PowerPoint プレゼンテーション
|
|
|
- まれあ うばら
- 8 years ago
- Views:
Transcription
1 マイコンプログラミング演習 I 第 回回路構築 /LEDを用いた出力制御担当 : 植村
2 導入

3 講義内容 本講義では携帯電話や携帯オーディオプレイヤー 各種ロボットなどの電子機器 情報機器に用いられるマイコン制御技術を 実習を通して理解する PIC: Peripheral Interface Controller 直訳 : 周辺装置インタフェースコントローラー マイクロコンピュータ CPUやメモリをワンチップ化した小型のコンピュータパソコンのような汎用性はないが低コスト 小型 省電力などのメリットがある 3
4 講義内容 目的 マイコン制御システムの設計に必要なマイコンの I/O ポート制御技術 アセンブラ言語によるプログラミング ROM ライタによる書込みと実装 回路部品技術 センサー入力技術などを学び 企業におけるマイコン制御設計の即戦力となるべく技術の習得を目的とする 開発環境 マイコンプログラミング演習 I ではアセンブラ言語を用いてプログラミングを行う 各自ノート PC を持参のこと 4
5 講義内容 本講義での規約事項 忌引きや病欠などのやむない理由を除く欠席は原則として認めない 欠席する場合は事前 または事後速やかに連絡を入れること 全てのレポートに於いて規定の評価基準を満たす必要がある 1 つでも未提出 不合格のレポートがある場合は成績評点を不可とする ただし レポートは採点後返却され 再提出が 1 度のみ認められる 5
6 コンピュータの行うこと 文字数値画像音声 印刷 再生 表示 情報の入力情報の処理情報の出力 6
7 ノイマン型コンピュータの基本構成 中央制御装置 演算装置 入力装置キーボードマウスなど 制御装置 出力装置ディスプレープリンターなど 主記憶装置 7
8 ノイマン型コンピュータの特徴 1 プログラム内蔵方式 処理手順であるプログラムはコンピュータ内部に記憶される 2 逐次処理 プログラムで指定した順序で 逐次命令が実行される 3 命令とデータの共存 同じメモリ ( 主記憶装置 ) 上に命令とデータが共存する 8
9 ハーバード型コンピュータの基本構成 演算装置 入力装置キーボードマウスなど 制御装置 出力装置ディスプレープリンターなど プログラムメモリ データメモリ 9
10 ハーバード型コンピュータの特徴 1 プログラム内蔵方式 処理手順であるプログラムはコンピュータ内部に記憶される 2 逐次処理 プログラムで指定した順序で 逐次命令が実行される 3 命令とデータのメモリ分離 命令 ( プログラム ) とデータの記憶領域が別である 10


11 ハーバード型の利点 ノイマン型 CPU ハーバード型 CPU メモリ ( プログラム データ兼用 ) プログラムメモリ データメモリ 1 つのバスでプログラムとデータのやりとりを行うので 転送が混雑 パフォーマンスの低下 ( フォン ノイマンのボトルネック ) プログラムとデータはそれぞれ別のバスが使われる 11
12 ハーバード型の利点 ハーバード型のコンピュータの特徴から 以下のような用途で使われることが多い プログラムを利用者が書き換える必要がない プログラムにアクセスさせたくない 高速にプログラムを処理したい リモコンやマウス タイマー コントローラーなどの制御によく使われる 12
13 ド ) 命令実行サイクル 1 命令の取り出し ( フェッチ ) 2 命令の解読 ( デコード ) 3 命令の実行 フェッチ ) ( 命令の取出し デコー ( 命令の解読 命令の実行 命令実行サイクル 13
14 命令実行の流れ 制御装置 プログラムカウンター 命令レジスタ デコーダ 命令メモリ命令命令命令命令命令データメモリデータデータデータデータデータ 演算装置 演算回路 各種レジスタ 14
15 PIC マイコンの特徴 小型パッケージに全ての機能を内蔵 CPU, メモリ,I/O( 入出力 ) プログラムを内蔵するメモリがフラッシュメモリ 機能が豊富 ハ ワーアッフ タイマ ウォチト ック タイマ 割込み スリーフ モート ADコンハ ータ等 命令数が少ない (35 個 ) 低消費電力 (2mA) 安価 (100 円程度 ) 15


16 PIC マイコンの概要 ゲーム機のコントローラーに用いられる PIC マイコン この実験で用いる PIC マイコン 16F84A その他リモコンやマウスなど 16
 入出力ポート B 入出力ポート数ポート A ポート B 最大 5 個 (5bit) 最大 8 個 (8bit)")
17 PIC の端子の構成 入出力ポート A リセット電源 (-) 入出力ポート B 入出力ポート A クロック IN/OUT 電源 (+) 入出力ポート B 入出力ポート数ポート A ポート B 最大 5 個 (5bit) 最大 8 個 (8bit) 17
18 18
19 実習内容
 20")
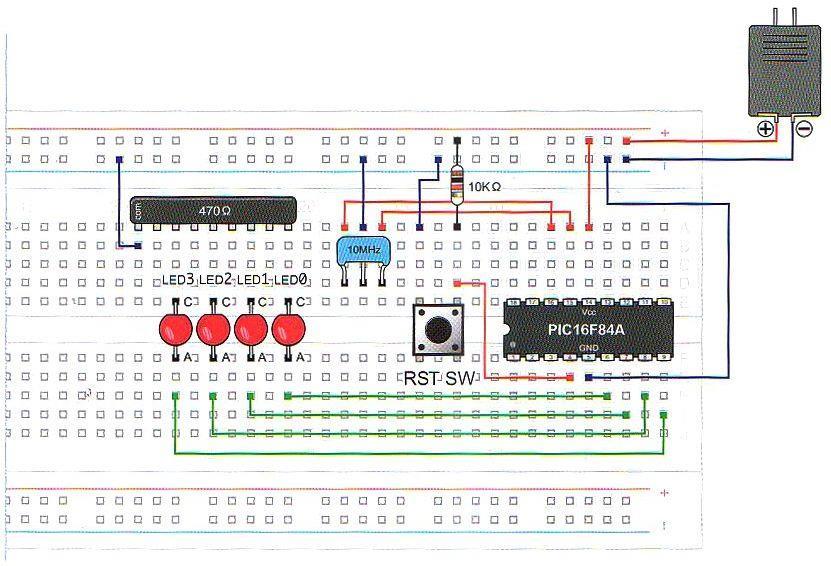
20 配置図 (P179) 20

21 配線図 PIC16F84A 21



22 プログラミング ~PIC への書き込み MPLAB でソースコードを記述 アセンブル.HEX マシン語のファイル Pic に書き込む 22
23 アセンブラによるプログラム (P54) LIST INCLUDE P=PIC16F84A P16F84A.INC CONFIG _HS_OSC & _WDT_OFF & _PWRTE_ON & _CP_OFF BSF STATUS, RP0 CLRF TRISA CLRF TRISB BCF STATUS, RP0 MOVLW B ; リテラル Wレジスタ MOVWF PORTB ;Wレジスタ ファイルレジスタ LOOP GOTO LOOP END ビルド時に Absolute を選ぶ 23
24 プログラム (P54) LIST P=PIC16F84A 使用するPICの記述 INCLUDE P16F84A.INC ファイルのインクルード CONFIG _HS_OSC & _WDT_OFF & _PWRTE_ON & _CP_OFF BSF STATUS, RP0 PIC CLRF の機能の設定 TRISA 順に CLRF TRISB BCF 発振回路の周波数を STATUS, RP0 HSモード (1MHz~20MHz) にする MOVLW ウォッチドッグタイマ B ( 暴走防止用のタイマ ; リテラル Wレジスタ ) をOFFにする MOVWF PORTB ;Wレジスタ ファイルレジスタ パワーアップタイマ ( 安定起動させるためのタイマ ) をONにする LOOP プログラムメモリのコードプロテクト ( 外部からのアクセスを禁止 GOTO する ) LOOP をOFFにする END 24

25 プログラム (P54) LIST INCLUDE P=PIC16F84A P16F84A.INC CONFIG _HS_OSC & _WDT_OFF & _PWRTE_ON & _CP_OFF BSF STATUS, RP0 CLRF TRISA CLRF TRISB BCF STATUS, RP0 MOVLW B ; リテラル Wレジスタ MOVWF PORTB ;Wレジスタ ファイルレジスタ LOOP GOTO LOOP END 25
26 新しく使う命令 BSF fレジスタ処理 bit Bit Set File-register ビット単位でファイルレジスタの値を1にセットする CLRF fレジスタ Clear File-register バイト単位でファイルレジスタの値を0にクリアする BCF fレジスタ処理 bit Bit Clear File-register ビット単位でファイルレジスタの値を0にクリアする 26
27 ワーキンク レシ スタとファイルレシ スタ PIC の命令文はデータを 2 つまでしか制御できないファイルレジスタに同時に 2 つ以上アクセスできない ワーキングレジスタ : 一時的に値を入れておくことのできるメモリ ファイルレジスタ : 設定やプログラムで予約することのできるメモリ領域 8bit 68 RAM 8bit W レジスタ 8bit 8bit F レジスタ 8bit ALU 算術演算部 8bit を 2 つまで制御 27
28 P16F84A のファイルレジスタ 設定用のメモリ領域 プログラムが自由に使用できるメモリ Address BANK 0 BANK 1 Address 00h Indirect addr BANK0 にマップ 80h 01h TMR0 OPTION 81h 02h PCL BANK0 にマップ 82h 03h STATUS BANK0 にマップ 83h 04h FSR BANK0 にマップ 84h 05h PORTA TRISA 85h 06h PORTB TRISB 86h 07h 使用不可 BANK0 にマップ 87h 08h EEDATA EECON1 88h 09h EEADR EECON2 89h 0Ah PCLATH BANK0 にマップ 8Ah 0Bh INTCON BANK0 にマップ 8Bh 0Ch 8CH : : 68 SRAM 汎用レジスタ BANK0 にマップ : : 4Fh CFh 50h D0h : : 使用不可使用不可 : : 7Fh FFh 28
29 P16F84A のファイルレジスタ Address BANK 0 Address BANK 1 00h h h h h h h h h h h h h h h h h h h h Ah Ah Bh Bh Ch CH : : : : : : : : 4Fh CFh h D0h : : 使用不可 : : 使用不可 7Fh FFh 29

 1= 電源 ON 後または CLRWDT 命令実行により 1 になる 0=SLEEP 命令により 0 になる Z DC C ゼロビット 1=")

30 STATUS レジスタの各 bit の意味 Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0 IRP RP1 RP0 ^TO ^PD Z DC C IRP RP1 PIC16F84 では未使用 PIC16F84 では未使用 RP0 バンク選択ビット 0= バンク 0 1= バンク 1 ^TO タイムアウトビット 1= 電源 ON 後,CLRWDT 命令または SLEEP 命令実行後 0=WDT タイムアウト発生 ^PD パワーダウンビット (SLEEP 命令実行有無判定用 ) 1= 電源 ON 後または CLRWDT 命令実行により 1 になる 0=SLEEP 命令により 0 になる Z DC C ゼロビット 1= 計算結果またはロジック演算結果がゼロ 0= 計算結果またはロジック演算結果がゼロでない デジットキャリービット 1= 結果により下位 4 ビット目からキャリーが発生した 0= 結果により下位 4 ビット目からキャリーが発生しなかった キャリービット 1= 結果により最上位ビットからキャリーが発生した 0= 結果により最上位ビットからキャリーが発生しなかった 30

31 TRISA, TRISB レジスタ TRISA レジスタ Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit TRISA4 TRISA3 TRISA2 TRISA1 TRISA0 TRISB レジスタ Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0 TRISB7 TRISB6 TRISB5 TRISB4 TRISB3 TRISB2 TRISB1 TRISB0 各ビットは PORTA の RA0~RA4 ピンおよび PORTB の RB0~RB7 ピンの入出力モードを設定する 0= 出力 1= 入力 使わないポートは通常 1 をセットする 31
32 前回のプログラム (P54) LIST INCLUDE P=PIC16F84A P16F84A.INC CONFIG _HS_OSC & _WDT_OFF & _PWRTE_ON & _CP_OFF BSF STATUS, RP0 CLRF TRISA CLRF TRISB BCF STATUS, RP0 MOVLW B ; リテラル Wレジスタ MOVWF PORTB ;Wレジスタ ファイルレジスタ LOOP GOTO LOOP END 32
 の数字列の意味 MOVWF f レジスタ MOVe Working-register to File-register ワーキングレジスタ内の値を指定されたファイルレジスタに格納する")
33 新しく使う命令 MOVLW 指定値 MOVe Literal to Working-register リテラルの値 ( こちらが表記で指示した値 ) をワーキングレジスタへ格納 B バイナリ (B) の数字列の意味 MOVWF f レジスタ MOVe Working-register to File-register ワーキングレジスタ内の値を指定されたファイルレジスタに格納する 33
 LED を PIC の RA0~RA3 のポートに接続しなおすならば, プログラムは \"MOVWF PORTB\" をどのように書き替えればよいか?")
