3 2 2 (1) (2) (3) (4) 4 4 AdaBoost 2. [11] Onishi&Yoda [8] Iwashita&Stoica [5] 4 [3] 3. 3 (1) (2) (3)
|
|
|
- はすな すえたけ
- 8 years ago
- Views:
Transcription
 (2) (3) (4) 4 AdaBoost 1.")
1 (MIRU2012) {d kouno,shimada,endo}@pluto.ai.kyutech.ac.jp (1) (2) (3) (4) 4 AdaBoost 1. Kanade [6] CLAFIC [12] EigenFace [10] [7]
 (3)")

![2. [11]](/docs-images/68/59204737/images/2-4.jpg)



















2 3 2 2 (1) (2) (3) (4) 4 4 AdaBoost 2. [11] Onishi&Yoda [8] Iwashita&Stoica [5] 4 [3] 3. 3 (1) (2) (3)




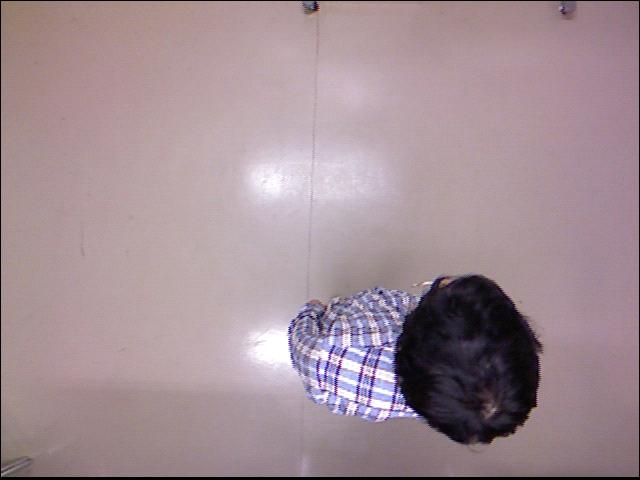
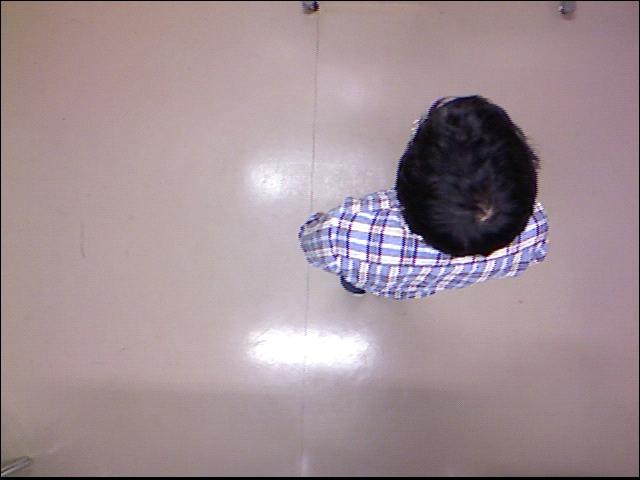







3 720 図 4 人物領域抽出例 特徴量抽出 この節では人物識別に用いる特徴量について述べる 図 5 人物の立ち位置による の出力結果の違い 本手法では (1) 人物の身長 (2) 人物の面積 (3) 人物 の体型 (4) 深度ヒストグラムの 4 つを特徴量を扱って いる 注 2 本手法における身長特徴は からの距離であり 実際の 人物の身長ではないことに注意 注 3 本論文における人物の体型特徴は頭部や肩の領域の幅 図 6 正規化の例 y 人物の身長 人物の身長は人物間の区別において最も重要な特徴量 の一つになる 本手法では深度情報を利用することで人 物の身長に関する特徴量を求める カメラから最も近い 位置にある人物の頭部までの距離は人物ごとに異なる そこで それぞれの深度画像においてカメラから最も近 いピクセルまでの距離を抽出する このようにして人物 の頭部までの距離は得ることができるが 立ち位置によ る距離値の差という問題がある 図 5 はその問題の例を 表している. この図において 下の値はそれぞれ から得られた距離を示している この値から分かるよう に人物の立っている位置によって同一人物においても特 徴量に大きく差が出てしまう 注 2 この問題を解決するために人物の立ち位置により出力 値を正規化する 本手法では深度情報を利用することで 概ね正しく人物領域を推定することができる こうして 求められた人物領域の中心位置を基に正規化することで 同一人物内における誤差を減少させることができる 図 6 は正規化の例を表している. このようにして得られた 値を人物の身長特徴とする 人物の面積 人物の面積も人物識別において直感的で特有の特徴量 となる そこで本手法では人物領域における面積の値を 利用する この特徴量は 3. 1 節において抽出された人物 領域のピクセル数の総和を算出することにより求める 人物の体型 人物の身体の大きさ 注 3 は人物識別において最も効果 的な特徴量の一つになる 本手法では 体型特徴として x 図 7 人物の体型特徴の取得例 x 座標と y 座標における幅の大きさを使用している こ れらの値は人物領域画像の周辺分布から抽出する 人物 領域の x 座標と y 座標において幅が最大となる値を使用 する 図 7 は体型特徴の取得例を表している
4 AdaBoost [2] AdaBoost Adaboost 1 2 C4.5 [9] 4 C AdaBoost Weka leave-one-out ,,, 3. 2,, 4 Weka J48 5
5 1 [%] all , +. all [%] 1 (94.4%)., % A H A H E G % 5 6cm 2 3cm 52.5% 21.9% 40.6% [7] x y Gallagher&Chen [4] [13]
6 2 + A B C D E F G H A B C D E F G H (1) (2) (3) (4) 4 AdaBoost C4.5 (1) (4) % 6 [1] pp , [4] A. C. Gallagher and T. Chen. Using Context to Recognize People in Consumer Images, IPSJ Transactions on Computer Vision and Applications, Vol. 1, pp , [5] Y. Iwashita and A. Stoica. Gait Recognition using Shadow Analysis, Proc. of Symposium on Bioinspired, Learning, and Intelligent Systems for Security 2009, pp , [6] T. Kanade. Picture processing by computer complex and recognition of human face, Technical report, Kyoto University, Dept. of Information Science, [7] R. Nakatani, D. Kouno, K. Shimada and T. Endo. A Person Identification Method Using a Top-view Head Image from an Overhead Camera, Proc. of 2nd International Workshop on Advanced Computational Intelligence and Intelligent Informatics (IWACIII2011), SS4-1, [8] M. Onishi and I. Yoda. Visualization of Customer Flow in an Office Complex over a Long Period, Proceedings of International Conference on Pattern Recognition (ICPR), pp , [9] J. R. Quinlan. C4.5 Programs for Machine Learning, Morgan Kaufmann Publishers, [10] M. Turk and A. P. Pentland. Eigenfaces for recognition, Journal of Cognitive Neuroscience, Vol. 3, No. 1, pp , [11],,, 129, No. 6, pp , [12] S. Watanabe and N. Pakvasa. Subspace method in pattern recognition, Proc. of 1st Int. J. Conf on Pattern Recognition, pp. 2-32, [13] Vol 23 No 2 pp [1] M. Farenzena, L. Bazzani, A. Perina, V. Murino and M. Cristani. Person re-identification by symmetrydriven accumulation of local features Proc. of IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pp , [2] Y. Freund and R. E. Schapier. Experiments with a new boosting algorithm, Proc of ICML pp , [3],,, 2008, Vol.J91-D, No. 5, 6
,,.,.,,.,.,.,.,,.,..,,,, i
 22 A person recognition using color information 1110372 2011 2 13 ,,.,.,,.,.,.,.,,.,..,,,, i Abstract A person recognition using color information Tatsumo HOJI Recently, for the purpose of collection of
22 A person recognition using color information 1110372 2011 2 13 ,,.,.,,.,.,.,.,,.,..,,,, i Abstract A person recognition using color information Tatsumo HOJI Recently, for the purpose of collection of
(MIRU2008) HOG Histograms of Oriented Gradients (HOG)
 HOG Histograms of Oriented Gradients (HOG)") (MIRU2008) 2008 7 HOG - - E-mail: [email protected], {takigu,ariki}@kobe-u.ac.jp Histograms of Oriented Gradients (HOG) HOG Shape Contexts HOG 5.5 Histograms of Oriented Gradients D Human
(MIRU2008) 2008 7 HOG - - E-mail: [email protected], {takigu,ariki}@kobe-u.ac.jp Histograms of Oriented Gradients (HOG) HOG Shape Contexts HOG 5.5 Histograms of Oriented Gradients D Human
1 (PCA) 3 2 P.Viola 2) Viola AdaBoost 1 Viola OpenCV 3) Web OpenCV T.L.Berg PCA kpca LDA k-means 4) Berg 95% Berg Web k-means k-means
