スライド 1
|
|
|
- なおちか さかわ
- 5 years ago
- Views:
Transcription
1 ET ロボコン向け TOPPERS 活用セミナー 動かしながら学ぶ EV3RT のアプリケーション開発 2018 年 6 月 16 日 ( 土 ) 松原豊 ( 名古屋大学 ) 1
2 EV3RT のインストール 開発環境をホスト PC にインストール の 開発環境 ( クロスコンパイラ, ツール ) のインストール を参考に 動作確認済のバージョンのコンパイラを使うことを推奨 パッケージをダウンロード から β7-1(ev3rt-beta7-1-release.zip) を取得 パッケージを解凍 $ unzip ev3rt-beta7-1-release.zip カーネルソースコードを解凍 $ cd ev3rt-beta7-1-release $ tar xvf hrp2.tar.xz 最近 一部の環境で β7-1 の倒立用サンプルでは開始直後に尻尾のモータが暴走する報告があった 似ている問題があったら β7 を試してください 2
3 EV3RT パッケージのフォルダ構成 ファイル / フォルダ名 内容 Changelog.txt リリースノート. 変更履歴. EV3RT_C_API_Reference/ EV3RT_CPP_API_Reference/ EV3RT の C API リファレンス index.html を開くと閲覧可能 EV3RT の C++ API リファレンス ngki_spec-171.pdf TOPPERS カーネルの仕様書 (Ver.1.7.1) sdcard/ SD カードに保存するファイルのサンプル EV3RT はカーネルやアプリケーションのイメージファイルを SD カードに保存し,EV3 本体に挿入することで使用 hrp2/ EV3RT のソースコード本体 ( 後ろで詳細に解説 ) HRP2 カーネル デバイスドライバやミドルウェア アプリケーションのワークスペース 3
4 SD カードに置くファイルのサンプル sdcard フォルダの中身 ファイル / フォルダ名 uimage ev3rt/ apps/ etc/rc.conf.ini res/ 内容 EV3RT のカーネル, 動的ローダのイメージファイル (EV3 に電源を入れるとこのファイルを使って起動 ) EV3RT が使用するディレクトリ アプリケーションのロードイメージを置くフォルダ 各種設定ファイル サンプルアプリケーション ( ファイル I/O) で使用しているフォルダ. プログラムでは /ev3rt/res というパスでアクセスできる. 4
5 設定ファイルでできること 動作ログの出力先の変更 無効化 [Debug] # DefaultPort = UART UART を使用する場合 DefaultPort = BT Bluetooth を使用する場合 # DefaultPort = LCD LCD を使用する場合 何も指定しない場合の出力先は LCD Bluetooth の接続情報の変更 [Bluetooth] LocalName=Mindstorms EV3 PinCode=0000 ペアリング時のピンコード rc.conf.ini rc.conf.ini ホスト PC から見える EV3 本体のデバイス名 5
6 設定ファイルでできること その他の設定項目 [Bluetooth] DisablePAN=0 IPAddress= [Sensors] DisablePort1=1 [USB] AutoTerminateApp=1 [Debug] LowBatteryWarning=0 rc.conf.ini Bluetooth PAN の無効化 EV3 の IP アドレス センサポート 1 の無効化 ( シリアルとして使用 ) USB 接続した時 アプリを終了 バッテリ低下のアラーム機能 6
7 EV3RT のカーネル (hrp2 フォルダ ) の内容 アプリケーション開発に関係しそうなもののみ フォルダ名 arch, include, extension, kernel, library, pdic, syssvc, target base-workspace sdk/workspace cfg configure 内容 HRP2 カーネルのソースコード. デバイスドライバなどは target/ev3_gcc/ の下 アプリケーションローダ アプリケーション開発用ワークスペースサンプルアプリケーション EV3RT でのアプリケーション開発に必要なツール ( 静的 API C コード生成 ) Windows 以外の環境では,cfg のバイナリを入れ替える必要がある. から環境にあったバイナリをダウンロードし,cfg/cfg/ に置く. アプリケーションの Makefile をテンプレートから生成するユーティリティ 7
8 EV3RT の起動順序 1. EV3 の電源を入れる 2. EV3 のメモリに書き込まれているブートローダ (uboot) が起動する 3. SD カードにある uimage ファイルを,EV3 の SDRAM に展開して実行する 8
9 アプリケーションのビルド EV3RT の workspace フォルダに移動 $ cd ev3rt-beta7-1-release/hrp2/sdk/workspace/ アプリケーションをビルド a) スタンドアローン形式のモジュールをビルドする場合は make img=< フォルダ名 > $ make img=helloev3 uimage というファイルが生成される b) 動的ローディング形式のモジュールをビルドする場合は make app=< フォルダ名 > $ make app=helloev3 app というファイルが生成される 9
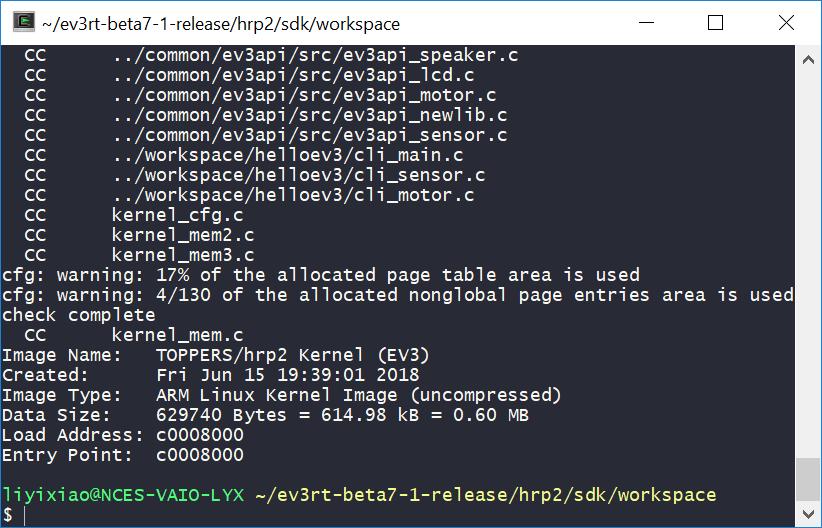
10 アプリケーションのビルド スタンドアローン形式が成功した場合 10
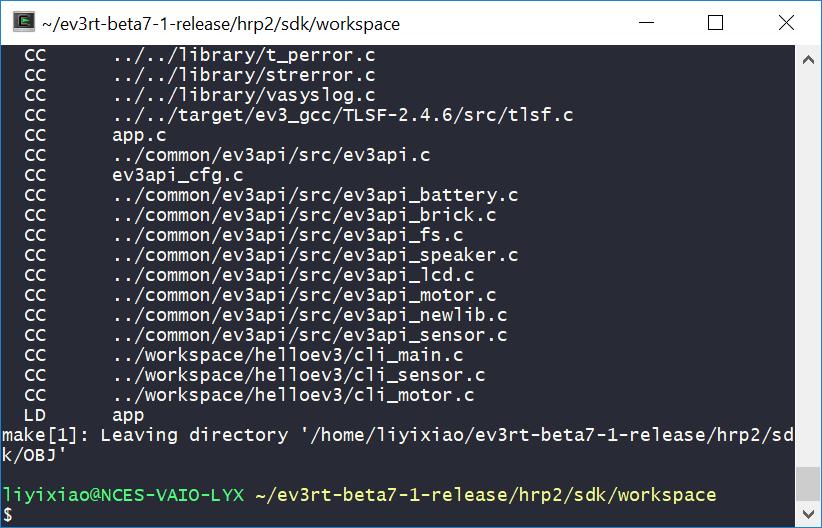
11 アプリケーションのビルド 動的ローディング形式が成功した場合 11
12 スタンドアローン形式 スタンドアローン形式とは? EV3RT の起動とともにアプリケーションの実行を開始する形式 EV3RT とアプリケーションを一つのモジュール (uimage ファイル ) にリンクする アプリケーションの更新方法 SD カードのトップフォルダにある uimage ファイルを更新する アプリケーションを変更する度に,uImage ファイルを作り直す必要がある 12
 4.")
13 スタンドアローン形式 アプリケーションの実行方法 1. 実行モジュール (uimage) を make img で生成 2. uimage を SD カードのトップに置く 3. EV3 を起動 ( 中央ボタンを押す ) 4. Run App と画面下部に表示されているときに, 中央ボタンを押すとアプリケーションが起動 Run 13
14 動的ローディング形式 動的ローディング形式とは? EV3RT の起動後に, アプリケーションローダを使って, 実行するアプリケーションを選択 ( ロード ) して実行する形式 アプリケーションモジュール ( デフォルト名は app) と, ローダを含む EV3RT のモジュールを別々にビルドする アプリケーションローダは, スタンドアローン形式で提供されるアプリケーションの一種 (base-workspace) アプリケーションの更新方法 アプリケーションモジュールを,SD カードの /ev3rt/apps フォルダに置く EV3RT 起動中に,Bluetooth/USB/ シリアルケーブル経由でアプリケーションモジュールを転送可能 ram#pc から EV3 へのアプリケーションのロード方法の選択 14
15 動的ローディング形式 アプリケーションの実行方法 1. アプリケーションのモジュールを make app で生成 2. app を SD カードの /ev3rt/apps/ に置く ファイル名を app から変更しても構わない 3. EV3 を起動 ( 中央ボタンを押す ) 4. Load App と画面下部に表示されているときに中央ボタンを押すと, アプリケーションローダが起動するので SD card を選択し, アプリケーションを選択して起動 上下ボタンでカーソル移動, 中央ボタンで決定 アプリケーション実行時にバックボタンを長押しすると, コンソールに戻る コンソールで右ボタンを押して Shutdown と画面下部に表示されているときに中央ボタンを押すと電源を切る ( 左 + 右 + バックボタンを同時に長押しする方法もある ) 15
16 参考 : ビルドの仕組み (make での処理内容 ) 1. sdk/workspace/makefile を使って make img=test or app=test を実行 2. sdk/workspace/test/makefile.inc を include configure のパラメータを設定 3. sdk/obj を mkdir して OBJ/ に移動 4. OBJ/ で configure を実行して,Makefile を生成 sdk/workspace/test をパスに含めて,2 の設定を使用 Makefile のテンプレートは sdk/common/makefile.img, Makefile.app 5. OBJ/ で 4. で生成した Makefile を使って make 6. スタンドアローン版の場合は,objcopy で ELF 形式のモジュールからバイナリ形式の hrp2 を生成したあと,mkimage コマンドで hrp2 から uimage を生成 uboot がロードするためのファイル形式に変換 7. sdk/workspace/ に app or uimage をコピー app は動的ローディング形式のアプリケーションモジュール 16
17 新しくプロジェクトを作る 簡単な方法は既存のプロジェクトをコピーする 1. cp a ev3way-cpp new_proj C 言語の場合は,gyroboy をベースにすると良い 2. 不要なソースコードファイルを削除し, 必要なファイルを追加注意 :app.h, app.cpp[c], app.cfg は必要なファイルなので削除しないこと! ファイル名を変える場合は,workspace/Makefile の -A app の部分を変更するか, sdk/common/makefile.img[app] の APPLNAME を直書きすればよい 3. Makefile.inc でアプリケーションの設定 app.c 以外のソースコードを追加する場合は, 以下のようにビルド対象に追加する.app.cfg 以外の cfg を追加する場合は app.cfg から INCLUDE すればよい APPL_COBJS += xxx.o # gcc でビルドするファイル群 APPL_CXXOBJS += xxx.o # g++ でビルドするファイル群 SRCLANG := c c++ # C のみか C++ ありか 17
18 タスクを追加する (1/2) cfg ファイルにタスクを生成するための静的 API を追加 CRE_TSK( タスク ID, { タスク属性, タスクに渡す引数, タスクの関数名, 優先度, スタックサイズ, スタックの先頭番地 }) タスク ID はシステムサービスのパラメータとなるマクロ識別子 タスク属性は初期状態 (TA_ACT: 起動,TA_NULL: 休止 ) 優先度は 0 に近いほど高い優先度となる スタックの先頭番地は NULL を指定するとカーネルが自動的にスタック領域を確保する タスクを非特権モードで動かすための記述 DOMAIN(TDOM_APP) { CRE_TSK(TEST_TASK, { TA_ACT, 0, test_task, 8, 1024, NULL }); } タスクをカーネルに登録するための記述 app.cfg 18
19 タスク生成に関係するマクロ /* タスクの優先度 */ #define TPRI_INIT_TASK (TMIN_TPRI) #define TPRI_USBMSC (TMIN_TPRI + 1) #define TPRI_BLUETOOTH_QOS (TMIN_TPRI + 1) #define TPRI_BLUETOOTH_HIGH (TMIN_TPRI + 2) #define TPRI_APP_TERM_TASK (TMIN_TPRI + 3) #define TPRI_EV3_LCD_TASK (TMIN_TPRI + 3) #define TPRI_EV3_MONITOR (TMIN_TPRI + 4) #define TPRI_PLATFORM_BUSY (TMIN_TPRI + 5) #define TPRI_APP_INIT_TASK (TMIN_TPRI + 6) #define TPRI_EV3_CYC (TMIN_TPRI + 7) #define TMIN_APP_TPRI (TMIN_TPRI + 8) #define TPRI_BLUETOOTH_LOW (TMAX_TPRI) target/ev3_gcc/ev3.h EV3RT のアプリで指定できる最高優先度 /* タスクのスタックサイズ */ #define STACK_SIZE 4096 デフォルトのスタックサイズ 19
20 タスクを追加する (2/2) C ファイルにタスクとして動作する関数を追加 void test_task(intptr_t exinf) { }... ext_tsk(); cfg ファイルに記述したタスクの関数名と同じ名前 app.c cfg ファイルに記述したタスクに渡す引数が exinf に渡される タスクを終了するための API 呼出し そのままリターンしても ext_tsk にジャンプする仕組みになっているが, 明示的に ext_tsk を呼び出すほうが正式 #ifndef TOPPERS_MACRO_ONLY extern void test_task(intptr_t exinf); #endif /* TOPPERS_MACRO_ONLY */ app.h プロトタイプ宣言の追加 20
21 EV3RT の提供する EV3 用 API APIを提供するモジュール一覧 サーボモータ 各種センサ 超音波, ジャイロ, タッチ, カラー LCD ファイルシステム シリアル送受信機能を含む EV3 本体機能 バッテリ, ボタン,LED, スピーカ 拡張 RTOS 機能 ユーザ空間での周期ハンドラ 21
22 API リファレンス EV3 用 C 言語 API リファレンス パッケージの EV3RT_C_API_Reference フォルダ または index.html こちらのリファレンスが C++API に対するベース EV3 用 C++ 言語 API リファレンス パッケージの EV3RT_CPP_API_Reference フォルダ または ce/index.html モータやセンサをクラス化 22
23 モータ制御 API の例 (1/3) 関数の引数で使用する列挙型 sdk/common/ev3api/src/ev3api_motor.h typedef enum { EV3_PORT_A = 0, // ポートA EV3_PORT_B = 1, // ポートB EV3_PORT_C = 2, // ポートC EV3_PORT_D = 3, // ポートD TNUM_MOTOR_PORT = 4 // モータポートの数 } motor_port_t; // モータポートを表す番号 typedef enum { NONE_MOTOR = 0, // モータ未接続 MEDIUM_MOTOR, // サーボモータM LARGE_MOTOR, // サーボモータL UNREGULATED_MOTOR, // 未調整モータ TNUM_MOTOR_TYPE // モータタイプの数 } motor_type_t; // サポートするモータタイプ 23
