ロボット技術の紹介
|
|
|
- さみ いまいだ
- 5 years ago
- Views:
Transcription
1 賢いロボットの作り方 ~ 自分で考えて行動するロボットをつくる ~ 関東学院大学 理工学部 ( 届出設置書類提出中 ) 准教授元木誠 夢ナビライブ東京賢いロボットの作り方 1
2 本日の講義内容 周囲の状況を認識し, 自分で考えて行動するロボットのことを知能ロボットといいます 知能ロボットは賢さのレベルによって作り方が違います 生物の脳をモデルにしたシステム ( ニューラルネットワーク ) で作る方法を紹介します! 知能ロボットと人工知能 人工知能の分類 人工知能を搭載したロボット 車輪型移動ロボットを賢くしてみましょう! 今後の知能ロボット研究 夢ナビライブ東京賢いロボットの作り方 2
3 知能ロボットと人工知能 知能ロボットとは? 周囲の情報をもとに自分で考え行動するロボットこと 人工知能を搭載しています 技術は 身近なところで応用されています 人工知能の特徴 人間と同じように 自らの考えと行動を成長させ 発展させることができる!! 学習 と 進化 という二つの方法があります 学習 見本 データと照合することで最も適切な行動を導き その行動の結果から内部情報を修正していく方法 進化ある行動に対する評価値を設定し 最も評価値の高い行動だけを残していく方法 夢ナビライブ東京賢いロボットの作り方 4
4 ニューラルネットワーク 脳の神経回路の仕組みを数学モデルにしたもの シナプス 軸索 神経細胞 脳の神経回路 樹状突起 入手した情報を信号にして伝達していきます 一つの信号が次のニューロン ( 神経細胞 ) に伝わり さらに次々と複雑に伝達することで情報処理を行います この仕組みを利用 数式にしてコンピュータ処理することで センサで感知した情報を 人間と同じように処理する人工知能をつくることができる!! 夢ナビライブ東京賢いロボットの作り方 5
5 ニューラルネットワークを用いた人工知能 ニューラルネットワークを使うと 例えば 障害物をよける といった単純な反応行動を実現できます シナプス 軸索神経細胞 樹状突起 もう少し複雑な行動を行うためには 例えば 一つ目の角を右折し 二つ目の角を左折する といった計画行動には パルスニューラルネットワーク という仕組みが使用されます 夢ナビライブ東京賢いロボットの作り方 6

6 より複雑で高度な行動を実現するためには ニューラルネットワークを使うと 単純な反応行動 パルスニューラルネットワーク もう少し高度な計画行動 さらに より高度な行動を行うためには 例えば 人と対話をする などの相互理解が必要な行動には 別の機能が使われます 夢ナビホームページより いくつかの人工知能システムを使い分けることによって より人間に近い行動が可能になります もしかしたら 人間が考えつかない 最良の方法 を 人工知能が教えてくれる日が来るかも 夢ナビライブ東京賢いロボットの作り方 7
7 人工知能の分類 ( 知能ロボットの場合 ) 反応行動 障害物回避, 注視反応など 外界の事象を感じ, 素早く反応するような行動 計画行動 目標到達 帰還行動など 環境の地図や事物の知識と現在の状態とを照らし合わせつつ, 一定の目的に向かって遂行する行動 適応行動 ニューラルネットワークの学習, 強化学習など 経験を通じて自己の行為を改良することで目的を達成する行動 協調行動 協調運搬, 役割分担など 一定の評価軸から見たとき, 複数のロボットが 1 体ロボットの行動よりも高い評価を達成する集団行動 相互理解 行為理解, 模倣など 他者や自分の状況, 振舞い, 意図, 感情などを理解したり, それに基づき意思疎通を行う知能 夢ナビライブ東京賢いロボットの作り方 9
 Bioloid")


8 ロボットの行動決定 ~ 反応行動 ~(1) Bioloid に自律行動させる 頭の中央赤外線反射率感知センサに反応があれば挨拶する 拍手の回数に応じてロボットも同じ回数だけ拍手をする 夢ナビライブ東京賢いロボットの作り方 10
9 ロボットの行動決定 ~ 反応行動 ~ (2) スタート 直立姿勢に 判断ポイント 中央センサ値 >50? YES 挨拶モーションを再生 NO 音感知回数!=0? YES 拍手モーションを音感知回数だけ繰り返し再生 NO 終了 音感知回数 0 夢ナビライブ東京賢いロボットの作り方 11



10 ロボットの行動決定 ~ 計画行動 ~(1) 二足歩行ロボットが自律的にボールを探索し, ゴールとボールの位置関係を考慮してゴールにボールをシュートする s u state unification module s u r evaluation a u action a u upper layer r selection of modules around module approach module shoot module lower layer s l1 s l2 s l3 state1 state2 state3 action sensor motor a l r evaluation environment 夢ナビライブ東京賢いロボットの作り方 12


11 ロボットの行動決定 ~ 計画行動 ~(2) 二足歩行ロボットが自律的にボールを探索し, ゴールとボールの位置関係を考慮してゴールにボールをシュートする 夢ナビライブ東京賢いロボットの作り方 13
")

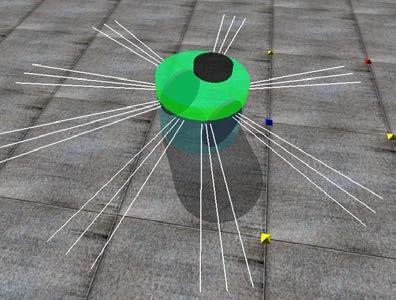
12 ロボットの行動決定 ~ 適応行動 ~ 視覚センサで目標物 ( 緑色の球 ) を探索し, 追従するように学習 夢ナビライブ東京賢いロボットの作り方 14


13 人工知能を搭載したロボット PALRO( パルロ ) (1) 知能化技術を集約した小型ヒューマノイドロボット 人に情報やサービスを提供するパーソナルホームコンシェルジュとして開発 身長約 39cm 体重約 1.6Kg 富士ソフト 夢ナビライブ東京賢いロボットの作り方 16
 (2) ハードウェア 富士ソフト")

14 人工知能を搭載したロボット PALRO( パルロ ) (2) ハードウェア 富士ソフト ネットワーク接続 夢ナビライブ東京賢いロボットの作り方 17
 e-puck(aai ジャパン社 ) 各種センサを搭載 近接赤外線センサ 8 個 光センサ 8 個 C-MOS カメラ 3 軸加速度センサ マイク 3 個 2")
15 車輪型移動ロボットを賢くしてみましょう!(1) e-puck(aai ジャパン社 ) 各種センサを搭載 近接赤外線センサ 8 個 光センサ 8 個 C-MOS カメラ 3 軸加速度センサ マイク 3 個 2 個のステッピングモータで左右の車輪を駆動 dspic プロセッサ (microchip 社 ) 夢ナビライブ東京賢いロボットの作り方 19
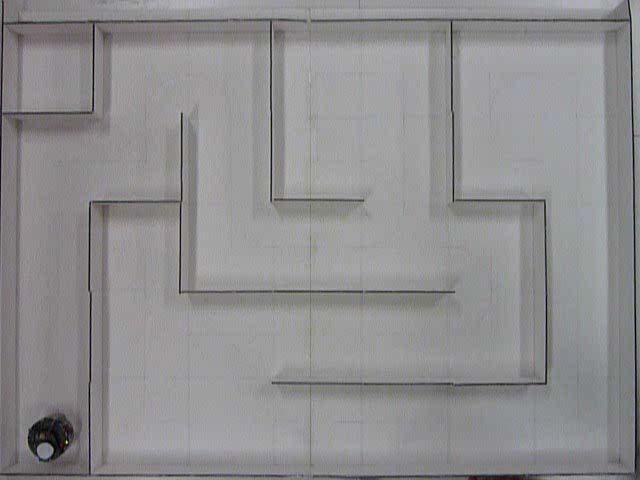
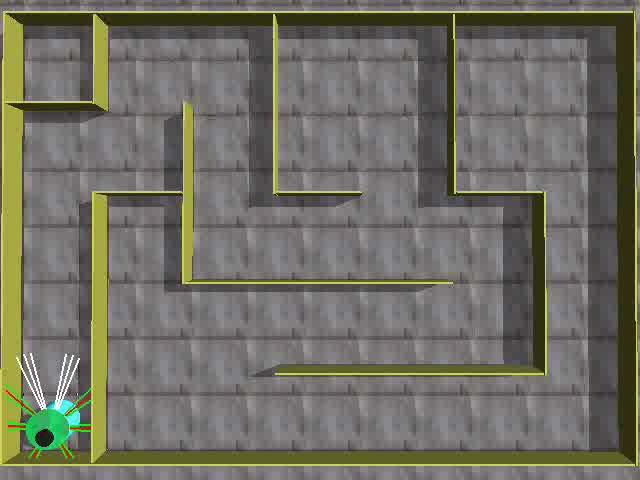
16 車輪型移動ロボットを賢くしてみましょう!(2) 実環境 (4 倍速 ) シミュレータ 夢ナビライブ東京賢いロボットの作り方 20
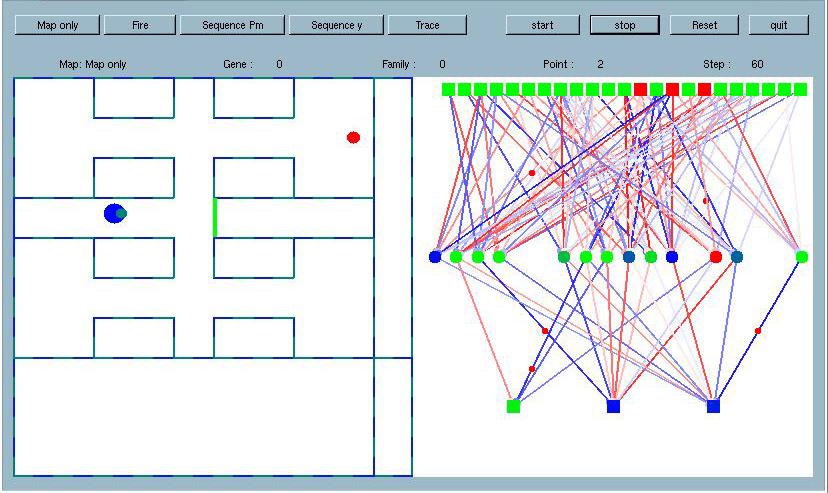

17 ニューラルネットワークを搭載する! ロボットを障害物にぶつからないようにニューラルネットワークを利用して行動させる 各種センサ値と 1 ステップ前の出力値をネットワークへ入力する ネットワークから左右の車輪モータへの出力値が出力される ネットワークを進化で賢くする! センサ値 モータへ出力 ニューラルネットワーク 知能ロボットシミュレータ ロボットを行動やニューラルネットワークの状態をコンピュータで解析する 夢ナビライブ東京賢いロボットの作り方 21

