ITS と ADAS の 3D マップに利用する数式による仮想軌道 (Virtual Orbit) 2010/05/05 三英技研
|
|
|
- さゆり すえたけ
- 6 years ago
- Views:
Transcription
1 ITS と ADAS の 3D マップに利用する数式による仮想軌道 (Virtual Orbit) 2010/05/05 三英技研
2 ITS と ADAS の国際動向 ITS:Intelligent Transport Systems ADAS:Advanced driver assistance systems 2
")
3 ( 資料 1) 2009, 第 16 回 ITS 世界会議 ES06 資料より抜粋 NAVTEQ の ADAS 用途 Adaptive headlight Adaptive cruse control Adaptive shift control Roll over warning CO2 reduction/green routing Electronic Horizon PatentUS (May 11,2004) 3
4 ( 資料 2) 2004, 名古屋 ITS 世界会議資料より抜粋 曲率半径 R 等パラメータ化が課題 4

5 ( 資料 3) 2009 年, 第 16 回 ITS 世界会議 ES06 予稿集から抜粋 ( 財 ) 衛星測位利用推進センター中島専務理事講演 1.Car Navigation System with sufficient accuracy 3D road map 2.ADAS Virtual orbit on 3D road map Virtual orbit: Digital lane marks by a priori knowledge eg. Clothoid curve, Up and down incline, Crossing incline, Sign Post etc. Virtual orbit Prior foresight Uphil Left Curve Right curve Downhill 5
6 数式による仮想軌道のご紹介 6




7 数式仮想軌道の作成方法と活用の目標 既存技術 提案ソフト 提案技術 3D/ 数式軌道道路 サインポスト GNSS 衛星 3D 道路設計 CAD 三英技研 3D 道路モデル 眼前の白線 高精度 GPS ジャイロ赤外線カメラ 数式仮想軌道 走行測量車三菱電機 (Virtual Orbit *1 ) *1: Virtual Digital Driving Orbit of Expressions 別名 : デジタルレーンマーク 目標 : 低炭素化社会実現に貢献 /CO2 排出量削減 燃費低減安全 安心 / 老齢者交通事故の減少 7
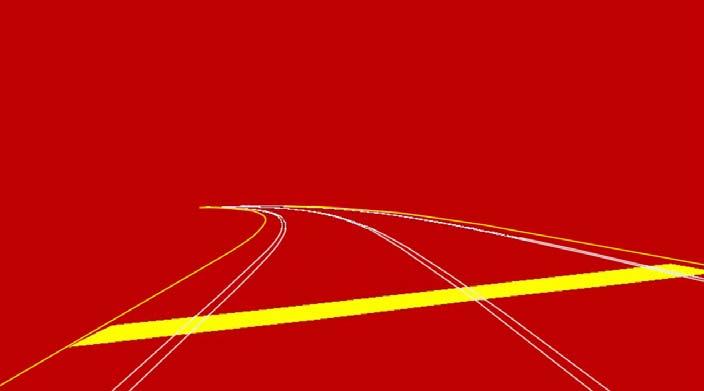
 縦断放物線 1 個 (VCL=500m) 横断勾配 1 個 (6%) と起点座標 (X,Y,Z) だけで 1Km 程度の精密な 3D 道路ジオメトリーが定義でき 慣性航法の理想軌道を構成できる また 従来の折線点列をベースにしたカーナビ地図と比較して")
8 地図上の数式仮想軌道 ( 赤線表示部分 ) 平面線形 幅員 拡幅 縦断線形 横断勾配 上図のように一般的な高規格道路であれば パラメータ数は 平面で 2 個 ( クロソイドパラメータ A=700m 道路車線幅 =3.5m) 縦断放物線 1 個 (VCL=500m) 横断勾配 1 個 (6%) と起点座標 (X,Y,Z) だけで 1Km 程度の精密な 3D 道路ジオメトリーが定義でき 慣性航法の理想軌道を構成できる また 従来の折線点列をベースにしたカーナビ地図と比較して データ量は百分の 1 以下になり路 車 人間通信の負荷を低減できる 8
9 既存カーナビ地図と数式仮想軌道の比較 既存カーナビ地図データ構造 : ノード リンク 膨大なデータ量 折線点列 P(x,y,z) 標高座標点は少ない 数式仮想軌道データ構造 : ノード 数式仮想軌道パラメータ データ圧縮率 : 1/100 以上 平面 : クロソイド曲線 円弧 直線 縦断 : 標高 勾配 パラボラ 横断 : 横断勾配の摺付 車道 : 拡幅の摺付 直線 :L ポリライン列 P(x,y,z) 円弧 :R クロソイド :A 縦断データ列 情報量 : 位置データ 1mm 誤差 ±1m~±15m カーナビ地図 国内 : ゼンリン トヨタマップマスター インクリメント P 海外 : NAVTEQ 社 TeleAtlas 社 情報量 : 位置データ + 軌道パラメータ 図面 航空測量 道路走行測量車によるデータ取得 道路線形の予知機能 : 3 次元数式仮想軌道を基準とする 車両制御に利用 クロソイド起点をトリガーにして ハンドルを等角速度で回転制御 精度 : 平面 ±1m 車両制御用 ±10cm 特許 ( 特開 ) ( 日 米 英 独 仏特許 ) 運転支援システム 運転支援方法及び運転支援プログラム 9
10 数式仮想軌道の概念 数式仮想軌道 (Virtual Orbit of Expressions) A : クロソイド曲線 車載機の 3D 演算による道路形状の表示 音声通報 ( ドライバーの見えない先を車載機は認識し透視する事が特徴 ) 3D 地図を先読みして 安全 省燃費運転に最適なアクセル シフト操作を音声 HUD(Head Up Display) 等でガイド 将来的には高速走行自動運転に利用 参照 : クロソイド曲線 - Wikipedia 10
11 安全運転を支援するバックグラウンド : 数式仮想軌道 自動車の誘導を可能にする 数式仮想軌道 上で 精密な 3D 道路地図と GPS ジャイロ サインポスト ( 電柱 標識 IC タグ ) 通信 (DSRC ZigBee WiMAX) 等を使用し走行支援する GNSS 衛星群 GPS/GALILEO/GLONASS/ 北斗 / 準天頂衛星等 100 機が数年後に配備 DGPS 誤差情報配信 SBAS 利用 日 :MSAS 米 :WAAS 欧 :EGNOS ( カバー率の低い FM 多重等の弱点が改善 ) サインポスト ( 電波灯台 ) 路 車 人間通信 眼前の白線 車載高精度 DGPS ジャイロミリ波レーダ レーザレーダ 赤外線複眼カメラ等搭載 数式仮想軌道 (Virtual Digital Driving Orbit of Expressions) ( 別名 : デジタルレーンマーク ) 実物道路 道路上に仮想のレール ( レーンマーク ) があって そのレール上を車が自動誘導されるという利用イメージ 目を閉じても安全誘導できる技術レベルが長期の目標 東名 名神 首都高速等のブロックで 3D 道路地図が必要 11
 電子標識を POI (*2) として利用 カーブ進入スピード警告 / 音声等 燃費低減運転にシフト ギヤ比のガイド 2 第 2 ステージ (2012 年 ~) 走行支援 車両制御に利用 ( 地図精度 車道情報の連続性が重要 ) (3) 感性 制御情報出力 勾配 5% 急坂の先は急カーブブレーキは? シフト ( ギヤー ) は?")
