開発環境の導入 本項目では PC に開発環境を準備する手順について説明します 本製品では C 言語の統合開発環境として Microsoft Visual Studio Express が使用できます ( それ以外の開発環境も存在しますが 本資料では説明を省きます ) 2014 年 7 月現在 Mic
|
|
|
- とらふみ かがんじ
- 6 years ago
- Views:
Transcription
1 ( ) アカデミックスカラロボット C 言語開発環境導入の手引き ヴイストン株式会社本資料は アカデミックスカラロボット ( 以下 本製品 と記述 ) を WindowsPC から C 言語プログラミングする際の 開発環境の導入とサンプルソースのビルドの手順について説明したものです 本製品は PC と USB ポートで接続し PC 側よりプログラムで通信制御します PC 側のプログラムとしては シミュレータ機能搭載のモーションエディタ SCARA Programmer を利用できますが 無償公開されているプログラム開発環境 通信ライブラリなどを利用して C 言語などのプログラミングによって制御プログラムを作成することが可能です 目次 開発環境の導入... 2 サンプルソースについて サンプルソース一覧 主な関数 主なマクロ 列挙子 座標系の説明 モータに関する資料 ご質問について... 22
 2014 年 7 月現在 Microsoft Visual Studio Express2013 が無償公開されており こちらで開発が可能です なお")


2 開発環境の導入 本項目では PC に開発環境を準備する手順について説明します 本製品では C 言語の統合開発環境として Microsoft Visual Studio Express が使用できます ( それ以外の開発環境も存在しますが 本資料では説明を省きます ) 2014 年 7 月現在 Microsoft Visual Studio Express2013 が無償公開されており こちらで開発が可能です なお 以前のバージョンの Visual Studio をお持ちの方は 新しい Visual Studio のインストールは不要です 1. お使いの PC に Visual Studio がインストールされていない場合は 下記 URL にアクセスし Visual Studio Express 2013 for Windows Desktop をインストールしてください Microsoft Visual Studio Express 配布 URL Visual Studip Express for Windows Desktop を選択する クリック Web インストーラを選択 for Windows Desktop 以外の種類では開発ができないため 間違えて異なる環境を選択しな いようご注意ください インストールは 画面に表示される説明に従って進めてください
3 2. ロボットとの通信に必要なライブラリをインストールします ロボット本体との通信のために Sillocon Laboratory 社 CP2110-USB-to-UART インターフェースライブラリ ( 以後 通信ライブラリ と記述 ) を使用します 下記 URL より ライブラリをダウンロードして PC にインストールしてください CP2110-USB-to-UART インターフェースライブラリ配布 URL Windows 版をダウンロード 関連資料も併せてダウンロード インストーラのファイルをダウンロードしたら 実行して PC にライブラリをインストールしてください また 後の設定でインストール先のフォルダを使用するので インストールが完了したら確認してください ( 標準の設定では C:\SiLabs\MCU\CP2110_4_SDK\Library\Windows\ にインストールされます ) また 同じ web ページより ライブラリに関する説明資料などをダウンロードしてください

4 3. サンプルソースを製品 web ページよりダウンロードします ここでは 直交座標変換 のサンプルをダウンロードしてください アカデミックスカラロボットダウンロードページ URL 直交座標変換のサンプルをダウンロード 4. Visual Studio を起動し 新しいプロジェクトを作成します 新しいプロジェクト をクリック




5 作成するプロジェクトの種類は Win32 コンソールアプリケーション (Visual C++) です 1 Visual C++ をクリック 2 Win32 コンソールアプリ ケーション をクリック 3 任意のプロジェクト名を入力 追加のオプション では 空のプロジェクト にチェックを入れます 続いて 完了 をクリッ クしてプロジェクトを作成します 空のプロジェクト をチェック 完了 をクリック










6 5. ダウンロードしたソースをプロジェクトに追加してください プロジェクトを作成すると VisualStudio の Project フォルダに プロジェクトのフォルダが作成されます Visual Studio Express2013 の場合 マイドキュメント \Visual Studio 013\Projects\( プロジェクト名 ) となります ダウンロードしたソースファイルを 下図のように ( プロジェクト名 )\ ( プロジェクト名 ) のフォルダにコピーしてください Project\( プロジェクト 名 )\( プロジェクト名 ) の フォルダを開く ダウンロードしたサンプルソース (cpp ファイル ) をコピーする ファイルをコピーしたら VisualStudio の ソリューションエクスプローラー ( ツリー状の表示 部分 ) より 作成したプロジェクトの ソースファイル のフォルダを右クリックします ソリューション エクスプローラ ソースファイル を右クリック







7 クリックするとポップアップメニューを表示するので 追加 既存の項目 をクリックしてく ださい クリック クリックするとファイル選択ダイアログを開くので 先ほどコピーしたサンプルソースファイルを選んで 追加 をクリックします ファイルを選択すると ソリューションエクスプローラーの ソースファイル のフォルダに 選択したファイルが追加されます コピーしたサンプルソースファイルをクリック 追加 をクリック サンプルソースをクリックすると 内容が表示される サンプルソースが 追加される



8 6. プロジェクトの参照フォルダの設定で 通信ライブラリのインストールフォルダを参照します ソリューションエクスプローラーより プロジェクト名の項目を右クリックし 表示されるメニュ ーより プロパティ をクリックしてください プロジェクト名を 右クリック プロパティを クリック クリックするとプロジェクトのプロパティ設定ダイアログを開きます ダイアログ左上の 構成 を すべての構成 に変更し 続いてダイアログ左のツリーより 構成プロパティ VC++ ディ レクトリ を選択してください 1 すべての構成 に変更 2 クリック 3 画面が切り替わる



9 選択するとダイアログ右の設定画面が切り替わるので インクルードディレクトリ の項目をクリ ックしてください クリックすると項目の右端に のマークが表示されるのでクリックし 更に < 編集 > をクリックします 1 クリック 2 クリック 3 クリック クリックすると ディレクトリの設定ダイアログを開きます ダイアログ上側の余白部分をダブルクリックするとテキスト入力の状態になるので 先ほど確認した通信ライブラリのインクルードファイルが含まれたフォルダを開きます このフォルダは デフォルトの設定では C:\SiLabs\MCU\CP2110_4_SDK\Library\Windows になります ダブルクリックして テキスト入力状態にする 通信ライブラリのインクルード ファイルへのパスを入力 OK をクリック




10 インクルードディレクトリを設定したら 続いて ライブラリディレクトリ を同様に設定します ライブラリディレクトリ も 設定を行う 先ほどと同じ方法でフォルダの選択画面まで開き 通信ライブラリの lib ファイルが含まれたフォルダを開きます このフォルダは デフォルトの設定では C:\SiLabs\MCU\CP2110_4_SDK\Library\Windows\x86 になります lib ファイルは x64 のフォルダにも同名の物が存在しますが Visual Studio の標準のビルドターゲットが Win32(32bit) なので x86 のフォルダを選択してください 通信ライブラリの lib ファイルへのパス を入力 (x86 のフォルダを選ぶ ) OK をクリック それぞれの設定が完了したら プロジェクトのプロパティダイアログの 適用 をクリックして 設定を適用してください







11 7. サンプルソースをビルドします 以上でプロジェクトに関する設定は完了です ここで一度ソースをビルドしてみましょう ソリューションエクスプローラーのプロジェクト名の項目を右クリックし メニューより ビルド をクリックしてください プロジェクト名を 右クリック ビルドをクリック ビルド結果は 画面下のコンソールウィンドウに表示されます ビルド結果の表示を確認して 問 題があれば解説の内容を確認しましょう コンソールウィンドウ 問題なくビルドできた インクルードディレクトリの 設定に問題が無いか確認 ライブラリディレクトリの 設定に問題が無いか確認

\Debug")
\Debug というフォルダができますが そちらは関係ありません )")



12 8. Dll ファイルを実行ファイルと同じフォルダにコピーして プログラムを実行します プログラムをビルドできたら プロジェクトのフォルダに Debug と言う名前のフォルダが作成され その中に ( プロジェクト名 ).exe というファイルが作成されます( ( プロジェクト名 )\Debug というフォルダです これとは別に ( プロジェクト名 )\ ( プロジェクト名 )\Debug というフォルダができますが そちらは関係ありません ) 実行ファイルをダブルクリックするとプログラムが起動しますが プログラムを動作させるためには 通信ライブラリの dll ファイルを 実行ファイルと同じフォルダにコピーする必要があります 作成された実行ファイル Debug フォルダが 作成される 先ほどインクルードディレクトリの設定で指定したフォルダを開き SLABHIDDevice.dll SLABHIDtoUART.dll の二つのファイルを 前述の実行ファイルが作成されたフォルダにコピーしてください インクルードディレクトリで設定したフォルダを開く 二つの dll ファイルを実行ファイル のフォルダにコピーする

 なら 5 ペンホルダへ組み替えたなら 3 を入力して Enter")
 5 軸の場合はそれに加えてハンドの回転軸角度 (360 法 ) と開閉軸の幅")

