Microsoft PowerPoint - 【最終提出版】 MATLAB_EXPO2014講演資料_ルネサス菅原.pptx
|
|
|
- いっけい やなぎしま
- 7 years ago
- Views:
Transcription

1 MATLAB/Simulink を使用したモータ制御アプリのモデルベース開発事例 ルネサスエレクトロニクス株式会社 第二ソリューション事業本部産業第一事業部家電ソリューション部 Rev Renesas Electronics Corporation. All rights reserved. IAAS-AA
2 目次 1. はじめに 1.1 モデルベース開発とは? 1.2 目的とメリット 1.3 モデルベース開発環境を使用した場合のメリット 2. 当社モデルベース開発環境ご紹介 2.1 当社モデルベース開発環境概要 2.2 モデル設計 3. シミュレーション 3.1 シミュレーション概要 3.2 GUI 上でできること ( 各種パラメータの設定 ~シミュレーション実行 ) 4. 実機検証 4.1 C 言語自動生成 4.2 実機検証 4.3 各種設定から実機評価までの流れ ( まとめ ) 5. まとめ 2014 Renesas Electronics Corporation. All rights reserved. 2

3 1. はじめに 2014 Renesas Electronics Corporation. All rights reserved. 3

4 1. はじめに ~MathWorks 社製品を採用した理由 ~ MathWorks 社では多種多様の製品を取り扱っており MathWorks 社製品のみでモータ制御アプリケーション向けモデルベース開発環境を構築することが可能 数値計算言語 MATLAB モデルベースデザイン Simulink ハードウェア系 SimElectronics SimPowerSystems Simscape ソフトウェア系 Stateflow コード生成 Embedded Coder MATLAB Coder Simulink Coder 解析 最適化 Control System Toolbox Optimization Toolbox Simulink Design Optimization モータ制御アプリケーションのモデル化 シミュレーション / 解析 2014 Renesas Electronics Corporation. All rights reserved. 4 GUI 開発 /C 言語自動生成
/ 制御対象 ( プラント ) またはその一部をモデルで表現し")
5 1.1 モデルベース開発とは? シミュレーション可能なモデルを用いるソフトウェア及びハードウェア開発手法 制御器 ( コントローラ )/ 制御対象 ( プラント ) またはその一部をモデルで表現し 机上シミュレーションにより制御アルゴリズムやハードウェアの開発検証を行う開発手法 システムのモデル化 MATLAB シミュレーション 実機評価 2014 Renesas Electronics Corporation. All rights reserved. 5
6 1.2 目的とメリット 目的 開発プロセスの改善 メリット 設計品質の向上 後戻り工程の低減 ヒューマンエラーの低減 生産性の向上 プラントモデルによる全体検証 低コスト化 開発工数の短縮 2014 Renesas Electronics Corporation. All rights reserved. 6




7 1.2 目的とメリット従来の組込みシステムの開発の流れ ( 一例 ) ハードウェア開発 ハードウェアバグが発生した場合 基板開発費がさらに上乗せ ハードウェア仕様策定 回路図レイアウト 基板作成 基板基礎評価 システム仕様策定 テストフィードバック システムテスト / 検証 ソフトウェア開発 ソフトウェア仕様策定 ハンドコーディング ソフトウェア単体試験 基板が完成するまで実機でソフトウェア検証することができない ハンドコーディングのためヒューマンエラーの可能性が高くなる 2014 Renesas Electronics Corporation. All rights reserved. 7


8 1.2 目的とメリットモデルベース開発を利用した組込みシステムの開発の流れ ( 一例 ) 仮想環境 実機環境 システムシミュレーション 基板作成 基板基礎評価 システム仕様策定 ハードウェアシミュレーション テストフィードバック システムテスト / 実機検証 ソフトウェアシミュレーション コーディング 仮想環境上 ( シミュレーション ) で仕様の妥当性を確認することが可能 モデルベース開発対応 設計品質の向上 後戻り工程の低減 ヒューマンエラーの低減 生産性の向上 プラントモデルによる全体検証 2014 Renesas Electronics Corporation. All rights reserved. 8
9 1.3 モデルベース開発環境を使用した場合のメリットモータ制御アプリケーションハードウェア開発では 従来の開発工程 机上による仕様及び機能検証 検討基板開発テスト モデルベース開発環境を使用した開発工程 シミュレーションによる仕様及び機能検証 検討 基板開発 テスト 工数削減 Time 机上による仕様検証 システム仕様でシミュレーションによる仕様検証 検討 ( ソフトウェア不要 ) 工数削減 低コスト化 信頼性の確保 2014 Renesas Electronics Corporation. All rights reserved. 9
10 1.3 モデルベース開発環境を使用した場合のメリットモータ制御アプリケーションソフトウェア ( アルゴリズム ) 開発では 従来の開発工程 仕様検討 コーディング パラメータ調整 実機によるテスト 検証コード / パラメータ微調整 モデルベース開発環境を使用した開発工程 シミュレーションによる仕様検証 検討 実機によるテスト 検証コード / パラメータ微調整 工数削減 シミュレーションによりソフトウェア ( アルゴリズム ) 検証が可能 ( ハードウェア不要 ) Time シミュレーション時にパラメータ調整を実施するため パラメータ調整工数や実機によるテスト出戻り及び実機破壊が半減 工数削減 低コスト化 信頼性の確保 2014 Renesas Electronics Corporation. All rights reserved. 10
11 1.3 モデルベース開発環境を使用した場合のメリットモータ制御アプリケーションのシステム検証では 制御系の安定性評価のために ナイキスト線図 周波数特性評価のために ボード線図 応答性評価のために ステップ応答特性評価 システム環境に近い状態の評価のために 負荷トルクを考慮した速度評価など 机上では難しい評価を簡単に確認することが可能 2014 Renesas Electronics Corporation. All rights reserved. 11
12 2. ルネサスモデルベース開発環境ご紹介 2014 Renesas Electronics Corporation. All rights reserved. 12
13 2.1 当社モデルベース開発環境概要 MATLAB & Simulink C プログラム C 言語自動生成 シミュレーションフィードバック シミュレーション 評価結果フィードバック マイコン実装 結果比較 シミュレーション結果 実機評価 / 結果 2014 Renesas Electronics Corporation. All rights reserved. 13
 Simulink 画面 2014 Renesas Electronics Corporation.")
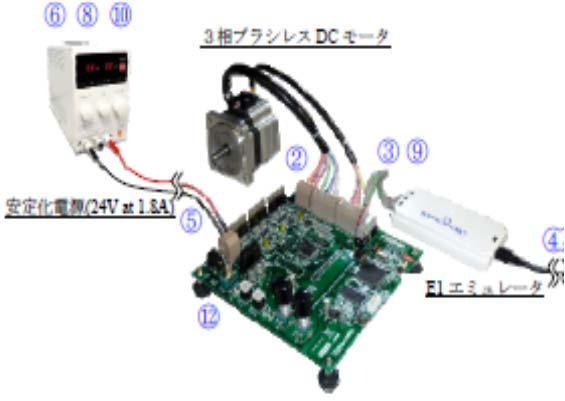
14 2.2 モデル設計 : 制御器 モータ制御ボード Renesas Solution Starter Kit( 低電圧モータ制御評価システム ) を MathWorks 社製ツールを用いて実装 ( モデル化 ) モデル化 Renesas Solution Starter Kit ( 低電圧モータ制御評価システム ) Simulink 画面 2014 Renesas Electronics Corporation. All rights reserved. 14

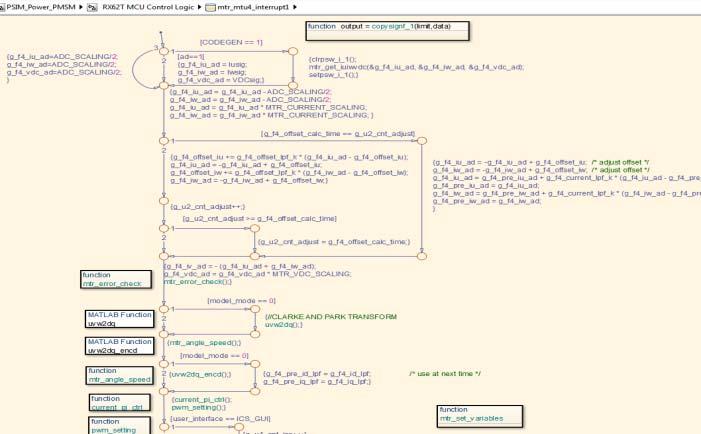
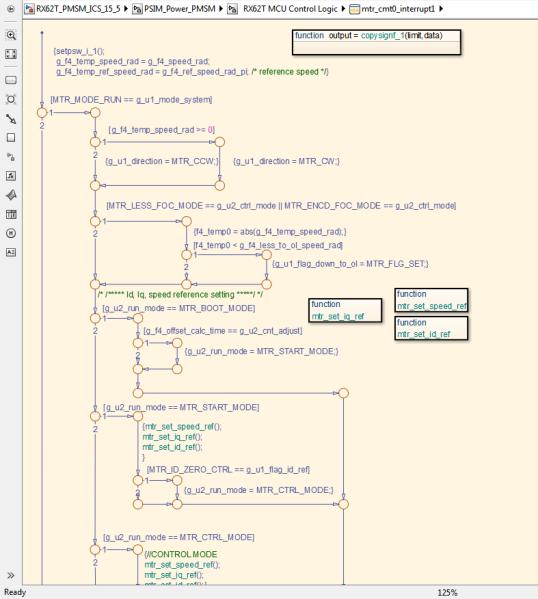
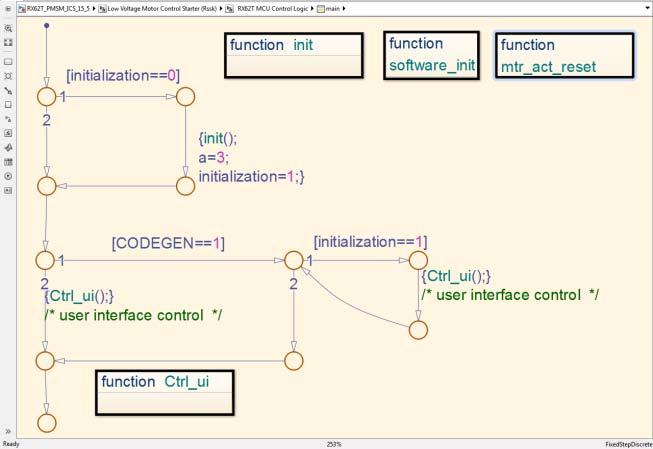
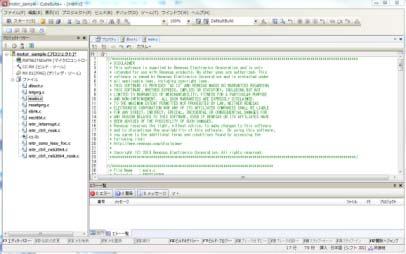
15 2.2 モデル設計 : 制御器 モータ制御ソフト センサレス / エンコーダベクトル制御サンプルソフトをMathWorks 社製ツールを用いて実装 ( モデル化 ) モデル化 サンプルコード 2014 Renesas Electronics Corporation. All rights reserved. 15
 負荷トルク BLDC モータ モデル化 エンコーダ BLDC モータ 2014 Renesas Electronics Corporation. All rights reserved.")
16 2.2 モデル設計 : 制御対象 3 相 BLDC モータ Renesas Solution Starter Kitに同梱しているBLDCモータを MathWorks 社製ツールを用いて実装 ( モデル化 ) 負荷トルク BLDC モータ モデル化 エンコーダ BLDC モータ 2014 Renesas Electronics Corporation. All rights reserved. 16
17 3. シミュレーション 2014 Renesas Electronics Corporation. All rights reserved. 17
18 3.1 シミュレーション概要 評価の流れ モータパラメータの設定 制御パラメータの設定 速度 / 負荷トルク指令値設定 シミュレーション 実機評価 1 つの GUI で操作可能 GUI トップ画面 2014 Renesas Electronics Corporation. All rights reserved. 18





19 2.1 当社モデルベース開発環境 GUI 概要 C 言語自動生成 モータパラメータ調整 制御パラメータ調整 GUI トップ画面 PIゲインチューニング 検証 19 シミュレーション 様々な機能を 1 つの GUI に実現 2014 Renesas Electronics Corporation. All rights reserved.

