100326_セミナー資料_物体認識.pptx
|
|
|
- たつや かくはり
- 5 years ago
- Views:
Transcription
1 !! "#! "#"! "#$! "#%! $#! $#"! $#$! $#%! $#&! %

2


3
*++,-.")





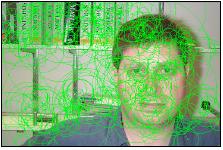
4 物体認識 検出 について '()*++,-./#,0121#3)+, ":; 物体検出は簡単か 多様な変動要素が存在して難しい 変動要素に対応する特徴量 学習手法がキー カメラの角度 姿勢 向き 形状が多様 照明変動 オクルージョン




5 !!!!!!!


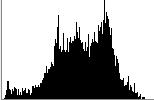
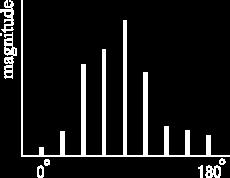
6 特定物体認識の処理の流れ 画像中の部分領域が検出対象かどうかを比較 部分領域 比較 物体情報 特徴量 画像サイズを 変えながら比 較 学習手法 認識処理 特定物体認識を実現する要素 特徴量 学習手法 認識する物体の情報を抽出 特徴量を汎化性のあるモデルへ 多様な変化が生じても 共通な情報に変換 多様な変化が生じても 共通な情報を選択 Edge, Color, haar-like, HOG Neural Network Support Vector Machine AdaBoost 学習手法の発展とともに特徴量も発展
7
8
9
10

11
12

13 $: ""B $:C BC "": &% =: DB



14 !!
15
16
17
18 ;2/.A!


19 :I "B:I :I "B:I :I "B:I :I "B:I :I :I :I "B:I :I "B:I "B:I "B:I




20 m! "#$#%!
21 & "3!3% '($($!)*'! " (+,-+&.&/$'+&)&/+& ' 0 0 ' "#$%& Multiview Pedestrian Detection Based on Vector Boosting
22
23 ;2/.A!

24 ! J005!KA6>.!! 7! 77!!
25 "CCOP#Q5.H19RQ5.H19!SCOT!! U090)NV.W!! X!!
26 "Y$! "!! N!!!!!!!!!*!!!!!!*!! Z"Y!K"! $!!!
27 ! " K"! :#D! %#"! [62A0\]21.;! " h t (x) = 1 p v(x) >p θ 1 otherwise h t t v θ p
28 %#$!! e t,m h! e t,m = N i:h t (x i )=y i D t (i) :#D p! ^.F_!!!`a2; a2;_!!!`^.f a2;!!!!!!!!!!!!!!!!^.f!! p a2;!!!!!!!!!!!!!!!!^.f!! θ e t,m =0.65 θ e t,m = 1 (0.65) = 0.35
29 &YD! e t &!h! D!!!b!! h t = arg min e t,m α t = 1 2 ln 1 et e t α t (ln = log e ) e t = α = 1 2 ln( ) = 1 ln = e t = α = 1 2 ln( ) = 1 ln = e t = 0.5 α = 1 2 ln( ) = 1 2 ln 1 = 0
30 =YO! =!! D t+1 (i) =D t (i) exp( α t y t h t (x i )) y =1 y =1 h =1 h =-1 y t h t (x i )=1 D t+1 (i) =D t (i) exp( α t ) y t h t (x i )= 1 D t+1 (i) =D t (i) exp(α t ) O!! D t+1 (i) D t+1 (i) = N D t (i) exp( α t y t h t (x i )) i=1
31 B!!! λ H T H(x) = sign α t h t (x) λ t=1
32 UW! U":: $::: W!!!!! $Y::: DY:::":Y:::!
33 U"YK"W X!! U5.0AW!!!!
34 "Y$! "!! N!!!!!*!!!!!!*!! Z"Y!K"! $!!!
35 %#"!! ME^!!UW :!!"!!$!!!!!!!!!!g!!!!!!!!!=$!=%!" ME^ :!!"!!$!!!!!!!!!!g!!!!!!!!!=$!=%!" ME^
36 %#$! $ M'0(0,'05880!! *! z =1 j W j +W j!" ME^!" ME^
37 &!#" #"!b!! U!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!W!" ME^ = 0.1, = 0.2 = -1.39!" ME^ = 0.15, = 0.15 = 0.0!" ME^ = 0.26, = 0.12 = 1.54
38 D D!!" ME^!" ME^!" ME^ = 0.1, = 0.2 = = 0.15, = 0.15 = 0.0 = 0.26, = 0.12 = 1.54
39 = =!! H λ T H(x) = sign h t (x) λ t=1








40 M22;N1F
41 ! hb:#% hb:#b 123 M22;N1F ' X J " U!!!!!!!!!!!!WY!!X " hb:#d hb:#=

42 hb:#o 123 hb:#d hb:#% M22;N1F ' X J " U!!!!!!!!!!!!WY!!X " J $ U!!!!!!!!!!!!WY!!X $ hb:#$ hb:#% hb:#& hb:#o M22;N1F ' X J " U!!!!!!!!!!!!WY!!X " J $ U!!!!!!!!!!!!WY!!X $ hb:#c 123 J i U!!!!!!!!!!!!WY!!X i


43 !




44 !!

45 J005KA6>.








46







47 Jjd
48

49 Jjd Jjd!!! &
50

51 j =(011) 2 = 3 L90M22;@
![! 4556789:; J005KA6>. Z(x)! +!$ Z(x)! J005KA6>.!! 4556789:; Z(x)! J005KA6>. Z(x)! J005KA6>. Z(x)! J005KA6>. ]261@!](/docs-images/93/112189923/images/52-3.jpg "J005KA6>. +! +! +! J005KA6>. J005KA6>. J005KA6>. $")
52 ! :; J005KA6>. Z(x)! +!$ Z(x)! J005KA6>.!! :; Z(x)! J005KA6>. Z(x)! J005KA6>. Z(x)! J005KA6>. +! +! +! J005KA6>. J005KA6>. J005KA6>. $

![! ]261@!](/docs-images/93/112189923/images/53-3.jpg "J005KA6>. ]261@!")
53 !! e U6W! :;!! ]261@!J005KA6>. ]261@!J005KA6>. " 2<5=>>?@



54 fqf! "#!"! $#!"! %#!$ $#!!
.a.@! f'0).a.@")
55 l2-!a.v.ab! & '& & l2-!a.v.a!

.!")

56 ! &
![]261@!J005KA6>. f'0).a.@! &! &! &! &! & &! &!! &! & A B>90@&4CD ]261@!](/docs-images/93/112189923/images/57-0.jpg "J005KA6>. f'0).a.@ ]261@!Jjd %! Y $ $ ]261@!Jjd! ajjl $ Jjd M22;N1F")
57 &! &! &! &! & &! &!! &! & A B>90@&4CD ]261@!J005KA6>. f'0).a.@ ]261@!Jjd %! Y $ $ ]261@!Jjd! ajjl $ Jjd M22;N1F
![]261@!Jjd!](/docs-images/93/112189923/images/58-0.jpg "]261@!")




58 $::! Y ]261@!Jjd! m699a.!a.v.a " L90M22;@ Jjd $ L90M22;@ Jjd


![]261@!](/docs-images/93/112189923/images/59-2.jpg "Jjd &")
59 " $ $ ]261@!Jjd & E&E&.&=>>?F0G&E&"1HIJA++*%



60 l2-ka.v.a! "! &"U%W!! ' (! ' )! n K! n Z! %!U%W! &!U%W h (x) KL&M6;N0<&50<&IL&OL&PQR5S96;&.&2&<;Q9?9>0@R;>6;FQ&G;0;6589T5F>0&>U&>07890;&8;56090G&& 50<&50&5SS89Q5F>0&@>&V>>?F0G&WE&BXPPE&'!!YL
61 n Z! n K! n Z! n K! A2-KA.V.A " " ^!! l2-!a.v.a! m699a.!l.v.a *! h(x) $ h1(x) $ $ 0 C(x) h2(x) 0 h1(x)!1 h2(x)!2 j m699a.!a.v.a! l2-!a.v.a!
62 m699a.!l.v.a! m699a.!l.v.a l2-!a.v.a! l2-ka.v.a!
63
64

