Jan 2019 版 ラルメカローラ総合カタログ Chapter 1 Technical information 第 1 章ベルトコンベヤ & ローラ / プーリ選定の手引き
|
|
|
- こうじ もちやま
- 2 years ago
- Views:
Transcription


1 Jan 2019 版 ラルメカローラ総合カタログ Chapter 1 Technical information 第 1 章ベルトコンベヤ & ローラ / プーリ選定の手引き
2 RULMECA Rollers and components for bulk handling ラルメカローラ総合カタログ Chapter 1 Technical information 第 1 章ベルトコンベヤ & ローラ / プーリ選定の手引き 目次 1.1 始めに 1.2 この手引書で使われる記号 1.3 ベルトコンベヤの技術特性 1.4 ベルトコンベヤ構成部品 & そのサイズ 1.5 設計基準 搬送物特性 ベルト速度 ベルト幅 ローラを保持するトラフ架台 据付ピッチ 及び 移行間距離 接線力 動力 従動抵抗 ベルト重量 テンション そして そのチェック ベルトコンベヤの駆動 及び 各プーリの寸法 / 仕様 1.6 ローラ その機能と選定基準 速度に基づくローラ径の選定 許容荷重に基づくローラの選定 1.7 ベルトへの載せ込み そして インパクトローラ インパクトローラの衝撃負荷の計算 1.8 その他の付属機器装置 1.9 計画ベルトコンベヤでの選定事例 この冊子は ラルメカ総合カタログ ( 英語版 ) 4 rel. BU EN 07/03 の第 1 章 Technical information / ベルトコンベヤ及びローラ / プーリ選定の仕方 ( 全 58 頁 ) を一部省略編集し 日本語化したものです ベルトコンベヤの計算に関する 解りやすくしかも安価な手引書がなかなか身近に見いだせない昨今 ISO 1537 ; 1973 及び JIS B8803 ; 2008 ベルトコンベヤ用ローラ に準じたこの手引書 ( Technical information ) が皆様のお役にたちますなら幸甚です 尚 ローラ総合カタログ ( 英語版 ) はラルメカのホームページ ( rulmeca.com ) からダウンロードできます 2012 年 6 月 バルクワールド

3 1.1 Introduction ( はじめに ) 原材料或いは加工された製品を搬送するプロジェクト設計をする際に その荷をどのくらい搬送するのか 又 どういう方法で行うかに依って その方向性が定まり 最も経済的で効果的な方策が選ばれます そして その設計は プラント建設にあたっての側面だけでなく メンテナンスの面にも配慮して さまざまな状況を想定し そして 過負荷状態が起こりえる事さえ考慮に入れて それらに対する柔軟性と適応性を持ち あらゆる状態に対処できる能力をもった設計が行わなくてはなりません ベルトコンベヤは こうしたニーズを満たしクリアした搬送手段として 過去 10 年の間に確実に増えてきています 事実 他の搬送手段と比較すると最も経済的で 且つ 最も様々で困難な状況に柔軟に適応できる搬送手段です 今日 ベルトコンベヤは 水平か上り傾斜の場合だけに使用されるのではありません 今や カーブのベルトコンベヤも実用化され 下り傾斜のベルトコンベヤも登場し そして ベルトコンベヤの速度はびっくりするほど早くなりました しかしながら この 選定の手引き は ベルトコンベヤのプロジェクト設計をするにあたっての 万能書 として用意されたものではありません この手引書はベルトコンベヤの最も重要なパーツをどう選定したらよいかについての諸基準を提供する目的で用意されたものです このテクニカル インフォメーションである手引書は 以下の各セクションで設計にあたっての基本的な裏付けを提供すると共に 計画するコンベヤプロジェクトのプランをテクニカルな側面から具体的に検討できる手助けになる事を意図して作成された手引書です 1
4 1.2 Technical symbols ( この手引書で使われる記号 ) 記号 内容 単位 a キャリア架台セットのピッチ (pitch of troughing set) m A ローラ軸長 (length or roller spindle) mm a g プーリ鏡面と軸受設置間の芯間距離 (distance between the pulley flange and support) m a i インパクトキャリア架台セットの取付ピッチ (pitch of impact sets) m a o キャリア架台セットの取付ピッチ (pitch of carrying sets) m a t 角度任意調整キャリア架台の取付ピッチ (pitch of transition sets) m a u リターンセットの取付ピッチ (pitch of return sets) m B ローラ管長 (length of roller shell) mm C ローラ取付内々寸法 (distance between roller supports) mm Ca キャリアセットにかかる静荷重 (static load on the carrying set) dan ca キャリアセットの中央ローラにかかる荷重 (load on central roller of the carrying set) dan Ca 1 キャリアセットにかかる動荷重 (dynamic load on the carrying set) dan cd ベアリングにかかる動荷重 (dynamic load on the bearing) dan Cf 衝撃を受けるローラ / 架台セットの恒久弾性率 (constant of elasticity of a frame/impact roller) Kg/m ch ローラシャフトの架台受けフライス加工面幅 (flats of roller shaft) mm C o ベアリングにかかる静荷重 (static load on bearing) dan Cp 駆動プーリシャフトにかかる負荷 (resulting load of associated forces on motorized drum shaft) dan Cp r 従動プーリシャフトにかかる負荷 (resulting load of associated forces on idler drum shaft) dan Cq コンベヤ機長如何に基づく抵抗係数 (coefficient of fixed resistance) --- Cr リターンセットにかかる静荷重 (static load on the return set) dan cr リターンセットのローラにかかる荷重 (load on the roller of return set) dan Cr 1 リターンセットにかかる動荷重 (dynamic load on the return set) dan Ct 環境温度抵抗変動係数 (coefficient of passive resistance given by temperature) --- Cw ベルト巻付角度係数 (wrap factor) --- d ローラ軸の直径 (diameter of spindle/shaft) mm D ローラ / プーリの外径 ( diameter of roller/pulley) mm E 鋼材弾性率 (modules of elasticity of steel) dan/mm 2 e 自然対数指数 (logarithmic natural base) f 搬送物 / ベルト & ローラ回転部間の摩擦係数 (coefficient of internal friction of material & of rotating parts)-- f a f r ベルト / プーリ間の巻付角に依る摩擦係数 (coefficient between the belt & drum given an angle of wrap)--- 2 台の連続したキャリア架台間でのベルトたわみ幅 (deflection of belt between two consecutive troughing set)m ft 左右対称シャフトのたわみ部分長さ (deflection of a symmetrical shaft) mm Fa 上り傾斜コンベヤ部分の接線力 (tangential force to move the belt in the direction of movement) dan Fd インパクト ( 衝撃 ) 係数 (factor of impact) --- Fm 環境係数 (environment factor) --- Fp 最も負荷がかかる中央部ローラのトラフ補正係数 (contribution factor) --- Fp 1 キャリアセット中央ローラでのトラフ補正係数 (contribution factor on the central roller of a troughing set)--- 2
5 記号 内容 単位 Fr 下り傾斜コンベヤ部分の接線力 (tangential force to move the belt in the return direction) dan Fs サービス ( 稼働 ) 係数 (service factor) --- Fu 総接線力 (total tangential force) dan Fv 速度係数 (speed factor) --- G 固定架台間距離 (distance between support brackets) mm Gm 大塊原材料重量 (weight of lump of material) Kg H ベルト揚程 (height change of belt) m Hc 修正落下高さ距離 (correct height of fall) m Hf 搬送物が上からホッパーまで落ちる落下高さ距離 (height of fall of material belt-screen) m Ht 駆動プーリと重錘プーリの芯間高さ距離 (height change between motorized drum & counterweight) m Hv 搬送物がホッパーから下まで落ちる落下高さ距離 (height of fall of material screen-receiving belt) m l C 駆動プーリと重錘プーリの芯間長さ距離 (distance from center of motorized drum to the center of counterweight connection) m l M 搬送容量 ( load volume) m 3 /h l V ベルト搬送能力 (belt load = material flow = ) t/h l VM 1M/ 秒当り修正搬送容量 (load volume corrected to 1 m/s in relation to the inclination & irregularity of the feed)m 3 /h l VT 1M/ 秒当りの理論搬送容量 ( load volume theoretic to 1 m/s ) m 3 /h J シャフト断面慣性モーメント (moment of inertia of screen of material) mm 4 K 傾斜係数 (inclination factor) --- K 1 修正傾斜係数 (correct factor) --- σ amm 許容応力 (admissive stress) dan/mm 2 L コンベヤ芯間機長 (load centers) m Lb 大塊搬送物のサイズ (dimensions of material lump) m Lt 移行間距離 (transition distance) m Mf 曲げモーメント (bending moment) dan/m Mif 理想曲げモーメント (ideal bending moment) dan/m Mt ねじれモーメント (torsion moment) dan/m N ベルト幅 (belt width) mm n 分当り回転数 (revolution per minute) rpm P 出力 (absorbed power) kw P d 動落下荷重 (dynamic falling force) Kg pi 落下搬送物の衝撃荷重 (impact force of falling material) Kg pic 中央ローラにかかる衝撃荷重 (force impact on central roller) Kg P pri リターン側回転部重量 (weight of lower rotating parts) Kg P prs キャリア側回転部重量 (weight of upper rotating parts) Kg q b 1M 当りベルト重量 (weight of belt per linear meter) Kg/m q bn 1M 当りベルト比重の重量 (weight of belt density) Kg/m 2 q G 1M 当り搬送物重量 (weight of material per linear meter) Kg/m
 Kg/m q S 搬送物比重 ( specific weight) t/m 3 q T プーリ重量 (weight of drum) dan RL モータープーリのプーリ管長 (length of motorized drum face) mm S 搬送断面積 (section of belt")
 dan T g 重錘プーリの重さがかかる地点での張力 (tension on belt at the point of counterweight connection) dan T max ベルトに最も負荷がかかる地点での張力 (tension on belt at the point of highest belt stress) dan Tu max ベルトの")
6 注記 : Kg 表記は ここでは Force( 力 ) の単位 として使用しています 3 記号 内容 単位 q RO 1M 当りキャリア側回転部重量 (weight of the upper rotating parts referred to the troughing set pitch) Kg/m q RU 1M 当りリターン側回転部重量 ( weight of the lower rotating parts referred to the troughing set pitch) Kg/m q S 搬送物比重 ( specific weight) t/m 3 q T プーリ重量 (weight of drum) dan RL モータープーリのプーリ管長 (length of motorized drum face) mm S 搬送断面積 (section of belt material) m 2 T 0 テール端部での負荷がかかる地点でのその Min 張力 (minimum tension at end of load zone) dan T 1 ベルトを引き込む側の張力 (tension of input side) dan T 2 ベルトを送りだす側の張力 (tension of output side) dan T 3 テール部の張力 (tension of idler side) dan T g 重錘プーリの重さがかかる地点での張力 (tension on belt at the point of counterweight connection) dan T max ベルトに最も負荷がかかる地点での張力 (tension on belt at the point of highest belt stress) dan Tu max ベルトの mm 当り Max 張力 (unitary maximum tension of belt) dan/mm Tx 任意地点 x でのベルト張力 (tension of the belt at a considered point) dan Ty 任意地点 y でのベルト張力 (tension of the belt at a considered point) dan v ベルト速度 (belt speed) m/s V 両端ベルト面の Max 曲り長 (maximum rise of edge of belt) mm W 抵抗モーメント (module of resistance) mm 3 α プーリ巻付角度 (angle of wrap of belt on pulley) degree α a 回転左右対称シャフトの傾斜度 (inclination of rotating symmetrical shaft) rad β 側角 (angle of overload) degree γ ホッパー受面の傾斜角度 (angle of screen inclination) degree σ 上り傾斜コンベヤの勾配角度 (inclination of conveyor) degree λ キャリアセット傾斜角 (inclination of side roller of troughing set) degree λ 1 キャリアセット内側ローラ傾斜角 (inclination of intermediate roller of troughing set)degree = 注記 :5 槽の ガーランド 吊下キャリアなどの場合の中央ローの外側にあるローラ = λ 2 キャリアセット外側ローラ傾斜角 (inclination of external roller of side roller) degree= = 注記 :5 槽の ガーランド 吊下キャリアなどの場合の両端外側にあるローラ = η 伝達効率 (efficiency) --- ψ ベアリングのたわみ角度 (angle deflection of bearing) degree
7 4 1.3 Technical characteristics of belt conveyors ( ベルトコンベヤの技術特性 ) ベルトコンベヤの機能は 粉や石のようなバラ物 ( bulk ) を連続して搬送する事にあります その搬送するバラ物原材料が均質であれ 或いは 大小入り混じった状態であれ搬送に影響はなく 又 コンベヤの機長は数メートルから 10 キロメートルに至るものまで様々です ベルトコンベヤの主要構成パーツの一つはゴムベルトで このゴムベルトには二つの機能があります - 搬送原材料を包み込む機能 - そのベルト上の搬送物を動かすに足る力を伝達する機能 ベルトコンベヤはベルト上に積載された搬送物を連続して移送するように設計されたものです ベルト 払出ホッパー 載込ホッパー インパクトキャリアセット キャリアセット テールプーリ リターンセット 駆動プーリ ベルトコンベヤの基本構成図 ベルトコンベヤのベルト積載面は 行きのキャリア側では上になり 返りのリターン側では下となって ベルトはコンベヤフレームに取り付けられたキャリア架台 / リターン架台のローラの上を順次回転します そして コンベヤの両端部ではベルトがプーリを包みこむように回り 片方のプーリはモーターとジョイントして動力をベルトに伝えます ベルトコンベヤに対比される他の搬送手段としては 例えば 大型トラックがありますが それと比較するとベルトコンベヤには次のような利点があります - 作業に従事する人が少なくてすむ事 - 消費エネルギーが少なくてすむ事 - コンベヤシステムが周りの環境から独立している事 - ビジネスにかかるコストを低く抑える事ができる事

8 大容量のベルトコンベヤの場合 大型トラック等の搬送手段と較べると 40~60 % のコストセービングができます 5 ベルトコンベヤに使用される機械部品や電気機器 例えば ローラとかプーリ 又 軸受 それからモーターと云ったものは 現在 最高の製造技術で作られています その品質レベルは主要企業の企業努力に依って行きつくところまで行った感があり 品質は保証され長寿命になっています コンベヤの主要なパーツ部品と云えばローラ及びベルトで 設計及び据付が完璧ならメンテナンスはほとんど必要ないはずです ゴムベルトは必要時或いは特別な場合にのみメンテナンスをすれば用が足ります それはローラも同じで ローラはベアリングを守るシールが施されており ベアリングの給油は必要ない無給油仕様になっています 故に ラルメカ社の高い品質と最先端のテクノロジーは ローラに対するメンテナンスについてのコンベヤ業界の常識を今後大きく変えるかもしれません ちなみに 駆動プーリのゴムラギングは少なくとも 2 年の寿命を保ちます 載せ込み 或いは 払い出しのヶ所での適切なベルトの " クリーンニング " は 取付する経費とはさほどのものではありませんが きちんと " クリーング " をするとしないでは コンベヤの円滑な稼働に大きな影響を与えます こうした " クリーンニング " をするしないと云ったファクターは 結果として ランニングコストに直結しますが これはコンベヤ条件がハードな掘削の現場とかトンネル工事でその差が顕著に現われます ベルトコンベヤはその傾斜角が 18 度以内の普通の上り傾斜のコンベヤならスムースに搬送物を積載し 又 下りのラインであれば電力を逆に得る事も可能です ちなみに ベルトコンベヤのプロジェクトにあっては コンベヤ総長で 100 km に達し その中の一つのコンベヤで 15 km に及ぶ実例があります ベルトコンベヤのフレキシビィティ 即ち 柔軟な対応性を利用し 且つ ベルトコンベヤの強みと経済性を生かし ベルトコンベヤは粉 砂等のバラ物を搬送する実際的なソリューションとして活躍しています この分野で日々行われている技術革新は 更なる利便性を我々に提供してくれるにちがいありません

9 6 以下の各図は ベルトコンベヤの典型的な事例を図式化したものです 図 2-1 水平のベルトコンベヤ事例 図 2-5 水平及び傾斜のベルトコンベヤで コンベヤを二つに分ける事が採用された事例 図 2-2 水平のベルトコンベヤで上り傾斜がある事例で設置空間に上りを許容する空間があり単一の駆動が求められた事例 図 2-6 水平部分及び上り傾斜部分があるベルトコンベヤで 単体コンベヤにする設置空間が無く 且つ 負荷の面で二つのコンベヤが必要と判断された事例 図 2-3 上り傾斜で搬送し次に水平部分があるベルトコンベヤで単一駆動が求められ 且つ それが可能な設置空間がある事例 図 2-7 水平部分がある単一のベルトコンベヤで しかも 上りか下りを伴う傾斜を含むベルトコンベヤの事例 図 2-4 上り傾斜部分及び水平部分があるベルトコンベヤで 単体コンベヤにする設置空間が無く 且つ 負荷の面で二つのコンベヤが採用された事例 図 2-8 上りか下り傾斜の途中で荷が積載されるベルトコンベヤ事例
10 7 1.4 Components & their sizing ( ベルトコンベヤ構成部品 & そのサイズ ) 下図 3 のイラストは典型的なベルトコンベヤを描き コンベヤを構成する主要なパーツを示したものです 実際には コンベヤの用途によってコンベヤ毎に違いがあり 例えば荷の載せ込み場所や引き出し場所での在り様は各コンベヤでに実に様々ですし 又 上り傾斜 / 下り傾斜のあり様も一様ではありません そして 付属機器を付けるか付けないかも 各コンベヤに依って異なります 駆動の伝達一般にはこれまでの減速機に依る駆動方法が普通ですが モータープーリに依る駆動方法もあります - 従来の減速機に依る駆動ベルトへの駆動伝達を構成するのは 駆動プーリ及びテールプーリで 駆動プーリの直径はベルト上の負荷如何によってその大きさは決まり テールプーリはそれに準じます 動力は直接のカップリングに依る減速機の動力伝達か或いは平行シャフト駆動に依る駆動伝達方式となります - モータープーリに依る駆動モータープーリの場合 モーター ギヤ ベアリング等がプーリ管体の中に入り 外部から保護される設計になっていて 動力をベルトに直接伝達します モータープーリは従来の駆動方法と異なり モーターやスプロケット / チェーンと云った外部に設けるものが全部管体に収まっているので 安全で場所を取りません 今日 モータープーリは外径で 1000 mm 出力で 250 kw まで製品化され その動力伝達効率は最高で 98 % の高伝達効率を達成している機種もあります 載込ホッパーキャリアセット自動調芯キャリアセット雨カバー角度任意調整キャリアセット 駆動プーリ クリーナー プレッシャー リターンセット プーリ スナッブプーリ テールプーリ V 型スクレーパー 自動調芯リターンセット 懸垂付テンションプーリ
11 スナッブプーリ 8 駆動プーリ従来の駆動方式の場合であれ モータープーリに依る駆動方式であれ プーリ管体の表面は管体そのままか 或いは 一定の厚みを伴ったゴム板で被覆されている管体で設計され 計算された動力をベルトに伝達します プーリ管体のゴムラギングは 魚の骨の形のようなダブルヘリカルと呼ばれる左右対称斜溝のゴム被覆か ベルト走行方向と直交する横溝のスーパーと呼ばれるゴム被覆か 或いは ダイヤモンドパターン形のゴムを被覆する場合があります いずれも ベルトとプーリ間の摩擦を増す目的とプーリ表面に付く雨水を逃す目的の為に施されるものです プーリの直径はベルトの種類及びその強度等の側面と 又 プール表面の摩擦力をどう設定するかで決まります テールプーリテールプーリは特別の場合を除き 通常 ゴム板で被覆を施す必要は通常ありません そして テールプーリの直径は 駆動プーリより小さく設計されます ベンドプーリ & スナッブプーリこれらのプーリは ベルトの巻き付け角度を増す為とベルト進行方向を変える必要から設けられるもので 重錘を伴うテンションプーリのような事例や可動式のアンローダーの事例も このプーリに含まれます ローラベルトを支え 荷が載った状態のベルトを円滑 且つ 容易に動かす事が出来るようにするのがローラの役目です ローラはベルトコンベヤを構成する最も重要な部品の一つで コンベヤの総体コストに大きな影響を与えます 計画するコンベヤに相応しいローラの径や規格を選定する作業は 稼働した際のプラントの効率に大きく影響し 又 建設コストにも大きく左右します キャリアセット & リターンセットキャリアローラは 普通 溶接架台に組み込まれて使用され 架台はコンベヤフレームに跨るように組み付けて使用されます 両端ローラの傾斜角は普通 20 ~ 45 ですが " ガーランド " の吊下式なら 60 も可能です リターンローラは 1 本のローラでベルトを支えるか 或いは 2 本で傾斜角 10 で V 字型を構成してベルトを支えるタイプが一般的な設計です 尚 搬送する原材料に依っては ローラを同じ長さで作らず左右対称の架台形状にしないで 搬送物に合わせた設計をするキャリアセットもあります テンション ( 緊張 ) 装置
12 ベルトを駆動プーリに接触させて必要な伝達力を保持させる為にテンション装置は使用されますが その方途は スクリュー テークアップ方式であったり 重錘式テークアップ 9 方式であったり 或いはウインチに依る巻き取りテークアップ方式であったりと様々です 重錘式のテークアップですと ベルトの張り状態如何に関係なくベルトへのテンションがコンスタントに得られる利点があります 設計にあたってのテンションプーリの重さはベルト張力の Min 必要張力を備え 且つ ベルトの過度の緊張状態の避ける重さとなります テンション装置の Min 許容移動距離値については 帆布ベルトの場合はコンベヤ機長の 2 % を超えないように設定する事 又 スチールコードベルトの場合はコンベヤ機長の 0.5 % を超えないように設定する事が必要です ホッパーホッパーの設計にあたっての留意点は 荷のスムーズなホッパーへの移行と その際の衝撃を出来るだけ吸収し 荷がホッパー内で閉塞しないようにすると共に ベルトに損傷を与えないようにする事です つまり 搬送物がホッパーに連続して入ってきたら支障なく受け入れ 一定に滞留させながらも円滑に払い出しができるように設計します ホッパーの傾斜角度は 搬送物自体の自然に流れ出る角度に依って 及び そのコンベヤの速度との関連に依って決まります 又 塊状の大きさとその比重 そして 含湿の程度とか腐蝕性の程度と云った物性特性は その設計に影響を与えますのでそうした要素も考慮して設計します クリーナーどのようなクリーナーを採用するかは それに依ってメンテナンスの頻度に大きな影響を与えるので充分な考察が必要です 増して 搬送物が湿度を多く含むものであったり 粘り気のあるものだったらなおさらです 効果的なクリーナーの採用は円滑なコンベヤの稼働を助け 生産性の増大に寄与します 市販のクリーナーにはいろんなタイプがあり デザインも多様です 最もシンプルで簡素なクリーナーは ベルトと 90 直交型のストレート型のスクレーパーでゴムのクッションが付いたクリーナーです ( ラルメカローラ総合カタログ 5 章を参照ください ) 雨カバーコンベヤを覆う雨カバーは ベルトコンベヤの搬送物を雨などの大気環境から守り 且つ 要望される作業環境を保つ必要がある場合には必須なコンベヤ構成部品で 設計の際に忘れてはならない部品の一つです ( ラルメカローラ総合カタログ 6 章を参照ください )



13 Project criteria ( 設計基準 ) ベルトコンベヤを設計するには 最も相応しいコンベヤシステムを選択して合理化すると共に その構築物の特徴についてよく理解し そのコンベヤの構成部品に至るまで 種々の特性を充分理解しておく事が大切です ベルトコンベヤの規格やサイズを選択する際に影響を与える主なファクターには 要求される搬送容量 搬送物の種類 粒度 / 塊状特性 及び 搬送物自体の化学的 物理的特性といった要素があります 又 揚程を含めたコンベヤ敷設条件もそれに関連して重要です この項に於いて 以下の各項目に沿って 図解と表を含めた説明で 必要ベルト速度やベルト幅 キャリアローラやトラフ架台の形式や種類の選定 そして プーリの仕様に至るまで 計画するコンベヤの概要を順次確認しつつ その要点を把握する事ができます


 尚 側角は安息角より角度が低くなります 表 1 は")

