Tokyo University of Marine Science and Technology Laboratory of Satellite Navigation Engineering Tokyo University of Marine Science and Technology GNS
|
|
|
- えみ たもん
- 7 years ago
- Views:
Transcription
1 GNSS DGPSSBAS MSAS SBAS/MSAS MSAS LEX
l1 P(Y) codel1l2 3 GPS P(Y) P(Y) C/A M P(Y) C/ACS) CS) P(Y) M C/A M C/ACS) CS) M C/A P(Y) P(Y) 1176 MHz (L5) 1227 MHz")
2 GPS ,561km L1=1,575.42MHz (10.23MHz154) L2=1,227.6MHz (10.23MHz120) C/A Code (1.023MHz : 1023 chips)l1 P(Y) codel1l2 3 GPS P(Y) P(Y) C/A M P(Y) C/ACS) CS) P(Y) M C/A M C/ACS) CS) M C/A P(Y) P(Y) 1176 MHz (L5) 1227 MHz (L2) 1575 MHz (L1) GPS III 2013 L1C 4
 (L1) (C/A) (16m ) Y-Code (L1Y & L2Y)")
 Block III Block IIIA: 4")
3 GPS Block Block Block Block Block M II R-M II F2009/2010F 2009/ GPS Block IIA/IIR GPS (16-24m ) (L1) (C/A) (16m ) Y-Code (L1Y & L2Y) Y-Code Block IIR-M, IIF IIR-M: IIA/IIR 2 (L2C) M-Code (L1M & L2M) Eliminates SA for denial IIF: IIR-M 3 (L5) Block III Block IIIA: 4 (L1C) 6
4 GPS Ambiguity L2L5 7 GNSS GPS L2C L2C GLONASS GalileoIOC IOC QZSS QZSS CNSS 8
5 DLL Punctual Early Late DLL Punctual Early Late -1/2 +1/2 ()
6 Potential Errors Receiver noise Multipath Tropospheric delay Ionospheric delay Ephemeris error Clock error MSAS PSP Global


7 SBAS DGPS// ARTEMIS 2MTSAT GAGAN 13 MSAS (MTSAT Satellite-based Augmentation System) / PRN / PRN MTSAT=Multi-functional Transport Satellite ( -A 14

8 MTSAT (MSAS) Cover Area 15 1/3
9 2/3 3/3

")
10 SBAS Data Type Type 26 (IGP : Ionospheric Grid Point) MSAS

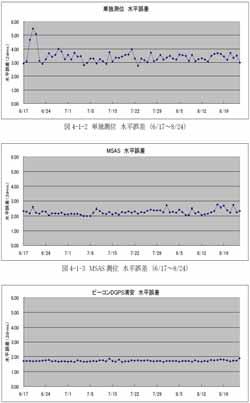
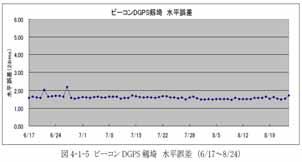
11 2007/06/162007/07/28 MSASDGPS : JLR-E MSASDGPS RTK (NovAtel OEMV)




12 u-blox EVK-5H MSAS OFF RANGE OFF 1.9 m MSAS 1.0 m MSAS OFF RANGE OFF 2.5 m MSAS 2.4 m GPS MSAS OFF RANGE OFF MSAS MSAS u-blox EVK-5H =48.6 =50 RPN4 65


13 I Range: off Range: on II Range: off Range: on

14 12 +MSAS GPS Hour 2 Hours MSAS MSAS MSAS MSASDOP
15 GPS GPSDGPSRTK-GPS FloatFix RTK-GPS DGPSRTK-GPS DGPSL1,L2 DGPSm 86cm L119cm
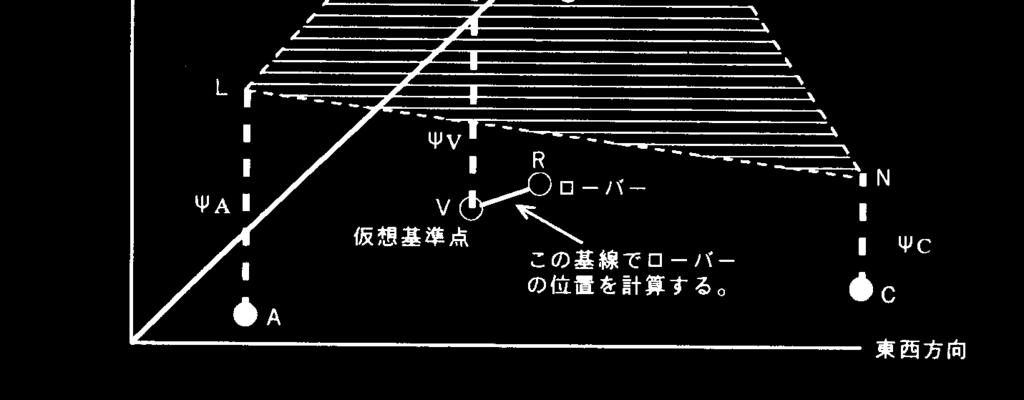
16 RTK-GPS (cm) SSE RTCM : 8 47 FIX: drms=1.43 cm (cm) (cm) SSE RTCM : 8 44 FIX: drms=1.57 cm (cm) RTK-GPS2 (m) (cm) : 7 48 FIX: drms=1.11 cm (m) (cm) (cm) : 7 45 FIX: drms= 4.45 cm (cm)