65 Z>[78;\;8 19<<8;&Z;\;8 o0;,09.!!!!! `!!!

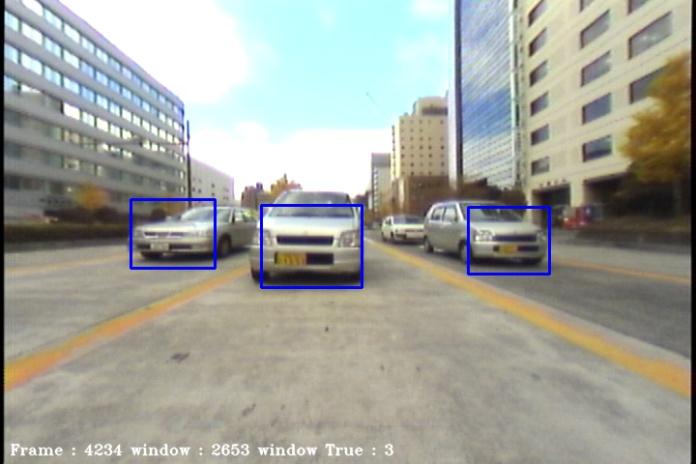
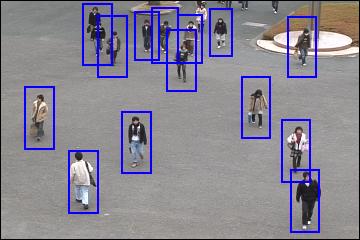
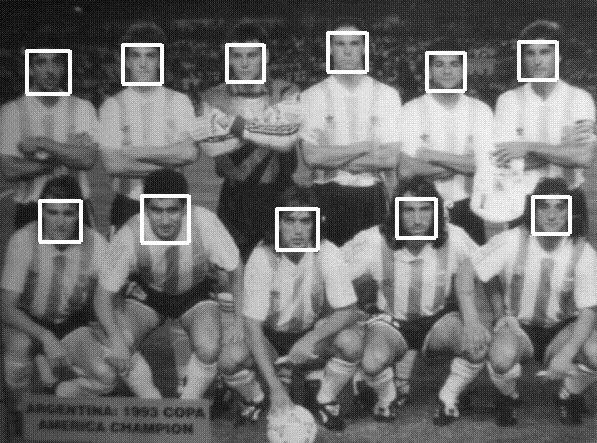
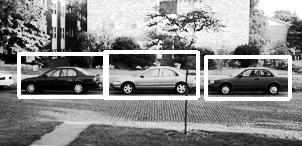
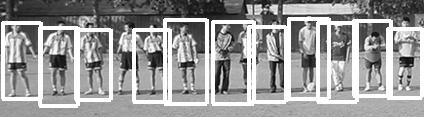
66 物体の探索方法 スライディングウィンドウ 物体の探索方法 スライディングウィンドウ 検出ウィンドウをずらしながら 位置 大きさを変えて探索 すべての位置 大きさを探索 するのは計算コスト大
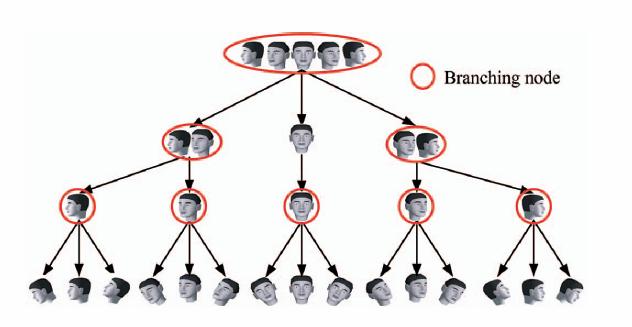
67 物体の探索方法 一定間隔ごとに荒く探索! 物体らしい領域のみ詳細に探索 計算コストを削減することができる 浅い階層はo205;.探索 深い階層はQ61.探索 非物体 物体 非物体 物体 物体 さらに計算コストを削減することができる 非物体

68 !!!
69 p

70 !



71 p

72
73 ! MIT+CMU Frontal Face Image! CMU Profile Face Image! MIT CBCL Face Data! Yale Face Database B! PIE! UIUC Image Database for Car Detection! MIT CBCL Car Data! Testing Images for Car Detection!
74 ! INRIA Person Dataset! USC Pedestrian Detection Test Set! MIT CBCL Pedestrian Data! Gavrila s Benchmark Dataset! NICTA! computer_vision_datasets/! OTCBVS! Open CV! INRIA Object Detection Toolkit (HOG)!
IPSJ SIG Technical Report Vol.2009-CVIM-167 No /6/10 Real AdaBoost HOG 1 1 1, 2 1 Real AdaBoost HOG HOG Real AdaBoost HOG A Method for Reducing
 Real AdaBoost HOG 1 1 1, 2 1 Real AdaBoost HOG HOG Real AdaBoost HOG A Method for Reducing number of HOG Features based on Real AdaBoost Chika Matsushima, 1 Yuji Yamauchi, 1 Takayoshi Yamashita 1, 2 and
Real AdaBoost HOG 1 1 1, 2 1 Real AdaBoost HOG HOG Real AdaBoost HOG A Method for Reducing number of HOG Features based on Real AdaBoost Chika Matsushima, 1 Yuji Yamauchi, 1 Takayoshi Yamashita 1, 2 and
 Real AdaBoost HOG 2009 3 A Graduation Thesis of College of Engineering, Chubu University Efficient Reducing Method of HOG Features for Human Detection based on Real AdaBoost Chika Matsushima ITS Graphics
Real AdaBoost HOG 2009 3 A Graduation Thesis of College of Engineering, Chubu University Efficient Reducing Method of HOG Features for Human Detection based on Real AdaBoost Chika Matsushima ITS Graphics
s s U s L e A = P A l l + dl dε = dl l l
 P (ε) A o B s= P A s B o Y l o s Y l e = l l 0.% o 0. s e s B 1 s (e) s Y s s U s L e A = P A l l + dl dε = dl l l ε = dε = l dl o + l lo l = log l o + l =log(1+ e) l o Β F Α E YA C Ο D ε YF B YA A YA
P (ε) A o B s= P A s B o Y l o s Y l e = l l 0.% o 0. s e s B 1 s (e) s Y s s U s L e A = P A l l + dl dε = dl l l ε = dε = l dl o + l lo l = log l o + l =log(1+ e) l o Β F Α E YA C Ο D ε YF B YA A YA
直交座標系の回転
 b T.Koama x l x, Lx i ij j j xi i i i, x L T L L, L ± x L T xax axx, ( a a ) i, j ij i j ij ji λ λ + λ + + λ i i i x L T T T x ( L) L T xax T ( T L T ) A( L) T ( LAL T ) T ( L AL) λ ii L AL Λ λi i axx
b T.Koama x l x, Lx i ij j j xi i i i, x L T L L, L ± x L T xax axx, ( a a ) i, j ij i j ij ji λ λ + λ + + λ i i i x L T T T x ( L) L T xax T ( T L T ) A( L) T ( LAL T ) T ( L AL) λ ii L AL Λ λi i axx
色の類似性に基づいた形状特徴量CS-HOGの提案
 IS3-04 第 18 回 画 像 センシングシンポジウム, 横 浜, 2012 年 6 月 CS-HOG CS-HOG : Color Similarity-based HOG feature Yuhi Goto, Yuji Yamauchi, Hironobu Fujiyoshi Chubu University E-mail: yuhi@vision.cs.chubu.ac.jp Abstract
IS3-04 第 18 回 画 像 センシングシンポジウム, 横 浜, 2012 年 6 月 CS-HOG CS-HOG : Color Similarity-based HOG feature Yuhi Goto, Yuji Yamauchi, Hironobu Fujiyoshi Chubu University E-mail: yuhi@vision.cs.chubu.ac.jp Abstract
untitled
 . x2.0 0.5 0 0.5.0 x 2 t= 0: : x α ij β j O x2 u I = α x j ij i i= 0 y j = + exp( u ) j v J = β y j= 0 j j o = + exp( v ) 0 0 e x p e x p J j I j ij i i o x β α = = = + +.. 2 3 8 x 75 58 28 36 x2 3 3 4
. x2.0 0.5 0 0.5.0 x 2 t= 0: : x α ij β j O x2 u I = α x j ij i i= 0 y j = + exp( u ) j v J = β y j= 0 j j o = + exp( v ) 0 0 e x p e x p J j I j ij i i o x β α = = = + +.. 2 3 8 x 75 58 28 36 x2 3 3 4
知能科学:ニューラルネットワーク
 2 3 4 (Neural Network) (Deep Learning) (Deep Learning) ( x x = ax + b x x x ? x x x w σ b = σ(wx + b) x w b w b .2.8.6 σ(x) = + e x.4.2 -.2 - -5 5 x w x2 w2 σ x3 w3 b = σ(w x + w 2 x 2 + w 3 x 3 + b) x,
2 3 4 (Neural Network) (Deep Learning) (Deep Learning) ( x x = ax + b x x x ? x x x w σ b = σ(wx + b) x w b w b .2.8.6 σ(x) = + e x.4.2 -.2 - -5 5 x w x2 w2 σ x3 w3 b = σ(w x + w 2 x 2 + w 3 x 3 + b) x,
知能科学:ニューラルネットワーク
 2 3 4 (Neural Network) (Deep Learning) (Deep Learning) ( x x = ax + b x x x ? x x x w σ b = σ(wx + b) x w b w b .2.8.6 σ(x) = + e x.4.2 -.2 - -5 5 x w x2 w2 σ x3 w3 b = σ(w x + w 2 x 2 + w 3 x 3 + b) x,
2 3 4 (Neural Network) (Deep Learning) (Deep Learning) ( x x = ax + b x x x ? x x x w σ b = σ(wx + b) x w b w b .2.8.6 σ(x) = + e x.4.2 -.2 - -5 5 x w x2 w2 σ x3 w3 b = σ(w x + w 2 x 2 + w 3 x 3 + b) x,
limit&derivative
 - - 7 )................................................................................ 5.................................. 7.. e ).......................... 9 )..........................................
- - 7 )................................................................................ 5.................................. 7.. e ).......................... 9 )..........................................
untitled
 - 1 - - 2 - - 3 - - 4 - - 5 - - 6 - - 7 - - 8 - - 9 - - 10 - - 11 - - 12 - - 13 - - 14 - - 15 - - 16 - - 17 - - 18 - - 19 - - 20 - - 21 - - 22 - - 23 - - 24 - - 25 - - 26 - - 27 - - 28 - - 29 - - 30 -
- 1 - - 2 - - 3 - - 4 - - 5 - - 6 - - 7 - - 8 - - 9 - - 10 - - 11 - - 12 - - 13 - - 14 - - 15 - - 16 - - 17 - - 18 - - 19 - - 20 - - 21 - - 22 - - 23 - - 24 - - 25 - - 26 - - 27 - - 28 - - 29 - - 30 -

