内容 1 安全について 安全にご使用いただくために ハードウェアについて パーツ一覧 名称について RasPiMouse の組立について OS のインストール方法について デバイスドライバの
|
|
|
- まれあ あさぶき
- 6 years ago
- Views:
Transcription
1 Raspberry Pi Mouse 取扱い説明書 2.0 版 2016 年 6 月 15 日 株式会社アールティ 1
2 内容 1 安全について 安全にご使用いただくために ハードウェアについて パーツ一覧 名称について RasPiMouse の組立について OS のインストール方法について デバイスドライバのインストールについて デバイスドライバの使い方について LED の操作 ブザの操作 モータの操作 センサの読み取り タクトスイッチの読み取り デバイスドライバの使用例 Step1 LED を光らせよう Shell バージョン C 言語バージョン Python バージョン Step2 ブザを鳴らそう Shell バーション C 言語バージョン Python バージョン Step3 スイッチを使おう Shell バージョン C 言語バージョン Python バージョン 備考 参考文献 著作権 問い合わせ 改版履歴
3 1 安全について 1.1 安全にご使用いただくために 1 Raspberry Pi Mouse をお買い上げいただきましてありがとうございます ご使用になる前 にこの説明書をよくお読みになり 十分理解した上で作業を始めてください 2 初めてロボットを触る方は 経験者と一緒に作業することをお勧めします 3 注意 ショートについてセンサ モータ 基板 電池などの端子同士など接触によるショート時にはロボットを壊すだけではなく 発火の恐れがあります ケーブルの取り回しの際には各部品に挟まれないよう余裕をもたせ ケーブルに傷がある場合は絶対に使用しないでください また 電源とグラウンド線の扱いには細心の注意を払ってください 4 重要 電池の関するご注意 Raspberry Pi Mouse は リチウムイオンポリマ充電池 ( 以下 Li-Po 電池と表記 ) を採用しています Li-Po 電池を使用するにあたり 必ず正しい知識で取扱いをお願いします Li-Po 電池は 小さくて軽く 瞬間的に流せる電流もほかの電池に比べて大きく さらにメモリ効果もほとんどないためロボット用途には向いています しかし 他の電池に比べるとやや高価です 過充電やショートを起こすと発火 爆発することもあります 一般的な Li-Po 電池は保護回路が入っていますが 取扱いには細心の注意が必要です Li-Po 電池はその Cell の数で電圧の大きさが決まります 1Cell 平均 3.7V 2Cell で 7.4V 3Cell で 11.1V と電圧が大きくなっていきます また 全ての電池の放電に関する単位に C を使います C は容量に対する放電の比率を表し 1C ですと 1 倍 2C ですと 2 倍 3C ですと 3 倍の電流を放電するという意味になります 充電する際には専用の充電器を使ってください (Li-Po 電池は 1C で充電するのが良いでしょう ) 保管する際には充電容量の約 90~100% の状態で保管するのが良いと言われています また 1Cell 3.3V を切ると過放電となり 使えなくなってしまいます Raspberry Pi Mouse で使われている Li-Po 電池は 3Cell なので 10V 以下には絶対しないでください 目安としてモータに電源が入っている場合 フル充電から 20 分ぐらいで 10V 程度まで電圧が下がります 10V 以下になるとピー ピーと警告音のブサがなります ブザがなりましたら 早急に電源を OFF してください Li-Po 電池を利用するときは 注意事項をよく守って 過放電 過充電にならないように取り扱ってください 万が一 誤った使用により怪我をしたり 火災を起こしたりした場合でもメーカ販売店は責任を持ちません 充電について 必ず専用充電器を使用してください 充電中は燃えやすいものが近くにない場所で 目を離さないように行って下さい 充電完了後は 必ず電池のコネクタを充電器からはずしてください また Li-Po 電池はメモリ効果がほとんどないため 追加充電可能です 必ず完全に放電してしまう前に充電してください 3
4 < 充電中に電池がふくれ始めたら > 万一 充電中に異臭やふくれ始めたのを確認したら 直ちに充電を中止し コネクタを充電器からはずしてください ( 充電し続けると発火 または爆発の危険があります ) その場合 電池を外して燃え移るものがない安全な場所で 1 日程度様子をみてください 再使用は絶対にしないで廃棄してください ( 廃棄方法の項を参照して廃棄処分してください ) 放電について Raspberry Pi Mouse に使用している Li-Po 電池は過放電をすると電池自体が使用不可能になります 過放電は絶対にしないよう注意してください また Raspberry Pi Mouse をご使用後は必ずコネクタを抜いてください 使用について本説明書をよくお読みになり 正しくご利用ください ショート 衝撃 釘刺し等による破損でも発火 爆発の危険があります たとえば 電池と鋭利な工具とを一緒に工具箱に入れる 汗をかいた手でコネクタを触る 誤って水に落とすなど いろいろな場面が想定されますが そのような行為は 絶対にしないでください Li-Po 電池は 定格電流が決められています Raspberry Pi Mouse のみでご使用の場合では最大電流を超えないように設計していますが 各ユニットパーツを自作等のものに取り替えたときやマニュアルに無いような応用回路にしたとき 電池の放電容量を超えないように設計してください 定格電流以上に電流を流すと 爆発の可能性があります 保管方法について保管する際十分な充電を行い 周りに導通するものや 燃えやすいものがないところに保管してください 廃棄方法について海水と同程度の濃度の塩水に 2~3 日漬けて完全に放電させてから 燃えないごみとして廃棄して下さい 具体的には水 1L に対して塩 30g を入れると海水と同程度の塩水になります Li-Po 電池の使用における保証について Li-Po 電池を安全に使用するのはユーザの責任です メーカおよび販売店は Li-Po 電池の誤使用によって起こるいかなる対人 対物事故 損害 破損について一切の責任を負いません 安全に管理すれば非常に使いやすい電池です 正しい知識をもってお取り扱いください 4
 Debian 系 OS の Raspbian 入り MicroSD カード ( フルキットのみ ) になります 2.")
5 2 ハードウェアについて ここでは Raspberry Pi Mouse の内容物と各部の名称を確認します 2.1 パーツ一覧 組み立てられた状態で出荷されますので パーツとしては本体 Raspberry Pi と本体をつなぐコネクタ RaspberryPi( フルキットのみ ) Debian 系 OS の Raspbian 入り MicroSD カード ( フルキットのみ ) になります 2.2 名称について Raspberry Pi とつなぐ接続コネクタ メイン基板 距離センサ Raspberry Pi とつなぐため のピンヘッダ ー ブザ 電源スイッチ モータの スイッチ センサ基板 LED x4 図 2.1 名称 タクトスイッチ x3 スピーカの音量調整 5

6 3 RasPiMouse の組立について OS が入った SD カードを図の向きで挿入します RasberryPi3 では ロック機能がなくなってい ます RasberryPi をつなぐコネクタと RasberryPi を固定するネジを外し スペーサの上に RaspberryPi を置きます ここについていたコネクタを外す ここについていたネジを外す Raspnberry Pi を置いたら 先ほど外したネジで固定してください 6

7 コネクタで RaspberryPi と Raspberry Pi Mouse を接続します ピンがずれないように入れてくだ さい 7
 あります RASPBIAN の方は イメージファイルになります ダウンロードして SD カードに書くにはイメージを書くソフトが必要になります NOOBS は ダウンロードし")
8 4 OS のインストール方法について Raspberry Pi は Raspbian Ubuntu(ROS) RTM にて動作確認ができていますが ここでは Raspberry Pi 公式の OS Raspbian のインストールを行う手順を示します Raspbian の OS は からダウンロードして SD カードに書き込む必要があります Windows 上での作業方法を掲載します ダウンロードサイトには上記の 2 種類 (NOOBS と RASPBIAN) あります RASPBIAN の方は イメージファイルになります ダウンロードして SD カードに書くにはイメージを書くソフトが必要になります NOOBS は ダウンロードし 展開したデータをそのまま SD カードにコピするだけです 初心者には NOOBS をお勧めします ここでは NOOBS での RASPBIN のインストール方法を示します NOOBS をクリックしていただくと下記の画面になります 8
 し SD カードにコピします SD カードは 16GB 以上をお勧めします デバイスドライバを RaspberryPi 上でコンパイルする環境を整備すると 8GB 必要です ドラッグ & ドロップ")
9 NOOBS(NOOBS LITE ではない方 ) の Download.ZIP をクリックしローカルに保存します この ZIP を展開 (windows7 以降なら右クリックし すべて展開 で展開できます ) し SD カードにコピします SD カードは 16GB 以上をお勧めします デバイスドライバを RaspberryPi 上でコンパイルする環境を整備すると 8GB 必要です ドラッグ & ドロップ ローカルディスク SD カード SD カードに OS の基となるデータを書き終えたら 3 章に示したように Raspberry Pi Mouse を 組み立てます 組み立てましたら Raspberry Pi に USB のマウスと USB のキーボードと HDMI の モニタを接続します 9
6500 円 ( 税抜き )] 電池で初期環境を作る際はフル充電した電池をご使用ください マウスとキーボードと HDMI のモニタを接続しましたら MAIN SW を ON にしてください MOTOR SW は OFF にしてください OS が起動する前で MOTOR_SW を ON にするとモータに電流が流れます 電池で環境整備をしている場合")
10 HDMI モニタ USB マウスと USB キーボート の挿入場所はどこでもよい 変換ケーブル RasPiMouse AC アダプタ マウス キーボード 上記の接続例では 電池の代わりに AC アダプタで接続しています ( フルキットに含まれています RaspberryPiMouse 単品で購入し AC アダプタがほしい方は オプションで別途購入できます Lipo 充電器 LBC-010[AC アダプタ 変換ケーブル付 )6500 円 ( 税抜き )] 電池で初期環境を作る際はフル充電した電池をご使用ください マウスとキーボードと HDMI のモニタを接続しましたら MAIN SW を ON にしてください MOTOR SW は OFF にしてください OS が起動する前で MOTOR_SW を ON にするとモータに電流が流れます 電池で環境整備をしている場合 環境の設定が終わる前に電圧が 10V 以下になる可能性があるため 環境整備の時は必ず MOTOR_SW は OFF にしてください デバイスドライバは github からダウンロードしますので LAN ケーブルを挿入するか無線 LAN で接続できるようにしておいてください 10


11 2 Install をクリック 1 Raspbian をクリック MAIN SW を ON し しばらくすると上記の画面が表示されます Raspbian をクリックし Install ボタンをクリックします Raspbian をクリックしないと Install ボタンが押せません Install ボタンを押すと確認の画面が表示されますので Yes をクリックしてください 11
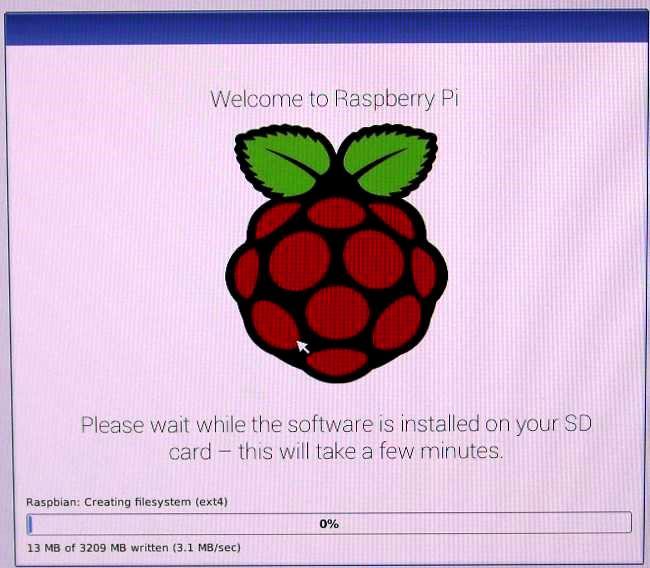
12 Yes を押すとインストールが始まりますのでしばらくお待ちください Raspberry Pi3 で 15 分ぐ らいです インストールが終わると上記が表示されますので OK ボタンをクリックします クリックすると 自動的に再起動します 再起動すると GUI が立ち上がります パスワードや user の問い合わせはありません 12


13 Raspberry Pi Mouse は SPI を使用するため SPI の機能をイネーブルにします Menu の Preferences の Raspberry Pi Configuration をクリックします クリック Raspberry Pi Configuration が立ち上がりますので Interfaces のタブをクリックします SPI の Enable をクリックし OK ボタンをクリックします 13


 git clone https://github.com/rt-net/raspberrypimouse.")