20 3.2 モータパラメータの設定 モータパラメータの設定 制御パラメータの設定 速度 / 負荷トルク指令値設定 シミュレーション 実機評価 モータパラメータ設定 モータに関わるパラメータを設定することが可能 抵抗 d/q 軸インダクタンス 定格トルク 最大速度 慣性モーメント 極対数 など 2014 Renesas Electronics Corporation. All rights reserved. 20

21 3.2 制御パラメータの設定 1 モータパラメータの設定 制御パラメータの設定 速度 / 負荷トルク指令値設定 シミュレーション 実機評価 制御パラメータ設定 ( 基本設定 ) 制御に関わるパラメータを設定することが可能 位置センサあり? なし? クロック デッドタイム 過速度リミット値 キャリア周波数 最大電流 など 2014 Renesas Electronics Corporation. All rights reserved. 21


 伝達関数 (")

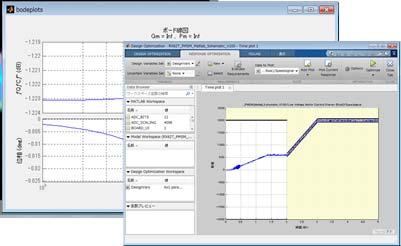
22 3.2 制御パラメータの設定 2 モータパラメータの設定 制御パラメータの設定 速度 / 負荷トルク指令値設定 シミュレーション 実機評価 制御パラメータ設定 PIゲインを直接入力可能 理論式から求めるPIゲイン静的チューニング 特定の負荷に対してのPIゲイン動的チューニング (Simulink Design Optimization 使用 ) 伝達関数 ( 電流ループ 速度ループ ) の計算 解析や勉強の為にステップ応答 ナイキスト線図 ボード線図の表示 2014 Renesas Electronics Corporation. All rights reserved. 22

23 3.2 指令値設定 モータパラメータの設定 制御パラメータの設定 速度 / 負荷トルク指令値設定 シミュレーション 実機評価 モータ速度指令値 / 負荷トルク指令値設定 モータ速度指令値や負荷トルク指令値をGUIを用いて直感的に操作 / 設定することが可能 速度指令値設定 負荷トルク指令値設定 2014 Renesas Electronics Corporation. All rights reserved. 23


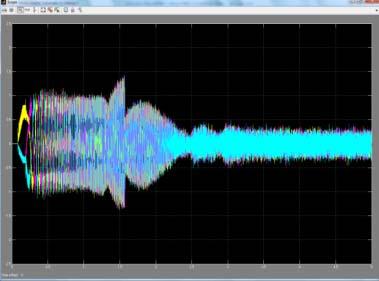
24 3.3 シミュレーション実行 モータパラメータの設定 制御パラメータの設定 速度 / 負荷トルク指令値設定 シミュレーション 実機評価 シミュレーション実行 ボタン 1 つでシミュレーション開始 / 停止 シミュレーション結果 : 任意の値を表示することが可能 シミュレーション進捗度 シミュレーション開始シミュレーション停止 例 1) 速度指令値とモータ速度 2014 Renesas Electronics Corporation. All rights reserved. 24 例 2)3 相電流波形

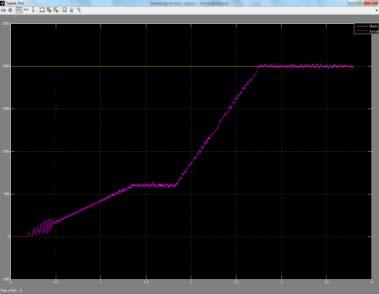
25 3.3 シミュレーション実行 モータパラメータの設定 制御パラメータの設定 速度 / 負荷トルク指令値設定 シミュレーション 実機評価 評価例 : 負荷トルクをかけたときの速度評価 シミュレーション条件 速度指令値 :2000rpm 負荷トルク : モータ定格トルクの50% 2000rpm 負荷をかけるとモータ速度低下 負荷 50% 3 秒 2014 Renesas Electronics Corporation. All rights reserved. 25 システムの要求に応じてパラメータを修正する 多様な条件を評価することが可能 ( 基板 モータ必要なし )
26 4. 実機評価 2014 Renesas Electronics Corporation. All rights reserved. 26

27 4.1 C 言語自動生成 モータパラメータの設定 制御パラメータの設定 速度 / 負荷トルク指令値設定 シミュレーション 実機評価 下記のソフトウェア開発環境 ( 統合開発環境 ) に対応し ボタン1つでコード生成が可能 CS+ 版 e 2 studio 版 CS+ 版 ユーザが任意に統合開発環境を選択することが可能 e 2 studio 版 2014 Renesas Electronics Corporation. All rights reserved. 27


28 4.2 実機検証 モータパラメータの設定 制御パラメータの設定 速度 / 負荷トルク指令値設定 シミュレーション 実機評価 シミュレーション結果と実機比較 速度指令値 0s~3.3s:2000rpm 3.3s~:0rpm 負荷トルク指令値 : 無負荷 シミュレーション時間 :6.5s モータ速度評価 速度指令値 シミュレーション結果と実機評価結果はほぼ同等の値を得ることが可能 シミュレーションモータ速度結果 実機評価モータ速度結果 シミュレーション上には存在しない基板ノイズなどが影響 シミュレーション結果 実機結果にすることが課題 2014 Renesas Electronics Corporation. All rights reserved. 28
29 4.3 各種設定から実機評価までの流れ ( まとめ ) モータパラメータの設定 制御パラメータの設定 速度 / 負荷トルク指令値設定 シミュレーション 実機評価 各種パラメータ設定 抵抗 q 軸インダクタンス d 軸インダクタンス 定格電圧 定格電力 極対数など 各種パラメータ設定 制御手法 デッドタイム 最大電流 最大電圧 PI チューニングなど 指令値設定 速度指令値の設定 負荷トルク指令値の設定 シミュレーション スタート ストップ 波形自動表示 実機評価 C 言語自動生成 統合開発環境自動表示 様々な機能を 1 つの GUI に実現 2014 Renesas Electronics Corporation. All rights reserved. 29
30 5. まとめ 2014 Renesas Electronics Corporation. All rights reserved. 30
31 5. まとめ 本講演では 当社で開発したモータ制御モデルベース開発環境の概要をご紹介致しました 当社モータ制御モデルベース開発環境を用いることにより 低コスト化や開発期間の短縮を図ることが可能です 当社では様々なモータ及び制御手法のモデルベース開発環境を用意しています 詳細に関しましては当社までお問い合わせください 問い合わせ先 : ルネサスエレクトロニクス株式会社技術問合わせホームページ Renesas Electronics Corporation. All rights reserved. 31

