能な平面領域の検出
 一般社団法人電子情報通信学会 HCGシンポジウム2016 THE INSTITUTE OF ELECTRONICS, HUMAN COMMUNICATION GROUP SYMPOSI INFORMATION AND COMMUNICATION ENGINEERS HCG2016-D-9-1 デプスカメラと加速度センサを用いた歩行可能な平面領域の検出 今井健太 北原格 亀田能成 筑波大学 305-8573
一般社団法人電子情報通信学会 HCGシンポジウム2016 THE INSTITUTE OF ELECTRONICS, HUMAN COMMUNICATION GROUP SYMPOSI INFORMATION AND COMMUNICATION ENGINEERS HCG2016-D-9-1 デプスカメラと加速度センサを用いた歩行可能な平面領域の検出 今井健太 北原格 亀田能成 筑波大学 305-8573
CPP46 UFO Image Analysis File on yucatan091206a By Tree man (on) BLACK MOON (Kinohito KULOTSUKI) CPP46 UFO 画像解析ファイル yucatan091206a / 黒月樹人 Fig.02 Targe
 BLACK MOON (Kinohito KULOTSUKI) CPP46 UFO 画像解析ファイル yucatan091206a / 黒月樹人 Fig.02 Targe") CPP46 UFO Image Analysis File on yucatan091206a By Tree man (on) BLACK MOON (Kinohito KULOTSUKI) CPP46 UFO 画像解析ファイル yucatan091206a / 黒月樹人 Fig.02 Target (T) of Fig.01 Original Image of yucatan091206a yucatan091206a
CPP46 UFO Image Analysis File on yucatan091206a By Tree man (on) BLACK MOON (Kinohito KULOTSUKI) CPP46 UFO 画像解析ファイル yucatan091206a / 黒月樹人 Fig.02 Target (T) of Fig.01 Original Image of yucatan091206a yucatan091206a
ダイアログボックス内内でのパラメータ設定 : las ファイルを例として説明します 他の形式もことわりがない限り同様の操操作です 1 元パス : 変換換対象の点群群データのファイル (*.las) を保存しているフォルダを指指定します las ファイルが 1 つの場合合 直接 las ファイルが所在
 を保存しているフォルダを指指定します las ファイルが 1 つの場合合 直接 las ファイルが所在") SuperMap idesktop 8C(2017) 点群デーータの OSGB キャッシュファイルへの変換操操作手順 日本スーパーーマップ株式式会社 SuperMap idesktop 8C( (2017) を使用用して 点群データ (las,txt,xyz,ply)) を OSGB キャッシュファイルに変換する手順を紹介介します OSGB ファイルの生成は 点点群設定ファイルの生成 と キャッシュの生生成
SuperMap idesktop 8C(2017) 点群デーータの OSGB キャッシュファイルへの変換操操作手順 日本スーパーーマップ株式式会社 SuperMap idesktop 8C( (2017) を使用用して 点群データ (las,txt,xyz,ply)) を OSGB キャッシュファイルに変換する手順を紹介介します OSGB ファイルの生成は 点点群設定ファイルの生成 と キャッシュの生生成
<90E096BE8F912E786C7378>
 コンパス togis.xls 説明書 画面構成 2: 属性入力 3: プレビュー画面 6: 各種ツール 4: データベース 5: ファイル出力 1: 測量成果入力 1 測量成果入力 濃い黄色の部分に入力された測量成果が図形になる 右の BP1~BP10 までの欄は 分割して測量した場合に使用する [ 表のクリア ]: 現在入力されている値を消去する セル移動制御 :Enter キーで移動する順番を制御する
コンパス togis.xls 説明書 画面構成 2: 属性入力 3: プレビュー画面 6: 各種ツール 4: データベース 5: ファイル出力 1: 測量成果入力 1 測量成果入力 濃い黄色の部分に入力された測量成果が図形になる 右の BP1~BP10 までの欄は 分割して測量した場合に使用する [ 表のクリア ]: 現在入力されている値を消去する セル移動制御 :Enter キーで移動する順番を制御する
isai300413web.indd
 2012.4 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 研究動向紹介 修士論文概要 次元計測に基づくテレオペレーションシステム 中京大学大学院 情報科学研究科 情報科学専攻 日比野 翔太郎 高所や災害現場などの極限環境での作業には人的被害が起こりやすいというリスクが常に伴う その 対策の一つとしてテレオペレーションロボットと呼ばれる遠隔操作ロボットによる作業が挙げられる