24 モータ制御 API の例 (2/3) クラス Motor (namespace ev3api) Motor の公開関数 Motor ( コンストラクタ ) ~Motor ( デストラクタ ) reset getcount setcount setpwm setbrake stop API リファレンスを確認してみましょう! ev3api_1_1_motor.html 24
25 モータ制御 API の例 (3/3) 使用例 sdk/workspace/ev3way-cpp/app.cpp /* モータオブジェクトの生成 */ tailmotor = new Motor(PORT_A); /* モータ停止, 回転角度を 0 初期化 */ tailmotor->reset(); /* モータの回転角度を取得 */ float pwm = (float)(angle - tailmotor->getcount()) * P_GAIN; /* モータ回転速度 (PWM) を設定 */ tailmotor->setpwm(pwm); コンストラクタの引数は, モータを繋いでいるポートに対応する motor_port_t, ブレーキモードの true/false( デフォルトは true), モータに対応する motor_type_t( デフォルトは LARGE_MOTOR) getcount は reset 直後は reset 時からの回転角度を返すが, setcount を呼び出すことで, 回転角度のオフセットを設定可能 25
26 センサ取得 API の例 (1/3) 関数の引数で使用する列挙型 typedef enum { EV3_PORT_1 = 0, sdk/common/ev3api/arc/ev3api_sensor.h // ポート1 EV3_PORT_2 = 1, // ポート2 EV3_PORT_3 = 2, // ポート3 EV3_PORT_4 = 3, // ポート4 TNUM_SENSOR_PORT = 4 // センサポートの数 } sensor_port_t; // センサポートを表す番号 typedef enum { NONE_SENSOR = 0, // センサ未接続 ULTRASONIC_SENSOR, // 超音波センサ GYRO_SENSOR, // ジャイロセンサ TOUCH_SENSOR, // タッチセンサ COLOR_SENSOR, // カラーセンサ TNUM_SENSOR_TYPE // センサタイプの数 } sensor_type_t; // サポートするセンサタイプ 26
27 センサ取得 API の例 (2/3) クラス GyroSensor (namespace ev3api) クラス Sensor の子クラス GyroSensor の公開関数 GyroSensor ( コンストラクタ ) setoffset reset getanglervelocity getangle 27
28 センサ取得 API の例 (3/3) 使用例 sdk/workspace/ev3way-cpp/app.cpp /* ジャイロセンサオブジェクトの生成 */ gyrosensor = new GyroSensor(PORT_4); /* ジャイロセンサ初期化 */ gyrosensor->reset(); /* ジャイロセンサのオフセット値を設定 */ gyrosensor->setoffset(offset); /* ジャイロセンサ値の取得 */ gyro = gyrosensor->getanglervelocity(); getanglervelocity は, ジャイロセンサの現在の値 ( 角速度 ) と, setoffset で指定したオフセット値との差分を返す 28
29 ファイルシステム API の例 (1/2) シリアル入出力用の列挙型 typedef enum { sdk/common/ev3api/src/ev3api_fs.h EV3_SERIAL_DEFAULT // EV3RTコンソール用ポート EV3_SERIAL_UART // UARTポート ( センサポート1) EV3_SERIAL_BT // Bluetooth 仮想シリアルポート } serial_port_t; // シリアルポートを表す番号 シリアル入出力用の関数 ev3_bluetooth_is_connected ev3_serial_open_file 入出力自体は newlib API を使用できる fprintf, fputc,... 他にファイルストリーム入力用の API もある 29
30 ファイルシステム API の例 (2/2) 使用例 /* Bluetooth(SPP) 経由でのシリアル I/O の open */ bt = ev3_serial_open_file(ev3_serial_bt) /* ホスト PC と Bluetooth 接続が確立されるまで待つ */ while (!ev3_bluetooth_is_connected()) tslp_tsk(100); /* Bluetooth 経由でのシリアル受信 (1 文字 ) */ uint8_t c = fgetc(bt); /* Bluetooth 経由でのシリアル出力 */ fprintf(bt, "main task started.\n"); app.c 30
31 拡張 RTOS 機能 API の例 (1/2) ユーザ空間の周期ハンドラ生成用静的 API EV3_CRE_CYC( 周期ハンドラ ID, { 属性, 引数, 周期ハンドラの関数名, 周期 [ms], 初期位相 [ms] }); 各パラメータの意味は CRE_CYC と同じ ユーザ空間の周期ハンドラ制御関数 ev3_sta_cyc 周期ハンドラの動作開始 ev3_stp_cyc 周期ハンドラの動作停止 API の仕様書 (ngki-spec-171.pdf) を確認してみましょう! p.242 周期ハンドラの仕様,p.249 sta_cyc の仕様実行コンテキストは, タスクコンテキストになることに注意 31
32 拡張 RTOS 機能 API の例 (2/2) 使用例 DOMAIN(TDOM_APP) { EV3_CRE_CYC(TEST_EV3_CYC, { TA_NULL, 0, test_ev3_cychdr, 250, 0 }); } void main_task(intptr_t exinf){ /* 周期ハンドラの開始 */ ev3_sta_cyc(test_ev3_cyc); } void test_ev3_cychdr(intptr_t exinf) {... } 250ms 周期で起動するようになる app.cfg app.c 32
33 FAQ Q: アプリケーションのソースコードを複数のサブディレクトリに分けて管理するにはどうすれば良いでしょうか? A:ev3rt/hrp2/sdk/common/Makefile.prj.common を以下のように修正します a) すべてのサブディレクトリを探索対象に入れる場合 APPL_DIR += $(foreach dir,$(shell find $(APPLDIR) -type d),$(dir)) b) 対象を個別に指定する場合 ( ここでは test を追加 ) APPL_DIR += $(foreach dir,$(shell find $(APPLDIR) -type d - name src),$(dir)) APPL_DIR += $(foreach dir,$(shell find $(APPLDIR) -type d - name test),$(dir)) これをディレクトリごとに追加 33
34 参考 : コマンドによる 1 発アプリ更新 Bluetooth PAN(Personal Area Network) による, 遠隔ソフトウェア更新 (uimage, アプリ ) EV3とPCをBluetoothで接続 アプリローダのメニューで Bluetooth PAN を選択 アプリの更新 $ make upload [ip=<ev3のipアドレス >] [from=< 手元のファイル名 >] [to=< アップロード後のファイル名 >] デフォルトの設定 BT PAN IP: 手元のファイル名 :app アップロード後のファイル名 :app イメージファイル (uimage) の更新 $ make uploadimg [ip=<ev3のipアドレス >] [from=< 手元のイメージファイル > Ex. hrp2/sdk/workspace で実行する場合 $ make uploadimg from=../../base-workspace/uimage 34

35 参考 : コマンドによる 1 発アプリ更新 Bluetooth で接続した後 PAN サービスの有効化が必要 例 :Windows 10 の場合 Control Panel -> Devices and Printers -> EV3 -> Connect using 35

36 参考 : コマンドによる 1 発アプリ更新 Upload が成功した場合 36
37 Tips:RTOS の活用, タスク分割のタイミング 1 ループがめちゃくちゃ長くなってきた 見やすく, 管理し易くしましょう 複数のタスク / 関数に分割しましょう 1 ループに色々詰め込んだら, 動作が遅い / 間に合わない処理が出てきた 重要さの違う処理が混在している場合は, タスクを分け, 重要さの低い処理を後回しにしましょう 重要度に応じたスケジューリングを OS に任せましょう 動作して欲しいタイミングが異なる処理 (100ms 秒周期, 1 秒周期など ) が混在している場合は, タスク or 周期ハンドラに分け, タイミング制御を OS に任せましょう 理論的に間に合わないという場合もあるので, うまくいかない場合はタスク設計を見直しましょう 37
EV3_APIの解説.pptx
 ET ロボコン向け TOPPERS 活 セミナー EV3 API の解説 2016 年 6 11 ( ) 松原豊 ( 名古屋 学 ) 川拓也 の資料を基に作成 1 EV3RT の提供する EV3 API API を提供するモジュール 覧 サーボモータ 各種センサ 超 波, ジャイロ, タッチ, カラー LCD ファイルシステム シリアル送受信機能を含む EV3 本体機能 バッテリ, ボタン,LED,
ET ロボコン向け TOPPERS 活 セミナー EV3 API の解説 2016 年 6 11 ( ) 松原豊 ( 名古屋 学 ) 川拓也 の資料を基に作成 1 EV3RT の提供する EV3 API API を提供するモジュール 覧 サーボモータ 各種センサ 超 波, ジャイロ, タッチ, カラー LCD ファイルシステム シリアル送受信機能を含む EV3 本体機能 バッテリ, ボタン,LED,
EV3RTの概要.pptx
 ETロボコン 向 けTOPPERS 活 セミナー EV3RTの 概 要 2016 年 6 11 ( ) 松 原 豊 ( 名 古 屋 学 ) 川 拓 也 の 資 料 を 基 に 作 成 1 EV3RT Real-Time platform for EV3 http://dev.toppers.jp/trac_user/ev3pf/wiki/whatsev3rt TOPPERS/HRP2カーネルをベースとしたプラット
ETロボコン 向 けTOPPERS 活 セミナー EV3RTの 概 要 2016 年 6 11 ( ) 松 原 豊 ( 名 古 屋 学 ) 川 拓 也 の 資 料 を 基 に 作 成 1 EV3RT Real-Time platform for EV3 http://dev.toppers.jp/trac_user/ev3pf/wiki/whatsev3rt TOPPERS/HRP2カーネルをベースとしたプラット
EV3RT Real- Time platform for EV3 user/ev3pf/wiki/whatsev3rt TOPPERS/HRP2カーネルをベースとしたプラット フォーム メモリ 保 護 機 能 を 提 供 CやC++で 開 発
 ETロボコン 向 けTOPPERS 活 用セミナー EV3RTの 概 要 2015 年年 6 月20 日( 土) 名 古 屋 大 学 石 川 拓拓 也 1 EV3RT Real- Time platform for EV3 http://dev.toppers.jp/trac_ user/ev3pf/wiki/whatsev3rt TOPPERS/HRP2カーネルをベースとしたプラット フォーム メモリ
ETロボコン 向 けTOPPERS 活 用セミナー EV3RTの 概 要 2015 年年 6 月20 日( 土) 名 古 屋 大 学 石 川 拓拓 也 1 EV3RT Real- Time platform for EV3 http://dev.toppers.jp/trac_ user/ev3pf/wiki/whatsev3rt TOPPERS/HRP2カーネルをベースとしたプラット フォーム メモリ
Microsoft PowerPoint - 20150509_開発環境構築相談会_資料_05.pptx
 東 海 地 区 独 教 育 開 発 環 境 相 談 会 2015/05/09 開 催 Copyright 2015 ETロボコン 実 行 委 員 会 All rights reserved. スケジュール 全 体 説 明 10:30 10:35 セクション:1 10:35 12:00 開 発 環 境 の 構 築 コンパイル ダウンロードの 操 作 説 明 セクション:2 13:00 16:30 サンプルプログラムを
東 海 地 区 独 教 育 開 発 環 境 相 談 会 2015/05/09 開 催 Copyright 2015 ETロボコン 実 行 委 員 会 All rights reserved. スケジュール 全 体 説 明 10:30 10:35 セクション:1 10:35 12:00 開 発 環 境 の 構 築 コンパイル ダウンロードの 操 作 説 明 セクション:2 13:00 16:30 サンプルプログラムを
ERTLテンプレート
 TOPPERS/EV3RT RTOS で Mindstorms EV3 開発 名古屋大学大学院情報科学研究科高田本田研究室博士後期課程 2 年李奕驍 1 背景 :Mindstorms EV3 とは 多くの教育や研究で活用されているロボット開発キットシリーズ Mindstorms の最新版 Motor Large Servo Motor Medium Servo Motor EV3 Intelligent
TOPPERS/EV3RT RTOS で Mindstorms EV3 開発 名古屋大学大学院情報科学研究科高田本田研究室博士後期課程 2 年李奕驍 1 背景 :Mindstorms EV3 とは 多くの教育や研究で活用されているロボット開発キットシリーズ Mindstorms の最新版 Motor Large Servo Motor Medium Servo Motor EV3 Intelligent
第一章 LPC2478 ボードの概要...3 第二章 uclinux の初体験 SD カードのテスト USB メモリのテスト USB Devices のテスト network のテスト...6 第三章 uclinux のコンパイル...
