MATLAB/Simulinkによる無人航空機の設計・開発
|
|
|
- まいか すわ
- 4 years ago
- Views:
Transcription

1 MATLAB /Simulink による無人航空機の設計 開発 MathWorks Japan Application Engineering Application Engineer 能戸フレッド Fred Noto 2017 The MathWorks, Inc. 1

2 無人航空機の進化 2





3 Model-Based Design はじめに Platform Sense 無人航空機 (UAV) はますます普及 UAV 自律機能の役割が増加 MATLAB/Simulink は UAV 開発の統一環境 Perceive Autonomous Algorithm Decide & Plan Hobby Drones Entertainment Coverage Delivery Drones Act Connect Solar-Powered Drones Surveillance and Defense 3
4 アジェンダ :UAV 開発プロセス Platform 機体ダイナミクスと制御アルゴリズム Autonomous Algorithm 自律アルゴリズム Test & Refine in Simulation シミュレーション Test & Refine on Real H/W 実装 & 実機実験 ステップ 1: 機体ダイナミクスの理解と飛行制御アルゴリズムの設計 ステップ 2: ビジョン レーダ 知覚アルゴリズムの設計 検証 ステップ 3: アルゴリズムの検証と実装 4

5 アジェンダ :UAV 開発プロセス Platform 機体ダイナミクスと制御アルゴリズム Autonomous Algorithm 自律アルゴリズム Test & Refine in Simulation シミュレーション Test & Refine on Real H/W 実装 & 実機実験 ステップ 1: 機体ダイナミクスの理解と飛行制御アルゴリズムの設計 ステップ 2: ビジョン レーダ 知覚アルゴリズムの設計 検証 ステップ 3: アルゴリズムの検証と実装 5

6 MATLAB/Simulink でのシステムシミュレーション システムレベルシミュレーションを目的としたモデル設計 コントローラ プラント 環境 6


7 MATLAB/Simulink によるプラントモデリング Simulink 環境で様々な作成方法を柔軟に対応 物理法則に基づく方法数式モデリング 実験データに基づく方法データドリブンモデリング プログラミング MATLAB ブロック線図 Simulink 数式処理 Symbolic Math Toolbox 物理モデリング Simscape 製品群 統計的手法 Model Based Calibration Toolbox パラメータチューニング Simulink Design Optimization システム同定 System Identification Toolbox ニューラルネットワーク Neural Network Toolbox 7








8 Simscape による制御対象の物理モデリング 数式不要で直感的にコンポーネントの追加 削除が容易 強電パワエレ 弱電デジアナ 油圧 熱流体 機械 3D 動力伝達 1D 基本部品ライブラリ Simscape 機械油圧電気磁気 初期段階ではトレードオフスタディーで活用 N S 熱 熱流体 二相流体 空気圧 Simscape Language によるカスタム部品 / ドメイン開発 CAD モデルインポート可能 8

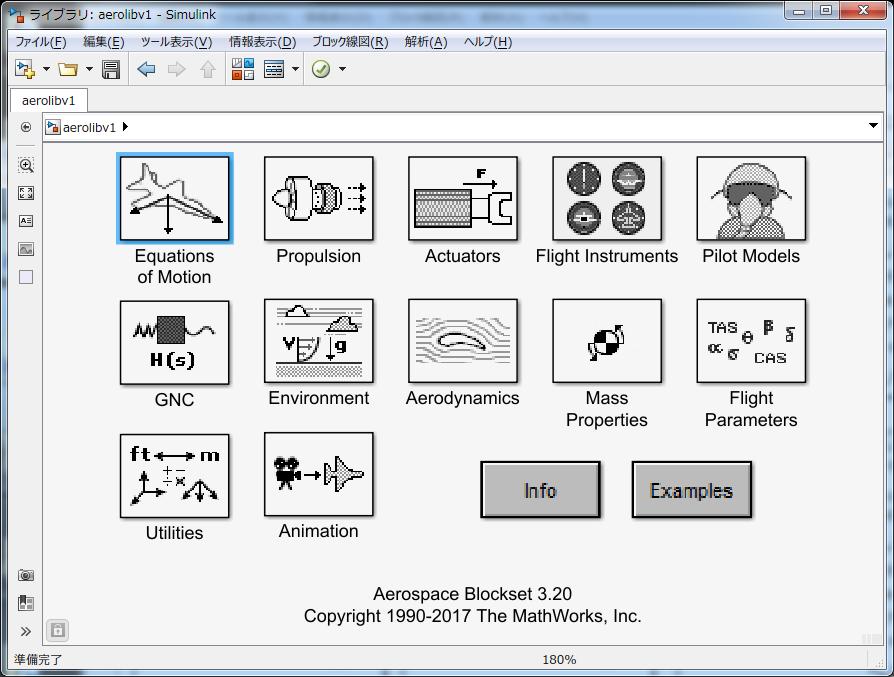
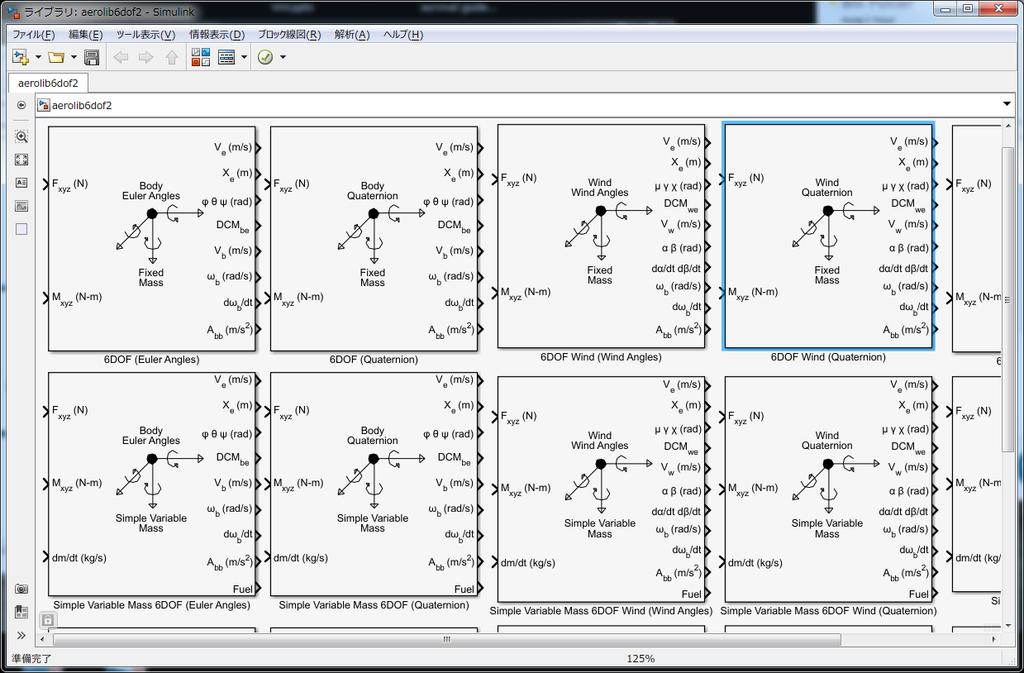
9 Aerospace Blockset でのダイナミクスモデリング 航空機コンポーネンツのモデリングを簡略化 効率化 運動方程式ブロックを活用 9

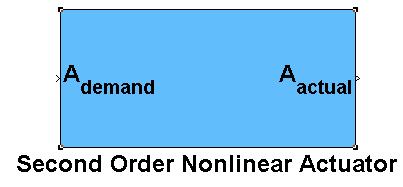
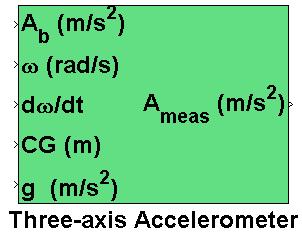
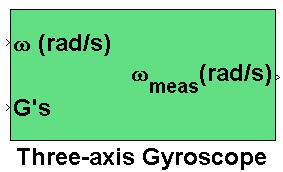
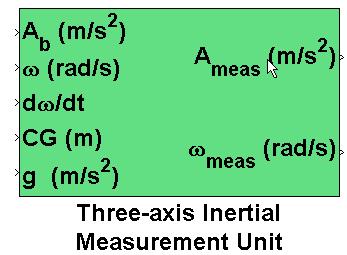
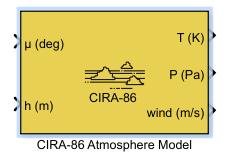
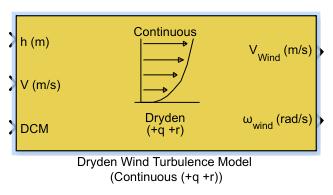
10 Aerospace Blockset でのダイナミクスモデリング センサー 推進力 アクチュエータ 環境ブロックを提供 10
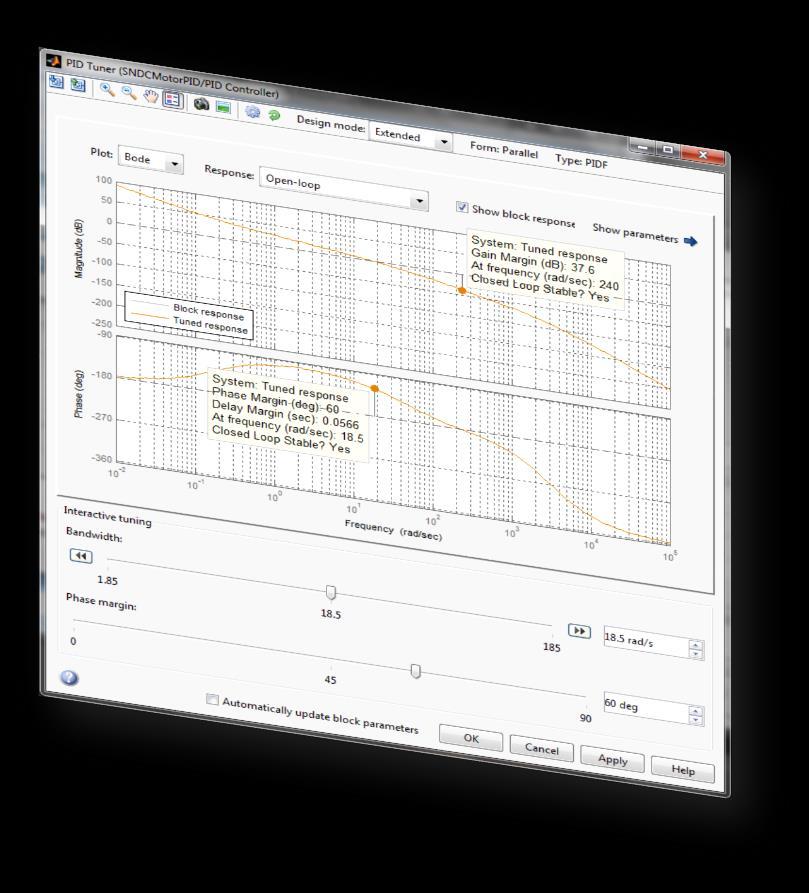
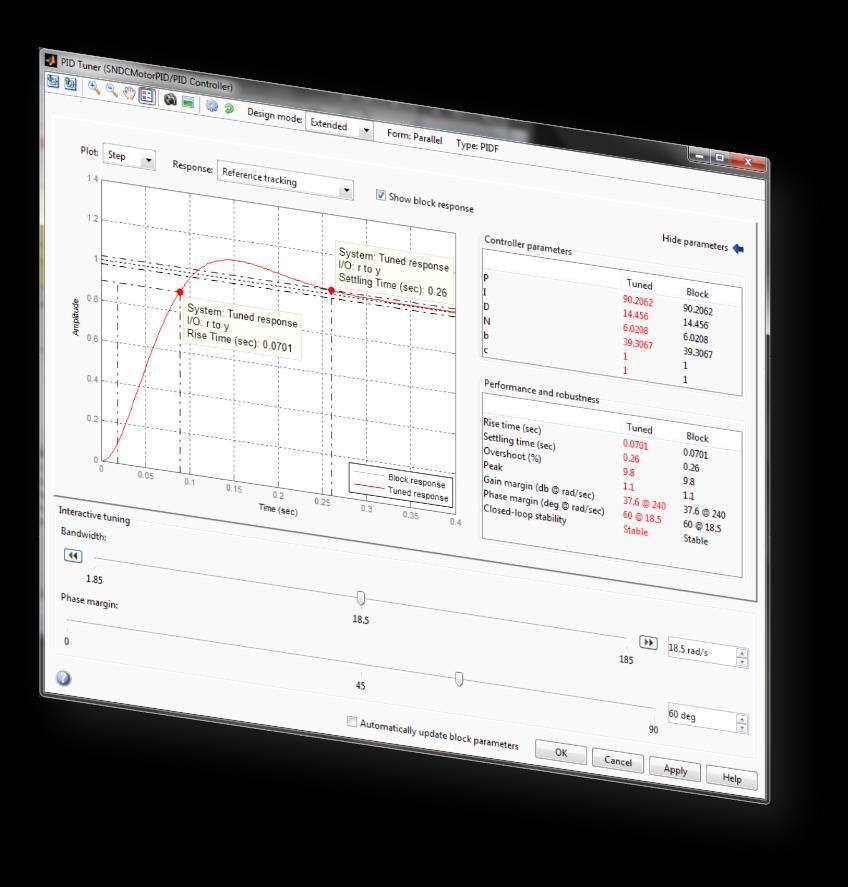
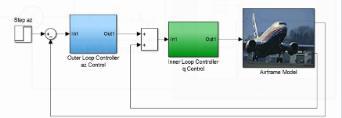
11 制御アルゴリズムの設計 プラントとコントローラを同一環境で組み合わせたシステムレベルの動作検証 Simulink Control Design と Control System Toolbox プラントモデルの線形化 PID コントローラの自動チューニング 周波数応答を考慮した調整 S1 S2 ステップ応答を考慮した調整 S3 11

