ヒューマノイドロボット技術 研究の流れ
|
|
|
- たしろう みやまる
- 3 years ago
- Views:
Transcription
1 1 遠赤外線画像への GAN の適用と自律移動ロボットの制御 MATLAB EXPO Japan 2020 令和 2 年 9 月 29 日 防衛装備庁 先進技術推進センター 防衛技官丹羽雄一郎
2 2 目次 遠赤外線画像の利点と活用 GANを用いた遠赤外線画像処理 可視 ( カラー ) 画像の生成 生成手順及び結果 遠赤外線画像の温度変化に対する汎化手法 応用 カラー画像から遠赤外画像の生成 領域分割画像の生成 自律移動ロボットの制御 まとめ ロボットへの適用 遠赤外線画像のみを用いた人の検知 障害物回避制御
 反射光により物体を視認 ( 陰影により物体の形状把握反射率の違いにより文字の視認可能")
 反射光により物体を視認 ( 陰影により物体の形状把握 LIDAR 等も視認可能 )")

 https://www.daiichi-kagaku.co.")
3 遠赤外線画像の利点と活用 ( 遠赤外線とは ) 電磁波 波長短い 波長長い 可視光画像 ( 波長約 0.4~0.7μm) 反射光により物体を視認 ( 陰影により物体の形状把握反射率の違いにより文字の視認可能 ) 可視光 NIR MWIR 中 LWIR 近赤外線画像 ( 波長約 0.7~2.7μm) 反射光により物体を視認 ( 陰影により物体の形状把握 LIDAR 等も視認可能 ) 遠赤外線画像 ( 波長約 8~12μm) 主に赤外線 ( 熱赤外 ) 放射により物体を視認 ( 熱源の探知に有効 物体の形状把握等には向かない ) 3



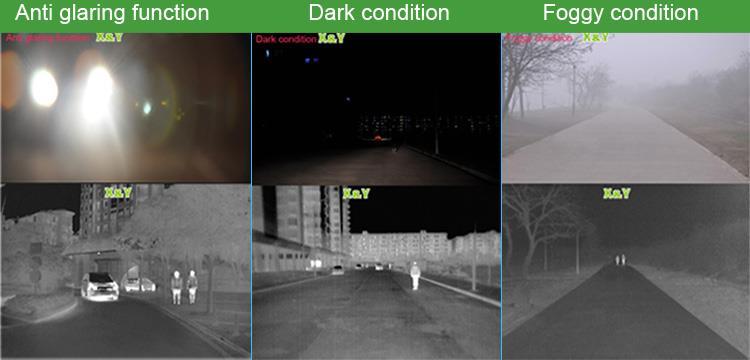
4 4 遠赤外線画像の利点と活用 ( 遠赤外線画像の利点 ) 可視光画像の欠点 照度変化に弱い 暗所では均一な照明が必要 センサとして 継続的で安定的な運用が難 %80%E5%A4%95%E6%97%A5%E3%81%AE%E5%BE%8C%E6%BF%A1%E3%82%8C%E3%81%9F%E9%81%93%E8%B7%AF.html 遠赤外線画像の利点 外光 ( 日照や照明 ) の変化に影響なし 放射のため照明を必要としない センサとして継続的で安定的な環境認識が可能 可視 遠赤外 FLIR
 センサが必要 = 遠赤外線画像の活用 日本航空宇宙工業会会報 航空と宇宙 2016 年 7 月号 2 波長赤外線センサの研究及び衛星搭載型 2 波長赤外線センサの研究の紹介,")
5 遠赤外線画像の利点と活用 ( 防衛用途での利用 ) 防衛用途で多用される遠赤外線センサ 一般的な環境認識に使用されるセンサ RGB カメラ 近赤外線カメラ 屋内や暗所ではライトが必要で その存在が暴露してしまう問題 照明環境の変化に脆弱 対向するライトによるハレーション LIDAR Depth センサ 近赤外光レーザー パターン投光を使用 通常のカメラや暗視ゴーグルを利用すれば その所在が暴露してしまう 隠密行動 秘匿行動が出来ない 完全な受動 ( パッシブ ) センサが必要 = 遠赤外線画像の活用 日本航空宇宙工業会会報 航空と宇宙 2016 年 7 月号 2 波長赤外線センサの研究及び衛星搭載型 2 波長赤外線センサの研究の紹介, 防衛装備庁小山技官 5



6 遠赤外線画像の利点と活用 ( 問題点とその解決策 ) 1. 視認性が低い 熱赤外放射をセンサで捉えているため 可視光画像に比べ分解能が悪く ボケた画像となる 物体の温度分布が色調と異なるため 可視光画像と同一の物体として認識が難しい 2. 環境温度が変化する 季節変化や空調設備により 環境温度が変化するため 遠赤外線画像の物体温度のシフト または物体間の温度序列が反転する 路上の人 道路上の車両 ( 真上から撮影 ) 冬季に暖房をつけた室内 冬季に暖房をつける前の室内 DNN を用いて遠赤外画像をカラー化 ( 生成 ) DNN を用いて物体認識 ( セマンティックセグメンテーション ) DNN のファインチューニングにより対象物の温度変化に対応 6
7 GAN を用いた遠赤外線画像処理 7
 と識別ネットワーク (discriminator) の 2 つのネットワークから構成 生成側は識別側を欺こうと学習し 識別側はより正確に識別しようと学習")
 チュートリアル Generative")

8 遠赤外画像からカラー画像の生成 ( 手法 ) 敵対的生成ネットワーク (Generative Adversarial Networks;GAN) を利用した 白黒画像からのカラー画像生成の研究を応用 GAN は生成ネットワーク (generator) と識別ネットワーク (discriminator) の 2 つのネットワークから構成 生成側は識別側を欺こうと学習し 識別側はより正確に識別しようと学習 学習により生成ネットワークが 学習データと類似した画像を生成可能となる 学習データ 識別ネットワーク 白黒画像からカラー画像を生成する GAN の例 GAN について詳しい説明は以下参照画像の認識 理解シンポジウム 2019 (MIRU2019) チュートリアル Generative Adversarial Networks の基礎 発展 応用金子卓弘 (NTT コミュニケーション科学基礎研究所 ) N_Tutorial_MIRU2019.pdf 生成ネットワーク 代表的な GAN の深層ネットワークアーキテクチャ図 8

 通称 pix2pix 学習時, データセット G U-Net D D 同時に撮影した遠赤外線画像とカラー画像のペア画像群")
9 9 遠赤外画像からカラー画像の生成 ( 手順 ) pix2pix Philip Isola,Jun-Yan Zhu, Tinghui Zhou,Alexei A.Efros, Image-to-Image Translation with Conditional Adversarial Networks,CVPR2017, arxiv (21 Nov 2016) 通称 pix2pix 学習時, データセット G U-Net D D 同時に撮影した遠赤外線画像とカラー画像のペア画像群 fake real 生成時 新たに入力された遠赤外線画像 G U-Net 生成されたカラー画像 Pix2pix は 他にも様々なドメイン適応が可能





10 キャリブレーション手法とデータ取得 Reshet Graf 社の製品 Passive Thermal Targets に用いられている遠赤外線反射塗料及び印刷技術を用いた 熱源を利用しない遠赤外 可視カメラ用チェッカーボードを作成使用 OpenCV に実装されているチェッカーボードを用いた歪曲収差の除去手法 遠赤外線カメラ 可視カメラ 補正前 USB USB 補正後 キャプチャソフトで同時に撮影 ( ビデオを撮影する程の工数で作成 ほぼ同時刻のフレームを切り出すことでデータセットを作成可能 ) 10
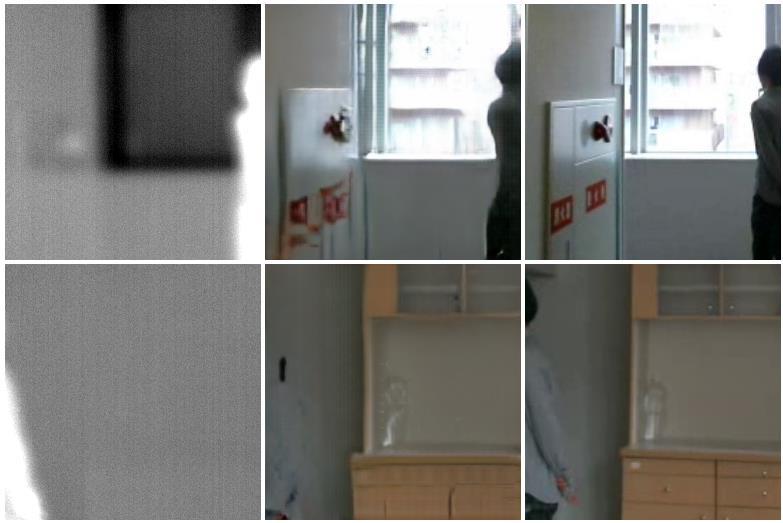





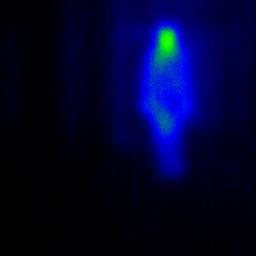
11 11 遠赤外画像からカラー画像の生成 ( 結果 ) 入力画像 (IR 画像 ) 出力画像 ( 生成された可視画像 ) 真値 入力画像 (IR 画像 ) 出力画像 ( 生成された可視画像 ) 真値 (1) (6) (2) (7) (3) (8) (4) (9) (5) (10)
 撮影に使用した遠赤外線カメラビジョンセンシング VIM-384 ULIS 社 ( 現 LYNRED 社 )PICO384 イメージセンサ使用 384x288 画素画素熱分可能 (NETD) 0.")
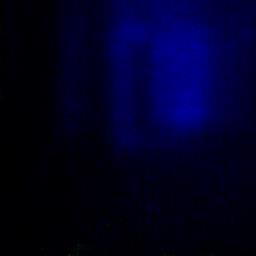
12 遠赤外画像からカラー画像の生成 ( 興味深い結果 ) (1) (2) 入力画像 (IR 画像 ) 出力画像 ( 生成された可視画像 ) 真値 遠赤外線は ガラスを透過できない 窓ガラス ( 赤枠 ) の遠赤外線画像部分には 窓の外にある建物の情報は入っていない (3) (4) (5) しかしながら 生成されたカラー画像は 真値と僅かに異なるが建物が生成されている! 分析の結果 ガラス面に付近の電灯や撮影者の熱赤外の反射像が映り込んでおり その情報により窓の外の画像を生成できたものと考えられる ( 過学習ではない ) 撮影に使用した遠赤外線カメラビジョンセンシング VIM-384 ULIS 社 ( 現 LYNRED 社 )PICO384 イメージセンサ使用 384x288 画素画素熱分可能 (NETD) 度 温度分解能が高いため 人の認識できない温度差も計測可能 CNN は物体表面の温度のムラ ( テクスチャ ) を特徴量として活用可能 12



13 遠赤外線画像の温度変化に対する汎化手法 LWIR IR 画像真値 1 同じ温度のテストデータでは生成画像は良好 学習データと同じ温度のときのテストデータ LWIR IR 画像真値 学習データと違う温度のときのテストデータ 暖かいときの学習データ 暖かいときの学習データ 暖かいときのデータで学習した GAN 3 寒いときの学習データを追加して再学習する ( ファインチューニング ) 暖寒のデータで学習した GAN 2 学習データと異なる温度のテストデータでは生成画像は不良 4 再学習により異なる温度のテストデータでも良好 寒いときの学習データ 改善 13


14 14 応用 : カラー画像から遠赤外画像の生成 ( 手法及び用途 ) カラー画像から生成ネットワークが生成した遠赤外線画像と 真の遠赤外線画像が一致するように学習させた GAN 生成ネットワークは カラー画像から遠赤外線画像を生成するネットワークとして機能 応用事例としては ロボットのシミュレータにおいて 従来不可能であった遠赤外線画像シミュレーションが可能となる 入力画像 ( 可視画像 ) 出力画像 ( 生成された赤外画像 ) 真値 入力画像 ( 可視画像 ) 出力画像 ( 生成された赤外画像 ) 真値 (1) (3) (2) (4)
 etc.")
15 応用 : 遠赤外画像からの可視画像生成手法の用途 遠赤外線画像から可視 ( カラー ) 画像を生成することで 従来研究開発された可視画像用の処理を流用することができる これにより 新たに学習用の教示データを作成すること無く 遠赤外線画像の領域分割 物体認識識別 ステレオ視 SLAM 等を構築することができる 又 判読しづらかった遠赤外線画像をカラー画像化することにより 画像読解者のワークロードを低減することが可能となる 可視画像用の処理が流用可能 既存のコンピュータビジョン処理 領域分割 領域分割 遠赤外線画像 GAN 深層生成モデル 可視画像 物体認識識別 距離画像推定 物体識別 SLAM( ) etc. GAN による遠赤外線画像の可視画像化 Simultaneous Localization and Mapping ( 自己位置推定と環境地図作成 ) 距離画像 15
16 応用 : 遠赤外画像からの領域分割 ( セマンティックセグメンテーション ) ( クロスドメイン蒸留法による学習手法 ) 可視画像生成用学習データセット 領域分割生成用学習データセット 遠赤外線画像可視画像可視画像領域分割 遠赤外線画像 遠赤外線画像 学習 GAN 深層生成モデル 遠赤外線画像領域分割生成用学習データセット 床 領域分割画像 生成された可視画像 学習 or ファインチューニング 遠赤外線画像 学習済み深層学習モデル 1 GAN 深層生成モデル 深層学習モデル 2 学習 or ファインチューニング or 学習済み深層学習モデル 1 床 床 生成された領域分割画像 人 or 生成された領域分割画像 親のニューラルネットワーク 深層学習モデル 1 知識蒸留 ( 親の知を子へ伝播 ) 子のニューラルネットワーク 16
 を利用し KAIST")





")
17 応用 : 遠赤外画像からの領域分割画像の生成 ( 結果 ) 1. 既存の学習済みの領域分割ネットワーク (Segnet) を利用し KAIST 学習用データセットの可視画像から領域分割画像を生成 2. 生成された領域分割画像と 上記可視画像と同時に撮影された遠赤外線画像をペアにし 領域分割の学習データとする 3. 上記の学習データを使用し 遠赤外線画像から領域分割画像を生成するネットワークを学習する 4. 3 項で学習させたネットワークへ KAIST テスト用遠赤外線画像を入力することで その画像に対応した領域分割画像が生成されることを確認した カラー画像から領域分割する学習済みネットワークを利用 可視から領域分割をするネットワーク作成 1 カラー画像学習用データ ( カラーと赤外同時撮影 ) 参考 : 下赤外と同時に撮影したカラー画像 3 学習 遠赤外線画像学習用データ 入力 ( ( 遠赤外 ) 赤外から領域分割をするネットワーク作成 今回は GAN を使用 出力 ( 領域分割 2 領域分割画像用の学習データの作成 ( 領域分割と赤外画像セット ) 人 ( ロボットに対する移動障害物 ) 道路 ( ロボットに対する移動可能領域 ) 4 遠赤外線画像から直接生成された領域分割画像 17
18 自律移動ロボットの制御 18


19 問題設定 : 偵察監視ロボットの環境認識 目的主に市街地環境における巡回偵察監視等を行う自律移動ロボット LIDAR による環境認識 遠赤外線カメラよる環境認識 一般的なロボットの環境認識に使用される外界センサ (RGBカメラ 近赤外線カメラ LIDAR Depth センサ ) は 照明投光 近赤外光レーザー パターン投光をするため 通常のカメラや暗視ゴーグルを利 用すれば その所在が暴露してしまう イメージ図 = 隠密行動 秘匿行動が出来ない問題点 完全パッシブな外界センサを利用した環境認識が必要 = 遠赤外線カメラを用いた環境認識技術 19

 2D マップ生成 ( ローカル ) 3D マップ生成 ( ローカル ) ビジュアルオドメトリ カメラ画像とレーザスキャナー情報の融合 慣性航法 三角測量 カルマンフィルタ ベイジアンフィルタ 衛星ナビゲーション ジャイロ 加速度計 速度センサ GPS エンコーダ トルクセンサ 触覚センサ 超音波センサ 可視カメラ 近赤外線カメラ 遠赤外線カメラ Lidar Depth")