12 安全運転 燃費低減に利用 1 デジタルレーンマーク 曲率半径 R 縦断 横断勾配 (*1) 2 車両から取得するデータ 車速 エンジン回転数 燃料吐出量 車両重量 積載重量 ギヤ比 ( シフト ) (1) 視覚 物理情報入力 / 取得 遠心力 コーナリングフォース 宇野高明 車両運動性能とシャシーメカニズム グランプリ出版 p17から引用 走行安全性計算 CO2 排出削減性能計算 (2) 性能計算 処理 1 第 1 ステージ (~2010 年 ) 電子標識を POI (*2) として利用 カーブ進入スピード警告 / 音声等 燃費低減運転にシフト ギヤ比のガイド 2 第 2 ステージ (2012 年 ~) 走行支援 車両制御に利用 ( 地図精度 車道情報の連続性が重要 ) (3) 感性 制御情報出力 勾配 5% 急坂の先は急カーブブレーキは? シフト ( ギヤー ) は? 電子標識 :POI (*2) R 50m *1 前方 50m~1000m ぐらいまで曲率半径 R 縦断 横断勾配データ等を先読みして 最適なアクセル シフト ( ギヤ比 ) を決定する ジャイロのみを使用する場合と比較して数秒から 60 秒程度先の予知制御に利用できる *2 Point of Interest 関心地点で座標付オブジェクトのこと 例えば コンビニ 病院 有名な寺社 景勝地等を指す 当面は電子標識も POI の扱いにする 12




13 安全運転 (ADAS) 支援の代表的な応用例 高齢者の運転支援センサ ナイトビジョン情報等の重畳ヘッドライト上下 左右傾き制御水害 水没路面での救援走行豪雨 霧 雪中の運転支援 仮想ディスプレイ 右折 直進衝突防止 車線逸脱防止警告 制御 ( 出典 : 国土交通省 ASV) カーブ進入スピード警告 制御転覆防止 ADAS(Advanced Driver Assistance Systems) 仮想磁気ネイル 車両検知センサと仮想レーダ地図 13


14 除雪支援に利用 橋梁ジョイント マンホール 障害物に接近すると画面が赤変して警告 ミリ波 マイクロ波レーダ等による車 人の検知 ( 前方障害 / 後方追抜 ) 14

15 CO2 排出量削減 動力性能計算に利用 15


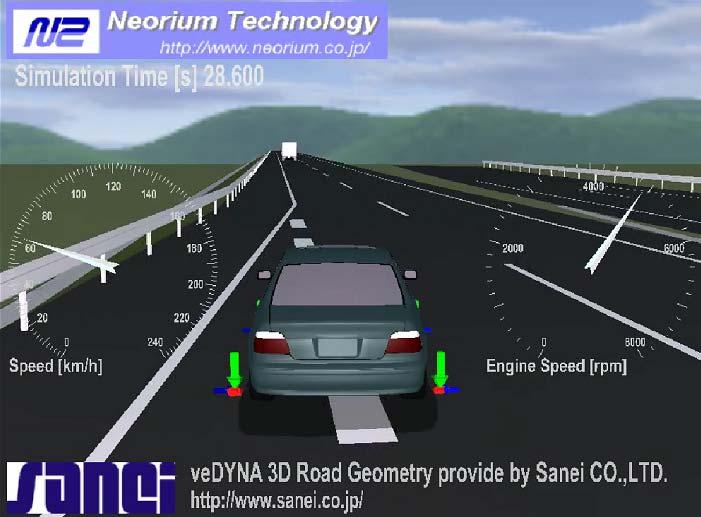
16 各種のアクティブ制御等に利用 悪路等の凹凸データ CarSim アイサンテクノロジー バーチャルメカニクス様ご提供 vedyna 16
<4D F736F F F696E74202D E838B93B E907D8BA689EF82CC8EE E B8CDD8AB B83685D>
 東大 CSISi/ITS Japan シンポジウム Ⅱ. 次世代デジタル道路情報に関するセッション デジタル道路地図協会における取組 Ⅰ. Ⅰ. 高度 DRM-DBの検討 Ⅱ. 方式テーブルの概要 2010 年 7 月 27 日 ( 財 ) 日本デジタル道路地図協会 1 検討内容 2 検討会のねらいと検討経緯 高度デジタル道路情報対応検討会 を開催 (H19 年度 ~) して検討 1 自動車 / カーナビの
東大 CSISi/ITS Japan シンポジウム Ⅱ. 次世代デジタル道路情報に関するセッション デジタル道路地図協会における取組 Ⅰ. Ⅰ. 高度 DRM-DBの検討 Ⅱ. 方式テーブルの概要 2010 年 7 月 27 日 ( 財 ) 日本デジタル道路地図協会 1 検討内容 2 検討会のねらいと検討経緯 高度デジタル道路情報対応検討会 を開催 (H19 年度 ~) して検討 1 自動車 / カーナビの
本章では 衝突被害軽減ブレーキ 車線逸脱警報 装置 等の自動車に備えられている運転支援装置の特性 Ⅻ. 運転支援装置を 備えるトラックの 適切な運転方法 と使い方を理解した運転の重要性について整理しています 指導においては 装置を過信し 事故に至るケースがあることを理解させましょう また 運転支援装
 本章では 衝突被害軽減ブレーキ 車線逸脱警報 装置 等の自動車に備えられている運転支援装置の特性 Ⅻ. 運転支援装置を 備えるトラックの 適切な運転方法 と使い方を理解した運転の重要性について整理しています 指導においては 装置を過信し 事故に至るケースがあることを理解させましょう また 運転支援装置の限界を心得て正しく使用するために 支援装置の限界とメーカーによる作動等の違いを明確にさせ 支援装置に頼り過ぎた運転にならないように指導しましょう
本章では 衝突被害軽減ブレーキ 車線逸脱警報 装置 等の自動車に備えられている運転支援装置の特性 Ⅻ. 運転支援装置を 備えるトラックの 適切な運転方法 と使い方を理解した運転の重要性について整理しています 指導においては 装置を過信し 事故に至るケースがあることを理解させましょう また 運転支援装置の限界を心得て正しく使用するために 支援装置の限界とメーカーによる作動等の違いを明確にさせ 支援装置に頼り過ぎた運転にならないように指導しましょう
PowerPoint プレゼンテーション
 ダイナミックマップ基盤企画 株式会社の概要と今後の展望 2016 年 6 月 17 日 ダイナミックマップ基盤企画株式会社 代表取締役社長中島務 1. なぜ 3 次元が必要なのか 日本の道路は複雑に交差しており 上下の識別をする必要がある 高精度 3 次元位置情報を活用することで 高さも含めた正確な位置を把握することができる 安全運転支援 自動走行には ( ローカル ) ダイナミックマップが必要不可欠である
ダイナミックマップ基盤企画 株式会社の概要と今後の展望 2016 年 6 月 17 日 ダイナミックマップ基盤企画株式会社 代表取締役社長中島務 1. なぜ 3 次元が必要なのか 日本の道路は複雑に交差しており 上下の識別をする必要がある 高精度 3 次元位置情報を活用することで 高さも含めた正確な位置を把握することができる 安全運転支援 自動走行には ( ローカル ) ダイナミックマップが必要不可欠である
Microsoft Word - 道路設計要領.doc
 Autodesk Civil 3D 2008 熊本大学三次元地形設計演習 Civil3D による三次元道路設計 1 1. 図面設定 (1) Civil3D を起動し dwg ファイルを開く サンプルファイル ( 道路作成用.dwg) 新規作成の場合は 開く からテンプレートを使用 2008 ならば 国土交通省仕様 100m 測点.dwt ワークスペース (2) ワークスペースが civil3d コンプリート
Autodesk Civil 3D 2008 熊本大学三次元地形設計演習 Civil3D による三次元道路設計 1 1. 図面設定 (1) Civil3D を起動し dwg ファイルを開く サンプルファイル ( 道路作成用.dwg) 新規作成の場合は 開く からテンプレートを使用 2008 ならば 国土交通省仕様 100m 測点.dwt ワークスペース (2) ワークスペースが civil3d コンプリート
図 -2 測位方式の概念図 RTK-GPS: Real Time Kinematic GPS 2 図 D-GPS RTK-GPS cm 1ms GPS CDMA 巻 8 号情報処理 2002 年 8 月 - 2 -
 1 RTK-GPS 柳原 徳久 (株)日立製作所 [email protected] 初本慎太郎 (株)日立産機システム [email protected] 日本ではカーナビゲーションが広く普及しており 新車への装着率は約 30 に達している カーナビの位置検 出には GPS Global Positioning System が用いられていることはよく知られている
1 RTK-GPS 柳原 徳久 (株)日立製作所 [email protected] 初本慎太郎 (株)日立産機システム [email protected] 日本ではカーナビゲーションが広く普及しており 新車への装着率は約 30 に達している カーナビの位置検 出には GPS Global Positioning System が用いられていることはよく知られている
高度交通システムの 研究
 高度交通システムと情報通信技術 2019/6/28 高取祐介 1 ITS( 高度交通システム ) I Intelligent( 高度 知能化 ) T Transport( 輸送 交通 ) S Systems( システム ) 情報通信技術を用いて 人やモノの移動を高度化するためのシステムの総称 交通問題の解決 利便性向上が目的事故防止 渋滞解消 環境改善など 2 ITS の要素技術 人や物が実世界で移動する
高度交通システムと情報通信技術 2019/6/28 高取祐介 1 ITS( 高度交通システム ) I Intelligent( 高度 知能化 ) T Transport( 輸送 交通 ) S Systems( システム ) 情報通信技術を用いて 人やモノの移動を高度化するためのシステムの総称 交通問題の解決 利便性向上が目的事故防止 渋滞解消 環境改善など 2 ITS の要素技術 人や物が実世界で移動する
高速道路への完全自動運転導入によるリスク低減効果の分析 リスク工学専攻グループ演習 10 班 田村聡宮本智明鄭起宅 ( アドバイザー教員伊藤誠 )
") 高速道路への完全自動運転導入によるリスク低減効果の分析 リスク工学専攻グループ演習 10 班 田村聡宮本智明鄭起宅 ( アドバイザー教員伊藤誠 ) はじめに 研究背景 自動運転の定義 研究目的 発表の流れ 交通流シミュレーションを用いた分析 分析手法 評価指標 分析結果および考察 ドライブシミュレータを用いた分析 分析手法 評価方法 分析結果および考察 まとめ 研究背景交通システムの現状 交通事故の死傷者数が一定の割合で推移