32 ルネサスエレクトロニクス株式会社 2014 Renesas Electronics Corporation. All rights reserved.
モータ HILS の概要 1 はじめに モータ HILS の需要 自動車の電子化及び 電気自動車やハイブリッド車の実用化に伴い モータの使用数が増大しています 従来行われていた駆動用モータ単体のシミュレーション レシプロエンジンとモータの駆動力分配制御シミュレーションの利用に加え パワーウインドやサ
 モータ HILS の概要 1 はじめに モータ HILS の需要 自動車の電子化及び 電気自動車やハイブリッド車の実用化に伴い モータの使用数が増大しています 従来行われていた駆動用モータ単体のシミュレーション レシプロエンジンとモータの駆動力分配制御シミュレーションの利用に加え パワーウインドやサンルーフなどのボディー系 電動パワーステアリングやそのアシスト機能など 高度な制御 大電流の制御などが要求されています
モータ HILS の概要 1 はじめに モータ HILS の需要 自動車の電子化及び 電気自動車やハイブリッド車の実用化に伴い モータの使用数が増大しています 従来行われていた駆動用モータ単体のシミュレーション レシプロエンジンとモータの駆動力分配制御シミュレーションの利用に加え パワーウインドやサンルーフなどのボディー系 電動パワーステアリングやそのアシスト機能など 高度な制御 大電流の制御などが要求されています
Introduction to System Identification
 y(t) モデルベースデザイン 制御系設計のためのシステム同定入門 s 2 Teja Muppirala t s 2 3s 4 2012 The MathWorks, Inc. 1 モデルベースデザイン 正確なモデルがあることが大前提 実行可能な仕様書 シミュレーションによる設計 モデル 連続したテスト 検証 コード生成による実装 2 動的システムのモデリング モデリング手法 第一原理モデリング データドリブンモデリング
y(t) モデルベースデザイン 制御系設計のためのシステム同定入門 s 2 Teja Muppirala t s 2 3s 4 2012 The MathWorks, Inc. 1 モデルベースデザイン 正確なモデルがあることが大前提 実行可能な仕様書 シミュレーションによる設計 モデル 連続したテスト 検証 コード生成による実装 2 動的システムのモデリング モデリング手法 第一原理モデリング データドリブンモデリング
Microsoft PowerPoint - EXPO2012_AKASAKA_rev.2.pptx
 リアルタイム制御環境を活用したフィードバック制御系設計実践 MathWorks Japan アプリケーションエンジニアリング部アプリケーションエンジニア赤阪大介 212 The MathWorks, Inc. 1 本講演では.. ギャップ? - フィードバック制御器の設計 設計 シミュレーション リアルタイム制御テスト ( ラピッドプロトタイピング ) 実機環境を活用し 制御系設計を効率的に行うには?
リアルタイム制御環境を活用したフィードバック制御系設計実践 MathWorks Japan アプリケーションエンジニアリング部アプリケーションエンジニア赤阪大介 212 The MathWorks, Inc. 1 本講演では.. ギャップ? - フィードバック制御器の設計 設計 シミュレーション リアルタイム制御テスト ( ラピッドプロトタイピング ) 実機環境を活用し 制御系設計を効率的に行うには?
エンジニアリング・サービスから見たMBD導入の成功・失敗
 2014 年 12 月 18 日 ( 金 ) 16:40-16:55 JMAAB 中部コンファレンス エンジニアリング サービスから見た MBD 導入の成功 失敗 COPYRIGHT (C) GAIO TECHNOLOGY ALL RIGHTS RESERVED 1 ガイオ テクノロジーとは 組み込み業界向け検証ツールメーカー コンパイラ 検証 テスト 解析ツール プロトタイピングツール エンジニアリングサービス
2014 年 12 月 18 日 ( 金 ) 16:40-16:55 JMAAB 中部コンファレンス エンジニアリング サービスから見た MBD 導入の成功 失敗 COPYRIGHT (C) GAIO TECHNOLOGY ALL RIGHTS RESERVED 1 ガイオ テクノロジーとは 組み込み業界向け検証ツールメーカー コンパイラ 検証 テスト 解析ツール プロトタイピングツール エンジニアリングサービス
CW6_A1441_15_D06.indd
 技術紹介 EPS 用 ECU 試作開発における MBD の適用 小林将之 1 はじめに 従来の組込み制御システム開発の多くは, ドキュメントベースの設計とハンドコーディングにより行われてきた. しかしながら, 自動車分野を中心に電子制御システムの高性能 多機能化が進む一方, 高品質 低コストかつ開発期間の短縮化が要求されている.KYBの代表的な電子制御システムの一つである電動パワーステアリング (
技術紹介 EPS 用 ECU 試作開発における MBD の適用 小林将之 1 はじめに 従来の組込み制御システム開発の多くは, ドキュメントベースの設計とハンドコーディングにより行われてきた. しかしながら, 自動車分野を中心に電子制御システムの高性能 多機能化が進む一方, 高品質 低コストかつ開発期間の短縮化が要求されている.KYBの代表的な電子制御システムの一つである電動パワーステアリング (
Presentation Title
 Simulink R / Stateflow R 入門 MathWorks Japan アプリケーションエンジニアリング部 小林昇洋 2016 The MathWorks, Inc. 1 本セッションで対象としている方々 Q : Simulink / Stateflow は使ったことがない どんなツールなのか? A : お使いいただいているシーン 理由などご紹介します 2 Simulink とは?
Simulink R / Stateflow R 入門 MathWorks Japan アプリケーションエンジニアリング部 小林昇洋 2016 The MathWorks, Inc. 1 本セッションで対象としている方々 Q : Simulink / Stateflow は使ったことがない どんなツールなのか? A : お使いいただいているシーン 理由などご紹介します 2 Simulink とは?
制御のためのSimulink入門
 今から始める Simulink 入門 ~ 制御編 ~ MathWorks Japan アプリケーションエンジニアリング部アプリケーションエンジニア張莉 2013 The MathWorks, Inc. 1 What is Simulink? 2 Why use Simulink? 例 : アポロ月着陸船のデジタル自動操縦の開発 3 Simulink を使うと? 当時の設計者が自ら Simulink
今から始める Simulink 入門 ~ 制御編 ~ MathWorks Japan アプリケーションエンジニアリング部アプリケーションエンジニア張莉 2013 The MathWorks, Inc. 1 What is Simulink? 2 Why use Simulink? 例 : アポロ月着陸船のデジタル自動操縦の開発 3 Simulink を使うと? 当時の設計者が自ら Simulink
SimulinkによるReal-Time Test環境の構築
 Simulink モデルを使ったリアルタイムテスト環境の構築 MathWorks Japan アプリケーションエンジニアリング部シニアアプリケーションエンジニア高島博 2012 The MathWorks, Inc. 1 はじめに Simulink はバーチャルなテスト環境 2 はじめに Simulink はバーチャルなテスト環境 3 はじめに Simulink はバーチャルなテスト環境 シミュレーション開始ボタンをクリック
Simulink モデルを使ったリアルタイムテスト環境の構築 MathWorks Japan アプリケーションエンジニアリング部シニアアプリケーションエンジニア高島博 2012 The MathWorks, Inc. 1 はじめに Simulink はバーチャルなテスト環境 2 はじめに Simulink はバーチャルなテスト環境 3 はじめに Simulink はバーチャルなテスト環境 シミュレーション開始ボタンをクリック
CANapeを用いたラピッドコントロールプロトタイピングのバイパス手法による制御モデル開発
 ape を用いたラピッドコントロールプロトタイピングのバイパス手法による制御モデル開発 近年 自動車のソフトウェア開発において 開発期間の短縮やコスト削減の面からモデルベース開発が注目されています アイシン エィ ダブリュ株式会社は ラピッドコントロールプロトタイピングのバイパス手法による制御モデル開発にベクターの測定 / キャリブレーションツール ape ( キャナピー ) を導入しました 本稿では
ape を用いたラピッドコントロールプロトタイピングのバイパス手法による制御モデル開発 近年 自動車のソフトウェア開発において 開発期間の短縮やコスト削減の面からモデルベース開発が注目されています アイシン エィ ダブリュ株式会社は ラピッドコントロールプロトタイピングのバイパス手法による制御モデル開発にベクターの測定 / キャリブレーションツール ape ( キャナピー ) を導入しました 本稿では
SimscapeプラントモデルのFPGAアクセラレーション
 Simscape TM プラントモデルの FPGA アクセラレーション MathWorks Japan アプリケーションエンジニアリング部 松本充史 2018 The MathWorks, Inc. 1 アジェンダ ユーザ事例 HILS とは? Simscape の電気系ライブラリ Simscape モデルを FPGA 実装する 2 つのアプローチ Simscape HDL Workflow Advisor
Simscape TM プラントモデルの FPGA アクセラレーション MathWorks Japan アプリケーションエンジニアリング部 松本充史 2018 The MathWorks, Inc. 1 アジェンダ ユーザ事例 HILS とは? Simscape の電気系ライブラリ Simscape モデルを FPGA 実装する 2 つのアプローチ Simscape HDL Workflow Advisor
Presentation Title
 ( ) 2017 The MathWorks, Inc. 1 新型乗用車の CO2 規制の比較 出典 :the International Council on Clean Transportation 2 自動車台数は今後も増加 多くの割合は内燃機関を使用 OEM 各社はコンセプト 想定ターゲットに応じて最適なパワートレインを選択 3 厳しい燃費規制に対応必至 従来の燃焼エンジンからフルバッテリのモータまで
( ) 2017 The MathWorks, Inc. 1 新型乗用車の CO2 規制の比較 出典 :the International Council on Clean Transportation 2 自動車台数は今後も増加 多くの割合は内燃機関を使用 OEM 各社はコンセプト 想定ターゲットに応じて最適なパワートレインを選択 3 厳しい燃費規制に対応必至 従来の燃焼エンジンからフルバッテリのモータまで
モデルベースデザイン(MBD)を始めましょう!
を始めましょう!") モデルベースデザイン (MBD) を始めましょう! MathWorks Japan アプリケーションエンジニアリング部シニアアプリケーションエンジニア村上直也 2014 The MathWorks, Inc. 1 モデルベースデザイン (MBD) を始めましょう! ますます増えていくスマートシステム多機能なソフトウェアモデルベースデザイン開発プロセスを加速 2 はじめに スマートシステムの増加 ソフトの高機能化
モデルベースデザイン (MBD) を始めましょう! MathWorks Japan アプリケーションエンジニアリング部シニアアプリケーションエンジニア村上直也 2014 The MathWorks, Inc. 1 モデルベースデザイン (MBD) を始めましょう! ますます増えていくスマートシステム多機能なソフトウェアモデルベースデザイン開発プロセスを加速 2 はじめに スマートシステムの増加 ソフトの高機能化
MATLAB EXPO 2019 Japan プレゼン資料の検討
 自動運転向けソフトウェア Autoware と MATLAB /Simulink の連携 ~ 事例紹介 ~ 2019 年 5 月 28 日株式会社ネクスティエレクトロニクス SW 開発部技術開発グループ太田徳幸 Copyright TOMEN Electronics Corp. 目次 2/31 1. 会社概要 2. Autoware Toolbox 紹介 1. 取り組み背景 2. Autoware
自動運転向けソフトウェア Autoware と MATLAB /Simulink の連携 ~ 事例紹介 ~ 2019 年 5 月 28 日株式会社ネクスティエレクトロニクス SW 開発部技術開発グループ太田徳幸 Copyright TOMEN Electronics Corp. 目次 2/31 1. 会社概要 2. Autoware Toolbox 紹介 1. 取り組み背景 2. Autoware
スライド 1
 ~MATLAB EXPO 2012~ スライディングモード制御の インクジェットプリンターへの適用 2012/10/30 ブラザー工業株式会社畠山雄一 MathWorks Japan 赤阪大介 2012 Brother Industries, Ltd. & The MathWorks, Inc. All Rights Reserved. 1 本講演の背景 提供している製品 技術の有用性を確認したい
~MATLAB EXPO 2012~ スライディングモード制御の インクジェットプリンターへの適用 2012/10/30 ブラザー工業株式会社畠山雄一 MathWorks Japan 赤阪大介 2012 Brother Industries, Ltd. & The MathWorks, Inc. All Rights Reserved. 1 本講演の背景 提供している製品 技術の有用性を確認したい
Presentation Title