 3 2 P.Viola 2) Viola AdaBoost 1 Viola OpenCV 3) Web OpenCV T.L.Berg PCA kpca LDA k-means 4) Berg 95% Berg Web k-means k-means") Web, Web k-means 62% Associating Faces and Names in Web Photo News Akio Kitahara and Keiji Yanai We propose a system which extracts faces and person names from news articles with photographs on the Web
Web, Web k-means 62% Associating Faces and Names in Web Photo News Akio Kitahara and Keiji Yanai We propose a system which extracts faces and person names from news articles with photographs on the Web
1 Kinect for Windows M = [X Y Z] T M = [X Y Z ] T f (u,v) w 3.2 [11] [7] u = f X +u Z 0 δ u (X,Y,Z ) (5) v = f Y Z +v 0 δ v (X,Y,Z ) (6) w = Z +
![1 Kinect for Windows M = [X Y Z] T M = [X Y Z ] T f (u,v) w 3.2 [11] [7] u = f X +u Z 0 δ u (X,Y,Z ) (5) v = f Y Z +v 0 δ v (X,Y,Z ) (6) w = Z +](/thumbs/81/83701592.jpg "1 Kinect for Windows M = [X Y Z] T M = [X Y Z ] T f (u,v) w 3.2 [11] [7] u = f X +u Z 0 δ u (X,Y,Z ) (5) v = f Y Z +v 0 δ v (X,Y,Z ) (6) w = Z +") 3 3D 1,a) 1 1 Kinect (X, Y) 3D 3D 1. 2010 Microsoft Kinect for Windows SDK( (Kinect) SDK ) 3D [1], [2] [3] [4] [5] [10] 30fps [10] 3 Kinect 3 Kinect Kinect for Windows SDK 3 Microsoft 3 Kinect for Windows
3 3D 1,a) 1 1 Kinect (X, Y) 3D 3D 1. 2010 Microsoft Kinect for Windows SDK( (Kinect) SDK ) 3D [1], [2] [3] [4] [5] [10] 30fps [10] 3 Kinect 3 Kinect Kinect for Windows SDK 3 Microsoft 3 Kinect for Windows
(a) 1 (b) 3. Gilbert Pernicka[2] Treibitz Schechner[3] Narasimhan [4] Kim [5] Nayar [6] [7][8][9] 2. X X X [10] [11] L L t L s L = L t + L s
![(a) 1 (b) 3. Gilbert Pernicka[2] Treibitz Schechner[3] Narasimhan [4] Kim [5] Nayar [6] [7][8][9] 2. X X X [10] [11] L L t L s L = L t + L s](/thumbs/75/72066128.jpg "(a) 1 (b) 3. Gilbert Pernicka[2] Treibitz Schechner[3] Narasimhan [4] Kim [5] Nayar [6] [7][8][9] 2. X X X [10] [11] L L t L s L = L t + L s") 1 1 1, Extraction of Transmitted Light using Parallel High-frequency Illumination Kenichiro Tanaka 1 Yasuhiro Mukaigawa 1 Yasushi Yagi 1 Abstract: We propose a new sharpening method of transmitted scene
1 1 1, Extraction of Transmitted Light using Parallel High-frequency Illumination Kenichiro Tanaka 1 Yasuhiro Mukaigawa 1 Yasushi Yagi 1 Abstract: We propose a new sharpening method of transmitted scene
DEIM Forum 2012 E Web Extracting Modification of Objec
 DEIM Forum 2012 E4-2 670 0092 1 1 12 E-mail: [email protected], {dkitayama,sumiya}@shse.u-hyogo.ac.jp Web Extracting Modification of Objects for Supporting Map Browsing Junki MATSUO, Daisuke
DEIM Forum 2012 E4-2 670 0092 1 1 12 E-mail: [email protected], {dkitayama,sumiya}@shse.u-hyogo.ac.jp Web Extracting Modification of Objects for Supporting Map Browsing Junki MATSUO, Daisuke
1 Fig. 1 Extraction of motion,.,,, 4,,, 3., 1, 2. 2.,. CHLAC,. 2.1,. (256 ).,., CHLAC. CHLAC, HLAC. 2.3 (HLAC ) r,.,. HLAC. N. 2 HLAC Fig. 2
.,., CHLAC. CHLAC, HLAC. 2.3 (HLAC ) r,.,. HLAC. N. 2 HLAC Fig. 2") CHLAC 1 2 3 3,. (CHLAC), 1).,.,, CHLAC,.,. Suspicious Behavior Detection based on CHLAC Method Hideaki Imanishi, 1 Toyohiro Hayashi, 2 Shuichi Enokida 3 and Toshiaki Ejima 3 We have proposed a method for
CHLAC 1 2 3 3,. (CHLAC), 1).,.,, CHLAC,.,. Suspicious Behavior Detection based on CHLAC Method Hideaki Imanishi, 1 Toyohiro Hayashi, 2 Shuichi Enokida 3 and Toshiaki Ejima 3 We have proposed a method for
Gaze Head Eye (a) deg (b) 45 deg (c) 9 deg 1: - 1(b) - [5], [6] [7] Stahl [8], [9] Fang [1], [11] Itti [12] Itti [13] [7] Fang [1],
![Gaze Head Eye (a) deg (b) 45 deg (c) 9 deg 1: - 1(b) - [5], [6] [7] Stahl [8], [9] Fang [1], [11] Itti [12] Itti [13] [7] Fang [1],](/thumbs/92/110933465.jpg "Gaze Head Eye (a) deg (b) 45 deg (c) 9 deg 1: - 1(b) - [5], [6] [7] Stahl [8], [9] Fang [1], [11] Itti [12] Itti [13] [7] Fang [1],") 1 1 1 Structure from Motion - 1 Ville [1] NAC EMR-9 [2] 1 Osaka University [3], [4] 1 1(a) 1(c) 9 9 9 c 216 Information Processing Society of Japan 1 Gaze Head Eye (a) deg (b) 45 deg (c) 9 deg 1: - 1(b)
1 1 1 Structure from Motion - 1 Ville [1] NAC EMR-9 [2] 1 Osaka University [3], [4] 1 1(a) 1(c) 9 9 9 c 216 Information Processing Society of Japan 1 Gaze Head Eye (a) deg (b) 45 deg (c) 9 deg 1: - 1(b)
3.1 Thalmic Lab Myo * Bluetooth PC Myo 8 RMS RMS t RMS(t) i (i = 1, 2,, 8) 8 SVM libsvm *2 ν-svm 1 Myo 2 8 RMS 3.2 Myo (Root
 i (i = 1, 2,, 8) 8 SVM libsvm *2 ν-svm 1 Myo 2 8 RMS 3.2 Myo (Root") 1,a) 2 2 1. 1 College of Information Science, School of Informatics, University of Tsukuba 2 Faculty of Engineering, Information and Systems, University of Tsukuba a) [email protected] 2.