14 OS 入りの SD カートには ここまで設定されたものが入っています 環境整備が面倒な方は Raspberry Pi Mouse フルキットをお勧めします 5 デバイスドライバのインストールについて デバイスドライバは Git を使って GitHub からダウンロードします Git はターミナルにコマンドを打ち込んで使用します GUI からターミナルの起動は以下のようにして起動します Terminal をクリックすると右の画面が表示されます デバイスドライバのインストールは SSH でログインしても可能です SSH でログインするには 初期ユーザ名 pi とパスワード raspberry を入力してください デバイスドライバは GitHub からダウンロードしたファイルの./lib/RaspberryPi のバージョン / カーネルのバージョン にあるので uname r でカーネルのバージョンを調べ カーネルのバージョンを合わせてご使用ください Git のクローンをします ( もし RaspberryPiMouse のディレクトリが既にある場合削除しておく ) git clone Git からパスワードを聞かれた場合は raspberry と入力してください 予め sudo su - で root になるとパスワードが聞かれなくなります 14
15 クローンすると以下のファイル構造が存在していると思います RaspberryPiMouse lib Pi1B など rtmouse.ko Pi2B v7+ など rtmouse.ko LICENSE README.md src drivers Makefile Makefile.rasbian Makefile.ubuntu14 rtmouse.c supplement Buzzer_circuit.jpg Drive_circuit4.jpg ハードの簡単な説明.rst RPiMouse-schematic.pdf MEMO.raspi-config.rst utils build_install.raspbian.bash build_install.ubuntu14.bash RaspberryPiMouse/lib/RaspberryPi のバージョン / カーネルバージョン /rtmouse.ko がドライバ本体です このファイルは カーネルモジュール といって カーネルの一部として動作するプログラムの集まりです また SPI をセンサで使用するので SPI 機能を有効にしてください 4 章参照 カーネルバージョン 以降のデバイスドライバでは RaspberryPi2 と RaspberryPi3 共通で使用できます RaspberryPi3 でデバイスドライバの組み込みは Pi2+ のデバイスドライバをご使用ください デバイスドライバの組み込みは insmod を使用します lsmod というコマンドを打つと組み込み済みのカーネルモジュールがリストされるので その中に rtmouse あることを確認してください デバイスドライバが組み込まれたときにブザかなり センサが光ります 15
16 インストール $sudo insmod rtmouse.ko メッセージが出なければ成功 RaspberryPi のバージョンまたは $sudo insmod /home/pi/raspberrypimouse/lib/pi?b+/`uname -r`/rtmouse.ko インストールされているかの確認 $lsmod grep rtmouse rtmouse カーネルのバージョン インストールがうまくいったら 下記のように /dev/ のディレクトリの下に rt< なんとか > というファイルができているはずです /dev/ の下にあるファイルは デバイスファイル といわれるもので 機械と入出力をつかさどるファイルです $ls /dev/rt* /dev/rtbuzzer0 /dev/rtled0 ( 略 ) /dev/rmotor_raw_r0 /dev/rtmotoren0 パーミッションを変更しておくことでルートにならずにデバイスドライバを扱うことができます 参考までに ドライバをアンインストールする場合は rmmod を使用します $sudo chmod 666 /dev/rt* $ls l /dev/rt* crw-rw-rw- 1 root root 245, 0 4 月 27 14:38 /dev/rtbuzzer0 crw-rw-rw- 1 root root 246, 0 4 月 27 14:38 /dev/rtled0 crw-rw-rw- 1 root root 246, 1 4 月 27 14:38 /dev/rtled1 ( 以下略 ) 16
17 6 デバイスドライバの使い方について デバイスドライバでできることは LED の点灯 ブザの発信 光反射型距離センサの値の取 得 モータを回す スイッチの on/off の確認ができます 6.1 LED の操作 LED は 0~3 まであり 下記に示すコマンドは例として LED0 の点灯 / 消灯を示します LED1 の場合は rtled1 で点灯 / 消灯できます 最後の数字を 0~3 に変更することで LED の点灯個所が変わります 点灯 消灯 $ echo 1 > /dev/rtled0 $echo 0 > /dev/rtled0 図 6-1 LED 操作 6.2 ブザの操作 echo で周波数 ( 単位 :Hz) を渡します 440Hz を鳴らす $ echo 440 > /dev/rtbuzzer0 消音する $ echo 0 > /dev/rtbuzzer0 図 6-2 Buzzer 操作 参考までに音階の周波数を表 1 に示します 小数点が使えません (0 と正の整数のみ ) ので 切り上げ 切り下げはユーザの判断でお願いします 表 1 音名 ( 階名 ) と周波数一覧 17
18 オクターブ 音名 ( 階名 ) C( ド ) ド # D( レ ) レ # E( ミ ) F( フ ファ # G( ソ ) ソ # A( ラ ) ラ # B( シ ) ァ ) モータの操作 モータを回すには ハードウェアスイッチ (MOTOR SW を ON) と ソフトウェアスイッチ (/dev/rtmotoren0) を両方 ON にして初めてモータを回すことができます ブログラムがミスなくソフトウェアスイッチを ON/OFF できればハードウェアスイッチを付ける必要はないのですが Raspberry Pi の暴走 ソフトウェアのバグなどによりソフトウェアスイッチで OFF できない場合 強制的に停止できるよう ハードウェアスイッチを付けてあります ソフトウェアスイッチを ON $ echo 1 > /dev/rtmoteren0 左のモータのみを順方向に 400Hz で回す $ echo 400 > /dev/rtmotor_raw_l0 逆方向に 400Hz で回す $ echo -400 > /dev/rtmotor_raw_l0 右のモータのみを順方向に 250Hz で回す $ echo 250 > /dev/rtmotor_raw_r0 回転を止める $echo 0 > /dev/rtmotor_raw_r0 $echo 0 > /dev/rtmotor_raw_l0 図 6-3 モータの操作 (1/2) 18

19 左右のモータを与えた周波数で与えた時間回す 左 500Hz 右 10Hz 1 秒間回す 時間の単位は ms 左右時間 $echo > /dev/rtmotor0 ソフトウェアスイッチを OFF $ echo 0 > /dev/rtmoteren0 図 6-3 モータの操作 (2/2) 入力できる数字は整数のみです Raspberry Pi Mouse に使用されているモータはステッピングモーターというもので 1 パルスで 0.9[deg] 回り 400 パルスで一回転します echo の後の数字は周波数を入力するようになっており 400 の場合は 1 秒間に 400 パルス入力され 丁度 1 秒間に一回転することになります 6.4 センサの読み取り 第 1 $ cat /dev/rtlightsensor 第 1 第 2 第 3 第 4 の順番でセンサの 値が表示されます 第 2 第 3 第 4 図 6-4 基板についている四つの可視光 LED 6.5 タクトスイッチの読み取り タクトスイッチは 0~2 まであり 下記に示すコマンドは例として SW0 が押されたか押されていないかを示します タクトスイッチ 1 の場合は rtswitch1 で最後の数字を 0~2 に変更することで各々のタクトス 19
20 イッチを状態を取得できます 押されている状態 $ cat /dev/rtswitch0 0 押されていない状態 $cat /dev/rtswitch0 1 図 6-5 スイッチの操作 20
21 7 デバイスドライバの使用例 6 章でデバイスドライバの簡単な使い方を記述しましたが この章では Shell C 言語 python の 3 種類で具体的なプログラムを提示し 解説します 7.1 Step1 LED を光らせよう Step1 は表示用の LED を光らせてみます LED を 0.5 秒ごとに点滅させるプログラム例を以 下に示します Shell バージョン #!/bin/bash while true do echo 1 tee /dev/rtled? done sleep 0.5 echo 0 tee /dev/rtled? sleep 0.5 # 点灯 #0.5 秒待ち # 消灯 #0.5 秒待ち 図 7-1 step1 shell バージョン 動作確認と解説 上記のプログラムを step1.sh というファイルに保存し 実行の権限を追加 (chmod +x step1.sh) し $./step1.sh で実行すると LED が点滅します 終了するには Ctrl + C で終 了します 無限に繰り返すコマンドとして while を使用しています while 文の書式 while 条件式 do 処理 done 図 7-2 while の書式 21
22 条件が真の場合 do~done の間の処理を繰り返し実行します true の代わりに : のヌルコマ ンドを指定しても無限ループになります デバイスドライバにデータを送るコマンドとして echo を使用しています echo コマンドは 引数に指定された文字列や変数を表示します echo 1 > /dev/rtled0 とすれば デバイスドライバ LED0 に 1 が送られ LED が点灯します 0 を送ると消灯します > はリダイレクションと呼ばれるもので 左のデータを右のファイル( デバイスドライバ ) に新規に書き込みます 追加で書き込む場合は >> になります ここの例題では > を使わずに tee コマンドと? ( 任意の 1 文字のワイルドカード 文字列の場合は * ) を使用して LED0 から LED3 まで書き込むようにしています tee を使用するには コマンドを連結するパイプ を使用します パイプを使用すると コマンドは左から実行され コマンドの実行結果を次のコマンドに渡されます echo 1 で発行された 1 が tee /dev/rtled? に渡されます tee はコマンドの結果をファイル( 今回はデバイスドライバ ) に出力しながら標準出力をするときに使用します sleep は指定した時間だけ停止します 記号なしの指定時間の単位は 秒 です 22
23 7.1.2 C 言語バージョン #include "fcntl.h" void main(void) { int led[4]; int i; led[0] = open("/dev/rtled0",o_wronly); led[1] = open("/dev/rtled1",o_wronly); led[2] = open("/dev/rtled2",o_wronly); led[3] = open("/dev/rtled3",o_wronly); while(1) { for(i=0;i<4;i++) { write(led[i],"1",1); usleep(500*1000); for(i=0;i<4;i++) { write(led[i],"0",1); usleep(500*1000); for(i=0;i<4;i++) { close(led[i]); 図 5-3 step1 C 言語バージョン 図 7-3 step1 C 言語バージョン 動作確認と解説上記のプログラムを step1.c というファイルに保存し $gcc step1.c o step1 でコンパイルします -o をしない場合は a.out になります コンパイルで作った実行ファイルを $./step1 で実行すると LED が点滅します 終了するには Ctrl + C で終了します C 言語でファイルの読み書きに open close 関数を使用します ファイルのアクセスに限らず デバイスドライバにも使用できます open close 関数を使用するには fcntl.h が必要に 23
24 なるため include します 無限に繰り返すコマンドして while を使用しています while 文の書式 while ( 条件式 ) { 処理 ; 図 7-4 while の書式 条件が真の場合 { の間の処理を繰り返し実行します 似たようなコマンドで do { while( 条件式 ); がありますが while( 条件式 ) { とは違い条件式が false でも一度は実行されるという仕様になります つまり while(false){ では{ 内を一度も実行されないが do { while(false); では一度点滅が実行されます while(0){ write (led0,"1",1); usleep(500 * 1000); write (led0,"0",1); usleep(500 * 1000); 図 7-5 LED0 が一度も点滅しない do{ write (led0,"1",1); usleep(500 * 1000); write (led0,"0",1); usleep(500 * 1000); while(0) 図 7-6 LED0 が一度だけ点滅する デバイスドライバに出力するコマンドして write コマンドを使用しています write の書式は int write(int fd, void *buf, unsigned int n); 図 7-7 wrtie の書式 int fd: データを書き込むファイルを指定します この例では デバイスドライバになります void *buf: 書き込むデータのアドレスを指定します この例では 直接データを書き込んでいます unsigned n: データの大きさを指定します この例では 1 文字を出力するので 1 としています fwrite でもデバイスドライバに書き込むことが可能ですが fwrite の場合 内部の buffer を経由するため buffer に溜まるまたは close されるまで出力されません C 言語には sleep 関数がありますが 小数点が使えず マイクロ秒 [μs] の usleep を使って 0.5 秒の sleep を実現しています 単位は 10-3 が ms 10-6 がμs でμs から ms にするには 1000 倍する必要があり 0.5 秒 = 500ms なので 500 * 1000 で 0.5 秒となります 24
25 7.1.3 Python バージョン #!/usr/bin/python import time import sys files = [ "/dev/rtled0","/dev/rtled1","/dev/rtled2","/dev/rtled3"] while 1: for filename in files: with open(filename,'w') as f: f.write("1") time.sleep(0.5) for filename in files: with open(filename,'w') as f: f.write("0") time.sleep(0.5) 図 7-8 step1 python バージョン 動作確認と解説上記のプログラムを step1.py というファイルに保存し $python step1.py で実行すると LED が点滅します 終了するには Ctrl + C で終了します デバイスドライバに書き込むコマンドとして write を使用しています Write 単体で使用するとバッファに入るため ある程度データの書き込みをしないとデバイスドライバに書いてくれません with を使うことで自動的に close をしてくれるので バッファに溜まらずデータがすぐに反映されます Sleep 関数は time に含まれているため time を import しています C 言語では while 内で処理するものとして { を使用していましたが Pythson は { を使用せず インデントで制御します 25

26 7.2 Step2 ブザを鳴らそう デバイスドライバを使用すると周波数をデバイスドライバに送るだけで音が鳴ります キーボードをたたいてピアノのように音階を出すプログラム例を以下に示します キーボードと音階の配置の仕様は以下のようになっています ド # レ # ファ # ソ # ラ # ドレミファソラシド 図 7-9 step2 音階 step2.sh Shell バーション #!/bin/bash while read -N 1 b ; do awk -v "t=$b" '$3==t{print $2' SCALE > /dev/rtbuzzer0 done 図 7-10 step2 shell バージョン (1/2) 26
27 SCALE ファイル off 0 0 ド 261 a ド # 277 w レ 293 s レ # 311 e ミ 329 d ファ 349 f ファ # 370 t ソ 392 g ソ # 415 y ラ 440 h ラ # 466 u シ 493 j ド 523 k 図 7-11 step2 shell バージョン (2/2) 動作確認と解説上記のプログラムを 1 つ目を step2.sh 2 つ目を SCALE というファイル名で保存し 実行の権限を追加し $./step2.sh で実行すると キーボートを叩くと音が鳴ります Shell には連想配列がないため awk と組み合わせて連想配列を実現しています While の後の read N 1 b はキーボードから 1 文字読んで変数 b に代入しています -N 数字 のオプションで変数に入れる文字数を指定できます -N 数字 のオプションがない場合は リターンを押すまで文字数が変数に入力されます 27
28 7.2.2 C 言語バージョン #include "fcntl.h" int _Getch(void) { Int ch; system("stty -echo -icanon min 1 time 0"); ch = getchar(); system("stty echo icanon"); return ch; void main(void){ int buzzer= open("/dev/rtbuzzer0", O_WRONLY ); int c=1; while(c){ switch(_getch()){ case '0'://off write (buzzer,"0",2); break; case 'a'://do write(buzzer,"261",4); break; case 'w'://do# write(buzzer,"277",4); break; case 's'://re write(buzzer,"293",4); break; case 'e'://re# write(buzzer,"311",4); break; case 'd'://mi write(buzzer,"329",4); break; case 'f'://fa write(buzzer,"349",4); break; 図 7-12 step2 C 言語バージョン (1/2) 28
29 case 't'://fa# write(buzzer,"370",4); break; case 'g'://so write(buzzer,"392",4); break; case 'y'://so# write(buzzer,"415",4); break; case 'h'://ra write(buzzer,"440",4); break; case 'u'://ra# write(buzzer,"446",4); break; case 'j'://shi write(buzzer,"493",4); break; case 'k'://do write(buzzer,"523",4); break; case c :// プログラムを終了 write(buzzer, 0,2); c=0; break; close(buzzer); 図 7-12 step2 C 言語バージョン (2/2) 動作確認と解説上記のプログラムを step2.c というファイル名で保存し $gcc step2.c o step2 でコンパイルします $ step2 で実行し キーボードを叩くと音がなります C 言語の getchar コマンドはリターンキーを叩いたときに入力データが変数に更新されるため 音階に指定したキーボードを叩くだけでは音がなりません そこで system 関数を使って Linux 上でエコーバックをしない (-echo) 特殊文字を無効にする(-icanon) -canon が設定されているとき 最小文字数が読み込まれなかった場合に時間切れにするタイム (time N) -canon が設定されているとき 最低 N 文字 (min N) を設定しています これにより 一文字入力されたらすぐに変数に反映されます 29
30 7.2.3 Python バージョン #!/usr/bin/python import sys class _Getch: def init (self): import tty, sys def call (self): import sys, tty, termios fd = sys.stdin.fileno() old_settings = termios.tcgetattr(fd) try: tty.setraw(sys.stdin.fileno()) ch = sys.stdin.read(1) finally: termios.tcsetattr(fd, termios.tcsadrain, old_settings) return ch dict= { "0":"0", "a":"261", "w":"277", "s":"293","e":"311","d":"329","f":"349","t":"370", "g":"392","y":"415","h":"440","u":"446","j":"493","k":"523" while 1: getch = _Getch() d = getch() if d == "c" : break if d in dict : with open( /dev/rtbuzzer0, w ) as f: f.write(dict[d]) 図 7-13 step2 python バージョン動作確認と解説上記のプログラムを step2.py というファイル名で保存し $python step2.py で実行し キーボードを叩くと音がなります 終了するには Ctrl + C または c を入力すると終了します python には 連想配列 ( ディクショナリ ) があり それを使用することですっきりしたプログラムになります Python にはキーボードの入力を取り込む raw_input() コマンドがありますが raw_input() コマンドはキーボードをたたいた後リターンキー を押さないとデータの取り込みができない仕様となっているため _Getch 関数を作り キーボードをたたいた後すぐにデータの取り込みができるようにしています 30
