mthesis.dvi
|
|
|
- ゆゆこ いちぞの
- 4 years ago
- Views:
Transcription
1 NAIST-IS-MT
2 ( )
3 3,.,,.,.,..,,.,,.,,.,,. 3, NAIST-IS- MT , i
4 ,,, ii
5 Generating a Panoramic Movie by Calibrating an Omnidirectional Multi-camera System 3 Sei IKEDA Abstract In the eld of mixed reality, virtualization of real outdoor scenes is widely investigated for a number of applications such astelepresence and walk-through systems. An omnidirectional multi-camera system is more useful to virtualize outdoor scenes than a monocular camera system, because the multi-camera system can easily capture high-resolution omnidirectional images. However, the exact calibration of the system is necessary to virtualize the real world accurately. In this paper, we describe a method for generating a high-resolution panoramic movie by calibrating an omnidirectional multi-camera system geometrically and photometrically. In experiments, a spherical panoramic video has been successfully computed to show the validity of the proposed calibration method. Finally, weshowsome prototypes of telepresence system using various immersive displays. Keywords: Omnidirectional Multi-Camera System, Camera Calibration, Panoramic Image Generation, Telepresence 3 Master's Thesis, Department of Information Systems, Graduate School of Information Science, Nara Institute of Science and Technology, NAIST-IS-MT , February 7, iii
6 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : Ladybug : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 38 iv
7 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : v
8 1 ( : NHK 21) : : : : : : : : 4 2 : : : : : : : : : : : : : : : : : 9 3 Ladybug ( ) ( ) : : : : : : : : : 13 4 ( ( ) ( )) : : : : : : : : : : : 14 5 Ladybug : : : : : : : : : : : : : : : : : : : 14 6 : : : : : : : : : : : : : : : : : : 18 7 : : : : : : : : : : : : : : : : : : : : : : 19 8 : : : : : : : : : : : : : : : : : : 19 9 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : cos 4 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : (R ) : : : : : : : : : : : : : : : : (G ) : : : : : : : : : : : : : : : (B ) : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : ( : ( ) ( )) : : : ( ) : : : : : : : : : : : ( ) : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 41 vi
9 29 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : ( ) : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 49 1 : : : : : : : : : : : : : : : : : : : : : : : 8 2 Ladybug : : : : : : : : : : : : : : : : : : : : : : : : : : : : 13 3 : : : : : : : : 18 4 : : : : : : : : : : : : : : : : : : : : : : 27 5 [pixel] : : : : : : : : : : : : : : : : : : : : 29 6 [rad] : : : : : : : : : : : : : : 42 7 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 45 8 : : 47 9 : : 49 vii
10 1., [1, 2, 3, 4].,,.,,,, [5,6,7,8,9].,,.,, [10, 11, 12, 13]. [10, 11, 12],,,.,,., 360.,,, [14].,.,,.,,,,.,, 1
11 .,,,.,,,.,,.,,., 2,. 3, Ladybug[15],. 4,.,,,.,. 5,., 6. 2
12 2.. [5, 14],, 1,.,,,.,.,.,,,,.,. 2.1, 1, 2.,,. :,,.,,. 3

13 1 ( : NHK 21) :,,. :,,.,. :,,.,,. 4
14 2.1.1,.,. : [16, 17, 18] 360.,.,,. Movingeye [18],,.,,,.,,,,. : [19, 20, 21],,. [19], [20], [21], [22],.,,. [14, 6] 5
15 .,.,.,, 1,. [5], ,., 360,. : [23, 24], 360.,.,. [25], [23],.,. 6
16 CYLINDRA[25, 26],,.,,. : [15, 27].,,..,.. Point Grey Research, Ladybug[15] 5.,,.,, ,,,,,.,,..,, 7
17 1 HD,.,,.,,,. 2.2,,.,,., [23], 2(a),.,, 8
![(a) [23] (b) SOS[27] 2.,.](/docs-images/104/162024314/images/18-0.jpg ",.., [28] [29]., [23],,.")
![CYLINDRA[25, 26],,.](/docs-images/104/162024314/images/18-1.jpg ", 2(b) (SOS)[27] 6")
18 (a) [23] (b) SOS[27] 2.,.,.., [28] [29]., [23],,. CYLINDRA[25, 26],,., 2(b) (SOS)[27] 6 COSMOS[30],.,, SOS. 9
19 ,,,.,,.,,,., [31]. 2.3,,.,,.,,,.,,.,,,.,,.,., 10
20 ..,,,.,. 11
21 3., 1,,. 3.1 Ladybug, Point Grey Research Ladybug[15]. Ladybug 3( ) 5, 1 CCD 3( ) HDD. 2, Ladybug 4 768, , 75% 15fps 20. 5,., PC IEEE1394, 6 5fps PC. 12

22 3 Ladybug ( ) ( ) 2 Ladybug % 15fps 20 13
23 ( ( ) ( )) ª ªª ªªªªª n ªªªª 5 Ladybug 14
24 3.2 (,,, ) (, ) ,.,, Tsai [32]..,. Tsai, 6 (X d ;Y d ) (X u ;Y u ). X u = X d (1 + 1 r r 4 ) (1) Y u = Y d (1 + 1 r r 4 ) (2) q r = Xd 2 + Yd 2 (3),, 1 :, 1,,,. [33], 2. 15
25 ,., X Y d x d y. (X d ;Y d ) (X f ;Y f ),. X d = d0 x s x (X f 0 C x ); Y d = d y (Y f 0 C y ) (4), C x ;C y, s x, d 0 x, X N cx N fx (d 0 N x = d cx x N fx )., Tc(t x ;t y ;t z ) Rc(; ; ), Mc. Mc = = = 2 4 R c Tc r 1 r 2 r 3 t x r 4 r 5 r 6 t y r 7 r 8 r 9 t z c 1 c 3 + s 1 s 2 s 3 s 1 c 2 0c 1 s 3 + s 1 s 2 c 3 t x 0s 1 c 3 + c 1 s 2 s 3 c 1 c 2 s 1 s 3 + c 1 s 2 c 3 t y c 2 s 3 0s 2 c 2 c 3 t z (5), s 1 =sin; s 2 =sin; s 3 =sin c 1 =cos; c 2 = cos ; c 3 = cos (6), 6 [x W ;y W ;z W ] T, [x C ;y C ;z C ] T, c. 16
26 2 6 4 x C y C z C = M x W y W z W (7),, 3 ( f, ( 1 ; 2 ), (C x ;C y ), s x ) ( c Tc, Rc) ,.,., 7., 3. 8,,,.,.,,.,.,, ,, 1. 17
27 ªª zw ( x u, yu ) ( x d, yd ) x I xc z C O I O C O W y W x W y I y C s M ªª 6 3 Tc(t x ;t y ;t z ) Rc(; ; ) f C x ; C y 1 ; 2 s x 18

28 z y ªªªªªªªªª ªªª Ladybug ªªªªªªªªªª x [34] 2,, ,. 5.,.,,, 2., Tsai[32]., 2 2. [35].,, 19
29 ªª d 9 c(c =0; 1; :::; 5) Tc Rc, Mc. Mc, m(m = 1; 2;:::) xm c(c = 0; 1; :::; 5) um, [36] M 0 c. M 0 c 12(r 1 ;r 2 ;:::;r 9 ;t x ;t y ;t z ) Rc.,, 6 (; ; ; t x ;t y ;t z ) Mc., vm um (, ) X E c = (um 0 vm) 2 (8) m Mc. 20
30 3.3,., cos 4,, ,,., cos 4 [37] [38],, cos 4. Horn[37], 10 l, I I 0,,. I 0 = l2 cos 4 f 2 I (9) l f, cos J L J = al + b, c c 0 I c I c 0 I c 0 = a c I c + b c (10). a c ;b c., 21
31 I l θ I' f ˆ ªªª 10 cos 4, c a c ;b c.,, RGB., 2 a c ; b c,.,,,., c c 0 i h c (i) h c0 (i) a c ;b c. RGB e(a c ;b c )= X i ( h c0 (i) 0 1 a c h c i 0 b c a c!) 2 (11), a c ;b c.,,., (10), RGB. 22
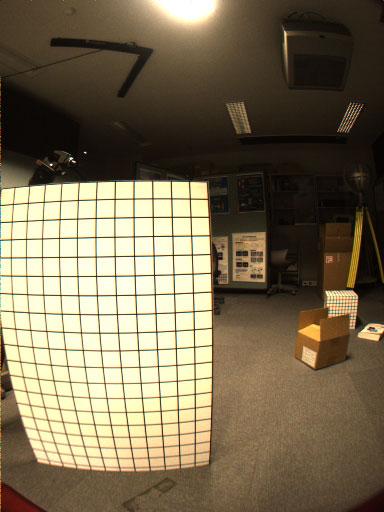
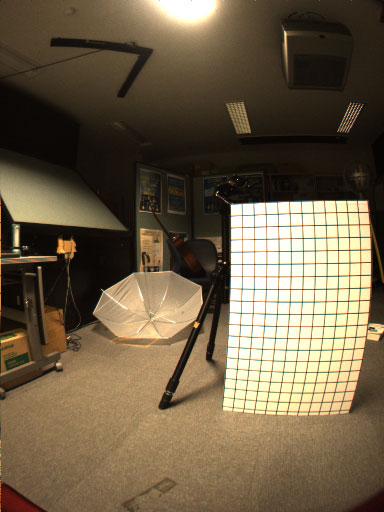
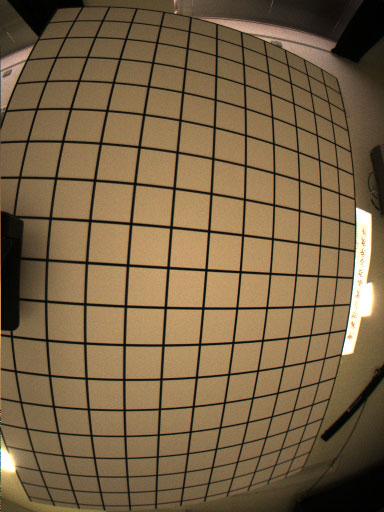
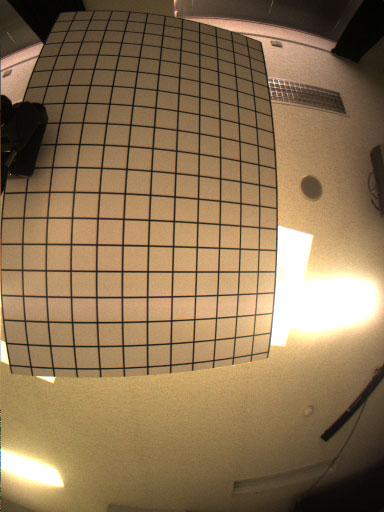
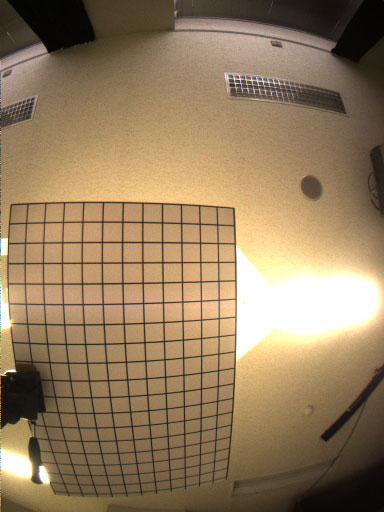
32 3.4 Ladybug, Ladybug, 50cm, , 561.,, 170, LEICA TCR1105 XR,.,,. 12,., , 5., 13.,., 14.,.,,., 5,,. 14 Ladybug, 5,. 15.,, 23
33 ., 16, 17, R, G, B., 0,.,.,,. 24

34 11 25
35 12 26
![4 0 1 2 1 [1/mm 2 ] 0.0326 0.0425 0.0354 2 [1/mm 4 ] 0.0122 0.0108 0.0119 f [mm] 2.5517 2.5577 2.](/docs-images/104/162024314/images/36-0.jpg "5470 s x 0.9988 0.9981 0.9972 C x [pixel] 351.18 355.97 339.35 C y [pixel] 507.33 492.47 477.")
![06 3 4 5 1 [1/mm 2 ] 0.0263 0.0308 0.0357 2 [1/mm 4 ] 0.0131 0.0126 0.0109 f [mm] 2.5317 2.5221 2.](/docs-images/104/162024314/images/36-1.jpg "5654 s x 0.9987 0.9989 0.9980 C x [pixel] 353.87 344.04 365.02 C y [pixel] 482.26 478.54 524.")
