新技術説明会 様式例
|
|
|
- ありかつ はらしない
- 3 years ago
- Views:
Transcription

1
2 研究背景
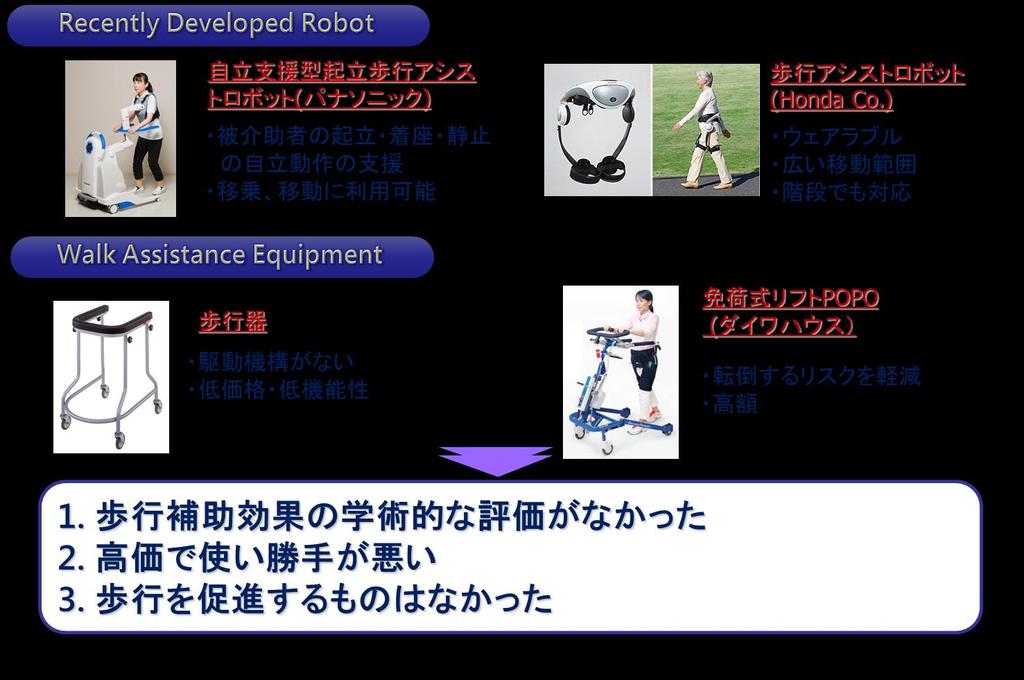
3 現行技術とその問題点
 従来の研究において歩行促進効果についての主観評価を行ったが 歩行器にセンサ類がないため")
4 研究開発の原点 フリー回転ジョイント機構 介護リフト型歩行車アルファローラの改良 傾斜回転 胸部支持パッド 昇降制御 1 軸フリー回転可能な胸部支持パッドを有する歩行車がミハマ社より開発された 利用者の歩行を促進する効果 準免荷式 起立 移乗 歩行アシストが可能 低価格 ( 15,) 従来の研究において歩行促進効果についての主観評価を行ったが 歩行器にセンサ類がないため 定量的な客観評価を行っていない






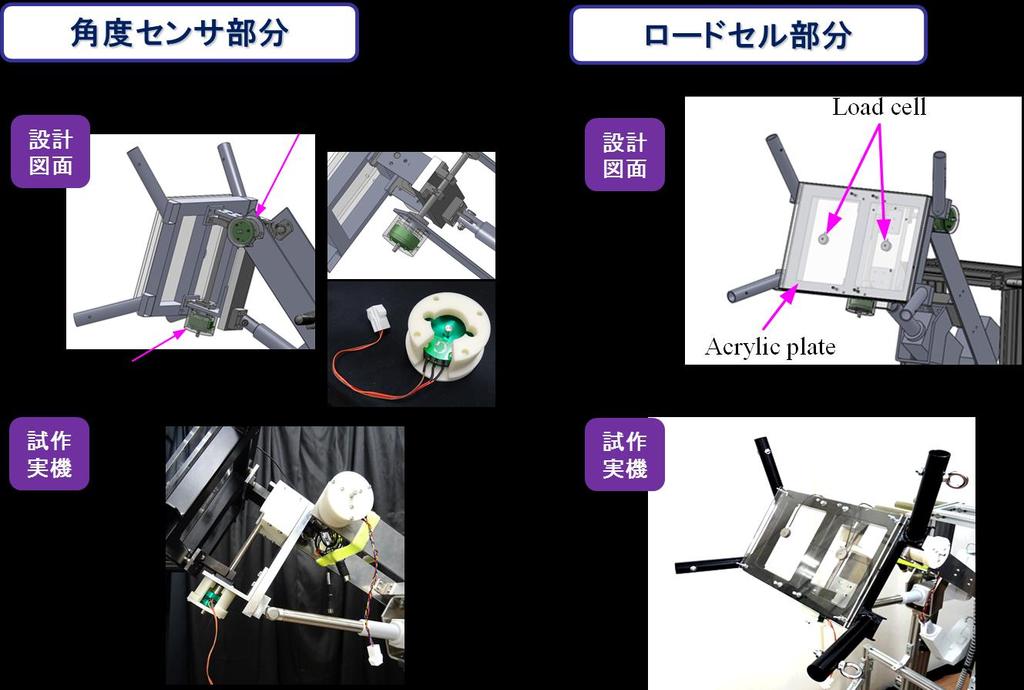
5 回転センサの取り付け 傾斜回転 フリー回転ジョイント機構 Attachment of the cover plate Rotation axis of the chest pad 胸部支持パッド 昇降制御 Rotation axis fittimg Rotation sensor Sensor cover Linear motor 歩行促進の効果を定量的に評価するため, まず胸部支持パッドの回転量を正確に測る必要がある. 支持パッドの回転角を計測するため角度センサ (CPP-45B, 緑測器 ) を用いる. 左図に示すように, 胸部支持パッド背面の連結機構にあわせてセンサ固定用台座とカバーなどのパーツを設計し,3D プリンタによって作成した. 上図に示すように, 歩行中の胸部支持パッドの回転角や圧力などの情報を取得するため, センサからの信号に対して A/D 変換を行う必要がある. 本稿では上図示すインタフェース増幅回路を製作し, パソコン,A/D 変換ボード (AD12-16(PCI), コンテック ), 直流電源を用いてデータ入力システムを構築した.
6 歩行計測 Vector n2 of S2 Vector n2 of S4 Vector n2 of S1 Walking Direction Normal vector n1 q1 P S1 P3.1 Walking Direction x Walking Direction P q Walking direction Normal vector n P5.5 S2 y z P6 Vector n2 of S3 Vector n2 of S x Walking Direction -.15 z P7 br P8 Sb bl y -.5 Walking Direction -.1 P P9 P1 Results of θ1 are wild ups and downs because the muscle contracts and relaxes during walk 歩行アシストで歩行したときの腰スイングの幅が最大約16 であり 従来に開発された介助 マニピュレータの制御アルゴリズム用いられた骨盤旋回角度より大きく上回ったことが分か った これは歩行アシストの胸パッドに1自由度の回転機構を加えることで腰部のスイング効 果の促進に一定な効果が得られたと考えられる


7 研究開発の原点 フリー回転ジョイント機構 介護リフト型歩行車アルファローラの改良 傾斜回転 胸部支持パッド 昇降制御 1 軸フリー回転可能な胸部支持パッドを有する歩行車がミハマ社より開発された 利用者の歩行を促進する効果 準免荷式 起立 移乗 歩行アシストが可能 低価格 ( 15,) 歩行促進効果について従来の研究で検証を行ったが 歩行促進効果の影響要因が定量的に特定できない 角度センサと圧力センサ類の追加 機構設計の見直しを含めて新しい歩行車の設計と試作は必要