 株式会社日新テクニカ株式会社日新テクニカ株式会社日新テクニカ 1 ARM ARM ARM ARM7/TDMI 7/TDMI 7/TDMI 7/TDMI LPC LPC LPC LPC247 247 247 2478-uC uc uc uclinux inux inux inux マニュアルマニュアルマニュアルマニュアル株式会社日新テクニカ株式会社日新テクニカ株式会社日新テクニカ株式会社日新テクニカ
株式会社日新テクニカ株式会社日新テクニカ株式会社日新テクニカ 1 ARM ARM ARM ARM7/TDMI 7/TDMI 7/TDMI 7/TDMI LPC LPC LPC LPC247 247 247 2478-uC uc uc uclinux inux inux inux マニュアルマニュアルマニュアルマニュアル株式会社日新テクニカ株式会社日新テクニカ株式会社日新テクニカ株式会社日新テクニカ
Raspberry Pi で WEB カメラを使用 会津大学 RT ミドルウェア講習会 2017 The University of Aizu
 会津大学 RT ミドルウェア講習会 2017 The University of Aizu 目次 1 コンポーネントをダウンロードする... 1 2 コンポーネントを Raspberry Pi へコピーする... 2 2.1 Raspberry Pi へコピーする... 2 3 Raspberry Pi 上でコンポーネントをビルドする... 3 3.1 コピーされたファイルを解凍する... 3 3.2
会津大学 RT ミドルウェア講習会 2017 The University of Aizu 目次 1 コンポーネントをダウンロードする... 1 2 コンポーネントを Raspberry Pi へコピーする... 2 2.1 Raspberry Pi へコピーする... 2 3 Raspberry Pi 上でコンポーネントをビルドする... 3 3.1 コピーされたファイルを解凍する... 3 3.2
C#の基本
 C# の基本 ~ 開発環境の使い方 ~ C# とは プログラミング言語のひとつであり C C++ Java 等に並ぶ代表的な言語の一つである 容易に GUI( グラフィックやボタンとの連携ができる ) プログラミングが可能である メモリ管理等の煩雑な操作が必要なく 比較的初心者向きの言語である C# の利点 C C++ に比べて メモリ管理が必要ない GUIが作りやすい Javaに比べて コードの制限が少ない
C# の基本 ~ 開発環境の使い方 ~ C# とは プログラミング言語のひとつであり C C++ Java 等に並ぶ代表的な言語の一つである 容易に GUI( グラフィックやボタンとの連携ができる ) プログラミングが可能である メモリ管理等の煩雑な操作が必要なく 比較的初心者向きの言語である C# の利点 C C++ に比べて メモリ管理が必要ない GUIが作りやすい Javaに比べて コードの制限が少ない
CommCheckerManual_Ver.1.0_.doc
 通信チェックツール (CommChecker) 取扱説明書 (Ver.1.0) 2009 ESPEC Corp. 目次 1. 使用条件 4 2. ダウンロード & インストール 5 3. 環境設定 6 3-1.RS-485 通信 6 3-2.RS-232C 通信 7 3-3.GPIB 通信 8 4. ソフトウェアの使用方法 9 4-1. 起動 9 4-2. 通信設定 10 (1)RS485 通信 10
通信チェックツール (CommChecker) 取扱説明書 (Ver.1.0) 2009 ESPEC Corp. 目次 1. 使用条件 4 2. ダウンロード & インストール 5 3. 環境設定 6 3-1.RS-485 通信 6 3-2.RS-232C 通信 7 3-3.GPIB 通信 8 4. ソフトウェアの使用方法 9 4-1. 起動 9 4-2. 通信設定 10 (1)RS485 通信 10
GettingStartedTK2
 T-Kernel 2.0 Getting Started T-Engine フォーラム ダウンロード T-Engine フォーラムの web ページから T-Kernel 2.0 Software Package をダウンロード 必要なソフトウェアや開発環境が全て含まれている 2 Copyright 2011 by T-Engine Forum, All Rights Reserved. 1 ReadMe.txt
T-Kernel 2.0 Getting Started T-Engine フォーラム ダウンロード T-Engine フォーラムの web ページから T-Kernel 2.0 Software Package をダウンロード 必要なソフトウェアや開発環境が全て含まれている 2 Copyright 2011 by T-Engine Forum, All Rights Reserved. 1 ReadMe.txt
TOPPERS基礎ロボコンセミナー
 ET ロボコン向け TOPPERS 活用セミナー mruby on EV3RT+TECS を使ったアプリ開発環境 小南靖雄 (TOPPERS 個人会員 ) 2018 年 6 月 11 日 1 目次 EV3に対してmrubyで操作できること mruby on EV3RT+TECSの仕組み mruby on EV3RT+TECSのリアルタイム性能 環境構築 mrubyのビルド EV3Way 向けとETロボコン向け設定
ET ロボコン向け TOPPERS 活用セミナー mruby on EV3RT+TECS を使ったアプリ開発環境 小南靖雄 (TOPPERS 個人会員 ) 2018 年 6 月 11 日 1 目次 EV3に対してmrubyで操作できること mruby on EV3RT+TECSの仕組み mruby on EV3RT+TECSのリアルタイム性能 環境構築 mrubyのビルド EV3Way 向けとETロボコン向け設定
1. USB の VCP( 仮想 COM ポート ) について USB の VCP( 仮想 COM ポート ) は USB を非同期シリアル通信として使用するための USB のドライバです PC には VCP ドライバをインストールする必要があります USB の VCP( 仮想 COM ポート )
 について USB の VCP( 仮想 COM ポート ) は USB を非同期シリアル通信として使用するための USB のドライバです PC には VCP ドライバをインストールする必要があります USB の VCP( 仮想 COM ポート )") TrueSTUDIO 用 F4D_VCP の説明 V001 2014/07/05 USB の VCP( 仮想 COM ポート ) による非同期シリアル通信を行うプログラムです 無料の試用版開発ツール Atollic TrueSTUDIO for ARM Lite で作成したプロジェクトです ビルド可能なプログラムのコードサイズが 32Kbyte 以内の制限があります プログラムの開始番地は 0x08000000
TrueSTUDIO 用 F4D_VCP の説明 V001 2014/07/05 USB の VCP( 仮想 COM ポート ) による非同期シリアル通信を行うプログラムです 無料の試用版開発ツール Atollic TrueSTUDIO for ARM Lite で作成したプロジェクトです ビルド可能なプログラムのコードサイズが 32Kbyte 以内の制限があります プログラムの開始番地は 0x08000000
CoIDE 用 F4D_VCP の説明 V /07/05 USB の VCP( 仮想 COM ポート ) による非同期シリアル通信を行うプログラムです Free の開発ツール CoIDE で作成した STM32F4 Discovery 用のプロジェクトです プログラムの開始番地は 0x
 による非同期シリアル通信を行うプログラムです Free の開発ツール CoIDE で作成した STM32F4 Discovery 用のプロジェクトです プログラムの開始番地は 0x") CoIDE 用 F4D_VCP の説明 V001 2014/07/05 USB の VCP( 仮想 COM ポート ) による非同期シリアル通信を行うプログラムです Free の開発ツール CoIDE で作成した STM32F4 Discovery 用のプロジェクトです プログラムの開始番地は 0x08000000 です デバッグが可能です 目次 1. USB の VCP( 仮想 COM ポート )
CoIDE 用 F4D_VCP の説明 V001 2014/07/05 USB の VCP( 仮想 COM ポート ) による非同期シリアル通信を行うプログラムです Free の開発ツール CoIDE で作成した STM32F4 Discovery 用のプロジェクトです プログラムの開始番地は 0x08000000 です デバッグが可能です 目次 1. USB の VCP( 仮想 COM ポート )
MINI2440マニュアル
 Linux/Android/WinCE 対応マルチ メディア ARM11 ボード Idea6410+LCD4.3 の Android 1.5 マニュアル 株式会社日昇テクノロジー http://www.csun.co.jp info@csun.co.jp 2010/2/5 copyright@2010 修正履歴 NO バージョン修正内容修正日 1 Ver0.1 新規作成 2010/2/5 2 Ver0.2
Linux/Android/WinCE 対応マルチ メディア ARM11 ボード Idea6410+LCD4.3 の Android 1.5 マニュアル 株式会社日昇テクノロジー http://www.csun.co.jp info@csun.co.jp 2010/2/5 copyright@2010 修正履歴 NO バージョン修正内容修正日 1 Ver0.1 新規作成 2010/2/5 2 Ver0.2
PowerPoint プレゼンテーション
 No 区分実行版 dbsheetclient2013 リリースノート Project Editor 内容 2012/5/29 現在 管理 V 1 新機能 タスクタイプ 参照ブックを開く (62201) に以下の機能を追加しました 1 オープンしたブックのファイル名出力 指定したセルにオープンした Excel ブックのファイル名 ( パスを含む ) を出力します 2 オープンしたブックの上書き保存を許可する
No 区分実行版 dbsheetclient2013 リリースノート Project Editor 内容 2012/5/29 現在 管理 V 1 新機能 タスクタイプ 参照ブックを開く (62201) に以下の機能を追加しました 1 オープンしたブックのファイル名出力 指定したセルにオープンした Excel ブックのファイル名 ( パスを含む ) を出力します 2 オープンしたブックの上書き保存を許可する
1. 概念 STM32F4 Discovery 基板は Mini USB を接続して デバッグやプログラムの書き込みができるようになっています 通常は CPU の 0x 番地からプログラムを実行します では なぜわざわざこのプロジェクトの雛形を使用して CPU の 0x
 Base_STM32F4_Discovery の説明 2013/09/05 STM32F4 Discovery 基板の CPU STM32F407VG の FlashMemory 0x08010000 番地に書き込んで実行させる ユーザープログラムのためのプロジェクトの雛形です 本プロジェクトを元にユーザープログラムを作成して USB 経由で CPU に書き込みます USB 経由で CPU にプログラムを書き込むためには
Base_STM32F4_Discovery の説明 2013/09/05 STM32F4 Discovery 基板の CPU STM32F407VG の FlashMemory 0x08010000 番地に書き込んで実行させる ユーザープログラムのためのプロジェクトの雛形です 本プロジェクトを元にユーザープログラムを作成して USB 経由で CPU に書き込みます USB 経由で CPU にプログラムを書き込むためには
Application Note Application Note No. ESC-APN Document No.: ESC-APN adviceluna Linux デバッグ手順 (MIPS コア編 ) はじめに adviceluna Linux デバッグ手順 ( 以
 はじめに adviceluna Linux デバッグ手順 ( 以") No. ESC-APN-026-02 Document No.: ESC-APN-026-02 adviceluna Linux デバッグ手順 (MIPS コア編 ) はじめに adviceluna Linux デバッグ手順 ( 以下 本書 ) は adviceluna にて下記 Linux 環境をデバッグする手順を説明した文書です Application Shared Library Loadable
No. ESC-APN-026-02 Document No.: ESC-APN-026-02 adviceluna Linux デバッグ手順 (MIPS コア編 ) はじめに adviceluna Linux デバッグ手順 ( 以下 本書 ) は adviceluna にて下記 Linux 環境をデバッグする手順を説明した文書です Application Shared Library Loadable
SDC_SDIO_STM32F4 の説明 2013/09/17 SDIO インターフェースで SD カードをアクセスするプログラムのプロジェクトサンプルです FAT でファイルアクセスするために FatFs( 汎用 FAT ファイルシステム モジュール ) を使用しています VCP(USB 仮想 C
 を使用しています VCP(USB 仮想 C") SDC_SDIO_STM32F4 の説明 2013/09/17 SDIO インターフェースで SD カードをアクセスするプログラムのプロジェクトサンプルです FAT でファイルアクセスするために FatFs( 汎用 FAT ファイルシステム モジュール ) を使用しています VCP(USB 仮想 COM ポート : 非同期シリアル通信 ) を使用して SD カードのアクセスを試験することができます
SDC_SDIO_STM32F4 の説明 2013/09/17 SDIO インターフェースで SD カードをアクセスするプログラムのプロジェクトサンプルです FAT でファイルアクセスするために FatFs( 汎用 FAT ファイルシステム モジュール ) を使用しています VCP(USB 仮想 COM ポート : 非同期シリアル通信 ) を使用して SD カードのアクセスを試験することができます
Raspberry Pi (Windows10 IoT Core) を使用したリーダ ライタの制御例 (UART 接続 ) 2018 年 12 月 18 日第 版 株式会社アートファイネックス
 を使用したリーダ ライタの制御例 (UART 接続 ) 2018 年 12 月 18 日第 版 株式会社アートファイネックス") Raspberry Pi (Windows10 IoT Core) を使用したリーダ ライタの制御例 (UART 接続 ) 2018 年 12 月 18 日第 1.1.0 版 株式会社アートファイネックス はじめに 本書は Raspberry Pi 3 Model B(OS:Windows10 IoT Core) を使用し アートファイネックス社製 RFID リー ダ ライタ ( 組込用モジュール
Raspberry Pi (Windows10 IoT Core) を使用したリーダ ライタの制御例 (UART 接続 ) 2018 年 12 月 18 日第 1.1.0 版 株式会社アートファイネックス はじめに 本書は Raspberry Pi 3 Model B(OS:Windows10 IoT Core) を使用し アートファイネックス社製 RFID リー ダ ライタ ( 組込用モジュール
Microsoft Word - XOOPS インストールマニュアルv12.doc
 XOOPS インストールマニュアル ( 第 1 版 ) 目次 1 はじめに 1 2 XOOPS のダウンロード 2 3 パッケージの解凍 4 4 FFFTP によるファイルアップロード手順 5 5 ファイルアップロード後の作業 11 6 XOOPS のインストール 15 7 インストール後の作業 22 8 XOOPS ログイン後の作業 24 愛媛県総合教育センター情報教育研究室 Ver.1.0.2
XOOPS インストールマニュアル ( 第 1 版 ) 目次 1 はじめに 1 2 XOOPS のダウンロード 2 3 パッケージの解凍 4 4 FFFTP によるファイルアップロード手順 5 5 ファイルアップロード後の作業 11 6 XOOPS のインストール 15 7 インストール後の作業 22 8 XOOPS ログイン後の作業 24 愛媛県総合教育センター情報教育研究室 Ver.1.0.2
RTC_STM32F4 の説明 2013/10/20 STM32F4 内蔵 RTC の日付 時刻の設定および読み込みを行うプログラムです UART2( 非同期シリアル通信ポート 2) を使用して RTC の設定および読み込みを行います 無料の開発ツール Atollic TrueSTUDIO for
 を使用して RTC の設定および読み込みを行います 無料の開発ツール Atollic TrueSTUDIO for") RTC_STM32F4 の説明 2013/10/20 STM32F4 内蔵 RTC の日付 時刻の設定および読み込みを行うプログラムです UART2( 非同期シリアル通信ポート 2) を使用して RTC の設定および読み込みを行います 無料の開発ツール Atollic TrueSTUDIO for ARM Lite 4.2.0 で作成した STM32F4 Discovery 基板用のプロジェクトです
RTC_STM32F4 の説明 2013/10/20 STM32F4 内蔵 RTC の日付 時刻の設定および読み込みを行うプログラムです UART2( 非同期シリアル通信ポート 2) を使用して RTC の設定および読み込みを行います 無料の開発ツール Atollic TrueSTUDIO for ARM Lite 4.2.0 で作成した STM32F4 Discovery 基板用のプロジェクトです
PCL6115-EV 取扱説明書
 PCL6115 スターターキット 取扱説明書モーションパターンビルダーサンプルプロジェクト 目次 1. はじめに... 1 1-1. 動作環境... 2 1-2. 動作モード... 2 1-3. 使用したプログラミング言語... 2 1-4. 注意... 2 2. サンプルプロジェクトの構成... 3 2-1. フォルダ構成... 3 2-2. ファイル構成... 3 3. デバイスドライバのインストール...
