高速道路への完全自動運転導入によるリスク低減効果の分析 リスク工学専攻グループ演習 10 班 田村聡宮本智明鄭起宅 ( アドバイザー教員伊藤誠 )
|
|
|
- かつかげ すすむ
- 4 years ago
- Views:
Transcription
1 高速道路への完全自動運転導入によるリスク低減効果の分析 リスク工学専攻グループ演習 10 班 田村聡宮本智明鄭起宅 ( アドバイザー教員伊藤誠 )
2 はじめに 研究背景 自動運転の定義 研究目的 発表の流れ 交通流シミュレーションを用いた分析 分析手法 評価指標 分析結果および考察 ドライブシミュレータを用いた分析 分析手法 評価方法 分析結果および考察 まとめ
3 研究背景交通システムの現状 交通事故の死傷者数が一定の割合で推移 大都市や幹線高速道路で渋滞が多発 東京の平均車速 :18[km/h] ロンドン :30[km/h] パリ :26[km/h] 人口 10 万人 自動車 1 万台 自動車 1 億走行キロ当たりの交通事故死傷者数 自動車交通における省エネルギー 安全対策が重要な課題 出典 : 参考文献 [1], [2]

4 研究背景省エネルギー 安全に向けた取り組み 経済産業省 - 世界一やさしいクルマ社会構想 ITS (Intelligent Transport System) をキーとした交通社会の実現が提唱 ITS ー最先端の情報通信技術を用いて人と道路と車両とを情報でネットワークすることにより 交通事故 渋滞などといった道路交通問題の解決を目的に構築する新しい交通システム 世界一やさしいクルマ社会の実現に向けた取り組み 出典 : 参考文献 [2]
5 研究背景安全運転支援技術 ASV( 車両を中心とした支援システム ) ACC 衝突被害軽減ブレーキ レーンキープアシスト AHS( 高速道路を中心とした支援システム ) 前方障害物情報提供 合流支援 DSSS( 一般道路を中心とした支援システム ) 各種感知機が視認困難な人 物を検出 車載装置 交通情報板を通して注意喚起 技術的には自動運転も実現可能 ( コストや法整備の面で課題 )
6 自動運転の定義 運転支援 ドライバーに対して情報提供 注意喚起 警報 操作支援をするシステム 自動運転 運転タスクの少なくとも一部を ドライバーから機械に渡した場合の運転 完全自動運転運転支援 人間の介入する余地を自動運転排除した場合の運転完全自動運転
7 研究目的 自動運転が与える影響に関して定量的によくわかっていない 1, 交通流シミュレーションを用いて手動運転 自動運転を模擬した走行を比較 交通流 CO2 排出量の変化を定量的に分析 2, ドライブシミュレータを用いて手動運転 完全自動運転を体験してもらい比較 平均速度 車間距離 アクセル ブレーキワークの定量的分析アンケートによる主観評価 自動運転の持つリスク低減効果 問題点 今後進むべき方向性の考察
8 交通流シミュレーションを用いた分析 手動運転か自動運転かによってそれぞれ運転パターンが相異 車両の運転パターンは自車だけでなく他車両にも影響 複数の車両が同時に影響しあいつつ走行することにより流れを形成 手動運転と自動運転の交通流を比較 計測することによって自動運転の効果を定量的に分析可能
9 分析手法 対象場所 使用アプリケーション シミュレーションモデル式 パラメータ設定 評価指標

10 対象地域 自動運転の想定および分析が簡単でさらに 導入されやすい高速道路を対象 大学から近く高低差の少ない常磐自動車道の三郷料金所 ~ 守谷 S.A. 間の区間を設定 車線数 -3 車線 制限速度 -80km/h 区間距離 -11.3km 三郷料金所 流山 I.C 柏 I.C 守谷 S.A
11 使用アプリケーション Aimsun( ユーデック株式会社 ) 追従モデルシミュレーションが可能 - 車両個々の挙動から分析 パラメータの変更が可能 - 手動運転と自動運転のパラメータをそれぞれ設定できる ビジュアル的表現が可能 < 合流地点での渋滞時の例 >
12 シミュレーションの構造 追従モデル 開始 車線変更モデル YES 車線変更が必要か NO 1 単位時間 (0.1 秒 ) を 1ステップで車両の挙動を時系列で記述 今回は追従モデルのパラメータのみ設定 車線変更モデル適用 目的地に到着したか YES 完了 追従モデル適用 NO 次のステップに
13 追従モデル式 自由加速時 V n,t : 車両 n の t 時点での速度 T: 反応時間 a n : 車両 n の最大加速度 V* n : 車両 n 運転者の希望速度 前方車両減速時 d n : 車両 n の最大減速度 x n,t : 車両 n の t 時点での位置 α は前方車両の減速に対する感度 2 速度のうち低い方を取る 速度から位置を計算する 0.1 秒間隔で各車両の速度と位置が計算される
14 パラメータ設定 反応時間の早さ 自動運転で反応が早くなるとどうなるか 感度の良さ( 変動 ) 前方車両との車車間通信により前方車両の減速を正確に読み取れるとどうなるか 希望速度の変動 路車間通信によりある区間での適正速度で一律的に走行させるとどうなるか ラメータ設定値交通量が多い時 4000[ 台 / 時 ] と少ない時 [2000 台 / 時 ] それぞれ各 8 ケース適用 全体 16 通りのケースを想定パによる8 ケースパラメータ組み合わせ
![評価指標 < 時間評価 > 三郷から守谷 S.Aまで走行した車両の平均所要時間 [ 秒 ] < 環境評価 > 三郷から守谷 S.](/docs-images/101/150975860/images/15-0.jpg "Aまで走行した車両の平均ガソリン消費量 [L] 平均ガソリン消費量に1[L] あたりCO2 排出量 2.")
15 評価指標 < 時間評価 > 三郷から守谷 S.Aまで走行した車両の平均所要時間 [ 秒 ] < 環境評価 > 三郷から守谷 S.Aまで走行した車両の平均ガソリン消費量 [L] 平均ガソリン消費量に1[L] あたりCO2 排出量 2.36[kg/l] をかけた平均 CO2 排出量 [kg] < ガソリン消費量計算式および設定したパラメータ >
16 分析結果 16 ケースそれぞれ 10 回のシミュレーション試行結果
17 平均ガソリン消費量2 排出量(kg )分析結果 渋滞無し 渋滞あり 平均CO A1 A2 A3 A4 A5 A6 A ほとんど変化無し (L )所要時間 (s) 所要時間 (s) B1 B2 B3 B4 B5 B6 B A8 平均ガソリン消費量(L )2 排出量(kg )平均CO B 交通量 ( 大 ) の場合の各ケースの結果 交通量 ( 少 ) の場合の各ケースの結果 交通量が少ない場合にはほとんど変化無し 交通量が多い場合 A1,A2,A5,A6( 反応時間の長いケース ) で所要時間と燃料消費量 CO2 の増加が顕著 ( 渋滞あり ) 交通量が多い場合のガソリン消費量および CO2 排出量 A2,A6( 感度変動無し )<A1,A5( 感度変動有り )
18 ドライブシミュレータを用いた分析 分析手法 参加者 実験装置 走行コース 計測要素 自動運転と手動運転 計測手順 評価方法 計測データ アンケートによる評価方法 分析結果と考察

19 分析手法参加者と実験装置 参加者 普通自動車運転免許を有し 日頃から運転をする 20 代男性 8 名が実験に参加 実験装置 forum8 社製 UC-win/Road ドライブシミュレータを使用 シミュレーションソフト UC-win/Road Ver.3.4 と対応
20 分析手法走行コースと計測要素 走行コース 常磐自動車道 ( 三郷 ~ 守谷 S.A. 間 ) 交通量を混雑時 標準時と2 種類の変化 計測要素 速度 前者との車間距離 アクセル ブレーキワーク 車線変更回数
21 分析手法自動運転と手動運転 自動運転 シミュレーションソフトの自動モードを使用 全車一括制御の自動運転ができたと仮定 手動運転 車線変更等の人工的な外乱を加えた ドライブシミュレータを接続して実現
22 分析手法ドライブシミュレーションの様子 左上合流地点 右上手動標準 左下自動運転

23 分析手法計測手順 以下のように実験を行った ( 標準 :2000[ 台 / 時間 ] 混雑 :4000[ 台 / 時間 ])
24 評価方法 計測データによる評価方法 被験者のクセを見つけ アンケートとの関連を見つける アンケートによる評価方法 自動運転を行った時の不安等について 5 段階評価をしてもらう 自動運転を導入することによって改善されるであろう点について評価してもらう アンケート内容の詳細は報告書図 6 を参照


25 結果と考察手動運転 自動運転の比較 速度の標準偏差 車間距離の標準偏差 自動運転は速度 車間距離両方の標準偏差について 手動運転より小さな値を取っている 効率の良い運転が実現できている
26 結果と考察平均速度 平均車間距離 平均速度 [km/h] 平均車間距離 [m] 手動標準手動混雑自動混雑 自動運転を導入することによって車間距離が詰まり より多くの交通量に対応できる 平均速度は ほとんど変わらなかった
 自動運転の方が アクセル")
27 結果と考察アクセル ブレーキワーク 図アクセル ブレーキワーク ( 参加者 01) 左手動標準右自動運転 ) 自動運転の方が アクセル ブレーキワーク共に最小限に抑えられている


28 結果と考察アンケート結果の平均値 質問 1 平均値質問 2 平均値 他車の割り込みがあった場合に 不安を感じる人が多い
29 結果と考察メリット内で重視する順番 [%] 時間削減 CO 2 排出量削減 コスト削減 運転負担軽減 1 位 位 位 位 時間削減を 1 位に選んだ 4 人のうち 3 人は 4 位に運転負担軽減選んだ 運転負担軽減を 1 位に選んだ 3 人は 手動運転時の標準偏差が大きい傾向にあった
30 まとめ 交通流シミュレーションを用いた分析 交通流が多い場合 反応時間の速い自動運転を行うと 手動運転と比較し所要時間が 20% 程度 CO 2 排出量が 50% 弱改善 ドライブシミュレータを用いた分析 自動運転を行うことで 速度 車間距離の標準偏差が減少 自動運転時 他車の割り込みがあった場合に不安を感じる人が多い 自動運転のメリットとして 時間の短縮を重視する人の割合が高く 運転負担の軽減に関しては, メリットとする人としない人で大きな差
31 今後の課題 交通流シミュレーションの分析 より現実に合わせた交通流モデルの開発 インフラを含めたトータルコストの分析 ドライブシミュレータを用いた分析 参加者の数を増やす ( 様々な年代 性別 運転歴を持った人を対象に分析 )
32 参考文献 [1] 内閣府ホームページ平成 18 年度交通事故の状況及び交通安全施策の現状 : tml [2] 経済産業省 : 次世代自動車 燃料イニシアティブ (2007) [3] 大口ら : 高速道路交通流の臨界領域における事故率の検討, 交通工学 39 巻,3 号 (2004) [4] 伊藤誠 : ITSにおける人間と機械の機能分担, 計測と制御 47 巻,2 号, (2008) [5] 加藤, 津川ら : 車々 路車間通信による予見的速度制御の交通流改善効果の一考察, 自動車技術会秋季学術講演会 40 巻,3 号, (2008) [6] ( 社 ) 交通工学研究会 : 平成 17 年度道路交通センサス一般交通量調査 ( 2007) [7] ECCJ 省エネルギーセンターホームページ :

33 ご静聴ありがとうございました
34 以下参考資料
35 研究背景交通事故の現状 人口 10 万人 自動車 1 万台 自動車 1 億走行キロ当たりの交通事故死傷者数 交通事故の死傷者数は近年ほぼ一定の割合で推移 出典 : 参考文献 [1]

36 研究背景渋滞の現状 首都高速渋滞損失時間 走行台キロの推移 ( 平日平均 ) 都心部を中心に渋滞も多数発生 出典 : 首都高渋滞対策アクションプログラム (H18)

37 研究背景交通事故と渋滞 東名高速道路における交通流状態別の総交通量と事故率 出典 : 参考文献 [3]

38 自動運転の定義 本研究での定義 運転支援 自動運転 完全自動運転 出典 : 走行支援道路システム開発機構ホームページ

39 ASV( 先進安全自動車 ) 車両の周辺や路面の状況などを検知して ドライバーの安全運転を支援する自動車 国土交通省による ASV 推進計画の概要 本格的普及 実用化が進行中 自動車単独から道路や他車両などとの連携に拡張

40 ASV 開発の基本理念 1. ドライバー支援の原則ドライバーの意思尊重 安全運転支援ドライバーが主体的に責任をもって運転 2. ドライバー受容性の確保使いやすく 安心して使えるように配慮するヒューマン インタフェースの工夫 3. 社会受容性の確保他の自動車や歩行者などと一緒に走行するので 社会から正しく理解され 受け入れられるよう配慮 出典 : 国土交通省ホームページ


41 ASV 技術 -ACC 前方車なし 設定した速度で走行 前方車あり 車両距離を一定に保って走行 先行車に続いて停止 ドライバの運転負荷減少
42 ASV- 衝突被害軽減ブレーキ システムなし 大きな被害 システムあり 前方注意! 遅いタイミングのブレーキ 衝突回避 警告により自分でブレーキ 小さな被害 警報に反応しなかった場合 自動ブレーキ 衝突回避および衝突した場合の被害軽減