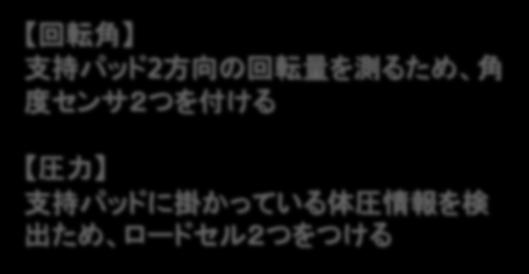




8 従来機器の問題点と機構の改良 回転角 支持パッド 2 方向の回転量を測るため 角度センサ 2 つを付ける CPP-45B, 緑測器 圧力 支持パッドに掛かっている体圧情報を検出ため ロードセル 2 つをつける センサを有しない LMA-A-5N, 共和電業 利用者の身長 15cm~16cm 機構設計の見直しによって身長 17cm の利用者まで対応できるように アクチュエータ 静音性と出力パワーとも高いリニアモータなので 本研究でも利用する LA31,LINAK Co.
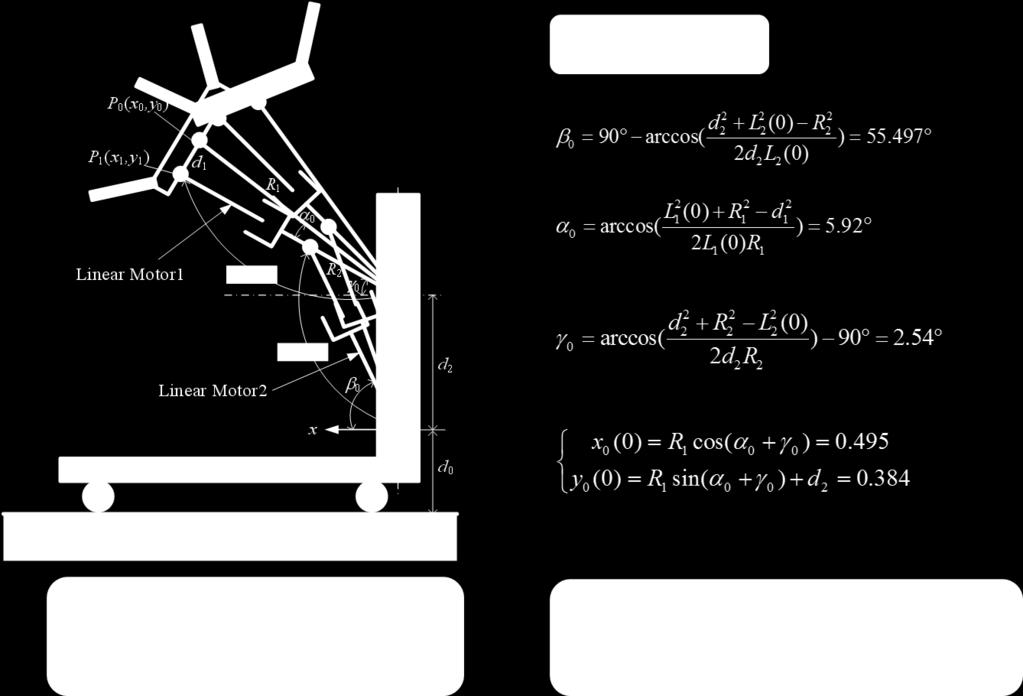
9 リンク機構の再計算
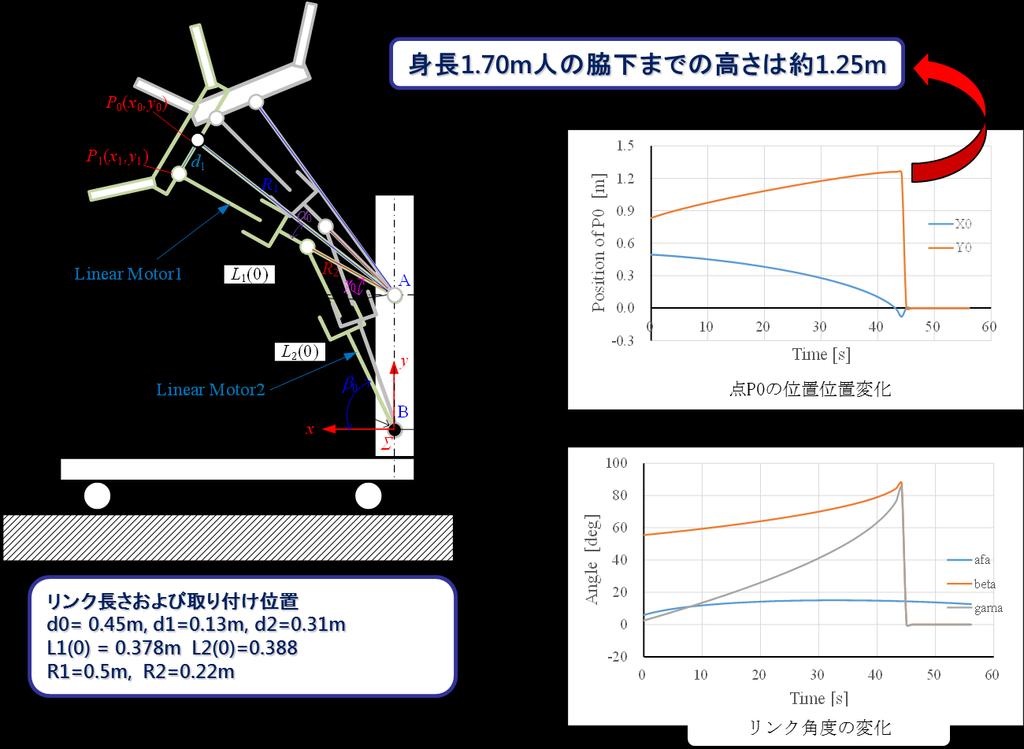
10 シミュレーション結果
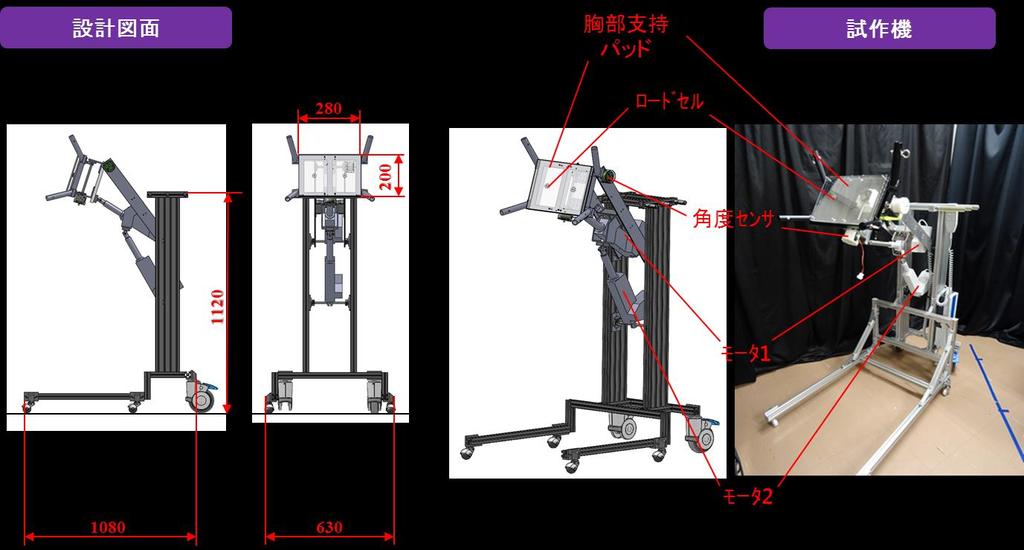
11 歩行車の設計と試作
12 胸部支持パッド
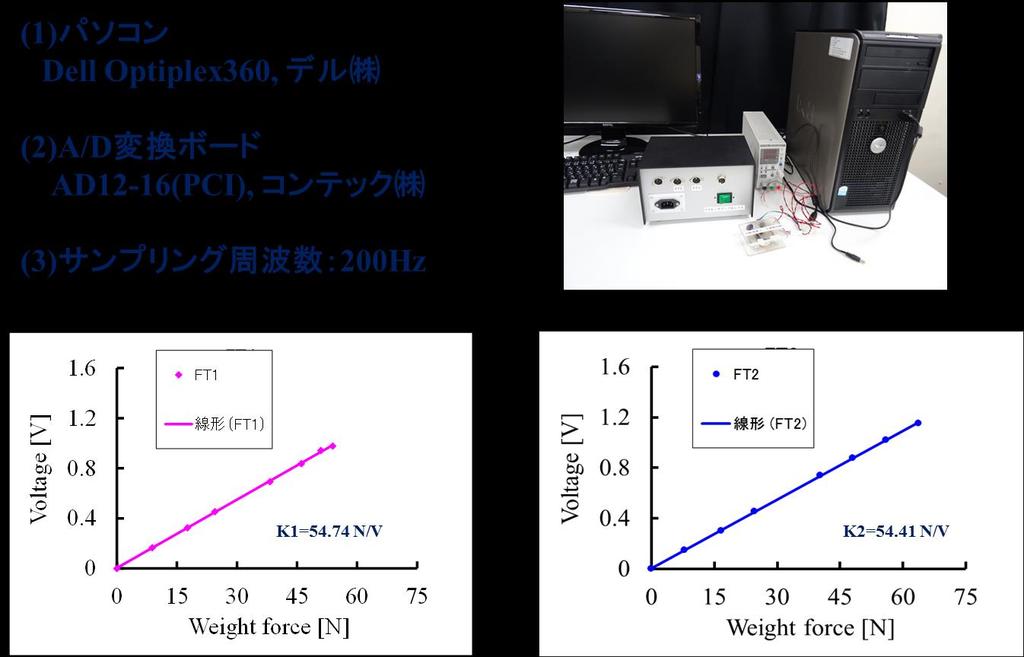
13 ロードセルのキャリブレーション


14 歩行計測環境 歩行時の身体運動を計測するため, 毎秒 6 フレームで測定可能な小型 CCD カメラ (XC-HR57,Sony) 6 台を有するモーションキャプチャシステム (PRO-TrackerⅡ, ディテクト ( 株 )) を用いる.


15 測定方法 P 1 Walking direction P 2 y x P 3 b l S b P 4 b r P 5 z P 6 P 7 図に示すように歩行者の進行方向に画像計測システムが設置される. 歩行時の体の運動をモーションキャプチャーによって測定するため, 歩行者の背中に光反射マーカーを取り付ける. 従来の研究と同様に, 腰部に 3 個, 下肢部左右ひざの裏に 1 個ずつ, 両足の踵に 1 個ずつの計 7 個の光反射マーカーを貼り付ける. 歩行時に被験者は約 2.5m 先の目標に向かって進む.

16 解析方法
17 Pad rotation [deg] Force [N] Pad rotation [deg] Force [N] 実験結果 (1) Pad FT1 FT2 ΔF Time [s] 2 Pad FT1 FT2 ΔF Time [s] 支持パッドの左右に取り付けているロードセル FT1 と FT2 のデータは歩行運動の周期的な変化に連れてリズム的に変化しており, その差 ΔF=F2-F1 は胸部支持パッドの左右回転とほぼ同期的に変化している
18 Knee extension [deg] Heel height [mm] Pad rotation [deg] Heel heighte [mm] 実験結果 (2) Knee L L-heel Knee R R-heel Pad R-heel R-heel Time [s] Time [s] 被験者の左右踵の持ち上げ高さが示されており, ひざ関節角の変化と同時に左右踵を持ち上げていることが確認された
19 Pad rotation [deg] Heel eight [mm] Pad rotation [deg] Heel height [mm] Pad rotation [deg] Heel heighte [mm] 実験結果 (3) -3-4 Pad R-heel L-heel Pad R-heel R-heel Time [s] Time [s] Pad R-heel L-heel Time [s] 踵持ち上げ高さと支持パッド回転角の結果から, 支持パッドの周期は左右踵の 1 回ずつ交替運動時間の合計とほぼ同じであり, 強い関連性を示す.


20 考察 表解析で得られた主な結果 (1) 歩行運動時に歩行者が最大で体重の約 1% を胸部支持パッドに掛けたことが表 1 より分かった. ただし, 今回の結果は若い健常者で歩行した実験で得られた数値であり, 下肢筋力の弱い利用者が歩行した場合体幹部がもっと支持パッドに掛けると考えられる. (2) 旧型歩行車を用いた歩行実験でのひざ関節伸展角や踵持ち上げ高さの結果に比べてほぼ同じ程度でありながら, 新型歩行車の場合支持パッドの回転角が旧型歩行車を用いた場合の約半分であったことが分かった. これは, 新型歩行車は旧型歩行車より高身長の利用者に対応できたため, 利用者は無理に上体を振る必要がなくなった結果と考えられる.





")
")
21 考察 Inclination 1'DOF free rotating How to enhance the effectiveness of walk assistance? Chest pad rotates during walk Chest support pad Weight lift Waist swing is naturally induced. Pulling belt and dragging legs The results demonstrated that the swing amplitude is greatly influenced by the following factors. Stimulating walk motivation But, it is a passive assistance Some factors 1) Suitable Body Height: 15cm-16cm 2) Inclination of the chest pad 3) Wearing state (tighten/loosen) of the belt Further Investigation is needed in future study
22 想定される用途 歩行者の歩行意欲の向上を期待できる 日常生活での利用をしながら歩行訓練も可能 製品化を実現すれば, 利用者自ら動ける喜びを実感できるとともに, 介護者の労力軽減や介護現場の人手不足の解消や寝たきり防止により医療費の軽減に寄与できる.
23 実用化に向けた技術課題 従来型の歩行車の胸部支持パッドの回転は受動的な機構であり 腰部のスイングを自然に引き出すことを特徴としているが 歩行車の支えで少しなら歩ける利用者に限定しており 歩きたくても足を踏み出せない利用者の自立歩行まで励起するものではない 実用化 商品化を実現するため 低価格になるための機器構成を新たに検討する必要がある
24 企業への期待 医療福祉制度の改善 福祉介護機器マーケットの動向 福祉介護機器のメーカーがとの共同研究を希望
25 本技術に関する知的財産権 Kindai University 発明の名称 : 歩行車 出願番号 : 特願 出願人 : 近畿大学 発明者 : 黄健 小谷内範穗 宮野直樹
26 産学連携の経歴 214/11-215/9 215/1-216/9 216/1~ 現在 ミハマ社と共同研究実施 JSTマッチングプランナープログラムに採択ミハマ社と連携研究
27 お問い合わせ先 近畿大学次世代基盤技術研究所社会連携センター長小川恭宏 TEL FAX
円筒面で利用可能なARマーカ
 円筒面で利用可能な AR マーカ AR Marker for Cylindrical Surface 2014 年 11 月 14 日 ( 金 ) 眞鍋佳嗣千葉大学大学院融合科学研究科 マーカベース AR 二次元マーカはカメラ姿勢の推定, 拡張現実等広い研究分野で利用されている 現実の風景 表示される画像 デジタル情報を付加 カメラで撮影し, ディスプレイに表示 使用方法の単純性, 認識の安定性からマーカベース
円筒面で利用可能な AR マーカ AR Marker for Cylindrical Surface 2014 年 11 月 14 日 ( 金 ) 眞鍋佳嗣千葉大学大学院融合科学研究科 マーカベース AR 二次元マーカはカメラ姿勢の推定, 拡張現実等広い研究分野で利用されている 現実の風景 表示される画像 デジタル情報を付加 カメラで撮影し, ディスプレイに表示 使用方法の単純性, 認識の安定性からマーカベース
運動器疾患予防靴の開発のための歩行時靴底踏力の計測
 平成 26 年度 JST 分野別新技術説明会 2014.1.20 JST( 市ヶ谷 K's 五番町 ) 歩行時における足底圧力の 3 分力分布計測装置 福島大学共生システム理工学類 人間支援システム専攻 教授小沢喜仁 1. 研究背景と目的 研究背景 (1/2) 近年, 高齢化社会が進行している加齢に伴う運動器疾患が増加している 1 高齢者の運動器疾患の要因 運動器疾患の予防加齢 予防するために 運動器の心身機能の向上機能低下
平成 26 年度 JST 分野別新技術説明会 2014.1.20 JST( 市ヶ谷 K's 五番町 ) 歩行時における足底圧力の 3 分力分布計測装置 福島大学共生システム理工学類 人間支援システム専攻 教授小沢喜仁 1. 研究背景と目的 研究背景 (1/2) 近年, 高齢化社会が進行している加齢に伴う運動器疾患が増加している 1 高齢者の運動器疾患の要因 運動器疾患の予防加齢 予防するために 運動器の心身機能の向上機能低下
オプション チェストサポート 体幹や骨盤の支持をする事ができ幅の調節や前後のパッドの角度の調節ができます S:47 ー 64cm( 内径 ) M:67 ー 78cm( 内径 ) L:87 ー 114cm( 内径 ) シート 休憩時に座ることができ 歩行時にも荷重を調節することもできます 足が前後にス
 M:67 ー 78cm( 内径 ) L:87 ー 114cm( 内径 ) シート 休憩時に座ることができ 歩行時にも荷重を調節することもできます 足が前後にス") Mustang( ムスタング ) 姿勢とリズムを融合させた歩行運動の促進のために 4 サイズのベースフレームと 15 種類のオプションで構成され歩行の変化と共にオプションの追加 変更が出来る最新のモジュラー型歩行器です 前方支持歩行 前方支持歩行 後方支持歩行 両方の支持歩行が選択できます ユーザーを乗せたままで 高さや前傾角度の微調節が簡単にできる為フィッティングが容易に行えます 後方支持歩行 本体ベースフレーム
Mustang( ムスタング ) 姿勢とリズムを融合させた歩行運動の促進のために 4 サイズのベースフレームと 15 種類のオプションで構成され歩行の変化と共にオプションの追加 変更が出来る最新のモジュラー型歩行器です 前方支持歩行 前方支持歩行 後方支持歩行 両方の支持歩行が選択できます ユーザーを乗せたままで 高さや前傾角度の微調節が簡単にできる為フィッティングが容易に行えます 後方支持歩行 本体ベースフレーム
新技術説明会 様式例
 1 低侵襲性を重視し 細く長く大出力密度で伸縮する圧力駆動 マイクロマシン 立命館大学理工学部機械工学科 教授小西聡 2 低侵襲性を重視し 細く長く大出力密度で伸縮する圧力駆動 マイクロマシン 伸縮動作用マイクロマシン技術の紹介 低侵襲性が重要な内視鏡等のワイヤー駆動系への応用を想定 薄膜構造を多関節化して柔軟で細長い構造を実現 二種類の圧力駆動技術を提案 : 小型ピストン / 伸縮バルーン 高出力密度の実現
1 低侵襲性を重視し 細く長く大出力密度で伸縮する圧力駆動 マイクロマシン 立命館大学理工学部機械工学科 教授小西聡 2 低侵襲性を重視し 細く長く大出力密度で伸縮する圧力駆動 マイクロマシン 伸縮動作用マイクロマシン技術の紹介 低侵襲性が重要な内視鏡等のワイヤー駆動系への応用を想定 薄膜構造を多関節化して柔軟で細長い構造を実現 二種類の圧力駆動技術を提案 : 小型ピストン / 伸縮バルーン 高出力密度の実現
the highest value at the midpoint of the transferring motion when subjects began to twist patient s body to the wheelchair from the bed. And the mean
 筋電図と映像分析からみた介助動作の特徴 - 体位変換動作と車いす移乗動作について - 松井健 小林培男 岡川暁 Characteristics of nursing-care motion in terms of electromyographic and motion analysis during lifting and posture -changing on bed, and transferring
筋電図と映像分析からみた介助動作の特徴 - 体位変換動作と車いす移乗動作について - 松井健 小林培男 岡川暁 Characteristics of nursing-care motion in terms of electromyographic and motion analysis during lifting and posture -changing on bed, and transferring