36 [1/mm 2 ] [1/mm 4 ] f [mm] s x C x [pixel] C y [pixel] [1/mm 2 ] [1/mm 4 ] f [mm] s x C x [pixel] C y [pixel] (a) (b) 13 27
37 (a) 2 (b) (c)
![5 [pixel] 0 1 2 0.65 0.46 0.42 0.52 0.36 0.32 2.66 1.94 2.](/docs-images/104/162024314/images/38-0.jpg "39 0 1 2 0.56 0.55 0.42 0.48 0.41 0.28 3.99 2.12 1.")
38 5 [pixel] (a) (b) 15 29
39 Š (a) Š (b) 16 (R ) 30
40 Š (a) Š (b) 17 (G ) 31
41 Š (a) Š (b) 18 (B ) 32

42
43 4., ( ). 4.1, 20,,,.,,.,.,,,.,,,.,, S. G., S., S s I S (s),. c s u c c, s I S (s), s C(s). I S (s) = P c2c(s) c I c (u c ) Pc2C (s) c (12),, (; ) 34
44 yt ªª jwt ˆ ªªªªªªªªª { ªªªª jwªªªªª ªªªªªªª ªªªª 20, 21,,. 4.2, S, x 2 c; c 0 u c ;u c 0, S s c ;s c 0, 2. S N, 6 s c Gs c 0 < 2 N, 1. 6 s c Gs c 0! 6 s c xs c 0, 6 T c xt c 0 < 2 N x. 2 d, x, 1. d > 2tan N (13), Ladybug, 40mm,
45 x z φ θ y φ θ ˆ ªªªª 21 ˆ S ªª c s c x u c T c G s c u c T c ªª c 22 36
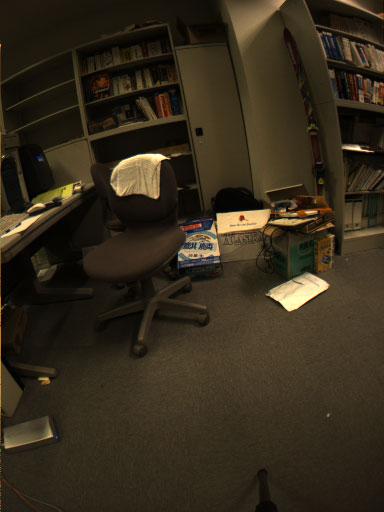
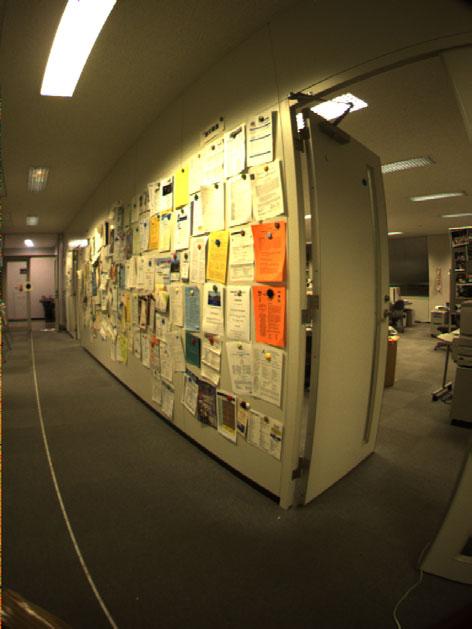
46 , 1, 24m , 6.,, , 23 Ladybug. 24 ( : )., 25., 25,.,,, 768pixel pixel.,, 1920pixel. 25,,., 26,. 25, 27,,,.,,. 37


47 ,. 28 Ladybug.,. u c ;u c 0, s c Gs c 0., m, 30m,





48 ( : ( ) ( )) 39
")
49 25 1 ( ) 26 1 ( ) 40


50 (a) (b)
51 6. 5, rad. 3., rad.,. 6,, , 640pixel,.,,.,,,. 6 [rad]
52 w š { 29 43
53 5..,. 3.. : 30..,.,,. : 31.,. : 33.,,.,.., 3, 5.1, 5.2,
54 5.1, 7, 2.,,., , JPEG. Ladybug 15fps.,.,,.,,,. 5.2, 8, 2.,, 7 Olympus Eye-Trek Polhemus Fastrack CPU: Intel Pentium4 1.7GHz, : 1GB Nvidia Geforce4 45

55 ªªªª ªª ª ªªª ªªª «ªªª«ªªª «ªªªª«30,., ,. 15fps.,.,,.,,.,. 5.3, 8 CYLINDRA 2.,, 32 46

56 8 Elumens VisionStaion Microsoft SideWinder Game Pad Pro CPU: Intel Pentium4 1.7GHz, : 1GB Nvidia Geforce
57 ., , , 15fps.,,.,,.,,. 48


58 9 CYLINDRA SGI Onyx2: CPU:MIPS R MHz 8 InniteReality ( ) 33 49
59 6.,, Ladybug.,.,,,.,.,,.,. Ladybug,., Ladybug,.,, 3. 3,.,,,.,.,.,,.,,, 50
60 .,,,. 51
61 ,,,.,,.,,.,,.,..,,,.,.,,,.,.,. 52
62 [1] \ ", PHP (1996). [2] A. Lippman: \Movie-Map: An Application of the Optical Videodisc to Computer Graphics", Proc. SIGGRAPH'80, pp. 39{46 (1993). [3],,, \ 3 ",, 4, 2,pp. 367{376 (1999). [4], C. R. Gunadi,, \, ", 1 (MIRU 2002), 2, 11, pp. 177{182 (2002). [5] K. Yamazawa, H. Takemura and N. Yokoya: \Telepresence System with an Omnidirectional HD Camera", Proc. 5th Asian Conf. on Computer Vision (ACCV2002), 2, pp. 535{538 (2002). [6] S. Morita, K. Yamazawa and N. Yokoya: \Internet Telepresence by Real-time View-dependent Image Generation with Omnidirectional Video Camera", Proc. SPIE Electronic Imaging, 5018, pp. 51{60 (2003). [7],, \ ", (FIT), 1, pp. 149{150 (2002). [8],, \ ",, G13-27, p. G329 (2002). [9],, \ ",, PRMU , pp. 49{54 (2002). 53
63 [10] D. Coombs and C. Brown: \Real-time Smooth Pursuit Tracking for a Moving Binocular Robot", Proc. Computer Vision and Pattern Recognition, pp. 23{ 29 (1992). [11] T. Uhlin, P. Nardlund, A. Maki and J. O. Eklundh: \Towards an Active Visiual Observer", Proc. Int. Conf. on Computer Vision, pp. 679{686 (1995). [12] S. Rougeaux and Y. Kuniyoshi: \Velocity and Disparity Cues for Robust Real-time Binocular Tracking", Proc. Computer Vision and Pattern Recognition (CVPR'97), pp. 1{6 (1997). [13] M. Hirose, K. Yokoyama and S. Sato: \Transmission of Realistic Sensation: Development of a Virtual Dome", Proc. Virtual Reality Annual International Symposium, pp. 125{131 (1993). [14] Y. Onoe, K. Yamazawaand N. Yokoya and H. Takemura: \Telepresence by real-time view-dependent image generation from omnidirectional video streams", Computer Vision and Image Understanding, 71, 2, pp. 154{165 (1998). [15] Point Grey Research, Inc.: \Ladybug Omnidirectional Camera System User Guide version 1.0" (2002). [16] Z. L. Cao, S. J. Oh and E. L. Hall: \Dynamic Omnidirectional Vision for Mobile Robots", J. Robotic Systems, 3, 1, pp. 5{17 (1986). [17] S. J. Oh and E. L. Hall: \Guidanceo of a Mobile Robot Using an Omnidirectional Vision Navigation System", Proc. Mobile Robots IISPIE 852, pp. 288{300 (1987). [18] Movingeye Inc.:"Movingeye", (1999). [19] J. Hong, X. Tan, B. Pinette, R. Weiss and E. M. Riseman: \Image-based homing", Proc. Int. Conf. on Robotics and Automation, pp. 620{625 (1991). 54
64 [20] Y. Yagi, Y. Nishizawa and M. Yachida: \Estimating Location and Avoiding Collision Against Unknown Obstacle for the Mobile Robot Using Omnidirectional Image Sensor COPIS", Proc. Int. Workshop on Intelligent Robots and Systems, pp. 909{914 (1991). [21],, \ HyperOmni Vision ",, J79-D-II, 5, pp. 698{707 (1996). [22] S. K. Nayar: \Catadioptric Omnidirectional Camera", Proc. Computer Vision and Pattern Recognition, pp. 482{488 (1997). [23] T. Kawanishi, K. Yamazawa, H. Takemura and N. Yokoya: \Generation of Hight-resolution Stereo Panoramic Images by Omnidirectional Imageing Sensor Using Hexagonal Pyramidal Mirrors", Proc. 14th Int. Conf. on Pattern Recognition, 1, pp. 445{489 (1998). [24] : \FC2", (2000). [25] J. Shimamura, H. Takemura, N. Yokoya and K. Yamazawa: \Construction of an Immersive Mixed Environment Using an Omnidirectional Stereo Image Sensor", Proc. IEEE Workshop on Omnidirectional Vision, pp. 62{69 (2000). [26],,, \ ",, MVE99-82 (2000). [27] H. Tanahashi, K. Yamamoto, C. Wang and Y. Niwa: \Development of a Stereo Omnidirectional Imageing System (SOS)", Proc. IEEE Int. Conf. on Industrial Electronics, Control and Instrumentation (IECON2000), pp. 289{ 294 (2000). 55
65 [28],,, \ ", 4, pp. 211{212 (1999). [29],,,, \ (SOS) ",, 56, 4, pp. 603{610 (2002). [30] T. Yamada, M. Hirose and Y. Iida: \Development of Complete Immersive Display", Proc. 4th Int. Conf. on Virtual Systems and Multimedia (VSMM'98), 2, pp. 522{527 (1998). [31] \ ", NAIST-IS-DT (2003). [32] R. Y. Tsai: \A Versatile Camera Calibration Technique for High-accuracy 3D Machine Vision Metrology Using O-the-shelf TV Cameras and Lenses", IEEE Journal of Robotics and Automation, RA-3, 4, pp. 323{344 (1987). [33] J. Z. C. Lai: \On the Sensitivity of Camera Calibration", Image and Vision Computing, 11, 10, pp. 656{664 (1993). [34] \ 2 ",, 4, J63-D, pp. 349{356 (1980). [35] T. Sato, M. Kanbara, N. Yokoya and H. Takemura: \Dense 3D Reconstruction of an Outdoor Scene by Hundreds-Baseline Stereo Using a Hand- Held Video Camera", Int. Journal of Computer Vision, 47, 1-3, pp. 110{129 (2002). [36] \ PnP ", '90, 90, 20, pp. 41{50 (1990). 56
66 [37] B. K. P. Horn: \Robot Vision", chapter 10, pp. 206{209, Mit Press (1986). [38] N. Asada, A. Amano and M. Baba: \Photometric Calibration of Zoom Lens Systems", Proc. Int. Conf. Pattern Recognition, A, pp. 186{190 (1996). 57
1 Kinect for Windows M = [X Y Z] T M = [X Y Z ] T f (u,v) w 3.2 [11] [7] u = f X +u Z 0 δ u (X,Y,Z ) (5) v = f Y Z +v 0 δ v (X,Y,Z ) (6) w = Z +
![1 Kinect for Windows M = [X Y Z] T M = [X Y Z ] T f (u,v) w 3.2 [11] [7] u = f X +u Z 0 δ u (X,Y,Z ) (5) v = f Y Z +v 0 δ v (X,Y,Z ) (6) w = Z +](/thumbs/81/83701592.jpg "1 Kinect for Windows M = [X Y Z] T M = [X Y Z ] T f (u,v) w 3.2 [11] [7] u = f X +u Z 0 δ u (X,Y,Z ) (5) v = f Y Z +v 0 δ v (X,Y,Z ) (6) w = Z +") 3 3D 1,a) 1 1 Kinect (X, Y) 3D 3D 1. 2010 Microsoft Kinect for Windows SDK( (Kinect) SDK ) 3D [1], [2] [3] [4] [5] [10] 30fps [10] 3 Kinect 3 Kinect Kinect for Windows SDK 3 Microsoft 3 Kinect for Windows
