2015垣内修論前半
|
|
|
- みさき たにしき
- 5 years ago
- Views:
Transcription
1 修士論文 平成 26 年度 研究題目 圧縮センシングを用いた CT 画像再構成 制限 X 線投影における再構成 学生証番号 氏名垣内友希 提出日平成 27 年 1 月 15 日 指導教員蚊野浩 京都産業大学 先端情報学研究科
2
3 要約コンピュータ断層撮影 (CT) は,X 線を利用して物体を走査し, 得た情報をコンピュータで処理することで, 物体の内部構造を画像として再構成するものである.CT は人体内部を断層像として観察することができるため, 内臓の異常発見に役立つ. しかし, 装置が大規模であること, 被曝量が他の X 線を用いた診断と比べると多いことが問題とされている. 近年 従来に比べて非常に少ない投影像から画像の再構成が可能な手法として圧縮センシングが注目されている 本論文では,X 線投影像の枚数 X 線の投影角度範囲 X 線検出器のサイズという3つの撮影条件について, それぞれ制限を設けて投影データを作成し, 圧縮センシングによる画像再構成を行った. このような制限下で十分な画像再構成が可能であることを示すことができれば, 装置の小型化による省スペース化や, 被曝量の低減につながる. また, 圧縮センシングと従来手法を比較し, 圧縮センシングの効果を検証した. 従来手法として,FBP 法, 逐次近似法, 線型方程式を解く方法の3 手法を用いて画像再構成を行った. 撮影条件制限下での圧縮センシングの効果を検証するためには, 様々に撮影条件を変えた投影データを用意する必要がある. 本研究では, 被写体の減衰係数を表す 2 次元画像から投影データを取得するシミュレーションプログラムを用いて投影データを生成した. 減衰係数を表す2 次元画像として, ランダムドット画像 文字画像 Shepp-Logan ファントム画像 ( いずれも 画素 ) を使用した. シミュレーションプログラムを用いて得た投影データを使用して実験を行った結果, 投影領域 投影角度範囲に制限を設けない場合, 圧縮センシングは従来手法よりも少ない投影回数で十分な再構成画像が得られた. また, 投影領域に制限を設けた場合,FBP 法と逐次近似法では十分な再構成画像が得られなかったが, 線形方程式を解く方法と圧縮センシングでは投影回数を増加させることにより十分な再構成画像が得られた. 投影角度範囲に制限を設けた場合,FBP 法と逐次近似法では十分な再構成画像が得られなかったが, 線型方程式を解く方法と圧縮センシングでは投影回数を増加させることにより十分な再構成画像が得られた. 線型方程式を解く方法と圧縮センシングの比較では, 投影領域制限 投影角度範囲制限のどちらにおいても, 圧縮センシングの方が十分な再構成画像を得るために必要な投影回数が少なかった. 以上の結果から, 圧縮センシングは投影回数 投影領域 投影角度範囲といった撮影条件が制限される状況においても十分な再構成画像が得られることを示した. i
4 目次 1. 序論 1 2. X 線コンピュータ断層撮影 (X 線 CT) X 線投影データの取得 2.2 CT における画像再構成の原理と投影データの取得 2.3 従来の画像再構成アルゴリズム フィルタ補正逆投影法 (FBP 法 ) 逐次近似法 線型方程式を解く方法 3. 圧縮センシング 圧縮センシングの原理 3.2 L1 ノルム最小化アルゴリズム 4. 圧縮センシングによる投影からの画像再構成 シミュレーションプログラム 4.2 ノイズを考慮した画像再構成 4.3 投影領域 投影角度範囲に制限がない画像再構成 4.4 投影領域 投影角度範囲に制限を設けた画像再構成 5. 実験と考察 圧縮センシングによる疎画像の再構成 投影領域 投影角度範囲に制限がない場合 投影範囲に制限を設けた場合 投影角度範囲に制限を設けた場合 5.2 圧縮センシングによるファントム画像の再構成 投影領域 投影角度範囲に制限がない場合 投影領域に制限を設けた場合 投影角度範囲に制限を設けた場合 5.3 従来手法によるファントム画像の再構成 5.4 実験結果の考察 6. 結論 40 参考文献 42 謝辞 43 付録 1 X 線 CT における観測行列の生成 44 付録 2 圧縮センシング理論の概要 47 付録 3 圧縮センシングによる CR 画像再構成 54 ノイズを考慮した再構成の一例 ii
5 iii
6 1. 序論医療において, 医者は患者に関する情報を収集し, それを元に診断を行う. 情報の収集手段としては, 問診や触診のほかに, 医療機器を用いるものがある. 医療機器を使用して得た患者の情報は, 数値や画像として表現される. 患者の情報を定量的に表現できることは, 診断において曖昧さをなくすことができ, 大きな利点となる. そのなかでも, X 線を用いた撮影は, 医者が直接知ることのできない人体内部の情報を画像として得ることができるものとして, 積極的に利用されている. コンピュータ断層撮影 (CT) は,X 線を利用して物体を走査し, 得た情報をコンピュータで処理することで, 物体の内部構造を画像として再構成するものである.CT では, 物体の断面画像を得ることができるため, 内臓の異常発見に役立つ. しかし,CT にはいくつかの問題がある. 第一に装置が非常に大掛かりである. 全身撮影用の X 線 CT は 360 の全周囲方向から 1000 回以上の撮影を繰り返す. 人体の周りを機器が回転して撮影を行うため, 装置は撮影する人体よりもかなり大きくなる. このような CT 撮影装置は設置に必要なスペースも大きなものとなり, 大病院でなければ設置が難しい. 第二に被曝量の問題がある. 一般的な胸部 CT 撮影における放射線の被曝量は 6.9mSv であり, 他の X 線診断装置と比較して被曝量が多い [1]. これらの問題を解決するには,360 の全周囲方向から撮影する必要をなくすであるとか,1000 回以上も必要な撮影回数を 100 回以下にするなどの, 画期的な技術開発が必要である.2005 年頃まで, 少ない方向数で撮影した画像から十分に高精度な断面画像を得ることは困難であると考えられていた.2006 年に, 標本化定理の仮定のもとでは不十分なサンプル数の測定データから原信号を完全に復元することができる圧縮センシングという手法が発見された [2]. 圧縮センシングの手法を CT 再構成に応用することで, 従来よりもはるかに少ない投影角度数の投影データからでも断面画像の構成が可能であることが多数報告されている [3][4]. また, 被写体の関心領域にのみ X 線を照射し, 画像再構成を行う interior CT においても, 圧縮センシングの原理を用いることで, 十分な断面画像の構成が可能であるという研究報告がある [6][7]. 本研究の目的は, 従来よりも小型で低被爆量の X 線 CT 装置が実現可能であることを明らかにすることである. そのために, 投影枚数 投影角度範囲 投影領域に制限を設けて撮影データを取得し, 制限の強い生データに圧縮センシングを用いた再構成を適用することで, 断面画像を復元することを試みる. 具体的には, (ⅰ) 従来研究で明らかであるが,CT 再構成に圧縮センシングを用いることで, 従来よりも少ない投影枚数から断面画像を再構成可能であることを追試する. (ⅱ) 通常の CT では対象物全体の投影像が得られるように検出器を設計するが, 検出器のサイズを制限し, 対象物の一部の投影像しか得られない条件で, 圧縮センシングによる再構成の性能を検証する. 1
7 (ⅲ) 測定部の回転角度が制限されており, 一定の角度範囲からしか X 線が照射できない条件で, 圧縮センシングによる再構成の性能を検証する. 以上の状況を想定し, 検出器サイズや角度を制限した投影を行う. これらの条件で十分な再構成画像を得ることができれば, 装置の小型化による省スペース化や, 被曝量の低減につながる. また, 従来手法との比較のため, 代表的な画像再構成手法であるフィルタ補正逆投影法 (FBP 法 ), 逐次近似法, 線型方程式を解く方法を利用した手法においても同様に画像再構成を行う. 本論文の構成は 次の通りである.2 章では, まず X 線コンピュータ断層撮影の原理について述べ, 次に, 従来の画像再構成手法としてフィルタ補正逆投影法 逐次近似法 線型方程式を解く方法について, 原理とアルゴリズムを記述する.3 章では, 圧縮センシングについて, 原理とそのアルゴリズムを記述する.4 章では, 圧縮センシングによる画像再構成の実験を行うにあたって, 設定した条件や実験環境を記述する.5 章において圧縮センシングによる画像再構成の結果を, 従来手法の画像再構成の結果とともに記述する. これにより,X 線の投影条件が制限された状況における, 圧縮センシングの効果を検証する. 2
, X 線の照射方向を t とすると, 検出器で測定される X 線の強度 I は以下の式で表される. I = I 0 exp{- f(x,y)dt } (2.1) - 式 (2.1) において両辺の対数をとると,X 線減衰率分布の t 軸に沿った線積分 g は以下の 式になる.")
8 2. X 線コンピュータ断層撮影 (X 線 CT) 2.1 X 線投影データの取得 図 2.1 に被写体の X 線投影データを取得する様子を示す.X 線源と X 線検出器を, 被 写体を挟んで対向配置し, 被写体を通過した X 線の強度を検出器で測定する.X 線源か ら照射された X 線の強度は, 被写体を通過するときに, 被写体の X 線減衰係数に応じて 指数関数的に減衰する. 照射する X 線の強度を I 0, 被写体のある x-y 断面における X 線 減衰係数分布を f(x,y), X 線の照射方向を t とすると, 検出器で測定される X 線の強度 I は以下の式で表される. I = I 0 exp{- f(x,y)dt } (2.1) - 式 (2.1) において両辺の対数をとると,X 線減衰率分布の t 軸に沿った線積分 g は以下の 式になる. g = f x,y dt = ln I (2.2) - I 0 図 2.1 X 線投影データの取得 2.2 CT における画像再構成の原理と投影データの取得 CT における画像再構成の基本原理は, オーストリアの数学者 J.Radon によって証明 3
 が被写体の周囲を回転するとともに, 各回転角度において, 回転軸の垂直方向に平行移動することにより, 投影データを全周方向から多数取得する.")
 の 2 次元分布を得る. 透過 X 線強度に対し, 式 (2.")
 からg(r,θ) への変換をラドン変換,g(r,θ) からf(x,y) への変換を逆ラドン変換,g(r,θ) を画像として表現したものをサイノグラムと呼ぶ. サイノグラムの一例を図 2.")
9 された, 二次元あるいは三次元の物体はその投影データの無限集合から一意に再構成できる という Radon の定理に基づく. CT 撮影では,X 線源と X 線検出器のペア ( 測定部 ) が被写体の周囲を回転するとともに, 各回転角度において, 回転軸の垂直方向に平行移動することにより, 投影データを全周方向から多数取得する.CT における投影データの取得について, 図 2.2 に示す. 回転角度をθ, 平行移動方向の位置をrとする. さまざまな回転角 θに対して測定部を平行移動させながら測定をすることで, 被写体を透過する X 線強度 ( 透過 X 線強度 ) の 2 次元分布を得る. 透過 X 線強度に対し, 式 (2.2) を用いることで X 線減衰量分布の線積分値の 2 次元分布 g(r,θ) が得られる. このg(r,θ) を 2 次元分布 f(x,y) に対する投影と呼ぶ. また,f(x,y) からg(r,θ) への変換をラドン変換,g(r,θ) からf(x,y) への変換を逆ラドン変換,g(r,θ) を画像として表現したものをサイノグラムと呼ぶ. サイノグラムの一例を図 2.3 に示す. 投影 g(r,θ) から, 線減衰係数の 2 次元分布 f(x,y) を求めることを再構成と呼ぶ. 図 2.2 CT における投影の測定 (CG-ARTS 協会, ディジタル画像処理,p.150, 図 8.5 を利用 ) 図 2.3 サイノグラムの例 4

 に示す値になる. これは図 2.4(a) に示す, 元の分布とは一致しない. 図 2.4 単純逆投影 図 2.4(b) を観察すると, 単純逆投影分布は, 元の 2 次元分布よりも広がりをもった値 になっている.")
10 2.3 従来の画像再構成アルゴリズムコンピュータで行われる実際の画像再構成法は, 解析的手法と代数的手法に大きく分けられる. 本論文では, 代表的な解析的手法としてフィルタ補正逆投影法 (FBP 法 ), 代表的な代数的手法として逐次近似法と線型方程式を解く方法について説明する フィルタ補正逆投影法 (FBP 法 ) 画像再構成において最も単純な方法は, 投影 g(r,θ) を空間領域に逆投影することである. これを単純逆投影法と呼ぶ 逆投影とは, 投影方向に沿って投影の値を均等に与えた 2 次元分布を得ることである. この逆投影を全ての方向について行い加算することで得られる 2 次元分布を単純逆投影分布という. しかし, この単純逆投影分布は再構成しようとしている元の分布とは一致しない. 図 2.4 に示す例を用いて, 単純逆投影分布が元の分布と一致しないことについて説明する. 図における投影サンプル 1 4 は投影 g(r,θ) の例である. この例のようになるのは, 被写体の X 線減衰係数の 2 次元分布 f(x,y) が, 中心で 100 の数値をとり, それ以外の位置で 0 となる場合である ( 図 2.4(a)). 投影の値を単純に逆投影すると, 単純逆投影分布は図 2.4(b) に示す値になる. これは図 2.4(a) に示す, 元の分布とは一致しない. 図 2.4 単純逆投影 図 2.4(b) を観察すると, 単純逆投影分布は, 元の 2 次元分布よりも広がりをもった値 になっている. 単純逆投影分布 b(x,y) と X 線減衰係数の 2 次元分布 f(x,y) は, 次式のよう 5
11 に点拡がり関数 h(x,y) によって関連付けられる. ここで * は畳み込み演算である. b x,y = f(x,y) * h(x,y) (2.3) さらに,h(x,y) は次式で与えられる. 1 h x,y = x 2 +y 2 (2.4) したがって, 単純逆投影分布 b(x,y) に対してh(x,y) をキャンセルするようなフィルタリングを行うことで,X 線減衰係数の 2 次元分布 f(x,y) を求めることができる. 実際には, 計算処理の負担の観点から, このような 2 次元フィルタリング処理を行うのではなく,h(x,y) をキャンセルするフィルタリングと同等の処理を, 投影 g(r,θ) のrに関する 1 次元フィルタリングとして行う. このようにして再構成を行う方法を, フィルタ補正逆投影法 (FBP) 法と呼ぶ 逐次近似法逐次近似法は, 繰り返しを利用して仮定画像を徐々に真の画像に近づけていく方法である. 以下の説明は, 文献 [5] の内容をまとめたものである. 逐次近似法の手順を図 2.5 に示す. まず初めに適当な仮定画像を作成しておき, 各方向に投影を行う. 仮定画像の投影データと真の画像の投影データの値が一致した場合, この断面画像の仮定は正しいといえる. 一方, 仮定画像の投影データと真の画像の投影データが異なる場合には, 真の画像の投影データに値が近くなるように, 仮定画像に修正を加える. そして, 再度, 仮定画像の投影を行い, 真の投影データと比較することを繰り返す. 図 2.5 逐次近似法の手順 仮定画像を修正する方法はさまざまなものが研究されてきたが, 近年,ML-EM (maximum likelihood expectation maximization) 法や, それを収束速度に関して改善した OS-EM(Ordered Subset Expectation Maximization) 法が開発された. これらの方法は, 測定されたデータがポアソン分布に従っていることを仮定したうえで, もっともらしい断層像を推定するものである. 6
12 ML-EM 法の繰り返しの式 ( 逐次式 ) は, 以下のように表される. λ j k+1 = k λ j I i=1 C ij I i=1 J m=1 y i C ij C im λ m k (2.5) ここで,k は繰り返し回数,j は画像の画素番号, すべての画素数は J である. また,i は投影データの検出器番号を表し, 全ての検出器の数は I である.λ k と λ (k+1) は, それぞれ k 回目と k+1 回目の仮定画像,y は真の画像の投影データである.C ij は画素番号 j, 検出器番号 i における, 画像と投影の関係を表す. この式を, 計算の手順に沿って分解して考えると以下のようになる. 1k 回目の仮定画像から投影データを作成する y i k = J m=1 C im λ m k (2.6) 2k 回目の仮定画像の投影データと真の画像の投影データの比を求める 32 で求めた比を逆投影する y i ' = y i y i k (2.7) λ ' j = 1 I i=1 C ij I i=1 y i ' C ij (2.8) 4k 回目の仮定画像に 3 の逆投影画像を掛けて k+1 回目に仮定画像を更新する λ k+1 j = λ k j λ ' j (2.9) 以上の計算手順を繰り返すことによって, 仮定画像 λ は真の画像に近づいていく. 仮 定画像 λ の投影データが真の画像の投影データとほぼ一致したところで繰り返しを打 ち切り, その仮定画像を再構成画像とすることが理想的である. しかし, 現状では繰り 返しの打ち切り条件は, 経験的に決めている. OS-EM 法は, 投影データをいくつかの組 ( サブセット ) に分割し, このサブセットに属 するデータのみで上記の ML-EM 法と同様の処理を行い, それをサブセットごとに繰り返 す方法である. サブセット数を 1 としたときに,OS-EM 法は ML-EM 法と等価になる. OS-EM 法では, 仮定画像の更新回数 =( サブセット数 ) ( 繰り返し回数 ) が成り立つ. 投影データをサブセットに分けることによって繰り返し 1 回あたりの仮定画像の更新 回数が増加し, その結果,ML-EM 法よりも速く真の画像に近づく 線型方程式を解く方法画像と投影の関係を行列とベクトルの計算式に置き換えて, 線形方程式を解くことで再構成画像を得る. なお,X 線 CT の画像再構成が大規模な線型方程式を解く問題に帰 7
13 着されることは, 付録 1 を参照のこと. 大規模な線型方程式を最小二乗法で解くことは, CT 技術の最も初期に検討された方法であるが, 一次方程式が大規模になり, 当時のコ ンピュータでは実用的な規模の画像を再構成することが不可能であった. そのため,FBP 法などの実用化が進んだ. 現在では, コンピュータの性能が向上したため, 再検討の余 地がある. また, この方法は本論文の主題である圧縮センシングによる画像再構成と類 似の方法でもある. 求めるべき画像を表すベクトルを x, 投影データを表すベクトルを b, 投影を表す行 列を A とすると, 投影の式を以下のように表すことができる. Ax = b (2.10) 単純に式 (2.10) から画像ベクトル x を求めることを考えると,A の逆行列 A -1 を計算す ることが可能であれば, 両辺の左に A -1 をかけることで, 以下のように解を求めること ができる. A -1 Ax = A -1 b x = A -1 b (2.11) A から逆行列を求めるには, 行列 A が正則 ( 正方行列で行列式が 0 でない ) でなければな らない.A の行数と階数 ( ランク ), 未知数の数が等しい場合は解を一意に求めることが できる. 一方, 投影の回数を十分に多くとった場合には,A の行数が未知数の数より大 きくなり, 投影回数が不十分な場合には,A の行数と階数が未知数の数より小さくなる. このようなときには通常の逆行列を求めることができない. そのような場合の, 一般的 な解法を以下に記述する. A の階数が未知数の数と等しく, 行数が未知数の数より大きい場合,Ax と b の二乗誤 差が最小になるような解を求めることが一般的である. これは, e 2 = Ax - b 2 (2.12) において,e が最小になるような x を最小二乗法で求めることに相当する. 最小二乗問題は, 基本的には正規方程式 A T Ax = A T b (2.13) を解くことに帰着される. これを解くために, 特異値分解を利用する. 特異値分解によ って, 階数 m の n m(n>m) 行列 A は, 以下の式のように分解される. A = UWV T (2.14) ここで,U は n 次直交行列,V は m 次直交行列,W は以下の式で表される対角行列であ る. W = D O n-m,m D = diag(σ 1,,σ m ) σ! σ! σ m > 0 式 (2.14) を特異値分解の式 (2.15) を用いて書き換えると, (2.15) 8
14 WV T x = U T b (2.16) となる.c = U T b とおくと, 式 (2.16) の解全体は, x = Vy y i = c i σ i 1 i m } (2.17) と表される. ここで,W の擬似的な逆行列として, W + = 1 σ 1 O O 1 σ m O m,n-m (2.18) を定義すると, 式 (2.16) は以下のように書くことができる. x = VW + U T b (2.19) これは式 (2.13) から導くことができる x = (A T A) -1 A T b (2.20) と同じ結果になる. A の階数が未知数の数より小さい場合, 解の L2 ノルムが最小になるような解を求める ことが一般的である. これは, 以下のような条件付最小化問題を解くことである. x = argmin x! subject to Ax=b (2.21) x 本研究では,n m の行列 A の階数と行数に応じて, 以下の表 2.1 のように解を求め ることとする. 表 2.1 行列 A の階数 行数と解の求め方 A のランク m m 未満 n>m 解の L2 ノルム最小化 n=m 二乗誤差の最小化解の L2 ノルム最小化 n>m 二乗誤差の最小化解の L2 ノルム最小化 9
15 3. 圧縮センシング 3.1 圧縮センシングの原理圧縮センシングは信号のスパース性に注目することで, 極めて少数のサンプリングデータから元信号を復元可能とする技術である.2006 年頃に,Donoho らや Candes らによって提唱された. ここで, 信号がスパース性をもつとは, 適切に基底変換を施すことにより, 信号の成分の大半が 0 になることを指す. なお, 圧縮センシング理論について付録 2 で説明し, 本文中では, 本研究に関係することだけを記述する. 圧縮センシングの基本的な問題設定は, 未知ベクトルを線形観測に基づいて推定することである.X 線 CT における断面画像と投影の関係を行列とベクトルの計算式に置き換えると式 (3.1) の形で表すことができ, これも未知ベクトルを線形観測に基づいて推定する問題である ( 式 (2.10) を式 (3.1) として再掲する ). Ax = b (3.1) 式 (3.1) における行列 Aを既知としたとき, 観測結果 bからベクトルxを推定する問題を考える. これはxを変数とする連立方程式を解くことと等価である でも述べたとおり, この連立方程式を通常の方法で解くためには, 行列 Aの行数とランク, 未知数 xの数が等しい必要がある. また, 行数が未知数の個数よりも多い場合には, 最小二乗解を求めることができる. 一方, 行列 Aのランクが未知数 xの数より少ない場合, 解を一意に求めることができない. このような場合の手法として, 解が真に近いほど値が小さくなるような評価関数 F(x) を構成し, それを最小化することが一般的である. 従来手法では, 評価関数 F(x) として解の L2 ノルムを用いることが多い. 一方, 圧縮センシングにおいては, 信号がスパース性を持つという仮定から, 解の L1 ノルムを用いる. 元信号がスパース性を持っているとき,L1 ノルムの利用が L2 ノルムの利用より優れていることを説明する. まず, 例としてz = (z 1,z 2 ) という 2 次元ベクトルを考える.L2 ノルムを最小化する評価関数を F(z) = z 1 2 +z 2 2,L1 ノルムを最小化する評価関数を F(z) = z 1 + z 2 とする. このとき F(z) がzの関数としてどのような等値線をとるかを, 図 3.1 に示す. このベクトルの要素である z 1 もしくは z 2 の値が0であるとき, このベクトルは疎であるといえる. つまり, 図 3.1 中では,z 1 軸上または z 2 軸上の点において, ベクトルは疎である. ここで, 図 3.1 中に赤い点で示したある疎な点 P(z 1 =1,z 2 =0) に注目する. このとき, 評価関数 F(z) の値は,L2 ノルム,L1 ノルム共に 1 であり 等価であることが確認できる. 次に,L1 ノルムにおいて評価関数 F(z) の値がこの疎な点 P と等しくなるような疎でない点 Q(z 1 =0.5,z 2 =0.5) を青い点で示す. 同じ点を L2 ノルムで注目すると, 点 P は点 Q の等値線の内側に入っており, 評価関数 F(z) の値は となっている. 以上のことから, L1 ノルムは L2 ノルムよりも疎でないベクトルの評価関数の値が 10
 式 (3.")
 z i + 0 z i! 0 以上の式を用いると, 式 (3.")