43 ASV- レーンキープアシスト システムなし 車線離脱による事故発生 システムあり 警報 操作補助 ドライバーの運転負荷軽減 安全補助

44 AHS( 走行支援道路システム ) 車両単独では高度なITSの実現は困難 車両と道路インフラの長所を活かす センサ 路車間通信の利用 安全運転 渋滞削減

45 AHS- 前方障害物情報提供 センサから障害物把握 アンテナによるドライバーへの情報提供


46 AHS- カーブ 合流危険防止支援 電子地図によるカーブ 合流の情報提供

47 DSSS( 安全運転支援システム ) 2010 年導入予定 双方向通信が可能な光ビーコン利用 車線ごとに個別の情報を提供することが可能
48 AHS と DSSS AHS DSSS 主体 国土交通省 警察庁 対称 不特定多数車両 条件符合車両 利用道路 自動車専用道路 一般道 通信メディア電波ビーコン DSRC 光ビーコン 通信距離 ~200m ~3.5m
本章では 衝突被害軽減ブレーキ 車線逸脱警報 装置 等の自動車に備えられている運転支援装置の特性 Ⅻ. 運転支援装置を 備えるトラックの 適切な運転方法 と使い方を理解した運転の重要性について整理しています 指導においては 装置を過信し 事故に至るケースがあることを理解させましょう また 運転支援装
 本章では 衝突被害軽減ブレーキ 車線逸脱警報 装置 等の自動車に備えられている運転支援装置の特性 Ⅻ. 運転支援装置を 備えるトラックの 適切な運転方法 と使い方を理解した運転の重要性について整理しています 指導においては 装置を過信し 事故に至るケースがあることを理解させましょう また 運転支援装置の限界を心得て正しく使用するために 支援装置の限界とメーカーによる作動等の違いを明確にさせ 支援装置に頼り過ぎた運転にならないように指導しましょう
本章では 衝突被害軽減ブレーキ 車線逸脱警報 装置 等の自動車に備えられている運転支援装置の特性 Ⅻ. 運転支援装置を 備えるトラックの 適切な運転方法 と使い方を理解した運転の重要性について整理しています 指導においては 装置を過信し 事故に至るケースがあることを理解させましょう また 運転支援装置の限界を心得て正しく使用するために 支援装置の限界とメーカーによる作動等の違いを明確にさせ 支援装置に頼り過ぎた運転にならないように指導しましょう
STAMP/STPA を用いた 自動運転システムのリスク分析 - 高速道路での合流 - 堀雅年 * 伊藤信行 梶克彦 * 内藤克浩 * 水野忠則 * 中條直也 * * 愛知工業大学 三菱電機エンジニアリング 1
 STAMP/STPA を用いた 自動運転システムのリスク分析 - 高速道路での合流 - 堀雅年 * 伊藤信行 梶克彦 * 内藤克浩 * 水野忠則 * 中條直也 * * 愛知工業大学 三菱電機エンジニアリング 1 はじめに 近年 先進運転支援システムが発展 オートクルーズコントロール レーンキープアシスト 2020 年を目処にレベル3 自動運転車の市場化が期待 運転システムが複雑化 出典 : 官民 ITS
STAMP/STPA を用いた 自動運転システムのリスク分析 - 高速道路での合流 - 堀雅年 * 伊藤信行 梶克彦 * 内藤克浩 * 水野忠則 * 中條直也 * * 愛知工業大学 三菱電機エンジニアリング 1 はじめに 近年 先進運転支援システムが発展 オートクルーズコントロール レーンキープアシスト 2020 年を目処にレベル3 自動運転車の市場化が期待 運転システムが複雑化 出典 : 官民 ITS
<4D F736F F F696E74202D20895E935D8E D BB8C7689E68A C4816A72332E >
 運転 援システム 度化計画 ( 概要 ) 的 ヒトやモノが安全 快適に移動することのできる社会 の実現に向け 関係府省の連携による研究開発 政府主導の実証計画等によって構成される計画を策定する ( 本再興戦略 ( 平成 25 年 6 14 閣議決定 )) 運転 援システム 動 システムによって得られる効果 1 渋滞の解消 緩和 2 交通事故の削減 3 環境負荷の低減 4 齢者等の移動 援 5 運転の快適性の向上
運転 援システム 度化計画 ( 概要 ) 的 ヒトやモノが安全 快適に移動することのできる社会 の実現に向け 関係府省の連携による研究開発 政府主導の実証計画等によって構成される計画を策定する ( 本再興戦略 ( 平成 25 年 6 14 閣議決定 )) 運転 援システム 動 システムによって得られる効果 1 渋滞の解消 緩和 2 交通事故の削減 3 環境負荷の低減 4 齢者等の移動 援 5 運転の快適性の向上
ICT を活用した ITS の概要 1 ITS は内閣府 警察庁 総務省 経済産業省 国土交通省が連携して推進 道路交通情報 VICS (1996 年 ~) FM 多重放送 電波ビーコン 光ビーコンで情報配信 ( 約 5,100 万台 :2016 年 6 月末 ) プローブ情報 携帯電話ネットワーク
 FM 多重放送 電波ビーコン 光ビーコンで情報配信 ( 約 5,100 万台 :2016 年 6 月末 ) プローブ情報 携帯電話ネットワーク") 参考資料 3 自動走行の実現に向けた総務省の取組 平成 28 年 12 月 15 日総務省 ICT を活用した ITS の概要 1 ITS は内閣府 警察庁 総務省 経済産業省 国土交通省が連携して推進 道路交通情報 VICS (1996 年 ~) FM 多重放送 電波ビーコン 光ビーコンで情報配信 ( 約 5,100 万台 :2016 年 6 月末 ) プローブ情報 携帯電話ネットワーク等自動車メーカー等では
参考資料 3 自動走行の実現に向けた総務省の取組 平成 28 年 12 月 15 日総務省 ICT を活用した ITS の概要 1 ITS は内閣府 警察庁 総務省 経済産業省 国土交通省が連携して推進 道路交通情報 VICS (1996 年 ~) FM 多重放送 電波ビーコン 光ビーコンで情報配信 ( 約 5,100 万台 :2016 年 6 月末 ) プローブ情報 携帯電話ネットワーク等自動車メーカー等では
スマートフォン利用が 自動車運転に与える影響について
 自動車運転中のスマートフォン利用実態の把握とテキスト入力が運転挙動に及ぼす影響の定量的分析 リスク工学グループ演習第 9 班 山本智基中川紗菜美佐藤祥路 アドバイザー教員 : 伊藤誠 1 発表の流れ 01 研究の背景 目的 02 研究の流れ 位置づけ 03 運転中のスマートフォン利用実態把握 04 シミュレーション準備 測定方法 05 実験結果 考察 06 まとめ 背景 目的 4 背景 図 主な情報通信機器の世帯保有状況
自動車運転中のスマートフォン利用実態の把握とテキスト入力が運転挙動に及ぼす影響の定量的分析 リスク工学グループ演習第 9 班 山本智基中川紗菜美佐藤祥路 アドバイザー教員 : 伊藤誠 1 発表の流れ 01 研究の背景 目的 02 研究の流れ 位置づけ 03 運転中のスマートフォン利用実態把握 04 シミュレーション準備 測定方法 05 実験結果 考察 06 まとめ 背景 目的 4 背景 図 主な情報通信機器の世帯保有状況
<4D F736F F F696E74202D CC8ED48ED48AD492CA904D82CC8EE D918CF08FC88E9197BF816A2E B8CDD8AB B8
 資料 1-8 ASV における車車間通信の取り組みについて 国土交通省自動車交通局 技術安全部技術企画課 1 交通事故の現状と政府目標 < 交通事故の状況 > 平成 19 年死者数 5,744 人 平成 19 年死傷者数 1,040,189 人 < 政府目標 > ( 警察庁統計より ) 平成 15 年総理施政方針 2012 年までに 死者数を半減し 5000 人以下とする 第 8 次交通安全基本計画
資料 1-8 ASV における車車間通信の取り組みについて 国土交通省自動車交通局 技術安全部技術企画課 1 交通事故の現状と政府目標 < 交通事故の状況 > 平成 19 年死者数 5,744 人 平成 19 年死傷者数 1,040,189 人 < 政府目標 > ( 警察庁統計より ) 平成 15 年総理施政方針 2012 年までに 死者数を半減し 5000 人以下とする 第 8 次交通安全基本計画
21m 車両の検証項目 ダブル連結トラック実験 高速道路 3 交通流への影響 4 道路構造への影響 合流部 : 本線 合流部 : ランプ 追越時 車線変更部 検証項目 分析視点 データ等 1 省人化 同一量輸送時のドライバー数 乗務記録表 環境負荷 同一量輸送時のCO2 排出量 2 走行 カーブ (
 21m ダブル連結トラック実験の実施状況 効果検証 ( 中間とりまとめ ) 21m 車両の検証項目 ダブル連結トラック実験 高速道路 3 交通流への影響 4 道路構造への影響 合流部 : 本線 合流部 : ランプ 追越時 車線変更部 検証項目 分析視点 データ等 1 省人化 同一量輸送時のドライバー数 乗務記録表 環境負荷 同一量輸送時のCO2 排出量 2 走行 カーブ ( 降坂部 ) 速度分布(
21m ダブル連結トラック実験の実施状況 効果検証 ( 中間とりまとめ ) 21m 車両の検証項目 ダブル連結トラック実験 高速道路 3 交通流への影響 4 道路構造への影響 合流部 : 本線 合流部 : ランプ 追越時 車線変更部 検証項目 分析視点 データ等 1 省人化 同一量輸送時のドライバー数 乗務記録表 環境負荷 同一量輸送時のCO2 排出量 2 走行 カーブ ( 降坂部 ) 速度分布(
03 【資料1】自動走行をめぐる最近の動向と今後の調査検討事項
 自動走行をめぐる最近の動向と 今後の調査検討事項について 平成 27 年 10 月 23 日警察庁交通局 目 次 1 交通事故情勢 2 自動走行の現状 3 自動走行の課題 4 調査検討事項 1 交通事故情勢 交通事故発生状況の推移 1 1 交通事故情勢 c 平成 26 年中の交通事故発生状況 交通事故発生件数 57 万 3,465 件 ( 前年比 -8.8%) 10 年連続で減少 交通事故死者数 4,113
自動走行をめぐる最近の動向と 今後の調査検討事項について 平成 27 年 10 月 23 日警察庁交通局 目 次 1 交通事故情勢 2 自動走行の現状 3 自動走行の課題 4 調査検討事項 1 交通事故情勢 交通事故発生状況の推移 1 1 交通事故情勢 c 平成 26 年中の交通事故発生状況 交通事故発生件数 57 万 3,465 件 ( 前年比 -8.8%) 10 年連続で減少 交通事故死者数 4,113
見出しタイトル
 2013 No.42 国内における自動車の自動運転システムの将来像 2013 年 9 月 13 日に政府の総合科学技術会議において 来年度創設される府省横断事業 戦略的イノベーション創造プログラム 1 の課題候補として 自動車の自動運転システムを含む 10 テーマが決定された これらは新聞でも大きく取り上げられ 自動車メーカーにおける自動運転システム開発の動きも加速している 10 月 14 日 ~
2013 No.42 国内における自動車の自動運転システムの将来像 2013 年 9 月 13 日に政府の総合科学技術会議において 来年度創設される府省横断事業 戦略的イノベーション創造プログラム 1 の課題候補として 自動車の自動運転システムを含む 10 テーマが決定された これらは新聞でも大きく取り上げられ 自動車メーカーにおける自動運転システム開発の動きも加速している 10 月 14 日 ~
国土技術政策総合研究所 研究資料
 第 7 章 検査基準 7-1 検査の目的 検査の目的は 対向車両情報表示サービス 前方停止車両 低速車両情報表示サービスおよび その組み合わせサービスに必要な機能の品質を確認することである 解説 設備の設置後 機能や性能の総合的な調整を経て 検査基準に従い各設備検査を実施する 各設備検査の合格後 各設備間を接続した完成検査で機能 性能等のサービス仕様を満たしていることを確認する検査を実施し 合否を判定する
第 7 章 検査基準 7-1 検査の目的 検査の目的は 対向車両情報表示サービス 前方停止車両 低速車両情報表示サービスおよび その組み合わせサービスに必要な機能の品質を確認することである 解説 設備の設置後 機能や性能の総合的な調整を経て 検査基準に従い各設備検査を実施する 各設備検査の合格後 各設備間を接続した完成検査で機能 性能等のサービス仕様を満たしていることを確認する検査を実施し 合否を判定する
ITS とは 1 ITS の役割 ITS (Intelligent Transport Systemsys) 高度道路交通システム 人と道路と自動車の間で情報の受発信を行い 道路交通が抱える事故や渋滞 環境対策など 様々な課題を解決するためのシステムとして考えられました 常に最先端の情報通信や制御技
 高度道路交通システム 人と道路と自動車の間で情報の受発信を行い 道路交通が抱える事故や渋滞 環境対策など 様々な課題を解決するためのシステムとして考えられました 常に最先端の情報通信や制御技") 文部科学省委託事業 次世代自動車エキスパート養成教育プログラム開発事業 実証実験授業講座名 次世代自動車基礎地域版 社会における ITS の役割について 氏名 1 ITS とは 1 ITS の役割 ITS (Intelligent Transport Systemsys) 高度道路交通システム 人と道路と自動車の間で情報の受発信を行い 道路交通が抱える事故や渋滞 環境対策など 様々な課題を解決するためのシステムとして考えられました
文部科学省委託事業 次世代自動車エキスパート養成教育プログラム開発事業 実証実験授業講座名 次世代自動車基礎地域版 社会における ITS の役割について 氏名 1 ITS とは 1 ITS の役割 ITS (Intelligent Transport Systemsys) 高度道路交通システム 人と道路と自動車の間で情報の受発信を行い 道路交通が抱える事故や渋滞 環境対策など 様々な課題を解決するためのシステムとして考えられました
ニュースレター「SEI WORLD」2016年6月号
 1 SEIWORLD JUNE 2016 JUNE 2016 SEIWORLD 2 ITS Intelligent Transport Systems 安心 安全 で 快適 な モビリティ社会に貢献しています 今回ご紹介した製品 ソリューションは 住 友 電 工グル ープは い つから ITS関連製品を提 供しているの 当社 Webサイトで詳しくご紹介しています ぜひご覧ください http://www.sei.co.jp/products/its/
1 SEIWORLD JUNE 2016 JUNE 2016 SEIWORLD 2 ITS Intelligent Transport Systems 安心 安全 で 快適 な モビリティ社会に貢献しています 今回ご紹介した製品 ソリューションは 住 友 電 工グル ープは い つから ITS関連製品を提 供しているの 当社 Webサイトで詳しくご紹介しています ぜひご覧ください http://www.sei.co.jp/products/its/
速度規制の目的と現状 警察庁交通局 1
 速度規制の目的と現状 警察庁交通局 1 1 最高速度規制の必要性 2 規制速度決定の基本的考え方 3 一般道路における速度規制基準の概要 4 最高速度規制の見直し状況 ( 平成 21 年度 ~23 年度 ) 5 最高速度違反による交通事故対策検討会の開催 2 1 最高速度規制の必要性 最高速度規制は 交通事故の抑止 ( 交通の安全 ) 交通の円滑化 道路交通に起因する障害の防止 の観点から 必要に応じて実施
速度規制の目的と現状 警察庁交通局 1 1 最高速度規制の必要性 2 規制速度決定の基本的考え方 3 一般道路における速度規制基準の概要 4 最高速度規制の見直し状況 ( 平成 21 年度 ~23 年度 ) 5 最高速度違反による交通事故対策検討会の開催 2 1 最高速度規制の必要性 最高速度規制は 交通事故の抑止 ( 交通の安全 ) 交通の円滑化 道路交通に起因する障害の防止 の観点から 必要に応じて実施
<4D F736F F F696E74202D E096BE97708E9197BF B998488CA48B8689EF816A A81698C668DDA97708
 ITS を巡る最近の動向 平成 25 年 5 月 25 日 国土交通省道路局 道路交通管理課 ITS 推進室 垣原清次 ITS( 高度道路交通システム ) について 人と道路と車両とを一体のシステムとして構築し 交通渋滞 交通事故 環境悪化などの道路交通問題の解決を図る 渋滞時間損失 : 年間約 50 億時間 交通事故事故約 66 万件 死者約 4.4 千人 ( 平成 24 年 ) 環境悪化 CO2