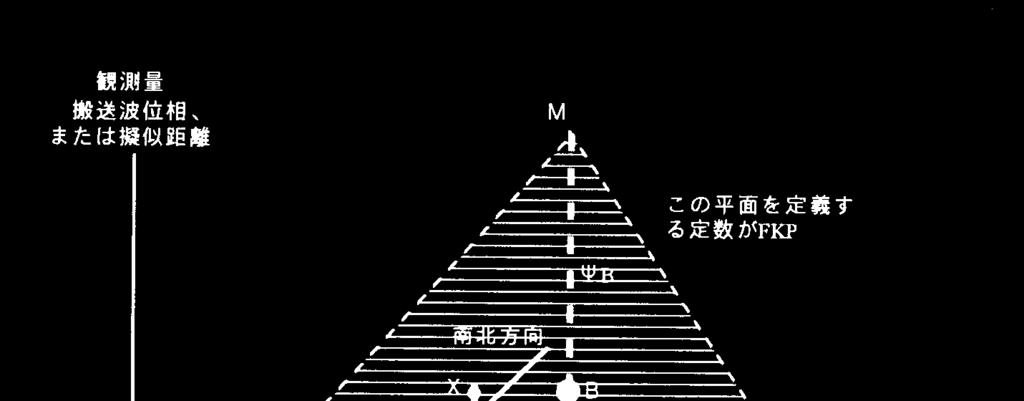
17 km VRS

18
19
20 GNSS Lower L-Band Upper L-Band C-Band ARNS RNSS RNSS* RNSS* ARNS RNSS ARNS RNSS Galileo E5/A GPS L5 Galileo E5/B Galileo E3 GPS L2 Glonass G2 Galileo E6 GPS L1 Glonass G2 Galileo C1 960MHz 1151MHz 1164MHz 1188MHz 1214MHz 1215MHz 1237MHz 1239MHz 1254MHz 1258MHz 1260MHz 1261MHz 1300MHz Galileo E4 1559MHz 1563MHz 1587MHz 1591MHz 1593MHz 1610MHz 5010MHz 5030MHz 5250MHz Galileo E2 Galileo E1 RNSS* shared with other services Galileo E5/A or E5/B frequency band options LEX(QZSS) MHz BPSK(5) 39 (1) 12ID+IOD 30 SV 3
21 (2) (55km) - (L1) L2, L5 L1 30 (110km) (ZWD) + 30 () (55km) : 280
22 (3) UPD (Uncalibrated Phase Delay) L1, L2, L5 (Phase Wind-up up) OTF, PPP-AR AR DCB (Differential Code Bias) L1C/A, L2C, L5 LC (L1P-L2P) L2P)
23
24 GDOP PDOP HDOP VDOP TDOP GPS QZS MSAS QZSLEX LEXKbps) Kbps) RTK-GPS GPS
GPS 1 2 GPS 29 GPS II IIA IIR 3 2 km GPS GPS 3 ID GPS 4 GPS GPS X Y GPS 1575:42 MHz L1 C/A coarse/acquisition code C/A SPS; standard po- 1:
 A1 GPS/GNSS sakai@enrigojp A11 GPS GPS GPS { 29 GPS 6 10 13 m 95% GPS GLONASS Galileo GNSS global navigation satellite system GPS GPS GPS 2005 9 IIR-M L2C SBAS satellite-based augmentation system WAAS
A1 GPS/GNSS sakai@enrigojp A11 GPS GPS GPS { 29 GPS 6 10 13 m 95% GPS GLONASS Galileo GNSS global navigation satellite system GPS GPS GPS 2005 9 IIR-M L2C SBAS satellite-based augmentation system WAAS
efit+ GPS静止/高速静止観測 使用説明書
 efit + I 1.1 1.1-1 2 1. 2. 1.1-2 (W) (T) (N) (H) (1) 2 efit+ GPS / efit+ GPS / Recon Recon Recon TDS Pocket PC ActiveSync (2) 2.1 Recon efit+(gps) MEMO: efit+(gps) efit+(gps) efit+(gps) ReconRecon CD-ROM
efit + I 1.1 1.1-1 2 1. 2. 1.1-2 (W) (T) (N) (H) (1) 2 efit+ GPS / efit+ GPS / Recon Recon Recon TDS Pocket PC ActiveSync (2) 2.1 Recon efit+(gps) MEMO: efit+(gps) efit+(gps) efit+(gps) ReconRecon CD-ROM
GPS GPS GPS GPS GPS
 22 GPS/QZSS 0723053 1... 4 1.1... 4 1.2... 4 1.3 GPS... 4 1.4 GPS... 6 1.5... 12 2 GPS... 16 2.1 GPS... 16 2.2 GPS... 16 2.3... 17 2.3... 18 2.4... 21 2.5... 24 2.6... 26 3 GPS... 28 3.1 DGPS... 28 3.1.1...
22 GPS/QZSS 0723053 1... 4 1.1... 4 1.2... 4 1.3 GPS... 4 1.4 GPS... 6 1.5... 12 2 GPS... 16 2.1 GPS... 16 2.2 GPS... 16 2.3... 17 2.3... 18 2.4... 21 2.5... 24 2.6... 26 3 GPS... 28 3.1 DGPS... 28 3.1.1...
2005年度卒業論文
 005 GPS 107 000 GPS (Global Positioning System) GPS GPS GPS GPS GPS 1 GPS GPS 3 GPS GPS 1GPS GPS GPS 1 1.1 GPS.1.1 GPS.1. GPS 3.1.3 9.1.4 11.1.5 13. 14..1 14.. 14..3 15..4 17 1) 17 ) 17 3) 18..5 19.4 GPS
005 GPS 107 000 GPS (Global Positioning System) GPS GPS GPS GPS GPS 1 GPS GPS 3 GPS GPS 1GPS GPS GPS 1 1.1 GPS.1.1 GPS.1. GPS 3.1.3 9.1.4 11.1.5 13. 14..1 14.. 14..3 15..4 17 1) 17 ) 17 3) 18..5 19.4 GPS
ネットワーク型RTK-GPS測量
 RTK-GPS 18 3 ...3....3....3. RTK-GPS...5....5....6....6...6...6...7...8 RTK-GPS...13...13 RTK-GPS...14...14...14...15...16...22...22...24...24-1 RTK-GPS...24-2...25...26. RTK-GPS...26....28 . CALS/EC RTK-GPS
RTK-GPS 18 3 ...3....3....3. RTK-GPS...5....5....6....6...6...6...7...8 RTK-GPS...13...13 RTK-GPS...14...14...14...15...16...22...22...24...24-1 RTK-GPS...24-2...25...26. RTK-GPS...26....28 . CALS/EC RTK-GPS
 km2 km2 km2 km2 km2 22 4 H20 H20 H21 H20 (H22) (H22) (H22) L=600m L=430m 1 H14.04.12 () 1.6km 2 H.14.05.31 () 3km 3 4 5 H.15.03.18 () 3km H.15.06.20 () 1.1km H.15.06.30 () 800m 6 H.15.07.18
km2 km2 km2 km2 km2 22 4 H20 H20 H21 H20 (H22) (H22) (H22) L=600m L=430m 1 H14.04.12 () 1.6km 2 H.14.05.31 () 3km 3 4 5 H.15.03.18 () 3km H.15.06.20 () 1.1km H.15.06.30 () 800m 6 H.15.07.18
「準天頂衛星システム ユーザインターフェース仕様書 (IS-QZSS)」 について
」 について") 準天頂衛星システムサービスセンチメータ級測位補強サービス編 利用実証信号からの差異について 2016 年 2 月 4 日準天頂衛星システムサービス株式会社 Quasi-Zenith Satellite System Services Inc. 2016 センチメータ級測位補強サービスの 利用実証信号からの差異について Page 1 Quasi-Zenith Satellite System Services
準天頂衛星システムサービスセンチメータ級測位補強サービス編 利用実証信号からの差異について 2016 年 2 月 4 日準天頂衛星システムサービス株式会社 Quasi-Zenith Satellite System Services Inc. 2016 センチメータ級測位補強サービスの 利用実証信号からの差異について Page 1 Quasi-Zenith Satellite System Services
untitled
 HOLUX GR-213 GPS 受信機ユーザーガイド へミスフィア 211-0015 神奈川県川崎市中原区北谷町 16-3 ソニア北谷町ビル 2 階 Tel. 044-223-7071 Fax. 044-223-7072 GR-213 1... 3 1.1... 3 1.2... 3 1.3... 4 1.3.1... 4 1.3.2... 4 1.3.3... 4 1.3.4... 4 1.3.5
HOLUX GR-213 GPS 受信機ユーザーガイド へミスフィア 211-0015 神奈川県川崎市中原区北谷町 16-3 ソニア北谷町ビル 2 階 Tel. 044-223-7071 Fax. 044-223-7072 GR-213 1... 3 1.1... 3 1.2... 3 1.3... 4 1.3.1... 4 1.3.2... 4 1.3.3... 4 1.3.4... 4 1.3.5
PowerPoint プレゼンテーション
 8GNSS 25 GNSS 25 1114 25 2 23 24 TCAR 3ILS L5 L1+L5 ISB GLONASS IFB GPS,GLONASS,QZSS + GPS-QZSS L2P-L2C, L2C 1/4cycle shift PPP GPS+GLONASS GPSGLONASS AR 23,24 25 25 GPSQZSS GLONASS Galileo BeiDou ISB
8GNSS 25 GNSS 25 1114 25 2 23 24 TCAR 3ILS L5 L1+L5 ISB GLONASS IFB GPS,GLONASS,QZSS + GPS-QZSS L2P-L2C, L2C 1/4cycle shift PPP GPS+GLONASS GPSGLONASS AR 23,24 25 25 GPSQZSS GLONASS Galileo BeiDou ISB
 3 65 1 4 5 67 1 2 5 5 3 6 68 23 69 2 6 8m 10m 1. 2. 3. 70 66 600km 11 3 16 21 3 0 3m 2m 0 5m 71 11 3 17 0 5 0 0 72 73 74 75 3 76 77 4 78 79 5 80 81 82 83 2 83 . 84 6 a b c d e f g a b c 3 85 16 86 87 7
3 65 1 4 5 67 1 2 5 5 3 6 68 23 69 2 6 8m 10m 1. 2. 3. 70 66 600km 11 3 16 21 3 0 3m 2m 0 5m 71 11 3 17 0 5 0 0 72 73 74 75 3 76 77 4 78 79 5 80 81 82 83 2 83 . 84 6 a b c d e f g a b c 3 85 16 86 87 7
○01 那覇市(7月変更)
") 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 H26,2 H28.2 9 9 38 39 40 41 42 43 l ll 44 45 46 47 48 49 50 51 52 53 54 55 2733 14,500 56 57 58 59
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 H26,2 H28.2 9 9 38 39 40 41 42 43 l ll 44 45 46 47 48 49 50 51 52 53 54 55 2733 14,500 56 57 58 59
- 2 -
 - 2 - - 3 - (1) (2) (3) (1) - 4 - ~ - 5 - (2) - 6 - (1) (1) - 7 - - 8 - (i) (ii) (iii) (ii) (iii) (ii) 10 - 9 - (3) - 10 - (3) - 11 - - 12 - (1) - 13 - - 14 - (2) - 15 - - 16 - (3) - 17 - - 18 - (4) -
- 2 - - 3 - (1) (2) (3) (1) - 4 - ~ - 5 - (2) - 6 - (1) (1) - 7 - - 8 - (i) (ii) (iii) (ii) (iii) (ii) 10 - 9 - (3) - 10 - (3) - 11 - - 12 - (1) - 13 - - 14 - (2) - 15 - - 16 - (3) - 17 - - 18 - (4) -
2 1980 8 4 4 4 4 4 3 4 2 4 4 2 4 6 0 0 6 4 2 4 1 2 2 1 4 4 4 2 3 3 3 4 3 4 4 4 4 2 5 5 2 4 4 4 0 3 3 0 9 10 10 9 1 1
 1 1979 6 24 3 4 4 4 4 3 4 4 2 3 4 4 6 0 0 6 2 4 4 4 3 0 0 3 3 3 4 3 2 4 3? 4 3 4 3 4 4 4 4 3 3 4 4 4 4 2 1 1 2 15 4 4 15 0 1 2 1980 8 4 4 4 4 4 3 4 2 4 4 2 4 6 0 0 6 4 2 4 1 2 2 1 4 4 4 2 3 3 3 4 3 4 4
1 1979 6 24 3 4 4 4 4 3 4 4 2 3 4 4 6 0 0 6 2 4 4 4 3 0 0 3 3 3 4 3 2 4 3? 4 3 4 3 4 4 4 4 3 3 4 4 4 4 2 1 1 2 15 4 4 15 0 1 2 1980 8 4 4 4 4 4 3 4 2 4 4 2 4 6 0 0 6 4 2 4 1 2 2 1 4 4 4 2 3 3 3 4 3 4 4