3 3D 1,a) 1 1 Kinect (X, Y) 3D 3D 1. 2010 Microsoft Kinect for Windows SDK( (Kinect) SDK ) 3D [1], [2] [3] [4] [5] [10] 30fps [10] 3 Kinect 3 Kinect Kinect for Windows SDK 3 Microsoft 3 Kinect for Windows
28 Horizontal angle correction using straight line detection in an equirectangular image
 28 Horizontal angle correction using straight line detection in an equirectangular image 1170283 2017 3 1 2 i Abstract Horizontal angle correction using straight line detection in an equirectangular image
28 Horizontal angle correction using straight line detection in an equirectangular image 1170283 2017 3 1 2 i Abstract Horizontal angle correction using straight line detection in an equirectangular image
& Vol.5 No (Oct. 2015) TV 1,2,a) , Augmented TV TV AR Augmented Reality 3DCG TV Estimation of TV Screen Position and Ro
 TV 1,2,a) , Augmented TV TV AR Augmented Reality 3DCG TV Estimation of TV Screen Position and Ro") TV 1,2,a) 1 2 2015 1 26, 2015 5 21 Augmented TV TV AR Augmented Reality 3DCG TV Estimation of TV Screen Position and Rotation Using Mobile Device Hiroyuki Kawakita 1,2,a) Toshio Nakagawa 1 Makoto Sato
TV 1,2,a) 1 2 2015 1 26, 2015 5 21 Augmented TV TV AR Augmented Reality 3DCG TV Estimation of TV Screen Position and Rotation Using Mobile Device Hiroyuki Kawakita 1,2,a) Toshio Nakagawa 1 Makoto Sato
xx/xx Vol. Jxx A No. xx 1 Fig. 1 PAL(Panoramic Annular Lens) PAL(Panoramic Annular Lens) PAL (2) PAL PAL 2 PAL 3 2 PAL 1 PAL 3 PAL PAL 2. 1 PAL
 PAL(Panoramic Annular Lens) PAL (2) PAL PAL 2 PAL 3 2 PAL 1 PAL 3 PAL PAL 2. 1 PAL") PAL On the Precision of 3D Measurement by Stereo PAL Images Hiroyuki HASE,HirofumiKAWAI,FrankEKPAR, Masaaki YONEDA,andJien KATO PAL 3 PAL Panoramic Annular Lens 1985 Greguss PAL 1 PAL PAL 2 3 2 PAL DP
PAL On the Precision of 3D Measurement by Stereo PAL Images Hiroyuki HASE,HirofumiKAWAI,FrankEKPAR, Masaaki YONEDA,andJien KATO PAL 3 PAL Panoramic Annular Lens 1985 Greguss PAL 1 PAL PAL 2 3 2 PAL DP
2003/3 Vol. J86 D II No.3 2.3. 4. 5. 6. 2. 1 1 Fig. 1 An exterior view of eye scanner. CCD [7] 640 480 1 CCD PC USB PC 2 334 PC USB RS-232C PC 3 2.1 2
![2003/3 Vol. J86 D II No.3 2.3. 4. 5. 6. 2. 1 1 Fig. 1 An exterior view of eye scanner. CCD [7] 640 480 1 CCD PC USB PC 2 334 PC USB RS-232C PC 3 2.1 2](/thumbs/42/22941906.jpg "2003/3 Vol. J86 D II No.3 2.3. 4. 5. 6. 2. 1 1 Fig. 1 An exterior view of eye scanner. CCD [7] 640 480 1 CCD PC USB PC 2 334 PC USB RS-232C PC 3 2.1 2") Curved Document Imaging with Eye Scanner Toshiyuki AMANO, Tsutomu ABE, Osamu NISHIKAWA, Tetsuo IYODA, and Yukio SATO 1. Shape From Shading SFS [1] [2] 3 2 Department of Electrical and Computer Engineering,
Curved Document Imaging with Eye Scanner Toshiyuki AMANO, Tsutomu ABE, Osamu NISHIKAWA, Tetsuo IYODA, and Yukio SATO 1. Shape From Shading SFS [1] [2] 3 2 Department of Electrical and Computer Engineering,
光学
 Fundamentals of Projector-Camera Systems and Their Calibration Methods Takayuki OKATANI To make the images projected by projector s appear as desired, it is e ective and sometimes an only choice to capture
Fundamentals of Projector-Camera Systems and Their Calibration Methods Takayuki OKATANI To make the images projected by projector s appear as desired, it is e ective and sometimes an only choice to capture
Fig Measurement data combination. 2 Fig. 2. Ray vector. Fig (12) 1 2 R 1 r t 1 3 p 1,i i 2 3 Fig.2 R 2 t 2 p 2,i [u, v] T (1)(2) r R 1 R 2
![Fig Measurement data combination. 2 Fig. 2. Ray vector. Fig (12) 1 2 R 1 r t 1 3 p 1,i i 2 3 Fig.2 R 2 t 2 p 2,i [u, v] T (1)(2) r R 1 R 2](/thumbs/93/113464882.jpg "Fig Measurement data combination. 2 Fig. 2. Ray vector. Fig (12) 1 2 R 1 r t 1 3 p 1,i i 2 3 Fig.2 R 2 t 2 p 2,i [u, v] T (1)(2) r R 1 R 2") IP 06 16 / IIS 06 32 3 3-D Environment Modeling from Images Acquired with an Omni-Directional Camera Mounted on a Mobile Robot Atsushi Yamashita, Tomoaki Harada, Ryosuke Kawanishi, Toru Kaneko (Shizuoka
IP 06 16 / IIS 06 32 3 3-D Environment Modeling from Images Acquired with an Omni-Directional Camera Mounted on a Mobile Robot Atsushi Yamashita, Tomoaki Harada, Ryosuke Kawanishi, Toru Kaneko (Shizuoka
光学
 Range Image Sensors Using Active Stereo Methods Kazunori UMEDA and Kenji TERABAYASHI Active stereo methods, which include the traditional light-section method and the talked-about Kinect sensor, are typical
Range Image Sensors Using Active Stereo Methods Kazunori UMEDA and Kenji TERABAYASHI Active stereo methods, which include the traditional light-section method and the talked-about Kinect sensor, are typical
(a) 1 (b) 3. Gilbert Pernicka[2] Treibitz Schechner[3] Narasimhan [4] Kim [5] Nayar [6] [7][8][9] 2. X X X [10] [11] L L t L s L = L t + L s
![(a) 1 (b) 3. Gilbert Pernicka[2] Treibitz Schechner[3] Narasimhan [4] Kim [5] Nayar [6] [7][8][9] 2. X X X [10] [11] L L t L s L = L t + L s](/thumbs/75/72066128.jpg "(a) 1 (b) 3. Gilbert Pernicka[2] Treibitz Schechner[3] Narasimhan [4] Kim [5] Nayar [6] [7][8][9] 2. X X X [10] [11] L L t L s L = L t + L s") 1 1 1, Extraction of Transmitted Light using Parallel High-frequency Illumination Kenichiro Tanaka 1 Yasuhiro Mukaigawa 1 Yasushi Yagi 1 Abstract: We propose a new sharpening method of transmitted scene
1 1 1, Extraction of Transmitted Light using Parallel High-frequency Illumination Kenichiro Tanaka 1 Yasuhiro Mukaigawa 1 Yasushi Yagi 1 Abstract: We propose a new sharpening method of transmitted scene
(3.6 ) (4.6 ) 2. [3], [6], [12] [7] [2], [5], [11] [14] [9] [8] [10] (1) Voodoo 3 : 3 Voodoo[1] 3 ( 3D ) (2) : Voodoo 3D (3) : 3D (Welc
![(3.6 ) (4.6 ) 2. [3], [6], [12] [7] [2], [5], [11] [14] [9] [8] [10] (1) Voodoo 3 : 3 Voodoo[1] 3 ( 3D ) (2) : Voodoo 3D (3) : 3D (Welc](/thumbs/65/54056306.jpg "(3.6 ) (4.6 ) 2. [3], [6], [12] [7] [2], [5], [11] [14] [9] [8] [10] (1) Voodoo 3 : 3 Voodoo[1] 3 ( 3D ) (2) : Voodoo 3D (3) : 3D (Welc") 1,a) 1,b) Obstacle Detection from Monocular On-Vehicle Camera in units of Delaunay Triangles Abstract: An algorithm to detect obstacles by using a monocular on-vehicle video camera is developed. Since
1,a) 1,b) Obstacle Detection from Monocular On-Vehicle Camera in units of Delaunay Triangles Abstract: An algorithm to detect obstacles by using a monocular on-vehicle video camera is developed. Since
258 5) GPS 1 GPS 6) GPS DP 7) 8) 10) GPS GPS 2 3 4 5 2. 2.1 3 1) GPS Global Positioning System
 GPS 1 GPS 6) GPS DP 7) 8) 10) GPS GPS 2 3 4 5 2. 2.1 3 1) GPS Global Positioning System") Vol. 52 No. 1 257 268 (Jan. 2011) 1 2, 1 1 measurement. In this paper, a dynamic road map making system is proposed. The proposition system uses probe-cars which has an in-vehicle camera and a GPS receiver.
Vol. 52 No. 1 257 268 (Jan. 2011) 1 2, 1 1 measurement. In this paper, a dynamic road map making system is proposed. The proposition system uses probe-cars which has an in-vehicle camera and a GPS receiver.
