九州大学学術情報リポジトリ Kyushu University Institutional Repository A Study on the Classification of Moving Units for Facial Expression Robot : Proposal of Movin
|
|
|
- ゆゆこ おまた
- 4 years ago
- Views:
Transcription
1 九州大学学術情報リポジトリ Kyushu University Institutional Repository A Study on the Classification of Moving Units for Facial Expression Robot : Proposal of Moving-Unit for Animatronics 權, 泰錫九州大学大学院芸術工学研究院 出版情報 : 九州大学, 2008, 博士 ( 芸術工学 ), 課程博士バージョン : 権利関係 :
2 109

")
")
















3 映像で使う特殊効果の例 区分映画の事例 コンピュータグラフィックス (Computer Graphics) ミニチュアエフェクツ (Miniature Effect) Transformer (2007) コンピュータとグラフィック周辺装置を用いて画像や映像を作成したり処理したりする技術 建物などのミニチュアを製作し 実物のように見せる技法 Spider-man 3 (2007) 特殊メイクアップ (Special Make-Up) ラテックス シリコーン等の人工物を俳優の顔などに付着させ造形を行う技術 The Lord of the Rings 3 : The Return of the King(2003) アニマトロニクス (Animatronics) 動作を表現するために電気や電子制御方式を用いた一種のロボット Alien (1986) マットペインティング (Matte Painting) 精巧な絵画を背景として利用する技法 Indiana Jones And The Temple Of Doom (1984) 爆破や人為的な火を作って演出する技法 火攻 (Pyrotechnics) Ladder49 (2004) モーションコントロール (Motion Control) 自動制御を利用し定められた軌跡を撮影するモーションコントロールカメラや動揺制御装置を利用し撮影する技法 King Kong (2005) ワイヤアクション (Wire Action) 細くて堅固なワイヤに俳優の体を縛り動きを演出する方法 無影劍 (2005) クロマキー (Chroma Key) 他のイメージや場面等と合成する目的で単色 (Blue, Green Screen など ) の背景をおいて撮影する技法 300 (2006)
4 アニマトロニクスとロボットの歴史年表 年代フィクション海外日本 BC8c 黄金の美女 变事 イーリアス BC3c 青銅巨人ターレス ギリシャ神話 BC1c ギリシャのヘロンが流体機構考案アラビア文献 9c イスラム圏にて Automata がつくられる 12c 仏教説話集 撰集抄 1434 年 朝鮮 蔣英實 自擊漏 という自動水時計開発 1626 年 竹田からくり人形 竹田近江大坂道頓堀紐 18c ヨーロッパにて Automata が流行 1796 年細川頼直 からくり図彙 刊行 19c 1907 年 1920 年代 1930 年代 1940 年代 1950 年年代 1960 年年代 1970 年年代 1980 年年代 1886 年小説 未来のイヴ に美女ロ 1839 年バベッジ コンピューターの前進 機械ボット登場式計算機開発 1893 年ムーア 蒸気人間 開発 Rescued from an Eagle's Nest) Animatronics が映画で最初に登場 1920 年カレル チャペック戯曲の中 1927 年アメリカ ウェスティングハウス社がロでロボットという言葉を創造ボット第 1 号 テレボックス を発表 1924 年映画 Aelita:The revolt of 1927 年演説ロボット エリック 発表 the Robots にロボットの制御登場 1927 年映画 メトロポリス に人間型ロボット マリア登場 1933 年映画 Kingkong 以後 ロボットの制御技術が発達 1932 年物理学者メイ ロボットアルファ 発表 1934 年サンフランシスコ万博で歩くロボット ウィーリー 発表 1945 年数学者ノイマン コンピューターの基礎 ノイマン型コンピュータ 開発 1948 年ウィーナー サイバネティック理論 ( 生物と機械を結ぶシステム ) 提唱 1946 年ペンシルベニア大学 世界初大型コンピューター ENIAC 完成 1950 年アイザック アシモフ SF 小 1950 年チューリングが 人工知能 を提唱説 われはロボット で ロ 1954 年デボル社が記憶再生ロボット特許ボット3 原則 を提唱 1957 年ソ連が世界初の人工衛星 スプートニク 1951 年手塚治虫 鉄腕アトム 連載 1 号 打ち上げ成功 1951 年映画 地球が静止する日 1958 年米国コンソリュデェーテッド コントロで巨大ロボットが登場ール社が産業用ロボット発表 1952 年バーナード ウルフがSF 小説 リムボー 発表 1956 年米国映画 禁断の惑星 に万能ロボット ロビー 登場 1959 年ロバート A ハイラインが小説 宇宙の戦士 発表 1928 年西村真琴日本初のロボット 学天則 製作発表 1959 年東京工業森政弘研究室が 人工の手 1 号機を製造 1968 年映画 2001 年宇宙の旅 公開 1960 年生物の動きや機能をロボットに取り入れ 1967 年米国から産業用ロボット輸入 国産ロボる学問 バイオニクス 登場ット製造開始 ( ロボット第 1 世代 ) 1960 年アメリカ世界初の産業用ロボット ユニメート 登場 1961 年 Audio-Animatronics という言葉がディズニーによって初めて商業的に使用 1963 年 The Enchanted Tiki Room:Disney land アニマトロニクス使用 1964 年 Audio-Animatronics 商標権登録 1966 年 GE 社 パワーアシスト機械 ハーディマン 開発 1967 年 Audio-Animatronics 商標登録 1970 年漫画 ドラえもん ( 藤子不二雄 ) 連載開始 1972 年永井豪 マジンガー Z 連載 1975 年映画 JAWS 公開 1977 年映画 スターウォーズ R2D2 C3PIO などのロボットが登場 1979 年映画 Buck Rogers 公開 1979 年映画 Alien 公開 1980 年映画 Saturn 3 公開 1982 年映画 Android 公開 1982 年映画 ブレードランナー 公開 1984 年映画 ターミネーター 公開 1984 年映画 Runaway 公開 1986 年映画 Short Circuit 公開 1987 年映画 Robocop 公開 1970 年フロッピーディスク考案 1977 年 スターウォーズ Workshop で Bruce Sharman が Animatronics 分野を提案 1983 年クルーガー コンピューターアート研究で人工現実感概念を提唱 1984 年アメリカ 自律地上移動ロボット 研究スタート 1989 年 W インダストリー社 バーチャリティー 商品化 1989 年アメリカ MIT メディア ラボ REGO/ LOGOPROJECT スタート CONTINUED ON NEXT PAGE 1970 年早稲田大学生物工学研究グループ ワボットプロジェクト 開始 1970 年三菱重工業産業用ロボット発売 1971 年産業用ロボット懇談会 ( 現 日本ロボット工業会 ) 発足 1973 年早稲田大学 WABOT-1 開発 1979 年富士電機 自動外観検査ロボット発表 1979 年日立製作所 プロセスロボット 発表 ( ロボット第 2 世代 ) 1980 年通商産業省 ロボット普及に乗り出し ロボット普及元年 に 1983 年日本ロボット工業会設立 1984 年早稲田大学 世界初二足歩行ロボット開発 1984 年通産省 極限作業ロボット 開発開始 1985 年ミュージシャンロボット WABOT-2 登場 1986 年ホンダ ロボット開発スタート ( ロボット第 3 世代 ) 日本製が世界のロボットの 60%
5 年 ~ 1995 年 1996 年 ~ 1999 年 2000 年 2001 年 2002 年 2003 年 2004 年 2005 年 2006 年 1990 年映画 ジュラシック パーク 1994 年アメリカ ネットスケープ コミュニケ 1991 年映画 ターミネーター 2 公開ーションズ ネットスケープナビゲー 1991 年映画 Eve Of Destruction ター 発売 1994 年映画 True Lies Harrierに 1995 年アメリカ マイクロソフト社 インター Motion Control System を適用 1995 年映画 ベイブ 公開 1995 年映画 Judge Dredd 公開 1998 年映画 Lost In Space 公開 1996 年映画 ピノキオ 公開 1996 年映画 Jumanji 公開 1996 年映画 ドラゴンハート 実物大ドラゴン製作 1997 年映画 Jurassic Park:The Lost World 恐竜アニマトロニクス 1999 年映画 アナコンダ 巨大のア ネットエクスプローラー 発売 1996 年アメリカ ファービー誕生 一大ブーム 1997 年アメリカ IBM 社スーパーコンピュータ Deep blue チェス世界チャンピオンに勝利 1997 年 NASAがロボットによる火星無人探査成功 1998 年第 2 回ロボカップ世界大会 フランスにて開催 1999 年 Daimler Chrysler 社 クレバー 開発 ナコンダのアニマトロニクス 1999 年第 3 回ロボカップ世界大会スウェーデン制作 1999 年映画 アンドリュー NDR-114 公開 1992 年早稲田大学 Humanoid Project 発足 1993 年ホンダ 二足歩行ロボット P1 完成 1994 年ソニー ロボット研究グループ発足 1995 年総合警備保障 ガードロボ 発売 1996 年早稲田大学 二足歩行ロボット WABIAN 1996 年ホンダ 二足歩行ロボット P2 公表 1997 年ホンダ 二足歩行ロボット P3 完成 1997 年早稲田大学 Hadaly-2 開発 1997 年第 1 回ロボカップ世界大会名古屋で開催 1998 年 NEC パーソナルロボット R100 開発 1999 年ソニー AIBO 発売 映画 X-Men 公開 ジョーダン ポラック コンピューターにロボ ソニー AIBO2 世代目発売 SDR-3X 発表ットを作らせる研究結果発表 ホンダ ASIMO 発表 韓国ダジンシステム社 二足歩行 LUCY 開発 北野共生システムプロジェクト PINO 発表 第 4 回ロボカップ世界大会オーストラリアで開催 テムザック 遠隔操作ロボット テムザック04 中国 人間型ロボット 先行者 発表災害救助ロボット テムザックT-5 発表 映画 A.I. 公開 映画 Jurassic Park3 公開 映画 Harry Potter and the Sorcerer's Stone 公開 映画 Lord Of The Rings:The Fellowship Of The Rings 公開 映画 Cube 公開 映画 Spider-Man 公開 映画 Harry Potter and the Chamber of Secrets 公開 映画 The Lord Of The Rings: The Two Towers 公開 2003 年 4 月 7 日 アトムの誕生日 映画 Terminator 3 - Rise Of The Machines 公開 TV シリーズ Battlestar Galactica 公開 映画 アイ, ロボット 公開 映画 The Stepford Wives 公開 映画 Sky Captain And The World Of Tomorrow 公開 映画 レーシング ストライプス 公開 3D アニメ映画 Robots 公開 映画 The Hichhiker's Guide To The Galaxy 公開 映画 Fantastic Four 公開 第 5 回ロボカップ世界大会シアトルにて開催 ソニー AIBO3 代目 ラッテ & マカロン 4 代目 ERS-220 発売 北野共生プロジェクト 動きを追求したロボット モルフ を開発 オムロン エンターテインメントロボット ネコロ 発表 第 6 回ロボカップ世界大会日韓共催 経済産業省 ロボット開発用基盤ソフトウェア ( ロボット用ミドルウェア ) 開発開始 日本科学未来館にて二足歩行ロボット格闘競技会 ROBO-ONE 開催 産業技術総合研究所 セラピー効果があるメンタルコミットロボット パロ テムザックと三洋電機共同開発 家庭用ユーティリティーロボット 番竜 早稲田大学 WE-3RV 開発 ERATO 北野共生システムプロジェクト [morph3] 川田工業 HRP-2(Promet) 三菱重工のアニマトロニクス 泳ぐシーラカンス 開発 ユジンロボティクス アイロビ ヴィストン 自律型二足歩行ロボット VisiON アメリカ国防省主催のロボットの操縦による自動車レース開催 ( アメリカのモハべ砂漠 ) 韓国の KAIST HUBO 開発 映画 Daft Punk's Electroma 公開 ROBOT WORLD 2006 韓国のソウルにて開催 映画 X-Man (The Last Stand) 公開 VFX Asia 2006 Malaysia にて開催 Visual Effects, Animatronics & Animation Event ZMP ROBODEX2003 で PINO ver.2 展示 テムザック 警備 監視等実用ロボット T62K ソニー SDR-4X II( 後の QRIO) 早稲田大学とテムザック共同開発 WL-16 三菱 コミュニケーションロボット wakamaru 富士通オートメーション HOAP-2 ロボス KOZOH-II 開発 ZMP モバイルヒューマノイド nuvo トヨタ トヨタ パートナーロボット ロボガレージ クロイノ テムザック 家庭用留守番ロボット ロボリア レスキューロボット 援竜 巡回警備ロボット アルテミス 2005 国際ロボット展 (irex 2005) 秋葉原にて開催 アキバ ロボット文化祭 2005 開催 NEC ロボット開発センター パーソナルロボット PaPeRo( パペロ ) 榊原機械 搭乗型 2 足歩行 LAND WALKER 開発 ALSOK 新型警備ロボット ガードロボ D1 富士通オートメーション 研究開発用小型人間型二足歩行ロボット HOAP-3 村田製作所 止まっても倒れない自動車型ロボット ムラタセイサク君 開発 テムザック 屋外対応警備案内ロボット ムジロー リグリオ ホンダ 受付 デリバリー対応 時速 6km の走行能力を持つ 新型 ASIMO 富士通サービスロボット enon 発表 2007 年 映画 トランスフォーマー 公開 韓国の KAIST Albert HUBO 発表 アニマトロニクス展 IT'S ALIVE! 東京にて開催 2008 年 映画 アイアンマン 公開 映画 Wall-E 公開 大ロボット博 国立科学博物館にて開催
 AU Description Facial muscle Example image AU Description Facial muscle Example image 1 2 Inner Brow Raiser Outer Brow Raiser 4 Brow")




6 FACS - Facial Action Coding System (Ekman and Friesen 1978) AU Description Facial muscle Example image AU Description Facial muscle Example image 1 2 Inner Brow Raiser Outer Brow Raiser 4 Brow Lowerer 5 Upper Lid Raiser 6 Cheek Raiser Frontalis, pars medialis Frontalis, pars lateralis Corrugator supercilii, Depressor supercilii Levator palpebrae superioris Orbicularis oculi, pars orbitalis 26 Jaw Drop 27 Mouth Stretch Masseter, relaxed Temporalis and internal Pterygoid Pterygoids, Digastric 28 Lip Suck Orbicularis oris 41 Lid droop** Relaxation of Levator palpebrae superioris 42 Slit Orbicularis oculi 7 Lid Tightener 9 Nose Wrinkler 10 Upper Lip Raiser 11 Nasolabial Deepener Orbicularis oculi, pars palpebralis Levator labii superioris alaquae nasi Levator labii superioris 43 Eyes Closed 44 Squint 45 Blink Zygomaticus minor 46 Wink Relaxation of Levator palpe-brae superioris; Orbicularis oculi, pars palpebralis Orbicularis oculi, pars palpebralis Relaxation of Levator palpe-brae superioris; Orbicularis oculi, pars palpebralis Relaxation of Levator palpe-brae superioris; Orbicularis oculi, pars palpebralis 12 Lip Corner Puller Zygomaticus major 51 Head turn left 13 Cheek Puffer Levator anguli oris (a.k.a. Caninus) 52 Head turn right 14 Dimpler Buccinator 53 Head up 15 Lip Corner Depressor Depressor anguli oris (a.k.a. Triangularis) 54 Head down 16 Lower Lip Depressor Depressor labii inferioris 55 Head tilt left 17 Chin Raiser Mentalis 56 Head tilt right 18 Lip Puckerer Incisivii labii superioris and Incisivii labii inferioris 57 Head forward 20 Lip stretcher Risorius w/ platysma 58 Head back 22 Lip Funneler Orbicularis oris 61 Eyes turn left 23 Lip Tightener Orbicularis oris 62 Eyes turn right 24 Lip Pressor Orbicularis oris 63 Eyes up 25 Lips part** Depressor labii inferioris or relaxati on of Mentalis, or Orb icularis oris 64 Eyes down * AUs (Action Units) underlined bold are currently recognizable by AFA System when occurring alone or cooccurring. ** The criteria has changed for this AU, that is, AU 25, 26 and 27 are now coded according to criteria of intensity (25A-E) and also AU 41, 42 and 43 are now coded according to criteria of intensity
 ウレタンゴムを利用し 原形型取りと内型制作 (3) 内部骨格と内装メカニズムの制作 (4) スキンシリコーン素材による成型 (5) 組み立て 外皮のつなぎ目等の修正 (6) ペイント 仕上げ (7)")
 から制作をおこなった 実際モデル アニマトロニクスによる表現 図 4-1.")