1,a) 2 2 1. 1 College of Information Science, School of Informatics, University of Tsukuba 2 Faculty of Engineering, Information and Systems, University of Tsukuba a) [email protected] 2.
1(a) (b),(c) - [5], [6] Itti [12] [13] gaze eyeball head 2: [time] [7] Stahl [8], [9] Fang [1], [11] 3 -
![1(a) (b),(c) - [5], [6] Itti [12] [13] gaze eyeball head 2: [time] [7] Stahl [8], [9] Fang [1], [11] 3 -](/thumbs/89/100816452.jpg "1(a) (b),(c) - [5], [6] Itti [12] [13] gaze eyeball head 2: [time] [7] Stahl [8], [9] Fang [1], [11] 3 -") Vol216-CVIM-22 No18 216/5/12 1 1 1 Structure from Motion - 1 8% Tobii Pro TX3 NAC EMR ACTUS Eye Tribe Tobii Pro Glass NAC EMR-9 Pupil Headset Ville [1] EMR-9 [2] 1 Osaka University Gaze Head Eye (a) deg
Vol216-CVIM-22 No18 216/5/12 1 1 1 Structure from Motion - 1 8% Tobii Pro TX3 NAC EMR ACTUS Eye Tribe Tobii Pro Glass NAC EMR-9 Pupil Headset Ville [1] EMR-9 [2] 1 Osaka University Gaze Head Eye (a) deg
IPSJ SIG Technical Report Vol.2012-CG-149 No.13 Vol.2012-CVIM-184 No /12/4 3 1,a) ( ) DB 3D DB 2D,,,, PnP(Perspective n-point), Ransa
 ( ) DB 3D DB 2D,,,, PnP(Perspective n-point), Ransa") 3,a) 3 3 ( ) DB 3D DB 2D,,,, PnP(Perspective n-point), Ransac. DB [] [2] 3 DB Web Web DB Web NTT NTT Media Intelligence Laboratories, - Hikarinooka Yokosuka-Shi, Kanagawa 239-0847 Japan a) [email protected]
3,a) 3 3 ( ) DB 3D DB 2D,,,, PnP(Perspective n-point), Ransac. DB [] [2] 3 DB Web Web DB Web NTT NTT Media Intelligence Laboratories, - Hikarinooka Yokosuka-Shi, Kanagawa 239-0847 Japan a) [email protected]
(3.6 ) (4.6 ) 2. [3], [6], [12] [7] [2], [5], [11] [14] [9] [8] [10] (1) Voodoo 3 : 3 Voodoo[1] 3 ( 3D ) (2) : Voodoo 3D (3) : 3D (Welc
![(3.6 ) (4.6 ) 2. [3], [6], [12] [7] [2], [5], [11] [14] [9] [8] [10] (1) Voodoo 3 : 3 Voodoo[1] 3 ( 3D ) (2) : Voodoo 3D (3) : 3D (Welc](/thumbs/65/54056306.jpg "(3.6 ) (4.6 ) 2. [3], [6], [12] [7] [2], [5], [11] [14] [9] [8] [10] (1) Voodoo 3 : 3 Voodoo[1] 3 ( 3D ) (2) : Voodoo 3D (3) : 3D (Welc") 1,a) 1,b) Obstacle Detection from Monocular On-Vehicle Camera in units of Delaunay Triangles Abstract: An algorithm to detect obstacles by using a monocular on-vehicle video camera is developed. Since
1,a) 1,b) Obstacle Detection from Monocular On-Vehicle Camera in units of Delaunay Triangles Abstract: An algorithm to detect obstacles by using a monocular on-vehicle video camera is developed. Since
& Vol.5 No (Oct. 2015) TV 1,2,a) , Augmented TV TV AR Augmented Reality 3DCG TV Estimation of TV Screen Position and Ro
 TV 1,2,a) , Augmented TV TV AR Augmented Reality 3DCG TV Estimation of TV Screen Position and Ro") TV 1,2,a) 1 2 2015 1 26, 2015 5 21 Augmented TV TV AR Augmented Reality 3DCG TV Estimation of TV Screen Position and Rotation Using Mobile Device Hiroyuki Kawakita 1,2,a) Toshio Nakagawa 1 Makoto Sato
TV 1,2,a) 1 2 2015 1 26, 2015 5 21 Augmented TV TV AR Augmented Reality 3DCG TV Estimation of TV Screen Position and Rotation Using Mobile Device Hiroyuki Kawakita 1,2,a) Toshio Nakagawa 1 Makoto Sato
(fnirs: Functional Near-Infrared Spectroscopy) [3] fnirs (oxyhb) Bulling [4] Kunze [5] [6] 2. 2 [7] [8] fnirs 3. 1 fnirs fnirs fnirs 1
![(fnirs: Functional Near-Infrared Spectroscopy) [3] fnirs (oxyhb) Bulling [4] Kunze [5] [6] 2. 2 [7] [8] fnirs 3. 1 fnirs fnirs fnirs 1](/thumbs/49/25651654.jpg "(fnirs: Functional Near-Infrared Spectroscopy) [3] fnirs (oxyhb) Bulling [4] Kunze [5] [6] 2. 2 [7] [8] fnirs 3. 1 fnirs fnirs fnirs 1") THE INSTITUTE OF ELECTRONICS, INFORMATION AND COMMUNICATION ENGINEERS TECHNICAL REPORT OF IEICE. fnirs Kai Kunze 599 8531 1 1 223 8526 4 1 1 E-mail: [email protected], [email protected],
THE INSTITUTE OF ELECTRONICS, INFORMATION AND COMMUNICATION ENGINEERS TECHNICAL REPORT OF IEICE. fnirs Kai Kunze 599 8531 1 1 223 8526 4 1 1 E-mail: [email protected], [email protected],
2 4 2 3 4 3 [12] 2 3 4 5 1 1 [5, 6, 7] [5, 6] [7] 1 [8] 1 1 [9] 1 [10, 11] [10] [11] 1 [13, 14] [13] [14] [13, 14] [10, 11, 13, 14] 1 [12]
![2 4 2 3 4 3 [12] 2 3 4 5 1 1 [5, 6, 7] [5, 6] [7] 1 [8] 1 1 [9] 1 [10, 11] [10] [11] 1 [13, 14] [13] [14] [13, 14] [10, 11, 13, 14] 1 [12]](/thumbs/39/20193688.jpg "2 4 2 3 4 3 [12] 2 3 4 5 1 1 [5, 6, 7] [5, 6] [7] 1 [8] 1 1 [9] 1 [10, 11] [10] [11] 1 [13, 14] [13] [14] [13, 14] [10, 11, 13, 14] 1 [12]") Walking Person Recognition by Matching Video Fragments Masashi Nishiyama, Mayumi Yuasa, Tomokazu Wakasugi, Tomoyuki Shibata, Osamu Yamaguchi ( ), Corporate Research and Development Center, TOSHIBA Corporation
