SIP自動走行システム推進委員会
|
|
|
- とらふみ さわなか
- 4 years ago
- Views:
Transcription
1 SIP システム実用化 WG(' ) 平成 28 年度 SIP( 自動走行システム ) 走行映像データベース構築技術の開発及び実証中間報告 日本自動車研究所 (JARI) 第 51 研究室 ( クラリオン ) 第 52 研究室 ( 萩原電気 ) 第 61 研究室 ( ルネサスエレクトロニクス ) 第 62 研究室 ( 日本電気 ) 第 63 研究室 ( デンソー ) 再委託 : 産業技術総合研究所 名古屋大学 トヨタ自動車 マツダ 日立製作所 三菱電機 パナソニック 富士通 1
 画像 DB")

:")
2 1. 走行映像データベースの概要 ( 再掲載 ) 画像 DB 構築技術を協調領域に設定し 欧州 R&D 戦略に対抗する要素技術を研究開発 研究開発の最終目標 ( アウトプット ): 単眼カメラ方式走行映像データベース構築技術の確立 歩行者事例延べ 400 万 歩行者 4 万シーン ( 動画 ) 以上の走行映像データベースを構築 2
 2017 年度 (H29) 位置付け映像収集の準備映像データ収集 DB 分析 評価実証 DB 構築完了 1) データ収集車両 2) データ収集 3) データ加工 4) DB 化基盤技術 タグ付け技術 リアルタイム可逆圧縮 検索エンジン 6 台製作 走行計画立案当初 5000 時間 加工手順 方法を具体化 ツール開発計画立案 開発 (80%) 国内 :1347 時間米国")
3 2. 研究開発内容と成果目標 (4 年間 ) 計画具体化 (H26) 映像収集 (H27) 分析 評価 (H28 ) 実証 DB 構築 (H29) 今期は加工済みデータ ( 全体の 40%) を活用して走行映像 DB の有効性評価に重点 最終的には 業界要望を反映し残り 60% の映像データを含め走行映像 DB を完成する 研究開発内容 2014 年度 (H26) 2015 年度 (H27) 2016 年度 (H28) 2017 年度 (H29) 位置付け映像収集の準備映像データ収集 DB 分析 評価実証 DB 構築完了 1) データ収集車両 2) データ収集 3) データ加工 4) DB 化基盤技術 タグ付け技術 リアルタイム可逆圧縮 検索エンジン 6 台製作 走行計画立案当初 5000 時間 加工手順 方法を具体化 ツール開発計画立案 開発 (80%) 国内 :1347 時間米国 :135 時間当初の 30% 取得 シーン抽出 40% ( 全体の 40% 分 ) タグ付け 10% ツール開発 ( 残 20%) 改良 シーン抽出 100% ( 全体残り60% 分完了 ) タグ付け100% シーン分類 40% 自動タグ付け機能追加 ( 対象物までの距離情報 ) 5) DB 評価 ( リース ) 評価用テ ータ準備評価計画策定 ( 産総研 ) 1 評価用データ提供 DBの質 量 多様性等製品 システム開発への有効性評価 2 3 シーン分類 100% 機能追加 (DB 評価結果を基に必要機能を追加 ) 関係者間で DB を本格的に活用した評価 3
4 3.H28 年度研究開発目標と進捗状況 今期の実施計画に対しては計画通り進行中 H28 年度研究開発目標 1DB の評価 委託先にデータ提供 (7 月完 ) 画像 タグ情報 センサデータ等を 10 時間分委託先ではデータの目視確認 & 自社システム評価用にデータ変換など準備中 月 ~ 月 ~ 月を予定 2 データ加工 シーン抽出 : 既取得映像 ( 残り 60%) から分析対象データを切り出し タグ付け : シ - ン抽出された映像データに 必要なタグ付け作業を実施 シーン分類 : 昨年度タグ付け加工済みの 40% データに対して 27 シーン分類 ( 道路構造 x 位置関係など ) への振分けを実施 3DB 化基盤技術 タグ付け技術 : 自動タグ付け機能追加 ( 対象物までの距離情報付加 ) 検索エンジン : 検索やデータ確認作業に適した環境整備 進捗状況 計画通り進捗約 50% 計画通り進捗約 15% 計画通り進捗約 50% 4
5 項目 4 月 5 月 6 月 7 月 8 月 9 月 10 月 11 月 12 月 1 月 2 月 3 月 SIP システム実用化 WG 自動運転システム研究推進委員会 JARI 開発検討会 1DB の評価 ( 再委託業務 ) 2 データ加工 シーン分類 概要報告 6/8 第 1 回 6/29 産総研概要報告 評価用データ提供済 中間報告 9/28 第 2 回 9/2 7 社概要報告 自動運転システム研究推進委員会 9/29 第 3 回 10/30 中間報告 一部提供 第 4 回 12/ 下 報告骨子報告 シーン分類 ( 加工済み 40% 分 ) 第 5 回 1/ 中 成果報告まとめ デモ実施 シーン抽出 タグ付け 3DB 化基礎技術 タグ付け技術 検索エンジン シーン抽出 ( 残り60% データ化作業 ) タグ付け ( 残り90% データ化作業 ) 自動タグ距離情報ツール開発検索エンジンの開発 青字 : 実施済み 5
6 4. 走行映像 DB の評価 ( 再委託業務 ) OEM( トヨタ マツダ ) サプライヤ ( 日立製作所 三菱電機 パナソニック 富士通 ) 研究機関 ( 産総研 名古屋大学 ) の 8 団体に再委託して DB の実用可能性など評価実施期間 :H28 年 6 月 ~H29 年 1 月末 ( 成果報告書を納入 ) OEM サプライヤ 研究機関の DB に対する期待 1 ハイビジョンカメラ映像データの有効性 従来カメラ 30 万画素 ハイビジョンカメラ 230 万画素画素数比 : 約 8 倍 2 画像情報 ( カメラ ) と距離情報 ( レーザセンサ ) の有効性 自車両周辺の対象物が連続的な挙動 + 距離データとして収録されている 3 映像データの多様性と量 映像シーン ( 地域 道路構造 追越し 横切り等 ) 障害物 ( 歩行者 自転車等 ) 及び環境条件 ( 昼 夜 雪等 ) 等の映像バリエーションやテ ータ量が豊富 概ね 各社での開発に有効活用できる と期待されている 6



7 5. 走行映像 DB 成果の活用イメージ (Tier1) ADAS の動向 (EuroNCAP) 16 単路飛び出しから 20 交差点事故の対応 ( 広域の検知 ) が必要 16 Euro-NCAP 20 Euro-NCAP 既存データベースとの有効性比較とその意義 KITTI *1 90 前方 Karlsruhe 市とその周辺限定で収集した画像 カメラ仕様画素数 1392 * 512, 分解能 12bit 画角 90 周期 10fps SIP 走行映像 DB * 4 日本各地 米国から地域性や天候等を考慮した 幅広い画像 情報量 側方約 100 倍 2 前広角 3 前遠方 カメラ仕様画素数 1920* 1200, 分解能 12bit 画角 90 & 185 * 4 周期 60fps *1 (Karlsruhe Institute of Technology) 次世代カメラ性能を先取りしたデータで 将来技術を開発加速本活用事例では前遠方に加え 前広角 側方のデータで 20 EuroNCAPに対応 SIPシステム実用化 WG < > 7

8 5. 走行映像 DB 成果の活用イメージ ( サプライヤ :LSI 開発 ) 画像認識技術の動向 : 障害物等特定対象物の認識から刻々と変化する対象の挙動認識やシーン認識に移行する X ( 年 ) ドライバアシスト 半自動運転 自動運転 想定アプリケーション モバイルアイ社開発ロードマップシーン認識に対応したデバイスを計画中 想定アプリケーション 対応カメラ能力 '07 EyeQ 単眼カメラによる物体認識 認識技術 '10 対歩行者 EyeQ2 単眼カメラによる歩行者認識 移動体識別 特定対象物の認識 '15 EyeQ3 EyeQ3x3 搭載の Trifocal システム アラウンドビュー対応 40 度マルチカメラ化可能 飛び出し 夜間 EyeQ4 '18 シーン / ランドマーク情報抽出 Fusion 対応 半自動運転対応 50 度 1080p-4k, 30fps EyeQ5 '20 シーン / ランドマーク情報抽出 Fusion 対応 自動運転対応 100 度 1080p-4K, 60fps 交差点 シーン認識 全被写体のカテゴライズ 高速道路半自動運転 Stop&Go リスク回避 対象物の挙動認識 人, 車両, 標識 人, 車両, 道路, 構造物, 街路樹 人, 車両の移動方向 + 量道路, 構造物, 街路樹 8
9 5. 走行映像 DB 成果の活用イメージ ( サプライヤ :LSI 開発 ) 市街地半自動運転対応 (2022 年度以降 ) に向けた全周囲監視画像認識用 LSI 開発に走行映像 DB 成果を活用 LSI 開発プロセス アーキテクチャ仕様 Fix: 量産時期の 7 から 8 年前に確定が必要 開発期間 : 設計 試作からデバイス量産に最低 5 年間以上必要 X ( 年 ) ドライバアシスト 半自動運転 自動運転 想定アプリケーション 交差点対応 市街地半自動運転対応 対歩行者 アーキテクチャ仕様 FIX アーキテクチャ選択肢の評価 飛び出し 夜間 交差点 シーン認識用 LSI 開発 ( 設計 試作 ) 高速道路半自動運転 Stop&Go 画像認識用 LSI 開発 ( 設計 試作 ) '16からのLSI 開発では '20 年の交差点対応用のLSI 量産は間に合わない 性能チュ ニング シーン認識 LSI 量産 画像処理 IP 系? メニーコア系? GPGPU 系? 性能評価データとして走行映像 DB 成果 ( 全周囲データ ) を活用 9
10 以下ご参考資料 10
11 参考 1. 走行映像 DB の評価実施分担 (OEM サプライヤ 研究機関 ) DB 質と DB 多様性など評価項目を提示し 各社の要望で実施内容を決定 SIP 走行映像 DB OEM/ 研究機関 / サプライヤ評価項目実施分担表 1 2 評価項目 システム評価 映像データの 27 シーン分類の指針検討および有効性の評価 網羅性の確保に向けて どのようなシーンを収集する必要があるかなど映像に対するコメント添削 誤認識対象のバリエーション評価 どのような誤認識シーンが必要か映像に対するコメント添削 トヨタマツタ 名古屋大日立ハ ナソニック三菱富士通 3 レーザーレンジセンサによる基準距離情報付加の有効性評価 カメラとレーザーを用いたセンサ フュージョンによるベンチマーク評価などを含む 歩行者の属性情報等を用いたタグ情報の有効性評価 属性情報を活用した歩行者の挙動解析などのタグ情報の有効性評価 真値タグ付き画像の活用方法検討および追加タグ情報の提案 事業成果の新たな活用展開に係る検討や提案を希望 性能評価 ハイビジョンカメラ画質 (1920x1200 画素 ) を画素抜きやノイズ等の画質を劣化させた環境劣化状況と既存カメラシステムとの認識率等の比較評価 ( 高分解能カメラの有効性を評価 ) 画像明暗 ( 昼 夜 影等 ) による認識率変化評価 ( 画像データの平均輝度のバリエーション評価 ) 11


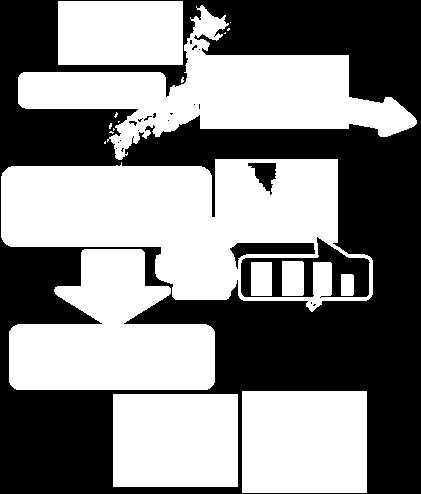
12 参考 1.1 走行映像 DB の評価 ( トヨタ自動車 ) 映像データの 27 シーン分類の指針検討および有効性 走行映像データベースの各シーンに対し 事故分析等の一般的な手法を活用して 追加すべきシーンや不要なシーンを考察 誤認識対象のバリエーション評価 走行映像データベースの各シーンに対し 事故分析等の一般的な手法を活用して 追加すべきシーンや不要なシー ンを考察し報告 検出結果 例. 歩行者 を評価する場合 画像タグ情報 タグ有 タグ無 有 (TP) 誤検出 (FP) 無未検出 (FN) (TN) 評価指標 Precision 適合率 ( 正解率 ) Recall 再現率 F-measure Precision&Recall の調和平均 未検出率 真値タグ付き画像の活用方法検討および追加タグ情報の提案 画像データやタグ情報に対し 画像ビューアを活用するなどして 画像データの有効活用方法や追加すべきタグ情報を検討 式 TP/(TP+FP) TP/(TP+FN) 2TP/(2TP+FP+ FN) FN/(TP+FN) 誤検出率 FP/(TP+FP) 12
13 参考 1.2 走行映像 DB の評価 ( マツダ ) 真値タグ付き画像の活用方法検討および追加タグ情報の提案 タグ情報 ( 歩行者及び車両 ) を活用した交通シミュレータの育成 走行映像 DB 活用 1 真値タグ付き画像を教師データとして利用し 歩行者及び車両のタグ付け情報及び画像から特徴量を抽出し 歩行者および車両の動きをモデル化 車両シミュレータの動画を表示 車両シミュレータ育成 撮像 車載カメラ XML 活用 2 タグ情報を時系列に組み合わせ車両シミュレータ用評価シナリオ ( 危険なシーンの組み合わせ ) が生成の検討 HILS 制御モデル 13
")
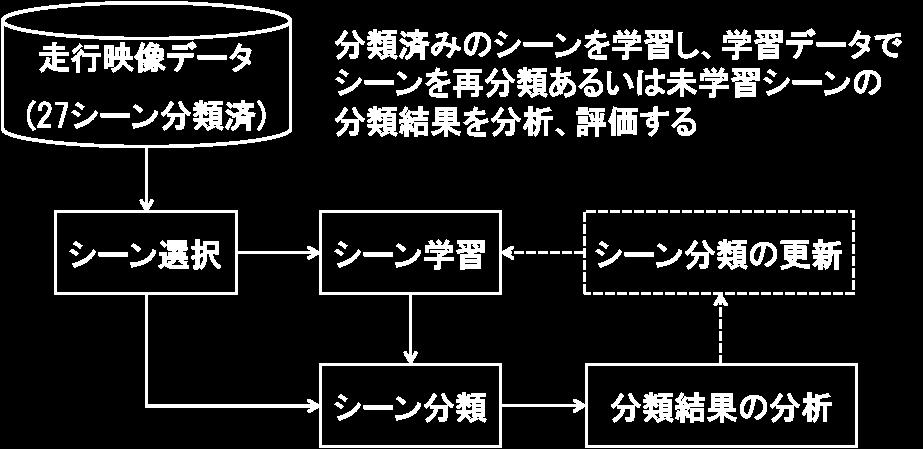
14 参考 1.3 走行映像 DB の評価 ( 日立製作所 ) 映像データ 27 シーン分類の妥当性および有効性の評価 歩行者の属性情報等を用いた認識アリゴリズムの性能比較評価 14
")


15 参考 1.4 走行映像 DB の評価 ( 三菱電機 ) レーザレンジセンサによる基準距離情報付加の有効性評価 高分解能カメラの有効性評価 真値タグ付き画像の活用方法検討および追加タグ情報の提案 社会インフラ点検システムや都市計画支援システムといった全く別の分野での活用 15
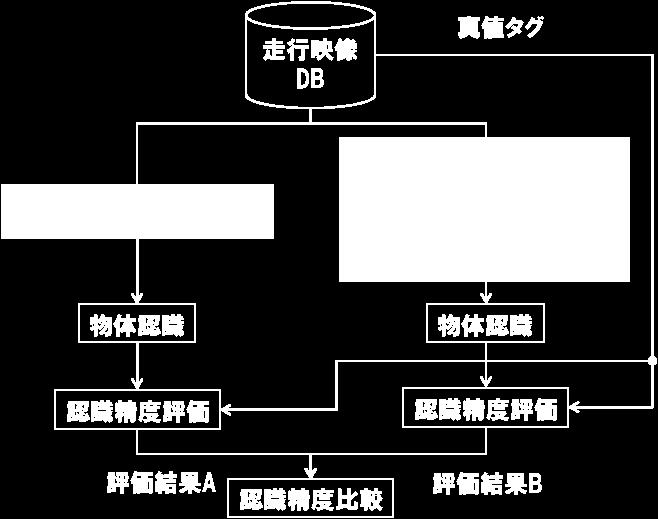
16 参考 1.5 走行映像 DB の評価 ( パナソニック ) 真値タグ付き画像の活用方法検討および追加タグ情報の提案 真値タグ情報を正解値とし 歩行者 ( 人 ) 検知を中心とした保有する 2 種類の画像認識アリゴリズムを用いた認識率の性能比較の評価 天候条件や時間帯 ( 昼 夜 ) 色調や対象物までの距離 複雑な形状や物体の重なりなど条件における性能比較の評価 真値タグに対する歩行者検知数 分析傾向 正解 未検知 誤検知 27 シーン別 分類 1 分類 2 方向 付属物 隠れ 天気 色 時間 アルゴ 1 アルゴ 2 16