7 4. MU を用いたアニマトロニクスの制作 MUを用いて顔ロボットを制作し MUの活用性を検討した 40 才の韓国人の男性をモデルとしてアニマトロニクスの制作をおこなった 制作の流れは以下である ( 図 4-2を參照 ) (1) 油粘土彫刻による原形制作 (2) ウレタンゴムを利用し 原形型取りと内型制作 (3) 内部骨格と内装メカニズムの制作 (4) スキンシリコーン素材による成型 (5) 組み立て 外皮のつなぎ目等の修正 (6) ペイント 仕上げ (7) プログラミング図 4-3の骨格にMUを適用し 各 MUとスキンシリコーンのムービングポイントの位置を合わせてスキンシリコーンを被せ 図 4-1のようにアニマトロニクスで表現した 表情表現の目的のため 制作に3ヶ月以上要する眉毛や髪の毛の表現は排除した 骨格のフレームや口腔構造等は FRP(Fiberglass Reinforced Plastics) から制作をおこなった 実際モデル アニマトロニクスによる表現 図 4-1. スキンシリコーンを被せたアニマトロニクス 114















8 1 2 3 寸法測定や原型制作 ムービングポイントの位置や動作の測定 分析 各種鋳型の製作及びスキン シリコーンによる成型作業 MU による内装メカニズムの制作 塗装による細部描写 組み立て コントローラ製作やプログラミング 7 8 アニマトロニクス 人間モデル 眉毛 ひげ 髪の毛等の表現 人間モデルとアニマトロニクスの比較 図 4-2. 顔ロボットの制作過程 115
 で制作し アクチュエータとスキンシリコーンの間はケーブルを用いて連結した 目玉はシリコーン プラスチックを用いて制作した 目玉の大きさは 25 mm 虹彩の大きさは 12 mm 眼球の回転の中心は角膜の表面から深さ 13.")
9 mub 眉毛及び眉間の動き muar 瞼の動き mual 瞼の動き mue 目玉の左 右の動き mugl 口角を引き上げる muf 目玉の上 下の動き muc 上唇の動き mud オトガイの皮膚を引き上げ 皺を作る mugr 口角を引き上げる muj 顎を開ける 図 4-3. 動きを担当する MU 機械的な付属品はジュラルミン (Duralumin) で制作し アクチュエータとスキンシリコーンの間はケーブルを用いて連結した 目玉はシリコーン プラスチックを用いて制作した 目玉の大きさは 25 mm 虹彩の大きさは 12 mm 眼球の回転の中心は角膜の表面から深さ 13.5 mm 等にして 人間の平均寸法を適用した [35] 舌と皮膚はスキン シリコーンを用いてほくろのみならず しわや毛穴まで表現し 触れても人間の肌のように感じられるように制作を行った スキン シリコーンの厚さは人間のように瞼部分の1 mm 顔面部の平均 2 mm 以外は平均 4 mmになるようにした 韓国人の平均 顔の軟組織の厚さに対する資料はハンスンホ等 [36] の超音波を利用した間接計測と ギムヒジン等 [37], [38] による直接計測資料を参考にした 筋肉を担当するアクチュエータとしては6 VのRCサーボモーターを用い 図 4-3のように顔を表情表現するためにmuB, mue, muf, muc, mud, mujは各 1 個ずつ mua, mugは各 2 個ずつにし 重要な10 個のMUを選んで適用した アニマトロニクスの制御はRoboBasic2.5を用いてプログラミングし RS232C 方 116
10 式でコンピュータと伝送を行った この顔ロボットの仕様を表 4-1に示す 顔ロボットは8 個のMUグループとして 10 個のMU( アクチュエータ ) だけでFAC Sの58 個のAU 中 30 個以上のAUが表現できることが観察された また 図 4-4 のようにAU 以外の様々な表情や微妙な表情まで表現することができ より効率的な表現が可能であることを示すことができた 表 4-1. 顔ロボットの仕様 区分 仕様 サイズ 450( 高さ ) 265( 幅 ) 215( 奥行き )mm 重量 3.9 kg 頭部サイズ 245( 高さ ) 175( 幅 ) 215( 奥行き )mm コントローラ ATMEL 89C4051 MPU メモリ Prochips 24LC32 eeprom アクチュエータ DC 6 V サーボモータ10 個 電源 AC 100 V, 50/60 Hz, 57 VA 制御部電源 DC 5 V, 4A (AC 110 V アダプターキット ) モータ部電源 DC 6 V, 4A (AC 110 V アダプターキット ) PC 接続形式 RS232C 入力端子 3.5 mm AUXジャック RS232C 入力ジャック 出力 120 W, 4 Ω, 80 Hz ~ 20 KHz スピーカー 1 個 プログラミング RoboBasic 皮 スキン シリコーン ( ショア硬度 10, 粘度 23,000 cps, 引き裂き強度 102 pli, 破壊伸び 1000%) 117
 mu(a190+b180+f150+c70+d70) mu(g180+j140) 図 4-4.")
11 眠気 嘲笑 微笑 mua10 mugl185 mu(a70+g140) あくび キス ウィンク mu(a10+j170) mu(c20+d20) muar10 忍耐 無関心 笑い mu(a90+j50) mu(a190+b180+f150+c70+d70) mu(g180+j140) 図 4-4. B モデルによる感情表現の応用の例 118
![5. 口角筋軸についての考察 口角筋軸 (Modiolus anguli oris) とは口周辺の表情筋が集まっている部分であり 表情の変化にとって重要な役割を担う 口角筋軸に集まっている筋肉は10 本の筋肉で構成されている また 口角筋軸がある口周辺の筋肉は 三層からなる浅層部と一つの深層部の合計四つの層で構成される [39] 表面部分の第一層は浅い部分で構成されている筋肉として 口角下制筋](/docs-images/99/140888318/images/12-0.jpg "(depressor anguli oris m.) 口輪筋(orbicularis oris m.) 大頬骨筋(zygomaticus major m.) がある 二番目の層は広頚筋 (platysma m.) 笑筋(risorius m.) 小頬骨筋 (zygomaticus minor m.) 上唇鼻翼挙筋(levator labii superior alaeque nasi m.")
12 5. 口角筋軸についての考察 口角筋軸 (Modiolus anguli oris) とは口周辺の表情筋が集まっている部分であり 表情の変化にとって重要な役割を担う 口角筋軸に集まっている筋肉は10 本の筋肉で構成されている また 口角筋軸がある口周辺の筋肉は 三層からなる浅層部と一つの深層部の合計四つの層で構成される [39] 表面部分の第一層は浅い部分で構成されている筋肉として 口角下制筋 (depressor anguli oris m.) 口輪筋(orbicularis oris m.) 大頬骨筋(zygomaticus major m.) がある 二番目の層は広頚筋 (platysma m.) 笑筋(risorius m.) 小頬骨筋 (zygomaticus minor m.) 上唇鼻翼挙筋(levator labii superior alaeque nasi m.) と大頬骨筋の深い部分で構成されている 三番目の層には上唇挙筋 (levator labii superioris m.) と口輪筋がある 一番深い四番目の層は口角挙筋 ( levator anguli oris m. ) オトガイ筋 ( mentalis m. ) 頬筋 (buccinator m.) で構成されている [40] 口角の周辺である口角筋軸の位置と周辺の構造に対する理解は 解剖学的な側面のみならず 歯科補綴学 言語フィジオロジーを必要とし 人の顔表情を基盤とするアニメーションやコンピューターシミュレーションに必要不可欠な要素である 5-1. 口角筋軸の解剖学的な位置 図 5-1 は口角筋軸の周辺の顔筋肉が集まって合される部位を 口角連結線 LAO Zmi Zmj OOr R DAO A 型 B 型 C 型 OOr: 口輪筋 (orbicularis oris m.) DAO: 口角下制筋 (depressor anguli oris m.) Zmj: 大頬骨筋 (zygomaticus major m.) Zmi: 小頬骨筋 (zygomaticus minor m.) R: 笑筋 (risorius m.) LAO: 口角挙筋 (levator anguli oris muscle m.) ( 出典 :Kyung-Seok Hu,2005)[46] 図 5-1. 口角筋軸の類型 119
![(intercheilion horizontal line 両方の口角点( ケイリオン [ch]:cheilion 口角で上赤唇と下赤唇の外端が移行する点 ) を連結した水平線 ) を基準にして 口角筋軸の高さにより 以下の三つの類型に分類したものである [40] A 型 : 口角筋軸が口角連結線上の口角点の横側に位する場合 B 型 : 口角筋軸が口角連結線より上側に位する場合 C 型 :](/docs-images/99/140888318/images/13-0.jpg "口角筋軸が口角連結線より下側に位する場合口角筋軸は人種 国 個人によって位置が違い 特に表 5-1のように韓国人や日本人のような黄色人種にはC 型が 黒人はA 型が 白人はB 型が多い また 韓国人の口角筋軸の位置は図 2-2のように 左側と右側で同じように 口角点の横側 10~20 mm 内と口角連結線の下方面 0~10 mm 内の部分に位する場合が一番多い [40] 表 5-1.")
13 (intercheilion horizontal line 両方の口角点( ケイリオン [ch]:cheilion 口角で上赤唇と下赤唇の外端が移行する点 ) を連結した水平線 ) を基準にして 口角筋軸の高さにより 以下の三つの類型に分類したものである [40] A 型 : 口角筋軸が口角連結線上の口角点の横側に位する場合 B 型 : 口角筋軸が口角連結線より上側に位する場合 C 型 : 口角筋軸が口角連結線より下側に位する場合口角筋軸は人種 国 個人によって位置が違い 特に表 5-1のように韓国人や日本人のような黄色人種にはC 型が 黒人はA 型が 白人はB 型が多い また 韓国人の口角筋軸の位置は図 2-2のように 左側と右側で同じように 口角点の横側 10~20 mm 内と口角連結線の下方面 0~10 mm 内の部分に位する場合が一番多い [40] 表 5-1. 口角筋軸の類型の比較 (Kyung-Seok Hu,2005)[40] Race Korean (n = 77) (Kyung-Seok Hu, 2005)[40] Japanese (n = 193) (Shimada & Gasser, 1989)[41] Caucasian (n = 86) (Shimada & Gasser, 1989)[41] African Negroid (n = 82) (Greyling & Meiring, 1992)[42] Type A B C 20 (26.0%) 12 (15.6%) 45 (58.4%) 29 (15.0%) 77 (39.9%) 87 (45.1%) 17 (19.8%) 38 (44.2%) 31 (36.0%) 56 (68.3%) 17 (20.8%) 9 (10.9%) Numerical is the number of samples observed. (Kyung-Seok Hu,2005)[45] 図 5-2. 韓国人の口角筋軸の位置 (dot: center of the modiolus, unit: mm) 120
![5-2. 笑筋の形態分類図 5-3のように口角筋軸に附着された顔筋肉の中で 笑筋は筋肉の方向によって五つのタイプに分類される [40] I 型 : 三角型笑筋 (triangularis-risorius, TR) 笑筋が口角下制筋の方へ斜め下に向き さらに広頚筋の方へ折れ その幅が広がっていく場合 II 型 : 広頚型笑筋 (platysma-risorius, PR)](/docs-images/99/140888318/images/14-0.jpg "笑筋が横側の広頚筋の方へ水平に広がっていく場合 III 型 : 頬骨型笑筋 (zygomaticus-risorius, ZR) 笑筋が大頬骨筋の方へ斜め上に広がっていく場合 IV 型 : 混合型 (PR±ZR, PR±TR, ZR±TR) I, II, III 型の筋肉形態が二つ存在する場合であり 頬骨ではなく 肌下組職や他の筋肉から笑肉ができている V 型 : ない場合 (none)")
14 5-2. 笑筋の形態分類図 5-3のように口角筋軸に附着された顔筋肉の中で 笑筋は筋肉の方向によって五つのタイプに分類される [40] I 型 : 三角型笑筋 (triangularis-risorius, TR) 笑筋が口角下制筋の方へ斜め下に向き さらに広頚筋の方へ折れ その幅が広がっていく場合 II 型 : 広頚型笑筋 (platysma-risorius, PR) 笑筋が横側の広頚筋の方へ水平に広がっていく場合 III 型 : 頬骨型笑筋 (zygomaticus-risorius, ZR) 笑筋が大頬骨筋の方へ斜め上に広がっていく場合 IV 型 : 混合型 (PR±ZR, PR±TR, ZR±TR) I, II, III 型の筋肉形態が二つ存在する場合であり 頬骨ではなく 肌下組職や他の筋肉から笑肉ができている V 型 : ない場合 (none) 笑筋が存在しない場合また 韓国人の笑筋の形態分類はI 型が40.2% II 型が39.0% III 型が2.6% V 型が5.2% であり IV 型は13.0% であり そのうちPR±ZRが6.5% TR±ZRが 3.9% TR±PRは2.6% である [40] Zmi Zmj OOr ZR ZR TR PR TR DAO Pl Ⅰ 型 Ⅱ 型 Ⅲ 型 Ⅳ 型 Ⅴ 型 OOr: 口輪筋 (orbicularis oris m.) DAO: 口角下制筋 (depressor anguli oris m.) Zmj: 大頬骨筋 (zygomaticus major m.) Zmi: 小頬骨筋 (zygomaticus minor m.) R: 笑筋 (risorius m.) Pl: 広頚筋 (platysma m.) ( 出典 :Kyung-Seok Hu,2005)[45] 図 5-3. 笑筋の形態分類 121
 にマーカーを付け 各マーカーの動きを2 次元 3 次元空間での数値データとして計測を行う分析方法である モーション トラッキングには 計測したいポイントに反射マーカーやLEDマーカー等を貼り付け")
15 6.MU を用いた顔筋肉ロボットの製作 6-1.MU を用いた顔筋肉ロボットの製作ためのモーション トラッキングの抽出実験モーション トラッキングは 人間などの動きのデータを取り込むもので 体の表面 ( 主に関節に近いところ ) にマーカーを付け 各マーカーの動きを2 次元 3 次元空間での数値データとして計測を行う分析方法である モーション トラッキングには 計測したいポイントに反射マーカーやLEDマーカー等を貼り付け カメラで撮影した画像からマーカーの位置を計算する 光学式 ( ワイヤレス方式 ) モーション トラッキング や 計測ポイントに磁気センサを貼り付けて 磁気発生装置による磁界の影響範囲でセンサの位置検出を行う 磁気式 ( ワイヤード方式 ) モーション トラッキング などがある 本実験には動きに制約されない反射マーカーを用いた光学式モーション トラッキングシステムを利用した 顔のモーション トラッキングは マーカーが陰にならない カメラに映らなくなることがなく 撮影範囲内での自由な動きのデータを得ることが可能であり 前後のマーカーなどから補正をする必要性がない [43] 本実験は ロボットにおいて表現の難しい顔筋肉ロボット製作のための予備実験である 特に 表情の変化にとって重要な役割を担う口角筋軸 ( 5 参照 ) の位置把握及び顔のムービングポイントの動作量を分析することを目的とする Light 撮影角度 :40 Digital Camera 500mm 図 6-1. 実験装置 122

16 実験対象として実験 1 の被験者中 表情の表現率が高い人を選んだ 実験装置は図 6-1 に示したよう に 実験 2 で用いたものを利用した ただし より詳しいデータを得るため に カメラは SONY DCR-TRV75 を用い て 1 秒当たり 29.97frame で撮影を行 った 反射マーカーの貼り付ける位置は 3 次元顔表情の生成手法に関する研 究 : 顔の特徴線と表情皺による形状 の表現 ( 河野央 )[44] と法 医学の顔面復元 (Facial Reconstruction)[45]~[49] を参考にし 筋肉と 皮膚のつながっているムービングポイントを選んた さらに 口角筋軸の位置の 分析のため 口角連結線の両方の横側 15mm とそれを基点に口角連結線の上 下 方面 7mm の部分にマーカーを貼り付け 計 32 個の反射マーカーを図 6-2 に 示した位置に貼り付けた マーカーの位置は以後の実験にも同じく適用する モーション トラッキングの分析には Innovision Systems 社の MaxTRAQ v2.00 を用いた 被験者によるモーション トラッキングの実験結果より 各マーカーの移動距 離や口角筋軸の位置等が分かった しかし 本実験は FACS で重要と示されてい る 17 個の AU だけを対象にしたため 完全ではない 例えば 17 個の重要と表示されている AU に入ってない AU43(Eyes Closed) の実験が行われなかったため 瞼を閉じた場合の結果はない 瞼の動作をトラッ キングする 10 と 23 のマーカーについては瞼を閉じる場合の動作範囲は本実験の 結果値より長くなる そのため 顔筋肉ロボットにおける駆動ユニットの制御に おいては 表 6-2 の結果値を参考し 調節して用いることとする また 口角筋軸の位置を調べるためのマーカー 16,17,18,29,30,31 の 軌跡より 被験者は C 型の口角筋軸であることが分かった この実験で得たデータを顔筋肉ロボットのムービングポイントや駆動ユニット の制作に際し 参考にした 図 6-2. 反射マーカーの位置 123
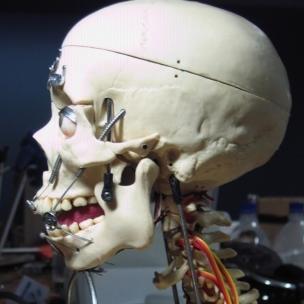
17 6-2. 頭蓋骨の模型からの顔面筋肉の復元本研究では ベースとなる頭蓋骨の模型を韓国人のものと仮定した 法医学の顔面復元 (Facial Reconstruction) の技術を利用し 韓国人の顔の標準軟組職の厚さを適用し 筋肉モデルを制作した 顔の復元術にはまず 性別 年齢の推定 次段階で対象になる人口集団 ( 国 人種等 ) に対する顔各部位の厚さに対する平均値が必要であり 頭蓋骨の形態と顔立ちとの係わり合いに対する資料が必要である 顔の軟組職の厚さの計測法は おもに顔に計測針を差し込んで計測する直接計測法と 超音波やコンピューター断層撮影 (MRI) などを利用した間接計測法がある (Lenedinskaya など 1979 Veselovskaya 1989 Manhein など 1998) 韓国人に対する資料はハンスンホら (1998) の超音波を利用した間接計測とギムヒジンら (1999) による直接計測資料があり 頭蓋骨の形態と顔の見かけとの関係は1988 年 Speranskyによって体系化された 現在 顔の軟組職の厚さに対する資料は人類学 法医学 人体工学 デザインなど各分野で活発に活用されているが ロボット分野ではあまり活用されていない [37] 図 6-3のように重要な地点にランドマーク (landmarks) を決め それぞれの地点の軟組職の厚さを表示する 顔の軟組職の厚さは体重が増加すれば正中面のブレグマ (bregma, br) 鼻根点(nasion, n) 鼻骨点(rhinion, r) 鼻下点 (subnasale, sb) 顎唇間点(chin-lip fissure, fissure) オトガイ点 ( グナチオ gnathion, gn) そして仮側面の上顎点(maxillare, mx) (temporale, t) を除くすべての計測点で厚くなり 特に下顎角点 (gonion, go) 奥歯外点(exomolare, em) が厚くなる その他 頬骨弓点 (zygion, zy) 下顎体点(mandibular body, body) 乳様突起点(mastoidale, ma) 前頭骨結節点 (metopion, m) で体重による軟組職の厚さの変化を顕著に確認することができる 即ち 体重増加の際には顔の先方より額部位と顔の側面部位 特にほおとあごの下部位の軟組職の厚さが厚くなる 年齢による変化量はほとんど些細であり 年齢を取れば体重が減少して 上のような結果が出る [37] 表 6-1は皮膚の表面までの軟組職の厚さのデータであり 皮膚組織の厚さを抜き取ったデータを利用した 皮膚は空気に触れている側から 表皮 真皮 皮下組織の3 種に分かれている 皮膚の厚みのほとんどを占めている真皮は 約 1 ~3mmの厚さがあり 頭部や顔の額 鼻などで約 2ミリである 表皮 真皮 皮下組織を含めても平均約 1~4mmであり 特に瞼は1mmである [35] 124
 [37] Korean (1999) North Korean (1988) Japanese (1948) Japanese (1960) South Africans (1996) White Americans (1984) Items M F M F M F M M F M F vertex 5.3 5.")