高速道路への完全自動運転導入によるリスク低減効果の分析 リスク工学専攻グループ演習 10 班 田村聡宮本智明鄭起宅 ( アドバイザー教員伊藤誠 ) はじめに 研究背景 自動運転の定義 研究目的 発表の流れ 交通流シミュレーションを用いた分析 分析手法 評価指標 分析結果および考察 ドライブシミュレータを用いた分析 分析手法 評価方法 分析結果および考察 まとめ 研究背景交通システムの現状 交通事故の死傷者数が一定の割合で推移
名古屋大学.indd
 車両性能実証装置高精度ドライビング シミュレーターシステム 世界で初めて 1) 本格的バーチャルリアリティ (VR) 空間内での運転 車両走行模擬を実現した大型 5 面立体視ドライビング シミュレーター 運転時の視覚環境 振動環境を高精度に再現する事により 運転車の特性や感性のモニタリングおよび数学モデル構築を目指します 約 240インチの高輝度高精細な大型ディスプレイで囲ま 1 れた空間で視野角
車両性能実証装置高精度ドライビング シミュレーターシステム 世界で初めて 1) 本格的バーチャルリアリティ (VR) 空間内での運転 車両走行模擬を実現した大型 5 面立体視ドライビング シミュレーター 運転時の視覚環境 振動環境を高精度に再現する事により 運転車の特性や感性のモニタリングおよび数学モデル構築を目指します 約 240インチの高輝度高精細な大型ディスプレイで囲ま 1 れた空間で視野角
国土技術政策総合研究所 研究資料
 第 7 章 検査基準 7-1 検査の目的 検査の目的は 対向車両情報表示サービス 前方停止車両 低速車両情報表示サービスおよび その組み合わせサービスに必要な機能の品質を確認することである 解説 設備の設置後 機能や性能の総合的な調整を経て 検査基準に従い各設備検査を実施する 各設備検査の合格後 各設備間を接続した完成検査で機能 性能等のサービス仕様を満たしていることを確認する検査を実施し 合否を判定する
第 7 章 検査基準 7-1 検査の目的 検査の目的は 対向車両情報表示サービス 前方停止車両 低速車両情報表示サービスおよび その組み合わせサービスに必要な機能の品質を確認することである 解説 設備の設置後 機能や性能の総合的な調整を経て 検査基準に従い各設備検査を実施する 各設備検査の合格後 各設備間を接続した完成検査で機能 性能等のサービス仕様を満たしていることを確認する検査を実施し 合否を判定する
選定技術の テーマ Ⅰ ウェッジハンプ 舗装面にくさび型の非対称の段差 ( ウェッジハンプ ) を設置し 走行時の衝撃により逆走車両に注意喚起するもの 全景 設置イメージ図 逆走車両に衝撃で注意喚起を行い 順行車両には走行に支障の無い形状としている 段差部分には超高強度繊維補強コンクリートを使用し
 を設置し 走行時の衝撃により逆走車両に注意喚起するもの 全景 設置イメージ図 逆走車両に衝撃で注意喚起を行い 順行車両には走行に支障の無い形状としている 段差部分には超高強度繊維補強コンクリートを使用し") 選定技術の 資料 5-3 選定技術の テーマ Ⅰ ウェッジハンプ 舗装面にくさび型の非対称の段差 ( ウェッジハンプ ) を設置し 走行時の衝撃により逆走車両に注意喚起するもの 全景 設置イメージ図 逆走車両に衝撃で注意喚起を行い 順行車両には走行に支障の無い形状としている 段差部分には超高強度繊維補強コンクリートを使用し 大型車が走行しても衝突に十分な強度有している 2 選定技術の テーマ Ⅰ 防眩板応用注意喚起
選定技術の 資料 5-3 選定技術の テーマ Ⅰ ウェッジハンプ 舗装面にくさび型の非対称の段差 ( ウェッジハンプ ) を設置し 走行時の衝撃により逆走車両に注意喚起するもの 全景 設置イメージ図 逆走車両に衝撃で注意喚起を行い 順行車両には走行に支障の無い形状としている 段差部分には超高強度繊維補強コンクリートを使用し 大型車が走行しても衝突に十分な強度有している 2 選定技術の テーマ Ⅰ 防眩板応用注意喚起
AutoCAD LT2000i
 空間デザイン演習資料 ( 第 10 回 -14 回 ) 課題 国土地理院の基盤地図情報数値標高モデルから東北地方の任意地域の標高データと航空写真を取得し, 以下の設計条件を満足する道路設計を行いなさい. また, 走行シミュレーションのアニメーションを作成しなさい.(Civil3D の新規 国土交通省仕様 100m 測点.dwt を用いて設計をすること ) 注意 : これまでの配布資料を忘れずに持参しなさい.
空間デザイン演習資料 ( 第 10 回 -14 回 ) 課題 国土地理院の基盤地図情報数値標高モデルから東北地方の任意地域の標高データと航空写真を取得し, 以下の設計条件を満足する道路設計を行いなさい. また, 走行シミュレーションのアニメーションを作成しなさい.(Civil3D の新規 国土交通省仕様 100m 測点.dwt を用いて設計をすること ) 注意 : これまでの配布資料を忘れずに持参しなさい.
測量士補 重要事項 はじめに GNSS測量の基礎
 GNSS 測量の基礎 (1)GNSS とは GNSS(Global Navigation Satellite Systems: 全地球衛星航法 ( または測位 ) システム ) 測量とは いわゆるカーナビを想像すればよい つまり 上空の衛星から発射される電波を受信する事により 地上の位置を求める測量である 衛星として代表的なものは アメリカの GPS 衛星であるが その他にも次のようなものがある アメリカの
GNSS 測量の基礎 (1)GNSS とは GNSS(Global Navigation Satellite Systems: 全地球衛星航法 ( または測位 ) システム ) 測量とは いわゆるカーナビを想像すればよい つまり 上空の衛星から発射される電波を受信する事により 地上の位置を求める測量である 衛星として代表的なものは アメリカの GPS 衛星であるが その他にも次のようなものがある アメリカの
スライド 1
 平成 28 年度経済産業省 国土交通省委託事業 自動走行の民事上の責任及び社会受容性に関する研究 シンポジウム 平成 29 年 3 月 7 日於 TKPガーデンシティPREMIUM 神保町 自動運転技術の動向について 独立行政法人自動車技術総合機構交通安全環境研究所自動車研究部河合英直 1 Agenda 1. 交通安全環境研究所について 2. 自動運転車とは 3. 運転支援技術の現状 4. 最後に
平成 28 年度経済産業省 国土交通省委託事業 自動走行の民事上の責任及び社会受容性に関する研究 シンポジウム 平成 29 年 3 月 7 日於 TKPガーデンシティPREMIUM 神保町 自動運転技術の動向について 独立行政法人自動車技術総合機構交通安全環境研究所自動車研究部河合英直 1 Agenda 1. 交通安全環境研究所について 2. 自動運転車とは 3. 運転支援技術の現状 4. 最後に
ドライビングシミュレータ用実写映像再生ソフトウェア Real Video Drive Player
 東陽テクニカ技術研究所 岩根研究所 共同開発 ドライビングシミュレータ用実写映像再生ソフトウェア Real Video Drive Player Real Video Drive Player Real Video Drive Playerは専用の360 カメラで撮影した走行映像を ステアリング操作やアクセル ブレーキ操作に連動させて再生できるソフトウェアです 専用の動画撮影 加工サービスは任意の道路で行うことができます
東陽テクニカ技術研究所 岩根研究所 共同開発 ドライビングシミュレータ用実写映像再生ソフトウェア Real Video Drive Player Real Video Drive Player Real Video Drive Playerは専用の360 カメラで撮影した走行映像を ステアリング操作やアクセル ブレーキ操作に連動させて再生できるソフトウェアです 専用の動画撮影 加工サービスは任意の道路で行うことができます

1 基本的な整備内容 道路標識 専用通行帯 (327 の 4) の設置 ( 架空標識の場合の例 ) 自 転 車 ピクトグラム ( 自転車マーク等 ) の設置 始点部および中間部 道路標示 専用通行帯 (109 の 6) の設置 ( 過度な表示は行わない ) 専 用 道路標示 車両通行帯 (109)
 の設置 ( 架空標識の場合の例 ) 自 転 車 ピクトグラム ( 自転車マーク等 ) の設置 始点部および中間部 道路標示 専用通行帯 (109 の 6) の設置 ( 過度な表示は行わない ) 専 用 道路標示 車両通行帯 (109)") 第 3 整備ガイドライン 本章では 安全で快適な自転車利用環境創出ガイドライン ( 国土交通省道路局 警察庁交通 局 ) を踏まえ 自転車走行空間の整備にあたって留意する事項などについて定めます 3.1 単路部における整備の考え方 (1) 自転車専用通行帯自転車専用通行帯の整備にあたっては 交通規制に必要な道路標識や道路標示のほか 自動車ドライバーに対して自転車専用の通行帯であることが分かるよう法定外の路面表示や舗装のカラー化を行います