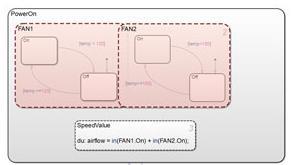
12 制御アルゴリズムの設計 Stateflow を活用したモードロジック等の瞬間的変化の設計を容易化 Simulinkは動的システムの連続的な変化の設計を得意としますシステムは連続的と瞬間的な変化に対応する必要があります モードロジック設計 12
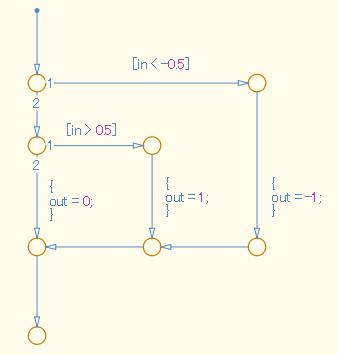
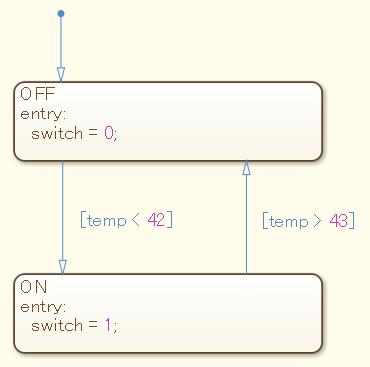
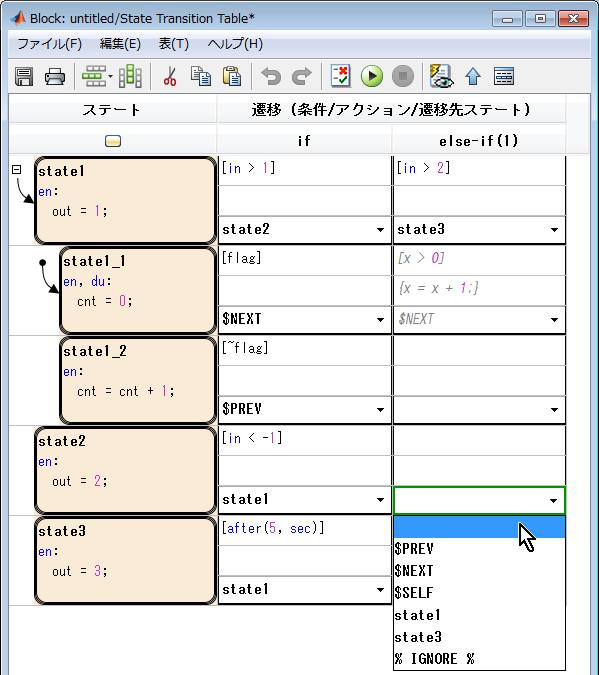

13 Stateflow による色々なロジック表現 設計したいアルゴリズムに応じて様々なデザインスタイルを活用できます フローチャート状態遷移図状態遷移表真理値表 13
14 アジェンダ :UAV 開発プロセス Platform 機体ダイナミクスと制御アルゴリズム Autonomous Algorithm 自律アルゴリズム Test & Refine in Simulation シミュレーション Test & Refine on Real H/W 実装 & 実機実験 ステップ 1: 機体ダイナミクスの理解と飛行制御アルゴリズムの設計 ステップ 2: ビジョン レーダ 知覚アルゴリズムの設計 ステップ 3: アルゴリズムの検証と実装 14


15 Responsibility 自律テクノロジーのトレンド 設計したいアルゴリズムに応じて様々なデザインスタイルを活用できます Computer Human Degree of Autonomy 15

16 パスプランニングの追加 ガイダンスアルゴリズムを組み合わせたシステムシミュレーション S1 S2 ガイダンス S3 コントローラ プラント 16
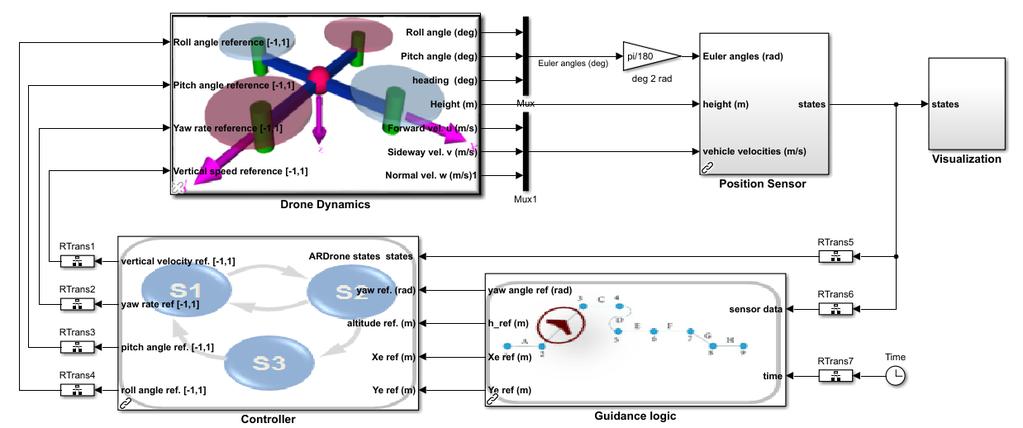
17 パスプランニングの追加 ガイダンスアルゴリズムを組み合わせたシステムシミュレーション プラント コントローラ ガイダンス (Waypoints) 17




18 センシングアルゴリズムの追加 視覚アルゴリズムによる自律機能の増加 センシング S1 S2 ガイダンス S3 コントローラ プラント カメラ, レーダー, LiDAR, GPS, IMU,, IMU GPS Optical Flow INS Nav Kalman Filter Position Velocity Attitude 18



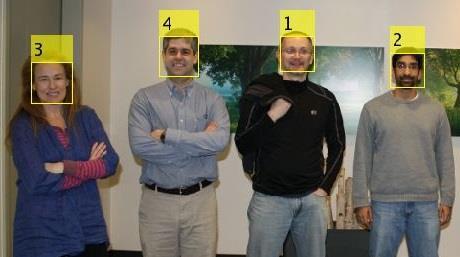

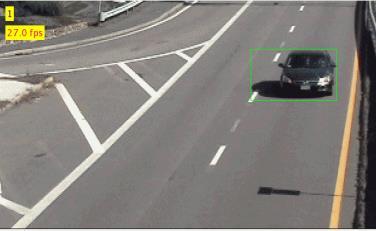
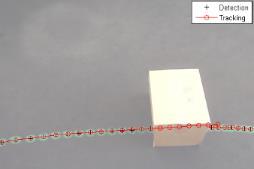
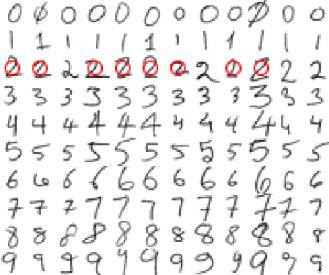



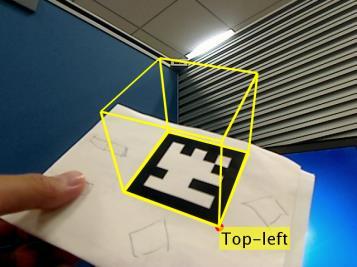

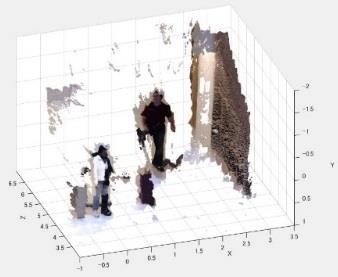
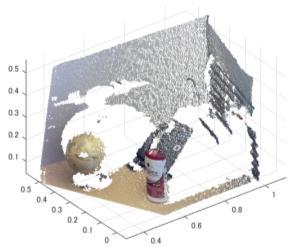
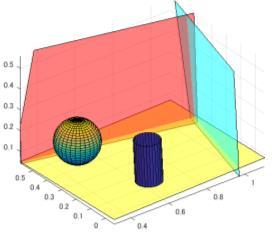
19 MATLAB による認識ソリューション AR( 拡張現実 ) カメラカリブレーション 物体の検出 文字認識 (OCR) ステレオビジョン 3 次元点群処理 Image Processing Toolbox Computer Vision System Toolbox 顔 人物認識 トラッキング センサーフュージョン 画像検索 分類 (BoF) 機械学習による分類 ディープラーニング (CNN/Faster R-CNN) Neural Network Toolbox Statistics and Machine Learning Toolbox Automated Driving System Toolbox 19


20 センサーデータの取得 Image Acquisition Toolbox 直接ハードウェアからデート取得 MATLAB/Simulink 保存データの読み込み Robotics System Toolbox ROS によるデータ通信 20

 の登場")







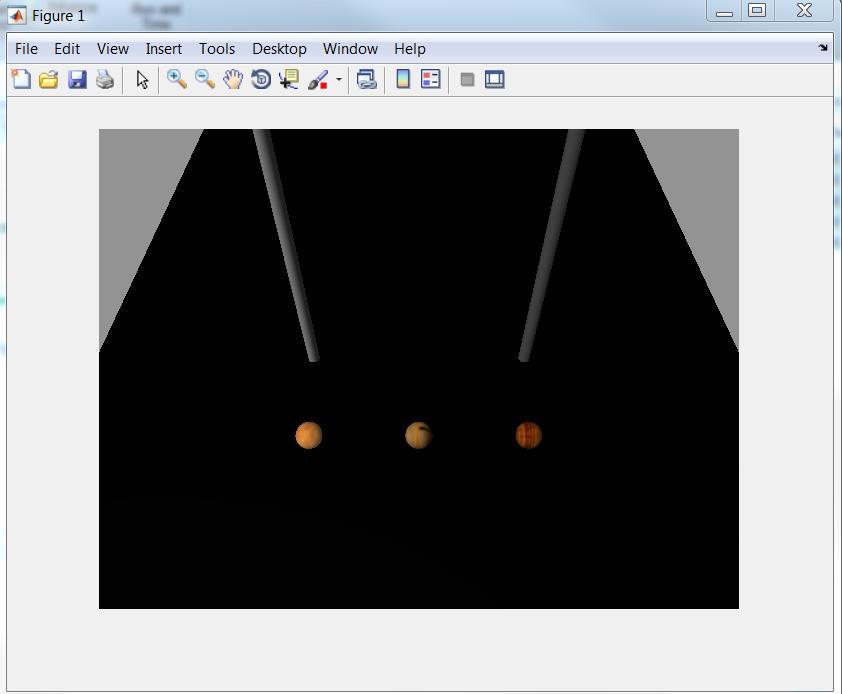
21 Robot Operating System (ROS) の登場 仮想センサーからデータ取得してアルゴリズムを評価 ROS + Gazebo LIDAR Camera RADAR GPS/IMU NODE NODE NODE さまざまなハードウェアのドライバーが提供されている 軌道計画 NODE 軌道制御 NODE 位置推定 NODE 障害物回避 NODE 地図連携 NODE 制御 + 自律アルゴリズム 21




22 ROS(Robot Operating System) とは? ロボットの内部プロセス間通信のための標準的なプロトコルを提供 複数の開発言語とのインタフェース (C++, Python, Lua, Java, etc.) ランタイムやデータ解析用ツール 良く使用されるアルゴリズムやドライバのパッケージ オープンソース 研究者の皆様が 標準的なツールやインタフェースを使用して既存のコンポーネントを一から作り直さずに 新しいロボティクスシステムを手早く開発することが出来るようにすること を意図しています Jonathan Bohren ROS Crash-Course, Part I: Introduction to ROS distribution, build system and infrastructure 22








23 MATLAB と ROS による自律制御システム開発 MATLAB/Simulink の柔軟な開発環境と ROS を連携しロボティクス開発を加速化 Robotics System Toolbox MATLAB/Simulink を ROS ネットワーク上のノードとして登録可能 ROS マスターとして起動することも可能 MATLAB 上で開発したアルゴリズムを 直接 ROS ネットワークに接続して検証可能 Simulink モデルからのコード生成機能を使い C++ ROS ノードを生成可能 ROS Log MATLAB/Simulink でロボットアルゴリズム開発 ログデータの解析 解析や可視化 シミュレータと接続可能 ROS ML/SL ノード ハードウェアにデプロイ可能 実機と接続可能 23




24 Robotics System Toolbox を使用した ROS 連携 ROS との連携によるロボティクス開発加速化 MATLAB ネットワーク 実機 MATLAB コード ROS すぐに使える組み込みアルゴリズム Simulink モデル C コード生成による ROS ノード生成 組み込み ROS ノード シミュレーション環境 24

 ROS 通信")
 ステータス 25")
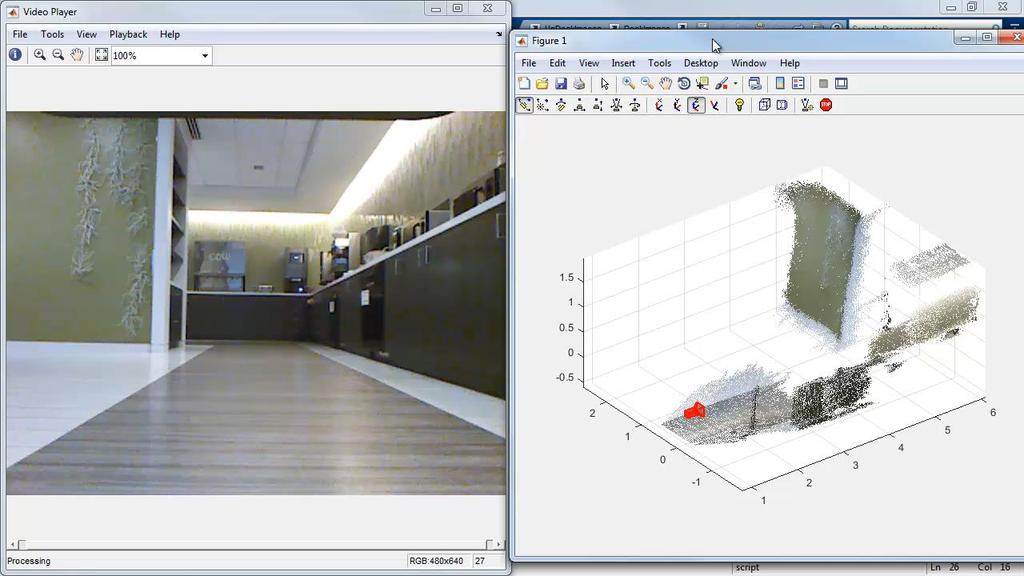
25 MATLAB Simulink ROS によるシステム設計 視覚アルゴリズム ( 物体認識 & 状態管理 ) ROS 通信 ( 受信 ) ROS 通信 ( 送信 ) ステータス 25
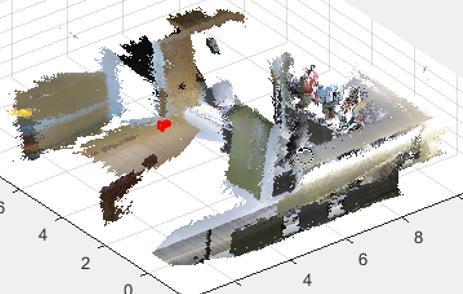
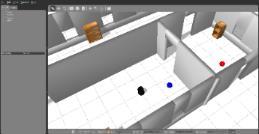
26 自律アルゴリズムのシミュレーション 検証 Robotics System Toolbox の ROS 連携機能による自律アルゴリズムの検証 MATLAB/Simulink ROS + Gazebo 26
27 アジェンダ :UAV 開発プロセス Platform 機体ダイナミクスと制御アルゴリズム Autonomous Algorithm 自律アルゴリズム Test & Refine in Simulation シミュレーション Test & Refine on Real H/W 実装 & 実機実験 ステップ 1: 機体ダイナミクスの理解と飛行制御アルゴリズムの設計 ステップ 2: ビジョン レーダ 知覚アルゴリズムの設計 ステップ 3: アルゴリズムの検証と実装 27
 { rtb_switch1_idx_0 = LOCK; } else if (LeftPos < 1.")