18 sc eu v br m g br v t eu op t n ex zy mx mn go em gn r sb fissure pg gn body go ma ex zy mx mn em 図 6-3. 頭蓋骨計測基準ランドマーク (Anthropometric landmarks) の位置 表 6-1. 各国別の顔の軟組職の厚さ (Unit: mm) [37] Korean (1999) North Korean (1988) Japanese (1948) Japanese (1960) South Africans (1996) White Americans (1984) Items M F M F M F M M F M F vertex bregma metopion glabella nasion rhinion subnasale Chin-lip fissure pogonion gnathion superciliare ectochonthion eurion mastoidale zygion temporale mandibulare gonion mandibularbody maxillare exomolare

19 6-3. 顔筋肉ロボットの制作過程 実際の顔筋肉ロボットにMUを適用し 制作を行った 特に重点をおいて制作した部分は口角筋軸である 5に記述した口角筋軸は 顔表情の表現で重要な部分を占める このような理由で口部分のアクチュエータとしてサーボモーター 6 個を使用し表現を試みた 筋肉を担当するアクチュエータとしては6VのRCサーボモーター 15 個を用い 図 6-4のように顔の表情を表現するために11 個のMUグループを適用した しかし 頭蓋骨の空間制限のため mucl, mucrとmuhl, muhrは各々 1 個ずつのアクチュエータを用い mub, mue, muf, muc, muh, muj, muyは各 1 個ずつ mua, mug, mud, muzは各 2 個ずつで表現し 総 15 個の重要なMUを選んでアニマトロニクスに適用した 顔筋肉ロボットは通常のアニマトロニクスとは異なり 図 6-5のような流れで制作を行った mub 眉毛及び眉間の動き muar 瞼の動き mue 目玉の左 右の動き mucr 上唇の動き mugr 口角を引き上げる muhr 口角を押し下げる mudr オトガイの皮膚を引き上げ 皺を作る muzr 頭の上 下 左 右 前 後の動き mual muf 目玉の上 下の動き mucl mugl muj 顎を開ける mudl muhl muy 頭の左右回転 muzl 図 6-4. 動きを担当する MU 126












20 1 2 3 筋肉の位置や動き測定 分析 ベースとなる頭蓋骨の手入れや歯や目玉等の制作 付着 頭蓋骨の模型にムービングポイントの位置を選定 MU による内装メカニズムの制作 頭蓋骨計測基準ランドマークの付着 油粘土彫刻による筋肉の原形制作 ウレタンゴムによる原形型取り作業と内型制作 スキンシリコーン素材による成型作業 組み立て 外皮のつなぎ目等の修正 血管や神経の表現 コントローラ制作やプログラミング 図 6-5. 顔筋肉ロボットの制作の流れ 完成 127
21 歯と目玉等は FRP(Fiberglass Reinforced Plastics) や液体プラスチック ( Liquid Plastics ) を用いて制作した 機械的な付属品はジュラルミン (Duralumin) で制作し アクチュエータとスキンシリコーンの間はケーブルを用いて連結した 舌と筋肉はスキンシリコーンを用いて制作を行った アニマトロニクスの制御にはRoboBasic2.5を用い RS232C 方式でコンピューターと伝送した この顔筋肉ロボットの仕様を表 6-2に示す 表 6-2. 顔筋肉ロボットの仕様 区分 仕様 サイズ 560( 高さ ) 300( 幅 ) 300( 奥行き )mm 重量 7.8 kg 頭部サイズ 245( 高さ ) 175( 幅 ) 215( 奥行き )mm コントローラ ATMEL 89C4051 MPU メモリ Prochips 24LC32 eeprom アクチュエータ DC 6 V サーボモータ15 個 電源 AC 100 V, 50/60 Hz, 57 VA 制御部電源 DC 5 V, 4A (AC 110 V アダプターキット ) モータ部電源 DC 6 V, 18A (AC 110 V アダプターキット ) PC 接続形式 RS232C 入力端子 3.5 mm AUXジャック RS232C 入力ジャック プログラミング RoboBasic 筋肉 スキンシリコーン ( ショア硬度 10, 粘度 23,000 cps, 引き裂き強度 102 pli, 破壊伸び 1000%) 128

22 表 6-6. 顔筋肉アニマトロニくずによる基本表情の MU 表記 AU 喜びの表情悲しみの表情怒りの表情区分 表情 MU A60+G150+J110 A70+B150+C110 +G95+D50+H150 A170+B30+C110 +D110+J110 区分 AU 嫌悪の表情驚きの表情恐れの表情 表情 MU A80+B40+C30+J110 A190+B190+D80+J150 A110+B150 +G30+H30+J

23 MU を用いた顔筋肉ロボットは微細な制御ができるため 微妙な表情表現ができる 例えば 図 6-7 に示したようにこれまでのロボットやアニマトロニクスでも表現ができなかったオトガイ筋の表現も可能であることが分かった 顔筋肉ロボットには 実験で行った 17 個の AU にあたる MU 以外の mue, muf, muy, muz もあり mue, muf は目玉の動作を muy, muz は首の動作を表現できる muy, muz は 図 6-8 のように一つのアクチュエータで構成され muy は AU51 と AU52 を ふたつのアクチュエータで構成される muz は AU53,AU54,AU55, AU56 の動作を担当する このように ほとんどの MU は一つ以上の AU を担当して動作を行い MU を組み合わせて様々な表情表現ができる 顔筋肉ロボットは 11 個の MU グループとしてサーボモーター 15 個を組み合わせ 今まで発表された FACS のすべての AU62 個中 36 個以上を 2002 年に発表された新しいバージョンの FACS の AU44 個中で 30 個以上を表現することができる また サーボモータの発達でリップシンク (lip-sync) の表現も可能である ハイスピードサーボモータの場合 モータの速度は 0.08 sec/60 であり リップシンク (lip-sync) の表現に用いることができる 図 6-7.muD によるオトガイ筋の表現 130

")




24 AU51 AU52 AU53 (muy10) (muy190) mu(zl170+zr170) AU54 AU55 AU56 mu(zl10+zr10) (muzr190) (muzl190) 図 6-8. 首を担当する muy と muz の動作の例 131
25 6-3. 顔筋肉ロボットに対するニュースや記事 顔筋肉ロボットにおける表情表現は海外の有名な言論等に好評を博した BBC News : Tour of LA robot show, Robots that are more human?, ABC, ナショナル ジオグラフィック (National Geographic): Robots "Express Themselves" robots-video-ap.html The Year in Robot,2008, 星島日報 : 以外の記事 keep-toddlers-and-the-elderly-from-frea/ sife_tli_robot#comments
Microsoft PowerPoint - 俯瞰サロン講演会( )
") エンターテインメントロボット AIBO の開発とビジネス化 2013 年 12 月 18 日 株式会社インタラクティブラボラトリー大槻正 本日の内容 ロボットの歴史と現状 AIBO 開発経緯 AIBO ビジネス化 創造性と価値創造 2 ロボットの歴史と現状 ロボットの語源 1920 年にチェコスロバキアの作家カレル チャペックの戯曲 R.U.R( ロッサム. ユニバーサル. ロボット ) で使用 チェコ語のrobota(
エンターテインメントロボット AIBO の開発とビジネス化 2013 年 12 月 18 日 株式会社インタラクティブラボラトリー大槻正 本日の内容 ロボットの歴史と現状 AIBO 開発経緯 AIBO ビジネス化 創造性と価値創造 2 ロボットの歴史と現状 ロボットの語源 1920 年にチェコスロバキアの作家カレル チャペックの戯曲 R.U.R( ロッサム. ユニバーサル. ロボット ) で使用 チェコ語のrobota(
Copyright c 2009 by Masaki Yagi
 041238 2009 2 Copyright c 2009 by Masaki Yagi c 2009 Masaki Yagi All rights reserved ,,,,,,,,,,,,,, 3,,,,,,, i 1 1 11 1 12 1 2 2 21 2 22 3 23 4 24 4 25 5 26 5 3 6 31 6 32 10 33 11 4 13 41 13 42 14 43
041238 2009 2 Copyright c 2009 by Masaki Yagi c 2009 Masaki Yagi All rights reserved ,,,,,,,,,,,,,, 3,,,,,,, i 1 1 11 1 12 1 2 2 21 2 22 3 23 4 24 4 25 5 26 5 3 6 31 6 32 10 33 11 4 13 41 13 42 14 43
20 Method for Recognizing Expression Considering Fuzzy Based on Optical Flow
 20 Method for Recognizing Expression Considering Fuzzy Based on Optical Flow 1115084 2009 3 5 3.,,,.., HCI(Human Computer Interaction),.,,.,,.,.,,..,. i Abstract Method for Recognizing Expression Considering
20 Method for Recognizing Expression Considering Fuzzy Based on Optical Flow 1115084 2009 3 5 3.,,,.., HCI(Human Computer Interaction),.,,.,,.,.,,..,. i Abstract Method for Recognizing Expression Considering
コンピュータグラフィックス第6回
 コンピュータグラフィックス 第 6 回 モデリング技法 1 ~3 次元形状表現 ~ 理工学部 兼任講師藤堂英樹 本日の講義内容 モデリング技法 1 様々な形状モデル 曲線 曲面 2014/11/10 コンピュータグラフィックス 2 CG 制作の主なワークフロー 3DCG ソフトウェアの場合 モデリング カメラ シーン アニメーション テクスチャ 質感 ライティング 画像生成 2014/11/10 コンピュータグラフィックス
コンピュータグラフィックス 第 6 回 モデリング技法 1 ~3 次元形状表現 ~ 理工学部 兼任講師藤堂英樹 本日の講義内容 モデリング技法 1 様々な形状モデル 曲線 曲面 2014/11/10 コンピュータグラフィックス 2 CG 制作の主なワークフロー 3DCG ソフトウェアの場合 モデリング カメラ シーン アニメーション テクスチャ 質感 ライティング 画像生成 2014/11/10 コンピュータグラフィックス
ロボット文化
 I. 54 1) 2) AIBO QRIO ASIMO P CM NHK SMAP 3) 4) 5) GUNDAM`S 1) National Research Council (NRC), 5 2) NRC, 7 3) 31 4) 3.12 5) 211 251 II. 1) AIBO AIBO 2) 3) 4) GPS AIBO AIBO AIBO 5) AIBO ERS-7 1) 2) 3)
I. 54 1) 2) AIBO QRIO ASIMO P CM NHK SMAP 3) 4) 5) GUNDAM`S 1) National Research Council (NRC), 5 2) NRC, 7 3) 31 4) 3.12 5) 211 251 II. 1) AIBO AIBO 2) 3) 4) GPS AIBO AIBO AIBO 5) AIBO ERS-7 1) 2) 3)
Microsoft Word - 博士論文概要.docx
 [ 博士論文概要 ] 平成 25 年度 金多賢 筑波大学大学院人間総合科学研究科 感性認知脳科学専攻 1. 背景と目的映像メディアは, 情報伝達における効果的なメディアの一つでありながら, 容易に感情喚起が可能な媒体である. 誰でも簡単に映像を配信できるメディア社会への変化にともない, 見る人の状態が配慮されていない映像が氾濫することで見る人の不快な感情を生起させる問題が生じている. したがって,
[ 博士論文概要 ] 平成 25 年度 金多賢 筑波大学大学院人間総合科学研究科 感性認知脳科学専攻 1. 背景と目的映像メディアは, 情報伝達における効果的なメディアの一つでありながら, 容易に感情喚起が可能な媒体である. 誰でも簡単に映像を配信できるメディア社会への変化にともない, 見る人の状態が配慮されていない映像が氾濫することで見る人の不快な感情を生起させる問題が生じている. したがって,
コンピュータグラフィックス演習 I 2012 年 5 月 21 日 ( 月 )5 限 担当 : 桐村喬 第 7 回モデリングの仕上げ 1 カメラワークとアニメーション 今日の内容 1. カメラワーク 2. シーンの設定 3. アニメーション 前回のテクスチャの紹介 1 / 10
5 限 担当 : 桐村喬 第 7 回モデリングの仕上げ 1 カメラワークとアニメーション 今日の内容 1. カメラワーク 2. シーンの設定 3. アニメーション 前回のテクスチャの紹介 1 / 10") コンピュータグラフィックス演習 I 2012 年 5 月 21 日 ( 月 )5 限 担当 : 桐村喬 第 7 回モデリングの仕上げ 1 カメラワークとアニメーション 今日の内容 1. カメラワーク 2. シーンの設定 3. アニメーション 前回のテクスチャの紹介 1 / 10 モデリングの仕上げモデルをどう見せるか? 作成した 3DCG モデルは 最終的には 作品 として 2 次元の画像あるいは
コンピュータグラフィックス演習 I 2012 年 5 月 21 日 ( 月 )5 限 担当 : 桐村喬 第 7 回モデリングの仕上げ 1 カメラワークとアニメーション 今日の内容 1. カメラワーク 2. シーンの設定 3. アニメーション 前回のテクスチャの紹介 1 / 10 モデリングの仕上げモデルをどう見せるか? 作成した 3DCG モデルは 最終的には 作品 として 2 次元の画像あるいは
I
 九州大学学術情報リポジトリ Kyushu University Institutional Repository 熊本県水俣市の限界集落における耕作放棄地の拡大とその要因 寺床, 幸雄九州大学大学院人文科学府 : 博士後期課程 : 農村 農業地理学 Teratoko, Yukio http://hdl.handle.net/2324/20036 出版情報 : 地理学評論. 82 (6), pp.588-603,
九州大学学術情報リポジトリ Kyushu University Institutional Repository 熊本県水俣市の限界集落における耕作放棄地の拡大とその要因 寺床, 幸雄九州大学大学院人文科学府 : 博士後期課程 : 農村 農業地理学 Teratoko, Yukio http://hdl.handle.net/2324/20036 出版情報 : 地理学評論. 82 (6), pp.588-603,
Microsoft PowerPoint _report_06081PDC2006Q1&2SUMMARY_roagroup_jp.ppt [互換モード]
![Microsoft PowerPoint _report_06081PDC2006Q1&2SUMMARY_roagroup_jp.ppt [互換モード]](/thumbs/50/25972868.jpg "Microsoft PowerPoint _report_06081PDC2006Q1&2SUMMARY_roagroup_jp.ppt [互換モード]") ROA Holdings, INC. Report No.06081 2006 年上半期携帯端末トレンド及び進化方向予測 ~ 日本 韓国 中国の新規端末比較分析 ~ 株式会社 ROA Holdings www.roaholdings.com research@roaholdings.com Notice Reproduction in whole or in part is restricted without