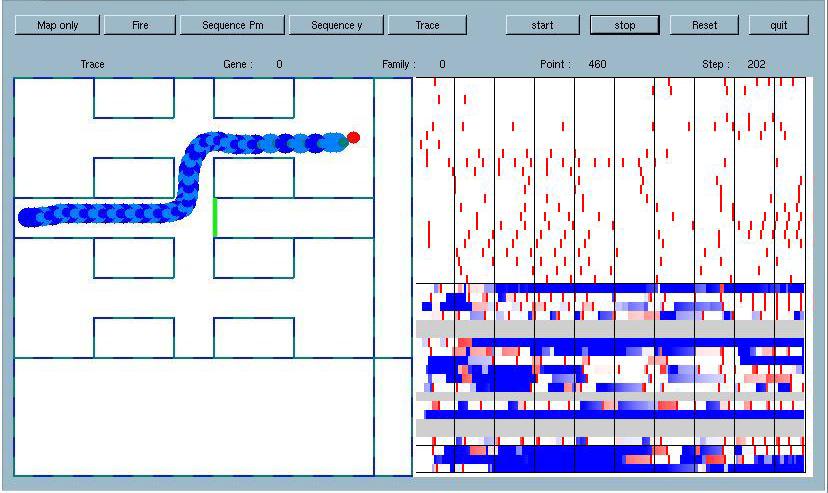
18 ニューラルネットワークで計画行動を作ってみよう! 指示板の色で 4 種類の環境を区別して, それぞれのゴールまで移動する 夢ナビライブ東京賢いロボットの作り方 22

19 普通のニューラルネットワークの場合 夢ナビライブ東京賢いロボットの作り方 23

20 パルスニューラルネットワークの場合 夢ナビライブ東京賢いロボットの作り方 24
21 今後の知能ロボット研究 センサ コンピュータ モータは さらに高度に多機能に より高度な人工知能 (AI) の搭載 技巧的な動きが可能 ( ダンスや 弦楽器の演奏など ) 会話能力や自動的な学習能力も獲得言葉を理解常識を理解 感情を理解 アカデミックロードマップ 夢ナビライブ東京賢いロボットの作り方 26

22 ロボット分野アカデミックロードマップ 株式会社日本総合研究所 社団法人日本ロボット学会 社団法人人工知能学会 日本人間工学会 ロボット分野に関するアカデミック ロードマップ報告書 より 夢ナビライブ東京賢いロボットの作り方 27
23 本日の講義内容おわり 周囲の状況を認識し, 自分で考えて行動するロボットのことを知能ロボットといいます 知能ロボットは賢さのレベルによって作り方が違います 生物の脳をモデルにしたシステム ( ニューラルネットワーク ) で作る方法を紹介しました! 2025 年には もっと賢いロボットが生活に普及しているはず?! 医療 介護 重労働 危険な作業 災害などの場面で活躍するロボットを想像してみましょう! 夢ナビライブ東京賢いロボットの作り方 28
Microsoft PowerPoint - 14.ppt [互換モード]
![Microsoft PowerPoint - 14.ppt [互換モード]](/thumbs/101/152433840.jpg "Microsoft PowerPoint - 14.ppt [互換モード]") ブレイン コンピューティング 14 林勲 研究室 :TA31 ihaya@cbii.kutc.kansai-u.ac.jp BMI と BCI Brain-machine interface: past, present, and future M.A.Lebedev and M.A.L.Nicolelis, Neuroscience, 29, 9 (26) NHK スペシャル HP サイボーグ技術が人類を変える
ブレイン コンピューティング 14 林勲 研究室 :TA31 ihaya@cbii.kutc.kansai-u.ac.jp BMI と BCI Brain-machine interface: past, present, and future M.A.Lebedev and M.A.L.Nicolelis, Neuroscience, 29, 9 (26) NHK スペシャル HP サイボーグ技術が人類を変える
 6 12 10661 93100 227213202 222208197 85kg cm 20 64.521 106856142 2 1 4 3 9767 100 35 cm 7747 208198 90kg 23 5828 10661 93100 cm 227213202 10639 61 64.521 85kg 78kg 70kg 61 100 197204.5 cm 15 61
6 12 10661 93100 227213202 222208197 85kg cm 20 64.521 106856142 2 1 4 3 9767 100 35 cm 7747 208198 90kg 23 5828 10661 93100 cm 227213202 10639 61 64.521 85kg 78kg 70kg 61 100 197204.5 cm 15 61
<82D282A982C1746F95F18D908F57967B95B E696E6464>
 1 2 (90cm 70cm 2015) 3 (68cm 28cm 30cm 12kg 2015) (77.5 109.5cm 2015) 4 (22cm 50cm 50cm 4.6kg 2015) (45cm 62.5cm 2015) (47.4cm 62.5cm 2014) 5 (28.5cm 23.5cm) (45cm 62cm 2015) (97cm 107cm 2015) 6 7 8 9
1 2 (90cm 70cm 2015) 3 (68cm 28cm 30cm 12kg 2015) (77.5 109.5cm 2015) 4 (22cm 50cm 50cm 4.6kg 2015) (45cm 62.5cm 2015) (47.4cm 62.5cm 2014) 5 (28.5cm 23.5cm) (45cm 62cm 2015) (97cm 107cm 2015) 6 7 8 9