1 (1) (2)
 (2)") 1 2 (1) (2) (3) 3-78 - 1 (1) (2) - 79 - i) ii) iii) (3) (4) (5) (6) - 80 - (7) (8) (9) (10) 2 (1) (2) (3) (4) i) - 81 - ii) (a) (b) 3 (1) (2) - 82 - - 83 - - 84 - - 85 - - 86 - (1) (2) (3) (4) (5) (6)
1 2 (1) (2) (3) 3-78 - 1 (1) (2) - 79 - i) ii) iii) (3) (4) (5) (6) - 80 - (7) (8) (9) (10) 2 (1) (2) (3) (4) i) - 81 - ii) (a) (b) 3 (1) (2) - 82 - - 83 - - 84 - - 85 - - 86 - (1) (2) (3) (4) (5) (6)
図 -2 測位方式の概念図 RTK-GPS: Real Time Kinematic GPS 2 図 D-GPS RTK-GPS cm 1ms GPS CDMA 巻 8 号情報処理 2002 年 8 月 - 2 -
 1 RTK-GPS 柳原 徳久 (株)日立製作所 [email protected] 初本慎太郎 (株)日立産機システム [email protected] 日本ではカーナビゲーションが広く普及しており 新車への装着率は約 30 に達している カーナビの位置検 出には GPS Global Positioning System が用いられていることはよく知られている
1 RTK-GPS 柳原 徳久 (株)日立製作所 [email protected] 初本慎太郎 (株)日立産機システム [email protected] 日本ではカーナビゲーションが広く普及しており 新車への装着率は約 30 に達している カーナビの位置検 出には GPS Global Positioning System が用いられていることはよく知られている
<4D F736F F F696E74202D2091AA88CA91E589EF8D E9197BF62208E E707074>
 RTK-GPS/GLONASS における 受信機間 inter-channel bias の calibration とその評価 東京海洋大学山田英輝 発表内容 研究の背景と目的 バイアス較正実験概要 実験結果及び考察 RTK 測位への適用 まとめ 移動体 RTK 測位結果 ( 周波 + 瞬時 AR) Only GPS Fix solution: 5 % Float solution: 4 % NovAtel
RTK-GPS/GLONASS における 受信機間 inter-channel bias の calibration とその評価 東京海洋大学山田英輝 発表内容 研究の背景と目的 バイアス較正実験概要 実験結果及び考察 RTK 測位への適用 まとめ 移動体 RTK 測位結果 ( 周波 + 瞬時 AR) Only GPS Fix solution: 5 % Float solution: 4 % NovAtel
準天頂衛星システムによって向上する ドローンの測位性能
 準天頂衛星システムによって向上するドローンの測位性能 於平成 29 年 10 月 21 日日本航海学会第 137 回講演会宇宙航空研究会 AAI-GNSS 技術士事務所荒井修 1 1. 測位性能の向上 GPS (GNSS) 単独の性能を準天頂衛星システム (QZSS : Quasi-Zenith Satellite System) で向上 性能は 精度 (Accuracy) 測位結果の正しさ QZSSでは誤差補正データを提供
準天頂衛星システムによって向上するドローンの測位性能 於平成 29 年 10 月 21 日日本航海学会第 137 回講演会宇宙航空研究会 AAI-GNSS 技術士事務所荒井修 1 1. 測位性能の向上 GPS (GNSS) 単独の性能を準天頂衛星システム (QZSS : Quasi-Zenith Satellite System) で向上 性能は 精度 (Accuracy) 測位結果の正しさ QZSSでは誤差補正データを提供
Trimble Agriculture 精密農業ソリューションカタログ
 Trimble Agriculture TRANSFORMING THE WAY THE WORLD WORKS GPS CFX-750 EZ-Guide 250 CFX-750 EZ-Guide 250 LCD 8 4.3 2 GPS 1 1 OnPath DGPS MSAS DGPS MSAS 15 20cm *1 OmniSTAR VBS 15 20cm *2 OmniSTAR XP/HP 7.5
Trimble Agriculture TRANSFORMING THE WAY THE WORLD WORKS GPS CFX-750 EZ-Guide 250 CFX-750 EZ-Guide 250 LCD 8 4.3 2 GPS 1 1 OnPath DGPS MSAS DGPS MSAS 15 20cm *1 OmniSTAR VBS 15 20cm *2 OmniSTAR XP/HP 7.5