20 本自律移動ロボットのタスクの定義とアーキテクチャ設計 本自律偵察用ロボットの基本タスク (1) 移動可能な領域を認識し移動する (2) 壁などの障害物を検知し回避する (3) 人を検知し 人の方向から離れる 基本タスク実現の方法 1 赤外画像の領域分割による物体検知及び認識 2 床領域が移動可能領域として進行 至近の壁領域は障害物として回避 人領域が検知された場合 検知された反対方向へ移動 Door Wall Floor Human 1 環境認識 2 遮蔽部への移動計画 環境との相互関係把握 他ロボットとの関係把握 3 移動選択 ミッション実行計画 タスク選択 リスク見積 他ロボットとの協調計画 環境認識及び障害物回避制御の機能の他のロボットでの活用を鑑み ROS にてパッケージング 遠距離経路生成 物体把持移動 障害物除去 ドア開閉 壁 人 床 1 赤外画像からの領域分割技術 壁 人 床 壁 人 床 2 画像処理のみにおける高速行動生成 右に示す自律移動ロボットアーキテクチャの第 3 層までを実装 MATLAB を活用し開発した自律ロボットの高速障害物回避制御 (IROS2004) の手法を利用 2D マップ生成 ( グローバル ) 3D マップ生成 ( グローバル ) 特定物体認識 ( セグメンテーション ) SLAM エッジ検出 特徴点抽出 移動可能領域 ( セグメンテーション ) 2D マップ生成 ( ローカル ) 3D マップ生成 ( ローカル ) ビジュアルオドメトリ カメラ画像とレーザスキャナー情報の融合 慣性航法 三角測量 カルマンフィルタ ベイジアンフィルタ 衛星ナビゲーション ジャイロ 加速度計 速度センサ GPS エンコーダ トルクセンサ 触覚センサ 超音波センサ 可視カメラ 近赤外線カメラ 遠赤外線カメラ Lidar Depth センサ レーダー 認知 グローバルな処理 ローカルな処理 状態推定 内界センサ 外界センサ タスク間状態遷移全体最適化 第 5 層 全体最適化制御 タスク内状態遷移安定化 第 4 層タスク制御 基本機能状態安定化 第 3 層基本機能制御 要素機能状態安定化 第 2 層要素機能制御 ミッションセンサ タスク間調整 タスク内プランニング及び制御 基本機能実現のための制御指示 要素機能実現のための制御指示 アクチュエータ 第 1 層ハードウェアプラットフォーム サブサンプションアーキテクチャ 近距離経路生成 障害物回避 サーチアルゴリズム 凹凸 / 軟弱路面歩行計画 マニュピレーション計画 転倒判断 転倒制御 / 転倒回避 不整地歩行計画 順運動学 逆運動学 速度運動学 姿勢制御 速度制御 オートバランサ 摩擦制御 機構制御 サーボモータ 油圧アクチュエータ 電動モータ 関節機構 雲台機構 投光機構 シミュレーション技術 (2.3.6) 第 1 層ハードウェアプラットフォームを模擬するもの 20

 (Raspberry Pi 3B) 5 モバイルバッテリ 4 移動プラットフォーム (Roomba) DC5V")
21 21 自律移動ロボット ( ハードウエア構成 ) 8 ポータブルバッテリ AC100V 7 移動プラットフォーム制御用 PC 7 1 赤外センサ (ULIS PICO384E 波長 8~ 14um NETD 95mK 熱時定数 6.4ms) USB 6 直流安定化電源 DC12V 2 演算補助装置 (Jeston TX2) irobot Ethernet Wifi 3 移動プラットフォーム ( 演算装置 ) (Raspberry Pi 3B) 5 モバイルバッテリ 4 移動プラットフォーム (Roomba) DC5V RS232C irobot Open Interface
 移動プラットフォーム (Roomba) 可視領域分割用 DNN 赤外領域分割用 DNN 変換 (Nvidia TensorRT) 赤外領域分割 ROS ノード演算補助装置用赤外領域分割用 DNN 移動方向生成 ROS ノード 移動プラットフォーム制御 ROS ノード 移動プラットフォーム 赤外領域分割用 DNNの学習データとして利用 可視領域分割画像")
22 可視領域分割用 DNN の作成 赤外領域分割用 DNN の作成 演算補助装置への実装 可視画像 赤外画像 赤外画像 赤外領域分割画像を基にする移動方向算出処理 移動プラットフォームへの搭載 自律移動ロボット ( ソフトウエア構成 ) 学習用計算サーバ 学習サーバ (Docker) 移動ロボット 赤外画像キャプチャ ROS ノード 演算補助装置 (Jetson TX2) 移動プラットフォーム (Raspberry Pi) 移動プラットフォーム (Roomba) 可視領域分割用 DNN 赤外領域分割用 DNN 変換 (Nvidia TensorRT) 赤外領域分割 ROS ノード演算補助装置用赤外領域分割用 DNN 移動方向生成 ROS ノード 移動プラットフォーム制御 ROS ノード 移動プラットフォーム 赤外領域分割用 DNNの学習データとして利用 可視領域分割画像 赤外領域分割画像 赤外領域分割画像 移動方向 ( 矢印 ) 領域分割用 DNN として 当時 (2018 ) 高精度 高速推論かつ省ネットワークサイズな ERFNet を選択した (E.Romera,J.Alvarez,L.Bergasa, R.Arroyo, ERFNet: Efficient Residual Factorized ConvNet for Real-Time Semantic Segmentation,IEEE Trans.on Intelligent Transportation Systems, Vol.19,Iss.1,Jan.2018) ただし Jetson TX2 へ実装した DNN は nvidia TensorRT により推論演算に関して縮小最適化されている 22


 本件 65,616")



23 データセットの構築 遠赤外 可視画像データセット 可視領域分割用 DNN 学習用 SUN データセット 実験環境データセット 遠赤外線画像可視画像可視画像領域分割 データセット作成工数 遠赤外 可視カメラを用いた同時撮影 ( ビデオ撮影程度の作業 ) 本件 65,616 ペアをスクリプト処理により切り出し データセットの可視画像 遠赤外線画像 本件 624 ペア 遠赤外線画像 学習 可視領域分割用 DNN 赤外領域分割用 DNN 学習用データセット 学習 赤外領域分割用 DNN 床 領域分割画像 床 生成された可視領域分割画像 可視画像 生成された赤外領域分割画像 領域分割画像 データセット作成工数 可視カメラの撮影 領域分割画像作成 ( アノテーション作業 ) 本件 217 ペア 23
24 赤外領域分割画像の評価 赤外領域分割の評価 評価値 IoU(Intersection over Union) は 物体認識の分野で領域の一致具合を評価する指標 元画像のあるラベル付けされたクラスの面積を集合 A 領域分割後の面積を集合 Bとしたとき 次式で定義される Average IoU: 各クラスの平均 IoU IoU = A B A B Mean Iou: Average IoU の平均値 class 学習サーバ (AverageIoU) 演算補助装置 (AverageIoU) 0: Person( 人 ) : Wall( 壁 ) : Floor( 床 ) 計算リソースの評価 (nvidia Jetson TX2) Process CPU [%] Memory [%] GPU(%) Time(msec) segmentation node image capture node main controller node roscore