SICE東北支部研究集会資料(2013年)
") 280 (2013.5.29) 280-4 SURF A Study of SURF Algorithm using Edge Image and Color Information Yoshihiro Sasaki, Syunichi Konno, Yoshitaka Tsunekawa * *Iwate University : SURF (Speeded Up Robust Features)
280 (2013.5.29) 280-4 SURF A Study of SURF Algorithm using Edge Image and Color Information Yoshihiro Sasaki, Syunichi Konno, Yoshitaka Tsunekawa * *Iwate University : SURF (Speeded Up Robust Features)
(MIRU2008) HOG Histograms of Oriented Gradients (HOG)
 HOG Histograms of Oriented Gradients (HOG)") (MIRU2008) 2008 7 HOG - - E-mail: katsu0920@me.cs.scitec.kobe-u.ac.jp, {takigu,ariki}@kobe-u.ac.jp Histograms of Oriented Gradients (HOG) HOG Shape Contexts HOG 5.5 Histograms of Oriented Gradients D Human
(MIRU2008) 2008 7 HOG - - E-mail: katsu0920@me.cs.scitec.kobe-u.ac.jp, {takigu,ariki}@kobe-u.ac.jp Histograms of Oriented Gradients (HOG) HOG Shape Contexts HOG 5.5 Histograms of Oriented Gradients D Human
‚åŁÎ“·„´Šš‡ðŠp‡¢‡½‹âfi`fiI…A…‰…S…−…Y…•‡ÌMarkovŸA“½fiI›ð’Í
 Markov 2009 10 2 Markov 2009 10 2 1 / 25 1 (GA) 2 GA 3 4 Markov 2009 10 2 2 / 25 (GA) (GA) L ( 1) I := {0, 1} L f : I (0, ) M( 2) S := I M GA (GA) f (i) i I Markov 2009 10 2 3 / 25 (GA) ρ(i, j), i, j I
Markov 2009 10 2 Markov 2009 10 2 1 / 25 1 (GA) 2 GA 3 4 Markov 2009 10 2 2 / 25 (GA) (GA) L ( 1) I := {0, 1} L f : I (0, ) M( 2) S := I M GA (GA) f (i) i I Markov 2009 10 2 3 / 25 (GA) ρ(i, j), i, j I


gengo.dvi
 4 97.52% tri-gram 92.76% 98.49% : Japanese word segmentation by Adaboost using the decision list as the weak learner Hiroyuki Shinnou In this paper, we propose the new method of Japanese word segmentation
4 97.52% tri-gram 92.76% 98.49% : Japanese word segmentation by Adaboost using the decision list as the weak learner Hiroyuki Shinnou In this paper, we propose the new method of Japanese word segmentation
IS1-09 第 回画像センシングシンポジウム, 横浜,14 年 6 月 2 Hough Forest Hough Forest[6] Random Forest( [5]) Random Forest Hough Forest Hough Forest 2.1 Hough Forest 1 2.2
![IS1-09 第 回画像センシングシンポジウム, 横浜,14 年 6 月 2 Hough Forest Hough Forest[6] Random Forest( [5]) Random Forest Hough Forest Hough Forest 2.1 Hough Forest 1 2.2](/thumbs/91/106196100.jpg "IS1-09 第 回画像センシングシンポジウム, 横浜,14 年 6 月 2 Hough Forest Hough Forest[6] Random Forest( [5]) Random Forest Hough Forest Hough Forest 2.1 Hough Forest 1 2.2") IS1-09 第 回画像センシングシンポジウム, 横浜,14 年 6 月 MI-Hough Forest () E-mail: ym@vision.cs.chubu.ac.jphf@cs.chubu.ac.jp Abstract Hough Forest Random Forest MI-Hough Forest Multiple Instance Learning Bag Hough Forest
IS1-09 第 回画像センシングシンポジウム, 横浜,14 年 6 月 MI-Hough Forest () E-mail: ym@vision.cs.chubu.ac.jphf@cs.chubu.ac.jp Abstract Hough Forest Random Forest MI-Hough Forest Multiple Instance Learning Bag Hough Forest
x x x 2, A 4 2 Ax.4 A A A A λ λ 4 λ 2 A λe λ λ2 5λ + 6 0,...λ 2, λ 2 3 E 0 E 0 p p Ap λp λ 2 p 4 2 p p 2 p { 4p 2 2p p + 2 p, p 2 λ {
 K E N Z OU 2008 8. 4x 2x 2 2 2 x + x 2. x 2 2x 2, 2 2 d 2 x 2 2.2 2 3x 2... d 2 x 2 5 + 6x 0 2 2 d 2 x 2 + P t + P 2tx Qx x x, x 2 2 2 x 2 P 2 tx P tx 2 + Qx x, x 2. d x 4 2 x 2 x x 2.3 x x x 2, A 4 2
K E N Z OU 2008 8. 4x 2x 2 2 2 x + x 2. x 2 2x 2, 2 2 d 2 x 2 2.2 2 3x 2... d 2 x 2 5 + 6x 0 2 2 d 2 x 2 + P t + P 2tx Qx x x, x 2 2 2 x 2 P 2 tx P tx 2 + Qx x, x 2. d x 4 2 x 2 x x 2.3 x x x 2, A 4 2
mobius1
 H + : ω = ( a, b, c, d, ad bc > 0) 3.. ( c 0 )... ( 5z + 2 : ω = L (*) z + 4 5z + 2 z = z =, 2. (*) z + 4 5z+ 2 6( z+) ω + = + = z+ 4 z+ 4 5z+ 2 3( z 2) ω 2 = 2= z+ 4 z+ 4 ω + z + = 2 ω 2 z 2 x + T ( x)
H + : ω = ( a, b, c, d, ad bc > 0) 3.. ( c 0 )... ( 5z + 2 : ω = L (*) z + 4 5z + 2 z = z =, 2. (*) z + 4 5z+ 2 6( z+) ω + = + = z+ 4 z+ 4 5z+ 2 3( z 2) ω 2 = 2= z+ 4 z+ 4 ω + z + = 2 ω 2 z 2 x + T ( x)
29
 9 .,,, 3 () C k k C k C + C + C + + C 8 + C 9 + C k C + C + C + C 3 + C 4 + C 5 + + 45 + + + 5 + + 9 + 4 + 4 + 5 4 C k k k ( + ) 4 C k k ( k) 3 n( ) n n n ( ) n ( ) n 3 ( ) 3 3 3 n 4 ( ) 4 4 4 ( ) n n
9 .,,, 3 () C k k C k C + C + C + + C 8 + C 9 + C k C + C + C + C 3 + C 4 + C 5 + + 45 + + + 5 + + 9 + 4 + 4 + 5 4 C k k k ( + ) 4 C k k ( k) 3 n( ) n n n ( ) n ( ) n 3 ( ) 3 3 3 n 4 ( ) 4 4 4 ( ) n n
2011de.dvi
 211 ( 4 2 1. 3 1.1............................... 3 1.2 1- -......................... 13 1.3 2-1 -................... 19 1.4 3- -......................... 29 2. 37 2.1................................ 37
211 ( 4 2 1. 3 1.1............................... 3 1.2 1- -......................... 13 1.3 2-1 -................... 19 1.4 3- -......................... 29 2. 37 2.1................................ 37
24 SPAM Performance Comparison of Machine Learning Algorithms for SPAM Discrimination
 24 SPAM Performance Comparison of Machine Learning Algorithms for SPAM Discrimination 1130378 2013 3 9 SPAM SPAM SPAM SPAM SVM AdaBoost RandomForest SPAM SPAM UCI Machine Learning Repository Spambase 4601
24 SPAM Performance Comparison of Machine Learning Algorithms for SPAM Discrimination 1130378 2013 3 9 SPAM SPAM SPAM SPAM SVM AdaBoost RandomForest SPAM SPAM UCI Machine Learning Repository Spambase 4601