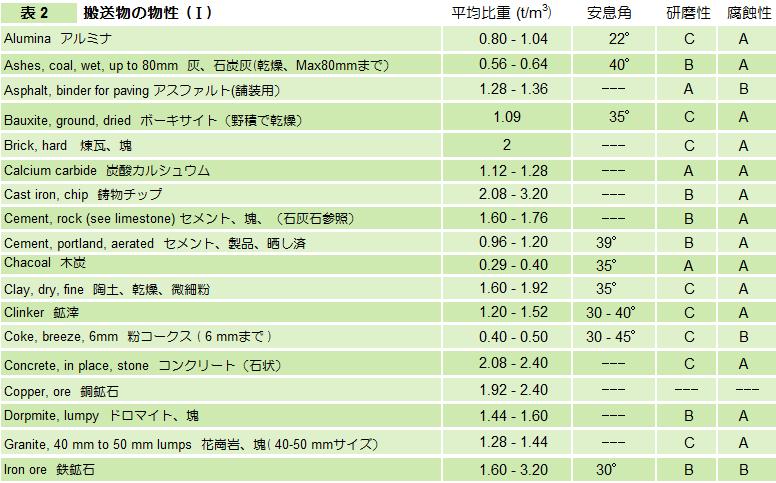
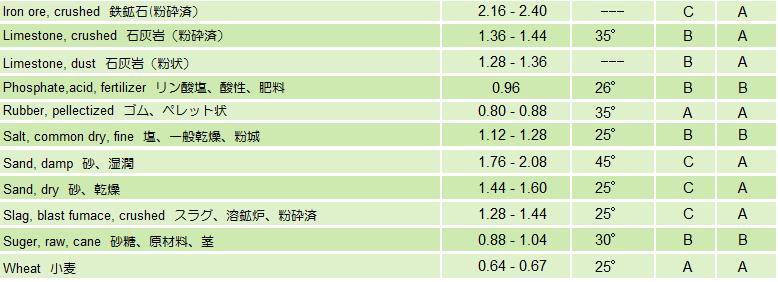
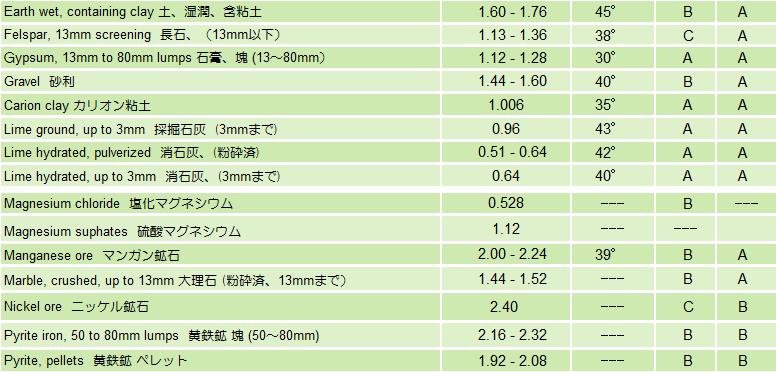
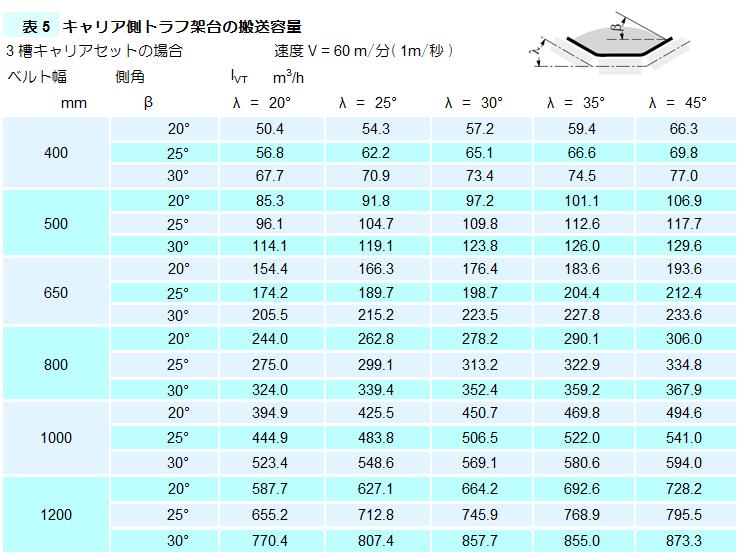
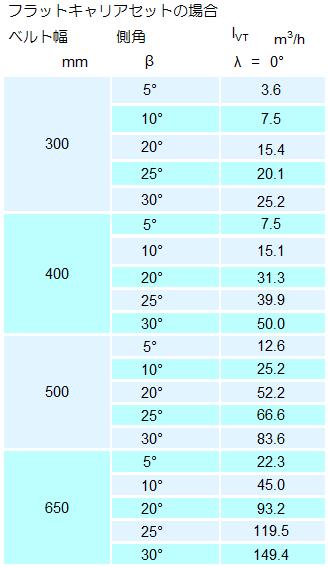
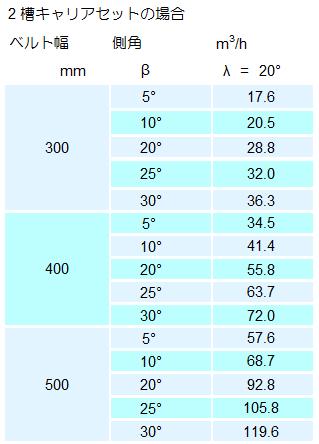
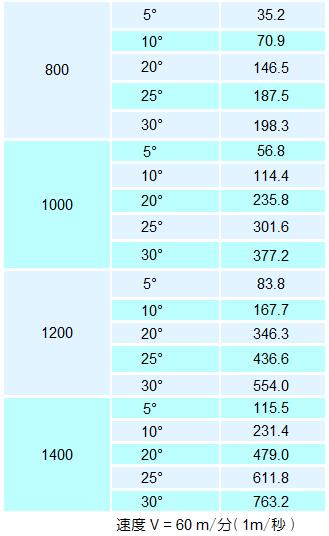
14 搬送物特性ベルトコンベヤの設計にあたっては まず 搬送物特性の理解が必要です 特に 図 4. 5 に示すように 当該搬送物が持つ安息角 及び 側角がどのような形状になるかの分析から始めます 図 4 搬送物が持つ安息角とは その物性が持つ 自然の摩擦角度 として知られているものですが 図 4 のように その搬送物を落下させた際に 地面に自然に形づくられる形状の角度を言います 側角とは 図 5 のように 動いているベルトコンベヤ上で搬送物が自ずと形づくる形状の水平面からの角度を言います この角度はおおむね 5 から 15 の間です ( 搬送物に依っては 20 になる場合があります ) 尚 側角は安息角より角度が低くなります 表 1 は 搬送物の形状特性と安息角との関係性を示します コンベヤ上の搬送物は 図 6 の断面図のような形状で運ばれます 図 5 図 6 図 "S で示される部分の断面積は 幾何学上 A 1 と A 2 の合計で計算できます その搬送断面積 S は 次の公式から容易に導く事ができます l VT =コンベヤ速度 1m / 秒 ( 60m/ 分 ) 当りの理論搬送容量 ( 表 5 参照 )
15 12

16 ベルト速度バラ物搬送分野に於けるベルトコンベヤの Max 速度は 数年前には考えられもしなかった速さになっています 極めて早い速度の達成は 搬送能力の増大をもたらしました その事は コンベヤのメートル当りの搬送重量を小さく設計しても同量の搬送能力が得られる事を意味し 従って ベルトやローラ & 架台のサイズを小さく出来る事から コンベヤのトータルコストを抑える事が可能になりました 最適ベルト速度を選定するにあたり 最も留意すべき事柄は搬送物の物理的特性です 軽量の搬送物 例えば 穀類或いは鉱物粉塵 / 微細分といったものは 高速で運ぶ事が可能です " ふるい にかけられたり 選別された原材料は 480 m / 分 ( 8 m / 秒 ) 以上の速度での搬送が可能です とは言え 搬送物が塊状で大きい場合や 研磨性ある原材料 或いは 極めて重い質量物の搬送物の場合には コンベヤ速度を設計値より遅くする考慮が必要です 又 塊状の原材料で 一次破砕していないとか 或いは まだ ふるい にかけていない段階で塊状が残る物の搬送については 90~210 m/ 分 ( 1.5~3.5 m/ 秒 ) の範囲で運ぶ必要があります コンベヤでのメートル当りの搬送能力の計算については 次の公式が使われます q G = 1M 当りの搬送物重量 [ Kg ] l V = ベルト搬送能力 [ t/h ] V = ベルト速度 [ m/ 秒 ] 尚 q G は接線力 ( tangential force) Fu を求める際に使われます 速度を増す事が出来れば 当然ながら 搬送能力 ( l V ) を増す事ができ その事はベルト幅を小さく出来る事を意味しています ( もちろん コンベヤフレームの構造もシンプルになります. ) 同様に 速度が増せば メートル当りの搬送能力は小さくてもよい事になりますから ベルト張力を減じたり ローラやキャリア架台のサイズや規格を小さくする事が可能になります とは言え ベルトの負荷を考えて一廻り幅広のベルトを使用すれば 高速であれ低速であれ 搬送物の荷こぼれを少なくする事ができ 又 搬送物の傷みやホッパー下の搬送物がつまる確率を減らせる等のメリットが生じます 表 3 は経験値から導かれた 搬送物物性 塊状サイズ 及び ベルト幅の観点から整理した推奨 Max ベルト速度との相関表です

 をベルトに与えます このように ベルトの耐用年数と速度は反比例の関係にある事も考慮に入れて Max")
17 Max ベルト速度を決定するには 以下の様な事柄も併せて考慮に入れる事をおすすめし ます 14 例えば 傾斜ベルトから荷が離れる時 その傾斜角が大きければ大きい程 ベルト上で荷が回転するように動いて不安定要因が増します この現象はベルト表面の早期摩耗を招く要因となりますから Max ベルト速度を決定するにあたり その速度を減じる処置を施した方が良いと云う事になります 又 ベルト上での研磨性のある荷の搬送中の不断の揺れは ホッパー下などでは特に大きな負荷 ( 損傷 ) をベルトに与えます このように ベルトの耐用年数と速度は反比例の関係にある事も考慮に入れて Max ベルト速度を決定します
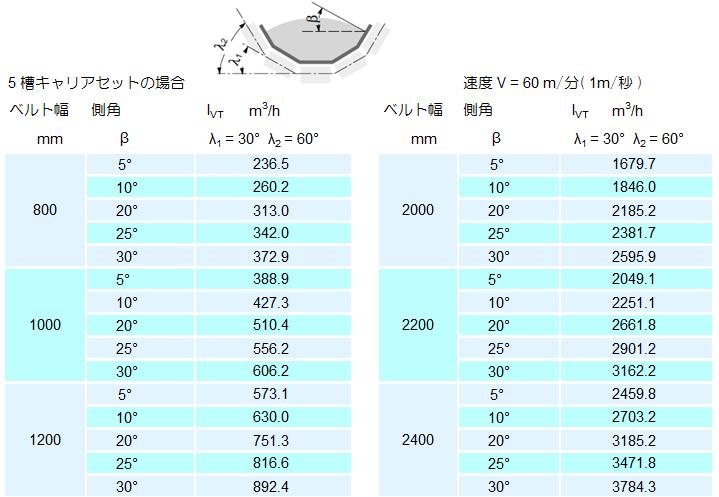
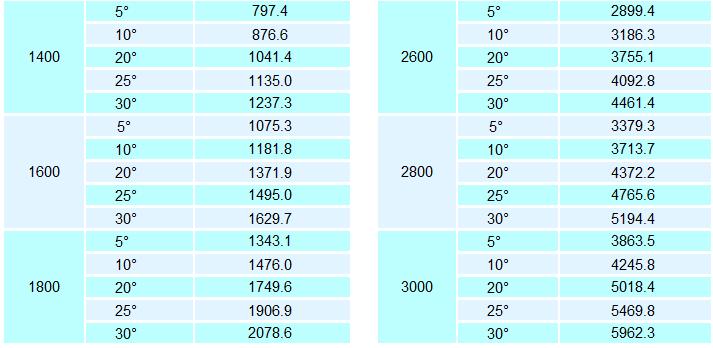
![15 1.5.3 ベルト幅前項の表 3 から得られた最適ベルト速度が決まれば 次に 計画しているコンベヤのベルト幅は そのコンベヤの搬送能力をどう設定するかによって決まります それは 以下に示すように 搬送容量 (l M) は L VT [ m 3 /h ] で表される 60m/ 分 ( 1m/ 秒 ) 当りの理論搬送容量から求めます 尚](/docs-images/116/219272217/images/18-0.jpg "キャリアセット両側のローラの傾斜角度 ( 20 ~45 ) は 以下の図 7 のキャリアセット傾斜角に基づきます 図 7 各ベルト幅に於ける 1M 当りの理論搬送容量 ( l VT ) は 側角が理論上の Max 値と同じであれば その理論値の搬送容量と同じです 荷が載った状態を想定してのキャリア架台の角度は トラフ角度が示すベルト幅毎の搬送容量をもって")

18 ベルト幅前項の表 3 から得られた最適ベルト速度が決まれば 次に 計画しているコンベヤのベルト幅は そのコンベヤの搬送能力をどう設定するかによって決まります それは 以下に示すように 搬送容量 (l M) は L VT [ m 3 /h ] で表される 60m/ 分 ( 1m/ 秒 ) 当りの理論搬送容量から求めます 尚 キャリアセット両側のローラの傾斜角度 ( 20 ~45 ) は 以下の図 7 のキャリアセット傾斜角に基づきます 図 7 各ベルト幅に於ける 1M 当りの理論搬送容量 ( l VT ) は 側角が理論上の Max 値と同じであれば その理論値の搬送容量と同じです 荷が載った状態を想定してのキャリア架台の角度は トラフ角度が示すベルト幅毎の搬送容量をもって 選定します 一昔前のキャリアセット両側のローラ傾斜角度と云えば それは 20 と決まっていました しかし 今日 コンベヤ構造の進化とベルトの原材料の改善で キャリア側両端のローラ傾斜角度は 30 ~ 35 とするのが普通となりました 従って ベルトが鋭角に曲がるようになり 40 ~ 45 のような急角度の事例も見受けられる昨今です ちなみに 実際のキャリア架台の角度選定及び設計にあたっては Min ベルト幅をもって欲する搬送能力を達成する事が最も経済的な事は云うまでもありません 尚 ベルト幅の選定及び計算に際しては 表 4 に示すようなベルト破断強度とキャリアセット側角の相関性もって Min ベルト幅を選定します そして 更に 混載の大塊の搬送物 或いは 貴重な原材料が そのベルト上に載って運ばれていく際に 荷こぼれ

![搬送容量 [ m 3 /h ] qs = 当該搬送物比重 故に これから次の公式も導かれます 尚](/docs-images/116/219272217/images/19-1.jpg "この場合の搬送容量は 速度が 1 m/ 秒 ( 60 m/ 分 ) 当りの数値になります")
")
19 しないだけの充分なベルト幅であるかどうかを 今一度 確認します 16 搬送容量 l M ベルト上での搬送容量は次の公式で導かれます l V = ベルト搬送能力 [ t/h ] l M = 搬送容量 [ m 3 /h ] qs = 当該搬送物比重 故に これから次の公式も導かれます 尚 この場合の搬送容量は 速度が 1 m/ 秒 ( 60 m/ 分 ) 当りの数値になります 計画するコンベヤ物件で必要とされる搬送容量 ( l M ) を満足するベルト幅は 表 5 を用いて選定できます 諸表は ベルト速度 ( 1 m/ 秒 ) 条件下での搬送物側角及びローラ傾斜角の違いに依る搬送容量を示します
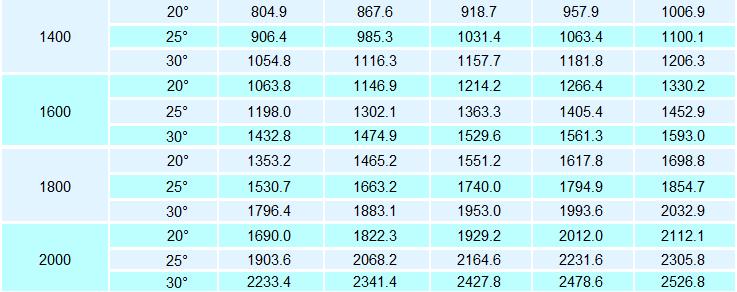

20 17 任意の速度での搬送容量を得るには次の公式を用います
21 18

22 任意速度での搬送容量を得るには次の公式を用います 19 任意速度での搬送容量を得るには次の公式を用います
![20 コンベヤ傾斜角と搬送物払い出しの観点からの搬送容量の修正傾斜角のあるベルトコンベヤの場合 搬送容量 ( l VT )[m 3 /h] を 次のように修正します l VM = 1 m/ 秒 ( 60 m/ 分 ) 当りのコンベヤに於いて 傾斜角度及び払い出しに頻度が一定か不規則かで修正される修正搬送容量 [ m 3 /h ] K = コンベヤ傾斜係数 K 1 =](/docs-images/116/219272217/images/23-0.jpg "払い出しが一定か不規則かで修正される係数 傾斜係数 K は 上り傾斜で搬送物が運ばれる場合 傾斜角度に依って荷のすべる量が異なり 従って その搬送容量を減じる必要があるので用います 図 8 の曲線は 当該ベルトコンベヤの傾斜角度が何度かをもって その傾斜係数 K の値を示したものです 但し 言うまでも無く 水平コンベヤの場合は この係数を考慮する必要はありません 図 8")
23 20 コンベヤ傾斜角と搬送物払い出しの観点からの搬送容量の修正傾斜角のあるベルトコンベヤの場合 搬送容量 ( l VT )[m 3 /h] を 次のように修正します l VM = 1 m/ 秒 ( 60 m/ 分 ) 当りのコンベヤに於いて 傾斜角度及び払い出しに頻度が一定か不規則かで修正される修正搬送容量 [ m 3 /h ] K = コンベヤ傾斜係数 K 1 = 払い出しが一定か不規則かで修正される係数 傾斜係数 K は 上り傾斜で搬送物が運ばれる場合 傾斜角度に依って荷のすべる量が異なり 従って その搬送容量を減じる必要があるので用います 図 8 の曲線は 当該ベルトコンベヤの傾斜角度が何度かをもって その傾斜係数 K の値を示したものです 但し 言うまでも無く 水平コンベヤの場合は この係数を考慮する必要はありません 図 8 搬送容量の計算にあたっては 大方の場合 ベルトコンベヤの払い出しの状況について考慮する必要があります 即ち 搬送は常に行われているのか 或いは 不規則なのかでその搬送容量は変わってくるからです そのファクターを係数 K 1 とし その状態如何を次に示す係数を選択して乗じ その搬送容量を修正します K 1 = 1 常時 連続した払い出しが行われているコンベヤの場合 K 1 = 0.95 不規則な払い出しが行われているコンベヤの場合 K 1 = 0.90 ~ 0.80 頻繁に不規則な払い出しが行われているコンベヤの場合 従って 計画する速度での搬送容量 (l M) は 上記の修正搬送容量にその速度を乗じた容量となります 尚 一連の計算の結果として導かれたベルト幅は そのベルトの幅と搬送物の Max 塊サ
24 イズを比較して そのベルト幅が搬送物 Max 塊サイズより広い事を確認します ベルト幅 Max 塊サイズ [mm] ローラを保持するトラフ架台 据付ピッチ 及び 移行間距離 その種類ローラをしっかり固定し保持するトラフ ( 角度付 ) 架台には下図 9 のようにさまざまな種類があり 又 その他 " ガーランド と呼ばれる下図のようなローラを繋ぎ 吊り下げて保持するタイプもあります トラフ架台には 機能が異なる二種類があり 一つはキャリア側に使われる荷が載ったベルトを支えるトラフ架台と 返りの空荷のベルトを支えるリターン側の架台があります キャリア側のトラフ架台には 一般に 次のような組み合わせがあります ( 下図参照 ) - 1 本ないし 2 本のキャリアローラが水平に置かれる組み合せのキャリアセット - 2 か 3 本 ないし 複数のキャリアローラが角度を以て設置される組み合せのキャリアセット リターン側の架台には 一般に 次のような組み合わせがあります ( 下図参照 ) - 1 本ないし 2 本のリターンローラが水平に置かれる組み合せのリターンセット - 2 本のリターンローラが角度を以て設置される組み合せのリターンセット キャリア側に使用するトラフ架台 リターン側に使用する架台 - フラットキャリア架台 : ローラ / インパクトローラで構成 - リターン架台 : ローラ / ゴム付ローラで構成 - 2 槽用架台 : ローラ / インパクトローラで構成 - 2 槽用架台 : ローラ / ゴム付ローラで構成 図 9-3 槽用架台 : ローラ / インパクトローラで構成




25 同じ長さの 3 本のローラをしっかり固定しベルトを支える架台は 負荷を均等に分散させます キャリア側架台の両端のローラの傾きは 20 ~ 45 で ベルト幅で 400W ~ 2200W 或いは もっと幅広のベルトを支えます 22 " ガーランド の呼称のある吊り下げ形式の 吊下キャリアセット は ホッパー下の衝撃を吸収するローラとしてインパクトローラとの組み合わせで普通使われます 又 搬送容量が大きなコンベヤや高速コンベヤの場合 " ガーランド は キャリア側及びリターン側の双方でよく使われます ガーランド と呼称される吊下式のハンガー架台 - 3 槽吊下式キャリア : ローラで構成 - 2 槽吊下式リターン : ローラ / ゴム付ローラで構成 図 10-5 槽吊下式キャリア : ローラで構成 トラフ架台は おおむね 世界共通として統一された規格寸法で設計され製作されています 尚 各架台のイラストは 一般的で代表的な事例を示したに過ぎません 計画するコンベヤに於いて 最もふさわしい架台をどう選択するかは ( もちろん それはベルト & ローラ間の摩擦がどのくらいかを計算する必要がありますが ) ベルトのスムースな始動及び走行が どの架台のタイプで最もベストかと云う観点で決めます 正逆するコンベヤに使用するキャリア側トラフ架台については 図 11 のようにベルトの進行に対し方向と直交 90 がきちんと取れているかどうかが重要です 正逆コンベヤの場合 図 11



26 23 一方方向のみで動かすコンベヤではベルトの進行方向に対し 図 12 のように 前向きに 2 傾かせて設置すると 片寄りしたベルトが中央に戻ろうとする働きが生じ ベルトの蛇行対策として効果があります 一方方向のみ走行するコンベヤの場合 図 12 図 13 トラフ架台はベルト走行に平行してきちんと 取付しないと蛇行の要因となります トラフ架台の据付ピッチトラフ架台の据付ピッチは ベルトコンベヤのキャリア側 ( a o ) で 1 メートル リターン側 ( a u ) で 3 メートルが最も一般的な据付ピッチです 図 14 トラフ架台と隣接するトラフ架台の間のベルトの " たわみ " はその据付ピッチの 2 % を超えてはなりません 大きなベルト " たわみ " は 搬送中の荷こぼれを引き起こすだけでなく 搬送中の荷の " あおり " が生じる事でベルトに過度の摩擦負荷がかかります この事は 動力の消費増大を招くだけでなく ローラにとっても大きな負担になり 又 ベルトにとっては ベルト表面の摩耗が全面にわたって早期に生じる事になります 表 6 はトラフ架台の Max 据付ピッチを ベルト幅と搬送物比重の観点で示したもので この表を活用してもらう事で ベルト " たわみ " を最小にする指標が得られます ピッチを基に作られたこの表は 同じく ローラにとっての搬送許容重量の限界値を示します

27 尚 荷の載せ込み位置でのトラフ架台の据付ピッチは 載せ込み位置でのベルト " たわみ " を許容出来る範囲に抑える為 普通 通常の据付ピッチの半分かそれ以下の短いピッチにします 24 又 " ガーランド タイプの吊下式の Max ピッチの選定にあたっては 図 15 のように荷の搬送途中の通常の揺れの状態に於いて 隣接する " ガーランド と接触しないよう据付ピッチを選定する必要があります 図 15 移行間距離 Lt コンベヤのヘッド / テールプーリと最も隣接するキャリア架台との距離は 図 16 のようにベルトが曲がった状態から平になる距離で " 移行間距離 " Lt です 図 16

28 チールベルトでの推奨移行間距離この " 移行間距離 " をベルトが移動する間に ベルトは上図のように キャリア架台の両端ローラに沿っての傾いた状態からのプーリ表面地点での平の状態まで徐々に姿を変えつつ移行します 25 この " 移行間距離 " の間 ベルトはキャリア側トラフ架台の両端ローラの角度に沿って 曲がった状態から プーリの処では水平になるように傾斜角を下げつつ変形していくので ベルトの両端に於いて 殊に過度の負荷がかかります この " 移行間距離 " Lt が キャリア側トラフ架台の据付ピッチよりも長い場合には その角度を徐々に任意に減らせる トランジション架台 と云う両端ローラ角度を任意に変角が出来る架台があり それを用いると便利です このような対策を施す事で ベルトの摩耗や疲労を防ぎつつ 角度ある処から平になる処まで徐々にベルトを減角させます 下図 19 のグラフは " 移行間距離 Lt を選定する際に使用するグラフで ベルト幅と ローラ両端の角度との関連性をグラフ化したものです 尚 ベルトは帆布 EP ベルト ( ポリエステル ) の場合と スチールベルト ST ベルト ( スチール ) の場合の両方で示してあります 例えば 帆布 EP ベルトで ベルト幅 1400 W 角度 45 のキャリア側トラフ架台の場合 その推奨 " 移行間距離 " は グラフから 3 メートルになる事が解ります " 移行間距離 図 19 帆布ベルトでの推奨移行間距離スLt Lt ベルト幅 mm
 のがベルトに負担をかけない据付になります ( 図 17.")
29 26 この事例の場合 推奨 " 移行間距離 Lt は 3 メートルですから 2 台のキャリア架台を据え付け そのうちの 1 台は角度 15 度のキャリア架台を付け もう 1 台は角度 30 度の架台を 1 メートルの据付ピッチで取り付けて角度を徐々に上げる ( 下げる ) のがベルトに負担をかけない据付になります ( 図 参照ください ) 図 17 図 18
 を求める事が必要です - 5 以上の上り傾斜のある場合の必要とされる力 - 下り傾斜がある場合のその機長と必要とされる力 - 図 20")
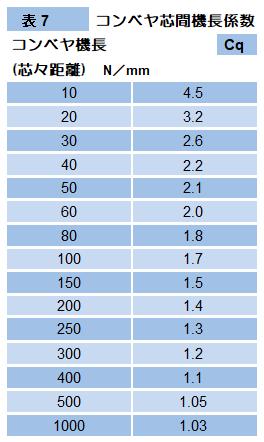
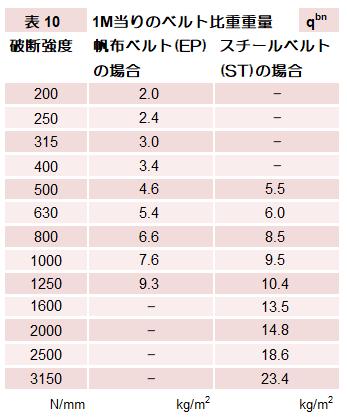
30 接線力 動力 従動抵抗 ベルト重量 テンション そして そのチェックコンベヤの駆動力の大きさ如何はコンベヤ機長に依って決まります 又 そのコンベヤの必要とされる動力を計算するには 下記留意項目のコンベヤ特性 (Max 値 ) を求める事が必要です - 5 以上の上り傾斜のある場合の必要とされる力 - 下り傾斜がある場合のその機長と必要とされる力 - 図 20 に示すような上り下りがある場合のその必要とされる力 総接線力 [ Total tangential force ] ( Fu ) 総接線力 ( Fu ) を求めるには 駆動プーリの設置位置でのその値を最初に求めます 総接線力は以下の項目の摩擦抵抗値の合計以上の力が必要です - 荷が載った状態でベルトを動かす事が出来る力 : 即ち 各プーリ及びキャリア & リターンローラの総摩擦力を抗してベルトを動かすに必要な力 - 荷を水平移動させるのに必要な ローラ類の抵抗に抗してベルトを動かすに必要な力 - 荷を求められる揚程まで持ち上げるのに必要な力 ( 但し 下り傾斜の場合には 逆に 駆動を助ける力となります ) - 付帯機器に依る摩擦で発生する二次的な抵抗力 ( トリッパー / クリーナー / スクレーパー / ゴム スカート / 反転機器 etc) 駆動プーリ地点での総接線力 ( Fu ) は次式で求められます 注記 : 下り傾斜コンベヤでは 式の ± はマイナスを採用します L = コンベヤ芯間機長 [ 単位 :m]( ヘッド / テールプーリ芯々間距離 ) Cq = コンベヤ機長に依る抵抗係数 : 表 7 参照 Ct = 環境温度に依る抵抗変動係数 : 表 8 参照 f = ローラ回転部 & 搬送物 / ベルト間の摩擦係数 : 表 9 参照 q b = 1M 当りのベルト重量 [Kg/m] : 表 10 参照 q G = 1M 当りの搬送物重量 [Kg/m] H = ベルト揚程 [ m ] q RO = 1M 当りのキャリア側回転部分の重量 [Kg/m] : 表 11 参照 q RU = 1M 当りのリターン側回転部分の重量 [Kg/m] : 表 11 参照
 Fa = 上り傾斜部分の接線力 Fr = 下り傾斜部分の接線力 出力 [ Driving power/ absorbed power ] ( P ) 出力 ( P ) を求めるには")