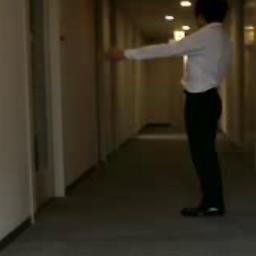
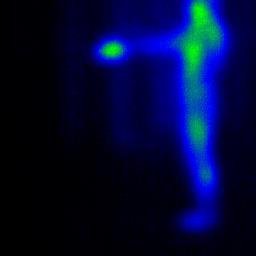
25 自律移動ロボットへの適用実験結果 ロボット制御装置 演算装置 遠赤外線カメラ 遠赤外線画像 深層ネットワーク 領域分割画像 移動ベクトル生成とロボット制御 テスト環境 ( 照明無し ) 供試体 ( 小型ロボット ) 壁を検知して回避 処理フロー 人を検知して回避 成果 暗所室内において 無照明 無投光下での移動ロボットの障害物検知及び回避の実現 外界センサに遠赤外線カメラのみを利用した障害物検知及び回避の実現 人を検知して回避 暗中の人 障害物の検知並びに回避テスト結果 ( 不可視な近赤外線ライトを照射し 近赤外線カメラで撮影 ) 遠赤外画像の領域分割処理 4.3Hz ロボット制御周期 3Hz 25
26 26 まとめ 遠赤外線画像の利点と活用 GAN を用いた遠赤外線画像処理 可視 ( カラー ) 画像の生成 領域分割画像の生成 ロボットへの適用 現状 推論速度の高速化を目指し 領域分割ネットワークの FPGA 実装を実施 100fps 以上の遠赤外線画像の領域分割を達成
27 27 発表文献 遠赤外線画像等データセットの作成方法 学習方法 丹羽雄一郎, GAN による遠赤外線画像による可視画像生成の実用化への検討, 第 25 回画像センシングシンポジウム (SSII2019) 本自律移動ロボットに関する内容 丹羽雄一郎, 移動ロボットの遠赤外線画像による物体検知識別と回避, 第 37 回日本ロボット学会学術講演会 丹羽雄一郎, 木村正成, 佐藤利鷹理 ( 株式会社 Ridge-i) 深層学習を用いた遠赤外線画像の意味論的領域分割, 第 37 回日本ロボット学会学術講演会 深層学習のロボットビジョンへの適用に関する考察 丹羽雄一郎, 自律移動ロボット環境認識に必要な深層学習に関する一考察実環境に適応可能な環境認識技術をめざして, 第 22 回画像の認識 理解シンポジウム (MIRU2019) 移動可能領域から移動経路算出 Y.Niwa,S.Yukita,H.Hanaizumi, Depthmap-based Obstacle Avoidance on Rough Terrain,Proc.IROS,2004
平成 28 年 6 月 3 日 報道機関各位 東京工業大学広報センター長 岡田 清 カラー画像と近赤外線画像を同時に撮影可能なイメージングシステムを開発 - 次世代画像センシングに向けオリンパスと共同開発 - 要点 可視光と近赤外光を同時に撮像可能な撮像素子の開発 撮像データをリアルタイムで処理する
 平成 28 年 6 月 3 日 報道機関各位 東京工業大学広報センター長 岡田 清 カラー画像と近赤外線画像を同時に撮影可能なイメージングシステムを開発 - 次世代画像センシングに向けオリンパスと共同開発 - 要点 可視光と近赤外光を同時に撮像可能な撮像素子の開発 撮像データをリアルタイムで処理する画像処理システムの開発 カラー画像と近赤外線画像を同時に撮影可能なプロトタイプシステムの開発 概要 国立大学法人東京工業大学工学院システム制御系の奥富正敏教授らと
平成 28 年 6 月 3 日 報道機関各位 東京工業大学広報センター長 岡田 清 カラー画像と近赤外線画像を同時に撮影可能なイメージングシステムを開発 - 次世代画像センシングに向けオリンパスと共同開発 - 要点 可視光と近赤外光を同時に撮像可能な撮像素子の開発 撮像データをリアルタイムで処理する画像処理システムの開発 カラー画像と近赤外線画像を同時に撮影可能なプロトタイプシステムの開発 概要 国立大学法人東京工業大学工学院システム制御系の奥富正敏教授らと
Microsoft PowerPoint - pr_12_template-bs.pptx
 12 回パターン検出と画像特徴 テンプレートマッチング 領域分割 画像特徴 テンプレート マッチング 1 テンプレートマッチング ( 図形 画像などの ) 型照合 Template Matching テンプレートと呼ばれる小さな一部の画像領域と同じパターンが画像全体の中に存在するかどうかを調べる方法 画像内にある対象物体の位置検出 物体数のカウント 物体移動の検出などに使われる テンプレートマッチングの計算
12 回パターン検出と画像特徴 テンプレートマッチング 領域分割 画像特徴 テンプレート マッチング 1 テンプレートマッチング ( 図形 画像などの ) 型照合 Template Matching テンプレートと呼ばれる小さな一部の画像領域と同じパターンが画像全体の中に存在するかどうかを調べる方法 画像内にある対象物体の位置検出 物体数のカウント 物体移動の検出などに使われる テンプレートマッチングの計算
Microsoft PowerPoint - 電装研_2波長赤外線センサを用いた2波長融合処理について
 2 波長赤外線センサを用いた 2 波長融合処理について 防衛装備庁電子装備研究所センサ研究部光波センサ研究室技官小山正敏 発表内容 1. 2 波長赤外線センサ (2 波長 QDIP*) の概要 2. 2 波長化のメリット 2.1 2 波長帯域の取得による運用場面の拡大 2.2 2 波長融合処理による目標抽出 識別能力の向上 2.2.1 特徴量分類処理 2.2.2 太陽光クラッタ低減処理 2.2.3
2 波長赤外線センサを用いた 2 波長融合処理について 防衛装備庁電子装備研究所センサ研究部光波センサ研究室技官小山正敏 発表内容 1. 2 波長赤外線センサ (2 波長 QDIP*) の概要 2. 2 波長化のメリット 2.1 2 波長帯域の取得による運用場面の拡大 2.2 2 波長融合処理による目標抽出 識別能力の向上 2.2.1 特徴量分類処理 2.2.2 太陽光クラッタ低減処理 2.2.3
Pick-up プロダクツ プリズム分光方式ラインセンサカメラ用専用レンズとその応用 株式会社ブルービジョン 当社は プリズムを使用した 3CMOS/3CCD/4CMOS/4CCD ラインセンサカメラ用に最適設計した FA 用レンズを設計 製造する専門メーカである 当社のレンズシリーズはプリズムにて
 Pick-up プロダクツ プリズム分光方式ラインセンサカメラ用専用レンズとその応用 当社は プリズムを使用した 3CMOS/3CCD/4CMOS/4CCD ラインセンサカメラ用に最適設計した FA 用レンズを設計 製造する専門メーカである 当社のレンズシリーズはプリズムにて発生する軸上色収差 倍率色収差を抑えた光学設計を行い 焦点距離が異なったレンズを使用しても RGB 個々の焦点位置がレンズ間で同じ位置になるよう設計されている
Pick-up プロダクツ プリズム分光方式ラインセンサカメラ用専用レンズとその応用 当社は プリズムを使用した 3CMOS/3CCD/4CMOS/4CCD ラインセンサカメラ用に最適設計した FA 用レンズを設計 製造する専門メーカである 当社のレンズシリーズはプリズムにて発生する軸上色収差 倍率色収差を抑えた光学設計を行い 焦点距離が異なったレンズを使用しても RGB 個々の焦点位置がレンズ間で同じ位置になるよう設計されている
画像の有 性とは何か? > 画像の利 的を明確にし その 的を確実に達成することができるか? という観点から 本来のビデオ監視カメラの性能を伝える > 解像度や照度など 単に数字のみで測れるものではない > 途と設置環境に応じて適切なカメラを 極めることが重要
 GDSF Japan 2014 7 つのシーンで る 画像の有 性 解説 アクシスコミュニケーションズ株式会社 画像の有 性とは何か? > 画像の利 的を明確にし その 的を確実に達成することができるか? という観点から 本来のビデオ監視カメラの性能を伝える > 解像度や照度など 単に数字のみで測れるものではない > 途と設置環境に応じて適切なカメラを 極めることが重要 シーン別考察 : 対象の状況から考える
GDSF Japan 2014 7 つのシーンで る 画像の有 性 解説 アクシスコミュニケーションズ株式会社 画像の有 性とは何か? > 画像の利 的を明確にし その 的を確実に達成することができるか? という観点から 本来のビデオ監視カメラの性能を伝える > 解像度や照度など 単に数字のみで測れるものではない > 途と設置環境に応じて適切なカメラを 極めることが重要 シーン別考察 : 対象の状況から考える
0 21 カラー反射率 slope aspect 図 2.9: 復元結果例 2.4 画像生成技術としての計算フォトグラフィ 3 次元情報を復元することにより, 画像生成 ( レンダリング ) に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生
 に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生") 0 21 カラー反射率 slope aspect 図 2.9: 復元結果例 2.4 画像生成技術としての計算フォトグラフィ 3 次元情報を復元することにより, 画像生成 ( レンダリング ) に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生まれ, コンピューテーショナルフォトグラフィ ( 計算フォトグラフィ ) と呼ばれている.3 次元画像認識技術の計算フォトグラフィへの応用として,
0 21 カラー反射率 slope aspect 図 2.9: 復元結果例 2.4 画像生成技術としての計算フォトグラフィ 3 次元情報を復元することにより, 画像生成 ( レンダリング ) に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生まれ, コンピューテーショナルフォトグラフィ ( 計算フォトグラフィ ) と呼ばれている.3 次元画像認識技術の計算フォトグラフィへの応用として,
_AV1_FrontCover_Base
 超小型 高性能 D MOS カメラ Mako シリーズ 解像度 29 万画素から 500 万画素 フルフレーム最大 14fps~550fps 近赤外線モデルあり PoE(Power Over Ethernet) 64MB FIFO メモリ AOI( 部分読み取り ) ビニング(Mako G-125B) 画像補正機能:LUT/ AG/ AE 外部トリガー 外部シンクモード データ転送: バンド幅調整
超小型 高性能 D MOS カメラ Mako シリーズ 解像度 29 万画素から 500 万画素 フルフレーム最大 14fps~550fps 近赤外線モデルあり PoE(Power Over Ethernet) 64MB FIFO メモリ AOI( 部分読み取り ) ビニング(Mako G-125B) 画像補正機能:LUT/ AG/ AE 外部トリガー 外部シンクモード データ転送: バンド幅調整
2008 年度下期未踏 IT 人材発掘 育成事業採択案件評価書 1. 担当 PM 田中二郎 PM ( 筑波大学大学院システム情報工学研究科教授 ) 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3.
 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3.") 2008 年度下期未踏 IT 人材発掘 育成事業採択案件評価書 1. 担当 PM 田中二郎 PM ( 筑波大学大学院システム情報工学研究科教授 ) 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3. プロジェクト管理組織 株式会社オープンテクノロジーズ 4. 委託金支払額 3,000,000 円 5.
2008 年度下期未踏 IT 人材発掘 育成事業採択案件評価書 1. 担当 PM 田中二郎 PM ( 筑波大学大学院システム情報工学研究科教授 ) 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3. プロジェクト管理組織 株式会社オープンテクノロジーズ 4. 委託金支払額 3,000,000 円 5.
Deep Learningでの地図タイル活用の検討
 第 7 回地理院地図パートナーネットワーク会議 2017/6/8 Deep Learning での 地図タイル活用の検討 OSGeo 財団日本支部 岩崎亘典 和山亮介 1 はじめに 発表内容 2 /36 汎用的フォーマットとしての地図タイル 地図タイルと Deep Learning CNN を用いた旧版地形図の分類 地形図から土地利用分類 Conditional GAN を用いたタイル画像変換 空中写真
第 7 回地理院地図パートナーネットワーク会議 2017/6/8 Deep Learning での 地図タイル活用の検討 OSGeo 財団日本支部 岩崎亘典 和山亮介 1 はじめに 発表内容 2 /36 汎用的フォーマットとしての地図タイル 地図タイルと Deep Learning CNN を用いた旧版地形図の分類 地形図から土地利用分類 Conditional GAN を用いたタイル画像変換 空中写真
SIP自動走行システム推進委員会
 SIP( 戦略的イノベーション創造プログラム ) 自動走行システム 次世代都市交通システム正着制御に係るセンシング技術に関する調査検討 先進モビリティ ( 株 ) 1 検討項目について 公募項目 実施内容 実施方法 1 バス停からの相対位置検出と経路特定 1) 可視光外の透明反射する塗料やシート等による位置 経路特定 2) 路面上に恣意的に設けたランダムパターンの学習による位置 経路特定 3) 路面汚れやタイヤ痕等の自然発生ランダムパターンの学習による位置
SIP( 戦略的イノベーション創造プログラム ) 自動走行システム 次世代都市交通システム正着制御に係るセンシング技術に関する調査検討 先進モビリティ ( 株 ) 1 検討項目について 公募項目 実施内容 実施方法 1 バス停からの相対位置検出と経路特定 1) 可視光外の透明反射する塗料やシート等による位置 経路特定 2) 路面上に恣意的に設けたランダムパターンの学習による位置 経路特定 3) 路面汚れやタイヤ痕等の自然発生ランダムパターンの学習による位置
目次 はじめに 1 1. 疑似近赤外画像の考え方 2 2. 疑似近赤外画像作成の流れ 必要とされるデータ 4 (1) データ取得方法 4 (2) 必要データ 基本データの整備 5 (1) データ準備 5 1) カラー写真データの準備 5 2) 航空レーザデータの準備 6
 データ取得方法 4 (2) 必要データ 基本データの整備 5 (1) データ準備 5 1) カラー写真データの準備 5 2) 航空レーザデータの準備 6") 疑似近赤外画像作成マニュアル 株式会社はまなすインフォメーション Ver.2011.1.1 目次 はじめに 1 1. 疑似近赤外画像の考え方 2 2. 疑似近赤外画像作成の流れ 3 2.1. 必要とされるデータ 4 (1) データ取得方法 4 (2) 必要データ 5 2.2. 基本データの整備 5 (1) データ準備 5 1) カラー写真データの準備 5 2) 航空レーザデータの準備 6 ア. 反射強度画像の作成
疑似近赤外画像作成マニュアル 株式会社はまなすインフォメーション Ver.2011.1.1 目次 はじめに 1 1. 疑似近赤外画像の考え方 2 2. 疑似近赤外画像作成の流れ 3 2.1. 必要とされるデータ 4 (1) データ取得方法 4 (2) 必要データ 5 2.2. 基本データの整備 5 (1) データ準備 5 1) カラー写真データの準備 5 2) 航空レーザデータの準備 6 ア. 反射強度画像の作成
粒子画像流速測定法を用いた室内流速測定法に関する研究
 可視化手法を用いた室内気流分布の測定法に関する研究 -PIV を用いた通風時及び空調吹出気流の測定 - T08K729D 大久保肇 指導教員 赤林伸一教授 流れの可視化は古来より流れの特性を直感的に把握する手法として様々な測定法が試みられている 近年の画像処理技術の発展及び PC の性能向上により粒子画像流速測定法 (PIV ) が実用化されている Particle Image Velocimetry
可視化手法を用いた室内気流分布の測定法に関する研究 -PIV を用いた通風時及び空調吹出気流の測定 - T08K729D 大久保肇 指導教員 赤林伸一教授 流れの可視化は古来より流れの特性を直感的に把握する手法として様々な測定法が試みられている 近年の画像処理技術の発展及び PC の性能向上により粒子画像流速測定法 (PIV ) が実用化されている Particle Image Velocimetry
この演習について Autoware 演習 1: データの記録 再生 Autoware 演習 2: センサーキャリブレーション Autoware 演習 3:3 次元地図の作成 Autoware 演習 4: 自己位置推定 Autoware 演習 5: パラメータ調整 Autoware 演習 6: 物体検
 version 1.0 TIER IV ACADEMY 自動運転システム構築塾 Day4 Autoware 演習 2 Autoware 演習 6: 物体検出とトラッキング この演習について Autoware 演習 1: データの記録 再生 Autoware 演習 2: センサーキャリブレーション Autoware 演習 3:3 次元地図の作成 Autoware 演習 4: 自己位置推定 Autoware
version 1.0 TIER IV ACADEMY 自動運転システム構築塾 Day4 Autoware 演習 2 Autoware 演習 6: 物体検出とトラッキング この演習について Autoware 演習 1: データの記録 再生 Autoware 演習 2: センサーキャリブレーション Autoware 演習 3:3 次元地図の作成 Autoware 演習 4: 自己位置推定 Autoware
b4-deeplearning-embedded-c-mw
 ディープラーニングアプリケーション の組み込み GPU/CPU 実装 アプリケーションエンジニアリング部町田和也 2015 The MathWorks, Inc. 1 アジェンダ MATLAB Coder/GPU Coder の概要 ディープニューラルネットワークの組み込み実装ワークフロー パフォーマンスに関して まとめ 2 ディープラーニングワークフローのおさらい Application logic
ディープラーニングアプリケーション の組み込み GPU/CPU 実装 アプリケーションエンジニアリング部町田和也 2015 The MathWorks, Inc. 1 アジェンダ MATLAB Coder/GPU Coder の概要 ディープニューラルネットワークの組み込み実装ワークフロー パフォーマンスに関して まとめ 2 ディープラーニングワークフローのおさらい Application logic
す 局所領域 ωk において 線形変換に用いる係数 (ak 画素の係数 (ak bk ) を算出し 入力画像の信号成分を bk ) は次式のコスト関数 E を最小化するように最適化 有さない画素に対して 式 (2) より画素値を算出する される これにより 低解像度な画像から補間によるアップサ E(