16 大きくなる傾向にある. したがって,L1 ノルムは L2 ノルムよりも疎な解を選びやすく なり, スパース性を持つ信号の再構成に優れていることがわかる. 図 3.1 L1 ノルムと L2 ノルムにおけるスパース性と評価値の関係 3.2 L1 ノルム最小化アルゴリズム 解候補の中で L1 ノルムが最小の解を求めることが主要な圧縮センシングの問題であ る. そこで, 以下のような条件付最小化問題を考える. x = arg min x x 1 subject to Ax = b (3.2) 式 (3.2) は, このままでは非線形最適化問題である. この問題は補助変数を導入して絶 対値を外すことで, 線形計画問題に帰着させることができる.x i が 0 以上の場合 x i に等 しく,x i が 0 以下の場合 0 になる変数を z!!,x i が 0 以下の場合 x i に等しく,x i が 0 以上 の場合 0 になる変数を z!! とする. すると, 以下の式が成り立つ. x i = z i + +z i! x i = z i + - z i! (3.3) z i + 0 z i! 0 以上の式を用いると, 式 (3.2) は以下のように書き換えることができる. (3.4) x=arg min x [z!! + z!! ] subject to A(z!! - z!! ) = b (3.5) 11
17 線形計画問題とは, いくつかの一次不等式および一次等式を満たす変数の値の間で, ある一次式を最大化または最小化する値を求める問題である. 式 (3.5) は, 補助変数に関する一次式を最小化する問題である. したがって, 線形計画問題である. 線形計画問題は,MATLAB の関数 linprog を用いて解くことができる. 絶対値を含む項が複数になった場合にも, 絶対値を含む項の数だけ補助変数を導入することによって, 上記同様に線形計画問題に帰着させることができる 12
18 4. 圧縮センシングによる投影からの画像再構成 4.1 シミュレーションプログラム CT 装置には,X 線源と検出器が被写体を挟んで対向配置されている ( この X 線源と検出器のペアのことを測定部と呼ぶ ). 測定部は被写体の周囲を回転しながら, 被写体の内部情報を取得していく. このときに, 再構成画像の画質に関与する投影条件として, X 線の照射回数 ( 投影回数 ), 測定部の回転角度 ( 投影角度範囲 ), 検出器のサイズ ( 投影領域 ) が挙げられる. 本論文では, これらの投影条件を制限して画像再構成を行うが, 投影条件を変更する度に CT 装置を用いて被写体の投影データを収集するのは, 現実的でない. そこで, 被写体の減衰係数を表す 2 次元画像から平行ビームを用いて投影データを取得するシミュレーションプログラムを用いて画像再構成を行う. 減衰係数を表す 2 次元画像から投影データを取得するには, ある投影角度から X 線が照射されたときに,2 次元画像の各画素が検出器の各ビンにどれだけ寄与するかを計算する必要がある. この寄与の割合を行列で表したものを観測行列とよぶ. 各画素の観測行列と減衰係数を掛けることにより, 検出器の各ビンにおける X 線減衰量を得ることができる. 観測行列の詳細な計算式については, 付録 1 に記載する. 被写体の減衰係数を表す 2 次元画像として,64 64 画素 (4096 画素 ) の以下のものを使用した. (Ⅰ) 疎画像 (ⅰ) ランダムドット画像 ( 図 4.1) (ⅱ) 文字画像 ( 図 4.2) (Ⅱ) ファントム画像 ( 図 4.3) (Ⅰ) の疎画像は, 画像の信号がスパースな 2 値画像である. これらは, 圧縮センシングにおけるスパース度 ( 画像中の画素値が 0 でない画素の個数 ) による画像再構成への影響を検証するために用いる.(ⅰ) のランダムドット画像は, 極力非零画素が構造を持たないよう, ランダムに画像中に 1- 画素を配置したものである. これにより, 画像中の構造による画像再構成への影響を無くし, スパース度の画像再構成への影響のみを調査することができる. ここでは,100-スパース( 図 4.1(a)),200-スパース ( 図 4.1(b)),400- スパース ( 図 4.1(c)),800-スパース ( 図 4.1(d)),1600-スパース ( 図 4.1(e)) の 4 種類のランダムドット画像を生成し, 使用する.(ⅱ) の文字画像は, 画像中の 1- 画素が文字の形に配置された, 構造を持つ 2 値画像である. 京 (100-スパース, 図 4.2(a)) 産 (200-スパース, 図 4.2(b)) 京産大 (400-スパース, 図 4.2(c)) という文字の構造を持つ画像を生成し, 使用する.(Ⅱ) のファントム画像は, 人体組織の断面を再現した濃淡画像であり, 人体の代用として用いられる. ここでは,X 線画像の研究で広く用いられ 13




19 る,Shepp-Logan ファントムというデジタル 3 次元モデルから生成したファントム画像を使用する.Shepp-Logan ファントムは, 頭蓋骨を想定したひとつの大きな楕円球の中に, 脳内の特徴を表す複数の楕円球が配置されたモデルである. Shepp-Logan ファントムのある水平平面における断面画像を, ファントム画像 ( 図 4.3) として使用する. なお 画素という画像サイズは実用的な観点からは不十分な大きさであるが, 画像サイズを大きくすると観測行列のメモリが大規模になり実行時間も長く要する. より大きな画像を用いた検証は今後の課題である. 図 4.1 ランダムドット画像 図 4.2 文字画像 図 4.3 ファントム画像 14
20 圧縮センシング問題は, 未知のベクトル x に対して, それを線形観測する行列 A と観測値ベクトル b が既知であるとき,x がスパースであるという条件のもとで x を推定することである. 本論文では, スパースであるという条件を x の L1 ノルムを最小にする解を求めることに帰着する. これをそのまま X 線 CT の画像再構成に応用すると, 未知ベクトル x は,X 線減衰率を表す画像を一次元化したベクトルになり, 線形観測行列 A は投影を表す行列になり, 観測値ベクトル b は全投影データを一次元化したベクトルになる. 再構成画像の画素値を並べたものを x, 画素の行番号をi, 列番号をj, 再構成画像の一辺のピクセル数をp, 観測行列をA, 投影データを b とする. 上記のランダムドット画像や文字画像のように原画像そのものがスパースである場合には, 最小化する評価関数 F x は, 以下のように解の L1 ノルムになる. p p F x = x i,j j=1 i=1 (4.1) この評価関数を最小化する問題を解くことにより, 再構成画像を得る. p p x = arg min x i,j x j=1 i=1 subject to Ax = b (4.2) 実際の断面画像において画素値はスパースでない. 全ての画素値が 0 以外の画素値を持つことが普通である. そこで, 断面画像において, 同一の組織内の画素値は一定であり, 組織の境界上でのみ画素値が変化すると仮定すると,CT 画像の勾配画像がスパースになる. よって, 評価関数は以下のようになる. p-1 p-1 F x = { x i,j -x i+1,j + x i,j -x i,j+1 } (4.3) j=1 i=1 この評価関数を最小化する問題を解くことにより, 再構成画像が得られる. p-1 p-1 x = arg min { x i,j -x i+1,j + x i,j -x i,j+1 } subject to Ax=b (4.4) x j=1 i=1 この式は補助変数を 2 つ導入することで線形計画問題に帰着させることができる. 本論文では, 線形計画問題を解くために,MATLAB の linprog 関数を使用した. 4.2 ノイズを考慮した画像再構成シミュレーションプログラムによる投影とは異なり, 実際の投影ではさまざまな誤差が生じる. 実際の CT の投影データに含まれる誤差として, 被写体の動きによるもの, フォトン数の揺らぎによるフォトンノイズ, 計測回路で生ずる回路ノイズがある. これ 15


21 らのノイズにより, 圧縮センシングにおける線形最小化問題の制約条件である等式が成立しなくなる. その結果, 正しい解を導くことが困難になる. そこで, 投影データの誤差をεという非常に小さな値まで許容するように式を変形し, その条件のもとで L1 ノルムの最小化を行う. このとき, 式は非線形最小化問題となる. 式の詳細と解の一例については付録 3 に記述する.5 章における実験においては, ノイズについて考慮しないものとする. 4.3 投影領域 投影角度範囲に制限を設けない画像再構成一般的な CT 装置において投影回数 投影領域 投影角度範囲がどのように設定されているかについて述べる. 第一に, 再構成画像一枚あたりの投影回数は, 数百から数千である. 第二に, 投影領域は一回の投影で被写体全体がカバーできるような大きさである. 第三に, 投影角度は 180 または 360 である. 投影角度を 180 としたときの撮影をハーフスキャン,360 としたときの撮影をフルスキャンと呼ぶ. フルスキャンの方がハーフスキャンよりも画質において優れているが, 被曝量の増大や被写体の動きによるアーチファクトの発生という理由から, ハーフスキャンを採用している装置が多く存在する. 上記の一般的な CT 装置の投影条件を考慮し, 投影条件に制限を設けない画像再構成においては, 投影領域を断面画像の一辺の長さの 2 倍, 投影角度範囲を 180 とした. これらの条件のもとで投影回数を変更し, どの程度の投影回数があれば十分な再構成画像が得られるかを検証した. 投影回数の変更について図 4.4 に示す. これは, 投影角度を 180 に設定したときに, 投影回数を 4 回から 2 回に減少させた例である. このように, 投影は投影角度範囲を投影回数で割った角度刻みで行った. 再構成画像の画質評価には, ピーク信号対雑音比 (PSNR) を使用し,PSNR が 40dB 以上であれば, 十分な再構成画像が得られたと判断した. 図 4.4 投影回数の変更 16

 を使用し, PSNR が 40dB 以上であれば, 十分な再構成画像が得られたと判断した.")
22 4.4 投影領域 投影角度範囲に制限を設けた画像再構成投影領域 投影角度範囲をそれぞれ制限した投影を行い, そのデータを用いて圧縮センシングによる画像再構成を行った. 投影領域制限について図 4.5 に, 投影角度範囲制限について図 4.6 に示す. 投影回数は,4.3 において十分な再構成画像を得られる最低限の投影回数と, その回数の 2 倍の投影回数を設定した. 投影角度は,10 から 180 まで,10 刻みで増加させていき, それぞれ画像再構成を行った. 投影領域は, 制限を設けない場合の 10% から 100% まで,10% 刻みで増加させていき, それぞれ画像再構成を行った. これにより, 投影領域, 投影角度範囲がそれぞれ制限された状況において, 十分な画像再構成が可能であるか検証した. 再構成画像の画質評価には, 投影領域 投影角度範囲に制限を設けない画像再構成と同様にピーク信号対雑音比 (PSNR) を使用し, PSNR が 40dB 以上であれば, 十分な再構成画像が得られたと判断した. また, この実験において, ランダムドット画像については 400-スパースの画像を用いて実験を行った. これは, ファントム画像の勾配画像が 502-スパースであり, 実験に用いたランダムドット画像の中では 400-スパースのランダムドット画像が最もスパース度が近いためである. 図 4.5 投影領域制限の概要 17
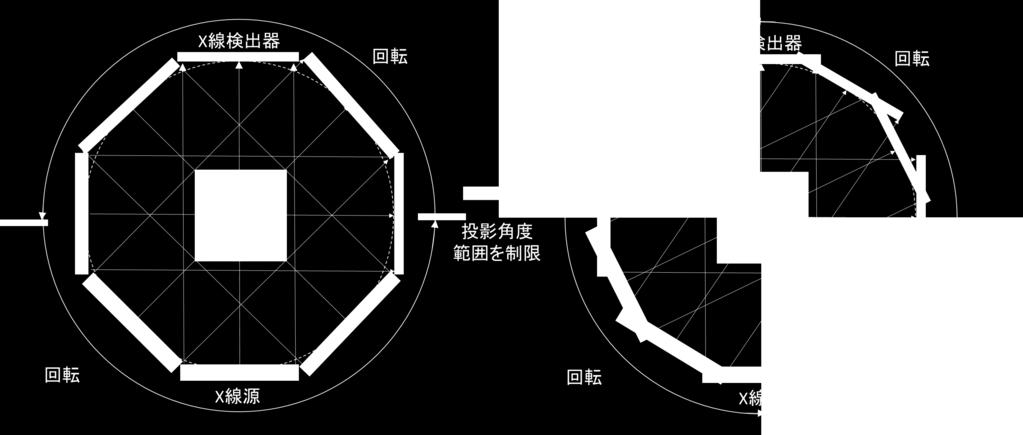
23 図 4.6 投影角度範囲制限の概要 18


24 5. 実験と考察 5.1 疎画像の再構成 投影領域 投影角度範囲に制限がない場合投影領域と投影角度範囲に制限がない場合の, 各投影回数におけるランダムドット画像の再構成画像を図 5.1~ 図 5.5 に,PSNR を図 5.6 に示す.100-スパースのランダムドット画像は投影回数が 6 回以上,200-スパースでは投影回数が 9 回以上,400-スパースでは投影回数が 17 回以上,800-スパースでは投影回数が 32 回以上,1600-スパースでは投影回数が 65 回以上のときに PSNR が 40dB 以上となり, 十分な再構成画像が得られた. 図 5.1 投影領域 投影角度範囲に制限がない場合の再構成画像 ( ランダムドット画像,100- スパース ) 図 5.2 投影領域 投影角度範囲に制限がない場合の再構成画像 ( ランダムドット画像,200- スパース ) 19
 図 5.")
 図 5.")
25 図 5.3 投影領域 投影角度範囲に制限がない場合の再構成画像 ( ランダムドット画像,400- スパース ) 図 5.4 投影領域 投影角度範囲に制限がない場合の再構成画像 ( ランダムドット画像,800- スパース ) 図 5.5 投影領域 投影角度範囲に制限がない場合の再構成画像 ( ランダムドット画像,1600- スパース ) 20

26 図 5.6 投影領域 投影角度範囲に制限がない場合の再構成画像の PSNR ( ランダムドット画像 ) 投影領域と投影角度範囲に制限がない場合の, 各投影回数における文字画像の再構成画像を図 5.7~ 図 5.9 に,PSNR を図 5.10 に示す.100-スパースの文字画像 京 は投影回数が 6 回以上,200-スパースの文字画像 産 では投影回数が 8 回以上,400-スパースの文字画像 京産大 では投影回数が 12 回以上のときに十分な再構成画像が得られた. 図 5.7 投影領域 投影角度範囲に制限がない場合の再構成画像 ( 文字画像 京,100- スパース ) 21
 図 5.10")
27 図 5.8 投影領域 投影角度範囲に制限がない場合の再構成画像 ( 文字画像 産,200- スパース ) 図 5.9 投影領域 投影角度範囲に制限がない場合の再構成画像 ( 文字画像 京産大,400- スパース ) 図 5.10 投影領域 投影角度範囲に制限がない場合の再構成画像の PSNR( 文字画像 ) 投影領域に制限を設けた場合 400- スパースのランダムドット画像に対し, 投影領域に制限を設けて投影を行い, 画 22
28 像再構成を行った. 投影回数を最低投影回数に設定したときの再構成画像を図 5.11 に, 投影回数を最低投影回数の 2 倍に設定したときの再構成画像を図 5.12 に示す. また, 再構成画像の PSNR を図 5.13 に示す. 投影回数を最低投影回数に設定したときには投影領域が 70% 以上のときに, 投影回数を最低投影回数の 2 倍に設定したときには投影領域が 40% 以上のときに, 十分な再構成画像が得られた. 図 5.11 投影領域に制限を設けた場合の再構成画像 ( ランダムドット画像,400- スパース, 投影回数 = 最低投影回数 ) 図 5.12 投影領域に制限を設けた場合の再構成画像 ( ランダムドット画像,400- スパース, 投影回数 = 最低投影回数の 2 倍 ) 23

29 図 5.13 投影領域に制限を設けた場合の再構成画像の PSNR ( ランダムドット画像,400- スパース ) 文字画像に対し, 投影領域に制限を設けて投影を行い, 画像再構成を行った. 京, 産, 京産大 という文字画像に対して投影回数を最低投影回数に設定したときの再構成画像をそれぞれ図 5.14, 図 5.17, 図 5.20 に, 投影回数を最低投影回数の 2 倍に設定したときの再構成画像をそれぞれ図 5.15, 図 5.18, 図 5.21 に示す. また, 再構成画像の PSNR をそれぞれ図 5.16, 図 5.19, 図 5.22 に示す. 投影回数を最低投影回数に設定したときには, 文字画像 京 は投影領域が 40% 以上のときに, 文字画像 産 は投影領域が 50% 以上のときに, 文字画像 京産大 は投影領域が 60% 以上のときに, それぞれ十分な再構成画像が得られた. 投影回数を最低投影回数の 2 倍に設定したときには文字画像 京 は投影領域が 30% 以上のときに, 文字画像 産 は投影領域が 40% 以上のときに, 文字画像 京産大 は投影領域が 50% 以上のときに, それぞれ十分な再構成画像が得られた. 24
30 図 5.14 投影領域に制限を設けた場合の再構成画像 ( 文字画像 京,100- スパース, 投影回数 = 最低投影回数 ) 図 5.15 投影領域に制限を設けた場合の再構成画像 ( 文字画像 京,100- スパース, 投影回数 = 最低投影回数の 2 倍 ) 25
31 図 5.16 投影領域に制限を設けた場合の再構成画像の PSNR ( 文字画像 京,100- スパース ) 図 5.17 投影領域に制限を設けた場合の再構成画像 ( 文字画像 産,200- スパース, 投影回数 = 最低投影回数 ) 図 5.18 投影領域に制限を設けた場合の再構成画像 ( 文字画像 産,200- スパース, 投影回数 = 最低投影回数の 2 倍 ) 26
")
32 図 5.19 投影領域に制限を設けた場合の再構成画像の PSNR ( 文字画像 産,200- スパース ) 図 5.20 投影領域に制限を設けた場合の再構成画像 ( 文字画像 京産大,400- スパース, 投影回数 = 最低投影回数 ) 27

33 図 5.21 投影領域に制限を設けた場合の再構成画像 ( 文字画像 京産大,400- スパース, 投影回数 = 最低投影回数の 2 倍 ) 図 5.22 投影領域に制限を設けた場合の再構成画像の PSNR ( 文字画像 京産大,400- スパース ) 投影角度範囲に制限を設けた場合 400-スパースのランダムドット画像に対し, 投影角度範囲に制限を設けて投影を行い, 画像再構成を行った. 投影回数を最低投影回数に設定したときの再構成画像を図 5.23 に, 投影回数を最低投影回数の 2 倍に設定したときの再構成画像を図 5.24 に示す. また, 再構成画像の PSNR を図 5.25 に示す. 投影回数を最低投影回数に設定したときには投影角度範囲が 110 以上 (130 を除く ) のときに, 投影回数を最低投影回数の 2 倍に設定したときには投影角度範囲が 50 以上 (80 を除く ) のときに, 十分な再構成画像が得られた.( なお, この実験結果のように, 本来ならば十分な再構成画像が得られるはずの条件でありながら, それに失敗する場合がある. これはプログラムに存在するバ 28
 図 5.")
34 グによるものであると思われる.) 図 5.23 投影角度範囲に制限を設けた場合の再構成画像 ( ランダムドット画像,400- スパース, 投影回数 = 最低投影回数 ) 図 5.24 投影角度範囲に制限を設けた場合の再構成画像 ( ランダムドット画像,400- スパース, 投影回数 = 最低投影回数の 2 倍 ) 図 5.25 投影角度範囲に制限を設けた場合の再構成画像の PSNR ( ランダムドット画像,400- スパース ) 29
 のときに, 文字画像 京産大 は投影角度範囲が 160 以上のときに, それぞれ十分な再構成画像が得られた.")