28 コード生成 実装 作成したモデルを自動コード生成機能を使用して容易に実装 if (LeftPos > 4.0F) { rtb_switch1_idx_0 = LOCK; } else if (LeftPos < 1.0F) { rtb_switch1_idx_0 = UNLOCK; } else { rtb_switch1_idx_0 = NEUTRAL; } C/C++ コード生成 ROS ノード C/C++ コード生成 コード生成レポート ROS ノード 28
 Robotics System Toolbox と組み合わせることで ROS ノード用コード生成可能 Embedded Coder Simulink Coder MATLAB Coder 29")
29 コード生成 実装関連ツール MATLAB Coder MATLAB プログラムからの C/C++ コード生成 スタンドアロン ライブラリのアプリ作成 Simulink Coder Simulink/Stateflow モデルからの C/C++ コード生成 RCP/HIL 試験用コードの生成 Embedded Coder 組込み実装に適した効率的な C/C++ コードを自動生成 プロセッサに合わせたコード最適化 サポートパッケージ モデル & 生成コード間トレーサビリティ モデル 生成コード間等価性検証 (B2B テスト ) Robotics System Toolbox と組み合わせることで ROS ノード用コード生成可能 Embedded Coder Simulink Coder MATLAB Coder 29
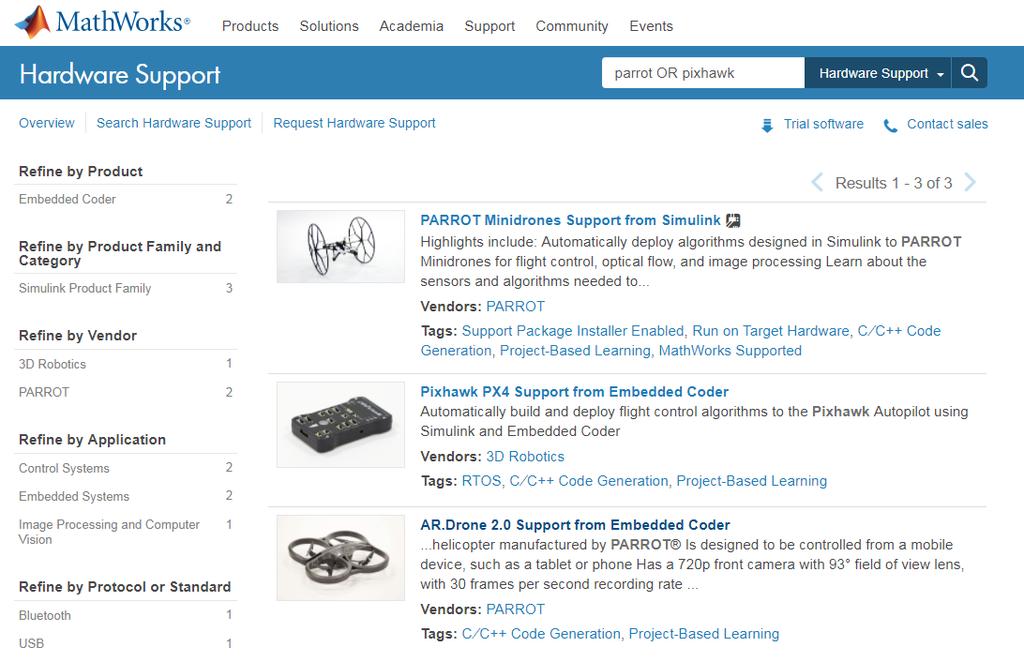
30 ハードウェアサポートパッケージ 30


31 自動コード生成の実装 31

32 UAV 開発プロセス MATLAB/Simulink 環境でのModel-Based Design Platform 機体ダイナミクスと制御アルゴリズム Autonomous Algorithm 自律アルゴリズム Test & Refine in Simulation シミュレーション Test & Refine on Real H/W 実装 & 実機実験 ステップ 1: 機体ダイナミクスの理解と飛行制御アルゴリズムの設計 ステップ 2: ビジョン レーダ 知覚アルゴリズムの設計 ステップ 3: アルゴリズムの検証と実装 32








33 Model-Based Design MATLAB/Simulink は無人航空機システムに必要な要素を網羅 Platform Control System Toolbox Simscape Simulink Real- Time Sense HW Support Packages Data Acquisition Toolbox Perceive Autonomous Algorithm Decide & Plan Computer Vision Robotics System Toolbox Phased Array Stateflow Statistics and Machine Learning Act WLAN System Toolbox Robotics System Toolbox Communications Toolbox Embedded Coder Connect 33



34 Autonomous System with MATLAB/Simulink Airnamics Develops Unmanned Aerial System for Close-Range Filming with Model-Based Design Challenge Design and develop an unmanned aerial camera motion system for close-range aerial filming Solution Use Model-Based Design with MATLAB and Simulink to accelerate the design, debugging, and implementation of the vehicle s fly-by-wire and flight management system software Results Time-to-market shortened by up to an order of magnitude Test flight anomalies quickly resolved Debugging time reduced from weeks to hours Link to user story With Model-Based Design our threeengineer team found more than 95% of control software bugs before the first flight. We used the test flights to increase our Simulink models fidelity and isolate remaining bugs with high precision. The result is a safer, more reliable, and higherquality product. Airnamics co-founders Marko Thaler and Zoran Bjelić with the R5 MSN1 prototype after its first flight. Marko Thaler Airnamics 34