 Simulink 環境で実施する ADAS( 先進運転支援システム ) 実験 MathWorks Japan アプリケーションエンジニアリング部制御 村上直也 2015 The MathWorks, Inc. 1 Agenda はじめに 弊社 ADAS 環境関連紹介 弊社 ADAS 関連製品を使用した DEMO ADAS 関連開発適用事例 まとめ 2 はじめに ADAS システムは今後もますます普及が進むと考えられる
Simulink 環境で実施する ADAS( 先進運転支援システム ) 実験 MathWorks Japan アプリケーションエンジニアリング部制御 村上直也 2015 The MathWorks, Inc. 1 Agenda はじめに 弊社 ADAS 環境関連紹介 弊社 ADAS 関連製品を使用した DEMO ADAS 関連開発適用事例 まとめ 2 はじめに ADAS システムは今後もますます普及が進むと考えられる
Presentation Title
 コード生成製品の普及と最新の技術動向 MathWorks Japan パイロットエンジニアリング部 東達也 2014 The MathWorks, Inc. 1 MBD 概要 MATLABおよびSimulinkを使用したモデルベース デザイン ( モデルベース開発 ) 紹介ビデオ 2 MBD による制御開発フローとコード生成製品の活用 制御設計の最適化で性能改善 設計図ですぐに挙動確認 MILS:
コード生成製品の普及と最新の技術動向 MathWorks Japan パイロットエンジニアリング部 東達也 2014 The MathWorks, Inc. 1 MBD 概要 MATLABおよびSimulinkを使用したモデルベース デザイン ( モデルベース開発 ) 紹介ビデオ 2 MBD による制御開発フローとコード生成製品の活用 制御設計の最適化で性能改善 設計図ですぐに挙動確認 MILS:
ムラタ流MBD:エネルギーマネジメントシステム向け組み込み開発の事例
 ムラタ流 MBD エネルギーマネジメントシステム (EMS) 向け組み込み開発の事例 株式会社村田製作所 馬 躍 1 村田製作所について 村田製作所は 最先端の技術 部品を創出する総合電子部品メーカーです Innovator in Electronics をスローガンに掲げ 豊かな社会の実現をめざします ムラタの強み 最先端の材料を研究開発 広範囲な製品ラインナップ グローバルな生産 販売ネットワーク
ムラタ流 MBD エネルギーマネジメントシステム (EMS) 向け組み込み開発の事例 株式会社村田製作所 馬 躍 1 村田製作所について 村田製作所は 最先端の技術 部品を創出する総合電子部品メーカーです Innovator in Electronics をスローガンに掲げ 豊かな社会の実現をめざします ムラタの強み 最先端の材料を研究開発 広範囲な製品ラインナップ グローバルな生産 販売ネットワーク
054_10モデルベースデザイン
 技術紹介 モデルベースデザインによる制御設計 石田修一 Ishida Shuuichi *1 近年 制御システムは高機能化や大規模化が急速に進み 従来の開発手法では開発費用の増加 開発期間の拡大 および品質の確保が困難となった 対して顧客からは 開発期間の短縮やコストダウンへの強い要求がある この現状を改善する方法として モデルベースデザイン (MBD:Model-Based Design) が自動車分野
技術紹介 モデルベースデザインによる制御設計 石田修一 Ishida Shuuichi *1 近年 制御システムは高機能化や大規模化が急速に進み 従来の開発手法では開発費用の増加 開発期間の拡大 および品質の確保が困難となった 対して顧客からは 開発期間の短縮やコストダウンへの強い要求がある この現状を改善する方法として モデルベースデザイン (MBD:Model-Based Design) が自動車分野
物理モデリングツールによる モデリングとシミュレーション入門
 Simscape TM による物理モデリング入門 ~Simscape + Sim シリーズの紹介 ~ MathWorks Japan アプリケーションエンジニア 渡辺修治 基本ツール MATLAB Simulink Stateflow 便利ツール Simulink Coder TM Simulink Control Design TM Simulink Design Optimization TM
Simscape TM による物理モデリング入門 ~Simscape + Sim シリーズの紹介 ~ MathWorks Japan アプリケーションエンジニア 渡辺修治 基本ツール MATLAB Simulink Stateflow 便利ツール Simulink Coder TM Simulink Control Design TM Simulink Design Optimization TM
EC-1 アプリケーションノート 高温動作に関する注意事項
 要旨 アプリケーションノート EC-1 R01AN3398JJ0100 Rev.1.00 要旨 EC-1 の動作温度範囲は Tj = -40 ~ 125 としており これらは記載の動作温度範囲内での動作を保証す るものです 但し 半導体デバイスの品質 信頼性は 使用環境に大きく左右されます すなわち 同じ品質の製品でも使用環境が厳しくなると信頼性が低下し 使用環境が緩くなると信頼性が向上します たとえ最大定格内であっても
要旨 アプリケーションノート EC-1 R01AN3398JJ0100 Rev.1.00 要旨 EC-1 の動作温度範囲は Tj = -40 ~ 125 としており これらは記載の動作温度範囲内での動作を保証す るものです 但し 半導体デバイスの品質 信頼性は 使用環境に大きく左右されます すなわち 同じ品質の製品でも使用環境が厳しくなると信頼性が低下し 使用環境が緩くなると信頼性が向上します たとえ最大定格内であっても
回路シミュレータ/MATLABリンク~詳細回路設計におけるシステムレベル検証~
 回路シミュレータ /MATLAB リンク ~ 詳細回路設計におけるシステムレベル検証 ~ MathWorks Japan アプリケーションエンジニアリング部シニアアプリケーションエンジニア初井良治 2017 The MathWorks, Inc. 1 MathWorks と Cadence 社パートナーシップ OrCAD PSpice 回路設計アナログ デジタル混在の回路シミュレーション 回路設計者
回路シミュレータ /MATLAB リンク ~ 詳細回路設計におけるシステムレベル検証 ~ MathWorks Japan アプリケーションエンジニアリング部シニアアプリケーションエンジニア初井良治 2017 The MathWorks, Inc. 1 MathWorks と Cadence 社パートナーシップ OrCAD PSpice 回路設計アナログ デジタル混在の回路シミュレーション 回路設計者
モータ・モーション制御MBD実践 ~組み込みコード生成編~
 モーター モーション制御モデルベースデザイン実践 プラントモデリング 編 MathWorks Japan アプリケーションエンジニアリング部アプリケーションエンジニア福井慶一 2013 The MathWorks, Inc. 1 モーター モーション制御とは? 負荷の動き ( 速度 位置 ) を意図した通りに制御 駆動回路モーター負荷 熱 制御信号 制御 モーター制御 制御指令 モーターの状態 (
モーター モーション制御モデルベースデザイン実践 プラントモデリング 編 MathWorks Japan アプリケーションエンジニアリング部アプリケーションエンジニア福井慶一 2013 The MathWorks, Inc. 1 モーター モーション制御とは? 負荷の動き ( 速度 位置 ) を意図した通りに制御 駆動回路モーター負荷 熱 制御信号 制御 モーター制御 制御指令 モーターの状態 (
ACモーター入門編 サンプルテキスト
 技術セミナーテキスト AC モーター入門編 目次 1 AC モーターの位置付けと特徴 2 1-1 AC モーターの位置付け 1-2 AC モーターの特徴 2 AC モーターの基礎 6 2-1 構造 2-2 動作原理 2-3 特性と仕様の見方 2-4 ギヤヘッドの役割 2-5 ギヤヘッドの仕様 2-6 ギヤヘッドの種類 2-7 代表的な AC モーター 3 温度上昇と寿命 32 3-1 温度上昇の考え方
技術セミナーテキスト AC モーター入門編 目次 1 AC モーターの位置付けと特徴 2 1-1 AC モーターの位置付け 1-2 AC モーターの特徴 2 AC モーターの基礎 6 2-1 構造 2-2 動作原理 2-3 特性と仕様の見方 2-4 ギヤヘッドの役割 2-5 ギヤヘッドの仕様 2-6 ギヤヘッドの種類 2-7 代表的な AC モーター 3 温度上昇と寿命 32 3-1 温度上昇の考え方
Microsoft PowerPoint - chap8.ppt
 第 8 章 : フィードバック制御系の設計法 第 8 章 : フィードバック制御系の設計法 8. 設計手順と性能評価 キーワード : 設計手順, 性能評価 8. 補償による制御系設計 キーワード : ( 比例 ),( 積分 ),( 微分 ) 学習目標 : 一般的な制御系設計における手順と制御系の性能評価について学ぶ. 学習目標 : 補償の有効性について理解し, その設計手順を習得する. 第 8 章
第 8 章 : フィードバック制御系の設計法 第 8 章 : フィードバック制御系の設計法 8. 設計手順と性能評価 キーワード : 設計手順, 性能評価 8. 補償による制御系設計 キーワード : ( 比例 ),( 積分 ),( 微分 ) 学習目標 : 一般的な制御系設計における手順と制御系の性能評価について学ぶ. 学習目標 : 補償の有効性について理解し, その設計手順を習得する. 第 8 章
RMS(Root Mean Square value 実効値 ) 実効値は AC の電圧と電流両方の値を規定する 最も一般的で便利な値です AC 波形の実効値はその波形から得られる パワーのレベルを示すものであり AC 信号の最も重要な属性となります 実効値の計算は AC の電流波形と それによって
 実効値は AC の電圧と電流両方の値を規定する 最も一般的で便利な値です AC 波形の実効値はその波形から得られる パワーのレベルを示すものであり AC 信号の最も重要な属性となります 実効値の計算は AC の電流波形と それによって") 入門書 最近の数多くの AC 電源アプリケーションに伴う複雑な電流 / 電圧波形のため さまざまな測定上の課題が発生しています このような問題に対処する場合 基本的な測定 使用される用語 それらの関係について理解することが重要になります このアプリケーションノートではパワー測定の基本的な考え方やパワー測定において重要な 以下の用語の明確に定義します RMS(Root Mean Square value
入門書 最近の数多くの AC 電源アプリケーションに伴う複雑な電流 / 電圧波形のため さまざまな測定上の課題が発生しています このような問題に対処する場合 基本的な測定 使用される用語 それらの関係について理解することが重要になります このアプリケーションノートではパワー測定の基本的な考え方やパワー測定において重要な 以下の用語の明確に定義します RMS(Root Mean Square value
f2-system-requirement-system-composer-mw
 Simulink Requirements と新製品 System Composer によるシステムズエンジニアリング MathWorks Japan アプリケーションエンジニアリング部大越亮二 2015 The MathWorks, Inc. 1 エンジニアリングの活動 要求レベル システムレベル 要求分析 システム記述 表現 高 システム分析 システム結合 抽象度 サブシステム コンポーネントレベル
Simulink Requirements と新製品 System Composer によるシステムズエンジニアリング MathWorks Japan アプリケーションエンジニアリング部大越亮二 2015 The MathWorks, Inc. 1 エンジニアリングの活動 要求レベル システムレベル 要求分析 システム記述 表現 高 システム分析 システム結合 抽象度 サブシステム コンポーネントレベル
CSWシリーズ専用ソフトウエアの紹介2
 CSW5550 /3 相交流直流電源 可変 3 相電源として 規格試験用電源として その特徴とソフトウエア < 特徴 > CSW は 3 相交流を入力し その交流を一次側と絶縁し 5550VA の可変 3 相交流及び直流にし出力し ノイズの少ない任意の出力を行 えます 3 相は一定出力から 設定したパターン 変化で出力することができます これは主に各種電子機器の入力試験を行えるよう にするために備わっている機能です
CSW5550 /3 相交流直流電源 可変 3 相電源として 規格試験用電源として その特徴とソフトウエア < 特徴 > CSW は 3 相交流を入力し その交流を一次側と絶縁し 5550VA の可変 3 相交流及び直流にし出力し ノイズの少ない任意の出力を行 えます 3 相は一定出力から 設定したパターン 変化で出力することができます これは主に各種電子機器の入力試験を行えるよう にするために備わっている機能です
MATLAB EXPO 2015 Japan 次世代モデルベース検証ソリューションで テスト・デバッグ改善
 次世代モデルベース検証ソリューションで テスト デバッグ改善 MathWorks Japan アプリケーションエンジニアリング部 ( 制御 ) リャンティファニー 2015 The MathWorks, Inc. 1 アジェンダ はじめに 検証作業におけるチャレンジ & 新しいソリューション まとめ 2 モデルベースデザイン / 開発 (MBD) が量産制御ソフト開発に求められる背景 課題解決策効果
次世代モデルベース検証ソリューションで テスト デバッグ改善 MathWorks Japan アプリケーションエンジニアリング部 ( 制御 ) リャンティファニー 2015 The MathWorks, Inc. 1 アジェンダ はじめに 検証作業におけるチャレンジ & 新しいソリューション まとめ 2 モデルベースデザイン / 開発 (MBD) が量産制御ソフト開発に求められる背景 課題解決策効果
PowerPoint プレゼンテーション
 BRMS への取り組みと導入事例 2013 年 11 月 15 日 ( 金 ) SCSK 株式会社 IT エンジニアリング事業本部ミドルウェア部 本日の内容 BRMS 適用のポイント BRMS の可能性 Page 1 Page 2 アプリケーション連携基盤 SCSKのRed Hat JBoss / ミドルウェア技術に関する取り組みの取り組み 世界のオープンソース コミュニティーから製品化されたソフトウェア