2). 3) 4) 1.2 NICTNICT DCRA Dihedral Corner Reflector micro-arraysdcra DCRA DCRA DCRA 3D DCRA PC USB PC PC ON / OFF Velleman K8055 K8055 K8055
. 3) 4) 1.2 NICTNICT DCRA Dihedral Corner Reflector micro-arraysdcra DCRA DCRA DCRA 3D DCRA PC USB PC PC ON / OFF Velleman K8055 K8055 K8055") 1 1 1 2 DCRA 1. 1.1 1) 1 Tactile Interface with Air Jets for Floating Images Aya Higuchi, 1 Nomin, 1 Sandor Markon 1 and Satoshi Maekawa 2 The new optical device DCRA can display floating images in free
1 1 1 2 DCRA 1. 1.1 1) 1 Tactile Interface with Air Jets for Floating Images Aya Higuchi, 1 Nomin, 1 Sandor Markon 1 and Satoshi Maekawa 2 The new optical device DCRA can display floating images in free
IPSJ SIG Technical Report iphone iphone,,., OpenGl ES 2.0 GLSL(OpenGL Shading Language), iphone GPGPU(General-Purpose Computing on Graphics Proc
, iphone GPGPU(General-Purpose Computing on Graphics Proc") iphone 1 1 1 iphone,,., OpenGl ES 2.0 GLSL(OpenGL Shading Language), iphone GPGPU(General-Purpose Computing on Graphics Processing Unit)., AR Realtime Natural Feature Tracking Library for iphone Makoto
iphone 1 1 1 iphone,,., OpenGl ES 2.0 GLSL(OpenGL Shading Language), iphone GPGPU(General-Purpose Computing on Graphics Processing Unit)., AR Realtime Natural Feature Tracking Library for iphone Makoto
Human-Agent Interaction Simposium A Heterogeneous Robot System U
 Human-Agent Interaction Simposium 2006 2A-3 277-8561 5 1-5 113-8656 7-3-1 E-mail: {hosoi,mori,sugi}@itl.t.u-tokyo.ac.jp 3 Heterogeneous Robot System Using Blimps Kazuhiro HOSOI, Akihiro MORI, and Masanori
Human-Agent Interaction Simposium 2006 2A-3 277-8561 5 1-5 113-8656 7-3-1 E-mail: {hosoi,mori,sugi}@itl.t.u-tokyo.ac.jp 3 Heterogeneous Robot System Using Blimps Kazuhiro HOSOI, Akihiro MORI, and Masanori
( )
") NAIST-IS-MT9951117 2001 2 9 ( ) 3 CG, VR.,,,.,,,,,.,, 2, 3 3,.,, 2, 3.,,,,,.,,,.,,.,,, 3, NAIST-IS- MT9951117, 2001 2 9. i Intaractive terrain generation within Immersive Modeling System 3 Ryutarou Morimoto
NAIST-IS-MT9951117 2001 2 9 ( ) 3 CG, VR.,,,.,,,,,.,, 2, 3 3,.,, 2, 3.,,,,,.,,,.,,.,,, 3, NAIST-IS- MT9951117, 2001 2 9. i Intaractive terrain generation within Immersive Modeling System 3 Ryutarou Morimoto
VRSJ-SIG-MR_okada_79dce8c8.pdf
 THE INSTITUTE OF ELECTRONICS, INFORMATION AND COMMUNICATION ENGINEERS TECHNICAL REPORT OF IEICE. 630-0192 8916-5 E-mail: {kaduya-o,takafumi-t,goshiro,uranishi,miyazaki,kato}@is.naist.jp,.,,.,,,.,,., CG.,,,
THE INSTITUTE OF ELECTRONICS, INFORMATION AND COMMUNICATION ENGINEERS TECHNICAL REPORT OF IEICE. 630-0192 8916-5 E-mail: {kaduya-o,takafumi-t,goshiro,uranishi,miyazaki,kato}@is.naist.jp,.,,.,,,.,,., CG.,,,
dthesis.dvi
 NAIST-IS-DD0361003 2006 3 24 ( ) 3 1 3, NAIST-IS- DD0361003, 2006 3 24. i 2 3 GPS 4 5 ii Construction of Telepresence Systems Using an Omnidirectional Multi-camera System 3 Sei Ikeda Abstract Telepresence
NAIST-IS-DD0361003 2006 3 24 ( ) 3 1 3, NAIST-IS- DD0361003, 2006 3 24. i 2 3 GPS 4 5 ii Construction of Telepresence Systems Using an Omnidirectional Multi-camera System 3 Sei Ikeda Abstract Telepresence
,,.,.,,.,.,.,.,,.,..,,,, i
 22 A person recognition using color information 1110372 2011 2 13 ,,.,.,,.,.,.,.,,.,..,,,, i Abstract A person recognition using color information Tatsumo HOJI Recently, for the purpose of collection of
22 A person recognition using color information 1110372 2011 2 13 ,,.,.,,.,.,.,.,,.,..,,,, i Abstract A person recognition using color information Tatsumo HOJI Recently, for the purpose of collection of
1 Fig. 1 Extraction of motion,.,,, 4,,, 3., 1, 2. 2.,. CHLAC,. 2.1,. (256 ).,., CHLAC. CHLAC, HLAC. 2.3 (HLAC ) r,.,. HLAC. N. 2 HLAC Fig. 2
.,., CHLAC. CHLAC, HLAC. 2.3 (HLAC ) r,.,. HLAC. N. 2 HLAC Fig. 2") CHLAC 1 2 3 3,. (CHLAC), 1).,.,, CHLAC,.,. Suspicious Behavior Detection based on CHLAC Method Hideaki Imanishi, 1 Toyohiro Hayashi, 2 Shuichi Enokida 3 and Toshiaki Ejima 3 We have proposed a method for
CHLAC 1 2 3 3,. (CHLAC), 1).,.,, CHLAC,.,. Suspicious Behavior Detection based on CHLAC Method Hideaki Imanishi, 1 Toyohiro Hayashi, 2 Shuichi Enokida 3 and Toshiaki Ejima 3 We have proposed a method for
*1 1 1 Augmented Telepresence Using Recorded Aerial Omnidirectional Videos Captured from Unmanned Airship Fumio Okura *1, Masayuki Kanbara 1 and Naoka
 *1 1 1 Augmented Telepresence Using Recorded Aerial Omnidirectional Videos Captured from Unmanned Airship Fumio Okura *1, Masayuki Kanbara 1 and Naokazu Yokoya 1 Abstract This paper proposes an augmented
*1 1 1 Augmented Telepresence Using Recorded Aerial Omnidirectional Videos Captured from Unmanned Airship Fumio Okura *1, Masayuki Kanbara 1 and Naokazu Yokoya 1 Abstract This paper proposes an augmented
Vol. 23 No. 4 Oct. 2006 37 2 Kitchen of the Future 1 Kitchen of the Future 1 1 Kitchen of the Future LCD [7], [8] (Kitchen of the Future ) WWW [7], [3
![Vol. 23 No. 4 Oct. 2006 37 2 Kitchen of the Future 1 Kitchen of the Future 1 1 Kitchen of the Future LCD [7], [8] (Kitchen of the Future ) WWW [7], [3](/thumbs/41/22750638.jpg "Vol. 23 No. 4 Oct. 2006 37 2 Kitchen of the Future 1 Kitchen of the Future 1 1 Kitchen of the Future LCD [7], [8] (Kitchen of the Future ) WWW [7], [3") 36 Kitchen of the Future: Kitchen of the Future Kitchen of the Future A kitchen is a place of food production, education, and communication. As it is more active place than other parts of a house, there
36 Kitchen of the Future: Kitchen of the Future Kitchen of the Future A kitchen is a place of food production, education, and communication. As it is more active place than other parts of a house, there
28 TCG SURF Card recognition using SURF in TCG play video
 28 TCG SURF Card recognition using SURF in TCG play video 1170374 2017 3 2 TCG SURF TCG TCG OCG SURF Bof 20 20 30 10 1 SURF Bag of features i Abstract Card recognition using SURF in TCG play video Haruka
28 TCG SURF Card recognition using SURF in TCG play video 1170374 2017 3 2 TCG SURF TCG TCG OCG SURF Bof 20 20 30 10 1 SURF Bag of features i Abstract Card recognition using SURF in TCG play video Haruka
IPSJ SIG Technical Report GPS LAN GPS LAN GPS LAN Location Identification by sphere image and hybrid sensing Takayuki Katahira, 1 Yoshio Iwai 1
 1 1 1 GPS LAN GPS LAN GPS LAN Location Identification by sphere image and hybrid sensing Takayuki Katahira, 1 Yoshio Iwai 1 and Hiroshi Ishiguro 1 Self-location is very informative for wearable systems.
1 1 1 GPS LAN GPS LAN GPS LAN Location Identification by sphere image and hybrid sensing Takayuki Katahira, 1 Yoshio Iwai 1 and Hiroshi Ishiguro 1 Self-location is very informative for wearable systems.
IPSJ SIG Technical Report Vol.2014-CG-155 No /6/28 1,a) 1,2,3 1 3,4 CG An Interpolation Method of Different Flow Fields using Polar Inter
 1,2,3 1 3,4 CG An Interpolation Method of Different Flow Fields using Polar Inter") ,a),2,3 3,4 CG 2 2 2 An Interpolation Method of Different Flow Fields using Polar Interpolation Syuhei Sato,a) Yoshinori Dobashi,2,3 Tsuyoshi Yamamoto Tomoyuki Nishita 3,4 Abstract: Recently, realistic
,a),2,3 3,4 CG 2 2 2 An Interpolation Method of Different Flow Fields using Polar Interpolation Syuhei Sato,a) Yoshinori Dobashi,2,3 Tsuyoshi Yamamoto Tomoyuki Nishita 3,4 Abstract: Recently, realistic
1 Table 1: Identification by color of voxel Voxel Mode of expression Nothing Other 1 Orange 2 Blue 3 Yellow 4 SSL Humanoid SSL-Vision 3 3 [, 21] 8 325
![1 Table 1: Identification by color of voxel Voxel Mode of expression Nothing Other 1 Orange 2 Blue 3 Yellow 4 SSL Humanoid SSL-Vision 3 3 [, 21] 8 325](/thumbs/91/105378470.jpg "1 Table 1: Identification by color of voxel Voxel Mode of expression Nothing Other 1 Orange 2 Blue 3 Yellow 4 SSL Humanoid SSL-Vision 3 3 [, 21] 8 325") 社団法人人工知能学会 Japanese Society for Artificial Intelligence 人工知能学会研究会資料 JSAI Technical Report SIG-Challenge-B3 (5/5) RoboCup SSL Humanoid A Proposal and its Application of Color Voxel Server for RoboCup SSL
社団法人人工知能学会 Japanese Society for Artificial Intelligence 人工知能学会研究会資料 JSAI Technical Report SIG-Challenge-B3 (5/5) RoboCup SSL Humanoid A Proposal and its Application of Color Voxel Server for RoboCup SSL
IPSJ SIG Technical Report Vol.2012-CG-149 No.13 Vol.2012-CVIM-184 No /12/4 3 1,a) ( ) DB 3D DB 2D,,,, PnP(Perspective n-point), Ransa
 ( ) DB 3D DB 2D,,,, PnP(Perspective n-point), Ransa") 3,a) 3 3 ( ) DB 3D DB 2D,,,, PnP(Perspective n-point), Ransac. DB [] [2] 3 DB Web Web DB Web NTT NTT Media Intelligence Laboratories, - Hikarinooka Yokosuka-Shi, Kanagawa 239-0847 Japan a) yabushita.hiroko@lab.ntt.co.jp
3,a) 3 3 ( ) DB 3D DB 2D,,,, PnP(Perspective n-point), Ransac. DB [] [2] 3 DB Web Web DB Web NTT NTT Media Intelligence Laboratories, - Hikarinooka Yokosuka-Shi, Kanagawa 239-0847 Japan a) yabushita.hiroko@lab.ntt.co.jp
1 3DCG [2] 3DCG CG 3DCG [3] 3DCG 3 3 API 2 3DCG 3 (1) Saito [4] (a) 1920x1080 (b) 1280x720 (c) 640x360 (d) 320x G-Buffer Decaudin[5] G-Buffer D
![1 3DCG [2] 3DCG CG 3DCG [3] 3DCG 3 3 API 2 3DCG 3 (1) Saito [4] (a) 1920x1080 (b) 1280x720 (c) 640x360 (d) 320x G-Buffer Decaudin[5] G-Buffer D](/thumbs/91/105248386.jpg "1 3DCG [2] 3DCG CG 3DCG [3] 3DCG 3 3 API 2 3DCG 3 (1) Saito [4] (a) 1920x1080 (b) 1280x720 (c) 640x360 (d) 320x G-Buffer Decaudin[5] G-Buffer D") 3DCG 1) ( ) 2) 2) 1) 2) Real-Time Line Drawing Using Image Processing and Deforming Process Together in 3DCG Takeshi Okuya 1) Katsuaki Tanaka 2) Shigekazu Sakai 2) 1) Department of Intermedia Art and Science,
3DCG 1) ( ) 2) 2) 1) 2) Real-Time Line Drawing Using Image Processing and Deforming Process Together in 3DCG Takeshi Okuya 1) Katsuaki Tanaka 2) Shigekazu Sakai 2) 1) Department of Intermedia Art and Science,
1 Web [2] Web [3] [4] [5], [6] [7] [8] S.W. [9] 3. MeetingShelf Web MeetingShelf MeetingShelf (1) (2) (3) (4) (5) Web MeetingShelf
![1 Web [2] Web [3] [4] [5], [6] [7] [8] S.W. [9] 3. MeetingShelf Web MeetingShelf MeetingShelf (1) (2) (3) (4) (5) Web MeetingShelf](/thumbs/79/80104027.jpg "1 Web [2] Web [3] [4] [5], [6] [7] [8] S.W. [9] 3. MeetingShelf Web MeetingShelf MeetingShelf (1) (2) (3) (4) (5) Web MeetingShelf") 1,a) 2,b) 4,c) 3,d) 4,e) Web A Review Supporting System for Whiteboard Logging Movies Based on Notes Timeline Taniguchi Yoshihide 1,a) Horiguchi Satoshi 2,b) Inoue Akifumi 4,c) Igaki Hiroshi 3,d) Hoshi
1,a) 2,b) 4,c) 3,d) 4,e) Web A Review Supporting System for Whiteboard Logging Movies Based on Notes Timeline Taniguchi Yoshihide 1,a) Horiguchi Satoshi 2,b) Inoue Akifumi 4,c) Igaki Hiroshi 3,d) Hoshi
4. C i k = 2 k-means C 1 i, C 2 i 5. C i x i p [ f(θ i ; x) = (2π) p 2 Vi 1 2 exp (x µ ] i) t V 1 i (x µ i ) 2 BIC BIC = 2 log L( ˆθ i ; x i C i ) + q
![4. C i k = 2 k-means C 1 i, C 2 i 5. C i x i p [ f(θ i ; x) = (2π) p 2 Vi 1 2 exp (x µ ] i) t V 1 i (x µ i ) 2 BIC BIC = 2 log L( ˆθ i ; x i C i ) + q](/thumbs/92/110416683.jpg "4. C i k = 2 k-means C 1 i, C 2 i 5. C i x i p [ f(θ i ; x) = (2π) p 2 Vi 1 2 exp (x µ ] i) t V 1 i (x µ i ) 2 BIC BIC = 2 log L( ˆθ i ; x i C i ) + q") x-means 1 2 2 x-means, x-means k-means Bayesian Information Criterion BIC Watershed x-means Moving Object Extraction Using the Number of Clusters Determined by X-means Clustering Naoki Kubo, 1 Kousuke
x-means 1 2 2 x-means, x-means k-means Bayesian Information Criterion BIC Watershed x-means Moving Object Extraction Using the Number of Clusters Determined by X-means Clustering Naoki Kubo, 1 Kousuke
Proceedings of the 61st Annual Conference of the Institute of Systems, Control and Information Engineers (ISCIE), Kyoto, May 23-25, 2017 The Visual Se
, Kyoto, May 23-25, 2017 The Visual Se") The Visual Servo Control of Drone in Consideration of Dead Time,, Junpei Shirai and Takashi Yamaguchi and Kiyotsugu Takaba Ritsumeikan University Abstract Recently, the use of drones has been expected
The Visual Servo Control of Drone in Consideration of Dead Time,, Junpei Shirai and Takashi Yamaguchi and Kiyotsugu Takaba Ritsumeikan University Abstract Recently, the use of drones has been expected
スライド 1
 swk(at)ic.is.tohoku.ac.jp 2 Outline 3 ? 4 S/N CCD 5 Q Q V 6 CMOS 1 7 1 2 N 1 2 N 8 CCD: CMOS: 9 : / 10 A-D A D C A D C A D C A D C A D C A D C ADC 11 A-D ADC ADC ADC ADC ADC ADC ADC ADC ADC A-D 12 ADC
swk(at)ic.is.tohoku.ac.jp 2 Outline 3 ? 4 S/N CCD 5 Q Q V 6 CMOS 1 7 1 2 N 1 2 N 8 CCD: CMOS: 9 : / 10 A-D A D C A D C A D C A D C A D C A D C ADC 11 A-D ADC ADC ADC ADC ADC ADC ADC ADC ADC A-D 12 ADC
A Navigation Algorithm for Avoidance of Moving and Stationary Obstacles for Mobile Robot Masaaki TOMITA*3 and Motoji YAMAMOTO Department of Production
 A Navigation Algorithm for Avoidance of Moving and Stationary Obstacles for Mobile Robot Masaaki TOMITA*3 and Motoji YAMAMOTO Department of Production System Engineering, Kyushu Polytecnic College, 1665-1
A Navigation Algorithm for Avoidance of Moving and Stationary Obstacles for Mobile Robot Masaaki TOMITA*3 and Motoji YAMAMOTO Department of Production System Engineering, Kyushu Polytecnic College, 1665-1
 24 21 21115025 i 1 1 2 5 2.1.................................. 6 2.1.1........................... 6 2.1.2........................... 7 2.2...................................... 8 2.3............................