ITS を巡る最近の動向 平成 25 年 5 月 25 日 国土交通省道路局 道路交通管理課 ITS 推進室 垣原清次 ITS( 高度道路交通システム ) について 人と道路と車両とを一体のシステムとして構築し 交通渋滞 交通事故 環境悪化などの道路交通問題の解決を図る 渋滞時間損失 : 年間約 50 億時間 交通事故事故約 66 万件 死者約 4.4 千人 ( 平成 24 年 ) 環境悪化 CO2
名古屋大学.indd
 車両性能実証装置高精度ドライビング シミュレーターシステム 世界で初めて 1) 本格的バーチャルリアリティ (VR) 空間内での運転 車両走行模擬を実現した大型 5 面立体視ドライビング シミュレーター 運転時の視覚環境 振動環境を高精度に再現する事により 運転車の特性や感性のモニタリングおよび数学モデル構築を目指します 約 240インチの高輝度高精細な大型ディスプレイで囲ま 1 れた空間で視野角
車両性能実証装置高精度ドライビング シミュレーターシステム 世界で初めて 1) 本格的バーチャルリアリティ (VR) 空間内での運転 車両走行模擬を実現した大型 5 面立体視ドライビング シミュレーター 運転時の視覚環境 振動環境を高精度に再現する事により 運転車の特性や感性のモニタリングおよび数学モデル構築を目指します 約 240インチの高輝度高精細な大型ディスプレイで囲ま 1 れた空間で視野角
untitled
 DSRC DSRC 0 ITS ITS ITS 1 2 3 2 豊かさかさかさかさ 環境環境環境環境 2 豊かさかさかさかさ 環境環境環境環境 2 豊かさかさかさかさ 環境環境環境環境 1 安全安全安全安全 安心安心安心安心 1 安全安全安全安全 安心安心安心安心 1 安全安全安全安全 安心安心安心安心決済決済決済決済決済決済決済決済決済決済決済決済 クルマに乗車している際に発生する様々な決済のキャッシュレス化を実現するサービス情報提供情報提供情報提供情報提供情報提供情報提供情報提供情報提供情報提供情報提供情報提供情報提供
DSRC DSRC 0 ITS ITS ITS 1 2 3 2 豊かさかさかさかさ 環境環境環境環境 2 豊かさかさかさかさ 環境環境環境環境 2 豊かさかさかさかさ 環境環境環境環境 1 安全安全安全安全 安心安心安心安心 1 安全安全安全安全 安心安心安心安心 1 安全安全安全安全 安心安心安心安心決済決済決済決済決済決済決済決済決済決済決済決済 クルマに乗車している際に発生する様々な決済のキャッシュレス化を実現するサービス情報提供情報提供情報提供情報提供情報提供情報提供情報提供情報提供情報提供情報提供情報提供情報提供
Microsoft Word - 資料4(修正).docx
.docx") 資料 4 運転支援機能の表示に関する規約運用の考え方 平成 30 年 11 月 20 日一般社団法人自動車公正取引協議会新車委員会 大型車委員会決定 衝突被害軽減ブレーキや車線逸脱警報装置 ペダル踏み間違い時加速抑制装置や自動運転化技術レベル2までの段階の機能や技術 ( 以下 運転支援機能 という ) について 一般消費者への理解促進を図るとともに 過信や誤解を招くような表示が行われることのないよう
資料 4 運転支援機能の表示に関する規約運用の考え方 平成 30 年 11 月 20 日一般社団法人自動車公正取引協議会新車委員会 大型車委員会決定 衝突被害軽減ブレーキや車線逸脱警報装置 ペダル踏み間違い時加速抑制装置や自動運転化技術レベル2までの段階の機能や技術 ( 以下 運転支援機能 という ) について 一般消費者への理解促進を図るとともに 過信や誤解を招くような表示が行われることのないよう
【資料8】車両安全対策の事後効果評価rev4
 平成 28 年度第 2 回車両安全対策検討会平成 28 年 12 月 9 日 安全 - 資料 -8 車両安全対策の事後効果評価 背景 目的 平成 23 年の交通政策審議会報告書において交通事故死者数削減目標 ( 平成 32 年度までに平成 22 年比で車両安全対策により 1,000 人削減 ) が設定された 中間年である平成 27 年度の調査結果では 735 人の削減効果と試算された 平成 32 年の目標に向けた達成状況について検証するため
平成 28 年度第 2 回車両安全対策検討会平成 28 年 12 月 9 日 安全 - 資料 -8 車両安全対策の事後効果評価 背景 目的 平成 23 年の交通政策審議会報告書において交通事故死者数削減目標 ( 平成 32 年度までに平成 22 年比で車両安全対策により 1,000 人削減 ) が設定された 中間年である平成 27 年度の調査結果では 735 人の削減効果と試算された 平成 32 年の目標に向けた達成状況について検証するため
1 見出し1
 9.17.1 現況調査 (1) 調査事項及びその選択理由調査事項及びその選択理由は 表 9.17-1 に示すとおりである 調査事項 1 交通量等の状況 2 道路等の状況 3 土地利用の状況 4 規制等の状況 表 9.17-1 調査事項及びその選択理由 選択理由事業の実施に伴い交通渋滞の発生又は解消等 交通量及び交通流の変化が考えられることから 計画地及びその周辺について 左記の事項に係る調査が必要である
9.17.1 現況調査 (1) 調査事項及びその選択理由調査事項及びその選択理由は 表 9.17-1 に示すとおりである 調査事項 1 交通量等の状況 2 道路等の状況 3 土地利用の状況 4 規制等の状況 表 9.17-1 調査事項及びその選択理由 選択理由事業の実施に伴い交通渋滞の発生又は解消等 交通量及び交通流の変化が考えられることから 計画地及びその周辺について 左記の事項に係る調査が必要である
PowerPoint Presentation
 参考資料 3 国内外における自動運転の取り組み概要 1. 単体走行の事例 2. 追随走行 隊列走行の事例 3. 専用道路の事例 1 1. 単体走行の事例 研究開発主体 研究開発期間 1DARPA 主催の技術コンテスト DARPA ( 米国国防総省国防高等研究計画局 ) グランドチャレンジ :2004 年 2005 年アーバンチャレンジ :2007 年 2Google の自動運転への取り組み Google
参考資料 3 国内外における自動運転の取り組み概要 1. 単体走行の事例 2. 追随走行 隊列走行の事例 3. 専用道路の事例 1 1. 単体走行の事例 研究開発主体 研究開発期間 1DARPA 主催の技術コンテスト DARPA ( 米国国防総省国防高等研究計画局 ) グランドチャレンジ :2004 年 2005 年アーバンチャレンジ :2007 年 2Google の自動運転への取り組み Google
( おさらい ) 自動運転とは レベルレベル1 レベル2 レベル3 レベル4 定義 加速 操舵 制動のいずれかの操作をシステムが行う 加速 操舵 制動のうち複数の操作を一度にシステムが行う ( 自動運転中であっても 運転責任はドライバーにある ) 加速 操舵 制動をすべてシステムが行い システムが要
 自動運転とは レベルレベル1 レベル2 レベル3 レベル4 定義 加速 操舵 制動のいずれかの操作をシステムが行う 加速 操舵 制動のうち複数の操作を一度にシステムが行う ( 自動運転中であっても 運転責任はドライバーにある ) 加速 操舵 制動をすべてシステムが行い システムが要") 自動運転と損害賠償 ~ 自動運転者事故の責任は誰が負うべきか ~ 2016 年 12 月 16 日一般社団法人日本損害保険協会大坪護 ( おさらい ) 自動運転とは レベルレベル1 レベル2 レベル3 レベル4 定義 加速 操舵 制動のいずれかの操作をシステムが行う 加速 操舵 制動のうち複数の操作を一度にシステムが行う ( 自動運転中であっても 運転責任はドライバーにある ) 加速 操舵 制動をすべてシステムが行い
自動運転と損害賠償 ~ 自動運転者事故の責任は誰が負うべきか ~ 2016 年 12 月 16 日一般社団法人日本損害保険協会大坪護 ( おさらい ) 自動運転とは レベルレベル1 レベル2 レベル3 レベル4 定義 加速 操舵 制動のいずれかの操作をシステムが行う 加速 操舵 制動のうち複数の操作を一度にシステムが行う ( 自動運転中であっても 運転責任はドライバーにある ) 加速 操舵 制動をすべてシステムが行い
 1 1 1 1 7 1 6 1 1 1 1 1 1 9 1 1 1 8 5 1 1 1 50 51 1 1 ルートを探索する 行き先に設定する 行き先に設定する (ルートが設定されていない場合) 1 地点を検索する 経由地に設定する 設定されているルートを消去し 行き先を新たに設定する 1 地点を検索する 検索のしかた P.6 51 ここに行く を選ぶ 1 地点を検索する ここに行く を選ぶ 1 地図をスクロールさせ
1 1 1 1 7 1 6 1 1 1 1 1 1 9 1 1 1 8 5 1 1 1 50 51 1 1 ルートを探索する 行き先に設定する 行き先に設定する (ルートが設定されていない場合) 1 地点を検索する 経由地に設定する 設定されているルートを消去し 行き先を新たに設定する 1 地点を検索する 検索のしかた P.6 51 ここに行く を選ぶ 1 地点を検索する ここに行く を選ぶ 1 地図をスクロールさせ
1 日本再興戦略 2016 改革 2020 隊列走行の実現 隊列走行活用事業モデルの明確化ニーズの明確化 ( 実施場所 事業性等 ) 技術開発 実証 制度 事業環境検討プロジェクト工程表技高齢者等の移動手段の確保 ( ラストワンマイル自動走行 ) 事業モデルの明確化 ( 実施主体 場所 事業性等 )
 技術開発 実証 制度 事業環境検討プロジェクト工程表技高齢者等の移動手段の確保 ( ラストワンマイル自動走行 ) 事業モデルの明確化 ( 実施主体 場所 事業性等 )") 参考資料 4 自動走行に関する取組について 平成 2 8 年 1 2 月 経 済 産 業 省 国 土 交 通 省 1 日本再興戦略 2016 改革 2020 隊列走行の実現 隊列走行活用事業モデルの明確化ニーズの明確化 ( 実施場所 事業性等 ) 技術開発 実証 制度 事業環境検討プロジェクト工程表技高齢者等の移動手段の確保 ( ラストワンマイル自動走行 ) 事業モデルの明確化 ( 実施主体 場所
参考資料 4 自動走行に関する取組について 平成 2 8 年 1 2 月 経 済 産 業 省 国 土 交 通 省 1 日本再興戦略 2016 改革 2020 隊列走行の実現 隊列走行活用事業モデルの明確化ニーズの明確化 ( 実施場所 事業性等 ) 技術開発 実証 制度 事業環境検討プロジェクト工程表技高齢者等の移動手段の確保 ( ラストワンマイル自動走行 ) 事業モデルの明確化 ( 実施主体 場所
1 見出し1
 9.16.1 現況調査 (1) 調査事項及びその選択理由調査事項及びその選択理由は 表 9.16-1 に示すとおりである 調査事項 1 交通量等の状況 2 道路等の状況 3 土地利用の状況 4 規制等の状況 表 9.16-1 調査事項及びその選択理由 選択理由事業の実施に伴い交通渋滞の発生又は解消等 交通量及び交通流の変化が考えられることから 計画地及びその周辺について 左記の事項に係る調査が必要である
9.16.1 現況調査 (1) 調査事項及びその選択理由調査事項及びその選択理由は 表 9.16-1 に示すとおりである 調査事項 1 交通量等の状況 2 道路等の状況 3 土地利用の状況 4 規制等の状況 表 9.16-1 調査事項及びその選択理由 選択理由事業の実施に伴い交通渋滞の発生又は解消等 交通量及び交通流の変化が考えられることから 計画地及びその周辺について 左記の事項に係る調査が必要である
1 見出し1
 9.17.1 現況調査 (1) 調査事項及びその選択理由調査事項及びその選択理由は 表 9.17-1 に示すとおりである 調査事項 1 交通量等の状況 2 道路等の状況 3 土地利用の状況 4 規制等の状況 表 9.17-1 調査事項及びその選択理由 選択理由事業の実施に伴い交通渋滞の発生又は解消等 交通量及び交通流の変化が考えられることから 計画地及びその周辺について 左記の事項に係る調査が必要である
9.17.1 現況調査 (1) 調査事項及びその選択理由調査事項及びその選択理由は 表 9.17-1 に示すとおりである 調査事項 1 交通量等の状況 2 道路等の状況 3 土地利用の状況 4 規制等の状況 表 9.17-1 調査事項及びその選択理由 選択理由事業の実施に伴い交通渋滞の発生又は解消等 交通量及び交通流の変化が考えられることから 計画地及びその周辺について 左記の事項に係る調査が必要である
Microsoft Word 交通渋滞(有明アーバン)_181017
_181017") 9.4.1 現況調査 (1) 調査事項及びその選択理由調査事項及びその選択理由は 表 9.4-1 に示すとおりである 調査事項 1 交通量等の状況 2 道路等の状況 3 土地利用の状況 4 規制等の状況 表 9.4-1 調査事項及びその選択理由選択理由 事業の実施に伴い交通渋滞の発生又は解消等 交通量及び交通流の変化が考えられることから 計画地及びその周辺について 左記の事項に係る調査が必要である
9.4.1 現況調査 (1) 調査事項及びその選択理由調査事項及びその選択理由は 表 9.4-1 に示すとおりである 調査事項 1 交通量等の状況 2 道路等の状況 3 土地利用の状況 4 規制等の状況 表 9.4-1 調査事項及びその選択理由選択理由 事業の実施に伴い交通渋滞の発生又は解消等 交通量及び交通流の変化が考えられることから 計画地及びその周辺について 左記の事項に係る調査が必要である
スライド 1
 平成 28 年度経済産業省 国土交通省委託事業 自動走行の民事上の責任及び社会受容性に関する研究 シンポジウム 平成 29 年 3 月 7 日於 TKPガーデンシティPREMIUM 神保町 自動運転技術の動向について 独立行政法人自動車技術総合機構交通安全環境研究所自動車研究部河合英直 1 Agenda 1. 交通安全環境研究所について 2. 自動運転車とは 3. 運転支援技術の現状 4. 最後に
平成 28 年度経済産業省 国土交通省委託事業 自動走行の民事上の責任及び社会受容性に関する研究 シンポジウム 平成 29 年 3 月 7 日於 TKPガーデンシティPREMIUM 神保町 自動運転技術の動向について 独立行政法人自動車技術総合機構交通安全環境研究所自動車研究部河合英直 1 Agenda 1. 交通安全環境研究所について 2. 自動運転車とは 3. 運転支援技術の現状 4. 最後に
[2] [3] [4] [] TTC 2 9 SAS[6] 2 SAS 4 DS 2. SAS 28 ( 2 ) 6 ( ) (PV:Preceding Vehicle) (FV:Fo
![[2] [3] [4] [] TTC 2 9 SAS[6] 2 SAS 4 DS 2. SAS 28 ( 2 ) 6 ( ) (PV:Preceding Vehicle) (FV:Fo](/thumbs/93/113996976.jpg "[2] [3] [4] [] TTC 2 9 SAS[6] 2 SAS 4 DS 2. SAS 28 ( 2 ) 6 ( ) (PV:Preceding Vehicle) (FV:Fo") Vol.26-ITS-64 No. 26/3/7,a),b),c),d) 24 TTC THW Driver characteristic estimation using vehicle behavior data while preceding vehicle decelerating Chisato Shibata,a) Yurie Iribe,b) Haruki Kawanaka,c) Koji
Vol.26-ITS-64 No. 26/3/7,a),b),c),d) 24 TTC THW Driver characteristic estimation using vehicle behavior data while preceding vehicle decelerating Chisato Shibata,a) Yurie Iribe,b) Haruki Kawanaka,c) Koji
<4D F736F F D208D8291AC93B BF8BE08E7B8DF482CC89658BBF92B28DB E92B A2E646F63>
 高速道路の新料金施策に関する影響調査について 2010 年 12 月 28 日財団法人運輸調査局 1. 調査の目的 2011 年 4 月以降の高速道路の新料金施策について 乗用車を平日上限 2,000 円 土日祝日上限 1,000 円とする上限料金制度を導入する方向で 政府で調整が進められていることを受け 施策実施による影響を把握することを目的に調査を行った 高速道路の新料金施策が実施された場合における
高速道路の新料金施策に関する影響調査について 2010 年 12 月 28 日財団法人運輸調査局 1. 調査の目的 2011 年 4 月以降の高速道路の新料金施策について 乗用車を平日上限 2,000 円 土日祝日上限 1,000 円とする上限料金制度を導入する方向で 政府で調整が進められていることを受け 施策実施による影響を把握することを目的に調査を行った 高速道路の新料金施策が実施された場合における
