2014 3
|
|
|
- りさこ てらわ
- 5 years ago
- Views:
Transcription
1 1 3
2 113 : 1 Copyright c 1 by Kobayashi Keisuke
3 Desktop Music (DTM) DAW (Digital Audio Workstation) YAMAHA Vocaloid DTM MIDI (Musical Instruments Digital Interface) Lee (Non-negative Matrix Factorization; NMF) NMF K NMF NMF K K 1 NMF (SDR) 3 11 db 3 3
4 , MIDI 6 8 NMF MIDI NMF MIDI
5 K i
6 ii
7 B n NMF SDR K = 1 (RWC1) K = (RWC1) K = 3 (RWC1) K = (RWC1) K = (RWC1) NMF (GP) (RWC3) NMF (UP1) NMF (UP) NMF (MAPS) iii
8 (UP3) YAMAHA GRAND C GP GP K = 1 (MIDI) K = (MIDI) K = 3 (MIDI) K = (MIDI) K = (MIDI) K = 1 (UP1) K = (UP1) K = 3 (UP1) K = (UP1) K = (UP1) K = 1 (UP) K = (UP) K = 3 (UP) K = (UP) K = (UP) K = 1 (UP3) K = (UP3) K = 3 (UP3) K = (UP3) K = (UP3) K = 1 (UP) K = (UP) K = 3 (UP) K = (UP) K = (UP) K = 1 (MAPS) K = (MAPS) K = 3 (MAPS) iv
9 33 K = (MAPS) K = (MAPS) K = 1 (GP1) K = (GP1) K = 3 (GP1) K = (GP1) K = (GP1) K = 1 (GP) K = (GP) K = 3 (GP) K = (GP) K = (GP) K = 1 (RWC1) K = (RWC1) K = 3 (RWC1) K = (RWC1) K = (RWC1) K = 1 (RWC3) K = (RWC3) K = 3 (RWC3) K = (RWC3) K = (RWC3) NMF (UP1) NMF (UP) NMF (UP3) NMF (UP) NMF (MAPS) NMF (GP1) NMF (GP) NMF (RWC1) NMF (RWC3) v
10 .1 K = 3 K = K = 3 K = GP GP vi
11 1 1.1 Desktop Music (DTM) DAW (Didital Audio Workstation) Vocaloid [1]. DTM MIDI (Musical Instruments Digital Interface)
12 1.. [ 7]. [8] [9] [1] Lee et al. [11] 1.3 (Non-negative Matrix Factorization; NMF) [1] NMF [9, 13 16] NMF K K R(R < K) R K R K R [17] [18]
13 1. 6 ( ) 3 NMF 3 6 3
14 cm 1 cm. 1.3,. [19]... (1). () (3). () []

15 .1:.:
16 .3:.: 6
17 .: (1) () ( ) []. [] Fletcher [7].6 7
18 8.6:
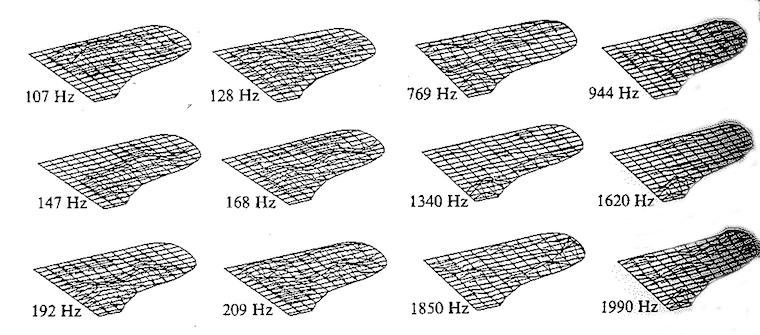
19 ( ) F n (n ) f n (.1) [7,1] f n = nf 1 + Bn (.1) F (.) (.1) f 1 F = 1 T L µ (.) L T µ ( ) B (.3) B = π3 Ed 6T L (.3) E d, T, L B [1, 1 ] []. B.7 1. (1), () (3) () 9
20 6 Frequency of n th harmonic component B=1.*1 3 B=.*1 B=1.*1 frequency [Hz] n.7: B n 1
21 NMF NMF 3. NMF Y ( R Ω T ) U( R Ω K ) V ( R K T ) (3.1) Y ω,t Ŷω,t = K U ω,k V k,t (3.1) k Ω T K NMF ω, t NMF ( ) Y U U V U NMF pre-emphasis FFT Log Scaling 3.1: 11
22 3..1 NMF Y U, V U, V ( (3.)) KL ( (3.3)) ( (3.)) [3, ] D euc (x y) = (x y) (3.) D KL (x y) = (x y) + y log y x (3.3) D IS (x y) = y x log y x 1 (3.) U, V (3.6) U U. Y V t UV V t (3.) V V. U t Y U t UV (3.6) t. [, 6] D Euc (Y UV ) = Y UV F = ω,t Y ω,t k U ω,k V k,t = ω,t ( Y ω,t Y ω,t k U ω,k V k,t + k U ω,k V k,t ) (3.7) 3 Jensen Jensen f(x i ) f( i λ i x i ) i λ i f(x i ) (3.8) 1
23 D(y x) : Degree of proximity between x and y 1 9 Euc KL IS 8 7 D( x) x 3.: (3.9) ( i x i ) = ( λ i x i λ i ) i λ i ( x i λ i ) = i x i λ i (3.9) 3 Jensen k U ω,k V k,t k U ω,k V k,t λ k,ω,t (3.1) (3.7) (3.11) D Euc (Y UV ) = ω,t ( Y ω,t Y ω,t k U ω,k V k,t + k U ω,k V k,t λ k,ω,t ) (3.11) 13
24 (3.11) U ω,k V k,t U ω,k = V ω,k = t Y ω,tv k,t t (3.1) Vk,t λ k,ω,t t Y ω,tu k,t t (3.13) Uk,t λ k,ω,t λ λ i 1 (3.1) λ k,ω,t = U ω,k V k,t k U ω,k V k,t (3.1) (3.13) (3.1) (3.16) t U ω,k = Y ω,tv k,t t V (3.1) k,t k U ω,k V k,t t V ω,k = Y ω,tu k,t t U (3.16) k,t k U ω,k V k,t U, V NMF db/oct (3.17) H(z) = 1.97z 1 (3.17) 3. NMF Y 1
25 1 1. x x x : NMF NMF X A, B, C,... (3.18) X = A + B + C N (3.18) (3.19) X = log A + log B + log C log N = log(a B C D) (3.19) 3. NMF 1
26 3.6 NMF 16
27 .1 K.1.1 NMF NMF K K NMF [7, 8] 1 NMF K 1.1. RWC : ( RWC-DB ) [9], MIDI Aligned Piano Sound ( MAPS-DB ) [3] 1 RWC-DB 3 MAPS-DB RWC-DB RWC1 RWC3 MAPS-DB MAPS GP1 GP, UP1, UP, UP3, UP A3 ( Hz) 16,.1 khz (Short Time Fourie Transform; STFT) 8 ( ms) 18 ( 3 ms) 17
28 8.1.3 NMF STFT 18
29 6 8 1 x x 1 3 Activation Matrix x : 1 19
30 x x 1 3 x 1 Activation Matrix 6 x 1 6 x x : 8
31 x x 1 x 1 1 Activation Matrix 1 x x x : 96 1
32 .1: K = 3 K = 1st (K=) nd (K=) 3rd (K=) th (K=) 1st (K=3) nd (K=3) rd (K=3) ( ) K = 1 (.) K = (.6), 1 khz 1 K = 3 (.7) K = 1, (1) () (3), () 1 () (Hz) K = (.8) K = 3 K = 1.1 K = 1 K = 3 1 K = (.9) K = K = 3 K = 3 3 (. )
33 .: K = 3 K = 1st(K=) nd (K=) 3rd (K=) th (K=) th (K=) 1st (K=3) nd (K=3) rd (K=3) K U V Ŷ Y (Signal to distortionratio;sdr) (.) S SDR = 1 log 1 db (.1) S Ŝ (S, Ŝ ) SDR. SDR K = 3 SDR K = SDR 11 db K 3 K SDR SDR K 3 3
34 Relationship between number of bases and SDR 1 1 Mean of SDR [db] K : Number of bases.: SDR
35 x 1 Activation Matrix x : K = 1 (RWC1)
36 x Activation Matrix x 1 6 x x : K = (RWC1) 6
37 1 3 x 1 3 Activation Matrix x 1 6 x 1 6 x x x : K = 3 (RWC1) 7
38 1 x x 1 3 Activation Matrix x 1 x 1 x 1 x x 1 3 x : K = (RWC1) 8
39 x 1 3 Activation Matrix x 1 x 1 x 1 x 1 x x x 3 x 1 x : K = (RWC1) 9
 (.")
40 .1: NMF...1, K = 3 NMF NMF (.1 U fix ) (.1 V fix ) (.1 U free ) NMF (U fix ) (V free ) NMF 3
41 NMF K khz khz khz, khz.1 khz Hz,.13,.1.1,.16,.17,.13, ,.16, ( 6 ) 3 ( 1 3 ) ( 3 khz) (1 khz ) 31
42
43 x x x : x 1 x 1 x 1.1: 33
44 1 x x x 1 3 x 1 Activation Matrix x 1 x 1 x 1 x 1 x 1 1 x x 1 3 x : (GP) 3
45 1 x x x 1 3 x 1 Activation Matrix x 1 x 1 x 1 x 1 x 1 1 x x 1 3 x : (RWC3) 3
46 1 x 1 3 x 1 Activation Matrix x 1 x 1 x 1 x 1 x x 1 3 x x 1 3 x 1 3 x : NMF (UP1) 36
47 1 x 1 3 x 1 Activation Matrix x 1 x 1 x 1 x 1 x x 1 1x 3 1x 3 1 x 1 x : NMF (UP) 37
48 1 x 1 3 x 1 Activation Matrix x 1 x 1 x 1 x 1 x x 1 1x 3 1x 3 1 x 1 x : NMF (MAPS) 38
49 6.3 NMF NMF 39
50 .1.11 khz GP1 (.1) RWC3 (.1(d)) GP (.1) 1,,,, 6, 7 khz khz RWC1 (.1(c)) 1, 3 khz K = RWC3 (.1) GP (.13)
51 1. x 1 3 th activation vector 1 Amplitude [deg] Frequency [Hz] 1.8 x 1 3 th activation vector Amplitude [deg] Frequency [Hz] 3. x 1 3 th activation vector 3 Amplitude [deg] Frequency [Hz] (c) 1. x 1 3 th activation vector 1 Amplitude [deg] Frequency [Hz] (d).1: 1
52 7 x 1 3rd activation vector 6 Amplitude [deg] Time [sec] 8 x 1 6th activation vector 7 Amplitude [deg] Time [sec].:
53 .1: GP1 GP RWC1 RWC3 (deg/sec) : UP1 UP UP3 UP MAPS (deg/sec) UP1.3 UP,.3(c) MAPS UP1 UP. khz MAPS khz 1. khz.. sec ( ).,(c),(e) UP1, UP,MAPS.(d)(f) UP1, UP,MAPS MAPS 6 UP1 (.) UP(.(c)) MAPS(.(e)) Hz 3
54 1.8 x 1 3 th activation vector Amplitude [deg] Frequency [Hz] 1. x 1 3 th activation vector Amplitude [deg] 1. Frequency [Hz] 1.8 x 1 3 th activation vector Amplitude [deg] Frequency [Hz] (c).3:
55 th basis vector. x 1 th activation vector Frequency [Hz] Amplitude [deg] Amplitude [deg] x Time[sec] th basis vector 3. x 1 th activation vector 3 Frequency [Hz] Amplitude [deg] Amplitude [deg] (c) x Time[sec] (d) th basis vector x 1 th activation vector. Frequency [Hz] Amplitude [deg] Amplitude [deg] (e) x Time[sec] (f).:
56 .3 MIDI.3.1. (c) MIDI.(c) MIDI. sec MIDI.8 sec MIDI.6 (b ). sec.6 sec.3..7 (c) MIDI MIDI 1.3 6
57 8 x 1 3rd activation vector 7 Amplitude [deg] Time [sec] 9 x 1 3rd activation vector 8 7 Amplitude [deg] Time[sec] 7 x 1 3rd activation vector 6 Amplitude [deg] Time [sec] (c).: 7
58 7 x 1 3rd activation vector 6 Amplitude [deg] Time[sec] x 1 3rd activation vector 3. Amplitude [deg] Time[sec].6: 8
59 3 x 1 3 1st basis vectors. Amplitude [deg] Frequency [Hz] 3 x 1 3 1st basis vectors. Amplitude [deg] Frequency [Hz]. x 1 3 1st basis vectors. Amplitude [deg] Frequency [Hz] (c).7: 9
60 .3: GRAND UPRIGHT MIDI GRAND UPRIGHT MIDI [] 7, MIDI,, 7 MIDI MIDI MIDI MIDI MIDI.3.3 khz khz.8
61 1 1.. x x x 1 3.8: (UP3) khz. khz MIDI 1
62 MIDI khz
63 6 6.1 NMF NMF 3 + NMF MIDI MIDI khz 6. ( ) NMF MIDI NMF 3
64 MIDI
65 Mr. Elbarougy, Mr.Chau, Mr.Ngo
66 [1]. : ( )., Vol. 67, No. 1, pp. 6, 1. [],.., Vol. 9, No. 3, pp , [3].., Vol., No. 1-, pp. 1 1, 7. [],. :.. SP,, Vol. 99, No. 66, pp. 1 6,. [],... [ ], Vol., No. 1, pp. 7 1,. [6],,.., 13. [7] N.H. Fletcher and T.D.Rossing. The Physics of Musical Instruments second edition, chapter 1, pp springer, [8],. :.. D-II,, II-, Vol. 81, No. 7, pp , [9],,,,,. gmm midi (,,, )., Vol. 7, No., pp , 1. [1],,,.., Vol. 3, No. 1, pp. 83 8, mar 3. [11] C.T.Lee, Y.H.Yang, and H.H.Chen. Multipitch estimation of piano music by exemplar-based sparse representation. Multimedia,IEEE transactions on, Vol. 1, No. 3, pp , 1. 6