スライド 1
 Katsura Laboratory Integrated Design Engineering Keio University ( 位置 力再現方法および位置 力再現装置 ) Department of Electrical Engineering Nagaoka University of Technology 長岡技術科学大学助教横倉勇希 新技術説明会 触覚 力覚情報の伝送 聴覚情報の伝送 視覚情報の伝送
Katsura Laboratory Integrated Design Engineering Keio University ( 位置 力再現方法および位置 力再現装置 ) Department of Electrical Engineering Nagaoka University of Technology 長岡技術科学大学助教横倉勇希 新技術説明会 触覚 力覚情報の伝送 聴覚情報の伝送 視覚情報の伝送
スライド 1
 アクティブインダクタを用いた コモンモードノイズ低減フィルタ 北海道大学大学院情報科学研究科准教授池辺将之 研究背景 アナログ回路におけるインダクタ 高インダクタ部品は 外付けでサイズが大きい オンチップ用途では インダクタンスとQ 値が低い 開発目標 アクティブインダクタを用いた 小面積 チューナブルな有用回路の実現 ( 本提案 ) 増幅機能も有するコモンモードノイズ低減フィルタ アクティブインダクタ回路
アクティブインダクタを用いた コモンモードノイズ低減フィルタ 北海道大学大学院情報科学研究科准教授池辺将之 研究背景 アナログ回路におけるインダクタ 高インダクタ部品は 外付けでサイズが大きい オンチップ用途では インダクタンスとQ 値が低い 開発目標 アクティブインダクタを用いた 小面積 チューナブルな有用回路の実現 ( 本提案 ) 増幅機能も有するコモンモードノイズ低減フィルタ アクティブインダクタ回路
. ) ) ) 4) ON DC 6 µm DC [4]. 8 NaPiOn 4
![. ) ) ) 4) ON DC 6 µm DC [4]. 8 NaPiOn 4](/thumbs/93/113867978.jpg ". ) ) ) 4) ON DC 6 µm DC [4]. 8 NaPiOn 4") 6- - E-mail: tam@ishss.doshisha.ac.jp, {skaneda,hhaga}@mail.doshisha.ac.jp ON, OFF.5[m].5[m].8[m] 9 8% Human Location/Height Detection using Analog type Pyroelectric Sensors Shinya OKUDA, Shigeo KANEDA,
6- - E-mail: tam@ishss.doshisha.ac.jp, {skaneda,hhaga}@mail.doshisha.ac.jp ON, OFF.5[m].5[m].8[m] 9 8% Human Location/Height Detection using Analog type Pyroelectric Sensors Shinya OKUDA, Shigeo KANEDA,
 1 1 1 1 1 A Smartphone Application for Improving Gait Hirotaka Kashihara, 1 Hiroki Shimizu, 1 Takefumi Miyoshi, 1 Tsutomu Yoshinaga 1 and Hidetsugu Irie 1 Although walking is a daily natural action, it
1 1 1 1 1 A Smartphone Application for Improving Gait Hirotaka Kashihara, 1 Hiroki Shimizu, 1 Takefumi Miyoshi, 1 Tsutomu Yoshinaga 1 and Hidetsugu Irie 1 Although walking is a daily natural action, it
 10 117 5 1 121841 4 15 12 7 27 12 6 31856 8 21 1983-2 - 321899 12 21656 2 45 9 2 131816 4 91812 11 20 1887 461971 11 3 2 161703 11 13 98 3 16201700-3 - 2 35 6 7 8 9 12 13 12 481973 12 2 571982 161703 11
10 117 5 1 121841 4 15 12 7 27 12 6 31856 8 21 1983-2 - 321899 12 21656 2 45 9 2 131816 4 91812 11 20 1887 461971 11 3 2 161703 11 13 98 3 16201700-3 - 2 35 6 7 8 9 12 13 12 481973 12 2 571982 161703 11
0.45m1.00m 1.00m 1.00m 0.33m 0.33m 0.33m 0.45m 1.00m 2
 24 11 10 24 12 10 30 1 0.45m1.00m 1.00m 1.00m 0.33m 0.33m 0.33m 0.45m 1.00m 2 23% 29% 71% 67% 6% 4% n=1525 n=1137 6% +6% -4% -2% 21% 30% 5% 35% 6% 6% 11% 40% 37% 36 172 166 371 213 226 177 54 382 704 216
24 11 10 24 12 10 30 1 0.45m1.00m 1.00m 1.00m 0.33m 0.33m 0.33m 0.45m 1.00m 2 23% 29% 71% 67% 6% 4% n=1525 n=1137 6% +6% -4% -2% 21% 30% 5% 35% 6% 6% 11% 40% 37% 36 172 166 371 213 226 177 54 382 704 216
人間の視野と同等の広視野画像を取得・提示する簡易な装置
 人間の視野と同等の広視野画像 を取得 提示する簡易な装置 公立はこだて未来大学 システム情報科学部複雑系知能学科 准教授鈴木昭二 研究背景 2 画像情報は有用である 多様な情報 ( 明るさ, 色, 形, 動きなど ) 見ればわかる しかし, カメラの画角は狭い 見える範囲が限定される 全体像を把握しくい 移動する物体を見失いやすい 広視野画像の取得 ( 従来方法 ) 3 多数のカメラを搭載 多数の画像を合成し高解像度の画像取得
人間の視野と同等の広視野画像 を取得 提示する簡易な装置 公立はこだて未来大学 システム情報科学部複雑系知能学科 准教授鈴木昭二 研究背景 2 画像情報は有用である 多様な情報 ( 明るさ, 色, 形, 動きなど ) 見ればわかる しかし, カメラの画角は狭い 見える範囲が限定される 全体像を把握しくい 移動する物体を見失いやすい 広視野画像の取得 ( 従来方法 ) 3 多数のカメラを搭載 多数の画像を合成し高解像度の画像取得