事故及び渋滞対策の取り組み 福岡都市高速 北九州都市高速 福岡北九州高速道路公社
 事故及び渋滞対策の取り組み 福岡都市高速 北九州都市高速 福岡北九州高速道路公社 < 目次 > 1. 福岡 北九州都市高速道路の現状 P1 1) はじめに 2) 交通事故の現状 3) 交通渋滞の現状 4) これまでの事故 渋滞の取り組み 2. 事故 渋滞対策の取り組み P8 1) 事故 渋滞の特性と取り組み方針 2) これからの主な対策メニュー 3. 事故 渋滞に関する情報について P12 1. 福岡
事故及び渋滞対策の取り組み 福岡都市高速 北九州都市高速 福岡北九州高速道路公社 < 目次 > 1. 福岡 北九州都市高速道路の現状 P1 1) はじめに 2) 交通事故の現状 3) 交通渋滞の現状 4) これまでの事故 渋滞の取り組み 2. 事故 渋滞対策の取り組み P8 1) 事故 渋滞の特性と取り組み方針 2) これからの主な対策メニュー 3. 事故 渋滞に関する情報について P12 1. 福岡
図 1 運転者 ( 原付以上 ) の法令違反別事故件数 (2015 年 ) 出典 : 警察庁 平成 27 年度における交通事故発生状況 表 1 自動運転のレベル出典 : 自動走行ビジネス検討会資料を基に JAEF 作成 加速 ( アクセル ) の自動化 =クルーズコントロール ( アクセルペダルを踏
 の法令違反別事故件数 (2015 年 ) 出典 : 警察庁 平成 27 年度における交通事故発生状況 表 1 自動運転のレベル出典 : 自動走行ビジネス検討会資料を基に JAEF 作成 加速 ( アクセル ) の自動化 =クルーズコントロール ( アクセルペダルを踏") 自動運転の現状と課題 公益財団法人日本自動車教育振興財団理事長田利彦 今, 自動車業界で話題になっている自動運転について, 公益財団法人日本自動車教育振興財団が年 3 回 (3 月,6 月,10 月 ) 発行している Traffi- Cation 2016 No.42 に特集として発表された内容を紹介する 1. 関心の高まりを見せる自動運転 ⑴ 自動運転機能の一部はすでに実運用されている自動運転というと,
自動運転の現状と課題 公益財団法人日本自動車教育振興財団理事長田利彦 今, 自動車業界で話題になっている自動運転について, 公益財団法人日本自動車教育振興財団が年 3 回 (3 月,6 月,10 月 ) 発行している Traffi- Cation 2016 No.42 に特集として発表された内容を紹介する 1. 関心の高まりを見せる自動運転 ⑴ 自動運転機能の一部はすでに実運用されている自動運転というと,
資料 3 社会資本整備審議会道路分科会基本政策部会 先進モビリティ ( 株 ) における 自動運転技術開発の取り組み 先進モビリティ株式会社代表取締役 青木 啓二 Advanced Smart Mobility 1
 における 自動運転技術開発の取り組み 先進モビリティ株式会社代表取締役 青木 啓二 Advanced Smart Mobility 1") 資料 3 社会資本整備審議会道路分科会基本政策部会 先進モビリティ ( 株 ) における 自動運転技術開発の取り組み 先進モビリティ株式会社代表取締役 青木 啓二 Advanced Smart Mobility 1 先進モビリティ ( 株 ) における技術開発の取り組み 大型トラック隊列走行技術 ITS 関係府省 トラックドライバー不足対策のため 高速道路上での後続車無人隊列走行を実現する自動運転トラックを開発中
資料 3 社会資本整備審議会道路分科会基本政策部会 先進モビリティ ( 株 ) における 自動運転技術開発の取り組み 先進モビリティ株式会社代表取締役 青木 啓二 Advanced Smart Mobility 1 先進モビリティ ( 株 ) における技術開発の取り組み 大型トラック隊列走行技術 ITS 関係府省 トラックドライバー不足対策のため 高速道路上での後続車無人隊列走行を実現する自動運転トラックを開発中
SICE東北支部研究集会資料(2014年)
") 計測自動制御学会東北支部第 292 回研究集会 (2014.11.29) 資料番号 292-1 高速道路走行データに基づくドライバーの運転挙動の分析 Analysis of Driver Behavior Based on the Real Highway Data 山田進 *, 高橋信 *( 東北大 ) Susumu Yamada*, Makoto Takahashi* 東北大学 *Tohoku
計測自動制御学会東北支部第 292 回研究集会 (2014.11.29) 資料番号 292-1 高速道路走行データに基づくドライバーの運転挙動の分析 Analysis of Driver Behavior Based on the Real Highway Data 山田進 *, 高橋信 *( 東北大 ) Susumu Yamada*, Makoto Takahashi* 東北大学 *Tohoku
「自動運転車」に関する意識調査(アンケート調査)~「自動運転技術」に対する認知度はドイツの消費者の方が高いことが判明~_損保ジャパン日本興亜
~「自動運転技術」に対する認知度はドイツの消費者の方が高いことが判明~_損保ジャパン日本興亜") 2018 年 4 月 10 日 自動運転車 に関する意識調査 ( アンケート調査 ) ~ 自動運転技術 に対する認知度はドイツの消費者の方が高いことが判明 ~ 損害保険ジャパン日本興亜株式会社 ( 社長 : 西澤敬二 以下 損保ジャパン日本興亜 ) は 4 月 10 日の 交通事故死ゼロを目指す日 を前に 事故のない安心 安全な社会の実現 の重要な手段と考えられている自動運転技術の普及促進に向けて
2018 年 4 月 10 日 自動運転車 に関する意識調査 ( アンケート調査 ) ~ 自動運転技術 に対する認知度はドイツの消費者の方が高いことが判明 ~ 損害保険ジャパン日本興亜株式会社 ( 社長 : 西澤敬二 以下 損保ジャパン日本興亜 ) は 4 月 10 日の 交通事故死ゼロを目指す日 を前に 事故のない安心 安全な社会の実現 の重要な手段と考えられている自動運転技術の普及促進に向けて
1 基本的な整備内容 道路標識 専用通行帯 (327 の 4) の設置 ( 架空標識の場合の例 ) 自 転 車 ピクトグラム ( 自転車マーク等 ) の設置 始点部および中間部 道路標示 専用通行帯 (109 の 6) の設置 ( 過度な表示は行わない ) 専 用 道路標示 車両通行帯 (109)
 の設置 ( 架空標識の場合の例 ) 自 転 車 ピクトグラム ( 自転車マーク等 ) の設置 始点部および中間部 道路標示 専用通行帯 (109 の 6) の設置 ( 過度な表示は行わない ) 専 用 道路標示 車両通行帯 (109)") 第 3 整備ガイドライン 本章では 安全で快適な自転車利用環境創出ガイドライン ( 国土交通省道路局 警察庁交通 局 ) を踏まえ 自転車走行空間の整備にあたって留意する事項などについて定めます 3.1 単路部における整備の考え方 (1) 自転車専用通行帯自転車専用通行帯の整備にあたっては 交通規制に必要な道路標識や道路標示のほか 自動車ドライバーに対して自転車専用の通行帯であることが分かるよう法定外の路面表示や舗装のカラー化を行います
第 3 整備ガイドライン 本章では 安全で快適な自転車利用環境創出ガイドライン ( 国土交通省道路局 警察庁交通 局 ) を踏まえ 自転車走行空間の整備にあたって留意する事項などについて定めます 3.1 単路部における整備の考え方 (1) 自転車専用通行帯自転車専用通行帯の整備にあたっては 交通規制に必要な道路標識や道路標示のほか 自動車ドライバーに対して自転車専用の通行帯であることが分かるよう法定外の路面表示や舗装のカラー化を行います
Microsoft Word - 資料6(修正).docx
.docx") 運転支援機能の表示に関する規約運用の考え方 に基づく表示例 資料 6 カタログ (Webを含む) の表示例 < 表示例 1> カタログの表示例 運転支援機能に関する説明や注意喚起等の詳細を表示した上で その他の頁では スペース等の関係により 運転支援機能に関する説明や注意喚起等を全て表示できない場合の例 < 運転支援機能の内容説明 作動条件や作動しない条件等の詳細を表示した頁 > 新型 は止まるをサホ
運転支援機能の表示に関する規約運用の考え方 に基づく表示例 資料 6 カタログ (Webを含む) の表示例 < 表示例 1> カタログの表示例 運転支援機能に関する説明や注意喚起等の詳細を表示した上で その他の頁では スペース等の関係により 運転支援機能に関する説明や注意喚起等を全て表示できない場合の例 < 運転支援機能の内容説明 作動条件や作動しない条件等の詳細を表示した頁 > 新型 は止まるをサホ
<4D F736F F D AC89CA817A E63189F18E7396AF B836795F18D908F912E646F6378>
 (4) エコドライブの推進 次世代自動車の普及について このテーマでは 自動車運転免許証を持っている方のみを対象とします 次世代自動車と一般車との購入差額 問 1 電気自動車やハイブリッドカーなどの次世代自動車は 一般ガソリン車に比べ高額ですが 1 年当たり約 9~10 万円の燃料費が節約でき ( ガソリン 160 円 /L 年間約 10,000km 走行した場合 ) CO2 排出量を約半分にすることができます
(4) エコドライブの推進 次世代自動車の普及について このテーマでは 自動車運転免許証を持っている方のみを対象とします 次世代自動車と一般車との購入差額 問 1 電気自動車やハイブリッドカーなどの次世代自動車は 一般ガソリン車に比べ高額ですが 1 年当たり約 9~10 万円の燃料費が節約でき ( ガソリン 160 円 /L 年間約 10,000km 走行した場合 ) CO2 排出量を約半分にすることができます
(Microsoft Word \217\254\215\373\216q \203G\203R\203h\203\211\203C\203u\202b.doc)
") エコドライブ知識エコドライブ知識 エコドライブチェックからエコドライブの具体的運転方法 平成 24 年 3 月 エコドライブその 1 エコドライブチェックをしましょう 最近 エコドライブ という言葉を聞きませんか? なぜ 今 この言葉が聞かれるようになったのでしょうか? そもそも エコドライブ ってどういうことなのでしょうか? 地球温暖化進行の原因の1つに 自動車利用によるCO2 排出量の増加があります
エコドライブ知識エコドライブ知識 エコドライブチェックからエコドライブの具体的運転方法 平成 24 年 3 月 エコドライブその 1 エコドライブチェックをしましょう 最近 エコドライブ という言葉を聞きませんか? なぜ 今 この言葉が聞かれるようになったのでしょうか? そもそも エコドライブ ってどういうことなのでしょうか? 地球温暖化進行の原因の1つに 自動車利用によるCO2 排出量の増加があります
<4D F736F F D E817A899E977095D22D979A97F082C882B >
 Ⅴ. 過積載の危険性 本章では 過積載による危険性 運転者に対する罰則 過積載防止のための配慮事項などを整理しています 指導においては 過積載が引き起こす交通事故の実例により 運転者に危険性を認識させるとともに 過積載を防止するために 運転者だけでなく 事業者や運行管理者に何が求められているのかなども理解することが大切です 指針第 1 章 2-(5) 1. 過積載による事故要因と社会的影響 指導のねらい過積載の状態は
Ⅴ. 過積載の危険性 本章では 過積載による危険性 運転者に対する罰則 過積載防止のための配慮事項などを整理しています 指導においては 過積載が引き起こす交通事故の実例により 運転者に危険性を認識させるとともに 過積載を防止するために 運転者だけでなく 事業者や運行管理者に何が求められているのかなども理解することが大切です 指針第 1 章 2-(5) 1. 過積載による事故要因と社会的影響 指導のねらい過積載の状態は
Ⅰ. はじめに P1 Ⅱ. 交通渋滞 環境問題と ITS P2 1. 交通渋滞と環境問題の概況 P2 2. 交通渋滞のメカニズムと交通渋滞対策 P2 3. 交通渋滞対策 環境問題においてITSが果たすべき役割 P3 Ⅲ. 交通安全と ITS P4 1. 交通事故の概況 P4 2. 交通安全対策の概要
 資料 1 ITS に関するタスクフォース 報告書 ( 素案 ) 2011 年 1 月 事務局 Ⅰ. はじめに P1 Ⅱ. 交通渋滞 環境問題と ITS P2 1. 交通渋滞と環境問題の概況 P2 2. 交通渋滞のメカニズムと交通渋滞対策 P2 3. 交通渋滞対策 環境問題においてITSが果たすべき役割 P3 Ⅲ. 交通安全と ITS P4 1. 交通事故の概況 P4 2. 交通安全対策の概要 P4
資料 1 ITS に関するタスクフォース 報告書 ( 素案 ) 2011 年 1 月 事務局 Ⅰ. はじめに P1 Ⅱ. 交通渋滞 環境問題と ITS P2 1. 交通渋滞と環境問題の概況 P2 2. 交通渋滞のメカニズムと交通渋滞対策 P2 3. 交通渋滞対策 環境問題においてITSが果たすべき役割 P3 Ⅲ. 交通安全と ITS P4 1. 交通事故の概況 P4 2. 交通安全対策の概要 P4
Microsoft PowerPoint - 01.【最終版】第2回東名WG_本編資料151217
 神奈川県東名軸渋滞ボトルネック検討 WG 第 2 回資料 資料 1. 第 1 回 WG 以降の状況 平成 27 年 月 日 目次 1. 第 1 回 WG 以降の対策等の進捗 ------------------------------------------------------ P 2 2. 交通状況の変化 1) 東名本線 1 交通量 ---------------------------------------------------------------------------
神奈川県東名軸渋滞ボトルネック検討 WG 第 2 回資料 資料 1. 第 1 回 WG 以降の状況 平成 27 年 月 日 目次 1. 第 1 回 WG 以降の対策等の進捗 ------------------------------------------------------ P 2 2. 交通状況の変化 1) 東名本線 1 交通量 ---------------------------------------------------------------------------
Microsoft Word - Malleable Attentional Resources Theory.doc
 Malleable Attentional Resources Theory: A New Explanation for the Effects of Mental Underload on Performance Mark S. Young & Neville A. Santon Human Factors, Vol. 44, No. 3, pp. 365-375 (2002) Introduction
Malleable Attentional Resources Theory: A New Explanation for the Effects of Mental Underload on Performance Mark S. Young & Neville A. Santon Human Factors, Vol. 44, No. 3, pp. 365-375 (2002) Introduction
Microsoft PowerPoint - ITS_J 0704 [互換モード]
![Microsoft PowerPoint - ITS_J 0704 [互換モード]](/thumbs/101/150975539.jpg "Microsoft PowerPoint - ITS_J 0704 [互換モード]") ITS を活用した交通渋滞の緩和に向けた活動 1) 渋滞緩和に向けた実証実験 以下の方法で車列に生じるショックウェーブを解消 サグ部での渋滞発生抑制のため ドライバーに適切な運転速度 車線などを指示 路側からの情報により アダプティブ クルーズコントローズ (ACC) のセット車速 車間などを自動設定 ACC を高速化した より賢いクルマを開発 路車間通信でドライバーに情報提供 走行車線を走り続けよう
ITS を活用した交通渋滞の緩和に向けた活動 1) 渋滞緩和に向けた実証実験 以下の方法で車列に生じるショックウェーブを解消 サグ部での渋滞発生抑制のため ドライバーに適切な運転速度 車線などを指示 路側からの情報により アダプティブ クルーズコントローズ (ACC) のセット車速 車間などを自動設定 ACC を高速化した より賢いクルマを開発 路車間通信でドライバーに情報提供 走行車線を走り続けよう