第 3 整備ガイドライン 本章では 安全で快適な自転車利用環境創出ガイドライン ( 国土交通省道路局 警察庁交通 局 ) を踏まえ 自転車走行空間の整備にあたって留意する事項などについて定めます 3.1 単路部における整備の考え方 (1) 自転車専用通行帯自転車専用通行帯の整備にあたっては 交通規制に必要な道路標識や道路標示のほか 自動車ドライバーに対して自転車専用の通行帯であることが分かるよう法定外の路面表示や舗装のカラー化を行います
505_切削オーバーレイ
 切削オーバーレイ [ 測量計算 ] の [ 切削オーバーレイ ] について 簡単な操作例で解説します 解説内容がオプションプログラムの説明である場合があります ご了承ください 目次 切削オーバーレイ. 作業設定 - [ 建設 CAD] を起動する - [ 切削オーバーレイ ] を起動する - 設計層を設定する. 現地盤の入力 - 入力条件を確認する - 測点を自動入力する - 地盤高を入力する 6
切削オーバーレイ [ 測量計算 ] の [ 切削オーバーレイ ] について 簡単な操作例で解説します 解説内容がオプションプログラムの説明である場合があります ご了承ください 目次 切削オーバーレイ. 作業設定 - [ 建設 CAD] を起動する - [ 切削オーバーレイ ] を起動する - 設計層を設定する. 現地盤の入力 - 入力条件を確認する - 測点を自動入力する - 地盤高を入力する 6
03 【資料1】自動走行をめぐる最近の動向と今後の調査検討事項
 自動走行をめぐる最近の動向と 今後の調査検討事項について 平成 27 年 10 月 23 日警察庁交通局 目 次 1 交通事故情勢 2 自動走行の現状 3 自動走行の課題 4 調査検討事項 1 交通事故情勢 交通事故発生状況の推移 1 1 交通事故情勢 c 平成 26 年中の交通事故発生状況 交通事故発生件数 57 万 3,465 件 ( 前年比 -8.8%) 10 年連続で減少 交通事故死者数 4,113
自動走行をめぐる最近の動向と 今後の調査検討事項について 平成 27 年 10 月 23 日警察庁交通局 目 次 1 交通事故情勢 2 自動走行の現状 3 自動走行の課題 4 調査検討事項 1 交通事故情勢 交通事故発生状況の推移 1 1 交通事故情勢 c 平成 26 年中の交通事故発生状況 交通事故発生件数 57 万 3,465 件 ( 前年比 -8.8%) 10 年連続で減少 交通事故死者数 4,113
<4D F736F F F696E74202D A B998488D5C91A297DF82CC89F090E0205B8CDD8AB B83685D>
 4 線形 道路構造の線形は 横方向の平面線形と 縦方向の縦断線形の組み合わせにより規定され 交通の安全性 円滑性の観点から設計速度に密接に関係する 平面線形の規定は 曲線半径 曲線部の片勾配 拡幅 緩和区間で構成される 縦断線形の規定は 縦断勾配 縦断曲線で構成される 線形に関する規定 平面線形に関する規定 第 15 条 曲線半径 曲線部の片勾配 曲線部の拡幅 第 18 条 緩和区間 第 16 条
4 線形 道路構造の線形は 横方向の平面線形と 縦方向の縦断線形の組み合わせにより規定され 交通の安全性 円滑性の観点から設計速度に密接に関係する 平面線形の規定は 曲線半径 曲線部の片勾配 拡幅 緩和区間で構成される 縦断線形の規定は 縦断勾配 縦断曲線で構成される 線形に関する規定 平面線形に関する規定 第 15 条 曲線半径 曲線部の片勾配 曲線部の拡幅 第 18 条 緩和区間 第 16 条
特別寄稿.indd
 特別寄稿 ソフトインフラとしてのデジタル地図を活用した自動運転システム Autonomous vehicle using digital map as a soft infrastructure 菅沼直樹 Naoki SUGANUMA 1. はじめに 1) 2008 2012 ITS 2) CO 2 3) 4) Door to door Door to door Door to door DARPA(
特別寄稿 ソフトインフラとしてのデジタル地図を活用した自動運転システム Autonomous vehicle using digital map as a soft infrastructure 菅沼直樹 Naoki SUGANUMA 1. はじめに 1) 2008 2012 ITS 2) CO 2 3) 4) Door to door Door to door Door to door DARPA(
NITAS の基本機能 1. 経路探索条件の設定 (1) 交通モードの設定 交通モードの設定 とは どのような交通手段のネットワークを用いて経路探索を行うかを設定するものです NITASの交通モードは 大きく 人流 ( 旅客移動 ) 物流( 貨物移動 ) に分かれ それぞれのネットワークを用いた経路
 交通モードの設定 交通モードの設定 とは どのような交通手段のネットワークを用いて経路探索を行うかを設定するものです NITASの交通モードは 大きく 人流 ( 旅客移動 ) 物流( 貨物移動 ) に分かれ それぞれのネットワークを用いた経路") NITAS の基本機能 1. 経路探索条件の設定 (1) 交通モードの設定 交通モードの設定 とは どのような交通手段のネットワークを用いて経路探索を行うかを設定するものです NITASの交通モードは 大きく 人流 ( 旅客移動 ) 物流( 貨物移動 ) に分かれ それぞれのネットワークを用いた経路探索を行うことができます また 道路 + 船モード 鉄道 + 航空モード 道路 + 鉄道モード では
NITAS の基本機能 1. 経路探索条件の設定 (1) 交通モードの設定 交通モードの設定 とは どのような交通手段のネットワークを用いて経路探索を行うかを設定するものです NITASの交通モードは 大きく 人流 ( 旅客移動 ) 物流( 貨物移動 ) に分かれ それぞれのネットワークを用いた経路探索を行うことができます また 道路 + 船モード 鉄道 + 航空モード 道路 + 鉄道モード では
別紙 1 ワイヤロープの今後の設置予定について H ワイヤロープの技術的検証結果 ( 第 3 回検討会 ) 土工区間については 技術的に実用化可能 中小橋については 試行設置箇所を拡大し 実用化に向けた取組みを進める 長大橋 トンネル区間については 公募選定技術の性能検証を引き続き進め
 土工区間については 技術的に実用化可能 中小橋については 試行設置箇所を拡大し 実用化に向けた取組みを進める 長大橋 トンネル区間については 公募選定技術の性能検証を引き続き進め") sdf あ sdf 平成 30 年 6 月 15 日道路局高速道路課道路局国道 技術課 暫定二車線の高速道路のワイヤロープ設置方針について 国土交通省では 重大事故につながりやすい暫定二車線区間での高速道路の正面衝突事故の緊急対策として 昨年度からラバーポールに代えてワイヤロープを設置することによる安全対策の検証を行ってきたところですが 高速道路の正面衝突事故防止対策に関する技術検討委員会 での検証状況を踏まえ
sdf あ sdf 平成 30 年 6 月 15 日道路局高速道路課道路局国道 技術課 暫定二車線の高速道路のワイヤロープ設置方針について 国土交通省では 重大事故につながりやすい暫定二車線区間での高速道路の正面衝突事故の緊急対策として 昨年度からラバーポールに代えてワイヤロープを設置することによる安全対策の検証を行ってきたところですが 高速道路の正面衝突事故防止対策に関する技術検討委員会 での検証状況を踏まえ
2t3 転ダンプ 2t3 転ダンプサイドテール 輌ダンプカートラック規制車 その他22tダンプ ダFンゲプー ト2t3転ダンプサイドテールRENTAL t 3 転12 車 2t3 転ダンプ 排土性の高い リヤサイド 50 度のダンプ角度 ( 最大積載量 2t 積車 ) 操作力を軽減した吊り下げ式方向
 操作力を軽減した吊り下げ式方向") 軽ダンプ 4WD 狭い場所での収穫作業など +α の便利さがうれしい 4WD と軽ダンプの機能を合わせ持つ ローダンプ エンジン保護カバー荷台からエンジン部への土砂などの落ち込みをしっかりガード 安全ブロックで作業は安心始業点検時などに アップした荷台を支える安全ブロックを装備 2t ダンプ低床 荷台が低くなっていますので 資材の積降しが容易です 過酷な使用条件に対応した デッキ板厚 0.6 mm
軽ダンプ 4WD 狭い場所での収穫作業など +α の便利さがうれしい 4WD と軽ダンプの機能を合わせ持つ ローダンプ エンジン保護カバー荷台からエンジン部への土砂などの落ち込みをしっかりガード 安全ブロックで作業は安心始業点検時などに アップした荷台を支える安全ブロックを装備 2t ダンプ低床 荷台が低くなっていますので 資材の積降しが容易です 過酷な使用条件に対応した デッキ板厚 0.6 mm
<4D F736F F D205B95BD90AC E93785D8AEE91628E9197BF8DEC90AC977697CC817C8E7392AC91BA AD6938C2E646F6378>
 平成 29 年度デジタル道路地図基礎資料作成要領 市町村道 ( 政令市を除く ) 農道 林道 臨港道路等 ( 市町村 ) ( 平成 29 年度開通予定道路 ) 国土交通省関東地方整備局 国土交通省国土地理院関東地方測量部 < 目次 > 1. デジタル道路地図基礎資料作成の目的... 2 2. 作成 提供いただく資料... 3 (1) 作成いただく資料... 3 (2) 提供いただく資料... 3 3.