ROA Holdings, INC. Report No.06081 2006 年上半期携帯端末トレンド及び進化方向予測 ~ 日本 韓国 中国の新規端末比較分析 ~ 株式会社 ROA Holdings www.roaholdings.com research@roaholdings.com Notice Reproduction in whole or in part is restricted without
PowerPoint プレゼンテーション
 GPS 実用化ロボットプロジェクト 警備ロボット ALSOK ガードロボ 仮称 綜合警備保障株式会社 火災や人体 不審物を検出し 警告 通報する警備機能と タッチパネルにより来場者を案内する機能を併せ持つロボット 特徴 1 自律走行ロボットによる屋外警備 火災や人体 不審物を検知 警告 通報 2 来場者への案内 3 機械警備システムとの連携 4 監視装置による複数台ロボットを一元管理できるシステム
GPS 実用化ロボットプロジェクト 警備ロボット ALSOK ガードロボ 仮称 綜合警備保障株式会社 火災や人体 不審物を検出し 警告 通報する警備機能と タッチパネルにより来場者を案内する機能を併せ持つロボット 特徴 1 自律走行ロボットによる屋外警備 火災や人体 不審物を検知 警告 通報 2 来場者への案内 3 機械警備システムとの連携 4 監視装置による複数台ロボットを一元管理できるシステム
24 LED A visual programming environment for art work using a LED matrix
 24 LED A visual programming environment for art work using a LED matrix 1130302 2013 3 1 LED,,,.,. Arduino. Arduino,,,., Arduino,.,, LED,., Arduino, LED, i Abstract A visual programming environment for
24 LED A visual programming environment for art work using a LED matrix 1130302 2013 3 1 LED,,,.,. Arduino. Arduino,,,., Arduino,.,, LED,., Arduino, LED, i Abstract A visual programming environment for
仕様 ハードウェア仕様 レシーバー側電源 消費電力 同梱 AC アダプター使用時入力 :AC100 V 50Hz/60 Hz 出力 :DC57 V / 1.14 A PoE 給電装置使用時 DC48 V / 265 ma 同梱 AC アダプター使用時 DC 57 V :1.14 A / 約 65 W
 製品の仕様 付属品およびデザインは予告なく変更する場合があります 記載内容は 2015 年 11 月現在のものです 同軸 -LAN コンバーター WJ- / WJ- / WJ-PC200 概要 レシーバー側 4ch レシーバー側 1ch カメラ側 本機は同軸 -LAN コンバーターで レシーバー側とカメラ側を組み合わせて使用します 既存の同軸ケーブルを利用し 少ない初期投資で長距離伝送や高速通信などのデジタルデータ伝送を実現します
製品の仕様 付属品およびデザインは予告なく変更する場合があります 記載内容は 2015 年 11 月現在のものです 同軸 -LAN コンバーター WJ- / WJ- / WJ-PC200 概要 レシーバー側 4ch レシーバー側 1ch カメラ側 本機は同軸 -LAN コンバーターで レシーバー側とカメラ側を組み合わせて使用します 既存の同軸ケーブルを利用し 少ない初期投資で長距離伝送や高速通信などのデジタルデータ伝送を実現します
Microsoft Word - PatchLive.doc
 PATCH LIVE USER S MANUAL 日本語版 1 はじめにこの度は RODEC PATCH LIVE をご購入いただき 誠に有難うございます 本製品の性能を最大限に発揮させ 末永くお使い頂くため ご使用になる前にこの取扱説明書を必ずお読みください 尚 本書が保証書となりますので お読みになった後は大切に保管してください ご使用になる前に取扱説明書をお読みください 1. 梱包を開き 破損や欠品がないか確認してください
PATCH LIVE USER S MANUAL 日本語版 1 はじめにこの度は RODEC PATCH LIVE をご購入いただき 誠に有難うございます 本製品の性能を最大限に発揮させ 末永くお使い頂くため ご使用になる前にこの取扱説明書を必ずお読みください 尚 本書が保証書となりますので お読みになった後は大切に保管してください ご使用になる前に取扱説明書をお読みください 1. 梱包を開き 破損や欠品がないか確認してください
コンピュータグラフィックス第8回
 コンピュータグラフィックス 第 8 回 レンダリング技法 1 ~ 基礎と概要, 隠面消去 ~ 理工学部 兼任講師藤堂英樹 レポート提出状況 課題 1 の選択が多い (STAND BY ME ドラえもん ) 体験演習型 ( 課題 3, 課題 4) の選択も多い 内訳 課題 1 課題 2 課題 3 課題 4 課題 5 2014/11/24 コンピュータグラフィックス 2 次回レポートの体験演習型 メタセコイア,
コンピュータグラフィックス 第 8 回 レンダリング技法 1 ~ 基礎と概要, 隠面消去 ~ 理工学部 兼任講師藤堂英樹 レポート提出状況 課題 1 の選択が多い (STAND BY ME ドラえもん ) 体験演習型 ( 課題 3, 課題 4) の選択も多い 内訳 課題 1 課題 2 課題 3 課題 4 課題 5 2014/11/24 コンピュータグラフィックス 2 次回レポートの体験演習型 メタセコイア,
国土技術政策総合研究所 研究資料
 第 7 章 検査基準 7-1 検査の目的 検査の目的は 対向車両情報表示サービス 前方停止車両 低速車両情報表示サービスおよび その組み合わせサービスに必要な機能の品質を確認することである 解説 設備の設置後 機能や性能の総合的な調整を経て 検査基準に従い各設備検査を実施する 各設備検査の合格後 各設備間を接続した完成検査で機能 性能等のサービス仕様を満たしていることを確認する検査を実施し 合否を判定する
第 7 章 検査基準 7-1 検査の目的 検査の目的は 対向車両情報表示サービス 前方停止車両 低速車両情報表示サービスおよび その組み合わせサービスに必要な機能の品質を確認することである 解説 設備の設置後 機能や性能の総合的な調整を経て 検査基準に従い各設備検査を実施する 各設備検査の合格後 各設備間を接続した完成検査で機能 性能等のサービス仕様を満たしていることを確認する検査を実施し 合否を判定する
お問合せはフリーコール 寸法図 CAD 図面がホームページよりダウンロード出来ます P.15 スライダタイプ 2 次元 CAD 1 モータ エンコーダケーブルを接続します ケーブルの詳細は巻末 59 ページをご参照下さい 2 原点復帰
 スライダタイプ -AR 型式項目 AR 20 アームタイプ本体幅 0mm 2V モータ折り返し仕様 シリーズタイプエンコーダ種類モータ種類ストローク適応コントローラケーブル長オプション SAD : アルミベース I: インクリメンタル 20 : 10 : 10mm 50:50mm SSD : 鉄ベース仕様 20W 5 : 5mm A: アブソリュート :mm 仕様 (50mmピッチ毎設定) 型式項目の内容は前付
スライダタイプ -AR 型式項目 AR 20 アームタイプ本体幅 0mm 2V モータ折り返し仕様 シリーズタイプエンコーダ種類モータ種類ストローク適応コントローラケーブル長オプション SAD : アルミベース I: インクリメンタル 20 : 10 : 10mm 50:50mm SSD : 鉄ベース仕様 20W 5 : 5mm A: アブソリュート :mm 仕様 (50mmピッチ毎設定) 型式項目の内容は前付
Microsoft Word - ORF docx
 FACS を用いた人間の感情と表情変化の相関 より良いコミュニケーションのために 遠藤史崇 * ( 指導教員石崎俊 ** ) * 慶応義塾大学総合政策学部 4 年 (2013 年 3 月卒業予定 ) ** 慶応義塾大学環境情報学部 s09161fe@sfc.keio.ac.jp, ishizaki@sfc.keio.ac.jp キーワード : コミュニケーション 認知科学 表情認識 1 はじめに本研究は
FACS を用いた人間の感情と表情変化の相関 より良いコミュニケーションのために 遠藤史崇 * ( 指導教員石崎俊 ** ) * 慶応義塾大学総合政策学部 4 年 (2013 年 3 月卒業予定 ) ** 慶応義塾大学環境情報学部 s09161fe@sfc.keio.ac.jp, ishizaki@sfc.keio.ac.jp キーワード : コミュニケーション 認知科学 表情認識 1 はじめに本研究は
( ), ( ) Patrol Mobile Robot To Greet Passing People Takemi KIMURA(Univ. of Tsukuba), and Akihisa OHYA(Univ. of Tsukuba) Abstract This research aims a
, ( ) Patrol Mobile Robot To Greet Passing People Takemi KIMURA(Univ. of Tsukuba), and Akihisa OHYA(Univ. of Tsukuba) Abstract This research aims a") ( ), ( ) Patrol Mobile Robot To Greet Passing People Takemi KIMURA(Univ. of Tsukuba), and Akihisa OHYA(Univ. of Tsukuba) Abstract This research aims at the development of a mobile robot to perform greetings
( ), ( ) Patrol Mobile Robot To Greet Passing People Takemi KIMURA(Univ. of Tsukuba), and Akihisa OHYA(Univ. of Tsukuba) Abstract This research aims at the development of a mobile robot to perform greetings
Microsoft PowerPoint - 口頭発表_折り畳み自転車
 1 公道走行を再現した振動試験による折り畳み自転車の破損状況 ~ 公道での繰り返し走行を再現した結果 ~ 2 公道走行を想定した試験用路面について 九州支所製品安全技術課清水寛治 目次 1. 折り畳み自転車のフレームはどのように破損するのか公道の走行振動を再現する自転車用ロードシミュレータについて繰り返し走行を想定した折り畳み自転車の破損部の特徴 ~ 公道による振動を繰り返し再現した結果 ~ 2.
1 公道走行を再現した振動試験による折り畳み自転車の破損状況 ~ 公道での繰り返し走行を再現した結果 ~ 2 公道走行を想定した試験用路面について 九州支所製品安全技術課清水寛治 目次 1. 折り畳み自転車のフレームはどのように破損するのか公道の走行振動を再現する自転車用ロードシミュレータについて繰り返し走行を想定した折り畳み自転車の破損部の特徴 ~ 公道による振動を繰り返し再現した結果 ~ 2.
2008 年度下期未踏 IT 人材発掘 育成事業採択案件評価書 1. 担当 PM 田中二郎 PM ( 筑波大学大学院システム情報工学研究科教授 ) 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3.
 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3.") 2008 年度下期未踏 IT 人材発掘 育成事業採択案件評価書 1. 担当 PM 田中二郎 PM ( 筑波大学大学院システム情報工学研究科教授 ) 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3. プロジェクト管理組織 株式会社オープンテクノロジーズ 4. 委託金支払額 3,000,000 円 5.
2008 年度下期未踏 IT 人材発掘 育成事業採択案件評価書 1. 担当 PM 田中二郎 PM ( 筑波大学大学院システム情報工学研究科教授 ) 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3. プロジェクト管理組織 株式会社オープンテクノロジーズ 4. 委託金支払額 3,000,000 円 5.
処分予定財産需要調査一覧表 ( 別紙 ) 事業名 : 平成 14 年度重点分野研究開発委託費 ( 生体高分子立体構造情報解析 ) ( 単位 : 円 ) NO 区分品名 仕様又は型式番号 数量 取得金額 ( 税込 ) 取得日保管又は設置場所備考 2 ( イ ) 低温循環恒温槽 RE206 1 式 51
 事業名 : 平成 14 年度重点分野研究開発委託費 ( 生体高分子立体構造情報解析 ) ( 単位 : 円 ) NO 区分品名 仕様又は型式番号 数量 取得金額 ( 税込 ) 取得日保管又は設置場所備考 2 ( イ ) 低温循環恒温槽 RE206 1 式 51") 2 ( イ ) 低温循環恒温槽 RE206 1 式 519,750 H14.8.18 3 ( イ ) 培養シェーカー NR-30 2 式 255,150 H14.6.19 標的蛋白質複合体を大量調製するための組織細胞の培養に使用 但し 著しい老朽化のため安定稼働し難い 標的蛋白質複合体を大量調製するための組織細胞の培養に使用 但し 著しい老朽化のため安定稼働し難い 4 ( イ ) データ解析用コンピュータ
2 ( イ ) 低温循環恒温槽 RE206 1 式 519,750 H14.8.18 3 ( イ ) 培養シェーカー NR-30 2 式 255,150 H14.6.19 標的蛋白質複合体を大量調製するための組織細胞の培養に使用 但し 著しい老朽化のため安定稼働し難い 標的蛋白質複合体を大量調製するための組織細胞の培養に使用 但し 著しい老朽化のため安定稼働し難い 4 ( イ ) データ解析用コンピュータ
Microsoft Word - report_public.doc
 こだわり を簡単に実現できるアニメーション作成システムの作成 こだわり物理エンジン の開発 1. 背景アニメーションが個性的で魅力的であるための条件として それを制作するアーティストが細かい部分まで こだわり すなわち ここはこのような表現にしたい という欲求を実現していくことが重要である 以下に こだわり の一例を示す ( 図 1) まず アーティストが自身で制作したアニメーションを見たときに 前髪の一部によって目が隠れてしまっていたこと
こだわり を簡単に実現できるアニメーション作成システムの作成 こだわり物理エンジン の開発 1. 背景アニメーションが個性的で魅力的であるための条件として それを制作するアーティストが細かい部分まで こだわり すなわち ここはこのような表現にしたい という欲求を実現していくことが重要である 以下に こだわり の一例を示す ( 図 1) まず アーティストが自身で制作したアニメーションを見たときに 前髪の一部によって目が隠れてしまっていたこと
ロボット技術の紹介
 賢いロボットの作り方 ~ 自分で考えて行動するロボットをつくる ~ 関東学院大学 理工学部 ( 届出設置書類提出中 ) 准教授元木誠 夢ナビライブ東京賢いロボットの作り方 1 本日の講義内容 周囲の状況を認識し, 自分で考えて行動するロボットのことを知能ロボットといいます 知能ロボットは賢さのレベルによって作り方が違います 生物の脳をモデルにしたシステム ( ニューラルネットワーク ) で作る方法を紹介します!
賢いロボットの作り方 ~ 自分で考えて行動するロボットをつくる ~ 関東学院大学 理工学部 ( 届出設置書類提出中 ) 准教授元木誠 夢ナビライブ東京賢いロボットの作り方 1 本日の講義内容 周囲の状況を認識し, 自分で考えて行動するロボットのことを知能ロボットといいます 知能ロボットは賢さのレベルによって作り方が違います 生物の脳をモデルにしたシステム ( ニューラルネットワーク ) で作る方法を紹介します!