スライド 1
 新技術で分離した ヒト骨質由来微小幹細胞の医療応用 薗田精昭 関西医科大学大学院医学研究科先端医療学専攻修復医療応用系幹細胞生物学 2001 背景 (1): 微小幹細胞とは Journal of Cellular Biochemistry 80;455-460(2001) 微小幹細胞に関する最初の報告生体の組織内に非常に小さな spore-like stem cell が存在することが初めて報告された
新技術で分離した ヒト骨質由来微小幹細胞の医療応用 薗田精昭 関西医科大学大学院医学研究科先端医療学専攻修復医療応用系幹細胞生物学 2001 背景 (1): 微小幹細胞とは Journal of Cellular Biochemistry 80;455-460(2001) 微小幹細胞に関する最初の報告生体の組織内に非常に小さな spore-like stem cell が存在することが初めて報告された
Copyright c 2009 by Masaki Yagi
 041238 2009 2 Copyright c 2009 by Masaki Yagi c 2009 Masaki Yagi All rights reserved ,,,,,,,,,,,,,, 3,,,,,,, i 1 1 11 1 12 1 2 2 21 2 22 3 23 4 24 4 25 5 26 5 3 6 31 6 32 10 33 11 4 13 41 13 42 14 43
041238 2009 2 Copyright c 2009 by Masaki Yagi c 2009 Masaki Yagi All rights reserved ,,,,,,,,,,,,,, 3,,,,,,, i 1 1 11 1 12 1 2 2 21 2 22 3 23 4 24 4 25 5 26 5 3 6 31 6 32 10 33 11 4 13 41 13 42 14 43
Microsoft PowerPoint - 【5】説明資料_池辺将之
 Time to digital converter の A/D 変換器への利用とその低電力化 国立大学法人北海道大学 大学院情報科学研究科 准教授池辺将之 背景 センシングされたアナログ情報をデジタル信号へ AD 変換器 (ADC) への要求 低電力 小面積 高速動作 Single-slope ADC に注目 シンプルな構成で小面積 Wikipedia: CMOS image sensor 課題 :
Time to digital converter の A/D 変換器への利用とその低電力化 国立大学法人北海道大学 大学院情報科学研究科 准教授池辺将之 背景 センシングされたアナログ情報をデジタル信号へ AD 変換器 (ADC) への要求 低電力 小面積 高速動作 Single-slope ADC に注目 シンプルな構成で小面積 Wikipedia: CMOS image sensor 課題 :
周波数特性解析
 周波数特性解析 株式会社スマートエナジー研究所 Version 1.0.0, 2018-08-03 目次 1. アナログ / デジタルの周波数特性解析................................... 1 2. 一巡周波数特性 ( 電圧フィードバック )................................... 4 2.1. 部分周波数特性解析..........................................
周波数特性解析 株式会社スマートエナジー研究所 Version 1.0.0, 2018-08-03 目次 1. アナログ / デジタルの周波数特性解析................................... 1 2. 一巡周波数特性 ( 電圧フィードバック )................................... 4 2.1. 部分周波数特性解析..........................................
特殊寝台 ベッド 楽匠Z専用付属品 キャスター I Vポールホルダー 延長フレーム 91 幅 延長 91 幅 ベッドのは3cm高くなります 自費 1,500 KQ-P70C セット 500 延長フレームとセット 1, KQ-P70V KQ-
 特殊寝台 ベッド サービスコード 171003 特殊寝台 171004 特殊寝台付属品 らくしょう 楽匠Zシリーズ ベッドの傾斜を組み合わせたまったく新しいあげ機構 を搭載した電動介護用ベッドです 視 界 が 広 い! 身 体 が 動かしやすい! 離床がしやすい! と膝 の 動きにベッドの 傾 斜を組 み 合わせたなら あげに伴う身 体 のずれを抑えて より安定した姿勢で起きあ がれます 1 2 身体がずれないように
特殊寝台 ベッド サービスコード 171003 特殊寝台 171004 特殊寝台付属品 らくしょう 楽匠Zシリーズ ベッドの傾斜を組み合わせたまったく新しいあげ機構 を搭載した電動介護用ベッドです 視 界 が 広 い! 身 体 が 動かしやすい! 離床がしやすい! と膝 の 動きにベッドの 傾 斜を組 み 合わせたなら あげに伴う身 体 のずれを抑えて より安定した姿勢で起きあ がれます 1 2 身体がずれないように
無印良品 2012 自転車 カタログ
 26 897895321,000 140cm 76.0cm 16.0kg H LED 3 263 897896025,000 140cm 76.0cm 16.5kg H 3 LED 20 8978984 8978977 19,800 134cm 73.0cm 15.0kg LED 2620 2620 8486656550 5536207483 14512372,100 8279999840 26 77342561,417
26 897895321,000 140cm 76.0cm 16.0kg H LED 3 263 897896025,000 140cm 76.0cm 16.5kg H 3 LED 20 8978984 8978977 19,800 134cm 73.0cm 15.0kg LED 2620 2620 8486656550 5536207483 14512372,100 8279999840 26 77342561,417
SICE東北支部研究集会資料(2012年)
") 273 (212.6.29) 273-5 Motion measurement of nordic walking using inertial sensor, Takuya Tateyama, Koichi Sagawa * *Graduate School of Science and Technology Hirosaki University : (inertial sensor), (motion
273 (212.6.29) 273-5 Motion measurement of nordic walking using inertial sensor, Takuya Tateyama, Koichi Sagawa * *Graduate School of Science and Technology Hirosaki University : (inertial sensor), (motion
 ROBOT + BOTOX = ROBOTOX (www.pref.tokushima.jp/docs/2015031300034/files/siryo4.pdf 後付式車椅子用安全ストッパー, 後付式車椅子用足こぎ装置の開発 1. 背景 車いすによる事故の現状認知機能が低下した患者荷重 片麻痺患者 今戸啓二大分大学工学部福祉環境工学科 第 3 回大分県医療介護ロボ HAL 研究大会 2016
ROBOT + BOTOX = ROBOTOX (www.pref.tokushima.jp/docs/2015031300034/files/siryo4.pdf 後付式車椅子用安全ストッパー, 後付式車椅子用足こぎ装置の開発 1. 背景 車いすによる事故の現状認知機能が低下した患者荷重 片麻痺患者 今戸啓二大分大学工学部福祉環境工学科 第 3 回大分県医療介護ロボ HAL 研究大会 2016
 ,' 畷!i (: 繊医工学 n-4,273/279(2003) 姿勢 歩行速度の無拘束同時計測法に関する基礎的検討 * IU0IIIlIIIIID, l 1- -000IIIU0I ユ 7 111 本井幸介 ** 田中志信 *** 野 11 雅道 山越憲一 ** 1. はじめに 近年, ホルダー心電計や自由行動下血圧測定装置を用いた循環生理情報の無拘束計測が可能となってきた. このような循環生理情報は姿勢や行動により大きく変動するため,
,' 畷!i (: 繊医工学 n-4,273/279(2003) 姿勢 歩行速度の無拘束同時計測法に関する基礎的検討 * IU0IIIlIIIIID, l 1- -000IIIU0I ユ 7 111 本井幸介 ** 田中志信 *** 野 11 雅道 山越憲一 ** 1. はじめに 近年, ホルダー心電計や自由行動下血圧測定装置を用いた循環生理情報の無拘束計測が可能となってきた. このような循環生理情報は姿勢や行動により大きく変動するため,
Microsoft PowerPoint - 10 詫間電波三崎提出_.ppt
 1 呼吸モニターによる SAS スクリーニング 居眠り検出技術 詫間電波工業高等専門学校 電子工学科 教授三﨑幸典 開発経緯 研究背景 筋ジストロフィー専門病院の医者からの依頼 人工呼吸器の外れによる医療事故防止 ( 人工呼吸器を使用することが多く医療事故を防止したい ) 導電ゴムを使用した呼吸モニター開発 ( 特許検索により多種多様な特許が存在することが判明 ) 寝返りや体動によるオフセット値の変化
1 呼吸モニターによる SAS スクリーニング 居眠り検出技術 詫間電波工業高等専門学校 電子工学科 教授三﨑幸典 開発経緯 研究背景 筋ジストロフィー専門病院の医者からの依頼 人工呼吸器の外れによる医療事故防止 ( 人工呼吸器を使用することが多く医療事故を防止したい ) 導電ゴムを使用した呼吸モニター開発 ( 特許検索により多種多様な特許が存在することが判明 ) 寝返りや体動によるオフセット値の変化
立石科学技術振興財団 Fig. 2 Phase division in walking motion (The left leg is colored with gray) Fig. 1 Robot Suit HAL for Well-being ベースにした両下肢支援用モデルを用いた Fig.1に
 Fig. 1 Robot Suit HAL for Well-being ベースにした両下肢支援用モデルを用いた Fig.1に") 立石科学技術振興財団助成研究成果集 ( 第 23 号 ) 2014 片麻痺患者のための健側歩容を活用した装着型歩行支援システム Walking support for hemiplegic patients wearing Robot Suit HAL using unaffected sideʼs motion data 2011901 研究代表者 共同研究者 筑波大学サイバニクス研究センター 筑波大学附属病院リハビリテーション部
立石科学技術振興財団助成研究成果集 ( 第 23 号 ) 2014 片麻痺患者のための健側歩容を活用した装着型歩行支援システム Walking support for hemiplegic patients wearing Robot Suit HAL using unaffected sideʼs motion data 2011901 研究代表者 共同研究者 筑波大学サイバニクス研究センター 筑波大学附属病院リハビリテーション部
モータ HILS の概要 1 はじめに モータ HILS の需要 自動車の電子化及び 電気自動車やハイブリッド車の実用化に伴い モータの使用数が増大しています 従来行われていた駆動用モータ単体のシミュレーション レシプロエンジンとモータの駆動力分配制御シミュレーションの利用に加え パワーウインドやサ
 モータ HILS の概要 1 はじめに モータ HILS の需要 自動車の電子化及び 電気自動車やハイブリッド車の実用化に伴い モータの使用数が増大しています 従来行われていた駆動用モータ単体のシミュレーション レシプロエンジンとモータの駆動力分配制御シミュレーションの利用に加え パワーウインドやサンルーフなどのボディー系 電動パワーステアリングやそのアシスト機能など 高度な制御 大電流の制御などが要求されています
モータ HILS の概要 1 はじめに モータ HILS の需要 自動車の電子化及び 電気自動車やハイブリッド車の実用化に伴い モータの使用数が増大しています 従来行われていた駆動用モータ単体のシミュレーション レシプロエンジンとモータの駆動力分配制御シミュレーションの利用に加え パワーウインドやサンルーフなどのボディー系 電動パワーステアリングやそのアシスト機能など 高度な制御 大電流の制御などが要求されています
NCB564個別00版
 HES-M00 シリーズの新機能 脱調レス / 脱調検出 1 1. 概要 EtherCAT モーションコントロール機能内蔵 2 相マイクロステップモータドライバ HES-M00 シリーズにエンコーダ入力が追加され, 脱調検出 / 脱調レス等の機能が付加されました 2. 仕様 項目 仕様 備考 制御軸数 1 ボードで 1 軸制御 最大 枚 ( 軸制御 ) までスタック可能 電源電圧 ( モータ駆動電圧
HES-M00 シリーズの新機能 脱調レス / 脱調検出 1 1. 概要 EtherCAT モーションコントロール機能内蔵 2 相マイクロステップモータドライバ HES-M00 シリーズにエンコーダ入力が追加され, 脱調検出 / 脱調レス等の機能が付加されました 2. 仕様 項目 仕様 備考 制御軸数 1 ボードで 1 軸制御 最大 枚 ( 軸制御 ) までスタック可能 電源電圧 ( モータ駆動電圧
別紙 1-2 移乗介助 ロボット技術を用いて介助者による抱え上げ動作のパワーアシストを行う非装着型の機器 移乗開始から終了まで 介助者が一人で使用することができる ベッドと車いすの間の移乗に用いることができる ( ベッドと車いすの間の移乗における使い勝手は ステージゲート審査での評価対象となる点に留
 別紙 1-1 移乗介助ロボット技術を用いて介助者のパワーアシストを行う装着型の機器 介助者が装着して用い 移乗介助の際の腰の負担を軽減する 介助者が一人で着脱可能であること ベッド 車いす 便器の間の移乗に用いることができる 1 別紙 1-2 移乗介助 ロボット技術を用いて介助者による抱え上げ動作のパワーアシストを行う非装着型の機器 移乗開始から終了まで 介助者が一人で使用することができる ベッドと車いすの間の移乗に用いることができる
別紙 1-1 移乗介助ロボット技術を用いて介助者のパワーアシストを行う装着型の機器 介助者が装着して用い 移乗介助の際の腰の負担を軽減する 介助者が一人で着脱可能であること ベッド 車いす 便器の間の移乗に用いることができる 1 別紙 1-2 移乗介助 ロボット技術を用いて介助者による抱え上げ動作のパワーアシストを行う非装着型の機器 移乗開始から終了まで 介助者が一人で使用することができる ベッドと車いすの間の移乗に用いることができる
MA3-1 30th Fuzzy System Symposium (Kochi, September 1-3, 2014) Analysis of Comfort Given to Human by Using Sound Generation System Based on Netowork o
 Analysis of Comfort Given to Human by Using Sound Generation System Based on Netowork o") Analysis of Comfort Given to Human by Using Sound Generation System Based on Netowork of Chaotic Elements 3 Yoichiro Maeda Shingo Muranaka 3 Masato Sasaki 3 Osaka Institute of Technology Falco SD Holdings
Analysis of Comfort Given to Human by Using Sound Generation System Based on Netowork of Chaotic Elements 3 Yoichiro Maeda Shingo Muranaka 3 Masato Sasaki 3 Osaka Institute of Technology Falco SD Holdings
 27 24 24115059 i 1 1 2 4 2.1...................... 4 2.1.1.............................. 5 2.1.2...................... 7 2.2............................ 9 2.2.1.................................. 10 2.2.2...............................
27 24 24115059 i 1 1 2 4 2.1...................... 4 2.1.1.............................. 5 2.1.2...................... 7 2.2............................ 9 2.2.1.................................. 10 2.2.2...............................
2001 Received November 28, 2014 Current status and long-term changes of the physique and physical fitness of female university students Shiho Hiraku Y
 2001 Received November 28, 2014 Current status and long-term changes of the physique and physical fitness of female university students Shiho Hiraku Yoshie Soga and Yuki Nakamura Abstract Understanding
2001 Received November 28, 2014 Current status and long-term changes of the physique and physical fitness of female university students Shiho Hiraku Yoshie Soga and Yuki Nakamura Abstract Understanding
実験題吊 「加速度センサーを作ってみよう《
 加速度センサーを作ってみよう 茨城工業高等専門学校専攻科 山越好太 1. 加速度センサー? 最近話題のセンサーに 加速度センサー というものがあります これは文字通り 加速度 を測るセンサーで 主に動きの検出に使われたり 地球から受ける重力加速度を測定することで傾きを測ることなどにも使われています 最近ではゲーム機をはじめ携帯電話などにも搭載されるようになってきています 2. 加速度センサーの仕組み加速度センサーにも様々な種類があります
加速度センサーを作ってみよう 茨城工業高等専門学校専攻科 山越好太 1. 加速度センサー? 最近話題のセンサーに 加速度センサー というものがあります これは文字通り 加速度 を測るセンサーで 主に動きの検出に使われたり 地球から受ける重力加速度を測定することで傾きを測ることなどにも使われています 最近ではゲーム機をはじめ携帯電話などにも搭載されるようになってきています 2. 加速度センサーの仕組み加速度センサーにも様々な種類があります
examguide_a2018
 1 2 3 4 5 1112 1 http://kindai.jp 2 3 6 7 8 9 10 11 57,000 29,000 32,000 30,000 20,000 7,000 7,000 Step 1 Step 2 Step 3 Step 3 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36
1 2 3 4 5 1112 1 http://kindai.jp 2 3 6 7 8 9 10 11 57,000 29,000 32,000 30,000 20,000 7,000 7,000 Step 1 Step 2 Step 3 Step 3 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36
クッション 製品名 : ジェイフュージョンクッション メーカー支持部下記参照 JFUSION 58,000 により枝番あり 例 : 15"x16" JFUSION "x17" JFUSION "x18" JFUSION "x16" JFUSION "x
 株式会社アクセスインターナショナル 義肢装具等完成用部品 認定製品のご案内 シーティングのパイオニア クッション 製品名 : ジェイフュージョンクッション メーカー支持部下記参照 JFUSION 58,000 により枝番あり 例 : 15"x16" JFUSION1516 15"x17" JFUSION1517 15"x18" JFUSION1518 15"x16" JFUSION1516 16"x16"
株式会社アクセスインターナショナル 義肢装具等完成用部品 認定製品のご案内 シーティングのパイオニア クッション 製品名 : ジェイフュージョンクッション メーカー支持部下記参照 JFUSION 58,000 により枝番あり 例 : 15"x16" JFUSION1516 15"x17" JFUSION1517 15"x18" JFUSION1518 15"x16" JFUSION1516 16"x16"
 Preliminary study of practice teaching by research interview Keiko OZAKI Keyword: practice teaching, university students, half-structural interview, intentions to become a teacher, support The purpose
Preliminary study of practice teaching by research interview Keiko OZAKI Keyword: practice teaching, university students, half-structural interview, intentions to become a teacher, support The purpose
 Studies on Mild School Myopia Part II. The Amplitude of Accmmodation in Mild School Myopia By Ling Nai Kay Department of Ophthalmology Okayama University Medical School (Director: Prof. Goro Akagi) By
Studies on Mild School Myopia Part II. The Amplitude of Accmmodation in Mild School Myopia By Ling Nai Kay Department of Ophthalmology Okayama University Medical School (Director: Prof. Goro Akagi) By
CsI(Tl) 2005/03/
 2005/03/") CsI(Tl) 2005/03/30 1 2 2 2 3 3 3.1............................................ 3 3.2................................... 4 3.3............................................ 5 4 6 4.1..............................................
CsI(Tl) 2005/03/30 1 2 2 2 3 3 3.1............................................ 3 3.2................................... 4 3.3............................................ 5 4 6 4.1..............................................
415, , , , , , , , , , , , , , , , , , ,00
 51,84057,240 19,440 21,600 16,200 32,400 21,600 10,260 5,400 384,000 384,000 354,000 354,000 415,000 435,000 415,000 435,000 415,000 435,000 415,000 435,000 360,000 380,000 360,000 380,000 360,000 380,000
51,84057,240 19,440 21,600 16,200 32,400 21,600 10,260 5,400 384,000 384,000 354,000 354,000 415,000 435,000 415,000 435,000 415,000 435,000 415,000 435,000 360,000 380,000 360,000 380,000 360,000 380,000
ガイドライン(案) 実践資料編.doc
 実践資料編.doc") (1) 15 (2) (3) 1.... 1 1.1... 1 1.2... 1 2.... 3 2.1... 3 2.2... 3 2.2.1... 3 2.3... 5 2.4... 5 2.4.1... 5 2.4.2... 6 3.... 7 4....12 4.1... 12 4.2... 14 5....20 5.1... 20 5.1.2... 22 5.1.3... 23 5.2...
(1) 15 (2) (3) 1.... 1 1.1... 1 1.2... 1 2.... 3 2.1... 3 2.2... 3 2.2.1... 3 2.3... 5 2.4... 5 2.4.1... 5 2.4.2... 6 3.... 7 4....12 4.1... 12 4.2... 14 5....20 5.1... 20 5.1.2... 22 5.1.3... 23 5.2...
Fig. 3 Coordinate system and notation Fig. 1 The hydrodynamic force and wave measured system Fig. 2 Apparatus of model testing
 The Hydrodynamic Force Acting on the Ship in a Following Sea (1 St Report) Summary by Yutaka Terao, Member Broaching phenomena are most likely to occur in a following sea to relative small and fast craft
The Hydrodynamic Force Acting on the Ship in a Following Sea (1 St Report) Summary by Yutaka Terao, Member Broaching phenomena are most likely to occur in a following sea to relative small and fast craft
Microsoft PowerPoint - tpms_session_matsuura
 1 このプレゼンテーションでは 5 つの項目について紹介します 2 近年 より快適 安全に環境に優しく高性能な自動車を開発すべく 各自動車メーカーが切磋琢磨しています 自動車を取り巻く数々の技術の中から ここではタイヤの空気圧を車両から監視し より安全に低燃費を実現するために用いられる タイヤ圧力監視システム の開発に役立つツールを紹介します 2000 年頃 米国内でタイヤの空気圧低下による事故が多発しました
1 このプレゼンテーションでは 5 つの項目について紹介します 2 近年 より快適 安全に環境に優しく高性能な自動車を開発すべく 各自動車メーカーが切磋琢磨しています 自動車を取り巻く数々の技術の中から ここではタイヤの空気圧を車両から監視し より安全に低燃費を実現するために用いられる タイヤ圧力監視システム の開発に役立つツールを紹介します 2000 年頃 米国内でタイヤの空気圧低下による事故が多発しました
SICE東北支部研究集会資料(2012年)
") 77 (..3) 77- A study on disturbance compensation control of a wheeled inverted pendulum robot during arm manipulation using Extended State Observer Luis Canete Takuma Sato, Kenta Nagano,Luis Canete,Takayuki
77 (..3) 77- A study on disturbance compensation control of a wheeled inverted pendulum robot during arm manipulation using Extended State Observer Luis Canete Takuma Sato, Kenta Nagano,Luis Canete,Takayuki
新技術説明会 様式例
 1 218 年 6 月 26 日 IoT/ トリリオンセンサを指向した 小型ホルムアルデヒド検出器 物質 材料研究機構 国際ナノアーキテク トニクス研究拠点 ナノマテリアル分野 フロンティア分子 G 主任研究員 石原伸輔 2 Outline (1) 電気抵抗が変わるホルムアルデヒド検出材料 (2) デバイス化の例 (3) まとめと企業連携への期待 3 従来技術とその問題点 ホルムアルデヒドは 接着剤や防腐剤として建材などに使用され
1 218 年 6 月 26 日 IoT/ トリリオンセンサを指向した 小型ホルムアルデヒド検出器 物質 材料研究機構 国際ナノアーキテク トニクス研究拠点 ナノマテリアル分野 フロンティア分子 G 主任研究員 石原伸輔 2 Outline (1) 電気抵抗が変わるホルムアルデヒド検出材料 (2) デバイス化の例 (3) まとめと企業連携への期待 3 従来技術とその問題点 ホルムアルデヒドは 接着剤や防腐剤として建材などに使用され
スライド 1
 機構学 Part6: ロボットの運動学 金子真 きんにく筋肉 筋紡錘 : 筋肉の長さを測るセンサ モータ センサ ロボットの運動学 関節にモータがついている場合の角度の取り方 関節にモータがついている場合の角度の取り方 関節にモータがついている場合の角度の取り方 関節にモータがついている場合の角度の取り方 関節にモータがついている場合の角度の取り方 ワイヤ駆動式ロボット ワイヤ駆動式ロボット ワイヤプーリ機構の場合
機構学 Part6: ロボットの運動学 金子真 きんにく筋肉 筋紡錘 : 筋肉の長さを測るセンサ モータ センサ ロボットの運動学 関節にモータがついている場合の角度の取り方 関節にモータがついている場合の角度の取り方 関節にモータがついている場合の角度の取り方 関節にモータがついている場合の角度の取り方 関節にモータがついている場合の角度の取り方 ワイヤ駆動式ロボット ワイヤ駆動式ロボット ワイヤプーリ機構の場合
PowerPoint プレゼンテーション
 完成用部品 認定製品のご案内 2018 年度版 Sunrise Medical Japan Co.,Ltd 製品名 : ジェイフュージョンクッション サイズ部品番号完成用部品価格支持部下記参照 JFUSION 58,000 サイズにより枝番あり 例 : 15"x16" JFUSION1516 15"x17" JFUSION1517 15"x18" JFUSION1518 15"x16" JFUSION1516
完成用部品 認定製品のご案内 2018 年度版 Sunrise Medical Japan Co.,Ltd 製品名 : ジェイフュージョンクッション サイズ部品番号完成用部品価格支持部下記参照 JFUSION 58,000 サイズにより枝番あり 例 : 15"x16" JFUSION1516 15"x17" JFUSION1517 15"x18" JFUSION1518 15"x16" JFUSION1516
CMOS リニアイメージセンサ用駆動回路 C CMOS リニアイメージセンサ S 等用 C は当社製 CMOSリニアイメージセンサ S 等用に開発された駆動回路です USB 2.0インターフェースを用いて C と PCを接続
 CMOS リニアイメージセンサ用駆動回路 C13015-01 CMOS リニアイメージセンサ S11639-01 等用 C13015-01は当社製 CMOSリニアイメージセンサ S11639-01 等用に開発された駆動回路です USB 2.0インターフェースを用いて C13015-01と PCを接続することにより PCからC13015-01 を制御して センサのアナログビデオ信号を 16-bitデジタル出力に変換した数値データを
CMOS リニアイメージセンサ用駆動回路 C13015-01 CMOS リニアイメージセンサ S11639-01 等用 C13015-01は当社製 CMOSリニアイメージセンサ S11639-01 等用に開発された駆動回路です USB 2.0インターフェースを用いて C13015-01と PCを接続することにより PCからC13015-01 を制御して センサのアナログビデオ信号を 16-bitデジタル出力に変換した数値データを
ARMOR CAGE ARMOR A7S STANDARD A-A7S STD 47,500 ARMOR A7S PRO A-A7S PRO 48,500 ARMOR GH4 PRO A-GH4 PRO 47,500 ARMOR GH4&GH3 A-GH4 STD 47,500 ARMOR POCK
 製品名製品写真型番定価 ( 税抜 ) VARAVON WIRECAM Wirecam Full Set VARAVON 製品価格表 WIRECAM W5 FULLSET 1,318,000 WIRECAM Birdycam2 Lithium polymer battery Battery Charger 50m Rope Remote Controller x2 Video Transmitter
製品名製品写真型番定価 ( 税抜 ) VARAVON WIRECAM Wirecam Full Set VARAVON 製品価格表 WIRECAM W5 FULLSET 1,318,000 WIRECAM Birdycam2 Lithium polymer battery Battery Charger 50m Rope Remote Controller x2 Video Transmitter