180 140 22
 21 180 140 22 23 25 50 1 3 350 140 500cm 600 140 24 25 26 27 28 29 30 31 1/12 8.3 1/15 6.7 10 1/8 12.5 1/20 140 90 75 150 60 150 10 30 15 35 2,000 30 32 1 1 1 2 1 3 1 4 1 5 1 6 1 7 1 8 1 9 % 100 50 33.3
21 180 140 22 23 25 50 1 3 350 140 500cm 600 140 24 25 26 27 28 29 30 31 1/12 8.3 1/15 6.7 10 1/8 12.5 1/20 140 90 75 150 60 150 10 30 15 35 2,000 30 32 1 1 1 2 1 3 1 4 1 5 1 6 1 7 1 8 1 9 % 100 50 33.3
Copyright c 2009 by Masaki Yagi
 041238 2009 2 Copyright c 2009 by Masaki Yagi c 2009 Masaki Yagi All rights reserved ,,,,,,,,,,,,,, 3,,,,,,, i 1 1 11 1 12 1 2 2 21 2 22 3 23 4 24 4 25 5 26 5 3 6 31 6 32 10 33 11 4 13 41 13 42 14 43
041238 2009 2 Copyright c 2009 by Masaki Yagi c 2009 Masaki Yagi All rights reserved ,,,,,,,,,,,,,, 3,,,,,,, i 1 1 11 1 12 1 2 2 21 2 22 3 23 4 24 4 25 5 26 5 3 6 31 6 32 10 33 11 4 13 41 13 42 14 43
研究成果報告書
 様式 C-19 科学研究費補助金研究成果報告書 平成 21 年 5 月 21 日現在 研究種目 : 若手研究 (B) 研究期間 :2006 ~ 2008 課題番号 :18710150 研究課題名 ( 和文 ) 生物情報処理技術を用いた自律型協調レスキューロボットの開発 研究課題名 ( 英文 ) Developmentofautonomouscooperativerescuerobots basedonabiologicalinformationprocessingtechnique.
様式 C-19 科学研究費補助金研究成果報告書 平成 21 年 5 月 21 日現在 研究種目 : 若手研究 (B) 研究期間 :2006 ~ 2008 課題番号 :18710150 研究課題名 ( 和文 ) 生物情報処理技術を用いた自律型協調レスキューロボットの開発 研究課題名 ( 英文 ) Developmentofautonomouscooperativerescuerobots basedonabiologicalinformationprocessingtechnique.
課題情報シート テーマ名 : 動画中継ラジコンカーの製作 担当指導員名 : 土山博剛実施年度 : 25 年度施設名 : 四国職業能力開発大学校課程名 : 専門課程訓練科名 : 電子情報技術科課題の区分 : 総合制作実習課題学生数 : 1 時間 : 12 単位 (216h) 課題制作 開発のポイント
 課題制作 開発のポイント") 課題情報シート テーマ名 : 担当指導員名 : 土山博剛実施年度 : 25 年度施設名 : 四国職業能力開発大学校課程名 : 専門課程訓練科名 : 電子情報技術科課題の区分 : 総合制作実習課題学生数 : 1 時間 : 12 単位 (216h) 課題制作 開発のポイント 開発( 制作 ) のポイント 今回製作したシステムでは 専門課程で習得した総合的な知識 ( ネットワーク技術 電子回路技術 C プログラミング技術
課題情報シート テーマ名 : 担当指導員名 : 土山博剛実施年度 : 25 年度施設名 : 四国職業能力開発大学校課程名 : 専門課程訓練科名 : 電子情報技術科課題の区分 : 総合制作実習課題学生数 : 1 時間 : 12 単位 (216h) 課題制作 開発のポイント 開発( 制作 ) のポイント 今回製作したシステムでは 専門課程で習得した総合的な知識 ( ネットワーク技術 電子回路技術 C プログラミング技術
自己紹介 名前 : 竹田卓也 年齢 : 20 歳 ( 大学生 ) 経歴 : 人工知能歴 1ヶ月プログラミング歴 5 年くらい 言語 : PythonとかJavaとかGoとか 趣味 : オンライン オフラインゲーム 2
 経歴 : 人工知能歴 1ヶ月プログラミング歴 5 年くらい 言語 : PythonとかJavaとかGoとか 趣味 : オンライン オフラインゲーム 2") リカレントニューラルネットワークの概要と動作原理 竹田卓也 後援 : ドワンゴ 1 自己紹介 名前 : 竹田卓也 年齢 : 20 歳 ( 大学生 ) 経歴 : 人工知能歴 1ヶ月プログラミング歴 5 年くらい 言語 : PythonとかJavaとかGoとか 趣味 : オンライン オフラインゲーム 2 アウトライン Feed forward neural network Recurrent neural
リカレントニューラルネットワークの概要と動作原理 竹田卓也 後援 : ドワンゴ 1 自己紹介 名前 : 竹田卓也 年齢 : 20 歳 ( 大学生 ) 経歴 : 人工知能歴 1ヶ月プログラミング歴 5 年くらい 言語 : PythonとかJavaとかGoとか 趣味 : オンライン オフラインゲーム 2 アウトライン Feed forward neural network Recurrent neural
生物 第39講~第47講 テキスト
 基礎から分かる生物 興奮の伝導と伝達 1. 興奮の伝導 1 興奮の伝導 興奮が生じると, 興奮が生じた部位と隣接する静止状態の部位の間で電位の差が発生する. この電位差により, 興奮部分から隣接部へと活動電流が流れる. 活動電流が隣接部を興奮させる刺激となり, 隣接部が次々と興奮する. これによって興奮は, 興奮が発生した部位から軸索内を両方向に伝導する. 1 興奮の発生 2 隣接部に活動電流が流れる
基礎から分かる生物 興奮の伝導と伝達 1. 興奮の伝導 1 興奮の伝導 興奮が生じると, 興奮が生じた部位と隣接する静止状態の部位の間で電位の差が発生する. この電位差により, 興奮部分から隣接部へと活動電流が流れる. 活動電流が隣接部を興奮させる刺激となり, 隣接部が次々と興奮する. これによって興奮は, 興奮が発生した部位から軸索内を両方向に伝導する. 1 興奮の発生 2 隣接部に活動電流が流れる
ic3_cf_p1-70_1018.indd
 章オペレーティングシステム()の基いソフトウェアで 基本ソフトウェア とも呼ばれます 第礎第 章 オペレーティングシステム () の基礎 - の役割と動作 ここでは コンピューターの基本的な構成やオペレーティングシステムの基本的な役割と操作を学習します -- コンピューターの基本構成 現代社会では さまざまな種類のコンピューター機器が各分野で利用されています 身近なものでは パソコン タブレット スマートフォンなどがありますが
章オペレーティングシステム()の基いソフトウェアで 基本ソフトウェア とも呼ばれます 第礎第 章 オペレーティングシステム () の基礎 - の役割と動作 ここでは コンピューターの基本的な構成やオペレーティングシステムの基本的な役割と操作を学習します -- コンピューターの基本構成 現代社会では さまざまな種類のコンピューター機器が各分野で利用されています 身近なものでは パソコン タブレット スマートフォンなどがありますが
小型移動ロボット
 小型移動ロボット 千葉工業大学 未来ロボット技術研究センター 吉田智章 背景 過去に開発した災害対応ロボット Hibiscus (2006) Kenaf (2007-2009) Quince (2009-2010) 4 大都市大震災軽減化特別プロジェクト ( 文科省 ) 戦略的先端ロボット要素技術開発プロジェクト (NEDO) 2006-2010 2002 2006 2011 2012 Kenaf
小型移動ロボット 千葉工業大学 未来ロボット技術研究センター 吉田智章 背景 過去に開発した災害対応ロボット Hibiscus (2006) Kenaf (2007-2009) Quince (2009-2010) 4 大都市大震災軽減化特別プロジェクト ( 文科省 ) 戦略的先端ロボット要素技術開発プロジェクト (NEDO) 2006-2010 2002 2006 2011 2012 Kenaf
サカナに逃げろ!と指令する神経細胞の分子メカニズムを解明 -個性的な神経細胞のでき方の理解につながり,難聴治療の創薬標的への応用に期待-
 サカナに逃げろ! と指令する神経細胞の分子メカニズムを解明 - 個性的な神経細胞のでき方の理解につながり 難聴治療の創薬標的への応用に期待 - 概要 名古屋大学大学院理学研究科生命理学専攻の研究グループ ( 小田洋一教授 渡邉貴樹等 ) は 大きな音から逃げろ! とサカナに指令を送る神経細胞 マウスナー細胞がその 音の開始を伝える機能 を獲得する分子メカニズムを解明しました これまで マウスナー細胞は大きな音の開始にたった1
サカナに逃げろ! と指令する神経細胞の分子メカニズムを解明 - 個性的な神経細胞のでき方の理解につながり 難聴治療の創薬標的への応用に期待 - 概要 名古屋大学大学院理学研究科生命理学専攻の研究グループ ( 小田洋一教授 渡邉貴樹等 ) は 大きな音から逃げろ! とサカナに指令を送る神経細胞 マウスナー細胞がその 音の開始を伝える機能 を獲得する分子メカニズムを解明しました これまで マウスナー細胞は大きな音の開始にたった1
卒業論文2003
 UEC イントロダクション メカトロニクスとは? 下条誠 * * 電気通信大学 1 自己紹介 昭和 26 年 1 月 27 日東京生まれ 昭和 48 年電気通信大学機械工学科卒業 昭和 51 年東京工業大学大学院総合理工学研究科精密機械システム専攻修了 同年通産省工業技術院製品科学研究所入所 平成 5 年 1 月生命工学工業技術研究所人間環境システム部報伝達機能研究室室長 平成 9 年 9 月茨城大学工学部情報工学科教授
UEC イントロダクション メカトロニクスとは? 下条誠 * * 電気通信大学 1 自己紹介 昭和 26 年 1 月 27 日東京生まれ 昭和 48 年電気通信大学機械工学科卒業 昭和 51 年東京工業大学大学院総合理工学研究科精密機械システム専攻修了 同年通産省工業技術院製品科学研究所入所 平成 5 年 1 月生命工学工業技術研究所人間環境システム部報伝達機能研究室室長 平成 9 年 9 月茨城大学工学部情報工学科教授
PowerPoint プレゼンテーション
 総務省 ICTスキル総合習得教材 概要版 eラーニング用 [ コース1] データ収集 1-5:API によるデータ収集と利活用 [ コース1] データ収集 [ コース2] データ蓄積 [ コース3] データ分析 [ コース4] データ利活用 1 2 3 4 5 座学本講座の学習内容 (1-5:API によるデータ収集と利活用 ) 講座概要 API の意味とイメージを 主に利用しているファイル形式と合わせて紹介します
総務省 ICTスキル総合習得教材 概要版 eラーニング用 [ コース1] データ収集 1-5:API によるデータ収集と利活用 [ コース1] データ収集 [ コース2] データ蓄積 [ コース3] データ分析 [ コース4] データ利活用 1 2 3 4 5 座学本講座の学習内容 (1-5:API によるデータ収集と利活用 ) 講座概要 API の意味とイメージを 主に利用しているファイル形式と合わせて紹介します
PowerPoint Presentation
 HiTechnic 社の 免責事項本資料に掲載する情報については 注意を払っていますが その内容について保証するものではありません 株式会社アフレルは本資料の使用ならびに閲覧によって生じるいかなる損害にも責任を負いかねます また 本資料の情報は予告無く変更される場合があります この資料は 主に http://www.hitechnic.com/ を参照して作成しています 各製品名及びサービス名は それぞれ各社の登録商標または商標です
HiTechnic 社の 免責事項本資料に掲載する情報については 注意を払っていますが その内容について保証するものではありません 株式会社アフレルは本資料の使用ならびに閲覧によって生じるいかなる損害にも責任を負いかねます また 本資料の情報は予告無く変更される場合があります この資料は 主に http://www.hitechnic.com/ を参照して作成しています 各製品名及びサービス名は それぞれ各社の登録商標または商標です
IPSJ SIG Technical Report Vol.2015-MUS-106 No.18 Vol.2015-EC-35 No /3/3 1,a) ch [1] 1 Kansai University Graduate School of Inf
![IPSJ SIG Technical Report Vol.2015-MUS-106 No.18 Vol.2015-EC-35 No /3/3 1,a) ch [1] 1 Kansai University Graduate School of Inf](/thumbs/99/139166035.jpg "IPSJ SIG Technical Report Vol.2015-MUS-106 No.18 Vol.2015-EC-35 No /3/3 1,a) ch [1] 1 Kansai University Graduate School of Inf") 1,a) 1 2 2. 1. 1.1 5.1ch [1] 1 Kansai University Graduate School of Informatics, 2-1-1 Ryozenji-cho, Takatsuki-shi, Osaka, 569-1095, Japan 2 Kansai University Faculty of Informatics, 2-1-1 Ryozenjicho,
1,a) 1 2 2. 1. 1.1 5.1ch [1] 1 Kansai University Graduate School of Informatics, 2-1-1 Ryozenji-cho, Takatsuki-shi, Osaka, 569-1095, Japan 2 Kansai University Faculty of Informatics, 2-1-1 Ryozenjicho,
金融ビジネスにおけるチャットボットの活用
 2018 年 8 月 3 日 日本銀行 金融ビジネスにおけるチャットボットの活用 ~ 新しいコミュニケーション サービスの現状とその可能性 ~ 第 6 回 FinTech フォーラムにおける挨拶 日本銀行理事 桑原茂裕 ( はじめに ) 日本銀行理事の桑原でございます 本日は第 6 回 FinTech フォーラムにお集まりいただき 誠に有難うございます 今回のテーマは 金融サービスのインターフェースに大きな変革の波をもたらしつつあるチャットボットです
2018 年 8 月 3 日 日本銀行 金融ビジネスにおけるチャットボットの活用 ~ 新しいコミュニケーション サービスの現状とその可能性 ~ 第 6 回 FinTech フォーラムにおける挨拶 日本銀行理事 桑原茂裕 ( はじめに ) 日本銀行理事の桑原でございます 本日は第 6 回 FinTech フォーラムにお集まりいただき 誠に有難うございます 今回のテーマは 金融サービスのインターフェースに大きな変革の波をもたらしつつあるチャットボットです
[ 指針 ] 1. 組織体および組織体集団におけるガバナンス プロセスの改善に向けた評価組織体の機関設計については 株式会社にあっては株主総会の専決事項であり 業務運営組織の決定は 取締役会等の専決事項である また 組織体集団をどのように形成するかも親会社の取締役会等の専決事項である したがって こ
![[ 指針 ] 1. 組織体および組織体集団におけるガバナンス プロセスの改善に向けた評価組織体の機関設計については 株式会社にあっては株主総会の専決事項であり 業務運営組織の決定は 取締役会等の専決事項である また 組織体集団をどのように形成するかも親会社の取締役会等の専決事項である したがって こ](/thumbs/92/109921559.jpg "[ 指針 ] 1. 組織体および組織体集団におけるガバナンス プロセスの改善に向けた評価組織体の機関設計については 株式会社にあっては株主総会の専決事項であり 業務運営組織の決定は 取締役会等の専決事項である また 組織体集団をどのように形成するかも親会社の取締役会等の専決事項である したがって こ") 実務指針 6.1 ガバナンス プロセス 平成 29( 2017) 年 5 月公表 [ 根拠とする内部監査基準 ] 第 6 章内部監査の対象範囲第 1 節ガバナンス プロセス 6.1.1 内部監査部門は ガバナンス プロセスの有効性を評価し その改善に貢献しなければならない (1) 内部監査部門は 以下の視点から ガバナンス プロセスの改善に向けた評価をしなければならない 1 組織体として対処すべき課題の把握と共有
実務指針 6.1 ガバナンス プロセス 平成 29( 2017) 年 5 月公表 [ 根拠とする内部監査基準 ] 第 6 章内部監査の対象範囲第 1 節ガバナンス プロセス 6.1.1 内部監査部門は ガバナンス プロセスの有効性を評価し その改善に貢献しなければならない (1) 内部監査部門は 以下の視点から ガバナンス プロセスの改善に向けた評価をしなければならない 1 組織体として対処すべき課題の把握と共有
1/2
 札幌学院大学社会情報学部課題用テキスト (2) 1 札幌学院大学社会情報学部課題用テキスト HTML の基礎知識 (2) 1 画像の表示 HP に画像を表示させてみる まず HTML 文書と同じフォルダ内 に JPEG ファイル ( 拡張子.jpg ) を 1 個準備する ( 画像の作り方 サイズの調べ方はこのプリントの最後を参照 ) この画像を読みこんで表示するためのタグは以下の通りである 画像ファイル名と
札幌学院大学社会情報学部課題用テキスト (2) 1 札幌学院大学社会情報学部課題用テキスト HTML の基礎知識 (2) 1 画像の表示 HP に画像を表示させてみる まず HTML 文書と同じフォルダ内 に JPEG ファイル ( 拡張子.jpg ) を 1 個準備する ( 画像の作り方 サイズの調べ方はこのプリントの最後を参照 ) この画像を読みこんで表示するためのタグは以下の通りである 画像ファイル名と
ComputerArchitecture.ppt
 1 人間とコンピュータの違い コンピュータ 複雑な科学計算や膨大な量のデータの処理, さまざまな装置の制御, 通信などを定められた手順に従って間違いなく高速に実行する 人間 誰かに命令されなくても自発的に処理したり, 条件が変化しても臨機応変に対処できる 多くの問題解決を経験することで, より高度な問題解決法を考え出す 数値では表しにくい情報の処理ができる 2 コンピュータの構成要素 構成要素 ハードウェア
1 人間とコンピュータの違い コンピュータ 複雑な科学計算や膨大な量のデータの処理, さまざまな装置の制御, 通信などを定められた手順に従って間違いなく高速に実行する 人間 誰かに命令されなくても自発的に処理したり, 条件が変化しても臨機応変に対処できる 多くの問題解決を経験することで, より高度な問題解決法を考え出す 数値では表しにくい情報の処理ができる 2 コンピュータの構成要素 構成要素 ハードウェア