34 課題 (1) MOVLW B' ' を次のように書き替えると, 動作はどう変化するか? MOVLW B' (2) LED を PIC の RA0~RA3 のポートに接続しなおすならば, プログラムは "MOVWF PORTB" をどのように書き替えればよいか? PIC を抜き差しするときは電源を OFF にすること PIC の向きに注意すること PIC を抜くときはピンが折れないように慎重に 34
PowerPoint プレゼンテーション
 マイコンプログラミング演習 I 第 04-05 回 LEDを用いたI/O 制御担当 : 植村 実験の目的 本実験ではマイコンシステムを用いた信号の入出力の制御方法を理解することを目的とし, マイコンのアーキテクチャを理解 実装するとともに, アセンブラによるプログラミング技術の習得を行う. 回路の構成として,PIC16F84A を用いてスイッチを入力とする LED の点灯 / 消灯の出力操作を行う回路ならびにアセンブラプログラムを実装する.
マイコンプログラミング演習 I 第 04-05 回 LEDを用いたI/O 制御担当 : 植村 実験の目的 本実験ではマイコンシステムを用いた信号の入出力の制御方法を理解することを目的とし, マイコンのアーキテクチャを理解 実装するとともに, アセンブラによるプログラミング技術の習得を行う. 回路の構成として,PIC16F84A を用いてスイッチを入力とする LED の点灯 / 消灯の出力操作を行う回路ならびにアセンブラプログラムを実装する.
余白 : 上下 25.4mm, 左右 19mm (Word2012 での やや狭い 設定 ) マイコンプログラミング演習 I レポート 1 実験日 提出日 回路構築 /LED を用いた I/O 制御 [16pt] 班員と担当責任者第 0 班レポート作成
![余白 : 上下 25.4mm, 左右 19mm (Word2012 での やや狭い 設定 ) マイコンプログラミング演習 I レポート 1 実験日 提出日 回路構築 /LED を用いた I/O 制御 [16pt] 班員と担当責任者第 0 班レポート作成](/thumbs/76/74111189.jpg "余白 : 上下 25.4mm, 左右 19mm (Word2012 での やや狭い 設定 ) マイコンプログラミング演習 I レポート 1 実験日 提出日 回路構築 /LED を用いた I/O 制御 [16pt] 班員と担当責任者第 0 班レポート作成") レポートを書く上での心得 実験レポートは, この実験を何も知らない人がこのレポート通りに実験を行って, ほぼ同じ結果が出せる程度の完成度 ( 実験の再現性 ) が求められる. そのためには教科書やスライドを丸写しするのではなく, 自分で内容を理解し, 自分の言葉で書く必要がある. また, 学術分野などで多少の違いはあるが, 一般的なレポートおよびレジュメ等の書き方としての大まかなルールを以下に示す.
レポートを書く上での心得 実験レポートは, この実験を何も知らない人がこのレポート通りに実験を行って, ほぼ同じ結果が出せる程度の完成度 ( 実験の再現性 ) が求められる. そのためには教科書やスライドを丸写しするのではなく, 自分で内容を理解し, 自分の言葉で書く必要がある. また, 学術分野などで多少の違いはあるが, 一般的なレポートおよびレジュメ等の書き方としての大まかなルールを以下に示す.
untitled
 PIC Pic MPLAB HEX Pic PIC 18CXXX 14000 17CXXX 16C92X 16F8XX 16C7XX 16C6XX 16C62X 16F8X 12C5XX 16C5X 16C55X 12C6XX d f b f k k PIC 4 2 1 2 1 SPI SPI,SSART SPI 4 5 8 1 2 SPI,USART 1 64 128 256 8 (10bit)
PIC Pic MPLAB HEX Pic PIC 18CXXX 14000 17CXXX 16C92X 16F8XX 16C7XX 16C6XX 16C62X 16F8X 12C5XX 16C5X 16C55X 12C6XX d f b f k k PIC 4 2 1 2 1 SPI SPI,SSART SPI 4 5 8 1 2 SPI,USART 1 64 128 256 8 (10bit)
3 1EEPROMElectrically Erasable PROM PROMProgrammable ROM 2 EEPROM 3
 1 ROM 3 1EEPROMElectrically Erasable PROM PROMProgrammable ROM 2 EEPROM 3 000 001 EEPROM 3FF 14bit1024 A B 00 INDIRECT ADDR 80 INDIRECT ADDR 01 TMR0 81 OPTION 02 PCL 82 PCL 03 STATUS 83 STATUS 04 FSR 84
1 ROM 3 1EEPROMElectrically Erasable PROM PROMProgrammable ROM 2 EEPROM 3 000 001 EEPROM 3FF 14bit1024 A B 00 INDIRECT ADDR 80 INDIRECT ADDR 01 TMR0 81 OPTION 02 PCL 82 PCL 03 STATUS 83 STATUS 04 FSR 84
スライド 1
 2. 転送命令を学ぼう 2004 年 8 月に本講義ノートを Web にアップして以来, とても多くの方の訪問を受けてきました. 内容が一部古くなっていたので,2012 年 5 月時点の情報に書き改めました. 主な変更点は以下の通りです. 第 0 章に本講座の準備のための章を設け, 以下の更新をしました. 1. プログラム開発環境 (MPLAB IDE) を v8.84 に更新しました. 2012
2. 転送命令を学ぼう 2004 年 8 月に本講義ノートを Web にアップして以来, とても多くの方の訪問を受けてきました. 内容が一部古くなっていたので,2012 年 5 月時点の情報に書き改めました. 主な変更点は以下の通りです. 第 0 章に本講座の準備のための章を設け, 以下の更新をしました. 1. プログラム開発環境 (MPLAB IDE) を v8.84 に更新しました. 2012
スライド 1
 9. 割り込みを学ぼう 9.1 外部からの割り込み (SW1 を押すことにより割り込みをかける方法 ) 9.2 タイマ 0 による割り込み ( 処理タイミングの管理方法 : 一定時間毎に LED1, 2, 3 を点滅させる方法 ) 回路製作の詳細は第 0 章を参照してください. 1 9.1 外部からの割り込み (SW1 を押すことにより割り込みをかける方法 ) ;Interrupt test program
9. 割り込みを学ぼう 9.1 外部からの割り込み (SW1 を押すことにより割り込みをかける方法 ) 9.2 タイマ 0 による割り込み ( 処理タイミングの管理方法 : 一定時間毎に LED1, 2, 3 を点滅させる方法 ) 回路製作の詳細は第 0 章を参照してください. 1 9.1 外部からの割り込み (SW1 を押すことにより割り込みをかける方法 ) ;Interrupt test program
Microsoft PowerPoint - 工学ゼミⅢLED1回_2018
 工学ゼミ Ⅲ 安全 環境活動に役立つ LEDイルミネーションの製作 第 1 回 1. 概要 3~5 名の学生グループで安全 環境活動に役立つ LED イルミネーションを作製する 作品のデザイン画や部品リスト 回路図 動作フロー図等は事前に作成し 計画的に作業を行うことが求められる 2. 達成すべき目標 作品に係る資料を事前にまとめ それに基づいて製作が行える 集団の中で 自身の知識 技術を積極的に応用しながら
工学ゼミ Ⅲ 安全 環境活動に役立つ LEDイルミネーションの製作 第 1 回 1. 概要 3~5 名の学生グループで安全 環境活動に役立つ LED イルミネーションを作製する 作品のデザイン画や部品リスト 回路図 動作フロー図等は事前に作成し 計画的に作業を行うことが求められる 2. 達成すべき目標 作品に係る資料を事前にまとめ それに基づいて製作が行える 集団の中で 自身の知識 技術を積極的に応用しながら
Microsoft Word - 工学ゼミ3_テキスト
 2017 年 工学ゼミ Ⅲ 安全 環境活動に役立つ LEDイルミネーションの製作 1. 概要 3~5 名の学生グループで安全 環境活動に役立つ LED イルミネーションを作製する 作品のデザイン画や部品リスト 回路図 動作フロー図等は事前に作成し 計画的に作業を行うことが求められる 2. 達成すべき目標 作品に係る資料を事前にまとめ それに基づいて製作が行える 集団の中で 自身の知識 技術を積 極的に応用しながら
2017 年 工学ゼミ Ⅲ 安全 環境活動に役立つ LEDイルミネーションの製作 1. 概要 3~5 名の学生グループで安全 環境活動に役立つ LED イルミネーションを作製する 作品のデザイン画や部品リスト 回路図 動作フロー図等は事前に作成し 計画的に作業を行うことが求められる 2. 達成すべき目標 作品に係る資料を事前にまとめ それに基づいて製作が行える 集団の中で 自身の知識 技術を積 極的に応用しながら
スライド 1
 8. ステッピングモータの制御を学ぼう 秋月電子通商 PIC ステッピングモータドライバキット ( 小型モータ付き ) を参照しました. 回路製作の詳細は第 0 章を参照してください. 1 2 第 0 章図 28 より完成写真 ( マイコン回路 + ステッピングモータ駆動回路 ) PIC マイコンによるステッピングモータの制御 PIC16F84 R 1 R 2 RB6 RB0 ステッピングモータ S
8. ステッピングモータの制御を学ぼう 秋月電子通商 PIC ステッピングモータドライバキット ( 小型モータ付き ) を参照しました. 回路製作の詳細は第 0 章を参照してください. 1 2 第 0 章図 28 より完成写真 ( マイコン回路 + ステッピングモータ駆動回路 ) PIC マイコンによるステッピングモータの制御 PIC16F84 R 1 R 2 RB6 RB0 ステッピングモータ S
正転時とは反対に回転する これが逆転である 図 2(d) の様に 4 つのスイッチ全てが OFF の場合 DC モータには電流が流れず 停止する ただし 元々 DC モータが回転していた場合は 惰性でしばらく回転を続ける 図 2(e) の様に SW2 と SW4 を ON SW1 と SW3 を O