PCL6115 スターターキット 取扱説明書モーションパターンビルダーサンプルプロジェクト 目次 1. はじめに... 1 1-1. 動作環境... 2 1-2. 動作モード... 2 1-3. 使用したプログラミング言語... 2 1-4. 注意... 2 2. サンプルプロジェクトの構成... 3 2-1. フォルダ構成... 3 2-2. ファイル構成... 3 3. デバイスドライバのインストール...
MS916 バッチ操作ガイド FW バージョン 0.52 向け バッチ操作の基本 MS916 のバッチ操作について バッチ操作では 読取ったバーコードデータはすべて 不揮発性のメモリ (1MB ROM JAN-13 約 50,000 件 ) に保存されます メモリに保存されたデータは任意のタイミング
 に保存されます メモリに保存されたデータは任意のタイミング") バッチ操作の基本 MS916 のバッチ操作について バッチ操作では 読取ったバーコードデータはすべて 不揮発性のメモリ (1MB ROM JAN-13 約 50,000 件 ) に保存されます メモリに保存されたデータは任意のタイミングで Bluetooth 通信または USB ケーブルを使用してホストへ送信することができます データの送信は スキャナ側の操作でのみ可能です ホスト側からの操作でのデータ送信には対応しておりません
バッチ操作の基本 MS916 のバッチ操作について バッチ操作では 読取ったバーコードデータはすべて 不揮発性のメモリ (1MB ROM JAN-13 約 50,000 件 ) に保存されます メモリに保存されたデータは任意のタイミングで Bluetooth 通信または USB ケーブルを使用してホストへ送信することができます データの送信は スキャナ側の操作でのみ可能です ホスト側からの操作でのデータ送信には対応しておりません
サーバ/クライアント オプション
 1/11 仕様書 2300 遠隔計測監視システムシリーズ 仕様書形名 :9768 : 9768-01 品名 : サーバ / クライアントオプション 9768 Smart Site Utility Pro の機能を拡張するソフトウェア ( 日本語版 ) 形名および品名 形名 : 9768-01 品名 : サーバ / クライアントオプション 製品構成 下記内容が含まれる CD-R 1 枚 サーバオプション
1/11 仕様書 2300 遠隔計測監視システムシリーズ 仕様書形名 :9768 : 9768-01 品名 : サーバ / クライアントオプション 9768 Smart Site Utility Pro の機能を拡張するソフトウェア ( 日本語版 ) 形名および品名 形名 : 9768-01 品名 : サーバ / クライアントオプション 製品構成 下記内容が含まれる CD-R 1 枚 サーバオプション
EV3 の初期設定
 目次 1 SD カードの準備... 2 2 EV3 へのアクセスの仕方... 3 3 OpenRTM-aist のインストール... 6 4 unzip のインストール... 8 当ドキュメントは下記ページを参考にしています LEGO Mindstorms EV3 活用事例 http://www.openrtm.org/openrtm/ja/casestudy/lego_mindstorm_ev3
目次 1 SD カードの準備... 2 2 EV3 へのアクセスの仕方... 3 3 OpenRTM-aist のインストール... 6 4 unzip のインストール... 8 当ドキュメントは下記ページを参考にしています LEGO Mindstorms EV3 活用事例 http://www.openrtm.org/openrtm/ja/casestudy/lego_mindstorm_ev3
0_テキストマイニング環境構築_mac
 本実験で利 するソフトウェア Anaconda 5.0.0 Python 本体及び数値計算ライブラリや開発環境 をセットにしたパッケージ MeCab IPA 辞書 NAIST Japanese Dictionary mecab-ipadic-neologd Natto-py 日本語形態素解析器 Mecab 用辞書 Mecab 用辞書 Mecab 用辞書 Python から MeCab を利用するためのライブラ
本実験で利 するソフトウェア Anaconda 5.0.0 Python 本体及び数値計算ライブラリや開発環境 をセットにしたパッケージ MeCab IPA 辞書 NAIST Japanese Dictionary mecab-ipadic-neologd Natto-py 日本語形態素解析器 Mecab 用辞書 Mecab 用辞書 Mecab 用辞書 Python から MeCab を利用するためのライブラ
利用ガイド
 Linux/Dos 版起動 CD の使用方法について この資料では LB コピーワークスの Linux/Dos 版起動 CD の使用方法についてご紹介します 1-1 起動 CD からの起動方法起動 CD をドライブにセットして PC を再起動 ( 起動 ) します CD からブートされ LB コピーワークス 10 のメインメニューが表示されます この画面が表示されずに OS が起動してしまう場合には
Linux/Dos 版起動 CD の使用方法について この資料では LB コピーワークスの Linux/Dos 版起動 CD の使用方法についてご紹介します 1-1 起動 CD からの起動方法起動 CD をドライブにセットして PC を再起動 ( 起動 ) します CD からブートされ LB コピーワークス 10 のメインメニューが表示されます この画面が表示されずに OS が起動してしまう場合には
<4D F736F F F696E74202D20834A815B836C838B835C815B835882CC95E082AB95FB F4B2E B8CDD8AB B83685D>
 カーネルソースの歩き方 RaspberryPi 演習 TOPPERS/SSP カーネルソース勉強会 アライブビジョンソフトウェア株式会社髙橋和浩 RaspberryPi 演習 1 概要 TOPEPRS/SSP 編 TOPPERS/SSP(smallest set profile) は ITRON の最小セットプロファイルに対応した 待ち 状態のないカーネルの公開ソースコードです 昨年から名古屋市工業研究所の主催で継続中のカーネルソース勉強会の成果として
カーネルソースの歩き方 RaspberryPi 演習 TOPPERS/SSP カーネルソース勉強会 アライブビジョンソフトウェア株式会社髙橋和浩 RaspberryPi 演習 1 概要 TOPEPRS/SSP 編 TOPPERS/SSP(smallest set profile) は ITRON の最小セットプロファイルに対応した 待ち 状態のないカーネルの公開ソースコードです 昨年から名古屋市工業研究所の主催で継続中のカーネルソース勉強会の成果として
MINI2440マニュアル
 なら可能にする Mini2440 の Android インストール 簡易マニュアル 株式会社 http://www.csun.co.jp info@csun.co.jp 2011/08/03 copyright@2013 ホームページ :http://www.csun.co.jp メール :info@csun.co.jp 1 なら可能にする 修正履歴 NO バージョン修正内容修正日 1 Ver1.0
なら可能にする Mini2440 の Android インストール 簡易マニュアル 株式会社 http://www.csun.co.jp info@csun.co.jp 2011/08/03 copyright@2013 ホームページ :http://www.csun.co.jp メール :info@csun.co.jp 1 なら可能にする 修正履歴 NO バージョン修正内容修正日 1 Ver1.0
04-process_thread_2.ppt
 オペレーティングシステム ~ 保護とシステムコール ~ 山田浩史 hiroshiy @ cc.tuat.ac.jp 2015/05/08 復習 : OS の目的 ( 今回の話題 ) 裸のコンピュータを抽象化 (abstraction) し より使いやすく安全なコンピュータとして見せること OS はハードウェアを制御し アプリケーションの効率的な動作や容易な開発を支援する OS がないと 1 つしかプログラムが動作しない
オペレーティングシステム ~ 保護とシステムコール ~ 山田浩史 hiroshiy @ cc.tuat.ac.jp 2015/05/08 復習 : OS の目的 ( 今回の話題 ) 裸のコンピュータを抽象化 (abstraction) し より使いやすく安全なコンピュータとして見せること OS はハードウェアを制御し アプリケーションの効率的な動作や容易な開発を支援する OS がないと 1 つしかプログラムが動作しない
株式会社日新テクニカ USB シリアル CAN 変換器 /8/22 ホームページ : メール
 USB シリアル CAN 変換器 http://www.nissin-tech.com info@nissin-tech.com 2011/8/22 copyright@2011 1 修正履歴 修正日 修正内容 2011/8/22 初作成 第一章 USB シリアル CAN 変換器の概要...3 第二章ドライバのインストール...4 第三章シリアル透明透明通信プロトコル...5 第四章モード設定設定ソフトソフトの使い方...7
USB シリアル CAN 変換器 http://www.nissin-tech.com info@nissin-tech.com 2011/8/22 copyright@2011 1 修正履歴 修正日 修正内容 2011/8/22 初作成 第一章 USB シリアル CAN 変換器の概要...3 第二章ドライバのインストール...4 第三章シリアル透明透明通信プロトコル...5 第四章モード設定設定ソフトソフトの使い方...7
リファレンスアプリケーション RefApp7
 リファレンスアプリケーション RefApp7 導入ガイド 概要 RefApp7.exe リファレンス制御アプリケーションは Windows 7 以降の 32bit 版と 64bit 版の両方の環境で動作します RefApp7 を運用する場合には マイクロソフト社提供の WinUSB 汎用デバイス ドライバが必要です このため 従来の制御ソフトウエア RefApp2 や RefApp3 が動作する環境でそのまま実行できません
リファレンスアプリケーション RefApp7 導入ガイド 概要 RefApp7.exe リファレンス制御アプリケーションは Windows 7 以降の 32bit 版と 64bit 版の両方の環境で動作します RefApp7 を運用する場合には マイクロソフト社提供の WinUSB 汎用デバイス ドライバが必要です このため 従来の制御ソフトウエア RefApp2 や RefApp3 が動作する環境でそのまま実行できません
1. A/D 入力について分解能 12bit の A/D コンバータ入力です A/D 入力電圧とディジタル値との対応は理論上 入力電圧 0V : 0 入力電圧 +3V : 4095 です 実際はオフセットと傾きがあり ぴったりこの数値にはなりません 2. A/D 入力に使用する信号 STM32L_A
 STM32L_ADC の説明 V003 2014/03/30 STM32L-Discovery の A/D 入力を行うプログラムです A/D CH0 ~ A/D CH3 の 4 本の入力が可能です 提供する PC のアプリケーション Access_SerialPort を使用して UART( 非同期シリアル通信 ) により A/D 入力の表示を行うことができます 無料の開発ツール Atollic TrueSTUDIO
STM32L_ADC の説明 V003 2014/03/30 STM32L-Discovery の A/D 入力を行うプログラムです A/D CH0 ~ A/D CH3 の 4 本の入力が可能です 提供する PC のアプリケーション Access_SerialPort を使用して UART( 非同期シリアル通信 ) により A/D 入力の表示を行うことができます 無料の開発ツール Atollic TrueSTUDIO
memo
 数理情報工学演習第一 C プログラミング演習 ( 第 5 回 ) 2015/05/11 DEPARTMENT OF MATHEMATICAL INFORMATICS 1 今日の内容 : プロトタイプ宣言 ヘッダーファイル, プログラムの分割 課題 : 疎行列 2 プロトタイプ宣言 3 C 言語では, 関数や変数は使用する前 ( ソースの上のほう ) に定義されている必要がある. double sub(int
数理情報工学演習第一 C プログラミング演習 ( 第 5 回 ) 2015/05/11 DEPARTMENT OF MATHEMATICAL INFORMATICS 1 今日の内容 : プロトタイプ宣言 ヘッダーファイル, プログラムの分割 課題 : 疎行列 2 プロトタイプ宣言 3 C 言語では, 関数や変数は使用する前 ( ソースの上のほう ) に定義されている必要がある. double sub(int
OS
 Operatig Systems カーネルとデバイスドライバ 2019-03 1 OS の構成要素 シェル ワープロ ブラウザ さまざまなソフトウェア ] ^ _ Z ` a b c d e ` f Y Z [ \ プロセス管理通信制御ファイルシステム メモリ管理割込み制御タイマ管理 デバイスドライバ 管理プログラム 基本ライブラリ デバイスドライバ CPU メモリ ストレージ さまざまなハードウェア
Operatig Systems カーネルとデバイスドライバ 2019-03 1 OS の構成要素 シェル ワープロ ブラウザ さまざまなソフトウェア ] ^ _ Z ` a b c d e ` f Y Z [ \ プロセス管理通信制御ファイルシステム メモリ管理割込み制御タイマ管理 デバイスドライバ 管理プログラム 基本ライブラリ デバイスドライバ CPU メモリ ストレージ さまざまなハードウェア
ServerView RAID Manager VMware vSphere ESXi 6 インストールガイド
 ServerView RAID Manager VMware vsphere ESXi 6 インストールガイド 2018 年 11 月 27 日富士通株式会社 アレイを構築して使用する場合 RAID 管理ツールの ServerView RAID Manager を使用します VMware vsphere ESXi 6.x ( 以後 ESXi 6 または ESXi と略します ) サーバで ServerView
ServerView RAID Manager VMware vsphere ESXi 6 インストールガイド 2018 年 11 月 27 日富士通株式会社 アレイを構築して使用する場合 RAID 管理ツールの ServerView RAID Manager を使用します VMware vsphere ESXi 6.x ( 以後 ESXi 6 または ESXi と略します ) サーバで ServerView
iExpressソフトフォン TE20-ST-EX
 2. セットアップ手順 2.1. システム構成 2.1.1. パソコンの動作環境 NEC PC-98NXシリーズまたはIBM-PC/AT 互換機 Windows2000(SP3) またはWindowsXP(SP1) CPU:PentiumⅢ800MHz 以上 メモリ:256MB 以上 ハードディスク: 空き容量 20MB 以上 DirectX:8.1 以上 ネットワークインタフェースカード(10/100BASE-T)
2. セットアップ手順 2.1. システム構成 2.1.1. パソコンの動作環境 NEC PC-98NXシリーズまたはIBM-PC/AT 互換機 Windows2000(SP3) またはWindowsXP(SP1) CPU:PentiumⅢ800MHz 以上 メモリ:256MB 以上 ハードディスク: 空き容量 20MB 以上 DirectX:8.1 以上 ネットワークインタフェースカード(10/100BASE-T)
MAHO Dialer について MAHO Dialer は MAHO-PBX を経由し PC にて着信時に発信者情報をポップアップしたり 着信履歴などから発信操作を行うためのソフトウエアです このガイドでは MAHO Dialer のインストール アップデート 初期設定 使用方法 および アンイン