Walking Person Recognition by Matching Video Fragments Masashi Nishiyama, Mayumi Yuasa, Tomokazu Wakasugi, Tomoyuki Shibata, Osamu Yamaguchi ( ), Corporate Research and Development Center, TOSHIBA Corporation
色の類似性に基づいた形状特徴量CS-HOGの提案
 IS3-04 第 18 回 画 像 センシングシンポジウム, 横 浜, 2012 年 6 月 CS-HOG CS-HOG : Color Similarity-based HOG feature Yuhi Goto, Yuji Yamauchi, Hironobu Fujiyoshi Chubu University E-mail: [email protected] Abstract
IS3-04 第 18 回 画 像 センシングシンポジウム, 横 浜, 2012 年 6 月 CS-HOG CS-HOG : Color Similarity-based HOG feature Yuhi Goto, Yuji Yamauchi, Hironobu Fujiyoshi Chubu University E-mail: [email protected] Abstract
[1] SBS [2] SBS Random Forests[3] Random Forests ii
![[1] SBS [2] SBS Random Forests[3] Random Forests ii](/thumbs/74/70333192.jpg "[1] SBS [2] SBS Random Forests[3] Random Forests ii") Random Forests 2013 3 A Graduation Thesis of College of Engineering, Chubu University Proposal of an efficient feature selection using the contribution rate of Random Forests Katsuya Shimazaki [1] SBS
Random Forests 2013 3 A Graduation Thesis of College of Engineering, Chubu University Proposal of an efficient feature selection using the contribution rate of Random Forests Katsuya Shimazaki [1] SBS
2. CABAC CABAC CABAC 1 1 CABAC Figure 1 Overview of CABAC 2 DCT 2 0/ /1 CABAC [3] 3. 2 値化部 コンテキスト計算部 2 値算術符号化部 CABAC CABAC
![2. CABAC CABAC CABAC 1 1 CABAC Figure 1 Overview of CABAC 2 DCT 2 0/ /1 CABAC [3] 3. 2 値化部 コンテキスト計算部 2 値算術符号化部 CABAC CABAC](/thumbs/92/108208872.jpg "2. CABAC CABAC CABAC 1 1 CABAC Figure 1 Overview of CABAC 2 DCT 2 0/ /1 CABAC [3] 3. 2 値化部 コンテキスト計算部 2 値算術符号化部 CABAC CABAC") H.264 CABAC 1 1 1 1 1 2, CABAC(Context-based Adaptive Binary Arithmetic Coding) H.264, CABAC, A Parallelization Technology of H.264 CABAC For Real Time Encoder of Moving Picture YUSUKE YATABE 1 HIRONORI
H.264 CABAC 1 1 1 1 1 2, CABAC(Context-based Adaptive Binary Arithmetic Coding) H.264, CABAC, A Parallelization Technology of H.264 CABAC For Real Time Encoder of Moving Picture YUSUKE YATABE 1 HIRONORI
28 Horizontal angle correction using straight line detection in an equirectangular image
 28 Horizontal angle correction using straight line detection in an equirectangular image 1170283 2017 3 1 2 i Abstract Horizontal angle correction using straight line detection in an equirectangular image
28 Horizontal angle correction using straight line detection in an equirectangular image 1170283 2017 3 1 2 i Abstract Horizontal angle correction using straight line detection in an equirectangular image
GID Haar-like Mean-Shift Multi-Viewpoint Human Tracking Based on Face Detection Using Haar-like Features and Mean-Shift Yu Ito (Shizuoka Univers
 GID-08-6 Haar-like Mean-Shift Multi-Viewpoint Human Tracking Based on Face Detection Using Haar-like Features and Mean-Shift Yu Ito (Shizuoka University), Atsushi Yamashita, Toru Kaneko (Shizuoka University)
GID-08-6 Haar-like Mean-Shift Multi-Viewpoint Human Tracking Based on Face Detection Using Haar-like Features and Mean-Shift Yu Ito (Shizuoka University), Atsushi Yamashita, Toru Kaneko (Shizuoka University)
fiš„v3.dvi
 (2001) 49 1 23 42 2000 10 16 2001 4 23 NTT * 1. 1.1 1998 * 104 0033 1 21 2 7F 24 49 1 2001 1999 70 91 MIT M. Turk Recognition Using Eigenface (Turk and Pentland (1991)). 1998 IC 1 CPU (Jain and Waller
(2001) 49 1 23 42 2000 10 16 2001 4 23 NTT * 1. 1.1 1998 * 104 0033 1 21 2 7F 24 49 1 2001 1999 70 91 MIT M. Turk Recognition Using Eigenface (Turk and Pentland (1991)). 1998 IC 1 CPU (Jain and Waller
Lyra 2 2 2 X Y X Y ivis Designer Lyra ivisdesigner Lyra ivisdesigner 2 ( 1 ) ( 2 ) ( 3 ) ( 4 ) ( 5 ) (1) (2) (3) (4) (5) Iv Studio [8] 3 (5) (4) (1) (
![Lyra 2 2 2 X Y X Y ivis Designer Lyra ivisdesigner Lyra ivisdesigner 2 ( 1 ) ( 2 ) ( 3 ) ( 4 ) ( 5 ) (1) (2) (3) (4) (5) Iv Studio [8] 3 (5) (4) (1) (](/thumbs/42/23098909.jpg "Lyra 2 2 2 X Y X Y ivis Designer Lyra ivisdesigner Lyra ivisdesigner 2 ( 1 ) ( 2 ) ( 3 ) ( 4 ) ( 5 ) (1) (2) (3) (4) (5) Iv Studio [8] 3 (5) (4) (1) (") 1,a) 2,b) 2,c) 1. Web [1][2][3][4] [5] 1 2 a) [email protected] b) [email protected] c) [email protected] [6] Lyra[5] ivisdesigner[6] [7] 2 Lyra ivisdesigner c 2012 Information Processing
1,a) 2,b) 2,c) 1. Web [1][2][3][4] [5] 1 2 a) [email protected] b) [email protected] c) [email protected] [6] Lyra[5] ivisdesigner[6] [7] 2 Lyra ivisdesigner c 2012 Information Processing