 の様に 4 つのスイッチ全てが OFF の場合 DC モータには電流が流れず 停止する ただし 元々 DC モータが回転していた場合は 惰性でしばらく回転を続ける 図 2(e) の様に SW2 と SW4 を ON SW1 と SW3 を O") コンピュータ工学講義プリント (1 月 29 日 ) 今回は TA7257P というモータ制御 IC を使って DC モータを制御する方法について学ぶ DC モータの仕組み DC モータは直流の電源を接続すると回転するモータである 回転数やトルク ( 回転させる力 ) は 電源電圧で調整でき 電源の極性を入れ替えると 逆回転するなどの特徴がある 図 1 に DC モータの仕組みを示す DC モータは
コンピュータ工学講義プリント (1 月 29 日 ) 今回は TA7257P というモータ制御 IC を使って DC モータを制御する方法について学ぶ DC モータの仕組み DC モータは直流の電源を接続すると回転するモータである 回転数やトルク ( 回転させる力 ) は 電源電圧で調整でき 電源の極性を入れ替えると 逆回転するなどの特徴がある 図 1 に DC モータの仕組みを示す DC モータは
,, ( ) 5 ma ( ) 5V V 5 6 A B C D E F G H I J , LED LED, LED, 7 LED,, 7 LED ( ) V LED VCC 5V 7 LED VCC f g f a g b a b c e d e d c dp dp VCC (
 5 ma ( ) 5V V 5 6 A B C D E F G H I J , LED LED, LED, 7 LED,, 7 LED ( ) V LED VCC 5V 7 LED VCC f g f a g b a b c e d e d c dp dp VCC (") [] PIC 8 (/6, 6/ ) (/, 6/) (5/7, 6/8) PIC PIC PIC (5/, 6/5) V 5 (5/, 7/ ) V LED ( LED ( /, 6/) V V V ( 5/8, 6/9) V ( 5/5, 6/6) ( V 5/8, 7/ 9) V % 6%, LED, LED /7, 6/ 5) 7,, LED, LED LED ,, ( ) 5 ma ( )
[] PIC 8 (/6, 6/ ) (/, 6/) (5/7, 6/8) PIC PIC PIC (5/, 6/5) V 5 (5/, 7/ ) V LED ( LED ( /, 6/) V V V ( 5/8, 6/9) V ( 5/5, 6/6) ( V 5/8, 7/ 9) V % 6%, LED, LED /7, 6/ 5) 7,, LED, LED LED ,, ( ) 5 ma ( )
PowerPoint プレゼンテーション
 コンピュータアーキテクチャ 第 11 週 制御アーキテクチャ メモリの仕組 2013 年 12 月 4 日 金岡晃 授業計画 第 1 週 (9/25) 第 2 週 (10/2) 第 3 週 (10/9) 第 4 週 (10/16) 第 5 週 (10/23) 第 6 週 (10/30) 第 7 週 (11/6) 授業概要 2 進数表現 論理回路の復習 2 進演算 ( 数の表現 ) 演算アーキテクチャ
コンピュータアーキテクチャ 第 11 週 制御アーキテクチャ メモリの仕組 2013 年 12 月 4 日 金岡晃 授業計画 第 1 週 (9/25) 第 2 週 (10/2) 第 3 週 (10/9) 第 4 週 (10/16) 第 5 週 (10/23) 第 6 週 (10/30) 第 7 週 (11/6) 授業概要 2 進数表現 論理回路の復習 2 進演算 ( 数の表現 ) 演算アーキテクチャ
計算機アーキテクチャ
 計算機アーキテクチャ 第 11 回命令実行の流れ 2014 年 6 月 20 日 電気情報工学科 田島孝治 1 授業スケジュール ( 前期 ) 2 回日付タイトル 1 4/7 コンピュータ技術の歴史と コンピュータアーキテクチャ 2 4/14 ノイマン型コンピュータ 3 4/21 コンピュータのハードウェア 4 4/28 数と文字の表現 5 5/12 固定小数点数と浮動小数点表現 6 5/19 計算アーキテクチャ
計算機アーキテクチャ 第 11 回命令実行の流れ 2014 年 6 月 20 日 電気情報工学科 田島孝治 1 授業スケジュール ( 前期 ) 2 回日付タイトル 1 4/7 コンピュータ技術の歴史と コンピュータアーキテクチャ 2 4/14 ノイマン型コンピュータ 3 4/21 コンピュータのハードウェア 4 4/28 数と文字の表現 5 5/12 固定小数点数と浮動小数点表現 6 5/19 計算アーキテクチャ
前付(念).indd
.indd") 図解 PIC マイコン実習 ( 第 2 版 ) サンプルページ この本の定価 判型などは, 以下の URL からご覧いただけます. http://www.morikita.co.jp/books/mid/078332 このサンプルページの内容は, 第 2 版 1 刷発行時のものです. i 第 2 版 まえがき 10 MPLAB PIC USB MPLAB X 2 PIC16F84A PIC PIC
図解 PIC マイコン実習 ( 第 2 版 ) サンプルページ この本の定価 判型などは, 以下の URL からご覧いただけます. http://www.morikita.co.jp/books/mid/078332 このサンプルページの内容は, 第 2 版 1 刷発行時のものです. i 第 2 版 まえがき 10 MPLAB PIC USB MPLAB X 2 PIC16F84A PIC PIC
Microsoft Word - 工学ゼミ3_テキスト
 2016 年 工学ゼミ Ⅲ 安全 環境活動に役立つ LEDイルミネーションの製作 1. 概要 3~5 名の学生グループで安全 環境活動に役立つ LED イルミネーションを作製する 作品のデザイン画や部品リスト 回路図 動作フロー図等は事前に作成し 計画的に作業を行うことが求められる 2. 達成すべき目標 作品に係る資料を事前にまとめ それに基づいて製作が行える 集団の中で 自身の知識 技術を積 極的に応用しながら
2016 年 工学ゼミ Ⅲ 安全 環境活動に役立つ LEDイルミネーションの製作 1. 概要 3~5 名の学生グループで安全 環境活動に役立つ LED イルミネーションを作製する 作品のデザイン画や部品リスト 回路図 動作フロー図等は事前に作成し 計画的に作業を行うことが求められる 2. 達成すべき目標 作品に係る資料を事前にまとめ それに基づいて製作が行える 集団の中で 自身の知識 技術を積 極的に応用しながら
また RLF 命令は 図 2 示す様に RRF 命令とは逆に 各ビットを一つずつ 左方向に回転 ( ローテイト ) する命令である 8 ビット変数のアドレスを A とし C フラグに 0 を代入してから RLF A,1 を実行すると 変数の内容が 左に 1 ビットシフトし 最下位ビット (LSB)
 する命令である 8 ビット変数のアドレスを A とし C フラグに 0 を代入してから RLF A,1 を実行すると 変数の内容が 左に 1 ビットシフトし 最下位ビット (LSB)") コンピュータ工学講義プリント (12 月 11 日 ) 今回は ローテイト命令を用いて 前回よりも高度な LED の制御を行う 光が流れるプログラム 片道バージョン( 教科書 P.119 参照 ) 0.5 秒ごとに 教科書 P.119 の図 5.23 の様に LED の点灯パターンが変化するプログラムを作成する事を考える この様にすれば 光っている点が 徐々に右に動いているように見え 右端まで移動したら
コンピュータ工学講義プリント (12 月 11 日 ) 今回は ローテイト命令を用いて 前回よりも高度な LED の制御を行う 光が流れるプログラム 片道バージョン( 教科書 P.119 参照 ) 0.5 秒ごとに 教科書 P.119 の図 5.23 の様に LED の点灯パターンが変化するプログラムを作成する事を考える この様にすれば 光っている点が 徐々に右に動いているように見え 右端まで移動したら
1.1 ラベル ラベルはカラム 1 から始まらなければならない ラベルの後にはコロン スペース タブ 改行が続いてよい ラベルはアルファベットかアンダーバーで始まり 英数字 アンダーバー クエスチョンマークを含んでよい ラベルは 32 文字までである デフォルトではこれらは大文字と小文字を区別するが
 MPASM MPASM は Microchip Tecnology Inc. 社の開発した PIC のためのアセンブリ言語である ここでは MPASM の文法と使用法などについて記述する 1. 文法 ソースコードファイルは ASCII テキストファイルエディターを使って作成する そのように作られたソースコードは以下に示す基本的ガイドラインに従うべきである ソースファイルの各行は次の 4 つのタイプの情報を含んでよい
MPASM MPASM は Microchip Tecnology Inc. 社の開発した PIC のためのアセンブリ言語である ここでは MPASM の文法と使用法などについて記述する 1. 文法 ソースコードファイルは ASCII テキストファイルエディターを使って作成する そのように作られたソースコードは以下に示す基本的ガイドラインに従うべきである ソースファイルの各行は次の 4 つのタイプの情報を含んでよい
スライド 1
 RL78/G13 周辺機能紹介安全機能 ルネサスエレクトロニクス株式会社 ルネサス半導体トレーニングセンター 2013/08/02 Rev. 0.00 00000-A コンテンツ 安全機能の概要 フラッシュ メモリ CRC 演算機能 RAM パリティ エラー検出機能 データの保護機能 RAM ガード機能 SFR ガード機能 不正メモリ アクセス機能 周辺機能を使用した安全機能 周波数検出機能 A/D
RL78/G13 周辺機能紹介安全機能 ルネサスエレクトロニクス株式会社 ルネサス半導体トレーニングセンター 2013/08/02 Rev. 0.00 00000-A コンテンツ 安全機能の概要 フラッシュ メモリ CRC 演算機能 RAM パリティ エラー検出機能 データの保護機能 RAM ガード機能 SFR ガード機能 不正メモリ アクセス機能 周辺機能を使用した安全機能 周波数検出機能 A/D
実習内容 PIC18C242 のポート B に接続した LED を点滅させます ( 他の実習と同じ内容です ) 8 個の LED に表示される値が +3 ずつインクリメントします MPLAB を使って MPASM アセンブラのソース ファイルをアセンブルします MPLAB とソース ファイルは配布し
 8 個の LED に表示される値が +3 ずつインクリメントします MPLAB を使って MPASM アセンブラのソース ファイルをアセンブルします MPLAB とソース ファイルは配布し") エンベデッド コントロール セミナー 2000 2000 Microchip Technology Incorporated. All Rights Reserved. S9002A Embedded Control Seminar 2000 1 実習内容 PIC18C242 のポート B に接続した LED を点滅させます ( 他の実習と同じ内容です ) 8 個の LED に表示される値が +3