 IP-PBX サポートツール 3.02.02 ファーストステップガイド この度はまほろば工房製品をお買い上げ頂き 誠にありがとうございます ご使用の前に 必ずこのドキュメントをお読みになり 正しくお使いください MAHO Dialer について 1 動作環境 1 インストール 2 アンインストール 4 初期設定 5 使用方法 8 MAHO Dialer について MAHO Dialer は MAHO-PBX
IP-PBX サポートツール 3.02.02 ファーストステップガイド この度はまほろば工房製品をお買い上げ頂き 誠にありがとうございます ご使用の前に 必ずこのドキュメントをお読みになり 正しくお使いください MAHO Dialer について 1 動作環境 1 インストール 2 アンインストール 4 初期設定 5 使用方法 8 MAHO Dialer について MAHO Dialer は MAHO-PBX
SystemDirector Developer's Studio(V3.2) 適用ガイド
 適用ガイド") 目次 4. フ ロク ラミンク と開発 1 Eclipse 編...2 4.1. Eclipse サポート範囲... 2 4.1.1. CVSを使ったチーム開発...2 4.1.2. Antを使用したビルド...2 4.1.3. JUnitを使ったテスト...2 4.1.4. Javaエディター...2 4.1.5. デバッグ機能...2 4.2. Eclipse サポートしていない機能... 2
目次 4. フ ロク ラミンク と開発 1 Eclipse 編...2 4.1. Eclipse サポート範囲... 2 4.1.1. CVSを使ったチーム開発...2 4.1.2. Antを使用したビルド...2 4.1.3. JUnitを使ったテスト...2 4.1.4. Javaエディター...2 4.1.5. デバッグ機能...2 4.2. Eclipse サポートしていない機能... 2
Microsoft Word - index.html
 R のインストールと超入門 R とは? R ダウンロード R のインストール R の基本操作 R 終了データの読み込みパッケージの操作 R とは? Rはデータ解析 マイニングを行うフリーソフトである Rはデータ解析の環境でもあり 言語でもある ニュージーランドのオークランド (Auckland) 大学の統計学科のRobert Gentlemanと Ross Ihakaにより開発がはじめられ 1997
R のインストールと超入門 R とは? R ダウンロード R のインストール R の基本操作 R 終了データの読み込みパッケージの操作 R とは? Rはデータ解析 マイニングを行うフリーソフトである Rはデータ解析の環境でもあり 言語でもある ニュージーランドのオークランド (Auckland) 大学の統計学科のRobert Gentlemanと Ross Ihakaにより開発がはじめられ 1997
Microsoft Word - RefApp7インストールガイド.doc
 リファレンスアプリケーション RefApp7 導入ガイド 概要 新しい RefApp7.exe リファレンス制御アプリケーションは Windows7 または Windows Vista の 32bit 版および 64bit 版の両方の環境で動作します RefApp7 を運用する場合には マイクロソフト社提供の WinUSB 汎用デバイス ドライバが必要です このため 従来の制御ソフトウエア RefApp2
リファレンスアプリケーション RefApp7 導入ガイド 概要 新しい RefApp7.exe リファレンス制御アプリケーションは Windows7 または Windows Vista の 32bit 版および 64bit 版の両方の環境で動作します RefApp7 を運用する場合には マイクロソフト社提供の WinUSB 汎用デバイス ドライバが必要です このため 従来の制御ソフトウエア RefApp2
Microsoft PowerPoint _2.プログラミングの基礎_final.pptx
 RT ミドルウェアによるロボットプログラミング技術 2. プログラミングの基礎 概要 1. プログラミングの基礎 2. Linuxでのプログラミング 3. Windowsでのプログラミング 目標 : 1.Linux および Windows での開発手法 ( 主に C++) を学ぶ 2.CMake を利用して 同じプログラムを Linux と Windows とでコンパイルして動作させる 2 プログラミングの流れ
RT ミドルウェアによるロボットプログラミング技術 2. プログラミングの基礎 概要 1. プログラミングの基礎 2. Linuxでのプログラミング 3. Windowsでのプログラミング 目標 : 1.Linux および Windows での開発手法 ( 主に C++) を学ぶ 2.CMake を利用して 同じプログラムを Linux と Windows とでコンパイルして動作させる 2 プログラミングの流れ
インテル(R) Visual Fortran コンパイラ 10.0
 Visual Fortran コンパイラ 10.0") インテル (R) Visual Fortran コンパイラー 10.0 日本語版スペシャル エディション 入門ガイド 目次 概要インテル (R) Visual Fortran コンパイラーの設定はじめに検証用ソースファイル適切なインストールの確認コンパイラーの起動 ( コマンドライン ) コンパイル ( 最適化オプションなし ) 実行 / プログラムの検証コンパイル ( 最適化オプションあり ) 実行
インテル (R) Visual Fortran コンパイラー 10.0 日本語版スペシャル エディション 入門ガイド 目次 概要インテル (R) Visual Fortran コンパイラーの設定はじめに検証用ソースファイル適切なインストールの確認コンパイラーの起動 ( コマンドライン ) コンパイル ( 最適化オプションなし ) 実行 / プログラムの検証コンパイル ( 最適化オプションあり ) 実行
ch2_android_2pri.indd
 Android SDK をインストールしよう Android Developers サイトから Android SDK をダウンロードして インストールします 1 インターネットブラウザのアドレスバーに http://dl.google.com/android/ installer_r20-windows.exe と入力して g キーを押す 1 ファイルを保存するメッセージが表示される 2 [ 保存
Android SDK をインストールしよう Android Developers サイトから Android SDK をダウンロードして インストールします 1 インターネットブラウザのアドレスバーに http://dl.google.com/android/ installer_r20-windows.exe と入力して g キーを押す 1 ファイルを保存するメッセージが表示される 2 [ 保存
MINI2440マニュアル
 Android 1.5 User Manual http://www.nissin-tech.com info@nissin-tech.com 2010/2/11 copyright@2010 1 一 Cross-compileのインストール...3 二 u-bootのコンパイル...3 三カーネルのコンパイル...4 四ルートファイルシステムcupcakeのコンパイル...5 五 ARM11/6410
Android 1.5 User Manual http://www.nissin-tech.com info@nissin-tech.com 2010/2/11 copyright@2010 1 一 Cross-compileのインストール...3 二 u-bootのコンパイル...3 三カーネルのコンパイル...4 四ルートファイルシステムcupcakeのコンパイル...5 五 ARM11/6410
Microsoft PowerPoint _2.プログラミングの基礎_final
 RT ミドルウェアによるロボットプログラミング技術 2. プログラミングの基礎 概要 1. プログラミングの基礎 2. Linuxでのプログラミング 3. Windowsでのプログラミング 目標 : 1.Linux および Windows での開発手法 ( 主に C++) を学ぶ 2.CMake を利用して 同じプログラムを Linux と Windows とでコンパイルして動作させる 2 プログラミングの流れ
RT ミドルウェアによるロボットプログラミング技術 2. プログラミングの基礎 概要 1. プログラミングの基礎 2. Linuxでのプログラミング 3. Windowsでのプログラミング 目標 : 1.Linux および Windows での開発手法 ( 主に C++) を学ぶ 2.CMake を利用して 同じプログラムを Linux と Windows とでコンパイルして動作させる 2 プログラミングの流れ
7th CodeGear Developer Camp
 A3 C++Builder テクニカルセッション wxforms で始める wxwidgets プログラミング CodeGear 高橋智宏 1 アジェンダ wxwidgets とは? wxforms とは? wxforms のインストール & 使い方 MacOS X(10.4.x, Carbon) でのビルド Linux(CentOS 4.5, GTK2) でのビルド 2 wxwidgets とは?
A3 C++Builder テクニカルセッション wxforms で始める wxwidgets プログラミング CodeGear 高橋智宏 1 アジェンダ wxwidgets とは? wxforms とは? wxforms のインストール & 使い方 MacOS X(10.4.x, Carbon) でのビルド Linux(CentOS 4.5, GTK2) でのビルド 2 wxwidgets とは?
Microsoft Word - DTX7LM.doc
 カシオハンディターミナル DT-X7 LMWIN 操作ガイド Rev 1.00 カシオ計算機株式会社 目次 1 IO-BOX...2 1-1.B.S.( ブリッジ サテライト ) クレイドル...2 1-2.B.S クレイドルの機能...3 2. ドライバのインストール...4 2-1.USB ドライバのインストール...4 2-2.USB モード使用時の設定...8 3. アップダウンロードシステム
カシオハンディターミナル DT-X7 LMWIN 操作ガイド Rev 1.00 カシオ計算機株式会社 目次 1 IO-BOX...2 1-1.B.S.( ブリッジ サテライト ) クレイドル...2 1-2.B.S クレイドルの機能...3 2. ドライバのインストール...4 2-1.USB ドライバのインストール...4 2-2.USB モード使用時の設定...8 3. アップダウンロードシステム
プログラマブル LED 制御モジュール アプリ操作説明書 プログラマブル LED 制御モジュール設定アプリ操作説明書 適用モジュール 改訂番号 エレラボドットコム 1
 設定 適用モジュール 041-1 改訂番号 20161024 エレラボドットコム 1 ( 用アプリの利用可能環境 ) Windows7 8.1 10 のいずれかが動作する PC Windows8 以降の場合は 次ページ記載の Windows8 以降の.NET Framework の有効化 (p3~7) の操作をするか 設定されていることを確認してからアプリをインストールしてください.NET Framework2.0
設定 適用モジュール 041-1 改訂番号 20161024 エレラボドットコム 1 ( 用アプリの利用可能環境 ) Windows7 8.1 10 のいずれかが動作する PC Windows8 以降の場合は 次ページ記載の Windows8 以降の.NET Framework の有効化 (p3~7) の操作をするか 設定されていることを確認してからアプリをインストールしてください.NET Framework2.0
KEW Smart for KEW3441BT 取扱説明書
 KEW Smart for KEW4500BT 取扱説明書 KEW4500BT と接続する 次のページ 接続と切断 KEW4500BTと接続する P.3 KEW4500BTから切断する P.8 測定データの保存 測定データを保存する P.9 保存データの見方について P.11 測定データを自動保存する P.12 ファイルを変更する メニューについて P.14 ファイルを作成する P.16 ファイルを変更する
KEW Smart for KEW4500BT 取扱説明書 KEW4500BT と接続する 次のページ 接続と切断 KEW4500BTと接続する P.3 KEW4500BTから切断する P.8 測定データの保存 測定データを保存する P.9 保存データの見方について P.11 測定データを自動保存する P.12 ファイルを変更する メニューについて P.14 ファイルを作成する P.16 ファイルを変更する
MINI2440マニュアル
 Linux-2.6.28 マニュアル 株式会社日新テクニカ http://www.nissin-tech.com info@nissin-tech.com 2010/2/13 copyright@2010 1 第一章 Linux-2.6.28 の紹介...4 1.1 バージョン...4 1.2 機能...4 第二章イメージファイルの書き込み...4 2.1 SDboot の書き込み...5 2.2
Linux-2.6.28 マニュアル 株式会社日新テクニカ http://www.nissin-tech.com info@nissin-tech.com 2010/2/13 copyright@2010 1 第一章 Linux-2.6.28 の紹介...4 1.1 バージョン...4 1.2 機能...4 第二章イメージファイルの書き込み...4 2.1 SDboot の書き込み...5 2.2
Microsoft Word - VPN...[.U.K.C.hLinux doc
 新潟大学 VPN ユーザガイド (Linux 版 ) VPN サービスとは 自宅など学外からインターネット経由で あたかも大学内からアクセスしているように学内ネットワークを利用することができるサービスのこと 1 です このサービスを利用することにより 大学へ行かないと利用できないサービス ( 例えば学内専用サーバへのアクセス ) を学外から利用できるようになります 2 VPN サービスの利用には 使用するコンピュータに
新潟大学 VPN ユーザガイド (Linux 版 ) VPN サービスとは 自宅など学外からインターネット経由で あたかも大学内からアクセスしているように学内ネットワークを利用することができるサービスのこと 1 です このサービスを利用することにより 大学へ行かないと利用できないサービス ( 例えば学内専用サーバへのアクセス ) を学外から利用できるようになります 2 VPN サービスの利用には 使用するコンピュータに
BizBrowser SmartDevice Android開発用スタートアップガイド
 Biz/Browser SmartDevice Android 開発用 スタートアップガイド 株式会社オープンストリーム Copyright(c) Open Stream, Inc. All Rights Reserved 1 目次 1. 事前準備... 3 2. Biz/Browser SmartDevice のインストール... 4 3. プロジェクトの作成 Hello World-... 5
Biz/Browser SmartDevice Android 開発用 スタートアップガイド 株式会社オープンストリーム Copyright(c) Open Stream, Inc. All Rights Reserved 1 目次 1. 事前準備... 3 2. Biz/Browser SmartDevice のインストール... 4 3. プロジェクトの作成 Hello World-... 5
目 次 1. All-In-One プリンタユーティリティ概要 All-In-One プリンタユーティティについて 対応プリンタ機種 システム要件 セットアップ方法 All-In-One プリンタユーティリテ
 SATO BARCODE PRINTER All-In-One Tool 簡易説明書 (PW208,CL4NX-J,CL6NX-J) 2015 年 8 月 24 日第 3 版 株式会社サトー 目 次 1. All-In-One プリンタユーティリティ概要... 2 1.1. All-In-One プリンタユーティティについて... 2 1.2. 対応プリンタ機種... 2 1.3. システム要件...