Microsoft PowerPoint - 201409_秀英体の取組み素材(予稿集).ppt
.ppt") 1 2 3 4 5 6 7 8 9 10 11 No Image No Image 12 13 14 15 16 17 18 19 20 21 22 23 No Image No Image No Image No Image 24 No Image No Image No Image No Image 25 No Image No Image No Image No Image 26 27 28
1 2 3 4 5 6 7 8 9 10 11 No Image No Image 12 13 14 15 16 17 18 19 20 21 22 23 No Image No Image No Image No Image 24 No Image No Image No Image No Image 25 No Image No Image No Image No Image 26 27 28
, ,
 41 42 73 121 121 10 122 11 122 12 131 13 131 15 10 133 16 11 133 17 12 136 18 13 141 19 14 141 20 15 146 21 16 149 22 17 149 23 174 18 24 73 19 241,301 25 20 242,301 (1) 26 21 331 27 22 241,341 28 23 242,341
41 42 73 121 121 10 122 11 122 12 131 13 131 15 10 133 16 11 133 17 12 136 18 13 141 19 14 141 20 15 146 21 16 149 22 17 149 23 174 18 24 73 19 241,301 25 20 242,301 (1) 26 21 331 27 22 241,341 28 23 242,341

平成20年5月 協会創立50年の歩み 海の安全と環境保全を目指して 友國八郎 海上保安庁 長官 岩崎貞二 日本船主協会 会長 前川弘幸 JF全国漁業協同組合連合会 代表理事会長 服部郁弘 日本船長協会 会長 森本靖之 日本船舶機関士協会 会長 大内博文 航海訓練所 練習船船長 竹本孝弘 第二管区海上保安本部長 梅田宜弘


![Œ{Ł¶/1ŒÊ −ªfiª„¾ [ 1…y†[…W ]](/thumbs/50/26134150.jpg "Œ{Ł¶/1ŒÊ −ªfiª„¾ [ 1…y†[…W ]")






,,,,,,,,,,,,,,,,,,, 976%, i
 20 Individual Recognition using positions of facial parts 1115081 2009 3 5 ,,,,,,,,,,,,,,,,,,, 976%, i Abstract Individual Recognition using positions of facial parts YOSHIHIRO Arisawa A facial recognition
20 Individual Recognition using positions of facial parts 1115081 2009 3 5 ,,,,,,,,,,,,,,,,,,, 976%, i Abstract Individual Recognition using positions of facial parts YOSHIHIRO Arisawa A facial recognition
KEIRIN
 KEIRIN KEIRIN PCOSS CIO PC PC OSS OSS 2003 CIO 2003 IT IT 2006 2006 IT IT IT IT 2008 2008 IT IT 2001 2001 5IT IT 5IT IT IT IT (NGN) Web2.0 (NGN) Web2.0 2005 IT CIO 2005 2005 IT CIO 2006 CIOIT IT SE 2006
KEIRIN KEIRIN PCOSS CIO PC PC OSS OSS 2003 CIO 2003 IT IT 2006 2006 IT IT IT IT 2008 2008 IT IT 2001 2001 5IT IT 5IT IT IT IT (NGN) Web2.0 (NGN) Web2.0 2005 IT CIO 2005 2005 IT CIO 2006 CIOIT IT SE 2006
untitled
 IS2-26 第 19 回 画 像 センシングシンポジウム, 横 浜,2013 年 6 月 SVM E-mail: yuhi@vision.cs.chubu.ac.jp Abstract SVM SVM SVM SVM HOG B-HOG HOG SVM 6.1% 17 1 Intelligent Transport System(ITS: ) 2005 Dalal HOG SVM[1] [2] HOG
IS2-26 第 19 回 画 像 センシングシンポジウム, 横 浜,2013 年 6 月 SVM E-mail: yuhi@vision.cs.chubu.ac.jp Abstract SVM SVM SVM SVM HOG B-HOG HOG SVM 6.1% 17 1 Intelligent Transport System(ITS: ) 2005 Dalal HOG SVM[1] [2] HOG
OpenCV IS Report No Report Medical Information System Labratry
 OpenCV 2014 8 25 IS Report No. 2014090201 Report Medical Information System Labratry Abstract OpenCV OpenCV 1............................ 2 1.1 OpenCV.......................... 2 1.2......................
OpenCV 2014 8 25 IS Report No. 2014090201 Report Medical Information System Labratry Abstract OpenCV OpenCV 1............................ 2 1.1 OpenCV.......................... 2 1.2......................
2010 II / y = e x y = log x = log e x 2. ( e x ) = e x 3. ( ) log x = 1 x 1.2 Warming Up 1 u = log a M a u = M a 0
 = e x 3. ( ) log x = 1 x 1.2 Warming Up 1 u = log a M a u = M a 0") 2010 II 6 10.11.15/ 10.11.11 1 1 5.6 1.1 1. y = e x y = log x = log e x 2. e x ) = e x 3. ) log x = 1 x 1.2 Warming Up 1 u = log a M a u = M a 0 log a 1 a 1 log a a a r+s log a M + log a N 1 0 a 1 a r
2010 II 6 10.11.15/ 10.11.11 1 1 5.6 1.1 1. y = e x y = log x = log e x 2. e x ) = e x 3. ) log x = 1 x 1.2 Warming Up 1 u = log a M a u = M a 0 log a 1 a 1 log a a a r+s log a M + log a N 1 0 a 1 a r
*
 d B 1 D D1 d2 d d1 a d D B s min 1 1s min 1 C Co C Co fo BNT900 10 22 6 0.3 0.15 2.30 1.00 235 101 1.43 146 9.3 62 200 125 600 BNT901 12 24 6 0.3 0.15 2.57 1.22 262 124 1.76 180 9.6 55 300 111 700 BNT902
d B 1 D D1 d2 d d1 a d D B s min 1 1s min 1 C Co C Co fo BNT900 10 22 6 0.3 0.15 2.30 1.00 235 101 1.43 146 9.3 62 200 125 600 BNT901 12 24 6 0.3 0.15 2.57 1.22 262 124 1.76 180 9.6 55 300 111 700 BNT902




1990 IMO 1990/1/15 1:00-4:00 1 N N N 1, N 1 N 2, N 2 N 3 N 3 2 x x + 52 = 3 x x , A, B, C 3,, A B, C 2,,,, 7, A, B, C
 0 9 (1990 1999 ) 10 (2000 ) 1900 1994 1995 1999 2 SAT ACT 1 1990 IMO 1990/1/15 1:00-4:00 1 N 1990 9 N N 1, N 1 N 2, N 2 N 3 N 3 2 x 2 + 25x + 52 = 3 x 2 + 25x + 80 3 2, 3 0 4 A, B, C 3,, A B, C 2,,,, 7,
0 9 (1990 1999 ) 10 (2000 ) 1900 1994 1995 1999 2 SAT ACT 1 1990 IMO 1990/1/15 1:00-4:00 1 N 1990 9 N N 1, N 1 N 2, N 2 N 3 N 3 2 x 2 + 25x + 52 = 3 x 2 + 25x + 80 3 2, 3 0 4 A, B, C 3,, A B, C 2,,,, 7,