![参考 1.6 走行映像 DB の評価 ( 富士通 ) 映像データ 27 シーン分類の妥当性および有効性の評価 シーン網羅性に対する考察 指針 : 性能差を把握できるようなシーンを網羅的に絞込む システム作動する環境でのロバスト性 網羅性を評価するシーン ( 渋滞 市街地 ) 画像の誤認識しやすいシーン ( 照度条件 [ 逆光 夜間 ] 複雑な背景 ) 他センサが苦手とするシーン ( 複雑形状 [](/docs-images/104/161948151/images/17-0.jpg "乱反射 強反射 ] 物体が重なっている ) 27 シーン分類 提供データ 1Pick Up 2 追加映像を抽出 1 単路追越し ( 歩行者 ) : : 27 交差点事故 シーンシーンA シーン A 歩行者 C 車速車速 :10km/h ( 子供 白シャツ :10km/h 追越し ) 追越し 映像データ 27 シーン分類の妥当性および有効性の評価 DB( タグ情報 ) 内容の過不足 改善点の抽出")
17 参考 1.6 走行映像 DB の評価 ( 富士通 ) 映像データ 27 シーン分類の妥当性および有効性の評価 シーン網羅性に対する考察 指針 : 性能差を把握できるようなシーンを網羅的に絞込む システム作動する環境でのロバスト性 網羅性を評価するシーン ( 渋滞 市街地 ) 画像の誤認識しやすいシーン ( 照度条件 [ 逆光 夜間 ] 複雑な背景 ) 他センサが苦手とするシーン ( 複雑形状 [ 乱反射 強反射 ] 物体が重なっている ) 27 シーン分類 提供データ 1Pick Up 2 追加映像を抽出 1 単路追越し ( 歩行者 ) : : 27 交差点事故 シーンシーンA シーン A 歩行者 C 車速車速 :10km/h ( 子供 白シャツ :10km/h 追越し ) 追越し 映像データ 27 シーン分類の妥当性および有効性の評価 DB( タグ情報 ) 内容の過不足 改善点の抽出 各システム(AEB LKA 追突防止 巻込み防止 etc) が要求する画像センサ障害物検知 標識検知 信号機検知 白線検知など様々である 画像データに添付されているタグ情報を確認し 付随するタグ情報に対して 抜け漏れがないかどうかの確認 障害物検知の要求仕様 ( 例 ) 項目 仕様 シーン X シーン Y 27 シーンのうち サンプリングした一部のシーン分類のみ評価実施 最大検知障害物数 12 出力 認識対象物人 ( 歩行者 子供 ) 二輪車 ( 自転車 バイク ) 静止障害物 ( ポール 壁 ) それ以外の特殊物 ( カート セグウェイ ) 自動車 ( 大型 普通 軽 ) 距離範囲 距離精度 1~20m 精度 5% SIPシステム実用化 WG < > 角度精度 ±30deg 精度 0.1deg 検知したい距離 角度 隠れた自転車より電検柱にタグが必要 17
 に基づく手法 + レーザレンジセンサによる距離情報 距離情報付加により検出精度向上が期待 画像明暗 ( 昼 夜 影等 ) による認識率変化評価 ( 画像データの平均輝度のバリエーション評価 ) 撮影条件の違いによって発生するカメラ映像中の明暗変化により")
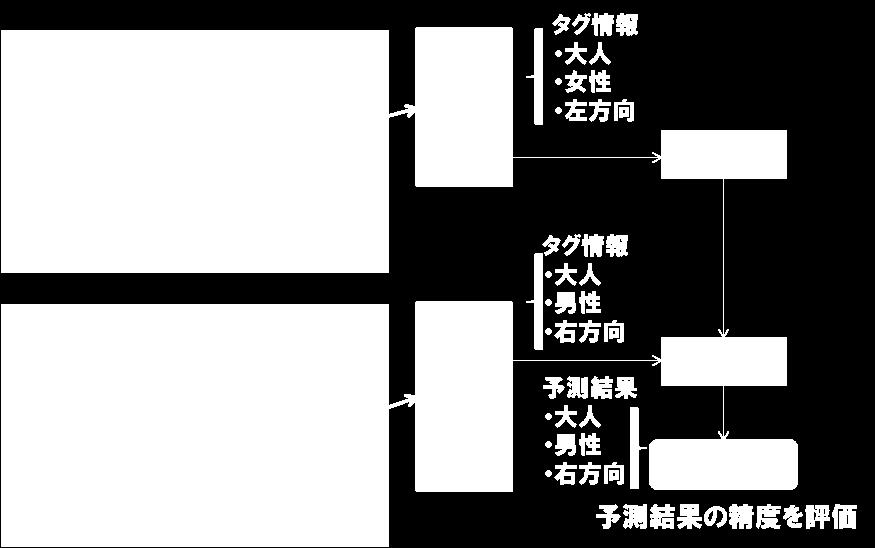
18 参考 1.7 走行映像 DB の評価 ( 名古屋大学 ) レーザーレンジセンサによる基準距離情報付加の有効性評価 カメラ映像のみを用いた歩行者検出手法とレーザーレンジセンサより得られる距離情報を併用したセンサフュージョンに基づく歩行者検出手法それぞれの性能を評価し カメラとレーザーレンジセンサを組み合わせるセンサフュージョンによる性能改善の度合いを定量化 画像のみから歩行者検出する方法 ベースラインによる手法 色特徴 形状特徴などを組合わせる最先端手法 深層学習 (Deep Learing) に基づく手法 + レーザレンジセンサによる距離情報 距離情報付加により検出精度向上が期待 画像明暗 ( 昼 夜 影等 ) による認識率変化評価 ( 画像データの平均輝度のバリエーション評価 ) 撮影条件の違いによって発生するカメラ映像中の明暗変化により どの程度歩行者検出性能が変化するかを定量的に評価 時間帯や照明などの条件に応じて画像を分類各条件での認識精度を比較 様々な条件で 照明等による歩行者検出の性能低下を定量化 18


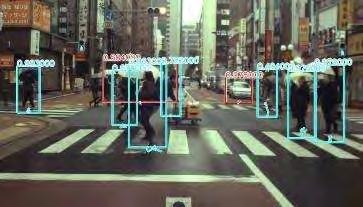



19 参考 2. タグ付け技術開発 (H28 年度 : 自動タグ付け機能の概要 : 再掲載 ) 1 単眼カメラ画像から障害物との距離を推定しタグ付け画像中の障害物の種類を判別しタグ付けする仕組みに加え H28 年度は障害物との 3 次元的な位置関係を把握する 3D 単眼画像認識技術 を用いてタグ付けを行う仕組みを研究 ~H27 年度 : 画像中の物体の種類を判別 タグ付け H28 年度 : 物体との 3 次元位置関係を把握 タグ付け 2 自動タグ付け処理速度の向上 対応 : 自動タグ付け処理の並列処理化を進め 単位時間あたりの処理量を増やすことにより処理速度の向上を図る 目標 :H27 年度の 2 倍以上 ( 単位時間あたりの処理量 ) 19
 で 分解能 0.")
20 参考 2.1 タグ付け技術開発 ( 距離情報付加仕様 ) 入力仕様 単眼ハイビジョンカメラによる走行映像 カメラに必要な初期設定情報 カメラ レンズの歪補正用パラメータ カメラ地上高 カメラ取付けピッチ カメラ取付け位置 ( 車両中心とのオフセット距離 ) 出力仕様 障害物の種類 歩行者 自動車 ( 普通車 大型車 ) 自転車 二輪車 自動化対象物 障害物までの距離 カメラを原点とした障害物までの前方 左右方向の距離をメートル出力 (m) で 分解能 0.1m カメラ取付け位置と車両位置とのオフセット距離がわかれば 車両中心座標への変換可能 目標性能 :±5% 以内 出力周期 : 60fps:6 フレーム毎 25fps:2 フレーム毎 注意事項 自車両のピッチ方向の姿勢変化 道路形状 ( 登り 下り坂 ) が 測定結果へ影響を及ぼす場合があり CAN 情報による補正は実施しません 映像中の障害物に隠れ 見切れなどが発生している場合で 画像認識が出来ない場合は 距離情報は生成されません 20

21 参考 3. 検索エンジンの開発 ( 再掲載 ) 狙い : 膨大に蓄積されたデータに対し 効率的なデータ抽出を実現するためのメタデータ管理方式と検索機能 検索エンジンにおける基本アーキテクチャ 21
22 参考 3.1 検索エンジンの開発 (H28 年度 : 検索エンジンの概要 ) 1 シーン特性が X で 2Y が映っている 3 データがほしい データ群 1 元データがシーン相当 ( シーン等 ) 発話ログ ( 状況 動作を表す情報 ) 集約データ シーン単位 データ群 2 元データが詳細なため集約 ( レーザセンサ GPS 等 ) データ群 2 詳細なまま活用するが一部集約 ( タグ情報等 ) シーン内の特徴抽出例 )max(xx) max(xx) 特徴的オブジェクト抽出例 ) 台車 ベビーカー 全てのオブジェクト情報 検索用分類キーの update 詳細データ 画像単位 1 2 検索エンジン UI 3 蓄積されている群データ 画像 タグ ( 非構造 ) シーン ( 車両 ) シーン ( 切出し ) レーザセンサ情報 ( 非構造 ) GPS 22
資料 2 < 道路交通 WT 資料 > 戦略的イノベーション創造プログラム SIP ( 自動走行システム ) 走行映像データベース 構築技術の開発及び実証 2017 年 3 月 9 日一般財団法人日本自動車研究所 1
 走行映像データベース 構築技術の開発及び実証 2017 年 3 月 9 日一般財団法人日本自動車研究所 1") 資料 2 < 道路交通 WT 資料 > 戦略的イノベーション創造プログラム SIP ( 自動走行システム ) 走行映像データベース 構築技術の開発及び実証 2017 年 3 月 9 日一般財団法人日本自動車研究所 1 1. 走行映像データベース開発の背景 走行映像 DB 開発の狙い 海外メカ サフ ライヤは OEM 各社に自社開発製品を供給し 実車 実路走行テ ータを入手することで効率よく製品を改良
資料 2 < 道路交通 WT 資料 > 戦略的イノベーション創造プログラム SIP ( 自動走行システム ) 走行映像データベース 構築技術の開発及び実証 2017 年 3 月 9 日一般財団法人日本自動車研究所 1 1. 走行映像データベース開発の背景 走行映像 DB 開発の狙い 海外メカ サフ ライヤは OEM 各社に自社開発製品を供給し 実車 実路走行テ ータを入手することで効率よく製品を改良
国土技術政策総合研究所 研究資料
 第 7 章 検査基準 7-1 検査の目的 検査の目的は 対向車両情報表示サービス 前方停止車両 低速車両情報表示サービスおよび その組み合わせサービスに必要な機能の品質を確認することである 解説 設備の設置後 機能や性能の総合的な調整を経て 検査基準に従い各設備検査を実施する 各設備検査の合格後 各設備間を接続した完成検査で機能 性能等のサービス仕様を満たしていることを確認する検査を実施し 合否を判定する
第 7 章 検査基準 7-1 検査の目的 検査の目的は 対向車両情報表示サービス 前方停止車両 低速車両情報表示サービスおよび その組み合わせサービスに必要な機能の品質を確認することである 解説 設備の設置後 機能や性能の総合的な調整を経て 検査基準に従い各設備検査を実施する 各設備検査の合格後 各設備間を接続した完成検査で機能 性能等のサービス仕様を満たしていることを確認する検査を実施し 合否を判定する
本章では 衝突被害軽減ブレーキ 車線逸脱警報 装置 等の自動車に備えられている運転支援装置の特性 Ⅻ. 運転支援装置を 備えるトラックの 適切な運転方法 と使い方を理解した運転の重要性について整理しています 指導においては 装置を過信し 事故に至るケースがあることを理解させましょう また 運転支援装
 本章では 衝突被害軽減ブレーキ 車線逸脱警報 装置 等の自動車に備えられている運転支援装置の特性 Ⅻ. 運転支援装置を 備えるトラックの 適切な運転方法 と使い方を理解した運転の重要性について整理しています 指導においては 装置を過信し 事故に至るケースがあることを理解させましょう また 運転支援装置の限界を心得て正しく使用するために 支援装置の限界とメーカーによる作動等の違いを明確にさせ 支援装置に頼り過ぎた運転にならないように指導しましょう
本章では 衝突被害軽減ブレーキ 車線逸脱警報 装置 等の自動車に備えられている運転支援装置の特性 Ⅻ. 運転支援装置を 備えるトラックの 適切な運転方法 と使い方を理解した運転の重要性について整理しています 指導においては 装置を過信し 事故に至るケースがあることを理解させましょう また 運転支援装置の限界を心得て正しく使用するために 支援装置の限界とメーカーによる作動等の違いを明確にさせ 支援装置に頼り過ぎた運転にならないように指導しましょう
(Microsoft PowerPoint - \216\251\223]\216\324\224F\216\257\202\314\223\256\214\374.pptx)
![(Microsoft PowerPoint - \216\251\223]\216\324\224F\216\257\202\314\223\256\214\374.pptx)](/thumbs/91/107002316.jpg "(Microsoft PowerPoint - \216\251\223]\216\324\224F\216\257\202\314\223\256\214\374.pptx)") 車載認識装置における自転車認識技術の動向 - トピック分析による認識技術の分類 - 歩行者認識の技術でテーマの内容を説明 特許庁 : 自動運転自動車より 2017.11.30 発表 JFE テクノリサーチ 平川雅彦 1 目 次 1. 調査の目的 2. 概念検索 3. 検索結果 4. 自転車認識技術の特徴 5. トピックモデルトピック分析と多次元尺度法との対比トピック KW によるランキング解析 6.
車載認識装置における自転車認識技術の動向 - トピック分析による認識技術の分類 - 歩行者認識の技術でテーマの内容を説明 特許庁 : 自動運転自動車より 2017.11.30 発表 JFE テクノリサーチ 平川雅彦 1 目 次 1. 調査の目的 2. 概念検索 3. 検索結果 4. 自転車認識技術の特徴 5. トピックモデルトピック分析と多次元尺度法との対比トピック KW によるランキング解析 6.
地図情報の差分更新・自動図化 概要版
 戦略的イノベーション創造プログラム (SIP) 自動走行システム / / 大規模実証実験 / ダイナミックマップ / 地図情報の差分更新 自動図化 報告書 平成 29 年度報告 平成 30 年 3 月 31 日 三菱電機株式会社 目次 1. 研究開発の目的 2. 静的高精度 3D 地図データの自動図化 / 差分抽出技術の実用性検証 (2) 自動図化 / 差分抽出技術適用による改善効果検証 3. リアルタイム自動図化
戦略的イノベーション創造プログラム (SIP) 自動走行システム / / 大規模実証実験 / ダイナミックマップ / 地図情報の差分更新 自動図化 報告書 平成 29 年度報告 平成 30 年 3 月 31 日 三菱電機株式会社 目次 1. 研究開発の目的 2. 静的高精度 3D 地図データの自動図化 / 差分抽出技術の実用性検証 (2) 自動図化 / 差分抽出技術適用による改善効果検証 3. リアルタイム自動図化
目次 序章... 序 1 1. はじめに... 序 事業全体の目標... 序 全体スキーム... 序 委員名簿... 序 5 2. 技術開発項目... 序 平成 28 年度の研究開発課題の概要... 序 技術開発内容... 序
 平成 28 年度成果報告書 平成 28 年度戦略的イノベーション創造プログラム ( 自動走行システム ): 走行映像データベース の構築技術の開発及び実証 平成 29 年 3 月 ( 委託先 ) 一般財団法人日本自動車研究所 目次 序章... 序 1 1. はじめに... 序 1 1.1 事業全体の目標... 序 1 1.2 全体スキーム... 序 2 1.3 委員名簿... 序 5 2. 技術開発項目...
平成 28 年度成果報告書 平成 28 年度戦略的イノベーション創造プログラム ( 自動走行システム ): 走行映像データベース の構築技術の開発及び実証 平成 29 年 3 月 ( 委託先 ) 一般財団法人日本自動車研究所 目次 序章... 序 1 1. はじめに... 序 1 1.1 事業全体の目標... 序 1 1.2 全体スキーム... 序 2 1.3 委員名簿... 序 5 2. 技術開発項目...