31 7.3 Step3 スイッチを使おう スイッチ (SW0) を押すと LED3 を点灯 / 消灯を繰り返し スイッチ (SW1) を押すと LED1 LED2 の点灯 / 消灯を繰り返し スイッチ (SW2) を押すと LED0 を点灯 / 消灯を繰り返すプログラムを以下に示します Shell バージョン #!/bin/bash state0=0 state1=0 state2=0 while true ; do if grep -q 0 /dev/rtswitch0 ; then sleep 0.1 while grep -q 0 /dev/rtswitch0 ; do sleep 0.1 done state0=`expr $state0 + 1` state0=`expr $state0 % 2` echo $state0 > /dev/rtled3 fi if grep -q 0 /dev/rtswitch1 ; then sleep 0.1 while grep -q 0 /dev/rtswitch1 ; do sleep 0.1 done state1=`expr $state1 + 1` state1=`expr $state1 %2` echo $state1 > /dev/rtled2 echo $state1 > /dev/rtled1 fi 図 7-14step3 shell バージョン (1/2) 31
32 if grep -q 0 /dev/rtswitch2 ; then sleep 0.1 while grep -q 0 /dev/rtswitch2 ; do sleep 0.1 done state2=`expr $state2 + 1` state2=`expr $state2 % 2` echo $state2 > /dev/rtled0 fi done 図 7-14step3 shell バージョン (2/2) 動作確認と解説上記のプログラムを step3.sh というファイル名で保存し 実行の権限を追加し $./step3.sh で実行すると タクトスイッチ(SW0~SW2) を押すと LED が光ります タクトスイッチが押されると 0 が入力されます 押されていない状態では 1 が入力されます if grep q 0 /dev/rtswitch?? で 0 が入力されたあと sleep 0.1 で少し待っています これは 機械的スイッチを押したとき / 離したときに内部の金属が震えている状態になります この状態をチャタリングといいます チャタリング時にスイッチの状態を調べると 0 か 1 のいずれの値も取れてしまうため 押したのか離したのかが分かりません しかし チャタリングは 数 μs から数 ms 待つことによって固定されますので sleep 0.1 でチャタリングが終わった後スイッチの状態を確認しに行っています C 言語バージョン #include "fcntl.h" char get_sw0(void){ char buf[2]; int SW0; SW0 = open("/dev/rtswitch0",o_rdonly); read(sw0,buf,2); close(sw0); return buf[0]; char get_sw1(void){ char buf[2]; int SW1; 図 7-15 step3 C 言語バージョン (1/3) 32
33 SW1 = open("/dev/rtswitch1",o_rdonly); read(sw1,buf,2); close(sw1); return buf[0]; char get_sw2(void){ char buf[2]; int SW2; SW2 = open("/dev/rtswitch2",o_rdonly); read(sw2,buf,2); close(sw2); return buf[0]; void main(void){ int state0,state1,state2; int LED0,LED1,LED2,LED3; LED0 = open("/dev/rtled0",o_wronly); LED1 = open("/dev/rtled1",o_wronly); LED2 = open("/dev/rtled2",o_wronly); LED3 = open("/dev/rtled3",o_wronly); state0 = state1 = state2 = 0; while(1){ if (get_sw0() =='0'){ usleep(10000); while (get_sw0() == '0'); usleep(10000); state0=(state0+1)&0x01; if(state0==0){ write(led3,"0",1); else{ write(led3,"1",1); 図 7-15 step3 C 言語バージョン (2/3) 33
34 if (get_sw1() =='0'){ usleep(10000); while (get_sw1() == '0'); usleep(10000); state1=(state1+1)&0x01; if(state1==0){ write(led2,"0",1); write(led1,"0",1); else{ write(led2,"1",1); write(led1,"1",1); if (get_sw2() =='0'){ usleep(10000); while (get_sw2() == '0'); usleep(10000); state2=(state2+1)&0x01; if(state2==0){ write(led0,"0",1); else{ write(led0,"1",1); 図 7-15 step3 C 言語バージョン (3/3) 動作確認と解説上記のプログラムを step3.c というファイル名で保存し $gcc step3.c o step3 でコンパイルします $ Step3 で実行し スイッチを押すと LED が光ります /dev/rtswitch?? からは 2 バイトの情報が送られてきます 1 つ目はスイッチの状態の 0 または 1 2 つ目は改行コードです read で 2 バイト受信し 1 つのデータを使用しています main 関数内で スイッチの入力を記述すると見にくくなるため関数化しています 34
35 7.3.3 Python バージョン #!/usr/bin/python import time state0=state1=state2=0 while 1 : with open("/dev/rtswitch0","r") as f: if f.readline() == "0\n" : time.sleep(0.1) while 1 : with open("/dev/rtswitch0","r") as f: if f.readline()!= "0\n" : break time.sleep(0.1) state0 = (state0 + 1 ) & 1 with open("/dev/rtled3","w") as f: f.write(str(state0)) with open("/dev/rtswitch1","r") as f: if f.readline() == "0\n" : time.sleep(0.1) while 1 : with open("/dev/rtswitch1","r") as f: if f.readline()!= "0\n" : break time.sleep(0.1) state1 = (state1 + 1 ) & 1 with open("/dev/rtled2","w") as f: f.write(str(state1)) with open("/dev/rtled1","w") as f: f.write(str(state1)) with open("/dev/rtswitch2","r") as f: if f.readline() == "0\n" : time.sleep(0.1) while 1 : with open("/dev/rtswitch2","r") as f: if f.readline()!= "0\n" : break time.sleep(0.1) state2 = (state2 + 1 ) & 1 with open("/dev/rtled0","w") as f: f.write(str(state2)) 図 7-16 step3 python バージョン 35
36 動作確認と解説上記のプログラムを step3.py というファイル名で保存し $python step3.py で実行し スイッチを押すと LED が光ります Python は数値を文字列に変換する str の組み込み関数があり それを使用して state の値をそのまま LED に出力しています 36
37 8 備考 8.1 参考文献 日経 Linux 2015 年 6 月号 ~10 月号 Raspberry Pi で始めるかんたんロボット製作 日経 BP ラズパイマガジン 2016 年春号 8.2 著作権 本取扱い説明書で紹介 または記載されている会社名 製品名は 各社の登録商標または商標です 本取扱い説明書に掲載されている文章 写真 イラストなどの著作物は 日本の著作権法及び国際条約により 著作権の保護を受けています インターネット等の公共ネットワーク 構内ネットワーク等へのアップロードなどは株式会社アールティの許可無く行うことはできません 9 問い合わせ 本製品に関するお問い合わせは 下記までお願いします 株式会社アールティ 東京都千代田区外神田 山口ビル 3F shop@rt-net.jp URL: 37
38 10 改版履歴 版数 改版内容 改版日 年 8 月 4 日 1.1 図 3-1 のパスを修正 2015 年 9 月 15 日 図 3-2 にアクセスの方法を追加 表 1 音階を追加 2.0 名称の図を RaspberryPiMouseV2 に変更 RasPiMouse の組み立て手順を追加 Raspbian の OS のインストール手順を追加 OS のインストールのところで初期ユーザとパスワードを記載 デバイスドライバのインストールのところでデバイスドライバが RasberryPi2 と RaspberryPi3 共通で使えることを追加 モータの操作で追加された機能 echo 左 Hz 右 Hz 時間 ms > /dev/rtmotor0 のサンプルを記載 デバイスドライバの使用例を追加 2016 年 6 月 15 日 38
Raspberry Pi Mouse Ver1.0 Raspberry Pi Mouse 取扱い説明書 1.0 版 2015 年 8 月 4 日 株式会社アールティ 1
 Raspberry Pi Mouse 取扱い説明書 1.0 版 2015 年 8 月 4 日 株式会社アールティ 1 内容 1 安全について... 3 1.1 安全にご使用いただくために... 3 2 ハードウェアについて... 5 2.1 パーツ一覧... 5 2.2 名称について... 5 3 デバイスドライバーのインストールについて... 6 4 デバイスドライバーの使い方について... 8
Raspberry Pi Mouse 取扱い説明書 1.0 版 2015 年 8 月 4 日 株式会社アールティ 1 内容 1 安全について... 3 1.1 安全にご使用いただくために... 3 2 ハードウェアについて... 5 2.1 パーツ一覧... 5 2.2 名称について... 5 3 デバイスドライバーのインストールについて... 6 4 デバイスドライバーの使い方について... 8
Raspberry Pi Mouse Ver. 2.1 Raspberry Pi Mouse 取扱い説明書 2.1 版 2019 年 3 月 25 日 株式会社アールティ 1
 Raspberry Pi Mouse 取扱い説明書 2.1 版 2019 年 3 月 25 日 株式会社アールティ 1 内容 1 安全について... 3 1.1 安全にご使用いただくために... 3 2 ハードウェアについて... 5 2.1 パーツ一覧... 5 2.2 名称について... 5 3 Raspberry Pi Mouse の組立について... 6 4 OS のインストール方法について...
Raspberry Pi Mouse 取扱い説明書 2.1 版 2019 年 3 月 25 日 株式会社アールティ 1 内容 1 安全について... 3 1.1 安全にご使用いただくために... 3 2 ハードウェアについて... 5 2.1 パーツ一覧... 5 2.2 名称について... 5 3 Raspberry Pi Mouse の組立について... 6 4 OS のインストール方法について...
EV3 の初期設定
 目次 1 SD カードの準備... 2 2 EV3 へのアクセスの仕方... 3 3 OpenRTM-aist のインストール... 6 4 unzip のインストール... 8 当ドキュメントは下記ページを参考にしています LEGO Mindstorms EV3 活用事例 http://www.openrtm.org/openrtm/ja/casestudy/lego_mindstorm_ev3
目次 1 SD カードの準備... 2 2 EV3 へのアクセスの仕方... 3 3 OpenRTM-aist のインストール... 6 4 unzip のインストール... 8 当ドキュメントは下記ページを参考にしています LEGO Mindstorms EV3 活用事例 http://www.openrtm.org/openrtm/ja/casestudy/lego_mindstorm_ev3
Taro-ラズパイのインストールと設定
 目 次 1 Rasbian のインストール 1 1-1 SD カードのフォーマット 1 1-2 Raspbian のダウンロード 2 1-3 Raspbian のインストール 2 2 設定 5 2-1 Raspbian の設定 5 2-2 VNC サーバーの設定 8 2-3 Wifi の接続設定 8 5 3 PC との接続 8 3-1 VNC サーバーへの接続 8 3-2 SSH での接続 10 4
目 次 1 Rasbian のインストール 1 1-1 SD カードのフォーマット 1 1-2 Raspbian のダウンロード 2 1-3 Raspbian のインストール 2 2 設定 5 2-1 Raspbian の設定 5 2-2 VNC サーバーの設定 8 2-3 Wifi の接続設定 8 5 3 PC との接続 8 3-1 VNC サーバーへの接続 8 3-2 SSH での接続 10 4
セットアップする付録2 セットアップする Step1 各部の名称を確認する 電源ボタン microusb ポート ( 電源供給用 ) 給電用 microusb ケーブル ( 添付 ) を接続します USB 2.0 ポート 必要に応じて USB 機器 ( 別途用意 ) をつなぎます ストラップホール
 給電用 microusb ケーブル ( 添付 ) を接続します USB 2.0 ポート 必要に応じて USB 機器 ( 別途用意 ) をつなぎます ストラップホール") セットアップする付録 I-O DATA DEVICE, INC. かんたんセットアップガイド インテル Compute Stick もくじ セットアップする...2 Step1 各部の名称を確認する 2 Step2 つなぐ 3 Step3 初回の設定をする 4 付録...8 電源を切る (Windows をシャットダウンする ) 8 液晶ディスプレイから電源供給する際のご注意 9 アフターサービス
セットアップする付録 I-O DATA DEVICE, INC. かんたんセットアップガイド インテル Compute Stick もくじ セットアップする...2 Step1 各部の名称を確認する 2 Step2 つなぐ 3 Step3 初回の設定をする 4 付録...8 電源を切る (Windows をシャットダウンする ) 8 液晶ディスプレイから電源供給する際のご注意 9 アフターサービス
重要更新作業を実施される前に必ずご確認ください OS の更新を実行するときはタブレット端末に AC アダプターを接続して使用してください AC アダプターを接続していないと OS の更新はできません 実行中は AC アダプターを抜かないでください OS の更新が正しく行えなくなり タブレット端末が正
 OS バージョン S9141 S0074 S1201091 以外の方へ タブレット端末 RW-T107/RW-T110 の OS 更新方法について (micro SD 編 ) ( システム更新ツールを使用して micro SD メモリーカードから OS を更新する方法 ) はじめに ここではタブレット端末 RW-T107 RW-T110 の OS 更新方法について説明します ただし RW-T107
OS バージョン S9141 S0074 S1201091 以外の方へ タブレット端末 RW-T107/RW-T110 の OS 更新方法について (micro SD 編 ) ( システム更新ツールを使用して micro SD メモリーカードから OS を更新する方法 ) はじめに ここではタブレット端末 RW-T107 RW-T110 の OS 更新方法について説明します ただし RW-T107
RW-5100 導入説明書 Windows7 用 2017 年 7 月 シャープ株式会社
 RW-5100 導入説明書 Windows7 用 2017 年 7 月 シャープ株式会社 はじめに 本書は Windows 7 環境において IC カードリーダライタ RW-5100 を使用するため お使いのパソコンにデバイスドライバソフトウェア ( 以下 ドライバソフト と記載 ) をインストールする方法について記述しています 本書で説明するドライバソフトは Windows 7 SP1 で動作するものです
RW-5100 導入説明書 Windows7 用 2017 年 7 月 シャープ株式会社 はじめに 本書は Windows 7 環境において IC カードリーダライタ RW-5100 を使用するため お使いのパソコンにデバイスドライバソフトウェア ( 以下 ドライバソフト と記載 ) をインストールする方法について記述しています 本書で説明するドライバソフトは Windows 7 SP1 で動作するものです
プログラマブル LED 制御モジュール アプリ操作説明書 プログラマブル LED 制御モジュール設定アプリ操作説明書 適用モジュール 改訂番号 エレラボドットコム 1
 設定 適用モジュール 041-1 改訂番号 20161024 エレラボドットコム 1 ( 用アプリの利用可能環境 ) Windows7 8.1 10 のいずれかが動作する PC Windows8 以降の場合は 次ページ記載の Windows8 以降の.NET Framework の有効化 (p3~7) の操作をするか 設定されていることを確認してからアプリをインストールしてください.NET Framework2.0
設定 適用モジュール 041-1 改訂番号 20161024 エレラボドットコム 1 ( 用アプリの利用可能環境 ) Windows7 8.1 10 のいずれかが動作する PC Windows8 以降の場合は 次ページ記載の Windows8 以降の.NET Framework の有効化 (p3~7) の操作をするか 設定されていることを確認してからアプリをインストールしてください.NET Framework2.0
重要更新作業を実施される前に必ずご確認ください OS の更新を実行するときはタブレット端末に AC アダプターを接続して使用してください AC アダプターを接続していないと OS の更新はできません 実行中は AC アダプターを抜かないでください OS の更新が正しく行えなくなり タブレット端末が正
 OS バージョン S9141 S0074 S1201091 の方へ タブレット端末 RW-T107 の OS 更新方法について (microsd 編 ) (System Update ツールを使用して microsd メモリーカードから OS を更新する方法 ) はじめに タブレット端末 RW-T107 の OS の更新方法は ご使用の OS のバージョンによって異なります ここでは ご使用中の OS
OS バージョン S9141 S0074 S1201091 の方へ タブレット端末 RW-T107 の OS 更新方法について (microsd 編 ) (System Update ツールを使用して microsd メモリーカードから OS を更新する方法 ) はじめに タブレット端末 RW-T107 の OS の更新方法は ご使用の OS のバージョンによって異なります ここでは ご使用中の OS
WiFiの現状
 V1.0 2018/02/06 はじめての AWS IoT 開発キット ~ センサ RaspberryPi を使い 実体験 開発短縮 ~ 設定編 ( 抜粋版 ) AWS IoT スペクトラム テクノロジー株式会社 https://spectrum-tech.co.jp sales@spectrum-tech.co.jp 1 目次 開発キット (Pi) 接続構成 開発キット (Pi) 設定マニュアル
V1.0 2018/02/06 はじめての AWS IoT 開発キット ~ センサ RaspberryPi を使い 実体験 開発短縮 ~ 設定編 ( 抜粋版 ) AWS IoT スペクトラム テクノロジー株式会社 https://spectrum-tech.co.jp sales@spectrum-tech.co.jp 1 目次 開発キット (Pi) 接続構成 開発キット (Pi) 設定マニュアル
arduino プログラミング課題集 ( Ver /06/01 ) arduino と各種ボードを組み合わせ 制御するためのプログラミングを学 ぼう! 1 入出力ポートの設定と利用方法 (1) 制御( コントロール ) する とは 外部装置( ペリフェラル ) が必要とする信号をマイ
 arduino と各種ボードを組み合わせ 制御するためのプログラミングを学 ぼう! 1 入出力ポートの設定と利用方法 (1) 制御( コントロール ) する とは 外部装置( ペリフェラル ) が必要とする信号をマイ") arduino プログラミング課題集 ( Ver.5.0 2017/06/01 ) arduino と各種ボードを組み合わせ 制御するためのプログラミングを学 ぼう! 1 入出力ポートの設定と利用方法 (1) 制御( コントロール ) する とは 外部装置( ペリフェラル ) が必要とする信号をマイコンから伝える 外部装置の状態をマイコンで確認する 信号の授受は 入出力ポート 経由で行う (2) 入出力ポートとは?
arduino プログラミング課題集 ( Ver.5.0 2017/06/01 ) arduino と各種ボードを組み合わせ 制御するためのプログラミングを学 ぼう! 1 入出力ポートの設定と利用方法 (1) 制御( コントロール ) する とは 外部装置( ペリフェラル ) が必要とする信号をマイコンから伝える 外部装置の状態をマイコンで確認する 信号の授受は 入出力ポート 経由で行う (2) 入出力ポートとは?