新技術説明会 様式例
 1 テレビ電話によるロボットの遠隔制御と アイドル応援システム 埼玉大学 大学院理工学研究科数理電子情報部門准教授小林貴訓 2 本日の内容 人を中心としたセンシングとそのインタラクションシステムへの応用 テレビ電話によるロボットの遠隔制御 アイドル応援システム 人と人の間で役立つ情報 / ロボット技術 ユーザ 人を中心としたセンシング カメラ距離センサ 加速度センサ 実世界事象の計算機理解 縦一列
1 テレビ電話によるロボットの遠隔制御と アイドル応援システム 埼玉大学 大学院理工学研究科数理電子情報部門准教授小林貴訓 2 本日の内容 人を中心としたセンシングとそのインタラクションシステムへの応用 テレビ電話によるロボットの遠隔制御 アイドル応援システム 人と人の間で役立つ情報 / ロボット技術 ユーザ 人を中心としたセンシング カメラ距離センサ 加速度センサ 実世界事象の計算機理解 縦一列
実験題吊 「加速度センサーを作ってみよう《
 加速度センサーを作ってみよう 茨城工業高等専門学校専攻科 山越好太 1. 加速度センサー? 最近話題のセンサーに 加速度センサー というものがあります これは文字通り 加速度 を測るセンサーで 主に動きの検出に使われたり 地球から受ける重力加速度を測定することで傾きを測ることなどにも使われています 最近ではゲーム機をはじめ携帯電話などにも搭載されるようになってきています 2. 加速度センサーの仕組み加速度センサーにも様々な種類があります
加速度センサーを作ってみよう 茨城工業高等専門学校専攻科 山越好太 1. 加速度センサー? 最近話題のセンサーに 加速度センサー というものがあります これは文字通り 加速度 を測るセンサーで 主に動きの検出に使われたり 地球から受ける重力加速度を測定することで傾きを測ることなどにも使われています 最近ではゲーム機をはじめ携帯電話などにも搭載されるようになってきています 2. 加速度センサーの仕組み加速度センサーにも様々な種類があります
新技術説明会 様式例
 1 ロボットへの FPGA 導入を 容易化する コンポーネント技術 宇都宮大学大学院工学研究科情報システム科学専攻助教大川猛 2 従来技術とその問題点 FPGA(Field Programmable Gate Array) は 任意のディジタル論理回路をプログラム可能な LSI ソフトウェアでは時間がかかる画像認識処理等を ハードウェア化して 高速化 低消費電力化可能 問題点 FPGA 上の回路設計が難しい
1 ロボットへの FPGA 導入を 容易化する コンポーネント技術 宇都宮大学大学院工学研究科情報システム科学専攻助教大川猛 2 従来技術とその問題点 FPGA(Field Programmable Gate Array) は 任意のディジタル論理回路をプログラム可能な LSI ソフトウェアでは時間がかかる画像認識処理等を ハードウェア化して 高速化 低消費電力化可能 問題点 FPGA 上の回路設計が難しい
.jtd")
.jtd")
< E89BB A838A834C D E786C73>
 応用化学科 カリキュラムマップ ( 共通教養科目 ) 授業科目名 単位数 必修 選択の別 学年 学期 C D E F G H 113 自校学習 1 選択科目 1 年 前期 112 人権と社会 1 2 113 人権と社会 2( 受講するには 人権と社会 1 を履修しなければならない ) 112 暮らしのなかの憲法 2 112 住みよい社会と福祉 2 112 現代社会と法 2 122 環境と社会 2 122
応用化学科 カリキュラムマップ ( 共通教養科目 ) 授業科目名 単位数 必修 選択の別 学年 学期 C D E F G H 113 自校学習 1 選択科目 1 年 前期 112 人権と社会 1 2 113 人権と社会 2( 受講するには 人権と社会 1 を履修しなければならない ) 112 暮らしのなかの憲法 2 112 住みよい社会と福祉 2 112 現代社会と法 2 122 環境と社会 2 122
")
AN41250A
 DATA SHEET 品種名 パッケージコード HQFP048-P-0707A 発行年月 : 2007 年 6 月 1 目 概要. 3 特長. 3 用途. 3 外形. 3 構造.... 3 ブロック図.... 4 端子説明... 5 絶対最大定格..... 7 動作電圧範囲. 7 次 2 光 Disk 用 7-ch Motor r 用 IC 概要 は Spindle Motor 駆動部に低雑音の Direct
DATA SHEET 品種名 パッケージコード HQFP048-P-0707A 発行年月 : 2007 年 6 月 1 目 概要. 3 特長. 3 用途. 3 外形. 3 構造.... 3 ブロック図.... 4 端子説明... 5 絶対最大定格..... 7 動作電圧範囲. 7 次 2 光 Disk 用 7-ch Motor r 用 IC 概要 は Spindle Motor 駆動部に低雑音の Direct
3 無線 / 有線接続で制御 メガローバー Ver2.0 は Wi-Fi / BLE / Bluetooth Classic の 3 種の無線通信と 有線の USB シリアル通信に対応しています 指定のコマンドを用いることで PC やタブレットなど 様々なデバイスからメガローバー Ver2.0 を制
 関係各位 2018 年 8 月 29 日 ヴイストン株式会社 研究開発用台車ロボット メガローバー Ver2.0 を発売 ~ 新開発の制御基板を搭載し ROS や Arduino IDE に対応 ~ ヴイストン株式会社 ( 本社 : 大阪府大阪市 代表取締役 : 大和信夫 ) は 2018 年 8 月 30 日より 研究開発用台車ロボット メガローバー Ver2.0 の販売を開始いたします 製品の概要
関係各位 2018 年 8 月 29 日 ヴイストン株式会社 研究開発用台車ロボット メガローバー Ver2.0 を発売 ~ 新開発の制御基板を搭載し ROS や Arduino IDE に対応 ~ ヴイストン株式会社 ( 本社 : 大阪府大阪市 代表取締役 : 大和信夫 ) は 2018 年 8 月 30 日より 研究開発用台車ロボット メガローバー Ver2.0 の販売を開始いたします 製品の概要
Slide 1
 ハンズオン受講の為の準備講座 これから始める人の為の ディープラーニング基礎講座 村上真奈 NVIDIA CUDA & Deep Learning Solution Architect NVIDIA Corporation 1 機械学習とディープラーニングの関係 AGENDA ディープラーニングとは? ニューラルネットワークの構造 ディープラーニングの学習とは 畳み込みニューラルネットワーク 午後に予定しているハンズオンの為の基礎講座ディープラーニングをこれから始める方を対象に基礎概念や用語の解説を行います
ハンズオン受講の為の準備講座 これから始める人の為の ディープラーニング基礎講座 村上真奈 NVIDIA CUDA & Deep Learning Solution Architect NVIDIA Corporation 1 機械学習とディープラーニングの関係 AGENDA ディープラーニングとは? ニューラルネットワークの構造 ディープラーニングの学習とは 畳み込みニューラルネットワーク 午後に予定しているハンズオンの為の基礎講座ディープラーニングをこれから始める方を対象に基礎概念や用語の解説を行います

今日の内容 現代の科学は 哲学の伝統的な問題である概念形成あるいは抽象の問題に どこまで迫っているのだろうか? 人工知能の研究は 心と世界あるいは抽象と具体の哲学的問題に どのような光を ( あるいは影を ) もたらすのか? コンピュータは概念をもつことができるか? 近年の深層学習によるブレークスル
 もたらすのか? コンピュータは概念をもつことができるか? 近年の深層学習によるブレークスル") 人工知能の哲学入門 池田真治 富山大学 人文学部 哲学分野准教授 今日の内容 現代の科学は 哲学の伝統的な問題である概念形成あるいは抽象の問題に どこまで迫っているのだろうか? 人工知能の研究は 心と世界あるいは抽象と具体の哲学的問題に どのような光を ( あるいは影を ) もたらすのか? コンピュータは概念をもつことができるか? 近年の深層学習によるブレークスルーは 心の哲学にどのようなインパクトをもつのか?
人工知能の哲学入門 池田真治 富山大学 人文学部 哲学分野准教授 今日の内容 現代の科学は 哲学の伝統的な問題である概念形成あるいは抽象の問題に どこまで迫っているのだろうか? 人工知能の研究は 心と世界あるいは抽象と具体の哲学的問題に どのような光を ( あるいは影を ) もたらすのか? コンピュータは概念をもつことができるか? 近年の深層学習によるブレークスルーは 心の哲学にどのようなインパクトをもつのか?
コンピュータグラフィックス演習 I 2012 年 5 月 21 日 ( 月 )5 限 担当 : 桐村喬 第 7 回モデリングの仕上げ 1 カメラワークとアニメーション 今日の内容 1. カメラワーク 2. シーンの設定 3. アニメーション 前回のテクスチャの紹介 1 / 10
5 限 担当 : 桐村喬 第 7 回モデリングの仕上げ 1 カメラワークとアニメーション 今日の内容 1. カメラワーク 2. シーンの設定 3. アニメーション 前回のテクスチャの紹介 1 / 10") コンピュータグラフィックス演習 I 2012 年 5 月 21 日 ( 月 )5 限 担当 : 桐村喬 第 7 回モデリングの仕上げ 1 カメラワークとアニメーション 今日の内容 1. カメラワーク 2. シーンの設定 3. アニメーション 前回のテクスチャの紹介 1 / 10 モデリングの仕上げモデルをどう見せるか? 作成した 3DCG モデルは 最終的には 作品 として 2 次元の画像あるいは
コンピュータグラフィックス演習 I 2012 年 5 月 21 日 ( 月 )5 限 担当 : 桐村喬 第 7 回モデリングの仕上げ 1 カメラワークとアニメーション 今日の内容 1. カメラワーク 2. シーンの設定 3. アニメーション 前回のテクスチャの紹介 1 / 10 モデリングの仕上げモデルをどう見せるか? 作成した 3DCG モデルは 最終的には 作品 として 2 次元の画像あるいは