cm H.11.3 P.13 2 3-106-
 H11.3 H.11.3 P.4-105- cm H.11.3 P.13 2 3-106- 2 H.11.3 P.47 H.11.3 P.27 i vl1 vl2-107- 3 h vl l1 l2 1 2 0 ii H.11.3 P.49 2 iii i 2 vl1 vl2-108- H.11.3 P.50 ii 2 H.11.3 P.52 cm -109- H.11.3 P.44 S S H.11.3
H11.3 H.11.3 P.4-105- cm H.11.3 P.13 2 3-106- 2 H.11.3 P.47 H.11.3 P.27 i vl1 vl2-107- 3 h vl l1 l2 1 2 0 ii H.11.3 P.49 2 iii i 2 vl1 vl2-108- H.11.3 P.50 ii 2 H.11.3 P.52 cm -109- H.11.3 P.44 S S H.11.3
GNSS Conductor GF ユーザーガイド (Document No. SE )
") GNSS Conductor GF ユーザーガイド (Document No. ) www.furuno.com IMPORTANT NOTICE 本書に記載された内容を発行元 ( 古野電気株式会社 ) の書面による許可なく複写 複製 転載および第三者へ開示することを禁止します FURUNO ELECTRIC CO., LTD. All rights reserved. 記載の製品 仕様は予告なく変更することがあります
GNSS Conductor GF ユーザーガイド (Document No. ) www.furuno.com IMPORTANT NOTICE 本書に記載された内容を発行元 ( 古野電気株式会社 ) の書面による許可なく複写 複製 転載および第三者へ開示することを禁止します FURUNO ELECTRIC CO., LTD. All rights reserved. 記載の製品 仕様は予告なく変更することがあります
メインタイトル 32-40pt
 Trimble Catalyst のご紹介 スマートフォンで高精度 GNSS 計測を実現! 2018 年 10 月 30 日株式会社ニコン トリンブル神崎政之 スマートフォンで高精度 GNSS 計測を実現! Trimble Catalyst とは Nikon-Trimble Co., Ltd. 2 Trimble Catalyst とは ソフトウエア GNSS 受信機 多周波数受信 (L1 と L2)
Trimble Catalyst のご紹介 スマートフォンで高精度 GNSS 計測を実現! 2018 年 10 月 30 日株式会社ニコン トリンブル神崎政之 スマートフォンで高精度 GNSS 計測を実現! Trimble Catalyst とは Nikon-Trimble Co., Ltd. 2 Trimble Catalyst とは ソフトウエア GNSS 受信機 多周波数受信 (L1 と L2)
Microsoft PowerPoint tokura.pptx
 国産の衛星測位システムによる 3 衛星測位 海事システム工学科情報コース 8143 土倉弘子 背景と目的 現在の衛星測位システム 日本の衛星測位システム 測位計算の理論と概要 3 衛星測位計算 座標系 衛星配置 実験 静止実験 移動体実験 まとめ 目次 1 背景と目的 衛星測位システムの普及 個人利用から社会インフラ 国民生活に 必要不可欠 GNSS (Global Navigation Satellite
国産の衛星測位システムによる 3 衛星測位 海事システム工学科情報コース 8143 土倉弘子 背景と目的 現在の衛星測位システム 日本の衛星測位システム 測位計算の理論と概要 3 衛星測位計算 座標系 衛星配置 実験 静止実験 移動体実験 まとめ 目次 1 背景と目的 衛星測位システムの普及 個人利用から社会インフラ 国民生活に 必要不可欠 GNSS (Global Navigation Satellite
Microsoft Word - M8P_miniEVKボードによるRTKマニュアル.docx
 M8P mini-evk ボードによる RTK マニュアル 2016/08/27 A 版 2016/09/03 目次 1. ハードウェアの接続及び設置... 1 2. 受信機の設定... 2 2.1 u-center 及び u-blox 受信機ドライバのインストール... 2 2.2 基準局受信機の設定... 3 2.3 移動局 ( ローバー ) 受信機の設定... 5 3. ソフトウェアの設定...
M8P mini-evk ボードによる RTK マニュアル 2016/08/27 A 版 2016/09/03 目次 1. ハードウェアの接続及び設置... 1 2. 受信機の設定... 2 2.1 u-center 及び u-blox 受信機ドライバのインストール... 2 2.2 基準局受信機の設定... 3 2.3 移動局 ( ローバー ) 受信機の設定... 5 3. ソフトウェアの設定...