13 Dll ファイルをコピーしたら ロボット本体を PC に接続して 実行ファイルをダブルクリックして 実行してください 実行したときに下記のエラーメッセージが表示される場合 正しく dll ファイルが コピーできているかご確認ください 実行すると 最初に使用する軸数を聞かれるので ロボット本体の現在の軸数に合わせて キーボ ードより 3 か 5 を入力して Enter を押してください 軸数の確認が行われず すぐにプログ ラムが終了する場合は ロボット本体が PC に正しく接続されているかご確認ください ハンド軸付 ( 標準 ) なら 5 ペンホルダへ組み替えたなら 3 を入力して Enter 軸数を入力すると ロボット本体のモータが現在の位置で ON になります モータが ON にならない場合 ロボット本体に電源を接続しているかご確認ください 続いて 座標とモータ角度の入力確認が行われます 3 軸の場合は X/Y/Z 座標 (mm) 5 軸の場合はそれに加えてハンドの回転軸角度 (360 法 ) と開閉軸の幅 (mm) を聞かれるので それぞれ数値を入力してください ( 座標系については 後述の 座標系の説明 をご参照ください ) X/Y/Z 座標 ハンド軸の 角度 開閉幅を入力 数値を入力すると ロボット本体が入力した数値に合わせたポーズに変形します 動かすときは モータロックが発生しないように 十分ご注意ください 他のサンプルソースをビルドする場合も 同様の手順でプロジェクトの作成及び設定を行ってくだ さい
14 サンプルソースについて この項目では 配布している各サンプルソースの概要 及び主な関数やマクロなど プログラミングに関する必要情報について説明します プログラムを改造する際には 本項目の説明をご参照ください サンプルソース一覧 ダウンロードページで配布しているサンプルソースの種類は下記の通りです モータ角度取得サンプル ロボットからのモータ角度の読み取り 及びモータ角度から直交座標への変換処理のサンプルです 直交座標変換サンプル 直交座標からモータ角度への変換処理 及びモータの制御に関するサンプルです 物体運搬サンプル 付属のスポンジキューブを運搬し モーション制御を学習するためのサンプルです 図形描画サンプル 三角形 四角形を描画し PtoP 制御と直線補間を学習するためのサンプルです 円弧描画サンプル す 二点の座標 円の半径 回転方向を指定して円弧を描画し CP 制御を学習するためのサンプルで
15 主な関数 サンプルソースに含まれる主な関数について説明します なお サンプルソースによっては 一部 必要ない関数を省略しているものがあります CP2110/4 HID USB-to-UART インターフェースライブラリに関連する関数これらの関数は 通信ライブラリに含まれる関数 または関係の深い処理です 一部の引数や戻り値で使用されている宣言子はライブラリ内で定義されています これらの詳細は 通信ライブラリの説明資料をご参照ください HID_UART_STATUS HidUart_GetNumDevices(DWORD* numdevices, WORD vid, WORD pid) 概要 : 現在 PC に接続されているロボットの数を取得する 関数が成功すると ポインタで与えた変数に現在のロボットの接続数が代入される 引数 : DWORD* numdevices ロボットの接続数を取得する変数へのポインタ WORD vid, WORD pid ロボットの VenderID ProductID それぞれマクロの VID, PID を代入する 戻り値 : 成功の場合 HID_UART_SUCCESS 失敗の場合それ以外を返す HID_UART_STATUS の各数値については ライブラリの説明資料を参照 HID_UART_STATUS HidUart_Open(HID_UART_DEVICE* device, DWORD devicenum, WORD vid, WORD pid) 概要 : ロボットとの通信ハンドルを取得し 通信を開始する 関数が成功すると ポインタで与えた変数に 通信に必要なハンドルの値が代入される 引数 : HID_UART_DEVICE* device 通信ハンドルを取得する変数へのポインタ DWORD devicenum 接続するロボットの番号 複数のロボットを同時に制御する場合 この数値によって接続先を選択する WORD vid, WORD pid ロボットの VenderID ProductID それぞれマクロの VID, PID を代入する 戻り値 : 成功の場合 HID_UART_SUCCESS 失敗の場合それ以外を返す HID_UART_STATUS の各数値については ライブラリの説明資料を参照 HID_UART_STATUS HidUart_Close(HID_UART_DEVICE device ) 概要 : 取得したロボットの通信ハンドルを閉じてロボットとの通信を終了する 引数 : HID_UART_DEVICE device 取得した通信ハンドル戻り値 : 成功の場合 HID_UART_SUCCESS 失敗の場合それ以外を返す HID_UART_STATUS の各数値については ライブラリの説明資料を参照
16 HID_UART_STATUS SetTXOpenDrain(HID_UART_DEVICE dev ) 概要 : ロボットの通信ポートの設定で TX を Open-Drain へ変更する ロボットと通信する場合は 必ずこの設定変更を行う必要がある ( 設定はロボット本体に記録されるため 一度変更していれば再度呼び出しの必要はない ) 引数 : HID_UART_DEVICE dev 取得した通信ハンドル戻り値 : 成功の場合 HID_UART_SUCCESS 失敗の場合それ以外を返す HID_UART_STATUS の各数値については ライブラリの説明資料を参照 座標変換に関連する関数 これらの関数は モータ角度と直交座標の変換を行う処理です 座標系については 座標系の説明 の項目をご参照ください void pos_to_rad(double x, double y, double z,double yaw, double w,short *spos,int sign,int num) 概要 : X/Y 座標と回転軸の角度からアームの角度へ変換する 引数 : double x, y, z 変換元の X/Y/Z 座標 (mm 単位 ) double yaw 変換元のハンド回転軸の角度 (360 法 ) double w 変換元のハンド開閉軸の幅 (mm 単位 ) short *spos 変換後のモータ角度を代入する配列変数へのポインタ int sign アームの折れ曲がる向き 正の値だと時計回り 負の値だと反時計回りに折れ曲がる int num アームの軸数 4 以上の場合 ハンドの 2 軸の計算を行う戻り値 : なし void rad_to_pos(double *x,double *y, double *z,double *yaw, double *w,short *spos,int num) 概要 : モータ角度を変換して X/Y 座標と回転軸角度を求める 引数 : double *x, *y, *z 変換後の X/Y/Z 座標を代入する変数へのポインタ double *yaw 変換後のハンド回転軸角度を代入する変数へのポインタ double *w 変換後のハンド開閉軸幅を代入する変数へのポインタ short *spos 変換元のモータ角度を格納した配列変数へのポインタ int num アームの軸数 4 以上の場合 ハンドの 2 軸の計算を行う戻り値 : なし
17 モータの制御に関連する関数これらの関数は モータとの通信を行う処理です モータの通信使用については モータに関する資料 で紹介しているサーボモータ RS304MD の資料をご参照ください また 引数に配列変数を使用するものは 他の引数で与えるモータの数やバッファのサイズ等と差異が無いようにしてください これらのサイズに違いがあると 不正なメモリアクセスによるエラーが発生します int RSTorqueOnOff( HID_UART_DEVICE dev, short smode,byte id,int num) 概要 : モータの ON/OFF を切り替える ID が連続した複数のモータを一度に制御可能 引数 : HID_UART_DEVICE dev ロボットの通信ハンドル short smode モータ ON/OFF の指定 0 の場合 off 1 の場合 ON になる BYTE id コマンドを送信するモータの ID 複数のモータを切り替える場合は先頭のモータの ID を代入する int num コマンドを送信するモータの数 戻り値 : 正しく通信できた場合は TRUE 通信エラーが発生した場合は FALSE int RSGetAngle( HID_UART_DEVICE dev,byte id,short *getparam) 概要 : モータから現在の角度を取得する関数 モータの角度は 1 個ずつしか取得できない 引数 : HID_UART_DEVICE dev ロボットの通信ハンドル BYTE id 角度を取得するモータの ID short *getparam 取得した角度値 (0.1 単位 ) 戻り値 : 正しく通信できた場合は TRUE 通信エラーが発生した場合は FALSE int RSMove( HID_UART_DEVICE dev, short *sposs, unsigned short stime,byte id,int num) 概要 : 時間と角度を指定してモータを動かす関数 ID が連続した複数のモータを一度に制御可能 引数 : HID_UART_DEVICE dev ロボットの通信ハンドル short *sposs 送信するモータ角度を記録した配列変数へのポインタ unsigned short stime モータの遷移時間 (10msec 単位 ) BYTE id コマンドを送信するモータの ID 複数のモータを切り替える場合は先頭のモータの ID を代入する int num コマンドを送信するモータの数 戻り値 : 正しく通信できた場合は TRUE 通信エラーが発生した場合は FALSE
18 int RSWriteMem( HID_UART_DEVICE dev, BYTE address, BYTE size, BYTE id, BYTE *data, int num) 概要 : モータのメモリマップに数値を書き込む関数 アドレスが連続したメモリブロックや ID が連続した複数のモータを一度に制御可能 引数 : HID_UART_DEVICE dev ロボットの通信ハンドル BYTE address データ書き込みを行うメモリマップのアドレス 2byte 以上書き込む場合は 先頭のアドレスを指定する BYTE size 書き込むデータのサイズ 複数のモータに書き込む場合は モータ 1 個当たりのデータサイズを指定する BYTE id 書き込みを行うモータの ID 複数のモータに書き込む場合は 先頭のモータの ID を指定する BYTE *data 書き込むデータ内容を記録したメモリブロックへのポインタ データ部は 必ず BYTE id * int num のサイズであること Int num 書き込みを行うモータの個数 戻り値 : 正しく通信できた場合は TRUE 通信エラーが発生した場合は FALSE int ReadLocalEcho(HID_UART_DEVICE dev,unsigned char *sendbuf,dword data_len) 概要 : ロボットへコマンドを送信したときに発生するローカルエコーを読み込む main 関数内では直接使用していないが ロボットとの通信を行う各関数内では 通信処理後にこの関数を用いて正しくコマンドを送信できているか確認している 引数 : HID_UART_DEVICE dev ロボットの通信ハンドル unsigned char *sendbuf 送信コマンドを記録した配列変数へのポインタ DWORD data_len 送信コマンドの長さ戻り値 : 元の送信コマンドと全く同じ文字列を取得できれば TRUE 文字数や内容に違いがあれば FALSE
19 主なマクロ 各サンプルプログラムで共通する主なマクロについて紹介します 通信に関する設定 VID (0x10C4) PID (0xEA80) ロボット本体の Vender ID Product ID です ロボット本体の寸法に関する設定 AXISLEN_A (80.0) AXISLEN_B (80.0) アーム軸の第一関節 第二関節の軸間距離 (mm) FIELD_H (210.0) FIELD_W (230.0) ステージの縦幅 横幅 (mm) X_OFS (FIELD_W/2-53.0) ステージ中央からアームの根元 (ID1 モータの出力軸 ) までの距離 (mm) 上下軸の距離 モータ角度の変換に関する設定 RAD_TO_HEIGHT(r) ( ((double)r/(height_rate*10.0))*height_range) モータ角度から上下軸の距離 (mm) に変換するマクロ関数 引数は r= モータ角度値 (0.1 度単位 ) 戻り値は距離(mm) HEIGHT_TO_RAD(h) (short) (h/height_range*height_rate*10.0) 距離からモータ角度に変換するマクロ関数 引数は h= 距離 (mm) 戻り値はモータ角度(0.1 単位 ) ハンド開閉軸の距離 モータ角度の変換に関する設定 RAD_TO_WIDTH(r,p) ( ((double)-r/(width_rate*10.0))*width_range + GROW_W*(p+1)) モータ角度からハンド軸の開閉幅に変換するマクロ関数 引数は r= モータ角度値 (0.1 度単位 ) p= 爪の取り付け位置 (0~3) 戻り値は距離(mm)
20 WIDTH_TO_RAD(w,p) (short) (-(w-grow_w*(p+1))/width_range*width_rate*10.0) ハンド軸の開閉幅からモータ角度に変換するマクロ関数 引数は w= 開閉幅 (mm) p= 爪の取り付け位置 (0~3) 戻り値はモータ角度(0.1 単位 ) ARM_RAD_RANGE (1350) HAND_WIDTH_RANGE (350) モータの可動範囲の設定 (0.1 度単位 ) アームの 2 軸 (ID1,ID2) 及びハンド開閉軸 (ID5) の設定 座標系に関する設定 BASE_ANGLE (180.0) BASE_OFFSET_X (+0.0) BASE_OFFSET_Y (+0.0) 本体の向き (360 法 ) と原点からの移動量 (mm) CROW_POS (1) 現在のハンド軸の爪のねじ穴番号 0~3 がねじ穴 1~4 に相当する 列挙子 RS304D の内部パラメータ ( メモリマップ ) のアドレスについて定義した列挙子です サンプルでは モータ出力に関連するパラメータのみを定義しています その他のアドレスを使用する場合は 別途モータの資料を参考に追記してください typedef enum{ CW_Compliance_Margin = 0x18, // コンプライアンスマージン ( 時計回り ) CCW_Compliance_Margin = 0x19, // コンプライアンスマージン ( 反時計回り ) CW_Compliance_Slope = 0x1a, // コンプライアンススロープ ( 時計回り ) CCW_Compliance_Slope = 0x1b, // コンプライアンススロープ ( 反時計回り ) Punch_L = 0x1c, // パンチ ( 下位 byte) Punch_H = 0x1d, // パンチ ( 上位 byte) ROMSIZE = 30 //ROM 領域のサイズ } RS304ROM;








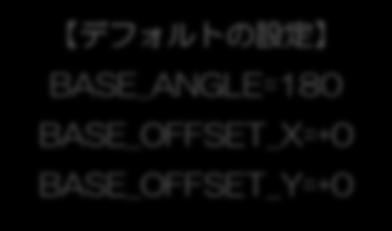
21 座標系の説明 サンプルソースでは アームの座標系を全て下記の通りに統一しています Y 軸 +105mm 0mm デフォルトの設定 BASE_ANGLE=180 BASE_OFFSET_X=+0 BASE_OFFSET_Y=+0 原点 (0,0) -105mm = 土台中央 -115mm 0mm +115mm X 軸 マクロの設定で説明した BASE_ANGLE BASE_OFFSET_X/Y の各マクロを書き換えることで 座標系を変更できます ただし 座標系を変更すると 対応するアームの角度や可動範囲が変わるた め 過去に作成したプログラムが意図通りに動作しなくなる場合がありますのでご注意ください BASE_ANGLE=90 BASE_OFFSET_X=+0 BASE_OFFSET_Y=-50 BASE_ANGLE=0 BASE_OFFSET_X=-60 BASE_OFFSET_Y=+0