2014 S hara/lectures/lectures-j.html r 1 S phone: ,
 14 S1-1+13 http://www.math.kyushu-u.ac.jp/ hara/lectures/lectures-j.html r 1 S1-1+13 14.4.11. 19 phone: 9-8-4441, e-mail: hara@math.kyushu-u.ac.jp Office hours: 1 4/11 web download. I. 1. ϵ-δ 1. 3.1, 3..
14 S1-1+13 http://www.math.kyushu-u.ac.jp/ hara/lectures/lectures-j.html r 1 S1-1+13 14.4.11. 19 phone: 9-8-4441, e-mail: hara@math.kyushu-u.ac.jp Office hours: 1 4/11 web download. I. 1. ϵ-δ 1. 3.1, 3..
Vol. 44 No. SIG 9(CVIM 7) ) 2) 1) 1 2) 3 7) 1) 2) 3 3) 4) 5) (a) (d) (g) (b) (e) (h) No Convergence? End (f) (c) Yes * ** * ** 1
 ) 2) 1) 1 2) 3 7) 1) 2) 3 3) 4) 5) (a) (d) (g) (b) (e) (h) No Convergence? End (f) (c) Yes * ** * ** 1") Vol. 44 No. SIG 9(CVIM 7) July 2003, Robby T. Tan, 1 Estimating Illumination Position, Color and Surface Reflectance Properties from a Single Image Kenji Hara,, Robby T. Tan, Ko Nishino, Atsushi Nakazawa,
Vol. 44 No. SIG 9(CVIM 7) July 2003, Robby T. Tan, 1 Estimating Illumination Position, Color and Surface Reflectance Properties from a Single Image Kenji Hara,, Robby T. Tan, Ko Nishino, Atsushi Nakazawa,
I y = f(x) a I a x I x = a + x 1 f(x) f(a) x a = f(a + x) f(a) x (11.1) x a x 0 f(x) f(a) f(a + x) f(a) lim = lim x a x a x 0 x (11.2) f(x) x
 a I a x I x = a + x 1 f(x) f(a) x a = f(a + x) f(a) x (11.1) x a x 0 f(x) f(a) f(a + x) f(a) lim = lim x a x a x 0 x (11.2) f(x) x") 11 11.1 I y = a I a x I x = a + 1 f(a) x a = f(a +) f(a) (11.1) x a 0 f(a) f(a +) f(a) = x a x a 0 (11.) x = a a f (a) d df f(a) (a) I dx dx I I I f (x) d df dx dx (x) [a, b] x a ( 0) x a (a, b) () [a,
11 11.1 I y = a I a x I x = a + 1 f(a) x a = f(a +) f(a) (11.1) x a 0 f(a) f(a +) f(a) = x a x a 0 (11.) x = a a f (a) d df f(a) (a) I dx dx I I I f (x) d df dx dx (x) [a, b] x a ( 0) x a (a, b) () [a,
1 1.1 ( ). z = a + bi, a, b R 0 a, b 0 a 2 + b 2 0 z = a + bi = ( ) a 2 + b 2 a a 2 + b + b 2 a 2 + b i 2 r = a 2 + b 2 θ cos θ = a a 2 + b 2, sin θ =
. z = a + bi, a, b R 0 a, b 0 a 2 + b 2 0 z = a + bi = ( ) a 2 + b 2 a a 2 + b + b 2 a 2 + b i 2 r = a 2 + b 2 θ cos θ = a a 2 + b 2, sin θ =") 1 1.1 ( ). z = + bi,, b R 0, b 0 2 + b 2 0 z = + bi = ( ) 2 + b 2 2 + b + b 2 2 + b i 2 r = 2 + b 2 θ cos θ = 2 + b 2, sin θ = b 2 + b 2 2π z = r(cos θ + i sin θ) 1.2 (, ). 1. < 2. > 3. ±,, 1.3 ( ). A
1 1.1 ( ). z = + bi,, b R 0, b 0 2 + b 2 0 z = + bi = ( ) 2 + b 2 2 + b + b 2 2 + b i 2 r = 2 + b 2 θ cos θ = 2 + b 2, sin θ = b 2 + b 2 2π z = r(cos θ + i sin θ) 1.2 (, ). 1. < 2. > 3. ±,, 1.3 ( ). A
6kg 1.1m 1.m.1m.1 l λ ϵ λ l + λ l l l dl dl + dλ ϵ dλ dl dl + dλ dl dl 3 1. JIS 1 6kg 1% 66kg 1 13 σ a1 σ m σ a1 σ m σ m σ a1 f f σ a1 σ a1 σ m f 4
 35-8585 7 8 1 I I 1 1.1 6kg 1m P σ σ P 1 l l λ λ l 1.m 1 6kg 1.1m 1.m.1m.1 l λ ϵ λ l + λ l l l dl dl + dλ ϵ dλ dl dl + dλ dl dl 3 1. JIS 1 6kg 1% 66kg 1 13 σ a1 σ m σ a1 σ m σ m σ a1 f f σ a1 σ a1 σ m
35-8585 7 8 1 I I 1 1.1 6kg 1m P σ σ P 1 l l λ λ l 1.m 1 6kg 1.1m 1.m.1m.1 l λ ϵ λ l + λ l l l dl dl + dλ ϵ dλ dl dl + dλ dl dl 3 1. JIS 1 6kg 1% 66kg 1 13 σ a1 σ m σ a1 σ m σ m σ a1 f f σ a1 σ a1 σ m
Chapter9 9 LDPC sum-product LDPC 9.1 ( ) 9.2 c 1, c 2, {0, 1, } SUM, PROD : {0, 1, } {0, 1, } SUM(c 1, c 2,, c n ) := { c1 + + c n (c n0 (1 n
 9.2 c 1, c 2, {0, 1, } SUM, PROD : {0, 1, } {0, 1, } SUM(c 1, c 2,, c n ) := { c1 + + c n (c n0 (1 n") 9 LDPC sum-product 9.1 9.2 LDPC 9.1 ( ) 9.2 c 1, c 2, {0, 1, } SUM, PROD : {0, 1, } {0, 1, } SUM(c 1, c 2,, c n ) := { c1 + + c n (c n0 (1 n 0 n)) ( ) 0 (N(0 c) > N(1 c)) PROD(c 1, c 2,, c n ) := 1 (N(0
9 LDPC sum-product 9.1 9.2 LDPC 9.1 ( ) 9.2 c 1, c 2, {0, 1, } SUM, PROD : {0, 1, } {0, 1, } SUM(c 1, c 2,, c n ) := { c1 + + c n (c n0 (1 n 0 n)) ( ) 0 (N(0 c) > N(1 c)) PROD(c 1, c 2,, c n ) := 1 (N(0
円筒面で利用可能なARマーカ
 円筒面で利用可能な AR マーカ AR Marker for Cylindrical Surface 2014 年 11 月 14 日 ( 金 ) 眞鍋佳嗣千葉大学大学院融合科学研究科 マーカベース AR 二次元マーカはカメラ姿勢の推定, 拡張現実等広い研究分野で利用されている 現実の風景 表示される画像 デジタル情報を付加 カメラで撮影し, ディスプレイに表示 使用方法の単純性, 認識の安定性からマーカベース
円筒面で利用可能な AR マーカ AR Marker for Cylindrical Surface 2014 年 11 月 14 日 ( 金 ) 眞鍋佳嗣千葉大学大学院融合科学研究科 マーカベース AR 二次元マーカはカメラ姿勢の推定, 拡張現実等広い研究分野で利用されている 現実の風景 表示される画像 デジタル情報を付加 カメラで撮影し, ディスプレイに表示 使用方法の単純性, 認識の安定性からマーカベース
 H27 28 4 1 11,353 45 14 10 120 27 90 26 78 323 401 27 11,120 D A BC 11,120 H27 33 H26 38 H27 35 40 126,154 129,125 130,000 150,000 5,961 11,996 6,000 15,000 688,684 708,924 700,000 750,000 1300 H28
H27 28 4 1 11,353 45 14 10 120 27 90 26 78 323 401 27 11,120 D A BC 11,120 H27 33 H26 38 H27 35 40 126,154 129,125 130,000 150,000 5,961 11,996 6,000 15,000 688,684 708,924 700,000 750,000 1300 H28

12
 4 1 JAMTIS 260 149 13 9 9 241 27 3 100 371 13 14 13 2 50 10 6 18 50 13 9 9 150 64 13 10 6 9 14 17 13 10 20 21 13 10 28 44 29 15 115 14 3 16 12 700,000 1,378,733 600,000 3,395,593 890,000 2,555,000 4,745,000
4 1 JAMTIS 260 149 13 9 9 241 27 3 100 371 13 14 13 2 50 10 6 18 50 13 9 9 150 64 13 10 6 9 14 17 13 10 20 21 13 10 28 44 29 15 115 14 3 16 12 700,000 1,378,733 600,000 3,395,593 890,000 2,555,000 4,745,000
極限
 si θ = ) θ 0 θ cos θ θ 0 θ = ) P T θ H A, 0) θ, 0 < θ < π ) AP, P H A P T PH < AP < AT si θ < θ < ta θ si θ < θ < si θ cos θ θ cos θ < si θ θ < θ < 0 θ = h θ 0 cos θ =, θ 0 si θ θ =. θ 0 cos θ θ θ 0 cos
si θ = ) θ 0 θ cos θ θ 0 θ = ) P T θ H A, 0) θ, 0 < θ < π ) AP, P H A P T PH < AP < AT si θ < θ < ta θ si θ < θ < si θ cos θ θ cos θ < si θ θ < θ < 0 θ = h θ 0 cos θ =, θ 0 si θ θ =. θ 0 cos θ θ θ 0 cos