2012.4 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 研究動向紹介 修士論文概要 次元計測に基づくテレオペレーションシステム 中京大学大学院 情報科学研究科 情報科学専攻 日比野 翔太郎 高所や災害現場などの極限環境での作業には人的被害が起こりやすいというリスクが常に伴う その 対策の一つとしてテレオペレーションロボットと呼ばれる遠隔操作ロボットによる作業が挙げられる
Spin Image [3] 3D Shape Context [4] Spin Image 2 3D Shape Context Shape Index[5] Local Surface Patch[6] DAI [7], [8] [9], [10] Reference Frame SHO[11]
![Spin Image [3] 3D Shape Context [4] Spin Image 2 3D Shape Context Shape Index[5] Local Surface Patch[6] DAI [7], [8] [9], [10] Reference Frame SHO[11]](/thumbs/87/96951219.jpg "Spin Image [3] 3D Shape Context [4] Spin Image 2 3D Shape Context Shape Index[5] Local Surface Patch[6] DAI [7], [8] [9], [10] Reference Frame SHO[11]") 3-D 1,a) 1 1,b) 3 3 3 1% Spin Image 51.6% 93.8% 9 PCL Point Cloud Library Correspondence Grouping 13.5% 10 3 Extraction of 3-D Feature Point for Effect in Object Recognition based on Local Shape Distinctiveness
3-D 1,a) 1 1,b) 3 3 3 1% Spin Image 51.6% 93.8% 9 PCL Point Cloud Library Correspondence Grouping 13.5% 10 3 Extraction of 3-D Feature Point for Effect in Object Recognition based on Local Shape Distinctiveness
(MIRU2008) HOG Histograms of Oriented Gradients (HOG)
 HOG Histograms of Oriented Gradients (HOG)") (MIRU2008) 2008 7 HOG - - E-mail: katsu0920@me.cs.scitec.kobe-u.ac.jp, {takigu,ariki}@kobe-u.ac.jp Histograms of Oriented Gradients (HOG) HOG Shape Contexts HOG 5.5 Histograms of Oriented Gradients D Human
(MIRU2008) 2008 7 HOG - - E-mail: katsu0920@me.cs.scitec.kobe-u.ac.jp, {takigu,ariki}@kobe-u.ac.jp Histograms of Oriented Gradients (HOG) HOG Shape Contexts HOG 5.5 Histograms of Oriented Gradients D Human
geoinformatics
 つき 点 群 処 理 における ポイントベースドレンダリングとその 活 中 川 雅 史 ( 芝 浦 業 学 ) - 点 群 データ 処 理 の 概 要 と 課 題 - ポイントベースドレンダリングとその 活 - レンダリング - クラスタリング - アブストラクション - そのほか - まとめ 般 的 な 点 群 処 理 の 流 れ ハードウェア データ 取 得 較 的 簡 単 点 群 処 理 における
つき 点 群 処 理 における ポイントベースドレンダリングとその 活 中 川 雅 史 ( 芝 浦 業 学 ) - 点 群 データ 処 理 の 概 要 と 課 題 - ポイントベースドレンダリングとその 活 - レンダリング - クラスタリング - アブストラクション - そのほか - まとめ 般 的 な 点 群 処 理 の 流 れ ハードウェア データ 取 得 較 的 簡 単 点 群 処 理 における
ポテンシャル法によるロボット製品の障害物回避技術の開発,三菱重工技報 Vol.51 No.1(2014)
") 三菱重工技報 Vol.51 No.1 (2014) 新製品 新技術特集 技 術 論 文 40 ポテンシャル法によるロボット製品の障害物回避技術の開発 Development of Obstacle Avoidance Control for Robot Products Using Potential Method 彌 城 祐 亮 *1 江 口 和 樹 *2 Yusuke Yashiro Kazuki