1. 研究背景 目的 2. 使用機器 3. 橋梁点検システム 4. 選定橋梁 5. 安全対策 橋梁点検フロー 6. 計測結果 計測条件 7. まとめ - 2 -
 ひび割れ計測機と飛行ロボットによる橋梁点検支援システムに関する研究 大阪市立大学大学院教授プロジェクトリーダー 山口隆司大阪市立大学大学院学生堂ノ本翔平菱田伸鉄工業 ( 株 ) 菱田聡クモノスコーポレーション ( 株 ) 藤田誠二近畿地方整備局道路部, 近畿技術事務所, 大阪国道事務所 - 1 - 1. 研究背景 目的 2. 使用機器 3. 橋梁点検システム 4. 選定橋梁 5. 安全対策 橋梁点検フロー
ひび割れ計測機と飛行ロボットによる橋梁点検支援システムに関する研究 大阪市立大学大学院教授プロジェクトリーダー 山口隆司大阪市立大学大学院学生堂ノ本翔平菱田伸鉄工業 ( 株 ) 菱田聡クモノスコーポレーション ( 株 ) 藤田誠二近畿地方整備局道路部, 近畿技術事務所, 大阪国道事務所 - 1 - 1. 研究背景 目的 2. 使用機器 3. 橋梁点検システム 4. 選定橋梁 5. 安全対策 橋梁点検フロー
Microsoft PowerPoint - ○ITARDA H30年1~9月( )JTA改
JTA改") 平成 30 年 1~9 月の交通事故統計分析結果 ~ 発生地別 ~ 2018 年 12 月 Ⅰ. 調査の目的等 1. 調査の目的 2. データの概要 1 Ⅱ.H30 年 1~9 月死亡事故データの傾向 1. 事故件数 2. 発生地別 3. 道路区分別 4. 車両区分別 5. 事故類型別 6. 行動類型別 7. 時間帯別 8. 運転者の危険認知速度別 9. 運転者の年齢層別 10. 運転者の免許取得年数別
平成 30 年 1~9 月の交通事故統計分析結果 ~ 発生地別 ~ 2018 年 12 月 Ⅰ. 調査の目的等 1. 調査の目的 2. データの概要 1 Ⅱ.H30 年 1~9 月死亡事故データの傾向 1. 事故件数 2. 発生地別 3. 道路区分別 4. 車両区分別 5. 事故類型別 6. 行動類型別 7. 時間帯別 8. 運転者の危険認知速度別 9. 運転者の年齢層別 10. 運転者の免許取得年数別
名古屋大学.indd
 車両性能実証装置高精度ドライビング シミュレーターシステム 世界で初めて 1) 本格的バーチャルリアリティ (VR) 空間内での運転 車両走行模擬を実現した大型 5 面立体視ドライビング シミュレーター 運転時の視覚環境 振動環境を高精度に再現する事により 運転車の特性や感性のモニタリングおよび数学モデル構築を目指します 約 240インチの高輝度高精細な大型ディスプレイで囲ま 1 れた空間で視野角
車両性能実証装置高精度ドライビング シミュレーターシステム 世界で初めて 1) 本格的バーチャルリアリティ (VR) 空間内での運転 車両走行模擬を実現した大型 5 面立体視ドライビング シミュレーター 運転時の視覚環境 振動環境を高精度に再現する事により 運転車の特性や感性のモニタリングおよび数学モデル構築を目指します 約 240インチの高輝度高精細な大型ディスプレイで囲ま 1 れた空間で視野角
(案)
") P13005 次世代スマートデバイス開発プロジェクト 基本計画 IoT 推進部 1. 研究開発の目的 目標 内容 (1) 研究開発の目的 1 政策的な重要性次世代交通社会の実現には 自動車の燃焼システムの環境対応に加え 急発進 急停止 渋滞等による非効率な燃料消費の改善及び人の飛び出しや走行中の急な割り込み等による衝突事故の削減など 一層の省エネ化と安全走行の高度化が重要である その実現には 自動車の周辺情報を集め即座に状況を把握するシステムの構築が必要となり
P13005 次世代スマートデバイス開発プロジェクト 基本計画 IoT 推進部 1. 研究開発の目的 目標 内容 (1) 研究開発の目的 1 政策的な重要性次世代交通社会の実現には 自動車の燃焼システムの環境対応に加え 急発進 急停止 渋滞等による非効率な燃料消費の改善及び人の飛び出しや走行中の急な割り込み等による衝突事故の削減など 一層の省エネ化と安全走行の高度化が重要である その実現には 自動車の周辺情報を集め即座に状況を把握するシステムの構築が必要となり
Microsoft Word - グラフイン_最終.doc
 各位 平成 27 年 1 月 13 日 会社名テクノホライゾン ホールディングス株式会社 代表者名代表取締役社長 野村拡伸 (JASDAQ コード 6629) 問合せ先役職 氏名 取締役 水上 康 電話 052-823-8551 オートモーティブワールド 2015 出展に関するお知らせ ( 当社連結子会社 : 株式会社グラフイン ) 当社の連結子会社である株式会社グラフインは オートモーティブワールド2015(
各位 平成 27 年 1 月 13 日 会社名テクノホライゾン ホールディングス株式会社 代表者名代表取締役社長 野村拡伸 (JASDAQ コード 6629) 問合せ先役職 氏名 取締役 水上 康 電話 052-823-8551 オートモーティブワールド 2015 出展に関するお知らせ ( 当社連結子会社 : 株式会社グラフイン ) 当社の連結子会社である株式会社グラフインは オートモーティブワールド2015(
 招待論文 フルスペック 8K スーパーハイビジョン圧縮記録装置の開発 3.3 記録制御機能と記録媒体 144 Gbps の映像信号を 1/8 に圧縮した場合 18 Gbps 程度 の転送速度が要求される さらに音声データやその他のメ タデータを同時に記録すると 記録再生には 20 Gbps 程度 の転送性能が必要となる また 記録媒体は記録装置から 着脱して持ち運ぶため 不慮の落下などにも耐性のあるこ
招待論文 フルスペック 8K スーパーハイビジョン圧縮記録装置の開発 3.3 記録制御機能と記録媒体 144 Gbps の映像信号を 1/8 に圧縮した場合 18 Gbps 程度 の転送速度が要求される さらに音声データやその他のメ タデータを同時に記録すると 記録再生には 20 Gbps 程度 の転送性能が必要となる また 記録媒体は記録装置から 着脱して持ち運ぶため 不慮の落下などにも耐性のあるこ
 直観的な使い易いユーザーインターフェースで多次元の視覚化と定量解析 日本語 英語画面表示対応 背景輝度の均一化 豊富な画質調整 画像処理 画像解析機能を搭載 マクロ自動記録 特定用途向けアプリでの利用で 複数データでのバッチ処理が可能 コントラスト強調 平坦化フィルタ ハイパスフィルタ ノイズ除去 境界線の強調 ローパスフィルタ 局部イコライズフィルタ エッジや模様の強調 ディスタンスマップ バリアンスフィルタ
直観的な使い易いユーザーインターフェースで多次元の視覚化と定量解析 日本語 英語画面表示対応 背景輝度の均一化 豊富な画質調整 画像処理 画像解析機能を搭載 マクロ自動記録 特定用途向けアプリでの利用で 複数データでのバッチ処理が可能 コントラスト強調 平坦化フィルタ ハイパスフィルタ ノイズ除去 境界線の強調 ローパスフィルタ 局部イコライズフィルタ エッジや模様の強調 ディスタンスマップ バリアンスフィルタ
円筒面で利用可能なARマーカ
 円筒面で利用可能な AR マーカ AR Marker for Cylindrical Surface 2014 年 11 月 14 日 ( 金 ) 眞鍋佳嗣千葉大学大学院融合科学研究科 マーカベース AR 二次元マーカはカメラ姿勢の推定, 拡張現実等広い研究分野で利用されている 現実の風景 表示される画像 デジタル情報を付加 カメラで撮影し, ディスプレイに表示 使用方法の単純性, 認識の安定性からマーカベース
円筒面で利用可能な AR マーカ AR Marker for Cylindrical Surface 2014 年 11 月 14 日 ( 金 ) 眞鍋佳嗣千葉大学大学院融合科学研究科 マーカベース AR 二次元マーカはカメラ姿勢の推定, 拡張現実等広い研究分野で利用されている 現実の風景 表示される画像 デジタル情報を付加 カメラで撮影し, ディスプレイに表示 使用方法の単純性, 認識の安定性からマーカベース
この演習について Autoware 演習 1: データの記録 再生 Autoware 演習 2: センサーキャリブレーション Autoware 演習 3:3 次元地図の作成 Autoware 演習 4: 自己位置推定 Autoware 演習 5: パラメータ調整 Autoware 演習 6: 物体検
 version 1.0 TIER IV ACADEMY 自動運転システム構築塾 Day4 Autoware 演習 2 Autoware 演習 6: 物体検出とトラッキング この演習について Autoware 演習 1: データの記録 再生 Autoware 演習 2: センサーキャリブレーション Autoware 演習 3:3 次元地図の作成 Autoware 演習 4: 自己位置推定 Autoware
version 1.0 TIER IV ACADEMY 自動運転システム構築塾 Day4 Autoware 演習 2 Autoware 演習 6: 物体検出とトラッキング この演習について Autoware 演習 1: データの記録 再生 Autoware 演習 2: センサーキャリブレーション Autoware 演習 3:3 次元地図の作成 Autoware 演習 4: 自己位置推定 Autoware
トヨタ 日産 ホンダ 装置名称 歩行者検知機能付 プリクラッシュセーフティシステム ( 衝突回避支援型 ) プリクラッシュセーフティシステム ( 歩行者検知機能付衝突回避支援型 ) エマージンシーブレーキシステム エマージンシーブレーキシステム エマージンシーブレーキシステム シティブレーキアクティ
 プリクラッシュセーフティシステム ( 歩行者検知機能付衝突回避支援型 ) エマージンシーブレーキシステム エマージンシーブレーキシステム エマージンシーブレーキシステム シティブレーキアクティ") 平成 28 年度第 2 回車両安全対策検討会平成 28 年 12 月 9 日 安全 - 資料 4 高齢運転者による交通事故防止対策について 1. 背景 本年 10 月 横浜市において 87 歳の高齢者が運転する軽トラックが集団登校中の小学生の列に突っ込み 小学生 1 名が死亡するなど 高齢運転者による交通事故が相次いでいる このため 11 月 15 日 政府は 高齢運転者による交通事故防止対策に関する関係閣僚会議
平成 28 年度第 2 回車両安全対策検討会平成 28 年 12 月 9 日 安全 - 資料 4 高齢運転者による交通事故防止対策について 1. 背景 本年 10 月 横浜市において 87 歳の高齢者が運転する軽トラックが集団登校中の小学生の列に突っ込み 小学生 1 名が死亡するなど 高齢運転者による交通事故が相次いでいる このため 11 月 15 日 政府は 高齢運転者による交通事故防止対策に関する関係閣僚会議
速度規制の目的と現状 警察庁交通局 1
 速度規制の目的と現状 警察庁交通局 1 1 最高速度規制の必要性 2 規制速度決定の基本的考え方 3 一般道路における速度規制基準の概要 4 最高速度規制の見直し状況 ( 平成 21 年度 ~23 年度 ) 5 最高速度違反による交通事故対策検討会の開催 2 1 最高速度規制の必要性 最高速度規制は 交通事故の抑止 ( 交通の安全 ) 交通の円滑化 道路交通に起因する障害の防止 の観点から 必要に応じて実施
速度規制の目的と現状 警察庁交通局 1 1 最高速度規制の必要性 2 規制速度決定の基本的考え方 3 一般道路における速度規制基準の概要 4 最高速度規制の見直し状況 ( 平成 21 年度 ~23 年度 ) 5 最高速度違反による交通事故対策検討会の開催 2 1 最高速度規制の必要性 最高速度規制は 交通事故の抑止 ( 交通の安全 ) 交通の円滑化 道路交通に起因する障害の防止 の観点から 必要に応じて実施
Microsoft PowerPoint - presen
 解析支援ネット OKAYAMA 画像解析に関する技術講演会 2008.03.28 車上からの道路標識の認識 岡山県立大学情報工学部スポーツシステム工学科山内仁 はじめに 高度道路交通システム (ITS) VICS ETC etc. 走行支援道路システム (AHS) 車載カメラによる環境認識 (AHS-i) 道路標識の認識 認知に関わる事故の防止 2 車両運行に関わる標識 標識情報の取得手段 : 車載カメラ
解析支援ネット OKAYAMA 画像解析に関する技術講演会 2008.03.28 車上からの道路標識の認識 岡山県立大学情報工学部スポーツシステム工学科山内仁 はじめに 高度道路交通システム (ITS) VICS ETC etc. 走行支援道路システム (AHS) 車載カメラによる環境認識 (AHS-i) 道路標識の認識 認知に関わる事故の防止 2 車両運行に関わる標識 標識情報の取得手段 : 車載カメラ
Microsoft PowerPoint - 23_電子制御情報の交換(配布用a).pptx
.pptx") JAMA 電子情報フォーラム 2018 デジタルエンジニアリング プロセスの 一般社団法人 適用範囲拡大 電子制御情報の交換 本 動 業会 電子情報委員会デジタルエンジニアリング部会電子制御情報の交換タスクタスクリーダー : 菊地洋輔 2018 年 2 月 16 日 目次 1 活動の背景 2 活動のゴール 進め方 3 成果目標 4 活動計画 5 2017 年度の取り組み 6 2018 年度以降の取り組み
JAMA 電子情報フォーラム 2018 デジタルエンジニアリング プロセスの 一般社団法人 適用範囲拡大 電子制御情報の交換 本 動 業会 電子情報委員会デジタルエンジニアリング部会電子制御情報の交換タスクタスクリーダー : 菊地洋輔 2018 年 2 月 16 日 目次 1 活動の背景 2 活動のゴール 進め方 3 成果目標 4 活動計画 5 2017 年度の取り組み 6 2018 年度以降の取り組み
高分解能衛星データによる地形図作成手法に関する調査研究 ( 第 2 年次 ) 実施期間平成 18 年度 ~ 測図部測図技術開発室水田良幸小井土今朝巳田中宏明 佐藤壮紀大野裕幸 1. はじめに国土地理院では, 平成 18 年 1 月に打ち上げられた陸域観測技術衛星 ALOS に関して, 宇宙航空研究開
 実施期間平成 18 年度 ~ 測図部測図技術開発室水田良幸小井土今朝巳田中宏明 佐藤壮紀大野裕幸 1. はじめに国土地理院では, 平成 18 年 1 月に打ち上げられた陸域観測技術衛星 ALOS に関して, 宇宙航空研究開") 高分解能衛星データによる地形図作成手法に関する調査研究 ( 第 2 年次 ) 実施期間平成 18 年度 ~ 測図部測図技術開発室水田良幸小井土今朝巳田中宏明 佐藤壮紀大野裕幸 1. はじめに国土地理院では, 平成 18 年 1 月に打ち上げられた陸域観測技術衛星 ALOS に関して, 宇宙航空研究開発機構 ( JAXA ) と共同研究協定を締結している. 測図部では,2 万 5 千分 1 地形図の作成及びリアルタイム修正の実証及び
高分解能衛星データによる地形図作成手法に関する調査研究 ( 第 2 年次 ) 実施期間平成 18 年度 ~ 測図部測図技術開発室水田良幸小井土今朝巳田中宏明 佐藤壮紀大野裕幸 1. はじめに国土地理院では, 平成 18 年 1 月に打ち上げられた陸域観測技術衛星 ALOS に関して, 宇宙航空研究開発機構 ( JAXA ) と共同研究協定を締結している. 測図部では,2 万 5 千分 1 地形図の作成及びリアルタイム修正の実証及び
2008 年度下期未踏 IT 人材発掘 育成事業採択案件評価書 1. 担当 PM 田中二郎 PM ( 筑波大学大学院システム情報工学研究科教授 ) 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3.
 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3.") 2008 年度下期未踏 IT 人材発掘 育成事業採択案件評価書 1. 担当 PM 田中二郎 PM ( 筑波大学大学院システム情報工学研究科教授 ) 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3. プロジェクト管理組織 株式会社オープンテクノロジーズ 4. 委託金支払額 3,000,000 円 5.
2008 年度下期未踏 IT 人材発掘 育成事業採択案件評価書 1. 担当 PM 田中二郎 PM ( 筑波大学大学院システム情報工学研究科教授 ) 2. 採択者氏名チーフクリエータ : 矢口裕明 ( 東京大学大学院情報理工学系研究科創造情報学専攻博士課程三年次学生 ) コクリエータ : なし 3. プロジェクト管理組織 株式会社オープンテクノロジーズ 4. 委託金支払額 3,000,000 円 5.
