PowerPoint Presentation
|
|
|
- ゆあ はかまや
- 4 years ago
- Views:
Transcription
1 参考資料 3 国内外における自動運転の取り組み概要 1. 単体走行の事例 2. 追随走行 隊列走行の事例 3. 専用道路の事例
2
3 1 1. 単体走行の事例 研究開発主体 研究開発期間 1DARPA 主催の技術コンテスト DARPA ( 米国国防総省国防高等研究計画局 ) グランドチャレンジ :2004 年 2005 年アーバンチャレンジ :2007 年 2Google の自動運転への取り組み Google 社 2007 年 ~ 研究内容対象道路対象車両協調レベル ロボットカーによる公道での自動運転 高速道路一般道 ( 未舗装路含む ) 一般車 単独 ロボットカーによる公道での自動運転 高速道路一般道 一般車 単独 インフラ ( 道路地図のデジタル化 ) ( 道路地図のデジタル化 ) 要素技術 通信 車両 - 速度制御操舵制御 ( レーダ検知 ) 位置特定 (GPS) - 速度制御操舵制御 ( レーザレーダによる 3D 作成 ) 信号 歩行者検知 ( カメラ )


4 1 DARPA 主催の技術コンテスト DARPA( 米国国防総省国防高等研究計画局 ) 主催により 完全自動制御のロボットカーレースが実施された 2004 年 2005 年には未舗装路で DARPA グランドチャレンジとして 2007 年には舗装路で DARPA アーバンチャレンジとして実施された レース前に主催者より渡される地図データをもとに 指定された順番に自動運転で通過ポイントを巡る カリフォルニア州の道路交通規制の法律に従わなかった場合は減点される 交差点での自動運転 2007 年レースでの完走車両 出典 :DARPA 2


5 2 Google の自動運転への取り組み Google では DARPA 主催の技術コンテンストに参加したスタンフォード大学の技術者を集め 自動運転技術の研究開発を実施している Google が収集した地図データをもとに 車両に搭載されたカメラやレーザレーダ等を活用して 周囲の交通環境を把握しながら目的地まで自動で走行する 米カリフォルニア州で公道走行の実験を実施している 2012 年 3 月 米ネバダ州が自動走行車の公道での運転を認める法律を全米で初めて施行し 運転操作及びシステムを監視する 2 人以上の乗車を条件として 公道で試運転できる免許を 2012 年 5 月 7 日に交付した レーザレーダ 自車位置 障害物検知 カメラ 信号 障害物検知 レーダ 離れた箇所の障害物検知 フロント 3 リア 1 左リアホイールセンサ 細かな挙動の検知に利用 Google CAR 外観 Google CAR 運転席 出典 :Google 3
6 2. 追随走行 隊列走行の事例 研究開発主体研究開発期間研究内容対象道路対象車両協調レベル 3 走行支援道路システム (AHS) 旧土木研究所 ( 現国土技術政策総合研究所 ) 1994~1996 年 ( 自動運転研究期間 ) 高速道路での自動運転による連結走行 4 カリフォルニア PATH PATH ( カリフォルニア大学バークレー校が主導 ) 1986 年 ~1997 年 その後も継続 高速道路での自動運転による隊列走行 5CHAUFFEUR プロジェクト CHAUFFEUR ( 欧州フレームワークプログラム ) 1994~2002 年 高速道路 高速道路 高速道路 一般道 一般車一般車貨物車 路車 車車路車 車車車車 高速道路 一般道 ( 幹線 ) での自動運転による連結走行 インフラ 磁気マーカ路車間通信 磁気マーカ - 要素技術 通信 車両 2.5GHz 帯 800MHz 帯 5.8GHz 帯 速度制御車間制御操舵制御 ( 磁気センサ ) 速度制御車間制御操舵制御 ( 磁気センサ ) 速度制御車間制御操舵制御 ( 前方車両検知 ) 前方検知 ( 赤外線マーカ ) 4
7 5 2. 追随走行 隊列走行の事例 6HAVEit プロジェクト 7 エネルギー ITS 8SARTRE プロジェクト 研究開発主体 HAVEit ( 欧州フレームワークプログラム ) 新エネルギー 産業技術総合開発機構 (NEDO) 日本自動車研究所 (JARI) ほか SARTRE ( 欧州フレームワークプログラム ) 研究開発期間 2008~2011 年 2008~2012 年 2009~2012 年 研究内容 対象道路 対象車両 一般道での先行車追随走行 高速道路での高度な運転支援 一般道高速道路 一般車貨物車 高速道路での自動運転による隊列走行 高速道路 貨物車 幹線道路での自動運転による隊列走行 一般道 一般車貨物車 協調レベル単独 車車車車車車 インフラ - Real Time Kinematic GPS ( 道路構造情報 ) - 要素技術 通信 車両 赤外線通信 ( 車車間 ) 速度制御車間制御操舵制御 ( 車線検知 ) 5.8GHz 帯光通信 ( 車車間 ) 速度制御車間制御操舵制御 ( 車線検知 ) IEEE802.11p(5.9GHz 帯 ) ( 車車間 ) 速度制御車間制御操舵制御 ( 車線検知 )
 は")
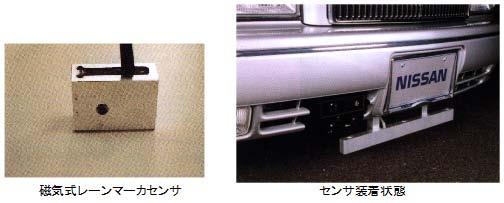
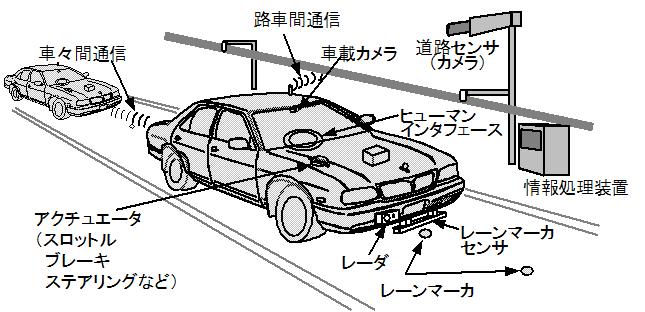
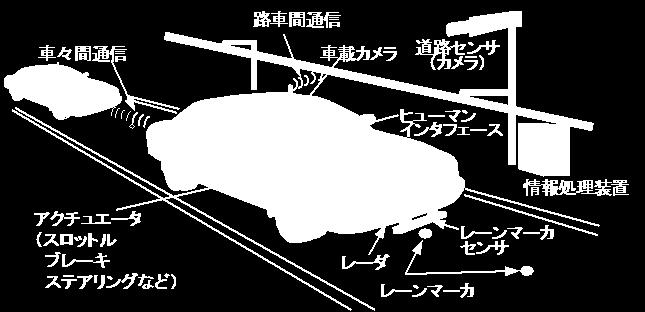
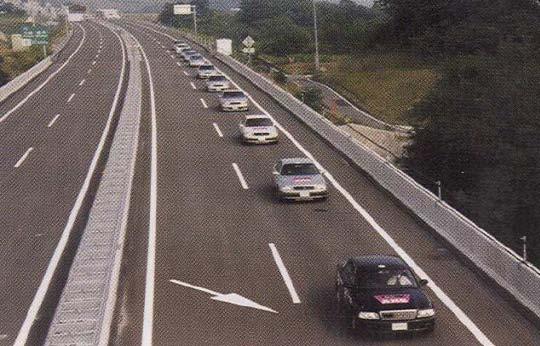
8 3 走行支援道路システム (AHS) 走行支援道路システム (AHS) は 道路と自動車が協調しリアルタイムな情報をドライバーに提供することにより 車両走行の安全 輸送量の増加等を図るとともに 最終的には自動運転を目指したシステムである 1994 年に AHS における自動運転の取り組みとして 旧土木研究所 ( 現国土技術政策総合研究所 ) にて開発 実験が開始された 1996 年には 磁気マーカを道路レーンの中心部に 2m 間隔で埋設し 11 台の車群により約 11km を連続走行する自動運転の公道実験を実施した 標準タイプ扁平タイプ磁気式レーンマーカセンサセンサ装着状態 磁気マーカ 磁気マーカセンサ AHS 連結走行の実証実験 実験システムの構成 出典 :AHS 研究組合資料 6
 のデモンストレーションに参加した 高速道路に磁気マーカを")
 間隔で埋設して 自動運転を実現し 8 台の乗用車による約 104km/h での隊列走行の実験を実施した PATH は現在も 大型車の隊列走行 普通自動車の CACC(Cooperative Adaptive")
9 4 カリフォルニア PATH PATH(California Partners for Advanced Transportation TecHnology) は 高速道路の自動運転を研究開発し 1997 年に米カリフォルニア州サンディエゴにて 研究開発の成果として NAHSC(National Automated Highway Systems Consortium) のデモンストレーションに参加した 高速道路に磁気マーカを 4 フィート ( 約 1.2m) 間隔で埋設して 自動運転を実現し 8 台の乗用車による約 104km/h での隊列走行の実験を実施した PATH は現在も 大型車の隊列走行 普通自動車の CACC(Cooperative Adaptive Cruise Control) など 継続して自動運転関連の研究を実施している カリフォルニア PATH 隊列走行の実証実験 出典 : カリフォルニア PATH 7


10 5 CHAUFFEUR プロジェクト CHAUFFEUR プロジェクトは 1994 年から 2002 年まで 欧州第 4 次 第 5 次フレームワークプログラムの一環として トラックによる連結走行の研究開発を実施した ブレーキやアクセルの情報を車車間通信により連結車両で共有する 前方車両に取り付けられた赤外線マーカを 後続車両に設置された赤外線カメラを使用して認識することで 前方車両との距離および角度を検出して 自動的に追従する 赤外線マーカによる車間距離維持と操舵制御 ( イメージ ) CHAUFFEUR 連結走行 青矢印 : 先頭車両から全ての後続車両へデータ送信 黒矢印 : 前車両から後続車両へデータ送信 送信テ ータ : 速度データ アクセル開度 車群管理データ センサデータの後続車への送信 ( イメージ ) 出典 :CHAUFFEUR2 Final Presentation 8
 高速道路における乗用車の高度な運転支援")

11 6 HAVEit プロジェクト HAVEit(Highly Automated Vehicles for Intelligent Transport) プロジェクトは 2008 年から 2011 年まで 欧州第 7 次フレームワークプログラムの一環として 一般道のトラックを対象とした先行車追随走行 (AQuA:Automated Queue Assistance) 高速道路における乗用車の高度な運転支援 (TAP:Temporary Auto Pilot) 等の研究開発を実施した AQuA では レーダ カメラを用いた交通環境認識や 赤外線による車車間通信により 渋滞時の追随走行の実験を実施した TAP では 速度制御技術や車線制御技術による高度な運転支援に関する実証実験を実施した 赤外線送受信部 AQuA デモ車両外観 TAP デモ車両外観 出典 :HAVEit 9

 出典 :NEDO http://www.nedo.go.jp/ 出典 :JARI http://www.jari.or.")
12 7 エネルギー ITS 2008 年度から 2012 年度までの 5 年間の研究期間を設け 新エネルギー 産業技術総合開発機構 (NEDO) の委託の下 産学公 15 機関が 既存の高速道路でも走行可能な 安全で信頼性の高い隊列走行の実現に向け 自動運転等の研究開発を実施している 2010 年度末には 大型トラック 3 台による時速 80km 車間距離 10m の隊列走行実験に成功しており 今後 2012 年度末までに大型トラックと小型トラックの計 4 台で車間距離 4m の隊列走行の実証実験を計画している エネルギー ITS 隊列走行エネルギー ITS 実験車両 ( イメージ ) 出典 :NEDO 出典 :JARI 10
")
 SARTRE 隊列走行イメージ 出典 :SARTRE http://www.sartre-project.")