24 21 21115025 i 1 1 2 5 2.1.................................. 6 2.1.1........................... 6 2.1.2........................... 7 2.2...................................... 8 2.3............................
IP IIS Construction of Overhead View Images by Estimating Intrinsic and Extrinsic Camera Parameters of Multiple Fish-Eye Cameras Shota Kas
 I-08- IIS-08- Construction of Overead View Images by Estimating Intrinsic and Extrinsic Camera arameters of Multiple Fis-Eye Cameras Sota Kase, Ryota Okutsu, Hisanori Mitsumoto (Cuo University) Yoei Aragaki,
I-08- IIS-08- Construction of Overead View Images by Estimating Intrinsic and Extrinsic Camera arameters of Multiple Fis-Eye Cameras Sota Kase, Ryota Okutsu, Hisanori Mitsumoto (Cuo University) Yoei Aragaki,
27 VR Effects of the position of viewpoint on self body in VR environment
 27 VR Effects of the position of viewpoint on self body in VR environment 1160298 2015 2 25 VR (HMD), HMD (VR). VR,.. HMD,., VR,.,.,,,,., VR,. HMD VR i Abstract Effects of the position of viewpoint on
27 VR Effects of the position of viewpoint on self body in VR environment 1160298 2015 2 25 VR (HMD), HMD (VR). VR,.. HMD,., VR,.,.,,,,., VR,. HMD VR i Abstract Effects of the position of viewpoint on
1752 T. SICE Vol.34 No.12 December 1998 Fig.2 Design of Secondary Mirror Fig.3 Design of Primary Mirror = (tantan tan ~~) -tan T llllfl) llll
 -tan T llllfl) llll") Omnidirectional Vision System Using Two Reflecting Mirrors Akito TAKEYAY, Takeshi KURODA*, Ken-ichi NISHIGUCHI* and Akira ICHIKAWA* Omnidirectional visual information is important to ensure the safety
Omnidirectional Vision System Using Two Reflecting Mirrors Akito TAKEYAY, Takeshi KURODA*, Ken-ichi NISHIGUCHI* and Akira ICHIKAWA* Omnidirectional visual information is important to ensure the safety
2. CABAC CABAC CABAC 1 1 CABAC Figure 1 Overview of CABAC 2 DCT 2 0/ /1 CABAC [3] 3. 2 値化部 コンテキスト計算部 2 値算術符号化部 CABAC CABAC
![2. CABAC CABAC CABAC 1 1 CABAC Figure 1 Overview of CABAC 2 DCT 2 0/ /1 CABAC [3] 3. 2 値化部 コンテキスト計算部 2 値算術符号化部 CABAC CABAC](/thumbs/92/108208872.jpg "2. CABAC CABAC CABAC 1 1 CABAC Figure 1 Overview of CABAC 2 DCT 2 0/ /1 CABAC [3] 3. 2 値化部 コンテキスト計算部 2 値算術符号化部 CABAC CABAC") H.264 CABAC 1 1 1 1 1 2, CABAC(Context-based Adaptive Binary Arithmetic Coding) H.264, CABAC, A Parallelization Technology of H.264 CABAC For Real Time Encoder of Moving Picture YUSUKE YATABE 1 HIRONORI
H.264 CABAC 1 1 1 1 1 2, CABAC(Context-based Adaptive Binary Arithmetic Coding) H.264, CABAC, A Parallelization Technology of H.264 CABAC For Real Time Encoder of Moving Picture YUSUKE YATABE 1 HIRONORI
Web Web Web Web Web, i
 22 Web Research of a Web search support system based on individual sensitivity 1135117 2011 2 14 Web Web Web Web Web, i Abstract Research of a Web search support system based on individual sensitivity
22 Web Research of a Web search support system based on individual sensitivity 1135117 2011 2 14 Web Web Web Web Web, i Abstract Research of a Web search support system based on individual sensitivity
mt_4.dvi
 ( ) 2006 1 PI 1 1 1.1................................. 1 1.2................................... 1 2 2 2.1...................................... 2 2.1.1.......................... 2 2.1.2..............................
( ) 2006 1 PI 1 1 1.1................................. 1 1.2................................... 1 2 2 2.1...................................... 2 2.1.1.......................... 2 2.1.2..............................
(a) (b) 2 2 (Bosch, IR Illuminator 850 nm, UFLED30-8BD) ( 7[m] 6[m]) 3 (PointGrey Research Inc.Grasshopper2 M/C) Hz (a) (b
![(a) (b) 2 2 (Bosch, IR Illuminator 850 nm, UFLED30-8BD) ( 7[m] 6[m]) 3 (PointGrey Research Inc.Grasshopper2 M/C) Hz (a) (b](/thumbs/91/105641706.jpg "(a) (b) 2 2 (Bosch, IR Illuminator 850 nm, UFLED30-8BD) ( 7[m] 6[m]) 3 (PointGrey Research Inc.Grasshopper2 M/C) Hz (a) (b") (MIRU202) 202 8 AdrianStoica 89 0395 744 89 0395 744 Jet Propulsion Laboratory 4800 Oak Grove Drive, Pasadena, CA 909, USA E-mail: uchino@irvs.ait.kyushu-u.ac.jp, {yumi,kurazume}@ait.kyushu-u.ac.jp 2 nearest
(MIRU202) 202 8 AdrianStoica 89 0395 744 89 0395 744 Jet Propulsion Laboratory 4800 Oak Grove Drive, Pasadena, CA 909, USA E-mail: uchino@irvs.ait.kyushu-u.ac.jp, {yumi,kurazume}@ait.kyushu-u.ac.jp 2 nearest
2007/8 Vol. J90 D No. 8 Stauffer [7] 2 2 I 1 I 2 2 (I 1(x),I 2(x)) 2 [13] I 2 = CI 1 (C >0) (I 1,I 2) (I 1,I 2) Field Monitoring Server
![2007/8 Vol. J90 D No. 8 Stauffer [7] 2 2 I 1 I 2 2 (I 1(x),I 2(x)) 2 [13] I 2 = CI 1 (C >0) (I 1,I 2) (I 1,I 2) Field Monitoring Server](/thumbs/91/107223763.jpg "2007/8 Vol. J90 D No. 8 Stauffer [7] 2 2 I 1 I 2 2 (I 1(x),I 2(x)) 2 [13] I 2 = CI 1 (C >0) (I 1,I 2) (I 1,I 2) Field Monitoring Server") a) Change Detection Using Joint Intensity Histogram Yasuyo KITA a) 2 (0 255) (I 1 (x),i 2 (x)) I 2 = CI 1 (C>0) (I 1,I 2 ) (I 1,I 2 ) 2 1. [1] 2 [2] [3] [5] [6] [8] Intelligent Systems Research Institute,
a) Change Detection Using Joint Intensity Histogram Yasuyo KITA a) 2 (0 255) (I 1 (x),i 2 (x)) I 2 = CI 1 (C>0) (I 1,I 2 ) (I 1,I 2 ) 2 1. [1] 2 [2] [3] [5] [6] [8] Intelligent Systems Research Institute,
Journal of Geography 116 (6) Configuration of Rapid Digital Mapping System Using Tablet PC and its Application to Obtaining Ground Truth
 Configuration of Rapid Digital Mapping System Using Tablet PC and its Application to Obtaining Ground Truth") Journal of Geography 116 (6) 749-758 2007 Configuration of Rapid Digital Mapping System Using Tablet PC and its Application to Obtaining Ground Truth Data: A Case Study of a Snow Survey in Chuetsu District,
Journal of Geography 116 (6) 749-758 2007 Configuration of Rapid Digital Mapping System Using Tablet PC and its Application to Obtaining Ground Truth Data: A Case Study of a Snow Survey in Chuetsu District,
IPSJ SIG Technical Report Vol.2009-DPS-141 No.20 Vol.2009-GN-73 No.20 Vol.2009-EIP-46 No /11/27 1. MIERUKEN 1 2 MIERUKEN MIERUKEN MIERUKEN: Spe
 1. MIERUKEN 1 2 MIERUKEN MIERUKEN MIERUKEN: Speech Visualization System Based on Augmented Reality Yuichiro Nagano 1 and Takashi Yoshino 2 As the spread of the Augmented Reality(AR) technology and service,
1. MIERUKEN 1 2 MIERUKEN MIERUKEN MIERUKEN: Speech Visualization System Based on Augmented Reality Yuichiro Nagano 1 and Takashi Yoshino 2 As the spread of the Augmented Reality(AR) technology and service,
IHI Robust Path Planning against Position Error for UGVs in Rough Terrain Yuki DOI, Yonghoon JI, Yusuke TAMURA(University of Tokyo), Yuki IKEDA, Atsus
, Yuki IKEDA, Atsus") IHI Robust Path Planning against Position Error for UGVs in Rough Terrain Yuki DOI, Yonghoon JI, Yusuke TAMURA(University of Tokyo), Yuki IKEDA, Atsushi UMEMURA, Yoshiharu KANESHIMA, Hiroki MURAKAMI(IHI
IHI Robust Path Planning against Position Error for UGVs in Rough Terrain Yuki DOI, Yonghoon JI, Yusuke TAMURA(University of Tokyo), Yuki IKEDA, Atsushi UMEMURA, Yoshiharu KANESHIMA, Hiroki MURAKAMI(IHI
SICE東北支部研究集会資料(2012年)
") 77 (..3) 77- A study on disturbance compensation control of a wheeled inverted pendulum robot during arm manipulation using Extended State Observer Luis Canete Takuma Sato, Kenta Nagano,Luis Canete,Takayuki
77 (..3) 77- A study on disturbance compensation control of a wheeled inverted pendulum robot during arm manipulation using Extended State Observer Luis Canete Takuma Sato, Kenta Nagano,Luis Canete,Takayuki
情報処理学会研究報告 IPSJ SIG Technical Report Vol.2014-GN-90 No.6 Vol.2014-CDS-9 No.6 Vol.2014-DCC-6 No /1/23 Bullet Time 1,a) 1 Bullet Time Bullet Time
 1 Bullet Time Bullet Time") Bullet Time 1,a) 1 Bullet Time Bullet Time Generation Technique and Eveluation on High-Resolution Bullet-Time Camera Work Ryuuki Sakamoto 1,a) Ding Chen 1 Abstract: The multi-camera environment have been
Bullet Time 1,a) 1 Bullet Time Bullet Time Generation Technique and Eveluation on High-Resolution Bullet-Time Camera Work Ryuuki Sakamoto 1,a) Ding Chen 1 Abstract: The multi-camera environment have been
IPSJ SIG Technical Report Vol.2010-MPS-77 No /3/5 VR SIFT Virtual View Generation in Hallway of Cybercity Buildings from Video Sequen
 VR 1 1 1 1 1 SIFT Virtual View Generation in Hallway of Cybercity Buildings from Video Sequences Sachiyo Yoshida, 1 Masami Takata 1 and Joe Kaduki 1 Appearance of Three-dimensional (3D) building model
VR 1 1 1 1 1 SIFT Virtual View Generation in Hallway of Cybercity Buildings from Video Sequences Sachiyo Yoshida, 1 Masami Takata 1 and Joe Kaduki 1 Appearance of Three-dimensional (3D) building model
IPSJ SIG Technical Report Vol.2012-IS-119 No /3/ Web A Multi-story e-picture Book with the Degree-of-interest Extraction Function
 1 2 2 3 4 2 Web A Multi-story e-picture Book with the Degree-of-interest Extraction Function Kunimichi Shibata, 1 Masakuni Moriyama, 2 Kazuhide Yukawa, 2 Koji Ueno, 3 Kazuo Takahashi 4 and Shigeo Kaneda
1 2 2 3 4 2 Web A Multi-story e-picture Book with the Degree-of-interest Extraction Function Kunimichi Shibata, 1 Masakuni Moriyama, 2 Kazuhide Yukawa, 2 Koji Ueno, 3 Kazuo Takahashi 4 and Shigeo Kaneda
LAN LAN LAN LAN LAN LAN,, i
 22 A secure wireless communication system using virtualization technologies 1115139 2011 3 4 LAN LAN LAN LAN LAN LAN,, i Abstract A secure wireless communication system using virtualization technologies
22 A secure wireless communication system using virtualization technologies 1115139 2011 3 4 LAN LAN LAN LAN LAN LAN,, i Abstract A secure wireless communication system using virtualization technologies
soturon.dvi
 12 Exploration Method of Various Routes with Genetic Algorithm 1010369 2001 2 5 ( Genetic Algorithm: GA ) GA 2 3 Dijkstra Dijkstra i Abstract Exploration Method of Various Routes with Genetic Algorithm
12 Exploration Method of Various Routes with Genetic Algorithm 1010369 2001 2 5 ( Genetic Algorithm: GA ) GA 2 3 Dijkstra Dijkstra i Abstract Exploration Method of Various Routes with Genetic Algorithm
3 3 3 Knecht (2-3fps) AR [3] 2. 2 Debevec High Dynamic Range( HDR) [4] HDR Derek [5] 2. 3 [6] 3. [6] x E(x) E(x) = 2π π 2 V (x, θ i, ϕ i )L(θ