35 文字画像に対し, 投影角度範囲に制限を設けて投影を行い, 画像再構成を行った. 京, 産, 京産大 という文字画像に対して投影回数を最低投影回数に設定したときの再構成画像をそれぞれ図 5.26, 図 5.29, 図 5.32 に, 投影回数を最低投影回数の 2 倍に設定したときの再構成画像をそれぞれ図 5.27, 図 5.30, 図 5.33 に示す. また, 再構成画像の PSNR をそれぞれ図 5.28, 図 5.31, 図 5.34 に示す. 投影回数を最低投影回数に設定したときには, 文字画像 京 は投影角度範囲が 110 以上のときに, 文字画像 産 は投影角度範囲が 130 以上 (170 を除く ) のときに, 文字画像 京産大 は投影角度範囲が 160 以上のときに, それぞれ十分な再構成画像が得られた. 投影回数を最低投影回数の 2 倍に設定したときには文字画像 京 は投影角度範囲が 50 以上のときに, 文字画像 産 は投影角度範囲が 90 以上のときに, 文字画像 京産大 は投影角度範囲が 80 以上 (90 は除く ) のときに, それぞれ十分な再構成画像が得られた. 図 5.26 投影角度範囲に制限を設けた場合の再構成画像 ( 文字画像 京,100- スパース, 投影回数 = 最低投影回数 ) 図 5.27 投影角度範囲に制限を設けた場合の再構成画像 ( 文字画像 京,100- スパース, 投影回数 = 最低投影回数の 2 倍 ) 30
 図 5.")
36 図 5.28 投影角度範囲に制限を設けた場合の再構成画像の PSNR ( 文字画像 京,100- スパース ) 図 5.29 投影角度範囲に制限を設けた場合の再構成画像 ( 文字画像 産,200- スパース, 投影回数 = 最低投影回数 ) 図 5.30 投影角度範囲に制限を設けた場合の再構成画像 ( 文字画像 産,200- スパース, 投影回数 = 最低投影回数の 2 倍 ) 31
 図 5.")
37 図 5.31 投影角度範囲に制限を設けた場合の再構成画像の PSNR ( 文字画像 産,200- スパース ) 図 5.32 投影角度範囲に制限を設けた場合の再構成画像 ( 文字画像 京産大,400- スパース, 投影回数 = 最低投影回数 ) 図 5.33 投影角度範囲に制限を設けた場合の再構成画像 ( 文字画像 京産大,400- スパース, 投影回数 = 最低投影回数の 2 倍 ) 32


38 図 5.34 投影角度範囲に制限を設けた場合の再構成画像の PSNR ( 文字画像 京産大,400- スパース ) 5.2 ファントム画像の再構成 投影領域 投影角度範囲に制限がない場合投影領域と投影角度範囲に制限がない場合の, 各投影回数におけるファントム画像の再構成画像を図 5.35 に, 再構成画像の PSNR を図 5.36 に示す. 投影領域 投影角度範囲に制限がない場合では, 投影回数が 14 回以上のときに PSNR が 40dB 以上となり, 十分な再構成画像が得られた. 図 5.35 投影領域 投影角度範囲に制限がない場合の再構成画像 ( ファントム画像 ) 33

39 図 5.36 投影領域 投影角度範囲に制限がない場合の再構成画像の PSNR ( ファントム画像 ) 投影領域に制限を設けた場合ファントム画像に対し, 投影領域に制限を設けて投影を行い, 画像再構成を行った. 投影回数を最低投影回数に設定したときの再構成画像を図 5.37 に, 投影回数を最低投影回数の 2 倍に設定したときの再構成画像を図 5.38 に示す. また, 再構成画像の PSNR を図 5.39 に示す. 投影回数を最低投影回数に設定したときには投影領域が 70% 以上のときに, 投影回数を最低投影回数の 2 倍に設定したときには投影領域が 60% 以上のときに, 十分な再構成画像が得られた. 図 5.37 投影領域に制限を設けた場合の再構成画像 ( ファントム画像, 投影回数 = 最低投影回数 ) 34
 5.2.")

40 図 5.38 投影領域に制限を設けた場合の再構成画像 ( ファントム画像, 投影回数 = 最低投影回数の 2 倍 ) 図 5.39 投影領域に制限を設けた場合の再構成画像の PSNR ( ファントム画像 ) 投影角度範囲に制限を設けた場合ファントム画像に対し, 投影角度範囲に制限を設けて投影を行い, 画像再構成を行った. 投影回数を最低投影回数に設定したときの再構成画像を図 5.40 に, 投影回数を最低投影回数の 2 倍に設定したときの再構成画像を図 5.41 に示す. また, 再構成画像の PSNR を図 5.42 に示す. 投影回数を最低投影回数に設定したときには投影角度範囲が 180 のときのみ, 投影回数を最低投影回数の 2 倍に設定したときには投影角度範囲が 150 以上 (170 を除く ) のときに, 十分な再構成画像が得られた. 35
41 図 5.40 投影角度範囲に制限を設けた場合の再構成画像 ( ファントム画像, 投影回数 = 最低投影回数 ) 図 5.41 投影角度範囲に制限を設けた場合の再構成画像 ( ファントム画像, 投影回数 = 最低投影回数の 2 倍 ) 図 5.42 投影角度範囲に制限を設けた場合の再構成画像の PSNR ( ファントム画像 ) 36
 FBP 法 逐次近似法 線形方程式を解く方法 PSNR 19.16 22.60 12.")
42 5.3 従来手法によるファントム画像の再構成最初に, 投影回数を 14 回 ( 圧縮センシングにおいて十分な再構成画像が得られた最低投影回数 ) に設定した. 投影領域と投影角度範囲には制限を設けず, 画像再構成を行った. 各手法による再構成画像を図 5.43 に,PSNR を表 5.1 に示す. いずれの手法においても, 十分な再構成画像を得られなかった. 図 5.43 投影回数を 14 回に設定した場合における従来手法の再構成画像 表 5.1 投影回数を 14 回に設定した場合における従来手法の再構成画像の PSNR( 単位 :db) FBP 法 逐次近似法 線形方程式を解く方法 PSNR 次に, 投影回数を 180 回に設定し, 投影領域 投影角度範囲に制限がない場合, 投影領域を 50% に制限した場合, 投影角度範囲を 90 に制限した場合についてそれぞれ画像再構成を行った. 図 5.44 に FBP 法, 図 5.45 に逐次近似法, 図 5.46 に線型方程式を解く方法における再構成画像を示す. また, 表 5.2 に以上の条件における各手法の再構成画像の PSNR を示す.FBP 法と逐次近似法においては, 投影領域を制限すると, 制限を設けた領域については十分な再構成画像が得られなかった. また,FBP 法と逐次近似法において, 投影角度範囲を制限すると, 制限を設けた角度部分について十分な再構成画像が得られなかった. 線型方程式を解く方法においては, 投影領域を制限した場合と投影角度範囲を制限した場合の両方で十分な再構成画像が得られた. 37
43 図 5.44 FBP 法を用いた画像再構成 図 5.45 逐次近似法を用いた画像再構成 図 5.46 線型方程式を解く方法を用いた画像再構成 表 5.2 様々な投影条件下における従来手法の再構成画像の PSNR( 単位 :db) 投影領域 投影角度制限なし 投影領域を 50% に制限 投影角度を 90 に制限 FBP 法 逐次近似法 線形方程式を解く 方法
44 5.4 実験結果の考察圧縮センシングによる疎な画像の再構成では, 画像の非零要素が多くなるほど, 十分な再構成画像を得るために必要な投影回数が増加した. また, ランダム画像と文字画像を, 十分な再構成画像を得るために必要な投影回数で比較すると, ランダム画像がより多くの回数を必要とした. 以上のことから, 一般の断層画像を圧縮センシングで再構成する場合, スパース度が高く, かつ, 構造を持つように変換することが重要である. 投影領域 投影角度範囲を制限しない場合のファントム画像の再構成において, 従来手法と圧縮センシングを比較する. 投影回数を 14 回に設定したときに, 圧縮センシングでは十分な再構成画像を得られたが, 従来手法では十分な再構成画像を得られなかった. このことから, 圧縮センシングは従来よりも少ない撮影枚数から断面画像の再構成が可能であることが確認できた. 投影領域を制限した場合,FBP 法と逐次近似法では, 投影回数を増加させても, 十分な再構成画像が得られなかった. 一方, 圧縮センシングと線型方程式を解く方法では, 投影回数を増加させれば, 十分な再構成画像が得られた. 圧縮センシングにおいては, 投影回数を増加させることで, より厳しい制限において十分な画像再構成が可能になる傾向が見られた. 投影角度範囲を制限した場合,FBP 法と逐次近似法では, 投影回数を増加させても十分な再構成画像が得られなかった. 一方, 圧縮センシングと線型方程式を解く方法では, 投影回数を増加させれば十分な再構成画像が得られた. 圧縮センシングにおいては, 投影回数を増加させることで, より厳しい制限において十分な画像再構成が可能になる傾向が見られた. 以上の結果からは, 投影領域 投影角度範囲それぞれを制限した場合の圧縮センシングと線型方程式を解く方法の違いを検証できていない. そこで, 投影領域を 50% に制限した場合に十分な再構成画像が得られる最低投影回数と, 投影角度範囲を 90 に制限した場合に十分な再構成画像が得られる最低投影回数を, 両手法において調査した. その結果, 線型方程式を解く方法は, 投影領域を 50% に制限した場合は投影回数が 87 回以上, 投影角度範囲を 90 に制限した場合は投影回数が 59 回以上必要であった. 一方圧縮センシングは, 投影領域を 50% に制限した場合は投影回数が 34 回以上, 投影角度範囲を 90 に制限した場合は投影回数が 36 回以上必要であった. 39
45 6. 結論 6.1 成果本研究では投影回数 投影領域 投影角度範囲をそれぞれ制限し, 圧縮センシングによる画像再構成を行った. また, 比較のため, 代表的な従来手法である FBP 法, 逐次近似法, 線型方程式を解く方法による画像再構成を行った. その結果, 以下のことが確認できた (ⅰ) 圧縮センシングは, 投影領域 投影角度範囲に制限を設けない場合に, 従来手法よりも少ない投影回数で十分な再構成画像が得られた. (ⅱ) 投影領域を制限した場合,FBP 法と逐次近似法では十分な再構成画像が得られなかった. 線型方程式を解く方法と圧縮センシングでは投影回数を増加させることにより十分な再構成画像が得られた. 十分な再構成画像を得るのに必要な投影回数は圧縮センシングの方が少なかった. (ⅲ) 投影角度範囲を制限した場合,FBP 法と逐次近似法では十分な再構成画像が得られなかった. 線型方程式を解く方法と圧縮センシングでは投影回数を増加させることにより十分な再構成画像が得られた. 十分な再構成画像を得るのに必要な投影回数は圧縮センシングの方が少なかった. 以上から, 投影回数 投影領域 投影角度範囲といった撮影条件が制限されるような状況においても, 圧縮センシングは十分な再構成画像を得ることができる. 圧縮センシングを CT 画像再構成に用いることで, 装置の小型化による省スペース化や被曝量の低減が期待できる. 具体的には, 以下のようなことが実現可能であると考えられる. (ⅰ) 投影角度範囲を 90 に制限した場合, X 線源と X 線検出器を分離することによる装置の小型化が可能である. 被曝線量は, 従来の線形方程式を解く方法の 61% に低減することができる. (ⅱ) 投影領域を 50% に制限した場合, 被曝線量を従来の線形方程式を解く方法の 39% に低減することができる. 6.2 課題従来手法と比較すると, 圧縮センシングは画像再構成の計算に, より長い時間を要した. 本論文のファントム画像の画像再構成の実験において,FBP 法 逐次近似法 線型方程式を解く方法では投影回数を 100 回程度に設定すると, 数十秒で一枚の再構成画像を得られたのに対し, 圧縮センシングは投影回数を 50 回程度に設定したときに, 数十分の時間を要した. 本論文では, 投影領域 投影角度範囲を制限した投影条件においても, 投影回数を増加させることにより十分な再構成画像が得られることを確認できた. しかし, 十分な再 40
46 構成画像が得られる投影領域 投影角度範囲の限界については, 前述の計算時間の問題 もあり十分に確認できておらず, 今後の課題である. 41
47 参考文献 [1] 経済産業省資源エネルギー庁, 日常生活で受ける放射線と人体影響, anko02.pdf. [2] David L. Donoho, Compressed Sensing,IEEE Transactions on Information Theory,Vol.52,No.4,pp ,2006. [3] 工藤博幸, イサム ラシド, 圧縮センシングを用いた少数方向投影データからの CT 画像再構成, 映像情報メディカル,Vol.43,pp ,2011. [4] Kihwan Choi,Jing Wang,Lei Zhu,Tae-Suk Suh,Stephen Boyd,Lei Xing, Compressed sensing based cone-beam computed tomography reconstruction with a first-order method,medicalphysics,vol.37,no.9,pp ,2010. [5] 篠原広行, 中世古和真, 坂口和也, 橋本雄幸, 逐次近似画像再構成の基礎, 医療科学社, pp.24-28,2013. [6] Hiroyuki Kudo,Taizo Suzuki,Essam A. Rashed, Image reconstruction for sparse-view CT and interior CT - introduction to compressed sensing and differentiated backprojection,quantitative Imaging in Medicine and Surgery, Vol.3,No.3,pp ,2013. [6] Hengyong Yu,Ge Wang, Compressed sensing based interior tomography, Physics in Medicine and Biology,Vol.54,pp ,
48 謝辞本論文の作成にあたり, 懇切丁寧な指導を賜りました蚊野浩教授に深く感謝致します. また, 精神面で支えてくれた友人, 大学院進学にあたり生活面で援助いただいた家族に深く感謝致します. 43
49 付録 1:X 線 CT における観測行列の生成 1. 投影像の生成図 A1-1 に角度 45 で投影像を生成する様子を示す 測定対象物を正方形小領域の2 次元配列で表現する 各小領域にその部分の X 線減衰量を対応させる 全ての小領域が 図のように 一次元センサに垂直投影される 一次元センサはビンとよばれる要素に分割されている 全ての小領域の X 線減衰量はいずれかのビンに対応づけられ 同じビンに投影される減衰量を加算し投影像を生成する 図 A1-1 投影像の生成 一次元センサを構成する要素であるビンの横幅は 正方形小領域の一辺の長さと同じに設定する 測定対象物の中心が投影される位置をセンサの中央に合わせる センサ全体の長さ ( ビン数 ) は測定対象物の対角線をカバーする 例えば 測定対象物の大きさが の場合 センサの長さは 2 ceil(32 2 )=92 となる ここで ceil() は小数を整数に切り上げる関数である ビンの横幅は正方形小領域の一辺の長さと同じに設定することが望ましい より短く設定すると高精細な投影データを得ることができるように思えるが 対応する観測行列がランク落ちするため 線形従属する行を削除する手間が増える. より長く設定すると 投影データの解像度が落ちするため より多くの投影枚数が必要になる 44
50 2. 観測行列の生成ある投影角度で 一つ小領域がセンサのビンと図 A1-2 の位置関係になっていたとする 小領域の減衰量を投影するとき 図のように小領域を 4 分割し 分割した領域の X 線減衰量を元の小領域の減衰量の 1/4 にする そして その減衰量をセンサのビンに投影する 投影位置がビンの中央であれば 投影を受けたビンにだけ投影加算する 投影位置がビンの中央からずれておれば 隣接するビンとの間で減衰量を比例配分する これを全ての小領域に繰り返すことで その投影角度での投影データを生成する ( この方法は Matlab の radon 関数のヘルプページに説明されている方法である ) 図 A1-2 減衰量の 4 分割投影 測定対象物の N N 個の減衰量を一次元に並べたものを x=(x 1, x 2,, x N N ) T とする ( T は x を縦ベクトルにするための転置を表す ) 投影角度 i における投影データを y i =(y i1, y i2,, y il ) T とする ただし L はビンの総数である y i は 図 A1-2 に示す小領域の投影を全体で加算したものであるから x と y i の間に式 (A1-1) の関係がある y i = A i x (A1-1) ここで A i は L N 2 の行列である 全ての投影角度について式 (A1-1) を書き並べ 全ての y i を並べた縦ベクトルを y 全ての A i を並べた行列を A とすると X 線 CT の投影データ全体を式 (A1-2) と表すことができる A を X 線 CT の観測行列とよぶ y = Ax (A1-2) 45
51 一例として測定対象物が センサのビン数が 92 投影の角度数が 20 の場合 式 (A1-2) の観測行列 A は になる ここで 1840= =64 64 である 式 (A1-2) は連立一次方程式を表す 連立する式の中で 像が投影されない行は対応する A の行の要素が全て 0 である そのような行は冗長な行であるから削除することができる 46
52 付録 2: 圧縮センシング理論の概要 付録 2 は この付録の参考文献である 4 件の解説論文をまとめたものである 1. はじめにデジタル写真など多くのデジタル画像は冗長で無駄の多い情報である デジタル画像を JPEG で保存すると 1/10 程度に圧縮しても画質の劣化はほとんど気にならない JPEG の場合 画像を 8 8 画素のブロックに分割し 64 個の画素値を 64 個の DCT( 離散コサイン変換 ) 係数に変換する これは 8 8 画素の小画像を DCT で表現された基底画像の線形和に分解することに相当する このとき 直流成分および低周波成分の係数が大きくなり 高周波成分の係数は急速に小さくなる したがって 写真画像は直流成分といくつかの低周波成分を用いれば ほぼ忠実に再現することができる 冗長性の高い生画像を入力し データ量を圧縮して保存する これが画像入力 保存の通常の流れであるが 入力段階で冗長な生画像を撮影することなく 最初から圧縮された形式で取り込むことはできないのだろうか それが可能であれば まず圧縮された形で画像を入力し 人間が観察する段階で通常のデジタル画像に展開することになる 圧縮センシングの考え方は このようなことを可能にする技術である デジタル写真を入力する段階で画像センサ面を高精細に空間サンプリングすることが 生画像に冗長性が生じる原因である しかし サンプリングは標本化定理に基づいて行わねばならず ナイキスト周波数以上の解像度が要求される このように 標本化定理に基づく画像入力原理では圧縮センシングの考え方は実現不可能である 一方 入力信号に厳しい条件をつければ このような事が可能になるかもしれない 圧縮センシングでは入力信号にスパース性 ( 圧縮可能性 ) を仮定する スパースという言葉は N 個の数値があったとき その多くがゼロであることを意味する 入力信号がスパース性を有するとは それが スパースな信号源から線形変換されたものであることを意味する 圧縮センシングの理論によると 入力信号がスパース性を持てば 少ない入力データ量であっても それに何らかの復元処理を加えることで 高精細な信号を生成できる 47
53 2. 一般の線形観測問題 未知の実数値ベクトル x=(x 1, x 2,, x N ) があり これに線形変換を加えることで スカラー値 y を得るならば y= a 1 x 1 + a 2 x 2 + +a N x N =a x である x は観測対象 の状態を表す未知数 a は観測装置の特性 y は観測装置の出力と考えることが できる このような観測を 1 回の観測ごとに線形変換の係数を変えて M 回 行う 各観測における係数ベクトルを a i =(a i1, a i2,, a in ) i=1 M 観測値を y=(y 1, y 2,, y M ) とする これを M N の行列! a $ # 1 & # a A = 2 & # &! # " a M & % を使って y = Ax (A2-1) (A2-2) と表現することができる これは x を未知数とする連立一次方程式である A を観測行列とよぶ 観測行列 A が既知で 観測値 y から x を推定する問題を考える A の全ての 行が線形独立で x について事前知識がなければ この問題は M と N の大小関 係によって 表 A2-1 のように分類できる M<N M=N M>N 表 A2-1 連立一次方程式の式数と未知数の関係観測データが不足しているため 式 (A122) を満たす解は無数にある x の l 2 ノルムを最小にする解であれば A の一般逆行列を A - として x = A - y として求めることができる 式 (A2-2) を満たす唯一の解が存在する 観測データが多すぎるため 式 (A2-2) を満たす解はない 式 (A2-2) を最小二乗近似する解であれば A の一般逆行列を A - として x = A - y として求めることができる 3. 圧縮センシング 3.1 ノルムの定義圧縮センシングではノルムが重要な働きをする ここで ベクトルのノルムを説明する ベクトルのノルムはベクトルの距離を表す概念である 通常 単 48