BRMS への取り組みと導入事例 2013 年 11 月 15 日 ( 金 ) SCSK 株式会社 IT エンジニアリング事業本部ミドルウェア部 本日の内容 BRMS 適用のポイント BRMS の可能性 Page 1 Page 2 アプリケーション連携基盤 SCSKのRed Hat JBoss / ミドルウェア技術に関する取り組みの取り組み 世界のオープンソース コミュニティーから製品化されたソフトウェア
enus MLD-030-ST ブラシレス DC モータドライバ スイッチ詳細 内蔵ポテションメータ ピーク出力設定 ( モータ保護機能 ) 配線説明 ドライバ側マーク Ref+ Hu Hv Hw Ref- モータ配線色黄色茶色オレンジ青色灰色緑黒赤 安心のフェニックスコンタクト社製コネクターを搭載
 配線説明 ドライバ側マーク Ref+ Hu Hv Hw Ref- モータ配線色黄色茶色オレンジ青色灰色緑黒赤 安心のフェニックスコンタクト社製コネクターを搭載") S MLD-030-ST ブラシレス DC モータドライバ コネクター定義 マーク 定義 DC+/DC- DC 電源入力 (DC24~DC48),, モータリード線 Hu,Hv,Hw ホール素子リード線 REF+ ホール素子電源 (+) REF- ホール素子電源 (-) S 外部ポテションメータ ( 内蔵ポテションメータにてスピード調整時は接続なし ) 又は記述 1 のパルスレート COM コモングラウンド
S MLD-030-ST ブラシレス DC モータドライバ コネクター定義 マーク 定義 DC+/DC- DC 電源入力 (DC24~DC48),, モータリード線 Hu,Hv,Hw ホール素子リード線 REF+ ホール素子電源 (+) REF- ホール素子電源 (-) S 外部ポテションメータ ( 内蔵ポテションメータにてスピード調整時は接続なし ) 又は記述 1 のパルスレート COM コモングラウンド
Presentation Title
 Robo- 剣 Conference 2017/05/20(Sat) - Robo- 剣における MATLAB/Simulink の活用 MathWorks Japan 三田宇洋 2012 The MathWorks, Inc. 1 Robo- 剣 Conference 2017 年 05 月 20 日土曜日講習会 13:00-18:00 会場 : 県立青少年センター 2. ロボット作りへのMatlab
Robo- 剣 Conference 2017/05/20(Sat) - Robo- 剣における MATLAB/Simulink の活用 MathWorks Japan 三田宇洋 2012 The MathWorks, Inc. 1 Robo- 剣 Conference 2017 年 05 月 20 日土曜日講習会 13:00-18:00 会場 : 県立青少年センター 2. ロボット作りへのMatlab
リスク分析・シミュレーション
 はじめての Crystal Ball 操作マニュアル編 株式会社構造計画研究所 164-0012 東京都中野区中央 4-5-3 TEL:03-5342-1090 Copyright 2012 KOZO KEIKAKU ENGINEERING Inc. All Rights Reserved. はじめに 本マニュアルは 初めて Crystal Ball を操作する方向けに作成された入門マニュアルです
はじめての Crystal Ball 操作マニュアル編 株式会社構造計画研究所 164-0012 東京都中野区中央 4-5-3 TEL:03-5342-1090 Copyright 2012 KOZO KEIKAKU ENGINEERING Inc. All Rights Reserved. はじめに 本マニュアルは 初めて Crystal Ball を操作する方向けに作成された入門マニュアルです
ハード・ソフト協調検証サービス
 ハード ソフトのトータルサービス 富士通エレクトロニクス株式会社株式会社富士通ソフトウェアテクノロジーズ 目次 モデル概要 モデル 特徴 このサービス利用のメリット サービスメニュー 1 企画から開発 量産までトータルでサポート 富士通エレクトロニクスと富士通ソフトウェアテクノロジーズはお客様の製品開発を 企画段階から開発 量産までサポートします 製品開発をサポートする検証 認定作業のご提供 製品要求仕様の作成をコンサルティング
ハード ソフトのトータルサービス 富士通エレクトロニクス株式会社株式会社富士通ソフトウェアテクノロジーズ 目次 モデル概要 モデル 特徴 このサービス利用のメリット サービスメニュー 1 企画から開発 量産までトータルでサポート 富士通エレクトロニクスと富士通ソフトウェアテクノロジーズはお客様の製品開発を 企画段階から開発 量産までサポートします 製品開発をサポートする検証 認定作業のご提供 製品要求仕様の作成をコンサルティング
PSIM Version 9
 PSIM Version 9.2 の 新 機 能 PSIM Version 9.2 の 主 な 新 機 能 : 新 機 能 HEV Design Suite リチウムイオンバッテリモデル モータ 駆 動 や HEV のための 最 大 トルク 制 御 弱 め 磁 束 制 御 などの 制 御 ブロック 追 加 空 間 ベクトル PWM ブロック 追 加 数 式 演 算 機 能 を 持 ったパラメータツール
PSIM Version 9.2 の 新 機 能 PSIM Version 9.2 の 主 な 新 機 能 : 新 機 能 HEV Design Suite リチウムイオンバッテリモデル モータ 駆 動 や HEV のための 最 大 トルク 制 御 弱 め 磁 束 制 御 などの 制 御 ブロック 追 加 空 間 ベクトル PWM ブロック 追 加 数 式 演 算 機 能 を 持 ったパラメータツール
 PSIM Ver9.0 の新機能 PSIM Version 9.0 の新機能のハイライト 太陽電池モデルモデル 風車風車モデルモデル MPPT サンプルを追加 (Renewable Energy Models) TI 社の DSP F28335 対応のコードのコード生成機能 (SimCoder Module) 温度変化によるデバイスによるデバイス特性特性を考慮 (Thermal Module) THD,
PSIM Ver9.0 の新機能 PSIM Version 9.0 の新機能のハイライト 太陽電池モデルモデル 風車風車モデルモデル MPPT サンプルを追加 (Renewable Energy Models) TI 社の DSP F28335 対応のコードのコード生成機能 (SimCoder Module) 温度変化によるデバイスによるデバイス特性特性を考慮 (Thermal Module) THD,
目次 ペトリネットの概要 適用事例
 ペトリネットを利用した状態遷移テスト 和田浩一 東京エレクトロン SDC FA グループ 目次 ペトリネットの概要 適用事例 ペトリネットの概要 - ペトリネットとは ペトリネット (Petri Net) とは カール アダム ペトリが 1962 年に発表した離散分散システムを数学的に表現する手法である 視覚的で 数学的な離散事象システムをモデル化するツールの一つである ペトリネットの概要 - ペトリネットの表記と挙動
ペトリネットを利用した状態遷移テスト 和田浩一 東京エレクトロン SDC FA グループ 目次 ペトリネットの概要 適用事例 ペトリネットの概要 - ペトリネットとは ペトリネット (Petri Net) とは カール アダム ペトリが 1962 年に発表した離散分散システムを数学的に表現する手法である 視覚的で 数学的な離散事象システムをモデル化するツールの一つである ペトリネットの概要 - ペトリネットの表記と挙動
NCB564個別00版
 HES-M00 シリーズの新機能 脱調レス / 脱調検出 1 1. 概要 EtherCAT モーションコントロール機能内蔵 2 相マイクロステップモータドライバ HES-M00 シリーズにエンコーダ入力が追加され, 脱調検出 / 脱調レス等の機能が付加されました 2. 仕様 項目 仕様 備考 制御軸数 1 ボードで 1 軸制御 最大 枚 ( 軸制御 ) までスタック可能 電源電圧 ( モータ駆動電圧
HES-M00 シリーズの新機能 脱調レス / 脱調検出 1 1. 概要 EtherCAT モーションコントロール機能内蔵 2 相マイクロステップモータドライバ HES-M00 シリーズにエンコーダ入力が追加され, 脱調検出 / 脱調レス等の機能が付加されました 2. 仕様 項目 仕様 備考 制御軸数 1 ボードで 1 軸制御 最大 枚 ( 軸制御 ) までスタック可能 電源電圧 ( モータ駆動電圧
降圧コンバータIC のスナバ回路 : パワーマネジメント
 スイッチングレギュレータシリーズ 降圧コンバータ IC では スイッチノードで多くの高周波ノイズが発生します これらの高調波ノイズを除去する手段の一つとしてスナバ回路があります このアプリケーションノートでは RC スナバ回路の設定方法について説明しています RC スナバ回路 スイッチングの 1 サイクルで合計 の損失が抵抗で発生し スイッチングの回数だけ損失が発生するので 発生する損失は となります
スイッチングレギュレータシリーズ 降圧コンバータ IC では スイッチノードで多くの高周波ノイズが発生します これらの高調波ノイズを除去する手段の一つとしてスナバ回路があります このアプリケーションノートでは RC スナバ回路の設定方法について説明しています RC スナバ回路 スイッチングの 1 サイクルで合計 の損失が抵抗で発生し スイッチングの回数だけ損失が発生するので 発生する損失は となります
Microsoft PowerPoint - 6.PID制御.pptx
 プロセス制御工学 6.PID 制御 京都大学 加納学 Division of Process Control & Process Systems Engineering Department of Chemical Engineering, Kyoto University [email protected] http://www-pse.cheme.kyoto-u.ac.jp/~kano/
プロセス制御工学 6.PID 制御 京都大学 加納学 Division of Process Control & Process Systems Engineering Department of Chemical Engineering, Kyoto University [email protected] http://www-pse.cheme.kyoto-u.ac.jp/~kano/
ルネサス半導体セミナースケジュール
 1 3ページ 2018 年 7 12 4 6ページ 2018 年 1 6 2018/6/25 ルネサス半導体トレーニングセンター 2018 年 7 12 セミナースケジュール 製品セミナー RL78 RX RZ Renesas Synergy 7 8 9 10 11 12 RL78 1day 速習 動かしてみよう編 コース 8/7 9/26 12/11 1 間 ( 無料 ) 8/23 12/20 RL78
1 3ページ 2018 年 7 12 4 6ページ 2018 年 1 6 2018/6/25 ルネサス半導体トレーニングセンター 2018 年 7 12 セミナースケジュール 製品セミナー RL78 RX RZ Renesas Synergy 7 8 9 10 11 12 RL78 1day 速習 動かしてみよう編 コース 8/7 9/26 12/11 1 間 ( 無料 ) 8/23 12/20 RL78
2008年度 設計手法標準化アンケート 集計結果
 2011 年度 設計手法普及調査アンケート 集計経過報告 2012 年 2 月社団法人組込みシステム技術協会状態遷移設計研究会 目次 1. アンケート実施の目的 3 2. アンケートの実施対象 4 3. アンケート回答数 5 4. 実施したアンケートの内容 6 5. アンケート回答者の構成 8 6. アンケート集計結果 9 6.1 回答者の担当製品分野について 10 6.2 回答者の部門について 11
2011 年度 設計手法普及調査アンケート 集計経過報告 2012 年 2 月社団法人組込みシステム技術協会状態遷移設計研究会 目次 1. アンケート実施の目的 3 2. アンケートの実施対象 4 3. アンケート回答数 5 4. 実施したアンケートの内容 6 5. アンケート回答者の構成 8 6. アンケート集計結果 9 6.1 回答者の担当製品分野について 10 6.2 回答者の部門について 11
Simulinkモデル開発における工夫事例
 MBD 中部コンファレンス PMA2:MATLAB 開発 Simulink モデル開発における 工夫事例 2014 年 12 月 18 日オムロンオートモーティブエレクトロニクス株式会社開発統括室ボディコントロールシステム開発部町井紀善 はじめに Simulink の導入 開発手法 環境をそれぞれの事情 ( 会社 部署 個人 開発アイテム ビジネスモデル 等 ) に合せ込むことで効率化を実現します
MBD 中部コンファレンス PMA2:MATLAB 開発 Simulink モデル開発における 工夫事例 2014 年 12 月 18 日オムロンオートモーティブエレクトロニクス株式会社開発統括室ボディコントロールシステム開発部町井紀善 はじめに Simulink の導入 開発手法 環境をそれぞれの事情 ( 会社 部署 個人 開発アイテム ビジネスモデル 等 ) に合せ込むことで効率化を実現します
Microsoft Word - 実験テキスト2005.doc
 7. プロセスの動特性 [Ⅰ] 目的液レベル制御実験および同シミュレーションを通して ステップ応答に基づくプロセス伝達関数の同定方法 ステップ応答法による PI 制御パラメータの調整方法 および PI 制御パラメータが制御性能へ与える影響について習熟する さらに 制御シミュレーションを通して むだ時間を有するプロセスに対するスミス補償型制御の有効性を確認する [Ⅱ] 理論 2.1 ステップ応答実験による伝達関数の同定
7. プロセスの動特性 [Ⅰ] 目的液レベル制御実験および同シミュレーションを通して ステップ応答に基づくプロセス伝達関数の同定方法 ステップ応答法による PI 制御パラメータの調整方法 および PI 制御パラメータが制御性能へ与える影響について習熟する さらに 制御シミュレーションを通して むだ時間を有するプロセスに対するスミス補償型制御の有効性を確認する [Ⅱ] 理論 2.1 ステップ応答実験による伝達関数の同定