Visual班
 Multimedia(Visual) 班 早稲田大学基幹理工学部情報通信学科甲藤研究室 1 Multimedia 班とは 画像処理の研究を中心に扱っています 主な研究分野 動画像圧縮符号化 圧縮動画像の画質推定 画像認識 4K, 8K, HDR 車載画像処理 画像信号処理からコンピュータビジョンまで 動画像に関する研究を幅広く扱っています 動画像に関係するものであれば 何でも研究できる! 2 動画像圧縮符号化
Multimedia(Visual) 班 早稲田大学基幹理工学部情報通信学科甲藤研究室 1 Multimedia 班とは 画像処理の研究を中心に扱っています 主な研究分野 動画像圧縮符号化 圧縮動画像の画質推定 画像認識 4K, 8K, HDR 車載画像処理 画像信号処理からコンピュータビジョンまで 動画像に関する研究を幅広く扱っています 動画像に関係するものであれば 何でも研究できる! 2 動画像圧縮符号化
高度交通システムの 研究
 高度交通システムと情報通信技術 2019/6/28 高取祐介 1 ITS( 高度交通システム ) I Intelligent( 高度 知能化 ) T Transport( 輸送 交通 ) S Systems( システム ) 情報通信技術を用いて 人やモノの移動を高度化するためのシステムの総称 交通問題の解決 利便性向上が目的事故防止 渋滞解消 環境改善など 2 ITS の要素技術 人や物が実世界で移動する
高度交通システムと情報通信技術 2019/6/28 高取祐介 1 ITS( 高度交通システム ) I Intelligent( 高度 知能化 ) T Transport( 輸送 交通 ) S Systems( システム ) 情報通信技術を用いて 人やモノの移動を高度化するためのシステムの総称 交通問題の解決 利便性向上が目的事故防止 渋滞解消 環境改善など 2 ITS の要素技術 人や物が実世界で移動する
資料 5 自動車検査場における OBD 検査に関する実証実験について 平成 30 年 4 月 ( 独 ) 自動車技術総合機構軽自動車検査協会 Copyright National Agency for Automobile and Land Transport Technology 1
 自動車技術総合機構軽自動車検査協会 Copyright National Agency for Automobile and Land Transport Technology 1") 資料 5 自動車検査場における OBD 検査に関する実証実験について 平成 30 年 4 月 ( 独 ) 自動車技術総合機構軽自動車検査協会 1 目次 1. 実証実験の実施体制 2. 実証実験の概要 3. 実験結果 4.OBD 検査導入に向けた課題と解決策 2 1. 実証実験の実施体制 平成 28 年度及び29 年度 自動車技術総合機構と軽自動車検査協会が連携し スナップオン ツールズ ( 株 )
資料 5 自動車検査場における OBD 検査に関する実証実験について 平成 30 年 4 月 ( 独 ) 自動車技術総合機構軽自動車検査協会 1 目次 1. 実証実験の実施体制 2. 実証実験の概要 3. 実験結果 4.OBD 検査導入に向けた課題と解決策 2 1. 実証実験の実施体制 平成 28 年度及び29 年度 自動車技術総合機構と軽自動車検査協会が連携し スナップオン ツールズ ( 株 )
1 日本再興戦略 2016 改革 2020 隊列走行の実現 隊列走行活用事業モデルの明確化ニーズの明確化 ( 実施場所 事業性等 ) 技術開発 実証 制度 事業環境検討プロジェクト工程表技高齢者等の移動手段の確保 ( ラストワンマイル自動走行 ) 事業モデルの明確化 ( 実施主体 場所 事業性等 )
 技術開発 実証 制度 事業環境検討プロジェクト工程表技高齢者等の移動手段の確保 ( ラストワンマイル自動走行 ) 事業モデルの明確化 ( 実施主体 場所 事業性等 )") 参考資料 4 自動走行に関する取組について 平成 2 8 年 1 2 月 経 済 産 業 省 国 土 交 通 省 1 日本再興戦略 2016 改革 2020 隊列走行の実現 隊列走行活用事業モデルの明確化ニーズの明確化 ( 実施場所 事業性等 ) 技術開発 実証 制度 事業環境検討プロジェクト工程表技高齢者等の移動手段の確保 ( ラストワンマイル自動走行 ) 事業モデルの明確化 ( 実施主体 場所
参考資料 4 自動走行に関する取組について 平成 2 8 年 1 2 月 経 済 産 業 省 国 土 交 通 省 1 日本再興戦略 2016 改革 2020 隊列走行の実現 隊列走行活用事業モデルの明確化ニーズの明確化 ( 実施場所 事業性等 ) 技術開発 実証 制度 事業環境検討プロジェクト工程表技高齢者等の移動手段の確保 ( ラストワンマイル自動走行 ) 事業モデルの明確化 ( 実施主体 場所
PowerPoint プレゼンテーション
 SPI Japan 2012 車載ソフトウェア搭載製品の 機能安全監査と審査 2012 年 10 月 11 日 パナソニック株式会社デバイス社 菅沼由美子 パナソニックのデバイス製品 SPI Japan 2012 2 パナソニック デバイス社のソフト搭載製品 車載スピーカーアクティブ消音アクティブ創音歩行者用警告音 スマートエントリー グローバルに顧客対応 ソフトウェア搭載製品 車載 複合スイッチパネル
SPI Japan 2012 車載ソフトウェア搭載製品の 機能安全監査と審査 2012 年 10 月 11 日 パナソニック株式会社デバイス社 菅沼由美子 パナソニックのデバイス製品 SPI Japan 2012 2 パナソニック デバイス社のソフト搭載製品 車載スピーカーアクティブ消音アクティブ創音歩行者用警告音 スマートエントリー グローバルに顧客対応 ソフトウェア搭載製品 車載 複合スイッチパネル
選定技術の テーマ Ⅰ ウェッジハンプ 舗装面にくさび型の非対称の段差 ( ウェッジハンプ ) を設置し 走行時の衝撃により逆走車両に注意喚起するもの 全景 設置イメージ図 逆走車両に衝撃で注意喚起を行い 順行車両には走行に支障の無い形状としている 段差部分には超高強度繊維補強コンクリートを使用し
 を設置し 走行時の衝撃により逆走車両に注意喚起するもの 全景 設置イメージ図 逆走車両に衝撃で注意喚起を行い 順行車両には走行に支障の無い形状としている 段差部分には超高強度繊維補強コンクリートを使用し") 選定技術の 資料 5-3 選定技術の テーマ Ⅰ ウェッジハンプ 舗装面にくさび型の非対称の段差 ( ウェッジハンプ ) を設置し 走行時の衝撃により逆走車両に注意喚起するもの 全景 設置イメージ図 逆走車両に衝撃で注意喚起を行い 順行車両には走行に支障の無い形状としている 段差部分には超高強度繊維補強コンクリートを使用し 大型車が走行しても衝突に十分な強度有している 2 選定技術の テーマ Ⅰ 防眩板応用注意喚起
選定技術の 資料 5-3 選定技術の テーマ Ⅰ ウェッジハンプ 舗装面にくさび型の非対称の段差 ( ウェッジハンプ ) を設置し 走行時の衝撃により逆走車両に注意喚起するもの 全景 設置イメージ図 逆走車両に衝撃で注意喚起を行い 順行車両には走行に支障の無い形状としている 段差部分には超高強度繊維補強コンクリートを使用し 大型車が走行しても衝突に十分な強度有している 2 選定技術の テーマ Ⅰ 防眩板応用注意喚起
情報漏洩対策ソリューション ESS REC のご説明
 ESS-REC for SuperStream の概要について 平成 18 年 6 月 株式会社ソルクシーズ ソリューションビジネス事業本部 セキュリティソリューション部 目次 背景 目的 製品概要 製品概要図 製品構成 機能概要 詳細機能 ハード構成 その他 背景 毎日のように報道される情報漏洩事故や一部企業で問題になっている財務報告に関する虚偽記載など IT の発展によりこれまでに考えられない事件が多発しています
ESS-REC for SuperStream の概要について 平成 18 年 6 月 株式会社ソルクシーズ ソリューションビジネス事業本部 セキュリティソリューション部 目次 背景 目的 製品概要 製品概要図 製品構成 機能概要 詳細機能 ハード構成 その他 背景 毎日のように報道される情報漏洩事故や一部企業で問題になっている財務報告に関する虚偽記載など IT の発展によりこれまでに考えられない事件が多発しています
Microsoft PowerPoint - ○ITARDA H29年1~12月( )
") 平成 29 年 1~12 月の交通事故統計分析結果 ~ 発生地別 ~ 2018 年 3 月 Ⅰ. 調査の目的等 1. 調査の目的 国土交通省では 平成 21 年に策定した 事業用自動車総合安全プラン2009 に基づき事業用自動車の事故防止対策に取り組み 平成 26 年におこなった中間見直しでは新たな重点施策を追加するなど 対策を強化してきた さらに平成 29 年 6 月には 新たに 事業用自動車総合安全プラン2020
平成 29 年 1~12 月の交通事故統計分析結果 ~ 発生地別 ~ 2018 年 3 月 Ⅰ. 調査の目的等 1. 調査の目的 国土交通省では 平成 21 年に策定した 事業用自動車総合安全プラン2009 に基づき事業用自動車の事故防止対策に取り組み 平成 26 年におこなった中間見直しでは新たな重点施策を追加するなど 対策を強化してきた さらに平成 29 年 6 月には 新たに 事業用自動車総合安全プラン2020
LED 道路 トンネル照明の設置に関する補完資料 Ⅰ LED 道路照明 ( 連続照明 ) の設置について 道路照明のうち連続照明の設計については 道路照明施設設置基準 同解説に基づき 性能指標 ( 規定値 ) 及び推奨値 ( 以下 性能指標等 という ) から所定の計算方法により設置間隔等を算出し
 の設置について 道路照明のうち連続照明の設計については 道路照明施設設置基準 同解説に基づき 性能指標 ( 規定値 ) 及び推奨値 ( 以下 性能指標等 という ) から所定の計算方法により設置間隔等を算出し") LED 道路 トンネル照明の設置に関する補完資料 Ⅰ LED 道路照明 ( 連続照明 ) の設置について 道路照明のうち連続照明の設計については 道路照明施設設置基準 同解説に基づき 性能指標 ( 規定値 ) 及び推奨値 ( 以下 性能指標等 という ) から所定の計算方法により設置間隔等を算出し 経済性等も勘案して照明施設を決定している しかしながら LED 照明の場合既存の照明灯具のように規格化されておらず
LED 道路 トンネル照明の設置に関する補完資料 Ⅰ LED 道路照明 ( 連続照明 ) の設置について 道路照明のうち連続照明の設計については 道路照明施設設置基準 同解説に基づき 性能指標 ( 規定値 ) 及び推奨値 ( 以下 性能指標等 という ) から所定の計算方法により設置間隔等を算出し 経済性等も勘案して照明施設を決定している しかしながら LED 照明の場合既存の照明灯具のように規格化されておらず
6-2- 応ネットワークセキュリティに関する知識 1 独立行政法人情報処理推進機構
 6-2- 応ネットワークセキュリティに関する知識 1 6-2. ネットワークセキュリティに関する知識 OSS 動作環境におけるセキュリティリスク それに対応するセキュリ ティ要件とその機能 構成に関して 実際の開発 運用の際に必要な Ⅰ. 概要 管理知識 手法の種類と特徴 内容を理解する 特に Linux サーバ による実務の手順に即して ネットワークセキュリティを確保するため の手順を学ぶ Ⅱ.
6-2- 応ネットワークセキュリティに関する知識 1 6-2. ネットワークセキュリティに関する知識 OSS 動作環境におけるセキュリティリスク それに対応するセキュリ ティ要件とその機能 構成に関して 実際の開発 運用の際に必要な Ⅰ. 概要 管理知識 手法の種類と特徴 内容を理解する 特に Linux サーバ による実務の手順に即して ネットワークセキュリティを確保するため の手順を学ぶ Ⅱ.
Microsoft PowerPoint - 口頭発表_折り畳み自転車
 1 公道走行を再現した振動試験による折り畳み自転車の破損状況 ~ 公道での繰り返し走行を再現した結果 ~ 2 公道走行を想定した試験用路面について 九州支所製品安全技術課清水寛治 目次 1. 折り畳み自転車のフレームはどのように破損するのか公道の走行振動を再現する自転車用ロードシミュレータについて繰り返し走行を想定した折り畳み自転車の破損部の特徴 ~ 公道による振動を繰り返し再現した結果 ~ 2.
1 公道走行を再現した振動試験による折り畳み自転車の破損状況 ~ 公道での繰り返し走行を再現した結果 ~ 2 公道走行を想定した試験用路面について 九州支所製品安全技術課清水寛治 目次 1. 折り畳み自転車のフレームはどのように破損するのか公道の走行振動を再現する自転車用ロードシミュレータについて繰り返し走行を想定した折り畳み自転車の破損部の特徴 ~ 公道による振動を繰り返し再現した結果 ~ 2.
AI 人物検索サービス Takumi Eyes 監視カメラ映像から特定の人物をリアルタイムに追跡 ~ 2018 年 10 月 4 日 NTTコミュニケーションズ株式会社 アプリケーション & コンテンツサービス部 AI 推進室 宮原拓磨 Copyright NTT Communications Co
 AI 人物検索サービス Takumi Eyes 監視カメラ映像から特定の人物をリアルタイムに追跡 ~ 2018 年 10 月 4 日 NTTコミュニケーションズ株式会社 アプリケーション & コンテンツサービス部 AI 推進室 宮原拓磨 NTT コミュニケーションズといえば ネットワーク 電話 クラウド データセンター etc 2 実は NTT コミュニケーションズ AI もやっています 3 NTT
AI 人物検索サービス Takumi Eyes 監視カメラ映像から特定の人物をリアルタイムに追跡 ~ 2018 年 10 月 4 日 NTTコミュニケーションズ株式会社 アプリケーション & コンテンツサービス部 AI 推進室 宮原拓磨 NTT コミュニケーションズといえば ネットワーク 電話 クラウド データセンター etc 2 実は NTT コミュニケーションズ AI もやっています 3 NTT
スマートフォン利用が 自動車運転に与える影響について
 自動車運転中のスマートフォン利用実態の把握とテキスト入力が運転挙動に及ぼす影響の定量的分析 リスク工学グループ演習第 9 班 山本智基中川紗菜美佐藤祥路 アドバイザー教員 : 伊藤誠 1 発表の流れ 01 研究の背景 目的 02 研究の流れ 位置づけ 03 運転中のスマートフォン利用実態把握 04 シミュレーション準備 測定方法 05 実験結果 考察 06 まとめ 背景 目的 4 背景 図 主な情報通信機器の世帯保有状況
自動車運転中のスマートフォン利用実態の把握とテキスト入力が運転挙動に及ぼす影響の定量的分析 リスク工学グループ演習第 9 班 山本智基中川紗菜美佐藤祥路 アドバイザー教員 : 伊藤誠 1 発表の流れ 01 研究の背景 目的 02 研究の流れ 位置づけ 03 運転中のスマートフォン利用実態把握 04 シミュレーション準備 測定方法 05 実験結果 考察 06 まとめ 背景 目的 4 背景 図 主な情報通信機器の世帯保有状況
Microsoft PowerPoint - pr_12_template-bs.pptx
 12 回パターン検出と画像特徴 テンプレートマッチング 領域分割 画像特徴 テンプレート マッチング 1 テンプレートマッチング ( 図形 画像などの ) 型照合 Template Matching テンプレートと呼ばれる小さな一部の画像領域と同じパターンが画像全体の中に存在するかどうかを調べる方法 画像内にある対象物体の位置検出 物体数のカウント 物体移動の検出などに使われる テンプレートマッチングの計算
12 回パターン検出と画像特徴 テンプレートマッチング 領域分割 画像特徴 テンプレート マッチング 1 テンプレートマッチング ( 図形 画像などの ) 型照合 Template Matching テンプレートと呼ばれる小さな一部の画像領域と同じパターンが画像全体の中に存在するかどうかを調べる方法 画像内にある対象物体の位置検出 物体数のカウント 物体移動の検出などに使われる テンプレートマッチングの計算
【資料8】車両安全対策の事後効果評価rev4
 平成 28 年度第 2 回車両安全対策検討会平成 28 年 12 月 9 日 安全 - 資料 -8 車両安全対策の事後効果評価 背景 目的 平成 23 年の交通政策審議会報告書において交通事故死者数削減目標 ( 平成 32 年度までに平成 22 年比で車両安全対策により 1,000 人削減 ) が設定された 中間年である平成 27 年度の調査結果では 735 人の削減効果と試算された 平成 32 年の目標に向けた達成状況について検証するため
平成 28 年度第 2 回車両安全対策検討会平成 28 年 12 月 9 日 安全 - 資料 -8 車両安全対策の事後効果評価 背景 目的 平成 23 年の交通政策審議会報告書において交通事故死者数削減目標 ( 平成 32 年度までに平成 22 年比で車両安全対策により 1,000 人削減 ) が設定された 中間年である平成 27 年度の調査結果では 735 人の削減効果と試算された 平成 32 年の目標に向けた達成状況について検証するため
J I S J A S O 廃止提案書 1. 対象規格 JASO M 304:02 ( 自動車用発泡体 ) 2. 廃止の背景と理由この規格は自動車用の断熱 防音 防振及びクッション用材料の性能 試験方法を標準化する趣旨で 1969 年に制定され 以後 4 回の改正が行われた なお 本年度の定期見直し
 2. 廃止の背景と理由この規格は自動車用の断熱 防音 防振及びクッション用材料の性能 試験方法を標準化する趣旨で 1969 年に制定され 以後 4 回の改正が行われた なお 本年度の定期見直し") 1. 対象規格 JASO M 304:02 ( 自動車用発泡体 ) 2. 廃止の背景と理由この規格は自動車用の断熱 防音 防振及びクッション用材料の性能 試験方法を標準化する趣旨で 1969 年に制定され 以後 4 回の改正が行われた なお 本年度の定期見直しにおいて この規格の維持要否を確認した結果 現在は各社個別の社内規定での運用 または 2004 年に制定された JIS K6400-1~-8(
1. 対象規格 JASO M 304:02 ( 自動車用発泡体 ) 2. 廃止の背景と理由この規格は自動車用の断熱 防音 防振及びクッション用材料の性能 試験方法を標準化する趣旨で 1969 年に制定され 以後 4 回の改正が行われた なお 本年度の定期見直しにおいて この規格の維持要否を確認した結果 現在は各社個別の社内規定での運用 または 2004 年に制定された JIS K6400-1~-8(