22 モータに関する資料ロボット本体を制御するための通信コマンドは ロボット本体に組み込まれているシリアルサーボモータ RS304MD ( 双葉電子工業社製 ) の仕様に従います このサーボモータに関する通信コマンド メモリマップ等の資料は 双葉電子工業の web ページで公開しております モータのメモリマップのダンプなど サンプルソースに含まれていない操作を行う場合は この資料をご参照ください 双葉電子工業 RS304MD 製品ページ URL ご質問について 開発環境の導入やサンプルソースの具体的な処理 改造などに関するご質問につきましては 原則として承っておりません これらに関する情報は 資料中で紹介している各種資料や web 上に公開している情報を参考に 各自ご確認ください オプションパーツ 関連商品のご購入は No.1 の品揃え! 各種オプションパーツ ロボット関連製品のご購入はコチラ ロボットセンター東京秋葉原店 ( 東京支店 ) 楽天 Amazon Yahoo の各 Web 店舗 または東京 福岡の各ロボットセンター店頭でもロボット関連 商品をお買い求めいただけます 東京都千代田区外神田 内田ビル 4F ヴイストン株式会社 商品に関するお問い合わせ ロボットセンターロボスクエア店 ( 福岡支店 ) 福岡市早良区百道浜 TNC 放送会館 2F ロボスクエア内 商品の技術的なご質問は 問題 症状 ご使用の環境などを記載の上メールにてお問い合わせください infodesk@vstone.co.jp 受付時間 :10:00~17:00( 土日祝日は除く ) 大阪市西淀川区御幣島 TEL : FAX:
実習を行う上での心構えについて
 Microsoft Visual C++ 2015 と OpenCV 2.4.13.2 を使用した 画像処理プログラミング 本資料では,Microsoft Visual C++ 2015 ( 以下, VC2015) と OpenCV 2.4.13.2 を用いたプログラムの作成方法について説明する. 本授業での使用方法であれば, ここで説明する内容は, 最初に1 回設定するだけでよく. ソリューションやプロジェクトを作り直さない限り,
Microsoft Visual C++ 2015 と OpenCV 2.4.13.2 を使用した 画像処理プログラミング 本資料では,Microsoft Visual C++ 2015 ( 以下, VC2015) と OpenCV 2.4.13.2 を用いたプログラムの作成方法について説明する. 本授業での使用方法であれば, ここで説明する内容は, 最初に1 回設定するだけでよく. ソリューションやプロジェクトを作り直さない限り,
VS-IX012取扱説明書
 VS-RC003 用ジャイロ / 加速度 / コンパスボード VS-IX012 取扱説明書 株式会社国際電気通信基礎技術研究所 ヴイストン株式会社 - 目次 - 1. 概要...3 2. ソフトウェアのバージョンについて...3 3. ジャイロ/ 加速度 / コンパスボード の基本設定...4 3-1. 基本設定の手順...4 3-2. 基本設定の詳細説明...6 4. 加速度センサの使用方法...7
VS-RC003 用ジャイロ / 加速度 / コンパスボード VS-IX012 取扱説明書 株式会社国際電気通信基礎技術研究所 ヴイストン株式会社 - 目次 - 1. 概要...3 2. ソフトウェアのバージョンについて...3 3. ジャイロ/ 加速度 / コンパスボード の基本設定...4 3-1. 基本設定の手順...4 3-2. 基本設定の詳細説明...6 4. 加速度センサの使用方法...7
ハンドタイプからペンタイプへの組み換え 1. 図中丸印のネジ (6 か所 ) を全て外し アーム上下軸のカバーを取り外してください ネジを外す カバーを外す 2. 爪の中に押し込まれているケーブルを爪の隙間から引っ張り出してください この時 無理に引っ張ら ないように注意してください ケーブルを引っ
 を全て外し アーム上下軸のカバーを取り外してください ネジを外す カバーを外す 2. 爪の中に押し込まれているケーブルを爪の隙間から引っ張り出してください この時 無理に引っ張ら ないように注意してください ケーブルを引っ") (2014.7.10) アカデミックスカラロボットペンタイプ ハンドタイプ組み換え説明書 ヴイストン株式会社 本ドキュメントは アカデミックスカラロボットのペンタイプ ハンドタイプの組み換え手順に関する 説明書です 組み替えを行う際は 本説明書の手順をご確認の上 怪我や製品の破損等が発生しないように ご注意ください 使用工具 組み換え作業には 下記の工具が必要となります プラスドライバー #1( 精密ドライバー
(2014.7.10) アカデミックスカラロボットペンタイプ ハンドタイプ組み換え説明書 ヴイストン株式会社 本ドキュメントは アカデミックスカラロボットのペンタイプ ハンドタイプの組み換え手順に関する 説明書です 組み替えを行う際は 本説明書の手順をご確認の上 怪我や製品の破損等が発生しないように ご注意ください 使用工具 組み換え作業には 下記の工具が必要となります プラスドライバー #1( 精密ドライバー
2 / 26 平成 26 年 4 月 11 日 ( 金 ) 午後 1 時 9 分 Visual C Express の使用法 ( 東海大学理学部物理学科 ) 無償で利用できる開発環境 (Windows XP 以降 ) Visual Studio 2010 Express
 午後 1 時 9 分 Visual C Express の使用法 ( 東海大学理学部物理学科 ) 無償で利用できる開発環境 (Windows XP 以降 ) Visual Studio 2010 Express") 1 / 26 平成 26 年 4 月 11 日 ( 金 ) 午後 1 時 9 分 Visual C++ 2010 Express の使用法 ( 安江正樹 @ 東海大学理学部物理学科 ) Visual C++ 2010 Express の使用法 コンソールプログラムの作成方法と実行 コンピュータ物理学演習 Ⅱ 東海大学理学部物理学科 安江正樹 yasue@keyaki.cc.u-tokai.ac.jp
1 / 26 平成 26 年 4 月 11 日 ( 金 ) 午後 1 時 9 分 Visual C++ 2010 Express の使用法 ( 安江正樹 @ 東海大学理学部物理学科 ) Visual C++ 2010 Express の使用法 コンソールプログラムの作成方法と実行 コンピュータ物理学演習 Ⅱ 東海大学理学部物理学科 安江正樹 yasue@keyaki.cc.u-tokai.ac.jp
インテル(R) Visual Fortran コンパイラ 10.0
 Visual Fortran コンパイラ 10.0") インテル (R) Visual Fortran コンパイラー 10.0 日本語版スペシャル エディション 入門ガイド 目次 概要インテル (R) Visual Fortran コンパイラーの設定はじめに検証用ソースファイル適切なインストールの確認コンパイラーの起動 ( コマンドライン ) コンパイル ( 最適化オプションなし ) 実行 / プログラムの検証コンパイル ( 最適化オプションあり ) 実行
インテル (R) Visual Fortran コンパイラー 10.0 日本語版スペシャル エディション 入門ガイド 目次 概要インテル (R) Visual Fortran コンパイラーの設定はじめに検証用ソースファイル適切なインストールの確認コンパイラーの起動 ( コマンドライン ) コンパイル ( 最適化オプションなし ) 実行 / プログラムの検証コンパイル ( 最適化オプションあり ) 実行
各種パスワードについて マイナンバー管理票では 3 種のパスワードを使用します (1) 読み取りパスワード Excel 機能の読み取りパスワードです 任意に設定可能です (2) 管理者パスワード マイナンバー管理表 の管理者のパスワードです 管理者パスワード はパスワードの流出を防ぐ目的で この操作
 読み取りパスワード Excel 機能の読み取りパスワードです 任意に設定可能です (2) 管理者パスワード マイナンバー管理表 の管理者のパスワードです 管理者パスワード はパスワードの流出を防ぐ目的で この操作") マイナンバー管理表 操作説明書 管理者用 2015 年 11 月 30 日 ( 初版 ) 概要 マイナンバー管理表 の動作環境は以下の通りです 対象 OS バージョン Windows7 Windows8 Windows8.1 Windows10 対象 Excel バージョン Excel2010 Excel2013 対象ファイル形式 Microsoft Excel マクロ有効ワークシート (.xlsm)
マイナンバー管理表 操作説明書 管理者用 2015 年 11 月 30 日 ( 初版 ) 概要 マイナンバー管理表 の動作環境は以下の通りです 対象 OS バージョン Windows7 Windows8 Windows8.1 Windows10 対象 Excel バージョン Excel2010 Excel2013 対象ファイル形式 Microsoft Excel マクロ有効ワークシート (.xlsm)
PCL6115-EV 取扱説明書
 PCL6115 スターターキット 取扱説明書モーションパターンビルダーサンプルプロジェクト 目次 1. はじめに... 1 1-1. 動作環境... 2 1-2. 動作モード... 2 1-3. 使用したプログラミング言語... 2 1-4. 注意... 2 2. サンプルプロジェクトの構成... 3 2-1. フォルダ構成... 3 2-2. ファイル構成... 3 3. デバイスドライバのインストール...
PCL6115 スターターキット 取扱説明書モーションパターンビルダーサンプルプロジェクト 目次 1. はじめに... 1 1-1. 動作環境... 2 1-2. 動作モード... 2 1-3. 使用したプログラミング言語... 2 1-4. 注意... 2 2. サンプルプロジェクトの構成... 3 2-1. フォルダ構成... 3 2-2. ファイル構成... 3 3. デバイスドライバのインストール...
10_Link3_manual
 KHR-3HV 10_LINK 機能の使い方 3 マニュアル 2010 KONDO KAGAKU CO.,LTD 2010.08 Ver.1.0 ここでは 既存のモーションの編集や オリジナルのモーション作成などで役立つ LINK 機能 についてご説明します 準備 本マニュアルで対応している HTH4 のバージョンは HTH4 Ver.1.2.2 となります 2010.08.27 時点 HTH4 Ver.1.2.2
KHR-3HV 10_LINK 機能の使い方 3 マニュアル 2010 KONDO KAGAKU CO.,LTD 2010.08 Ver.1.0 ここでは 既存のモーションの編集や オリジナルのモーション作成などで役立つ LINK 機能 についてご説明します 準備 本マニュアルで対応している HTH4 のバージョンは HTH4 Ver.1.2.2 となります 2010.08.27 時点 HTH4 Ver.1.2.2
( 目次 ) 1. はじめに 開発環境の準備 仮想ディレクトリーの作成 ASP.NET のWeb アプリケーション開発環境準備 データベースの作成 データベースの追加 テーブルの作成
 1. はじめに 開発環境の準備 仮想ディレクトリーの作成 ASP.NET のWeb アプリケーション開発環境準備 データベースの作成 データベースの追加 テーブルの作成") KDDI ホスティングサービス (G120, G200) ブック ASP.NET 利用ガイド ( ご参考資料 ) rev.1.0 KDDI 株式会社 1 ( 目次 ) 1. はじめに... 3 2. 開発環境の準備... 3 2.1 仮想ディレクトリーの作成... 3 2.2 ASP.NET のWeb アプリケーション開発環境準備... 7 3. データベースの作成...10 3.1 データベースの追加...10
KDDI ホスティングサービス (G120, G200) ブック ASP.NET 利用ガイド ( ご参考資料 ) rev.1.0 KDDI 株式会社 1 ( 目次 ) 1. はじめに... 3 2. 開発環境の準備... 3 2.1 仮想ディレクトリーの作成... 3 2.2 ASP.NET のWeb アプリケーション開発環境準備... 7 3. データベースの作成...10 3.1 データベースの追加...10
プログラマブル LED 制御モジュール アプリ操作説明書 プログラマブル LED 制御モジュール設定アプリ操作説明書 適用モジュール 改訂番号 エレラボドットコム 1
 設定 適用モジュール 041-1 改訂番号 20161024 エレラボドットコム 1 ( 用アプリの利用可能環境 ) Windows7 8.1 10 のいずれかが動作する PC Windows8 以降の場合は 次ページ記載の Windows8 以降の.NET Framework の有効化 (p3~7) の操作をするか 設定されていることを確認してからアプリをインストールしてください.NET Framework2.0
設定 適用モジュール 041-1 改訂番号 20161024 エレラボドットコム 1 ( 用アプリの利用可能環境 ) Windows7 8.1 10 のいずれかが動作する PC Windows8 以降の場合は 次ページ記載の Windows8 以降の.NET Framework の有効化 (p3~7) の操作をするか 設定されていることを確認してからアプリをインストールしてください.NET Framework2.0
本書は INpMac v2.20(intime 5.2 INplc 3 Windows7/8/8.1に対応 ) の内容を元に記載しています Microsoft Windows Visual Studio は 米国 Microsoft Corporation の米国及びその他の国における登録商標です
 の内容を元に記載しています Microsoft Windows Visual Studio は 米国 Microsoft Corporation の米国及びその他の国における登録商標です") ACTIVE TOUCH 拡張部品取扱説明書 - 共有メモリアクセスコンポーネント - 1. はじめに 1 (1) 概要... 1 (2) INpMac のインストール... 1 2. Windows アプリケーションとの連携 2 (1) コントロール ( 部品 ) の登録... 2 (2) データの関連付け... 3 3. INtime アプリケーションとの連携 4 (1) 部品 ( コンポーネント
ACTIVE TOUCH 拡張部品取扱説明書 - 共有メモリアクセスコンポーネント - 1. はじめに 1 (1) 概要... 1 (2) INpMac のインストール... 1 2. Windows アプリケーションとの連携 2 (1) コントロール ( 部品 ) の登録... 2 (2) データの関連付け... 3 3. INtime アプリケーションとの連携 4 (1) 部品 ( コンポーネント
Officeインストールマニュアル
 Office インストールマニュアル Win/Mac 改訂履歴 改訂日 改定内容 第 1 版 2015 年 9 月 1 日 新規作成 第 2 版 2015 年 9 月 29 日 Office for mac 2016 操作手順の追加 第 3 版 2015 年 10 月 6 日 Office 2016 操作手順の追加(Windows 向け ) 第 4 版 2016 年 5 月 12 日 Office2016
Office インストールマニュアル Win/Mac 改訂履歴 改訂日 改定内容 第 1 版 2015 年 9 月 1 日 新規作成 第 2 版 2015 年 9 月 29 日 Office for mac 2016 操作手順の追加 第 3 版 2015 年 10 月 6 日 Office 2016 操作手順の追加(Windows 向け ) 第 4 版 2016 年 5 月 12 日 Office2016
HEW&FDT
 HEW 開発環境の導入と サンプルプログラムのビルド ヴイストン株式会社 (2012.05.02) 本項説明書は VS-WRC003 を C 言語で開発する際に使用可能な ルネサスエレクトロニクス社より無 料配布されている High-performance Embedded Workshop を用いたサンプルプログラムの実行に関し て解説をします おおまかな手順は以下の通りです 1 開発環境の入手
HEW 開発環境の導入と サンプルプログラムのビルド ヴイストン株式会社 (2012.05.02) 本項説明書は VS-WRC003 を C 言語で開発する際に使用可能な ルネサスエレクトロニクス社より無 料配布されている High-performance Embedded Workshop を用いたサンプルプログラムの実行に関し て解説をします おおまかな手順は以下の通りです 1 開発環境の入手
 Jam Careソフト目次 マニュアル 5 Jamcareソフトのセットアップをしましょう 12 ソフトの起動と終了をしましょう 15 サポートセンターから電話が欲しい 19 サポートセンターにメッセージを送信する 27 サポートサイトで Q&A 集を見る 33 サポートサイトにバージョンアップの要望を書き込む 36 サポートサイトへ質問する 39 顧客情報登録を編集する 40 ジャムケアソフトのバージョンアップを行う
Jam Careソフト目次 マニュアル 5 Jamcareソフトのセットアップをしましょう 12 ソフトの起動と終了をしましょう 15 サポートセンターから電話が欲しい 19 サポートセンターにメッセージを送信する 27 サポートサイトで Q&A 集を見る 33 サポートサイトにバージョンアップの要望を書き込む 36 サポートサイトへ質問する 39 顧客情報登録を編集する 40 ジャムケアソフトのバージョンアップを行う
工程’S 9 ヘルプ Excelバーチャート
 工程 S 9.1 ヘルプ Excel バーチャート 株式会社ウェッブアイ [2018 年 3 月 ] 目次 はじめに... 2 Excel バーチャートについて... 2 商標について... 3 動作環境... 3 バージョン情報... 3 Excel バーチャートの実行... 4 Excel バーチャートの起動... 4 対象の工程 s ファイルを開く... 5 Excel バーチャートの出力...
工程 S 9.1 ヘルプ Excel バーチャート 株式会社ウェッブアイ [2018 年 3 月 ] 目次 はじめに... 2 Excel バーチャートについて... 2 商標について... 3 動作環境... 3 バージョン情報... 3 Excel バーチャートの実行... 4 Excel バーチャートの起動... 4 対象の工程 s ファイルを開く... 5 Excel バーチャートの出力...
Team Foundation Server 2018 を使用したバージョン管理 補足資料
 Team Foundation Server 2018 を使用したバージョン管理 Magic xpa 3.0/Magic xpa 2.5/uniPaaS V1Plus 補足資料 マジックソフトウェア ジャパン株式会社 2018 年 8 月 24 日 本ドキュメントは Magic xpa 3.0/Magic xpa 2.5/uniPaaS V1Plus で Team Foundation Server(