31 28 図 20 のような上り下りするコンベヤの張力は 上りコンベヤの接線力 (Fa ) と下りコンベヤの接線力 ( Fr ) の総和からその張力を求めます ( 次式参照 ) 図 20 Fu = ( Fa 1 + Fa 2 + Fa 3,,,,, ) + ( Fr 1 + Fr 2 + Fr 3,,,,, ) Fa = 上り傾斜部分の接線力 Fr = 下り傾斜部分の接線力 出力 [ Driving power/ absorbed power ] ( P ) 出力 ( P ) を求めるには まず駆動プーリのベルト間の摩擦力 及び コンベヤ速度 ( V ) とモーターの伝達効率 ( η ) を考慮して Min 出力を次式から求めます 間接的影響間接的影響と云うのは 当該ベルトコンベヤの機長 当該コンベヤ環境の雰囲気温度 当該コンベヤ速度 当該コンベヤのメンテナンスの良し悪し 当該コンベヤのクリーン度 当該搬送物の流動性や摩擦抵抗値の程度 及び 当該コンベヤのキャリア架台の傾斜角度と云ったベルトコンベヤに及ぼす間接的な影響を指し そうしたファクターを係数化して ベルトコンベヤの設計にあたっての計算に組み込み反映させます


32 29 メートル当りのベルト重量 q b ベルトの総重量はベルトの表層と裏層の部分が約 1.15 Kg/m 2 の重さなので それにベルトの芯体部分の重量 ( 表 10 ) を加える事で求められます
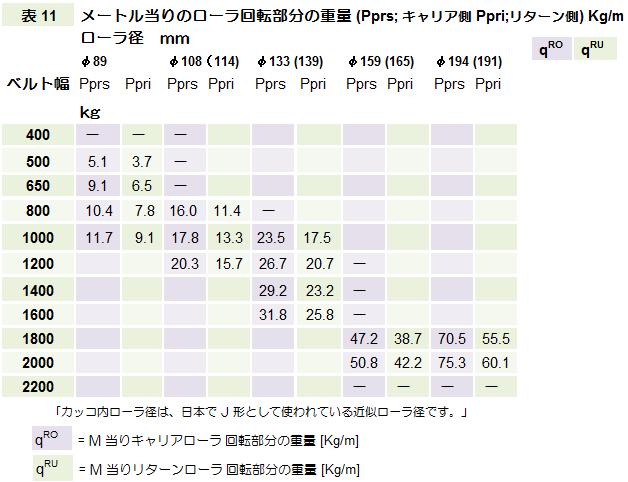

33 又 表 11 ではキャリア側及びリターン側のローラの回転部重量のおおよその重量が示し てあります 尚 キャリア側及びリターン側のローラ回転部重量は次式から求める事ができます 30 Pprs = キャリア側ローラの回転部重量 [Kg] a o = キャリアピッチ [m] Ppri = リターン側ローラの回転部重量 [Kg] a u = リターンピッチ [m]
34 31 ベルト張力 [ Belt tension ] ベルトコンベヤではさまざまな張力を検証する必要があります T 1 と T 2 の張力 [ T 1 e T 2 Tensions ] 総接線力 ( Fu ) は プーリ円周上での張力 T 1 ( 引っ張り側 ) と張力 T 2 ( 送り出し側 ) の差となります これにより ベルト始動時及び搬送時の必要トルクが導かれます 図 21 図 21 のように A 地点から B 地点に移行する際にベルト張力は T 1 値から T 2 値に指数関数的に変化します T 1 と T 2 値の関係は次式で表します fa = ベルトとプーリ間の摩擦係数 ; 巻付角に依る e = 自然対数指数 : ( 上記式の = 値はベルトとプーリ間摩擦の Max 値です もし T 1/T 2 > e fa ならベルトは駆動プーリ上をスリップし 駆動力は伝達されません ) 故に 上記公式から 次式が導かれます ベルト巻付角度係数 ( C w ) は巻付係数で 駆動プーリのベルトの巻付角度値を表します ( ツイン駆動の場合は 420 になります ) 即ち ベルトと駆動プーリ間の摩擦は 摩擦係数 fa で表わされます ちなみに テンションプーリの据付位置は下流側に置かれるのが普通ですから Min ベルト張力は駆動プーリのベルトとのその巻付摩擦極限値とする事ができます

35 尚 テンション装置は駆動プーリにベルトが巻付力をより増す為に用いられます 従って どんな稼働状況であれ 充分なテンションが与えられる必要があります 表 12 は 一般に 使用されるさまざまなテンション事例のベルト巻付角度係数です 表 12 は 巻き付けファクター ( Cw ) を係数で表示したものです プーリにゴム被覆 すべがしてある場合及び無い場合での プーリと緊張装置の間の滑りに依る駆動力の伝達程度 を数値化したものです 32 コンベヤ設計にあたっては T 1 と T 2 のベルト張力の他 以下のファクターにも留意します 張力 T 3 テールプーリ側のベルトのテンションを張る装置に係わる張力です 張力 T 0 コンベヤテール端部での負荷がかかる地点での その Min 張力です 張力 T g コンベヤテール部のテークアップ装置が引っ張る張力です 張力 T max ベルトにかかる Max 張力を指します テール部の張力 T 3 前ページで既に見たように 張力計算には
 が荷が載った状態でキャリアピッチ間距離 a o の 2 % にならないよう設定する必要があります 図 23 又 それに加えて 張力は上図 23 のように 荷がベルトからこぼれ落ちる事無く しかも")
36 及び の公式があります 張力 T 3 は次頁図のように テールプーリのテンションを張る際に生じ T 2 及びベルトの返り側接線力 F r の合計した値となります 33 図 22 従って 張力 T 3 を求める式は次のように表わされます 張力 T 0 テールプーリのテークアップ装置部での Min 必要張力 T 3 は ベルトを動かす動力を伝達する必要から駆動プーリとベルト間で滑りが無いようにしますが 下図のようにテール部ベルトの " たわみ ( f r ) が荷が載った状態でキャリアピッチ間距離 a o の 2 % にならないよう設定する必要があります 図 23 又 それに加えて 張力は上図 23 のように 荷がベルトからこぼれ落ちる事無く しかも ローラを超える際に荷の重さで過度の跳ね返りが無いように考慮しなければなりません " たわみ " 2 % を保つに必要な Min 張力 T 0 は次式で表わされます q b = 1M 当りのベルト重量 [Kg/m] q G = 1M 当りの搬送物重量 [Kg/m] a 0 = キャリア側の架取付ピッチ [m] この公式は 重錘テンション事例を考慮して 個々のアプリケーション事例及び理論の簡略化の必要から導き出されたものです
37 望ましい たわみ として 2 % 以下に変更する場合は 上式の定数 6.25 を下記のように変更します 1.5 % の " たわみ " にする場合 = % の " たわみ " にする場合 = 望ましい たわみ を保持するには テンション装置を設けるか 或いは 円周力 ( circumferential force ) である Fu = T 1 - T 2 を普段に保つ事で 張力 T 1 及び T 2 が充分機能するようにします 張力 T g とテンション装置ベルトコンベヤで普通用いられるテンション装置は スクリュー方式 ( 図 24 ) か 或いは 重錘方式 ( 図 ) です スクリュー方式は テールプーリ側に設けられ コンベヤ芯間機長は 30/40 m を超えるものではありません もっと機長が長いものになると重錘方式ですが 場所が無ければウインチに依る巻取方式が用いられます 又 必要とされる Min テンション力は 使用されるベルトの種類の特性に依っても異なります 帆布ベルトの伸び代は Min 値でコンベヤ芯間の 2 % を見ておく必要があります スチールコードか金属ベルトの伸び代は Min 値でコンベヤ芯間の 0.3~0.5% を見ておく必要があります テンション装置には 次のようなものがあります 図 24 左図 24 の方式のテンションテークアップは スクリューの都度調整に依ってテンション力を調整します 図 25 左図 25 の方式のテンションは " 錘り でもってテンションをかけます その張力は 次式で表わされます 図 26 左図 26 の方式のテンションも " 錘り でもってテンションをかける方式ですが その張力は次式で表されます
![I C = 駆動プーリと重錘プーリの芯間距離 [m] Ht = 駆動プーリからベルトが離れるポイントから重錘プーリが働くポイント間のベルトの高低差距離 [m] 35 正しく張力計算ができたかどうかの検証基本張力である T 0 値 ( 検討されたベルトの " たわみ ) が 計算値の T 3 値より小さい値であれば ベルトはきちんと動くはずです 何故なら 張力 T 2 は常に T 2 Fu x](/docs-images/116/219272217/images/38-0.jpg "Cw であり 又 T 2 = T 3 ± F r の関係 ( 従って T 3 T 0 ) で表されるからです Max 張力 T max この張力は コンベヤに於いてベルトが非常に大きな負荷を受ける地点での張力です 通常 この張力は張力 T 1 と同じ値です しかし コンベヤの機長如何に伴い 高低差が生じたり 地点ごとに条件が異なったり 著しく異なった地点があったりするケースがあります Max")
38 I C = 駆動プーリと重錘プーリの芯間距離 [m] Ht = 駆動プーリからベルトが離れるポイントから重錘プーリが働くポイント間のベルトの高低差距離 [m] 35 正しく張力計算ができたかどうかの検証基本張力である T 0 値 ( 検討されたベルトの " たわみ ) が 計算値の T 3 値より小さい値であれば ベルトはきちんと動くはずです 何故なら 張力 T 2 は常に T 2 Fu x Cw であり 又 T 2 = T 3 ± F r の関係 ( 従って T 3 T 0 ) で表されるからです Max 張力 T max この張力は コンベヤに於いてベルトが非常に大きな負荷を受ける地点での張力です 通常 この張力は張力 T 1 と同じ値です しかし コンベヤの機長如何に伴い 高低差が生じたり 地点ごとに条件が異なったり 著しく異なった地点があったりするケースがあります Max 張力はベルトの任意点ごとで異なります 搬送負荷とベルト破断ひずみ張力 T max は次式のように 一元化されたベルト Max 張力 Tu max として表されます N = ベルト幅 [ mm ] T max = ベルトに最も負荷がかかる地点での Max 張力 [dan] 従って 当該ベルトコンベヤのベルトの破断強度の決定にあたっては Max ベルト張力をもって決定します 又 安全の為 安全ファクターとして 帆布ベルトの場合はベルト Max 張力値の 10 倍 スチールベルトでは その 8 倍をその値として見なし ベルトの破断強度を決定します




39 ベルトコンベヤの駆動 及び プーリの寸法 / 仕様 駆動の方法ベルトコンベヤの駆動の方法としては ヘッドプーリに減速機や動力伝達機器 及び 安全カバー等を付けて動かす従来の方法がありますが その他の方法としては 図 27 のようにモータープーリで動かす方法もあり その Max 出力は 250kW に達します モータープーリをベルトコンベヤの駆動に使う事例は 今日 その利点とコンパプト性の評価を背景にその採用が増えてきています その利点とは 省スペースで 据付が簡単 そして IP66/67 のシール性があり防塵防水性端子 Box が優れている事 ( IP 67 = 水中 1 M 下で 30 分置いても水が入らない基準 ) 又 駆動部分がプーリ管体の中に内包されている為に安全で しかも 日常のメンテナンスがほとんど必要無い ( オイル交換図 27 が 2 万時間毎に必要のみ = 合成オイルなら 5 万時間 =) と云うメリットがあります 図 28 のように設置スペースに多くの場所を取る減速機に依る 従来の駆動方式と較べると モータープーリの省スペース性が一目で解ります 図 28


40 しかしながら 出力で 250 kw 以上が必要となるベルトコンベヤに於いては 従来の駆動方式となりますが 複数の動力伝達機器の併設が必須になる事は言うまでもありません 37 プーリの直径ヘッドプーリ径の大きさを決めるにあたっては どのようなベルトを使用するかどうかでその特性が大きく異なるので 決定する前に慎重に検討する必要があります 表 13 は推奨 Min 直径を帆布とスチールの 2 種類のベルト毎に分けて示してあります Min 直径はベルト内部の帆布の層よれに依る損傷や強化帆布の裂傷を防ぐにあたって重要な検討要素です 尚 各プーリの推奨 Min 直径を示す表 13 は 搬送物の温度が 110 度を超えるか 或いは ベルトコンベヤが設置してある所の雰囲気温度がマイナス 40 度を下回る場所にある場合は この表は適用できません 駆動プーリのサイズ

41 駆動プーリ径のシャフトは 曲げやねじれを不断に蒙っており 金属疲労による損傷を引き起こしやすい事に注意する必要があります 適正なシャフト径を選択するには 曲げモーメント Mf とねじれモーメント Mt が幾つになるかを決定する必要があります 38 シャフトの曲げモーメントとは 結論から言えば 下図 29 のようにテンション T 1 と T 2 のベクトルの合計 及び 重錘プーリの重量の総和です シャフト直径を決めるにあたっては 以下のような種々の要素を検討し決定する必要があります すなわち テンション合力 Cp 曲げモーメント Mf ねじれモーメント Mt 理想曲げモーメント Mif 及び 抵抗モーメント W の各要素です これらを求めるには 次式を用います 図 29 P = モーター出力 [ kw ] n = 駆動プーリの回転数 [ r.p.m ] 図 30 σ amm 値はシャフトに使用する鋼材に依って 右表 14 より破断係数を選択します 上記の各連立方程式を統合し シャフトの直径を次の式から導く事ができます

42 Π = テール / ベンドプーリのシャフトのサイズテール / ベンドプーリの場合は " ねじれ " の負荷を考慮する必要はありませんが " たわみ " の負荷について検討する必要があります 曲げモーメント Mf は そのプーリの前後に在ってプーリを引っ張るベルト張力のベクトル 及び そのプーリ重量の総和として生じる力の合計となります 通常の場合 曲げモーメントに係わるプーリはテール / ベンドプーリですから 図 31 のように Tx 及び Ty は Tx = Ty の関係になります 図 31 右図 31, 32 にいろいろな従動プーリの事例が示してありますが その曲げモーメント 及び その抵抗モーメントは駆動プーリの場合と同じ次式です 故に 抵抗モーメント W は 図 32 与えられた抵抗モーメント値とシャフト径の関係は次式ですから シャフト径は次式の計算から得る事ができます
![40 駆動プーリ及びテール / ベンドプーリの " たわみ 限界と角度各プーリのシャフト直径を決定したら そのシャフト径の " たわみ " と角度が限界をこえていないかどうかをチェックします " たわみ "( ft ) と角度 ( αt ) の値は下記を超えない値にします 図 33 図 30 a g = プーリ鏡面と軸受設置間の芯々距離 [mm] E =](/docs-images/116/219272217/images/43-2.jpg "鋼材弾性率 (module of elasticity of steel) 20600 [ dan/mm 2 ] J = シャフト断面慣性モーメント (sectional moment of inertia of the shaft) 0.")
43 40 駆動プーリ及びテール / ベンドプーリの " たわみ 限界と角度各プーリのシャフト直径を決定したら そのシャフト径の " たわみ " と角度が限界をこえていないかどうかをチェックします " たわみ "( ft ) と角度 ( αt ) の値は下記を超えない値にします 図 33 図 30 a g = プーリ鏡面と軸受設置間の芯々距離 [mm] E = 鋼材弾性率 (module of elasticity of steel) [ dan/mm 2 ] J = シャフト断面慣性モーメント (sectional moment of inertia of the shaft) D 4 [ mm 4 ] Cpr = 従動プーリシャフトにかかる負荷 ( テンション合力 ) [ dan ]


44 Rollers, function & design criteria ( ローラ その機能と選定基準 ) コンベヤに於いて ベルトは高価な構成要素で 且つ 消耗しやすい部品と言えます そのベルトを支えるローラも負けず劣らず重要なコンベヤ構成部品です ローラはベルトの寿命に大きく影響しますので ベルトコンベヤの設計 / プランニングにあたって 最適ローラを選定する事は大切な事柄です ローラの始動抵抗及び回転抵抗値は ベルトコンベヤを始動させ荷を載せて稼働させる力 すなわち 駆動力 の決定に大きな影響を与えます ローラの回転部分は管と両端のハウジングで ハウジングはベアリングとそのベアリングを保護するシールを内包していますが ベアリング及びシールはローラの寿命を左右するだけで無く ローラの耐負荷がどのくらいかを決定する主要構成要素です この章の ローラの選定 にあたっては プログラムに沿って所定のファクターにデータをインプットしていけば ベルトコンベヤ設計の基本を学びつつ 自ずと 最適ローラが選定ができるようになっています 尚 併せて 総合カタログ第 2 章 ローラ & 架台 を併せて参照していただければ より深くご理解いただけます 尚 第 2 章 ローラ & 架台 では以下のような事柄が述べてあります - バランス & 始動抵抗 - 許容公差 - ローラ管の種類 ; その管の特徴と管厚 * ハウジングとの勘合 - 摩擦抵抗 & 衝撃抵抗 - ベアリングの種類 * そのシール機構 * シャフト及びハウジングとの勘合 * その潤滑図 34 * その位置合わせ - シャフト ; その特徴と製造工程上の許容公差

![次の公式で毎分当たりのローラ回転数を知る事ができます D = ローラ直径 [mm] V = ベルト速度 [m/ 秒 ] 右表 15 は Max ベルト速度及びローラ径との関係を回転数 [ r.p.](/docs-images/116/219272217/images/45-1.jpg "m ] で示したものでよく知られています ( この表から 600 回転 / 分 ± が目安である事が解ります ) ローラの選定に際し一回り大きい径のローラを選べば コンベヤ始動時の慣性にはそれより大きな力が必要となります しかし 同条件下で比較すると")
45 速度に基づくローラ径の選定ベルトコンベヤの設計にあたっての重要な検討要素の一つとして 荷が載った状態下での ベルト速度とローラ径の相関関係 のファクターがあった事は 既に前項で見た通りです そのベルト速度と使用するローラの直径の関係は 次の公式で毎分当たりのローラ回転数を知る事ができます D = ローラ直径 [mm] V = ベルト速度 [m/ 秒 ] 右表 15 は Max ベルト速度及びローラ径との関係を回転数 [ r.p.m ] で示したものでよく知られています ( この表から 600 回転 / 分 ± が目安である事が解ります ) ローラの選定に際し一回り大きい径のローラを選べば コンベヤ始動時の慣性にはそれより大きな力が必要となります しかし 同条件下で比較すると 回転数が減り ベアリングの摩耗が少なくて済み ローラの消耗が減り ローラの回転抵抗値が下がり ローラ及びベルトの消耗度も減ると云ったメリットが生じる事は留意されてよい事柄です ローラ径の正しい選定にあたっては ベルト幅についても考察する必要があります 表 16 は ローラ径とベルト幅の相互の関連性を表にしたものです
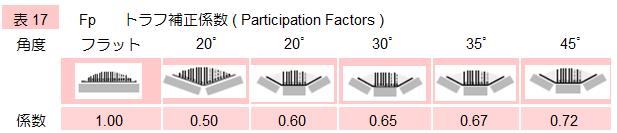
46 許容荷重に基づくローラの選定ベルトコンベヤに於けるローラ径の種類は 主としてベルト幅 及び トラフ架台のピッチに依りますが しかし 何よりそれにも増して 最も負荷のかかる場所でのローラの Max 荷重がどのくらいかが重要な判断基準になります 計画するコンベヤの負荷がどのくらいになるかは プラントを設計する専門家が行う仕事である事は言うまでもありません しかしながら 基本的なコンベヤであれば 以下のようなファクターを検討していく事でその値を得る事は出来ます それにあたり 最初に明確にしなくてはならない事は トラフ架台にかかる荷重の計算とその決定です これをはっきりさせる為には トラフ架台のタイプ ( キャリア リターン インパクトごと ) キャリア/ リターン架台のピッチ 架台の角度 搬送物塊状の大きさ如何と云った下記に示す要素を順次に明確にしていけば 自ずと答えが導かれます その計算は簡単で 誰もがキャリア / リターンのトラフ架台でのローラの Max 荷重を得る事ができます そして次に その Max 荷重値をベースに そのコンベヤの 1 日当りの稼働時間 ( サービス係数 ) やコンベヤ環境 使用ローラ径の違いと云った個々のコンベヤに依って異なる要素を加味して その数値を修正し 決定します このようにして導き出された負荷 [ 荷重 ] 値を 個々のローラが持つカタログに記載の許容荷重 ( その値は 3 万稼働時間を基に算出された値です ) と較べ 最適ローラを選定します 尚 理論ローラ寿命時間である 3 万時間をもっと長くしたり短くしたい場合は 更に 表 22 の ベアリング理論寿命に基づく係数 を使用して その許容荷重を再計算する事で 期待する任意の寿命時間が得られるように プログラムが作られている事を補記します この計算で使われるファクターには次のようなものがあります - lv = 搬送能力 t/h - V = ベルト速度 m/ 秒 - a o = キャリア架台のピッチ m - a U = リターン架台のピッチ m - q b = メートル当りのベルト重量 kg/m - Fp = 最も負荷がかかる中央部ローラのトラフ補正係数 : 表 17 参照 ( 当該架台のローラの角度に依って係数は異なります ) - Fd = インパクト ( 衝撃 ) 係数 : 表 20 参照
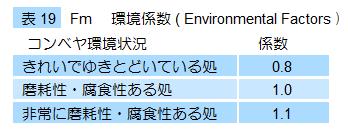
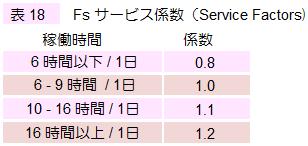
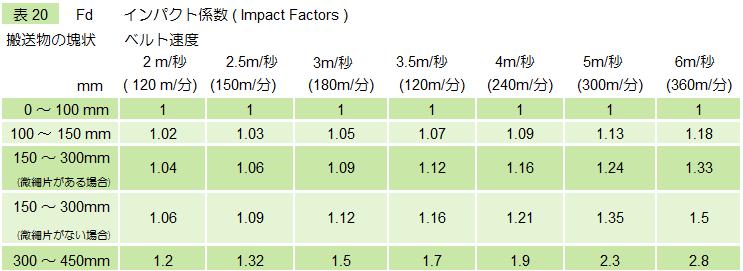
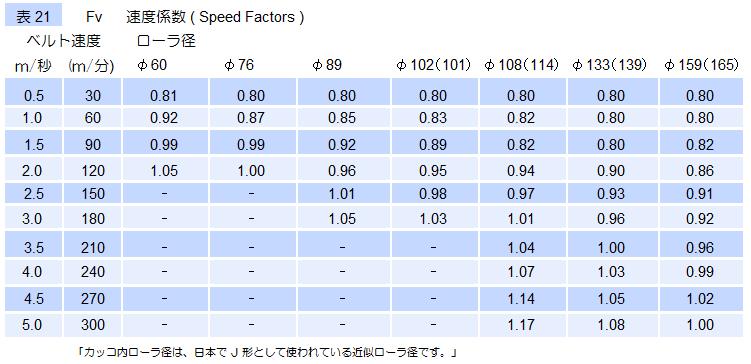

47 ( 当該コンベヤ搬送物の塊状サイズに依って係数は異なります ) - Fs = サービス ( 稼働 ) 係数 : 表 18 参照 - Fm = 環境係数 : 表 19 参照 - Fv = 速度係数 : 表 21 参照 - Fb = ベアリングの理論寿命時間に基づく寿命係数 : 表 22 参照 44
![45 許容荷重の計算ベルト速度とローラ回転数の関連をもってローラ直径を選定したら 次に 下記の公式を使用してキャリア架台の中央ローラにかかる静止荷重 [ dan ] を求めます ( 1daN [10N] = 9.](/docs-images/116/219272217/images/48-0.jpg "8N = 1kgf ) 次に コンベヤの稼働条件は個々に違いますので 当該コンベヤでの実稼働条件を加味して修正荷重 [dan] を求めます 最後に トラフ補正係数を乗じて キャリア架台の中で最も負荷がかかるローラ (")
![架台の中央にあるローラでローラ長が両端ローラと同じ場合 ) の許容荷重 [ dan ] を求めます リターンセットのローラにかかる負荷については ローラに負荷がかかりませんから 次の公式を用いて まず その静止荷重 [ dan ] を求めます 次に](/docs-images/116/219272217/images/48-1.jpg "当該コンベヤでの実稼働条件を加味してリターンローラの修正荷重を次式から求めます 最後に リターンセットが 1 本ローラ式であれ 2 本ローラ式であれトラフ補正係数を乗じて ローラの許容荷重を求めます この計算で得られた Ca 及び Cr の値をもとに")
48 45 許容荷重の計算ベルト速度とローラ回転数の関連をもってローラ直径を選定したら 次に 下記の公式を使用してキャリア架台の中央ローラにかかる静止荷重 [ dan ] を求めます ( 1daN [10N] = 9.8N = 1kgf ) 次に コンベヤの稼働条件は個々に違いますので 当該コンベヤでの実稼働条件を加味して修正荷重 [dan] を求めます 最後に トラフ補正係数を乗じて キャリア架台の中で最も負荷がかかるローラ ( 架台の中央にあるローラでローラ長が両端ローラと同じ場合 ) の許容荷重 [ dan ] を求めます リターンセットのローラにかかる負荷については ローラに負荷がかかりませんから 次の公式を用いて まず その静止荷重 [ dan ] を求めます 次に 当該コンベヤでの実稼働条件を加味してリターンローラの修正荷重を次式から求めます 最後に リターンセットが 1 本ローラ式であれ 2 本ローラ式であれトラフ補正係数を乗じて ローラの許容荷重を求めます この計算で得られた Ca 及び Cr の値をもとに カタログに記載のある各ローラの許容荷重の値と照らし合せて 最適ローラを選定します
 が使われ そして そのインパクトキャリア架台は 取付ピッチを狭めて据付するよう設計されています このように ローラはベルトを守り支えるものとして その役割を担います 図 37 及び 38 は \"")
49 Loading of belt and impact rollers ( ベルトへの載せ込み そして インパクトローラ ) 図 35 図 36 ベルトへの原材料の載せ込み或いは落し込みの作業にあたっては ベルトの素材や表面に損傷を与えないか 少なくとも最小にするように配慮した設計にしなくてはなりません 殊に 搬送物がかなりの高さから落下したり それが鋭角を伴った大きな塊状の原石だったりしたら なおさらです 載せ込みの場所でベルトを支えつつ つつがなく搬送する役割を持つローラには 普通 インパクトローラ ( ゴムで被覆されたローラ ) が使われ そして そのインパクトキャリア架台は 取付ピッチを狭めて据付するよう設計されています このように ローラはベルトを守り支えるものとして その役割を担います 図 37 及び 38 は " ガーランド として知られる吊下式ローラの使用例を的確に示したもので ベルトに落ちてくる原材料の衝撃を効果的に吸収しながら搬送する吊下式の特徴を描いたものです その上 この " ガーランド は 図のように荷が片荷でも ベルトに荷が載った状態をそのままに受け入れつつ 且つ その状態を安定的に保ちながら搬送すると云う 柔軟性をもった新しいローラ搬送方式です 図 37





50 47 新規のコンベヤプロジェクトの際に 殊に留意すべきは 荷の載せ込みの仕方とその衝撃を吸収するインパクトキャリア架台をどう設計するかです 図 38 そのコンベヤの設計責任者は 次の事柄に注意を払わなくてはなりません それは - ベルトへの荷の載せ込みの際 荷はベルトに衝撃を与えますが その衝撃方向はコンベヤの進行方向に沿い 且つ その速度はベルト速度とほぼ同じでなくてはなりません 片荷になり蛇行を招く悪い事例 - 荷がベルトへ落ちるホッパー部では 片荷を避け 出来るだけ荷がベルトの中央に落ちるように 設計の際 ホッパー位置を設けなくてはなりません 図 39 - ホッパーを設ける位置は 設計が許される限り 荷が落ちる高さを出来るだけ小さく抑えるように 設計しなくてはなりません カタログ第 3 章にインパクトローラ及び衝撃を吸収する働きを高く持つゴムリング付ローラについての設計要領が詳細に述べてありますので 併せて 参照してください そこには " ガーランド " で知られる吊下式キャリアセット / リターンセットの設計要領についても書かれています