1 趣旨このガイドラインは 日本国内の公道 ( 道路交通法 ( 昭和 35 年法律第 105 号 ) 第 2 条第 1 項第 1 号に規定する 道路 をいう 以下同じ ) において 自動走行システム ( 加速 操舵 制動のうち複数の操作を一度に行い 又はその全てを行うシステムをいう 以下同じ ) を
 第 2 条第 1 項第 1 号に規定する 道路 をいう 以下同じ ) において 自動走行システム ( 加速 操舵 制動のうち複数の操作を一度に行い 又はその全てを行うシステムをいう 以下同じ ) を") 自動走行システムに関する公道実証実験のためのガイドライン 平成 28 年 5 月 警察庁 1 趣旨このガイドラインは 日本国内の公道 ( 道路交通法 ( 昭和 35 年法律第 105 号 ) 第 2 条第 1 項第 1 号に規定する 道路 をいう 以下同じ ) において 自動走行システム ( 加速 操舵 制動のうち複数の操作を一度に行い 又はその全てを行うシステムをいう 以下同じ ) を用いて自動車を走行させる実証実験
自動走行システムに関する公道実証実験のためのガイドライン 平成 28 年 5 月 警察庁 1 趣旨このガイドラインは 日本国内の公道 ( 道路交通法 ( 昭和 35 年法律第 105 号 ) 第 2 条第 1 項第 1 号に規定する 道路 をいう 以下同じ ) において 自動走行システム ( 加速 操舵 制動のうち複数の操作を一度に行い 又はその全てを行うシステムをいう 以下同じ ) を用いて自動車を走行させる実証実験
全地連"次世代CALS"対応研究会 報告書
 4. GIS アプリケーションソフト 4.1 入手可能なソフト GIS アプリケーションソフトは, 大きく 2 区分することができる 1) 汎用 GIS ソフト 2) 管理 支援ソフト汎用 GIS ソフトは, ある目的に対して拡張機能を利用して GIS システムを開発することができる 一方管理 支援ソフトは, ある1つの目的に対して開発されたソフトであり, ユーザーがデータを入力することによりすぐに使用できる反面拡張性が少ない
4. GIS アプリケーションソフト 4.1 入手可能なソフト GIS アプリケーションソフトは, 大きく 2 区分することができる 1) 汎用 GIS ソフト 2) 管理 支援ソフト汎用 GIS ソフトは, ある目的に対して拡張機能を利用して GIS システムを開発することができる 一方管理 支援ソフトは, ある1つの目的に対して開発されたソフトであり, ユーザーがデータを入力することによりすぐに使用できる反面拡張性が少ない
<4D F736F F F696E74202D E838B93B E907D8BA689EF82CC8EE E B8CDD8AB B83685D>
 東大 CSISi/ITS Japan シンポジウム Ⅱ. 次世代デジタル道路情報に関するセッション デジタル道路地図協会における取組 Ⅰ. Ⅰ. 高度 DRM-DBの検討 Ⅱ. 方式テーブルの概要 2010 年 7 月 27 日 ( 財 ) 日本デジタル道路地図協会 1 検討内容 2 検討会のねらいと検討経緯 高度デジタル道路情報対応検討会 を開催 (H19 年度 ~) して検討 1 自動車 / カーナビの
東大 CSISi/ITS Japan シンポジウム Ⅱ. 次世代デジタル道路情報に関するセッション デジタル道路地図協会における取組 Ⅰ. Ⅰ. 高度 DRM-DBの検討 Ⅱ. 方式テーブルの概要 2010 年 7 月 27 日 ( 財 ) 日本デジタル道路地図協会 1 検討内容 2 検討会のねらいと検討経緯 高度デジタル道路情報対応検討会 を開催 (H19 年度 ~) して検討 1 自動車 / カーナビの
屋内 3 次元 測位 + 地図 総合技術開発 現状 屋内 3 次元測位統一的な測位手法 情報交換手順がなく 共通の位置情報基盤が効率的に整備されない 技術開発 屋内外のシームレス測位の実用化 (1) 都市部での衛星測位の適用範囲拡大 (2) パブリックタグ 屋内測位の標準仕様策定 効果 3 次元屋内
 都市部での衛星測位の適用範囲拡大 (2) パブリックタグ 屋内測位の標準仕様策定 効果 3 次元屋内") 資料 4 国土交通省総合技術開発プロジェクト 3 次元地理空間情報を活用した安全 安心 快適な社会実現のための技術開発プロジェクト概要 平成 30 年 3 月 Ministry of Land, Infrastructure, Transport and Tourism Geospatial Information Authority of Japan 屋内 3 次元 測位 + 地図 総合技術開発
資料 4 国土交通省総合技術開発プロジェクト 3 次元地理空間情報を活用した安全 安心 快適な社会実現のための技術開発プロジェクト概要 平成 30 年 3 月 Ministry of Land, Infrastructure, Transport and Tourism Geospatial Information Authority of Japan 屋内 3 次元 測位 + 地図 総合技術開発
Microsoft PowerPoint - 2_「ゾーン30」の推進状況について
 ゾーン 3 の推進状況について 1 ゾーン3 の概要 P 1 2 ゾーン3 の経緯 P 2 3 整備状況 P 5 4 整備効果 P 7 5 効果的な整備事例 P11 6 今後の取組 P14 平成 29 年 12 月 7 日警察庁交通局 1 ゾーン 3 の概要 生活道路における歩行者等の安全な通行を確保することを目的として 区域 ( ゾーン ) を定めて最高速度 3km/hの速度規制を実施するとともに
ゾーン 3 の推進状況について 1 ゾーン3 の概要 P 1 2 ゾーン3 の経緯 P 2 3 整備状況 P 5 4 整備効果 P 7 5 効果的な整備事例 P11 6 今後の取組 P14 平成 29 年 12 月 7 日警察庁交通局 1 ゾーン 3 の概要 生活道路における歩行者等の安全な通行を確保することを目的として 区域 ( ゾーン ) を定めて最高速度 3km/hの速度規制を実施するとともに
ドライブレコーダ協議会 (1) ipadアプリhazardtouchの訓練効果 (2) DR 映像を利用した運転評価の可能性 2012/11/02 島崎敢早稲田大学人間科学学術院 中村愛早稲田大学大学院人間科学研究科
 ipadアプリhazardtouchの訓練効果 (2) DR 映像を利用した運転評価の可能性 2012/11/02 島崎敢早稲田大学人間科学学術院 中村愛早稲田大学大学院人間科学研究科") ドライブレコーダ協議会 (1) ipadアプリhazardtouchの訓練効果 (2) DR 映像を利用した運転評価の可能性 2012/11/02 島崎敢早稲田大学人間科学学術院 中村愛早稲田大学大学院人間科学研究科 ドライブレコーダ活用の未来 交通事故処理 これまで主に交通事故処理用途で用いられてきたドラレコ映像を, ドライバ教育と運転評価に用いようという研究です. ドラレコに新たな 2 つの柱を追加します.
ドライブレコーダ協議会 (1) ipadアプリhazardtouchの訓練効果 (2) DR 映像を利用した運転評価の可能性 2012/11/02 島崎敢早稲田大学人間科学学術院 中村愛早稲田大学大学院人間科学研究科 ドライブレコーダ活用の未来 交通事故処理 これまで主に交通事故処理用途で用いられてきたドラレコ映像を, ドライバ教育と運転評価に用いようという研究です. ドラレコに新たな 2 つの柱を追加します.
コンテンツセントリックネットワーク技術を用いた ストリームデータ配信システムの設計と実装
 コンテンツセントリックネットワークにおけるストリームデータ配信機構の実装 川崎賢弥, 阿多信吾, 村田正幸 大阪大学大学院情報科学研究科 大阪市立大学大学院工学研究科 2 発表内容 研究背景 研究目的 ストリームデータ配信機構の設計 ストリームデータのモデル化 コンテンツの名前構造 ストリームデータの要求とフロー制御 ストリームデータ配信機構の実装 動作デモンストレーション 3 コンテンツセントリックネットワーク
コンテンツセントリックネットワークにおけるストリームデータ配信機構の実装 川崎賢弥, 阿多信吾, 村田正幸 大阪大学大学院情報科学研究科 大阪市立大学大学院工学研究科 2 発表内容 研究背景 研究目的 ストリームデータ配信機構の設計 ストリームデータのモデル化 コンテンツの名前構造 ストリームデータの要求とフロー制御 ストリームデータ配信機構の実装 動作デモンストレーション 3 コンテンツセントリックネットワーク
Microsoft PowerPoint - 04_01_text_UML_03-Sequence-Com.ppt
 システム設計 (1) シーケンス図 コミュニケーション図等 1 今日の演習のねらい 2 今日の演習のねらい 情報システムを構成するオブジェクトの考え方を理解す る 業務プロセスでのオブジェクトの相互作用を考える シーケンス図 コミュニケーション図を作成する 前回までの講義システム開発の上流工程として 要求仕様を確定パソコンを注文するまでのユースケースユースケースから画面の検討イベントフロー アクティビティ図
システム設計 (1) シーケンス図 コミュニケーション図等 1 今日の演習のねらい 2 今日の演習のねらい 情報システムを構成するオブジェクトの考え方を理解す る 業務プロセスでのオブジェクトの相互作用を考える シーケンス図 コミュニケーション図を作成する 前回までの講義システム開発の上流工程として 要求仕様を確定パソコンを注文するまでのユースケースユースケースから画面の検討イベントフロー アクティビティ図
画像の有 性とは何か? > 画像の利 的を明確にし その 的を確実に達成することができるか? という観点から 本来のビデオ監視カメラの性能を伝える > 解像度や照度など 単に数字のみで測れるものではない > 途と設置環境に応じて適切なカメラを 極めることが重要
 GDSF Japan 2014 7 つのシーンで る 画像の有 性 解説 アクシスコミュニケーションズ株式会社 画像の有 性とは何か? > 画像の利 的を明確にし その 的を確実に達成することができるか? という観点から 本来のビデオ監視カメラの性能を伝える > 解像度や照度など 単に数字のみで測れるものではない > 途と設置環境に応じて適切なカメラを 極めることが重要 シーン別考察 : 対象の状況から考える
GDSF Japan 2014 7 つのシーンで る 画像の有 性 解説 アクシスコミュニケーションズ株式会社 画像の有 性とは何か? > 画像の利 的を明確にし その 的を確実に達成することができるか? という観点から 本来のビデオ監視カメラの性能を伝える > 解像度や照度など 単に数字のみで測れるものではない > 途と設置環境に応じて適切なカメラを 極めることが重要 シーン別考察 : 対象の状況から考える
本事業の意義 実効性 ( 見直しの必要性 ) 医療情報データベース基盤整備事業 ( 平成 23 年度 ~ 10 協力医療機関 ) 日本再興戦略 ( 平成 25 年 6 月 14 日 ) 医療 介護情報の電子化の促進 医薬品の副作用データベースシステムについて データ収集の拠点となる病院の拡充や地域連
 医療情報データベース基盤整備事業 ( 平成 23 年度 ~ 10 協力医療機関 ) 日本再興戦略 ( 平成 25 年 6 月 14 日 ) 医療 介護情報の電子化の促進 医薬品の副作用データベースシステムについて データ収集の拠点となる病院の拡充や地域連") 資料 3 検討について ( 案 ) 1 本事業の意義 実効性 ( 見直しの必要性 ) 医療情報データベース基盤整備事業 ( 平成 23 年度 ~ 10 協力医療機関 ) 日本再興戦略 ( 平成 25 年 6 月 14 日 ) 医療 介護情報の電子化の促進 医薬品の副作用データベースシステムについて データ収集の拠点となる病院の拡充や地域連携の推進を図ることにより 利活用できる十分な情報を確保し 医薬品の有効性
資料 3 検討について ( 案 ) 1 本事業の意義 実効性 ( 見直しの必要性 ) 医療情報データベース基盤整備事業 ( 平成 23 年度 ~ 10 協力医療機関 ) 日本再興戦略 ( 平成 25 年 6 月 14 日 ) 医療 介護情報の電子化の促進 医薬品の副作用データベースシステムについて データ収集の拠点となる病院の拡充や地域連携の推進を図ることにより 利活用できる十分な情報を確保し 医薬品の有効性
dji.htm - 無題 <標準モード>
 Mavic Air MAVIC PRO 主な特長 主な特長 32MPスフィアパノラマ折りたたみ設計 & 優れた携帯性 3 軸ジンバル & 4Kカメラ 3 方向障害物検知スマートキャプチャー最大飛行時間 21 分高度操縦支援システム (APAS) 折りたたみ式 4Kカメラ RAWフォーマット写真 7km 動画伝送最大 27 分の飛行時間 ハイライト 寸法 168 83 49 mm (L W H) 168
Mavic Air MAVIC PRO 主な特長 主な特長 32MPスフィアパノラマ折りたたみ設計 & 優れた携帯性 3 軸ジンバル & 4Kカメラ 3 方向障害物検知スマートキャプチャー最大飛行時間 21 分高度操縦支援システム (APAS) 折りたたみ式 4Kカメラ RAWフォーマット写真 7km 動画伝送最大 27 分の飛行時間 ハイライト 寸法 168 83 49 mm (L W H) 168
第 2 章横断面の構成 2-1 総則 道路の横断面の基本的な考え方 必要とされる交通機能や空間機能に応じて, 構成要素の組合せ と 総幅員 総幅員 双方の観点から検討 必要とされる道路の機能の設定 通行機能 交通機能アクセス機能 滞留機能 環境空間 防災空間 空間機能 収容空間 市街地形成 横断面構
 2-1 総則 道路の横断面の基本的な考え方 必要とされる交通機能や空間機能に応じて, 構成要素の組合せ と 総幅員 総幅員 双方の観点から検討 必要とされる道路の機能の設定 通行機能 交通機能アクセス機能 滞留機能 環境空間 防災空間 空間機能 収容空間 市街地形成 横断面構成要素とその幅員の検討ネットワークや沿道状況に応交通状況にじたサーヒ ス提供応じて設定を考慮して設定 横断面構成要素の組合せ
2-1 総則 道路の横断面の基本的な考え方 必要とされる交通機能や空間機能に応じて, 構成要素の組合せ と 総幅員 総幅員 双方の観点から検討 必要とされる道路の機能の設定 通行機能 交通機能アクセス機能 滞留機能 環境空間 防災空間 空間機能 収容空間 市街地形成 横断面構成要素とその幅員の検討ネットワークや沿道状況に応交通状況にじたサーヒ ス提供応じて設定を考慮して設定 横断面構成要素の組合せ
ドライビングシミュレータ用実写映像再生ソフトウェア Real Video Drive Player
 東陽テクニカ技術研究所 岩根研究所 共同開発 ドライビングシミュレータ用実写映像再生ソフトウェア Real Video Drive Player Real Video Drive Player Real Video Drive Playerは専用の360 カメラで撮影した走行映像を ステアリング操作やアクセル ブレーキ操作に連動させて再生できるソフトウェアです 専用の動画撮影 加工サービスは任意の道路で行うことができます
東陽テクニカ技術研究所 岩根研究所 共同開発 ドライビングシミュレータ用実写映像再生ソフトウェア Real Video Drive Player Real Video Drive Player Real Video Drive Playerは専用の360 カメラで撮影した走行映像を ステアリング操作やアクセル ブレーキ操作に連動させて再生できるソフトウェアです 専用の動画撮影 加工サービスは任意の道路で行うことができます
Microsoft PowerPoint - 技術概要・有効性資料
 情報分析 意思決定 援システム 更新更新 概要 地震直後に 可能な地震動分布に基づく施設被害推測情報 CCTV カメラ画像や施設点検情報 衛星 SAR 航空機 SAR の画像判読による被災情報等を統合 更新する 効果 災害対応従事者の意思決定を 援 災害発 初期推測情報の反映 反映情報 発 した地震のマグニチュード 位置情報等 インフラ施設の被害推測 CCTV カメラ画像等の情報の反映 反映情報 CCTV
情報分析 意思決定 援システム 更新更新 概要 地震直後に 可能な地震動分布に基づく施設被害推測情報 CCTV カメラ画像や施設点検情報 衛星 SAR 航空機 SAR の画像判読による被災情報等を統合 更新する 効果 災害対応従事者の意思決定を 援 災害発 初期推測情報の反映 反映情報 発 した地震のマグニチュード 位置情報等 インフラ施設の被害推測 CCTV カメラ画像等の情報の反映 反映情報 CCTV
PowerPoint Presentation
 参考資料 3 国内外における自動運転の取り組み概要 1. 単体走行の事例 2. 追随走行 隊列走行の事例 3. 専用道路の事例 1 1. 単体走行の事例 研究開発主体 研究開発期間 1DARPA 主催の技術コンテスト DARPA ( 米国国防総省国防高等研究計画局 ) グランドチャレンジ :2004 年 2005 年アーバンチャレンジ :2007 年 2Google の自動運転への取り組み Google
参考資料 3 国内外における自動運転の取り組み概要 1. 単体走行の事例 2. 追随走行 隊列走行の事例 3. 専用道路の事例 1 1. 単体走行の事例 研究開発主体 研究開発期間 1DARPA 主催の技術コンテスト DARPA ( 米国国防総省国防高等研究計画局 ) グランドチャレンジ :2004 年 2005 年アーバンチャレンジ :2007 年 2Google の自動運転への取り組み Google
国交省様向け Web版道路ビデオGISのご紹介
 国土交通省様向け道路ビデオ GIS Web 版道路ビデオ GIS とは お手元に現場を! 全周囲 CV 映像 地図 / 図面 WebGIS GIS DB 現実世界をそのままキャプチャー 属性情報 上下カメラ 2 台の全周囲 CV 映像による道路現況確認システム 全周囲 CV 映像と地図 / 図面 属性情報がリンクした WebGIS システム 道路及び周辺構造物を電子化して一元管理する DB システム