54 にベクトルのノルムと言えば ベクトルの要素の二乗和の平方根であり x = x x x N 2 となる これを l 2 ノルム あるいはユークリッドノルムと もよぶ より一般的なノルムとして p- ノルムがある これは x p = p x 1 p p p + x x N と定義されるものである p=1 の場合 x 1 = x 1 + x x N となり これを l 1 ノルムとよぶ p=0 に対して p-ノルムは定義できないが 別途 x の非ゼロ要素の個数を l 0 ノルムと定義する 図 A2-1 に2 次元空間におけるノルム =1 の等ノルム線を l 0 ノルム l 1 ノルムl 2 ノルムについて示す l 0 ノルムの場合 原点を除く軸上でノルム =1 となる l 2 ノルムは等ノルム線上において 原点からのユークリッド距離が等しくなる l 1 ノルムは両者の中間的な性質を持つ. y y 1 y 1 x x x l 0 l 1 l 2 図 A2-1 等ノルム線 ノルムはベクトル空間に距離の概念を定義するものである 距離は三角不等式 (2 辺の和が他辺よりも長い ) が成り立たねばならないが 0 p<1 のノルムはこれが成立しない このため ノルムに準じた性質のものであるとして 準ノルムとよばれる 3.2 スパース信号と圧縮可能信号ベクトル x の N 個の要素の中で ゼロでない要素が高々 K 個であるとき x は K-スパースであるという 一方 現実の信号が完全にスパースであるとは考え難い JPEG 圧縮信号のように 多くの信号をゼロとして扱っても元の信号 49
55 に非常に近い場合 圧縮可能信号とよぶ 圧縮可能信号は K 個の大きな値とそ れ以外の非常に小さい値からなる信号である 3.3 圧縮センシング問題 N 個の要素からなる原信号 x が K スパースであり K が N よりも十分小さいという条件のもとで x を線形変換した観測信号から x を推定することが基本的な圧縮センシング問題である これを推定する方法として 式 (A2-2) を拘束条件として x の l 0 ノルムを最小化する式 (A2-3) を考える この方法を l 0 再構成とよぶ ˆx (0) = argmin x x 0 subject to y = Ax (A2-3) l 0 再構成によって得る解は M>K であれば ほとんどいつも正しい推定結果を与える その理由を次のように理解することができる 線形制約 y=ax は N 次元空間において余次元 M のアフィン部分空間 L(y) を定める また K-スパースな x の集合は K 個の基本ベクトルで張る K 次元部分空間の和集合 S K に対応する K-スパースなベクトル x は L(y) S K に属する 一方で 余次元 M のアフィン空間と K 次元部分空間は 一般の位置にあれば M>K のとき交点を持たなない それにも関わらず解が存在する ( 余次元 M のアフィン空間と K 次元部分空間が交点を持つ ) のであれば それは正解であろう したがって M>K の場合 L(y) S K が空集合でなければ {x} に等しいと考えてよい l 0 再構成は優れた方法であるが 一般には NP 困難であり 計算に必要な時間が N に関して指数関数的に増大する 実用的な問題に l 0 再構成を適用することは厳しく制限される 圧縮センシング問題に対する l 0 再構成を緩和するために 式 (A2-3) における l 0 ノルムを l 1 ノルムに置き換えた 式 (A2-4) の l 1 再構成を考える ˆx (1) = argmin x x 1 subject to y = Ax (A2-4) 式 (A2-4) は線形計画問題として定式化することができ 効率的に解を求めることができる また ある条件では M<N であっても完全に正しい推定結果を得ることできる 図 A2-2 を用いて l 1 再構成でスパースな解を得ることができる理由を 2 変数の場合について説明する 図の直線は線形拘束を示し スパースな解は x 軸 50
56 との交点か y 軸との交点である 図中の四角形は l 1 ノルムが一定の線である l 1 再構成を行うことは 四角形を直線に外接させることに相当する 図中の赤丸を真の解とすると 図 A2-2 左の場合には 赤丸を計算することができ 右の場合は計算することができていない いずれにしても l 1 再構成でスパースな解を求めることはできている y y x x 図 A2-2 l 1 再構成で赤丸を求めることができる場合とできない場合 3.4 l 0 再構成の計算手法 l 0 再構成は NP 困難である この計算法の一例を説明する y=ax の条件のもとで K スパースな解 x を求めるには A から任意に選び出した K 個の列が一次独立でなければならない この条件が成立していれば A から K 個の列ベクトルを順に選び出していく 得られる部分行列 A K の値域に y が含まれているかどうかを判定する 含まれていれば A K の一般逆行列を y に作用させることで解を求めることができる この手順で唯一の解を得ることができるが K の増加とともに 組合せ爆発を起こしてしまうため 現実的な解法ではない 3.5 l 1 再構成の完全再現性とロバスト性任意の K スパースベクトル x に対して Ax のノルムの範囲が次の式 (A1-5) のように定数 δ K で制限されるとき 式 (A2-5) を満たす最小の δ K を制限等長定数とよぶ (1 δ K ) x 2 Ax 2 (1+δ K ) x 2 (A2-5) 式 (A2-5) は δ K がゼロに近い場合 観測行列 A によって原信号 x のノルムが 51
57 それほど変化しないことを意味している これは A が x のスパース成分に対して正規直交行列に近いことを意味する このような性質を制限等長性とよぶ 観測行列に対する制限等長性を用いて 次の定理が示されている [ 定理 ] (Candes, 2008) K 1 とする 観測行列 A R M N がδ 2K < 2 1を満たし ǁ xǁ 0 K なる任意の x R N について y=ax とするとき minimize x 1 subject to y = Ax の唯一の解 ˆx (1) は ˆx (1) =x を満たす この定理から 制限等長定数が よりも小さい場合 l 1 再構成の解は l 0 再構成の解に等しい (l 1 再構成の完全再現性 ) 現実の信号では 原信号 x が完全にスパースでないことも多い そのような場合に l 1 再構成によってどの程度の精度で原信号が復元できるか ということに関して 次の定理が示されている [ 定理 ] (Candes, 2008) 観測行列 A R M N がδ 2K < 2 1を満たし 任意の x R N について y=ax とするとき minimize x 1 subject to y = Ax の唯一の解を ˆx (1) とする このとき 次の不等式が成り立つ ˆx (1) x 2 C 0 K 0.5 x K x 1 ここで 定数 C 0 は ˆx (1) x C 0 x K x 1 C 0 = 2 1+ ( 2 1)δ 2K 1 ( 2 +1)δ 2K である x K は x の K スパース成分以外をゼロとしたものある この定理は 原信号 x が完全にスパースでないでも 復元誤差が残差の定数倍 で抑えられることを意味している 付録 2 の参考文献 [1] 平林晃, [ チュートリアル講演 ]Compressed Sensing 基本原理と最新研究動向, 信学技報,SIP ,pp.55-60,2009. [2] 田中利幸, 圧縮センシングの数理,IEICE Fundamentals Review, Vol.4, 52
58 No.1,pp.39-47,2010. [3] 和田山正, 圧縮センシングにおける完全再現十分条件について, 日本神経回路学会誌,Vol.17,No.2,pp.63-69,2010. [4] 平林晃, 圧縮センシングの基礎と最近の話題, システム / 制御 / 情報, Vol.58,No.10,pp ,
59 付録 3: 圧縮センシングによる CT 画像再構成 ノイズを考慮した再構成手法の 一例 1. 問題設定推定すべき画素集合を表す縦ベクトルを x 投影を表す行列を A 投影データを b とすると これらには式 (A3-1) の関係がある Ax = b (A3-1) 圧縮センシングによる CT 画像再構成は 投影におけるノイズを考慮しない場合 式 (A3-1) を線形拘束として x の l1ノルムを最小化する問題になる したがって 問題を式 (A3-2) のように記述することができる この問題は 線形計画法で解くことができる x = argmin x x 1 subject to Ax = b (A3-2) 投影データがノイズを含む場合 式 (A3-1) は近似的に成立する これを式 (A3-2) のように線形拘束として問題を解くと 投影データ ( 投影回数 ) が増えるにしたがい 式 (A3-2) による解が不適切なものになる これを解決する一つの方法は 問題を式 (A3-3) のように扱うことである すなわち 投影データの誤差 ( 式 (A3-3) の場合 l2 ノルムの意味での誤差 ) としてεまで許容し その条件で x の l1 ノルムを最小化する 式 (A3-3) は非線形最小化 ( 非線形計画法 ) の一つである 非線形最小化問題は 最小化する関数が連続関数で 制約条件が定義する領域が凸であれば 比較的 効率的に解くことができる x = argmin x x 1 subject to Ax b l2 ε (A3-3) 2. 解法の一例 Matlab に制約付き非線形多変数関数の最小値を求める関数 ( ソルバー ) fmincon がある fmincon の使い方の一つに 最小化する関数と制約条件を m コード関数として与える方法があり それを用いた 投影の元データとして手書きで 大 の文字を書いた 画素の2 値画像を用いた これを の範囲で均等に8 方向から 93 分割したビンに投影した 投影データに対する誤差として平均 0 分散 0.05 の正規分布乱数を与 54
60 え 式 (A3-3) の ε として実際の誤差の 2 倍程度にあたる 3.0 に設定して fmincon を 50 時間程度 実行した 最適化の繰り返し回数と l 1 ノルム 二乗誤差の 変化を表 1 に示す また その時に再構成された画像と元画像を図 A3-1 に示す 表 A3-1 ノイズを考慮した l1 ノルム最小化の収束の一例 繰り返し回数 x l1 Ax b l l1 155$ 150$ 145$ 140$ 135$ 130$ 125$ 0$ 5000$ 10000$ 15000$ 20000$ 80$ 70$ 60$ 50$ 40$ 30$ 20$ 10$ 0$ 0$ 5000$ 10000$ 15000$ 20000$ (a) l 1 ノルムの変化 (b) 二乗誤差の変化 図 A3-2 繰り返し回数と l 1 ノルム 二乗誤差の変化 55
61 図 A3-1 元画像と再構成された画像 これらのデータから次のように判断している 1 Matlab の制約付き非線形多変数関数の最小値を求める関数 fmincon を用いると 圧縮センシングを用いた CT 画像再構成において ノイズを考慮した処理が可能である 2 fmincon の収束は遅いが 十分に最適化の処理を繰り返せば 元画像に近づく 3 収束を高速化することや より大きな画像サイズに適用するためには この問題に適した手法を用いる必要がある 56
連続講座 断層映像法の基礎第 32 回 : 篠原広行 他 断層映像法の基礎 第 32 回 ML-EM 法と OS-EM 法 篠原広行 1) 桑山潤 1) 小川亙 1) 2) 橋本雄幸 1) 首都大学東京人間健康科学研究科放射線科学域 2) 横浜創英短期大学情報学科 はじめに第 31 回では繰り返しを
 桑山潤 1) 小川亙 1) 2) 橋本雄幸 1) 首都大学東京人間健康科学研究科放射線科学域 2) 横浜創英短期大学情報学科 はじめに第 31 回では繰り返しを") 断層映像法の基礎 第 32 回 ML-EM 法と OS-EM 法 篠原広行 1) 桑山潤 1) 小川亙 1) 2) 橋本雄幸 1) 首都大学東京人間健康科学研究科放射線科学域 2) 横浜創英短期大学情報学科 はじめに第 31 回では繰り返しを利用して徐々に解に近づけていく方法を紹介した 本稿ではその繰り返しを使った方法で最も多く使われている ML-EM 法と OS-EM 法について解説する また その方法を利用した数値シミュレーションの結果についても紹介する
断層映像法の基礎 第 32 回 ML-EM 法と OS-EM 法 篠原広行 1) 桑山潤 1) 小川亙 1) 2) 橋本雄幸 1) 首都大学東京人間健康科学研究科放射線科学域 2) 横浜創英短期大学情報学科 はじめに第 31 回では繰り返しを利用して徐々に解に近づけていく方法を紹介した 本稿ではその繰り返しを使った方法で最も多く使われている ML-EM 法と OS-EM 法について解説する また その方法を利用した数値シミュレーションの結果についても紹介する
Microsoft PowerPoint - 10.pptx
 m u. 固有値とその応用 8/7/( 水 ). 固有値とその応用 固有値と固有ベクトル 行列による写像から固有ベクトルへ m m 行列 によって線形写像 f : R R が表せることを見てきた ここでは 次元平面の行列による写像を調べる とし 写像 f : を考える R R まず 単位ベクトルの像 u y y f : R R u u, u この事から 線形写像の性質を用いると 次の格子上の点全ての写像先が求まる
m u. 固有値とその応用 8/7/( 水 ). 固有値とその応用 固有値と固有ベクトル 行列による写像から固有ベクトルへ m m 行列 によって線形写像 f : R R が表せることを見てきた ここでは 次元平面の行列による写像を調べる とし 写像 f : を考える R R まず 単位ベクトルの像 u y y f : R R u u, u この事から 線形写像の性質を用いると 次の格子上の点全ての写像先が求まる
連続講座 断層映像法の基礎第 34 回 : 篠原 広行 他 放射状に 線を照射し 対面に検出器の列を置いておき 一度に 1 つの角度データを取得する 後は全体を 1 回転しながら次々と角度データを取得することで計測を終了する この計測で得られる投影はとなる ここで l はファンビームのファンに沿った
 連続講座 断層映像法の基礎第 34 回 : 篠原広行 他 篠原 広行 桑山 潤 小川 亙 中世古 和真 断層映像法の基礎第 34 回スパイラルスキャン CT 1) 軽部修平 2) 橋本雄幸 1) 小島慎也 1) 藤堂幸宏 1) 3) 首都大学東京人間健康科学研究科放射線科学域 2) 東邦大学医療センター大橋病院 3) 横浜創英短期大学情報学科 1) はじめに第 33 回では検出確率 C ij の関係を行列とベクトルの計算式に置き換えて解を求める最小二乗法を利用した方法について解説した
連続講座 断層映像法の基礎第 34 回 : 篠原広行 他 篠原 広行 桑山 潤 小川 亙 中世古 和真 断層映像法の基礎第 34 回スパイラルスキャン CT 1) 軽部修平 2) 橋本雄幸 1) 小島慎也 1) 藤堂幸宏 1) 3) 首都大学東京人間健康科学研究科放射線科学域 2) 東邦大学医療センター大橋病院 3) 横浜創英短期大学情報学科 1) はじめに第 33 回では検出確率 C ij の関係を行列とベクトルの計算式に置き換えて解を求める最小二乗法を利用した方法について解説した
0 21 カラー反射率 slope aspect 図 2.9: 復元結果例 2.4 画像生成技術としての計算フォトグラフィ 3 次元情報を復元することにより, 画像生成 ( レンダリング ) に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生
 に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生") 0 21 カラー反射率 slope aspect 図 2.9: 復元結果例 2.4 画像生成技術としての計算フォトグラフィ 3 次元情報を復元することにより, 画像生成 ( レンダリング ) に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生まれ, コンピューテーショナルフォトグラフィ ( 計算フォトグラフィ ) と呼ばれている.3 次元画像認識技術の計算フォトグラフィへの応用として,
0 21 カラー反射率 slope aspect 図 2.9: 復元結果例 2.4 画像生成技術としての計算フォトグラフィ 3 次元情報を復元することにより, 画像生成 ( レンダリング ) に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生まれ, コンピューテーショナルフォトグラフィ ( 計算フォトグラフィ ) と呼ばれている.3 次元画像認識技術の計算フォトグラフィへの応用として,
memo
 数理情報工学特論第一 機械学習とデータマイニング 4 章 : 教師なし学習 3 かしまひさし 鹿島久嗣 ( 数理 6 研 ) kashima@mist.i.~ DEPARTMENT OF MATHEMATICAL INFORMATICS 1 グラフィカルモデルについて学びます グラフィカルモデル グラフィカルラッソ グラフィカルラッソの推定アルゴリズム 2 グラフィカルモデル 3 教師なし学習の主要タスクは
数理情報工学特論第一 機械学習とデータマイニング 4 章 : 教師なし学習 3 かしまひさし 鹿島久嗣 ( 数理 6 研 ) kashima@mist.i.~ DEPARTMENT OF MATHEMATICAL INFORMATICS 1 グラフィカルモデルについて学びます グラフィカルモデル グラフィカルラッソ グラフィカルラッソの推定アルゴリズム 2 グラフィカルモデル 3 教師なし学習の主要タスクは
PowerPoint Presentation
 付録 2 2 次元アフィン変換 直交変換 たたみ込み 1.2 次元のアフィン変換 座標 (x,y ) を (x,y) に移すことを 2 次元での変換. 特に, 変換が と書けるとき, アフィン変換, アフィン変換は, その 1 次の項による変換 と 0 次の項による変換 アフィン変換 0 次の項は平行移動 1 次の項は座標 (x, y ) をベクトルと考えて とすれば このようなもの 2 次元ベクトルの線形写像
付録 2 2 次元アフィン変換 直交変換 たたみ込み 1.2 次元のアフィン変換 座標 (x,y ) を (x,y) に移すことを 2 次元での変換. 特に, 変換が と書けるとき, アフィン変換, アフィン変換は, その 1 次の項による変換 と 0 次の項による変換 アフィン変換 0 次の項は平行移動 1 次の項は座標 (x, y ) をベクトルと考えて とすれば このようなもの 2 次元ベクトルの線形写像
<4D F736F F D E4F8E9F82C982A882AF82E98D7397F1>
 3 三次における行列 要旨高校では ほとんど 2 2 の正方行列しか扱ってなく 三次の正方行列について考えてみたかったため 数 C で学んだ定理を三次の正方行列に応用して 自分たちで仮説を立てて求めていったら 空間における回転移動を表す行列 三次のケーリー ハミルトンの定理 三次における逆行列を求めたり 仮説をたてることができた. 目的 数 C で学んだ定理を三次の正方行列に応用する 2. 概要目的の到達点として
3 三次における行列 要旨高校では ほとんど 2 2 の正方行列しか扱ってなく 三次の正方行列について考えてみたかったため 数 C で学んだ定理を三次の正方行列に応用して 自分たちで仮説を立てて求めていったら 空間における回転移動を表す行列 三次のケーリー ハミルトンの定理 三次における逆行列を求めたり 仮説をたてることができた. 目的 数 C で学んだ定理を三次の正方行列に応用する 2. 概要目的の到達点として
Microsoft PowerPoint - mp11-02.pptx
 数理計画法第 2 回 塩浦昭義情報科学研究科准教授 shioura@dais.is.tohoku.ac.jp http://www.dais.is.tohoku.ac.jp/~shioura/teaching 前回の復習 数理計画とは? 数理計画 ( 復習 ) 数理計画問題とは? 狭義には : 数理 ( 数学 ) を使って計画を立てるための問題 広義には : 与えられた評価尺度に関して最も良い解を求める問題
数理計画法第 2 回 塩浦昭義情報科学研究科准教授 shioura@dais.is.tohoku.ac.jp http://www.dais.is.tohoku.ac.jp/~shioura/teaching 前回の復習 数理計画とは? 数理計画 ( 復習 ) 数理計画問題とは? 狭義には : 数理 ( 数学 ) を使って計画を立てるための問題 広義には : 与えられた評価尺度に関して最も良い解を求める問題
Microsoft Word - NumericalComputation.docx
 数値計算入門 武尾英哉. 離散数学と数値計算 数学的解法の中には理論計算では求められないものもある. 例えば, 定積分は, まずは積分 ( 被積分関数の原始関数をみつけること できなければ値を得ることはできない. また, ある関数の所定の値における微分値を得るには, まずその関数の微分ができなければならない. さらに代数方程式の解を得るためには, 解析的に代数方程式を解く必要がある. ところが, これらは必ずしも解析的に導けるとは限らない.
数値計算入門 武尾英哉. 離散数学と数値計算 数学的解法の中には理論計算では求められないものもある. 例えば, 定積分は, まずは積分 ( 被積分関数の原始関数をみつけること できなければ値を得ることはできない. また, ある関数の所定の値における微分値を得るには, まずその関数の微分ができなければならない. さらに代数方程式の解を得るためには, 解析的に代数方程式を解く必要がある. ところが, これらは必ずしも解析的に導けるとは限らない.