個人依存開発から組織的開発への移行事例 ~ 要求モデル定義と開発プロセスの形式化 による高生産性 / 高信頼性化 ~ 三菱電機メカトロニクスソフトウエア ( 株 ) 和歌山支所岩橋正実 1
 和歌山支所岩橋正実 1") 個人依存開発から組織的開発への移行事例 ~ 要求モデル定義と開発プロセスの形式化 による高生産性 / 高信頼性化 ~ 三菱電機メカトロニクスソフトウエア ( 株 ) 和歌山支所岩橋正実 [email protected] [email protected] 1 改善効果 品質 : フロントローディングが進み流出不具合 0 継続生産性 : 平均 130% 改善 工数割合分析
個人依存開発から組織的開発への移行事例 ~ 要求モデル定義と開発プロセスの形式化 による高生産性 / 高信頼性化 ~ 三菱電機メカトロニクスソフトウエア ( 株 ) 和歌山支所岩橋正実 [email protected] [email protected] 1 改善効果 品質 : フロントローディングが進み流出不具合 0 継続生産性 : 平均 130% 改善 工数割合分析
ハピタス のコピー.pages
 Copyright (C) All Rights Reserved. 10 12,500 () ( ) ()() 1 : 2 : 3 : 2 4 : 5 : Copyright (C) All Rights Reserved. Copyright (C) All Rights Reserved. Copyright (C) All Rights Reserved. Copyright (C) All
Copyright (C) All Rights Reserved. 10 12,500 () ( ) ()() 1 : 2 : 3 : 2 4 : 5 : Copyright (C) All Rights Reserved. Copyright (C) All Rights Reserved. Copyright (C) All Rights Reserved. Copyright (C) All
Copyright 2008 All Rights Reserved 2
 Copyright 2008 All Rights Reserved 1 Copyright 2008 All Rights Reserved 2 Copyright 2008 All Rights Reserved 3 Copyright 2008 All Rights Reserved 4 Copyright 2008 All Rights Reserved 5 Copyright 2008 All
Copyright 2008 All Rights Reserved 1 Copyright 2008 All Rights Reserved 2 Copyright 2008 All Rights Reserved 3 Copyright 2008 All Rights Reserved 4 Copyright 2008 All Rights Reserved 5 Copyright 2008 All
- 目次 - 1. 商用電源バックアップ 標準接続図 切換回路の接続図 タイムチャート パラメータ設定 標準接続図 ( スター - デルタ切換始動 ) 切換回路の接続図 タイムチャート パラメータ設定... 5
 切換回路の接続図 タイムチャート パラメータ設定... 5") 2 TOSVERT V-AS1/PS1 商用電源バックアップ商用電源 インバータ切換について 本資料に掲載してある技術情報は 製品の代表的動作 応用を説明するためのもので その使用に際して当社 及び第三者の知的財産権その他の権利に対する保証または実施権の許諾を行うものではありません Toshiba Schneider Inverter Corporation 2006 All rights reserved.
2 TOSVERT V-AS1/PS1 商用電源バックアップ商用電源 インバータ切換について 本資料に掲載してある技術情報は 製品の代表的動作 応用を説明するためのもので その使用に際して当社 及び第三者の知的財産権その他の権利に対する保証または実施権の許諾を行うものではありません Toshiba Schneider Inverter Corporation 2006 All rights reserved.
HEVの車両全体シミュレーションによるシステム最適化
 HEV の車両全体シミュレーションによるシステム最適化 MathWorks Japan アプリケーションエンジニアリング部アプリケーションエンジニア張莉 2016 The MathWorks, Inc. 1 マルチモードハイブリッド自動車 Engine Mode EV Mode SHEV Mode 1. Higuchi, N., Sunaga, Y., Tanaka, M., Shimada, H.:
HEV の車両全体シミュレーションによるシステム最適化 MathWorks Japan アプリケーションエンジニアリング部アプリケーションエンジニア張莉 2016 The MathWorks, Inc. 1 マルチモードハイブリッド自動車 Engine Mode EV Mode SHEV Mode 1. Higuchi, N., Sunaga, Y., Tanaka, M., Shimada, H.:
")
86 セRH Series 型式と記号 機種 :DC サーボアクチュエータ RH シリーズ 型番 :5,8,11,14 バージョン記号 出力軸定格回転速度 : 6r/min を示す 仕様 ( インクリメンタルエンコーダ付 ) RH - 14 D E 1 A L エンコーダ出力方式 O
 RH - 14 D E 1 A L エンコーダ出力方式 O") ハーモニックドライブ には 歯車のガタツキによるバックラッシがありませんので 高精度の位置決めを可能にしています 小型で高出力トルク 最小型番 RH-5A のアクチュエータの外形寸法φ 2 89mm で.69N m 瞬時最大トルク と高出力です 短形出力信号を 4逓倍速まで分解できます サーボドライバ 高精度オプティカルエンコーダ リニアアクチュエータ 構造 Galvanometer Scanner
ハーモニックドライブ には 歯車のガタツキによるバックラッシがありませんので 高精度の位置決めを可能にしています 小型で高出力トルク 最小型番 RH-5A のアクチュエータの外形寸法φ 2 89mm で.69N m 瞬時最大トルク と高出力です 短形出力信号を 4逓倍速まで分解できます サーボドライバ 高精度オプティカルエンコーダ リニアアクチュエータ 構造 Galvanometer Scanner
Copyright 2008 NIFTY Corporation All rights reserved. 2
 Copyright 2008 NIFTY Corporation All rights reserved. 2 Copyright 2008 NIFTY Corporation All rights reserved. 3 Copyright 2008 NIFTY Corporation All rights reserved. 4 Copyright 2008 NIFTY Corporation
Copyright 2008 NIFTY Corporation All rights reserved. 2 Copyright 2008 NIFTY Corporation All rights reserved. 3 Copyright 2008 NIFTY Corporation All rights reserved. 4 Copyright 2008 NIFTY Corporation
PowerPoint プレゼンテーション
 回転型クレーン / 倒立振子の制御 回転型クレーンの制御 状態方程式 コントローラ設計 ( 極配置法 ) コントローラ設計 ( 最適レギュレータ ) 回転型倒立振子の制御 状態方程式 コントローラ設計 コントローラの形式 : 状態フィードバック P-D コントローラ アームの P-D 振子の P-D 目標値 状態フィードバック制御 回転型クレーン コントローラ で 状態フィードバック制御 回転型クレーン
回転型クレーン / 倒立振子の制御 回転型クレーンの制御 状態方程式 コントローラ設計 ( 極配置法 ) コントローラ設計 ( 最適レギュレータ ) 回転型倒立振子の制御 状態方程式 コントローラ設計 コントローラの形式 : 状態フィードバック P-D コントローラ アームの P-D 振子の P-D 目標値 状態フィードバック制御 回転型クレーン コントローラ で 状態フィードバック制御 回転型クレーン
AMS Expoコンテンツ
 MATLAB /Simulink を活用した電源システム設計フロー紹介 MathWorks Japan アプリケーションエンジニアリング部初井良治 2013 The MathWorks, Inc. 1 内容 MATLAB /Simulink アナログ ミックスドシグナルシステム設計フロー 適用事例 ( アナログ ミックスドシグナル ) システム設計フロー MATLAB /Simulink の利点 MATLAB
MATLAB /Simulink を活用した電源システム設計フロー紹介 MathWorks Japan アプリケーションエンジニアリング部初井良治 2013 The MathWorks, Inc. 1 内容 MATLAB /Simulink アナログ ミックスドシグナルシステム設計フロー 適用事例 ( アナログ ミックスドシグナル ) システム設計フロー MATLAB /Simulink の利点 MATLAB
PLQ-20 取扱説明書 詳細編
 2013 Seiko Epson Corporation. All rights reserved. o n h o n n A B o C h h n h A B n C n n A B C A B C A B C D E A B C D E h o h B n C A D E F G n A C B n A B C D C n A B D F G H E n A B D C E F n A h
2013 Seiko Epson Corporation. All rights reserved. o n h o n n A B o C h h n h A B n C n n A B C A B C A B C D E A B C D E h o h B n C A D E F G n A C B n A B C D C n A B D F G H E n A B D C E F n A h
Microsoft PowerPoint - EMPro_ADS_co_design_draft.ppt [互換モード]
![Microsoft PowerPoint - EMPro_ADS_co_design_draft.ppt [互換モード]](/thumbs/84/90916619.jpg "Microsoft PowerPoint - EMPro_ADS_co_design_draft.ppt [互換モード]") 3 次元電磁界シミュレータ (EMPro) と 回路シミュレータ (ADS) との効率的な協調解析事例のご紹介 Page 1 EMPro 2010 3 次元電磁界解析専用プラットフォーム 3 次元形状入力に特化した操作性 Windows & Linux 対応 多くの 3D CAD フォーマットの Import をサポート Fastest, t Highest Capacity 3 次元フルウェーブ電磁界シミュレーション
3 次元電磁界シミュレータ (EMPro) と 回路シミュレータ (ADS) との効率的な協調解析事例のご紹介 Page 1 EMPro 2010 3 次元電磁界解析専用プラットフォーム 3 次元形状入力に特化した操作性 Windows & Linux 対応 多くの 3D CAD フォーマットの Import をサポート Fastest, t Highest Capacity 3 次元フルウェーブ電磁界シミュレーション
PowerPoint Presentation
 ETAS の AUTO ソリューションイータス株式会社 1 Public STJ2/ETAS 2014-01 ETAS GmbH 2014. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, イータス株式会社会社概要 ETAS Driving Embedded Excellence
ETAS の AUTO ソリューションイータス株式会社 1 Public STJ2/ETAS 2014-01 ETAS GmbH 2014. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, イータス株式会社会社概要 ETAS Driving Embedded Excellence
PowerPoint プレゼンテーション
 MATLAB 2008 5 22 Quick history - Cleve Moler s original MATLAB program Quick history The MathWorks in 1984 Cleve Moler Jack Little MATLAB/Simulink MATLAB 80 / MATLAB Toolbox 100 Simulink Blockset Stateflow
MATLAB 2008 5 22 Quick history - Cleve Moler s original MATLAB program Quick history The MathWorks in 1984 Cleve Moler Jack Little MATLAB/Simulink MATLAB 80 / MATLAB Toolbox 100 Simulink Blockset Stateflow
Microsoft PowerPoint - RL78G1E_スタータキットデモ手順_2012_1119修正版.pptx