IPSJ SIG Technical Report Vol.2009-CVIM-169 No /11/ Stereo by the horizontal rotary movement of the upswing fisheye camera Sat
 1 1 1 9 36 3 Stereo b the horiontal rotar oveent of the upswing fishee caera Satoru Yoshioto, 1 Kubo Maoru 1 an Muraoto Kenichiro 1 In this paper, the upswing fishee caera that can shoot up once the enith
1 1 1 9 36 3 Stereo b the horiontal rotar oveent of the upswing fishee caera Satoru Yoshioto, 1 Kubo Maoru 1 an Muraoto Kenichiro 1 In this paper, the upswing fishee caera that can shoot up once the enith
04_学術_特発性側彎症患者.indd
 Arts and Evaluation of whole-spine radiography with respect to gonadal shielding in female patients with idiopathic scoliosis 1 59858 2 25483 1 48473 1 52805 3 37576 2 19263 1 2 3 Key words: Whole-spine
Arts and Evaluation of whole-spine radiography with respect to gonadal shielding in female patients with idiopathic scoliosis 1 59858 2 25483 1 48473 1 52805 3 37576 2 19263 1 2 3 Key words: Whole-spine
新技術説明会 様式例
 1 ロボットへの FPGA 導入を 容易化する コンポーネント技術 宇都宮大学大学院工学研究科情報システム科学専攻助教大川猛 2 従来技術とその問題点 FPGA(Field Programmable Gate Array) は 任意のディジタル論理回路をプログラム可能な LSI ソフトウェアでは時間がかかる画像認識処理等を ハードウェア化して 高速化 低消費電力化可能 問題点 FPGA 上の回路設計が難しい
1 ロボットへの FPGA 導入を 容易化する コンポーネント技術 宇都宮大学大学院工学研究科情報システム科学専攻助教大川猛 2 従来技術とその問題点 FPGA(Field Programmable Gate Array) は 任意のディジタル論理回路をプログラム可能な LSI ソフトウェアでは時間がかかる画像認識処理等を ハードウェア化して 高速化 低消費電力化可能 問題点 FPGA 上の回路設計が難しい
粒子画像流速測定法を用いた室内流速測定法に関する研究
 可視化手法を用いた室内気流分布の測定法に関する研究 -PIV を用いた通風時及び空調吹出気流の測定 - T08K729D 大久保肇 指導教員 赤林伸一教授 流れの可視化は古来より流れの特性を直感的に把握する手法として様々な測定法が試みられている 近年の画像処理技術の発展及び PC の性能向上により粒子画像流速測定法 (PIV ) が実用化されている Particle Image Velocimetry
可視化手法を用いた室内気流分布の測定法に関する研究 -PIV を用いた通風時及び空調吹出気流の測定 - T08K729D 大久保肇 指導教員 赤林伸一教授 流れの可視化は古来より流れの特性を直感的に把握する手法として様々な測定法が試みられている 近年の画像処理技術の発展及び PC の性能向上により粒子画像流速測定法 (PIV ) が実用化されている Particle Image Velocimetry
...S.....\1_4.ai
 * ** *** * ** *** 20 17 BMI 10 20 10 20 96 2000 2000a 2000b 2005 2004 binge eating 1997 2003 2004 2000 2000b 10 20 30 BMI 2000a BMI 2005 2004 97 2003 2003 2006 2003 2003 1997 binge eating binge eating
* ** *** * ** *** 20 17 BMI 10 20 10 20 96 2000 2000a 2000b 2005 2004 binge eating 1997 2003 2004 2000 2000b 10 20 30 BMI 2000a BMI 2005 2004 97 2003 2003 2006 2003 2003 1997 binge eating binge eating
25 3 4
 25 3 4 1 µ e + ν e +ν µ µ + e + +ν e + ν µ e e + TAC START STOP START veto START (2.04 ± 0.18)µs 1/2 STOP (2.09 ± 0.11)µs 1/8 G F /( c) 3 (1.21±0.09) 5 /GeV 2 (1.19±0.05) 5 /GeV 2 Weinberg θ W sin θ W
25 3 4 1 µ e + ν e +ν µ µ + e + +ν e + ν µ e e + TAC START STOP START veto START (2.04 ± 0.18)µs 1/2 STOP (2.09 ± 0.11)µs 1/8 G F /( c) 3 (1.21±0.09) 5 /GeV 2 (1.19±0.05) 5 /GeV 2 Weinberg θ W sin θ W