67 [1] D. D. Lee and H. S. Seung. Learning the parts of objects by non-negative matrix factorization. Nature, Vol. 1, pp , [13] P.Smaragdis and J.C.Brown. Non-negative matrix factorization for polyphonic music. IEEE Workshop on Applications of Signal Processing to Audio and Acoustics, pp. 19, 3. [1],,,,. nmf., No., pp , 7. [1] F.Rigaud, A.Falaize, B.David, and L.Daudet. Does inharmonicity improve an nmfbased piano transcription model? Proc. IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), pp. 11 1, 13. [16],,,,,,. gmm nmf., Vol., No. 1, pp , 11. [17],,. :., Vol. 3, No.,. [18],. ( ( ), 13)., Vol. 37, No. 17, pp. 6 68, 13. [19].. products/musical-instruments/keyboards/about/gp/#upgp. [] W.Goebl, R.Bresin, and A.Galembo. Once again: The perception of piano touch and tone: Can touch audibly change piano sound independently of intensity? Proceedings of the International Symposium on Musical Acoustics,, pp ,. [1] F.Rigaud, B.David, and L.Daudet. A parametric model of piano tuning. Proc. of the 1th International Conference on Difital Audio Effects, pp , 11. [] F.Rigaud, A.Falaize, B.David, and L.Daudet. Does inharmonicity improve an nmfbased piano transcription model? ICASSP, 13. [3] A.Lefévre, F. Bach, and C.Févotte. Online algorithms for nonnegative matrix factorization with the itakura-saito divergence. In Proc. IEEE Workshop on Applications of Signal Processing to Audio and Acoustics (WASPAA), Mohonk, NY, Oct
68 [] C.Févotte. Majorization-minimization algorithm for smooth itakura-saito nonnegative matrix factorization. In Proc. IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Prague, Czech Republic, May 11. []. nmf /., Vol. 9, No. 9, pp , 1. [6]. :.. [ ], Vol. 11, No., p. 1, 11. [7],,,,,... [ ], Vol. 11, No. 6, pp. 1 8, jul 11. [8],.. MUS, Vol. 1-MUS-96, No. 8, pp. 1 8, 1. [9],,,. Rwc :., Vol. 3, No. 1, pp. 83 8, mar 3. [3] V.Emiya, R.Badeau, and B.David. Multipitch estimation of piano sounds using a new probabilistic spectral smoothness principle. IEEE Transactions on Audio, Speech and Language Processing, No. 18, pp , 1. 8
69 1, m 1 PC ( I/F) 6 RWC-DB GP1 GP1 YAMAHA GRAND C3( 1) 1cm, 18cm 3 9

 (d) 図")



70 図 1: YAMAHA GRAND C3 (c) (d) 図 : GP1 のマイク設置 6
71 1: PC OS CPU DELL precision M6 windows 7 (3-bit) intel core i7 MATLAB13a Roland OCTA-CAPTURE Audio-Technica AT8Ra (1,,, ch) RAMSA WM-C7 (3 ch) SENNHEISER HDA GP GP YAMAHA GRAND S6A 11cm, 1cm 3 MAPS-DB UP1,UP,UP UP1,, YAMAHA YU3SZ 1 cm, 19cm, 6 cm UP3 UP3 KAWAI K8 YAMAHA 61




72 (c) (d) 図 3: GP のマイク設置 6




73 (c) (d) 図 : アップライトピアノのマイク設置 63
74 : [sec] 1 A3( Hz) m 3 P1 A3 f 3 P1 3 A3 p 3 P1 A3 m 3 P1 A( Hz) m 3 P1 6 A3 m 3 P 7 A f 3 P1 8 A p 3 P1 9 A3 m 3 P 1 A3 m 3 P 11 A3 m 3 P3 1 A3 m 3 P3 1 A3 p 3 P 1 A3 p 3 P3 3: GP1 Ch [cm] 1 7 cm 9 cm 8 18 cm 9 cm 3 7 cm 1 cm 8 1 cm MIDI 9 UP1 1 1 UP 1 19 UP3 UP 9 MAPS 3 3 GP GP1 RWC1 9 RWC3 K = 1 6
75 : GP Ch 1 7. cm 1 cm 8 cm 113 cm 1 cm cm 3 7. cm 11 cm 8 cm 1 cm : Ch 1 7 cm 1 cm 19 cm 7 cm 1 cm 179 cm 3 8 cm 1 cm 19 cm 1cm 1 cm 6
76 x 1 Activation Matrix x : K = 1 (MIDI) 66
77 1 1. x Activation Matrix x x x : K = (MIDI) 67
78 x 1 3 Activation Matrix x 1 6 x 1 6 x x 1 3 x : K = 3 (MIDI) 68
79 1 1.. x x 1 3 Activation Matrix x 1 x 1 x 1 x x 1 3 x : K = (MIDI) 69
80 1 x x x 1 3 Activation Matrix x 1 x 1 x 1 x 1 x 1 1 x x : K = (MIDI) 7
81 x 1 Activation Matrix x : K = 1 (UP1) 71
82 1 1. x x 1 Activation Matrix 6 8 x x : K = (UP1) 7
83 x Activation Matrix x 1 x 1 6 x x x : K = 3 (UP1) 73
84 1 x x 1 3 Activation Matrix x 1 x 1 x 1 x x 1 3 x : K = (UP1) 7
85 1 x x 1 3 x 1 3 Activation Matrix x 1 x 1 x 1 x 1 x x 1 3 x : K = (UP1) 7
86 x 1 Activation Matrix x : K = 1 (UP) 76
87 1 1. x 1 3 Activation Matrix x x x : K = (UP) 77
88 1 1. x 1 3 Activation Matrix x 1 x 1 x x 1 3 x : K = 3 (UP) 78
89 x x 1 3 Activation Matrix x 1 x 1 x 1 x x 1 3 x : K = (UP) 79
90 x x x 1 3 Activation Matrix x 1 x 1 x 1 x 1 x x x : K = (UP) 8
91 x 1 Activation Matrix x : K = 1 (UP3) 81
92 x 1 3 Activation Matrix x x x : K = (UP3) 8
93 1 1.. x x 1 Activation Matrix 6 8 x x x x : K = 3 (UP3) 83
94 1 x x 1 3 Activation Matrix x 1 x 1 x 1 x x 1 3 x : K = (UP3) 8
95 x 1 3 x 1 3 x 1 3 Activation Matrix x 1 x 1 x 1 x 1 x 1 x 1 3 x : K = (UP3) 8
96 x 1 Activation Matrix x : K = 1 (UP) 86
97 x Activation Matrix x 1 6 x x : K = (UP) 87
98 1 x Activation Matrix x 1 x 1 6 x x 1 3 x : K = 3 (UP) 88
99 1 x x 1 3 Activation Matrix x 1 x 1 x 1 x x 1 x : K = (UP) 89
100 x x 1 3 x 1 3 Activation Matrix x 1 x 1 x 1 x 1 x x 1 3 x : K = (UP) 9
101 x 1 Activation Matrix x : K = 1 (MAPS) 91
102 1 1. x Activation Matrix x x x : K = (MAPS) 9
103 1 1. x 1 3 Activation Matrix x 1 x 1 x x 1 3 x : K = 3 (MAPS) 93
104 1 x x 1 3 Activation Matrix x 1 x 1 x 1 x x 1 3 x : K = (MAPS) 9
105 1 3 x 1 3 Activation Matrix x 1 x 1 x 1 x 1 x x 1 3 x 1 3 x x : K = (MAPS) 9
106 x 1 Activation Matrix x : K = 1 (GP1) 96
107 1 1. x Activation Matrix x x x : K = (GP1) 97
108 1 1. x Activation Matrix x 1 x 1 6 x x 1 3 x : K = 3 (GP1) 98
109 1 1. x x 1 3 Activation Matrix x 1 x 1 x 1 x x 1 3 x : K = (GP1) 99
110 1 x x x 1 3 Activation Matrix x 1 x 1 x 1 x 1 x x 1 3 x : K = (GP1) 1
111 x 1 1. Activation Matrix x : K = 1 (GP) 11
112 x 1 3 Activation Matrix x x x : K = (GP) 1
113 x Activation Matrix x 1 6 x x x 1 3 x : K = 3 (GP) 13
114 1 x x 1 3 Activation Matrix x 1 x 1 x 1 x x 1 3 x : K = (GP) 1
115 x x 1 3 x 1 3 Activation Matrix x 1 x 1 x 1 x 1 x x 1 3 x : K = (GP) 1
116 x 1 Activation Matrix x : K = 1 (RWC1) 16
117 x Activation Matrix x 1 6 x x : K = (RWC1) 17
118 1 3 x 1 3 Activation Matrix x 1 6 x 1 6 x x x : K = 3 (RWC1) 18
119 1 x x 1 3 Activation Matrix x 1 x 1 x 1 x x 1 3 x : K = (RWC1) 19
120 x 1 3 Activation Matrix x 1 x 1 x 1 x 1 x x x 3 x 1 x : K = (RWC1) 11
121 8.6 x 1 Activation Matrix x : K = 1 (RWC3) 111
122 x Activation Matrix x 1 6 x x : K = (RWC3) 11
123 1 1.. x 1 3 Activation Matrix x 1 6 x 1 6 x x 1 3 x : K = 3 (RWC3) 113
124 x x 1 3 Activation Matrix x 1 x 1 x 1 x x 1 3 x : K = (RWC3) 11
125 1 x 1 3 Activation Matrix x 1 x 1 x 1 x 1 x x 1 3 x 1 3 x 1 3 x : K = (RWC3) 11
126 UP1 UP 6 UP3 7 UP 8 MAPS 9 GP1 6 GP 61 RWC1 6 RWC
127 1 x 1 3 x 1 Activation Matrix x 1 x 1 x 1 x 1 x x 1 3 x x 1 3 x 1 3 x : NMF (UP1) 117
128 1 x 1 3 x 1 Activation Matrix x 1 x 1 x 1 x 1 x x 1 1x 3 1x 3 1 x 1 x : NMF (UP) 118
129 1 x 1 3 x 1 Activation Matrix x 1 x 1 x 1 x 1 x x 1 3 x x x x : NMF (UP3) 119
130 1 x 1 3 x 1 Activation Matrix x 1 x 1 x 1 x 1 x x 1 3 x x 1 3 x 1 3 x : NMF (UP) 1
131 1 x 1 3 x 1 Activation Matrix x 1 x 1 x 1 x 1 x x 1 1x 3 1x 3 1 x 1 x : NMF (MAPS) 11
132 1 x 1 3 x 1 Activation Matrix x 1 x 1 x 1 x 1 x 1 1 x x x x 1 3 x : NMF (GP1) 1
133 1 x 1 3 x 1 Activation Matrix x 1 x 1 x 1 x 1 x 1 1 x x x x 1 3 x : NMF (GP) 13
134 x 1 3 x 1 Activation Matrix x 1 x 1 x 1 x 1 x 1 x 1 3 x 1 3 x 1 3 x 1 3 x : NMF (RWC1) 1
135 1 x 1 3 x 1 Activation Matrix x 1 x 1 x 1 x 1 x 1 1 x x x x 1 3 x : NMF (RWC3) 1
136 Kobayashi,K.,Morikawa,D.,Akagi,M., Study on Analyzing Individuality of Piano Sounds Using Non-negative Matrix Factorization, The 6th seminar of A3 foresight program, February 1. Kobayashi,K.,Morikawa,D.,Akagi,M., Study on Analyzing Individuality of Instrurment Sounds Using Non-negative Matrix Factorization, Proc. 1 RISP International Workshop on Nonliner Circuits, Communications and Signal Processing, 33 36, March 1., in, December13., 1,March 1. 16
H(ω) = ( G H (ω)g(ω) ) 1 G H (ω) (6) 2 H 11 (ω) H 1N (ω) H(ω)= (2) H M1 (ω) H MN (ω) [ X(ω)= X 1 (ω) X 2 (ω) X N (ω) ] T (3)
![H(ω) = ( G H (ω)g(ω) ) 1 G H (ω) (6) 2 H 11 (ω) H 1N (ω) H(ω)= (2) H M1 (ω) H MN (ω) [ X(ω)= X 1 (ω) X 2 (ω) X N (ω) ] T (3)](/thumbs/92/108069141.jpg "H(ω) = ( G H (ω)g(ω) ) 1 G H (ω) (6) 2 H 11 (ω) H 1N (ω) H(ω)= (2) H M1 (ω) H MN (ω) [ X(ω)= X 1 (ω) X 2 (ω) X N (ω) ] T (3)") 72 12 2016 pp. 777 782 777 * 43.60.Pt; 43.38.Md; 43.60.Sx 1. 1 2 [1 8] Flexible acoustic interface based on 3D sound reproduction. Yosuke Tatekura (Shizuoka University, Hamamatsu, 432 8561) 2. 2.1 3 M
72 12 2016 pp. 777 782 777 * 43.60.Pt; 43.38.Md; 43.60.Sx 1. 1 2 [1 8] Flexible acoustic interface based on 3D sound reproduction. Yosuke Tatekura (Shizuoka University, Hamamatsu, 432 8561) 2. 2.1 3 M
2 DS SS (SS+DS) Fig. 2 Separation algorithm for motorcycle sound by combining DS and SS (SS+DS). 3. [3] DS SS 2 SS+DS 1 1 B SS SS 4. NMF 4. 1 (NMF) Y