 を算出し 入力画像の信号成分を bk ) は次式のコスト関数 E を最小化するように最適化 有さない画素に対して 式 (2) より画素値を算出する される これにより 低解像度な画像から補間によるアップサ E(") IR E-mail: hf@cs.chubu.ac.jp Abstract IR RGB ( ) IR IR IR RGB RGB PSNR 1 Time-Of- Flight(TOF)[1] Kinect [2] TOF LED TOF [3] [6] [4][5] 2 [6] RGB ( ) Infrared(IR) IR 2 2.1 1 す 局所領域 ωk において 線形変換に用いる係数 (ak
IR E-mail: hf@cs.chubu.ac.jp Abstract IR RGB ( ) IR IR IR RGB RGB PSNR 1 Time-Of- Flight(TOF)[1] Kinect [2] TOF LED TOF [3] [6] [4][5] 2 [6] RGB ( ) Infrared(IR) IR 2 2.1 1 す 局所領域 ωk において 線形変換に用いる係数 (ak
円筒面で利用可能なARマーカ
 円筒面で利用可能な AR マーカ AR Marker for Cylindrical Surface 2014 年 11 月 14 日 ( 金 ) 眞鍋佳嗣千葉大学大学院融合科学研究科 マーカベース AR 二次元マーカはカメラ姿勢の推定, 拡張現実等広い研究分野で利用されている 現実の風景 表示される画像 デジタル情報を付加 カメラで撮影し, ディスプレイに表示 使用方法の単純性, 認識の安定性からマーカベース
円筒面で利用可能な AR マーカ AR Marker for Cylindrical Surface 2014 年 11 月 14 日 ( 金 ) 眞鍋佳嗣千葉大学大学院融合科学研究科 マーカベース AR 二次元マーカはカメラ姿勢の推定, 拡張現実等広い研究分野で利用されている 現実の風景 表示される画像 デジタル情報を付加 カメラで撮影し, ディスプレイに表示 使用方法の単純性, 認識の安定性からマーカベース
田向研究室PPTテンプレート
 Hibikino-Musashi@Home: ホームサービスロボット開発学生プロジェクトの紹介 18/09/14 ROSCon JP 2018 Hibikino-Musashi@Home 九州工業大学田向研究室 石田裕太郎 hma@brain.kyutech.ac.jp 今日紹介するロボット RoboCup@Home に参戦するホームサービスロボット Eix@ HW: 九工大 SW: 九工大 2018
Hibikino-Musashi@Home: ホームサービスロボット開発学生プロジェクトの紹介 18/09/14 ROSCon JP 2018 Hibikino-Musashi@Home 九州工業大学田向研究室 石田裕太郎 hma@brain.kyutech.ac.jp 今日紹介するロボット RoboCup@Home に参戦するホームサービスロボット Eix@ HW: 九工大 SW: 九工大 2018
Coding theorems for correlated sources with cooperative information
 グラフコストの逐次更新を用いた映像顕著領域の自動抽出 2009 年 5 月 28 日 福地賢宮里洸司 (2) 木村昭悟 (1) 高木茂 (2) 大和淳司 (1) (1) 日本電信電話 ( 株 )NTT) コミュニケーション科学基礎研究所メディア情報研究部メディア認識研究グループ (2) 国立沖縄工業高等専門学校情報通信システム工学科 背景 ヒトはどのようにして もの を認識する能力を獲得するのか?
グラフコストの逐次更新を用いた映像顕著領域の自動抽出 2009 年 5 月 28 日 福地賢宮里洸司 (2) 木村昭悟 (1) 高木茂 (2) 大和淳司 (1) (1) 日本電信電話 ( 株 )NTT) コミュニケーション科学基礎研究所メディア情報研究部メディア認識研究グループ (2) 国立沖縄工業高等専門学校情報通信システム工学科 背景 ヒトはどのようにして もの を認識する能力を獲得するのか?
屋内 3 次元 測位 + 地図 総合技術開発 現状 屋内 3 次元測位統一的な測位手法 情報交換手順がなく 共通の位置情報基盤が効率的に整備されない 技術開発 屋内外のシームレス測位の実用化 (1) 都市部での衛星測位の適用範囲拡大 (2) パブリックタグ 屋内測位の標準仕様策定 効果 3 次元屋内
 都市部での衛星測位の適用範囲拡大 (2) パブリックタグ 屋内測位の標準仕様策定 効果 3 次元屋内") 資料 4 国土交通省総合技術開発プロジェクト 3 次元地理空間情報を活用した安全 安心 快適な社会実現のための技術開発プロジェクト概要 平成 30 年 3 月 Ministry of Land, Infrastructure, Transport and Tourism Geospatial Information Authority of Japan 屋内 3 次元 測位 + 地図 総合技術開発
資料 4 国土交通省総合技術開発プロジェクト 3 次元地理空間情報を活用した安全 安心 快適な社会実現のための技術開発プロジェクト概要 平成 30 年 3 月 Ministry of Land, Infrastructure, Transport and Tourism Geospatial Information Authority of Japan 屋内 3 次元 測位 + 地図 総合技術開発
研究成果報告書
 様式 C-19 科学研究費補助金研究成果報告書 平成 23 年 4 月 30 日現在 機関番号 :32641 研究種目 : 基盤研究 (C) 研究期間 : 2008 ~ 2010 課題番号 :20500164 研究課題名 ( 和文 ) 屋外利用可能な高速小型距離画像センサの構築と三次元環境モデリング応用研究課題名 ( 英文 ) Construction of a fast and compact range
様式 C-19 科学研究費補助金研究成果報告書 平成 23 年 4 月 30 日現在 機関番号 :32641 研究種目 : 基盤研究 (C) 研究期間 : 2008 ~ 2010 課題番号 :20500164 研究課題名 ( 和文 ) 屋外利用可能な高速小型距離画像センサの構築と三次元環境モデリング応用研究課題名 ( 英文 ) Construction of a fast and compact range
基礎輪講2週目 Kinectの話
 基礎輪講 2 週目 Kinect の話 3D Computer Vision カメラから 3 次元の情報を取得 3 次元再構築 :2 次元の画像から 3 次元形状の復元 多視点画像群 3 次元再構築結果 3 次元の情報を持つ画像ってないの? 2 距離画像 Depth( 距離 ) の情報を持った画像 各画素の部分に距離の値が入る. 距離画像 距離画像を取得する機器が必要 3 距離画像センサ 実世界の距離情報を取得できる.
基礎輪講 2 週目 Kinect の話 3D Computer Vision カメラから 3 次元の情報を取得 3 次元再構築 :2 次元の画像から 3 次元形状の復元 多視点画像群 3 次元再構築結果 3 次元の情報を持つ画像ってないの? 2 距離画像 Depth( 距離 ) の情報を持った画像 各画素の部分に距離の値が入る. 距離画像 距離画像を取得する機器が必要 3 距離画像センサ 実世界の距離情報を取得できる.
Copyright c 2009 by Masaki Yagi
 041238 2009 2 Copyright c 2009 by Masaki Yagi c 2009 Masaki Yagi All rights reserved ,,,,,,,,,,,,,, 3,,,,,,, i 1 1 11 1 12 1 2 2 21 2 22 3 23 4 24 4 25 5 26 5 3 6 31 6 32 10 33 11 4 13 41 13 42 14 43
041238 2009 2 Copyright c 2009 by Masaki Yagi c 2009 Masaki Yagi All rights reserved ,,,,,,,,,,,,,, 3,,,,,,, i 1 1 11 1 12 1 2 2 21 2 22 3 23 4 24 4 25 5 26 5 3 6 31 6 32 10 33 11 4 13 41 13 42 14 43
ここまで進化した! 外観検査システムの今 表 2 2 焦点ラインスキャンカメラ製品仕様 項目 仕 様 ラインセンサ 4K ラインセンサ 2 光学系 ビームスプリッター (F2.8) ピクセルサイズ 7μm 7μm, 4096 pixels 波長帯域 400nm ~ 900nm 感度 可視光 : 量子
 ピクセルサイズ 7μm 7μm, 4096 pixels 波長帯域 400nm ~ 900nm 感度 可視光 : 量子") 2 焦点ラインスキャンカメラ 株式会社ブルービジョン 当社は プリズムによる分光を用いた特殊カメラ 専用レンズの製造販売を行っている 本稿では プルズム分光技術を使用し 可視領域で異なる 2 面に焦点を結ぶようにラインセンサを配置した 2 焦点ラインスキャンカメラ ( 写真 1) および専用レンズについて紹介する 1 開発の経緯と技術的特長 透明物体の表面と裏面の画像を同時に取得する また 凹凸のある製品
2 焦点ラインスキャンカメラ 株式会社ブルービジョン 当社は プリズムによる分光を用いた特殊カメラ 専用レンズの製造販売を行っている 本稿では プルズム分光技術を使用し 可視領域で異なる 2 面に焦点を結ぶようにラインセンサを配置した 2 焦点ラインスキャンカメラ ( 写真 1) および専用レンズについて紹介する 1 開発の経緯と技術的特長 透明物体の表面と裏面の画像を同時に取得する また 凹凸のある製品
MATLAB EXPO 2019 Japan プレゼン資料の検討
 自動運転向けソフトウェア Autoware と MATLAB /Simulink の連携 ~ 事例紹介 ~ 2019 年 5 月 28 日株式会社ネクスティエレクトロニクス SW 開発部技術開発グループ太田徳幸 Copyright TOMEN Electronics Corp. 目次 2/31 1. 会社概要 2. Autoware Toolbox 紹介 1. 取り組み背景 2. Autoware
自動運転向けソフトウェア Autoware と MATLAB /Simulink の連携 ~ 事例紹介 ~ 2019 年 5 月 28 日株式会社ネクスティエレクトロニクス SW 開発部技術開発グループ太田徳幸 Copyright TOMEN Electronics Corp. 目次 2/31 1. 会社概要 2. Autoware Toolbox 紹介 1. 取り組み背景 2. Autoware
PowerPoint プレゼンテーション
 Turtlereal2 で Navigation ー Gazebo と Navigation を動かすのに苦労した話 - 目次 1. TurtleReal2 とは 2. Navigation 3. そこに壁が... 4. ネタ元 5. Navigaiton を動かすステップ 6. 必要なパッケージのインストール 7. ジョイスティックで cmd_vel 発行 8. URDF ロボットモデルを rviz
Turtlereal2 で Navigation ー Gazebo と Navigation を動かすのに苦労した話 - 目次 1. TurtleReal2 とは 2. Navigation 3. そこに壁が... 4. ネタ元 5. Navigaiton を動かすステップ 6. 必要なパッケージのインストール 7. ジョイスティックで cmd_vel 発行 8. URDF ロボットモデルを rviz
選定技術の テーマ Ⅰ ウェッジハンプ 舗装面にくさび型の非対称の段差 ( ウェッジハンプ ) を設置し 走行時の衝撃により逆走車両に注意喚起するもの 全景 設置イメージ図 逆走車両に衝撃で注意喚起を行い 順行車両には走行に支障の無い形状としている 段差部分には超高強度繊維補強コンクリートを使用し
 を設置し 走行時の衝撃により逆走車両に注意喚起するもの 全景 設置イメージ図 逆走車両に衝撃で注意喚起を行い 順行車両には走行に支障の無い形状としている 段差部分には超高強度繊維補強コンクリートを使用し") 選定技術の 資料 5-3 選定技術の テーマ Ⅰ ウェッジハンプ 舗装面にくさび型の非対称の段差 ( ウェッジハンプ ) を設置し 走行時の衝撃により逆走車両に注意喚起するもの 全景 設置イメージ図 逆走車両に衝撃で注意喚起を行い 順行車両には走行に支障の無い形状としている 段差部分には超高強度繊維補強コンクリートを使用し 大型車が走行しても衝突に十分な強度有している 2 選定技術の テーマ Ⅰ 防眩板応用注意喚起
選定技術の 資料 5-3 選定技術の テーマ Ⅰ ウェッジハンプ 舗装面にくさび型の非対称の段差 ( ウェッジハンプ ) を設置し 走行時の衝撃により逆走車両に注意喚起するもの 全景 設置イメージ図 逆走車両に衝撃で注意喚起を行い 順行車両には走行に支障の無い形状としている 段差部分には超高強度繊維補強コンクリートを使用し 大型車が走行しても衝突に十分な強度有している 2 選定技術の テーマ Ⅰ 防眩板応用注意喚起
複雑な立体形状を捉える [3 次元計測 ] カラーカメラでの画像処理では 侵入者を抽出するために 画像の変化を検出する差分処理 ( 背景差分 フレーム間差分 ) を行う しかし 侵入者が 背景と類似した服を着用していると 輝度の違い ( コントラスト ) がなくなり 分離が難しくなる 3 次元情報が
![複雑な立体形状を捉える [3 次元計測 ] カラーカメラでの画像処理では 侵入者を抽出するために 画像の変化を検出する差分処理 ( 背景差分 フレーム間差分 ) を行う しかし 侵入者が 背景と類似した服を着用していると 輝度の違い ( コントラスト ) がなくなり 分離が難しくなる 3 次元情報が](/thumbs/82/85663809.jpg "複雑な立体形状を捉える [3 次元計測 ] カラーカメラでの画像処理では 侵入者を抽出するために 画像の変化を検出する差分処理 ( 背景差分 フレーム間差分 ) を行う しかし 侵入者が 背景と類似した服を着用していると 輝度の違い ( コントラスト ) がなくなり 分離が難しくなる 3 次元情報が") 未来の非接触 UI のカギを握る距離画像カメラ ~ カメラからセンサへ ZC-1000 シリーズ オプテックス株式会社要素技術部 / 部長村田記一 最近 ゲーム用に低価格の距離画像を取得できるカメラが市販されている これにより 距離画像 あるいは 3D の動画距離映像を利用した研究や 開発が進んでいる また 距離画像技術を利用した研究や論文は増加傾向にある 本稿では 外乱光の影響が少なく 10 万
未来の非接触 UI のカギを握る距離画像カメラ ~ カメラからセンサへ ZC-1000 シリーズ オプテックス株式会社要素技術部 / 部長村田記一 最近 ゲーム用に低価格の距離画像を取得できるカメラが市販されている これにより 距離画像 あるいは 3D の動画距離映像を利用した研究や 開発が進んでいる また 距離画像技術を利用した研究や論文は増加傾向にある 本稿では 外乱光の影響が少なく 10 万
新技術説明会 様式例
 1 ロボットへの FPGA 導入を 容易化する コンポーネント技術 宇都宮大学大学院工学研究科情報システム科学専攻助教大川猛 2 従来技術とその問題点 FPGA(Field Programmable Gate Array) は 任意のディジタル論理回路をプログラム可能な LSI ソフトウェアでは時間がかかる画像認識処理等を ハードウェア化して 高速化 低消費電力化可能 問題点 FPGA 上の回路設計が難しい
1 ロボットへの FPGA 導入を 容易化する コンポーネント技術 宇都宮大学大学院工学研究科情報システム科学専攻助教大川猛 2 従来技術とその問題点 FPGA(Field Programmable Gate Array) は 任意のディジタル論理回路をプログラム可能な LSI ソフトウェアでは時間がかかる画像認識処理等を ハードウェア化して 高速化 低消費電力化可能 問題点 FPGA 上の回路設計が難しい
Mobile robotics KUKA Navigation Solution JP
 Mobile robotics KUKA Navigation Solution JP 自律型 インテリジェント ハードウェア非依存型 KUKA Navigation Solution は 移動型ロボット分野で使用されている自己ナビゲーション車両向けの SLAM 手法に基づいて設計されている 自己学習型ナビゲーションシステムです この中には 多数の車両を同時に管理 制御するソフトウェアと自己経路検出機能を含めた
Mobile robotics KUKA Navigation Solution JP 自律型 インテリジェント ハードウェア非依存型 KUKA Navigation Solution は 移動型ロボット分野で使用されている自己ナビゲーション車両向けの SLAM 手法に基づいて設計されている 自己学習型ナビゲーションシステムです この中には 多数の車両を同時に管理 制御するソフトウェアと自己経路検出機能を含めた
Raspberry Pi BF BF BF Raspberry Pi PC USB HDMI OS SD SD OS Raspberry Pi Model B MicroUSB MicroSD OS SD GPIO HDMI USB LAN Raspberry Pi MicroUSB MicroSD
 Raspberry Pi Arduino Arduino Raspberry Pi Arduino URL Raspberry Pi HDMI USB SD https://www.raspberrypi.org/ Python, Scratch Arduino PC USB https://www.arduino.cc/ Arduino SDK Processing Kinect for Windows,
Raspberry Pi Arduino Arduino Raspberry Pi Arduino URL Raspberry Pi HDMI USB SD https://www.raspberrypi.org/ Python, Scratch Arduino PC USB https://www.arduino.cc/ Arduino SDK Processing Kinect for Windows,
高分解能衛星データによる地形図作成手法に関する調査研究 ( 第 2 年次 ) 実施期間平成 18 年度 ~ 測図部測図技術開発室水田良幸小井土今朝巳田中宏明 佐藤壮紀大野裕幸 1. はじめに国土地理院では, 平成 18 年 1 月に打ち上げられた陸域観測技術衛星 ALOS に関して, 宇宙航空研究開
 実施期間平成 18 年度 ~ 測図部測図技術開発室水田良幸小井土今朝巳田中宏明 佐藤壮紀大野裕幸 1. はじめに国土地理院では, 平成 18 年 1 月に打ち上げられた陸域観測技術衛星 ALOS に関して, 宇宙航空研究開") 高分解能衛星データによる地形図作成手法に関する調査研究 ( 第 2 年次 ) 実施期間平成 18 年度 ~ 測図部測図技術開発室水田良幸小井土今朝巳田中宏明 佐藤壮紀大野裕幸 1. はじめに国土地理院では, 平成 18 年 1 月に打ち上げられた陸域観測技術衛星 ALOS に関して, 宇宙航空研究開発機構 ( JAXA ) と共同研究協定を締結している. 測図部では,2 万 5 千分 1 地形図の作成及びリアルタイム修正の実証及び