国土交通省様向け道路ビデオ GIS Web 版道路ビデオ GIS とは お手元に現場を! 全周囲 CV 映像 地図 / 図面 WebGIS GIS DB 現実世界をそのままキャプチャー 属性情報 上下カメラ 2 台の全周囲 CV 映像による道路現況確認システム 全周囲 CV 映像と地図 / 図面 属性情報がリンクした WebGIS システム 道路及び周辺構造物を電子化して一元管理する DB システム
【NanotechJapan Bulletin】10-9 INNOVATIONの最先端<第4回>
 企画特集 10-9 INNOVATION の最先端 Life & Green Nanotechnology が培う新技術 < 第 4 回 > プリンテッドエレクトロニクス時代実現に向けた材料 プロセス基盤技術の開拓 NEDO プロジェクトプロジェクトリーダー東京 学教授染 隆夫 に聞く 図6 4 3 解像度を変えた TFT アレイによる電子ペーパー 提供 凸版印刷 株 大面積圧力センサの開発
企画特集 10-9 INNOVATION の最先端 Life & Green Nanotechnology が培う新技術 < 第 4 回 > プリンテッドエレクトロニクス時代実現に向けた材料 プロセス基盤技術の開拓 NEDO プロジェクトプロジェクトリーダー東京 学教授染 隆夫 に聞く 図6 4 3 解像度を変えた TFT アレイによる電子ペーパー 提供 凸版印刷 株 大面積圧力センサの開発
1-1 交通死亡事故全体の推移 10 年前と比較し の死者は 40.7% 65 歳以上の死者は 24.0% それぞれ減少 死者に占める 65 歳以上の割合は 24 年以降増加 27 年中死者の半数以上 (54.6%) を 65 歳以上が占める 10 年前と比較し 人口当たり死者数は 65 歳以上のい
 を 65 歳以上が占める 10 年前と比較し 人口当たり死者数は 65 歳以上のい") 平成 27 年における交通死亡事故の特徴 について 平成 28 年 3 月 3 日警察庁交通局 1-1 交通死亡事故全体の推移 10 年前と比較し の死者は 40.7% 65 歳以上の死者は 24.0% それぞれ減少 死者に占める 65 歳以上の割合は 24 年以降増加 27 年中死者の半数以上 (54.6%) を 65 歳以上が占める 10 年前と比較し 人口当たり死者数は 65 歳以上のいずれについても
平成 27 年における交通死亡事故の特徴 について 平成 28 年 3 月 3 日警察庁交通局 1-1 交通死亡事故全体の推移 10 年前と比較し の死者は 40.7% 65 歳以上の死者は 24.0% それぞれ減少 死者に占める 65 歳以上の割合は 24 年以降増加 27 年中死者の半数以上 (54.6%) を 65 歳以上が占める 10 年前と比較し 人口当たり死者数は 65 歳以上のいずれについても
1 基本的な整備内容 道路標識 専用通行帯 (327 の 4) の設置 ( 架空標識の場合の例 ) 自 転 車 ピクトグラム ( 自転車マーク等 ) の設置 始点部および中間部 道路標示 専用通行帯 (109 の 6) の設置 ( 過度な表示は行わない ) 専 用 道路標示 車両通行帯 (109)
 の設置 ( 架空標識の場合の例 ) 自 転 車 ピクトグラム ( 自転車マーク等 ) の設置 始点部および中間部 道路標示 専用通行帯 (109 の 6) の設置 ( 過度な表示は行わない ) 専 用 道路標示 車両通行帯 (109)") 第 3 整備ガイドライン 本章では 安全で快適な自転車利用環境創出ガイドライン ( 国土交通省道路局 警察庁交通 局 ) を踏まえ 自転車走行空間の整備にあたって留意する事項などについて定めます 3.1 単路部における整備の考え方 (1) 自転車専用通行帯自転車専用通行帯の整備にあたっては 交通規制に必要な道路標識や道路標示のほか 自動車ドライバーに対して自転車専用の通行帯であることが分かるよう法定外の路面表示や舗装のカラー化を行います
第 3 整備ガイドライン 本章では 安全で快適な自転車利用環境創出ガイドライン ( 国土交通省道路局 警察庁交通 局 ) を踏まえ 自転車走行空間の整備にあたって留意する事項などについて定めます 3.1 単路部における整備の考え方 (1) 自転車専用通行帯自転車専用通行帯の整備にあたっては 交通規制に必要な道路標識や道路標示のほか 自動車ドライバーに対して自転車専用の通行帯であることが分かるよう法定外の路面表示や舗装のカラー化を行います
Microsoft PowerPoint - H24全国大会_発表資料.ppt [互換モード]
![Microsoft PowerPoint - H24全国大会_発表資料.ppt [互換モード]](/thumbs/94/118755799.jpg "Microsoft PowerPoint - H24全国大会_発表資料.ppt [互換モード]") 第 47 回地盤工学研究発表会 モアレを利用した変位計測システムの開発 ( 計測原理と画像解析 ) 平成 24 年 7 月 15 日 山形設計 ( 株 ) 技術部長堀内宏信 1. はじめに ひびわれ計測の必要性 高度成長期に建設された社会基盤の多くが老朽化を迎え, また近年多発している地震などの災害により, 何らかの損傷を有する構造物は膨大な数に上ると想定される 老朽化による劣化や外的要因による損傷などが生じた構造物の適切な維持管理による健全性の確保と長寿命化のためには,
第 47 回地盤工学研究発表会 モアレを利用した変位計測システムの開発 ( 計測原理と画像解析 ) 平成 24 年 7 月 15 日 山形設計 ( 株 ) 技術部長堀内宏信 1. はじめに ひびわれ計測の必要性 高度成長期に建設された社会基盤の多くが老朽化を迎え, また近年多発している地震などの災害により, 何らかの損傷を有する構造物は膨大な数に上ると想定される 老朽化による劣化や外的要因による損傷などが生じた構造物の適切な維持管理による健全性の確保と長寿命化のためには,
人間の視野と同等の広視野画像を取得・提示する簡易な装置
 人間の視野と同等の広視野画像 を取得 提示する簡易な装置 公立はこだて未来大学 システム情報科学部複雑系知能学科 准教授鈴木昭二 研究背景 2 画像情報は有用である 多様な情報 ( 明るさ, 色, 形, 動きなど ) 見ればわかる しかし, カメラの画角は狭い 見える範囲が限定される 全体像を把握しくい 移動する物体を見失いやすい 広視野画像の取得 ( 従来方法 ) 3 多数のカメラを搭載 多数の画像を合成し高解像度の画像取得
人間の視野と同等の広視野画像 を取得 提示する簡易な装置 公立はこだて未来大学 システム情報科学部複雑系知能学科 准教授鈴木昭二 研究背景 2 画像情報は有用である 多様な情報 ( 明るさ, 色, 形, 動きなど ) 見ればわかる しかし, カメラの画角は狭い 見える範囲が限定される 全体像を把握しくい 移動する物体を見失いやすい 広視野画像の取得 ( 従来方法 ) 3 多数のカメラを搭載 多数の画像を合成し高解像度の画像取得
SIP自動走行システム推進委員会
 SIP( 戦略的イノベーション創造プログラム ) 自動走行システム 次世代都市交通システム正着制御に係るセンシング技術に関する調査検討 先進モビリティ ( 株 ) 1 検討項目について 公募項目 実施内容 実施方法 1 バス停からの相対位置検出と経路特定 1) 可視光外の透明反射する塗料やシート等による位置 経路特定 2) 路面上に恣意的に設けたランダムパターンの学習による位置 経路特定 3) 路面汚れやタイヤ痕等の自然発生ランダムパターンの学習による位置
SIP( 戦略的イノベーション創造プログラム ) 自動走行システム 次世代都市交通システム正着制御に係るセンシング技術に関する調査検討 先進モビリティ ( 株 ) 1 検討項目について 公募項目 実施内容 実施方法 1 バス停からの相対位置検出と経路特定 1) 可視光外の透明反射する塗料やシート等による位置 経路特定 2) 路面上に恣意的に設けたランダムパターンの学習による位置 経路特定 3) 路面汚れやタイヤ痕等の自然発生ランダムパターンの学習による位置
P1.eps
 昇降 ピット式 UP-G /KP-GS 3段式 2段式 より静 か に スピー ディに 油 圧 駆 動 方 式 に より 快 適 な 入 出 庫を 実 現 低騒音で夜間も安心 5連基 6連基といった連続設置に対応 昇降動作が静かな油圧駆動方式を採用 5連基 6連基と拡張できますので 中規模から 夜間でも静かに入出庫できます 大規模の駐車場まで 幅広いニーズにお応えできます 大 電動駆動 豊富なバリエーション
昇降 ピット式 UP-G /KP-GS 3段式 2段式 より静 か に スピー ディに 油 圧 駆 動 方 式 に より 快 適 な 入 出 庫を 実 現 低騒音で夜間も安心 5連基 6連基といった連続設置に対応 昇降動作が静かな油圧駆動方式を採用 5連基 6連基と拡張できますので 中規模から 夜間でも静かに入出庫できます 大規模の駐車場まで 幅広いニーズにお応えできます 大 電動駆動 豊富なバリエーション
コンピュータグラフィックス第8回
 コンピュータグラフィックス 第 8 回 レンダリング技法 1 ~ 基礎と概要, 隠面消去 ~ 理工学部 兼任講師藤堂英樹 レポート提出状況 課題 1 の選択が多い (STAND BY ME ドラえもん ) 体験演習型 ( 課題 3, 課題 4) の選択も多い 内訳 課題 1 課題 2 課題 3 課題 4 課題 5 2014/11/24 コンピュータグラフィックス 2 次回レポートの体験演習型 メタセコイア,
コンピュータグラフィックス 第 8 回 レンダリング技法 1 ~ 基礎と概要, 隠面消去 ~ 理工学部 兼任講師藤堂英樹 レポート提出状況 課題 1 の選択が多い (STAND BY ME ドラえもん ) 体験演習型 ( 課題 3, 課題 4) の選択も多い 内訳 課題 1 課題 2 課題 3 課題 4 課題 5 2014/11/24 コンピュータグラフィックス 2 次回レポートの体験演習型 メタセコイア,
2019 年 1 月 18 日 インド共和国アーメダバード市における 日本で規格化され世界標準規格でもある UHF 帯 V2X 通信技術を応用した緊急車両優先システムの実証実験 の実施について 株式会社ゼロ サム 株式会社トヨタ IT 開発センター 0. サマリー 〇株式会社ゼロ サムと株式会社トヨ
 2019 年 1 月 18 日 インド共和国アーメダバード市における 日本で規格化され世界標準規格でもある UHF 帯 V2X 通信技術を応用した緊急車両優先システムの実証実験 の実施について 株式会社トヨタ IT 開発センター 0. サマリー 〇と株式会社トヨタ IT 開発センターは インド共和国グジャラート州アーメダバード市のリバーフロント地区において 日本国総務省 インド共和国アーメダバード市政府
2019 年 1 月 18 日 インド共和国アーメダバード市における 日本で規格化され世界標準規格でもある UHF 帯 V2X 通信技術を応用した緊急車両優先システムの実証実験 の実施について 株式会社トヨタ IT 開発センター 0. サマリー 〇と株式会社トヨタ IT 開発センターは インド共和国グジャラート州アーメダバード市のリバーフロント地区において 日本国総務省 インド共和国アーメダバード市政府
<4D F736F F F696E74202D F817993FA967B90BB8E8695A897AC817A89DD95A892C790D F6C30362E707074>
 - スマートフォン (Android ) 利用による - 貨物追跡システム ( 位置情報サービス ASP サービス DP2) 日本製紙物流株式会社 http://www.np-log.co.jp/ システム導入目的について 導入目的 自社 / 配車センターと車両 ( トラック ) との情報共有 システム導入時のユーザー要望について 1. 配送進捗状況 車両最新位置 をリアルタイムで把握したい ユーザーからの配送
- スマートフォン (Android ) 利用による - 貨物追跡システム ( 位置情報サービス ASP サービス DP2) 日本製紙物流株式会社 http://www.np-log.co.jp/ システム導入目的について 導入目的 自社 / 配車センターと車両 ( トラック ) との情報共有 システム導入時のユーザー要望について 1. 配送進捗状況 車両最新位置 をリアルタイムで把握したい ユーザーからの配送
<4D F736F F F696E74202D CC8ED48ED48AD492CA904D82CC8EE D918CF08FC88E9197BF816A2E B8CDD8AB B8
 資料 1-8 ASV における車車間通信の取り組みについて 国土交通省自動車交通局 技術安全部技術企画課 1 交通事故の現状と政府目標 < 交通事故の状況 > 平成 19 年死者数 5,744 人 平成 19 年死傷者数 1,040,189 人 < 政府目標 > ( 警察庁統計より ) 平成 15 年総理施政方針 2012 年までに 死者数を半減し 5000 人以下とする 第 8 次交通安全基本計画
資料 1-8 ASV における車車間通信の取り組みについて 国土交通省自動車交通局 技術安全部技術企画課 1 交通事故の現状と政府目標 < 交通事故の状況 > 平成 19 年死者数 5,744 人 平成 19 年死傷者数 1,040,189 人 < 政府目標 > ( 警察庁統計より ) 平成 15 年総理施政方針 2012 年までに 死者数を半減し 5000 人以下とする 第 8 次交通安全基本計画
PowerPoint プレゼンテーション
 Google アナリティクス 設定項目チェックリスト 株式会社マイティーエース福岡県福岡市中央区天神 3-9-33 KG 天神ビル2F TEL:092-737-8400 FAX:092-737-8401 Google アナリティクス設定の必要性 重要性 Google アナリティクスの設定は今すぐ見直すべき Google アナリティクスは無料で高機能なアクセス解析ツールですが導入しただけでは その性能の
Google アナリティクス 設定項目チェックリスト 株式会社マイティーエース福岡県福岡市中央区天神 3-9-33 KG 天神ビル2F TEL:092-737-8400 FAX:092-737-8401 Google アナリティクス設定の必要性 重要性 Google アナリティクスの設定は今すぐ見直すべき Google アナリティクスは無料で高機能なアクセス解析ツールですが導入しただけでは その性能の
スライド 1
 平成 22 年 6 月 11 日改定 ドライブレコーダ取扱補足資料 製品名 :CDR-180 ドライブレコーダ取り扱い補足資料をご利用の場合は 付属の取り扱い本書と併用してご利用ください 日本低炭素開発株式会社 初期本体機器の取付及びファームのソフト設定作業 初期設定 ファームとは CDR-180 本体機器のソフトを示します フロントガラス 両面テープで固定 手順 2 CDR-180 本体に SDHC
平成 22 年 6 月 11 日改定 ドライブレコーダ取扱補足資料 製品名 :CDR-180 ドライブレコーダ取り扱い補足資料をご利用の場合は 付属の取り扱い本書と併用してご利用ください 日本低炭素開発株式会社 初期本体機器の取付及びファームのソフト設定作業 初期設定 ファームとは CDR-180 本体機器のソフトを示します フロントガラス 両面テープで固定 手順 2 CDR-180 本体に SDHC
Pick-up プロダクツ プリズム分光方式ラインセンサカメラ用専用レンズとその応用 株式会社ブルービジョン 当社は プリズムを使用した 3CMOS/3CCD/4CMOS/4CCD ラインセンサカメラ用に最適設計した FA 用レンズを設計 製造する専門メーカである 当社のレンズシリーズはプリズムにて
 Pick-up プロダクツ プリズム分光方式ラインセンサカメラ用専用レンズとその応用 当社は プリズムを使用した 3CMOS/3CCD/4CMOS/4CCD ラインセンサカメラ用に最適設計した FA 用レンズを設計 製造する専門メーカである 当社のレンズシリーズはプリズムにて発生する軸上色収差 倍率色収差を抑えた光学設計を行い 焦点距離が異なったレンズを使用しても RGB 個々の焦点位置がレンズ間で同じ位置になるよう設計されている
Pick-up プロダクツ プリズム分光方式ラインセンサカメラ用専用レンズとその応用 当社は プリズムを使用した 3CMOS/3CCD/4CMOS/4CCD ラインセンサカメラ用に最適設計した FA 用レンズを設計 製造する専門メーカである 当社のレンズシリーズはプリズムにて発生する軸上色収差 倍率色収差を抑えた光学設計を行い 焦点距離が異なったレンズを使用しても RGB 個々の焦点位置がレンズ間で同じ位置になるよう設計されている
Raspberry Pi BF BF BF Raspberry Pi PC USB HDMI OS SD SD OS Raspberry Pi Model B MicroUSB MicroSD OS SD GPIO HDMI USB LAN Raspberry Pi MicroUSB MicroSD
 Raspberry Pi Arduino Arduino Raspberry Pi Arduino URL Raspberry Pi HDMI USB SD https://www.raspberrypi.org/ Python, Scratch Arduino PC USB https://www.arduino.cc/ Arduino SDK Processing Kinect for Windows,
Raspberry Pi Arduino Arduino Raspberry Pi Arduino URL Raspberry Pi HDMI USB SD https://www.raspberrypi.org/ Python, Scratch Arduino PC USB https://www.arduino.cc/ Arduino SDK Processing Kinect for Windows,
ITS とは 1 ITS の役割 ITS (Intelligent Transport Systemsys) 高度道路交通システム 人と道路と自動車の間で情報の受発信を行い 道路交通が抱える事故や渋滞 環境対策など 様々な課題を解決するためのシステムとして考えられました 常に最先端の情報通信や制御技
 高度道路交通システム 人と道路と自動車の間で情報の受発信を行い 道路交通が抱える事故や渋滞 環境対策など 様々な課題を解決するためのシステムとして考えられました 常に最先端の情報通信や制御技") 文部科学省委託事業 次世代自動車エキスパート養成教育プログラム開発事業 実証実験授業講座名 次世代自動車基礎地域版 社会における ITS の役割について 氏名 1 ITS とは 1 ITS の役割 ITS (Intelligent Transport Systemsys) 高度道路交通システム 人と道路と自動車の間で情報の受発信を行い 道路交通が抱える事故や渋滞 環境対策など 様々な課題を解決するためのシステムとして考えられました