13 8 SARTRE プロジェクト SARTRE(Safe Road Trains for the Environment) プロジェクトは 2009 年から 2012 年まで 欧州第 7 次フレームワークプログラムの一環として実施され 一般道 ( 幹線 ) における隊列走行の実現を目指している 2012 年 1 月に スウェーデンのテストコースにおいて 時速 90km/h 車間距離 6m で トラックを先頭車両として 3 台の乗用車が追随する隊列走行の実証実験を実施した 2012 年 5 月には スペインの一般道 ( 幹線 ) において 時速 80km/h 車間距離 6m で トラックを先頭車両として トラック 1 台と乗用車 3 台が追随する隊列走行の実証実験を実施した 目的地に近くなったとき 運転手が車を操作して隊列から離れる 前車との間隔を近づける操作が自動で行われる 隊列に入ることを希望する場合 ナビゲーションが近くの隊列までを案内し 隊列の最後尾に入り 目的地付近まで自動制御となる SARTRE 隊列走行の実証実験 ( スペイン ) SARTRE 隊列走行イメージ 出典 :SARTRE 11
14 12 3. 専用道路の事例 研究開発主体 9IMTS トヨタ自動車 10City Mobil プロジェクト City Mobil ( 欧州フレームワークプログラム ) 研究開発期間 1999 年 ~ 2004 年 ~2011 年 研究内容 専用道路での自動運転 専用道路 専用車線での自動運転 対象道路 専用道路 ( 一般道は運転手により操縦 ) 専用道路 専用車線 対象車両 バス バス専用車両 協調レベル 路車車車 路車車車 インフラ 磁気マーカ地上信号装置 車両誘導用白線 要素技術 通信 2.5GHz 帯光通信 2.5GHz 帯 車両 位置 速度制御車間制御操舵制御 ( 磁気センサ ) 速度制御操舵制御 ( 白線検知 レーザレーダ )


15 9 IMTS IMTS(Intelligent Multimode Transit System) は トヨタ自動車により研究開発された新たな交通システムであり 専用道は自動運転で隊列走行を行い 一般道は通常のバス同様にマニュアルで単独走行を行う 淡路ファームパークイングランドの丘 愛 地球博で運行された実績があり 法的には 鉄道 ( 磁気誘導式鉄道 ) として運用された 車両は 走行路中央に埋設された磁気マーカに沿い操舵制御され 車車間通信および地上信号装置等による速度制御を採用している 愛 地球博における IMTS の隊列走行イメージ IMTS の専用道と一般道における運行 出典 : 愛 地球博公式 HP 14
 は 駐車場とターミナルを結び専用道を最高速度")


16 10 City Mobil プロジェクト City Mobil プロジェクトは 2004 年から 2011 年まで 欧州第 6 次フレームワークプログラムの一環として 専用道路における自動運転の試行運用を実施した ヒースロー空港の PRT(Personal Rapid Transit) は 駐車場とターミナルを結び専用道を最高速度 40km/h で無人自動走行するシステムである ローマのサイバーカーは 走行路をあらかじめ登録し 最高時速 30km/h で無人自動走行するシステムであり 障害物等をセンサが検知すると停止する カステリョンのハイブリッドトランスポートシステムは ガイドバスとトラムの機能を組み合わせたものであり 白線を検知して操舵を自動制御する ローマのサイバーカー 出典 :CityMobil A CTS for the New Rome Exhibition ヒースロー空港の PRT 出典 :ultra global prt 出典 :CityMobil カステリョンのハイブリットトランスポートシステム 14
資料 3 社会資本整備審議会道路分科会基本政策部会 先進モビリティ ( 株 ) における 自動運転技術開発の取り組み 先進モビリティ株式会社代表取締役 青木 啓二 Advanced Smart Mobility 1
 における 自動運転技術開発の取り組み 先進モビリティ株式会社代表取締役 青木 啓二 Advanced Smart Mobility 1") 資料 3 社会資本整備審議会道路分科会基本政策部会 先進モビリティ ( 株 ) における 自動運転技術開発の取り組み 先進モビリティ株式会社代表取締役 青木 啓二 Advanced Smart Mobility 1 先進モビリティ ( 株 ) における技術開発の取り組み 大型トラック隊列走行技術 ITS 関係府省 トラックドライバー不足対策のため 高速道路上での後続車無人隊列走行を実現する自動運転トラックを開発中
資料 3 社会資本整備審議会道路分科会基本政策部会 先進モビリティ ( 株 ) における 自動運転技術開発の取り組み 先進モビリティ株式会社代表取締役 青木 啓二 Advanced Smart Mobility 1 先進モビリティ ( 株 ) における技術開発の取り組み 大型トラック隊列走行技術 ITS 関係府省 トラックドライバー不足対策のため 高速道路上での後続車無人隊列走行を実現する自動運転トラックを開発中
本章では 衝突被害軽減ブレーキ 車線逸脱警報 装置 等の自動車に備えられている運転支援装置の特性 Ⅻ. 運転支援装置を 備えるトラックの 適切な運転方法 と使い方を理解した運転の重要性について整理しています 指導においては 装置を過信し 事故に至るケースがあることを理解させましょう また 運転支援装
 本章では 衝突被害軽減ブレーキ 車線逸脱警報 装置 等の自動車に備えられている運転支援装置の特性 Ⅻ. 運転支援装置を 備えるトラックの 適切な運転方法 と使い方を理解した運転の重要性について整理しています 指導においては 装置を過信し 事故に至るケースがあることを理解させましょう また 運転支援装置の限界を心得て正しく使用するために 支援装置の限界とメーカーによる作動等の違いを明確にさせ 支援装置に頼り過ぎた運転にならないように指導しましょう
本章では 衝突被害軽減ブレーキ 車線逸脱警報 装置 等の自動車に備えられている運転支援装置の特性 Ⅻ. 運転支援装置を 備えるトラックの 適切な運転方法 と使い方を理解した運転の重要性について整理しています 指導においては 装置を過信し 事故に至るケースがあることを理解させましょう また 運転支援装置の限界を心得て正しく使用するために 支援装置の限界とメーカーによる作動等の違いを明確にさせ 支援装置に頼り過ぎた運転にならないように指導しましょう
1 日本再興戦略 2016 改革 2020 隊列走行の実現 隊列走行活用事業モデルの明確化ニーズの明確化 ( 実施場所 事業性等 ) 技術開発 実証 制度 事業環境検討プロジェクト工程表技高齢者等の移動手段の確保 ( ラストワンマイル自動走行 ) 事業モデルの明確化 ( 実施主体 場所 事業性等 )
 技術開発 実証 制度 事業環境検討プロジェクト工程表技高齢者等の移動手段の確保 ( ラストワンマイル自動走行 ) 事業モデルの明確化 ( 実施主体 場所 事業性等 )") 参考資料 4 自動走行に関する取組について 平成 2 8 年 1 2 月 経 済 産 業 省 国 土 交 通 省 1 日本再興戦略 2016 改革 2020 隊列走行の実現 隊列走行活用事業モデルの明確化ニーズの明確化 ( 実施場所 事業性等 ) 技術開発 実証 制度 事業環境検討プロジェクト工程表技高齢者等の移動手段の確保 ( ラストワンマイル自動走行 ) 事業モデルの明確化 ( 実施主体 場所
参考資料 4 自動走行に関する取組について 平成 2 8 年 1 2 月 経 済 産 業 省 国 土 交 通 省 1 日本再興戦略 2016 改革 2020 隊列走行の実現 隊列走行活用事業モデルの明確化ニーズの明確化 ( 実施場所 事業性等 ) 技術開発 実証 制度 事業環境検討プロジェクト工程表技高齢者等の移動手段の確保 ( ラストワンマイル自動走行 ) 事業モデルの明確化 ( 実施主体 場所
STAMP/STPA を用いた 自動運転システムのリスク分析 - 高速道路での合流 - 堀雅年 * 伊藤信行 梶克彦 * 内藤克浩 * 水野忠則 * 中條直也 * * 愛知工業大学 三菱電機エンジニアリング 1
 STAMP/STPA を用いた 自動運転システムのリスク分析 - 高速道路での合流 - 堀雅年 * 伊藤信行 梶克彦 * 内藤克浩 * 水野忠則 * 中條直也 * * 愛知工業大学 三菱電機エンジニアリング 1 はじめに 近年 先進運転支援システムが発展 オートクルーズコントロール レーンキープアシスト 2020 年を目処にレベル3 自動運転車の市場化が期待 運転システムが複雑化 出典 : 官民 ITS
STAMP/STPA を用いた 自動運転システムのリスク分析 - 高速道路での合流 - 堀雅年 * 伊藤信行 梶克彦 * 内藤克浩 * 水野忠則 * 中條直也 * * 愛知工業大学 三菱電機エンジニアリング 1 はじめに 近年 先進運転支援システムが発展 オートクルーズコントロール レーンキープアシスト 2020 年を目処にレベル3 自動運転車の市場化が期待 運転システムが複雑化 出典 : 官民 ITS
ICT を活用した ITS の概要 1 ITS は内閣府 警察庁 総務省 経済産業省 国土交通省が連携して推進 道路交通情報 VICS (1996 年 ~) FM 多重放送 電波ビーコン 光ビーコンで情報配信 ( 約 5,100 万台 :2016 年 6 月末 ) プローブ情報 携帯電話ネットワーク
 FM 多重放送 電波ビーコン 光ビーコンで情報配信 ( 約 5,100 万台 :2016 年 6 月末 ) プローブ情報 携帯電話ネットワーク") 参考資料 3 自動走行の実現に向けた総務省の取組 平成 28 年 12 月 15 日総務省 ICT を活用した ITS の概要 1 ITS は内閣府 警察庁 総務省 経済産業省 国土交通省が連携して推進 道路交通情報 VICS (1996 年 ~) FM 多重放送 電波ビーコン 光ビーコンで情報配信 ( 約 5,100 万台 :2016 年 6 月末 ) プローブ情報 携帯電話ネットワーク等自動車メーカー等では
参考資料 3 自動走行の実現に向けた総務省の取組 平成 28 年 12 月 15 日総務省 ICT を活用した ITS の概要 1 ITS は内閣府 警察庁 総務省 経済産業省 国土交通省が連携して推進 道路交通情報 VICS (1996 年 ~) FM 多重放送 電波ビーコン 光ビーコンで情報配信 ( 約 5,100 万台 :2016 年 6 月末 ) プローブ情報 携帯電話ネットワーク等自動車メーカー等では
<4D F736F F F696E74202D20895E935D8E D BB8C7689E68A C4816A72332E >
 運転 援システム 度化計画 ( 概要 ) 的 ヒトやモノが安全 快適に移動することのできる社会 の実現に向け 関係府省の連携による研究開発 政府主導の実証計画等によって構成される計画を策定する ( 本再興戦略 ( 平成 25 年 6 14 閣議決定 )) 運転 援システム 動 システムによって得られる効果 1 渋滞の解消 緩和 2 交通事故の削減 3 環境負荷の低減 4 齢者等の移動 援 5 運転の快適性の向上
運転 援システム 度化計画 ( 概要 ) 的 ヒトやモノが安全 快適に移動することのできる社会 の実現に向け 関係府省の連携による研究開発 政府主導の実証計画等によって構成される計画を策定する ( 本再興戦略 ( 平成 25 年 6 14 閣議決定 )) 運転 援システム 動 システムによって得られる効果 1 渋滞の解消 緩和 2 交通事故の削減 3 環境負荷の低減 4 齢者等の移動 援 5 運転の快適性の向上
03 【資料1】自動走行をめぐる最近の動向と今後の調査検討事項
 自動走行をめぐる最近の動向と 今後の調査検討事項について 平成 27 年 10 月 23 日警察庁交通局 目 次 1 交通事故情勢 2 自動走行の現状 3 自動走行の課題 4 調査検討事項 1 交通事故情勢 交通事故発生状況の推移 1 1 交通事故情勢 c 平成 26 年中の交通事故発生状況 交通事故発生件数 57 万 3,465 件 ( 前年比 -8.8%) 10 年連続で減少 交通事故死者数 4,113
自動走行をめぐる最近の動向と 今後の調査検討事項について 平成 27 年 10 月 23 日警察庁交通局 目 次 1 交通事故情勢 2 自動走行の現状 3 自動走行の課題 4 調査検討事項 1 交通事故情勢 交通事故発生状況の推移 1 1 交通事故情勢 c 平成 26 年中の交通事故発生状況 交通事故発生件数 57 万 3,465 件 ( 前年比 -8.8%) 10 年連続で減少 交通事故死者数 4,113
【生産性革命プロジェクト】 産業界における気象情報利活用
 クルマの ICT 革命 ~ 自動運転 社会実装 ~ 自動運転技術の実用化により 安全性の向上 運送効率の向上 新たな交通サービスの創出等が図られ 大幅な生産性向上に資する可能性 これらの実現に向けて ルールの整備やシステムの実証を進める 政策課題 交通事故の 96% は運転者に起因 法令違反別死亡事故発生件数 (H25 年 ) トラックの隊列走行 運転者の法令違反 96% 将来ビジョンと実用化に向けた課題
クルマの ICT 革命 ~ 自動運転 社会実装 ~ 自動運転技術の実用化により 安全性の向上 運送効率の向上 新たな交通サービスの創出等が図られ 大幅な生産性向上に資する可能性 これらの実現に向けて ルールの整備やシステムの実証を進める 政策課題 交通事故の 96% は運転者に起因 法令違反別死亡事故発生件数 (H25 年 ) トラックの隊列走行 運転者の法令違反 96% 将来ビジョンと実用化に向けた課題
自動運転に関する世界の動向 2012 年頃より 各国で活発に議論が開始されている ITS WC Vienna ITS WC Tokyo ITS WC Detroit ITS EU Dublin TRA Paris ITS EU Helsinki WS#1 WG#1 WS
 自動運転に関する国際動向 平成 27 年 2 月 27 日内閣府大臣官房審議官 ( 科学技術 イノベーション担当 ) 山岸秀之 自動運転に関する世界の動向 2012 年頃より 各国で活発に議論が開始されている 2012 2013 2014 ITS WC Vienna ITS WC Tokyo ITS WC Detroit ITS EU Dublin TRA Paris ITS EU Helsinki
自動運転に関する国際動向 平成 27 年 2 月 27 日内閣府大臣官房審議官 ( 科学技術 イノベーション担当 ) 山岸秀之 自動運転に関する世界の動向 2012 年頃より 各国で活発に議論が開始されている 2012 2013 2014 ITS WC Vienna ITS WC Tokyo ITS WC Detroit ITS EU Dublin TRA Paris ITS EU Helsinki
ITS とは 1 ITS の役割 ITS (Intelligent Transport Systemsys) 高度道路交通システム 人と道路と自動車の間で情報の受発信を行い 道路交通が抱える事故や渋滞 環境対策など 様々な課題を解決するためのシステムとして考えられました 常に最先端の情報通信や制御技
 高度道路交通システム 人と道路と自動車の間で情報の受発信を行い 道路交通が抱える事故や渋滞 環境対策など 様々な課題を解決するためのシステムとして考えられました 常に最先端の情報通信や制御技") 文部科学省委託事業 次世代自動車エキスパート養成教育プログラム開発事業 実証実験授業講座名 次世代自動車基礎地域版 社会における ITS の役割について 氏名 1 ITS とは 1 ITS の役割 ITS (Intelligent Transport Systemsys) 高度道路交通システム 人と道路と自動車の間で情報の受発信を行い 道路交通が抱える事故や渋滞 環境対策など 様々な課題を解決するためのシステムとして考えられました
文部科学省委託事業 次世代自動車エキスパート養成教育プログラム開発事業 実証実験授業講座名 次世代自動車基礎地域版 社会における ITS の役割について 氏名 1 ITS とは 1 ITS の役割 ITS (Intelligent Transport Systemsys) 高度道路交通システム 人と道路と自動車の間で情報の受発信を行い 道路交通が抱える事故や渋滞 環境対策など 様々な課題を解決するためのシステムとして考えられました
見出しタイトル
 2013 No.42 国内における自動車の自動運転システムの将来像 2013 年 9 月 13 日に政府の総合科学技術会議において 来年度創設される府省横断事業 戦略的イノベーション創造プログラム 1 の課題候補として 自動車の自動運転システムを含む 10 テーマが決定された これらは新聞でも大きく取り上げられ 自動車メーカーにおける自動運転システム開発の動きも加速している 10 月 14 日 ~
2013 No.42 国内における自動車の自動運転システムの将来像 2013 年 9 月 13 日に政府の総合科学技術会議において 来年度創設される府省横断事業 戦略的イノベーション創造プログラム 1 の課題候補として 自動車の自動運転システムを含む 10 テーマが決定された これらは新聞でも大きく取り上げられ 自動車メーカーにおける自動運転システム開発の動きも加速している 10 月 14 日 ~
( おさらい ) 自動運転とは レベルレベル1 レベル2 レベル3 レベル4 定義 加速 操舵 制動のいずれかの操作をシステムが行う 加速 操舵 制動のうち複数の操作を一度にシステムが行う ( 自動運転中であっても 運転責任はドライバーにある ) 加速 操舵 制動をすべてシステムが行い システムが要
 自動運転とは レベルレベル1 レベル2 レベル3 レベル4 定義 加速 操舵 制動のいずれかの操作をシステムが行う 加速 操舵 制動のうち複数の操作を一度にシステムが行う ( 自動運転中であっても 運転責任はドライバーにある ) 加速 操舵 制動をすべてシステムが行い システムが要") 自動運転と損害賠償 ~ 自動運転者事故の責任は誰が負うべきか ~ 2016 年 12 月 16 日一般社団法人日本損害保険協会大坪護 ( おさらい ) 自動運転とは レベルレベル1 レベル2 レベル3 レベル4 定義 加速 操舵 制動のいずれかの操作をシステムが行う 加速 操舵 制動のうち複数の操作を一度にシステムが行う ( 自動運転中であっても 運転責任はドライバーにある ) 加速 操舵 制動をすべてシステムが行い