製 品 名 プラズマディスプレイ 型 番 PDP-425CMX 寸法図 ( 単位 : mm) TOP VIEW (SCREEN AREA) (SCREEN AREA) LED LEFT SIDE VIEW
 TOP VIEW (SCREEN AREA) (SCREEN AREA) LED LEFT SIDE VIEW") 寸法図 ( 単位 : mm) TOP VIEW 1022 952 921.6(SCREEN AREA) 50.2 1055.89 515.33(SCREEN AREA) 47.34 538 610 LED LEFT SIDE VIEW 14.7 22.3 19 15 13.5 13.5 304 468.6 18 受光部 40.4 外光センサー 98 RIGHT SIDE VIEW CONTROL BUTTONS
寸法図 ( 単位 : mm) TOP VIEW 1022 952 921.6(SCREEN AREA) 50.2 1055.89 515.33(SCREEN AREA) 47.34 538 610 LED LEFT SIDE VIEW 14.7 22.3 19 15 13.5 13.5 304 468.6 18 受光部 40.4 外光センサー 98 RIGHT SIDE VIEW CONTROL BUTTONS
LW_LiberView_cephalograms.pdf
 画像ビューアーソフト LiberView LiberView DICOM 画像表示用ビューアーソフト 参考 睡眠時無呼吸症候群向けセファログラム計測機能 DICOM 画像表示用のビューアーソフトです 主な特徴 DICOM による画像の受信/送信機能 検査 シリーズ単位 患者単位及び DICOM ヘッダ情報による抽出機能(カスタマイズ) 様々な画像表示機能及び計測 アノテーション機能を実装 参考機能
画像ビューアーソフト LiberView LiberView DICOM 画像表示用ビューアーソフト 参考 睡眠時無呼吸症候群向けセファログラム計測機能 DICOM 画像表示用のビューアーソフトです 主な特徴 DICOM による画像の受信/送信機能 検査 シリーズ単位 患者単位及び DICOM ヘッダ情報による抽出機能(カスタマイズ) 様々な画像表示機能及び計測 アノテーション機能を実装 参考機能
<8FEE95F18CA48B865F35308D862E696E6462>
 多チャンネル化と放送の 多様性 に関する一考察 ~ 地上波放送および BS CS の内容分析調査 ~ 日吉昭彦 A Study of Diversity in Broadcasting in the Multichannel Age : Content Analysis of TV Programming Akihiko HIYOSHI Abstract In the latest issue of
多チャンネル化と放送の 多様性 に関する一考察 ~ 地上波放送および BS CS の内容分析調査 ~ 日吉昭彦 A Study of Diversity in Broadcasting in the Multichannel Age : Content Analysis of TV Programming Akihiko HIYOSHI Abstract In the latest issue of
paper.dvi
 Vol. 14, No. 6, pp. 248 256 (2015) ( ) A New Exhibition System of National Treasure "Hollow Cray Figure" Using Interactive Projection Mapping Kazushi MUKAIYAMA Masayuki KOBAYASHI Graduate School of System
Vol. 14, No. 6, pp. 248 256 (2015) ( ) A New Exhibition System of National Treasure "Hollow Cray Figure" Using Interactive Projection Mapping Kazushi MUKAIYAMA Masayuki KOBAYASHI Graduate School of System
Brookfield回転粘度計
 Brookfield 回転粘度計 仕様書一覧 ver.1.5.2 BROOKFIELD Viscometer 英弘精機株式会社 目次アナログ粘度計 T(Dial Reading)... 1 デジタル粘度計 DV-E... 2 デジタル粘度計 DV1M... 3 デジタル粘度計 DV2T... 4 デジタル粘度計 DV3T... 5 スピンドルサイズ一覧... 6 スピンドル別測定粘度範囲一覧...11
Brookfield 回転粘度計 仕様書一覧 ver.1.5.2 BROOKFIELD Viscometer 英弘精機株式会社 目次アナログ粘度計 T(Dial Reading)... 1 デジタル粘度計 DV-E... 2 デジタル粘度計 DV1M... 3 デジタル粘度計 DV2T... 4 デジタル粘度計 DV3T... 5 スピンドルサイズ一覧... 6 スピンドル別測定粘度範囲一覧...11
Microsoft Word -
 電池 Fruit Cell 自然系 ( 理科 ) コース高嶋めぐみ佐藤尚子松本絵里子 Ⅰはじめに高校の化学における電池の単元は金属元素のイオン化傾向や酸化還元反応の応用として重要な単元である また 電池は日常においても様々な場面で活用されており 生徒にとっても興味を引きやすい その一方で 通常の電池の構造はブラックボックスとなっており その原理について十分な理解をさせるのが困難な教材である そこで
電池 Fruit Cell 自然系 ( 理科 ) コース高嶋めぐみ佐藤尚子松本絵里子 Ⅰはじめに高校の化学における電池の単元は金属元素のイオン化傾向や酸化還元反応の応用として重要な単元である また 電池は日常においても様々な場面で活用されており 生徒にとっても興味を引きやすい その一方で 通常の電池の構造はブラックボックスとなっており その原理について十分な理解をさせるのが困難な教材である そこで
1 Table 1: Identification by color of voxel Voxel Mode of expression Nothing Other 1 Orange 2 Blue 3 Yellow 4 SSL Humanoid SSL-Vision 3 3 [, 21] 8 325
![1 Table 1: Identification by color of voxel Voxel Mode of expression Nothing Other 1 Orange 2 Blue 3 Yellow 4 SSL Humanoid SSL-Vision 3 3 [, 21] 8 325](/thumbs/91/105378470.jpg "1 Table 1: Identification by color of voxel Voxel Mode of expression Nothing Other 1 Orange 2 Blue 3 Yellow 4 SSL Humanoid SSL-Vision 3 3 [, 21] 8 325") 社団法人人工知能学会 Japanese Society for Artificial Intelligence 人工知能学会研究会資料 JSAI Technical Report SIG-Challenge-B3 (5/5) RoboCup SSL Humanoid A Proposal and its Application of Color Voxel Server for RoboCup SSL
社団法人人工知能学会 Japanese Society for Artificial Intelligence 人工知能学会研究会資料 JSAI Technical Report SIG-Challenge-B3 (5/5) RoboCup SSL Humanoid A Proposal and its Application of Color Voxel Server for RoboCup SSL
T
 ! " 位置決め 人間と共存 代替可能なバリ取りロボットを開発 安全 コンパクトで高精度な技術を持つロボットが実現 研究開発のきっかけ 自動車や家電製品等において樹脂部品の割合は増加しているが その成形時に生じるバリについて 主に費用対効 果の問題から 小物部品のバリ除去の自動化が遅れている 現在 人海戦術でバリを取っているが 除去が不十分で信頼性に欠け 研削具の巻き込み危険や粉塵による人体への
! " 位置決め 人間と共存 代替可能なバリ取りロボットを開発 安全 コンパクトで高精度な技術を持つロボットが実現 研究開発のきっかけ 自動車や家電製品等において樹脂部品の割合は増加しているが その成形時に生じるバリについて 主に費用対効 果の問題から 小物部品のバリ除去の自動化が遅れている 現在 人海戦術でバリを取っているが 除去が不十分で信頼性に欠け 研削具の巻き込み危険や粉塵による人体への
Brookfield回転粘度計
 ver.1.2 Brookfield 回転粘度計 仕様書一覧 BROOKFIELD Viscometer 英弘精機株式会社 目次アナログ粘度計 T(Dial Reading)... 1 デジタル粘度計 DV-E... 2 デジタル粘度計 DV1... 3 デジタル粘度計 DV2T... 4 デジタル粘度計 DV3T... 5 スピンドルサイズ一覧... 6 スピンドル別測定粘度範囲一覧... 9 対応ソフトウェア...13
ver.1.2 Brookfield 回転粘度計 仕様書一覧 BROOKFIELD Viscometer 英弘精機株式会社 目次アナログ粘度計 T(Dial Reading)... 1 デジタル粘度計 DV-E... 2 デジタル粘度計 DV1... 3 デジタル粘度計 DV2T... 4 デジタル粘度計 DV3T... 5 スピンドルサイズ一覧... 6 スピンドル別測定粘度範囲一覧... 9 対応ソフトウェア...13
,.,.,,.,. X Y..,,., [1].,,,.,,.. HCI,,,,,,, i
![,.,.,,.,. X Y..,,., [1].,,,.,,.. HCI,,,,,,, i](/thumbs/51/27619178.jpg ",.,.,,.,. X Y..,,., [1].,,,.,,.. HCI,,,,,,, i") 23 Experimental investigation of Natural Use Profiles of Pen Pressure, Tilt and Azimuth 1120230 2012 3 1 ,.,.,,.,. X Y..,,., [1].,,,.,,.. HCI,,,,,,, i Abstract Experimental investigation of Natural Use
23 Experimental investigation of Natural Use Profiles of Pen Pressure, Tilt and Azimuth 1120230 2012 3 1 ,.,.,,.,. X Y..,,., [1].,,,.,,.. HCI,,,,,,, i Abstract Experimental investigation of Natural Use
2/17 目次 I. はじめに... 3 II. 操作手順 (Controlの場合) 断面の作成 寸法測定 異なる断面間の寸法測定 繰り返し処理...11 III. 操作手順 (Verifyの場合) 断面の作成... 1
 断面の作成 寸法測定 異なる断面間の寸法測定 繰り返し処理...11 III. 操作手順 (Verifyの場合) 断面の作成... 1") Geomagic Control / Verify 操作手順書 2D 断面における寸法測定 第 2 版 2016.6.1 会社名 連絡先変更初版 2016.3.10 新規発行 2/17 目次 I. はじめに... 3 II. 操作手順 (Controlの場合)... 4 1. 断面の作成... 4 2. 寸法測定... 6 3. 異なる断面間の寸法測定... 9 4. 繰り返し処理...11 III.
Geomagic Control / Verify 操作手順書 2D 断面における寸法測定 第 2 版 2016.6.1 会社名 連絡先変更初版 2016.3.10 新規発行 2/17 目次 I. はじめに... 3 II. 操作手順 (Controlの場合)... 4 1. 断面の作成... 4 2. 寸法測定... 6 3. 異なる断面間の寸法測定... 9 4. 繰り返し処理...11 III.
CCD リニアイメージセンサ用駆動回路 C CCD リニアイメージセンサ (S11155/S ) 用 C は 当社製 CCDリニアイメージセンサ S11155/S 用に開発された駆動回路です S11155/S11156-
 用 C は 当社製 CCDリニアイメージセンサ S11155/S 用に開発された駆動回路です S11155/S11156-") CCD リニアイメージセンサ用駆動回路 C11165-02 CCD リニアイメージセンサ (S11155/S11156-2048-02) 用 C11165-02は 当社製 CCDリニアイメージセンサ S11155/S11156-2048-02 用に開発された駆動回路です S11155/S11156-2048-02と組み合わせることにより分光器に使用できます C11165-02 は CCD 駆動回路
CCD リニアイメージセンサ用駆動回路 C11165-02 CCD リニアイメージセンサ (S11155/S11156-2048-02) 用 C11165-02は 当社製 CCDリニアイメージセンサ S11155/S11156-2048-02 用に開発された駆動回路です S11155/S11156-2048-02と組み合わせることにより分光器に使用できます C11165-02 は CCD 駆動回路
起動時
 De-Works Release NC 自動プログラミング CAD/CAM ソフトウェア De-WORKS 進化論 NC プログラム作成を強力にサポート! NCプログラム作成の手順 2 加工図面の作成 3 図面からNCプログラムの作成 4 NCプログラムの編集とチェック 7 商品の選択 タイプ別構成とオプションの説明 8 Godo System Machine Corporation. NC プログラム作成の手順
De-Works Release NC 自動プログラミング CAD/CAM ソフトウェア De-WORKS 進化論 NC プログラム作成を強力にサポート! NCプログラム作成の手順 2 加工図面の作成 3 図面からNCプログラムの作成 4 NCプログラムの編集とチェック 7 商品の選択 タイプ別構成とオプションの説明 8 Godo System Machine Corporation. NC プログラム作成の手順
課題情報シート テーマ名 : 動画中継ラジコンカーの製作 担当指導員名 : 土山博剛実施年度 : 25 年度施設名 : 四国職業能力開発大学校課程名 : 専門課程訓練科名 : 電子情報技術科課題の区分 : 総合制作実習課題学生数 : 1 時間 : 12 単位 (216h) 課題制作 開発のポイント
 課題制作 開発のポイント") 課題情報シート テーマ名 : 担当指導員名 : 土山博剛実施年度 : 25 年度施設名 : 四国職業能力開発大学校課程名 : 専門課程訓練科名 : 電子情報技術科課題の区分 : 総合制作実習課題学生数 : 1 時間 : 12 単位 (216h) 課題制作 開発のポイント 開発( 制作 ) のポイント 今回製作したシステムでは 専門課程で習得した総合的な知識 ( ネットワーク技術 電子回路技術 C プログラミング技術
課題情報シート テーマ名 : 担当指導員名 : 土山博剛実施年度 : 25 年度施設名 : 四国職業能力開発大学校課程名 : 専門課程訓練科名 : 電子情報技術科課題の区分 : 総合制作実習課題学生数 : 1 時間 : 12 単位 (216h) 課題制作 開発のポイント 開発( 制作 ) のポイント 今回製作したシステムでは 専門課程で習得した総合的な知識 ( ネットワーク技術 電子回路技術 C プログラミング技術
untitled
 インクジェットを利用した微小液滴形成における粘度及び表面張力が与える影響 色染化学チーム 向井俊博 要旨インクジェットとは微小な液滴を吐出し, メディアに対して着滴させる印刷方式の総称である 現在では, 家庭用のプリンターをはじめとした印刷分野以外にも, 多岐にわたる産業分野において使用されている技術である 本報では, 多価アルコールや界面活性剤から成る様々な物性値のインクを吐出し, マイクロ秒オーダーにおける液滴形成を観察することで,
インクジェットを利用した微小液滴形成における粘度及び表面張力が与える影響 色染化学チーム 向井俊博 要旨インクジェットとは微小な液滴を吐出し, メディアに対して着滴させる印刷方式の総称である 現在では, 家庭用のプリンターをはじめとした印刷分野以外にも, 多岐にわたる産業分野において使用されている技術である 本報では, 多価アルコールや界面活性剤から成る様々な物性値のインクを吐出し, マイクロ秒オーダーにおける液滴形成を観察することで,
 1 23G 2 1 2 3 4 5 6 7 3 a a b c a 4 1 18G 18G 6 6 3 30 34 2 23G 48 23G 1 25 45 5 20 145mm 20 26 0.6 1.000 0.7 1.000mm a b c a 20 b c 24 28 a c d 3 60 70 / a RC 5 15 b 1 3 c 0.5 1 4 6 5 a 5 1 b a b a d
1 23G 2 1 2 3 4 5 6 7 3 a a b c a 4 1 18G 18G 6 6 3 30 34 2 23G 48 23G 1 25 45 5 20 145mm 20 26 0.6 1.000 0.7 1.000mm a b c a 20 b c 24 28 a c d 3 60 70 / a RC 5 15 b 1 3 c 0.5 1 4 6 5 a 5 1 b a b a d
FLIRTools+デモ手順書
 FLIRTools+ 簡易取扱説明書 FLIR Tools+ 手順書 1. FLIR ToolsをPCにインストールする 2. Tools+ ライセンス番号を認識させる 3. カメラの電源を入れ USBでPCと接続する 4. 表示設定 5. 静止画を撮影する 6. 動画記録スピードを設定する 7. 動画を記録する / 停止する 8. 動画からグラフを作成する 9. グラフデータ ( 温度値 ) をExcelにペーストする
FLIRTools+ 簡易取扱説明書 FLIR Tools+ 手順書 1. FLIR ToolsをPCにインストールする 2. Tools+ ライセンス番号を認識させる 3. カメラの電源を入れ USBでPCと接続する 4. 表示設定 5. 静止画を撮影する 6. 動画記録スピードを設定する 7. 動画を記録する / 停止する 8. 動画からグラフを作成する 9. グラフデータ ( 温度値 ) をExcelにペーストする
三菱電線工業時報 第 105 号 2008 年 10 月 1 High-speed disaster prevention radio information system R-LCX50-4SL-75 LANIEEE b/g R-LCX50-4SL D 2 1
 1 GHz GHz 帯長距離漏洩同軸ケーブルを用いた高速防災無線情報システムの研究開発 High Speed Communication System for Emergencies Using Long-distance GHz Leaky Coaxial Cables 長野県工業技術総合センター 国立大学法人信州大学 株式会社サーキットデザイン 加賀電子株式会社 菱星通信システム株式会社ネットワーク技術部
1 GHz GHz 帯長距離漏洩同軸ケーブルを用いた高速防災無線情報システムの研究開発 High Speed Communication System for Emergencies Using Long-distance GHz Leaky Coaxial Cables 長野県工業技術総合センター 国立大学法人信州大学 株式会社サーキットデザイン 加賀電子株式会社 菱星通信システム株式会社ネットワーク技術部
円筒面で利用可能なARマーカ
 円筒面で利用可能な AR マーカ AR Marker for Cylindrical Surface 2014 年 11 月 14 日 ( 金 ) 眞鍋佳嗣千葉大学大学院融合科学研究科 マーカベース AR 二次元マーカはカメラ姿勢の推定, 拡張現実等広い研究分野で利用されている 現実の風景 表示される画像 デジタル情報を付加 カメラで撮影し, ディスプレイに表示 使用方法の単純性, 認識の安定性からマーカベース
円筒面で利用可能な AR マーカ AR Marker for Cylindrical Surface 2014 年 11 月 14 日 ( 金 ) 眞鍋佳嗣千葉大学大学院融合科学研究科 マーカベース AR 二次元マーカはカメラ姿勢の推定, 拡張現実等広い研究分野で利用されている 現実の風景 表示される画像 デジタル情報を付加 カメラで撮影し, ディスプレイに表示 使用方法の単純性, 認識の安定性からマーカベース
PowerPoint プレゼンテーション
 総務省 ICTスキル総合習得教材 概要版 eラーニング用 [ コース1] データ収集 1-4: 現実世界へのフィードバックとロボット [ コース1] データ収集 [ コース2] データ蓄積 [ コース3] データ分析 [ コース4] データ利活用 1 2 3 4 5 座学本講座の学習内容 (1-4: 現実世界へのフィードバックとロボット ) 講座概要 データの利活用から現実世界へのフィードバックとして
総務省 ICTスキル総合習得教材 概要版 eラーニング用 [ コース1] データ収集 1-4: 現実世界へのフィードバックとロボット [ コース1] データ収集 [ コース2] データ蓄積 [ コース3] データ分析 [ コース4] データ利活用 1 2 3 4 5 座学本講座の学習内容 (1-4: 現実世界へのフィードバックとロボット ) 講座概要 データの利活用から現実世界へのフィードバックとして
AC サーボアクチュエータ RSF supermini シリーズ FHA-C mini シリーズ コラボレーション対応機種を追加 AC サーボアクチュエータが三菱電機株式会社製 MELSERVO-J4 SSCNET Ⅲ /H 通信への対応機種を追加し コラボレーション製品が充実しました 超小型を特長
 AC サーボアクチュエータ FHA-C mini シリーズ コラボレーション対応機種を追加 AC サーボアクチュエータが三菱電機株式会社製 MELSERVO-J4 SSCNET Ⅲ /H 通信への対応機種を追加し コラボレーション製品が充実しました 超小型を特長とする と 小型 扁平でコンパクトな形状を特長とする FHA-C mini シリーズへの対応により 接続ネットワークの選択肢を更に広げることができます
AC サーボアクチュエータ FHA-C mini シリーズ コラボレーション対応機種を追加 AC サーボアクチュエータが三菱電機株式会社製 MELSERVO-J4 SSCNET Ⅲ /H 通信への対応機種を追加し コラボレーション製品が充実しました 超小型を特長とする と 小型 扁平でコンパクトな形状を特長とする FHA-C mini シリーズへの対応により 接続ネットワークの選択肢を更に広げることができます
ACモーター入門編 サンプルテキスト
 技術セミナーテキスト AC モーター入門編 目次 1 AC モーターの位置付けと特徴 2 1-1 AC モーターの位置付け 1-2 AC モーターの特徴 2 AC モーターの基礎 6 2-1 構造 2-2 動作原理 2-3 特性と仕様の見方 2-4 ギヤヘッドの役割 2-5 ギヤヘッドの仕様 2-6 ギヤヘッドの種類 2-7 代表的な AC モーター 3 温度上昇と寿命 32 3-1 温度上昇の考え方
技術セミナーテキスト AC モーター入門編 目次 1 AC モーターの位置付けと特徴 2 1-1 AC モーターの位置付け 1-2 AC モーターの特徴 2 AC モーターの基礎 6 2-1 構造 2-2 動作原理 2-3 特性と仕様の見方 2-4 ギヤヘッドの役割 2-5 ギヤヘッドの仕様 2-6 ギヤヘッドの種類 2-7 代表的な AC モーター 3 温度上昇と寿命 32 3-1 温度上昇の考え方
光学
 Range Image Sensors Using Active Stereo Methods Kazunori UMEDA and Kenji TERABAYASHI Active stereo methods, which include the traditional light-section method and the talked-about Kinect sensor, are typical
Range Image Sensors Using Active Stereo Methods Kazunori UMEDA and Kenji TERABAYASHI Active stereo methods, which include the traditional light-section method and the talked-about Kinect sensor, are typical
自動車ボディ寸法検査
 Dimensional Inspection of an Automotive Body Kazunori Higuchi, Osamu Ozeki, Shin Yamamoto Abstract With recent increase of a high class and high quality cars, there is a great demand for more sophisticated
Dimensional Inspection of an Automotive Body Kazunori Higuchi, Osamu Ozeki, Shin Yamamoto Abstract With recent increase of a high class and high quality cars, there is a great demand for more sophisticated
形式 :KAPU プラグイン形 FA 用変換器 K UNIT シリーズ アナログパルス変換器 ( レンジ可変形 ) 主な機能と特長 直流入力信号を単位パルス信号に変換 オープンコレクタ 5V 電圧パルス リレー接点出力を用意 出力周波数レンジは前面から可変 ドロップアウトは前面から可変 耐電圧 20
 主な機能と特長 直流入力信号を単位パルス信号に変換 オープンコレクタ 5V 電圧パルス リレー接点出力を用意 出力周波数レンジは前面から可変 ドロップアウトは前面から可変 耐電圧 20") プラグイン形 FA 用変換器 K UNIT シリーズ アナログパルス変換器 ( レンジ可変形 ) 主な機能と特長 直流入力信号を単位パルス信号に変換 オープンコレクタ 5V 電圧パルス リレー接点出力を用意 出力周波数レンジは前面から可変 ドロップアウトは前面から可変 耐電圧 2000V AC 密着取付可能 9012345678 ABCDEF SPAN ZERO CUTOUT CUTOUT ADJ.