逐次近似法の基礎と各種補正方法
 逐次近似法の基礎と各種補正方法 横浜創英大学橋本雄幸 画像再構成における逐次近似法の歴史は長く,X 線 CT においても解析的方法が見つかる前は, 逐次近似法を用いて画像を再構成していた. 解析的方法が見つかってからは, 計算時間の長さから逐次近似法はあまり使われなくなった. しかし, コンピュータの発展に伴い, 繰り返しても計算時間がそれほどかからなくなったこともあり, 解析的方法が確立できない
逐次近似法の基礎と各種補正方法 横浜創英大学橋本雄幸 画像再構成における逐次近似法の歴史は長く,X 線 CT においても解析的方法が見つかる前は, 逐次近似法を用いて画像を再構成していた. 解析的方法が見つかってからは, 計算時間の長さから逐次近似法はあまり使われなくなった. しかし, コンピュータの発展に伴い, 繰り返しても計算時間がそれほどかからなくなったこともあり, 解析的方法が確立できない
学習指導要領
 (1 ) 数と式 ア数と集合 ( ア ) 実数数を実数まで拡張する意義を理解し 簡単な無理数の四則計算をすること 自然数 整数 有理数 無理数の包含関係など 実 数の構成を理解する ( 例 ) 次の空欄に適当な言葉をいれて, 数の集合を表しなさい 実数の絶対値が実数と対応する点と原点との距離で あることを理解する ( 例 ) 次の値を求めよ (1) () 6 置き換えなどを利用して 三項の無理数の乗法の計
(1 ) 数と式 ア数と集合 ( ア ) 実数数を実数まで拡張する意義を理解し 簡単な無理数の四則計算をすること 自然数 整数 有理数 無理数の包含関係など 実 数の構成を理解する ( 例 ) 次の空欄に適当な言葉をいれて, 数の集合を表しなさい 実数の絶対値が実数と対応する点と原点との距離で あることを理解する ( 例 ) 次の値を求めよ (1) () 6 置き換えなどを利用して 三項の無理数の乗法の計
例 e 指数関数的に減衰する信号を h( a < + a a すると, それらのラプラス変換は, H ( ) { e } e インパルス応答が h( a < ( ただし a >, U( ) { } となるシステムにステップ信号 ( y( のラプラス変換 Y () は, Y ( ) H ( ) X (
 { e } e インパルス応答が h( a < ( ただし a >, U( ) { } となるシステムにステップ信号 ( y( のラプラス変換 Y () は, Y ( ) H ( ) X (") 第 週ラプラス変換 教科書 p.34~ 目標ラプラス変換の定義と意味を理解する フーリエ変換や Z 変換と並ぶ 信号解析やシステム設計における重要なツール ラプラス変換は波動現象や電気回路など様々な分野で 微分方程式を解くために利用されてきた ラプラス変換を用いることで微分方程式は代数方程式に変換される また 工学上使われる主要な関数のラプラス変換は簡単な形の関数で表されるので これを ラプラス変換表
第 週ラプラス変換 教科書 p.34~ 目標ラプラス変換の定義と意味を理解する フーリエ変換や Z 変換と並ぶ 信号解析やシステム設計における重要なツール ラプラス変換は波動現象や電気回路など様々な分野で 微分方程式を解くために利用されてきた ラプラス変換を用いることで微分方程式は代数方程式に変換される また 工学上使われる主要な関数のラプラス変換は簡単な形の関数で表されるので これを ラプラス変換表
Microsoft Word - 補論3.2
 補論 3. 多変量 GARC モデル 07//6 新谷元嗣 藪友良 対数尤度関数 3 章 7 節では 変量の対数尤度を求めた ここでは多変量の場合 とくに 変量について対数尤度を求める 誤差項 は平均 0 で 次元の正規分布に従うとする 単純化のため 分散と共分散は時間を通じて一定としよう ( この仮定は後で変更される ) したがって ij から添え字 を除くことができる このとき と の尤度関数は
補論 3. 多変量 GARC モデル 07//6 新谷元嗣 藪友良 対数尤度関数 3 章 7 節では 変量の対数尤度を求めた ここでは多変量の場合 とくに 変量について対数尤度を求める 誤差項 は平均 0 で 次元の正規分布に従うとする 単純化のため 分散と共分散は時間を通じて一定としよう ( この仮定は後で変更される ) したがって ij から添え字 を除くことができる このとき と の尤度関数は
航空機の運動方程式
 可制御性 可観測性. 可制御性システムの状態を, 適切な操作によって, 有限時間内に, 任意の状態から別の任意の状態に移動させることができるか否かという特性を可制御性という. 可制御性を有するシステムに対し, システムは可制御である, 可制御なシステム という言い方をする. 状態方程式, 出力方程式が以下で表されるn 次元 m 入力 r 出力線形時不変システム x Ax u y x Du () に対し,
可制御性 可観測性. 可制御性システムの状態を, 適切な操作によって, 有限時間内に, 任意の状態から別の任意の状態に移動させることができるか否かという特性を可制御性という. 可制御性を有するシステムに対し, システムは可制御である, 可制御なシステム という言い方をする. 状態方程式, 出力方程式が以下で表されるn 次元 m 入力 r 出力線形時不変システム x Ax u y x Du () に対し,
Microsoft PowerPoint - SPECTPETの原理2012.ppt [互換モード]
![Microsoft PowerPoint - SPECTPETの原理2012.ppt [互換モード]](/thumbs/94/121508518.jpg "Microsoft PowerPoint - SPECTPETの原理2012.ppt [互換モード]") 22 年国家試験解答 1,5 フーリエ変換は線形変換 FFT はデータ数に 2 の累乗数を要求するが DFT は任意のデータ数に対応 123I-IMP Brain SPECT FBP with Ramp filter 123I-IMP Brain SPECT FBP with Shepp&Logan filter 99mTc-MIBI Myocardial SPECT における ストリークアーチファクト
22 年国家試験解答 1,5 フーリエ変換は線形変換 FFT はデータ数に 2 の累乗数を要求するが DFT は任意のデータ数に対応 123I-IMP Brain SPECT FBP with Ramp filter 123I-IMP Brain SPECT FBP with Shepp&Logan filter 99mTc-MIBI Myocardial SPECT における ストリークアーチファクト
画像類似度測定の初歩的な手法の検証
 画像類似度測定の初歩的な手法の検証 島根大学総合理工学部数理 情報システム学科 計算機科学講座田中研究室 S539 森瀧昌志 1 目次 第 1 章序論第 章画像間類似度測定の初歩的な手法について.1 A. 画素値の平均を用いる手法.. 画素値のヒストグラムを用いる手法.3 C. 相関係数を用いる手法.4 D. 解像度を合わせる手法.5 E. 振れ幅のヒストグラムを用いる手法.6 F. 周波数ごとの振れ幅を比較する手法第
画像類似度測定の初歩的な手法の検証 島根大学総合理工学部数理 情報システム学科 計算機科学講座田中研究室 S539 森瀧昌志 1 目次 第 1 章序論第 章画像間類似度測定の初歩的な手法について.1 A. 画素値の平均を用いる手法.. 画素値のヒストグラムを用いる手法.3 C. 相関係数を用いる手法.4 D. 解像度を合わせる手法.5 E. 振れ幅のヒストグラムを用いる手法.6 F. 周波数ごとの振れ幅を比較する手法第
Microsoft PowerPoint - ip02_01.ppt [互換モード]
![Microsoft PowerPoint - ip02_01.ppt [互換モード]](/thumbs/96/127250376.jpg "Microsoft PowerPoint - ip02_01.ppt [互換モード]") 空間周波数 周波数領域での処理 空間周波数 (spatial frquncy) とは 単位長さ当たりの正弦波状の濃淡変化の繰り返し回数を表したもの 正弦波 : y sin( t) 周期 : 周波数 : T f / T 角周波数 : f 画像処理 空間周波数 周波数領域での処理 波形が違うと 周波数も違う 画像処理 空間周波数 周波数領域での処理 画像処理 3 周波数領域での処理 周波数は一つしかない?-
空間周波数 周波数領域での処理 空間周波数 (spatial frquncy) とは 単位長さ当たりの正弦波状の濃淡変化の繰り返し回数を表したもの 正弦波 : y sin( t) 周期 : 周波数 : T f / T 角周波数 : f 画像処理 空間周波数 周波数領域での処理 波形が違うと 周波数も違う 画像処理 空間周波数 周波数領域での処理 画像処理 3 周波数領域での処理 周波数は一つしかない?-
代数 幾何 < ベクトル > 1 ベクトルの演算 和 差 実数倍については 文字の計算と同様 2 ベクトルの成分表示 平面ベクトル : a x e y e x, ) ( 1 y1 空間ベクトル : a x e y e z e x, y, ) ( 1 1 z1
 ( 1 y1 空間ベクトル : a x e y e z e x, y, ) ( 1 1 z1") 代数 幾何 < ベクトル > ベクトルの演算 和 差 実数倍については 文字の計算と同様 ベクトルの成分表示 平面ベクトル :, 空間ベクトル : z,, z 成分での計算ができるようにすること ベクトルの内積 : os 平面ベクトル :,, 空間ベクトル :,,,, z z zz 4 ベクトルの大きさ 平面上 : 空間上 : z は 良く用いられる 5 m: に分ける点 : m m 図形への応用
代数 幾何 < ベクトル > ベクトルの演算 和 差 実数倍については 文字の計算と同様 ベクトルの成分表示 平面ベクトル :, 空間ベクトル : z,, z 成分での計算ができるようにすること ベクトルの内積 : os 平面ベクトル :,, 空間ベクトル :,,,, z z zz 4 ベクトルの大きさ 平面上 : 空間上 : z は 良く用いられる 5 m: に分ける点 : m m 図形への応用
数学 ⅡB < 公理 > 公理を論拠に定義を用いて定理を証明する 1 大小関係の公理 順序 (a > b, a = b, a > b 1 つ成立 a > b, b > c a > c 成立 ) 順序と演算 (a > b a + c > b + c (a > b, c > 0 ac > bc) 2 図
 順序と演算 (a > b a + c > b + c (a > b, c > 0 ac > bc) 2 図") 数学 Ⅱ < 公理 > 公理を論拠に定義を用いて定理を証明する 大小関係の公理 順序 >, =, > つ成立 >, > > 成立 順序と演算 > + > + >, > > 図形の公理 平行線の性質 錯角 同位角 三角形の合同条件 三角形の合同相似 量の公理 角の大きさ 線分の長さ < 空間における座漂とベクトル > ベクトルの演算 和 差 実数倍については 文字の計算と同様 ベクトルの成分表示 平面ベクトル
数学 Ⅱ < 公理 > 公理を論拠に定義を用いて定理を証明する 大小関係の公理 順序 >, =, > つ成立 >, > > 成立 順序と演算 > + > + >, > > 図形の公理 平行線の性質 錯角 同位角 三角形の合同条件 三角形の合同相似 量の公理 角の大きさ 線分の長さ < 空間における座漂とベクトル > ベクトルの演算 和 差 実数倍については 文字の計算と同様 ベクトルの成分表示 平面ベクトル
Microsoft PowerPoint - 資料04 重回帰分析.ppt
 04. 重回帰分析 京都大学 加納学 Division of Process Control & Process Sstems Engineering Department of Chemical Engineering, Koto Universit manabu@cheme.koto-u.ac.jp http://www-pse.cheme.koto-u.ac.jp/~kano/ Outline
04. 重回帰分析 京都大学 加納学 Division of Process Control & Process Sstems Engineering Department of Chemical Engineering, Koto Universit manabu@cheme.koto-u.ac.jp http://www-pse.cheme.koto-u.ac.jp/~kano/ Outline
vecrot
 1. ベクトル ベクトル : 方向を持つ量 ベクトルには 1 方向 2 大きさ ( 長さ ) という 2 つの属性がある ベクトルの例 : 物体の移動速度 移動量電場 磁場の強さ風速力トルクなど 2. ベクトルの表現 2.1 矢印で表現される 矢印の長さ : ベクトルの大きさ 矢印の向き : ベクトルの方向 2.2 2 個の点を用いて表現する 始点 () と終点 () を結ぶ半直線の向き : ベクトルの方向
1. ベクトル ベクトル : 方向を持つ量 ベクトルには 1 方向 2 大きさ ( 長さ ) という 2 つの属性がある ベクトルの例 : 物体の移動速度 移動量電場 磁場の強さ風速力トルクなど 2. ベクトルの表現 2.1 矢印で表現される 矢印の長さ : ベクトルの大きさ 矢印の向き : ベクトルの方向 2.2 2 個の点を用いて表現する 始点 () と終点 () を結ぶ半直線の向き : ベクトルの方向
Microsoft Word - thesis.doc
 剛体の基礎理論 -. 剛体の基礎理論初めに本論文で大域的に使用する記号を定義する. 使用する記号トルク撃力力角運動量角速度姿勢対角化された慣性テンソル慣性テンソル運動量速度位置質量時間 J W f F P p .. 質点の並進運動 質点は位置 と速度 P を用いる. ニュートンの運動方程式 という状態を持つ. 但し ここでは速度ではなく運動量 F P F.... より質点の運動は既に明らかであり 質点の状態ベクトル
剛体の基礎理論 -. 剛体の基礎理論初めに本論文で大域的に使用する記号を定義する. 使用する記号トルク撃力力角運動量角速度姿勢対角化された慣性テンソル慣性テンソル運動量速度位置質量時間 J W f F P p .. 質点の並進運動 質点は位置 と速度 P を用いる. ニュートンの運動方程式 という状態を持つ. 但し ここでは速度ではなく運動量 F P F.... より質点の運動は既に明らかであり 質点の状態ベクトル
Microsoft Word - 201hyouka-tangen-1.doc
 数学 Ⅰ 評価規準の作成 ( 単元ごと ) 数学 Ⅰ の目標及び図形と計量について理解させ 基礎的な知識の習得と技能の習熟を図り それらを的確に活用する機能を伸ばすとともに 数学的な見方や考え方のよさを認識できるようにする 評価の観点の趣旨 式と不等式 二次関数及び図形と計量における考え方に関 心をもつとともに 数学的な見方や考え方のよさを認識し それらを事象の考察に活用しようとする 式と不等式 二次関数及び図形と計量における数学的な見
数学 Ⅰ 評価規準の作成 ( 単元ごと ) 数学 Ⅰ の目標及び図形と計量について理解させ 基礎的な知識の習得と技能の習熟を図り それらを的確に活用する機能を伸ばすとともに 数学的な見方や考え方のよさを認識できるようにする 評価の観点の趣旨 式と不等式 二次関数及び図形と計量における考え方に関 心をもつとともに 数学的な見方や考え方のよさを認識し それらを事象の考察に活用しようとする 式と不等式 二次関数及び図形と計量における数学的な見
2014年度 名古屋大・理系数学
 04 名古屋大学 ( 理系 ) 前期日程問題 解答解説のページへ空間内にある半径 の球 ( 内部を含む ) を B とする 直線 と B が交わっており, その交わりは長さ の線分である () B の中心と との距離を求めよ () のまわりに B を 回転してできる立体の体積を求めよ 04 名古屋大学 ( 理系 ) 前期日程問題 解答解説のページへ 実数 t に対して 点 P( t, t ), Q(
04 名古屋大学 ( 理系 ) 前期日程問題 解答解説のページへ空間内にある半径 の球 ( 内部を含む ) を B とする 直線 と B が交わっており, その交わりは長さ の線分である () B の中心と との距離を求めよ () のまわりに B を 回転してできる立体の体積を求めよ 04 名古屋大学 ( 理系 ) 前期日程問題 解答解説のページへ 実数 t に対して 点 P( t, t ), Q(
Microsoft PowerPoint - H17-5時限(パターン認識).ppt
.ppt") パターン認識早稲田大学講義 平成 7 年度 独 産業技術総合研究所栗田多喜夫 赤穂昭太郎 統計的特徴抽出 パターン認識過程 特徴抽出 認識対象から何らかの特徴量を計測 抽出 する必要がある 認識に有効な情報 特徴 を抽出し 次元を縮小した効率の良い空間を構成する過程 文字認識 : スキャナ等で取り込んだ画像から文字の識別に必要な本質的な特徴のみを抽出 例 文字線の傾き 曲率 面積など 識別 与えられた未知の対象を
パターン認識早稲田大学講義 平成 7 年度 独 産業技術総合研究所栗田多喜夫 赤穂昭太郎 統計的特徴抽出 パターン認識過程 特徴抽出 認識対象から何らかの特徴量を計測 抽出 する必要がある 認識に有効な情報 特徴 を抽出し 次元を縮小した効率の良い空間を構成する過程 文字認識 : スキャナ等で取り込んだ画像から文字の識別に必要な本質的な特徴のみを抽出 例 文字線の傾き 曲率 面積など 識別 与えられた未知の対象を
行列、ベクトル
 行列 (Mtri) と行列式 (Determinnt). 行列 (Mtri) の演算. 和 差 積.. 行列とは.. 行列の和差 ( 加減算 ).. 行列の積 ( 乗算 ). 転置行列 対称行列 正方行列. 単位行列. 行列式 (Determinnt) と逆行列. 行列式. 逆行列. 多元一次連立方程式のコンピュータによる解法. コンピュータによる逆行列の計算.. 定数項の異なる複数の方程式.. 逆行列の計算
行列 (Mtri) と行列式 (Determinnt). 行列 (Mtri) の演算. 和 差 積.. 行列とは.. 行列の和差 ( 加減算 ).. 行列の積 ( 乗算 ). 転置行列 対称行列 正方行列. 単位行列. 行列式 (Determinnt) と逆行列. 行列式. 逆行列. 多元一次連立方程式のコンピュータによる解法. コンピュータによる逆行列の計算.. 定数項の異なる複数の方程式.. 逆行列の計算
DVIOUT
 最適レギュレータ 松尾研究室資料 第 最適レギュレータ 節時不変型無限時間最適レギュレータ 状態フィードバックの可能な場合の無限時間問題における最適レギュレータについて確定系について説明する. ここで, レギュレータとは状態量をゼロにするようなコントローラのことである. なぜ, 無限時間問題のみを述べるかという理由は以下のとおりである. 有限時間の最適レギュレータ問題の場合の最適フィードバックゲインは微分方程式の解から構成される時間関数として表現される.
最適レギュレータ 松尾研究室資料 第 最適レギュレータ 節時不変型無限時間最適レギュレータ 状態フィードバックの可能な場合の無限時間問題における最適レギュレータについて確定系について説明する. ここで, レギュレータとは状態量をゼロにするようなコントローラのことである. なぜ, 無限時間問題のみを述べるかという理由は以下のとおりである. 有限時間の最適レギュレータ問題の場合の最適フィードバックゲインは微分方程式の解から構成される時間関数として表現される.
Microsoft PowerPoint - 10.pptx
 0. 固有値とその応用 固有値と固有ベクトル 2 行列による写像から固有ベクトルへ m n A : m n n m 行列によって線形写像 f R R A が表せることを見てきた ここでは 2 次元平面の行列による写像を調べる 2 = 2 A 2 2 とし 写像 まず 単位ベクトルの像を求める u 2 x = v 2 y f : R A R を考える u 2 2 u, 2 2 0 = = v 2 0
0. 固有値とその応用 固有値と固有ベクトル 2 行列による写像から固有ベクトルへ m n A : m n n m 行列によって線形写像 f R R A が表せることを見てきた ここでは 2 次元平面の行列による写像を調べる 2 = 2 A 2 2 とし 写像 まず 単位ベクトルの像を求める u 2 x = v 2 y f : R A R を考える u 2 2 u, 2 2 0 = = v 2 0
微分方程式による現象記述と解きかた
 微分方程式による現象記述と解きかた 土木工学 : 公共諸施設 構造物の有用目的にむけた合理的な実現をはかる方法 ( 技術 ) に関する学 橋梁 トンネル ダム 道路 港湾 治水利水施設 安全化 利便化 快適化 合法則的 経済的 自然および人口素材によって作られた 質量保存則 構造物の自然的な性質 作用 ( 外力による応答 ) エネルギー則 の解明 社会的諸現象のうち マスとしての移動 流通 運動量則
微分方程式による現象記述と解きかた 土木工学 : 公共諸施設 構造物の有用目的にむけた合理的な実現をはかる方法 ( 技術 ) に関する学 橋梁 トンネル ダム 道路 港湾 治水利水施設 安全化 利便化 快適化 合法則的 経済的 自然および人口素材によって作られた 質量保存則 構造物の自然的な性質 作用 ( 外力による応答 ) エネルギー則 の解明 社会的諸現象のうち マスとしての移動 流通 運動量則
学習指導要領
 (1) 数と式 ア数と集合 ( ア ) 実数数を実数まで拡張する意義を理解し 簡単な無理数の四則計算をすること 絶対値の意味を理解し適切な処理することができる 例題 1-3 の絶対値をはずせ 展開公式 ( a + b ) ( a - b ) = a 2 - b 2 を利用して根号を含む分数の分母を有理化することができる 例題 5 5 + 2 の分母を有理化せよ 実数の整数部分と小数部分の表し方を理解している