 20 6 4 1 4 1.1 1.................................... 4 1.1.1.................................... 4 1.1.2 1................................ 5 1.2................................... 7 1.2.1....................................
20 6 4 1 4 1.1 1.................................... 4 1.1.1.................................... 4 1.1.2 1................................ 5 1.2................................... 7 1.2.1....................................
.. ( )T p T = p p = T () T x T N P (X < x T ) N = ( T ) N (2) ) N ( P (X x T ) N = T (3) T N P T N P 0
T p T = p p = T () T x T N P (X < x T ) N = ( T ) N (2) ) N ( P (X x T ) N = T (3) T N P T N P 0") 20 5 8..................................................2.....................................3 L.....................................4................................. 2 2. 3 2. (N ).........................................
20 5 8..................................................2.....................................3 L.....................................4................................. 2 2. 3 2. (N ).........................................
LBP 2 LBP 2. 2 Local Binary Pattern Local Binary pattern(lbp) [6] R
![LBP 2 LBP 2. 2 Local Binary Pattern Local Binary pattern(lbp) [6] R](/thumbs/86/93333816.jpg "LBP 2 LBP 2. 2 Local Binary Pattern Local Binary pattern(lbp) [6] R") DEIM Forum 24 F5-4 Local Binary Pattern 6 84 E-mail: {tera,kida}@ist.hokudai.ac.jp Local Binary Pattern (LBP) LBP 3 3 LBP 5 5 5 LBP improved LBP uniform LBP.. Local Binary Pattern, Gradient Local Auto-Correlations,,,,
DEIM Forum 24 F5-4 Local Binary Pattern 6 84 E-mail: {tera,kida}@ist.hokudai.ac.jp Local Binary Pattern (LBP) LBP 3 3 LBP 5 5 5 LBP improved LBP uniform LBP.. Local Binary Pattern, Gradient Local Auto-Correlations,,,,
arctan 1 arctan arctan arctan π = = ( ) π = 4 = π = π = π = =
 π = 4 = π = π = π = =") arctan arctan arctan arctan 2 2000 π = 3 + 8 = 3.25 ( ) 2 8 650 π = 4 = 3.6049 9 550 π = 3 3 30 π = 3.622 264 π = 3.459 3 + 0 7 = 3.4085 < π < 3 + 7 = 3.4286 380 π = 3 + 77 250 = 3.46 5 3.45926 < π < 3.45927
arctan arctan arctan arctan 2 2000 π = 3 + 8 = 3.25 ( ) 2 8 650 π = 4 = 3.6049 9 550 π = 3 3 30 π = 3.622 264 π = 3.459 3 + 0 7 = 3.4085 < π < 3 + 7 = 3.4286 380 π = 3 + 77 250 = 3.46 5 3.45926 < π < 3.45927