プラグイン形 FA 用変換器 K UNIT シリーズ アナログパルス変換器 ( レンジ可変形 ) 主な機能と特長 直流入力信号を単位パルス信号に変換 オープンコレクタ 5V 電圧パルス リレー接点出力を用意 出力周波数レンジは前面から可変 ドロップアウトは前面から可変 耐電圧 2000V AC 密着取付可能 9012345678 ABCDEF SPAN ZERO CUTOUT CUTOUT ADJ.
main.dvi
 A 1/4 1 1/ 1/1 1 9 6 (Vergence) (Convergence) (Divergence) ( ) ( ) 97 1) S. Fukushima, M. Takahashi, and H. Yoshikawa: A STUDY ON VR-BASED MUTUAL ADAPTIVE CAI SYSTEM FOR NUCLEAR POWER PLANT, Proc. of FIFTH
A 1/4 1 1/ 1/1 1 9 6 (Vergence) (Convergence) (Divergence) ( ) ( ) 97 1) S. Fukushima, M. Takahashi, and H. Yoshikawa: A STUDY ON VR-BASED MUTUAL ADAPTIVE CAI SYSTEM FOR NUCLEAR POWER PLANT, Proc. of FIFTH
HMD VR VR HMD VR HMD VR Eye-Gaze Interface on HMD for Virtual Reality Hiromu MIYASHITA Masaki HAYASHI Kenichi OKADA Faculty of Science and Technology,
 HMD VR VR HMD VR HMD VR Eye-Gaze Interface on HMD for Virtual Reality Hiromu MIYASHITA Masaki HAYASHI Kenichi OKADA Faculty of Science and Technology, Keio University In the technology of the VR space,
HMD VR VR HMD VR HMD VR Eye-Gaze Interface on HMD for Virtual Reality Hiromu MIYASHITA Masaki HAYASHI Kenichi OKADA Faculty of Science and Technology, Keio University In the technology of the VR space,
HDLトレーナーサンプルプログラム説明書
 H8-BASE2 拡張キット説明書 June 10,2007 株式会社ソリトンウェーブ 目次 本製品の付属品について...3 本製品に付属するサンプルプログラムについて...4 サンプルソースの説明...5 1.TimerATest...5 2.LcdTest...5 3.AdcTest...5 4.AdcTest2...5 5.ComTest...5 6.PS2Test...6 7.FanTest...6
H8-BASE2 拡張キット説明書 June 10,2007 株式会社ソリトンウェーブ 目次 本製品の付属品について...3 本製品に付属するサンプルプログラムについて...4 サンプルソースの説明...5 1.TimerATest...5 2.LcdTest...5 3.AdcTest...5 4.AdcTest2...5 5.ComTest...5 6.PS2Test...6 7.FanTest...6
形式 :PDU 計装用プラグイン形変換器 M UNIT シリーズ パルス分周変換器 ( レンジ可変形 ) 主な機能と特長 パルス入力信号を分周 絶縁して単位パルス出力信号に変換 センサ用電源内蔵 パルス分周比は前面のスイッチで可変 出力は均等パルス オープンコレクタ 電圧パルス リレー接点パルス出力
 主な機能と特長 パルス入力信号を分周 絶縁して単位パルス出力信号に変換 センサ用電源内蔵 パルス分周比は前面のスイッチで可変 出力は均等パルス オープンコレクタ 電圧パルス リレー接点パルス出力") 計装用プラグイン形変換器 M UNIT シリーズ パルス分周変換器 ( レンジ可変形 ) 主な機能と特長 パルス入力信号を分周 絶縁して単位パルス出力信号に変換 センサ用電源内蔵 パルス分周比は前面のスイッチで可変 出力は均等パルス オープンコレクタ 電圧パルス リレー接点パルス出力を用意 密着取付可能 アプリケーション例 容積式流量計のパルス信号を単位パルスに変換 機械の回転による無接点信号を単位パルスに変換
計装用プラグイン形変換器 M UNIT シリーズ パルス分周変換器 ( レンジ可変形 ) 主な機能と特長 パルス入力信号を分周 絶縁して単位パルス出力信号に変換 センサ用電源内蔵 パルス分周比は前面のスイッチで可変 出力は均等パルス オープンコレクタ 電圧パルス リレー接点パルス出力を用意 密着取付可能 アプリケーション例 容積式流量計のパルス信号を単位パルスに変換 機械の回転による無接点信号を単位パルスに変換
ワイヤレスセンサモジュール取扱説明書
 スポーツセンシング 遠隔制御アプリケーション (For Windows) [ スポーツセンシング無線 ] 目次 1. 概要... 3 1.1 はじめに... 3 2. 遠隔制御アプリケーション... 4 2.1 はじめに... 4 2.2 アプリケーションの構成... 4 3. 機能詳細... 5 3.1 共通メニュー... 5 3.1.1. 接続... 5 3.1.1. COM ポート... 5
スポーツセンシング 遠隔制御アプリケーション (For Windows) [ スポーツセンシング無線 ] 目次 1. 概要... 3 1.1 はじめに... 3 2. 遠隔制御アプリケーション... 4 2.1 はじめに... 4 2.2 アプリケーションの構成... 4 3. 機能詳細... 5 3.1 共通メニュー... 5 3.1.1. 接続... 5 3.1.1. COM ポート... 5
55BDL5055P_Japanese_DFU_ pdf
 /11 V1.10 www.philips.co.jp ( ) : 6 Philips : LCD LCD - - LCD : ii DC 6 DC LCD iii 1....1 1.4. ( )...2 2....6 6 / 3.... 14 6. OSD... 41 7. USB... 51 8.... 53 9.... 54 + 10.... 56 11.... 58 12.... 59 4....
/11 V1.10 www.philips.co.jp ( ) : 6 Philips : LCD LCD - - LCD : ii DC 6 DC LCD iii 1....1 1.4. ( )...2 2....6 6 / 3.... 14 6. OSD... 41 7. USB... 51 8.... 53 9.... 54 + 10.... 56 11.... 58 12.... 59 4....
TH-42PAS10 TH-37PAS10 TQBA0286
 TH-42PAS10 TH-37PAS10 TQBA0286 2 4 8 10 11 17 18 20 21 22 23 24 25 26 27 28 29 30 31 32 33 38 42 44 46 50 51 52 53 54 3 4 5 6 7 8 3 4 1 2 9 5 6 1 4 2 3 5 6 10 11 1 2 3 4 12 13 14 TH-42PAS10 TH-42PAS10
TH-42PAS10 TH-37PAS10 TQBA0286 2 4 8 10 11 17 18 20 21 22 23 24 25 26 27 28 29 30 31 32 33 38 42 44 46 50 51 52 53 54 3 4 5 6 7 8 3 4 1 2 9 5 6 1 4 2 3 5 6 10 11 1 2 3 4 12 13 14 TH-42PAS10 TH-42PAS10
ホームシアター固定フレームカーブドスクリーン リュネット (Lunette) シリーズ ユーザーガイド重要 : 安全に使用するための注意事項 ご使用前に このユーザーガイドをご一読ください 正しく使用することで長くお使いいただけます 1. スクリーンは 照明スイッチ コンセント 家具 窓などの障害物
 シリーズ ユーザーガイド重要 : 安全に使用するための注意事項 ご使用前に このユーザーガイドをご一読ください 正しく使用することで長くお使いいただけます 1. スクリーンは 照明スイッチ コンセント 家具 窓などの障害物") ホームシアター固定フレームカーブドスクリーン リュネット (Lunette) シリーズ ユーザーガイド重要 : 安全に使用するための注意事項 ご使用前に このユーザーガイドをご一読ください 正しく使用することで長くお使いいただけます 1. スクリーンは 照明スイッチ コンセント 家具 窓などの障害物がない空間を選んで取り付けてください 2. スクリーンを壁に取り付ける場合 重量のある大きな絵画を取り付けるのと同様に
ホームシアター固定フレームカーブドスクリーン リュネット (Lunette) シリーズ ユーザーガイド重要 : 安全に使用するための注意事項 ご使用前に このユーザーガイドをご一読ください 正しく使用することで長くお使いいただけます 1. スクリーンは 照明スイッチ コンセント 家具 窓などの障害物がない空間を選んで取り付けてください 2. スクリーンを壁に取り付ける場合 重量のある大きな絵画を取り付けるのと同様に
9.プレゼン資料(小泉)R1
R1") 1 Me-DigIT 2 TRO, TMECH Interesting Readings IJMRCAS, TUFFC The Most 3., etc.. etc.. etc. 4 TRO09 5 J TRO09 The Most Interesting Readings J http://www.learner.org/interactives/renaissance/printing.html
1 Me-DigIT 2 TRO, TMECH Interesting Readings IJMRCAS, TUFFC The Most 3., etc.. etc.. etc. 4 TRO09 5 J TRO09 The Most Interesting Readings J http://www.learner.org/interactives/renaissance/printing.html
表紙.indd
 教育実践学研究 23,2018 1 Studies of Educational Psychology for Children (Adults) with Intellectual Disabilities * 鳥海順子 TORIUMI Junko 要約 : 本研究では, の動向を把握するために, 日本特殊教育学会における過去 25 年間の学会発表論文について分析を行った 具体的には, 日本特殊教育学会の1982
教育実践学研究 23,2018 1 Studies of Educational Psychology for Children (Adults) with Intellectual Disabilities * 鳥海順子 TORIUMI Junko 要約 : 本研究では, の動向を把握するために, 日本特殊教育学会における過去 25 年間の学会発表論文について分析を行った 具体的には, 日本特殊教育学会の1982
Unit 4 Around Town Let s Talk テキスト p 学習したこと 会話 Where s the food court? Do you know? Let s look at the map. It s across from the music store. We
 Unit 4 Around Town Let s Talk テキスト p. 30 31 会話 Where s the food court? Do you know? Let s look at the map. It s across from the music store. We should go this way. There s the food court. Where are the
Unit 4 Around Town Let s Talk テキスト p. 30 31 会話 Where s the food court? Do you know? Let s look at the map. It s across from the music store. We should go this way. There s the food court. Where are the
NCB564個別00版
 HES-M00 シリーズの新機能 脱調レス / 脱調検出 1 1. 概要 EtherCAT モーションコントロール機能内蔵 2 相マイクロステップモータドライバ HES-M00 シリーズにエンコーダ入力が追加され, 脱調検出 / 脱調レス等の機能が付加されました 2. 仕様 項目 仕様 備考 制御軸数 1 ボードで 1 軸制御 最大 枚 ( 軸制御 ) までスタック可能 電源電圧 ( モータ駆動電圧
HES-M00 シリーズの新機能 脱調レス / 脱調検出 1 1. 概要 EtherCAT モーションコントロール機能内蔵 2 相マイクロステップモータドライバ HES-M00 シリーズにエンコーダ入力が追加され, 脱調検出 / 脱調レス等の機能が付加されました 2. 仕様 項目 仕様 備考 制御軸数 1 ボードで 1 軸制御 最大 枚 ( 軸制御 ) までスタック可能 電源電圧 ( モータ駆動電圧
CMOS リニアイメージセンサ用駆動回路 C CMOS リニアイメージセンサ S 等用 C は当社製 CMOSリニアイメージセンサ S 等用に開発された駆動回路です USB 2.0インターフェースを用いて C と PCを接続
 CMOS リニアイメージセンサ用駆動回路 C13015-01 CMOS リニアイメージセンサ S11639-01 等用 C13015-01は当社製 CMOSリニアイメージセンサ S11639-01 等用に開発された駆動回路です USB 2.0インターフェースを用いて C13015-01と PCを接続することにより PCからC13015-01 を制御して センサのアナログビデオ信号を 16-bitデジタル出力に変換した数値データを
CMOS リニアイメージセンサ用駆動回路 C13015-01 CMOS リニアイメージセンサ S11639-01 等用 C13015-01は当社製 CMOSリニアイメージセンサ S11639-01 等用に開発された駆動回路です USB 2.0インターフェースを用いて C13015-01と PCを接続することにより PCからC13015-01 を制御して センサのアナログビデオ信号を 16-bitデジタル出力に変換した数値データを
Raspberry Pi BF BF BF Raspberry Pi PC USB HDMI OS SD SD OS Raspberry Pi Model B MicroUSB MicroSD OS SD GPIO HDMI USB LAN Raspberry Pi MicroUSB MicroSD
 Raspberry Pi Arduino Arduino Raspberry Pi Arduino URL Raspberry Pi HDMI USB SD https://www.raspberrypi.org/ Python, Scratch Arduino PC USB https://www.arduino.cc/ Arduino SDK Processing Kinect for Windows,
Raspberry Pi Arduino Arduino Raspberry Pi Arduino URL Raspberry Pi HDMI USB SD https://www.raspberrypi.org/ Python, Scratch Arduino PC USB https://www.arduino.cc/ Arduino SDK Processing Kinect for Windows,
01JP01COV-JP
 4-075-712-02 (1) FDL-1500MX1 2000 Sony Corporation ... 4... 6... 6... 7... 8... 9...11...12...12...14 MS... 16 MS...17 MS...18 MS...20 90...22...23...25...26...27...29...30...32...33...34 2 ...35 1:...
4-075-712-02 (1) FDL-1500MX1 2000 Sony Corporation ... 4... 6... 6... 7... 8... 9...11...12...12...14 MS... 16 MS...17 MS...18 MS...20 90...22...23...25...26...27...29...30...32...33...34 2 ...35 1:...
 L C -6D Z3 L C -0D Z3 3 4 5 6 7 8 9 10 11 1 13 14 15 16 17 OIL CLINIC BAR 18 19 POWER TIMER SENSOR 0 3 1 3 1 POWER TIMER SENSOR 3 4 1 POWER TIMER SENSOR 5 11 00 6 7 1 3 4 5 8 9 30 1 3 31 1 3 1 011 1
L C -6D Z3 L C -0D Z3 3 4 5 6 7 8 9 10 11 1 13 14 15 16 17 OIL CLINIC BAR 18 19 POWER TIMER SENSOR 0 3 1 3 1 POWER TIMER SENSOR 3 4 1 POWER TIMER SENSOR 5 11 00 6 7 1 3 4 5 8 9 30 1 3 31 1 3 1 011 1
サーマル型 ( ロッカースイッチ ) 3130 特長 1~3 極対応のロッカースイッチ兼用サーキットプロテクタです 内部はトリップフリー構造になっており またスナップインになっているため 簡単に取付可能です オプションとしてランプ点灯も可能です CBE standard EN (IEC
 3130 特長 1~3 極対応のロッカースイッチ兼用サーキットプロテクタです 内部はトリップフリー構造になっており またスナップインになっているため 簡単に取付可能です オプションとしてランプ点灯も可能です CBE standard EN (IEC") 特長 ~3 極対応のロッカースイッチ兼用サーキットプロテクタです 内部はトリップフリー構造になっており またスナップインになっているため 簡単に取付可能です オプションとしてランプ点灯も可能です CBE standard EN 609 (IEC 609) 取得製品です 用途 モータ トランス ソレノイド 事務機 電気器具 小型船舶 建設機械 医療機器 (EN6060) 値 / 内部抵抗値 ( 極当り
特長 ~3 極対応のロッカースイッチ兼用サーキットプロテクタです 内部はトリップフリー構造になっており またスナップインになっているため 簡単に取付可能です オプションとしてランプ点灯も可能です CBE standard EN 609 (IEC 609) 取得製品です 用途 モータ トランス ソレノイド 事務機 電気器具 小型船舶 建設機械 医療機器 (EN6060) 値 / 内部抵抗値 ( 極当り
Microsoft PowerPoint - pr_12_template-bs.pptx
 12 回パターン検出と画像特徴 テンプレートマッチング 領域分割 画像特徴 テンプレート マッチング 1 テンプレートマッチング ( 図形 画像などの ) 型照合 Template Matching テンプレートと呼ばれる小さな一部の画像領域と同じパターンが画像全体の中に存在するかどうかを調べる方法 画像内にある対象物体の位置検出 物体数のカウント 物体移動の検出などに使われる テンプレートマッチングの計算
12 回パターン検出と画像特徴 テンプレートマッチング 領域分割 画像特徴 テンプレート マッチング 1 テンプレートマッチング ( 図形 画像などの ) 型照合 Template Matching テンプレートと呼ばれる小さな一部の画像領域と同じパターンが画像全体の中に存在するかどうかを調べる方法 画像内にある対象物体の位置検出 物体数のカウント 物体移動の検出などに使われる テンプレートマッチングの計算
Web UX Web Web Web 1.2 Web GIF Kevin Burg Jamie Beck GIF GIF [2] Flixel Cinemagraph pro *1 Adobe Photoshop *2 GIMP *3 Web *1 Flixel Photos Inc. *2 *3
![Web UX Web Web Web 1.2 Web GIF Kevin Burg Jamie Beck GIF GIF [2] Flixel Cinemagraph pro *1 Adobe Photoshop *2 GIMP *3 Web *1 Flixel Photos Inc. *2 *3](/thumbs/89/99926796.jpg "Web UX Web Web Web 1.2 Web GIF Kevin Burg Jamie Beck GIF GIF [2] Flixel Cinemagraph pro *1 Adobe Photoshop *2 GIMP *3 Web *1 Flixel Photos Inc. *2 *3") 1 1 1 Web Web SNS 1 The Proposition of New Method to Generate Cinemagraph in Simple Way Isono Yuuka 1 Ando Daichi 1 Kasahafa Shinichi 1 Abstract: Recently, many animations are used for the web design.