 Smart Analog Stick をはじめて動かす RL78G1E STARTER KIT を始めて使う方のために インストールから基本的な使い方を体験する部分を順番にまとめました この順番で動かせば とりあえず体験できるという内容で作成してあります 2 度目からお使いの場合には Stick ボードを USB に接続した状態で 3 から始めてください 詳細な機能説明は ユーザーズマニュアルやオンラインヘルプを参考にしてください
Smart Analog Stick をはじめて動かす RL78G1E STARTER KIT を始めて使う方のために インストールから基本的な使い方を体験する部分を順番にまとめました この順番で動かせば とりあえず体験できるという内容で作成してあります 2 度目からお使いの場合には Stick ボードを USB に接続した状態で 3 から始めてください 詳細な機能説明は ユーザーズマニュアルやオンラインヘルプを参考にしてください
Simulink 環境における小規模マイクログリッドのシミュレーション第 2 報 - フェーザー法による 24 時間のシミュレーション - 三田宇洋, テクニカルコンサルティング部, MathWorks Japan 1. 導入文献 [1] では 実用的な時間でシミュレーションを行う小規模のマイクログ
![Simulink 環境における小規模マイクログリッドのシミュレーション第 2 報 - フェーザー法による 24 時間のシミュレーション - 三田宇洋, テクニカルコンサルティング部, MathWorks Japan 1. 導入文献 [1] では 実用的な時間でシミュレーションを行う小規模のマイクログ](/thumbs/100/145768709.jpg "Simulink 環境における小規模マイクログリッドのシミュレーション第 2 報 - フェーザー法による 24 時間のシミュレーション - 三田宇洋, テクニカルコンサルティング部, MathWorks Japan 1. 導入文献 [1] では 実用的な時間でシミュレーションを行う小規模のマイクログ") Simulink 環境における小規模マイクログリッドのシミュレーション第 2 報 - フェーザー法による 24 時間のシミュレーション - 三田宇洋, テクニカルコンサルティング部, MathWorks Japan 1. 導入文献 [1] では 実用的な時間でシミュレーションを行う小規模のマイクログリッドのシミュレーションモデルを紹介した モデルはコンバータやインバータとそのスイッチング制御を省略し
Simulink 環境における小規模マイクログリッドのシミュレーション第 2 報 - フェーザー法による 24 時間のシミュレーション - 三田宇洋, テクニカルコンサルティング部, MathWorks Japan 1. 導入文献 [1] では 実用的な時間でシミュレーションを行う小規模のマイクログリッドのシミュレーションモデルを紹介した モデルはコンバータやインバータとそのスイッチング制御を省略し
画像処理回路のASIC実装へ向けたHDL Coder適用事例
 画像処理回路の ASIC 実装へ向けた HDL Coder 適用事例 ~ 手書き HDL コード vs コード生成ツール ~ ルネサスシステムデザイン株式会社 部署名 第一要素技術事業部ロジックIP 開発部 氏名 神谷衛 2013/10/29 2013 Renesas System Design Co., Ltd. All rights reserved. 1 / 30 Agenda 会社紹介 画像コア開発の課題
画像処理回路の ASIC 実装へ向けた HDL Coder 適用事例 ~ 手書き HDL コード vs コード生成ツール ~ ルネサスシステムデザイン株式会社 部署名 第一要素技術事業部ロジックIP 開発部 氏名 神谷衛 2013/10/29 2013 Renesas System Design Co., Ltd. All rights reserved. 1 / 30 Agenda 会社紹介 画像コア開発の課題
1. はじめに 本書は スプリット演算器 MFS2 用コンフィギュレータソフトウェア の取扱方法 操作手順 注意事項などを説明したものです Windows の操作や用語を理解している方を前提にしています Windows の操作や用語については それぞれのマニュアルを参照してください 1.1. MFS
 スプリット演算器 MFS2 用コンフィギュレータソフトウェア MFS2CFG バージョン 0.02 取扱説明書 1/10 NM-9307 改 2 1. はじめに 本書は スプリット演算器 MFS2 用コンフィギュレータソフトウェア の取扱方法 操作手順 注意事項などを説明したものです Windows の操作や用語を理解している方を前提にしています Windows の操作や用語については それぞれのマニュアルを参照してください
スプリット演算器 MFS2 用コンフィギュレータソフトウェア MFS2CFG バージョン 0.02 取扱説明書 1/10 NM-9307 改 2 1. はじめに 本書は スプリット演算器 MFS2 用コンフィギュレータソフトウェア の取扱方法 操作手順 注意事項などを説明したものです Windows の操作や用語を理解している方を前提にしています Windows の操作や用語については それぞれのマニュアルを参照してください
 GUI Graphical User interface ジェンウェアスリー 情報家電から産業機器まで あらゆる分野のGUI開発で 驚異的な効率UPを実現する新世代ソリューション GUI開発工数 ソフトウェア構成 GUI統合開発環境 GENWARE3は GUIエディタ と GUIライブラリ で構成されています (ジェンウェアスリー) GUIライブラリ(ミドルウェア)( ) GUIエディタ (ジェンスケッチスリー)
GUI Graphical User interface ジェンウェアスリー 情報家電から産業機器まで あらゆる分野のGUI開発で 驚異的な効率UPを実現する新世代ソリューション GUI開発工数 ソフトウェア構成 GUI統合開発環境 GENWARE3は GUIエディタ と GUIライブラリ で構成されています (ジェンウェアスリー) GUIライブラリ(ミドルウェア)( ) GUIエディタ (ジェンスケッチスリー)
1000 Copyright(C)2009 All Rights Reserved - 2 -
2009 All Rights Reserved - 2 -") 1000 Copyright(C)2009 All Rights Reserved - 1 - 1000 Copyright(C)2009 All Rights Reserved - 2 - 1000 Copyright(C)2009 All Rights Reserved - 3 - 1000 Copyright(C)2009 All Rights Reserved - 4 - 1000 Copyright(C)2009
1000 Copyright(C)2009 All Rights Reserved - 1 - 1000 Copyright(C)2009 All Rights Reserved - 2 - 1000 Copyright(C)2009 All Rights Reserved - 3 - 1000 Copyright(C)2009 All Rights Reserved - 4 - 1000 Copyright(C)2009
Managing and Sharing MATLAB Code
 MATLAB 入門 ~ 開発向けプログラミング編 ~ MathWorks Japan アプリケーションエンジニアリング部テクニカルコンピューティング 大開孝文 2015 The MathWorks, Inc. 1 プログラミング言語としての MATLAB 2014 年 7 月 IEEE Spectrum による プログラミング言語の人気調査 (12 種類の項目での結果 ) 結果 : MATLAB が
MATLAB 入門 ~ 開発向けプログラミング編 ~ MathWorks Japan アプリケーションエンジニアリング部テクニカルコンピューティング 大開孝文 2015 The MathWorks, Inc. 1 プログラミング言語としての MATLAB 2014 年 7 月 IEEE Spectrum による プログラミング言語の人気調査 (12 種類の項目での結果 ) 結果 : MATLAB が
Copyright 2006 KDDI Corporation. All Rights Reserved page1
 Copyright 2006 KDDI Corporation. All Rights Reserved page1 Copyright 2006 KDDI Corporation. All Rights Reserved page2 Copyright 2006 KDDI Corporation. All Rights Reserved page3 Copyright 2006 KDDI Corporation.
Copyright 2006 KDDI Corporation. All Rights Reserved page1 Copyright 2006 KDDI Corporation. All Rights Reserved page2 Copyright 2006 KDDI Corporation. All Rights Reserved page3 Copyright 2006 KDDI Corporation.
周波数特性解析
 周波数特性解析 株式会社スマートエナジー研究所 Version 1.0.0, 2018-08-03 目次 1. アナログ / デジタルの周波数特性解析................................... 1 2. 一巡周波数特性 ( 電圧フィードバック )................................... 4 2.1. 部分周波数特性解析..........................................
周波数特性解析 株式会社スマートエナジー研究所 Version 1.0.0, 2018-08-03 目次 1. アナログ / デジタルの周波数特性解析................................... 1 2. 一巡周波数特性 ( 電圧フィードバック )................................... 4 2.1. 部分周波数特性解析..........................................
Library for Cadence OrCAD Capture ユーザマニュアル 2018 年 7 月 株式会社村田製作所 Ver.1.0 Copyright Murata Manufacturing Co., Ltd. All rights reserved. 10 July
 Library for Cadence OrCAD Capture ユーザマニュアル 2018 年 7 月 株式会社村田製作所 Ver.1.0 10 July 2018 目次 1. 本マニュアルについて 2.( 前準備 ) ライブラリの解凍と保存 3. プロジェクトの作成 4. シミュレーションプロファイルの作成 5.LIBファイルの登録 6.OLBファイルの登録 7. コンデンサのインピーダンス計算例
Library for Cadence OrCAD Capture ユーザマニュアル 2018 年 7 月 株式会社村田製作所 Ver.1.0 10 July 2018 目次 1. 本マニュアルについて 2.( 前準備 ) ライブラリの解凍と保存 3. プロジェクトの作成 4. シミュレーションプロファイルの作成 5.LIBファイルの登録 6.OLBファイルの登録 7. コンデンサのインピーダンス計算例
スライド 1
 パワーインダクタ および高誘電率系チップ積層セラミックコンデンサの動的モデルについて 1 v1.01 2015/6 24 August 2015 パワーインダクタの動的モデルについて 2 24 August 2015 24 August 2015 動的モデルの必要性 Q. なぜ動的モデルが必要なのか? A. 静的モデルでは リアルタイムに変化するインダクタンスを反映したシミュレーション結果が得られないから
パワーインダクタ および高誘電率系チップ積層セラミックコンデンサの動的モデルについて 1 v1.01 2015/6 24 August 2015 パワーインダクタの動的モデルについて 2 24 August 2015 24 August 2015 動的モデルの必要性 Q. なぜ動的モデルが必要なのか? A. 静的モデルでは リアルタイムに変化するインダクタンスを反映したシミュレーション結果が得られないから
PowerPoint Resources
 2009 The MathWorks, Inc. ET ロボコンを通じた MBD 人材育成 MathWorks Japan アドバンストサポート部 ET ロボコン 2009 実行委員会技術委員 / 性能審査委員 近政隆 背景 (1) 自動車業界における MBD の浸透 JMAAB(Japan MATLAB Automotive Advisory Board) と MathWorks の協調による開発手法
2009 The MathWorks, Inc. ET ロボコンを通じた MBD 人材育成 MathWorks Japan アドバンストサポート部 ET ロボコン 2009 実行委員会技術委員 / 性能審査委員 近政隆 背景 (1) 自動車業界における MBD の浸透 JMAAB(Japan MATLAB Automotive Advisory Board) と MathWorks の協調による開発手法
Presentation Title Arial 28pt Bold Agilent Blue