Microsoft PowerPoint - ›žŠpfidŠÍŁÏ−·“H−w5›ñŒÚ.ppt
 応用電力変換工学舟木剛 第 5 回本日のテーマ交流 - 直流変換半端整流回路 平成 6 年 月 7 日 整流器 (cfr) とは 交流を直流に変換する 半波整流器は 交直変換半波整流回路 小電力用途 入力電源側の平均電流が零にならない あんまり使われていない 全波整流回路の基本回路 変圧器が直流偏磁しやすい 変圧器の負荷電流に直流分を含むと その直流分により 鉄心が一方向に磁化する これにより 鉄心の磁束密度の増大
応用電力変換工学舟木剛 第 5 回本日のテーマ交流 - 直流変換半端整流回路 平成 6 年 月 7 日 整流器 (cfr) とは 交流を直流に変換する 半波整流器は 交直変換半波整流回路 小電力用途 入力電源側の平均電流が零にならない あんまり使われていない 全波整流回路の基本回路 変圧器が直流偏磁しやすい 変圧器の負荷電流に直流分を含むと その直流分により 鉄心が一方向に磁化する これにより 鉄心の磁束密度の増大
PowerPoint プレゼンテーション
 多自由度駆動機構 先行研究 世界中の研究機関で球面アクチュエータの研究がおこなわれている メリット 多自由度 アクチュエータ 小型化 軽量化 高効率化 課題 高トルク化 広角化 位置センシング ジョージア工科大学 従来複数のモータを用いていた多自由度駆動機構には大 型化などの問題があったが 多自由度アクチュエータを用い ることで必要なアクチュエータの数を低減でき 小型化 軽 量化などのメリットが期待できる
多自由度駆動機構 先行研究 世界中の研究機関で球面アクチュエータの研究がおこなわれている メリット 多自由度 アクチュエータ 小型化 軽量化 高効率化 課題 高トルク化 広角化 位置センシング ジョージア工科大学 従来複数のモータを用いていた多自由度駆動機構には大 型化などの問題があったが 多自由度アクチュエータを用い ることで必要なアクチュエータの数を低減でき 小型化 軽 量化などのメリットが期待できる

 56cm 1 15 1960 2 8 2 2 1 2008 1992 2 1992 2 3562mm 3773mm 2 1980 1991 2008 2007 2003 5 2 3 2003 2005 2008 2010 2005 2008 2012 2010 2012 4 7 4 5 2 1975 1994 8 2008 NPO 2 2010 3 2013 2016 3 2008 2009 14
56cm 1 15 1960 2 8 2 2 1 2008 1992 2 1992 2 3562mm 3773mm 2 1980 1991 2008 2007 2003 5 2 3 2003 2005 2008 2010 2005 2008 2012 2010 2012 4 7 4 5 2 1975 1994 8 2008 NPO 2 2010 3 2013 2016 3 2008 2009 14
第4部門_13_鉄口宗弘.indd
 * ** *** 22 31 18.44m 1 2 3 4 3 5 4 3 6 6 176 7 8 7 9 7 10 11 12 12 13 21 O 32 19.8±1.1 18 21 21 11 10 12 18 177 14 BMI Body Mass Index 15 BC 118E TANITA 14 16 T 16 45 10kg 30 1RM Repetition Maximum 17
* ** *** 22 31 18.44m 1 2 3 4 3 5 4 3 6 6 176 7 8 7 9 7 10 11 12 12 13 21 O 32 19.8±1.1 18 21 21 11 10 12 18 177 14 BMI Body Mass Index 15 BC 118E TANITA 14 16 T 16 45 10kg 30 1RM Repetition Maximum 17
Fig. 1 KAMOME50-2 Table 1 Principal dimensions Fig.2 Configuration of the hydrofoils (Endurance and sprint foil) Fig. 3 Schematic view of the vortex l
 Fig. 3 Schematic view of the vortex l") A study on the simulation of the motion of personal full-submerged hydrofoil craft by Yutaka Terao, Member Summary A new energy utilization project developed by Tokai University was started in 1991. It
A study on the simulation of the motion of personal full-submerged hydrofoil craft by Yutaka Terao, Member Summary A new energy utilization project developed by Tokai University was started in 1991. It
Raspberry Pi BF BF BF Raspberry Pi PC USB HDMI OS SD SD OS Raspberry Pi Model B MicroUSB MicroSD OS SD GPIO HDMI USB LAN Raspberry Pi MicroUSB MicroSD
 Raspberry Pi Arduino Arduino Raspberry Pi Arduino URL Raspberry Pi HDMI USB SD https://www.raspberrypi.org/ Python, Scratch Arduino PC USB https://www.arduino.cc/ Arduino SDK Processing Kinect for Windows,
Raspberry Pi Arduino Arduino Raspberry Pi Arduino URL Raspberry Pi HDMI USB SD https://www.raspberrypi.org/ Python, Scratch Arduino PC USB https://www.arduino.cc/ Arduino SDK Processing Kinect for Windows,
04_06.indd
 改修のポイント 3 洗面手洗いの選定 洗面手洗いの高さと大きさ車イスでの使用には 立位で使用するよりも低く設置する必要がありますが 高さは個人差が大きいので使用するご本人に模擬動作を行ってもらって決めるのが良いでしょう 洗面のサイズは 小さすぎると洗面の下のスペースも狭くなって足が入らず 洗面に手が届きにくくなります 逆に大きすぎると洗面が上体に当たり 前に手が伸ばしにくい方の場合には水栓のレバーに手が届きにくくなります
改修のポイント 3 洗面手洗いの選定 洗面手洗いの高さと大きさ車イスでの使用には 立位で使用するよりも低く設置する必要がありますが 高さは個人差が大きいので使用するご本人に模擬動作を行ってもらって決めるのが良いでしょう 洗面のサイズは 小さすぎると洗面の下のスペースも狭くなって足が入らず 洗面に手が届きにくくなります 逆に大きすぎると洗面が上体に当たり 前に手が伸ばしにくい方の場合には水栓のレバーに手が届きにくくなります
25 D Effects of viewpoints of head mounted wearable 3D display on human task performance
 25 D Effects of viewpoints of head mounted wearable 3D display on human task performance 1140322 2014 2 28 D HMD HMD HMD HMD 3D HMD HMD HMD HMD i Abstract Effects of viewpoints of head mounted wearable
25 D Effects of viewpoints of head mounted wearable 3D display on human task performance 1140322 2014 2 28 D HMD HMD HMD HMD 3D HMD HMD HMD HMD i Abstract Effects of viewpoints of head mounted wearable
しおり.PDF
 H15.7 90-1 - 2 118 PHS 1-2 - 100 ( ) - 3 - - 4 - - 5 - - 6 - - 7-1 5 2 6 3 7 4 1 1 2 3 http://heat.gr.jp/ Outdoor2001 8 OUTDOORhttp://www.jrcnav.com/outdoor/od_menu2.dml?menu1.code=002 http://www.fop.co.jp/fop/education/risk/risk04sea.html
H15.7 90-1 - 2 118 PHS 1-2 - 100 ( ) - 3 - - 4 - - 5 - - 6 - - 7-1 5 2 6 3 7 4 1 1 2 3 http://heat.gr.jp/ Outdoor2001 8 OUTDOORhttp://www.jrcnav.com/outdoor/od_menu2.dml?menu1.code=002 http://www.fop.co.jp/fop/education/risk/risk04sea.html
〈論文〉高校生の学校適応と社会的スキルおよびソーシャルサポートとの関連--不登校生徒との比較
 Social Skills, Social Support and High School Student Adjustment : A Comparison with Truants Kanako OTSUI This study identified the factors that influence how high school students adjust to school and
Social Skills, Social Support and High School Student Adjustment : A Comparison with Truants Kanako OTSUI This study identified the factors that influence how high school students adjust to school and
研究成果報告書
 様式 C-19 F-19-1 Z-19 CK-19( 共通 ) 1. 研究開始当初の背景日本の高度経済成長期にビルや橋梁などのコンクリート構造物が大量に建築され 橋梁やトンネルなどの道路構造物においては 全橋梁数の約 40% 全トンネル数の約 2 5% を占めている その多くが建設後 40 年以上経過しており 耐用年数に近づきつつある ( 図 1 は 2002 年現在 ) このため 近年コンクリート片の落下が頻発しており
様式 C-19 F-19-1 Z-19 CK-19( 共通 ) 1. 研究開始当初の背景日本の高度経済成長期にビルや橋梁などのコンクリート構造物が大量に建築され 橋梁やトンネルなどの道路構造物においては 全橋梁数の約 40% 全トンネル数の約 2 5% を占めている その多くが建設後 40 年以上経過しており 耐用年数に近づきつつある ( 図 1 は 2002 年現在 ) このため 近年コンクリート片の落下が頻発しており
Microsoft Word - H26mse-bese-exp_no1.docx
 実験 No 電気回路の応答 交流回路とインピーダンスの計測 平成 26 年 4 月 担当教員 : 三宅 T A : 許斐 (M2) 齋藤 (M) 目的 2 世紀の社会において 電気エネルギーの占める割合は増加の一途をたどっている このような電気エネルギーを制御して使いこなすには その基礎となる電気回路をまず理解する必要がある 本実験の目的は 電気回路の基礎特性について 実験 計測を通じて理解を深めることである
実験 No 電気回路の応答 交流回路とインピーダンスの計測 平成 26 年 4 月 担当教員 : 三宅 T A : 許斐 (M2) 齋藤 (M) 目的 2 世紀の社会において 電気エネルギーの占める割合は増加の一途をたどっている このような電気エネルギーを制御して使いこなすには その基礎となる電気回路をまず理解する必要がある 本実験の目的は 電気回路の基礎特性について 実験 計測を通じて理解を深めることである
ラビット用パーツリスト ラビット用パーツリスト 2013 年 10 月更新 前腕部分 12 (3~4P) ハンドル部分 12 (5~6P) 本体フレーム 123 (7~9P) WA-0 専用部品はP14 に掲載しています ブレーキ本体 旧タイプ 12 新タイプ 12 (10~13P) その他の部品
 ハンドル部分 12 (5~6P) 本体フレーム 123 (7~9P) WA-0 専用部品はP14 に掲載しています ブレーキ本体 旧タイプ 12 新タイプ 12 (10~13P) その他の部品") ラビット用パーツリスト 前腕部分 12 (3~4P) ハンドル部分 12 (5~6P) 本体フレーム 123 (7~9P) WA-0 専用部品はP14 に掲載しています ブレーキ本体 旧タイプ 12 新タイプ 12 (10~13P) その他の部品 アルファベットシールの説 (15P) P-1 アルファベットシールの説明 製品の向上の為ラビットの部品変更を行う際 目印として本体フレームにあるロットナンバーの横に
ラビット用パーツリスト 前腕部分 12 (3~4P) ハンドル部分 12 (5~6P) 本体フレーム 123 (7~9P) WA-0 専用部品はP14 に掲載しています ブレーキ本体 旧タイプ 12 新タイプ 12 (10~13P) その他の部品 アルファベットシールの説 (15P) P-1 アルファベットシールの説明 製品の向上の為ラビットの部品変更を行う際 目印として本体フレームにあるロットナンバーの横に
旗影会H29年度研究報告概要集.indb
 高齢者のサルコペニア対策におけるタマゴ摂取の意義 京都女子大学家政学部食物栄養学科 教授田中清 緒言ロコモティブシンドローム ( 以下ロコモ ) は加齢に伴う運動器障害であり 要介護 要支援の重要な原因 健康寿命短縮の大きな要因である ロコモの構成疾患のうち 骨粗鬆症については治療薬が多数開発され 栄養面からの研究も多数存在するが 変形性関節症 サルコペニアに関しては研究報告が乏しい サルコペニアは
高齢者のサルコペニア対策におけるタマゴ摂取の意義 京都女子大学家政学部食物栄養学科 教授田中清 緒言ロコモティブシンドローム ( 以下ロコモ ) は加齢に伴う運動器障害であり 要介護 要支援の重要な原因 健康寿命短縮の大きな要因である ロコモの構成疾患のうち 骨粗鬆症については治療薬が多数開発され 栄養面からの研究も多数存在するが 変形性関節症 サルコペニアに関しては研究報告が乏しい サルコペニアは
平成19年度・地球工学研究所の知的財産に関する報告会 - 資料集
 地盤環境モニタリングの広域化とコスト低減のための無線センサネットワークの実用化に関する検討 地球工学研究所地圏科学領域池川洋二郎 Email:ikegawa@criepi.denken.or.jp 1 背景と目的 背景 : 豪雨, 地震などによる斜面災害に対する維持管理や減災技術の適用による効果や機能をモニタリングにより評価することが重要である. 必要性 : モニタリングの広域化と, 低コスト化が可能な技術開発が望まれる.
地盤環境モニタリングの広域化とコスト低減のための無線センサネットワークの実用化に関する検討 地球工学研究所地圏科学領域池川洋二郎 Email:ikegawa@criepi.denken.or.jp 1 背景と目的 背景 : 豪雨, 地震などによる斜面災害に対する維持管理や減災技術の適用による効果や機能をモニタリングにより評価することが重要である. 必要性 : モニタリングの広域化と, 低コスト化が可能な技術開発が望まれる.
Ⅱ. 研究目的 Ⅲ. 研究方法 1. 対象者 J.. 2. 用具.... Ledraplastic GYMNIC cm 3. 大型ボールを用いたトレーニング内容 DVD DVD
 研究ノート 大型ボールの身体的効果に関する研究 平衡性機能と姿勢保持のトレーニング効果に着目して Study of Effect of Large-sized ball on Human Body Shedding light on the effect of training on balance function and posture retention Yoshika MarikoYoshinori
研究ノート 大型ボールの身体的効果に関する研究 平衡性機能と姿勢保持のトレーニング効果に着目して Study of Effect of Large-sized ball on Human Body Shedding light on the effect of training on balance function and posture retention Yoshika MarikoYoshinori
isai300413web.indd
 2012.4 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 研究動向紹介 修士論文概要 次元計測に基づくテレオペレーションシステム 中京大学大学院 情報科学研究科 情報科学専攻 日比野 翔太郎 高所や災害現場などの極限環境での作業には人的被害が起こりやすいというリスクが常に伴う その 対策の一つとしてテレオペレーションロボットと呼ばれる遠隔操作ロボットによる作業が挙げられる
2012.4 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 研究動向紹介 修士論文概要 次元計測に基づくテレオペレーションシステム 中京大学大学院 情報科学研究科 情報科学専攻 日比野 翔太郎 高所や災害現場などの極限環境での作業には人的被害が起こりやすいというリスクが常に伴う その 対策の一つとしてテレオペレーションロボットと呼ばれる遠隔操作ロボットによる作業が挙げられる
ロボット技術の紹介
 賢いロボットの作り方 ~ 自分で考えて行動するロボットをつくる ~ 関東学院大学 理工学部 ( 届出設置書類提出中 ) 准教授元木誠 夢ナビライブ東京賢いロボットの作り方 1 本日の講義内容 周囲の状況を認識し, 自分で考えて行動するロボットのことを知能ロボットといいます 知能ロボットは賢さのレベルによって作り方が違います 生物の脳をモデルにしたシステム ( ニューラルネットワーク ) で作る方法を紹介します!
賢いロボットの作り方 ~ 自分で考えて行動するロボットをつくる ~ 関東学院大学 理工学部 ( 届出設置書類提出中 ) 准教授元木誠 夢ナビライブ東京賢いロボットの作り方 1 本日の講義内容 周囲の状況を認識し, 自分で考えて行動するロボットのことを知能ロボットといいます 知能ロボットは賢さのレベルによって作り方が違います 生物の脳をモデルにしたシステム ( ニューラルネットワーク ) で作る方法を紹介します!