自動運転と損害賠償 ~ 自動運転者事故の責任は誰が負うべきか ~ 2016 年 12 月 16 日一般社団法人日本損害保険協会大坪護 ( おさらい ) 自動運転とは レベルレベル1 レベル2 レベル3 レベル4 定義 加速 操舵 制動のいずれかの操作をシステムが行う 加速 操舵 制動のうち複数の操作を一度にシステムが行う ( 自動運転中であっても 運転責任はドライバーにある ) 加速 操舵 制動をすべてシステムが行い
21m 車両の検証項目 ダブル連結トラック実験 高速道路 3 交通流への影響 4 道路構造への影響 合流部 : 本線 合流部 : ランプ 追越時 車線変更部 検証項目 分析視点 データ等 1 省人化 同一量輸送時のドライバー数 乗務記録表 環境負荷 同一量輸送時のCO2 排出量 2 走行 カーブ (
 21m ダブル連結トラック実験の実施状況 効果検証 ( 中間とりまとめ ) 21m 車両の検証項目 ダブル連結トラック実験 高速道路 3 交通流への影響 4 道路構造への影響 合流部 : 本線 合流部 : ランプ 追越時 車線変更部 検証項目 分析視点 データ等 1 省人化 同一量輸送時のドライバー数 乗務記録表 環境負荷 同一量輸送時のCO2 排出量 2 走行 カーブ ( 降坂部 ) 速度分布(
21m ダブル連結トラック実験の実施状況 効果検証 ( 中間とりまとめ ) 21m 車両の検証項目 ダブル連結トラック実験 高速道路 3 交通流への影響 4 道路構造への影響 合流部 : 本線 合流部 : ランプ 追越時 車線変更部 検証項目 分析視点 データ等 1 省人化 同一量輸送時のドライバー数 乗務記録表 環境負荷 同一量輸送時のCO2 排出量 2 走行 カーブ ( 降坂部 ) 速度分布(
特集 モビリティの進化 先進的な交通社会を目指して 自動運転 隊列走行の実現に向けて 自動運転技術の開発状況について 3 青木啓二 ( 日本自動車研究所 ) 基応専般 自動運転車開発の動き 安全 安心で環境にやさしいモビリティ社会の実現を目指して, 路車間通信を利用した安全運転支援システムや自動運転
 基応専般 自動運転車開発の動き 安全 安心で環境にやさしいモビリティ社会の実現を目指して, 路車間通信を利用した安全運転支援システムや自動運転") 自動運転 隊列走行の実現に向けて 自動運転技術の開発状況について 3 青木啓二 ( 日本自動車研究所 ) 基応専般 自動運転車開発の動き 安全 安心で環境にやさしいモビリティ社会の実現を目指して, 路車間通信を利用した安全運転支援システムや自動運転車の開発等, 自動車と情報通信との融合による新しい自動車交通システムの開発が進められている. 特に自動運転車はドライバの認知 判断 操作といった運転操作を補助する運転支援システムに代わる次世代のシステムとして期待されており,
自動運転 隊列走行の実現に向けて 自動運転技術の開発状況について 3 青木啓二 ( 日本自動車研究所 ) 基応専般 自動運転車開発の動き 安全 安心で環境にやさしいモビリティ社会の実現を目指して, 路車間通信を利用した安全運転支援システムや自動運転車の開発等, 自動車と情報通信との融合による新しい自動車交通システムの開発が進められている. 特に自動運転車はドライバの認知 判断 操作といった運転操作を補助する運転支援システムに代わる次世代のシステムとして期待されており,
国土技術政策総合研究所 研究資料
 第 7 章 検査基準 7-1 検査の目的 検査の目的は 対向車両情報表示サービス 前方停止車両 低速車両情報表示サービスおよび その組み合わせサービスに必要な機能の品質を確認することである 解説 設備の設置後 機能や性能の総合的な調整を経て 検査基準に従い各設備検査を実施する 各設備検査の合格後 各設備間を接続した完成検査で機能 性能等のサービス仕様を満たしていることを確認する検査を実施し 合否を判定する
第 7 章 検査基準 7-1 検査の目的 検査の目的は 対向車両情報表示サービス 前方停止車両 低速車両情報表示サービスおよび その組み合わせサービスに必要な機能の品質を確認することである 解説 設備の設置後 機能や性能の総合的な調整を経て 検査基準に従い各設備検査を実施する 各設備検査の合格後 各設備間を接続した完成検査で機能 性能等のサービス仕様を満たしていることを確認する検査を実施し 合否を判定する
Microsoft PowerPoint - day1-l05.pptx
 自動運転の実現に向けた 警察の取組について 平成 30 年 11 月 14 日警察庁交通局交通企画課自動運転企画室長杉俊弘 概 要 1 日本における交通事故の発生状況等 2 自動運転の概要と制度整備大綱 3 自動運転の実現に向けた警察の取組 1 日本における交通事故の発生状況 ( 人 ) 7,000 6,000 5,000 4,000 3,000 2,000 1,000 0 平成 6,415 5,796
自動運転の実現に向けた 警察の取組について 平成 30 年 11 月 14 日警察庁交通局交通企画課自動運転企画室長杉俊弘 概 要 1 日本における交通事故の発生状況等 2 自動運転の概要と制度整備大綱 3 自動運転の実現に向けた警察の取組 1 日本における交通事故の発生状況 ( 人 ) 7,000 6,000 5,000 4,000 3,000 2,000 1,000 0 平成 6,415 5,796
平成 28 年度第 2 回車両安全対策検討会平成 28 年 12 月 9 日 安全 - 資料 9 自動運転に係る国際基準の検討状況
 平成 28 年度第 2 回車両安全対策検討会平成 28 年 12 月 9 日 安全 - 資料 9 自動運転に係る国際基準の検討状況 自動運転の導入を巡る国際的動向 国連欧州経済委員会 (UN-ECE) の政府間会合 (WP29) において自動車の安全 環境基準に関する国際調和活動を実施しているところ 平成 26 年 11 月に開催された WP29 において 自動運転について議論する 自動運転分科会
平成 28 年度第 2 回車両安全対策検討会平成 28 年 12 月 9 日 安全 - 資料 9 自動運転に係る国際基準の検討状況 自動運転の導入を巡る国際的動向 国連欧州経済委員会 (UN-ECE) の政府間会合 (WP29) において自動車の安全 環境基準に関する国際調和活動を実施しているところ 平成 26 年 11 月に開催された WP29 において 自動運転について議論する 自動運転分科会
自動運転への対応状況 自動運転の分類 運転支援型自動運転 : 緊急時は運転者が操作 ( 運転者がいることを前提とした自動運転 ) 完全自動運転 : 緊急時もシステムが操作 ( 運転者が不要な自動運転 ) 自動車メーカーの開発状況 運転支援の高度化を目指す 当面目標とはしておらず 試験走行の予定もない
 完全自動運転 : 緊急時もシステムが操作 ( 運転者が不要な自動運転 ) 自動車メーカーの開発状況 運転支援の高度化を目指す 当面目標とはしておらず 試験走行の予定もない") 資料 3 自動運転を巡る国際的動向 国土交通省自動車局技術政策課 Ministry of Land, Infrastructure, Transport and Tourism 1 自動運転への対応状況 自動運転の分類 運転支援型自動運転 : 緊急時は運転者が操作 ( 運転者がいることを前提とした自動運転 ) 完全自動運転 : 緊急時もシステムが操作 ( 運転者が不要な自動運転 ) 自動車メーカーの開発状況
資料 3 自動運転を巡る国際的動向 国土交通省自動車局技術政策課 Ministry of Land, Infrastructure, Transport and Tourism 1 自動運転への対応状況 自動運転の分類 運転支援型自動運転 : 緊急時は運転者が操作 ( 運転者がいることを前提とした自動運転 ) 完全自動運転 : 緊急時もシステムが操作 ( 運転者が不要な自動運転 ) 自動車メーカーの開発状況
自動運転に係る国際基準の動向
 自動運転に係る国際基準の動向 平成 28 年 12 月 自動運転の導入を巡る国際的動向 国連欧州経済委員会 (UN-ECE) の政府間会合 (WP29) において自動車の安全 環境基準に関する国際調和活動を実施しているところ 平成 26 年 11 月に開催された WP29 において 自動運転について議論する 自動運転分科会 を立ち上げることが合意された この分科会では日本と英国が共同議長に就任し 自動運転に関する国際的な議論を主導している
自動運転に係る国際基準の動向 平成 28 年 12 月 自動運転の導入を巡る国際的動向 国連欧州経済委員会 (UN-ECE) の政府間会合 (WP29) において自動車の安全 環境基準に関する国際調和活動を実施しているところ 平成 26 年 11 月に開催された WP29 において 自動運転について議論する 自動運転分科会 を立ち上げることが合意された この分科会では日本と英国が共同議長に就任し 自動運転に関する国際的な議論を主導している
高度交通システムの 研究
 高度交通システムと情報通信技術 2019/6/28 高取祐介 1 ITS( 高度交通システム ) I Intelligent( 高度 知能化 ) T Transport( 輸送 交通 ) S Systems( システム ) 情報通信技術を用いて 人やモノの移動を高度化するためのシステムの総称 交通問題の解決 利便性向上が目的事故防止 渋滞解消 環境改善など 2 ITS の要素技術 人や物が実世界で移動する
高度交通システムと情報通信技術 2019/6/28 高取祐介 1 ITS( 高度交通システム ) I Intelligent( 高度 知能化 ) T Transport( 輸送 交通 ) S Systems( システム ) 情報通信技術を用いて 人やモノの移動を高度化するためのシステムの総称 交通問題の解決 利便性向上が目的事故防止 渋滞解消 環境改善など 2 ITS の要素技術 人や物が実世界で移動する
資料 2 ダブル連結トラック実験方針 ( 案 ) Ministry of Land, Infrastructure, Transport and Tourism
 Ministry of Land, Infrastructure, Transport and Tourism") 資料 2 ダブル連結トラック実験方針 ( 案 ) Ministry of Land, Infrastructure, Transport and Tourism 1. 実験の概要 深刻なドライバー不足が進行するトラック輸送の省人化を促進するため ダブル連 結トラック の特車通行許可基準 ( 車両長 ) を最大 25m まで緩和する実験を 新東名 を中心とするフィールドで実施し 省人化の効果 安全性等を検証する
資料 2 ダブル連結トラック実験方針 ( 案 ) Ministry of Land, Infrastructure, Transport and Tourism 1. 実験の概要 深刻なドライバー不足が進行するトラック輸送の省人化を促進するため ダブル連 結トラック の特車通行許可基準 ( 車両長 ) を最大 25m まで緩和する実験を 新東名 を中心とするフィールドで実施し 省人化の効果 安全性等を検証する
(4) トラムトレインの衝突安全対策 1) 自動運転技術のトラムトレイン等への応用自動運転技術について トラムトレイン LRT 及びBRTへの応用について検討を行った 現在 2020 年までの自動運転の実用化を目指して 日本 米国及び欧州において技術開発が進められている 自動運転は人間に代わり認知
 トラムトレインの衝突安全対策 1) 自動運転技術のトラムトレイン等への応用自動運転技術について トラムトレイン LRT 及びBRTへの応用について検討を行った 現在 2020 年までの自動運転の実用化を目指して 日本 米国及び欧州において技術開発が進められている 自動運転は人間に代わり認知") 表我が国の鉄道テロ対策のベストプラクティス ( その 2) 3. 鉄道テロ対策に資する新技術の導入に向けた取組み ( つづき ) 4. 鉄道事業者と警察機関等多様な主体が連携した取組み駅構内売店と警察機関との緊急通報体制の強化 沿線住民のボランティアによる不審情報の通報制度など鉄軌道事業者と警察機関等とが連携した様々な取組 5. テロ発生時の緊急事態対処 被害軽減対策鉄道テロを想定した警察 消防等との合同訓練
表我が国の鉄道テロ対策のベストプラクティス ( その 2) 3. 鉄道テロ対策に資する新技術の導入に向けた取組み ( つづき ) 4. 鉄道事業者と警察機関等多様な主体が連携した取組み駅構内売店と警察機関との緊急通報体制の強化 沿線住民のボランティアによる不審情報の通報制度など鉄軌道事業者と警察機関等とが連携した様々な取組 5. テロ発生時の緊急事態対処 被害軽減対策鉄道テロを想定した警察 消防等との合同訓練
[ 内容 ] [Ⅰ] 総論 [Ⅱ] ITSの機能 [Ⅲ] 情報通信技術 [Ⅳ] 国際動向 [Ⅴ] 展望 2
![[ 内容 ] [Ⅰ] 総論 [Ⅱ] ITSの機能 [Ⅲ] 情報通信技術 [Ⅳ] 国際動向 [Ⅴ] 展望 2](/thumbs/92/110849395.jpg "[ 内容 ] [Ⅰ] 総論 [Ⅱ] ITSの機能 [Ⅲ] 情報通信技術 [Ⅳ] 国際動向 [Ⅴ] 展望 2") 高度道路交通システム ITS(Intelligent Transport Systems) 沖電気工業 ( 株 ) SSC 技師長福井良太郎 1 [ 内容 ] [Ⅰ] 総論 [Ⅱ] ITSの機能 [Ⅲ] 情報通信技術 [Ⅳ] 国際動向 [Ⅴ] 展望 2 2002 7 3 IT 最前線 ITS -1. ITS 2002 7 4 IT 最前線 ITS 道路 -2. ITS 20 -3. ITS Intelligent
高度道路交通システム ITS(Intelligent Transport Systems) 沖電気工業 ( 株 ) SSC 技師長福井良太郎 1 [ 内容 ] [Ⅰ] 総論 [Ⅱ] ITSの機能 [Ⅲ] 情報通信技術 [Ⅳ] 国際動向 [Ⅴ] 展望 2 2002 7 3 IT 最前線 ITS -1. ITS 2002 7 4 IT 最前線 ITS 道路 -2. ITS 20 -3. ITS Intelligent
高速道路への完全自動運転導入によるリスク低減効果の分析 リスク工学専攻グループ演習 10 班 田村聡宮本智明鄭起宅 ( アドバイザー教員伊藤誠 )
") 高速道路への完全自動運転導入によるリスク低減効果の分析 リスク工学専攻グループ演習 10 班 田村聡宮本智明鄭起宅 ( アドバイザー教員伊藤誠 ) はじめに 研究背景 自動運転の定義 研究目的 発表の流れ 交通流シミュレーションを用いた分析 分析手法 評価指標 分析結果および考察 ドライブシミュレータを用いた分析 分析手法 評価方法 分析結果および考察 まとめ 研究背景交通システムの現状 交通事故の死傷者数が一定の割合で推移
高速道路への完全自動運転導入によるリスク低減効果の分析 リスク工学専攻グループ演習 10 班 田村聡宮本智明鄭起宅 ( アドバイザー教員伊藤誠 ) はじめに 研究背景 自動運転の定義 研究目的 発表の流れ 交通流シミュレーションを用いた分析 分析手法 評価指標 分析結果および考察 ドライブシミュレータを用いた分析 分析手法 評価方法 分析結果および考察 まとめ 研究背景交通システムの現状 交通事故の死傷者数が一定の割合で推移
図 1 運転者 ( 原付以上 ) の法令違反別事故件数 (2015 年 ) 出典 : 警察庁 平成 27 年度における交通事故発生状況 表 1 自動運転のレベル出典 : 自動走行ビジネス検討会資料を基に JAEF 作成 加速 ( アクセル ) の自動化 =クルーズコントロール ( アクセルペダルを踏
 の法令違反別事故件数 (2015 年 ) 出典 : 警察庁 平成 27 年度における交通事故発生状況 表 1 自動運転のレベル出典 : 自動走行ビジネス検討会資料を基に JAEF 作成 加速 ( アクセル ) の自動化 =クルーズコントロール ( アクセルペダルを踏") 自動運転の現状と課題 公益財団法人日本自動車教育振興財団理事長田利彦 今, 自動車業界で話題になっている自動運転について, 公益財団法人日本自動車教育振興財団が年 3 回 (3 月,6 月,10 月 ) 発行している Traffi- Cation 2016 No.42 に特集として発表された内容を紹介する 1. 関心の高まりを見せる自動運転 ⑴ 自動運転機能の一部はすでに実運用されている自動運転というと,
自動運転の現状と課題 公益財団法人日本自動車教育振興財団理事長田利彦 今, 自動車業界で話題になっている自動運転について, 公益財団法人日本自動車教育振興財団が年 3 回 (3 月,6 月,10 月 ) 発行している Traffi- Cation 2016 No.42 に特集として発表された内容を紹介する 1. 関心の高まりを見せる自動運転 ⑴ 自動運転機能の一部はすでに実運用されている自動運転というと,
Microsoft Word - 資料4(修正).docx
.docx") 資料 4 運転支援機能の表示に関する規約運用の考え方 平成 30 年 11 月 20 日一般社団法人自動車公正取引協議会新車委員会 大型車委員会決定 衝突被害軽減ブレーキや車線逸脱警報装置 ペダル踏み間違い時加速抑制装置や自動運転化技術レベル2までの段階の機能や技術 ( 以下 運転支援機能 という ) について 一般消費者への理解促進を図るとともに 過信や誤解を招くような表示が行われることのないよう
資料 4 運転支援機能の表示に関する規約運用の考え方 平成 30 年 11 月 20 日一般社団法人自動車公正取引協議会新車委員会 大型車委員会決定 衝突被害軽減ブレーキや車線逸脱警報装置 ペダル踏み間違い時加速抑制装置や自動運転化技術レベル2までの段階の機能や技術 ( 以下 運転支援機能 という ) について 一般消費者への理解促進を図るとともに 過信や誤解を招くような表示が行われることのないよう