Team Foundation Server 2018 を使用したバージョン管理 Magic xpa 3.0/Magic xpa 2.5/uniPaaS V1Plus 補足資料 マジックソフトウェア ジャパン株式会社 2018 年 8 月 24 日 本ドキュメントは Magic xpa 3.0/Magic xpa 2.5/uniPaaS V1Plus で Team Foundation Server(
Microsoft Word - _ ‘C’³_V1.6InstManual.doc
 厚生労働省版医薬品等電子申請ソフト ダウンロードマニュアル 平成 23 年 6 月 17 日版 厚生労働省医薬食品局 はじめに 本マニュアルの利用方法 本マニュアルは 医薬品等電子申請ソフト ( 以下 申請ソフト と呼びます ) のダウンロード方法について説明したものです 申請ソフトのダウンロードは ウェブブラウザを用いたインターネットからの一般のドキュメントやプログラムのダウンロードと大きく異なるところはありません
厚生労働省版医薬品等電子申請ソフト ダウンロードマニュアル 平成 23 年 6 月 17 日版 厚生労働省医薬食品局 はじめに 本マニュアルの利用方法 本マニュアルは 医薬品等電子申請ソフト ( 以下 申請ソフト と呼びます ) のダウンロード方法について説明したものです 申請ソフトのダウンロードは ウェブブラウザを用いたインターネットからの一般のドキュメントやプログラムのダウンロードと大きく異なるところはありません
1. USB の VCP( 仮想 COM ポート ) について USB の VCP( 仮想 COM ポート ) は USB を非同期シリアル通信として使用するための USB のドライバです PC には VCP ドライバをインストールする必要があります USB の VCP( 仮想 COM ポート )
 について USB の VCP( 仮想 COM ポート ) は USB を非同期シリアル通信として使用するための USB のドライバです PC には VCP ドライバをインストールする必要があります USB の VCP( 仮想 COM ポート )") TrueSTUDIO 用 F4D_VCP の説明 V001 2014/07/05 USB の VCP( 仮想 COM ポート ) による非同期シリアル通信を行うプログラムです 無料の試用版開発ツール Atollic TrueSTUDIO for ARM Lite で作成したプロジェクトです ビルド可能なプログラムのコードサイズが 32Kbyte 以内の制限があります プログラムの開始番地は 0x08000000
TrueSTUDIO 用 F4D_VCP の説明 V001 2014/07/05 USB の VCP( 仮想 COM ポート ) による非同期シリアル通信を行うプログラムです 無料の試用版開発ツール Atollic TrueSTUDIO for ARM Lite で作成したプロジェクトです ビルド可能なプログラムのコードサイズが 32Kbyte 以内の制限があります プログラムの開始番地は 0x08000000
Alfa-Products_installguide
 Alfatech 製品インストール説明書 http://www.alfatech.jp/ 本書では下記の Alfatech 製品の動作環境 インストールとアクティベートなどについて説明いたします 説明対象の Alfatech 製品 : ダウンロード アクティベートファイルのメール納品のソフトウェア BJ-Electrical BJ-MechaTool BJ-MechaTool Pro BJ 変換 JW
Alfatech 製品インストール説明書 http://www.alfatech.jp/ 本書では下記の Alfatech 製品の動作環境 インストールとアクティベートなどについて説明いたします 説明対象の Alfatech 製品 : ダウンロード アクティベートファイルのメール納品のソフトウェア BJ-Electrical BJ-MechaTool BJ-MechaTool Pro BJ 変換 JW
CubePDF ユーザーズマニュアル
 CubePDF ユーザーズマニュアル 2018.11.22 第 13 版 1 1. PDF への変換手順 CubePDF は仮想プリンターとしてインストールされます そのため Web ブラウザや Microsoft Word, Excel, PowerPoint など印刷ボタンのあるアプリケーションであればどれでも 次の 3 ステップで PDF へ変換することができます 1. PDF 化したいものを適当なアプリケーションで表示し
CubePDF ユーザーズマニュアル 2018.11.22 第 13 版 1 1. PDF への変換手順 CubePDF は仮想プリンターとしてインストールされます そのため Web ブラウザや Microsoft Word, Excel, PowerPoint など印刷ボタンのあるアプリケーションであればどれでも 次の 3 ステップで PDF へ変換することができます 1. PDF 化したいものを適当なアプリケーションで表示し
1. 新規プロジェクト作成の準備新規プロジェクトのためのフォルダを用意して そこにプロジェクトを作成します [ 新しいフォルダー ] をクリックして希望のフォルダに新しいフォルダを作成します この例では TrST_F401N_BlinkLD2 というフォルダを作成しました TrST_F401N_Bl
![1. 新規プロジェクト作成の準備新規プロジェクトのためのフォルダを用意して そこにプロジェクトを作成します [ 新しいフォルダー ] をクリックして希望のフォルダに新しいフォルダを作成します この例では TrST_F401N_BlinkLD2 というフォルダを作成しました TrST_F401N_Bl](/thumbs/91/105983818.jpg "1. 新規プロジェクト作成の準備新規プロジェクトのためのフォルダを用意して そこにプロジェクトを作成します [ 新しいフォルダー ] をクリックして希望のフォルダに新しいフォルダを作成します この例では TrST_F401N_BlinkLD2 というフォルダを作成しました TrST_F401N_Bl") NUCLEO-F401RE の TrueSTUDIO プロジェクト構築方法 V001 2014/09/24 Atollic TrueSTUDIO for ARM Lite を使用して NUCLEO-F401RE のプロジェクトを新規に作成する方法について説明します また ビルドとデバッグについても説明しています 目次 1. 新規プロジェクト作成の準備... 2 2. 新規プロジェクトの作成... 3
NUCLEO-F401RE の TrueSTUDIO プロジェクト構築方法 V001 2014/09/24 Atollic TrueSTUDIO for ARM Lite を使用して NUCLEO-F401RE のプロジェクトを新規に作成する方法について説明します また ビルドとデバッグについても説明しています 目次 1. 新規プロジェクト作成の準備... 2 2. 新規プロジェクトの作成... 3
第 7.0 版 利用履歴管理 ETCPRO5 セットアップマニュアル (Ver5.002) カードリーダモデル変更 ( 表示付き 表示なし ) に伴い 改訂 Windows10 対応に伴い 改訂 参考ホームページサイト :
 カードリーダモデル変更 ( 表示付き 表示なし ) に伴い 改訂 Windows10 対応に伴い 改訂 参考ホームページサイト :") 第 7.0 版 利用履歴管理 ETCPRO5 セットアップマニュアル (Ver5.002) カードリーダモデル変更 ( 表示付き 表示なし ) に伴い 改訂 Windows10 対応に伴い 改訂 参考ホームページサイト : http://www.denso-wave.com/download/etcp/etcpro.html 2016 年 2 月 株式会社デンソーウェーブ 目次 1. はじめに......
第 7.0 版 利用履歴管理 ETCPRO5 セットアップマニュアル (Ver5.002) カードリーダモデル変更 ( 表示付き 表示なし ) に伴い 改訂 Windows10 対応に伴い 改訂 参考ホームページサイト : http://www.denso-wave.com/download/etcp/etcpro.html 2016 年 2 月 株式会社デンソーウェーブ 目次 1. はじめに......
AN1526 RX開発環境の使用方法(CS+、Renesas Flash Programmer)
") RX 開発環境の使用方法 (CS+ Renesas Flash Programmer) 第 2 版 2018 年 03 月 13 日 1. 概要 1.1 概要 本アプリケーションノートでは RX シリーズで使用する開発環境についての解説を行います 解説を行う開発環境は以下の 3 つです 1.RX ファミリ用 C/C++ コンパイラパッケージ 2.Renesas Flash Programmer(RFP)
RX 開発環境の使用方法 (CS+ Renesas Flash Programmer) 第 2 版 2018 年 03 月 13 日 1. 概要 1.1 概要 本アプリケーションノートでは RX シリーズで使用する開発環境についての解説を行います 解説を行う開発環境は以下の 3 つです 1.RX ファミリ用 C/C++ コンパイラパッケージ 2.Renesas Flash Programmer(RFP)
Studuino ライブラリ環境設定Windows編
 Studuino ライブラリセット 環境設定手順書 Windows 編 本資料は Studuino ライブラリのセットアップ手順書になります 以下の作業の前に 本資料を参考に Arduino 言語開発環境を設定して下さい Arduino 言語で加速度センサーを制御する Studuino プログラミング環境で Arduino 言語に変換したソースを編集する もくじ 1. Arduino IDE のインストール...
Studuino ライブラリセット 環境設定手順書 Windows 編 本資料は Studuino ライブラリのセットアップ手順書になります 以下の作業の前に 本資料を参考に Arduino 言語開発環境を設定して下さい Arduino 言語で加速度センサーを制御する Studuino プログラミング環境で Arduino 言語に変換したソースを編集する もくじ 1. Arduino IDE のインストール...
CS-DRC1操作説明書
 操作説明書 プログラミングソフトウェア Windows 用 CS-DRC1 Rev. 1.0 IC-DRC1 デジタル小電力コミュニティ無線機 ご注意 : 設定内容の変更についてプログラミングソフトウェア (CS-DRC1) を起動したときの初期設定と無線機 (IC-DRC1) の設定値は 異なる場合があります 無線機の設定を変更する場合は 下記の手順 (1~3) で操作することをおすすめします 1
操作説明書 プログラミングソフトウェア Windows 用 CS-DRC1 Rev. 1.0 IC-DRC1 デジタル小電力コミュニティ無線機 ご注意 : 設定内容の変更についてプログラミングソフトウェア (CS-DRC1) を起動したときの初期設定と無線機 (IC-DRC1) の設定値は 異なる場合があります 無線機の設定を変更する場合は 下記の手順 (1~3) で操作することをおすすめします 1
Maple 12 Windows版シングルユーザ/ネットワークライセンス
 Maple インストール アンインストール手順書スタンドアロン版 更新日 2017/09/27 はじめに この手順書は Windows 32bit Windows 64bit Mac OS Linux に対応しております 詳しい動作環境については こちらをご参照ください http://www.cybernet.co.jp/maple/product/system/maple.html この手順書の説明画面は
Maple インストール アンインストール手順書スタンドアロン版 更新日 2017/09/27 はじめに この手順書は Windows 32bit Windows 64bit Mac OS Linux に対応しております 詳しい動作環境については こちらをご参照ください http://www.cybernet.co.jp/maple/product/system/maple.html この手順書の説明画面は
Sharpdesk V3.5インストレーションガイド:プロダクトキー編
 Sharpdesk V3.5 インストレーションガイド : プロダクトキー編 Version 1.0 著作権 このソフトウェアの著作権はシャープ株式会社にあります 著作権法で許諾される場合を除き 無断で複製 転載 翻訳することはできません 登録商標 SHARP および Sharpdesk はシャープ株式会社の登録商標です Microsoft および Windows は Microsoft 社の登録商標です
Sharpdesk V3.5 インストレーションガイド : プロダクトキー編 Version 1.0 著作権 このソフトウェアの著作権はシャープ株式会社にあります 著作権法で許諾される場合を除き 無断で複製 転載 翻訳することはできません 登録商標 SHARP および Sharpdesk はシャープ株式会社の登録商標です Microsoft および Windows は Microsoft 社の登録商標です
PowerPoint プレゼンテーション
 第 6 次パッケージソフト初期導入手順書 輸出入 港湾関連情報処理センター株式会社 [2018.2.27] 目次 1. はじめに 2. デジタル証明書インストールツール ( 有効期限チェック機能版 ) の取得 3. パッケージソフトのダウンロード手順 4. パッケージソフトのインストール手順 5. パッケージソフトの設定方法 6. よくあるお問い合わせ 7. お問合せ先 2 3 4 8 12 15
第 6 次パッケージソフト初期導入手順書 輸出入 港湾関連情報処理センター株式会社 [2018.2.27] 目次 1. はじめに 2. デジタル証明書インストールツール ( 有効期限チェック機能版 ) の取得 3. パッケージソフトのダウンロード手順 4. パッケージソフトのインストール手順 5. パッケージソフトの設定方法 6. よくあるお問い合わせ 7. お問合せ先 2 3 4 8 12 15
NS-Draw Ver
 第 2 章インストール 本章では コンピュータへの NS-Draw のインストール方法について解説します 次の STEP1~3の順番で説明を進めていきます 2.1 インストール 2.2 ライセンスの確認 2.3 回路シミュレーションの実行までの確認 2.1 インストールインストーラのメニューに従って インストール作業を行ってください インストール先を c:\program Files にすると Windows
第 2 章インストール 本章では コンピュータへの NS-Draw のインストール方法について解説します 次の STEP1~3の順番で説明を進めていきます 2.1 インストール 2.2 ライセンスの確認 2.3 回路シミュレーションの実行までの確認 2.1 インストールインストーラのメニューに従って インストール作業を行ってください インストール先を c:\program Files にすると Windows
01_08 インストールガイド
 STAFF EXPRESS アンインストール / インストールについて 概要 Staff Express インストーラはスタッフエクスプレスの動作上必要なファイルをインストールするためのプログラムです 注意 本プログラムを実行する前には必ず他のプログラムを終了させてください インストールインストール アンインストール アンインストール作業は 必ず管理者権限を持つユーザーで行ってください インストールプログラムについて
STAFF EXPRESS アンインストール / インストールについて 概要 Staff Express インストーラはスタッフエクスプレスの動作上必要なファイルをインストールするためのプログラムです 注意 本プログラムを実行する前には必ず他のプログラムを終了させてください インストールインストール アンインストール アンインストール作業は 必ず管理者権限を持つユーザーで行ってください インストールプログラムについて
Microsoft Word - BJ-Trans_JW_SXFInstallguide.doc
 ビージェーソフト株式会社 Mail: support@bj-soft.jp FAX: 03-3444-7123 本書は BJ 変換 JW SXF ( 以下 本ソフト ) の概要とインストール ( アクティベート ) について説明するものです 本ソフトは JWW 形式と DWG 形式 ( または DXF 形式 ) の相互変換を行うための BricsCAD 対応アドオンソフトです 本ソフトのインストール前に
ビージェーソフト株式会社 Mail: support@bj-soft.jp FAX: 03-3444-7123 本書は BJ 変換 JW SXF ( 以下 本ソフト ) の概要とインストール ( アクティベート ) について説明するものです 本ソフトは JWW 形式と DWG 形式 ( または DXF 形式 ) の相互変換を行うための BricsCAD 対応アドオンソフトです 本ソフトのインストール前に
CoIDE 用 F4D_VCP の説明 V /07/05 USB の VCP( 仮想 COM ポート ) による非同期シリアル通信を行うプログラムです Free の開発ツール CoIDE で作成した STM32F4 Discovery 用のプロジェクトです プログラムの開始番地は 0x
 による非同期シリアル通信を行うプログラムです Free の開発ツール CoIDE で作成した STM32F4 Discovery 用のプロジェクトです プログラムの開始番地は 0x") CoIDE 用 F4D_VCP の説明 V001 2014/07/05 USB の VCP( 仮想 COM ポート ) による非同期シリアル通信を行うプログラムです Free の開発ツール CoIDE で作成した STM32F4 Discovery 用のプロジェクトです プログラムの開始番地は 0x08000000 です デバッグが可能です 目次 1. USB の VCP( 仮想 COM ポート )
CoIDE 用 F4D_VCP の説明 V001 2014/07/05 USB の VCP( 仮想 COM ポート ) による非同期シリアル通信を行うプログラムです Free の開発ツール CoIDE で作成した STM32F4 Discovery 用のプロジェクトです プログラムの開始番地は 0x08000000 です デバッグが可能です 目次 1. USB の VCP( 仮想 COM ポート )
「Microsoft
 Microsoft.NET Framework インストール手順 1. はじめに以下のバージョンより @dream をご利用される際には Microsoft.NET Framework 2.0 以降のバージョンと Microsoft.NET Framework 4 が必要となります @dream-progre 売買版 Ver.4 以降 @dream-progre 賃貸版 Ver.4 以降オペレーションシステムが