高度交通システムの 研究
 高度交通システムと情報通信技術 2019/6/28 高取祐介 1 ITS( 高度交通システム ) I Intelligent( 高度 知能化 ) T Transport( 輸送 交通 ) S Systems( システム ) 情報通信技術を用いて 人やモノの移動を高度化するためのシステムの総称 交通問題の解決 利便性向上が目的事故防止 渋滞解消 環境改善など 2 ITS の要素技術 人や物が実世界で移動する
高度交通システムと情報通信技術 2019/6/28 高取祐介 1 ITS( 高度交通システム ) I Intelligent( 高度 知能化 ) T Transport( 輸送 交通 ) S Systems( システム ) 情報通信技術を用いて 人やモノの移動を高度化するためのシステムの総称 交通問題の解決 利便性向上が目的事故防止 渋滞解消 環境改善など 2 ITS の要素技術 人や物が実世界で移動する
(案)
") P13005 次世代スマートデバイス開発プロジェクト 基本計画 IoT 推進部 1. 研究開発の目的 目標 内容 (1) 研究開発の目的 1 政策的な重要性次世代交通社会の実現には 自動車の燃焼システムの環境対応に加え 急発進 急停止 渋滞等による非効率な燃料消費の改善及び人の飛び出しや走行中の急な割り込み等による衝突事故の削減など 一層の省エネ化と安全走行の高度化が重要である その実現には 自動車の周辺情報を集め即座に状況を把握するシステムの構築が必要となり
P13005 次世代スマートデバイス開発プロジェクト 基本計画 IoT 推進部 1. 研究開発の目的 目標 内容 (1) 研究開発の目的 1 政策的な重要性次世代交通社会の実現には 自動車の燃焼システムの環境対応に加え 急発進 急停止 渋滞等による非効率な燃料消費の改善及び人の飛び出しや走行中の急な割り込み等による衝突事故の削減など 一層の省エネ化と安全走行の高度化が重要である その実現には 自動車の周辺情報を集め即座に状況を把握するシステムの構築が必要となり
第 2 章横断面の構成 2-1 総則 道路の横断面の基本的な考え方 必要とされる交通機能や空間機能に応じて, 構成要素の組合せ と 総幅員 総幅員 双方の観点から検討 必要とされる道路の機能の設定 通行機能 交通機能アクセス機能 滞留機能 環境空間 防災空間 空間機能 収容空間 市街地形成 横断面構
 2-1 総則 道路の横断面の基本的な考え方 必要とされる交通機能や空間機能に応じて, 構成要素の組合せ と 総幅員 総幅員 双方の観点から検討 必要とされる道路の機能の設定 通行機能 交通機能アクセス機能 滞留機能 環境空間 防災空間 空間機能 収容空間 市街地形成 横断面構成要素とその幅員の検討ネットワークや沿道状況に応交通状況にじたサーヒ ス提供応じて設定を考慮して設定 横断面構成要素の組合せ
2-1 総則 道路の横断面の基本的な考え方 必要とされる交通機能や空間機能に応じて, 構成要素の組合せ と 総幅員 総幅員 双方の観点から検討 必要とされる道路の機能の設定 通行機能 交通機能アクセス機能 滞留機能 環境空間 防災空間 空間機能 収容空間 市街地形成 横断面構成要素とその幅員の検討ネットワークや沿道状況に応交通状況にじたサーヒ ス提供応じて設定を考慮して設定 横断面構成要素の組合せ
スライド 1
 移動体観測を活用した交通 NW の リアルタイムマネジメントに向けて : プローブカーデータを用いた動的 OD 交通量のリアルタイム推定 名古屋大学山本俊行 背景 : マルチモード経路案内システム PRONAVI 2 プローブカーデータの概要 プローブカー : タクシー 157 台 蓄積用データ収集期間 : 22 年 1 月 ~3 月,1 月 ~23 年 3 月 データ送信はイベントベース : 車両発進
移動体観測を活用した交通 NW の リアルタイムマネジメントに向けて : プローブカーデータを用いた動的 OD 交通量のリアルタイム推定 名古屋大学山本俊行 背景 : マルチモード経路案内システム PRONAVI 2 プローブカーデータの概要 プローブカー : タクシー 157 台 蓄積用データ収集期間 : 22 年 1 月 ~3 月,1 月 ~23 年 3 月 データ送信はイベントベース : 車両発進
NITAS の基本機能 1. 経路探索条件の設定 (1) 交通モードの設定 交通モードの設定 とは どのような交通手段のネットワークを用いて経路探索を行うかを設定するものです NITASの交通モードは 大きく 人流 ( 旅客移動 ) 物流( 貨物移動 ) に分かれ それぞれのネットワークを用いた経路
 交通モードの設定 交通モードの設定 とは どのような交通手段のネットワークを用いて経路探索を行うかを設定するものです NITASの交通モードは 大きく 人流 ( 旅客移動 ) 物流( 貨物移動 ) に分かれ それぞれのネットワークを用いた経路") NITAS の基本機能 1. 経路探索条件の設定 (1) 交通モードの設定 交通モードの設定 とは どのような交通手段のネットワークを用いて経路探索を行うかを設定するものです NITASの交通モードは 大きく 人流 ( 旅客移動 ) 物流( 貨物移動 ) に分かれ それぞれのネットワークを用いた経路探索を行うことができます また 道路 + 船モード 鉄道 + 航空モード 道路 + 鉄道モード では
NITAS の基本機能 1. 経路探索条件の設定 (1) 交通モードの設定 交通モードの設定 とは どのような交通手段のネットワークを用いて経路探索を行うかを設定するものです NITASの交通モードは 大きく 人流 ( 旅客移動 ) 物流( 貨物移動 ) に分かれ それぞれのネットワークを用いた経路探索を行うことができます また 道路 + 船モード 鉄道 + 航空モード 道路 + 鉄道モード では
38 39
 38 39 地図の紹介 地図の表示 案内図の表示 市街地図 ハイウェイマップ 縮尺 25 m 50 m 100 m 1 ルート案内中に都市高速 都市間高速道路 一部の有料 道路を走行すると自動的に表示されます SA PA IC JCTの名称 自車からの距離 SA PAの施設がわかり やすく表示されます SAなどの看板表示を選ぶと 選択施設詳細情報が表示 されます を選ぶと スクロールできます 選択施設詳細情報
38 39 地図の紹介 地図の表示 案内図の表示 市街地図 ハイウェイマップ 縮尺 25 m 50 m 100 m 1 ルート案内中に都市高速 都市間高速道路 一部の有料 道路を走行すると自動的に表示されます SA PA IC JCTの名称 自車からの距離 SA PAの施設がわかり やすく表示されます SAなどの看板表示を選ぶと 選択施設詳細情報が表示 されます を選ぶと スクロールできます 選択施設詳細情報
事例2_自動車用材料
 省エネルギーその 1- 自動車用材料 ( 炭素繊維複合材料 ) 1. 調査の目的自動車用材料としての炭素繊維複合材料 (CFRP) は 様々な箇所に使用されている 炭素繊維複合材料を用いることにより 従来と同じ強度 安全性を保ちつつ自動車の軽量化が可能となる CFRP 自動車は 車体の 17% に炭素繊維複合材料を使用しても 従来自動車以上の強度を発揮することができる さらに炭素繊維複合材料を使用することによって機体の重量を低減することができ
省エネルギーその 1- 自動車用材料 ( 炭素繊維複合材料 ) 1. 調査の目的自動車用材料としての炭素繊維複合材料 (CFRP) は 様々な箇所に使用されている 炭素繊維複合材料を用いることにより 従来と同じ強度 安全性を保ちつつ自動車の軽量化が可能となる CFRP 自動車は 車体の 17% に炭素繊維複合材料を使用しても 従来自動車以上の強度を発揮することができる さらに炭素繊維複合材料を使用することによって機体の重量を低減することができ
平成 30 年度 自動車局税制改正要望の概要 平成 29 年 8 月 国土交通省自動車局
 平成 30 年度 自動車局税制改正要望の概要 平成 29 年 8 月 国土交通省自動車局 平成 30 年度自動車局税制改正要望事項 1. 先進安全技術を搭載したトラック バスに係る特例措置の拡充 延長 ( 自動車重量税 自動車取得税 ) 交通事故の防止及び被害の軽減のため 衝突被害軽減ブレーキ 車両安定性制御装置を搭載したトラック バスに係る特例措置を自動車重量税について 3 年間延長する また 車線逸脱警報装置を備えたトラック
平成 30 年度 自動車局税制改正要望の概要 平成 29 年 8 月 国土交通省自動車局 平成 30 年度自動車局税制改正要望事項 1. 先進安全技術を搭載したトラック バスに係る特例措置の拡充 延長 ( 自動車重量税 自動車取得税 ) 交通事故の防止及び被害の軽減のため 衝突被害軽減ブレーキ 車両安定性制御装置を搭載したトラック バスに係る特例措置を自動車重量税について 3 年間延長する また 車線逸脱警報装置を備えたトラック
研究成果報告書
 様式 C-19 F-19 Z-19( 共通 ) 1. 研究開始当初の背景 (1) 突発渋滞発生時の交通管理における交通シミュレーション有用性都市高速道路は一般道よりも高い水準の速達性と信頼性が要求される一方で 交通事故等の 突発事象 による交通障害の影響が極めて大きい 突発渋滞の発生自体は予測困難であり その発生を即時検出したうえで それ以降の交通状況の短期的変化を 交通ミュレーションにより予測 把握することが有力な対応策の一つである
様式 C-19 F-19 Z-19( 共通 ) 1. 研究開始当初の背景 (1) 突発渋滞発生時の交通管理における交通シミュレーション有用性都市高速道路は一般道よりも高い水準の速達性と信頼性が要求される一方で 交通事故等の 突発事象 による交通障害の影響が極めて大きい 突発渋滞の発生自体は予測困難であり その発生を即時検出したうえで それ以降の交通状況の短期的変化を 交通ミュレーションにより予測 把握することが有力な対応策の一つである
<81798E9197BF FCD817A8CF092CA82DC82BF82C382AD82E88D7393AE8C7689E62E786477>
 資料 3 豊田市交通まちづくり推進協議会 豊田市交通まちづくり行動計画 (2011~2015)( 案 ) 3. 豊田市交通まちづくりビジョン 2030 平成 23 年 11 月 豊田市都市整備部交通政策課 目 次 3. 豊田市交通まちづくりビジョン2030 3.1 基本理念 1 3.2 基本目標と目指すべき姿 2 3.3 目標値の設定 3 3.1 基本理念 豊田市は ものづくりを中心とする我が国屈指の産業都市でありながら
資料 3 豊田市交通まちづくり推進協議会 豊田市交通まちづくり行動計画 (2011~2015)( 案 ) 3. 豊田市交通まちづくりビジョン 2030 平成 23 年 11 月 豊田市都市整備部交通政策課 目 次 3. 豊田市交通まちづくりビジョン2030 3.1 基本理念 1 3.2 基本目標と目指すべき姿 2 3.3 目標値の設定 3 3.1 基本理念 豊田市は ものづくりを中心とする我が国屈指の産業都市でありながら
地図情報の差分更新・自動図化 概要版
 戦略的イノベーション創造プログラム (SIP) 自動走行システム / / 大規模実証実験 / ダイナミックマップ / 地図情報の差分更新 自動図化 報告書 平成 29 年度報告 平成 30 年 3 月 31 日 三菱電機株式会社 目次 1. 研究開発の目的 2. 静的高精度 3D 地図データの自動図化 / 差分抽出技術の実用性検証 (2) 自動図化 / 差分抽出技術適用による改善効果検証 3. リアルタイム自動図化
戦略的イノベーション創造プログラム (SIP) 自動走行システム / / 大規模実証実験 / ダイナミックマップ / 地図情報の差分更新 自動図化 報告書 平成 29 年度報告 平成 30 年 3 月 31 日 三菱電機株式会社 目次 1. 研究開発の目的 2. 静的高精度 3D 地図データの自動図化 / 差分抽出技術の実用性検証 (2) 自動図化 / 差分抽出技術適用による改善効果検証 3. リアルタイム自動図化
HDMI 機器を使う 本機にポータブルビデオなどの外部映像機器を接続すると その映像を本機の AV ソース (HDMI) として見ることができます 本機に外部映像機器を接続するには 別売の HDMI 入力ケーブルと市販の HDMIケーブルが必要です 映像入力の設定をする 1 を押し 設定 編集 -
 として見ることができます 本機に外部映像機器を接続するには 別売の HDMI 入力ケーブルと市販の HDMIケーブルが必要です 映像入力の設定をする 1 を押し 設定 編集 -") AUX を使う (MP313D-W のみ ) 本機正面の AUX 端子にポータブルオーディオプレーヤーなどの外部音声機器を接続すると その音声を本機の AV ソース (AUX) として聞くことができます 本機正面の AUX 端子に外部機器を接続するには 別売の音声ケーブル (φ3.5 mmステレオ音声用 ) が必要です 外部機器の音声を聞く 1 音声ケーブル (3.5φ) を本機の AUX 端子に接続する
AUX を使う (MP313D-W のみ ) 本機正面の AUX 端子にポータブルオーディオプレーヤーなどの外部音声機器を接続すると その音声を本機の AV ソース (AUX) として聞くことができます 本機正面の AUX 端子に外部機器を接続するには 別売の音声ケーブル (φ3.5 mmステレオ音声用 ) が必要です 外部機器の音声を聞く 1 音声ケーブル (3.5φ) を本機の AUX 端子に接続する
資料 1-6 ITS に関するタスクフォース 報告書 平成 23 年 3 月
 資料 1-6 ITS に関するタスクフォース 報告書 平成 23 年 3 月 目次 Ⅰ. はじめに 1 Ⅱ. 交通渋滞 環境問題とITS 2 1. 交通渋滞と環境問題の概況 2 2. 交通渋滞のメカニズムと交通渋滞対策の現況 2 3. 交通渋滞対策 環境問題においてITSが果たすべき役割 3 Ⅲ. 交通安全とITS 5 1. 交通事故の概況 5 2. 交通安全対策の現況 5 3. 交通安全対策においてITSが果たすべき役割
資料 1-6 ITS に関するタスクフォース 報告書 平成 23 年 3 月 目次 Ⅰ. はじめに 1 Ⅱ. 交通渋滞 環境問題とITS 2 1. 交通渋滞と環境問題の概況 2 2. 交通渋滞のメカニズムと交通渋滞対策の現況 2 3. 交通渋滞対策 環境問題においてITSが果たすべき役割 3 Ⅲ. 交通安全とITS 5 1. 交通事故の概況 5 2. 交通安全対策の現況 5 3. 交通安全対策においてITSが果たすべき役割
平成 28 年度第 2 回車両安全対策検討会平成 28 年 12 月 9 日 安全 - 資料 9 自動運転に係る国際基準の検討状況
 平成 28 年度第 2 回車両安全対策検討会平成 28 年 12 月 9 日 安全 - 資料 9 自動運転に係る国際基準の検討状況 自動運転の導入を巡る国際的動向 国連欧州経済委員会 (UN-ECE) の政府間会合 (WP29) において自動車の安全 環境基準に関する国際調和活動を実施しているところ 平成 26 年 11 月に開催された WP29 において 自動運転について議論する 自動運転分科会
平成 28 年度第 2 回車両安全対策検討会平成 28 年 12 月 9 日 安全 - 資料 9 自動運転に係る国際基準の検討状況 自動運転の導入を巡る国際的動向 国連欧州経済委員会 (UN-ECE) の政府間会合 (WP29) において自動車の安全 環境基準に関する国際調和活動を実施しているところ 平成 26 年 11 月に開催された WP29 において 自動運転について議論する 自動運転分科会
スマートICの事業費の基準について
 資料 2 高速道路における安全 安心計画の 構成について 委員からの主な意見 (R1.5.30 国幹部会 ) 安全 安心計画全体の守備範囲を明確にすべき 安全 安心が誰にとってのものなのかを整理すべき 安全 安心の実現に向けて 道路が担うべき部分とそれ以外の部分 ( 車両 働き方の規制 ) とを分けて考えるべき 基本計画 ( 大枠の方針 ) は 国が中心となり 実際に事業を行う会社の 意見を聞きつつ
資料 2 高速道路における安全 安心計画の 構成について 委員からの主な意見 (R1.5.30 国幹部会 ) 安全 安心計画全体の守備範囲を明確にすべき 安全 安心が誰にとってのものなのかを整理すべき 安全 安心の実現に向けて 道路が担うべき部分とそれ以外の部分 ( 車両 働き方の規制 ) とを分けて考えるべき 基本計画 ( 大枠の方針 ) は 国が中心となり 実際に事業を行う会社の 意見を聞きつつ
<4D F736F F F696E74202D E838B93B E907D8BA689EF82CC8EE E B8CDD8AB B83685D>