��8��
 コンピュータ演習第 8 回 今回のテーマは プレゼンテーション です プレゼンテーションソフトを使えば 効果的な資料を作成することができ より伝わりやすいプレゼンテーションを手助けしてくれます 今回は 文字を使った基本的な機能を実習します プレゼンテーションソフトの基本的な機能を実習します プレゼンテーションソフトの編集機能を使って 文章を効果的に伝えるプレゼンテーションを作成しましょう 連絡事項
コンピュータ演習第 8 回 今回のテーマは プレゼンテーション です プレゼンテーションソフトを使えば 効果的な資料を作成することができ より伝わりやすいプレゼンテーションを手助けしてくれます 今回は 文字を使った基本的な機能を実習します プレゼンテーションソフトの基本的な機能を実習します プレゼンテーションソフトの編集機能を使って 文章を効果的に伝えるプレゼンテーションを作成しましょう 連絡事項
 H24.12.23")
Microsoft PowerPoint ppt
 情報科学第 07 回データ解析と統計代表値 平均 分散 度数分布表 1 本日の内容 データ解析とは 統計の基礎的な値 平均と分散 度数分布表とヒストグラム 講義のページ 第 7 回のその他の欄に 本日使用する教材があります 171025.xls というファイルがありますので ダウンロードして デスクトップに保存してください 2/45 はじめに データ解析とは この世の中には多くのデータが溢れています
情報科学第 07 回データ解析と統計代表値 平均 分散 度数分布表 1 本日の内容 データ解析とは 統計の基礎的な値 平均と分散 度数分布表とヒストグラム 講義のページ 第 7 回のその他の欄に 本日使用する教材があります 171025.xls というファイルがありますので ダウンロードして デスクトップに保存してください 2/45 はじめに データ解析とは この世の中には多くのデータが溢れています
例えば お客様へのサービス提供の提案 検討として 1 予測通行量を生かした受発注システム (POS) 2 客層にあった商品の取扱 棚割検討 販促手法の検討 3 広告 宣伝の手法 位置の検討 4 出店立地の検討 5 配車サービスへの利用 6 自動運転車におけるエネルギー補給ポイントの案内として 都市計
 2 客層にあった商品の取扱 棚割検討 販促手法の検討 3 広告 宣伝の手法 位置の検討 4 出店立地の検討 5 配車サービスへの利用 6 自動運転車におけるエネルギー補給ポイントの案内として 都市計") 各位 人流 ( 位置情報 ) から最適なサービスを提案 街の客動線から複雑系を解いてみよう 知りたいが分かる AI ソフトウェア特許です 日本特許登録第 5892403 号米国特許 PCT 国内移行中欧州特許 PCT 国内移行中中国特許 PCT 国内移行中 東京都江戸川区鎌田浩 e-mail: kamata-hiroshi-px@ynu.jp 1 / 7 ページ 例えば お客様へのサービス提供の提案
各位 人流 ( 位置情報 ) から最適なサービスを提案 街の客動線から複雑系を解いてみよう 知りたいが分かる AI ソフトウェア特許です 日本特許登録第 5892403 号米国特許 PCT 国内移行中欧州特許 PCT 国内移行中中国特許 PCT 国内移行中 東京都江戸川区鎌田浩 e-mail: kamata-hiroshi-px@ynu.jp 1 / 7 ページ 例えば お客様へのサービス提供の提案
お問合せはフリーコール 寸法図 CAD 図面がホームページよりダウンロード出来ます P.15 スライダタイプ 2 次元 CAD 1 モータ エンコーダケーブルを接続します ケーブルの詳細は巻末 59 ページをご参照下さい 2 原点復帰
 スライダタイプ -AR 型式項目 AR 20 アームタイプ本体幅 0mm 2V モータ折り返し仕様 シリーズタイプエンコーダ種類モータ種類ストローク適応コントローラケーブル長オプション SAD : アルミベース I: インクリメンタル 20 : 10 : 10mm 50:50mm SSD : 鉄ベース仕様 20W 5 : 5mm A: アブソリュート :mm 仕様 (50mmピッチ毎設定) 型式項目の内容は前付
スライダタイプ -AR 型式項目 AR 20 アームタイプ本体幅 0mm 2V モータ折り返し仕様 シリーズタイプエンコーダ種類モータ種類ストローク適応コントローラケーブル長オプション SAD : アルミベース I: インクリメンタル 20 : 10 : 10mm 50:50mm SSD : 鉄ベース仕様 20W 5 : 5mm A: アブソリュート :mm 仕様 (50mmピッチ毎設定) 型式項目の内容は前付
情報C 実習プリント
 高等学校 選択情報 実習プリント 8-1 < 基本操作 3> プログラムを体験しよう!1 ~アルゴロジック編 ~ 1コンピュータプログラムの基本となる思考 ( アルゴリズム ) について体験的に学ぶ 2プログラムの基本的な処理である 順次処理 繰り返し処理 分岐処理 を組み合わせた制御構造について体験的に学ぶ ELSE コマンド IF[ A ]ELSE[ B ]: もし であればA そうでなければB
高等学校 選択情報 実習プリント 8-1 < 基本操作 3> プログラムを体験しよう!1 ~アルゴロジック編 ~ 1コンピュータプログラムの基本となる思考 ( アルゴリズム ) について体験的に学ぶ 2プログラムの基本的な処理である 順次処理 繰り返し処理 分岐処理 を組み合わせた制御構造について体験的に学ぶ ELSE コマンド IF[ A ]ELSE[ B ]: もし であればA そうでなければB
Microsoft Word -
 電池 Fruit Cell 自然系 ( 理科 ) コース高嶋めぐみ佐藤尚子松本絵里子 Ⅰはじめに高校の化学における電池の単元は金属元素のイオン化傾向や酸化還元反応の応用として重要な単元である また 電池は日常においても様々な場面で活用されており 生徒にとっても興味を引きやすい その一方で 通常の電池の構造はブラックボックスとなっており その原理について十分な理解をさせるのが困難な教材である そこで
電池 Fruit Cell 自然系 ( 理科 ) コース高嶋めぐみ佐藤尚子松本絵里子 Ⅰはじめに高校の化学における電池の単元は金属元素のイオン化傾向や酸化還元反応の応用として重要な単元である また 電池は日常においても様々な場面で活用されており 生徒にとっても興味を引きやすい その一方で 通常の電池の構造はブラックボックスとなっており その原理について十分な理解をさせるのが困難な教材である そこで
2008 年度下期未踏 IT 人材発掘 育成事業採択案件評価書 1. 担当 PM 田中二郎 PM ( 筑波大学大学院システム情報工学研究科教授 ) 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3.
 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3.") 2008 年度下期未踏 IT 人材発掘 育成事業採択案件評価書 1. 担当 PM 田中二郎 PM ( 筑波大学大学院システム情報工学研究科教授 ) 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3. プロジェクト管理組織 株式会社オープンテクノロジーズ 4. 委託金支払額 3,000,000 円 5.
2008 年度下期未踏 IT 人材発掘 育成事業採択案件評価書 1. 担当 PM 田中二郎 PM ( 筑波大学大学院システム情報工学研究科教授 ) 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3. プロジェクト管理組織 株式会社オープンテクノロジーズ 4. 委託金支払額 3,000,000 円 5.
 DIRECT DRIVE ACTUATOR, QUICK RESPONSE TYPE, AX1000T, AX2000T, AX4000T SERIES CC-995 11 AX1000T AX2000T AX4000T AX9000TS AX9000TH AX0180 AX1000T Series AX1 022 TS B C DM04 J1 P1 U0 AX1000T
DIRECT DRIVE ACTUATOR, QUICK RESPONSE TYPE, AX1000T, AX2000T, AX4000T SERIES CC-995 11 AX1000T AX2000T AX4000T AX9000TS AX9000TH AX0180 AX1000T Series AX1 022 TS B C DM04 J1 P1 U0 AX1000T
TopSE並行システム はじめに
 はじめに 平成 23 年 9 月 1 日 トップエスイープロジェクト 磯部祥尚 ( 産業技術総合研究所 ) 2 本講座の背景と目標 背景 : マルチコア CPU やクラウドコンピューティング等 並列 / 分散処理環境が身近なものになっている 複数のプロセス ( プログラム ) を同時に実行可能 通信等により複数のプロセスが協調可能 並行システムの構築 並行システム 通信 Proc2 プロセス ( プログラム
はじめに 平成 23 年 9 月 1 日 トップエスイープロジェクト 磯部祥尚 ( 産業技術総合研究所 ) 2 本講座の背景と目標 背景 : マルチコア CPU やクラウドコンピューティング等 並列 / 分散処理環境が身近なものになっている 複数のプロセス ( プログラム ) を同時に実行可能 通信等により複数のプロセスが協調可能 並行システムの構築 並行システム 通信 Proc2 プロセス ( プログラム
家庭系パソコンの回収再資源化にかかる論点
 1 134 1212 134 2 1 137 1212 (1) 12 12,102 40.2 4,865 2-1 12 21,497 2-2 50.1 2-3 1 kg 2 12 2-1 13 12% 2-1 (2) 2-2 4 4 7 2-3 4 (3) 13.8 2-4 46 10 80 3 3 4 3 2-5, 2-6 13 9 2-7 18 2 2 8 5,000 30 25% 25 2 2
1 134 1212 134 2 1 137 1212 (1) 12 12,102 40.2 4,865 2-1 12 21,497 2-2 50.1 2-3 1 kg 2 12 2-1 13 12% 2-1 (2) 2-2 4 4 7 2-3 4 (3) 13.8 2-4 46 10 80 3 3 4 3 2-5, 2-6 13 9 2-7 18 2 2 8 5,000 30 25% 25 2 2
Robot Platform Project(RPP) "Spur" "YP-Spur" rev. 4 [ ] Robot Platform Project(RPP) WATANABE Atsushi 1.,,., Fig. 1.,,,,,.,,,..,,..,,..,,,,. "
![Robot Platform Project(RPP) Spur YP-Spur rev. 4 [ ] Robot Platform Project(RPP) WATANABE Atsushi 1.,,., Fig. 1.,,,,,.,,,..,,..,,..,,,,.](/thumbs/93/117962738.jpg "Robot Platform Project(RPP) Spur YP-Spur rev. 4 [ ] Robot Platform Project(RPP) WATANABE Atsushi 1.,,., Fig. 1.,,,,,.,,,..,,..,,..,,,,.") Robot Platform Project(RPP) "Spur" "YP-Spur" ev. 4 [.8.9] Robot Platform Project(RPP) WATANABE Atsushi.,,., Fig..,,,,,.,,,..,,..,,..,,,,. "",,, Spur.,, Robot Platform Project, "YP-Spur".,,, 98 99,. [][3][4].,,,
Robot Platform Project(RPP) "Spur" "YP-Spur" ev. 4 [.8.9] Robot Platform Project(RPP) WATANABE Atsushi.,,., Fig..,,,,,.,,,..,,..,,..,,,,. "",,, Spur.,, Robot Platform Project, "YP-Spur".,,, 98 99,. [][3][4].,,,
マウス操作だけで本格プログラミングを - 世界のナベアツをコンピュータで - プログラムというと普通は英語みたいな言葉で作ることになりますが 今回はマウスの操作だけで作ってみます Baltie, SGP System 操作説明ビデオなどは 高校 情
 マウス操作だけで本格プログラミングを - 世界のナベアツをコンピュータで - プログラムというと普通は英語みたいな言葉で作ることになりますが 今回はマウスの操作だけで作ってみます Baltie, SGP System http://www.sgpsys.com/en/ 操作説明ビデオなどは 高校 情報科 の教材 指導案作ってみました http://www.beyondbb.jp/ Zip の教材内に入っています
マウス操作だけで本格プログラミングを - 世界のナベアツをコンピュータで - プログラムというと普通は英語みたいな言葉で作ることになりますが 今回はマウスの操作だけで作ってみます Baltie, SGP System http://www.sgpsys.com/en/ 操作説明ビデオなどは 高校 情報科 の教材 指導案作ってみました http://www.beyondbb.jp/ Zip の教材内に入っています
<4D F736F F D20906C8AD489C88A778CA48B8689C881408BB38A77979D944F82C6906C8DDE88E790AC96DA95572E646F6378>
 人間科学研究科の教学理念 人材育成目的と 3 ポリシー 教学理念 人間科学研究科は 総合的な心理学をもとにして 人間それ自身の研究を拓き 対人援助 人間理解にかかわる関連分野の諸科学や多様に取り組まれている実践を包括する 広い意味での人間科学の創造をめざす 細分化している専門の深まりを 社会のなかの人間科学としての広がりのなかで自らの研究主題を構築しなおす研究力を養い 社会のなかに活きる心理学 人間科学の創造をとおして
人間科学研究科の教学理念 人材育成目的と 3 ポリシー 教学理念 人間科学研究科は 総合的な心理学をもとにして 人間それ自身の研究を拓き 対人援助 人間理解にかかわる関連分野の諸科学や多様に取り組まれている実践を包括する 広い意味での人間科学の創造をめざす 細分化している専門の深まりを 社会のなかの人間科学としての広がりのなかで自らの研究主題を構築しなおす研究力を養い 社会のなかに活きる心理学 人間科学の創造をとおして
経営統計学
 5 章基本統計量 3.5 節で量的データの集計方法について簡単に触れ 前章でデータの分布について学びましたが データの特徴をつの数値で示すこともよく行なわれます これは統計量と呼ばれ 主に分布の中心や拡がりなどを表わします この章ではよく利用される分布の統計量を特徴で分類して説明します 数式表示を統一的に行なうために データの個数を 個とし それらを,,, と表わすことにします ここで学ぶ統計量は統計分析の基礎となっており
5 章基本統計量 3.5 節で量的データの集計方法について簡単に触れ 前章でデータの分布について学びましたが データの特徴をつの数値で示すこともよく行なわれます これは統計量と呼ばれ 主に分布の中心や拡がりなどを表わします この章ではよく利用される分布の統計量を特徴で分類して説明します 数式表示を統一的に行なうために データの個数を 個とし それらを,,, と表わすことにします ここで学ぶ統計量は統計分析の基礎となっており
3.ごみの減量方法.PDF
 - 7 - - 8 - - 9 - - 10 - - 11 - - 12 - ( 100 ( 100 - 13-123,550,846 111,195,762 92,663,135 ( 12 25 37 49.2 16 33 49 65.6 15 30 44 59.0 2.5kg) ( 5kg) ( 7.5kg) ( k ( 123,550,846 111,195,762 92,663,135 (
- 7 - - 8 - - 9 - - 10 - - 11 - - 12 - ( 100 ( 100 - 13-123,550,846 111,195,762 92,663,135 ( 12 25 37 49.2 16 33 49 65.6 15 30 44 59.0 2.5kg) ( 5kg) ( 7.5kg) ( k ( 123,550,846 111,195,762 92,663,135 (