平成 29 年度デジタル道路地図基礎資料作成要領 市町村道 ( 政令市を除く ) 農道 林道 臨港道路等 ( 市町村 ) ( 平成 29 年度開通予定道路 ) 国土交通省関東地方整備局 国土交通省国土地理院関東地方測量部 < 目次 > 1. デジタル道路地図基礎資料作成の目的... 2 2. 作成 提供いただく資料... 3 (1) 作成いただく資料... 3 (2) 提供いただく資料... 3 3.
38 39
 38 39 地図の紹介 地図の表示 案内図の表示 市街地図 ハイウェイマップ 縮尺 25 m 50 m 100 m 1 ルート案内中に都市高速 都市間高速道路 一部の有料 道路を走行すると自動的に表示されます SA PA IC JCTの名称 自車からの距離 SA PAの施設がわかり やすく表示されます SAなどの看板表示を選ぶと 選択施設詳細情報が表示 されます を選ぶと スクロールできます 選択施設詳細情報
38 39 地図の紹介 地図の表示 案内図の表示 市街地図 ハイウェイマップ 縮尺 25 m 50 m 100 m 1 ルート案内中に都市高速 都市間高速道路 一部の有料 道路を走行すると自動的に表示されます SA PA IC JCTの名称 自車からの距離 SA PAの施設がわかり やすく表示されます SAなどの看板表示を選ぶと 選択施設詳細情報が表示 されます を選ぶと スクロールできます 選択施設詳細情報
Trimble Agriculture 精密農業ソリューションカタログ
 Trimble Agriculture TRANSFORMING THE WAY THE WORLD WORKS GPS CFX-750 EZ-Guide 250 CFX-750 EZ-Guide 250 LCD 8 4.3 2 GPS 1 1 OnPath DGPS MSAS DGPS MSAS 15 20cm *1 OmniSTAR VBS 15 20cm *2 OmniSTAR XP/HP 7.5
Trimble Agriculture TRANSFORMING THE WAY THE WORLD WORKS GPS CFX-750 EZ-Guide 250 CFX-750 EZ-Guide 250 LCD 8 4.3 2 GPS 1 1 OnPath DGPS MSAS DGPS MSAS 15 20cm *1 OmniSTAR VBS 15 20cm *2 OmniSTAR XP/HP 7.5
1. 発注図読み込み 平面図や横断図 座標データなどから 3 次元の設計 データを作成し 出力しましょう 建設 CAD 起動後の画面からご説明しま 発注図を開きましょう メニューバーより ファイル 発注図を開くガイ ド を選択しま 用紙を決める を選択すると用紙サイズ設定画 面が表示されま 今回は
 3 次元設計データ作成 1 発注図読み込み 1 2 主要点 工事基準点の登録 4 3 基本設定 5 4 線形入力 6 5 横断形状入力 8 6 管理項目設定 11 7 データ (XML) 出力 12 8 保存 14 1. 発注図読み込み 平面図や横断図 座標データなどから 3 次元の設計 データを作成し 出力しましょう 建設 CAD 起動後の画面からご説明しま 発注図を開きましょう メニューバーより
3 次元設計データ作成 1 発注図読み込み 1 2 主要点 工事基準点の登録 4 3 基本設定 5 4 線形入力 6 5 横断形状入力 8 6 管理項目設定 11 7 データ (XML) 出力 12 8 保存 14 1. 発注図読み込み 平面図や横断図 座標データなどから 3 次元の設計 データを作成し 出力しましょう 建設 CAD 起動後の画面からご説明しま 発注図を開きましょう メニューバーより
<4D F736F F F696E74202D A957A A81798CBB8FEA8C9F8FD8826F A DB91B6817A2E505054>
 モデル事業検証 PT( 中間報告 ) ICT 導入技術の調査 検証対象とした建設 ICT モデル工事 1 盛土工 A 工事 ( 河川 ) 建設 ICT モデル工事 B 工事 ( 河川 ) 捲き出し 3DMC ブルドーザ 3DMC ブルドーザ 従来ブルドーザ GNSS 受信機 GNSS 受信機 標尺 締固め 3DMG ローラ 3DMG ローラ 従来ローラ GNSS 受信機 GNSS 受信機 標尺 特筆すべき
モデル事業検証 PT( 中間報告 ) ICT 導入技術の調査 検証対象とした建設 ICT モデル工事 1 盛土工 A 工事 ( 河川 ) 建設 ICT モデル工事 B 工事 ( 河川 ) 捲き出し 3DMC ブルドーザ 3DMC ブルドーザ 従来ブルドーザ GNSS 受信機 GNSS 受信機 標尺 締固め 3DMG ローラ 3DMG ローラ 従来ローラ GNSS 受信機 GNSS 受信機 標尺 特筆すべき
コンピュータグラフィックス第6回
 コンピュータグラフィックス 第 6 回 モデリング技法 1 ~3 次元形状表現 ~ 理工学部 兼任講師藤堂英樹 本日の講義内容 モデリング技法 1 様々な形状モデル 曲線 曲面 2014/11/10 コンピュータグラフィックス 2 CG 制作の主なワークフロー 3DCG ソフトウェアの場合 モデリング カメラ シーン アニメーション テクスチャ 質感 ライティング 画像生成 2014/11/10 コンピュータグラフィックス
コンピュータグラフィックス 第 6 回 モデリング技法 1 ~3 次元形状表現 ~ 理工学部 兼任講師藤堂英樹 本日の講義内容 モデリング技法 1 様々な形状モデル 曲線 曲面 2014/11/10 コンピュータグラフィックス 2 CG 制作の主なワークフロー 3DCG ソフトウェアの場合 モデリング カメラ シーン アニメーション テクスチャ 質感 ライティング 画像生成 2014/11/10 コンピュータグラフィックス
資料 3 社会資本整備審議会道路分科会基本政策部会 先進モビリティ ( 株 ) における 自動運転技術開発の取り組み 先進モビリティ株式会社代表取締役 青木 啓二 Advanced Smart Mobility 1
 における 自動運転技術開発の取り組み 先進モビリティ株式会社代表取締役 青木 啓二 Advanced Smart Mobility 1") 資料 3 社会資本整備審議会道路分科会基本政策部会 先進モビリティ ( 株 ) における 自動運転技術開発の取り組み 先進モビリティ株式会社代表取締役 青木 啓二 Advanced Smart Mobility 1 先進モビリティ ( 株 ) における技術開発の取り組み 大型トラック隊列走行技術 ITS 関係府省 トラックドライバー不足対策のため 高速道路上での後続車無人隊列走行を実現する自動運転トラックを開発中
資料 3 社会資本整備審議会道路分科会基本政策部会 先進モビリティ ( 株 ) における 自動運転技術開発の取り組み 先進モビリティ株式会社代表取締役 青木 啓二 Advanced Smart Mobility 1 先進モビリティ ( 株 ) における技術開発の取り組み 大型トラック隊列走行技術 ITS 関係府省 トラックドライバー不足対策のため 高速道路上での後続車無人隊列走行を実現する自動運転トラックを開発中
STAMP/STPA を用いた 自動運転システムのリスク分析 - 高速道路での合流 - 堀雅年 * 伊藤信行 梶克彦 * 内藤克浩 * 水野忠則 * 中條直也 * * 愛知工業大学 三菱電機エンジニアリング 1
 STAMP/STPA を用いた 自動運転システムのリスク分析 - 高速道路での合流 - 堀雅年 * 伊藤信行 梶克彦 * 内藤克浩 * 水野忠則 * 中條直也 * * 愛知工業大学 三菱電機エンジニアリング 1 はじめに 近年 先進運転支援システムが発展 オートクルーズコントロール レーンキープアシスト 2020 年を目処にレベル3 自動運転車の市場化が期待 運転システムが複雑化 出典 : 官民 ITS
STAMP/STPA を用いた 自動運転システムのリスク分析 - 高速道路での合流 - 堀雅年 * 伊藤信行 梶克彦 * 内藤克浩 * 水野忠則 * 中條直也 * * 愛知工業大学 三菱電機エンジニアリング 1 はじめに 近年 先進運転支援システムが発展 オートクルーズコントロール レーンキープアシスト 2020 年を目処にレベル3 自動運転車の市場化が期待 運転システムが複雑化 出典 : 官民 ITS
地図情報の差分更新・自動図化 概要版