51 インパクトローラの衝撃負荷の計算落下高さ距離如何に依るその衝撃負荷の程度 Hc を正しく計算するには 次の公式があります H f = 搬送物が上からホッパーまで落ちる落下高さ距離 H v = 搬送物がホッパーから下まで落ちる落下高さ距離 r = ホッパー傾斜角度 ホッパー下に主に使われるインパクトローラの選定にあたっては その設計に際し 次の観点でそのプロジェクトを検討し 選定する事をお奨めします - 均質で細かい原材料を連続して搬送する負荷があるコンベヤかどうか - 大きな塊状の原材料がある搬送物を運ぶコンベヤかどうか 均質で細かい原材料を連続して搬送する負荷があるコンベヤの場合インパクトローラの選定にあたっては 唯単にベルト上に載った原材料を運ぶだけでなく ( それは通常 架台上のインパクトローラが支えます ) 落下する搬送物の衝撃負荷についても考慮して選定する必要があります さらさらした均質で細かい物質を搬送する場合の その衝撃負荷 ( pi ) は 先の修正された落下高さ距離を用いて計算します ( その公式は下記になります )
![l V = ベルト搬送能力 [ t/h ] 尚 最も負荷がかかるローラはキャリアセット中央のローラですが その負荷については 先に見たトラフ補正係数 = Participation factors = ( Fp ) を用いて得る事ができます 49 その計算にあたっては様々なファクターがありますが そのファクターは 主に キャリアセットの両端ローラの傾斜角が何度であるかどうかで決まります 従って](/docs-images/116/219272217/images/52-0.jpg "中央ローラの負荷は 次式で求められます トラフ補正係数 ( Fp ) は一般にキャリアセットの両端ローラの傾斜角度に依って以下の値が用いられます Fp :λ = 30 の時 :0.65 λ = 35 の時 :0.67 λ = 45 の時 :0.")
52 l V = ベルト搬送能力 [ t/h ] 尚 最も負荷がかかるローラはキャリアセット中央のローラですが その負荷については 先に見たトラフ補正係数 = Participation factors = ( Fp ) を用いて得る事ができます 49 その計算にあたっては様々なファクターがありますが そのファクターは 主に キャリアセットの両端ローラの傾斜角が何度であるかどうかで決まります 従って 中央ローラの負荷は 次式で求められます トラフ補正係数 ( Fp ) は一般にキャリアセットの両端ローラの傾斜角度に依って以下の値が用いられます Fp :λ = 30 の時 :0.65 λ = 35 の時 :0.67 λ = 45 の時 :0.72 ちなみに 傾斜角度の無い平ベルトのコンベヤの場合は中央ローラにかかる負荷は同じなので その衝撃負荷は pi と同じ値です 大塊の原材料を搬送する負荷があるコンベヤの場合キャリアセットの中央ローラの動荷重 ( pd ) を知るには以下の式から計算できます この式中の Gm 値は搬送物である大塊の重量を指し 又 その計算にはベルトを支えるローラ / 架台セットの恒久弾性率 ( Cf ) を用います Gm = 大塊の原材料重量 [ Kg ] 表 41 参照 Hc = 修正落下高さ距離 [ m ] Cf = ローラ / 架台セットの恒久弾性率表 42 参照 この衝撃負荷は キャリアセットの中央ローラにはローラに 2 個のベアリングが入っていますので その衝撃負荷は半分に分散されて 個々のベアリングがその力を受ける事になります 計算にあたっては 大塊のおおよその重量 ( Gm ) は 表 41 を用いて定めます 大塊の形状それ自体の重さと長さとの相関性からこの表が使われます 表 42 は 衝撃負荷を支え 且つ 吸収するローラ / 架台セットの内 最も一般的な各種キャリアセットの恒久弾性率を表にしたものです そのキャリアセットとは 鉄製ローラと架台のキャリアセット ゴム付ローラと架台のキャリアセット " ガーランド " の 5 本吊下セット 及び 衝撃吸収仕様 ガーランド の 4 種類で その衝撃負荷とは Gm x Hc で表される落下荷重の様々な落下エネルギーを各セットのローラが受ける負荷となります
 の計算にあたっては")
53 尚 表 42 は Gm x Hc で表される落下荷重から導き出された上記各ローラのベアリングにかかる静荷重値を表にしており 安全係数を 2 倍及び 1.5 倍にした場合とで表示しています 50 恒久弾性率は様々なファクターに依って違ってきます 例えば ゴム付ローラに使われるゴム形状の違いやローラの長さや重さの違い 又 " ガーランド " ではローラ本数や取り付け方の違い そして " ガーランド " が衝撃を吸収するタイプかどうかといった違いです 尚 動落下荷重 ( pd ) の計算にあたっては これらのファクターを正確に予測し反映したものでなければなりません 以下に 参考までに動落下荷重 ( pd ) を求める計算例を示します 大塊 100 kg が高低差 0.8 m の処から落下するコンベヤで そのキャリア架台は " ガーランド " タイプの 5 本のローラが繋がった 5 槽吊下キャリアセットだったとします 尚 ローラは一般に使われるスチール製ローラ ( その Cf : 約 20,000 Kg/m = 200 Kg/cm ) だとします この場合の求める落下エネルギーは次式となり Gm x Hc = 100 x 0.8 = 80 Kg/m となります 従って この値から 動落下荷重の値を図 42 から読み取ります 落下エネルギー ( Gm x Hc ) は 80 Kg/m ですから 図の下の落下エネルギー重量 80 Kg を選び 次に キャリア架台のタイプは " ガーランド " というのですから 80 Kg の線と 5 槽ガーランドの曲線と交わる処が pd 値です 尚 この値は搬送物の比重が 2 で見ていますから 比重 1.5 で見た方が良い場合は 右端の比重 1.5 の目盛から読み取ります pd = 約 1800 Kg ちなみに この動荷重値は安全係数 2 倍の数値ですから 静荷重で 1800 Kg を支えるには充分と言えます この計算結果から ローラの選定にあたっては PSV7 ( 使用ベアリング 6308;Co = 2400 Kg ) が当該コンベヤに使用する推奨ローラ ( 2 個のベアリング内封 ) となります

")
54 51 図 41 大塊原材料の重量 比重 大塊の寸法 "Lb" (mm)



55 52 図 42 恒久弾性率 安全係数 5 槽ガーランド ゴムリング付ローラ 鉄製ローラ 衝撃吸収仕様ガーランド Cf = 恒久弾性率 落下エネルギー = Gm x Hc (kg/m)



56 Other accessories ( その他の付属機器装置 ) ベルトコンベヤに据え付けられる付属機器装置としては ベルトやローラの他に 主なものとしてベルトをきれいに保つクリーナー装置及び安全カバー等があります これらは重要なコンベヤの付属機器装置ですから コンベヤを設計する初期の段階でどこに置くかを決定しておかなくてはなりません クリーナー計画にあたっては ベルトを円滑に 且つ 機能的に働くようにするものとして クリーナーが充分に機能するよう考慮されなくてはなりません クリーナーが十分機能すればベルトのメンテナンスに要する時間が減り 従って 生産が増える事になります クリーナーは稼働時間に比例して部品が摩耗していくものですが 良いクリーナ-を採用すれば機能に無理が無いので歯とか部品の寿命は長くなるはずです 市販のクリーナーには装置としていくつかのタイプがありますが 主に 固定式のタイプと駆動式の二つに大別できます 図 44 固定式は 最も一般的に使われ 又 使われ方も様々で ベルトが汚れやすい所ならどこにでも設置できます このタイプは図 44 のように ベルトに直接クリーナーの歯が当たる構造で その歯は分割式です


57 54 図 43 クリーナー取り付け推奨場所事例 1. 駆動プーリに直接あてて設置 3. スナッブ / ベンド変角プーリの前の 返り ベルト上の内側に設置 2. ベルトがプーリから離れて約 テールプーリ前の返りベルト上の内側に mm の処に設置 設置 駆動式のクリーナーとはモーターでブラシや歯を回転させているタイプを言いますがその種類は少なく 又 設置にあたっては 初期投資や通電を含む据付費用 試運転調整が必要で 購入コストが割高になりますが一考に値します 図 45 クリーナ の機構は 外付のモーターで歯やブラシを付けて動かしますが いずれも 図 45 のように ベルトに歯やブラシを直接あててクリーニングする機構です 図 46 他のクリーナーとしては 犂型及び V 型の形状で 返りベルトの上に置いて使用する V 型スクレーパーがあります この種のクリーナーは 駆動プーリ



58 及びテールプーリの前 或いは プーリとベルトの間で行き場を無くした滞留物が貯まりやすい場所に設置し ( 図 46) ベルトに付着した堆積物を除去してベルトの蛇行を防ぐ機能を有するクリ ナーです ベルト反転装置長距離コンベヤのリターン側では ローラやリターン架台に搬送物の残滓が付着して落下する現象を減らす為に ベルトを 180 度反転させる装置があります この場合 リターン側のベルトは一般に駆動プーリを過ぎた処で 180 度反転させ その後テールプーリ前で 又 元に戻るよう再度 180 度反転させます ベルトを反転させるには 一般にローラが使われますが ローラの選定にあたってはその働きに見合う強度のあるローラが選定されなくてはなりません 尚 ベルトの反転に要する距離は一般にベルト幅の 14~22 倍の距離となります この反転装置があれば 返りベルトのいたる所に付着した残滓がリターンローラに触れる事が無くなる事は言うまでもありません 図 47 汚れた側 きれいな側 雨カバー計画するコンベヤの設計に臨み 主要な付属装置 / 機器の選定を一通り終えた後で 次に選定作業にかかるものとして 例えば 雨カバーがあります ( 雨カバーについては ラルメカ ローラの総合カタログを参照ください ) ベルトコンベヤをどう保護するかは 天候の観点 搬送物特性 ( 乾湿の程度 軽重の程度 揮発性の程度 ) の観点 コンベヤプラント自体の特性に依ってその必要性は変わってきますので それに見合った対策を施します
59 Project examples of a belt conveyor ( 計画ベルトコンベヤでの選定事例 ) ベルトコンベヤに於けるさまざまな注意すべき張力関係についてこれまで述べてきましたが 最後に あるプロジェクトの事例をもって どのように仕様 / 規格を選定するかについて 以下 示します その事例に関する 搬送原材料の種類及びその物性特性と云ったデータについては 下記になります 搬送原材料 : セメントのクリンカ表 2 ( 13 頁 ) 参照比重 ;1.2 t/m 3 塊サイズ ;80 ~ 150 ミリ原材料の研磨性 ; 非常に研磨性ある原材料原材料の安息角 ;30 要求搬送能力 : 搬送能力 l V ;1000 t/h ( 搬送容量と相関 1000 / 1.2 = 833 ) 搬送容量 l M ; 833 m 3 /h プラント特性 : コンベヤ芯間機長 ;150m コンベヤ揚程 ;+15m ( 上り傾斜 ) 傾斜角度 ;6 稼働環境 ; 普通稼働時間 ;12 時間 / 日 上記のデータから 以下の事項について 計算し選定する事ができます ; 順に 速度 ベルト幅 キャリア / リターンローラ及び架台の規格 / 仕様の選定 次に 速度等が選定される事に依って 次の事柄も選定できます ; ベルト張力 モーター出力 (kw) ベルトの規格/ 仕様 プーリ径シャフト径の選定
60 速度とベルト幅 表 3 ( 15 頁 ) から 当該原材料は比重が 1.2 で 次に 塊状が 80/150 ですから Max 推 奨速度は 138 m/ 分 ( 2.3 m/ 秒 ) となる事がわかります 57 従って 速度は決まったとして 次に どのタイプのキャリア側トラフ架台を選定すれば よいかは 要求搬送容量 l M が 833 m 3 /h をキーに 表 5 ( 頁 ) から求める事ができま す すなわち 計画の上りコンベヤの傾斜角度はδ = 6 ですから これから 60 m/ 分 (1 m/ 秒 ) 速度条件下の搬送容量 l VT を次式から求めます l M = 搬送容量 [ m 3 /h ] V = 速度 [ m/ 秒 ] K = コンベヤ傾斜係数 ; 傾斜角度 6 からその係数は 0.98 [ 図 8 ( 21 頁 )] K 1 = 払い出しが一定か不規則かで修正される係数 ;0.90 ( 21 頁 ) 従って となります ところで 与えられた条件の原材料の安息角が 30 と云う条件は 表 1 ( 13 頁 ) の Max 側角と安息角及び搬送物の粒度との関係 から ベルトコンベヤ上の側角は 20 になる事がわかります 次に 表 5 ( 18 頁 ) の キャリア側トラフ架台搬送容量 を見てどのキャリアセットを選択するかを検討します 60 m/ 分 (1 m/ 秒 ) 速度条件下の搬送容量 l VT = 411 m 3 /h という計算を満たし 又 側角が 20 でのキャリア側トラフ ( 角度付 ) 架台を表から求めると ベルト幅 1000W で両端ローラの傾斜角度 λが 30 が条件を満たすので それを選定します 即ち 普通 30-3 槽キャリアセット と呼ばれるタイプです キャリアセットのピッチキャリア側トラフ架台のピッチは 2 台の連続したトラフ架台上のベルトの たわみ 如何で選定します 表 6 ( 25 頁 ) の トラフ架台の推奨 Max 据付ピッチ は 搬送物重量とベルト幅との相関関係からそのピッチをどう選定するかを示しますので その推奨ピッチを採用します
61 尚 たわみ 幅がキャリアピッチの 2 % を超えていないかどうかの確認をします たわみ が大きいとベルト稼働中の荷の大きな変形を招きかねず それは結果として摩擦を上昇させます 58 この事は 問題を招きかねない大きな問題です と云うのは この普通でないストレスの発生は動力を上昇させ そして ローラ間で ベルト上で 或いは ベルトの層内で 早期の損傷を招きかねません 次に プロジェクト事例での 1000W ベルト幅での 1.2 t/m 3 の搬送物を運ぶ条件から 表 6 ( 25 頁 ) の トラフ架台の推奨 Max 据付ピッチ を見ると その推奨ピッチは - 推奨キャリア側トラフ架台のピッチは 1.2 メートル - 推奨リターン側架台のピッチは 3.0 メートル となります ローラの選定これまでの検討から ベルト幅は 1000W 速度は 138m/ 分 (2.3m/ 秒 ) と選定しましたので ローラ径の選定にあたっては 表 16 推奨ローラ径 (43 頁 ) から 径 114(φ108) を選定します 尚 ここで キャリア側トラフ架台の中央ローラ 及び リターンローラに掛かる負荷 ( 荷重 ) がどのくらいになるかを検討しておきます ちなみに 使用するベルトについては ここでは 315 N/mm 同等の抵抗値を持つベルトで qb 値 ( M 当りベルト重量 ) が 9.9 kg/m で 表層 4 ミリ裏層 2 ミリのベルトを使用すると仮定します 次に キャリアセットの中央ローラの静荷重 ( dan ) を求めるには次式がある事は先に見た通りです 従って 次式から静荷重を求めます [ 1 dan = 10 N = 約 1.02kgf ] この結果を受けて 次に 個々のコンベヤ条件を加味した動荷重を次式から求めます 尚 上記の各係数の値は プロジェクト事例の条件から導き出されたもので Fd = 1.03 は表 20 ( 45 頁 ) インパクト( 衝撃 ) 係数 Fs = 1.1 は表 18 ( 45 頁 ) サービス( 稼働 ) 係数 Fm = 1 は表 19 ( 45 頁 ) 環境係数 から選択された数値です
62 この計算を基に キャリア側トラフ架台の中央ローラの許容荷重は次式から求めます 59 尚 Fp = 0.65 は表 17 ( 45 頁 ) トラフ補正係数 のキャリア側トラフ架台の角度が 30 の場合は係数が 0.65 になる事から選択された数値です 以上からキャリアセットに使用するローラの許容荷重が得られました 同じように リターンセットのローラについても計算します リターンローラの静荷重を求める計算式は次式です 次に リターンセットの使用するローラの動荷重を求めます [ 1 dan = 10 N = 約 1.02kgf ] 尚 Fv = 0.97 はプロジェクト事例のローラ径が φ114 で 速度が 139 m/ 分 ( 2.3 m/ 秒 ) である事から表 21 ( 45 頁 ) 速度係数 から選択された数値です 故に これから リターンセットに使用するローラの許容荷重は次式から求められます 尚 Fp = 1 は表 17 ( 45 頁 ) トラフ補正係数 のリターンセットの係数が 1 である事から選択された数値です 以上の一連の計算から ベルト幅 1000W でのキャリアローラ及びリターンローラに使用するローラを 以下のように選定します キャリアセットに使用するローラ ; PSV/1 ( シャフト径 φ20) ローラ径: φ114 (108) 使用ベアリング: # 6204 ローラ取付内々寸法 : 360 mm 許容荷重: 144 dan ( ちなみに このローラの許容荷重は 上記計算の必要荷重 dan を満たします ) リターンセットに使用するローラ ; PSV/1 ( シャフト径 φ20) ローラ径: φ114 (108) 使用ベアリング: # 6204 ローラ取付内々寸法 : 1130 mm 許容荷重: 103 dan ( ちなみに このローラの許容荷重は 上記計算の必要荷重 31.3 dan を満たします ) 張力 T 1 - T 2 - T 3 T 0 - Tg
63 さて 張力計算を続けるにあたり 以下のように当該プロジェクトのコンベヤを仮定します 当該コンベヤはシングルの駆動プーリを持つコンベヤで その駆動プーリはコンベヤのヘッド部にありゴムラギングしてあるヘッドプーリです 尚 この駆動プーリはスナッブプーリに依ってベルトとの巻付角度は 200 に設定する設計で テール部には懸垂型テンションプーリを設ける設計のコンベヤです 60 以上の条件から まず このコンベヤの巻付係数 Cw は表 12 (33 頁 ) ベルト巻付角度係数 から その係数は Cw = 0.42 とする事ができます これから 駆動プーリの返り側の張力 ( テンション ) については 次式から求める事ができます ちなみに 接線力 F u は先に見たように (28 頁 ) 次式で求められ その値は下記になります 従って T 2 は下記になります これから 次に 駆動プーリの行き側の張力 ( テンション ) を次式から求めます 又 テールプーリの返り側の張力 ( テンション ) は次式から求められます ちなみに 返り側接線力 Fr は 先に見たように ( 34 頁 ) 次式で求められ 下記になります ところで 連続した 2 台のキャリアセットの たわみ が 2 % を保つ Max たわみ を導き出すには 先に見たように ( 34 頁 ) 次式を用います
64 以上の計算で T 3 値は T 0 値より小さいので 従って 張力 T 0 を適正にする為に懸垂プーリを用いる必要があります 61 従って T 3 = T 0 と仮定して再計算を行い T 1 と T 2 の値を求め直します 次に テンション装置を置く地点でのベルトの張力 T g を求めます 尚 このコンベヤの計画では重錘プーリはテールプーリ側に設ける事を前もって決めていましたので それに則って話をすすめる事にします このテンション荷重 ( T g ) は 次の公式に依って示されるように 当該コンベヤが平衡状態を保つに足る重さが必要となります ベルトの選定上記の一連の計算結果に依る当該コンベヤの Max 張力は T 1 = 3376 dan の値でした 従って 当該 1000W ベルトの mm 当りのベルト Max 張力は次式で表されます 又 この結果から 当該ベルトの破断強度は この稼働張力の計算値から 帆布ベルトの場合は 10 倍の安全係数を掛けた値が そして スチールベルトの場合は 8 倍の安全係数を掛けた値が そのベルトコンベヤに使用するベルトの破断強度となります 従って このプロジェクト事例では 400N/mm 相当の抵抗値を持つベルトを選定します 何故なら そのベルトの抵抗値は 一般に 当初のプロジェクト計画から計算された値 ( 315 N/mm) より高い値が採用されるからで そうなればベルト重量も当初案より重くなり 故に T 1 及び T 2 はもう一度計算する必要がでてくる事になります 再計算で得られた張力は上記の T 1 及び T 2 の値より小さいとの結果になりますので その事から 次の値が当該プロジェクトの T 1 及び T 2 となります
65 62 駆動プーリのシャフト径これまでの計算を受けて 以下の減速機駆動の場合の条件で設計計算を進めます これまでの駆動プーリに関するこのプロジェクトのデータは 下記になります プーリ径 D = φ 400 mm; 先にベルト破断強度を 400 N/mm に選定しましたので 表 13 推奨 Min プーリ径 ( 38 頁 ) を見ると 400 N/mm の強度を持つベルトの駆動プーリでその推奨径は φ400mm です プーリ重量 q r = 220 dan; プーリの重量は Kg では無く dan で示します 1Kg = 約 10 dan です [ 1 dan = 10 N = 約 1.02kgf ] 回転数 n = 110 r.p.m; 駆動プーリの毎分当り回転数 ( r.p.m ) a g = m; 軸受とプーリ鏡との芯間距離 単位は m です 前頁までの計算結果を基に 先に 39 頁で見た 駆動プーリの場合の張力とプーリ重量のテンション合力 ( Cp ) を求めます ( 尚 簡単にする為に T と q T は垂直と見なします ) 次に 曲げモーメントを求めます 次に ねじれモーメントを求めます 次に 理想曲げモーメントを求めます 次に 熱処理された調質鋼である C40 (σ amm 値 :7.82 dan/mm 2 ) 材質のシャフトを使用して駆動プーリを作った場合の抵抗モーメント W を求めます
66 63 この計算結果を受けて 次式から駆動プーリのシャフト径を求めます この公式で得られたシャフト径の φ94mm は ピローブロック等の軸受でシャフトを固定する右上図 C 地点でのシャフト径になります 従って 市販軸受に合致する径 例えば φ95 φ100 の径を選定します では次に シャフトの母材径 ( それは 普通 鋼材原材料の径になります ) をどのように決めるかという事になりますが それは既に見た 41 頁での 駆動及びテール / ベンドプーリの たわみ 限界と角度 の項での公式から選定できます ここでは 詳細は述べませんが シャフト母材径は φ120mm になります テールプーリのシャフト径駆動に用いないテールプーリに関するデータは 下記になります プーリ径 D = φ 315 mm; 先にベルト破断強度を 400 N/mm に選定しましたので 表 13 推奨 Min プーリ径 ( 38 頁 ) を見ると 400 N/mm の強度を持つベルトのテールプーリ推奨径は φ315mm です プーリ重量 q r = 170 dan; プーリの重量は Kg では無く dan で示します 1Kg = 約 10 dan です a g = m; 軸受とプーリ鏡との芯間距離 単位は m です これまでの計算結果を基に 先に 40 頁で見た テール / ベンドプーリの場合の張力とプーリ重量 の合力 Cpr を求めます ( 尚 簡単にする為に T と q T は垂直と見なします ) 次に 曲げモーメントを求めます
67 次に 熱処理された調質鋼である C40 (σ amm 値 :7.82 dan/mm 2 ) 材質のシャフトを使用して駆動プーリを作った場合の抵抗モーメント W を求めます 64 この計算結果を受けて 次式からテールプーリのシャフト径を求めます この公式で得られたシャフト径の φ61mm は ピローブロック等の軸受でシャフトを固定する地点でのシャフト径になります 従って 市販軸受に合致する径 例えば φ65 φ70 の径を選定します では次に シャフトの母材径 ( それは一般に鋼材原材料の径になります ) をどのように決めるかという事になりますが それは既に見た 41 頁での 駆動及びテール / ベンドプーリの たわみ 限界と角度 の項での公式から選定できます ここでは 詳細は述べませんが シャフト母材径は φ95mm になります 選定結果のまとめこうした計算のステップを経て得られた このプロジェクトのベルトコンベヤの主要部品類の仕様 / 規格は 以下になります 原材料を搬送するコンベヤ速度 :V = 138m/ 分 (2.3m/ 秒 ) キャリアセット: 両側のローラの傾斜角度は λ = 30 従って 30-3 槽キャリアセット リターンセット:1 本ローラのリターンセット ベルト幅:1000W ( ベルト破断強度 :400 N/mm ) キャリアセットのピッチ:1.2 m リターンセットのピッチ:3 m キャリアローラ:PSV1 ( シャフト径 φ20), ローラ径 φ114, シャフト取付内々 C 寸法 360 mm リターンローラ:PSV1, ローラ径 φ114, シャフト取付内々 C 寸法 1130 mm ベルトコンベヤを動かすのに必要なモーター出力:64 kw ベルト たわみ ( 2 台の連続したキャリアセット架台間 ):2 % 以下 駆動プーリ : 外径 φ400mm シャフト軸受部径 φ100 mm( 母材径 φ120) C40 材使用 テールプーリ: 外径 φ315mm シャフト軸受部径 φ65 mm( 母材径 φ95) C40 材使用 この以上のまとめを受けて 駆動方法については 従来の減速モーターの駆動方法 ( 駆動プーリ + ギヤ + 動力伝達装置 / 部品 ) の採用を考える方もあれば モータープーリの採用を考