 Results Design and rework costs substantially reduced Testing cycle time minimized Coding errors and manual documentation work minimized MATLAB and Simulink greatly reduced development cycle time")
35 Autonomous System with MATLAB/Simulink BAE Systems Controls Develops Autopilot for Unmanned Aerial Vehicle Using MathWorks Tools Challenge Enable teams working in separate locations to design a sophisticated UAV autopilot system quickly and inexpensively Solution Use MathWorks tools, modify existing software designs with Model-Based Design, and automatically generate embedded control code An Eagle 150 unmanned aerial vehicle flight. (Image courtesy of Composites Technology Research Malaysia.) Results Design and rework costs substantially reduced Testing cycle time minimized Coding errors and manual documentation work minimized MATLAB and Simulink greatly reduced development cycle time and cut system software design and testing costs by 50%. Feng Liang BAE Systems Controls Link to user story 35
36 まとめ 自律アルゴリズムの設計 検証にはシステムシミュレーションが重要! MATLAB/Simulink による UAV 設計 開発のサポート : プラント コントローラモデリングによるダイナミクス評価 ガイダンス 視覚アルゴリズム設計 検証の容易化 シミュレーションでの動作確認後に自動コード生成 実装 MATLAB/Simulink: UAV 設計 開発の統一環境! 36
37 Thank You For Your Attention ご清聴ありがとうございました 2017 The MathWorks, Inc. MATLAB and Simulink are registered trademarks of The MathWorks, Inc. See for a list of additional trademarks. Other product or brand names may be trademarks or registered trademarks of their respective holders. 37
f2-system-requirement-system-composer-mw
 Simulink Requirements と新製品 System Composer によるシステムズエンジニアリング MathWorks Japan アプリケーションエンジニアリング部大越亮二 2015 The MathWorks, Inc. 1 エンジニアリングの活動 要求レベル システムレベル 要求分析 システム記述 表現 高 システム分析 システム結合 抽象度 サブシステム コンポーネントレベル
Simulink Requirements と新製品 System Composer によるシステムズエンジニアリング MathWorks Japan アプリケーションエンジニアリング部大越亮二 2015 The MathWorks, Inc. 1 エンジニアリングの活動 要求レベル システムレベル 要求分析 システム記述 表現 高 システム分析 システム結合 抽象度 サブシステム コンポーネントレベル
SimulinkによるReal-Time Test環境の構築
 Simulink モデルを使ったリアルタイムテスト環境の構築 MathWorks Japan アプリケーションエンジニアリング部シニアアプリケーションエンジニア高島博 2012 The MathWorks, Inc. 1 はじめに Simulink はバーチャルなテスト環境 2 はじめに Simulink はバーチャルなテスト環境 3 はじめに Simulink はバーチャルなテスト環境 シミュレーション開始ボタンをクリック
Simulink モデルを使ったリアルタイムテスト環境の構築 MathWorks Japan アプリケーションエンジニアリング部シニアアプリケーションエンジニア高島博 2012 The MathWorks, Inc. 1 はじめに Simulink はバーチャルなテスト環境 2 はじめに Simulink はバーチャルなテスト環境 3 はじめに Simulink はバーチャルなテスト環境 シミュレーション開始ボタンをクリック
Presentation Title
 Simulink R / Stateflow R 入門 MathWorks Japan アプリケーションエンジニアリング部 小林昇洋 2016 The MathWorks, Inc. 1 本セッションで対象としている方々 Q : Simulink / Stateflow は使ったことがない どんなツールなのか? A : お使いいただいているシーン 理由などご紹介します 2 Simulink とは?
Simulink R / Stateflow R 入門 MathWorks Japan アプリケーションエンジニアリング部 小林昇洋 2016 The MathWorks, Inc. 1 本セッションで対象としている方々 Q : Simulink / Stateflow は使ったことがない どんなツールなのか? A : お使いいただいているシーン 理由などご紹介します 2 Simulink とは?
MATLAB ではじめる画像処理とロボットビジョン ~ 機械学習による物体認識と SLAM~ MathWorks Japan アプリケーションエンジニアリング部信号処理 通信 木川田亘 2015 The MathWorks, 1Inc.
 MATLAB ではじめる画像処理とロボットビジョン ~ 機械学習による物体認識と SLAM~ MathWorks Japan アプリケーションエンジニアリング部信号処理 通信 木川田亘 2015 The MathWorks, 1Inc. ロボットビジョンとは ロボットに搭載することを目的としたコンピュータービジョン技術の一分野 標識認識などさまざまな環境下での物体認識や複雑なシーンの理解 未知の領域を探索する際にロボット自身の位置推定と地図作成(SLAM)
MATLAB ではじめる画像処理とロボットビジョン ~ 機械学習による物体認識と SLAM~ MathWorks Japan アプリケーションエンジニアリング部信号処理 通信 木川田亘 2015 The MathWorks, 1Inc. ロボットビジョンとは ロボットに搭載することを目的としたコンピュータービジョン技術の一分野 標識認識などさまざまな環境下での物体認識や複雑なシーンの理解 未知の領域を探索する際にロボット自身の位置推定と地図作成(SLAM)
タイトル
 生活支援ロボット HSR 向け 自律動作アプリケーション開発 アプリケーションエンジニアリング部木川田亘 2015 The MathWorks, Inc. 1 実演 :HSR による あいさつ アプリケーションの開発 2 アジェンダ 自律ロボット開発における MATLAB ROS を使った HSR との連携ワークフロー まとめ 3 アジェンダ 自律ロボット開発における MATLAB ROS を使った
生活支援ロボット HSR 向け 自律動作アプリケーション開発 アプリケーションエンジニアリング部木川田亘 2015 The MathWorks, Inc. 1 実演 :HSR による あいさつ アプリケーションの開発 2 アジェンダ 自律ロボット開発における MATLAB ROS を使った HSR との連携ワークフロー まとめ 3 アジェンダ 自律ロボット開発における MATLAB ROS を使った
制御のためのSimulink入門
 今から始める Simulink 入門 ~ 制御編 ~ MathWorks Japan アプリケーションエンジニアリング部アプリケーションエンジニア張莉 2013 The MathWorks, Inc. 1 What is Simulink? 2 Why use Simulink? 例 : アポロ月着陸船のデジタル自動操縦の開発 3 Simulink を使うと? 当時の設計者が自ら Simulink
今から始める Simulink 入門 ~ 制御編 ~ MathWorks Japan アプリケーションエンジニアリング部アプリケーションエンジニア張莉 2013 The MathWorks, Inc. 1 What is Simulink? 2 Why use Simulink? 例 : アポロ月着陸船のデジタル自動操縦の開発 3 Simulink を使うと? 当時の設計者が自ら Simulink
SimscapeプラントモデルのFPGAアクセラレーション
 Simscape TM プラントモデルの FPGA アクセラレーション MathWorks Japan アプリケーションエンジニアリング部 松本充史 2018 The MathWorks, Inc. 1 アジェンダ ユーザ事例 HILS とは? Simscape の電気系ライブラリ Simscape モデルを FPGA 実装する 2 つのアプローチ Simscape HDL Workflow Advisor
Simscape TM プラントモデルの FPGA アクセラレーション MathWorks Japan アプリケーションエンジニアリング部 松本充史 2018 The MathWorks, Inc. 1 アジェンダ ユーザ事例 HILS とは? Simscape の電気系ライブラリ Simscape モデルを FPGA 実装する 2 つのアプローチ Simscape HDL Workflow Advisor
PowerPoint Presentation
 Simulink +Unreal Engine 連携による ADAS/ 自動運転シミュレーション環境 MathWorks Japan アプリケーションエンジニアリング部宮川浩 2015 The MathWorks, Inc. 1 Session Key Take Away MathWorks は 自動運転システム開発に必要な フルビークルモデルを提供します 3 自動車業界のメガトレンド Connectivity
Simulink +Unreal Engine 連携による ADAS/ 自動運転シミュレーション環境 MathWorks Japan アプリケーションエンジニアリング部宮川浩 2015 The MathWorks, Inc. 1 Session Key Take Away MathWorks は 自動運転システム開発に必要な フルビークルモデルを提供します 3 自動車業界のメガトレンド Connectivity
Microsoft PowerPoint - 【最終提出版】 MATLAB_EXPO2014講演資料_ルネサス菅原.pptx
 MATLAB/Simulink を使用したモータ制御アプリのモデルベース開発事例 ルネサスエレクトロニクス株式会社 第二ソリューション事業本部産業第一事業部家電ソリューション部 Rev. 1.00 2014 Renesas Electronics Corporation. All rights reserved. IAAS-AA-14-0202-1 目次 1. はじめに 1.1 モデルベース開発とは?
MATLAB/Simulink を使用したモータ制御アプリのモデルベース開発事例 ルネサスエレクトロニクス株式会社 第二ソリューション事業本部産業第一事業部家電ソリューション部 Rev. 1.00 2014 Renesas Electronics Corporation. All rights reserved. IAAS-AA-14-0202-1 目次 1. はじめに 1.1 モデルベース開発とは?
Presentation Title
 Simulink 環境で実施する ADAS( 先進運転支援システム ) 実験 MathWorks Japan アプリケーションエンジニアリング部制御 村上直也 2015 The MathWorks, Inc. 1 Agenda はじめに 弊社 ADAS 環境関連紹介 弊社 ADAS 関連製品を使用した DEMO ADAS 関連開発適用事例 まとめ 2 はじめに ADAS システムは今後もますます普及が進むと考えられる
Simulink 環境で実施する ADAS( 先進運転支援システム ) 実験 MathWorks Japan アプリケーションエンジニアリング部制御 村上直也 2015 The MathWorks, Inc. 1 Agenda はじめに 弊社 ADAS 環境関連紹介 弊社 ADAS 関連製品を使用した DEMO ADAS 関連開発適用事例 まとめ 2 はじめに ADAS システムは今後もますます普及が進むと考えられる
MATLAB EXPO 2019 Japan プレゼン資料の検討
 自動運転向けソフトウェア Autoware と MATLAB /Simulink の連携 ~ 事例紹介 ~ 2019 年 5 月 28 日株式会社ネクスティエレクトロニクス SW 開発部技術開発グループ太田徳幸 Copyright TOMEN Electronics Corp. 目次 2/31 1. 会社概要 2. Autoware Toolbox 紹介 1. 取り組み背景 2. Autoware
自動運転向けソフトウェア Autoware と MATLAB /Simulink の連携 ~ 事例紹介 ~ 2019 年 5 月 28 日株式会社ネクスティエレクトロニクス SW 開発部技術開発グループ太田徳幸 Copyright TOMEN Electronics Corp. 目次 2/31 1. 会社概要 2. Autoware Toolbox 紹介 1. 取り組み背景 2. Autoware
回路シミュレータ/MATLABリンク~詳細回路設計におけるシステムレベル検証~
 回路シミュレータ /MATLAB リンク ~ 詳細回路設計におけるシステムレベル検証 ~ MathWorks Japan アプリケーションエンジニアリング部シニアアプリケーションエンジニア初井良治 2017 The MathWorks, Inc. 1 MathWorks と Cadence 社パートナーシップ OrCAD PSpice 回路設計アナログ デジタル混在の回路シミュレーション 回路設計者
回路シミュレータ /MATLAB リンク ~ 詳細回路設計におけるシステムレベル検証 ~ MathWorks Japan アプリケーションエンジニアリング部シニアアプリケーションエンジニア初井良治 2017 The MathWorks, Inc. 1 MathWorks と Cadence 社パートナーシップ OrCAD PSpice 回路設計アナログ デジタル混在の回路シミュレーション 回路設計者
Presentation Title
 モデルベースデザインではじめる自律型アームロボットの開発 導入 アプリケーションエンジニアリング部小林昇洋 2015 The MathWorks, Inc. 1 本セッションでお伝えしたいこと 自律ロボットシステムの開発のキーポイント : 1. マルチドメインシミュレーション 2. 複雑な開発要素をトータルでサポートする開発環境 3. モデルベースデザイン 2 自律ロボットシステムの開発における課題
モデルベースデザインではじめる自律型アームロボットの開発 導入 アプリケーションエンジニアリング部小林昇洋 2015 The MathWorks, Inc. 1 本セッションでお伝えしたいこと 自律ロボットシステムの開発のキーポイント : 1. マルチドメインシミュレーション 2. 複雑な開発要素をトータルでサポートする開発環境 3. モデルベースデザイン 2 自律ロボットシステムの開発における課題
Presentation Title
 ( ) 2017 The MathWorks, Inc. 1 新型乗用車の CO2 規制の比較 出典 :the International Council on Clean Transportation 2 自動車台数は今後も増加 多くの割合は内燃機関を使用 OEM 各社はコンセプト 想定ターゲットに応じて最適なパワートレインを選択 3 厳しい燃費規制に対応必至 従来の燃焼エンジンからフルバッテリのモータまで
( ) 2017 The MathWorks, Inc. 1 新型乗用車の CO2 規制の比較 出典 :the International Council on Clean Transportation 2 自動車台数は今後も増加 多くの割合は内燃機関を使用 OEM 各社はコンセプト 想定ターゲットに応じて最適なパワートレインを選択 3 厳しい燃費規制に対応必至 従来の燃焼エンジンからフルバッテリのモータまで
Introduction to System Identification
 y(t) モデルベースデザイン 制御系設計のためのシステム同定入門 s 2 Teja Muppirala t s 2 3s 4 2012 The MathWorks, Inc. 1 モデルベースデザイン 正確なモデルがあることが大前提 実行可能な仕様書 シミュレーションによる設計 モデル 連続したテスト 検証 コード生成による実装 2 動的システムのモデリング モデリング手法 第一原理モデリング データドリブンモデリング
y(t) モデルベースデザイン 制御系設計のためのシステム同定入門 s 2 Teja Muppirala t s 2 3s 4 2012 The MathWorks, Inc. 1 モデルベースデザイン 正確なモデルがあることが大前提 実行可能な仕様書 シミュレーションによる設計 モデル 連続したテスト 検証 コード生成による実装 2 動的システムのモデリング モデリング手法 第一原理モデリング データドリブンモデリング
Expo 2014
 物理層 &MAC 層のマルチレイヤシミュレーションとコード生成 MathWorks Japan アプリケーションエンジニアリング部シニアアプリケーションエンジニア田中明美 2014 The MathWorks, Inc. 1 Go-Back-N ( クロスレイヤモデル ) BER/PER 特性の確認 Bit レベルで雑音を加えているため PER だけでなく BER も評価可能 2 Go-Back-N
物理層 &MAC 層のマルチレイヤシミュレーションとコード生成 MathWorks Japan アプリケーションエンジニアリング部シニアアプリケーションエンジニア田中明美 2014 The MathWorks, Inc. 1 Go-Back-N ( クロスレイヤモデル ) BER/PER 特性の確認 Bit レベルで雑音を加えているため PER だけでなく BER も評価可能 2 Go-Back-N
Presentation Title
 コード生成製品の普及と最新の技術動向 MathWorks Japan パイロットエンジニアリング部 東達也 2014 The MathWorks, Inc. 1 MBD 概要 MATLABおよびSimulinkを使用したモデルベース デザイン ( モデルベース開発 ) 紹介ビデオ 2 MBD による制御開発フローとコード生成製品の活用 制御設計の最適化で性能改善 設計図ですぐに挙動確認 MILS:
コード生成製品の普及と最新の技術動向 MathWorks Japan パイロットエンジニアリング部 東達也 2014 The MathWorks, Inc. 1 MBD 概要 MATLABおよびSimulinkを使用したモデルベース デザイン ( モデルベース開発 ) 紹介ビデオ 2 MBD による制御開発フローとコード生成製品の活用 制御設計の最適化で性能改善 設計図ですぐに挙動確認 MILS:
物理モデリングツールによる モデリングとシミュレーション入門
 Simscape TM による物理モデリング入門 ~Simscape + Sim シリーズの紹介 ~ MathWorks Japan アプリケーションエンジニア 渡辺修治 基本ツール MATLAB Simulink Stateflow 便利ツール Simulink Coder TM Simulink Control Design TM Simulink Design Optimization TM
Simscape TM による物理モデリング入門 ~Simscape + Sim シリーズの紹介 ~ MathWorks Japan アプリケーションエンジニア 渡辺修治 基本ツール MATLAB Simulink Stateflow 便利ツール Simulink Coder TM Simulink Control Design TM Simulink Design Optimization TM
Microsoft PowerPoint - EXPO2012_AKASAKA_rev.2.pptx
 リアルタイム制御環境を活用したフィードバック制御系設計実践 MathWorks Japan アプリケーションエンジニアリング部アプリケーションエンジニア赤阪大介 212 The MathWorks, Inc. 1 本講演では.. ギャップ? - フィードバック制御器の設計 設計 シミュレーション リアルタイム制御テスト ( ラピッドプロトタイピング ) 実機環境を活用し 制御系設計を効率的に行うには?