エンベデッド コントロール セミナー 2000 2000 Microchip Technology Incorporated. All Rights Reserved. S9002A Embedded Control Seminar 2000 1 実習内容 PIC18C242 のポート B に接続した LED を点滅させます ( 他の実習と同じ内容です ) 8 個の LED に表示される値が +3
64 松尾邦昭 2. 無線送受信装置 SANWA 製のラジコン送受信装置は, その機能性の豊富さと価格の安さを理由に多くのラジコン ファンに愛用されており, 今回使用した VG6000は, チャンネル数が6チャンネルあり, ヘリコプター制御用に設計 開発され使用されているものだが, 我々はこれをロボ
 広島国際学院大学研究報告, 第 42 巻 (2009),63~68 63 無線の信号を PIC へ 松尾 邦昭 ( 平成 21 年 ₉ 月 24 日受理 ) How to Transform the Signal from a Radio Controller to a PIC Kuniaki MATSUO (Received September 24, 2009) This short report
広島国際学院大学研究報告, 第 42 巻 (2009),63~68 63 無線の信号を PIC へ 松尾 邦昭 ( 平成 21 年 ₉ 月 24 日受理 ) How to Transform the Signal from a Radio Controller to a PIC Kuniaki MATSUO (Received September 24, 2009) This short report
3 4 PIC
 PIC 16 2 9 3 4 PIC 5 7 4-1 4-2 4-3 4-4 4-5 4-6 4-7 4-8 4-9 7 7 7 0 7 0 7 11 13 14 15 19 5-1 5-2 5-3 19 19 19 5-4 20 5-5 20 5-6 22 5-7 23 5-8 25 5-9 26 5-10 27 29 6-1 29 6-2 29 6-3 29 1 6-4 IC 30 6-5 31
PIC 16 2 9 3 4 PIC 5 7 4-1 4-2 4-3 4-4 4-5 4-6 4-7 4-8 4-9 7 7 7 0 7 0 7 11 13 14 15 19 5-1 5-2 5-3 19 19 19 5-4 20 5-5 20 5-6 22 5-7 23 5-8 25 5-9 26 5-10 27 29 6-1 29 6-2 29 6-3 29 1 6-4 IC 30 6-5 31
Microsoft Word - 組込みプログラミング2018テキスト
 ロボティクスコース実験 Ⅰ 組込みプログラミング Ⅰ, Ⅱ 平成 30 年度版 1. スケジュール 日付内容 4/16 - コンピュータの機械語 ( ニーモニック ) と MPLAB( プログラム開発環境 ) の使い方 - 実験 1の予備実験 4/23 - 実験 1の予備実験のまとめ - 実験 1の計画書の作成とチェック 5/2 - 実験 1の実施とレポート作成 月曜授業 5/7 - 実験 1のレポートのチェック
ロボティクスコース実験 Ⅰ 組込みプログラミング Ⅰ, Ⅱ 平成 30 年度版 1. スケジュール 日付内容 4/16 - コンピュータの機械語 ( ニーモニック ) と MPLAB( プログラム開発環境 ) の使い方 - 実験 1の予備実験 4/23 - 実験 1の予備実験のまとめ - 実験 1の計画書の作成とチェック 5/2 - 実験 1の実施とレポート作成 月曜授業 5/7 - 実験 1のレポートのチェック
PowerPoint プレゼンテーション
 コンピュータアーキテクチャ 第 13 週 割込みアーキテクチャ 2013 年 12 月 18 日 金岡晃 授業計画 第 1 週 (9/25) 第 2 週 (10/2) 第 3 週 (10/9) 第 4 週 (10/16) 第 5 週 (10/23) 第 6 週 (10/30) 第 7 週 (11/6) 授業概要 2 進数表現 論理回路の復習 2 進演算 ( 数の表現 ) 演算アーキテクチャ ( 演算アルゴリズムと回路
コンピュータアーキテクチャ 第 13 週 割込みアーキテクチャ 2013 年 12 月 18 日 金岡晃 授業計画 第 1 週 (9/25) 第 2 週 (10/2) 第 3 週 (10/9) 第 4 週 (10/16) 第 5 週 (10/23) 第 6 週 (10/30) 第 7 週 (11/6) 授業概要 2 進数表現 論理回路の復習 2 進演算 ( 数の表現 ) 演算アーキテクチャ ( 演算アルゴリズムと回路
Microsoft Word - テキスト.docx
 学籍番号 氏 名 情報電子工学演習 Ⅴ( ハードウェア実技編 ) PIC マイコンによる光学式テルミンの製作 新潟工科大学情報電子工学科 課題チェック欄 課題 ドレミ音の発生 (6/28) 回路図 (7/5) フローチャート (7/12) 評価 スケジュール < 内容 > < 集合場所 > 第 1 回 (6/14) PIC マイコンとタイマモジュールの活用 [S2-9] 第 2 回 (6/21) パルスの発生とオシロスコープによる観察
学籍番号 氏 名 情報電子工学演習 Ⅴ( ハードウェア実技編 ) PIC マイコンによる光学式テルミンの製作 新潟工科大学情報電子工学科 課題チェック欄 課題 ドレミ音の発生 (6/28) 回路図 (7/5) フローチャート (7/12) 評価 スケジュール < 内容 > < 集合場所 > 第 1 回 (6/14) PIC マイコンとタイマモジュールの活用 [S2-9] 第 2 回 (6/21) パルスの発生とオシロスコープによる観察
Jan/25/2019 errata_c17m11_10 S1C17 マニュアル正誤表 項目 リセット保持時間 対象マニュアル発行 No. 項目ページ S1C17M10 テクニカルマニュアル システムリセットコントローラ (SRC) 特性 19-3 S1C17M20/M
 特性 19-3 S1C17M20/M") Jan/25/2019 errata_c17m11_10 S1C17 マニュアル正誤表 項目 リセット保持時間 対象マニュアル発行 No. 項目ページ S1C17M10 テクニカルマニュアル 413180100 19.4 システムリセットコントローラ (SRC) 特性 19-3 S1C17M20/M21/M22/M23/M24/M25 テクニカルマニュアル 413556900 21.4 システムリセットコントローラ
Jan/25/2019 errata_c17m11_10 S1C17 マニュアル正誤表 項目 リセット保持時間 対象マニュアル発行 No. 項目ページ S1C17M10 テクニカルマニュアル 413180100 19.4 システムリセットコントローラ (SRC) 特性 19-3 S1C17M20/M21/M22/M23/M24/M25 テクニカルマニュアル 413556900 21.4 システムリセットコントローラ
PowerPoint プレゼンテーション
 電気 電子計測 第 3 回 第 8 章ディジタル計測制御システムの基礎 http://cobayasi.com/keisoku/3th/3th.pdf 今日の学習の要点 ( テキスト P85~P94). 計算機の基本的なしくみを学ぼう 2. 外部機器とのデータのやりとりについて知ろう 3. 計算機によるディジタル計測制御システムの構成法 物理量. 計算機の基本的なしくみを学ぼう ディジタル計測制御システムセンサから得た情報を
電気 電子計測 第 3 回 第 8 章ディジタル計測制御システムの基礎 http://cobayasi.com/keisoku/3th/3th.pdf 今日の学習の要点 ( テキスト P85~P94). 計算機の基本的なしくみを学ぼう 2. 外部機器とのデータのやりとりについて知ろう 3. 計算機によるディジタル計測制御システムの構成法 物理量. 計算機の基本的なしくみを学ぼう ディジタル計測制御システムセンサから得た情報を
-2 外からみたプロセッサ GND VCC CLK A0 A1 A2 A3 A4 A A6 A7 A8 A9 A10 A11 A12 A13 A14 A1 A16 A17 A18 A19 D0 D1 D2 D3 D4 D D6 D7 D8 D9 D10 D11 D12 D13 D14 D1 MEMR
 第 回マイクロプロセッサのしくみ マイクロプロセッサの基本的なしくみについて解説する. -1 マイクロプロセッサと周辺回路の接続 制御バス プロセッサ データ バス アドレス バス メモリ 周辺インタフェース バスの基本構成 Fig.-1 バスによる相互接続は, 現在のコンピュータシステムのハードウェアを特徴づけている. バス (Bus): 複数のユニットで共有される信号線システム内の データの通り道
第 回マイクロプロセッサのしくみ マイクロプロセッサの基本的なしくみについて解説する. -1 マイクロプロセッサと周辺回路の接続 制御バス プロセッサ データ バス アドレス バス メモリ 周辺インタフェース バスの基本構成 Fig.-1 バスによる相互接続は, 現在のコンピュータシステムのハードウェアを特徴づけている. バス (Bus): 複数のユニットで共有される信号線システム内の データの通り道
BANK1 MOVLW b' ' PIC16F648A独自 MOVWF CMCON コンパレータ OFF BCF INTCON,PEIE 周辺割り込み OFF PIC16F648A独自 MOVLW B' ' RB2/TX, RB1/RX PIC16F648A独自 MOVW
 Function: PIC16F648A Tiny Monitor Processor: PIC16F648A at 20 MHz using external HS oscillator Hardware: http://www.geocities.jp/jk1brk/misc/pic/pic16f648a.pdf Filename: PicMonV6.asm Author: jk1brk Website:
Function: PIC16F648A Tiny Monitor Processor: PIC16F648A at 20 MHz using external HS oscillator Hardware: http://www.geocities.jp/jk1brk/misc/pic/pic16f648a.pdf Filename: PicMonV6.asm Author: jk1brk Website:
AKI-PIC16F877A開発キット (Ver1