68 える方もあると思います 後者のモータープーリの採用を考える方には 弊社ラルメカのモータープーリの総合カタログを参照して選定いただけますが その機種は 75kW 出力の 800H ( プーリ径 φ800mm シャフト径 φ120 mm ) の選定になります 65 ラルメカ日本総代理店 バルクワールド本社 : 千葉県船橋市大神保町 TEL: FAX: 北日本事務所 : 岩手県北上市村崎野 TEL: / FAX:
69
ACモーター入門編 サンプルテキスト
 技術セミナーテキスト AC モーター入門編 目次 1 AC モーターの位置付けと特徴 2 1-1 AC モーターの位置付け 1-2 AC モーターの特徴 2 AC モーターの基礎 6 2-1 構造 2-2 動作原理 2-3 特性と仕様の見方 2-4 ギヤヘッドの役割 2-5 ギヤヘッドの仕様 2-6 ギヤヘッドの種類 2-7 代表的な AC モーター 3 温度上昇と寿命 32 3-1 温度上昇の考え方
技術セミナーテキスト AC モーター入門編 目次 1 AC モーターの位置付けと特徴 2 1-1 AC モーターの位置付け 1-2 AC モーターの特徴 2 AC モーターの基礎 6 2-1 構造 2-2 動作原理 2-3 特性と仕様の見方 2-4 ギヤヘッドの役割 2-5 ギヤヘッドの仕様 2-6 ギヤヘッドの種類 2-7 代表的な AC モーター 3 温度上昇と寿命 32 3-1 温度上昇の考え方
Microsoft PowerPoint - zairiki_3
 材料力学講義 (3) 応力と変形 Ⅲ ( 曲げモーメント, 垂直応力度, 曲率 ) 今回は, 曲げモーメントに関する, 断面力 - 応力度 - 変形 - 変位の関係について学びます 1 曲げモーメント 曲げモーメント M 静定力学で求めた曲げモーメントも, 仮想的に断面を切ることによって現れる内力です 軸方向力は断面に働く力 曲げモーメント M は断面力 曲げモーメントも, 一つのモーメントとして表しますが,
材料力学講義 (3) 応力と変形 Ⅲ ( 曲げモーメント, 垂直応力度, 曲率 ) 今回は, 曲げモーメントに関する, 断面力 - 応力度 - 変形 - 変位の関係について学びます 1 曲げモーメント 曲げモーメント M 静定力学で求めた曲げモーメントも, 仮想的に断面を切ることによって現れる内力です 軸方向力は断面に働く力 曲げモーメント M は断面力 曲げモーメントも, 一つのモーメントとして表しますが,
ポリチェーンベルトプーリ追加工プーリ技術資料 E Vベルト G Tベルト H T Dベルト タイミングベルト 特殊ベルト15 長尺ベルト
 14 ポリチェーンベルトプーリ追加工プーリ技術資料 E Vベルト G Tベルト H T Dベルト タイミングベルト 特殊ベルト15 長尺ベルト ポリチェーンベルト POLYCHAIN GT CARBON 8MGT 8MGT ピッチ :8.0mm ベルト歯形寸法 ベルト呼称例 8MGT-640-12 CB カーボン仕様 幅 (mm) ピッチ周長 (mm) タイプ記号 ベルトサイズ一覧表 8MGT-
14 ポリチェーンベルトプーリ追加工プーリ技術資料 E Vベルト G Tベルト H T Dベルト タイミングベルト 特殊ベルト15 長尺ベルト ポリチェーンベルト POLYCHAIN GT CARBON 8MGT 8MGT ピッチ :8.0mm ベルト歯形寸法 ベルト呼称例 8MGT-640-12 CB カーボン仕様 幅 (mm) ピッチ周長 (mm) タイプ記号 ベルトサイズ一覧表 8MGT-
第 2 章 構造解析 8
 第 2 章 構造解析 8 2.1. 目的 FITSAT-1 の外郭構造が, 打ち上げ時の加速度等によって発生する局所的な応力, 及び温度変化によってビスに発生する引っ張り応力に対して, 十分な強度を有することを明らかにする. 解析には SolidWorks2011 を用いた. 2.2. 適用文書 (1)JMX-2011303B: JEM 搭載用小型衛星放出機構を利用する小型衛星への構造 フラクチャコントロール計画書
第 2 章 構造解析 8 2.1. 目的 FITSAT-1 の外郭構造が, 打ち上げ時の加速度等によって発生する局所的な応力, 及び温度変化によってビスに発生する引っ張り応力に対して, 十分な強度を有することを明らかにする. 解析には SolidWorks2011 を用いた. 2.2. 適用文書 (1)JMX-2011303B: JEM 搭載用小型衛星放出機構を利用する小型衛星への構造 フラクチャコントロール計画書
V- リング 1 / 11 V- リンク の概要と機能について 概要フォーシェダ V- リングは回転軸用のユニークなゴムシールです 1960 年代に開発されて以来 世界中であらゆる業界の OEM や補修市場において幅広く使われてきました V- リングはベアリング内のグリースを保持したまま塵や埃 水ま
 V- リング 1 / 11 V- リンク の概要と機能について 概要フォーシェダ V- リングは回転軸用のユニークなゴムシールです 1960 年代に開発されて以来 世界中であらゆる業界の OEM や補修市場において幅広く使われてきました V- リングはベアリング内のグリースを保持したまま塵や埃 水またはその混合物が侵入するのを防ぎます V- リングの独創的なデザインと機能は様々なベアリングタイプに使用できます
V- リング 1 / 11 V- リンク の概要と機能について 概要フォーシェダ V- リングは回転軸用のユニークなゴムシールです 1960 年代に開発されて以来 世界中であらゆる業界の OEM や補修市場において幅広く使われてきました V- リングはベアリング内のグリースを保持したまま塵や埃 水またはその混合物が侵入するのを防ぎます V- リングの独創的なデザインと機能は様々なベアリングタイプに使用できます
ギリシャ文字の読み方を教えてください
 埼玉工業大学機械工学学習支援セミナー ( 小西克享 ) 慣性モーメント -1/6 テーマ 01: 慣性モーメント (Momet of ietia) コマ回しをすると, 長い時間回転させるには重くて大きなコマを選ぶことや, ひもを早く引くことが重要であることが経験的にわかります. 遊びを通して, 回転の運動エネルギーを増やせば, 回転の勢いが増すことを学習できるので, 機械系の学生にとってコマ回しも大切な体験学習のひとつと言えます.
埼玉工業大学機械工学学習支援セミナー ( 小西克享 ) 慣性モーメント -1/6 テーマ 01: 慣性モーメント (Momet of ietia) コマ回しをすると, 長い時間回転させるには重くて大きなコマを選ぶことや, ひもを早く引くことが重要であることが経験的にわかります. 遊びを通して, 回転の運動エネルギーを増やせば, 回転の勢いが増すことを学習できるので, 機械系の学生にとってコマ回しも大切な体験学習のひとつと言えます.
3.3 モータ運転の留意点 ギヤモータをインバータで運転する場合 ギヤモータをインバータで運転する場合 以下のような注意事項があります 出力軸トルク特性に対する注意事項ギヤモータの出力軸トルク 9544 モータ出力 (kw) SI 単位系 T G = (N m) 出力軸回転数 (r/min) < ギ
 SI 単位系 T G = (N m) 出力軸回転数 (r/min) < ギ") 3.3 モータ運転の留意点 ギヤモータをインバータで運転する場合 ギヤモータをインバータで運転する場合 以下のような注意事項があります 出力軸トルク特性に対する注意事項ギヤモータの出力軸トルク 9544 モータ出力 (kw) SI 単位系 T G = (N m) 出力軸回転数 (r/min) < ギヤで回転数を変えた場合 > トルク モータ出力軸トルク 9544 モータ出力 (kw) SI 単位系
3.3 モータ運転の留意点 ギヤモータをインバータで運転する場合 ギヤモータをインバータで運転する場合 以下のような注意事項があります 出力軸トルク特性に対する注意事項ギヤモータの出力軸トルク 9544 モータ出力 (kw) SI 単位系 T G = (N m) 出力軸回転数 (r/min) < ギヤで回転数を変えた場合 > トルク モータ出力軸トルク 9544 モータ出力 (kw) SI 単位系
EV5GT EV5GT ピッチ :5.0mm ベルト歯形寸法 ベルト呼称例 500-EV5GT-15 プーリ歯形寸法 幅 (mm) タイプ記号 ピッチ周長 (mm) ベルトサイズ一覧表 185-EV5GT EV5GT EV5GT
 タイプ記号 ピッチ周長 (mm) ベルトサイズ一覧表 185-EV5GT EV5GT EV5GT") E Vベルト EV5GT EV5GT ピッチ :5.0mm ベルト歯形寸法 ベルト呼称例 500-EV5GT-15 プーリ歯形寸法 幅 (mm) タイプ記号 ピッチ周長 (mm) ベルトサイズ一覧表 185-EV5GT 185.00 37 225-EV5GT 225.00 45 230-EV5GT 230.00 46 240-EV5GT 240.00 48 245-EV5GT 245.00 49 250-EV5GT
E Vベルト EV5GT EV5GT ピッチ :5.0mm ベルト歯形寸法 ベルト呼称例 500-EV5GT-15 プーリ歯形寸法 幅 (mm) タイプ記号 ピッチ周長 (mm) ベルトサイズ一覧表 185-EV5GT 185.00 37 225-EV5GT 225.00 45 230-EV5GT 230.00 46 240-EV5GT 240.00 48 245-EV5GT 245.00 49 250-EV5GT
総合143表紙
 スライドガイドA-0 A-1 スライドガイド SGL 形 N スライドガイド SGL 形は 4 条列の軌道溝内でボールが転がり運動をおこなう直線運動軸受です コンパクトな形状にもかかわらず高負荷容量であることからあらゆる用途に使用されます 構造と特長 ブロックの形式 SGL 形スライドガイドのブロックは取付け方式で以下の 種類のブロックから選定できます SGL-F 形 P.A-4 SGL-F 形 P.A-
スライドガイドA-0 A-1 スライドガイド SGL 形 N スライドガイド SGL 形は 4 条列の軌道溝内でボールが転がり運動をおこなう直線運動軸受です コンパクトな形状にもかかわらず高負荷容量であることからあらゆる用途に使用されます 構造と特長 ブロックの形式 SGL 形スライドガイドのブロックは取付け方式で以下の 種類のブロックから選定できます SGL-F 形 P.A-4 SGL-F 形 P.A-
Microsoft Word - thesis.doc
 剛体の基礎理論 -. 剛体の基礎理論初めに本論文で大域的に使用する記号を定義する. 使用する記号トルク撃力力角運動量角速度姿勢対角化された慣性テンソル慣性テンソル運動量速度位置質量時間 J W f F P p .. 質点の並進運動 質点は位置 と速度 P を用いる. ニュートンの運動方程式 という状態を持つ. 但し ここでは速度ではなく運動量 F P F.... より質点の運動は既に明らかであり 質点の状態ベクトル
剛体の基礎理論 -. 剛体の基礎理論初めに本論文で大域的に使用する記号を定義する. 使用する記号トルク撃力力角運動量角速度姿勢対角化された慣性テンソル慣性テンソル運動量速度位置質量時間 J W f F P p .. 質点の並進運動 質点は位置 と速度 P を用いる. ニュートンの運動方程式 という状態を持つ. 但し ここでは速度ではなく運動量 F P F.... より質点の運動は既に明らかであり 質点の状態ベクトル
ローラチェーンスプロケット 形式及び円滑なローラチェーン伝動には ローラチェーンとスプロケットの噛合いが正確に行われる事が要求されます スプロケットの ( 速比 ) 中心距離 配置などの選定が使用ローラチェーンに対して適切であるかどうかがローラチェーン及び スプロケットの寿命を左右しますから 円滑な
 中心距離 配置などの選定が使用ローラチェーンに対して適切であるかどうかがローラチェーン及び スプロケットの寿命を左右しますから 円滑な") スプロケット 71 ローラチェーンスプロケット 形式及び円滑なローラチェーン伝動には ローラチェーンとスプロケットの噛合いが正確に行われる事が要求されます スプロケットの ( 速比 ) 中心距離 配置などの選定が使用ローラチェーンに対して適切であるかどうかがローラチェーン及び スプロケットの寿命を左右しますから 円滑な回転と伝動効率を低下させないためにも スプロケットの選定には十分な考慮を払って下さい
スプロケット 71 ローラチェーンスプロケット 形式及び円滑なローラチェーン伝動には ローラチェーンとスプロケットの噛合いが正確に行われる事が要求されます スプロケットの ( 速比 ) 中心距離 配置などの選定が使用ローラチェーンに対して適切であるかどうかがローラチェーン及び スプロケットの寿命を左右しますから 円滑な回転と伝動効率を低下させないためにも スプロケットの選定には十分な考慮を払って下さい
Microsoft PowerPoint - fuseitei_6
 不静定力学 Ⅱ 骨組の崩壊荷重の計算 不静定力学 Ⅱ では, 最後の問題となりますが, 骨組の崩壊荷重の計算法について学びます 1 参考書 松本慎也著 よくわかる構造力学の基本, 秀和システム このスライドの説明には, 主にこの参考書の説明を引用しています 2 崩壊荷重 構造物に作用する荷重が徐々に増大すると, 構造物内に発生する応力は増加し, やがて, 構造物は荷重に耐えられなくなる そのときの荷重を崩壊荷重あるいは終局荷重という
不静定力学 Ⅱ 骨組の崩壊荷重の計算 不静定力学 Ⅱ では, 最後の問題となりますが, 骨組の崩壊荷重の計算法について学びます 1 参考書 松本慎也著 よくわかる構造力学の基本, 秀和システム このスライドの説明には, 主にこの参考書の説明を引用しています 2 崩壊荷重 構造物に作用する荷重が徐々に増大すると, 構造物内に発生する応力は増加し, やがて, 構造物は荷重に耐えられなくなる そのときの荷重を崩壊荷重あるいは終局荷重という
バンコランロングシンクロベルト 設計マニュアル
 BANCOLLAN LONG SNCHRONOUS BELT C-L-002-001 C O NTENTS ISO9001ISO14001 ISO9001ISO14001 370 3 4 5 6 7 8 12 ISO 9001 199652 KA0953248 16 17 20 21 23 26 28 ISO 14001 1999521 KA0772509 29 32 47 49 53 54 BANCOLLAN
BANCOLLAN LONG SNCHRONOUS BELT C-L-002-001 C O NTENTS ISO9001ISO14001 ISO9001ISO14001 370 3 4 5 6 7 8 12 ISO 9001 199652 KA0953248 16 17 20 21 23 26 28 ISO 14001 1999521 KA0772509 29 32 47 49 53 54 BANCOLLAN
[Ⅹ]資料編
![[Ⅹ]資料編](/thumbs/96/130035081.jpg "[Ⅹ]資料編") 料編 Ⅹ の設計および使用上の留意事項 (1) シンクロベルトの適正な張り方 ベルトの張り方はベルトがたるまない程度が適正で張り過ぎは ベルトの寿命を低下させます また張りがゆるい場合 衝撃的な負荷または起動トルクが大きいとベルトがプーリ溝からジャンプして乗り上げることがあります ベルトの張りを数値的に管理する場合は 次の手順により行います STEP1 スパンの計算 STEP2 s= C 2 (Dpdp)2
料編 Ⅹ の設計および使用上の留意事項 (1) シンクロベルトの適正な張り方 ベルトの張り方はベルトがたるまない程度が適正で張り過ぎは ベルトの寿命を低下させます また張りがゆるい場合 衝撃的な負荷または起動トルクが大きいとベルトがプーリ溝からジャンプして乗り上げることがあります ベルトの張りを数値的に管理する場合は 次の手順により行います STEP1 スパンの計算 STEP2 s= C 2 (Dpdp)2
構造力学Ⅰ第12回
 第 回材の座屈 (0 章 ) p.5~ ( 復習 ) モールの定理 ( 手順 ) 座屈とは 荷重により梁に生じた曲げモーメントをで除して仮想荷重と考える 座屈荷重 偏心荷重 ( 曲げと軸力 ) 断面の核 この仮想荷重に対するある点でのせん断力 たわみ角に相当する曲げモーメント たわみに相当する ( 例 ) 単純梁の支点のたわみ角 : は 図 を仮想荷重と考えたときの 点の支点反力 B は 図 を仮想荷重と考えたときのB
第 回材の座屈 (0 章 ) p.5~ ( 復習 ) モールの定理 ( 手順 ) 座屈とは 荷重により梁に生じた曲げモーメントをで除して仮想荷重と考える 座屈荷重 偏心荷重 ( 曲げと軸力 ) 断面の核 この仮想荷重に対するある点でのせん断力 たわみ角に相当する曲げモーメント たわみに相当する ( 例 ) 単純梁の支点のたわみ角 : は 図 を仮想荷重と考えたときの 点の支点反力 B は 図 を仮想荷重と考えたときのB
円筒歯車の最適歯面修整の設計例 適正な歯面修整で負荷容量の増大を目指すー 目次 1. はじめに 2 2. ` 解析例 ( はすば歯車の例 ) 歯車諸元 (C 面取り ) 歯車諸元 (R 面取り ) 最適歯面修整 歯先修整 + 歯先
 歯車諸元 (C 面取り ) 歯車諸元 (R 面取り ) 最適歯面修整 歯先修整 + 歯先") 円筒歯車の最適歯面修整の設計例 適正な歯面修整で負荷容量の増大を目指すー 2019.02.25 目次 1. はじめに 2 2. ` 解析例 ( はすば歯車の例 ) 2 2.1 歯車諸元 (C 面取り ) 2 2.2 歯車諸元 (R 面取り ) 7 2.3 最適歯面修整 9 2.4 歯先修整 + 歯先 C 12 2.5 歯先修整 + 歯先 R 14 2.6 解析結果の比較 16 3. 修整歯形 + 歯先
円筒歯車の最適歯面修整の設計例 適正な歯面修整で負荷容量の増大を目指すー 2019.02.25 目次 1. はじめに 2 2. ` 解析例 ( はすば歯車の例 ) 2 2.1 歯車諸元 (C 面取り ) 2 2.2 歯車諸元 (R 面取り ) 7 2.3 最適歯面修整 9 2.4 歯先修整 + 歯先 C 12 2.5 歯先修整 + 歯先 R 14 2.6 解析結果の比較 16 3. 修整歯形 + 歯先
Microsoft PowerPoint - 講義 ppt [互換モード]
![Microsoft PowerPoint - 講義 ppt [互換モード]](/thumbs/82/84810866.jpg "Microsoft PowerPoint - 講義 ppt [互換モード]") カム リンク機構の設計 2010/03/16 テクファ ジャパン ( 株 ) 香取英男 カム機構は 半導体や電子部品などを高速かつ多量に製造する機械に数多く用いられている重要な機構の一つである カム機構の設計 製作を正しく行えば 長期間にわたって信頼性の高い性能を発揮できる そこで カム機構の設計を進めていく上での いくつかの留意点を示そう 1 カム リンク機構とは カム機構は基本的には カムの回転に対して
カム リンク機構の設計 2010/03/16 テクファ ジャパン ( 株 ) 香取英男 カム機構は 半導体や電子部品などを高速かつ多量に製造する機械に数多く用いられている重要な機構の一つである カム機構の設計 製作を正しく行えば 長期間にわたって信頼性の高い性能を発揮できる そこで カム機構の設計を進めていく上での いくつかの留意点を示そう 1 カム リンク機構とは カム機構は基本的には カムの回転に対して
1. ベアリングユニットの構造と特徴 Tベアリングユニットはシール付きラジアル玉軸受と, さまざまな形状と材質の軸受箱を組み合わせたもので, 軸受外径面と軸受箱内径面は球面のため調心性がある ユニット用玉軸受は,T 深溝玉軸受の62,63 系列の内部構造, 内部潤滑用のグリースの封入, 合成ゴムシー
 ベアリングユニット 1. ベアリングユニットの構造と特徴 Tベアリングユニットはシール付きラジアル玉軸受と, さまざまな形状と材質の軸受箱を組み合わせたもので, 軸受外径面と軸受箱内径面は球面のため調心性がある ユニット用玉軸受は,T 深溝玉軸受の62,63 系列の内部構造, 内部潤滑用のグリースの封入, 合成ゴムシール付 き, 止めねじなどの軸固定装置を持っていることを基本仕様としている 軸受箱は鋳鉄製を基本材料としてさまざまな形状がある
ベアリングユニット 1. ベアリングユニットの構造と特徴 Tベアリングユニットはシール付きラジアル玉軸受と, さまざまな形状と材質の軸受箱を組み合わせたもので, 軸受外径面と軸受箱内径面は球面のため調心性がある ユニット用玉軸受は,T 深溝玉軸受の62,63 系列の内部構造, 内部潤滑用のグリースの封入, 合成ゴムシール付 き, 止めねじなどの軸固定装置を持っていることを基本仕様としている 軸受箱は鋳鉄製を基本材料としてさまざまな形状がある
CAT_728g
 . 歯車の荷重計算. 平歯車, はすば歯車, やまば歯車にかかる力の計算 被動歯車に作用する力,, の大きさは, それぞれ,, に等しく方向が反対である. 歯車と転がり軸受の二つの機械要素の間には, 非常に密接な関係があり, 多くの機械に使用されている歯車装置には, 軸受がほとんど使われている. これらの歯車装置に使用する軸受の定格寿命計算, 軸受の選定は, 歯車のかみあい点における力が基本となる.
. 歯車の荷重計算. 平歯車, はすば歯車, やまば歯車にかかる力の計算 被動歯車に作用する力,, の大きさは, それぞれ,, に等しく方向が反対である. 歯車と転がり軸受の二つの機械要素の間には, 非常に密接な関係があり, 多くの機械に使用されている歯車装置には, 軸受がほとんど使われている. これらの歯車装置に使用する軸受の定格寿命計算, 軸受の選定は, 歯車のかみあい点における力が基本となる.
Microsoft PowerPoint - fcn-360-idc-tool-i.pptx
 FUJITSU Component Connector FCN-360 形コネクタ圧着作業基準案内書 1 はじめに FCN-360 形コネクタには 電線と端子を接続する手段として圧着接続を行うタイプがあります この接続方法は 圧力型接続とも呼ばれ 二つの導体に機械的な力を加えて密接な金属接触を行わせ 残留応力 または金属間の結合力によって接触が保持されることにより永久接続を行うものです 圧着接続は
FUJITSU Component Connector FCN-360 形コネクタ圧着作業基準案内書 1 はじめに FCN-360 形コネクタには 電線と端子を接続する手段として圧着接続を行うタイプがあります この接続方法は 圧力型接続とも呼ばれ 二つの導体に機械的な力を加えて密接な金属接触を行わせ 残留応力 または金属間の結合力によって接触が保持されることにより永久接続を行うものです 圧着接続は
開放形シールド形シール形 ( 非接触 ) 膨張補正形 1. 構造及び特性 転がり軸受のなかで最も多方面に使用されている深溝玉軸受は, 内輪 外輪とも軌道は円弧状の深い溝になっておりラジアル荷重, 両方向のアキシアル荷重, 又はそれらの組み合わせである合成荷重を受けることができ, 高速回転にも適してい
 膨張補正形 1. 構造及び特性 転がり軸受のなかで最も多方面に使用されている深溝玉軸受は, 内輪 外輪とも軌道は円弧状の深い溝になっておりラジアル荷重, 両方向のアキシアル荷重, 又はそれらの組み合わせである合成荷重を受けることができ, 高速回転にも適してい") 開放形シールド形シール形 ( 非接触 ) 膨張補正形 1. 構造及び特性 転がり軸受のなかで最も多方面に使用されている深溝玉軸受は, 内輪 外輪とも軌道は円弧状の深い溝になっておりラジアル荷重, 両方向のアキシアル荷重, 又はそれらの組み合わせである合成荷重を受けることができ, 高速回転にも適している この形式の軸受には開放形のほかにグリ スを封入した密封形玉軸受 ( 両シ ル又は両シ ルド軸受 )
開放形シールド形シール形 ( 非接触 ) 膨張補正形 1. 構造及び特性 転がり軸受のなかで最も多方面に使用されている深溝玉軸受は, 内輪 外輪とも軌道は円弧状の深い溝になっておりラジアル荷重, 両方向のアキシアル荷重, 又はそれらの組み合わせである合成荷重を受けることができ, 高速回転にも適している この形式の軸受には開放形のほかにグリ スを封入した密封形玉軸受 ( 両シ ル又は両シ ルド軸受 )
第1章 単 位
 H. Hamano,. 長柱の座屈 - 長柱の座屈 長い柱は圧縮荷重によって折れてしまう場合がある. この現象を座屈といい, 座屈するときの荷重を座屈荷重という.. 換算長 長さ の柱に荷重が作用する場合, その支持方法によって, 柱の理論上の長さ L が異なる. 長柱の計算は, この L を用いて行うと都合がよい. この L を換算長 ( あるいは有効長さという ) という. 座屈荷重は一般に,
H. Hamano,. 長柱の座屈 - 長柱の座屈 長い柱は圧縮荷重によって折れてしまう場合がある. この現象を座屈といい, 座屈するときの荷重を座屈荷重という.. 換算長 長さ の柱に荷重が作用する場合, その支持方法によって, 柱の理論上の長さ L が異なる. 長柱の計算は, この L を用いて行うと都合がよい. この L を換算長 ( あるいは有効長さという ) という. 座屈荷重は一般に,
材料の力学解答集
 材料の力学 ( 第 章 ) 解答集 ------------------------------------------------------------------------------- 各種応力の計算問題 (No1) 1. 断面積 1mm の材料に 18N の引張荷重が働くとき, 断面に生じる応力はどれほどか ( 18(N/mm ) または 18(MP)) P 18( N) 18 N /
材料の力学 ( 第 章 ) 解答集 ------------------------------------------------------------------------------- 各種応力の計算問題 (No1) 1. 断面積 1mm の材料に 18N の引張荷重が働くとき, 断面に生じる応力はどれほどか ( 18(N/mm ) または 18(MP)) P 18( N) 18 N /
Microsoft Word - 9章3 v3.2.docx
 3. 内歯歯車 K--V 機構の効率 3. 退行駆動前項では外歯の K--V 機構の効率について考察した ここでは内歯歯車の K--V 機構を対象とする その考え方は外歯の場合と同じであるが 一部外歯の場合とは違った現象が起こるのでその部分に焦点を当てて述べる 先に固定したラックとピニオンの例を取り上げた そこではピニオン軸心を押す場合と ピニオンにモーメントを加える方法とではラックの役割が違うことを示した
3. 内歯歯車 K--V 機構の効率 3. 退行駆動前項では外歯の K--V 機構の効率について考察した ここでは内歯歯車の K--V 機構を対象とする その考え方は外歯の場合と同じであるが 一部外歯の場合とは違った現象が起こるのでその部分に焦点を当てて述べる 先に固定したラックとピニオンの例を取り上げた そこではピニオン軸心を押す場合と ピニオンにモーメントを加える方法とではラックの役割が違うことを示した
軸受内部すきまと予圧 δeff =δo (δf +δt ) (8.1) δeff: 運転すきま mm δo: 軸受内部すきま mm δf : しめしろによる内部すきまの減少量 mm δt: 内輪と外輪の温度差による内部すきまの減少量 mm (1) しめしろによる内部すきまの減少量しめしろを与えて軸受
 (8.1) δeff: 運転すきま mm δo: 軸受内部すきま mm δf : しめしろによる内部すきまの減少量 mm δt: 内輪と外輪の温度差による内部すきまの減少量 mm (1) しめしろによる内部すきまの減少量しめしろを与えて軸受") 軸受内部すきまと予圧 8. 軸受内部すきまと予圧 8. 1 軸受内部すきま軸受内部すきまとは, 軸又はハウジングに取り付ける前の状態で, 図 8.1に示すように内輪又は外輪のいずれかを固定して, 固定されていない軌道輪をラジアル方向又はアキシアル方向に移動させたときの軌道輪の移動量をいう 移動させる方向によって, それぞれラジアル内部すきま又はアキシアル内部すきまと呼ぶ 軸受内部すきまを測定する場合は,