三菱重工技報 Vol.51 No.1 (2014) 新製品 新技術特集 技 術 論 文 40 ポテンシャル法によるロボット製品の障害物回避技術の開発 Development of Obstacle Avoidance Control for Robot Products Using Potential Method 彌 城 祐 亮 *1 江 口 和 樹 *2 Yusuke Yashiro Kazuki
for item in bpy.context.scene.objects: if item.type == MESH : bpy.context.scene.objects.unlink(item) for item in bpy.data.objects: if item.type == MES
 for item in bpy.data.objects: if item.type == MES") 1 GUI 1.1 1.1.1 Smoothing Smoothing Object Object Tools Shading Smooth Smoothing Auto Smoothing Object Object Tools Shading Smooth Normals Auto Smooth 1.2 1.2.1 post porocessing Edge 1.3 1.3.1 F3 Image
1 GUI 1.1 1.1.1 Smoothing Smoothing Object Object Tools Shading Smooth Smoothing Auto Smoothing Object Object Tools Shading Smooth Normals Auto Smooth 1.2 1.2.1 post porocessing Edge 1.3 1.3.1 F3 Image
--
 機械学習シリーズ :k-means 原文はこちら k-means クラスタリングとは? k 平均クラスタリングは 教師なし学習アルゴリズムであり 類似性に基づいてデータをグループにクラスタ化します k-means を使用すると 重心で表される k 個のデータクラスタを見つけることができます ユーザーは クラスタ数を選択します たとえば 購買履歴に基づいて顧客をグループに分けて 異なるグループにターゲットを絞った電子メールを送信したいとします
機械学習シリーズ :k-means 原文はこちら k-means クラスタリングとは? k 平均クラスタリングは 教師なし学習アルゴリズムであり 類似性に基づいてデータをグループにクラスタ化します k-means を使用すると 重心で表される k 個のデータクラスタを見つけることができます ユーザーは クラスタ数を選択します たとえば 購買履歴に基づいて顧客をグループに分けて 異なるグループにターゲットを絞った電子メールを送信したいとします
情報処理学会研究報告 IPSJ SIG Technical Report Vol.2017-CG-166 No /3/ HUNTEXHUNTER1 NARUTO44 Dr.SLUMP1,,, Jito Hiroki Satoru MORITA The
 755-8611 2-16-1 HUNTEXHUNTER1 NARUTO44 Dr.SLUMP1,,, Jito Hiroki Satoru MORITA The Graduate School of Science and Engineering,Yamaguchi University 2-16-1 Tokiwadai, Ube, 755-8611, Japan It is not easy to
755-8611 2-16-1 HUNTEXHUNTER1 NARUTO44 Dr.SLUMP1,,, Jito Hiroki Satoru MORITA The Graduate School of Science and Engineering,Yamaguchi University 2-16-1 Tokiwadai, Ube, 755-8611, Japan It is not easy to
16soukatsu_p1_40.ai
 2 2016 DATA. 01 3 DATA. 02 4 DATA. 03 5 DATA. 04 6 DATA. 05 7 DATA. 06 8 DATA. 07 9 DATA. 08 DATA. 09 DATA. 10 DATA. 11 DATA. 12 DATA. 13 DATA. 14 10 11 12 13 COLUMN 1416 17 18 19 DATA. 15 20 DATA. 16
2 2016 DATA. 01 3 DATA. 02 4 DATA. 03 5 DATA. 04 6 DATA. 05 7 DATA. 06 8 DATA. 07 9 DATA. 08 DATA. 09 DATA. 10 DATA. 11 DATA. 12 DATA. 13 DATA. 14 10 11 12 13 COLUMN 1416 17 18 19 DATA. 15 20 DATA. 16