SATO BARCODE PRINTER All-In-One Tool 簡易説明書 (PW208,CL4NX-J,CL6NX-J) 2015 年 8 月 24 日第 3 版 株式会社サトー 目 次 1. All-In-One プリンタユーティリティ概要... 2 1.1. All-In-One プリンタユーティティについて... 2 1.2. 対応プリンタ機種... 2 1.3. システム要件...
Windows2000/XPインストール手順
 日歯生涯研修事業 IC カード用研修受付ソフト インストール手順書 (Windows 10 用 ) 日本歯科医師会 1 IC カード用研修受付ソフト の Windows 10 へのインストール手順... 3 1. インストール前の確認事項... 3 2. インストール手順の概略説明... 4 3. 新規インストール... 5 4. 既に IC カード用研修受付ソフト がインストールされている場合...
日歯生涯研修事業 IC カード用研修受付ソフト インストール手順書 (Windows 10 用 ) 日本歯科医師会 1 IC カード用研修受付ソフト の Windows 10 へのインストール手順... 3 1. インストール前の確認事項... 3 2. インストール手順の概略説明... 4 3. 新規インストール... 5 4. 既に IC カード用研修受付ソフト がインストールされている場合...
AutoSway_Gaide_kari4
 ファイル一覧 readme.txt スクリプトの簡易説明書 AutoSway.jsx.bin スクリプト本体 インストール方法 Windows の場合 Windows Program Files\Adobe After Effects \support Files\Scripts\ScriptUI Panels Mac の場合 Applications/Adobe After Effects
ファイル一覧 readme.txt スクリプトの簡易説明書 AutoSway.jsx.bin スクリプト本体 インストール方法 Windows の場合 Windows Program Files\Adobe After Effects \support Files\Scripts\ScriptUI Panels Mac の場合 Applications/Adobe After Effects
Microsoft Word - (171118_v4250)ACS_インストールマニュアル.doc
ACS_インストールマニュアル.doc") NTT コミュニケーションズ IC カードリーダライタ ドライバソフト対応 OS 一覧 ドライバソフトインストールマニュアル 2017.11 1. はじめに はじめに ( インストールを開始する前に必ずお読みください ) (1) 本書では NTT コミュニケーションズの IC カードリーダライタをご使用になる場合のドライバソフトのインストール手順を記述しています 製品名 ACR39-NTTCom ACR1251CL-NTTCom
NTT コミュニケーションズ IC カードリーダライタ ドライバソフト対応 OS 一覧 ドライバソフトインストールマニュアル 2017.11 1. はじめに はじめに ( インストールを開始する前に必ずお読みください ) (1) 本書では NTT コミュニケーションズの IC カードリーダライタをご使用になる場合のドライバソフトのインストール手順を記述しています 製品名 ACR39-NTTCom ACR1251CL-NTTCom
データベースアクセス
 データベースアクセスコンポーネント 1. 概要 データベースアクセスコンポーネントとは SQL データベースにアクセスして SQL 文を実行することによりデータベース検索を行う機能を提供するコンポーネントです また データベースアクセスコンポーネントでは データベースの構成情報 接続情報 エラー情報等を取得することも可能です データベースアクセスコンポーネントは アプリケーションビルダーのメニューから以下のように選びます
データベースアクセスコンポーネント 1. 概要 データベースアクセスコンポーネントとは SQL データベースにアクセスして SQL 文を実行することによりデータベース検索を行う機能を提供するコンポーネントです また データベースアクセスコンポーネントでは データベースの構成情報 接続情報 エラー情報等を取得することも可能です データベースアクセスコンポーネントは アプリケーションビルダーのメニューから以下のように選びます
今月の呼びかけ 添付資料 ファイル名に細工を施されたウイルスに注意! ~ 見た目でパソコン利用者をだます手口 ~ 2011 年 9 月 IPA に RLTrap というウイルスの大量の検出報告 ( 約 5 万件 ) が寄せられました このウイルスには パソコン利用者がファイルの見た目 ( 主に拡張子
 が寄せられました このウイルスには パソコン利用者がファイルの見た目 ( 主に拡張子") 今月の呼びかけ 添付資料 ファイル名に細工を施されたウイルスに注意! ~ 見た目でパソコン利用者をだます手口 ~ 2011 年 9 月 IPA に RLTrap というウイルスの大量の検出報告 ( 約 5 万件 ) が寄せられました このウイルスには パソコン利用者がファイルの見た目 ( 主に拡張子 ) を誤認し実行してしまうように ファイル名に細工が施されています このような手法は決して新しいものではなく
今月の呼びかけ 添付資料 ファイル名に細工を施されたウイルスに注意! ~ 見た目でパソコン利用者をだます手口 ~ 2011 年 9 月 IPA に RLTrap というウイルスの大量の検出報告 ( 約 5 万件 ) が寄せられました このウイルスには パソコン利用者がファイルの見た目 ( 主に拡張子 ) を誤認し実行してしまうように ファイル名に細工が施されています このような手法は決して新しいものではなく
不可能への挑戦株式会社日昇テクノロジー低価格 高品質が不可能? 日昇テクノロジーなら可能にする Mini2440 クイックインスト ールマニュアル 株式会社日昇テクノロジー 更新日 2013/08/13 日昇テクノロジー c
 Mini2440 クイックインスト ールマニュアル 株式会社 http://www.csun.co.jp info@csun.co.jp 更新日 2013/08/13 copyright@2013 ホームページ :http://www.csun.co.jp メール :info@csun.co.jp 1 修正履歴 NO バージョン修正内容修正日 1 Ver1.0 新規作成 2013/08/13 この文書の情報は
Mini2440 クイックインスト ールマニュアル 株式会社 http://www.csun.co.jp info@csun.co.jp 更新日 2013/08/13 copyright@2013 ホームページ :http://www.csun.co.jp メール :info@csun.co.jp 1 修正履歴 NO バージョン修正内容修正日 1 Ver1.0 新規作成 2013/08/13 この文書の情報は
intra-mart e-Builder ver 5
 e-builder ver 5.0.0 インストールガイド Page 1 ================================================================== 名称 e-builder version 5.0.0 制作者名 NTTDATA INTRAMART Corp. 動作環境 Page Producer (Windows2000, Xp) Framework
e-builder ver 5.0.0 インストールガイド Page 1 ================================================================== 名称 e-builder version 5.0.0 制作者名 NTTDATA INTRAMART Corp. 動作環境 Page Producer (Windows2000, Xp) Framework
ファイル メニューのコマンド
 CHAPTER43 次のオプションは Cisco Configuration Professional(Cisco CP) の [ ファイル ] メニューから利用できます 実行コンフィギュレーションを PC に保存 ルータの実行コンフィギュレーションファイルを PC 上のテキストファイルに保存します 43-1 設定をルータに配信する 第 43 章 設定をルータに配信する このウィンドウでは Cisco
CHAPTER43 次のオプションは Cisco Configuration Professional(Cisco CP) の [ ファイル ] メニューから利用できます 実行コンフィギュレーションを PC に保存 ルータの実行コンフィギュレーションファイルを PC 上のテキストファイルに保存します 43-1 設定をルータに配信する 第 43 章 設定をルータに配信する このウィンドウでは Cisco
1. UART について UART は Universal Asynchronous Receiver Transmitter の頭文字をとったもので 非同期シリアル通信と呼ばれます シリアル通信とは 一本の信号線でデータをやりとりするために 1bit ずつデータを送出することをいいます データを受
 STM32L_UART1 の説明 V004 2014/03/30 STM32L-Discovery の UART 1 の送受信を行うプログラムです 無料の開発ツール Atollic TrueSTUDIO for ARM Lite( 試用版 ) で作成したプロジェクトです プログラムの開始番地は 0x08000000 です デバッグが可能です PC アプリケーションの Access_SerialPort
STM32L_UART1 の説明 V004 2014/03/30 STM32L-Discovery の UART 1 の送受信を行うプログラムです 無料の開発ツール Atollic TrueSTUDIO for ARM Lite( 試用版 ) で作成したプロジェクトです プログラムの開始番地は 0x08000000 です デバッグが可能です PC アプリケーションの Access_SerialPort
『テクノス』V2プログラムインストール説明書
 土木積算システム テクノス V2 プログラム インストール説明書 ( 第 3 版 ) 目 次 1. テクノス V2 プログラム インストールの概要...3 2. テクノス V2 のプログラム ドライバ インストール...4 3. テクノス V2 の初期起動...10 4. アンインストール...11 5. 補足 ( 動作環境 )...11 2. 1. テクノス V2 プログラム インストールの概要
土木積算システム テクノス V2 プログラム インストール説明書 ( 第 3 版 ) 目 次 1. テクノス V2 プログラム インストールの概要...3 2. テクノス V2 のプログラム ドライバ インストール...4 3. テクノス V2 の初期起動...10 4. アンインストール...11 5. 補足 ( 動作環境 )...11 2. 1. テクノス V2 プログラム インストールの概要
CubePDF ユーザーズマニュアル
 CubePDF ユーザーズマニュアル 2018.11.22 第 13 版 1 1. PDF への変換手順 CubePDF は仮想プリンターとしてインストールされます そのため Web ブラウザや Microsoft Word, Excel, PowerPoint など印刷ボタンのあるアプリケーションであればどれでも 次の 3 ステップで PDF へ変換することができます 1. PDF 化したいものを適当なアプリケーションで表示し
CubePDF ユーザーズマニュアル 2018.11.22 第 13 版 1 1. PDF への変換手順 CubePDF は仮想プリンターとしてインストールされます そのため Web ブラウザや Microsoft Word, Excel, PowerPoint など印刷ボタンのあるアプリケーションであればどれでも 次の 3 ステップで PDF へ変換することができます 1. PDF 化したいものを適当なアプリケーションで表示し
Windows Graphic Loader for Label Printers
 Windows Graphic Loader for Label Printers ユーザーズマニュアル Version 1.0.3.0 商標 版権 CITIZEN は シチズン時計株式会社の登録商標です Windows は 米国 Microsoft Corporation の米国及びその他の国における登録商標です Datamax は Datamax-O'Neil の登録商標です Zebra は Zebra
Windows Graphic Loader for Label Printers ユーザーズマニュアル Version 1.0.3.0 商標 版権 CITIZEN は シチズン時計株式会社の登録商標です Windows は 米国 Microsoft Corporation の米国及びその他の国における登録商標です Datamax は Datamax-O'Neil の登録商標です Zebra は Zebra
XIMERA(Ver1
 ワイヤレステクノロジ株式会社製 小型無線加速度センサ データ収集用ソフトウエア AccelRealTime Software manual Version 1.0.4 株式会社 ATR-Promotions Copyright 2006 ATR-Promotions,Inc. All rights reserved. 更新履歴 2006 年 9 月 28 日 Version1.0.1 用新規作成 2006
ワイヤレステクノロジ株式会社製 小型無線加速度センサ データ収集用ソフトウエア AccelRealTime Software manual Version 1.0.4 株式会社 ATR-Promotions Copyright 2006 ATR-Promotions,Inc. All rights reserved. 更新履歴 2006 年 9 月 28 日 Version1.0.1 用新規作成 2006
Microsoft PowerPoint - Kozos12step_
 部内向けスキルアップ研修 組込み OS 自作入門 2013 年 5 月 1st ステップ担当 : 池田 目次 はじめに 開発環境の構築 Hello World! まとめ はじめに 本研修のねらい OS の自作を通してスキルアップ ハードウェアとソフトウェアにまたがる広範な基本技術を獲得 全員講師型スタイルが機能するか実験 講師をやるためには主体的な学習が必要 発表機会が増えることにより発表技術も向上
部内向けスキルアップ研修 組込み OS 自作入門 2013 年 5 月 1st ステップ担当 : 池田 目次 はじめに 開発環境の構築 Hello World! まとめ はじめに 本研修のねらい OS の自作を通してスキルアップ ハードウェアとソフトウェアにまたがる広範な基本技術を獲得 全員講師型スタイルが機能するか実験 講師をやるためには主体的な学習が必要 発表機会が増えることにより発表技術も向上
SAC (Jap).indd
.indd") 取扱説明書 機器を使用する前に本マニュアルを十分にお読みください また 以後も参照できるよう保管してください バージョン 1.7 目次 目次 について...3 ご使用になる前に...3 インストール手順...4 ログイン...6 マネージメントソフトウェアプログラムの初期画面... 7 プロジェクタの検索...9 グループの設定... 11 グループ情報画面... 12 グループの削除... 13
取扱説明書 機器を使用する前に本マニュアルを十分にお読みください また 以後も参照できるよう保管してください バージョン 1.7 目次 目次 について...3 ご使用になる前に...3 インストール手順...4 ログイン...6 マネージメントソフトウェアプログラムの初期画面... 7 プロジェクタの検索...9 グループの設定... 11 グループ情報画面... 12 グループの削除... 13
MS5145、MS7120,USB通信の設定
 株式会社エイポック http://www.a-poc.co.jp/ MS5145-AC-U,MS7120-AC-U 設定用バーコード 1.USB(Low Speed) 通信の設定対象機種 MS5145-AC-U (USBインターフェース) Fバージョン以上 MS7120-AC-U (USBインターフェース) Lバージョン以上説明 [ 説明 1] USB Serial Emulation Mode (USBシリアルエミュレーションモード)
株式会社エイポック http://www.a-poc.co.jp/ MS5145-AC-U,MS7120-AC-U 設定用バーコード 1.USB(Low Speed) 通信の設定対象機種 MS5145-AC-U (USBインターフェース) Fバージョン以上 MS7120-AC-U (USBインターフェース) Lバージョン以上説明 [ 説明 1] USB Serial Emulation Mode (USBシリアルエミュレーションモード)
第 7.0 版 利用履歴管理 ETCPRO5 セットアップマニュアル (Ver5.002) カードリーダモデル変更 ( 表示付き 表示なし ) に伴い 改訂 Windows10 対応に伴い 改訂 参考ホームページサイト :
 カードリーダモデル変更 ( 表示付き 表示なし ) に伴い 改訂 Windows10 対応に伴い 改訂 参考ホームページサイト :") 第 7.0 版 利用履歴管理 ETCPRO5 セットアップマニュアル (Ver5.002) カードリーダモデル変更 ( 表示付き 表示なし ) に伴い 改訂 Windows10 対応に伴い 改訂 参考ホームページサイト : http://www.denso-wave.com/download/etcp/etcpro.html 2016 年 2 月 株式会社デンソーウェーブ 目次 1. はじめに......