°ÌÁê¿ô³ØII
 July 14, 2007 Brouwer f f(x) = x x f(z) = 0 2 f : S 2 R 2 f(x) = f( x) x S 2 3 3 2 - - - 1. X x X U(x) U(x) x U = {U(x) x X} X 1. U(x) A U(x) x 2. A U(x), A B B U(x) 3. A, B U(x) A B U(x) 4. A U(x),
July 14, 2007 Brouwer f f(x) = x x f(z) = 0 2 f : S 2 R 2 f(x) = f( x) x S 2 3 3 2 - - - 1. X x X U(x) U(x) x U = {U(x) x X} X 1. U(x) A U(x) x 2. A U(x), A B B U(x) 3. A, B U(x) A B U(x) 4. A U(x),
ohpmain.dvi
 fujisawa@ism.ac.jp 1 Contents 1. 2. 3. 4. γ- 2 1. 3 10 5.6, 5.7, 5.4, 5.5, 5.8, 5.5, 5.3, 5.6, 5.4, 5.2. 5.5 5.6 +5.7 +5.4 +5.5 +5.8 +5.5 +5.3 +5.6 +5.4 +5.2 =5.5. 10 outlier 5 5.6, 5.7, 5.4, 5.5, 5.8,
fujisawa@ism.ac.jp 1 Contents 1. 2. 3. 4. γ- 2 1. 3 10 5.6, 5.7, 5.4, 5.5, 5.8, 5.5, 5.3, 5.6, 5.4, 5.2. 5.5 5.6 +5.7 +5.4 +5.5 +5.8 +5.5 +5.3 +5.6 +5.4 +5.2 =5.5. 10 outlier 5 5.6, 5.7, 5.4, 5.5, 5.8,
(1.2) T D = 0 T = D = 30 kn 1.2 (1.4) 2F W = 0 F = W/2 = 300 kn/2 = 150 kn 1.3 (1.9) R = W 1 + W 2 = = 1100 N. (1.9) W 2 b W 1 a = 0
 T D = 0 T = D = 30 kn 1.2 (1.4) 2F W = 0 F = W/2 = 300 kn/2 = 150 kn 1.3 (1.9) R = W 1 + W 2 = = 1100 N. (1.9) W 2 b W 1 a = 0") 1 1 1.1 1.) T D = T = D = kn 1. 1.4) F W = F = W/ = kn/ = 15 kn 1. 1.9) R = W 1 + W = 6 + 5 = 11 N. 1.9) W b W 1 a = a = W /W 1 )b = 5/6) = 5 cm 1.4 AB AC P 1, P x, y x, y y x 1.4.) P sin 6 + P 1 sin 45
1 1 1.1 1.) T D = T = D = kn 1. 1.4) F W = F = W/ = kn/ = 15 kn 1. 1.9) R = W 1 + W = 6 + 5 = 11 N. 1.9) W b W 1 a = a = W /W 1 )b = 5/6) = 5 cm 1.4 AB AC P 1, P x, y x, y y x 1.4.) P sin 6 + P 1 sin 45
I A A441 : April 15, 2013 Version : 1.1 I Kawahira, Tomoki TA (Shigehiro, Yoshida )
") I013 00-1 : April 15, 013 Version : 1.1 I Kawahira, Tomoki TA (Shigehiro, Yoshida) http://www.math.nagoya-u.ac.jp/~kawahira/courses/13s-tenbou.html pdf * 4 15 4 5 13 e πi = 1 5 0 5 7 3 4 6 3 6 10 6 17
I013 00-1 : April 15, 013 Version : 1.1 I Kawahira, Tomoki TA (Shigehiro, Yoshida) http://www.math.nagoya-u.ac.jp/~kawahira/courses/13s-tenbou.html pdf * 4 15 4 5 13 e πi = 1 5 0 5 7 3 4 6 3 6 10 6 17
さくらの個別指導 ( さくら教育研究所 ) A a 1 a 2 a 3 a n {a n } a 1 a n n n 1 n n 0 a n = 1 n 1 n n O n {a n } n a n α {a n } α {a
 A a 1 a 2 a 3 a n {a n } a 1 a n n n 1 n n 0 a n = 1 n 1 n n O n {a n } n a n α {a n } α {a") ... A a a a 3 a n {a n } a a n n 3 n n n 0 a n = n n n O 3 4 5 6 n {a n } n a n α {a n } α {a n } α α {a n } a n n a n α a n = α n n 0 n = 0 3 4. ()..0.00 + (0.) n () 0. 0.0 0.00 ( 0.) n 0 0 c c c c c
... A a a a 3 a n {a n } a a n n 3 n n n 0 a n = n n n O 3 4 5 6 n {a n } n a n α {a n } α {a n } α α {a n } a n n a n α a n = α n n 0 n = 0 3 4. ()..0.00 + (0.) n () 0. 0.0 0.00 ( 0.) n 0 0 c c c c c
(Compton Scattering) Beaming 1 exp [i (k x ωt)] k λ k = 2π/λ ω = 2πν k = ω/c k x ωt ( ω ) k α c, k k x ωt η αβ k α x β diag( + ++) x β = (ct, x) O O x
![(Compton Scattering) Beaming 1 exp [i (k x ωt)] k λ k = 2π/λ ω = 2πν k = ω/c k x ωt ( ω ) k α c, k k x ωt η αβ k α x β diag( + ++) x β = (ct, x) O O x](/thumbs/104/162595168.jpg "(Compton Scattering) Beaming 1 exp [i (k x ωt)] k λ k = 2π/λ ω = 2πν k = ω/c k x ωt ( ω ) k α c, k k x ωt η αβ k α x β diag( + ++) x β = (ct, x) O O x") Compton Scattering Beaming exp [i k x ωt] k λ k π/λ ω πν k ω/c k x ωt ω k α c, k k x ωt η αβ k α x β diag + ++ x β ct, x O O x O O v k α k α β, γ k γ k βk, k γ k + βk k γ k k, k γ k + βk 3 k k 4 k 3 k
Compton Scattering Beaming exp [i k x ωt] k λ k π/λ ω πν k ω/c k x ωt ω k α c, k k x ωt η αβ k α x β diag + ++ x β ct, x O O x O O v k α k α β, γ k γ k βk, k γ k + βk k γ k k, k γ k + βk 3 k k 4 k 3 k
it-ken_open.key
 深層学習技術の進展 ImageNet Classification 画像認識 音声認識 自然言語処理 機械翻訳 深層学習技術は これらの分野において 特に圧倒的な強みを見せている Figure (Left) Eight ILSVRC-2010 test Deep images and the cited4: from: ``ImageNet Classification with Networks et
深層学習技術の進展 ImageNet Classification 画像認識 音声認識 自然言語処理 機械翻訳 深層学習技術は これらの分野において 特に圧倒的な強みを見せている Figure (Left) Eight ILSVRC-2010 test Deep images and the cited4: from: ``ImageNet Classification with Networks et
II Time-stamp: <05/09/30 17:14:06 waki> ii
 II waki@cc.hirosaki-u.ac.jp 18 1 30 II Time-stamp: ii 1 1 1.1.................................................. 1 1.2................................................... 3 1.3..................................................
II waki@cc.hirosaki-u.ac.jp 18 1 30 II Time-stamp: ii 1 1 1.1.................................................. 1 1.2................................................... 3 1.3..................................................
sekibun.dvi
 a d = a + a+ (a ), e d = e, sin d = cos, (af() + bg())d = a d = log, cosd = sin, f()d + b g()d d 3 d d d d d d d ( + 3 + )d ( + )d ( 3 )d (e )d ( sin 3 cos)d g ()f (g())d = f(g()) e d e d ( )e d cos d
a d = a + a+ (a ), e d = e, sin d = cos, (af() + bg())d = a d = log, cosd = sin, f()d + b g()d d 3 d d d d d d d ( + 3 + )d ( + )d ( 3 )d (e )d ( sin 3 cos)d g ()f (g())d = f(g()) e d e d ( )e d cos d
 CONTENTS 1 7 8 89 9 1011 111 1 1 114 1516 160 01 1 4 4 45 56 6 67 7 79 9 0 0 1 1 6 6 1 4 5 6 7 8 1 H55 A6 A4 4 A51 5 S5 6 I 7 H 8 I81 9 H1 10 11 1 1 14 I1 I1 I14 I15 I16 15 H6 16 H8 17 H7 18 I86 19 A 0
CONTENTS 1 7 8 89 9 1011 111 1 1 114 1516 160 01 1 4 4 45 56 6 67 7 79 9 0 0 1 1 6 6 1 4 5 6 7 8 1 H55 A6 A4 4 A51 5 S5 6 I 7 H 8 I81 9 H1 10 11 1 1 14 I1 I1 I14 I15 I16 15 H6 16 H8 17 H7 18 I86 19 A 0
Sobel Canny i
 21 Edge Feature for Monochrome Image Retrieval 1100311 2010 3 1 3 3 2 2 7 200 Sobel Canny i Abstract Edge Feature for Monochrome Image Retrieval Naoto Suzue Content based image retrieval (CBIR) has been
21 Edge Feature for Monochrome Image Retrieval 1100311 2010 3 1 3 3 2 2 7 200 Sobel Canny i Abstract Edge Feature for Monochrome Image Retrieval Naoto Suzue Content based image retrieval (CBIR) has been
1. (8) (1) (x + y) + (x + y) = 0 () (x + y ) 5xy = 0 (3) (x y + 3y 3 ) (x 3 + xy ) = 0 (4) x tan y x y + x = 0 (5) x = y + x + y (6) = x + y 1 x y 3 (
 (1) (x + y) + (x + y) = 0 () (x + y ) 5xy = 0 (3) (x y + 3y 3 ) (x 3 + xy ) = 0 (4) x tan y x y + x = 0 (5) x = y + x + y (6) = x + y 1 x y 3 (") 1 1.1 (1) (1 + x) + (1 + y) = 0 () x + y = 0 (3) xy = x (4) x(y + 3) + y(y + 3) = 0 (5) (a + y ) = x ax a (6) x y 1 + y x 1 = 0 (7) cos x + sin x cos y = 0 (8) = tan y tan x (9) = (y 1) tan x (10) (1 +
1 1.1 (1) (1 + x) + (1 + y) = 0 () x + y = 0 (3) xy = x (4) x(y + 3) + y(y + 3) = 0 (5) (a + y ) = x ax a (6) x y 1 + y x 1 = 0 (7) cos x + sin x cos y = 0 (8) = tan y tan x (9) = (y 1) tan x (10) (1 +
x T = (x 1,, x M ) x T x M K C 1,, C K 22 x w y 1: 2 2
 x T x M K C 1,, C K 22 x w y 1: 2 2") Takio Kurita Neurosceince Research Institute, National Institute of Advanced Indastrial Science and Technology takio-kurita@aistgojp (Support Vector Machine, SVM) 1 (Support Vector Machine, SVM) ( ) 2
Takio Kurita Neurosceince Research Institute, National Institute of Advanced Indastrial Science and Technology takio-kurita@aistgojp (Support Vector Machine, SVM) 1 (Support Vector Machine, SVM) ( ) 2
1 n A a 11 a 1n A =.. a m1 a mn Ax = λx (1) x n λ (eigenvalue problem) x = 0 ( x 0 ) λ A ( ) λ Ax = λx x Ax = λx y T A = λy T x Ax = λx cx ( 1) 1.1 Th
 x n λ (eigenvalue problem) x = 0 ( x 0 ) λ A ( ) λ Ax = λx x Ax = λx y T A = λy T x Ax = λx cx ( 1) 1.1 Th") 1 n A a 11 a 1n A = a m1 a mn Ax = λx (1) x n λ (eigenvalue problem) x = ( x ) λ A ( ) λ Ax = λx x Ax = λx y T A = λy T x Ax = λx cx ( 1) 11 Th9-1 Ax = λx λe n A = λ a 11 a 12 a 1n a 21 λ a 22 a n1 a n2
1 n A a 11 a 1n A = a m1 a mn Ax = λx (1) x n λ (eigenvalue problem) x = ( x ) λ A ( ) λ Ax = λx x Ax = λx y T A = λy T x Ax = λx cx ( 1) 11 Th9-1 Ax = λx λe n A = λ a 11 a 12 a 1n a 21 λ a 22 a n1 a n2
y π π O π x 9 s94.5 y dy dx. y = x + 3 y = x logx + 9 s9.6 z z x, z y. z = xy + y 3 z = sinx y 9 s x dx π x cos xdx 9 s93.8 a, fx = e x ax,. a =
 [ ] 9 IC. dx = 3x 4y dt dy dt = x y u xt = expλt u yt λ u u t = u u u + u = xt yt 6 3. u = x, y, z = x + y + z u u 9 s9 grad u ux, y, z = c c : grad u = u x i + u y j + u k i, j, k z x, y, z grad u v =
[ ] 9 IC. dx = 3x 4y dt dy dt = x y u xt = expλt u yt λ u u t = u u u + u = xt yt 6 3. u = x, y, z = x + y + z u u 9 s9 grad u ux, y, z = c c : grad u = u x i + u y j + u k i, j, k z x, y, z grad u v =
(5) 75 (a) (b) ( 1 ) v ( 1 ) E E 1 v (a) ( 1 ) x E E (b) (a) (b)
 75 (a) (b) ( 1 ) v ( 1 ) E E 1 v (a) ( 1 ) x E E (b) (a) (b)") (5) 74 Re, bondar laer (Prandtl) Re z ω z = x (5) 75 (a) (b) ( 1 ) v ( 1 ) E E 1 v (a) ( 1 ) x E E (b) (a) (b) (5) 76 l V x ) 1/ 1 ( 1 1 1 δ δ = x Re x p V x t V l l (1-1) 1/ 1 δ δ δ δ = x Re p V x t V
(5) 74 Re, bondar laer (Prandtl) Re z ω z = x (5) 75 (a) (b) ( 1 ) v ( 1 ) E E 1 v (a) ( 1 ) x E E (b) (a) (b) (5) 76 l V x ) 1/ 1 ( 1 1 1 δ δ = x Re x p V x t V l l (1-1) 1/ 1 δ δ δ δ = x Re p V x t V
1007.\1.ai
 - 1 - B - 2 - e - 3 - F O f g e f - 4 - O O N N N N N N N N N N N N N N N N N N N N N N N F C - 5 - N N N N N N N N N N N N N N N N N N N N N N N F - 6 - D - 7 - - 8 - - 9 - - 10 - - 11 - - 12 - - 13 -
- 1 - B - 2 - e - 3 - F O f g e f - 4 - O O N N N N N N N N N N N N N N N N N N N N N N N F C - 5 - N N N N N N N N N N N N N N N N N N N N N N N F - 6 - D - 7 - - 8 - - 9 - - 10 - - 11 - - 12 - - 13 -