![2 DS SS (SS+DS) Fig. 2 Separation algorithm for motorcycle sound by combining DS and SS (SS+DS). 3. [3] DS SS 2 SS+DS 1 1 B SS SS 4. NMF 4. 1 (NMF) Y](/thumbs/49/25425602.jpg "2 DS SS (SS+DS) Fig. 2 Separation algorithm for motorcycle sound by combining DS and SS (SS+DS). 3. [3] DS SS 2 SS+DS 1 1 B SS SS 4. NMF 4. 1 (NMF) Y") a) Separation of Motorcycle Sound by Near Field Microphone Array and Nonnegative Matrix Factorization Chisaki YOSHINAGA, Nonmember, Yosuke TATEKURA a), Member, Kazuaki HAMADA, and Tetsuya KIMURA, Nonmembers
a) Separation of Motorcycle Sound by Near Field Microphone Array and Nonnegative Matrix Factorization Chisaki YOSHINAGA, Nonmember, Yosuke TATEKURA a), Member, Kazuaki HAMADA, and Tetsuya KIMURA, Nonmembers
IPSJ SIG Technical Report 1, Instrument Separation in Reverberant Environments Using Crystal Microphone Arrays Nobutaka ITO, 1, 2 Yu KITANO, 1
 1, 2 1 1 1 Instrument Separation in Reverberant Environments Using Crystal Microphone Arrays Nobutaka ITO, 1, 2 Yu KITANO, 1 Nobutaka ONO 1 and Shigeki SAGAYAMA 1 This paper deals with instrument separation
1, 2 1 1 1 Instrument Separation in Reverberant Environments Using Crystal Microphone Arrays Nobutaka ITO, 1, 2 Yu KITANO, 1 Nobutaka ONO 1 and Shigeki SAGAYAMA 1 This paper deals with instrument separation
Support Vector Machine (SVM) 4 SVM SVM 2 80% 100% SVM SVM SVM 4 SVM 2 2 SVM 4
 4 SVM SVM 2 80% 100% SVM SVM SVM 4 SVM 2 2 SVM 4") Analysis of Groove Feelings of Drums Plays 47 56340 19 1 31 Support Vector Machine (SVM) 4 SVM SVM 2 80% 100% SVM SVM SVM 4 SVM 2 2 SVM 4 1 1 1.1........................................ 1 1.1.1.............................
Analysis of Groove Feelings of Drums Plays 47 56340 19 1 31 Support Vector Machine (SVM) 4 SVM SVM 2 80% 100% SVM SVM SVM 4 SVM 2 2 SVM 4 1 1 1.1........................................ 1 1.1.1.............................
pp d 2 * Hz Hz 3 10 db Wind-induced noise, Noise reduction, Microphone array, Beamforming 1
 72 12 2016 pp. 739 748 739 43.60.+d 2 * 1 2 2 3 2 125 Hz 0.3 0.8 2 125 Hz 3 10 db Wind-induced noise, Noise reduction, Microphone array, Beamforming 1. 1.1 PSS [1] [2 4] 2 Wind-induced noise reduction
72 12 2016 pp. 739 748 739 43.60.+d 2 * 1 2 2 3 2 125 Hz 0.3 0.8 2 125 Hz 3 10 db Wind-induced noise, Noise reduction, Microphone array, Beamforming 1. 1.1 PSS [1] [2 4] 2 Wind-induced noise reduction
動画コンテンツ 動画 1 動画 2 動画 3 生成中の映像 入力音楽 選択された素片 テンポによる伸縮 音楽的構造 A B B B B B A C C : 4) 6) Web Web 2 2 c 2009 Information Processing S
 6) Web Web 2 2 c 2009 Information Processing S") 1 2 2 1 Web An Automatic Music Video Creation System by Reusing Dance Video Content Sora Murofushi, 1 Tomoyasu Nakano, 2 Masataka Goto 2 and Shigeo Morishima 1 This paper presents a system that automatically
1 2 2 1 Web An Automatic Music Video Creation System by Reusing Dance Video Content Sora Murofushi, 1 Tomoyasu Nakano, 2 Masataka Goto 2 and Shigeo Morishima 1 This paper presents a system that automatically
untitled
 The Impact of Digitization on Music Production: From a Perspective of Modularity 51 2 pp. 87-108 2003 12 I 21 3 Information and Communication Technology, ICT 0 1 1 20 1 199820012000 1 MP3 CD 2 3 II CD
The Impact of Digitization on Music Production: From a Perspective of Modularity 51 2 pp. 87-108 2003 12 I 21 3 Information and Communication Technology, ICT 0 1 1 20 1 199820012000 1 MP3 CD 2 3 II CD
untitled
 ,a,b (F0 (NMF (AR F0 (VB (MU. (Nonnegative Matrix Factorization: NMF [ 3] NMF [4,5] NMF (Multiplicative Update: MU NMF ( (F0 Umezono --, Tsuuba, Ibarai 305 8568, Japan a.yoshii(ataist.go.jp b m.goto(ataist.go.jp
,a,b (F0 (NMF (AR F0 (VB (MU. (Nonnegative Matrix Factorization: NMF [ 3] NMF [4,5] NMF (Multiplicative Update: MU NMF ( (F0 Umezono --, Tsuuba, Ibarai 305 8568, Japan a.yoshii(ataist.go.jp b m.goto(ataist.go.jp
thesis.dvi
 26 27 2 2 : : : : A-D Abstract In this study, the author measured breath sounds at multiple points simultaneously with two or more stethoscopes, and analyzed frequency of the measured breath sounds. First,
26 27 2 2 : : : : A-D Abstract In this study, the author measured breath sounds at multiple points simultaneously with two or more stethoscopes, and analyzed frequency of the measured breath sounds. First,
IPSJ SIG Technical Report Vol.2014-MUS-104 No /8/27 F0 1,a) 1,b) 1,c) 2,d) (F0) F0 F0 Graphical User Interface (GUI) F0 1. [1] CD MIDI [2] [3,
![IPSJ SIG Technical Report Vol.2014-MUS-104 No /8/27 F0 1,a) 1,b) 1,c) 2,d) (F0) F0 F0 Graphical User Interface (GUI) F0 1. [1] CD MIDI [2] [3,](/thumbs/95/124014679.jpg "IPSJ SIG Technical Report Vol.2014-MUS-104 No /8/27 F0 1,a) 1,b) 1,c) 2,d) (F0) F0 F0 Graphical User Interface (GUI) F0 1. [1] CD MIDI [2] [3,") F,a),b),c) 2,d) (F) F F Graphical User Interface (GUI) F. [] CD MIDI [2] [3, 4] [5] 2 a) ikemiya@kuis.kyoto-u.ac.jp b) itoyama@kuis.kyoto-u.ac.jp c) yoshii@kuis.kyoto-u.ac.jp d) okuno@aoni.waseda.jp TANDEM-STRAIGHT
F,a),b),c) 2,d) (F) F F Graphical User Interface (GUI) F. [] CD MIDI [2] [3, 4] [5] 2 a) ikemiya@kuis.kyoto-u.ac.jp b) itoyama@kuis.kyoto-u.ac.jp c) yoshii@kuis.kyoto-u.ac.jp d) okuno@aoni.waseda.jp TANDEM-STRAIGHT
IPSJ SIG Technical Report Vol.2012-MUS-94 No.27 Vol.2012-SLP-90 No /2/4 1 2 J K L 3 ( ) GUI Musical Audio Signal Modeling for Joint Estimation
 GUI Musical Audio Signal Modeling for Joint Estimation") 2 J K L 3 GUI Musical Audio Signal Modeling or Joint Estiation o Haronic, Inharonic, and Tibral Structure and its Application to Source Sepatation NAOKI YASURAOKA and HIROSHI G. OKUNO 2 This paper presents
2 J K L 3 GUI Musical Audio Signal Modeling or Joint Estiation o Haronic, Inharonic, and Tibral Structure and its Application to Source Sepatation NAOKI YASURAOKA and HIROSHI G. OKUNO 2 This paper presents
2) 3) LAN 4) 2 5) 6) 7) K MIC NJR4261JB0916 8) 24.11GHz V 5V 3kHz 4 (1) (8) (1)(5) (2)(3)(4)(6)(7) (1) (2) (3) (4)
 3) LAN 4) 2 5) 6) 7) K MIC NJR4261JB0916 8) 24.11GHz V 5V 3kHz 4 (1) (8) (1)(5) (2)(3)(4)(6)(7) (1) (2) (3) (4)") ドップラーセンサ 送信波 観測対象 1 1 1 SVM 2 9 Activity and State Recognition without Body-Attached Sensor Using Microwave Doppler Sensor Masatoshi Sekine, 1 Kurato Maeno 1 and Masanori Nozaki 1 To spread context-aware
ドップラーセンサ 送信波 観測対象 1 1 1 SVM 2 9 Activity and State Recognition without Body-Attached Sensor Using Microwave Doppler Sensor Masatoshi Sekine, 1 Kurato Maeno 1 and Masanori Nozaki 1 To spread context-aware
2). 3) 4) 1.2 NICTNICT DCRA Dihedral Corner Reflector micro-arraysdcra DCRA DCRA DCRA 3D DCRA PC USB PC PC ON / OFF Velleman K8055 K8055 K8055
. 3) 4) 1.2 NICTNICT DCRA Dihedral Corner Reflector micro-arraysdcra DCRA DCRA DCRA 3D DCRA PC USB PC PC ON / OFF Velleman K8055 K8055 K8055") 1 1 1 2 DCRA 1. 1.1 1) 1 Tactile Interface with Air Jets for Floating Images Aya Higuchi, 1 Nomin, 1 Sandor Markon 1 and Satoshi Maekawa 2 The new optical device DCRA can display floating images in free
1 1 1 2 DCRA 1. 1.1 1) 1 Tactile Interface with Air Jets for Floating Images Aya Higuchi, 1 Nomin, 1 Sandor Markon 1 and Satoshi Maekawa 2 The new optical device DCRA can display floating images in free
Hz
 ( ) 2006 1 3 3 3 4 10 Hz 1 1 1.1.................................... 1 1.2.................................... 1 2 2 2.1.................................... 2 2.2.................................... 3
( ) 2006 1 3 3 3 4 10 Hz 1 1 1.1.................................... 1 1.2.................................... 1 2 2 2.1.................................... 2 2.2.................................... 3
5 Armitage x 1,, x n y i = 10x i + 3 y i = log x i {x i } {y i } 1.2 n i i x ij i j y ij, z ij i j 2 1 y = a x + b ( cm) x ij (i j )
 x ij (i j )") 5 Armitage. x,, x n y i = 0x i + 3 y i = log x i x i y i.2 n i i x ij i j y ij, z ij i j 2 y = a x + b 2 2. ( cm) x ij (i j ) (i) x, x 2 σ 2 x,, σ 2 x,2 σ x,, σ x,2 t t x * (ii) (i) m y ij = x ij /00 y
5 Armitage. x,, x n y i = 0x i + 3 y i = log x i x i y i.2 n i i x ij i j y ij, z ij i j 2 y = a x + b 2 2. ( cm) x ij (i j ) (i) x, x 2 σ 2 x,, σ 2 x,2 σ x,, σ x,2 t t x * (ii) (i) m y ij = x ij /00 y
 2008 : 80725872 1 2 2 3 2.1.......................................... 3 2.2....................................... 3 2.3......................................... 4 2.4 ()..................................