 戦略的イノベーション創造プログラム (SIP) 自動走行システム / / 大規模実証実験 / ダイナミックマップ / 地図情報の差分更新 自動図化 報告書 平成 29 年度報告 平成 30 年 3 月 31 日 三菱電機株式会社 目次 1. 研究開発の目的 2. 静的高精度 3D 地図データの自動図化 / 差分抽出技術の実用性検証 (2) 自動図化 / 差分抽出技術適用による改善効果検証 3. リアルタイム自動図化
戦略的イノベーション創造プログラム (SIP) 自動走行システム / / 大規模実証実験 / ダイナミックマップ / 地図情報の差分更新 自動図化 報告書 平成 29 年度報告 平成 30 年 3 月 31 日 三菱電機株式会社 目次 1. 研究開発の目的 2. 静的高精度 3D 地図データの自動図化 / 差分抽出技術の実用性検証 (2) 自動図化 / 差分抽出技術適用による改善効果検証 3. リアルタイム自動図化
屋内 3 次元 測位 + 地図 総合技術開発 現状 屋内 3 次元測位統一的な測位手法 情報交換手順がなく 共通の位置情報基盤が効率的に整備されない 技術開発 屋内外のシームレス測位の実用化 (1) 都市部での衛星測位の適用範囲拡大 (2) パブリックタグ 屋内測位の標準仕様策定 効果 3 次元屋内
 都市部での衛星測位の適用範囲拡大 (2) パブリックタグ 屋内測位の標準仕様策定 効果 3 次元屋内") 資料 4 国土交通省総合技術開発プロジェクト 3 次元地理空間情報を活用した安全 安心 快適な社会実現のための技術開発プロジェクト概要 平成 30 年 3 月 Ministry of Land, Infrastructure, Transport and Tourism Geospatial Information Authority of Japan 屋内 3 次元 測位 + 地図 総合技術開発
資料 4 国土交通省総合技術開発プロジェクト 3 次元地理空間情報を活用した安全 安心 快適な社会実現のための技術開発プロジェクト概要 平成 30 年 3 月 Ministry of Land, Infrastructure, Transport and Tourism Geospatial Information Authority of Japan 屋内 3 次元 測位 + 地図 総合技術開発
PowerPoint プレゼンテーション
 1 2017 年度ベンチマーク試験について エネルギーフロー車両試験 (2 台 ) (1) Chevrolet Malibu (2) BMW 320i エンジンユニット単体試験 (2 ユニット ) (3) Mercedes C200 (M274) (4) Audi A4 (EA888) エンジンフリクション測定 (2 ユニット ) (5) Chevrolet Malibu(Ecotec 1.5L )
1 2017 年度ベンチマーク試験について エネルギーフロー車両試験 (2 台 ) (1) Chevrolet Malibu (2) BMW 320i エンジンユニット単体試験 (2 ユニット ) (3) Mercedes C200 (M274) (4) Audi A4 (EA888) エンジンフリクション測定 (2 ユニット ) (5) Chevrolet Malibu(Ecotec 1.5L )
目次第 1 章 : 自己位置推定とは第 2 章 : 位置推定手法の種類第 3 章 :Autoware の自己位置推定システム 第 4 章 : まとめ 1. Autowareの自己位置推定 2. Autowareでの位置推定の実装 自動運転システムの自己位置推定技術 2
 version 1.1 TIER IV ACADEMY 自動運転システム構築塾 Day1 自動運転システム実践解説 自動運転システムの自己位置推定技術 目次第 1 章 : 自己位置推定とは第 2 章 : 位置推定手法の種類第 3 章 :Autoware の自己位置推定システム 第 4 章 : まとめ 1. Autowareの自己位置推定 2. Autowareでの位置推定の実装 自動運転システムの自己位置推定技術
version 1.1 TIER IV ACADEMY 自動運転システム構築塾 Day1 自動運転システム実践解説 自動運転システムの自己位置推定技術 目次第 1 章 : 自己位置推定とは第 2 章 : 位置推定手法の種類第 3 章 :Autoware の自己位置推定システム 第 4 章 : まとめ 1. Autowareの自己位置推定 2. Autowareでの位置推定の実装 自動運転システムの自己位置推定技術
事故及び渋滞対策の取り組み 福岡都市高速 北九州都市高速 福岡北九州高速道路公社
 事故及び渋滞対策の取り組み 福岡都市高速 北九州都市高速 福岡北九州高速道路公社 < 目次 > 1. 福岡 北九州都市高速道路の現状 P1 1) はじめに 2) 交通事故の現状 3) 交通渋滞の現状 4) これまでの事故 渋滞の取り組み 2. 事故 渋滞対策の取り組み P8 1) 事故 渋滞の特性と取り組み方針 2) これからの主な対策メニュー 3. 事故 渋滞に関する情報について P12 1. 福岡
事故及び渋滞対策の取り組み 福岡都市高速 北九州都市高速 福岡北九州高速道路公社 < 目次 > 1. 福岡 北九州都市高速道路の現状 P1 1) はじめに 2) 交通事故の現状 3) 交通渋滞の現状 4) これまでの事故 渋滞の取り組み 2. 事故 渋滞対策の取り組み P8 1) 事故 渋滞の特性と取り組み方針 2) これからの主な対策メニュー 3. 事故 渋滞に関する情報について P12 1. 福岡
ダイナミックマップ 2.0 コンソーシアムが高精度道路地図仕様とクエリ言語仕様を公開 名古屋大学未来社会創造機構の高田広章教授を代表者として推進している産学連携の共同研究体 ダイナミックマップ 2.0 コンソーシアム ( 略称 :DM2.0 コンソ ) は その成果物の一部である高精度道路地図仕様と
 は その成果物の一部である高精度道路地図仕様と") ダイナミックマップ 2.0 コンソーシアムが高精度道路地図仕様とクエリ言語仕様を公開 名古屋大学未来社会創造機構の高田広章教授を代表者として推進している産学連携の共同研究体 ダイナミックマップ 2.0 コンソーシアム ( 略称 :DM2.0 コンソ ) は その成果物の一部である高精度道路地図仕様とクエリ言語仕様を公開しました ダイナミックマップは 高精度道路地図データ上に 交通情報データ ( 動的情報
ダイナミックマップ 2.0 コンソーシアムが高精度道路地図仕様とクエリ言語仕様を公開 名古屋大学未来社会創造機構の高田広章教授を代表者として推進している産学連携の共同研究体 ダイナミックマップ 2.0 コンソーシアム ( 略称 :DM2.0 コンソ ) は その成果物の一部である高精度道路地図仕様とクエリ言語仕様を公開しました ダイナミックマップは 高精度道路地図データ上に 交通情報データ ( 動的情報
目 次 1. はじめに 平面線形と縦断線形を作成する 横断図から 3D モデルを作成する 標準横断をアセンブリで作成して 3D モデル ( コリドー ) を作成する... 17
 を作成する... 17") Autodesk AEC Collection トレーニングテキスト (2 次元図面からの 3D モデル作成 ) 2017 年 8 月 31 日 Ver1.0 目 次 1. はじめに... 1 2. 平面線形と縦断線形を作成する... 1 3. 横断図から 3D モデルを作成する... 11 4. 標準横断をアセンブリで作成して 3D モデル ( コリドー ) を作成する... 17 1. はじめに本テキストでは
Autodesk AEC Collection トレーニングテキスト (2 次元図面からの 3D モデル作成 ) 2017 年 8 月 31 日 Ver1.0 目 次 1. はじめに... 1 2. 平面線形と縦断線形を作成する... 1 3. 横断図から 3D モデルを作成する... 11 4. 標準横断をアセンブリで作成して 3D モデル ( コリドー ) を作成する... 17 1. はじめに本テキストでは
<4D F736F F F696E74202D E93788CA48B8694AD955C89EF5F4E6F30325F D AC48E8B8CA48B865F53438FBC
 [2] ADS-B 方式高度維持性能監視の 評価結果 監視通信領域 松永圭左, 宮崎裕己 平成 29 年 6 月 8 日第 17 回電子航法研究所研究発表会 - 発表内容 - 1. 背景 2. 高度監視システム (HMS) の概要 2.1 高度誤差の内容, 算出処理 2.2 ADS-B 方式 HMS(AHMS) の測定誤差要因 3. AHMS 試験システム 3.1 試験システム概要 3.2. データ評価結果