平成 17 年度岐阜県生活技術研究所研究報告 No.8 人間工学的手法による木製椅子の快適性評価と機能設計に関する研究 ( 第 8 報 ) 背もたれの最適な支持位置に関する検討 藤巻吾朗 *1 安藤敏弘 *1 成瀬哲哉 *1 坂東直行 *1 堀部哲 *2 Research on comfort ev
 背もたれの最適な支持位置に関する検討 藤巻吾朗 *1 安藤敏弘 *1 成瀬哲哉 *1 坂東直行 *1 堀部哲 *2 Research on comfort ev") 人間工学的手法による木製椅子の快適性評価と機能設計に関する研究 ( 第 8 報 ) 背もたれの最適なに関する検討 藤巻吾朗 安藤敏弘 成瀬哲哉 坂東直行 堀部哲 *2 Research on comfort evaluation and function design of wooden chair by ergonomic technique ( VIII ) An Estimation of the
人間工学的手法による木製椅子の快適性評価と機能設計に関する研究 ( 第 8 報 ) 背もたれの最適なに関する検討 藤巻吾朗 安藤敏弘 成瀬哲哉 坂東直行 堀部哲 *2 Research on comfort evaluation and function design of wooden chair by ergonomic technique ( VIII ) An Estimation of the
 Hiroshi OSAWA A Study of Nutrition and Behavior With Particular Reference to Functional Hypoglycemia In order to understand causes of various kinds of problem behavior in the present time, it is assumed
Hiroshi OSAWA A Study of Nutrition and Behavior With Particular Reference to Functional Hypoglycemia In order to understand causes of various kinds of problem behavior in the present time, it is assumed
第 10 回 歩行のバイオメカニクス FF:足部水平 足底面がすべて地面に接地すること (Foot Flat) HO:踵離地 踵が地面から離れること (Heel Off) TO つま先離れ つま先が地面から離れること (Toe Off) 上記の定義に気をつけて歩いてみれば 歩行では両足で身体を支持してい
 HO:踵離地 踵が地面から離れること (Heel Off) TO つま先離れ つま先が地面から離れること (Toe Off) 上記の定義に気をつけて歩いてみれば 歩行では両足で身体を支持してい") 69 10 2002 Jacqueline Perry 2007 Jessica Rose, James G. Gamble, Human Walking, Lipricott Williams & Wilkins, 2006[10] James Watkins, An Introduction to Biomechanics of Sport and Exercise, Elsevier, 2007[9]
69 10 2002 Jacqueline Perry 2007 Jessica Rose, James G. Gamble, Human Walking, Lipricott Williams & Wilkins, 2006[10] James Watkins, An Introduction to Biomechanics of Sport and Exercise, Elsevier, 2007[9]
Microsoft PowerPoint - ロボットの運動学forUpload'C5Q [互換モード]
![Microsoft PowerPoint - ロボットの運動学forUpload'C5Q [互換モード]](/thumbs/104/163308363.jpg "Microsoft PowerPoint - ロボットの運動学forUpload'C5Q [互換モード]") ロボットの運動学 順運動学とは 座標系の回転と並進 同次座標変換行列 Denavit-Hartenberg の表記法 多関節ロボットの順運動学 レポート課題 & 中間試験について 逆運動学とは ヤコビアン行列 運動方程式 ( 微分方程式 ) ロボットの運動学 動力学 Equation of motion f ( ( t), ( t), ( t)) τ( t) 姿勢 ( 関節角の組合せ ) Posture
ロボットの運動学 順運動学とは 座標系の回転と並進 同次座標変換行列 Denavit-Hartenberg の表記法 多関節ロボットの順運動学 レポート課題 & 中間試験について 逆運動学とは ヤコビアン行列 運動方程式 ( 微分方程式 ) ロボットの運動学 動力学 Equation of motion f ( ( t), ( t), ( t)) τ( t) 姿勢 ( 関節角の組合せ ) Posture
問診票-1ol
 参考 6 作業標準の作成例 作業標準は様々な職場で作成されている ここでは介護 看護作業における作業標準を例示するが 介護 看護の質を確保し 対象者にとっても安全な作業標準 なおかつ 労働者にとって腰痛発生のリスクの小さい作業方法や作業手順に注目した作業標準の作成を考える 労働者の腰痛予防対策という観点から介護 看護作業における作業標準を作成するにあたり 時間に合わせて作業標準を定めると 腰痛発生のリスクが高まる結果となり
参考 6 作業標準の作成例 作業標準は様々な職場で作成されている ここでは介護 看護作業における作業標準を例示するが 介護 看護の質を確保し 対象者にとっても安全な作業標準 なおかつ 労働者にとって腰痛発生のリスクの小さい作業方法や作業手順に注目した作業標準の作成を考える 労働者の腰痛予防対策という観点から介護 看護作業における作業標準を作成するにあたり 時間に合わせて作業標準を定めると 腰痛発生のリスクが高まる結果となり
電気的特性 (Ta=25 C) 項目 記号 条件 Min. Typ. Max. 単位 読み出し周波数 * 3 fop khz ラインレート * Hz 変換ゲイン Gc ゲイン =2-5 - e-/adu トリガ出力電圧 Highレベル Vdd V -
 項目 記号 条件 Min. Typ. Max. 単位 読み出し周波数 * 3 fop khz ラインレート * Hz 変換ゲイン Gc ゲイン =2-5 - e-/adu トリガ出力電圧 Highレベル Vdd V -") CCD イメージセンサ S11850-1106, S11511 シリーズ用 は 当社製 CCDイメージセンサ S11850-1106, S11511 シリーズ用に開発された駆動回路です USB 2.0インターフェースを用いて とPCを接続することにより PCからの制御でセンサのアナログビデオ信号をデジタル出力に変換し PCに取り込むことができます は センサを駆動するセンサ基板 センサ基板の駆動と
CCD イメージセンサ S11850-1106, S11511 シリーズ用 は 当社製 CCDイメージセンサ S11850-1106, S11511 シリーズ用に開発された駆動回路です USB 2.0インターフェースを用いて とPCを接続することにより PCからの制御でセンサのアナログビデオ信号をデジタル出力に変換し PCに取り込むことができます は センサを駆動するセンサ基板 センサ基板の駆動と
86 セRH Series 型式と記号 機種 :DC サーボアクチュエータ RH シリーズ 型番 :5,8,11,14 バージョン記号 出力軸定格回転速度 : 6r/min を示す 仕様 ( インクリメンタルエンコーダ付 ) RH - 14 D E 1 A L エンコーダ出力方式 O
 RH - 14 D E 1 A L エンコーダ出力方式 O") ハーモニックドライブ には 歯車のガタツキによるバックラッシがありませんので 高精度の位置決めを可能にしています 小型で高出力トルク 最小型番 RH-5A のアクチュエータの外形寸法φ 2 89mm で.69N m 瞬時最大トルク と高出力です 短形出力信号を 4逓倍速まで分解できます サーボドライバ 高精度オプティカルエンコーダ リニアアクチュエータ 構造 Galvanometer Scanner
ハーモニックドライブ には 歯車のガタツキによるバックラッシがありませんので 高精度の位置決めを可能にしています 小型で高出力トルク 最小型番 RH-5A のアクチュエータの外形寸法φ 2 89mm で.69N m 瞬時最大トルク と高出力です 短形出力信号を 4逓倍速まで分解できます サーボドライバ 高精度オプティカルエンコーダ リニアアクチュエータ 構造 Galvanometer Scanner
2 片脚での体重支持 ( 立脚中期, 立脚終期 ) 60 3 下肢の振り出し ( 前遊脚期, 遊脚初期, 遊脚中期, 遊脚終期 ) 64 第 3 章ケーススタディ ❶ 変形性股関節症ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー
 60 3 下肢の振り出し ( 前遊脚期, 遊脚初期, 遊脚中期, 遊脚終期 ) 64 第 3 章ケーススタディ ❶ 変形性股関節症ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー") PT OT ビジュアルテキスト 姿勢 動作 歩行分析 contents 序ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー畠中泰彦 3 本書の使い方ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー
PT OT ビジュアルテキスト 姿勢 動作 歩行分析 contents 序ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー畠中泰彦 3 本書の使い方ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー
Web UX Web Web Web 1.2 Web GIF Kevin Burg Jamie Beck GIF GIF [2] Flixel Cinemagraph pro *1 Adobe Photoshop *2 GIMP *3 Web *1 Flixel Photos Inc. *2 *3
![Web UX Web Web Web 1.2 Web GIF Kevin Burg Jamie Beck GIF GIF [2] Flixel Cinemagraph pro *1 Adobe Photoshop *2 GIMP *3 Web *1 Flixel Photos Inc. *2 *3](/thumbs/89/99926796.jpg "Web UX Web Web Web 1.2 Web GIF Kevin Burg Jamie Beck GIF GIF [2] Flixel Cinemagraph pro *1 Adobe Photoshop *2 GIMP *3 Web *1 Flixel Photos Inc. *2 *3") 1 1 1 Web Web SNS 1 The Proposition of New Method to Generate Cinemagraph in Simple Way Isono Yuuka 1 Ando Daichi 1 Kasahafa Shinichi 1 Abstract: Recently, many animations are used for the web design.
1 1 1 Web Web SNS 1 The Proposition of New Method to Generate Cinemagraph in Simple Way Isono Yuuka 1 Ando Daichi 1 Kasahafa Shinichi 1 Abstract: Recently, many animations are used for the web design.
新技術説明会 様式例
 1 レアアースを用いない新構造の 50kW ハイブリッド 自動車用フェライト磁石モータの開発 北海道大学大学院情報科学研究科教授小笠原悟司 准教授 竹本真紹 2010 年 9 月 29 日 ( 金 ) 研究背景 ハイブリッド自動車の駆動システムにおいて重要な役割 永久磁石同期モータ 希土類磁石 HEV 駆動用モータ性能向上の要求 小型化 高出力化 高効率化 etc. 原材料にレアアース ( 希土類元素
1 レアアースを用いない新構造の 50kW ハイブリッド 自動車用フェライト磁石モータの開発 北海道大学大学院情報科学研究科教授小笠原悟司 准教授 竹本真紹 2010 年 9 月 29 日 ( 金 ) 研究背景 ハイブリッド自動車の駆動システムにおいて重要な役割 永久磁石同期モータ 希土類磁石 HEV 駆動用モータ性能向上の要求 小型化 高出力化 高効率化 etc. 原材料にレアアース ( 希土類元素
ムーアの法則に関するレポート
 情報理工学実験レポート 実験テーマ名 : ムーアの法則に関する調査 職員番号 4570 氏名蚊野浩 提出日 2019 年 4 月 9 日 要約 大規模集積回路のトランジスタ数が 18 ヶ月で2 倍になる というムーアの法則を検証した その結果 Intel 社のマイクロプロセッサに関して 1971 年から 2016 年の平均で 26.4 ヶ月に2 倍 というペースであった このことからムーアの法則のペースが遅くなっていることがわかった
情報理工学実験レポート 実験テーマ名 : ムーアの法則に関する調査 職員番号 4570 氏名蚊野浩 提出日 2019 年 4 月 9 日 要約 大規模集積回路のトランジスタ数が 18 ヶ月で2 倍になる というムーアの法則を検証した その結果 Intel 社のマイクロプロセッサに関して 1971 年から 2016 年の平均で 26.4 ヶ月に2 倍 というペースであった このことからムーアの法則のペースが遅くなっていることがわかった
 (2) 2")
身体福祉論
 貯筋のすすめ 福永哲夫早稲田大学スポーツ科学学術院 2008 年度スポーツ科学研究センターシンポジウム メタボリックシンドロームをいかに予防するか 保健指導における運動の理論と実践 スポーツ科学研究, 6, 50-54, 2009 年, 受付日 :2009 年 5 月 22 日, 受理日 :2009 年 5 月 22 日 日常生活においては, 椅子から立ち上がる, 歩くなど様々な身体運動がなされる.
貯筋のすすめ 福永哲夫早稲田大学スポーツ科学学術院 2008 年度スポーツ科学研究センターシンポジウム メタボリックシンドロームをいかに予防するか 保健指導における運動の理論と実践 スポーツ科学研究, 6, 50-54, 2009 年, 受付日 :2009 年 5 月 22 日, 受理日 :2009 年 5 月 22 日 日常生活においては, 椅子から立ち上がる, 歩くなど様々な身体運動がなされる.
3.....ren
 823 2011 329 20 11 20 48.3 90.5 20 40 21 12 16 22 3 23 50 50 50 1 54 2 55 3 56 57 49 330 823 2011 6 0.3 0.7 1.0 3 1 0.3 0.7 1.0 5 m 3 m 3 m 5 m 5 3 m 1 2 5001,000 3 50 52 mm 4 0.1 1 50 823 2011 331 5 10
823 2011 329 20 11 20 48.3 90.5 20 40 21 12 16 22 3 23 50 50 50 1 54 2 55 3 56 57 49 330 823 2011 6 0.3 0.7 1.0 3 1 0.3 0.7 1.0 5 m 3 m 3 m 5 m 5 3 m 1 2 5001,000 3 50 52 mm 4 0.1 1 50 823 2011 331 5 10
2 Hermite-Gaussian モード 2-1 Hermite-Gaussian モード 自由空間を伝搬するレーザ光は次のような Hermite-gaussian Modes を持つ光波として扱う ことができる ここで U lm (x, y, z) U l (x, z)u m (y, z) e
 U l (x, z)u m (y, z) e") Wavefront Sensor 法による三角共振器のミスアラインメント検出 齊藤高大 新潟大学大学院自然科学研究科電気情報工学専攻博士後期課程 2 年 214 年 8 月 6 日 1 はじめに Input Mode Cleaner(IMC) は Fig.1 に示すような三角共振器である 懸架鏡の共振などにより IMC を構成する各ミラーが角度変化を起こすと 入射光軸と共振器軸との間にずれが生じる
Wavefront Sensor 法による三角共振器のミスアラインメント検出 齊藤高大 新潟大学大学院自然科学研究科電気情報工学専攻博士後期課程 2 年 214 年 8 月 6 日 1 はじめに Input Mode Cleaner(IMC) は Fig.1 に示すような三角共振器である 懸架鏡の共振などにより IMC を構成する各ミラーが角度変化を起こすと 入射光軸と共振器軸との間にずれが生じる
( ), ( ) Patrol Mobile Robot To Greet Passing People Takemi KIMURA(Univ. of Tsukuba), and Akihisa OHYA(Univ. of Tsukuba) Abstract This research aims a
, ( ) Patrol Mobile Robot To Greet Passing People Takemi KIMURA(Univ. of Tsukuba), and Akihisa OHYA(Univ. of Tsukuba) Abstract This research aims a") ( ), ( ) Patrol Mobile Robot To Greet Passing People Takemi KIMURA(Univ. of Tsukuba), and Akihisa OHYA(Univ. of Tsukuba) Abstract This research aims at the development of a mobile robot to perform greetings
( ), ( ) Patrol Mobile Robot To Greet Passing People Takemi KIMURA(Univ. of Tsukuba), and Akihisa OHYA(Univ. of Tsukuba) Abstract This research aims at the development of a mobile robot to perform greetings
九州大学学術情報リポジトリ Kyushu University Institutional Repository 看護師の勤務体制による睡眠実態についての調査 岩下, 智香九州大学医学部保健学科看護学専攻 出版情報 : 九州大学医学部保健学
 九州大学学術情報リポジトリ Kyushu University Institutional Repository 看護師の勤務体制による睡眠実態についての調査 岩下, 智香九州大学医学部保健学科看護学専攻 https://doi.org/10.15017/4055 出版情報 : 九州大学医学部保健学科紀要. 8, pp.59-68, 2007-03-12. 九州大学医学部保健学科バージョン : 権利関係
九州大学学術情報リポジトリ Kyushu University Institutional Repository 看護師の勤務体制による睡眠実態についての調査 岩下, 智香九州大学医学部保健学科看護学専攻 https://doi.org/10.15017/4055 出版情報 : 九州大学医学部保健学科紀要. 8, pp.59-68, 2007-03-12. 九州大学医学部保健学科バージョン : 権利関係
平成○○年度(第○次補正予算)地域新生コンソーシアム研究開発事業
地域新生コンソーシアム研究開発事業") 平成 22 年度課題解決型医療機器の開発改良に向けた病院 企業間の連携支援事業成果報告概要 < 全 233> 人工呼吸器に関する医療事故を防止するための安全管理支援システムの開発 ( 委託先 ) 株式会社三五 ( 再委託先 ) 株式会社ファーレックス アコマ医科工業株式会社 株式会社スカイネット 株式会社アイビジョン 学校法人帝京大学プロジェクトリーダー株式会社三五 技術本部執行本部長 長谷川勉サブ
平成 22 年度課題解決型医療機器の開発改良に向けた病院 企業間の連携支援事業成果報告概要 < 全 233> 人工呼吸器に関する医療事故を防止するための安全管理支援システムの開発 ( 委託先 ) 株式会社三五 ( 再委託先 ) 株式会社ファーレックス アコマ医科工業株式会社 株式会社スカイネット 株式会社アイビジョン 学校法人帝京大学プロジェクトリーダー株式会社三五 技術本部執行本部長 長谷川勉サブ