(4) ω t(x) = 1 ω min Ω ( (I C (y))) min 0 < ω < C A C = 1 (5) ω (5) t transmission map tmap 1 4(a) 2. 3 2. 2 t 4(a) t tmap RGB 2 (a) RGB (A), (B), (C)
 ω t(x) = 1 ω min Ω ( (I C (y))) min 0 < ω < C A C = 1 (5) ω (5) t transmission map tmap 1 4(a) 2. 3 2. 2 t 4(a) t tmap RGB 2 (a) RGB (A), (B), (C)") (MIRU2011) 2011 7 890 0065 1 21 40 105-6691 1 1 1 731 3194 3 4 1 338 8570 255 346 8524 1836 1 E-mail: {fukumoto,kawasaki}@ibe.kagoshima-u.ac.jp, [email protected], [email protected],
(MIRU2011) 2011 7 890 0065 1 21 40 105-6691 1 1 1 731 3194 3 4 1 338 8570 255 346 8524 1836 1 E-mail: {fukumoto,kawasaki}@ibe.kagoshima-u.ac.jp, [email protected], [email protected],
Convolutional Neural Network A Graduation Thesis of College of Engineering, Chubu University Investigation of feature extraction by Convolution
 Convolutional Neural Network 2014 3 A Graduation Thesis of College of Engineering, Chubu University Investigation of feature extraction by Convolutional Neural Network Fukui Hiroshi 1940 1980 [1] 90 3
Convolutional Neural Network 2014 3 A Graduation Thesis of College of Engineering, Chubu University Investigation of feature extraction by Convolutional Neural Network Fukui Hiroshi 1940 1980 [1] 90 3
2). 3) 4) 1.2 NICTNICT DCRA Dihedral Corner Reflector micro-arraysdcra DCRA DCRA DCRA 3D DCRA PC USB PC PC ON / OFF Velleman K8055 K8055 K8055
. 3) 4) 1.2 NICTNICT DCRA Dihedral Corner Reflector micro-arraysdcra DCRA DCRA DCRA 3D DCRA PC USB PC PC ON / OFF Velleman K8055 K8055 K8055") 1 1 1 2 DCRA 1. 1.1 1) 1 Tactile Interface with Air Jets for Floating Images Aya Higuchi, 1 Nomin, 1 Sandor Markon 1 and Satoshi Maekawa 2 The new optical device DCRA can display floating images in free
1 1 1 2 DCRA 1. 1.1 1) 1 Tactile Interface with Air Jets for Floating Images Aya Higuchi, 1 Nomin, 1 Sandor Markon 1 and Satoshi Maekawa 2 The new optical device DCRA can display floating images in free
IPSJ SIG Technical Report Vol.2010-GN-74 No /1/ , 3 Disaster Training Supporting System Based on Electronic Triage HIROAKI KOJIMA, 1 KU
 1 2 2 1, 3 Disaster Training Supporting System Based on Electronic Triage HIROAKI KOJIMA, 1 KUNIAKI SUSEKI, 2 KENTARO NAGAHASHI 2 and KEN-ICHI OKADA 1, 3 When there are a lot of injured people at a large-scale
1 2 2 1, 3 Disaster Training Supporting System Based on Electronic Triage HIROAKI KOJIMA, 1 KUNIAKI SUSEKI, 2 KENTARO NAGAHASHI 2 and KEN-ICHI OKADA 1, 3 When there are a lot of injured people at a large-scale
WISS 2018 [2 4] [5,6] Query-by-Dancing Query-by- Dancing Cao [1] OpenPose 2 Ghias [7] Query by humming Chen [8] Query by rhythm Jang [9] Query-by-tapp
![WISS 2018 [2 4] [5,6] Query-by-Dancing Query-by- Dancing Cao [1] OpenPose 2 Ghias [7] Query by humming Chen [8] Query by rhythm Jang [9] Query-by-tapp](/thumbs/91/107555259.jpg "WISS 2018 [2 4] [5,6] Query-by-Dancing Query-by- Dancing Cao [1] OpenPose 2 Ghias [7] Query by humming Chen [8] Query by rhythm Jang [9] Query-by-tapp") Query-by-Dancing: WISS 2018. Query-by-Dancing Query-by-Dancing 1 OpenPose [1] Copyright is held by the author(s). DJ DJ DJ WISS 2018 [2 4] [5,6] Query-by-Dancing Query-by- Dancing Cao [1] OpenPose 2 Ghias
Query-by-Dancing: WISS 2018. Query-by-Dancing Query-by-Dancing 1 OpenPose [1] Copyright is held by the author(s). DJ DJ DJ WISS 2018 [2 4] [5,6] Query-by-Dancing Query-by- Dancing Cao [1] OpenPose 2 Ghias
2007/8 Vol. J90 D No. 8 Stauffer [7] 2 2 I 1 I 2 2 (I 1(x),I 2(x)) 2 [13] I 2 = CI 1 (C >0) (I 1,I 2) (I 1,I 2) Field Monitoring Server
![2007/8 Vol. J90 D No. 8 Stauffer [7] 2 2 I 1 I 2 2 (I 1(x),I 2(x)) 2 [13] I 2 = CI 1 (C >0) (I 1,I 2) (I 1,I 2) Field Monitoring Server](/thumbs/91/107223763.jpg "2007/8 Vol. J90 D No. 8 Stauffer [7] 2 2 I 1 I 2 2 (I 1(x),I 2(x)) 2 [13] I 2 = CI 1 (C >0) (I 1,I 2) (I 1,I 2) Field Monitoring Server") a) Change Detection Using Joint Intensity Histogram Yasuyo KITA a) 2 (0 255) (I 1 (x),i 2 (x)) I 2 = CI 1 (C>0) (I 1,I 2 ) (I 1,I 2 ) 2 1. [1] 2 [2] [3] [5] [6] [8] Intelligent Systems Research Institute,
a) Change Detection Using Joint Intensity Histogram Yasuyo KITA a) 2 (0 255) (I 1 (x),i 2 (x)) I 2 = CI 1 (C>0) (I 1,I 2 ) (I 1,I 2 ) 2 1. [1] 2 [2] [3] [5] [6] [8] Intelligent Systems Research Institute,
す 局所領域 ωk において 線形変換に用いる係数 (ak 画素の係数 (ak bk ) を算出し 入力画像の信号成分を bk ) は次式のコスト関数 E を最小化するように最適化 有さない画素に対して 式 (2) より画素値を算出する される これにより 低解像度な画像から補間によるアップサ E(