リアルタイム制御環境を活用したフィードバック制御系設計実践 MathWorks Japan アプリケーションエンジニアリング部アプリケーションエンジニア赤阪大介 212 The MathWorks, Inc. 1 本講演では.. ギャップ? - フィードバック制御器の設計 設計 シミュレーション リアルタイム制御テスト ( ラピッドプロトタイピング ) 実機環境を活用し 制御系設計を効率的に行うには?
モデルベースデザイン(MBD)を始めましょう!
を始めましょう!") モデルベースデザイン (MBD) を始めましょう! MathWorks Japan アプリケーションエンジニアリング部シニアアプリケーションエンジニア村上直也 2014 The MathWorks, Inc. 1 モデルベースデザイン (MBD) を始めましょう! ますます増えていくスマートシステム多機能なソフトウェアモデルベースデザイン開発プロセスを加速 2 はじめに スマートシステムの増加 ソフトの高機能化
モデルベースデザイン (MBD) を始めましょう! MathWorks Japan アプリケーションエンジニアリング部シニアアプリケーションエンジニア村上直也 2014 The MathWorks, Inc. 1 モデルベースデザイン (MBD) を始めましょう! ますます増えていくスマートシステム多機能なソフトウェアモデルベースデザイン開発プロセスを加速 2 はじめに スマートシステムの増加 ソフトの高機能化
d4-automated-driving-mw
 ADAS 自動運転アルゴリズム検証のためのシナリオ生成とシミュレーション アプリケーションエンジニアリング部大塚慶太郎 2015 The MathWorks, Inc. 1 ADAS 自動運転システムの開発 with MATLAB and Simulink 統合シミュレーション 認識 プランニング 制御 2 ADAS 自動運転 : 運転シナリオの定義 with MATLAB and Simulink
ADAS 自動運転アルゴリズム検証のためのシナリオ生成とシミュレーション アプリケーションエンジニアリング部大塚慶太郎 2015 The MathWorks, Inc. 1 ADAS 自動運転システムの開発 with MATLAB and Simulink 統合シミュレーション 認識 プランニング 制御 2 ADAS 自動運転 : 運転シナリオの定義 with MATLAB and Simulink
/ , ,908 4,196 2, ,842 38, / / 2 33 /
 MathWorks Automotive Conference 2014 ( ) ECU 0.1. 1 /30 1949 12 16 1,874 4 959 2 4,908 4,196 2,993 139,842 38,581 62 26 35 56 / 6 185 13 4 3 11 / 2 33 / 2014 3 31 0.1. 2 /30 ETC 0.2. 3 /30 1. 1. 2. 2.
MathWorks Automotive Conference 2014 ( ) ECU 0.1. 1 /30 1949 12 16 1,874 4 959 2 4,908 4,196 2,993 139,842 38,581 62 26 35 56 / 6 185 13 4 3 11 / 2 33 / 2014 3 31 0.1. 2 /30 ETC 0.2. 3 /30 1. 1. 2. 2.
PowerPoint プレゼンテーション
 MATLAB 2008 5 22 Quick history - Cleve Moler s original MATLAB program Quick history The MathWorks in 1984 Cleve Moler Jack Little MATLAB/Simulink MATLAB 80 / MATLAB Toolbox 100 Simulink Blockset Stateflow
MATLAB 2008 5 22 Quick history - Cleve Moler s original MATLAB program Quick history The MathWorks in 1984 Cleve Moler Jack Little MATLAB/Simulink MATLAB 80 / MATLAB Toolbox 100 Simulink Blockset Stateflow
MAAB でのプレゼンテーション に関する提案
 J-MAAB 2005 10 27 (1) OBD (2) (3) (4) OEM (5) MAAB J-MAAB 1. MBD (Model-Based Development) MBD Process 2. MAAB MAAB 3. J (Japan) -MAAB J-MAAB 4. J-MAAB WG WG 5. MBD Virtual World *SILS Rapid *HILS Real
J-MAAB 2005 10 27 (1) OBD (2) (3) (4) OEM (5) MAAB J-MAAB 1. MBD (Model-Based Development) MBD Process 2. MAAB MAAB 3. J (Japan) -MAAB J-MAAB 4. J-MAAB WG WG 5. MBD Virtual World *SILS Rapid *HILS Real
Presentation Title
 データの本質を読み解くための機械学習 MATLAB でデータ解析の課題に立ち向かう MathWorks Japan アプリケーションエンジニア部アプリケーションエンジニア井原瑞希 2016 The MathWorks, Inc. 1 Buzzwords IoT 人工知能 / AI データ解析 ビッグデータ 2 データ解析ワークフロー データへのアクセスと探索 データの前処理 予測モデルの構築 システムへの統合
データの本質を読み解くための機械学習 MATLAB でデータ解析の課題に立ち向かう MathWorks Japan アプリケーションエンジニア部アプリケーションエンジニア井原瑞希 2016 The MathWorks, Inc. 1 Buzzwords IoT 人工知能 / AI データ解析 ビッグデータ 2 データ解析ワークフロー データへのアクセスと探索 データの前処理 予測モデルの構築 システムへの統合
MATLAB®製品紹介セミナー
 MATLAB における分類 パターン認識 - 入門編 - MathWorks Japan アプリケーションエンジニアリング部 ( テクニカルコンピューティング部 ) アプリケーションエンジニア大開孝文 2012 The MathWorks, Inc. 1 アジェンダ 回帰モデルと分類モデルについて 分類手法を使ったワインの品質モデリング まとめ 2 分類手法を使ったワインの品質モデリング アプローチ
MATLAB における分類 パターン認識 - 入門編 - MathWorks Japan アプリケーションエンジニアリング部 ( テクニカルコンピューティング部 ) アプリケーションエンジニア大開孝文 2012 The MathWorks, Inc. 1 アジェンダ 回帰モデルと分類モデルについて 分類手法を使ったワインの品質モデリング まとめ 2 分類手法を使ったワインの品質モデリング アプローチ
AI技術の紹介とセンサーデータ解析への応用
 AI を活用したセンサーデータ解析 MathWorks Japan アプリケーションエンジニアリンググループアプリケーションエンジニア吉田剛士 2018 The MathWorks, Inc. 1 AI を活用したセンサーデータ解析 11:20-11:50 MATLAB による AI 作成 アプリを使った簡易的な解析 学習モデルのパラメータ自動調整 学習モデルのスタンドアロン化 2 課題 : ターボファンエンジンの予知保全
AI を活用したセンサーデータ解析 MathWorks Japan アプリケーションエンジニアリンググループアプリケーションエンジニア吉田剛士 2018 The MathWorks, Inc. 1 AI を活用したセンサーデータ解析 11:20-11:50 MATLAB による AI 作成 アプリを使った簡易的な解析 学習モデルのパラメータ自動調整 学習モデルのスタンドアロン化 2 課題 : ターボファンエンジンの予知保全
untitled
 SUBJECT: Applied Biosystems Data Collection Software v2.0 v3.0 Windows 2000 OS : 30 45 Cancel Data Collection - Applied Biosystems Sequencing Analysis Software v5.2 - Applied Biosystems SeqScape Software
SUBJECT: Applied Biosystems Data Collection Software v2.0 v3.0 Windows 2000 OS : 30 45 Cancel Data Collection - Applied Biosystems Sequencing Analysis Software v5.2 - Applied Biosystems SeqScape Software
CANapeを用いたラピッドコントロールプロトタイピングのバイパス手法による制御モデル開発
 ape を用いたラピッドコントロールプロトタイピングのバイパス手法による制御モデル開発 近年 自動車のソフトウェア開発において 開発期間の短縮やコスト削減の面からモデルベース開発が注目されています アイシン エィ ダブリュ株式会社は ラピッドコントロールプロトタイピングのバイパス手法による制御モデル開発にベクターの測定 / キャリブレーションツール ape ( キャナピー ) を導入しました 本稿では
ape を用いたラピッドコントロールプロトタイピングのバイパス手法による制御モデル開発 近年 自動車のソフトウェア開発において 開発期間の短縮やコスト削減の面からモデルベース開発が注目されています アイシン エィ ダブリュ株式会社は ラピッドコントロールプロトタイピングのバイパス手法による制御モデル開発にベクターの測定 / キャリブレーションツール ape ( キャナピー ) を導入しました 本稿では
PowerPoint Presentation
 MATLAB による 大規模フリートデータ解析 アプリケーションエンジニアリング部齊藤甲次朗 2015 The MathWorks, Inc. 1 アジェンダ はじめに ビッグデータ解析の課題 MATLAB を活用したフリートデータ解析事例 フリートデータ解析実践 デスクトップでの解析 クラスターへのスケールアウト MATLAB 解析のシステムへの統合 まとめ 2 25 GB / 1hour 4 フリートデータ解析を含むビッグデータ解析の課題
MATLAB による 大規模フリートデータ解析 アプリケーションエンジニアリング部齊藤甲次朗 2015 The MathWorks, Inc. 1 アジェンダ はじめに ビッグデータ解析の課題 MATLAB を活用したフリートデータ解析事例 フリートデータ解析実践 デスクトップでの解析 クラスターへのスケールアウト MATLAB 解析のシステムへの統合 まとめ 2 25 GB / 1hour 4 フリートデータ解析を含むビッグデータ解析の課題
サイバネットニュース No.115
 Fall 2005 no.115 C O N T E N T S 1 2 2 3 4 4 5 5 6 7 8 9 10-11 12-14 15 16 CAE CAE CAE CAE CAE CAE CAE CAE CAE CAE CAE CAE CAE CAE CAE CAE CAE BP 1 Just-in-TimeIT epiplex Epiance4.7 CAD/CAE ERPWindows
Fall 2005 no.115 C O N T E N T S 1 2 2 3 4 4 5 5 6 7 8 9 10-11 12-14 15 16 CAE CAE CAE CAE CAE CAE CAE CAE CAE CAE CAE CAE CAE CAE CAE CAE CAE BP 1 Just-in-TimeIT epiplex Epiance4.7 CAD/CAE ERPWindows
f3-power-train-simulation-mw
 車両全体シミュレーションを活用しよう 電動パワートレインシステム開発を例題に MathWorks Application Engineering 宮川浩 2015 The MathWorks, Inc. 1 電動パワートレインの選択 モータは一つ パラレルハイブリッド モータをどこに置くのがベストでしょうか? 燃費がより良いのは? 加速性能がより良いのは? 3 電動パワートレイン比較結果 P0 P1
車両全体シミュレーションを活用しよう 電動パワートレインシステム開発を例題に MathWorks Application Engineering 宮川浩 2015 The MathWorks, Inc. 1 電動パワートレインの選択 モータは一つ パラレルハイブリッド モータをどこに置くのがベストでしょうか? 燃費がより良いのは? 加速性能がより良いのは? 3 電動パワートレイン比較結果 P0 P1
Introduction Purpose This training course describes the configuration and session features of the High-performance Embedded Workshop (HEW), a key tool
, a key tool") Introduction Purpose This training course describes the configuration and session features of the High-performance Embedded Workshop (HEW), a key tool for developing software for embedded systems that
Introduction Purpose This training course describes the configuration and session features of the High-performance Embedded Workshop (HEW), a key tool for developing software for embedded systems that
FA/MV用レンズマウント 標準化の最新動向
 JIIA セミナー 2016 GenICam につながる照明機器 ~ 照明制御の新たな時代 ~ 2016 年 11 月 16 日 日本インダストリアルイメージング協会 照明分科会主査佐久間恒雄 ( キリンテクノシステム株式会社 ) マシンビジョンのグローバルな規格化活動 G3による規格化の取り組み 規格化を取り巻く環境 Industrie4.0~Embedded Vision~GenICam 照明規格の
JIIA セミナー 2016 GenICam につながる照明機器 ~ 照明制御の新たな時代 ~ 2016 年 11 月 16 日 日本インダストリアルイメージング協会 照明分科会主査佐久間恒雄 ( キリンテクノシステム株式会社 ) マシンビジョンのグローバルな規格化活動 G3による規格化の取り組み 規格化を取り巻く環境 Industrie4.0~Embedded Vision~GenICam 照明規格の
,,,,., C Java,,.,,.,., ,,.,, i
 24 Development of the programming s learning tool for children be derived from maze 1130353 2013 3 1 ,,,,., C Java,,.,,.,., 1 6 1 2.,,.,, i Abstract Development of the programming s learning tool for children
24 Development of the programming s learning tool for children be derived from maze 1130353 2013 3 1 ,,,,., C Java,,.,,.,., 1 6 1 2.,,.,, i Abstract Development of the programming s learning tool for children
Multi-konzeptionelle Verwendung von Low-Cost Hardware in der Lehre
 開発プロセスにおける制御試験入門 MathWorks Japan アプリケーションエンジニアリング部制御 岩井理樹 2015 The MathWorks, Inc. 1 本講演の対象者 & メッセージング 対象者 ( 下記の初心者の方々が主に対象となります ) あまり Simulink に馴染みのない方 Simulink で廉価版ハードウェア実装をされていない方 MATLAB /Simulink で設計したアルゴリズムの動作検証を実機で確認されたい方
開発プロセスにおける制御試験入門 MathWorks Japan アプリケーションエンジニアリング部制御 岩井理樹 2015 The MathWorks, Inc. 1 本講演の対象者 & メッセージング 対象者 ( 下記の初心者の方々が主に対象となります ) あまり Simulink に馴染みのない方 Simulink で廉価版ハードウェア実装をされていない方 MATLAB /Simulink で設計したアルゴリズムの動作検証を実機で確認されたい方
AMS Expoコンテンツ
 高速伝送路での信号特性の解析 ~ 新しい MATLAB /Simulink の使い方 ~ MathWorks Japan アプリケーションエンジニアリング部初井良治 2014 The MathWorks, Inc. 1 Demo MATLAB/Simulink 高速伝送特性シミュレーション DFE CDR ビット生成プリエンファシス伝送路特性データ 8B10Bエンコーダ アナログイコライザ 8B10B
高速伝送路での信号特性の解析 ~ 新しい MATLAB /Simulink の使い方 ~ MathWorks Japan アプリケーションエンジニアリング部初井良治 2014 The MathWorks, Inc. 1 Demo MATLAB/Simulink 高速伝送特性シミュレーション DFE CDR ビット生成プリエンファシス伝送路特性データ 8B10Bエンコーダ アナログイコライザ 8B10B
いまからはじめる、MATLABによる 画像処理・コンピュータビジョン
 いまからはじめる MATLAB による画像処理 コンピュータビジョン MathWorks Japan アプリケーションエンジニアリング部シニアアプリケーションエンジニア大谷卓也 2012 The MathWorks, Inc. 1 Demo: 顔検出 画像から 人間の顔認識を行い 数のカウントを行う 2 Demo: MRI Analysis モンタージュ画像からの 3 次元構築 3 MATLAB/Simulink
いまからはじめる MATLAB による画像処理 コンピュータビジョン MathWorks Japan アプリケーションエンジニアリング部シニアアプリケーションエンジニア大谷卓也 2012 The MathWorks, Inc. 1 Demo: 顔検出 画像から 人間の顔認識を行い 数のカウントを行う 2 Demo: MRI Analysis モンタージュ画像からの 3 次元構築 3 MATLAB/Simulink
24 LED A visual programming environment for art work using a LED matrix
 24 LED A visual programming environment for art work using a LED matrix 1130302 2013 3 1 LED,,,.,. Arduino. Arduino,,,., Arduino,.,, LED,., Arduino, LED, i Abstract A visual programming environment for
24 LED A visual programming environment for art work using a LED matrix 1130302 2013 3 1 LED,,,.,. Arduino. Arduino,,,., Arduino,.,, LED,., Arduino, LED, i Abstract A visual programming environment for
HEVの車両全体シミュレーションによるシステム最適化
 HEV の車両全体シミュレーションによるシステム最適化 MathWorks Japan アプリケーションエンジニアリング部アプリケーションエンジニア張莉 2016 The MathWorks, Inc. 1 マルチモードハイブリッド自動車 Engine Mode EV Mode SHEV Mode 1. Higuchi, N., Sunaga, Y., Tanaka, M., Shimada, H.:
HEV の車両全体シミュレーションによるシステム最適化 MathWorks Japan アプリケーションエンジニアリング部アプリケーションエンジニア張莉 2016 The MathWorks, Inc. 1 マルチモードハイブリッド自動車 Engine Mode EV Mode SHEV Mode 1. Higuchi, N., Sunaga, Y., Tanaka, M., Shimada, H.:
Vol. 42 No. SIG 8(TOD 10) July HTML 100 Development of Authoring and Delivery System for Synchronized Contents and Experiment on High Spe