(1) 数と式 ア数と集合 ( ア ) 実数数を実数まで拡張する意義を理解し 簡単な無理数の四則計算をすること 絶対値の意味を理解し適切な処理することができる 例題 1-3 の絶対値をはずせ 展開公式 ( a + b ) ( a - b ) = a 2 - b 2 を利用して根号を含む分数の分母を有理化することができる 例題 5 5 + 2 の分母を有理化せよ 実数の整数部分と小数部分の表し方を理解している
学習指導要領
 (1) 数と式 学習指導要領ア数と集合 ( ア ) 実数数を実数まで拡張する意義を理解し 簡単な無理数の四則計算をすること 千早高校学力スタンダード 自然数 整数 有理数 無理数の用語の意味を理解す る ( 例 ) 次の数の中から自然数 整数 有理 数 無理数に分類せよ 3 3,, 0.7, 3,,-, 4 (1) 自然数 () 整数 (3) 有理数 (4) 無理数 自然数 整数 有理数 無理数の包含関係など
(1) 数と式 学習指導要領ア数と集合 ( ア ) 実数数を実数まで拡張する意義を理解し 簡単な無理数の四則計算をすること 千早高校学力スタンダード 自然数 整数 有理数 無理数の用語の意味を理解す る ( 例 ) 次の数の中から自然数 整数 有理 数 無理数に分類せよ 3 3,, 0.7, 3,,-, 4 (1) 自然数 () 整数 (3) 有理数 (4) 無理数 自然数 整数 有理数 無理数の包含関係など
1.民営化
 参考資料 最小二乗法 数学的性質 経済統計分析 3 年度秋学期 回帰分析と最小二乗法 被説明変数 の動きを説明変数 の動きで説明 = 回帰分析 説明変数がつ 単回帰 説明変数がつ以上 重回帰 被説明変数 従属変数 係数 定数項傾き 説明変数 独立変数 残差... で説明できる部分 説明できない部分 説明できない部分が小さくなるように回帰式の係数 を推定する有力な方法 = 最小二乗法 最小二乗法による回帰の考え方
参考資料 最小二乗法 数学的性質 経済統計分析 3 年度秋学期 回帰分析と最小二乗法 被説明変数 の動きを説明変数 の動きで説明 = 回帰分析 説明変数がつ 単回帰 説明変数がつ以上 重回帰 被説明変数 従属変数 係数 定数項傾き 説明変数 独立変数 残差... で説明できる部分 説明できない部分 説明できない部分が小さくなるように回帰式の係数 を推定する有力な方法 = 最小二乗法 最小二乗法による回帰の考え方
Microsoft PowerPoint - 第3回2.ppt
 講義内容 講義内容 次元ベクトル 関数の直交性フーリエ級数 次元代表的な対の諸性質コンボリューション たたみこみ積分 サンプリング定理 次元離散 次元空間周波数の概念 次元代表的な 次元対 次元離散 次元ベクトル 関数の直交性フーリエ級数 次元代表的な対の諸性質コンボリューション たたみこみ積分 サンプリング定理 次元離散 次元空間周波数の概念 次元代表的な 次元対 次元離散 ベクトルの直交性 3
講義内容 講義内容 次元ベクトル 関数の直交性フーリエ級数 次元代表的な対の諸性質コンボリューション たたみこみ積分 サンプリング定理 次元離散 次元空間周波数の概念 次元代表的な 次元対 次元離散 次元ベクトル 関数の直交性フーリエ級数 次元代表的な対の諸性質コンボリューション たたみこみ積分 サンプリング定理 次元離散 次元空間周波数の概念 次元代表的な 次元対 次元離散 ベクトルの直交性 3
様々なミクロ計量モデル†
 担当 : 長倉大輔 ( ながくらだいすけ ) この資料は私の講義において使用するために作成した資料です WEB ページ上で公開しており 自由に参照して頂いて構いません ただし 内容について 一応検証してありますが もし間違いがあった場合でもそれによって生じるいかなる損害 不利益について責任を負いかねますのでご了承ください 間違いは発見次第 継続的に直していますが まだ存在する可能性があります 1 カウントデータモデル
担当 : 長倉大輔 ( ながくらだいすけ ) この資料は私の講義において使用するために作成した資料です WEB ページ上で公開しており 自由に参照して頂いて構いません ただし 内容について 一応検証してありますが もし間違いがあった場合でもそれによって生じるいかなる損害 不利益について責任を負いかねますのでご了承ください 間違いは発見次第 継続的に直していますが まだ存在する可能性があります 1 カウントデータモデル
学習指導要領
 (1) 数と式 学習指導要領ア数と集合 ( ア ) 実数数を実数まで拡張する意義を理解し 簡単な無理数の四則計算をすること 第 1 章第 節実数 東高校学力スタンダード 4 実数 (P.3~7) 自然数 整数 有理数 無理数 実数のそれぞれの集 合について 四則演算の可能性について判断できる ( 例 ) 下の表において, それぞれの数の範囲で四則計算を考えるとき, 計算がその範囲で常にできる場合には
(1) 数と式 学習指導要領ア数と集合 ( ア ) 実数数を実数まで拡張する意義を理解し 簡単な無理数の四則計算をすること 第 1 章第 節実数 東高校学力スタンダード 4 実数 (P.3~7) 自然数 整数 有理数 無理数 実数のそれぞれの集 合について 四則演算の可能性について判断できる ( 例 ) 下の表において, それぞれの数の範囲で四則計算を考えるとき, 計算がその範囲で常にできる場合には
Probit , Mixed logit
 Probit, Mixed logit 2016/5/16 スタートアップゼミ #5 B4 後藤祥孝 1 0. 目次 Probit モデルについて 1. モデル概要 2. 定式化と理解 3. 推定 Mixed logit モデルについて 4. モデル概要 5. 定式化と理解 6. 推定 2 1.Probit 概要 プロビットモデルとは. 効用関数の誤差項に多変量正規分布を仮定したもの. 誤差項には様々な要因が存在するため,
Probit, Mixed logit 2016/5/16 スタートアップゼミ #5 B4 後藤祥孝 1 0. 目次 Probit モデルについて 1. モデル概要 2. 定式化と理解 3. 推定 Mixed logit モデルについて 4. モデル概要 5. 定式化と理解 6. 推定 2 1.Probit 概要 プロビットモデルとは. 効用関数の誤差項に多変量正規分布を仮定したもの. 誤差項には様々な要因が存在するため,
データ解析
 データ解析 ( 前期 ) 最小二乗法 向井厚志 005 年度テキスト 0 データ解析 - 最小二乗法 - 目次 第 回 Σ の計算 第 回ヒストグラム 第 3 回平均と標準偏差 6 第 回誤差の伝播 8 第 5 回正規分布 0 第 6 回最尤性原理 第 7 回正規分布の 分布の幅 第 8 回最小二乗法 6 第 9 回最小二乗法の練習 8 第 0 回最小二乗法の推定誤差 0 第 回推定誤差の計算 第
データ解析 ( 前期 ) 最小二乗法 向井厚志 005 年度テキスト 0 データ解析 - 最小二乗法 - 目次 第 回 Σ の計算 第 回ヒストグラム 第 3 回平均と標準偏差 6 第 回誤差の伝播 8 第 5 回正規分布 0 第 6 回最尤性原理 第 7 回正規分布の 分布の幅 第 8 回最小二乗法 6 第 9 回最小二乗法の練習 8 第 0 回最小二乗法の推定誤差 0 第 回推定誤差の計算 第
航空機の運動方程式
 オブザーバ 状態フィードバックにはすべての状態変数の値が必要であった. しかしながら, システムの外部から観測できるのは出力だけであり, すべての状態変数が観測できるとは限らない. そこで, 制御対象システムの状態変数を, システムのモデルに基づいてその入出力信号から推定する方法を考える.. オブザーバとは 次元 m 入力 r 出力線形時不変システム x Ax Bu y Cx () の状態変数ベクトル
オブザーバ 状態フィードバックにはすべての状態変数の値が必要であった. しかしながら, システムの外部から観測できるのは出力だけであり, すべての状態変数が観測できるとは限らない. そこで, 制御対象システムの状態変数を, システムのモデルに基づいてその入出力信号から推定する方法を考える.. オブザーバとは 次元 m 入力 r 出力線形時不変システム x Ax Bu y Cx () の状態変数ベクトル
Microsoft PowerPoint - 9.pptx
 9/7/8( 水 9. 線形写像 ここでは 行列の積によって 写像を定義できることをみていく また 行列の積によって定義される写像の性質を調べていく 拡大とスカラー倍 行列演算と写像 ( 次変換 拡大後 k 倍 k 倍 k 倍拡大の関係は スカラー倍を用いて次のように表現できる p = (, ' = k ' 拡大前 p ' = ( ', ' = ( k, k 拡大 4 拡大と行列の積 拡大後 k 倍
9/7/8( 水 9. 線形写像 ここでは 行列の積によって 写像を定義できることをみていく また 行列の積によって定義される写像の性質を調べていく 拡大とスカラー倍 行列演算と写像 ( 次変換 拡大後 k 倍 k 倍 k 倍拡大の関係は スカラー倍を用いて次のように表現できる p = (, ' = k ' 拡大前 p ' = ( ', ' = ( k, k 拡大 4 拡大と行列の積 拡大後 k 倍
受信機時計誤差項の が残ったままであるが これをも消去するのが 重位相差である. 重位相差ある時刻に 衛星 から送られてくる搬送波位相データを 台の受信機 でそれぞれ測定する このとき各受信機で測定された衛星 からの搬送波位相データを Φ Φ とし 同様に衛星 からの搬送波位相データを Φ Φ とす
 RTK-GPS 測位計算アルゴリズム -FLOT 解 - 東京海洋大学冨永貴樹. はじめに GPS 測量を行う際 実時間で測位結果を得ることが出来るのは今のところ RTK-GPS 測位のみである GPS 測量では GPS 衛星からの搬送波位相データを使用するため 整数値バイアスを決定しなければならず これが測位計算を複雑にしている所以である この整数値バイアスを決定するためのつの方法として FLOT
RTK-GPS 測位計算アルゴリズム -FLOT 解 - 東京海洋大学冨永貴樹. はじめに GPS 測量を行う際 実時間で測位結果を得ることが出来るのは今のところ RTK-GPS 測位のみである GPS 測量では GPS 衛星からの搬送波位相データを使用するため 整数値バイアスを決定しなければならず これが測位計算を複雑にしている所以である この整数値バイアスを決定するためのつの方法として FLOT
2011年度 大阪大・理系数学
 0 大阪大学 ( 理系 ) 前期日程問題 解答解説のページへ a a を自然数とする O を原点とする座標平面上で行列 A= a の表す 次変換 を f とする cosθ siθ () >0 および0θ
0 大阪大学 ( 理系 ) 前期日程問題 解答解説のページへ a a を自然数とする O を原点とする座標平面上で行列 A= a の表す 次変換 を f とする cosθ siθ () >0 および0θ
Microsoft Word - 卒業論文.doc
 006 年度卒業研究 画像補間法を用いた拡大画像の比較 岡山理科大学総合情報学部情報科学科 澤見研究室 I03I04 兼安俊治 I03I050 境永 目次 はじめに ラスタ画像 3 画像補間法 3. ニアレストネイバー法 3. バイリニア法 3.3 バイキュービック法 4 DCT を用いた拡大画像手法 5 FIR 法 6 評価 6. SNR 6. PSNR 7 実験 7. 主観評価 7. 客観評価
006 年度卒業研究 画像補間法を用いた拡大画像の比較 岡山理科大学総合情報学部情報科学科 澤見研究室 I03I04 兼安俊治 I03I050 境永 目次 はじめに ラスタ画像 3 画像補間法 3. ニアレストネイバー法 3. バイリニア法 3.3 バイキュービック法 4 DCT を用いた拡大画像手法 5 FIR 法 6 評価 6. SNR 6. PSNR 7 実験 7. 主観評価 7. 客観評価
学習指導要領
 (1) 数と式 ア数と集合 ( ア ) 実数数を実数まで拡張する意義を理解し 簡単な無理数の四則計算をすること 自然数 整数 有理数 無理数の包含関係など 実数 の構成を理解する ( 例 ) 次の空欄に適当な言葉をいれて, 数の集合を表しなさい ア イ 無理数 整数 ウ 無理数の加法及び減法 乗法公式などを利用した計 算ができる また 分母だけが二項である無理数の 分母の有理化ができる ( 例 1)
(1) 数と式 ア数と集合 ( ア ) 実数数を実数まで拡張する意義を理解し 簡単な無理数の四則計算をすること 自然数 整数 有理数 無理数の包含関係など 実数 の構成を理解する ( 例 ) 次の空欄に適当な言葉をいれて, 数の集合を表しなさい ア イ 無理数 整数 ウ 無理数の加法及び減法 乗法公式などを利用した計 算ができる また 分母だけが二項である無理数の 分母の有理化ができる ( 例 1)
DVIOUT-SS_Ma
 第 章 微分方程式 ニュートンはリンゴが落ちるのを見て万有引力を発見した という有名な逸話があります 無重力の宇宙船の中ではリンゴは落ちないで静止していることを考えると 重力が働くと始め静止しているものが動き出して そのスピードはどんどん大きくなる つまり速度の変化が現れることがわかります 速度は一般に時間と共に変化します 速度の瞬間的変化の割合を加速度といい で定義しましょう 速度が変化する, つまり加速度がでなくなるためにはその原因があり
第 章 微分方程式 ニュートンはリンゴが落ちるのを見て万有引力を発見した という有名な逸話があります 無重力の宇宙船の中ではリンゴは落ちないで静止していることを考えると 重力が働くと始め静止しているものが動き出して そのスピードはどんどん大きくなる つまり速度の変化が現れることがわかります 速度は一般に時間と共に変化します 速度の瞬間的変化の割合を加速度といい で定義しましょう 速度が変化する, つまり加速度がでなくなるためにはその原因があり
Microsoft PowerPoint - 9.pptx
 9. 線形写像 ここでは 行列の積によって 写像を定義できることをみていく また 行列の積によって定義される写像の性質を調べていく 行列演算と写像 ( 次変換 3 拡大とスカラー倍 p ' = ( ', ' = ( k, kk p = (, k 倍 k 倍 拡大後 k 倍拡大の関係は スカラー倍を用いて次のように表現できる ' = k ' 拡大前 拡大 4 拡大と行列の積 p ' = ( ', '
9. 線形写像 ここでは 行列の積によって 写像を定義できることをみていく また 行列の積によって定義される写像の性質を調べていく 行列演算と写像 ( 次変換 3 拡大とスカラー倍 p ' = ( ', ' = ( k, kk p = (, k 倍 k 倍 拡大後 k 倍拡大の関係は スカラー倍を用いて次のように表現できる ' = k ' 拡大前 拡大 4 拡大と行列の積 p ' = ( ', '
特殊なケースでの定式化技法
 特殊なケースでの定式化技法 株式会社数理システム. はじめに 本稿は, 特殊な数理計画問題を線形計画問題 (Lear Programmg:LP) ないしは混合整数計画問題 (Med Ieger Programmg:MIP) に置き換える為の, 幾つかの代表的な手法についてまとめたものである. 具体的には以下の話題を扱った. LP による定式化 絶対値最小化問題 最大値最小化問題 ノルム最小化問題 MIP
特殊なケースでの定式化技法 株式会社数理システム. はじめに 本稿は, 特殊な数理計画問題を線形計画問題 (Lear Programmg:LP) ないしは混合整数計画問題 (Med Ieger Programmg:MIP) に置き換える為の, 幾つかの代表的な手法についてまとめたものである. 具体的には以下の話題を扱った. LP による定式化 絶対値最小化問題 最大値最小化問題 ノルム最小化問題 MIP
学習指導要領
 (1) 数と式 ア数と集合 ( ア ) 実数数を実数まで拡張する意義を理解し 簡単な無理数の四則計算をすること 自然数 整数 有理数 無理数 実数のそれぞれの集 合について 四則演算の可能性について判断できる ( 例 ) 下の表において それぞれの数の範囲で四則計算を考えるとき 計算がその範囲で常にできる場合には を 常にできるとは限らない場合には を付けよ ただし 除法では 0 で割ることは考えない
(1) 数と式 ア数と集合 ( ア ) 実数数を実数まで拡張する意義を理解し 簡単な無理数の四則計算をすること 自然数 整数 有理数 無理数 実数のそれぞれの集 合について 四則演算の可能性について判断できる ( 例 ) 下の表において それぞれの数の範囲で四則計算を考えるとき 計算がその範囲で常にできる場合には を 常にできるとは限らない場合には を付けよ ただし 除法では 0 で割ることは考えない
学習指導要領
 (1) 数と式 学習指導要領 数と式 (1) 式の計算二次の乗法公式及び因数分解の公式の理解を深め 式を多面的にみたり目的に応じて式を適切に変形したりすること 東京都立町田高等学校学力スタンダード 整式の加法 減法 乗法展開の公式を利用できる 式を1 つの文字におき換えることによって, 式の計算を簡略化することができる 式の形の特徴に着目して変形し, 展開の公式が適用できるようにすることができる 因数分解因数分解の公式を利用できる
(1) 数と式 学習指導要領 数と式 (1) 式の計算二次の乗法公式及び因数分解の公式の理解を深め 式を多面的にみたり目的に応じて式を適切に変形したりすること 東京都立町田高等学校学力スタンダード 整式の加法 減法 乗法展開の公式を利用できる 式を1 つの文字におき換えることによって, 式の計算を簡略化することができる 式の形の特徴に着目して変形し, 展開の公式が適用できるようにすることができる 因数分解因数分解の公式を利用できる
パソコンシミュレータの現状
 第 2 章微分 偏微分, 写像 豊橋技術科学大学森謙一郎 2. 連続関数と微分 工学において物理現象を支配する方程式は微分方程式で表されていることが多く, 有限要素法も微分方程式を解く数値解析法であり, 定式化においては微分 積分が一般的に用いられており. 数学の基礎知識が必要になる. 図 2. に示すように, 微分は連続な関数 f() の傾きを求めることであり, 微小な に対して傾きを表し, を無限に
第 2 章微分 偏微分, 写像 豊橋技術科学大学森謙一郎 2. 連続関数と微分 工学において物理現象を支配する方程式は微分方程式で表されていることが多く, 有限要素法も微分方程式を解く数値解析法であり, 定式化においては微分 積分が一般的に用いられており. 数学の基礎知識が必要になる. 図 2. に示すように, 微分は連続な関数 f() の傾きを求めることであり, 微小な に対して傾きを表し, を無限に
学習指導要領
 (1) 数と式 ア整式 ( ア ) 式の展開と因数分解二次の乗法公式及び因数分解の公式の理解を深め 式を多面的にみたり目的に応じて式を適切に変形したりすること (ax b)(cx d) acx (ad bc)x bd などの基本的な公式を活用して 二次式の展開や因数分解ができる また 式の置き換えや一文字に着目するなどして 展開 因数分解ができる ( 例 ) 次の問に答えよ (1) (3x a)(4x
(1) 数と式 ア整式 ( ア ) 式の展開と因数分解二次の乗法公式及び因数分解の公式の理解を深め 式を多面的にみたり目的に応じて式を適切に変形したりすること (ax b)(cx d) acx (ad bc)x bd などの基本的な公式を活用して 二次式の展開や因数分解ができる また 式の置き換えや一文字に着目するなどして 展開 因数分解ができる ( 例 ) 次の問に答えよ (1) (3x a)(4x
多変量解析 ~ 重回帰分析 ~ 2006 年 4 月 21 日 ( 金 ) 南慶典
 南慶典") 多変量解析 ~ 重回帰分析 ~ 2006 年 4 月 21 日 ( 金 ) 南慶典 重回帰分析とは? 重回帰分析とは複数の説明変数から目的変数との関係性を予測 評価説明変数 ( 数量データ ) は目的変数を説明するのに有効であるか得られた関係性より未知のデータの妥当性を判断する これを重回帰分析という つまり どんなことをするのか? 1 最小 2 乗法により重回帰モデルを想定 2 自由度調整済寄与率を求め
多変量解析 ~ 重回帰分析 ~ 2006 年 4 月 21 日 ( 金 ) 南慶典 重回帰分析とは? 重回帰分析とは複数の説明変数から目的変数との関係性を予測 評価説明変数 ( 数量データ ) は目的変数を説明するのに有効であるか得られた関係性より未知のデータの妥当性を判断する これを重回帰分析という つまり どんなことをするのか? 1 最小 2 乗法により重回帰モデルを想定 2 自由度調整済寄与率を求め
Microsoft PowerPoint - 測量学.ppt [互換モード]
![Microsoft PowerPoint - 測量学.ppt [互換モード]](/thumbs/92/109082022.jpg "Microsoft PowerPoint - 測量学.ppt [互換モード]") 8/5/ 誤差理論 測定の分類 性格による分類 独立 ( な ) 測定 : 測定値がある条件を満たさなければならないなどの拘束や制約を持たないで独立して行う測定 条件 ( 付き ) 測定 : 三角形の 3 つの内角の和のように, 個々の測定値間に満たすべき条件式が存在する場合の測定 方法による分類 直接測定 : 距離や角度などを機器を用いて直接行う測定 間接測定 : 求めるべき量を直接測定するのではなく,
8/5/ 誤差理論 測定の分類 性格による分類 独立 ( な ) 測定 : 測定値がある条件を満たさなければならないなどの拘束や制約を持たないで独立して行う測定 条件 ( 付き ) 測定 : 三角形の 3 つの内角の和のように, 個々の測定値間に満たすべき条件式が存在する場合の測定 方法による分類 直接測定 : 距離や角度などを機器を用いて直接行う測定 間接測定 : 求めるべき量を直接測定するのではなく,