1 (PCA) 3 2 P.Viola 2) Viola AdaBoost 1 Viola OpenCV 3) Web OpenCV T.L.Berg PCA kpca LDA k-means 4) Berg 95% Berg Web k-means k-means
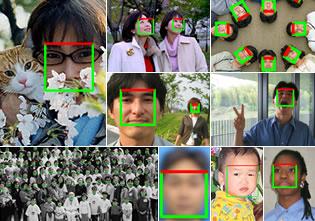
 3 2 P.Viola 2) Viola AdaBoost 1 Viola OpenCV 3) Web OpenCV T.L.Berg PCA kpca LDA k-means 4) Berg 95% Berg Web k-means k-means") Web, Web k-means 62% Associating Faces and Names in Web Photo News Akio Kitahara and Keiji Yanai We propose a system which extracts faces and person names from news articles with photographs on the Web
Web, Web k-means 62% Associating Faces and Names in Web Photo News Akio Kitahara and Keiji Yanai We propose a system which extracts faces and person names from news articles with photographs on the Web
3 2 2 (1) (2) (3) (4) 4 4 AdaBoost 2. [11] Onishi&Yoda [8] Iwashita&Stoica [5] 4 [3] 3. 3 (1) (2) (3)
![3 2 2 (1) (2) (3) (4) 4 4 AdaBoost 2. [11] Onishi&Yoda [8] Iwashita&Stoica [5] 4 [3] 3. 3 (1) (2) (3)](/thumbs/68/59204737.jpg "3 2 2 (1) (2) (3) (4) 4 4 AdaBoost 2. [11] Onishi&Yoda [8] Iwashita&Stoica [5] 4 [3] 3. 3 (1) (2) (3)") (MIRU2012) 2012 8 820-8502 680-4 E-mail: {d kouno,shimada,endo}@pluto.ai.kyutech.ac.jp (1) (2) (3) (4) 4 AdaBoost 1. Kanade [6] CLAFIC [12] EigenFace [10] 1 1 2 1 [7] 3 2 2 (1) (2) (3) (4) 4 4 AdaBoost
(MIRU2012) 2012 8 820-8502 680-4 E-mail: {d kouno,shimada,endo}@pluto.ai.kyutech.ac.jp (1) (2) (3) (4) 4 AdaBoost 1. Kanade [6] CLAFIC [12] EigenFace [10] 1 1 2 1 [7] 3 2 2 (1) (2) (3) (4) 4 4 AdaBoost
2000年度『数学展望 I』講義録
 2000 I I IV I II 2000 I I IV I-IV. i ii 3.10 (http://www.math.nagoya-u.ac.jp/ kanai/) 2000 A....1 B....4 C....10 D....13 E....17 Brouwer A....21 B....26 C....33 D....39 E. Sperner...45 F....48 A....53
2000 I I IV I II 2000 I I IV I-IV. i ii 3.10 (http://www.math.nagoya-u.ac.jp/ kanai/) 2000 A....1 B....4 C....10 D....13 E....17 Brouwer A....21 B....26 C....33 D....39 E. Sperner...45 F....48 A....53
A
 A 2563 15 4 21 1 3 1.1................................................ 3 1.2............................................. 3 2 3 2.1......................................... 3 2.2............................................
A 2563 15 4 21 1 3 1.1................................................ 3 1.2............................................. 3 2 3 2.1......................................... 3 2.2............................................
S K(S) = T K(T ) T S K n (1.1) n {}}{ n K n (1.1) 0 K 0 0 K Q p K Z/pZ L K (1) L K L K (2) K L L K [L : K] 1.1.
![S K(S) = T K(T ) T S K n (1.1) n {}}{ n K n (1.1) 0 K 0 0 K Q p K Z/pZ L K (1) L K L K (2) K L L K [L : K] 1.1.](/thumbs/91/105754396.jpg "S K(S) = T K(T ) T S K n (1.1) n {}}{ n K n (1.1) 0 K 0 0 K Q p K Z/pZ L K (1) L K L K (2) K L L K [L : K] 1.1.") () 1.1.. 1. 1.1. (1) L K (i) 0 K 1 K (ii) x, y K x + y K, x y K (iii) x, y K xy K (iv) x K \ {0} x 1 K K L L K ( 0 L 1 L ) L K L/K (2) K M L M K L 1.1. C C 1.2. R K = {a + b 3 i a, b Q} Q( 2, 3) = Q( 2
() 1.1.. 1. 1.1. (1) L K (i) 0 K 1 K (ii) x, y K x + y K, x y K (iii) x, y K xy K (iv) x K \ {0} x 1 K K L L K ( 0 L 1 L ) L K L/K (2) K M L M K L 1.1. C C 1.2. R K = {a + b 3 i a, b Q} Q( 2, 3) = Q( 2
lim lim lim lim 0 0 d lim 5. d 0 d d d d d d 0 0 lim lim 0 d
 lim 5. 0 A B 5-5- A B lim 0 A B A 5. 5- 0 5-5- 0 0 lim lim 0 0 0 lim lim 0 0 d lim 5. d 0 d d d d d d 0 0 lim lim 0 d 0 0 5- 5-3 0 5-3 5-3b 5-3c lim lim d 0 0 5-3b 5-3c lim lim lim d 0 0 0 3 3 3 3 3 3
lim 5. 0 A B 5-5- A B lim 0 A B A 5. 5- 0 5-5- 0 0 lim lim 0 0 0 lim lim 0 0 d lim 5. d 0 d d d d d d 0 0 lim lim 0 d 0 0 5- 5-3 0 5-3 5-3b 5-3c lim lim d 0 0 5-3b 5-3c lim lim lim d 0 0 0 3 3 3 3 3 3
S I. dy fx x fx y fx + C 3 C dy fx 4 x, y dy v C xt y C v e kt k > xt yt gt [ v dt dt v e kt xt v e kt + C k x v + C C k xt v k 3 r r + dr e kt S dt d
 S I.. http://ayapin.film.s.dendai.ac.jp/~matuda /TeX/lecture.html PDF PS.................................... 3.3.................... 9.4................5.............. 3 5. Laplace................. 5....
S I.. http://ayapin.film.s.dendai.ac.jp/~matuda /TeX/lecture.html PDF PS.................................... 3.3.................... 9.4................5.............. 3 5. Laplace................. 5....
[ ] 0.1 lim x 0 e 3x 1 x IC ( 11) ( s114901) 0.2 (1) y = e 2x (x 2 + 1) (2) y = x/(x 2 + 1) 0.3 dx (1) 1 4x 2 (2) e x sin 2xdx (3) sin 2 xdx ( 11) ( s
![[ ] 0.1 lim x 0 e 3x 1 x IC ( 11) ( s114901) 0.2 (1) y = e 2x (x 2 + 1) (2) y = x/(x 2 + 1) 0.3 dx (1) 1 4x 2 (2) e x sin 2xdx (3) sin 2 xdx ( 11) ( s](/thumbs/94/118579915.jpg "[ ] 0.1 lim x 0 e 3x 1 x IC ( 11) ( s114901) 0.2 (1) y = e 2x (x 2 + 1) (2) y = x/(x 2 + 1) 0.3 dx (1) 1 4x 2 (2) e x sin 2xdx (3) sin 2 xdx ( 11) ( s") [ ]. lim e 3 IC ) s49). y = e + ) ) y = / + ).3 d 4 ) e sin d 3) sin d ) s49) s493).4 z = y z z y s494).5 + y = 4 =.6 s495) dy = 3e ) d dy d = y s496).7 lim ) lim e s49).8 y = e sin ) y = sin e 3) y =
[ ]. lim e 3 IC ) s49). y = e + ) ) y = / + ).3 d 4 ) e sin d 3) sin d ) s49) s493).4 z = y z z y s494).5 + y = 4 =.6 s495) dy = 3e ) d dy d = y s496).7 lim ) lim e s49).8 y = e sin ) y = sin e 3) y =
(1) θ a = 5(cm) θ c = 4(cm) b = 3(cm) (2) ABC A A BC AD 10cm BC B D C 99 (1) A B 10m O AOB 37 sin 37 = cos 37 = tan 37
 θ a = 5(cm) θ c = 4(cm) b = 3(cm) (2) ABC A A BC AD 10cm BC B D C 99 (1) A B 10m O AOB 37 sin 37 = cos 37 = tan 37") 4. 98 () θ a = 5(cm) θ c = 4(cm) b = (cm) () D 0cm 0 60 D 99 () 0m O O 7 sin 7 = 0.60 cos 7 = 0.799 tan 7 = 0.754 () xkm km R km 00 () θ cos θ = sin θ = () θ sin θ = 4 tan θ = () 0 < x < 90 tan x = 4 sin
4. 98 () θ a = 5(cm) θ c = 4(cm) b = (cm) () D 0cm 0 60 D 99 () 0m O O 7 sin 7 = 0.60 cos 7 = 0.799 tan 7 = 0.754 () xkm km R km 00 () θ cos θ = sin θ = () θ sin θ = 4 tan θ = () 0 < x < 90 tan x = 4 sin
2 HMM HTK[2] 3 left-to-right HMM triphone MLLR 1 CSJ 10 1 : 3 1: GID AM/CSJ-APS/hmmdefs.gz
![2 HMM HTK[2] 3 left-to-right HMM triphone MLLR 1 CSJ 10 1 : 3 1: GID AM/CSJ-APS/hmmdefs.gz](/thumbs/89/99052459.jpg "2 HMM HTK[2] 3 left-to-right HMM triphone MLLR 1 CSJ 10 1 : 3 1: GID AM/CSJ-APS/hmmdefs.gz") Ver.1.0 2004/3/23 : : 1 1 2 2 2.1..................................... 3 2.2..................................... 5 2.3........................... 5 2.4.............................. 7 2.5............................
Ver.1.0 2004/3/23 : : 1 1 2 2 2.1..................................... 3 2.2..................................... 5 2.3........................... 5 2.4.............................. 7 2.5............................