 STM32F101C8T6 STM32F103CxT6 マイコンキット仕様書 (Ver2012.05.11) この文書の情報は事前の通知なく変更されることがあります 本開発キットを使用したことによる 損害 損失については一切の責任を負いかねます 製造上の不良がございましたら 良品とお取替えいたします それ以外の責についてご容赦ください 変更履歴 Version Ver2012.05.08 新規 Ver2012.05.11
STM32F101C8T6 STM32F103CxT6 マイコンキット仕様書 (Ver2012.05.11) この文書の情報は事前の通知なく変更されることがあります 本開発キットを使用したことによる 損害 損失については一切の責任を負いかねます 製造上の不良がございましたら 良品とお取替えいたします それ以外の責についてご容赦ください 変更履歴 Version Ver2012.05.08 新規 Ver2012.05.11
コンピュータ工学Ⅰ
 コンピュータ工学 Ⅰ 中央処理装置 Rev. 2019.01.16 コンピュータの基本構成と CPU 内容 ➊ CPUの構成要素 ➋ 命令サイクル ➌ アセンブリ言語 ➍ アドレッシング方式 ➎ CPUの高速化 ➏ CPUの性能評価 コンピュータの構成装置 中央処理装置 (CPU) 主記憶装置から命令を読み込み 実行を行う 主記憶装置 CPU で実行するプログラム ( 命令の集合 ) やデータを記憶する
コンピュータ工学 Ⅰ 中央処理装置 Rev. 2019.01.16 コンピュータの基本構成と CPU 内容 ➊ CPUの構成要素 ➋ 命令サイクル ➌ アセンブリ言語 ➍ アドレッシング方式 ➎ CPUの高速化 ➏ CPUの性能評価 コンピュータの構成装置 中央処理装置 (CPU) 主記憶装置から命令を読み込み 実行を行う 主記憶装置 CPU で実行するプログラム ( 命令の集合 ) やデータを記憶する
arduino プログラミング課題集 ( Ver /06/01 ) arduino と各種ボードを組み合わせ 制御するためのプログラミングを学 ぼう! 1 入出力ポートの設定と利用方法 (1) 制御( コントロール ) する とは 外部装置( ペリフェラル ) が必要とする信号をマイ
 arduino と各種ボードを組み合わせ 制御するためのプログラミングを学 ぼう! 1 入出力ポートの設定と利用方法 (1) 制御( コントロール ) する とは 外部装置( ペリフェラル ) が必要とする信号をマイ") arduino プログラミング課題集 ( Ver.5.0 2017/06/01 ) arduino と各種ボードを組み合わせ 制御するためのプログラミングを学 ぼう! 1 入出力ポートの設定と利用方法 (1) 制御( コントロール ) する とは 外部装置( ペリフェラル ) が必要とする信号をマイコンから伝える 外部装置の状態をマイコンで確認する 信号の授受は 入出力ポート 経由で行う (2) 入出力ポートとは?
arduino プログラミング課題集 ( Ver.5.0 2017/06/01 ) arduino と各種ボードを組み合わせ 制御するためのプログラミングを学 ぼう! 1 入出力ポートの設定と利用方法 (1) 制御( コントロール ) する とは 外部装置( ペリフェラル ) が必要とする信号をマイコンから伝える 外部装置の状態をマイコンで確認する 信号の授受は 入出力ポート 経由で行う (2) 入出力ポートとは?
PIC の書き込み解説 PICライターを使うときに間違った使い方を見受ける 書き込み失敗の原因は知識不足にある やってはいけないことをしている 単に失敗だけならまだしも部品を壊してしまう 正しい知識を身に着けよう 書き込みに必要なピンと意味 ICSPを意識した回路設計の必要性 ICSP:In Cir
 PIC の書き込み解説 PICライターを使うときに間違った使い方を見受ける 書き込み失敗の原因は知識不足にある やってはいけないことをしている 単に失敗だけならまだしも部品を壊してしまう 正しい知識を身に着けよう 書き込みに必要なピンと意味 ICSPを意識した回路設計の必要性 ICSP:In Circuit Serial Programmming 原則論を解説 PIC の種類によって多少異なる 1
PIC の書き込み解説 PICライターを使うときに間違った使い方を見受ける 書き込み失敗の原因は知識不足にある やってはいけないことをしている 単に失敗だけならまだしも部品を壊してしまう 正しい知識を身に着けよう 書き込みに必要なピンと意味 ICSPを意識した回路設計の必要性 ICSP:In Circuit Serial Programmming 原則論を解説 PIC の種類によって多少異なる 1
命令セットの構成例 a) 算術 演算命令 例 )ADD dest, source : dest dest + source SUB dest, source : dest dest - source AND dest, source : dest dest AND source SHR reg, c
 算術 演算命令 例 )ADD dest, source : dest dest + source SUB dest, source : dest dest - source AND dest, source : dest dest AND source SHR reg, c") 第 11 回機械語とアーキテクチャ コンピュータは, 記号で組み立てられ, 記号で動く機械 : ソフトウェアソフトウェア としても理解されなければならない ソフトウェアの最も下位レベルのしくみが ( 命令セット ) アーキテクチャ である 講義では命令符号 ( 機械語 ) の構成と種類についてまとめる また, 機械語を効率良く実行するために採用されている技術について紹介する 機械語とアセンブリ言語
第 11 回機械語とアーキテクチャ コンピュータは, 記号で組み立てられ, 記号で動く機械 : ソフトウェアソフトウェア としても理解されなければならない ソフトウェアの最も下位レベルのしくみが ( 命令セット ) アーキテクチャ である 講義では命令符号 ( 機械語 ) の構成と種類についてまとめる また, 機械語を効率良く実行するために採用されている技術について紹介する 機械語とアセンブリ言語
PIC
 PIC - 1 ページ 2 週目 UBW を使用してみる 2010 年 5 月 23 日 15:28 前回の Gainer mini はあくまでも PC 側にプログラムがあり PIC は IO ボックス的な使用しかできなかった 入出力デバイスとして PIC を使う場合は 簡易で便利であるが それ以上の事 (PC なしでの動作 PC と対等の動作 ) は出来ない 今週からは 本来の PIC としての使い方を学ぶ
PIC - 1 ページ 2 週目 UBW を使用してみる 2010 年 5 月 23 日 15:28 前回の Gainer mini はあくまでも PC 側にプログラムがあり PIC は IO ボックス的な使用しかできなかった 入出力デバイスとして PIC を使う場合は 簡易で便利であるが それ以上の事 (PC なしでの動作 PC と対等の動作 ) は出来ない 今週からは 本来の PIC としての使い方を学ぶ
Microsoft Word - 実験4_FPGA実験2_2015
 FPGA の実験 Ⅱ 1. 目的 (1)FPGA を用いて組合せ回路や順序回路を設計する方法を理解する (2) スイッチや表示器の動作を理解し 入出力信号を正しく扱う 2. スケジュール項目 FPGAの実験 Ⅱ( その1) FPGAの実験 Ⅱ( その2) FPGAの実験 Ⅱ( その3) FPGAの実験 Ⅱ( その4) FPGAの実験 Ⅱ( その5) FPGAの実験 Ⅱ( その6) FPGAの実験 Ⅱ(
FPGA の実験 Ⅱ 1. 目的 (1)FPGA を用いて組合せ回路や順序回路を設計する方法を理解する (2) スイッチや表示器の動作を理解し 入出力信号を正しく扱う 2. スケジュール項目 FPGAの実験 Ⅱ( その1) FPGAの実験 Ⅱ( その2) FPGAの実験 Ⅱ( その3) FPGAの実験 Ⅱ( その4) FPGAの実験 Ⅱ( その5) FPGAの実験 Ⅱ( その6) FPGAの実験 Ⅱ(
Microsoft PowerPoint - 3.3タイミング制御.pptx
 3.3 タイミング制御 ハザードの回避 同期式回路と非同期式回路 1. 同期式回路 : 回路全体で共通なクロックに合わせてデータの受け渡しをする 通信における例 :I 2 C(1 対 N 通信 ) 2. 非同期式回路 : 同一のクロックを使用せず データを受け渡す回路間の制御信号を用いてデータの受け渡しをす 通信における例 :UART(1 対 1 通信 ) 2 3.3.1 ハザード 3 1 出力回路のハザード
3.3 タイミング制御 ハザードの回避 同期式回路と非同期式回路 1. 同期式回路 : 回路全体で共通なクロックに合わせてデータの受け渡しをする 通信における例 :I 2 C(1 対 N 通信 ) 2. 非同期式回路 : 同一のクロックを使用せず データを受け渡す回路間の制御信号を用いてデータの受け渡しをす 通信における例 :UART(1 対 1 通信 ) 2 3.3.1 ハザード 3 1 出力回路のハザード
回路 7 レジスタ ( 同期イネーブル及び非同期リセット付 ) 入力データを保持するのに用いる記憶素子 使用用途として, マイクロプロセッサ内部で演算や実行状態の保持に用いられる Fig4-2 のレジスタは, クロック信号の立ち上がり時かつ 信号が 1 のときに外部からの 1 ビットデータ R をレ
 入力データを保持するのに用いる記憶素子 使用用途として, マイクロプロセッサ内部で演算や実行状態の保持に用いられる Fig4-2 のレジスタは, クロック信号の立ち上がり時かつ 信号が 1 のときに外部からの 1 ビットデータ R をレ") 第 4 回 VHDL 演習 2 プロセス文とステートマシン プロセス文を用いるステートマシンの記述について学ぶ 回路 6 バイナリカウンタ (Fig.4-1) バイナリカウンタを設計し, クロック信号に同期して動作する同期式回路の動作を学ぶ ⅰ) リスト 4-1 のコードを理解してから, コンパイル, ダウンロードする ⅱ) 実験基板上のディップスイッチを用いて, 発生するクロック周波数を 1Hz
第 4 回 VHDL 演習 2 プロセス文とステートマシン プロセス文を用いるステートマシンの記述について学ぶ 回路 6 バイナリカウンタ (Fig.4-1) バイナリカウンタを設計し, クロック信号に同期して動作する同期式回路の動作を学ぶ ⅰ) リスト 4-1 のコードを理解してから, コンパイル, ダウンロードする ⅱ) 実験基板上のディップスイッチを用いて, 発生するクロック周波数を 1Hz
RL78開発環境移行ガイド R8C/M16C, H8S/H8SXからRL78への移行(統合開発環境編)(High-performance Embedded Workshop→CS+)