 東大 CSISi/ITS Japan シンポジウム Ⅱ. 次世代デジタル道路情報に関するセッション デジタル道路地図協会における取組 Ⅰ. Ⅰ. 高度 DRM-DBの検討 Ⅱ. 方式テーブルの概要 2010 年 7 月 27 日 ( 財 ) 日本デジタル道路地図協会 1 検討内容 2 検討会のねらいと検討経緯 高度デジタル道路情報対応検討会 を開催 (H19 年度 ~) して検討 1 自動車 / カーナビの
東大 CSISi/ITS Japan シンポジウム Ⅱ. 次世代デジタル道路情報に関するセッション デジタル道路地図協会における取組 Ⅰ. Ⅰ. 高度 DRM-DBの検討 Ⅱ. 方式テーブルの概要 2010 年 7 月 27 日 ( 財 ) 日本デジタル道路地図協会 1 検討内容 2 検討会のねらいと検討経緯 高度デジタル道路情報対応検討会 を開催 (H19 年度 ~) して検討 1 自動車 / カーナビの
ダイナミックマップ車線毎の交通情報提供等の仕様に関する調査 概要版
 戦略的イノベーション創造プログラム (SIP) 自動走行システム / 大規模実証実験 ダイナミックマップ車線毎の交通情報提供等の仕様に関する調査 報告書 次世代インフラ事業本部 2018 年 3 月 31 日 Copyright (C) Mitsubishi Research Institute, Inc. 調査内容 ダイナミックマップを活用した自動走行技術の実用化とそれに向けた技術的課題の明確化に向けて
戦略的イノベーション創造プログラム (SIP) 自動走行システム / 大規模実証実験 ダイナミックマップ車線毎の交通情報提供等の仕様に関する調査 報告書 次世代インフラ事業本部 2018 年 3 月 31 日 Copyright (C) Mitsubishi Research Institute, Inc. 調査内容 ダイナミックマップを活用した自動走行技術の実用化とそれに向けた技術的課題の明確化に向けて
ひっかけ問題 ( 緊急対策ゼミ ) ステップ A B C D 39.4% 学科試験パーフェクト分析から ひっかけ問題 に重点をおいた特別ゼミ! 2 段階 出題頻度 39.4% D ゼミ / 内容 *(2 段階 24.07%+ 安知 15.28%=39.4
 ステップ A B C D 39.4% 学科試験パーフェクト分析から ひっかけ問題 に重点をおいた特別ゼミ! 2 段階 出題頻度 39.4% D ゼミ / 内容 *(2 段階 24.07%+ 安知 15.28%=39.4") ひっかけ問題 ( 緊急対策ゼミ ) ステップ A B C D 39.4% http://www.derutoko.kp 学科試験パーフェクト分析から ひっかけ問題 に重点をおいた特別ゼミ! 2 段階 出題頻度 39.4% D ゼミ / 内容 *(2 段階 24.07%+ 安知 15.28%=39.4%) 16 経路の設計 0.19%( 予想出題数 0~1 問 ) 17 高速道路での運転 8.33%(
ひっかけ問題 ( 緊急対策ゼミ ) ステップ A B C D 39.4% http://www.derutoko.kp 学科試験パーフェクト分析から ひっかけ問題 に重点をおいた特別ゼミ! 2 段階 出題頻度 39.4% D ゼミ / 内容 *(2 段階 24.07%+ 安知 15.28%=39.4%) 16 経路の設計 0.19%( 予想出題数 0~1 問 ) 17 高速道路での運転 8.33%(
<4D F736F F F696E74202D CA48B8694AD955C89EF81698EA993AE895E935D816A90E79774>
 平成 28 年度高速道路調査会研究発表会 高速道路における自動運転に関する研究 ( 平成 27 年度の活動 ) 公益財団法人高速道路調査会 研究部千葉早苗 本日の発表 1. 研究の概要 高速道路における自動運転に関する研究 2. 研究の検討内容 (1) 自動運転に関する国内動向 (2) 高速道路における安全運転支援システムの効果 (3) 高速道路における自動走行システム ( レベル3) を早期に実現するための課題と対応
平成 28 年度高速道路調査会研究発表会 高速道路における自動運転に関する研究 ( 平成 27 年度の活動 ) 公益財団法人高速道路調査会 研究部千葉早苗 本日の発表 1. 研究の概要 高速道路における自動運転に関する研究 2. 研究の検討内容 (1) 自動運転に関する国内動向 (2) 高速道路における安全運転支援システムの効果 (3) 高速道路における自動走行システム ( レベル3) を早期に実現するための課題と対応
【生産性革命プロジェクト】 産業界における気象情報利活用
 クルマの ICT 革命 ~ 自動運転 社会実装 ~ 自動運転技術の実用化により 安全性の向上 運送効率の向上 新たな交通サービスの創出等が図られ 大幅な生産性向上に資する可能性 これらの実現に向けて ルールの整備やシステムの実証を進める 政策課題 交通事故の 96% は運転者に起因 法令違反別死亡事故発生件数 (H25 年 ) トラックの隊列走行 運転者の法令違反 96% 将来ビジョンと実用化に向けた課題
クルマの ICT 革命 ~ 自動運転 社会実装 ~ 自動運転技術の実用化により 安全性の向上 運送効率の向上 新たな交通サービスの創出等が図られ 大幅な生産性向上に資する可能性 これらの実現に向けて ルールの整備やシステムの実証を進める 政策課題 交通事故の 96% は運転者に起因 法令違反別死亡事故発生件数 (H25 年 ) トラックの隊列走行 運転者の法令違反 96% 将来ビジョンと実用化に向けた課題
と案 目的地を探したら ルートを設定します ルートが設定されると案内がはじまりますので ルート案内にしたがって走行してください 検索した地点を確認 設定する 52 現在の条件でルートを探索する 52 ルートの確認や設定をする 52 検索した地点の位置を修正する 53 検索した地点をルート上に追加する
 と案 目的地を探したら ルートを設定します ルートが設定されると案内がはじまりますので ルート案内にしたがって走行してください 検索した地点を確認 設定する 52 現在の条件でルートを探索する 52 ルートの確認や設定をする 52 検索した地点の位置を修正する 53 検索した地点をルート上に追加する 53 検索した地点を本機に登録する 53 検索した地点周辺の駐車場を探す 53 検索した地点の施設情報を表示する
と案 目的地を探したら ルートを設定します ルートが設定されると案内がはじまりますので ルート案内にしたがって走行してください 検索した地点を確認 設定する 52 現在の条件でルートを探索する 52 ルートの確認や設定をする 52 検索した地点の位置を修正する 53 検索した地点をルート上に追加する 53 検索した地点を本機に登録する 53 検索した地点周辺の駐車場を探す 53 検索した地点の施設情報を表示する
Microsoft PowerPoint - 1.プロセス制御の概要.pptx
 プロセス制御工学 1. プロセス制御の概要 京都大学 加納学 Division of Process Control & Process Systems Engineering Department of Chemical Engineering, Kyoto University manabu@cheme.kyoto-u.ac.jp http://www-pse.cheme.kyoto-u.ac.jp/~kano/
プロセス制御工学 1. プロセス制御の概要 京都大学 加納学 Division of Process Control & Process Systems Engineering Department of Chemical Engineering, Kyoto University manabu@cheme.kyoto-u.ac.jp http://www-pse.cheme.kyoto-u.ac.jp/~kano/
目次 1 1. 奈良市中心部の道路交通環境 1) 広域的な自転車利用ネットワーク P2 2) 幹線道路の交通状況 ( 交通量 ) P3 3) 幹線道路の交通状況 ( 混雑状況 ) P4 2. 自転車事故の分析結果 1) 道路種別別 ( 国道 県道 市道 ) 自転車事故発生状況 P5 2) 自動車交通
 広域的な自転車利用ネットワーク P2 2) 幹線道路の交通状況 ( 交通量 ) P3 3) 幹線道路の交通状況 ( 混雑状況 ) P4 2. 自転車事故の分析結果 1) 道路種別別 ( 国道 県道 市道 ) 自転車事故発生状況 P5 2) 自動車交通") 資料 -2 奈良中心部奈良中心部奈良中心部奈良中心部の交通特性交通特性交通特性交通特性の分析分析分析分析奈良中心部奈良中心部奈良中心部奈良中心部の交通特性交通特性交通特性交通特性の分析分析分析分析 奈良中心部奈良中心部奈良中心部奈良中心部の道路交通環境道路交通環境道路交通環境道路交通環境 奈良中心部奈良中心部奈良中心部奈良中心部の道路交通環境道路交通環境道路交通環境道路交通環境 自転車事故自転車事故自転車事故自転車事故の分析結果分析結果分析結果分析結果
資料 -2 奈良中心部奈良中心部奈良中心部奈良中心部の交通特性交通特性交通特性交通特性の分析分析分析分析奈良中心部奈良中心部奈良中心部奈良中心部の交通特性交通特性交通特性交通特性の分析分析分析分析 奈良中心部奈良中心部奈良中心部奈良中心部の道路交通環境道路交通環境道路交通環境道路交通環境 奈良中心部奈良中心部奈良中心部奈良中心部の道路交通環境道路交通環境道路交通環境道路交通環境 自転車事故自転車事故自転車事故自転車事故の分析結果分析結果分析結果分析結果
PowerPoint プレゼンテーション
 2015.06.22 第 48 回まちべん資料 PHV の電費 燃費に影響を与える要因 ( 公財 ) 豊田都市交通研究所研究員楊甲 本日の流れ 1. 豊田市で PHV の普及に向けた取り組み 2. PHV の実電費 実燃費を把握する必要性 3. PHV の実電費 実燃費に影響を与える要因分析 4. 実電費 実燃費に基づく PHV の導入効果分析 2 PHV とは? PHV の仕組み 1 外部電源から充電できるタイプのハイブリッド自動車
2015.06.22 第 48 回まちべん資料 PHV の電費 燃費に影響を与える要因 ( 公財 ) 豊田都市交通研究所研究員楊甲 本日の流れ 1. 豊田市で PHV の普及に向けた取り組み 2. PHV の実電費 実燃費を把握する必要性 3. PHV の実電費 実燃費に影響を与える要因分析 4. 実電費 実燃費に基づく PHV の導入効果分析 2 PHV とは? PHV の仕組み 1 外部電源から充電できるタイプのハイブリッド自動車
初任運転者に対する指導内容 ( 座学 ) 菰野東部交通株式会社 指導教育の内容 事業用自動車の安全な運転に関する基本的事項 道路運送法その他の法令に基づき運転者が遵守すべき事項及び交通ルール等を理解させるとともに 事業用自動車を安全に運転するための基本的な心構えをしゅうとくさせる ( 事業用自動車に
 菰野東部交通株式会社 指導教育の内容 事業用自動車の安全な運転に関する基本的事項 道路運送法その他の法令に基づき運転者が遵守すべき事項及び交通ルール等を理解させるとともに 事業用自動車を安全に運転するための基本的な心構えをしゅうとくさせる ( 事業用自動車に") 初任運転者に対する指導内容 ( 座学 ) 事業用自動車の安全な運転に関する基本的事項 道路運送法その他の法令に基づき運転者が遵守すべき事項及び交通ルール等を理解させるとともに 事業用自動車を安全に運転するための基本的な心構えをしゅうとくさせる ( 事業用自動車による交通事故の統計を説明するなどして社会的影響を理解させる ) 事業用自動車の構造上の特性と日常点検の方法 事業用自動車の基本的な構造及び装置の概要及び車高
初任運転者に対する指導内容 ( 座学 ) 事業用自動車の安全な運転に関する基本的事項 道路運送法その他の法令に基づき運転者が遵守すべき事項及び交通ルール等を理解させるとともに 事業用自動車を安全に運転するための基本的な心構えをしゅうとくさせる ( 事業用自動車による交通事故の統計を説明するなどして社会的影響を理解させる ) 事業用自動車の構造上の特性と日常点検の方法 事業用自動車の基本的な構造及び装置の概要及び車高
PowerPoint Presentation
 2016.10.5 CEATEC IEICE 特別シンポジウム講演 5. 次世代交通 運輸システムにおける 通信の役割 電気通信大学 先端ワイヤレス コミュニケーション研究センター 山尾泰 目次 1. 自動走行の必要性と達成レベル 2. 国を中心とした取り組み 3. 自動走行のシステムモデル - ドライバーの視点 vs. 交通の視点 - 4. 自動走行における通信の役割と要求条件 - ブロードキャスト型通信とユニキャスト型通信
2016.10.5 CEATEC IEICE 特別シンポジウム講演 5. 次世代交通 運輸システムにおける 通信の役割 電気通信大学 先端ワイヤレス コミュニケーション研究センター 山尾泰 目次 1. 自動走行の必要性と達成レベル 2. 国を中心とした取り組み 3. 自動走行のシステムモデル - ドライバーの視点 vs. 交通の視点 - 4. 自動走行における通信の役割と要求条件 - ブロードキャスト型通信とユニキャスト型通信
<4D F736F F D D88C7689E68A F8C6F8DCF8CF889CA32>
 都市高速道路交通管制システム整備に係る新たな評価指標算定方法 小澤友記子 1 前川和彦 2 萩原武司 3 鈴木健太郎 4 大藤武彦 5 1 正会員交通システム研究所 ( 532-0011 大阪府大阪市淀川区西中島 7 丁目 1-20) E-mail: ozawa@tss-lab.com 2 正会員阪神高速道路株式会社保全交通部システム技術課 3 正会員阪神高速道路株式会社保全交通部システム技術課 4
都市高速道路交通管制システム整備に係る新たな評価指標算定方法 小澤友記子 1 前川和彦 2 萩原武司 3 鈴木健太郎 4 大藤武彦 5 1 正会員交通システム研究所 ( 532-0011 大阪府大阪市淀川区西中島 7 丁目 1-20) E-mail: ozawa@tss-lab.com 2 正会員阪神高速道路株式会社保全交通部システム技術課 3 正会員阪神高速道路株式会社保全交通部システム技術課 4
<4D F736F F F696E74202D E096BE8E9197BF816982A8967E8A8488F8816A>
 渋滞回滞箇所数高速道路本線の対策強化 ( 案 ) ゴールデンウィークは 都市部の渋滞回数は減少したが 地方部の渋滞回数が約 2 倍以上に増加 ( 図 1) また 既存の渋滞箇所ではなく 新たな箇所での渋滞が 全体箇所数の約 3 割を占める ( 図 2) 45 4 35 3 25 2 15 5 地方部大都市部 渋344 14 74 63 H2 GW 図 1 地域別の渋滞発生回数 (1km 以上 ) 図
渋滞回滞箇所数高速道路本線の対策強化 ( 案 ) ゴールデンウィークは 都市部の渋滞回数は減少したが 地方部の渋滞回数が約 2 倍以上に増加 ( 図 1) また 既存の渋滞箇所ではなく 新たな箇所での渋滞が 全体箇所数の約 3 割を占める ( 図 2) 45 4 35 3 25 2 15 5 地方部大都市部 渋344 14 74 63 H2 GW 図 1 地域別の渋滞発生回数 (1km 以上 ) 図
Microsoft PowerPoint - day1-l05.pptx
 自動運転の実現に向けた 警察の取組について 平成 30 年 11 月 14 日警察庁交通局交通企画課自動運転企画室長杉俊弘 概 要 1 日本における交通事故の発生状況等 2 自動運転の概要と制度整備大綱 3 自動運転の実現に向けた警察の取組 1 日本における交通事故の発生状況 ( 人 ) 7,000 6,000 5,000 4,000 3,000 2,000 1,000 0 平成 6,415 5,796
自動運転の実現に向けた 警察の取組について 平成 30 年 11 月 14 日警察庁交通局交通企画課自動運転企画室長杉俊弘 概 要 1 日本における交通事故の発生状況等 2 自動運転の概要と制度整備大綱 3 自動運転の実現に向けた警察の取組 1 日本における交通事故の発生状況 ( 人 ) 7,000 6,000 5,000 4,000 3,000 2,000 1,000 0 平成 6,415 5,796
LEXUS Apps エージェント + マニュアル 2014/08/01 作成 2018/07/19 更新 1. エージェント + とは 基本的な使い方 お好み情報の学習 生活圏内 / 生活圏外について プライバシーモードについて
 LEXUS Apps エージェント + マニュアル 2014/08/01 作成 2018/07/19 更新 1. エージェント + とは...2 2. 基本的な使い方...2 3. お好み情報の学習...3 4. 生活圏内 / 生活圏外について...3 5. プライバシーモードについて...3 6. ご利用開始直後の配信情報について...4 7. ナビ設定時の動きについて...5 8. 情報の配信内容...5