Microsoft.NET Framework インストール手順 1. はじめに以下のバージョンより @dream をご利用される際には Microsoft.NET Framework 2.0 以降のバージョンと Microsoft.NET Framework 4 が必要となります @dream-progre 売買版 Ver.4 以降 @dream-progre 賃貸版 Ver.4 以降オペレーションシステムが
図 2 インストールウイザード画面 図 3 のような画面が表示されるので 使用許諾契約の全項目に同意します (A) にチェックを入れ て 次へ (N)> をクリックしてください 図 3 使用許諾契約の画面 図 4 のような画面が表示されるので 次へ (N) をクリックしてください インストール先を変
 にチェックを入れ て 次へ (N)> をクリックしてください 図 3 使用許諾契約の画面 図 4 のような画面が表示されるので 次へ (N) をクリックしてください インストール先を変") ProselfDisk のインストールから操作方法まで (Windows 版 ) ProselfDisk は ファイル共有システム ( 以下 Proself という ) の利用者フォルダをパソコンの仮想ドラ イブとして割り付け ローカルディスクと同じようにファイル操作を行うことができるクライアント ソフトです この ProselfDisk は 次の Proself を仮想ドライブとしてアクセスできます
ProselfDisk のインストールから操作方法まで (Windows 版 ) ProselfDisk は ファイル共有システム ( 以下 Proself という ) の利用者フォルダをパソコンの仮想ドラ イブとして割り付け ローカルディスクと同じようにファイル操作を行うことができるクライアント ソフトです この ProselfDisk は 次の Proself を仮想ドライブとしてアクセスできます
Microsoft Word - tutorial3-dbreverse.docx
 株式会社チェンジビジョン使用バージョン :astah* 6.0, 6.1 [ ] サンプル サポート対象外 目次 DB リバースを使ってみよう ( サンプル サポート対象外 ) 2 ご利用の前に 2 予備知識 2 データベースの環境設定をしてみよう 2 astah* データベースリバースコンポーネントを使用してみよう 5 作成した asta ファイルを astah* professional で開いてみよう
株式会社チェンジビジョン使用バージョン :astah* 6.0, 6.1 [ ] サンプル サポート対象外 目次 DB リバースを使ってみよう ( サンプル サポート対象外 ) 2 ご利用の前に 2 予備知識 2 データベースの環境設定をしてみよう 2 astah* データベースリバースコンポーネントを使用してみよう 5 作成した asta ファイルを astah* professional で開いてみよう
SimLabプラグインは各機能を15回分評価版として試用できます
 SimLab Plugins for SketchUp 評価版インストールおよびアクティベート方法 注意事項 各 SimLab プラグインはその機能 ( インポートまたはエクスポート ) を 30 回分評価用として試用できます 評価版をお使い頂くには 評価用ライセンスでのアクティベートが必要です 評価用ライセンスファイルの取得を行い 手動でアクティベートする必要があります インターネット接続環境 有効なメールアドレスの保持が必須です
SimLab Plugins for SketchUp 評価版インストールおよびアクティベート方法 注意事項 各 SimLab プラグインはその機能 ( インポートまたはエクスポート ) を 30 回分評価用として試用できます 評価版をお使い頂くには 評価用ライセンスでのアクティベートが必要です 評価用ライセンスファイルの取得を行い 手動でアクティベートする必要があります インターネット接続環境 有効なメールアドレスの保持が必須です
【バーコード作成】マニュアル 第1版
 日本 JC 入場管理システム 2012 バーコードバーコード作成作成マニュアルマニュアル 第 1 版 平成 23 年 1 月 6 日 本書概要本書は JC 入場管理システムにおける バーコード作成機能 操作方法について 説明したものです 改版履歴 更新日版数修正概要 2011/1/6 初版リリース 2 /14 目次 1. バーコードの作成 ( 簡略版 )... 4 2. バーコードの作成 ( ヒサゴ工房工房を利用利用したした場合
日本 JC 入場管理システム 2012 バーコードバーコード作成作成マニュアルマニュアル 第 1 版 平成 23 年 1 月 6 日 本書概要本書は JC 入場管理システムにおける バーコード作成機能 操作方法について 説明したものです 改版履歴 更新日版数修正概要 2011/1/6 初版リリース 2 /14 目次 1. バーコードの作成 ( 簡略版 )... 4 2. バーコードの作成 ( ヒサゴ工房工房を利用利用したした場合
Microsoft PowerPoint - Borland C++ Compilerの使用方法(v1.1).ppt [互換モード]
![Microsoft PowerPoint - Borland C++ Compilerの使用方法(v1.1).ppt [互換モード]](/thumbs/92/109692094.jpg "Microsoft PowerPoint - Borland C++ Compilerの使用方法(v1.1).ppt [互換モード]") Borland C++ Compiler の 使用方法 解説書 (v1.1) 1 準備 (1/2) 1. スタートメニューから コントロールパネル を開いて その中に デスクトップのカスタマイズ フォルダーオプション があるので開く エクスプローラー内の ツール フォルダーオプション などからも開ける 2. 表示 タブにある 登録されている拡張子は表示しない のチェックを外して OKを押す これでファイルの拡張子が表示されるようになった
Borland C++ Compiler の 使用方法 解説書 (v1.1) 1 準備 (1/2) 1. スタートメニューから コントロールパネル を開いて その中に デスクトップのカスタマイズ フォルダーオプション があるので開く エクスプローラー内の ツール フォルダーオプション などからも開ける 2. 表示 タブにある 登録されている拡張子は表示しない のチェックを外して OKを押す これでファイルの拡張子が表示されるようになった
改訂履歴 改訂日付 改訂内容 2014/11/01 初版発行 2017/01/16 Studuino web サイトリニューアルに伴う改訂 2017/04/14 Studuino web サイトリニューアルに伴うアクセス方法の説明変更 2018/01/22 Mac 版インストール手順変更に伴う改訂
 Arduino IDE 環境 設定手順書 Windows/Mac 用 2014/11/01 作成 2018/01/22 改訂 改訂履歴 改訂日付 改訂内容 2014/11/01 初版発行 2017/01/16 Studuino web サイトリニューアルに伴う改訂 2017/04/14 Studuino web サイトリニューアルに伴うアクセス方法の説明変更 2018/01/22 Mac 版インストール手順変更に伴う改訂
Arduino IDE 環境 設定手順書 Windows/Mac 用 2014/11/01 作成 2018/01/22 改訂 改訂履歴 改訂日付 改訂内容 2014/11/01 初版発行 2017/01/16 Studuino web サイトリニューアルに伴う改訂 2017/04/14 Studuino web サイトリニューアルに伴うアクセス方法の説明変更 2018/01/22 Mac 版インストール手順変更に伴う改訂
取引上手くん 9 のインストール時にエラーが表示される際の対処法 ~Windows8 Windows8.1~ 本ドキュメントは Windows8/8.1 のパソコンにおいて 取引上手くん 9 のインストールが正常にできなかった場合の対処 法をまとめたものです なお インストールの手順そのものにつきま
 取引上手くん 9 のインストール時にエラーが表示される際の対処法 ~Windows8 Windows8.1~ 本ドキュメントは Windows8/8.1 のパソコンにおいて 取引上手くん 9 のインストールが正常にできなかった場合の対処 法をまとめたものです なお インストールの手順そのものにつきましては 別ドキュメント ( 取引上手くん 9 のインストール説明書 または about.pdf ) をご覧ください
取引上手くん 9 のインストール時にエラーが表示される際の対処法 ~Windows8 Windows8.1~ 本ドキュメントは Windows8/8.1 のパソコンにおいて 取引上手くん 9 のインストールが正常にできなかった場合の対処 法をまとめたものです なお インストールの手順そのものにつきましては 別ドキュメント ( 取引上手くん 9 のインストール説明書 または about.pdf ) をご覧ください
Maple 18 ネットワーク版インストール手順
 インストール アンインストール手順書 更新日 製品 バージョン OS 利用形態 2014/04/21 Maple 18 Windows 64-bit ネットワーク ( クライアント ) SECTION 1: Maple 18 のインストール Page 1 Page 11 SECTION 2: コンパイラの設定 Page 12 Page 14 SECTION 3: コンパイラの設定の確認 Page 15
インストール アンインストール手順書 更新日 製品 バージョン OS 利用形態 2014/04/21 Maple 18 Windows 64-bit ネットワーク ( クライアント ) SECTION 1: Maple 18 のインストール Page 1 Page 11 SECTION 2: コンパイラの設定 Page 12 Page 14 SECTION 3: コンパイラの設定の確認 Page 15
SimLab Plugins for SketchUp 評価版インストールおよびアクティベート方法 注意事項 評価版をお使い頂くには 評価用ライセンスでのアクティベートが必要です 評価用ライセンスファイルの取得を行い 手動でアクティベートする必要があります 各 SimLab プラグインは 評価用とし
 SimLab Plugins for SketchUp 評価版インストールおよびアクティベート方法 注意事項 評価版をお使い頂くには 評価用ライセンスでのアクティベートが必要です 評価用ライセンスファイルの取得を行い 手動でアクティベートする必要があります 各 SimLab プラグインは 評価用として評価用ライセンス認証をしてから 2 週間の内に機能 ( インポートまたはエクスポート ) を 30
SimLab Plugins for SketchUp 評価版インストールおよびアクティベート方法 注意事項 評価版をお使い頂くには 評価用ライセンスでのアクティベートが必要です 評価用ライセンスファイルの取得を行い 手動でアクティベートする必要があります 各 SimLab プラグインは 評価用として評価用ライセンス認証をしてから 2 週間の内に機能 ( インポートまたはエクスポート ) を 30
FlashAir ソフトウェア更新ツール Version 東芝メモリ株式会社 Copyright 2017 Toshiba Memory Corporation, All Rights Reserved. 対応 OS: 最新の対応 OS は Web サイトをご参照ください 概要本ソフ
 FlashAir W-03 ソフトウェア更新ツール Ver.3.00.02 ユーザーズマニュアル 1 FlashAir ソフトウェア更新ツール Version 3.00.02 東芝メモリ株式会社 Copyright 2017 Toshiba Memory Corporation, All Rights Reserved. 対応 OS: 最新の対応 OS は Web サイトをご参照ください 概要本ソフトウェア更新ツールは
FlashAir W-03 ソフトウェア更新ツール Ver.3.00.02 ユーザーズマニュアル 1 FlashAir ソフトウェア更新ツール Version 3.00.02 東芝メモリ株式会社 Copyright 2017 Toshiba Memory Corporation, All Rights Reserved. 対応 OS: 最新の対応 OS は Web サイトをご参照ください 概要本ソフトウェア更新ツールは
Microsoft PowerPoint - kougi2.ppt
 C プログラミング演習 第 2 回 Microsoft Visual Studio.NET を使ってみよう 説明 例題 1. プログラム実行の体験 コンピュータを役に立つ道具として実感する 次ページのプログラムを使って, Microsoft Visual Studio.NETでの C++ ソースファイル編集, ビルド, テスト実行の一連の過程を体験する 例題 1 のプログラムの機能 計算の繰り返し
C プログラミング演習 第 2 回 Microsoft Visual Studio.NET を使ってみよう 説明 例題 1. プログラム実行の体験 コンピュータを役に立つ道具として実感する 次ページのプログラムを使って, Microsoft Visual Studio.NETでの C++ ソースファイル編集, ビルド, テスト実行の一連の過程を体験する 例題 1 のプログラムの機能 計算の繰り返し
1 〇〇クリッカーマニュアル 目次 クリックすると移動します 目次準備 1. VC または VS2013 をインストール 2. DX ライブラリのダウンロードと解凍 3. なんとかクリッカー プロジェクトのダウンロードと解凍 4. なんとかクリッカー プロジェクトを開く編集編集する部分画
 1 〇〇クリッカーマニュアル 目次 クリックすると移動します 目次準備 1. VC++2010 または VS2013 をインストール 2. DX ライブラリのダウンロードと解凍 3. なんとかクリッカー プロジェクトのダウンロードと解凍 4. なんとかクリッカー プロジェクトを開く編集編集する部分画像ファイルウィンドウのタイトルスコアの単位その他 準備 Internet Explorer を例に説明しますので
1 〇〇クリッカーマニュアル 目次 クリックすると移動します 目次準備 1. VC++2010 または VS2013 をインストール 2. DX ライブラリのダウンロードと解凍 3. なんとかクリッカー プロジェクトのダウンロードと解凍 4. なんとかクリッカー プロジェクトを開く編集編集する部分画像ファイルウィンドウのタイトルスコアの単位その他 準備 Internet Explorer を例に説明しますので
Studuinoソフトウェアのインストール
 Studuino プログラミング環境 Studuino ソフトウェアのインストール 2014/11/01 作成 2018/03/30 改訂 改訂履歴 改訂日付 改訂内容 2014/11/01 初版発行 2017/01/16 Studuino web サイトリニューアルに伴う改訂 2017/04/14 Studuino web サイトリニューアルに伴う改訂 2018/01/22 ソフトウェア OS のバージョンアップに伴う改訂
Studuino プログラミング環境 Studuino ソフトウェアのインストール 2014/11/01 作成 2018/03/30 改訂 改訂履歴 改訂日付 改訂内容 2014/11/01 初版発行 2017/01/16 Studuino web サイトリニューアルに伴う改訂 2017/04/14 Studuino web サイトリニューアルに伴う改訂 2018/01/22 ソフトウェア OS のバージョンアップに伴う改訂
VS-BT プログラマ取扱説明書 ( ) VS-BT プログラマは Bluetooth(R) プロファイルの SPP に対応したシリアル通信モジュール VS-BT001 の通信設定が可能な製品です Web より RFCOMM により外部 PC の仮想 COM ポートとして通信が出来
 VS-BT プログラマは Bluetooth(R) プロファイルの SPP に対応したシリアル通信モジュール VS-BT001 の通信設定が可能な製品です Web より RFCOMM により外部 PC の仮想 COM ポートとして通信が出来") VS-BT プログラマ取扱説明書 (2011.10.14) VS-BT プログラマは Bluetooth(R) プロファイルの SPP に対応したシリアル通信モジュール VS-BT001 の通信設定が可能な製品です Web より RFCOMM により外部 PC の仮想 COM ポートとして通信が出来ます 本取扱説明書 また弊社 Web 上 (http://www.vstone.co.jp/products/vs_bt001/)
VS-BT プログラマ取扱説明書 (2011.10.14) VS-BT プログラマは Bluetooth(R) プロファイルの SPP に対応したシリアル通信モジュール VS-BT001 の通信設定が可能な製品です Web より RFCOMM により外部 PC の仮想 COM ポートとして通信が出来ます 本取扱説明書 また弊社 Web 上 (http://www.vstone.co.jp/products/vs_bt001/)
目次 第 1 章はじめに 取扱いについて 記載内容について... 6 第 2 章基本操作 Word Online を開く 文書 ( ドキュメント ) を作成する 文書 ( ドキュメント ) を開く.
 を作成する 文書 ( ドキュメント ) を開く.") Office 365 Word Online - 利用マニュアル - 発行日 2015/10/01 1 目次 第 1 章はじめに... 5 1.1. 取扱いについて... 6 1.2. 記載内容について... 6 第 2 章基本操作... 7 2.1. Word Online を開く... 8 2.2. 文書 ( ドキュメント ) を作成する... 10 2.3. 文書 ( ドキュメント ) を開く...
Office 365 Word Online - 利用マニュアル - 発行日 2015/10/01 1 目次 第 1 章はじめに... 5 1.1. 取扱いについて... 6 1.2. 記載内容について... 6 第 2 章基本操作... 7 2.1. Word Online を開く... 8 2.2. 文書 ( ドキュメント ) を作成する... 10 2.3. 文書 ( ドキュメント ) を開く...
Speed突破!シリーズマニュアル
 Speed 突破! 過去問題集シリーズ インストールマニュアル Speed 突破! 過去問題集シリーズのインストール方法をご案内します ご利用の OS やインターネット接続環境によりインストールする方法が異なります 該当のページをご参照ください インターネットに接続できる方 Windows 8 / 8.1 / 10 をご利用の方 P2 へ Windows 7 をご利用の方 P3 へ インターネットに接続できない方