文部科学省委託事業 次世代自動車エキスパート養成教育プログラム開発事業 実証実験授業講座名 次世代自動車基礎地域版 社会における ITS の役割について 氏名 1 ITS とは 1 ITS の役割 ITS (Intelligent Transport Systemsys) 高度道路交通システム 人と道路と自動車の間で情報の受発信を行い 道路交通が抱える事故や渋滞 環境対策など 様々な課題を解決するためのシステムとして考えられました
SD D1 HD 720p Full HD 1080p アナログCCTVと同等の配線距離を実現したフルHD同軸カメラシステム EX-SDI方式 長距離伝送対応モデル フルHDの映像を圧縮し 特性インピーダンス75Ωの同軸ケーブルで伝送する方式です HD-SDI方式よりも 同軸ケーブルを延長することが
 SD D1 HD 720p Full HD 1080p アナログCCTVと同等の配線距離を実現したフルHD同軸カメラシステム EX-SDI方式 長距離伝送対応モデル フルHDの映像を圧縮し 特性インピーダンス75Ωの同軸ケーブルで伝送する方式です HD-SDI方式よりも 同軸ケーブルを延長することが可能で HD-SDIリピーター無しで最長500m 1 の配線距離を実現します また 長距離伝送による画質の劣化も無くシャープな画像を提供します
SD D1 HD 720p Full HD 1080p アナログCCTVと同等の配線距離を実現したフルHD同軸カメラシステム EX-SDI方式 長距離伝送対応モデル フルHDの映像を圧縮し 特性インピーダンス75Ωの同軸ケーブルで伝送する方式です HD-SDI方式よりも 同軸ケーブルを延長することが可能で HD-SDIリピーター無しで最長500m 1 の配線距離を実現します また 長距離伝送による画質の劣化も無くシャープな画像を提供します
ソフト活用事例③自動Rawデータ管理システム
 ソフト活用事例 3 自動 Raw データ管理システム ACD/Labs NMR 無料講習会 & セミナー 2014 於 )2014.7.29 東京 /2014.7.31 大阪 富士通株式会社テクニカルコンピューティング ソリューション事業本部 HPC アプリケーション統括部 ACD/Spectrus をご選択頂いた理由 (NMR 領域 ) パワフルな解 析機能 ベンダーニュートラルな解析環境 直感的なインターフェース
ソフト活用事例 3 自動 Raw データ管理システム ACD/Labs NMR 無料講習会 & セミナー 2014 於 )2014.7.29 東京 /2014.7.31 大阪 富士通株式会社テクニカルコンピューティング ソリューション事業本部 HPC アプリケーション統括部 ACD/Spectrus をご選択頂いた理由 (NMR 領域 ) パワフルな解 析機能 ベンダーニュートラルな解析環境 直感的なインターフェース
智美塾 ゆもつよメソッドのアーキテクチャ
 ゆもつよメソッドのテスト要求分析とテストアーキテクチャ設計 JaSST13 東京智美塾 2013 年 1 月 30 日 湯本剛 ( 日本 HP) tsuyoshi.yumoto@hp.com ゆもつよ風テスト開発プロセス テスト計画 実現したい品質の具体的把握 テスト箇所の選択 テストの目的設定 テスト対象アイテム特定 テスト分析 テストタイプ特定 機能の整理 & 再分類 テスト条件となる仕様項目特定
ゆもつよメソッドのテスト要求分析とテストアーキテクチャ設計 JaSST13 東京智美塾 2013 年 1 月 30 日 湯本剛 ( 日本 HP) tsuyoshi.yumoto@hp.com ゆもつよ風テスト開発プロセス テスト計画 実現したい品質の具体的把握 テスト箇所の選択 テストの目的設定 テスト対象アイテム特定 テスト分析 テストタイプ特定 機能の整理 & 再分類 テスト条件となる仕様項目特定
OTデータとITデータの双方を統合的に分析可能な社会・産業インフラ分野向けのデータ分析基盤を提供開始
 2018 年 3 月 29 日 株式会社日立製作所 データと IT データの双方を統合的に分析可能な社会 産業インフラ分野向けのデータ分析基盤を提供開始 分析基盤を活用し 事前準備から分析までをトータルに支援するサービスを提供 株式会社日立製作所 ( 執行役社長兼 CEO: 東原敏昭 / 以下 日立 ) は このたび 機器やセンサーから得た多種多様な現場データ ( *1 データ ) のほか 各種業務システムなどのデータ
2018 年 3 月 29 日 株式会社日立製作所 データと IT データの双方を統合的に分析可能な社会 産業インフラ分野向けのデータ分析基盤を提供開始 分析基盤を活用し 事前準備から分析までをトータルに支援するサービスを提供 株式会社日立製作所 ( 執行役社長兼 CEO: 東原敏昭 / 以下 日立 ) は このたび 機器やセンサーから得た多種多様な現場データ ( *1 データ ) のほか 各種業務システムなどのデータ
不具合情報受付管理 DB 不具合情報対応情報要因 履歴登録 設備情報 不具合情報 対応情報 不具合 ( 履歴 ) 情報 機器仕様 納入情報 機器部品情報 関連資料 機器情報 交換部品情報 交換履歴 交換部品情報 保有部材管理 DB 保有部材管理 不具合情報 不具合先情報 不具合復旧情報 受付情報 対
 情報 機器仕様 納入情報 機器部品情報 関連資料 機器情報 交換部品情報 交換履歴 交換部品情報 保有部材管理 DB 保有部材管理 不具合情報 不具合先情報 不具合復旧情報 受付情報 対") 技術動向概要 設備情報管理システムによる高付加価値サービスの提供 鈴木昌也 Masaya Suzuki 深澤行夫 Yukio Fukasawa キーワード 現場点検, 試験作業の IT 自動化 帳票出力 作業支援情報 DB 情報 Webページ 携帯端末で 登録設備情報 登録編集 帳票データ 編集 承認 帳票印刷編集 文書ファイル図面 工号ファイル 技術資料 生産実績 品質記録 検査記録 不良報告 安全パトロール
技術動向概要 設備情報管理システムによる高付加価値サービスの提供 鈴木昌也 Masaya Suzuki 深澤行夫 Yukio Fukasawa キーワード 現場点検, 試験作業の IT 自動化 帳票出力 作業支援情報 DB 情報 Webページ 携帯端末で 登録設備情報 登録編集 帳票データ 編集 承認 帳票印刷編集 文書ファイル図面 工号ファイル 技術資料 生産実績 品質記録 検査記録 不良報告 安全パトロール
0 21 カラー反射率 slope aspect 図 2.9: 復元結果例 2.4 画像生成技術としての計算フォトグラフィ 3 次元情報を復元することにより, 画像生成 ( レンダリング ) に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生
 に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生") 0 21 カラー反射率 slope aspect 図 2.9: 復元結果例 2.4 画像生成技術としての計算フォトグラフィ 3 次元情報を復元することにより, 画像生成 ( レンダリング ) に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生まれ, コンピューテーショナルフォトグラフィ ( 計算フォトグラフィ ) と呼ばれている.3 次元画像認識技術の計算フォトグラフィへの応用として,
0 21 カラー反射率 slope aspect 図 2.9: 復元結果例 2.4 画像生成技術としての計算フォトグラフィ 3 次元情報を復元することにより, 画像生成 ( レンダリング ) に応用することが可能である. 近年, コンピュータにより, カメラで直接得られない画像を生成する技術分野が生まれ, コンピューテーショナルフォトグラフィ ( 計算フォトグラフィ ) と呼ばれている.3 次元画像認識技術の計算フォトグラフィへの応用として,
プロジェクトマネジメント知識体系ガイド (PMBOK ガイド ) 第 6 版 訂正表 - 第 3 刷り 注 : 次の正誤表は PMBOK ガイド第 6 版 の第 1 刷りと第 2 刷りに関するものです 本 ( または PDF) の印刷部数を確認するには 著作権ページ ( 通知ページおよび目次の前 )
 第 6 版 訂正表 - 第 3 刷り 注 : 次の正誤表は PMBOK ガイド第 6 版 の第 1 刷りと第 2 刷りに関するものです 本 ( または PDF) の印刷部数を確認するには 著作権ページ ( 通知ページおよび目次の前 )") プロジェクトマネジメント知識体系ガイド (PMBOK ガイド ) 第 6 版 訂正表 - 第 3 刷り 注 : 次の正誤表は PMBOK ガイド第 6 版 の第 1 刷りと第 2 刷りに関するものです 本 ( または PDF) の印刷部数を確認するには 著作権ページ ( 通知ページおよび目次の前 ) の一番下を参照してください 10 9 8 などで始まる文字列の 最後の 数字は その特定コピーの印刷を示します
プロジェクトマネジメント知識体系ガイド (PMBOK ガイド ) 第 6 版 訂正表 - 第 3 刷り 注 : 次の正誤表は PMBOK ガイド第 6 版 の第 1 刷りと第 2 刷りに関するものです 本 ( または PDF) の印刷部数を確認するには 著作権ページ ( 通知ページおよび目次の前 ) の一番下を参照してください 10 9 8 などで始まる文字列の 最後の 数字は その特定コピーの印刷を示します
ドライブレコーダーにより記録すべき情報及びドライブレコーダーの性能要件を定める告示 ( 平成 28 年 11 月 17 日国土交通省告示 1346 号 ) ( 総則 ) 第一条一般貸切旅客自動車運送事業者が 旅客自動車運送事業運輸規則 ( 昭和 31 年運輸省令第 44 号 ) 第 38 条第 1
 ( 総則 ) 第一条一般貸切旅客自動車運送事業者が 旅客自動車運送事業運輸規則 ( 昭和 31 年運輸省令第 44 号 ) 第 38 条第 1") ドライブレコーダーにより記録すべき情報及びドライブレコーダーの性能要件を定める告示 ( 平成 28 年 11 月 17 日国土交通省告示 1346 号 ) ( 総則 ) 第一条一般貸切旅客自動車運送事業者が 旅客自動車運送事業運輸規則 ( 昭和 31 年運輸省令第 44 号 ) 第 38 条第 1 項及び第 2 項の規定に基づきその事業用自動車の運転者に対して指導監督及び特別な指導 ( 以下 指導監督等
ドライブレコーダーにより記録すべき情報及びドライブレコーダーの性能要件を定める告示 ( 平成 28 年 11 月 17 日国土交通省告示 1346 号 ) ( 総則 ) 第一条一般貸切旅客自動車運送事業者が 旅客自動車運送事業運輸規則 ( 昭和 31 年運輸省令第 44 号 ) 第 38 条第 1 項及び第 2 項の規定に基づきその事業用自動車の運転者に対して指導監督及び特別な指導 ( 以下 指導監督等
介護ロボットの開発 普及に関する現状 社会保障費は増加の一途 ( 介護に係る社会保障費の推計 :2012 年 8.4 兆円 2025 年 19.8 兆円 ) 2025 年時点の介護職員の需給を推計すると 介護職員は 38 万人不足する見込み 持続的な財政及び社会保障システム維持のためには 介護需要増
 2025 年時点の介護職員の需給を推計すると 介護職員は 38 万人不足する見込み 持続的な財政及び社会保障システム維持のためには 介護需要増") H30 年度ロボット介護機器開発 標準化事業に向けて 平成 30 年 1 月 経済産業省製造産業局ロボット政策室 介護ロボットの開発 普及に関する現状 社会保障費は増加の一途 ( 介護に係る社会保障費の推計 :2012 年 8.4 兆円 2025 年 19.8 兆円 ) 2025 年時点の介護職員の需給を推計すると 介護職員は 38 万人不足する見込み 持続的な財政及び社会保障システム維持のためには
H30 年度ロボット介護機器開発 標準化事業に向けて 平成 30 年 1 月 経済産業省製造産業局ロボット政策室 介護ロボットの開発 普及に関する現状 社会保障費は増加の一途 ( 介護に係る社会保障費の推計 :2012 年 8.4 兆円 2025 年 19.8 兆円 ) 2025 年時点の介護職員の需給を推計すると 介護職員は 38 万人不足する見込み 持続的な財政及び社会保障システム維持のためには
別添42前部霧灯の技術基準
 別添 72 後退灯の技術基準 1. 適用範囲等この技術基準は 自動車に備える後退灯に適用する ( 保安基準第 40 条第 2 項関係 ) ただし 法第 75 条の3 第 1 項の規定によりその型式について指定を受けた白色の前部霧灯が後退灯として取付けられている自動車にあっては 3.2. の規定のみ適用する なお 本技術基準は 車両並びに車両への取付け又は車両における使用が可能な装置及び部品に係る統一的な技術上の要件の採択並びにこれらの要件に基づいて行われる認定の相互承認のための条件に関する協定に基づく規則
別添 72 後退灯の技術基準 1. 適用範囲等この技術基準は 自動車に備える後退灯に適用する ( 保安基準第 40 条第 2 項関係 ) ただし 法第 75 条の3 第 1 項の規定によりその型式について指定を受けた白色の前部霧灯が後退灯として取付けられている自動車にあっては 3.2. の規定のみ適用する なお 本技術基準は 車両並びに車両への取付け又は車両における使用が可能な装置及び部品に係る統一的な技術上の要件の採択並びにこれらの要件に基づいて行われる認定の相互承認のための条件に関する協定に基づく規則
<4D F736F F D E817A8AEE916295D22D979A97F082C882B >
 自動車運送事業者が事業用自動車の運転者に対して行う一般的な指導及び監督の実施マニュアル 第 1 編基礎編 トラック事業者編 本マニュアルについて 本マニュアルは トラックにより運送事業を行う事業者が 貨物自動車運送事業者が事業用自動車の運転者に対して行う指導及び監督の指針 / 平成 13 年 8 月 20 日国土交通省告示第 1366 号 ( 以下 指導 監督指針 ) に基づき実施することとされている運転者に対する指導及び監督の実施方法を
自動車運送事業者が事業用自動車の運転者に対して行う一般的な指導及び監督の実施マニュアル 第 1 編基礎編 トラック事業者編 本マニュアルについて 本マニュアルは トラックにより運送事業を行う事業者が 貨物自動車運送事業者が事業用自動車の運転者に対して行う指導及び監督の指針 / 平成 13 年 8 月 20 日国土交通省告示第 1366 号 ( 以下 指導 監督指針 ) に基づき実施することとされている運転者に対する指導及び監督の実施方法を
使用する前に
 この章では Cisco Secure ACS リリース 5.5 以降から Cisco ISE リリース 2.4 システムへのデー タ移行に使用される Cisco Secure ACS to Cisco ISE Migration Tool について説明します 移行の概要 1 ページ Cisco Secure ACS から データ移行 1 ページ Cisco Secure ACS to Cisco ISE
この章では Cisco Secure ACS リリース 5.5 以降から Cisco ISE リリース 2.4 システムへのデー タ移行に使用される Cisco Secure ACS to Cisco ISE Migration Tool について説明します 移行の概要 1 ページ Cisco Secure ACS から データ移行 1 ページ Cisco Secure ACS to Cisco ISE
車載式故障診断装置 (OBD) に関する制度と運用の現状 資料 4
 に関する制度と運用の現状 資料 4") 車載式故障診断装置 (OBD) に関する制度と運用の現状 資料 4 OBD( 車載式故障診断装置 ) とは 車載式故障診断装置 (OBD:On-Board Diagnostics) とは エンジンやトランスミッションなどの電子制御装置 (ECU:Electronic Control Unit) 内部に搭載された故障診断機能である ECU は 自動車が安全 環境性能を発揮するため センサからの信号等に基づき最適な制御を行っているが
車載式故障診断装置 (OBD) に関する制度と運用の現状 資料 4 OBD( 車載式故障診断装置 ) とは 車載式故障診断装置 (OBD:On-Board Diagnostics) とは エンジンやトランスミッションなどの電子制御装置 (ECU:Electronic Control Unit) 内部に搭載された故障診断機能である ECU は 自動車が安全 環境性能を発揮するため センサからの信号等に基づき最適な制御を行っているが
Microsoft PowerPoint - day1-l05.pptx
 自動運転の実現に向けた 警察の取組について 平成 30 年 11 月 14 日警察庁交通局交通企画課自動運転企画室長杉俊弘 概 要 1 日本における交通事故の発生状況等 2 自動運転の概要と制度整備大綱 3 自動運転の実現に向けた警察の取組 1 日本における交通事故の発生状況 ( 人 ) 7,000 6,000 5,000 4,000 3,000 2,000 1,000 0 平成 6,415 5,796
自動運転の実現に向けた 警察の取組について 平成 30 年 11 月 14 日警察庁交通局交通企画課自動運転企画室長杉俊弘 概 要 1 日本における交通事故の発生状況等 2 自動運転の概要と制度整備大綱 3 自動運転の実現に向けた警察の取組 1 日本における交通事故の発生状況 ( 人 ) 7,000 6,000 5,000 4,000 3,000 2,000 1,000 0 平成 6,415 5,796
<4D F736F F F696E74202D204E4B8D EF8E9197BF5F91E A291448F8A2E >
 造船設計における上流 3D-CAD と下流 3D-CAD の艤装システムデータ連係に関する研究開発 三菱重工業株式会社株式会社大島造船所常石造船株式会社株式会社エスイーエー創研株式会社 CIM クリエーション一般財団法人日本海事協会 本研究開発は, 三菱重工業株式会社 株式会社大島造船所 常石造船株式会社 株式会社エスイーエー創研 株式会社 CIM クリエーション 一般財団法人日本海事協会との共同研究体制により実施すると共に