第 4 週コンボリューションその 2, 正弦波による分解 教科書 p. 16~ 目標コンボリューションの演習. 正弦波による信号の分解の考え方の理解. 正弦波の複素表現を学ぶ. 演習問題 問 1. 以下の図にならって,1 と 2 の δ 関数を図示せよ δ (t) 2
 2") 第 4 週コンボリューションその, 正弦波による分解 教科書 p. 6~ 目標コンボリューションの演習. 正弦波による信号の分解の考え方の理解. 正弦波の複素表現を学ぶ. 演習問題 問. 以下の図にならって, と の δ 関数を図示せよ. - - - δ () δ ( ) - - - 図 δ 関数の図示の例 δ ( ) δ ( ) δ ( ) δ ( ) δ ( ) - - - - - - - -
第 4 週コンボリューションその, 正弦波による分解 教科書 p. 6~ 目標コンボリューションの演習. 正弦波による信号の分解の考え方の理解. 正弦波の複素表現を学ぶ. 演習問題 問. 以下の図にならって, と の δ 関数を図示せよ. - - - δ () δ ( ) - - - 図 δ 関数の図示の例 δ ( ) δ ( ) δ ( ) δ ( ) δ ( ) - - - - - - - -
Microsoft PowerPoint - 三次元座標測定 ppt
 冗長座標測定機 ()( 三次元座標計測 ( 第 9 回 ) 5 年度大学院講義 6 年 月 7 日 冗長性を持つ 次元座標測定機 次元 辺測量 : 冗長性を出すために つのレーザトラッカを配置し, キャッツアイまでの距離から座標を測定する つのカメラ ( 次元的なカメラ ) とレーザスキャナ : つの角度測定システムによる座標測定 つの回転関節による 次元 自由度多関節機構 高増潔東京大学工学系研究科精密機械工学専攻
冗長座標測定機 ()( 三次元座標計測 ( 第 9 回 ) 5 年度大学院講義 6 年 月 7 日 冗長性を持つ 次元座標測定機 次元 辺測量 : 冗長性を出すために つのレーザトラッカを配置し, キャッツアイまでの距離から座標を測定する つのカメラ ( 次元的なカメラ ) とレーザスキャナ : つの角度測定システムによる座標測定 つの回転関節による 次元 自由度多関節機構 高増潔東京大学工学系研究科精密機械工学専攻
講義「○○○○」
 講義 信頼度の推定と立証 内容. 点推定と区間推定. 指数分布の点推定 区間推定 3. 指数分布 正規分布の信頼度推定 担当 : 倉敷哲生 ( ビジネスエンジニアリング専攻 ) 統計的推測 標本から得られる情報を基に 母集団に関する結論の導出が目的 測定値 x x x 3 : x 母集団 (populaio) 母集団の特性値 統計的推測 標本 (sample) 標本の特性値 分布のパラメータ ( 母数
講義 信頼度の推定と立証 内容. 点推定と区間推定. 指数分布の点推定 区間推定 3. 指数分布 正規分布の信頼度推定 担当 : 倉敷哲生 ( ビジネスエンジニアリング専攻 ) 統計的推測 標本から得られる情報を基に 母集団に関する結論の導出が目的 測定値 x x x 3 : x 母集団 (populaio) 母集団の特性値 統計的推測 標本 (sample) 標本の特性値 分布のパラメータ ( 母数
Microsoft PowerPoint - e-stat(OLS).pptx
.pptx") 経済統計学 ( 補足 ) 最小二乗法について 担当 : 小塚匡文 2015 年 11 月 19 日 ( 改訂版 ) 神戸大学経済学部 2015 年度後期開講授業 補足 : 最小二乗法 ( 単回帰分析 ) 1.( 単純 ) 回帰分析とは? 標本サイズTの2 変数 ( ここではXとY) のデータが存在 YをXで説明する回帰方程式を推定するための方法 Y: 被説明変数 ( または従属変数 ) X: 説明変数
経済統計学 ( 補足 ) 最小二乗法について 担当 : 小塚匡文 2015 年 11 月 19 日 ( 改訂版 ) 神戸大学経済学部 2015 年度後期開講授業 補足 : 最小二乗法 ( 単回帰分析 ) 1.( 単純 ) 回帰分析とは? 標本サイズTの2 変数 ( ここではXとY) のデータが存在 YをXで説明する回帰方程式を推定するための方法 Y: 被説明変数 ( または従属変数 ) X: 説明変数
構造力学Ⅰ第12回
 第 回材の座屈 (0 章 ) p.5~ ( 復習 ) モールの定理 ( 手順 ) 座屈とは 荷重により梁に生じた曲げモーメントをで除して仮想荷重と考える 座屈荷重 偏心荷重 ( 曲げと軸力 ) 断面の核 この仮想荷重に対するある点でのせん断力 たわみ角に相当する曲げモーメント たわみに相当する ( 例 ) 単純梁の支点のたわみ角 : は 図 を仮想荷重と考えたときの 点の支点反力 B は 図 を仮想荷重と考えたときのB
第 回材の座屈 (0 章 ) p.5~ ( 復習 ) モールの定理 ( 手順 ) 座屈とは 荷重により梁に生じた曲げモーメントをで除して仮想荷重と考える 座屈荷重 偏心荷重 ( 曲げと軸力 ) 断面の核 この仮想荷重に対するある点でのせん断力 たわみ角に相当する曲げモーメント たわみに相当する ( 例 ) 単純梁の支点のたわみ角 : は 図 を仮想荷重と考えたときの 点の支点反力 B は 図 を仮想荷重と考えたときのB
Microsoft Word - 町田・全 H30学力スタ 別紙1 1年 数学Ⅰ.doc
 (1) 数と式 学習指導要領 都立町田高校 学力スタンダード ア 数と集合 ( ア ) 実数 根号を含む式の計算 数を実数まで拡張する意義を理解し 簡単な 循環小数を表す記号を用いて, 分数を循環小数で表 無理数の四則計算をすること すことができる 今まで学習してきた数の体系について整理し, 考察 しようとする 絶対値の意味と記号表示を理解している 根号を含む式の加法, 減法, 乗法の計算ができる
(1) 数と式 学習指導要領 都立町田高校 学力スタンダード ア 数と集合 ( ア ) 実数 根号を含む式の計算 数を実数まで拡張する意義を理解し 簡単な 循環小数を表す記号を用いて, 分数を循環小数で表 無理数の四則計算をすること すことができる 今まで学習してきた数の体系について整理し, 考察 しようとする 絶対値の意味と記号表示を理解している 根号を含む式の加法, 減法, 乗法の計算ができる
Microsoft Word - 1B2011.doc
 第 14 回モールの定理 ( 単純梁の場合 ) ( モールの定理とは何か?p.11) 例題 下記に示す単純梁の C 点のたわみ角 θ C と, たわみ δ C を求めよ ただし, 部材の曲げ 剛性は材軸に沿って一様で とする C D kn B 1.5m 0.5m 1.0m 解答 1 曲げモーメント図を描く,B 点の反力を求める kn kn 4 kn 曲げモーメント図を描く knm 先に得られた曲げモーメントの値を
第 14 回モールの定理 ( 単純梁の場合 ) ( モールの定理とは何か?p.11) 例題 下記に示す単純梁の C 点のたわみ角 θ C と, たわみ δ C を求めよ ただし, 部材の曲げ 剛性は材軸に沿って一様で とする C D kn B 1.5m 0.5m 1.0m 解答 1 曲げモーメント図を描く,B 点の反力を求める kn kn 4 kn 曲げモーメント図を描く knm 先に得られた曲げモーメントの値を
untitled
 KLT はエネルギを集約する カルーネンレーベ変換 (KLT) で 情報を集約する 要点 分散 7. 9. 8.3 3.7 4.5 4.0 KLT 前 集約 分散 0.3 0.4 4.5 7.4 3.4 00.7 KLT 後 分散 = エネルギ密度 エネルギ と表現 最大を 55, 最小を 0 に正規化して表示した 情報圧縮に応用できないか? エネルギ集約 データ圧縮 分散 ( 平均 ) KLT 前
KLT はエネルギを集約する カルーネンレーベ変換 (KLT) で 情報を集約する 要点 分散 7. 9. 8.3 3.7 4.5 4.0 KLT 前 集約 分散 0.3 0.4 4.5 7.4 3.4 00.7 KLT 後 分散 = エネルギ密度 エネルギ と表現 最大を 55, 最小を 0 に正規化して表示した 情報圧縮に応用できないか? エネルギ集約 データ圧縮 分散 ( 平均 ) KLT 前
カイ二乗フィット検定、パラメータの誤差
 統計的データ解析 008 008.. 林田清 ( 大阪大学大学院理学研究科 ) 問題 C (, ) ( x xˆ) ( y yˆ) σ x πσ σ y y Pabx (, ;,,, ) ˆ y σx σ y = dx exp exp πσx ただし xy ˆ ˆ はyˆ = axˆ+ bであらわされる直線モデル上の点 ( ˆ) ( ˆ ) ( ) x x y ax b y ax b Pabx (,
統計的データ解析 008 008.. 林田清 ( 大阪大学大学院理学研究科 ) 問題 C (, ) ( x xˆ) ( y yˆ) σ x πσ σ y y Pabx (, ;,,, ) ˆ y σx σ y = dx exp exp πσx ただし xy ˆ ˆ はyˆ = axˆ+ bであらわされる直線モデル上の点 ( ˆ) ( ˆ ) ( ) x x y ax b y ax b Pabx (,
Kumamoto University Center for Multimedia and Information Technologies Lab. 熊本大学アプリケーション実験 ~ 実環境における無線 LAN 受信電波強度を用いた位置推定手法の検討 ~ InKIAI 宮崎県美郷
 熊本大学アプリケーション実験 ~ 実環境における無線 LAN 受信電波強度を用いた位置推定手法の検討 ~ InKIAI プロジェクト @ 宮崎県美郷町 熊本大学副島慶人川村諒 1 実験の目的 従来 信号の受信電波強度 (RSSI:RecevedSgnal StrengthIndcator) により 対象の位置を推定する手法として 無線 LAN の AP(AccessPont) から受信する信号の減衰量をもとに位置を推定する手法が多く検討されている
熊本大学アプリケーション実験 ~ 実環境における無線 LAN 受信電波強度を用いた位置推定手法の検討 ~ InKIAI プロジェクト @ 宮崎県美郷町 熊本大学副島慶人川村諒 1 実験の目的 従来 信号の受信電波強度 (RSSI:RecevedSgnal StrengthIndcator) により 対象の位置を推定する手法として 無線 LAN の AP(AccessPont) から受信する信号の減衰量をもとに位置を推定する手法が多く検討されている
補足 中学で学習したフレミング左手の法則 ( 電 磁 力 ) と関連付けると覚えやすい 電磁力は電流と磁界の外積で表される 力 F 磁 電磁力 F li 右ねじの回転の向き電 li ( l は導線の長さ ) 補足 有向線分とベクトル有向線分 : 矢印の位
 と関連付けると覚えやすい 電磁力は電流と磁界の外積で表される 力 F 磁 電磁力 F li 右ねじの回転の向き電 li ( l は導線の長さ ) 補足 有向線分とベクトル有向線分 : 矢印の位") http://totemt.sur.ne.p 外積 ( ベクトル積 ) の活用 ( 面積, 法線ベクトル, 平面の方程式 ) 3 次元空間の つのベクトルの積が つのベクトルを与えるようなベクトルの掛け算 ベクトルの積がベクトルを与えることからベクトル積とも呼ばれる これに対し内積は符号と大きさをもつ量 ( スカラー量 ) を与えるので, スカラー積とも呼ばれる 外積を使うと, 平行四辺形や三角形の面積,
http://totemt.sur.ne.p 外積 ( ベクトル積 ) の活用 ( 面積, 法線ベクトル, 平面の方程式 ) 3 次元空間の つのベクトルの積が つのベクトルを与えるようなベクトルの掛け算 ベクトルの積がベクトルを与えることからベクトル積とも呼ばれる これに対し内積は符号と大きさをもつ量 ( スカラー量 ) を与えるので, スカラー積とも呼ばれる 外積を使うと, 平行四辺形や三角形の面積,
景気指標の新しい動向
 内閣府経済社会総合研究所 経済分析 22 年第 166 号 4 時系列因子分析モデル 4.1 時系列因子分析モデル (Stock-Watson モデル の理論的解説 4.1.1 景気循環の状態空間表現 Stock and Watson (1989,1991 は観測される景気指標を状態空間表現と呼ば れるモデルで表し, 景気の状態を示す指標を開発した. 状態空間表現とは, わ れわれの目に見える実際に観測される変数は,
内閣府経済社会総合研究所 経済分析 22 年第 166 号 4 時系列因子分析モデル 4.1 時系列因子分析モデル (Stock-Watson モデル の理論的解説 4.1.1 景気循環の状態空間表現 Stock and Watson (1989,1991 は観測される景気指標を状態空間表現と呼ば れるモデルで表し, 景気の状態を示す指標を開発した. 状態空間表現とは, わ れわれの目に見える実際に観測される変数は,
<4D F736F F F696E74202D2091E6824F82538FCD8CEB82E88C9F8F6F814592F990B382CC8CB4979D82BB82CC82505F D E95848D8682CC90B69
 第 章 誤り検出 訂正の原理 その ブロック符号とその復号 安達文幸 目次 誤り訂正符号化を用いる伝送系誤り検出符号誤り検出 訂正符号 7, ハミング符号, ハミング符号生成行列, パリティ検査行列の一般形符号の生成行列符号の生成行列とパリティ検査行列の関係符号の訂正能力符号多項式 安達 : コミュニケーション符号理論 安達 : コミュニケーション符号理論 誤り訂正符号化を用いる伝送系 伝送システム
第 章 誤り検出 訂正の原理 その ブロック符号とその復号 安達文幸 目次 誤り訂正符号化を用いる伝送系誤り検出符号誤り検出 訂正符号 7, ハミング符号, ハミング符号生成行列, パリティ検査行列の一般形符号の生成行列符号の生成行列とパリティ検査行列の関係符号の訂正能力符号多項式 安達 : コミュニケーション符号理論 安達 : コミュニケーション符号理論 誤り訂正符号化を用いる伝送系 伝送システム
2016年度 京都大・文系数学
 06 京都大学 ( 文系 ) 前期日程問題 解答解説のページへ xy 平面内の領域の面積を求めよ x + y, x で, 曲線 C : y= x + x -xの上側にある部分 -- 06 京都大学 ( 文系 ) 前期日程問題 解答解説のページへ ボタンを押すと あたり か はずれ のいずれかが表示される装置がある あたり の表示される確率は毎回同じであるとする この装置のボタンを 0 回押したとき,
06 京都大学 ( 文系 ) 前期日程問題 解答解説のページへ xy 平面内の領域の面積を求めよ x + y, x で, 曲線 C : y= x + x -xの上側にある部分 -- 06 京都大学 ( 文系 ) 前期日程問題 解答解説のページへ ボタンを押すと あたり か はずれ のいずれかが表示される装置がある あたり の表示される確率は毎回同じであるとする この装置のボタンを 0 回押したとき,
スライド 1
 5.5.2 画像の間引き 5.1 線形変換 5.2 アフィン変換 5.3 同次座標 5.4 平面射影変換 5.5 再標本化 1. 画素数の減少による表現能力の低下 画像の縮小 変形を行う際 結果画像の 画素数 < 入力画像の 画素数 ( 画素の密度 ) ( 画素の密度 ) になることがある この場合 結果画像の表現力 < 入力画像の表現力 ( 情報量 ) ( 情報量 ) 結果的に 情報の損失が生じる!
5.5.2 画像の間引き 5.1 線形変換 5.2 アフィン変換 5.3 同次座標 5.4 平面射影変換 5.5 再標本化 1. 画素数の減少による表現能力の低下 画像の縮小 変形を行う際 結果画像の 画素数 < 入力画像の 画素数 ( 画素の密度 ) ( 画素の密度 ) になることがある この場合 結果画像の表現力 < 入力画像の表現力 ( 情報量 ) ( 情報量 ) 結果的に 情報の損失が生じる!
Microsoft PowerPoint - pr_12_template-bs.pptx
 12 回パターン検出と画像特徴 テンプレートマッチング 領域分割 画像特徴 テンプレート マッチング 1 テンプレートマッチング ( 図形 画像などの ) 型照合 Template Matching テンプレートと呼ばれる小さな一部の画像領域と同じパターンが画像全体の中に存在するかどうかを調べる方法 画像内にある対象物体の位置検出 物体数のカウント 物体移動の検出などに使われる テンプレートマッチングの計算
12 回パターン検出と画像特徴 テンプレートマッチング 領域分割 画像特徴 テンプレート マッチング 1 テンプレートマッチング ( 図形 画像などの ) 型照合 Template Matching テンプレートと呼ばれる小さな一部の画像領域と同じパターンが画像全体の中に存在するかどうかを調べる方法 画像内にある対象物体の位置検出 物体数のカウント 物体移動の検出などに使われる テンプレートマッチングの計算
Microsoft PowerPoint - H21生物計算化学2.ppt
 演算子の行列表現 > L いま 次元ベクトル空間の基底をケットと書くことにする この基底は完全系を成すとすると 空間内の任意のケットベクトルは > > > これより 一度基底を与えてしまえば 任意のベクトルはその基底についての成分で完全に記述することができる これらの成分を列行列の形に書くと M これをベクトル の基底 { >} による行列表現という ところで 行列 A の共役 dont 行列は A
演算子の行列表現 > L いま 次元ベクトル空間の基底をケットと書くことにする この基底は完全系を成すとすると 空間内の任意のケットベクトルは > > > これより 一度基底を与えてしまえば 任意のベクトルはその基底についての成分で完全に記述することができる これらの成分を列行列の形に書くと M これをベクトル の基底 { >} による行列表現という ところで 行列 A の共役 dont 行列は A
PowerPoint プレゼンテーション
 復習 ) 時系列のモデリング ~a. 離散時間モデル ~ y k + a 1 z 1 y k + + a na z n ay k = b 0 u k + b 1 z 1 u k + + b nb z n bu k y k = G z 1 u k = B(z 1 ) A(z 1 u k ) ARMA モデル A z 1 B z 1 = 1 + a 1 z 1 + + a na z n a = b 0
復習 ) 時系列のモデリング ~a. 離散時間モデル ~ y k + a 1 z 1 y k + + a na z n ay k = b 0 u k + b 1 z 1 u k + + b nb z n bu k y k = G z 1 u k = B(z 1 ) A(z 1 u k ) ARMA モデル A z 1 B z 1 = 1 + a 1 z 1 + + a na z n a = b 0
Microsoft PowerPoint - 2.ppt [互換モード]
![Microsoft PowerPoint - 2.ppt [互換モード]](/thumbs/74/70606453.jpg "Microsoft PowerPoint - 2.ppt [互換モード]") 0 章数学基礎 1 大学では 高校より厳密に議論を行う そのために 議論の議論の対象を明確にする必要がある 集合 ( 定義 ) 集合 物の集まりである集合 X に対して X を構成している物を X の要素または元という 集合については 3 セメスタ開講の 離散数学 で詳しく扱う 2 集合の表現 1. 要素を明示する表現 ( 外延的表現 ) 中括弧で 囲う X = {0,1, 2,3} 慣用的に 英大文字を用いる
0 章数学基礎 1 大学では 高校より厳密に議論を行う そのために 議論の議論の対象を明確にする必要がある 集合 ( 定義 ) 集合 物の集まりである集合 X に対して X を構成している物を X の要素または元という 集合については 3 セメスタ開講の 離散数学 で詳しく扱う 2 集合の表現 1. 要素を明示する表現 ( 外延的表現 ) 中括弧で 囲う X = {0,1, 2,3} 慣用的に 英大文字を用いる
臨床画像技術学Ⅱ
 核医学機器工学概論 2 断層画像 CT( Computed Tomography) を得る方法 1. フィルタ重畳逆投影法 FBP ( Filtered Back Projection ) 2. 逐次近似再構成法 Iterative Reconstruction MLEM (Maximum Likelihood Expectation Maximization) OSEM ( Ordered Subsets
核医学機器工学概論 2 断層画像 CT( Computed Tomography) を得る方法 1. フィルタ重畳逆投影法 FBP ( Filtered Back Projection ) 2. 逐次近似再構成法 Iterative Reconstruction MLEM (Maximum Likelihood Expectation Maximization) OSEM ( Ordered Subsets
横浜市環境科学研究所
 周期時系列の統計解析 単回帰分析 io 8 年 3 日 周期時系列に季節調整を行わないで単回帰分析を適用すると, 回帰係数には周期成分の影響が加わる. ここでは, 周期時系列をコサイン関数モデルで近似し単回帰分析によりモデルの回帰係数を求め, 周期成分の影響を検討した. また, その結果を気温時系列に当てはめ, 課題等について考察した. 気温時系列とコサイン関数モデル第 報の結果を利用するので, その一部を再掲する.
周期時系列の統計解析 単回帰分析 io 8 年 3 日 周期時系列に季節調整を行わないで単回帰分析を適用すると, 回帰係数には周期成分の影響が加わる. ここでは, 周期時系列をコサイン関数モデルで近似し単回帰分析によりモデルの回帰係数を求め, 周期成分の影響を検討した. また, その結果を気温時系列に当てはめ, 課題等について考察した. 気温時系列とコサイン関数モデル第 報の結果を利用するので, その一部を再掲する.