 を算出し 入力画像の信号成分を bk ) は次式のコスト関数 E を最小化するように最適化 有さない画素に対して 式 (2) より画素値を算出する される これにより 低解像度な画像から補間によるアップサ E(") IR E-mail: [email protected] Abstract IR RGB ( ) IR IR IR RGB RGB PSNR 1 Time-Of- Flight(TOF)[1] Kinect [2] TOF LED TOF [3] [6] [4][5] 2 [6] RGB ( ) Infrared(IR) IR 2 2.1 1 す 局所領域 ωk において 線形変換に用いる係数 (ak
IR E-mail: [email protected] Abstract IR RGB ( ) IR IR IR RGB RGB PSNR 1 Time-Of- Flight(TOF)[1] Kinect [2] TOF LED TOF [3] [6] [4][5] 2 [6] RGB ( ) Infrared(IR) IR 2 2.1 1 す 局所領域 ωk において 線形変換に用いる係数 (ak
 1 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15. 1. 2. 3. 16 17 18 ( ) ( 19 ( ) CG PC 20 ) I want some rice. I want some lice. 21 22 23 24 2001 9 18 3 2000 4 21 3,. 13,. Science/Technology, Design, Experiments,
1 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15. 1. 2. 3. 16 17 18 ( ) ( 19 ( ) CG PC 20 ) I want some rice. I want some lice. 21 22 23 24 2001 9 18 3 2000 4 21 3,. 13,. Science/Technology, Design, Experiments,
3 Abstract CAD 3-D ( ) 4 Spin Image Correspondence Grouping 46.1% 17.4% 97.6% ICP [0.6mm/point] 1 CAD [1][2]
![3 Abstract CAD 3-D ( ) 4 Spin Image Correspondence Grouping 46.1% 17.4% 97.6% ICP [0.6mm/point] 1 CAD [1][2]](/thumbs/94/118738978.jpg "3 Abstract CAD 3-D ( ) 4 Spin Image Correspondence Grouping 46.1% 17.4% 97.6% ICP [0.6mm/point] 1 CAD [1][2]") 3 E-mail: {akizuki}@isl.sist.chukyo-u.ac.jp Abstract CAD 3-D ( ) 4 Spin Image Correspondence Grouping 46.1% 17.4% 97.6% ICP [0.6mm/point] 1 CAD [1][2] Shape Index [3] [4][5] 3 SHOT [6] [7] Point Pair Feature
3 E-mail: {akizuki}@isl.sist.chukyo-u.ac.jp Abstract CAD 3-D ( ) 4 Spin Image Correspondence Grouping 46.1% 17.4% 97.6% ICP [0.6mm/point] 1 CAD [1][2] Shape Index [3] [4][5] 3 SHOT [6] [7] Point Pair Feature
01-全体表紙.PDF
 1 2005 11 26 1 1 5 15 18 1 1. 2005 11 26 09 00 1245 12 45 18207 2. 1,000 2,000 3. 4,000 2,000 5,000 4. 10,000 2,000 30,000 5. 1 20 10 1300 17 00 1500 1700 6. 7. TEL 047-372-4111 821 FAX 047-373-9901 [email protected]
1 2005 11 26 1 1 5 15 18 1 1. 2005 11 26 09 00 1245 12 45 18207 2. 1,000 2,000 3. 4,000 2,000 5,000 4. 10,000 2,000 30,000 5. 1 20 10 1300 17 00 1500 1700 6. 7. TEL 047-372-4111 821 FAX 047-373-9901 [email protected]
IPSJ SIG Technical Report Vol.2014-DBS-159 No.6 Vol.2014-IFAT-115 No /8/1 1,a) 1 1 1,, 1. ([1]) ([2], [3]) A B 1 ([4]) 1 Graduate School of Info
![IPSJ SIG Technical Report Vol.2014-DBS-159 No.6 Vol.2014-IFAT-115 No /8/1 1,a) 1 1 1,, 1. ([1]) ([2], [3]) A B 1 ([4]) 1 Graduate School of Info](/thumbs/101/149057081.jpg "IPSJ SIG Technical Report Vol.2014-DBS-159 No.6 Vol.2014-IFAT-115 No /8/1 1,a) 1 1 1,, 1. ([1]) ([2], [3]) A B 1 ([4]) 1 Graduate School of Info") 1,a) 1 1 1,, 1. ([1]) ([2], [3]) A B 1 ([4]) 1 Graduate School of Information Science and Technology, Osaka University a) [email protected] 1 1 Bucket R*-tree[5] [4] 2 3 4 5 6 2. 2.1 2.2 2.3
1,a) 1 1 1,, 1. ([1]) ([2], [3]) A B 1 ([4]) 1 Graduate School of Information Science and Technology, Osaka University a) [email protected] 1 1 Bucket R*-tree[5] [4] 2 3 4 5 6 2. 2.1 2.2 2.3
Input image Initialize variables Loop for period of oscillation Update height map Make shade image Change property of image Output image Change time L
 1,a) 1,b) 1/f β Generation Method of Animation from Pictures with Natural Flicker Abstract: Some methods to create animation automatically from one picture have been proposed. There is a method that gives
1,a) 1,b) 1/f β Generation Method of Animation from Pictures with Natural Flicker Abstract: Some methods to create animation automatically from one picture have been proposed. There is a method that gives
Haiku Generation Based on Motif Images Using Deep Learning Koki Yoneda 1 Soichiro Yokoyama 2 Tomohisa Yamashita 2 Hidenori Kawamura Scho
 Haiku Generation Based on Motif Images Using Deep Learning 1 2 2 2 Koki Yoneda 1 Soichiro Yokoyama 2 Tomohisa Yamashita 2 Hidenori Kawamura 2 1 1 School of Engineering Hokkaido University 2 2 Graduate
Haiku Generation Based on Motif Images Using Deep Learning 1 2 2 2 Koki Yoneda 1 Soichiro Yokoyama 2 Tomohisa Yamashita 2 Hidenori Kawamura 2 1 1 School of Engineering Hokkaido University 2 2 Graduate
光学
 Range Image Sensors Using Active Stereo Methods Kazunori UMEDA and Kenji TERABAYASHI Active stereo methods, which include the traditional light-section method and the talked-about Kinect sensor, are typical