1 1 1 Web Web SNS 1 The Proposition of New Method to Generate Cinemagraph in Simple Way Isono Yuuka 1 Ando Daichi 1 Kasahafa Shinichi 1 Abstract: Recently, many animations are used for the web design.
コンテンツセントリックネットワーク技術を用いた ストリームデータ配信システムの設計と実装
 コンテンツセントリックネットワークにおけるストリームデータ配信機構の実装 川崎賢弥, 阿多信吾, 村田正幸 大阪大学大学院情報科学研究科 大阪市立大学大学院工学研究科 2 発表内容 研究背景 研究目的 ストリームデータ配信機構の設計 ストリームデータのモデル化 コンテンツの名前構造 ストリームデータの要求とフロー制御 ストリームデータ配信機構の実装 動作デモンストレーション 3 コンテンツセントリックネットワーク
コンテンツセントリックネットワークにおけるストリームデータ配信機構の実装 川崎賢弥, 阿多信吾, 村田正幸 大阪大学大学院情報科学研究科 大阪市立大学大学院工学研究科 2 発表内容 研究背景 研究目的 ストリームデータ配信機構の設計 ストリームデータのモデル化 コンテンツの名前構造 ストリームデータの要求とフロー制御 ストリームデータ配信機構の実装 動作デモンストレーション 3 コンテンツセントリックネットワーク
SnNCutCnvs ステッカーウィザードを使ってデザインを作成する ここでは スターターキットに付属している A4 サイズ (210 mm 297 mm) のプリントステッカーを使用する場合の例を説明します [ ステップ 1] エリアサイズを変更します パソコンの場合 : 編集画面 >[ プロジェ
![SnNCutCnvs ステッカーウィザードを使ってデザインを作成する ここでは スターターキットに付属している A4 サイズ (210 mm 297 mm) のプリントステッカーを使用する場合の例を説明します [ ステップ 1] エリアサイズを変更します パソコンの場合 : 編集画面 >[ プロジェ](/thumbs/91/104717917.jpg "SnNCutCnvs ステッカーウィザードを使ってデザインを作成する ここでは スターターキットに付属している A4 サイズ (210 mm 297 mm) のプリントステッカーを使用する場合の例を説明します [ ステップ 1] エリアサイズを変更します パソコンの場合 : 編集画面 >[ プロジェ") SnNCutCnvs プリントステッカー機能の使い方 カッティングマシンのダイレクトカット機能と お手持ちのインクジェットプリンターを使って オリジナルステッカーを作ることができます SnNCutCnvs の基本的な操作については ヘルプを参照してください ヘルプを表示させるには 画面上部のをクリックします プリントステッカー機能を追加すると あらかじめデザインされたプリントステッカー模様が SnNCutCnvs
SnNCutCnvs プリントステッカー機能の使い方 カッティングマシンのダイレクトカット機能と お手持ちのインクジェットプリンターを使って オリジナルステッカーを作ることができます SnNCutCnvs の基本的な操作については ヘルプを参照してください ヘルプを表示させるには 画面上部のをクリックします プリントステッカー機能を追加すると あらかじめデザインされたプリントステッカー模様が SnNCutCnvs
Robot Platform Project(RPP) "Spur" "YP-Spur" rev. 4 [ ] Robot Platform Project(RPP) WATANABE Atsushi 1.,,., Fig. 1.,,,,,.,,,..,,..,,..,,,,. "
![Robot Platform Project(RPP) Spur YP-Spur rev. 4 [ ] Robot Platform Project(RPP) WATANABE Atsushi 1.,,., Fig. 1.,,,,,.,,,..,,..,,..,,,,.](/thumbs/93/117962738.jpg "Robot Platform Project(RPP) Spur YP-Spur rev. 4 [ ] Robot Platform Project(RPP) WATANABE Atsushi 1.,,., Fig. 1.,,,,,.,,,..,,..,,..,,,,.") Robot Platform Project(RPP) "Spur" "YP-Spur" ev. 4 [.8.9] Robot Platform Project(RPP) WATANABE Atsushi.,,., Fig..,,,,,.,,,..,,..,,..,,,,. "",,, Spur.,, Robot Platform Project, "YP-Spur".,,, 98 99,. [][3][4].,,,
Robot Platform Project(RPP) "Spur" "YP-Spur" ev. 4 [.8.9] Robot Platform Project(RPP) WATANABE Atsushi.,,., Fig..,,,,,.,,,..,,..,,..,,,,. "",,, Spur.,, Robot Platform Project, "YP-Spur".,,, 98 99,. [][3][4].,,,
今日の目的 電子工作や電子基板でオリジナル製品を作っていて 外装も自分で作りたいなあと思っているメイカーズの方や やっぱり3D 造形に興味がある各種デザイナーの方向けに 出来る限りローコストで3D 造形をはじめられる方法を初心者でもわかるように基本から30 分でご説明します メイカーズとデザイナーの
 30 分でわかる メイカーズとデザイナーのための 3D 造形再入門 大阪 3D プリンタービジネス研究会 2016 年 1 月 20 日 今日の目的 電子工作や電子基板でオリジナル製品を作っていて 外装も自分で作りたいなあと思っているメイカーズの方や やっぱり3D 造形に興味がある各種デザイナーの方向けに 出来る限りローコストで3D 造形をはじめられる方法を初心者でもわかるように基本から30 分でご説明します
30 分でわかる メイカーズとデザイナーのための 3D 造形再入門 大阪 3D プリンタービジネス研究会 2016 年 1 月 20 日 今日の目的 電子工作や電子基板でオリジナル製品を作っていて 外装も自分で作りたいなあと思っているメイカーズの方や やっぱり3D 造形に興味がある各種デザイナーの方向けに 出来る限りローコストで3D 造形をはじめられる方法を初心者でもわかるように基本から30 分でご説明します
スピーカ_レター
 NS-8 master ラッピングサウンド システムスピーカ 特徴 NS-8( 特許取得 ) は天井や壁へ直付けする事が出来る 半球状の指向特性 少ない数で室内に音をサービスする事が可能 1 エンクロージャーの振動が少なく 階上への振動が抑えられる 広い指向特性を得る事が出来る マイクなどを使用する場所においては はねかえりスピーカーを必要としない 自身の声も聞き取り易いので ストレスが少なく運営が可能
NS-8 master ラッピングサウンド システムスピーカ 特徴 NS-8( 特許取得 ) は天井や壁へ直付けする事が出来る 半球状の指向特性 少ない数で室内に音をサービスする事が可能 1 エンクロージャーの振動が少なく 階上への振動が抑えられる 広い指向特性を得る事が出来る マイクなどを使用する場所においては はねかえりスピーカーを必要としない 自身の声も聞き取り易いので ストレスが少なく運営が可能
実験題吊 「加速度センサーを作ってみよう《
 加速度センサーを作ってみよう 茨城工業高等専門学校専攻科 山越好太 1. 加速度センサー? 最近話題のセンサーに 加速度センサー というものがあります これは文字通り 加速度 を測るセンサーで 主に動きの検出に使われたり 地球から受ける重力加速度を測定することで傾きを測ることなどにも使われています 最近ではゲーム機をはじめ携帯電話などにも搭載されるようになってきています 2. 加速度センサーの仕組み加速度センサーにも様々な種類があります
加速度センサーを作ってみよう 茨城工業高等専門学校専攻科 山越好太 1. 加速度センサー? 最近話題のセンサーに 加速度センサー というものがあります これは文字通り 加速度 を測るセンサーで 主に動きの検出に使われたり 地球から受ける重力加速度を測定することで傾きを測ることなどにも使われています 最近ではゲーム機をはじめ携帯電話などにも搭載されるようになってきています 2. 加速度センサーの仕組み加速度センサーにも様々な種類があります
九州大学学術情報リポジトリ Kyushu University Institutional Repository 九州大学百年史第 7 巻 : 部局史編 Ⅳ 九州大学百年史編集委員会 出版情報 : 九州大学百年史. 7, 2017
 九州大学学術情報リポジトリ Kyushu University Institutional Repository 九州大学百年史第 7 巻 : 部局史編 Ⅳ 九州大学百年史編集委員会 http://hdl.handle.net/2324/1801803 出版情報 : 九州大学百年史. 7, 2017-03-31. 九州大学バージョン :published 権利関係 : 第 67 編 国際交流推進機構
九州大学学術情報リポジトリ Kyushu University Institutional Repository 九州大学百年史第 7 巻 : 部局史編 Ⅳ 九州大学百年史編集委員会 http://hdl.handle.net/2324/1801803 出版情報 : 九州大学百年史. 7, 2017-03-31. 九州大学バージョン :published 権利関係 : 第 67 編 国際交流推進機構
HMD を用いた PT カメラのインターネット遠隔操作芝浦工業大学知能機械システム研究室 HMD(Head Mounted Display) を用いた PT(Pan-Tilt) カメラのインターネット遠隔操作 ユーザマニュアル (ver1.0) 2014 年 10 月 23 日 芝浦工業大学知能機械
 を用いた PT(Pan-Tilt) カメラのインターネット遠隔操作 ユーザマニュアル (ver1.0) 2014 年 10 月 23 日 芝浦工業大学知能機械") 芝浦工業大学知能機械システム研究室 HMD(Head Mounted Display) を用いた PT(Pan-Tilt) カメラのインターネット遠隔操作 ユーザマニュアル (ver1.0) 2014 年 10 月 23 日 芝浦工業大学知能機械システム研究室 荻谷浩史, 石田真一, 安田福啓, 松日楽信人 目次 1. はじめに... 2 1.1 RTC 群概要... 2 1.2 システム構成...
芝浦工業大学知能機械システム研究室 HMD(Head Mounted Display) を用いた PT(Pan-Tilt) カメラのインターネット遠隔操作 ユーザマニュアル (ver1.0) 2014 年 10 月 23 日 芝浦工業大学知能機械システム研究室 荻谷浩史, 石田真一, 安田福啓, 松日楽信人 目次 1. はじめに... 2 1.1 RTC 群概要... 2 1.2 システム構成...
27 VR Effects of the position of viewpoint on self body in VR environment
 27 VR Effects of the position of viewpoint on self body in VR environment 1160298 2015 2 25 VR (HMD), HMD (VR). VR,.. HMD,., VR,.,.,,,,., VR,. HMD VR i Abstract Effects of the position of viewpoint on
27 VR Effects of the position of viewpoint on self body in VR environment 1160298 2015 2 25 VR (HMD), HMD (VR). VR,.. HMD,., VR,.,.,,,,., VR,. HMD VR i Abstract Effects of the position of viewpoint on
3 2 q w e r t y
 Panasonic System Networks Co., Ltd. 2010 WV-CL930,WV-CL934 WV-LZ80/2 TV LENS 6~12mm 1:1.4 WV-CL930,WV-CL934 3 2 q w e r t y 4 q w e r t y u i o!0!1!2!3!4!5 5 7 6 9 8 11 10 13 12 AC 24V IN DC 12V IN GEN-LOCK
Panasonic System Networks Co., Ltd. 2010 WV-CL930,WV-CL934 WV-LZ80/2 TV LENS 6~12mm 1:1.4 WV-CL930,WV-CL934 3 2 q w e r t y 4 q w e r t y u i o!0!1!2!3!4!5 5 7 6 9 8 11 10 13 12 AC 24V IN DC 12V IN GEN-LOCK
センサーライト型カメラ LC002 取扱説明書 ご使用前に 正しくご使用いただくために この取扱説明書を必ずお読みください 必要に応じてダウンロードをして保管下さい 最終更新 :2016 年 2 月 5 日 - 1 -
 センサーライト型カメラ LC002 取扱説明書 ご使用前に 正しくご使用いただくために この取扱説明書を必ずお読みください 必要に応じてダウンロードをして保管下さい 最終更新 :2016 年 2 月 5 日 - 1 - 目次 1: スペック... - 3-2: 付属品を確かめる... - 4-3: 時間設定 接続方法... - 4 - ... - 4 -
センサーライト型カメラ LC002 取扱説明書 ご使用前に 正しくご使用いただくために この取扱説明書を必ずお読みください 必要に応じてダウンロードをして保管下さい 最終更新 :2016 年 2 月 5 日 - 1 - 目次 1: スペック... - 3-2: 付属品を確かめる... - 4-3: 時間設定 接続方法... - 4 - ... - 4 -
SURF,,., 55%,.,., SURF(Speeded Up Robust Features), 4 (,,, ), SURF.,, 84%, 96%, 28%, 32%.,,,. SURF, i
, 4 (,,, ), SURF.,, 84%, 96%, 28%, 32%.,,,. SURF, i") 24 SURF Recognition of Facial Expression Based on SURF 1130402 2013 3 1 SURF,,., 55%,.,., SURF(Speeded Up Robust Features), 4 (,,, ), SURF.,, 84%, 96%, 28%, 32%.,,,. SURF, i Abstract Recognition of Facial
24 SURF Recognition of Facial Expression Based on SURF 1130402 2013 3 1 SURF,,., 55%,.,., SURF(Speeded Up Robust Features), 4 (,,, ), SURF.,, 84%, 96%, 28%, 32%.,,,. SURF, i Abstract Recognition of Facial
E-510 カタログ
 Let s Head Out on a Journey. Cameras enable emotions to take shape. They preserve beautiful memories and let you share a special moment with many people. It is precisely this extraordinary power that makes
Let s Head Out on a Journey. Cameras enable emotions to take shape. They preserve beautiful memories and let you share a special moment with many people. It is precisely this extraordinary power that makes
総合仕様
 Dell Inspiron 300/400 仕様 本書には セットアップ ドライバのアップデート およびコンピュータのアップデートの際に必要となる可能性がある基本情報が記載されています メモ : 提供される内容は地域により異なる場合があります コンピュータの設定に関する詳細については スタートとサポートをクリックし お使いのコンピュータに関する情報を表示するためのオプションを選択してください ヘルプ
Dell Inspiron 300/400 仕様 本書には セットアップ ドライバのアップデート およびコンピュータのアップデートの際に必要となる可能性がある基本情報が記載されています メモ : 提供される内容は地域により異なる場合があります コンピュータの設定に関する詳細については スタートとサポートをクリックし お使いのコンピュータに関する情報を表示するためのオプションを選択してください ヘルプ
3 無線 / 有線接続で制御 メガローバー Ver2.0 は Wi-Fi / BLE / Bluetooth Classic の 3 種の無線通信と 有線の USB シリアル通信に対応しています 指定のコマンドを用いることで PC やタブレットなど 様々なデバイスからメガローバー Ver2.0 を制
 関係各位 2018 年 8 月 29 日 ヴイストン株式会社 研究開発用台車ロボット メガローバー Ver2.0 を発売 ~ 新開発の制御基板を搭載し ROS や Arduino IDE に対応 ~ ヴイストン株式会社 ( 本社 : 大阪府大阪市 代表取締役 : 大和信夫 ) は 2018 年 8 月 30 日より 研究開発用台車ロボット メガローバー Ver2.0 の販売を開始いたします 製品の概要
関係各位 2018 年 8 月 29 日 ヴイストン株式会社 研究開発用台車ロボット メガローバー Ver2.0 を発売 ~ 新開発の制御基板を搭載し ROS や Arduino IDE に対応 ~ ヴイストン株式会社 ( 本社 : 大阪府大阪市 代表取締役 : 大和信夫 ) は 2018 年 8 月 30 日より 研究開発用台車ロボット メガローバー Ver2.0 の販売を開始いたします 製品の概要
Web プログラミング 1 HTML+CSS (3) (2 章 ) 2013/5/8( 水 ) 演習室の PC のハードディスクには演習で作成したデータは保管できません 各 PC の ネットワーク接続 ショートカットからメディア情報センターのサーバーにアクセスしてください (Z ドライブとして使用で
 (2 章 ) 2013/5/8( 水 ) 演習室の PC のハードディスクには演習で作成したデータは保管できません 各 PC の ネットワーク接続 ショートカットからメディア情報センターのサーバーにアクセスしてください (Z ドライブとして使用で") Web プログラミング 1 HTML+CSS (3) (2 章 ) 2013/5/8( 水 ) 演習室の PC のハードディスクには演習で作成したデータは保管できません 各 PC の ネットワーク接続 ショートカットからメディア情報センターのサーバーにアクセスしてください (Z ドライブとして使用できます ) 演習名 使用するフォルダ 演習 1 Z: Web プログラミング 1 20130508 演習