Speed 突破! 過去問題集シリーズ インストールマニュアル Speed 突破! 過去問題集シリーズのインストール方法をご案内します ご利用の OS やインターネット接続環境によりインストールする方法が異なります 該当のページをご参照ください インターネットに接続できる方 Windows 8 / 8.1 / 10 をご利用の方 P2 へ Windows 7 をご利用の方 P3 へ インターネットに接続できない方
PowerPoint プレゼンテーション
 第 6 次パッケージソフト初期導入手順書 輸出入 港湾関連情報処理センター株式会社 [2018.9.14] 目次 1. はじめに 2. デジタル証明書インストールツール ( 有効期限チェック機能版 ) の取得 3. パッケージソフトのダウンロード手順 4. パッケージソフトのインストール手順 5. パッケージソフトの設定方法 6. お問合せ先 2 3 4 8 12 15 1 1. はじめに 本手順書は
第 6 次パッケージソフト初期導入手順書 輸出入 港湾関連情報処理センター株式会社 [2018.9.14] 目次 1. はじめに 2. デジタル証明書インストールツール ( 有効期限チェック機能版 ) の取得 3. パッケージソフトのダウンロード手順 4. パッケージソフトのインストール手順 5. パッケージソフトの設定方法 6. お問合せ先 2 3 4 8 12 15 1 1. はじめに 本手順書は
MAPインストーラー起動時のエラーメッセージへの対処方法
 MAP インストーラー起動時の エラーメッセージへの対処方法 2017 年 11 月第 1.1 版 株式会社デンソーテン 1 / 19 ページ MAP インストーラーを起動した際に表示されたエラーメッセージへの対処方法を解説します 下記より エラーメッセージを選択し それぞれの対処方法をご確認ください エラーメッセージ [ 1 ] メッセージ文 : 現在 Windows にログインしているユーザに
MAP インストーラー起動時の エラーメッセージへの対処方法 2017 年 11 月第 1.1 版 株式会社デンソーテン 1 / 19 ページ MAP インストーラーを起動した際に表示されたエラーメッセージへの対処方法を解説します 下記より エラーメッセージを選択し それぞれの対処方法をご確認ください エラーメッセージ [ 1 ] メッセージ文 : 現在 Windows にログインしているユーザに
SCPIサンプルプログラム クィックレファレンスガイド
 Quick Reference Guide SCPI サンプルプログラムクィックレファレンスガイド BERTWave MP2100B 目次 1 概要... 3 2 機器の接続と BERTWave のセットアップ... 3 3 コントローラ PC のセットアップ... 4 3.1. VISUAL C# EXPRESS/NET FRAMEWORK4.0 のインストール... 4 3.2. NI-VISA
Quick Reference Guide SCPI サンプルプログラムクィックレファレンスガイド BERTWave MP2100B 目次 1 概要... 3 2 機器の接続と BERTWave のセットアップ... 3 3 コントローラ PC のセットアップ... 4 3.1. VISUAL C# EXPRESS/NET FRAMEWORK4.0 のインストール... 4 3.2. NI-VISA
ReTRY HUB
 USB デバイス接続制御アダプター ReTRY HUB 型番 CT USB4HUB 設定ソフト Ver1.0 版 マニュアル http://www.centech.jp 2017/04/21 製品仕様 商品名 型番 ReTRY HUB CT USB4HUB サイズ 縦 75mm x 横 120mm x 高さ15mm( 突起部含まず ) 重量 約 230g( 本体のみ ) 消費電流 12V 30mA(
USB デバイス接続制御アダプター ReTRY HUB 型番 CT USB4HUB 設定ソフト Ver1.0 版 マニュアル http://www.centech.jp 2017/04/21 製品仕様 商品名 型番 ReTRY HUB CT USB4HUB サイズ 縦 75mm x 横 120mm x 高さ15mm( 突起部含まず ) 重量 約 230g( 本体のみ ) 消費電流 12V 30mA(
Windows ユーザー名に全角が含まれている場合は インストールできません のエラーが表示される場合の対処法 手順 1 管理者権限のある Windows ユーザーでログインした上で 以下の処理を行ってください 画面左下の 旗のマークを左クリックし 続いて表示される一覧から 設定 ( 左側に歯車のよ
 取引上手くん 9 のインストール時にエラーが表示される際の対処法 ~Windows10~ 本ドキュメントは Windows10 のパソコンにおいて 取引上手くん 9 のインストールが正常にできなかった場合の対処法 をまとめたものです なお インストールの手順そのものにつきましては 別ドキュメント ( 取引上手くん 9 のインストール説明書 または about.pdf ) をご覧ください インストーラー
取引上手くん 9 のインストール時にエラーが表示される際の対処法 ~Windows10~ 本ドキュメントは Windows10 のパソコンにおいて 取引上手くん 9 のインストールが正常にできなかった場合の対処法 をまとめたものです なお インストールの手順そのものにつきましては 別ドキュメント ( 取引上手くん 9 のインストール説明書 または about.pdf ) をご覧ください インストーラー
「Microsoft
 Microsoft.NET Framework インストール手順 1. はじめに以下のバージョンより @dream をご利用される際には Microsoft.NET Framework 2.0 以降のバージョンと Microsoft.NET Framework 4 が必要となります @dream-progre 売買版 Ver.4 以降 @dream-progre 賃貸版 Ver.4 以降オペレーションシステムが
Microsoft.NET Framework インストール手順 1. はじめに以下のバージョンより @dream をご利用される際には Microsoft.NET Framework 2.0 以降のバージョンと Microsoft.NET Framework 4 が必要となります @dream-progre 売買版 Ver.4 以降 @dream-progre 賃貸版 Ver.4 以降オペレーションシステムが
カルテダウンロード 操作マニュアル
 カルテ ZERO 操作マニュアル カルテダウンロード Ver1. 3 目 次 カルテダウンロード カルテダウンロード時の注意点 1. インストール 2. カルテダウンロード 2-1. 時間を設定し自動でダウンロードする方法 2-2. 手動でダウンロードする方法 3. 補足説明 P.3 P.4 P.9 P.14 P.18 P.20 カルテダウンロード時の注意点 カルテダウンロードは Windows 7
カルテ ZERO 操作マニュアル カルテダウンロード Ver1. 3 目 次 カルテダウンロード カルテダウンロード時の注意点 1. インストール 2. カルテダウンロード 2-1. 時間を設定し自動でダウンロードする方法 2-2. 手動でダウンロードする方法 3. 補足説明 P.3 P.4 P.9 P.14 P.18 P.20 カルテダウンロード時の注意点 カルテダウンロードは Windows 7
RTC_STM32F4 の説明 2013/10/20 STM32F4 内蔵 RTC の日付 時刻の設定および読み込みを行うプログラムです UART2( 非同期シリアル通信ポート 2) を使用して RTC の設定および読み込みを行います 無料の開発ツール Atollic TrueSTUDIO for
 を使用して RTC の設定および読み込みを行います 無料の開発ツール Atollic TrueSTUDIO for") RTC_STM32F4 の説明 2013/10/20 STM32F4 内蔵 RTC の日付 時刻の設定および読み込みを行うプログラムです UART2( 非同期シリアル通信ポート 2) を使用して RTC の設定および読み込みを行います 無料の開発ツール Atollic TrueSTUDIO for ARM Lite 4.2.0 で作成した STM32F4 Discovery 基板用のプロジェクトです
RTC_STM32F4 の説明 2013/10/20 STM32F4 内蔵 RTC の日付 時刻の設定および読み込みを行うプログラムです UART2( 非同期シリアル通信ポート 2) を使用して RTC の設定および読み込みを行います 無料の開発ツール Atollic TrueSTUDIO for ARM Lite 4.2.0 で作成した STM32F4 Discovery 基板用のプロジェクトです
LINE WORKS セットアップガイド目次 管理者画面へのログイン... 2 ドメイン所有権の確認... 3 操作手順... 3 組織の登録 / 編集 / 削除... 7 組織を個別に追加 ( マニュアル操作による登録 )... 7 組織を一括追加 (XLS ファイルによる一括登録 )... 9
... 7 組織を一括追加 (XLS ファイルによる一括登録 )... 9") VER.4.0.0 ライトプラン 1 LINE WORKS セットアップガイド目次 管理者画面へのログイン... 2 ドメイン所有権の確認... 3 操作手順... 3 組織の登録 / 編集 / 削除... 7 組織を個別に追加 ( マニュアル操作による登録 )... 7 組織を一括追加 (XLS ファイルによる一括登録 )... 9 組織の編集... 11 組織の移動... 12 組織の並べ替え...
VER.4.0.0 ライトプラン 1 LINE WORKS セットアップガイド目次 管理者画面へのログイン... 2 ドメイン所有権の確認... 3 操作手順... 3 組織の登録 / 編集 / 削除... 7 組織を個別に追加 ( マニュアル操作による登録 )... 7 組織を一括追加 (XLS ファイルによる一括登録 )... 9 組織の編集... 11 組織の移動... 12 組織の並べ替え...
新規インストールガイド Sophos Anti-Virus for Mac 9.7 学内利用版 本書は Download Station から Sophos Anti-Virus for Mac 9.7 の学内利用版 ( 以下 Sophos Anti-Virus とする ) をダウンロ ドし 新規イ
 をダウンロ ドし 新規イ") 新規インストールガイド Sophos Anti-Virus for Mac 9.7 学内利用版 本書は Download Station から Sophos Anti-Virus for Mac 9.7 の学内利用版 ( 以下 Sophos Anti-Virus とする ) をダウンロ ドし 新規インストールを行う手順を記載しています 本手順は学内ネットワークに接続した状態で行う必要があります 認証プログラム
新規インストールガイド Sophos Anti-Virus for Mac 9.7 学内利用版 本書は Download Station から Sophos Anti-Virus for Mac 9.7 の学内利用版 ( 以下 Sophos Anti-Virus とする ) をダウンロ ドし 新規インストールを行う手順を記載しています 本手順は学内ネットワークに接続した状態で行う必要があります 認証プログラム
IOWebDOC
 IOWebDOC Windows 版インストールマニュアル Page1 > 1 IOWEBDOC のインストール... 3 IOWEBDOC JAVA INTERFACE 環境設定例について... 3 1.1 インストールの前に... 4 1.2 インストール手順 (32bit 版 )... 4 1.3 インストール手順 (64bit 版 )... 8 Page2 1 IOWebDOC
IOWebDOC Windows 版インストールマニュアル Page1 > 1 IOWEBDOC のインストール... 3 IOWEBDOC JAVA INTERFACE 環境設定例について... 3 1.1 インストールの前に... 4 1.2 インストール手順 (32bit 版 )... 4 1.3 インストール手順 (64bit 版 )... 8 Page2 1 IOWebDOC
Studuinoプログラミング環境
 Studuino ロボット用ブルートゥースモジュール 取扱説明書 Ver1.0.0 2015/4/1 本資料は Studuino( スタディーノ ) プログラミング環境の取扱説明書になります Studuino プログラミング環境の変更に伴い 加筆 修正が加えられる可能性があります また 本取扱説明書は 下記の資料を参照します Studuino ソフトウェアのインストール URL:http://artec-kk.co.jp/studuino/docs/jp/Studuino_setup_software.pdf
Studuino ロボット用ブルートゥースモジュール 取扱説明書 Ver1.0.0 2015/4/1 本資料は Studuino( スタディーノ ) プログラミング環境の取扱説明書になります Studuino プログラミング環境の変更に伴い 加筆 修正が加えられる可能性があります また 本取扱説明書は 下記の資料を参照します Studuino ソフトウェアのインストール URL:http://artec-kk.co.jp/studuino/docs/jp/Studuino_setup_software.pdf
RW-4040 導入説明書 Windows 7 用 2017 年 7 月 シャープ株式会社
 Windows 7 用 2017 年 7 月 シャープ株式会社 はじめに 本書は IC カードリーダライタ RW-4040 を使用するため お使いのパソコンにデバイスドライバソフトウェア ( 以下 ドライバソフト と記載 ) をインストールする方法について記述しています このドライバソフトは Windows 7 SP1 で動作します 本書では ドライバソフトバージョン 2.27 のインストールについて説明します
Windows 7 用 2017 年 7 月 シャープ株式会社 はじめに 本書は IC カードリーダライタ RW-4040 を使用するため お使いのパソコンにデバイスドライバソフトウェア ( 以下 ドライバソフト と記載 ) をインストールする方法について記述しています このドライバソフトは Windows 7 SP1 で動作します 本書では ドライバソフトバージョン 2.27 のインストールについて説明します
(株) 殿
 殿") 医療機関様向け VPN Client/ 証明書導入手順書 2017 年 1 月 27 日 本資料は Windows7 IE11 を前提とした手順です 環境が異なる場合は 手順や適用する証明書 ソフトウェアが異なる場合があります - 目次 - 1. VPN クライアント導入までの流れ... 1 2. VPN クライアントソフトインストール手順... 3 3. ルート証明書インストール手順... 7 4.
医療機関様向け VPN Client/ 証明書導入手順書 2017 年 1 月 27 日 本資料は Windows7 IE11 を前提とした手順です 環境が異なる場合は 手順や適用する証明書 ソフトウェアが異なる場合があります - 目次 - 1. VPN クライアント導入までの流れ... 1 2. VPN クライアントソフトインストール手順... 3 3. ルート証明書インストール手順... 7 4.
スライド 1
 Multimeter Version 1. 3. 3 簡易取扱説明書 2009 年 9 月 9 日 この簡易説明書は Multimeter Version 1. 3. 3 ( 以後 IntuiLink) の簡易説明書です サポートしておりますマルチメータは 34401A, 34405A, 34410A, 34411A, L4411A, 34420A です IntuiLink Multimeter は
Multimeter Version 1. 3. 3 簡易取扱説明書 2009 年 9 月 9 日 この簡易説明書は Multimeter Version 1. 3. 3 ( 以後 IntuiLink) の簡易説明書です サポートしておりますマルチメータは 34401A, 34405A, 34410A, 34411A, L4411A, 34420A です IntuiLink Multimeter は
ご注意 1) 本書の内容 およびプログラムの一部 または全部を当社に無断で転載 複製することは禁止されております 2) 本書 およびプログラムに関して将来予告なしに変更することがあります 3) プログラムの機能向上のため 本書の内容と実際の画面 操作が異なってしまう可能性があります この場合には 実
 本書の内容 およびプログラムの一部 または全部を当社に無断で転載 複製することは禁止されております 2) 本書 およびプログラムに関して将来予告なしに変更することがあります 3) プログラムの機能向上のため 本書の内容と実際の画面 操作が異なってしまう可能性があります この場合には 実") 周辺機器ツールセットアップガイド ( 第 1.1 版 ) ご注意 1) 本書の内容 およびプログラムの一部 または全部を当社に無断で転載 複製することは禁止されております 2) 本書 およびプログラムに関して将来予告なしに変更することがあります 3) プログラムの機能向上のため 本書の内容と実際の画面 操作が異なってしまう可能性があります この場合には 実際の画面 操作を優先させていただきます 4)
周辺機器ツールセットアップガイド ( 第 1.1 版 ) ご注意 1) 本書の内容 およびプログラムの一部 または全部を当社に無断で転載 複製することは禁止されております 2) 本書 およびプログラムに関して将来予告なしに変更することがあります 3) プログラムの機能向上のため 本書の内容と実際の画面 操作が異なってしまう可能性があります この場合には 実際の画面 操作を優先させていただきます 4)
Application Note Application Note No. ESC-APN Document No.: ESC-APN adviceluna Linux デバッグ手順 (MIPS コア編 ) はじめに adviceluna Linux デバッグ手順 ( 以
 はじめに adviceluna Linux デバッグ手順 ( 以") No. ESC-APN-026-02 Document No.: ESC-APN-026-02 adviceluna Linux デバッグ手順 (MIPS コア編 ) はじめに adviceluna Linux デバッグ手順 ( 以下 本書 ) は adviceluna にて下記 Linux 環境をデバッグする手順を説明した文書です Application Shared Library Loadable
No. ESC-APN-026-02 Document No.: ESC-APN-026-02 adviceluna Linux デバッグ手順 (MIPS コア編 ) はじめに adviceluna Linux デバッグ手順 ( 以下 本書 ) は adviceluna にて下記 Linux 環境をデバッグする手順を説明した文書です Application Shared Library Loadable
■POP3の廃止について