LEXUS Apps エージェント + マニュアル 2014/08/01 作成 2018/07/19 更新 1. エージェント + とは...2 2. 基本的な使い方...2 3. お好み情報の学習...3 4. 生活圏内 / 生活圏外について...3 5. プライバシーモードについて...3 6. ご利用開始直後の配信情報について...4 7. ナビ設定時の動きについて...5 8. 情報の配信内容...5
SIP 自動走行システムの概要 1 < 実施体制 > 総合科学技術 イノベーション会議 (CSTI) ガバニングボード PD( プログラムディレクター ) ( 内閣府に課題ごとに置く ) 課題ごとに以下の体制を整備 推進委員会 PD( 議長 ) 担当有識者議員 内閣府 関係省庁 外部専門家 関係省庁
 ガバニングボード PD( プログラムディレクター ) ( 内閣府に課題ごとに置く ) 課題ごとに以下の体制を整備 推進委員会 PD( 議長 ) 担当有識者議員 内閣府 関係省庁 外部専門家 関係省庁") 戦略的イノベーション創造プログラム (SIP) 自動走行システム研究開発の取組状況 内閣府 政策統括官 ( 科学技術 イノベーション担当 ) SIP 自動走行システムの概要 1 < 実施体制 > 総合科学技術 イノベーション会議 (CSTI) ガバニングボード PD( プログラムディレクター ) ( 内閣府に課題ごとに置く ) 課題ごとに以下の体制を整備 推進委員会 PD( 議長 ) 担当有識者議員
戦略的イノベーション創造プログラム (SIP) 自動走行システム研究開発の取組状況 内閣府 政策統括官 ( 科学技術 イノベーション担当 ) SIP 自動走行システムの概要 1 < 実施体制 > 総合科学技術 イノベーション会議 (CSTI) ガバニングボード PD( プログラムディレクター ) ( 内閣府に課題ごとに置く ) 課題ごとに以下の体制を整備 推進委員会 PD( 議長 ) 担当有識者議員
<4D F736F F D F91E F18CF092CA8D488A778CA48B8694AD955C89EF8CB48D F295F66696E8DB791D682A672322E646F63>
 高速道路サグ部渋滞対策に資する ACC の将来性能と渋滞緩和効果 Impact Assessment of Future Performance of Adaptive Cruise Control for Congestion Mitigation at Expressway Sag Sections 鈴木一史 1, 山田康右 2, 堀口良太 3 4, 岩武宏一 Kazufumi SUZUKI 1,
高速道路サグ部渋滞対策に資する ACC の将来性能と渋滞緩和効果 Impact Assessment of Future Performance of Adaptive Cruise Control for Congestion Mitigation at Expressway Sag Sections 鈴木一史 1, 山田康右 2, 堀口良太 3 4, 岩武宏一 Kazufumi SUZUKI 1,
2-2 需要予測モデルの全体構造交通需要予測の方法としては,1950 年代より四段階推定法が開発され, 広く実務的に適用されてきた 四段階推定法とは, 以下の4つの手順によって交通需要を予測する方法である 四段階推定法将来人口を出発点に, 1 発生集中交通量 ( 交通が, どこで発生し, どこへ集中
 資料 2 2 需要予測 2-1 需要予測モデルの構築地下鉄などの将来の交通需要の見通しを検討するに当たっては パーソントリップ調査をベースとした交通需要予測手法が一般的に行われている その代表的なものとしては 国土交通省では 近畿圏における望ましい交通のあり方について ( 近畿地方交通審議会答申第 8 号 ) ( 以下 8 号答申 と略す ) などにおいて 交通需要予測手法についても検討が行われ これを用いて提案路線の検討が行われている
資料 2 2 需要予測 2-1 需要予測モデルの構築地下鉄などの将来の交通需要の見通しを検討するに当たっては パーソントリップ調査をベースとした交通需要予測手法が一般的に行われている その代表的なものとしては 国土交通省では 近畿圏における望ましい交通のあり方について ( 近畿地方交通審議会答申第 8 号 ) ( 以下 8 号答申 と略す ) などにおいて 交通需要予測手法についても検討が行われ これを用いて提案路線の検討が行われている
<4D F736F F F696E74202D208D8291AC93B CC8F6191D891CE8DF482C982C282A282C481698B408D5C8D EF A>
 高速道路における 効果的な渋滞対策について ( 抜粋 ) 2010 年 10 月 1 日 ( 財 ) 高速道路調査会 研究部道路交通担当部長 シン 邢健 ジャン 1 欧米先進国渋滞対策の最新の取り組み Traffic Management 既存施設の有効活用 +Traffic Control (Managed Lanes) 交通状況に応じた動的速度規制同時運用がより効果的 独, 英, 仏, 蘭 路肩運用交通容量
高速道路における 効果的な渋滞対策について ( 抜粋 ) 2010 年 10 月 1 日 ( 財 ) 高速道路調査会 研究部道路交通担当部長 シン 邢健 ジャン 1 欧米先進国渋滞対策の最新の取り組み Traffic Management 既存施設の有効活用 +Traffic Control (Managed Lanes) 交通状況に応じた動的速度規制同時運用がより効果的 独, 英, 仏, 蘭 路肩運用交通容量
PowerPoint プレゼンテーション
 エージェントベースドシミュレーションによる店舗内回遊モデル構築に関する研究 大阪府立大学 現代システム科学域 知識情報システム学類石丸悠太郎 指導教員 森田裕之 背景 顧客の店舗内回遊シミュレーションは 店舗内でのプロモーションや商品配置の影響を実施する前に結果を予測することが可能となるため 実施前に効果を確認することでコストや時間を削減することができる 従来は 購買履歴やアンケート結果を用いたモデルを行わざるを得なかったため
エージェントベースドシミュレーションによる店舗内回遊モデル構築に関する研究 大阪府立大学 現代システム科学域 知識情報システム学類石丸悠太郎 指導教員 森田裕之 背景 顧客の店舗内回遊シミュレーションは 店舗内でのプロモーションや商品配置の影響を実施する前に結果を予測することが可能となるため 実施前に効果を確認することでコストや時間を削減することができる 従来は 購買履歴やアンケート結果を用いたモデルを行わざるを得なかったため
Microsoft PowerPoint - 【資料9-2】春日伸予委員提出資料
 資料 10-1 高齢ドライバの事故防止対策案 芝浦工大春日伸予 基本課題高齢者の運転の安全性や安全運転意識を高める技術や教育, 環境を充実させる 一方で, 基準となる検査の結果, 運転の停止が望ましいと判断されたドライバが, 安心して速やかに免許返納を出来る体制と環境を整備する ドライバ自身の判断による自主返納もスムースに出来る体制を整備する 重要項目 1. 運転免許を返納するドライバへの対応返納後,
資料 10-1 高齢ドライバの事故防止対策案 芝浦工大春日伸予 基本課題高齢者の運転の安全性や安全運転意識を高める技術や教育, 環境を充実させる 一方で, 基準となる検査の結果, 運転の停止が望ましいと判断されたドライバが, 安心して速やかに免許返納を出来る体制と環境を整備する ドライバ自身の判断による自主返納もスムースに出来る体制を整備する 重要項目 1. 運転免許を返納するドライバへの対応返納後,
PowerPoint プレゼンテーション
 インフラ協調システムのための 新メディア通信システム 2007 年 3 月 15 日 ( 木 ) トヨタ自動車株式会社 IT ITS 企画部秋山由和 1/29 インフラ協調システムのための新メディア通信システム 1. 交通事故削減のために 2. インフラ協調システムとは 3. インフラ協調システムの導入に向けて 4. 将来の通信メディアの方向 2/29 1 交通事故削減のために 1.1 持続可能なモビリティ社会の実現に向けて
インフラ協調システムのための 新メディア通信システム 2007 年 3 月 15 日 ( 木 ) トヨタ自動車株式会社 IT ITS 企画部秋山由和 1/29 インフラ協調システムのための新メディア通信システム 1. 交通事故削減のために 2. インフラ協調システムとは 3. インフラ協調システムの導入に向けて 4. 将来の通信メディアの方向 2/29 1 交通事故削減のために 1.1 持続可能なモビリティ社会の実現に向けて
1. 調査の背景 目的 (1) 本調査の背景 1 自動運転システムに関する技術開発が日進月歩で進化する中 自動運転システムの機能や性能限界等に関する消費者の認識状況 自動運転システムの普及に必要な社会的受容性への正しい理解等 解消すべき不安 ( リスク ) についての事前調査および議論がまだ広範かつ
 本調査の背景 1 自動運転システムに関する技術開発が日進月歩で進化する中 自動運転システムの機能や性能限界等に関する消費者の認識状況 自動運転システムの普及に必要な社会的受容性への正しい理解等 解消すべき不安 ( リスク ) についての事前調査および議論がまだ広範かつ") 自動走行システムの社会的受容性等に関する調査結果 ( 概要 ) について (2017 年度版 ) 2017 年 11 月 9 日 1. 調査の背景 目的 (1) 本調査の背景 1 自動運転システムに関する技術開発が日進月歩で進化する中 自動運転システムの機能や性能限界等に関する消費者の認識状況 自動運転システムの普及に必要な社会的受容性への正しい理解等 解消すべき不安 ( リスク ) についての事前調査および議論がまだ広範かつ十分に深まっているとまでは言えないと考えたことから
自動走行システムの社会的受容性等に関する調査結果 ( 概要 ) について (2017 年度版 ) 2017 年 11 月 9 日 1. 調査の背景 目的 (1) 本調査の背景 1 自動運転システムに関する技術開発が日進月歩で進化する中 自動運転システムの機能や性能限界等に関する消費者の認識状況 自動運転システムの普及に必要な社会的受容性への正しい理解等 解消すべき不安 ( リスク ) についての事前調査および議論がまだ広範かつ十分に深まっているとまでは言えないと考えたことから
<4D F736F F D205B8A6D92E894C55D8E528C6093B9838A836A B B8D488E96928B96E B18ED490FC8B4B90A72E646F6378>
 平成 31 年 3 月 18 日東日本高速道路株式会社東北支社山形管理事務所 ~ 老朽化した高速道路を長期に安心してご利用いただけるための取り組み ~ E48 山形自動車道関沢 IC 笹谷 IC 間 ( 上り線 ) リニューアル工事による昼夜連続車線規制 ( 平日のみ ) を実施 NEXCO 東日本山形管理事務所 ( 山形県山形市 ) は E48 山形自動車道関沢インターチェンジ (IC) 笹谷 IC
平成 31 年 3 月 18 日東日本高速道路株式会社東北支社山形管理事務所 ~ 老朽化した高速道路を長期に安心してご利用いただけるための取り組み ~ E48 山形自動車道関沢 IC 笹谷 IC 間 ( 上り線 ) リニューアル工事による昼夜連続車線規制 ( 平日のみ ) を実施 NEXCO 東日本山形管理事務所 ( 山形県山形市 ) は E48 山形自動車道関沢インターチェンジ (IC) 笹谷 IC
トヨタ 日産 ホンダ 装置名称 歩行者検知機能付 プリクラッシュセーフティシステム ( 衝突回避支援型 ) プリクラッシュセーフティシステム ( 歩行者検知機能付衝突回避支援型 ) エマージンシーブレーキシステム エマージンシーブレーキシステム エマージンシーブレーキシステム シティブレーキアクティ
 プリクラッシュセーフティシステム ( 歩行者検知機能付衝突回避支援型 ) エマージンシーブレーキシステム エマージンシーブレーキシステム エマージンシーブレーキシステム シティブレーキアクティ") 平成 28 年度第 2 回車両安全対策検討会平成 28 年 12 月 9 日 安全 - 資料 4 高齢運転者による交通事故防止対策について 1. 背景 本年 10 月 横浜市において 87 歳の高齢者が運転する軽トラックが集団登校中の小学生の列に突っ込み 小学生 1 名が死亡するなど 高齢運転者による交通事故が相次いでいる このため 11 月 15 日 政府は 高齢運転者による交通事故防止対策に関する関係閣僚会議
平成 28 年度第 2 回車両安全対策検討会平成 28 年 12 月 9 日 安全 - 資料 4 高齢運転者による交通事故防止対策について 1. 背景 本年 10 月 横浜市において 87 歳の高齢者が運転する軽トラックが集団登校中の小学生の列に突っ込み 小学生 1 名が死亡するなど 高齢運転者による交通事故が相次いでいる このため 11 月 15 日 政府は 高齢運転者による交通事故防止対策に関する関係閣僚会議
選定技術の テーマ Ⅰ ウェッジハンプ 舗装面にくさび型の非対称の段差 ( ウェッジハンプ ) を設置し 走行時の衝撃により逆走車両に注意喚起するもの 全景 設置イメージ図 逆走車両に衝撃で注意喚起を行い 順行車両には走行に支障の無い形状としている 段差部分には超高強度繊維補強コンクリートを使用し
 を設置し 走行時の衝撃により逆走車両に注意喚起するもの 全景 設置イメージ図 逆走車両に衝撃で注意喚起を行い 順行車両には走行に支障の無い形状としている 段差部分には超高強度繊維補強コンクリートを使用し") 選定技術の 資料 5-3 選定技術の テーマ Ⅰ ウェッジハンプ 舗装面にくさび型の非対称の段差 ( ウェッジハンプ ) を設置し 走行時の衝撃により逆走車両に注意喚起するもの 全景 設置イメージ図 逆走車両に衝撃で注意喚起を行い 順行車両には走行に支障の無い形状としている 段差部分には超高強度繊維補強コンクリートを使用し 大型車が走行しても衝突に十分な強度有している 2 選定技術の テーマ Ⅰ 防眩板応用注意喚起
選定技術の 資料 5-3 選定技術の テーマ Ⅰ ウェッジハンプ 舗装面にくさび型の非対称の段差 ( ウェッジハンプ ) を設置し 走行時の衝撃により逆走車両に注意喚起するもの 全景 設置イメージ図 逆走車両に衝撃で注意喚起を行い 順行車両には走行に支障の無い形状としている 段差部分には超高強度繊維補強コンクリートを使用し 大型車が走行しても衝突に十分な強度有している 2 選定技術の テーマ Ⅰ 防眩板応用注意喚起
Microsoft PowerPoint - 口頭発表_折り畳み自転車
 1 公道走行を再現した振動試験による折り畳み自転車の破損状況 ~ 公道での繰り返し走行を再現した結果 ~ 2 公道走行を想定した試験用路面について 九州支所製品安全技術課清水寛治 目次 1. 折り畳み自転車のフレームはどのように破損するのか公道の走行振動を再現する自転車用ロードシミュレータについて繰り返し走行を想定した折り畳み自転車の破損部の特徴 ~ 公道による振動を繰り返し再現した結果 ~ 2.
1 公道走行を再現した振動試験による折り畳み自転車の破損状況 ~ 公道での繰り返し走行を再現した結果 ~ 2 公道走行を想定した試験用路面について 九州支所製品安全技術課清水寛治 目次 1. 折り畳み自転車のフレームはどのように破損するのか公道の走行振動を再現する自転車用ロードシミュレータについて繰り返し走行を想定した折り畳み自転車の破損部の特徴 ~ 公道による振動を繰り返し再現した結果 ~ 2.
SIP 自動運転 _ 研究開発計画説明会 SIP 自動運転 ( システムとサービスの拡張 ) 研究開発計画について 平成 30 年 8 月 3 日 ( 金 ) 内閣府プログラムディレクター 葛巻清吾 1
 研究開発計画について 平成 30 年 8 月 3 日 ( 金 ) 内閣府プログラムディレクター 葛巻清吾 1") SIP 自動運転 _ 研究開発計画説明会 SIP 自動運転 ( システムとサービスの拡張 ) 研究開発計画について 平成 30 年 8 月 3 日 ( 金 ) 内閣府プログラムディレクター 葛巻清吾 1 本日の内容 第 1 期 SIP 自動走行システム 背景 意義 目標と取り組み領域 取り組みと進捗 第 2 期 SIP 自動運転 概要 目標 内容 スケジュール 体制 2 日本政府の自動運転への取組み
SIP 自動運転 _ 研究開発計画説明会 SIP 自動運転 ( システムとサービスの拡張 ) 研究開発計画について 平成 30 年 8 月 3 日 ( 金 ) 内閣府プログラムディレクター 葛巻清吾 1 本日の内容 第 1 期 SIP 自動走行システム 背景 意義 目標と取り組み領域 取り組みと進捗 第 2 期 SIP 自動運転 概要 目標 内容 スケジュール 体制 2 日本政府の自動運転への取組み