Web プログラミング 1 HTML+CSS (3) (2 章 ) 2013/5/8( 水 ) 演習室の PC のハードディスクには演習で作成したデータは保管できません 各 PC の ネットワーク接続 ショートカットからメディア情報センターのサーバーにアクセスしてください (Z ドライブとして使用できます ) 演習名 使用するフォルダ 演習 1 Z: Web プログラミング 1 20130508 演習
untitled
 Japanese Journal of Administrative Science Volume 21, No.3, 2008, 239-251. Case Study 中国における知識創造マネジメントの実践的な展開 海爾集団を事例として The Practice of Knowledge Creation Management in Chinese Companies: The Case of
Japanese Journal of Administrative Science Volume 21, No.3, 2008, 239-251. Case Study 中国における知識創造マネジメントの実践的な展開 海爾集団を事例として The Practice of Knowledge Creation Management in Chinese Companies: The Case of
率 九州 ( 工 -エネルギー科学) 新潟 ( 工 - 力学 ) 神戸 ( 海事科学 ) 60.0 ( 工 - 化学材料 ) 岡山 ( 工 - 機械システム系 ) 北海道 ( 総合理系 - 化学重点 ) 57.5 名古屋工業 ( 工 - 電気 機械工 ) 首都大学東京
 新潟 ( 工 - 力学 ) 神戸 ( 海事科学 ) 60.0 ( 工 - 化学材料 ) 岡山 ( 工 - 機械システム系 ) 北海道 ( 総合理系 - 化学重点 ) 57.5 名古屋工業 ( 工 - 電気 機械工 ) 首都大学東京") 率 93 東京工業 ( 生命理工 - 生命理工 ) 67.5 東京 ( 理科一類 ) 67.5 90 九州 ( 工 - 機械航空工 ) 67.5 ( 理科二類 ) 67.5 89 九州 ( 工 - 電気情報工 ) 65.0 京都 ( 工 - 情報 ) 65.0 87 筑波 ( 理工 - 工学システム ) 九州 ( 工 - 建築 ) 65.0 86 北海道 ( 工 - 情報エレクトロニクス ) 60.0
率 93 東京工業 ( 生命理工 - 生命理工 ) 67.5 東京 ( 理科一類 ) 67.5 90 九州 ( 工 - 機械航空工 ) 67.5 ( 理科二類 ) 67.5 89 九州 ( 工 - 電気情報工 ) 65.0 京都 ( 工 - 情報 ) 65.0 87 筑波 ( 理工 - 工学システム ) 九州 ( 工 - 建築 ) 65.0 86 北海道 ( 工 - 情報エレクトロニクス ) 60.0
Devio CR- 1T / CR- 1C クイックスタートガイド July
 Devio CR- 1T / CR- 1C クイックスタートガイド July 2016 585.0396.900 同梱内容 Devio CR- 1T Devio CR-1 Devio DTM-1 テーブルトップビームフォーミングマイクロフォン 電源ケーブル :24V / 2.5A USB3.0 ケーブル (TYPE A - TYPE B) ブラケットおよび取り付けネジ 2 ピン及び 4 ピンユーロブロックコネクター
Devio CR- 1T / CR- 1C クイックスタートガイド July 2016 585.0396.900 同梱内容 Devio CR- 1T Devio CR-1 Devio DTM-1 テーブルトップビームフォーミングマイクロフォン 電源ケーブル :24V / 2.5A USB3.0 ケーブル (TYPE A - TYPE B) ブラケットおよび取り付けネジ 2 ピン及び 4 ピンユーロブロックコネクター
平成 27 年度 ICT とくしま創造戦略 重点戦略の推進に向けた調査 研究事業 アクティブラーニングを支援する ユーザインターフェースシステムの開発 ( 報告書 ) 平成 28 年 1 月 国立高等専門学校機構阿南工業高等専門学校
 平成 28 年 1 月 国立高等専門学校機構阿南工業高等専門学校") 平成 27 年度 ICT とくしま創造戦略 重点戦略の推進に向けた調査 研究事業 アクティブラーニングを支援する ユーザインターフェースシステムの開発 ( 報告書 ) 平成 28 年 1 月 国立高等専門学校機構阿南工業高等専門学校 1 はじめに ICTとくしま創造戦略の人材育成 教育分野の重点戦略のひとつに教育環境のICT 化があげられており, また平成 27 年に閣議決定された世界最先端 IT
平成 27 年度 ICT とくしま創造戦略 重点戦略の推進に向けた調査 研究事業 アクティブラーニングを支援する ユーザインターフェースシステムの開発 ( 報告書 ) 平成 28 年 1 月 国立高等専門学校機構阿南工業高等専門学校 1 はじめに ICTとくしま創造戦略の人材育成 教育分野の重点戦略のひとつに教育環境のICT 化があげられており, また平成 27 年に閣議決定された世界最先端 IT
 Building a Culture of Self- Access Learning at a Japanese University An Action Research Project Clair Taylor Gerald Talandis Jr. Michael Stout Keiko Omura Problem Action Research English Central Spring,
Building a Culture of Self- Access Learning at a Japanese University An Action Research Project Clair Taylor Gerald Talandis Jr. Michael Stout Keiko Omura Problem Action Research English Central Spring,
形式 :AEDY 直流出力付リミッタラーム AE UNIT シリーズ ディストリビュータリミッタラーム主な機能と特長 直流出力付プラグイン形の上下限警報器 入力短絡保護回路付 サムロータリスイッチ設定方式 ( 最小桁 1%) 警報時のリレー励磁 非励磁が選択可能 出力接点はトランスファ形 (c 接点
 警報時のリレー励磁 非励磁が選択可能 出力接点はトランスファ形 (c 接点") 直流出力付リミッタラーム AE UNIT シリーズ ディストリビュータリミッタラーム主な機能と特長 直流出力付プラグイン形の上下限警報器 入力短絡保護回路付 サムロータリスイッチ設定方式 ( 最小桁 1%) 警報時のリレー励磁 非励磁が選択可能 出力接点はトランスファ形 (c 接点 ) リレー接点は 110V DC 使用可 AEDY-12345-67 価格基本価格 75,000 円加算価格 110V
直流出力付リミッタラーム AE UNIT シリーズ ディストリビュータリミッタラーム主な機能と特長 直流出力付プラグイン形の上下限警報器 入力短絡保護回路付 サムロータリスイッチ設定方式 ( 最小桁 1%) 警報時のリレー励磁 非励磁が選択可能 出力接点はトランスファ形 (c 接点 ) リレー接点は 110V DC 使用可 AEDY-12345-67 価格基本価格 75,000 円加算価格 110V
Microsoft Word - LiberView_3D-セファロ_資料 doc
 LiberView 3D Cephalo 睡眠時無呼吸症候群向けセファログラム計測ソフト 2010 年 2 月販売開始予定 睡眠時無呼吸症候群向けのセファログラム計測ソフトです 主な特徴 3D 画像用の睡眠時無呼吸症候群向けセファロ計測機能 2D 画像用の睡眠時無呼吸症候群向けセファロ計測機能 2D 画像用のセファロ計測結果の電子カルテ連携機能 様々な画像表示機能及び計測 アノテーション機能を実装
LiberView 3D Cephalo 睡眠時無呼吸症候群向けセファログラム計測ソフト 2010 年 2 月販売開始予定 睡眠時無呼吸症候群向けのセファログラム計測ソフトです 主な特徴 3D 画像用の睡眠時無呼吸症候群向けセファロ計測機能 2D 画像用の睡眠時無呼吸症候群向けセファロ計測機能 2D 画像用のセファロ計測結果の電子カルテ連携機能 様々な画像表示機能及び計測 アノテーション機能を実装
Microsoft Word - NJJ-105の平均波処理について_改_OK.doc
 ハンディサーチ NJJ-105 の平均波処理について 2010 年 4 月 株式会社計測技術サービス 1. はじめに平均波処理の処理アルゴリズムの内容と有効性の度合いを現場測定例から示す まず ほぼ同じ鉄筋かぶりの密接鉄筋 壁厚測定時の平均波処理画像について また ダブル筋 千鳥筋の現場測定例へ平均波処理とその他画像処理を施し 処理画像の差について比較検証し 考察を加えた ( 平均波処理画像はその他の各処理画像同様
ハンディサーチ NJJ-105 の平均波処理について 2010 年 4 月 株式会社計測技術サービス 1. はじめに平均波処理の処理アルゴリズムの内容と有効性の度合いを現場測定例から示す まず ほぼ同じ鉄筋かぶりの密接鉄筋 壁厚測定時の平均波処理画像について また ダブル筋 千鳥筋の現場測定例へ平均波処理とその他画像処理を施し 処理画像の差について比較検証し 考察を加えた ( 平均波処理画像はその他の各処理画像同様
ZIMCODE TRACTION SYSTEM ジムコード牽引システム Antioxidant protection for long-lasting strength and performance.
 ZIMCODE TRACTION SYSTEM ジムコード牽引システム Antioxidant protection for long-lasting strength and performance. 1 2 3 4 ジムコード 基本フレーム A 組み立て手順 Ⅰ. 1 クランプ付き IV ポストをベッドの頭 / 足側の IV ソケットに差し込みます 事前に必要な IV ソケットのサイズ 頭 /
ZIMCODE TRACTION SYSTEM ジムコード牽引システム Antioxidant protection for long-lasting strength and performance. 1 2 3 4 ジムコード 基本フレーム A 組み立て手順 Ⅰ. 1 クランプ付き IV ポストをベッドの頭 / 足側の IV ソケットに差し込みます 事前に必要な IV ソケットのサイズ 頭 /
1
 1 Smart Simple Spot 2 3 01 02 4 03 04 5 05 06 2016 7 6 07 08 09 2 10 11 12 10 4 7 13 14 15 6 3 2 16 17 18 8 2000 2000 lm NEW 1000 lm 9 2000 22000 1 10 2000 1000 1 2 3 HAPPY BIRTHDAY! 11 2000 1000 1 2 3
1 Smart Simple Spot 2 3 01 02 4 03 04 5 05 06 2016 7 6 07 08 09 2 10 11 12 10 4 7 13 14 15 6 3 2 16 17 18 8 2000 2000 lm NEW 1000 lm 9 2000 22000 1 10 2000 1000 1 2 3 HAPPY BIRTHDAY! 11 2000 1000 1 2 3
Pioneer DJ DJ Mixer TRAKTOR シリーズ接続ガイド はじめに DJミキサーとコンピュータをUSBケーブル1 本で接続することで TRAKTOR シリーズ 1 のデッキ ( プレーヤー ) のコントロールや DJミキサーに内蔵されたUSBサウンドカードで音声を入出力するなど T
 のコントロールや DJミキサーに内蔵されたUSBサウンドカードで音声を入出力するなど T") Pioneer DJ DJ Mixer TRAKTOR シリーズ接続ガイド はじめに DJミキサーとコンピュータをUSBケーブル1 本で接続することで TRAKTOR シリーズ 1 のデッキ ( プレーヤー ) のコントロールや DJミキサーに内蔵されたUSBサウンドカードで音声を入出力するなど TRAKTOR シリーズと組み合わせたさまざまなDJプレイをお楽しみいただけます また 楽曲の録音 制作などにも対応しています
Pioneer DJ DJ Mixer TRAKTOR シリーズ接続ガイド はじめに DJミキサーとコンピュータをUSBケーブル1 本で接続することで TRAKTOR シリーズ 1 のデッキ ( プレーヤー ) のコントロールや DJミキサーに内蔵されたUSBサウンドカードで音声を入出力するなど TRAKTOR シリーズと組み合わせたさまざまなDJプレイをお楽しみいただけます また 楽曲の録音 制作などにも対応しています
目次 1: スペック 2 ページ 2: 付属品を確かめる 3 ページ 3: 時間設定 接続方法 3 ページ 3-1: 時間設定の方法について 3 ページ 3-2: カメラ本体に microsd カードを装着 3 ページ 3-3: カメラ本体に付属アダプタを接続 4 ページ 4: 録画 & 録音方法と
 目次 1: スペック 2 ページ 2: 付属品を確かめる 3 ページ 3: 時間設定 接続方法 3 ページ 3-1: 時間設定の方法について 3 ページ 3-2: カメラ本体に microsd カードを装着 3 ページ 3-3: カメラ本体に付属アダプタを接続 4 ページ 4: 録画 & 録音方法と LED 点灯方法 4 ページ 4-1: 録画 & 録音と LED ライトについて 4 ページ 4-2:
目次 1: スペック 2 ページ 2: 付属品を確かめる 3 ページ 3: 時間設定 接続方法 3 ページ 3-1: 時間設定の方法について 3 ページ 3-2: カメラ本体に microsd カードを装着 3 ページ 3-3: カメラ本体に付属アダプタを接続 4 ページ 4: 録画 & 録音方法と LED 点灯方法 4 ページ 4-1: 録画 & 録音と LED ライトについて 4 ページ 4-2:
ギョロモガイガー Ⅱ 操作ガイド ギョロガイガー Ⅱ 操作ガイド 本書では ギョロガイガー Ⅱ の操作方法についてご説明いたします 目次 1. 概要 コンセプト 主な機能 基本仕様 インストール 使い方...
 ギョロガイガー Ⅱ 操作ガイド 本書では ギョロガイガー Ⅱ の操作方法についてご説明いたします 目次 1. 概要... 2 1.1. コンセプト... 2 1.2. 主な機能... 2 1.3. 基本仕様... 3 2. インストール... 4 3. 使い方... 5 3.1. ペアリング... 5 3.2. アプリを起動する... 7 3.3. 単位を変更する... 8 3.4. 計測間隔を変更する...
ギョロガイガー Ⅱ 操作ガイド 本書では ギョロガイガー Ⅱ の操作方法についてご説明いたします 目次 1. 概要... 2 1.1. コンセプト... 2 1.2. 主な機能... 2 1.3. 基本仕様... 3 2. インストール... 4 3. 使い方... 5 3.1. ペアリング... 5 3.2. アプリを起動する... 7 3.3. 単位を変更する... 8 3.4. 計測間隔を変更する...
IPCClient(英語)の使用方法
の使用方法") IPCClient( 英語 ) の使用方法 1. ダウンロードされた pcsoft2.zip ファイルを解凍して下さい 2. NC004.exe を起動して下さい (NC003 でも使用可能です ) 3. 下記画面の操作方法に沿って ソフトをインストールして下さい (1) 确定 をクリックして下さい (2) Next をクリックして下さい (3) Browse... で保存場所を指定して Next
IPCClient( 英語 ) の使用方法 1. ダウンロードされた pcsoft2.zip ファイルを解凍して下さい 2. NC004.exe を起動して下さい (NC003 でも使用可能です ) 3. 下記画面の操作方法に沿って ソフトをインストールして下さい (1) 确定 をクリックして下さい (2) Next をクリックして下さい (3) Browse... で保存場所を指定して Next
MR524 MR624 MR824 Powered Studio Monitors 必ず実行 禁止 必ず実行 禁止 禁止 本書を全て読むこと 水分をかけたり湿気にさらさないこと 電源コードは安全に配置すること 本体を落下しないこと 異臭や異常を感じたら修理を依頼すること 禁止 必ず実行 禁止 禁止
 Powered Studio Monitors 日本語オーナーズマニュアル 2017 12 MR524 MR624 MR824 Powered Studio Monitors 必ず実行 禁止 必ず実行 禁止 禁止 本書を全て読むこと 水分をかけたり湿気にさらさないこと 電源コードは安全に配置すること 本体を落下しないこと 異臭や異常を感じたら修理を依頼すること 禁止 必ず実行 禁止 禁止 大音量で使用しないこと
Powered Studio Monitors 日本語オーナーズマニュアル 2017 12 MR524 MR624 MR824 Powered Studio Monitors 必ず実行 禁止 必ず実行 禁止 禁止 本書を全て読むこと 水分をかけたり湿気にさらさないこと 電源コードは安全に配置すること 本体を落下しないこと 異臭や異常を感じたら修理を依頼すること 禁止 必ず実行 禁止 禁止 大音量で使用しないこと
C FGIH C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C
 TUDSR5SET TUDSR5 C 7 8 9 ch DIGITAL CS TUNER C C C C S-A C FGIH C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C
TUDSR5SET TUDSR5 C 7 8 9 ch DIGITAL CS TUNER C C C C S-A C FGIH C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C
問 1 図 1 の図形を作るプログラムを作成せよ 但し ウィンドウの大きさは と し 座標の関係は図 2 に示すものとする 図 1 作成する図形 原点 (0,0) (280,0) (80,0) (180,0) (260,0) (380,0) (0,160) 図 2 座標関係 問 2
 (280,0) (80,0) (180,0) (260,0) (380,0) (0,160) 図 2 座標関係 問 2") 問 1 図 1 の図形を作るプログラムを作成せよ 但し ウィンドウの大きさは 400 200 と し 座標の関係は図 2 に示すものとする 図 1 作成する図形 原点 (0,0) (280,0) (80,0) (180,0) (260,0) (380,0) (0,160) 図 2 座標関係 問 2 for 文を用いて図 3 の様な図形を描くプログラムを作成せよ 但し ウィンドウのサイズは 300 300
問 1 図 1 の図形を作るプログラムを作成せよ 但し ウィンドウの大きさは 400 200 と し 座標の関係は図 2 に示すものとする 図 1 作成する図形 原点 (0,0) (280,0) (80,0) (180,0) (260,0) (380,0) (0,160) 図 2 座標関係 問 2 for 文を用いて図 3 の様な図形を描くプログラムを作成せよ 但し ウィンドウのサイズは 300 300