消火まえがき.qxd
 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 1100 1200 1300 1400 1500 1600 1700 1800 1900 2000 2100 1032MHz 1489MHz 1895MHz 2150MHz 142 143 144 145 146 147
119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 1100 1200 1300 1400 1500 1600 1700 1800 1900 2000 2100 1032MHz 1489MHz 1895MHz 2150MHz 142 143 144 145 146 147
GPS/GNSS: Satellite Navigation
 海外の精密測位 - 準天頂衛星への期待と大学間連携 - MADOCA 利用検討会 2016 年 3 月 29 日 久保信明 ( 東京海洋大学 ) 1 海外連携基準点の例 ( アジア ) フィリピン大学 ( マニラ ) インドネシア大学 ( ジャカルタ ) 東京海洋大学 ( 東京 ) 準天頂衛星 1 つをみても見え方は異なる 現段階で BEIDOU は高仰角に多数 2 これまでに設置してきた大学 チュラロンコン大学
海外の精密測位 - 準天頂衛星への期待と大学間連携 - MADOCA 利用検討会 2016 年 3 月 29 日 久保信明 ( 東京海洋大学 ) 1 海外連携基準点の例 ( アジア ) フィリピン大学 ( マニラ ) インドネシア大学 ( ジャカルタ ) 東京海洋大学 ( 東京 ) 準天頂衛星 1 つをみても見え方は異なる 現段階で BEIDOU は高仰角に多数 2 これまでに設置してきた大学 チュラロンコン大学

44 4 I (1) ( ) (10 15 ) ( 17 ) ( 3 1 ) (2)
 ( ) (10 15 ) ( 17 ) ( 3 1 ) (2)") (1) I 44 II 45 III 47 IV 52 44 4 I (1) ( ) 1945 8 9 (10 15 ) ( 17 ) ( 3 1 ) (2) 45 II 1 (3) 511 ( 451 1 ) ( ) 365 1 2 512 1 2 365 1 2 363 2 ( ) 3 ( ) ( 451 2 ( 314 1 ) ( 339 1 4 ) 337 2 3 ) 363 (4) 46
(1) I 44 II 45 III 47 IV 52 44 4 I (1) ( ) 1945 8 9 (10 15 ) ( 17 ) ( 3 1 ) (2) 45 II 1 (3) 511 ( 451 1 ) ( ) 365 1 2 512 1 2 365 1 2 363 2 ( ) 3 ( ) ( 451 2 ( 314 1 ) ( 339 1 4 ) 337 2 3 ) 363 (4) 46
 NX501 NX501 2 NX501 1... 5 1.1...5 1.2 GPS...6 1.2.1 GPS...6 1.2.2...6 1.3...6 1.4...7 1.5...10 1.6...12 1.7...13 1.8...16 1.9...20
NX501 NX501 2 NX501 1... 5 1.1...5 1.2 GPS...6 1.2.1 GPS...6 1.2.2...6 1.3...6 1.4...7 1.5...10 1.6...12 1.7...13 1.8...16 1.9...20
.PDF")
スライド 1
 測位航法学会 GPS セミナー 213.4.18 GLONASS,Galileo,BeiDou の信号捕捉と追尾 東京海洋大学日本学術振興会特別研究員 (PD) 鈴木太郎 [email protected] 目次 1. マルチ GNSS の現状 2. ソフトウェア受信機 3.GLONASS 4.Galileo 5.BeiDou 6.QZSS 補足資料 1 各衛星信号の詳細補足資料 2 各ナビゲーションデータの詳細補足資料
測位航法学会 GPS セミナー 213.4.18 GLONASS,Galileo,BeiDou の信号捕捉と追尾 東京海洋大学日本学術振興会特別研究員 (PD) 鈴木太郎 [email protected] 目次 1. マルチ GNSS の現状 2. ソフトウェア受信機 3.GLONASS 4.Galileo 5.BeiDou 6.QZSS 補足資料 1 各衛星信号の詳細補足資料 2 各ナビゲーションデータの詳細補足資料
2.6. GPS の L2P(Y)と L2C 信 号 間 の 擬 似 距 離 バイアスの 観 測 条 件 による 変 化 GPS の L2P(Y) 信 号 と L2C 信 号 間 で 発 生 する 擬 似 距 離 バイアスが メーカや 機 種 温 度 変 化 アンテナ 機 種 受 信 機 ファームウ
と L2C 信 号 間 の 擬 似 距 離 バイアスの 観 測 条 件 による 変 化 GPS の L2P(Y) 信 号 と L2C 信 号 間 で 発 生 する 擬 似 距 離 バイアスが メーカや 機 種 温 度 変 化 アンテナ 機 種 受 信 機 ファームウ") 2.5. GPS の L2P(Y)と L2C 信 号 間 の 擬 似 距 離 バイアスの 補 正 値 を 推 定 する 方 法 GPS の L2P(Y) 信 号 と L2C 信 号 間 で 発 生 する 擬 似 距 離 バイアス( 以 下 L2P-L2C バ イアス)の 補 正 値 を 推 定 する 方 法 について 調 査 した L2P-L2C バイアスは 主 に 受 信 機 内 の 各 信 号
2.5. GPS の L2P(Y)と L2C 信 号 間 の 擬 似 距 離 バイアスの 補 正 値 を 推 定 する 方 法 GPS の L2P(Y) 信 号 と L2C 信 号 間 で 発 生 する 擬 似 距 離 バイアス( 以 下 L2P-L2C バ イアス)の 補 正 値 を 推 定 する 方 法 について 調 査 した L2P-L2C バイアスは 主 に 受 信 機 内 の 各 信 号
ニチベイ 高遮蔽ブラインド セレーノグランツ 25・35
 Glanz 2015 61 3 6.5 3 35mm 3 300cm400cm 6.5 1cm 35mm 35mm 25mm 25 35 C059S C011S C472S C471S C474S C473S C476S C475S C410S C411S C211S C210S C012S C061S C209S C413S C063S C407S C051S C013S C054S C408S
Glanz 2015 61 3 6.5 3 35mm 3 300cm400cm 6.5 1cm 35mm 35mm 25mm 25 35 C059S C011S C472S C471S C474S C473S C476S C475S C410S C411S C211S C210S C012S C061S C209S C413S C063S C407S C051S C013S C054S C408S