Taro-82ADAカ.jtd
 デジタル & アナログ絶縁入出力ユニット解説書製品型式 8 2 A D A - K C 製品型式 8 2 A D A - B D 製品型式 D A C S - 8 2 0 0 この解説書は 8 2 A D A または D A C S - 8 2 0 0 の動作と使用方法について簡単に説明したものです D A C S - 8 2 0 0 の場合は この解説書の 8 2 A D A という表現を 一部
デジタル & アナログ絶縁入出力ユニット解説書製品型式 8 2 A D A - K C 製品型式 8 2 A D A - B D 製品型式 D A C S - 8 2 0 0 この解説書は 8 2 A D A または D A C S - 8 2 0 0 の動作と使用方法について簡単に説明したものです D A C S - 8 2 0 0 の場合は この解説書の 8 2 A D A という表現を 一部
RW-4040 導入説明書 Windows 7 用 2017 年 7 月 シャープ株式会社
 Windows 7 用 2017 年 7 月 シャープ株式会社 はじめに 本書は IC カードリーダライタ RW-4040 を使用するため お使いのパソコンにデバイスドライバソフトウェア ( 以下 ドライバソフト と記載 ) をインストールする方法について記述しています このドライバソフトは Windows 7 SP1 で動作します 本書では ドライバソフトバージョン 2.27 のインストールについて説明します
Windows 7 用 2017 年 7 月 シャープ株式会社 はじめに 本書は IC カードリーダライタ RW-4040 を使用するため お使いのパソコンにデバイスドライバソフトウェア ( 以下 ドライバソフト と記載 ) をインストールする方法について記述しています このドライバソフトは Windows 7 SP1 で動作します 本書では ドライバソフトバージョン 2.27 のインストールについて説明します
WiFiの現状
 V2.0 2018/10/29 はじめての AI プログラム学習キット 2 グーグル開発の Tensorflow Python の基礎をマスター設定編 ( 抜粋版 ) スペクトラム テクノロジー株式会社 https://spectrum-tech.co.jp sales@spectrum-tech.co.jp 1 目次 学習キット接続構成 学習キット設定マニュアル ページ 1. Raspberry
V2.0 2018/10/29 はじめての AI プログラム学習キット 2 グーグル開発の Tensorflow Python の基礎をマスター設定編 ( 抜粋版 ) スペクトラム テクノロジー株式会社 https://spectrum-tech.co.jp sales@spectrum-tech.co.jp 1 目次 学習キット接続構成 学習キット設定マニュアル ページ 1. Raspberry
TWE-Lite R 取扱説明書
 USB アダプター TWE-Lite R( トワイ ライター ) TWE-Lite R( トワイ ライター ) は TWE-Lite DIP( トワイライト ディップ ) にソフトウエアを書き込むためのライターです USB 接続でパソコンから TWE-Lite DIP 内蔵のフラッシュメモリーにソフトウエアを転送することができます ソフトウエアを更新し機能追加することや 他のソフトウエアや自作ソフトウエアを書き込むことができます
USB アダプター TWE-Lite R( トワイ ライター ) TWE-Lite R( トワイ ライター ) は TWE-Lite DIP( トワイライト ディップ ) にソフトウエアを書き込むためのライターです USB 接続でパソコンから TWE-Lite DIP 内蔵のフラッシュメモリーにソフトウエアを転送することができます ソフトウエアを更新し機能追加することや 他のソフトウエアや自作ソフトウエアを書き込むことができます
Flash Loader
 J MA1309-A プロジェクターファームウェア更新ガイド 本書はお読みになった後も大切に保管してください 本書の最新版は下記ウェブサイトに公開されております http://world.casio.com/manual/projector/ Microsoft Windows Windows Vistaは米国 Microsoft Corporationの米国およびその他の国における登録商標または商標です
J MA1309-A プロジェクターファームウェア更新ガイド 本書はお読みになった後も大切に保管してください 本書の最新版は下記ウェブサイトに公開されております http://world.casio.com/manual/projector/ Microsoft Windows Windows Vistaは米国 Microsoft Corporationの米国およびその他の国における登録商標または商標です
 Biz Box ルータ RTX1210 ファームウェアバージョンアップ手順書 - 1 - 1.1 外部メモリを使用して GUI 画面でファームウェアを更新する 市販の外部メモリ (USB メモリ /microsd カード ) に保存したファームウェアをルーターに読み込ませてファームウェアの更新を 行います FAT またはFAT32 形式でフォーマットされていない外部メモリは ルーターで使用できません
Biz Box ルータ RTX1210 ファームウェアバージョンアップ手順書 - 1 - 1.1 外部メモリを使用して GUI 画面でファームウェアを更新する 市販の外部メモリ (USB メモリ /microsd カード ) に保存したファームウェアをルーターに読み込ませてファームウェアの更新を 行います FAT またはFAT32 形式でフォーマットされていない外部メモリは ルーターで使用できません
Microsoft Word - USB60F_Raspi_ doc
 REX-USB60F USB RS-232C 変換アダプタ REX-USB60F の Raspberry Pi での使用について 1. 概要 2 2. 設定手順 2 2-1. REX-USB60F の装着と確認 2 3. 通信の確認 4 3-1. cutecom による確認 4 4. Python での使用 8 4-1. データ送信のスクリプト 8 4-2. データ受信のスクリプト 9 2016 年
REX-USB60F USB RS-232C 変換アダプタ REX-USB60F の Raspberry Pi での使用について 1. 概要 2 2. 設定手順 2 2-1. REX-USB60F の装着と確認 2 3. 通信の確認 4 3-1. cutecom による確認 4 4. Python での使用 8 4-1. データ送信のスクリプト 8 4-2. データ受信のスクリプト 9 2016 年
OS バージョンアップ実行後のご注意 OS バージョンアップ後 更新完了通知が自動的にNECカシオモバイルコミュニケーションズ株式会社の運用するサーバへ送信されます なお NECカシオモバイルコミュニケーションズ株式会社は送信された情報を OS バージョンアップ以外の目的には利用いたしません また
 MEDIAS X N-07D OS バージョンアップ手順書 ~ パソコンを利用してバージョンアップする ~ このたびは MEDIAS X N-07D( 以下 N-07D とします ) をお買い上げいただきまして 誠にありがとうございました N-07D の本体 OS を Android OS 4.0 から Android OS 4.1 にバージョンアップするための OS バージョンアップ手順をご説明いたします
MEDIAS X N-07D OS バージョンアップ手順書 ~ パソコンを利用してバージョンアップする ~ このたびは MEDIAS X N-07D( 以下 N-07D とします ) をお買い上げいただきまして 誠にありがとうございました N-07D の本体 OS を Android OS 4.0 から Android OS 4.1 にバージョンアップするための OS バージョンアップ手順をご説明いたします
Microsoft Word - SCR331DI_mac10.14_manual.doc
 目次 : NTT コミュニケーションズ IC カードリーダライタ ドライバソフトインストールマニュアル 1. はじめに 2. ドライバソフトのインストール 3. IC カードリーダーの状態確認 ----------------------------------------------- 2018.12 4. ドライバソフトのアンインストール 5. ( 参考 ) ドライバソフトの手動インストール方法
目次 : NTT コミュニケーションズ IC カードリーダライタ ドライバソフトインストールマニュアル 1. はじめに 2. ドライバソフトのインストール 3. IC カードリーダーの状態確認 ----------------------------------------------- 2018.12 4. ドライバソフトのアンインストール 5. ( 参考 ) ドライバソフトの手動インストール方法
<4D F736F F D20438CBE8CEA8D758DC F0939A82C282AB2E646F63>
 C 言語講座第 2 回 作成 : ハルト 前回の復習基本的に main () の中カッコの中にプログラムを書く また 変数 ( int, float ) はC 言語では main() の中カッコの先頭で宣言する 1 画面へ出力 printf() 2 キーボードから入力 scanf() printf / scanf で整数を表示 / 入力 %d 小数を表示 / 入力 %f 3 整数を扱う int 型を使う
C 言語講座第 2 回 作成 : ハルト 前回の復習基本的に main () の中カッコの中にプログラムを書く また 変数 ( int, float ) はC 言語では main() の中カッコの先頭で宣言する 1 画面へ出力 printf() 2 キーボードから入力 scanf() printf / scanf で整数を表示 / 入力 %d 小数を表示 / 入力 %f 3 整数を扱う int 型を使う
現行のICカードリーダRW4040インストーラの課題
 RW-5100 導入説明書 Windows 8 用 2012 年 12 月 シャープ株式会社 はじめに 本書は Windows 8 環境において IC カードリーダライタ RW-5100 を使用するため お使いのパソコンにデバイスドライバソフトウェア ( 以下 ドライバソフト と記載 ) をインストールする方法について記述しています Windows 8 以外の OS に関するドライバソフトのインストールについては
RW-5100 導入説明書 Windows 8 用 2012 年 12 月 シャープ株式会社 はじめに 本書は Windows 8 環境において IC カードリーダライタ RW-5100 を使用するため お使いのパソコンにデバイスドライバソフトウェア ( 以下 ドライバソフト と記載 ) をインストールする方法について記述しています Windows 8 以外の OS に関するドライバソフトのインストールについては
RPI-ZUMO-ASM-MANUAL Raspberry Pi on Zumo キット 組立てマニュアル ver2.0 弊社製品 Raspberry Pi on Zumo キットをお買い上げ頂きありがとうございます 本製品は組立てキットとなっております 以
 Raspberry Pi on Zumo キット 組立てマニュアル 2017.08.22 ver2.0 弊社製品 Raspberry Pi on Zumo キットをお買い上げ頂きありがとうございます 本製品は組立てキットとなっております 以降の手順に基づき組立ててお使い下さい 1. 製品の概要 Raspberry Pi on Zumo は Pololu 社製 Zumo Robot for Arduino
Raspberry Pi on Zumo キット 組立てマニュアル 2017.08.22 ver2.0 弊社製品 Raspberry Pi on Zumo キットをお買い上げ頂きありがとうございます 本製品は組立てキットとなっております 以降の手順に基づき組立ててお使い下さい 1. 製品の概要 Raspberry Pi on Zumo は Pololu 社製 Zumo Robot for Arduino
microsd メモリカード (microsdhc メモリカードを含む ) を IS11LG 本体にセットして データを保存することができます また 連絡先 メール ブックマークなどを microsd メモリカードに控えておくことができます アプリケーションによっては microsdメモリカードをセ
 を IS11LG 本体にセットして データを保存することができます また 連絡先 メール ブックマークなどを microsd メモリカードに控えておくことができます アプリケーションによっては microsdメモリカードをセ") ファイル管理 microsdメモリカードを利用する 227 microsdメモリカードを取り付ける 228 microsdメモリカードを取り外す 229 microusbケーブルでパソコンと接続する 230 メモリの使用量を確認する 232 226 microsd メモリカード (microsdhc メモリカードを含む ) を IS11LG 本体にセットして データを保存することができます また 連絡先
ファイル管理 microsdメモリカードを利用する 227 microsdメモリカードを取り付ける 228 microsdメモリカードを取り外す 229 microusbケーブルでパソコンと接続する 230 メモリの使用量を確認する 232 226 microsd メモリカード (microsdhc メモリカードを含む ) を IS11LG 本体にセットして データを保存することができます また 連絡先
ファイル管理 microsdメモリカードを利用する 232 microsdメモリカードを取り付ける 233 microsdメモリカードを取り外す 234 microusbケーブルでパソコンと接続する 235 メモリの使用量を確認する
 ファイル管理 microsdメモリカードを利用する 232 microsdメモリカードを取り付ける 233 microsdメモリカードを取り外す 234 microusbケーブルでパソコンと接続する 235 メモリの使用量を確認する 237 231 ファイル管理232 microsd メモリカードを利用する microsd メモリカード (microsdhc メモリカードを含む ) を IS11LG
ファイル管理 microsdメモリカードを利用する 232 microsdメモリカードを取り付ける 233 microsdメモリカードを取り外す 234 microusbケーブルでパソコンと接続する 235 メモリの使用量を確認する 237 231 ファイル管理232 microsd メモリカードを利用する microsd メモリカード (microsdhc メモリカードを含む ) を IS11LG
4 本体の入力を USB-B 端子に対応する入力に切り換える 下記の画面表示になります 手順 8 の画面になるまでしばらくお待ちください 5 解凍したフォルダー内にある "Setup.exe" をダブルクリックして実行する InstallShield ウィザードが表示されます xxxxxxxxxx.
 ドライバーソフトウェアのインストール USB オーディオドライバーインストールマニュアル (Windows 用 ) 目次 ドライバーソフトウェアのインストール... 1 ページ ドライバーソフトウェアのアンインストール... 3 ページ 困ったとき (Windows 7 の場合 )... 4 ページ 困ったとき (Windows 8/8.1/10 の場合 )... 8 ページ ドライバー名およびデバイス名を
ドライバーソフトウェアのインストール USB オーディオドライバーインストールマニュアル (Windows 用 ) 目次 ドライバーソフトウェアのインストール... 1 ページ ドライバーソフトウェアのアンインストール... 3 ページ 困ったとき (Windows 7 の場合 )... 4 ページ 困ったとき (Windows 8/8.1/10 の場合 )... 8 ページ ドライバー名およびデバイス名を
エコノナビットⅱ 電力管理ソフト/壁紙書き換えソフト
 エコノナビット ii 電力管理ソフト / 壁紙書き換えソフト インストール手順書 -Windows 7 64 ビット版 Windows Vista 64 ビット版 - 1. はじめに エコノナビット ii 電力管理ソフトと壁紙書き換えソフトはエコノナビット ii 表示機のアプリケーションソフトです 電力管理ソフトをお使いいただくと エコノナビット ii 表示機のデータをパソコンで管理することができます
エコノナビット ii 電力管理ソフト / 壁紙書き換えソフト インストール手順書 -Windows 7 64 ビット版 Windows Vista 64 ビット版 - 1. はじめに エコノナビット ii 電力管理ソフトと壁紙書き換えソフトはエコノナビット ii 表示機のアプリケーションソフトです 電力管理ソフトをお使いいただくと エコノナビット ii 表示機のデータをパソコンで管理することができます
MS5145 USB シリアル エミュレーション モードの設定
 MS5145-AC-U 補足設定 2010 年 7 月株式会社エイポック http://www.a-poc.co.jp/ USB シリアルエミュレーションモードの設定 1. 概要 USB シリアル エミュレーション モードとはバーコードリーダーを USB で接続していながら RS-232C 接続機器としてパソコンに認識させる設定です 読み取ったバーコード データは COM ポートにシリアルデータとして入力します
MS5145-AC-U 補足設定 2010 年 7 月株式会社エイポック http://www.a-poc.co.jp/ USB シリアルエミュレーションモードの設定 1. 概要 USB シリアル エミュレーション モードとはバーコードリーダーを USB で接続していながら RS-232C 接続機器としてパソコンに認識させる設定です 読み取ったバーコード データは COM ポートにシリアルデータとして入力します
第 7.0 版 利用履歴管理 ETCPRO5 セットアップマニュアル (Ver5.002) カードリーダモデル変更 ( 表示付き 表示なし ) に伴い 改訂 Windows10 対応に伴い 改訂 参考ホームページサイト :
 カードリーダモデル変更 ( 表示付き 表示なし ) に伴い 改訂 Windows10 対応に伴い 改訂 参考ホームページサイト :") 第 7.0 版 利用履歴管理 ETCPRO5 セットアップマニュアル (Ver5.002) カードリーダモデル変更 ( 表示付き 表示なし ) に伴い 改訂 Windows10 対応に伴い 改訂 参考ホームページサイト : http://www.denso-wave.com/download/etcp/etcpro.html 2016 年 2 月 株式会社デンソーウェーブ 目次 1. はじめに......
第 7.0 版 利用履歴管理 ETCPRO5 セットアップマニュアル (Ver5.002) カードリーダモデル変更 ( 表示付き 表示なし ) に伴い 改訂 Windows10 対応に伴い 改訂 参考ホームページサイト : http://www.denso-wave.com/download/etcp/etcpro.html 2016 年 2 月 株式会社デンソーウェーブ 目次 1. はじめに......