[2] ADS-B 方式高度維持性能監視の 評価結果 監視通信領域 松永圭左, 宮崎裕己 平成 29 年 6 月 8 日第 17 回電子航法研究所研究発表会 - 発表内容 - 1. 背景 2. 高度監視システム (HMS) の概要 2.1 高度誤差の内容, 算出処理 2.2 ADS-B 方式 HMS(AHMS) の測定誤差要因 3. AHMS 試験システム 3.1 試験システム概要 3.2. データ評価結果
ドライブレコーダーにより記録すべき情報及びドライブレコーダーの性能要件を定める告示 ( 平成 28 年 11 月 17 日国土交通省告示 1346 号 ) ( 総則 ) 第一条一般貸切旅客自動車運送事業者が 旅客自動車運送事業運輸規則 ( 昭和 31 年運輸省令第 44 号 ) 第 38 条第 1
 ( 総則 ) 第一条一般貸切旅客自動車運送事業者が 旅客自動車運送事業運輸規則 ( 昭和 31 年運輸省令第 44 号 ) 第 38 条第 1") ドライブレコーダーにより記録すべき情報及びドライブレコーダーの性能要件を定める告示 ( 平成 28 年 11 月 17 日国土交通省告示 1346 号 ) ( 総則 ) 第一条一般貸切旅客自動車運送事業者が 旅客自動車運送事業運輸規則 ( 昭和 31 年運輸省令第 44 号 ) 第 38 条第 1 項及び第 2 項の規定に基づきその事業用自動車の運転者に対して指導監督及び特別な指導 ( 以下 指導監督等
ドライブレコーダーにより記録すべき情報及びドライブレコーダーの性能要件を定める告示 ( 平成 28 年 11 月 17 日国土交通省告示 1346 号 ) ( 総則 ) 第一条一般貸切旅客自動車運送事業者が 旅客自動車運送事業運輸規則 ( 昭和 31 年運輸省令第 44 号 ) 第 38 条第 1 項及び第 2 項の規定に基づきその事業用自動車の運転者に対して指導監督及び特別な指導 ( 以下 指導監督等

経営理念 宇宙と空を活かし 安全で豊かな社会を実現します 私たちは 先導的な技術開発を行い 幅広い英知と共に生み出した成果を 人類社会に展開します 宇宙航空研究開発を通して社会への新たな価値提供のために JAXAは 2003年10月の発足以来 宇宙航空分野の基礎研究から開発 利用に至るまで一貫して行
 国立研究開発法人 経営理念 宇宙と空を活かし 安全で豊かな社会を実現します 私たちは 先導的な技術開発を行い 幅広い英知と共に生み出した成果を 人類社会に展開します 宇宙航空研究開発を通して社会への新たな価値提供のために JAXAは 2003年10月の発足以来 宇宙航空分野の基礎研究から開発 利用に至るまで一貫して行うことのできる機関として 活動を行っております 発足当初から10年は研究開発組織として技術実証による技術基盤の獲得を行い
国立研究開発法人 経営理念 宇宙と空を活かし 安全で豊かな社会を実現します 私たちは 先導的な技術開発を行い 幅広い英知と共に生み出した成果を 人類社会に展開します 宇宙航空研究開発を通して社会への新たな価値提供のために JAXAは 2003年10月の発足以来 宇宙航空分野の基礎研究から開発 利用に至るまで一貫して行うことのできる機関として 活動を行っております 発足当初から10年は研究開発組織として技術実証による技術基盤の獲得を行い

1. エージェント + とは カーナビの目的地を設定していなくても ビッグデータから今後の行先と走行ルートを 予測し ルート上の交通情報や天候 路面情報をお知らせする 先読み情報案内 サービスです 例えば 通勤 通学でいつも通る道に 渋滞や規制が発生している場合には ドライバーが早めに その情報を察
 T-Connect Apps エージェント + マニュアル 2014/08/01 作成 2018/10/31 更新 1. エージェント + とは...2 2. 基本的な使い方...2 3. お好み情報の学習...3 4. 生活圏内 / 生活圏外について...3 5. プライバシーモードについて...3 6. ご利用開始直後の配信情報について...4 7. ナビ設定時の動きについて...6 8. 情報の配信内容...7
T-Connect Apps エージェント + マニュアル 2014/08/01 作成 2018/10/31 更新 1. エージェント + とは...2 2. 基本的な使い方...2 3. お好み情報の学習...3 4. 生活圏内 / 生活圏外について...3 5. プライバシーモードについて...3 6. ご利用開始直後の配信情報について...4 7. ナビ設定時の動きについて...6 8. 情報の配信内容...7
8. ピンポイント渋滞対策について 資料 8
 8. ピンポイント渋滞対策について 資料 8 8. これまでの徳島地区における渋滞対策について 徳島地区渋滞対策協議会では 平成 24 年度に県内の 78 箇所を主要渋滞箇所に特定し 以降 渋滞要因の分析 具体的対策のとりまとめ 具体的対策の効果検証 主要渋滞箇所の見直し 等の取り組みを実施してきた 事業実施に期間を要するハード対策 効果の発現が限定的で緩やかなソフト対策 といった特徴を踏まえ 徳島地区の交通円滑化を実現するためには
8. ピンポイント渋滞対策について 資料 8 8. これまでの徳島地区における渋滞対策について 徳島地区渋滞対策協議会では 平成 24 年度に県内の 78 箇所を主要渋滞箇所に特定し 以降 渋滞要因の分析 具体的対策のとりまとめ 具体的対策の効果検証 主要渋滞箇所の見直し 等の取り組みを実施してきた 事業実施に期間を要するハード対策 効果の発現が限定的で緩やかなソフト対策 といった特徴を踏まえ 徳島地区の交通円滑化を実現するためには
Microsoft PowerPoint - Salome-Meca.pptx
 1 SALOME-MECA による CAD モデリングとメッシュ生成 秋山善克 2 本日の演習内容 3DCADの概要説明 CAD 演習 1 Primitivesによるモデル作成 CAD 演習 2 押出 回転によるモデル作成 Mesh 演習 1 メッシュ作成 Mesh 演習 2 メッシュアルゴリズムの変更 Mesh 演習 2 メッシュサイズの変更 Mesh 演習 3 メッシュの任意サイズ指定 Mesh
1 SALOME-MECA による CAD モデリングとメッシュ生成 秋山善克 2 本日の演習内容 3DCADの概要説明 CAD 演習 1 Primitivesによるモデル作成 CAD 演習 2 押出 回転によるモデル作成 Mesh 演習 1 メッシュ作成 Mesh 演習 2 メッシュアルゴリズムの変更 Mesh 演習 2 メッシュサイズの変更 Mesh 演習 3 メッシュの任意サイズ指定 Mesh
SICEセミナー 制御のためのシステム同定
 状態推定班 ロケット ( 企業共研 ) 電気自動車用リチウムイオン電池 ( 企業共研 ) モデリングと制御班 ヘリコプタ実験 エンジン制御 ( 企業共研 ) RoboCar 実験 制御実験装置 複写機の制御 ( 企業共研 ) 異常検出 基礎理論研究 モデリング Multi-domain modeling 非線形同定 JIT,PLS,PCA,... 統計的学習理論ベイジアン,RVM スパース推定 状態推定
状態推定班 ロケット ( 企業共研 ) 電気自動車用リチウムイオン電池 ( 企業共研 ) モデリングと制御班 ヘリコプタ実験 エンジン制御 ( 企業共研 ) RoboCar 実験 制御実験装置 複写機の制御 ( 企業共研 ) 異常検出 基礎理論研究 モデリング Multi-domain modeling 非線形同定 JIT,PLS,PCA,... 統計的学習理論ベイジアン,RVM スパース推定 状態推定
<4D F736F F F696E74202D20834B F D78BAD89EF5F A957A A2E B8CDD8AB B83685D>
 自然環境と農業農村の調和をめざして ~ 安全な水と土壌が健康な農作物を育て私たちの生命と地域を守ります~ 農作業用 GPS ガイダンスの概要 GIS フリーソフト Quantum GIS によるGPS データの活用方法 一般財団法人北海道農業近代化技術研究センター企画研究グループ南部雄二農業情報システムグループ大原譽丈 1. GPS の農業利用に期待する効果 1 次的効果 ~ 圃場大区画化 経営の大規模化に伴う生産性の向上