高分解能衛星データによる地形図作成手法に関する調査研究 ( 第 2 年次 ) 実施期間平成 18 年度 ~ 測図部測図技術開発室水田良幸小井土今朝巳田中宏明 佐藤壮紀大野裕幸 1. はじめに国土地理院では, 平成 18 年 1 月に打ち上げられた陸域観測技術衛星 ALOS に関して, 宇宙航空研究開発機構 ( JAXA ) と共同研究協定を締結している. 測図部では,2 万 5 千分 1 地形図の作成及びリアルタイム修正の実証及び
平成19年度・地球工学研究所の知的財産に関する報告会 - 資料集
 地盤環境モニタリングの広域化とコスト低減のための無線センサネットワークの実用化に関する検討 地球工学研究所地圏科学領域池川洋二郎 Email:ikegawa@criepi.denken.or.jp 1 背景と目的 背景 : 豪雨, 地震などによる斜面災害に対する維持管理や減災技術の適用による効果や機能をモニタリングにより評価することが重要である. 必要性 : モニタリングの広域化と, 低コスト化が可能な技術開発が望まれる.
地盤環境モニタリングの広域化とコスト低減のための無線センサネットワークの実用化に関する検討 地球工学研究所地圏科学領域池川洋二郎 Email:ikegawa@criepi.denken.or.jp 1 背景と目的 背景 : 豪雨, 地震などによる斜面災害に対する維持管理や減災技術の適用による効果や機能をモニタリングにより評価することが重要である. 必要性 : モニタリングの広域化と, 低コスト化が可能な技術開発が望まれる.
1. 研究背景 目的 2. 使用機器 3. 橋梁点検システム 4. 選定橋梁 5. 安全対策 橋梁点検フロー 6. 計測結果 計測条件 7. まとめ - 2 -
 ひび割れ計測機と飛行ロボットによる橋梁点検支援システムに関する研究 大阪市立大学大学院教授プロジェクトリーダー 山口隆司大阪市立大学大学院学生堂ノ本翔平菱田伸鉄工業 ( 株 ) 菱田聡クモノスコーポレーション ( 株 ) 藤田誠二近畿地方整備局道路部, 近畿技術事務所, 大阪国道事務所 - 1 - 1. 研究背景 目的 2. 使用機器 3. 橋梁点検システム 4. 選定橋梁 5. 安全対策 橋梁点検フロー
ひび割れ計測機と飛行ロボットによる橋梁点検支援システムに関する研究 大阪市立大学大学院教授プロジェクトリーダー 山口隆司大阪市立大学大学院学生堂ノ本翔平菱田伸鉄工業 ( 株 ) 菱田聡クモノスコーポレーション ( 株 ) 藤田誠二近畿地方整備局道路部, 近畿技術事務所, 大阪国道事務所 - 1 - 1. 研究背景 目的 2. 使用機器 3. 橋梁点検システム 4. 選定橋梁 5. 安全対策 橋梁点検フロー
MSX WIFI Wi-Fi FLIR Tools mobile app Apple ios MSX SD HDMI USB mini USB A LCD FLIR T600 FLIR T620 FLIR T640 640 480 0.0430 40 650 1-4 GPS MSX 640 480
 FLIR T600シリーズ 人間工学デザインによる使いやすさと 高い柔軟性を兼ね備えた高画質 高機能の最先端サーモグラフィ FLIR T600シリーズは 最高640 480ピクセルの高解像度で ほんのわずかな温度差や画像の 詳細まで検出できる鮮明な画像を実現 あらゆるニーズに応える柔軟性の高さと通信機能が特長です 640 x 480 HIGH SENSITIVITY 解像度640 480ピクセル タッチスクリーン
FLIR T600シリーズ 人間工学デザインによる使いやすさと 高い柔軟性を兼ね備えた高画質 高機能の最先端サーモグラフィ FLIR T600シリーズは 最高640 480ピクセルの高解像度で ほんのわずかな温度差や画像の 詳細まで検出できる鮮明な画像を実現 あらゆるニーズに応える柔軟性の高さと通信機能が特長です 640 x 480 HIGH SENSITIVITY 解像度640 480ピクセル タッチスクリーン
コンクリート工学年次論文集 Vol.27
 論文アクティブ赤外線法における照射光源の影響に関する基礎的研究 田中寿志 *1 仁平達也 * 鳥取誠一 *3 *4 栗田耕一 要旨 : アクティブ赤外線法に用いる照射設備は, はく離検知の程度に大きな影響を及ぼす そこで, 本研究では, 遠赤外線, キセノンランプ, およびハロゲンランプを用いた場合のコンクリート平板の照射試験および非定常熱伝導解析を行い, 熱伝導の挙動を確認した また, 照射条件を検討するために,
論文アクティブ赤外線法における照射光源の影響に関する基礎的研究 田中寿志 *1 仁平達也 * 鳥取誠一 *3 *4 栗田耕一 要旨 : アクティブ赤外線法に用いる照射設備は, はく離検知の程度に大きな影響を及ぼす そこで, 本研究では, 遠赤外線, キセノンランプ, およびハロゲンランプを用いた場合のコンクリート平板の照射試験および非定常熱伝導解析を行い, 熱伝導の挙動を確認した また, 照射条件を検討するために,
コンテンツセントリックネットワーク技術を用いた ストリームデータ配信システムの設計と実装
 コンテンツセントリックネットワークにおけるストリームデータ配信機構の実装 川崎賢弥, 阿多信吾, 村田正幸 大阪大学大学院情報科学研究科 大阪市立大学大学院工学研究科 2 発表内容 研究背景 研究目的 ストリームデータ配信機構の設計 ストリームデータのモデル化 コンテンツの名前構造 ストリームデータの要求とフロー制御 ストリームデータ配信機構の実装 動作デモンストレーション 3 コンテンツセントリックネットワーク
コンテンツセントリックネットワークにおけるストリームデータ配信機構の実装 川崎賢弥, 阿多信吾, 村田正幸 大阪大学大学院情報科学研究科 大阪市立大学大学院工学研究科 2 発表内容 研究背景 研究目的 ストリームデータ配信機構の設計 ストリームデータのモデル化 コンテンツの名前構造 ストリームデータの要求とフロー制御 ストリームデータ配信機構の実装 動作デモンストレーション 3 コンテンツセントリックネットワーク
組込みシステムにおける UMLモデルカタログの実践研究
 Modeling Forum 2015 組込みシステムの設計実装への モデルカタログの活用 仙台高等専門学校 情報システム工学科 力武克彰, 新村祐太 ( 豊橋技科大 ), 菊池雄太郎 ( 仙台高専 ) 概要 組込み分野のための UML モデルカタログ (*) のモデルを実装してみました (* 以下 モデルカタログと呼びます ) 2 概要 モデルカタログ : 目標制御モデル モデルカタログより引用
Modeling Forum 2015 組込みシステムの設計実装への モデルカタログの活用 仙台高等専門学校 情報システム工学科 力武克彰, 新村祐太 ( 豊橋技科大 ), 菊池雄太郎 ( 仙台高専 ) 概要 組込み分野のための UML モデルカタログ (*) のモデルを実装してみました (* 以下 モデルカタログと呼びます ) 2 概要 モデルカタログ : 目標制御モデル モデルカタログより引用
コンピュータグラフィックス第8回
 コンピュータグラフィックス 第 8 回 レンダリング技法 1 ~ 基礎と概要, 隠面消去 ~ 理工学部 兼任講師藤堂英樹 レポート提出状況 課題 1 の選択が多い (STAND BY ME ドラえもん ) 体験演習型 ( 課題 3, 課題 4) の選択も多い 内訳 課題 1 課題 2 課題 3 課題 4 課題 5 2014/11/24 コンピュータグラフィックス 2 次回レポートの体験演習型 メタセコイア,
コンピュータグラフィックス 第 8 回 レンダリング技法 1 ~ 基礎と概要, 隠面消去 ~ 理工学部 兼任講師藤堂英樹 レポート提出状況 課題 1 の選択が多い (STAND BY ME ドラえもん ) 体験演習型 ( 課題 3, 課題 4) の選択も多い 内訳 課題 1 課題 2 課題 3 課題 4 課題 5 2014/11/24 コンピュータグラフィックス 2 次回レポートの体験演習型 メタセコイア,
図 2: 高周波成分を用いた超解像 解像度度画像とそれらを低解像度化して得られる 低解像度画像との差により低解像度の高周波成分 を得る 高解像度と低解像度の高周波成分から位 置関係を保ったままパッチ領域をそれぞれ切り出 し 高解像度パッチ画像と低解像度パッチ画像の ペアとしてデータベースに登録する
 Exemplar-Based Super-Resolution of Human Body Image in Surveillance Video 1 1,2 1 1 1 Kento Nishibori 1, Tomokazu TAKAHASHI 1,2, Daisuke DEGUCHI 1, Ichiro IDE 1 and Hiroshi MURASE 1 1 2 nishiborik@murase.m.is.nagoya-u.ac.jp
Exemplar-Based Super-Resolution of Human Body Image in Surveillance Video 1 1,2 1 1 1 Kento Nishibori 1, Tomokazu TAKAHASHI 1,2, Daisuke DEGUCHI 1, Ichiro IDE 1 and Hiroshi MURASE 1 1 2 nishiborik@murase.m.is.nagoya-u.ac.jp
デプスカメラと加速度センサを用いた歩行可能な平面領域の検出
 一般社団法人電子情報通信学会 HCGシンポジウム2016 THE INSTITUTE OF ELECTRONICS, HUMAN COMMUNICATION GROUP SYMPOSI INFORMATION AND COMMUNICATION ENGINEERS HCG2016-D-9-1 デプスカメラと加速度センサを用いた歩行可能な平面領域の検出 今井健太 北原格 亀田能成 筑波大学 305-8573
一般社団法人電子情報通信学会 HCGシンポジウム2016 THE INSTITUTE OF ELECTRONICS, HUMAN COMMUNICATION GROUP SYMPOSI INFORMATION AND COMMUNICATION ENGINEERS HCG2016-D-9-1 デプスカメラと加速度センサを用いた歩行可能な平面領域の検出 今井健太 北原格 亀田能成 筑波大学 305-8573
PowerPoint プレゼンテーション
 vsmp Foundation スケーラブル SMP システム スケーラブル SMP システム 製品コンセプト 2U サイズの 8 ソケット SMP サーバ コンパクトな筐体に多くのコアとメモリを実装し SMP システムとして利用可能 スイッチなし構成でのシステム構築によりラックスペースを無駄にしない構成 将来的な拡張性を保証 8 ソケット以上への拡張も可能 2 システム構成例 ベースシステム 2U
vsmp Foundation スケーラブル SMP システム スケーラブル SMP システム 製品コンセプト 2U サイズの 8 ソケット SMP サーバ コンパクトな筐体に多くのコアとメモリを実装し SMP システムとして利用可能 スイッチなし構成でのシステム構築によりラックスペースを無駄にしない構成 将来的な拡張性を保証 8 ソケット以上への拡張も可能 2 システム構成例 ベースシステム 2U
PowerPoint Presentation
 HiTechnic 社の 免責事項本資料に掲載する情報については 注意を払っていますが その内容について保証するものではありません 株式会社アフレルは本資料の使用ならびに閲覧によって生じるいかなる損害にも責任を負いかねます また 本資料の情報は予告無く変更される場合があります この資料は 主に http://www.hitechnic.com/ を参照して作成しています 各製品名及びサービス名は それぞれ各社の登録商標または商標です
HiTechnic 社の 免責事項本資料に掲載する情報については 注意を払っていますが その内容について保証するものではありません 株式会社アフレルは本資料の使用ならびに閲覧によって生じるいかなる損害にも責任を負いかねます また 本資料の情報は予告無く変更される場合があります この資料は 主に http://www.hitechnic.com/ を参照して作成しています 各製品名及びサービス名は それぞれ各社の登録商標または商標です
Microsoft PowerPoint - 遮蔽コーティングの必要性 [互換モード]
![Microsoft PowerPoint - 遮蔽コーティングの必要性 [互換モード]](/thumbs/93/112209622.jpg "Microsoft PowerPoint - 遮蔽コーティングの必要性 [互換モード]") 窓ガラスの省エネルギー対策 遮蔽対策の必要性 建物の屋根 壁などの断熱対策は検討されますが 意外に見落とされていたのが窓ガラスの省エネルギー対策 遮蔽対策です 最近では 窓ガラスの省エネルギー対策は重要なテーマとして位置付けられており 検討 対策がおこなわれています ゼロコン株式会社 建物室内が暑くなる原因 建物内に侵入する熱の割合 効果的な省エネ対策をするには? 建物室内が暑くなる原因 建物内に侵入する熱の割合
窓ガラスの省エネルギー対策 遮蔽対策の必要性 建物の屋根 壁などの断熱対策は検討されますが 意外に見落とされていたのが窓ガラスの省エネルギー対策 遮蔽対策です 最近では 窓ガラスの省エネルギー対策は重要なテーマとして位置付けられており 検討 対策がおこなわれています ゼロコン株式会社 建物室内が暑くなる原因 建物内に侵入する熱の割合 効果的な省エネ対策をするには? 建物室内が暑くなる原因 建物内に侵入する熱の割合
3 無線 / 有線接続で制御 メガローバー Ver2.0 は Wi-Fi / BLE / Bluetooth Classic の 3 種の無線通信と 有線の USB シリアル通信に対応しています 指定のコマンドを用いることで PC やタブレットなど 様々なデバイスからメガローバー Ver2.0 を制
 関係各位 2018 年 8 月 29 日 ヴイストン株式会社 研究開発用台車ロボット メガローバー Ver2.0 を発売 ~ 新開発の制御基板を搭載し ROS や Arduino IDE に対応 ~ ヴイストン株式会社 ( 本社 : 大阪府大阪市 代表取締役 : 大和信夫 ) は 2018 年 8 月 30 日より 研究開発用台車ロボット メガローバー Ver2.0 の販売を開始いたします 製品の概要
関係各位 2018 年 8 月 29 日 ヴイストン株式会社 研究開発用台車ロボット メガローバー Ver2.0 を発売 ~ 新開発の制御基板を搭載し ROS や Arduino IDE に対応 ~ ヴイストン株式会社 ( 本社 : 大阪府大阪市 代表取締役 : 大和信夫 ) は 2018 年 8 月 30 日より 研究開発用台車ロボット メガローバー Ver2.0 の販売を開始いたします 製品の概要
スライド 1
 CNN を用いた弱教師学習による画像領域分割 下田和, 柳井啓司 電気通信大学 大学院情報理工学 研究科 総合情報学専攻 c 2015 UEC Tokyo. Convolutional Neural Network CNN クラス分類タスクにおいてトップの精度 CNN の応用 ( 物体位置の認識 ) 物体検出 物体に BB を付与 領域分割 ピクセル単位の認識 CNN を用いた領域分割 CNN による完全教師ありのセグメンテーション
CNN を用いた弱教師学習による画像領域分割 下田和, 柳井啓司 電気通信大学 大学院情報理工学 研究科 総合情報学専攻 c 2015 UEC Tokyo. Convolutional Neural Network CNN クラス分類タスクにおいてトップの精度 CNN の応用 ( 物体位置の認識 ) 物体検出 物体に BB を付与 領域分割 ピクセル単位の認識 CNN を用いた領域分割 CNN による完全教師ありのセグメンテーション
Microsoft Word - 01.docx
 京都大学 MU レーダーで宇宙ごみの姿を捉える ~ 観測波長より小さいスペースデブリのサイズやスピンの推定に成功 ~ 概要高度数百 km の地球周回軌道上にあるスペースデブリ ( 宇宙ごみ ) のうち レーダー観測装置の波長と比較して 大きさが同程度以下のスペースデブリのサイズ スピン 概形等の状態の推定をする観測手法を提案し 大型大気レーダーである京都大学生存圏研究所 MU レーダー ( 周波数
京都大学 MU レーダーで宇宙ごみの姿を捉える ~ 観測波長より小さいスペースデブリのサイズやスピンの推定に成功 ~ 概要高度数百 km の地球周回軌道上にあるスペースデブリ ( 宇宙ごみ ) のうち レーダー観測装置の波長と比較して 大きさが同程度以下のスペースデブリのサイズ スピン 概形等の状態の推定をする観測手法を提案し 大型大気レーダーである京都大学生存圏研究所 MU レーダー ( 周波数
de:code 2019 CM04 Azure Kinect DK 徹底解説 ~ 進化したテクノロジーとその実装 ~ 技術統括室 千葉慎二 Ph.D.
 de:code 2019 CM04 Azure Kinect DK 徹底解説 ~ 進化したテクノロジーとその実装 ~ 技術統括室 千葉慎二 Ph.D. Mixed Reality の全体像 Kinect はただのカメラではない 3D 空間の認識 ( 深度 ) 人の全身の動きをとらえる Azure Kinect Development Environment Azure Kinect DK 開発環境
de:code 2019 CM04 Azure Kinect DK 徹底解説 ~ 進化したテクノロジーとその実装 ~ 技術統括室 千葉慎二 Ph.D. Mixed Reality の全体像 Kinect はただのカメラではない 3D 空間の認識 ( 深度 ) 人の全身の動きをとらえる Azure Kinect Development Environment Azure Kinect DK 開発環境
2 色式熱画像カメラシステム Thermera の二色温度計測原理 二色温度測定法 レシオ温度測定法 または比温度測定法 1
 色式熱画像カメラシステム hermera の二色温度計測原理 二色温度測定法 レシオ温度測定法 または比温度測定法 : 色法の概念的理解 物体からの電磁放射 ( 光等 ) は物体の温度が高くなるに従って (a) 放射量が増大する ( 可視光域では輝度が高くなる ) (b) 最大の放射が成される波長が短くなる ( 可視光域では赤色から青白い色になる ) ことが知られています 黒体についてこれを図示すると
色式熱画像カメラシステム hermera の二色温度計測原理 二色温度測定法 レシオ温度測定法 または比温度測定法 : 色法の概念的理解 物体からの電磁放射 ( 光等 ) は物体の温度が高くなるに従って (a) 放射量が増大する ( 可視光域では輝度が高くなる ) (b) 最大の放射が成される波長が短くなる ( 可視光域では赤色から青白い色になる ) ことが知られています 黒体についてこれを図示すると
SimscapeプラントモデルのFPGAアクセラレーション