Range Image Sensors Using Active Stereo Methods Kazunori UMEDA and Kenji TERABAYASHI Active stereo methods, which include the traditional light-section method and the talked-about Kinect sensor, are typical
(a) (b) (c) Canny (d) 1 ( x α, y α ) 3 (x α, y α ) (a) A 2 + B 2 + C 2 + D 2 + E 2 + F 2 = 1 (3) u ξ α u (A, B, C, D, E, F ) (4) ξ α (x 2 α, 2x α y α,
 (b) (c) Canny (d) 1 ( x α, y α ) 3 (x α, y α ) (a) A 2 + B 2 + C 2 + D 2 + E 2 + F 2 = 1 (3) u ξ α u (A, B, C, D, E, F ) (4) ξ α (x 2 α, 2x α y α,") [II] Optimization Computation for 3-D Understanding of Images [II]: Ellipse Fitting 1. (1) 2. (2) (edge detection) (edge) (zero-crossing) Canny (Canny operator) (3) 1(a) [I] [II] [III] [IV ] E-mail [email protected]
[II] Optimization Computation for 3-D Understanding of Images [II]: Ellipse Fitting 1. (1) 2. (2) (edge detection) (edge) (zero-crossing) Canny (Canny operator) (3) 1(a) [I] [II] [III] [IV ] E-mail [email protected]
xx/xx Vol. Jxx A No. xx 1 Fig. 1 PAL(Panoramic Annular Lens) PAL(Panoramic Annular Lens) PAL (2) PAL PAL 2 PAL 3 2 PAL 1 PAL 3 PAL PAL 2. 1 PAL
 PAL(Panoramic Annular Lens) PAL (2) PAL PAL 2 PAL 3 2 PAL 1 PAL 3 PAL PAL 2. 1 PAL") PAL On the Precision of 3D Measurement by Stereo PAL Images Hiroyuki HASE,HirofumiKAWAI,FrankEKPAR, Masaaki YONEDA,andJien KATO PAL 3 PAL Panoramic Annular Lens 1985 Greguss PAL 1 PAL PAL 2 3 2 PAL DP
PAL On the Precision of 3D Measurement by Stereo PAL Images Hiroyuki HASE,HirofumiKAWAI,FrankEKPAR, Masaaki YONEDA,andJien KATO PAL 3 PAL Panoramic Annular Lens 1985 Greguss PAL 1 PAL PAL 2 3 2 PAL DP
HASC2012corpus HASC Challenge 2010,2011 HASC2011corpus( 116, 4898), HASC2012corpus( 136, 7668) HASC2012corpus HASC2012corpus
, HASC2012corpus( 136, 7668) HASC2012corpus HASC2012corpus") HASC2012corpus 1 1 1 1 1 1 2 2 3 4 5 6 7 HASC Challenge 2010,2011 HASC2011corpus( 116, 4898), HASC2012corpus( 136, 7668) HASC2012corpus HASC2012corpus: Human Activity Corpus and Its Application Nobuo KAWAGUCHI,
HASC2012corpus 1 1 1 1 1 1 2 2 3 4 5 6 7 HASC Challenge 2010,2011 HASC2011corpus( 116, 4898), HASC2012corpus( 136, 7668) HASC2012corpus HASC2012corpus: Human Activity Corpus and Its Application Nobuo KAWAGUCHI,
IPSJ SIG Technical Report Vol.2011-CE-110 No /7/9 Bebras 1, 6 1, 2 3 4, 6 5, 6 Bebras 2010 Bebras Reporting Trial of Bebras Contest for K12 stud
 Bebras 1, 6 1, 2 3 4, 6 5, 6 Bebras 2010 Bebras Reporting Trial of Bebras Contest for K12 students in Japan Susumu Kanemune, 1, 6 Yukio Idosaka, 1, 2 Toshiyuki Kamada, 3 Seiichi Tani 4, 6 and Etsuro Moriya
Bebras 1, 6 1, 2 3 4, 6 5, 6 Bebras 2010 Bebras Reporting Trial of Bebras Contest for K12 students in Japan Susumu Kanemune, 1, 6 Yukio Idosaka, 1, 2 Toshiyuki Kamada, 3 Seiichi Tani 4, 6 and Etsuro Moriya
LBP 2 LBP 2. 2 Local Binary Pattern Local Binary pattern(lbp) [6] R
![LBP 2 LBP 2. 2 Local Binary Pattern Local Binary pattern(lbp) [6] R](/thumbs/86/93333816.jpg "LBP 2 LBP 2. 2 Local Binary Pattern Local Binary pattern(lbp) [6] R") DEIM Forum 24 F5-4 Local Binary Pattern 6 84 E-mail: {tera,kida}@ist.hokudai.ac.jp Local Binary Pattern (LBP) LBP 3 3 LBP 5 5 5 LBP improved LBP uniform LBP.. Local Binary Pattern, Gradient Local Auto-Correlations,,,,
DEIM Forum 24 F5-4 Local Binary Pattern 6 84 E-mail: {tera,kida}@ist.hokudai.ac.jp Local Binary Pattern (LBP) LBP 3 3 LBP 5 5 5 LBP improved LBP uniform LBP.. Local Binary Pattern, Gradient Local Auto-Correlations,,,,
 1 IDC Wo rldwide Business Analytics Technology and Services 2013-2017 Forecast 2 24 http://www.soumu.go.jp/johotsusintokei/whitepaper/ja/h24/pdf/n2010000.pdf 3 Manyika, J., Chui, M., Brown, B., Bughin,
1 IDC Wo rldwide Business Analytics Technology and Services 2013-2017 Forecast 2 24 http://www.soumu.go.jp/johotsusintokei/whitepaper/ja/h24/pdf/n2010000.pdf 3 Manyika, J., Chui, M., Brown, B., Bughin,
6_27.dvi
 Vol. 49 No. 6 1932 1941 (June 2008) RFID 1 2 RFID RFID RFID 13.56 MHz RFID A Experimental Study for Measuring Human Activities in A Bathroom Using RFID Ryo Onishi 1 and Shigeyuki Hirai 2 A bathroom is
Vol. 49 No. 6 1932 1941 (June 2008) RFID 1 2 RFID RFID RFID 13.56 MHz RFID A Experimental Study for Measuring Human Activities in A Bathroom Using RFID Ryo Onishi 1 and Shigeyuki Hirai 2 A bathroom is
THE INSTITUTE OF ELECTRONICS, INFORMATION AND COMMUNICATION ENGINEERS TECHNICAL REPORT OF IEICE.