![3 3 3 Knecht (2-3fps) AR [3] 2. 2 Debevec High Dynamic Range( HDR) [4] HDR Derek [5] 2. 3 [6] 3. [6] x E(x) E(x) = 2π π 2 V (x, θ i, ϕ i )L(θ](/thumbs/91/105641694.jpg "3 3 3 Knecht (2-3fps) AR [3] 2. 2 Debevec High Dynamic Range( HDR) [4] HDR Derek [5] 2. 3 [6] 3. [6] x E(x) E(x) = 2π π 2 V (x, θ i, ϕ i )L(θ") (MIRU212) 212 8 RGB-D 223 8522 3 14 1 E-mail: {ikeda,charmie,saito}@hvrl.ics.keio.ac.jp, sugimoto@ics.keio.ac.jp RGB-D Lambert RGB-D 1. Augmented Reality AR [1] AR AR 2 [2], [3] [4], [5] [6] RGB-D RGB-D
(MIRU212) 212 8 RGB-D 223 8522 3 14 1 E-mail: {ikeda,charmie,saito}@hvrl.ics.keio.ac.jp, sugimoto@ics.keio.ac.jp RGB-D Lambert RGB-D 1. Augmented Reality AR [1] AR AR 2 [2], [3] [4], [5] [6] RGB-D RGB-D
P2P P2P peer peer P2P peer P2P peer P2P i
 26 P2P Proposed a system for the purpose of idle resource utilization of the computer using the P2P 1150373 2015 2 27 P2P P2P peer peer P2P peer P2P peer P2P i Abstract Proposed a system for the purpose
26 P2P Proposed a system for the purpose of idle resource utilization of the computer using the P2P 1150373 2015 2 27 P2P P2P peer peer P2P peer P2P peer P2P i Abstract Proposed a system for the purpose
(a) (b) (c) Fig. 2 2 (a) ; (b) ; (c) (a)configuration of the proposed system; (b)processing flow of the system; (c)the system in use 1 GPGPU (
 (b) (c) Fig. 2 2 (a) ; (b) ; (c) (a)configuration of the proposed system; (b)processing flow of the system; (c)the system in use 1 GPGPU (") 1 1 1 (a) (b) imperceptible A Realtime and Adaptive Technique for Projection onto Non-Flat Surfaces Using a Mobile Projector Camera System Eiji Seki, 1 Dao Vinh Ninh 1 and Masanori Sugimoto 1 In this paper,
1 1 1 (a) (b) imperceptible A Realtime and Adaptive Technique for Projection onto Non-Flat Surfaces Using a Mobile Projector Camera System Eiji Seki, 1 Dao Vinh Ninh 1 and Masanori Sugimoto 1 In this paper,
( )
") NAIST-IS-MT9951130 2001 2 9 ( ) 3 360 HyperOmni Vision 360 CG 3, NAIST-IS- MT9951130, 2001 2 9. i 2 HyperOmni Vision ii Teleoperation of a Mobile Robot by Telepresence with an Omnidirectional Sensor 3
NAIST-IS-MT9951130 2001 2 9 ( ) 3 360 HyperOmni Vision 360 CG 3, NAIST-IS- MT9951130, 2001 2 9. i 2 HyperOmni Vision ii Teleoperation of a Mobile Robot by Telepresence with an Omnidirectional Sensor 3
( )
") NAIST-IS-MT0851100 2010 2 4 ( ) CR CR CR 1980 90 CR Kerberos SSH CR CR CR CR CR CR,,, ID, NAIST-IS- MT0851100, 2010 2 4. i On the Key Management Policy of Challenge Response Authentication Schemes Toshiya
NAIST-IS-MT0851100 2010 2 4 ( ) CR CR CR 1980 90 CR Kerberos SSH CR CR CR CR CR CR,,, ID, NAIST-IS- MT0851100, 2010 2 4. i On the Key Management Policy of Challenge Response Authentication Schemes Toshiya
IEEE HDD RAID MPI MPU/CPU GPGPU GPU cm I m cm /g I I n/ cm 2 s X n/ cm s cm g/cm
 Neutron Visual Sensing Techniques Making Good Use of Computer Science J-PARC CT CT-PET TB IEEE HDD RAID MPI MPU/CPU GPGPU GPU cm I m cm /g I I n/ cm 2 s X n/ cm s cm g/cm cm cm barn cm thn/ cm s n/ cm
Neutron Visual Sensing Techniques Making Good Use of Computer Science J-PARC CT CT-PET TB IEEE HDD RAID MPI MPU/CPU GPGPU GPU cm I m cm /g I I n/ cm 2 s X n/ cm s cm g/cm cm cm barn cm thn/ cm s n/ cm
25 D Effects of viewpoints of head mounted wearable 3D display on human task performance
 25 D Effects of viewpoints of head mounted wearable 3D display on human task performance 1140322 2014 2 28 D HMD HMD HMD HMD 3D HMD HMD HMD HMD i Abstract Effects of viewpoints of head mounted wearable
25 D Effects of viewpoints of head mounted wearable 3D display on human task performance 1140322 2014 2 28 D HMD HMD HMD HMD 3D HMD HMD HMD HMD i Abstract Effects of viewpoints of head mounted wearable
Input image Initialize variables Loop for period of oscillation Update height map Make shade image Change property of image Output image Change time L
 1,a) 1,b) 1/f β Generation Method of Animation from Pictures with Natural Flicker Abstract: Some methods to create animation automatically from one picture have been proposed. There is a method that gives
1,a) 1,b) 1/f β Generation Method of Animation from Pictures with Natural Flicker Abstract: Some methods to create animation automatically from one picture have been proposed. There is a method that gives
IPSJ SIG Technical Report Vol.2012-CG-148 No /8/29 3DCG 1,a) On rigid body animation taking into account the 3D computer graphics came
 On rigid body animation taking into account the 3D computer graphics came") 3DCG 1,a) 2 2 2 2 3 On rigid body animation taking into account the 3D computer graphics camera viewpoint Abstract: In using computer graphics for making games or motion pictures, physics simulation is
3DCG 1,a) 2 2 2 2 3 On rigid body animation taking into account the 3D computer graphics camera viewpoint Abstract: In using computer graphics for making games or motion pictures, physics simulation is
光学
 Image Recognition for On-Board Cameras and Distance Measurement Using Stereo Camera Takeshi SHIMA Haruki MATONO Shinji KAKEGAWA and Tatsuhiko MONJI Active safety systems for vehicles using outside detection
Image Recognition for On-Board Cameras and Distance Measurement Using Stereo Camera Takeshi SHIMA Haruki MATONO Shinji KAKEGAWA and Tatsuhiko MONJI Active safety systems for vehicles using outside detection
3 2 2 (1) (2) (3) (4) 4 4 AdaBoost 2. [11] Onishi&Yoda [8] Iwashita&Stoica [5] 4 [3] 3. 3 (1) (2) (3)
![3 2 2 (1) (2) (3) (4) 4 4 AdaBoost 2. [11] Onishi&Yoda [8] Iwashita&Stoica [5] 4 [3] 3. 3 (1) (2) (3)](/thumbs/68/59204737.jpg "3 2 2 (1) (2) (3) (4) 4 4 AdaBoost 2. [11] Onishi&Yoda [8] Iwashita&Stoica [5] 4 [3] 3. 3 (1) (2) (3)") (MIRU2012) 2012 8 820-8502 680-4 E-mail: {d kouno,shimada,endo}@pluto.ai.kyutech.ac.jp (1) (2) (3) (4) 4 AdaBoost 1. Kanade [6] CLAFIC [12] EigenFace [10] 1 1 2 1 [7] 3 2 2 (1) (2) (3) (4) 4 4 AdaBoost
(MIRU2012) 2012 8 820-8502 680-4 E-mail: {d kouno,shimada,endo}@pluto.ai.kyutech.ac.jp (1) (2) (3) (4) 4 AdaBoost 1. Kanade [6] CLAFIC [12] EigenFace [10] 1 1 2 1 [7] 3 2 2 (1) (2) (3) (4) 4 4 AdaBoost
IPSJ SIG Technical Report Vol.2017-ARC-225 No.12 Vol.2017-SLDM-179 No.12 Vol.2017-EMB-44 No /3/9 1 1 RTOS DefensiveZone DefensiveZone MPU RTOS
 1 1 RTOS DefensiveZone DefensiveZone MPU RTOS RTOS OS Lightweight partitioning architecture for automotive systems Suzuki Takehito 1 Honda Shinya 1 Abstract: Partitioning using protection RTOS has high
1 1 RTOS DefensiveZone DefensiveZone MPU RTOS RTOS OS Lightweight partitioning architecture for automotive systems Suzuki Takehito 1 Honda Shinya 1 Abstract: Partitioning using protection RTOS has high
17 Proposal of an Algorithm of Image Extraction and Research on Improvement of a Man-machine Interface of Food Intake Measuring System
 1. (1) ( MMI ) 2. 3. MMI Personal Computer(PC) MMI PC 1 1 2 (%) (%) 100.0 95.2 100.0 80.1 2 % 31.3% 2 PC (3 ) (2) MMI 2 ( ),,,, 49,,p531-532,2005 ( ),,,,,2005,p66-p67,2005 17 Proposal of an Algorithm of
1. (1) ( MMI ) 2. 3. MMI Personal Computer(PC) MMI PC 1 1 2 (%) (%) 100.0 95.2 100.0 80.1 2 % 31.3% 2 PC (3 ) (2) MMI 2 ( ),,,, 49,,p531-532,2005 ( ),,,,,2005,p66-p67,2005 17 Proposal of an Algorithm of
GPGPU
 GPGPU 2013 1008 2015 1 23 Abstract In recent years, with the advance of microscope technology, the alive cells have been able to observe. On the other hand, from the standpoint of image processing, the
GPGPU 2013 1008 2015 1 23 Abstract In recent years, with the advance of microscope technology, the alive cells have been able to observe. On the other hand, from the standpoint of image processing, the
Web Basic Web SAS-2 Web SAS-2 i
 19 Development of moving image delivery system for elementary school 1080337 2008 3 10 Web Basic Web SAS-2 Web SAS-2 i Abstract Development of moving image delivery system for elementary school Ayuko INOUE
19 Development of moving image delivery system for elementary school 1080337 2008 3 10 Web Basic Web SAS-2 Web SAS-2 i Abstract Development of moving image delivery system for elementary school Ayuko INOUE
23 A Comparison of Flick and Ring Document Scrolling in Touch-based Mobile Phones
 23 A Comparison of Flick and Ring Document Scrolling in Touch-based Mobile Phones 1120220 2012 3 1 iphone..,. 2 (, ) 3 (,, ),,,.,..,. HCI i Abstract A Comparison of Flick and Ring Document Scrolling in
23 A Comparison of Flick and Ring Document Scrolling in Touch-based Mobile Phones 1120220 2012 3 1 iphone..,. 2 (, ) 3 (,, ),,,.,..,. HCI i Abstract A Comparison of Flick and Ring Document Scrolling in
九州大学学術情報リポジトリ Kyushu University Institutional Repository 多視点動画像処理による 3 次元モデル復元に基づく自由視点画像生成のオンライン化 : PC クラスタを用いた実現法 上田, 恵九州大学システム情報科学研究院知能システム学部門 有田, 大
 九州大学学術情報リポジトリ Kyushu University Institutional Repository 多視点動画像処理による 3 次元モデル復元に基づく自由視点画像生成のオンライン化 : PC クラスタを用いた実現法 上田, 恵九州大学システム情報科学研究院知能システム学部門 有田, 大作九州大学システム情報科学研究院知能システム学部門 谷口, 倫一郎九州大学システム情報科学研究院知能システム学部門
九州大学学術情報リポジトリ Kyushu University Institutional Repository 多視点動画像処理による 3 次元モデル復元に基づく自由視点画像生成のオンライン化 : PC クラスタを用いた実現法 上田, 恵九州大学システム情報科学研究院知能システム学部門 有田, 大作九州大学システム情報科学研究院知能システム学部門 谷口, 倫一郎九州大学システム情報科学研究院知能システム学部門
24 Depth scaling of binocular stereopsis by observer s own movements
 24 Depth scaling of binocular stereopsis by observer s own movements 1130313 2013 3 1 3D 3D 3D 2 2 i Abstract Depth scaling of binocular stereopsis by observer s own movements It will become more usual
24 Depth scaling of binocular stereopsis by observer s own movements 1130313 2013 3 1 3D 3D 3D 2 2 i Abstract Depth scaling of binocular stereopsis by observer s own movements It will become more usual
(bundle adjustment) 8),9) ),6),7) GPS 8),9) GPS GPS 8) GPS GPS GPS GPS Anai 9) GPS GPS GPS GPS GPS GPS GPS Maier ) GPS GPS Anai 9) GPS GPS M GPS M inf
 8),9) ),6),7) GPS 8),9) GPS GPS 8) GPS GPS GPS GPS Anai 9) GPS GPS GPS GPS GPS GPS GPS Maier ) GPS GPS Anai 9) GPS GPS M GPS M inf") GPS GPS solve this problem, we propose ()novel model about GPS positioning which enables more robust estimation with extended bundle adjustment, and ()outlier removal for GPS positioning using video information.