Microsoft PowerPoint - 2_「ゾーン30」の推進状況について
 ゾーン 3 の推進状況について 1 ゾーン3 の概要 P 1 2 ゾーン3 の経緯 P 2 3 整備状況 P 5 4 整備効果 P 7 5 効果的な整備事例 P11 6 今後の取組 P14 平成 29 年 12 月 7 日警察庁交通局 1 ゾーン 3 の概要 生活道路における歩行者等の安全な通行を確保することを目的として 区域 ( ゾーン ) を定めて最高速度 3km/hの速度規制を実施するとともに
ゾーン 3 の推進状況について 1 ゾーン3 の概要 P 1 2 ゾーン3 の経緯 P 2 3 整備状況 P 5 4 整備効果 P 7 5 効果的な整備事例 P11 6 今後の取組 P14 平成 29 年 12 月 7 日警察庁交通局 1 ゾーン 3 の概要 生活道路における歩行者等の安全な通行を確保することを目的として 区域 ( ゾーン ) を定めて最高速度 3km/hの速度規制を実施するとともに
1. エージェント + とは カーナビの目的地を設定していなくても ビッグデータから今後の行先と走行ルートを 予測し ルート上の交通情報や天候 路面情報をお知らせする 先読み情報案内 サービスです 例えば 通勤 通学でいつも通る道に 渋滞や規制が発生している場合には ドライバーが早めに その情報を察
 T-Connect Apps エージェント + マニュアル 2014/08/01 作成 2018/10/31 更新 1. エージェント + とは...2 2. 基本的な使い方...2 3. お好み情報の学習...3 4. 生活圏内 / 生活圏外について...3 5. プライバシーモードについて...3 6. ご利用開始直後の配信情報について...4 7. ナビ設定時の動きについて...6 8. 情報の配信内容...7
T-Connect Apps エージェント + マニュアル 2014/08/01 作成 2018/10/31 更新 1. エージェント + とは...2 2. 基本的な使い方...2 3. お好み情報の学習...3 4. 生活圏内 / 生活圏外について...3 5. プライバシーモードについて...3 6. ご利用開始直後の配信情報について...4 7. ナビ設定時の動きについて...6 8. 情報の配信内容...7
Accord Plug-In Hybrid
 Accord Plug-In Hybrid クイックガイドACC/LKAS とは ACC は前の車との車間距離を一定に保ちます ACC は エンブレムの奥に設置してあるレーダーセンサーが先行車との車間距離を測定して 適切な加減速を行い 設定車間距離を保持しながら 運転者がアクセルやブレーキ操作をしなくても 定速で走行するシステムです LKAS は車線維持走行をアシストします LKAS は フロントウィンドウ上部に設置してあるカメラによって
Accord Plug-In Hybrid クイックガイドACC/LKAS とは ACC は前の車との車間距離を一定に保ちます ACC は エンブレムの奥に設置してあるレーダーセンサーが先行車との車間距離を測定して 適切な加減速を行い 設定車間距離を保持しながら 運転者がアクセルやブレーキ操作をしなくても 定速で走行するシステムです LKAS は車線維持走行をアシストします LKAS は フロントウィンドウ上部に設置してあるカメラによって
2016/02/23 情報通信審議会先端技術 WG 交通事故死傷者ゼロに向けた自動運転 通信技術 トヨタ自動車株式会社 CSTO 補佐 葛巻清吾 Integrated Safety 0 0
 2016/02/23 情報通信審議会先端技術 WG 交通事故死傷者ゼロに向けた自動運転 通信技術 トヨタ自動車株式会社 CSTO 補佐 葛巻清吾 Integrated Safety 0 0 本日の内容 SIP 自動走行システム 自動運転実現に向け必要な技術 トヨタの安全の取り組み 安全の考え方 トヨタの安全技術開発 協調型安全システム ;ITS Connect 自動運転 ;Highway Teammate
2016/02/23 情報通信審議会先端技術 WG 交通事故死傷者ゼロに向けた自動運転 通信技術 トヨタ自動車株式会社 CSTO 補佐 葛巻清吾 Integrated Safety 0 0 本日の内容 SIP 自動走行システム 自動運転実現に向け必要な技術 トヨタの安全の取り組み 安全の考え方 トヨタの安全技術開発 協調型安全システム ;ITS Connect 自動運転 ;Highway Teammate
<4D F736F F F696E74202D A957A A8EC0895E8D7182C982A882AF82E EF89FC915082CC82BD82DF82CC A83808DC5934B89BB A2E >
 Techno Forum 2012 実運航における燃費改善のためのトリム最適化 株式会社 MTI 技術戦略グループ上級研究員堀正寿 1 目次 1. はじめに 2. 最適トリムの評価手法 2-1. オペレーションプロファイル調査 2-2. 水槽試験とトリム影響解析 2-3. 実船検証 3. トリムチャートと運用 4. まとめ 2 1-1 トリムの定義 1. はじめに 船尾喫水 (da) と船首喫水 (df)
Techno Forum 2012 実運航における燃費改善のためのトリム最適化 株式会社 MTI 技術戦略グループ上級研究員堀正寿 1 目次 1. はじめに 2. 最適トリムの評価手法 2-1. オペレーションプロファイル調査 2-2. 水槽試験とトリム影響解析 2-3. 実船検証 3. トリムチャートと運用 4. まとめ 2 1-1 トリムの定義 1. はじめに 船尾喫水 (da) と船首喫水 (df)
交通ミクロシミュレーションを用いた長岡まつり花火大会の交通渋滞緩和施策評価 環境システム工学課程 4 年 都市交通研究室杉本有基 指導教員佐野可寸志 1. 研究背景と目的長岡まつり大花火大会は長岡市の夏の最大イベントである 長岡まつり大花火大会は 昭和 20 年 8 月 1 日の長
 交通ミクロシミュレーションを用いた長岡まつり花火大会の交通渋滞緩和施策評価 環境システム工学課程 4 年 10333288 都市交通研究室杉本有基 指導教員佐野可寸志 1. 研究背景と目的長岡まつり大花火大会は長岡市の夏の最大イベントである 長岡まつり大花火大会は 昭和 20 年 8 月 1 日の長岡空襲からの復興を意義ある日とするために毎年 8 月 2 日 3 日に開催されるようになり, 現在では
交通ミクロシミュレーションを用いた長岡まつり花火大会の交通渋滞緩和施策評価 環境システム工学課程 4 年 10333288 都市交通研究室杉本有基 指導教員佐野可寸志 1. 研究背景と目的長岡まつり大花火大会は長岡市の夏の最大イベントである 長岡まつり大花火大会は 昭和 20 年 8 月 1 日の長岡空襲からの復興を意義ある日とするために毎年 8 月 2 日 3 日に開催されるようになり, 現在では
<566F6C F4390B3817A834A815B83758BE68AD482CC8E968CCC91CE8DF482C982C282A282C E362E36816A F97702E786C73>
 名古屋高速道路の交通安全対策 ~ カーブ事故の撲滅に向けて ~ 平成 24 年 6 月 名古屋高速道路公社管理部交通課 1. はじめに 1 2. 交通事故の現状と事故防止対策 2-1. 事故件数の推移 1 2-2. カーブ事故の特徴 1 2-3. 事故に伴う社会的影響 3 2-4. これまでの取り組み 4 3. 今後の取り組み 3-1. 事故対策の骨子 6 3-2. 新たな取り組み 7 4. お客様へのお願い
名古屋高速道路の交通安全対策 ~ カーブ事故の撲滅に向けて ~ 平成 24 年 6 月 名古屋高速道路公社管理部交通課 1. はじめに 1 2. 交通事故の現状と事故防止対策 2-1. 事故件数の推移 1 2-2. カーブ事故の特徴 1 2-3. 事故に伴う社会的影響 3 2-4. これまでの取り組み 4 3. 今後の取り組み 3-1. 事故対策の骨子 6 3-2. 新たな取り組み 7 4. お客様へのお願い
メイン表示 例 バーグラフ表示 例 平均燃費 1 一般道高速道平均燃費 1/ 移動平均燃費 1 燃料流量 1/ スロットル開度 1 燃費インジケーター 時計 スピード コンパス 2 標高 2 車両電圧 燃料流量インジケーター 瞬間燃費を表示 燃費インジケーター 今回燃費 瞬間燃費を表示 電源OFF毎
 メイン表示 例 バーグラフ表示 例 平均燃費 1 一般道高速道平均燃費 1/ 移動平均燃費 1 燃料流量 1/ スロットル開度 1 燃費インジケーター 時計 スピード コンパス 2 標高 2 車両電圧 燃料流量インジケーター 瞬間燃費を表示 燃費インジケーター 今回燃費 瞬間燃費を表示 電源OFF毎にクリア 一般道平均燃費 平均燃費 現在値を表示 現在の燃料流量 累積クリアまたはデータ クリアで初期化
メイン表示 例 バーグラフ表示 例 平均燃費 1 一般道高速道平均燃費 1/ 移動平均燃費 1 燃料流量 1/ スロットル開度 1 燃費インジケーター 時計 スピード コンパス 2 標高 2 車両電圧 燃料流量インジケーター 瞬間燃費を表示 燃費インジケーター 今回燃費 瞬間燃費を表示 電源OFF毎にクリア 一般道平均燃費 平均燃費 現在値を表示 現在の燃料流量 累積クリアまたはデータ クリアで初期化
スライド 1
 flex-ds ドライビング シミュレータ 製品カタログ コンセプトラフィック活用例その1活用例その3モジュール群グ製品情報flex-DS - コンセプト - データ設定自由度の高い 拡張性の高い柔軟な DS システムをご提案致します モジュールと CG 描画を行う 他車両の走行制御のための交通シミュレーション ASSTranse-DS モ ジュールから構成されています また 道路環境 交通状況を独自に設定
flex-ds ドライビング シミュレータ 製品カタログ コンセプトラフィック活用例その1活用例その3モジュール群グ製品情報flex-DS - コンセプト - データ設定自由度の高い 拡張性の高い柔軟な DS システムをご提案致します モジュールと CG 描画を行う 他車両の走行制御のための交通シミュレーション ASSTranse-DS モ ジュールから構成されています また 道路環境 交通状況を独自に設定
1 趣旨このガイドラインは 日本国内の公道 ( 道路交通法 ( 昭和 35 年法律第 105 号 ) 第 2 条第 1 項第 1 号に規定する 道路 をいう 以下同じ ) において 自動走行システム ( 加速 操舵 制動のうち複数の操作を一度に行い 又はその全てを行うシステムをいう 以下同じ ) を
 第 2 条第 1 項第 1 号に規定する 道路 をいう 以下同じ ) において 自動走行システム ( 加速 操舵 制動のうち複数の操作を一度に行い 又はその全てを行うシステムをいう 以下同じ ) を") 自動走行システムに関する公道実証実験のためのガイドライン 平成 28 年 5 月 警察庁 1 趣旨このガイドラインは 日本国内の公道 ( 道路交通法 ( 昭和 35 年法律第 105 号 ) 第 2 条第 1 項第 1 号に規定する 道路 をいう 以下同じ ) において 自動走行システム ( 加速 操舵 制動のうち複数の操作を一度に行い 又はその全てを行うシステムをいう 以下同じ ) を用いて自動車を走行させる実証実験
自動走行システムに関する公道実証実験のためのガイドライン 平成 28 年 5 月 警察庁 1 趣旨このガイドラインは 日本国内の公道 ( 道路交通法 ( 昭和 35 年法律第 105 号 ) 第 2 条第 1 項第 1 号に規定する 道路 をいう 以下同じ ) において 自動走行システム ( 加速 操舵 制動のうち複数の操作を一度に行い 又はその全てを行うシステムをいう 以下同じ ) を用いて自動車を走行させる実証実験
資料 -2 国道 24 号烏丸通 歩行者 自転車通行安全協議会 国道 24 号烏丸通の概要 平成 30 年 3 月 国土交通省近畿地方整備局京都国道事務所
 資料 -2 国道 24 号烏丸通 歩行者 自転車通行安全協議会 国道 24 号烏丸通の概要 平成 30 年 3 月 国土交通省近畿地方整備局京都国道事務所 目次 1. 国道 24 号烏丸通の現況 2. 歩行者 自転車関連事故の発生状況 3. 現況 問題点把握のための交通量調査の実施 4. 地区の交通安全の問題を踏まえた検討方針 5. 歩行者 自転車通行安全協議会 の立ち上げ 1 本願寺東本願寺西鴨川国道
資料 -2 国道 24 号烏丸通 歩行者 自転車通行安全協議会 国道 24 号烏丸通の概要 平成 30 年 3 月 国土交通省近畿地方整備局京都国道事務所 目次 1. 国道 24 号烏丸通の現況 2. 歩行者 自転車関連事故の発生状況 3. 現況 問題点把握のための交通量調査の実施 4. 地区の交通安全の問題を踏まえた検討方針 5. 歩行者 自転車通行安全協議会 の立ち上げ 1 本願寺東本願寺西鴨川国道
別紙 1 ワイヤロープの今後の設置予定について H ワイヤロープの技術的検証結果 ( 第 3 回検討会 ) 土工区間については 技術的に実用化可能 中小橋については 試行設置箇所を拡大し 実用化に向けた取組みを進める 長大橋 トンネル区間については 公募選定技術の性能検証を引き続き進め
 土工区間については 技術的に実用化可能 中小橋については 試行設置箇所を拡大し 実用化に向けた取組みを進める 長大橋 トンネル区間については 公募選定技術の性能検証を引き続き進め") sdf あ sdf 平成 30 年 6 月 15 日道路局高速道路課道路局国道 技術課 暫定二車線の高速道路のワイヤロープ設置方針について 国土交通省では 重大事故につながりやすい暫定二車線区間での高速道路の正面衝突事故の緊急対策として 昨年度からラバーポールに代えてワイヤロープを設置することによる安全対策の検証を行ってきたところですが 高速道路の正面衝突事故防止対策に関する技術検討委員会 での検証状況を踏まえ
sdf あ sdf 平成 30 年 6 月 15 日道路局高速道路課道路局国道 技術課 暫定二車線の高速道路のワイヤロープ設置方針について 国土交通省では 重大事故につながりやすい暫定二車線区間での高速道路の正面衝突事故の緊急対策として 昨年度からラバーポールに代えてワイヤロープを設置することによる安全対策の検証を行ってきたところですが 高速道路の正面衝突事故防止対策に関する技術検討委員会 での検証状況を踏まえ
ITS 安全運転支援システムイメージ
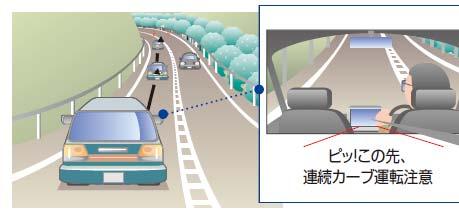
 資料 2-3 ITS 無線システムの利用イメージと検討課題について 2008 年 12 月 5 日 日本電気株式会社 ITS 事業推進センター ITS 安全運転支援システムイメージ ITS 安全運転支援システム利用イメージ 車車間 路車間通信により 周辺車両の位置情報や路側センサ情報等を共有 その情報を利用し 安全運転支援や渋滞回避などのアプリケーションを実現する この先 前方車両急ブレーキ走行注意
資料 2-3 ITS 無線システムの利用イメージと検討課題について 2008 年 12 月 5 日 日本電気株式会社 ITS 事業推進センター ITS 安全運転支援システムイメージ ITS 安全運転支援システム利用イメージ 車車間 路車間通信により 周辺車両の位置情報や路側センサ情報等を共有 その情報を利用し 安全運転支援や渋滞回避などのアプリケーションを実現する この先 前方車両急ブレーキ走行注意
<4D F736F F F696E74202D F8E9197BF C96BC8DE393B982CC8F6191D8837B B836C E82C982C282A282C E63189F
 資料 2 東名阪道の渋滞対策について 平成 28 年 10 月 7 日 目次 1.WG 設立の背景 2 2. 想定される対策 5 3. 東名阪道の現状と課題 10 4. 対策検討区間の交通状況 13 5. 渋滞状況の分析 18 1 1.WG 設立の背景 労働者の減少を上回る生産性の上昇が必要 国土交通省生産性革命本部 ( 第 1 回会合 ) 資料より抜粋 2 1.WG 設立の背景 国土交通省生産性革命本部
資料 2 東名阪道の渋滞対策について 平成 28 年 10 月 7 日 目次 1.WG 設立の背景 2 2. 想定される対策 5 3. 東名阪道の現状と課題 10 4. 対策検討区間の交通状況 13 5. 渋滞状況の分析 18 1 1.WG 設立の背景 労働者の減少を上回る生産性の上昇が必要 国土交通省生産性革命本部 ( 第 1 回会合 ) 資料より抜粋 2 1.WG 設立の背景 国土交通省生産性革命本部