16 41 17 22 12 10
 1914 11 1897 99 16 41 17 22 12 10 11 10 18 11 2618 12 22 28 15 1912 13 191516 2,930 1914 5,100 43 1.25 11 14 25 34364511 7.54 191420 434849 72 191536 1739 17 1918 1915 60 1913 70 10 10 10 99.5 1898 19034.17.6
1914 11 1897 99 16 41 17 22 12 10 11 10 18 11 2618 12 22 28 15 1912 13 191516 2,930 1914 5,100 43 1.25 11 14 25 34364511 7.54 191420 434849 72 191536 1739 17 1918 1915 60 1913 70 10 10 10 99.5 1898 19034.17.6

製品案内 価格表 2014/4/1
 4 (17) 3 43 5/20370/ 231(504,150) 11 12 10 14-16 10 3 100 17 100kg 5-6 3 13 3 18 18 # # # # #$$ %&$ ' ()* +,-% ' #). +,-%'% / ' # # #$ %&&&'( %)* +'(#$ #$ %&&&'( ++,-). +'(#$ #$ /'( + /0)- +'(#$ %&&&'(
4 (17) 3 43 5/20370/ 231(504,150) 11 12 10 14-16 10 3 100 17 100kg 5-6 3 13 3 18 18 # # # # #$$ %&$ ' ()* +,-% ' #). +,-%'% / ' # # #$ %&&&'( %)* +'(#$ #$ %&&&'( ++,-). +'(#$ #$ /'( + /0)- +'(#$ %&&&'(
別紙 1-2 移乗介助 ロボット技術を用いて介助者による抱え上げ動作のパワーアシストを行う非装着型の機器 移乗開始から終了まで 介助者が一人で使用することができる ベッドと車いすの間の移乗に用いることができる ( ベッドと車いすの間の移乗における使い勝手は ステージゲート審査での評価対象となる点に留
 別紙 1-1 移乗介助ロボット技術を用いて介助者のパワーアシストを行う装着型の機器 介助者が装着して用い 移乗介助の際の腰の負担を軽減する 介助者が一人で着脱可能であること ベッド 車いす 便器の間の移乗に用いることができる 1 別紙 1-2 移乗介助 ロボット技術を用いて介助者による抱え上げ動作のパワーアシストを行う非装着型の機器 移乗開始から終了まで 介助者が一人で使用することができる ベッドと車いすの間の移乗に用いることができる
別紙 1-1 移乗介助ロボット技術を用いて介助者のパワーアシストを行う装着型の機器 介助者が装着して用い 移乗介助の際の腰の負担を軽減する 介助者が一人で着脱可能であること ベッド 車いす 便器の間の移乗に用いることができる 1 別紙 1-2 移乗介助 ロボット技術を用いて介助者による抱え上げ動作のパワーアシストを行う非装着型の機器 移乗開始から終了まで 介助者が一人で使用することができる ベッドと車いすの間の移乗に用いることができる
<4D F736F F D E815B836C F898B89914F95D C5816A>
 目 次 第 1 章インターネットの概要... 1 1-1 インターネットとは... 1 1-2 インターネットでできること... 2 第 2 章インターネットを見るためのソフト... 6 2-1 ブラウザ とは... 6 2-2 ブラウザ はいくつか種類がある... 6 2-3 クロームを入手するためにIEを使う... 8 2-4 IEを起動する... 8 2-5 インターネット用語 1 ウェブページ...
目 次 第 1 章インターネットの概要... 1 1-1 インターネットとは... 1 1-2 インターネットでできること... 2 第 2 章インターネットを見るためのソフト... 6 2-1 ブラウザ とは... 6 2-2 ブラウザ はいくつか種類がある... 6 2-3 クロームを入手するためにIEを使う... 8 2-4 IEを起動する... 8 2-5 インターネット用語 1 ウェブページ...
PowerPoint プレゼンテーション
 2. セルラ オートマトン (Cellular Automata) オートマトン (automata): 自動人形 自動機械, 順序機械 [John von Neuman] 自己複製オートマトン : 局所近傍則を備えた自己増殖プログラム, 離散系 セルラ オートマトン 2.1 セルラ オートマトン (CA) の一般事項 (1) セルラ オートマトンの定義 解析空間をセルと称する離散的領域に分割し,
2. セルラ オートマトン (Cellular Automata) オートマトン (automata): 自動人形 自動機械, 順序機械 [John von Neuman] 自己複製オートマトン : 局所近傍則を備えた自己増殖プログラム, 離散系 セルラ オートマトン 2.1 セルラ オートマトン (CA) の一般事項 (1) セルラ オートマトンの定義 解析空間をセルと称する離散的領域に分割し,
Microsoft PowerPoint - exp2-02_intro.ppt [互換モード]
![Microsoft PowerPoint - exp2-02_intro.ppt [互換モード]](/thumbs/96/128100373.jpg "Microsoft PowerPoint - exp2-02_intro.ppt [互換モード]") 情報工学実験 II 実験 2 アルゴリズム ( リスト構造とハッシュ ) 実験を始める前に... C 言語を復習しよう 0. プログラム書ける? 1. アドレスとポインタ 2. 構造体 3. 構造体とポインタ 0. プログラム書ける? 講義を聴いているだけで OK? 言語の要素技術を覚えれば OK? 目的のプログラム? 要素技術 データ型 配列 文字列 関数 オブジェクト クラス ポインタ 2 0.
情報工学実験 II 実験 2 アルゴリズム ( リスト構造とハッシュ ) 実験を始める前に... C 言語を復習しよう 0. プログラム書ける? 1. アドレスとポインタ 2. 構造体 3. 構造体とポインタ 0. プログラム書ける? 講義を聴いているだけで OK? 言語の要素技術を覚えれば OK? 目的のプログラム? 要素技術 データ型 配列 文字列 関数 オブジェクト クラス ポインタ 2 0.
組込みシステムにおける UMLモデルカタログの実践研究
 Modeling Forum 2015 組込みシステムの設計実装への モデルカタログの活用 仙台高等専門学校 情報システム工学科 力武克彰, 新村祐太 ( 豊橋技科大 ), 菊池雄太郎 ( 仙台高専 ) 概要 組込み分野のための UML モデルカタログ (*) のモデルを実装してみました (* 以下 モデルカタログと呼びます ) 2 概要 モデルカタログ : 目標制御モデル モデルカタログより引用
Modeling Forum 2015 組込みシステムの設計実装への モデルカタログの活用 仙台高等専門学校 情報システム工学科 力武克彰, 新村祐太 ( 豊橋技科大 ), 菊池雄太郎 ( 仙台高専 ) 概要 組込み分野のための UML モデルカタログ (*) のモデルを実装してみました (* 以下 モデルカタログと呼びます ) 2 概要 モデルカタログ : 目標制御モデル モデルカタログより引用
PowerPoint プレゼンテーション
 エージェントベースドシミュレーションによる店舗内回遊モデル構築に関する研究 大阪府立大学 現代システム科学域 知識情報システム学類石丸悠太郎 指導教員 森田裕之 背景 顧客の店舗内回遊シミュレーションは 店舗内でのプロモーションや商品配置の影響を実施する前に結果を予測することが可能となるため 実施前に効果を確認することでコストや時間を削減することができる 従来は 購買履歴やアンケート結果を用いたモデルを行わざるを得なかったため
エージェントベースドシミュレーションによる店舗内回遊モデル構築に関する研究 大阪府立大学 現代システム科学域 知識情報システム学類石丸悠太郎 指導教員 森田裕之 背景 顧客の店舗内回遊シミュレーションは 店舗内でのプロモーションや商品配置の影響を実施する前に結果を予測することが可能となるため 実施前に効果を確認することでコストや時間を削減することができる 従来は 購買履歴やアンケート結果を用いたモデルを行わざるを得なかったため
電子回路I_8.ppt
 電子回路 Ⅰ 第 8 回 電子回路 Ⅰ 9 1 講義内容 1. 半導体素子 ( ダイオードとトランジスタ ) 2. 基本回路 3. 増幅回路 小信号増幅回路 (1) 結合増幅回路 電子回路 Ⅰ 9 2 増幅の原理 増幅度 ( 利得 ) 信号源 増幅回路 負荷 電源 電子回路 Ⅰ 9 3 増幅度と利得 ii io vi 増幅回路 vo 増幅度 v P o o o A v =,Ai =,Ap = = vi
電子回路 Ⅰ 第 8 回 電子回路 Ⅰ 9 1 講義内容 1. 半導体素子 ( ダイオードとトランジスタ ) 2. 基本回路 3. 増幅回路 小信号増幅回路 (1) 結合増幅回路 電子回路 Ⅰ 9 2 増幅の原理 増幅度 ( 利得 ) 信号源 増幅回路 負荷 電源 電子回路 Ⅰ 9 3 増幅度と利得 ii io vi 増幅回路 vo 増幅度 v P o o o A v =,Ai =,Ap = = vi
Microsoft PowerPoint - 画像工学2007-8印刷用
 教室 : 14-0 DECEMBER 04 画像工学 007 年度版 Imagng Scnc and Tchnolog 画像工学 007 年度版 8 慶応義塾大学理工学部 教授 中島真人 Drctonal Band-pass Fltr の効果 前回の講義 訂正があります! Huv g v u ここで フィルタの形が間違っていました. Input Imag v Drctonal Band-pass Fltr
教室 : 14-0 DECEMBER 04 画像工学 007 年度版 Imagng Scnc and Tchnolog 画像工学 007 年度版 8 慶応義塾大学理工学部 教授 中島真人 Drctonal Band-pass Fltr の効果 前回の講義 訂正があります! Huv g v u ここで フィルタの形が間違っていました. Input Imag v Drctonal Band-pass Fltr
-2 外からみたプロセッサ GND VCC CLK A0 A1 A2 A3 A4 A A6 A7 A8 A9 A10 A11 A12 A13 A14 A1 A16 A17 A18 A19 D0 D1 D2 D3 D4 D D6 D7 D8 D9 D10 D11 D12 D13 D14 D1 MEMR
 第 回マイクロプロセッサのしくみ マイクロプロセッサの基本的なしくみについて解説する. -1 マイクロプロセッサと周辺回路の接続 制御バス プロセッサ データ バス アドレス バス メモリ 周辺インタフェース バスの基本構成 Fig.-1 バスによる相互接続は, 現在のコンピュータシステムのハードウェアを特徴づけている. バス (Bus): 複数のユニットで共有される信号線システム内の データの通り道
第 回マイクロプロセッサのしくみ マイクロプロセッサの基本的なしくみについて解説する. -1 マイクロプロセッサと周辺回路の接続 制御バス プロセッサ データ バス アドレス バス メモリ 周辺インタフェース バスの基本構成 Fig.-1 バスによる相互接続は, 現在のコンピュータシステムのハードウェアを特徴づけている. バス (Bus): 複数のユニットで共有される信号線システム内の データの通り道