2008 : 80725872 1 2 2 3 2.1.......................................... 3 2.2....................................... 3 2.3......................................... 4 2.4 ()..................................
情報処理学会研究報告 IPSJ SIG Technical Report Vol.2011-MUS-89 No /2/12 NMF NMF NMF NMF NMF NMF Matrix Generation Using Probabilistic Spectrum Enve
 NMF 1 2 2 NMF NMF NMF NMF NMF Matrix Generation Using Probabilistic Spectrum Envelope for Mixed Music Analysis Toru Nakashika, 1 Tetsuya Takiguchi 2 and Yasuo Ariki 2 NMF (Non-negative Matrix Factorization)
NMF 1 2 2 NMF NMF NMF NMF NMF Matrix Generation Using Probabilistic Spectrum Envelope for Mixed Music Analysis Toru Nakashika, 1 Tetsuya Takiguchi 2 and Yasuo Ariki 2 NMF (Non-negative Matrix Factorization)
2013 M
 2013 M0110453 2013 : M0110453 20 1 1 1.1............................ 1 1.2.............................. 4 2 5 2.1................................. 6 2.2................................. 8 2.3.................................
2013 M0110453 2013 : M0110453 20 1 1 1.1............................ 1 1.2.............................. 4 2 5 2.1................................. 6 2.2................................. 8 2.3.................................
sigmus201007_fujihara.dvi
 1 1 1) W-PST W-PST W-PST W-PST Singing voice conversion method by using spectral envelope of singing voice estimated from polyphonic music Hiromasa Fujihara 1 and Masataka Goto 1 This paper describes a
1 1 1) W-PST W-PST W-PST W-PST Singing voice conversion method by using spectral envelope of singing voice estimated from polyphonic music Hiromasa Fujihara 1 and Masataka Goto 1 This paper describes a
,.,. NP,., ,.,,.,.,,, (PCA)...,,. Tipping and Bishop (1999) PCA. (PPCA)., (Ilin and Raiko, 2010). PPCA EM., , tatsukaw
...,,. Tipping and Bishop (1999) PCA. (PPCA)., (Ilin and Raiko, 2010). PPCA EM., , tatsukaw") ,.,. NP,.,. 1 1.1.,.,,.,.,,,. 2. 1.1.1 (PCA)...,,. Tipping and Bishop (1999) PCA. (PPCA)., (Ilin and Raiko, 2010). PPCA EM., 152-8552 2-12-1, tatsukawa.m.aa@m.titech.ac.jp, 190-8562 10-3, mirai@ism.ac.jp
,.,. NP,.,. 1 1.1.,.,,.,.,,,. 2. 1.1.1 (PCA)...,,. Tipping and Bishop (1999) PCA. (PPCA)., (Ilin and Raiko, 2010). PPCA EM., 152-8552 2-12-1, tatsukawa.m.aa@m.titech.ac.jp, 190-8562 10-3, mirai@ism.ac.jp
2000年度『数学展望 I』講義録
 2000 I I IV I II 2000 I I IV I-IV. i ii 3.10 (http://www.math.nagoya-u.ac.jp/ kanai/) 2000 A....1 B....4 C....10 D....13 E....17 Brouwer A....21 B....26 C....33 D....39 E. Sperner...45 F....48 A....53
2000 I I IV I II 2000 I I IV I-IV. i ii 3.10 (http://www.math.nagoya-u.ac.jp/ kanai/) 2000 A....1 B....4 C....10 D....13 E....17 Brouwer A....21 B....26 C....33 D....39 E. Sperner...45 F....48 A....53
A Study of Adaptive Array Implimentation for mobile comunication in cellular system GD133
 A Study of Adaptive Array Implimentation for mobile comunication in cellular system 15 1 31 01GD133 LSI DSP CMA 10km/s i 1 1 2 LS-CMA 5 2.1 CMA... 5 2.1.1... 5 2.1.2... 7 2.1.3... 10 2.2 LS-CMA... 13 2.2.1...
A Study of Adaptive Array Implimentation for mobile comunication in cellular system 15 1 31 01GD133 LSI DSP CMA 10km/s i 1 1 2 LS-CMA 5 2.1 CMA... 5 2.1.1... 5 2.1.2... 7 2.1.3... 10 2.2 LS-CMA... 13 2.2.1...
i
 14 i ii iii iv v vi 14 13 86 13 12 28 14 16 14 15 31 (1) 13 12 28 20 (2) (3) 2 (4) (5) 14 14 50 48 3 11 11 22 14 15 10 14 20 21 20 (1) 14 (2) 14 4 (3) (4) (5) 12 12 (6) 14 15 5 6 7 8 9 10 7
14 i ii iii iv v vi 14 13 86 13 12 28 14 16 14 15 31 (1) 13 12 28 20 (2) (3) 2 (4) (5) 14 14 50 48 3 11 11 22 14 15 10 14 20 21 20 (1) 14 (2) 14 4 (3) (4) (5) 12 12 (6) 14 15 5 6 7 8 9 10 7


2007-Kanai-paper.dvi
 19 Estimation of Sound Source Zone using The Arrival Time Interval 1080351 2008 3 7 S/N 2 2 2 i Abstract Estimation of Sound Source Zone using The Arrival Time Interval Koichiro Kanai The microphone array
19 Estimation of Sound Source Zone using The Arrival Time Interval 1080351 2008 3 7 S/N 2 2 2 i Abstract Estimation of Sound Source Zone using The Arrival Time Interval Koichiro Kanai The microphone array
main.dvi
 A 1/4 1 1/ 1/1 1 9 6 (Vergence) (Convergence) (Divergence) ( ) ( ) 97 1) S. Fukushima, M. Takahashi, and H. Yoshikawa: A STUDY ON VR-BASED MUTUAL ADAPTIVE CAI SYSTEM FOR NUCLEAR POWER PLANT, Proc. of FIFTH
A 1/4 1 1/ 1/1 1 9 6 (Vergence) (Convergence) (Divergence) ( ) ( ) 97 1) S. Fukushima, M. Takahashi, and H. Yoshikawa: A STUDY ON VR-BASED MUTUAL ADAPTIVE CAI SYSTEM FOR NUCLEAR POWER PLANT, Proc. of FIFTH
Run-Based Trieから構成される 決定木の枝刈り法
 Run-Based Trie 2 2 25 6 Run-Based Trie Simple Search Run-Based Trie Network A Network B Packet Router Packet Filtering Policy Rule Network A, K Network B Network C, D Action Permit Deny Permit Network
Run-Based Trie 2 2 25 6 Run-Based Trie Simple Search Run-Based Trie Network A Network B Packet Router Packet Filtering Policy Rule Network A, K Network B Network C, D Action Permit Deny Permit Network
, (GPS: Global Positioning Systemg),.,, (LBS: Local Based Services).. GPS,.,. RFID LAN,.,.,.,,,.,..,.,.,,, i
,.,, (LBS: Local Based Services).. GPS,.,. RFID LAN,.,.,.,,,.,..,.,.,,, i") 25 Estimation scheme of indoor positioning using difference of times which chirp signals arrive 114348 214 3 6 , (GPS: Global Positioning Systemg),.,, (LBS: Local Based Services).. GPS,.,. RFID LAN,.,.,.,,,.,..,.,.,,,
25 Estimation scheme of indoor positioning using difference of times which chirp signals arrive 114348 214 3 6 , (GPS: Global Positioning Systemg),.,, (LBS: Local Based Services).. GPS,.,. RFID LAN,.,.,.,,,.,..,.,.,,,
1 (1997) (1997) 1974:Q3 1994:Q3 (i) (ii) ( ) ( ) 1 (iii) ( ( 1999 ) ( ) ( ) 1 ( ) ( 1995,pp ) 1
 (1997) 1974:Q3 1994:Q3 (i) (ii) ( ) ( ) 1 (iii) ( ( 1999 ) ( ) ( ) 1 ( ) ( 1995,pp ) 1") 1 (1997) (1997) 1974:Q3 1994:Q3 (i) (ii) ( ) ( ) 1 (iii) ( ( 1999 ) ( ) ( ) 1 ( ) ( 1995,pp.218 223 ) 1 2 ) (i) (ii) / (iii) ( ) (i ii) 1 2 1 ( ) 3 ( ) 2, 3 Dunning(1979) ( ) 1 2 ( ) ( ) ( ) (,p.218) (
1 (1997) (1997) 1974:Q3 1994:Q3 (i) (ii) ( ) ( ) 1 (iii) ( ( 1999 ) ( ) ( ) 1 ( ) ( 1995,pp.218 223 ) 1 2 ) (i) (ii) / (iii) ( ) (i ii) 1 2 1 ( ) 3 ( ) 2, 3 Dunning(1979) ( ) 1 2 ( ) ( ) ( ) (,p.218) (
IPSJ SIG Technical Report Vol.2011-MUS-91 No /7/ , 3 1 Design and Implementation on a System for Learning Songs by Presenting Musical St
 1 2 1, 3 1 Design and Implementation on a System for Learning Songs by Presenting Musical Structures based on Phrase Similarity Yuma Ito, 1 Yoshinari Takegawa, 2 Tsutomu Terada 1, 3 and Masahiko Tsukamoto
1 2 1, 3 1 Design and Implementation on a System for Learning Songs by Presenting Musical Structures based on Phrase Similarity Yuma Ito, 1 Yoshinari Takegawa, 2 Tsutomu Terada 1, 3 and Masahiko Tsukamoto
1 Kinect for Windows M = [X Y Z] T M = [X Y Z ] T f (u,v) w 3.2 [11] [7] u = f X +u Z 0 δ u (X,Y,Z ) (5) v = f Y Z +v 0 δ v (X,Y,Z ) (6) w = Z +
![1 Kinect for Windows M = [X Y Z] T M = [X Y Z ] T f (u,v) w 3.2 [11] [7] u = f X +u Z 0 δ u (X,Y,Z ) (5) v = f Y Z +v 0 δ v (X,Y,Z ) (6) w = Z +](/thumbs/81/83701592.jpg "1 Kinect for Windows M = [X Y Z] T M = [X Y Z ] T f (u,v) w 3.2 [11] [7] u = f X +u Z 0 δ u (X,Y,Z ) (5) v = f Y Z +v 0 δ v (X,Y,Z ) (6) w = Z +") 3 3D 1,a) 1 1 Kinect (X, Y) 3D 3D 1. 2010 Microsoft Kinect for Windows SDK( (Kinect) SDK ) 3D [1], [2] [3] [4] [5] [10] 30fps [10] 3 Kinect 3 Kinect Kinect for Windows SDK 3 Microsoft 3 Kinect for Windows
3 3D 1,a) 1 1 Kinect (X, Y) 3D 3D 1. 2010 Microsoft Kinect for Windows SDK( (Kinect) SDK ) 3D [1], [2] [3] [4] [5] [10] 30fps [10] 3 Kinect 3 Kinect Kinect for Windows SDK 3 Microsoft 3 Kinect for Windows
,, 2. Matlab Simulink 2018 PC Matlab Scilab 2
 (2018 ) ( -1) TA Email : ohki@i.kyoto-u.ac.jp, ske.ta@bode.amp.i.kyoto-u.ac.jp : 411 : 10 308 1 1 2 2 2.1............................................ 2 2.2..................................................
(2018 ) ( -1) TA Email : ohki@i.kyoto-u.ac.jp, ske.ta@bode.amp.i.kyoto-u.ac.jp : 411 : 10 308 1 1 2 2 2.1............................................ 2 2.2..................................................