自然環境と農業農村の調和をめざして ~ 安全な水と土壌が健康な農作物を育て私たちの生命と地域を守ります~ 農作業用 GPS ガイダンスの概要 GIS フリーソフト Quantum GIS によるGPS データの活用方法 一般財団法人北海道農業近代化技術研究センター企画研究グループ南部雄二農業情報システムグループ大原譽丈 1. GPS の農業利用に期待する効果 1 次的効果 ~ 圃場大区画化 経営の大規模化に伴う生産性の向上
Microsoft PowerPoint - 00_GIKEN_MMSユーザー会用.pptx
 1.MMS-K320 による 17 条申請に関する精度検証について 2.IP-S2 Lite について ( 紹介 ) 1 1.MMS-K320 による 17 条申請に関する精度検証について 平成 25 年 7 月 MMS-K320 導入 2 1 自社作業マニュアルの作成 作業全体フロー マニュアルに加え 計測経験からのノウハウを加味した計測手順書を用いて高精度なデータ取得を目指しています 初期化作業場所開始時刻方位角検定初期化走行
1.MMS-K320 による 17 条申請に関する精度検証について 2.IP-S2 Lite について ( 紹介 ) 1 1.MMS-K320 による 17 条申請に関する精度検証について 平成 25 年 7 月 MMS-K320 導入 2 1 自社作業マニュアルの作成 作業全体フロー マニュアルに加え 計測経験からのノウハウを加味した計測手順書を用いて高精度なデータ取得を目指しています 初期化作業場所開始時刻方位角検定初期化走行
国交省様向け Web版道路ビデオGISのご紹介
 国土交通省様向け道路ビデオ GIS Web 版道路ビデオ GIS とは お手元に現場を! 全周囲 CV 映像 地図 / 図面 WebGIS GIS DB 現実世界をそのままキャプチャー 属性情報 上下カメラ 2 台の全周囲 CV 映像による道路現況確認システム 全周囲 CV 映像と地図 / 図面 属性情報がリンクした WebGIS システム 道路及び周辺構造物を電子化して一元管理する DB システム
国土交通省様向け道路ビデオ GIS Web 版道路ビデオ GIS とは お手元に現場を! 全周囲 CV 映像 地図 / 図面 WebGIS GIS DB 現実世界をそのままキャプチャー 属性情報 上下カメラ 2 台の全周囲 CV 映像による道路現況確認システム 全周囲 CV 映像と地図 / 図面 属性情報がリンクした WebGIS システム 道路及び周辺構造物を電子化して一元管理する DB システム

HDMI 機器を使う 本機にポータブルビデオなどの外部映像機器を接続すると その映像を本機の AV ソース (HDMI) として見ることができます 本機に外部映像機器を接続するには 別売の HDMI 入力ケーブルと市販の HDMIケーブルが必要です 映像入力の設定をする 1 を押し 設定 編集 -
 として見ることができます 本機に外部映像機器を接続するには 別売の HDMI 入力ケーブルと市販の HDMIケーブルが必要です 映像入力の設定をする 1 を押し 設定 編集 -") AUX を使う (MP313D-W のみ ) 本機正面の AUX 端子にポータブルオーディオプレーヤーなどの外部音声機器を接続すると その音声を本機の AV ソース (AUX) として聞くことができます 本機正面の AUX 端子に外部機器を接続するには 別売の音声ケーブル (φ3.5 mmステレオ音声用 ) が必要です 外部機器の音声を聞く 1 音声ケーブル (3.5φ) を本機の AUX 端子に接続する
AUX を使う (MP313D-W のみ ) 本機正面の AUX 端子にポータブルオーディオプレーヤーなどの外部音声機器を接続すると その音声を本機の AV ソース (AUX) として聞くことができます 本機正面の AUX 端子に外部機器を接続するには 別売の音声ケーブル (φ3.5 mmステレオ音声用 ) が必要です 外部機器の音声を聞く 1 音声ケーブル (3.5φ) を本機の AUX 端子に接続する
untitled
 1 2 1 1 2 3 1 2 1 2 4 0,76 4 5 0,1 1970 1974 1993 6 7 8 9 4 1920 10 1960 1971 ( ) IC 11 1980 1990 1992 1987 0,269 1996 0,023 2001 2002 1996 1996 1 98 27 70 1 3 7 12 2003 63 2 13 3 5 1 13 5 14 2 14 2 14
1 2 1 1 2 3 1 2 1 2 4 0,76 4 5 0,1 1970 1974 1993 6 7 8 9 4 1920 10 1960 1971 ( ) IC 11 1980 1990 1992 1987 0,269 1996 0,023 2001 2002 1996 1996 1 98 27 70 1 3 7 12 2003 63 2 13 3 5 1 13 5 14 2 14 2 14
株式会社ビィーシステム 概要資料
 株式会社ビィーシステム 概要資料 目次 1. 概要... 3 2.ScanSurveyZでできること... 4~6 3. 標準機能...7~12 4. その他の機能... 13~14 5. オプション... 15~19 6. 仕様... 20~21 パワフル スピーディー エクスペリエンス GIS CIM に特化した 3D 点群処理システム パワーとスピード ScanSurveyZ は新たな 3D
株式会社ビィーシステム 概要資料 目次 1. 概要... 3 2.ScanSurveyZでできること... 4~6 3. 標準機能...7~12 4. その他の機能... 13~14 5. オプション... 15~19 6. 仕様... 20~21 パワフル スピーディー エクスペリエンス GIS CIM に特化した 3D 点群処理システム パワーとスピード ScanSurveyZ は新たな 3D
選定技術の テーマ Ⅰ No.1 ウェッジハンプ企業名大成ロテック ( 株 ) 舗装面にくさび型の非対称の段差 ( ウェッジハンプ ) を設置し 衝撃により逆走車両に注意喚起するもの 全景 設置イメージ図 逆走車両に衝撃で注意喚起を行い 順行車両には走行に支障の無い形状としている 段差部分には超高強
 舗装面にくさび型の非対称の段差 ( ウェッジハンプ ) を設置し 衝撃により逆走車両に注意喚起するもの 全景 設置イメージ図 逆走車両に衝撃で注意喚起を行い 順行車両には走行に支障の無い形状としている 段差部分には超高強") 選定技術の 別紙 3 選定技術の テーマ Ⅰ No.1 ウェッジハンプ企業名大成ロテック ( 株 ) 舗装面にくさび型の非対称の段差 ( ウェッジハンプ ) を設置し 衝撃により逆走車両に注意喚起するもの 全景 設置イメージ図 逆走車両に衝撃で注意喚起を行い 順行車両には走行に支障の無い形状としている 段差部分には超高強度繊維補強コンクリートを使用し 大型車が走行しても衝突に十分な強度有している 選定技術の
選定技術の 別紙 3 選定技術の テーマ Ⅰ No.1 ウェッジハンプ企業名大成ロテック ( 株 ) 舗装面にくさび型の非対称の段差 ( ウェッジハンプ ) を設置し 衝撃により逆走車両に注意喚起するもの 全景 設置イメージ図 逆走車両に衝撃で注意喚起を行い 順行車両には走行に支障の無い形状としている 段差部分には超高強度繊維補強コンクリートを使用し 大型車が走行しても衝突に十分な強度有している 選定技術の
PowerPoint プレゼンテーション
 京都学園大学 チーム MSK 広大な市場へようこそ みてる君 安全をより確実なものに! INDEX 1. 事前調査 2. 京阪京都交通 での調査結果 3. バス事業者のニーズ 4. 事故の予兆データとは? 5. 商品 ビジネスの概要 6. 視線検出技術概要 7. 視線検出技術比較 8. 既存商品 9. 類似製品および技術 10. 車載系との比較 11. 新製品の概要 12. みてる君の構成 13.
京都学園大学 チーム MSK 広大な市場へようこそ みてる君 安全をより確実なものに! INDEX 1. 事前調査 2. 京阪京都交通 での調査結果 3. バス事業者のニーズ 4. 事故の予兆データとは? 5. 商品 ビジネスの概要 6. 視線検出技術概要 7. 視線検出技術比較 8. 既存商品 9. 類似製品および技術 10. 車載系との比較 11. 新製品の概要 12. みてる君の構成 13.