(High-performance Embedded Workshop→CS+)") RL78 開発環境移行ガイド R8C/M16C, H8S/H8SXからRL78への移行 ( 統合開発環境編 ) (High-performance Embedded Workshop CS+) 2017/4/7 R20UT2087JJ0103 ソフトウェア事業部ソフトウエア技術部ルネサスシステムデザイン株式会社 はじめに 本資料は 統合開発環境 High-performance Embedded Workshop
RL78 開発環境移行ガイド R8C/M16C, H8S/H8SXからRL78への移行 ( 統合開発環境編 ) (High-performance Embedded Workshop CS+) 2017/4/7 R20UT2087JJ0103 ソフトウェア事業部ソフトウエア技術部ルネサスシステムデザイン株式会社 はじめに 本資料は 統合開発環境 High-performance Embedded Workshop
ソフトウェア基礎技術研修
 算術論理演算ユニットの設計 ( 教科書 4.5 節 ) yi = fi (x, x2, x3,..., xm) (for i n) 基本的な組合せ論理回路 : インバータ,AND ゲート,OR ゲート, y n 組合せ論理回路 ( 復習 ) 組合せ論理回路 : 出力値が入力値のみの関数となっている論理回路. 論理関数 f: {, } m {, } n を実現.( フィードバック ループや記憶回路を含まない
算術論理演算ユニットの設計 ( 教科書 4.5 節 ) yi = fi (x, x2, x3,..., xm) (for i n) 基本的な組合せ論理回路 : インバータ,AND ゲート,OR ゲート, y n 組合せ論理回路 ( 復習 ) 組合せ論理回路 : 出力値が入力値のみの関数となっている論理回路. 論理関数 f: {, } m {, } n を実現.( フィードバック ループや記憶回路を含まない
QuartusII SOPC_Builderで利用できるGPIF-AVALONブリッジとは?
 アルテラ FPGA 向け PLL リコンフィグの応用回路 1. PLL リコンフィグとは アルテラ FPGA は PLL 機能を内蔵しています PLL を利用して基本周波数を逓倍 分周したクロックを利用することができます 通常 FPGA 開発ツール Quartus2( 以下 Q2) の MegaWizard プラグインマネージャを利用して PLL を設定し 希望のクロック周波数を得ることができます
アルテラ FPGA 向け PLL リコンフィグの応用回路 1. PLL リコンフィグとは アルテラ FPGA は PLL 機能を内蔵しています PLL を利用して基本周波数を逓倍 分周したクロックを利用することができます 通常 FPGA 開発ツール Quartus2( 以下 Q2) の MegaWizard プラグインマネージャを利用して PLL を設定し 希望のクロック周波数を得ることができます
書式に示すように表示したい文字列をダブルクォーテーション (") の間に書けば良い ダブルクォーテーションで囲まれた文字列は 文字列リテラル と呼ばれる プログラム中では以下のように用いる プログラム例 1 printf(" 情報処理基礎 "); printf("c 言語の練習 "); printf
 の間に書けば良い ダブルクォーテーションで囲まれた文字列は 文字列リテラル と呼ばれる プログラム中では以下のように用いる プログラム例 1 printf( 情報処理基礎 ); printf(c 言語の練習 ); printf") 情報処理基礎 C 言語についてプログラミング言語は 1950 年以前の機械語 アセンブリ言語 ( アセンブラ ) の開発を始めとして 現在までに非常に多くの言語が開発 発表された 情報処理基礎で習う C 言語は 1972 年にアメリカの AT&T ベル研究所でオペレーションシステムである UNIX を作成するために開発された C 言語は現在使われている多数のプログラミング言語に大きな影響を与えている
情報処理基礎 C 言語についてプログラミング言語は 1950 年以前の機械語 アセンブリ言語 ( アセンブラ ) の開発を始めとして 現在までに非常に多くの言語が開発 発表された 情報処理基礎で習う C 言語は 1972 年にアメリカの AT&T ベル研究所でオペレーションシステムである UNIX を作成するために開発された C 言語は現在使われている多数のプログラミング言語に大きな影響を与えている
ディジタル回路 第1回 ガイダンス、CMOSの基本回路
 1 前回教育用の RISC POCO を導入しました 今日はその Verilog 記述を紹介します まず この復習をやっておきましょう 2 最も重要な点は メモリの読み書きで レジスタ間接指定の理解です これはポインタと一緒なので 間違えないように修得してください 3 RISC なので 基本の演算はレジスタ同士でしかできません MV はレジスタ間のデータ移動なので気をつけてください 4 イミーディエイト命令は
1 前回教育用の RISC POCO を導入しました 今日はその Verilog 記述を紹介します まず この復習をやっておきましょう 2 最も重要な点は メモリの読み書きで レジスタ間接指定の理解です これはポインタと一緒なので 間違えないように修得してください 3 RISC なので 基本の演算はレジスタ同士でしかできません MV はレジスタ間のデータ移動なので気をつけてください 4 イミーディエイト命令は
ガイダンス 2
 データ構造とアルゴリズム (a) 科目区分 : 専門科目電子物性工学コース ( 自由選択 ) 電気通信システム工学コース ( 自由選択 ) 時間割番号 :G2209 ソフトウェア工学 旧課程 科目区分 : 専門科目電子物性 エネルギー工学コース ( 選択 ) システム制御 通信工学コース ( 限選 ) 時間割番号 :33310 ( 第 1 週 ) ガイダンス ソフトウェアの基本概念とプログラミング言語
データ構造とアルゴリズム (a) 科目区分 : 専門科目電子物性工学コース ( 自由選択 ) 電気通信システム工学コース ( 自由選択 ) 時間割番号 :G2209 ソフトウェア工学 旧課程 科目区分 : 専門科目電子物性 エネルギー工学コース ( 選択 ) システム制御 通信工学コース ( 限選 ) 時間割番号 :33310 ( 第 1 週 ) ガイダンス ソフトウェアの基本概念とプログラミング言語
ソフトウェア基礎技術研修
 マルチサイクルを用いた実現方式 ( 教科書 5. 節 ) マルチサイクル方式 () 2 つのデータパス実現方式 単一クロックサイクル : 命令を クロックサイクルで処理 マルチクロックサイクル : 命令を複数クロックサイクルで処理 単一クロックサイクル方式は処理効率が悪い. CLK 処理時間 命令命令命令命令命令 時間のかかる命令にクロック サイクル時間をあわさなければならない. 余り時間の発生 クロック
マルチサイクルを用いた実現方式 ( 教科書 5. 節 ) マルチサイクル方式 () 2 つのデータパス実現方式 単一クロックサイクル : 命令を クロックサイクルで処理 マルチクロックサイクル : 命令を複数クロックサイクルで処理 単一クロックサイクル方式は処理効率が悪い. CLK 処理時間 命令命令命令命令命令 時間のかかる命令にクロック サイクル時間をあわさなければならない. 余り時間の発生 クロック
スライド 1
 RX62N 周辺機能紹介データフラッシュ データ格納用フラッシュメモリ ルネサスエレクトロニクス株式会社ルネサス半導体トレーニングセンター 2013/08/02 Rev. 1.00 00000-A コンテンツ データフラッシュの概要 プログラムサンプル 消去方法 書き込み方法 読み出し方法 FCUのリセット プログラムサンプルのカスタマイズ 2 データフラッシュの概要 3 データフラッシュとは フラッシュメモリ
RX62N 周辺機能紹介データフラッシュ データ格納用フラッシュメモリ ルネサスエレクトロニクス株式会社ルネサス半導体トレーニングセンター 2013/08/02 Rev. 1.00 00000-A コンテンツ データフラッシュの概要 プログラムサンプル 消去方法 書き込み方法 読み出し方法 FCUのリセット プログラムサンプルのカスタマイズ 2 データフラッシュの概要 3 データフラッシュとは フラッシュメモリ
計算機アーキテクチャ
 計算機アーキテクチャ 第 18 回ハザードとその解決法 2014 年 10 月 17 日 電気情報工学科 田島孝治 1 授業スケジュール ( 後期 ) 2 回 日付 タイトル 17 10/7 パイプライン処理 18 10/17 ハザードの解決法 19 10/21 並列処理 20 11/11 マルチプロセッサ 21 11/18 入出力装置の分類と特徴 22 11/25 割り込み 23 12/2 ネットワークアーキテクチャ
計算機アーキテクチャ 第 18 回ハザードとその解決法 2014 年 10 月 17 日 電気情報工学科 田島孝治 1 授業スケジュール ( 後期 ) 2 回 日付 タイトル 17 10/7 パイプライン処理 18 10/17 ハザードの解決法 19 10/21 並列処理 20 11/11 マルチプロセッサ 21 11/18 入出力装置の分類と特徴 22 11/25 割り込み 23 12/2 ネットワークアーキテクチャ
から付与します さらに, ゼロプレッシャー ICソケットの空き部分を使って, タイマー ICである555の動作チェックができます ユニバーサル基板の一部に555 用の発振回路を構成しています 555をソケットに差し込んで電源スイッチを入れると,ICが良品の場合は LEDが点滅します LEDが点滅しな
 実験ノート IC チェッカーの製作 無接点シーケンス制御と電子回路で使える小品 秋田センター ( 秋田職業能力開発促進センター ) 千葉富雄. はじめに 本作品はデジタルICが良品か不良品かの判定を, だれでも簡単に行える試験器です 当センターの電気設備科では 無接点シーケンス制御 を2ユニット勉強します 実技課題はブレッドボードを使用して実習回路の組み立てを行っています 受講生が回路を組み立てても作動しないとき,
実験ノート IC チェッカーの製作 無接点シーケンス制御と電子回路で使える小品 秋田センター ( 秋田職業能力開発促進センター ) 千葉富雄. はじめに 本作品はデジタルICが良品か不良品かの判定を, だれでも簡単に行える試験器です 当センターの電気設備科では 無接点シーケンス制御 を2ユニット勉強します 実技課題はブレッドボードを使用して実習回路の組み立てを行っています 受講生が回路を組み立てても作動しないとき,