造船設計における上流 3D-CAD と下流 3D-CAD の艤装システムデータ連係に関する研究開発 三菱重工業株式会社株式会社大島造船所常石造船株式会社株式会社エスイーエー創研株式会社 CIM クリエーション一般財団法人日本海事協会 本研究開発は, 三菱重工業株式会社 株式会社大島造船所 常石造船株式会社 株式会社エスイーエー創研 株式会社 CIM クリエーション 一般財団法人日本海事協会との共同研究体制により実施すると共に
3) 撮影 ( スキャン ) の方法 撮影( スキャン ) する場合の撮影エリアと撮影距離の関係を調査の上 おおよその撮影距離を定める - 今回調査を行った代表的なスマホの画角では 30cm 程度の距離であった これより離れた距離から撮影すると解像度規定を満足しない事より この 30cm 以内で撮影
 撮影 ( スキャン ) の方法 撮影( スキャン ) する場合の撮影エリアと撮影距離の関係を調査の上 おおよその撮影距離を定める - 今回調査を行った代表的なスマホの画角では 30cm 程度の距離であった これより離れた距離から撮影すると解像度規定を満足しない事より この 30cm 以内で撮影") スマホでの国税関係書類を記録する場合の留意事項 2016 年 ( 平成 28 年 )8 月公益社団法人日本文書情報マネジメント協会 電子帳簿保存法スキャナ保存の画質要件とスマホでの満足するための考え方 1) 電子帳簿保存法スキャナ保存の画質要件 解像度 ( 施行規則 3 条 5 項二号イ (1)): 200dpi 以上 カラー / 階調 ( 施行規則 3 条 5 項二号イ (2)): RGB 各 256
スマホでの国税関係書類を記録する場合の留意事項 2016 年 ( 平成 28 年 )8 月公益社団法人日本文書情報マネジメント協会 電子帳簿保存法スキャナ保存の画質要件とスマホでの満足するための考え方 1) 電子帳簿保存法スキャナ保存の画質要件 解像度 ( 施行規則 3 条 5 項二号イ (1)): 200dpi 以上 カラー / 階調 ( 施行規則 3 条 5 項二号イ (2)): RGB 各 256
医療機器開発マネジメントにおけるチェック項目
 2018 年 11 月作成 医療機器開発マネジメントにおけるチェック項目 1. 各ステージゲートにおけるチェック項目 (1) チェック項目作成の目的従来個々の事業において実施されていた 事前 中間 事後の各ゲートにおける評価項目 Go/no-go の判断を 医療機器開発全期間を通して整理し 共通認識化する 技術的観点及び事業化の観点の双方を意識し 医療機器開発の特性を考慮したチェック項目を設定する
2018 年 11 月作成 医療機器開発マネジメントにおけるチェック項目 1. 各ステージゲートにおけるチェック項目 (1) チェック項目作成の目的従来個々の事業において実施されていた 事前 中間 事後の各ゲートにおける評価項目 Go/no-go の判断を 医療機器開発全期間を通して整理し 共通認識化する 技術的観点及び事業化の観点の双方を意識し 医療機器開発の特性を考慮したチェック項目を設定する
LMSシリーズ LMS1000, 製品群一覧
 製品群一覧 LMS1000 新記録の超高速測定 利点 A 超高速測定 B C D E F 2D-LiDARセンサLMS1000は 屋内および屋外アプリケーション向けの理想的なソリューションを提供する上 過酷な環境 条件にも対応することができます この傑出した性能は LMS1000によって測定された距離値の準備および最適化を行う デジタルフィルタを追加することにより さらに向上させることができます ユーザはフィルタを使用することにより
製品群一覧 LMS1000 新記録の超高速測定 利点 A 超高速測定 B C D E F 2D-LiDARセンサLMS1000は 屋内および屋外アプリケーション向けの理想的なソリューションを提供する上 過酷な環境 条件にも対応することができます この傑出した性能は LMS1000によって測定された距離値の準備および最適化を行う デジタルフィルタを追加することにより さらに向上させることができます ユーザはフィルタを使用することにより
PowerPoint プレゼンテーション
 1 2017 年度ベンチマーク試験について エネルギーフロー車両試験 (2 台 ) (1) Chevrolet Malibu (2) BMW 320i エンジンユニット単体試験 (2 ユニット ) (3) Mercedes C200 (M274) (4) Audi A4 (EA888) エンジンフリクション測定 (2 ユニット ) (5) Chevrolet Malibu(Ecotec 1.5L )
1 2017 年度ベンチマーク試験について エネルギーフロー車両試験 (2 台 ) (1) Chevrolet Malibu (2) BMW 320i エンジンユニット単体試験 (2 ユニット ) (3) Mercedes C200 (M274) (4) Audi A4 (EA888) エンジンフリクション測定 (2 ユニット ) (5) Chevrolet Malibu(Ecotec 1.5L )
自主演習履修の手引き 自主演習とは 履修手引きには 個々の演習の内容は, 学生自らがその目標, 計画を設定する. とあります. 学生自身が学習内容を決める科目です. 自主演習の履修手順 1. 演習内容の企画 どのような演習を行いたいのか企画してください. 演習のテーマを決定してください. 必要に応じ
 自主演習履修の手引き 自主演習とは 履修手引きには 個々の演習の内容は, 学生自らがその目標, 計画を設定する. とあります. 学生自身が学習内容を決める科目です. 自主演習の履修手順 1. 演習内容の企画 どのような演習を行いたいのか企画してください. 演習のテーマを決定してください. 必要に応じてメンバーを集めてください. 2. 履修計画書の作成 履修計画書の書式はクリエのホームページからダウンロードできます.
自主演習履修の手引き 自主演習とは 履修手引きには 個々の演習の内容は, 学生自らがその目標, 計画を設定する. とあります. 学生自身が学習内容を決める科目です. 自主演習の履修手順 1. 演習内容の企画 どのような演習を行いたいのか企画してください. 演習のテーマを決定してください. 必要に応じてメンバーを集めてください. 2. 履修計画書の作成 履修計画書の書式はクリエのホームページからダウンロードできます.
Microsoft PowerPoint - document pptx
 2018 年 5 月 11 日 ITDLab 株式会社 実吉敬二 Part 1. LiDARやミリ波レーダー 単眼カメラと比較したステレオカメラの優位性 1. あらゆる距離の物体を検出できる 画面に写っていれば どのような物体でも 距離精度は別にして そこまでの距離がわかる 例えば今使われている車載用のステレオカメラで東京から富士山を撮像したら 1.2 kmより遠くにあるということがわかる これは衝突回避にとって重要な情報である
2018 年 5 月 11 日 ITDLab 株式会社 実吉敬二 Part 1. LiDARやミリ波レーダー 単眼カメラと比較したステレオカメラの優位性 1. あらゆる距離の物体を検出できる 画面に写っていれば どのような物体でも 距離精度は別にして そこまでの距離がわかる 例えば今使われている車載用のステレオカメラで東京から富士山を撮像したら 1.2 kmより遠くにあるということがわかる これは衝突回避にとって重要な情報である
Microsoft Word - 資料6(修正).docx
.docx") 運転支援機能の表示に関する規約運用の考え方 に基づく表示例 資料 6 カタログ (Webを含む) の表示例 < 表示例 1> カタログの表示例 運転支援機能に関する説明や注意喚起等の詳細を表示した上で その他の頁では スペース等の関係により 運転支援機能に関する説明や注意喚起等を全て表示できない場合の例 < 運転支援機能の内容説明 作動条件や作動しない条件等の詳細を表示した頁 > 新型 は止まるをサホ
運転支援機能の表示に関する規約運用の考え方 に基づく表示例 資料 6 カタログ (Webを含む) の表示例 < 表示例 1> カタログの表示例 運転支援機能に関する説明や注意喚起等の詳細を表示した上で その他の頁では スペース等の関係により 運転支援機能に関する説明や注意喚起等を全て表示できない場合の例 < 運転支援機能の内容説明 作動条件や作動しない条件等の詳細を表示した頁 > 新型 は止まるをサホ
ひっかけ問題 ( 緊急対策ゼミ ) ステップ A B C D 39.4% 学科試験パーフェクト分析から ひっかけ問題 に重点をおいた特別ゼミ! 2 段階 出題頻度 39.4% D ゼミ / 内容 *(2 段階 24.07%+ 安知 15.28%=39.4
 ステップ A B C D 39.4% 学科試験パーフェクト分析から ひっかけ問題 に重点をおいた特別ゼミ! 2 段階 出題頻度 39.4% D ゼミ / 内容 *(2 段階 24.07%+ 安知 15.28%=39.4") ひっかけ問題 ( 緊急対策ゼミ ) ステップ A B C D 39.4% http://www.derutoko.kp 学科試験パーフェクト分析から ひっかけ問題 に重点をおいた特別ゼミ! 2 段階 出題頻度 39.4% D ゼミ / 内容 *(2 段階 24.07%+ 安知 15.28%=39.4%) 16 経路の設計 0.19%( 予想出題数 0~1 問 ) 17 高速道路での運転 8.33%(
ひっかけ問題 ( 緊急対策ゼミ ) ステップ A B C D 39.4% http://www.derutoko.kp 学科試験パーフェクト分析から ひっかけ問題 に重点をおいた特別ゼミ! 2 段階 出題頻度 39.4% D ゼミ / 内容 *(2 段階 24.07%+ 安知 15.28%=39.4%) 16 経路の設計 0.19%( 予想出題数 0~1 問 ) 17 高速道路での運転 8.33%(
インターリーブADCでのタイミングスキュー影響のデジタル補正技術
 1 インターリーブADCでのタイミングスキュー影響のデジタル補正技術 浅見幸司 黒沢烈士 立岩武徳 宮島広行 小林春夫 ( 株 ) アドバンテスト 群馬大学 2 目次 1. 研究背景 目的 2. インターリーブADCの原理 3. チャネル間ミスマッチの影響 3.1. オフセットミスマッチの影響 3.2. ゲインミスマッチの影響 3.3. タイミングスキューの影響 4. 提案手法 4.1. インターリーブタイミングミスマッチ補正フィルタ
1 インターリーブADCでのタイミングスキュー影響のデジタル補正技術 浅見幸司 黒沢烈士 立岩武徳 宮島広行 小林春夫 ( 株 ) アドバンテスト 群馬大学 2 目次 1. 研究背景 目的 2. インターリーブADCの原理 3. チャネル間ミスマッチの影響 3.1. オフセットミスマッチの影響 3.2. ゲインミスマッチの影響 3.3. タイミングスキューの影響 4. 提案手法 4.1. インターリーブタイミングミスマッチ補正フィルタ
FANUC i Series CNC/SERVO
 + Series CNC/SERVO * * 2 * * 3 Series 0+-MODEL F * * * Series 30+/31+/32+/35+-MODEL B * Power Motion +-MODEL A * PANEL +H * PANEL +H Pro * MT-LINK+ * MT-LINKi 4 サーボラインアップ @*-B series SERVO α*-bシリーズサーボは
+ Series CNC/SERVO * * 2 * * 3 Series 0+-MODEL F * * * Series 30+/31+/32+/35+-MODEL B * Power Motion +-MODEL A * PANEL +H * PANEL +H Pro * MT-LINK+ * MT-LINKi 4 サーボラインアップ @*-B series SERVO α*-bシリーズサーボは
PowerPoint プレゼンテーション
 GSN を応用したナレッジマネジメントシステムの提案 2017 年 10 月 27 日 D-Case 研究会 国立研究開発法人宇宙航空研究開発機構 研究開発部門第三研究ユニット 梅田浩貴 2017/3/27 C Copyright 2017 JAXA All rights reserved 1 目次 1 課題説明 SECI モデル 2 GSN を応用したナレッジマネジメントシステム概要 3 ツリー型チェックリスト分析
GSN を応用したナレッジマネジメントシステムの提案 2017 年 10 月 27 日 D-Case 研究会 国立研究開発法人宇宙航空研究開発機構 研究開発部門第三研究ユニット 梅田浩貴 2017/3/27 C Copyright 2017 JAXA All rights reserved 1 目次 1 課題説明 SECI モデル 2 GSN を応用したナレッジマネジメントシステム概要 3 ツリー型チェックリスト分析
 平成 28 年度経済産業省委託業務 平成 28 年度 スマートモビリティシステム研究開発 実証事業 ( 高度な自動走行の実現に向けた周辺環境認識技術に関する競争力の調査 ) 成果報告書 平成 29 年 1 月 デロイトトーマツコンサルティング合同会社 目次 本編 1 周辺環境認識技術を取り巻く市場環境... 1 1-1 先進運転システム (ADAS: Advanced Driving Assistance
平成 28 年度経済産業省委託業務 平成 28 年度 スマートモビリティシステム研究開発 実証事業 ( 高度な自動走行の実現に向けた周辺環境認識技術に関する競争力の調査 ) 成果報告書 平成 29 年 1 月 デロイトトーマツコンサルティング合同会社 目次 本編 1 周辺環境認識技術を取り巻く市場環境... 1 1-1 先進運転システム (ADAS: Advanced Driving Assistance
g-contents world Geomedia Summit 東京のタクシー IoT 化 サービス向上からデータ活用まで タクシー新配車システムの変遷 ~ 日本でのアプリ配車における これまでの流れと今後の可能性 ~
 g-contents world Geomedia Summit 東京のタクシー IoT 化 サービス向上からデータ活用まで タクシー新配車システムの変遷 ~ 日本でのアプリ配車における これまでの流れと今後の可能性 ~ トヨタ次世代タクシー 10 月 23 日出発式 タクシー産業の現状 ( 全国ハイヤー タクシー連合会資料 ) 東京のタクシーの現状 ( 東京ハイヤー タクシー協会資料 ) 新配車システムの起源
g-contents world Geomedia Summit 東京のタクシー IoT 化 サービス向上からデータ活用まで タクシー新配車システムの変遷 ~ 日本でのアプリ配車における これまでの流れと今後の可能性 ~ トヨタ次世代タクシー 10 月 23 日出発式 タクシー産業の現状 ( 全国ハイヤー タクシー連合会資料 ) 東京のタクシーの現状 ( 東京ハイヤー タクシー協会資料 ) 新配車システムの起源
Deep Learningでの地図タイル活用の検討
 第 7 回地理院地図パートナーネットワーク会議 2017/6/8 Deep Learning での 地図タイル活用の検討 OSGeo 財団日本支部 岩崎亘典 和山亮介 1 はじめに 発表内容 2 /36 汎用的フォーマットとしての地図タイル 地図タイルと Deep Learning CNN を用いた旧版地形図の分類 地形図から土地利用分類 Conditional GAN を用いたタイル画像変換 空中写真
第 7 回地理院地図パートナーネットワーク会議 2017/6/8 Deep Learning での 地図タイル活用の検討 OSGeo 財団日本支部 岩崎亘典 和山亮介 1 はじめに 発表内容 2 /36 汎用的フォーマットとしての地図タイル 地図タイルと Deep Learning CNN を用いた旧版地形図の分類 地形図から土地利用分類 Conditional GAN を用いたタイル画像変換 空中写真
(trip) ( ) 1 1
 ( ) 1 1") 9 2 2.1 2.1.1 1 (trip) 2.1 2.1 1 ( ) 1 1 10 2 4 4 4 2.1.2 4 4 1 4 4?? 2 2.2 4 2.1 11 OD OD OD (a) 4 OD 4 OD 12 2 (b) 4 1 2 (c) r s t rs 2 OD OD t rs (d) 1 1 2.1 13 OD () (e) 1 OD 3 (f) 4 4 4 4 1 4 4 14
9 2 2.1 2.1.1 1 (trip) 2.1 2.1 1 ( ) 1 1 10 2 4 4 4 2.1.2 4 4 1 4 4?? 2 2.2 4 2.1 11 OD OD OD (a) 4 OD 4 OD 12 2 (b) 4 1 2 (c) r s t rs 2 OD OD t rs (d) 1 1 2.1 13 OD () (e) 1 OD 3 (f) 4 4 4 4 1 4 4 14
活用してみませんか?NHK の技術 NHK の研究開発成果をご利用いただくには 実施許諾( ライセンス ) と 技術協力 の二つの方法があります NHKが保有する特許 ノウハウは NHKエンジニアリングシステムと実施契約を締結することで ビジネスにご利用いただくことができます また NHKエンジニア
 と 技術協力 の二つの方法があります NHKが保有する特許 ノウハウは NHKエンジニアリングシステムと実施契約を締結することで ビジネスにご利用いただくことができます また NHKエンジニア") NHK 開放特許一覧表 (NHK 技術カタログのデータを除く ) 送受信技術 1 衛星放送 地上デジタル放送兼用アンテナ 2 受信状況測定システム 受信状況測定装置及び受信状況測定プログラム 特開 2010-200292 特開 2008-252690 特許第 5337621 号 特許第 4594954 号 音響技術 3 マイクロホン保持装置 特開 2006-352649 特許第 4528209 号
NHK 開放特許一覧表 (NHK 技術カタログのデータを除く ) 送受信技術 1 衛星放送 地上デジタル放送兼用アンテナ 2 受信状況測定システム 受信状況測定装置及び受信状況測定プログラム 特開 2010-200292 特開 2008-252690 特許第 5337621 号 特許第 4594954 号 音響技術 3 マイクロホン保持装置 特開 2006-352649 特許第 4528209 号