軸受内部すきまと予圧 8. 軸受内部すきまと予圧 8. 1 軸受内部すきま軸受内部すきまとは, 軸又はハウジングに取り付ける前の状態で, 図 8.1に示すように内輪又は外輪のいずれかを固定して, 固定されていない軌道輪をラジアル方向又はアキシアル方向に移動させたときの軌道輪の移動量をいう 移動させる方向によって, それぞれラジアル内部すきま又はアキシアル内部すきまと呼ぶ 軸受内部すきまを測定する場合は,
風力治具 バリオタップ Vario-TAP-R L リース 販売 バリオタップ 風力発電用リフティング 棒天秤 12ton P74参照 フランジ穴に合わせたピッチ調整機能付き 製作天秤 タワーの吊り上げ 引き起こし フランジ直径2m 6mに対応 使用荷重 WLL フランジ Φ ボルト サ
 風力治具 Vario-TAP-R L 棒 12ton-10000 P74参照 フランジ穴に合わせたピッチ調整機能付き 製作 タワーの吊り上げ 引き起こし フランジ直径2m 6mに対応 使用荷重 WLL フランジ Φ ボルト サイズ 製品質量 t 2 6m M20 M56 kg (t用) フック シャックル ベルトと接続 使用例写真 シリーズ 誤装着ミスを防ぐ 左右識別カラー 吊金具 注意 124 バリオワッシャー
風力治具 Vario-TAP-R L 棒 12ton-10000 P74参照 フランジ穴に合わせたピッチ調整機能付き 製作 タワーの吊り上げ 引き起こし フランジ直径2m 6mに対応 使用荷重 WLL フランジ Φ ボルト サイズ 製品質量 t 2 6m M20 M56 kg (t用) フック シャックル ベルトと接続 使用例写真 シリーズ 誤装着ミスを防ぐ 左右識別カラー 吊金具 注意 124 バリオワッシャー
Microsoft PowerPoint - zairiki_7
 許容応力度設計の基礎 曲げに対する設計 材料力学の後半は 許容応力度設計の基礎を学びます 構造設計の手法は 現在も進化を続けています 例えば 最近では限界耐力計算法という耐震設計法が登場しています 限界耐力計算法では 地震による建物の振動現象を耐震設計法の中に取り入れています しかし この設計法も 許容応力度設計法をベースにしながら 新しい概念 ( 限界設計法 ) を取り入れて発展させたものです ですから
許容応力度設計の基礎 曲げに対する設計 材料力学の後半は 許容応力度設計の基礎を学びます 構造設計の手法は 現在も進化を続けています 例えば 最近では限界耐力計算法という耐震設計法が登場しています 限界耐力計算法では 地震による建物の振動現象を耐震設計法の中に取り入れています しかし この設計法も 許容応力度設計法をベースにしながら 新しい概念 ( 限界設計法 ) を取り入れて発展させたものです ですから
タイトシリンダ複動 片ロッド形 CMK2 Series チューブ内径 :φ20~φ40 特長 高耐蝕で長寿命 バリエーションが豊富なカシメタイプ 10 本以下 カタログ No.CB-029S 形番表示方法 スイッチなし ( スイッチ用磁石内蔵 ) CMK スイッチ付 ( スイッチ用磁石
 CMK スイッチ付 ( スイッチ用磁石") タイトシリンダ複動 片ロッド形 CMK2 Series チューブ内径 :φ20~φ40 特長 高耐蝕で長寿命 バリエーションが豊富なカシメタイプ 10 本以下 カタログ No.CB-029S 形番表示方法 スイッチなし ( スイッチ用磁石内蔵 ) CMK2 00 20 スイッチ付 ( スイッチ用磁石内蔵 ) CMK2 00 20 100 T2H R Y A 100 Y B C D E F 標準価格
タイトシリンダ複動 片ロッド形 CMK2 Series チューブ内径 :φ20~φ40 特長 高耐蝕で長寿命 バリエーションが豊富なカシメタイプ 10 本以下 カタログ No.CB-029S 形番表示方法 スイッチなし ( スイッチ用磁石内蔵 ) CMK2 00 20 スイッチ付 ( スイッチ用磁石内蔵 ) CMK2 00 20 100 T2H R Y A 100 Y B C D E F 標準価格
POCO 社の EDM グラファイト電極材料は 長年の技術と実績があり成形性や被加工性が良好で その構造ならびに物性の制御が比較的に容易であることから 今後ますます需要が伸びる材料です POCO 社では あらゆる工業製品に対応するため 各種の電極材料を多数用意しました EDM-1 EDM-3 EDM
 POCO 社の EDM グラファイト電極材料は 長年の技術と実績があり成形性や被加工性が良好で その構造ならびに物性の制御が比較的に容易であることから 今後ますます需要が伸びる材料です POCO 社では あらゆる工業製品に対応するため 各種の電極材料を多数用意しました EDM-1 EDM-200 EDM-200 EDM-200 INDEX EDM グラファイトの分類 電極材料選択の主要ファクタ P2
POCO 社の EDM グラファイト電極材料は 長年の技術と実績があり成形性や被加工性が良好で その構造ならびに物性の制御が比較的に容易であることから 今後ますます需要が伸びる材料です POCO 社では あらゆる工業製品に対応するため 各種の電極材料を多数用意しました EDM-1 EDM-200 EDM-200 EDM-200 INDEX EDM グラファイトの分類 電極材料選択の主要ファクタ P2
機械式ムーブメント 機械式時計の品質とメンテナンス なぜロンジンは機械式ムーブメントを搭載した時計をコレクションに加えているの でしょうか 答えは単純です 最新式の手巻ムーブメントもしくは自動巻ムーブメントを搭載している時計に優る満足は 他のムーブメントを搭載している時計からは得 られないからです
 機械式ムーブメント 機械式時計の品質とメンテナンス なぜロンジンは機械式ムーブメントを搭載した時計をコレクションに加えているの でしょうか 答えは単純です 最新式の手巻ムーブメントもしくはムーブメントを搭載している時計に優る満足は 他のムーブメントを搭載している時計からは得 られないからです もちろん より高い精度を求めるなら クォーツムーブメントのほうが優れているといっていいでしょう しかし時計に純粋な喜びを求
機械式ムーブメント 機械式時計の品質とメンテナンス なぜロンジンは機械式ムーブメントを搭載した時計をコレクションに加えているの でしょうか 答えは単純です 最新式の手巻ムーブメントもしくはムーブメントを搭載している時計に優る満足は 他のムーブメントを搭載している時計からは得 られないからです もちろん より高い精度を求めるなら クォーツムーブメントのほうが優れているといっていいでしょう しかし時計に純粋な喜びを求
EOS: 材料データシート(アルミニウム)
") EOS EOS は EOSINT M システムで処理できるように最適化された粉末状のアルミニウム合金である 本書は 下記のシステム仕様により EOS 粉末 (EOS art.-no. 9011-0024) で造形した部品の情報とデータを提供する - EOSINT M 270 Installation Mode Xtended PSW 3.4 とデフォルトジョブ AlSi10Mg_030_default.job
EOS EOS は EOSINT M システムで処理できるように最適化された粉末状のアルミニウム合金である 本書は 下記のシステム仕様により EOS 粉末 (EOS art.-no. 9011-0024) で造形した部品の情報とデータを提供する - EOSINT M 270 Installation Mode Xtended PSW 3.4 とデフォルトジョブ AlSi10Mg_030_default.job
はじめに 構成シミュレーションと注文 受け取り 1
 はじめに 構成シミュレーションと注文 受け取り 1 [mm] [mm] [mm] [kg/m] [m] [ C] E E Z Z ウェブガイド の使い方 製品写真の横に サイズや走行距離などの製品概要があります オレンジ色のカタログ クイックリンク (www.igus.co.jp/web/...) は オンラインの製品情報に直接つながり 製品の構成 比較 3D データ作成 寿命計算 見積り依頼をすることが可能です
はじめに 構成シミュレーションと注文 受け取り 1 [mm] [mm] [mm] [kg/m] [m] [ C] E E Z Z ウェブガイド の使い方 製品写真の横に サイズや走行距離などの製品概要があります オレンジ色のカタログ クイックリンク (www.igus.co.jp/web/...) は オンラインの製品情報に直接つながり 製品の構成 比較 3D データ作成 寿命計算 見積り依頼をすることが可能です
問題 2-1 ボルト締結体の設計 (1-1) 摩擦係数の推定図 1-1 に示すボルト締結体にて, 六角穴付きボルト (M12) の締付けトルクとボルト軸力を測定した ボルトを含め材質はすべて SUS304 かそれをベースとしたオーステナイト系ステンレス鋼である 測定時, ナットと下締結体は固着させた
 摩擦係数の推定図 1-1 に示すボルト締結体にて, 六角穴付きボルト (M12) の締付けトルクとボルト軸力を測定した ボルトを含め材質はすべて SUS304 かそれをベースとしたオーステナイト系ステンレス鋼である 測定時, ナットと下締結体は固着させた") 問題 2-1 ボルト締結体の設計 (1-1) 摩擦係数の推定図 1-1 に示すボルト締結体にて, 六角穴付きボルト (M12) の締付けトルクとボルト軸力を測定した ボルトを含め材質はすべて SUS304 かそれをベースとしたオーステナイト系ステンレス鋼である 測定時, ナットと下締結体は固着させた 測定データを図 1-2 に示す データから, オーステナイト系ステンレス鋼どうしの摩擦係数を推定せよ
問題 2-1 ボルト締結体の設計 (1-1) 摩擦係数の推定図 1-1 に示すボルト締結体にて, 六角穴付きボルト (M12) の締付けトルクとボルト軸力を測定した ボルトを含め材質はすべて SUS304 かそれをベースとしたオーステナイト系ステンレス鋼である 測定時, ナットと下締結体は固着させた 測定データを図 1-2 に示す データから, オーステナイト系ステンレス鋼どうしの摩擦係数を推定せよ
Autodesk Inventor Skill Builders Autodesk Inventor 2010 構造解析の精度改良 メッシュリファインメントによる収束計算 予想作業時間:15 分 対象のバージョン:Inventor 2010 もしくはそれ以降のバージョン シミュレーションを設定する際
 Autodesk Inventor Skill Builders Autodesk Inventor 2010 構造解析の精度改良 メッシュリファインメントによる収束計算 予想作業時間:15 分 対象のバージョン:Inventor 2010 もしくはそれ以降のバージョン シミュレーションを設定する際に 収束判定に関するデフォルトの設定をそのまま使うか 修正をします 応力解析ソルバーでは計算の終了を判断するときにこの設定を使います
Autodesk Inventor Skill Builders Autodesk Inventor 2010 構造解析の精度改良 メッシュリファインメントによる収束計算 予想作業時間:15 分 対象のバージョン:Inventor 2010 もしくはそれ以降のバージョン シミュレーションを設定する際に 収束判定に関するデフォルトの設定をそのまま使うか 修正をします 応力解析ソルバーでは計算の終了を判断するときにこの設定を使います
強度のメカニズム コンクリートは 骨材同士をセメントペーストで結合したものです したがって コンクリート強度は セメントペーストの接着力に支配されます セメントペーストの接着力は 水セメント比 (W/C 質量比 ) によって決められます 水セメント比が小さいほど 高濃度のセメントペーストとなり 接着
 によって決められます 水セメント比が小さいほど 高濃度のセメントペーストとなり 接着") コンクリートの強度 コンクリートの最も重要な特性は強度です ここでは まず コンクリート強度の基本的特性について解説し 次に 呼び強度および配合強度がどのように設定されるか について説明します 強度のメカニズム 強度の影響要因 強度性状 構造物の強度と供試体強度 配合 ( 調合 ) 強度と呼び強度の算定 材料強度のばらつき 配合強度の設定 呼び強度の割増し 構造体強度補正値 舞鶴市および周辺部における構造体強度補正値
コンクリートの強度 コンクリートの最も重要な特性は強度です ここでは まず コンクリート強度の基本的特性について解説し 次に 呼び強度および配合強度がどのように設定されるか について説明します 強度のメカニズム 強度の影響要因 強度性状 構造物の強度と供試体強度 配合 ( 調合 ) 強度と呼び強度の算定 材料強度のばらつき 配合強度の設定 呼び強度の割増し 構造体強度補正値 舞鶴市および周辺部における構造体強度補正値
Taro-用語集
 < 用語集 > 01.2WAY トラベル フロント側 ( 手前側 ) リア側 ( 奥側 ) にもドロワーメンバー ( 移動側 ) を移動させることができる タイプのスライドレールで 両トラベルとも言います 02.2 メンバースライドレール アウターメンバー インナーメンバーの二つのメンバーで構成されているスライドレールです 03.3/4 トラベル スライド全長に対しその 3/4 の距離を引き出せるスライドレールです
< 用語集 > 01.2WAY トラベル フロント側 ( 手前側 ) リア側 ( 奥側 ) にもドロワーメンバー ( 移動側 ) を移動させることができる タイプのスライドレールで 両トラベルとも言います 02.2 メンバースライドレール アウターメンバー インナーメンバーの二つのメンバーで構成されているスライドレールです 03.3/4 トラベル スライド全長に対しその 3/4 の距離を引き出せるスライドレールです
Microsoft PowerPoint - H21生物計算化学2.ppt
 演算子の行列表現 > L いま 次元ベクトル空間の基底をケットと書くことにする この基底は完全系を成すとすると 空間内の任意のケットベクトルは > > > これより 一度基底を与えてしまえば 任意のベクトルはその基底についての成分で完全に記述することができる これらの成分を列行列の形に書くと M これをベクトル の基底 { >} による行列表現という ところで 行列 A の共役 dont 行列は A
演算子の行列表現 > L いま 次元ベクトル空間の基底をケットと書くことにする この基底は完全系を成すとすると 空間内の任意のケットベクトルは > > > これより 一度基底を与えてしまえば 任意のベクトルはその基底についての成分で完全に記述することができる これらの成分を列行列の形に書くと M これをベクトル の基底 { >} による行列表現という ところで 行列 A の共役 dont 行列は A
Microsoft PowerPoint - zairiki_11
 許容応力度設計の基礎 圧縮材の設計 ( 座屈現象 ) 構造部材には 圧縮を受ける部材があります 柱はその代表格みたいなものです 柱以外にも トラス材やブレース材 ラチス材といったものがあります ブレースは筋交いともいい はりや柱の構面に斜め材として設けられています この部材は 主に地震などの水平力に抵抗します 一方 ラチス材は 細長い平鋼 ( 鉄の板 ) を組み合わせて はりや柱をつくることがありますが
許容応力度設計の基礎 圧縮材の設計 ( 座屈現象 ) 構造部材には 圧縮を受ける部材があります 柱はその代表格みたいなものです 柱以外にも トラス材やブレース材 ラチス材といったものがあります ブレースは筋交いともいい はりや柱の構面に斜め材として設けられています この部材は 主に地震などの水平力に抵抗します 一方 ラチス材は 細長い平鋼 ( 鉄の板 ) を組み合わせて はりや柱をつくることがありますが
杭の事前打ち込み解析
 杭の事前打ち込み解析 株式会社シーズエンジニアリング はじめに杭の事前打込み解析 ( : Pile Driving Prediction) は, ハンマー打撃時の杭の挙動と地盤抵抗をシミュレートする解析方法である 打ち込み工法の妥当性を検討する方法で, 杭施工に最適なハンマー, 杭の肉厚 材質等の仕様等を決めることができる < 特徴 > 杭施工に最適なハンマーを選定することができる 杭の肉厚 材質等の仕様を選定することができる
杭の事前打ち込み解析 株式会社シーズエンジニアリング はじめに杭の事前打込み解析 ( : Pile Driving Prediction) は, ハンマー打撃時の杭の挙動と地盤抵抗をシミュレートする解析方法である 打ち込み工法の妥当性を検討する方法で, 杭施工に最適なハンマー, 杭の肉厚 材質等の仕様等を決めることができる < 特徴 > 杭施工に最適なハンマーを選定することができる 杭の肉厚 材質等の仕様を選定することができる
線積分.indd
 線積分 線積分 ( n, n, n ) (ξ n, η n, ζ n ) ( n-, n-, n- ) (ξ k, η k, ζ k ) ( k, k, k ) ( k-, k-, k- ) 物体に力 を作用させて位置ベクトル A の点 A から位置ベクトル の点 まで曲線 に沿って物体を移動させたときの仕事 W は 次式で計算された A, A, W : d 6 d+ d+ d@,,, d+ d+
線積分 線積分 ( n, n, n ) (ξ n, η n, ζ n ) ( n-, n-, n- ) (ξ k, η k, ζ k ) ( k, k, k ) ( k-, k-, k- ) 物体に力 を作用させて位置ベクトル A の点 A から位置ベクトル の点 まで曲線 に沿って物体を移動させたときの仕事 W は 次式で計算された A, A, W : d 6 d+ d+ d@,,, d+ d+
株式会社イマダロードセル LMU/LU/ZD シリーズ ロードセル LMU/LU/ZD シリーズ 小型 軽量で狭いスペースにも対応 センサー両端にねじ留め可能で 設備への組み込み サンプルの固定が容易 表示器 ZT シリーズと組み合わせて使用します P.3 をご参照ください 型式 超小型 :LMU
 ロードセル LMU/LU/ZD シリーズ 小型 軽量で狭いスペースにも対応 センサー両端にねじ留め可能で 設備への組み込み サンプルの固定が容易 表示器 ZT シリーズと組み合わせて使用します P.3 をご参照ください 型式 超小型 :LMU シリーズ 小型 :LU シリーズ 高荷重型 :ZD 最大荷重値 50N~500N 50N~2000N 1000N~20kN 力の方向 圧縮 引張両用 圧縮 引張両用
ロードセル LMU/LU/ZD シリーズ 小型 軽量で狭いスペースにも対応 センサー両端にねじ留め可能で 設備への組み込み サンプルの固定が容易 表示器 ZT シリーズと組み合わせて使用します P.3 をご参照ください 型式 超小型 :LMU シリーズ 小型 :LU シリーズ 高荷重型 :ZD 最大荷重値 50N~500N 50N~2000N 1000N~20kN 力の方向 圧縮 引張両用 圧縮 引張両用
<8D5C91A28C768E5A8F91836C C768E5A8F A2E786C73>
 スカイセイフティネット構造計算書 スカイテック株式会社 1. 標準寸法 2. 設計条件 (1) 荷重 通常の使用では スカイセーフティネットに人や物は乗せないことを原則とするが 仮定の荷重としてアスファルト ルーフィング1 巻 30kgが1スパンに1 個乗ったとした場合を考える ネットの自重は12kgf/1 枚 これに単管 (2.73kgf/m) を1m 辺り2 本考える 従ってネット自重は合計で
スカイセイフティネット構造計算書 スカイテック株式会社 1. 標準寸法 2. 設計条件 (1) 荷重 通常の使用では スカイセーフティネットに人や物は乗せないことを原則とするが 仮定の荷重としてアスファルト ルーフィング1 巻 30kgが1スパンに1 個乗ったとした場合を考える ネットの自重は12kgf/1 枚 これに単管 (2.73kgf/m) を1m 辺り2 本考える 従ってネット自重は合計で
<4D F736F F D208D5C91A297CD8A7793FC96E591E631308FCD2E646F63>
 第 1 章モールの定理による静定梁のたわみ 1-1 第 1 章モールの定理による静定梁のたわみ ポイント : モールの定理を用いて 静定梁のたわみを求める 断面力の釣合と梁の微分方程式は良く似ている 前章では 梁の微分方程式を直接積分する方法で 静定梁の断面力と変形状態を求めた 本章では 梁の微分方程式と断面力による力の釣合式が類似していることを利用して 微分方程式を直接解析的に解くのではなく 力の釣合より梁のたわみを求める方法を学ぶ
第 1 章モールの定理による静定梁のたわみ 1-1 第 1 章モールの定理による静定梁のたわみ ポイント : モールの定理を用いて 静定梁のたわみを求める 断面力の釣合と梁の微分方程式は良く似ている 前章では 梁の微分方程式を直接積分する方法で 静定梁の断面力と変形状態を求めた 本章では 梁の微分方程式と断面力による力の釣合式が類似していることを利用して 微分方程式を直接解析的に解くのではなく 力の釣合より梁のたわみを求める方法を学ぶ
横浜市環境科学研究所
 周期時系列の統計解析 単回帰分析 io 8 年 3 日 周期時系列に季節調整を行わないで単回帰分析を適用すると, 回帰係数には周期成分の影響が加わる. ここでは, 周期時系列をコサイン関数モデルで近似し単回帰分析によりモデルの回帰係数を求め, 周期成分の影響を検討した. また, その結果を気温時系列に当てはめ, 課題等について考察した. 気温時系列とコサイン関数モデル第 報の結果を利用するので, その一部を再掲する.
周期時系列の統計解析 単回帰分析 io 8 年 3 日 周期時系列に季節調整を行わないで単回帰分析を適用すると, 回帰係数には周期成分の影響が加わる. ここでは, 周期時系列をコサイン関数モデルで近似し単回帰分析によりモデルの回帰係数を求め, 周期成分の影響を検討した. また, その結果を気温時系列に当てはめ, 課題等について考察した. 気温時系列とコサイン関数モデル第 報の結果を利用するので, その一部を再掲する.
< B837B B835E82C982A882AF82E991CF905593AE90AB8CFC8FE382C98AD682B782E988EA8D6C8E40>
 1 / 4 SANYO DENKI TECHNICAL REPORT No.10 November-2000 一般論文 日置洋 Hiroshi Hioki 清水明 Akira Shimizu 石井秀幸 Hideyuki Ishii 小野寺悟 Satoru Onodera 1. まえがき サーボモータを使用する機械の小型軽量化と高応答化への要求に伴い サーボモータは振動の大きな環境で使用される用途が多くなってきた
1 / 4 SANYO DENKI TECHNICAL REPORT No.10 November-2000 一般論文 日置洋 Hiroshi Hioki 清水明 Akira Shimizu 石井秀幸 Hideyuki Ishii 小野寺悟 Satoru Onodera 1. まえがき サーボモータを使用する機械の小型軽量化と高応答化への要求に伴い サーボモータは振動の大きな環境で使用される用途が多くなってきた
POWER-直接基礎Ⅱの出力例(表形式)
") page < 出力例 > 地盤の支持力の計算 S01 (1F Y1@X1 ) BxL hf hw C,O r2 r1 基礎底面の形状 長方形 基礎最小幅 B 1.20 (m) 基礎の長さ L 2.60 (m) 基礎下端の深さ hf GL- 1.20 (m) 地下水位 hw GL- 3.90 (m) 根入れ深さ Df 1.20 (m) 土質定数 砂層 基礎下の土重量 γ1 18.14 (kn/m 3
page < 出力例 > 地盤の支持力の計算 S01 (1F Y1@X1 ) BxL hf hw C,O r2 r1 基礎底面の形状 長方形 基礎最小幅 B 1.20 (m) 基礎の長さ L 2.60 (m) 基礎下端の深さ hf GL- 1.20 (m) 地下水位 hw GL- 3.90 (m) 根入れ深さ Df 1.20 (m) 土質定数 砂層 基礎下の土重量 γ1 18.14 (kn/m 3
どのような便益があり得るか? より重要な ( ハイリスクの ) プロセス及びそれらのアウトプットに焦点が当たる 相互に依存するプロセスについての理解 定義及び統合が改善される プロセス及びマネジメントシステム全体の計画策定 実施 確認及び改善の体系的なマネジメント 資源の有効利用及び説明責任の強化
 プロセス及びそれらのアウトプットに焦点が当たる 相互に依存するプロセスについての理解 定義及び統合が改善される プロセス及びマネジメントシステム全体の計画策定 実施 確認及び改善の体系的なマネジメント 資源の有効利用及び説明責任の強化") ISO 9001:2015 におけるプロセスアプローチ この文書の目的 : この文書の目的は ISO 9001:2015 におけるプロセスアプローチについて説明することである プロセスアプローチは 業種 形態 規模又は複雑さに関わらず あらゆる組織及びマネジメントシステムに適用することができる プロセスアプローチとは何か? 全ての組織が目標達成のためにプロセスを用いている プロセスとは : インプットを使用して意図した結果を生み出す
ISO 9001:2015 におけるプロセスアプローチ この文書の目的 : この文書の目的は ISO 9001:2015 におけるプロセスアプローチについて説明することである プロセスアプローチは 業種 形態 規模又は複雑さに関わらず あらゆる組織及びマネジメントシステムに適用することができる プロセスアプローチとは何か? 全ての組織が目標達成のためにプロセスを用いている プロセスとは : インプットを使用して意図した結果を生み出す
Microsoft Word - t30_西_修正__ doc
 反応速度と化学平衡 金沢工業大学基礎教育部西誠 ねらい 化学反応とは分子を構成している原子が組み換り 新しい分子構造を持つことといえます この化学反応がどのように起こるのか どのような速さでどの程度の分子が組み換るのかは 反応の種類や 濃度 温度などの条件で決まってきます そして このような反応の進行方向や速度を正確に予測するために いろいろな数学 物理的な考え方を取り入れて化学反応の理論体系が作られています
反応速度と化学平衡 金沢工業大学基礎教育部西誠 ねらい 化学反応とは分子を構成している原子が組み換り 新しい分子構造を持つことといえます この化学反応がどのように起こるのか どのような速さでどの程度の分子が組み換るのかは 反応の種類や 濃度 温度などの条件で決まってきます そして このような反応の進行方向や速度を正確に予測するために いろいろな数学 物理的な考え方を取り入れて化学反応の理論体系が作られています
<4D F736F F D2097CD8A7793FC96E582BD82ED82DD8A E6318FCD2E646F63>
 - 第 章たわみ角法の基本式 ポイント : たわみ角法の基本式を理解する たわみ角法の基本式を梁の微分方程式より求める 本章では たわみ角法の基本式を導くことにする 基本式の誘導法は各種あるが ここでは 梁の微分方程式を解いて基本式を求める方法を採用する この本で使用する座標系は 右手 右ネジの法則に従った座標を用いる また ひとつの部材では 図 - に示すように部材の左端の 点を原点とし 軸線を
- 第 章たわみ角法の基本式 ポイント : たわみ角法の基本式を理解する たわみ角法の基本式を梁の微分方程式より求める 本章では たわみ角法の基本式を導くことにする 基本式の誘導法は各種あるが ここでは 梁の微分方程式を解いて基本式を求める方法を採用する この本で使用する座標系は 右手 右ネジの法則に従った座標を用いる また ひとつの部材では 図 - に示すように部材の左端の 点を原点とし 軸線を
参考資料 -1 補強リングの強度計算 1) 強度計算式 (2 点支持 ) * 参考文献土木学会昭和 56 年構造力学公式集 (p410) Mo = wr1 2 (1/2+cosψ+ψsinψ-πsinψ+sin 2 ψ) No = wr1 (sin 2 ψ-1/2) Ra = πr1w Rb = π