 July HTML 100 Development of Authoring and Delivery System for Synchronized Contents and Experiment on High Spe") Vol. 42 No. SIG 8(TOD 10) July 2001 1 2 3 4 HTML 100 Development of Authoring and Delivery System for Synchronized Contents and Experiment on High Speed Networks Yutaka Kidawara, 1 Tomoaki Kawaguchi, 2
Vol. 42 No. SIG 8(TOD 10) July 2001 1 2 3 4 HTML 100 Development of Authoring and Delivery System for Synchronized Contents and Experiment on High Speed Networks Yutaka Kidawara, 1 Tomoaki Kawaguchi, 2
Presentation Title
 Robo- 剣 Conference 2017/05/20(Sat) - Robo- 剣における MATLAB/Simulink の活用 MathWorks Japan 三田宇洋 2012 The MathWorks, Inc. 1 Robo- 剣 Conference 2017 年 05 月 20 日土曜日講習会 13:00-18:00 会場 : 県立青少年センター 2. ロボット作りへのMatlab
Robo- 剣 Conference 2017/05/20(Sat) - Robo- 剣における MATLAB/Simulink の活用 MathWorks Japan 三田宇洋 2012 The MathWorks, Inc. 1 Robo- 剣 Conference 2017 年 05 月 20 日土曜日講習会 13:00-18:00 会場 : 県立青少年センター 2. ロボット作りへのMatlab
2D/3D CAD データ管理導入手法実践セミナー Autodesk Vault 最新バージョン情報 Presenter Name 2013 年 4 月 2013 Autodesk
 2D/3D CAD データ管理導入手法実践セミナー Autodesk Vault 最新バージョン情報 Presenter Name 2013 年 4 月 2013 Autodesk Autodesk Vault 2014 新機能 操作性向上 Inventor ファイルを Vault にチェックインすることなくステータス変更を実行できるようになりました 履歴テーブルの版管理を柔軟に設定できるようになりました
2D/3D CAD データ管理導入手法実践セミナー Autodesk Vault 最新バージョン情報 Presenter Name 2013 年 4 月 2013 Autodesk Autodesk Vault 2014 新機能 操作性向上 Inventor ファイルを Vault にチェックインすることなくステータス変更を実行できるようになりました 履歴テーブルの版管理を柔軟に設定できるようになりました
d1-ros-picking-system-yasukawa
 2019 年 5 月 28 日 / 出典 :https://jp.mathworks.com/products/simulink.html 環境 社会システム事業部 森田賢 開発部 出典 :http://wiki.ros.org 出典 :http://gazebosim.org/ : The MathWorks, Inc. の商標 発表者自己紹介 Qiita : Increments 株式会社の商標
2019 年 5 月 28 日 / 出典 :https://jp.mathworks.com/products/simulink.html 環境 社会システム事業部 森田賢 開発部 出典 :http://wiki.ros.org 出典 :http://gazebosim.org/ : The MathWorks, Inc. の商標 発表者自己紹介 Qiita : Increments 株式会社の商標
SMART USER'S GUIDE_0804.ai
 CONNECT with your SMARTPHONE PADRONE SMART CC-PA500B STRADA SMART CC-RD500B The Bluetooth word mark and logos are owned by Bluetooth SIG, Inc. and any use of such marks by CATEYE Co., Ltd. is under license.
CONNECT with your SMARTPHONE PADRONE SMART CC-PA500B STRADA SMART CC-RD500B The Bluetooth word mark and logos are owned by Bluetooth SIG, Inc. and any use of such marks by CATEYE Co., Ltd. is under license.
MATLAB® における並列・分散コンピューティング ~ Parallel Computing Toolbox™ & MATLAB Distributed Computing Server™ ~
 MATLAB における並列 分散コンピューティング ~ Parallel Computing Toolbox & MATLAB Distributed Computing Server ~ MathWorks Japan Application Engineering Group Takashi Yoshida 2016 The MathWorks, Inc. 1 System Configuration
MATLAB における並列 分散コンピューティング ~ Parallel Computing Toolbox & MATLAB Distributed Computing Server ~ MathWorks Japan Application Engineering Group Takashi Yoshida 2016 The MathWorks, Inc. 1 System Configuration
医用画像を題材とした3次元画像解析とディープラーニング
 医用画像を題材とした 3 次元画像解析とディープラーニング MathWorks Japan シニアアプリケーションエンジニア大塚慶太郎 kei.otsuka@mathworks.co.jp 2018 The MathWorks, Inc. 1 リリース毎に進化する MATLAB の機能 医用画像処理 自動運転 ロボティクス セキュリティ 3-D Image 3-D Vision SfM Point
医用画像を題材とした 3 次元画像解析とディープラーニング MathWorks Japan シニアアプリケーションエンジニア大塚慶太郎 kei.otsuka@mathworks.co.jp 2018 The MathWorks, Inc. 1 リリース毎に進化する MATLAB の機能 医用画像処理 自動運転 ロボティクス セキュリティ 3-D Image 3-D Vision SfM Point
Introduction Purpose This training course demonstrates the use of the High-performance Embedded Workshop (HEW), a key tool for developing software for
, a key tool for developing software for") Introduction Purpose This training course demonstrates the use of the High-performance Embedded Workshop (HEW), a key tool for developing software for embedded systems that use microcontrollers (MCUs)
Introduction Purpose This training course demonstrates the use of the High-performance Embedded Workshop (HEW), a key tool for developing software for embedded systems that use microcontrollers (MCUs)
189 2015 1 80
 189 2015 1 A Design and Implementation of the Digital Annotation Basis on an Image Resource for a Touch Operation TSUDA Mitsuhiro 79 189 2015 1 80 81 189 2015 1 82 83 189 2015 1 84 85 189 2015 1 86 87
189 2015 1 A Design and Implementation of the Digital Annotation Basis on an Image Resource for a Touch Operation TSUDA Mitsuhiro 79 189 2015 1 80 81 189 2015 1 82 83 189 2015 1 84 85 189 2015 1 86 87
AutoCAD のCitrix XenApp 対応
 AutoCAD ニューテクノロジーセミナー AutoCAD の Citrix XenApp 対応 オートデスク株式会社伊勢崎俊明 Citrix 対応 AutoCAD 2012 とは オートデスクのデスクトップ製品用ライセンス方式 Flexera Software 社 FLEXnet テクノロジを利用 スタンドアロンライセンス 1 つのコンピュータに 1 つのラインセンスをインストール アクティベーション処理でライセンスを有効化
AutoCAD ニューテクノロジーセミナー AutoCAD の Citrix XenApp 対応 オートデスク株式会社伊勢崎俊明 Citrix 対応 AutoCAD 2012 とは オートデスクのデスクトップ製品用ライセンス方式 Flexera Software 社 FLEXnet テクノロジを利用 スタンドアロンライセンス 1 つのコンピュータに 1 つのラインセンスをインストール アクティベーション処理でライセンスを有効化
PowerPoint Presentation
 Embedded CFD 1D-3D 連成によるエンジンコンパートメント熱収支解析手法の提案 June 9, 2017 . アジェンダ Embedded CFD 概要 エンコパ内風流れデモモデル 他用途への適用可能性, まとめ V サイクルにおける,1D-3D シミュレーションの使い分け ( 現状 ) 1D 機能的表現 企画 & 初期設計 詳細 3D 形状情報の無い段階 1D 1D 空気流れ計算精度に限度
Embedded CFD 1D-3D 連成によるエンジンコンパートメント熱収支解析手法の提案 June 9, 2017 . アジェンダ Embedded CFD 概要 エンコパ内風流れデモモデル 他用途への適用可能性, まとめ V サイクルにおける,1D-3D シミュレーションの使い分け ( 現状 ) 1D 機能的表現 企画 & 初期設計 詳細 3D 形状情報の無い段階 1D 1D 空気流れ計算精度に限度
Presentation Title
 センサーデータ解析と機械学習 ~ 振動データからの異常検出 ~ MathWorks Japan アプリケーションエンジニアリング部 ( テクニカルコンピューティング ) 太田英司 2015 2014 The MathWorks, Inc. 1 構造ヘルスモニタリング センサーとコンピュータにより構造物の健全性を自動監視する 老朽化する構造物 インフラの数 人手のみの監視による限界 人間では検知できない故障や異常の予兆
センサーデータ解析と機械学習 ~ 振動データからの異常検出 ~ MathWorks Japan アプリケーションエンジニアリング部 ( テクニカルコンピューティング ) 太田英司 2015 2014 The MathWorks, Inc. 1 構造ヘルスモニタリング センサーとコンピュータにより構造物の健全性を自動監視する 老朽化する構造物 インフラの数 人手のみの監視による限界 人間では検知できない故障や異常の予兆
Vol. 48 No. 3 Mar PM PM PMBOK PM PM PM PM PM A Proposal and Its Demonstration of Developing System for Project Managers through University-Indus
 Vol. 48 No. 3 Mar. 2007 PM PM PMBOK PM PM PM PM PM A Proposal and Its Demonstration of Developing System for Project Managers through University-Industry Collaboration Yoshiaki Matsuzawa and Hajime Ohiwa
Vol. 48 No. 3 Mar. 2007 PM PM PMBOK PM PM PM PM PM A Proposal and Its Demonstration of Developing System for Project Managers through University-Industry Collaboration Yoshiaki Matsuzawa and Hajime Ohiwa
DesignRangeCheckExpr Insertion Discussion
 C プログラマーのための Simulink 活用講座 ~Simulink を使った開発に迷うエンジニアへ ~ MathWorks Japan アプリケーションエンジニアリング部アプリケーションエンジニア渡辺修治 2012 The MathWorks, Inc. 1 ショータくんは 何に悩んでいるの? 制御ロジックを理解したいけど データーフローが見にくい コードの全体像が把握できない ショータくん
C プログラマーのための Simulink 活用講座 ~Simulink を使った開発に迷うエンジニアへ ~ MathWorks Japan アプリケーションエンジニアリング部アプリケーションエンジニア渡辺修治 2012 The MathWorks, Inc. 1 ショータくんは 何に悩んでいるの? 制御ロジックを理解したいけど データーフローが見にくい コードの全体像が把握できない ショータくん
Tech Info share 2015 Q2 CDA Team 2
 制 御 モデルを 活 用 した 量 産 / 組 み 込 みソフト 開 発 ソリューション MathWorks Japan アプリケーションエンジニアリング 部 ( 制 御 ) シニアアプリケーションエンジニア 山 本 順 久 2015 The MathWorks, Inc. 1 はじめに: 本 講 演 でお 話 しする 内 容 Simulinkモデルを 用 いた 量 産 / 組 み 込 み 制 御
制 御 モデルを 活 用 した 量 産 / 組 み 込 みソフト 開 発 ソリューション MathWorks Japan アプリケーションエンジニアリング 部 ( 制 御 ) シニアアプリケーションエンジニア 山 本 順 久 2015 The MathWorks, Inc. 1 はじめに: 本 講 演 でお 話 しする 内 容 Simulinkモデルを 用 いた 量 産 / 組 み 込 み 制 御
Y X X Y1 X 2644 Y1 Y2 Y1 Y3 Y1 Y1 Y1 Y2 Y3 Y2 Y3 Y1 Y1 Y2 Y3 Y1 Y2 Y3 Y1 X Lexis X Y X X2 X3 X2 Y2 Y1 Y1
 2 20 I II III 1 2 392 3 4 IV Makiko Noto / 3 3 1 1 5 52 1 2 2 2 3 9 11 5 31 1037 227 7 4 1 4 Y1 1 1 5 1965 2000 302 050 2012 autumn / No.393 051 2 5 Y1 9 9 4 X X Y1 X 2644 Y1 Y2 Y1 Y3 Y1 Y1 Y1 Y2 Y3 Y2
2 20 I II III 1 2 392 3 4 IV Makiko Noto / 3 3 1 1 5 52 1 2 2 2 3 9 11 5 31 1037 227 7 4 1 4 Y1 1 1 5 1965 2000 302 050 2012 autumn / No.393 051 2 5 Y1 9 9 4 X X Y1 X 2644 Y1 Y2 Y1 Y3 Y1 Y1 Y1 Y2 Y3 Y2
Model-Based Calibration Toolbox 4.0
 Model-Based Calibration Toolbox 4.0 複雑なパワートレインシステムのキャリブレーション Model-Based Calibration ToolboxTM は 統計モデリングと数値最適化を使用して複雑なパワートレイン システムの最適なキャリブレーションを実行するための設計ツールを提供します 従来の手法では網 羅的なテストが必要となるような 複雑で自由度の高いエンジンに対して
Model-Based Calibration Toolbox 4.0 複雑なパワートレインシステムのキャリブレーション Model-Based Calibration ToolboxTM は 統計モデリングと数値最適化を使用して複雑なパワートレイン システムの最適なキャリブレーションを実行するための設計ツールを提供します 従来の手法では網 羅的なテストが必要となるような 複雑で自由度の高いエンジンに対して
MATLAB EXPO 2015 Japan 次世代モデルベース検証ソリューションで テスト・デバッグ改善
 次世代モデルベース検証ソリューションで テスト デバッグ改善 MathWorks Japan アプリケーションエンジニアリング部 ( 制御 ) リャンティファニー 2015 The MathWorks, Inc. 1 アジェンダ はじめに 検証作業におけるチャレンジ & 新しいソリューション まとめ 2 モデルベースデザイン / 開発 (MBD) が量産制御ソフト開発に求められる背景 課題解決策効果
次世代モデルベース検証ソリューションで テスト デバッグ改善 MathWorks Japan アプリケーションエンジニアリング部 ( 制御 ) リャンティファニー 2015 The MathWorks, Inc. 1 アジェンダ はじめに 検証作業におけるチャレンジ & 新しいソリューション まとめ 2 モデルベースデザイン / 開発 (MBD) が量産制御ソフト開発に求められる背景 課題解決策効果
AMS Expoコンテンツ
 MATLAB /Simulink を活用した電源システム設計フロー紹介 MathWorks Japan アプリケーションエンジニアリング部初井良治 2013 The MathWorks, Inc. 1 内容 MATLAB /Simulink アナログ ミックスドシグナルシステム設計フロー 適用事例 ( アナログ ミックスドシグナル ) システム設計フロー MATLAB /Simulink の利点 MATLAB
MATLAB /Simulink を活用した電源システム設計フロー紹介 MathWorks Japan アプリケーションエンジニアリング部初井良治 2013 The MathWorks, Inc. 1 内容 MATLAB /Simulink アナログ ミックスドシグナルシステム設計フロー 適用事例 ( アナログ ミックスドシグナル ) システム設計フロー MATLAB /Simulink の利点 MATLAB
b4-deeplearning-embedded-c-mw
 ディープラーニングアプリケーション の組み込み GPU/CPU 実装 アプリケーションエンジニアリング部町田和也 2015 The MathWorks, Inc. 1 アジェンダ MATLAB Coder/GPU Coder の概要 ディープニューラルネットワークの組み込み実装ワークフロー パフォーマンスに関して まとめ 2 ディープラーニングワークフローのおさらい Application logic
ディープラーニングアプリケーション の組み込み GPU/CPU 実装 アプリケーションエンジニアリング部町田和也 2015 The MathWorks, Inc. 1 アジェンダ MATLAB Coder/GPU Coder の概要 ディープニューラルネットワークの組み込み実装ワークフロー パフォーマンスに関して まとめ 2 ディープラーニングワークフローのおさらい Application logic
ディープラーニングの組み込み機器実装ソリューション ~GPC/CPU編~
 ディープラーニングの組み込み機器実装ソリューション ~GPU/CPU 編 ~ MathWorks Japan アプリケーションエンジニアリング部大塚慶太郎 Kei.Otsuka@mathworks.co.jp 2018 The MathWorks, Inc. 1 自動運転 : 車 歩行者等の物体認識 白線検出 組み込み GPU への実装 モデル GPU 実装 / 配布 3 医用画像 : 腫瘍等 特定の部位の検出
ディープラーニングの組み込み機器実装ソリューション ~GPU/CPU 編 ~ MathWorks Japan アプリケーションエンジニアリング部大塚慶太郎 Kei.Otsuka@mathworks.co.jp 2018 The MathWorks, Inc. 1 自動運転 : 車 歩行者等の物体認識 白線検出 組み込み GPU への実装 モデル GPU 実装 / 配布 3 医用画像 : 腫瘍等 特定の部位の検出
2. CABAC CABAC CABAC 1 1 CABAC Figure 1 Overview of CABAC 2 DCT 2 0/ /1 CABAC [3] 3. 2 値化部 コンテキスト計算部 2 値算術符号化部 CABAC CABAC