04-西城惠一-3.02
 Bull. Natl. Mus. Nat. Sci., Ser. E, 30, pp. 33 44, December 21, 2007 169 0073 3 23 1 Prism Binoculars Made by Tokyo Gas and Electric Corporation Keiichi SAIJO and Takashi NAKAJIMA Department of Science
Bull. Natl. Mus. Nat. Sci., Ser. E, 30, pp. 33 44, December 21, 2007 169 0073 3 23 1 Prism Binoculars Made by Tokyo Gas and Electric Corporation Keiichi SAIJO and Takashi NAKAJIMA Department of Science
Microsoft PowerPoint - H22パワエレ第3回.ppt
 パワーエレトクロニクス ( 舟木担当分 ) 第三回サイリスタ位相制御回路逆変換動作 平成 年 月 日月曜日 限目 誘導負荷 位相制御単相全波整流回路 導通期間 ( 点弧角, 消弧角 β) ~β( 正の半波について ) ~ β( 負の半波について ) β> となる時に連続導通となる» この時, 正の半波の導通期間は~» ダイオードでは常に連続導通 連続導通と不連続導通の境界を求める オン状態の微分方程式
パワーエレトクロニクス ( 舟木担当分 ) 第三回サイリスタ位相制御回路逆変換動作 平成 年 月 日月曜日 限目 誘導負荷 位相制御単相全波整流回路 導通期間 ( 点弧角, 消弧角 β) ~β( 正の半波について ) ~ β( 負の半波について ) β> となる時に連続導通となる» この時, 正の半波の導通期間は~» ダイオードでは常に連続導通 連続導通と不連続導通の境界を求める オン状態の微分方程式
2015 Future University Hakodate 2015 System Information Science Practice Group Report Project Name Development of myoelectric prosthetic hand with hap
 2015 Future University Hakodate 2015 System Information Science Practice Group Report Project Name Development of myoelectric prosthetic hand with haptic sense Group Name The sensation of touch group /Project
2015 Future University Hakodate 2015 System Information Science Practice Group Report Project Name Development of myoelectric prosthetic hand with haptic sense Group Name The sensation of touch group /Project
Microsoft Word - H doc
 3.2.3. 広帯域高ダイナミックレンジ孔井式地震計の開発 (1) 業務の内容 (a) 業務題目 広帯域高ダイナミックレンジ孔井式地震計の開発 (b) 担当者 所属機関 役職 氏名 メールアドレス 独立行政法人防災科学技術研究所地震観測データセンター センター長主任研究員主任研究員 小原一成功刀卓廣瀬仁 obara@bosai.go.jp kunugi@bosai.go.jp hirose@bosai.go.jp
3.2.3. 広帯域高ダイナミックレンジ孔井式地震計の開発 (1) 業務の内容 (a) 業務題目 広帯域高ダイナミックレンジ孔井式地震計の開発 (b) 担当者 所属機関 役職 氏名 メールアドレス 独立行政法人防災科学技術研究所地震観測データセンター センター長主任研究員主任研究員 小原一成功刀卓廣瀬仁 obara@bosai.go.jp kunugi@bosai.go.jp hirose@bosai.go.jp
FANUC i Series CNC/SERVO
 + Series CNC/SERVO * * 2 * * 3 Series 0+-MODEL F * * * Series 30+/31+/32+/35+-MODEL B * Power Motion +-MODEL A * PANEL +H * PANEL +H Pro * MT-LINK+ * MT-LINKi 4 サーボラインアップ @*-B series SERVO α*-bシリーズサーボは
+ Series CNC/SERVO * * 2 * * 3 Series 0+-MODEL F * * * Series 30+/31+/32+/35+-MODEL B * Power Motion +-MODEL A * PANEL +H * PANEL +H Pro * MT-LINK+ * MT-LINKi 4 サーボラインアップ @*-B series SERVO α*-bシリーズサーボは