 強度計算式 (2 点支持 ) * 参考文献土木学会昭和 56 年構造力学公式集 (p410) Mo = wr1 2 (1/2+cosψ+ψsinψ-πsinψ+sin 2 ψ) No = wr1 (sin 2 ψ-1/2) Ra = πr1w Rb = π") 番号 場所打ちコンクリート杭の鉄筋かご無溶接工法設計 施工に関するガイドライン 正誤表 (2015 年 7 月更新 ) Page 行位置誤正 1 p.3 下から 1 行目 場所打ちコンクリート杭施工指 針 同解説オールケーシング工法 ( 土木 ): 日本基礎建設協会 (2014) 2 p.16 上から 3 行目 1) 補強リングと軸方向主筋を固定する金具の計算 3 p.22 図 4-2-1 右下 200
番号 場所打ちコンクリート杭の鉄筋かご無溶接工法設計 施工に関するガイドライン 正誤表 (2015 年 7 月更新 ) Page 行位置誤正 1 p.3 下から 1 行目 場所打ちコンクリート杭施工指 針 同解説オールケーシング工法 ( 土木 ): 日本基礎建設協会 (2014) 2 p.16 上から 3 行目 1) 補強リングと軸方向主筋を固定する金具の計算 3 p.22 図 4-2-1 右下 200
数値計算で学ぶ物理学 4 放物運動と惑星運動 地上のように下向きに重力がはたらいているような場においては 物体を投げると放物運動をする 一方 中心星のまわりの重力場中では 惑星は 円 だ円 放物線または双曲線を描きながら運動する ここでは 放物運動と惑星運動を 運動方程式を導出したうえで 数値シミュ
 数値計算で学ぶ物理学 4 放物運動と惑星運動 地上のように下向きに重力がはたらいているような場においては 物体を投げると放物運動をする 一方 中心星のまわりの重力場中では 惑星は 円 だ円 放物線または双曲線を描きながら運動する ここでは 放物運動と惑星運動を 運動方程式を導出したうえで 数値シミュレーションによって計算してみる 4.1 放物運動一様な重力場における放物運動を考える 一般に質量の物体に作用する力をとすると運動方程式は
数値計算で学ぶ物理学 4 放物運動と惑星運動 地上のように下向きに重力がはたらいているような場においては 物体を投げると放物運動をする 一方 中心星のまわりの重力場中では 惑星は 円 だ円 放物線または双曲線を描きながら運動する ここでは 放物運動と惑星運動を 運動方程式を導出したうえで 数値シミュレーションによって計算してみる 4.1 放物運動一様な重力場における放物運動を考える 一般に質量の物体に作用する力をとすると運動方程式は
備編 水処理関連機器 ヘリカルポート ルーツタイプ ロータリブロワ連機器曝気用ルーツブロワ RS 型設 機構 独自のヘリカル機構 ブロワはうるさいもの ブロワの騒音は宿命的なもの と考えられがちでした それは 従来のルーツブロワでは ケーシング内の空気を一気に吐き出す構造のため 大きな衝撃や脈動が生
 備編 水処理関連機器 ヘリカルポート ルーツタイプ ロータリブロワ連機器曝気用ルーツブロワ RS 型設 機構 独自のヘリカル機構 ブロワはうるさいもの ブロワの騒音は宿命的なもの と考えられがちでした それは 従来のルーツブロワでは ケーシング内の空気を一気に吐き出す構造のため 大きな衝撃や脈動が生じ これが騒音の原因になったからです ツルミのルーツブロワは 吸込口 吐出し口をヘリカル構造としています
備編 水処理関連機器 ヘリカルポート ルーツタイプ ロータリブロワ連機器曝気用ルーツブロワ RS 型設 機構 独自のヘリカル機構 ブロワはうるさいもの ブロワの騒音は宿命的なもの と考えられがちでした それは 従来のルーツブロワでは ケーシング内の空気を一気に吐き出す構造のため 大きな衝撃や脈動が生じ これが騒音の原因になったからです ツルミのルーツブロワは 吸込口 吐出し口をヘリカル構造としています
indd
 カールツァイス社 ZEISS Lenses for Line Scan and Large Image Format General Features 高精度マニュアルフォーカス& アイリス調整 堅牢なフルメタル構造 忠実な色表現 マシンビジョン 43mm ラインスキャンカメラ対応 マシンビジョン 24x36mm エリアスキャンカメラ対応 Index Introduction 4 Interlock
カールツァイス社 ZEISS Lenses for Line Scan and Large Image Format General Features 高精度マニュアルフォーカス& アイリス調整 堅牢なフルメタル構造 忠実な色表現 マシンビジョン 43mm ラインスキャンカメラ対応 マシンビジョン 24x36mm エリアスキャンカメラ対応 Index Introduction 4 Interlock
ミガキ ( 丸鋼 ) は は自社 は不可 (7/16インチ) (1/2インチ) (9/16インチ) (
 は は自社 は不可 (7/16インチ) (1/2インチ) (9/16インチ) (") ミガキ ( 丸鋼 ) JIS 規格 G3123 相当品旧 JIS 寸法公差 H ( 新 JIS IT ) 基 本寸法 1. 基本的に SGD3(JISG318) 相当ミルシート対応品ですが 一部他鋼種使用の製品がありますので鋼種指定の場合はお問い合せください 3. 一般ミガキ材は引張強さ等の機械的性質を保証する試験検査は行っており ません 4. 定尺品は両端が寸法公差に入っていない場合がありますので使用上ごください
ミガキ ( 丸鋼 ) JIS 規格 G3123 相当品旧 JIS 寸法公差 H ( 新 JIS IT ) 基 本寸法 1. 基本的に SGD3(JISG318) 相当ミルシート対応品ですが 一部他鋼種使用の製品がありますので鋼種指定の場合はお問い合せください 3. 一般ミガキ材は引張強さ等の機械的性質を保証する試験検査は行っており ません 4. 定尺品は両端が寸法公差に入っていない場合がありますので使用上ごください
IBM Cloud Social Visual Guidelines
 IBM Business Process Manager 連載 : 事例に学ぶパフォーマンスの向上 第 3 回 画面描画の高速化 概要 IBM BPM は Coach フレームワークと呼ばれる画面のフレームワークを提供し CoachView と呼ばれる画面部品を組み合わせることによって効率よく画面を実装していくことが可能です しかしながら 1 画面に数百の単位の CoachView を配置した場合
IBM Business Process Manager 連載 : 事例に学ぶパフォーマンスの向上 第 3 回 画面描画の高速化 概要 IBM BPM は Coach フレームワークと呼ばれる画面のフレームワークを提供し CoachView と呼ばれる画面部品を組み合わせることによって効率よく画面を実装していくことが可能です しかしながら 1 画面に数百の単位の CoachView を配置した場合
Microsoft PowerPoint - zairiki_10
 許容応力度設計の基礎 はりの断面設計 前回までは 今から建てようとする建築物の設計において 建物の各部材断面を適当に仮定しておいて 予想される荷重に対してラーメン構造を構造力学の力を借りていったん解き その仮定した断面が適切であるかどうかを 危険断面に生じる最大応力度と材料の許容応力度を比較することによって検討するという設計手法に根拠を置いたものでした 今日は 前回までとは異なり いくつかの制約条件から
許容応力度設計の基礎 はりの断面設計 前回までは 今から建てようとする建築物の設計において 建物の各部材断面を適当に仮定しておいて 予想される荷重に対してラーメン構造を構造力学の力を借りていったん解き その仮定した断面が適切であるかどうかを 危険断面に生じる最大応力度と材料の許容応力度を比較することによって検討するという設計手法に根拠を置いたものでした 今日は 前回までとは異なり いくつかの制約条件から
建築支保工一部1a計算書
 P7118088-(1) 型枠支保工 (1) 計算書 工事名称 (1) B1FL-3570~1FL (W1-W~WE~WF 間 ) 1 / 1 1: 条件 鉄筋コンクリートの単位重量 r 3.50 kn /m 3 (.400 t/m 3 ) 作業荷重 W 1 ( 作業荷重 :1.47kN/m + 衝撃荷重 :1.96kN/m) 3.430 kn /m (0.350 t/m ) 合板 (1mm) の許容曲げ応力度
P7118088-(1) 型枠支保工 (1) 計算書 工事名称 (1) B1FL-3570~1FL (W1-W~WE~WF 間 ) 1 / 1 1: 条件 鉄筋コンクリートの単位重量 r 3.50 kn /m 3 (.400 t/m 3 ) 作業荷重 W 1 ( 作業荷重 :1.47kN/m + 衝撃荷重 :1.96kN/m) 3.430 kn /m (0.350 t/m ) 合板 (1mm) の許容曲げ応力度
7090Gスヘ?ック140523_7090-1Fスヘ?ック.qxp
 t k 主要諸元 1 k フック巻上限界 1 k 仕様とアタッチメント 1 クローラクレーン k 全体図 2 k ブーム構成 3 k ジブ構成 4 k 作動範囲図 5 k 定格総荷重 6 k 主ブーム定格総荷重表 7 k 補助シーブ定格総荷重表 8,9 k ジブ定格総荷重表 10,11 k 主ブーム定格総荷重表 (26.8t カウンタウエイト / カーボディウエイトなし )( オプション ) 12
t k 主要諸元 1 k フック巻上限界 1 k 仕様とアタッチメント 1 クローラクレーン k 全体図 2 k ブーム構成 3 k ジブ構成 4 k 作動範囲図 5 k 定格総荷重 6 k 主ブーム定格総荷重表 7 k 補助シーブ定格総荷重表 8,9 k ジブ定格総荷重表 10,11 k 主ブーム定格総荷重表 (26.8t カウンタウエイト / カーボディウエイトなし )( オプション ) 12
道路橋の耐震設計における鉄筋コンクリート橋脚の水平力 - 水平変位関係の計算例 (H24 版対応 ) ( 社 ) 日本道路協会 橋梁委員会 耐震設計小委員会 平成 24 年 5 月
 ( 社 ) 日本道路協会 橋梁委員会 耐震設計小委員会 平成 24 年 5 月") 道路橋の耐震設計における鉄筋コンクリート橋脚の水平力 - 水平変位関係の計算例 (H24 版対応 ) ( 社 ) 日本道路協会 橋梁委員会 耐震設計小委員会 平成 24 年 5 月 目次 本資料の利用にあたって 1 矩形断面の橋軸方向の水平耐力及び水平変位の計算例 2 矩形断面 (D51 SD490 使用 ) 橋軸方向の水平耐力及び水平変位の計算例 8 矩形断面の橋軸直角方向の水平耐力及び水平変位の計算例
道路橋の耐震設計における鉄筋コンクリート橋脚の水平力 - 水平変位関係の計算例 (H24 版対応 ) ( 社 ) 日本道路協会 橋梁委員会 耐震設計小委員会 平成 24 年 5 月 目次 本資料の利用にあたって 1 矩形断面の橋軸方向の水平耐力及び水平変位の計算例 2 矩形断面 (D51 SD490 使用 ) 橋軸方向の水平耐力及び水平変位の計算例 8 矩形断面の橋軸直角方向の水平耐力及び水平変位の計算例
マイクロメータヘッド サイズ比率で見るマイクロメータヘッド一覧 1マス 10mmをイメージ 測定範囲 0 5.0mm 測定範囲 0 13mm 測定範囲 0 15mm MICROMETER HEAD P215 MH-130KD P P
 サイズ比率で見る一覧 1マス 1mmをイメージ 測定範囲.mm 測定範囲 1mm 測定範囲 1mm - P21 MH-1KD P21 12-2 P2 1- P21 12- P21 112-2 P2 112- P21 19- P2 MH-KD P21 12- P21 119- P2 11- P21 112- P21 測定範囲.mm 9- P2 111- P21 2- P21 19- P2 11- P21
サイズ比率で見る一覧 1マス 1mmをイメージ 測定範囲.mm 測定範囲 1mm 測定範囲 1mm - P21 MH-1KD P21 12-2 P2 1- P21 12- P21 112-2 P2 112- P21 19- P2 MH-KD P21 12- P21 119- P2 11- P21 112- P21 測定範囲.mm 9- P2 111- P21 2- P21 19- P2 11- P21
エラー動作 スピンドル動作 スピンドルエラーの計測は 通常 複数の軸にあるセンサーによって行われる これらの計測の仕組みを理解するために これらのセンサーの 1つを検討する シングル非接触式センサーは 回転する対象物がセンサー方向またはセンサー反対方向に移動する1 軸上の対象物の変位を測定する 計測
 LION PRECISION TechNote LT03-0033 2012 年 8 月 スピンドルの計測 : 回転数および帯域幅 該当機器 : スピンドル回転を測定する静電容量センサーシステム 適用 : 高速回転対象物の回転を計測 概要 : 回転スピンドルは 様々な周波数でエラー動作が発生する これらの周波数は 回転スピード ベアリング構成部品の形状のエラー 外部影響およびその他の要因によって決定される
LION PRECISION TechNote LT03-0033 2012 年 8 月 スピンドルの計測 : 回転数および帯域幅 該当機器 : スピンドル回転を測定する静電容量センサーシステム 適用 : 高速回転対象物の回転を計測 概要 : 回転スピンドルは 様々な周波数でエラー動作が発生する これらの周波数は 回転スピード ベアリング構成部品の形状のエラー 外部影響およびその他の要因によって決定される
19年度一次基礎科目計算問題略解
 9 年度機械科目 ( 計算問題主体 ) 略解 基礎科目の解析の延長としてわかる範囲でトライしてみたものです Coprigh (c) 7 宮田明則技術士事務所 Coprigh (c) 7 宮田明則技術士事務所 Ⅳ- よってから は許容荷重として は直径をロ - プの断面積 Ⅳ- cr E E E I, から Ⅳ- Ⅳ- : q q q q q q q q q で絶対値が最大 で絶対値が最大モーメントはいずれも中央で最大となる
9 年度機械科目 ( 計算問題主体 ) 略解 基礎科目の解析の延長としてわかる範囲でトライしてみたものです Coprigh (c) 7 宮田明則技術士事務所 Coprigh (c) 7 宮田明則技術士事務所 Ⅳ- よってから は許容荷重として は直径をロ - プの断面積 Ⅳ- cr E E E I, から Ⅳ- Ⅳ- : q q q q q q q q q で絶対値が最大 で絶対値が最大モーメントはいずれも中央で最大となる
<4D F736F F F696E74202D20836F CC8A C58B858B4F93B982A882E682D1978E89BA814091B28BC68CA48B E >
 バットの角度 打球軌道および落下地点の関係 T999 和田真迪 担当教員 飯田晋司 目次 1. はじめに. ボールとバットの衝突 -1 座標系 -ボールとバットの衝突の前後でのボールの速度 3. ボールの軌道の計算 4. おわりに参考文献 はじめに この研究テーマにした理由は 好きな野球での小さい頃からの疑問であるバッテングについて 角度が変わればどう打球に変化が起こるのかが大学で学んだ物理と数学んだ物理と数学を使って判明できると思ったから
バットの角度 打球軌道および落下地点の関係 T999 和田真迪 担当教員 飯田晋司 目次 1. はじめに. ボールとバットの衝突 -1 座標系 -ボールとバットの衝突の前後でのボールの速度 3. ボールの軌道の計算 4. おわりに参考文献 はじめに この研究テーマにした理由は 好きな野球での小さい頃からの疑問であるバッテングについて 角度が変わればどう打球に変化が起こるのかが大学で学んだ物理と数学んだ物理と数学を使って判明できると思ったから
円筒ころ軸受 円筒ころ軸受 E 形円筒ころ軸受複列円筒ころ軸受四列円筒ころ軸受 1. 形式 構造及び特徴 ころと軌道面が線接触しており, ラジアル荷重の負荷能力が大きく, ころは内輪又は外輪のつばで案内されているので構造上高速回転にも適する また分離形であることから内輪, 外輪ともしまりばめを必要と
 円筒ころ軸受 E 形円筒ころ軸受複列円筒ころ軸受四列円筒ころ軸受 1. 形式 構造及び特徴 ころと軌道面が線接触しており, ラジアル荷重の負荷能力が大きく, ころは内輪又は外輪のつばで案内されているので構造上高速回転にも適する また分離形であることから内輪, 外輪ともしまりばめを必要とする場合にも取付け, 取外しは比較的容易である 円筒ころ軸受には標準形以外に主要寸法が同じで高負荷容 量のE 形,
円筒ころ軸受 E 形円筒ころ軸受複列円筒ころ軸受四列円筒ころ軸受 1. 形式 構造及び特徴 ころと軌道面が線接触しており, ラジアル荷重の負荷能力が大きく, ころは内輪又は外輪のつばで案内されているので構造上高速回転にも適する また分離形であることから内輪, 外輪ともしまりばめを必要とする場合にも取付け, 取外しは比較的容易である 円筒ころ軸受には標準形以外に主要寸法が同じで高負荷容 量のE 形,
Japanese nuclear policy and its effect on EAGLE project
 2018 年 8 月 23 日 JASMiRT 第 2 回国内ワークショップ 3 既往研究で取得された関連材料特性データの現状 - オーステナイト系ステンレス鋼の超高温材料特性式の開発 - 鬼澤高志 下村健太 加藤章一 若井隆純 日本原子力研究開発機構 背景 目的 (1/2) 福島第一原子力発電所の事故以降 シビアアクシデント時の構造健全性評価が求められている 構造材料の超高温までの材料特性が必要
2018 年 8 月 23 日 JASMiRT 第 2 回国内ワークショップ 3 既往研究で取得された関連材料特性データの現状 - オーステナイト系ステンレス鋼の超高温材料特性式の開発 - 鬼澤高志 下村健太 加藤章一 若井隆純 日本原子力研究開発機構 背景 目的 (1/2) 福島第一原子力発電所の事故以降 シビアアクシデント時の構造健全性評価が求められている 構造材料の超高温までの材料特性が必要
技術計算 SELECTION OF SYNCHRONOUS BELT DRIVES 伝動タイミングベルトの選定方法 2 http: fawos.misumi.jp FA_WEB pulley 2-c 2GT 3GT Pd kw Pt kw Ks 2-d EV5GT EV8YU Pd kw Pt kw
 伝動タイミングベルトの選定方法 -cgtgt PdkWPtkWKs -dev5gtev8yu PdkWPtkWKs Pt Ks KsKoKiKrKh Ko.5Ko.5 Ko Ko. Ko8 Ki9 Kr Kh 8.Ko 5 55 5 Kw Kw 68 5Kw 6 Kw 8 5.5Kw Pt Ks KsKoKiKrKhKm Ko Ki 5 Kr 6 Kh Km8 TqPd TqtqKs Tq Nm PdTqn955
伝動タイミングベルトの選定方法 -cgtgt PdkWPtkWKs -dev5gtev8yu PdkWPtkWKs Pt Ks KsKoKiKrKh Ko.5Ko.5 Ko Ko. Ko8 Ki9 Kr Kh 8.Ko 5 55 5 Kw Kw 68 5Kw 6 Kw 8 5.5Kw Pt Ks KsKoKiKrKhKm Ko Ki 5 Kr 6 Kh Km8 TqPd TqtqKs Tq Nm PdTqn955
ここで, 力の向きに動いた距離 とあることに注意しよう 仮にみかんを支えながら, 手を水平に 1 m 移動させる場合, 手がした仕事は 0 である 手がみかんに加える力の向きは鉛直上向き ( つまり真上 ) で, みかんが移動した向きはこれに垂直 みかんは力の向きに動いていないからである 解説 1
 で, みかんが移動した向きはこれに垂直 みかんは力の向きに動いていないからである 解説 1") 1 仕事と仕事の原理 仕事の原理 解説 1 エネルギー電池で明かりをともすことができる 音を出すことやモーターを動かすことにも利用できる 電池には光, 音, 物を動かすといった能力がある 車の燃料はガソリンが一般的だが, 水素を燃料とするもの, 太陽光で動くものもある ガソリン, 水素, 太陽光それぞれには, 車を動かすという能力がある 電池, ガソリン, 水素, 太陽光 には, 光, 音, 物を動かす,
1 仕事と仕事の原理 仕事の原理 解説 1 エネルギー電池で明かりをともすことができる 音を出すことやモーターを動かすことにも利用できる 電池には光, 音, 物を動かすといった能力がある 車の燃料はガソリンが一般的だが, 水素を燃料とするもの, 太陽光で動くものもある ガソリン, 水素, 太陽光それぞれには, 車を動かすという能力がある 電池, ガソリン, 水素, 太陽光 には, 光, 音, 物を動かす,
Microsoft Word - Stattext07.doc
 7 章正規分布 正規分布 (ormal dstrbuto) は 偶発的なデータのゆらぎによって生じる統計学で最も基本的な確率分布です この章では正規分布についてその性質を詳しく見て行きましょう 7. 一般の正規分布正規分布は 平均と分散の つの量によって完全に特徴付けられています 平均 μ 分散 の正規分布は N ( μ, ) 分布とも書かれます ここに N は ormal の頭文字を 表わしています
7 章正規分布 正規分布 (ormal dstrbuto) は 偶発的なデータのゆらぎによって生じる統計学で最も基本的な確率分布です この章では正規分布についてその性質を詳しく見て行きましょう 7. 一般の正規分布正規分布は 平均と分散の つの量によって完全に特徴付けられています 平均 μ 分散 の正規分布は N ( μ, ) 分布とも書かれます ここに N は ormal の頭文字を 表わしています
<4D F736F F D208E9197BF A082C68E7B8D A815B82CC8D5C91A28AEE8F C4816A2E646F63>
 資料 9 液化石油ガス法施行規則関係技術基準 (KHK0739) 地上設置式バルク貯槽に係るあと施工アンカーの構造等 ( 案 ) 地盤面上に設置するバルク貯槽を基礎と固定する方法として あと施工アンカーにより行う 場合の構造 設計 施工等は次の基準によるものとする 1. あと施工アンカーの構造及び種類あと施工アンカーとは アンカー本体又はアンカー筋の一端をコンクリート製の基礎に埋め込み バルク貯槽の支柱やサドル等に定着することで
資料 9 液化石油ガス法施行規則関係技術基準 (KHK0739) 地上設置式バルク貯槽に係るあと施工アンカーの構造等 ( 案 ) 地盤面上に設置するバルク貯槽を基礎と固定する方法として あと施工アンカーにより行う 場合の構造 設計 施工等は次の基準によるものとする 1. あと施工アンカーの構造及び種類あと施工アンカーとは アンカー本体又はアンカー筋の一端をコンクリート製の基礎に埋め込み バルク貯槽の支柱やサドル等に定着することで
パソコンシミュレータの現状
 第 2 章微分 偏微分, 写像 豊橋技術科学大学森謙一郎 2. 連続関数と微分 工学において物理現象を支配する方程式は微分方程式で表されていることが多く, 有限要素法も微分方程式を解く数値解析法であり, 定式化においては微分 積分が一般的に用いられており. 数学の基礎知識が必要になる. 図 2. に示すように, 微分は連続な関数 f() の傾きを求めることであり, 微小な に対して傾きを表し, を無限に
第 2 章微分 偏微分, 写像 豊橋技術科学大学森謙一郎 2. 連続関数と微分 工学において物理現象を支配する方程式は微分方程式で表されていることが多く, 有限要素法も微分方程式を解く数値解析法であり, 定式化においては微分 積分が一般的に用いられており. 数学の基礎知識が必要になる. 図 2. に示すように, 微分は連続な関数 f() の傾きを求めることであり, 微小な に対して傾きを表し, を無限に
H4
 機種構成一覧表 3 4 21 ブレーキ付きギヤモータ ブレーキ部標準仕様表 ( 無励磁制動型 ) 項 目 内 容 電 源 三相 200V 50/60Hz 220V 60Hz 外 被 構 造 0.1 0.2: 全閉構造 0.4 2.2: 開放構造 制 御 方 式 無励磁制動型 (OFFブレーキ) 耐 熱 ク ラ ス 130(B) 保 護 構 造 IP42 整 流 ユ ニ ッ ト 端子箱内搭載 周 囲
機種構成一覧表 3 4 21 ブレーキ付きギヤモータ ブレーキ部標準仕様表 ( 無励磁制動型 ) 項 目 内 容 電 源 三相 200V 50/60Hz 220V 60Hz 外 被 構 造 0.1 0.2: 全閉構造 0.4 2.2: 開放構造 制 御 方 式 無励磁制動型 (OFFブレーキ) 耐 熱 ク ラ ス 130(B) 保 護 構 造 IP42 整 流 ユ ニ ッ ト 端子箱内搭載 周 囲
三菱シリアルインターフェース搭載ロータリエンコーダ
 製品概要 三菱シリアルインターフェース搭載ロータリエンコーダ 2014.6 三菱高速シリアルインターフェース搭載ロータリエンコーダ 本製品概要に記載されているロータリエンコーダは 三菱高速シリアルインタフェース (Generation 2 4 線式 ) を搭載した三菱社製制御装置に対応しています 機械設計本資料で紹介しているロータリエンコーダは 例えば 工作機械のサーボ駆動軸や主軸での使用に適しています
製品概要 三菱シリアルインターフェース搭載ロータリエンコーダ 2014.6 三菱高速シリアルインターフェース搭載ロータリエンコーダ 本製品概要に記載されているロータリエンコーダは 三菱高速シリアルインタフェース (Generation 2 4 線式 ) を搭載した三菱社製制御装置に対応しています 機械設計本資料で紹介しているロータリエンコーダは 例えば 工作機械のサーボ駆動軸や主軸での使用に適しています
PowerPoint Presentation
 Non-linea factue mechanics き裂先端付近の塑性変形 塑性域 R 破壊進行領域応カ特異場 Ω R R Hutchinson, Rice and Rosengen 全ひずみ塑性理論に基づいた解析 現段階のひずみは 除荷がないとすると現段階の応力で一義的に決まる 単純引張り時の応カーひずみ関係 ( 構成方程式 ): ( ) ( ) n () y y y ここで α,n 定数, /
Non-linea factue mechanics き裂先端付近の塑性変形 塑性域 R 破壊進行領域応カ特異場 Ω R R Hutchinson, Rice and Rosengen 全ひずみ塑性理論に基づいた解析 現段階のひずみは 除荷がないとすると現段階の応力で一義的に決まる 単純引張り時の応カーひずみ関係 ( 構成方程式 ): ( ) ( ) n () y y y ここで α,n 定数, /
Problem P5
 問題 P5 メンシュトキン反応 三級アミンとハロゲン化アルキルの間の求核置換反応はメンシュトキン反応として知られている この実験では DABCO(1,4 ジアザビシクロ [2.2.2] オクタン というアミンと臭化ベンジルの間の反応速度式を調べる N N Ph Br N N Br DABCO Ph DABCO 分子に含まれるもう片方の窒素も さらに他の臭化ベンジルと反応する可能性がある しかし この実験では
問題 P5 メンシュトキン反応 三級アミンとハロゲン化アルキルの間の求核置換反応はメンシュトキン反応として知られている この実験では DABCO(1,4 ジアザビシクロ [2.2.2] オクタン というアミンと臭化ベンジルの間の反応速度式を調べる N N Ph Br N N Br DABCO Ph DABCO 分子に含まれるもう片方の窒素も さらに他の臭化ベンジルと反応する可能性がある しかし この実験では
周期時系列の統計解析 (3) 移動平均とフーリエ変換 nino 2017 年 12 月 18 日 移動平均は, 周期時系列における特定の周期成分の消去や不規則変動 ( ノイズ ) の低減に汎用されている統計手法である. ここでは, 周期時系列をコサイン関数で近似し, その移動平均により周期成分の振幅