Input image Initialize variables Loop for period of oscillation Update height map Make shade image Change property of image Output image Change time L
 1,a) 1,b) 1/f β Generation Method of Animation from Pictures with Natural Flicker Abstract: Some methods to create animation automatically from one picture have been proposed. There is a method that gives
1,a) 1,b) 1/f β Generation Method of Animation from Pictures with Natural Flicker Abstract: Some methods to create animation automatically from one picture have been proposed. There is a method that gives
64 3 g=9.85 m/s 2 g=9.791 m/s 2 36, km ( ) 1 () 2 () m/s : : a) b) kg/m kg/m k
 1 () 2 () m/s : : a) b) kg/m kg/m k") 63 3 Section 3.1 g 3.1 3.1: : 64 3 g=9.85 m/s 2 g=9.791 m/s 2 36, km ( ) 1 () 2 () 3 9.8 m/s 2 3.2 3.2: : a) b) 5 15 4 1 1. 1 3 14. 1 3 kg/m 3 2 3.3 1 3 5.8 1 3 kg/m 3 3 2.65 1 3 kg/m 3 4 6 m 3.1. 65 5
63 3 Section 3.1 g 3.1 3.1: : 64 3 g=9.85 m/s 2 g=9.791 m/s 2 36, km ( ) 1 () 2 () 3 9.8 m/s 2 3.2 3.2: : a) b) 5 15 4 1 1. 1 3 14. 1 3 kg/m 3 2 3.3 1 3 5.8 1 3 kg/m 3 3 2.65 1 3 kg/m 3 4 6 m 3.1. 65 5
IPSJ SIG Technical Report Vol.2012-MUS-96 No /8/10 MIDI Modeling Performance Indeterminacies for Polyphonic Midi Score Following and
 MIDI 1 2 3 2 1 Modeling Performance Indeterminacies for Polyphonic Midi Score Following and Its Application to Automatic Accompaniment Nakamura Eita 1 Yamamoto Ryuichi 2 Saito Yasuyuki 3 Sako Shinji 2
MIDI 1 2 3 2 1 Modeling Performance Indeterminacies for Polyphonic Midi Score Following and Its Application to Automatic Accompaniment Nakamura Eita 1 Yamamoto Ryuichi 2 Saito Yasuyuki 3 Sako Shinji 2
第122号.indd
 -1- -2- -3- 0852-36-5150 0852-36-5163-4- -5- -6- -7- 1st 1-1 1-2 1-3 1-4 1-5 -8- 2nd M2 E2 D2 J2 C2-9- 3rd M3 E3 D3 J3 C3-10- 4th M4 E4 D4 J4 C4-11- -12- M5 E5 J5 D5 C5 5th -13- -14- NEWS NEWS -15- NEWS
-1- -2- -3- 0852-36-5150 0852-36-5163-4- -5- -6- -7- 1st 1-1 1-2 1-3 1-4 1-5 -8- 2nd M2 E2 D2 J2 C2-9- 3rd M3 E3 D3 J3 C3-10- 4th M4 E4 D4 J4 C4-11- -12- M5 E5 J5 D5 C5 5th -13- -14- NEWS NEWS -15- NEWS
( ) [1] [4] ( ) 2. [5] [6] Piano Tutor[7] [1], [2], [8], [9] Radiobaton[10] Two Finger Piano[11] Coloring-in Piano[12] ism[13] MIDI MIDI 1 Fig. 1 Syst
![( ) [1] [4] ( ) 2. [5] [6] Piano Tutor[7] [1], [2], [8], [9] Radiobaton[10] Two Finger Piano[11] Coloring-in Piano[12] ism[13] MIDI MIDI 1 Fig. 1 Syst](/thumbs/91/107597950.jpg "( ) [1] [4] ( ) 2. [5] [6] Piano Tutor[7] [1], [2], [8], [9] Radiobaton[10] Two Finger Piano[11] Coloring-in Piano[12] ism[13] MIDI MIDI 1 Fig. 1 Syst") 情報処理学会インタラクション 2015 IPSJ Interaction 2015 15INT014 2015/3/7 1,a) 1,b) 1,c) Design and Implementation of a Piano Learning Support System Considering Motivation Fukuya Yuto 1,a) Takegawa Yoshinari 1,b) Yanagi
情報処理学会インタラクション 2015 IPSJ Interaction 2015 15INT014 2015/3/7 1,a) 1,b) 1,c) Design and Implementation of a Piano Learning Support System Considering Motivation Fukuya Yuto 1,a) Takegawa Yoshinari 1,b) Yanagi
DPA,, ShareLog 3) 4) 2.2 Strino Strino STRain-based user Interface with tacticle of elastic Natural ObjectsStrino 1 Strino ) PC Log-Log (2007 6)
 4) 2.2 Strino Strino STRain-based user Interface with tacticle of elastic Natural ObjectsStrino 1 Strino ) PC Log-Log (2007 6)") 1 2 1 3 Experimental Evaluation of Convenient Strain Measurement Using a Magnet for Digital Public Art Junghyun Kim, 1 Makoto Iida, 2 Takeshi Naemura 1 and Hiroyuki Ota 3 We present a basic technology
1 2 1 3 Experimental Evaluation of Convenient Strain Measurement Using a Magnet for Digital Public Art Junghyun Kim, 1 Makoto Iida, 2 Takeshi Naemura 1 and Hiroyuki Ota 3 We present a basic technology
Computational Semantics 1 category specificity Warrington (1975); Warrington & Shallice (1979, 1984) 2 basic level superiority 3 super-ordinate catego
; Warrington & Shallice (1979, 1984) 2 basic level superiority 3 super-ordinate catego") Computational Semantics 1 category specificity Warrington (1975); Warrington & Shallice (1979, 1984) 2 basic level superiority 3 super-ordinate category preservation 1 / 13 analogy by vector space Figure
Computational Semantics 1 category specificity Warrington (1975); Warrington & Shallice (1979, 1984) 2 basic level superiority 3 super-ordinate category preservation 1 / 13 analogy by vector space Figure
A Feasibility Study of Direct-Mapping-Type Parallel Processing Method to Solve Linear Equations in Load Flow Calculations Hiroaki Inayoshi, Non-member
 A Feasibility Study of Direct-Mapping-Type Parallel Processing Method to Solve Linear Equations in Load Flow Calculations Hiroaki Inayoshi, Non-member (University of Tsukuba), Yasuharu Ohsawa, Member (Kobe
A Feasibility Study of Direct-Mapping-Type Parallel Processing Method to Solve Linear Equations in Load Flow Calculations Hiroaki Inayoshi, Non-member (University of Tsukuba), Yasuharu Ohsawa, Member (Kobe
i 1.,,,,,,.,.,,,,, 1,.,, PR.,,.,., PR,,, 5.,., 1, 2. 1, PR,,
 27 PR, 2016 2 i 1.,,,,,,.,.,,,,, 1,.,, PR.,,.,., PR,,, 5.,., 1, 2. 1, PR,, ii.,, 4, 2.,,,, 4. 2,, 5,.,.,, 0.68, 0.42.,., 0.2.,,., 3. 1. 2,.,. 2.,. 3,,.,,, 0.2.,.,,.. iii iii v vii 1 1 1.1..............................
27 PR, 2016 2 i 1.,,,,,,.,.,,,,, 1,.,, PR.,,.,., PR,,, 5.,., 1, 2. 1, PR,, ii.,, 4, 2.,,,, 4. 2,, 5,.,.,, 0.68, 0.42.,., 0.2.,,., 3. 1. 2,.,. 2.,. 3,,.,,, 0.2.,.,,.. iii iii v vii 1 1 1.1..............................
86 7 I ( 13 ) II ( )
 II ( )") 10 I 86 II 86 III 89 IV 92 V 2001 93 VI 95 86 7 I 2001 6 12 10 2001 ( 13 ) 10 66 2000 2001 4 100 1 3000 II 1988 1990 1991 ( ) 500 1994 2 87 1 1994 2 1000 1000 1000 2 1994 12 21 1000 700 5 800 ( 97 ) 1000
10 I 86 II 86 III 89 IV 92 V 2001 93 VI 95 86 7 I 2001 6 12 10 2001 ( 13 ) 10 66 2000 2001 4 100 1 3000 II 1988 1990 1991 ( ) 500 1994 2 87 1 1994 2 1000 1000 1000 2 1994 12 21 1000 700 5 800 ( 97 ) 1000
最新耐震構造解析 ( 第 3 版 ) サンプルページ この本の定価 判型などは, 以下の URL からご覧いただけます. このサンプルページの内容は, 第 3 版 1 刷発行時のものです.
 サンプルページ この本の定価 判型などは, 以下の URL からご覧いただけます. このサンプルページの内容は, 第 3 版 1 刷発行時のものです.") 最新耐震構造解析 ( 第 3 版 ) サンプルページ この本の定価 判型などは, 以下の URL からご覧いただけます. http://www.morikita.co.jp/books/mid/052093 このサンプルページの内容は, 第 3 版 1 刷発行時のものです. i 3 10 3 2000 2007 26 8 2 SI SI 20 1996 2000 SI 15 3 ii 1 56 6
最新耐震構造解析 ( 第 3 版 ) サンプルページ この本の定価 判型などは, 以下の URL からご覧いただけます. http://www.morikita.co.jp/books/mid/052093 このサンプルページの内容は, 第 3 版 1 刷発行時のものです. i 3 10 3 2000 2007 26 8 2 SI SI 20 1996 2000 SI 15 3 ii 1 56 6
P2P P2P peer peer P2P peer P2P peer P2P i
 26 P2P Proposed a system for the purpose of idle resource utilization of the computer using the P2P 1150373 2015 2 27 P2P P2P peer peer P2P peer P2P peer P2P i Abstract Proposed a system for the purpose
26 P2P Proposed a system for the purpose of idle resource utilization of the computer using the P2P 1150373 2015 2 27 P2P P2P peer peer P2P peer P2P peer P2P i Abstract Proposed a system for the purpose
untitled
 非負値行列因子分解 NMF の基礎とデータ / 信号解析への応用 Nonnegative Matrix Factorization and Its Applications to Data/Signal Analysis 澤田 宏 非負値行列因子分解 (NMF : Nonnegative Matrix Factorization) は, 非負値のみからなる行列を分解するという数学的に非常にシンプルな定式化でありながら,
非負値行列因子分解 NMF の基礎とデータ / 信号解析への応用 Nonnegative Matrix Factorization and Its Applications to Data/Signal Analysis 澤田 宏 非負値行列因子分解 (NMF : Nonnegative Matrix Factorization) は, 非負値のみからなる行列を分解するという数学的に非常にシンプルな定式化でありながら,
IPSJ SIG Technical Report Vol.2015-MUS-107 No /5/23 HARK-Binaural Raspberry Pi 2 1,a) ( ) HARK 2 HARK-Binaural A/D Raspberry Pi 2 1.
 ( ) HARK 2 HARK-Binaural A/D Raspberry Pi 2 1.") HARK-Binaural Raspberry Pi 2 1,a) 1 1 1 2 3 () HARK 2 HARK-Binaural A/D Raspberry Pi 2 1. [1,2] [2 5] () HARK (Honda Research Institute Japan audition for robots with Kyoto University) *1 GUI ( 1) Python
HARK-Binaural Raspberry Pi 2 1,a) 1 1 1 2 3 () HARK 2 HARK-Binaural A/D Raspberry Pi 2 1. [1,2] [2 5] () HARK (Honda Research Institute Japan audition for robots with Kyoto University) *1 GUI ( 1) Python
untitled
 MRR Physical Basis( 1.8.4) METEK MRR 1 MRR 1.1 MRR 24GHz FM-CW(frequency module continuous wave) 30 r+ r f+ f 1.2 1 4 MRR 24GHz 1.3 50mW 1 rf- (waveguide) (horn) 60cm ( monostatic radar) (continuous wave)
MRR Physical Basis( 1.8.4) METEK MRR 1 MRR 1.1 MRR 24GHz FM-CW(frequency module continuous wave) 30 r+ r f+ f 1.2 1 4 MRR 24GHz 1.3 50mW 1 rf- (waveguide) (horn) 60cm ( monostatic radar) (continuous wave)
「産業上利用することができる発明」の審査の運用指針(案)
") 1 1.... 2 1.1... 2 2.... 4 2.1... 4 3.... 6 4.... 6 1 1 29 1 29 1 1 1. 2 1 1.1 (1) (2) (3) 1 (4) 2 4 1 2 2 3 4 31 12 5 7 2.2 (5) ( a ) ( b ) 1 3 2 ( c ) (6) 2. 2.1 2.1 (1) 4 ( i ) ( ii ) ( iii ) ( iv)
1 1.... 2 1.1... 2 2.... 4 2.1... 4 3.... 6 4.... 6 1 1 29 1 29 1 1 1. 2 1 1.1 (1) (2) (3) 1 (4) 2 4 1 2 2 3 4 31 12 5 7 2.2 (5) ( a ) ( b ) 1 3 2 ( c ) (6) 2. 2.1 2.1 (1) 4 ( i ) ( ii ) ( iii ) ( iv)
2016 : M SF
 2016 M0113407 2017 3 2016 : M0113407 SF 1 1 1.1......................................... 1 2 4 2.1............................... 4 2.2................................... 5 2.3 [scene-by-scene]..............