![2. CABAC CABAC CABAC 1 1 CABAC Figure 1 Overview of CABAC 2 DCT 2 0/ /1 CABAC [3] 3. 2 値化部 コンテキスト計算部 2 値算術符号化部 CABAC CABAC](/thumbs/92/108208872.jpg "2. CABAC CABAC CABAC 1 1 CABAC Figure 1 Overview of CABAC 2 DCT 2 0/ /1 CABAC [3] 3. 2 値化部 コンテキスト計算部 2 値算術符号化部 CABAC CABAC") H.264 CABAC 1 1 1 1 1 2, CABAC(Context-based Adaptive Binary Arithmetic Coding) H.264, CABAC, A Parallelization Technology of H.264 CABAC For Real Time Encoder of Moving Picture YUSUKE YATABE 1 HIRONORI
H.264 CABAC 1 1 1 1 1 2, CABAC(Context-based Adaptive Binary Arithmetic Coding) H.264, CABAC, A Parallelization Technology of H.264 CABAC For Real Time Encoder of Moving Picture YUSUKE YATABE 1 HIRONORI
A Study on Throw Simulation for Baseball Pitching Machine with Rollers and Its Optimization Shinobu SAKAI*5, Yuichiro KITAGAWA, Ryo KANAI and Juhachi
 A Study on Throw Simulation for Baseball Pitching Machine with Rollers and Its Optimization Shinobu SAKAI*5, Yuichiro KITAGAWA, Ryo KANAI and Juhachi ODA Department of Human and Mechanical Systems Engineering,
A Study on Throw Simulation for Baseball Pitching Machine with Rollers and Its Optimization Shinobu SAKAI*5, Yuichiro KITAGAWA, Ryo KANAI and Juhachi ODA Department of Human and Mechanical Systems Engineering,
258 5) GPS 1 GPS 6) GPS DP 7) 8) 10) GPS GPS 2 3 4 5 2. 2.1 3 1) GPS Global Positioning System
 GPS 1 GPS 6) GPS DP 7) 8) 10) GPS GPS 2 3 4 5 2. 2.1 3 1) GPS Global Positioning System") Vol. 52 No. 1 257 268 (Jan. 2011) 1 2, 1 1 measurement. In this paper, a dynamic road map making system is proposed. The proposition system uses probe-cars which has an in-vehicle camera and a GPS receiver.
Vol. 52 No. 1 257 268 (Jan. 2011) 1 2, 1 1 measurement. In this paper, a dynamic road map making system is proposed. The proposition system uses probe-cars which has an in-vehicle camera and a GPS receiver.
特別寄稿.indd
 特別寄稿 ソフトインフラとしてのデジタル地図を活用した自動運転システム Autonomous vehicle using digital map as a soft infrastructure 菅沼直樹 Naoki SUGANUMA 1. はじめに 1) 2008 2012 ITS 2) CO 2 3) 4) Door to door Door to door Door to door DARPA(
特別寄稿 ソフトインフラとしてのデジタル地図を活用した自動運転システム Autonomous vehicle using digital map as a soft infrastructure 菅沼直樹 Naoki SUGANUMA 1. はじめに 1) 2008 2012 ITS 2) CO 2 3) 4) Door to door Door to door Door to door DARPA(
IPSJ SIG Technical Report Vol.2012-EMB-26 No /9/10 1,a) 1,b) 1,c) 1,d) 1,e) 1,f) 1,g) 5 3D HILS HILS An Integrated Driving Simulator for Interdi
 1,b) 1,c) 1,d) 1,e) 1,f) 1,g) 5 3D HILS HILS An Integrated Driving Simulator for Interdi") 1,a) 1,b) 1,c) 1,d) 1,e) 1,f) 1,g) 5 3D HILS HILS An Integrated Driving Simulator for Interdisciplinary Education of Automotive Science in Kyushu University Makoto Uchiyama 1,a) Taketoshi Kawabe 1,b) Katsumi
1,a) 1,b) 1,c) 1,d) 1,e) 1,f) 1,g) 5 3D HILS HILS An Integrated Driving Simulator for Interdisciplinary Education of Automotive Science in Kyushu University Makoto Uchiyama 1,a) Taketoshi Kawabe 1,b) Katsumi
HILS実装のためのプラントモデリングツールの活用
 HILS 実装のためのプラントモデリングツールの活用 MathWorks Japan アプリケーションエンジニアリング部 ( 制御 ) アプリケーションエンジニア新井克明 2016 The MathWorks, Inc. 1 ハードウェアインザループシミュレーション (HILS) 制御対象の振る舞いを模擬し 試作 量産コントローラの機能検証を行うアプローチ 実機を利用したテストよりも再現性高くテストシナリオの繰り返し実施が可能
HILS 実装のためのプラントモデリングツールの活用 MathWorks Japan アプリケーションエンジニアリング部 ( 制御 ) アプリケーションエンジニア新井克明 2016 The MathWorks, Inc. 1 ハードウェアインザループシミュレーション (HILS) 制御対象の振る舞いを模擬し 試作 量産コントローラの機能検証を行うアプローチ 実機を利用したテストよりも再現性高くテストシナリオの繰り返し実施が可能
(3.6 ) (4.6 ) 2. [3], [6], [12] [7] [2], [5], [11] [14] [9] [8] [10] (1) Voodoo 3 : 3 Voodoo[1] 3 ( 3D ) (2) : Voodoo 3D (3) : 3D (Welc
![(3.6 ) (4.6 ) 2. [3], [6], [12] [7] [2], [5], [11] [14] [9] [8] [10] (1) Voodoo 3 : 3 Voodoo[1] 3 ( 3D ) (2) : Voodoo 3D (3) : 3D (Welc](/thumbs/65/54056306.jpg "(3.6 ) (4.6 ) 2. [3], [6], [12] [7] [2], [5], [11] [14] [9] [8] [10] (1) Voodoo 3 : 3 Voodoo[1] 3 ( 3D ) (2) : Voodoo 3D (3) : 3D (Welc") 1,a) 1,b) Obstacle Detection from Monocular On-Vehicle Camera in units of Delaunay Triangles Abstract: An algorithm to detect obstacles by using a monocular on-vehicle video camera is developed. Since
1,a) 1,b) Obstacle Detection from Monocular On-Vehicle Camera in units of Delaunay Triangles Abstract: An algorithm to detect obstacles by using a monocular on-vehicle video camera is developed. Since
MIDI_IO.book
 MIDI I/O t Copyright This guide is copyrighted 2002 by Digidesign, a division of Avid Technology, Inc. (hereafter Digidesign ), with all rights reserved. Under copyright laws, this guide may not be duplicated
MIDI I/O t Copyright This guide is copyrighted 2002 by Digidesign, a division of Avid Technology, Inc. (hereafter Digidesign ), with all rights reserved. Under copyright laws, this guide may not be duplicated
TOOLS for UR44 Release Notes for Windows
 TOOLS for UR44 V2.1.2 for Windows Release Notes TOOLS for UR44 V2.1.2 for Windows consists of the following programs. - V1.9.9 - Steinberg UR44 Applications V2.1.1 - Basic FX Suite V1.0.1 Steinberg UR44
TOOLS for UR44 V2.1.2 for Windows Release Notes TOOLS for UR44 V2.1.2 for Windows consists of the following programs. - V1.9.9 - Steinberg UR44 Applications V2.1.1 - Basic FX Suite V1.0.1 Steinberg UR44
MDD PBL ET 9) 2) ET ET 2.2 2), 1 2 5) MDD PBL PBL MDD MDD MDD 10) MDD Executable UML 11) Executable UML MDD Executable UML
 2) ET ET 2.2 2), 1 2 5) MDD PBL PBL MDD MDD MDD 10) MDD Executable UML 11) Executable UML MDD Executable UML") PBL 1 2 3 4 (MDD) PBL Project Based Learning MDD PBL PBL PBL MDD PBL A Software Development PBL for Beginners using Project Facilitation Tools Seiko Akayama, 1 Shin Kuboaki, 2 Kenji Hisazumi 3 and Takao
PBL 1 2 3 4 (MDD) PBL Project Based Learning MDD PBL PBL PBL MDD PBL A Software Development PBL for Beginners using Project Facilitation Tools Seiko Akayama, 1 Shin Kuboaki, 2 Kenji Hisazumi 3 and Takao
福岡カーエレ研究会
 モデルベース開発の業界動向 2011.10.14 MathWorks Japan インダストリーマーケティング部柴田克久 2011 The MathWorks, Inc. 1 Agenda はじめに 今日のモデルベース開発とその背景 ユーザー事例にみるモデルベース開発のトレンド 事例紹介 : 東風車両 /Medrad/Faraday モデルベース開発のトレンド ユーザーニーズの変化への対応 MBD
モデルベース開発の業界動向 2011.10.14 MathWorks Japan インダストリーマーケティング部柴田克久 2011 The MathWorks, Inc. 1 Agenda はじめに 今日のモデルベース開発とその背景 ユーザー事例にみるモデルベース開発のトレンド 事例紹介 : 東風車両 /Medrad/Faraday モデルベース開発のトレンド ユーザーニーズの変化への対応 MBD
A 28 TEL Take-Two Interactive Software and its subsidiaries. All rights reserved. 2K Sports, the 2K
 108-6028 2-15-1 A 28 TEL 0570-064-951 10 00 18 00 2005-2010 Take-Two Interactive Software and its subsidiaries. All rights reserved. 2K Sports, the 2K Sports logo, and Take-Two Interactive Software are
108-6028 2-15-1 A 28 TEL 0570-064-951 10 00 18 00 2005-2010 Take-Two Interactive Software and its subsidiaries. All rights reserved. 2K Sports, the 2K Sports logo, and Take-Two Interactive Software are
新しい価値創出に貢献する大規模CAEシミュレーション
 CAE Large-scale CAE Simulation Supporting New Value-creation あらまし CAE Computer Aided Engineering LS-DYNA CAE CAE afjrls-dyna CAE Abstract In the manufacturing industry, numerical simulation assisted by
CAE Large-scale CAE Simulation Supporting New Value-creation あらまし CAE Computer Aided Engineering LS-DYNA CAE CAE afjrls-dyna CAE Abstract In the manufacturing industry, numerical simulation assisted by
Microsoft Word - HowToSetupVault_mod.doc
 Autodesk Vault 環境設定ガイド Autodesk Vault をインストール後 必要最小限の環境設定方法を説明します ここで 紹介しているのは一般的な環境での設定です すべての環境に当てはまるものではありません 1 条件 Autodesk Data Management Server がインストール済み Autodesk Vault Explorer がクライアント PC にインストール済み
Autodesk Vault 環境設定ガイド Autodesk Vault をインストール後 必要最小限の環境設定方法を説明します ここで 紹介しているのは一般的な環境での設定です すべての環境に当てはまるものではありません 1 条件 Autodesk Data Management Server がインストール済み Autodesk Vault Explorer がクライアント PC にインストール済み
PowerPoint
 2011 12 6PTC Live TechForum TOKYO manji@rd.denso.co.jp 1/ 52 1949 12 16 1,874 ( ) 1 9,457 3 1,315 ( ) 38,318 123,165 ( ) 2011 3 31 Gr. Gr. Gr. Gr. Gr. PF 2/ 52 1 2 3 4PMT 5 Integrity 6 7 8 1/2 3/ 52 OEM
2011 12 6PTC Live TechForum TOKYO manji@rd.denso.co.jp 1/ 52 1949 12 16 1,874 ( ) 1 9,457 3 1,315 ( ) 38,318 123,165 ( ) 2011 3 31 Gr. Gr. Gr. Gr. Gr. PF 2/ 52 1 2 3 4PMT 5 Integrity 6 7 8 1/2 3/ 52 OEM
17 Proposal of an Algorithm of Image Extraction and Research on Improvement of a Man-machine Interface of Food Intake Measuring System
 1. (1) ( MMI ) 2. 3. MMI Personal Computer(PC) MMI PC 1 1 2 (%) (%) 100.0 95.2 100.0 80.1 2 % 31.3% 2 PC (3 ) (2) MMI 2 ( ),,,, 49,,p531-532,2005 ( ),,,,,2005,p66-p67,2005 17 Proposal of an Algorithm of
1. (1) ( MMI ) 2. 3. MMI Personal Computer(PC) MMI PC 1 1 2 (%) (%) 100.0 95.2 100.0 80.1 2 % 31.3% 2 PC (3 ) (2) MMI 2 ( ),,,, 49,,p531-532,2005 ( ),,,,,2005,p66-p67,2005 17 Proposal of an Algorithm of
PowerPoint Presentation
 ディープラーニングの 実践的な適用ワークフロー MathWorks Japan テクニカルコンサルティング部縣亮 2015 The MathWorks, Inc. 1 アジェンダ ディープラーニングとは?( おさらい ) ディープラーニングの適用ワークフロー ワークフローの全体像 MATLAB によるニューラルネットワークの構築 学習 検証 配布 MATLAB ではじめるメリット 試行錯誤のやりやすさ
ディープラーニングの 実践的な適用ワークフロー MathWorks Japan テクニカルコンサルティング部縣亮 2015 The MathWorks, Inc. 1 アジェンダ ディープラーニングとは?( おさらい ) ディープラーニングの適用ワークフロー ワークフローの全体像 MATLAB によるニューラルネットワークの構築 学習 検証 配布 MATLAB ではじめるメリット 試行錯誤のやりやすさ
1 Fig. 1 Extraction of motion,.,,, 4,,, 3., 1, 2. 2.,. CHLAC,. 2.1,. (256 ).,., CHLAC. CHLAC, HLAC. 2.3 (HLAC ) r,.,. HLAC. N. 2 HLAC Fig. 2
.,., CHLAC. CHLAC, HLAC. 2.3 (HLAC ) r,.,. HLAC. N. 2 HLAC Fig. 2") CHLAC 1 2 3 3,. (CHLAC), 1).,.,, CHLAC,.,. Suspicious Behavior Detection based on CHLAC Method Hideaki Imanishi, 1 Toyohiro Hayashi, 2 Shuichi Enokida 3 and Toshiaki Ejima 3 We have proposed a method for
CHLAC 1 2 3 3,. (CHLAC), 1).,.,, CHLAC,.,. Suspicious Behavior Detection based on CHLAC Method Hideaki Imanishi, 1 Toyohiro Hayashi, 2 Shuichi Enokida 3 and Toshiaki Ejima 3 We have proposed a method for
 The Indirect Support to Faculty Advisers of die Individual Learning Support System for Underachieving Student The Indirect Support to Faculty Advisers of the Individual Learning Support System for Underachieving