第 7.0 版 利用履歴管理 ETCPRO5 セットアップマニュアル (Ver5.002) カードリーダモデル変更 ( 表示付き 表示なし ) に伴い 改訂 Windows10 対応に伴い 改訂 参考ホームページサイト : http://www.denso-wave.com/download/etcp/etcpro.html 2016 年 2 月 株式会社デンソーウェーブ 目次 1. はじめに......
フローチャート自動生成ツール yflowgen の使い方 目次 1 はじめに 本ツールの機能 yflowgen.exe の使い方 yflowgen.exe の実行方法 制限事項 生成したファイル (gml ファイル形式 ) の開
 の開") フローチャート自動生成ツール yflowgen の使い方 目次 1 はじめに...2 2 本ツールの機能...2 3 yflowgen.exe の使い方...3 3.1 yflowgen.exe の実行方法...3 3.2 制限事項...3 3.3 生成したファイル (gml ファイル形式 ) の開き方...4 3.3.1 yed Graph Editor を使って開く...4 3.3.2 yed
フローチャート自動生成ツール yflowgen の使い方 目次 1 はじめに...2 2 本ツールの機能...2 3 yflowgen.exe の使い方...3 3.1 yflowgen.exe の実行方法...3 3.2 制限事項...3 3.3 生成したファイル (gml ファイル形式 ) の開き方...4 3.3.1 yed Graph Editor を使って開く...4 3.3.2 yed
Studuinoプログラミング環境
 Studuino ロボット用ブルートゥースモジュール 取扱説明書 Ver1.0.0 2015/4/1 本資料は Studuino( スタディーノ ) プログラミング環境の取扱説明書になります Studuino プログラミング環境の変更に伴い 加筆 修正が加えられる可能性があります また 本取扱説明書は 下記の資料を参照します Studuino ソフトウェアのインストール URL:http://artec-kk.co.jp/studuino/docs/jp/Studuino_setup_software.pdf
Studuino ロボット用ブルートゥースモジュール 取扱説明書 Ver1.0.0 2015/4/1 本資料は Studuino( スタディーノ ) プログラミング環境の取扱説明書になります Studuino プログラミング環境の変更に伴い 加筆 修正が加えられる可能性があります また 本取扱説明書は 下記の資料を参照します Studuino ソフトウェアのインストール URL:http://artec-kk.co.jp/studuino/docs/jp/Studuino_setup_software.pdf
RW-5100 導入説明書 Windows7 用 2017 年 7 月 シャープ株式会社
 RW-5100 導入説明書 Windows7 用 2017 年 7 月 シャープ株式会社 はじめに 本書は Windows 7 環境において IC カードリーダライタ RW-5100 を使用するため お使いのパソコンにデバイスドライバソフトウェア ( 以下 ドライバソフト と記載 ) をインストールする方法について記述しています 本書で説明するドライバソフトは Windows 7 SP1 で動作するものです
RW-5100 導入説明書 Windows7 用 2017 年 7 月 シャープ株式会社 はじめに 本書は Windows 7 環境において IC カードリーダライタ RW-5100 を使用するため お使いのパソコンにデバイスドライバソフトウェア ( 以下 ドライバソフト と記載 ) をインストールする方法について記述しています 本書で説明するドライバソフトは Windows 7 SP1 で動作するものです
Microsoft PowerPoint _VL-CD2xx バージョンアップ手順(汎用版).pptx
.pptx") センサーカメラ VL CD2xx シリーズ バージョンアップ手順 対象機種 VL CD265/CD235/CD215 2015 年 1 月 5 日 パナソニックシステムネットワークス株式会社セキュリティシステム事業部グローバルソリューショングループ FE チーム ( グローバル CS) 1 改版履歴 発行日内容詳細 2015/1/5 初版 - 2 必要なもの PC( パソコン ) LAN ケーブル
センサーカメラ VL CD2xx シリーズ バージョンアップ手順 対象機種 VL CD265/CD235/CD215 2015 年 1 月 5 日 パナソニックシステムネットワークス株式会社セキュリティシステム事業部グローバルソリューショングループ FE チーム ( グローバル CS) 1 改版履歴 発行日内容詳細 2015/1/5 初版 - 2 必要なもの PC( パソコン ) LAN ケーブル
スライド 1
 ver. 2018/4/13 プログラミング 計算機利用上の Tips 補足資料 分類 項目 ページ 計算機利用 ホスト計算機への接続方法 Unix (Linux) の基本的なコマンド容量制限についてターミナルで文字を大きくする方法 xtermで文字を大きくする方法 Fortran プログラミングについて最近あった事例 : コンパイル 実行時のエラーコンパイルオプションプログラムは正しそうなのに エラーが出る場合データファイルは正しそうなのに
ver. 2018/4/13 プログラミング 計算機利用上の Tips 補足資料 分類 項目 ページ 計算機利用 ホスト計算機への接続方法 Unix (Linux) の基本的なコマンド容量制限についてターミナルで文字を大きくする方法 xtermで文字を大きくする方法 Fortran プログラミングについて最近あった事例 : コンパイル 実行時のエラーコンパイルオプションプログラムは正しそうなのに エラーが出る場合データファイルは正しそうなのに
TWE-Lite R 取扱説明書
 USB アダプター TWE-Lite R( トワイ ライター ) TWE-Lite R( トワイ ライター ) は TWE-Lite DIP( トワイライト ディップ ) にソフトウエアを書き込むためのライターです USB 接続でパソコンから TWE-Lite DIP 内蔵のフラッシュメモリーにソフトウエアを転送することができます ソフトウエアを更新し機能追加することや 他のソフトウエアや自作ソフトウエアを書き込むことができます
USB アダプター TWE-Lite R( トワイ ライター ) TWE-Lite R( トワイ ライター ) は TWE-Lite DIP( トワイライト ディップ ) にソフトウエアを書き込むためのライターです USB 接続でパソコンから TWE-Lite DIP 内蔵のフラッシュメモリーにソフトウエアを転送することができます ソフトウエアを更新し機能追加することや 他のソフトウエアや自作ソフトウエアを書き込むことができます
Microsoft PowerPoint Java基本技術PrintOut.ppt [互換モード]
![Microsoft PowerPoint Java基本技術PrintOut.ppt [互換モード]](/thumbs/88/116903886.jpg "Microsoft PowerPoint Java基本技術PrintOut.ppt [互換モード]") 第 3 回 Java 基本技術講義 クラス構造と生成 33 クラスの概念 前回の基本文法でも少し出てきたが, オブジェクト指向プログラミングは という概念をうまく活用した手法である. C 言語で言う関数に似ている オブジェクト指向プログラミングはこれら状態と振る舞いを持つオブジェクトの概念をソフトウェア開発の中に適用し 様々な機能を実現する クラス= = いろんなプログラムで使いまわせる 34 クラスの概念
第 3 回 Java 基本技術講義 クラス構造と生成 33 クラスの概念 前回の基本文法でも少し出てきたが, オブジェクト指向プログラミングは という概念をうまく活用した手法である. C 言語で言う関数に似ている オブジェクト指向プログラミングはこれら状態と振る舞いを持つオブジェクトの概念をソフトウェア開発の中に適用し 様々な機能を実現する クラス= = いろんなプログラムで使いまわせる 34 クラスの概念
PICKIT3オフライン書き込みガイドブック
 不可能への挑戦株式会社低価格 高品質が不可能? なら可能にする NanoPC(Exynos 4412) Ubuntu インストールマニュアル 株式会社 http://www.csun.co.jp info@csun.co.jp 更新日 2015/2/18 copyright@2015 ホームページ :http://www.csun.co.jp メール :info@csun.co.jp 1 不可能への挑戦株式会社低価格
不可能への挑戦株式会社低価格 高品質が不可能? なら可能にする NanoPC(Exynos 4412) Ubuntu インストールマニュアル 株式会社 http://www.csun.co.jp info@csun.co.jp 更新日 2015/2/18 copyright@2015 ホームページ :http://www.csun.co.jp メール :info@csun.co.jp 1 不可能への挑戦株式会社低価格
AP-RZA-1A シリアルFlashROMの書き込み方法
 AP-RZA-1A (RZ/A1H CPU BOARD) シリアル FlashROM の書き込み方法 1 版 2015 年 11 月 9 日 1. 概要... 2 1.1 概要... 2 1.2 動作環境ついて... 2 1.3 書き込み手順の概要... 3 2. 準備... 4 2.1 ソフトウェアのダウンロード... 4 3. シリアル FLASHROM の書き込み方法... 5 3.1 microsd
AP-RZA-1A (RZ/A1H CPU BOARD) シリアル FlashROM の書き込み方法 1 版 2015 年 11 月 9 日 1. 概要... 2 1.1 概要... 2 1.2 動作環境ついて... 2 1.3 書き込み手順の概要... 3 2. 準備... 4 2.1 ソフトウェアのダウンロード... 4 3. シリアル FLASHROM の書き込み方法... 5 3.1 microsd
PIC
 PIC - 1 ページ 2 週目 UBW を使用してみる 2010 年 5 月 23 日 15:28 前回の Gainer mini はあくまでも PC 側にプログラムがあり PIC は IO ボックス的な使用しかできなかった 入出力デバイスとして PIC を使う場合は 簡易で便利であるが それ以上の事 (PC なしでの動作 PC と対等の動作 ) は出来ない 今週からは 本来の PIC としての使い方を学ぶ
PIC - 1 ページ 2 週目 UBW を使用してみる 2010 年 5 月 23 日 15:28 前回の Gainer mini はあくまでも PC 側にプログラムがあり PIC は IO ボックス的な使用しかできなかった 入出力デバイスとして PIC を使う場合は 簡易で便利であるが それ以上の事 (PC なしでの動作 PC と対等の動作 ) は出来ない 今週からは 本来の PIC としての使い方を学ぶ
WebARENA SuiteX V2 EC-CUBE 2.13 インストールマニュアル ( 標準 MySQL+ 非 SSL ) 作成 :2014 年 2 月 Ver.1.1
 作成 :2014 年 2 月 Ver.1.1") WebARENA SuiteX V2 EC-CUBE 2.13 インストールマニュアル ( 標準 MySQL+ 非 SSL ) 作成 :2014 年 2 月 Ver.1.1 注意事項 EC-CUBE は株式会社ロックオンの提供するソフトウェアです ここでは株式会社ロックオンから提供されている EC-CUBE バージョン 2.13 のパッケージをご利用される前提で 基本的な設置手順を掲載しております
WebARENA SuiteX V2 EC-CUBE 2.13 インストールマニュアル ( 標準 MySQL+ 非 SSL ) 作成 :2014 年 2 月 Ver.1.1 注意事項 EC-CUBE は株式会社ロックオンの提供するソフトウェアです ここでは株式会社ロックオンから提供されている EC-CUBE バージョン 2.13 のパッケージをご利用される前提で 基本的な設置手順を掲載しております
Flex Signal for AirGRID
 第 4.3 版 当社に無断で本資料の掲載内容を転載することはご遠慮下さい 2013 Flex Signal はじめに 本書は Flex Signal のセットアップ手順をまとめた資料です 2 改訂履歴 版 日付 改訂内容 1.0 2014 年 10 月 27 日 初版 1.1 2015 年 3 月 25 日 文言修正 2.0 2015 年 9 月 3 日 インストーラー追加のために手順変更 2.1
第 4.3 版 当社に無断で本資料の掲載内容を転載することはご遠慮下さい 2013 Flex Signal はじめに 本書は Flex Signal のセットアップ手順をまとめた資料です 2 改訂履歴 版 日付 改訂内容 1.0 2014 年 10 月 27 日 初版 1.1 2015 年 3 月 25 日 文言修正 2.0 2015 年 9 月 3 日 インストーラー追加のために手順変更 2.1
Section 16-7 Mac で Windows も使う (Boot Camp) 光学式ドライブ DVD が読み取れる光学式ドライブを使った方がスムーズにインストールできます 光学式ドライブの付 いていない Mac は Windows インストールディスクの ISO イメージデータを使ってもイン
 光学式ドライブ DVD が読み取れる光学式ドライブを使った方がスムーズにインストールできます 光学式ドライブの付 いていない Mac は Windows インストールディスクの ISO イメージデータを使ってもイン") Section 16-7 移動 メニュー ユーティリティ フォルダ Boot Camp アシスタント Mac で Windows も使う (Boot Camp) Boot Camp を使い Windows をインストールすると Mac だけでなく Windows に切り替えて起動できるようになります Mac と Windows の両方を使うユーザには便利な機能です Boot Camp の準備 Mac
Section 16-7 移動 メニュー ユーティリティ フォルダ Boot Camp アシスタント Mac で Windows も使う (Boot Camp) Boot Camp を使い Windows をインストールすると Mac だけでなく Windows に切り替えて起動できるようになります Mac と Windows の両方を使うユーザには便利な機能です Boot Camp の準備 Mac
平成 28 年度大学情報セキュリティ研究講習会 A-2 標的型攻撃を受けているらしいとの連絡があった時の調査と対応の演習 実習資料 A-2 標的型攻撃を受けているらしいとの連絡があった時の調査と対応の演習 実習環境について 攻撃側 PC(attacker-pc) と感染側 PC(sjk-pc) の
 と感染側 PC(sjk-pc) の") A-2 標的型攻撃を受けているらしいとの連絡があった時の調査と対応の演習 実習環境について 攻撃側 PC(attacker-pc) と感染側 PC(sjk-pc) の 2 台の PC を使用します 攻撃側 PC(attacker-pc) から感染側 PC(sjk-pc) 操作してみましょう 実習の進め方 実習 1 初期潜入 感染側 PC を RAT に感染させましょう 攻撃側 PC から感染側 PC
A-2 標的型攻撃を受けているらしいとの連絡があった時の調査と対応の演習 実習環境について 攻撃側 PC(attacker-pc) と感染側 PC(sjk-pc) の 2 台の PC を使用します 攻撃側 PC(attacker-pc) から感染側 PC(sjk-pc) 操作してみましょう 実習の進め方 実習 1 初期潜入 感染側 PC を RAT に感染させましょう 攻撃側 PC から感染側 PC
IntroductionForGR-PEACH.pptx
 1 Arduino,mbed,TOPPERS を全部試せる! GR-PEACH 向けソフトウェアプラットフォームのご紹介 松原豊 (Yutaka MATSUBARA) 名古屋 学 学院情報科学研究科助教 TOPPERS プロジェクト運営委員 / 開発者会議実 委員 E-mail: yutaka@ertl.jp Web: http://www.ertl.jp/~yutaka 2 GR-PEACH とは?