GPS GPS solve this problem, we propose ()novel model about GPS positioning which enables more robust estimation with extended bundle adjustment, and ()outlier removal for GPS positioning using video information.
25 AR 3 Property of three-dimensional perception in the wearable AR environment
 25 AR 3 Property of three-dimensional perception in the wearable AR environment 1140378 2014 2 28 AR 3 AR.. AR,. AR. 2, [2]., [3]., AR. AR. 3D 3D,,., 3D..,,,,. AR,, HMD,, 3 i Abstract Property of three-dimensional
25 AR 3 Property of three-dimensional perception in the wearable AR environment 1140378 2014 2 28 AR 3 AR.. AR,. AR. 2, [2]., [3]., AR. AR. 3D 3D,,., 3D..,,,,. AR,, HMD,, 3 i Abstract Property of three-dimensional
1., 1 COOKPAD 2, Web.,,,,,,.,, [1]., 5.,, [2].,,.,.,, 5, [3].,,,.,, [4], 33,.,,.,,.. 2.,, 3.., 4., 5., ,. 1.,,., 2.,. 1,,
![1., 1 COOKPAD 2, Web.,,,,,,.,, [1]., 5.,, [2].,,.,.,, 5, [3].,,,.,, [4], 33,.,,.,,.. 2.,, 3.., 4., 5., ,. 1.,,., 2.,. 1,,](/thumbs/50/25936361.jpg "1., 1 COOKPAD 2, Web.,,,,,,.,, [1]., 5.,, [2].,,.,.,, 5, [3].,,,.,, [4], 33,.,,.,,.. 2.,, 3.., 4., 5., ,. 1.,,., 2.,. 1,,") THE INSTITUTE OF ELECTRONICS, INFORMATION AND COMMUNICATION ENGINEERS TECHNICAL REPORT OF IEICE.,, 464 8601 470 0393 101 464 8601 E-mail: matsunagah@murase.m.is.nagoya-u.ac.jp, {ide,murase,hirayama}@is.nagoya-u.ac.jp,
THE INSTITUTE OF ELECTRONICS, INFORMATION AND COMMUNICATION ENGINEERS TECHNICAL REPORT OF IEICE.,, 464 8601 470 0393 101 464 8601 E-mail: matsunagah@murase.m.is.nagoya-u.ac.jp, {ide,murase,hirayama}@is.nagoya-u.ac.jp,
(MIRU2008) HOG Histograms of Oriented Gradients (HOG)
 HOG Histograms of Oriented Gradients (HOG)") (MIRU2008) 2008 7 HOG - - E-mail: katsu0920@me.cs.scitec.kobe-u.ac.jp, {takigu,ariki}@kobe-u.ac.jp Histograms of Oriented Gradients (HOG) HOG Shape Contexts HOG 5.5 Histograms of Oriented Gradients D Human
(MIRU2008) 2008 7 HOG - - E-mail: katsu0920@me.cs.scitec.kobe-u.ac.jp, {takigu,ariki}@kobe-u.ac.jp Histograms of Oriented Gradients (HOG) HOG Shape Contexts HOG 5.5 Histograms of Oriented Gradients D Human
Virtual Window System Virtual Window System Virtual Window System Virtual Window System Virtual Window System Virtual Window System Social Networking
 23 An attribute expression of the virtual window system communicators 1120265 2012 3 1 Virtual Window System Virtual Window System Virtual Window System Virtual Window System Virtual Window System Virtual
23 An attribute expression of the virtual window system communicators 1120265 2012 3 1 Virtual Window System Virtual Window System Virtual Window System Virtual Window System Virtual Window System Virtual
Shonan Institute of Technology MEMOIRS OF SHONAN INSTITUTE OF TECHNOLOGY Vol. 41, No. 1, 2007 Ships1 * ** ** ** Development of a Small-Mid Range Paral
 MEMOIRS OF SHONAN INSTITUTE OF TECHNOLOGY Vol. 41, No. 1, 2007 Ships1 * ** ** ** Development of a Small-Mid Range Parallel Computer Ships1 Makoto OYA*, Hiroto MATSUBARA**, Kazuyoshi SAKURAI** and Yu KATO**
MEMOIRS OF SHONAN INSTITUTE OF TECHNOLOGY Vol. 41, No. 1, 2007 Ships1 * ** ** ** Development of a Small-Mid Range Parallel Computer Ships1 Makoto OYA*, Hiroto MATSUBARA**, Kazuyoshi SAKURAI** and Yu KATO**
fiš„v5.dvi
 (2001) 49 2 293 303 VRML 1 2 3 2001 4 12 2001 10 16 Web Java VRML (Virtual Reality Modeling Language) VRML Web VRML VRML VRML VRML Web VRML VRML, 3D 1. WWW (World Wide Web) WWW Mittag (2000) Web CGI Java
(2001) 49 2 293 303 VRML 1 2 3 2001 4 12 2001 10 16 Web Java VRML (Virtual Reality Modeling Language) VRML Web VRML VRML VRML VRML Web VRML VRML, 3D 1. WWW (World Wide Web) WWW Mittag (2000) Web CGI Java
「hoge」
 ICS-06M-404 255 1 7 1.1................................... 7 1.1.1........................... 7 1.1.2........................ 8 1.1.3............................ 9 1.2..................................
ICS-06M-404 255 1 7 1.1................................... 7 1.1.1........................... 7 1.1.2........................ 8 1.1.3............................ 9 1.2..................................
36 581/2 2012
 4 Development of Optical Ground Station System 4-1 Overview of Optical Ground Station with 1.5 m Diameter KUNIMORI Hiroo, TOYOSHMA Morio, and TAKAYAMA Yoshihisa The OICETS experiment, LEO Satellite-Ground
4 Development of Optical Ground Station System 4-1 Overview of Optical Ground Station with 1.5 m Diameter KUNIMORI Hiroo, TOYOSHMA Morio, and TAKAYAMA Yoshihisa The OICETS experiment, LEO Satellite-Ground
IPSJ SIG Technical Report Vol.2015-MUS-107 No /5/23 HARK-Binaural Raspberry Pi 2 1,a) ( ) HARK 2 HARK-Binaural A/D Raspberry Pi 2 1.
 ( ) HARK 2 HARK-Binaural A/D Raspberry Pi 2 1.") HARK-Binaural Raspberry Pi 2 1,a) 1 1 1 2 3 () HARK 2 HARK-Binaural A/D Raspberry Pi 2 1. [1,2] [2 5] () HARK (Honda Research Institute Japan audition for robots with Kyoto University) *1 GUI ( 1) Python
HARK-Binaural Raspberry Pi 2 1,a) 1 1 1 2 3 () HARK 2 HARK-Binaural A/D Raspberry Pi 2 1. [1,2] [2 5] () HARK (Honda Research Institute Japan audition for robots with Kyoto University) *1 GUI ( 1) Python
untitled
 Application of image correlation technique to determination of in-plane deformation distribution of paper Toshiharu Enomae Graduate School of Agricultural and Life Sciences The University of Tokyo 1 Peters
Application of image correlation technique to determination of in-plane deformation distribution of paper Toshiharu Enomae Graduate School of Agricultural and Life Sciences The University of Tokyo 1 Peters
21 e-learning Development of Real-time Learner Detection System for e-learning
 21 e-learning Development of Real-time Learner Detection System for e-learning 1100349 2010 3 1 e-learning WBT (Web Based training) e-learning LMS (Learning Management System) LMS WBT e-learning e-learning
21 e-learning Development of Real-time Learner Detection System for e-learning 1100349 2010 3 1 e-learning WBT (Web Based training) e-learning LMS (Learning Management System) LMS WBT e-learning e-learning
IPSJ SIG Technical Report Vol.2012-HCI-149 No /7/20 1 1,2 1 (HMD: Head Mounted Display) HMD HMD,,,, An Information Presentation Method for Weara
 HMD HMD,,,, An Information Presentation Method for Weara") 1 1,2 1 (: Head Mounted Display),,,, An Information Presentation Method for Wearable Displays Considering Surrounding Conditions in Wearable Computing Environments Masayuki Nakao 1 Tsutomu Terada 1,2 Masahiko
1 1,2 1 (: Head Mounted Display),,,, An Information Presentation Method for Wearable Displays Considering Surrounding Conditions in Wearable Computing Environments Masayuki Nakao 1 Tsutomu Terada 1,2 Masahiko
20 Method for Recognizing Expression Considering Fuzzy Based on Optical Flow
 20 Method for Recognizing Expression Considering Fuzzy Based on Optical Flow 1115084 2009 3 5 3.,,,.., HCI(Human Computer Interaction),.,,.,,.,.,,..,. i Abstract Method for Recognizing Expression Considering
20 Method for Recognizing Expression Considering Fuzzy Based on Optical Flow 1115084 2009 3 5 3.,,,.., HCI(Human Computer Interaction),.,,.,,.,.,,..,. i Abstract Method for Recognizing Expression Considering
14 2 5
 14 2 5 i ii Surface Reconstruction from Point Cloud of Human Body in Arbitrary Postures Isao MORO Abstract We propose a method for surface reconstruction from point cloud of human body in arbitrary postures.
14 2 5 i ii Surface Reconstruction from Point Cloud of Human Body in Arbitrary Postures Isao MORO Abstract We propose a method for surface reconstruction from point cloud of human body in arbitrary postures.