 Simscape TM プラントモデルの FPGA アクセラレーション MathWorks Japan アプリケーションエンジニアリング部 松本充史 2018 The MathWorks, Inc. 1 アジェンダ ユーザ事例 HILS とは? Simscape の電気系ライブラリ Simscape モデルを FPGA 実装する 2 つのアプローチ Simscape HDL Workflow Advisor
Simscape TM プラントモデルの FPGA アクセラレーション MathWorks Japan アプリケーションエンジニアリング部 松本充史 2018 The MathWorks, Inc. 1 アジェンダ ユーザ事例 HILS とは? Simscape の電気系ライブラリ Simscape モデルを FPGA 実装する 2 つのアプローチ Simscape HDL Workflow Advisor
15288解説_D.pptx
 ISO/IEC 15288:2015 テクニカルプロセス解説 2015/8/26 システムビューロ システムライフサイクル 2 テクニカルプロセス a) Business or mission analysis process b) Stakeholder needs and requirements definieon process c) System requirements definieon
ISO/IEC 15288:2015 テクニカルプロセス解説 2015/8/26 システムビューロ システムライフサイクル 2 テクニカルプロセス a) Business or mission analysis process b) Stakeholder needs and requirements definieon process c) System requirements definieon
小型移動ロボット
 小型移動ロボット 千葉工業大学 未来ロボット技術研究センター 吉田智章 背景 過去に開発した災害対応ロボット Hibiscus (2006) Kenaf (2007-2009) Quince (2009-2010) 4 大都市大震災軽減化特別プロジェクト ( 文科省 ) 戦略的先端ロボット要素技術開発プロジェクト (NEDO) 2006-2010 2002 2006 2011 2012 Kenaf
小型移動ロボット 千葉工業大学 未来ロボット技術研究センター 吉田智章 背景 過去に開発した災害対応ロボット Hibiscus (2006) Kenaf (2007-2009) Quince (2009-2010) 4 大都市大震災軽減化特別プロジェクト ( 文科省 ) 戦略的先端ロボット要素技術開発プロジェクト (NEDO) 2006-2010 2002 2006 2011 2012 Kenaf
SD D1 HD 720p Full HD 1080p アナログCCTVと同等の配線距離を実現したフルHD同軸カメラシステム EX-SDI方式 長距離伝送対応モデル フルHDの映像を圧縮し 特性インピーダンス75Ωの同軸ケーブルで伝送する方式です HD-SDI方式よりも 同軸ケーブルを延長することが
 SD D1 HD 720p Full HD 1080p アナログCCTVと同等の配線距離を実現したフルHD同軸カメラシステム EX-SDI方式 長距離伝送対応モデル フルHDの映像を圧縮し 特性インピーダンス75Ωの同軸ケーブルで伝送する方式です HD-SDI方式よりも 同軸ケーブルを延長することが可能で HD-SDIリピーター無しで最長500m 1 の配線距離を実現します また 長距離伝送による画質の劣化も無くシャープな画像を提供します
SD D1 HD 720p Full HD 1080p アナログCCTVと同等の配線距離を実現したフルHD同軸カメラシステム EX-SDI方式 長距離伝送対応モデル フルHDの映像を圧縮し 特性インピーダンス75Ωの同軸ケーブルで伝送する方式です HD-SDI方式よりも 同軸ケーブルを延長することが可能で HD-SDIリピーター無しで最長500m 1 の配線距離を実現します また 長距離伝送による画質の劣化も無くシャープな画像を提供します
MATLAB ではじめる画像処理とロボットビジョン ~ 機械学習による物体認識と SLAM~ MathWorks Japan アプリケーションエンジニアリング部信号処理 通信 木川田亘 2015 The MathWorks, 1Inc.
 MATLAB ではじめる画像処理とロボットビジョン ~ 機械学習による物体認識と SLAM~ MathWorks Japan アプリケーションエンジニアリング部信号処理 通信 木川田亘 2015 The MathWorks, 1Inc. ロボットビジョンとは ロボットに搭載することを目的としたコンピュータービジョン技術の一分野 標識認識などさまざまな環境下での物体認識や複雑なシーンの理解 未知の領域を探索する際にロボット自身の位置推定と地図作成(SLAM)
MATLAB ではじめる画像処理とロボットビジョン ~ 機械学習による物体認識と SLAM~ MathWorks Japan アプリケーションエンジニアリング部信号処理 通信 木川田亘 2015 The MathWorks, 1Inc. ロボットビジョンとは ロボットに搭載することを目的としたコンピュータービジョン技術の一分野 標識認識などさまざまな環境下での物体認識や複雑なシーンの理解 未知の領域を探索する際にロボット自身の位置推定と地図作成(SLAM)
モータ HILS の概要 1 はじめに モータ HILS の需要 自動車の電子化及び 電気自動車やハイブリッド車の実用化に伴い モータの使用数が増大しています 従来行われていた駆動用モータ単体のシミュレーション レシプロエンジンとモータの駆動力分配制御シミュレーションの利用に加え パワーウインドやサ
 モータ HILS の概要 1 はじめに モータ HILS の需要 自動車の電子化及び 電気自動車やハイブリッド車の実用化に伴い モータの使用数が増大しています 従来行われていた駆動用モータ単体のシミュレーション レシプロエンジンとモータの駆動力分配制御シミュレーションの利用に加え パワーウインドやサンルーフなどのボディー系 電動パワーステアリングやそのアシスト機能など 高度な制御 大電流の制御などが要求されています
モータ HILS の概要 1 はじめに モータ HILS の需要 自動車の電子化及び 電気自動車やハイブリッド車の実用化に伴い モータの使用数が増大しています 従来行われていた駆動用モータ単体のシミュレーション レシプロエンジンとモータの駆動力分配制御シミュレーションの利用に加え パワーウインドやサンルーフなどのボディー系 電動パワーステアリングやそのアシスト機能など 高度な制御 大電流の制御などが要求されています
(a) (b) 2 2 (Bosch, IR Illuminator 850 nm, UFLED30-8BD) ( 7[m] 6[m]) 3 (PointGrey Research Inc.Grasshopper2 M/C) Hz (a) (b
![(a) (b) 2 2 (Bosch, IR Illuminator 850 nm, UFLED30-8BD) ( 7[m] 6[m]) 3 (PointGrey Research Inc.Grasshopper2 M/C) Hz (a) (b](/thumbs/91/105641706.jpg "(a) (b) 2 2 (Bosch, IR Illuminator 850 nm, UFLED30-8BD) ( 7[m] 6[m]) 3 (PointGrey Research Inc.Grasshopper2 M/C) Hz (a) (b") (MIRU202) 202 8 AdrianStoica 89 0395 744 89 0395 744 Jet Propulsion Laboratory 4800 Oak Grove Drive, Pasadena, CA 909, USA E-mail: uchino@irvs.ait.kyushu-u.ac.jp, {yumi,kurazume}@ait.kyushu-u.ac.jp 2 nearest
(MIRU202) 202 8 AdrianStoica 89 0395 744 89 0395 744 Jet Propulsion Laboratory 4800 Oak Grove Drive, Pasadena, CA 909, USA E-mail: uchino@irvs.ait.kyushu-u.ac.jp, {yumi,kurazume}@ait.kyushu-u.ac.jp 2 nearest
PowerPoint プレゼンテーション
 T13K707D 蜂谷亮祐 指導教員 赤林伸一教授 研究目的 住宅における冷暖房のエネルギー消費量は 住宅全体のエネルギー消費の約 1/ 4 を占め 冷暖房機器の運転効率の向上は省エネルギーの観点から極めて重要である 動力 照明他 38.1% 厨房 9.1% 冷房 % 2014 年度 34,330 MJ/ 世帯 暖房 22.9% 給湯 27.8% 24.9% 図世帯当たりのエネルギー消費原単位と用途別エネルギー消費の推移
T13K707D 蜂谷亮祐 指導教員 赤林伸一教授 研究目的 住宅における冷暖房のエネルギー消費量は 住宅全体のエネルギー消費の約 1/ 4 を占め 冷暖房機器の運転効率の向上は省エネルギーの観点から極めて重要である 動力 照明他 38.1% 厨房 9.1% 冷房 % 2014 年度 34,330 MJ/ 世帯 暖房 22.9% 給湯 27.8% 24.9% 図世帯当たりのエネルギー消費原単位と用途別エネルギー消費の推移
CSM_FZ5_SDNB-031_10_3
 0120-919-066 www.fa.omron.co.jp 1 2 0120-919-066 www.fa.omron.co.jp 0120-919-066 www.fa.omron.co.jp 3 4 0120-919-066 www.fa.omron.co.jp 0120-919-066 www.fa.omron.co.jp 5 6 0120-919-066 www.fa.omron.co.jp
0120-919-066 www.fa.omron.co.jp 1 2 0120-919-066 www.fa.omron.co.jp 0120-919-066 www.fa.omron.co.jp 3 4 0120-919-066 www.fa.omron.co.jp 0120-919-066 www.fa.omron.co.jp 5 6 0120-919-066 www.fa.omron.co.jp
LMSシリーズ LMS1000, 製品群一覧
 製品群一覧 LMS1000 新記録の超高速測定 利点 A 超高速測定 B C D E F 2D-LiDARセンサLMS1000は 屋内および屋外アプリケーション向けの理想的なソリューションを提供する上 過酷な環境 条件にも対応することができます この傑出した性能は LMS1000によって測定された距離値の準備および最適化を行う デジタルフィルタを追加することにより さらに向上させることができます ユーザはフィルタを使用することにより
製品群一覧 LMS1000 新記録の超高速測定 利点 A 超高速測定 B C D E F 2D-LiDARセンサLMS1000は 屋内および屋外アプリケーション向けの理想的なソリューションを提供する上 過酷な環境 条件にも対応することができます この傑出した性能は LMS1000によって測定された距離値の準備および最適化を行う デジタルフィルタを追加することにより さらに向上させることができます ユーザはフィルタを使用することにより
SICEセミナー 制御のためのシステム同定
 状態推定班 ロケット ( 企業共研 ) 電気自動車用リチウムイオン電池 ( 企業共研 ) モデリングと制御班 ヘリコプタ実験 エンジン制御 ( 企業共研 ) RoboCar 実験 制御実験装置 複写機の制御 ( 企業共研 ) 異常検出 基礎理論研究 モデリング Multi-domain modeling 非線形同定 JIT,PLS,PCA,... 統計的学習理論ベイジアン,RVM スパース推定 状態推定
状態推定班 ロケット ( 企業共研 ) 電気自動車用リチウムイオン電池 ( 企業共研 ) モデリングと制御班 ヘリコプタ実験 エンジン制御 ( 企業共研 ) RoboCar 実験 制御実験装置 複写機の制御 ( 企業共研 ) 異常検出 基礎理論研究 モデリング Multi-domain modeling 非線形同定 JIT,PLS,PCA,... 統計的学習理論ベイジアン,RVM スパース推定 状態推定
mCam View User Manual
 mcam View User Manual - 0 - 目次 1 カメラリストの登録 2 2 カメラリストオプション 3 2-1 お知らせ機能 3 2-2 ストリーム設定 ( ネットワーク関連の設定 ) 4 2-3 ビデオ設定 ( 映像設定 制御設定 赤外線照射設定 ) 5 2-4 カメラ設定 ( 接続情報 ネットワーク接続 アラーム機能と録画設定 ) 7 2-5 SD カード再生 9 3 スマートフォンでの録画と再生
mcam View User Manual - 0 - 目次 1 カメラリストの登録 2 2 カメラリストオプション 3 2-1 お知らせ機能 3 2-2 ストリーム設定 ( ネットワーク関連の設定 ) 4 2-3 ビデオ設定 ( 映像設定 制御設定 赤外線照射設定 ) 5 2-4 カメラ設定 ( 接続情報 ネットワーク接続 アラーム機能と録画設定 ) 7 2-5 SD カード再生 9 3 スマートフォンでの録画と再生
ドライビングシミュレータ用実写映像再生ソフトウェア Real Video Drive Player
 東陽テクニカ技術研究所 岩根研究所 共同開発 ドライビングシミュレータ用実写映像再生ソフトウェア Real Video Drive Player Real Video Drive Player Real Video Drive Playerは専用の360 カメラで撮影した走行映像を ステアリング操作やアクセル ブレーキ操作に連動させて再生できるソフトウェアです 専用の動画撮影 加工サービスは任意の道路で行うことができます
東陽テクニカ技術研究所 岩根研究所 共同開発 ドライビングシミュレータ用実写映像再生ソフトウェア Real Video Drive Player Real Video Drive Player Real Video Drive Playerは専用の360 カメラで撮影した走行映像を ステアリング操作やアクセル ブレーキ操作に連動させて再生できるソフトウェアです 専用の動画撮影 加工サービスは任意の道路で行うことができます
人間の視野と同等の広視野画像を取得・提示する簡易な装置
 人間の視野と同等の広視野画像 を取得 提示する簡易な装置 公立はこだて未来大学 システム情報科学部複雑系知能学科 准教授鈴木昭二 研究背景 2 画像情報は有用である 多様な情報 ( 明るさ, 色, 形, 動きなど ) 見ればわかる しかし, カメラの画角は狭い 見える範囲が限定される 全体像を把握しくい 移動する物体を見失いやすい 広視野画像の取得 ( 従来方法 ) 3 多数のカメラを搭載 多数の画像を合成し高解像度の画像取得
人間の視野と同等の広視野画像 を取得 提示する簡易な装置 公立はこだて未来大学 システム情報科学部複雑系知能学科 准教授鈴木昭二 研究背景 2 画像情報は有用である 多様な情報 ( 明るさ, 色, 形, 動きなど ) 見ればわかる しかし, カメラの画角は狭い 見える範囲が限定される 全体像を把握しくい 移動する物体を見失いやすい 広視野画像の取得 ( 従来方法 ) 3 多数のカメラを搭載 多数の画像を合成し高解像度の画像取得
Microsoft PowerPoint - EXPO 2015
 ロボットハンドと触覚センサー を いた能動的物体認識 奈良先端科学技術 学院 学情報科学研究科知能システム制御研究室助教松原崇充 MATLAB EXPO 2015 JAPAN @ 東京 ホテルグランパシフィック LE DAIBA 16th Nov, 2015(Presentation: 40min) 1 松原崇充の 紹介 研究 的 : や環境と相互作 する次世代ロボットの情報処理基盤の構築 不確実性を考慮した運動制御
ロボットハンドと触覚センサー を いた能動的物体認識 奈良先端科学技術 学院 学情報科学研究科知能システム制御研究室助教松原崇充 MATLAB EXPO 2015 JAPAN @ 東京 ホテルグランパシフィック LE DAIBA 16th Nov, 2015(Presentation: 40min) 1 松原崇充の 紹介 研究 的 : や環境と相互作 する次世代ロボットの情報処理基盤の構築 不確実性を考慮した運動制御
Application Note 光束の評価方法に関して Light Emitting Diode 目次 1. 概要 2. 評価方法 3. 注意事項 4. まとめ This document contains tentative information; the contents may chang
 光束の評価方法に関して 目次 1. 概要 2. 評価方法 3. 注意事項 4. まとめ 1/6 1. 概要 本書では 日亜化学工業株式会社製 LED について積分球にて光束を評価する上での評価方法と注意事項を示します 2. 評価方法 通常 LED の光束を評価する際は積分球を用いて評価を行います 積分球のサイズも数 inch クラスのものから 1inch クラスまでの様々なサイズのものがありますが
光束の評価方法に関して 目次 1. 概要 2. 評価方法 3. 注意事項 4. まとめ 1/6 1. 概要 本書では 日亜化学工業株式会社製 LED について積分球にて光束を評価する上での評価方法と注意事項を示します 2. 評価方法 通常 LED の光束を評価する際は積分球を用いて評価を行います 積分球のサイズも数 inch クラスのものから 1inch クラスまでの様々なサイズのものがありますが
Microsoft PowerPoint - acr_rod_ b.ppt [互換モード]
![Microsoft PowerPoint - acr_rod_ b.ppt [互換モード]](/thumbs/91/107636705.jpg "Microsoft PowerPoint - acr_rod_ b.ppt [互換モード]") 必要な時だけ目覚める無線通信ネットワーク技術 ~ 無駄な消費電力を削減します ~ 家庭やオフィスにある多くの無線 LAN アクセスポイント等の無線通信機器は 使わない時も つけっぱなし になっており 無駄に電力を消費しています 使わない時に スリープ させておくことができれば 消費電力を大幅に抑えることができます ATR では ユーザが使いたい時に即座に起動できるオンデマンド起動型無線 LAN アクセスポイント用のウェイクアップ機を開発しています
必要な時だけ目覚める無線通信ネットワーク技術 ~ 無駄な消費電力を削減します ~ 家庭やオフィスにある多くの無線 LAN アクセスポイント等の無線通信機器は 使わない時も つけっぱなし になっており 無駄に電力を消費しています 使わない時に スリープ させておくことができれば 消費電力を大幅に抑えることができます ATR では ユーザが使いたい時に即座に起動できるオンデマンド起動型無線 LAN アクセスポイント用のウェイクアップ機を開発しています