 i ii i iii iv 1 3 3 10 14 17 17 18 22 23 28 29 31 36 37 39 40 43 48 59 70 75 75 77 90 95 102 107 109 110 118 125 128 130 132 134 48 43 43 51 52 61 61 64 62 124 70 58 3 10 17 29 78 82 85 102 95 109 iii
i ii i iii iv 1 3 3 10 14 17 17 18 22 23 28 29 31 36 37 39 40 43 48 59 70 75 75 77 90 95 102 107 109 110 118 125 128 130 132 134 48 43 43 51 52 61 61 64 62 124 70 58 3 10 17 29 78 82 85 102 95 109 iii
レジャー産業と顧客満足の課題
 1 1983 1983 2 3700 4800 5500 3300 15 3 100 1000 JR 4 14 2000 55% 72% 1878 2000 5 ( ) 22 1,040 5 946 42 15 25 30 30 4 14 39 1 24 8 6 390 33 800 34 34 3 35 () 37 40 1 50 40 46 47 2 55 4.43 4 16.98 40 55
1 1983 1983 2 3700 4800 5500 3300 15 3 100 1000 JR 4 14 2000 55% 72% 1878 2000 5 ( ) 22 1,040 5 946 42 15 25 30 30 4 14 39 1 24 8 6 390 33 800 34 34 3 35 () 37 40 1 50 40 46 47 2 55 4.43 4 16.98 40 55


 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 () - 1 - - 2 - - 3 - - 4 - - 5 - 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 () - 1 - - 2 - - 3 - - 4 - - 5 - 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57