Microsoft Word - MacOSXインストールマニュアル( ).doc
.doc") 目次 : NTT コミュニケーションズ IC カードリーダライタ ドライバソフトインストールマニュアル 1. はじめに 2. ドライバソフトのインストール 3. IC カードリーダーの状態確認 ----------------------------------------------- 2014.12 4. ドライバソフトのアンインストール 5. ( 参考 ) ドライバソフトの手動インストール方法
目次 : NTT コミュニケーションズ IC カードリーダライタ ドライバソフトインストールマニュアル 1. はじめに 2. ドライバソフトのインストール 3. IC カードリーダーの状態確認 ----------------------------------------------- 2014.12 4. ドライバソフトのアンインストール 5. ( 参考 ) ドライバソフトの手動インストール方法
MMO ゲームパッド JC-DUX60BK ドライバー設定ガイド このドライバー設定ガイドは JC-DUX60BK に付属のドライバーを使った 各ボタンやスティックへの機能割り当てや連射の設定などの操作について説明しています ドライバーのインストール方法については JC-DUX60BK に付属のユー
 MMO ゲームパッド JC-DUX60BK ドライバー設定ガイド このドライバー設定ガイドは JC-DUX60BK に付属のドライバーを使った 各ボタンやスティックへの機能割り当てや連射の設定などの操作について説明しています ドライバーのインストール方法については JC-DUX60BK に付属のユーザーズマニュアルをご覧ください このドライバー設定ガイドは Windows 10 の画面で説明しています
MMO ゲームパッド JC-DUX60BK ドライバー設定ガイド このドライバー設定ガイドは JC-DUX60BK に付属のドライバーを使った 各ボタンやスティックへの機能割り当てや連射の設定などの操作について説明しています ドライバーのインストール方法については JC-DUX60BK に付属のユーザーズマニュアルをご覧ください このドライバー設定ガイドは Windows 10 の画面で説明しています
G800SE HTMLdocument update
 HTML ドキュメントアップデート手順説明書 本説明書では 弊社ホームページから G800SE の HTML ドキュメントをダウンロードし アップデートを行う方法を説明しています HTML ドキュメントのアップデートを行うには 下記の操作を行ってください 操作フロー 1. ご使用のカメラのHTMLドキュメントバージョンを確認する (P.2) 2. ダウンロードしてHTMLドキュメントのファイルを準備する
HTML ドキュメントアップデート手順説明書 本説明書では 弊社ホームページから G800SE の HTML ドキュメントをダウンロードし アップデートを行う方法を説明しています HTML ドキュメントのアップデートを行うには 下記の操作を行ってください 操作フロー 1. ご使用のカメラのHTMLドキュメントバージョンを確認する (P.2) 2. ダウンロードしてHTMLドキュメントのファイルを準備する
はじめに URBANO PROGRESSO を microusb ケーブル 01 ( 別売 ) またはこれと共通の仕様の microusb ケーブル ( 別売 )( 以下 USB ケーブル ) と接続して USB テザリング機能をご使用いただくためには あらかじめパソコンに USB ドライバ をイン
 またはこれと共通の仕様の microusb ケーブル ( 別売 )( 以下 USB ケーブル ) と接続して USB テザリング機能をご使用いただくためには あらかじめパソコンに USB ドライバ をイン") はじめに URBANO PROGRESSO を microusb ケーブル 01 ( 別売 ) またはこれと共通の仕様の microusb ケーブル ( 別売 )( 以下 USB ケーブル ) と接続して USB テザリング機能をご使用いただくためには あらかじめパソコンに USB ドライバ をインストールしていただく必要があります USB ドライバをインストールする 3 パソコンに接続する 4 接続状態を確認する
はじめに URBANO PROGRESSO を microusb ケーブル 01 ( 別売 ) またはこれと共通の仕様の microusb ケーブル ( 別売 )( 以下 USB ケーブル ) と接続して USB テザリング機能をご使用いただくためには あらかじめパソコンに USB ドライバ をインストールしていただく必要があります USB ドライバをインストールする 3 パソコンに接続する 4 接続状態を確認する
Microsoft Word - XPC4ソフトマニュアル.doc
 < XPC-4 映像ツール 簡易マニュアル> お試し版 Ver1.0 XPC-4 に USB ケーブルを接続する際の注意事項 ファームウェア アップデートの作業 もしくは XPC-4 映像ツール を使用するときは USB2.0 に対応した USB ケーブル (Type A[ オス ]-Type B[ オス ]) が 1 本必要です USB ケーブルはパソコンの OS(Windows) が完全に起動してから
< XPC-4 映像ツール 簡易マニュアル> お試し版 Ver1.0 XPC-4 に USB ケーブルを接続する際の注意事項 ファームウェア アップデートの作業 もしくは XPC-4 映像ツール を使用するときは USB2.0 に対応した USB ケーブル (Type A[ オス ]-Type B[ オス ]) が 1 本必要です USB ケーブルはパソコンの OS(Windows) が完全に起動してから
ファームウェアアップデート手順書 EOS C300 Mark II
 ファームウェアアップデート手順書 デジタルシネマカメラ EOS C300 Mark II 本書ではデジタルシネマカメラ EOS C300 Mark II のファームウェア * をアップデート ( 書き換え ) するための手順と注意事項について説明しています * ファームウェアとは 機器を制御するために組み込まれたソフトウェアのことです カメラはファームウェアによって撮影 画像処理などを行います 重要
ファームウェアアップデート手順書 デジタルシネマカメラ EOS C300 Mark II 本書ではデジタルシネマカメラ EOS C300 Mark II のファームウェア * をアップデート ( 書き換え ) するための手順と注意事項について説明しています * ファームウェアとは 機器を制御するために組み込まれたソフトウェアのことです カメラはファームウェアによって撮影 画像処理などを行います 重要
無線LAN JRL-710/720シリーズ ファームウェアバージョンアップマニュアル 第2.1版
 無線 LAN JRL-710/720 シリーズ < 第 2.1 版 > G lobal Communications http://www.jrc.co.jp 目次 1. バージョンアップを行う前に...1 1.1. 用意するもの...1 1.2. 接続の確認...1 2. バージョンアップ手順...4 2.1. 手順 1...6 2.2. 手順 2...8 2.3. 手順 3... 11 本書は,
無線 LAN JRL-710/720 シリーズ < 第 2.1 版 > G lobal Communications http://www.jrc.co.jp 目次 1. バージョンアップを行う前に...1 1.1. 用意するもの...1 1.2. 接続の確認...1 2. バージョンアップ手順...4 2.1. 手順 1...6 2.2. 手順 2...8 2.3. 手順 3... 11 本書は,
7
 AW-HE2 ソフトウェア アップデート方法 必ずはじめにお読みください アップデートを実施する過程で 設定内容を誤って変更してしまうなど あらゆる事態を十分に考慮しアップデートを実施してください 事前に現在の設定内容などを書きとめておくことをお勧めいたします 免責について弊社はいかなる場合も以下に関して一切の責任を負わないものとします 1 本機に関連して直接または間接に発生した 偶発的 特殊 または結果的損害
AW-HE2 ソフトウェア アップデート方法 必ずはじめにお読みください アップデートを実施する過程で 設定内容を誤って変更してしまうなど あらゆる事態を十分に考慮しアップデートを実施してください 事前に現在の設定内容などを書きとめておくことをお勧めいたします 免責について弊社はいかなる場合も以下に関して一切の責任を負わないものとします 1 本機に関連して直接または間接に発生した 偶発的 特殊 または結果的損害
S0027&S0028 取扱説明書 1-1 充電をするには 1-2 電源を入れるには 1-3 電源を切るには 1-4 充電が少なくなった場合 1-5 動作切り替え 目次 2-1 動画録画 2-2 静止画撮影 2-3 PC で再生するには 3-1 録画装置を HDMI コードでテレビモニターに繋いで使
 S0027&S0028 取扱説明書 1-1 充電をするには 1-2 電源を入れるには 1-3 電源を切るには 1-4 充電が少なくなった場合 1-5 動作切り替え 目次 2-1 動画録画 2-2 静止画撮影 2-3 PC で再生するには 3-1 録画装置を HDMI コードでテレビモニターに繋いで使用する場合 3-2 動画録画するには 3-3 静止画撮影するには 3-4 動画 静止画の保存ファイルを確認するには
S0027&S0028 取扱説明書 1-1 充電をするには 1-2 電源を入れるには 1-3 電源を切るには 1-4 充電が少なくなった場合 1-5 動作切り替え 目次 2-1 動画録画 2-2 静止画撮影 2-3 PC で再生するには 3-1 録画装置を HDMI コードでテレビモニターに繋いで使用する場合 3-2 動画録画するには 3-3 静止画撮影するには 3-4 動画 静止画の保存ファイルを確認するには
User Support Tool 操作ガイド
 User Support Tool - 操作ガイド - User Support Tool とは? User Support Tool は ファームウェアを更新するためのユーティリティソフトウェアです 本書では User Support Tool を使用して プリンタのファームウェアを更新する方法を解説しています ご使用前に必ず本書をお読みください 1 準備する 1-1 必要なシステム環境...P.
User Support Tool - 操作ガイド - User Support Tool とは? User Support Tool は ファームウェアを更新するためのユーティリティソフトウェアです 本書では User Support Tool を使用して プリンタのファームウェアを更新する方法を解説しています ご使用前に必ず本書をお読みください 1 準備する 1-1 必要なシステム環境...P.
手順書 20 イメージ最小化作業 はじめに JumboSpot を動かすために使用している RaspberryPi( 以下 ラズパイ という ) に Pi-Star という OS 兼ソフトウェアを microsd カードにセットアップして利用しているが バックアップイメージを残す際に利用するソフトウ
 に Pi-Star という OS 兼ソフトウェアを microsd カードにセットアップして利用しているが バックアップイメージを残す際に利用するソフトウ") 手順書 20 イメージ最小化作業 はじめに JumboSpot を動かすために使用している RaspberryPi( 以下 ラズパイ という ) に Pi-Star という OS 兼ソフトウェアを microsd カードにセットアップして利用しているが バックアップイメージを残す際に利用するソフトウェアにもよるが Pi-Star が使用していないパーテーションもバックアップしてしまい イメージサイズの肥大化の要因となっている
手順書 20 イメージ最小化作業 はじめに JumboSpot を動かすために使用している RaspberryPi( 以下 ラズパイ という ) に Pi-Star という OS 兼ソフトウェアを microsd カードにセットアップして利用しているが バックアップイメージを残す際に利用するソフトウェアにもよるが Pi-Star が使用していないパーテーションもバックアップしてしまい イメージサイズの肥大化の要因となっている
4 本体の入力を USB-B 端子に対応する入力に切り換える 下記の画面表示になります 手順 8 の画面になるまでしばらくお待ちください 5 解凍したフォルダー内にある "Setup.exe" をダブルクリックして実行する InstallShield ウィザードが表示されます xxxxxxxxxx.
 ドライバーソフトウェアのインストール USB オーディオドライバーインストールマニュアル (Windows 用 ) 目次 ドライバーソフトウェアのインストール... 1 ページ ドライバーソフトウェアのアンインストール... 3 ページ 困ったとき (Windows XP の場合 )... 4 ページ 困ったとき (Windows Vista の場合 )... 6 ページ 困ったとき (Windows
ドライバーソフトウェアのインストール USB オーディオドライバーインストールマニュアル (Windows 用 ) 目次 ドライバーソフトウェアのインストール... 1 ページ ドライバーソフトウェアのアンインストール... 3 ページ 困ったとき (Windows XP の場合 )... 4 ページ 困ったとき (Windows Vista の場合 )... 6 ページ 困ったとき (Windows
monologue Sound Librarian 取扱説明書
 J 3 目次 はじめに... 2 monologue Sound Librarian とは?... 2 使用上のご注意... 2 動作環境... 2 インストール... 3 Mac へのインストール... 3 Windows へのインストール... 3 クイック スタート... 4 monologue Sound Librarian を起動する... 4 monologue Sound Librarian
J 3 目次 はじめに... 2 monologue Sound Librarian とは?... 2 使用上のご注意... 2 動作環境... 2 インストール... 3 Mac へのインストール... 3 Windows へのインストール... 3 クイック スタート... 4 monologue Sound Librarian を起動する... 4 monologue Sound Librarian
エコノナビットⅱ 電力管理ソフト/壁紙書き換えソフト
 エコノナビット ⅱ 電力管理ソフト / 壁紙書き換えソフト インストール手順書 -Windows XP- 1. はじめに エコノナビット ii 電力管理ソフトと壁紙書き換えソフトはエコノナビット ii 表示機のアプリケーションソフトです 電力管理ソフトをお使いいただくと エコノナビット ii 表示機のデータをパソコンで管理することができます 壁紙書き換えソフトをお使いいただくとエコノナビット ii
エコノナビット ⅱ 電力管理ソフト / 壁紙書き換えソフト インストール手順書 -Windows XP- 1. はじめに エコノナビット ii 電力管理ソフトと壁紙書き換えソフトはエコノナビット ii 表示機のアプリケーションソフトです 電力管理ソフトをお使いいただくと エコノナビット ii 表示機のデータをパソコンで管理することができます 壁紙書き換えソフトをお使いいただくとエコノナビット ii
Windows パソコンに接続する 画面表示は Windows 7 を例としています 1. EM chip を取り付けた本製品の USB コネクタに USB ケーブルを接続します 2. USB ケーブルのもう一方のコネクタをパソコンの USB ポートに接続します パソコンがデータ通信カード ( 本製
 Windows パソコンに接続する...50 EMOBILE GL04P ドライバをインストールする...51 Windows パソコンから取り外す...53 EMOBILE GL04P ドライバをアンインストール ( 削除 ) する場合...55 Mac に接続する...56 EMOBILE GL04P ドライバをインストールする...57 Mac から取り外す...59 EMOBILE GL04P
Windows パソコンに接続する...50 EMOBILE GL04P ドライバをインストールする...51 Windows パソコンから取り外す...53 EMOBILE GL04P ドライバをアンインストール ( 削除 ) する場合...55 Mac に接続する...56 EMOBILE GL04P ドライバをインストールする...57 Mac から取り外す...59 EMOBILE GL04P
ポインタ変数
 プログラミング及び実習 5 馬青 1 文字処理 数値処理 : 整数 浮動小数点数 単一の文字は と ( シングルクォーテーション ) で囲んで表現される 文字のデータ型は char または int である int を用いたほうが ライブラリの関数の引数の型と一致する 以下は全部 int の使用に統一する 従って int ch; で文字変数を宣言しておくと ch= A ; のように ch に文字 A
プログラミング及び実習 5 馬青 1 文字処理 数値処理 : 整数 浮動小数点数 単一の文字は と ( シングルクォーテーション ) で囲んで表現される 文字のデータ型は char または int である int を用いたほうが ライブラリの関数の引数の型と一致する 以下は全部 int の使用に統一する 従って int ch; で文字変数を宣言しておくと ch= A ; のように ch に文字 A
ReTRY HUB
 USB デバイス接続制御アダプター ReTRY HUB 型番 CT USB4HUB 設定ソフト Ver1.0 版 マニュアル http://www.centech.jp 2017/04/21 製品仕様 商品名 型番 ReTRY HUB CT USB4HUB サイズ 縦 75mm x 横 120mm x 高さ15mm( 突起部含まず ) 重量 約 230g( 本体のみ ) 消費電流 12V 30mA(
USB デバイス接続制御アダプター ReTRY HUB 型番 CT USB4HUB 設定ソフト Ver1.0 版 マニュアル http://www.centech.jp 2017/04/21 製品仕様 商品名 型番 ReTRY HUB CT USB4HUB サイズ 縦 75mm x 横 120mm x 高さ15mm( 突起部含まず ) 重量 約 230g( 本体のみ ) 消費電流 12V 30mA(
本製品にインストールされているWindows 10 について
 重要保管 本紙はご覧いただいた後も大切に保管してください 本製品にインストールされている Windows 10 について 本製品にインストールされている Windows 10 について本製品にインストールされている Windows10 には Windows 10 April 2018 Update が適用されています 本製品のマニュアルに記載の画面や操作方法は Windows 10 April 2018
重要保管 本紙はご覧いただいた後も大切に保管してください 本製品にインストールされている Windows 10 について 本製品にインストールされている Windows 10 について本製品にインストールされている Windows10 には Windows 10 April 2018 Update が適用されています 本製品のマニュアルに記載の画面や操作方法は Windows 10 April 2018
5
 AG-HPX375 ソフトウェア アップデート方法 AG-HPX375 ソフトアップデート手順 2013.6 1. バージョンの確認 1-1. 本体のメニューにてバージョンを確認することもできます ソフトウェアのバージョン番号は 設定メニューの DIAGNOSTIC 画面に表示されます 1. 電源を ON にします 2. MENU ボタンを押すと設定メニューが表示されます 3. ジョグダイヤルボタンにて
AG-HPX375 ソフトウェア アップデート方法 AG-HPX375 ソフトアップデート手順 2013.6 1. バージョンの確認 1-1. 本体のメニューにてバージョンを確認することもできます ソフトウェアのバージョン番号は 設定メニューの DIAGNOSTIC 画面に表示されます 1. 電源を ON にします 2. MENU ボタンを押すと設定メニューが表示されます 3. ジョグダイヤルボタンにて
KEW Smart for KEW3552BT 取扱説明書
 KEW Smart for KEW3552BT 取扱説明書 KEW3552BT と接続する 次のページ 接続と切断 KEW3552BTと接続する P.3 KEW3552BTから切断する P.7 測定データの保存 測定データを保存する P.8 保存データの見方について P.10 測定データを自動保存する P.11 ファイルを変更する メニューについて P.13 ファイルを作成する P.15 ファイルを変更する
KEW Smart for KEW3552BT 取扱説明書 KEW3552BT と接続する 次のページ 接続と切断 KEW3552BTと接続する P.3 KEW3552BTから切断する P.7 測定データの保存 測定データを保存する P.8 保存データの見方について P.10 測定データを自動保存する P.11 ファイルを変更する メニューについて P.13 ファイルを作成する P.15 ファイルを変更する
:30 18:00 9:30 12:00 13:00 17:00
 http://pioneer.jp/support/ 0120-944-222 044-572-8102 9:30 18:00 9:30 12:00 13:00 17:00 この取扱説明書について 製品本体の USB DAC 端子に USB ケーブルでパソコンを接続すると パソコンからの音声信号を再生できます この機能を使用するためには 専用のドライバーソフトウェアをパソコンにインストールする必要があります