The Indirect Support to Faculty Advisers of die Individual Learning Support System for Underachieving Student The Indirect Support to Faculty Advisers of the Individual Learning Support System for Underachieving
ScanFront300/300P セットアップガイド
 libtiff Copyright (c) 1988-1996 Sam Leffler Copyright (c) 1991-1996 Silicon Graphics, Inc. Permission to use, copy, modify, distribute, and sell this software and its documentation for any purpose is hereby
libtiff Copyright (c) 1988-1996 Sam Leffler Copyright (c) 1991-1996 Silicon Graphics, Inc. Permission to use, copy, modify, distribute, and sell this software and its documentation for any purpose is hereby
Jupyter Notebook を活用したプログラムライブラリ構築の検討 吹谷芳博 1, 藤澤正樹 1 ( 1 あすか製薬株式会社 ) Examination of the program library construction using Jupyter Notebook ASKA Pharm
 Examination of the program library construction using Jupyter Notebook ASKA Pharm") Jupyter Notebook を活用したプログラムライブラリ構築の検討 吹谷芳博 1, 藤澤正樹 1 ( 1 あすか製薬株式会社 ) Examination of the program library construction using Jupyter Notebook ASKA Pharmaceutical Co., Ltd. 要旨 : PC SAS での Jupyter Notebook
Jupyter Notebook を活用したプログラムライブラリ構築の検討 吹谷芳博 1, 藤澤正樹 1 ( 1 あすか製薬株式会社 ) Examination of the program library construction using Jupyter Notebook ASKA Pharmaceutical Co., Ltd. 要旨 : PC SAS での Jupyter Notebook
3_23.dvi
 Vol. 52 No. 3 1234 1244 (Mar. 2011) 1 1 mixi 1 Casual Scheduling Management and Shared System Using Avatar Takashi Yoshino 1 and Takayuki Yamano 1 Conventional scheduling management and shared systems
Vol. 52 No. 3 1234 1244 (Mar. 2011) 1 1 mixi 1 Casual Scheduling Management and Shared System Using Avatar Takashi Yoshino 1 and Takayuki Yamano 1 Conventional scheduling management and shared systems
システム開発プロセスへのデザイン技術適用の取組み~HCDからUXデザインへ~
 HCDUX Approach of Applying Design Technology to System Development Process: From HCD to UX Design 善方日出夫 小川俊雄 あらまし HCDHuman Centered Design SE SDEMHCDUIUser Interface RIARich Internet ApplicationUXUser
HCDUX Approach of Applying Design Technology to System Development Process: From HCD to UX Design 善方日出夫 小川俊雄 あらまし HCDHuman Centered Design SE SDEMHCDUIUser Interface RIARich Internet ApplicationUXUser
IPSJ SIG Technical Report Vol.2012-CG-148 No /8/29 3DCG 1,a) On rigid body animation taking into account the 3D computer graphics came
 On rigid body animation taking into account the 3D computer graphics came") 3DCG 1,a) 2 2 2 2 3 On rigid body animation taking into account the 3D computer graphics camera viewpoint Abstract: In using computer graphics for making games or motion pictures, physics simulation is
3DCG 1,a) 2 2 2 2 3 On rigid body animation taking into account the 3D computer graphics camera viewpoint Abstract: In using computer graphics for making games or motion pictures, physics simulation is
X-Form Plug-in Guide
 X-Form Plug-in Version 7.2 Copyright 2006 Digidesign, a division of Avid Technology, Inc. All rights reserved. This guide may not be duplicated in whole or in part without the express written consent of
X-Form Plug-in Version 7.2 Copyright 2006 Digidesign, a division of Avid Technology, Inc. All rights reserved. This guide may not be duplicated in whole or in part without the express written consent of
IPSJ SIG Technical Report Secret Tap Secret Tap Secret Flick 1 An Examination of Icon-based User Authentication Method Using Flick Input for
 1 2 3 3 1 Secret Tap Secret Tap Secret Flick 1 An Examination of Icon-based User Authentication Method Using Flick Input for Mobile Terminals Kaoru Wasai 1 Fumio Sugai 2 Yosihiro Kita 3 Mi RangPark 3 Naonobu
1 2 3 3 1 Secret Tap Secret Tap Secret Flick 1 An Examination of Icon-based User Authentication Method Using Flick Input for Mobile Terminals Kaoru Wasai 1 Fumio Sugai 2 Yosihiro Kita 3 Mi RangPark 3 Naonobu
IPSJ SIG Technical Report Vol.2014-CDS-10 No /5/ Intuitive appliance control method based on high-accurate indoor localization system
 1 1 1 1 Intuitive appliance control method based on high-accurate indoor localization system Jun Komeda 1 Yutaka Arakawa 1 Morihiko Tamai 1 Keiichi Yasumoto 1 Abstract: In our home, the increase of appliances
1 1 1 1 Intuitive appliance control method based on high-accurate indoor localization system Jun Komeda 1 Yutaka Arakawa 1 Morihiko Tamai 1 Keiichi Yasumoto 1 Abstract: In our home, the increase of appliances
ダウンロード方法 アルテラのソフトウェアをインストールするためのダウンロード ファイルには以下の種類が あります.tar フォーマットのソフトウェアとデバイス ファイルがバンドルされたセット ダウンロードとインストールをカスタマイズするための個別の実行ファイル ディスクに焼いて他の場所にインストール
 Quartus II ソフトウェア ダウンロードおよびインストール クイック スタート ガイド 2014 Altera Corporation. All rights reserved. ALTERA, ARRIA, CYCLONE, HARDCOPY, MAX, MEGACORE, NIOS, QUARTUS and STRATIX words and logos are trademarks of
Quartus II ソフトウェア ダウンロードおよびインストール クイック スタート ガイド 2014 Altera Corporation. All rights reserved. ALTERA, ARRIA, CYCLONE, HARDCOPY, MAX, MEGACORE, NIOS, QUARTUS and STRATIX words and logos are trademarks of
Elastic stack Jun Ohtani 1
 Elastic stack Jun Ohtani 2017/12/06 @johtani 1 about Me, Jun Ohtani / Technical Advocate lucene-gosen ElasticSearch Server http://blog.johtani.info Elasticsearch, founded in 2012 Products: Elasticsearch,
Elastic stack Jun Ohtani 2017/12/06 @johtani 1 about Me, Jun Ohtani / Technical Advocate lucene-gosen ElasticSearch Server http://blog.johtani.info Elasticsearch, founded in 2012 Products: Elasticsearch,
28 Docker Design and Implementation of Program Evaluation System Using Docker Virtualized Environment
 28 Docker Design and Implementation of Program Evaluation System Using Docker Virtualized Environment 1170288 2017 2 28 Docker,.,,.,,.,,.,. Docker.,..,., Web, Web.,.,.,, CPU,,. i ., OS..,, OS, VirtualBox,.,
28 Docker Design and Implementation of Program Evaluation System Using Docker Virtualized Environment 1170288 2017 2 28 Docker,.,,.,,.,,.,. Docker.,..,., Web, Web.,.,.,, CPU,,. i ., OS..,, OS, VirtualBox,.,
PowerPoint Resources
 2009 The MathWorks, Inc. ET ロボコンを通じた MBD 人材育成 MathWorks Japan アドバンストサポート部 ET ロボコン 2009 実行委員会技術委員 / 性能審査委員 近政隆 背景 (1) 自動車業界における MBD の浸透 JMAAB(Japan MATLAB Automotive Advisory Board) と MathWorks の協調による開発手法
2009 The MathWorks, Inc. ET ロボコンを通じた MBD 人材育成 MathWorks Japan アドバンストサポート部 ET ロボコン 2009 実行委員会技術委員 / 性能審査委員 近政隆 背景 (1) 自動車業界における MBD の浸透 JMAAB(Japan MATLAB Automotive Advisory Board) と MathWorks の協調による開発手法
いまからはじめる、MATLABによる 画像処理・コンピュータビジョン
 先端運転支援システムへ向けた各種画像 コンピュータビジョンアルゴリズム開発環境 MathWorks Japan アプリケーションエンジニアリング部 シニアアプリケーションエンジニア乙部雅則 2014 The MathWorks, Inc. 1 MATLAB / Simulink テスト検証 Test and measurement Model checking Code verification Certification
先端運転支援システムへ向けた各種画像 コンピュータビジョンアルゴリズム開発環境 MathWorks Japan アプリケーションエンジニアリング部 シニアアプリケーションエンジニア乙部雅則 2014 The MathWorks, Inc. 1 MATLAB / Simulink テスト検証 Test and measurement Model checking Code verification Certification
光学
 Range Image Sensors Using Active Stereo Methods Kazunori UMEDA and Kenji TERABAYASHI Active stereo methods, which include the traditional light-section method and the talked-about Kinect sensor, are typical
Range Image Sensors Using Active Stereo Methods Kazunori UMEDA and Kenji TERABAYASHI Active stereo methods, which include the traditional light-section method and the talked-about Kinect sensor, are typical
 1 2 8 24 32 44 48 49 50 SEC journal Vol.11 No.2 Sep. 2015 1 2 SEC journal Vol.11 No.2 Sep. 2015 SEC journal Vol.11 No.2 Sep. 2015 3 4 SEC journal Vol.11 No.2 Sep. 2015 SEC journal Vol.11 No.2 Sep. 2015
1 2 8 24 32 44 48 49 50 SEC journal Vol.11 No.2 Sep. 2015 1 2 SEC journal Vol.11 No.2 Sep. 2015 SEC journal Vol.11 No.2 Sep. 2015 3 4 SEC journal Vol.11 No.2 Sep. 2015 SEC journal Vol.11 No.2 Sep. 2015
MA3-1 30th Fuzzy System Symposium (Kochi, September 1-3, 2014) Analysis of Comfort Given to Human by Using Sound Generation System Based on Netowork o
 Analysis of Comfort Given to Human by Using Sound Generation System Based on Netowork o") Analysis of Comfort Given to Human by Using Sound Generation System Based on Netowork of Chaotic Elements 3 Yoichiro Maeda Shingo Muranaka 3 Masato Sasaki 3 Osaka Institute of Technology Falco SD Holdings
Analysis of Comfort Given to Human by Using Sound Generation System Based on Netowork of Chaotic Elements 3 Yoichiro Maeda Shingo Muranaka 3 Masato Sasaki 3 Osaka Institute of Technology Falco SD Holdings
人文学部研究年報12号.indb
 制御理論を用いた在庫管理モデルの一解析 * リードタイムが変動する場合 西平直史 1 [1, 2, 3, 4] [1] [2, 3, 4] 1 1 3 2 [2] = +w(k) d(k) (1) 2014 12 1 1 制御理論を用いた在庫管理モデルの一解析 西平 k w(k) d(k) L k u(k) (2) (1) 2 w(k) =u(k L) (2) = +u(k L) d(k) (3)
制御理論を用いた在庫管理モデルの一解析 * リードタイムが変動する場合 西平直史 1 [1, 2, 3, 4] [1] [2, 3, 4] 1 1 3 2 [2] = +w(k) d(k) (1) 2014 12 1 1 制御理論を用いた在庫管理モデルの一解析 西平 k w(k) d(k) L k u(k) (2) (1) 2 w(k) =u(k L) (2) = +u(k L) d(k) (3)
Presentation Title
 次世代 Simulink が導入する 新 MBD 環境 MathWorks Japan アプリケーションエンジニアリング部シニアアプリケーションエンジニア山本順久 2012 The MathWorks, Inc. 1 これまでの歴史 5 年ぶりのメジャーバージョンアップ! 2002 R13 Simulink Stateflow 5.0 2004 R14 Simulink Stateflow 6.0
次世代 Simulink が導入する 新 MBD 環境 MathWorks Japan アプリケーションエンジニアリング部シニアアプリケーションエンジニア山本順久 2012 The MathWorks, Inc. 1 これまでの歴史 5 年ぶりのメジャーバージョンアップ! 2002 R13 Simulink Stateflow 5.0 2004 R14 Simulink Stateflow 6.0
JACi400のご紹介~RPGとHTMLで簡単Web化~
 セッション No.4 JACi400 のご紹介 ~RPG と HTML で簡単 Web 化 ~ 株式会社ミガロ RAD 事業部技術支援課営業推進岩井利枝 1 Agenda ミガロご提供ソリューションのご紹介 JACi400の概要 4つの開発ステップのご紹介 JACi400ご利用のメリット 2 ミガロご提供ソリューション 開発ツール (C/S Web 開発 ) Delphi/400 開発ツール (Web
セッション No.4 JACi400 のご紹介 ~RPG と HTML で簡単 Web 化 ~ 株式会社ミガロ RAD 事業部技術支援課営業推進岩井利枝 1 Agenda ミガロご提供ソリューションのご紹介 JACi400の概要 4つの開発ステップのご紹介 JACi400ご利用のメリット 2 ミガロご提供ソリューション 開発ツール (C/S Web 開発 ) Delphi/400 開発ツール (Web
<95DB8C9288E397C389C88A E696E6462>
 2011 Vol.60 No.2 p.138 147 Performance of the Japanese long-term care benefit: An International comparison based on OECD health data Mie MORIKAWA[1] Takako TSUTSUI[2] [1]National Institute of Public Health,
2011 Vol.60 No.2 p.138 147 Performance of the Japanese long-term care benefit: An International comparison based on OECD health data Mie MORIKAWA[1] Takako TSUTSUI[2] [1]National Institute of Public Health,