 移動平均とフーリエ変換 nino 2017 年 12 月 18 日 移動平均は, 周期時系列における特定の周期成分の消去や不規則変動 ( ノイズ ) の低減に汎用されている統計手法である. ここでは, 周期時系列をコサイン関数で近似し, その移動平均により周期成分の振幅") 周期時系列の統計解析 3 移動平均とフーリエ変換 io 07 年 月 8 日 移動平均は, 周期時系列における特定の周期成分の消去や不規則変動 ノイズ の低減に汎用されている統計手法である. ここでは, 周期時系列をコサイン関数で近似し, その移動平均により周期成分のがどのように変化するのか等について検討する. また, 気温の実測値に移動平均を適用した結果についてフーリエ変換も併用して考察する. 単純移動平均の計算式移動平均には,
周期時系列の統計解析 3 移動平均とフーリエ変換 io 07 年 月 8 日 移動平均は, 周期時系列における特定の周期成分の消去や不規則変動 ノイズ の低減に汎用されている統計手法である. ここでは, 周期時系列をコサイン関数で近似し, その移動平均により周期成分のがどのように変化するのか等について検討する. また, 気温の実測値に移動平均を適用した結果についてフーリエ変換も併用して考察する. 単純移動平均の計算式移動平均には,
第1章 単 位
 H. Hmno 問題解答 問題解答. 力の釣合い [ 問題.] V : sin. H :.cos. 7 V : sin sin H : cos cos cos 上第 式より これと第 式より.. cos V : sin sin H : coscos cos 上第 式より これと第 式より.98. cos [ 問題.] :. V :. : 9 9. V :. : sin V : sin 8.78 H
H. Hmno 問題解答 問題解答. 力の釣合い [ 問題.] V : sin. H :.cos. 7 V : sin sin H : cos cos cos 上第 式より これと第 式より.. cos V : sin sin H : coscos cos 上第 式より これと第 式より.98. cos [ 問題.] :. V :. : 9 9. V :. : sin V : sin 8.78 H
伝熱学課題
 練習問題解答例 < 第 章強制対流熱伝達 >. 式 (.9) を導出せよ (.6) を変換する 最初に の微分値を整理しておく (.A) (.A) これを用いて の微分値を求める (.A) (.A) (.A) (.A6) (.A7) これらの微分値を式 (.6) に代入する (.A8) (.A9) (.A) (.A) (.A) (.9). 薄い平板が温度 で常圧の水の一様な流れの中に平行に置かれている
練習問題解答例 < 第 章強制対流熱伝達 >. 式 (.9) を導出せよ (.6) を変換する 最初に の微分値を整理しておく (.A) (.A) これを用いて の微分値を求める (.A) (.A) (.A) (.A6) (.A7) これらの微分値を式 (.6) に代入する (.A8) (.A9) (.A) (.A) (.A) (.9). 薄い平板が温度 で常圧の水の一様な流れの中に平行に置かれている
H4
 機種構成一覧表 3 4 56 GA GA 57 58 59 60 端子箱 ブレーキ不付きブレーキ付き 0.4 2.2 0.4 0.75 1.5 3.7 3.7 5.5 7.5 5.5 11 11 ブレーキ仕様表 出力 () 定格制御許容制動ライニング寿命電磁石ストローク (mm) 電源電圧概略電流 (A) ブレーキ慣性整流ユニットモーメント型式トルク仕事率 ( 総制動仕事量 ) 単相 (V) J:k
機種構成一覧表 3 4 56 GA GA 57 58 59 60 端子箱 ブレーキ不付きブレーキ付き 0.4 2.2 0.4 0.75 1.5 3.7 3.7 5.5 7.5 5.5 11 11 ブレーキ仕様表 出力 () 定格制御許容制動ライニング寿命電磁石ストローク (mm) 電源電圧概略電流 (A) ブレーキ慣性整流ユニットモーメント型式トルク仕事率 ( 総制動仕事量 ) 単相 (V) J:k
13. サーボモータ 第 13 章サーボモータ ロック付きサーボモータ 概要 ロック付きサーボモータの特性 油水対策 ケーブル サーボモータ定格回転速度 コネクタ取付
 第 13 章サーボモータ...2 13.1 ロック付きサーボモータ...2 13.1.1 概要...2 13.1.2 ロック付きサーボモータの特性...4 13.2 油水対策...5 13.3 ケーブル...5 13.4 サーボモータ定格回転速度...5 13.5 コネクタ取付け...6 13-1 電磁ブレーキスイッチ 電磁ブレーキスイッチ 第 13 章サーボモータ 13.1 ロック付きサーボモータ
第 13 章サーボモータ...2 13.1 ロック付きサーボモータ...2 13.1.1 概要...2 13.1.2 ロック付きサーボモータの特性...4 13.2 油水対策...5 13.3 ケーブル...5 13.4 サーボモータ定格回転速度...5 13.5 コネクタ取付け...6 13-1 電磁ブレーキスイッチ 電磁ブレーキスイッチ 第 13 章サーボモータ 13.1 ロック付きサーボモータ
QCCチャックカタログ.indd
 クイックチェンジコレットチャックシステム 特長 フランジワークにも対応 QCCチャックの特徴コレットの取付け / 取外しが簡単 コレットは専用の冶具を利用することで ワンタッチで30 秒以内に交換可能です ワーククランプが確実 コレットがワークに対し平行に移動するので ワークにクランプ力が均等確実に伝達されます 高いクランプ精度 高品質仕上げ シンプル機構 及びコレット平行移動などにより TIR0.0mmを保証します
クイックチェンジコレットチャックシステム 特長 フランジワークにも対応 QCCチャックの特徴コレットの取付け / 取外しが簡単 コレットは専用の冶具を利用することで ワンタッチで30 秒以内に交換可能です ワーククランプが確実 コレットがワークに対し平行に移動するので ワークにクランプ力が均等確実に伝達されます 高いクランプ精度 高品質仕上げ シンプル機構 及びコレット平行移動などにより TIR0.0mmを保証します
表 4.2 歯車係数 fz f まがりばかさ歯車では, ねじれ角の方向, 回転方向及び駆動側か従動側かによって荷重の向きが異なる 分離力 (Ks) 及びアキシアル荷重 (Ka) は図 4.5に示す方向を正としている 回転方向とねじれ角の方向は歯車の大端面からみて定義することになっており, 図 4.5
 及びアキシアル荷重 (Ka) は図 4.5に示す方向を正としている 回転方向とねじれ角の方向は歯車の大端面からみて定義することになっており, 図 4.5") 4. 軸受荷重の計算 軸受荷重を算定するためには, 軸受が支持している軸系に作用している荷重を決定する必要がある 軸系に作用する荷重には, 回転体の自重, 機械が仕事をするために生じる荷重及び動力伝達による荷重などがあり, これらは理論的に数値計算できるものもあるが, 計算が困難な場合も多い 軸受の主要な用途である動力伝達軸について作用する荷重の計算方法を示す 4. 1 軸系に作用する荷重 4. 1.
4. 軸受荷重の計算 軸受荷重を算定するためには, 軸受が支持している軸系に作用している荷重を決定する必要がある 軸系に作用する荷重には, 回転体の自重, 機械が仕事をするために生じる荷重及び動力伝達による荷重などがあり, これらは理論的に数値計算できるものもあるが, 計算が困難な場合も多い 軸受の主要な用途である動力伝達軸について作用する荷重の計算方法を示す 4. 1 軸系に作用する荷重 4. 1.
Kumamoto University Center for Multimedia and Information Technologies Lab. 熊本大学アプリケーション実験 ~ 実環境における無線 LAN 受信電波強度を用いた位置推定手法の検討 ~ InKIAI 宮崎県美郷
 熊本大学アプリケーション実験 ~ 実環境における無線 LAN 受信電波強度を用いた位置推定手法の検討 ~ InKIAI プロジェクト @ 宮崎県美郷町 熊本大学副島慶人川村諒 1 実験の目的 従来 信号の受信電波強度 (RSSI:RecevedSgnal StrengthIndcator) により 対象の位置を推定する手法として 無線 LAN の AP(AccessPont) から受信する信号の減衰量をもとに位置を推定する手法が多く検討されている
熊本大学アプリケーション実験 ~ 実環境における無線 LAN 受信電波強度を用いた位置推定手法の検討 ~ InKIAI プロジェクト @ 宮崎県美郷町 熊本大学副島慶人川村諒 1 実験の目的 従来 信号の受信電波強度 (RSSI:RecevedSgnal StrengthIndcator) により 対象の位置を推定する手法として 無線 LAN の AP(AccessPont) から受信する信号の減衰量をもとに位置を推定する手法が多く検討されている
PowerPoint Presentation
 H8 年度有限要素法 1 構造強度設計 1. 塑性崩壊 1.3 疲労設計 ( 一部修正版 ) H8-1/6 早川 (R : 夏学期の復習部分 ) 1. 塑性崩壊とその評価法 ( 極限解析 ) R 塑性崩壊 : 構造物として使用に耐えないほどの過度の塑性変形 全断面降伏 前提 : 弾完全塑性材モデル E ひずみ硬化ありひずみ硬化なし : 降伏強さ E : ヤング率 ε 図 1.3 弾完全塑性材モデルの応力
H8 年度有限要素法 1 構造強度設計 1. 塑性崩壊 1.3 疲労設計 ( 一部修正版 ) H8-1/6 早川 (R : 夏学期の復習部分 ) 1. 塑性崩壊とその評価法 ( 極限解析 ) R 塑性崩壊 : 構造物として使用に耐えないほどの過度の塑性変形 全断面降伏 前提 : 弾完全塑性材モデル E ひずみ硬化ありひずみ硬化なし : 降伏強さ E : ヤング率 ε 図 1.3 弾完全塑性材モデルの応力
ホームシアター固定フレームカーブドスクリーン リュネット (Lunette) シリーズ ユーザーガイド重要 : 安全に使用するための注意事項 ご使用前に このユーザーガイドをご一読ください 正しく使用することで長くお使いいただけます 1. スクリーンは 照明スイッチ コンセント 家具 窓などの障害物
 シリーズ ユーザーガイド重要 : 安全に使用するための注意事項 ご使用前に このユーザーガイドをご一読ください 正しく使用することで長くお使いいただけます 1. スクリーンは 照明スイッチ コンセント 家具 窓などの障害物") ホームシアター固定フレームカーブドスクリーン リュネット (Lunette) シリーズ ユーザーガイド重要 : 安全に使用するための注意事項 ご使用前に このユーザーガイドをご一読ください 正しく使用することで長くお使いいただけます 1. スクリーンは 照明スイッチ コンセント 家具 窓などの障害物がない空間を選んで取り付けてください 2. スクリーンを壁に取り付ける場合 重量のある大きな絵画を取り付けるのと同様に
ホームシアター固定フレームカーブドスクリーン リュネット (Lunette) シリーズ ユーザーガイド重要 : 安全に使用するための注意事項 ご使用前に このユーザーガイドをご一読ください 正しく使用することで長くお使いいただけます 1. スクリーンは 照明スイッチ コンセント 家具 窓などの障害物がない空間を選んで取り付けてください 2. スクリーンを壁に取り付ける場合 重量のある大きな絵画を取り付けるのと同様に
目次 1. 適用範囲 1 2. 引用規格 1 3. 種類 1 4. 性能 2 5. 構造 2 6. 形状 寸法 3 7. 材料 3 8. 特性 4 9. 試験方法 検査 6 ( 最終ページ :11)
") 地仕 ( 材 )-21 強化プラスチック複合管用管枕標準仕様書 昭和 55 年 10 月 7 日制定 平成 25 年 7 月 1 日 ( 改定 04) 東京電力パワーグリッド株式会社 目次 1. 適用範囲 1 2. 引用規格 1 3. 種類 1 4. 性能 2 5. 構造 2 6. 形状 寸法 3 7. 材料 3 8. 特性 4 9. 試験方法 6 10. 検査 6 ( 最終ページ :11) 強化プラスチック複合管用管枕標準仕様書
地仕 ( 材 )-21 強化プラスチック複合管用管枕標準仕様書 昭和 55 年 10 月 7 日制定 平成 25 年 7 月 1 日 ( 改定 04) 東京電力パワーグリッド株式会社 目次 1. 適用範囲 1 2. 引用規格 1 3. 種類 1 4. 性能 2 5. 構造 2 6. 形状 寸法 3 7. 材料 3 8. 特性 4 9. 試験方法 6 10. 検査 6 ( 最終ページ :11) 強化プラスチック複合管用管枕標準仕様書
0. 極低比速度単段オープン羽根遠心ポンプ検討の目的本書は極低比速度単段オープン羽根遠心ポンプについての検討を記したものである 食品製造等のサニタリー性を求められる製造プロセスにおいては現状 容積式のロータリーポンプあるいはベーンポンプが利用されている これは軸回転数 2900/3500min -1
 極低比速度 単段オープン羽根 遠心ポンプの検討 0. 極低比速度単段オープン羽根遠心ポンプ検討の目的本書は極低比速度単段オープン羽根遠心ポンプについての検討を記したものである 食品製造等のサニタリー性を求められる製造プロセスにおいては現状 容積式のロータリーポンプあるいはベーンポンプが利用されている これは軸回転数 2900/3500min -1 の三相かご型誘導電動機により駆動される単段の遠心ポンプで必要な揚程流量比を得ることができていないためである
極低比速度 単段オープン羽根 遠心ポンプの検討 0. 極低比速度単段オープン羽根遠心ポンプ検討の目的本書は極低比速度単段オープン羽根遠心ポンプについての検討を記したものである 食品製造等のサニタリー性を求められる製造プロセスにおいては現状 容積式のロータリーポンプあるいはベーンポンプが利用されている これは軸回転数 2900/3500min -1 の三相かご型誘導電動機により駆動される単段の遠心ポンプで必要な揚程流量比を得ることができていないためである
TSK 国土交通省 新技術情報提供システム NETIS登録番号 HK A PAT.P 環境適応型落石防止工 プラスネット プラスネット プラスネットハニー
 TSK 国土交通省 新技術情報提供システム NETIS登録番号 HK-00-A PAT.P 環境適応型落石防止工 ハニー 高い耐荷重性と優れた経済性 落石予防工の進化形 ハニー 高い耐荷重性 従来のロープネット マイティーネットの基本構造 主ロープで連結された 本のアンカーの中心に新たにアンカーを増設することにより各アンカーにかかる負荷を軽減 従来工法の 倍の強度を実現しました 優れた経済性 豊富な規格バリエーションを取り揃えており
TSK 国土交通省 新技術情報提供システム NETIS登録番号 HK-00-A PAT.P 環境適応型落石防止工 ハニー 高い耐荷重性と優れた経済性 落石予防工の進化形 ハニー 高い耐荷重性 従来のロープネット マイティーネットの基本構造 主ロープで連結された 本のアンカーの中心に新たにアンカーを増設することにより各アンカーにかかる負荷を軽減 従来工法の 倍の強度を実現しました 優れた経済性 豊富な規格バリエーションを取り揃えており
Microsoft Word - 建築研究資料143-1章以外
 4. ブレース接合部 本章では, ブレース接合部について,4 つの部位のディテールを紹介し, それぞれ問題となる点や改善策等を示す. (1) ブレースねらい点とガセットプレートの形状 (H 形柱, 弱軸方向 ) 対象部位の概要 H 形柱弱軸方向にガセットプレートタイプでブレースが取り付く場合, ブレースの傾きやねらい点に応じてガセットプレートの形状等を適切に設計する. 検討対象とする接合部ディテール
4. ブレース接合部 本章では, ブレース接合部について,4 つの部位のディテールを紹介し, それぞれ問題となる点や改善策等を示す. (1) ブレースねらい点とガセットプレートの形状 (H 形柱, 弱軸方向 ) 対象部位の概要 H 形柱弱軸方向にガセットプレートタイプでブレースが取り付く場合, ブレースの傾きやねらい点に応じてガセットプレートの形状等を適切に設計する. 検討対象とする接合部ディテール
タイプ出力回転速度Unit Type HPG 型番の選定 ハーモニックプラネタリ HPG シリーズの優れた性能を十分発揮させるために 使用条件の確認とフローチャートを参考に型番選定を行ってください 一般的に サーボシステムにおいては 連続一定負荷の状態はほとんどありません 入力回転速度の変動にともな
 タイプHPG 入力軸ユニットタイプ サイズ 型番 :,14,2,2,,6 ピークトルク.9Nm~22Nm 小バックラッシ 標準 : 分以下特殊 :1 分以下 減速比 6 種類 1 段減速 =~9 2 段減速 =~ 高効率 9% 以上 ( 型番 :,14 は 8%) 構造図 図 8-1 出力フランジ部 出力回転方向 出力側オイルシール クロスローラベアリング 取付けインロー部 締結用ボルト穴 アンギュラベアリング
タイプHPG 入力軸ユニットタイプ サイズ 型番 :,14,2,2,,6 ピークトルク.9Nm~22Nm 小バックラッシ 標準 : 分以下特殊 :1 分以下 減速比 6 種類 1 段減速 =~9 2 段減速 =~ 高効率 9% 以上 ( 型番 :,14 は 8%) 構造図 図 8-1 出力フランジ部 出力回転方向 出力側オイルシール クロスローラベアリング 取付けインロー部 締結用ボルト穴 アンギュラベアリング
物理演習問題
 < 物理 > =0 問 ビルの高さを, ある速さ ( 初速 をとおく,において等加速度運動の公式より (- : -= t - t : -=- t - t (-, 式よりを消去すると t - t =- t - t ( + - ( + ( - =0 0 t t t t t t ( t + t - ( t - =0 t=t t=t t - 地面 ( t - t t +t 0 より, = 3 図 問 が最高点では速度が
< 物理 > =0 問 ビルの高さを, ある速さ ( 初速 をとおく,において等加速度運動の公式より (- : -= t - t : -=- t - t (-, 式よりを消去すると t - t =- t - t ( + - ( + ( - =0 0 t t t t t t ( t + t - ( t - =0 t=t t=t t - 地面 ( t - t t +t 0 より, = 3 図 問 が最高点では速度が
Microsoft Word - 第5章.doc
 第 5 章表面ひび割れ幅法 5-1 解析対象 ( 表面ひび割れ幅法 ) 表面ひび割れ幅法は 図 5-1 に示すように コンクリート表面より生じるひび割れを対象とした解析方法である. すなわち コンクリートの弾性係数が断面で一様に変化し 特に方向性を持たない表面にひび割れを解析の対象とする. スラブ状構造物の場合には地盤を拘束体とみなし また壁状構造物の場合にはフーチングを拘束体として それぞれ外部拘束係数を定める.
第 5 章表面ひび割れ幅法 5-1 解析対象 ( 表面ひび割れ幅法 ) 表面ひび割れ幅法は 図 5-1 に示すように コンクリート表面より生じるひび割れを対象とした解析方法である. すなわち コンクリートの弾性係数が断面で一様に変化し 特に方向性を持たない表面にひび割れを解析の対象とする. スラブ状構造物の場合には地盤を拘束体とみなし また壁状構造物の場合にはフーチングを拘束体として それぞれ外部拘束係数を定める.
DURO-TA XT キーバーチャック 小径から大きなワークまで柔軟に対応する軽量チャック
 DURO-TA XT キーバーチャック 小径から大きなワークまで柔軟に対応する軽量チャック DURO-TA XT( デュロ ) キーバーチャック 複合旋盤で求められる要求に柔軟に対応し ワーク保持具の軽量化に寄与する革新的なコンセプトのチャックを レーム社の実績がある DURO-TA チャックを元に開発しました この軽量な拡張式 DURO-TA XT チャックシステムは 柔軟に大きなワークから小さなワークまで対応することが出来ます
DURO-TA XT キーバーチャック 小径から大きなワークまで柔軟に対応する軽量チャック DURO-TA XT( デュロ ) キーバーチャック 複合旋盤で求められる要求に柔軟に対応し ワーク保持具の軽量化に寄与する革新的なコンセプトのチャックを レーム社の実績がある DURO-TA チャックを元に開発しました この軽量な拡張式 DURO-TA XT チャックシステムは 柔軟に大きなワークから小さなワークまで対応することが出来ます
Sprocket series M2600
 M = モジュラーベルトベルトピッチ S = 成型スプロケット ; Z = 分割スプロケット歯数シャフトサイズ ( 直径 ) シャフトタイプ : Q = 角孔, R = 丸孔材質 : 8 = PA; 6 = POM M 26 S 18 4 Q 8 入手可能なスプロケット タイプ歯数ピッチ円径 Ø dp A1 ハブ幅 B L 角孔 Q Ø 丸孔 R 標準材質 - S 18 147.7 5.8 67.5
M = モジュラーベルトベルトピッチ S = 成型スプロケット ; Z = 分割スプロケット歯数シャフトサイズ ( 直径 ) シャフトタイプ : Q = 角孔, R = 丸孔材質 : 8 = PA; 6 = POM M 26 S 18 4 Q 8 入手可能なスプロケット タイプ歯数ピッチ円径 Ø dp A1 ハブ幅 B L 角孔 Q Ø 丸孔 R 標準材質 - S 18 147.7 5.8 67.5
参考資料-2 換気量について
 参 2 換気量について ずり出し方式により換気量が影響をどの程度受けるかを検討するために影響要素による換気量を試算する これにより 換気量が何に支配されているかを調べる 1) 換気量算出の検討項目山岳トンネル工事における換気量については 一般に以下の項目について検討する 1) 自然発生ガス 酸素欠乏空気に対する換気量 2) 発破の後ガス及び発生粉じんに対する換気量 ) ディーゼル機関に対する換気量
参 2 換気量について ずり出し方式により換気量が影響をどの程度受けるかを検討するために影響要素による換気量を試算する これにより 換気量が何に支配されているかを調べる 1) 換気量算出の検討項目山岳トンネル工事における換気量については 一般に以下の項目について検討する 1) 自然発生ガス 酸素欠乏空気に対する換気量 2) 発破の後ガス及び発生粉じんに対する換気量 ) ディーゼル機関に対する換気量
実験題吊 「加速度センサーを作ってみよう《
 加速度センサーを作ってみよう 茨城工業高等専門学校専攻科 山越好太 1. 加速度センサー? 最近話題のセンサーに 加速度センサー というものがあります これは文字通り 加速度 を測るセンサーで 主に動きの検出に使われたり 地球から受ける重力加速度を測定することで傾きを測ることなどにも使われています 最近ではゲーム機をはじめ携帯電話などにも搭載されるようになってきています 2. 加速度センサーの仕組み加速度センサーにも様々な種類があります
加速度センサーを作ってみよう 茨城工業高等専門学校専攻科 山越好太 1. 加速度センサー? 最近話題のセンサーに 加速度センサー というものがあります これは文字通り 加速度 を測るセンサーで 主に動きの検出に使われたり 地球から受ける重力加速度を測定することで傾きを測ることなどにも使われています 最近ではゲーム機をはじめ携帯電話などにも搭載されるようになってきています 2. 加速度センサーの仕組み加速度センサーにも様々な種類があります
TSK 国土交通省 新技術情報提供システム NETIS登録番号 HK A PAT.P 環境適応型落石防止工 プラスネット プラスネット プラスネットハニー
 TSK 国土交通省 新技術情報提供システム NETIS登録番号 HK-000-A PAT.P 環境適応型落石防止工 ハニー 高い耐荷重性と優れた経済性 落石予防工の進化形 ハニー 高い耐荷重性 従来のロープネット マイティーネットの基本構造 主ロープで連結された本のアンカー の中心に新たにアンカーを増設することにより各アンカーにかかる負荷を軽減 従来工 法の倍の強度を実現しました 優れた経済性 豊富な規格バリエーションを取り揃えており
TSK 国土交通省 新技術情報提供システム NETIS登録番号 HK-000-A PAT.P 環境適応型落石防止工 ハニー 高い耐荷重性と優れた経済性 落石予防工の進化形 ハニー 高い耐荷重性 従来のロープネット マイティーネットの基本構造 主ロープで連結された本のアンカー の中心に新たにアンカーを増設することにより各アンカーにかかる負荷を軽減 従来工 法の倍の強度を実現しました 優れた経済性 豊富な規格バリエーションを取り揃えており
Q
 埼玉工業大学機械工学学習支援セミナー ( 小西克享 ) 剛体の重心と自由運動 -1/8 テーマ 07: 剛体の重心と自由運動 一般的に剛体が自由に運動できる状態 ( 非拘束の状態 ) で運動するとき, 剛体は回転運動を伴った運動をします. たとえば, 棒の端を持って空中に放り投げると, 棒はくるくる回転しながら上昇してやがて地面に落ちてきます. 剛体が拘束されない状態で運動する様子を考察してみましょう.
埼玉工業大学機械工学学習支援セミナー ( 小西克享 ) 剛体の重心と自由運動 -1/8 テーマ 07: 剛体の重心と自由運動 一般的に剛体が自由に運動できる状態 ( 非拘束の状態 ) で運動するとき, 剛体は回転運動を伴った運動をします. たとえば, 棒の端を持って空中に放り投げると, 棒はくるくる回転しながら上昇してやがて地面に落ちてきます. 剛体が拘束されない状態で運動する様子を考察してみましょう.
2018年度 東京大・理系数学
 08 東京大学 ( 理系 ) 前期日程問題 解答解説のページへ関数 f ( ) = + cos (0 < < ) の増減表をつくり, + 0, 0 のと sin きの極限を調べよ 08 東京大学 ( 理系 ) 前期日程問題 解答解説のページへ n+ 数列 a, a, を, Cn a n = ( n =,, ) で定める n! an qn () n とする を既約分数 an p として表したときの分母
08 東京大学 ( 理系 ) 前期日程問題 解答解説のページへ関数 f ( ) = + cos (0 < < ) の増減表をつくり, + 0, 0 のと sin きの極限を調べよ 08 東京大学 ( 理系 ) 前期日程問題 解答解説のページへ n+ 数列 a, a, を, Cn a n = ( n =,, ) で定める n! an qn () n とする を既約分数 an p として表したときの分母
<4D F736F F D FCD B90DB93AE96402E646F63>
 7 章摂動法講義のメモ 式が複雑なので 黒板を何度も修正したし 間違ったことも書いたので メモを置きます 摂動論の式の導出無摂動系 先ず 厳密に解けている Schrödiger 方程式を考える,,,3,... 3,,,3,... は状態を区別する整数であり 状態 はエネルギー順に並んでいる 即ち は基底状態 は励起状態である { m } は相互に規格直交条件が成立する k m k mdx km k
7 章摂動法講義のメモ 式が複雑なので 黒板を何度も修正したし 間違ったことも書いたので メモを置きます 摂動論の式の導出無摂動系 先ず 厳密に解けている Schrödiger 方程式を考える,,,3,... 3,,,3,... は状態を区別する整数であり 状態 はエネルギー順に並んでいる 即ち は基底状態 は励起状態である { m } は相互に規格直交条件が成立する k m k mdx km k
Taro-解答例NO3放物運動H16
 放物運動 解答のポイント 初速度, 水平との角度 θ で 高さ の所から投げあげるとき 秒後の速度 =θ =θ - 秒後の位置 =θ 3 ( 水平飛行距離 ) =θ - + 4 ( 高さ ) ~4 の導出は 基本問題 参照 ( 地上から投げた場合の図 : 教科書参照 ) 最高点の 高さ 最高点では において = 水平到達距離 より 最高点に到達する時刻 を求め 4に代入すると最高点の高さH 地上では
放物運動 解答のポイント 初速度, 水平との角度 θ で 高さ の所から投げあげるとき 秒後の速度 =θ =θ - 秒後の位置 =θ 3 ( 水平飛行距離 ) =θ - + 4 ( 高さ ) ~4 の導出は 基本問題 参照 ( 地上から投げた場合の図 : 教科書参照 ) 最高点の 高さ 最高点では において = 水平到達距離 より 最高点に到達する時刻 を求め 4に代入すると最高点の高さH 地上では