FANUC i Series CNC/SERVO
 + Series CNC/SERVO * * 2 * * 3 Series 0+-MODEL F * * * Series 30+/31+/32+/35+-MODEL B * Power Motion +-MODEL A * PANEL +H * PANEL +H Pro * MT-LINK+ * MT-LINKi 4 サーボラインアップ @*-B series SERVO α*-bシリーズサーボは
+ Series CNC/SERVO * * 2 * * 3 Series 0+-MODEL F * * * Series 30+/31+/32+/35+-MODEL B * Power Motion +-MODEL A * PANEL +H * PANEL +H Pro * MT-LINK+ * MT-LINKi 4 サーボラインアップ @*-B series SERVO α*-bシリーズサーボは
PowerPoint Presentation
 更新日 :2004/7/13 プロモデル使用カメラ 3rdEye プロモデル標準ネットワークカメラ ライブの分割表示 Axis2100 Axis2120 インターネットを通して離れた場所のライブ映像を閲覧することができます 分割表示 / 拡大表示の切替えが可能です Axis2120 はオートアイリス機能により 明るさが不足していても正確な画像を撮影することができます ライブの拡大表示 NetCam
更新日 :2004/7/13 プロモデル使用カメラ 3rdEye プロモデル標準ネットワークカメラ ライブの分割表示 Axis2100 Axis2120 インターネットを通して離れた場所のライブ映像を閲覧することができます 分割表示 / 拡大表示の切替えが可能です Axis2120 はオートアイリス機能により 明るさが不足していても正確な画像を撮影することができます ライブの拡大表示 NetCam
製品カタログ 3D LiDAR [TOF] 株式会社日立 LG データストレージ
![製品カタログ 3D LiDAR [TOF] 株式会社日立 LG データストレージ](/thumbs/103/157842315.jpg "製品カタログ 3D LiDAR [TOF] 株式会社日立 LG データストレージ") 製品カタログ 3D LiDAR [TOF] 株式会社日立 LG データストレージ PRODUCTS 次世代を拓く日立 LGデータストレージの 3D LiDAR (TOF) センサー Next Generation Technology 3D LiDAR (TOF) Motion Sensor Series 物体との距離を高精度にリアルタイムでセンシング イーサネット (POE+) 接続で 設置が容易
製品カタログ 3D LiDAR [TOF] 株式会社日立 LG データストレージ PRODUCTS 次世代を拓く日立 LGデータストレージの 3D LiDAR (TOF) センサー Next Generation Technology 3D LiDAR (TOF) Motion Sensor Series 物体との距離を高精度にリアルタイムでセンシング イーサネット (POE+) 接続で 設置が容易
Microsoft Word - Aセンサプレスリリース原稿 _校正2__FD改.doc
 報道関係者各位プレスリリース 2012 年 05 月 21 日日本セラミック株式会社 インテリジェントな人感センサ アクティブ型赤外線センサ 3 タイプ (SN5-0185 SN1-0195 SNC-0196) を開発 発売 ~ 赤外線による三角測量の原理を採用 ~ 日本セラミック株式会社 ( 代表取締役社長兼会長 : 谷口義晴 ) は 赤外線による三角測距を原理とし 物体と人体を判別可能としたインテリジェントな人感センサ
報道関係者各位プレスリリース 2012 年 05 月 21 日日本セラミック株式会社 インテリジェントな人感センサ アクティブ型赤外線センサ 3 タイプ (SN5-0185 SN1-0195 SNC-0196) を開発 発売 ~ 赤外線による三角測量の原理を採用 ~ 日本セラミック株式会社 ( 代表取締役社長兼会長 : 谷口義晴 ) は 赤外線による三角測距を原理とし 物体と人体を判別可能としたインテリジェントな人感センサ
スライド タイトルなし
 アンテナ狭小化に伴う方位分解能劣化 の改善と東京湾での評価結果 - 民需等の利活用拡大を目指して - 直線 4 アレイ ( 八木 ) 菱形 4 アレイ ( ダイポール ) 伊藤浩之, 千葉修, 小海尊宏, 大西喬之 *1 山田寛喜 *2 長野日本無線 ( 株 ) *1 新潟大学 *2 08 年 12 月 17 日 08 年海洋レーダ研究集会 No.1 目次 1. はじめに : 海洋レーダの課題 2.
アンテナ狭小化に伴う方位分解能劣化 の改善と東京湾での評価結果 - 民需等の利活用拡大を目指して - 直線 4 アレイ ( 八木 ) 菱形 4 アレイ ( ダイポール ) 伊藤浩之, 千葉修, 小海尊宏, 大西喬之 *1 山田寛喜 *2 長野日本無線 ( 株 ) *1 新潟大学 *2 08 年 12 月 17 日 08 年海洋レーダ研究集会 No.1 目次 1. はじめに : 海洋レーダの課題 2.
製品カタログ 3D LiDAR [TOF] 株式会社日立 LG データストレージ
![製品カタログ 3D LiDAR [TOF] 株式会社日立 LG データストレージ](/thumbs/103/157842500.jpg "製品カタログ 3D LiDAR [TOF] 株式会社日立 LG データストレージ") 製品カタログ 3D LiDAR [TOF] 株式会社日立 LG データストレージ PRODUCTS 次世代を拓く日立 LGデータストレージの 3D LiDAR (TOF) センサー Next Generation Technology 3D LiDAR (TOF) Motion Sensor Series 物体との距離を高精度にリアルタイムでセンシング イーサネット (POE+) 接続で 設置が容易
製品カタログ 3D LiDAR [TOF] 株式会社日立 LG データストレージ PRODUCTS 次世代を拓く日立 LGデータストレージの 3D LiDAR (TOF) センサー Next Generation Technology 3D LiDAR (TOF) Motion Sensor Series 物体との距離を高精度にリアルタイムでセンシング イーサネット (POE+) 接続で 設置が容易
スライド 1
 MiniConVer2.1 操作マニュアル KinectV2 センサー用 株式会社テレビ朝日クリエイト 動作条件 Kinect2 を動作させるためには Microsoft 社が推奨する以下のハードウェア環境で必要です http://www.microsoft.com/en-us/kinectforwindows/purchase/sensor_setup.aspx 対応 OS は以下になります Microsoft
MiniConVer2.1 操作マニュアル KinectV2 センサー用 株式会社テレビ朝日クリエイト 動作条件 Kinect2 を動作させるためには Microsoft 社が推奨する以下のハードウェア環境で必要です http://www.microsoft.com/en-us/kinectforwindows/purchase/sensor_setup.aspx 対応 OS は以下になります Microsoft
タイトル
 生活支援ロボット HSR 向け 自律動作アプリケーション開発 アプリケーションエンジニアリング部木川田亘 2015 The MathWorks, Inc. 1 実演 :HSR による あいさつ アプリケーションの開発 2 アジェンダ 自律ロボット開発における MATLAB ROS を使った HSR との連携ワークフロー まとめ 3 アジェンダ 自律ロボット開発における MATLAB ROS を使った
生活支援ロボット HSR 向け 自律動作アプリケーション開発 アプリケーションエンジニアリング部木川田亘 2015 The MathWorks, Inc. 1 実演 :HSR による あいさつ アプリケーションの開発 2 アジェンダ 自律ロボット開発における MATLAB ROS を使った HSR との連携ワークフロー まとめ 3 アジェンダ 自律ロボット開発における MATLAB ROS を使った
Microsoft PowerPoint - 写測学会.pptx
 UAV 空撮画像における 3 次元モデリング (SfM/MVS) ソフトウェアの形状特性比較 阪南大学 北川悦司 北川悦司 博士 ( 情報学 ) 自己紹介 阪南大学経営情報学部教授 23 歳の時に IT ベンチャー企業を起業 約 12 年間で様々な業務をこなす 現在は個人事業主として企業と共同研究や受託開発などを行っている専門分野 :IT 全般 写真測量,3 次元点群処理, 画像処理,SLAM その他,
UAV 空撮画像における 3 次元モデリング (SfM/MVS) ソフトウェアの形状特性比較 阪南大学 北川悦司 北川悦司 博士 ( 情報学 ) 自己紹介 阪南大学経営情報学部教授 23 歳の時に IT ベンチャー企業を起業 約 12 年間で様々な業務をこなす 現在は個人事業主として企業と共同研究や受託開発などを行っている専門分野 :IT 全般 写真測量,3 次元点群処理, 画像処理,SLAM その他,
スライド 1
 超解像技術とは? 動画や静止画連写などで得られる複数の低解像度 (= 小さな ) 画像を組み合わせ 演算により高解像度の (= 大きな ) 画像を作り出す技術の事を一般に 超解像 技術と呼びます 超解像処理 高解像処理 (1 枚超解像 ) 超解像 のように複数の画像を用いるのではなく 1 枚の画像が持つ情報を深く解析する事で 高解像度の画像を得る最新技術です では 最新の画像処理技術により この高解像処理を実現しました
超解像技術とは? 動画や静止画連写などで得られる複数の低解像度 (= 小さな ) 画像を組み合わせ 演算により高解像度の (= 大きな ) 画像を作り出す技術の事を一般に 超解像 技術と呼びます 超解像処理 高解像処理 (1 枚超解像 ) 超解像 のように複数の画像を用いるのではなく 1 枚の画像が持つ情報を深く解析する事で 高解像度の画像を得る最新技術です では 最新の画像処理技術により この高解像処理を実現しました
Microsoft PowerPoint - document pptx
 2018 年 5 月 11 日 ITDLab 株式会社 実吉敬二 Part 1. LiDARやミリ波レーダー 単眼カメラと比較したステレオカメラの優位性 1. あらゆる距離の物体を検出できる 画面に写っていれば どのような物体でも 距離精度は別にして そこまでの距離がわかる 例えば今使われている車載用のステレオカメラで東京から富士山を撮像したら 1.2 kmより遠くにあるということがわかる これは衝突回避にとって重要な情報である
2018 年 5 月 11 日 ITDLab 株式会社 実吉敬二 Part 1. LiDARやミリ波レーダー 単眼カメラと比較したステレオカメラの優位性 1. あらゆる距離の物体を検出できる 画面に写っていれば どのような物体でも 距離精度は別にして そこまでの距離がわかる 例えば今使われている車載用のステレオカメラで東京から富士山を撮像したら 1.2 kmより遠くにあるということがわかる これは衝突回避にとって重要な情報である
関係各位 2018 年 10 月 10 日 ヴイストン株式会社 研究開発用台車ロボット メカナムローバー Ver2.0 を発売 ~ Arduino 互換の制御基板を搭載し ROS や Arduino IDE に対応 ~ ヴイストン株式会社 ( 本社 : 大阪府大阪市 代表取締役 : 大和信夫 ) は
 は") 関係各位 2018 年 10 月 10 日 ヴイストン株式会社 研究開発用台車ロボット メカナムローバー Ver2.0 を発売 ~ Arduino 互換の制御基板を搭載し ROS や Arduino IDE に対応 ~ ヴイストン株式会社 ( 本社 : 大阪府大阪市 代表取締役 : 大和信夫 ) は 2018 年 10 月 31 日より 研究開発用台車ロボット メカナムローバー Ver2.0 の販売を開始いたします
関係各位 2018 年 10 月 10 日 ヴイストン株式会社 研究開発用台車ロボット メカナムローバー Ver2.0 を発売 ~ Arduino 互換の制御基板を搭載し ROS や Arduino IDE に対応 ~ ヴイストン株式会社 ( 本社 : 大阪府大阪市 代表取締役 : 大和信夫 ) は 2018 年 10 月 31 日より 研究開発用台車ロボット メカナムローバー Ver2.0 の販売を開始いたします
目次 1. CAD インターフェイス (3D_Analyzer&3D_Evolution) ユーザーインターフェイス機能強化 (3D_Analyzer&3D_Evolution)... 3 レポート... 3 クリッピング機能... 4 言語... 4 表示オプション
 ユーザーインターフェイス機能強化 (3D_Analyzer&3D_Evolution)... 3 レポート... 3 クリッピング機能... 4 言語... 4 表示オプション") 2016 年 6 月 22 日 3D_Analyzer & 3D_Evolution リリースノート 1/8 目次 1. CAD インターフェイス (3D_Analyzer&3D_Evolution)... 3 2. ユーザーインターフェイス機能強化 (3D_Analyzer&3D_Evolution)... 3 レポート... 3 クリッピング機能... 4 言語... 4 表示オプション...
2016 年 6 月 22 日 3D_Analyzer & 3D_Evolution リリースノート 1/8 目次 1. CAD インターフェイス (3D_Analyzer&3D_Evolution)... 3 2. ユーザーインターフェイス機能強化 (3D_Analyzer&3D_Evolution)... 3 レポート... 3 クリッピング機能... 4 言語... 4 表示オプション...
伝統芸能のデジタルアーカイブと ロボットによる実体提示
 三次元データ認識による災害状況自動計測システムの研究開発 中澤篤志 安福健佑大阪大学サイバーメディアセンター {nakazawa,yasufuku}@cmc.osaka-u.ac.jp プロジェクトの概要 目的自律移動ロボットを用いて周囲の3 次元状況を把握し 被災状況の把握を行うシステムを構築する ロボットは レーザー距離センサが搭載されるため 環境を移動しながら被害状況を計測 把握し 被害状況マップを構築する
三次元データ認識による災害状況自動計測システムの研究開発 中澤篤志 安福健佑大阪大学サイバーメディアセンター {nakazawa,yasufuku}@cmc.osaka-u.ac.jp プロジェクトの概要 目的自律移動ロボットを用いて周囲の3 次元状況を把握し 被災状況の把握を行うシステムを構築する ロボットは レーザー距離センサが搭載されるため 環境を移動しながら被害状況を計測 把握し 被害状況マップを構築する
課題情報シート テーマ名 : 動画中継ラジコンカーの製作 担当指導員名 : 土山博剛実施年度 : 25 年度施設名 : 四国職業能力開発大学校課程名 : 専門課程訓練科名 : 電子情報技術科課題の区分 : 総合制作実習課題学生数 : 1 時間 : 12 単位 (216h) 課題制作 開発のポイント
 課題制作 開発のポイント") 課題情報シート テーマ名 : 担当指導員名 : 土山博剛実施年度 : 25 年度施設名 : 四国職業能力開発大学校課程名 : 専門課程訓練科名 : 電子情報技術科課題の区分 : 総合制作実習課題学生数 : 1 時間 : 12 単位 (216h) 課題制作 開発のポイント 開発( 制作 ) のポイント 今回製作したシステムでは 専門課程で習得した総合的な知識 ( ネットワーク技術 電子回路技術 C プログラミング技術
課題情報シート テーマ名 : 担当指導員名 : 土山博剛実施年度 : 25 年度施設名 : 四国職業能力開発大学校課程名 : 専門課程訓練科名 : 電子情報技術科課題の区分 : 総合制作実習課題学生数 : 1 時間 : 12 単位 (216h) 課題制作 開発のポイント 開発( 制作 ) のポイント 今回製作したシステムでは 専門課程で習得した総合的な知識 ( ネットワーク技術 電子回路技術 C プログラミング技術
ロボット技術の紹介
 賢いロボットの作り方 ~ 自分で考えて行動するロボットをつくる ~ 関東学院大学 理工学部 ( 届出設置書類提出中 ) 准教授元木誠 夢ナビライブ東京賢いロボットの作り方 1 本日の講義内容 周囲の状況を認識し, 自分で考えて行動するロボットのことを知能ロボットといいます 知能ロボットは賢さのレベルによって作り方が違います 生物の脳をモデルにしたシステム ( ニューラルネットワーク ) で作る方法を紹介します!
賢いロボットの作り方 ~ 自分で考えて行動するロボットをつくる ~ 関東学院大学 理工学部 ( 届出設置書類提出中 ) 准教授元木誠 夢ナビライブ東京賢いロボットの作り方 1 本日の講義内容 周囲の状況を認識し, 自分で考えて行動するロボットのことを知能ロボットといいます 知能ロボットは賢さのレベルによって作り方が違います 生物の脳をモデルにしたシステム ( ニューラルネットワーク ) で作る方法を紹介します!
PowerPoint Presentation
 ディープラーニングの 実践的な適用ワークフロー MathWorks Japan テクニカルコンサルティング部縣亮 2015 The MathWorks, Inc. 1 アジェンダ ディープラーニングとは?( おさらい ) ディープラーニングの適用ワークフロー ワークフローの全体像 MATLAB によるニューラルネットワークの構築 学習 検証 配布 MATLAB ではじめるメリット 試行錯誤のやりやすさ
ディープラーニングの 実践的な適用ワークフロー MathWorks Japan テクニカルコンサルティング部縣亮 2015 The MathWorks, Inc. 1 アジェンダ ディープラーニングとは?( おさらい ) ディープラーニングの適用ワークフロー ワークフローの全体像 MATLAB によるニューラルネットワークの構築 学習 検証 配布 MATLAB ではじめるメリット 試行錯誤のやりやすさ
国土技術政策総合研究所 研究資料
 第 7 章 検査基準 7-1 検査の目的 検査の目的は 対向車両情報表示サービス 前方停止車両 低速車両情報表示サービスおよび その組み合わせサービスに必要な機能の品質を確認することである 解説 設備の設置後 機能や性能の総合的な調整を経て 検査基準に従い各設備検査を実施する 各設備検査の合格後 各設備間を接続した完成検査で機能 性能等のサービス仕様を満たしていることを確認する検査を実施し 合否を判定する
第 7 章 検査基準 7-1 検査の目的 検査の目的は 対向車両情報表示サービス 前方停止車両 低速車両情報表示サービスおよび その組み合わせサービスに必要な機能の品質を確認することである 解説 設備の設置後 機能や性能の総合的な調整を経て 検査基準に従い各設備検査を実施する 各設備検査の合格後 各設備間を接続した完成検査で機能 性能等のサービス仕様を満たしていることを確認する検査を実施し 合否を判定する