<4D F736F F F696E74202D20322D32305F8F B AF4C312D E28BAD904D8D8682CC474C4F4E CE899E205B8CDD8AB783828
 第 14 回電子航法研究所研究発表会 June 6, 2014 20. 準天頂衛星 L1-SAIF 補強信号の GLONASS 対応 航法システム領域坂井丈泰 星野尾一明 伊藤憲 June 2014 - Slide 1 はじめに 準天頂衛星システム (QZSS): 準天頂衛星軌道上の測位衛星による衛星測位サービス GPS 補完信号に加え 補強信号を放送 補強信号 :L1-SAIF LEX の 2 種類
第 14 回電子航法研究所研究発表会 June 6, 2014 20. 準天頂衛星 L1-SAIF 補強信号の GLONASS 対応 航法システム領域坂井丈泰 星野尾一明 伊藤憲 June 2014 - Slide 1 はじめに 準天頂衛星システム (QZSS): 準天頂衛星軌道上の測位衛星による衛星測位サービス GPS 補完信号に加え 補強信号を放送 補強信号 :L1-SAIF LEX の 2 種類
1 1 1 11 25 2 28 2 2 6 10 8 30 4 26 1 38 5 1 2 25 57ha 25 3 24ha 3 4 83km2 15cm 5 8ha 30km2 8ha 30km2 4 14
 3 9 11 25 1 2 2 3 3 6 7 1 2 4 2 1 1 1 11 25 2 28 2 2 6 10 8 30 4 26 1 38 5 1 2 25 57ha 25 3 24ha 3 4 83km2 15cm 5 8ha 30km2 8ha 30km2 4 14 60 m3 60 m3 4 1 11 26 30 2 3 15 50 2 1 4 7 110 2 4 21 180 1 38
3 9 11 25 1 2 2 3 3 6 7 1 2 4 2 1 1 1 11 25 2 28 2 2 6 10 8 30 4 26 1 38 5 1 2 25 57ha 25 3 24ha 3 4 83km2 15cm 5 8ha 30km2 8ha 30km2 4 14 60 m3 60 m3 4 1 11 26 30 2 3 15 50 2 1 4 7 110 2 4 21 180 1 38
GPS
 平成 27 年度測位航法学会全国大会セミナー GNSS 測位入門から RTKLIB の活用まで ( その 1) 2015-04-22 ~ 2015-04-23@ 東京海洋大学越中島 東京海洋大学高須知二 時間割 (1) GNSS 測位入門 4/22 ( 水 ) 9:30-10:20 (2) RTKLIBの概要と導入 ( 実習 ) 10:30-11:20 (3) RTKLIBの基本操作 ( 実習 )
平成 27 年度測位航法学会全国大会セミナー GNSS 測位入門から RTKLIB の活用まで ( その 1) 2015-04-22 ~ 2015-04-23@ 東京海洋大学越中島 東京海洋大学高須知二 時間割 (1) GNSS 測位入門 4/22 ( 水 ) 9:30-10:20 (2) RTKLIBの概要と導入 ( 実習 ) 10:30-11:20 (3) RTKLIBの基本操作 ( 実習 )
高精度測位技術の応用について 第 13 回クリティカルソフトウェアワークショップ 宇宙航空研究開発機構衛星測位システム技術ユニット小暮聡 1
 高精度測位技術の応用について 2016.1.21 第 13 回クリティカルソフトウェアワークショップ 宇宙航空研究開発機構衛星測位システム技術ユニット小暮聡 1 内容 1. 衛星測位とは? 2. 衛星測位システム 3. 準天頂衛星システム 4. GPSからGNSSへ 5. 高精度測位技術 ( 衛星測位の精度向上 ) 6. 高精度測位技術 (MADOCAの研究開発) 7. PPP/PPP-ARの応用
高精度測位技術の応用について 2016.1.21 第 13 回クリティカルソフトウェアワークショップ 宇宙航空研究開発機構衛星測位システム技術ユニット小暮聡 1 内容 1. 衛星測位とは? 2. 衛星測位システム 3. 準天頂衛星システム 4. GPSからGNSSへ 5. 高精度測位技術 ( 衛星測位の精度向上 ) 6. 高精度測位技術 (MADOCAの研究開発) 7. PPP/PPP-ARの応用
untitled
 1 211022 2 11150 211022384 3 1000 23% 77% 10% 10% 5% 20% 15% 40% 5% 3% 8% 16% 15% 42% 5% 6% 4 =1000 = 66 5 =1000 = 59 6 52%(42% 1000 7 56% 41% 40% 97% 3% 11%, 2% 3%, 41 7% 49% 30%, 18%, 40%, 83% =1000
1 211022 2 11150 211022384 3 1000 23% 77% 10% 10% 5% 20% 15% 40% 5% 3% 8% 16% 15% 42% 5% 6% 4 =1000 = 66 5 =1000 = 59 6 52%(42% 1000 7 56% 41% 40% 97% 3% 11%, 2% 3%, 41 7% 49% 30%, 18%, 40%, 83% =1000
電力線重畳型機器認証技術
 1 電力線重畳型認証技術 RFID over Power Line System ソニー株式会社コーポレート R&D 新規事業創出部門ホームエネルギーネットワーク事業開発部 和城賢典 2012 年 4 月 17 日 2 内容 イントロダクション 基本構造 測定結果 EV 充電スタンドへの取り組み 3 内容 イントロダクション 基本構造 測定結果 EV 充電スタンドへの取り組み 4 RFID の原理
1 電力線重畳型認証技術 RFID over Power Line System ソニー株式会社コーポレート R&D 新規事業創出部門ホームエネルギーネットワーク事業開発部 和城賢典 2012 年 4 月 17 日 2 内容 イントロダクション 基本構造 測定結果 EV 充電スタンドへの取り組み 3 内容 イントロダクション 基本構造 測定結果 EV 充電スタンドへの取り組み 4 RFID の原理
Keysight Technologies GPSレシーバ・テスト
 Keysight Technologies GPS Application Note 25 37500 12.5 2 300 1 6 3 4 5 1500 30 (TLM) 30 0.6 8 16 6 16 7 (HOW) 30 0.6 TOW (Time of week) ID 6 ...3...3 GPS...4 GPS A-GPS...4 GPS...4 GPS...4 GPS...5 GPS...5
Keysight Technologies GPS Application Note 25 37500 12.5 2 300 1 6 3 4 5 1500 30 (TLM) 30 0.6 8 16 6 16 7 (HOW) 30 0.6 TOW (Time of week) ID 6 ...3...3 GPS...4 GPS A-GPS...4 GPS...4 GPS...4 GPS...5 GPS...5
測量士補 重要事項 はじめに GNSS測量の基礎
 GNSS 測量の基礎 (1)GNSS とは GNSS(Global Navigation Satellite Systems: 全地球衛星航法 ( または測位 ) システム ) 測量とは いわゆるカーナビを想像すればよい つまり 上空の衛星から発射される電波を受信する事により 地上の位置を求める測量である 衛星として代表的なものは アメリカの GPS 衛星であるが その他にも次のようなものがある アメリカの
GNSS 測量の基礎 (1)GNSS とは GNSS(Global Navigation Satellite Systems: 全地球衛星航法 ( または測位 ) システム ) 測量とは いわゆるカーナビを想像すればよい つまり 上空の衛星から発射される電波を受信する事により 地上の位置を求める測量である 衛星として代表的なものは アメリカの GPS 衛星であるが その他にも次のようなものがある アメリカの
16soukatsu_p1_40.ai
 2 2016 DATA. 01 3 DATA. 02 4 DATA. 03 5 DATA. 04 6 DATA. 05 7 DATA. 06 8 DATA. 07 9 DATA. 08 DATA. 09 DATA. 10 DATA. 11 DATA. 12 DATA. 13 DATA. 14 10 11 12 13 COLUMN 1416 17 18 19 DATA. 15 20 DATA. 16
2 2016 DATA. 01 3 DATA. 02 4 DATA. 03 5 DATA. 04 6 DATA. 05 7 DATA. 06 8 DATA. 07 9 DATA. 08 DATA. 09 DATA. 10 DATA. 11 DATA. 12 DATA. 13 DATA. 14 10 11 12 13 COLUMN 1416 17 18 19 DATA. 15 20 DATA. 16