1 趣旨このガイドラインは 日本国内の公道 ( 道路交通法 ( 昭和 35 年法律第 105 号 ) 第 2 条第 1 項第 1 号に規定する 道路 をいう 以下同じ ) において 自動走行システム ( 加速 操舵 制動のうち複数の操作を一度に行い 又はその全てを行うシステムをいう 以下同じ ) を
 第 2 条第 1 項第 1 号に規定する 道路 をいう 以下同じ ) において 自動走行システム ( 加速 操舵 制動のうち複数の操作を一度に行い 又はその全てを行うシステムをいう 以下同じ ) を") 自動走行システムに関する公道実証実験のためのガイドライン 平成 28 年 5 月 警察庁 1 趣旨このガイドラインは 日本国内の公道 ( 道路交通法 ( 昭和 35 年法律第 105 号 ) 第 2 条第 1 項第 1 号に規定する 道路 をいう 以下同じ ) において 自動走行システム ( 加速 操舵 制動のうち複数の操作を一度に行い 又はその全てを行うシステムをいう 以下同じ ) を用いて自動車を走行させる実証実験
自動走行システムに関する公道実証実験のためのガイドライン 平成 28 年 5 月 警察庁 1 趣旨このガイドラインは 日本国内の公道 ( 道路交通法 ( 昭和 35 年法律第 105 号 ) 第 2 条第 1 項第 1 号に規定する 道路 をいう 以下同じ ) において 自動走行システム ( 加速 操舵 制動のうち複数の操作を一度に行い 又はその全てを行うシステムをいう 以下同じ ) を用いて自動車を走行させる実証実験
1. 自動運転とは? 2. 自動運転車開発の実例 (1)E-ITSにおける自動運転 隊列走行技術 (2) 海外の隊列走行技術 (KONVOI, SARTRE) (3) 自律型自動運転車技術 (Have-it アーバンチャレンジ グーグル車) 3. 実用化に向けた課題 情報処理学会計算機アーキテクチャ
E-ITSにおける自動運転 隊列走行技術 (2) 海外の隊列走行技術 (KONVOI, SARTRE) (3) 自律型自動運転車技術 (Have-it アーバンチャレンジ グーグル車) 3. 実用化に向けた課題 情報処理学会計算機アーキテクチャ") 自動運転技術の開発動向と実用化に向けた課題 一般財団法人日本自動車研究所 ITS 研究部 青木 啓二 情報処理学会計算機アーキテクチャ研究会 自動運転技術の開発動向と実用化に向けた課題 1 1. 自動運転とは? 2. 自動運転車開発の実例 (1)E-ITSにおける自動運転 隊列走行技術 (2) 海外の隊列走行技術 (KONVOI, SARTRE) (3) 自律型自動運転車技術 (Have-it アーバンチャレンジ
自動運転技術の開発動向と実用化に向けた課題 一般財団法人日本自動車研究所 ITS 研究部 青木 啓二 情報処理学会計算機アーキテクチャ研究会 自動運転技術の開発動向と実用化に向けた課題 1 1. 自動運転とは? 2. 自動運転車開発の実例 (1)E-ITSにおける自動運転 隊列走行技術 (2) 海外の隊列走行技術 (KONVOI, SARTRE) (3) 自律型自動運転車技術 (Have-it アーバンチャレンジ
ニュースレター「SEI WORLD」2016年6月号
 1 SEIWORLD JUNE 2016 JUNE 2016 SEIWORLD 2 ITS Intelligent Transport Systems 安心 安全 で 快適 な モビリティ社会に貢献しています 今回ご紹介した製品 ソリューションは 住 友 電 工グル ープは い つから ITS関連製品を提 供しているの 当社 Webサイトで詳しくご紹介しています ぜひご覧ください http://www.sei.co.jp/products/its/
1 SEIWORLD JUNE 2016 JUNE 2016 SEIWORLD 2 ITS Intelligent Transport Systems 安心 安全 で 快適 な モビリティ社会に貢献しています 今回ご紹介した製品 ソリューションは 住 友 電 工グル ープは い つから ITS関連製品を提 供しているの 当社 Webサイトで詳しくご紹介しています ぜひご覧ください http://www.sei.co.jp/products/its/
ひっかけ問題 ( 緊急対策ゼミ ) ステップ A B C D 39.4% 学科試験パーフェクト分析から ひっかけ問題 に重点をおいた特別ゼミ! 2 段階 出題頻度 39.4% D ゼミ / 内容 *(2 段階 24.07%+ 安知 15.28%=39.4
 ステップ A B C D 39.4% 学科試験パーフェクト分析から ひっかけ問題 に重点をおいた特別ゼミ! 2 段階 出題頻度 39.4% D ゼミ / 内容 *(2 段階 24.07%+ 安知 15.28%=39.4") ひっかけ問題 ( 緊急対策ゼミ ) ステップ A B C D 39.4% http://www.derutoko.kp 学科試験パーフェクト分析から ひっかけ問題 に重点をおいた特別ゼミ! 2 段階 出題頻度 39.4% D ゼミ / 内容 *(2 段階 24.07%+ 安知 15.28%=39.4%) 16 経路の設計 0.19%( 予想出題数 0~1 問 ) 17 高速道路での運転 8.33%(
ひっかけ問題 ( 緊急対策ゼミ ) ステップ A B C D 39.4% http://www.derutoko.kp 学科試験パーフェクト分析から ひっかけ問題 に重点をおいた特別ゼミ! 2 段階 出題頻度 39.4% D ゼミ / 内容 *(2 段階 24.07%+ 安知 15.28%=39.4%) 16 経路の設計 0.19%( 予想出題数 0~1 問 ) 17 高速道路での運転 8.33%(
<4D F736F F F696E74202D CC8ED48ED48AD492CA904D82CC8EE D918CF08FC88E9197BF816A2E B8CDD8AB B8
 資料 1-8 ASV における車車間通信の取り組みについて 国土交通省自動車交通局 技術安全部技術企画課 1 交通事故の現状と政府目標 < 交通事故の状況 > 平成 19 年死者数 5,744 人 平成 19 年死傷者数 1,040,189 人 < 政府目標 > ( 警察庁統計より ) 平成 15 年総理施政方針 2012 年までに 死者数を半減し 5000 人以下とする 第 8 次交通安全基本計画
資料 1-8 ASV における車車間通信の取り組みについて 国土交通省自動車交通局 技術安全部技術企画課 1 交通事故の現状と政府目標 < 交通事故の状況 > 平成 19 年死者数 5,744 人 平成 19 年死傷者数 1,040,189 人 < 政府目標 > ( 警察庁統計より ) 平成 15 年総理施政方針 2012 年までに 死者数を半減し 5000 人以下とする 第 8 次交通安全基本計画
SIP 自動走行システムの概要 1 < 実施体制 > 総合科学技術 イノベーション会議 (CSTI) ガバニングボード PD( プログラムディレクター ) ( 内閣府に課題ごとに置く ) 課題ごとに以下の体制を整備 推進委員会 PD( 議長 ) 担当有識者議員 内閣府 関係省庁 外部専門家 関係省庁
 ガバニングボード PD( プログラムディレクター ) ( 内閣府に課題ごとに置く ) 課題ごとに以下の体制を整備 推進委員会 PD( 議長 ) 担当有識者議員 内閣府 関係省庁 外部専門家 関係省庁") 戦略的イノベーション創造プログラム (SIP) 自動走行システム研究開発の取組状況 内閣府 政策統括官 ( 科学技術 イノベーション担当 ) SIP 自動走行システムの概要 1 < 実施体制 > 総合科学技術 イノベーション会議 (CSTI) ガバニングボード PD( プログラムディレクター ) ( 内閣府に課題ごとに置く ) 課題ごとに以下の体制を整備 推進委員会 PD( 議長 ) 担当有識者議員
戦略的イノベーション創造プログラム (SIP) 自動走行システム研究開発の取組状況 内閣府 政策統括官 ( 科学技術 イノベーション担当 ) SIP 自動走行システムの概要 1 < 実施体制 > 総合科学技術 イノベーション会議 (CSTI) ガバニングボード PD( プログラムディレクター ) ( 内閣府に課題ごとに置く ) 課題ごとに以下の体制を整備 推進委員会 PD( 議長 ) 担当有識者議員
資料 5 自動車検査場における OBD 検査に関する実証実験について 平成 30 年 4 月 ( 独 ) 自動車技術総合機構軽自動車検査協会 Copyright National Agency for Automobile and Land Transport Technology 1
 自動車技術総合機構軽自動車検査協会 Copyright National Agency for Automobile and Land Transport Technology 1") 資料 5 自動車検査場における OBD 検査に関する実証実験について 平成 30 年 4 月 ( 独 ) 自動車技術総合機構軽自動車検査協会 1 目次 1. 実証実験の実施体制 2. 実証実験の概要 3. 実験結果 4.OBD 検査導入に向けた課題と解決策 2 1. 実証実験の実施体制 平成 28 年度及び29 年度 自動車技術総合機構と軽自動車検査協会が連携し スナップオン ツールズ ( 株 )
資料 5 自動車検査場における OBD 検査に関する実証実験について 平成 30 年 4 月 ( 独 ) 自動車技術総合機構軽自動車検査協会 1 目次 1. 実証実験の実施体制 2. 実証実験の概要 3. 実験結果 4.OBD 検査導入に向けた課題と解決策 2 1. 実証実験の実施体制 平成 28 年度及び29 年度 自動車技術総合機構と軽自動車検査協会が連携し スナップオン ツールズ ( 株 )
1 見出し1
 9.17.1 現況調査 (1) 調査事項及びその選択理由調査事項及びその選択理由は 表 9.17-1 に示すとおりである 調査事項 1 交通量等の状況 2 道路等の状況 3 土地利用の状況 4 規制等の状況 表 9.17-1 調査事項及びその選択理由 選択理由事業の実施に伴い交通渋滞の発生又は解消等 交通量及び交通流の変化が考えられることから 計画地及びその周辺について 左記の事項に係る調査が必要である
9.17.1 現況調査 (1) 調査事項及びその選択理由調査事項及びその選択理由は 表 9.17-1 に示すとおりである 調査事項 1 交通量等の状況 2 道路等の状況 3 土地利用の状況 4 規制等の状況 表 9.17-1 調査事項及びその選択理由 選択理由事業の実施に伴い交通渋滞の発生又は解消等 交通量及び交通流の変化が考えられることから 計画地及びその周辺について 左記の事項に係る調査が必要である
スライド 1
 平成 28 年度経済産業省 国土交通省委託事業 自動走行の民事上の責任及び社会受容性に関する研究 シンポジウム 平成 29 年 3 月 7 日於 TKPガーデンシティPREMIUM 神保町 自動運転技術の動向について 独立行政法人自動車技術総合機構交通安全環境研究所自動車研究部河合英直 1 Agenda 1. 交通安全環境研究所について 2. 自動運転車とは 3. 運転支援技術の現状 4. 最後に
平成 28 年度経済産業省 国土交通省委託事業 自動走行の民事上の責任及び社会受容性に関する研究 シンポジウム 平成 29 年 3 月 7 日於 TKPガーデンシティPREMIUM 神保町 自動運転技術の動向について 独立行政法人自動車技術総合機構交通安全環境研究所自動車研究部河合英直 1 Agenda 1. 交通安全環境研究所について 2. 自動運転車とは 3. 運転支援技術の現状 4. 最後に
【資料8】車両安全対策の事後効果評価rev4
 平成 28 年度第 2 回車両安全対策検討会平成 28 年 12 月 9 日 安全 - 資料 -8 車両安全対策の事後効果評価 背景 目的 平成 23 年の交通政策審議会報告書において交通事故死者数削減目標 ( 平成 32 年度までに平成 22 年比で車両安全対策により 1,000 人削減 ) が設定された 中間年である平成 27 年度の調査結果では 735 人の削減効果と試算された 平成 32 年の目標に向けた達成状況について検証するため
平成 28 年度第 2 回車両安全対策検討会平成 28 年 12 月 9 日 安全 - 資料 -8 車両安全対策の事後効果評価 背景 目的 平成 23 年の交通政策審議会報告書において交通事故死者数削減目標 ( 平成 32 年度までに平成 22 年比で車両安全対策により 1,000 人削減 ) が設定された 中間年である平成 27 年度の調査結果では 735 人の削減効果と試算された 平成 32 年の目標に向けた達成状況について検証するため
ITS 安全運転支援システムイメージ
 資料 2-3 ITS 無線システムの利用イメージと検討課題について 2008 年 12 月 5 日 日本電気株式会社 ITS 事業推進センター ITS 安全運転支援システムイメージ ITS 安全運転支援システム利用イメージ 車車間 路車間通信により 周辺車両の位置情報や路側センサ情報等を共有 その情報を利用し 安全運転支援や渋滞回避などのアプリケーションを実現する この先 前方車両急ブレーキ走行注意
資料 2-3 ITS 無線システムの利用イメージと検討課題について 2008 年 12 月 5 日 日本電気株式会社 ITS 事業推進センター ITS 安全運転支援システムイメージ ITS 安全運転支援システム利用イメージ 車車間 路車間通信により 周辺車両の位置情報や路側センサ情報等を共有 その情報を利用し 安全運転支援や渋滞回避などのアプリケーションを実現する この先 前方車両急ブレーキ走行注意
同轍制御を行うことが出来る. そのため, 車両のアクセルやブレーキのコントロールを手動で行わずとも, 先行車両に自動で追随することが出来る. プラトゥーン走行によって期待される効果としては, 以下が挙げられる 道路容量の増大による効果プラトゥーン構成車両が車間距離を自由走行時よりも縮め
 マルチエージェントによるプラトゥーン走行グループ構成の検討 河合功介 田学軍 井手口哲夫 奥田隆史 プラトゥーン走行とは車間距離を縮めた複数台の車両が隊列を成して道路を走行することにより, 空気抵抗の減少による燃費の向上や, 道路容量の増大による渋滞の抑制に期待されている走行形態である. プラトゥーン走行に関して,2010 年現在, さまざまな研究, 実証実験が行われてきた. しかし, プラトゥーンが一般車両と混在する場合における,
マルチエージェントによるプラトゥーン走行グループ構成の検討 河合功介 田学軍 井手口哲夫 奥田隆史 プラトゥーン走行とは車間距離を縮めた複数台の車両が隊列を成して道路を走行することにより, 空気抵抗の減少による燃費の向上や, 道路容量の増大による渋滞の抑制に期待されている走行形態である. プラトゥーン走行に関して,2010 年現在, さまざまな研究, 実証実験が行われてきた. しかし, プラトゥーンが一般車両と混在する場合における,
<4D F736F F F696E74202D E096BE8E9197BF816982A8967E8A8488F8816A>
 渋滞回滞箇所数高速道路本線の対策強化 ( 案 ) ゴールデンウィークは 都市部の渋滞回数は減少したが 地方部の渋滞回数が約 2 倍以上に増加 ( 図 1) また 既存の渋滞箇所ではなく 新たな箇所での渋滞が 全体箇所数の約 3 割を占める ( 図 2) 45 4 35 3 25 2 15 5 地方部大都市部 渋344 14 74 63 H2 GW 図 1 地域別の渋滞発生回数 (1km 以上 ) 図
渋滞回滞箇所数高速道路本線の対策強化 ( 案 ) ゴールデンウィークは 都市部の渋滞回数は減少したが 地方部の渋滞回数が約 2 倍以上に増加 ( 図 1) また 既存の渋滞箇所ではなく 新たな箇所での渋滞が 全体箇所数の約 3 割を占める ( 図 2) 45 4 35 3 25 2 15 5 地方部大都市部 渋344 14 74 63 H2 GW 図 1 地域別の渋滞発生回数 (1km 以上 ) 図
(案)
") P13005 次世代スマートデバイス開発プロジェクト 基本計画 IoT 推進部 1. 研究開発の目的 目標 内容 (1) 研究開発の目的 1 政策的な重要性次世代交通社会の実現には 自動車の燃焼システムの環境対応に加え 急発進 急停止 渋滞等による非効率な燃料消費の改善及び人の飛び出しや走行中の急な割り込み等による衝突事故の削減など 一層の省エネ化と安全走行の高度化が重要である その実現には 自動車の周辺情報を集め即座に状況を把握するシステムの構築が必要となり
P13005 次世代スマートデバイス開発プロジェクト 基本計画 IoT 推進部 1. 研究開発の目的 目標 内容 (1) 研究開発の目的 1 政策的な重要性次世代交通社会の実現には 自動車の燃焼システムの環境対応に加え 急発進 急停止 渋滞等による非効率な燃料消費の改善及び人の飛び出しや走行中の急な割り込み等による衝突事故の削減など 一層の省エネ化と安全走行の高度化が重要である その実現には 自動車の周辺情報を集め即座に状況を把握するシステムの構築が必要となり
<4D F736F F F696E74202D CA48B8694AD955C89EF81698EA993AE895E935D816A90E79774>
 平成 28 年度高速道路調査会研究発表会 高速道路における自動運転に関する研究 ( 平成 27 年度の活動 ) 公益財団法人高速道路調査会 研究部千葉早苗 本日の発表 1. 研究の概要 高速道路における自動運転に関する研究 2. 研究の検討内容 (1) 自動運転に関する国内動向 (2) 高速道路における安全運転支援システムの効果 (3) 高速道路における自動走行システム ( レベル3) を早期に実現するための課題と対応
平成 28 年度高速道路調査会研究発表会 高速道路における自動運転に関する研究 ( 平成 27 年度の活動 ) 公益財団法人高速道路調査会 研究部千葉早苗 本日の発表 1. 研究の概要 高速道路における自動運転に関する研究 2. 研究の検討内容 (1) 自動運転に関する国内動向 (2) 高速道路における安全運転支援システムの効果 (3) 高速道路における自動走行システム ( レベル3) を早期に実現するための課題と対応