20情報【授業】
 情報科学習指導案 日時 : 平成 23 年 1 月 28 日 ( 金 ) 対象 : 第 1 学年 組 授業者 : 都立 高等学校 1 単元名 総合実習 科目 : 情報 C 2 単元の指導目標 (1) いろいろな情報機器やソフトウェアを活用して自分の意図を効果的に表現する技能を身に付けさせる (2) 評価の観点を理解し 表現された情報を適正に評価する判断力を身に付けさせる (3) 個人情報の取り扱いや著作権などについて関心をもち
情報科学習指導案 日時 : 平成 23 年 1 月 28 日 ( 金 ) 対象 : 第 1 学年 組 授業者 : 都立 高等学校 1 単元名 総合実習 科目 : 情報 C 2 単元の指導目標 (1) いろいろな情報機器やソフトウェアを活用して自分の意図を効果的に表現する技能を身に付けさせる (2) 評価の観点を理解し 表現された情報を適正に評価する判断力を身に付けさせる (3) 個人情報の取り扱いや著作権などについて関心をもち
裁定審議会における裁定の概要 (平成23年度)
") 23 23 23 4 24 3 10 11 12 13 14 () 1 23 7 21 23 12 14 (19 ) 30 1.876% 60 8 24 19 78 27 1 (10) 37 (3) 2 22 9 21 23 5 9 21 12 1 22 2 27 89 10 11 6 A B 3 21 12 1 12 10 10 12 5 1 9 1 2 61 ( 21 10 1 11 30 )
23 23 23 4 24 3 10 11 12 13 14 () 1 23 7 21 23 12 14 (19 ) 30 1.876% 60 8 24 19 78 27 1 (10) 37 (3) 2 22 9 21 23 5 9 21 12 1 22 2 27 89 10 11 6 A B 3 21 12 1 12 10 10 12 5 1 9 1 2 61 ( 21 10 1 11 30 )
和県監査H15港湾.PDF
 ...1...1...1...1...1...1...1...1...2...2...2...3...3...3...5...5...10...11...12...13...13...13...14...14...14...14...14...14...15...15...15...15...15 ...16...17 14...17...18...18...19...21...23 2...25...27...27...28...28...28
...1...1...1...1...1...1...1...1...2...2...2...3...3...3...5...5...10...11...12...13...13...13...14...14...14...14...14...14...15...15...15...15...15 ...16...17 14...17...18...18...19...21...23 2...25...27...27...28...28...28
 2002 (1) (2) (3) (4) (5) (1) (2) (3) (4) (5) (1) (2) (3) (4) (5) (6) (7) (8) (1) (2) (3) (4) (1) (2) (3) (4) (5) (6) (7) (8) No 2,500 3 200 200 200 200 200 50 200 No, 3 1 2 00 No 2,500 200 7 2,000 7
2002 (1) (2) (3) (4) (5) (1) (2) (3) (4) (5) (1) (2) (3) (4) (5) (6) (7) (8) (1) (2) (3) (4) (1) (2) (3) (4) (5) (6) (7) (8) No 2,500 3 200 200 200 200 200 50 200 No, 3 1 2 00 No 2,500 200 7 2,000 7


 ... 6 1) 2) No. 01 02 03 04 05 06 07 08 09 10 11 12 No. 1 2 2 3 3cm 4
... 6 1) 2) No. 01 02 03 04 05 06 07 08 09 10 11 12 No. 1 2 2 3 3cm 4 

untitled
 21 14 487 2,322 2 7 48 4 15 ( 27) 14 3(1867) 3 () 1 2 3 ( 901923 ) 5 (1536) 3 4 5 6 7 8 ( ) () () 9 10 21 11 12 13 14 16 17 18 20 1 19 20 21 22 23 21 22 24 25 26 27 28 22 5 29 30cm 7.5m 1865 3 1820 5
21 14 487 2,322 2 7 48 4 15 ( 27) 14 3(1867) 3 () 1 2 3 ( 901923 ) 5 (1536) 3 4 5 6 7 8 ( ) () () 9 10 21 11 12 13 14 16 17 18 20 1 19 20 21 22 23 21 22 24 25 26 27 28 22 5 29 30cm 7.5m 1865 3 1820 5

1948 1907 4024 1925 14 19281929 30 111931 4 3 15 4 16 3 15 4 161933 813 1935 12 17 11 17 1938 1945 2010 14 221 1945 10 1946 11 1947 1048 1947 1949 24
 15 4 16 1988 63 28 19314 29 3 15 4 16 19283 15294 16 1930 113132 3 15 4 16 33 13 35 12 3 15 4 16 1945 10 10 10 10 40 1948 1907 4024 1925 14 19281929 30 111931 4 3 15 4 16 3 15 4 161933 813 1935 12 17 11
15 4 16 1988 63 28 19314 29 3 15 4 16 19283 15294 16 1930 113132 3 15 4 16 33 13 35 12 3 15 4 16 1945 10 10 10 10 40 1948 1907 4024 1925 14 19281929 30 111931 4 3 15 4 16 3 15 4 161933 813 1935 12 17 11
<91E6825289F1938C966B95FA8ECB90FC88E397C38B5A8F708A778F7091E589EF8EC08D7388CF88F5837D836A83858341838B566572312E696E6464>

Microsoft Word - 入居のしおり.doc
 1 1 2 2 2 3 2 4 3 5 3 6 3 7 3 8 4 1 7 2 7 3 7 4 8 5 9 6 9 7 10 8 10 9 11 10 11 11 11 12 12 13 13 1 14 2 17 3 18 4 19 5 20 6 22 (1) 24 (2) 24 (3) 24 (4) 24 (5) 24 (6) 25 (7) 25 (8) 25 (9) 25 1 29 (1) 29
1 1 2 2 2 3 2 4 3 5 3 6 3 7 3 8 4 1 7 2 7 3 7 4 8 5 9 6 9 7 10 8 10 9 11 10 11 11 11 12 12 13 13 1 14 2 17 3 18 4 19 5 20 6 22 (1) 24 (2) 24 (3) 24 (4) 24 (5) 24 (6) 25 (7) 25 (8) 25 (9) 25 1 29 (1) 29