線形システム応答 Linear System response
 画質が異なる画像例 コントラスト劣 コントラスト優 コントラスト普 鮮鋭性 普 鮮鋭性 優 鮮鋭性 劣 粒状性 普 粒状性 劣 粒状性 優 医用画像の画質 コントラスト, 鮮鋭性, 粒状性の要因が互いに密接に関わり合って形成されている. 比 鮮鋭性 コントラスト 反 反 粒状性 増感紙 - フィルム系での 3 要因の関係 ディジタル画像処理系でもおよそ成り立つ WS u MTFu 画質に影響する因子
画質が異なる画像例 コントラスト劣 コントラスト優 コントラスト普 鮮鋭性 普 鮮鋭性 優 鮮鋭性 劣 粒状性 普 粒状性 劣 粒状性 優 医用画像の画質 コントラスト, 鮮鋭性, 粒状性の要因が互いに密接に関わり合って形成されている. 比 鮮鋭性 コントラスト 反 反 粒状性 増感紙 - フィルム系での 3 要因の関係 ディジタル画像処理系でもおよそ成り立つ WS u MTFu 画質に影響する因子
数学の世界
 東京女子大学文理学部数学の世界 (2002 年度 ) 永島孝 17 6 行列式の基本法則と効率的な計算法 基本法則 三次以上の行列式についても, 二次の場合と同様な法則がなりたつ ここには三次の場合を例示するが, 四次以上でも同様である 1 単位行列の行列式の値は 1 である すなわち 1 0 0 0 1 0 1 0 0 1 2 二つの列を入れ替えると行列式の値は 1 倍になる 例えば a 13 a
東京女子大学文理学部数学の世界 (2002 年度 ) 永島孝 17 6 行列式の基本法則と効率的な計算法 基本法則 三次以上の行列式についても, 二次の場合と同様な法則がなりたつ ここには三次の場合を例示するが, 四次以上でも同様である 1 単位行列の行列式の値は 1 である すなわち 1 0 0 0 1 0 1 0 0 1 2 二つの列を入れ替えると行列式の値は 1 倍になる 例えば a 13 a
連続講座 断層映像法の基礎第 29 回 : 篠原広行 他 断層映像法の基礎第 29 回 2 次元ファンビームの投影と画像再構成 篠原広行 II 梶原宏則 II 中世古和真 1 ) 橘篤志 II 橋本雄幸 2) 首都大学東京人間健康科学研究科放射線科学域 21 横浜愈 l 英短期大学情報学科 はじめに
 橘篤志 II 橋本雄幸 2) 首都大学東京人間健康科学研究科放射線科学域 21 横浜愈 l 英短期大学情報学科 はじめに") 連続講座 断層映像法の基礎第 29 回 : 篠原広行 他 断層映像法の基礎第 29 回 2 次元ファンビームの投影と画像再構成 篠原広行 II 梶原宏則 II 中世古和真 1 ) 橘篤志 II 橋本雄幸 2) 首都大学東京人間健康科学研究科放射線科学域 21 横浜愈 l 英短期大学情報学科 はじめに第 28 固までで レジストレーションについてその基本から非剛体レジストレーションまで解説してきた 今回から直接
連続講座 断層映像法の基礎第 29 回 : 篠原広行 他 断層映像法の基礎第 29 回 2 次元ファンビームの投影と画像再構成 篠原広行 II 梶原宏則 II 中世古和真 1 ) 橘篤志 II 橋本雄幸 2) 首都大学東京人間健康科学研究科放射線科学域 21 横浜愈 l 英短期大学情報学科 はじめに第 28 固までで レジストレーションについてその基本から非剛体レジストレーションまで解説してきた 今回から直接
Microsoft PowerPoint - mp11-06.pptx
 数理計画法第 6 回 塩浦昭義情報科学研究科准教授 shioura@dais.is.tohoku.ac.jp http://www.dais.is.tohoku.ac.jp/~shioura/teaching 第 5 章組合せ計画 5.2 分枝限定法 組合せ計画問題 組合せ計画問題とは : 有限個の もの の組合せの中から, 目的関数を最小または最大にする組合せを見つける問題 例 1: 整数計画問題全般
数理計画法第 6 回 塩浦昭義情報科学研究科准教授 shioura@dais.is.tohoku.ac.jp http://www.dais.is.tohoku.ac.jp/~shioura/teaching 第 5 章組合せ計画 5.2 分枝限定法 組合せ計画問題 組合せ計画問題とは : 有限個の もの の組合せの中から, 目的関数を最小または最大にする組合せを見つける問題 例 1: 整数計画問題全般
画像解析論(2) 講義内容
 講義内容") 画像解析論 画像解析論 東京工業大学長橋宏 主な講義内容 信号処理と画像処理 二次元システムとその表現 二次元システムの特性解析 各種の画像フィルタ 信号処理と画像処理 画像解析論 処理の応答 記憶域 入出力の流れ 信号処理系 実時間性が求められる メモリ容量に対する制限が厳しい オンラインでの対応が厳しく求められる 画像処理系 ある程度の処理時間が許容される 大容量のメモリ使用が容認され易い オフラインでの対応が容認され易い
画像解析論 画像解析論 東京工業大学長橋宏 主な講義内容 信号処理と画像処理 二次元システムとその表現 二次元システムの特性解析 各種の画像フィルタ 信号処理と画像処理 画像解析論 処理の応答 記憶域 入出力の流れ 信号処理系 実時間性が求められる メモリ容量に対する制限が厳しい オンラインでの対応が厳しく求められる 画像処理系 ある程度の処理時間が許容される 大容量のメモリ使用が容認され易い オフラインでの対応が容認され易い
スライド 1
 Keal H. Sahn A R. Crc: A dual teperature sulated annealng approach for solvng blevel prograng probles Coputers and Checal Engneerng Vol. 23 pp. 11-251998. 第 12 回論文ゼミ 2013/07/12( 金 ) #4 M1 今泉孝章 2 段階計画問題とは
Keal H. Sahn A R. Crc: A dual teperature sulated annealng approach for solvng blevel prograng probles Coputers and Checal Engneerng Vol. 23 pp. 11-251998. 第 12 回論文ゼミ 2013/07/12( 金 ) #4 M1 今泉孝章 2 段階計画問題とは
2011年度 筑波大・理系数学
 0 筑波大学 ( 理系 ) 前期日程問題 解答解説のページへ O を原点とするy 平面において, 直線 y= の を満たす部分をC とする () C 上に点 A( t, ) をとるとき, 線分 OA の垂直二等分線の方程式を求めよ () 点 A が C 全体を動くとき, 線分 OA の垂直二等分線が通過する範囲を求め, それ を図示せよ -- 0 筑波大学 ( 理系 ) 前期日程問題 解答解説のページへ
0 筑波大学 ( 理系 ) 前期日程問題 解答解説のページへ O を原点とするy 平面において, 直線 y= の を満たす部分をC とする () C 上に点 A( t, ) をとるとき, 線分 OA の垂直二等分線の方程式を求めよ () 点 A が C 全体を動くとき, 線分 OA の垂直二等分線が通過する範囲を求め, それ を図示せよ -- 0 筑波大学 ( 理系 ) 前期日程問題 解答解説のページへ
学力スタンダード(様式1)
") (1) 数と式 学習指導要領ア数と集合 ( ア ) 実数数を実数まで拡張する意義を理解し 簡単な無理数の四則計算をすること 稔ヶ丘高校学力スタンダード 有理数 無理数の定義や実数の分類について理解し ている 絶対値の意味と記号表示を理解している 実数と直線上の点が一対一対応であることを理解 し 実数を数直線上に示すことができる 例 実数 (1) -.5 () π (3) 数直線上の点はどれか答えよ
(1) 数と式 学習指導要領ア数と集合 ( ア ) 実数数を実数まで拡張する意義を理解し 簡単な無理数の四則計算をすること 稔ヶ丘高校学力スタンダード 有理数 無理数の定義や実数の分類について理解し ている 絶対値の意味と記号表示を理解している 実数と直線上の点が一対一対応であることを理解 し 実数を数直線上に示すことができる 例 実数 (1) -.5 () π (3) 数直線上の点はどれか答えよ
統計的データ解析
 統計的データ解析 011 011.11.9 林田清 ( 大阪大学大学院理学研究科 ) 連続確率分布の平均値 分散 比較のため P(c ) c 分布 自由度 の ( カイ c 平均値 0, 標準偏差 1の正規分布 に従う変数 xの自乗和 c x =1 が従う分布を自由度 の分布と呼ぶ 一般に自由度の分布は f /1 c / / ( c ) {( c ) e }/ ( / ) 期待値 二乗 ) 分布 c
統計的データ解析 011 011.11.9 林田清 ( 大阪大学大学院理学研究科 ) 連続確率分布の平均値 分散 比較のため P(c ) c 分布 自由度 の ( カイ c 平均値 0, 標準偏差 1の正規分布 に従う変数 xの自乗和 c x =1 が従う分布を自由度 の分布と呼ぶ 一般に自由度の分布は f /1 c / / ( c ) {( c ) e }/ ( / ) 期待値 二乗 ) 分布 c
Microsoft PowerPoint - H22制御工学I-2回.ppt
 制御工学 I 第二回ラプラス変換 平成 年 4 月 9 日 /4/9 授業の予定 制御工学概論 ( 回 ) 制御技術は現在様々な工学分野において重要な基本技術となっている 工学における制御工学の位置づけと歴史について説明する さらに 制御システムの基本構成と種類を紹介する ラプラス変換 ( 回 ) 制御工学 特に古典制御ではラプラス変換が重要な役割を果たしている ラプラス変換と逆ラプラス変換の定義を紹介し
制御工学 I 第二回ラプラス変換 平成 年 4 月 9 日 /4/9 授業の予定 制御工学概論 ( 回 ) 制御技術は現在様々な工学分野において重要な基本技術となっている 工学における制御工学の位置づけと歴史について説明する さらに 制御システムの基本構成と種類を紹介する ラプラス変換 ( 回 ) 制御工学 特に古典制御ではラプラス変換が重要な役割を果たしている ラプラス変換と逆ラプラス変換の定義を紹介し
以下 変数の上のドットは時間に関する微分を表わしている (ex. 2 dx d x x, x 2 dt dt ) 付録 E 非線形微分方程式の平衡点の安定性解析 E-1) 非線形方程式の線形近似特に言及してこなかったが これまでは線形微分方程式 ( x や x, x などがすべて 1 次で なおかつ
 付録 E 非線形微分方程式の平衡点の安定性解析 E-1) 非線形方程式の線形近似特に言及してこなかったが これまでは線形微分方程式 ( x や x, x などがすべて 1 次で なおかつ") 以下 変数の上のドットは時間に関する微分を表わしている (e. d d, dt dt ) 付録 E 非線形微分方程式の平衡点の安定性解析 E-) 非線形方程式の線形近似特に言及してこなかったが これまでは線形微分方程式 ( や, などがすべて 次で なおかつそれらの係数が定数であるような微分方程式 ) に対して安定性の解析を行ってきた しかしながら 実際には非線形の微分方程式で記述される現象も多く存在する
以下 変数の上のドットは時間に関する微分を表わしている (e. d d, dt dt ) 付録 E 非線形微分方程式の平衡点の安定性解析 E-) 非線形方程式の線形近似特に言及してこなかったが これまでは線形微分方程式 ( や, などがすべて 次で なおかつそれらの係数が定数であるような微分方程式 ) に対して安定性の解析を行ってきた しかしながら 実際には非線形の微分方程式で記述される現象も多く存在する
FEM原理講座 (サンプルテキスト)
") サンプルテキスト FEM 原理講座 サイバネットシステム株式会社 8 年 月 9 日作成 サンプルテキストについて 各講師が 講義の内容が伝わりやすいページ を選びました テキストのページは必ずしも連続していません 一部を抜粋しています 幾何光学講座については 実物のテキストではなくガイダンスを掲載いたします 対象とする構造系 物理モデル 連続体 固体 弾性体 / 弾塑性体 / 粘弾性体 / 固体
サンプルテキスト FEM 原理講座 サイバネットシステム株式会社 8 年 月 9 日作成 サンプルテキストについて 各講師が 講義の内容が伝わりやすいページ を選びました テキストのページは必ずしも連続していません 一部を抜粋しています 幾何光学講座については 実物のテキストではなくガイダンスを掲載いたします 対象とする構造系 物理モデル 連続体 固体 弾性体 / 弾塑性体 / 粘弾性体 / 固体
チェビシェフ多項式の2変数への拡張と公開鍵暗号(ElGamal暗号)への応用
への応用") チェビシェフ多項式の 変数への拡張と公開鍵暗号 Ell 暗号 への応用 Ⅰ. チェビシェフ Chbhv Chbhv の多項式 より であるから よって ここで とおくと coθ iθ coθ iθ iθ coθcoθ 4 4 iθ iθ iθ iθ iθ i θ i θ i θ i θ co θ co θ} co θ coθcoθ co θ coθ coθ したがって が成り立つ この漸化式と であることより
チェビシェフ多項式の 変数への拡張と公開鍵暗号 Ell 暗号 への応用 Ⅰ. チェビシェフ Chbhv Chbhv の多項式 より であるから よって ここで とおくと coθ iθ coθ iθ iθ coθcoθ 4 4 iθ iθ iθ iθ iθ i θ i θ i θ i θ co θ co θ} co θ coθcoθ co θ coθ coθ したがって が成り立つ この漸化式と であることより
14 化学実験法 II( 吉村 ( 洋 mmol/l の半分だったから さんの測定値は くんの測定値の 4 倍の重みがあり 推定値 としては 0.68 mmol/l その標準偏差は mmol/l 程度ということになる 測定値を 特徴づけるパラメータ t を推定するこの手
 14 化学実験法 II( 吉村 ( 洋 014.6.1. 最小 乗法のはなし 014.6.1. 内容 最小 乗法のはなし...1 最小 乗法の考え方...1 最小 乗法によるパラメータの決定... パラメータの信頼区間...3 重みの異なるデータの取扱い...4 相関係数 決定係数 ( 最小 乗法を語るもう一つの立場...5 実験条件の誤差の影響...5 問題...6 最小 乗法の考え方 飲料水中のカルシウム濃度を
14 化学実験法 II( 吉村 ( 洋 014.6.1. 最小 乗法のはなし 014.6.1. 内容 最小 乗法のはなし...1 最小 乗法の考え方...1 最小 乗法によるパラメータの決定... パラメータの信頼区間...3 重みの異なるデータの取扱い...4 相関係数 決定係数 ( 最小 乗法を語るもう一つの立場...5 実験条件の誤差の影響...5 問題...6 最小 乗法の考え方 飲料水中のカルシウム濃度を
<4D F736F F D208CF68BA48C6F8DCF8A C30342C CFA90B68C6F8DCF8A7782CC8AEE967B92E8979D32288F4390B394C529332E646F63>
 2. 厚生経済学の ( 第 ) 基本定理 2 203 年 4 月 7 日 ( 水曜 3 限 )/8 本章では 純粋交換経済において厚生経済学の ( 第 ) 基本定理 が成立することを示す なお より一般的な生産技術のケースについては 4.5 補論 2 で議論する 2. 予算集合と最適消費点 ( 完全 ) 競争市場で達成される資源配分がパレート効率的であることを示すための準備として 個人の最適化行動を検討する
2. 厚生経済学の ( 第 ) 基本定理 2 203 年 4 月 7 日 ( 水曜 3 限 )/8 本章では 純粋交換経済において厚生経済学の ( 第 ) 基本定理 が成立することを示す なお より一般的な生産技術のケースについては 4.5 補論 2 で議論する 2. 予算集合と最適消費点 ( 完全 ) 競争市場で達成される資源配分がパレート効率的であることを示すための準備として 個人の最適化行動を検討する
ディジタル信号処理
 ディジタルフィルタの設計法. 逆フィルター. 直線位相 FIR フィルタの設計. 窓関数法による FIR フィルタの設計.5 時間領域での FIR フィルタの設計 3. アナログフィルタを基にしたディジタル IIR フィルタの設計法 I 4. アナログフィルタを基にしたディジタル IIR フィルタの設計法 II 5. 双 次フィルタ LI 離散時間システムの基礎式の証明 [ ] 4. ] [ ]*
ディジタルフィルタの設計法. 逆フィルター. 直線位相 FIR フィルタの設計. 窓関数法による FIR フィルタの設計.5 時間領域での FIR フィルタの設計 3. アナログフィルタを基にしたディジタル IIR フィルタの設計法 I 4. アナログフィルタを基にしたディジタル IIR フィルタの設計法 II 5. 双 次フィルタ LI 離散時間システムの基礎式の証明 [ ] 4. ] [ ]*
線形代数とは
 線形代数とは 第一回ベクトル 教科書 エクササイズ線形代数 立花俊一 成田清正著 共立出版 必要最低限のことに限る 得意な人には物足りないかもしれません 線形代数とは何をするもの? 線形関係 y 直線 yもも 次式で登場する (( 次の形 ) 線形 ただし 次元の話世の中は 3 次元 [4[ 次元 ] 次元 3 次元 4 次元 はどうやって直線を表すの? ベクトルや行列の概念 y A ベクトルを使うと
線形代数とは 第一回ベクトル 教科書 エクササイズ線形代数 立花俊一 成田清正著 共立出版 必要最低限のことに限る 得意な人には物足りないかもしれません 線形代数とは何をするもの? 線形関係 y 直線 yもも 次式で登場する (( 次の形 ) 線形 ただし 次元の話世の中は 3 次元 [4[ 次元 ] 次元 3 次元 4 次元 はどうやって直線を表すの? ベクトルや行列の概念 y A ベクトルを使うと
数値計算で学ぶ物理学 4 放物運動と惑星運動 地上のように下向きに重力がはたらいているような場においては 物体を投げると放物運動をする 一方 中心星のまわりの重力場中では 惑星は 円 だ円 放物線または双曲線を描きながら運動する ここでは 放物運動と惑星運動を 運動方程式を導出したうえで 数値シミュ
 数値計算で学ぶ物理学 4 放物運動と惑星運動 地上のように下向きに重力がはたらいているような場においては 物体を投げると放物運動をする 一方 中心星のまわりの重力場中では 惑星は 円 だ円 放物線または双曲線を描きながら運動する ここでは 放物運動と惑星運動を 運動方程式を導出したうえで 数値シミュレーションによって計算してみる 4.1 放物運動一様な重力場における放物運動を考える 一般に質量の物体に作用する力をとすると運動方程式は
数値計算で学ぶ物理学 4 放物運動と惑星運動 地上のように下向きに重力がはたらいているような場においては 物体を投げると放物運動をする 一方 中心星のまわりの重力場中では 惑星は 円 だ円 放物線または双曲線を描きながら運動する ここでは 放物運動と惑星運動を 運動方程式を導出したうえで 数値シミュレーションによって計算してみる 4.1 放物運動一様な重力場における放物運動を考える 一般に質量の物体に作用する力をとすると運動方程式は
PowerPoint プレゼンテーション
 空間フィルタリング (spatal lterng) 入力画像の対応する画素値だけではなく その周囲 ( 近傍領域 ) の画素も含めた領域内の画素値を用いて 出力画像の対応する画素値を計算する処理 入力画像出力画像入力画像出力画像 画素ごとの濃淡変換 ( 階調処理 ) 領域に基づく濃淡変換 ( 空間フィルタリング ) 空間フィルタ (spatal lter) 線形フィルタ (lnear lter) w
空間フィルタリング (spatal lterng) 入力画像の対応する画素値だけではなく その周囲 ( 近傍領域 ) の画素も含めた領域内の画素値を用いて 出力画像の対応する画素値を計算する処理 入力画像出力画像入力画像出力画像 画素ごとの濃淡変換 ( 階調処理 ) 領域に基づく濃淡変換 ( 空間フィルタリング ) 空間フィルタ (spatal lter) 線形フィルタ (lnear lter) w
Microsoft PowerPoint - H22制御工学I-10回.ppt
 制御工学 I 第 回 安定性 ラウス, フルビッツの安定判別 平成 年 6 月 日 /6/ 授業の予定 制御工学概論 ( 回 ) 制御技術は現在様々な工学分野において重要な基本技術となっている 工学における制御工学の位置づけと歴史について説明する さらに 制御システムの基本構成と種類を紹介する ラプラス変換 ( 回 ) 制御工学 特に古典制御ではラプラス変換が重要な役割を果たしている ラプラス変換と逆ラプラス変換の定義を紹介し
制御工学 I 第 回 安定性 ラウス, フルビッツの安定判別 平成 年 6 月 日 /6/ 授業の予定 制御工学概論 ( 回 ) 制御技術は現在様々な工学分野において重要な基本技術となっている 工学における制御工学の位置づけと歴史について説明する さらに 制御システムの基本構成と種類を紹介する ラプラス変換 ( 回 ) 制御工学 特に古典制御ではラプラス変換が重要な役割を果たしている ラプラス変換と逆ラプラス変換の定義を紹介し
09.pptx
 講義内容 数値解析 第 9 回 5 年 6 月 7 日 水 理学部物理学科情報理学コース. 非線形方程式の数値解法. はじめに. 分法. 補間法.4 ニュートン法.4. 多変数問題への応用.4. ニュートン法の収束性. 連立 次方程式の解法. 序論と行列計算の基礎. ガウスの消去法. 重対角行列の場合の解法項目を変更しました.4 LU 分解法.5 特異値分解法.6 共役勾配法.7 反復法.7. ヤコビ法.7.
講義内容 数値解析 第 9 回 5 年 6 月 7 日 水 理学部物理学科情報理学コース. 非線形方程式の数値解法. はじめに. 分法. 補間法.4 ニュートン法.4. 多変数問題への応用.4. ニュートン法の収束性. 連立 次方程式の解法. 序論と行列計算の基礎. ガウスの消去法. 重対角行列の場合の解法項目を変更しました.4 LU 分解法.5 特異値分解法.6 共役勾配法.7 反復法.7. ヤコビ法.7.
ボルツマンマシンの高速化
 1. はじめに ボルツマン学習と平均場近似 山梨大学工学部宗久研究室 G04MK016 鳥居圭太 ボルツマンマシンは学習可能な相互結合型ネットワー クの代表的なものである. ボルツマンマシンには, 学習のための統計平均を取る必要があり, 結果を求めるまでに長い時間がかかってしまうという欠点がある. そこで, 学習の高速化のために, 統計を取る2つのステップについて, 以下のことを行う. まず1つ目のステップでは,
1. はじめに ボルツマン学習と平均場近似 山梨大学工学部宗久研究室 G04MK016 鳥居圭太 ボルツマンマシンは学習可能な相互結合型ネットワー クの代表的なものである. ボルツマンマシンには, 学習のための統計平均を取る必要があり, 結果を求めるまでに長い時間がかかってしまうという欠点がある. そこで, 学習の高速化のために, 統計を取る2つのステップについて, 以下のことを行う. まず1つ目のステップでは,
SAP11_03
 第 3 回 音声音響信号処理 ( 線形予測分析と自己回帰モデル ) 亀岡弘和 東京大学大学院情報理工学系研究科日本電信電話株式会社 NTT コミュニケーション科学基礎研究所 講義内容 ( キーワード ) 信号処理 符号化 標準化の実用システム例の紹介情報通信の基本 ( 誤り検出 訂正符号 変調 IP) 符号化技術の基本 ( 量子化 予測 変換 圧縮 ) 音声分析 合成 認識 強調 音楽信号処理統計的信号処理の基礎
第 3 回 音声音響信号処理 ( 線形予測分析と自己回帰モデル ) 亀岡弘和 東京大学大学院情報理工学系研究科日本電信電話株式会社 NTT コミュニケーション科学基礎研究所 講義内容 ( キーワード ) 信号処理 符号化 標準化の実用システム例の紹介情報通信の基本 ( 誤り検出 訂正符号 変調 IP) 符号化技術の基本 ( 量子化 予測 変換 圧縮 ) 音声分析 合成 認識 強調 音楽信号処理統計的信号処理の基礎
(Microsoft PowerPoint - \221\34613\211\361)
") 計算力学 ~ 第 回弾性問題の有限要素解析 (Ⅱ)~ 修士 年後期 ( 選択科目 ) 担当 : 岩佐貴史 講義の概要 全 5 講義. 計算力学概論, ガイダンス. 自然現象の数理モデル化. 行列 場とその演算. 数値計算法 (Ⅰ) 5. 数値計算法 (Ⅱ) 6. 初期値 境界値問題 (Ⅰ) 7. 初期値 境界値問題 (Ⅱ) 8. マトリックス変位法による構造解析 9. トラス構造の有限要素解析. 重み付き残差法と古典的近似解法.
計算力学 ~ 第 回弾性問題の有限要素解析 (Ⅱ)~ 修士 年後期 ( 選択科目 ) 担当 : 岩佐貴史 講義の概要 全 5 講義. 計算力学概論, ガイダンス. 自然現象の数理モデル化. 行列 場とその演算. 数値計算法 (Ⅰ) 5. 数値計算法 (Ⅱ) 6. 初期値 境界値問題 (Ⅰ) 7. 初期値 境界値問題 (Ⅱ) 8. マトリックス変位法による構造解析 9. トラス構造の有限要素解析. 重み付き残差法と古典的近似解法.
20~22.prt
 [ 三クリア W] 辺が等しいことの証明 ( 円周角と弦の関係利用 ) の の二等分線がこの三角形の外接円と交わる点をそれぞれ とするとき 60 ならば であることを証明せよ 60 + + 0 + 0 80-60 60 から ゆえに 等しい長さの弧に対する弦の長さは等しいから [ 三クリア ] 方べきの定理 接線と弦のなす角と円周角を利用 線分 を直径とする円 があり 右の図のように の延長上の点
[ 三クリア W] 辺が等しいことの証明 ( 円周角と弦の関係利用 ) の の二等分線がこの三角形の外接円と交わる点をそれぞれ とするとき 60 ならば であることを証明せよ 60 + + 0 + 0 80-60 60 から ゆえに 等しい長さの弧に対する弦の長さは等しいから [ 三クリア ] 方べきの定理 接線と弦のなす角と円周角を利用 線分 を直径とする円 があり 右の図のように の延長上の点
経済数学演習問題 2018 年 5 月 29 日 I a, b, c R n に対して a + b + c 2 = a 2 + b 2 + c 2 + 2( a, b) + 2( b, c) + 2( a, c) が成立することを示しましょう.( 線型代数学 教科書 13 ページ 演習 1.17)
 + 2( b, c) + 2( a, c) が成立することを示しましょう.( 線型代数学 教科書 13 ページ 演習 1.17)") 経済数学演習問題 8 年 月 9 日 I a, b, c R n に対して a + b + c a + b + c + a, b + b, c + a, c が成立することを示しましょう. 線型代数学 教科書 ページ 演習.7 II a R n がすべての x R n に対して垂直, すなわち a, x x R n が成立するとします. このとき a となることを示しましょう. 線型代数学 教科書
経済数学演習問題 8 年 月 9 日 I a, b, c R n に対して a + b + c a + b + c + a, b + b, c + a, c が成立することを示しましょう. 線型代数学 教科書 ページ 演習.7 II a R n がすべての x R n に対して垂直, すなわち a, x x R n が成立するとします. このとき a となることを示しましょう. 線型代数学 教科書
基礎統計
 基礎統計 第 11 回講義資料 6.4.2 標本平均の差の標本分布 母平均の差 標本平均の差をみれば良い ただし, 母分散に依存するため場合分けをする 1 2 3 分散が既知分散が未知であるが等しい分散が未知であり等しいとは限らない 1 母分散が既知のとき が既知 標準化変量 2 母分散が未知であり, 等しいとき 分散が未知であるが, 等しいということは分かっているとき 標準化変量 自由度 の t
基礎統計 第 11 回講義資料 6.4.2 標本平均の差の標本分布 母平均の差 標本平均の差をみれば良い ただし, 母分散に依存するため場合分けをする 1 2 3 分散が既知分散が未知であるが等しい分散が未知であり等しいとは限らない 1 母分散が既知のとき が既知 標準化変量 2 母分散が未知であり, 等しいとき 分散が未知であるが, 等しいということは分かっているとき 標準化変量 自由度 の t