Presentation Title
 Simulink R / Stateflow R 入門 MathWorks Japan アプリケーションエンジニアリング部 小林昇洋 2016 The MathWorks, Inc. 1 本セッションで対象としている方々 Q : Simulink / Stateflow は使ったことがない どんなツールなのか? A : お使いいただいているシーン 理由などご紹介します 2 Simulink とは?
Simulink R / Stateflow R 入門 MathWorks Japan アプリケーションエンジニアリング部 小林昇洋 2016 The MathWorks, Inc. 1 本セッションで対象としている方々 Q : Simulink / Stateflow は使ったことがない どんなツールなのか? A : お使いいただいているシーン 理由などご紹介します 2 Simulink とは?
Microsoft PowerPoint - 1.プロセス制御の概要.pptx
 プロセス制御工学 1. プロセス制御の概要 京都大学 加納学 Division of Process Control & Process Systems Engineering Department of Chemical Engineering, Kyoto University manabu@cheme.kyoto-u.ac.jp http://www-pse.cheme.kyoto-u.ac.jp/~kano/
プロセス制御工学 1. プロセス制御の概要 京都大学 加納学 Division of Process Control & Process Systems Engineering Department of Chemical Engineering, Kyoto University manabu@cheme.kyoto-u.ac.jp http://www-pse.cheme.kyoto-u.ac.jp/~kano/
Microsoft PowerPoint - 口頭発表_折り畳み自転車
 1 公道走行を再現した振動試験による折り畳み自転車の破損状況 ~ 公道での繰り返し走行を再現した結果 ~ 2 公道走行を想定した試験用路面について 九州支所製品安全技術課清水寛治 目次 1. 折り畳み自転車のフレームはどのように破損するのか公道の走行振動を再現する自転車用ロードシミュレータについて繰り返し走行を想定した折り畳み自転車の破損部の特徴 ~ 公道による振動を繰り返し再現した結果 ~ 2.
1 公道走行を再現した振動試験による折り畳み自転車の破損状況 ~ 公道での繰り返し走行を再現した結果 ~ 2 公道走行を想定した試験用路面について 九州支所製品安全技術課清水寛治 目次 1. 折り畳み自転車のフレームはどのように破損するのか公道の走行振動を再現する自転車用ロードシミュレータについて繰り返し走行を想定した折り畳み自転車の破損部の特徴 ~ 公道による振動を繰り返し再現した結果 ~ 2.
特別寄稿.indd
 特別寄稿 ソフトインフラとしてのデジタル地図を活用した自動運転システム Autonomous vehicle using digital map as a soft infrastructure 菅沼直樹 Naoki SUGANUMA 1. はじめに 1) 2008 2012 ITS 2) CO 2 3) 4) Door to door Door to door Door to door DARPA(
特別寄稿 ソフトインフラとしてのデジタル地図を活用した自動運転システム Autonomous vehicle using digital map as a soft infrastructure 菅沼直樹 Naoki SUGANUMA 1. はじめに 1) 2008 2012 ITS 2) CO 2 3) 4) Door to door Door to door Door to door DARPA(
Microsoft Word - 論文(091124).doc
.doc") レーザーカメラによる昼夜連続斜面監視システム ( 独 ) 土木研究所寒地土木研究所 高橋幸継 同 上 伊東佳彦 同 上 日下部祐基 北海道開発局帯広開発建設部帯広道路事務所 坂本多朗 1. はじめに北海道では急崖斜面を背後に擁する道路が多数分布しており 崩落事故も多数発生している 斜面災害が発生した場合やその可能性がある場合には 状況に応じて通行止めや片側通行 あるいは斜面の監視を行いながらの通行などの措置がとられる
レーザーカメラによる昼夜連続斜面監視システム ( 独 ) 土木研究所寒地土木研究所 高橋幸継 同 上 伊東佳彦 同 上 日下部祐基 北海道開発局帯広開発建設部帯広道路事務所 坂本多朗 1. はじめに北海道では急崖斜面を背後に擁する道路が多数分布しており 崩落事故も多数発生している 斜面災害が発生した場合やその可能性がある場合には 状況に応じて通行止めや片側通行 あるいは斜面の監視を行いながらの通行などの措置がとられる
スライド 0
 画像センシング展 2011 イメージングセミナー 非冷却赤外線カメラとアプリケーション 於 : パシフィコ横浜 2011.6.9 12:30-13:20 クロニクス株式会社代表取締役社長黒江春海 株式会社ビジョンセンシング徳武委久代 Contents 1 2 3 4 ULIS 社ディテクタ技術概要非冷却赤外線カメラ ULVIPS の概要遠赤外線カメラのアプリケーション会社概要 2011/6/9 Vision
画像センシング展 2011 イメージングセミナー 非冷却赤外線カメラとアプリケーション 於 : パシフィコ横浜 2011.6.9 12:30-13:20 クロニクス株式会社代表取締役社長黒江春海 株式会社ビジョンセンシング徳武委久代 Contents 1 2 3 4 ULIS 社ディテクタ技術概要非冷却赤外線カメラ ULVIPS の概要遠赤外線カメラのアプリケーション会社概要 2011/6/9 Vision
PowerPoint プレゼンテーション
 エージェントベースドシミュレーションによる店舗内回遊モデル構築に関する研究 大阪府立大学 現代システム科学域 知識情報システム学類石丸悠太郎 指導教員 森田裕之 背景 顧客の店舗内回遊シミュレーションは 店舗内でのプロモーションや商品配置の影響を実施する前に結果を予測することが可能となるため 実施前に効果を確認することでコストや時間を削減することができる 従来は 購買履歴やアンケート結果を用いたモデルを行わざるを得なかったため
エージェントベースドシミュレーションによる店舗内回遊モデル構築に関する研究 大阪府立大学 現代システム科学域 知識情報システム学類石丸悠太郎 指導教員 森田裕之 背景 顧客の店舗内回遊シミュレーションは 店舗内でのプロモーションや商品配置の影響を実施する前に結果を予測することが可能となるため 実施前に効果を確認することでコストや時間を削減することができる 従来は 購買履歴やアンケート結果を用いたモデルを行わざるを得なかったため
2. CABAC CABAC CABAC 1 1 CABAC Figure 1 Overview of CABAC 2 DCT 2 0/ /1 CABAC [3] 3. 2 値化部 コンテキスト計算部 2 値算術符号化部 CABAC CABAC
![2. CABAC CABAC CABAC 1 1 CABAC Figure 1 Overview of CABAC 2 DCT 2 0/ /1 CABAC [3] 3. 2 値化部 コンテキスト計算部 2 値算術符号化部 CABAC CABAC](/thumbs/92/108208872.jpg "2. CABAC CABAC CABAC 1 1 CABAC Figure 1 Overview of CABAC 2 DCT 2 0/ /1 CABAC [3] 3. 2 値化部 コンテキスト計算部 2 値算術符号化部 CABAC CABAC") H.264 CABAC 1 1 1 1 1 2, CABAC(Context-based Adaptive Binary Arithmetic Coding) H.264, CABAC, A Parallelization Technology of H.264 CABAC For Real Time Encoder of Moving Picture YUSUKE YATABE 1 HIRONORI
H.264 CABAC 1 1 1 1 1 2, CABAC(Context-based Adaptive Binary Arithmetic Coding) H.264, CABAC, A Parallelization Technology of H.264 CABAC For Real Time Encoder of Moving Picture YUSUKE YATABE 1 HIRONORI
Microsoft PowerPoint - 三次元座標測定 ppt
 冗長座標測定機 ()( 三次元座標計測 ( 第 9 回 ) 5 年度大学院講義 6 年 月 7 日 冗長性を持つ 次元座標測定機 次元 辺測量 : 冗長性を出すために つのレーザトラッカを配置し, キャッツアイまでの距離から座標を測定する つのカメラ ( 次元的なカメラ ) とレーザスキャナ : つの角度測定システムによる座標測定 つの回転関節による 次元 自由度多関節機構 高増潔東京大学工学系研究科精密機械工学専攻
冗長座標測定機 ()( 三次元座標計測 ( 第 9 回 ) 5 年度大学院講義 6 年 月 7 日 冗長性を持つ 次元座標測定機 次元 辺測量 : 冗長性を出すために つのレーザトラッカを配置し, キャッツアイまでの距離から座標を測定する つのカメラ ( 次元的なカメラ ) とレーザスキャナ : つの角度測定システムによる座標測定 つの回転関節による 次元 自由度多関節機構 高増潔東京大学工学系研究科精密機械工学専攻
関係各位 2019 年 1 月 31 日 ヴイストン株式会社 4 軸独立ステアリング駆動方式の ROS 対応台車ロボット 4WDS ローバー Ver2.0 を発売 ヴイストン株式会社 ( 本社 : 大阪府大阪市 代表取締役 : 大和信夫 ) は 4 輪独立ステアリング駆動式全方位移動台車ロボット 4
 は 4 輪独立ステアリング駆動式全方位移動台車ロボット 4") 関係各位 2019 年 1 月 31 日 ヴイストン株式会社 4 軸独立ステアリング駆動方式の ROS 対応台車ロボット 4WDS ローバー Ver2.0 を発売 ヴイストン株式会社 ( 本社 : 大阪府大阪市 代表取締役 : 大和信夫 ) は 4 輪独立ステアリング駆動式全方位移動台車ロボット 4WDS ローバー Ver.2.0 をリリースします 旧製品である 4WDS ローバー で好評な機能はそのままに
関係各位 2019 年 1 月 31 日 ヴイストン株式会社 4 軸独立ステアリング駆動方式の ROS 対応台車ロボット 4WDS ローバー Ver2.0 を発売 ヴイストン株式会社 ( 本社 : 大阪府大阪市 代表取締役 : 大和信夫 ) は 4 輪独立ステアリング駆動式全方位移動台車ロボット 4WDS ローバー Ver.2.0 をリリースします 旧製品である 4WDS ローバー で好評な機能はそのままに
ライティングの基本要素ライト ( 光源 ) の位置や種類 強さを決め モデルやシーンの見せ方を決めることをライティングとよぶ また モデルの表面での光の反射の度合いを調節することで ライティングの効果を変化させることができる 今回は ライティングの基本的な要素を解説し SketchUp のライティン
 の位置や種類 強さを決め モデルやシーンの見せ方を決めることをライティングとよぶ また モデルの表面での光の反射の度合いを調節することで ライティングの効果を変化させることができる 今回は ライティングの基本的な要素を解説し SketchUp のライティン") コンピュータグラフィックス演習 I 2012 年 5 月 28 日 ( 月 )5 限 担当 : 桐村喬 第 8 回モデリングの仕上げ 2 ライティングとその他の表現 今日の内容 1. ライティングの基本要素 2.SketchUp でのライティング 3.Podium プラグインの利用 4.SketchUp でのその他の表現手法 5. 今後の授業スケジュール 前回の動画の紹介 SketchUp の教材フォルダからのコピー今回も教材フォルダにある
コンピュータグラフィックス演習 I 2012 年 5 月 28 日 ( 月 )5 限 担当 : 桐村喬 第 8 回モデリングの仕上げ 2 ライティングとその他の表現 今日の内容 1. ライティングの基本要素 2.SketchUp でのライティング 3.Podium プラグインの利用 4.SketchUp でのその他の表現手法 5. 今後の授業スケジュール 前回の動画の紹介 SketchUp の教材フォルダからのコピー今回も教材フォルダにある
LEDの光度調整について
 光測定と単位について 目次 1. 概要 2. 色とは 3. 放射量と測光量 4. 放射束 5. 視感度 6. 放射束と光束の関係 7. 光度と立体角 8. 照度 9. 照度と光束の関係 10. 各単位の関係 11. まとめ 1/6 1. 概要 LED の性質を表すには 光の強さ 明るさ等が重要となり これらはその LED をどのようなアプリケーションに使用するかを決定するために必須のものになることが殆どです
光測定と単位について 目次 1. 概要 2. 色とは 3. 放射量と測光量 4. 放射束 5. 視感度 6. 放射束と光束の関係 7. 光度と立体角 8. 照度 9. 照度と光束の関係 10. 各単位の関係 11. まとめ 1/6 1. 概要 LED の性質を表すには 光の強さ 明るさ等が重要となり これらはその LED をどのようなアプリケーションに使用するかを決定するために必須のものになることが殆どです
Microsoft PowerPoint - presen
 解析支援ネット OKAYAMA 画像解析に関する技術講演会 2008.03.28 車上からの道路標識の認識 岡山県立大学情報工学部スポーツシステム工学科山内仁 はじめに 高度道路交通システム (ITS) VICS ETC etc. 走行支援道路システム (AHS) 車載カメラによる環境認識 (AHS-i) 道路標識の認識 認知に関わる事故の防止 2 車両運行に関わる標識 標識情報の取得手段 : 車載カメラ
解析支援ネット OKAYAMA 画像解析に関する技術講演会 2008.03.28 車上からの道路標識の認識 岡山県立大学情報工学部スポーツシステム工学科山内仁 はじめに 高度道路交通システム (ITS) VICS ETC etc. 走行支援道路システム (AHS) 車載カメラによる環境認識 (AHS-i) 道路標識の認識 認知に関わる事故の防止 2 車両運行に関わる標識 標識情報の取得手段 : 車載カメラ
サイバー救助犬
 サイバー救助犬 大野和則 ( 東北大学 ) 2018/06/14 2 サイバー救助犬分科会主査 : 大野和則 ( 東北大 ) 人間と犬とロボティクス知能を融合した世界初の被災者捜索 犬 ( 優れた嗅覚 運動能力 ) 人間 ( 高い判断力 ) ロボティクス知能 : センシング 遠隔認識推定 制御 救助犬 救助犬に不足する能力を災害対応ロボットの技術で補う 災害対応ロボット サイバー救助犬 救助犬による捜索と課題
サイバー救助犬 大野和則 ( 東北大学 ) 2018/06/14 2 サイバー救助犬分科会主査 : 大野和則 ( 東北大 ) 人間と犬とロボティクス知能を融合した世界初の被災者捜索 犬 ( 優れた嗅覚 運動能力 ) 人間 ( 高い判断力 ) ロボティクス知能 : センシング 遠隔認識推定 制御 救助犬 救助犬に不足する能力を災害対応ロボットの技術で補う 災害対応ロボット サイバー救助犬 救助犬による捜索と課題
完成版_セミナー発表資料110928
 PROFINET オープンセミナー ASIC を使用した開発 開発セミナー 目次 2 PROFINET の実装 ASIC という選択 PROFINET 機器開発における課題 ASIC による課題の解決 ASIC の特徴ターゲットアプリケーション適用例ラインアップ ASIC 製品紹介 1 PROFINET の実装 3 PROFINET の実装手法 Ethernet ポート付きマイコン FPGA PROFINET
PROFINET オープンセミナー ASIC を使用した開発 開発セミナー 目次 2 PROFINET の実装 ASIC という選択 PROFINET 機器開発における課題 ASIC による課題の解決 ASIC の特徴ターゲットアプリケーション適用例ラインアップ ASIC 製品紹介 1 PROFINET の実装 3 PROFINET の実装手法 Ethernet ポート付きマイコン FPGA PROFINET
Software-Defined Tester(SDT) を用いた高精度遅延測定による SDN/NFV 品質向上 富士通アドバンストテクノロジ株式会社システム技術統括部大久保克彦 0 Copyright 2017 FUJITSU AD
 を用いた高精度遅延測定による SDN/NFV 品質向上 富士通アドバンストテクノロジ株式会社システム技術統括部大久保克彦 0 Copyright 2017 FUJITSU AD") Software-Defined Tester(SDT) を用いた高精度遅延測定による SDN/NFV 品質向上 富士通アドバンストテクノロジ株式会社システム技術統括部大久保克彦 fatec-ood-2017@dl.jp.fujitsu.com 0 背景 リアルタイム性が必要な分野への適用 5G( 低遅延 ) による新たなサービス展開 ゲーム VoIP 動画医療金融車載 遅延がサービス品質に直結 End-to-End
Software-Defined Tester(SDT) を用いた高精度遅延測定による SDN/NFV 品質向上 富士通アドバンストテクノロジ株式会社システム技術統括部大久保克彦 fatec-ood-2017@dl.jp.fujitsu.com 0 背景 リアルタイム性が必要な分野への適用 5G( 低遅延 ) による新たなサービス展開 ゲーム VoIP 動画医療金融車載 遅延がサービス品質に直結 End-to-End
PowerPoint プレゼンテーション
 Foundation アプライアンス スケーラブルシステムズ株式会社 サーバ クラスタの課題 複数のシステムを一つの だけで容易に管理することは出来ないだろうか? アプリケーションがより多くのメモリを必要とするのだけど ハードウエアの増設なしで対応出来ないだろうか? 現在の利用環境のまま 利用できるコア数やメモリサイズの増強を図ることは出来ないだろうか? 短時間で導入可能で また 必要に応じて 柔軟にシステム構成の変更が可能なソリューションは無いだろうか?...
Foundation アプライアンス スケーラブルシステムズ株式会社 サーバ クラスタの課題 複数のシステムを一つの だけで容易に管理することは出来ないだろうか? アプリケーションがより多くのメモリを必要とするのだけど ハードウエアの増設なしで対応出来ないだろうか? 現在の利用環境のまま 利用できるコア数やメモリサイズの増強を図ることは出来ないだろうか? 短時間で導入可能で また 必要に応じて 柔軟にシステム構成の変更が可能なソリューションは無いだろうか?...