( )
") ( ) () () 3 cm cm cm cm cm cm 1000 1500 50 500 1000 1000 1500 1000 10 50 300 1000 2000 1000 1500 50 10 1000 2000 300 50 1000 2000 1000 1500 50 10 1000 2000 300 30 10 300 1000 2000 1000 1500 1000
( ) () () 3 cm cm cm cm cm cm 1000 1500 50 500 1000 1000 1500 1000 10 50 300 1000 2000 1000 1500 50 10 1000 2000 300 50 1000 2000 1000 1500 50 10 1000 2000 300 30 10 300 1000 2000 1000 1500 1000

-26-
 -25- -26- -27- -28- -29- -30- -31- -32- -33- -34- -35- -36- -37- -38- cm -39- -40- 1 2 3 4 4 3 2 1 5 5-41- -42- -43- -44- -45- -46- -47- -48- -49- -50- cm -51- -52- -53- -54- -55- -56- -57- -58- -59- -60-
-25- -26- -27- -28- -29- -30- -31- -32- -33- -34- -35- -36- -37- -38- cm -39- -40- 1 2 3 4 4 3 2 1 5 5-41- -42- -43- -44- -45- -46- -47- -48- -49- -50- cm -51- -52- -53- -54- -55- -56- -57- -58- -59- -60-


 -1- 4 1 2 4-2- -- 2 2 cm 0 80cm 2 80cm 80cm 80cm 50cm 80cm 50cm 6 80cm 100 50 50 cm 10 6 4 50cm 4 4 50cm -4- -5- cm 50cm 4 4 4 50cm 50cm 4 80cm 50cm 80cm 50cm 6 cm -6- 20 250cm 1 2 1 4 0cm 60cm cm cm 1
-1- 4 1 2 4-2- -- 2 2 cm 0 80cm 2 80cm 80cm 80cm 50cm 80cm 50cm 6 80cm 100 50 50 cm 10 6 4 50cm 4 4 50cm -4- -5- cm 50cm 4 4 4 50cm 50cm 4 80cm 50cm 80cm 50cm 6 cm -6- 20 250cm 1 2 1 4 0cm 60cm cm cm 1
untitled
 () () () () () ( ) () ( ) () ( ) () 2 () () 2 () () ( ) () () () 2 () () 2 3 ( ) () ( ) 2 3 4 () () 2 3 4 () () ( )( ) ( ) 2 ( ) 3 () () 2 3 () () 2 3 () () () () () () () () (( ) ( ) (( ))( )( ) ) 2 3
() () () () () ( ) () ( ) () ( ) () 2 () () 2 () () ( ) () () () 2 () () 2 3 ( ) () ( ) 2 3 4 () () 2 3 4 () () ( )( ) ( ) 2 ( ) 3 () () 2 3 () () 2 3 () () () () () () () () (( ) ( ) (( ))( )( ) ) 2 3
河川砂防技術基準・基本計画編.PDF
 4 1 1 1 1 1 2 1 2.1 1 2.2 2 2.3 2 2.4 2 3 2 4 3 2 4 1 4 1.1 4 1.2 4 2 4 2.1 4 2.2 4 2.3 5 2.4 5 2.5 5 2.5.1 5 2.5.2 5 2.6 5 2.6.1 5 2.6.2 5 2.6.3 5 2.6.4 5 2.6.5 6 2.7 6 2.7.1 6 2.7.2 6 2.7.3 6 2.7.4
4 1 1 1 1 1 2 1 2.1 1 2.2 2 2.3 2 2.4 2 3 2 4 3 2 4 1 4 1.1 4 1.2 4 2 4 2.1 4 2.2 4 2.3 5 2.4 5 2.5 5 2.5.1 5 2.5.2 5 2.6 5 2.6.1 5 2.6.2 5 2.6.3 5 2.6.4 5 2.6.5 6 2.7 6 2.7.1 6 2.7.2 6 2.7.3 6 2.7.4
4 100g
 100g 10 20 30 40 50 60 70 80 4 5 7 9 12 15 19 24 60 100 10 80 100 20 10 5 20 195 20-1- 60 60 15 100 60 100 15 15 15 100 15 15 60 100 10 60 100 100 15 10 10 60 100 15 10 15 10 5-2- 80 80 24 100 80 100 24
100g 10 20 30 40 50 60 70 80 4 5 7 9 12 15 19 24 60 100 10 80 100 20 10 5 20 195 20-1- 60 60 15 100 60 100 15 15 15 100 15 15 60 100 10 60 100 100 15 10 10 60 100 15 10 15 10 5-2- 80 80 24 100 80 100 24
180 30 30 180 180 181 (3)(4) (3)(4)(2) 60 180 (1) (2) 20 (3)
(4) (3)(4)(2) 60 180 (1) (2) 20 (3)") 12 12 72 (1) (2) (3) 12 (1) (2) (3) (1) (2) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (1) (2) 180 30 30 180 180 181 (3)(4) (3)(4)(2) 60 180 (1) (2) 20 (3) 30 16 (1) 31 (2) 31 (3) (1) (2) (3) (4) 30
12 12 72 (1) (2) (3) 12 (1) (2) (3) (1) (2) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (1) (2) 180 30 30 180 180 181 (3)(4) (3)(4)(2) 60 180 (1) (2) 20 (3) 30 16 (1) 31 (2) 31 (3) (1) (2) (3) (4) 30
untitled
 1....1 2....2 2.1...2 2.2...2 3....14 3.1...14 3.2...14 4....15 4.1...15 4.2...18 4.3...21 4.4...23 4.5...26 5....27 5.1...27 5.2...35 5.3...54 5.4...64 5.5...75 6....79 6.1...79 6.2...85 6.3...94 6.4...
1....1 2....2 2.1...2 2.2...2 3....14 3.1...14 3.2...14 4....15 4.1...15 4.2...18 4.3...21 4.4...23 4.5...26 5....27 5.1...27 5.2...35 5.3...54 5.4...64 5.5...75 6....79 6.1...79 6.2...85 6.3...94 6.4...
 113 120cm 1120cm 3 10cm 900 500+240 10 1 2 3 5 4 5 3 8 6 3 8 6 7 6 8 4 4 4 4 23 23 5 5 7
113 120cm 1120cm 3 10cm 900 500+240 10 1 2 3 5 4 5 3 8 6 3 8 6 7 6 8 4 4 4 4 23 23 5 5 7


Microsoft PowerPoint - H29小学校理科
 教育課程研究集会資料 平成 29 年 8 月 改訂の経緯 社会の変化 生産年齢人口の減少 社会構造の変化 AI の飛躍的な進化など 新しい学習指導要領における小学校理科教育 徳島県教育委員会 子供たちが様々な変化に積極的に向き合い, 他者と協働して課題を解決していくこと 学校教育に求められていること 様々な情報を見極め知識の概念的な理解を実現し情報を再構築するなどして新たな価値につなげていくこと 複雑な状況変化の中で目的を再構築したりすることができるようにすること
教育課程研究集会資料 平成 29 年 8 月 改訂の経緯 社会の変化 生産年齢人口の減少 社会構造の変化 AI の飛躍的な進化など 新しい学習指導要領における小学校理科教育 徳島県教育委員会 子供たちが様々な変化に積極的に向き合い, 他者と協働して課題を解決していくこと 学校教育に求められていること 様々な情報を見極め知識の概念的な理解を実現し情報を再構築するなどして新たな価値につなげていくこと 複雑な状況変化の中で目的を再構築したりすることができるようにすること
NCB564個別00版
 HES-M00 シリーズの新機能 脱調レス / 脱調検出 1 1. 概要 EtherCAT モーションコントロール機能内蔵 2 相マイクロステップモータドライバ HES-M00 シリーズにエンコーダ入力が追加され, 脱調検出 / 脱調レス等の機能が付加されました 2. 仕様 項目 仕様 備考 制御軸数 1 ボードで 1 軸制御 最大 枚 ( 軸制御 ) までスタック可能 電源電圧 ( モータ駆動電圧
HES-M00 シリーズの新機能 脱調レス / 脱調検出 1 1. 概要 EtherCAT モーションコントロール機能内蔵 2 相マイクロステップモータドライバ HES-M00 シリーズにエンコーダ入力が追加され, 脱調検出 / 脱調レス等の機能が付加されました 2. 仕様 項目 仕様 備考 制御軸数 1 ボードで 1 軸制御 最大 枚 ( 軸制御 ) までスタック可能 電源電圧 ( モータ駆動電圧
Microsoft PowerPoint - comprog11.pptx
 Outline プログラミング演習第 回エッジを検出する on 3..4 電気通信大学情報理工学部知能機械工学科長井隆行 画像の本質 輝度の境目に情報あり! 画像の微分と 階微分 エッジ検出 画像をぼかす 本日の課題 画像の本質 エッジ抽出 画像の情報は境目にあり! エッジ 輝度が大きく変化しているところ ( 境界 ) 画像の情報はエッジにあり 輝度 人間の視覚系でも特定のエッジの方向に発火するニューロンが見つかっている
Outline プログラミング演習第 回エッジを検出する on 3..4 電気通信大学情報理工学部知能機械工学科長井隆行 画像の本質 輝度の境目に情報あり! 画像の微分と 階微分 エッジ検出 画像をぼかす 本日の課題 画像の本質 エッジ抽出 画像の情報は境目にあり! エッジ 輝度が大きく変化しているところ ( 境界 ) 画像の情報はエッジにあり 輝度 人間の視覚系でも特定のエッジの方向に発火するニューロンが見つかっている
Microsoft PowerPoint - 口頭発表_折り畳み自転車
 1 公道走行を再現した振動試験による折り畳み自転車の破損状況 ~ 公道での繰り返し走行を再現した結果 ~ 2 公道走行を想定した試験用路面について 九州支所製品安全技術課清水寛治 目次 1. 折り畳み自転車のフレームはどのように破損するのか公道の走行振動を再現する自転車用ロードシミュレータについて繰り返し走行を想定した折り畳み自転車の破損部の特徴 ~ 公道による振動を繰り返し再現した結果 ~ 2.
1 公道走行を再現した振動試験による折り畳み自転車の破損状況 ~ 公道での繰り返し走行を再現した結果 ~ 2 公道走行を想定した試験用路面について 九州支所製品安全技術課清水寛治 目次 1. 折り畳み自転車のフレームはどのように破損するのか公道の走行振動を再現する自転車用ロードシミュレータについて繰り返し走行を想定した折り畳み自転車の破損部の特徴 ~ 公道による振動を繰り返し再現した結果 ~ 2.