2016 M0113407 2017 3 2016 : M0113407 SF 1 1 1.1......................................... 1 2 4 2.1............................... 4 2.2................................... 5 2.3 [scene-by-scene]..............
P361
 ΣAD -RFDAC - High-Speed Continuous-Time Bandpass ΣAD Modulator Architecture Employing Sub-Sampling Technnique with 376-8515 1-5-1 Masafumi Uemori Tomonari Ichikawa Haruo Kobayashi Department of Electronic
ΣAD -RFDAC - High-Speed Continuous-Time Bandpass ΣAD Modulator Architecture Employing Sub-Sampling Technnique with 376-8515 1-5-1 Masafumi Uemori Tomonari Ichikawa Haruo Kobayashi Department of Electronic
1. HNS [1] HNS HNS HNS [2] HNS [3] [4] [5] HNS 16ch SNR [6] 1 16ch 1 3 SNR [4] [5] 2. 2 HNS API HNS CS27-HNS [1] (SOA) [7] API Web 2
![1. HNS [1] HNS HNS HNS [2] HNS [3] [4] [5] HNS 16ch SNR [6] 1 16ch 1 3 SNR [4] [5] 2. 2 HNS API HNS CS27-HNS [1] (SOA) [7] API Web 2](/thumbs/91/106048225.jpg "1. HNS [1] HNS HNS HNS [2] HNS [3] [4] [5] HNS 16ch SNR [6] 1 16ch 1 3 SNR [4] [5] 2. 2 HNS API HNS CS27-HNS [1] (SOA) [7] API Web 2") THE INSTITUTE OF ELECTRONICS, INFORMATION AND COMMUNICATION ENGINEERS TECHNICAL REPORT OF IEICE. 657 8531 1 1 E-mail: {soda,matsubara}@ws.cs.kobe-u.ac.jp, {masa-n,shinsuke,shin,yosimoto}@cs.kobe-u.ac.jp,
THE INSTITUTE OF ELECTRONICS, INFORMATION AND COMMUNICATION ENGINEERS TECHNICAL REPORT OF IEICE. 657 8531 1 1 E-mail: {soda,matsubara}@ws.cs.kobe-u.ac.jp, {masa-n,shinsuke,shin,yosimoto}@cs.kobe-u.ac.jp,
& Vol.5 No (Oct. 2015) TV 1,2,a) , Augmented TV TV AR Augmented Reality 3DCG TV Estimation of TV Screen Position and Ro
 TV 1,2,a) , Augmented TV TV AR Augmented Reality 3DCG TV Estimation of TV Screen Position and Ro") TV 1,2,a) 1 2 2015 1 26, 2015 5 21 Augmented TV TV AR Augmented Reality 3DCG TV Estimation of TV Screen Position and Rotation Using Mobile Device Hiroyuki Kawakita 1,2,a) Toshio Nakagawa 1 Makoto Sato
TV 1,2,a) 1 2 2015 1 26, 2015 5 21 Augmented TV TV AR Augmented Reality 3DCG TV Estimation of TV Screen Position and Rotation Using Mobile Device Hiroyuki Kawakita 1,2,a) Toshio Nakagawa 1 Makoto Sato
17 Proposal of an Algorithm of Image Extraction and Research on Improvement of a Man-machine Interface of Food Intake Measuring System
 1. (1) ( MMI ) 2. 3. MMI Personal Computer(PC) MMI PC 1 1 2 (%) (%) 100.0 95.2 100.0 80.1 2 % 31.3% 2 PC (3 ) (2) MMI 2 ( ),,,, 49,,p531-532,2005 ( ),,,,,2005,p66-p67,2005 17 Proposal of an Algorithm of
1. (1) ( MMI ) 2. 3. MMI Personal Computer(PC) MMI PC 1 1 2 (%) (%) 100.0 95.2 100.0 80.1 2 % 31.3% 2 PC (3 ) (2) MMI 2 ( ),,,, 49,,p531-532,2005 ( ),,,,,2005,p66-p67,2005 17 Proposal of an Algorithm of
IPSJ SIG Technical Report Vol.2013-GN-87 No /3/ Research of a surround-sound field adjustmen system based on loudspeakers arrangement Ak
 1 1 3 Research of a surround-sound field adjustmen system based on loudspeakers arrangement Akiyama Daichi 1 Kanai Hideaki 1 Abstract: In this paper, we propose a presentation method that does not depend
1 1 3 Research of a surround-sound field adjustmen system based on loudspeakers arrangement Akiyama Daichi 1 Kanai Hideaki 1 Abstract: In this paper, we propose a presentation method that does not depend
25 fmri A study of discrimination of musical harmony using brain activity obtained by fmri
 25 fmri A study of discrimination of musical harmony using brain activity obtained by fmri 1140359 2014 2 28 fmri fmri BCI(Brain Computer Interface) 6 (C C# D D# E F) 6 (Cm C#m Dm D#m Em Fm) 12 fmri fmri
25 fmri A study of discrimination of musical harmony using brain activity obtained by fmri 1140359 2014 2 28 fmri fmri BCI(Brain Computer Interface) 6 (C C# D D# E F) 6 (Cm C#m Dm D#m Em Fm) 12 fmri fmri
IPSJ SIG Technical Report Vol.2009-BIO-17 No /5/26 DNA 1 1 DNA DNA DNA DNA Correcting read errors on DNA sequences determined by Pyrosequencing
 DNA 1 1 DNA DNA DNA DNA Correcting read errors on DNA sequences determined by Pyrosequencing Youhei Namiki 1 and Yutaka Akiyama 1 Pyrosequencing, one of the DNA sequencing technologies, allows us to determine
DNA 1 1 DNA DNA DNA DNA Correcting read errors on DNA sequences determined by Pyrosequencing Youhei Namiki 1 and Yutaka Akiyama 1 Pyrosequencing, one of the DNA sequencing technologies, allows us to determine
Getting Started Creative Sound Blaster Live! 5.1 Creative Sound Blaster Live! 5.1 Digital Audio Creative Technology Ltd. Creative Technology Ltd. 1 Co
 TM Getting Started Creative Sound Blaster Live! 5.1 Creative Sound Blaster Live! 5.1 Digital Audio Creative Technology Ltd. Creative Technology Ltd. 1 Copyright 1998-2002 by Creative Technology Ltd. All
TM Getting Started Creative Sound Blaster Live! 5.1 Creative Sound Blaster Live! 5.1 Digital Audio Creative Technology Ltd. Creative Technology Ltd. 1 Copyright 1998-2002 by Creative Technology Ltd. All
[2] 2. [3 5] 3D [6 8] Morishima [9] N n 24 24FPS k k = 1, 2,..., N i i = 1, 2,..., n Algorithm 1 N io user-specified number of inbetween omis
![[2] 2. [3 5] 3D [6 8] Morishima [9] N n 24 24FPS k k = 1, 2,..., N i i = 1, 2,..., n Algorithm 1 N io user-specified number of inbetween omis](/thumbs/76/74386791.jpg "[2] 2. [3 5] 3D [6 8] Morishima [9] N n 24 24FPS k k = 1, 2,..., N i i = 1, 2,..., n Algorithm 1 N io user-specified number of inbetween omis") 1,a) 2 2 2 1 2 3 24 Motion Frame Omission for Cartoon-like Effects Abstract: Limited animation is a hand-drawn animation style that holds each drawing for two or three successive frames to make up 24 frames
1,a) 2 2 2 1 2 3 24 Motion Frame Omission for Cartoon-like Effects Abstract: Limited animation is a hand-drawn animation style that holds each drawing for two or three successive frames to make up 24 frames
Vol.53 No (Mar. 2012) 1, 1,a) 1, 2 1 1, , Musical Interaction System Based on Stage Metaphor Seiko Myojin 1, 1,a
 1, 1,a) 1, 2 1 1, , Musical Interaction System Based on Stage Metaphor Seiko Myojin 1, 1,a") 1, 1,a) 1, 2 1 1, 3 2 1 2011 6 17, 2011 12 16 Musical Interaction System Based on Stage Metaphor Seiko Myojin 1, 1,a) Kazuki Kanamori 1, 2 Mie Nakatani 1 Hirokazu Kato 1, 3 Sanae H. Wake 2 Shogo Nishida
1, 1,a) 1, 2 1 1, 3 2 1 2011 6 17, 2011 12 16 Musical Interaction System Based on Stage Metaphor Seiko Myojin 1, 1,a) Kazuki Kanamori 1, 2 Mie Nakatani 1 Hirokazu Kato 1, 3 Sanae H. Wake 2 Shogo Nishida
User's Guide
 magicolor 2300 DL 1800687-014B magicolor 2300 DL Windows TCP/IP Web URL http://www.minolta-qms.co.jp/support/userreg/index.html QMS MINOLTA-QMS magicolor MINOLTA-QMS, Inc. Minolta Peerless Systems Corporation
magicolor 2300 DL 1800687-014B magicolor 2300 DL Windows TCP/IP Web URL http://www.minolta-qms.co.jp/support/userreg/index.html QMS MINOLTA-QMS magicolor MINOLTA-QMS, Inc. Minolta Peerless Systems Corporation
IPSJ SIG Technical Report Vol.2017-MUS-116 No /8/24 MachineDancing: 1,a) 1,b) 3 MachineDancing MachineDancing MachineDancing 1 MachineDan
 1,b) 3 MachineDancing MachineDancing MachineDancing 1 MachineDan") MachineDancing: 1,a) 1,b) 3 MachineDancing 2 1. 3 MachineDancing MachineDancing 1 MachineDancing MachineDancing [1] 1 305 0058 1-1-1 a) s.fukayama@aist.go.jp b) m.goto@aist.go.jp 1 MachineDancing 3 CG
MachineDancing: 1,a) 1,b) 3 MachineDancing 2 1. 3 MachineDancing MachineDancing 1 MachineDancing MachineDancing [1] 1 305 0058 1-1-1 a) s.fukayama@aist.go.jp b) m.goto@aist.go.jp 1 MachineDancing 3 CG
WISS 2018 [2 4] [5,6] Query-by-Dancing Query-by- Dancing Cao [1] OpenPose 2 Ghias [7] Query by humming Chen [8] Query by rhythm Jang [9] Query-by-tapp
![WISS 2018 [2 4] [5,6] Query-by-Dancing Query-by- Dancing Cao [1] OpenPose 2 Ghias [7] Query by humming Chen [8] Query by rhythm Jang [9] Query-by-tapp](/thumbs/91/107555259.jpg "WISS 2018 [2 4] [5,6] Query-by-Dancing Query-by- Dancing Cao [1] OpenPose 2 Ghias [7] Query by humming Chen [8] Query by rhythm Jang [9] Query-by-tapp") Query-by-Dancing: WISS 2018. Query-by-Dancing Query-by-Dancing 1 OpenPose [1] Copyright is held by the author(s). DJ DJ DJ WISS 2018 [2 4] [5,6] Query-by-Dancing Query-by- Dancing Cao [1] OpenPose 2 Ghias
Query-by-Dancing: WISS 2018. Query-by-Dancing Query-by-Dancing 1 OpenPose [1] Copyright is held by the author(s). DJ DJ DJ WISS 2018 [2 4] [5,6] Query-by-Dancing Query-by- Dancing Cao [1] OpenPose 2 Ghias
untitled
 N N X=[ ] R IJK R X R ABC A=[a ] R B=[b ] R C=[c ] R ABC X =[ ] R = a b c X X X X X D( ) D(X X )= log + D( ) a a b b c c b c b c a c a c a b a b R X X A a t =a b c a = t a R i i = a =. a I R = a = b =
N N X=[ ] R IJK R X R ABC A=[a ] R B=[b ] R C=[c ] R ABC X =[ ] R = a b c X X X X X D( ) D(X X )= log + D( ) a a b b c c b c b c a c a c a b a b R X X A a t =a b c a = t a R i i = a =. a I R = a = b =
OPA134/2134/4134('98.03)
") OPA OPA OPA OPA OPA OPA OPA OPA OPA TM µ Ω ± ± ± ± + OPA OPA OPA Offset Trim Offset Trim Out A V+ Out A Out D In +In V+ Output In A +In A A B Out B In B In A +In A A D In D +In D V NC V +In B V+ V +In
OPA OPA OPA OPA OPA OPA OPA OPA OPA TM µ Ω ± ± ± ± + OPA OPA OPA Offset Trim Offset Trim Out A V+ Out A Out D In +In V+ Output In A +In A A B Out B In B In A +In A A D In D +In D V NC V +In B V+ V +In
SURF,,., 55%,.,., SURF(Speeded Up Robust Features), 4 (,,, ), SURF.,, 84%, 96%, 28%, 32%.,,,. SURF, i
, 4 (,,, ), SURF.,, 84%, 96%, 28%, 32%.,,,. SURF, i") 24 SURF Recognition of Facial Expression Based on SURF 1130402 2013 3 1 SURF,,., 55%,.,., SURF(Speeded Up Robust Features), 4 (,,, ), SURF.,, 84%, 96%, 28%, 32%.,,,. SURF, i Abstract Recognition of Facial
24 SURF Recognition of Facial Expression Based on SURF 1130402 2013 3 1 SURF,,., 55%,.,., SURF(Speeded Up Robust Features), 4 (,,, ), SURF.,, 84%, 96%, 28%, 32%.,,,. SURF, i Abstract Recognition of Facial
o 2o 3o 3 1. I o 3. 1o 2o 31. I 3o PDF Adobe Reader 4o 2 1o I 2o 3o 4o 5o 6o 7o 2197/ o 1o 1 1o
 78 2 78... 2 22201011... 4... 9... 7... 29 1 1214 2 7 1 8 2 2 3 1 2 1o 2o 3o 3 1. I 1124 4o 3. 1o 2o 31. I 3o PDF Adobe Reader 4o 2 1o 72 1. I 2o 3o 4o 5o 6o 7o 2197/6 9. 9 8o 1o 1 1o 2o / 3o 4o 5o 6o
78 2 78... 2 22201011... 4... 9... 7... 29 1 1214 2 7 1 8 2 2 3 1 2 1o 2o 3o 3 1. I 1124 4o 3. 1o 2o 31. I 3o PDF Adobe Reader 4o 2 1o 72 1. I 2o 3o 4o 5o 6o 7o 2197/6 9. 9 8o 1o 1 1o 2o / 3o 4o 5o 6o
The copyright of this material is retained by the Information Processing Society of Japan (IPSJ). The material has been made available on the website
. The material has been made available on the website") The copyright of this material is retained by the Information Processing Society of Japan (IPSJ). The material has been made available on the website by the author(s) under the agreement with the IPSJ.