 最終更新日 :2017.8.28 メール受信方式の変更手順書 (Outlook 版 ) 情報連携統括本部 POP3 の廃止について メール受信方式の一つである POP3 形式はセキュリティ上の問題があるため 2011 年度夏に行いました キャンパス情報基幹システム の更新の際にお知らせいたしました通り 2017 年度夏の更新を持ちまして廃止いたします これにより 更新後は POP3 によるメールの受信はできなくなり
最終更新日 :2017.8.28 メール受信方式の変更手順書 (Outlook 版 ) 情報連携統括本部 POP3 の廃止について メール受信方式の一つである POP3 形式はセキュリティ上の問題があるため 2011 年度夏に行いました キャンパス情報基幹システム の更新の際にお知らせいたしました通り 2017 年度夏の更新を持ちまして廃止いたします これにより 更新後は POP3 によるメールの受信はできなくなり
目次 1. PDF 変換サービスの設定について )Internet Explorer をご利用の場合 )Microsoft Edge をご利用の場合 )Google Chrome をご利用の場合 )Mozilla Firefox をご利
Internet Explorer をご利用の場合 )Microsoft Edge をご利用の場合 )Google Chrome をご利用の場合 )Mozilla Firefox をご利") PDF 変換サービス セキュリティ設定マニュアル 第 21 版 2018 年 2 月 目次 1. PDF 変換サービスの設定について...2 1-1)Internet Explorer をご利用の場合...2 1-2)Microsoft Edge をご利用の場合... 14 1-3)Google Chrome をご利用の場合... 18 1-4)Mozilla Firefox をご利用の場合...
PDF 変換サービス セキュリティ設定マニュアル 第 21 版 2018 年 2 月 目次 1. PDF 変換サービスの設定について...2 1-1)Internet Explorer をご利用の場合...2 1-2)Microsoft Edge をご利用の場合... 14 1-3)Google Chrome をご利用の場合... 18 1-4)Mozilla Firefox をご利用の場合...
スライド 1
 ミライシード設定手順書 H W < はじめにご確認ください > 本手順書に従ってインストール作業が完了した後は 学校管理者でログインし学校設定やユーザ情報の設定 文字認識ツールの起動確認が必要となります 詳細は P20 をご確認ください 設定手順書 もくじ Windows 8/8.1/10 の場合 1. 手書きツールのインストール 3 2. ショートカットの作成 ( 先生 / 子ども ) 8 ipad
ミライシード設定手順書 H W < はじめにご確認ください > 本手順書に従ってインストール作業が完了した後は 学校管理者でログインし学校設定やユーザ情報の設定 文字認識ツールの起動確認が必要となります 詳細は P20 をご確認ください 設定手順書 もくじ Windows 8/8.1/10 の場合 1. 手書きツールのインストール 3 2. ショートカットの作成 ( 先生 / 子ども ) 8 ipad
シヤチハタ デジタルネーム 操作マニュアル
 操作マニュアル 目次 1 はじめに... 2 2 動作環境... 2 3 インストール... 3 4 印鑑を登録する... 6 5 登録した印鑑を削除する... 9 6 印鑑を捺印する... 10 6.1 Word 文書へ捺印する... 10 6.2 Excel 文書へ捺印する... 12 7 コピー & ペーストで捺印する... 13 8 印鑑の色を変更する... 15 9 印鑑の順番を入れ替える...
操作マニュアル 目次 1 はじめに... 2 2 動作環境... 2 3 インストール... 3 4 印鑑を登録する... 6 5 登録した印鑑を削除する... 9 6 印鑑を捺印する... 10 6.1 Word 文書へ捺印する... 10 6.2 Excel 文書へ捺印する... 12 7 コピー & ペーストで捺印する... 13 8 印鑑の色を変更する... 15 9 印鑑の順番を入れ替える...
Microsoft Word JA_revH.doc
 X-RiteColor Master Web バージョン このドキュメントでは X-RiteColor Master Web バージョンのインストール手順を説明します 必ずここで紹介される手順に従って設定を実行してください 設定を開始する前に Windows 2003 Server がインストールされており サーバーの構成ウィザード サーバの役割 で下図のように設定されていることを確認してください
X-RiteColor Master Web バージョン このドキュメントでは X-RiteColor Master Web バージョンのインストール手順を説明します 必ずここで紹介される手順に従って設定を実行してください 設定を開始する前に Windows 2003 Server がインストールされており サーバーの構成ウィザード サーバの役割 で下図のように設定されていることを確認してください
ゲームプログラミング講習 第0章 導入
 ゲームプログラミング講習 第 0 章 導入 ゲーム制作に必要なものをインストールします ゲームプログラミング講習第 0 章導入 1 ゲーム制作に必要なもの Microsoft Visual Studio DXライブラリ プロジェクトテンプレート C 言語の知識 ゲームプログラミング講習第 0 章導入 2 Microsoft Visual Studio とは C 言語でプログラミングして Windows
ゲームプログラミング講習 第 0 章 導入 ゲーム制作に必要なものをインストールします ゲームプログラミング講習第 0 章導入 1 ゲーム制作に必要なもの Microsoft Visual Studio DXライブラリ プロジェクトテンプレート C 言語の知識 ゲームプログラミング講習第 0 章導入 2 Microsoft Visual Studio とは C 言語でプログラミングして Windows
1. Office365 ProPlus アプリケーションから利用する方法 (Windows / Mac) この方法では Office365 ProPlus アプリケーションで ファイルの保管先として OneDrive を指定することができます Office365 ProPlus アプリケーションで
 この方法では Office365 ProPlus アプリケーションで ファイルの保管先として OneDrive を指定することができます Office365 ProPlus アプリケーションで") Microsoft OneDrive 利用マニュアル お使いの PC で OneDrive を利用するには 下記の方法があります 本マニュアルでは それぞれの方法で OneDrive を利用する手順 ( サインイン サインアウトの手順 ) を説明します 1. Office365 ProPlus アプリケーションから利用する方法 (Windows / Mac) Office アプリケーションは ファイルの保管先として
Microsoft OneDrive 利用マニュアル お使いの PC で OneDrive を利用するには 下記の方法があります 本マニュアルでは それぞれの方法で OneDrive を利用する手順 ( サインイン サインアウトの手順 ) を説明します 1. Office365 ProPlus アプリケーションから利用する方法 (Windows / Mac) Office アプリケーションは ファイルの保管先として
! 2. CCS のインストール CCS をインストールする前に, パソコンのアカウントは, 必ず 管理者 にしてください ログイン中のアカウントの個人用フォルダ (C:\Users\ ログイン名 ) に全角や半角カタカナなどが含まれているとインストールが完了しません 新規で半角英数字名のローカルア
 に全角や半角カタカナなどが含まれているとインストールが完了しません 新規で半角英数字名のローカルア") 学習内容 パソコンに ARM の開発環境を構築します インストールは以下の手順で行います 1. CCS のダウンロード 2. CCS のインストール 3. TivaWare のダウンロード 4. TivaWare のインストール 5. USB ドライバのインストール 1. CCS のダウンロード 下記 URL をウェブブラウザで開き,CCS のインストーラをダウンロードしてください http://processors.wiki.ti.com/index.php/download_ccs
学習内容 パソコンに ARM の開発環境を構築します インストールは以下の手順で行います 1. CCS のダウンロード 2. CCS のインストール 3. TivaWare のダウンロード 4. TivaWare のインストール 5. USB ドライバのインストール 1. CCS のダウンロード 下記 URL をウェブブラウザで開き,CCS のインストーラをダウンロードしてください http://processors.wiki.ti.com/index.php/download_ccs
インテル® Parallel Studio XE 2019 Composer Edition for Fortran Windows 日本語版 : インストール・ガイド
 インテル Parallel Studio XE 2019 Composer Edition for Fortran Windows 日本語版インストール ガイド エクセルソフト株式会社 Version 2.1.0-20190405 目次 1. はじめに.................................................................................
インテル Parallel Studio XE 2019 Composer Edition for Fortran Windows 日本語版インストール ガイド エクセルソフト株式会社 Version 2.1.0-20190405 目次 1. はじめに.................................................................................
RICOH Device Manager Pro バックアップ/バージョンアップ作業手順書
 RICOH Device Manager Pro バックアップ / バージョンアップ作業手順書 1. 概要 本手順書は DeviceManagerPro 機器アドレス帳データ確認用ツール操作手順書.pdf での作業を実施する前に実施する RICOH Device Manager Pro( 以降 DMPro と表現 ) のバージョンアップとそれに伴うバックアップの作業手順を記載した手順書です page
RICOH Device Manager Pro バックアップ / バージョンアップ作業手順書 1. 概要 本手順書は DeviceManagerPro 機器アドレス帳データ確認用ツール操作手順書.pdf での作業を実施する前に実施する RICOH Device Manager Pro( 以降 DMPro と表現 ) のバージョンアップとそれに伴うバックアップの作業手順を記載した手順書です page
Windows への opensource COBOL 環境の構築手順 0. 前提条件当手順は Windows へ opensource COBOL 環境を構築する手順である 手順確認時の OS と時期は以下の通りである OS Windows 8.1(64bit) 時期 2018/09 1. 構築手
 時期 2018/09 1. 構築手") 0. 前提条件当手順は Windows へ opensource COBOL 環境を構築する手順である 手順確認時の OS と時期は以下の通りである OS Windows 8.1(64bit) 時期 2018/09 1. 構築手順 1.1 Visual Stdio のインストール以下のHPからVisual Studio Community 2017 をダウンロードする https://www.microsoft.com/ja-jp/dev/campaign/free-edition.aspx
0. 前提条件当手順は Windows へ opensource COBOL 環境を構築する手順である 手順確認時の OS と時期は以下の通りである OS Windows 8.1(64bit) 時期 2018/09 1. 構築手順 1.1 Visual Stdio のインストール以下のHPからVisual Studio Community 2017 をダウンロードする https://www.microsoft.com/ja-jp/dev/campaign/free-edition.aspx
<31305F F C815B82C582CC91808DEC8EE88F878F A5F56322E342E786C7378>
 USB キーでの操作手順書 STR 目次 目次 -------------------------------------------------------------------------------------- 1. パッケージをご利用いただくまでの手順 1 (1) ユーザ専用ページから 該当パッケージをダウンロードする 手順 2 (2) 該当パッケージをインストールする 手順 5 (3)
USB キーでの操作手順書 STR 目次 目次 -------------------------------------------------------------------------------------- 1. パッケージをご利用いただくまでの手順 1 (1) ユーザ専用ページから 該当パッケージをダウンロードする 手順 2 (2) 該当パッケージをインストールする 手順 5 (3)
成功しました と表示されればライセンス認証の更新は完了です プロダクトキーを入力した後にテキストエディタが開き エラーメッセージが表示された場合 WEB ブラウザを起動して指定されたアドレスにアクセスしアカウントでログインします 画面に表示された ライセンスファイル を全てコピーし Originのダ
 Origin ライセンスファイル版 ( マルチシート含む ) の更新 このインストールガイドはシリアル番号の下 7 桁が 76xxxxx 71xxxxx 70xxxxx のライセンスの更新方法についてご案内しています Origin 7.5~9.1, 2015(9.2), 2016(9.3) のバージョンには対応しておりません 1. 納品物についてこの度は Origin をお買い上げいただきまして誠にありがとうございます
Origin ライセンスファイル版 ( マルチシート含む ) の更新 このインストールガイドはシリアル番号の下 7 桁が 76xxxxx 71xxxxx 70xxxxx のライセンスの更新方法についてご案内しています Origin 7.5~9.1, 2015(9.2), 2016(9.3) のバージョンには対応しておりません 1. 納品物についてこの度は Origin をお買い上げいただきまして誠にありがとうございます
Microsoft Word - XOOPS インストールマニュアルv12.doc
 XOOPS インストールマニュアル ( 第 1 版 ) 目次 1 はじめに 1 2 XOOPS のダウンロード 2 3 パッケージの解凍 4 4 FFFTP によるファイルアップロード手順 5 5 ファイルアップロード後の作業 11 6 XOOPS のインストール 15 7 インストール後の作業 22 8 XOOPS ログイン後の作業 24 愛媛県総合教育センター情報教育研究室 Ver.1.0.2
XOOPS インストールマニュアル ( 第 1 版 ) 目次 1 はじめに 1 2 XOOPS のダウンロード 2 3 パッケージの解凍 4 4 FFFTP によるファイルアップロード手順 5 5 ファイルアップロード後の作業 11 6 XOOPS のインストール 15 7 インストール後の作業 22 8 XOOPS ログイン後の作業 24 愛媛県総合教育センター情報教育研究室 Ver.1.0.2
PowerPoint プレゼンテーション
 バージョンアップ手順 (Ver10.3.0 用 ) バージョンアップを開始する前に ( 重要事項 ) 重要 セットアップ前に必ず WindowsUpdate を実施して PC を最新の状態に保ってください 総合コンピュータシステム (SCOPS) では PC 毎の WindowsOS に設定されている元号及び日時を参照しています Microsoft では 2019 年 5 月 1 日の和暦改元に伴い
バージョンアップ手順 (Ver10.3.0 用 ) バージョンアップを開始する前に ( 重要事項 ) 重要 セットアップ前に必ず WindowsUpdate を実施して PC を最新の状態に保ってください 総合コンピュータシステム (SCOPS) では PC 毎の WindowsOS に設定されている元号及び日時を参照しています Microsoft では 2019 年 5 月 1 日の和暦改元に伴い
Microsoft Word - Mac版 Eclipseの導入と設定.docx
 Mac OS X 版 Eclipse の導入と プログラムの作成方法 このドキュメントは下記のシステムで検証しました -1- Copyright (C) Takashi Kawaba 2012 目次 A. Eclipse を日本語化する 1. ダウンロードと解凍 3 2. features フォルダ内のファイルをコピーする 3 3. plugins 内のファイルをコピーする 4 B. Eclipse
Mac OS X 版 Eclipse の導入と プログラムの作成方法 このドキュメントは下記のシステムで検証しました -1- Copyright (C) Takashi Kawaba 2012 目次 A. Eclipse を日本語化する 1. ダウンロードと解凍 3 2. features フォルダ内のファイルをコピーする 3 3. plugins 内のファイルをコピーする 4 B. Eclipse
! 2. CCS のインストール CCS をインストールする前に, パソコンのアカウントは, 必ず 管理者 にしてください ログイン中のアカウントの個人用フォルダ (C:\Users\ ログイン名 ) に全角や半角カタカナなどが含まれているとインストールが完了しません 新規で半角英数字名のローカルア
 に全角や半角カタカナなどが含まれているとインストールが完了しません 新規で半角英数字名のローカルア") 学習内容 パソコンに ARM の開発環境を構築します インストールは以下の手順で行います 1. CCS のダウンロード 2. CCS のインストール 3. TivaWare のダウンロード 4. TivaWare のインストール 5. USB ドライバのインストール 1. CCS のダウンロード 以下の手順で CCS のインストーラをダウンロードしてください 1 Ti 社のサイトの CCS 紹介ページを開く