第 2 章横断面の構成 2-1 総則 道路の横断面の基本的な考え方 必要とされる交通機能や空間機能に応じて, 構成要素の組合せ と 総幅員 総幅員 双方の観点から検討 必要とされる道路の機能の設定 通行機能 交通機能アクセス機能 滞留機能 環境空間 防災空間 空間機能 収容空間 市街地形成 横断面構
 2-1 総則 道路の横断面の基本的な考え方 必要とされる交通機能や空間機能に応じて, 構成要素の組合せ と 総幅員 総幅員 双方の観点から検討 必要とされる道路の機能の設定 通行機能 交通機能アクセス機能 滞留機能 環境空間 防災空間 空間機能 収容空間 市街地形成 横断面構成要素とその幅員の検討ネットワークや沿道状況に応交通状況にじたサーヒ ス提供応じて設定を考慮して設定 横断面構成要素の組合せ
2-1 総則 道路の横断面の基本的な考え方 必要とされる交通機能や空間機能に応じて, 構成要素の組合せ と 総幅員 総幅員 双方の観点から検討 必要とされる道路の機能の設定 通行機能 交通機能アクセス機能 滞留機能 環境空間 防災空間 空間機能 収容空間 市街地形成 横断面構成要素とその幅員の検討ネットワークや沿道状況に応交通状況にじたサーヒ ス提供応じて設定を考慮して設定 横断面構成要素の組合せ
1 基本的な整備内容 道路標識 専用通行帯 (327 の 4) の設置 ( 架空標識の場合の例 ) 自 転 車 ピクトグラム ( 自転車マーク等 ) の設置 始点部および中間部 道路標示 専用通行帯 (109 の 6) の設置 ( 過度な表示は行わない ) 専 用 道路標示 車両通行帯 (109)
 の設置 ( 架空標識の場合の例 ) 自 転 車 ピクトグラム ( 自転車マーク等 ) の設置 始点部および中間部 道路標示 専用通行帯 (109 の 6) の設置 ( 過度な表示は行わない ) 専 用 道路標示 車両通行帯 (109)") 第 3 整備ガイドライン 本章では 安全で快適な自転車利用環境創出ガイドライン ( 国土交通省道路局 警察庁交通 局 ) を踏まえ 自転車走行空間の整備にあたって留意する事項などについて定めます 3.1 単路部における整備の考え方 (1) 自転車専用通行帯自転車専用通行帯の整備にあたっては 交通規制に必要な道路標識や道路標示のほか 自動車ドライバーに対して自転車専用の通行帯であることが分かるよう法定外の路面表示や舗装のカラー化を行います
第 3 整備ガイドライン 本章では 安全で快適な自転車利用環境創出ガイドライン ( 国土交通省道路局 警察庁交通 局 ) を踏まえ 自転車走行空間の整備にあたって留意する事項などについて定めます 3.1 単路部における整備の考え方 (1) 自転車専用通行帯自転車専用通行帯の整備にあたっては 交通規制に必要な道路標識や道路標示のほか 自動車ドライバーに対して自転車専用の通行帯であることが分かるよう法定外の路面表示や舗装のカラー化を行います
1 見出し1
 9.16.1 現況調査 (1) 調査事項及びその選択理由調査事項及びその選択理由は 表 9.16-1 に示すとおりである 調査事項 1 交通量等の状況 2 道路等の状況 3 土地利用の状況 4 規制等の状況 表 9.16-1 調査事項及びその選択理由 選択理由事業の実施に伴い交通渋滞の発生又は解消等 交通量及び交通流の変化が考えられることから 計画地及びその周辺について 左記の事項に係る調査が必要である
9.16.1 現況調査 (1) 調査事項及びその選択理由調査事項及びその選択理由は 表 9.16-1 に示すとおりである 調査事項 1 交通量等の状況 2 道路等の状況 3 土地利用の状況 4 規制等の状況 表 9.16-1 調査事項及びその選択理由 選択理由事業の実施に伴い交通渋滞の発生又は解消等 交通量及び交通流の変化が考えられることから 計画地及びその周辺について 左記の事項に係る調査が必要である
1 見出し1
 9.17.1 現況調査 (1) 調査事項及びその選択理由調査事項及びその選択理由は 表 9.17-1 に示すとおりである 調査事項 1 交通量等の状況 2 道路等の状況 3 土地利用の状況 4 規制等の状況 表 9.17-1 調査事項及びその選択理由 選択理由事業の実施に伴い交通渋滞の発生又は解消等 交通量及び交通流の変化が考えられることから 計画地及びその周辺について 左記の事項に係る調査が必要である
9.17.1 現況調査 (1) 調査事項及びその選択理由調査事項及びその選択理由は 表 9.17-1 に示すとおりである 調査事項 1 交通量等の状況 2 道路等の状況 3 土地利用の状況 4 規制等の状況 表 9.17-1 調査事項及びその選択理由 選択理由事業の実施に伴い交通渋滞の発生又は解消等 交通量及び交通流の変化が考えられることから 計画地及びその周辺について 左記の事項に係る調査が必要である
Microsoft Word - 資料6(修正).docx
.docx") 運転支援機能の表示に関する規約運用の考え方 に基づく表示例 資料 6 カタログ (Webを含む) の表示例 < 表示例 1> カタログの表示例 運転支援機能に関する説明や注意喚起等の詳細を表示した上で その他の頁では スペース等の関係により 運転支援機能に関する説明や注意喚起等を全て表示できない場合の例 < 運転支援機能の内容説明 作動条件や作動しない条件等の詳細を表示した頁 > 新型 は止まるをサホ
運転支援機能の表示に関する規約運用の考え方 に基づく表示例 資料 6 カタログ (Webを含む) の表示例 < 表示例 1> カタログの表示例 運転支援機能に関する説明や注意喚起等の詳細を表示した上で その他の頁では スペース等の関係により 運転支援機能に関する説明や注意喚起等を全て表示できない場合の例 < 運転支援機能の内容説明 作動条件や作動しない条件等の詳細を表示した頁 > 新型 は止まるをサホ
Microsoft PowerPoint 群馬大 欧州の自動運の状況 自分用最終版 復元
 2019. 3.26 欧州の自動運転の状況 ( 一財 ) 道路新産業開発機構中村徹 1 本日の内容 1. 欧州の自動運転車両車種 デモンストレーション 2. 自動運転の実運用 3. 自動運転とモビリティー 4. 自動運転の国際会議動向 5. おまけ Mobility as a Service(MaaS) 欧州以外の自動運転の状況 1. 欧州の自動運転車両 1. 欧州の自動運転車両 本日紹介する自動運転車両
2019. 3.26 欧州の自動運転の状況 ( 一財 ) 道路新産業開発機構中村徹 1 本日の内容 1. 欧州の自動運転車両車種 デモンストレーション 2. 自動運転の実運用 3. 自動運転とモビリティー 4. 自動運転の国際会議動向 5. おまけ Mobility as a Service(MaaS) 欧州以外の自動運転の状況 1. 欧州の自動運転車両 1. 欧州の自動運転車両 本日紹介する自動運転車両
スマートICの事業費の基準について
 資料 2 高速道路における安全 安心計画の 構成について 委員からの主な意見 (R1.5.30 国幹部会 ) 安全 安心計画全体の守備範囲を明確にすべき 安全 安心が誰にとってのものなのかを整理すべき 安全 安心の実現に向けて 道路が担うべき部分とそれ以外の部分 ( 車両 働き方の規制 ) とを分けて考えるべき 基本計画 ( 大枠の方針 ) は 国が中心となり 実際に事業を行う会社の 意見を聞きつつ
資料 2 高速道路における安全 安心計画の 構成について 委員からの主な意見 (R1.5.30 国幹部会 ) 安全 安心計画全体の守備範囲を明確にすべき 安全 安心が誰にとってのものなのかを整理すべき 安全 安心の実現に向けて 道路が担うべき部分とそれ以外の部分 ( 車両 働き方の規制 ) とを分けて考えるべき 基本計画 ( 大枠の方針 ) は 国が中心となり 実際に事業を行う会社の 意見を聞きつつ
名古屋大学.indd
 車両性能実証装置高精度ドライビング シミュレーターシステム 世界で初めて 1) 本格的バーチャルリアリティ (VR) 空間内での運転 車両走行模擬を実現した大型 5 面立体視ドライビング シミュレーター 運転時の視覚環境 振動環境を高精度に再現する事により 運転車の特性や感性のモニタリングおよび数学モデル構築を目指します 約 240インチの高輝度高精細な大型ディスプレイで囲ま 1 れた空間で視野角
車両性能実証装置高精度ドライビング シミュレーターシステム 世界で初めて 1) 本格的バーチャルリアリティ (VR) 空間内での運転 車両走行模擬を実現した大型 5 面立体視ドライビング シミュレーター 運転時の視覚環境 振動環境を高精度に再現する事により 運転車の特性や感性のモニタリングおよび数学モデル構築を目指します 約 240インチの高輝度高精細な大型ディスプレイで囲ま 1 れた空間で視野角
PowerPoint プレゼンテーション
 自動運転の実用化及びセンシング技術の導入に関する道路局の取組 Ministry of Land, Infrastructure, Transport and Tourism 1 自動運転の実現により期待される効果 交通事故の低減 現在の課題 交通事故により年間 4,000 人超が死亡 ( 1) 交通事故の 96% は運転者に起因 法令違反別死亡事故発生件数 (H25 年 ) 渋滞の解消 緩和 少子高齢化への対応生産性の向上
自動運転の実用化及びセンシング技術の導入に関する道路局の取組 Ministry of Land, Infrastructure, Transport and Tourism 1 自動運転の実現により期待される効果 交通事故の低減 現在の課題 交通事故により年間 4,000 人超が死亡 ( 1) 交通事故の 96% は運転者に起因 法令違反別死亡事故発生件数 (H25 年 ) 渋滞の解消 緩和 少子高齢化への対応生産性の向上
<4D F736F F D E817A899E977095D22D979A97F082C882B >
 Ⅴ. 過積載の危険性 本章では 過積載による危険性 運転者に対する罰則 過積載防止のための配慮事項などを整理しています 指導においては 過積載が引き起こす交通事故の実例により 運転者に危険性を認識させるとともに 過積載を防止するために 運転者だけでなく 事業者や運行管理者に何が求められているのかなども理解することが大切です 指針第 1 章 2-(5) 1. 過積載による事故要因と社会的影響 指導のねらい過積載の状態は
Ⅴ. 過積載の危険性 本章では 過積載による危険性 運転者に対する罰則 過積載防止のための配慮事項などを整理しています 指導においては 過積載が引き起こす交通事故の実例により 運転者に危険性を認識させるとともに 過積載を防止するために 運転者だけでなく 事業者や運行管理者に何が求められているのかなども理解することが大切です 指針第 1 章 2-(5) 1. 過積載による事故要因と社会的影響 指導のねらい過積載の状態は
2019 年 1 月 18 日 インド共和国アーメダバード市における 日本で規格化され世界標準規格でもある UHF 帯 V2X 通信技術を応用した緊急車両優先システムの実証実験 の実施について 株式会社ゼロ サム 株式会社トヨタ IT 開発センター 0. サマリー 〇株式会社ゼロ サムと株式会社トヨ
 2019 年 1 月 18 日 インド共和国アーメダバード市における 日本で規格化され世界標準規格でもある UHF 帯 V2X 通信技術を応用した緊急車両優先システムの実証実験 の実施について 株式会社トヨタ IT 開発センター 0. サマリー 〇と株式会社トヨタ IT 開発センターは インド共和国グジャラート州アーメダバード市のリバーフロント地区において 日本国総務省 インド共和国アーメダバード市政府
2019 年 1 月 18 日 インド共和国アーメダバード市における 日本で規格化され世界標準規格でもある UHF 帯 V2X 通信技術を応用した緊急車両優先システムの実証実験 の実施について 株式会社トヨタ IT 開発センター 0. サマリー 〇と株式会社トヨタ IT 開発センターは インド共和国グジャラート州アーメダバード市のリバーフロント地区において 日本国総務省 インド共和国アーメダバード市政府
Mode S Daps 技術
 SSR モード S のネットワーク技術について 監視通信領域 古賀禎 目次 1. 背景 2. 課題 3. モードSネットワーク 4. 実験ネットワーク 5. 確認実験の結果 6. まとめ 1. 背景 二次監視レーダモード S SSR Mode S (Secondary Surveillance Radar) 監視性能を向上するとともにデータリンク機能を付加した SSR 1. 背景 SSR モード S
SSR モード S のネットワーク技術について 監視通信領域 古賀禎 目次 1. 背景 2. 課題 3. モードSネットワーク 4. 実験ネットワーク 5. 確認実験の結果 6. まとめ 1. 背景 二次監視レーダモード S SSR Mode S (Secondary Surveillance Radar) 監視性能を向上するとともにデータリンク機能を付加した SSR 1. 背景 SSR モード S

38 39
 38 39 地図の紹介 地図の表示 案内図の表示 市街地図 ハイウェイマップ 縮尺 25 m 50 m 100 m 1 ルート案内中に都市高速 都市間高速道路 一部の有料 道路を走行すると自動的に表示されます SA PA IC JCTの名称 自車からの距離 SA PAの施設がわかり やすく表示されます SAなどの看板表示を選ぶと 選択施設詳細情報が表示 されます を選ぶと スクロールできます 選択施設詳細情報
38 39 地図の紹介 地図の表示 案内図の表示 市街地図 ハイウェイマップ 縮尺 25 m 50 m 100 m 1 ルート案内中に都市高速 都市間高速道路 一部の有料 道路を走行すると自動的に表示されます SA PA IC JCTの名称 自車からの距離 SA PAの施設がわかり やすく表示されます SAなどの看板表示を選ぶと 選択施設詳細情報が表示 されます を選ぶと スクロールできます 選択施設詳細情報
P012345
 P08018 平成 23 年度実施方針 エネルギー対策推進部 1. 件名 : プログラム名エネルギーイノベーションプログラム 大項目エネルギー ITS 推進事業 2. 根拠法 独立行政法人新エネルギー 産業技術総合開発機構法第 15 条第 1 項第一号ニ 3. 背景及び目的 目標 (1) 背景及び目的運輸部門のエネルギー 環境対策は自動車単体に依存しており 京都議定書目標達成計画ではITS(Intelligent
P08018 平成 23 年度実施方針 エネルギー対策推進部 1. 件名 : プログラム名エネルギーイノベーションプログラム 大項目エネルギー ITS 推進事業 2. 根拠法 独立行政法人新エネルギー 産業技術総合開発機構法第 15 条第 1 項第一号ニ 3. 背景及び目的 目標 (1) 背景及び目的運輸部門のエネルギー 環境対策は自動車単体に依存しており 京都議定書目標達成計画ではITS(Intelligent
<4D F736F F F696E74202D E096BE97708E9197BF B998488CA48B8689EF816A A81698C668DDA97708
 ITS を巡る最近の動向 平成 25 年 5 月 25 日 国土交通省道路局 道路交通管理課 ITS 推進室 垣原清次 ITS( 高度道路交通システム ) について 人と道路と車両とを一体のシステムとして構築し 交通渋滞 交通事故 環境悪化などの道路交通問題の解決を図る 渋滞時間損失 : 年間約 50 億時間 交通事故事故約 66 万件 死者約 4.4 千人 ( 平成 24 年 ) 環境悪化 CO2
ITS を巡る最近の動向 平成 25 年 5 月 25 日 国土交通省道路局 道路交通管理課 ITS 推進室 垣原清次 ITS( 高度道路交通システム ) について 人と道路と車両とを一体のシステムとして構築し 交通渋滞 交通事故 環境悪化などの道路交通問題の解決を図る 渋滞時間損失 : 年間約 50 億時間 交通事故事故約 66 万件 死者約 4.4 千人 ( 平成 24 年 ) 環境悪化 CO2
(Microsoft Word \217\254\215\373\216q \203G\203R\203h\203\211\203C\203u\202b.doc)
") エコドライブ知識エコドライブ知識 エコドライブチェックからエコドライブの具体的運転方法 平成 24 年 3 月 エコドライブその 1 エコドライブチェックをしましょう 最近 エコドライブ という言葉を聞きませんか? なぜ 今 この言葉が聞かれるようになったのでしょうか? そもそも エコドライブ ってどういうことなのでしょうか? 地球温暖化進行の原因の1つに 自動車利用によるCO2 排出量の増加があります
エコドライブ知識エコドライブ知識 エコドライブチェックからエコドライブの具体的運転方法 平成 24 年 3 月 エコドライブその 1 エコドライブチェックをしましょう 最近 エコドライブ という言葉を聞きませんか? なぜ 今 この言葉が聞かれるようになったのでしょうか? そもそも エコドライブ ってどういうことなのでしょうか? 地球温暖化進行の原因の1つに 自動車利用によるCO2 排出量の増加があります
メイン表示 例 バーグラフ表示 例 平均燃費 1 一般道高速道平均燃費 1/ 移動平均燃費 1 燃料流量 1/ スロットル開度 1 燃費インジケーター 時計 スピード コンパス 2 標高 2 車両電圧 燃料流量インジケーター 瞬間燃費を表示 燃費インジケーター 今回燃費 瞬間燃費を表示 電源OFF毎
 メイン表示 例 バーグラフ表示 例 平均燃費 1 一般道高速道平均燃費 1/ 移動平均燃費 1 燃料流量 1/ スロットル開度 1 燃費インジケーター 時計 スピード コンパス 2 標高 2 車両電圧 燃料流量インジケーター 瞬間燃費を表示 燃費インジケーター 今回燃費 瞬間燃費を表示 電源OFF毎にクリア 一般道平均燃費 平均燃費 現在値を表示 現在の燃料流量 累積クリアまたはデータ クリアで初期化