The copyright of this material is retained by the Information Processing Society of Japan (IPSJ). The material has been made available on the website by the author(s) under the agreement with the IPSJ.
S I. dy fx x fx y fx + C 3 C dy fx 4 x, y dy v C xt y C v e kt k > xt yt gt [ v dt dt v e kt xt v e kt + C k x v + C C k xt v k 3 r r + dr e kt S dt d
 S I.. http://ayapin.film.s.dendai.ac.jp/~matuda /TeX/lecture.html PDF PS.................................... 3.3.................... 9.4................5.............. 3 5. Laplace................. 5....
S I.. http://ayapin.film.s.dendai.ac.jp/~matuda /TeX/lecture.html PDF PS.................................... 3.3.................... 9.4................5.............. 3 5. Laplace................. 5....
1
 16 A study on musical instrument design by using sympathetic vibration 03A25 SUGIYAMA Kouichirou 1 1.4 2.5 2.1 5 2.1.1 1 5 2.1.2 2 6 2.1.3 6 2.2 9 2.2.1 9 2.2.2 9 3.10 3.1 10 3.2 10 3.2.1 10 3.2.2 11 3.2.3
16 A study on musical instrument design by using sympathetic vibration 03A25 SUGIYAMA Kouichirou 1 1.4 2.5 2.1 5 2.1.1 1 5 2.1.2 2 6 2.1.3 6 2.2 9 2.2.1 9 2.2.2 9 3.10 3.1 10 3.2 10 3.2.1 10 3.2.2 11 3.2.3
prp6.PDF
 REALPIANO DIGITAL DIGITAL 2 Contents Instrument Layout...6...7 Playing the prp6...8...9 The fynctions of the prp6...10...11...12 TUNE...13 MIDI MIDI...14 MIDI LOCAL...15 MIDI COMMON...16 MIDI...17 MIDI...19...20...20
REALPIANO DIGITAL DIGITAL 2 Contents Instrument Layout...6...7 Playing the prp6...8...9 The fynctions of the prp6...10...11...12 TUNE...13 MIDI MIDI...14 MIDI LOCAL...15 MIDI COMMON...16 MIDI...17 MIDI...19...20...20
 Key Words: probabilisic scenario earthquake, active fault data, Great Hanshin earthquake, low frequency-high impact earthquake motion, seismic hazard map 3) Cornell, C. A.: Engineering Seismic
Key Words: probabilisic scenario earthquake, active fault data, Great Hanshin earthquake, low frequency-high impact earthquake motion, seismic hazard map 3) Cornell, C. A.: Engineering Seismic
28 Horizontal angle correction using straight line detection in an equirectangular image
 28 Horizontal angle correction using straight line detection in an equirectangular image 1170283 2017 3 1 2 i Abstract Horizontal angle correction using straight line detection in an equirectangular image
28 Horizontal angle correction using straight line detection in an equirectangular image 1170283 2017 3 1 2 i Abstract Horizontal angle correction using straight line detection in an equirectangular image
5) 2. Geminoid HI-1 6) Telenoid 7) Geminoid HI-1 Geminoid HI-1 Telenoid Robot- PHONE 8) RobotPHONE 11 InterRobot 9) InterRobot InterRobot irt( ) 10) 4
 2. Geminoid HI-1 6) Telenoid 7) Geminoid HI-1 Geminoid HI-1 Telenoid Robot- PHONE 8) RobotPHONE 11 InterRobot 9) InterRobot InterRobot irt( ) 10) 4") Remote Hand Clapping Transmission Using Hand Clapping Machines on Live Video Streaming Masato Takahashi, Yuto Kumon,ShuheyTakeda and Masahiko Inami Abstract We propose a remote transmission system of hand
Remote Hand Clapping Transmission Using Hand Clapping Machines on Live Video Streaming Masato Takahashi, Yuto Kumon,ShuheyTakeda and Masahiko Inami Abstract We propose a remote transmission system of hand
医系の統計入門第 2 版 サンプルページ この本の定価 判型などは, 以下の URL からご覧いただけます. このサンプルページの内容は, 第 2 版 1 刷発行時のものです.
 医系の統計入門第 2 版 サンプルページ この本の定価 判型などは, 以下の URL からご覧いただけます. http://www.morikita.co.jp/books/mid/009192 このサンプルページの内容は, 第 2 版 1 刷発行時のものです. i 2 t 1. 2. 3 2 3. 6 4. 7 5. n 2 ν 6. 2 7. 2003 ii 2 2013 10 iii 1987
医系の統計入門第 2 版 サンプルページ この本の定価 判型などは, 以下の URL からご覧いただけます. http://www.morikita.co.jp/books/mid/009192 このサンプルページの内容は, 第 2 版 1 刷発行時のものです. i 2 t 1. 2. 3 2 3. 6 4. 7 5. n 2 ν 6. 2 7. 2003 ii 2 2013 10 iii 1987
 SEISMIC HAZARD ESTIMATION BASED ON ACTIVE FAULT DATA AND HISTORICAL EARTHQUAKE DATA By Hiroyuki KAMEDA and Toshihiko OKUMURA A method is presented for using historical earthquake data and active fault
SEISMIC HAZARD ESTIMATION BASED ON ACTIVE FAULT DATA AND HISTORICAL EARTHQUAKE DATA By Hiroyuki KAMEDA and Toshihiko OKUMURA A method is presented for using historical earthquake data and active fault
 i ii iii iv v vi vii ( ー ー ) ( ) ( ) ( ) ( ) ー ( ) ( ) ー ー ( ) ( ) ( ) ( ) ( ) 13 202 24122783 3622316 (1) (2) (3) (4) 2483 (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) 11 11 2483 13
i ii iii iv v vi vii ( ー ー ) ( ) ( ) ( ) ( ) ー ( ) ( ) ー ー ( ) ( ) ( ) ( ) ( ) 13 202 24122783 3622316 (1) (2) (3) (4) 2483 (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) 11 11 2483 13

JIS Z803: (substitution method) 3 LCR LCR GPIB
 3 LCR LCR GPIB") LCR NMIJ 003 Agilent 8A 500 ppm JIS Z803:000 50 (substitution method) 3 LCR LCR GPIB Taylor 5 LCR LCR meter (Agilent 8A: Basic accuracy 500 ppm) V D z o I V DUT Z 3 V 3 I A Z V = I V = 0 3 6 V, A LCR meter
LCR NMIJ 003 Agilent 8A 500 ppm JIS Z803:000 50 (substitution method) 3 LCR LCR GPIB Taylor 5 LCR LCR meter (Agilent 8A: Basic accuracy 500 ppm) V D z o I V DUT Z 3 V 3 I A Z V = I V = 0 3 6 V, A LCR meter
W 1983 W ± Z cm 10 cm 50 MeV TAC - ADC ADC [ (µs)] = [] (2.08 ± 0.36) 10 6 s 3 χ µ + µ 8 = (1.20 ± 0.1) 10 5 (Ge
![W 1983 W ± Z cm 10 cm 50 MeV TAC - ADC ADC [ (µs)] = [] (2.08 ± 0.36) 10 6 s 3 χ µ + µ 8 = (1.20 ± 0.1) 10 5 (Ge](/thumbs/91/105929864.jpg "W 1983 W ± Z cm 10 cm 50 MeV TAC - ADC ADC [ (µs)] = [] (2.08 ± 0.36) 10 6 s 3 χ µ + µ 8 = (1.20 ± 0.1) 10 5 (Ge") 22 2 24 W 1983 W ± Z 0 3 10 cm 10 cm 50 MeV TAC - ADC 65000 18 ADC [ (µs)] = 0.0207[] 0.0151 (2.08 ± 0.36) 10 6 s 3 χ 2 2 1 20 µ + µ 8 = (1.20 ± 0.1) 10 5 (GeV) 2 G µ ( hc) 3 1 1 7 1.1.............................
22 2 24 W 1983 W ± Z 0 3 10 cm 10 cm 50 MeV TAC - ADC 65000 18 ADC [ (µs)] = 0.0207[] 0.0151 (2.08 ± 0.36) 10 6 s 3 χ 2 2 1 20 µ + µ 8 = (1.20 ± 0.1) 10 5 (GeV) 2 G µ ( hc) 3 1 1 7 1.1.............................
2007/8 Vol. J90 D No. 8 Stauffer [7] 2 2 I 1 I 2 2 (I 1(x),I 2(x)) 2 [13] I 2 = CI 1 (C >0) (I 1,I 2) (I 1,I 2) Field Monitoring Server
![2007/8 Vol. J90 D No. 8 Stauffer [7] 2 2 I 1 I 2 2 (I 1(x),I 2(x)) 2 [13] I 2 = CI 1 (C >0) (I 1,I 2) (I 1,I 2) Field Monitoring Server](/thumbs/91/107223763.jpg "2007/8 Vol. J90 D No. 8 Stauffer [7] 2 2 I 1 I 2 2 (I 1(x),I 2(x)) 2 [13] I 2 = CI 1 (C >0) (I 1,I 2) (I 1,I 2) Field Monitoring Server") a) Change Detection Using Joint Intensity Histogram Yasuyo KITA a) 2 (0 255) (I 1 (x),i 2 (x)) I 2 = CI 1 (C>0) (I 1,I 2 ) (I 1,I 2 ) 2 1. [1] 2 [2] [3] [5] [6] [8] Intelligent Systems Research Institute,
a) Change Detection Using Joint Intensity Histogram Yasuyo KITA a) 2 (0 255) (I 1 (x),i 2 (x)) I 2 = CI 1 (C>0) (I 1,I 2 ) (I 1,I 2 ) 2 1. [1] 2 [2] [3] [5] [6] [8] Intelligent Systems Research Institute,
 11 22 33 12 23 1 2 3, 1 2, U2 3 U 1 U b 1 (o t ) b 2 (o t ) b 3 (o t ), 3 b (o t ) MULTI-SPEAKER SPEECH DATABASE Training Speech Analysis Mel-Cepstrum, logf0 /context1/ /context2/... Context Dependent
11 22 33 12 23 1 2 3, 1 2, U2 3 U 1 U b 1 (o t ) b 2 (o t ) b 3 (o t ), 3 b (o t ) MULTI-SPEAKER SPEECH DATABASE Training Speech Analysis Mel-Cepstrum, logf0 /context1/ /context2/... Context Dependent
 2 dbx ProVocal ProVocal 3 EQ dbx / MIDI 24bit S/PDIF 44.1/48kHz Mic/Line 20dB 48V XLR XLR ProVocal 1U ProVocal Provocal 45 3 Section 1 1.1 ProVocal S/PDIF ProVocal S/PDIF RCA MIDI MIDI ProVocal XLR( )
2 dbx ProVocal ProVocal 3 EQ dbx / MIDI 24bit S/PDIF 44.1/48kHz Mic/Line 20dB 48V XLR XLR ProVocal 1U ProVocal Provocal 45 3 Section 1 1.1 ProVocal S/PDIF ProVocal S/PDIF RCA MIDI MIDI ProVocal XLR( )
A Japanese Word Dependency Corpus ÆüËܸì¤Îñ¸ì·¸¤ê¼õ¤±¥³¡¼¥Ñ¥¹
 A Japanese Word Dependency Corpus 2015 3 18 Special thanks to NTT CS, 1 /27 Bunsetsu? What is it? ( ) Cf. CoNLL Multilingual Dependency Parsing [Buchholz+ 2006] (, Penn Treebank [Marcus 93]) 2 /27 1. 2.