学習内容 パソコンに ARM の開発環境を構築します インストールは以下の手順で行います 1. CCS のダウンロード 2. CCS のインストール 3. TivaWare のダウンロード 4. TivaWare のインストール 5. USB ドライバのインストール 1. CCS のダウンロード 以下の手順で CCS のインストーラをダウンロードしてください 1 Ti 社のサイトの CCS 紹介ページを開く
セットアップチュートリアル SlingPlayer 伊藤忠商事株式会社 1
 2007 伊藤忠商事株式会社 1 設定にあたりましてのご注意 クイックセットアップガイドにしたがって Slingbox とケーブルの接続を完了してください 複数のルータをご利用の場合 Slingbox と Slingbox の設定を行う PC は トップのルータ ( インターネットに一番近いルータ ) に接続してください Slingbox の設定を行う PC にファイアウォールソフトが存在する場合
2007 伊藤忠商事株式会社 1 設定にあたりましてのご注意 クイックセットアップガイドにしたがって Slingbox とケーブルの接続を完了してください 複数のルータをご利用の場合 Slingbox と Slingbox の設定を行う PC は トップのルータ ( インターネットに一番近いルータ ) に接続してください Slingbox の設定を行う PC にファイアウォールソフトが存在する場合
目次 1 はじめに アンインストール前の注意点 Sophos アンインストール手順 アンインストーラの場所を確認する アンインストーラの実行 F-Secure Client Security for Mac インストー
 Sophos アンインストール & F-Secure インストールマニュアル Mac 版 Ver. 1.0 岐阜大学情報連携統括本部 目次 1 はじめに... 1 1.1 アンインストール前の注意点... 1 2 Sophos アンインストール手順... 2 2.1 アンインストーラの場所を確認する... 2 2.2 アンインストーラの実行... 3 3 F-Secure Client Security
Sophos アンインストール & F-Secure インストールマニュアル Mac 版 Ver. 1.0 岐阜大学情報連携統括本部 目次 1 はじめに... 1 1.1 アンインストール前の注意点... 1 2 Sophos アンインストール手順... 2 2.1 アンインストーラの場所を確認する... 2 2.2 アンインストーラの実行... 3 3 F-Secure Client Security
FTDI USB-Serial Converter デバイスドライバのインストール(Rev.1.01)
") FTDI USB-Serial Converter デバイスドライバの インストール / アンインストール (Rev.1.10) 年 月 日 合同会社クラッグ電子 (1/19) 目次 1. 初めに... 3 2. デバイスドライバのインストール... 3 2-1. インターネットに接続されている環境... 4 2-2. インターネットに接続されていない環境 ( 自動 )... 6 2-3. インターネットに接続されていない環境
FTDI USB-Serial Converter デバイスドライバの インストール / アンインストール (Rev.1.10) 年 月 日 合同会社クラッグ電子 (1/19) 目次 1. 初めに... 3 2. デバイスドライバのインストール... 3 2-1. インターネットに接続されている環境... 4 2-2. インターネットに接続されていない環境 ( 自動 )... 6 2-3. インターネットに接続されていない環境
目次 1. ユーザー登録 ( 初期セットアップ ) を行う Office365 の基本的な動作を確認する... 6 Office365 にログインする ( サインイン )... 6 Office365 からサインアウトする ( ログアウト )... 6 パスワードを変更する... 7
 を行う Office365 の基本的な動作を確認する... 6 Office365 にログインする ( サインイン )... 6 Office365 からサインアウトする ( ログアウト )... 6 パスワードを変更する... 7") 実践女子学園 目次 1. ユーザー登録 ( 初期セットアップ ) を行う... 2 2. Office365 の基本的な動作を確認する... 6 Office365 にログインする ( サインイン )... 6 Office365 からサインアウトする ( ログアウト )... 6 パスワードを変更する... 7 3. Office インストール... 8 Office インストール手順... 8
実践女子学園 目次 1. ユーザー登録 ( 初期セットアップ ) を行う... 2 2. Office365 の基本的な動作を確認する... 6 Office365 にログインする ( サインイン )... 6 Office365 からサインアウトする ( ログアウト )... 6 パスワードを変更する... 7 3. Office インストール... 8 Office インストール手順... 8
プロッタドライバインストールガイド <OPS628>-Windows 2000/XP- プロッタドライバインストールガイド <OPS628> Windows 2000/XP 環境 本説明書は グラフテックのホームページよりドライバをダウンロードして コンピュータにインストール する手順を説明したもの
 Windows 2000/XP 環境 本説明書は グラフテックのホームページよりドライバをダウンロードして コンピュータにインストール する手順を説明したものです 内容をご確認のうえ ご使用のコンピュータに正しくインストールを行ってください 本説明書では Windows XP(32bit 版 ) 環境にプロッタドライバOPS628 Ver.9.10Aをインストールする場合を例に説明しています
Windows 2000/XP 環境 本説明書は グラフテックのホームページよりドライバをダウンロードして コンピュータにインストール する手順を説明したものです 内容をご確認のうえ ご使用のコンピュータに正しくインストールを行ってください 本説明書では Windows XP(32bit 版 ) 環境にプロッタドライバOPS628 Ver.9.10Aをインストールする場合を例に説明しています
論文誌用MS-Wordテンプレートファイル
 1. eclipse のインストール eclipse は 統合開発環境 (IDE) の一つで 高機能ながらオープンソースであり Java をはじめとするいくつかの言語に対応しているものである こちらを用いてマリオ AI の開発を行う この章では eclipse のダウンロード方法 eclipse のインストール方法 マリオ AI を開発する上での必要な eclipse の設定に関して書いてある 1.1
1. eclipse のインストール eclipse は 統合開発環境 (IDE) の一つで 高機能ながらオープンソースであり Java をはじめとするいくつかの言語に対応しているものである こちらを用いてマリオ AI の開発を行う この章では eclipse のダウンロード方法 eclipse のインストール方法 マリオ AI を開発する上での必要な eclipse の設定に関して書いてある 1.1
AGT10(Android (TM) 2.3) ファームウェア更新方法
 2.3) ファームウェア更新方法") AGT10( Android 2.3 ) ファームウェア更新方法 2013 年 12 月 17 日 日本電気株式会社 1 対象製品型番 無線 LAN モデル N8730-41101W (AGT10-W1), N8730-41101B (AGT10-B1) N8730-41102W (AGT10-W1), N8730-41102B (AGT10-B1) 3G モデル N8730-41103S1 (AGT10-D),
AGT10( Android 2.3 ) ファームウェア更新方法 2013 年 12 月 17 日 日本電気株式会社 1 対象製品型番 無線 LAN モデル N8730-41101W (AGT10-W1), N8730-41101B (AGT10-B1) N8730-41102W (AGT10-W1), N8730-41102B (AGT10-B1) 3G モデル N8730-41103S1 (AGT10-D),
FlashAir 設定ソフトウエア株式会社東芝セミコンダクター & ストレージ社 Copyright 2012 TOSHIBA CORPORATION, All Rights Reserved. 対応 OS: Windows XP SP3 / Vista SP2 / 7 (32bit/64bit)
") FlashAir 設定ソフトウエア ユーザーズマニュアル Revision 4 1 FlashAir 設定ソフトウエア株式会社東芝セミコンダクター & ストレージ社 Copyright 2012 TOSHIBA CORPORATION, All Rights Reserved. 対応 OS: Windows XP SP3 / Vista SP2 / 7 (32bit/64bit) はじめに設定ソフトウエアを
FlashAir 設定ソフトウエア ユーザーズマニュアル Revision 4 1 FlashAir 設定ソフトウエア株式会社東芝セミコンダクター & ストレージ社 Copyright 2012 TOSHIBA CORPORATION, All Rights Reserved. 対応 OS: Windows XP SP3 / Vista SP2 / 7 (32bit/64bit) はじめに設定ソフトウエアを
ES720_GPS_setup_procedure
 はじめに 本資料では ES720 に GPS デバイスを接続して計測するまでの手順を説明致します 本資料は下記の INCA 環境を前提としています INCA V7.1 Service Pack 10.3 ES720 V7.1 Service Pack 10 INCA の基本的な操作につきましては オンラインヘルプやマニュアルをご参照ください 本資料では Windows 標準のリモートデスクトップ機能を使用して
はじめに 本資料では ES720 に GPS デバイスを接続して計測するまでの手順を説明致します 本資料は下記の INCA 環境を前提としています INCA V7.1 Service Pack 10.3 ES720 V7.1 Service Pack 10 INCA の基本的な操作につきましては オンラインヘルプやマニュアルをご参照ください 本資料では Windows 標準のリモートデスクトップ機能を使用して
2. FileZilla のインストール 2.1. ダウンロード 次の URL に接続し 最新版の FileZilla をダウンロードします URL: なお バージョンが異なるとファイル名が
 作成 : 平成 18 年 2 月 28 日 修正 : 平成 29 年 5 月 26 日 SFTP を使用したファイル転送方法について 目 次 1. はじめに... 1 2. FileZilla のインストール... 2 2.1. ダウンロード... 2 2.2. インストール... 2 3. FileZilla の使用... 7 3.1. 起動... 7 3.2. 設定... 8 3.3. 接続...
作成 : 平成 18 年 2 月 28 日 修正 : 平成 29 年 5 月 26 日 SFTP を使用したファイル転送方法について 目 次 1. はじめに... 1 2. FileZilla のインストール... 2 2.1. ダウンロード... 2 2.2. インストール... 2 3. FileZilla の使用... 7 3.1. 起動... 7 3.2. 設定... 8 3.3. 接続...
CompuSec SW 強制削除手順
 CompuSec SW 強制削除手順 CompuSec SW Ver.5.2 Windows 7, Vista 機能 仕様は予告なく変更される場合があります 2012/08/29 - はじめに - CompuSec を導入直後から OS が起動しない USB 機器や SD カードの類は接続されておらず USB に関する BIOS 設定を変更しても回避できないなど PC 固有の問題や原因が特定できない場合は
CompuSec SW 強制削除手順 CompuSec SW Ver.5.2 Windows 7, Vista 機能 仕様は予告なく変更される場合があります 2012/08/29 - はじめに - CompuSec を導入直後から OS が起動しない USB 機器や SD カードの類は接続されておらず USB に関する BIOS 設定を変更しても回避できないなど PC 固有の問題や原因が特定できない場合は
Windows AIKを使用したPE2
 Windows AIK を使用した PE2.0 ベースの起動 CD 作成方法 この資料では マイクロソフト社から提供されている Windows AIK( 自動インストールキット ) を使用して Windows PE 2.0 ベースの起動 CD を作成する方法をご紹介します Image Backup や LB コピーコマンダーなどの製品 CD やリカバリーメディアは 主に DOS や Linux 環境で動作するため
Windows AIK を使用した PE2.0 ベースの起動 CD 作成方法 この資料では マイクロソフト社から提供されている Windows AIK( 自動インストールキット ) を使用して Windows PE 2.0 ベースの起動 CD を作成する方法をご紹介します Image Backup や LB コピーコマンダーなどの製品 CD やリカバリーメディアは 主に DOS や Linux 環境で動作するため
PowerPoint プレゼンテーション
 No 区分実行版 dbsheetclient2013 リリースノート Project Editor 内容 2012/5/29 現在 管理 V 1 新機能 タスクタイプ 参照ブックを開く (62201) に以下の機能を追加しました 1 オープンしたブックのファイル名出力 指定したセルにオープンした Excel ブックのファイル名 ( パスを含む ) を出力します 2 オープンしたブックの上書き保存を許可する
No 区分実行版 dbsheetclient2013 リリースノート Project Editor 内容 2012/5/29 現在 管理 V 1 新機能 タスクタイプ 参照ブックを開く (62201) に以下の機能を追加しました 1 オープンしたブックのファイル名出力 指定したセルにオープンした Excel ブックのファイル名 ( パスを含む ) を出力します 2 オープンしたブックの上書き保存を許可する
TDB電子証明書ダウンロード手順書(Microsoft Internet Explorer 版)
") Microsoft Internet Explorer 版 TDB 電子証明書ダウンロード手順書 (2003/05/27 改訂 ) < 電子証明書取得手順 > TDB 電子証明書をダウンロードする前に ---------------------------------1 ダウンロード手順 -------------------------------------------------------------
Microsoft Internet Explorer 版 TDB 電子証明書ダウンロード手順書 (2003/05/27 改訂 ) < 電子証明書取得手順 > TDB 電子証明書をダウンロードする前に ---------------------------------1 ダウンロード手順 -------------------------------------------------------------
STEP 5 使用許諾契約の条項に同意します を選択し 次へ をクリックし STEP 7 インストール をクリックし インストールを行います ます インストールが完了したら 完了 をクリックします 以上でスキャナドライバーのインストールは終了です STEP 6 ドライバー を選択して 次へ をクリッ
 インストールガイド 1. スキャナのセットアップ ご利用されるスキャナに応じてドライバーをインストールしてください [DR-C225W] をご利用のお客様 1.1 スキャナ (DR-C225W) ドライバーのインストール をご参照ください それ以外のスキャナをご利用のお客様スキャナ付属のインストールガイド または各製品 HP から最新版のドライバーをダウンロードしインストールを行ってください 1.1
インストールガイド 1. スキャナのセットアップ ご利用されるスキャナに応じてドライバーをインストールしてください [DR-C225W] をご利用のお客様 1.1 スキャナ (DR-C225W) ドライバーのインストール をご参照ください それ以外のスキャナをご利用のお客様スキャナ付属のインストールガイド または各製品 HP から最新版のドライバーをダウンロードしインストールを行ってください 1.1
8. 適用 を後 OK をしウインドウを閉じてください 2. パソコンと LCV3 を LAN ケーブルで接続し 設定を行います Windows パソコンの推奨環境は以下の通りです (2015 年 6 月現在 ) OS : Windows XP Vista 7 8 CPU : 32bit 64bit
 OS : Windows XP Vista 7 8 CPU : 32bit 64bit") 2015.10.8 マスプロ電工株式会社 本手順書は デジタルレベルチェッカー LCV3 の Web ブラウザーによるソフトウェア更新の手順を説明した資料です Web ブラウザーより LCV3 をバージョンアップする手順は以下の 4 段階で実施します 1. パソコン上に新しいソフトウェアをコピーします 2. パソコンと LCV3 を LAN ケーブルで接続します 3. LCV3 を新しいソフトウェアに更新します
2015.10.8 マスプロ電工株式会社 本手順書は デジタルレベルチェッカー LCV3 の Web ブラウザーによるソフトウェア更新の手順を説明した資料です Web ブラウザーより LCV3 をバージョンアップする手順は以下の 4 段階で実施します 1. パソコン上に新しいソフトウェアをコピーします 2. パソコンと LCV3 を LAN ケーブルで接続します 3. LCV3 を新しいソフトウェアに更新します
RW-5100 導入説明書 Windows7 用 2017 年 7 月 シャープ株式会社
 RW-5100 導入説明書 Windows7 用 2017 年 7 月 シャープ株式会社 はじめに 本書は Windows 7 環境において IC カードリーダライタ RW-5100 を使用するため お使いのパソコンにデバイスドライバソフトウェア ( 以下 ドライバソフト と記載 ) をインストールする方法について記述しています 本書で説明するドライバソフトは Windows 7 SP1 で動作するものです
RW-5100 導入説明書 Windows7 用 2017 年 7 月 シャープ株式会社 はじめに 本書は Windows 7 環境において IC カードリーダライタ RW-5100 を使用するため お使いのパソコンにデバイスドライバソフトウェア ( 以下 ドライバソフト と記載 ) をインストールする方法について記述しています 本書で説明するドライバソフトは Windows 7 SP1 で動作するものです