メイン表示 例 バーグラフ表示 例 平均燃費 1 一般道高速道平均燃費 1/ 移動平均燃費 1 燃料流量 1/ スロットル開度 1 燃費インジケーター 時計 スピード コンパス 2 標高 2 車両電圧 燃料流量インジケーター 瞬間燃費を表示 燃費インジケーター 今回燃費 瞬間燃費を表示 電源OFF毎にクリア 一般道平均燃費 平均燃費 現在値を表示 現在の燃料流量 累積クリアまたはデータ クリアで初期化
SIP 自動運転 _ 研究開発計画説明会 SIP 自動運転 ( システムとサービスの拡張 ) 研究開発計画について 平成 30 年 8 月 3 日 ( 金 ) 内閣府プログラムディレクター 葛巻清吾 1
 研究開発計画について 平成 30 年 8 月 3 日 ( 金 ) 内閣府プログラムディレクター 葛巻清吾 1") SIP 自動運転 _ 研究開発計画説明会 SIP 自動運転 ( システムとサービスの拡張 ) 研究開発計画について 平成 30 年 8 月 3 日 ( 金 ) 内閣府プログラムディレクター 葛巻清吾 1 本日の内容 第 1 期 SIP 自動走行システム 背景 意義 目標と取り組み領域 取り組みと進捗 第 2 期 SIP 自動運転 概要 目標 内容 スケジュール 体制 2 日本政府の自動運転への取組み
SIP 自動運転 _ 研究開発計画説明会 SIP 自動運転 ( システムとサービスの拡張 ) 研究開発計画について 平成 30 年 8 月 3 日 ( 金 ) 内閣府プログラムディレクター 葛巻清吾 1 本日の内容 第 1 期 SIP 自動走行システム 背景 意義 目標と取り組み領域 取り組みと進捗 第 2 期 SIP 自動運転 概要 目標 内容 スケジュール 体制 2 日本政府の自動運転への取組み
Microsoft Word 交通渋滞(有明アーバン)_181017
_181017") 9.4.1 現況調査 (1) 調査事項及びその選択理由調査事項及びその選択理由は 表 9.4-1 に示すとおりである 調査事項 1 交通量等の状況 2 道路等の状況 3 土地利用の状況 4 規制等の状況 表 9.4-1 調査事項及びその選択理由選択理由 事業の実施に伴い交通渋滞の発生又は解消等 交通量及び交通流の変化が考えられることから 計画地及びその周辺について 左記の事項に係る調査が必要である
9.4.1 現況調査 (1) 調査事項及びその選択理由調査事項及びその選択理由は 表 9.4-1 に示すとおりである 調査事項 1 交通量等の状況 2 道路等の状況 3 土地利用の状況 4 規制等の状況 表 9.4-1 調査事項及びその選択理由選択理由 事業の実施に伴い交通渋滞の発生又は解消等 交通量及び交通流の変化が考えられることから 計画地及びその周辺について 左記の事項に係る調査が必要である
HDMI 機器を使う 本機にポータブルビデオなどの外部映像機器を接続すると その映像を本機の AV ソース (HDMI) として見ることができます 本機に外部映像機器を接続するには 別売の HDMI 入力ケーブルと市販の HDMIケーブルが必要です 映像入力の設定をする 1 を押し 設定 編集 -
 として見ることができます 本機に外部映像機器を接続するには 別売の HDMI 入力ケーブルと市販の HDMIケーブルが必要です 映像入力の設定をする 1 を押し 設定 編集 -") AUX を使う (MP313D-W のみ ) 本機正面の AUX 端子にポータブルオーディオプレーヤーなどの外部音声機器を接続すると その音声を本機の AV ソース (AUX) として聞くことができます 本機正面の AUX 端子に外部機器を接続するには 別売の音声ケーブル (φ3.5 mmステレオ音声用 ) が必要です 外部機器の音声を聞く 1 音声ケーブル (3.5φ) を本機の AUX 端子に接続する
AUX を使う (MP313D-W のみ ) 本機正面の AUX 端子にポータブルオーディオプレーヤーなどの外部音声機器を接続すると その音声を本機の AV ソース (AUX) として聞くことができます 本機正面の AUX 端子に外部機器を接続するには 別売の音声ケーブル (φ3.5 mmステレオ音声用 ) が必要です 外部機器の音声を聞く 1 音声ケーブル (3.5φ) を本機の AUX 端子に接続する
SIP自動走行システム推進委員会
 SIP( 戦略的イノベーション創造プログラム ) 自動走行システム 次世代都市交通システム正着制御に係るセンシング技術に関する調査検討 先進モビリティ ( 株 ) 1 検討項目について 公募項目 実施内容 実施方法 1 バス停からの相対位置検出と経路特定 1) 可視光外の透明反射する塗料やシート等による位置 経路特定 2) 路面上に恣意的に設けたランダムパターンの学習による位置 経路特定 3) 路面汚れやタイヤ痕等の自然発生ランダムパターンの学習による位置
SIP( 戦略的イノベーション創造プログラム ) 自動走行システム 次世代都市交通システム正着制御に係るセンシング技術に関する調査検討 先進モビリティ ( 株 ) 1 検討項目について 公募項目 実施内容 実施方法 1 バス停からの相対位置検出と経路特定 1) 可視光外の透明反射する塗料やシート等による位置 経路特定 2) 路面上に恣意的に設けたランダムパターンの学習による位置 経路特定 3) 路面汚れやタイヤ痕等の自然発生ランダムパターンの学習による位置
Microsoft PowerPoint - ITS_J 0704 [互換モード]
![Microsoft PowerPoint - ITS_J 0704 [互換モード]](/thumbs/101/150975539.jpg "Microsoft PowerPoint - ITS_J 0704 [互換モード]") ITS を活用した交通渋滞の緩和に向けた活動 1) 渋滞緩和に向けた実証実験 以下の方法で車列に生じるショックウェーブを解消 サグ部での渋滞発生抑制のため ドライバーに適切な運転速度 車線などを指示 路側からの情報により アダプティブ クルーズコントローズ (ACC) のセット車速 車間などを自動設定 ACC を高速化した より賢いクルマを開発 路車間通信でドライバーに情報提供 走行車線を走り続けよう
ITS を活用した交通渋滞の緩和に向けた活動 1) 渋滞緩和に向けた実証実験 以下の方法で車列に生じるショックウェーブを解消 サグ部での渋滞発生抑制のため ドライバーに適切な運転速度 車線などを指示 路側からの情報により アダプティブ クルーズコントローズ (ACC) のセット車速 車間などを自動設定 ACC を高速化した より賢いクルマを開発 路車間通信でドライバーに情報提供 走行車線を走り続けよう
平成 27 年度 輸送の安全教育計画 安全ミーティング外部講習会適性診断安全委員会社長面談 4 月 月 6 月 月 8 月 月 10 月 月 12 月 月 2 月 月 教育内容 1
 輸送の安全に関する基本的な方針 1. 輸送の安全確保に全社員で努める 2. 関係法令及び関連規程を遵守し 全社員が職務を遂行する 社内に掲示し基本方針を社員に周知徹底させる 平成 27 年度輸送の安全に関する目標 後退時事故ゼロ 追突事故ゼロ 交差点事故ゼロ 平成 27 年 4 月 1 日株式会社エポック 代表取締役 松本仁孝 1 平成 27 年度 輸送の安全教育計画 安全ミーティング外部講習会適性診断安全委員会社長面談
輸送の安全に関する基本的な方針 1. 輸送の安全確保に全社員で努める 2. 関係法令及び関連規程を遵守し 全社員が職務を遂行する 社内に掲示し基本方針を社員に周知徹底させる 平成 27 年度輸送の安全に関する目標 後退時事故ゼロ 追突事故ゼロ 交差点事故ゼロ 平成 27 年 4 月 1 日株式会社エポック 代表取締役 松本仁孝 1 平成 27 年度 輸送の安全教育計画 安全ミーティング外部講習会適性診断安全委員会社長面談
ZERO704V
 メイン表示 例 バーグラフ表示 例 平均燃費 1 一般道高速道平均燃費 1/ 移動平均燃費 1 燃料流量 1/ スロットル開度 1 燃費インジケーター カレンダー 時計 スピード コンパス 2 標高 2 車両電圧 燃料流量インジケーター 瞬間燃費を表示 燃費インジケーター 今回燃費 瞬間燃費を表示 電源OFF毎にクリア 一般道平均燃費 平均燃費 現在値を表示 現在の燃料流量 累積クリアまたはデータ
メイン表示 例 バーグラフ表示 例 平均燃費 1 一般道高速道平均燃費 1/ 移動平均燃費 1 燃料流量 1/ スロットル開度 1 燃費インジケーター カレンダー 時計 スピード コンパス 2 標高 2 車両電圧 燃料流量インジケーター 瞬間燃費を表示 燃費インジケーター 今回燃費 瞬間燃費を表示 電源OFF毎にクリア 一般道平均燃費 平均燃費 現在値を表示 現在の燃料流量 累積クリアまたはデータ
 メイン表示 例 バーグラフ表示 例 平均燃費 1 一般道高速道平均燃費 1/ 移動平均燃費 1 燃料流量 1/ スロットル開度 1 燃費インジケーター 時計 スピード コンパス 2 標高 2 車両電圧 燃料流量インジケーター 瞬間燃費を表示 燃費インジケーター 今回燃費 瞬間燃費を表示 電源OFF毎にクリア 一般道平均燃費 平均燃費 現在値を表示 現在の燃料流量 累積クリアまたはデータ クリアで初期化
メイン表示 例 バーグラフ表示 例 平均燃費 1 一般道高速道平均燃費 1/ 移動平均燃費 1 燃料流量 1/ スロットル開度 1 燃費インジケーター 時計 スピード コンパス 2 標高 2 車両電圧 燃料流量インジケーター 瞬間燃費を表示 燃費インジケーター 今回燃費 瞬間燃費を表示 電源OFF毎にクリア 一般道平均燃費 平均燃費 現在値を表示 現在の燃料流量 累積クリアまたはデータ クリアで初期化
速度規制の目的と現状 警察庁交通局 1
 速度規制の目的と現状 警察庁交通局 1 1 最高速度規制の必要性 2 規制速度決定の基本的考え方 3 一般道路における速度規制基準の概要 4 最高速度規制の見直し状況 ( 平成 21 年度 ~23 年度 ) 5 最高速度違反による交通事故対策検討会の開催 2 1 最高速度規制の必要性 最高速度規制は 交通事故の抑止 ( 交通の安全 ) 交通の円滑化 道路交通に起因する障害の防止 の観点から 必要に応じて実施
速度規制の目的と現状 警察庁交通局 1 1 最高速度規制の必要性 2 規制速度決定の基本的考え方 3 一般道路における速度規制基準の概要 4 最高速度規制の見直し状況 ( 平成 21 年度 ~23 年度 ) 5 最高速度違反による交通事故対策検討会の開催 2 1 最高速度規制の必要性 最高速度規制は 交通事故の抑止 ( 交通の安全 ) 交通の円滑化 道路交通に起因する障害の防止 の観点から 必要に応じて実施
79!! 21
 79!! 21 94 94 138 94 8 15 1 100 10 25 65 138 30 94 1 138 94 !! 1570 km 1.5 79 7 12 138 11 72 11 72 15 11 72 11 72 11 15 11 72 15 12 138 11 72 12 21 12 94 12 21 12 12 94 12 138 12 138 11 79 12 12 138
79!! 21 94 94 138 94 8 15 1 100 10 25 65 138 30 94 1 138 94 !! 1570 km 1.5 79 7 12 138 11 72 11 72 15 11 72 11 72 11 15 11 72 15 12 138 11 72 12 21 12 94 12 21 12 12 94 12 138 12 138 11 79 12 12 138
特別寄稿.indd
 特別寄稿 ソフトインフラとしてのデジタル地図を活用した自動運転システム Autonomous vehicle using digital map as a soft infrastructure 菅沼直樹 Naoki SUGANUMA 1. はじめに 1) 2008 2012 ITS 2) CO 2 3) 4) Door to door Door to door Door to door DARPA(
特別寄稿 ソフトインフラとしてのデジタル地図を活用した自動運転システム Autonomous vehicle using digital map as a soft infrastructure 菅沼直樹 Naoki SUGANUMA 1. はじめに 1) 2008 2012 ITS 2) CO 2 3) 4) Door to door Door to door Door to door DARPA(
自動運転技術の開発動向と技術課題 自動運転技術の開発動向と技術課題 Current activities and some issues on the development of automated driving 1 須田義大 2 青木啓二 SUDA Yoshihiro 1 ; AOKI Kei
 Current activities and some issues on the development of automated driving 1 須田義大 2 青木啓二 SUDA Yoshihiro 1 ; AOKI Keiji 2 1 東京大学生産技術研究所次世代モビリティセンター ( 153-8505 東京都目黒区駒場 4-6-1)Tel: 03-5452-6193 E-mail: suda@iis.u-tokyo.ac.jp
Current activities and some issues on the development of automated driving 1 須田義大 2 青木啓二 SUDA Yoshihiro 1 ; AOKI Keiji 2 1 東京大学生産技術研究所次世代モビリティセンター ( 153-8505 東京都目黒区駒場 4-6-1)Tel: 03-5452-6193 E-mail: suda@iis.u-tokyo.ac.jp
< 目次 > 1 自動運転に関する自工会の体制と関連組織との連携 2 実用化と普及に向けた課題と取り組み -1 道交法および車両法について (WP1, WP29 関連 ) -2 法律上 運用上の課題にについて( 国内道交法関連 ) -3 基盤技術 インフラに関する項目について (1) 高精度地図 /
 -2 法律上 運用上の課題にについて( 国内道交法関連 ) -3 基盤技術 インフラに関する項目について (1) 高精度地図 /") 資料 1 自動運転の実用化と普及に向けて 2016 年 12 月 12 日 一般社団法人日本自動車工業会自動運転検討会主査横山利夫 1 < 目次 > 1 自動運転に関する自工会の体制と関連組織との連携 2 実用化と普及に向けた課題と取り組み -1 道交法および車両法について (WP1, WP29 関連 ) -2 法律上 運用上の課題にについて( 国内道交法関連 ) -3 基盤技術 インフラに関する項目について
資料 1 自動運転の実用化と普及に向けて 2016 年 12 月 12 日 一般社団法人日本自動車工業会自動運転検討会主査横山利夫 1 < 目次 > 1 自動運転に関する自工会の体制と関連組織との連携 2 実用化と普及に向けた課題と取り組み -1 道交法および車両法について (WP1, WP29 関連 ) -2 法律上 運用上の課題にについて( 国内道交法関連 ) -3 基盤技術 インフラに関する項目について
<4D F736F F D2095F18D908F C4816A F C52E646F63>
 第 2 章 ITS 安全運転支援無線システムの在り方 2.1 車車間通信と路車間通信の共用 ITS 安全運転支援無線システムは 見通しの悪い交差点などで 車両同士が情報をやり取りする無線通信によって安全運転を支援する車車間通信システム インフラからの情報 ( 信号機情報 規制情報 歩行者情報など ) を路側機から車両に対し 電波による無線通信を介して安全運転を支援する路車間通信がある 図 2.1-1
第 2 章 ITS 安全運転支援無線システムの在り方 2.1 車車間通信と路車間通信の共用 ITS 安全運転支援無線システムは 見通しの悪い交差点などで 車両同士が情報をやり取りする無線通信によって安全運転を支援する車車間通信システム インフラからの情報 ( 信号機情報 規制情報 歩行者情報など ) を路側機から車両に対し 電波による無線通信を介して安全運転を支援する路車間通信がある 図 2.1-1
Ⅰ. はじめに P1 Ⅱ. 交通渋滞 環境問題と ITS P2 1. 交通渋滞と環境問題の概況 P2 2. 交通渋滞のメカニズムと交通渋滞対策 P2 3. 交通渋滞対策 環境問題においてITSが果たすべき役割 P3 Ⅲ. 交通安全と ITS P4 1. 交通事故の概況 P4 2. 交通安全対策の概要
 資料 1 ITS に関するタスクフォース 報告書 ( 素案 ) 2011 年 1 月 事務局 Ⅰ. はじめに P1 Ⅱ. 交通渋滞 環境問題と ITS P2 1. 交通渋滞と環境問題の概況 P2 2. 交通渋滞のメカニズムと交通渋滞対策 P2 3. 交通渋滞対策 環境問題においてITSが果たすべき役割 P3 Ⅲ. 交通安全と ITS P4 1. 交通事故の概況 P4 2. 交通安全対策の概要 P4
資料 1 ITS に関するタスクフォース 報告書 ( 素案 ) 2011 年 1 月 事務局 Ⅰ. はじめに P1 Ⅱ. 交通渋滞 環境問題と ITS P2 1. 交通渋滞と環境問題の概況 P2 2. 交通渋滞のメカニズムと交通渋滞対策 P2 3. 交通渋滞対策 環境問題においてITSが果たすべき役割 P3 Ⅲ. 交通安全と ITS P4 1. 交通事故の概況 P4 2. 交通安全対策の概要 P4
NITAS の基本機能 1. 経路探索条件の設定 (1) 交通モードの設定 交通モードの設定 とは どのような交通手段のネットワークを用いて経路探索を行うかを設定するものです NITASの交通モードは 大きく 人流 ( 旅客移動 ) 物流( 貨物移動 ) に分かれ それぞれのネットワークを用いた経路