Trimble G3100-R1B G6Ni ATLAS (GR-5) GNR5 (NET-G5) R2 GNSS G3100-R1R G6Ni GGD GGBD GGD GGBD 一体型一体型一体型一体型一体型分離型分離型 GPS L2 GPS L2C GPS L5 - GLONASS Galil
 GNR5 (NET-G5) R2 GNSS G3100-R1R G6Ni GGD GGBD GGD GGBD 一体型一体型一体型一体型一体型分離型分離型 GPS L2 GPS L2C GPS L5 - GLONASS Galil") Trimble Trimble R10 Trimble NetR9 Trimble R9s GNSS Trimble R9s GNSS Trimble 一体型 分離型 分離型 分離型 一体型 一体型 一体型 GPS L2 (OP) (OP) GPS L2C (OP) (OP) GPS L5 (OP) (OP) (OP) (OP) - GLONASS (L1,L2)(L3 ) (L1)(L2,L3 )
Trimble Trimble R10 Trimble NetR9 Trimble R9s GNSS Trimble R9s GNSS Trimble 一体型 分離型 分離型 分離型 一体型 一体型 一体型 GPS L2 (OP) (OP) GPS L2C (OP) (OP) GPS L5 (OP) (OP) (OP) (OP) - GLONASS (L1,L2)(L3 ) (L1)(L2,L3 )
PowerPoint Presentation
 / 2008/04/04 Ferran Salleras 1 2 40Gb/s 40Gb/s PC QD PC: QD: e.g. PCQD PC/QD 3 CP-ON SP T CP-OFF PC/QD-SMZ T ~ps, 40Gb/s ~100fJ T CP-ON CP-OFF 500µm500µm Photonic Crystal SMZ K. Tajima, JJAP, 1993. Control
/ 2008/04/04 Ferran Salleras 1 2 40Gb/s 40Gb/s PC QD PC: QD: e.g. PCQD PC/QD 3 CP-ON SP T CP-OFF PC/QD-SMZ T ~ps, 40Gb/s ~100fJ T CP-ON CP-OFF 500µm500µm Photonic Crystal SMZ K. Tajima, JJAP, 1993. Control
ADC121S Bit, ksps, Diff Input, Micro Pwr Sampling ADC (jp)
") ADC121S625 ADC121S625 12-Bit, 50 ksps to 200 ksps, Differential Input, Micro Power Sampling A/D Converter Literature Number: JAJSAB8 ADC121S625 12 50kSPS 200kSPS A/D ADC121S625 50kSPS 200kSPS 12 A/D 500mV
ADC121S625 ADC121S625 12-Bit, 50 ksps to 200 ksps, Differential Input, Micro Power Sampling A/D Converter Literature Number: JAJSAB8 ADC121S625 12 50kSPS 200kSPS A/D ADC121S625 50kSPS 200kSPS 12 A/D 500mV
IS-QZSS
 IS-QZSS Ver..6 準 天 頂 衛 星 システム ユーザインタフェース 仕 様 書 (IS-QZSS) この 文 書 の 内 容 は 206 年 9 月 以 降 に 予 定 されている 準 天 頂 衛 星 システムサ ービス 株 式 会 社 が 整 備 する QZSS 地 上 システムが 完 成 し 当 該 システムで みち びき の 運 用 が 開 始 されるまで 有 効 である 新 地
IS-QZSS Ver..6 準 天 頂 衛 星 システム ユーザインタフェース 仕 様 書 (IS-QZSS) この 文 書 の 内 容 は 206 年 9 月 以 降 に 予 定 されている 準 天 頂 衛 星 システムサ ービス 株 式 会 社 が 整 備 する QZSS 地 上 システムが 完 成 し 当 該 システムで みち びき の 運 用 が 開 始 されるまで 有 効 である 新 地
スライド 1
 SPAC シンポジウム 2018 みちびき を活用した利用展望と受信機の最新動向 2018 年 11 月 16 日 一般財団法人衛星測位利用推進センター 利用実証推進部 松岡繁 1 1. 利用実証全容と期待される サービス 2 初号機 QZS-1 準天頂衛星システムの開発 整備 運用スケジュール H26 H27 H28 H29 H30 H31 H32 H33 H34 H35 H36 H37 H38
SPAC シンポジウム 2018 みちびき を活用した利用展望と受信機の最新動向 2018 年 11 月 16 日 一般財団法人衛星測位利用推進センター 利用実証推進部 松岡繁 1 1. 利用実証全容と期待される サービス 2 初号機 QZS-1 準天頂衛星システムの開発 整備 運用スケジュール H26 H27 H28 H29 H30 H31 H32 H33 H34 H35 H36 H37 H38
IS-QZSS サブメータ級測位補強サービス / 災害 危機管理通報サービス編 (IS-QZSS-L1S-001) の構成 Page 1 Quasi-Zenith Satellite System Services Inc. 2015
 の構成 Page 1 Quasi-Zenith Satellite System Services Inc. 2015") 準天頂衛星システムユーザインタフェース仕様書サブメータ級測位補強サービス / 災害 危機管理通報サービス編 について < 共通 > 2015 年 07 月 16 日準天頂衛星システムサービス株式会社 Quasi-Zenith Satellite System Services Inc. 2015 IS-QZSS サブメータ級測位補強サービス / 災害 危機管理通報サービス編 (IS-QZSS-L1S-001)
準天頂衛星システムユーザインタフェース仕様書サブメータ級測位補強サービス / 災害 危機管理通報サービス編 について < 共通 > 2015 年 07 月 16 日準天頂衛星システムサービス株式会社 Quasi-Zenith Satellite System Services Inc. 2015 IS-QZSS サブメータ級測位補強サービス / 災害 危機管理通報サービス編 (IS-QZSS-L1S-001)
![かんたん操作ガイド[arrows M02]](/thumbs/39/20071242.jpg "かんたん操作ガイド[arrows M02]")
![かんたん操作ガイド[arrows RM02]](/thumbs/39/20475147.jpg "かんたん操作ガイド[arrows RM02]")


![かんたん操作ガイド[arrows M03]](/thumbs/42/22941141.jpg "かんたん操作ガイド[arrows M03]")
スライド 1
 2019 年度測位航法学会全国大会 QZSS 特別講演会 準天頂衛星受信機の最新動向 2019 年 5 月 17 日 一般財団法人衛星測位利用推進センター SPAC 利用実証推進部 松岡繁 1 初号機 QZS-1 準天頂衛星システムの開発 整備 運用スケジュール H26 H27 H28 H29 H30 R1 R2 R3 R4 R5 R6 R7 R8 2010.9.11 打上げ JAXA 運用 運用開始
2019 年度測位航法学会全国大会 QZSS 特別講演会 準天頂衛星受信機の最新動向 2019 年 5 月 17 日 一般財団法人衛星測位利用推進センター SPAC 利用実証推進部 松岡繁 1 初号機 QZS-1 準天頂衛星システムの開発 整備 運用スケジュール H26 H27 H28 H29 H30 R1 R2 R3 R4 R5 R6 R7 R8 2010.9.11 打上げ JAXA 運用 運用開始

宿泊産業活性化のための実証実験
 121 32 10 12 12 19 2 15 59 40 33 34 35 36 37 38 3637 20 39 12 19 OFF 2008/12/19 2008/12/25 3 1 1 72,000 2008/12/19 2008/12/26 2 1 1 36,000 2008/12/28 2009/1/5 2 1 1 24,000 2009/1/6 2009/1/16 3 1 1 25,200
121 32 10 12 12 19 2 15 59 40 33 34 35 36 37 38 3637 20 39 12 19 OFF 2008/12/19 2008/12/25 3 1 1 72,000 2008/12/19 2008/12/26 2 1 1 36,000 2008/12/28 2009/1/5 2 1 1 24,000 2009/1/6 2009/1/16 3 1 1 25,200
")