1 Arduino,mbed,TOPPERS を全部試せる! GR-PEACH 向けソフトウェアプラットフォームのご紹介 松原豊 (Yutaka MATSUBARA) 名古屋 学 学院情報科学研究科助教 TOPPERS プロジェクト運営委員 / 開発者会議実 委員 E-mail: yutaka@ertl.jp Web: http://www.ertl.jp/~yutaka 2 GR-PEACH とは?
Microsoft Word - XPC4ソフトマニュアル.doc
 < XPC-4 映像ツール 簡易マニュアル> お試し版 Ver1.0 XPC-4 に USB ケーブルを接続する際の注意事項 ファームウェア アップデートの作業 もしくは XPC-4 映像ツール を使用するときは USB2.0 に対応した USB ケーブル (Type A[ オス ]-Type B[ オス ]) が 1 本必要です USB ケーブルはパソコンの OS(Windows) が完全に起動してから
< XPC-4 映像ツール 簡易マニュアル> お試し版 Ver1.0 XPC-4 に USB ケーブルを接続する際の注意事項 ファームウェア アップデートの作業 もしくは XPC-4 映像ツール を使用するときは USB2.0 に対応した USB ケーブル (Type A[ オス ]-Type B[ オス ]) が 1 本必要です USB ケーブルはパソコンの OS(Windows) が完全に起動してから
モバイル統合アプリケーション 障害切り分け手順書
 モバイル統合アプリケーション障害切り分け手順書 第 5 版 2014 年 2 月 7 日 目次 1. サーバー接続 1.1. DocuShare に接続できない 1.2. WebDAV Server に接続できない 1.3. Working Folder に接続できない 1.4. WebDAV サーバースペースの DocuWorks ファイルが閲覧できない 2. 複合機接続 2.1. プリントができない
モバイル統合アプリケーション障害切り分け手順書 第 5 版 2014 年 2 月 7 日 目次 1. サーバー接続 1.1. DocuShare に接続できない 1.2. WebDAV Server に接続できない 1.3. Working Folder に接続できない 1.4. WebDAV サーバースペースの DocuWorks ファイルが閲覧できない 2. 複合機接続 2.1. プリントができない
Diginnos PC 初期化方法 初期化操作を行うと ストレージ ( ハードディスク / SSD)( 以降ストレージと記載します ) 内のデータが全て初期化されます 必要なデータは他のメディア等にバックアップのうえ作業してください 初期化とは Windows 10 のプッシュボタンリセットの機能の
( 以降ストレージと記載します ) 内のデータが全て初期化されます 必要なデータは他のメディア等にバックアップのうえ作業してください 初期化とは Windows 10 のプッシュボタンリセットの機能の") 初期化操作を行うと ストレージ ( ハードディスク / SSD)( 以降ストレージと記載します ) 内のデータが全て初期化されます 必要なデータは他のメディア等にバックアップのうえ作業してください 初期化とは Windows 10 のプッシュボタンリセットの機能の内 すべてを削除して再インストール を使用し インストールしたアプリやドライバー 保存したデータなどすべてを削除して W i n d o
初期化操作を行うと ストレージ ( ハードディスク / SSD)( 以降ストレージと記載します ) 内のデータが全て初期化されます 必要なデータは他のメディア等にバックアップのうえ作業してください 初期化とは Windows 10 のプッシュボタンリセットの機能の内 すべてを削除して再インストール を使用し インストールしたアプリやドライバー 保存したデータなどすべてを削除して W i n d o
Microsoft Word - tutorial3-dbreverse.docx
 株式会社チェンジビジョン使用バージョン :astah* 6.0, 6.1 [ ] サンプル サポート対象外 目次 DB リバースを使ってみよう ( サンプル サポート対象外 ) 2 ご利用の前に 2 予備知識 2 データベースの環境設定をしてみよう 2 astah* データベースリバースコンポーネントを使用してみよう 5 作成した asta ファイルを astah* professional で開いてみよう
株式会社チェンジビジョン使用バージョン :astah* 6.0, 6.1 [ ] サンプル サポート対象外 目次 DB リバースを使ってみよう ( サンプル サポート対象外 ) 2 ご利用の前に 2 予備知識 2 データベースの環境設定をしてみよう 2 astah* データベースリバースコンポーネントを使用してみよう 5 作成した asta ファイルを astah* professional で開いてみよう
目次 1. はじめに WEB インタフェース... 4 アクセス方法... 4 操作方法 FTP クライアント FFFTP(WINDOWS) インストール方法 アクセス方法 操作方法 CYBERD
 インストール方法 アクセス方法 操作方法 CYBERD") ストレージサービスご利用マニュアル (Ver1.3) 目次 1. はじめに... 3 2. WEB インタフェース... 4 アクセス方法... 4 操作方法... 5 3.FTP クライアント... 9 3-1.FFFTP(WINDOWS)... 10 インストール方法... 10 アクセス方法... 11 操作方法... 15 3-2.CYBERDUCK (MAC OS)... 20 〇インストール方法...
ストレージサービスご利用マニュアル (Ver1.3) 目次 1. はじめに... 3 2. WEB インタフェース... 4 アクセス方法... 4 操作方法... 5 3.FTP クライアント... 9 3-1.FFFTP(WINDOWS)... 10 インストール方法... 10 アクセス方法... 11 操作方法... 15 3-2.CYBERDUCK (MAC OS)... 20 〇インストール方法...
PowerPoint プレゼンテーション
 PitTouchPro2 打刻設定操作マニュアル Ver1.0.2 株式会社ネオキャリア 2018.6.15 更新 もくじ 1 PitTouchPro2 初期設定 PitTouchPro2 を使用する前の準備 PitTouchPro2 を起動して設定画面を立ち上げる PitTouchPro2 を PC に接続する PC で設定する 2 jinjer 画面登録 カード情報を読み込む jinjer へカード情報を登録する
PitTouchPro2 打刻設定操作マニュアル Ver1.0.2 株式会社ネオキャリア 2018.6.15 更新 もくじ 1 PitTouchPro2 初期設定 PitTouchPro2 を使用する前の準備 PitTouchPro2 を起動して設定画面を立ち上げる PitTouchPro2 を PC に接続する PC で設定する 2 jinjer 画面登録 カード情報を読み込む jinjer へカード情報を登録する
「MT-3_2-ja
 MT-3_2-ja.zip の解凍 Movable type 3.2 の設置方法 入手した MT-3_2-ja.zip を解凍します 解凍ソフトは zip 形式の解凍に対応したソフトをご利用ください 設定ファイル mt-config.cgi の編集 設定ファイル mt-config.cgi の編集作業は お客様の独自ドメインのサーバ上で MovableType を動かすために必要な作業です mt-config.cgi
MT-3_2-ja.zip の解凍 Movable type 3.2 の設置方法 入手した MT-3_2-ja.zip を解凍します 解凍ソフトは zip 形式の解凍に対応したソフトをご利用ください 設定ファイル mt-config.cgi の編集 設定ファイル mt-config.cgi の編集作業は お客様の独自ドメインのサーバ上で MovableType を動かすために必要な作業です mt-config.cgi
FTP_RW_ProgramDescription_jp_V100
 FTP 通信を利用利用してしてファイルファイルの送受信送受信をするサンプルプログラム V1.0.0 11/09/30 1 本サンプルプログラムの概要 このサンプルプログラムは FTP 通信プロトコルを使用して WebVisu 画面からファイルの送信 受信を行うサンプルプログラムです バスカプラ間のファイル交換及び FTP サーバソフトを起動したパーソナルコンピュータとの通信が可能です 本サンプルプログラムを応用することによって
FTP 通信を利用利用してしてファイルファイルの送受信送受信をするサンプルプログラム V1.0.0 11/09/30 1 本サンプルプログラムの概要 このサンプルプログラムは FTP 通信プロトコルを使用して WebVisu 画面からファイルの送信 受信を行うサンプルプログラムです バスカプラ間のファイル交換及び FTP サーバソフトを起動したパーソナルコンピュータとの通信が可能です 本サンプルプログラムを応用することによって
KEW Smart for KEW3552BT 取扱説明書
 KEW Smart for KEW3552BT 取扱説明書 KEW3552BT と接続する 次のページ 接続と切断 KEW3552BTと接続する P.3 KEW3552BTから切断する P.7 測定データの保存 測定データを保存する P.8 保存データの見方について P.10 測定データを自動保存する P.11 ファイルを変更する メニューについて P.13 ファイルを作成する P.15 ファイルを変更する
KEW Smart for KEW3552BT 取扱説明書 KEW3552BT と接続する 次のページ 接続と切断 KEW3552BTと接続する P.3 KEW3552BTから切断する P.7 測定データの保存 測定データを保存する P.8 保存データの見方について P.10 測定データを自動保存する P.11 ファイルを変更する メニューについて P.13 ファイルを作成する P.15 ファイルを変更する
厚生労働省版ストレスチェック実施プログラム 設置 設定マニュアル Ver.3.0 目次 1. プログラム概要 設置手順 注意事項 動作環境 初期設定 ( 環境設定 ) 初期設定 ( パスワード変更 ) 初
 初期設定 ( パスワード変更 ) 初") 厚生労働省版ストレスチェック実施プログラム 設置 設定マニュアル Ver.3.0 目次 1. プログラム概要... 2 2. 設置手順... 3 3. 注意事項... 5 4. 動作環境... 6 5. 初期設定 ( 環境設定 )... 7 6. 初期設定 ( パスワード変更 )... 9 7. 初期設定 ( 面接指導医登録 )... 11 8. 初期設定 ( 実施設定 )... 12 9. 初期設定
厚生労働省版ストレスチェック実施プログラム 設置 設定マニュアル Ver.3.0 目次 1. プログラム概要... 2 2. 設置手順... 3 3. 注意事項... 5 4. 動作環境... 6 5. 初期設定 ( 環境設定 )... 7 6. 初期設定 ( パスワード変更 )... 9 7. 初期設定 ( 面接指導医登録 )... 11 8. 初期設定 ( 実施設定 )... 12 9. 初期設定
作業環境カスタマイズ 機能ガイド(応用編)
") Customize Feature Guide by SparxSystems Japan Enterprise Architect 日本語版 作業環境カスタマイズ機能ガイド ( 応用編 ) (2018/05/16 最終更新 ) 1 はじめに このドキュメントでは Enterprise Architect を利用して作業を行う場合に より快適に作業を行うためのカスタマイズ可能な項目について説明します
Customize Feature Guide by SparxSystems Japan Enterprise Architect 日本語版 作業環境カスタマイズ機能ガイド ( 応用編 ) (2018/05/16 最終更新 ) 1 はじめに このドキュメントでは Enterprise Architect を利用して作業を行う場合に より快適に作業を行うためのカスタマイズ可能な項目について説明します
ATDEインストールガイド
 ATDE インストールガイド Version 3.0.2 2011/10/21 株式会社アットマークテクノ [http://www.atmark-techno.com] Armadillo サイト [http://armadillo.atmark-techno.com] SUZAKU サイト [http://suzaku.atmark-techno.com] 株式会社アットマークテクノ 060-0035
ATDE インストールガイド Version 3.0.2 2011/10/21 株式会社アットマークテクノ [http://www.atmark-techno.com] Armadillo サイト [http://armadillo.atmark-techno.com] SUZAKU サイト [http://suzaku.atmark-techno.com] 株式会社アットマークテクノ 060-0035
OpenAM 9.5 インストールガイド オープンソース ソリューション テクノロジ ( 株 ) 更新日 : 2013 年 7 月 19 日 リビジョン : 1.8
 更新日 : 2013 年 7 月 19 日 リビジョン : 1.8") OpenAM 9.5 インストールガイド オープンソース ソリューション テクノロジ ( 株 ) 更新日 : 2013 年 7 月 19 日 リビジョン : 1.8 目次 1. はじめに 1 1.1 本文書の目的... 1 1.2 前提条件... 1 1.3 略語...1 2. 事前準備 2 2.1 ホスト名の名前解決... 2 3. Linix 版パッケージ 3 3.1 システム要件... 3 3.1.1
OpenAM 9.5 インストールガイド オープンソース ソリューション テクノロジ ( 株 ) 更新日 : 2013 年 7 月 19 日 リビジョン : 1.8 目次 1. はじめに 1 1.1 本文書の目的... 1 1.2 前提条件... 1 1.3 略語...1 2. 事前準備 2 2.1 ホスト名の名前解決... 2 3. Linix 版パッケージ 3 3.1 システム要件... 3 3.1.1
Microsoft Word - ModelAnalys操作マニュアル_
 モデル分析アドイン操作マニュアル Ver.0.5.0 205/0/05 株式会社グローバルアシスト 目次 概要... 3. ツール概要... 3.2 対象... 3 2 インストールと設定... 4 2. モデル分析アドインのインストール... 4 2.2 モデル分析アドイン画面の起動... 6 3 モデル分析機能... 7 3. 要求分析機能... 7 3.. ID について... 0 3.2 要求ツリー抽出機能...
モデル分析アドイン操作マニュアル Ver.0.5.0 205/0/05 株式会社グローバルアシスト 目次 概要... 3. ツール概要... 3.2 対象... 3 2 インストールと設定... 4 2. モデル分析アドインのインストール... 4 2.2 モデル分析アドイン画面の起動... 6 3 モデル分析機能... 7 3. 要求分析機能... 7 3.. ID について... 0 3.2 要求ツリー抽出機能...