 交通モードの設定 交通モードの設定 とは どのような交通手段のネットワークを用いて経路探索を行うかを設定するものです NITASの交通モードは 大きく 人流 ( 旅客移動 ) 物流( 貨物移動 ) に分かれ それぞれのネットワークを用いた経路") NITAS の基本機能 1. 経路探索条件の設定 (1) 交通モードの設定 交通モードの設定 とは どのような交通手段のネットワークを用いて経路探索を行うかを設定するものです NITASの交通モードは 大きく 人流 ( 旅客移動 ) 物流( 貨物移動 ) に分かれ それぞれのネットワークを用いた経路探索を行うことができます また 道路 + 船モード 鉄道 + 航空モード 道路 + 鉄道モード では
NITAS の基本機能 1. 経路探索条件の設定 (1) 交通モードの設定 交通モードの設定 とは どのような交通手段のネットワークを用いて経路探索を行うかを設定するものです NITASの交通モードは 大きく 人流 ( 旅客移動 ) 物流( 貨物移動 ) に分かれ それぞれのネットワークを用いた経路探索を行うことができます また 道路 + 船モード 鉄道 + 航空モード 道路 + 鉄道モード では
背景 スマートフォンやタブレットとインターネットの普及により いつでも どこでも 高速のインターネット環境を利用したいという社会ニーズが顕在化し 高速走行する列車と地上間の高速通信環境の実現に向けた研究開発が各所で実施されています 最近では旅客サービス以外にも 走行車両内の防犯カメラ映像や営業車によ
 世界初 90GHz 帯を用いて時速 240km で走行する列車と地上間で毎秒 1.5 ギガビットのデータ伝送に成功 2 0 1 9 年 1 月 2 9 日公益財団法人鉄道総合技術研究所株式会社日立国際電気国立研究開発法人情報通信研究機構 公益財団法人鉄道総合技術研究所と株式会社日立国際電気 国立研究開発法人情報通信研究機構は 時速約 240km で走行する列車と地上間にて ミリ波 (90GHz 帯
世界初 90GHz 帯を用いて時速 240km で走行する列車と地上間で毎秒 1.5 ギガビットのデータ伝送に成功 2 0 1 9 年 1 月 2 9 日公益財団法人鉄道総合技術研究所株式会社日立国際電気国立研究開発法人情報通信研究機構 公益財団法人鉄道総合技術研究所と株式会社日立国際電気 国立研究開発法人情報通信研究機構は 時速約 240km で走行する列車と地上間にて ミリ波 (90GHz 帯
平成 30 年度 自動車局税制改正要望の概要 平成 29 年 8 月 国土交通省自動車局
 平成 30 年度 自動車局税制改正要望の概要 平成 29 年 8 月 国土交通省自動車局 平成 30 年度自動車局税制改正要望事項 1. 先進安全技術を搭載したトラック バスに係る特例措置の拡充 延長 ( 自動車重量税 自動車取得税 ) 交通事故の防止及び被害の軽減のため 衝突被害軽減ブレーキ 車両安定性制御装置を搭載したトラック バスに係る特例措置を自動車重量税について 3 年間延長する また 車線逸脱警報装置を備えたトラック
平成 30 年度 自動車局税制改正要望の概要 平成 29 年 8 月 国土交通省自動車局 平成 30 年度自動車局税制改正要望事項 1. 先進安全技術を搭載したトラック バスに係る特例措置の拡充 延長 ( 自動車重量税 自動車取得税 ) 交通事故の防止及び被害の軽減のため 衝突被害軽減ブレーキ 車両安定性制御装置を搭載したトラック バスに係る特例措置を自動車重量税について 3 年間延長する また 車線逸脱警報装置を備えたトラック
資料 四輪車の加速走行騒音規制について ( 乗用車 小型車 ) 現行加速走行騒音試験法の課題 新加速走行騒音試験法の概要 国内走行実態との比較による新加速走行騒音試験法の検証 1
 現行加速走行騒音試験法の課題 新加速走行騒音試験法の概要 国内走行実態との比較による新加速走行騒音試験法の検証 1") 資料 13-3-1 四輪車の加速走行騒音規制について ( 乗用車 小型車 ) 現行加速走行騒音試験法の課題 新加速走行騒音試験法の概要 国内走行実態との比較による新加速走行騒音試験法の検証 1 現行加速走行騒音試験法の課題 ( 乗用車 小型車 ) 現行の加速走行騒音試験方法 ( 以下 TRIAS という ) は ISO362 をベースとしており 車種に応じたギヤ位置により 一定速度で騒音測定区間 (A-A
資料 13-3-1 四輪車の加速走行騒音規制について ( 乗用車 小型車 ) 現行加速走行騒音試験法の課題 新加速走行騒音試験法の概要 国内走行実態との比較による新加速走行騒音試験法の検証 1 現行加速走行騒音試験法の課題 ( 乗用車 小型車 ) 現行の加速走行騒音試験方法 ( 以下 TRIAS という ) は ISO362 をベースとしており 車種に応じたギヤ位置により 一定速度で騒音測定区間 (A-A
スライド 1
 flex-ds ドライビング シミュレータ 製品カタログ コンセプトラフィック活用例その1活用例その3モジュール群グ製品情報flex-DS - コンセプト - データ設定自由度の高い 拡張性の高い柔軟な DS システムをご提案致します モジュールと CG 描画を行う 他車両の走行制御のための交通シミュレーション ASSTranse-DS モ ジュールから構成されています また 道路環境 交通状況を独自に設定
flex-ds ドライビング シミュレータ 製品カタログ コンセプトラフィック活用例その1活用例その3モジュール群グ製品情報flex-DS - コンセプト - データ設定自由度の高い 拡張性の高い柔軟な DS システムをご提案致します モジュールと CG 描画を行う 他車両の走行制御のための交通シミュレーション ASSTranse-DS モ ジュールから構成されています また 道路環境 交通状況を独自に設定
資料 1-6 ITS に関するタスクフォース 報告書 平成 23 年 3 月
 資料 1-6 ITS に関するタスクフォース 報告書 平成 23 年 3 月 目次 Ⅰ. はじめに 1 Ⅱ. 交通渋滞 環境問題とITS 2 1. 交通渋滞と環境問題の概況 2 2. 交通渋滞のメカニズムと交通渋滞対策の現況 2 3. 交通渋滞対策 環境問題においてITSが果たすべき役割 3 Ⅲ. 交通安全とITS 5 1. 交通事故の概況 5 2. 交通安全対策の現況 5 3. 交通安全対策においてITSが果たすべき役割
資料 1-6 ITS に関するタスクフォース 報告書 平成 23 年 3 月 目次 Ⅰ. はじめに 1 Ⅱ. 交通渋滞 環境問題とITS 2 1. 交通渋滞と環境問題の概況 2 2. 交通渋滞のメカニズムと交通渋滞対策の現況 2 3. 交通渋滞対策 環境問題においてITSが果たすべき役割 3 Ⅲ. 交通安全とITS 5 1. 交通事故の概況 5 2. 交通安全対策の現況 5 3. 交通安全対策においてITSが果たすべき役割
と案 目的地を探したら ルートを設定します ルートが設定されると案内がはじまりますので ルート案内にしたがって走行してください 検索した地点を確認 設定する 52 現在の条件でルートを探索する 52 ルートの確認や設定をする 52 検索した地点の位置を修正する 53 検索した地点をルート上に追加する
 と案 目的地を探したら ルートを設定します ルートが設定されると案内がはじまりますので ルート案内にしたがって走行してください 検索した地点を確認 設定する 52 現在の条件でルートを探索する 52 ルートの確認や設定をする 52 検索した地点の位置を修正する 53 検索した地点をルート上に追加する 53 検索した地点を本機に登録する 53 検索した地点周辺の駐車場を探す 53 検索した地点の施設情報を表示する
と案 目的地を探したら ルートを設定します ルートが設定されると案内がはじまりますので ルート案内にしたがって走行してください 検索した地点を確認 設定する 52 現在の条件でルートを探索する 52 ルートの確認や設定をする 52 検索した地点の位置を修正する 53 検索した地点をルート上に追加する 53 検索した地点を本機に登録する 53 検索した地点周辺の駐車場を探す 53 検索した地点の施設情報を表示する
2016/02/23 情報通信審議会先端技術 WG 交通事故死傷者ゼロに向けた自動運転 通信技術 トヨタ自動車株式会社 CSTO 補佐 葛巻清吾 Integrated Safety 0 0
 2016/02/23 情報通信審議会先端技術 WG 交通事故死傷者ゼロに向けた自動運転 通信技術 トヨタ自動車株式会社 CSTO 補佐 葛巻清吾 Integrated Safety 0 0 本日の内容 SIP 自動走行システム 自動運転実現に向け必要な技術 トヨタの安全の取り組み 安全の考え方 トヨタの安全技術開発 協調型安全システム ;ITS Connect 自動運転 ;Highway Teammate
2016/02/23 情報通信審議会先端技術 WG 交通事故死傷者ゼロに向けた自動運転 通信技術 トヨタ自動車株式会社 CSTO 補佐 葛巻清吾 Integrated Safety 0 0 本日の内容 SIP 自動走行システム 自動運転実現に向け必要な技術 トヨタの安全の取り組み 安全の考え方 トヨタの安全技術開発 協調型安全システム ;ITS Connect 自動運転 ;Highway Teammate
1 踏切事故 とは国土交通省鉄道局の資料( 鉄軌道輸送の安全にかかわる情報 の 用語の説明 ) によれば 踏切障害に伴う列車衝突事故 列車脱線事故及び列車火災事故並びに踏切障害事故 をいいます 2 3 出典 : 国土交通省鉄道局 鉄軌道輸送の安全にかかわる情報
 によれば 踏切障害に伴う列車衝突事故 列車脱線事故及び列車火災事故並びに踏切障害事故 をいいます 2 3 出典 : 国土交通省鉄道局 鉄軌道輸送の安全にかかわる情報") 1 踏切事故 とは国土交通省鉄道局の資料( 鉄軌道輸送の安全にかかわる情報 の 用語の説明 ) によれば 踏切障害に伴う列車衝突事故 列車脱線事故及び列車火災事故並びに踏切障害事故 をいいます 2 3 出典 : 国土交通省鉄道局 鉄軌道輸送の安全にかかわる情報 http://www.mlit.go.jp/tetudo/tetudo_tk8_000001.html 4 運輸安全委員会では 踏切事故 である
1 踏切事故 とは国土交通省鉄道局の資料( 鉄軌道輸送の安全にかかわる情報 の 用語の説明 ) によれば 踏切障害に伴う列車衝突事故 列車脱線事故及び列車火災事故並びに踏切障害事故 をいいます 2 3 出典 : 国土交通省鉄道局 鉄軌道輸送の安全にかかわる情報 http://www.mlit.go.jp/tetudo/tetudo_tk8_000001.html 4 運輸安全委員会では 踏切事故 である
国土交通省自動車交通局プレスリリース
 別紙 1. 背景 道路運送車両の保安基準等の一部を改正する省令等について ( 概要 ) 自動車の安全基準等について 国際的な整合性を図り自動車の安全性等を確保するた め 我が国は国際連合の 車両等の型式認定相互承認協定 ( 以下 相互承認協定 とい う ) に平成 10 年に加入し 現在 相互承認協定に基づく規則 ( 以下 協定規則 とい う ) について段階的に採用を進めているところです 今般 協定規則のうち
別紙 1. 背景 道路運送車両の保安基準等の一部を改正する省令等について ( 概要 ) 自動車の安全基準等について 国際的な整合性を図り自動車の安全性等を確保するた め 我が国は国際連合の 車両等の型式認定相互承認協定 ( 以下 相互承認協定 とい う ) に平成 10 年に加入し 現在 相互承認協定に基づく規則 ( 以下 協定規則 とい う ) について段階的に採用を進めているところです 今般 協定規則のうち
平成29年度 地域指定型 実験箇所(今回選定)
") 参考資料 1 中間取りまとめ ( 案 ) 参考資料 Ministry of Land, Infrastructure, Transport and Tourism 道の駅等を拠点とした自動運転サービス 中間とりまとめ ( 案 ) 短期間の実験を通じた課題 ( 平成 29 年度 ) 長期間の実験を通して検証 ( 平成 30 年度 ~) 走行空間の確保 < 自動走行に支障のある事例 > 走行路上の歩行者
参考資料 1 中間取りまとめ ( 案 ) 参考資料 Ministry of Land, Infrastructure, Transport and Tourism 道の駅等を拠点とした自動運転サービス 中間とりまとめ ( 案 ) 短期間の実験を通じた課題 ( 平成 29 年度 ) 長期間の実験を通して検証 ( 平成 30 年度 ~) 走行空間の確保 < 自動走行に支障のある事例 > 走行路上の歩行者
PowerPoint Presentation
 2016.10.5 CEATEC IEICE 特別シンポジウム講演 5. 次世代交通 運輸システムにおける 通信の役割 電気通信大学 先端ワイヤレス コミュニケーション研究センター 山尾泰 目次 1. 自動走行の必要性と達成レベル 2. 国を中心とした取り組み 3. 自動走行のシステムモデル - ドライバーの視点 vs. 交通の視点 - 4. 自動走行における通信の役割と要求条件 - ブロードキャスト型通信とユニキャスト型通信
2016.10.5 CEATEC IEICE 特別シンポジウム講演 5. 次世代交通 運輸システムにおける 通信の役割 電気通信大学 先端ワイヤレス コミュニケーション研究センター 山尾泰 目次 1. 自動走行の必要性と達成レベル 2. 国を中心とした取り組み 3. 自動走行のシステムモデル - ドライバーの視点 vs. 交通の視点 - 4. 自動走行における通信の役割と要求条件 - ブロードキャスト型通信とユニキャスト型通信
選定技術の テーマ Ⅰ ウェッジハンプ 舗装面にくさび型の非対称の段差 ( ウェッジハンプ ) を設置し 走行時の衝撃により逆走車両に注意喚起するもの 全景 設置イメージ図 逆走車両に衝撃で注意喚起を行い 順行車両には走行に支障の無い形状としている 段差部分には超高強度繊維補強コンクリートを使用し
 を設置し 走行時の衝撃により逆走車両に注意喚起するもの 全景 設置イメージ図 逆走車両に衝撃で注意喚起を行い 順行車両には走行に支障の無い形状としている 段差部分には超高強度繊維補強コンクリートを使用し") 選定技術の 資料 5-3 選定技術の テーマ Ⅰ ウェッジハンプ 舗装面にくさび型の非対称の段差 ( ウェッジハンプ ) を設置し 走行時の衝撃により逆走車両に注意喚起するもの 全景 設置イメージ図 逆走車両に衝撃で注意喚起を行い 順行車両には走行に支障の無い形状としている 段差部分には超高強度繊維補強コンクリートを使用し 大型車が走行しても衝突に十分な強度有している 2 選定技術の テーマ Ⅰ 防眩板応用注意喚起
選定技術の 資料 5-3 選定技術の テーマ Ⅰ ウェッジハンプ 舗装面にくさび型の非対称の段差 ( ウェッジハンプ ) を設置し 走行時の衝撃により逆走車両に注意喚起するもの 全景 設置イメージ図 逆走車両に衝撃で注意喚起を行い 順行車両には走行に支障の無い形状としている 段差部分には超高強度繊維補強コンクリートを使用し 大型車が走行しても衝突に十分な強度有している 2 選定技術の テーマ Ⅰ 防眩板応用注意喚起
Microsoft PowerPoint - プレゼンテーション1
 参考資料 1 最近の自動運転の実現に向けた取組概要 1. 欧州における動的情報の提供事例 2. 欧米における自動運転車両の制度上の扱い事例 3. 欧州における製造物責任における検討事例 1. 欧州における動的情報の提供事例 アムステルダムグループ ( 欧州の道路管理者 自動車メーカー 部品メーカー インフカラメーカーから構成される協調システムを共同で開発するためのグループ ) では 管理者車両等からの動的情報を収集し
参考資料 1 最近の自動運転の実現に向けた取組概要 1. 欧州における動的情報の提供事例 2. 欧米における自動運転車両の制度上の扱い事例 3. 欧州における製造物責任における検討事例 1. 欧州における動的情報の提供事例 アムステルダムグループ ( 欧州の道路管理者 自動車メーカー 部品メーカー インフカラメーカーから構成される協調システムを共同で開発するためのグループ ) では 管理者車両等からの動的情報を収集し
 1 1 1 1 7 1 6 1 1 1 1 1 1 9 1 1 1 8 5 1 1 1 50 51 1 1 ルートを探索する 行き先に設定する 行き先に設定する (ルートが設定されていない場合) 1 地点を検索する 経由地に設定する 設定されているルートを消去し 行き先を新たに設定する 1 地点を検索する 検索のしかた P.6 51 ここに行く を選ぶ 1 地点を検索する ここに行く を選ぶ 1 地図をスクロールさせ
1 1 1 1 7 1 6 1 1 1 1 1 1 9 1 1 1 8 5 1 1 1 50 51 1 1 ルートを探索する 行き先に設定する 行き先に設定する (ルートが設定されていない場合) 1 地点を検索する 経由地に設定する 設定されているルートを消去し 行き先を新たに設定する 1 地点を検索する 検索のしかた P.6 51 ここに行く を選ぶ 1 地点を検索する ここに行く を選ぶ 1 地図をスクロールさせ
(Microsoft PowerPoint - \216\251\223]\216\324\224F\216\257\202\314\223\256\214\374.pptx)
![(Microsoft PowerPoint - \216\251\223]\216\324\224F\216\257\202\314\223\256\214\374.pptx)](/thumbs/91/107002316.jpg "(Microsoft PowerPoint - \216\251\223]\216\324\224F\216\257\202\314\223\256\214\374.pptx)") 車載認識装置における自転車認識技術の動向 - トピック分析による認識技術の分類 - 歩行者認識の技術でテーマの内容を説明 特許庁 : 自動運転自動車より 2017.11.30 発表 JFE テクノリサーチ 平川雅彦 1 目 次 1. 調査の目的 2. 概念検索 3. 検索結果 4. 自転車認識技術の特徴 5. トピックモデルトピック分析と多次元尺度法との対比トピック KW によるランキング解析 6.