1. プログラム実行時の動作プログラムを実行すると以下のように動作します 1) NUCLEO-F401RE 上の LED LD2( 緑 ) が 200mSec 間隔で点滅します 2. プロジェクトの構成 2.1. プロジェクト F401N_BlinkLD2 の起動画面 TrueSTUDIO で作成し
 NUCLEO-F401RE 上の LED LD2( 緑 ) が 200mSec 間隔で点滅します 2. プロジェクトの構成 2.1. プロジェクト F401N_BlinkLD2 の起動画面 TrueSTUDIO で作成し") TrueSTUDIO 用 F401N_BlinkLD2 の説明 V003 2014/10/01 TIM11 の割り込みを使用して LED 点滅を行う NUCLEO-F401RE のプロジェクトサンプルです NUCLEO-F401RE は STMicroelectronics 社製の Cortex-M4 ARM CPU である STM32F401RET6 を搭載した基板です 試用版の開発ツール Atollic
TrueSTUDIO 用 F401N_BlinkLD2 の説明 V003 2014/10/01 TIM11 の割り込みを使用して LED 点滅を行う NUCLEO-F401RE のプロジェクトサンプルです NUCLEO-F401RE は STMicroelectronics 社製の Cortex-M4 ARM CPU である STM32F401RET6 を搭載した基板です 試用版の開発ツール Atollic
スライド 1
 RL78/G13 周辺機能紹介 ADC A/D コンバータ ルネサスエレクトロニクス株式会社 ルネサス半導体トレーニングセンター 2013/08/02 Rev. 0.00 00000-A コンテンツ ADC の概要 ソフトウエア トリガ セレクト モード 連続変換モードのプログラム サンプル紹介 2 ADC の概要 3 ADC のブロック図 パワー オフが可能 入力 選択 記憶 比較 基準電圧 変換結果
RL78/G13 周辺機能紹介 ADC A/D コンバータ ルネサスエレクトロニクス株式会社 ルネサス半導体トレーニングセンター 2013/08/02 Rev. 0.00 00000-A コンテンツ ADC の概要 ソフトウエア トリガ セレクト モード 連続変換モードのプログラム サンプル紹介 2 ADC の概要 3 ADC のブロック図 パワー オフが可能 入力 選択 記憶 比較 基準電圧 変換結果
コンピュータの仕組み(1)ハードウェア
ハードウェア") Copyright 守屋悦朗 2005 コンピュータの仕組み (1) ハードウェア 2.1 CPU の基本原理 2 つの整数の和を出力するプログラムを考えよう main() { int a, b, c; /* 変数 a,b が整数値をとる変数であることを宣言する */ a = 1; /* a に 1 を代入する */ b = 2; /* b に 2 を代入する */ c = a+b; /* a と
Copyright 守屋悦朗 2005 コンピュータの仕組み (1) ハードウェア 2.1 CPU の基本原理 2 つの整数の和を出力するプログラムを考えよう main() { int a, b, c; /* 変数 a,b が整数値をとる変数であることを宣言する */ a = 1; /* a に 1 を代入する */ b = 2; /* b に 2 を代入する */ c = a+b; /* a と
本日の内容 導入 回路の作製 回路図から配線図へ ブレッドボードを使った試作回路の作製 マイコンへのプログラム書き込み GPIOの実験
 本日の内容 導入 回路の作製 回路図から配線図へ ブレッドボードを使った試作回路の作製 マイコンへのプログラム書き込み GPIOの実験 マイコン マイクロコントローラ 小型のコンピュータ Z80などは 通常のパソコンと同じように CPU メモリ パラレル シリアルIO タイ マなどが別々の部品だったが 最近主流のPIC AVR ARM の一部 等は これらをすべて一つのチップ に集積化したワンチップマイコン
本日の内容 導入 回路の作製 回路図から配線図へ ブレッドボードを使った試作回路の作製 マイコンへのプログラム書き込み GPIOの実験 マイコン マイクロコントローラ 小型のコンピュータ Z80などは 通常のパソコンと同じように CPU メモリ パラレル シリアルIO タイ マなどが別々の部品だったが 最近主流のPIC AVR ARM の一部 等は これらをすべて一つのチップ に集積化したワンチップマイコン
スライド タイトルなし
 2019. 7.18 Ibaraki Univ. Dept of Electrical & Electronic Eng. Keiichi MIYAJIMA 今後の予定 7 月 18 日メモリアーキテクチャ1 7 月 22 日メモリアーキテクチャ2 7 月 29 日まとめと 期末テストについて 8 月 5 日期末試験 メモリアーキテクチャ - メモリ装置とメモリアーキテクチャ - メモリアーキテクチャメモリ装置とは?
2019. 7.18 Ibaraki Univ. Dept of Electrical & Electronic Eng. Keiichi MIYAJIMA 今後の予定 7 月 18 日メモリアーキテクチャ1 7 月 22 日メモリアーキテクチャ2 7 月 29 日まとめと 期末テストについて 8 月 5 日期末試験 メモリアーキテクチャ - メモリ装置とメモリアーキテクチャ - メモリアーキテクチャメモリ装置とは?
1. 購入物品リスト 電子部品名 用途 規格 単価 数量 合計 購入先 PIC16F84A-20/P PIC16F 秋月電子通商 カーボン抵抗 1/4W R0,R1 10kΩ 秋月電子通商 カーボン抵抗 1/4W R2,R2 追加分 300Ω 秋月
 電子回路設計演習レポート 目次 : 1. 購入物品リスト 2. 課題 3: 7 セグメント LED の表示 2.1 課題 3 のプログラムリスト 3. 自由課題 : プレイステーションパッドによるデジ Q のリモコン操作 3.1 パッドの改造 3.2 リモコンの機能 3.3 プログラムリスト参考文献付録 : DigiQ 通信仕様付録 : プレイステーション PAD 通信仕様 提出年月日 2005 年
電子回路設計演習レポート 目次 : 1. 購入物品リスト 2. 課題 3: 7 セグメント LED の表示 2.1 課題 3 のプログラムリスト 3. 自由課題 : プレイステーションパッドによるデジ Q のリモコン操作 3.1 パッドの改造 3.2 リモコンの機能 3.3 プログラムリスト参考文献付録 : DigiQ 通信仕様付録 : プレイステーション PAD 通信仕様 提出年月日 2005 年
1. UART について UART は Universal Asynchronous Receiver Transmitter の頭文字をとったもので 非同期シリアル通信と呼ばれます シリアル通信とは 一本の信号線でデータをやりとりするために 1bit ずつデータを送出することをいいます データを受
 STM32L_UART1 の説明 V004 2014/03/30 STM32L-Discovery の UART 1 の送受信を行うプログラムです 無料の開発ツール Atollic TrueSTUDIO for ARM Lite( 試用版 ) で作成したプロジェクトです プログラムの開始番地は 0x08000000 です デバッグが可能です PC アプリケーションの Access_SerialPort
STM32L_UART1 の説明 V004 2014/03/30 STM32L-Discovery の UART 1 の送受信を行うプログラムです 無料の開発ツール Atollic TrueSTUDIO for ARM Lite( 試用版 ) で作成したプロジェクトです プログラムの開始番地は 0x08000000 です デバッグが可能です PC アプリケーションの Access_SerialPort
スライド 1
 RX62N 周辺機能紹介 TMR 8 ビットタイマ ルネサスエレクトロニクス株式会社ルネサス半導体トレーニングセンター 2013/08/02 Rev. 1.00 00000-A コンテンツ TMR の概要 プログラムサンプル (1) パルス出力機能 (8 ビットモード ) プログラムサンプル (2) インターバルタイマ機能 (16 ビット コンペアマッチカウントモード ) プログラムサンプルのカスタマイズ
RX62N 周辺機能紹介 TMR 8 ビットタイマ ルネサスエレクトロニクス株式会社ルネサス半導体トレーニングセンター 2013/08/02 Rev. 1.00 00000-A コンテンツ TMR の概要 プログラムサンプル (1) パルス出力機能 (8 ビットモード ) プログラムサンプル (2) インターバルタイマ機能 (16 ビット コンペアマッチカウントモード ) プログラムサンプルのカスタマイズ
CMOS リニアイメージセンサ用駆動回路 C CMOS リニアイメージセンサ S 等用 C は当社製 CMOSリニアイメージセンサ S 等用に開発された駆動回路です USB 2.0インターフェースを用いて C と PCを接続
 CMOS リニアイメージセンサ用駆動回路 C13015-01 CMOS リニアイメージセンサ S11639-01 等用 C13015-01は当社製 CMOSリニアイメージセンサ S11639-01 等用に開発された駆動回路です USB 2.0インターフェースを用いて C13015-01と PCを接続することにより PCからC13015-01 を制御して センサのアナログビデオ信号を 16-bitデジタル出力に変換した数値データを
CMOS リニアイメージセンサ用駆動回路 C13015-01 CMOS リニアイメージセンサ S11639-01 等用 C13015-01は当社製 CMOSリニアイメージセンサ S11639-01 等用に開発された駆動回路です USB 2.0インターフェースを用いて C13015-01と PCを接続することにより PCからC13015-01 を制御して センサのアナログビデオ信号を 16-bitデジタル出力に変換した数値データを
ターゲット項目の設定について
 Code Debugger CodeStage マニュアル別冊 ターゲット 項目の設定について Rev. 2.8 2018 年 4 月 13 日 BITRAN CORPORATION ご注意 1 本書及びプログラムの内容の一部または 全部を無断で転載することは プログラムのバックアップの場合を除き 禁止されています 2 本書及びプログラムの内容に関しては 将来予告なしに変更することがあります 3 当社の許可なく複製
Code Debugger CodeStage マニュアル別冊 ターゲット 項目の設定について Rev. 2.8 2018 年 4 月 13 日 BITRAN CORPORATION ご注意 1 本書及びプログラムの内容の一部または 全部を無断で転載することは プログラムのバックアップの場合を除き 禁止されています 2 本書及びプログラムの内容に関しては 将来予告なしに変更することがあります 3 当社の許可なく複製