 Agilent EEsof 3D EM Application series 磁気共鳴による無線電力伝送システムの解析 アジレント テクノロジー第 3 営業統括部 EDA アプリケーション エンジニアリングアプリケーション エンジニア 佐々木広明 Page 1 アプリケーション概要 実情と現状の問題点 非接触による電力の供給システムは 以前から研究 実用化されていますが そのほとんどが電磁誘導の原理を利用したシステムで
Agilent EEsof 3D EM Application series 磁気共鳴による無線電力伝送システムの解析 アジレント テクノロジー第 3 営業統括部 EDA アプリケーション エンジニアリングアプリケーション エンジニア 佐々木広明 Page 1 アプリケーション概要 実情と現状の問題点 非接触による電力の供給システムは 以前から研究 実用化されていますが そのほとんどが電磁誘導の原理を利用したシステムで
LP-M8040シリーズ
 NPD4928-01 2013 Seiko Epson Corporation. All rights reserved. A B K L N N N N N N N N N N N N N N N N N N N N N N N N N N N N N N N N N N N L L N N N N B K N N L A N C D B C E E K G F H I N N
NPD4928-01 2013 Seiko Epson Corporation. All rights reserved. A B K L N N N N N N N N N N N N N N N N N N N N N N N N N N N N N N N N N N N L L N N N N B K N N L A N C D B C E E K G F H I N N
TOPPERS 活用アイデア アプリケーション開発 コンテスト 部門 : 活用アイデア部門アプリケーション開発部門 作品のタイトル : Toppers_JSP と Scicos_lab / (Scilab でも可 ) による 組込みメカトロニクス制御シミュレーション 作成者 : 塩出武 ( シオデタ
 による 組込みメカトロニクス制御シミュレーション 作成者 : 塩出武 ( シオデタ") TOPPERS 活用アイデア アプリケーション開発 コンテスト 部門 : 活用アイデア部門アプリケーション開発部門 作品のタイトル : Toppers_JSP と Scicos_lab / (Scilab でも可 ) による 組込みメカトロニクス制御シミュレーション 作成者 : 塩出武 ( シオデタケシ ) 対象者 : 実機レス環境でモーター含むメカ制御プログラムの設計 および検証 学習をしてみたい方
TOPPERS 活用アイデア アプリケーション開発 コンテスト 部門 : 活用アイデア部門アプリケーション開発部門 作品のタイトル : Toppers_JSP と Scicos_lab / (Scilab でも可 ) による 組込みメカトロニクス制御シミュレーション 作成者 : 塩出武 ( シオデタケシ ) 対象者 : 実機レス環境でモーター含むメカ制御プログラムの設計 および検証 学習をしてみたい方
ソフト活用事例③自動Rawデータ管理システム
 ソフト活用事例 3 自動 Raw データ管理システム ACD/Labs NMR 無料講習会 & セミナー 2014 於 )2014.7.29 東京 /2014.7.31 大阪 富士通株式会社テクニカルコンピューティング ソリューション事業本部 HPC アプリケーション統括部 ACD/Spectrus をご選択頂いた理由 (NMR 領域 ) パワフルな解 析機能 ベンダーニュートラルな解析環境 直感的なインターフェース
ソフト活用事例 3 自動 Raw データ管理システム ACD/Labs NMR 無料講習会 & セミナー 2014 於 )2014.7.29 東京 /2014.7.31 大阪 富士通株式会社テクニカルコンピューティング ソリューション事業本部 HPC アプリケーション統括部 ACD/Spectrus をご選択頂いた理由 (NMR 領域 ) パワフルな解 析機能 ベンダーニュートラルな解析環境 直感的なインターフェース
スライド 1
 レガシーシステムを刷新するモダナイゼーションの効果的 / 効率的なアプローチについて 自動マイグレーション サービス i Renaissance のご紹介 自動マイグレーション サービス i Renaissance とは i RenaissanceはRPG/COBOL/CLから 元言語に寄せたJavaへの自動変換 サービスを提供します i Renaissanceは下記の3つフェーズから構成されます
レガシーシステムを刷新するモダナイゼーションの効果的 / 効率的なアプローチについて 自動マイグレーション サービス i Renaissance のご紹介 自動マイグレーション サービス i Renaissance とは i RenaissanceはRPG/COBOL/CLから 元言語に寄せたJavaへの自動変換 サービスを提供します i Renaissanceは下記の3つフェーズから構成されます
トルクリップル計測システム 特長 高速リップル計測 : モーターの常用回転数での計測が可能 自動計測 : ブレーキ負荷の PID トルク制御や回転制御で自動計測 使いやすいソフトウェア : タブ切り替えだけの簡単操作 豊富なグラフ表示 : 強度分布 ウォーターフォール表示 次数解析機能 : 特定の次
 トルクリップル計測システム 音 振動に影響する モータの実回転域でのトルクリップル計測 トルクリップル計測システム 特長 高速リップル計測 : モーターの常用回転数での計測が可能 自動計測 : ブレーキ負荷の PID トルク制御や回転制御で自動計測 使いやすいソフトウェア : タブ切り替えだけの簡単操作 豊富なグラフ表示 : 強度分布 ウォーターフォール表示 次数解析機能 : 特定の次数のリップル成分抽出
トルクリップル計測システム 音 振動に影響する モータの実回転域でのトルクリップル計測 トルクリップル計測システム 特長 高速リップル計測 : モーターの常用回転数での計測が可能 自動計測 : ブレーキ負荷の PID トルク制御や回転制御で自動計測 使いやすいソフトウェア : タブ切り替えだけの簡単操作 豊富なグラフ表示 : 強度分布 ウォーターフォール表示 次数解析機能 : 特定の次数のリップル成分抽出
フロントエンド IC 付光センサ S CR S CR 各種光量の検出に適した小型 APD Si APD とプリアンプを一体化した小型光デバイスです 外乱光の影響を低減するための DC フィードバック回路を内蔵していま す また 優れたノイズ特性 周波数特性を実現しています
 各種光量の検出に適した小型 APD Si APD とプリアンプを一体化した小型光デバイスです 外乱光の影響を低減するための DC フィードバック回路を内蔵していま す また 優れたノイズ特性 周波数特性を実現しています なお 本製品の評価キットを用意しています 詳細については 当社 営業までお問い合わせください 特長 高速応答 増倍率 2 段階切替機能 (Low ゲイン : シングル出力, High
各種光量の検出に適した小型 APD Si APD とプリアンプを一体化した小型光デバイスです 外乱光の影響を低減するための DC フィードバック回路を内蔵していま す また 優れたノイズ特性 周波数特性を実現しています なお 本製品の評価キットを用意しています 詳細については 当社 営業までお問い合わせください 特長 高速応答 増倍率 2 段階切替機能 (Low ゲイン : シングル出力, High
3.3 モータ運転の留意点 ギヤモータをインバータで運転する場合 ギヤモータをインバータで運転する場合 以下のような注意事項があります 出力軸トルク特性に対する注意事項ギヤモータの出力軸トルク 9544 モータ出力 (kw) SI 単位系 T G = (N m) 出力軸回転数 (r/min) < ギ
 SI 単位系 T G = (N m) 出力軸回転数 (r/min) < ギ") 3.3 モータ運転の留意点 ギヤモータをインバータで運転する場合 ギヤモータをインバータで運転する場合 以下のような注意事項があります 出力軸トルク特性に対する注意事項ギヤモータの出力軸トルク 9544 モータ出力 (kw) SI 単位系 T G = (N m) 出力軸回転数 (r/min) < ギヤで回転数を変えた場合 > トルク モータ出力軸トルク 9544 モータ出力 (kw) SI 単位系
3.3 モータ運転の留意点 ギヤモータをインバータで運転する場合 ギヤモータをインバータで運転する場合 以下のような注意事項があります 出力軸トルク特性に対する注意事項ギヤモータの出力軸トルク 9544 モータ出力 (kw) SI 単位系 T G = (N m) 出力軸回転数 (r/min) < ギヤで回転数を変えた場合 > トルク モータ出力軸トルク 9544 モータ出力 (kw) SI 単位系
オペアンプの容量負荷による発振について
 Alicatin Nte オペアンプシリーズ オペアンプの容量負荷による発振について 目次 :. オペアンプの周波数特性について 2. 位相遅れと発振について 3. オペアンプの位相遅れの原因 4. 安定性の確認方法 ( 増幅回路 ) 5. 安定性の確認方法 ( 全帰還回路 / ボルテージフォロア ) 6. 安定性の確認方法まとめ 7. 容量負荷による発振の対策方法 ( 出力分離抵抗 ) 8. 容量負荷による発振の対策方法
Alicatin Nte オペアンプシリーズ オペアンプの容量負荷による発振について 目次 :. オペアンプの周波数特性について 2. 位相遅れと発振について 3. オペアンプの位相遅れの原因 4. 安定性の確認方法 ( 増幅回路 ) 5. 安定性の確認方法 ( 全帰還回路 / ボルテージフォロア ) 6. 安定性の確認方法まとめ 7. 容量負荷による発振の対策方法 ( 出力分離抵抗 ) 8. 容量負荷による発振の対策方法
HA17458シリーズ データシート
 お客様各位 カタログ等資料中の旧社名の扱いについて 1 年 月 1 日を以って NEC エレクトロニクス株式会社及び株式会社ルネサステクノロジが合併し 両社の全ての事業が当社に承継されております 従いまして 本資料中には旧社名での表記が残っておりますが 当社の資料として有効ですので ご理解の程宜しくお願い申し上げます ルネサスエレクトロニクスホームページ (http://www.renesas.com)
お客様各位 カタログ等資料中の旧社名の扱いについて 1 年 月 1 日を以って NEC エレクトロニクス株式会社及び株式会社ルネサステクノロジが合併し 両社の全ての事業が当社に承継されております 従いまして 本資料中には旧社名での表記が残っておりますが 当社の資料として有効ですので ご理解の程宜しくお願い申し上げます ルネサスエレクトロニクスホームページ (http://www.renesas.com)
untitled
 http://www.riskdatabank.co.jp The of Japan, Ltd. All rights reserved. 2 The of Japan, Ltd. All rights reserved. 3 The of Japan, Ltd. All rights reserved. 4 The of Japan, Ltd. All rights reserved. 5 The
http://www.riskdatabank.co.jp The of Japan, Ltd. All rights reserved. 2 The of Japan, Ltd. All rights reserved. 3 The of Japan, Ltd. All rights reserved. 4 The of Japan, Ltd. All rights reserved. 5 The
Multi-konzeptionelle Verwendung von Low-Cost Hardware in der Lehre
 開発プロセスにおける制御試験入門 MathWorks Japan アプリケーションエンジニアリング部制御 岩井理樹 2015 The MathWorks, Inc. 1 本講演の対象者 & メッセージング 対象者 ( 下記の初心者の方々が主に対象となります ) あまり Simulink に馴染みのない方 Simulink で廉価版ハードウェア実装をされていない方 MATLAB /Simulink で設計したアルゴリズムの動作検証を実機で確認されたい方
開発プロセスにおける制御試験入門 MathWorks Japan アプリケーションエンジニアリング部制御 岩井理樹 2015 The MathWorks, Inc. 1 本講演の対象者 & メッセージング 対象者 ( 下記の初心者の方々が主に対象となります ) あまり Simulink に馴染みのない方 Simulink で廉価版ハードウェア実装をされていない方 MATLAB /Simulink で設計したアルゴリズムの動作検証を実機で確認されたい方
印刷アプリケーションマニュアル
 印刷アプリケーションマニュアル 目次印刷アプリケーションについて... 2 1.1. インストール前の管理者での事前準備... 2 1.2. インストールする... 2 1.3. 基本的な使い方... 6 1.3.1. 各部の概要... 6 1.3.2. カメレオンコードを印刷する... 7 1.3.3. 印刷レイアウトを作成する... 9 1.3.. 用紙を設定する... 10 2. サポートサービスのご案内...
印刷アプリケーションマニュアル 目次印刷アプリケーションについて... 2 1.1. インストール前の管理者での事前準備... 2 1.2. インストールする... 2 1.3. 基本的な使い方... 6 1.3.1. 各部の概要... 6 1.3.2. カメレオンコードを印刷する... 7 1.3.3. 印刷レイアウトを作成する... 9 1.3.. 用紙を設定する... 10 2. サポートサービスのご案内...