 THE INSTITUTE OF ELECTRONICS, INFORMATION AND COMMUNICATION ENGINEERS TECHNICAL REPORT OF IEICE. E-mail: {ytamura,takai,tkato,tm}@vision.kuee.kyoto-u.ac.jp Abstract Current Wave Pattern Analysis for Anomaly
THE INSTITUTE OF ELECTRONICS, INFORMATION AND COMMUNICATION ENGINEERS TECHNICAL REPORT OF IEICE. E-mail: {ytamura,takai,tkato,tm}@vision.kuee.kyoto-u.ac.jp Abstract Current Wave Pattern Analysis for Anomaly
[6] DoN DoN DDoN(Donuts DoN) DoN 4(2) DoN DDoN 3.2 RDoN(Ring DoN) 4(1) DoN 4(3) DoN RDoN 2 DoN 2.2 DoN PCA DoN DoN 2 DoN PCA 0 DoN 3. DoN
![[6] DoN DoN DDoN(Donuts DoN) DoN 4(2) DoN DDoN 3.2 RDoN(Ring DoN) 4(1) DoN 4(3) DoN RDoN 2 DoN 2.2 DoN PCA DoN DoN 2 DoN PCA 0 DoN 3. DoN](/thumbs/89/99418350.jpg "[6] DoN DoN DDoN(Donuts DoN) DoN 4(2) DoN DDoN 3.2 RDoN(Ring DoN) 4(1) DoN 4(3) DoN RDoN 2 DoN 2.2 DoN PCA DoN DoN 2 DoN PCA 0 DoN 3. DoN") 3 1,a) 1,b) 3D 3 3 Difference of Normals (DoN)[1] DoN, 1. 2010 Kinect[2] 3D 3 [3] 3 [4] 3 [5] 3 [6] [7] [1] [8] [9] [10] Difference of Normals (DoN) 48 8 [1] [6] DoN DoN 1 National Defense Academy a) [email protected]
3 1,a) 1,b) 3D 3 3 Difference of Normals (DoN)[1] DoN, 1. 2010 Kinect[2] 3D 3 [3] 3 [4] 3 [5] 3 [6] [7] [1] [8] [9] [10] Difference of Normals (DoN) 48 8 [1] [6] DoN DoN 1 National Defense Academy a) [email protected]
IPSJ SIG Technical Report Vol.2013-CVIM-187 No /5/30 1,a) 1,b), 1,,,,,,, (DNN),,,, 2 (CNN),, 1.,,,,,,,,,,,,,,,,,, [1], [6], [7], [12], [13]., [
![IPSJ SIG Technical Report Vol.2013-CVIM-187 No /5/30 1,a) 1,b), 1,,,,,,, (DNN),,,, 2 (CNN),, 1.,,,,,,,,,,,,,,,,,, [1], [6], [7], [12], [13]., [](/thumbs/94/121682292.jpg "IPSJ SIG Technical Report Vol.2013-CVIM-187 No /5/30 1,a) 1,b), 1,,,,,,, (DNN),,,, 2 (CNN),, 1.,,,,,,,,,,,,,,,,,, [1], [6], [7], [12], [13]., [") ,a),b),,,,,,,, (DNN),,,, (CNN),,.,,,,,,,,,,,,,,,,,, [], [6], [7], [], [3]., [8], [0], [7],,,, Tohoku University a) [email protected] b) [email protected], [3],, (DNN), DNN, [3],
,a),b),,,,,,,, (DNN),,,, (CNN),,.,,,,,,,,,,,,,,,,,, [], [6], [7], [], [3]., [8], [0], [7],,,, Tohoku University a) [email protected] b) [email protected], [3],, (DNN), DNN, [3],
スライド 1
 知能制御システム学 画像追跡 (1) 特徴点の検出と追跡 東北大学大学院情報科学研究科鏡慎吾 swk(at)ic.is.tohoku.ac.jp 2008.07.07 今日の内容 前回までの基本的な画像処理の例を踏まえて, ビジュアルサーボシステムの構成要素となる画像追跡の代表的手法を概説する 画像上の ある点 の追跡 オプティカルフローの拘束式 追跡しやすい点 (Harris オペレータ ) Lucas-Kanade
知能制御システム学 画像追跡 (1) 特徴点の検出と追跡 東北大学大学院情報科学研究科鏡慎吾 swk(at)ic.is.tohoku.ac.jp 2008.07.07 今日の内容 前回までの基本的な画像処理の例を踏まえて, ビジュアルサーボシステムの構成要素となる画像追跡の代表的手法を概説する 画像上の ある点 の追跡 オプティカルフローの拘束式 追跡しやすい点 (Harris オペレータ ) Lucas-Kanade
IPSJ-CVIM
 STHOG 1 1 1 STHOG STHOG Pedestrian Matching across Cameras using STHOG Features Ryo Kawai, 1 Yasushi Makihara 1 and Yasushi Yagi 1 In this paper, we propose a method of pedestrian matching across CCTV
STHOG 1 1 1 STHOG STHOG Pedestrian Matching across Cameras using STHOG Features Ryo Kawai, 1 Yasushi Makihara 1 and Yasushi Yagi 1 In this paper, we propose a method of pedestrian matching across CCTV
IPSJ SIG Technical Report Vol.2011-EC-19 No /3/ ,.,., Peg-Scope Viewer,,.,,,,. Utilization of Watching Logs for Support of Multi-
 1 3 5 4 1 2 1,.,., Peg-Scope Viewer,,.,,,,. Utilization of Watching Logs for Support of Multi-View Video Contents Kosuke Niwa, 1 Shogo Tokai, 3 Tetsuya Kawamoto, 5 Toshiaki Fujii, 4 Marutani Takafumi,
1 3 5 4 1 2 1,.,., Peg-Scope Viewer,,.,,,,. Utilization of Watching Logs for Support of Multi-View Video Contents Kosuke Niwa, 1 Shogo Tokai, 3 Tetsuya Kawamoto, 5 Toshiaki Fujii, 4 Marutani Takafumi,
21 Pitman-Yor Pitman- Yor [7] n -gram W w n-gram G Pitman-Yor P Y (d, θ, G 0 ) (1) G P Y (d, θ, G 0 ) (1) Pitman-Yor d, θ, G 0 d 0 d 1 θ Pitman-Yor G
![21 Pitman-Yor Pitman- Yor [7] n -gram W w n-gram G Pitman-Yor P Y (d, θ, G 0 ) (1) G P Y (d, θ, G 0 ) (1) Pitman-Yor d, θ, G 0 d 0 d 1 θ Pitman-Yor G](/thumbs/89/99361107.jpg "21 Pitman-Yor Pitman- Yor [7] n -gram W w n-gram G Pitman-Yor P Y (d, θ, G 0 ) (1) G P Y (d, θ, G 0 ) (1) Pitman-Yor d, θ, G 0 d 0 d 1 θ Pitman-Yor G") ol2013-nl-214 No6 1,a) 2,b) n-gram 1 M [1] (TG: Tree ubstitution Grammar) [2], [3] TG TG 1 2 a) ohno@ilabdoshishaacjp b) khatano@maildoshishaacjp [4], [5] [6] 2 Pitman-Yor 3 Pitman-Yor 1 21 Pitman-Yor
ol2013-nl-214 No6 1,a) 2,b) n-gram 1 M [1] (TG: Tree ubstitution Grammar) [2], [3] TG TG 1 2 a) ohno@ilabdoshishaacjp b) khatano@maildoshishaacjp [4], [5] [6] 2 Pitman-Yor 3 Pitman-Yor 1 21 Pitman-Yor
258 5) GPS 1 GPS 6) GPS DP 7) 8) 10) GPS GPS 2 3 4 5 2. 2.1 3 1) GPS Global Positioning System
 GPS 1 GPS 6) GPS DP 7) 8) 10) GPS GPS 2 3 4 5 2. 2.1 3 1) GPS Global Positioning System") Vol. 52 No. 1 257 268 (Jan. 2011) 1 2, 1 1 measurement. In this paper, a dynamic road map making system is proposed. The proposition system uses probe-cars which has an in-vehicle camera and a GPS receiver.
Vol. 52 No. 1 257 268 (Jan. 2011) 1 2, 1 1 measurement. In this paper, a dynamic road map making system is proposed. The proposition system uses probe-cars which has an in-vehicle camera and a GPS receiver.