Microsoft PowerPoint - Sol7 [Compatibility Mode]
![Microsoft PowerPoint - Sol7 [Compatibility Mode]](/thumbs/96/126579889.jpg "Microsoft PowerPoint - Sol7 [Compatibility Mode]") ミニクイズ 4 E ハザード ( つ前の命令の結果を必要とする状況 ) が発生する条件を つ挙げよ. また それぞれの時に 制御線 ForwardA, ForwardB はどのように設定すれば良いか? ( 回答 ) E/.RegWrite= かつ E/.RegisterRd = ID/.RegisterRs この時,ForwardA = と制御すれば良い. E/.RegWrite= かつ E/.RegisterRd
ミニクイズ 4 E ハザード ( つ前の命令の結果を必要とする状況 ) が発生する条件を つ挙げよ. また それぞれの時に 制御線 ForwardA, ForwardB はどのように設定すれば良いか? ( 回答 ) E/.RegWrite= かつ E/.RegisterRd = ID/.RegisterRs この時,ForwardA = と制御すれば良い. E/.RegWrite= かつ E/.RegisterRd
PowerPoint プレゼンテーション
 午後の部 準受動ロボット作り電子回路編 部品の確認 NO 品 名 個数 1 ブレッドボード 1 2 PIC12F675 1 3 単連式ボリューム B 特性 10kΩ 1 4 低ドロップ電圧レギュレータTA4805S(5V1A) 1 5 電解コンデンサー 47uF16V 1 6 セラミックコンデンサー 0.1uF 1 7 BH-9V-3A 型電池ホルダー BH-9V-3A 1 8 9V 006P 電池
午後の部 準受動ロボット作り電子回路編 部品の確認 NO 品 名 個数 1 ブレッドボード 1 2 PIC12F675 1 3 単連式ボリューム B 特性 10kΩ 1 4 低ドロップ電圧レギュレータTA4805S(5V1A) 1 5 電解コンデンサー 47uF16V 1 6 セラミックコンデンサー 0.1uF 1 7 BH-9V-3A 型電池ホルダー BH-9V-3A 1 8 9V 006P 電池
Microsoft PowerPoint - RL78G1E_スタータキットデモ手順_2012_1119修正版.pptx
 Smart Analog Stick をはじめて動かす RL78G1E STARTER KIT を始めて使う方のために インストールから基本的な使い方を体験する部分を順番にまとめました この順番で動かせば とりあえず体験できるという内容で作成してあります 2 度目からお使いの場合には Stick ボードを USB に接続した状態で 3 から始めてください 詳細な機能説明は ユーザーズマニュアルやオンラインヘルプを参考にしてください
Smart Analog Stick をはじめて動かす RL78G1E STARTER KIT を始めて使う方のために インストールから基本的な使い方を体験する部分を順番にまとめました この順番で動かせば とりあえず体験できるという内容で作成してあります 2 度目からお使いの場合には Stick ボードを USB に接続した状態で 3 から始めてください 詳細な機能説明は ユーザーズマニュアルやオンラインヘルプを参考にしてください
1. SMDLR2 SYSMACCCVM1 CVCQM1 PLC NestBus PLC PLC 2. PLC CPU PLC DCS PLC PLC SMDL PLC1 1 SMDL DiDo 512 AiAo 32 PLC PLC SMDLR2 K V AC L170
 取扱説明書 MUNIT シリーズ NestBus 用 オムロン (1:N プロトコル ) 用 PLC インタフェース 形式 SMDL R2 1. はじめに 2 2. 概要 2 3. 使用機器 2 3.1. PLC インタフェース 2 3.2. 設定装置 3 3.3. 上位リンク機能 / 上位リンクユニット 3 3.4. アナログ入力ユニット 3 3.5. アナログ出力ユニット 3 3.6. 電源の投入順序
取扱説明書 MUNIT シリーズ NestBus 用 オムロン (1:N プロトコル ) 用 PLC インタフェース 形式 SMDL R2 1. はじめに 2 2. 概要 2 3. 使用機器 2 3.1. PLC インタフェース 2 3.2. 設定装置 3 3.3. 上位リンク機能 / 上位リンクユニット 3 3.4. アナログ入力ユニット 3 3.5. アナログ出力ユニット 3 3.6. 電源の投入順序
(2)NEC による日本初のマイクロプロセッサ NEC 2002 NEC µcom µcom8 8 µcom16 16 NEC 製マイクロプロセッサ / マイクロコンピュータの系譜 (1973 年 ~84 年 ) 1973 年 ~ µcom-4 µcom-41 CD P (
NEC による日本初のマイクロプロセッサ NEC 2002 NEC µcom µcom8 8 µcom16 16 NEC 製マイクロプロセッサ / マイクロコンピュータの系譜 (1973 年 ~84 年 ) 1973 年 ~ µcom-4 µcom-41 CD P (") DIP パッケージマイコン 78K0S/KA1P CX 参考資料 NEC エレクトロニクス 8 ビットマイコンのあゆみ 1.70 ~ 80 年代マイクロプロセッサの黎明期 1971 4 4004 ALU 1 8 8008 1972 8080 1974 16 8086 1978 1974 8 MPU Micro Processing Unit MC6800 MPU 1979 16 MPU MC68000
DIP パッケージマイコン 78K0S/KA1P CX 参考資料 NEC エレクトロニクス 8 ビットマイコンのあゆみ 1.70 ~ 80 年代マイクロプロセッサの黎明期 1971 4 4004 ALU 1 8 8008 1972 8080 1974 16 8086 1978 1974 8 MPU Micro Processing Unit MC6800 MPU 1979 16 MPU MC68000
内容 1. 仕様 動作確認条件 ハードウェア説明 使用端子一覧 ソフトウェア説明 動作概要 ファイル構成 オプション設定メモリ 定数一覧 変数一
 RX210 グループ IRQ 割り込みを使用したパルス出力 要旨 本サンプルコードでは IRQ 割り込みが発生すると 一定期間タイマでパルスを出力する 方法について説明します 対象デバイス RX210 1 / 25 内容 1. 仕様... 3 2. 動作確認条件... 3 3. ハードウェア説明... 3 3.1 使用端子一覧... 3 4. ソフトウェア説明... 4 4.1 動作概要... 4
RX210 グループ IRQ 割り込みを使用したパルス出力 要旨 本サンプルコードでは IRQ 割り込みが発生すると 一定期間タイマでパルスを出力する 方法について説明します 対象デバイス RX210 1 / 25 内容 1. 仕様... 3 2. 動作確認条件... 3 3. ハードウェア説明... 3 3.1 使用端子一覧... 3 4. ソフトウェア説明... 4 4.1 動作概要... 4
完成版_セミナー発表資料110928
 PROFINET オープンセミナー ASIC を使用した開発 開発セミナー 目次 2 PROFINET の実装 ASIC という選択 PROFINET 機器開発における課題 ASIC による課題の解決 ASIC の特徴ターゲットアプリケーション適用例ラインアップ ASIC 製品紹介 1 PROFINET の実装 3 PROFINET の実装手法 Ethernet ポート付きマイコン FPGA PROFINET
PROFINET オープンセミナー ASIC を使用した開発 開発セミナー 目次 2 PROFINET の実装 ASIC という選択 PROFINET 機器開発における課題 ASIC による課題の解決 ASIC の特徴ターゲットアプリケーション適用例ラインアップ ASIC 製品紹介 1 PROFINET の実装 3 PROFINET の実装手法 Ethernet ポート付きマイコン FPGA PROFINET
1. A/D 入力について分解能 12bit の A/D コンバータ入力です A/D 入力電圧とディジタル値との対応は理論上 入力電圧 0V : 0 入力電圧 +3V : 4095 です 実際はオフセットと傾きがあり ぴったりこの数値にはなりません 2. A/D 入力に使用する信号 STM32L_A
 STM32L_ADC の説明 V003 2014/03/30 STM32L-Discovery の A/D 入力を行うプログラムです A/D CH0 ~ A/D CH3 の 4 本の入力が可能です 提供する PC のアプリケーション Access_SerialPort を使用して UART( 非同期シリアル通信 ) により A/D 入力の表示を行うことができます 無料の開発ツール Atollic TrueSTUDIO
STM32L_ADC の説明 V003 2014/03/30 STM32L-Discovery の A/D 入力を行うプログラムです A/D CH0 ~ A/D CH3 の 4 本の入力が可能です 提供する PC のアプリケーション Access_SerialPort を使用して UART( 非同期シリアル通信 ) により A/D 入力の表示を行うことができます 無料の開発ツール Atollic TrueSTUDIO
Microsoft Word - PIC-USBマイコンボード_v1-02@WEB公開用資料.docx
 PIC-USB マイコンボード C 言語による PIC プログラミング入門 ( 浅川毅著 ) にて使用しているマイコンボードです プログラム ファームウェア 基板単体 パーツ類 URL1 より全てダウンロード可能 URL2 より購入可能 URL2 または電子パーツ店より購入可能 URL1 ソースファイルほか http://www.tdupress.jp/download/robot-mpu/isbn978-4-501-55350-0-2.html
PIC-USB マイコンボード C 言語による PIC プログラミング入門 ( 浅川毅著 ) にて使用しているマイコンボードです プログラム ファームウェア 基板単体 パーツ類 URL1 より全てダウンロード可能 URL2 より購入可能 URL2 または電子パーツ店より購入可能 URL1 ソースファイルほか http://www.tdupress.jp/download/robot-mpu/isbn978-4-501-55350-0-2.html