車載認識装置における自転車認識技術の動向 - トピック分析による認識技術の分類 - 歩行者認識の技術でテーマの内容を説明 特許庁 : 自動運転自動車より 2017.11.30 発表 JFE テクノリサーチ 平川雅彦 1 目 次 1. 調査の目的 2. 概念検索 3. 検索結果 4. 自転車認識技術の特徴 5. トピックモデルトピック分析と多次元尺度法との対比トピック KW によるランキング解析 6.
資料 2 < 道路交通 WT 資料 > 戦略的イノベーション創造プログラム SIP ( 自動走行システム ) 走行映像データベース 構築技術の開発及び実証 2017 年 3 月 9 日一般財団法人日本自動車研究所 1
 走行映像データベース 構築技術の開発及び実証 2017 年 3 月 9 日一般財団法人日本自動車研究所 1") 資料 2 < 道路交通 WT 資料 > 戦略的イノベーション創造プログラム SIP ( 自動走行システム ) 走行映像データベース 構築技術の開発及び実証 2017 年 3 月 9 日一般財団法人日本自動車研究所 1 1. 走行映像データベース開発の背景 走行映像 DB 開発の狙い 海外メカ サフ ライヤは OEM 各社に自社開発製品を供給し 実車 実路走行テ ータを入手することで効率よく製品を改良
資料 2 < 道路交通 WT 資料 > 戦略的イノベーション創造プログラム SIP ( 自動走行システム ) 走行映像データベース 構築技術の開発及び実証 2017 年 3 月 9 日一般財団法人日本自動車研究所 1 1. 走行映像データベース開発の背景 走行映像 DB 開発の狙い 海外メカ サフ ライヤは OEM 各社に自社開発製品を供給し 実車 実路走行テ ータを入手することで効率よく製品を改良
Microsoft Word - 【最終】高度化PTPS参加規約
 高度化 PTPS 実証実験 参加規約 別添 本参加規約 ( 以下 本規約 という ) には 高度化 PTPS 実証実験 ( 以下 実証実験 という ) における SIP 大規模実証実験運営事務局 ( 以下 事務局 という ) 実証実験受託者 ( 以下 受託者 という ) 及び実験参加者 ( 以下 参加者 という ) の間の権利義務関係が定められています 本実証実験の参加に際しては 本規約の全文をお読みいただいたうえで
高度化 PTPS 実証実験 参加規約 別添 本参加規約 ( 以下 本規約 という ) には 高度化 PTPS 実証実験 ( 以下 実証実験 という ) における SIP 大規模実証実験運営事務局 ( 以下 事務局 という ) 実証実験受託者 ( 以下 受託者 という ) 及び実験参加者 ( 以下 参加者 という ) の間の権利義務関係が定められています 本実証実験の参加に際しては 本規約の全文をお読みいただいたうえで
Microsoft PowerPoint - ○ITARDA H30年1~9月( )JTA改
JTA改") 平成 30 年 1~9 月の交通事故統計分析結果 ~ 発生地別 ~ 2018 年 12 月 Ⅰ. 調査の目的等 1. 調査の目的 2. データの概要 1 Ⅱ.H30 年 1~9 月死亡事故データの傾向 1. 事故件数 2. 発生地別 3. 道路区分別 4. 車両区分別 5. 事故類型別 6. 行動類型別 7. 時間帯別 8. 運転者の危険認知速度別 9. 運転者の年齢層別 10. 運転者の免許取得年数別
平成 30 年 1~9 月の交通事故統計分析結果 ~ 発生地別 ~ 2018 年 12 月 Ⅰ. 調査の目的等 1. 調査の目的 2. データの概要 1 Ⅱ.H30 年 1~9 月死亡事故データの傾向 1. 事故件数 2. 発生地別 3. 道路区分別 4. 車両区分別 5. 事故類型別 6. 行動類型別 7. 時間帯別 8. 運転者の危険認知速度別 9. 運転者の年齢層別 10. 運転者の免許取得年数別
中山間地域の道の駅を拠点とした自動運転サービス
 資料 3 自動運転に関する主な政府方針等 1 新たな成長戦略 未来投資戦略 2017 2 官民 ITS 構想 ロードマップ 2017 3 遠隔型自動走行システムの公道実証実験に係る道路使用許可取扱い基準 ( 警察庁策定 ) ( 参考 ) 日本における地域での自動運転実証実験 Ministry of Land, Infrastructure, Transport and Tourism 1 1 新たな成長戦略
資料 3 自動運転に関する主な政府方針等 1 新たな成長戦略 未来投資戦略 2017 2 官民 ITS 構想 ロードマップ 2017 3 遠隔型自動走行システムの公道実証実験に係る道路使用許可取扱い基準 ( 警察庁策定 ) ( 参考 ) 日本における地域での自動運転実証実験 Ministry of Land, Infrastructure, Transport and Tourism 1 1 新たな成長戦略
Microsoft PowerPoint [資料1-3]事務局提出資料.pptx
![Microsoft PowerPoint [資料1-3]事務局提出資料.pptx](/thumbs/97/132925615.jpg "Microsoft PowerPoint [資料1-3]事務局提出資料.pptx") 資料 1-3 Connected Car をめぐる現状等 平成 28 年 12 月 20 日 ITS を発展させて実現する Connected Car 社会 1 これまでの ITS VICS 渋滞情報提供 ETC 料金所渋滞の解消レータ ー 追突防止 ITSスポット 安全情報提供 ( それぞれは独立 ) 基本的には車がネットワークに依存しないでサービス展開 ITS を取り巻く世界が大きく拡大 将来の
資料 1-3 Connected Car をめぐる現状等 平成 28 年 12 月 20 日 ITS を発展させて実現する Connected Car 社会 1 これまでの ITS VICS 渋滞情報提供 ETC 料金所渋滞の解消レータ ー 追突防止 ITSスポット 安全情報提供 ( それぞれは独立 ) 基本的には車がネットワークに依存しないでサービス展開 ITS を取り巻く世界が大きく拡大 将来の
[2] [3] [4] [] TTC 2 9 SAS[6] 2 SAS 4 DS 2. SAS 28 ( 2 ) 6 ( ) (PV:Preceding Vehicle) (FV:Fo
![[2] [3] [4] [] TTC 2 9 SAS[6] 2 SAS 4 DS 2. SAS 28 ( 2 ) 6 ( ) (PV:Preceding Vehicle) (FV:Fo](/thumbs/93/113996976.jpg "[2] [3] [4] [] TTC 2 9 SAS[6] 2 SAS 4 DS 2. SAS 28 ( 2 ) 6 ( ) (PV:Preceding Vehicle) (FV:Fo") Vol.26-ITS-64 No. 26/3/7,a),b),c),d) 24 TTC THW Driver characteristic estimation using vehicle behavior data while preceding vehicle decelerating Chisato Shibata,a) Yurie Iribe,b) Haruki Kawanaka,c) Koji
Vol.26-ITS-64 No. 26/3/7,a),b),c),d) 24 TTC THW Driver characteristic estimation using vehicle behavior data while preceding vehicle decelerating Chisato Shibata,a) Yurie Iribe,b) Haruki Kawanaka,c) Koji
1. 調査の背景 目的 (1) 本調査の背景 1 自動走行システムに関する技術開発が活発化する中 自動走行システムの機能や性能限界等に関する消費者の認識状況 自動走行システムの普及に必要な社会的受容性への正しい理解など 解消すべき不安 ( リスク ) についての事前調査および議論が広範かつ十分に深ま
 本調査の背景 1 自動走行システムに関する技術開発が活発化する中 自動走行システムの機能や性能限界等に関する消費者の認識状況 自動走行システムの普及に必要な社会的受容性への正しい理解など 解消すべき不安 ( リスク ) についての事前調査および議論が広範かつ十分に深ま") 自動走行システムの社会的受容性等に関する調査結果 ( 概要 ) について 2016 年 9 月 5 日 1. 調査の背景 目的 (1) 本調査の背景 1 自動走行システムに関する技術開発が活発化する中 自動走行システムの機能や性能限界等に関する消費者の認識状況 自動走行システムの普及に必要な社会的受容性への正しい理解など 解消すべき不安 ( リスク ) についての事前調査および議論が広範かつ十分に深まっているとまでは言えないと考えたことから
自動走行システムの社会的受容性等に関する調査結果 ( 概要 ) について 2016 年 9 月 5 日 1. 調査の背景 目的 (1) 本調査の背景 1 自動走行システムに関する技術開発が活発化する中 自動走行システムの機能や性能限界等に関する消費者の認識状況 自動走行システムの普及に必要な社会的受容性への正しい理解など 解消すべき不安 ( リスク ) についての事前調査および議論が広範かつ十分に深まっているとまでは言えないと考えたことから
NITAS Ver.2.4 システムの概要 利用上の注意等 1.NITAS の概要 動作環境 利用対象者 (1)NITAS の概要総合交通分析システム (NITAS:National Integrated Transport Analysis System) は 道路 鉄道 航空 船舶の各交通機関を
NITAS の概要総合交通分析システム (NITAS:National Integrated Transport Analysis System) は 道路 鉄道 航空 船舶の各交通機関を") NITAS Ver.2.4 システムの概要 利用上の注意等 1.NITAS の概要 動作環境 利用対象者 (1)NITAS の概要総合交通分析システム (NITAS:National Integrated Transport Analysis System) は 道路 鉄道 航空 船舶の各交通機関を組み合わせて総合的に交通体系の分析を行うシステムです 全国的な視点から地方レベルの課題まで様々な問題意識に対応して
NITAS Ver.2.4 システムの概要 利用上の注意等 1.NITAS の概要 動作環境 利用対象者 (1)NITAS の概要総合交通分析システム (NITAS:National Integrated Transport Analysis System) は 道路 鉄道 航空 船舶の各交通機関を組み合わせて総合的に交通体系の分析を行うシステムです 全国的な視点から地方レベルの課題まで様々な問題意識に対応して
スマートフォン利用が 自動車運転に与える影響について
 自動車運転中のスマートフォン利用実態の把握とテキスト入力が運転挙動に及ぼす影響の定量的分析 リスク工学グループ演習第 9 班 山本智基中川紗菜美佐藤祥路 アドバイザー教員 : 伊藤誠 1 発表の流れ 01 研究の背景 目的 02 研究の流れ 位置づけ 03 運転中のスマートフォン利用実態把握 04 シミュレーション準備 測定方法 05 実験結果 考察 06 まとめ 背景 目的 4 背景 図 主な情報通信機器の世帯保有状況
自動車運転中のスマートフォン利用実態の把握とテキスト入力が運転挙動に及ぼす影響の定量的分析 リスク工学グループ演習第 9 班 山本智基中川紗菜美佐藤祥路 アドバイザー教員 : 伊藤誠 1 発表の流れ 01 研究の背景 目的 02 研究の流れ 位置づけ 03 運転中のスマートフォン利用実態把握 04 シミュレーション準備 測定方法 05 実験結果 考察 06 まとめ 背景 目的 4 背景 図 主な情報通信機器の世帯保有状況
たたら製鉄についてのまとめ
 65 1229 1570 5 3 5 2769 1876 1889 9 1892 1927-73 - - 1619 131 2 5500 43 194 1889 1955-1617 3 2 3 1186 2 9 15 1165-74 - 596 300 200 4 888 4 888 11 3 8892 10 2 969 708781782888 729 749 859 877 3 947 3 1523
65 1229 1570 5 3 5 2769 1876 1889 9 1892 1927-73 - - 1619 131 2 5500 43 194 1889 1955-1617 3 2 3 1186 2 9 15 1165-74 - 596 300 200 4 888 4 888 11 3 8892 10 2 969 708781782888 729 749 859 877 3 947 3 1523