A Japanese Word Dependency Corpus 2015 3 18 Special thanks to NTT CS, 1 /27 Bunsetsu? What is it? ( ) Cf. CoNLL Multilingual Dependency Parsing [Buchholz+ 2006] (, Penn Treebank [Marcus 93]) 2 /27 1. 2.
MCMC: Marov Chain Monte Carlo [20] 2. VAE-NMF DNN DNN F T X x t R F t = 1,..., T x t 2. 1 Generative Adversarial Networ: GAN [21,22] GAN z t R D x t z
![MCMC: Marov Chain Monte Carlo [20] 2. VAE-NMF DNN DNN F T X x t R F t = 1,..., T x t 2. 1 Generative Adversarial Networ: GAN [21,22] GAN z t R D x t z](/thumbs/91/105341774.jpg "MCMC: Marov Chain Monte Carlo [20] 2. VAE-NMF DNN DNN F T X x t R F t = 1,..., T x t 2. 1 Generative Adversarial Networ: GAN [21,22] GAN z t R D x t z") 一般社団法人電子情報通信学会 THE INSTITUTE OF ELECTRONICS, INFORMATION AND COMMUNICATION ENGINEERS THE INSTITUTE OF ELECTRONICS, INFORMATION AND COMMUNICATION ENGINEERS 信学技報 IEICE Technical Report SP2017-202017-08 TECHNICAL
一般社団法人電子情報通信学会 THE INSTITUTE OF ELECTRONICS, INFORMATION AND COMMUNICATION ENGINEERS THE INSTITUTE OF ELECTRONICS, INFORMATION AND COMMUNICATION ENGINEERS 信学技報 IEICE Technical Report SP2017-202017-08 TECHNICAL
(2009), p.57 1) 2) 3) 4) (2004), p ) (1989), p.128 6) 12 2 (1989), p.122 7) ) 2) (1989), p ) 4) 5) 8 12 (1989), p.
, p.57 1) 2) 3) 4) (2004), p ) (1989), p.128 6) 12 2 (1989), p.122 7) ) 2) (1989), p ) 4) 5) 8 12 (1989), p.") 41, 1, 2011 9 23 50 The estimate of 12-tone temperament in Japan by the application of basic statistics methods Akedo Shin-ya 1884 3 95% 291.333 Hz In China and Japan, the musical pitches have each meaning.
41, 1, 2011 9 23 50 The estimate of 12-tone temperament in Japan by the application of basic statistics methods Akedo Shin-ya 1884 3 95% 291.333 Hz In China and Japan, the musical pitches have each meaning.
 262014 3 1 1 6 3 2 198810 2/ 198810 2 1 3 4 http://www.pref.hiroshima.lg.jp/site/monjokan/ 1... 1... 1... 2... 2... 4... 5... 9... 9... 10... 10... 10... 10... 13 2... 13 3... 15... 15... 15... 16 4...
262014 3 1 1 6 3 2 198810 2/ 198810 2 1 3 4 http://www.pref.hiroshima.lg.jp/site/monjokan/ 1... 1... 1... 2... 2... 4... 5... 9... 9... 10... 10... 10... 10... 13 2... 13 3... 15... 15... 15... 16 4...
 Creative Sound Blaster Digital Music Creative Technology Ltd. Creative Technology Ltd. 1 CD Copyright 2003 Creative Technology Ltd. All rights reserved. 2003 3 1 Sound Blaster Creative Technology Ltd.
Creative Sound Blaster Digital Music Creative Technology Ltd. Creative Technology Ltd. 1 CD Copyright 2003 Creative Technology Ltd. All rights reserved. 2003 3 1 Sound Blaster Creative Technology Ltd.
, IT.,.,..,.. i
 25 To construct the system that promote a interactive method as a knowledge acquisition 1140317 2014 2 28 , IT.,.,..,.. i Abstract To construct the system that promote a interactive method as a knowledge
25 To construct the system that promote a interactive method as a knowledge acquisition 1140317 2014 2 28 , IT.,.,..,.. i Abstract To construct the system that promote a interactive method as a knowledge


44 4 I (1) ( ) (10 15 ) ( 17 ) ( 3 1 ) (2)
 ( ) (10 15 ) ( 17 ) ( 3 1 ) (2)") (1) I 44 II 45 III 47 IV 52 44 4 I (1) ( ) 1945 8 9 (10 15 ) ( 17 ) ( 3 1 ) (2) 45 II 1 (3) 511 ( 451 1 ) ( ) 365 1 2 512 1 2 365 1 2 363 2 ( ) 3 ( ) ( 451 2 ( 314 1 ) ( 339 1 4 ) 337 2 3 ) 363 (4) 46
(1) I 44 II 45 III 47 IV 52 44 4 I (1) ( ) 1945 8 9 (10 15 ) ( 17 ) ( 3 1 ) (2) 45 II 1 (3) 511 ( 451 1 ) ( ) 365 1 2 512 1 2 365 1 2 363 2 ( ) 3 ( ) ( 451 2 ( 314 1 ) ( 339 1 4 ) 337 2 3 ) 363 (4) 46
 i ii i iii iv 1 3 3 10 14 17 17 18 22 23 28 29 31 36 37 39 40 43 48 59 70 75 75 77 90 95 102 107 109 110 118 125 128 130 132 134 48 43 43 51 52 61 61 64 62 124 70 58 3 10 17 29 78 82 85 102 95 109 iii
i ii i iii iv 1 3 3 10 14 17 17 18 22 23 28 29 31 36 37 39 40 43 48 59 70 75 75 77 90 95 102 107 109 110 118 125 128 130 132 134 48 43 43 51 52 61 61 64 62 124 70 58 3 10 17 29 78 82 85 102 95 109 iii
untitled
 18 1 2,000,000 2,000,000 2007 2 2 2008 3 31 (1) 6 JCOSSAR 2007pp.57-642007.6. LCC (1) (2) 2 10mm 1020 14 12 10 8 6 4 40,50,60 2 0 1998 27.5 1995 1960 40 1) 2) 3) LCC LCC LCC 1 1) Vol.42No.5pp.29-322004.5.
18 1 2,000,000 2,000,000 2007 2 2 2008 3 31 (1) 6 JCOSSAR 2007pp.57-642007.6. LCC (1) (2) 2 10mm 1020 14 12 10 8 6 4 40,50,60 2 0 1998 27.5 1995 1960 40 1) 2) 3) LCC LCC LCC 1 1) Vol.42No.5pp.29-322004.5.
Doctor Thesis Template
 A Study of Variable Beam-tilted Microstrip Array Antenna LAN(Local Area Network) LAN PC LAN LAN LAN 5.2GHz 20 25Mbps OFDM(Orthogonal Frequency Division Multiplexing) 2 2 90 2 60 30 45 60 1....2 1.1....
A Study of Variable Beam-tilted Microstrip Array Antenna LAN(Local Area Network) LAN PC LAN LAN LAN 5.2GHz 20 25Mbps OFDM(Orthogonal Frequency Division Multiplexing) 2 2 90 2 60 30 45 60 1....2 1.1....
178 5 I 1 ( ) ( ) 10 3 13 3 1 8891 8 3023 6317 ( 10 1914 7152 ) 16 5 1 ( ) 6 13 3 13 3 8575 3896 8 1715 779 6 (1) 2 7 4 ( 2 ) 13 11 26 12 21 14 11 21
 ( ) 10 3 13 3 1 8891 8 3023 6317 ( 10 1914 7152 ) 16 5 1 ( ) 6 13 3 13 3 8575 3896 8 1715 779 6 (1) 2 7 4 ( 2 ) 13 11 26 12 21 14 11 21") I 178 II 180 III ( ) 181 IV 183 V 185 VI 186 178 5 I 1 ( ) ( ) 10 3 13 3 1 8891 8 3023 6317 ( 10 1914 7152 ) 16 5 1 ( ) 6 13 3 13 3 8575 3896 8 1715 779 6 (1) 2 7 4 ( 2 ) 13 11 26 12 21 14 11 21 4 10 (
I 178 II 180 III ( ) 181 IV 183 V 185 VI 186 178 5 I 1 ( ) ( ) 10 3 13 3 1 8891 8 3023 6317 ( 10 1914 7152 ) 16 5 1 ( ) 6 13 3 13 3 8575 3896 8 1715 779 6 (1) 2 7 4 ( 2 ) 13 11 26 12 21 14 11 21 4 10 (
75 unit: mm Fig. Structure of model three-phase stacked transformer cores (a) Alternate-lap joint (b) Step-lap joint 3 4)
 Alternate-lap joint (b) Step-lap joint 3 4)") 3 * 35 (3), 7 Analysis of Local Magnetic Properties and Acoustic Noise in Three-Phase Stacked Transformer Core Model Masayoshi Ishida Kenichi Sadahiro Seiji Okabe 3.7 T 5 Hz..4 3 Synopsis: Methods of local
3 * 35 (3), 7 Analysis of Local Magnetic Properties and Acoustic Noise in Three-Phase Stacked Transformer Core Model Masayoshi Ishida Kenichi Sadahiro Seiji Okabe 3.7 T 5 Hz..4 3 Synopsis: Methods of local
7) 8) 9),10) 11) 18) 11),16) 18) 19) 20) Vocaloid 6) Vocaloid 1 VocaListener1 2 VocaListener1 3 VocaListener VocaListener1 VocaListener1 Voca
 8) 9),10) 11) 18) 11),16) 18) 19) 20) Vocaloid 6) Vocaloid 1 VocaListener1 2 VocaListener1 3 VocaListener VocaListener1 VocaListener1 Voca") VocaListener2: 1 1 VocaListener2 VocaListener VocaListener2 VocaListener2 VocaListener VocaListener2 VocaListener2: A Singing Synthesis System Mimicking Voice Timbre Changes in Addition to Pitch and Dynamics
VocaListener2: 1 1 VocaListener2 VocaListener VocaListener2 VocaListener2 VocaListener VocaListener2 VocaListener2: A Singing Synthesis System Mimicking Voice Timbre Changes in Addition to Pitch and Dynamics
 Real AdaBoost HOG 2009 3 A Graduation Thesis of College of Engineering, Chubu University Efficient Reducing Method of HOG Features for Human Detection based on Real AdaBoost Chika Matsushima ITS Graphics
Real AdaBoost HOG 2009 3 A Graduation Thesis of College of Engineering, Chubu University Efficient Reducing Method of HOG Features for Human Detection based on Real AdaBoost Chika Matsushima ITS Graphics
 1 2 1 0 6 a. b. c. d. e. 1. 1 2. 4 2.1 4 2.2 5 2.3 6 3. 8 4. 9 4.1 9 4.2 11 4.2.1 11 4.2.2 13 4.3 15 4.3.1 15 4.3.2 16 5. 19 5.1 19 5.1.1 19 5.1.2 21 5.1.3 24 5.1.4 27 5.1.5 29 5.1.6 37 5.2 39 5.2.1 39
1 2 1 0 6 a. b. c. d. e. 1. 1 2. 4 2.1 4 2.2 5 2.3 6 3. 8 4. 9 4.1 9 4.2 11 4.2.1 11 4.2.2 13 4.3 15 4.3.1 15 4.3.2 16 5. 19 5.1 19 5.1.1 19 5.1.2 21 5.1.3 24 5.1.4 27 5.1.5 29 5.1.6 37 5.2 39 5.2.1 39