http://pioneer.jp/support/ 0120-944-222 044-572-8102 9:30 18:00 9:30 12:00 13:00 17:00 この取扱説明書について 製品本体の USB DAC 端子に USB ケーブルでパソコンを接続すると パソコンからの音声信号を再生できます この機能を使用するためには 専用のドライバーソフトウェアをパソコンにインストールする必要があります
はじめに 京セラ製スマートフォンを指定の microusb ケーブル ( 別売 ) またはこれと共通仕様の microusb ケーブル ( 別売 )( 以下 USB ケーブル ) と接続して USB テザリング機能をご使用いただくためには あらかじめパソコンに USB ドライバ をインストールしてい
 またはこれと共通仕様の microusb ケーブル ( 別売 )( 以下 USB ケーブル ) と接続して USB テザリング機能をご使用いただくためには あらかじめパソコンに USB ドライバ をインストールしてい") 京セラ製スマートフォン用 USB ドライバインストールマニュアル 本書内で使用されている表示画面は説明用に作成されたものです OS のバージョンやお使いのパソコンの環境 セキュリティ設定によっては表示画面の有無 詳細内容 名称が異なる場合があります 本書は お客様が Windows の基本操作に習熟していることを前提にしています パソコンの操作については お使いのパソコンの取扱説明書をご覧ください
京セラ製スマートフォン用 USB ドライバインストールマニュアル 本書内で使用されている表示画面は説明用に作成されたものです OS のバージョンやお使いのパソコンの環境 セキュリティ設定によっては表示画面の有無 詳細内容 名称が異なる場合があります 本書は お客様が Windows の基本操作に習熟していることを前提にしています パソコンの操作については お使いのパソコンの取扱説明書をご覧ください
[参考資料] Bluetooth対応タブレットでインターネット(MSP1000)
![[参考資料] Bluetooth対応タブレットでインターネット(MSP1000)](/thumbs/91/106719613.jpg "[参考資料] Bluetooth対応タブレットでインターネット(MSP1000)") を使って Bluetooth 対応タブレットでインターネット 1. はじめに この資料では をアクセスポイントとして使い それに Bluetooth(PAN プロファイル ) 対応のタブレット 端末を接続してインターネットができるようになるまでの手順をご紹介します Bluetooth を使うので 無線 LAN(Wi-Fi) の使えない環境でも無線でインターネット接続が可能 同時接続数 :28 台まで
を使って Bluetooth 対応タブレットでインターネット 1. はじめに この資料では をアクセスポイントとして使い それに Bluetooth(PAN プロファイル ) 対応のタブレット 端末を接続してインターネットができるようになるまでの手順をご紹介します Bluetooth を使うので 無線 LAN(Wi-Fi) の使えない環境でも無線でインターネット接続が可能 同時接続数 :28 台まで
ファクス送信用変換ソフト 操作説明書_UA
 ファクス送信用変換ソフト操作説明書 ファクス送信用変換ソフトのインストールから操作までを説明します 本書では ファクス送信用変換ソフトを 本ソフト と表記している場合があります ファクス送信用変換ソフトについて...2 ファクス送信用変換ソフトをインストールする...3 ファクス送信用変換ソフトを再インストールする...5 ファクス送信用変換ソフトをアンインストールする...5 Windows 10
ファクス送信用変換ソフト操作説明書 ファクス送信用変換ソフトのインストールから操作までを説明します 本書では ファクス送信用変換ソフトを 本ソフト と表記している場合があります ファクス送信用変換ソフトについて...2 ファクス送信用変換ソフトをインストールする...3 ファクス送信用変換ソフトを再インストールする...5 ファクス送信用変換ソフトをアンインストールする...5 Windows 10
Java講座
 ~ 第 1 回 ~ 情報科学部コンピュータ科学科 2 年竹中優 プログラムを書く上で Hello world 基礎事項 演算子 構文 2 コメントアウト (//, /* */, /** */) をしよう! インデントをしよう! 変数などにはわかりやすい名前をつけよう! 要するに 他人が見て理解しやすいコードを書こうということです 3 1. Eclipse を起動 2. ファイル 新規 javaプロジェクト
~ 第 1 回 ~ 情報科学部コンピュータ科学科 2 年竹中優 プログラムを書く上で Hello world 基礎事項 演算子 構文 2 コメントアウト (//, /* */, /** */) をしよう! インデントをしよう! 変数などにはわかりやすい名前をつけよう! 要するに 他人が見て理解しやすいコードを書こうということです 3 1. Eclipse を起動 2. ファイル 新規 javaプロジェクト
2. WiFi 接続 1.1 GuruPlug Server 初期設定情報 記載の SSID が設定されているアクセスポイントが GuruPlug Server です PC を操作して GuruPlug Server のアクセスポイントに接続して WiFi 接続してください 接続に成功すると PC
 GuruPlug Server スタートアップガイド 1. はじめにこの度は GuruPlug Server をご購入いただきまして 誠にありがとうございます 本スタートアップガイドでは GuruPlug Server への WiFi 経由での操作方法や SSH 接続の方法を説明します 1.1. GuruPlug Server 初期設定情報 GuruPlug Server の初期設定情報を下表にまとめます
GuruPlug Server スタートアップガイド 1. はじめにこの度は GuruPlug Server をご購入いただきまして 誠にありがとうございます 本スタートアップガイドでは GuruPlug Server への WiFi 経由での操作方法や SSH 接続の方法を説明します 1.1. GuruPlug Server 初期設定情報 GuruPlug Server の初期設定情報を下表にまとめます
リモートオペレーションキット ユーザーズガイド
 JPN はじめに このたびはキヤノン製品をお買い上げいただき 誠にありがとうございます 本製品は キヤノン複合機 ( 以下 本体と呼びます ) のタッチパネルディスプレーと同様の操作画面をコンピューターに表示し 離れた場所からの設定やジョブの実行を可能にするオプションのコントローラーソフトです 本製品の機能を十分にご理解いただき より効果的にご利用いただくために ご使用前にこの取扱説明書をよくお読みください
JPN はじめに このたびはキヤノン製品をお買い上げいただき 誠にありがとうございます 本製品は キヤノン複合機 ( 以下 本体と呼びます ) のタッチパネルディスプレーと同様の操作画面をコンピューターに表示し 離れた場所からの設定やジョブの実行を可能にするオプションのコントローラーソフトです 本製品の機能を十分にご理解いただき より効果的にご利用いただくために ご使用前にこの取扱説明書をよくお読みください
GR Firmware Update JP
 K-3 ファームウェアアップデート手順説明書 2015 年 5 月リコーイメージング株式会社 本説明書では ホームページからダウンロードしたファームウェアを利用し アップデートを行う方法を説明しています 準備する 必要なもの K-3 本体 充電済みの電池 D-LI90P または AC アダプターキット K-AC132J [ ご注意 ] バッテリー容量が少ない場合 電池容量がたりないためアップデートを行えません
K-3 ファームウェアアップデート手順説明書 2015 年 5 月リコーイメージング株式会社 本説明書では ホームページからダウンロードしたファームウェアを利用し アップデートを行う方法を説明しています 準備する 必要なもの K-3 本体 充電済みの電池 D-LI90P または AC アダプターキット K-AC132J [ ご注意 ] バッテリー容量が少ない場合 電池容量がたりないためアップデートを行えません
GR Firmware Update JP
 リコーイメージング株式会社 K-1 ファームウェアアップデート手順説明書 本説明書では ホームページからダウンロードしたファームウェアを利用し アップデートを行う方法を説明しています 用意するもの K-1 本体 K-1 でフォーマットされた SD メモリーカード / SDHC メモリーカード ( 容量が 32MB 以上のもの ) 充電済みの電池 D-LI90P または AC アダプターキット K-AC132J
リコーイメージング株式会社 K-1 ファームウェアアップデート手順説明書 本説明書では ホームページからダウンロードしたファームウェアを利用し アップデートを行う方法を説明しています 用意するもの K-1 本体 K-1 でフォーマットされた SD メモリーカード / SDHC メモリーカード ( 容量が 32MB 以上のもの ) 充電済みの電池 D-LI90P または AC アダプターキット K-AC132J
アスラテック株式会社 会社案内
 V-Sido CONNECT RC スタートアップガイド DARWIN-MINI 編 アスラテック株式会社 はじめに 本マニュアルの概要 このマニュアルでは ROBOTIS のロボット DARWIN-MINI で V-Sido CONNECT RC を利用するための初期設定例を解説した スタートアップガイドです ここでは V-Sido CONNECT RC で Bluetooth による無線通信が行えるように設定し
V-Sido CONNECT RC スタートアップガイド DARWIN-MINI 編 アスラテック株式会社 はじめに 本マニュアルの概要 このマニュアルでは ROBOTIS のロボット DARWIN-MINI で V-Sido CONNECT RC を利用するための初期設定例を解説した スタートアップガイドです ここでは V-Sido CONNECT RC で Bluetooth による無線通信が行えるように設定し
PICKIT3オフライン書き込みガイドブック
 不可能への挑戦株式会社低価格 高品質が不可能? なら可能にする NanoPC(Exynos 4412) Ubuntu インストールマニュアル 株式会社 http://www.csun.co.jp info@csun.co.jp 更新日 2015/2/18 copyright@2015 ホームページ :http://www.csun.co.jp メール :info@csun.co.jp 1 不可能への挑戦株式会社低価格
不可能への挑戦株式会社低価格 高品質が不可能? なら可能にする NanoPC(Exynos 4412) Ubuntu インストールマニュアル 株式会社 http://www.csun.co.jp info@csun.co.jp 更新日 2015/2/18 copyright@2015 ホームページ :http://www.csun.co.jp メール :info@csun.co.jp 1 不可能への挑戦株式会社低価格
Pocket WiFi LTE (GL04P) ソフトウェア更新マニュアル パソコン ipad 編 Version2 10
 ソフトウェア更新マニュアル パソコン ipad 編 Version2 10") Pocket WiFi LTE (GL04P) ソフトウェア更新マニュアル パソコン ipad 編 Version2 10 GL04P ソフトウェア更新について GL04P のソフトウェア更新を行う際は以下の注意事項をご確認のうえ実行してください GL04P ソフトウェア更新に関する注意点 1. ソフトウェア更新中にパソコン等がスタンバイ スリープ サスペンド状態に移行しないように設定してください
Pocket WiFi LTE (GL04P) ソフトウェア更新マニュアル パソコン ipad 編 Version2 10 GL04P ソフトウェア更新について GL04P のソフトウェア更新を行う際は以下の注意事項をご確認のうえ実行してください GL04P ソフトウェア更新に関する注意点 1. ソフトウェア更新中にパソコン等がスタンバイ スリープ サスペンド状態に移行しないように設定してください
RR1soft.book
 第 章 カメラとパソコンを接続する この章では カメラとパソコン間でファイルのやりとりを行うために USB ケーブルを使って接続する方法について説明します USB ケーブルを接続する 2 Windows 接続をはじめる前に以下のことを確認してください USB ドライバーが正しくインストールされている必要があります P.11 ソフトウェアのインストール お使いのパソコンに USB ポートが標準で装備され
第 章 カメラとパソコンを接続する この章では カメラとパソコン間でファイルのやりとりを行うために USB ケーブルを使って接続する方法について説明します USB ケーブルを接続する 2 Windows 接続をはじめる前に以下のことを確認してください USB ドライバーが正しくインストールされている必要があります P.11 ソフトウェアのインストール お使いのパソコンに USB ポートが標準で装備され
目次 ページ 1. 本マニュアルについて 3 2. 動作環境 4 3. ( 前準備 ) ライブラリの解凍と保存 5 4. モデルのインポート 6 5. インポートしたモデルのインピーダンス計算例 8 6. 補足 単シリーズ 単モデルのインポート お問い合わせ先 21 2
 ライブラリの解凍と保存 5 4. モデルのインポート 6 5. インポートしたモデルのインピーダンス計算例 8 6. 補足 単シリーズ 単モデルのインポート お問い合わせ先 21 2") SIMetrix/SIMPLIS ライブラリ ユーザーマニュアル 2018 年 8 月 株式会社村田製作所 Ver1.0 1 22 August 2018 目次 ページ 1. 本マニュアルについて 3 2. 動作環境 4 3. ( 前準備 ) ライブラリの解凍と保存 5 4. モデルのインポート 6 5. インポートしたモデルのインピーダンス計算例 8 6. 補足 単シリーズ 単モデルのインポート
SIMetrix/SIMPLIS ライブラリ ユーザーマニュアル 2018 年 8 月 株式会社村田製作所 Ver1.0 1 22 August 2018 目次 ページ 1. 本マニュアルについて 3 2. 動作環境 4 3. ( 前準備 ) ライブラリの解凍と保存 5 4. モデルのインポート 6 5. インポートしたモデルのインピーダンス計算例 8 6. 補足 単シリーズ 単モデルのインポート
リコーイメージング株式会社 RICOH GR III ファームウェアアップデート手順説明書 本説明書では ホームページからダウンロードしたファームウェアを利用し アップデートを行う方法を説明しています 用意するもの RICOH GR III 本体 RICOH GR III でフォーマットされた SD
 リコーイメージング株式会社 RICOH GR III ファームウェアアップデート手順説明書 本説明書では ホームページからダウンロードしたファームウェアを利用し アップデートを行う方法を説明しています 用意するもの RICOH GR III 本体 RICOH GR III でフォーマットされた SD メモリーカード / SDHC メモリーカード ( 容量が 32MB 以上のもの ) 充電済みの電池
リコーイメージング株式会社 RICOH GR III ファームウェアアップデート手順説明書 本説明書では ホームページからダウンロードしたファームウェアを利用し アップデートを行う方法を説明しています 用意するもの RICOH GR III 本体 RICOH GR III でフォーマットされた SD メモリーカード / SDHC メモリーカード ( 容量が 32MB 以上のもの ) 充電済みの電池
ご利用になる前に ここでは しんきん電子記録債権システム をご利用になる前に知っておいていただきたいことがらについて説明します 1 ご利用環境と動作条件の確認 2 2 初期設定とは 4 3 ソフトウェアキーボードの使いかた 6
 ご利用になる前に ここでは しんきん電子記録債権システム をご利用になる前に知っておいていただきたいことがらについて説明します 1 ご利用環境と動作条件の確認 2 2 初期設定とは 4 3 ソフトウェアキーボードの使いかた 6 1 ご利用環境と動作条件の確認 本システムのご利用にあたり 推奨する動作環境をご案内します 1 ご利用可能な OS/ ブラウザの組み合わせ 2 本システムにおける企業向けの端末推奨環境は
ご利用になる前に ここでは しんきん電子記録債権システム をご利用になる前に知っておいていただきたいことがらについて説明します 1 ご利用環境と動作条件の確認 2 2 初期設定とは 4 3 ソフトウェアキーボードの使いかた 6 1 ご利用環境と動作条件の確認 本システムのご利用にあたり 推奨する動作環境をご案内します 1 ご利用可能な OS/ ブラウザの組み合わせ 2 本システムにおける企業向けの端末推奨環境は
CoIDE 用 F4D_VCP の説明 V /07/05 USB の VCP( 仮想 COM ポート ) による非同期シリアル通信を行うプログラムです Free の開発ツール CoIDE で作成した STM32F4 Discovery 用のプロジェクトです プログラムの開始番地は 0x
 による非同期シリアル通信を行うプログラムです Free の開発ツール CoIDE で作成した STM32F4 Discovery 用のプロジェクトです プログラムの開始番地は 0x") CoIDE 用 F4D_VCP の説明 V001 2014/07/05 USB の VCP( 仮想 COM ポート ) による非同期シリアル通信を行うプログラムです Free の開発ツール CoIDE で作成した STM32F4 Discovery 用のプロジェクトです プログラムの開始番地は 0x08000000 です デバッグが可能です 目次 1. USB の VCP( 仮想 COM ポート )
CoIDE 用 F4D_VCP の説明 V001 2014/07/05 USB の VCP( 仮想 COM ポート ) による非同期シリアル通信を行うプログラムです Free の開発ツール CoIDE で作成した STM32F4 Discovery 用のプロジェクトです プログラムの開始番地は 0x08000000 です デバッグが可能です 目次 1. USB の VCP( 仮想 COM ポート )
ソフトウェア基礎 Ⅰ Report#2 提出日 : 2009 年 8 月 11 日 所属 : 工学部情報工学科 学籍番号 : K 氏名 : 當銘孔太
 ソフトウェア基礎 Ⅰ Report#2 提出日 : 2009 年 8 月 11 日 所属 : 工学部情報工学科 学籍番号 : 095739 K 氏名 : 當銘孔太 1. UNIX における正規表現とは何か, 使い方の例を挙げて説明しなさい. 1.1 正規表現とは? 正規表現 ( 正則表現ともいう ) とは ある規則に基づいて文字列 ( 記号列 ) の集合を表す方法の 1 つです ファイル名表示で使うワイルドカードも正規表現の兄弟みたいなもの
ソフトウェア基礎 Ⅰ Report#2 提出日 : 2009 年 8 月 11 日 所属 : 工学部情報工学科 学籍番号 : 095739 K 氏名 : 當銘孔太 1. UNIX における正規表現とは何か, 使い方の例を挙げて説明しなさい. 1.1 正規表現とは? 正規表現 ( 正則表現ともいう ) とは ある規則に基づいて文字列 ( 記号列 ) の集合を表す方法の 1 つです ファイル名表示で使うワイルドカードも正規表現の兄弟みたいなもの
WebCaster600MNファームウェアバージョンアップ手順 (Windows編)
") ADSL ファームウェアバージョンアップ手順書 (Windows 編 ) ファームウェアバージョンアップを行う前に 本書をよくお読みのうえ 内容を理解してからバージョンアップを行ってください はじめに 本書では Web Caster 600MN のファームウェアバージョンアップ手順について説明します ファームウェアバージョンアップ手順 WebCaster600MN ファームウェアのバージョンアップは次のような手順で行います
ADSL ファームウェアバージョンアップ手順書 (Windows 編 ) ファームウェアバージョンアップを行う前に 本書をよくお読みのうえ 内容を理解してからバージョンアップを行ってください はじめに 本書では Web Caster 600MN のファームウェアバージョンアップ手順について説明します ファームウェアバージョンアップ手順 WebCaster600MN ファームウェアのバージョンアップは次のような手順で行います
KEW Smart for KEW3441BT 取扱説明書
 KEW Smart for KEW4500BT 取扱説明書 KEW4500BT と接続する 次のページ 接続と切断 KEW4500BTと接続する P.3 KEW4500BTから切断する P.8 測定データの保存 測定データを保存する P.9 保存データの見方について P.11 測定データを自動保存する P.12 ファイルを変更する メニューについて P.14 ファイルを作成する P.16 ファイルを変更する
KEW Smart for KEW4500BT 取扱説明書 KEW4500BT と接続する 次のページ 接続と切断 KEW4500BTと接続する P.3 KEW4500BTから切断する P.8 測定データの保存 測定データを保存する P.9 保存データの見方について P.11 測定データを自動保存する P.12 ファイルを変更する メニューについて P.14 ファイルを作成する P.16 ファイルを変更する
Windows2000/XPインストール手順
 日歯生涯研修事業 IC カード用研修受付ソフト インストール手順書 (Windows 10 用 ) 日本歯科医師会 1 IC カード用研修受付ソフト の Windows 10 へのインストール手順... 3 1. インストール前の確認事項... 3 2. インストール手順の概略説明... 4 3. 新規インストール... 5 4. 既に IC カード用研修受付ソフト がインストールされている場合...