Silhouette on Image Object Silhouette on Images Object 1 Fig. 1 Visual cone Fig. 2 2 Volume intersection method Fig. 3 3 Background subtraction Fig. 4
 Image-based Modeling 1 1 Object Extraction Method for Image-based Modeling using Projection Transformation of Multi-viewpoint Images Masanori Ibaraki 1 and Yuji Sakamoto 1 The volume intersection method
Image-based Modeling 1 1 Object Extraction Method for Image-based Modeling using Projection Transformation of Multi-viewpoint Images Masanori Ibaraki 1 and Yuji Sakamoto 1 The volume intersection method
dsample.dvi
 1 1 1 2009 2 ( ) 600 1 2 1 2 RFID PC Practical Verification of Evacuation Guidance Based on Pedestrian Traffic Measurement Tomohisa Yamashita, 1 Shunsuke Soeda 1 and Noda Itsuki 1 In this paper, we report
1 1 1 2009 2 ( ) 600 1 2 1 2 RFID PC Practical Verification of Evacuation Guidance Based on Pedestrian Traffic Measurement Tomohisa Yamashita, 1 Shunsuke Soeda 1 and Noda Itsuki 1 In this paper, we report
 1 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15. 1. 2. 3. 16 17 18 ( ) ( 19 ( ) CG PC 20 ) I want some rice. I want some lice. 21 22 23 24 2001 9 18 3 2000 4 21 3,. 13,. Science/Technology, Design, Experiments,
1 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15. 1. 2. 3. 16 17 18 ( ) ( 19 ( ) CG PC 20 ) I want some rice. I want some lice. 21 22 23 24 2001 9 18 3 2000 4 21 3,. 13,. Science/Technology, Design, Experiments,
ActionScript Flash Player 8 ActionScript3.0 ActionScript Flash Video ActionScript.swf swf FlashPlayer AVM(Actionscript Virtual Machine) Windows
 Windows") ActionScript3.0 1 1 YouTube Flash ActionScript3.0 Face detection and hiding using ActionScript3.0 for streaming video on the Internet Ryouta Tanaka 1 and Masanao Koeda 1 Recently, video streaming and video
ActionScript3.0 1 1 YouTube Flash ActionScript3.0 Face detection and hiding using ActionScript3.0 for streaming video on the Internet Ryouta Tanaka 1 and Masanao Koeda 1 Recently, video streaming and video
proc.dvi
 M. D. Wheler Cyra Technologies, Inc. 3 3 CAD albedo Mapping textures on 3D geometric model using reflectance image Ryo Kurazume M. D. Wheler Katsushi Ikeuchi The University oftokyo Cyra Technologies, Inc.
M. D. Wheler Cyra Technologies, Inc. 3 3 CAD albedo Mapping textures on 3D geometric model using reflectance image Ryo Kurazume M. D. Wheler Katsushi Ikeuchi The University oftokyo Cyra Technologies, Inc.
(4) ω t(x) = 1 ω min Ω ( (I C (y))) min 0 < ω < C A C = 1 (5) ω (5) t transmission map tmap 1 4(a) 2. 3 2. 2 t 4(a) t tmap RGB 2 (a) RGB (A), (B), (C)
 ω t(x) = 1 ω min Ω ( (I C (y))) min 0 < ω < C A C = 1 (5) ω (5) t transmission map tmap 1 4(a) 2. 3 2. 2 t 4(a) t tmap RGB 2 (a) RGB (A), (B), (C)") (MIRU2011) 2011 7 890 0065 1 21 40 105-6691 1 1 1 731 3194 3 4 1 338 8570 255 346 8524 1836 1 E-mail: {fukumoto,kawasaki}@ibe.kagoshima-u.ac.jp, ryo-f@hiroshima-cu.ac.jp, fukuda@cv.ics.saitama-u.ac.jp,
(MIRU2011) 2011 7 890 0065 1 21 40 105-6691 1 1 1 731 3194 3 4 1 338 8570 255 346 8524 1836 1 E-mail: {fukumoto,kawasaki}@ibe.kagoshima-u.ac.jp, ryo-f@hiroshima-cu.ac.jp, fukuda@cv.ics.saitama-u.ac.jp,
SICE東北支部研究集会資料(2004年)
") 219 (2004.11.05) 219-4 Development of a 3D Range Sensor Based on Equiphase Light-Section Method KUMAGAI Masaaki * *Tohoku Gakuin University : (Vision sensor), (3-D range sensor), (Light-section method),
219 (2004.11.05) 219-4 Development of a 3D Range Sensor Based on Equiphase Light-Section Method KUMAGAI Masaaki * *Tohoku Gakuin University : (Vision sensor), (3-D range sensor), (Light-section method),
IPSJ SIG Technical Report Vol.2015-CVIM-196 No /3/6 1,a) 1,b) 1,c) U,,,, The Camera Position Alignment on a Gimbal Head for Fixed Viewpoint Swi
 1,b) 1,c) U,,,, The Camera Position Alignment on a Gimbal Head for Fixed Viewpoint Swi") 1,a) 1,b) 1,c) U,,,, The Camera Position Alignment on a Gimbal Head for Fixed Viewpoint Swiveling using a Misalignment Model Abstract: When the camera sets on a gimbal head as a fixed-view-point, it is
1,a) 1,b) 1,c) U,,,, The Camera Position Alignment on a Gimbal Head for Fixed Viewpoint Swiveling using a Misalignment Model Abstract: When the camera sets on a gimbal head as a fixed-view-point, it is
main.dvi
 A 1/4 1 1/ 1/1 1 9 6 (Vergence) (Convergence) (Divergence) ( ) ( ) 97 1) S. Fukushima, M. Takahashi, and H. Yoshikawa: A STUDY ON VR-BASED MUTUAL ADAPTIVE CAI SYSTEM FOR NUCLEAR POWER PLANT, Proc. of FIFTH
A 1/4 1 1/ 1/1 1 9 6 (Vergence) (Convergence) (Divergence) ( ) ( ) 97 1) S. Fukushima, M. Takahashi, and H. Yoshikawa: A STUDY ON VR-BASED MUTUAL ADAPTIVE CAI SYSTEM FOR NUCLEAR POWER PLANT, Proc. of FIFTH
Sobel Canny i
 21 Edge Feature for Monochrome Image Retrieval 1100311 2010 3 1 3 3 2 2 7 200 Sobel Canny i Abstract Edge Feature for Monochrome Image Retrieval Naoto Suzue Content based image retrieval (CBIR) has been
21 Edge Feature for Monochrome Image Retrieval 1100311 2010 3 1 3 3 2 2 7 200 Sobel Canny i Abstract Edge Feature for Monochrome Image Retrieval Naoto Suzue Content based image retrieval (CBIR) has been
23 Fig. 2: hwmodulev2 3. Reconfigurable HPC 3.1 hw/sw hw/sw hw/sw FPGA PC FPGA PC FPGA HPC FPGA FPGA hw/sw hw/sw hw- Module FPGA hwmodule hw/sw FPGA h
 23 FPGA CUDA Performance Comparison of FPGA Array with CUDA on Poisson Equation (lijiang@sekine-lab.ei.tuat.ac.jp), (kazuki@sekine-lab.ei.tuat.ac.jp), (takahashi@sekine-lab.ei.tuat.ac.jp), (tamukoh@cc.tuat.ac.jp),
23 FPGA CUDA Performance Comparison of FPGA Array with CUDA on Poisson Equation (lijiang@sekine-lab.ei.tuat.ac.jp), (kazuki@sekine-lab.ei.tuat.ac.jp), (takahashi@sekine-lab.ei.tuat.ac.jp), (tamukoh@cc.tuat.ac.jp),
IPSJ SIG Technical Report Vol.2014-GN-90 No.16 Vol.2014-CDS-9 No.16 Vol.2014-DCC-6 No /1/24 1,a) 2,b) 2,c) 1,d) QUMARION QUMARION Kinect Kinect
 2,b) 2,c) 1,d) QUMARION QUMARION Kinect Kinect") 1,a) 2,b) 2,c) 1,d) QUMARION QUMARION Kinect Kinect Using a Human-Shaped Input Device for Remote Pose Instruction Yuki Tayama 1,a) Yoshiaki Ando 2,b) Misaki Hagino 2,c) Ken-ichi Okada 1,d) Abstract: There
1,a) 2,b) 2,c) 1,d) QUMARION QUMARION Kinect Kinect Using a Human-Shaped Input Device for Remote Pose Instruction Yuki Tayama 1,a) Yoshiaki Ando 2,b) Misaki Hagino 2,c) Ken-ichi Okada 1,d) Abstract: There
IPSJ SIG Technical Report Vol.2011-EC-19 No /3/ ,.,., Peg-Scope Viewer,,.,,,,. Utilization of Watching Logs for Support of Multi-
 1 3 5 4 1 2 1,.,., Peg-Scope Viewer,,.,,,,. Utilization of Watching Logs for Support of Multi-View Video Contents Kosuke Niwa, 1 Shogo Tokai, 3 Tetsuya Kawamoto, 5 Toshiaki Fujii, 4 Marutani Takafumi,
1 3 5 4 1 2 1,.,., Peg-Scope Viewer,,.,,,,. Utilization of Watching Logs for Support of Multi-View Video Contents Kosuke Niwa, 1 Shogo Tokai, 3 Tetsuya Kawamoto, 5 Toshiaki Fujii, 4 Marutani Takafumi,
11) 13) 11),12) 13) Y c Z c Image plane Y m iy O m Z m Marker coordinate system T, d X m f O c X c Camera coordinate system 1 Coordinates and problem
 13) 11),12) 13) Y c Z c Image plane Y m iy O m Z m Marker coordinate system T, d X m f O c X c Camera coordinate system 1 Coordinates and problem") 1 1 1 Posture Esimation by Using 2-D Fourier Transform Yuya Ono, 1 Yoshio Iwai 1 and Hiroshi Ishiguro 1 Recently, research fields of augmented reality and robot navigation are actively investigated. Estimating
1 1 1 Posture Esimation by Using 2-D Fourier Transform Yuya Ono, 1 Yoshio Iwai 1 and Hiroshi Ishiguro 1 Recently, research fields of augmented reality and robot navigation are actively investigated. Estimating
ÅÇÈÉ ÂÃ ÂÃÄ Â ÉÂÄ ÉÂÄ Â!Â" ÄÅÇÈÉ ÈÈ Â ÂÃ 2 1 ARCHEOGUIDE[14, 15] AR CG [16, 17] PDA ÂÃÄ ÅÇÈÉ 2 [18] CG
![ÅÇÈÉ Âà ÂÃÄ Â ÉÂÄ ÉÂÄ Â! ÄÅÇÈÉ ÈÈ Â Âà 2 1 ARCHEOGUIDE[14, 15] AR CG [16, 17] PDA ÂÃÄ ÅÇÈÉ 2 [18] CG](/thumbs/91/105658249.jpg "ÅÇÈÉ Âà ÂÃÄ Â ÉÂÄ ÉÂÄ Â! ÄÅÇÈÉ ÈÈ Â Âà 2 1 ARCHEOGUIDE[14, 15] AR CG [16, 17] PDA ÂÃÄ ÅÇÈÉ 2 [18] CG") 630-0192 8916-5 E-mail: {ryuhei-t, kanbara, yokoya}@is.naist.jp PDA Nara Palace Site Navigator Mobile Tour Guide System Using Multimedia Contents Ryuhei TENMOKU Masayuki KANBARA and Naokazu YOKOYA Graduate
630-0192 8916-5 E-mail: {ryuhei-t, kanbara, yokoya}@is.naist.jp PDA Nara Palace Site Navigator Mobile Tour Guide System Using Multimedia Contents Ryuhei TENMOKU Masayuki KANBARA and Naokazu YOKOYA Graduate
Vol. 42 No. SIG 8(TOD 10) July HTML 100 Development of Authoring and Delivery System for Synchronized Contents and Experiment on High Spe
 July HTML 100 Development of Authoring and Delivery System for Synchronized Contents and Experiment on High Spe") Vol. 42 No. SIG 8(TOD 10) July 2001 1 2 3 4 HTML 100 Development of Authoring and Delivery System for Synchronized Contents and Experiment on High Speed Networks Yutaka Kidawara, 1 Tomoaki Kawaguchi, 2
Vol. 42 No. SIG 8(TOD 10) July 2001 1 2 3 4 HTML 100 Development of Authoring and Delivery System for Synchronized Contents and Experiment on High Speed Networks Yutaka Kidawara, 1 Tomoaki Kawaguchi, 2
NAIST-IS-MT
 NAIST-IS-MT1251002 2014 3 13 ( ) Augmented Reality AR AR AR AR AR (1) (2) (3) AR AR, NAIST-IS-MT1251002, 2014 3 13. i AR AR AR ii Augmented Reality Using Pre-captured Images Considering Change of Real-world
NAIST-IS-MT1251002 2014 3 13 ( ) Augmented Reality AR AR AR AR AR (1) (2) (3) AR AR, NAIST-IS-MT1251002, 2014 3 13. i AR AR AR ii Augmented Reality Using Pre-captured Images Considering Change of Real-world