日歯生涯研修事業 IC カード用研修受付ソフト インストール手順書 (Windows 10 用 ) 日本歯科医師会 1 IC カード用研修受付ソフト の Windows 10 へのインストール手順... 3 1. インストール前の確認事項... 3 2. インストール手順の概略説明... 4 3. 新規インストール... 5 4. 既に IC カード用研修受付ソフト がインストールされている場合...
VG シリーズ用ローカルファームアップ / 自動ファームウェア更新設定手順書 VG400aⅡ ローカルファームアップ / 自動ファームウェア更新設定手順書
 VG400aⅡ ローカルファームアップ / 自動ファームウェア更新設定手順書 本マニュアルに記載された内容は 将来予告なしに一部または全体を修正及び変更することがあります なお 本マニュアルにこのような不備がありましても 運用上の影響につきましては責任を負いかねますのでご了承ください 本マニュアルの一部 あるいは全部について 許諾を得ずに無断で転載することを禁じます ( 電子 機械 写真 磁気などを含むいかなる手段による複製を禁じます
VG400aⅡ ローカルファームアップ / 自動ファームウェア更新設定手順書 本マニュアルに記載された内容は 将来予告なしに一部または全体を修正及び変更することがあります なお 本マニュアルにこのような不備がありましても 運用上の影響につきましては責任を負いかねますのでご了承ください 本マニュアルの一部 あるいは全部について 許諾を得ずに無断で転載することを禁じます ( 電子 機械 写真 磁気などを含むいかなる手段による複製を禁じます
1. USB の VCP( 仮想 COM ポート ) について USB の VCP( 仮想 COM ポート ) は USB を非同期シリアル通信として使用するための USB のドライバです PC には VCP ドライバをインストールする必要があります USB の VCP( 仮想 COM ポート )
 について USB の VCP( 仮想 COM ポート ) は USB を非同期シリアル通信として使用するための USB のドライバです PC には VCP ドライバをインストールする必要があります USB の VCP( 仮想 COM ポート )") TrueSTUDIO 用 F4D_VCP の説明 V001 2014/07/05 USB の VCP( 仮想 COM ポート ) による非同期シリアル通信を行うプログラムです 無料の試用版開発ツール Atollic TrueSTUDIO for ARM Lite で作成したプロジェクトです ビルド可能なプログラムのコードサイズが 32Kbyte 以内の制限があります プログラムの開始番地は 0x08000000
TrueSTUDIO 用 F4D_VCP の説明 V001 2014/07/05 USB の VCP( 仮想 COM ポート ) による非同期シリアル通信を行うプログラムです 無料の試用版開発ツール Atollic TrueSTUDIO for ARM Lite で作成したプロジェクトです ビルド可能なプログラムのコードサイズが 32Kbyte 以内の制限があります プログラムの開始番地は 0x08000000
3.Cygwin で日本語を使いたい Cygwin で以下のコマンドを実行すると それ以降 メッセージが日本語になります export LANG=ja_JP.UTF-8 これは 文字コードを日本語の UTF-8 に設定することを意味しています UTF-8 は Cygwin で標準の文字コードで, 多
 Cygwin 使いこなしマニュアル 2011/10/17 1.Cygwin の起動 Cygwin のインストールが完了したら 一般ユーザーで Windows にログインし Cygwin を起動してみましょう 下の図は ユーザー名 densan でログインして Cygwin を起動した後 いくつかコマンドを実行してみたところです 2.Cygwin のファイルはどこにある? Windows から Cygwin
Cygwin 使いこなしマニュアル 2011/10/17 1.Cygwin の起動 Cygwin のインストールが完了したら 一般ユーザーで Windows にログインし Cygwin を起動してみましょう 下の図は ユーザー名 densan でログインして Cygwin を起動した後 いくつかコマンドを実行してみたところです 2.Cygwin のファイルはどこにある? Windows から Cygwin
A&D社製データロガーを初めてお使いになる方へ
 温度データーロガー チュートリアル Ver.2.00 ( 株 ) エー アンド デイの温度データーロガーを初めてお使いになる方へ AD-5324SET/AD-5325SET に付属の Win Data Logger ( データーロガー用通信ソフトウェア ) を お使いのコンピュータにあらかじめインストールしてください このチュートリアルは 初めてデーターロガーを使うと言う方のために 実際の取り扱い方を説明いたします
温度データーロガー チュートリアル Ver.2.00 ( 株 ) エー アンド デイの温度データーロガーを初めてお使いになる方へ AD-5324SET/AD-5325SET に付属の Win Data Logger ( データーロガー用通信ソフトウェア ) を お使いのコンピュータにあらかじめインストールしてください このチュートリアルは 初めてデーターロガーを使うと言う方のために 実際の取り扱い方を説明いたします
準備完了後 下記手順でオフセット設定および車種別設定データの読み込みを実施して下さい 1. アクセス 車種別設定データ ( 車種別キャリブレーションデータ ) のダウンロードサイトにアクセスします ダウンロードサイト
 のダウンロードサイトにアクセスします ダウンロードサイト") 取付後の作業手順 はじめに 別体型ドライブレコーダー取り付け後 必ずオフセット設定および車種別設定データの読み込みを行ってください オフセット設定は 別体型ドライブレコーダーの取付状態を認識させる為に行います 別体型ドライブレコーダーが固定されていなかったり 取り付け後のオフセット設定が行われていないなど 本機の取付状態に問題がある場合 衝撃を正しく検知できず 誤って作動したり 衝撃があっても検知できず映像記録の保護ができないことがあります
取付後の作業手順 はじめに 別体型ドライブレコーダー取り付け後 必ずオフセット設定および車種別設定データの読み込みを行ってください オフセット設定は 別体型ドライブレコーダーの取付状態を認識させる為に行います 別体型ドライブレコーダーが固定されていなかったり 取り付け後のオフセット設定が行われていないなど 本機の取付状態に問題がある場合 衝撃を正しく検知できず 誤って作動したり 衝撃があっても検知できず映像記録の保護ができないことがあります
Mac LIPS 簡易版プリンタドライバ インストールガイド
 JPN 目次 はじめに... ii 本書の読みかた... iii マークについて...iii キー ボタンの表記について...iii 画面について...iv 商標について...iv 第 1 章 ご使用の前に 本書の対応機種...1-2 必要なシステム環境...1-4 ヘルプを参照する...1-5 第 2 章 プリンタドライバを使用する ソフトウェアのインストール...2-2 プリンタドライバをインストールする...2-2
JPN 目次 はじめに... ii 本書の読みかた... iii マークについて...iii キー ボタンの表記について...iii 画面について...iv 商標について...iv 第 1 章 ご使用の前に 本書の対応機種...1-2 必要なシステム環境...1-4 ヘルプを参照する...1-5 第 2 章 プリンタドライバを使用する ソフトウェアのインストール...2-2 プリンタドライバをインストールする...2-2
Microsoft PowerPoint - Borland C++ Compilerの使用方法(v1.1).ppt [互換モード]
![Microsoft PowerPoint - Borland C++ Compilerの使用方法(v1.1).ppt [互換モード]](/thumbs/92/109692094.jpg "Microsoft PowerPoint - Borland C++ Compilerの使用方法(v1.1).ppt [互換モード]") Borland C++ Compiler の 使用方法 解説書 (v1.1) 1 準備 (1/2) 1. スタートメニューから コントロールパネル を開いて その中に デスクトップのカスタマイズ フォルダーオプション があるので開く エクスプローラー内の ツール フォルダーオプション などからも開ける 2. 表示 タブにある 登録されている拡張子は表示しない のチェックを外して OKを押す これでファイルの拡張子が表示されるようになった
Borland C++ Compiler の 使用方法 解説書 (v1.1) 1 準備 (1/2) 1. スタートメニューから コントロールパネル を開いて その中に デスクトップのカスタマイズ フォルダーオプション があるので開く エクスプローラー内の ツール フォルダーオプション などからも開ける 2. 表示 タブにある 登録されている拡張子は表示しない のチェックを外して OKを押す これでファイルの拡張子が表示されるようになった
Microsoft Word - CygwinでPython.docx
 Cygwin でプログラミング 2018/4/9 千葉 数値計算は計算プログラムを書いて行うわけですが プログラムには様々な 言語 があるので そのうちどれかを選択する必要があります プログラム言語には 人間が書いたプログラムを一度計算機用に翻訳したのち計算を実行するものと 人間が書いたプログラムを計算機が読んでそのまま実行するものとがあります ( 若干不正確な説明ですが ) 前者を システム言語
Cygwin でプログラミング 2018/4/9 千葉 数値計算は計算プログラムを書いて行うわけですが プログラムには様々な 言語 があるので そのうちどれかを選択する必要があります プログラム言語には 人間が書いたプログラムを一度計算機用に翻訳したのち計算を実行するものと 人間が書いたプログラムを計算機が読んでそのまま実行するものとがあります ( 若干不正確な説明ですが ) 前者を システム言語
ZipTheRipper のページへ移動したら ダウンロードの文字をクリックして下さい 使用許諾書を確認の上 同意チェックを入力し ダウンロードボタンを押して下さい サブウィンドウが表示されたら 保存 を選択して下さい ダウンロードが開始されます ダウンロードフォルダの中にある ZipTheRipp
 パスワード共有サービス用 KIIS Whisper ZIP 生成ツール -Zip the Ripper- 利用マニュアル 1. はじめに (1) パスワード共有サービスとはパスワード共有サービス (KIIS Whisper) は一般財団法人関西情報センターが提供するメールでの添付ファイルのパスワードを相手方に安全に届けるサービスです (2)Zip the Ripper とはメールで添付ファイルを送信する際に添付する
パスワード共有サービス用 KIIS Whisper ZIP 生成ツール -Zip the Ripper- 利用マニュアル 1. はじめに (1) パスワード共有サービスとはパスワード共有サービス (KIIS Whisper) は一般財団法人関西情報センターが提供するメールでの添付ファイルのパスワードを相手方に安全に届けるサービスです (2)Zip the Ripper とはメールで添付ファイルを送信する際に添付する
OSバージョンアップ手順書(wifi)[REGZA Phone T-01C]
![OSバージョンアップ手順書(wifi)[REGZA Phone T-01C]](/thumbs/88/117133071.jpg "OSバージョンアップ手順書(wifi)[REGZA Phone T-01C]") REGZA Phone T-01C OS バージョンアップ手順書 ~ T-01C を Wi-Fi に接続してバージョンアップする ~ このたびは REGZA Phone T-01C( 以下 T-01C とします) をお買い上げいただきまして 誠にありがとうございました T-01C の本体 OS を Android OS 2.1 から Android OS 2.2 にバージョンアップするための OS
REGZA Phone T-01C OS バージョンアップ手順書 ~ T-01C を Wi-Fi に接続してバージョンアップする ~ このたびは REGZA Phone T-01C( 以下 T-01C とします) をお買い上げいただきまして 誠にありがとうございました T-01C の本体 OS を Android OS 2.1 から Android OS 2.2 にバージョンアップするための OS
SLCONFIG の操作 JF1PYE Ⅰ. PC と slconfig の通信設定 Ⅱ. Slconfig の操作 Ⅲ. 端末ソフトによる Command 機能 Ⅳ. slconfig 実行形式プログラムの作成 Ⅴ. 端末ソフト Tera Term のダウンロード インストー
 SLCONFIG の操作 2011.03.02 JF1PYE Ⅰ. PC と slconfig の通信設定 Ⅱ. Slconfig の操作 Ⅲ. 端末ソフトによる Command 機能 Ⅳ. slconfig 実行形式プログラムの作成 Ⅴ. 端末ソフト Tera Term のダウンロード インストール 設定 Soliloc-10G Slconfig の開発 提供ならびに本書を作成するに当たり情報提供を頂いた
SLCONFIG の操作 2011.03.02 JF1PYE Ⅰ. PC と slconfig の通信設定 Ⅱ. Slconfig の操作 Ⅲ. 端末ソフトによる Command 機能 Ⅳ. slconfig 実行形式プログラムの作成 Ⅴ. 端末ソフト Tera Term のダウンロード インストール 設定 Soliloc-10G Slconfig の開発 提供ならびに本書を作成するに当たり情報提供を頂いた
ARROWS Tab Wi-Fi (FAR75A/FAR70A) ソフトウェアバージョンアップ手順書
 ソフトウェアバージョンアップ手順書") ARROWS Tab Wi-Fi (FAR75A/FAR70A) ソフトウェアバージョンアップ手順書 (Android 3.2 用 ) 本書では ARROWS Tab Wi-Fi (FAR75A/FAR70A) の本体ソフトウェアを Android 3.2 からバージョンアップするための手順を説明しています Android 4.0 からバージョンアップする手順については ARROWS Tab Wi-Fi
ARROWS Tab Wi-Fi (FAR75A/FAR70A) ソフトウェアバージョンアップ手順書 (Android 3.2 用 ) 本書では ARROWS Tab Wi-Fi (FAR75A/FAR70A) の本体ソフトウェアを Android 3.2 からバージョンアップするための手順を説明しています Android 4.0 からバージョンアップする手順については ARROWS Tab Wi-Fi
C#の基本
 C# の基本 ~ 開発環境の使い方 ~ C# とは プログラミング言語のひとつであり C C++ Java 等に並ぶ代表的な言語の一つである 容易に GUI( グラフィックやボタンとの連携ができる ) プログラミングが可能である メモリ管理等の煩雑な操作が必要なく 比較的初心者向きの言語である C# の利点 C C++ に比べて メモリ管理が必要ない GUIが作りやすい Javaに比べて コードの制限が少ない
C# の基本 ~ 開発環境の使い方 ~ C# とは プログラミング言語のひとつであり C C++ Java 等に並ぶ代表的な言語の一つである 容易に GUI( グラフィックやボタンとの連携ができる ) プログラミングが可能である メモリ管理等の煩雑な操作が必要なく 比較的初心者向きの言語である C# の利点 C C++ に比べて メモリ管理が必要ない GUIが作りやすい Javaに比べて コードの制限が少ない
リコーイメージング株式会社 RICOH WG-6 ファームウェアアップデート手順説明書 本説明書では ホームページからダウンロードしたファームウェアを利用し アップデートを行う方法を説明しています 用意するもの RICOH WG-6 本体 RICOH WG-6 でフォーマットされた SD メモリーカ
 リコーイメージング株式会社 RICOH WG-6 ファームウェアアップデート手順説明書 本説明書では ホームページからダウンロードしたファームウェアを利用し アップデートを行う方法を説明しています 用意するもの RICOH WG-6 本体 RICOH WG-6 でフォーマットされた SD メモリーカード / SDHC メモリーカード ( 容量が 32MB 以上のもの ) 充電済みの電池 DB-110
リコーイメージング株式会社 RICOH WG-6 ファームウェアアップデート手順説明書 本説明書では ホームページからダウンロードしたファームウェアを利用し アップデートを行う方法を説明しています 用意するもの RICOH WG-6 本体 RICOH WG-6 でフォーマットされた SD メモリーカード / SDHC メモリーカード ( 容量が 32MB 以上のもの ) 充電済みの電池 DB-110
Microsoft Word - HOBO雨量専用説明書_v1.1.doc
 HOBOevent による雨量データの 回収と変換の方法 Rev 1.1 HOBO ペンダントシリーズ パルス入力 ベースステーション (USB) 雨量各種 HobowareLite 2007 年 9 月 http://www.weather.co.jp/ 目次 目次...1 はじめに...2 HOBOWARELITE の開始...2 ケーブル接続...2 HOBOwareLite の開始...2
HOBOevent による雨量データの 回収と変換の方法 Rev 1.1 HOBO ペンダントシリーズ パルス入力 ベースステーション (USB) 雨量各種 HobowareLite 2007 年 9 月 http://www.weather.co.jp/ 目次 目次...1 はじめに...2 HOBOWARELITE の開始...2 ケーブル接続...2 HOBOwareLite の開始...2
ICカードリーダー動作確認手順書
 JN-CR-20170630-V0.4 電子入札コアシステム用 IC カードリーダー 動作確認手順書 ジャパンネット株式会社 目次 1 はじめに... 2 2 IC カードリーダーの LED の状態確認... 3 3 IC カードリーダーのドライバーの確認... 6 4 IC カードリーダーの設定変更... 8 5 IC カードリーダーの動作確認... 9 6 IC カードリーダーのドライバーの再インストール...
JN-CR-20170630-V0.4 電子入札コアシステム用 IC カードリーダー 動作確認手順書 ジャパンネット株式会社 目次 1 はじめに... 2 2 IC カードリーダーの LED の状態確認... 3 3 IC カードリーダーのドライバーの確認... 6 4 IC カードリーダーの設定変更... 8 5 IC カードリーダーの動作確認... 9 6 IC カードリーダーのドライバーの再インストール...
SHOFU SureFile for DentalX Manual
 日本語版 for 本ソフトの概要... 1 本ソフトの起動方法... 3 使用方法... 5 参考情報... 9 仕様... 12 For DentalX Ver.1.6 本ソフトの概要 本ソフトはデジタル口腔撮影装置 アイスペシャル C-Ⅱ および アイスペシャル C-Ⅲ 専用の画像振り分けソフトです 株式会社プラネット製 DentalX と連携し アイスペシャル C-Ⅱ C-Ⅲのテンキーを使って
日本語版 for 本ソフトの概要... 1 本ソフトの起動方法... 3 使用方法... 5 参考情報... 9 仕様... 12 For DentalX Ver.1.6 本ソフトの概要 本ソフトはデジタル口腔撮影装置 アイスペシャル C-Ⅱ および アイスペシャル C-Ⅲ 専用の画像振り分けソフトです 株式会社プラネット製 DentalX と連携し アイスペシャル C-Ⅱ C-Ⅲのテンキーを使って
4 分岐処理と繰返し処理 ( 教科書 P.32) プログラムの基本的処理は三つある. (1) 順次処理 : 上から下に順番に処理する ぶんきそろ (2) 分岐処理 : 条件が揃えば, 処理する はんぷく (3) 反復処理 : 条件が揃うまで処理を繰り返す 全てのプログラムは (1) から (3) の
 プログラムの基本的処理は三つある. (1) 順次処理 : 上から下に順番に処理する ぶんきそろ (2) 分岐処理 : 条件が揃えば, 処理する はんぷく (3) 反復処理 : 条件が揃うまで処理を繰り返す 全てのプログラムは (1) から (3) の") 4 分岐処理と繰返し処理 ( 教科書 P.32) プログラムの基本的処理は三つある. (1) 順次処理 : 上から下に順番に処理する ぶんきそろ (2) 分岐処理 : 条件が揃えば, 処理する はんぷく (3) 反復処理 : 条件が揃うまで処理を繰り返す 全てのプログラムは (1) から (3) の組み合わせで作れる. ここでは (2) と (3) について扱う. 4.1 分岐処理 4.1.1 if
4 分岐処理と繰返し処理 ( 教科書 P.32) プログラムの基本的処理は三つある. (1) 順次処理 : 上から下に順番に処理する ぶんきそろ (2) 分岐処理 : 条件が揃えば, 処理する はんぷく (3) 反復処理 : 条件が揃うまで処理を繰り返す 全てのプログラムは (1) から (3) の組み合わせで作れる. ここでは (2) と (3) について扱う. 4.1 分岐処理 4.1.1 if
FC4510HT2バージョンアップマニュアル
 FC4510HT2 バージョンアップマニュアル 第 3.0 版 はじめに 本書は 富士通株式会社から提供されている手動式非接触型 IC カードリーダライタ FC4510HT2 のドライバのバージョンアップ方法について記載されたものです ドライバのバージョンアップを行うことで 住民基本台帳ネットワークシステムの住民基本台帳カード 個人番号カードを扱う業務に対応します ( 住民基本台帳ネットワークシステム以外でのご利用については
FC4510HT2 バージョンアップマニュアル 第 3.0 版 はじめに 本書は 富士通株式会社から提供されている手動式非接触型 IC カードリーダライタ FC4510HT2 のドライバのバージョンアップ方法について記載されたものです ドライバのバージョンアップを行うことで 住民基本台帳ネットワークシステムの住民基本台帳カード 個人番号カードを扱う業務に対応します ( 住民基本台帳ネットワークシステム以外でのご利用については
ソフトウェア更新の前に お客様に より快適に LGL22 をご利用いただくため ソフトウェア更新によるアップグレードを行っております この手順書は LGL22 とパソコンを microusb ケーブルにて接続してソフトウェア更新を行う方法となります ソフトウェア更新は microusb ケーブルによ
 LGL22 パソコン接続による ソフトウェア更新手順 1 ソフトウェア更新の前に お客様に より快適に LGL22 をご利用いただくため ソフトウェア更新によるアップグレードを行っております この手順書は LGL22 とパソコンを microusb ケーブルにて接続してソフトウェア更新を行う方法となります ソフトウェア更新は microusb ケーブルによるパソコン接続のみとなります ソフトウェア更新を行うには以下の動作環境を満たすパソコンおよびインターネット接続環境をご用意ください
LGL22 パソコン接続による ソフトウェア更新手順 1 ソフトウェア更新の前に お客様に より快適に LGL22 をご利用いただくため ソフトウェア更新によるアップグレードを行っております この手順書は LGL22 とパソコンを microusb ケーブルにて接続してソフトウェア更新を行う方法となります ソフトウェア更新は microusb ケーブルによるパソコン接続のみとなります ソフトウェア更新を行うには以下の動作環境を満たすパソコンおよびインターネット接続環境をご用意ください
目次 同梱物の確認... 3 フロントベゼル... 4 基本設定... 5 ディスクの再フォーマット... 8 追加情報
 インストールガイド ReadyNAS OS6 ラックマウントストレージ 目次 同梱物の確認... 3 フロントベゼル... 4 基本設定... 5 ディスクの再フォーマット... 8 追加情報...11 2 同梱物の確認 ReadyNAS 本体 ( モデルにより異なります ) フロントベゼル ( 一部のモデルのみ付属 ) 電源コード ( モデルにより異なります ) LAN ケーブル 重要 : ReadyNAS
インストールガイド ReadyNAS OS6 ラックマウントストレージ 目次 同梱物の確認... 3 フロントベゼル... 4 基本設定... 5 ディスクの再フォーマット... 8 追加情報...11 2 同梱物の確認 ReadyNAS 本体 ( モデルにより異なります ) フロントベゼル ( 一部のモデルのみ付属 ) 電源コード ( モデルにより異なります ) LAN ケーブル 重要 : ReadyNAS
内容 MD00Manager とは?... MD00Manager をインストールする.... ソフトのインストール... MD00Manager の使い方.... 起動をする... 機能説明...7 機能説明 ( メニューバー )...8 機能説明 ( ステータスバー )...8 機能説明 ( コ
...8 機能説明 ( ステータスバー )...8 機能説明 ( コ") MD00Manager マニュアル このマニュアルでは MD00Manager の詳細設定を行うことが出来ます MD00Manager では MD00 の設定変更や読み取ったデータを CSV に出力 照合用のデータベースの作成を行えます MD00 についてはそれぞれのマニュアルを確認して下さい Ver.0 内容 MD00Manager とは?... MD00Manager をインストールする....
MD00Manager マニュアル このマニュアルでは MD00Manager の詳細設定を行うことが出来ます MD00Manager では MD00 の設定変更や読み取ったデータを CSV に出力 照合用のデータベースの作成を行えます MD00 についてはそれぞれのマニュアルを確認して下さい Ver.0 内容 MD00Manager とは?... MD00Manager をインストールする....
カルテダウンロード 操作マニュアル
 カルテ ZERO 操作マニュアル カルテダウンロード Ver1. 2 目 次 カルテダウンロード カルテダウンロード時の注意点 1. インストール 2. カルテダウンロード 2-1. 時間を設定し自動でダウンロードする方法 2-2. 手動でダウンロードする方法 3. 補足説明 P.4 P.5 P.10 P.15 P.19 P.21 アイコン ボタン説明 カルテ ZERO 内や操作マニュアル内で共通して表示されるアイコンやボタンについて
カルテ ZERO 操作マニュアル カルテダウンロード Ver1. 2 目 次 カルテダウンロード カルテダウンロード時の注意点 1. インストール 2. カルテダウンロード 2-1. 時間を設定し自動でダウンロードする方法 2-2. 手動でダウンロードする方法 3. 補足説明 P.4 P.5 P.10 P.15 P.19 P.21 アイコン ボタン説明 カルテ ZERO 内や操作マニュアル内で共通して表示されるアイコンやボタンについて
PN-T321
 インフォメーションディスプレイ 形名 PN-T321 USB メモリーファイル書き込みツール取扱説明書 もくじ はじめに 2 インストール / アンインストールする 3 動作条件 3 インストールする 3 アンインストールする 3 USB メモリーファイル書き込みツールを使う 4 USB メモリーを新規作成する 4 USB メモリーを編集する 5 はじめに 本ソフトウェアは インフォメーションディスプレイ
インフォメーションディスプレイ 形名 PN-T321 USB メモリーファイル書き込みツール取扱説明書 もくじ はじめに 2 インストール / アンインストールする 3 動作条件 3 インストールする 3 アンインストールする 3 USB メモリーファイル書き込みツールを使う 4 USB メモリーを新規作成する 4 USB メモリーを編集する 5 はじめに 本ソフトウェアは インフォメーションディスプレイ
OS バージョンアップ実行後のご注意 OS バージョンアップ後 更新完了通知が自動的にNECカシオモバイルコミュニケーションズ株式会社の運用するサーバへ送信されます なお NECカシオモバイルコミュニケーションズ株式会社は送信された情報を OS バージョンアップ以外の目的には利用いたしません また
 MEDIAS X N-07D OS バージョンアップ手順書 ~ Wi-Fi を利用してバージョンアップする ~ このたびは MEDIAS X N-07D( 以下 N-07D とします ) をお買い上げいただきまして 誠にありがとうございました N-07D の本体 OS を Android OS 4.0 から Android OS 4.1 にバージョンアップするための OS バージョンアップ手順をご説明いたします
MEDIAS X N-07D OS バージョンアップ手順書 ~ Wi-Fi を利用してバージョンアップする ~ このたびは MEDIAS X N-07D( 以下 N-07D とします ) をお買い上げいただきまして 誠にありがとうございました N-07D の本体 OS を Android OS 4.0 から Android OS 4.1 にバージョンアップするための OS バージョンアップ手順をご説明いたします
AR-DV1_TAI_Software_Media_Setup_Procedure_v1.0_JAPANESE
 技術資料 AR-DV1 TAI Software Media Setup Procedure 起動用メディア設定手順 v1.0c 2019.05.10 株式会社エーオーアール Authority On Radio Communications Web アプリケーションの作成 および この資料の記載内容に関して エーオーアールによる技術サポートはありません この資料はエーオーアールによって 現状有姿のまま
技術資料 AR-DV1 TAI Software Media Setup Procedure 起動用メディア設定手順 v1.0c 2019.05.10 株式会社エーオーアール Authority On Radio Communications Web アプリケーションの作成 および この資料の記載内容に関して エーオーアールによる技術サポートはありません この資料はエーオーアールによって 現状有姿のまま
<4D F736F F D20342E899E D2091E52D81848FAC82D682CC88F8897A2E646F6378>
 まるコピ marucopy 容量の大きい HDD から小さ い HDD への引越し方法 1 説明 ここでは 記憶容量の大きい HDD から小さい HDD への引越し手順を紹介します まるコピ は記憶容量が同じか より大きな HDD への引越しを支援する目的で製作しておりますが ここで紹介するフリーソフト GParted を使用すれば 記憶容量の小さい HDD への引越しも可能です なお このソフトウェアは
まるコピ marucopy 容量の大きい HDD から小さ い HDD への引越し方法 1 説明 ここでは 記憶容量の大きい HDD から小さい HDD への引越し手順を紹介します まるコピ は記憶容量が同じか より大きな HDD への引越しを支援する目的で製作しておりますが ここで紹介するフリーソフト GParted を使用すれば 記憶容量の小さい HDD への引越しも可能です なお このソフトウェアは
AGT10(Android (TM) 2.3) ファームウェア更新方法
 2.3) ファームウェア更新方法") AGT10( Android 2.3 ) ファームウェア更新方法 2013 年 12 月 17 日 日本電気株式会社 1 対象製品型番 無線 LAN モデル N8730-41101W (AGT10-W1), N8730-41101B (AGT10-B1) N8730-41102W (AGT10-W1), N8730-41102B (AGT10-B1) 3G モデル N8730-41103S1 (AGT10-D),
AGT10( Android 2.3 ) ファームウェア更新方法 2013 年 12 月 17 日 日本電気株式会社 1 対象製品型番 無線 LAN モデル N8730-41101W (AGT10-W1), N8730-41101B (AGT10-B1) N8730-41102W (AGT10-W1), N8730-41102B (AGT10-B1) 3G モデル N8730-41103S1 (AGT10-D),
MS916 バッチ操作ガイド FW バージョン 0.52 向け バッチ操作の基本 MS916 のバッチ操作について バッチ操作では 読取ったバーコードデータはすべて 不揮発性のメモリ (1MB ROM JAN-13 約 50,000 件 ) に保存されます メモリに保存されたデータは任意のタイミング
 に保存されます メモリに保存されたデータは任意のタイミング") バッチ操作の基本 MS916 のバッチ操作について バッチ操作では 読取ったバーコードデータはすべて 不揮発性のメモリ (1MB ROM JAN-13 約 50,000 件 ) に保存されます メモリに保存されたデータは任意のタイミングで Bluetooth 通信または USB ケーブルを使用してホストへ送信することができます データの送信は スキャナ側の操作でのみ可能です ホスト側からの操作でのデータ送信には対応しておりません
バッチ操作の基本 MS916 のバッチ操作について バッチ操作では 読取ったバーコードデータはすべて 不揮発性のメモリ (1MB ROM JAN-13 約 50,000 件 ) に保存されます メモリに保存されたデータは任意のタイミングで Bluetooth 通信または USB ケーブルを使用してホストへ送信することができます データの送信は スキャナ側の操作でのみ可能です ホスト側からの操作でのデータ送信には対応しておりません
センサーライト型カメラ LC002 取扱説明書 ご使用前に 正しくご使用いただくために この取扱説明書を必ずお読みください 必要に応じてダウンロードをして保管下さい 最終更新 :2016 年 2 月 5 日 - 1 -
 センサーライト型カメラ LC002 取扱説明書 ご使用前に 正しくご使用いただくために この取扱説明書を必ずお読みください 必要に応じてダウンロードをして保管下さい 最終更新 :2016 年 2 月 5 日 - 1 - 目次 1: スペック... - 3-2: 付属品を確かめる... - 4-3: 時間設定 接続方法... - 4 - ... - 4 -
センサーライト型カメラ LC002 取扱説明書 ご使用前に 正しくご使用いただくために この取扱説明書を必ずお読みください 必要に応じてダウンロードをして保管下さい 最終更新 :2016 年 2 月 5 日 - 1 - 目次 1: スペック... - 3-2: 付属品を確かめる... - 4-3: 時間設定 接続方法... - 4 - ... - 4 -